monografia simulador fluxo potencia 2002
DESCRIPTION
Simulador fluxoTRANSCRIPT

CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ
Departamento Acadêmico de Eletrotécnica
DESENVOLVIMENTO DE SOFTWARE DIDÁTICO PARA CÁLCULO DE FLUXO DE POTÊNCIA
Projeto Final de Graduação
Daniela Zocollotti
Hugo Fernando Magalhães
Isabelle Coelho de Mattos Pellegrini
Marcelo Krahn
CURITIBA
2002

DESENVOLVIMENTO DE SOFTWARE DIDÁTICO PARA CÁLCULO DE FLUXO DE POTÊNCIA

CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ
Departamento Acadêmico de Eletrotécnica
DESENVOLVIMENTO DE SOFTWARE DIDÁTICO
PARA CÁLCULO DE FLUXO DE POTÊNCIA
Daniela Zocollotti
Hugo Fernando Magalhães
Isabelle Coelho de Mattos Pellegrini
Marcelo Krahn
Curitiba
2002
Trabalho de graduação apresentado à disciplina de Projeto Final do Curso de Engenharia Elétrica, ênfase em Eletrotécnica, do Centro Federal de Educação Tecnológica do Paraná. Orientador: Eng. Josemar Carstens. Co-orientador: Eng. Álvaro Augusto.

ii
Daniela Zocollotti
Hugo Fernando Magalhães
Isabelle Coelho de Mattos Pellegrini
Marcelo Krahn
DESENVOLVIMENTO DE SOFTWARE DIDÁTICO
PARA CÁLCULO DE FLUXO DE POTÊNCIA
Este Projeto Final de Gradação foi Julgado e aprovado como requisito parcial para a obtenção do
título de Engenheiro Eletricista pelo Centro Federal de Educação Tecnológica do Paraná.
Curitiba, 19 de Agosto de 2002
Professor Paulo José Walenia
Coordenador do Curso
Professor Josemar Carstens
Orientador
Professor Paulo José Walenia
Membro da Banca Avaliadora
Professor Álvaro Augusto de Almeida
Co-Orientador e Membro da Banca Avaliadora

iii
Aos nossos pais, que nos deram a base para alcançar
este estágio da vida.

iv
AGRADECIMENTOS
Este projeto vem coroar um trabalho realizado nestes últimos anos nesta
instituição. Fica claro que ele não seria possível sem o apoio de algumas pessoas.
São elas:
• Professor Josemar Carstens – Cuja a idéia inicial e apoio foram toda
a base para o projeto.
• Professor Alvaro Augusto – Por ser o professor de confiança no
departamento.
• Professor José Pasini – Pelo acesso a sua pesquisa e software
desenvolvido.
• Professor Joaquim – Pela idéia das novas bobinas. E pelo interesse,
mesmo não estando envolvido diretamente com o projeto.
• Professores Paulo Walênia, Geraldo Cavalin, Ney José Kloster,
Hamilton Born – Pela prontidão em nos ajudar a conseguir o
material necessário nos almoxarifados.
• Aos companheiros de equipe, pela força, determinação e garra que
executaram o projeto.

v
SUMÁRIO
AGRADECIMENTOS .................................................................................... IV
LISTA DE FIGURAS...................................................................................... XI
LISTA DE QUADROS ................................................................................. XIII
1 RESUMO ...............................................................................................1
2 INTRODUÇÃO.......................................................................................2
3 CONSIDERAÇÕES INICIAIS ................................................................4
3.1 O Problema do Fluxo de Potência ..................................................5
3.2 Finalidade e Importância do Fluxo de Potência ............................8
3.2.1 Aplicações do Fluxo de Potência .................................................8
3.3 Finalidade e Importância do Presente Trabalho..........................10
3.3.1 Software.....................................................................................11
3.3.2 Protótipo.....................................................................................11
3.3.3 Multidisciplinaridade...................................................................11
3.4 Simulação Estática em Regime Permanente ...............................12
4 HISTÓRICO E EVOLUÇÃO.................................................................13
4.1 Considerações Históricas .............................................................13
4.2 O Impacto dos Computadores ......................................................15
4.3 Aplicação dos Computadores na Engenharia .............................16
4.3.1 Definição do Problema...............................................................16
4.3.2 Formulação Matemática.............................................................17
4.3.3 Seleção da Técnica de Solução do Problema ...........................17
4.3.4 Definição do Algoritmo ...............................................................17
4.3.5 Programação .............................................................................18
4.3.6 Verificação do Programa............................................................18
4.3.7 Aplicação ...................................................................................18
4.4 Pesquisas Relacionadas ao Fluxo de Potência...........................19
4.5 Interatividade e Programação .......................................................19
4.5.1 Processamento Não Interativo...................................................20

vi
4.5.2 Processamento Interativo ..........................................................20
4.5.3 Processamento Interativo com Interfaces Gráficas Interativas ..21
4.5.4 IDE (Integrated Development Environment) ..............................22
5 NOÇÕES BÁSICAS ............................................................................24
5.1 Grandezas .......................................................................................24
5.1.1 Impedância ................................................................................24
5.1.2 Resistência ................................................................................24
5.1.3 Reatância...................................................................................25
5.1.4 Admitância .................................................................................25
5.1.4.1 Condutância ........................................................................26
5.1.4.2 Susceptância .......................................................................26
5.2 Modelos para a Simulação de Sistemas Elétricos de Potência .27
5.2.1 Modelos de Geradores Síncronos .............................................29
5.2.2 Modelos de Linhas de Transmissão...........................................31
5.2.2.1 Linha Longa.........................................................................32
5.2.2.2 Linha Média.........................................................................33
5.2.2.3 Linha Curta..........................................................................34
5.2.3 Modelos de Transformadores ....................................................35
5.2.3.1 Transformador de Dois Enrolamentos.................................35
5.2.3.2 Transformador de Três Enrolamentos.................................40
5.2.3.3 Modelos de Transf.Relação de Transf.Fora da Nominal .....42
5.2.3.4 Modelos de Cargas .............................................................44
5.3 Formação das Matrizes Admitância e Impedância......................46
5.3.1 Equações Nodais.......................................................................46
5.3.2 Medição dos Elem. das Matrizes Imp. e Adm. de Barra ............49
5.3.3 Modificação de uma Matriz Impedância de Barra ......................49
5.3.3.1 Adição de ZB de uma Nova Barra P à Barra de Referência 50
5.3.3.2 Adição de Zb de uma Nova Barra P à uma Barra K.............50
5.3.3.3 Adição de Zb de Uma Barra K à Barra de Referência .........52
5.3.3.4 Adição de ZB entre Duas Barras Existentes j e k ................52
5.3.4 Determinação Direta de uma Matriz Impedância de Barra ........54
5.3.5 Esparcidade ...............................................................................55
5.4 Métodos de Solução e Análise de SEP ........................................57
5.4.1 Sistema Por Unidade (PU).........................................................57

vii
5.4.1.1 Definição .............................................................................57
5.4.1.2 Vantagens da Utilização do Sistema PU .............................58
5.4.1.3 A Escolha de Bases ............................................................59
5.4.2 Mudança de Base ......................................................................61
5.4.3 Bases de Tensão e Potência na Solução de Problemas ...........62
5.4.4 Impedâncias de Transformadores em PU..................................63
5.5 Tipos de Barras ..............................................................................64
5.5.1 Barra Tipo 1 ou de Carga...........................................................65
5.5.2 Barra Tipo 2 ou de Geração.......................................................65
5.5.3 Barra Tipo 3 ou Oscilante (Swing) .............................................66
5.6 Especificação de Barras................................................................67
5.6.1 Especificação de Barra Incondicional-Local...............................67
5.6.1.1 Barra PQ .............................................................................67
5.6.1.2 Barra PE..............................................................................67
5.6.1.3 Barra E ..............................................................................68
5.6.2 Especificação de Barra Condicional-Local.................................68
5.6.2.1 Barra PQ/PE........................................................................68
5.6.2.2 Barra PE/PQ........................................................................68
5.6.3 Especificação de Barra Incondicional-Remota...........................69
5.6.3.1 Barra PE..............................................................................69
5.6.4 Especificação de Barra Condicional-Remota.............................69
5.6.4.1 Barra PiEi/PiQk....................................................................69
6 CÁLCULO DE FLUXO DE POTÊNCIA................................................70
6.1 Equacionamento do Problema......................................................70
6.2 Método de Gauss ...........................................................................71
6.3 Método de Gauss-Seidel................................................................72
6.3.1 Formulação do Problema...........................................................74
6.3.2 Critério de Convergência ...........................................................75
6.3.3 Aceleração da Convergência .....................................................76
6.3.4 Vantagens e Desvantagens .......................................................78
6.3.5 Algoritmo....................................................................................78
6.4 Fluxo de Potência Newton-Raphson ............................................81
6.4.1 Formulação do Problema...........................................................81
6.4.2 Vantagens e Desvantagens .......................................................85

viii
6.4.3 Algoritmo....................................................................................86
6.5 Método de Ward e Hale..................................................................89
6.6 Método da Matriz ZBARRA ................................................................89
6.7 Fluxo de Potência Desacoplado Rápido ......................................90
6.8 Variantes do Fluxo de Potência Desacoplado Rápido................91
6.9 Fluxos de Potência Aproximados.................................................91
6.10 Métodos Baseados nas Matrizes Y e Z .....................................91
6.10.1 Avaliação dos Métodos Baseados na Matriz Z ........................91
6.10.2 Avaliação dos Métodos Baseados na Matriz Y ........................92
6.11 Comparação dos Métodos .........................................................93
6.11.1 Considerações Sobre a Armazenagem no Computador..........93
6.11.2 Versatilidade ............................................................................94
6.11.3 Velocidade ...............................................................................94
6.12 Justificativa do Método Escolhido............................................95
7 ANALISADOR DE REDE (PROTÓTIPO) ............................................96
7.1 Painel...............................................................................................96
7.1.1 O Painel .....................................................................................96
7.2 Descrição do Painel de Sistema de Potência. .............................96
7.2.1 Instrumentos ..............................................................................96
7.2.2 Indutores ....................................................................................97
7.2.3 Transformadores........................................................................97
7.3 Circuito Simplificado .....................................................................97
8 SOFTWARES EXISTENTES.............................................................101
8.1 Introdução.....................................................................................101
8.2 SIMICRO........................................................................................101
8.2.1 Descrição .................................................................................101
8.2.2 Funcionalidades do Software...................................................102
8.2.3 Características. ........................................................................102
8.2.4 Dificuldades Encontradas ........................................................103
8.3 FLOWGR .......................................................................................103
8.3.1 Descrição .................................................................................103
8.4 NFlux .............................................................................................105
8.4.1 Descrição .................................................................................105

ix
8.4.2 Dificuldades Encontradas ........................................................105
8.5 PowerWorld Simulator .................................................................105
8.5.1 Descrição .................................................................................105
8.5.2 Dificuldades Encontradas ........................................................106
9 COMPROVAÇÃO DO FUNCIONAMENTO DO SOFTWARE............107
9.1 Cálculo do Circuito Exemplo.......................................................107
9.2 Comprovação do Circuito Exemplo............................................107
9.2.1 Cálculo das Tensões................................................................108
9.2.1.1 Primeira Iteração ...............................................................108
9.2.1.2 Segunda Iteração ..............................................................109
9.2.1.3 Terceira Iteração ...............................................................110
9.2.2 Resultados ...............................................................................111
9.3 Comprovação do Circuito Exemplo com Deslig. de uma LT....111
9.3.1 Cálculo das Tensões................................................................112
9.3.1.1 Primeira Iteração ...............................................................112
9.3.1.2 Segunda Iteração ..............................................................113
9.3.1.3 Terceira Iteração ...............................................................114
9.4 COMPROVAÇÃO DO CIRCUITO DE 11 BARRAS ......................115
9.5 Aplicação do circuito de onze barras calculado no SFP: .........116
9.5.1 Primeira Iteração......................................................................116
9.5.1.1 Tabela Resumo da Primeira Iteração ................................117
9.5.1.2 Valores Obtidos do Cálculo Manual ..................................117
9.5.2 Segunda Iteração.....................................................................118
9.5.2.1 Tabela Resumo da Segunda Iteração ...............................119
9.5.2.2 Valores Obtidos do Cálculo Manual ..................................119
9.5.3 Terceira Iteração......................................................................120
9.5.3.1 Tabela Resumo da Terceira Iteração ................................121
9.5.3.2 Valores Obtidos do Cálculo Manual ..................................121
9.6 Comprovação do Circuito Protótipo...........................................122
9.6.1 Valores tabelados resultados da simulação do software .........123
9.6.1.1 Valores Obtidos da Medição do Protótipo .........................123
9.7 Conclusões das Comprovações .................................................124
10 CONCLUSÕES..................................................................................125

x
11 BIBLIOGRAFIAS...............................................................................127
12 REFERÊNCIAS BILIOGRÁFICAS ....................................................128
13 ANEXO I – APRESENTAÇÃO DOS CÁLCULOS DO CIRCUITO EXEMPLO .....129
13.1 Cálculo do Circuito Exemplo ...................................................129
13.1.1 Admitância em PU .................................................................129
13.1.2 Matriz Admitância...................................................................132
13.1.3 Matriz Admitância:..................................................................134
13.1.4 Cálculo das Tensões..............................................................135
14 ANEXO II – CÁLCULOS DO CIRCUITO DE 11 BARRAS.............................141
14.1 Cálculo do Circuito Pelo Método de Gauss-Seidel ................142
14.1.1 Cálculo das Tensões de Base ...............................................142
14.1.2 Calculo das Impedâncias de Base.........................................143
14.1.3 Conversão do Circuito para PU .............................................145
14.1.4 Matriz Admitância...................................................................159
14.1.5 Cálculo das Tensões..............................................................170
15 ANEXO III – APRESENTAÇÃO DOS CÁLCULOS DO PROTÓTIPO................184
15.1 Cálculo das Bobinas utilizadas ...............................................184
15.2 Esquemático x Protótipo..........................................................185
15.3 Cálculos.....................................................................................186
15.3.1 Cálculo das Tensões de Base ...............................................186
15.3.2 Calculo das Impedâncias de Base.........................................186
15.3.3 Conversão do Circuito para PU .............................................187
16 ANEXO IV – MANUAL DO SOFTWARE DESENVOLVIDO SFP ...................191

xi
LISTA DE FIGURAS
Figura 3.1 – Sistema Elétrico de Potência ..................................................................4
Figura 3.2 – Exemplo de um Sistema Elétrico de Potência.........................................6
Figura 3.3 – Exemplo de Fluxo de Potência..............................................................10
Figura 5.1 – Símbolo e representação da Resistência Elétrica .................................25
Figura 5.2 – Símbolo e representação das Reatâncias Indutiva e Capacitiva ..........25
Figura 5.3 – Modelamento de Equipamentos: Linha de Transmissão.......................27
Figura 5.4 – Modelamento de Equipamentos: Transformador .................................28
Figura 5.5 – Exemplo de diagrama Unifilar de Admitâncias ......................................29
Figura 5.6 – Modelo de Gerador ...............................................................................30
Figura 5.7 – Diagrama de Fasorial de um Gerador ...................................................30
Figura 5.8 – Esquema para linha longa.....................................................................32
Figura 5.9 – Esquema para linha média....................................................................33
Figura 5.10 – Esquema para linha curta ...................................................................34
Figura 5.11 – Esquema para transformador..............................................................35
Figura 5.12 – Esquema para transformador..............................................................36
Figura 5.13 – Esquema para transformador..............................................................36
Figura 5.14 – Esquema para transformador..............................................................37
Figura 5.15 – Esquema para transformador..............................................................37
Figura 5.16 – Esquema simplificado de transformador .............................................38
Figura 5.17 – Esquema de Transformador com 3 enrolamentos ..............................41
Figura 5.18 – Transformador com Relação Fora da Nominal....................................43
Figura 5.19 – Modelo π de Transformador ................................................................43
Figura 5.20 - Diagrama unifilar de um sistema simples.............................................46
Figura 5.21 - Diagrama de reatâncias do sistema da Figura 5.20.............................47
Figura 5.22 - Circuito da Figura 5.20 com fontes de corrente ...................................47
Figura 5.23 - Adição da nova barra p conec. através da imp. Zb a uma barra k ........51
Figura 5.24 - Adição da impedância Zb entre as barras j e k existentes....................53
Figura 5.25 - Exemplo de matriz Y sistema Sul/Sudeste/Centro-Oeste brasileiro.....56
Figura 6.1 – Equação matricial..................................................................................71
Figura 6.2– Sistema com uma barra p genérica........................................................74
Figura 6.3 – Aceleração da Convergência ................................................................77
Figura 6.4 - Algoritmo de Gauss-Seidel ....................................................................79

xii
Figura 6.5 – Continuação do algoritmo de Gauss-Seidel ..........................................80
Figura 6.6 – Exemplo de um sistema elétrico de potencia ........................................82
Figura 6.7 – Algoritmo para método de Newton-Raphson ........................................87
Figura 6.8 – Continuação de algoritmo de Newton-Raphson....................................88
Figura 6.9 - Característica de convergência..............................................................94
Figura 7.1 – Esquema de Montagem ........................................................................98
Figura 7.2 – Esquema de montagem (visualização das barras)................................98
Figura 7.3 – Onda no osciloscópio ............................................................................99
Figura 7.4 - Osciloscópio EWB................................................................................100
Figura 8.1 – Circuito desenvolvido no FlowGR .......................................................104
Figura 8.2 – Snapshot do PowerWorld Simulator....................................................106
Figura 9.1 – Circuito exemplo..................................................................................107
Figura 9.2 – Primeira Iteração .................................................................................108
Figura 9.3 – Segunda Iteração ...............................................................................109
Figura 9.4 – Terceira Iteração .................................................................................110
Figura 9.5 – Primeira Iteração .................................................................................112
Figura 9.6 – Segunda Iteração ................................................................................113
Figura 9.7 – Terceira Iteração .................................................................................114
Figura 9.8 - Diagrama Unifilar do Circuito de 11 Barras..........................................115
Figura 9.9 - Resultados da Primeira Iteração ..........................................................116
Figura 9.10 - Tabela Resumo da Primeira Iteração.................................................117
Figura 9.11 - Tabela Resumo dos Cálculos Manuais..............................................117
Figura 9.12 - Resultados da Segunda Iteração .......................................................118
Figura 9.13 - Tabela Resumo da Segunda Iteração................................................119
Figura 9.14 - Tabela Resumo dos Cálculos Manuais..............................................119
Figura 9.15 - Resultados da Terceira Iteração ........................................................120
Figura 9.16 - - Tabela Resumo da Terceira Iteração...............................................121
Figura 9.17 - Tabela Resumo dos Cálculos Manuais..............................................121
Figura 9.18 - Resultados para a convergência do circuito protótipo........................122
Figura 9.19 - Valores Tabelados .............................................................................123
Figura 9.20 - Valores Medidos no Protótipo ............................................................123
Figura 13.1 - Circuito Exemplo ................................................................................129

xiii
LISTA DE QUADROS
Quadro 5.1 - Esparcidade .........................................................................................55
Quadro 5.2 – Tipos de barras....................................................................................64
Quadro 9.1 – Resultado da Primeira Iteração ........................................................108
Quadro 9.2 – Resultado da Segunda Iteração .......................................................109
Quadro 9.3 – Resultado da Terceira Iteração ........................................................110
Quadro 9.4 – Cálculos com o Software ..................................................................111
Quadro 9.5 – Cálculos Manuais .............................................................................111
Quadro 9.6 – Resultados da Primeira Iteração .......................................................112
Quadro 9.7 – Resultado da Segunda Iteração ........................................................113
Quadro 9.8 – Resultado da Terceira Iteração .........................................................114

1
1 RESUMO
O objetivo do projeto de conclusão de curso foi desenvolver um Software
para cálculo de Fluxo de Potência com fins didáticos e aplicá-lo em um determinado
circuito comprovando assim seu funcionamento.
O software desenvolvido foi implementado em Visual Basic, tendo assim
uma interface gráfica agradável para quem for utilizar. O método utilizado para os
cálculos do fluxo de potência foi Gauss-Seidel, devido a sua facilidade de
implementação no software. Como este software tem fins didáticos, com isso os
circuitos não tem um número grande de barras, o método Gauss-Seidel supre todas
as necessidades de desempenho que o software necessita. Em complemento foram
feitas validações práticas através de um analisador de redes (protótipo) montado a
partir de um painel existente na instituição.

2
2 INTRODUÇÃO
Este trabalho é dedicado à conceituação e ao tratamento analítico do
problema de cálculo de fluxo de potência em redes elétricas, como também à
implementação de um software didático para o cálculo de fluxo de potência, com o
intuito de auxiliar ao acadêmico da área de engenharia elétrica, posto que um
programa de cálculo de fluxo de potência é a principal e mais utilizada ferramenta ao
dispor do engenheiro que executa estudos de planejamento e operação de sistemas
elétricos. Feito isto, apresentaremos os resultados de uma simulação de um circuito
protótipo em escala reduzida, montado em laboratório, representando um pequeno
sistema elétrico de potência, agregando assim um diferencial em relação aos
trabalhos já existentes desenvolvidos nesta linha de pesquisa.
O desenvolvimento do software e do protótipo implica em agrupar num
mesmo projeto técnicas e teorias de Matemática Aplicada nas áreas da
Programação não Linear, Análise Numérica e Álgebra Linear Aplicada; de
informática nas áreas de Processamento Gráfico Interativo e Programação de
Computadores, e de Engenharia Elétrica nas áreas de Circuitos Elétricos, Eletrônica,
Medidas Elétricas e Sistemas Elétricos de Potência.
O objetivo que se deseja alcançar com a realização deste projeto não tem
fins comerciais, nem tampouco se deseja inventar algo novo, sendo assim, não
levaremos em consideração os aspectos de viabilidade econômica e otimização
computacional, tais como aprimoramento de algoritmos, economia de memória
computacional, tempo de processamento e quantidade de iterações.
As características do software desenvolvido foram definidas de maneira que
esse se aplique aos laboratórios do CEFET e sua capacidade de processamento
está limitada em apenas algumas barras, uma vez que o seu objetivo é puramente
didático aplicado a graduação em Engenharia Elétrica.
Atualmente já existem alguns softwares capazes de atender às
necessidades das concessionárias quanto às questões de fluxo de potência, porém
a utilização desses para fins acadêmicos é um tanto complicada, uma vez que são
desenvolvidos para Sistemas Elétricos de grande porte e agregam muitas variáveis.
Devido a isso, a entrada de dados para a simulação de um sistema elétrico de
potência exige a configuração de uma quantidade muito grande de parâmetros o que

3
requer um conhecimento muito profundo do software utilizado e uma grande
capacidade de processamento.
No presente trabalho encontram-se reunidas uma série de bibliografias
referentes ao estudo do fluxo de potência, organizadas de maneira a possibilitar o
entendimento da filosofia adotada para a implementação do software além de um
manual explicativo para a sua utilização.

4
3 CONSIDERAÇÕES INICIAIS
Todo Sistema Elétrico de Potência (SEP) deve ser planejado de forma a
atender seus usuários com elevada continuidade de serviço, respeitando ainda
diversos critérios de qualidade nesse atendimento. Esses critérios (de regime
permanente) referem-se a valores máximos e mínimos de tensão nos pontos de
entrega, excursão máxima de freqüência em torno do valor nominal, carregamento
máximo dos componentes do sistema etc. No projeto de sistemas elétricos ou
planejamento da ampliação de sistemas já existentes, devido ao crescimento anual
da carga, impõem-se a instalação de novas usinas e reforços nos sistemas de
transmissão e distribuição.
Figura 3.1 – Sistema Elétrico de Potênciai

5
Os estudos de fluxo de potência desempenham um papel muito importante,
pois permitem verificar, admitida uma projeção da carga ao longo do tempo, se o
sistema proposto será capaz de manter-se dentro dos critérios estabelecidos no
atendimento aos usuários. Permitem ainda a comparação de alternativas de
expansão, bem como a avaliação do impacto no sistema em função da entrada de
novas unidades geradoras.
Além do setor de planejamento, os estudos de fluxo de carga são
largamente utilizados para operação e planejamento de operação de sistemas.
Nesse último caso, a maneira como o sistema irá evoluir até atingir uma certa
configuração já está definida, e os estudos de fluxo de potência visam, com
informações mais confiáveis a respeito da carga, definir o melhor perfil de tensões
para a operação do sistema bem como os ajustes de taps dos transformadores,
condições para o chaveamento de bancos de capacitores etc.
3.1 O Problema do Fluxo de Potência
O Estudo de Fluxo de Potência, também denominado de “Fluxo de Carga”
ou de “Load Flow”, pode ser entendido como sendo um processo de cálculo onde o
sistema elétrico é trabalhado através de modelos físico-matemáticos visando a
obtenção dos fluxos de potência ativa e reativa através das linhas e
transformadores, tensões em módulo e ângulo nas barras, valores de geração ativa
e reativa das unidades geradoras etc., nos vários pontos de um sistema elétrico de
potência.

6
Figura 3.2 – Exemplo de um Sistema Elétrico de Potênciaii
As soluções obtidas mediante a análise do sistema através de estudos de
fluxo de potência possui um cunho estático, ou seja, os resultados de um fluxo de
potência mostram o comportamento do sistema para uma dada condição de
configuração, geração e carga.
Assim sendo, é de fundamental importância que a escolha dessas condições
de configuração, carga e geração sejam feitas de modo a representar o
comportamento do sistema em uma determinada situação o mais próximo possível
da operação real.
Mesmo levando em conta o aspecto de ser o fluxo de potência de cunho
estático, desde que seja feita uma boa escolha das condições do sistema, as

7
conclusões obtidas da análise do resultado do fluxo de potência possuem um
elevado grau de confiabilidade quanto à sua aplicação.
Como em um SEP não conhecemos os valores das correntes dos diversos
ramos do circuito, mas sim as especificações de potências Ativa e Reativa, o
problema, que inicialmente se trataria de forma linear, passa a ser encarado como
um problema não linear, que não pode ser resolvido diretamente pelas técnicas
matriciais normais. Pelo contrário, a solução deve ser obtida por um procedimento
iterativo.
Os estudos de fluxo de potência são realizados para simular o sistema
funcionando em regime permanente, seja em condição normal ou de emergência.
Estudos para a condição normal são feitos para verificar, se nessa situação, os
critérios estabelecidos são respeitados, tanto na situação de carga máxima quanto
de carga mínima. Os estudos de carga em condições de emergência são realizados
de forma a verificar a viabilidade de o sistema continuar operando, mesmo com a
perda temporária de algum equipamento ou Linha de Transmissão, dentro de
critérios estabelecidos para as condições de emergência.
Com a crescente interligação dos sistemas e utilização da tecnologia digital,
tanto para operação como para o gerenciamento de dados nos Sistemas Elétricos
de Potência, a operação e os estudos de fluxo de carga são realizados praticamente
on line pelo computador, recebendo os dados das telemedições comandados por
sistemas supervisores.
As informações fornecidas a partir do estudo de Fluxo de Potência são
necessárias para testar a capacidade do sistema de transferir energia da geração
para a carga, sem sobrecarregar determinadas linhas, e testar a adequação da
regulagem de tensão por capacitores em paralelo, reatores em paralelo,
transformadores com mudança de derivação e a capacidade de fornecimento
potência reativa por parte das máquinas rotativas. De forma genérica, podemos citar
alguns exemplos de aplicação de simulações de fluxo de potência:
• Estudos para planejamento do Sistema Elétrico;
• Avaliação das condições operacionais do Sistema;
• Determinação dos limites de transmissão de Potência do Sistema
Elétrico;

8
• Estudos de avaliação e determinação de medidas corretivas para a
operação do sistema em condições de emergência.
3.2 Finalidade e Importância do Fluxo de Potência
Os três problemas encontrados, mais freqüentemente, em análise de
sistemas de potência são fluxo de carga, curto-circuito e estabilidade.
A simulação de Fluxo de Potência é uma das mais poderosas ferramentas
na análise de Sistemas Elétricos de Potência em regime permanente. E usada para
se analisar condições operacionais dos Sistemas Elétricos de Potência que podem
ocorrer na prática, de modo que se possa conhecer de antemão qual será o seu
desempenho, e se possam definir ações corretivas a serem tomadas para que os
consumidores sejam atendidos com qualidade de fornecimento de energia elétrica,
sem que os equipamentos das concessionárias de energia elétrica fiquem
submetidos a condições operacionais inadmissíveis.
“A importância do Fluxo de Potência é tanto maior quanto mais interligados se
encontrarem os Sistemas Elétricos. A interligação de Sistemas Elétricos tem sido
crescente desde o seu surgimento em função da necessidade de se aumentar a
confiabilidade de fornecimento de energia elétrica aos consumidores pela existência
de diversas alternativas para sua alimentação, bem como para se permitir um melhor
aproveitamento dos recursos energéticos pela possibilidade que as interligações
trazem de transferência de energia elétrica de uma região para outra..”iii
Podemos destacar algumas das aplicações mais usuais do Fluxo de
Potência que demonstram a sua grande importância no campo da Engenharia.
3.2.1 Aplicações do Fluxo de Potência
Como já ressaltamos, o estudo de fluxo de potência é uma ferramenta
indispensável aos profissionais que atuam não só na parte de planejamento, como
também na parte de operação de um SEP. A seguir, relacionamos algumas
aplicações de grande importância do fluxo de potência:
• Simulação de Sistemas Elétricos considerando diferentes
despachos das usinas geradoras de energia elétrica, de modo a se

9
prever de antemão quais as condições operacionais decorrentes
desses despachos;
• Simulação de Sistemas Elétricos operando sob condições anormais
decorrentes da saída de operação de equipamentos como linhas de
transmissão, transformadores e unidades geradoras. A saída de
operação desses equipamentos pode se dar devido à necessidade
de manutenção preventiva ou corretiva, ou ainda, em se tratando de
linhas de transmissão, devido ao desligamento automático;
• Simulação de Sistemas Elétricos com finalidade de planejamento da
sua expansão. Como se sabe, a demanda por energia elétrica é
crescente no tempo em função do aumento da população ou da
melhoria do seu nível de vida, ou ainda, devido ao crescimento da
atividade econômica. Para atender ao crescimento da demanda, é
necessário não somente aumentar a sua oferta mediante a
construção de novas usinas geradoras, como também é necessária
a construção de novas linhas de transmissão e subestações para
levá-la até os locais de consumo. Também neste caso o Fluxo de
Potência atua como uma ferramenta poderosa para auxiliar na
definição das obras que permitam o cumprimento desse objetivo de
uma forma tecnicamente correta.
O estudo de fluxo de potência vem cada vez mais se fazendo
necessário ao engenheiro, já que fornece, nas diversas etapas de planejamento e
operação, fundamentação prática e teórica, graças à possibilidade de simulação dos
sistemas, para a tomada de decisões técnicas.

10
Figura 3.3 – Exemplo de Fluxo de Potênciaiv
3.3 Finalidade e Importância do Presente Trabalho
Este trabalho tem por finalidade a implementação de um software didático
para o cálculo de fluxo de potência. No entanto, acreditamos ser de suma
importância a apresentação da teoria relacionada ao assunto, para que não apenas
aqueles já familiarizados com o tema possam fazer uso de tal ferramenta.
Não nos propomos a apresentar aqui uma apostila referente às técnicas de
Fluxo de Potência ou a uma metodologia ideal a ser utilizada neste âmbito, mas sim
reunir aquelas informações que julgamos de grande importância para uma utilização
adequada do nosso produto final, o software.
Desta forma, o material encontrado no presente trabalho, se destina a
apresentar os passos por nós seguidos e os estudos realizados para um adequado
embasamento das técnicas por nós utilizadas.
Considerando que o projeto possui um cunho acadêmico, procuramos não
apenas descrever os caminhos por nós seguidos, mas também apresentar aqueles
por nós estudados e, por razões que serão apresentadas, descartados. Desta forma
aqueles que, futuramente, pretendam dar continuidade, no sentido de aperfeiçoar e

11
agregar funções ao projeto inicial, encontrem aqui um ponto inicial para seus
trabalhos.
3.3.1 Software
Como encontramos algumas dificuldades em utilizar alguns softwares
disponíveis para cálculos de Fluxo de Potência, procuramos desenvolver um
software com uma Interface Gráfica Interativa, de modo que o usuário não precise
editar arquivos de entrada e saída de dados, e possa gerar e alterar configurações
de Sistemas Elétricos manipulando diretamente diagramas elétricos desenhados na
tela do computador. Para facilitar a utilização deste software, desenvolvemos
também um Manual com o intuito de auxiliar o usuário na entrada, alteração e leitura
dos dados apresentados.
Como o manual se destinará aos usuários do software, não iremos nos ater
a apresentar embasamento teórico em seu conteúdo, algo com que nos
preocupamos na atual etapa.
3.3.2 Protótipo
Além da inegável importância dos estudos de Fluxo de Potência,
salientamos o embasamento teórico da montagem do circuito em escala reduzida,
uma vez que esta também poderá auxiliar outras pesquisas, como material
preliminar, na montagem de protótipos mais elaborados tanto no segmento de fluxo
de potência como também de curto-circuito ou estabilidade de sistemas.
Acreditamos que a importância do projeto desenvolvido na presente
pesquisa reside não só no desenvolvimento do software didático, mas também na
aplicação de conceitos teóricos na prototipação em escala reduzida de um sistema
elétrico e na verificação conjunta da funcionalidade do software através de não
somente cálculos manuais, mas também através das medições realizadas.
3.3.3 Multidisciplinaridade
Por se tratar de um projeto cujo resultado se dá mediante a concepção de
um software didático destinado aos acadêmicos do CEFET na disciplina de Sistemas

12
de Potência, poderíamos pensar tratar-se de uma pesquisa restrita a essa área. No
entanto, estaríamos profundamente enganados.
Outra grande importância da pesquisa realizada foi a utilização de conceitos
de diversas áreas reunidos com o objetivo de proporcionar uma ferramenta a uma
área específica.
Para a realização do presente trabalho foram utilizados não só os conceitos
na área de Sistemas Elétricos de Potência, mas também nas áreas de Eletrônica;
Circuitos Elétricos, com a conceituação básica de elementos do SEP; Medidas
Elétricas, para a realização das medições no protótipo montado; Conversão
eletromagnética, para os ensaios nos transformadores; Programação não Linear e
Análise Numérica, na realização de cálculos numéricos para soluções de fluxo de
potência e, Informática, no que diz respeito às linguagens de programação,
processamentos gráficos e plataforma.
3.4 Simulação Estática em Regime Permanente
Neste trabalho, para fins de simulação, adotamos a simulação estática em
regime permanente. O fato de ser em regime permanente significa que os
fenômenos que podem ocorrer no período transitório não serão objeto de estudo.
“Sabe-se que o período transitório dos fenômenos envolvendo Sistemas
Elétricos de Potência é geralmente muito rápido, e a preocupação principal dos
engenheiros diz respeito ao surgimento de sobretensões nos Sistemas Elétricos. Em
se tratando de regime permanente, a preocupação dos engenheiros geralmente diz
respeito a problemas de tensão baixa nos consumidores e sobrecarga em
equipamentos, os quais podem ser danificados pela elevação da temperatura.”v
O fato de se tratar de simulação estática significa que os modelos adotados
para representar os Sistemas Elétricos são invariantes no tempo, situação esta que
corresponde à maioria das contingências envolvendo Sistemas Elétricos de
Potência.

13
4 HISTÓRICO E EVOLUÇÃO
Uma vez estabelecidos os objetivos e a abrangência do trabalho,
discutiremos agora a evolução histórica do Fluxo de Potência e da interação do
homem com o computador.
4.1 Considerações Históricas
As etapas de planejamento, projeto e de operação de Sistemas de Potência
requerem uma análise contínua e detalhada para avaliar a performance atual do
sistema bem como para verificar a eficácia de futuras ampliações. Estes Estudos de
Fluxo de Potência consistem ainda em uma importante ferramenta para garantir a
máxima utilização de um dado investimento de capital de modo a termos um retorno
baseado em um sistema de confiança.
A tarefa computacional de determinar fluxos de potência e níveis de tensão
até mesmo de pequenos sistemas, é inquestionável, uma vez que tratamos com
cálculos iterativos que realizados manualmente têm seu tempo de “processamento”
consideravelmente aumentado.
As simulações para estudos de questões de Fluxo de Potência até o início
da década de 50 eram inviáveis para grandes Sistemas Elétricos de Potência, de
modo que elas eram realizadas mediante modelos reduzidos dos Sistemas Elétricos
de Potência.
Estes modelos reduzidos, que eram computadores analógicos de propósitos
específicos, foram chamados de “Analisadores de Rede ac” (ac network analyzer) e
tiveram origem em 1929 devido à necessidade computacional para engenharia de
sistemas de potência.
Os Analisadores de Rede possibilitaram o estudo de uma grande variedade
de condições operacionais do Sistema Elétrico de Potência, tanto para plantas
existentes quanto para futuras ampliações. Graças ao seu desenvolvimento, foi
possível a determinação de fluxos de Potência e tensões no sistema durante
condições de operação normal e de emergência, além de possibilitar o estudo do
comportamento transitório do sistema durante faltas ou operações de manobras.
Por volta da metade dos anos 50, os Analisadores de Rede já estavam em
operação nos Estados Unidos e no Canadá, sendo considerados ferramenta

14
indispensável para engenheiros atuantes nas áreas de planejamento, proteção de
operação de Sistemas.
Apesar do grande avanço alcançado graças aos Analisadores de Rede, eles
exigiam um grande esforço para os ajustes iniciais e para a etapa de análise. A
solução por meio de sua utilização necessitava de dados provenientes da leitura de
diversos instrumentos de medição além de se basear em diagramas elétricos
traçados manualmente em papel.
As primeiras aplicações de computadores digitais aos problemas de
Sistemas de Potência datam do final dos anos 40. No entanto, a maioria das
aplicações era limitada devido à pequena capacidade dos computadores de cartões
geralmente utilizados na época. Foi na metade da década de 50 que os novos
computadores vieram responder às necessidades da maioria dos problemas de
Sistemas de Potência graças ao aumento de sua capacidade e velocidade de
processamento. Em 1957 a American Eletric Power Service Corporation concluiu um
programa para ser aplicado em larga escala no IBM 704 de Fluxo de Potência, o
qual calculava as tensões e fluxos de potência para um dado sistema de Potência.
As aplicações iniciais dos programas de estudo de Fluxo de Potência aos
estudos de planejamento foram extremamente positivas, que todos os estudo
subseqüentes passaram a empregá-los no lugar dos Analisadores de Rede. O
sucesso deste primeiro programa levou ao desenvolvimento de programas para
cálculo de curto-circuito e estabilidade transitória. Atualmente o computador digital,
assim como em inúmeras áreas, tornou-se uma ferramenta indispensável em todas
as fases de planejamento, projeto e operação dos Sistemas Elétricos de Potência.
Paralelamente com o desenvolvimento dos computadores digitais mais
rápidos e com maior capacidade durante a década de 50, um esforço considerável
era direcionado para o modelamento computacional de grandes Sistemas Elétricos
de Potência. Inúmeras bibliografias apresentam as experiências na busca de
enfatizar a grande potencialidade do uso da análise matricial e da teoria de redes
para solucionar problemas referentes aos Sistemas de Potência.
Nos primeiros estágios, no entanto, a falta de coordenação no que diz
respeito ao aspecto de hardware e de linguagens de programação, dificultou o
desenvolvimento de técnicas genéricas e a tendência foi para que diversos
pesquisadores desenvolvessem seus próprios programas abandonando
paulatinamente os analisadores de rede. Posteriormente, com o princípio de

15
aceitação do FORTRAN no campo de Sistemas de Potência, um certo sucesso foi
atingido pelos fabricantes de computadores na produção e desenvolvimento de
pacotes de softwares que incluíam estudos de fluxo de carga.
Tamanha foi a expansão no que se refere ao assunto durante a década de
70, que ela já não cabe em um único livro. Ainda hoje, diversos pesquisadores estão
constantemente revisando e fazendo novas compilações a fim de comparar e
aperfeiçoar as incontáveis técnicas criadas.
Contudo, já na década de 80, existia um sentimento genérico de que não
haveria maiores contribuições no que diz respeito às técnicas desenvolvidas na
década de 70 para o modelamento dos sistemas de potência. Ainda assim, as
pesquisas acadêmicas com intuito de encontrarem novos métodos continuaram.
Os tópicos principais do modelamento computacional são os estudos no que
se refere aos problemas de fluxo de potência, uma vez que eles possuem aplicação
em todas as etapas de análise de sistemas de potência. Normalmente, devido a
algumas limitações, apenas a solução para as equações básicas para os estudos de
fluxo de potência é considerada. Porém, é sabido que o problema de fluxo de
potência não é restrito à solução das equações diferenciais básicas. Vários aspectos
alheios a estas equações muitas vezes possuem uma maior influência na
convergência do problema do que a performance do próprio algoritmo base.
4.2 O Impacto dos Computadores
O desenvolvimento da tecnologia digital dos computadores proporcionou
inúmeras vantagens para a engenharia de Sistemas de Potência, dentre elas,
podemos citar:
• Meios mais eficientes e econômicos de realizar rotinas de cálculos
necessários às etapas de planejamento, projeto e operação de
sistemas de Potência;
• Uma melhor utilização do intelecto do engenheiro, uma vez que o
liberou de tediosos cálculos manuais permitindo que ele gaste mais
tempo em trabalhos técnicos;
• A possibilidade de realizar estudos de engenharia mais efetivos
através da aplicação de procedimentos de cálculos para obter um
maior número de soluções alternativas para um problema particular,

16
oferecendo ao engenheiro uma gama de opções para a tomada de
decisão;
• A possibilidade de realização de estudos que, anteriormente, não
eram possíveis devido ao grande volume de cálculo envolvido.
Dois grandes fatores que contribuíram para a realização destes benefícios
foram o decréscimo do custo dos equipamentos de computação e o
desenvolvimento de técnicas computacionais eficientes. Com esta evolução
tecnológica, cada vez mais precisamos direcionar nossos esforços dos problemas de
engenharia para as soluções computacionais.
4.3 Aplicação dos Computadores na Engenharia
Uma vez que recorremos ao processo de aplicação de um computador para
a solução de um problema da engenharia, acabamos envolvendo novos passos à
resolução do nosso problema.
Veremos a seguir as etapas que compõe a resolução de problemas com o
auxílio do computador. A importância relativa de cada uma destas etapas pode
variar de problema para problema. Cada vez mais, todos as etapas estão
intimamente relacionadas representando um papel de grande importância nas
decisões a serem tomadas. Devemos aqui ressaltar a grande importância que reside
na inter-relação entre a formulação matemática de um problema e entre a seleção
da técnica de solução. Freqüentemente, é difícil avaliar a influência destes dois itens
um sobre o outro sem desenvolver um programa completo e realmente efetuar os
cálculos para comparar as opções.
4.3.1 Definição do Problema
Inicialmente, o problema deve ser definido de forma precisa e os objetivos
determinados claramente. Este pode ser o passo mais difícil de todo o processo.
Considerações devem ser feitas quanto aos dados de entrada disponíveis, o escopo
do problema e suas limitações devem ser especificadas. Precisamos ter previamente
em mente os resultados esperados e a sua relativa importância na tomada de uma
decisão do engenheiro. Esta fase requer o julgamento de engenheiros experientes e
capacitados.

17
4.3.2 Formulação Matemática
Após o problema ter sido definido, é necessário desenvolver um modelo
matemático para representar o sistema físico. Isso requer a especificação de
características individuais dos componentes do sistema envolvidos no problema,
bem como a relação que governa a interconexão destes componentes. Diferentes
modelos matemáticos podem ser utilizados para representar um mesmo sistema e
para vários problemas, formulações complementares podem ser obtidas. Uma dada
formulação pode resultar em um diferente número de equações que uma outra
formulação, como é o caso dos problemas de redes que podem ser resolvidos tanto
pela utilização de equações iterativas quanto nodais. A formulação matemática,
portanto, inclui o projeto de não apenas um modelo, mas sim de uma série deles
para que seja possível a seleção daquele mais adequado à representação física do
sistema.
4.3.3 Seleção da Técnica de Solução do Problema
A formulação da maioria dos problemas de engenharia envolve expressões
matemáticas, como equações não lineares, equações diferenciais, e funções
trigonométricas, as quais não podem ser calculadas diretamente por um computador
digital. Um computador é capaz de realizar apenas as quatro operações aritméticas
básicas: adição, subtração, multiplicação e divisão. A solução para qualquer
problema, portanto, deve ser obtida através de técnicas numéricas que empregam
estas operações. Nesta fase é então importante selecionar um método que seja
prático para o processamento computacional e, obviamente, que nos dê um
resultado com gasto de um menor tempo computacional possível. Uma vez que
aproximações numéricas envolvem certas considerações, devemos ter cuidado
quanto a estas considerações para que tenhamos um grau de precisão adequado.
4.3.4 Definição do Algoritmo
A seqüência lógica pela qual o problema será resolvido, a alocação de
memória necessária, o acesso de dados e a definição dos dados de entrada e saída
são aspectos importantes do projeto do programa computacional. A definição dos
objetivos é essencial para o desenvolvimento de um procedimento que elimine

18
cálculos repetitivos e inúteis. A definição do algoritmo a ser implementado
geralmente é feita na forma de diagrama de blocos.
4.3.5 Programação
Esta etapa esta intimamente relacionada com a elaboração de um algoritmo
adequado. Além das instruções aritméticas, de entradas e de saídas, devemos
agora colocar em prática a execução de um programa com as instruções lógicas
utilizadas para direcionar a seqüência de cálculos a ser realizada. Atualmente, com a
grande variedade de linguagens de programação existentes, podemos agregar
inúmeros facilitadores ao usuário, mas sempre baseados nas etapas predecessoras
para atingirmos um resultado satisfatório.
4.3.6 Verificação do Programa
Existem inúmeras “oportunidades” para cometermos algum erro no
programa na etapa de programação. Portanto, uma série de verificações
sistemáticas devem ser realizadas para assegurar a formulação correta do
problema, do método de solução e da operação do programa.
4.3.7 Aplicação
Os programas de engenharia, de maneira geral, podem ser classificados em
dois grupos distintos. O Primeiro consiste em programas de propósito específico,
que são desenvolvidos em um período relativamente curto para a solução de
problemas simples de engenharia. Este tipo de programa é geralmente bem definido
de modo a servir completamente ao propósito em questão após a primeira série de
cálculos ter sido completada. Contudo, devido sua natureza específica dos
programas, eles são um tanto quanto restritos.
O segundo grupo consiste em programas de propósitos gerais,
desenvolvidos para a análise de grandes problemas de engenharia. Estes
programas são utilizados regularmente em diversas áreas da engenharia para
realização de estudos variados. O seu uso pode representar uma aproximação
efetiva entre um problema de engenharia e a organização de um estudo. Assim, é

19
de extrema importância conhecermos em qual destes dois grupos se enquadra um
determinado programa. Neste caso, no segundo grupo.
4.4 Pesquisas Relacionadas ao Fluxo de Potência
É indiscutível a grande importância do estudo de Fluxo de Potência nas
etapas de planejamento e operação dos Sistemas. Iremos agora relacionar alguns
assuntos dentre os diversos relacionados com o Fluxo de Potência que têm sido
pesquisados.
“No problema original de Fluxo de Potência os despachos das usinas, exceto
uma, é definido de antemão. No Fluxo de Potência ótimo, estes despachos não são
pré-definidos, e são calculados pelo próprio programa de Fluxo de Potência, de tal
forma que se consiga otimizar alguma variável relacionada ao sistema elétrico. Por
exemplo, pode-se obter os despachos capazes de minimizar as perdas de energia
no Sistema de Transmissão, ou os despachos capazes de minimizar os custos de
geração, ou ambos (...)”vi
Uma outra área de pesquisas tem sido o desenvolvimento de novas
técnicas, ou ainda o aperfeiçoamento das existentes, visando o cálculo mais rápido
e eficiente do Fluxo de Potência, com a finalidade, entre outras, de se garantir a
convergência das simulações.
Podemos ainda citar a área de pesquisa que associa os programas de Fluxo
de Potência aos sistemas especialistas, visando facilitar a tomada de decisões pelos
analistas de Sistemas Elétricos. Alguns campos para a aplicação destas técnicas
combinadas são a tomada de decisões em tempo real para se prevenir ou remediar
condições operacionais inadequadas, e a tomada de decisões em estudos de
planejamento, de como deve se dar à expansão mais adequada dos Sistemas
Elétricos.
4.5 Interatividade e Programação
A palavra Interatividade, quando aplicada na área de sistemas
computacionais, designa a facilidade com que ocorre a comunicação entre os
usuários e os sistemas aplicativos processados nos computadores. Essa
comunicação se dá por meio de interfaces.

20
4.5.1 Processamento Não Interativo
Na década de 60 e 70 a interface de comunicação entre os usuários e os
aplicativos era feita mediante cartões perfurados e relatórios impressos. Por meio
dos cartões perfurados os usuários forneciam os dados de entrada ou indicavam
onde os dados se encontravam, e por meio de relatórios impressos o computador
fornecia aos usuários os dados de saída ou a solução do problema. Tanto a entrada
como a saída de dados era textual.
Naquela época, o processamento dos programas dos usuários era feito de
modo seqüencial, sem que houvesse, em tempo de execução, qualquer interação do
computador com os usuários.
Quando da submissão do programa, o usuário tinha que previamente
fornecer, ou indicar onde se encontravam, os dados do problema que pretendia
solucionar, e também adicionar alguns cartões de controle. A única comunicação
homem-máquina em tempo de execução era feita mediante a console do operador,
para a qual o computador enviava mensagens de erro e/ou controle.
Posteriormente, no final da década de 1970, a comunicação dos usuários
com o computador passou a ser feita através dos terminais de computador, usados
tanto para a entrada como para a saída de dados. No princípio, os terminais
reproduziam, via teclado e vídeo de tubo de raios catódicos, o que era feito
anteriormente por meio dos cartões perfurados e relatórios de saída. Não obstante a
existência de um terminal para fins de interface, podia acontecer que o resultado de
um programa submetido para processamento, apenas fosse disponibilizado ao
usuário, para consulta na tela, horas depois, e não raro somente no dia seguinte.
4.5.2 Processamento Interativo
A evolução do Hardware e Software foi levando ao surgimento de
computadores cada vez mais velozes, o que aliado às novas exigências do mercado
e dos usuários, acabou levando ao processamento interativo. Neste caso, os
usuários se comunicam diretamente com o computador, e os computadores
respondem diretamente aos usuários. No processamento interativo, os dados vão
sendo fornecidos ao aplicativo na medida em que são necessários, e o usuário pode
ter acesso a resultados intermediários, e, com base nestes resultados, ele pode

21
manipular convenientemente os dados de entrada ou mesmo reorientar inteiramente
a direção que pretende dar ao processamento.
Neste aspecto, o sistema interativo pode ser entendido como um sistema no
qual o usuário recebe feed-back da máquina em tempo de execução, e pode
interferir no processamento do aplicativo.
Com o advento e grande desenvolvimento da microinformática nos anos 80,
o uso intensivo de microcomputadores popularizou-se. Os aplicativos desenvolvidos
neste ambiente são projetados segundo a filosofia de processamento interativo, ou
seja, o processamento do aplicativo se inicia por ordem do usuário no momento em
que este desejar, havendo geralmente forte comunicação entre o homem e a
máquina durante a execução dos mesmos.
Nos primeiros tempos da microinformática, apesar do processamento ser
interativo, nem o Hardware, nem os sistemas operacionais, a exemplo do MS-DOS,
davam suporte adequado ao uso de interfaces complexas entre o usuário e os
aplicativos. A maior parte das aplicações continuavam a usar interfaces textuais.
4.5.3 Processamento Interativo com Interfaces Gráficas Interativas
A rápida evolução do hardware de microcomputadores, e o surgimento de
sistemas operacionais multitarefa, a exemplo do Windows, Windows NT e UNIX,
propiciaram grandes progressos nas ferramentas de desenvolvimento de sistemas
aplicativos na área de microinformática. Um sistema operacional multitarefa significa
que o microcomputador ganha a capacidade de executar diversos programas ou
tarefas simultaneamente, como por exemplo editar um texto, imprimir um relatório, e
responder a eventos que o usuários realiza com o mouse. Na verdade o que ocorre
é um melhor aproveitamento da CPU (processador) pela divisão do seu tempo de
utilização entre diversos processos que estão sendo executados. Cada processo
ganha a CPU por alguns milissegundos, e executa durante esse tempo algumas
instruções. Como esse compartilhamento temporal da CPU por diversos processos
se dá de forma muito rápida, fica parecendo aos usuários que todos os processos
são executados simultaneamente.
Essa característica, até então disponível apenas em computadores de médio
e grande porte, quando passou a ser aplicada na área de microinformática permitiu o
surgimento de novas ferramentas que permitem o desenvolvimento de softwares que
utilizam Interfaces Gráficas Interativas para efetuar a interação homem-máquina. O

22
próprio sistema operacional Windows se comunica com o usuário mediante
Interfaces Gráficas Interativas.
4.5.4 IDE (Integrated Development Environment)
As pesquisas mostraram que muitas tarefas que eram difíceis de serem
programadas, como construir janelas, menus, botões, etc., podiam ser sempre
programadas da mesma forma, usando as mesmas rotinas de utilização geral,
bastando customizá-las conforme as necessidades do programador e da aplicação,
mediante a passagem de parâmetros e a definição de propriedades.
Essas rotinas de uso geral passaram a ser encapsuladas em objetos prontos
para serem usados, e que podem ser acessados mediante clicks sobre ícones na
tela do computador que representam objetos. Desta forma, as interfaces deixaram
de ser construídas em torno do código básico que realmente executa as ações, mas
sim em torno de sub-rotinas constituídas por centenas ou milhares de linhas pré
programadas com código básico, e normalmente chamadas, em inglês, de Applets.
Os softwares Visual Basic e Delphi são exemplos de ferramentas de
desenvolvimento que trabalham segundo esta filosofia.
O surgimento destas linguagens fez com que a programação se tornasse
menos procedimental, e as linguagens se tornassem um pouco mais próximas
daquilo que se chama de linguagens de Quarta geração, que são aquelas nas quais
o programador não precisa se preocupar exaustivamente com os passos do
procedimento básico necessário para alcançar seus objetivos, mas sobretudo com o
objetivo que deseja alcançar. Isto tudo fez com que no desenvolvimento de software
existisse uma utilização maciça de elementos gráficos, acessados por meio do
mouse, os quais representam uma rotina a ser incorporada ao aplicativo.
Uma outra característica incorporada aos novos ambientes de programação
é a de que os compiladores passaram a disponibilizar aos programadores, dentro do
próprio ambiente de compilação, rotinas gráficas capazes, por exemplo, de traçar
linhas, desenhar pontos e círculos, colorir desenhos, formar figuras, referenciar
pontos mediante um sistema de coordenadas, executar operações de arrastar e
soltar, etc.
Estes novos ambientes de desenvolvimento, que também incorporam um
editor de programas fonte, são geralmente chamados de IDE - Integrated

23
Development Environment e são destas facilidades que fizemos uso para
desenvolver nosso software com uma interface amigável.

24
5 NOÇÕES BÁSICAS
Iremos apresentar a seguir uma abordagem dos conceitos básicos
necessários para um completo entendimento dos problemas relacionados ao fluxo
de Potência.
5.1 Grandezas
Iremos agora fazer uma breve revisão de algumas grandezas elétricas
fundamentais ao equacionamento dos sistemas elétricos.
5.1.1 Impedância
A impedância é uma composição das grandezas resistência com reatância
(indutiva ou capacitiva).
A grandeza impedância é representada por “Z” e tem um módulo e uma
fase. É medida em ohms e indica quanto um elemento “impede” a passagem de
corrente no circuito.
É importante observar que Z não é um fasor, muito embora sua notação seja
semelhante à notação fasorial, já que o termo fasor é utilizado para grandezas que
variam no tempo e o módulo e fase da impedância são grandezas fixas.
Z = impedância (ohms, )
Z = R + jX (ohms, ) Equação 5.1
onde:
• Z é a impedância;
• R é a resistência;
• X é a reatância.
5.1.2 Resistência
O escoamento de cargas através de qualquer material encontra a oposição
de uma força semelhante, em muitos aspectos, ao atrito mecânico. Esta oposição,
resultante das colisões entre elétrons e entre elétrons e átomos do material. O

25
símbolo usado para representar a resistência é a letra R e assim como a
impedância, sua unidade de medida é o ohm (Ω).
Figura 5.1 – Símbolo e representação da Resistência Elétrica
5.1.3 Reatância
A reatância é uma oposição à corrente que resulta em uma troca contínua
de energia entre a fonte e o campo magnético do indutor ou capacitor. Em outras
palavras, a reatância, ao contrário da resistência (que dissipa energia em forma de
calor), não dissipa energia (ignorando os efeitos da resistência). Podemos ter uma
reatância tanto indutiva como capacitiva:
XL = Impedância Indutiva (Omhs, );
XC = Impedância Capacitiva (Omhs, ).
Figura 5.2 – Símbolo e representação das Reatâncias Indutiva e Capacitiva
) (ohms, Ω LX L ω Equação 5.2
) (ohms, 1 ΩC
X C ω Equação 5.3
5.1.4 Admitância
A admitância, analogamente a impedância, é uma composição das
grandezas condutância e susceptância (indutiva ou capacitiva). Em circuitos de

26
corrente alternada (AC) definimos admitância (Y) como sendo igual a 1/Z. A unidade
de admitância no SI é o siemens, cujo símbolo é S. A admitância é uma medida de
quanto um circuito AC admite, ou permite, a passagem da corrente. Assim, quanto
maior o seu valor, maior será a corrente para a mesma tensão aplicada.
S) (siemens, AdmitânciaY
S) (siemens, 1ZY =
S) (siemens, jBGY += Equação 5.4
onde:
• Y é a admitância;
• G é a condutância;
• B é a susceptância.
5.1.4.1 Condutância
Quando calculamos o inverso da resistência de um material, obtemos
uma medida da facilidade com que o material conduz eletricidade. Esta grandeza é
chamada condutância, seu símbolo é G, e é medida em siemens (S). Em termos
matemáticos a condutância é definida por:
S) (siemens, aCondutânciG
S) (siemens, 1R
G = Equação 5.5
5.1.4.2 Susceptância
O inverso da reatância (1/X) é denominado susceptância, e dá uma idéia de
quanto um componente é susceptível à passagem de corrente. A susceptância
também é medida em siemens e representada pela letra B.
Assim como a reatância, podemos ter susceptância indutiva ou capacitiva:

27
S) (siemens, Capacitiva iaSusceptânc
S) (siemens, Indutiva iaSusceptânc
C
L
B
B
S) (siemens, 1
LL X
B = Equação 5.6
S) (siemens, 1
CC X
B = Equação 5.7
5.2 Modelos para a Simulação de Sistemas Elétricos de Potência
A análise do desempenho de um Sistema Elétrico de Potência se faz por
meio de simulações utilizando para isso modelos matemáticos que representam os
equipamentos por meio de equações. Uma vez fornecidos os elementos conhecidos
destas equações (características e condições do sistema) e resolvidas as equações,
tem-se o resultado para aquela condição (ou estado) do sistema.
Para a representação dos vários componentes do sistema são necessários
modelos adequados a cada componente e a cada tipo de estudo, tendo-se
normalmente, modelos mais simples para estudos em regime permanente e modelos
mais complexos para estudos de transitórios.
Figura 5.3 – Modelamento de Equipamentos: Linha de Transmissãovii

28
Figura 5.4 – Modelamento de Equipamentos: Transformador viii
Como os sistemas elétricos trifásicos simétricos e equilibrados são sempre
estudados utilizando-se a representação monofásica devido à enorme simplificação
que advém de tal procedimento, os modelos matemáticos desenvolvidos para a
representação dos vários componentes do sistema são também modelos
monofásicos.
Dependendo do estudo que se deseja fazer, tem-se uma representação
específica dos vários componentes do sistema, representando com maiores detalhes
os aspectos que interessam ao estudo. Para um estudo de fluxo de potência, a
localização, número e características dos disjuntores ou relés não interessa, não
havendo necessidade da representação destes equipamentos.
No diagrama unifilar de impedâncias, como também no de admitâncias, cada
elemento (linha, gerador, transformador, etc.) do sistema em estudo deve ser
representado por um circuito equivalente monofásico, ou seja, representativo de uma
fase do elemento. O grau de precisão deste circuito equivalente vai depender da
finalidade do estudo. Determinados estudos requerem representações mais
completas e detalhadas, enquanto outros admitem maiores simplificações. Assim,
em diferentes estudos, um mesmo elemento do sistema pode ser representado por
circuitos equivalentes diferentes.

29
Figura 5.5 – Exemplo de diagrama Unifilar de Admitânciasix
5.2.1 Modelos de Geradores Síncronos
Nos estudos de Fluxo de Potência convencional onde se admite rede e
carga equilibrados, e por isso só se modelam os elementos em termos de sua
seqüência positiva, os geradores são comumente representados por uma força
eletromotriz constante em módulo e uma potência ativa injetada na barra terminal
(que na maioria das vezes é a barra de alta tensão da usina, mas que também pode
ser a barra de baixa tensão nos casos em que houver interesse em representar os
transformadores elevadores).
Deve-se ressaltar que o modelo mais sofisticado e que incluiria a
consideração da saliência das máquinas de pólos salientes necessitaria, para a sua
dedução, do subsídio da teoria geral das máquinas elétricas. Sendo que este tema
além de exigir bastante espaço para uma abordagem eficiente, não se utiliza deste
modelo para os cálculos de fluxo de potência, portanto abordaremos apenas o
modelo aqui empregado.
Uma máquina em regime permanente de funcionamento simétrico, pode ser
vista de seus terminais, como uma fonte de força eletromotriz E em série com uma
impedância interna jXd. O diagrama equivalente é mostrado na figura abaixo:

30
Figura 5.6 – Modelo de Geradorx
A impedância jXd é designada como a impedância síncrona da máquina. O
diagrama fasorial da máquina é mostrado abaixo:
Figura 5.7 – Diagrama de Fasorial de um Geradorxi
Onde:
• E é a força magneto motriz;
• V é a tensão terminal da máquina;
• δ o ângulo de carregamento;
• φ o ângulo de fase.

31
5.2.2 Modelos de Linhas de Transmissão
Normalmente as linhas de transmissão funcionam como cargas equilibradas
trifásicas. Embora as vezes não apresentem espaçamento eqüilateral ou não sejam
transpostas, a assimetria resultante será pequena e as fases podem ser
consideradas em equilíbrio.
Uma linha de transmissão possui quatro parâmetros: resistência e
indutância, que constituem a impedância série da linha, e capacitância e
condutância que constituem a admitância em paralelo entre fases ou entre fase e
neutro. A condutância em paralelo é pequena e pode ser geralmente desprezada
para o cálculo das tensões e correntes nas linhas de transmissão.
Costuma-se caracterizar as linhas de transmissão como curtas, médias ou
longas, conforme o comprimento das mesmas. Tal caracterização deve-se ao
comportamento das linhas quando operando em regime permanente em função do
efeito da capacitância das mesmas.
A resistência, a reatância e a condutância das linhas estão uniformemente
distribuídas ao longo da linha e isso deve ser observado no cálculo rigoroso das
linhas longas. Para linhas médias é razoável considerar metade da capacitância total
da linha como concentrada em cada extremidade da mesma e a impedância série
concentrada entre as capacitâncias, sem que sejam introduzidos erros apreciáveis
nas correntes e tensões nos terminais. Para linhas curtas, a susceptância capacitiva
total é tão pequena que pode ser omitida, considerando-se somente a impedância
série concentrada.
Nos modelos considerados a seguir considera-se uma linha trifásica, com os
condutores dispostos segundo os vértices de um triangulo eqüilátero (ou totalmente
transposta), com tensões e correntes simétricas e equilibradas, para a qual se
podem obter parâmetros “por fase” e que pode, então ser representada por um
modelo monofásico unifilar.
No desenvolvimento das equações considerar-se-á a seguinte notação:
• Vs - tensão fase-terra no terminal emissor;
• Vr - tensão terminal no terminal do receptor;
• Is - corrente de fase no terminal emissor;
• Ir - corrente de fase no terminal receptor;
• Z = R + jXl - impedância série;
• Y = G + jBc - admitância em derivação.

32
5.2.2.1 Linha Longa
Considerando-se que todos os parâmetros das linhas de transmissão:
resistência, indutância, condutância e capacitância, são uniformemente distribuídas
pode-se considerar uma seção infinitesimal de linha representada por elementos de
seus parâmetros, como mostrado na figura abaixo, e obter as relações entre
correntes e tensões nos terminais desta seção.
Figura 5.8 – Esquema para linha longa
Extendendo-se depois para a linha toda, de comprimento [km] e
resolvendo-se as equações diferenciais, obtém-se as equações relacionadas abaixo:
[V] )senh()cosh γγ RCRS IZ(VV += Equação 5.8
[A] )senh()cosh γγC
RRS Z
V(II += Equação 5.9
que fornecem a solução exata para a tensão e a corrente no terminal emissor da
linha em função da tensão no terminal receptor tendo-se, ainda:
][ Ω=CL
ZC Equação 5.10
βγ jLC +== Equação 5.11
sendo:
αααα em neper;
ββββ em radianos;

33
L em henry;
C em farad.
Com as equações para o modelo da linha longa pode-se na verdade, obter a
tensão e a corrente em qualquer ponto de uma linha, bastando que se substitua
por x, onde x é a distância do receptor ao ponto considerado.
5.2.2.2 Linha Média
Tomando-se as equações 5.8 e 5.9 e expandindo-se em série as funções
senh( γ ) e cosh( γ ) e tomando apenas os dois primeiros termos da série, obtém-se
as equações 5.12 e 5.13, com funções trigonométricas, que são as chamadas
equações de linha média ou equações do pi-nominal, cujo o diagrama é mostrado na
figura abaixo:
Figura 5.9 – Esquema para linha média
[V] 2
1 RLRS IZZY
VV +
+= Equação 5.12
[A] 2
14
1
++
+×= ZYI
ZYYVI RRS Equação 5.13

34
onde:
LjXRZ += e CjBGY += .
Estas equações permitem uma precisão suficiente para os cálculos usuais
de linhas de transmissão.
Este modelo é, também, normalmente utilizado na modelagem de linhas de
transmissão em programas computacionais devido à facilidade da implantação do
mesmo na representação das linhas de transmissão. E é este o modelo que
utilizamos na elaboração do software.
5.2.2.3 Linha Curta
Para este modelo, mostrado no diagrama unifilar da figura abaixo, onde
foram eliminadas as admitâncias em derivação, consideradas nos modelos de linha
longa (exato) e pi-nominal têm-se as seguintes expressões:
RS II = Equação 5.14
RLRS IZVV += Equação 5.15
Figura 5.10 – Esquema para linha curta
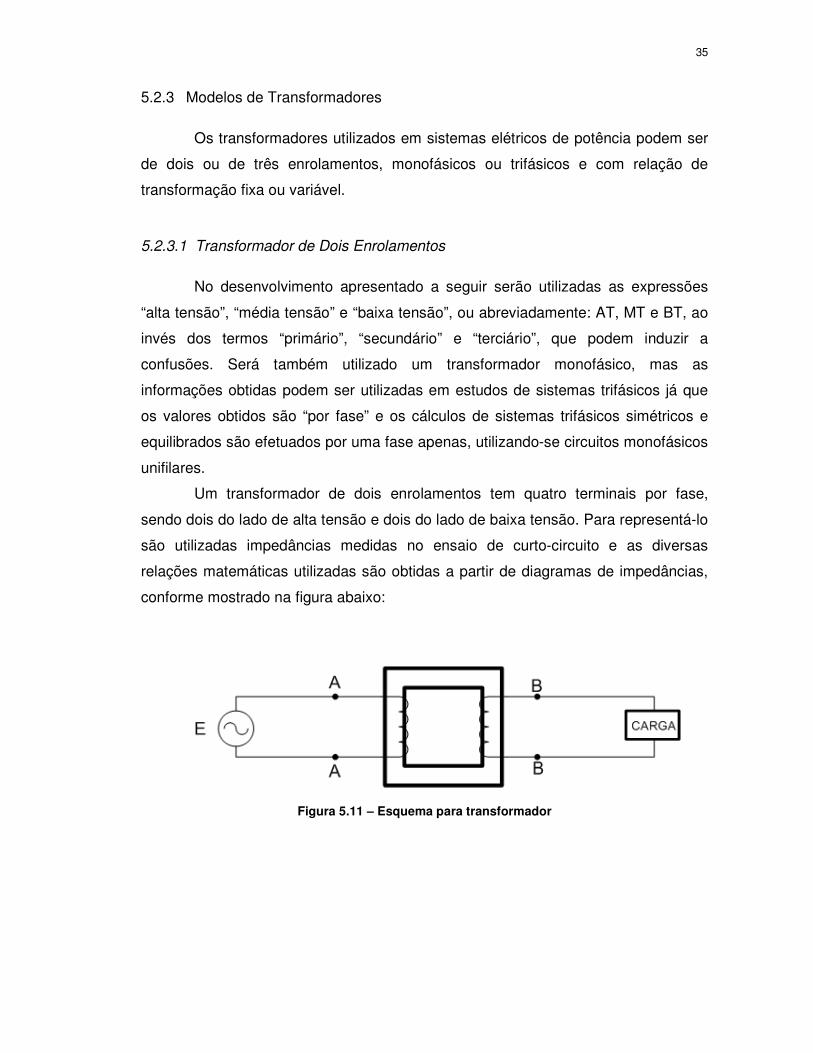
35
5.2.3 Modelos de Transformadores
Os transformadores utilizados em sistemas elétricos de potência podem ser
de dois ou de três enrolamentos, monofásicos ou trifásicos e com relação de
transformação fixa ou variável.
5.2.3.1 Transformador de Dois Enrolamentos
No desenvolvimento apresentado a seguir serão utilizadas as expressões
“alta tensão”, “média tensão” e “baixa tensão”, ou abreviadamente: AT, MT e BT, ao
invés dos termos “primário”, “secundário” e “terciário”, que podem induzir a
confusões. Será também utilizado um transformador monofásico, mas as
informações obtidas podem ser utilizadas em estudos de sistemas trifásicos já que
os valores obtidos são “por fase” e os cálculos de sistemas trifásicos simétricos e
equilibrados são efetuados por uma fase apenas, utilizando-se circuitos monofásicos
unifilares.
Um transformador de dois enrolamentos tem quatro terminais por fase,
sendo dois do lado de alta tensão e dois do lado de baixa tensão. Para representá-lo
são utilizadas impedâncias medidas no ensaio de curto-circuito e as diversas
relações matemáticas utilizadas são obtidas a partir de diagramas de impedâncias,
conforme mostrado na figura abaixo:
Figura 5.11 – Esquema para transformador

36
Figura 5.12 – Esquema para transformador
Figura 5.13 – Esquema para transformador

37
Figura 5.14 – Esquema para transformador
Figura 5.15 – Esquema para transformador

38
Figura 5.16 – Esquema simplificado de transformador
A representação de um transformador monofásico é feita por um diagrama
de impedâncias equivalente, a dois e três terminais, em estrela (Y) ou delta (∆). A
figura 5.13 representa o circuito equivalente em Y, com Z1, Z2 e Z12 a serem
determinados.
Se o transformador da figura 5.11 é representado com terminais A’ e B’
conectados, como na figura 5.12, nenhuma alteração é introduzida, já que estes
pontos estão no potencial de neutro. Nesta figura, Z11 é a impedância própria do
enrolamento AA’, Z22 é a impedância própria do enrolamento BB’ e Z12 é a
impedância mútua entre os dois enrolamentos, já que estes estão acoplados
magneticamente.
Aplicando-se uma tensão entre A e A’, com B aberto e entre B e B’, com A
aberto (figura 5.12), tendo-se os valores de corrente em ambos os casos e
equacionando V/I no transformador e no circuito equivalente (figura 5.13) tem-se:
31111
ZZZIV +== Equação 5.16
32222
ZZZIV +== Equação 5.17
Aplicando-se agora uma tensão V entre os terminais A e A’ com B e B’ curto-
circuitados (figura 5.12), o que corresponde a aplicar a tensão V entre A e A’B’ com
B curto-circuitado com A’B’ no circuito equivalente (figura 5.13), tem-se:
122111 ZIZIV −= Equação 5.18

39
1222110 ZIZI +−= Equação 5.19
22
2112 Z
ZII = Equação 5.20
Eliminando I2 nas equações acima, tem-se:
−=
22
212
111 ZZ
ZIV Equação 5.21
22
212
111 Z
ZZ
IV −=∴ Equação 5.22
32
321
1 ZZZZ
ZIV
++=∴ Equação 5.23
Igualando-se as equações 5.21 e 5.22 e substituindo-se o valor de Z11 obtido
de 5.16, obtém-se:
32
23
32
323
22
212
ZZZ
ZZZZ
ZZZ
+=
+−= Equação 5.24
Verifica-se, então, que as equações 5.16, 5.17 e 5.19 somente são satisfeitas
se:
12111 ZZZ −= Equação 5.25
12222 ZZZ −= Equação 5.26
123 ZZ = Equação 5.27
O circuito equivalente é então mostrado na figura 5.14, onde:
Z1 = impedância de dispersão do enrolamento AA’;

40
Z2 = impedância de dispersão do enrolamento BB’;
Z3 = impedância mútua entre dois enrolamentos.
Na figura 5.15 estão mostrados com detalhes os componentes da
impedância mútua. A resistência Rh+e é a resistência que leva em conta as perdas
por histerese e correntes parasitas no ferro do núcleo, e Xm é a reatância mútua ou
de magnetização.
A corrente que flui através da combinação em paralelo é a corrente de
excitação do transformador. A parcela Rh+e é a corrente de perdas, responsável
entre outras coisas pelo aquecimento do núcleo. A outra parcela, que flui através de
Xm é a corrente de magnetização do transformador.
Na maioria dos problemas o ramo paralelo de excitação é considerado como
impedância infinita e o circuito equivalente passa a dois terminais, conforme figura
5.16, onde ZT é a impedância de dispersão do transformador.
5.2.3.2 Transformador de Três Enrolamentos
Com a corrente de excitação desprezada, o circuito equivalente de um
transformador de três enrolamentos, para uso no diagrama monofásico de
impedâncias, será um circuito de três terminais.
Em um transformador de três enrolamentos, as potências de cada um deles
poderá ser diferente. As impedâncias fornecidas pelos fabricantes estão geralmente
referidas à tensão e à potência de cada enrolamento. Assim é necessário, antes de
tudo, referir todas as impedâncias à potência base comum de estudo. Como as
tensões bases serão as tensões nominais dos respectivos circuitos do
transformador, as impedâncias em pu serão as mesmas referidas a qualquer lado do
mesmo. Assim as impedâncias já estão nas tensões adequadas. Tomados estes
cuidados teremos a seguinte correspondência entre as impedâncias do
transformador e as do circuito equivalente em Y, da figura 5.17.

41
Figura 5.17 – Esquema de Transformador com 3 enrolamentos
maam ZZZ += Equação 5.28
baab ZZZ += Equação 5.29
bmmb ZZZ += Equação 5.30
onde Za, Zm e Zb são as impedâncias do circuito equivalente, a determinar, e
Zam, Zab e Zmb as impedâncias do transformador, definidas como:
Zam = impedância de dispersão entre alta e média, com a baixa aberta;
Zab = impedância de dispersão entre alta e baixa, com a média aberta;
Zmb = impedância de dispersão entre média e baixa, com a alta aberta (com
todos os valores em pu).
Resolvendo o conjunto de equações (5.28, 5.29, 5.30) tem-se:
( )mbabama ZZZZ −+=21
Equação 5.31
( )abmbamm ZZZZ −+=21
Equação 5.32
( )ammbabb ZZZZ −+=21
Equação 5.33

42
5.2.3.3 Modelos de Transformadores com Relação de Transformação Fora da
Nominal
Os transformadores normalmente têm várias derivações em um dos
enrolamentos (ou em ambos) o que possibilita a regulação da tensão com a
operação fora da relação de transformação nominal.
Os transformadores com relação de transformação nominal são
representados, em pu, por uma reatância série apenas, como visto no item anterior.
Já os transformadores com relação fora da nominal necessitam ser adequadamente
modelados para poderem levar em conta a derivação em que o comutador está
conectado.
Considerando-se as tensões do lado de alta e do lado de baixa em cada
derivação, e as respectivas tensões bases, e admitindo que haja derivações de
ambos os lados, obtém-se o valor da derivação “a” (ou “tap”), em pu:
[pu] BA
a = Equação 5.34
Onde:
AT da base TensãoAT da derivação da Tensão=A Equação 5.35
BT da base TensãoBT da derivação da Tensão=B Equação 5.36
O transformador com relação de transformação fora da nominal pode ser
representado apenas por um transformador ideal, com relação de transformação a:1,
em série com uma admitância, como mostrado na figura abaixo:

43
Figura 5.18 – Transformador com Relação Fora da Nominal
Eliminando-se a barra r obtém-se um equivalente na forma de um modelo π,
como mostrado na figura 5.19:
a
Figura 5.19 – Modelo ππππ de Transformador
É importante observar que os elementos do modelo π obtidos anteriormente
somente serão válidos se:
qppq YY = Equação 5.37
para o que é necessário que se tenha a = a*, ou seja, somente quando “a” é real,
que é o que acontece para transformadores em que há mudança apenas da
magnitude da tensão e não da fase da mesma.

44
No caso em que a ≠ a* tem-se um “transformador defasador”, com o qual é
possível obter tanto a mudança da amplitude da tensão como a sua fase e, com
isso, regular a tensão e forçar o fluxo de potência de forma desejada.
5.2.3.4 Modelos de Cargas
Podemos conceituar carga de um Sistema Elétrico de Potência como sendo
qualquer dispositivo elétrico que consuma energia ativa e reativa deste ou mesmo
apenas energia reativa.
Quando se está tratando da análise e operação de um Sistema Elétrico de
Potência, a carga deste surge como um parâmetro de altíssimo interesse e
importância visto que o objetivo básico das áreas de operação e análise do Sistema
Elétrico de Potência é o atendimento aos consumidores dentro dos padrões
adequados de qualidade, confiabilidade e continuidade.
Um outro aspecto que se deve ser considerado é que certos
comportamentos de carga global de um Sistema Elétrico de Potência, ao longo do
tempo ou mesmo em determinadas condições anômalas, fazem com que as
decisões e providências operacionais sejam mutáveis.
Vamos analisar alguns aspectos das cargas que devem ser levados em
conta quando da operação e análise de um SEP.
O primeiro seria a grandeza da carga, no que tange ao seu valor, é bastante
compreensível que a magnitude de uma determinada carga faça com que o controle
operacional, a análise e mesmo a estrutura do SEP seja tal qual atenda esta, dentro
dos padrões legais e adequados de fornecimento.
Outro aspecto de suma importância que deve ser levado em conta é a
dependência da carga com a tensão e freqüência.
Na atual representação de cargas utilizadas em estudos de grandes
Sistemas Elétricos de Potência, normalmente a freqüência média do sistema é
considerada constante, a respeito da mudança de carga dos geradores e da posição
angular relativa dos geradores durante distúrbios.
Como conseqüência, as características dos geradores, equipamentos e
linhas de um SEP são definidas para a freqüência nominal.
Por outro lado, pelo que se tem observado em alguns estudos de SEP, as
características dos elementos desse não variam de modo substancial de forma que
justifique levar em conta a mudança de freqüência.

45
Dessa forma, para esses casos, torna-se desnecessário incluir o efeito da
variação das cargas de um SEP com a freqüência.
A inclusão dos efeitos de variação de carga de um SEP com a freqüência
exige, para que se tenha uma precisão adequada, uma metodologia extremamente
complicada na análise e modelagem das cargas, muito embora nos atuais
programas de estabilidade seja possível levar em conta a variação das cargas com
inércia (a exemplo de motores de indução, síncronos) com a variação da freqüência.
Dentro da filosofia de análise do comportamento da carga composta de um
SEP com a tensão pode-se classificar essa carga em três tipos clássicos:
• Impedância constante, onde a variação da potência consumida é
função do quadrado da tensão, ou seja:
( )2VfP = Equação 5.38
como, por exemplo, aquecedores ou mesmo a carga geral de um
SEP;
• Corrente constante, onde a variação da potência, consumida é
função linear da tensão, ou seja:
( )VfP = Equação 5.39
como, por exemplo, lâmpadas fluorescentes;
• Potência constante, onde a potência consumida independe, da
variação da tensão, ou seja:
( )0VfP = Equação 5.40
como, por exemplo, motores síncronos e de indução (com restrições).
Em suma, a variação geral da carga global de um Sistema Elétrico de
Potência com a tensão pode ser caracterizada pela expressão genérica:
( ) ( ) ( )23
12
01 VpVpVpP ++= Equação 5.41
De qualquer forma, dado o escopo do trabalho em questão, ater-se-á manter
constante os valores da potência consumida pelas cargas em função da tensão.

46
5.3 Formação das Matrizes Admitância e Impedância
O desenvolvimento contínuo de grandes computadores de alta velocidade
tem propiciado uma importante mudança nas técnicas de solução de grandes
circuitos elétricos. As soluções através de computador digital dependem das
equações do circuito. Assim, é importante que o engenheiro de sistemas de potência
entenda a formulação das equações e, para a obtenção da solução desenvolva o
programa de computador.
Abordaremos agora a formulação das matrizes admitância de barra e
impedância de barra.
5.3.1 Equações Nodais
As junções formadas por dois ou mais elementos (R, L, C, ou uma fonte
ideal de corrente ou tensão) conectados nos seus terminais, são chamados de nós.
Em sistemas de potência são comumente chamados de barras. A formulação
sistemática das equações determinada nos nós de um circuito pela aplicação da lei
de Kirchhoff das correntes, é a base de algumas soluções de problemas de sistemas
de potência.
Na Figura 5.20 podemos examinar alguns aspectos das equações nodais.
Os geradores são conectados através de transformadores às barras de alta tensão 1
e 3, suprindo um motor síncrono na barra 2.
Figura 5.20 - Diagrama unifilar de um sistema simplesxii

47
Para análise, as máquinas ligadas a uma barra são tratadas como máquinas
simples representadas por uma fonte de tensão em série com uma reatância. O
diagrama de reatância, com as reatâncias em p.u., é mostrado na Figura 5.21. Os
nós são indicados por pontos e os nós com mais de duas conexões são indicados
por números circunscritos.
O circuito é refeito com as fontes de tensão em série com as impedâncias
conectadas aos nós com mais de duas conexões trocadas por fontes de corrente em
paralelo com admitância shunt, com mostra a Figura 5.22.
Figura 5.21 - Diagrama de reatâncias do sistema da Figura 5.20xiii
Figura 5.22 - Circuito da Figura 5.20 com fontes de correntexiv

48
Aplicando a lei de Kirchhoff das correntes no nó 1 com a fonte de corrente
injetando corrente igual a soma das correntes que deixam o nó, temos:
( ) ( )413111 VVyVVyVyI dfa −×+−×+×= Equação 5.42
e para o nó 4:
( ) ( ) ( )3424140 VVyVVyVVy ehd −×+−×+−×= Equação 5.43
Rearranjando essas equações temos:
( ) 4311 VyVyVyyyI dfdfa ×−×−×++= Equação 5.44
( ) 43210 VyyyVyVyVy hedehd ×+++×−×−×−= Equação 5.45
Equações semelhantes podem ser formadas para os nós 2 e 3, e o sistema
de equações pode ser resolvido para determinar V1, V2, V3 e V4. As correntes podem
ser calculadas uma vez conhecidas essas tensões.
As equações do sistema podem ser colocadas na forma matricial por:
×
=
4
3
2
1
44
34
24
14
43
33
23
13
42
32
22
12
41
31
21
11
4
3
2
1
V
V
V
V
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
I
I
I
I
A matriz Y é simétrica e denominada de YBARRA e chamada de matriz
admitância de barra. Os elementos Y11, Y22, Y33 e Y44 são chamados de elementos
próprios da matriz. Os elementos fora da diagonal são chamados de elementos
mútuos.
A expressão geral para a corrente injetada no nó k de um circuito com N nós
independentes, isto é, N barras fora a referência, é:

49
=
×=N
nnknk VYI
1
Equação 5.46
Os elementos da matriz YBARRA são formados de uma forma genérica por:
• Elementos próprios =
=N
jijii yY
1
• Elementos mútuos yijYij −=
Sendo yij a admitância conectada entre a barra i e a barra j.
5.3.2 Medição dos Elementos das Matrizes Impedância e Admitância de Barra
A inversão da matriz admitância de barra YBARRA é chamada de matriz
impedância de barra ZBARRA e é, por definição:
1−= BARRABARRA YZ
Para um circuito de três nós, temos que:
=
33
23
13
32
22
12
31
21
11
Z
Z
Z
Z
Z
Z
Z
Z
Z
Z BARRA
sendo ZBARRA uma matriz simétrica.
A matriz YBARRA não necessariamente deve ser obtida para se obter ZBARRA.
5.3.3 Modificação de uma Matriz Impedância de Barra
A matriz ZBARRA é uma ferramenta importante em análise de sistemas de
potência. Veremos agora como modificar ZBARRA ao adicionar uma nova barra ou ao
conectar uma nova linha a uma barra já existente. Poderíamos criar uma nova matriz
YBARRA e invertê-la, mas, o método direto de modificação é mais vantajoso e mais
simples que a inversão.
Consideremos vários tipos de modificações envolvendo a adição de um
ramo com impedância Zb a um circuito cuja matriz original ZBARRA é conhecida e que
a identificaremos por Zorig (n x n).

50
As barras existentes serão identificadas por números ou letras h, i, j e k. A
letra p designará a nova barra a ser adicionada ao circuito para converter Zorig a uma
matriz (n+1)x(n+1). Quatro casos serão considerados.
• adição de ZB de uma nova barra P à barra de referência;
• adição de ZB de uma nova barra P a uma barra existente K;
• adição de ZB de uma barra existente K à barra de referência;
• adição de ZB entre duas barras existentes j e k.
5.3.3.1 Adição de ZB de uma Nova Barra P à Barra de Referência
A adição de Zb de uma nova barra p à barra de referência sem conexão com
as barras já existentes do circuito original, não altera as tensões de barra original
quando uma corrente Ip é injetada na nova barra. A tensão Vp na nova barra é igual
a Zb.Ip. Assim,
×
=
p
n
b
orig
p
n
I
I
I
I
Z
Z
V
V
V
V
2
1
2
1
000
0
00
Observe que o vetor de correntes multiplicado pela nova matriz ZBARRA não
altera as tensões do circuito original
5.3.3.2 Adição de Zb de uma Nova Barra P à uma Barra Existente K
A adição de Zb de uma barra p a uma barra k, já existente, com injeção de Ip
na barra p, produzirá na barra k Ik + Ip, como mostra a Figura 5.23.

51
Figura 5.23 - Adição da nova barra p conectada através da impedância Zb a uma barra k
A corrente Ip injetada na barra k produzirá um acréscimo na tensão original
de Zkk.Ip, ou seja:
pkkorigknovok IZVV ×+= )()( Equação 5.47
e Vp será igual a
pbpkkorigkp IZIZVV ×+×+= )( Equação 5.48
e
pbkknknkkp IZZIZIZIZV ××+×++×+×= )(2211 Equação 5.49
A nova linha a ser acrescida a Zorig para encontrar Vp é:
)( 21 bkkknkk ZZZZZ × Equação 5.50
Como ZBARRA é uma matriz quadrada e diagonal, devemos colocar uma
coluna igual a transposta da nova linha. Assim a equação matricial torna-se:

52
×
+
=
p
n
bkkknkk
nk
korig
k
p
n
I
I
I
I
ZZZZZ
Z
ZZ
Z
V
V
V
V
2
1
21
2
1
2
1
Observe que os n primeiros elementos da nova linha são os elementos da
linha k de Zorig e os n primeiros elementos da nova coluna são os elementos da
coluna k de Zorig.
5.3.3.3 Adição de Zb de Uma Barra Existente K à Barra de Referência
Para alterar Zorig conectando uma impedância Zb de uma barra k existente à
barra de referência, adiciona-se uma nova barra p conectada por Zb à barra k,
depois curto-circuita-se a barra p à barra de referência fazendo Vp igual a zero. Para
modificar cria-se uma nova linha e uma nova coluna semelhante ao caso 2 e depois
elimina-se a linha e a coluna (n+1) pelo fato da tensão ser nula. Para determinar os
elementos da nova matriz, temos:
bkk
innhorighinovohi ZZ
ZZZZ
+×
−= ++ )1()1()()( Equação 5.51
5.3.3.4 Adição de ZB entre Duas Barras Existentes j e k
Para adicionar Zb entre duas barras existentes j e k examinaremos a Figura
5.24.

53
Figura 5.24 - Adição da impedância Zb entre as barras j e k existentes.
A corrente Ib flui através de Zb de k para j. As equações para as tensões são:
( ) ( ) +−×++×++×= bkkbjj IIZIIZIZV 111111 Equação 5.52
Rearranjando:
)( 11111111 kjbkkjj ZZIIZIZIZV −×++×+×++×= Equação 5.53
Igualmente:
)(11 jkjjbkjkjjjjj ZZIIZIZIZV −×++×+×++×= Equação 5.54
)(11 kkkjbkkkjkjkk ZZIIZIZIZV −×++×+×++×= Equação 5.55
Necessita-se de mais uma equação, já que Ib é desconhecida:
bbjk IZVV ×=− Equação 5.56
ou
kjbb VVIZ −+×=0 Equação 5.57

54
Fazendo um arranjo com as equações descritas, podemos escrever a
equação matricial,
( )
( )( )
( )
( ) ( ) ( )
×
−−
−
−−
−
=
b
n
k
j
bbkkkjkj
nknj
kkkj
jkjjorig
kj
n
k
j
I
I
I
I
I
ZZZZZ
ZZ
ZZ
ZZZ
ZZ
V
V
V
V
1
11
111
0
Eliminando a linha e a coluna (n+1), temos, para cada elemento da nova
matriz:
jkkkjjb
innhorighinovohi ZZZZ
ZZZZ
2)1()1(
)()( −++×
−= ++ Equação 5.58
5.3.4 Determinação Direta de uma Matriz Impedância de Barra
Vimos que uma forma para se obter ZBARRA era fazendo a inversão de
YBARRA. Entretanto, a formação de ZBARRA diretamente, sob o ponto de vista
computacional, é mais simples que inverter YBARRA, principalmente para grandes
circuitos.
Para a montagem de ZBARRA é necessário possuir uma lista das impedâncias
mostrando as barras em que elas são conectadas. Inicia-se escrevendo a equação
de uma barra conectada através de uma impedância Za à barra de referência, como:
11 IZV a ×= Equação 5.59
Agora podemos adicionar uma nova barra conectada a primeira ou à barra
de referência. Assim, se a segunda barra for conectada à barra de referência através
de Zb temos a equação matricial,

55
×
=
2
1
2
1 0
0 I
I
Z
Z
V
V
b
a Equação 5.60
E assim prossegue-se com a modificação da matriz adicionando outras
barras seguindo os procedimentos descritos anteriormente.
O procedimento é simples para um computador digital. Para isso se faz
necessário determinar os tipos de modificações envolvidas para cada impedância a
ser adicionada. Entretanto, as operações devem seguir uma seqüência de forma a
permitir conexões entre duas barras.
5.3.5 Esparcidade
Uma das características da matriz de admitâncias Y é a esparcidade, ou
seja, grande numero dos elementos da matriz é igual a zero.
Considerando uma rede com NB barras e NR ramos:
• A matriz Y terá a dimensão (NB x NB);
• Todos os elementos da diagonal são não nulos;
• Os elementos fora da diagonal Ykm e Ymk serão não nulos se
houver um ramo conectado as barras k e m.
Em resumo:
Número total de elementos NB2
Número de elementos da diagonal (sempre não nulos) NB
Números de elementos não nulos fora da diagonal 2.NR
Número total de elementos não nulos NB + 2.NR
Quadro 5.1 - Esparcidade
O grau de esparcidade é a porcentagem de elementos da matriz e é dado por:
%100).2(
%100elementos de totalnúmero
nulos elementos de número2
2
×+−=×=NB
NRNBNBGE Equação 5.61

56
Consideremos o exemplo de matriz de admitância Y baseada no sistema
Sul/Sudeste/Centro-Oeste brasileiro, composto por 1663 barras e 2349 ramos:
Figura 5.25 - Exemplo de matriz Y baseada no sistema Sul/Sudeste/Centro-Oeste brasileiroxv
O Grau de Esparcidade para este caso é:
%77,99%1001663
)2349.21663(16632
2
=×+−=GE
Existem métodos para o tratamento e armazenamento da matriz de
admitância que visam a redução de memória, uma vez que a grande quantidade dos
elementos desta matriz são nulos. Para a implementação do software não fizemos
uso dessas técnicas, uma vez que temos por objetivos construir um software didático
com um número limitado de barras.

57
5.4 Métodos de Solução e Análise de Sistemas Elétricos de Potência
Um Sistema Elétrico de Potência nada mais é do que um circuito elétrico de
grande porte onde existem fontes (geradores) e impedâncias (linhas de transmissão,
transformadores etc.). A análise de desempenho deste sistema consiste em
determinar a tensão em cada nó (barramento) e a corrente em cada ramo (linha ou
transformador), e implica em resolver o circuito elétrico correspondente para
determinadas condições das fontes e das cargas e, para tanto, utilizam-se métodos
estudados em circuitos elétricos tais como: matrizes de impedâncias ou de
admitâncias. Em um sistema elétrico de potência existem transformadores que
mudam a tensão e a corrente dos pontos onde estão conectados, de forma que a
solução do circuito, com a utilização dos métodos matriciais, fica dificultada pela
necessidade de se utilizar as relações de transformação dos vários transformadores,
passando, inicialmente, todos os dados do circuito (em ohm) para um mesmo nível
de tensão (um determinado lado do transformador) para, somente então, resolver o
circuito. A maior vantagem do sistema “por unidade” (pu) é simplificar esta
“uniformização” inicial dos dados, facilitando todo o processo de cálculo.
5.4.1 Sistema Por Unidade (PU)
5.4.1.1 Definição
O valor numérico, em pu, de uma grandeza qualquer, é a relação entre o
valor real desta grandeza (na sua unidade) e um valor base, da mesma grandeza e
na mesma unidade, expresso como um número decimal:
basevalor realvalor
pu emvalor = Equação 5.62
O sistema “pu” é semelhante ao sistema “percentual”, sem as desvantagens
deste, pois quando dois valores percentuais são multiplicados ou divididos, o
resultado deverá ser dividido ou multiplicado, respectivamente, por 100 para se obter
o resultado correto, o que não é necessário no sistema pu. Um valor percentual é um
valor em pu, multiplicado por 100.

58
Em aplicações práticas é muito comum utilizarem-se valores percentuais
(para reatâncias de transformadores e de geradores ou parâmetros R, L, C de linhas
de transmissão), bastando admitir esses valores percentuais por 100 para
transformá-los para pu, para daí efetuar os cálculos com os mesmos.
5.4.1.2 Vantagens da Utilização do Sistema PU
Além de facilitar a solução dos circuitos onde há transformadores, a
utilização de pu apresenta algumas vantagens adicionais, como veremos a seguir.
Normalmente a reatância dos equipamentos elétricos, como geradores e
transformadores, é fornecida pelos fabricantes na forma de valores percentuais (pu
multiplicados por 100), valores estes calculados considerando como bases os
valores nominais de tensão e potência do equipamento em questão. Quando
expressos desta maneira, as características dos equipamentos elétricos podem ser
facilmente comparadas e o que se verifica é que a reatância das máquinas elétricas
de diferentes potências, mas do mesmo tipo, estão dentro de limites bem definidos e
que a reatâncias de transformadores de mesmas tensões nominais não diferem
significativamente. Desta forma é possível efetuar estudos bastante precisos
assumindo valores típicos para reatâncias de equipamentos futuros dentro da faixa
de valores característicos para os mesmos.
Na análise de um sistema em condição normal é necessário verificar as
condições de tensão nos vários barramentos e, sabendo-se que a tensão em um
barramento deve estar entre mais ou menos 5% do valor nominal, fica mais fácil
efetuar a análise quando os valores estão em pu, pois basta ter em mente que os
limites extremos da tensão são 1,05pu no máximo e 0,95pu no mínimo, para
qualquer barramento, não sendo necessário memorizar todos valores em kV para
todas as classes de tensão.
No cálculo de redes por meio de computadores digitais, todos os valores
numéricos dos parâmetros da rede, das excitações e das respostas são de mesma
ordem de grandeza, resultando maior precisão dos cálculos.

59
5.4.1.3 A Escolha de Bases
Para o cálculo dos valores em pu são necessárias “bases”, as quais, como
em um sistema de unidades, são arbitrariamente escolhidas, porém, uma vez
escolhidas, devem ser mantidas inalteradas no decorrer de todo o problema.
Na solução dos problemas de sistemas elétricos são necessárias quatro
bases, a saber: Tensão, Corrente, Impedância e Potência. Tendo em vista as
relações fundamentais entre estas grandezas elétricas, verifica-se que duas delas
podem ser sempre arbitrariamente escolhidas enquanto que as duas outras são
obrigatoriamente determinadas em função das duas arbitradas. Na maioria dos
problemas práticos de Sistemas Elétricos de Potência é normal escolherem-se as
bases de potência e de tensão e calculam-se as bases de corrente e de impedância,
sendo que comumente a base de potência que se utiliza é de 100MVA e a base de
tensão é o valor nominal do equipamento no ponto considerado. Os resultados
obtidos em pu são funções das bases escolhidas, porém, os resultados em
grandezas elétricas independem das bases, obtendo-se o mesmo valor para
qualquer conjunto de base adotado.
Os Sistemas Elétricos de Potência são sempre trifásicos e para o cálculo em
pu são normalmente utilizadas bases trifásicas, mas, podem também, ser utilizadas
bases monofásicas.
Em sistemas monofásicos, ou trifásicos, tomando-se a corrente de linha em
Amperes, a tensão de fase (fase-terra) em kVolts e a potência de uma fase em MVA,
vem:
][A b
bb E
SI = Equação 5.63
][ 2
Ω=b
bb S
EZ Equação 5.64
É usual, entretanto, trabalhar-se apenas com sistemas trifásicos, simétricos
e equilibrados, nos quais, tomando-se a corrente de linha em Amperes, a tensão
entre as fases em kVolts e a potência trifásica em MVA:
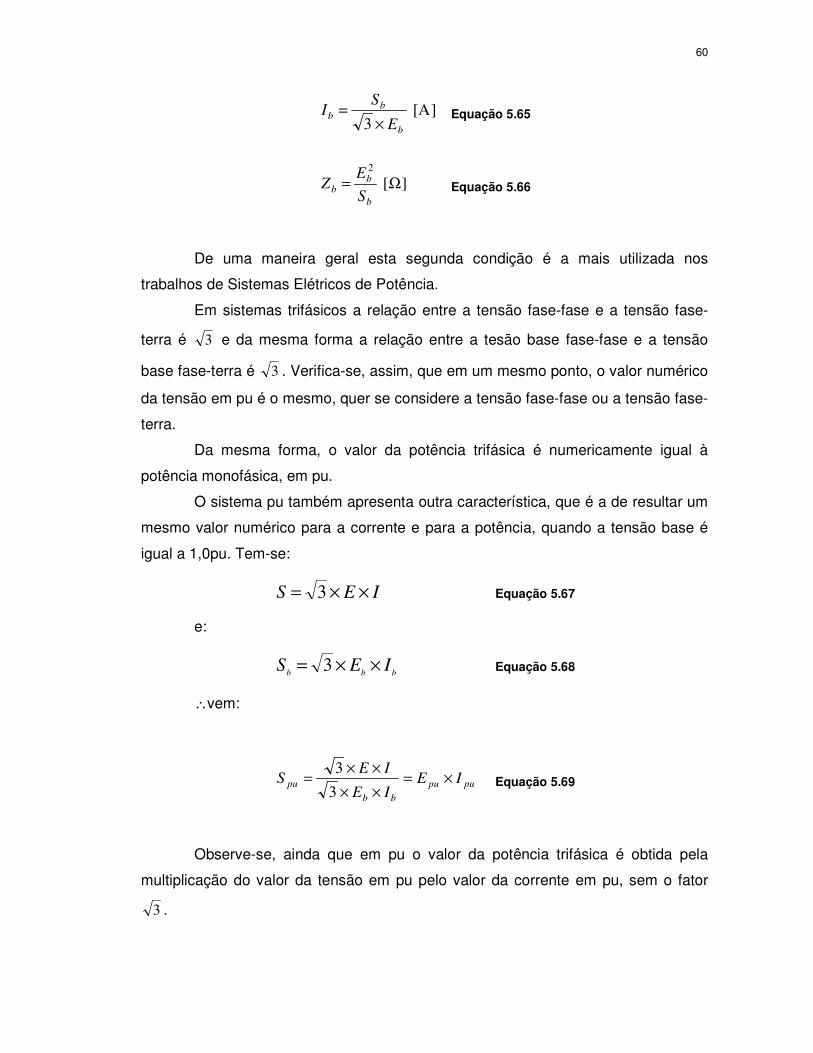
60
][A 3
b
bb
E
SI
×= Equação 5.65
][ 2
Ω=b
bb S
EZ Equação 5.66
De uma maneira geral esta segunda condição é a mais utilizada nos
trabalhos de Sistemas Elétricos de Potência.
Em sistemas trifásicos a relação entre a tensão fase-fase e a tensão fase-
terra é 3 e da mesma forma a relação entre a tesão base fase-fase e a tensão
base fase-terra é 3 . Verifica-se, assim, que em um mesmo ponto, o valor numérico
da tensão em pu é o mesmo, quer se considere a tensão fase-fase ou a tensão fase-
terra.
Da mesma forma, o valor da potência trifásica é numericamente igual à
potência monofásica, em pu.
O sistema pu também apresenta outra característica, que é a de resultar um
mesmo valor numérico para a corrente e para a potência, quando a tensão base é
igual a 1,0pu. Tem-se:
IES ××= 3 Equação 5.67
e:
bbb IES ××= 3 Equação 5.68
∴vem:
pupubb
pu IEIE
IES ×=
××××=
3
3 Equação 5.69
Observe-se, ainda que em pu o valor da potência trifásica é obtida pela
multiplicação do valor da tensão em pu pelo valor da corrente em pu, sem o fator
3 .

61
5.4.2 Mudança de Base
A impedâncias dos equipamentos elétricos, como geradores e
transformadores é fornecida pelos fabricantes em valores percentuais, calculados
com as bases que correspondem aos valores nominais do equipamento em questão.
Considerando que a base de potência, uma vez arbitrada, deve ser mantida única
em toda a solução do problema e que, normalmente a base de tensão é igual ao
valor da tensão nominal dos equipamentos, no ponto considerado, verifica-se que as
características dos equipamentos devem ser colocadas em um mesmo conjunto de
bases (de tensão e de potência) antes de se iniciar a resolução do problema elétrico
- a este processo se denomina “mudança de bases”. A mudança de base deve ser
sempre, das bases com as quais o valor da reatância fornecida (em pu ou por cento)
foi calculada, para as bases de potência (escolhida para a solução do problema) e
de tensão obtida para o ponto (nó ou barramento) em questão.
Seja um equipamento construído para operar em tensão nominal E e que
tem uma potencial nominal S e cuja a impedância é Z%. Esta impedância percentual
foi calculada pelo fabricante com as bases nominais do equipamento, que serão
denominadas Eb1 e Sb1, respectivamente. Calculando-se a impedância base e
multiplicando-se por Z% (dividido por 100), obtém-se o valor da impedância em ohm,
Z, enquanto que o valor Z% dividido por 100 fornece o valor em pu, Z1. Deseja-se,
agora, o valor da impedância do equipamento em pu, nas bases Eb2 e Sb2, para a
solução do sistema.
A impedância base, com os valores nominais do equipamento é:
][ 1
21
1 Ω=b
bb S
EZ Equação 5.70
e o valor da impedância do equipamento, em ohm, é:
][ 1
21
111 Ω×=×=Ωb
bb S
EZZZZ Equação 5.71
A impedância base, com as novas bases é:

62
][ 2
22
2 Ω=b
bb S
EZ Equação 5.72
e o valor da impedância, em pu, do novo conjunto de bases é:
][pu
2
222
2
b
bb
SEZ
ZZ
Z ΩΩ == Equação 5.73
de forma que, substituindo-se agora a equação (5.71) em (5.73), obtém-se o
valor da impedância, em pu, com as novas bases:
][pu 1 11
222
21
22
2
1
21
2b
b
b
b
b
b
b
b
SS
EE
ZES
SE
ZZ ×=
×
= Equação 5.74
A equação (5.74) mostra que, dado um valor de impedância em pu,
calculada com um conjunto de bases, pode-se obter o valor desta impedância em pu
em um outro conjunto de bases, diretamente.
5.4.3 Bases de Tensão e Potência na Solução de Problemas
Nos Sistemas Elétricos de Potência a tensão nominal dos barramentos é
função da tensão nominal dos equipamentos, como geradores e transformadores,
como também da relação de transformação dos transformadores.
A tensão base por sua vez, é arbitrariamente escolhida e fixada em um
barramento do sistema e muda de um barramento para outro em função da relação
de transformação dos transformadores. Assim, a tensão base de todos os pontos do
circuito fica “amarrada” àquela tensão escolhida inicialmente. Já a potência base
será única para todo o sistema em questão.

63
A tensão de operação em cada ponto do sistema, por sua vez, é função da
tensão fixada nos terminais dos geradores, da relação de transformação dos
transformadores, das impedâncias das linhas e transformadores do sistema, bem
como das cargas, reatores, capacitores, etc, existentes no sistema no instante
considerado.
Assim é importante distinguir, na análise de um Sistema Elétrico de
Potência, a tensão nominal da tensão de base e da tensão de operação, em cada
barramento do sistema.
Verifica-se entretanto, que em sistemas em que existe padronização de
equipamentos e de tensões, há coincidência entre tensão nominal e tensão de base,
em cada barramento de forma que não é necessário efetuar mudanças de base de
tensão, para a impedância dos equipamentos, bastando apenas efetuar a mudança
de bases de potência.
5.4.4 Impedâncias de Transformadores em PU
No caso de transformadores tem-se uma tensão nominal do lado de alta
tensão (AT) e outra tensão do lado de baixa tensão (BT). Através de ensaios obtém-
se o valor das reatâncias referidas a um dos lados do transformador (AT ou BT),
dependente do lado em que foram feitas as medições, este valor é fornecido em
porcentagem, nas bases de potência nominal do equipamento e da tensão em que
foi realizado o ensaio. Ocorre que o valor percentual (ou em pu) da reatância resulta
o mesmo, quer faça a medição do lado de AT ou de BT. Isto será mostrado no
desenvolvimento a seguir:
Seja:
Za = impedância referida à AT, em ohm;
Zb = impedância referida à BT, em ohm;
ZbA = impedância base da AT, em ohm;
ZbB = impedância base da BT, em ohm;
Ea = tensão da AT, em kV;
Eb = tensão da BT, em kV;
Sb = potência nominal, em MVA (potência base, neste caso).
em ohm, tem-se:

64
][ 2
2
Ω
=
a
bab E
EZZ Equação 5.75
][ 22
2
2
Ω==
=
== Apuba
a
a
ba
b
b
a
ba
bB
bBpu Z
ZZ
ES
Z
SE
EE
Z
ZZ
Z Equação 5.76
No caso de transformadores de três enrolamentos, são válidas as mesmas
considerações feitas acima.
5.5 Tipos de Barras
A completa definição de fluxo de potência requer o conhecimento de quatro
variáveis em cada barra k do sistema:
Pk – Potência Ativa;
Qk – Potência Reativa;
Vk – Magnitude da Tensão;
k – Ângulo de fase da Tensão.
A priori, apenas duas variáveis são conhecidas para cada barra, e o objetivo
do fluxo de potência é o de resolver as duas variáveis restantes na barra.
Podemos definir três diferentes condições de barramentos em função da
dupla de variáveis que são fixadas, conforme o quadro abaixo:
Quadro 5.2 – Tipos de barras

65
5.5.1 Barra Tipo 1 ou de Carga
Nessa barra conhecemos as potências ativa e reativa da carga Pc e Qc e,
portanto essas serão, naturalmente, as variáveis fixadas.
Nossas incógnitas serão o módulo e a fase da tensão de barra. No caso de
haver também geradores conectados a uma barra tipo 1, fixamos também as
potências ativa e reativa geradas Pg e Qg, respectivamente, e utilizamos a soma
algébrica das potências [(Pc+Pg)+j(Qc+Qg)] no processo de solução. Sendo o valor
de Pc um número negativo, e o valor de Qc será negativo para carga indutiva e
positivo para carga capacitiva.
A barra do tipo 1 também é conhecida como “Nonvoltage Controlled bus” e
nos sistemas elétricos de potência, este tipo de barra corresponde, fisicamente, a
um centro de carga, como uma cidade ou uma industria, onde o consumidor é
responsável pela demanda. Tanto a potência ativa como a reativa são consideradas
invariáveis para pequenas variações da tensão na barra.
Para as demais considerações a respeito deste tipo de barra, a
chamaremos de “Barra PQ”.
5.5.2 Barra Tipo 2 ou de Geração
Nessa barra admitimos conhecida a potência ativa gerada Pg e módulo da
tensão da barra, restando como incógnitas a potência reativa Qc e a fase da tensão
de barra.
Caso exista uma carga Pc+jQc na barra, utilizamos o valor (Pc+Pg) durante
a solução e armazenamos Qc para ser computado só ao final do processo iterativo,
pois a potência reativa total injetada/absorvida na barra é incógnita de nosso
problema.
Este tipo de barra geralmente corresponde a um gerador, onde a potência
ativa gerada é determinada pelas características da turbina e o módulo da tensão da
barra é determinado pelo regulador automático de tensão atuando na excitação da
máquina. Ou uma barra onde a tensão é fixada através do fornecimento de potência
reativa de capacitores shunt ou ainda por compensadores síncronos.
A barra do tipo 2 também é conhecida como “Voltage Controlled bus”, assim
chamada porque sua tensão pode ser controlada.
66
Para as demais considerações a respeito deste tipo de barra, a chamaremos
de “Barra PE”.
5.5.3 Barra Tipo 3 ou Oscilante (Swing)
Aqui, as variáveis fixadas serão o módulo e a fase da tensão da barra,
restando como incógnitas as potências Pg e Qg.
A necessidade deste tipo de barra surge devido ao fato de que as perdas
também são uma incógnita e só serão conhecidas ao final da solução, não
permitindo que se especifique a priori, o despacho de todos os geradores. É então
necessário não especificar P em uma das barras. Essa barra também pode receber
o nome de barra de balanço (algumas vezes “barra de perdas”).
Uma vez que é especificado (isto é, mantido constante durante a solução
do fluxo de carga), ele será também o ângulo de referência para o sistema. A barra
de balanço é, em conseqüência também chamada barra de referência.
As equações a seguir precisam ser respeitadas, sob pena de não
conseguirmos obter solução para o nosso sistema de equações algébricas de fluxo
de carga, e é para possibilitar a existência de uma solução que se torna
indispensável a presença de uma barra tipo 3.
Pctotal + perdas = Pgtotal Equação 5.77
Qctotal + perdas = Qgtotal Equação 5.78
Em um sistema totalmente conexo, apenas uma barra swing é especificada,
mas se o sistema for constituído por vários subsistemas desconexos ou interligados
apenas em corrente contínua, haverá necessidade de tantas swings quantos forem
os subsistemas.
Salientamos ainda que a swing é um tipo de barra não envolvido no
processo iterativo, sendo que as potências ativa e reativa de fase são calculadas
apenas ao final do processo, após ter-se atingido a convergência numérica.
Adota-se como barra oscilante uma barra de geração em que não se
representa o efeito do regulador de tensão, fixando-se as condições de tensão na
barra interna do gerador. No caso de se haver representado o efeito do regulador
(barra terminal com tensão controlada), então torna-se mais realista fixar o módulo
da tensão, e o respectivo ângulo, da fase A da barra terminal.

67
Fazendo a correspondência para um sistema prático, teríamos a estação de
geração que é responsável pelo controle da freqüência do sistema.
Para as demais considerações a respeito deste tipo de barra, a chamaremos
de “Barra E”.
5.6 Especificação de Barras
A especificação das barras é o instrumento com o qual o engenheiro
manipula a solução de fluxo de carga para obter as informações desejadas.
As classificações de “barra de geração” e “barra de carga” não devem ser
interpretadas literalmente. Haverá, por exemplo, ocasiões em que uma barra de
carga pura possa ser especificada por P e |E|.
Há quatro tipos de especificações de barras:
• Incondicional-Local
• Condicional-Local
• Incondicional-Remota
• Condicional-Remota
5.6.1 Especificação de Barra Incondicional-Local
As especificações discutidas anteriormente (barra de carga, barra de
geração e barra de balanço), são todas deste tipo:
5.6.1.1 Barra PQ
Especificados: P, Q
Esta especificação de barra é normalmente usada para representar barras
de carga. A preocupação principal neste tipo de barra, é se o módulo de tensão
resultante estará, ou não, dentro de limites aceitáveis.
5.6.1.2 Barra PE
Especificados: P, |E|
Este tipo de barra é normalmente usado para barras de geração, com ou
sem cargas locais. Ao fazer-se a especificação, supõe-se que haja a possibilidade

68
ilimitada de fornecimento da potência reativa. O resultado pode dar uma saída de
potência reativa que esteja além da capacidade do gerador.
5.6.1.3 Barra E
Especificados: |E|,
Esta é a barra de balanço, ou a barra de referência de tensão. Se as
potências ativas e reativas nas cargas das barras de geração não forem
emparelhadas apropriadamente, a solução do fluxo de carga pode apresentar uma
potência resultante irreal para a barra de balanço.
5.6.2 Especificação de Barra Condicional-Local
Barras deste tipo podem mudar de características durante o processamento
do fluxo de carga.
5.6.2.1 Barra PQ/PE
Especificados: P, Q e Emin<=|E|<=Emax
Esta barra funciona como uma “barra PQ”, desde que as soluções de tensão
não violem os limites especificados de tensão. Quando um limite de tensão á
violado, a barra muda, efetivamente, para “barra PE”, com a tensão especificada em
Emin ou Emax, conforme for o caso.
5.6.2.2 Barra PE/PQ
Especificados: P, |E| e Qmin<=Q<=Qmax
Esta barra é comumente usada para especificação das barras de geração,
reconhecendo-se o limite inerente na capacidade do gerador em fornecer potência
reativa. O módulo da tensão de barra será mantido constante no valor especificado,
até que os limites de potência reativa sejam violados. Quando isto ocorre, a barra é,
efetivamente, uma “barra PQ” e o módulo da tensão variará para satisfazer às
condições do sistema.

69
5.6.3 Especificação de Barra Incondicional-Remota
5.6.3.1 Barra PE
Especificados: P, |E| e uma barra remota que ajustará o fornecimento de
potência reativa para manter |E| constante.
A especificação desta barra simula um esquema de controle remoto usado
em alguns sistemas. A especificação pode, também, ser usada como um artifício
para obter informações específicas de projeto.
5.6.4 Especificação de Barra Condicional-Remota
5.6.4.1 Barra PiEi/PiQk
Especificados: P, |E| na barra i; Qmin<=Q<=Qmax na barra k.
Este tipo de barra manterá a tensão constante na barra “i”, regulando o
fornecimento da potência reativa na barra “k”, sem violar os limites de potência
reativa nesta barra.

70
6 CÁLCULO DE FLUXO DE POTÊNCIA
Muitos métodos têm sido propostos na literatura sobre técnicas numéricas.
Apresentaremos aqui uma breve descrição sobre alguns dos métodos utilizados para
o cálculo do fluxo de potência, comentando suas vantagens frente aos demais.
Uma vez que optamos pela implementação do software utilizando o
algoritmo do método de Gauss-Seidel, por motivos que serão apresentados adiante,
e efetuamos os cálculos manuais com este método e também com o método de
Newton-Raphson, descreveremos a formulação matemática apenas para estes dois
métodos.
6.1 Equacionamento do Problema
As equações utilizadas para a solução de problemas de fluxo de potência
são obtidas com base na aplicação das leis de Kirchoff aos nós e às malhas do
sistema. Estando o sistema em regime permanente, com tensões senoidais, a soma
algébrica das correntes em cada nó deve ser nula. A solução das equações escritas
para cada nó do sistema fornecerá a tensão de cada nó. Com as tensões calculadas
e com as admitância dos ramos do sistema, calcula-se, então, as correntes dos
ramos.
Na prática, como se trabalha com potência dos geradores e das cargas,
prefere-se trabalhar com a potência que flui nos ramos e, por isso, calculam-se estas
potências a partir das correntes – daí o nome “fluxo de potência”, ou também “fluxo
de carga” (em inglês “load flow”).
As equações necessárias à obtenção da tensão dos nós, embora sejam
algébricas, não são lineares, de modo que não é possível utilizar os métodos diretos
de solução de circuitos elétricos, sendo, para tanto, utilizados métodos iterativos que
serão vistos a seguir.
A não linearidade das equações se deve, basicamente, ao fato de que, tanto
os geradores como as cargas, são modelados como potências constantes e não
como f.e.m. constantes ou impedâncias constantes, respectivamente, como
consideradas em circuitos elétricos.

71
6.2 Método de Gauss
O método de Gauss foi utilizado no primeiro programa computacional
desenvolvido para a solução do fluxo de potência. Este método tem a vantagem de
não necessitar de muita memória de computador já que a matriz [Y] não precisa ser
armazenada. A desvantagem deste método é não poder apresentar impedâncias
negativas (resultante da representação das impedâncias de transformadores de três
enrolamentos na forma de estrela) e de utilizar muito tempo de computação para
obter a convergência, além de, às vezes, apresentar dificuldade em convergir para
uma solução.
Considerar um sistema de n equações algébricas lineares bxA =. . Tomando
a linha i da equação matricial representada abaixo, podemos escrever as seguintes
equações:
Figura 6.1 – Equação matricialxvi
),1 1
n(ibxA i
n
jjij ==
=
Equação 6.1
),1 1
n(ibxAxA i
n
ijj
jijiii ==+≠=
Equação 6.2
Resolvendo para xi, tem-se:

72
),1 .1
1
n(ixAbA
xn
ijj
jijiii
i =
−= ≠=
Equação 6.3
Para uma iteração (m+1), o processo iterativo pode ser definido como:
( ) ( ) ),1 .1
1
1 n(ixAbA
xn
ijj
mjiji
ii
mi =
−= ≠=
+ Equação 6.4
Método de Gauss
Podemos ver abaixo um exemplo de um processo iterativo utilizando os
método de Gauss para n=3:
( ) ( ) ( )( )[ ] .1
313212111
11
mmm xAxAbA
x +−=+ Equação 6.5
( ) ( ) ( )( )[ ] .1
323121222
12
mmm xAxAbA
x +−=+ Equação 6.6
( ) ( ) ( )( )[ ] .1
232131333
13
mmm xAxAbA
x +−=+ Equação 6.7
6.3 Método de Gauss-Seidel
Considerando ainda a equação matricial representada na figura 6.1,
podemos escrever uma forma alternativa para o processo iterativo como:
Para obter a solução de ( )1+mix são utilizados os
valores de ( )mix (todos os valores da iteração anterior).

73
( ) ( ) ( ) ),1 .1
1
1
1
11 n(ixAxAbA
xn
ij
mjij
i
j
mjiji
ii
mi =
−−=
+=
−
=
++ Equação 6.8
Método de Gauss-Seidel
Podemos ver abaixo um exemplo de um processo iterativo utilizando os
método de Gauss-Seidel para n=3:
( ) ( ) ( )( )[ ] .1
313212111
11
mmm xAxAbA
x +−=+ Equação 6.9
( ) ( ) ( )( )[ ] .1
3231
121222
12
mmm xAxAbA
x +−= ++ Equação 6.10
( ) ( ) ( )( )[ ] .1 1
2321
131333
13
+++ +−= mmm xAxAbA
x Equação 6.11
No método de Gauss, atribui-se um valor inicial estimado para todas a
tensões complexas, e a partir daí estas tensões vão sendo recalculadas
ciclicamente, até que, para todas as tensões, a diferença entre os valores calculados
em duas iterações consecutivas seja menor do que uma tolerância pré-definida. Se,
além disso, em todas as barras a diferença entre as potências calculadas e reais for
menor que uma tolerância pré-definida, diz-se que o caso convergiu.
No método de Gauss-Seidel, durante uma mesma iteração, as tensões já
atualizadas das barras (1) até (i-1) são utilizadas no cálculo da tensão da barra i.
Este método diferencia-se do método de Gauss pelo fato de utilizar, nas
equações para o cálculo das tensões, valores de tensões já calculados para outros
barramentos, na mesma iteração. A característica deste método faz com que este
seja mais rápido do que o método de Gauss.
Para obter a solução de ( )1+mix são utilizados os
valores mais recentes disponíveis dos elementos do vetor x.

74
6.3.1 Formulação do Problema
Os Sistemas de potência podem ser modelos como um sistema de
equações algébricas lineares.
Figura 6.2– Sistema com uma barra p genérica
Supondo um sistema de n barras (figura 6.2), sendo p uma barra genérica,
teremos a seguinte equação matricial para este sistema:
[ ] [ ] [ ]nnnn EY ×= ×I Equação 6.12
Podemos escrever o valor da corrente Ip em função de Sp e Ep:
∗×= ppp IES Equação 6.13
∗
=
p
pp E
SI
Equação 6.14
Podemos também escrever o valor da corrente Ip em função das correntes
que saem da barra:

75
pnpppppp IIIIII +++++= 321 Equação 6.15
npnppppppp EYEYEYEYEYI ++++++= 332211 Equação 6.16
Igualando as equações (6.14) e (6.16) ficamos com:
npnppppppp
p EYEYEYEYEYE
S
++++++=
∗
332211 Equação 6.17
≠=
∗
+=
n
pqq
qpqpppp
p EYEYE
S
1
Equação 6.18
A partir da equação (6.18) podemos escrever uma expressão para o cálculo
da tensão Ep segundo o método de Gauss-Seidel:
( )
( )
( )( )
pp
n
pqq
kqpqk
p
kp
kp Y
EYE
S
E
≠=
∗
+
−
=1
1 Equação 6.19
6.3.2 Critério de Convergência
As tensões calculadas são ditas convergentes quando, para cada iteração,
se revelam cada vez mais próximas da solução real, que satisfaz as equações da
rede. Uma vez que o tempo de cálculo aumenta, linearmente, com o número de
iterações, é necessário que haja um controle no programa de computador, que
confira após cada iteração e decida se as últimas tensões calculadas são
suficientemente próximas da solução verdadeira, ou se são necessários cálculos
posteriores. O critério que especifica o grau de exatidão desejado é denominado
critério de convergência.

76
Um critério de convergência, digno de crédito, é o assim chamado teste de
desvio de potência. A potência, em cada barra, é calculada com base na solução
das tensões e comparada com a potência especificada da barra. A diferença - desvio
de potência - é a medida de aproximação das tensões calculadas em relação à
solução verdadeira. Se o desvio máximo for obtido na barra “i”, o critério de
convergência será expresso da seguinte forma:
p
n
kkikii EYEPPP ε<
×−=∆=∆
=1max ' Equação 6.20
Onde o apóstrofo indica que essa variável de barra está especificada.
Geralmente, εp é especificado na faixa de 0,01 a 0,0001 pu.
Uma verificação diferente de convergência avalia a mudança máxima na
tensão de qualquer barra, entre uma e outra iteração. Considera-se ter sido obtida
uma solução com a exatidão desejada quando a mudança for inferior a um pequeno
valor, especificado para εE (por exemplo, εE=0,0001).
Emi
mii EEEE ε<−=∆=∆ −1
max Equação 6.21
O teste de tensão depende da rapidez de convergência e, assim, é menos
digno de crédito do que o teste de potência. No entanto, a equação do teste de
tensão (6.21) propicia uma solução mais rápida de que a equação do teste de
potência (6.20) e, uma vez que ∆Pmax>εp, até que ∆Emax seja bastante pequeno,
pode-se usar, economicamente, o método onde os cálculos de ∆Pmax sejam evitados
até que ∆Emax seja menor de que εE.
A conversão é assintótica, isto é, a tensão de uma dada barra se aproxima
do valor final, com incrementos cada vez menores, e é sempre maior ou sempre
menor do que a solução desejada.
6.3.3 Aceleração da Convergência
Estudos realizados demonstraram que a convergência poderia ser
alcançada mais rapidamente, se, após se atualizar a tensão na barra i.

77
A convergência pode ser acelerada através da utilização de parâmetros de
aceleração. O método mais popular é o chamado método SOR (successive
overrelaxation).
A aceleração corresponde a uma extrapolação:
( ) ( ) ( ) ( )( )mmmm xzxx −+= ++ 11 .ω Equação 6.22
( ) ( ) xxx mm ∆+=+ .1 ω Equação 6.23
Figura 6.3 – Aceleração da Convergênciaxvii
Para cada problema existe um ω ótimo, mas para a maioria dos problemas
práticos, valores aproximados são escolhidos. Várias tentativas foram feitas para se
obter um valor ótimo de ω. Em geral, o esforço não compensa.
Aceleração também pode ser usada para a solução de redes elétricas, onde
normalmente se escolhe um fator de aceleração 1<ω<2. Uma boa escolha de ω
pode resultar em uma taxa de convergência de até duas vezes a original.
Para aplicação nos problemas de Fluxo de Potência podemos escrever a
seguinte equação para a aceleração da convergência:
( )AiiAii EEEE −+= α' Equação 6.24
Onde:
α: é denominado de fator de aceleração, e seu valor normalmente encontra-
se na faixa de 1,2 a 1,5;
EAi: é a tensão na barra i na iteração imediatamente anterior;

78
Ei: é a nova tensão calculada;
Ei’: é a tensão corrigida chamada de acelerada, sendo que, depois de
calculada, faz-se Ei = Ei’.
6.3.4 Vantagens e Desvantagens
O método de Gauss-Seidel tem as mesmas vantagens e desvantagens do
método de Gauss, somente apresentado um menor tempo de computação para
convergir para uma solução.
A solução do fluxo de potência pelo método de Gauss-Seidel se caracteriza
por:
Vantagens:
• Não requer o armazenamento de matrizes, necessitando de menor
memória computacional;
• Não requer a inversão de matrizes;
• Facilidade de elaboração de um programa computacional;
• Menores requisitos de memória.
Desvantagens:
• Número de iteração que varia com o número de barras;
• Tempo computacional função do quadrado do número de barras;
• Tempo de solução grande, se comparado com o método de Newton-
Raphson;
• Impossibilidade de utilizar reatâncias negativas;
• Apresenta uma convergência oscilatória e lenta;
• Necessita de “fator de aceleração” para tornar a convergência mais
rápida;
• Dificuldade de convergência para grandes sistemas.
6.3.5 Algoritmo
Mostramos agora um algoritmo que apresenta a seqüência dos cálculos das
equações de fluxo de potência utilizando o método iterativo de Gauss-Seidel:
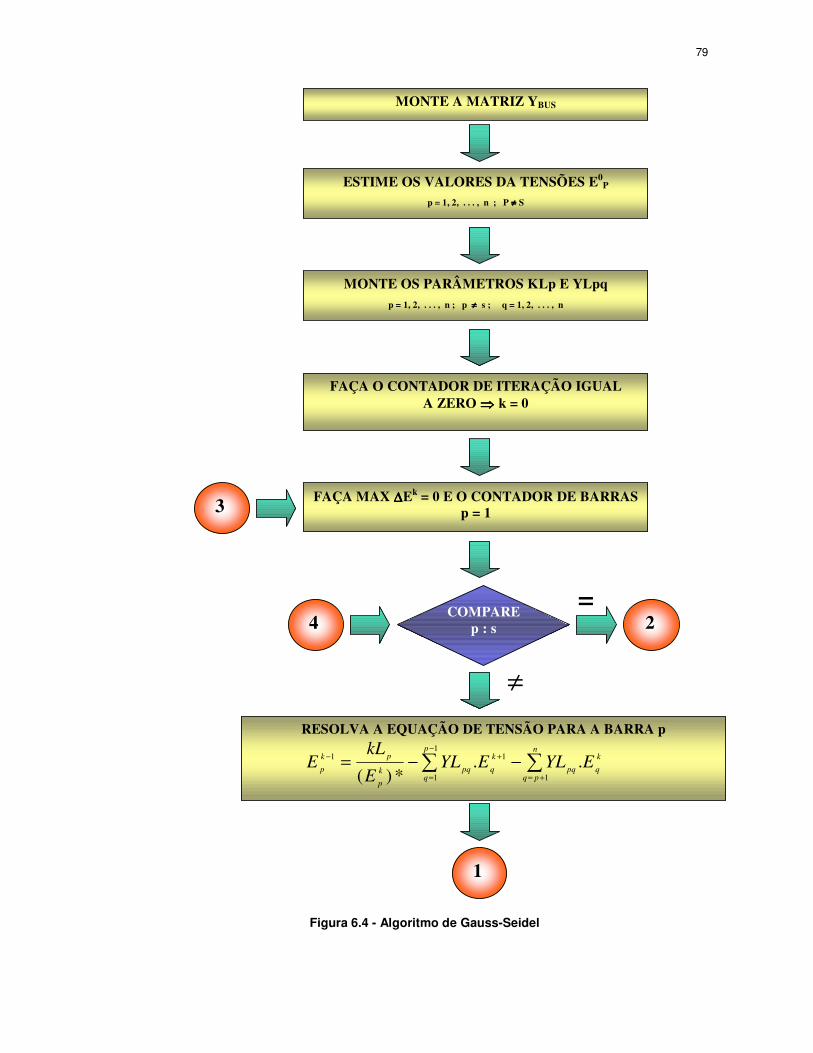
79
MONTE A MATRIZ YBUS
ESTIME OS VALORES DA TENSÕES E0P
p = 1, 2, . . . , n ; P ≠≠≠≠ S
MONTE OS PARÂMETROS KLp E YLpq
p = 1, 2, . . . , n ; p ≠≠≠≠ s ; q = 1, 2, . . . , n
FAÇA O CONTADOR DE ITERAÇÃO IGUAL A ZERO k = 0
FAÇA MAX ∆∆∆∆Ek = 0 E O CONTADOR DE BARRAS p = 1
COMPARE p : s
3
4 2 =
RESOLVA A EQUAÇÃO DE TENSÃO PARA A BARRA p
+=
−
=
+− −−=n
pq
k
qpq
p
q
k
qpqk
p
pk
p EYLEYLE
kLE
1
1
1
11 ..*)(
≠
1
Figura 6.4 - Algoritmo de Gauss-Seidel

80
CALCULE A MUDANÇA DE TENSÃO NA BARRA p
SUBSTITUA Epk POR Epk+1
COMPARE p : n
3
4
2
>
kp
kp
kp EEE −=∆ +1
1
COMPARE |∆∆∆∆Epk| : max ∆∆∆∆Ek
>
≤
FAÇA max ∆∆∆∆Ek = |∆∆∆∆Epk |
FAÇA p = p + 1
≤
COMPARE p : n
> ≤ CALCULE O FLUXO NAS BARRAS E A POTÊNCIA
NA BARRA SWING
FAÇA k = k + 1
Figura 6.5 – Continuação do algoritmo de Gauss-Seidel

81
6.4 Fluxo de Potência Newton-Raphson
A medida em que os Sistemas Elétricos foram crescendo em tamanho e
complexidade, os pesquisadores começaram a buscar técnicas mais eficientes para
simular o Fluxo de Potência. Na década de 1960 surgiu o Fluxo de Potência Newton-
Raphson. Neste método o sistema de equações não lineares que constitui o Fluxo
de Potência é linearizado mediante expansão em série de Taylor a partir de uma
estimativa inicial para as variáveis, aproveitando-se apenas os termos da série até a
derivada primeira. Como o sistema linear assim obtido é uma aproximação do
sistema não linear original, são necessárias sucessivas iterações até que se obtenha
a solução do sistema original não linear. As primeiras aplicações do Fluxo de
Potência pelo método de Newton-Raphson na simulação de Sistemas Elétricos de
porte não pareciam ser muito vantajosas quando comparadas com o método de
Gauss-Seidel, porém a deficiência do método estava nos problemas numéricos
relativos a sua implementação. As grandes deficiências então existentes
relacionavam-se com a dificuldade de se resolver eficientemente grandes sistemas
lineares esparsos. Foi somente depois do aproveitamento de técnicas de
esparsidade que o método de Newton-Raphson foi reconhecido como eficiente e
capaz de substituir inteiramente o método de Gauss-Seidel. No método de Newton-
Raphson, o número de iterações para se chegar a solução é geralmente pequeno e
independente do tamanho do sistema em estudo.
No método de Newton-Raphson, a cada iteração é feita uma linearização
das equações não lineares, o que requer o cálculo da matriz dos coeficientes do
sistema linear, a qual é denominada matriz Jacobiana, bem como o cálculo do vetor
dos termos independentes. Assim, um sistema linear precisa ser resolvido a cada
iteração.
6.4.1 Formulação do Problema
No caso de um sistema não linear de equações, encontrar a sua solução
significa achar a interseção das superfícies que representam cada uma de suas
equações. Aplicar o método de Newton equivale, a partir de uma estimativa inicial de
solução (pontos iniciais), substituir as superfícies por planos tangentes nesses
pontos e encontrar a interseção desses planos. Geralmente a interseção dos planos

82
vai se aproximando da interseção das superfícies na medida em que a técnica é
repetida mediante cálculo iterativo.
No método de Newton-Raphson aplicado à resolução do Fluxo de Potência,
o sistema de equações complexas não lineares é inicialmente substituído por um
sistema de equações reais não lineares, porém contendo um número de equações e
incógnitas iguais ao dobro do número de equações complexas.
A matriz Jacobiana, representada por [J], contém as derivadas parciais de
potência, em relação às tensões. Quando for mudada, substancialmente, uma ou
mais tensões, deverá ser calculada uma nova matriz Jacobiana.
Considerando uma rede elétrica constituída por:
• Uma barra de referência ou Eδ (E e δ são dados e deve-se obter P e Q)
• NPQ barras do tipo PQ (P e Q são dados e deve-se obter E e δ)
• NPE barras do tipo PE (P e E são dados e deve-se obter Q e δ)
Figura 6.6 – Exemplo de um sistema elétrico de potenciaxviii
Logo a rede tem (NPQ + NPE + 1) barras e :
(NPQ + NPE + 1) dados
(NPQ + NPE + 1) incógnitas
Existem dois tipos de incógnitas para o problema do fluxo de potência e que
devem ser obtidas:
• E e δ - incógnitas associadas ao estado da rede – variáveis de estado;
• P e Q – podem ser obtidas uma vez conhecidas as variáveis de estado
(através da simples utilização das equações das potencias nodais);

83
Em função da existência de dois tipos de incógnitas, o problema de fluxo de
potencia pode ser dividido em dois subsistemas de equações algébricas:
Subsistema 1 (dimensão 2NPQ + NPE)
• Determinação das variáveis de estado (E, δ), desconhecidas:
o E e δ para barras PQ – (2 . NPQ) incógnitas
o δ para barras PE – NPE incógnitas
Que resulta num total de (2 . NPQ + NPE) incógnitas
• Em termos das potencias, são dados:
o P e Q para barras PQ – (2 . NPQ) dados
o P para barras PE – NPE dados
Para cada potencia dada pode-se escrever uma equação de
fluxo de carga:
PE e PQ barras para ;0)sencos( =+− ∈ kmkmkmkmmKmkesp
k BGEEP δδ Equação 6.25
PQ barras para ;0)cossen( =+− ∈ kmkmkmkmmKmkespk BGEEQ δδ Equação 6.26
onde K é o conjunto das barras em k mais a própria barra k.
Resultando em um sistema de (NPQ + NPE) equações e mesmo número de
incógnitas, ou seja em um sistema determinado.
Deve-se portanto se obter E e δ tais que as potências nodais calculadas se
igualem às respectivas potências especificadas.
Subsistema 2 (dimensão NPE + 2)
• Determinação das potências nodais desconhecidas
Resolvido o sistema de equações do subsistema 1, todas as
tensões da rede são conhecidas. As incógnitas restantes são:
o P para uma barra de referência – 1 incógnita
o Q para as barras PE e a barra de referência – NPE + 1
incógnitas
O que resulta em (NPE + 2) incógnitas a serem determinadas. Como o
estado da rede é conhecido, basta aplicar diretamente as equações das potências
nodais para as respectivas barras:

84
referencia de barra a para ;0)sencos( =+− ∈ kmkmkmkmmKmkesp
k BGEEP δδ Equação 6.27
ref de barra e PE barras para ;0)cossen( =+− ∈ kmkmkmkmmKmkespk BGEEQ δδ Equação 6.28
As incógnitas do subsistema 1 podem ser escritas como:
NPQ NPE NPQ
+
=
Ex
δ
Em que δ é o vetor dos ângulos das tensões das barras PQ e PE e E é o
vetor das magnitudes das tensões das barras PQ.
As equações de fluxo de potência para o subsistema 1 podem ser escritas
como:
PE e PQ barras para ;0),( =∆−∆=∆ δEPPP calck
espkk Equação 6.29
PQ barras para ;0),( =−∆=∆ δEQPQQ calck
espkk Equação 6.30
o Pkesp e Qk
esp são os valores das injeções de potencia ativa e reativa
especificados para as barras (consideradas constantes, em
principio) e dados por:
Ck
Gk
espk PPP −=∆ Equação 6.31
Ck
Gk
espk QQQ −=∆ Equação 6.32
o Pkcalc (E, δ) e Qk
calc (E, δ) são calculados através de equações
das potências nodais.
o ∆Pk e ∆Qk são chamados de mismatches (ou resíduos, ou erros)
de potência ativa e reativa.
Se a solução exata das equações do subsistema 1 for conhecida, sua
substituição nas equações acima resultam em mismatches nulos.
85
Se valores arbitrários de tensão forem definidos, os mismatches serão não-
nulos.
O método de solução das equações do subsistema 1 consiste na escolha
inicial de valores de tensão (mismatches não nulos) e da sua atualização sucessiva,
até que os mismatches se anulem.
Na prática, considera-se que a solução tenha sido atingida se os
mismatches forem muito pequenos (menores que um certo valor pré-deteminado -
tolerância).
A convergência não é assintótica, como era o caso com o método de
iteração de Gauss-Seidel.
Os problemas de fluxo de carga em grandes sistemas de potência, não
calculam, explicitamente, o inverso do Jacobiano. Em lugar disso, a correção de
tensão ∆E é obtida por uma técnica numérica conhecida como Eliminação
Gaussiana. Esta técnica é muito mais rápida e necessita muito menos
armazenamento do que a inversão da matriz.
6.4.2 Vantagens e Desvantagens
A solução de fluxo de potência com o método de Newton-Raphson
caracteriza-se por:
Vantagens:
• Número de iteração praticamente independe do número de barras
do sistema;
• Tempo computacional linearmente dependente número de barras;
• Tempo de solução pequeno, se comparado com o método de
Gauss-Seidel;
• Possibilidade de utilizar reatâncias negativas.
Desvantagens:
• Necessidade de armazenar a matriz de admitância nodal do
sistema;
• Matriz de admitância é muito esparsa e utiliza muita memória;
• Exige a utilização de técnicas de esparsidade no trabalho com
matrizes;

86
• Necessidade de inverter o Jacobiano várias vezes durante a
solução.
6.4.3 Algoritmo
O fluxograma a seguir mostra basicamente os passos para a solução das
equações de fluxo de potência utilizando o método de Newton-Raphson.

87
Figura 6.7 – Algoritmo para método de Newton-Raphson
MONTE A MATRIZ YBUS
ESTIME OS VALORES DA TENSÕES E0P
p = 1, 2, . . . , n - 1
FAÇA O NÚMERO DA ITERAÇÃO k = 0
CALCULE A POTÊNCIA ATIVA E REATIVA NAS BARRAS
p = 1, 2, . . . , ; n =1 ; p ≠≠≠≠ s
TESTE | MAX ∆∆∆∆Pk | : εεεε | MAX ∆∆∆∆Qk | : εεεε
2
≤≤≤≤
>
1
( ) ( ) −
×+×+×+×=n
qpq
k
ppq
k
p
k
ppq
k
ppq
k
p
k
p
k
p BeGffBfGeeP1
( ) ( ) −
×+×+×+×=n
qpq
k
ppq
k
p
k
ppq
k
ppq
k
p
k
p
k
p BeGfeBfGefQ1
CALCULE :
p = 1, 2, . . . , ; n =1 ; p ≠≠≠≠ s
k
pPE
k
p
k
pPE
k
p QQQPPP −=∆−=∆ ;
DETERMINE O MAX ∆∆∆∆Pk E MAX ∆∆∆∆Qk
CALCULE O FLUXO NAS
LINHAS E A POTÊNCIA
NA BARRA SWING

88
Figura 6.8 – Continuação de algoritmo de Newton-Raphson
CALCULE A CORRENTE NAS BARRAS
p = 1, 2, . . . , n -1 ; p ≠≠≠≠ s
1
( )*k
p
kp
kpk
p E
jQPI
−=
RESOLVA:
CALCULE OS ELEMENTOS DA MATRIZ JACOBIANA
∆∆
×
=
∆∆
k
k
kk
kk
k
k
f
eJJ
JJ
Q
P
43
21
CALCULE:
p = 1, 2, . . . , n ; p ≠≠≠≠ s
k
p
k
p
k
p
k
p
k
p
k
p fffeee ∆+=∆+= ++ 11 ;
SUBSTITUA:
p = 1, 2, . . . , n ; p ≠≠≠≠ s
11 por e ++ k
p
k
p
k
p
k
p fefe
FAÇA k = k + 1 2

89
6.5 Método de Ward e Hale
Em seu trabalho pioneiro, publicado em 1956, J. B. Ward e H. W. Hale
introduziram um método que usa somente os elementos diagonais da matriz
Jacobiana, tornando trivial a inversão da matriz.
Este método também converge assintoticamente e dá impressão de que a
convergência se torna mais rápida, quando se faz a correção de tensão um pouco
maior do que a pela equação.
Tanto este método quanto o de Gauss-Seidel ou combinação de ambos são
largamente empregados na industria. A principal vantagem destes métodos sobre o
método de Newton-Raphson e sobre as soluções de fluxo de carga com base na
impedância, são as suas exigências, relativamente limitadas, de armazenagem no
computador.
6.6 Método da Matriz ZBARRA
Neste caso, a rede de transmissão é representada por:
[ ] [ ][ ]IZEE R .=− Equação 6.33
onde ER é a tensão especificada da barra de balanço, ou barra de
referência.
A equação (6.33) dá a diferença de tensão entre uma barra “i” e a barra de
balanço (R), como uma função das correntes de barra que entram na rede de
transmissão em todas as barras do sistema.Sendo o elemento de tensão,
correspondente à barra de balanço, igual a zero, os elementos da linha e coluna na
matriz Z, que correspondem à barra de balanço, serão todos iguais a zero e,
geralmente, são omitidos da matriz. A dimensão da matriz será, então, (N-1) por (N-
1). A matriz ZBARRA, como foi definida aqui, não inclui nenhum elemento em paralelo
com a terra. Os elementos em paralelo na barra “i”, com admitância total Yi, estão
incluídos na corrente de barra.
iii
iii EY
EjQP
I −−= ∗ Equação 6.34

90
Usando-se a técnica iterativa de Gauss-Seidel, o método da impedância
apresenta soluções aceitáveis depois de, somente, 5 iterações, enquanto que os
métodos de admitância (exceto o de Newton-Raphson) geralmente exigem 20 ou
mais iterações.
A razão para a convergência relativamente vagarosa do tradicional fluxo de
carga, baseado na admitância, é o fato de que, quando se calcula a corrente para a
barra “i”, a partir das equações da rede, só são levadas em consideração as
condições nas barras ligadas diretamente à barra “i”. (Na matriz Y os termos mútuos,
para todas as outras barras, são iguais a zero). A matriz Z, por outro lado, é uma
matriz “completa” (nenhum elemento é igual a zero).
Conseqüentemente, a corrente em uma barra influência as tensões em
todas as outras barras quando se aplica a equação 6.34.
6.7 Fluxo de Potência Desacoplado Rápido
Percebeu-se que o método de Newton-Raphson poderia ser modificado e
tornado mais eficiente, em termos computacionais, se a cada iteração não houvesse
a necessidade de se calcular uma nova matriz Jacobiana e conseqüentemente se
resolver um novo sistema linear. Percebeu-se que se a matriz Jacobiana fosse
escolhida adequadamente desde a primeira iteração, poder-se-ia chegar igualmente
a solução do sistema não linear original, mediante um cálculo iterativo, alterando-se,
de uma iteração para a seguinte, apenas o vetor dos termos independentes. Neste
caso bastaria calcular uma única vez a inversa da matriz dos coeficientes, e a partir
dai realizar operações simples equivalentes a produtos matriciais para obter a
solução dos sistemas lineares.
O método derivado do algoritmo de Newton-Raphson, no qual a matriz
Jacobiana com aproximações adicionais é mantida constante, conforme descrito
anteriormente, passou a ser conhecido como Fluxo de Potência Desacoplado
Rápido. O primeiro artigo que apresentou esta metodologia foi publicado em 1974.
Normalmente, para se chegar à solução, o método Desacoplado Rápido requer um
maior número de iterações do que no método de Newton-Raphson, pois a
convergência é superlinear e não quadrática. Entretanto, essas iterações são
realizadas a um custo computacional muito mais baixo. Outra vantagem do método
desacoplado rápido é que, devido a suposição que se faz de desacoplamento entre
as variáveis P e E (potência ativa e tensão) e Q e δ (potência reativa e ângulo), os

91
sistemas lineares são decompostos em dois subsistemas lineares menores e de
mais fácil solução.
6.8 Variantes do Fluxo de Potência Desacoplado Rápido
Em vista das simplificações efetuadas ao se assumir uma matriz Jacobiana
aproximada e fixa, percebeu-se que o método Desacoplado Rápido funcionava bem
para Sistemas Elétricos de Transmissão, onde a relação X/R (reatância/resistência)
é alta. Porém, havia problemas de convergência no caso de Sistemas de
Distribuição onde a relação X/R é baixa. Para resolver este problema, algumas
variantes do Fluxo de Potência Desacoplado Rápido foram desenvolvidas, as quais
são capazes de funcionar adequadamente tanto com Sistemas de Transmissão
como de Distribuição. O Fluxo de Potência desacoplado rápido BX é um exemplo
desses desenvolvimentos.
6.9 Fluxos de Potência Aproximados
Além dos métodos descritos acima, de solução exata dentro da tolerância
pré-determinada, há métodos muito rápidos, porém de solução não exata,
desenvolvidos a partir de simplificações do problema original. Dentre estes métodos
pode-se citar o Fluxo de Potência DC e o Fluxo de Potência baseado na matriz Z.
Ambos podem ser usados apenas em situações onde a precisão dos cálculos não é
um fator fundamental, o que restringe bastante a sua utilização.
6.10 Métodos Baseados nas Matrizes Y e Z
6.10.1 Avaliação dos Métodos Baseados na Matriz Z
• A matriz Z é cheia (não esparsa);
• Normalmente a matriz Z é construída diretamente, e não através da
inversão de Y. Existem métodos de construção de Z (que envolvem
grande esforço de calculo);
• É necessário grande espaço de memória para o armazenamento da
matriz;

92
• Maior número de cálculos são necessários no processo iterativo;
• Pare redes muito grandes, memória e volume de cálculos se tornam
impráticos;
• Como cada tensão é avaliada em função de todas as correntes, a
convergência é mais confiável e rápida, comparada com os métodos
baseados na matriz Y;
• A escolha da barra de referencia não é tão importante neste caso. Pode-
se escolher a barra para a qual a soma dos elementos da linha da matriz Z
é maior;
• Em geral os métodos baseados na matriz Z não são atrativos se
comparados com a matriz Y.
6.10.2 Avaliação dos Métodos Baseados na Matriz Y
• Método simples;
• Número de elementos da somatória é pequeno;
• Pequeno espaço de armazenamento é necessário. No caso do método de
Gauss-Seidel os valores da iteração anterior não precisam ser
armazenados;
• Pequeno número de cálculos por iteração;
• Convergência lenta;
• O método converge se Y é diagonal dominante:
n),(iYY ii
n
ijj
ij 1 1
=<≠=
Equação 6.35
• Em sistemas elétricos esta característica é normalmente encontrada;
• Entre os fatores que podem afetar a dominância diagonal e também a
convergência do método estão:
• Junção de impedância série muito grandes e pequenas;
• Capacitâncias grandes;
• Linhas longas;
• Compensação série e shunt.

93
A escolha da barra de referência afeta as características de convergência. A
melhor escolha é a barra para a qual sua linha é a menos dominante diagonalmente;
Quanto maior a rede, os métodos baseados na matriz na matriz Y se tornam
menos competitivos em relação a outros métodos.
6.11 Comparação dos Métodos
6.11.1 Considerações Sobre a Armazenagem no Computador
A matriz Y ou a matriz Z complexas e completas tem cerca de 2N2
elementos. Mesmo em um computador de grande porte, o espaço de armazenagem
disponível para a matriz da rede pode ser limitado a, por exemplo, 40.000
elementos. Se todos os elementos fossem armazenados, poder-se-ia representar
um máximo de 140 barras. Uma vez que as matrizes são simétricas, só o triângulo
superior necessita ser armazenado e pode-se representar cerca de 250 barras. Este
seria o tamanho máximo que poderia ser representado por um fluxo de carga básico,
com base na impedância, uma vez que todos os elementos da matriz Z são,
geralmente, diferentes zero. A matriz Y, entretanto, é uma matriz esparsa, porque
cada elemento Yik somente será diferente de zero, se houver uma ligação direta
(linha de transmissão ou transformador) entre as barra i e k. Uma vez que os
elementos iguais a zero não necessitam ser armazenados, um fluxo de carga de
1.000 ou, mesmo, 2.000 barras poderá ser rodado, sem dificuldades, nas instalações
atuais de computadores.
Além das necessidades de espaço de armazenagem para a matriz Y, o
método de Newton-Raphson necessita de espaço de armazenagem para os
elementos da matriz Jacobiana. Para os sistemas de potência de grande porte, é
necessário explorar a esparsidade dessas matrizes, para reduzir a armazenagem e
o tempo de computador a níveis razoáveis. A matriz Jacobiana tem a mesma
estrutura esparsa que a matriz Y. Por exemplo, o elemento ∂Pi/∂ek será diferente de
zero, somente, para i = k e quando a barra i for diretamente ligada a barra k.

94
6.11.2 Versatilidade
Os programas de fluxo de carga, com base em admitâncias, que não usam a
matriz Jacobiana completa, podem não apresentar uma solução para condições
incomuns do sistema, como acontece quando a impedância do circuito entre duas
barras é muito pequena, zero ou negativa. O método de Newton-Raphson e o
método da impedância podem tratar de tais situações sem dificuldade.
6.11.3 Velocidade
O método de Newton-Raphson parece ter uma pequena vantagem sobre os
outros métodos de admitância, bem como sobre os atuais métodos com base na
impedância. A figura 6.9 mostra as características de convergência do método de
Newton-Raphson, do método da matriz de impedância e de um método de
admitância que converge assintoticamente. As curvas mostram como as
componentes real e imaginária da tensão de uma determinada barra convergem
desde a estimativa inicial.
FIG. 37 – CAR
Figura 6.9 - Característica de convergênciaxix

95
6.12 Justificativa do Método Escolhido
O método de Gauss-Seidel foi escolhido devido principalmente a sua
facilidade de implementação no software. O método escolhido sem dúvida, como
podemos verificar pela teoria exposta, não é o mais eficiente computacionalmente,
porém para a implementação no software que tem uma capacidade limitada de
barras e tem fins puramente didáticos o método atende as necessidades.
O método de Newton-Raphson não foi escolhido principalmente devido a
sua dificuldade de implementação, haja vista que devemos inverter a matriz
jacobiana (composta por números complexos) a cada iteração, como também é
sabido o computador não trabalha com grandezas complexas e realiza apenas as
quatro operações básicas (adição, subtração, multiplicação e divisão). A
implementação de uma rotina que invertesse a matriz jacobiana seria extremamente
trabalhosa e despenderia muito tempo, além de fugir um pouco aos objetivos do
projeto final de curso uma vez que estaríamos desenvolvendo algoritmos puramente
matemáticos ficando assim a Engenharia Elétrica de lado.
Atualmente existem métodos que foram desenvolvidos com o intuito de
implementação em computadores digitais que obviamente são muito mais eficientes
e são aplicados na construção de softwares poderosos para o cálculo de grandes
sistemas de potência. A utilização destes métodos em um software didático tornaria
o desenvolvimento muito complexo e o resultado final não teria grandes melhorias,
estaríamos “matando uma mosca com um canhão”.
Portanto, para os fins que se propõe o software e pelo objetivo de
desenvolver algo voltado à graduação de engenharia elétrica optamos pela
implementação do método de Gauss-Seidel. Além do mais, no que se refere ao
usuário de programas de fluxo de carga, os detalhes do método usado não são
significativos, desde que ele conheça as características e limitações do programa.

96
7 ANALISADOR DE REDE (PROTÓTIPO)
7.1 Painel
7.1.1 O Painel
Inicialmente a idéia era fazer o circuito criado em escala reduzida e simular
com valores de tensões proporcionais, a medida que foi se estudando as montagens
verificou-se que esta redução em escala, simulação das bobinas e vários outros
aspectos, tornavam impraticável a montagem, com isso foi decidido a criação de um
circuito simplificado para fazer os testes práticos. Em um primeiro momento foi
montado um circuito com quatro barras, uma carga, e um gerador, porém foi
lembrado que existia um protótipo que começou a ser desenvolvido pelo antigo
professor titular da cadeira de sistema de potência o professor Arlei, este protótipo
não foi finalizado e também não funcionava, tendo este painel como base, a idéia
passou a ser colocar o Painel de sistema de potência em funcionamento, e simular o
circuito neste painel.
7.2 Descrição do Painel de Sistema de Potência.
O painel é composto por placas onde cada uma delas tem determinados
componentes, basicamente, são bobinas, medidores e transformadores. Como a
maioria (todos) dos instrumentos não funcionam, foi decidido que do painel somente
seriam utilizados os transformadores e as bobinas para simular as indutâncias das
linhas, mais tarde veremos que nem as bobinas foram utilizadas.
7.2.1 Instrumentos
Os instrumentos (medidores) existentes no painel são:
2 Wattímetros;
2 Varímetros;
2 Cosefímetro;
2 Voltímetros;

97
2 Amperímetros;
Todos os instrumentos são analógicos e nenhum deles se encontrava em
funcionamento, todas as medições foram feitas através de instrumentos digitais que
foram cedidos pelos almoxarifados de Eletrônica e Eletrotécnica.
7.2.2 Indutores
Os Indutores que compõem o painel são bobinas na sua maioria por volta de
27mH (fase) e 14 mH(neutro), para a montagem prática inicialmente seria utilizada
uma bobina de 27mH para simular uma linha de transmissão, e outra de 42 mH
simulando a segunda linha, porém após os primeiros ensaios contatou-se que estes
valores estavam muito acima para uma redução, como os valores de tensões são
baixos (127 V e 8 V) a tensão na saída do segundo transformador, que era para ser
algo em torno de 127 volts, era apenas 6 volts. Para contornar estes problema foram
feitas bobinas específicas nos valores de aproximadamente 90H e 9H, com isso
os valores ficaram mais próximos para ser feito um estudo.
Mais detalhes estão na parte descritiva das montagens e nas comprovações
matemáticas.
7.2.3 Transformadores
Dois transformadores idênticos foram utilizados para o ensaio, com a relação
de 127:8 com uma potência de 150 MVA, os ensaios a vazio e de Curto circuito
foram feitos com base nestes valores para a determinação dos parâmetros
construtivos.
7.3 Circuito Simplificado
O esquema utilizado para a simulação do circuito foi elaborado de modo que
representasse uma malha interligada com duas fontes de geração e duas cargas,
abaixo segue o esquema de ligação.

98
Figura 7.1 – Esquema de Montagem
Figura 7.2 – Esquema de montagem (visualização das barras)

99
Os valores obtidos através das demonstrações acima comprovam tanto
os valores prático como calculados, um valor que não foi possível de ser verificado
na prática, foi a defasagem da corrente em relação a tensão em cima de uma linha
simulada, devido aos valores muito pequenos de resistência e indutância as mesmas
estão quase que em fase. Abaixo, uma foto do osciloscópio digital mostrando a
coincidência entre tensão e corrente (a defasagem de 180º foi deixada de propósito
para uma melhor visualização).
Figura 7.3 – Onda no osciloscópio
Mesmo fazendo o circuito em um simulador (EWB) esta diferença não foi
observada. Abaixo segue a medição feita no osciloscópio do simulador.

100
Figura 7.4 - Osciloscópio EWB

101
8 SOFTWARES EXISTENTES
8.1 Introdução
Neste capítulo serão analisados quatro softwares existentes no mercado,
dois deles comercias e dois deles desenvolvidos em faculdades, sendo que um foi
desenvolvido no Laboratório de Sistema de Potencia (LABSPOT) na Universidade
Federal de Santa Catarina (UFSC), o outro software, foi desenvolvido como parte da
tese de mestrado do Professor José Carlos Lobato Pasini.
A abordagem será feita no sentido de apresentar as vantagens,
desvantagens e características peculiares de um deles.
8.2 SIMICRO
8.2.1 Descrição
O SIMICRO é um Simulador didático de sistema de potência, que foi
desenvolvido por um grupo de estudos na UFSC, a versão utilizada foi a 2.8
finalizada em 21 de Novembro de 1995, sob a orientação do Professor Luiz Jairo
Branco Machado.
A versão disponível faz a simulação de uma determinada região, no caso,
o sistema da região sul do Brasil, o total dos elementos utilizados no nível de
525/230 kV foram:
• 24 a 36 barras, 24 subestações;
• 10 transformadores;
• 34 linhas de transmissão;
• 11 “shunts” (reatores);
• 49 cargas;
• Seis interligações (correspondem a gerações equivalentes
provenientes dos sistemas CEEE/COPEL. São representadas por
setas azuis na tela geral e por uma carga negativa nas
subestações);
• 14 unidades geradoras (nove hidrelétricas e 5 termelétricas);

102
• 1091 dispositivos lógicos (sendo 266 disjuntores e 825
seccionadores);
Por ser um software antigo, qualquer computador atual tem todos os pré-
requisitos para executar este aplicativo (Monitor que suporte no mínimo 16 cores e
mouse e 500Kbytes de memória livre).
A base para o funcionamento do software é o sistema operacional DOS
6.22. Hoje, por este sistema ser quase inexistente algumas configurações extras são
necessárias nos arquivos do Windows para que ele possa ser executado sem
problemas, isto se torna um pouco trabalhoso para pessoas que não tenham uma
certa intimidade com arquivos de configuração de um computador.
8.2.2 Funcionalidades do Software
Salvar arquivos.
Quando é solicitado para se salvar arquivos quatro tipos de dados são
armazenados:
• Os que contem os dados relativos à configuração do sistema;
• Os que contem dados relativos à modelagem da rede para o fluxo
de potência;
• Os que contem os resultados do fluxo de potência;
• Os que contem os resultados da análise de conectividade.
Uma vez salvo estes arquivos seus dados podem ser acessados por um
simples editor de texto.
8.2.3 Características.
Todo o acompanhamento do comportamento do sistema pode ser
observado de acordo com a variação de cores dos elementos, ao lado do esquema
do sistema segue uma legenda explicando cada uma das representações.
Por default o sistema é monitorado a cada 5 segundos reais, esta
velocidade de monitoração pode ser alterada.

103
As tensões dos sistemas são indicadas em todos os pontos em p.u.,
também é indicado o carregamento das linhas indicando assim a potência ativa
sobre cada linha solicitada.
As características do software com relação à área de sistema de potência
foram às apresentadas acima, porém, o software não se restringe somente a esta
área, nele você tem acesso às características das subestações, a abertura e
fechamento de chaves seccionadoras e outros elementos da rede elétrica nele
esquematizada.
8.2.4 Dificuldades Encontradas
Um problema encontrado para o funcionamento do software foi que este
necessitava de uma fonte de texto específica para funcionar, ou seja, é necessária a
complementação da instalação do computador em que este software for utilizado.
Por se tratar de um software antigo que é executado em DOS, sua
interface não é amigável, sendo até um pouco agressiva para os padrões atuais.
O sistema disponível no sistema de demonstração é fechado no sistema
sul, se for do interesse modificar o sistema ao criar um novo, isto não é possível.
8.3 FLOWGR
8.3.1 Descrição
Este software foi desenvolvido pelo professor José Pasini, do
departamento de matemática do CEFET-PR, apresentado como parte da defesa
para a obtenção do título de Mestre em Ciências.
Este software tem mais as características do software que esta sendo
desenvolvido pela nossa equipe, nele você vai “desenhar” o sistema existente dando
as característica de cada um dos elementos, como resultado final é informado se o
sistema convergiu ou não.
O método utilizado neste software é o desacoplado rápido BX, que tem
como característica poder ser utilizado tanto sistemas de transmissão como
distribuição.

104
O aplicativo foi todo desenvolvido na linguagem de Visual Basic, isto
garante uma interface com um “padrão Windows”, ou seja, quem estiver utilizando
não vai estranhar tanto como acontece com o SIMICRO.
Sua utilização é feita na base de inserção dos elementos com suas
determinadas características, depois é feita sua interligação, por ultimo, são feitos os
cálculos do fluxo de potência.
Depois destas etapas cumpridas todos os valores obtidos são plotados em
cima de cada elementos em um diagrama unifilar, também, após processado o
circuito, automaticamente relatório que contem todos os dados especificados no
diagrama unifilar e mais o balanço energético de potência ativa por área ou
empresa, e o intercambio energético de potencia ativa entre as empresas.
As próxima figura mostra um circuito feito no software:
Figura 8.1 – Circuito desenvolvido no FlowGR

105
8.4 NFlux
8.4.1 Descrição
Este software foi desenvolvido por Nelson Bittencourt, e ele é utilizado na
calculadora HP48 G, de interface muito simples, os dados são colocados em
seqüência, 1 a 1, observado os parâmetros de cada componentes, a saída é feita
por partes indicando a tensão nas barras bem como o seu ângulo, e a segunda
indica as potências nas barras.
O método utilizado neste software é o de Newton-Raphson.
8.4.2 Dificuldades Encontradas
Por ter sido utilizado uma versão demo do software não deu para se ter
uma idéia de como ele se comporta com um circuito maior, a versão demo somente
permite calcular um circuito com 3 barras. Neste circuito simples o software
funcionou sem problemas, o grande limitante deste software é a própria calculadora,
por ter uma memória baixa, o desempenho deve ser afetado para cálculos de
circuitos com um maior número de barras.
8.5 PowerWorld Simulator
Este é um software comercial, com origem nos E.U.A., uma das
simulações que ele executa é o cálculo de fluxo de potência. Tambem neste caso foi
testado uma versão demo do software, onde o limitante era o número de barras, os
circuitos poderiam ter somente 12 barras, na versão completa o número de barras
pode ser superior a 60000.
8.5.1 Descrição
Este software é o que apresenta a maior semelhança gráfica com o
software desenvolvido neste projeto, apesar de que este software só foi testado
depois do nosso software estar quase pronto. Para a inserção de elementos ele
funciona com um “drag & drop”, na seqüência são preenchidas as características
dos elementos.

106
Figura 8.2 – Snapshot do PowerWorld Simulator.
8.5.2 Dificuldades Encontradas
O software tem uma capacidade imensa de situações e simulações, para
isso cada parâmetro precisa ser especificado, isto torna a montagem de um circuito
neste software muito lenta. Se a intenção é uma resposta rápida para um circuito
simples, não compensa a montagem neste programa.

107
9 COMPROVAÇÃO DO FUNCIONAMENTO DO SOFTWARE
Tendo em mãos os dados do circuito protótipo e dos cálculos manuais,
partimos para a comprovação do correto funcionamento do Software, o SFP -
Simulador de Fluxo de Potência.
Utilizamos ainda alguns circuitos mais simples, também calculados
manualmente, na etapa de depuração do software, onde pudemos verificar
todos os cálculos intermediários, como os valores da matriz de admitância e da
potência na barra de geração, executando o programa passo a passo.
A seguir, temos um destes circuitos com os cálculos detalhados e na
seqüência a comprovação e comparação com os resultados obtidos com a
utilização do Software.
9.1 Cálculo do Circuito Exemplo
B1 b2
g1
g2
E=1,01 puP=30MW
230/138 kV1,02∠0° pu
(Referência)
Z=0,0035+j0,017 puB=j0,06 pu
S=154+j52,8 MVA
b3 b4
S=15+j4 MVA
Z=0,0105+j0,051puB=j0,18 pu
Z=0,007+j0,034puB=j0,12 pu
T1
LT1
LT3 LT2
Figura 9.1 – Circuito exemplo
9.2 Comprovação do Circuito Exemplo
Realizamos a entrada de dados de acordo com diagrama do circuito
exemplo e efetuamos os cálculos para as três iterações que são apresentados
na seção de anexos.

108
9.2.1 Cálculo das Tensões
9.2.1.1 Primeira Iteração
Figura 9.2 – Primeira Iteração
Obtemos os seguintes resultados na primeira iteração:
Quadro 9.1 – Resultado da Primeira Iteração
E 1 = 1,0100 0,10291 o pu
E 2 = 0,9982 -0,87461 o pu
E 3 = 1,0102 -0,67972 o pu
E 4 = 1,0200 0 o pu
Primeira Iteração

109
9.2.1.2 Segunda Iteração
Figura 9.3 – Segunda Iteração
Obtemos os seguintes na primeira iteração:
Quadro 9.2 – Resultado da Segunda Iteração
E 1 = 1,0100 -0,66819 o pu
E 2 = 1,0016 -1,61274 o pu
E 3 = 1,0123 -1,36031 o pu
E 4 = 1,0200 0 o pu
Segunda Iteração

110
9.2.1.3 Terceira Iteração
Figura 9.4 – Terceira Iteração
Obtemos os seguintes na primeira iteração:
Quadro 9.3 – Resultado da Terceira Iteração
E 1 = 1,0100 -1,36214 o pu
E 2 = 1,0023 -2,298 o pu
E 3 = 1,0128 -1,98615 o pu
E 4 = 1,0200 0 o pu
Terceira Iteração

111
9.2.2 Resultados
Podemos verificar a igualdade dos valores encontrados mediante o
cálculo manual e por meio do software comparando as tabelas abaixo:
Quadro 9.4 – Cálculos com o Software
Quadro 9.5 – Cálculos Manuais
9.3 Comprovação do Circuito Exemplo com Desligamento de uma LT
Efetuamos novamente todos os cálculos considerando a condição de
desligamento da Linha de Transmissão localizada entre as barras um e três,
simulando uma situação de emergência.
Inserimos também os dados deste circuito no Simulador obtendo os
seguintes resultados:
E 1 = 1,0100 0,10291 o pu E 1 = 1,0100 -0,66819 o pu E 1 = 1,0100 -1,36214 o pu
E 2 = 0,9982 -0,87461 o pu E 2 = 1,0016 -1,61274 o pu E 2 = 1,0023 -2,298 o pu
E 3 = 1,0102 -0,67972 o pu E 3 = 1,0123 -1,36031 o pu E 3 = 1,0128 -1,98615 o pu
E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu
Primeira Iteração Segunda Iteração Terceira Iteração
E 1 = 1,0100 0,1029 o pu E 1 = 1,0100 -0,6683 o pu E 1 = 1,0100 -1,362 o pu
E 2 = 0,9982 -0,8746 o pu E 2 = 1,0016 1,6128 o pu E 2 = 1,0023 -2,2979 o pu
E 3 = 1,0100 -0,6797 o pu E 3 = 1,0123 -1,3604 o pu E 3 = 1,0129 -1,986 o pu
E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu
Primeira Iteração Segunda Iteração Terceira Iteração

112
9.3.1 Cálculo das Tensões
9.3.1.1 Primeira Iteração
Figura 9.5 – Primeira Iteração
Para este circuito obtemos os seguintes resultados:
Quadro 9.6 – Resultados da Primeira Iteração
E 1 = 1,0100 0,1744 o pu E 1 = 1,0100 0,17438 o pu
E 2 = 0,9982 -0,8263 o pu E 2 = 0,9982 -0,82636 o pu
E 3 = 1,0079 -1,0641 o pu E 3 = 1,0079 -1,06413 o pu
E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu
Cálculo Manual Cáculo com Software

113
9.3.1.2 Segunda Iteração
Figura 9.6 – Segunda Iteração
Para este circuito obtemos os seguintes resultados:
E 1 = 1,0100 -0,6244 o pu E 1 = 1,0100 -0,62444 o pu
E 2 = 1,0008 -1,7136 o pu E 2 = 1,0008 -1,71361 o pu
E 3 = 1,0105 -1,8182 o pu E 3 = 1,0105 -1,81814 o pu
E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu
Cálculo Manual Cáculo com Software
Quadro 9.7 – Resultado da Segunda Iteração

114
9.3.1.3 Terceira Iteração
Figura 9.7 – Terceira Iteração
Para este circuito obtemos os seguintes resultados:
Quadro 9.8 – Resultado da Terceira Iteração
E 1 = 1,0100 -1,4814 o pu E 1 = 1,0100 -1,48103 o pu
E 2 = 1,0017 -2,5327 o pu E 2 = 1,0017 -2,53236 o pu
E 3 = 1,0116 -2,5182 o pu E 3 = 1,0116 -2,51790 o pu
E 4 = 1,0200 0 o pu E 4 = 1,0200 0 o pu
Cálculo Manual Cáculo com Software

115
9.4 COMPROVAÇÃO DO CIRCUITO DE 11 BARRAS
Os cálculos do circuito em questão estão detalhados na seção de anexos.
O esquema unifilar do circuito é apresentado abaixo:
Figura 9.8 - Diagrama Unifilar do Circuito de 11 Barras

116
9.5 Aplicação do circuito de onze barras previamente calculado no SFP:
9.5.1 Primeira Iteração
Figura 9.9 - Resultados da Primeira Iteração

117
9.5.1.1 Tabela Resumo da Primeira Iteração
Figura 9.10 - Tabela Resumo da Primeira Iteração
9.5.1.2 Valores Obtidos do Cálculo Manual
Figura 9.11 - Tabela Resumo dos Cálculos Manuais

118
9.5.2 Segunda Iteração
Figura 9.12 - Resultados da Segunda Iteração

119
9.5.2.1 Tabela Resumo da Segunda Iteração
Figura 9.13 - Tabela Resumo da Segunda Iteração
9.5.2.2 Valores Obtidos do Cálculo Manual
Figura 9.14 - Tabela Resumo dos Cálculos Manuais

120
9.5.3 Terceira Iteração
Figura 9.15 - Resultados da Terceira Iteração

121
9.5.3.1 Tabela Resumo da Terceira Iteração
Figura 9.16 - - Tabela Resumo da Terceira Iteração
9.5.3.2 Valores Obtidos do Cálculo Manual
Figura 9.17 - Tabela Resumo dos Cálculos Manuais

122
9.6 Comprovação do Circuito Protótipo
A descrição da montagem como também a apresentação do circuito foi
mostrada na seção 7, portanto nos ateremos aqui apenas em mostrar os
valores obtidos através da simulação no software. A figura abaixo mostra os
valores apresentados pelo software para 300 iterações quando o circuito em
questão converge.
Figura 9.18 - Resultados para a convergência do circuito protótipo

123
9.6.1 Valores tabelados resultados da simulação do software
Figura 9.19 - Valores Tabelados
9.6.1.1 Valores Obtidos da Medição do Protótipo
Figura 9.20 - Valores Medidos no Protótipo

124
9.7 Conclusões das Comprovações
Pôde-se perceber com os três exemplos apresentados uma
funcionalidade bastante aceitável uma vez que os resultados obtidos com o
software se aproximam muito dos valores calculados. Podemos perceber e
concluir que esta diferença se dá devido ao arredondamento que foi
empregado nos cálculos manuais (veja o desenvolvimento detalhado dos
cálculos da seção de anexos) em relação ao cálculo do software.
Quanto aos valores apresentados pela medição do protótipo, pudemos
observar uma aproximação bastante boa dos valores obtidos com o software.
Como já explicado na seção 7 o ângulo das tensões nas barras não foi possível
de se obter, porém os módulos das tensões das barras se aproximaram
satisfatoriamente uma vez que temos imprecisões de equipamentos, oscilações
e ruídos na tensão da rede. Para uma melhor precisão dos valores do protótipo
seria necessária a utilização de equipamentos mais precisos e de uma fonte
de tensão controlada que não dispúnhamos no momento da realização das
medições.

125
10 CONCLUSÕES
O objetivo inicial do projeto foi alcançado com sucesso, os cálculos e
medições feitas comprovam a eficiência do software desenvolvido, com isso
haverá mais facilidades por parte dos alunos e professores na resolução de
problemas relacionados aos cálculos do fluxo de potência.
O projeto final foi iniciado com a idéia de que iríamos utilizar apenas
a disciplina de sistema de potência, um pouco de circuitos e muito com relação
a programação. Durante o desenrolar do projeto muitas coisas começaram a
ser vista com outros olhos. Quando se faz um projeto no papel, alguns detalhes
são esquecidos, quando o projeto começou a passar para as montagens, a
prática, muito pode ser visto. Problemas em obter valores de indutores para a
simulação de linhas, nos obrigaram a começar a estudar a simulação de
indutores com amplificadores operacionais (Eletrônica), depois, para se medir o
valor das indutâncias foi estudado a teoria de Pontes (medidas elétricas), como
seriam utilizados e ensaiados transformadores, a teoria deste equipamentos
também foi estudado (Eletromagnetismo e Conversão Eletromecânica). Efeitos
da freqüência de pontes digitais na medição de resistências (Efeito pelicular)
também começou a ser discutido, e isto não é visto no curso. Estes “detalhes”
não foram considerados no projeto inicial, e a medida que o projeto vai se
desenrolando tem-se que ir atrás de mais conhecimento técnico para que ele
não pare. Sem sombra de dúvida, o projeto final é uma disciplina que une os
conhecimentos de todo o curso, em uma aplicação prática, muito válido.
Outro detalhe que chamou a atenção foi para a valorização da
teoria, inicialmente conceitos abordados em sala de aula, que aparentemente
não serviam para nada, foram as explicações para muitos problemas ocorridos
na prática, durante as montagens, fatos ocorriam fora do conforme, para
resolvê-los não bastava somente um multímetro e um osciloscópio para
identificar o problema, nestas horas as pesquisas teóricas em livros, apostilas,
apontamentos de sala de aula e conversa com os professores foram de grande
valia.
Com relação ao software desenvolvido, também tivemos vários
problemas, primeiramente não conhecíamos nenhuma linguagem de
programação que nos oferecesse a possibilidade da interface gráfica interativa

126
que queríamos obter, criando assim um diferencial em relação aos outros
softwares existentes atualmente, a facilidade de manipulação e inserção de
dados para o cálculo de circuitos simples que podem ser aplicados na
graduação de engenharia elétrica.
A nossa inexperiência em desenvolvimento de softwares nos fez
penar um pouco no desenvolvimento pois precisávamos aprender uma nova
linguagem e ao mesmo tempo desenvolver um programa de tamanha
complexidade. Isso acarretou que no decorrer no desenvolvimento do software
detectávamos problemas que não poderiam ser resolvidos se continuássemos
seguindo determinado caminho e para isso precisávamos mudar perdendo
parte do trabalho desenvolvido.
Superadas as dificuldades conseguimos atingir o objetivo principal, o
desenvolvimento intelectual dos acadêmicos de engenharia e além,
implementamos um software didático para o calculo de fluxo de potência
empregando conhecimentos apreendidos em nossa vida acadêmica.
Deixamos como sugestões para trabalhos futuros a continuidade da
implementação do SFP com os outros métodos de cálculo de fluxo de potência
como por exemplo Newton-Raphson, que tem uma eficiência computacional
melhor podendo assim o acadêmico de engenharia ter um comparativo visual
entre os diversos métodos atualmente empregados nos problemas de fluxo de
potência.

127
11 BIBLIOGRAFIAS
STOUT, DAIVD F. HandBook of operational amplifier circuit design.
McGraw-hill Book Company, 1976.
MCLYMAN, COLONEL WM. T. Transformer and inductor design handbook.
Marcel DEKKER Inc. 1978.
MARTIGNONI, ÂNGELO Medidas elétricas e ensaios de máquinas
elétricas. Exped- expansão editorial, 1979.
MARTIGNONI, ÂNGELO Transformadores. Exped- expansão editorial, 1979.
ARRILLAGA, J. AND ARNOLD, C. P. AND HARKER, B.J. Computer modeling
of electrical power systems, Wiley interscience publications.
BLUCHER, EDGARD. Introdução a sistema elétricos de potência:
Componentes Simétricas. São Paulo: Editora Edgard Blucher LTDA, 1979.
HOUSAIN, ASHFAG. Electrical Power Systems. 2 ed, Vany Educational
Books.
STAGG, GLENN W. Computer Methods in power system analysis,
McgrawHill internacional.
ELGERG, OLLE INGEMAR. Introdução à teoria de sistemas de energia
elétrica. São Paulo: McGrawHill do Brasil, 1977.
BARTHOLD, L. O. Análise de circuitos de sistemas de potência, Edições
UFSM, 1983
PASINI, JOSÉ C. L. Implementação de um sistema de fluxo de potência em
regime permanente usando interface gráfica interativa. Curitiba, 1998, 112
f, Dissertação (Mestrado em Ciências) – Setor de Tecnologia, departamento de
construção civil, Setor de Exatas, departamento de matemática
BICHELS, ARLEI. Sistemas elétricos de potência. Curitiba, apostila da
disciplina de Sistema de potência. Curso de Engenharia Elétrica, ênfase
Eletrotécnica, CEFET-PR
CASTRO JR, CARLOS A., Cálculo de Fluxo de Carga. Campinas, apostila da
disciplina de Sistema de Potência. UNICAMP

128
12 REFERÊNCIAS BILIOGRÁFICAS
i CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA.
ii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 1, PAG 1
iii PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 12
iv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 1, PAG. 2
v PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 14
vi PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 20
vii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 17
viii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 18
ix CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 6, PAG. 101
x BARTHOLD, L. O., ANÁLISE DE CIRCUITOS DE DE SISTEMAS DE POTÊNCIA, 1983,
PAG. 23
xi BARTHOLD, L. O., ANÁLISE DE CIRCUITOS DE DE SISTEMAS DE POTÊNCIA, 1983,
PAG. 24
xii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 54
xiii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 4
xiv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 4
xv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 7, PAG. 2
xvi CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 3, PAG. 1
xvii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 3, PAG. 5
xviii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 4, PAG. 8
xix ELGERD, OLLE INGEMAR, INTRODUÇÃO À TEORIA DE SISTEMAS DE ENERGIA
ELÉTRICA, 1977, PAG. 32

129
13 ANEXO I – APRESENTAÇÃO DOS CÁLCULOS DO CIRCUITO EXEMPLO
13.1 Cálculo do Circuito Exemplo
B1 b2
g1
g2
E=1,01 puP=30MW
230/138 kV1,02∠0° pu
(Referência)
Z=0,0035+j0,017 puB=j0,06 pu
S=154+j52,8 MVA
b3 b4
S=15+j4 MVA
Z=0,0105+j0,051puB=j0,18 pu
Z=0,007+j0,034puB=j0,12 pu
T1
LT1
LT3 LT2
Figura 13.1 - Circuito Exemplo
13.1.1 Admitância em PU
Tendo os dados referentes às Impedância em pu, seguimos com os
cálculos para acharmos os valores das Admitâncias.
Desprezaremos as admitâncias dos geradores.
13.1.1.1 Linha de Transmissão 1
Impedância Série em PU (valor dado)
Zs j puLT1 0 0035 0 017= +, ,
Admitância Série em PU
Ys
Zs jj puLT
LT1
1
1 10 0035 0 017
11 6183 56 4315= =+
= −, ,
, ,

130
Admitâncias Paralelas em PU
B j pu.
,= 0 06 (dado)
Yp B j puLT1 0 06= =.
,
13.1.1.2 Linha de Transmissão 2
Impedância Série em PU (valor dado)
Zs j puLT 2 0 007 0 034= +, ,
Admitância Série em PU
Admitâncias Paralelas em PU
B j pu.
,= 0 12 (dado)
Yp B j puLT 2 0 12= =.
,
13.1.1.3 Linha de Transmissão 3
Impedância Série em PU (valor dado)
Zs j puLT 3 0 0105 0 051= +, ,
Yp Ypj
j puLT LT1 20 062
0 031 1= = =,
,
YsZs j
j puLTLT
22
1 10 007 0 034
5 0891 28 2158= =+
= −, ,
, ,
Yp Ypj
j puLT LT1 20 122
0 062 2= = =,
,

131
Admitância Série em PU
Admitâncias Paralelas em PU
B j pu.
,= 0 18 (dado)
Yp B j puLT 3 0 18= =.
,
13.1.1.4 Transformador T1
Admitância Série em PU (valor dado)
Admitâncias Paralelas em PU (valores dados)
YsZs j
j puLLT
33
1 10 0105 0 051
3 8727 18 8106= =+
= −, ,
, ,
Yp Ypj
j puLT LT1 20 182
0 093 3= = =,
,
pujYsT 761,41 −=
pujYpTAT 216,0
1)( =
pujYpTBT 2268,0
1)( −=

132
13.1.2 Matriz Admitância
Yii
.
= Soma de todas as admitâncias que chegam na barra i.
Yij
.
= Soma de todas as admitâncias que ligam as barras i e j, com o sinal
trocado.
Soma de todas as admitâncias que chegam na barra 1
( ) ( ) ( ) ( )Y j j j j11 0 03 11 6183 56 4315 0 09 3 8727 18 8105.
, , , , , ,= + − + + −
Y j pu11 15 4910 751220.
, ,= −
Soma de todas as admitâncias que chegam na barra 2
( ) ( ) ( ) ( )Y j j j j22 0 03 11 6183 56 4315 0 06 5 8091 28 2158.
, , , , , ,= + − + + −
B1
b4b3
b2
j0,03j0,03
11,6183 -j56,4315 pu
j0,06
j0,06
5,8091 -j28,2158 pu
3,8727 -j18,8105 puj0,09
j0,09
-j4,761 pu
j0,216 pu -j0,2268 pu

133
Y j pu22 17 4274 84 5573.
, ,= −
Soma de todas as admitâncias que chegam na barra 3
( ) ( ) ( ) ( ) ( ) ( )Y j j j j j j33 0 09 3 8727 18 8105 0 06 5 8091 28 2158 0 216 4 761.
, , , , , , , ,= + − + + − + + −
Y j pu33 9 6818 51 4213.
, ,= −
Soma de todas as admitâncias que chegam na barra 4
( ) ( )Y j j44 0 216 4 761.
, ,= − + −
Y j pu44 4 9878.
,= −
13.1.2.1 Soma de todas as admitâncias que ligam as barras 1 e 2 ou 2 e 1,
com o sinal trocado.
( )Y Y j12 21 11 6183 56 4315. .
, ,= = − −
Y Y j pu12 21 11 6183 56 4315. .
, ,= = − +
13.1.2.2 Soma de todas as admitâncias que ligam as barras 1 e 3 ou 3 e 1,
com o sinal trocado.
( )Y Y j13 31 3 8727 18 8105. .
, ,= = − −
Y Y j pu13 31 3 8727 18 8105. .
, ,= = − +
13.1.2.3 Soma de todas as admitâncias que ligam as barras 1 e 4 ou 4 e 1,
com o sinal trocado.
Y Y14 41 0. .
= =

134
13.1.2.4 Soma de todas as admitâncias que ligam as barras 2 e 3 ou 3 e 2,
com o sinal trocado.
Y Y j23 32 8091 28 2158. .
(5, , )= = − +
Y Y j pu23 32 5 8091 28 2158. .
, ,= = − +
13.1.2.5 Soma de todas as admitâncias que ligam as barras 2 e 4 ou 4 e 2,
com o sinal trocado.
Y Y24 42 0. .
= =
13.1.2.6 Soma de todas as admitâncias que ligam as barras 3 e 4 ou 4 e 3,
com o sinal trocado.
Y Y j34 43 4 761. .
( , )= = − −
Y Y j pu34 43 4 761. .
,= =
13.1.3 Através dos itens acima calculados conseguimos escrever a Matriz
Admitância:
15,4910 -j75,1220 -11,6183 +j56,4315 -3,8727 +j18,8105 0
-11,6183 +j56,4315 17,4274 -j84,5573 -5,8091 +j28,2158 0
-3,8727 +j18,8105 -5,8091 +j28,2158 9,6818 -j51,4213 j4,761
0 0 j4,761 -j4,9878
Y 11 Y 12 Y 13 Y 14Y 21 Y 22 Y 23 Y 24Y 31 Y 32 Y 33 Y 34Y 41 Y 42 Y 43 Y 44

135
puE °∠= 001,1.01
( ) ( )( ) ( ) ( )[ ]( ) ( ) ( )[ ]( )[ ]
6375,01565,0
8105,1838727001,1001,14315,566183,1101001,115,0001,1001,1
3,0
.01
*.01
*.
13
.03
.01
.
12
.02
.01
.
10
.01
.01
.*1
.01
.01
111
.01
jS
jjjS
YEEYEEYEEIES
jQjQPS
+=
−°∠−°∠+−°∠−°∠+°∠°∠=
−+
−+==
+=+=
( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ][ ]( )
puE
jjjj
E
°∠=
−°∠×+−+°∠×+−−°∠÷+=
1029,00104,1
1220,754910,15018105,188727,3014315,566183,11001,16375,03,0
.11
*.11
pu,1029001,1E.11 °∠=
pujjQjQPS 6375,03,03,0 111
.01 +=+=+=
13.1.4 Cálculo das Tensões
=p número da barra.
=k número da iteração.
=n número de barras.
13.1.4.1 Primeira Iteração:
13.1.4.1.1 Barra 1:
Barra de geração: +.
pS
p=1
k=1
n=4
(Valor foi arbritado)
( )
−÷
=
≠=
−−
.
1
*11
.
pp
n
qpq
qpqkp
kp
k
p
Y
EYES
E
+
−
÷
=.
11
.03
.
13
.02
.
12
*.01
.01.
11
Y
EYEYES
E

136
( )[ ] ( ) ( )[ ] ( ) ( )[ ]( )5573,844274,17
012158,288091,51029,001,14315,566183,1101528,054,1
528,054,1*.
12
.02
jjjj
E
pujS
−°∠×+−+°∠×+−−°∠÷+−=
+=
pu002,1E.14 °∠=
( )[ ] ( ) ( ) ( )( )4213,516818,9
002,18746,09982,01029,001,10104,015,0
04,015,0.
34
.
32
.
31*
.13
.03
j
YYYjE
pujS
−
°∠×+°−∠×+°∠×−°∠÷+−=
+=
13.1.4.1.2 Barra 2:
Barra de carga: -.
pS
p=2
k=1
n=4
pu8746,09982,0E.12 °−∠=
13.1.4.1.3 Barra 3:
Barra de carga: -.
pS
p=3
k=1
n=4
pu6797,00102,1E.13 °−∠=
13.1.4.1.4 Barra 4:
Barra de referência
+−
÷
= .
22
.0323
..1121
.*.
02
.02.
12
Y
EYEYES
E
++−
÷= .
33
.04
.
34
.12
.
32
.11
.
31
*.03
.03.
13
Y
EYEYEYESE

137
pu6683,001,1E.12 °−∠=
( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ]
3026,03725,1
6797,00102,11029,001,18746,09982,01029,001,11029,001,11029,001,1
3,0
.11
*.
13
.
1210
.11
*.
13
.13
.11
.
12
.12
.11
.
10
.11
.11
.*1
.11
.11
111
.11
jS
YYYS
YEEYEEYEEIES
jQjQPS
+=
°−∠−°∠+
°−∠−°∠+°∠°∠=
−+
−+==
+=+=
pujjQjQPS 3026,03,03,0 111
.11 +=+=+=
( ) ( )[ ] ( ) ( )
( )
puE
j
YYjE
°−∠=
−
°−∠+
°−∠−°∠÷+=
6683,00073,1
1220,754910,15
6797,00102,18746,09982,01029,001,13026,03,0
.2
1
.
13
.
12*
.2
1
13.1.4.2 Segunda Iteração:
13.1.4.2.1 Barra 1:
Barra de geração: +.
pS
p=1
k=2
n=4
13.1.4.2.2 Barra 2:
Barra de carga: -.
pS
p=2
k=2
n=4
+−
÷
= .
22
.1323
..2
121
.*.
12
.12.
22
Y
EYEYES
E
+−
÷
= .
11
.1313
..1212
.*.
11
.11.
21
Y
EYEYES
E

138
pu6128,10016,1E.22 °−∠=
pu3604,10123,1E.23 °−∠=
( )[ ] ( ) ( )
( )5573,844274,17
6797,00102,16683,001,18746,09982,0528,054,1
528,054,1.
23
.
21*
.22
.12
j
YYjE
pujS
−
°−∠+
°−∠−°−∠÷+−=
+=
( )[ ] ( ) ( ) ( )
( )4213,516818,9
002,16128,10016,16683,001,16797,00102,104,015,0
04,015,0.
34
.
32
.
31*
.23
.13
j
YYYjE
pujS
−
°∠×+
°−∠×+
°−∠×−°−∠÷+−=
+=
pu002,1E.14 °∠=
13.1.4.2.3 Barra 3:
Barra de carga: -.
pS
p=3
k=2
n=4
13.1.4.2.4 Barra 4:
Barra de referência
13.1.4.3 Terceira Iteração:
13.1.4.3.1 Barra 1:
Barra de geração: +.
pS
p=1
k=3
n=4
++−
÷
= .
33
.14
.
34
.22
.
32
.2
1
.
31
*.13
.13.
23
Y
EYEYEYES
E
+−
÷
= .
11
.23
.
13
.22
.
12
*.21
.21.
31
Y
EYEYES
E

139
pu362,101,1E.31 °−∠=
pu2979,20023,1E.32 °−∠=
( ) ( ) ( ) ( )[ ] ( ) ( )[ ]
0807,0265,1
3604,10123,16683,001,16128,10016,16683,001,16683,001,16683,001,1
3,0
.2
1
*.
13
.
12
.
10
.2
1
*.
13
.23
.2
1
.
12
.22
.2
1
.
10
.2
1
.2
1
.*1
.2
1
.2
1
111
.2
1
jS
YYYS
YEEYEEYEEIES
jQjQPS
+=
°−∠−°−∠+
°−∠−°−∠+
°−∠°−∠=
−+
−+==
+=+=
( ) ( )[ ] ( ) ( )
( )
puE
j
YYjE
°−∠=
−
°−∠+
°−∠−°−∠÷+=
3620,10076,1
1220,754910,15
3604,10123,16128,10016,16683,001,10807,03,0
.31
.
13
.
12*
.31
pujjQjQPS 0807,03,03,0 111
.2
1 +=+=+=
( )[ ] ( ) ( )
( )5573,844274,17
3604,10123,1362,101,16128,10016,1528,054,1
528,054,1.
23
.
21*
.3.
2
.22
j
YYjE
pujS
−
°−∠+
°−∠−°−∠÷+−=
+=
13.1.4.3.2 Barra 2:
Barra de carga: -.
pS
p=2
k=3
n=4
+−
÷= .
22
.2323
..3121
.*.
22
.22.
32
Y
EYEYESE

140
pu986,10129,1E.33 °−∠=
( )[ ] ( ) ( ) ( )
( )4213,516818,9
002,12979,20023,1362,101,13604,10123,104,015,0
04,015,0.
34
.
32
.
31*
.33
.23
j
YYYjE
pujS
−
°∠×+
°−∠×+
°−∠×−°−∠÷+−=
+=
pu002,1E.14 °∠=
13.1.4.3.3 Barra 3:
Barra de carga: -.
pS
p=3
k=3
n=4
13.1.4.3.4 Barra 4:
Barra de referência
++−
÷= .
33
.24
.
34
.32
.
32
.31
.
31
*.23
.23.
33
Y
EYEYEYESE

141
14 ANEXO II – APRESENTAÇÃO DOS CÁLCULOS DO CIRCUITO DE 11 BARRAS
Esta seção é dedicada para o desenvolvimento matemático do circuito
sugerido. Abaixo, o esquema unifilar do circuito.
FIG. 38 – CIRCUITO PARA A BASE DE CÁLCULOS.

142
14.1 Cálculo do Circuito Pelo Método de Gauss-Seidel
14.1.1 Cálculo das Tensões de Base
Cálculo da Tensão de Base do Barramento 1 (Eb1)
=1bE 13,8 kV
Cálculo da Tensão de Base do Barramento 2 (Eb2)
=×=×=kVkV
kVkEE Tbb 8,13220
8,13112220 kV
Cálculo da Tensão de Base do Barramento 3 (Eb3)
== 23 bb EE 220 kV
Cálculo da Tensão de Base do Barramento 4 (Eb4)
=×=×=kVkV
kVkEE Tbb 220138
220224138 kV
Cálculo da Tensão de Base do Barramento 5 (Eb5)
== 45 bb EE 138 kV
Cálculo da Tensão de Base do Barramento 6 (Eb6)
=×=×=kVkV
kVkEE Tbb 13269
13835672,13636364 kV
Cálculo da Tensão de Base do Barramento 7 (Eb7)
== 67 bb EE 72,13636364 kV
Cálculo da Tensão de Base do Barramento 8 (Eb8)

143
=×=×=kVkV
kVkEE Tbb 668,13
13636364,7247815,08305785 kV
Cálculo da Tensão de Base do Barramento 9 (Eb9)
== 29 bb EE 220 kV
Cálculo da Tensão de Base do Barramento 10 (Eb10)
== 910 bb EE 220 kV
Cáculo da Tensão de Base do Barramento 11 (Eb11)
== 511 bb EE 138 kV
=×=×=kVkV
kVkEE Tbb 220138
22051011138 kV
14.1.2 Calculo das Impedâncias de Base
Cálculo da Impedância de Base do Barramento 1 (Eb1)
=
=
=
1008,13 22
11 Sb
EZ b
b1,9044 ohm
Cálculo da Impedância de Base do Barramento 2 (Eb2)
=
=
=
10022022
22 Sb
EZ b
b484 ohm
Cálculo da Impedância de Base do Barramento 3 (Eb3)
=
=
=
10022022
33 Sb
EZ b
b484 ohm
Cálculo da Impedância de Base do Barramento 4 (Eb4)
=
=
=
10013822
44 Sb
EZ b
b190,44 ohm

144
Cálculo da Impedância de Base do Barramento 5 (Eb5)
=
=
=
10013822
55 Sb
EZ b
b190,44 ohm
Cálculo da Impedância de Base do Barramento 6 (Eb6)
=
=
=
10013636364,72 22
66 Sb
EZ b
b52,03654959 ohm
Cálculo da Impedância de Base do Barramento 7 (Eb7)
=
=
=
10013636364,72 22
77 Sb
EZ b
b52,03654959 ohm
Cálculo da Impedância de Base do Barramento 8 (Eb8)
=
=
=
10008305785,15 22
88 Sb
EZ b
b2,274986341 ohm
Cálculo da Impedância de Base do Barramento 9 (Eb9)
=
=
=
10022022
99 Sb
EZ b
b484 ohm
Cálculo da Impedância de Base do Barramento 10 (Eb10)
=
=
=
10022022
1010 Sb
EZ b
b484 ohm
Cálculo da Impedância de Base do Barramento 11 (Eb11)
=
=
=
10013822
1111 Sb
EZ b
b190,44 ohm

145
14.1.3 Conversão do Circuito para PU
Tendo os dados referentes às Bases de Tensão e Impedância por barramento, seguimos com a transformação do circuito para o sistema por unidade (PU).
Eb1 = 13,80000000 kV Zb1 = 1,90440000 ohmsEb2 = 220,00000000 kV Zb2 = 484,00000000 ohmsEb3 = 220,00000000 kV Zb3 = 484,00000000 ohmsEb4 = 138,00000000 kV Zb4 = 190,44000000 ohmsEb5 = 138,00000000 kV Zb5 = 190,44000000 ohmsEb6 = 72,13636364 kV Zb6 = 52,03654959 ohmsEb7 = 72,13636364 kV Zb7 = 52,03654959 ohmsEb8 = 15,08305785 kV Zb8 = 2,27498634 ohmsEb9 = 220,00000000 kV Zb9 = 484,00000000 ohmsEb10 = 220,00000000 kV Zb10 = 484,00000000 ohmsEb11 = 138,00000000 kV Zb11 = 190,44000000 ohms
Tensões de Base Impedâncias de Base
CONVERSÃO DO GERADOR G1
Impedância Base com os Valores Nominais do Equipamento
=====50
8,13 2
1
21
11
21
1
1
1
1
g
g
g
b
b
bb
bb S
EZ
SE
Z 3,80880000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 508,13
100100
%%2
111 11
jZZZZZZ
gg bgbj 0,38088000 ohm
Impedância Base com as Novas Bases
=====100
8,13 2
2
22
22
22
2
1
1
1
g
g
g
b
b
bb
bb S
EZ
SE
Z 1,90440000 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
9044,13808,00
12
22
2
1
1
1
jZ
Z
ZZ
ZZ
Z gbb g
g
g
j 0,20000000 pu

146
Admitância em PU
=+
==2000,00
11
11 jZ
Yg
g-j 5,00000000 pu
CONVERSÃO DO GERADOR G2
Impedância Base com os Valores Nominais do Equipamento
=====150
8,13 2
1
21
11
21
1
2
2
2
g
g
g
b
b
bb
bb S
EZ
SE
Z 1,26960000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 1508,13
100120
%%2
121 22
jZZZZZZ
gg bgbj 0,15235200 ohm
Impedância Base com as Novas Bases
=====100
8,13 2
2
22
22
22
2
2
2
2
g
g
g
b
b
bb
bb S
EZ
SE
Z 1,90440000 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
9044,115235200,00
22
22
2
2
2
2
jZ
Z
ZZ
ZZ
Z gbb g
g
g
j 0,08000000 pu
Admitância em PU
=+
==0800,00
11
22 jZ
Yg
g-j 12,50000000 pu

147
CONVERSÃO DA LINHA DE TRANSMISSÃO 1
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω1
1
2
5 15484
0,01033058 +j 0,03099174 pu
Admitância Série em PU
YsZs jL
LT1
1
1 10 01033058 0 03099174
= =+
=, ,
9,68000000 -j 29,04000000 pu
Admitâncias Paralelas em PU
Yp B YpLT LT= = =.
1j 0,15000000 pu
Yp Ypj
LT LT1 20 1521 1= = =, j 0,07500000 pu
CONVERSÃO DA LINHA DE TRANSMISSÃO 2
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω2
2
4
7 25190 44,
0,03675698 +j 0,13127494 pu
Admitância Série em PU
YsZs jL
LT2
2
1 10 03675698 0 13127494
= =+
=, ,
1,97786350 -j 7,06379822 pu
Admitâncias Paralelas em PU
Yp B YpLT LT= = =.
2j 0,15000000 pu
Yp Ypj
LT LT1 20 1522 2= = =, j 0,07500000 pu

148
CONVERSÃO DA LINHA DE TRANSMISSÃO 3
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω3
3
6
10 3252 03654959,
0,19217262 +j 0,61495238 pu
Admitância Série em PU
YsZs jL
LT3
3
1 10 19217262 0 61495238
= =+
=, ,
0,46295863 -j 1,48146760 pu
Admitâncias Paralelas em PU
Yp B YpLT LT= = =.
3j 0,15000000 pu
Yp Ypj
LT LT1 20 1523 3= = =, j 0,07500000 pu
CONVERSÃO DA LINHA DE TRANSMISSÃO 4
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω4
4
2
5 15484
0,01033058 +j 0,03099174 pu
Admitância Série em PU
YsZs jL
LT4
4
1 10 01033058 0 03099174
= =+
=, ,
9,68000000 -j 29,04000000 pu
Admitâncias Paralelas em PU
Yp B YpLT LT= = =.
4
j 0,15000000 pu

149
Yp Ypj
LT LT1 20 1524 4= = =, j 0,07500000 pu
CONVERSÃO DA LINHA DE TRANSMISSÃO 5
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω5
5
9
5 15484
0,01033058 +j 0,03099174 pu
Admitância Série em PU
YsZs jL
LT5
5
1 10 01033058 0 03099174
= =+
=, ,
9,68000000 -j 29,04000000 pu
Admitância Paralela em PU
Yp B YpLT LT= = =.
5
j 0,15000000 pu
Yp Ypj
LT LT1 20 1525 5= = =, j 0,07500000 pu
CONVERSÃO DA LINHA DE TRANSMISSÃO 6
Impedância Série em PU
ZsZs
ZZs
Zs
Zj
LTb
LTb
LT
LT
LT= = = =+
=Ω Ω6
6
5
7 25190 44,
0,03675698 +j 0,13127494 pu
Admitância Série em PU
YsZs jL
LT6
6
1 10 03675698 0 13127494
= =+
=, ,
1,97786350 -j 7,06379822 pu
Admitâncias Paralelas em PU

150
Yp B YpLT LT= = =.
6j 0,15000000 pu
Yp Ypj
LT LT1 20 1526 6= = =, j 0,07500000 pu
CONVERSÃO DO TRANSFORMADOR T1
Impedância Base com os Valores Nominais do Equipamento
=====75
8,13 2
1
21
11
21
1
1
1
1
T
T
T
b
bb
b
bb S
EZ
SE
Z 2,53920000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 758,13
10070
%%2
111 11
jZZZZZZ
TT bTbj 0,17774400 ohm
Impedância Base com as Novas Bases
=====100
8,13 2
2
22
22
22
2
1
1
1
T
T
T
b
bb
b
bb S
EZ
SE
Z 1,90440000 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
9044,1177744,00
12
22
2
1
1
1
jZ
Z
ZZ
ZZ
Z Tbb T
T
T
j 0,09333333 pu
Admitância Auxiliar em PU
=+
====09333333,0011
'1
'1
1 jZY
ZY
TT
-j 10,71428571 pu
Variáveis Auxiliares Provenientes do Tap
=====230220
1
11
T
T
nomAT
tapATT
nomAT
tapAT
V
VA
V
VA 0,95652174
=====8,138,13
1
1
1
T
T
nomBT
tapBTT
nomBT
tapBT
V
VB
V
VB 1,00000000

151
=====00000000,195652174,0
1
11
T
TT B
Aa
BA
a 0,95652174
Admitância Série em PU
=−====95652174,0
71428571,10''
1
11
jaY
YsaY
YsT
TT
-j 11,20129870 pu
Admitâncias Paralelas em PU
=−×−=×−==×−= )71428571,10()95652174,0(
)95652174,01('
)1('
)1(21
12
1)(2)( 1
jYa
aYpY
aa
Yp TT
TATAT T
=1)( TATYp -j 0,50914994 pu
=−×−=×−==×−= )71428571,10()95652174,0(
)195652174,0('
)1('
)1(1
1
1)()( 1
jYa
aYpY
aa
Yp TT
TBTBT T
=1)( TBTYp +j 0,48701299 pu
CONVERSÃO DO TRANSFORMADOR T2
Impedância Base com os Valores Nominais do Equipamento
=====1001382
1
21
11
21
1
2
2
2
T
T
T
b
bb
b
bb S
EZ
SE
Z 190,44000000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 100138
10080
%%2
121 22
jZZZZZZ
TT bTbj 15,23520000 ohm
Impedância Base com as Novas Bases
=====1001382
2
22
22
22
2
2
2
2
T
T
T
b
bb
b
bb S
EZ
SE
Z 190,44000000 ohm
Impedância em PU, no Novo Conjunto de Bases

152
=+===== ΩΩ
44000000,19023520000,150
22
22
2
2
2
2
jZ
Z
ZZ
ZZ
Z Tbb T
T
T
j 0,08000000 pu
Admitância Auxiliar em PU
=+
====08000000,0011
'1
'2
2 jZY
ZY
TT
-j 12,50000000 pu
Variáveis Auxiliares Provenientes do Tap
=====230220
2
2
2
T
T
nomAT
tapATT
nomAT
tapAT
V
VA
V
VA 0,95652174
=====138138
2
2
2
T
T
nomBT
tapBTT
nomBT
tapBT
V
VB
V
VB 1,00000000
=====00000000,195652174,0
2
22
T
TT B
Aa
BA
a 0,95652174
Admitância Série em PU
=−====95652174,0
50000000,12''
2
22
jaY
YsaY
YsT
TT
-j 13,06818182 pu
Admitâncias Paralelas em PU
=−×−=×−==×−= )50000000,12()95652174,0(
)95652174,01('
)1('
)1(22
22
2)(2)( 2
jYa
aYpY
aa
Yp TT
TATAT T
=2)( TATYp -j 0,59400826 pu
=−×−=×−==×−= )50000000,12()95652174,0(
)195652174,0('
)1('
)1(2
2
2)()( 2
jYa
aYpY
aa
Yp TT
TBTBT T
=2)( TBTYp +j 0,56818182 pu
CONVERSÃO DO TRANSFORMADOR T3
Impedância Base com os Valores Nominais do Equipamento

153
=====150692
1
21
11
21
1
3
3
3
T
T
T
b
bb
b
bb S
EZ
SE
Z 31,74000000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 15069
100100
%%2
131 33
jZZZZZZ
TT bTbj 3,17400000 ohm
Impedância Base com as Novas Bases
=====100
13636364,72 2
2
22
22
22
2
3
3
3
T
T
T
b
bb
b
bb S
EZ
SE
Z 52,03654959 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
03654959,5217400000,30
32
22
2
3
3
3
jZ
Z
ZZ
ZZ
Z Tbb T
T
T
j 0,06099559 pu
Admitância Auxiliar em PU
=+
====06099559,0011
'1
'3
3 jZY
ZY
TT
-j 16,39462810 pu
Variáveis Auxiliares Provenientes do Tap
=====132138
3
33
T
T
nomAT
tapATT
nomAT
tapAT
V
VA
V
VA 0,95652174
=====6969
3
33
T
T
nomBT
tapBTT
nomBT
tapBT
V
VB
V
VB 1,00000000
=====00000000,195652174,0
3
33
T
TT B
Aa
BA
a 0,95652174
Admitância Série em PU
=−====95652174,0
39462810,16''
3
33
jaY
YsaY
YsT
TT
-j 17,13983847 pu

154
Admitâncias Paralelas em PU
=−×−=×−==×−= )39462810,16()95652174,0(
)95652174,01('
)1('
)1(23
32
3)(2)( 3
jYa
aYpY
aa
Yp TT
TATAT T
=3)( TATYp -j 0,77908357 pu
=−×−=×−==×−= )39462810,16()95652174,0(
)195652174,0('
)1('
)1(3
3
3)()( 3
jYa
aYpY
aa
Yp TT
TBTBT T
=3)( TBTYp +j 0,74521037 pu
CONVERSÃO DO TRANSFORMADOR T4
Impedância Base com os Valores Nominais do Equipamento
=====150
8,13 2
1
21
11
21
1
4
4
4
T
T
T
b
bb
b
bb S
EZ
SE
Z 1,26960000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 1508,13
100100
%%2
141 44
jZZZZZZ
TT bTbj 0,12696000 ohm
Impedância Base com as Novas Bases
=====100
08305785,15 2
2
22
22
22
2
4
4
4
T
T
T
b
bb
b
bb S
EZ
SE
Z 2,27498634 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
27498634,212696000,00
42
22
2
4
4
4
jZ
Z
ZZ
ZZ
Z Tbb T
T
T
j 0,05580693 pu
Admitância Auxiliar em PU
=+
====05580693,0011
'1
'4
4 jZY
ZY
TT
-j 17,91892203 pu

155
Variáveis Auxiliares Provenientes do Tap
=====6966
4
44
T
T
nomAT
tapATT
nomAT
tapAT
V
VA
V
VA 0,95652174
=====8,138,13
4
44
T
T
nomBT
tapBTT
nomBT
tapBT
V
VB
V
VB 1,00000000
=====00000000,195652174,0
4
44
T
TT B
Aa
BA
a 0,95652174
Admitância Série em PU
=−====95652174,0
91892203,17''
4
44
jaY
YsaY
YsT
TT
-j 18,73341849 pu
Admitâncias Paralelas em PU
=−×−=×−==×−= )91892203,17()95652174,0(
)95652174,01('
)1('
)1(24
42
4)(2)( 4
jYa
aYpY
aa
Yp TT
TATAT T
=4)( TATYp -j 0,85151902 pu
=−×−=×−==×−= )91892203,17()95652174,0(
)195652174,0('
)1('
)1(4
4
4)()( 4
jYa
aYpY
aa
Yp TT
TBTBT T
=4)( TBTYp +j 0,81449646 pu
CONVERSÃO DO TRANSFORMADOR T5
Impedância Base com os Valores Nominais do Equipamento
=====75
1382
1
21
11
21
1
5
5
5
T
T
T
b
bb
b
bb S
EZ
SE
Z 253,92000000 ohm
Impedância do Equipamento em Ohms
=×+=×==×= ΩΩ 75138
100100
%%2
151 55
jZZZZZZ
TT bTbj 25,39200000 ohm
156
Impedância Base com as Novas Bases
=====1001382
2
22
22
22
2
5
5
5
T
T
T
b
bb
b
bb S
EZ
SE
Z 190,44000000 ohm
Impedância em PU, no Novo Conjunto de Bases
=+===== ΩΩ
44000000,19039200000,250
52
22
2
5
5
5
jZ
Z
ZZ
ZZ
Z Tbb T
T
T
j 0,13333333 pu
Admitância Auxiliar em PU
=+
====13333333,0011
'1
'5
5 jZY
ZY
TT
-j 7,50000000 pu
Variáveis Auxiliares Provenientes do Tap
=====230220
5
55
T
T
nomAT
tapATT
nomAT
tapAT
V
VA
V
VA 0,95652174
=====138138
5
55
T
T
nomBT
tapBTT
nomBT
tapBT
V
VB
V
VB 1,00000000
=====00000000,195652174,0
5
55
T
TT B
Aa
BA
a 0,95652174
Admitância Série em PU
=−====95652174,0
50000000,7''
5
55
jaY
YsaY
YsT
TT
-j 7,84090909 pu
Admitâncias Paralelas em PU
=−×−=×−==×−= )50000000,7()95652174,0(
)95652174,01('
)1('
)1(25
52
5)(2)( 5
jYa
aYpY
aa
Yp TT
TATAT T
=5)( TATYp -j 0,35640496 pu

157
=−×−=×−==×−= )50000000,7()95652174,0(
)195652174,0('
)1('
)1(5
5
5)()( 5
jYa
aYpY
aa
Yp TT
TBTBT T
=5)( TBTYp +j 0,34090909 pu
RESUMO DAS ADMITANCIAS em PU
QUADRO 03 – RESUMO DAS ADMITÂNCIAS EM PU
Equi.G1 0,00000000 -j 5,00000000 0,00000000 +j 0,00000000 0,00000000 +j 0,00000000G2 0,00000000 -j 12,50000000 0,00000000 +j 0,00000000 0,00000000 +j 0,00000000T1 0,00000000 -j 11,20129870 0,00000000 -j 0,50914994 0,00000000 +j 0,48701299T2 0,00000000 -j 13,06818182 0,00000000 -j 0,59400826 0,00000000 +j 0,56818182T3 0,00000000 -j 17,13983847 0,00000000 -j 0,77908357 0,00000000 +j 0,74521037T4 0,00000000 -j 18,73341849 0,00000000 -j 0,85151902 0,00000000 +j 0,81449646T5 0,00000000 -j 7,84090909 0,00000000 -j 0,35640496 0,00000000 +j 0,34090909LT 1 9,68000000 -j 29,04000000 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000LT 2 1,97786350 -j 7,06379822 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000LT 3 0,46295863 -j 1,48146760 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000LT 4 9,68000000 -j 29,04000000 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000LT 5 9,68000000 -j 29,04000000 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000LT 6 1,97786350 -j 7,06379822 0,00000000 +j 0,07500000 0,00000000 +j 0,07500000
Ysérie Yparalelo 1 (AT) Yparalelo 2 (BT)

158
B2g1 t 1
B1
-j5 pu -j11,20129870 pu
j0,48701299 -j0,50914994
9,68-j29,04 pu
j0,075
l t 1
j0,075 j0,56818182
-j13,06818182 pu
-j0,59400826
t 2B3
1,97786350-j7,06379822 pu
l t 2B4
j0,075 j0,075 j0,85151902
-j18,73341849 pu
j0,74521037
-j17,13983847 pu
t 3
j0,075 j0,075
0,46295863-j1,4814676 pu
l t 3 t 4
j0,81449646-j0,77908357
B5 b6 b7 b8
-j12,5 pu
g2
9,68-j29,04 pu
j0,075j0,075
B10l t 5 t 5
B11B9
j0,075 j0,075
j0,075j0,075
9,68-j29,04 pu 1,97786350-j7,06379822 pu
l t 4 l t 6
-j7,84090909 pu
-j0,35640496 j0,34090909
DIAGRAMA PARA CÁLCULO DA MATRIZ ADMITÂNCIA

159
14.1.4 Matriz Admitância
Yii
.
= Soma de todas as admitâncias que chegam na barra i.
Yij
.
= Soma de todas as admitâncias que ligam as barras i e j, com o sinal trocado.
Soma de todas as admitâncias que chegam na barra 1
Y j j j11 5 11 20129870 0 48701299.
, ,= − − +
Y11
.
= -j15,71428571 pu
Soma de todas as admitâncias que chegam na barra 2
Y j j j j j j22 0 50914994 11 20129870 9 68 29 04 0 075 9 68 29 04 0 075.
, , , , , , , ,= − − + − + + − +
Y22
.
= puj 64044864,6936000000,19 −
Soma de todas as admitâncias que chegam na barra 3
Y j j j j33 9 68 29 04 0 075 13 06818182 0 59400826.
, , , , ,= − + − −
Y33
.
= 9,68000000 -j 42,62719008 pu
Soma de todas as admitâncias que chegam na barra 4
Y j j j j44 13 06818182 0 56818182 1 97786350 7 06379822 0 075.
, , , , ,= − + + − +
Y44
.
= + 1,97786350 -j 19,48879822 pu
Soma de todas as admitâncias que chegam na barra 5
Y j j j j j j55 1 97786350 7 06379822 0 075 1 97786350 7 06379822 0 075 17 13983847 0 77908357.
, , , , , , , ,= − + + − + − −
Y55
.
= 3,95572700 -j 31,89651847 pu
Soma de todas as admitâncias que chegam na barra 6
Y j j j j66 17 13983847 0 74521037 0 46295863 1 48146760 0 075.
, , , , ,= − + + − + Y66
.
=0,46295863 -j 17,80109570 pu
Soma de todas as admitâncias que chegam na barra 7

160
Y j j j j77 0 46295863 1 48146760 0 075 18 73341849 0 85151902.
, , , , ,= − + − −
Y77
.
= 0,46295863 -j 20,99140512 pu
Soma de todas as admitâncias que chegam na barra 8
Y j j j88 18 73341849 0 81449646 12 5.
, , ,= − + −
Y88
.
= -j 30,41892203 pu
Soma de todas as admitâncias que chegam na barra 9
Y j j j j99 9 68 29 04 0 075 9 68 29 04 0 075.
, , , , , ,= − + + − +
Y99
.
= 19,36000000 -j 57,93000000 pu
Soma de todas as admitâncias que chegam na barra 10
Y j j j j1010 9 68 29 04 0 075 7 84090909 0 35640496.
, , , , ,= − + − −
Y1010
.9,68000000 -j 37,16231405 pu
Soma de todas as admitâncias que chegam na barra 11
Y j j j j1111 7 84090909 0 34090909 1 97786350 7 06379822 0 075.
, , , , ,= − + + − +
Y1111
.
= 1,97786350 -j 14,48879822 pu
Soma de todas as admitâncias que ligam as barras 1 e 2 ou 2 e 1, com o sinal trocado.
Y Y12 21
. .
= = +j 11,20129870 pu
Soma de todas as admitâncias que ligam as barras 1 e 3 ou 3 e 1, com o sinal trocado.
Y Y13 31
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 4 ou 4 e 1, com o sinal trocado.
Y Y14 41
. .
= = 0 pu

161
Soma de todas as admitâncias que ligam as barras 1 e 5 ou 5 e 1, com o sinal trocado.
Y Y15 51
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 6 ou 6 e 1, com o sinal trocado.
Y Y16 61
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 7 ou 7 e 1, com o sinal trocado.
Y Y17 71
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 8 ou 8 e 1, com o sinal trocado.
Y Y18 81
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 9 ou 9 e 1, com o sinal trocado.
Y Y19 91
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 10 ou 10 e 1, com o sinal trocado.
Y Y110 101
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 1 e 11 ou 11 e 1, com o sinal trocado.
Y Y111 111
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 3 ou 3 e 2, com o sinal trocado.
Y Y j23 32 9 68 29 04. .
( , , )= = − −

162
Y Y23 32
. .
= = - 9,68000000 +j 29,04000000 pu
Soma de todas as admitâncias que ligam as barras 2 e 4 ou 4 e 2, com o sinal trocado.
Y Y24 42
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 5 ou 5 e 2, com o sinal trocado.
Y Y25 52
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 6 ou 6 e 2, com o sinal trocado.
Y Y26 62
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 7 ou 7 e 2, com o sinal trocado.
Y Y27 72
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 8 ou 8 e 2, com o sinal trocado.
Y Y28 82
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 2 e 9 ou 9 e 2, com o sinal trocado.
Y Y j29 92 9 68 29 04. .
( , , )= = − −
Y Y29 92
. .
= = - 9,68000000 +j 29,04000000 pu
Soma de todas as admitâncias que ligam as barras 2 e 10 ou 10 e 2, com o sinal trocado.
Y Y210 102
. .
= = 0 pu

163
Soma de todas as admitâncias que ligam as barras 2 e 11 ou 11 e 2, com o sinal trocado.
Y Y211 112
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 4 ou 4 e 3, com o sinal trocado.
Y Y j34 43 13 06818182. .
( , )= = − −
Y Y34 43
. .
= = + j 13,06818182 pu
Soma de todas as admitâncias que ligam as barras 3 e 5 ou 5 e 3, com o sinal trocado.
Y Y35 53
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 6 ou 6 e 3, com o sinal trocado.
Y Y36 63
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 7 ou 7 e 3, com o sinal trocado.
Y Y37 73
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 8 ou 8 e 3, com o sinal trocado.
Y Y38 83
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 9 ou 9 e 3, com o sinal trocado.
Y Y39 93
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 3 e 10 ou 10 e 3, com o sinal trocado.
Y Y310 103
. .
= = 0 pu

164
Soma de todas as admitâncias que ligam as barras 3 e 11 ou 11 e 3, com o sinal trocado.
Y Y311 113
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 5 ou 5 e 4, com o sinal trocado.
Y Y45 54
. .
= = - 1,97786350 +j 7,06379822 pu
Soma de todas as admitâncias que ligam as barras 4 e 6 ou 6 e 4, com o sinal trocado.
Y Y46 64
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 7 ou 7 e 4, com o sinal trocado.
Y Y47 74
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 8 ou 8 e 4, com o sinal trocado.
Y Y48 84
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 9 ou 9 e 4, com o sinal trocado.
Y Y49 94
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 10 ou 10 e 4, com o sinal trocado.
Y Y410 104
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 4 e 11 ou 11 e 4, com o sinal trocado.
Y Y411 114
. .
= = 0 pu

165
Soma de todas as admitâncias que ligam as barras 5 e 6 ou 6 e 5, com o sinal trocado.
Y Y56 65
. .
= = +j 17,13983847 pu
Soma de todas as admitâncias que ligam as barras 5 e 7 ou 7 e 5, com o sinal trocado.
Y Y57 75
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 5 e 8 ou 8 e 5, com o sinal trocado.
Y Y58 85
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 5 e 9 ou 9 e 5, com o sinal trocado.
Y Y59 95
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 5 e 10 ou 10 e 5, com o sinal trocado.
Y Y510 105
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 5 e 11 ou 11 e 5, com o sinal trocado.
Y Y511 115
. .
= = - 1,97786350 +j 7,06379822 pu
Soma de todas as admitâncias que ligam as barras 6 e 7 ou 7 e 6, com o sinal trocado.
Y Y67 76
. .
= = - 0,46295863 +j 1,48146760 pu
Soma de todas as admitâncias que ligam as barras 6 e 8 ou 8 e 6, com o sinal trocado.
Y Y68 86
. .
= = 0 pu

166
Soma de todas as admitâncias que ligam as barras 6 e 9 ou 9 e 6, com o sinal trocado.
Y Y69 96
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 6 e 10 ou 10 e 6, com o sinal trocado.
Y Y610 106
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 6 e 11 ou 11 e 6, com o sinal trocado.
Y Y611 116
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 7 e 8 ou 8 e 7, com o sinal trocado.
Y Y78 87
. .
= = +j 18,73341849 pu
Soma de todas as admitâncias que ligam as barras 7 e 9 ou 9 e 7, com o sinal trocado.
Y Y79 97
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 7 e 10 ou 10 e 7, com o sinal trocado.
Y Y710 107
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 7 e 11 ou 11 e 7, com o sinal trocado.
Y Y711 117
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 8 e 9 ou 9 e 8, com o sinal trocado.
Y Y89 98
. .
= = 0 pu

167
Soma de todas as admitâncias que ligam as barras 8 e 10 ou 10 e 8, com o sinal trocado.
Y Y810 108
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 8 e 11 ou 11 e 8, com o sinal trocado.
Y Y811 118
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 9 e 10 ou 10 e 9, com o sinal trocado.
Y Y910 109
. .
= = - 9,68000000 +j 29,04000000 pu
Soma de todas as admitâncias que ligam as barras 9 e 11 ou 11 e 9, com o sinal trocado.
Y Y911 119
. .
= = 0 pu
Soma de todas as admitâncias que ligam as barras 10 e 11 ou 11 e 10, com o sinal trocado.
Y Y1011 1110
. .
= = +j 7,84090909 pu

168
Através dos itens acima calculados conseguimos escrever a Matriz Admitância:
QUADRO 04– ESQUEMA DA MATRIZ ADMITÂNCIA
Y 11 Y 12 Y 13 Y 14 Y 15 Y 16 Y 17 Y 18 Y 19 Y 110 Y 111
Y 21 Y 22 Y 23 Y 24 Y 25 Y 26 Y 27 Y 28 Y 29 Y 210 Y 211
Y 31 Y 32 Y 33 Y 34 Y 35 Y 36 Y 37 Y 38 Y 39 Y 310 Y 311
Y 41 Y 42 Y 43 Y 44 Y 45 Y 46 Y 47 Y 48 Y 49 Y 410 Y 411
Y 51 Y 52 Y 53 Y 54 Y 55 Y 56 Y 57 Y 58 Y 59 Y 510 Y 511
Y 61 Y 62 Y 63 Y 64 Y 65 Y 66 Y 67 Y 68 Y 69 Y 610 Y 611
Y 71 Y 72 Y 73 Y 74 Y 75 Y 76 Y 77 Y 78 Y 79 Y 710 Y 711
Y 81 Y 82 Y 83 Y 84 Y 85 Y 86 Y 87 Y 88 Y 89 Y 810 Y 811
Y 91 Y 92 Y 93 Y 94 Y 95 Y 96 Y 97 Y 98 Y 99 Y 910 Y 911
Y 101 Y 102 Y 103 Y 104 Y 105 Y 106 Y 107 Y 108 Y 109 Y 1010 Y 1011
Y 111 Y 112 Y 113 Y 114 Y 115 Y 116 Y 117 Y 118 Y 119 Y 1011 Y 1111

169
MATRIZ Y

170
puE °∠== 09565217391,08,132,13.
01
pujjQjQPS
pujyEEyEEIES
jQjQPS
91142317,03,03,0
91142317,0
3,0
111
.01
*
12
.02
.0
110
.0
1
.01
.*1
.0
1
.01
111
.01
−=+=+=
−=
−+==
+=+=
( ) ( )[ ] ( ) ( )[ ]( )
puE
jjj
E
°∠=
−°∠×−°∠÷−=
75289317,165247924,0
71428571,15012012987,11095652174,091142316,03,0
.11
*.11
pu1,752893170,95652174E.11 °∠=
14.1.5 Cálculo das Tensões
=p número da barra.
=k número da iteração.
=n número de barras.
Primeira Iteração:
Barra 1:
• Barra de geração: +.
pS
• p=1 • k=1 • n=11
(Valor do ângulo foi arbitrado)
( )
−÷
=
≠=
−−
.
1
*11
.
pp
n
qpq
qpqkp
kp
k
p
Y
EYES
E
−
÷= .
11
.02
.
12
*.0
1
.01.
11
Y
EYESE

171
( ) ( ) ( ) ( ) ( ) ( )[ ]( )64044864,6936,19
0104,2968,90104,2968,975289317,195652174,02012987,11
0.12
.02
jjjj
E
puS
−°∠×+−+°∠×+−+°∠×−=
=
pu43541723,098989742,0E.12 °∠=
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×−°∠÷+−=
48879822,199778635,101 06379822,79778635,1 41908058,098086972,0 06818182,13011,03,0 *.
14 j
jjjE
pu67726132,001388070,1E.14 °−∠=
( ) ( ) ( ) ( )[ ]( )62719008,4268,9
0106818182,1343541723,098989742,004,2968,9
0.13
.03
jjj
E
puS
−°∠×+°∠×+−−=
=
pu41908058,098086972,0E.13 °∠=
Barra 2:
• Outra Barra: .
pS = 0
• p=2 • k=1 • n=11
Barra 3:
• Outra Barra: .
pS = 0
• p=3 • k=1 • n=11
Barra 4:
• Barra de carga: -.
pS
• p=4 • k=1 • n=11
Barra 5:
++−
÷= .
22
.0929
..0323
..1121
.*.
02
.02.
12
Y
EYEYEYESE
+−
÷= .
44
.05
.
45
.13
.
43
*.04
.04.
14
Y
EYEYESE
pujS
MVAMVAj
MVAjS
1,03,0
1001030
1030
.04
.04
+=
+=+=
+−
÷= .
33
.04
.
34
.12
.
32
*.03
.03.
13
Y
EYEYESE

172
pu01013827,098410043,0E.15 °∠=
( ) ( ) ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×+°−∠×+−−
=
=
89651847,31955727,30106379822,79778635,10113983847,1767726132,001388070,106379822,79778635,1
0.15
.05
jjjj
E
puS
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×−°∠÷+−=
8010957,1746295863,0014814676,146295863,001013827,098410043,013983847,170108,02,0 *.
16 j
jjjE
pu65576356,002603513,1E.16 °−∠=
( ) ( ) ( ) ( )[ ]( )99140512,2046295863,0
0173341849,1865576356,002603513,14814676,146296,0
0.17
.07
jjj
E
puS
−°∠×+°−∠×+−−=
=
pu03048061,096511090,0E.17 °∠=
• Outra Barra: .
pS = 0
• p=5 • k=1 • n=11
Barra 6:
• Barra de carga: -.
pS
• p=6 • k=1 • n=11
Barra 7:
• Outra Barra: .
pS = 0
• p=7 • k=1 • n=11
++−
÷= .
55
.011
.
511
.06
.
56
.14
.
54
*.05
.05.
15
Y
EYEYEYESE
+−
÷= .
66
.07
.
67
.15
.
65
*.06
.06.
16
Y
EYEYESE
pujS
MVAMVAj
MVAjS
08,02,0
100820
820
.06
.06
+=
+=+=
+−
÷= .
77
.08
.
78
.16
.
76
*.07
.07.
17
Y
EYEYESE

173
pu0,01E.18 °∠=
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×+−−°∠÷+−
=93,5736,19
0104,2968,9 43541723,098989742,004,2968,90102,01,0 *.19 j
jjjE
pu°∠= 08893143,099642644,0E.19
Barra 8:
• Barra de geração: +.
pS
• p=8 • k=1 • n=11
Barra 9:
• Barra de carga: -.
pS
• p=9 • k=1 • n=11
Barra 10:
• Outra Barra: .
pS = 0
• p=10
−
÷= .
88
.17
.
87
*.08
.08.
18
Y
EYESE
pujS
pujyEEyEEIES
16090173,000961823,0
16090173,000961823,0
.08
*
87
.17
.0880
.08
.08
.*8
.08
.08
−−=
−−=
−+==
+−
÷= .
99
.0
10
.
910
.12
.
92
*.09
.09.
19
Y
EYEYESE
pujS
MVAMVAj
MVAjS
02,01,0
100210
210
.09
.09
+=
+=+=

174
( ) ( ) ( ) ( )[ ]( )16231405,3768,9
0184090909,708893143,099642644,004,2968,9
0.110
.010
jjj
E
puS
−°∠×+°∠×+−−=
=
pu16706111,098998747,0E.110 °∠=
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×−°∠÷+−
=48879822,149778635,1
01013827,098410043,006379822,79778635,116706111,098998747,084090909,70115,05,0 *.111 j
jjjE
pu°−∠= 00854661,200098242,1E.111
pujjQjQPS
pujyEEyEEIES
jQjQPS
80037746,03,03,0
80037746,024385699,0
3,0
111
.11
*
12
.12
.1110
.11
.11
.*1
.11
.11
111
.11
−=+=+=
−=
−+==
+=+=
• k=1 • n=11
Barra 11:
• Barra de carga: -.
pS
• p=11 • k=1 • n=11
Segunda Iteração:
Barra 1:
• Barra de geração: +.
pS
• p=1 • k=2 • n=11
+−
÷= .
1010
.011
.
1011
.19
.
109
*.010
.0
10.110
Y
EYEYESE
pujS
MVAMVAj
MVAjS
15,05,0
1001550
1550
.0
11
.0
11
+=
+=+=
+−
÷= .
1111
.15
.
115
.110
.
1110
*.011
.0
11.111
Y
EYEYESE
−
÷
= .
11
.1212
.*.
11
.11.
21
Y
EYES
E

175
( ) ( )[ ] ( ) ( )[ ]( )
puE
jjj
E
°∠=
−°∠×−°∠÷−=
08103431,265218461,0
71428571,1543541723,098989742,02012987,1175289317,195652174,080037746,03,0
.2
1
*.2
1
pu,0810343120,95652174E.21 °∠=
( ) ( ) ( ) ( ) ( ) ( )[ ]( )64044864,6436,19
08893143,099642644,004,2968,941908058,098086972,004,2968,9,0810343120,956521742012987,11
0.22
.12
jjjj
E
puS
−°∠×+−+°∠×+−+°∠×−
=
=
pu67501857,098033570,0E.22 °∠=
( ) ( ) ( ) ( )[ ]( )62719008,4268,9
67726132,001388070,106818182,1367501857,098033570,004,2968,9
0.23
.13
jjj
E
puS
−°−∠×+°∠×+−−=
=
pu28800247,097712040,0E.23 °∠=
Barra 2:
• Outra Barra: .
pS = 0
• p=2 • k=2 • n=11
Barra 3:
• Outra Barra: .
pS = 0
• p=3 • k=2 • n=11
Barra 4:
• Barra de carga: -.
pS
• p=4 • k=2
++−
÷
= .
22
.1929
..1323
..2
121
.*.
12
.12.
22
Y
EYEYEYES
E
+−
÷= .
44
.15
.
45
.23
.
43
*.14
.14.
24
Y
EYEYESE
+−
÷= .
33
.14
.
34
.22
.
32
*.13
.13.
23
Y
EYEYESE

176
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×−°−∠÷+−=
48879822,199778635,101014,09841,0063798,797786,1288,097712,0068182,1367726,001388,11,03,0 *.
24 j
jjjE
pu79271947,000531660,1E.24 °−∠=
pu94152707,099661042,0E.25 °−∠=
( ) ( ) ( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+°−∠×+°−∠×+−−
=
=
89651847,31955727,30085,2000982,10638,79779,16558,00260,11398,177927,00053,10638,79779,1
0.25
.15
jjjj
E
puS
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°−∠×−°−∠÷+−=
8010957,1746295863,00305,09651,04815,14629,09415,09966,01398,176558,0026,108,02,0 *.
26 j
jjjE
pu57415348,103491229,1E.26 °−∠=
• n=11
Barra 5:
• Outra Barra: .
pS = 0
• p=5 • k=2 • n=11
Barra 6:
• Barra de carga: -.
pS
• p=6 • k=2 • n=11
pujS
MVAMVAj
MVAjS
1,03,0
1001030
1030
.14
.14
+=
+=+=
++−
÷= .
55
.111
.
511
.16
.
56
.24
.
54
*.15
.15.
25
Y
EYEYEYESE
+−
÷
= .
66
.17
.
67
.25
.
65
*.16
.16.
26
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
08,02,0
100820
820
.16
.16
+=
+=+=

177
( ) ( ) ( ) ( )[ ]( )99140512,2046295863,0
00,173341849,1857415348,103491229,14814676,146296,0
0.27
.17
jjj
E
puS
−°∠×+°−∠×+−−=
=
pu02944873,096606032,0E.27 °−∠=
pu0,01E.28 °∠=
Barra 7:
• Outra Barra: .
pS = 0
• p=7 • k=2 • n=11
Barra 8:
• Barra de geração: +.
pS
• p=8 • k=2 • n=11
Barra 9:
• Barra de carga: -.
pS
• p=9 • k=2 • n=11
+−
÷
=.
77
.18
.
78
.26
.
76
*.17
.17.
27
Y
EYEYES
E
−
÷
= .
88
.27
.
87
*.18
.18.
28
Y
EYES
E
+−
÷
= .
99
.110
.
910
.22
.
92
*.19
.19.
29
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
02,01,0
100210
210
.19
.19
+=
+=+=
pujS
pujyEEyEEIES
17868783,000930176,0
17868783,000930176,0
.18
*
87
.27
.1880
.18
.18
.*8
.18
.18
−=
−=
−+==

178
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×+−−°∠÷+−=
93,5738,19 16706,098999,004,2968,9 67502,098034,004,2968,9 0889,099643,002,01,0 *.
29 j
jjjE
pu°∠= 29109189,098660815,0E.29
( ) ( ) ( ) ( )[ ]( )16231405,3768,9
00854661,200098242,184090909,729109189,098660815,004,2968,9
0.2
10
.110
jjj
E
puS
−°−∠×+°∠×+−−=
=
pu10706928,098024929,0E.210 °−∠=
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+°−∠×−°−∠÷+−=
48879822,149778635,19415,09966,00638,79779,11071,09803,08409,7 0086,200098,115,05,0 *.
211 j
jjjE
pu°−∠= 49900168,200197792,1E.211
Barra 10:
• Outra Barra: .
pS = 0
• p=10 • k=2 • n=11
Barra 11:
• Barra de carga: -.
pS
• p=11 • k=2 • n=11
Terceira Iteração:
Barra 1:
+−
÷
= .
1010
.111
.
1011
.29
.
109
*.110
.110.
210
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
15,05,0
1001550
1550
.111
.111
+=
+=+=
+−
÷
= .
1111
.25
.
115
.2
10
.
1110
*.111
.111.
211
Y
EYEYES
E
−
÷
= .
11
.22
.
12
*.2
1
.21.
31
Y
EYES
E

179
pujjQjQPS
pujyEEyEEIES
jQjQPS
69757178,03,03,0
69757178,025772824,0
3,0
111
.2
1
12
.22
.2
110
.2
1
.2
1
.*1
.2
1
.2
1
111
.2
1
−=+=+=
−=
−+==
+=+=
( ) ( )[ ] ( ) ( )[ ]( )
puE
jjj
E
°∠=
−°∠×−°∠÷−=
32810282,265217998,0
71428571,1567501857,09803357,02012987,1108103431,295652174,069757178,03,0
.31
*.31
pu,3281028220,95652174E.31 °∠=
( ) ( ) ( ) ( ) ( ) ( )[ ]( )64044864,6936,19
29109,09866,004,2968,9288,09771,004,2968,9º328,29565,020129,11
0.32
.22
jjjj
E
puS
−°∠×+−+°∠×+−+∠×−=
=
pu72829546,09773055,0E.32 °∠=
• Barra de geração: +.
pS
• p=1 • k=3 • n=11
Barra 2:
• Outra Barra: .
pS = 0
• p=2 • k=3 • n=11
Barra 3:
• Outra Barra: .
pS = 0
• p=3 • k=3 • n=11
++−
÷
= .
22
.2929
..2323
..3121
.*.
22
.22.
32
Y
EYEYEYES
E
+−
÷
= .
33
.24
.
34
.32
.
32
*.23
.23.
33
Y
EYEYES
E

180
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°∠×+−+°∠×−°−∠÷+−=
48879,1997786,19415,09966,00638,79779,13022,09705,0068,1379272,000532,11,03,0 *.
34 j
jjjE
pu06734584,100656590,1E.34 °−∠=
pu64500976,100119022,1E.35 °−∠=
( ) ( ) ( ) ( )[ ]( )62719008,4268,9
79272,000532,10682,13728295,097473,004,2968,9
0.33
.23
jjj
E
puS
−°−∠×+°∠×+−−=
=
pu30215985,097051856,0E.33 °∠=
( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+−∠×+°−∠×+−−=
=
89651,3195572,3499,200198,1064,797786,1)57415,103491,1()13983,17(06734,100657,106379,79778,1
03
5
.
2
5
.
jjjj
E
puS
Barra 4:
• Barra de carga: -.
pS
• p=4 • k=3 • n=11
Barra 5:
• Outra Barra: .
pS = 0
• p=5 • k=3 • n=11
Barra 6:
• Barra de carga: -.
pS
• p=6 • k=3 • n=11
+−
÷
= .
44
.25
.
45
.33
.
43
*.24
.24.
34
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
1,03,0
1001030
1030
.24
.24
+=
+=+=
++−
÷
= .
55
.211
.
511
.26
.
56
.34
.
54
*.25
.25.
35
Y
EYEYEYES
E
+−
÷
= .
66
.27
.
67
.35
.
65
*.26
.26.
36
Y
EYEYES
E

181
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+°−∠×−°−∠÷+−=
8010957,1746295863,002945,096606,048146,146295,064500,100119,113983,1757415,103491,108,02,0 *.
36 j
jjjE
pu22416524,203910838,1E.36 °−∠=
( ) ( ) ( ) ( )[ ]( )99140512,2046295863,0
00,173341849,1822416524,203910838,14814676,146296,0
0.37
.27
jjj
E
puS
−°∠×+°−∠×+−−=
=
pu07490399,096657495,0E.37 °−∠=
pu0,01E.38 °∠=
Barra 7:
• Outra Barra: .
pS = 0
• p=7 • k=3 • n=11
Barra 8:
• Barra de geração: +.
pS
• p=8 • k=3 • n=11
pujS
MVAMVAj
MVAjS
08,02,0
100820
820
.26
.26
+=
+=+=
+−
÷
= .
77
.28
.
78
.36
.
76
*.27
.27.
37
Y
EYEYES
E
−
÷
=.
88
.37
.
87
*.28
.28.
38
Y
EYES
E
pujS
pujyEEyEEIES
18831544,002367199,0
18831544,002367199,0
.28
*
87
.37
.2880
.28
.28
.*8
.28
.28
−=
−=
−+==

182
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+°∠×+−−°∠÷+−=
93,5738,191071,09802,004,2968,97283,09747,004,2968,92911,09866,002,01,0 *.
39 j
jjjE
pu°∠= 17895320,097890196,0E.39
( ) ( ) ( ) ( )[ ]( )16231405,3768,9
49900168,200197792,184090909,71789532,097890196,004,2968,9
0.310
.2
10
jjj
E
puS
−°−∠×+°∠×+−−=
=
pu32539934,097393199,0E.310 °−∠=
Barra 9:
• Barra de carga: -.
pS
• p=9 • k=3 • n=11
Barra 10:
• Outra Barra: .
pS = 0
• p=10 • k=3 • n=11
Barra 11:
• Barra de carga: -.
pS
• p=11 • k=3 • n=11
+−
÷
= .
99
.2
10
.
910
.32
.
92
*.29
.29.
39
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
02,01,0
100210
210
.29
.29
+=
+=+=
+−
÷
= .
1010
.2
11
.
1011
.39
.
109
*.2
10
.2
10.310
Y
EYEYES
E
pujS
MVAMVAj
MVAjS
15,05,0
1001550
1550
.2
11
.2
11
+=
+=+=
+−
÷
=.
1111
.35
.
115
.310
.
1110
*.2
11
.2
11.311
Y
EYEYES
E

183
( ) ( )[ ] ( ) ( ) ( ) ( )[ ]( )
−°−∠×+−+°−∠×−°−∠÷+−=
48879822,149778635,1645,10012,10638,79779,13254,09739,0841,7499,2002,115,05,0 *.
311 j
jjjE
pu°−∠= 91201408,200141636,1E.311

184
15 ANEXO III – APRESENTAÇÃO DOS CÁLCULOS DO PROTÓTIPO
Desenvolvimento Matemático para circuito simplificado.
Cálculo do Circuito Pelo Método de Gauss-Seidel
15.1 Cálculo das Bobinas utilizadas
Cálculo do indutor (em ohm) da Linha de Transmissão 1
Cálculo do indutor (em ohm) da Linha de Transmissão 2
Cálculo do indutor (em ohm) da Linha de Transmissão 3
Cálculo do indutor (em ohm) da Linha de Transmissão 4
X fL HLT12 2 60 88 7 0 03343911= = × × =π π µ, , Ω
X fL HLT22 2 60 8 5 0 00320442= = × × =π π µ, , Ω
X fL HLT32 2 60 87 4 0 03294902= = × × =π π µ, , Ω
X fL HLT42 2 60 9 3 0 00350602= = × × =π π µ, , Ω

185
Z=1,77+j0,03294902Ω
l t 3
8 /127V
B3
g2
Z=1,59+j0,00320442Ω
Z=1,77+j0,03343911Ω
l t 4l t 2
l t 1
8 /127V
g1
B1
40VA
B4
Z=1,59+j0,00350602Ω
40VA
B2
15.2 Esquemático x Protótipo
ESQUEMA DE MONTAGEM EM BARRAS
PROTÓTIPO MONTADO NO PAINEL

186
15.3 Cálculos
15.3.1 Cálculo das Tensões de Base
Cálculo da Tensão de Base do Barramento 1 (Eb1)
Cálculo da Tensão de Base do Barramento 2 (Eb2)
Cálculo da Tensão de Base do Barramento 3 (Eb3)
Cálculo da Tensão de Base do Barramento 4 (Eb4)
15.3.2 Calculo das Impedâncias de Base
Cálculo da Impedância de Base do Barramento 1 (Eb1)
Cálculo da Impedância de Base do Barramento 2 (Eb2)
Cálculo da Impedância de Base do Barramento 3 (Eb3)
Cálculo da Impedância de Base do Barramento 4 (Eb4)
E Vb1 127=
E E Vb b2 1 127= =
E Vb3 127=
E E Vb b4 3 127= =
Ω=
=
= 225,403
40127 22
11 Sb
EZ b
b
Ω=
=
= 225,403
40127 22
22 Sb
EZ b
b
Ω=
=
= 225,403
40127 22
33 Sb
EZ b
b

187
15.3.3 Conversão do Circuito para PU
Tendo os dados referentes às Bases de Tensão e Impedância por
barramento, seguimos com a transformação do circuito para o sistema por unidade
(PU). Desprezamos as admitâncias dos geradores.
De acordo com a montagem do protótipo, a linhas representadas são
linhas curtas, onde a susceptância capacitiva total é tão pequena que pode ser
omitida, considerando-se somente a impedância série concentrada.
Conversão do Linha de Transmissão 1
Impedância em PU
Admitância em PU
Conversão da Linha de Transmissão 2
Impedância em PU
Admitância em PU
Ω=
=
= 225,403
40127 22
44 Sb
EZ b
b
ZsZs
ZZs
Zs
Zj
J puLTb
LTb
LT
LT
LT= = = =+
= +Ω Ω1
1
12
1 77 0 03343911403 225
0 00438961 0 00008293, ,
,, ,
YsZs j
j puLLT
11
1 10 00438961 0 00008293
227 72945476 4 30229960= =+
= −, ,
, ,
ZsZs
ZZs
Zs
Zj
J puLTb
LTb
LT
LT
LT= = = =+
= +Ω Ω2
2
12
159 0 00320442403 225
0 00394321 0 00000795, ,
,, ,
YsZs j
j puLLT
22
1 10 00394321 0 00000795
253 59959889 0 51109410= =+
= −, ,
, ,

188
Conversão da Linha de Transmissão 3
Impedância em PU
Admitância em PU
Conversão do Linha de Transmissão 4
Impedância em PU
Admitância em PU
ZsZs
ZZs
Zs
Zj
J puLTb
LTb
LT
LT
LT= = = =+
= +Ω Ω3
3
34
1 77 0 03294902403 225
0 00438961 0 00008171, ,
,, ,
YsZs j
j puLLT
33
1 10 00438961 0 00008171
227 73181899 4 23928828= =+
= −, ,
, ,
ZsZs
ZZs
Zs
Zj
J puLTb
LTb
LT
LT
LT= = = =+
= +Ω Ω4
4 159 0 00350602403 225
0 00394321 0 00000869, ,
,, ,
YsZs j
j puLLT
44
1 10 00394321 0 00000869
253 59939588 0 55919783= =+
= −, ,
, ,

189
Matriz Admitância
FIG. 44 - DIAGRAMA PARA CÁLCULO DA MATRIZ ADMITÂNCIA
Yii
.
= Soma de todas as admitâncias que chegam na barra i.
Yij
.
= Soma de todas as admitâncias que ligam as barras i e j, com o sinal trocado.
Soma de todas as admitâncias que chegam na barra 1
Y Y Y
Y j j
11 12 13
11 227 72945476 4 30229960 253 59959889 0 51109410
. . .
.
, , , ,
= +
= − + −
Y j pu11 481 32905366 4 81339370.
, ,= −
Soma de todas as admitâncias que chegam na barra 2
Y Y Y
Y j j
22 12 24
22 227 72945476 4 30229960 253 59939588 0 55919783
. . .
.
, , , ,
= +
= − + −
Y j pu22 481 32885064 4 86149743.
, ,= −
Soma de todas as admitâncias que chegam na barra 3
227,73181899 -j4,23928828 pu
227,72945476 -j4,30229960 pu
l t 2253,59959889 -j0,51109410 pu
B3
B1
253,59939588 -j0,55919783 pu
l t 3
l t4
B4
B2
l t1
Y Y Y
Y j j
. . .
.
, , , ,
33 13 34
33 253 59959889 0 51109410 227 73181899 4 23928828
= +
= + − + −

190
Soma de todas as admitâncias que chegam na barra 4
Soma de todas as admitâncias que ligam as barras 2 e 4 ou 4 e 2, com o sinal trocado.
Y Y j pu24 42 253 59939588 0 55919783. .
, ,= = − +
Soma de todas as admitâncias que ligam as barras 3 e 4 ou 4 e 3, com o sinal trocado.
Y Y j pu34 43 227 73181899 4 23928828. .
, ,= = − +
VALORES DA MATRIZ ADMITÂNCIA CALCULADA
Y 1 2 3 4
1 481,32905366 -j4,81339370 -227,72945476 +j4,30229960 -253,59959889 +j0,51109410 0
2 -227,72945476 +j4,30229960 481,32885064 -j4,86149743 0 -253,59939588 +j0,55919783
3 -253,59959889 +j0,51109410 0 481,33141788 -j4,75038239 -227,73181899 +j4,23928828
4 0 -253,59939588 +j0,55919783 -227,73181899 +j4,23928828 481,33121486 -j4,79848611
Y pu.
, ,33 481 33141788 4 75038239= −
Y Y Y
Y j j
. . .
.
, , , ,
44 24 34
44 253 59939588 0 55919783 227 73181899 4 23928828
= +
= − + −
Y pu.
, ,44 481 33121486 4 79848911= −
Y 11 Y 12 Y 13 Y 14
Y 21 Y 22 Y 23 Y 24
Y 31 Y 32 Y 33 Y 34
Y 41 Y 42 Y 43 Y 44

191
16 ANEXO IV – MANUAL DO SOFTWARE DESENVOLVIDO SFP

192
i CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. ii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 1, PAG 1 iii PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 12 iv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 1, PAG. 2 v PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 14 vi PASINI, JOSÉ C. L. IMPLEMENTAÇÃO DE UM SISTEMA DE FLUXO DE POTÊNCIA EM
REGIME PEMANENTE USANDO INTERFACE GRÁFICA INTERATIVA, 1998, PAG. 20 vii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 17 viii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 18 ix CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 6, PAG. 101 x BARTHOLD, L. O., ANÁLISE DE CIRCUITOS DE DE SISTEMAS DE POTÊNCIA, 1983,
PAG. 23 xi BARTHOLD, L. O., ANÁLISE DE CIRCUITOS DE DE SISTEMAS DE POTÊNCIA, 1983,
PAG. 24
xii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 54 xiii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 4 xiv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 2, PAG. 4 xv CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 7, PAG. 2 xvi CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 3, PAG. 1 xvii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 3, PAG. 5 xviii CASTRO JR, CARLOS A., CÁLCULO DE FLUXO DE CARGA. CAP 4, PAG. 8 xix ELGERD, OLLE INGEMAR, INTRODUÇÃO À TEORIA DE SISTEMAS DE ENERGIA
ELÉTRICA, 1977, PAG. 32