matemática computacional - producao.virtual.ufpb.brproducao.virtual.ufpb.br/.../livro/livro.pdf ·...
TRANSCRIPT
Felipe Antonio Garcia MorenoKely Diana Villacorta Villacorta
Matemática Computacional
Editora da UFPBJoão Pessoa
2014
UNIVERSIDADE FEDERAL DA PARAÍBA
ReitoraVice-Reitor
MARGARETH DE FÁTIMA FORMIGA MELO DINIZEDUARDO RAMALHO RABENHORST
EDITORA DA UFPB
DiretoraSupervisão de Editoração
Supervisão de Produção
IZABEL FRANÇA DE LIMAALMIR CORREIA DE VASCONCELLOS JÚNIORJOSÉ AUGUSTO DOS SANTOS FILHO
Pró-reitora de graduaçãoDiretor da UFPB Virtual
Diretor do CI
ARIANE NORMA DE MENESES SÁJAN EDSON RODRIGUES LEITEGUIDO LEMOS DE SOUZA FILHO
CURSO DE LICENCIATURA EM COMPUTAÇÃO A DISTÂNCIA
CoordenadorVice-coordenadora
LUCIDIO DOS ANJOS FORMIGA CABRALDANIELLE ROUSY DIAS DA SILVA
Conselho EditorialProf Dr. Lucídio Cabral (UFPB)Prof Dr. Danielle Rousy (UFPB)Prof. Ms. Eduardo de Santana Medeiros Alexandre (UFPB)
M843m Moreno, Felipe Antonio Garcia. Matemática Computacional / Felipe Antonio Garcia Moreno, Kely Diana Villacorta Villacorta; editor: Eduardo de Santana Medeiros Alexandre. - João Pessoa: Editora da UFPB, 2014.
166. : il. – ISBN: 978-85-237-0911-2
Curso de Licenciatura em Computação na Modalidade à Distância. Universidade Federal da Paraíba.
1. Matemática computacional. 2. Vetores. 3. Matrizes. 4. Sistemas de Equações. I.Título.
CDU: 519.6
Todos os direitos e responsabilidades dos autores.EDITORA DA UFPBCaixa Postal 5081 – Cidade Universitária João Pessoa – Paraíba – BrasilCEP: 58.051 – 970 http://www.editora.ufpb.br
Impresso no BrasilPrinted in Brazil
Matemática Computacional
Matemática Computacional
i
Matemática Computacional
Sumário
1 Cap 1 1
2 Vetores 2
2.1 Vetores em R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Vetores em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Adição de vetores e multiplicação por um escalar . . . . . . . . . . . . . . . 5
2.2.2 Produto interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.3 Norma e distância em Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.4 Vetores coordenados unitários . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.5 Envoltória linear de um conjunto finito de vetores . . . . . . . . . . . . . . . 13
2.2.6 Independência linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.7 Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Referências 23
3.1 Referências Bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
ii
Matemática Computacional
Capítulo 1
Cap 1
glkdk
1 / 23
Matemática Computacional
Capítulo 2
Vetores
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Compreender o conceito de vetores em Rn;
• Familiarizar-se com as operações e propriedades dos vetores, e aplicar estes resultadosnos cálculos que os envolvam;
• Entender os conceitos de produto interno, norma e distância entre vetores;
• Dado um conjunto de vetores em Rn, saber determinar se este é linearmente indepen-dente ou não;
• Dado um conjunto de vetores em Rn, saber determinar se este é uma base ou não deRn;
Em diversas aplicações da física surgem grandezas, como por exemplo: altura, diâmetro, tempera-tura, etc., as quais são grandezas que podem ser representadas na reta real, denotada por R, e sãodenominadas de grandezas escalares. Por outro lado, existem outros tipos de grandezas, como porexemplo: força, velocidade, etc., as quais podem ser representadas por segmentos de reta orientadosnum plano, ou seja, além de ter magnitude, tem uma direção apropriada e partem de um ponto dereferência, denotado por O. Mais ainda, existem grandezas que podem ser representadas no espaço.Em geral, este tipo de elemento é denominado de vetor, e será este o assunto abordado neste capítulo.
2.1 Vetores em R2
Começaremos apresentando as operações de soma e multiplicação por um escalar, entre vetores deR2.
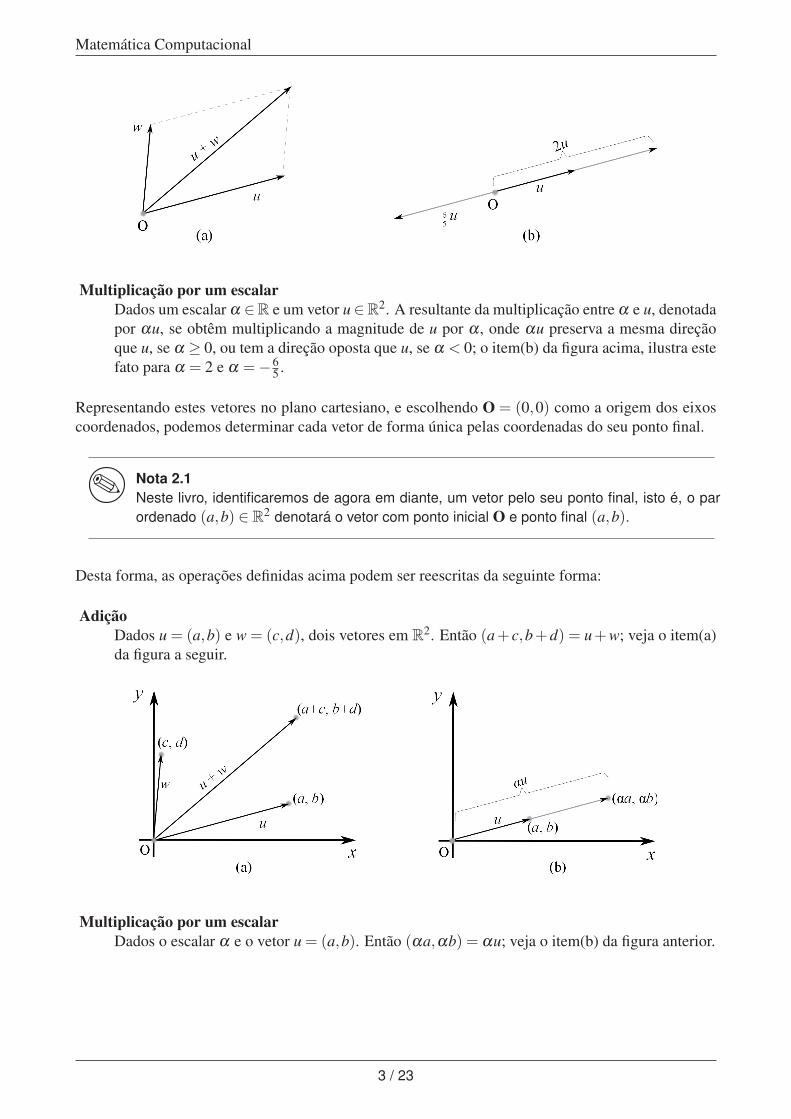
AdiçãoDados os vetores u e w ∈ R2. A soma dos vetores u e w, denotada por u+w, se obtêm pelachamada lei do paralelogramo, isto é, u+w é a diagonal do paralelogramo formado por u e w;veja o item(a) da figura a seguir.
2 / 23
Matemática Computacional
O
u
w
u + w
Multiplicação por um escalarDados um escalar α ∈R e um vetor u∈R2. A resultante da multiplicação entre α e u, denotadapor αu, se obtêm multiplicando a magnitude de u por α , onde αu preserva a mesma direçãoque u, se α ≥ 0, ou tem a direção oposta que u, se α < 0; o item(b) da figura acima, ilustra estefato para α = 2 e α =−6
5 .
Representando estes vetores no plano cartesiano, e escolhendo O = (0,0) como a origem dos eixoscoordenados, podemos determinar cada vetor de forma única pelas coordenadas do seu ponto final.
Nota 2.1Neste livro, identificaremos de agora em diante, um vetor pelo seu ponto final, isto é, o parordenado (a,b) ∈ R2 denotará o vetor com ponto inicial O e ponto final (a,b).
Desta forma, as operações definidas acima podem ser reescritas da seguinte forma:
AdiçãoDados u = (a,b) e w = (c,d), dois vetores em R2. Então (a+ c,b+d) = u+w; veja o item(a)da figura a seguir.
Multiplicação por um escalarDados o escalar α e o vetor u = (a,b). Então (αa,αb) = αu; veja o item(b) da figura anterior.
3 / 23

Matemática Computacional
Exemplo 2.1Consideremos os seguintes vetores:
u = (1,−3), v = (5,6) e o escalar α = 7.
Entãou+ v = (1,−3)+(5,6) = (1+5,−3+6) = (6,3).
α u = 7(1,−3) = (7(1),7(−3)) = (7,−21).
α v = 7(5,6) = (7(5),7(6)) = (35,42).
2.2 Vetores em Rn
Continuando, as definições de adição e multiplicação são generalizadas em Rn, com a n-upla ordenada(u1,u2, . . . ,un) denotando um vetor em Rn, com ponto inicial O e ponto final (u1,u2, . . . ,un).
Definição 2.1
i. Uma n-upla, é denotada por u = (u1,u2, . . . ,un) e chamada de vetor ou ponto ;
ii. O conjunto de todas as n-uplas de números reais, é denominado de n-espaço e é denotadopor Rn;
iii. Os números reais ui se chamam de coordenadas ou componentes do vetor u.
Importante 2.1Quando trabalhamos com o espaço Rn, usamos o termo escalar para os elementos de R.
Exemplo 2.2Consideremos os seguintes vetores:
(1,0), (−2,5),(
1,√
2,15,9,0
), e
(−1,−2,−π,−
√3,10000
).
Os dois primeiros vetores tem duas componentes, logo pertencem a R2, enquanto que os dois últimosvetores tem cinco componentes, logo pertencem a R5.
Definição 2.2Sejam os vetores u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn. Diz-se que u e w são iguais,e se denota u = w, se suas coordenadas correspondentes são iguais, isto é,
u1 = w1, u2 = w2, . . . , un = wn.
4 / 23

Matemática Computacional
Exemplo 2.3
a. Os vetores u =−3(13 ,−2) e v = (−1,6) de R2 são iguais.
b. Os vetores u = (1,3,5) e w = (3,5,1) de R3 não são iguais, devido que nenhuma das compo-nentes correspondentes são iguais.
c. Se (x−1,y−2,z−3) = (3,2,1), então por igualdade de vetores temos que
x−1 = 3, y−2 = 2 e z−3 = 1.
Resolvendo cada igualdade temos que x = 4, y = 4, z = 4.
2.2.1 Adição de vetores e multiplicação por um escalar
Definição 2.3Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
i. a adição de u e w, denotada por u+w, é o vetor que se obtêm somando coordenada a coorde-nada:
u+w = (u1 +w1,u2 +w2, . . . ,un +wn);
ii. a multiplicação de um número α ∈ R pelo vetor u, denotada por αu, é o vetor que se obtêmmultiplicando cada coordenada de u por α:
αu = (αu1,αu2, . . . ,αun).
iii. o vetor nulo em Rn, denotado por 0, é definido por
0 = (0,0, . . . ,0);
além disso, para qualquer vetor u ∈ Rn, temos que
u+0 = (u1 +0,u2 +0, . . . ,un +0) = (u1,u2, . . . ,un) = u = 0+u.
Nota 2.2Dados u e w em Rn. Então
a. u+w e αu são também vetores em Rn;
b.−u =−1u e u−w = u+(−w);
c. A adição de vetores com diferente número de componentes não está definida.
5 / 23

Matemática Computacional
Exemplo 2.4Sejam u = (1,2,3,4) e w = (6,7,−1,3) vetores em R4. Então:
u+w = (1,2,3,4)+(6,7,−1,3) = (1+6,2+7,3+(−1),4+3) = (7,9,2,7);
−2u = −2(1,2,3,4) = (−2(1),−2(2),−2(3),−2(4)) = (−2,−4,−6,−8);
3u−4w = 3u+(−4w)= 3(1,2,3,4)−4(6,7,−1,3)= (3(1),3(2),3(3),3(4))+((−4)6,(−4)7,(−4)(−1),(−4)3)= (3,6,9,12)+(−24,−28,4,−12)= (3+(−24),6+(−28),9+4,12+(−12)) = (−21,−22,13,0).
A seguir resumiremos as propriedades básicas das operações de adição de vetores e multiplicação deum vetor por um escalar em Rn.
Teorema 2.1Sejam os vetores u,v,w ∈ Rn e os escalares α,β ∈ R. Então
i. (u+ v)+w = u+(v+w);
ii. u+0 = u;
iii. u+(−u) = 0;
iv. u+ v = v+u;
v. α(u+ v) = αu+αv;
vi. (α +β )u = αu+βu;
vii. (αβ )u = α(βu);
viii. 1u = u.
Importante 2.2Sejam u e w vetores em Rn, tal que u = αw, para algum escalar não nulo α ∈ R. Então:
a. Se α > 0, diz-se que u tem a mesma direção de w;
b. Se α < 0, diz-se que u tem a direção oposta de w.
2.2.2 Produto interno
A seguir definiremos um novo tipo de produto, denominado de produto escalar ou produto interno,entre dois vetores em Rn. Este conceito é importante para o bom entendimento dos próximos capítu-los.
Definição 2.4Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
6 / 23

Matemática Computacional
i. O produto interno de u e w, denotado por u ·w, é o escalar que se obtêm multiplicandoas componentes correspondentes dos vetores e, logo depois, somando os produtos resul-tantes, isto é:
u ·w = u1w1 +u2w2 + · · ·+unwn =n
∑i=1
uiwi;
ii. diz-se que os vetores u e w são ortogonais ou perpendiculares, se seu produto interno éigual a zero, isto é:
u ·w = 0.
Exemplo 2.5Sejam u = (1,2,3), v = (6,7,1) e w = (4,−5,2). Então
u · v = (1)(6)+(2)(7)+(3)(1) = 6+14+3 = 23;v ·w = (6)(4)+(7)(−5)+(1)(2) = 24−35+2 = −8;u ·w = (1)(4)+(2)(−5)+(3)(2) = 4−10+6 = 0.
Portanto, do item ii da definição acima, u e v não são ortogonais, v e w não são ortogonais e, u e wsão ortogonais.
As propriedades básicas do produto interno em Rn são apresentadas no seguinte resultado.
Teorema 2.2Para todo vetor u,v,w ∈ Rn e todo escalar α ∈ R:
i. (u+ v) ·w = u ·w+ v ·w;
ii. (αu) · v = α(u · v)iii. u · v = v ·u;
iv. u ·u≥ 0;
v. u ·u = 0 ⇔ u = 0.
Nota 2.3O espaço Rn munido com as operações de adição, multiplicação por um escalar e produtointerno é conhecido como o n-espaço euclidiano.
2.2.3 Norma e distância em Rn
Definição 2.5Sejam os vetores
u = (u1,u2, . . . ,un) e w = (w1,w2, . . . ,wn) ∈ Rn.
Então,
7 / 23

Matemática Computacional
i. a norma de u, denotada por ‖u‖ , é definida como a raíz quadrada não negativa do produtointerno u ·u:
‖u‖=√
u ·u =√
u21 +u2
2 + · · ·+u2n =
√n
∑i=1
u2i ;
ii. a distância entre u e w, denotada por d(u,w), é definida por:
d(u,w) =√
(u1−w1)2 +(u2−w2)2 + · · ·+(un−wn)2 =
√n
∑i=1
(ui−wi)2;
iii. diz-se que u ∈ Rn é um vetor unitário se a norma deste é 1, isto é:
‖u‖= 1.
Exemplo 2.6Sejam u = (1,−2,3) e w = (5,1,−2). Então
‖u‖=√
(1)2 +(−2)2 +(3)2 =√
14;
‖w‖=√
(5)2 +(1)2 +(−2)2 =√
30;
d(u,w) =√
(1−5)2 +(−2−1)2 +(3− (−2))2 =√
40.
Além disso, já que‖u‖ 6= 1 e ‖w‖ 6= 1
estes vetores não são unitários.
Nota 2.4Dados os vetores u e w em Rn, temos que:
a. ‖u‖2 = u ·u;
b. Se u 6= 0, então o vetor u definido por
u :=u‖u‖
é um vetor unitário, e tem a mesma direção de u;
c. d(u,0) = ‖u‖;
d. d(u,w) = ‖u−w‖;
e. d(u,w) =√‖u‖2−2u · v+‖w‖2;
f. Do item ii da definição acima, temos que d(u,w) = d(w,u).
8 / 23

Matemática Computacional
Importante 2.3A norma definida no item i da Definição 2.5, é conhecida como ‖ · ‖2. Embora que, nestelivro somente trabalharemos com esta norma em Rn, a definição formal é dada a seguir.Uma norma vetorial em Rn é uma aplicação, denotada por ‖ · ‖, tal que:
‖ · ‖ : Rn −→ Ru 7−→ ‖u‖
satisfaz às seguintes condições:
i. ‖u‖ ≥ 0, ∀u ∈ Rn e ‖u‖= 0⇔ u = 0;
ii. ‖αu‖= |α|‖u‖, ∀α ∈ R e ∀u ∈ Rn;
iii. ‖u+ v‖ ≤ ‖u‖+‖v‖, ∀u e v ∈ Rn.
Assim, temos as seguintes normas em Rn:
Norma 1
‖u‖1 =n
∑i=1|ui|.
Norma Infinito
‖u‖∞ = max1≤i≤n
|ui|.
Norma p
‖u‖p =
(n
∑i=1
(ui)p
) 1p
, 1≤ p≤ ∞.
As propriedades vistas no Teorema 2.2, sobre o produto interno, implicam nas seguintes propriedadesda norma.
Teorema 2.3Para todo vetor u, w ∈ Rn e todo escalar α ∈ R:
i. ‖u‖> 0, se u 6= 0;
ii. ‖u‖= 0, se u = 0;
iii. ‖αu‖= |α|‖u‖;iv. ‖u+w‖ ≤ ‖u‖+‖w‖.
9 / 23

Matemática Computacional
Nota 2.5
a. O item iv do teorema acima é conhecido, na literatura, como a Desigualdade Trian-gular.
b. Se consideramos, em particular, R2 e os pontos p = (a,b) e q = (c,d), temos que
‖p‖=√
a2 +b2, e d(p,q) =√
(a− c)2 +(b−d)2.
Em outras palavras, ‖p‖ corresponde à magnitude do segmento de reta que vai desdea origem até o ponto p e d(p,q) corresponde à distância entre os pontos p e q. Oitem(a) e item(b) da figura a seguir ilustram ‖p‖ e d(p,q), respectivamente.
Com a teoria estudada até o momento, estamos prontos para mostrar uma interpretação geométricado produto interno de dois vetores em R2. O item(a) da figura a seguir, mostra dois vetores não nulosu e w, formando entre si um ângulo θ ∈ (0, π
2 ). Por outro lado, no item(b) temos três vetores, omesmo vetor u e dois vetores ortogonais p e q, cuja soma resulta em u, ainda mais, q = αw, desdeque 0 < θ < π
2 , α > 0.
(a) (b)
u
w
θ θ
u = αw + p
q = αw
p
O seguinte resultado é uma relação fundamental na teoria de vetores, conhecida na literatura como adesigualdade de Cauchy-Schwarz.
Teorema 2.4 (Teorema de Cauchy-Schwarz)Sejam u,w ∈ Rn. Então,
|u ·w| ≤ ‖u‖‖w‖.
10 / 23

Matemática Computacional
Importante 2.4Da desigualdade de Cauchy-Schwarz, obtemos que
−1≤ u ·w‖u‖‖w‖
≤ 1.
O que pela sua vez implica na existência de um único número real θ ∈ [0,π] tal que:
cos(θ) =u ·w‖u‖‖w‖
.
Definição 2.6Sejam u,w ∈ Rn, tais que w 6= 0.
i. O vetor projeção de u sobre v, é definido por αw, onde
α =u ·w‖u‖‖w‖
;
ii. Se u e w são ambos não nulos, o ângulo θ entre os vetores u e w é definido
θ = arccos(
u ·w‖u‖‖w‖
).
Nota 2.6
a. A função arcocosseno restringe θ ao intervalo [0,π];
b. Se u ·w = 0, então θ = π
2 (ou θ = 90◦) o qual coincide com a definição de ortogonali-dade.
2.2.4 Vetores coordenados unitários
Definição 2.7Seja o vetor ei em Rn, definido por:
ei = (0, . . . ,0,1,0, . . . ,0)
onde a i-ésima componente de ei é 1 e todas as outras componentes são zero.
i. ei é chamado de i-ésimo vetor coordenado unitário;
ii. os n vetores:
e1 = (1,0, . . . ,0), e2 = (0,1, . . . ,0), . . . ,en = (0,0, . . . ,1)
são chamados de vetores coordenados unitários.
11 / 23

Matemática Computacional
Exemplo 2.7
a. Em R3 temos os seguintes vetores coordenados unitários:
e1 = (1,0,0), e2 = (0,1,0) e e3 = (0,0,1).
b. Em R5 temos os seguintes vetores coordenados unitários:
e1 = (1,0,0,0,0), e2 = (0,1,0,0,0), e3 = (0,0,1,0,0),e4 = (0,0,0,1,0) e e5 = (0,0,0,0,1).
Importante 2.5
a. O termo de “vetor coordenado unitário” provém do fato de cada vetor ei ter norma 1isto é,
‖ei‖= 1 ∀ i = 1,2, . . . ,n.
b. Todos os vetores coordenados unitários são ortogonais entre si, isto é, o produto in-terno de qualquer par de vetores é zero:
ei · e j = 0, se i 6= j;
Assim obtemos o seguinte resultado
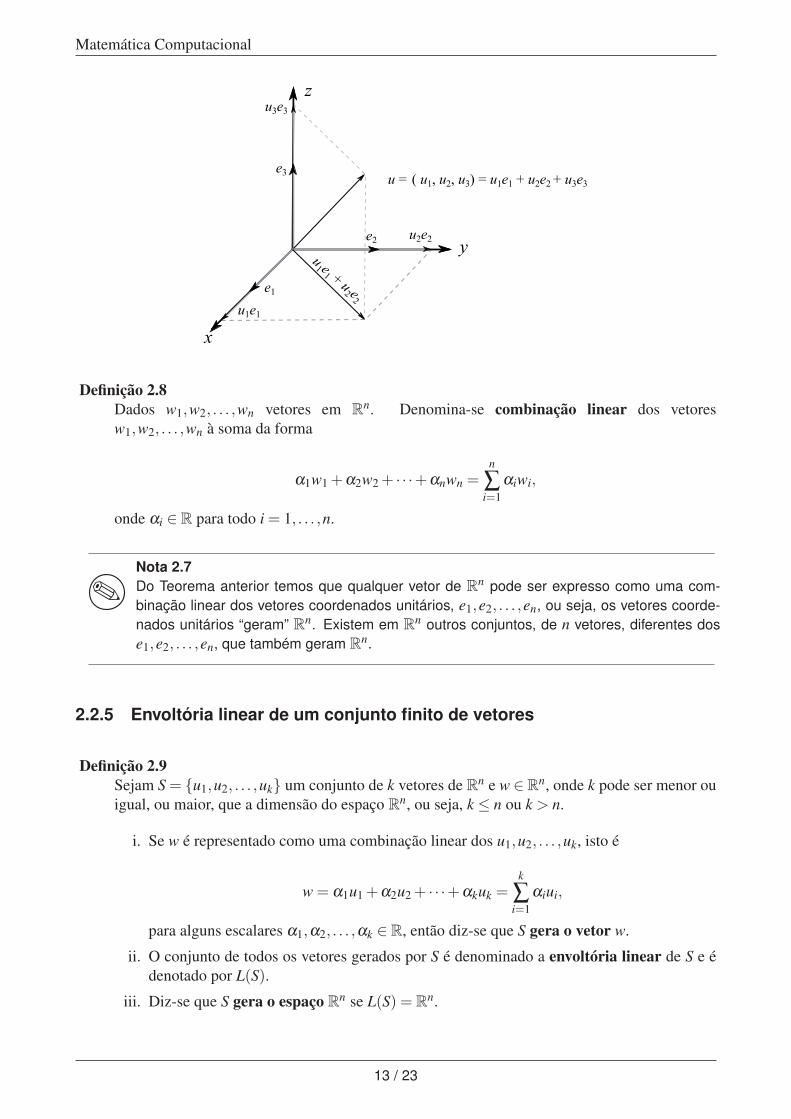
Teorema 2.5Todo vetor u = (u1,u2, . . . ,un) ∈ Rn pode ser expresso da forma:
u = u1e1 +u2e2 + · · ·+uiei + · · ·+unen =n∑
k=1unen.
Além disso, esta representação é única, isto é, se
u =n
∑k=1
ukek e u =n
∑k=1
wkek,
então uk = wk para cada k = 1,2, . . . ,n.
Na seguinte figura vemos uma ilustração deste fato para n = 3.
12 / 23
Matemática Computacional
z
x
y
e1
e3
e2
u1e1
u3e3
u2e2
u = ( u1, u2, u3) = u1e1 + u2e2 + u3e3
u1 e
1 + u2 e
2
Definição 2.8Dados w1,w2, . . . ,wn vetores em Rn. Denomina-se combinação linear dos vetoresw1,w2, . . . ,wn à soma da forma
α1w1 +α2w2 + · · ·+αnwn =n
∑i=1
αiwi,
onde αi ∈ R para todo i = 1, . . . ,n.
Nota 2.7Do Teorema anterior temos que qualquer vetor de Rn pode ser expresso como uma com-binação linear dos vetores coordenados unitários, e1,e2, . . . ,en, ou seja, os vetores coorde-nados unitários “geram” Rn. Existem em Rn outros conjuntos, de n vetores, diferentes dose1,e2, . . . ,en, que também geram Rn.
2.2.5 Envoltória linear de um conjunto finito de vetores
Definição 2.9Sejam S = {u1,u2, . . . ,uk} um conjunto de k vetores de Rn e w ∈Rn, onde k pode ser menor ouigual, ou maior, que a dimensão do espaço Rn, ou seja, k ≤ n ou k > n.
i. Se w é representado como uma combinação linear dos u1,u2, . . . ,uk, isto é
w = α1u1 +α2u2 + · · ·+αkuk =k
∑i=1
αiui,
para alguns escalares α1,α2, . . . ,αk ∈ R, então diz-se que S gera o vetor w.
ii. O conjunto de todos os vetores gerados por S é denominado a envoltória linear de S e édenotado por L(S).
iii. Diz-se que S gera o espaço Rn se L(S) = Rn.
13 / 23

Matemática Computacional
Nota 2.8A envoltória linear de S é o conjunto de todas as possíveis combinações lineares de vetoresem S.
Exemplo 2.8
a. Seja S = {u}. Então a envoltória linear de S é:
L(S) = {λu : λ ∈ R}.
b. Seja S = {u,v}. Então a envoltória linear de S é:
L(S) = {λ u+β v : λ , β ∈ R}.
c. Seja S = {u,−u}. Então a envoltória linear de S é:
L(S) = {λ u+β (−u) : λ , β ∈ R}= {(λ −β )u : λ , β ∈ R}.
Fazendo γ = λ −β , temos queL(S) = {γu : γ ∈ R}
Nota 2.9O vetor nulo 0 pode ser gerado por qualquer conjunto S = {u1,u2, . . . ,uk}, pois:
0 = 0u1 +0u2 + · · ·+0uk.
A representação, α1 = 0, α2 = 0, . . ., αk = 0, é denominada de representação trivial dovetor nulo. Porém, podem existir combinações lineares não triviais que representem o vetornulo. De fato, se u2 = 3u1, então obtemos infinitas representações não triviais do 0:
0 = 3λu1−λu2 +0u3 + · · ·+0uk, para qualquer λ ∈ R.
Agora vamos focar nossa atenção nos conjuntos S que geram os vetores de forma única.
Definição 2.10Sejam o conjunto S = {u1,u2, . . . ,uk} de vetores de Rn e w ∈ Rn. Diz-se que S gera o vetor wde forma única se:
i. S gera w;
ii. w =k∑
i=1αiui e w =
k∑
i=1βiui implica que αi = βi para todo i = 1, . . . ,k.
14 / 23

Matemática Computacional
Exemplo 2.9
a. Seja o conjunto S = {(1,0),(0,1),(1,1)} e w = (2,2). Então, temos que
w = 2(1,0)+2(0,1)+0(1,1),
ou seja, w é gerado por S. Porém, também temos que
w = 0(1,0)+0(0,1)+2(1,1).
Portanto, w não é gerado de forma única por S.
b. Seja o conjunto S = {(1,0),(0,1)} e w = (2,2). Então, temos que
w = 2(1,0)+2(0,1),
ou seja, w é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere w.
Portanto, w é gerado de forma única por S.
c. Seja o conjunto S̃ = {(1,0),(1,1)} e w = (2,2). Então, temos que
w = 0(1,0)+2(1,1),
ou seja, w é gerado por S̃. Além disso, não existe nenhuma outra combinação em S̃ que gere w.
Portanto, w é gerado de forma única por S̃.
Teorema 2.6Seja um conjunto S ⊂ Rn. Então, os vetores de L(S) são gerados de forma única por S se, esomente se, S gera de forma única o vetor nulo.
Exemplo 2.10
a. Seja o conjunto S = {(1,0),(0,1),(1,1)}. Então, temos que
0 = 1(1,0)+1(0,1)−1(1,1),
ou seja, 0 é gerado por S. Porém, também temos que
0 =−2(1,0)+−2(0,1)+2(1,1).
Assim, 0 não é gerado de forma única por S. Portanto, segundo o teorema acima, existemvetores em L(S) que não são gerados de forma única.
b. Seja o conjunto S = {(1,0),(0,1)}. Então, temos que
0 = 0(1,0)+0(0,1).
ou seja, 0 é gerado por S. Além disso, não existe nenhuma outra combinação em S que gere 0.Assim, 0 é gerado de forma única por S. Portanto, segundo o teorema acima, todos os vetoresem L(S) são gerados de forma única.
15 / 23
Matemática Computacional
c. Seja o conjunto S̃ = {(1,0),(1,1)}. Então, temos que
0 = 0(1,0)+0(1,1).
ou seja, 0 é gerado por S̃. Além disso, não existe nenhuma outra combinação em S̃ que gere 0.Assim, 0 é gerado de forma única por S̃. Portanto, segundo o teorema acima, todos os vetoresem L(S̃) são gerados de forma única.
2.2.6 Independência linear
O teorema anterior, mostra a importância dos conjuntos de vetores que geram de forma única o vetornulo, tais conjuntos são de especial distinção, por esse motivo este é o assunto bordado a seguir.
Definição 2.11Seja S = {u1,u2, . . . ,uk} ⊂ Rn. Se S gera de forma única o vetor 0, então se diz que S é umconjunto de vetores linearmente independente. Caso contrário, se diz que é linearmentedependente. Em outras palavras:
i. a independência linear significa que S gera o vetor nulo de forma única, com a represen-tação trivial, isto é,
sek
∑i=1
αiui = 0 implica que αi = 0, ∀i = 1, . . . ,k;
ii. a dependência linear significa que S gera o vetor nulo de forma não trivial, isto é,
existem β1, . . . ,βk ∈ R não todos nulos :k
∑i=1
βiui = 0.
Exemplo 2.11Segundo o exemplo anterior temos que:
a. O conjunto S = {(1,0),(0,1),(1,1)} é um conjunto de vetores linearmente dependente;
b. Os conjuntos S = {(1,0),(0,1)} e S̃ = {(1,0),(1,1)} são conjuntos de vetores linearmenteindependentes.
Importante 2.6
a. Por convenção, o conjunto vazio é linearmente independente;
b. Os vetores coordenados unitários e1,e2, . . . ,en de Rn, geram o vetor 0, de forma única,assim S = {e1,e2, . . . ,en} é linearmente independente.
c. Qualquer conjunto de vetores que contém o vetor nulo é linearmente dependente. Defato, se S = {u1 = 0,u2, . . . ,uk}, temos que o vetor nulo possui uma representaçãonão trivial:
0 = (2)u1 +0u2 + · · ·+0uk = (2)0+0u2 + · · ·+0uk.
16 / 23

Matemática Computacional
O próximo resultado estabelece que, se dado um conjunto S adicionamos a este qualquer vetor daenvoltória linear de S, L(S), obteremos um conjunto linearmente dependente.
Teorema 2.7Seja S = {u1,u2, . . . ,uk} um conjunto linearmente independente de k vetores de Rn, e seja L(S)a envoltória linear de S. Então, qualquer subconjunto de k+ 1 vetores de L(S) é linearmentedependente.
No próximo resultado, veremos a relação entre o conceito de ortogonalidade e a independência linear.
Definição 2.12Dado um conjunto de vetores S = {u1,u2, . . . ,uk} de Rn. Diz-se que:
i. S é ortogonal se
ui ·u j = 0 para todo i 6= j.
Isto é, dois vetores diferentes quaisquer de um conjunto ortogonal são perpendiculares.
ii. S é ortonormal, se S é ortogonal e cada um dos vetores ui são unitários, isto é,
‖ui‖= 1 para todo i = 1, . . . ,k.
Importante 2.7O conjunto dos vetores S = {e1,e2, . . . ,en} é um conjunto ortonormal.
Exemplo 2.12
a. O conjunto S := {(−1,2),(4,2)} é um conjunto ortogonal;
b. Para qualquer θ ∈ R se verifica que:
sen2θ + cos2
θ = 1.
Assim, o conjunto S := {(cosθ ,senθ),(−senθ ,cosθ)} é um conjunto ortonormal, para qual-quer θ ;
c. O conjunto S :={(
1√3, 1√
3, 1√
3
),(− 2√
6, 1√
6, 1√
6
),(
0,− 1√2, 1√
2
)}é um conjunto ortonormal.
Teorema 2.8Se S = {u1,u2, . . . ,uk} é um conjunto ortogonal de k vetores não nulos de Rn, então S é linear-mente independente. Além disso,
i. se w ∈ Rn é gerado por S, isto é:
w =k
∑i=1
αiui,
então os escalares αi são dados por:
αi =w ·ui
‖ui‖2 ∀ i = 1,2, . . . ,k;
17 / 23

Matemática Computacional
ii. se S é um conjunto ortonormal, então cada αi é dado por:
αi = w ·ui ∀ i = 1,2, . . . ,k.
2.2.7 Bases
Devido à importância de estudar os conjuntos de vetores do Rn que geram qualquer vetor de Rn, deforma única. Introduzimos nesta seção a definição de uma base em Rn.
Definição 2.13Seja o conjunto S = {u1,u2, . . . ,un} de vetores de Rn. Se S gera qualquer vetor em Rn de formaúnica, então diz-se que S é uma base em Rn. Em outras palavras, uma base é um conjuntolinearmente independente que gera todo o espaço Rn. Além disso, se:
i. S é ortogonal, então diz-se que S é uma base ortogonal;ii. S é ortonormal, então diz-se que S é uma base ortonormal.
Importante 2.8O conjunto de vetores coordenados unitários {e1,e2, . . . ,en} de Rn é uma base para Rn.Mais ainda, desde que:
i. ei · e j = 0, para todo j 6= i = 1, . . . ,n, esta base também é uma base ortogonal.
ii. ‖ei‖1, para todo i = 1, . . . ,n, esta base também é uma base ortonormal.
Exemplo 2.13
a. O conjunto ortogonal S := {(−1,2),(4,2)} é uma base ortogonal de R2, porém não é uma baseortonormal, pois
‖(−1,2)‖=√
5 6= 1 e ‖(4,2)‖=√
20 = 2√
5 6= 1.
b. O conjunto ortonormal S := {(cosθ ,senθ),(−senθ ,cosθ)} é uma base ortonormal de R2, paraqualquer θ ;
c. O conjunto ortonormal S :={(
1√3, 1√
3, 1√
3
),(− 2√
6, 1√
6, 1√
6
),(
0,− 1√2, 1√
2
)}é uma base or-
tonormal de R3.
O seguinte resultado, afirma que qualquer base de um espaço de dimensão n, contém n elementos.
Teorema 2.9Todas as bases que geram Rn tem as seguintes propriedades:
i. Toda base tem exatamente n vetores;
ii. Qualquer conjunto de vetores linearmente independentes é um subconjunto de algumabase;
iii. Qualquer conjunto de n vetores linearmente independente é uma base.
18 / 23

Matemática Computacional
2.3 Recapitulando
Neste capítulo, abordamos as noções básicas e necessárias sobre vetores em Rn, já que esta teoria éfundamental para o bom entendimento deste livro. Em primeiro lugar, apresentamos o conceito devetores em R2, e logo depois, em Rn. Assim como, as operações e propriedades relativas a estes.
Desta forma, nas seções deste capítulo, fomos estudando os conceitos de produto interno, norma edistância entre vetores; foram também apresentados diversos exemplos ilustrando esses tópicos.
Também foi abordado o conceito de independencia linear, mais precisamente, dado um conjunto devetores em Rn, saber determinar se este é linearmente independente ou não; se é uma base ou nãode Rn.
No próximo capítulo, estudaremos as noções básicas e necessárias sobre as matrizes, importanteobjeto de estudo deste livro, em particular dos capítulos 4 e 5.
2.4 Atividades
1. Sejam u = (1,3,7), v = (2,−5,5) e w = (1,2,−5) vetores de R3. Determine as componentesdos seguintes vetores:
i. u+ v ii. u− v iii. u+ v−w
iv. 3u−2v−7w v. u+2v−3w vi. −5u+ v−3w
2. Esboce os vetores que unem a origem aos pontos u = (2,1) e v = (1,3). Na mesma figura,esboce o vetor que une a origem ao ponto w = u+ λv, para λ = 1
2 , λ = 34 , λ = 1, λ = 2,
λ =−1.
3. Sejam u = (2,1) e v = (1,3). Prove que todo vetor w = (w1,w2) de R2 pode ser expresso naforma w = αu+βv. Expresse α e β em função de w1 e w2.
4. Sejam u= (1,1,1), v= (0,1,1) e w= (1,1,0) vetores de R3 e z=αu+βv+γw, onde α,β ,γ ∈R.
i. Determine as componentes de z;
ii. Se z = 0 mostre que α = β = γ = 0;
iii. Calcule α,β ,γ tais que z = (1,2,3).
5. Sejam u = (1,2,3,4), v = (−1,2,−3,0) e w = (0,1,0,1) vetores de R4. Calcule os seguintesprodutos internos
i. u · v;
ii. v ·w;
iii. u · (v+w);
iv. (u− v) ·w.
6. Sejam u = (2,1,−1) e v = (1,−1,2). Determine um vetor não nulo w de R3 tal que u ·w =v ·w = 0.
19 / 23

Matemática Computacional
7. Sejam u = (2,−1,2) e v = (1,2,−2). Determine dois vetores w,z∈R3 tais que verifiquem cadauma das seguintes condições:
i. u = w+ z;
ii. v · z = 0;
iii. w paralelo a v.
8. Sejam u = (1,2,3,4,5) e v = (1, 12 ,
13 ,
14 ,
15). Determine dos vetores w,z ∈ R5 que verifiquem
cada uma das seguinte condições:
i. v = w+2z;
ii. z ·u = 0;
iii. w paralelo a u.
9. Sejam u = (2,−1,5), v = (−1,−2,3) e w = (1,−1,1) vetores de R3. Calcule a norma dosseguintes vetores:
i. u+ v;
ii. u− v;
iii. u+ v−w;
iv. u− v+w.
10. Em cada caso determine um vetor v ∈ R2 tal que u · v = 0 e ‖u‖= ‖v‖, se:
i. u = (1,1);
ii. u = (1,−1);
iii. u = (2,−3);
iv. u = (u1,u2).
11. Sejam u = (1,−1,2) e v = (2,1,−1). Determine um vetor não nulo w ∈ R3, ortogonal a u e av.
12. Sejam u = (1,2) e v = (3,4) vetores de R2. Determine os vetores w e z de R2 tais que u = w+z,sendo p paralelo a v e z ortogonal a v.
13. Dados os vetores u = (2,−1,1), v = (1,2,−1) e w = (1,1,−2) de R3. Calcule os vetores z daforma αv+βw ortogonais ao vetor u e de norma 1.
14. Determine a projeção de u sobre v se u = (1,2,3) e v = (1,2,2).
15. Determine a projeção de u sobre v se u = (4,3,2,1) e v = (1,1,1,1).
16. Mostre que o ângulo que formam os vetores u = (1,2,1) e v = (2,1,−1) é duas vezes o ânguloformado por w = (1,4,1) e z = (2,5,5).
17. Sejam os vetores u,v,w ∈R3 tais que: ‖u‖= ‖w‖= 5, ‖v‖= 1, ‖u−v+w‖= ‖u+v+w‖. Seo ângulo que formam os vetores u e v é π
8 . Calcule o ângulo entre w e z.
18. Dados os vetores não nulos u,v,w ∈ Rn. Se o ângulo entre u e w é igual ao ângulo entre v,w.Prove que w é ortogonal ao vetor ‖v‖u−‖u‖v.
20 / 23
Matemática Computacional
19. Seja θ o ângulo entre os vetores u e v de Rn. Calcule o valor limite de θ quando n→+∞. Se
i. u = (1,1, . . . ,1) e v = (1,2, . . . ,n);
ii. u = (2,4,6, . . . ,2n) e v = (1,3,5, . . . ,2n−1).
20. Sejam u = (1,−2,4), v = (3,1,−2). Calcule
i. u+ v;
ii. −2u;
iii. 2u−4v;
iv. u · v;
v. ‖u‖, ‖v‖;vi. d(u,v).
21. Sejam u = (2,−1,0,1,−2), v = (1,1,−1,−1), w = (2,0,−2,0). Calcule
i. 2u−3v;
ii. 5u−4v−3w;
iii. −u+3v−2w;
iv. u · v u ·w, v ·w;
v. ‖u‖, ‖v‖, ‖w‖;vi. d(u,v), d(v,w).
22. Determine k de modo que os vetores u e v sejam ortogonais.
i. u = (3,k,−2), v = (6,−4,−3);
ii. u = (5,k,−4,2), v = (1,−3,2,2k);
iii. u = (1,7,k+2,−22), v = (3,k,−3,k).
23. Calcule λ , β e γ se:
i. (3,−1,2) = λ (1,1,1,)+β (1,−1,0)+ γ(1,0,0);
ii. (−1,3,3) = λ (1,1,0)+β (0,0,−1)+ γ(0,1,1).
24. Sejam e1 = (1,0,0), e2 = (0,1,0), e3 = (0,0,1). Verifice que para qualquer vetor u = (x,y,z) ∈R3:
i. u = xe1 + ye2 + ze3;
ii. u · e1 = x;
iii. u · e2 = y;
iv. u · e3 = z.
25. Sejam {e1 =(1,0),e2 =(0,1)} vetores de R2. Calcule α,β ∈R tais que α(e1−e2)+β (e1+e2)seja igual a
i. e1;
21 / 23

Matemática Computacional
ii. e2;
iii. 2e1−4e2;
iv. 5e1 +7e2.
26. Sejam u = (1,2), v = (2,−4) e w = (2,−3) vetores de R2. Calcule α,β ∈ R tais que w =αu+βv.
27. Sejam u = (2,−1,1), v = (1,2,−1) e w = (2,−11,7) vetores de R3. Calcule α,β ∈R tais quew = αu+βv.
28. Calcule t ∈R tal que os vetores (1+t,1−t) e (1−t,1+t) de R2 são linearmente independentes.
29. Sejam e1 e e2 os vetores coordenados de R2 e S = {e1,e1 + e2}.
i. Mostre que S é linearmente independente ;
ii. Mostre que e2 pertence à envoltória linear de S;
iii. Expresse 3e1−4e2 como combinação linear de e1 e e1 + e2;
iv. Prove que L(S) = R2.
30. Considere os seguintes vetores u = e1, v = e1 + e2 e w = e1 + e2 +3e3 de R3.
i. Prove que {u,v,w} é linearmente independente;
ii. Expresse os vetores e2 e e3 como combinação linear de u, v e w;
iii. Expresse 2e1 +3e2−4e3 como combinação linear de u, v e w;
iv. Demostre que {u,v,w} é uma base de R3.
31. Sejam u = (1,1,1,0), v = (0,1,1,1) e w = (1,1,0,0) vetores de R4.
i. Determine se o conjunto {u,v,w} é linearmente independente ou dependente;
ii. Obtenha um vetor não nulo y tal que o conjunto {u,v,w,y} seja linearmente dependente;
iii. Obtenha um vetor z tal que o conjunto {u,v,w,z} seja linearmente independente.
32. Dados os seguintes vetores em R3:
i. Prove que {(√
3,1,0),(1,√
3,1),(0,1,√
3)} é linearmente independente;
ii. Prove que {(√
2,1,0),(1,√
2,1),(0,1,√
2)} é linearmente dependente;
iii. Calcule t ∈ R tal que {(t,1,0),(1, t,1),(0,1, t)} seja linearmente dependente.
33. Encontre duas bases para R3 que contenham os vetores (0,1,1) e (1,1,1).
34. Encontre duas bases para R4 que contenham os vetores (0,1,1,1) e (1,1,1,1).
22 / 23

Matemática Computacional
Capítulo 3
Referências
3.1 Referências Bibliográficas
[1] APOSTOL, T. M. Cálculo, Vol. 1. Editora Reverté ltda. 2a Edição, 2004.
[2] ARENALES, S., DAREZZO, A. Cálculo Numérico: Aprendizagem com apoio desoftware. Editora Thomson, 1a Edição, 2008.
[3] BOLDRINI, J. L., COSTA, S. I. L., FIGUEIREDO, V. L., WETZLER, H. G. Álge-bra Linear. Editora Harbra ltda, 1a Edição, 1987.
[4] BURDEN, R. L., FAIRES, J. D. Análise Numérica. Editora Cengage Learning, 8aEdição, 2008.
[5] FRANCO, N. B. Cálculo Numérico. Editora Pearson Education do Brasil, 1a Edi-ção, 2007.
[6] SOUSA FILHO, G. F. e MEDEIROS, E. S. Introdução à Computação. Editora daUFPB, 1a edição, 2013.
[7] KINCAID, D., CHENEY, W. Numerical Analysis: Mathematics of Scientific Com-puting. Editora Brooks/Cole/Thomson Learning, 3a Edição, 2002.
[8] LIPSCHUTZ, S. Álgebra Linear: teoria e problemas. Editora Makron Books, 3aEdição, 1994.
[9] RUGGIERO, M. A. G., LOPES, V. L. R. Cálculo Numérico, Aspectos Teóricos eComputacionais. Editora Makron Books, 2a Edição, 1997.
23 / 23