mecÂnica - mac010 - ufjf.br · sistema ´e menor que a soma alg´ebrica de suas quantidades...
TRANSCRIPT

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
MECANICA - MAC010
Michele Farage
22 de junho de 2009

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
1 1
2 2
3 3
4 4
5 5
6 6
7 Trabalho virtual

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Objetivo
O Metodo dos trabalhos virtuais e um metodoalternativo para a resolucao de certos problemas deequilıbrio - em alguns casos, mais eficaz do que oemprego das equacoes de equilıbrio.
Foi empregado formalmente pela primeira vez no seculoXVIII, pelo matematico suıco Jean Bernoulli, e baseia-seno princıpio dos trabalhos virtuais.
• Princıpio dos trabalhos virtuais;
• Energia Potencial;
• Estabilidade do equilıbrio.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Objetivo
O Metodo dos trabalhos virtuais e um metodoalternativo para a resolucao de certos problemas deequilıbrio - em alguns casos, mais eficaz do que oemprego das equacoes de equilıbrio.
Foi empregado formalmente pela primeira vez no seculoXVIII, pelo matematico suıco Jean Bernoulli, e baseia-seno princıpio dos trabalhos virtuais.
• Princıpio dos trabalhos virtuais
• Energia Potencial;
• Estabilidade do equilıbrio

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Trabalho virtual
Princıpio dos trabalhos virtuais: analise do equilıbrio de
sistemas estruturais isostaticos e hiperestaticos, determinacao
de deslocamentos em estruturas → Analise Estrutural II (6o
perıodo) e Analise Estrutural III - 7o perıodo;
Energia Potencial e Estabilidade do equilıbrio:flambagem de colunas → Resistencia dos Materiais II, 6o
perıodo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Objetivo
O Metodo dos trabalhos virtuais e um metodoalternativo para a resolucao de certos problemas deequilıbrio - em alguns casos, mais eficaz do que oemprego das equacoes de equilıbrio.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Definicoes
Trabalho de uma forca:
e o produto da forca F pela
distancia d percorrida na direcao da linha de acao da forca.
U = Fd

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Definicoes
Trabalho de uma forca: e o produto da forca F pela
distancia d percorrida na direcao da linha de acao da forca.
U = Fd
MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Definicoes
Trabalho de uma forcaU e uma grandeza escalar, com dimensoes [FL]. No SI, aunidade e o Joule (N.m).Pode ser negativo, positivo ou nulo, dependendo de θ.
U = F.d = Fdcosθ
onde θ e o angulo entre os vetores F e d

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
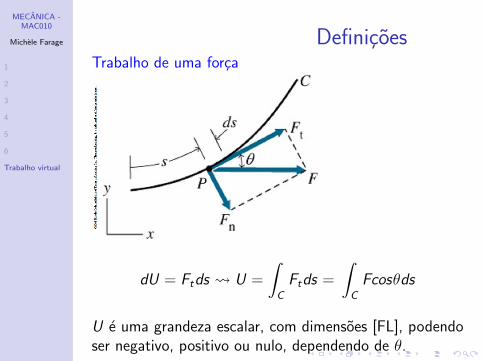
DefinicoesTrabalho de uma forca
dU = Ftds
U =
∫C
Ftds =
∫C
Fcosθds
U e uma grandeza escalar, com dimensoes [FL], podendoser negativo, positivo ou nulo, dependendo de θ.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de uma forca
dU = Ftds U =
∫C
Ftds =
∫C
Fcosθds
U e uma grandeza escalar, com dimensoes [FL], podendoser negativo, positivo ou nulo, dependendo de θ.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de uma forca
dU = Ftds U =
∫C
Ftds =
∫C
Fcosθds
U e uma grandeza escalar, com dimensoes [FL], podendoser negativo, positivo ou nulo, dependendo de θ.
MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de uma forca
dU = Ftds U =
∫C
Ftds =
∫C
Fcosθds
U e uma grandeza escalar, com dimensoes [FL], podendoser negativo, positivo ou nulo, dependendo de θ.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1
Um tanque de agua cilındrico com diametro de 18 pes e altura de 27 pes e enchido com agua
(γ = 62, 4lb/pes3) oriunda de um poco cilındrico com diametro de 10 pes e nıvel d’agua 30 pes abaixo
do nıvel do solo. Quanto trabalho a bomba realiza ao encher o tanque, supondo que nao haja
reabastecimento do poco durante o bombeamento?

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1 - resolucao
Volume de agua a bombear: Va = π.92.27 = 6871 pes3
Profundidade da agua a bombear no poco:π.52.a = 6871 → a = 87, 41 pes
Distancia entre o centroide do volume de agua no poco e ocentroide do tanque: d = a
2 + 30 + 272 = 87, 24
Calculo do trabalho realizado pela bomba:
U = Fd = (6871.γ).87, 24 = 3, 74.104pes.libras

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1 - resolucao
Volume de agua a bombear: Va = π.92.27 = 6871 pes3
Profundidade da agua a bombear no poco:π.52.a = 6871 → a = 87, 41 pes
Distancia entre o centroide do volume de agua no poco e ocentroide do tanque: d = a
2 + 30 + 272 = 87, 24
Calculo do trabalho realizado pela bomba:
U = Fd = (6871.γ).87, 24 = 3, 74.104pes.libras

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1 - resolucao
Volume de agua a bombear: Va = π.92.27 = 6871 pes3
Profundidade da agua a bombear no poco:π.52.a = 6871 → a = 87, 41 pes
Distancia entre o centroide do volume de agua no poco e ocentroide do tanque: d = a
2 + 30 + 272 = 87, 24
Calculo do trabalho realizado pela bomba:
U = Fd = (6871.γ).87, 24 = 3, 74.104pes.libras

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1 - resolucao
Volume de agua a bombear: Va = π.92.27 = 6871 pes3
Profundidade da agua a bombear no poco:π.52.a = 6871 → a = 87, 41 pes
Distancia entre o centroide do volume de agua no poco e ocentroide do tanque: d = a
2 + 30 + 272 = 87, 24
Calculo do trabalho realizado pela bomba:
U = Fd = (6871.γ).87, 24 = 3, 74.104pes.libras

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 2
Um aviao tem massa de 12000kg e decola do nıvel do mar, atingindo uma altitude de cruzeiro de 9km.
• Qual e o trabalho realizado pela gravidade no aviao da decolagem ate atingir a altitude decruzeiro?
Ug = −(12000.9, 81)9000 = −1, 06.109N.m
• Qual e o trabalho realizado pelos motores do aviao para eleva-lo ate a altitude de cruzeiro?
Um = −Ug = 1, 06.109N.m

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 2
Um aviao tem massa de 12000kg e decola do nıvel do mar, atingindo uma altitude de cruzeiro de 9km.
• Qual e o trabalho realizado pela gravidade no aviao da decolagem ate atingir a altitude decruzeiro?
Ug = −(12000.9, 81)9000 = −1, 06.109N.m
• Qual e o trabalho realizado pelos motores do aviao para eleva-lo ate a altitude de cruzeiro?
Um = −Ug = 1, 06.109N.m

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 2
Um aviao tem massa de 12000kg e decola do nıvel do mar, atingindo uma altitude de cruzeiro de 9km.
• Qual e o trabalho realizado pela gravidade no aviao da decolagem ate atingir a altitude decruzeiro?
Ug = −(12000.9, 81)9000 = −1, 06.109N.m
• Qual e o trabalho realizado pelos motores do aviao para eleva-lo ate a altitude de cruzeiro?
Um = −Ug = 1, 06.109N.m

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 1
Uma bola de aco pesada de peso P esta suspensa por meio de uma corda de peso desprezıvel ecomprimento L, para formar um pendulo. A bola e erguida de forma que a corda forme um angulo φ coma vertical e e entao solta.
• Determinar o trabalho realizado pela gravidade durante o tempo que a bola leva para chegar aposicao vertical;
• Determine o trabalho realizado pela tracao T durante o tempo que a bola leva para chegar aposicao vertical.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 2
Uma mola helicoidal e pendurada por uma das extremidades e esticada por uma carga crescente F . Acurva carga-extensao da mola e uma reta (F = ke) onde k e a constante da mola. Determine o trabalhorealizado pela carga F ao se esticar a mola.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 3
Verifique se as afirmacoes abaixo sao verdadeiras ou falsas, justificando as respostas.
• O trabalho e o produto de uma forca por uma distancia, sendo portanto sinonimo do momentode um binario.
• Uma forca que age sobre uma partıcula numa direcao perpendicular ao caminho percorrido pelapartıcula nao realiza trabalho sobre a partıcula.
• O trabalho de uma forca F sobre uma partıcula pode ser representado por uma integral de linhado produto escalar de F pelo vetor deslocamento infinitesimal dr da partıcula;
• Se varias forcas agem em um sistema em movimento, o trabalho que estas realizam sobre osistema e menor que a soma algebrica de suas quantidades individuais de trabalho.
• Para que uma forca nao-nula que age em uma partıcula nao realize trabalho, a partıcula deve semover em linha reta.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 3
Verifique se as afirmacoes abaixo sao verdadeiras ou falsas, justificando as respostas.
• O trabalho e o produto de uma forca por uma distancia, sendo portanto sinonimo do momentode um binario.
• Uma forca que age sobre uma partıcula numa direcao perpendicular ao caminho percorrido pelapartıcula nao realiza trabalho sobre a partıcula.
• O trabalho de uma forca F sobre uma partıcula pode ser representado por uma integral de linhado produto escalar de F pelo vetor deslocamento infinitesimal dr da partıcula;
• Se varias forcas agem em um sistema em movimento, o trabalho que estas realizam sobre osistema e menor que a soma algebrica de suas quantidades individuais de trabalho.
• Para que uma forca nao-nula que age em uma partıcula nao realize trabalho, a partıcula deve semover em linha reta.
MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 3
Verifique se as afirmacoes abaixo sao verdadeiras ou falsas, justificando as respostas.
• O trabalho e o produto de uma forca por uma distancia, sendo portanto sinonimo do momentode um binario.
• Uma forca que age sobre uma partıcula numa direcao perpendicular ao caminho percorrido pelapartıcula nao realiza trabalho sobre a partıcula.
• O trabalho de uma forca F sobre uma partıcula pode ser representado por uma integral de linhado produto escalar de F pelo vetor deslocamento infinitesimal dr da partıcula;
• Se varias forcas agem em um sistema em movimento, o trabalho que estas realizam sobre osistema e menor que a soma algebrica de suas quantidades individuais de trabalho.
• Para que uma forca nao-nula que age em uma partıcula nao realize trabalho, a partıcula deve semover em linha reta.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 3
Verifique se as afirmacoes abaixo sao verdadeiras ou falsas, justificando as respostas.
• O trabalho e o produto de uma forca por uma distancia, sendo portanto sinonimo do momentode um binario.
• Uma forca que age sobre uma partıcula numa direcao perpendicular ao caminho percorrido pelapartıcula nao realiza trabalho sobre a partıcula.
• O trabalho de uma forca F sobre uma partıcula pode ser representado por uma integral de linhado produto escalar de F pelo vetor deslocamento infinitesimal dr da partıcula;
• Se varias forcas agem em um sistema em movimento, o trabalho que estas realizam sobre osistema e menor que a soma algebrica de suas quantidades individuais de trabalho.
• Para que uma forca nao-nula que age em uma partıcula nao realize trabalho, a partıcula deve semover em linha reta.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exercıcio proposto 3
Verifique se as afirmacoes abaixo sao verdadeiras ou falsas, justificando as respostas.
• O trabalho e o produto de uma forca por uma distancia, sendo portanto sinonimo do momentode um binario.
• Uma forca que age sobre uma partıcula numa direcao perpendicular ao caminho percorrido pelapartıcula nao realiza trabalho sobre a partıcula.
• O trabalho de uma forca F sobre uma partıcula pode ser representado por uma integral de linhado produto escalar de F pelo vetor deslocamento infinitesimal dr da partıcula;
• Se varias forcas agem em um sistema em movimento, o trabalho que estas realizam sobre osistema e menor que a soma algebrica de suas quantidades individuais de trabalho.
• Para que uma forca nao-nula que age em uma partıcula nao realize trabalho, a partıcula deve semover em linha reta.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de um binario:
ds =r
2dθ
U = F .ds + F .ds = 2.F .r
2dθ = (Fr)dθ
U = Mdθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de um binario:
ds =r
2dθ
U = F .ds + F .ds = 2.F .r
2dθ = (Fr)dθ
U = Mdθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de um binario:
ds =r
2dθ
U = F .ds + F .ds = 2.F .r
2dθ = (Fr)dθ
U = Mdθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
DefinicoesTrabalho de um binario:
ds =r
2dθ
U = F .ds + F .ds = 2.F .r
2dθ = (Fr)dθ
U = Mdθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Trabalho Virtual
Deslocamentos virtuais ou imaginarios sao translacoes ourotacoes infinitesimais, representados pelos sımbolos δs eδθ, respectivamente.
O trabalho virtual realizado por uma forca sujeita a umdeslocamento virtual e:
δU = Fcosθδs
δU = Mδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Trabalho Virtual
Deslocamentos virtuais ou imaginarios sao translacoes ourotacoes infinitesimais, representados pelos sımbolos δs eδθ, respectivamente.
O trabalho virtual realizado por uma forca sujeita a umdeslocamento virtual e:
δU = Fcosθδs
δU = Mδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Um sistema mecanico esta em equilıbrio se o trabalhovirtual realizado no sistema e negativo ou nulo paratodos os deslocamentos virtuais possıveis.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Quando um sistema comeca a se mover a partir do repouso,as forcas que agem no sistema realizam trabalho positivo;como o sistema se move na direcao da forca,o trabalho epositivo.
Entao, um sistema mecanico em repouso nao se movesozinho se nao ha nenhum pequeno deslocamento para oqual as forcas realizam trabalho positivo. Para examinar estaconclusao, impoe-se ao sistema um deslocamento imaginarioarbitrario, e determina-se o sinal do trabalho resultante dasforcas que agem no sistema, excluindo as forcas imaginarias.Como tal deslocamento e imaginario e nao necessariamenteocorre como um movimento real do sistema, ele edenominado deslocamento virtual, e o trabalho das forcasreais que agem durante um deslocamento virtual e chamadode trabalho virtual. Durante um deslocamento virtual,considera-se que as forcas reais permanecem constantes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Quando um sistema comeca a se mover a partir do repouso,as forcas que agem no sistema realizam trabalho positivo;como o sistema se move na direcao da forca,o trabalho epositivo.Entao, um sistema mecanico em repouso nao se movesozinho se nao ha nenhum pequeno deslocamento para oqual as forcas realizam trabalho positivo.
Para examinar estaconclusao, impoe-se ao sistema um deslocamento imaginarioarbitrario, e determina-se o sinal do trabalho resultante dasforcas que agem no sistema, excluindo as forcas imaginarias.Como tal deslocamento e imaginario e nao necessariamenteocorre como um movimento real do sistema, ele edenominado deslocamento virtual, e o trabalho das forcasreais que agem durante um deslocamento virtual e chamadode trabalho virtual. Durante um deslocamento virtual,considera-se que as forcas reais permanecem constantes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Quando um sistema comeca a se mover a partir do repouso,as forcas que agem no sistema realizam trabalho positivo;como o sistema se move na direcao da forca,o trabalho epositivo.Entao, um sistema mecanico em repouso nao se movesozinho se nao ha nenhum pequeno deslocamento para oqual as forcas realizam trabalho positivo. Para examinar estaconclusao, impoe-se ao sistema um deslocamento imaginarioarbitrario, e determina-se o sinal do trabalho resultante dasforcas que agem no sistema, excluindo as forcas imaginarias.
Como tal deslocamento e imaginario e nao necessariamenteocorre como um movimento real do sistema, ele edenominado deslocamento virtual, e o trabalho das forcasreais que agem durante um deslocamento virtual e chamadode trabalho virtual. Durante um deslocamento virtual,considera-se que as forcas reais permanecem constantes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Quando um sistema comeca a se mover a partir do repouso,as forcas que agem no sistema realizam trabalho positivo;como o sistema se move na direcao da forca,o trabalho epositivo.Entao, um sistema mecanico em repouso nao se movesozinho se nao ha nenhum pequeno deslocamento para oqual as forcas realizam trabalho positivo. Para examinar estaconclusao, impoe-se ao sistema um deslocamento imaginarioarbitrario, e determina-se o sinal do trabalho resultante dasforcas que agem no sistema, excluindo as forcas imaginarias.Como tal deslocamento e imaginario e nao necessariamenteocorre como um movimento real do sistema, ele edenominado deslocamento virtual, e o trabalho das forcasreais que agem durante um deslocamento virtual e chamadode trabalho virtual.
Durante um deslocamento virtual,considera-se que as forcas reais permanecem constantes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho Virtual
Quando um sistema comeca a se mover a partir do repouso,as forcas que agem no sistema realizam trabalho positivo;como o sistema se move na direcao da forca,o trabalho epositivo.Entao, um sistema mecanico em repouso nao se movesozinho se nao ha nenhum pequeno deslocamento para oqual as forcas realizam trabalho positivo. Para examinar estaconclusao, impoe-se ao sistema um deslocamento imaginarioarbitrario, e determina-se o sinal do trabalho resultante dasforcas que agem no sistema, excluindo as forcas imaginarias.Como tal deslocamento e imaginario e nao necessariamenteocorre como um movimento real do sistema, ele edenominado deslocamento virtual, e o trabalho das forcasreais que agem durante um deslocamento virtual e chamadode trabalho virtual. Durante um deslocamento virtual,considera-se que as forcas reais permanecem constantes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;
• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);
• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);
• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs
verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................
MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Princıpio do Trabalho
Virtual
Aplicacoes simples:
• sistema mecanico: um tijolo apoiado no piso;• deslocamento virtual: translacao para cima (δs);• forcas que agem no sistema: peso do tijolo (P);• trabalho virtual: δU = −Pδs verifica-se que o tijolo esta em
repouso.
• bolinha de gude em uma tigela• deslocamento virtual:.............• forcas que agem no sistema: peso da bolinha (P);• .....................

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
Se um ponto material esta sujeito a um deslocamento virtualδr realizado por um sistema de forcas, o trabalho virtual δUrealizado pelas forcas e:
δU =∑
F.δr
δU = (∑
Fx i +∑
Fy j +∑
Fzk).(δx i + δy j + δzk)
δU = (∑
Fxδx +∑
Fyδy +∑
Fzδz)

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
Se um ponto material esta sujeito a um deslocamento virtualδr realizado por um sistema de forcas, o trabalho virtual δUrealizado pelas forcas e:
δU =∑
F.δr
δU = (∑
Fx i +∑
Fy j +∑
Fzk).(δx i + δy j + δzk)
δU = (∑
Fxδx +∑
Fyδy +∑
Fzδz)
MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
Se um ponto material esta sujeito a um deslocamento virtualδr realizado por um sistema de forcas, o trabalho virtual δUrealizado pelas forcas e:
δU =∑
F.δr
δU = (∑
Fx i +∑
Fy j +∑
Fzk).(δx i + δy j + δzk)
δU = (∑
Fxδx +∑
Fyδy +∑
Fzδz)

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
Se um ponto material esta sujeito a um deslocamento virtualδr realizado por um sistema de forcas, o trabalho virtual δUrealizado pelas forcas e:
δU =∑
F.δr
δU = (∑
Fx i +∑
Fy j +∑
Fzk).(δx i + δy j + δzk)
δU = (∑
Fxδx +∑
Fyδy +∑
Fzδz)

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
δU =∑
Fxδx +∑
Fyδy +∑
Fzδz
Sabe-se que a condicao para o equilıbrio e:∑Fx = 0,
∑Fy = 0 e
∑Fz = 0.
Daı tem-se que, no equilıbrio: δU = 0.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV para um Ponto Material
δU =∑
Fxδx +∑
Fyδy +∑
Fzδz
Sabe-se que a condicao para o equilıbrio e:∑Fx = 0,
∑Fy = 0 e
∑Fz = 0.
Daı tem-se que, no equilıbrio: δU = 0.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0
δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0
P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ
P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Aplicacao: equılıbrio de uma alavanca
Se a alavanca e submetida a umdeslocamento virtual δθ, o trabalho das forcas que agem no
sistema e:
δU = −W1.aδθ + W2bδθ
Qual e a condicao para que o sistema esteja em equilıbrio?
δU ≤ 0 δU = 0 P1.aδθ = P2bδθ P1a = P2b

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV
Em alguns casos, aplicar o princıpio dos trabalhos virtuais emais simples do que aplicar as equacoes de equilıbrio paraanalisar o equilıbrio de sistemas mecanicos.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: resolucao de problemas de equilıbrio
Aplicacao do PTV a sistemas isostaticos e indeformaveis:
• Desenhar um diagrama do sistema, incluindo todas ascargas externas atuantes. Se a incognita for uma reacaode apoio, remover o apoio e substituı-lo pela reacao. Sehouver mais de uma reacao a calcular, remover umvınculo de cada vez para aplicar o PTV e entaosuperpor os efeitos;
• Escolher um deslocamento virtual δu (translacao ourotacao) e desenhar o diagrama do sistema deslocado.Devem se respeitar os vınculos do sistema.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos de δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo ounegativo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: resolucao de problemas de equilıbrio
Aplicacao do PTV a sistemas isostaticos e indeformaveis:
• Desenhar um diagrama do sistema, incluindo todas ascargas externas atuantes. Se a incognita for uma reacaode apoio, remover o apoio e substituı-lo pela reacao. Sehouver mais de uma reacao a calcular, remover umvınculo de cada vez para aplicar o PTV e entaosuperpor os efeitos;
• Escolher um deslocamento virtual δu (translacao ourotacao) e desenhar o diagrama do sistema deslocado.Devem se respeitar os vınculos do sistema.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos de δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo ounegativo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: resolucao de problemas de equilıbrio
Aplicacao do PTV a sistemas isostaticos e indeformaveis:
• Desenhar um diagrama do sistema, incluindo todas ascargas externas atuantes. Se a incognita for uma reacaode apoio, remover o apoio e substituı-lo pela reacao. Sehouver mais de uma reacao a calcular, remover umvınculo de cada vez para aplicar o PTV e entaosuperpor os efeitos;
• Escolher um deslocamento virtual δu (translacao ourotacao) e desenhar o diagrama do sistema deslocado.Devem se respeitar os vınculos do sistema.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos de δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo ounegativo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: resolucao de problemas de equilıbrio
Aplicacao do PTV a sistemas isostaticos e indeformaveis:
• Desenhar um diagrama do sistema, incluindo todas ascargas externas atuantes. Se a incognita for uma reacaode apoio, remover o apoio e substituı-lo pela reacao. Sehouver mais de uma reacao a calcular, remover umvınculo de cada vez para aplicar o PTV e entaosuperpor os efeitos;
• Escolher um deslocamento virtual δu (translacao ourotacao) e desenhar o diagrama do sistema deslocado.Devem se respeitar os vınculos do sistema.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos de δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo ounegativo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
Calcular a reacao de apoio em B.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
Calcular a reacao de apoio em B.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(1) Substituir o apoio em B por uma forca e desenhar um
diagrama do sistema.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(1) Substituir o apoio em B por uma forca e desenhar um
diagrama do sistema.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(2) Escolher um δu compatıvel com os vınculos da estrutura.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(2) Escolher um δu compatıvel com os vınculos da estrutura.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(3) Escrever a expressao do trabalho virtual.
δU = −Ps1 + Bs2
s1 =L
4δθ s2 = Lδθ
δU = −PL
4δθ + BLδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(3) Escrever a expressao do trabalho virtual.
δU = −Ps1 + Bs2
s1 =L
4δθ s2 = Lδθ
δU = −PL
4δθ + BLδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(3) Escrever a expressao do trabalho virtual.
δU = −Ps1 + Bs2
s1 =L
4δθ s2 = Lδθ
δU = −PL
4δθ + BLδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(3) Escrever a expressao do trabalho virtual.
δU = −Ps1 + Bs2
s1 =L
4δθ s2 = Lδθ
δU = −PL
4δθ + BLδθ

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(4) Aplicar o PTV e determinar a incognita.
δU = −PL
4δθ + BLδθ ≤ 0
PL
4δθ = BLδθ
P1
4= B B =
P
4

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(4) Aplicar o PTV e determinar a incognita.
δU = −PL
4δθ + BLδθ ≤ 0
PL
4δθ = BLδθ
P1
4= B B =
P
4

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(4) Aplicar o PTV e determinar a incognita.
δU = −PL
4δθ + BLδθ ≤ 0
PL
4δθ = BLδθ
P1
4= B B =
P
4

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo 1: calculo de reacoes de apoio
(4) Aplicar o PTV e determinar a incognita.
δU = −PL
4δθ + BLδθ ≤ 0
PL
4δθ = BLδθ
P1
4= B B =
P
4

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Grau de liberdade: e todo deslocamento independente quepode ocorrer em um determinado ponto de uma estrutura.
A estrutura representada consiste em duas barras rıgidasconectadas por um no articulado.
A configuracao da estrutura em um deteminado instante e
descrita pela posicao dos varios pontos da estrutura,
podendo ser definida pela localizacao das extremidades (ou
nos) de cada barra, por exemplo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Grau de liberdade: e todo deslocamento independente quepode ocorrer em um determinado ponto de uma estrutura.
A estrutura representada consiste em duas barras rıgidasconectadas por um no articulado.
A configuracao da estrutura em um deteminado instante e
descrita pela posicao dos varios pontos da estrutura,
podendo ser definida pela localizacao das extremidades (ou
nos) de cada barra, por exemplo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Grau de liberdade: e todo deslocamento independente quepode ocorrer em um determinado ponto de uma estrutura.
A estrutura representada consiste em duas barras rıgidasconectadas por um no articulado.
A configuracao da estrutura em um deteminado instante e
descrita pela posicao dos varios pontos da estrutura,
podendo ser definida pela localizacao das extremidades (ou
nos) de cada barra, por exemplo.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Considerando-se, entao os deslocamentos de tais nos, quaissao estes e quantos ocorrem de forma independente?
Trata-se de um sistema com 1 grau de liberdade.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Considerando-se, entao os deslocamentos de tais nos, quaissao estes e quantos ocorrem de forma independente?
Trata-se de um sistema com 1 grau de liberdade.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV aplicado a corpos rıgido interligados
Para corpos rıgidos, conectados por articulacoes, sematrito:um sistema de corpos rıgidos interligados estara emequilıbrio se o trabalho virtual realizado por todas asforcas e momentos externos atuantes no sistema for nulopara cada deslocamento virtual na direcao dos graus deliberdade do sistema.
δU = 0
Emprega-se uma equacao δU = 0 para cada grau deliberdade do sistema. Daı, a resolucao via PTV de umproblema com n graus de liberdade consiste em umsistema de equacoes de ordem n.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
PTV: equilıbrio de corpos indeformaveis
• Desenhar um diagrama de corpo livro do sistema,identificando os graus de liberdade;
• Escrever as coordenadas dos pontos de aplicacao dascargas em funcao do grau de liberdade;
• Efetuar os diferenciais das expressoes que localizam ascargas em relacao ao deslocamento virtual (δu, nadirecao do GL);
• Impor um deslocamento virtual δu (translacao ourotacao) na direcao do grau de liberdade e desenhar odiagrama do sistema na posicao deslocada.
• Escrever as expressoes para o trabalho virtual das forcase conjugados em termos do deslocamento virtual δu.
• Aplicar o PTV e determinar os valores das incognitaspara os quais o trabalho virtual do sistema e nulo.
• Repetir o procedimento para cada um dos graus deliberdade isoladamente, obtendo um sistema deequacoes.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo com 1 grau de liberdade
As barras que compoem a estrutura baixo possuem massa me comprimento l . Considerando o carregamento indicado,determinar o angulo θ relativo a configuracao de equilıbrio dosistema.

MECANICA -MAC010
Michele Farage
1
2
3
4
5
6
Trabalho virtual
Exemplo com 1 grau de liberdade:
resolucao