matemática computacional -...
TRANSCRIPT
Felipe Antonio Garcia MorenoKely Diana Villacorta Villacorta
Matemática Computacional
Editora da UFPBJoão Pessoa
2014
UNIVERSIDADE FEDERAL DA PARAÍBA
ReitoraVice-Reitor
MARGARETH DE FÁTIMA FORMIGA MELO DINIZEDUARDO RAMALHO RABENHORST
EDITORA DA UFPB
DiretoraSupervisão de Editoração
Supervisão de Produção
IZABEL FRANÇA DE LIMAALMIR CORREIA DE VASCONCELLOS JÚNIORJOSÉ AUGUSTO DOS SANTOS FILHO
Pró-reitora de graduaçãoDiretor da UFPB Virtual
Diretor do CI
ARIANE NORMA DE MENESES SÁJAN EDSON RODRIGUES LEITEGUIDO LEMOS DE SOUZA FILHO
CURSO DE LICENCIATURA EM COMPUTAÇÃO A DISTÂNCIA
CoordenadorVice-coordenadora
LUCIDIO DOS ANJOS FORMIGA CABRALDANIELLE ROUSY DIAS DA SILVA
Conselho EditorialProf Dr. Lucídio Cabral (UFPB)Prof Dr. Danielle Rousy (UFPB)Prof. Ms. Eduardo de Santana Medeiros Alexandre (UFPB)
M843m Moreno, Felipe Antonio Garcia. Matemática Computacional / Felipe Antonio Garcia Moreno, Kely Diana Villacorta Villacorta; editor: Eduardo de Santana Medeiros Alexandre. - João Pessoa: Editora da UFPB, 2014.
166. : il. – ISBN: 978-85-237-0911-2
Curso de Licenciatura em Computação na Modalidade à Distância. Universidade Federal da Paraíba.
1. Matemática computacional. 2. Vetores. 3. Matrizes. 4. Sistemas de Equações. I.Título.
CDU: 519.6
Todos os direitos e responsabilidades dos autores.EDITORA DA UFPBCaixa Postal 5081 – Cidade Universitária João Pessoa – Paraíba – BrasilCEP: 58.051 – 970 http://www.editora.ufpb.br
Impresso no BrasilPrinted in Brazil
Matemática Computacional
Matemática Computacional
i
Matemática Computacional
Sumário
1 Noções Básicas dos Erros 1
1.1 Representação dos números no computador . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Representação dos números reais no sistema decimal e no sistema binário . . . . . . 3
1.2.1 Conversão de um número inteiro da base 2 para a base 10 . . . . . . . . . . 3
1.2.2 Conversão de um número inteiro da base 10 para a base 2 . . . . . . . . . . 6
1.2.3 Conversão de um número fracionário da base 10 para a base 2 . . . . . . . . 10
1.2.4 Conversão de um número fracionário da base 2 para a base 10 . . . . . . . . 13
1.3 Sistema de Ponto Flutuante Normalizado . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4 Erros Absoluto e Relativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.4.1 Erros num Sistema de Ponto Flutuante . . . . . . . . . . . . . . . . . . . . . 21
1.4.1.1 Erros no Truncamento . . . . . . . . . . . . . . . . . . . . . . . . 21
1.4.1.2 Erros no Arredondamento . . . . . . . . . . . . . . . . . . . . . . 22
1.4.2 Propagação dos erros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2 Vetores 28
2.1 Vetores em R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Vetores em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.1 Adição de vetores e multiplicação por um escalar . . . . . . . . . . . . . . . 31
2.2.2 Produto interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.3 Norma e distância em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.4 Vetores coordenados unitários . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.5 Envoltória linear de um conjunto finito de vetores . . . . . . . . . . . . . . . 39
2.2.6 Independência linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.2.7 Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.3 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
ii
Matemática Computacional
3 Matrizes 49
3.1 Definições básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Tipos especiais de matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3 Operações com matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.4 Matriz reduzida escalonada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.5 Operações elementares entre linhas e equivalência por linhas de matrizes . . . . . . . 59
3.6 Posto de uma matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.7 Determinante de uma matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.7.1 Desenvolvimento de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.7.2 Posto de uma matriz e determinantes . . . . . . . . . . . . . . . . . . . . . . 73
3.8 Matriz Positiva Definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.9 Matriz Adjunta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.10 Matriz inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.11 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.12 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4 Sistemas de equações lineares 85
4.1 Equação Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2 Sistema de Equações Lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.3 Solução de um sistema de equações lineares . . . . . . . . . . . . . . . . . . . . . . 89
4.3.1 Método de eliminação de Gauss . . . . . . . . . . . . . . . . . . . . . . . . 92
4.3.2 Solução de um sistema homogêneo de equações lineares . . . . . . . . . . . 99
4.4 Matrizes e sistemas de equações lineares . . . . . . . . . . . . . . . . . . . . . . . . 100
4.5 Resolução de um sistema por escalonamento . . . . . . . . . . . . . . . . . . . . . . 102
4.6 Posto de uma matriz e sistemas de Equações lineares . . . . . . . . . . . . . . . . . 104
4.7 Regra de Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.8 Procedimento para inversão de matrizes . . . . . . . . . . . . . . . . . . . . . . . . 110
4.9 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.10 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5 Métodos diretos e iterativos para a resolução de sistemas de equações lineares 116
5.1 Métodos diretos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.1.1 Solução de sistemas lineares triangulares . . . . . . . . . . . . . . . . . . . 117
5.1.2 Decomposição LU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
5.1.2.1 Processo de decomposição LU . . . . . . . . . . . . . . . . . . . 120
5.1.2.2 Obtendo a solução de sistemas lineares . . . . . . . . . . . . . . . 125
iii
Matemática Computacional
5.1.3 Método de Cholesky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.1.3.1 Processo de decomposição de Cholesky . . . . . . . . . . . . . . 128
5.1.3.2 Obtendo a solução de sistemas lineares . . . . . . . . . . . . . . . 129
5.1.4 Variações do método de eliminação de Gauss . . . . . . . . . . . . . . . . . 131
5.1.4.1 Método de eliminação de Gauss com pivotamento parcial . . . . . 132
5.1.4.2 Método de eliminação de Gauss com pivotamento total . . . . . . 137
5.2 Métodos Iterativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.2.1 Processo Iterativo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.2.2 O método de Jacobi-Richardson . . . . . . . . . . . . . . . . . . . . . . . . 144
5.2.3 O método de Gauss-Seidel . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
5.3 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
5.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
6 Referências 165
6.1 Referências Bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
iv
Matemática Computacional
Capítulo 1
Noções Básicas dos Erros
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Representar números no computador;
• Converter números do sistema decimal a binário, e vice-versa;
• Entender o conceito de Sistema de Ponto Flutuante Normalizado;
• Relacionar-se cada vez mais com os conceitos de erros absoluto e relativo, e as impli-cações destes tipos de erros num sistema de ponto flutuante;
• Realizar operações aritméticas com números de um sistema de ponto flutuante dado, eentender a propagação de seus erros.
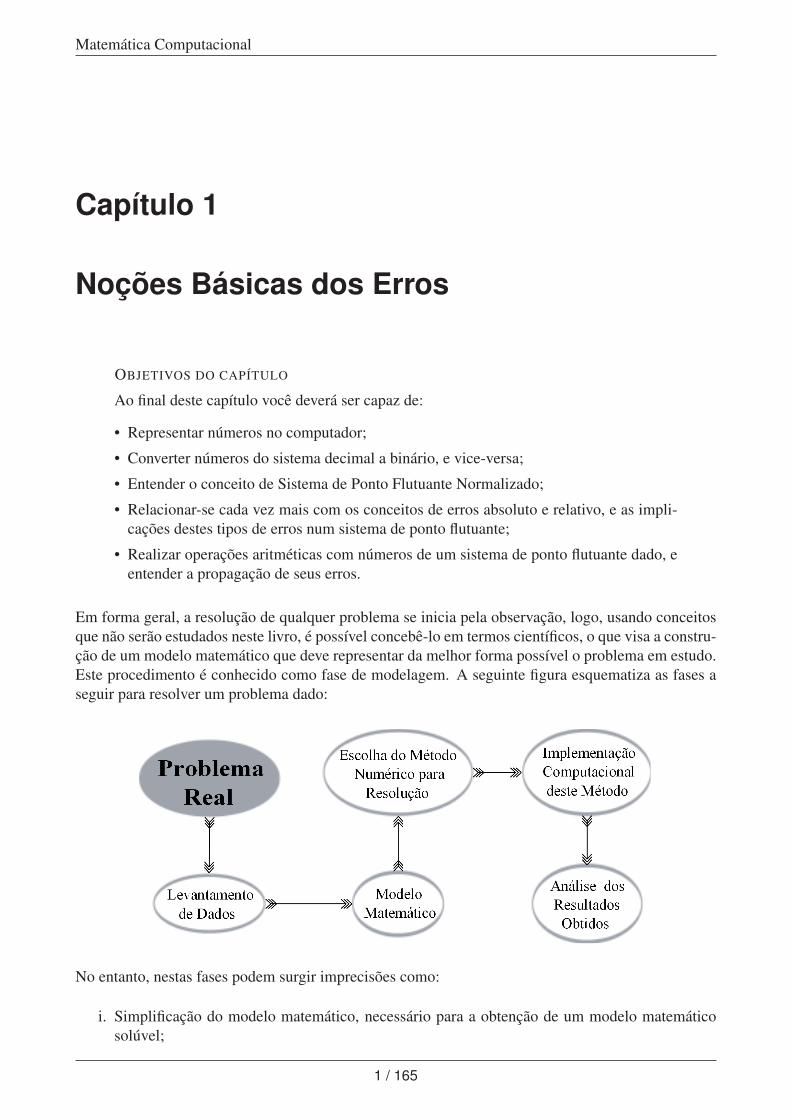
Em forma geral, a resolução de qualquer problema se inicia pela observação, logo, usando conceitosque não serão estudados neste livro, é possível concebê-lo em termos científicos, o que visa a constru-ção de um modelo matemático que deve representar da melhor forma possível o problema em estudo.Este procedimento é conhecido como fase de modelagem. A seguinte figura esquematiza as fases aseguir para resolver um problema dado:
No entanto, nestas fases podem surgir imprecisões como:
i. Simplificação do modelo matemático, necessário para a obtenção de um modelo matemáticosolúvel;
1 / 165

Matemática Computacional
ii. Erro de truncamento, devido à troca de uma série infinita por uma finita;
iii. Erro de arredondamento, devido à própria estrutura da máquina;
iv. Erro na obtenção dos dados, dados imprecisos obtidos de experimentos ou arredondados naentrada;
v. etc.
A menos que algumas medidas sejam consideradas para contornar estas imprecisões, estas implicarãona diminuição da precisão dos resultados obtidos ou, ainda pior, na obtenção de resultados incorretos.
Portanto, neste capítulo, focaremos a nossa atenção no estudo dos erros, que possam surgir na resolu-ção de um determinado problema; tais como, os erros que surgem da representação dos números nocomputador e os erros das operações aritméticas efetuadas entre eles.
1.1 Representação dos números no computador
Na matématica temos que as seguintes afirmações são válidas:
2+3 = 5, 2×3 = 6 e(√
2)2
= 2
Logo, não é do outro mundo pensar que estas afirmações sejam verdadeiras ou válidas também numcomputador. No entanto, a aritmética executada por um computador é diferente daquela utilizada naMatemática, isto é, num computador stardard, esperamos resultados exatos para:
2+3 = 5 e 2×3 = 6;
porém, não necessariamente obteremos de forma precisa que(√2)2
= 2.
Nesta seção compreenderemos o porquê desse fato, isto é, estudaremos a aritmética com a qual tra-balha um computador.
Desta forma, mesmo que, na matemática, existam números expressos com uma quantidade infinita dealgarismos, por exemplo:
π = 3.1415926535 . . . ,√
2 = 1.4142135623 . . . ,13= 0.3333333333 . . . ,
no computador, estes números devem ser representados com apenas um número fixo e finito de al-garismos, o que implicará que tais números não serão representados de forma exata, porém essasrepresentações deverão ser aceitáveis na maioria das situações. Embora que, muitas vezes, a aritmé-tica usada no computador seja satisfatória, quase sempre surgem problemas devido a essa limitação.
Mais ainda, comumente, os computadores trabalham os números reais representando-os no sistemabinário, diferentemente do sistema decimal que normalmente usamos. De fato, quando introduzimosuma informação numérica no computador, esta é automaticamente transformada em sua representa-ção binária, porém, em muitas situações, essa conversão pode acarretar em erros, devido ao númerolimitado de algarismos que temos a disposição. A implicação desse fato, é que o resultado de umasimples operação aritmética entre números representados no computador pode apresentar erros; paraevitar isto nas próximas seções aprenderemos a teoria necessária para conter os erros decorrentesdesses fatores.
2 / 165
Matemática Computacional
1.2 Representação dos números reais no sistema decimal e nosistema binário
Como já foi mencionado acima, os computadores comumente trabalham com o sistema binário, po-rém desde que nós estamos habituados a trabalhar somente com o sistema decimal, é necessário sabercomo são representados os números em ambas bases, além de convertê-los de uma base para outra.Por este motivo, nesta seção estudaremos e/ou lembraremos como realizar a conversão de númerosdo sistema binário para decimal, e vice-versa. Informação complementar sobre este assunto pode serencontrada em Introdução à Computação de Sousa Filho, G. F. e Medeiros, E. S.
Então:
• Dado (11010.000111)2, qual é sua representação decimal?
• Dado 271.375, qual é sua representação binária?
No decorrer desta seção responderemos estas perguntas.
Nota 1.1Desde que estamos habituados a trabalhar com o sistema decimal não é necessário pôr emevidência esta base no momento de representar os números, isto é
271.375≡ (271.375)10, 10≡ (10)10 e 0.349≡ (0.349)10.
Porém, quando necessário usaremos sem distinção qualquer uma destas representações.
Comecemos estudando e/ou lembrando a conversão de números inteiros.
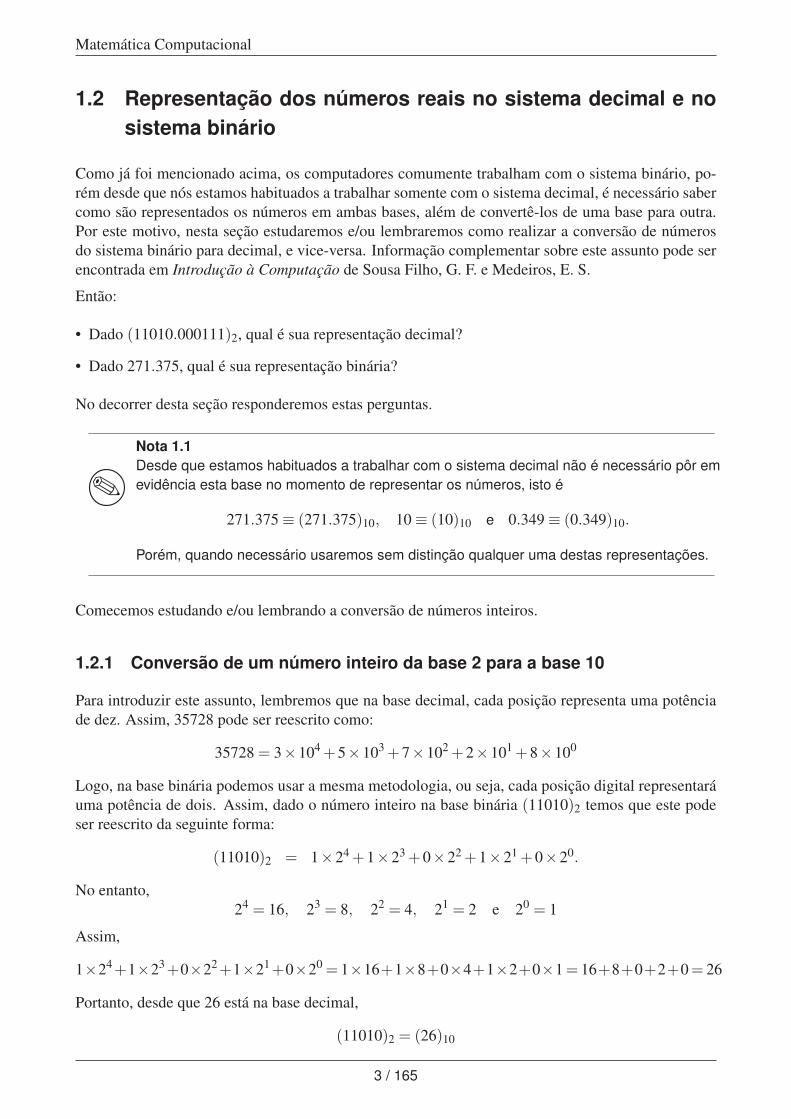
1.2.1 Conversão de um número inteiro da base 2 para a base 10
Para introduzir este assunto, lembremos que na base decimal, cada posição representa uma potênciade dez. Assim, 35728 pode ser reescrito como:
35728 = 3×104 +5×103 +7×102 +2×101 +8×100
Logo, na base binária podemos usar a mesma metodologia, ou seja, cada posição digital representaráuma potência de dois. Assim, dado o número inteiro na base binária (11010)2 temos que este podeser reescrito da seguinte forma:
(11010)2 = 1×24 +1×23 +0×22 +1×21 +0×20.
No entanto,24 = 16, 23 = 8, 22 = 4, 21 = 2 e 20 = 1
Assim,
1×24+1×23+0×22+1×21+0×20 = 1×16+1×8+0×4+1×2+0×1= 16+8+0+2+0= 26
Portanto, desde que 26 está na base decimal,
(11010)2 = (26)10
3 / 165

Matemática Computacional
Da mesma forma, para o múmero inteiro na base binária (1111111)2, temos que:
(111111)2 = 1×26 +1×25 +1×24 +1×23 +1×22 +1×21 +1×20
= 1×64+1×32+1×16+1×8+1×4+1×2+1×1= 64+32+16+8+4+2+1= (127)10.
Nota 1.2De forma geral, dada uma base β ≥ 2, um número nesta base será representado por:
(aiai−1 . . .a2a1a0)β , com 0≤ a j ≤ (β −1), j = 0, . . . , i,
porém, cada posição digital deste número representará uma potência de β . Assim, ele podeser reescrito da seguinte forma:
(aiai−1 . . .a2a1a0)β = ai×βi+ai−1×β
i−1+ · · ·+a2×β2+a1×β
1+a0×β0 =
i
∑j=0
a j×βj.
Logo, ao efetuar o somatórioi
∑j=0
a j×β j o resultado já é um número decimal. Portanto, da
representação acima, dada uma base β ≥ 2, podemos converter qualquer número expressonesta base para sua representação na base 10.
Por outro lado,(26)10 = 2× (2× (2× (2×1+1)+0)+1)+0.
e(127)10 = 2× (2× (2× (2× (2× (2×1+1)+1)+1)+1)+1)+1.
Ou seja, vemos intuitivamente que temos uma forma alternativa de converter um número da basebinária para a base decimal, sem ter que trabalhar com as potências de 2. Para sermos mais precisos,dado um número na base 2: (aiai−1 . . .a2a1a0)2 a sua representação na base 10, denotada por b0, épode ser obtida usando o seguinte algoritmo:
Algoritmo 1.1
Passo 0:Dado um número inteiro (aiai−1 . . .a2a1a0)2 na base binária, faça
k = i e bk = ak.
Passo 1:Se k = 0, PARE. A representação decimal de (aiai−1 . . .a2a1a0)2 é b0.Caso contrário, obtenha bk−1 tal que:
bk−1 = 2×bk +ak−1.
Passo 2:Faça k = k−1 e volte para o Passo 1.
4 / 165
Matemática Computacional
Exemplo 1.1Usando o Algoritmo 1.1 determinemos a representação decimal dos seguintes números binários:
(10001)2 e (10011010)2.
Solução
a. Fazendo (10001)2 = (a4a3a2a1a0), temos que
k = 4,3,2,1,0.
Logo
• Para k = 4 fazemos b4 = a4 = 1. Desde que k = 4 6= 0
b3 = 2×b4 +a3 = 2×1+0 = 2;
e agora k = k−1 = 3.• Para k = 3. Desde que k = 3 6= 0
b2 = 2×b3 +a2 = 2×2+0 = 4;
e agora k = k−1 = 2.• Para k = 2. Desde que k = 2 6= 0
b1 = 2×b2 +a1 = 2×4+0 = 8;
e agora k = k−1 = 1.• Para k = 1. Desde que k = 1 6= 0
b0 = 2×b1 +a0 = 2×8+1 = 17;
e agora k = k−1 = 0.• Para k = 0. Desde que k = 0 Paramos!
Portanto, a representação decimal de (10001)2 é 17, isto é
(10001)2 = (17)10.
b. Fazendo (10011010)2 = (a7a6a5a4a3a2a1a0), temos que
k = 7,6,5,4,3,2,1,0.
Logo,
• Para k = 7 fazemos b7 = a7 = 1. Desde que k = 7 6= 0
b6 = 2×b7 +a6 = 2×1+0 = 2;
e agora k = k−1 = 6.• Para k = 6. Desde que k = 6 6= 0
b5 = 2×b6 +a5 = 2×2+0 = 4;
e agora k = k−1 = 5.
5 / 165

Matemática Computacional
• Para k = 5. Desde que k = 5 6= 0
b4 = 2×b5 +a4 = 2×4+1 = 9;
e agora k = k−1 = 4.• Para k = 4. Desde que k = 4 6= 0
b3 = 2×b4 +a3 = 2×9+1 = 19;
e agora k = k−1 = 3.• Para k = 3. Desde que k = 3 6= 0
b2 = 2×b3 +a2 = 2×19+0 = 38;
e agora k = k−1 = 2.• Para k = 2. Desde que k = 2 6= 0
b1 = 2×b2 +a1 = 2×38+1 = 77;
e agora k = k−1 = 1.• Para k = 1. Desde que k = 1 6= 0
b0 = 2×b1 +a0 = 2×77+0 = 154;
e agora k = k−1 = 0.• Para k = 0. Desde que k = 0 Paramos!
Portanto, a representação decimal de (10011010)2 é 154, isto é
(10011010)2 = (154)10.
1.2.2 Conversão de um número inteiro da base 10 para a base 2
No seguinte exemplo, apresenta de forma intuitiva como obter um algoritmo para converter um nú-mero da base decimal para a base binária.
Exemplo 1.2Considere o número b0 = 271 e a sua representação binária (aiai−1 . . .a2a1a0)2, isto é,
(271)10 = (aiai−1 . . .a2a1a0)2
Porém,
(aiai−1 . . .a2a1a0)2 = ai×2i +ai−1×2i + · · ·+a2×22 +a1×21 +a0×20
= 2×(ai×2i−1 +ai−1×2i−2 + · · ·+a2×21 +a1×20)+a0
Assim,271 = 2×135+1.
Logo, a0 = 1, e representa o resto da divisão de 271 por 2. Repetindo o processo para b1 = 135 temosque
135 = ai×2i−1 +ai−1×2i−2 + · · ·a2×21 +a1= 2×
(ai×2i−2 +ai−1×2i−3 + · · ·a2×20)+a1
= 2×67+1.
6 / 165

Matemática Computacional
Assim, a1 = 1, e representa o resto da divisão de b1 = 135 por 2. Repetindo este processo sucessiva-mente obtemos os seguintes b′is e a′is:
b0 = 271 = 2×135+1 ⇒ a0 = 1;b1 = 135 = 2×67+1 ⇒ a1 = 1;b2 = 67 = 2×33+1 ⇒ a2 = 1;b3 = 33 = 2×16+1 ⇒ a3 = 1;b4 = 16 = 2×8+0 ⇒ a4 = 0;b5 = 8 = 2×4+0 ⇒ a5 = 0;b6 = 4 = 2×2+0 ⇒ a6 = 0;b7 = 2 = 2×1+0 ⇒ a7 = 0;b8 = 1 = 2×0+1 ⇒ a8 = 1.
Portanto,(271)10 = (100001111)2.
Assim, para sermos mais precisos, dado um número inteiro n na base decimal, com(aiai−1 . . .a2a1a0)2, como sua representação binária, podemos obter o dígito binário ak para cadak, k = 0,1, . . . , i, usando o seguinte algoritmo:
Algoritmo 1.2
Passo 0:Dado um número inteiro n na base decimal, faça
k = 0 e nk = n.
Passo 1:Obtenha qk e rk tais que:
nk = 2×qk + rk.
Faça ak = rk.
Passo 2:Se qk = 0, PARE.Caso contrário, faça nk+1 = qk, k = k+1 e volte para o Passo 1.
Exemplo 1.3Usando o Algoritmo 1.2 determinemos a representação binária dos seguintes números decimais:
3710 e 15610.
Solução
a. Para n = 3710, fazemos k = 0 e n0 = 3710. Logo
• Para k = 0, precisamos obter q0 e r0 tais que
37 = 2×q0 + r0.
Desde que37 = 2×18+1 ⇒ q0 = 18 e r0 = 1 = a0.
Como q0 6= 0, fazemos n1 = q0 = 18, k = k+1 = 1;
7 / 165

Matemática Computacional
• Para k = 1, precisamos obter q1 e r1 tais que
18 = 2×q1 + r1.
Desde que18 = 2×9+0 ⇒ q1 = 9 e r1 = 0 = a1.
Como q1 6= 0, fazemos n2 = q1 = 9, k = k+1 = 2;• Para k = 2, precisamos obter q2 e r2 tais que
9 = 2×q2 + r2.
Desde que9 = 2×4+1 ⇒ q2 = 4 e r2 = 1 = a2.
Como q2 6= 0, fazemos n3 = q2 = 4, k = k+1 = 3;• Para k = 3, precisamos obter q3 e r3 tais que
4 = 2×q3 + r3.
Desde que4 = 2×2+0 ⇒ q3 = 2 e r3 = 0 = a3.
Como q3 6= 0, fazemos n4 = q3 = 2, k = k+1 = 4;• Para k = 4, precisamos obter q4 e r4 tais que
2 = 2×q4 + r4.
Desde que2 = 2×1+0 ⇒ q4 = 1 e r4 = 0 = a4.
Como q4 6= 0, fazemos n5 = q4 = 1, k = k+1 = 5;• Para k = 5, precisamos obter q5 e r5 tais que
1 = 2×q5 + r5.
Desde que1 = 2×0+1 ⇒ q5 = 0 e r5 = 1 = a5.
Como q5 = 0, paramos!
Portanto,3710 = (a5a4a3a2a1a0)2 = (100101)2.
b. Para n = 15610, fazemos k = 0 e n0 = 15610. Logo
• Para k = 0, precisamos obter q0 e r0 tais que
156 = 2×q0 + r0.
Desde que156 = 2×78+0 ⇒ q0 = 78 e r0 = 0 = a0.
Como q0 6= 0, fazemos n1 = q0 = 78, k = k+1 = 1;
8 / 165
Matemática Computacional
• Para k = 1, precisamos obter q1 e r1 tais que
78 = 2×q1 + r1.
Desde que78 = 2×39+0 ⇒ q1 = 39 e r1 = 0 = a1.
Como q1 6= 0, fazemos n2 = q1 = 39, k = k+1 = 2;• Para k = 2, precisamos obter q2 e r2 tais que
39 = 2×q2 + r2.
Desde que39 = 2×19+1 ⇒ q2 = 19 e r2 = 1 = a2.
Como q2 6= 0, fazemos n3 = q2 = 19, k = k+1 = 3;• Para k = 3, precisamos obter q3 e r3 tais que
19 = 2×q3 + r3.
Desde que19 = 2×9+1 ⇒ q3 = 9 e r3 = 1 = a3.
Como q3 6= 0, fazemos n4 = q3 = 9, k = k+1 = 4;• Para k = 4, precisamos obter q4 e r4 tais que
9 = 2×q4 + r4.
Desde que9 = 2×4+1 ⇒ q4 = 4 e r4 = 1 = a4.
Como q4 6= 0, fazemos n5 = q4 = 4, k = k+1 = 5;• Para k = 5, precisamos obter q5 e r5 tais que
4 = 2×q5 + r5.
Desde que4 = 2×2+0 ⇒ q5 = 2 e r5 = 0 = a5.
Como q5 6= 0, fazemos n6 = q5 = 4, k = k+1 = 6;• Para k = 6, precisamos obter q6 e r6 tais que
2 = 2×q6 + r6.
Desde que2 = 2×1+0 ⇒ q6 = 1 e r6 = 0 = a6.
Como q6 6= 0, fazemos n7 = q6 = 2, k = k+1 = 7;• Para k = 7, precisamos obter q7 e r7 tais que
1 = 2×q7 + r7.
Desde que1 = 2×0+1 ⇒ q7 = 0 e r7 = 1 = a7.
Como q7 = 0, paramos!Portanto,
15610 = (a7a6a5a4a3a2a1a0)2 = (10011100)2.
9 / 165

Matemática Computacional
1.2.3 Conversão de um número fracionário da base 10 para a base 2
Vejamos agora como converter um número fracionário da base 10 para a base binária.
Importante 1.1Dado um número n ∈ R. Se n é fracionário, então ele será fracionário em qualquer base.
Exemplo 1.4Consideremos o número n = 0.375, logo, da nota acima, existem dígitos binários d1,d2, . . . ,di, . . .,tais que:
n = 0.375 = (0.d1d2 . . .di . . .)2.
Mais ainda,
(0.375)10 = (0.d1d2 . . .di . . .)2 = d1×2−1 +d2×2−2 + · · ·+di×2−i + · · ·
Agora, se multiplicamos cada termo da expressão acima por 2 obtemos:
2×0.375 = 0.75 = 0+0.75 = d1 +d2×2−1 +d3×2−2 + · · ·+di×2−i+1 + · · ·
Logo, d1 representa a parte inteira de 2×0.375 = 0.75, porém 0.75 não tem parte inteira, implicandoque d1 = 0 e
0.75 = d2×2−1 +d3×2−2 + · · ·+di×2−i+1 + · · ·Repetindo novamente este procedimento para 0.75 temos que:
2×0.75 = 1.5 = 1+0.5 = d2 +d3×2−1 +d4×2−2 + · · ·+di×2−i+2 + · · ·
Logo, d2 representa a parte inteira de 2× 0.75 = 1.5, como 1 é a parte inteira de 1.5, resulta qued2 = 1 e
0.5 = d3×2−1 +d4×2−2 + · · ·+di×2−i+2 + · · ·Repetindo novamente o procedimento para o número 0.5 temos que:
2×0.5 = 1.0 = 1+0.0 = d3 +d4×2−1 + · · ·+di×2−i+3 + · · ·
Assim, d3 = 1 representa a parte inteira de 2×0.5 = 1 e
0.0 = d4×2−1 + · · ·+di×2−i+3 + · · ·
Como a parte fracionária é zero, o processo termina. Assim, d1 = 0, d2 = 1, d3 = 1. Portanto,
(0.375)10 = (0.011)2.
Nota 1.3No exemplo acima, vimos que n = 0.375 tem uma representação finita na base binária,porém isto não necessariamente é verdadeiro na maioria dos casos. De forma geral, dadoum número n ∈ (0,1), embora este tenha representação finita no sistema decimal, a suarepresentação na base 2 pode ser finita ou infinita. Este fato será ilustrado no próximoexemplo.
10 / 165

Matemática Computacional
De forma geral, dado um número 0 < n < 1 no sistema decimal. Então, (0.d1d2 . . .di . . .)2, sua repre-sentação binária é obtida, dígito a dígito, usando o seguinte algoritmo:
Algoritmo 1.3
Passo 0:Dado um número 0 < n < 1, faça
k = 1 e r1 = n.
Passo 1:Calcule pk = 2× rk.
• Se pk ≥ 1, faça dk = 1;• Caso contrário, faça dk = 0.
Passo 2:Faça rk+1 = pk−dk.
• Se rk+1 = 0, PARE;• Caso contrário, faça k = k+1 e volte para o Passo 1.
Nota 1.4Da nota anterior, o Algoritmo 1.3 pode ou não parar após um número finito de iterações.
Exemplo 1.5Usando o Algoritmo 1.3 determinemos a representação binária dos seguintes números fracionáriosdecimais:
0.17187510 e 0.210
Solução
a. Para n = 0.17187510, façamos k = 1 e r1 = 0.171875. Logo
• Para k = 1, calculamos p1. Desde que
p1 = 2×r1 = 2×0.171875= 0.34375< 1 ⇒ d1 = 0 e r2 = p1−d1 = 0.34375.
Como r2 6= 0, fazemos k = k+1 = 2.• Para k = 2, calculamos p2. Desde que
p2 = 2× r2 = 2×0.34375 = 0.6875 < 1 ⇒ d2 = 0 e r3 = p2−d2 = 0.6875.
Como r3 6= 0, fazemos k = k+1 = 3.• Para k = 3, calculamos p3. Desde que
p3 = 2× r3 = 2×0.6875 = 1.375 > 1 ⇒ d3 = 1 e r4 = p3−d3 = 0.375.
Como r4 6= 0, fazemos k = k+1 = 4.
11 / 165

Matemática Computacional
• Para k = 4, calculamos p4. Desde que
p4 = 2× r4 = 2×0.375 = 0.75 < 1 ⇒ d4 = 0 e r5 = p4−d4 = 0.75.
Como r5 6= 0, fazemos k = k+1 = 5.• Para k = 5, calculamos p5. Desde que
p5 = 2× r5 = 2×0.75 = 1.5 > 1 ⇒ d5 = 1 e r6 = p5−d5 = 0.5.
Como r6 6= 0, fazemos k = k+1 = 6.• Para k = 6, calculamos p6. Desde que
p6 = 2× r6 = 2×0.5 = 1.0≥ 1 ⇒ d6 = 1 e r7 = p6−d6 = 0.
Como r7 = 0, Paramos!.
Portanto,0.17187510 = (0.001011)2.
b. Para n = 0.210, façamos k = 1 e r1 = 0.2. Logo
• Para k = 1, calculamos p1. Desde que
p1 = 2× r1 = 2×0.2 = 0.4 < 1 ⇒ d1 = 0 e r2 = p1−d1 = 0.4.
Como r2 6= 0, fazemos k = k+1 = 2.• Para k = 2, calculamos p2. Desde que
p2 = 2× r2 = 2×0.4 = 0.8 < 1 ⇒ d2 = 0 e r3 = p2−d2 = 0.8.
Como r3 6= 0, fazemos k = k+1 = 3.• Para k = 3, calculamos p3. Desde que
p3 = 2× r3 = 2×0.8 = 1.6 > 1 ⇒ d3 = 1 e r4 = p3−d3 = 0.6.
Como r4 6= 0, fazemos k = k+1 = 4.• Para k = 4, calculamos p4. Desde que
p4 = 2× r4 = 2×0.6 = 1.2 > 1 ⇒ d4 = 1 e r5 = p4−d4 = 0.2.
Como r5 6= 0, fazemos k = k+1 = 5.• Para k = 5, notemos que r5 = r1, ou seja, os valores obtidos acima serão repetido de
foma periódica.
Mais ainda, 0.2 = r1 = r5 = r9 = r13 . . . e assim por diante. Portanto,
0.210 = (0.001100110011 . . .)2 = (0.0011)2.
12 / 165

Matemática Computacional
Atenção 1.1A situação vista no exemplo acima, isto é, dado um número na base decimal com represen-tação finita e com representação infinita na base binária, pode gerar erros, não detectáveispor nós, nos resultados obtidos usando sistemas computacionais que trabalhem no sistemabinário. De fato, (0.2)10 será armazenado de forma aproximada no computador, devido queo computador possui uma quantidade fixa e finita de posições para armazenar os dígitosda mantissa de um número, e tal aproximação será usada para realizar os cálculos. Por-tanto, não podemos esperar um resultados exatos quando trabalhamos com números destaclasse.
1.2.4 Conversão de um número fracionário da base 2 para a base 10
Dado um número fracionário na base 2, denotado por (r)2, isto é,
(r)2 = (0.d1d2 . . .di . . .)2
obteremos a sua representação na base decimal.
O algoritmo que apresentaremos para fazer esta transformação é equivalente ao descrito previamente.Inicialmente definimos r1 = r, e em cada iteração k, o processo multiplica o número rk por (10)10 =(1010)2 para obter o dígito bk, onde bk é a parte inteira deste produto convertida para a base decimal.Notemos que essas operações devem ser realizadas no sistema binário.
Algoritmo 1.4
Passo 0:Dado (r)2, faça
k = 1 e r1 = (r)2.
Passo 1Calcule wk = (1010)2× rk.Seja zk a parte inteira de wk.Faça bk igual à conversão de zk para a base 10.
Passo 2:Faça rk+1 = wk− zk.
• Se rk+1 = 0, PARE.• Caso contrário, faça k = k+1 e volte para o Passo 1.
Exemplo 1.6Usando o Algoritmo 1.4 determinemos a representação em base 10 de (0.000111)2,.
SoluçãoFazendo k = 1 e r1 = (r)2 = (0.000111)2, temos que:
• Para k = 1, calculamos w1.
13 / 165
Matemática Computacional
Desde quew1 = (1010)2× r1 = (1010)2× (0.000111)2
= (1010)2× (111)2×2−6 = (1000110)2×2−6
= (1.000110)2 = (1.00011)2
se segue quez1 = (1)2, r2 = w1− z1 = (0.00011)2 e b1 = 1.
Como r2 6= 0, fazemos k = k+1 = 2.
• Para k = 2, calculamos w2.Desde que
w2 = (1010)2× r2 = (1010)2× (0.00011)2
= (1010)2× (11)2×2−5 = (11110)2×2−5
= (0.11110)2 = (0.1111)2
se segue quez2 = (0)2, r3 = w2− z2 = (0.1111)2 e b2 = 0.
Como r3 6= 0, fazemos k = k+1 = 3.
• Para k = 3, calculamos w3.Desde que
w3 = (1010)2× r3 = (1010)2× (0.1111)2
= (1010)2× (1111)2×2−4 = (10010110)2×2−4
= (1001.0110)2 = (1001.011)2
se segue quez3 = (1001)2, r4 = w3− z3 = (0.011)2 e b3 = 9.
Como r4 6= 0, fazemos k = k+1 = 4.
• Para k = 4, calculamos w4.Desde que
w4 = (1010)2× r4 = (1010)2× (0.011)2
= (1010)2× (11)2×2−3 = (11110)2×2−3
= (11.110)2 = (11.11)2
se segue quez4 = (11)2, r5 = w4− z4 = (0.11)2 e b4 = 3.
Como r5 6= 0, fazemos k = k+1 = 5.
• Para k = 5, calculamos w5.Desde que
w5 = (1010)2× r5 = (1010)2× (0.11)2
= (1010)2× (11)2×2−2 = (11110)×2−2
= (111.10)2 = (111.1)2
14 / 165

Matemática Computacional
se segue quez5 = (111)2, r6 = w5− z5 = (0.1)2 e b5 = 7.
Como r6 6= 0, fazemos k = k+1 = 6.
• Para k = 6, calculamos w6.Desde que
w6 = (1010)2× r6 = (1010)2× (0.1)2
= (1010)2× (1)2×2−1 = (1010)2×2−1
= (101.0)2 = (101)2
se segue quez6 = (101)2, r7 = w6− z6 = (0)2 e b6 = 5.
Como r7 = 0, Paramos!
Portanto,(0.000111)2 = 0.10937510.
Assim, na seguinte caixa respondemos à pergunta feita no início desta seção, além disso, ilustraremosisto com o próximo exemplo.
Importante 1.2Se o número em questão tem uma parte inteira e uma parte fracionária, então a sua con-versão, em outra base, será obtida decompondo esse na soma da parte inteira com a partefracionária, logo aplicaremos os algoritmos respectivos a cada parte.
Exemplo 1.7
a. Dado o número (271.375)10, determinemos a sua representação em base 2.
SoluçãoDesde que
(271.375)10 = (271)10 +(0.375)10.
Do Exemplos 1.2 e 1.4, temos que
(271)10 = (100001111)2 e (0.375)10 = (0.001)2,
respectivamente. Portanto
(271.375)10 = (100001111)2 +(0.001)2 = (100001111.001)2.
b. Dado o número (11010.000111)2, determinemos a sua representação em base 10.
15 / 165

Matemática Computacional
SoluçãoDesde que
(11010.000111)2 = (11010)2 +(0.000111)2.
Do Exemplo 1.1(a) e o exemplo anterior, temos que
(11010)2 = (26)10 e (0.000111)2 = (0.109375)10,
respectivamente. Portanto
(11010.000111)2 = (26)10 +(0.109375)10 = (26.109375)10.
1.3 Sistema de Ponto Flutuante Normalizado
Como mencionado previamente, temos um número fixo e finito de espaço para armazenar os númerosreais num computador, por este motivo, apenas um subconjunto será representado exatamente, equalquer outro fora deste subconjunto terá uma representação aproximada. Desta forma, a seguintedefinição estabelece teoricamente como é feita essa representação.
Definição 1.1Sejam β ≥ 2, n ∈ N, expmin ≤ 0 e expmax ≥ 1 inteiros. O Sistema de Ponto Flutuante Nor-malizado, denotado por SPF(β ,n,expmin,expmax), é definido por:
SPF(β ,n,expmin,expmax) := {x ∈ R : x =±(0.d1d2 . . .dn)×βexp}
onde:
• β ≥ 2 é a base do sistema;
• n é o número de dígitos na mantissa;
0≤ di ≤ (β −1), i = 1, . . . ,n, com d1 6= 0;
• exp é o expoente no intervalo [expmin,expmax].
Mais ainda, cada elemento desse conjunto é denominado de ponto flutuante normalizado, ecomo d1 6= 0, o zero é representado da seguinte forma:
zero = 0.000000 . . .0︸ ︷︷ ︸n vezes
×βexpmin .
Definição 1.2Seja SPF(β ,n,expmin,expmax). Então:
i. O menor número positivo exatamente representável, denotado por m, é dado por:
m = (0.1000000 . . .0︸ ︷︷ ︸(n−1) vezes
))β ×βexpmin = β
expmin−1;
16 / 165

Matemática Computacional
ii. O maior número positivo exatamente representável, denotado por M, é dado por:
M = (0. [β −1][β −1] . . . [β −1]︸ ︷︷ ︸n−vezes
)β ×βexpmax = (β n−1)×β
expmax−n;
iii. O número máximo de mantissas positivas possíveis, denotado por mantissasposs, é dadopor:
mantissasposs = (β −1)×βn−1;
iv. O número máximo de expoentes possíveis, denotado por expposs, é dado por:
expposs = expmax−expmin+1;
v. O número de elementos positivos representáveis, denotado por NumR+, é dado por:
NumR+ = mantissasposs× expposs;
vi. o número total de elementos representáveis, denotado por NumRT, é dado por:
NumRT = 2×NumR++1.
Atenção 1.2Dado x ∈ R. Então:
a. Se x ∈ SPF(β ,n,expmin,expmax), então −x ∈ SPF(β ,n,expmin,expmax);
b. Se 0 < |x| < m, então x não pode ser representado em SPF(β ,n,expmin,expmax).Nesta situação o sistema acusará underflow;
c. Se |x| > M, então x não pode ser representado em SPF(β ,n,expmin,expmax). Nestasituação o sistema acusará overflow.
Os seguintes exemplos ilustram cada um dos conceitos estabelecidos na Definição 1.2, para β = 2 e10.
Exemplo 1.8
a. Se consideramos β = 2, n = 3, expmin =−1 e expmax = 3. Então, temos que:
SPF(2,3,−1,3) = {x ∈ R : x =±0.d1d2d3×2exp} .
ondedi ∈ {0,1}, para i = 2,3, d1 = 1, exp ∈ [−1,3].
Logo,
• m = 0.1002×2−1 = 2−1×2−1 = 14 ;
• M = 0.1112×23 =(2−1 +2−2 +2−3)×23 = 7
8 ×23 = 7;
17 / 165

Matemática Computacional
• mantissasposs = (2−1)×23−1 = 4;
0.1002 =12, 0.1012 =
58, 0.1102 =
34
e 0.1112 =78.
• expposs = 3− (−1)+1 = 5, e eles explicitamente são:
−1, 0, 1, 2 e 3;
• NumR+ = 4×5 = 20, e eles são:
12×2exp,
58×2exp,
34×2exp e
78×2exp, exp ∈ {−1,0,1,2,3}.
Ou seja, realmente temos os seguintes números:
12 ×2−1 = 1
4 ,12 ×20 = 1
2 ,12 ×21 = 1, 1
2 ×22 = 2, 12 ×23 = 4,
58 ×2−1 = 5
16 ,58 ×20 = 5
8 ,58 ×21 = 5
4 ,58 ×22 = 5
2 ,58 ×23 = 5,
34 ×2−1 = 3
8 ,34 ×20 = 3
4 ,34 ×21 = 3
2 ,34 ×22 = 3, 3
4 ×23 = 6,
78 ×2−1 = 7
16 ,78 ×20 = 7
8 ,78 ×21 = 7
4 ,78 ×22 = 7
2 ,78 ×23 = 7.
• NumRT = 2×20+1 = 41, e eles explicitamente são:
−7, −6, −5, −4, −72 , −3, −5
2 , −2, −74 , −
32 ,
−54 , −1, −7
8 , −34 , −
58 , −
12 , −
716 , −
38 , −
516 , −
14 , 0
14 ,
516 ,
38 ,
716 ,
12 ,
58 ,
34 ,
78 , 1, 5
4 ,
32 ,
74 , 2, 5
2 , 3, 72 , 4, 5, 6, 7
Mais ainda, para
SPF(2,3,−1,3) = {x ∈ R : x =±0.d1d2d3×2exp} .
Temos que, Underflow e Overflow são os intervalos ilustrados na seguinte figura:
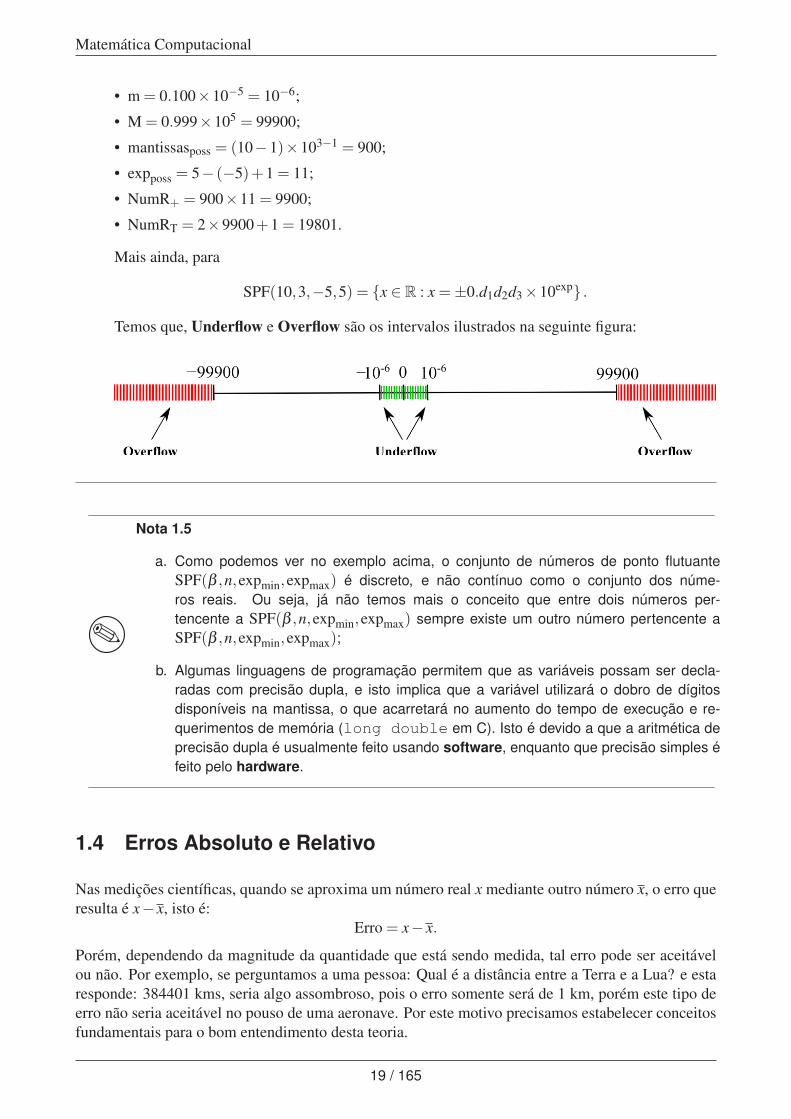
b. Se consideramos β = 10, n = 3, expmin =−5 e expmax = 5. Então, temos que:
SPF(10,3,−5,5) = {x ∈ R : x =±0.d1d2d3×2exp} .onde
di ∈ {0,1,2,3,4,5,6,7,8,9}, para i = 2,3, d1 6= 0, exp ∈ [−5,5].
Logo,
18 / 165
Matemática Computacional
• m = 0.100×10−5 = 10−6;
• M = 0.999×105 = 99900;
• mantissasposs = (10−1)×103−1 = 900;
• expposs = 5− (−5)+1 = 11;
• NumR+ = 900×11 = 9900;
• NumRT = 2×9900+1 = 19801.
Mais ainda, para
SPF(10,3,−5,5) = {x ∈ R : x =±0.d1d2d3×10exp} .
Temos que, Underflow e Overflow são os intervalos ilustrados na seguinte figura:
Nota 1.5
a. Como podemos ver no exemplo acima, o conjunto de números de ponto flutuanteSPF(β ,n,expmin,expmax) é discreto, e não contínuo como o conjunto dos núme-ros reais. Ou seja, já não temos mais o conceito que entre dois números per-tencente a SPF(β ,n,expmin,expmax) sempre existe um outro número pertencente aSPF(β ,n,expmin,expmax);
b. Algumas linguagens de programação permitem que as variáveis possam ser decla-radas com precisão dupla, e isto implica que a variável utilizará o dobro de dígitosdisponíveis na mantissa, o que acarretará no aumento do tempo de execução e re-querimentos de memória (long double em C). Isto é devido a que a aritmética deprecisão dupla é usualmente feito usando software, enquanto que precisão simples éfeito pelo hardware.
1.4 Erros Absoluto e Relativo
Nas medições científicas, quando se aproxima um número real x mediante outro número x, o erro queresulta é x− x, isto é:
Erro = x− x.
Porém, dependendo da magnitude da quantidade que está sendo medida, tal erro pode ser aceitávelou não. Por exemplo, se perguntamos a uma pessoa: Qual é a distância entre a Terra e a Lua? e estaresponde: 384401 kms, seria algo assombroso, pois o erro somente será de 1 km, porém este tipo deerro não seria aceitável no pouso de uma aeronave. Por este motivo precisamos estabelecer conceitosfundamentais para o bom entendimento desta teoria.
19 / 165

Matemática Computacional
Definição 1.3O erro absoluto de aproximar x, denotado por EAx, é a diferença entre o valor exato de umnúmero x e o seu valor aproximado x, isto é:
EAx = x− x.
Atenção 1.3Na maioria das vezes, o valor exato de um número não está disponível, por este motivo,é necessário trabalhar com um limitante superior ou uma estimativa para o módulo do erroabsoluto.
Exemplo 1.9
a. Dados π e π , com π sendo qualquer valor no intervalo aberto (3.14,3.15). Então, temos que
|EAπ |= |π−π|< 0.01;
b. Dados x e x, com x = 332.9 tal que:
|EAx|= |x− x|< 0.1. Então x ∈ (332.8,333);
c. Dados y e y, com y = 1.4 tal que:
|EAy|= |y− y|< 0.1. Então y ∈ (1.3,1.5).
Embora, os números x e y estejam sendo representados com a mesma precisão, necessitamos sabera ordem de grandeza deles para obter uma maior precisão em nossos cálculos. Por este motivo,precisamos conhecer o conceito de erro relativo.
Definição 1.4O erro relativo de aproximar x, denotado por ERx, é o erro absoluto, de aproximar x, divididopelo seu valor aproximado, isto é:
ERx =EAx
x=
x− xx
.
Podemos notar que o erro relativo proporciona mais informações sobre a qualidade do erro que esta-mos cometendo num determinado cálculo, já que a ordem de grandeza do valor calculado é contem-plada.
Exemplo 1.10Do exemplo anterior, temos que:
|ERx|=|EAx||x|
<0.1
332.9≈ 3.003×10−4
|ERy|=|EAy||y|
<0.11.4≈ 0.071
Portanto, x será representado com maior precisão que y.
20 / 165

Matemática Computacional
1.4.1 Erros num Sistema de Ponto Flutuante
A representação de num número num sistema de ponto flutuante depende do computador usado, poiso seu sistema estabelecerá a base numérica adotada, o número de dígitos da mantissa, etc.
Sejam um computador que trabalha com SPF(10,n,expmin,expmax) e um número real x ∈ [m, M].Então, x pode ser reescrito como
x = fx×10exp +gx×10exp−n
onde 0.1≤ fx < 1 e 0≤ gx < 1.
Por exemplo, considerando o sistema SPF(10,4,−5,5), temos que
β = 10, n = 4, expmin =−5 e expmax = 5.
Mais ainda,m = 10−6 e M = 99990
Agora, considerando x = 123.45 temos que
x ∈ [m,M]
e normalizando x temos quex = 0.12345×103.
No entanto, a mantissa neste sistema somente atura 4 dígitos, assim x não poderá ser representado emSPF(10,4,−5,5) de forma exata. Assim, trabalharemos com uma aproximação de x. Para, obter estaaproximação reescreveremos x da seguinte forma:
x = 0.12345×103
= 0.1234×103 +0.00005×103
= 0.1234×103 +0.5×103−4
= 0.1234×103 +0.5×10−1
Assim, neste casofx = 0.1234 e gx = 0.5.
Agora, o problema é considerar, ou não, gx na aproximação de x. Dependendo da escolha, precisamosanalisar os erros absoluto e relativo máximo cometido nesta aproximação. Assim, para resolver esteproblema, podemos adotar um dos seguintes critérios:
truncar ou arredondar.
1.4.1.1 Erros no Truncamento
Quando consideramos num sistema de punto flutuante que trabalha com aritmética de truncamento,o valor gx×10exp−n é desprezado. Portanto, o valor aproximado é dado por:
x = fx×10exp.
Logo, |gx|< 1 implica que
|EAx| = |x− x|= |gx|×10exp−n < 10exp−n.
Além disso, 1 <1| fx|≤ 1
0.1implica que
|ERx| =|EAx||x|
=|gx|×10exp−n
| fx|×10exp <10exp−n
0.1×10exp = 10−n+1.
21 / 165

Matemática Computacional
Exemplo 1.11Para SPF(10,4,−5,5), que trabalha com aritmética de truncamento, e x = 123.45, temos que gx×10−1 será desprezado. Logo:
x = fx×10exp = 0.1234×103.
EAx = x− x = 0.12345×103−0.1234×103
= (0.12345−0.1234)×103 = 0.00005×103
= 0.05.
ERx =EAx
x= 0.05
0.1234×103
≈ 4.0518×10−4.
1.4.1.2 Erros no Arredondamento
Quando consideramos um sistema de punto flutuante que trabalha com aritmética de arredonda-mento, fx é modificado para levar em conta gx. A forma mais usada é o arredondamento simétrico:
x =
fx×10exp, se |gx|<
12
;
fx×10exp +10exp−n, se |gx| ≥12.
Em outras palavras, se |gx|<12
, então gx×10exp−n é desprezado, caso contrário somamos o número1 ao último dígito de fx. Logo,
• se |gx|< 12 , então
|EAx|= |x− x|= |gx|×10exp−n <12×10exp−n;
|ERx|=|EAx||x|
=|gx|×10exp−n
| fx|×10exp <0.5×10exp−n
0.1×10exp =12×10−n+1;
• se |gx| ≥ 12 , então
|EAx| = |x− x|= |( fx×10exp +gx×10exp−n)− ( fx×10exp +10exp−n)|
= |gx×10exp−n−10exp−n|= |gx−1|×10exp−n
≤ 12 ×10exp−n
|ERx| =|EAx||x|
=12 ×10exp−n
| fx×10exp +10exp|<
12 ×10exp−n
| fx|×10exp
<12 ×10exp−n
0.1×10exp < 12 ×10−n+1
22 / 165
Matemática Computacional
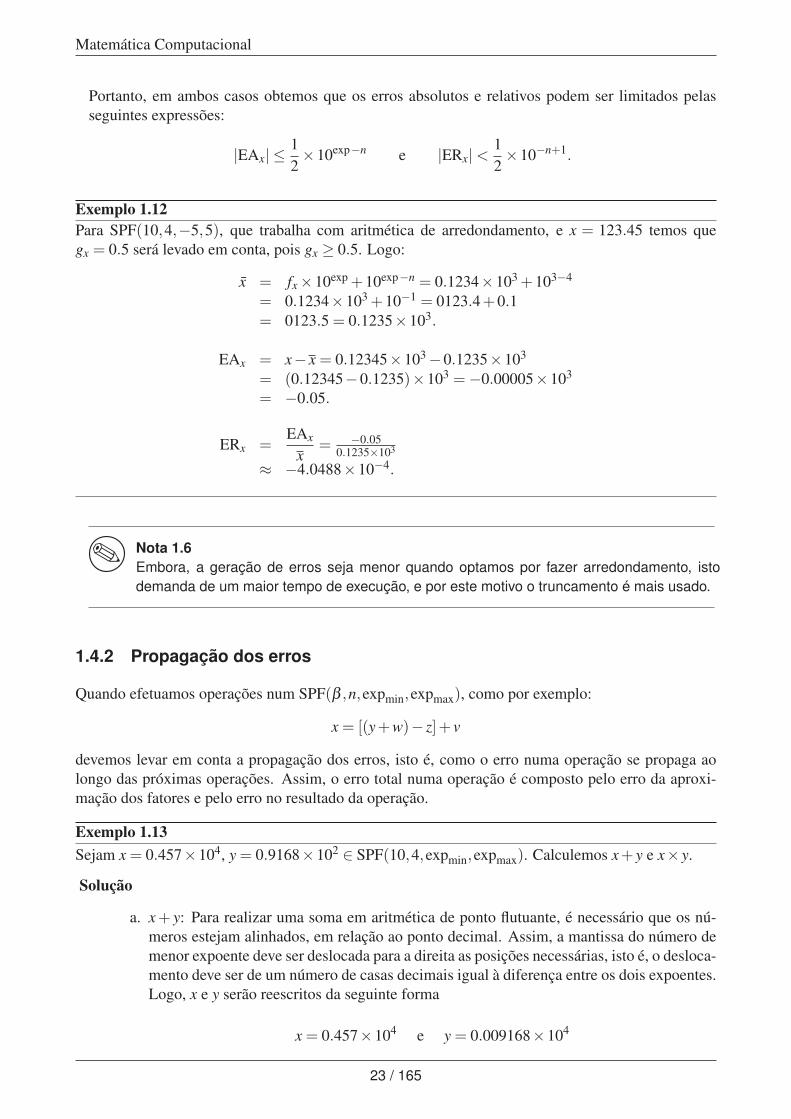
Portanto, em ambos casos obtemos que os erros absolutos e relativos podem ser limitados pelasseguintes expressões:
|EAx| ≤12×10exp−n e |ERx|<
12×10−n+1.
Exemplo 1.12Para SPF(10,4,−5,5), que trabalha com aritmética de arredondamento, e x = 123.45 temos quegx = 0.5 será levado em conta, pois gx ≥ 0.5. Logo:
x = fx×10exp +10exp−n = 0.1234×103 +103−4
= 0.1234×103 +10−1 = 0123.4+0.1= 0123.5 = 0.1235×103.
EAx = x− x = 0.12345×103−0.1235×103
= (0.12345−0.1235)×103 =−0.00005×103
= −0.05.
ERx =EAx
x= −0.05
0.1235×103
≈ −4.0488×10−4.
Nota 1.6Embora, a geração de erros seja menor quando optamos por fazer arredondamento, istodemanda de um maior tempo de execução, e por este motivo o truncamento é mais usado.
1.4.2 Propagação dos erros
Quando efetuamos operações num SPF(β ,n,expmin,expmax), como por exemplo:
x = [(y+w)− z]+ v
devemos levar em conta a propagação dos erros, isto é, como o erro numa operação se propaga aolongo das próximas operações. Assim, o erro total numa operação é composto pelo erro da aproxi-mação dos fatores e pelo erro no resultado da operação.
Exemplo 1.13Sejam x = 0.457×104, y = 0.9168×102 ∈ SPF(10,4,expmin,expmax). Calculemos x+ y e x× y.
Solução
a. x+ y: Para realizar uma soma em aritmética de ponto flutuante, é necessário que os nú-meros estejam alinhados, em relação ao ponto decimal. Assim, a mantissa do número demenor expoente deve ser deslocada para a direita as posições necessárias, isto é, o desloca-mento deve ser de um número de casas decimais igual à diferença entre os dois expoentes.Logo, x e y serão reescritos da seguinte forma
x = 0.457×104 e y = 0.009168×104
23 / 165
Matemática Computacional
Desta forma,x+ y = (0.457+0.009168)×104 = 0.466168×104.
Como n = 4, o resultado exato desta operação deve ser arredondado ou truncado, parapoder pertencer a SPF(10,4,expmin,expmax). Assim,
i. se arredondamos, temos que:
x+ y = 0.4662×104;
ii. se truncamos, temos que:
x+ y = 0.4661×104.
b. x× y: Para realizar o produto de dois números procedemos da forma habitual.
x× y = (0.457×104)× (0.9168×102) = (0.457×0.9168)×106 = 0.4189776×106
devido a que em nosso sistema n = 4, o resultado deve de ser arredondado ou truncado.Assim,
i. Se arredondamos, temos que:
x× y = 0.4190×106;
ii. Se truncamos, temos que:
x× y = 0.4189×106.
Do exemplo anterior, observamos que, embora os números envolvidos na operação sejam representa-dos num sistema de ponto flutuante normalizado, não podemos esperar que o resultado também possaser representado neste sistema.
Quando trabalhamos num processo numérico, o processamento dos dados pode envolver um certonúmero de operações elementares. Existem casos em que o erro não é significativo para a solução doproblema, porém em geral, é importante saber como os erros estão se propagando, pois isto pode ounão afetar os resultados obtidos.
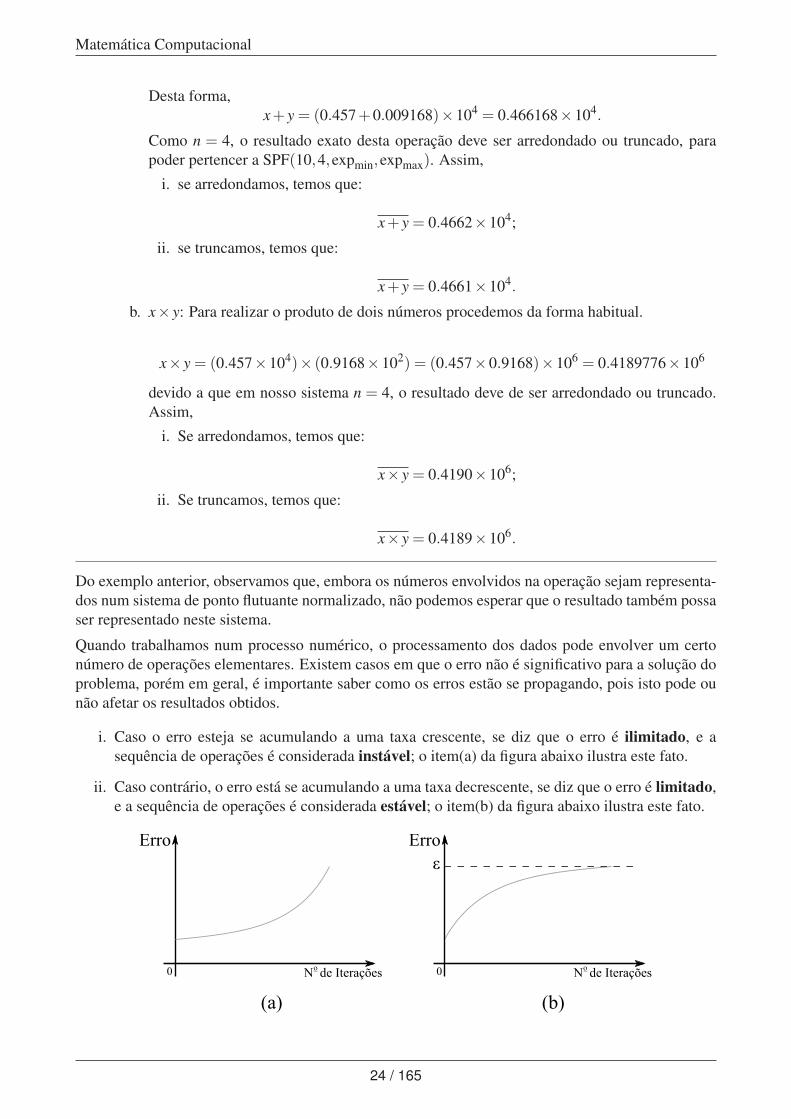
i. Caso o erro esteja se acumulando a uma taxa crescente, se diz que o erro é ilimitado, e asequência de operações é considerada instável; o item(a) da figura abaixo ilustra este fato.
ii. Caso contrário, o erro está se acumulando a uma taxa decrescente, se diz que o erro é limitado,e a sequência de operações é considerada estável; o item(b) da figura abaixo ilustra este fato.
N de Iterações
Erro
0 oN de Iterações
Erro
0 o
ε
(a) (b)
24 / 165

Matemática Computacional
Exemplo 1.14Usando SPF(10,4,expmin,expmax), com aritmética de truncamento, calculemos o valor da seguintesoma:
S =3
∑i=1
(xi + yi), com xi = 0.51909 yi = 4.4878 ∀ i = 1,2,3.
SoluçãoDesde que estamos trabalhando em SPF(10,4,expmin,expmax), temos que
xi = 0.51909 ⇒ xi = 0.519 e yi = 4.4878 ⇒ yi = 0.4487×101
para todo i = 1,2,3.
i. Para i = 1 temos que:
S1 = x1 + y1 = 0.51909+4.4878 = 0.500689×101
S1 = x1 + y1 = 0.519+0.4487×101 = 0.5006×101
Logo, o Erro absoluto é dado por:
EA1 = 0.500689×101−0.5006×101 = 0.000089×101 = 0.89×10−3.
ii. Para i = 2 temos que:
S2 = (x2 + y2)+(x1 + y1) = 0.500689×101 +0.500689×101 = 0.1001378×102
S2 = (x2+y2)+(x1+y1) = 0.5006×101+0.5006×101 = 0.10012×102≈ 0.1001×102
Logo, o Erro absoluto é dado por:
EA2 = 0.1001378×102−0.1001×102 = 0.0000378×102 = 0.378×10−2.
iii. Para i = 3 temos que:
S3 = (x3 + y3)+(x2 + y2)+(x1 + y1) = 0.1502067×102
S3 = (x3 + y3)+(x2 + y2)+(x1 + y1) = 0.15018×102 ≈ 0.1501×102
Logo, o Erro absoluto é dado por:
EA3 = 0.1502067×102−0.1501×102 = 0.0001067×102 = 0.1067×10−1.
Neste exemplo, observamos que a medida que aumentam as operações de adição e considerandoa aritmética de ponto flutuante definida, o erro absoluto cresce. Assim, a medida que i cresce asequência de operações pode torna-se instável.
25 / 165
Matemática Computacional
Exemplo 1.15Considere a sequência gerada por:
xi+1 =12
(xi +
2xi
), ∀ i = 1,2, . . .
Nesta sequência, estão envolvidas as operações de adição, multiplicação e divisão, as quais são repe-tidas sucessivamente até obter o valor aproximado de xi, que deve ser uma solução com a precisãodesejada ε .Assim, o valor final xi possui um determinado tipo de erro, o qual pode se propagar ao longo de todoo processo. Caso a sequência convirja para um número, apesar dos erros cometidos na obtenção decada iteração, temos que a sequência de operações torna-se estável.
1.5 Recapitulando
Desde que na computação é importantíssimo entender o porque do surgimento de erros nos resultadosobtidos na execução de um algoritmo, neste capítulo, aprendimos como o computador armazena umnúmero dado.
Porém, para que esta aprendizagem aconteça de forma natural, nas seções subsequentes, trabalhamoscom o sistema binário e sistema decimal, e lembramos como converter números da base 10 paraa base 2, e vice-versa. Além disso, foram estabelecidos os conceitos de sistema de ponto flutuantenormalizado, erro absoluto e erro relativo.
Por último, mas não menos importante, realizamos operações aritméticas com números de um sis-tema de ponto flutuante dado, e entendemos a propagação de seus erros. Mais ainda, todos estesconceitos foram ilustrados com diversos exemplos.
No próximo capítulo, apresentaremos as noções básicas e necessárias sobre vetores em Rn, já queesta teoria é fundamental para o bom entendimento dos próximos capítulos.
1.6 Atividades
1. Represente na base binária os seguintes números decimais:
i. 12 ii. 35 iii. 2341
iv. 0.1234 v. 27.65 vi. 0.6871
vii. 54.3219 viii. 219.23 ix. 153.003
2. Converta os seguintes números binários para sua forma decimal
i. (101011)2 ii. (1111011)2 iii. (0.1101)2
iv. (0.1111111)2 v. (101011)2 vi. (111.1101011)2
3. Representar os seguintes números na forma normalizada
26 / 165
Matemática Computacional
i. (101)10 ii. (0.0123)10 iii. (1101)2
iv. (0.1111111)2 v. (101011)2 vi. (10001.10110101)2
4. Represente na reta os números positivos que são representáveis em SPF(2,2,−1,2).
5. Dado SPF(2,4,−1,2), calcule
i. o menor positivo exatamente representável
ii. o maior positivo exatamente representável
iii. a quantidade exata de positivos representáveis
iv. o número total de reais exatamente representáveis
6. Dado SPF(10,3,−1,2), represente, em cada caso, o valor arredondado e o truncado dos seguin-tes números:
i. 0.1234567 ii. 89123.1 iii. 23.4019
iv. 0.23101 v. 543.21 v. 163.002
7. Calcule para cada item da atividade acima |EA| e |ER|.
Feedback sobre o capítuloVocê pode contribuir para melhoria dos nossos livros. Encontrou algum erro? Gostaria desubmeter uma sugestão ou crítica?Para compreender melhor como feedbacks funcionam consulte o guia do curso.
27 / 165
Matemática Computacional
Capítulo 2
Vetores
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Compreender o conceito de vetores em Rn;
• Familiarizar-se com as operações e propriedades dos vetores, e aplicar estes resultadosnos cálculos que os envolvam;
• Entender os conceitos de produto interno, norma e distância entre vetores;
• Dado um conjunto de vetores em Rn, saber determinar se este é linearmente indepen-dente ou não;
• Dado um conjunto de vetores em Rn, saber determinar se este é uma base ou não deRn;
Em diversas aplicações da física surgem grandezas, como por exemplo: altura, diâmetro, tempera-tura, etc., as quais são grandezas que podem ser representadas na reta real, denotada por R, e sãodenominadas de grandezas escalares. Por outro lado, existem outros tipos de grandezas, como porexemplo: força, velocidade, etc., as quais podem ser representadas por segmentos de reta orientadosnum plano, ou seja, além de ter magnitude, tem uma direção apropriada e partem de um ponto dereferência, denotado por O. Mais ainda, existem grandezas que podem ser representadas no espaço.Em geral, este tipo de elemento é denominado de vetor, e será este o assunto abordado neste capítulo.
2.1 Vetores em R2
Começaremos apresentando as operações de soma e multiplicação por um escalar, entre vetores deR2.
AdiçãoDados os vetores u e w ∈ R2. A soma dos vetores u e w, denotada por u+w, se obtêm pelachamada lei do paralelogramo, isto é, u+w é a diagonal do paralelogramo formado por u e w;veja o item(a) da figura a seguir.
28 / 165
Matemática Computacional
O
u
w
u + w
Multiplicação por um escalarDados um escalar α ∈R e um vetor u∈R2. A resultante da multiplicação entre α e u, denotadapor αu, se obtêm multiplicando a magnitude de u por α , onde αu preserva a mesma direçãoque u, se α ≥ 0, ou tem a direção oposta que u, se α < 0; o item(b) da figura acima, ilustra estefato para α = 2 e α =−6
5 .
Representando estes vetores no plano cartesiano, e escolhendo O = (0,0) como a origem dos eixoscoordenados, podemos determinar cada vetor de forma única pelas coordenadas do seu ponto final.
Nota 2.1Neste livro, identificaremos de agora em diante, um vetor pelo seu ponto final, isto é, o parordenado (a,b) ∈ R2 denotará o vetor com ponto inicial O e ponto final (a,b).
Desta forma, as operações definidas acima podem ser reescritas da seguinte forma:
AdiçãoDados u = (a,b) e w = (c,d), dois vetores em R2. Então (a+ c,b+d) = u+w; veja o item(a)da figura a seguir.
Multiplicação por um escalarDados o escalar α e o vetor u = (a,b). Então (αa,αb) = αu; veja o item(b) da figura anterior.
29 / 165

Matemática Computacional
Exemplo 2.1Consideremos os seguintes vetores:
u = (1,−3), v = (5,6) e o escalar α = 7.
Entãou+ v = (1,−3)+(5,6) = (1+5,−3+6) = (6,3).
α u = 7(1,−3) = (7(1),7(−3)) = (7,−21).
α v = 7(5,6) = (7(5),7(6)) = (35,42).
2.2 Vetores em Rn
Continuando, as definições de adição e multiplicação são generalizadas em Rn, com a n-upla ordenada(u1,u2, . . . ,un) denotando um vetor em Rn, com ponto inicial O e ponto final (u1,u2, . . . ,un).
Definição 2.1
i. Uma n-upla, é denotada por u = (u1,u2, . . . ,un) e chamada de vetor ou ponto ;
ii. O conjunto de todas as n-uplas de números reais, é denominado de n-espaço e é denotadopor Rn;
iii. Os números reais ui se chamam de coordenadas ou componentes do vetor u.
Importante 2.1Quando trabalhamos com o espaço Rn, usamos o termo escalar para os elementos de R.
Exemplo 2.2Consideremos os seguintes vetores:
(1,0), (−2,5),(
1,√
2,15,9,0
), e
(−1,−2,−π,−
√3,10000
).
Os dois primeiros vetores tem duas componentes, logo pertencem a R2, enquanto que os dois últimosvetores tem cinco componentes, logo pertencem a R5.
Definição 2.2Sejam os vetores u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn. Diz-se que u e w são iguais,e se denota u = w, se suas coordenadas correspondentes são iguais, isto é,
u1 = w1, u2 = w2, . . . , un = wn.
30 / 165

Matemática Computacional
Exemplo 2.3
a. Os vetores u =−3(13 ,−2) e v = (−1,6) de R2 são iguais.
b. Os vetores u = (1,3,5) e w = (3,5,1) de R3 não são iguais, devido que nenhuma das compo-nentes correspondentes são iguais.
c. Se (x−1,y−2,z−3) = (3,2,1), então por igualdade de vetores temos que
x−1 = 3, y−2 = 2 e z−3 = 1.
Resolvendo cada igualdade temos que x = 4, y = 4, z = 4.
2.2.1 Adição de vetores e multiplicação por um escalar
Definição 2.3Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
i. a adição de u e w, denotada por u+w, é o vetor que se obtêm somando coordenada a coorde-nada:
u+w = (u1 +w1,u2 +w2, . . . ,un +wn);
ii. a multiplicação de um número α ∈ R pelo vetor u, denotada por αu, é o vetor que se obtêmmultiplicando cada coordenada de u por α:
αu = (αu1,αu2, . . . ,αun).
iii. o vetor nulo em Rn, denotado por 0, é definido por
0 = (0,0, . . . ,0);
além disso, para qualquer vetor u ∈ Rn, temos que
u+0 = (u1 +0,u2 +0, . . . ,un +0) = (u1,u2, . . . ,un) = u = 0+u.
Nota 2.2Dados u e w em Rn. Então
a. u+w e αu são também vetores em Rn;
b.−u =−1u e u−w = u+(−w);
c. A adição de vetores com diferente número de componentes não está definida.
31 / 165

Matemática Computacional
Exemplo 2.4Sejam u = (1,2,3,4) e w = (6,7,−1,3) vetores em R4. Então:
u+w = (1,2,3,4)+(6,7,−1,3) = (1+6,2+7,3+(−1),4+3) = (7,9,2,7);
−2u = −2(1,2,3,4) = (−2(1),−2(2),−2(3),−2(4)) = (−2,−4,−6,−8);
3u−4w = 3u+(−4w)= 3(1,2,3,4)−4(6,7,−1,3)= (3(1),3(2),3(3),3(4))+((−4)6,(−4)7,(−4)(−1),(−4)3)= (3,6,9,12)+(−24,−28,4,−12)= (3+(−24),6+(−28),9+4,12+(−12)) = (−21,−22,13,0).
A seguir resumiremos as propriedades básicas das operações de adição de vetores e multiplicação deum vetor por um escalar em Rn.
Teorema 2.1Sejam os vetores u,v,w ∈ Rn e os escalares α,β ∈ R. Então
i. (u+ v)+w = u+(v+w);
ii. u+0 = u;
iii. u+(−u) = 0;
iv. u+ v = v+u;
v. α(u+ v) = αu+αv;
vi. (α +β )u = αu+βu;
vii. (αβ )u = α(βu);
viii. 1u = u.
Importante 2.2Sejam u e w vetores em Rn, tal que u = αw, para algum escalar não nulo α ∈ R. Então:
a. Se α > 0, diz-se que u tem a mesma direção de w;
b. Se α < 0, diz-se que u tem a direção oposta de w.
2.2.2 Produto interno
A seguir definiremos um novo tipo de produto, denominado de produto escalar ou produto interno,entre dois vetores em Rn. Este conceito é importante para o bom entendimento dos próximos capítu-los.
Definição 2.4Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
32 / 165

Matemática Computacional
i. O produto interno de u e w, denotado por u ·w, é o escalar que se obtêm multiplicandoas componentes correspondentes dos vetores e, logo depois, somando os produtos resul-tantes, isto é:
u ·w = u1w1 +u2w2 + · · ·+unwn =n
∑i=1
uiwi;
ii. diz-se que os vetores u e w são ortogonais ou perpendiculares, se seu produto interno éigual a zero, isto é:
u ·w = 0.
Exemplo 2.5Sejam u = (1,2,3), v = (6,7,1) e w = (4,−5,2). Então
u · v = (1)(6)+(2)(7)+(3)(1) = 6+14+3 = 23;v ·w = (6)(4)+(7)(−5)+(1)(2) = 24−35+2 = −8;u ·w = (1)(4)+(2)(−5)+(3)(2) = 4−10+6 = 0.
Portanto, do item ii da definição acima, u e v não são ortogonais, v e w não são ortogonais e, u e wsão ortogonais.
As propriedades básicas do produto interno em Rn são apresentadas no seguinte resultado.
Teorema 2.2Para todo vetor u,v,w ∈ Rn e todo escalar α ∈ R:
i. (u+ v) ·w = u ·w+ v ·w;
ii. (αu) · v = α(u · v)iii. u · v = v ·u;
iv. u ·u≥ 0;
v. u ·u = 0 ⇔ u = 0.
Nota 2.3O espaço Rn munido com as operações de adição, multiplicação por um escalar e produtointerno é conhecido como o n-espaço euclidiano.
2.2.3 Norma e distância em Rn
Definição 2.5Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
33 / 165

Matemática Computacional
i. a norma de u, denotada por ‖u‖ , é definida como a raíz quadrada não negativa do produtointerno u ·u:
‖u‖=√
u ·u =√
u21 +u2
2 + · · ·+u2n =
√n
∑i=1
u2i ;
ii. a distância entre u e w, denotada por d(u,w), é definida por:
d(u,w) =√
(u1−w1)2 +(u2−w2)2 + · · ·+(un−wn)2 =
√n
∑i=1
(ui−wi)2;
iii. diz-se que u ∈ Rn é um vetor unitário se a norma deste é 1, isto é:
‖u‖= 1.
Exemplo 2.6Sejam u = (1,−2,3) e w = (5,1,−2). Então
‖u‖=√
(1)2 +(−2)2 +(3)2 =√
14;
‖w‖=√
(5)2 +(1)2 +(−2)2 =√
30;
d(u,w) =√
(1−5)2 +(−2−1)2 +(3− (−2))2 =√
50.
Além disso, já que‖u‖ 6= 1 e ‖w‖ 6= 1
estes vetores não são unitários.
Nota 2.4Dados os vetores u e w em Rn, temos que:
a. ‖u‖2 = u ·u;
b. Se u 6= 0, então o vetor u definido por
u :=u‖u‖
é um vetor unitário, e tem a mesma direção de u;
c. d(u,0) = ‖u‖;
d. d(u,w) = ‖u−w‖;
e. d(u,w) =√‖u‖2−2(u ·w)+‖w‖2;
f. Do item ii da definição acima, temos que d(u,w) = d(w,u).
34 / 165

Matemática Computacional
Importante 2.3A norma definida no item i da Definição 2.5, é conhecida como ‖ · ‖2. Embora que, nestelivro somente trabalharemos com esta norma em Rn, a definição formal é dada a seguir.Uma norma vetorial em Rn é uma aplicação, denotada por ‖ · ‖, tal que:
‖ · ‖ : Rn −→ Ru 7−→ ‖u‖
satisfaz às seguintes condições:
i. ‖u‖ ≥ 0, ∀u ∈ Rn e ‖u‖= 0⇔ u = 0;
ii. ‖αu‖= |α|‖u‖, ∀α ∈ R e ∀u ∈ Rn;
iii. ‖u+ v‖ ≤ ‖u‖+‖v‖, ∀u e v ∈ Rn.
Assim, temos as seguintes normas em Rn:
Norma 1
‖u‖1 =n
∑i=1|ui|.
Norma Infinito
‖u‖∞ = max1≤i≤n
|ui|.
Norma p
‖u‖p =
(n
∑i=1
(ui)p
) 1p
, 1≤ p≤ ∞.
As propriedades vistas no Teorema 2.2, sobre o produto interno, implicam nas seguintes propriedadesda norma.
Teorema 2.3Para todo vetor u, w ∈ Rn e todo escalar α ∈ R:
i. ‖u‖> 0, se u 6= 0;
ii. ‖u‖= 0, se u = 0;
iii. ‖αu‖= |α|‖u‖;iv. ‖u+w‖ ≤ ‖u‖+‖w‖.
35 / 165

Matemática Computacional
Nota 2.5
a. O item iv do teorema acima é conhecido, na literatura, como a Desigualdade Trian-gular.
b. Se consideramos, em particular, R2 e os pontos p = (a,b) e q = (c,d), temos que
‖p‖=√
a2 +b2, e d(p,q) =√
(a− c)2 +(b−d)2.
Em outras palavras, ‖p‖ corresponde à magnitude do segmento de reta que vai desdea origem até o ponto p e d(p,q) corresponde à distância entre os pontos p e q. Oitem(a) e item(b) da figura a seguir ilustram ‖p‖ e d(p,q), respectivamente.
Com a teoria estudada até o momento, estamos prontos para mostrar uma interpretação geométricado produto interno de dois vetores em R2. O item(a) da figura a seguir, mostra dois vetores não nulosu e w, formando entre si um ângulo θ ∈ (0, π
2 ). Por outro lado, no item(b) temos três vetores, omesmo vetor u e dois vetores ortogonais p e q, cuja soma resulta em u, ainda mais, q = αw, desdeque 0 < θ < π
2 , α > 0.
(a) (b)
u
w
θ θ
u = αw + p
q = αw
p
O seguinte resultado é uma relação fundamental na teoria de vetores, conhecida na literatura como adesigualdade de Cauchy-Schwarz.
Teorema 2.4 (Teorema de Cauchy-Schwarz)Sejam u,w ∈ Rn. Então,
|u ·w| ≤ ‖u‖‖w‖.
36 / 165

Matemática Computacional
Importante 2.4Da desigualdade de Cauchy-Schwarz, obtemos que
−1≤ u ·w‖u‖‖w‖
≤ 1.
O que pela sua vez implica na existência de um único número real θ ∈ [0,π] tal que:
cos(θ) =u ·w‖u‖‖w‖
.
Definição 2.6Sejam u,w ∈ Rn, tais que w 6= 0.
i. O vetor projeção de u sobre v, é definido por αw, onde
α =u ·w‖u‖‖w‖
;
ii. Se u e w são ambos não nulos, o ângulo θ entre os vetores u e w é definido
θ = arccos(
u ·w‖u‖‖w‖
).
Nota 2.6
a. A função arcocosseno restringe θ ao intervalo [0,π];
b. Se u ·w = 0, então θ = π
2 (ou θ = 90◦) o qual coincide com a definição de ortogonali-dade.
2.2.4 Vetores coordenados unitários
Definição 2.7Seja o vetor ei em Rn, definido por:
ei = (0, . . . ,0,1,0, . . . ,0)
onde a i-ésima componente de ei é 1 e todas as outras componentes são zero.
i. ei é chamado de i-ésimo vetor coordenado unitário;
ii. os n vetores:
e1 = (1,0, . . . ,0), e2 = (0,1, . . . ,0), . . . ,en = (0,0, . . . ,1)
são chamados de vetores coordenados unitários.
37 / 165

Matemática Computacional
Exemplo 2.7
a. Em R3 temos os seguintes vetores coordenados unitários:
e1 = (1,0,0), e2 = (0,1,0) e e3 = (0,0,1).
b. Em R5 temos os seguintes vetores coordenados unitários:
e1 = (1,0,0,0,0), e2 = (0,1,0,0,0), e3 = (0,0,1,0,0),e4 = (0,0,0,1,0) e e5 = (0,0,0,0,1).
Importante 2.5
a. O termo de “vetor coordenado unitário” provém do fato de cada vetor ei ter norma 1isto é,
‖ei‖= 1 ∀ i = 1,2, . . . ,n.
b. Todos os vetores coordenados unitários são ortogonais entre si, isto é, o produto in-terno de qualquer par de vetores é zero:
ei · e j = 0, se i 6= j;
Assim obtemos o seguinte resultado
Teorema 2.5Todo vetor u = (u1,u2, . . . ,un) ∈ Rn pode ser expresso da forma:
u = u1e1 +u2e2 + · · ·+uiei + · · ·+unen =n∑
k=1unen.
Além disso, esta representação é única, isto é, se
u =n
∑k=1
ukek e u =n
∑k=1
wkek,
então uk = wk para cada k = 1,2, . . . ,n.
Na seguinte figura vemos uma ilustração deste fato para n = 3.
38 / 165
Matemática Computacional
z
x
y
e1
e3
e2
u1e1
u3e3
u2e2
u = ( u1, u2, u3) = u1e1 + u2e2 + u3e3
u1 e
1 + u2 e
2
Definição 2.8Dados w1,w2, . . . ,wn vetores em Rn. Denomina-se combinação linear dos vetoresw1,w2, . . . ,wn à soma da forma
α1w1 +α2w2 + · · ·+αnwn =n
∑i=1
αiwi,
onde αi ∈ R para todo i = 1, . . . ,n.
Nota 2.7Do Teorema anterior temos que qualquer vetor de Rn pode ser expresso como uma com-binação linear dos vetores coordenados unitários, e1,e2, . . . ,en, ou seja, os vetores coorde-nados unitários “geram” Rn. Existem em Rn outros conjuntos, de n vetores, diferentes dose1,e2, . . . ,en, que também geram Rn.
2.2.5 Envoltória linear de um conjunto finito de vetores
Definição 2.9Sejam S = {u1,u2, . . . ,uk} um conjunto de k vetores de Rn e w ∈Rn, onde k pode ser menor ouigual, ou maior, que a dimensão do espaço Rn, ou seja, k ≤ n ou k > n.
i. Se w é representado como uma combinação linear dos u1,u2, . . . ,uk, isto é
w = α1u1 +α2u2 + · · ·+αkuk =k
∑i=1
αiui,
para alguns escalares α1,α2, . . . ,αk ∈ R, então diz-se que S gera o vetor w.
ii. O conjunto de todos os vetores gerados por S é denominado a envoltória linear de S e édenotado por L(S).
iii. Diz-se que S gera o espaço Rn se L(S) = Rn.
39 / 165

Matemática Computacional
Nota 2.8A envoltória linear de S é o conjunto de todas as possíveis combinações lineares de vetoresem S.
Exemplo 2.8
a. Seja S = {u}. Então a envoltória linear de S é:
L(S) = {λu : λ ∈ R}.
b. Seja S = {u,v}. Então a envoltória linear de S é:
L(S) = {λ u+β v : λ , β ∈ R}.
c. Seja S = {u,−u}. Então a envoltória linear de S é:
L(S) = {λ u+β (−u) : λ , β ∈ R}= {(λ −β )u : λ , β ∈ R}.
Fazendo γ = λ −β , temos queL(S) = {γu : γ ∈ R}
Nota 2.9O vetor nulo 0 pode ser gerado por qualquer conjunto S = {u1,u2, . . . ,uk}, pois:
0 = 0u1 +0u2 + · · ·+0uk.
A representação, α1 = 0, α2 = 0, . . ., αk = 0, é denominada de representação trivial dovetor nulo. Porém, podem existir combinações lineares não triviais que representem o vetornulo. De fato, se u2 = 3u1, então obtemos infinitas representações não triviais do 0:
0 = 3λu1−λu2 +0u3 + · · ·+0uk, para qualquer λ ∈ R.
Agora vamos focar nossa atenção nos conjuntos S que geram os vetores de forma única.
Definição 2.10Sejam o conjunto S = {u1,u2, . . . ,uk} de vetores de Rn e w ∈ Rn. Diz-se que S gera o vetor wde forma única se:
i. S gera w;
ii. w =k∑
i=1αiui e w =
k∑
i=1βiui implica que αi = βi para todo i = 1, . . . ,k.
40 / 165

Matemática Computacional
Exemplo 2.9
a. Seja o conjunto S = {(1,0),(0,1),(1,1)} e w = (2,2). Então, temos que
w = 2(1,0)+2(0,1)+0(1,1),
ou seja, w é gerado por S. Porém, também temos que
w = 0(1,0)+0(0,1)+2(1,1).
Portanto, w não é gerado de forma única por S.
b. Seja o conjunto S = {(1,0),(0,1)} e w = (2,2). Então, temos que
w = 2(1,0)+2(0,1),
ou seja, w é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere w.
Portanto, w é gerado de forma única por S.
c. Seja o conjunto S = {(1,0),(1,1)} e w = (2,2). Então, temos que
w = 0(1,0)+2(1,1),
ou seja, w é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere w.
Portanto, w é gerado de forma única por S.
Teorema 2.6Seja um conjunto S ⊂ Rn. Então, os vetores de L(S) são gerados de forma única por S se, esomente se, S gera de forma única o vetor nulo.
Exemplo 2.10
a. Seja o conjunto S = {(1,0),(0,1),(1,1)}. Então, temos que
0 = 1(1,0)+1(0,1)−1(1,1),
ou seja, 0 é gerado por S. Porém, também temos que
0 =−2(1,0)+−2(0,1)+2(1,1).
Assim, 0 não é gerado de forma única por S. Portanto, segundo o teorema acima, existemvetores em L(S) que não são gerados de forma única.
b. Seja o conjunto S = {(1,0),(0,1)}. Então, temos que
0 = 0(1,0)+0(0,1).
ou seja, 0 é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere 0.Assim, 0 é gerado de forma única por S. Portanto, segundo o teorema acima, todos os vetoresem L(S) são gerados de forma única.
41 / 165
Matemática Computacional
c. Seja o conjunto S = {(1,0),(1,1)}. Então, temos que
0 = 0(1,0)+0(1,1).
ou seja, 0 é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere 0.Assim, 0 é gerado de forma única por S. Portanto, segundo o teorema acima, todos os vetoresem L(S) são gerados de forma única.
2.2.6 Independência linear
O teorema anterior, mostra a importância dos conjuntos de vetores que geram de forma única o vetornulo, tais conjuntos são de especial distinção, por esse motivo este é o assunto bordado a seguir.
Definição 2.11Seja S = {u1,u2, . . . ,uk} ⊂ Rn. Se S gera de forma única o vetor 0, então se diz que S é umconjunto de vetores linearmente independente. Caso contrário, se diz que é linearmentedependente. Em outras palavras:
i. a independência linear significa que S gera o vetor nulo de forma única, com a represen-tação trivial, isto é,
sek
∑i=1
αiui = 0 implica que αi = 0, ∀i = 1, . . . ,k;
ii. a dependência linear significa que S gera o vetor nulo de forma não trivial, isto é,
existem β1, . . . ,βk ∈ R não todos nulos :k
∑i=1
βiui = 0.
Exemplo 2.11Segundo o exemplo anterior temos que:
a. O conjunto S = {(1,0),(0,1),(1,1)} é um conjunto de vetores linearmente dependente;
b. Os conjuntos S = {(1,0),(0,1)} e S = {(1,0),(1,1)} são conjuntos de vetores linearmenteindependentes.
Importante 2.6
a. Por convenção, o conjunto vazio é linearmente independente;
b. Os vetores coordenados unitários e1,e2, . . . ,en de Rn, geram o vetor 0, de forma única,assim S = {e1,e2, . . . ,en} é linearmente independente.
c. Qualquer conjunto de vetores que contém o vetor nulo é linearmente dependente. Defato, se S = {u1 = 0,u2, . . . ,uk}, temos que o vetor nulo possui uma representaçãonão trivial:
0 = (2)u1 +0u2 + · · ·+0uk = (2)0+0u2 + · · ·+0uk.
42 / 165

Matemática Computacional
O próximo resultado estabelece que, se dado um conjunto S adicionamos a este qualquer vetor daenvoltória linear de S, L(S), obteremos um conjunto linearmente dependente.
Teorema 2.7Seja S = {u1,u2, . . . ,uk} um conjunto linearmente independente de k vetores de Rn, e seja L(S)a envoltória linear de S. Então, qualquer subconjunto de k+ 1 vetores de L(S) é linearmentedependente.
No próximo resultado, veremos a relação entre o conceito de ortogonalidade e a independência linear.
Definição 2.12Dado um conjunto de vetores S = {u1,u2, . . . ,uk} de Rn. Diz-se que:
i. S é ortogonal se
ui ·u j = 0 para todo i 6= j.
Isto é, dois vetores diferentes quaisquer de um conjunto ortogonal são perpendiculares.ii. S é ortonormal, se S é ortogonal e cada um dos vetores ui são unitários, isto é,
‖ui‖= 1 para todo i = 1, . . . ,k.
Importante 2.7O conjunto dos vetores S = {e1,e2, . . . ,en} é um conjunto ortonormal.
Exemplo 2.12
a. O conjunto S := {(−1,2),(4,2)} é um conjunto ortogonal;
b. Para qualquer θ ∈ R se verifica que:
sen2θ + cos2
θ = 1.
Assim, o conjunto S := {(cosθ ,senθ),(−senθ ,cosθ)} é um conjunto ortonormal, para qual-quer θ ;
c. O conjunto S :={(
1√3, 1√
3, 1√
3
),(− 2√
6, 1√
6, 1√
6
),(
0,− 1√2, 1√
2
)}é um conjunto ortonormal.
Teorema 2.8Se S = {u1,u2, . . . ,uk} é um conjunto ortogonal de k vetores não nulos de Rn, então S é linear-mente independente. Além disso,
i. se w ∈ Rn é gerado por S, isto é:
w =k
∑i=1
αiui,
então os escalares αi são dados por:
αi =w ·ui
‖ui‖2 ∀ i = 1,2, . . . ,k;
43 / 165

Matemática Computacional
ii. se S é um conjunto ortonormal, então cada αi é dado por:
αi = w ·ui ∀ i = 1,2, . . . ,k.
2.2.7 Bases
Devido à importância de estudar os conjuntos de vetores do Rn que geram qualquer vetor de Rn, deforma única. Introduzimos nesta seção a definição de uma base em Rn.
Definição 2.13Seja o conjunto S = {u1,u2, . . . ,un} de vetores de Rn. Se S gera qualquer vetor em Rn de formaúnica, então diz-se que S é uma base em Rn. Em outras palavras, uma base é um conjuntolinearmente independente que gera todo o espaço Rn. Além disso, se:
i. S é ortogonal, então diz-se que S é uma base ortogonal;ii. S é ortonormal, então diz-se que S é uma base ortonormal.
Importante 2.8O conjunto de vetores coordenados unitários {e1,e2, . . . ,en} de Rn é uma base para Rn.Mais ainda, desde que:
i. ei · e j = 0, para todo j 6= i = 1, . . . ,n, esta base também é uma base ortogonal.
ii. ‖ei‖1, para todo i = 1, . . . ,n, esta base também é uma base ortonormal.
Exemplo 2.13
a. O conjunto ortogonal S := {(−1,2),(4,2)} é uma base ortogonal de R2, porém não é uma baseortonormal, pois
‖(−1,2)‖=√
5 6= 1 e ‖(4,2)‖=√
20 = 2√
5 6= 1.
b. O conjunto ortonormal S := {(cosθ ,senθ),(−senθ ,cosθ)} é uma base ortonormal de R2, paraqualquer θ ;
c. O conjunto ortonormal S :={(
1√3, 1√
3, 1√
3
),(− 2√
6, 1√
6, 1√
6
),(
0,− 1√2, 1√
2
)}é uma base or-
tonormal de R3.
O seguinte resultado, afirma que qualquer base de um espaço de dimensão n, contém n elementos.
Teorema 2.9Todas as bases que geram Rn tem as seguintes propriedades:
i. Toda base tem exatamente n vetores;
ii. Qualquer conjunto de vetores linearmente independentes é um subconjunto de algumabase;
iii. Qualquer conjunto de n vetores linearmente independente é uma base.
44 / 165

Matemática Computacional
2.3 Recapitulando
Neste capítulo, abordamos as noções básicas e necessárias sobre vetores em Rn, já que esta teoria éfundamental para o bom entendimento deste livro. Em primeiro lugar, apresentamos o conceito devetores em R2, e logo depois, em Rn. Assim como, as operações e propriedades relativas a estes.
Desta forma, nas seções deste capítulo, fomos estudando os conceitos de produto interno, norma edistância entre vetores; foram também apresentados diversos exemplos ilustrando esses tópicos.
Também foi abordado o conceito de independencia linear, mais precisamente, dado um conjunto devetores em Rn, saber determinar se este é linearmente independente ou não; se é uma base ou nãode Rn.
No próximo capítulo, estudaremos as noções básicas e necessárias sobre as matrizes, importanteobjeto de estudo deste livro, em particular dos capítulos 4 e 5.
2.4 Atividades
1. Sejam u = (1,3,7), v = (2,−5,5) e w = (1,2,−5) vetores de R3. Determine as componentesdos seguintes vetores:
i. u+ v ii. u− v iii. u+ v−w
iv. 3u−2v−7w v. u+2v−3w vi. −5u+ v−3w
2. Esboce os vetores que unem a origem aos pontos u = (2,1) e v = (1,3). Na mesma figura,esboce o vetor que une a origem ao ponto w = u+ λv, para λ = 1
2 , λ = 34 , λ = 1, λ = 2,
λ =−1.
3. Sejam u = (2,1) e v = (1,3). Prove que todo vetor w = (w1,w2) de R2 pode ser expresso naforma w = αu+βv. Expresse α e β em função de w1 e w2.
4. Sejam u= (1,1,1), v= (0,1,1) e w= (1,1,0) vetores de R3 e z=αu+βv+γw, onde α,β ,γ ∈R.
i. Determine as componentes de z;
ii. Se z = 0 mostre que α = β = γ = 0;
iii. Calcule α,β ,γ tais que z = (1,2,3).
5. Sejam u = (1,2,3,4), v = (−1,2,−3,0) e w = (0,1,0,1) vetores de R4. Calcule os seguintesprodutos internos
i. u · v;
ii. v ·w;
iii. u · (v+w);
iv. (u− v) ·w.
6. Sejam u = (2,1,−1) e v = (1,−1,2). Determine um vetor não nulo w de R3 tal que u ·w =v ·w = 0.
45 / 165

Matemática Computacional
7. Sejam u = (2,−1,2) e v = (1,2,−2). Determine dois vetores w,z∈R3 tais que verifiquem cadauma das seguintes condições:
i. u = w+ z;
ii. v · z = 0;
iii. w paralelo a v.
8. Sejam u = (1,2,3,4,5) e v = (1, 12 ,
13 ,
14 ,
15). Determine dois vetores w,z ∈ R5 que verifiquem
cada uma das seguinte condições:
i. v = w+2z;
ii. z ·u = 0;
iii. w paralelo a u.
9. Sejam u = (2,−1,5), v = (−1,−2,3) e w = (1,−1,1) vetores de R3. Calcule a norma dosseguintes vetores:
i. u+ v;
ii. u− v;
iii. u+ v−w;
iv. u− v+w.
10. Em cada caso determine um vetor v ∈ R2 tal que u · v = 0 e ‖u‖= ‖v‖, se:
i. u = (1,1);
ii. u = (1,−1);
iii. u = (2,−3);
iv. u = (u1,u2).
11. Sejam u = (1,−1,2) e v = (2,1,−1). Determine um vetor não nulo w ∈ R3, ortogonal a u e av.
12. Sejam u = (1,2) e v = (3,4) vetores de R2. Determine os vetores w e z de R2 tais que u = w+z,sendo w paralelo a v e z ortogonal a v.
13. Dados os vetores u = (2,−1,1), v = (1,2,−1) e w = (1,1,−2) de R3. Calcule os vetores z daforma αv+βw ortogonais ao vetor u e de norma 1.
14. Determine a projeção de u sobre v se u = (1,2,3) e v = (1,2,2).
15. Determine a projeção de u sobre v se u = (4,3,2,1) e v = (1,1,1,1).
16. Mostre que o ângulo que formam os vetores u = (1,2,1) e v = (2,1,−1) é duas vezes o ânguloformado por w = (1,4,1) e z = (2,5,5).
17. Sejam os vetores u,v,w ∈R3 tais que: ‖u‖= ‖w‖= 5, ‖v‖= 1, ‖u−v+w‖= ‖u+v+w‖. Seo ângulo que formam os vetores u e v é π
8 . Calcule o ângulo entre w e z.
18. Dados os vetores não nulos u,v,w ∈ Rn. Se o ângulo entre u e w é igual ao ângulo entre v,w.Prove que w é ortogonal ao vetor ‖v‖u−‖u‖v.
46 / 165

Matemática Computacional
19. Seja θ o ângulo entre os vetores u e v de Rn. Calcule o valor limite de θ quando n→+∞. Se
i. u = (1,1, . . . ,1) e v = (1,2, . . . ,n);
ii. u = (2,4,6, . . . ,2n) e v = (1,3,5, . . . ,2n−1).
20. Sejam u = (1,−2,4), v = (3,1,−2). Calcule
i. u+ v;
ii. −2u;
iii. 2u−4v;
iv. u · v;
v. ‖u‖, ‖v‖;vi. d(u,v).
21. Sejam u = (2,−1,0,1,−2), v = (1,1,−1,−1), w = (2,0,−2,0). Calcule
i. 2u−3v;
ii. 5u−4v−3w;
iii. −u+3v−2w;
iv. u · v u ·w, v ·w;
v. ‖u‖, ‖v‖, ‖w‖;vi. d(u,v), d(v,w).
22. Determine k de modo que os vetores u e v sejam ortogonais.
i. u = (3,k,−2), v = (6,−4,−3);
ii. u = (5,k,−4,2), v = (1,−3,2,2k);
iii. u = (1,7,k+2,−22), v = (3,k,−3,k).
23. Calcule λ , β e γ se:
i. (3,−1,2) = λ (1,1,1,)+β (1,−1,0)+ γ(1,0,0);
ii. (−1,3,3) = λ (1,1,0)+β (0,0,−1)+ γ(0,1,1).
24. Sejam e1 = (1,0,0), e2 = (0,1,0), e3 = (0,0,1). Verifice que para qualquer vetor u = (x,y,z) ∈R3:
i. u = xe1 + ye2 + ze3;
ii. u · e1 = x;
iii. u · e2 = y;
iv. u · e3 = z.
25. Sejam {e1 =(1,0),e2 =(0,1)} vetores de R2. Calcule α,β ∈R tais que α(e1−e2)+β (e1+e2)seja igual a
i. e1;
47 / 165
Matemática Computacional
ii. e2;
iii. 2e1−4e2;
iv. 5e1 +7e2.
26. Sejam u = (1,2), v = (2,−4) e w = (2,−3) vetores de R2. Calcule α,β ∈ R tais que w =αu+βv.
27. Sejam u = (2,−1,1), v = (1,2,−1) e w = (2,−11,7) vetores de R3. Calcule α,β ∈R tais quew = αu+βv.
28. Calcule t ∈R tal que os vetores (1+t,1−t) e (1−t,1+t) de R2 são linearmente independentes.
29. Sejam e1 e e2 os vetores coordenados de R2 e S = {e1,e1 + e2}.
i. Mostre que S é linearmente independente ;
ii. Mostre que e2 pertence à envoltória linear de S;
iii. Expresse 3e1−4e2 como combinação linear de e1 e e1 + e2;
iv. Prove que L(S) = R2.
30. Considere os seguintes vetores u = e1, v = e1 + e2 e w = e1 + e2 +3e3 de R3.
i. Prove que {u,v,w} é linearmente independente;
ii. Expresse os vetores e2 e e3 como combinação linear de u, v e w;
iii. Expresse 2e1 +3e2−4e3 como combinação linear de u, v e w;
iv. Demostre que {u,v,w} é uma base de R3.
31. Sejam u = (1,1,1,0), v = (0,1,1,1) e w = (1,1,0,0) vetores de R4.
i. Determine se o conjunto {u,v,w} é linearmente independente ou dependente;
ii. Obtenha um vetor não nulo y tal que o conjunto {u,v,w,y} seja linearmente dependente;
iii. Obtenha um vetor z tal que o conjunto {u,v,w,z} seja linearmente independente.
32. Dados os seguintes vetores em R3:
i. Prove que {(√
3,1,0),(1,√
3,1),(0,1,√
3)} é linearmente independente;
ii. Prove que {(√
2,1,0),(1,√
2,1),(0,1,√
2)} é linearmente dependente;
iii. Calcule t ∈ R tal que {(t,1,0),(1, t,1),(0,1, t)} seja linearmente dependente.
33. Encontre duas bases para R3 que contenham os vetores (0,1,1) e (1,1,1).
34. Encontre duas bases para R4 que contenham os vetores (0,1,1,1) e (1,1,1,1).
Feedback sobre o capítuloVocê pode contribuir para melhoria dos nossos livros. Encontrou algum erro? Gostaria desubmeter uma sugestão ou crítica?Para compreender melhor como feedbacks funcionam consulte o guia do curso.
48 / 165
Matemática Computacional
Capítulo 3
Matrizes
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Compreender o conceito de matrizes reais;
• Familiarizar-se com as operações de soma e produto entre matrizes;
• Entender as principais propriedades das matrizes;
• Compreender os conceitos de posto e determinantes, e suas principais propriedades;
• Entender o conceito de matriz adjunta;
• Entender o conceito de matriz inversa e, caso exista, aprender a determiná-la.
Neste capítulo estudaremos as matrizes e algumas operações algebraicas definidas entre elas. Em-bora somente, neste livro, trabalhemos com números, vetores e matrizes reais, existe o conjunto dosnúmeros complexos, denotado por C, no qual todos estes conceitos são generalizados.
3.1 Definições básicas
Definição 3.1uma matriz sobre R, ou simplesmente uma matriz real, é uma ordenação retangular da forma:
a11 a12 . . . a1na21 a22 . . . a2n
......
...am1 am2 . . . amn
onde ai j ∈ R para todo i ∈ {1,2, . . . ,m} e j ∈ {1,2, . . . ,n}.
i. Uma matriz também é denota por [ai j]m×n.
ii. As m n-uplas horizontais
[a11, a12, . . . , a1n
],[a21, a22, . . . , a2n
]. . .
[am1, am2, . . . , amn
]são as linhas da matriz;
49 / 165
Matemática Computacional
iii. As n m-uplas verticais a11a21
...am1
,
a12a22
...am2
. . .
a1na2n
...amn
são as colunas da matriz;
iv. O elemento ai j é chamado de componente i j, e se encontra na i-ésima linha e a j-ésimacoluna;
v. Uma matriz com m linhas e n colunas é denominada uma matriz de ordem m×n.
Exemplo 3.1Dada a matriz [
1 −2 3−5 4 0
].
Ela é uma matriz de ordem 2×3. Além disso, tem 2 linhas:[1 −2 3
]e[−5 4 0
]e 3 colunas: [
1−5
],
[−24
]e[
30
].
Nota 3.1As matrizes geralmente são denotadas por letras maiúsculas A,B, . . ., e suas componentespor letras minúsculas.
Definição 3.2Sejam A e B matrizes de ordem m×n. Diz-se que A e B são iguais, isto é, A = B, se elas têm omesmo número de linhas e de colunas, e seus elementos correspondentes são iguais.
Importante 3.1Da definição acima dadas duas matrizes de ordem m×n,
A =
a11 a12 . . . a1na21 a22 . . . a2n
......
...am1 am2 . . . amn
e B =
b11 b12 . . . b1nb21 b22 . . . b2n
......
...bm1 bm2 . . . bmn
estas são iguais se
a11 = b11, a12 = b21 . . . a1n = b1na21 = b21, a22 = b22 . . . a2n = b2n
. . .am1 = bm1, am2 = bm2 . . . amn = bmn
50 / 165

Matemática Computacional
Exemplo 3.2Determinemos x, y, z e w tal que [
x+ y 2z+wx− y z−w
]=
[3 51 4
].
SoluçãoDesde que [
x+ y 2z+wx− y z−w
]=
[3 51 4
]Da nota acima temos que
x+ y = 3x− y = 12z+w = 5z−w = 4
Ou seja, para determinar x, y, z e w, precisamos resolver cada uma destas equações. Assim,
x+ y = 3 ⇒ x = 3− yx− y = 1 ⇒ x = 1+ y
}⇒ 3− y = 1+ y ⇒ y = 1 ⇒ x = 2.
2z+w = 5 ⇒ w = 5−2zz−w = 4 ⇒ w = z−4
}⇒ 5−2z = z−4 ⇒ z = 3 ⇒ w = −1.
Portanto,x = 2, y = 1, z = 3 e w =−1.
3.2 Tipos especiais de matrizes
Ao manipular as matrizes, notamos que existem algumas que possuem características particulares queas diferenciam de uma matriz qualquer, já seja pela quantidade de lihnas ou colunas, ou pela naturezadas componentes. Desde que este tipo de matrizes aparecem com frequência na prática, elas recebemnomes especiais. As seguintes definições estabelecem alguns destes tipos especiais.
Definição 3.3Seja A uma matriz de ordem m× n. Diz-se que A é uma matriz nula, se ai j = 0 para todoi ∈ {1, . . . ,m} e j ∈ {1, . . . ,n}. A matriz nula de ordem m×n, é denotada por 0m×n
Exemplo 3.3
01×2 =[0 0
], 02×2 =
[0 00 0
], 03×4
0 0 0 00 0 0 00 0 0 0
.Definição 3.4
Seja A uma matriz de ordem m×n. Diz-se que A é uma matriz coluna, se ela possui uma únicacoluna, isto é, n = 1.
51 / 165

Matemática Computacional
Exemplo 3.4
A =
[12
], B =
−131
, C =
400−2
.
Definição 3.5Seja A uma matriz de ordem m× n. Diz-se que A é uma matriz linha, se ela que possui umaúnica linha, isto é, m = 1.
Exemplo 3.5
A =[−1 0
], B =
[0 2 1
], C =
[1 1 9 3
].
Definição 3.6Seja A uma matriz de ordem m× n. Diz-se que A é uma matriz quadrada, se o número decolunas coincide com o número de linhas, isto é, m = n.
Exemplo 3.6
A =[−2], B =
[3 51 4
], C =
1 0 −34 −3 05 0 7
.
Nota 3.2Quando trabalhamos com matrizes quadradas Am×m, é suficiente dizer que A é uma matrizde ordem m.
Definição 3.7Seja A uma matriz quadrada, de ordem m. Diz-se que A é uma matriz diagonal, se ai j = 0 parai 6= j, isto é, todos os elementos que não pertencem à diagonal são nulos.
Exemplo 3.7
A =
[−1 00 2
], B =
9 0 00 3 00 0 −1
, C =
6 0 0 00 5 0 00 0 −3 00 0 0 1
.
Definição 3.8Seja A uma matriz quadrada, de ordem m. Diz-se que A é a matriz identidade, se ela é umamatriz diagonal com todos os elementos da diagonal iguais a um, isto é, aii = 1, para todoi ∈ {1,2, . . . ,m}. A matriz identidade de ordem m, é denotada por Im.
52 / 165
Matemática Computacional
Exemplo 3.8
I2 =
[1 00 1
], I3 =
1 0 00 1 00 0 1
, I4 =
1 0 0 00 1 0 00 0 1 00 0 0 1
.
Definição 3.9Seja A uma matriz quadrada, de ordem m. Diz-se que A é uma matriz triangular superior, setodos os elementos abaixo da diagonal são nulos, isto é, ai j = 0 para i > j.
Exemplo 3.9
A =
[2 30 1
], B =
1 −1 10 −3 40 0 9
, C =
1 3 5 70 2 4 00 0 3 50 0 0 4
.
Definição 3.10Seja A uma matriz quadrada, de ordem m. Diz-se que A é uma matriz triangular inferior, setodos os elementos acima da diagonal são nulos, isto é, ai j = 0 para i < j.
Exemplo 3.10
A =
[−2 01 7
], B =
1 0 0−1 −3 01 7 9
, C =
1 0 0 03 2 0 07 1 3 08 0 −1 4
.
Definição 3.11Seja A uma matriz quadrada, de ordem m. Diz-se que A é uma matriz simétrica, se ai j = a jipara todo i, j ∈ {1, . . . ,m}.
Exemplo 3.11
A =
[1 33 2
], B =
1 −1 1−1 −3 41 4 9
, C =
1 3 5 73 2 4 65 4 3 −57 6 −5 4
.
3.3 Operações com matrizes
A seguinte definição estabelece uma nova matriz obtida a partir da troca das linhas pelas colunas deuma matriz dada, esta operação é denominada transposição de uma matriz.
53 / 165

Matemática Computacional
Definição 3.12Seja A uma matriz de ordem m×n. A matriz transposta é uma matriz de ordem n×m,denotada por AT , obtida trocando as linhas pelas colunas de A, isto é,
Se A =[ai j]
m×n , então AT =[a ji]
n×m .
Exemplo 3.12Sejam as matrizes
A =
−3 −2−9 615 1
, B =
[1 73 0
]e C =
[−1 5 −3
].
Então:
AT =
[−3 −9 15−2 6 1
], BT =
[1 37 0
]e CT =
−15−3
.Propriedade 3.1
Seja A uma matriz de ordem m×n. Então:
i. (AT )T = A;
ii. A = AT se, e somente se, m = n e A é simétrica.
Da mesma forma que trabalhar com números reais, para trabalhar com matrizes é necessário saberrealizar operações aritméticas com elas, e conhecer suas principais propriedades.
Definição 3.13Sejam A e B matrizes de ordem m× n. A matriz soma, denotada por A+B, é uma matriz deordem m×n, cujos elementos são as somas dos elementos correspondentes de A e B, isto é
Se A =[ai j]
m×n e B =[bi j]
m×n , então A+B =[ai j +bi j
]m×n .
Exemplo 3.13
a. Sejam as matrizes de ordem 3×2, A =
[−1 0 70 1 0
]e B =
[0 1 −20 −1 2
]. Então,
A+B =
[−1 0 70 1 0
]+
[0 1 −20 −1 2
]=
[−1 1 50 0 2
].
b. Sejam as matrizes de ordem 3, C =
1 3 53 2 45 4 3
e D =
2 4 −10 −1 57 2 4
. Então,
C+D =
1 3 53 2 45 4 3
+2 4 −1
0 −1 57 2 4
=
3 7 43 1 9
12 6 7
.DT −C = DT +(−C) =
2 0 74 −1 2−1 5 4
+−1 −3 −5−3 −2 −4−5 −4 −3
=
1 −3 21 −3 −2−6 1 1
.54 / 165

Matemática Computacional
Importante 3.2A soma de duas matrizes com ordens diferentes não esta definida.
Na seguinte propriedade são estabelecidas importantes propriedades relativas à soma de matrizes, e amaioria delas são uma extensão natural da soma de números reais.
Propriedade 3.2Sejam A, B e C, matrizes de ordem m×n, e 0 a matriz nula de ordem m×n. Então:
i. A+B = B+A;
ii. A+(B+C) = (A+B)+C;
iii. A+0 = 0+A = A;
iv. (A+B)T = AT +BT .
Definição 3.14Sejam α ∈ R e A =
[ai j]
uma matriz de ordem m×n. A matriz produto por um escalar α ,denotada por α A, é uma matriz de ordem m×n, cujos elementos são
αA =[αai j
]m×n .
Exemplo 3.14
a. Sejam a matriz A =[2 4 −6
]e o escalar α1 =
12 . Então
α1A =12[2 4 −6
]=[1 2 −3
].
b. Sejam a matriz B =
1 3 −13 −2 4−5 4 3
e o escalar α2 =−3. Então
α2B =−3
1 3 −13 −2 4−5 4 3
=
−3 −9 3−9 6 −1215 −12 −9
.
Propriedade 3.3Sejam A e B, matrizes de ordem m×n e, α e β ∈ R. Então:
i. α(A+B) = αA+αB;
ii. (α +β )A = αA+βA;
iii. α(βA) = (αβ )A;
iv. 0A = 0m×n.
55 / 165

Matemática Computacional
Nota 3.3No item iv da propriedade acima, significa que, se multiplicarmos por zero qualquer matriz,teremos a matriz nula, da mesma ordem de A.
Definição 3.15Sejam as matrizes A de ordem m×n e B de ordem n× p. A matriz produto de A por B, é umamatriz de ordem m× p, denotada por AB, em que cada elemento de AB é obtido por meio dasoma dos produtos dos elementos correspondentes da i−ésima linha de A pelos elementos daj−ésima coluna B, isto é,
AB =[ci j]
m×p , onde ci j =n
∑k=1
aikbk j = ai1b1 j +ai2b2 j + · · ·+ainbn j.
Importante 3.3
a. O produto de duas matrizes somente pode ser efetuado se o número de colunas daprimeira matriz for igual ao número de linhas da segunda matriz;
b. A matriz produto terá o mesmo número de linhas da primeira matriz, A, e o mesmonúmero de colunas da segunda matriz, B.
Exemplo 3.15Sejam as seguintes matrizes
A =
[1 30 −1
], B =
1 73 02 −2
e C
1 7 3−1 0 32 −2 −21 0 0
Então:
BA =
1 73 02 −2
[1 30 −1
]=
1(1)+7(0) 1(3)+7(−1)3(1)+0(0) 3(3)+0(−1)
2(1)+(−2)(0) 2(3)+(−2)(−1)
=
1 −43 92 8
.
C B =
1 7 3−1 0 32 −2 −21 0 0
1 7
3 02 −2
=
1(1)+7(3)+3(2) 1(7)+7(0)+3(−2)−1(1)+0(3)+3(2) −1(7)+0(0)+3(−2)
2(1)+(−2)(3)+(−2)(2) 2(7)+(−2)(−1)+(−2)(−2)1(1)+0(3)+0(2) 1(7)+0(0)+0(−2)
=
28 15 −13−8 201 7
.No entanto, não é possível obter
AB, AC, BC e CA
devido a que o número de colunas da primeira matriz é diferente ao número de linhas da segundamatriz.
56 / 165
Matemática Computacional
Propriedade 3.4Desde que as ordens das matrizes sejam compatíveis, as seguintes propriedades são válidas:
i. AI = IA = A;
ii. A(B+C) = AB+AC;
iii. (A+B)C = AC+BC;
iv. (AB)C = A(BC);
v. (AB)T = BT AT ;
vi. 0A = 0 e A0 = 0.
Importante 3.4Embora, as propriedades referentes à soma de matrizes sejam uma estensão direta das pro-priedades referentes à soma de números reais, não podemos afirmar que o mesmo acontecepara o produto de matrizes. Em geral:
a. O produto de matrizes não é comutativo, isto é:
AB 6= BA;
b. O produto de matrizes não nulas pode ser uma matriz nula.
O seguinte exemplo mostra estes fatos.
Exemplo 3.16
Sejam as matrizes não nulas A =
1 2 12 4 23 6 3
e B =
1 −3 −2−1 2 11 −1 0
. Então
AB =
−11 −22 −116 12 6−1 −2 −1
e BA =
0 0 00 0 00 0 0
= 0.
3.4 Matriz reduzida escalonada
Definição 3.16Seja A uma matriz de ordem m×n. Diz-se que A é uma matriz reduzida escalonada, se elaverifica as seguintes condições:
i. O primeiro elemento não nulo de cada linha é 1, este será denominado de pivô da linha;
ii. Na coluna que contém o pivô de alguma linha, todos os outros elementos são iguais azero;
iii. Se existe alguma linha nula, então esta se encontra abaixo de todas as linhas não nulas;
iv. Se existe pivô na linha i+1, então este se encontra à direita do pivô da linha i.
57 / 165
Matemática Computacional
Exemplo 3.17
1. As seguintes matrizes não são matrizes reduzidas escalonadas:
a. 1 3 2 0 4 5 −60 0 6 1 −3 2 00 0 0 0 0 1 −30 0 0 0 0 0 0
Esta matriz não é uma matriz reduzida escalonada, devido a que, ela não verifica a con-dição i, da definição anterior. Ou seja, o primeiro elemento não nulo da segunda linha é6 6= 1.
b. 0 1 2 0 4 5 −60 0 0 1 −3 2 00 0 0 0 1 5 −30 0 0 0 0 0 1
Esta matriz não é uma matriz reduzida escalonada, devido a que, ela não verifica a con-dição ii, da definição anterior. Ou seja, a quinta coluna contém o pivô da terceira linha, enesta coluna existem outros não nulos.
c. 1 0 50 0 00 1 0
Esta matriz não é uma matriz reduzida escalonada, devido a que, ela não verifica a condi-ção iii, da definição anterior. Ou seja, a segunda linha é uma linha nula e ela está acimade uma linha não nula.
d. 1 1 0 0 30 0 0 1 40 0 1 0 20 0 0 0 0
Esta matriz não é uma matriz reduzida escalonada, devido a que, ela não verifica a condi-ção iv, da definição anterior. Ou seja, o pivô da terceira linha não se encontra à direita dopivô da segunda linha.
2. As seguintes matrizes são matrizes reduzidas escalonadas:1 2 0 0 20 0 1 0 −10 0 0 1 3
0 1 0 00 0 1 00 0 0 1
Nota 3.4A matriz nula de qualquer ordem é uma matriz reduzida escalonada.
58 / 165

Matemática Computacional
3.5 Operações elementares entre linhas e equivalência por li-nhas de matrizes
Definição 3.17Seja A uma matriz de ordem m× n. Então as operações elementares entre linhas de umamatriz é o conjunto de operações sobre as linhas, as quais não alteram nenhuma característicade A. As seguintes operações sobre as linhas de uma matriz são elementares:
i. E1(i, j) : Troca a i-ésima linha e a j-ésima linha de A: `i↔ ` j.
Exemplo 3.18Seja
A =
1 2 3−4 5 67 8 −91 0 3
Então, E1(1,3) ⇒ `1↔ `3 ⇒
7 8 −9−4 5 61 2 31 0 3
ii. E2(i,α) : Multiplica a i-ésima linha por um escalar α 6= 0 de A: `i← α`i, α 6= 0.
Exemplo 3.19Seja
A =
1 2 3−4 5 67 8 −91 0 3
Então, E2(2,−3) ⇒ `2←−3`2 ⇒
1 2 3
12 −15 −187 8 −91 0 3
iii. E3(i, j,α) : Substitui a i-ésima linha por a i-ésima linha mais α vezes a linha j-ésima de
A: `i← `i +α` j.
Exemplo 3.20Seja
A =
1 2 3−4 5 67 8 −91 0 3
Então, E3(1,4,2) ⇒ `1← 2`4 + `1 ⇒
3 2 9−4 5 67 8 −91 0 3
Na pratica, a seguinte operação elementar é mais usada, esta é uma combinação de E2 eE3, isto é:
iv. E(i, j,α,β ) : Substitui a i-ésima linha por α 6= 0 vezes a i-ésima linha mais β vezes a linhaj-ésima de A: `i← α`i +β` j, α 6= 0.
Exemplo 3.21Seja
1 2 3−4 5 67 8 −91 0 3
Então, E(2,4,2,−1) ⇒ `2← 2`2− `4 ⇒
1 2 3−9 10 97 8 −91 0 3
59 / 165

Matemática Computacional
Definição 3.18Sejam A e B matrizes de ordem m×n. Diz-se que A é equivalente por linhas a B, se B é obtidaa partir de A, por médio de uma sucessão finita de operações elementares entre linhas.
Teorema 3.1Toda matriz A, de ordem m× n, é equivalente por linhas a uma única matriz reduzida escalo-nada, da mesma ordem.
Nota 3.5Dada uma matriz A, de ordem m×n, chamaremos de matriz equivalente reduzida escalo-nada, à matriz reduzida escalonada, que seja equivalente por linhas a A
Exemplo 3.22Obtenhamos, mediante operações elementares entre linhas, a matriz equivalente reduzida escalonada,das matrizes dadas a seguir:
1.
A =
1 2 −3 02 4 −2 23 6 −4 3
Solução
Para obter a matriz reduzida escalonada, desta matriz, precisamos aplicar as seguintesoperações elementares:
i. Fazendo
E3(2,1,−2) : `2 ← −2`1 + `2 e E3(3,1,−3) : `3 ← −3`1 + `3
obtemos a matriz: 1 2 −3 00 0 4 20 0 5 3
ii. Fazendo
E(3,2,4,−5) : `3 ← −5`2 +4`3
obtemos a matriz 1 2 −3 00 0 4 20 0 0 2
iii. Fazendo
E2
(2,
14
): `2 ← 1
4`2 e E2
(3,
12
): `3 ← 1
2`3
obtemos a matriz 1 2 −3 00 0 1 1
20 0 0 1
60 / 165

Matemática Computacional
iv. Fazendo
E3
(2,3,−1
2
): `2 ← `2−
12`3
obtemos a matriz 1 2 −3 00 0 1 00 0 0 1
v. Fazendo
E3(1,2,3) : `1 ← 3`2 + `1
obtemos a matriz
A =
1 2 0 00 0 1 00 0 0 1
Notemos que, esta última matriz verifica as 4 condições da Definição 3.15. Portanto,A é a matriz reduzida escalonada da matriz A.
2.
B =
2 3 4 5 60 0 3 2 50 0 0 0 2
Solução
Para obter a matriz reduzida escalonada, desta matriz, precisamos aplicar as seguintesoperações elementares:
i. Fazendo
E(1,2,3,−4) : `1 ← −4`2 +3`1, E2
(2,
13
): `2 ← 1
3`2
e E2
(3,
12
): `3 ← 1
2`3
obtemos a matriz: 6 9 0 7 −20 0 1 2
353
0 0 0 0 1
ii. Fazendo
E2
(1,
16
): `1 ← 1
6`1 e E3
(2,3,−5
3
): `2 ← −5
3`3 + `2
obtemos a matriz 1 32 0 7
6 −13
0 0 1 23 0
0 0 0 0 1
61 / 165

Matemática Computacional
iii. Fazendo
E3
(1,3,
13
): `1 ← 1
3`3 + `1
obtemos a matriz
B =
1 32 0 7
6 00 0 1 2
3 00 0 0 0 1
Notemos que, esta última matriz verifica as 4 condições da Definição 3.15. Portanto,B é a matriz reduzida escalonada da matriz B.
Nota 3.6A matriz reduzida escalonada é única, porém a forma de obter esta não é única.
Exemplo 3.23Sejam A e B as matrizes do exemplo anterior. Então,
a. fazendo as seguintes operações elementares, na ordem dada:
E3 (2,1,−2), E3 (3,1,−3), E2
(2,
14
), E3 (3,2,−5) e E2 (3,3).
Obtemos a matriz 1 2 0 00 0 1 00 0 0 1
a qual é a matriz A, do exemplo anterior, ou seja, a matriz reduzida escalonada de A.
b. fazendo as seguintes operações elementares, na ordem dada:
E2
(1,
12
), E2
(2,
13
), E2
(3,
12
), E3 (1,2,−2), E3
(2,3,−5
3
)e E3 (1,2,−2).
Obtemos a matriz 1 32 0 7
6 00 0 1 2
3 00 0 0 0 1
a qual é a matriz B, do exemplo anterior, ou seja, a matriz reduzida escalonada de B.
3.6 Posto de uma matriz
Definição 3.19Dada uma matriz A, de ordem m× n. O posto de A, denotado por posto(A), é o número delinhas não nulas da sua matriz equivalente reduzida escalonada. Além disso, diz-se que A temposto completo se o posto(A) = min{m,n}.
62 / 165

Matemática Computacional
Exemplo 3.24Do exemplo anterior, temos que:
1.
A =
1 2 0 00 0 1 00 0 0 1
é a matriz equivalente reduzida escalonada de
A =
1 2 −3 02 4 −2 23 6 −4 3
Desde que A tem três linhas não nulas, então posto(A) = 3 e tem posto completo.
2.
B =
1 32 0 7
6 00 0 1 2
3 00 0 0 0 1
é a matriz reduzida escalonada da matriz
B =
2 3 4 5 60 0 3 2 50 0 0 0 2
Desde que B tem três linhas não nulas, então posto(B) = 3 e tem posto completo.
3. Dada a seguinte matriz
C =
1 7 33 0 1−2 7 24 7 4
fazendo as seguintes operações elementares, na ordem dada:
E3 (2,1,−3), E3 (3,1,2), E3 (3,1,−4), E3 (3,2,1), E3 (4,2,−1) e E2
(2,− 1
21
).
Obtemos sua matriz equivalente reduzida escalonada:1 7 30 1 8
210 0 00 0 0
Desde que esta última matriz tem duas linhas não nulas, então posto(C) = 2 e não tem postocompleto.
Nota 3.7De forma equivalente à Definição 3.19, temos que, o posto de uma matriz é o número delinhas ou colunas linearmente independentes desta.
63 / 165

Matemática Computacional
3.7 Determinante de uma matriz
Nesta seção, particularizamos o nosso estudo nas matrizes quadradas, para apresentar o conceitode determinantes. Desde que, a definição formal do determinante envolve a teoria de permutações,isto dificulta num início a apresentação da definição formal. Em ordem a tornar mais simples esteconceito, num primeiro momento, somente definiremos o determinante para matrizes de ordem 1, 2 e3.
Definição 3.20Seja A = [ai j] uma matriz quadrada, de ordem n. O determinante de A, denotado por det(A), éum número real, e
i. Se n = 1, então A = [a11] e
det(A) = det(a11)= a11.
ii. Se n = 2, então A =
[a11 a12a21 a22
]e
det(A) = det(
a11 a12a21 a22
)= a11a22−a12a21.
iii. Se n = 3, então A =
a11 a12 a13a21 a22 a23a31 a32 a33
e
det(A) = det
a11 a12 a13a21 a22 a23a31 a32 a33
= a11a22a33−a11a23a32−a12a21a33 +a12a23a31 +a13a21a32−a13a22a31.
Exemplo 3.25
a. Se A = [2] então det(A) = 2.
b. Se A =
[1 23 4
], então det(A) = (1)(4)− (2)(3) = 4−6 =−2.
c. Se A =
1 −2 32 1 −1−2 −1 2
então
det(A) = (1)(1)(2)− (1)(−1)(−1)− (−2)(2)(2)+(−2)(−1)(−2)+(3)(2)(−1)− (3)(−1)(−2)= 2−1+8−4−6+6= 5.
64 / 165
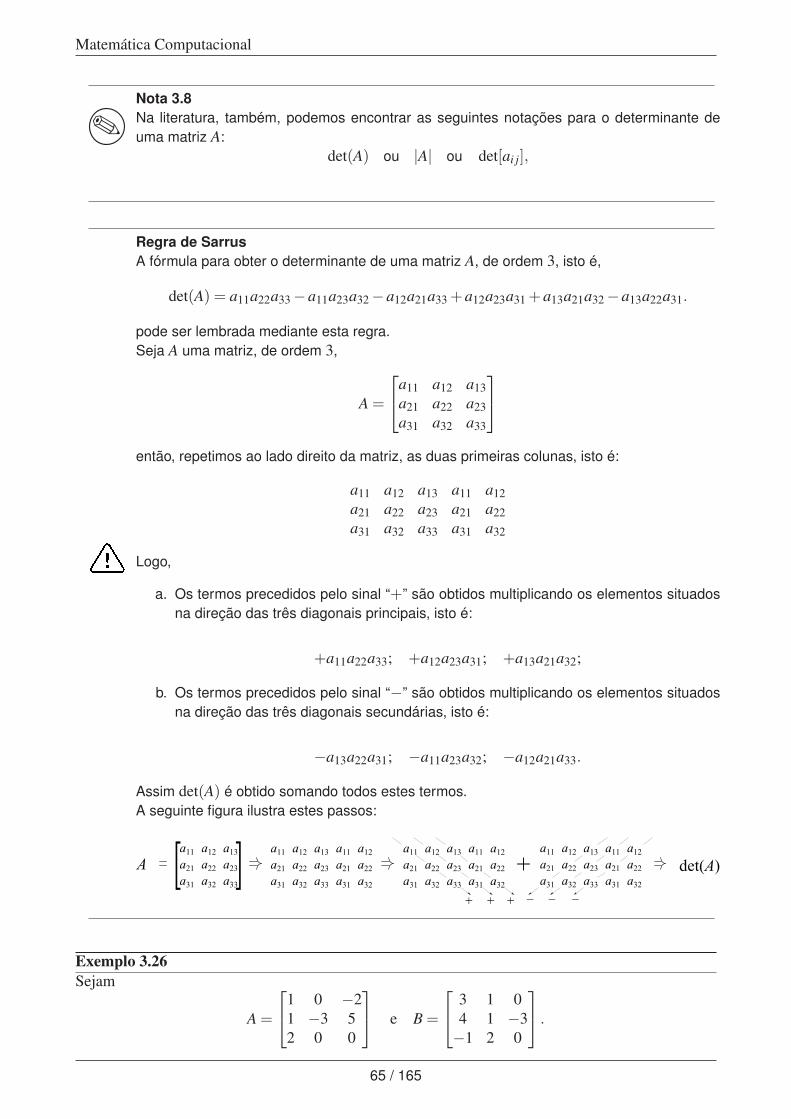
Matemática Computacional
Nota 3.8Na literatura, também, podemos encontrar as seguintes notações para o determinante deuma matriz A:
det(A) ou |A| ou det[ai j],
Regra de SarrusA fórmula para obter o determinante de uma matriz A, de ordem 3, isto é,
det(A) = a11a22a33−a11a23a32−a12a21a33 +a12a23a31 +a13a21a32−a13a22a31.
pode ser lembrada mediante esta regra.Seja A uma matriz, de ordem 3,
A =
a11 a12 a13a21 a22 a23a31 a32 a33
então, repetimos ao lado direito da matriz, as duas primeiras colunas, isto é:
a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
Logo,
a. Os termos precedidos pelo sinal “+” são obtidos multiplicando os elementos situadosna direção das três diagonais principais, isto é:
+a11a22a33; +a12a23a31; +a13a21a32;
b. Os termos precedidos pelo sinal “−” são obtidos multiplicando os elementos situadosna direção das três diagonais secundárias, isto é:
−a13a22a31; −a11a23a32; −a12a21a33.
Assim det(A) é obtido somando todos estes termos.A seguinte figura ilustra estes passos:
a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
+ + +
a11 a12 a13
a21 a22 a23
a31 a32 a33[
[ a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32_ _ _
A det(A)+a11 a12 a13
a21 a22 a23
a31 a32 a33
a11 a12
a21 a22
a31 a32
Exemplo 3.26Sejam
A =
1 0 −21 −3 52 0 0
e B =
3 1 04 1 −3−1 2 0
.65 / 165
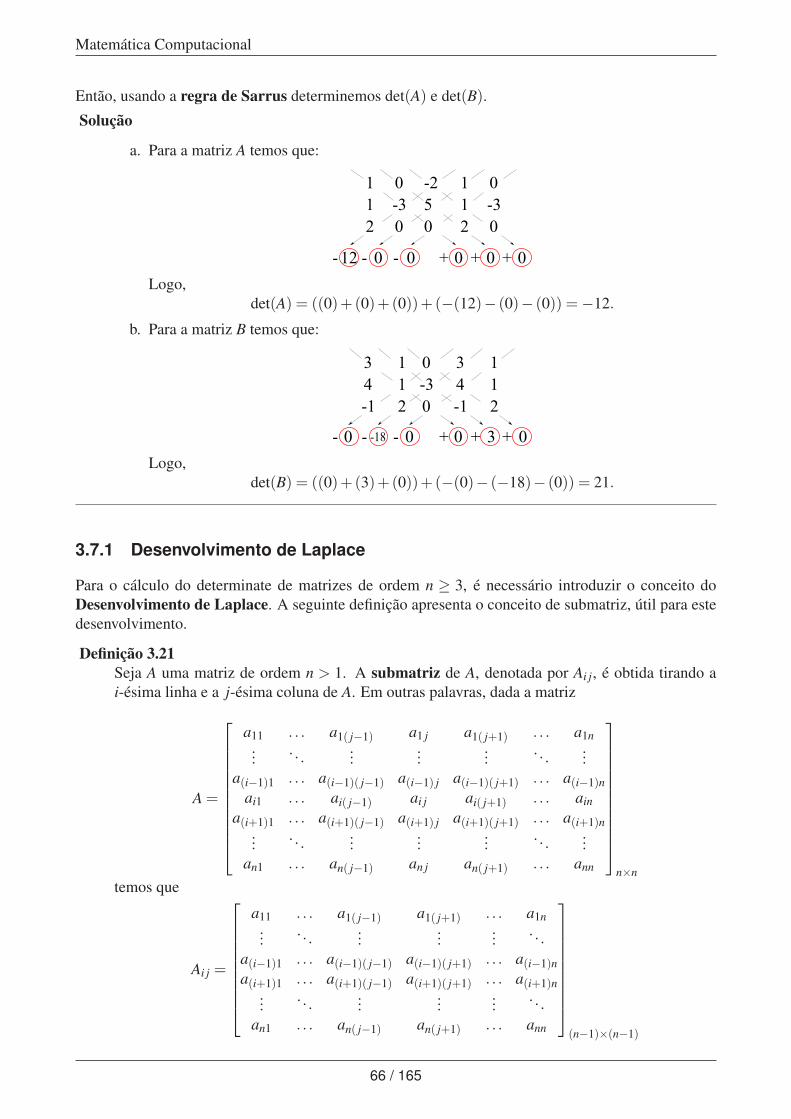
Matemática Computacional
Então, usando a regra de Sarrus determinemos det(A) e det(B).
Solução
a. Para a matriz A temos que:
1 0 -2
1 -3 5
2 0 0
1 0
1 -3
2 0
12- 0- 0- 0+ 0+ 0+
Logo,det(A) = ((0)+(0)+(0))+(−(12)− (0)− (0)) =−12.
b. Para a matriz B temos que:
3 1 0
4 1 -3
-1 2 0
0- -18- 0- 0+ 3+ 0+
3 1
4 1
-1 2
Logo,det(B) = ((0)+(3)+(0))+(−(0)− (−18)− (0)) = 21.
3.7.1 Desenvolvimento de Laplace
Para o cálculo do determinate de matrizes de ordem n ≥ 3, é necessário introduzir o conceito doDesenvolvimento de Laplace. A seguinte definição apresenta o conceito de submatriz, útil para estedesenvolvimento.
Definição 3.21Seja A uma matriz de ordem n > 1. A submatriz de A, denotada por Ai j, é obtida tirando ai-ésima linha e a j-ésima coluna de A. Em outras palavras, dada a matriz
A =
a11 . . . a1( j−1) a1 j a1( j+1) . . . a1n... . . . ...
...... . . . ...
a(i−1)1 . . . a(i−1)( j−1) a(i−1) j a(i−1)( j+1) . . . a(i−1)nai1 . . . ai( j−1) ai j ai( j+1) . . . ain
a(i+1)1 . . . a(i+1)( j−1) a(i+1) j a(i+1)( j+1) . . . a(i+1)n... . . . ...
...... . . . ...
an1 . . . an( j−1) an j an( j+1) . . . ann
n×n
temos que
Ai j =
a11 . . . a1( j−1) a1( j+1) . . . a1n... . . . ...
...... . . .
a(i−1)1 . . . a(i−1)( j−1) a(i−1)( j+1) . . . a(i−1)na(i+1)1 . . . a(i+1)( j−1) a(i+1)( j+1) . . . a(i+1)n
... . . . ......
... . . .an1 . . . an( j−1) an( j+1) . . . ann
(n−1)×(n−1)
66 / 165

Matemática Computacional
ImportanteDada uma matriz de ordem n > 1, são obtidas n2 submatrizes de ordem n−1.
Exemplo 3.27
Seja A =
3 0 −24 −3 5−1 0 0
. Então todas as submatrizes de A são:
A11 =
[−3 50 0
], A12 =
[4 5−1 0
], A13 =
[4 −3−1 0
],
A21 =
[0 −20 0
], A22 =
[3 −2−1 0
], A23 =
[3 0−1 0
],
A31 =
[0 −2−3 5
], A32 =
[3 −24 5
], A33 =
[3 04 −3
].
Em ordem a estabelecer de forma natural o desenvolvimento de Laplace de A, para a obtenção dodeterminante de A, analisemos o item iii da Definição 3.20:
det(A) = det
a11 a12 a13a21 a22 a23a31 a32 a33
= a11a22a33−a11a23a32−a12a21a33 +a12a23a31 +a13a21a32−a13a23a31
= a11 (a22a33−a23a32)−a12 (a21a33−a23a31)+a13 (a21a32−a23a31)
= a11 ·det(
a22 a23a32 a33
)−a12 ·det
(a21 a23a31 a33
)+a13 ·det
(a21 a22a31 a32
).
Ou seja, o determinante de uma matriz de ordem 3 pode ser expresso em função dos determinantesde 3 submatrizes de A, isto é
det(A) = a11 det(A11)−a12 det(A12)+a13 det(A13).
Além disso, fazendo
∆i j = (−1)i+ j det(Ai j), para i = 1 e j = 1,2,3.
obtemos a seguinte expressão
det(A) = a11 ∆11 +a12 ∆12 +a13 ∆13.
67 / 165

Matemática Computacional
Exemplo 3.28
a. Se A =
3 0 −24 −3 5−1 0 0
, então fixando i = 1, se segue que
det(A) = det
3 0 −24 −3 5−1 0 0
= (3) ·∆11 +(0) ·∆12 +(−2) ·∆13
onde
∆11 = (−1)1+1 det(A11) = (−1)1+1 det[−3 50 0
]= (1)(0−0) = 0;
∆12 = (−1)1+2 det(A12) = (−1)1+2 det[
4 5−1 0
]= (−1)(0+5) =−5;
∆13 = (−1)1+3 det(A13) = (−1)1+3 det[
4 −3−1 0
]= (1)(0−3) =−3.
Portanto,det(A) = (3)(0)+(0)(−5)+(−2)(−3) = 6.
b. Se C =
3 1 −24 1 5−1 2 0
, então fixando i = 1, se segue que
det(C) = det
3 1 −24 1 5−1 2 0
= (3) ·∆11 +(1) ·∆12 +(−2) ·∆13
onde
∆11 = (−1)1+1 det(C11) = (−1)1+1 det[
1 52 0
]= (1)(0−10) =−10;
∆12 = (−1)1+2 det(C12) = (−1)1+2 det[
4 5−1 0
]= (−1)(0+5) =−5;
∆13 = (−1)1+3 det(C13) = (−1)1+3 det[
4 1−1 2
]= (1)(8+1) = 9.
Portanto,det(C) = (3)(−10)+(1)(−5)+(−2)(9) =−53.
De forma natural, é estendido este conceito para matrizes quadradas de ordem n.
Definição 3.22Seja A uma matriz quadrada, de ordem n. Fixando algum i em {1,2, . . . ,m}, o desenvolvimentode Laplace de A é obtido da seguinte forma:
det(A) = ai1 ∆i1 +ai2 ∆i2 + · · ·+ain ∆in
=n∑j=1
ai j (−1)i+ j det(Ai j)
=n∑j=1
ai j ∆i j.
68 / 165

Matemática Computacional
Exemplo 3.29Seja
A =
1 −2 0 43 1 0 −24 1 −3 5−1 2 0 0
Então, determinemos det(A) usando o desenvolvimento de Laplace, fixando i = 1.
SoluçãoDo desenvolvimento de Laplace se segue que:
det(A) = det
1 −2 0 43 1 0 −24 1 −3 5−1 2 0 0
= (1) ·∆11 +(−2) ·∆12 +(0) ·∆13 +(4) ·∆14
onde
∆11 = (−1)1+1 det(A11) e A11 =
1 0 −21 −3 52 0 0
∆12 = (−1)1+2 det(A12) e A12 =
3 0 −24 −3 5−1 0 0
∆13 = (−1)1+3 det(A13) e A13 =
3 1 −24 1 5−1 2 0
∆14 = (−1)1+4 det(A14) e A14 =
3 1 04 1 −3−1 2 0
No entanto, do Exemplo 3.26 temos que A11 = A e A14 = B, logo
det(A11) =−12 e det(A14) = 21,
e do Exemplo 3.28 temos que A12 = A e A13 =C, logo
det(A12) = 6 e det(A13) =−53.
Assim,∆11 = (−1)1+1 det(A11) = (1)(−12) = −12;∆12 = (−1)1+2 det(A12) = (−1)(6) = −6;∆13 = (−1)1+3 det(A13) = (1)(−53) = −53;∆14 = (−1)1+4 det(A13) = (−1)(21) = −21.
Portanto,
det(A) = (1)(−12)+(−2)(−6)+(0)(−53)+(4)(−21) =−12+12+0−84 =−84.
69 / 165

Matemática Computacional
Nota 3.9
a. O número ∆i j é denominado cofator do elemento ai j;
b. Na fórmula acima, o determinante foi “desenvolvido” a partir da i-ésima linha. Deforma análoga, este desenvolvimento pode, também, ser obtido considerando a j-ésima coluna, o seguinte exemplo ilustra este fato.
Exemplo 3.30
Seja A =
1 −3 −32 1 −1−2 −2 2
. Usando o desenvolvimento de Laplace, determinemos det(A) :
Solução
a. Usando a primeira linha, no desenvolvimento de Laplace, temos que i = 1
det(A) = det
1 −3 −32 1 −1−2 −2 2
= (1) ∆11 +(−3) ∆12 +(−3) ∆13
onde
∆11 = (−1)1+1 det(A11) = (−1)1+1 det[
1 −1−2 2
]= (1)(0) = 0,
∆12 = (−1)1+2 det(A12) = (−1)1+2 det[
2 −1−2 2
]= (−1)(2) =−2,
∆13 = (−1)1+3 det(A13) = (−1)1+3 det[
2 1−2 −2
]= (1)(−2) =−2.
Portantodet(A) = (1)(0)+(−3)(−2)+(−3)(−2) = 12.
b. Usando a terceira linha, no desenvolvimento de Laplace, temos que i = 3
det(A) = det
1 −3 −32 1 −1−2 −2 2
= (−2) ∆31 +(−2) ∆32 +(2) ∆33
onde
∆31 = (−1)3+1 det(A12) = (−1)3+1 det[−3 −31 −1
]= (1)(6) = 6,
∆32 = (−1)3+2 det(A32) = (−1)3+2 det[
1 −32 −1
]= (−1)(5) =−5,
∆33 = (−1)3+3 det(A33) = (−1)3+3 det[
1 −32 1
]= (1)(7) = 7.
Portantodet(A) = (−2)(6)+(−2)(−5)+(2)(7) = 12.
70 / 165

Matemática Computacional
c. Usando a segunda coluna, no desenvolvimento de Laplace, temos que j = 2
det(A) = det
1 −3 −32 1 −1−2 −2 2
= (−3) ∆12 +(1) ∆22 +(−2) ∆32
onde
∆12 = (−1)1+2 det(A12) = (−1)1+2 det[
2 −1−2 2
]= (−1)(2) =−2,
∆22 = (−1)2+2 det(A22) = (−1)2+2 det[
1 −3−2 2
]= (1)(−4) =−4,
∆32 = (−1)3+2 det(A32) = (−1)3+2 det[
1 −32 −1
]= (−1)(5) =−5.
Portantodet(A) = (−3)(−2)+(1)(−4)+(−2)(−5) = 12.
d. Usando a terceira coluna, no desenvolvimento de Laplace, temos que j = 3
det(A) = det
1 −3 −32 1 −1−2 −2 2
= (−3) ∆13 +(−1) ∆23 +(2) ∆33
onde
∆13 = (−1)1+3 det(A13) = (−1)1+3 det[
2 1−2 −2
]= (1)(−2) =−2,
∆23 = (−1)2+3 det(A23) = (−1)2+3 det[
2 −3−2 −2
]= (−1)(−8) = 8,
∆33 = (−1)3+3 det(A33) = (−1)3+3 det[
1 −32 1
]= (1)(7) = 7.
Portantodet(A) = (−3)(−2)+(−1)(8)+(2)(7) = 12.
Nota 3.10O desenvolvimento de Laplace é uma fórmula de recorrência que permite calcular o deter-minante de uma matriz de ordem n, a partir dos determinantes das submatrizes quadradasde ordem (n−1).
A continuação apresentamos as propriedades mais relevantes dos determinantes:
Teorema 3.2Dada uma matriz quadrada A de ordem n. Então:
i. Se todos os elementos de uma linha (ou coluna) de A são nulos, então det(A) = 0;
ii. det(A) = det(AT );
iii. Se multiplicamos uma linha (ou coluna) de A por uma constante, então o determinantefica multiplicado por esta constante.
71 / 165

Matemática Computacional
iv. Se trocamos a posição de duas linhas (ou colunas) de A, então o determinante troca desinal.
v. Se A tem duas linhas (ou colunas) iguais, então o determinante é zero.
vi. det(AB) = det(A) det(B)
vii.
det
a11 . . . a1na21 . . . a2n
......
ai1 +bi1 . . . ain +bin...
...an1 . . . ann
= det
a11 . . . a1na21 . . . a2n
......
ai1 . . . ain...
...an1 . . . ann
+det
a11 . . . a1na21 . . . a2n
......
bi1 . . . bin...
...an1 . . . ann
viii. O determinante não é alterado se somarmos a uma linha outra linha multiplicada por uma
constante.
Quando aplicamos as propriedades acima, simplifica-se muito o cálculo de determinantes. Alémdisso, a fixação do índice i ou j é arbitrária. Para uma diminuição nos cálculos, devem ser considera-das as linhas (ou colunas) com uma maior quantidade de zeros.
Exemplo 3.31
a. Dada A =
−2 −1 22 1 −11 −3 3
. Calculemos det(A).
Solução
det(A) = det
−2 −1 22 1 −11 −3 3
Somando a segunda linha à primeira
det(A) = det
0 0 12 1 −11 −3 3
Aplicando a o item(viii) do teorema acima
det(A) = 1(−1)1+3 det(
2 11 −3
)=−6−1 =−7.
b. Dada A =
−1 2 3 −44 2 0 0−1 2 −3 02 5 3 1
. Calculemos det(A).
Solução
det(A) = det
−1 2 3 −44 2 0 0−1 2 −3 02 5 3 1
72 / 165

Matemática Computacional
Somando a segunda coluna multiplicada por -2 à primeira
det(A) = det
−5 2 3 −40 2 0 0−5 2 −3 0−8 5 3 1
Aplicando a item(viii) do teorema acima e consideramos a segunda linha
det(A) = 2(−1)2+2 det
−5 3 −4−5 −3 0−8 3 1
= 2det
−5 3 −4−5 −3 0−8 3 1
Somando a segunda linha à primeira e a terceira linha
det(A) = 2det
−10 0 −4−5 −3 0−13 0 1
Aplicando a item(viii) do teorema acima e consideramos a segunda coluna
det(A) = 2(−3)(−1)2+2 det(−10 −4−13 1
)= 2(−3)(−1)2+2(−10−52) = 372.
3.7.2 Posto de uma matriz e determinantes
Apresentamos a seguir uma forma de obter o posto de uma matriz usando determinantes.
Teorema 3.3Seja uma matriz A de ordem m× n. Então, o posto de A, posto(A), é a maior ordem possíveldas submatrizes quadradas de A, com determinantes diferentes de zero.
Nota 3.11Se A é uma matriz quadrada de ordem n e det(A) 6= 0, então o posto de A é n. Isto é devidoa que A é uma submatriz dela mesma.
Exemplo 3.32Seja a matriz A de ordem 4×5:
A =
1 3 −2 5 31 11 −15 19 143 1 7 1 −27 −3 25 −7 0
Calculemos o posto de A.
73 / 165

Matemática Computacional
Solução
i. Analisando as submatrizes de ordem 4: existem 5 submatrizes 4× 4, e calculando cadaum destes determinantes, obtemos que todas tem o determinante igual a zero.
ii. Analisando as submatrizes de ordem 3: existem 40 submatrizes 3×3, e calculando cadaum destes determinantes, obtemos que todas tem o determinante igual a zero.
iii. Analisando as submatrizes de ordem 2: existem 60 submatrizes 2×2, e calculando cadaum destes determinantes, obtemos que
det[
1 31 11
]= 8 6= 0.
Portanto, o posto da matriz A é 2.
3.8 Matriz Positiva Definida
Definição 3.23Seja A uma matriz de ordem n da forma:
A =
a11 a12 . . . a1na21 a22 . . . a2n
...... . . . ...
an1 an2 . . . ann
Então, os menores principais de A, são sub-matrizes quadradas de A, de ordem k, com k =1,2, . . . ,n, denotados por Ak, constituídos pelas k primeiras linhas e as k primeiras colunas deA, isto é:
Ak =
a11 a12 . . . a1ka21 a22 . . . a2k
...... . . . ...
ak1 ak2 . . . akk
, k = 1,2, . . . ,n.
Definição 3.24Seja A uma matriz de ordem n. Diz-se que A é positiva definida, se
xT Ax > 0, ∀x ∈ Rn \{0}.
Teorema 3.4Seja A uma matriz de ordem n. Então,
i. Se A é positiva definida, então todos seus menores principais têm determinantes positivos,isto é:
det(Ak)> 0, ∀ k = 1,2, . . . ,n.
ii. Se A é simétrica e todos seus menores principais têm determinantes positivos, então A épositiva definida.
74 / 165

Matemática Computacional
Exemplo 3.33Verifiquemos se as seguintes matrizes são positivas definidas:
A =
1 2 32 5 −43 −4 0
e B =
5 −2 −3 0−2 4 −1 −3−3 −1 10 10 −3 1 5
Solução
Desde que ambas matrizes são simétricas, para verificar se estas são, ou não, positivas definidas,pelo Teorema 3.4 é somente necessário verificar se os determinantes dos menores principais,de cada matriz, são positivos.
1. Para a matriz A temos que ela é de ordem n = 3, então k = 1,2,3. Logo:
i. A1 = [1], e det(A1) = 1;
ii. A2 =
[1 22 5
], e det(A2) = 1;
iii. A3 = A =
1 2 32 5 −43 −4 0
, e det(A3) =−109.
Desde que det(A3)< 0, concluímos que A não é uma matriz positiva definida.
2. Para a matriz B temos que ela é de ordem n = 4, então k = 1,2,3,4. Logo:
i. B1 = [5], e det(B1) = 5;
ii. B2 =
[5 −2−2 4
], e det(B2) = 16;
iii. B3 =
5 −2 −3−2 4 −1−3 −1 10
, e det(B3) = 107.
iv. B4 = B =
5 −2 −3 0−2 4 −1 −3−3 −1 10 10 −3 1 5
, e det(B4) = 216.
Desde que det(Bk) > 0, para todo k = 1,2,3,4, concluímos que B é uma matriz positivadefinida.
Importante 3.1Se det(Ak)> 0, para todo k = 1,2, . . . ,n e A não é simétrica, então A não necessariamenteé positiva definida.
75 / 165

Matemática Computacional
Exemplo 3.34Se consideramos
A =
[1 3−1 1
],
então temos que, A não é simétrica e
det(A1) = 1 > 0 e det(A2) = 4 > 0.
Porém,
xT Ax = (x1,x2)
[1 3−1 1
][x1x2
]= (x1 + x2)
2 ≥ 0
Ou seja,xT Ax = 0, ∀x ∈ {(x1,x2) : x1 =−x2}
Logo, A não é definida positiva.
3.9 Matriz Adjunta
Definição 3.25Seja A uma matriz quadrada, de ordem n. A matriz de cofatores de A, denotada por A, é amatriz quadrada, de ordem n, obtida de todos os cofatores ∆i j de A, isto é:
A =[∆i j]
n×n .
Exemplo 3.35
Dada A =
2 3 −40 −4 21 −1 5
. Calculemos A.
SoluçãoPara calcular A, precisamos determinar os nove cofatores de A. Lembrando que, veja logodepois do Exemplo 3.27, cada um dos cofatores é obtido da seguinte fórmula:
∆i j = (−1)i+ j det(Ai j) ∀ i, j = 1,2,3.
76 / 165

Matemática Computacional
Logo,
∆11 = (−1)2 det(A11) = +
[−4 2−1 5
]=−18, ∆12 = (−1)3 det(A12) =−
[0 21 5
]= 2,
∆13 = (−1)4 det(A13) = +
[0 −41 −1
]= 4, ∆21 = (−1)3 det(A21) =−
[3 −4−1 5
]=−11,
∆22 = (−1)4 det(A22) = +
[2 −41 5
]= 14, ∆23 = (−1)5 det(A23) =−
[2 31 −1
]= 5,
∆31 = (−1)4 det(A31) = +
[3 −4−4 2
]=−10, ∆32 = (−1)5 det(A32) =−
[2 −40 2
]=−4,
∆33 = (−1)6 det(A33) = +
[2 30 −4
]=−8.
Portanto,
A =
∆11 ∆12 ∆13∆21 ∆22 ∆23∆31 ∆32 ∆33
=
−18 2 4−11 14 5−10 −4 −8
.
Definição 3.26Seja A uma matriz quadrada de ordem n. A matriz adjunta de A, denotada por adj(A), é atransposta da matriz dos cofatores de A, isto é
adj(A) = AT.
Exemplo 3.36
Seja A =
2 3 −40 −4 21 −1 5
. Calculemos adj(A).
SoluçãoDo exemplo anterior temos que
A =
−18 2 4−11 14 5−10 −4 −8
.Logo,
adj(A) = AT=
−18 −11 −102 14 −44 5 −8
.
Teorema 3.5Se A é uma matriz quadrada, de ordem n, então
AAT= Aadj(A) = det(A)In.
77 / 165

Matemática Computacional
3.10 Matriz inversa
Uma característica importante dos números não nulos é de ter inverso, tal conceito é estendido paraas matrizes quadradas. Este fato é muito importante nas aplicações, como por exemplo na resoluçãode sistemas de equações lineares. A seguir apresentamos o conceito de inversa de uma matriz.
Definição 3.27Seja A uma matriz quadrada de ordem n. A inversa de A é a matriz B, se esta verifica que:
AB = BA = In,
onde In é a matriz identidade de ordem n. Quando B verifica estas condições denotaremos estainversa por A−1 e se diz que A é inversível ou invertível.
Exemplo 3.37
a. Dada A =
[1 2−2 4
], temos que A−1 =
[12 −1
414
18
]. De fato:
AA−1 = I2 e A−1 A = I2.
b. Dada A =
[2 51 3
]. Calculemos a matriz inversa de A.
Solução
Calcular a inversa da matriz A equivale a encontrar uma matriz B =
[α β
γ δ
]tal que AB =
I2 e BA = I2.Da primeira condição temos:
AB = I2 ⇔[
2 51 3
][α β
γ δ
]=
[1 00 1
]⇔
[2α +5γ 2β +5δ
α +3γ β +3δ
]=
[1 00 1
].
Logo, pela igualdade de matrizes temos que
2α +5γ = 1α +3γ = 0
2β +5δ = 0β +3δ = 1
Ou seja, para determinar α , β , γ e δ , precisamos resolver cada uma destas equações.Assim,
2α +5γ = 1 ⇒ α = 1−5γ
2α +3γ = 0 ⇒ α = −3γ
}⇒ 1−5γ
2 =−3γ ⇒ γ =−1 ⇒ α = 3
2β +5δ = 0 ⇒ β = −52δ
β +3δ = 1 ⇒ β = 1−3δ
}⇒ −5
2δ = 1−3δ ⇒ δ = 2 ⇒ β =−5
Ou seja,α = 3, γ =−1, β =−5 e δ = 2.
78 / 165

Matemática Computacional
Assim,
B =
[3 −5−1 2
]e AB =
[2 51 3
][3 −5−1 2
]=
[1 00 1
]= I2.
Além disso,
BA =
[3 −5−1 2
][2 51 3
]=
[1 00 1
]= I2
Portanto, a matriz inversa de A é
A−1 = B =
[3 −5−1 2
].
Propriedade 3.5
i. Se A e B são matrizes quadradas inversíveis, da mesma ordem, então AB e BA são matrizesinveríveis. Além disso:
(AB)−1 = B−1A−1 e (BA)−1 = A−1B−1.
ii. Se A é inversível, então
det(A−1) =1
det(A).
Teorema 3.6Seja A uma matriz quadrada de ordem n. Então, A é inversível se, e somente se, det(A) 6= 0.Além disso:
A−1 =1
det(A)adj(A).
Pelo resultado anterior, temos uma nova forma de calcular a inversa de uma matriz, a qual exemplifi-caremos a seguir.
Exemplo 3.38
a. Seja A =
[1 2−2 4
]a matriz do exemplo anterior, calculemos a matriz inversa de A, se ela existe.
SoluçãoDo Teorema 3.6, precisamos calcular o determinante de A:
det(A) = det(
1 2−2 4
)= (1)(4)− (2)(−2) = 8 6= 0,
portanto existe A−1. Agora calculemos a inversa usando a expressão
A−1 =1
det(A)adj(A).
Assim, de A temos que
A =
[∆11 ∆12∆21 ∆22
]=
[4 2−2 1
],
79 / 165

Matemática Computacional
o que implica que
adj(A) = AT=
[4 −22 1
].
Portanto,
A−1 =1
det(A)adj(A) =
18
[4 −22 1
]=
[12 −1
414
18
].
b. Seja A =
[2 51 3
]. Calculemos a matriz inversa de A, se ela existe.
SoluçãoDo Teorema 3.6, precisamos calcular o determinante de A:
det(A) = det(
2 51 3
)= (2)(3)− (5)(1) = 1 6= 0,
portanto existe A−1. Agora calculemos a inversa usando a expressão
A−1 =1
det(A)adj(A).
Assim, de A temos que
A =
[∆11 ∆12∆21 ∆22
]=
[3 −1−5 2
]o que implica que
adj(A) = AT=
[3 −5−1 2
]Então
A−1 =1
det(A)adj(A) =
11
[3 −5−1 2
]=
[3 −5−1 2
].
c. Seja A =
[2 −61 −3
]. Calculemos a matriz inversa de A, se ela existe.
SoluçãoDo Teorema 3.6, precisamos calcular o determinante de A:
det(A) = det(
2 −61 −3
)= (2)(−3)− (−6)(1) = 0.
Portanto, não existe A−1.
Importante 3.6Do item(c) do exemplo acima, verificamos que não toda matriz quadrada possui inversa.
80 / 165

Matemática Computacional
3.11 Recapitulando
Neste capítulo, apresentamos as noções básicas e necessárias sobre as matrizes reais, tais comoas operações de soma, produto por um escalar e produto de matrizes. Também estudamos asprincipais propriedades que as envolvem.
Nas seções subsequentes deste capítulo, tratamos dos conceitos de posto e determinante de umamatriz, em relação ao determinante, apresentamos também as suas implicações caso estes seja nãonulo. Além disso, vimos como este conceito é necessário para determinar se uma matriz é positivadefinida, a matriz adjunta e a matriz inversa. Como é de prática habitual, exemplos ilustrando esteconceitos foram apresentados, em todo este capítulo.
No próximo capítulo, começaremos a usar a teoria apresentada até agora, pois iniciaremos o estudodos sistemas de equações lineares e a obtenção da sua solução, ou soluções, caso esta exista, ouexistam.
3.12 Atividades
1. Sejam
A =
[2 −1 3−1 1 −2
]2×3
, B =
[1 −3 −2−1 2 1
]2×3
, C =
5−33
3×1
, D =[5 −2
]1×2 .
Calcule
i. A+B;
ii. AC;
iii. CD;
iv. DA;
v. −A;
vi. −D.
2. Seja A =
[2 x2
2x−1 0
]2×2
. Calcule x de forma que AT = A.
3. Se A é uma matriz simétrica, então A−AT =?
4. Se A é uma matriz triangular inferior, que tipo de matriz será AT ?
5. Calcule x,y,w,z se[
x yz w
][2 33 4
]=
[1 00 1
].
6. Se A =
[2 −2−4 3
]. Calcule B, de forma que B2 = A.
7. Calcule os determinantes das seguintes matrizes:
i. A =
[3 −24 5
]81 / 165

Matemática Computacional
ii. B =
1 2 34 −2 32 5 −1
iii. C =
2 0 13 2 −3−1 −3 5
iv. D =
1 0 03 2 −44 1 3
.
8. Para cada matriz A, calcule os valores de t para os quais o determinante é zero:
i. A =
[t−5 7−1 t +3
]
ii. A =
t−2 4 31 t +1 −20 0 t−4
iii. A =
t +3 −1 17 t−5 16 −6 t +2
9. Determine se as matrizes, dadas a seguir, são positivas definidas ou não:
i.[
1 −1−1 1
]
ii.
0 2 22 −4 22 2 1
iii.
3 −3 6−3 2 −76 −7 13
iv.
3 −6 9−6 14 −209 −20 29
v.
1 1 11 −1 21 2 3
vi.
2 −1 −1−1 2 1−1 1 2
vii.
2 0 00 7 00 0 1
viii.
4 2 12 5 21 2 4
82 / 165

Matemática Computacional
ix.
1 2 −2 −12 −1 2 3−2 2 0 5−1 3 5 3
x.
−7 0 −1 50 1 3 −2−1 3 −4 25 −2 2 −1
xi.
1 −2 −3 0−2 4 0 −1−3 0 −2 70 −1 7 0
xii.
−1 2 0 12 −1 6 120 6 4 −21 12 −2 6
xiii.
1 −1 2 −2−1 3 −4 52 −4 5 −5−2 5 −5 14
xiv.
1 1 1 3 11 4 0 −1 21 0 −1 5 43 −1 5 0 21 2 4 2 0
10. Para cada matriz A, calcule adj(A) e A−1:
i. A =
1 1 01 1 10 2 1
ii. A =
1 2 23 1 01 1 1
iii. A =
1 2 32 3 41 5 7
11. Determinar uma matriz A de ordem 2×2 tal que A = adj(A).
12. Considere as matrizes do exercício 7 e determinar as inversas das matrizes A,B,C,D, se elasexistem.
13. Das matrizes dadas a seguir, determine a matriz reduzida escalonada
i.
1 −2 3 −12 −1 2 33 1 2 3
83 / 165

Matemática Computacional
ii.
0 1 3 −22 1 −4 32 3 2 −1
iii.
0 2 21 1 33 −4 22 −3 1
iv.
1 −2 −3 01 4 −1 −12 −1 10 0
v.[
1 1 1 3 11 1 −1 2 0
]
vi.
1 1 1 11 −1 −1 22 1 1 3
Feedback sobre o capítuloVocê pode contribuir para melhoria dos nossos livros. Encontrou algum erro? Gostaria desubmeter uma sugestão ou crítica?Para compreender melhor como feedbacks funcionam consulte o guia do curso.
84 / 165

Matemática Computacional
Capítulo 4
Sistemas de equações lineares
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Familiarizar-se com os sistemas de Equações Lineares;• Representar qualquer sistema de equações na sua forma matricial;• Determinar as soluções de um sistema de equações lineares;• Usar a Regra de Cramer para resolver sistemas, quadrados, de equações lineares;• Calcular a inversa de uma matriz usando operações elementares linha.
Neste capítulo estudaremos como resolver um sistema de equações lineares. Para isto pode ser ne-cessário modificar/transformar este num outro sistema equivalente, no qual a solução seja de fácilidentificação.
4.1 Equação Linear
Definição 4.1
i. Uma equação linear sobre R, é uma expressão da forma:
a1x1 +a2x2 + · · ·+anxn = b, (I)
onde ai, b ∈ R, ∀ i = 1, . . . ,n. Mais ainda, os xi’s são as incógnitas (ou variáveis), os ai’ssão os coeficientes dos xi’s, e b é o termo constante (ou independente) desta equação;
ii. Uma n-upla x∗ = (x∗1,x∗2, . . . ,x
∗n) é uma solução de (I), se x∗ verifica a equação linear (I);
Em outras palavras, fazendo
x1 = x∗1, x2 = x∗2 . . . xn = x∗n,
e ao substituir em (I) temos que
a1x∗1 +a2x∗2 + · · ·+anx∗n = b,
ou seja, a igualdade é verificada;iii. O conjunto formado por todas as soluções de (I) é denominado de conjunto solução.
85 / 165

Matemática Computacional
Exemplo 4.1Considerando a equação linear:
4x1 +2x2− x3 + x4 = 1
temos que:
a. A 4-upla x∗ = (1,2,3,−4) é uma solução desta equação. De fato, quando substituimos x∗ naexpressão acima, temos que:
4(1)+2(2)− (3)+(−4) = 1 ⇒ 1 = 1.
A qual é uma proposição verdadeira;
b. A 4-upla x = (14 ,0,0,0) é uma solução desta equação. De fato, quando substituimos x na
expressão acima, temos que:
4(14)+2(0)− (0)+(0) = 1 ⇒ 1 = 1.
A qual é uma proposição verdadeira;
c. A 4-upla x = (1,0,2,3) não é uma solução da equação. De fato, quando substituimos x naexpressão acima, temos que:
4(1)+2(0)− (2)+(3) = 1 ⇒ 5 = 1.
A qual é uma proposição falsa.
Realmente, esta equação tem infinitas soluções. No decorrer deste capítulo aprenderemos como obtê-las
Nota 4.1Dada a equação linear (I). Então, o seu conjunto solução admite somente 3 possibilidades:
i. O conjunto solução é vazio: isto acontece quando todos os coeficientes são nulos, e otermo constante é não nulo, isto é, a equação da forma
0x1 +0x2 + · · ·+0xn = b, com b 6= 0.
é inconsistente, portanto, não possui solução.
ii. O conjunto solução tem uma única solução: isto acontece quando temos uma únicaincógnita, isto é, n = 1.
iii. O conjunto solução tem infinitas soluções: isto acontece quando temos mais de umaincógnita, isto é, n≥ 2, com seu respeitivo coeficiente não nulo.
O seguinte exemplo ilustra melhor os itens (ii) e (iii) desta nota.
86 / 165

Matemática Computacional
Exemplo 4.2
a. Considerando a equação linear:
4x1 =54⇒ x1 =
516
.
Assim, temos que x∗1 =5
16 é a única solução desta equação.
b. Considerando a equação linear:
4x1 +2x2 = 1 ⇒ x1 =1−2x2
4, com x2 ∈ R.
Assim, temos que x∗1 =1−2x∗2
4 , e quando x∗2 varia em R, são geradas as infinitas soluções destaequação linear.
Importante 4.1Em geral, a solução, ou soluções, da equação linear (I) pode ser obtida da seguinte forma,quando um dos coeficiente é não nulo. Sem perda de generalidade, consideremos a1 6= 0,então
x1 =ba1− a2
a1x2−·· ·−
an
a1xn.
i. Se damos valores às variáveis x2, . . . ,xn, obtemos um valor para x1, estes valoresformam uma solução da equação;
ii. Se fazemos variar os valores de x2, . . . ,xn obtemos infinitas soluções para esta equa-ção;
iii. Se a1 é o único coeficiente não nulo, então a equação tem uma única solução, igual aba1
.
4.2 Sistema de Equações Lineares
Definição 4.2
i. Um sistema de equações lineares com m equações e n incógnitas é da forma:
a11x1 + a12x2 + · · · + a1nxn = b1a21x1 + a22x2 + · · · + a2nxn = b2
......
......
am1x1 + am2x2 + · · · + amnxn = bm
(II)
onde os ai j, bi são números reais e os x1,x2, . . . ,xn são as incógnitas;
ii. Uma n-upla x∗ = (x∗1,x∗2, . . . ,x
∗n) é uma solução de (II), se x∗ é solução de cada uma das m
equações lineares de (II);
87 / 165
Matemática Computacional
iii. O conjunto formado por todas as soluções de (II) é denominado de conjunto solução;
iv. Diz-se que (II) é um sistema homogêneo, se todos os termos constantes b1,b2, . . . ,bm sãoiguais a zero, isto é:
a11x1 + a12x2 + · · · + a1nxn = 0a21x1 + a22x2 + · · · + a2nxn = 0
......
......
am1x1 + am2x2 + · · · + amnxn = 0
este sistema sempre tem entre as suas soluções a n-upla 0 = (0,0, . . . ,0), a que é deno-minada de solução trivial, qualquer outra solução, caso exista, é denominada de soluçãonão trivial.
Importante 4.2Em (II), se existe um i ∈ {1,2, . . . ,m} tal que:
0x1 +0x2 + · · ·+0xn = bi, bi 6= 0,
então este sistema é inconsistente e não possui solução, isto é, o conjunto solução de (II) évazio.
Definição 4.3Sejam os sistemas de equações lineares:
(II1)
a11x1 + · · · + a1nxn = b1a21x1 + · · · + a2nxn = b2
......
...am1x1 + · · · + amnxn = bm
(II2)
c11x1 + · · · + c1nxn = d1c21x1 + · · · + c2nxn = d2
......
...cm1x1 + · · · + cmnxn = dm
Diz-se que (II1) e (II2) são sistemas equivalentes se, e somente se, o conjunto solução de (II1)é igual ao conjunto solução (II2).
Importante 4.3
a. Se permutamos as posições de duas equações quaisquer, de (II), então o novo sis-tema de equações é um sistema equivalente de (II);
b. Se multiplicamos ambos os membros de qualquer uma das equações, de (II), por umnúmero real não nulo, então o novo sistema de equações é um sistema equivalente de(II);
c. Se substituímos uma equação qualquer, de (II), por outra obtida a partir da adiçãomembro a membro desta equação, com outra na qual foi aplicada o item acima por umnúmero real não nulo, então o novo sistema de equações é um sistema equivalente de(II).
88 / 165
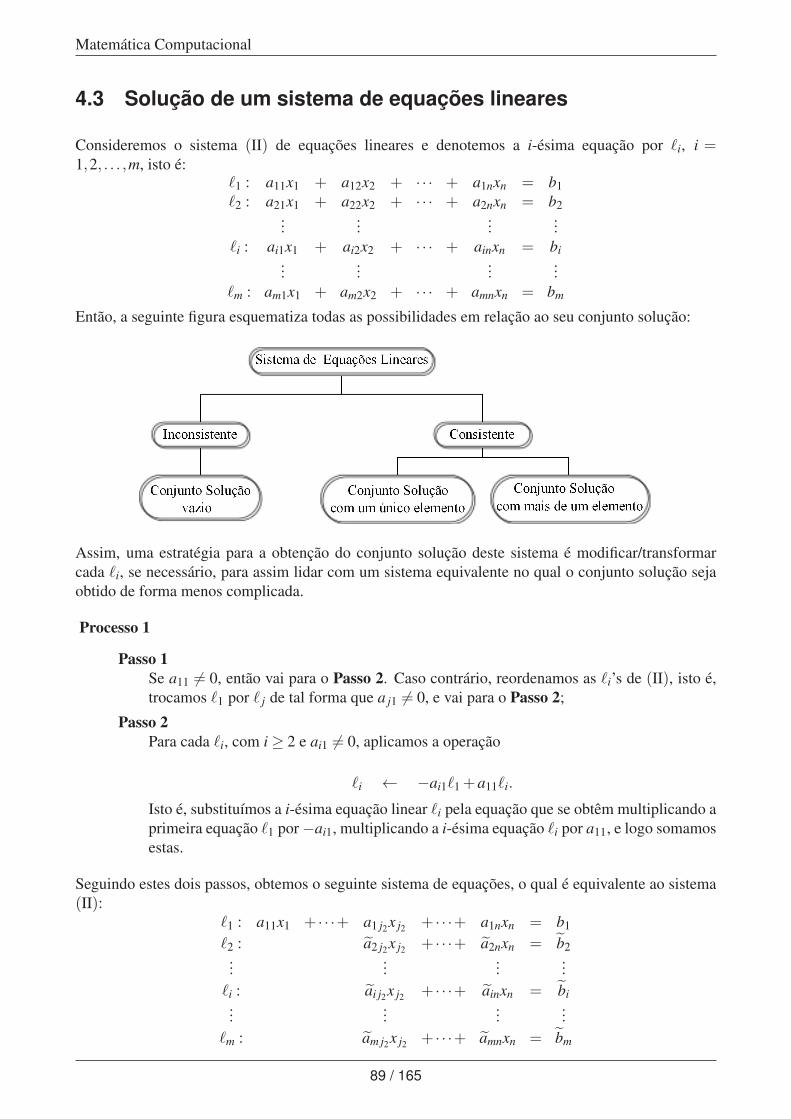
Matemática Computacional
4.3 Solução de um sistema de equações lineares
Consideremos o sistema (II) de equações lineares e denotemos a i-ésima equação por `i, i =1,2, . . . ,m, isto é:
`1 : a11x1 + a12x2 + · · · + a1nxn = b1`2 : a21x1 + a22x2 + · · · + a2nxn = b2
......
......
`i : ai1x1 + ai2x2 + · · · + ainxn = bi...
......
...`m : am1x1 + am2x2 + · · · + amnxn = bm
Então, a seguinte figura esquematiza todas as possibilidades em relação ao seu conjunto solução:
Sistema de Equações Lineares
Assim, uma estratégia para a obtenção do conjunto solução deste sistema é modificar/transformarcada `i, se necessário, para assim lidar com um sistema equivalente no qual o conjunto solução sejaobtido de forma menos complicada.
Processo 1
Passo 1Se a11 6= 0, então vai para o Passo 2. Caso contrário, reordenamos as `i’s de (II), isto é,trocamos `1 por ` j de tal forma que a j1 6= 0, e vai para o Passo 2;
Passo 2Para cada `i, com i≥ 2 e ai1 6= 0, aplicamos a operação
`i ← −ai1`1 +a11`i.
Isto é, substituímos a i-ésima equação linear `i pela equação que se obtêm multiplicando aprimeira equação `1 por−ai1, multiplicando a i-ésima equação `i por a11, e logo somamosestas.
Seguindo estes dois passos, obtemos o seguinte sistema de equações, o qual é equivalente ao sistema(II):
`1 : a11x1 + · · ·+ a1 j2x j2 + · · ·+ a1nxn = b1
`2 : a2 j2x j2 + · · ·+ a2nxn = b2...
......
...`i : ai j2x j2 + · · ·+ ainxn = bi...
......
...`m : am j2x j2 + · · ·+ amnxn = bm
89 / 165
Matemática Computacional
onde a11 6= 0 e x j2 representa a primeira incógnita com coeficiente não nulo, para alguma das equações`2, `3, . . . , `m.
Nota 4.2O Processo 1 elimina no mínimo uma incógnita em todas as equações `2, `3, . . . , `m. Isto é,j2 ≥ 2.
O exemplos a seguir ilustram o Processo 1.
Exemplo 4.3Consideremos o seguinte sistema de equações lineares:
`1 : 6x2 + 7x3 − x4 = −1`2 : 2x1 + 4x2 − x3 + 2x4 = 1`3 : −3x1 + 2x2 + x3 − x4 = 2`4 : −4x1 + 4x2 + x3 + 5x4 = 3
Usando o Processo 1 eliminemos a incógnita x1.
SoluçãoDesde que a11 = 0 e a21 = 2, do Passo 1, trocamos `1 com `2, e obtemos o seguinte sistemaequivalente de equações:
`1 : 2x1 + 4x2 − x3 + 2x4 = 1`2 : 6x2 + 7x3 − x4 = −1`3 : −3x1 + 2x2 + x3 − x4 = 2`4 : −4x1 + 4x2 + x3 + 5x4 = 3
Agora, precisamos eliminar a incógnita x1 de `3 e `4, pois `2 não tem esta incógnita. Do Passo2, aplicamos as seguintes operações:
`3 ← 3`1 +2`3 e `4 ← 4`1 +2`4.
Isto é:3`1 : 6x1 + 12x2 − 3x3 + 6x4 = 32`3 : −6x1 + 4x2 + 2x3 − 2x4 = 4
`3← 3`1 +2`3 : 16x2 − x3 + 4x4 = 7
4`1 : 8x1 + 16x2 − 4x3 + 8x4 = −22`4 : −8x1 + 2x2 + 2x3 + 10x4 = 12
`4← 4`1 +2`4 : 18x2 − 2x3 + 18x4 = 10Assim, o sistema original se reduz ao seguinte sistema equivalente:
`1 : 2x1 + 4x2 − x3 + 2x4 = 1`2 : 6x2 + 7x3 − x4 = −1`3 : 16x2 − x3 + 4x4 = 7`4 : 18x2 − 2x3 + 18x4 = 10
Logo, x1 foi eliminada de `2, `3 e `4, assim a incógnita x2 desempenha o papel da incógnita x j2 ,isto é j2 = 2.
Embora, no exemplo acima, j2 = 2 isto não, necessariamente, acontece em geral, o seguinte exemploilustra este fato.
90 / 165
Matemática Computacional
Exemplo 4.4Consideremos o seguinte sistema de equações lineares:
`1 : 2x1 + 4x2 − x3 + 2x4 + 2x5 = 1`2 : 3x1 + 6x2 + x3 − x4 + 4x5 = −7`3 : 4x1 + 8x2 + x3 + 5x4 − x5 = 3
Usando o Processo 1 eliminemos a incógnita x1.
SoluçãoDesde que a11 = 2, então vamos diretamente ao Passo 2. Agora, precisamos eliminar a incóg-nita x1 de `2 e `3. Do Passo 2, aplicamos as seguintes operações:
`2 ← −3`1 +2`2 e `3 ← −2`1 + `3.
Isto é:
−3`1 : −6x1 − 12x2 + 3x3 − 6x4 − 6x5 = −32`2 : 6x1 + 12x2 + 2x3 − 2x4 + 8x5 = −14
`2←−3`1 +2`2 : 5x3 − 8x4 + 2x5 = −17
−2`1 : −4x1 − 8x2 + 2x3 − 4x4 − 4x5 = −2`3 : 4x1 + 8x2 + x3 + 5x4 − x5 = 3
`3←−2`1 + `3 : 3x3 + x4 − 5x5 = 1
Assim, o sistema original se reduz ao seguinte sistema equivalente:
`1 : 2x1 + 4x2 − x3 + 2x4 + 2x5 = 1`2 : 5x3 − 8x4 + 2x5 = −17`3 : 3x3 + x4 − 5x5 = 1
Observe que, x1 foi eliminado de `2 e `3, porém x2 também foi eliminado de `2 e `3, assim aincógnita x3 desempenha o papel da incógnita x j2 , isto é j2 = 3.
Nota 4.3As equações `2, . . . `m, formam um subsistema que tem menos equações e menos incógnitasque o sistema original (II):
`2 : a2 j2x j2 + · · · + a2nxn = b2...
......
...`i : ai j2x2 + · · · + ainxn = bi...
......
...`m : am j2x j2 + · · · + amnxn = bm
, com j2 ≥ 2.
91 / 165

Matemática Computacional
4.3.1 Método de eliminação de Gauss
Pela nota anterior, podemos aplicar Processo 1 em ordem a eliminar a incógnita x j2 , do novo subsis-tema, e assim sucessivamente, até obter um sistema de equações equivalente a (II), com um númeromínimo de incógnitas na última equação. Ressaltemos que este último sistema pode ser consistenteou inconsistente, o que implicaria que o sistema original também o seja. Esta aplicação recorrente doProcesso 1 é conhecida na literatura como o método de eliminação de Gauss, para ser mais precisos,a seguir é apresentado este método com detalhes.
Método de eliminação de GaussDado o sistema de equações lineares (II), isto é, n incógnitas e m equações. Para k =1,2, . . . ,n−1 faça:
Passo 1
• Se akk 6= 0, então vai para o Passo 2.• Caso contrário:
– reordenamos as linhas `k, `k+1, . . . , `m, de forma que akk 6= 0, e vai para o Passo 2;– Se
akk = a(k+1)k = · · ·= amk = 0,
então, faça k = k+1 e volte para o Passo 1;
Passo 2Para cada `i, i = k+1,k+2, . . . ,m, aplicamos a operação
`i ← −aik`k +akk`i.
Isto é, substituímos a i-ésima equação linear `i pela equação que se obtêm multiplicando ak−ésima equação `k por−aik, multiplicando a i-ésima equação `i por akk, e logo somamosestas.
Nota 4.4Na literatura, podemos encontrar a atualização de `i, no Passo 2, da seguinte forma:
`i ← − aik
akk`k + `i.
Exemplo 4.5Consideremos os seguintes sistemas de equações lineares e aplicando o Método de eliminação deGauss, verifiquemos se estes sistemas são consistentes e/ou inconsistentes.
1.`1 : x1 + 2x2 − 3x3 = 4`2 : x1 + 3x2 + x3 = 11`3 : 2x1 + 5x2 − 4x3 = 13`4 : 2x1 + 6x2 + 2x3 = 22
92 / 165
Matemática Computacional
SoluçãoDesde que este sistema tem 3 incógnitas, então n = 3. Assim, aplicando o método deeliminação de Gauss se segue que:
k = 1,2.
• Para k = 1:Passo 1
Desde que a11 6= 0, vai para o Passo 2.Passo 2
Faça
`2 ← −`1 + `2, `3 ← −2`1 + `3 e `4 ← −2`1 + `4
Isto é:−`1 : −x1 − 2x2 + 3x3 = −4`2 : x1 + 3x2 + x3 = 11
`2←−`1 + `2 : x2 + 4x3 = 7
−2`1 : −2x1 − 4x2 + 6x3 = −8`3 : 2x1 + 5x2 − 4x3 = 13
`3←−2`1 + `3 : x2 + 2x3 = 5
−2`1 : −2x1 − 4x2 + 6x3 = −8`4 : 2x1 + 6x2 + 2x3 = 22
`4←−2`1 + `4 : 2x2 + 8x3 = 14
Assim, obtemos o seguinte sistema equivalente:
`1 : x1 + 2x2 − 3x3 = 4`2 : x2 + 4x3 = 7`3 : x2 + 2x3 = 5`4 : 2x2 + 8x3 = 14
• Para k = 2:Passo 1
Desde que a22 6= 0, vai para o Passo 2.Passo 2
Faça
`3 ← `2− `3 e `4 ← −2`2 + `4
Isto é:`2 : x2 + 4x3 = 7−`3 : −x2 − 2x3 = −5
`3← `2− `3 : 2x3 = 2
−2`2 : −2x2 − 8x3 = −14`4 : 2x2 + 8x3 = 14
`4←−2`2 + `4 : 0 = 0
93 / 165

Matemática Computacional
Assim, obtemos o seguinte sistema equivalente:
`1 : x1 + 2x2 − 3x3 = 4`2 : x2 + 4x3 = 7`3 : 2x3 = 2`4 : 0 = 0
Portanto, o sistema original se reduz ao seguinte sistema equivalente:
`1 : x1 + 2x2 − 3x3 = 4`2 : x2 + 4x3 = 7`3 : 2x3 = 2
Desde que não existe uma equação da forma 0 = α , com α 6= 0, este sistema é um sistemaconsistente, e seu conjunto solução é não vazio.
2.`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : 2x1 + 4x2 − 3x3 + 4x4 = 5`3 : 5x1 + 10x2 − 8x3 + 11x4 = 12
SoluçãoDesde que este sistema tem 4 incógnitas, então n = 4. Assim, aplicando o método deeliminação de Gauss se segue que:
k = 1,2,3.
• Para k = 1:Passo 1
Desde que a11 6= 0, vai para o Passo 2.Passo 2
Faça
`2 ← −2`1 + `2 e `3 ← −5`1 + `3
Isto é:
−2`1 : −2x1 − 4x2 + 4x3 − 6x4 = −4`2 : 2x1 + 4x2 − 3x3 + 4x4 = 5
`2←−2`1 + `2 : x3 − 2x4 = 1
−5`1 : −5x1 − 10x2 + 10x3 − 15x4 = −10`3 : 5x1 + 10x2 − 8x3 + 11x4 = 12
`3←−5`1 + `3 : 2x3 − 4x4 = 2
Logo, obtemos o seguinte sistema equivalente:
`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : x3 − 2x4 = 1`3 : 2x3 − 4x4 = 2
• Para k = 2:Desde que
a22 = 0 e a32 = 0,
então, faça k = k+1 = 2+1 = 3.
94 / 165

Matemática Computacional
• Para k = 3:Passo 1
Desde que a33 6= 0, vai para o Passo 2.Passo 2
Faça
`3 ← −2`2 + `3.
Isto é:−2`2 : −2x3 + 4x4 = −2
`3 : 2x3 − 4x4 = 2`3←−2`2 + `3 : 0 = 0
Assim, obtemos o seguinte sistema equivalente:
`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : x3 − 2x4 = 1`3 : 0 = 0
Portanto, o sistema original se reduz ao seguinte sistema equivalente:
`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : x3 − 2x4 = 1
Portanto, este sistema é um sistema consistente, e seu conjunto solução é não vazio.
3.`1 : 2x1 + x2 − 2x3 + 3x4 = 1`2 : 3x1 + 2x2 − x3 + 2x4 = 4`3 : 3x1 + 3x2 + 3x3 − 3x4 = 5
SoluçãoDesde que este sistema tem 4 incógnitas, então n = 4. Assim, aplicando o método deeliminação de Gauss se segue que:
k = 1,2,3.
• Para k = 1:Passo 1
Desde que a11 6= 0, vai para o Passo 2.Passo 2
Faça
`2 ← −3`1 +2`2 e `3 ← −3`1 +2`3.
Isto é:
−3`1 : −6x1 − 3x2 + 6x3 − 9x4 = −32`3 : 6x1 + 6x2 + 6x3 − 6x4 = 10
`2←−3`1 +2`2 : 3x2 + 12x3 − 15x4 = 7
−3`1 : −6x1 − 3x2 + 6x3 − 9x4 = −32`3 : 6x1 + 6x2 + 6x3 − 6x4 = 10
`3←−3`1 +2`3 : 3x2 + 12x3 − 15x4 = 7
95 / 165

Matemática Computacional
Logo, obtemos o seguinte sistema equivalente:
`1 : 2x1 + x2 − 2x3 + 3x4 = 1`2 : x2 + 4x3 − 5x4 = 5`3 : 3x2 + 12x3 − 15x4 = 7
• Para k = 2:Passo 1
Desde que a22 6= 0, vai para o Passo 2.Passo 2
Faça
`3 ← −3`2 + `3
Isto é:−3`2 : −3x2 − 12x3 + 15x4 = −15
`3 : 3x2 + 12x3 − 15x4 = 7`3←−3`2 + `3 : 0 = −8
Assim, obtemos o seguinte sistema equivalente:
`1 : 2x1 + x2 − 2x3 + 3x4 = 1`2 : x2 + 4x3 − 5x4 = 5`3 : 0 = −8
Porém, em `3 temos que 0 =−8. Segundo a caixa Importante 4.2, se segue que o sistemaoriginal é inconsistente, portanto, o conjunto solução deste sistema é vazio.
Até agora, vimos que aplicando o Método de eliminação de Gauss ao sistema de equações (II),obtemos um sistema de equações equivalente, no qual:
`2 tem menos incógnitas que `1;`3 tem menos incógnitas que `2;
...`m tem menos incógnitas que `m−1.
Assim, podemos ver com menos dificuldade se (II) é um sistema inconsistente ou se reduz ao umsistema consistente, equivalente, da forma:
`1 : a11x1 +a12x2 +a13x3 + · · · · · · · · · · · · · · · · · · · · · · · ·+a1nxn = b1`2 : a2 j2x j2 +a2 j2+1x j2+1 + · · · · · · · · · · · ·+a2nxn = b2
... · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·`r : ar jrx jr +ar jr+1x jr+1 + · · ·+arnxn = br
(III)
onde 2≤ j2 < · · ·< jr e os coeficientes:
a11 6= 0, a2 j2 6= 0, . . . , ar jr 6= 0.
Nota 4.5Para não sobrecarregar as nossas notações, usaremos os mesmos coeficientes ai j, bk nonovo sistema de equações gerado, embora possam representar números diferentes.
96 / 165
Matemática Computacional
Continuando nosso estudo, em ordem a obter o conjunto solução de (III), temos a seguinte definiçãoe o seguinte teorema.
Definição 4.4Seja o sistema de equações (III). Diz-se que:
i. (III) está na sua forma escalonada;
ii. as incógnitas xi que não aparecem ao início de alguma equação (i 6= 1, j2, . . . , jr) sãovariáveis livres.
Teorema 4.1Seja o sistema de equações (III). Então, somente existem 2 casos a ser analisados, em ordem aobter o seu conjunto solução:
i. Se o número de equações é igual que o número de incógnitas, isto é r = n, então (III) temuma única solução;
ii. Se o número de equações é menor que o número de incógnitas, isto é r < n, então atri-buindo, arbitrariamente, valores às n− r variáveis livres, obtemos mais de uma soluçãopara (III).
Obtenção do conjunto soluçãoA equação `r de (III) nos proporciona o ponto de partida para a obtenção do seu conjuntosolução. De `r temos que:
x jr =br− (ar jr+1x jr+1 + · · ·+arnxn)
ar jr
assim substituindo regressivamente nas equações anteriores obtemos valores para cadaincógnita.Em particular, quando r = n temos que a única solução é da forma:
xn =bn
ann, xn−1 =
bn−1−a(n−1)nxn
a(n−1)(n−1). . . x1 =
b1−n∑
k=2a1kxk
a11
Exemplo 4.6Para os itens 1 e 2 do exemplo anterior, temos que:
1. Dado o sistema de equações
`1 : x1 + 2x2 − 3x3 = 4`2 : x1 + 3x2 + x3 = 11`3 : 2x1 + 5x2 − 4x3 = 13`4 : 2x1 + 6x2 + 2x3 = 22
Então, aplicando as seguintes operações
`2←−`1 + `2, `3←−2`1 + `3, `4←−2`1 + `4, `3←−`2 + `3 e `4←−2`2 + `4
97 / 165

Matemática Computacional
obtemos que a sua forma escalonada é
`1 : x1 + 2x2 − 3x3 = 4`2 : x2 + 4x3 = 7`3 : −2x3 = −2
e desde que a11 = 1, a22 = 1 e a33 =−2, não existem variáveis livres neste sistema.Mais ainda, o número de equações é igual ao número de incógnitas, logo segundo o Teorema4.1, o conjunto solução possui uma única solução. Agora obtenhamos esta solução.
i. Da equação `3 temos que:
−2x3 =−2 ⇒ x3 = 1;
ii. Da equação `2 e do item acima temos que:
x2 = 7−4x3 e x3 = 1 ⇒ x2 = 7−4(1) = 3;
iii. Da equação `1 e dos itens acima temos que:
x1 = 4−2x2 +3x3, x2 = 3 e x3 = 1 ⇒ x1 = 4−2(3)+3(1) = 1;
Portanto, a única solução deste sistema de equações é:
x∗ = (1,3,1).
2. Dado o sistema de equações
`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : 2x1 + 4x2 − 3x3 + 4x4 = 5`3 : 5x1 + 10x2 − 8x3 + 11x4 = 12
Então, aplicando as seguintes operações
`2←−2`1 + `2, `3←−5`1 + `3 e `3←−2`2 + `3
obtemos que a sua forma escalonada é
`1 : x1 + 2x2 − 2x3 + 3x4 = 2`2 : x3 − 2x4 = 1
e desde que a11 = 1, a22 = 0, a33 = 2 e a44 = 0, temos que x2 e x4 são variáveis livres nestesistema. Mais ainda, o número de equações é menor que o número de incógnitas, logo segundoo Teorema 4.1, o conjunto solução possui mais de uma solução. Agora obtenhamos estassoluções.
i. Da equação `2 temos que:
x3 = 1+2x4;
ii. Da equação `1 e do item acima temos que:
x1 = 2−2x2 +2x3−3x4, e x3 = 1+2x4
⇒ x1 = 2−2x2 +2(1+2x4)−3x4 = 2−2x2 +2+4x4−3x4 = 4−2x2 + x4;
98 / 165

Matemática Computacional
Portanto, o conjunto solução deste sistema de equações é:{x∗ = (x∗1,x
∗2,x∗3,x∗4) : x∗1 = 4−2x∗2 + x∗4, x∗3 = 1+2x∗4 e x∗2, x∗4 variando em R
}.
Assim soluções particulares pode ser geradas dando valores arbitrários às variáveis livres x∗2 ex∗4, isto é:
a. Para x∗2 = 1 e x∗4 =−5, temos que x∗3 = 1+2(−5) =−9 e x∗1 = 4−2(1)+(−5) =−3, oque implica que x∗1 = (−3,1,−9,−5) é uma solução para este sistema;
b. Para x∗2 =−1 e x∗4 = 5, temos que x∗3 = 1+2(5) = 11 e x∗1 = 4−2(−1)+(5) = 11, o queimplica que x∗2 = (11,−1,11,5) é uma solução para este sistema;
c. Para x∗2 = 3 e x∗4 = 0, temos que x∗3 = 1+ 2(0) = 1 e x∗1 = 4− 2(3)+ (0) = −2, o queimplica que x∗3 = (−2,3,1,0) é uma solução para este sistema.
4.3.2 Solução de um sistema homogêneo de equações lineares
Consideremos um sistema homogêneo de equações lineares. Desde que, 0 = (0,0, . . . ,0) é sempreuma solução deste tipo de sistemas, então um sistema homogêneo de equações lineares é, sempre,consistente. Portanto, este pode ser reduzido a um sistema homogêneo equivalente da forma escalo-nada:
`1 : a11x1 +a12x2 +a13x3 + · · · · · · · · · · · · · · · · · · · · · · · ·+a1nxn = 0`2 : a2 j2x j2 +a2 j2+1x j2+1 + · · · · · · · · · · · ·+a2nxn = 0
... · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·`r : ar jrx jr +ar jr+1x jr+1 + · · ·+arnxn = 0
(III)
onde 1≤ j2 < · · ·< jr e os coeficientes:
a11 6= 0, a2 j2 6= 0 . . . ar jr 6= 0.
Logo, pelo Teorema 4.1, temos somente dois casos:
Caso ISe r = n, então o sistema tem como única solução zero 0 = (0,0, . . . ,0).
Caso IISe r < n, então o sistema tem, pelo menos, uma solução diferente do zero.
Exemplo 4.7Consideremos os seguintes sistemas de equações lineares:
1.`1 : x1 + x2 − x3 = 0`2 : 2x1 + 5x2 + x3 = 0`3 : x1 + 4x2 + 2x3 = 0
Então, aplicando o método de eliminação de Gauss, isto é, aplicando as seguintes operações
`2←−2`1 + `2, `3←−`1 + `3 e `3←−`2 + `3
99 / 165

Matemática Computacional
obtemos o sistema equivalente
`1 : x1 + x2 − x3 = 0`2 : 3x2 + 3x3 = 0`3 : 0 = 0
≡ `1 : x1 + x2 − x3 = 0`2 : 3x2 + 3x3 = 0
Desde que, neste último sistema, a11 = 1 e a22 = 3, então ambos sistemas são consistentes eeste último é a forma escalonada do primeiro. Notemos que, x3 é uma variável livre. Assim,do Teorema 4.1, temos que este sistema tem infinitas soluções, além do 0. Logo, de `1 e `2obtemos que
x1 =−2x3 e x2 =−x3.
Portanto, o conjunto solução é da forma:{x∗ = (x∗1,x
∗2,x∗3) : x∗1 =−2x∗3, x∗2 =−x∗3 e x∗3 ∈ R
}.
Em particular, para x∗3 = 1, temos que x∗2 = −1 e x∗1 = −2, isto é x∗1 = (−2,−1,1) é umasolução não nula do sistema original.
2.`1 : x1 + x2 − x3 = 0`2 : 2x1 + 4x2 − x3 = 0`3 : 3x1 + 2x2 + 2x3 = 0
Aplicando o método de eliminação de Gauss, obtemos o sistema equivalente
`1 : x1 + x2 − x3 = 0`2 : 2x2 + x3 = 0`3 : 11x3 = 0
Desde que, neste último sistema, a11 = 1, a22 = 2 e a33 = 11, então ambos sistemas são con-sistentes e este último é a forma escalonada do primeiro. Notemos que, não existem variáveislivres neste sistema. Assim, do Teorema 4.1, temos que 0 é a única solução do sistema original.
4.4 Matrizes e sistemas de equações lineares
No estudo das equações lineares é mais fácil usar a linguagem e a teoria de matrizes, para a obtençãodo seu conjunto solução. Considerando o sistema de equações lineares (II):
a11x1 + a12x2 + · · · + a1nxn = b1a21x1 + a22x2 + · · · + a2nxn = b2
......
......
am1x1 + am2x2 + · · · + amnxn = bm
(II)
este pode ser reescrito usando matrizes da seguinte forma:a11 a12 . . . a1na21 a22 . . . a2n
......
...am1 am2 . . . amn
x1x2...
xn
=
b1b2...
bm
100 / 165
Matemática Computacional
Fazendo:
A =
a11 a12 . . . a1na21 a22 . . . a2n
......
...am1 am2 . . . amn
= [ai j]m×n, x =
x1x2...
xn
= [xi]n×1 e b =
b1b2...
bm
= [bi]m×1
conseguimos reescrever de forma mais simple o sistema (II):
Ax = b (IV)
Assim, toda solução do sistema (II) é uma solução da equação matricial (IV), e vice-versa.
Desde que, associado ao sistema (II) temos o sistema homogêneo da forma:
a11x1 + a12x2 + · · · + a1nxn = 0a21x1 + a22x2 + · · · + a2nxn = 0
......
......
am1x1 + am2x2 + · · · + amnxn = 0
este é reescrito usando matrizes da seguinte forma:
Ax = 0.
Definição 4.5Seja a equação matricial (IV).
i. A matriz A, deste sistema, é denominada de matriz dos coeficientes do sistema (II);
ii. A matriz [A|b], definida por
[A|b] =
a11 a12 . . . a1n b1a21 a22 . . . a2n b2
......
......
am1 am2 . . . amn bm
é denominada de matriz aumentada de (II)
Importante 4.4A matriz aumentada determina completamente o sistema (II).
Exemplo 4.8Dado o seguinte sistema de equações
x1 + x2 − x3 = 32x1 + 4x2 − x3 = 8
reescrevemos este na sua forma matricial:[1 1 −12 4 −1
]x1x2x3
=
[38
]
101 / 165

Matemática Computacional
Além disso, a matriz dos coeficientes e a matriz aumentada são respectivamente:[1 1 −12 4 −1
]e
[1 1 −1 32 4 −1 8
]
Teorema 4.2Se x∗1,x∗2, . . . ,x∗k, são soluções de um sistema homogêneo de equações lineares Ax = 0, entãotoda combinação linear dos x∗i’s da forma α1x∗1 +α2x∗2 + · · ·+αkx∗k onde αi ∈ R, para todoi ∈ {1, . . . ,k}, é uma solução de Ax = 0. Em particular, se x∗ é solução de Ax = 0, então αx∗ étambém solução de Ax = 0.
O seguinte teorema é uma versão em forma matricial do resultado apresentado na caixa Nota 4.1.
Teorema 4.3Dada a equação matricial Ax = b. Então, esta equação não tem solução, tem uma única soluçãoou tem um número infinito de soluções.
4.5 Resolução de um sistema por escalonamento
Para resolver a equação matricial Ax = b, com m equações e n incógnitas, podemos proceder daseguinte maneira:
Processo 2
Passo 1Construímos a matriz aumentada da equação matricial;
Passo 2Usando as operações elementares entre linhas adequadas, obtemos a matriz reduzidaescalonada equivalente do sistema;
Passo 3Escrevemos o sistema associado à matriz equivalente obtida e obtemos o conjunto soluçãodeste sistema equivalente.
Exemplo 4.9Resolvamos os seguintes sistemas usando o Processo 2:
1.2x1 + x2 = 5
x1 − 3x2 = 6
SoluçãoReescrevendo este sistema na sua forma matricial temos[
2 11 −3
][x1x2
]=
[56
]Logo, a matriz aumentada deste sistema de equações é:[
2 1 51 −3 6
]102 / 165

Matemática Computacional
Fazendo as seguintes operações elementares linha, na ordem dada,
E2
(1,
12
), E3 (2,1,−1), E2
(2,−2
7
)e E3
(1,2,−1
2
),
obtemos a matriz reduzida escalonada equivalente do sistema:[1 0 30 1 −1
]a qual é a matriz aumentada do sistema de equações:
x1 = 3x2 = −1
logo,x1 = 3 e x2 =−1
Desde que, este sistema é equivale ao sistema inicial, temos que x∗ = (3,−1) é a únicasolução do sistema original. Além disso, o posto da matriz dos coeficientes do sistemareduzido e da matriz aumentada é 2.
2.2x1 + x2 = 54x1 + 2x2 = 10
SoluçãoReescrevendo este sistema na sua forma matricial temos[
2 14 2
][x1x2
]=
[5
10
]Logo, a matriz aumentada deste sistema de equações é:[
2 1 54 2 10
]Fazendo as seguintes operações elementares linha, na ordem dada,
E3 (2,1,−2) e E2
(1,
12
),
obtemos a matriz reduzida escalonada equivalente do sistema:[1 1
252
0 0 0
]a qual é a matriz aumentada do sistema de equações:
x1 + 12x2 = 5
20x1 + 0x2 = 0
Neste sistema equivalente a segunda equação é descartada, devido a que não fornece ne-nhuma informação a mais sobre as incógnitas x1 e x2. Assim o conjunto de soluções destesistema tem infinitas soluções e é dado por:{
x∗ = (x1,x2) : x∗1 =52− 1
2x∗2, x∗2 ∈ R
}Desde que este sistema é equivale ao sistema inicial, temos que o conjunto acima tambémé o conjunto solução do sistema original. Além disso, o posto da matriz dos coeficientesdo sistema reduzido e da matriz aumentada é 1.
103 / 165

Matemática Computacional
3.2x1 + x2 = 58x1 + 4x2 = 10
SoluçãoReescrevendo este sistema na sua forma matricial temos[
2 18 4
][x1x2
]=
[510
]Logo, a matriz aumentada deste sistema de equações é:[
2 1 58 4 10
]Fazendo as seguintes operações elementares linha, na ordem dada,
E3 (2,1−4), E2
(1,
12
)e E2
(2,
110
)obtemos a matriz reduzida escalonada equivalente do sistema:[
1 12 0
0 0 1
]a qual é a matriz aumentada do sistema de equações:
x1 + 12x2 = 0
0x1 + 0x2 = 1
Desde que a segunda equação é inconsistente, o sistema todo é inconsistente. Portanto, oconjunto solução para este sistema e o sistema original é vazio. Além disso, o posto damatriz dos coeficientes do sistema inicial é 1 e o posto da matriz aumentada é 2.
4.6 Posto de uma matriz e sistemas de Equações lineares
Em muitas situações, é suficiente saber apenas se um sistema de equações lineares tem solução semter a necessidade de resolvê-lo. Por exemplo, sabemos que ao estudar a posição relativa de duasretas no plano, podemos estar interessados em conhecer apenas se elas se interceptam ou não semdeterminar seu ponto de interseção.
Teorema 4.4Sejam A uma matriz de ordem m×n e um vetor b ∈ Rm. Então a equação Ax = b admite, pelomenos, uma solução se, e somente se, os postos de A e [A|b] são iguais, mais precisamente:
i. Se as duas matrizes têm posto p e p= n, então o conjunto solução tem um único elemento;
ii. Se as duas matrizes têm posto p e p < n, então o conjunto solução tem infinitas soluções.Mais ainda, podemos escolher n− p incógnitas, tal que as restantes, p incógnitas, serãodadas em função destas.
104 / 165

Matemática Computacional
Nota 4.6
a. O item(ii), diz respeito ao grau de liberdade da equação Ax = b;
b. Dado um sistema de equações, no que segue deste livro, pc denotará o posto damatriz dos coeficientes, e pa o posto da matriz aumentada. Se pc = pa denotamossimplesmente por p;
c. Do teorema acima, podemos concluir que, se pc 6= pa, então a equação Ax = b nãoadmite nenhuma solução.
Os seguinte exemplo visa ilustrar o teorema acima,
Exemplo 4.10Seja a equação matricial:
Ax = b
onde A é uma matriz de ordem m×n, x ∈ Rn e b ∈ Rm. As seguintes matrizes representam a matrizaumentada deste sistema. Então determinemos o conjunto solução de cada sistema.
1.
[A|b] =
1 0 0 10 1 0 20 0 1 3
Solução
Neste caso m = 3, n = 3. Além disso, desde que as 3 primeiras colunas desta matriz sãol.i., e a Nota 3.7, o posto de A e da matriz aumentada é 3, isto é, pc = pa = 3 = p e p = n.Portanto, do item(i) do teorema acima, o conjunto solução tem um único elemento, o qualé x∗ = (x∗1,x
∗2,x∗3) = (1,2,3).
2.
[A|b] =[
1 0 2 10 1 3 2
]Solução
Neste caso m = 2, n = 3. Além disso, desde que as 2 primeiras colunas desta matrizsão l.i., e a Nota 3.7, o posto de A e da matriz aumentada é 2, isto é, pc = pa = 2 = pe n− p = 1. Portanto, do item(ii) do teorema acima, o conjunto solução tem infinitassoluções:
{x∗ = (x∗1,x∗2,x∗3) : x∗1 = 1−2x∗3, x∗2 = 2−3x∗3 e x∗3 ∈ R} .
3.
[A|b] =
1 0 2 1 50 1 3 2 40 0 0 0 0
Solução
Neste caso m = 3, n = 4. Além disso, desde que as 2 primeiras colunas desta matrizsão l.i., e a Nota 3.7, o posto de A e da matriz aumentada é 2, isto é, pc = pa = 2 = pe n− p = 2. Portanto, do item(ii) do teorema acima, o conjunto solução tem infinitassoluções:
105 / 165

Matemática Computacional
{x∗ = (x∗1,x∗2,x∗3,x∗4) : x∗1 = 5−2x∗2− x∗3− x∗4, x∗2 = 4−3x∗3−2x∗4 e x∗3, x∗4 ∈ R} .
4.
[A|b] =
1 0 2 10 1 3 20 0 0 3
Solução
Neste caso m = 3 e n = 3. Além disso, desde que as 2 primeiras colunas desta matriz sãol.i., e a Nota 3.7, então o posto de A é 2, porém a matriz aumentada tem 3 colunas l.i.,então o posto desta é 3, isto é, 2 = pc 6= pa = 3. Portanto, este sistema é inconsistente eseu conjunto solução é vazio.
Como já vimos, a existência e o número de soluções estão relacionados com o posto da matriz doscoeficientes e o posto da matriz aumentada. Assim, c
A seguinte nota, complementa a Nota 3.11 e o Teorema 3.3.
Nota 4.7Se A é uma matriz quadrada de ordem n, com det(A) 6= 0, e A é a matriz dos coeficientes deum sistema Ax = b, então este sistema tem solução, e é única.
Exemplo 4.11Dado o sistema de equações lineares:
x + 2x2 + 3x3 = 1−2x + x2 + x3 = 0
6x − 3x2 − 3x3 = −1
Vejamos se este é consistente ou inconsistente.
SoluçãoPara saber se este sistema é consistente ou inconsistente, o reescrevemos na sua forma matricial: 1 2 3
−2 1 16 −3 −3
x1x2x3
=
10−1
Assim, segundo o Teorema 4.4, precisamos determinar os postos da matriz dos coeficientes e damatriz aumentada.
i. Determinando o posto da matriz dos coeficientes:
A =
1 2 3−2 1 16 −3 −3
desde que a `3 =−3`2, temos que det(A) = 0. Logo, o posto de A é menor que 3. Ao analisaras submatrizes 2×2, temos que
det[
1 2−2 1
]= 5.
Assim, A tem uma submatriz 2×2, com determinante diferente de zero. Então, o posto de A é2.
106 / 165

Matemática Computacional
ii. Determinando o posto da matriz aumentada:
[A|b] =
1 2 3 1−2 1 1 06 −3 −3 −1
Ao analisar as submatrizes 3×3 temos que:
det
2 3 11 1 0−3 −3 −1
= 2(−1−0)−3(−1−0)+1(−3+3) = 1,
Então, o posto de [A|b] é 3. Portanto, do Teorema 4.4, item(i), concluímos que o sistema nãoadmite solução, ou seja, este sistema é inconsistente.
4.7 Regra de Cramer
Dado o sistema de equações lineares m×n:
a11x1 + a12x2 + · · · + a1nxn = b1a21x1 + a22x2 + · · · + a2nxn = b2
......
......
an1x1 + an2x2 + · · · + annxn = bn
(II)
já foi visto que este pode ser reescrito em formato matricial:
Ax = b
onde
A =
a11 a12 . . . a1na21 a22 . . . a2n
......
...an1 an2 . . . ann
, x =
x1x2...
xn
e b =
b1b2...
bn
Como, foi mencionado anteriormente, reescrever um sistema de equações lineares em formato matri-cial, simplifica a resolução destes sistemas. A continuação apresentaremos uma regra para a obtençãodo conjunto solução de um sistema de equações de ordem n, isto é m = n, usando a teoria de determi-nantes.
Suponhamos que A é uma matriz quadrada de ordem n e det(A) 6= 0. Então, A possui inversa A−1 e
A−1(Ax) = A−1b ⇔ (A−1A)︸ ︷︷ ︸In
x = A−1b ⇔ Inx = A−1b ⇔ x = A−1b
Ou seja, esta equação matricial possui uma única solução dada por:x∗1x∗2...
x∗n
=
a11 a12 . . . a1na21 a22 . . . a2n
......
...an1 an2 . . . ann
−1
b1b2...
bn
107 / 165
Matemática Computacional
Porém, no capítulo anterior aprendimos como obter a inversa de uma matriz através de seus cofatores,isto é:
A−1 =1
det(A)adj(A) =
1det(A)
∆11 ∆21 . . . ∆n1∆12 ∆22 . . . ∆n2
......
...∆1n ∆2n . . . ∆nn
onde ∆i j é o cofator do elemento ai j. Assim, substituindo esta expressão na equação anterior temosque:
x∗1x∗2...
x∗n
=1
det(A)
∆11 ∆21 . . . ∆n1∆12 ∆22 . . . ∆n2
......
...∆1n ∆2n . . . ∆nn
b1b2...
bn
Efetuando o produto, se segue que:
x∗1x∗2...
x∗n
=1
det(A)
b1∆11 +b2∆21 + . . .+bn∆n1b1∆12 +b2∆22 + . . .+bn∆n2
...b1∆1n +b2∆2n + . . .+bn∆nn
Assim, para x∗1 temos que:
x∗1 =b1∆11 +b2∆21 + · · ·+bn∆n1
det(A)=
det
b1 a12 . . . a1nb2 a22 . . . a2n...
... . . . ...bn an2 . . . ann
det(A)
para x∗2 temos que:
x∗2 =b1∆12 +b2∆22 + · · ·+bn∆n2
det(A)=
det
a11 b1 a13 . . . a1na21 b2 a23 . . . a2n
......
... . . . ...an1 bn an3 . . . ann
det(A)
Em geral, para x∗i temos que:
x∗i =b1∆1i +b2∆2i + · · ·+bn∆ni
det(A)=
det
a11 . . . a1(i−1) b1 a1(i+1) . . . a1na21 . . . a2(i−1) b2 a2(i+1) . . . a2n
... . . . ...... . . . ...
an1 . . . an(i−1) bn an(i+1) . . . ann
det(A)
108 / 165
Matemática Computacional
Importante 4.5
a. Para a obtenção de x∗i , a i−ésima coluna da matriz A é trocada pelo vetor de termosconstantes b;
b. Desde que no denominador de cada expressão tem o det(A), então a hipótese dedet(A) 6= 0 é fundamental para a validez dos resultados;
c. Este método é aplicado exclusivamente para resolver sistemas de equações linearesde ordem n;
d. Este método é conhecido na literatura como a Regra de Cramer.
Exemplo 4.12Dado o sistema de 2 equações e 2 incógnitas
2x1 − 3x2 = 73x1 + 5x2 = 1
Resolver usando a regra de Cramer.
SoluçãoPrimeiro calculamos o determinante da matriz dos coeficientes:
det[
2 −33 5
]= 10+9 = 19 6= 0.
Desde que o determinante é diferente de zero, o sistema tem solução única. Então:
x∗1 =det[
7 −31 5
]det[
2 −33 5
] =3819
= 2 e x∗2 =det[
2 73 1
]det[
2 −33 5
] =−1919
=−1.
Portanto, a única solução do sistema é x∗ = (2,−1).
Exemplo 4.13Dado o sistema de 3 equações e 3 incógnitas
2x1 + 3x2 − x3 = 13x1 + 5x2 + 2x3 = 8x1 − 2x2 − 3x3 = −1
Resolver usando a regra de Cramer.
SoluçãoPrimeiro calculamos o determinante da matriz dos coeficientes:
det
2 3 −13 5 21 −2 −3
= 2(−15+4)−3(−9−2)−1(−6−5) = 22 6= 0.
109 / 165
Matemática Computacional
Desde que o determinante é diferente de zero, o sistema tem solução única. Então:
x∗1 =
det
1 3 −18 5 2−1 −2 −3
det
2 3 −13 5 21 −2 −3
=6622
= 3, x∗2 =
det
2 1 −13 8 21 −1 −3
det
2 3 −13 5 21 −2 −3
=−2222
=−1,
x∗3 =
det
2 3 13 5 81 −2 −1
det
2 3 −13 5 21 −2 −3
=4422
= 2.
Portanto, a única solução do sistema é (3,−1,2).
4.8 Procedimento para inversão de matrizes
A continuação apresentamos um processo prático para a obtenção da inversa de uma matriz, baseadonas operações elementares entre linhas.
Teorema 4.5Seja A é uma matriz de ordem n. Se A é uma matriz inversível, então:
i. a matriz reduzida escalonada de A é a matriz identidade, a qual é obtida através da aplica-ção de um número finito de operações elementares entre linhas sobre A;
ii. A−1 é obtida a partir da matriz identidade, aplicando a mesma sequência de operaçõeselementares entre linhas, do item acima.
Nota 4.8Na prática, operamos simultaneamente com as matrizes A e I, usando as operações ele-mentares entre linhas, até obter a matriz identidade I na posição correspondente à matriz A.A matriz obtida no lugar correspondente da matriz I é a matriz A−1, isto é:[
A I]−→ Operações elementares −→
[I A−1]
Exemplo 4.14Dada a matriz A, obtenhamos A−1, caso exista.
1.
A =
[1 23 4
]
110 / 165

Matemática Computacional
SoluçãoDa nota acima, podemos juntar a matriz identidade à matriz A e aplicar as operaçõeselementares entre linhas até obter A−1. Assim:
[A I
]=
[1 2 1 03 4 0 1
]Fazendo E3(3,1,−3) obtemos a matriz:[
1 2 1 00 −2 −3 1
]Fazendo E3(1,2,1) e E2
(3,−1
2)
obtemos a matriz:[1 0 −2 10 1 3
2 −12
]=[I A−1]
Portanto,
A−1 =
[−2 1
32 −1
2
]2.
A =
2 4 30 1 −13 5 7
Solução
Da nota acima, podemos juntar a matriz identidade à matriz A e aplicar as operaçõeselementares entre linhas até obter A−1. Assim:
[A I
]=
2 4 3 1 0 00 1 −1 0 1 03 5 7 0 0 1
aplicando E2
(1, 1
2), E3(3,1,−3), E3(3,2,1) e E2
(3, 2
3)
obtemos a matriz:1 2 32
12 0 0
0 1 −1 0 1 00 0 1 −1 2
323
aplicando E3 (1,2,−2), E3 (2,3,1) e E3
(1,3,−7
2)
obtemos a matriz1 0 0 4 −133 −7
30 1 0 −1 5
323
0 0 1 −1 23
23
=[I A−1]
Portanto,
A−1 =
4 −133 −7
3−1 5
323
−1 23
23
3.
A =
1 0 11 2 10 2 0
111 / 165

Matemática Computacional
SoluçãoDa nota acima, podemos juntar a matriz identidade à matriz A e aplicar as operaçõeselementares entre linhas até obter A−1. Assim:
[A I
]=
1 0 1 1 0 01 2 1 0 1 00 2 0 0 0 1
aplicando E3 (2,1,−1) obtemos a matriz:1 0 1 1 0 0
0 2 0 −1 1 00 2 0 0 0 1
aplicando E3 (3,2,−1) e E2
(2, 1
2)
obtemos a matriz:1 0 1 1 0 00 1 0 −1
212 0
0 0 0 1 −1 1
Desde que, não existem operações elementares entre linhas, tal que a forma escalonadaseja a matriz identidade, concluímos que não existe a inversa de A.
4.9 Recapitulando
Neste capítulo estudamos os sistemas de equações lineares, e como resolver este tipo de sistemas.O método de eliminação de Gauss, foi apresentado com este proposito. Analisamos também ossistemas de equações lineares homogêneos, e em que casos estes possuem solução.
Por outro lado, desde que é possível representar os sistemas de equações lineares em termos matri-ciais, usamos todo o ferramental matemático estudado no capítulo anterior, com o objetivo de tornarmenos complicada a manipulação dos sistemas de equações lineares, como por exemplo quando usa-mos a teoria referente às operações elementares entre linhas para efetuar o escalonamento da ma-triz de coeficientes. Mais ainda, este escalonamento permite a resolução de um sistema de equaçõeslineares de forma mais rápida.
Além disso, empregamos a teoria de determinantes, na Regra de Cramer, regra que nos auxilia naobtenção da solução de um sistema de equações lineares, caso esta exista, também no cálculo do postoda matriz dos coeficientes, importante conceito que nos fornece informação sobre o conjunto soluçãode um sistema de equações lineares, isto é, se ele é vazio, possui uma única solução ou infinitassoluções.
Por último, apresentamos um processo prático para a obtenção da inversa de uma matriz, baseadonas operações elementares entre linhas.
4.10 Atividades
1. Resolva, se possível, os seguintes sistemas de equações lineares:
112 / 165

Matemática Computacional
i.2x1 + 3x2 = 15x1 + 7x2 = 3
ii.4x1 − 2x2 = 5−6x1 + 3x2 = 1
iii.2x1 + 3x2 = 15x1 + 7x2 = 3
iv.2x1 + 3x2 − 2x3 = 5
x1 − 2x2 + 3x3 = 24x1 − x2 + 4x3 = 1
v.x1 + 2x2 + 3x3 = 3
2x1 + 3x2 + 8x3 = 43x1 + 2x2 + 17x3 = 1
vi.x1 + 2x2 − 3x3 + 2x4 = 2
2x1 − 5x2 − 8x3 + 6x4 = 53x1 − 4x2 − 5x3 + 2x4 = 4
vii.x1 + 2x2 + 2x3 = 2
3x1 − 2x2 − x3 = 52x1 − 5x2 + 3x3 = −4x1 + 4x2 + 6x3 = 0
viii.x1 + 5x2 + 4x3 − 13x4 = 3
3x1 − x2 + 2x3 + 5x4 = 22x1 + 2x2 + 3x3 − 4x4 = 1
2. Determinar os valores de α tais que o sistema com as incógnitas x1, x2, x3 tenha: uma únicasolução, nenhuma solução, mas de uma solução:
i.αx1 + x2 + x3 = 1
x1 + αx2 + x3 = 1x1 + x2 + αx3 = 1
ii.x1 + x2 + αx3 = 2
3x1 + 4x2 + 2x3 = α
2x1 + 3x2 − x3 = 1
3. Resolva os seguintes sistemas de equações lineares, determinando a matriz equivalente redu-zida escalonada das suas respectivas matrizes aumentadas. Determine também os postos dasmatrizes dos coeficientes e da matriz aumentada, e o grau de liberdade quando possível.
i. 2x1 +4x2−2x3 +3x4 = 1
113 / 165
Matemática Computacional
ii.2x1 + 5x2 − 2x3 = 33x1 + 3x2 + 3x3 = 12
iii.x1 + 7x2 − 7x3 = 5
3x1 + 3x2 + 3x3 = 124x1 + 10x2 − 4x3 = 6
iv.2x1 + 5x2 + 6x3 = 03x1 − 6x2 + 9x3 = 0
v.x1 + 2x2 + 3x3 = 0
2x1 + x2 + 3x3 = 03x1 + 2x2 + x3 = 0
vi.
x1 − x2 + x3 = 3x1 − x2 − 3x3 = −3−x1 + x2 + x3 = 13x1 + 3x2 − 5x3 = 03x1 + 2x2 − 4x3 = 1
vii.
2x1 + 2x2 + 2x3 + 2x4 = 0x1 + x2 + x3 − x4 = 4x1 + x2 − x3 + x4 = −4x1 − x2 + x3 + x4 = 2
4. Determine, mediante a regra de Cramer, o conjunto solução dos seguintes sistemas de equaçõeslineares:
i.x1 + 2x2 + 3x3 = 5
2x1 − x2 + 4x3 = 11− x2 + x3 = 3
ii.x1 + x2 + 2x3 = 4
3x1 − x2 − x3 = 22x1 + 5x2 + 3x3 = 3
iii.x1 + x2 = 5x1 + x3 = 2
x2 + x3 = 5
iv.x1 − 2x2 + x3 = 1
2x1 + x2 = 3x2 − 5x3 = 4
5. Calcular o posto das matrizes do exercício 5.
6. Calcular a inversa das seguintes matrizes:
i.
1 0 01 1 10 0 1
ii.
2 −1 0−1 2 −10 −1 2
114 / 165
Matemática Computacional
iii.
0 0 10 1 11 1 1
Feedback sobre o capítuloVocê pode contribuir para melhoria dos nossos livros. Encontrou algum erro? Gostaria desubmeter uma sugestão ou crítica?Para compreender melhor como feedbacks funcionam consulte o guia do curso.
115 / 165
Matemática Computacional
Capítulo 5
Métodos diretos e iterativos para a resoluçãode sistemas de equações lineares
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Obter facilmente a solução de um sistema de equações lineares triangular inferior, ousuperior;
• Conhecer os principais métodos de resolução para um sistema de equações lineares;
• Aplicar os métodos de decomposição LU e Cholesky;
• Aplicar os métodos de eliminação Gauss com pivotamento parcial e pivotamento total;
• Aplicar os métodos iterativos Jacobi-Richardson e Gauss-Seidel.
Neste capítulo estudaremos alguns métodos númericos, existentes na literatura, para resolver sistemasde equações lineares de ordem n que tenham solução única. Lembremos que, tais sistemas são aquelesonde a matriz dos coeficientes tem seu determinante não nulo, isto é, é não singular. Estes métodospodem ser divididos em dois grupos:
Métodos diretos (ou exatos)São aqueles que fornecem a solução exata, a menos de erros de arredondamento, num númerofinito de operações elementares;
Métodos iterativosSão aqueles que geram uma sequência de vetores
{x(k)}
, a partir de uma solução inicial x(0),isto é, através de um processo infinito convergente. Sob certas condições esta sequência con-verge para a solução do problema, caso ela exista.
No entanto, ambos métodos apresentam vantagens e desvantagens:
• Nos métodos diretos a solução é determinada depois de um número finito de iterações;
• Nos métodos iterativos precisamos truncar para ter um valor aproximado da solução;
• Nos métodos iterativos os erros de arredodamento não são acumuláveis;
116 / 165

Matemática Computacional
• Quando um sistema linear é de grande porte, os erros de arredondamento produzidos pelos métodosdiretos podem gerar uma solução sem nenhum significado para o problema dado;
• Nos métodos iterativos os erros de arredodamento não são acumuláveis.
Procuraremos resolver sistemas consistentes através de métodos diretos e iterativos cuja solução sejanão nula. Para isso, sempre será considerado um sistema de equações linear com o vetor de termosindependentes sendo não nulo, isto é, b 6= 0.
5.1 Métodos diretos
SejaAx = b
um sistema de equações lineares, onde A é uma matriz de ordem n, com det(A) 6= 0, e b ∈ Rn \{0}.Denotemos por x∗ =
(x∗1, . . . ,x
∗n)
o vetor solução deste sistema de equações lineares. Um métododireto ou exato é caracterizado por determinar x∗ do sistema dado, num número finito de operaçõeselementares, desprezando os erros de arredondamento provenientes do processamento do algoritmonum equipamento computacional.
5.1.1 Solução de sistemas lineares triangulares
Começaremos apresentando como resolver sistemas lineares triangulares, devido a que a soluçãodeste tipo de sistemas é obtida de forma quase direta.
Sistema linear triangular inferiorSeja
Lx = b
um sistema de equações lineares, onde L = (li j) é uma matriz de ordem n, triangular inferior,isto é,
li j = 0, para todo i < j e lii 6= 0, para todo i = 1, . . . ,n
e b ∈ Rn \{0}. Este sistema pode ser reescrito da seguinte maneira:
l11x1 = b1l21x1 + l22x2 = b2
...li1x1 + li2x2 + . . . + liixi = bi
...ln1x1 + ln2x2 + . . . . . . . . . + lnnxn = bn
Logo, x∗ =(x∗1,x
∗2, . . . ,x
∗n)
é obtido por substituição direta, isto é, determinando o valor de x∗1da primeira equação, e substituindo este valor na segunda equação, para determinar x∗2, e assimsucessivamente. Temos, assim, o seguinte algoritmo.
117 / 165

Matemática Computacional
Algoritmo 5.1Seja um sistema triangular inferior
Lx = b.
Faça
x∗1 ←b1
l11
Para i = 2,3, . . . ,n faça
x∗i ←bi−
n−1∑
k=1likx∗k
lii.
Exemplo 5.1Calculemos a solução do seguinte sistema de equações lineares:1 0 0
2 2 04 1 3
x1x2x3
=
1−410
Solução
Usando o algoritmo anterior, temos:
x∗1 =b1
l11=
11= 1
x∗2 =b2− l21x∗1
l22=−4−2(1)
2=−3
x∗3 =b3− (l31x∗1 + l32x∗2)
l22=
10− (4(1)+1(−3))3
= 3
Portanto, a solução do sistema éx∗ =
(1,−3,3
).
Sistema linear triangular superiorSeja
Ux = b
um sistema de equações lineares, onde U = (ui j) é uma matriz de ordem n, triangular superior,isto é,
ui j = 0, para todo i > j e uii 6= 0, para todo i = 1, . . . ,n
e b ∈ Rn \{0}. Este sistema pode ser reescrito da seguinte maneira:
u11x1 + u12x2 + . . . . . . . . . + u1nxn = b1...
uiixi + . . . . . . . . . + uinxn = bi...
u(n−1)(n−1)xn−1 + u(n−1)nxn = bn−1unnxn = bn
118 / 165

Matemática Computacional
Logo, x∗ =(x∗1,x
∗2, . . . ,x
∗n)
é obtido por retro-substituição, isto é, determinamos o valor de x∗nna última equação, e substituimos este valor na penúltima equação para determinar o valor dex∗n−1, e assim sucessivamente. Temos, assim, o seguinte algoritmo.
Algoritmo 5.2Seja o sistema linear triangular superior
Ux = b.
Faça
x∗n ←bn
unn
Para i = n−1,n−2, . . . ,1 faça
x∗i ←bi−
n∑
k=i+1uikx∗k
uii.
Exemplo 5.2Calculemos a solução do seguinte sistema de equações lineares:1 2 4
0 −4 −20 0 5
x1x2x3
=
16
10
Solução
Usando o algoritmo anterior, temos:
x∗3 =b3
u33=
105
= 2;
x∗2 =b2− (u23x∗3)
u22=
6− (−2(2))−4
=−52
;
x∗1 =b1− (u12x∗2 +u13x∗3)
u11=
1−(2(−5
2
)+4(2)
)1
=−2.
Portanto, a solução do sistema éx∗ =
(−2,−5
2 ,2).
119 / 165
Matemática Computacional
ImportanteDesde que o esforço computacional de um algoritmo é a quantidade de operações elemen-tares necessárias para calcular a solução do problema para o qual foi desenvolvido. Então,para resolver um sistema triangular inferior, ou superior, de orden n, precisamos realizar:
• n operações de divisão;
•n(n−1)
2operações de adição (ou substração);
•n(n−1)
2operações de multiplicação.
Portanto, o esforço computacional dos Algoritmos 5.1 e 5.2 é a soma destas operações, istoé:
n+n(n−1)
2+
n(n−1)2
= n2.
5.1.2 Decomposição LU
Desde que trabalhar com sistemas de equações lineares triangulares inferiores, ou superiores, apresen-tam um método de resolução quase direto e o esforço computacional envolvido é “pequeno”. Nestaseção veremos como decompor uma matriz quadrada A = [ai j] no produto de uma matriz triangularinferior por uma matriz triangular superior, para que, dado o sistema de equações lineares Ax = b,este possa ser resolvido utilizando, de forma apropriada, os Algoritmos 5.1 e 5.2.
Teorema 5.1 (Teorema LU)Sejam A= [ai j] uma matriz de ordem n e Ak o menor principal de A, k = 1,2, . . . ,n. Suponhamosque det(Ak) 6= 0 para k = 1,2, . . . ,n− 1. Então, existe uma única matriz triangular inferiorL = [li j], com l11 = l22 = · · ·= lnn = 1, e uma única matriz triangular superior U = [ui j], tal que
LU = A.
Além disso,det(A) = det(U) = u11u22 . . .unn.
Nota 5.1
a. A decomposição obtida no teorema acima, isto é, onde L tem 1 na diagonal é conhe-cida também como Método Doolittle;
b. A decomposição LU fornece um dos algoritmos mais eficientes para o cálculo do de-terminante de uma matriz quadrada.
5.1.2.1 Processo de decomposição LU
Uma das forma de obtermos as matrizes L e U, é recorrendo à definição de produto e igualdade dematrizes, ou seja, precisamos impor que A = LU . Sejam A = [ai j], L = [li j] e U = [ui j]. Então,
120 / 165
Matemática Computacional
podemos escrevera11 a12 . . . a1na21 a22 . . . a2n
...... . . . ...
an1 an2 . . . ann
=
1
l21 1 0...
... . . .ln1 ln2 . . . 1
u11 u12 . . . u1nu22 . . . u2n
0 . . . ...unn
e efetuar o produto. Assim, os elementos de U e L, são obtidos das seguintes fórmulas gerais:
Matriz U
ui j = ai j−i−1
∑k=1
likuk j, i, j = 1,2, . . . ,n, i≤ j.
Matriz L
li j =
ai j−j−1∑
k=1likuk j
ui j, i, j = 1,2, . . . ,n, i > j.
Mais ainda, o seguinte algoritmo é desenvolvido para obter a decomposição LU de qualquer matrizA.
Algoritmo 5.3Para m = 1,2, . . . ,n, faça
lmm← 1
Para j = m,m+1, . . . ,n, faça
um j← am j−m−1
∑k=1
lmkuk j
Para i = m+1, . . . ,n, faça
lim←aim−
m−1∑
k=1likukm
umm
Exemplo 5.3Determinemos a decomposição LU , se possível, das seguintes matrizes:
A =
1 2 21 1 33 −4 0
e B =
5 −2 −3 01 4 −1 −12 −1 10 02 −3 1 5
Solução
121 / 165
Matemática Computacional
Decomposição LU da matriz APelo Teorema 5.1, precisamos primeiro analisar se os determinantes dos seus menoresprincipais, de ordens k = 1,2, são diferentes de zero. Logo,
i. A1 = [1], e det(A1) = 1 6= 0;
ii. A2 =
[1 21 1
], e det(A2) =−1 6= 0.
Assim, A admite uma única decomposição LU , com lii = 1, para todo i = 1,2,3. Como aordem de A é 3 temos que n = 3. Então, aplicando o Algoritmo 5.3 para determinar todosos elementos das matrizes L e U se segue que:
m = 1,2,3.
• Para m = 1, faça
l11← 1
Para j = 1,2,3, faça
u11← a11−0∑
k=1l1kuk1 = 1−0 = 1
u12← a12−0∑
k=1l1kuk2 = 2−0 = 2
u13← a13−0∑
k=1l1kuk3 = 2−0 = 2
Para i = 2,3, faça
l21←a21−
0∑
k=1l2kuk1
u11=
1−01
= 1
l31←a31−
0∑
k=1l3kuk1
u11=
3−01
= 3
• Para m = 2, faça
l22← 1
Para j = 2,3, faça
u22← a22−1∑
k=1l2kuk2 = 1− l21u12 = 1− (1)(2) =−1
u23← a23−1∑
k=1l2kuk3 = 1− l21u13 = 3− (1)(2) = 1
Para i = 3, faça
l32←a32−
1∑
k=1l3kuk2
u22=−4− l31u12
u22=−4− (3)(2)−1
= 10
122 / 165

Matemática Computacional
• Para m = 3, faça
l33← 1
Para j = 3, faça
u33← a33−2∑
k=1l3kuk3 = 0− (l31u13 + l32u23) = 0− ((3)(2)+(10)(1)) =−16
Portanto,
L =
1 0 01 1 03 10 1
e U =
1 2 20 −1 10 0 −16
Decomposição LU da matriz B
Pelo Teorema 5.1, precisamos primeiro analisar se os determinantes dos seus menoresprincipais, de ordens k = 1,2,3, são diferentes de zero. Logo,
i. B1 = [5], e det(B1) = 5 6= 0;
ii. B2 =
[5 −21 4
], e det(B2) = 22 6= 0;
iii. B3 =
5 −2 −31 4 −12 −1 10
, e det(B3) = 246 6= 0.
Assim, B admite uma única decomposição LU , com lii = 1, para todo i = 1,2,3,4. Comoa ordem de B é 4 temos que n = 4. Então, aplicando o Algoritmo 5.3 para determinartodos os elementos das matrizes L e U se segue que:
m = 1,2,3,4.
• Para m = 1, faça
l11← 1
Para j = 1,2,3,4, faça
u11← b11−0∑
k=1l1kuk1 = 5−0 = 5
u12← b12−0∑
k=1l1kuk2 =−2−0 =−2
u13← b13−0∑
k=1l1kuk3 =−3−0 =−3
u14← b14−0∑
k=1l1kuk4 = 0−0 = 0
123 / 165

Matemática Computacional
Para i = 2,3,4, faça
l21←b21−
0∑
k=1l2kuk1
u11=
1−05
=15
l31←b31−
0∑
k=1l3kuk1
u11=
2−05
=25
l41←b41−
0∑
k=1l4kuk1
u11=
2−05
=25
• Para m = 2, faça
l22← 1
Para j = 2,3,4, faça
u22← b22−1∑
k=1l2kuk2 = 4− l21u12 = 4− (1
5)(−2) =225
u23← b23−1∑
k=1l2kuk3 =−1− l21u13 =−1− (1
5)(−3) =−25
u24← b24−1∑
k=1l2kuk4 =−1− l21u14 =−1− (1
5)(0) =−1
Para i = 3,4, faça
l32←b32−
1∑
k=1l3kuk2
u22=−1− (l31u12)
u22=−1− (2
5)(−2)22/5
=− 122
l42←b42−
1∑
k=1l4kuk2
u22=−3− (l41u12)
u22=−3− (2
5)(−2)22/5
=−12
• Para m = 3, faça
l33← 1
Para j = 3,4, faça
u33 ← b33−2∑
k=1l3kuk3 = 10− (l31u13 + l32u23)
= 10− ((25)(−3)+(− 1
22)(−25)) =
12311
u34 ← b34−2∑
k=1l3kuk4 = 0− (l31u14 + l32u24)
= 0− ((25)(0)+(− 1
22)(−1)) =− 122
124 / 165

Matemática Computacional
Para i = 4, faça
l43 ←b43−
2∑
k=1l4kuk3
u33=−3− (l41u13 + l42u23)
u33
=1− ((2
5)(−3)+(−12)(−
25))
123/11=
22123
• Para m = 4, faça
l44← 1
Para j = 4, faça
u44 ← b44−3∑
k=1l4kuk4 = 5− (l41u14 + l42u24 + l43u34)
= 5− ((25)(0)+(−1
2)(−1)+( 22123)(−
122)) =
1109246
Portanto,
L =
1 0 0 0
15 1 0 0
25 − 1
22 1 0
25 −1
222
123 1
e U =
5 −2 −3 0
0 225 −2
5 −1
0 0 12311 − 1
22
0 0 0 1109246
5.1.2.2 Obtendo a solução de sistemas lineares
Nesta subseção usaremos todo o ferramental teorico estudado até agora. Em outras palavras, apren-deremos como usar os Algoritmos 5.1, 5.2 e 5.3 para obter a solução de sistema linear dado.
Sejam A uma matriz de ordem n, b ∈ Rn. Suponhamos que A satisfaz as condições do Teorema 5.1,então o sistema linear
Ax = b
é equivalente a(LU)x = b.
Se denotamos Ux = y e o substituímos na última equação temos
Ly = b
Assim, o cálculo da solução do sistema Ax = b, é substituído pela resolução de dois sistemas triangu-lares:
Um inferior
125 / 165

Matemática Computacional
Ly = b;
Um superior
Ux = y.
Assim, para obter a decomposição LU de A usaremos o Algoritmos 5.3 e para resolver cada umdestes sistemas usaremos os Algoritmos 5.1 e 5.2, respectivamente.
Exemplo 5.4Encontremos a solução dos seguintes sistemas lineares.
1. 1 2 21 1 33 −4 0
x1x2x3
=
53
11
Solução
Desde que a matriz dada neste sistema é a matriz A do exemplo anterior temos que:1 2 21 1 33 −4 0
︸ ︷︷ ︸
A
=
1 0 01 1 03 10 1
︸ ︷︷ ︸
L
1 2 20 −1 10 0 −16
︸ ︷︷ ︸
U
Logo, para obter a solução deste sistema de equações precisamos resolver:
1o
1 0 01 1 03 10 1
y1y2y3
=
53
11
2o
1 2 20 −1 10 0 −16
x1x2x3
=
y1y2y3
Assim, aplicando o Algoritmo 5.1 ao 1o sistema temos que
y1 = 5, y2 =−2 e y3 = 16
e aplicando o Algoritmo 5.2 ao 2o temos que
x3 =−1, x2 = 1 e x1 = 5.
Portanto, a solução do sistema é
x∗ =(5,1,−1
).
2. 5 −2 −3 01 4 −1 −12 −1 10 02 −3 1 5
x1x2x3x4
=
542−13
126 / 165
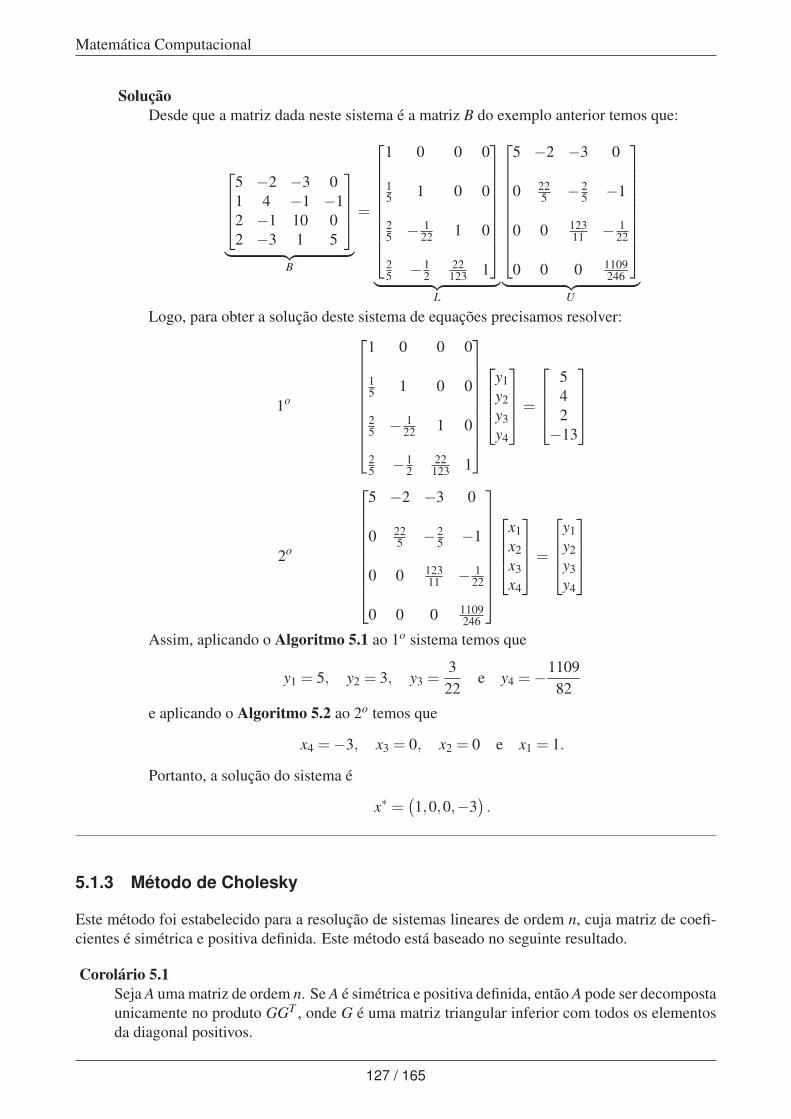
Matemática Computacional
SoluçãoDesde que a matriz dada neste sistema é a matriz B do exemplo anterior temos que:
5 −2 −3 01 4 −1 −12 −1 10 02 −3 1 5
︸ ︷︷ ︸
B
=
1 0 0 0
15 1 0 0
25 − 1
22 1 0
25 −1
222123 1
︸ ︷︷ ︸
L
5 −2 −3 0
0 225 −2
5 −1
0 0 12311 − 1
22
0 0 0 1109246
︸ ︷︷ ︸
U
Logo, para obter a solução deste sistema de equações precisamos resolver:
1o
1 0 0 0
15 1 0 0
25 − 1
22 1 0
25 −1
222123 1
y1y2y3y4
=
542−13
2o
5 −2 −3 0
0 225 −2
5 −1
0 0 12311 − 1
22
0 0 0 1109246
x1x2x3x4
=
y1y2y3y4
Assim, aplicando o Algoritmo 5.1 ao 1o sistema temos que
y1 = 5, y2 = 3, y3 =3
22e y4 =−
110982
e aplicando o Algoritmo 5.2 ao 2o temos que
x4 =−3, x3 = 0, x2 = 0 e x1 = 1.
Portanto, a solução do sistema é
x∗ =(1,0,0,−3
).
5.1.3 Método de Cholesky
Este método foi estabelecido para a resolução de sistemas lineares de ordem n, cuja matriz de coefi-cientes é simétrica e positiva definida. Este método está baseado no seguinte resultado.
Corolário 5.1Seja A uma matriz de ordem n. Se A é simétrica e positiva definida, então A pode ser decompostaunicamente no produto GGT , onde G é uma matriz triangular inferior com todos os elementosda diagonal positivos.
127 / 165

Matemática Computacional
5.1.3.1 Processo de decomposição de Cholesky
Da mesma forma como foi feito no Processo de decomposição LU , vamos a recorrer à definição deproduto e igualdade de matrizes, isto é, A = GGT . Sejam A = (ai j), G = (gi j). Então, podemosescrever
a11 a12 . . . a1na21 a22 . . . a2n
...... . . . ...
an1 an2 . . . ann
=
g11g21 g22 0
...... . . .
gn1 gn2 . . . gnn
g11 g21 . . . gn1g22 . . . gn2
0 . . . ...gnn
e efetuar o produto. Assim, os elementos de G, são obtidos das seguintes fórmulas gerais:
Elementos da diagonal de G
g11 =√
a11;
gii =
√aii−
i−1∑
k=1g2
ik, i = 2,3, . . . ,n.
Elementos não diagonais de G
gi1 =ai1
g11, i = 2,3, . . . ,n;
gi j =
ai j−j−1∑
k=1gikg jk
g j j, 2≤ j < i.
Importante
a. Se A é simétrica e positiva definida, então aplicar o método de Cholesky requer demenos cálculos que o método de decomposição LU;
b.
det(A) = det(GGT ) = (det(G))2 = (g11g22 . . .gnn)2 .
Exemplo 5.5Determinemos a decomposição de Cholesky das seguintes matrizes simétricas e definidas positivas:
A =
[4 22 10
]B =
3 3 03 4 10 1 12
Decomposição de Cholesky da matriz A
Desde que a ordem de A é 2, temos que n = 2. Assim aplicando o processo acima temos que:
128 / 165

Matemática Computacional
g11 =√
a11 =√
4 = 2
g21 =a21
g11=
22= 1
g22 =√
a22−g221 =
√10−12 = 3
Logo,
G =
[2 01 3
]e A = GGT =
[2 01 3
][2 10 3
]Decomposição de Cholesky da matriz B
Desde que a ordem de B é 3, temos que n = 3. Assim aplicando o processo acima temos que:
g11 =√
b11 =√
3
g21 =b21
g11=
3√3=√
3
g22 =√
b22−g221 =
√4− (√
3)2 = 1
g31 =b31
g11=
0√3= 0
g32 =b32−g31g21
g22=
1− (0)(√
3)1
= 1
g33 =√
b33− (g231 +g2
32) =√
12− (02 +12) =√
11
Logo,
G =
√
3 0 0√3 1 0
0 1√
11
e B = GGT =
√
3 0 0√3 1 0
0 1√
11
√3√
3 00 1 10 0
√11
5.1.3.2 Obtendo a solução de sistemas lineares
Agora aprenderemos como usar esta teoria para obter a solução de sistema linear dado. Sejam Auma matriz de ordem n, b ∈ Rn. Suponhamos que A satisfaz as condições do Corolário 5.1, então osistema linear
Ax = b
é equivalente a(GGT )x = b.
Se denotamos GT x = y e o substituímos na última equação temos
Gy = b
Assim, o cálculo da solução do sistema Ax = b, é substituído pela resolução de dois sistemas triangu-lares:
129 / 165

Matemática Computacional
Um inferior
Gy = b;
Um superior
GT x = y.
Assim, primeiro precisamos obter a decomposição GGT de A e para resolver cada um destes sistemasusaremos os Algoritmos 5.1 e 5.2, respectivamente.
Exemplo 5.6Encontremos a solução dos seguintes sistemas lineares:
1. [4 22 10
][x1x2
]=
[4.44
]Solução
Desde que a matriz dada neste sistema é a matriz A do exemplo anterior, e esta tem de-composição de Cholesky temos que:[
4 22 10
]︸ ︷︷ ︸
A
=
[2 01 3
]︸ ︷︷ ︸
G
[2 10 3
]︸ ︷︷ ︸
GT
Logo, para obter a solução deste sistema de equações precisamos resolver:
1o[
2 01 3
][y1y2
]=
[4.44
]
2o[
2 10 3
][x1x2
]=
[y1y2
]Assim, aplicando o Algoritmo 5.1 ao 1o sistema temos que
y1 = 2.2 e y2 = 0.6
e aplicando o Algoritmo 5.2 ao 2o temos que
x2 = 0.2 e x1 = 1
Portanto, a solução do sistema éx∗ =
(1,0.2
).
2. 3 3 03 4 10 1 12
x1x2x3
=
35−9
130 / 165
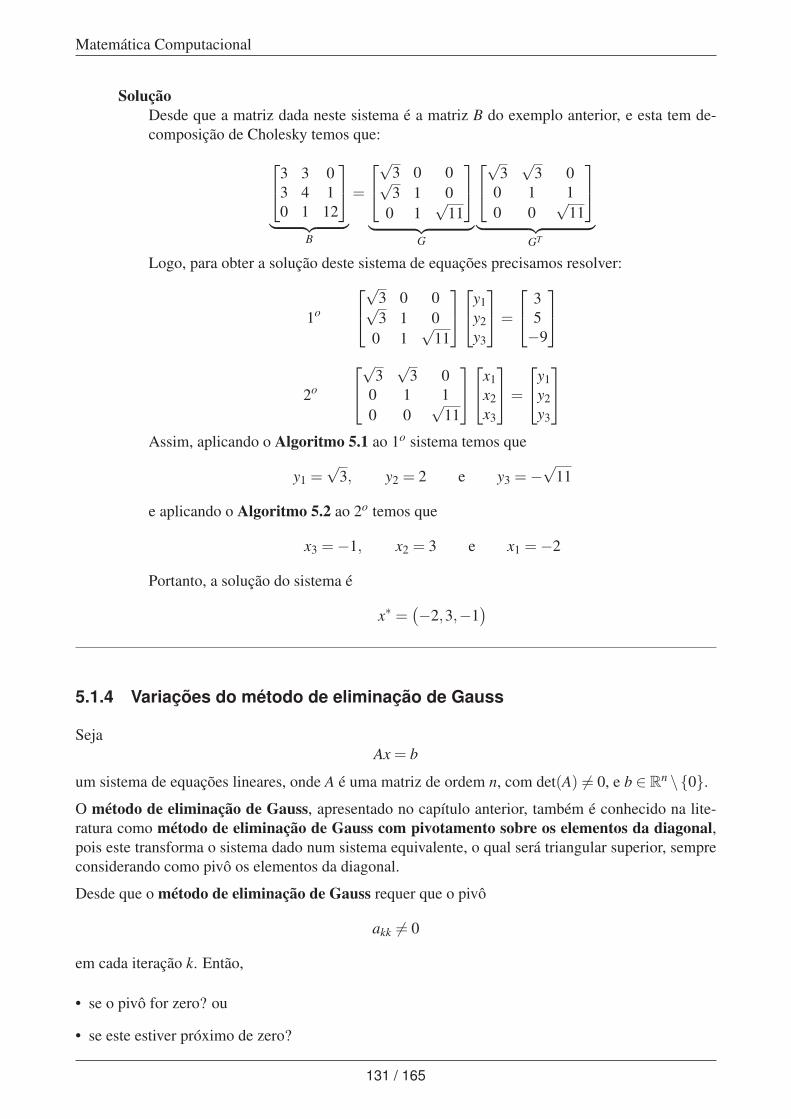
Matemática Computacional
SoluçãoDesde que a matriz dada neste sistema é a matriz B do exemplo anterior, e esta tem de-composição de Cholesky temos que:3 3 0
3 4 10 1 12
︸ ︷︷ ︸
B
=
√
3 0 0√3 1 0
0 1√
11
︸ ︷︷ ︸
G
√3√
3 00 1 10 0
√11
︸ ︷︷ ︸
GT
Logo, para obter a solução deste sistema de equações precisamos resolver:
1o
√
3 0 0√3 1 0
0 1√
11
y1y2y3
=
35−9
2o
√3√
3 00 1 10 0
√11
x1x2x3
=
y1y2y3
Assim, aplicando o Algoritmo 5.1 ao 1o sistema temos que
y1 =√
3, y2 = 2 e y3 =−√
11
e aplicando o Algoritmo 5.2 ao 2o temos que
x3 =−1, x2 = 3 e x1 =−2
Portanto, a solução do sistema é
x∗ =(−2,3,−1
)
5.1.4 Variações do método de eliminação de Gauss
SejaAx = b
um sistema de equações lineares, onde A é uma matriz de ordem n, com det(A) 6= 0, e b ∈ Rn \{0}.O método de eliminação de Gauss, apresentado no capítulo anterior, também é conhecido na lite-ratura como método de eliminação de Gauss com pivotamento sobre os elementos da diagonal,pois este transforma o sistema dado num sistema equivalente, o qual será triangular superior, sempreconsiderando como pivô os elementos da diagonal.
Desde que o método de eliminação de Gauss requer que o pivô
akk 6= 0
em cada iteração k. Então,
• se o pivô for zero? ou
• se este estiver próximo de zero?
131 / 165

Matemática Computacional
Estes dois casos podem fornecer resultados totalmente imprecisos, devido a que o computador efetuaseus cálculos com aritmética de precisão finita e tais pivôs podem acarretar em uma propagação doserros de arredondamento.
Assim, para resolver este tipo de problemas, as variações deste método usam a mesma metodologia,no entanto, será necessário considerar como pivô, elementos que não necessáriamente se encontramna diagonal. Logo, em cada iteração o sistema original vai se transformando num sistema triangularsuperior. Em outras palavras:[
A b]→ operações elementares linha →
[A(n−1) b(n−1)
]onde A(n−1)x = b(n−1) é um sistema triangular superior.
5.1.4.1 Método de eliminação de Gauss com pivotamento parcial
SejaAx = b
um sistema de equações lineares, onde A é uma matriz de ordem n, com det(A) 6= 0 e a11 6= 0, eb ∈ Rn \{0}.
Para contornar os problemas mencionados na Nota 5.1 devemos usar uma estratégia de pivotamento,isto é, escolher adequadamente o elemento pivô. Desta forma, o método de eliminação de Gauss,com pivotamento parcial, considera como pivô o elemento que tem maior valor absoluto abaixo dadiagonal de cada coluna da matriz A. Em outras palavras, esta estratégia consiste em:
1. No início da iteração k, antes da fase de eliminação, procurar o elemento de maior valor absolutoda coluna k, entre os coeficientes: aik para i = k,k+1, . . . ,n, isto é, escolher a linha r tal que:
|ark|= max{|akk|, |ak+1,k|, . . . , |ank|
};
2. Se r 6= k então trocar a linha r pela linha k;
3. Depois, efetuamos a Eliminação de Gauss como na seção anterior, a este novo sistema equi-valente;
4. Por último, resolvemos o sistema triangular equivalente, usando o Algoritmo 5.2.
Assim, o seguinte algoritmo aplica o processo da eliminação Gaussiana com pivotamento parcial aosistema
[A|b]:
Algoritmo 5.4Considere a matriz aumentada
[A|b]
do sistema de equações lineares
Ax = b
e denotemos por `i cada linha desta matriz, i = 1,2, . . . ,n.
Passo 1: para k = 1,2, . . . ,n−1, faça:
132 / 165

Matemática Computacional
• Permutação: determine r ≥ k tal que:
|ark|= max{|aik| : i = k,k+1, . . . ,n}Se r 6= k, troque `k com `r e vai para Eliminação;Senão, vai para Eliminação.
• Eliminação: para i = k+1, . . . ,n, faça
mi ←aik
akk`i ← `i−mi`k
Passo2: Resolver o sistema triangular superior resultante, usando o Algoritmo 5.2.
Nota 5.2Na fase de Eliminação, a atualização da i−ésima linha, `i, isto é:
`i ← `i−mi`k equivale a considerar a operação elementar E3(i,k,−mi
)
Exemplo 5.7Usando o método de Gauss, com pivotamento parcial, resolvamos os seguintes sistemas de equaçõeslineares:
1. 1 2 33 1 00 3 4
x1x2x3
=
343
Solução
Dado o sistema acima, temos que a matriz aumentada deste sistema é
[A|b] =
1 2 3 | 33 1 0 | 40 3 4 | 3
Desde que a matriz de coeficientes A é de ordem 3, temos que n = 3, então k = 1,2. Logo:
Passo 1
k = 1:
• Permutação: Determinar r ≥ 1 tal que:
|ar1|= max{|a11|, |a21|, |a31|}= max{|1|, |3|, |0|}= 3 = |a21| =⇒ r = 2
Logo, como r 6= 1, então
`1↔ `2 ⇒ [A|b] =
3 1 0 | 41 2 3 | 30 3 4 | 3
133 / 165
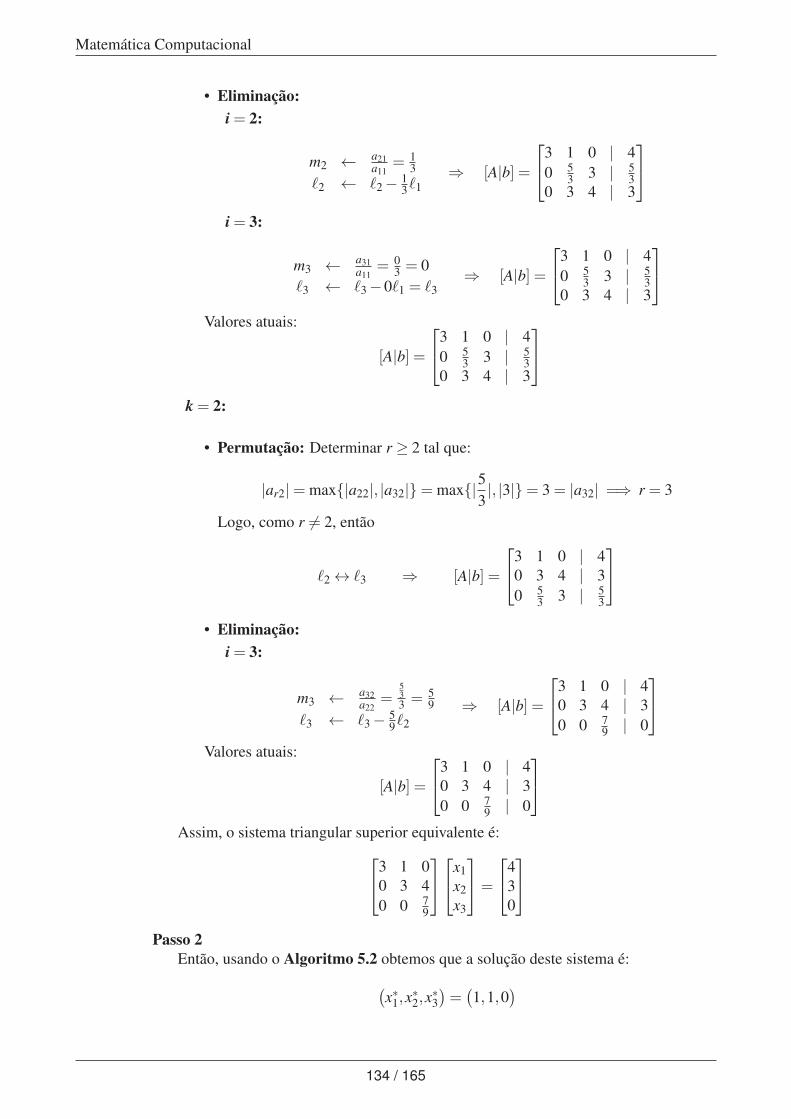
Matemática Computacional
• Eliminação:i = 2:
m2 ← a21a11
= 13
`2 ← `2− 13`1
⇒ [A|b] =
3 1 0 | 40 5
3 3 | 53
0 3 4 | 3
i = 3:
m3 ← a31a11
= 03 = 0
`3 ← `3−0`1 = `3⇒ [A|b] =
3 1 0 | 40 5
3 3 | 53
0 3 4 | 3
Valores atuais:
[A|b] =
3 1 0 | 40 5
3 3 | 53
0 3 4 | 3
k = 2:
• Permutação: Determinar r ≥ 2 tal que:
|ar2|= max{|a22|, |a32|}= max{|53|, |3|}= 3 = |a32| =⇒ r = 3
Logo, como r 6= 2, então
`2↔ `3 ⇒ [A|b] =
3 1 0 | 40 3 4 | 30 5
3 3 | 53
• Eliminação:
i = 3:
m3 ← a32a22
=533 = 5
9`3 ← `3− 5
9`2⇒ [A|b] =
3 1 0 | 40 3 4 | 30 0 7
9 | 0
Valores atuais:
[A|b] =
3 1 0 | 40 3 4 | 30 0 7
9 | 0
Assim, o sistema triangular superior equivalente é:3 1 0
0 3 40 0 7
9
x1x2x3
=
430
Passo 2
Então, usando o Algoritmo 5.2 obtemos que a solução deste sistema é:(x∗1,x
∗2,x∗3)=(1,1,0
)
134 / 165

Matemática Computacional
2. −1 1 0 −31 0 3 10 1 −1 −13 0 1 2
x1x2x3x4
=
4031
Solução
Dado o sistema acima, temos que a matriz aumentada deste sistema é
[A|b] =
−1 1 0 −3 | 41 0 3 1 | 00 1 −1 −1 | 33 0 1 2 | 1
Desde que a matriz de coeficientes A é de ordem 4, temos que n = 4, então k = 1,2,3.Logo:
Passo 1
k = 1:
• Permutação: Determinar r ≥ 1 tal que:
|ar1|=max{|a11|, |a21|, |a31|, |a41|}=max{|−1|, |0|, |1|, |3|}= 3= |a41| =⇒ r = 4
Logo, como r 6= 1, então
`1↔ `4 ⇒ [A|b] =
3 0 1 2 | 11 0 3 1 | 00 1 −1 −1 | 3−1 1 0 −3 | 4
• Eliminação:
i = 2:
m2 ← a21a11
= 13
`2 ← `2− 13`1
⇒ [A|b] =
3 0 1 2 | 10 0 8
313 | −1
30 1 −1 −1 | 3−1 1 0 −3 | 4
i = 3:
m3 ← a31a11
= 03 = 0
`3 ← `3−0`1 = `3⇒ [A|b] =
3 0 1 2 | 10 0 8
313 | −1
30 1 −1 −1 | 3−1 1 0 −3 | 4
i = 4:
m4 ← a41a11
= −13 =−1
3`4 ← `4 +
13`1
⇒ [A|b] =
3 0 1 2 | 10 0 8
313 | −1
30 1 −1 −1 | 30 1 1
3 −73 | 13
3
135 / 165

Matemática Computacional
Valores atuais:
[A|b] =
3 0 1 2 | 10 0 8
313 | −1
30 1 −1 −1 | 30 1 1
3 −73 | 13
3
k = 2:
• Permutação: Determinar r ≥ 2 tal que:
|ar2|= max{|a22|, |a32|, |a42|}= max{0|, |1|, |1|}= 1 = |a32| =⇒ r = 3
Logo, como r 6= 2, então
`2↔ `3 ⇒ [A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 1 1
3 −73 | 13
3
• Eliminação:
i = 3:
m3 ← a32a22
= 01 = 0
`3 ← `3−0`2 = `3⇒ [A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 1 1
3 −73 | 13
3
i = 4:
m4 ← a42a22
= 11 = 1
`4 ← `4− `2⇒ [A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 0 4
3 −43 | 4
3
Valores atuais:
[A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 0 4
3 −43 | 4
3
k = 3:
• Permutação: Determinar r ≥ 3 tal que:
|ar3|= max{|a33|, |a34|}= max{|83|, |4
3|}= 8
3= |a33| =⇒ r = 3
Logo, como k = r, não precisamos permutar nada. Isto é,
[A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 0 4
3 −43 | 4
3
136 / 165

Matemática Computacional
• Eliminação:i = 4:
m4 ← a43a33
=4383= 1
2
`4 ← `4− 12`3
⇒ [A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 0 0 −3
2 | 32
Valores atuais:
[A|b] =
3 0 1 2 | 10 1 −1 −1 | 30 0 8
313 | −1
30 0 0 −3
2 | 32
Assim, o sistema triangular superior equivalente é:
3 0 1 20 1 −1 −10 0 8
313
0 0 0 −32
x1x2x3x4
=
13−1
332
Passo 2
Então, usando o Algoritmo 5.2 obtemos que a solução deste sistema é:(x∗1,x
∗2,x∗3,x∗4)=(1,2,0,−1
)
5.1.4.2 Método de eliminação de Gauss com pivotamento total
SejaAx = b
um sistema de equações lineares, onde A é uma matriz de ordem n, com det(A) 6= 0 e a11 6= 0, eb ∈ Rn \ {0}. Da mesma forma como nos métodos anteriores, este método consiste em transformaro sistema dado, através de operações elementares linha, em um sistema equivalente, o qual serátriangular superior. Agora a diferença será que, em cada passo consideraremos como pivô o elementode maior valor absoluto entre todos os elementos da submatriz abaixo da k-ésima linha e a partir dak-ésima coluna da matriz A. Ou seja, a estratégia consiste em:
1. No início da iteração k, antes da fase de eliminação, procurar o elemento de maior valor absolutoentre os coeficientes: ai j para i≥ k, j ≥ k, isto é, escolher uma linha r e uma coluna s tal que:
|ars|= max{|ai j| : i≥ k j ≥ k
};
2. Se r 6= k então trocar a linha r pela linha k;
3. Se s 6= k então trocar a coluna r pela coluna k;
4. Depois, efetuamos a Eliminação de Gauss como na seção anterior, a este novo sistema equi-valente;
5. Por último, resolvemos o sistema triangular equivalente, usando o Algoritmo 5.2.
137 / 165

Matemática Computacional
Assim, o seguinte algoritmo aplica o processo da eliminação Gaussiana com pivotamento total aosistema
[A|b]:
Algoritmo 5.5Considere a matriz aumentada
[A|b]
do sistema de equações lineares
Ax = b
e denotemos por `i cada linha, i = 1,2, . . . ,n, e ρ j cada coluna, j = 1,2, . . . ,n+1, desta matriz.
Passo 1: para k = 1,2, . . . ,n−1, faça:
• Permutação: determine r ≥ k e s≥ k tal que:
|ars|= max{|ai j| : i = k,k+1, . . . ,n j = k,k+1, . . . ,n
}a. Se r 6= k, troque `k com `r;b. Se s 6= k, troque ρk com ρs;
e vai para Eliminação;Senão, vai para Eliminação.
• Eliminação: para i = k+1, . . . ,n, faça
mi ←aik
akk`i ← `i−mi`k
Passo2: Resolver o sistema triangular superior resultante, usando o Algoritmo 5.2.
Exemplo 5.8Usando o método de Gauss, com pivotamento total, resolvamos o seguinte sistema de equações line-ares −1 1 −4
2 2 03 3 2
x1x2x3
=
0112
Solução
Dado o sistema acima, temos que a matriz aumentada deste sistema é
[A|b] =
−1 1 −4 | 02 2 0 | 13 3 2 | 1
2
Desde que a matriz de coeficientes A é de ordem 3, temos que n = 3, então k = 1,2. Logo:
Passo 1
k = 1:
138 / 165

Matemática Computacional
• Permutação: Determinar r ≥ 1 e s≥ 1 tal que:
|ars| = max{|a11|, |a12|, |a13|, |a21|, |a22|, |a23|, |a31|, |a32|, |a33|}= max{|−1|, |1|, |−4|, |2|, |2|, |0|, |3|, |3|, |2|}= 4 = |a13|
⇒ r = 1, s = 3
Logo, como s 6= 1, então
ρ1↔ ρ3 ⇒ [A|b] =
−4 1 −1 | 00 2 2 | 12 3 3 | 1
2
• Eliminação:
i = 2:
m2 ← a21a11
= 0−4 = 0
`2 ← `2−0`1 = `2⇒ [A|b] =
−4 1 −1 | 00 2 2 | 12 3 3 | 1
2
i = 3:
m3 ← a31a11
= 2−4 =−1
2`3 ← `3− (−1
2)`1 = `3 +12`1
⇒ [A|b] =
−4 1 −1 | 00 2 2 | 10 7
252 | 1
2
Valores atuais:
[A|b] =
−4 1 −1 | 00 2 2 | 10 7
252 | 1
2
k = 2:
• Permutação: Determinar r ≥ 2 e s≥ 2 tal que:
|ars| = max{|a22|, |a23|, |a31|, |a32|, |a33|}= max
{|2|, |2|, |72 |, |
52 |}
= 72 = |a32|⇒ r = 3, s = 2
Logo, como r 6= 2, então
`2↔ `3 ⇒ [A|b] =
−4 1 −1 | 00 7
252 | 1
20 2 2 | 1
• Eliminação:
i = 3:
m3 ← a32a22
= 272= 4
7
`3 ← `3− 47`2
⇒ [A|b] =
−4 1 −1 | 00 7
252 | 1
20 0 4
7 | 57
139 / 165

Matemática Computacional
Valores atuais:
[A|b] =
−4 1 −1 | 00 7
252 | 1
20 0 4
7 | 57
Assim, o sistema triangular superior equivalente é:−4 1 −1
0 72
52
0 0 47
x1x2x3
=
01257
Passo 2
Então, usando o Algoritmo 5.2 obtemos que a solução deste sistema é:(x∗1,x
∗2,x∗3)=(5
4 ,−34 ,−
12
)
5.2 Métodos Iterativos
Nesta seção, estudaremos métodos que nos permitam aproximar a solução de um sistema linear deequações, de forma a diminuir o número de operações (relativamente aos métodos diretos), o quepode ser útil no caso de se tratar de um sistema de grande porte, isto é, com um grande número deequações e incógnitas, ou um sistema onde a matriz de coeficientes possui muitos elementos nulos.Outra utilidade é que não precisamos mais definir ou armazenar a matriz de coeficientes, de iteraçãoem iteração, mais ainda, evitamos os problemas de instabilidade numérica, que podem ocorrer nummétodo direto, pois os métodos iterativos partem de uma solução inicial e sistematicamente geramuma sequência de iterandos que convergirá para a solução sob certas condições.
Definição 5.1Sejam x(k) = (x(k)1 ,x(k)2 , . . . ,x(k)n ) uma sequência de vetores do espaço vetorial Rn e x∗ =(x∗1,x
∗2, . . . ,x
∗n)∈ Rn. Diz-se que x(k) converge para x∗, quando k→ ∞, se
‖x(k)− x∗‖→ 0, quando k→ ∞,
para qualquer norma em Rn.
Exemplo 5.9
Consideremos a sequência x(k) =(
1+1k2 ,1+
1k2 , . . . ,1+
1k2
)∈ Rn; k = 1,2, . . . e x∗ = (1,1, . . . ,1)
como
‖x(k)− x∗‖=∥∥∥∥( 1
k2 ,1k2 , . . . ,
1k2
)∥∥∥∥=√√√√√(
1k2
)2
+
(1k2
)2
+ · · ·+(
1k2
)2
︸ ︷︷ ︸n vezes
=
√nk4 =
√n
k2 ,
se segue que √n
k2 → 0, quando k→ ∞.
Portanto, x(k) converge para x∗.
140 / 165

Matemática Computacional
Definição 5.2Seja R(n,n) o espaço vetorial de todas as matrizes quadradas de ordem n sobre R. Uma normamatricial em R(n,n) é uma aplicação, denotada por ‖ · ‖, tal que:
‖ · ‖ : R(n,n) −→ RA 7−→ ‖A‖
satisfaz às seguintes condições:
i. ‖A‖ ≥ 0, ∀A ∈ R(n,n) e ‖A‖= 0⇔ A = 0;
ii. ‖αA‖= |α|‖A‖, ∀α ∈ R e ∀A ∈ R(n,n);iii. ‖A+B‖ ≤ ‖A‖+‖B‖, ∀A e B ∈ R(n,n).
Nota 5.3Seja A = [ai j]n×n. Então temos:
Norma Coluna
‖A‖1 = max1≤ j≤n
n
∑i=1|ai j|
Norma Linha
‖A‖∞ = max1≤i≤n
n
∑j=1|ai j|
Norma Frobenius
‖A‖F =
√n
∑i=1
n
∑j=1
(ai j)2
Exemplo 5.10Seja
A
3 −1 13 6 23 3 7
.Então, determinemos ‖A‖1, ‖A‖∞ e ‖A‖F .
Solução
Determinando ‖A‖1
• Para j = 1,3∑
i=1|ai1|= |3|+ |3|+ |3|= 9;
• Para j = 2,3∑
i=1|ai2|= |−1|+ |6|+ |3|= 10;
141 / 165

Matemática Computacional
• Para j = 3,3∑
i=1|ai3|= |1|+ |2|+ |7|= 10.
Assim,
max1≤ j≤3
3
∑i=1|ai j|= max
1≤ j≤3{9,10,10}= 10.
Portanto,‖A‖1 = 10.
Determinando ‖A‖∞
• Para i = 1,3∑j=1|a1 j|= |3|+ |−1|+ |1|= 5;
• Para i = 2,3∑j=1|a2 j|= |3|+ |6|+ |2|= 11;
• Para i = 3,3∑j=1|a3 j|= |3|+ |3|+ |7|= 13.
Assim,
max1≤i≤3
3
∑j=1|ai j|= max
1≤i≤3{5,11,13}= 13.
Portanto,‖A‖∞ = 13.
Determinando ‖A‖2√√√√ 3
∑i=1
3
∑j=1
(ai j)2 =√
32 +(−1)2 +12 +32 +62 +22 +32 +32 +72 =√
123.
Portanto,‖A‖F =
√123.
Propriedade 5.1Para as normas matriciais ‖ · ‖1 e ‖ · ‖∞ temos:
‖A ·B‖ ≤ ‖A‖ · ‖B‖, ∀A, B ∈ R(n,n).
Definição 5.3Sejam ‖·‖ uma norma vetorial em Rn e ‖·‖ uma norma matricial em Rn(n,n). Diz-se que estasnormas são consistentes se:
‖Ax‖ ≤ ‖A‖‖x‖, ∀A ∈ R(n,n) e ∀x ∈ Rn.
Embora o conceito geral de norma de matrical seja muito trabalhado e importante para o desenvolvi-mento e obtenção de muitas teorias e resultados, é usualmente preferível trabalhar com um conceitoparticular de normas matriciais, isto é, trabalharemos com as normas matriciais que estão intimamenterelacionadas com as normas vetoriais, desta forma temos a seguinte definição.
142 / 165

Matemática Computacional
Definição 5.4Seja ‖ · ‖ uma norma vetorial em Rn e A uma matrix de ordem n. Então diz-se que ‖ · ‖ é umanorma matricial subordinada se
‖A‖= sup{‖Az‖ : z ∈ Rn,‖z‖= 1} .
Exemplo 5.11
1. A norma coluna ‖ · ‖1 é uma norma matricial subordinada à norma vetorial ‖ · ‖1;
2. A norma linha ‖ · ‖∞ é uma norma matricial subordinada à norma vetorial ‖ · ‖∞;
3. A norma de Frobenius ‖ · ‖F não é uma norma matricial subordinada.
5.2.1 Processo Iterativo Geral
Uma das formas de obter um processo iterativo para resolver
Ax = b
onde det(A) 6= 0, é considerar uma matriz Q, denominada matriz de decomposição, e inseri-la noproblema original da seguinte forma:
Qx = (Q−A)x+b
Ou seja, reescrevemos a equação original num processo iterativo definido por:
Qx(k) = (Q−A)x(k−1)+b, k ≥ 1, (I)
onde x(0) é denominado de vetor inicial e pode ser escolhido arbitrariamente.
Nota 5.4Sempre que tenhamos um “bom chute” para a solução do sistema, este deveria de ser usadocomo o vetor inicial x(0). Diz-se que este processo iterativo é convergente, se este convergepara a solução do problema original, para qualquer vetor inicial x(0).
Mais ainda, assumamos que a matriz Q é inversível, isto é Q−1 existe, assim ao substituir na equaçãoacima obtemos:
x(k) = Q−1((Q−A)x(k−1)+b
)=(Q−1Q−Q−1A
)x(k−1)+Q−1b k ≥ 1
ou equivalentemente
x(k) =(I−Q−1A
)x(k−1)+Q−1b k ≥ 1, (II)
Logo, executando este processo iterativo, inúmeras vezes, geramos uma sequência de vetoresx(1),x(2), . . .. Assim, o nosso objetivo será escolher a matriz Q de forma que:
143 / 165

Matemática Computacional
i.{
x(k)}
k∈Nseja facilmente calculada;
ii.{
x(k)}
k∈Nconvirja rapidamente.
Nesta parte, veremos que estas duas condições se verificam, quando o sistema Qx(k) = y, onde y é umvetor que muda dependendo do contexto, é fácil de resolver e quando a matriz Q−1 se aproxima damatriz A−1.
Observamos, que se a sequência{
x(k)}
k∈Nconverge para um vetor x∗, então x∗ é a solução do sistema
Ax = b, de fato ao tomar o limite no processo iterativo e pela continuidade obtemos:
Qx∗ = (Q−A)x∗+b
ImportanteO processo iterativo (II) é conveniente para a analise de convergência, porém nas imple-mentações computacionais é quase sempre, mais utilizado o processo iterativo (I), pois ocálculo da matriz Q−1 pode ser custoso, computacionalmente.
O próximo resultado garante a convergência do processo iterativo (I).
Teorema 5.2Se ‖I−Q−1A‖ < 1 para alguma norma matricial subordinada, então a sequência gerada peloprocesso iterativo:
Qx(k) = (Q−A)x(k−1)+b k ≥ 1
converge para a solução de Ax = b para qualquer vetor inicial x(0).
5.2.2 O método de Jacobi-Richardson
Este método particulariza o método iterativo (II), por considerar a matriz Q como a matriz diagonalcujos elementos da diagonal são os elementos da diagonal da matriz A, isto é
Q =
a11 0 . . . 00 a22 . . . 0...
......
0 0 . . . ann
=⇒ Q−1 =
1
a110 . . . 0
0 1a22
. . . 0...
......
0 0 . . . 1ann
e Q−1b =
b1a11b2a22...bnann
assim
Q−1A =
1
a110 . . . 0
0 1a22
. . . 0...
......
0 0 . . . 1ann
a11 a12 . . . a1na21 a22 . . . a2n
......
...an1 an2 . . . ann
=
1 a12
a11. . . a1n
a11a21a22
1 . . . a2na22...
......
an1ann
an2ann
. . . 1
e obtemos
(I−Q−1A) =
1 0 . . . 00 1 . . . 0...
......
0 0 . . . 1
−
1 a12a11
. . . a1na11a21
a221 . . . a2n
a22......
...an1ann
an2ann
. . . 1
=−
0 a12
a11. . . a1n
a11a21a22
0 . . . a2na22...
......
an1ann
an2ann
. . . 0
144 / 165

Matemática Computacional
Portanto, ao substituir estes resultados no processo iterativo (II), obtemos o método de Jacobi-Richardson:
x(k)1
x(k)2...
x(k)n
=
b1a11b2a22...bnann
−
0 a12a11
. . . a1na11a21
a220 . . . a2n
a22......
...an1ann
an2ann
. . . 0
x(k−1)1
x(k−1)2
...x(k−1)
n
k ≥ 1
Definição 5.5Seja A uma matrix de ordem n. Diz-se que:
i. A é diagonalmente dominante se
|aii| ≥n
∑j=1j 6=i
|ai j|, i = 1,2, . . . ,n.
ii. A é estritamente diagonalmente dominante se
|aii|>n
∑j=1j 6=i
|ai j|, i = 1,2, . . . ,n.
Exemplo 5.12As matrizes A e B, do Exemplo 5.3, não são diagonalmente dominantes; porém as submatrizes B2 eB3 são diagonalmente dominante e estritamente diagonalmente dominante respectivamente.
ImportanteDado o seguinte sistema de equações lineares:
Ax = b.
a. Se A é estritamente diagonalmente dominante, ou
b. Se todos os menores principais de A têm determinantes diferentes de zero,
então este sistema pode ser resolvido mediante Eliminação de Gauss sem a necessidadede algum tipo de pivotamento, isto é, sem a necessidade de permutar linhas ou colunas.
Teorema 5.3Se A é estritamente diagonalmente dominante, então a sequência gerada pela iteração de Jacobi-Richardson converge para a solução de Ax = b para qualquer vetor inicial.
O seguinte algoritmo aplica o processo iterativo de Jacobi-Richardson:
Algoritmo 5.6
145 / 165

Matemática Computacional
Dados Iniciais
x(0) =
x(0)1
x(0)2...
x(0)n
, M = quantidade de iterações.
Para k = 1,2, . . . ,M faça:Para i = 1,2, . . . ,n faça
x(k)i ←1aii
bi−n
∑j=1j 6=i
ai jx(k−1)j
Saída
x(M) =
x(M)
1
x(M)2...
x(M)n
Exemplo 5.13Se possível, usando o Algoritmo 5.6, calculemos as 3 primeiras iterações dos seguintes problemas,
com x(0) =
000
:
1.3x1 − x2 + x3 = 13x1 + 6x2 + 2x3 = 03x1 + 3x2 + 7x3 = 4
SoluçãoDo Teorema 5.3, para que seja possível aplicar o Algoritmo 5.6, devemos verificar se amatriz de coeficientes é uma matriz estritamente diagonalmente dominante. Denotemospor A a matriz de coeficientes, ou seja,
A =
3 −1 13 6 23 3 7
assim, n = 3 e:
Linha 1:
i = 1 =⇒ 3 = |a11|>3
∑j=1j 6=1
|a1 j|= |a12|+ |a13|= |−1|+ |1|= 2
Linha 2:
i = 2 =⇒ 6 = |a22|>3
∑j=1j 6=2
|a2 j|= |a21|+ |a23|= |3|+ |2|= 5
146 / 165

Matemática Computacional
Linha 3:
i = 3 =⇒ 7 = |a33|>3
∑j=1j 6=3
|a3 j|= |a31|+ |a32|= |3|+ |3|= 6
Então, A é diagonalmente dominante. Logo, podemos aplicar o Algoritmo 5.6, paraos dados iniciais
x(0) =
000
e M = 3.
k = 1:
i = 1:
x(1)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(0)j
=1
a11
(b1− (a12x(0)2 +a13x(0)3 )
)=
13(1− (−1(0)+1(0))) =
13
i = 2:
x(1)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(0)j
=1
a22
(b2− (a21x(0)1 +a23x(0)3 )
)=
16(0− (3(0)+2(0))) = 0
i = 3:
x(1)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(0)j
=1
a33
(b3− (a31x(0)1 +a32x(0)2 )
)=
17(4− (3(0)+3(0))) =
47.
Logo,
x(1) =
x(1)1
x(1)2
x(1)3
=
13047
k = 2:
i = 1:
x(2)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(1)j
=1
a11
(b1− (a12x(1)2 +a13x(1)3 )
)=
13(1− (−1(0)+1(4
7)))=
17
147 / 165
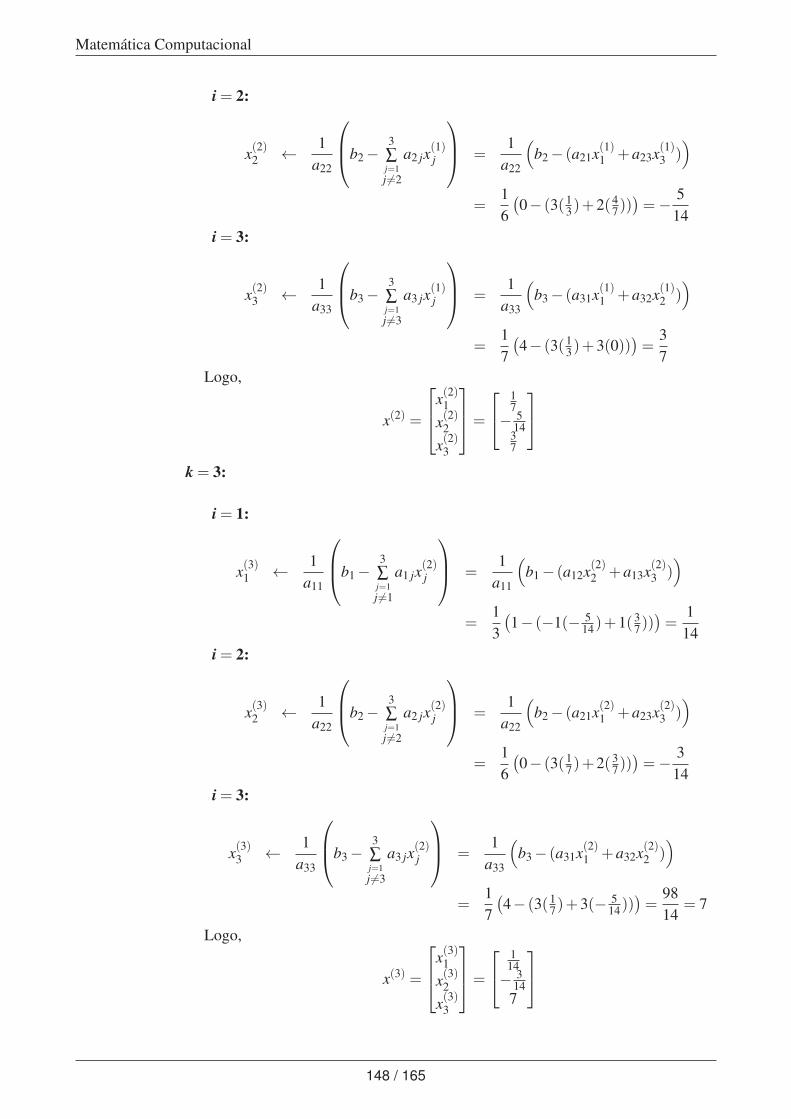
Matemática Computacional
i = 2:
x(2)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(1)j
=1
a22
(b2− (a21x(1)1 +a23x(1)3 )
)=
16(0− (3(1
3)+2(47)))=− 5
14i = 3:
x(2)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(1)j
=1
a33
(b3− (a31x(1)1 +a32x(1)2 )
)=
17(4− (3(1
3)+3(0)))=
37
Logo,
x(2) =
x(2)1
x(2)2
x(2)3
=
17− 5
1437
k = 3:
i = 1:
x(3)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(2)j
=1
a11
(b1− (a12x(2)2 +a13x(2)3 )
)=
13(1− (−1(− 5
14)+1(37)))=
114
i = 2:
x(3)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(2)j
=1
a22
(b2− (a21x(2)1 +a23x(2)3 )
)=
16(0− (3(1
7)+2(37)))=− 3
14i = 3:
x(3)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(2)j
=1
a33
(b3− (a31x(2)1 +a32x(2)2 )
)=
17(4− (3(1
7)+3(− 514))
)=
9814
= 7
Logo,
x(3) =
x(3)1
x(3)2
x(3)3
=
114− 3
147
148 / 165

Matemática Computacional
Desde que M = 3, paramos com as iterações e
x(M) = x(3) =
114− 3
147
.Se prosseguíssemos iterando, a sequência
{x(k)}
convergirá parax∗1x∗2x∗3
=
257− 9
3825
385
,solução deste problema.Por outro lado, se trabalhamos na forma matricialx(k)1
x(k)2
x(k)3
=
130647
−0 −1
313
36 0 2
637
37 0
x(k−1)
1
x(k−1)2
x(k−1)3
, k ≥ 1,
obteriamos os mesmos resultados quando x(0) =
000
, isto é:
x(1) =
1/30
4/7
, x(2) =
1/7−5/14
3/7
e x(3) =
1/14−3/14
7
.2.
10x1 − x2 = 9−x1 + 10x2 − 2x3 = 7
− 2x2 + 10x3 = 6
SoluçãoDo Teorema 5.3, para que seja possível aplicar o Algoritmo 5.6, devemos verificar se amatriz de coeficientes é uma matriz estritamente diagonalmente dominante. Denotemospor A a matriz de coeficientes, ou seja,
A =
10 −1 0−1 10 −20 −2 10
assim, n = 3 e:
Linha 1:
i = 1 =⇒ 10 = |a11|>3
∑j=1j 6=1
|a1 j|= |a12|+ |a13|= |−1|+ |0|= 1
Linha 2:
i = 2 =⇒ 10 = |a22|>3
∑j=1j 6=2
|a2 j|= |a21|+ |a23|= |−1|+ |−2|= 3
149 / 165

Matemática Computacional
Linha 3:
i = 3 =⇒ 10 = |a33|>3
∑j=1j 6=3
|a3 j|= |a31|+ |a32|= |0|+ |−2|= 2
Então, A é diagonalmente dominante. Logo, podemos aplicar o Algoritmo 5.6, paraos dados iniciais
x(0) =
000
e M = 3.
k = 1:
i = 1:
x(1)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(0)j
=1
a11
(b1− (a12x(0)2 +a13x(0)3 )
)=
110
(9− (−1(0)+0(0))) =9
10i = 2:
x(1)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(0)j
=1
a22
(b2− (a21x(0)1 +a23x(0)3 )
)=
110
(7− (−1(0)+(−2)(0))) =7
10i = 3:
x(1)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(0)j
=1
a33
(b3− (a31x(0)1 +a32x(0)2 )
)=
110
(6− (0(0)+(−2)(0))) =6
10.
Logo,
x(1) =
x(1)1
x(1)2
x(1)3
=
9107
106
10
k = 2:
i = 1:
x(2)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(1)j
=1
a11
(b1− (a12x(1)2 +a13x(1)3 )
)=
110
(9− (−1(
710
)+0( 610))
)=
97100
150 / 165

Matemática Computacional
i = 2:
x(2)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(1)j
=1
a22
(b2− (a21x(1)1 +a23x(1)3 )
)=
110(7− (−1( 9
10)+(−2)( 610))
)=
91100
i = 3:
x(2)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(1)j
=1
a33
(b3− (a31x(1)1 +a32x(1)2 )
)=
110(6− (0( 9
10)+(−2)( 710))
)=
74100
Logo,
x(2) =
x(2)1
x(2)2
x(2)3
=
9710091
10074
100
k = 3:
i = 1:
x(3)1 ← 1a11
b1−3∑j=1j 6=1
a1 jx(2)j
=1
a11
(b1− (a12x(2)2 +a13x(2)3 )
)=
110(9− (−1( 91
100)+0( 74100))
)=
9911000
i = 2:
x(3)2 ← 1a22
b2−3∑j=1j 6=2
a2 jx(2)j
=1
a22
(b2− (a21x(2)1 +a23x(2)3 )
)=
110(7− (−1( 97
100)+(−2)( 74100))
)=
9451000
i = 3:
x(3)3 ← 1a33
b3−3∑j=1j 6=3
a3 jx(2)j
=1
a33
(b3− (a31x(2)1 +a32x(2)2 )
)=
1100
(6− (0( 97
100)+(−2)( 91100))
)=
7821000
Logo,
x(3) =
x(3)1
x(3)2
x(3)3
=
991100094510007821000
151 / 165

Matemática Computacional
Desde que M = 3, paramos com as iterações e
x(M) = x(3) =
9911000945
1000782
1000
.Se prosseguíssemos iterando, a sequência
{x(k)}
convergirá parax∗1x∗2x∗3
=
4734759195
376475
,solução deste problema.Por outro lado, se trabalhamos na forma matricialx(k)1
x(k)2
x(k)3
=
9107
106
10
− 0 − 1
10 0− 1
10 0 − 210
0 − 210 0
x(k−1)
1
x(k−1)2
x(k−1)3
, k ≥ 1,
obteriamos os mesmos resultados quando x(0) =
000
, isto é:
x(1) =
0,90,70,6
, x(2) =
0,970,910,74
e x(3) =
0,9910,9450,782
.
5.2.3 O método de Gauss-Seidel
Este método particulariza o método iterativo (I), por considerar a matriz Q como a parte triangularinferior da matriz A, incluindo os elementos da diagonal de A, isto é
Q =
a11 0 . . . 0a21 a22 . . . 0
......
...an1 an2 . . . ann
Então
(Q−A) =
0 a12 a13 . . . a1n0 0 a23 . . . a2n...
...... . . . ...
0 0 0 . . . a(n−1)n0 0 0 . . . 0
Portanto, o processo iterativo de Gauss-Seidel é da forma:
a11 0 . . . 0a21 a22 . . . 0
......
...an1 an2 . . . ann
x(k)1
x(k)2...
x(k)n
=
b1b2...
bn
−
0 a12 a13 . . . a1n0 0 a23 . . . a2n...
...... . . . ...
0 0 0 . . . a(n−1)n0 0 0 . . . 0
x(k−1)1
x(k−1)2
...x(k−1)
n
152 / 165
Matemática Computacional
para k = 1,2,3, . . .
Desde que
Q =
a11 0 . . . 00 a22 . . . 0...
... . . . ...0 0 . . . ann
+
0 . . . 0 0 0a21 . . . 0 0 0
... . . . ......
...a(n−1)1 . . . a(n−1)(n−2) 0 0
an1 . . . an(n−2) an(n−1) 0
e
a11 0 . . . 00 a22 . . . 0...
... . . . ...0 0 . . . ann
−1
=
1
a110 . . . 0
0 1a22
. . . 0...
... . . . ...0 0 . . . 1
ann
Este processo iterativo pode ser reescrito como:
x(k)1
x(k)2...
x(k)n
=
b1a11b2a22...bnann
−
0 a12a11
. . . a1na11...
... . . . ...0 0 . . .
a(n−1)na(n−1)(n−1)
0 0 . . . 0
x(k−1)1
x(k−1)2
...x(k−1)
n
−
0 . . . 0 0a21a22
. . . 0 0... . . . ...
...an1ann
. . .an(n−1)
ann0
x(k)1
x(k)2...
x(k)n
Teorema 5.4
Se A é estritamente diagonalmente dominante, então a sequência gerada pela iteração de Gauss-Seidel converge para a solução de Ax = b para qualquer vetor inicial.
O seguinte algoritmo aplica o processo iterativo de Gauss-Seidel:
Algoritmo 5.7
Dados Iniciais
x(0) =
x(0)1
x(0)2...
x(0)n
, M = quantidade de iterações.
Para k = 1,2, . . . ,M façaPara i = 1,2, . . . ,n faça
ui ←1aii
bi−n∑j=1j 6=i
ai jx(k−1)j
x(k−1)
i ← ui
Para i = 1,2, . . . ,n façax(k)i ← ui
153 / 165

Matemática Computacional
Saída
x(M) =
x(M)
1
x(M)2...
x(M)n
ImportanteNo método de Jacobi-Richardson, as componentes do vetor x(k+1) podem ser calculadasde forma simultânea, enquanto no método de Gauss-Seidel as componentes devem ser cal-culadas de forma serial, devido a que o cálculo da componente x(k+1)
i precisa dos valores
recém-determinados x(k+1)1 ,x(k+1)
2 , . . . ,x(k+1)i−1 .
Exemplo 5.14Se possível, usando o Algoritmo 5.7, calculemos as 3 primeiras iterações dos seguintes problemas,
com x(0) =
000
:
1. 2 −1 01 6 −24 −3 8
x1x2x3
=
2−45
Solução
Do Teorema 5.4, para que seja possível aplicar o Algoritmo 5.7, devemos verificar se amatriz de coeficientes é uma matriz estritamente diagonalmente dominante. Denotemospor A a matriz de coeficientes, ou seja,
A =
2 −1 01 6 −24 −3 8
assim, n = 3 e:
Linha 1:
i = 1 =⇒ 2 = |a11|>3
∑j=1j 6=1
|a1 j|= |a12|+ |a13|= |−1|+ |0|= 1
Linha 2:
i = 2 =⇒ 6 = |a22|>3
∑j=1j 6=2
|a2 j|= |a21|+ |a23|= |1|+ |−2|= 3
Linha 3:
i = 3 =⇒ 8 = |a33|>3
∑j=1j 6=3
|a3 j|= |a31|+ |a32|= |4|+ |−3|= 7
154 / 165

Matemática Computacional
Então, A é estritamente diagonalmente dominante. Logo, podemos aplicar o Algo-ritmo 5.7, para os dados iniciais
x(0) =
000
e M = 3.
k = 1:
i = 1:
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(0)j
=1
a11
(b1− (a12x(0)2 +a13x(0)3 )
)=
12(2− (−1(0)+0(0))) = 1
x(0)1 ← u1 = 1.
i = 2:
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(0)j
=1
a22
(b2− (a21x(0)1 +a23x(0)3 )
)=
16(−4− (1(1)+(−2)(0))) =−5
6
x(0)2 ← u2 =−56 .
i = 3:
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(0)j
=1
a33
(b3− (a31x(0)1 +a32x(0)2 )
)=
18(5− ((4)(1)+(−3)(−5
6)))=− 3
16
x(0)3 ← u3 =− 316 .
Logo
x(1)←
u1u2u3
=
1−5
6− 3
16
.k = 2:
i = 1:
155 / 165

Matemática Computacional
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(1)j
=1
a11
(b1− (a12x(1)2 +a13x(1)3 )
)=
12(2− (−1(−5
6)+0(− 316))
)= 7
12
x(1)1 ← u1 =7
12 .
i = 2:
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(1)j
=1
a22
(b2− (a21x(1)1 +a23x(1)3 )
)=
16(−4− (1( 7
12)+(−2)(− 316))
)=−119
144
x(1)2 ← u2 =−119144 .
i = 3:
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(1)j
=1
a33
(b3− (a31x(1)1 +a32x(1)2 )
)=
18(5− ((4)( 7
12)+(−3)(−119144))
)= 3
128
x(1)3 ← u3 =3
128 .
Logo
x(2)←
u1u2u3
=
712−119
1443
128
k = 3:
i = 1:
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(2)j
=1
a11
(b1− (a12x(2)2 +a13x(2)3 )
)=
12(2− (−1(−119
144)+0( 3128))
)= 169
288
x(2)1 ← u1 =169288 .
i = 2:
156 / 165

Matemática Computacional
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(2)j
=1
a22
(b2− (a21x(2)1 +a23x(2)3 )
)=
16(−4− (1(169
288)+(−2)( 3128))
)=−2615
3456
x(2)2 ← u2 =−26153456 .
i = 3:
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(2)j
=1
a33
(b3− (a31x(2)1 +a32x(2)2 )
)=
18(5− ((4)(169
288)+(−3)(−26153456))
)= 49
1024
x(2)3 ← u3 =49
1024 .
Logo
x(3)←
u1u2u3
=
169288−2615
345649
1024
.Desde que M = 3, paramos com as iterações e
x(M) = x(3) =
169288−2615
345649
1024
.Se prosseguíssemos iterando, a sequência
{x(k)}
convergirá parax∗1x∗2x∗3
=
3150−19
253
100
.solução deste problema.Por outro lado, se trabalhamos na forma matricialx(k)1
x(k)2
x(k)3
=
1−5
6− 3
16
− 196
0 −48 00 8 −320 27 −12
x(k−1)
1
x(k−1)2
x(k−1)3
k ≥ 1
obteriamos os mesmos resultados quando x(0) =
000
, isto é:
x(1) =
1−5
6− 3
16
, x(2) =
712−119
1443
128
e x(3) =
169288−2615
345649
1024
.
157 / 165

Matemática Computacional
2. 10 2 11 5 12 3 10
x1x2x3
=
14118
Solução
Do Teorema 5.4, para que seja possível aplicar o Algoritmo 5.7, devemos verificar se amatriz de coeficientes é uma matriz estritamente diagonalmente dominante. Denotemospor A a matriz de coeficientes, ou seja,
A =
10 2 11 5 12 3 10
assim, n = 3 e:
Linha 1:
i = 1 =⇒ 10 = |a11|>3
∑j=1j 6=1
|a1 j|= |a12|+ |a13|= |2|+ |1|= 3
Linha 2:
i = 2 =⇒ 5 = |a22|>3
∑j=1j 6=2
|a2 j|= |a21|+ |a23|= |1|+ |1|= 2
Linha 3:
i = 3 =⇒ 10 = |a33|>3
∑j=1j 6=3
|a3 j|= |a31|+ |a32|= |2|+ |3|= 5
Então, A é estritamente diagonalmente dominante. Logo, podemos aplicar o Algo-ritmo 5.7, para os dados iniciais
x(0) =
000
e M = 3.
k = 1:
i = 1:
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(0)j
=1
a11
(b1− (a12x(0)2 +a13x(0)3 )
)=
110
(14− (2(0)+1(0))) = 75
x(0)1 ← u1 =75 .
158 / 165

Matemática Computacional
i = 2:
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(0)j
=1
a22
(b2− (a21x(0)1 +a23x(0)3 )
)=
15(11− (1(7
5)+1(0)))= 48
25
x(0)2 ← u2 =4825 .
i = 3:
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(0)j
=1
a33
(b3− (a31x(0)1 +a32x(0)2 )
)=
110(8− (2(7
5)+3(4825))
)=− 7
125
x(0)3 ← u3 =− 7125 .
Logo
x(1)←
u1u2u3
=
75
4825− 7
125
k = 2:
i = 1:
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(1)j
=1
a11
(b1− (a12x(1)2 +a13x(1)3 )
)=
110(14− (2(48
25)+1(− 7125))
)= 1277
1250
x(1)1 ← u1 =12771250 .
i = 2:
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(1)j
=1
a22
(b2− (a21x(1)1 +a23x(1)3 )
)=
15(11− (1(1277
1250)+1(− 7125))
)= 12543
6250
x(1)2 ← u2 =125436250 .
i = 3:
159 / 165

Matemática Computacional
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(1)j
=1
a33
(b3− (a31x(1)1 +a32x(1)2 )
)=
110(8− (2(1277
1250)+3(125436250 ))
)= − 399
62500
x(1)3 ← u3 =− 39962500 .
Logo
x(2)←
u1u2u3
=
12771250
125436250− 399
62500
k = 3:
i = 1:
u1 ←1
a11
b1−3∑j=1j 6=1
a1 jx(2)j
=1
a11
(b1− (a12x(2)2 +a13x(2)3 )
)=
12(2− (−1(12543
6250 )+0(− 39962500))
)= 624539
625000
x(2)1 ← u1 =624539625000 .
i = 2:
u2 ←1
a22
b2−3∑j=1j 6=2
a2 jx(2)j
=1
a22
(b2− (a21x(2)1 +a23x(2)3 )
)=
16(−4− (1(624539
625000)+(−2)(− 39962500))
)= 6254451
3125000
x(2)2 ← u2 =62544513125000 .
i = 3:
u3 ←1
a33
b3−3∑j=1j 6=3
a3 jx(2)j
=1
a33
(b3− (a31x(2)1 +a32x(2)2 )
)=
18(5− ((4)(624539
625000)+(−3)(62544513125000))
)= − 8743
31250000
x(2)3 ← u3 =− 874331250000 .
160 / 165
Matemática Computacional
Logo
x(3)←
u1u2u3
=
624539625000
62544513125000− 8743
31250000
.Desde que M = 3, paramos com as iterações e
x(M) = x(3) =
624539625000
62544513125000− 8743
31250000
.Se prosseguíssemos iterando, a sequência
{x(k)}
convergirá parax∗1x∗2x∗3
=
120
.Por outro lado, se trabalhamos na forma matricialx(k)1
x(k)2
x(k)3
=
754825− 7
125
−0 1
5110
0 − 125
950
0 − 7250 − 37
500
x(k−1)
1
x(k−1)2
x(k−1)3
k ≥ 1
obteriamos os mesmos resultados quando x(0) =
000
, isto é:
x(1) =
75
4825− 7
125
, x(2) =
12771250125436250− 399
62500
e x(3) =
624539625000
62544513125000− 8743
31250000
.
5.3 Recapitulando
Neste último capítulo abordamos de uma forma mais algoritmica a resolução dos sistemas de equa-ções lineares, ou seja, apresentamos diferentes algoritmos para resolver um sistema de equaçõeslineares dado. Ressaltando que, estes algoritmos são classificados em métodos diretos e métodositerativos.
Em primeiro lugar estudamos os métodos diretos, os quais são caracterizados por resolver um sistemade equações lineares dado num número finito de passos; com este proposito começamos estudandoos sistemas triangulares inferiores e superiores, os quais são resolvidos de forma direta. Baseados,nos sistemas triangulares inferiores e superiores, se estabelece a teoria conhecida na literatura comodecomposição LU , da matriz de coeficientes, mais ainda, sob certas condições desta, ela pode teruma decomposição Cholesky. Desta forma, uma vez decomposta a matriz de coeficientes, podemosaplicar a teoria sobre a resolução de sistemas triangulares vistos previamente. Finalizando este tipode métodos, apresentamos os métodos de eliminação de Gauss, com pivotamento parcial e total.Em segundo e último lugar, estudamos os métodos iterativos, cuja principal característica é a geraçãode uma sequência infinita de iterações, a qual convergirá à solução de um sistema de equações, sobcertas hipóteses. Desta forma, são apresentados o processo iterativo geral e dois importantes casosparticulares: o Método de Jacobi-Richardson e o Método de Gauss-Seidel.
161 / 165
Matemática Computacional
5.4 Atividades
1. Resolva os seguintes sistemas de equações lineares triangulares:
i.2x1 + 3x2 = 1
7x2 = 3
ii.4x1 = 5−6x1 + 3x2 = 1
iii.2x1 + 3x2 − 2x3 = 5
2x2 + 3x3 = 24x3 = 1
iv.x1 = 3
2x1 + 3x2 = 43x1 + 2x2 + 17x3 = 1
v.2x1 = 33x1 + 3x2 = 124x1 + 5x2 − 2x3 = 8
vi.x1 + 7x2 − 7x3 = 5
3x2 + 3x3 = 12− 4x3 = 6
vii.− 2x4 = 0
3x3 + x4 = −42x2 − x3 + 3x4 = 5
x1 + 2x2 + 2x3 − x4 = 2
viii.x1 + 5x2 + 4x3 − 13x4 = 3− x2 + 2x3 + 5x4 = 2
− 4x3 + 3x4 = −5− 4x4 = 1
2. Transforme cada um deste sistemas num sistema triangular, inferior ou superior, equivalente eobtenha a sua solução.
i.2x1 + 5x2 − 2x3 = 33x1 + 3x2 + 3x3 = 12−x1 + x2 + x3 = 6
ii.x1 + 7x2 − 7x3 = 5
3x1 + x2 + 3x3 = 124x1 + 10x2 − 4x3 = 6
162 / 165
Matemática Computacional
iii.2x1 + 5x2 + 6x3 = 13x1 − 6x2 + 9x3 = 07x1 + 1x2 − 7x3 = 5
iv.x1 + 2x2 + 3x3 = 3
2x1 + x2 + 3x3 = 43x1 + 2x2 + x3 = 5
v.x1 − x2 + x3 − x4 = 3x1 − x2 − 3x3 − 3x5 = −3− x2 + x4 + x5 = 1
3x1 + 3x2 − 5x3 = 03x1 + 2x2 − 4x3 + 2x4 − 3x5 = 1
vi.2x1 + 2x2 + 2x3 + 2x4 = 0
x1 + x2 + x3 − x4 = 4x1 + x2 − x3 + x4 = −4x1 − x2 + x3 + x4 = 2
vii.x1 + 2x2 + 3x3 = 5
2x1 − x2 + 4x3 = 11− x2 + x3 = 3
viii.x1 + x2 + 2x3 = 4
3x1 − x2 − x3 = 22x1 + 5x2 + 3x3 = 3
ix.x1 + x2 = 5x1 + x3 = 2
x2 + x3 = 5
x.x1 − 2x2 + x3 = 1
2x1 + x2 = 3x2 − 5x3 = 4
3. Verifique se cada matriz de coeficientes dada acima, satisfaz as hipóteses do Teorema 5.1. Casoafirmativo, determine sua solução, usando decomposição LU.
4. Verifique se cada matriz dada no item(9) das atividades do capítulo 3, satisfaz as hipóteses doCorolário 5.1. Caso afirmativo, obtenha a sua decomposição de Cholesky, GGT .
5. Usando decomposição de Cholesky, GGT , determine a solução dos seguintes sistemas lineares:
i.x1 + x2 = 1x1 + 2x2 − x3 = 6− x2 + 3x3 = −11
163 / 165

Matemática Computacional
ii.3x1 = 9
2x2 = 45x3 = 25
iii.x1 − x2 = 2−x1 + 4x2 = −5
iv.2x1 − x2 = 0−x1 + 2x2 − x3 = 4
− x2 + 2x3 = −4
v.4x1 + 2x2 − 4x3 = 162x1 + 10x2 + 4x3 = −4−4x1 − 4x2 + 9x3 = −26
vi.9x1 − 12x2 + 9x3 = 21−6x1 + 11x2 − 21x3 = 1912x1 − 21x2 + 21x3 = 13
9x1 − 21x2 + 63x3 = −138
6. Obtenha a solução de cada um dos sistemas de equações lineares apresentados nos itens 2 e 6,acima, aplicando cada um dos métodos de eliminação, isto é:
i. Método de eliminação de Gauss com pivotamento diagonal;
ii. Método de eliminação de Gauss com pivotamento parcial;
iii. Método de eliminação de Gauss com pivotamento total.
7. Verifique se a matriz de coeficientes, dos sistemas de equações lineares apresentados nos itens2 e 6, é uma matriz estritamente diagonal dominante.
8. Para as matrizes de coeficientes estritamente diagonal dominantes, do item acima:
a. Usando o Algoritmo 5.7, calcule as 5 primeiras iterações destes sistemas, para o pontoinicial x(0) = (0,0,0)T ;
b. Usando o Algoritmo 5.8, calcule as 5 primeiras iterações destes sistemas, para o pontoinicial x(0) = (0,0,0)T .
Feedback sobre o capítuloVocê pode contribuir para melhoria dos nossos livros. Encontrou algum erro? Gostaria desubmeter uma sugestão ou crítica?Para compreender melhor como feedbacks funcionam consulte o guia do curso.
164 / 165
Matemática Computacional
Capítulo 6
Referências
6.1 Referências Bibliográficas
[1] APOSTOL, T. M. Cálculo, Vol. 1. Editora Reverté ltda. 2a Edição, 2004.
[2] ARENALES, S., DAREZZO, A. Cálculo Numérico: Aprendizagem com apoio desoftware. Editora Thomson, 1a Edição, 2008.
[3] BOLDRINI, J. L., COSTA, S. I. L., FIGUEIREDO, V. L., WETZLER, H. G. Álge-bra Linear. Editora Harbra ltda, 1a Edição, 1987.
[4] BURDEN, R. L., FAIRES, J. D. Análise Numérica. Editora Cengage Learning, 8aEdição, 2008.
[5] FRANCO, N. B. Cálculo Numérico. Editora Pearson Education do Brasil, 1a Edi-ção, 2007.
[6] SOUSA FILHO, G. F. e MEDEIROS, E. S. Introdução à Computação. Editora daUFPB, 1a edição, 2013.
[7] KINCAID, D., CHENEY, W. Numerical Analysis: Mathematics of Scientific Com-puting. Editora Brooks/Cole/Thomson Learning, 3a Edição, 2002.
[8] LIPSCHUTZ, S. Álgebra Linear: teoria e problemas. Editora Makron Books, 3aEdição, 1994.
[9] RUGGIERO, M. A. G., LOPES, V. L. R. Cálculo Numérico, Aspectos Teóricos eComputacionais. Editora Makron Books, 2a Edição, 1997.
165 / 165