momentos de inÉrcia -...
TRANSCRIPT

Física Aplicada à Engenharia Civil II Paulo Mendes
21
2 MOMENTOS DE INÉRCIA
Neste capítulo pretende-se introduzir o conceito de momento de inércia, em especial quando aplicado para o caso de superfícies planas.♣
♣ Este documento, constitui apenas um instrumento de apoio às aulas de Física Aplicada à Engenharia Civil II.

Física Aplicada à Engenharia Civil II Paulo Mendes
22
2 MOMENTOS DE INÉRCIA
2.1 DEFINIÇÃO
Em termos gerais, pode-se definir momento de inércia, como a resistência que um determinado elemento oferece ao movimento de rotação. Considerando um ponto material constituído por uma pequena massa m∆ , o momento de inércia desse ponto material, em relação a um eixo, é, por definição, o produto da massa do ponto pelo quadrado da distância ao eixo.
Figura 1. Momento de inércia de um ponto material relativamente a um eixo.
Tendo por base, a figura anterior o momento de inércia do ponto de massa m∆ , que se encontra à distância r do eixo AA’, é dado por:
2I r m= ∆ No entanto, não faz muito sentido falar de pontos materiais isolados, mas sim abordar um conjunto de pontos materiais, ou seja, considerar um sistema constituído por vários pontos materiais (ainda que independentes, ou descontínuos), nesse caso pode-se definir o momento de inércia como sendo o devido ao referido conjunto de pontos materiais, dados pela seguinte expressão:
2
1
n
i ii
I m r=
= ∑

Física Aplicada à Engenharia Civil II Paulo Mendes
23
Que traduz a soma dos momentos de inércia de todos os pontos que constituem o sistema material. Por outro lado, quando se está perante um sistema material contínuo, a abordagem assume outra perspectiva, ou seja, é necessário recorrer ao conceito de contínuo que se baseia na aplicação de cálculo integral, traduzido pela seguinte expressão:
2
MI r dm= ∫
2.1.1 Designações correntes
Os momentos de inércia, podem apresentar diferentes designações, dependendo da base de referência (planos, eixos, ou pontos), relativamente à qual são determinados, assim tem-se para:
• Planos – momentos de inércia planares; • Eixos – momentos de inércia axiais; • Pontos – momentos de inércia polares.
Refira-se porém que o momento de inércia planar não encontra aplicação prática em engenharia. O momento de inércia axial é o de utilização corrente, sendo usual designar-se simplesmente por momento de inércia, quando se deseja fazer referência a um momento de inércia axial.
2.1.2 Propriedades dos momentos de inércia
Os momentos de inércia têm as seguintes propriedades:
• São sempre grandezas positivas, uma vez que a massa é uma grandeza positiva e o quadrado de uma distância também;
• Só é nulo para pontos sobre a base de referência (plano, eixo, ou ponto); • Nunca é negativo.
Assim definidos os momentos de inércia, têm como unidades 2kg m⋅ . Uma outra propriedade dos momentos de inércia é o raio de giração (i), que se define como a distância, em relação à base de referência, a que se deve concentrar toda a massa para que o seu momento de inércia, em relação a essa base de referência, permaneça constante. A aplicação desta propriedade traduz-se pela seguinte expressão:

Física Aplicada à Engenharia Civil II Paulo Mendes
24
Iim
=
2.1.3 Representação dos momentos de inércia num sistema de eixos coordenados
Recorrendo à definição de sistemas materiais contínuos, já apresentada anteriormente, recorre-se à seguinte expressão:
2
MI r dm= ∫
em que r , representa a distância do elemento de massa dm , ao eixo de referência. No entanto, os elementos de massa podem passar para elementos de volume, pelo conceito de massa volúmica ρ , em que:
dm dm dvdv
ρ ρ= ⇔ =
quando se está perante corpos com material homogéneo .constρ = , tendo por base a figura seguinte:
Figura 2. Representação no espaço de um elmento de volume.
Desta forma a determinação do momento de inércia relativamente ao eixo dos ZZ será dada por:
2Z zI r dm= ∫ , em que 2 2 2
zr x y= + e dm dvρ= , tem-se então ( )2 2ZI x y dvρ= +∫

Física Aplicada à Engenharia Civil II Paulo Mendes
25
de forma análoga obtêm-se os momentos de inércia relativamente aos eixos dos XX e dos YY, que são dadas pelas seguintes expressões:
( )2 2XI y z dvρ= +∫ ; ( )2 2
YI x z dvρ= +∫
2.2 TEOREMA DOS EIXOS PERPENDICULARES
Este teorema também é conhecido pelo teorema das placas finas. Considere-se um elemento (ou corpo) com duas direcções bastante desenvolvidas comparativamente com uma terceira, a qual apresenta um desenvolvimento muito reduzido. A um elemento com estas características dá-se a designação de placa fina.
Figura 3. Exemplo de um placa fina.
Para a placa representada na figura 3, o momento de inércia relativamente ao eixo Z é
( )2 2ZI x y dvρ= +∫
já relativamente aos eixos X e Y, uma vez que a espessura na direção Z é desprezável, os momentos de inércia representam-se da seguinte forma:
2XI y dvρ= ∫ ; 2
YI x dvρ= ∫
Neste caso, Z X YI I I= + , pelo que se conclui que, o momento de inércia de um eixo perpendicular a uma placa é dado pela soma dos momentos de inércia, relativos aos eixos perpendiculares assentes sobre a placa, Teorema dos Eixos Perpendiculares.

Física Aplicada à Engenharia Civil II Paulo Mendes
26
2.3 TEOREMA DOS EIXOS PARALELOS ( OU TEOREMA DE STEINER)
O Teorema dos eixos paralelos, mais conhecido por Teorema de Steiner, também relaciona entre si momentos de inércia, determinados em relação a eixos paralelos, em que pelo menos um passa pelo baricentro, ou centróide do corpo. Considere-se a figura 4, em que ir , representa a distância de im ao eixo Z e iCr , representa a distância de im ao eixo CZ , sendo Z paralelo a CZ , afastados entre si de d .
Figura 4. Aplicação do Teorema de Steiner.
Geometricamente, verifica-se que:
2 2 2i i ir x y= + e 2 2 2
iC iC iCr x y= + , em que i iCx x= e i iCy y d= +
Por definição, os momentos de inércia, relativamente a Z e CZ , são:
2
1
n
Z i ii
I m r=
= ∑ e 2
1C
n
Z i iCi
I m r=
= ∑
para os relacionar, basta estabelecer uma relação entre 2
ir e 2iCr , pode-se então escrever
( )22 2 2 2 2 2 2 2 22 2i iC iC i iC iC iC i iC iCr x y d r x y d y d r r d y d= + + ⇔ = + + + ⇔ = + +
multiplicando os dois termos por 1
n
ii
m=∑ , vem

Física Aplicada à Engenharia Civil II Paulo Mendes
27
2 2 2
1 1 1 12
n n n n
i i i iC i i iCi i i i
m r m r d m d m y= = = =
= + +∑ ∑ ∑ ∑
em 1
n
ii
m M=
=∑ , uma vez que representa a massa total do corpo e 1
0n
i iCi
m y=
=∑ representa o
momento estático do corpo em relação a um eixo baricêntrico, pelo que se obtém
2CZ ZI I M d= + ⋅
Desta forma, a definição do Teorema de Steiner consiste, no seguinte: o momento de inércia relativo a um eixo qualquer Z , é dado pela soma do momento de inércia relativo a um eixo baricêntrico paralelo CZ , com o produto da massa total do corpo, pelo quadrado da distância entre os dois eixos.
2.4 MOMENTOS DE INÉRCIA DE SUPERFÍCIES PLANAS
Numa perspectiva de Engenharia Civil, a aplicação do conceito de momento de inércia, está gerneralizada para superfícies planas, nomeadamente quando aplicado a secções transversais de elementos lineares prismáticos, como sejam por exemplo, o caso de vigas e pilares. No entanto, convém partir da definição geral que se apresenta de seguida.
2.4.1 Definição
Em termos conceptuais, o momento de inércia, também é conhecido como momento de segunda ordem. Considerando uma superfície finita em relação a um eixo arbitrário no plano da área, o momento de inércia é dado pelo somatório dos momentos de inércia em relação a esse mesmo eixo de todos os elementos de área contidos na superfície finita. Quando determinado por integração assume a seguinte forma:
2XI y dA= ∫ ; 2
YI x dA= ∫
Figura 5. Superfície finita.
Física Aplicada à Engenharia Civil II Paulo Mendes
28
Quando se considera uma superfície plana composta por n subáreas iA , o integral é substituído por um somatório:
( )1
n
X X ii
I I=
=∑ ; ( )1
n
Y Y ii
I I=
= ∑
Em termos de unidades, os momentos de inércia representam a quarta potência de uma distância, que em unidades SI é [m4].
2.4.2 Raio de giração
Apesar de não possuir qualquer significado físico, é frequentemente utilizado para fins comparativos, é definido por:
XX
IiA
= ; YY
IiA
=
Dado que as unidades de I , representam a quarta potência de uma distância e A é o quadrado de uma distância, o raio de giração tem unidades de comprimento, em unidades SI é [m].
2.4.3 Momento de inércia polar
O momento de inércia polar, ou momento polar de inércia, é dado pela soma dos momentos de inércia de uma dada superfície plana, em relação a dois eixos perpendiculares quaisquer, centrados no ponto de referência. Tendo por exemplo a figura 5, o momento de inércia relativamente à origem é dado por:
O X YI I I= +
2.4.4 Teorema de Steiner ou dos eixos paralelos
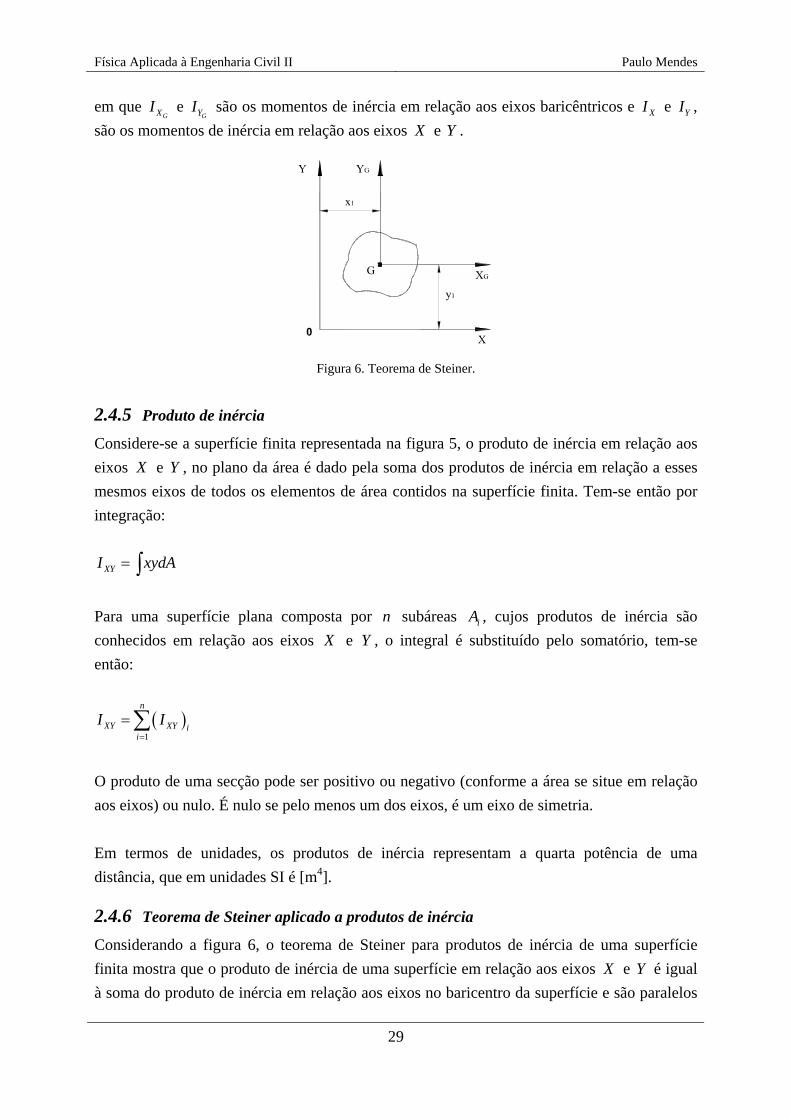
O Teorema de Steiner para momentos de inércia de uma área finita mostra que o momento de inércia de uma área em relação a um eixo arbitrário é igual à soma do momento de inércia em relação a um eixo paralelo que passa no baricentro da área com o produto da área pelo quadrado da distância, medida na perpendicular, entre os dois eixos. Considerando a figura 6, os eixos GX e GY passam no baricentro da superfície plana. Os eixos X e Y , são eixos paralelos localizados às distâncias 1x e 1y dos eixos baricêntricos. Considerando A , como a área total da figura, tem-se então que:
( )21GX XI I A y= + ; ( )2
1GY YI I A x= +
Física Aplicada à Engenharia Civil II Paulo Mendes
29
em que GXI e
GYI são os momentos de inércia em relação aos eixos baricêntricos e XI e YI , são os momentos de inércia em relação aos eixos X e Y .
Figura 6. Teorema de Steiner.
2.4.5 Produto de inércia
Considere-se a superfície finita representada na figura 5, o produto de inércia em relação aos eixos X e Y , no plano da área é dado pela soma dos produtos de inércia em relação a esses mesmos eixos de todos os elementos de área contidos na superfície finita. Tem-se então por integração:
XYI xydA= ∫
Para uma superfície plana composta por n subáreas iA , cujos produtos de inércia são conhecidos em relação aos eixos X e Y , o integral é substituído pelo somatório, tem-se então:
( )1
n
XY XY ii
I I=
= ∑
O produto de uma secção pode ser positivo ou negativo (conforme a área se situe em relação aos eixos) ou nulo. É nulo se pelo menos um dos eixos, é um eixo de simetria. Em termos de unidades, os produtos de inércia representam a quarta potência de uma distância, que em unidades SI é [m4].
2.4.6 Teorema de Steiner aplicado a produtos de inércia
Considerando a figura 6, o teorema de Steiner para produtos de inércia de uma superfície finita mostra que o produto de inércia de uma superfície em relação aos eixos X e Y é igual à soma do produto de inércia em relação aos eixos no baricentro da superfície e são paralelos

Física Aplicada à Engenharia Civil II Paulo Mendes
30
a X e Y , com o produto da área pelas duas distâncias medidas na perpendicular ao baricentro da superfície. Os eixos GX e GY passam no baricentro da superfície plana. Os eixos X e Y , são eixos paralelos localizados às distâncias 1x e 1y dos eixos baricêntricos. Considerando A , como a área total da figura, tem-se então que:
1 1G GXY X YI I Ax y= +
em que
G GX YI representa o produto de inércia em relação aos eixos baricêntricos e XYI , o produto de inércia em relação aos eixos X e Y .
2.5 TRANSPOSIÇÃO DE EIXOS DE INÉRCIA
Considere-se a figura 7 na qual está representada uma superfície de área A , tendo por base o elemento de área representado, verfica-se a existência de algumas relações entre as coordenadas X e Y e as coordenadas U e V , nomeadamente:
cosu x ysenθ θ= + ; cosv y xsenθ θ= −
Figura 7. Transposição de eixos de inércia.
Por definição sabe-se que:
2XI y dA= ∫ ; 2
YI x dA= ∫ ; XYI xydA= ∫

Física Aplicada à Engenharia Civil II Paulo Mendes
31
e que
2UI v dA= ∫ ; 2
VI u dA= ∫ ; UVI uvdA= ∫
utilizando as relações entre coordenadas, aplicadas às últimas expressões obtém-se:
( )2cosUI y xsen dAθ θ= −∫ ;
( )2cosVI x ysen dAθ θ= +∫ ;
( )( )cos cosUVI x ysen y xsen dAθ θ θ θ= + −∫ ;
desenvolvendo
( )2 2 2 2cos 2 cosUI y x sen xysen dAθ θ θ θ= + −∫ ;
( )2 2 2 2cos 2 cosVI x y sen xysen dAθ θ θ θ= + +∫ ;
( )2 2 2 2cos cos cosUVI xy x sen y sen xysen dAθ θ θ θ θ θ= − + −∫ ; ⇔
2 2 2 2cos 2 cosUI y dA x sen dA xysen dAθ θ θ θ= + −∫ ∫ ∫ ; 2 2 2 2cos 2 cosVI x dA y sen dA xysen dAθ θ θ θ= + +∫ ∫ ∫ ;
( ) ( )2 2 2 2cos cosUVI xy sen dA y x sen dAθ θ θ θ= − + −∫ ∫ ; ⇔
2 2 2 2cos 2 cosUI y dA sen x dA sen xydAθ θ θ θ= + −∫ ∫ ∫ ; 2 2 2 2cos 2 cosVI x dA sen y dA sen xydAθ θ θ θ= + +∫ ∫ ∫ ;
( ) ( )2 2 2 2cos cosUVI sen xydA sen y x dAθ θ θ θ= − + −∫ ∫ ; ⇔
( )2 2cos 2U X Y XYI I I sen I senθ θ θ= + − ;
( )2 2cos 2V X Y XYI I sen I I senθ θ θ= + + ;
( ) ( )2 cos 22
X YUV XY
I II sen Iθ θ−= + ;
Com base nestas expressões, uma vez conhecidos os momentos de inércia e o produto de inércia relativamente aos eixos X e Y , é possível determinar analiticamente os momentos de inércia e produto de inércia relativamente a quaisquer eixos U e V , que estejam rodados relativamente a X e Y de θ , no sentido anti-horário (como está representado na figura 7). As três equações obtidas podem ser expressas só em função de 2θ , utilizando as seguintes relações trigonométricas:

Física Aplicada à Engenharia Civil II Paulo Mendes
32
( )2 1 cos 2cos
2θ
θ+
= ; ( )2 1 cos 22
senθ
θ−
=
passando a ser escritas como:
( ) ( )cos 2 22 2
X Y X YU XY
I I I II I senθ θ+ −= + − ;
( ) ( )cos 2 22 2
X Y X YV XY
I I I II I senθ θ+ −= − + ;
( ) ( )2 cos 22
X YUV XY
I II sen Iθ θ−= + ;
A primeira e a terceira, são as equações paramétricas de uma circunferência. Isto significa que, se for escolhido um par de eixos cartesianos e se se desenhar um ponto M de abcissa UI e ordenada UVI , para um valor genérico do parâmetro θ , todos os pontos assim obtidos encontrar-se-ão sobre uma circunferência. Para o verificar-mos elimina-se θ das equações, da seguinte forma:
( ) ( )cos 2 22 2
X Y X YU XY
I I I II I senθ θ+ −= + − ;
( ) ( )2 cos 22
X YUV XY
I II sen Iθ θ−= + ;
⇔
( ) ( )cos 2 22 2
X Y X YU XY
I I I II I senθ θ+ −− = − ;
( ) ( )2 cos 22
X YUV XY
I II sen Iθ θ−= + ;
elevando agora ao quadrado os membros das equações e adicionando, obtém-se
( ) ( ) ( ) ( ) ( )2 2 2
2 cos 2 2 2 cos 22 2 2
X Y X Y X YU UV XY XY
I I I I I II I I sen sen Iθ θ θ θ+ − −⎛ ⎞ ⎛ ⎞ ⎛ ⎞− + = − + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⇔
( ) ( )2 2
2 2
2 2X Y X Y
U UV XYI I I II I I+ −⎛ ⎞ ⎛ ⎞− + = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
fazendo
. 2X Y
médI II +
= e ( )2
2
2X Y
XYI IR I−⎛ ⎞= +⎜ ⎟
⎝ ⎠

Física Aplicada à Engenharia Civil II Paulo Mendes
33
aquela igualdade pode-se escrever na forma seguinte ( ) ( )2 2 2
.U méd UVI I I R− + =
que é a equação de uma circunferência de raio R e centro no ponto C , cujas coordenadas x e y são .médI e zero respectivamente.
Iméd.
IU
IUV
P
I
R
Imáx.
Imín.
M (IU ; IUV)
0
Figura 8.
Note-se ainda que a equação de VI e UVI , também são as equações paramétricas da mesma circunferência. Só que neste caso, devido à simetria da circunferência em relação ao eixo horinzontal, obter-se-ia um ponto genérico N, de coordenadas ( VI ; - UVI ), como se mostra na figura seguinte.
Iméd.IV
- IUV
P
I
R
Imáx.
Imín.
0
N (IV ; -IUV)
Figura 9.

Física Aplicada à Engenharia Civil II Paulo Mendes
34
Os pontos onde a circunferência intersecta o eixo horizontal, têm um interesse especial; o ponto à direita corresponde ao valor máximo do momento de inércia .máxI , enquanto que o ponto à esquerda corresponde ao valor mínimo do momento de inércia .mínI . Além disso, para ambos os pontos o produto de inércia é nulo. Relativamente ao parâmetro 2θ , obtém-se mediante o cálculo dos máximos e mínimos da função UI , que traduz o ângulo que as rectas ( ).;médI M e ( ).;médI N fazem com a horizontal, desta forma:
0UdIdθ
=
( ) ( ) ( ) ( )2 2 2 cos 2 02
X YXY
I I sen Iθ θ−− − =
( ) ( )2 cos 22
X YXY
I Isen Iθ θ−− =
( )( )2 2
cos 2XY
X Y
sen II I
θθ
= −−
( ) 2tan 2 XY
X Y
II I
θ = −−
2.6 EIXOS PRINCIPAIS DE INÉRCIA
Como já se viu, para qualquer ponto genérico situado no plano de uma superfície existem sempre dois eixos perpendiculares, que se cruzam nesse ponto, em relação aos quais os momentos de inércia da superfície são denominados momentos principais de inércia, um deles máximo e o outro mínimo.
( )2
2. 2 2
X Y X Ymáx XY
I I I II I+ −⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
. .máx médI I R= +
( )2
2. 2 2
X Y X Ymín XY
I I I II I+ −⎛ ⎞ ⎛ ⎞= − +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
. .mín médI I R= −

Física Aplicada à Engenharia Civil II Paulo Mendes
35
2.7 CÍRCULO DE MOHR
O círculo de Mohr para momentos de inércia, é um método gráfico que se baseia no traçado da circunferência atrás referida, conhecidos XI , YI e XYI , para uma dada superfície em relação ao par de eixos X e Y . Com base neste método é possível determinar:
i) Eixos e momentos principais de inércia em relação ao ponto, que é o centro de simetria dos eixos;
ii) Momentos de produtos de inércia, da mesma superfície em relação a qualquer par de eixos ortogonais U e V , que se cruzem no centro do sistema de eixos X e Y .
Cada ponto da circunferência representa a imagem de um eixo, representando a circunferência a infinidade de eixos que se cruzam num determinado ponto. Dois eixos perpendiculares são representados por dois pontos diametralmente opostos, como se mostra por exemplo na figura 10.
R
CB AIX
IY
- IXY
IXY X (IX;IXY)
P
I
2θ
R
2θ
Y (IY;-IXY)
0
Figura 10. Círculo de Mohr.
2.7.1 Método gráfico
De seguida apresentam-se as várias etapas que compõem o traçado do designado método gráfico do círculo de Mohr de momentos de inércia para superfícies planas.
1. Graduam-se os eixos e marcam-se XI X e YI sobre o eixo dos I ;
2. A partir de XI , marca-se XYI (para cima se é positivo ou para baixo se é negativo),
obtém-se X a imagem no círculo do eixo dos XX;

Física Aplicada à Engenharia Civil II Paulo Mendes
36
3. A partir de YI , marca-se XYI− , obtendo-se o ponto Y . Une-se X com Y e encontra-
se C , no ponto de intercepção com o eixo dos I ;
4. Traça-se a circunferência com raio CX . A circunferência corta o eixo dos I, nos
pontos A e B . Medem-se as distâncias OA e OB .
5. O ângulo que CX faz com CA é 2θ , partindo do eixo dos XX, com o sentido da
rotação de CX para coincidir com CA , fica determinada a posição de um eixo
principal 1; o eixo 2 é perpendicular no ponto base.
Nota: Os ângulos no círculo, são sempre duplos dos reais.
2.8 EXERCÍCIOS
Nesta secção serão resolvidos alguns exercícios, para uma melhor percepção prática da aplicação dos conceitos teóricos.
2.8.1 Exercício
Dada a secção representada na figura, determine:
Y Y'
X
X'
A
B
a) O centro de gravidade relativamente aos eixos X’Y’. b) O momento de inércia relativamente ao ponto A. c) O círculo de Mohr para o ponto A. Indique na figura os eixos principais de inércia e
determine os momentos principais de inércia. d) O momento de inércia relativamente ao eixo Y’. e) O círculo de Mohr para o ponto B indicando os eixos principais de inércia.

Física Aplicada à Engenharia Civil II Paulo Mendes
37
f) Determine o volume gerado pela rotação da peça em torno do eixo Y’. Diga e enuncie o teorema em que se baseu.
R: Em primeiro lugar convém dividir a superfície num conjunto de figuras conhecidas. Como por exemplo se apresenta em seguida.
1
2
3
4
De notar que a figura 3 corresponde a um rectângulo que se irá “retirar” ao conjunto das outras figuras.
a) Relativamente aos eixos X’Y’, o centro de gravidade será:
1
1
3,00
n
i ii
CG n
ii
A xx cm
A
=
=
⋅= = −∑
∑ corresponde a um eixo de simetria da superfície.
( )( ) ( )( )
( ) ( )
2
12
1
3 4 3 3 2 22 6 2 1 3 1 1,52 3 2 3
1,98 3 3 26 2 3 1
2 2
n
i ii
CG n
ii
A yy cm
A
πππ
=
=
⎛ ⎞× × ⎛ × ⎞⎛ ⎞ ⎛ ⎞× + + × × − × × + × −⋅ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟×⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠= = ≈⎛ ⎞× ×⎛ ⎞+ × − × + ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
∑
∑
b) Corresponde ao momento polar de inércia, que é dado pela soma de XAI com YAI ,
24 3 3 343 6 2 3 1 3 2 3 2 22 68,81
8 3 3 36 2 3XAI cmπ ⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞× × × × × ⎛ ⎞= + − + + × + =⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠

Física Aplicada à Engenharia Civil II Paulo Mendes
38
4 3 3 343 2 6 1 3 2 1,5 2 66,68
8 12 12 12YAI cmπ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞× × × ×= + − + × =⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
então 468,81 66,68 135,49 A XA YAI I I cm= + = + =
c) Como o eixo Y é um eixo de simetria, os eixos X e Y são eixos principais de inércia, então como XA YAI I> o eixo X é o eixo principal máximo e o eixo Y o eixo principal mínimo. Logo o produto de inércia 0XAYAI = , então o círculo de Mohr será o seguinte
C
X (68,81;0)
P
I0Y (66,68;0)
12
Relativamente aos eixos principais de inércia 1 e 2 coincidem com X e Y respectivamente, como se mostra na figura seguinte.
1
2
A
X
Y
Quanto aos valores dos momentos principais de inércia, são
41 68,81 A XAI I cm= =
4
2 66,68 A YAI I cm= =

Física Aplicada à Engenharia Civil II Paulo Mendes
39
d) Como o eixo Y’ é paralelo ao eixo Y, e sendo este um eixo que passa no centro de gravidade da superfície, pode-se aplicar “directamente” o teorema de Steiner, obtendo-se então
2
'Y YAI I A d= + ⋅ , em que A é a área da superfície e d é a distância entre Y e Y’
2 4
' 66,68 26,14 3 301,94 YI cm= + × =
e) Para traçar o círculo de Mohr para o ponto, é necessário determinar XBI , YBI e XBYBI .
Na alínea anterior determinou-se 'Y YBI I= , falta então determinar XBI e XBYBI . Para determinar XBI , vai-se utilizar o valor de XAI , transpondo-o para o centro de gravidade da superfície e daí para o eixo XB . Tem-se então
2CGXA XI I A d= + ⋅
( )2 468,81 26,14 2 1,98 68,80
CG CGX XI I cm= + × − ⇔ =
e agora far-se-á a transposição, do centro de gravidade para o eixo XB
2CGXB XI I A d= + ⋅
2 468,80 26,14 1,98 171,28 XB XBI I cm= + × ⇔ =
Agora irá determinar-se XBYBI
( ) ( ) ( )( ) ( ) ( )( )
( )
2
4
3 4 30 3 0 6 2 3 1 0 3 1 3 0,52 3
3 2 20 3 2 10,5 2 3
XBYBI
cm
ππ
⎛ ⎞× ×⎛ ⎞= + × − × + + × × − × − − + × × − × − +⎜ ⎟⎜ ⎟×⎝ ⎠⎝ ⎠⎛ × ⎞⎛ ⎞+ + × − × − − = −⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Conhecendo XBI , YBI e XBYBI , pode-se traçar o círculo de Mohr, para o ponto B.

Física Aplicada à Engenharia Civil II Paulo Mendes
40
C
Y (301,94;10,5)
P
I0
X (171,28;-10,5)1
2
Os eixos principais de inércia estão representados no círculo como 1 e 2 e correspondem respectivamente ao eixo principal de inércia máximo e mínimo. Em seguida apresenta-se a sua representação na superfície.
2
1
B
X
Y
f) A determinação do volume gerado pela rotação de uma superfície plana em torno de um eixo, baseia-se na aplicação do 2º teorema de Pappus Guldinus, o qualse baseia no cáculo de volumes a partir da revolução de superfícies planas em trono de eixos.
SV d Aθ= ⋅ ⋅ em que θ , é o ângulo de rotação em radianos, d é a distância entre o eixo de rotação e o centro de gravidade da superfície plana e SA é a área da superfície, tem-se então
32 26,14 3 492,73 V mπ= × × =

Física Aplicada à Engenharia Civil II Paulo Mendes
41
2.9 BIBLIOGRAFIA
Beer, F.; Johnston, E. “Mecânica Vectorial para Engenheiros – Estática (sexta edição)”, MacGrawHill, 1998.
Meriam, J.; Kraige, L. “Engineering Mechanics – Statics (fourth edition)”, John Willey & Sons, INC, 1998.
Brazão Farinha, J. “Tabelas Técnicas”, Edições Técnicas E. T. L. L.da, 1998.

Física Aplicada à Engenharia Civil II Paulo Mendes
42