fluidodinÂmica computacional aplicada À …app.uff.br/riuff/bitstream/1/1997/1/tcc_vinicius...
TRANSCRIPT

UNIVERSIDADE FEDERAL FLUMINENSE
ESCOLA DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA QUÍMICA E DE PETRÓLEO
CURSO DE ENGENHARIA DE PETRÓLEO
VINÍCIUS ANTÔNIO MESSIAS MARTINS
FLUIDODINÂMICA COMPUTACIONAL APLICADA À GERAÇÃO E
PROPAGAÇÃO DE ONDAS EM UM RESERVATÓRIO
Niterói, RJ
2016

VINÍCIUS ANTÔNIO MESSIAS MARTINS
FLUIDODINÂMICA COMPUTACIONAL APLICADA À GERAÇÃO E
PROPAGAÇÃO DE ONDAS EM UM RESERVATÓRIO
Trabalho de Conclusão de Curso
apresentado ao Curso de Engenharia de
Petróleo da Universidade Federal
Fluminense, como requisito parcial para a
obtenção do grau de Bacharel em
Engenharia de Petróleo.
Orientador:
Prof. Roger Matsumoto Moreira, Ph.D.
Niterói, RJ
2016

VINÍCIUS ANTÔNIO MESSIAS MARTINS
FLUIDODINÂMICA COMPUTACIONAL APLICADA À GERAÇÃO E PROPAGAÇÃO DE ONDAS EM UM RESERVATÓRIO
Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia de Petróleo da Escola de Engenharia da Universidade Federal Fluminense, como requisito parcial para obtenção do Grau de Bacharel em Engenharia de Petróleo
Aprovado em 07 de Julho de 2016.
BANCA EXAMINADORA
__________________________________________________ Prof. Roger Matsumoto Moreira, Ph.D. - UFF
Orientador
__________________________________________________ Prof. Fernando Cunha Peixoto, D.Sc. - UFF
__________________________________________________ Eng. Raphael David Bacchi - ESSS
NITERÓI, RJ
2016

AGRADECIMENTOS
Em primeiro lugar agradeço aos meus pais, Rosângela e Gaspar, que são dois gigantes
que sempre estiveram ao meu lado, que sempre me deram o apoio e carinho para que a
caminhada fosse possível. Agradeço também à minha filha Alice, que é a luz da minha vida e
me dá forças para seguir em frente; aos meus padrinhos, Roberto, Sônia e Rosália, que sempre
me deram o amor da forma mais leve e bonita possível; a todo o restante da minha família por
serem parte essencial da minha existência. Um abraço carinhoso aos meus amigos tanto de
faculdade como os que fiz por toda a minha vida. Um agradecimento enorme à todos os
professores que fizeram parte da minha formação, em especial ao meu orientador Roger, por
toda a ajuda, pela oportunidade e pela confiança dada à mim.

"I learned that courage was not the
absence of fear, but the triumph over it. I
felt fear myself more times than I can
remember, but I hid it behind a mask of
boldness. The brave man is not he who
does not feel afraid, but he who conquers
that fear."
Nelson Mandela

RESUMO
Este trabalho tem por objetivo modelar numericamente a geração e propagação de ondas em
contêineres parcialmente cheios de fluidos. As equações da continuidade e de Navier-Stokes
são resolvidas via método dos volumes finitos com um modelo homogêneo multifásico para
geometrias 2D e 3D. A ideia central do projeto envolve a análise da interação de ondas não-
lineares de diferentes fluidos newtonianos com as paredes de um tanque. Tal projeto poderia
ser considerado como uma representação simplificada das ondas geradas e propagadas em um
reservatório de uma plataforma de petróleo, por exemplo. Neste caso, parâmetros como
pressão, fração de volumes, perda de carga, esforços nos equipamentos e estruturas, e
propriedades dos fluidos, podem ser analisados. Essa simulação é comparada e validada com
experimentos de artigos publicados. Uma boa concordância é encontrada entre os resultados
numéricos e experimentais. Dependendo do fluido empregado, diferentes picos de pressão são
encontrados nas paredes do reservatório.
Palavras-chave: sloshing, interação fluido-estrutura, fluidodinâmica computacional,
método dos volumes finitos.

ABSTRACT
This work aims to model numerically the generation and propagation of free surface waves in
walled containers partially filled with different fluids. Therefore, continuity and Navier-
Stokes equations are solved via a finite volume method with a homogeneous multiphase
condition for 2D and 3D geometries. The central idea of the present work involves the
analysis of the interaction of nonlinear waves of different Newtonian fluids with the walls of a
tank. Such a design could be considered a simplified representation of the waves generated in
a reservoir of an oilrig, for example. In this case, parameters such as pressure, volume
fraction, pressure drop, stresses in equipment and structures, and fluid properties can be
studied. This simulation is compared and validated with results of published articles. A good
agreement is found when comparing the numerical results with experiments. Depending on
the fluid used, different pressure peaks at the walls of the reservoir are found.
Keywords: sloshing, fluid-structure interaction, computational fluid dynamics, finite
volume method.

LISTA DE FIGURAS
Figura 1 - Movimentos translacionais de uma estrutura flutuante. .......................................... 17
Figura 2 - Movimentos rotacionais de uma estrutura flutuante. ............................................... 17
Figura 3 – Deslocamento horizontal do sinal tipo “H”. ........................................................... 18
Figura 4 – Deslocamentos do sinal tipo “V”. ........................................................................... 19
Figura 5 - As ciências envolvidas em CFD .............................................................................. 22
Figura 6 - Tensão de cisalhamento em uma artéria do corpo humano. .................................... 23
Figura 7 - Projeto de um trocador casco-tubo. ......................................................................... 24
Figura 8 – Interpolação temporal pelos diferentes metodos. .................................................... 29
Figura 9 - Fluxo laminar e fluxo turbulento. ............................................................................ 31
Figura 10 - Funcionamento dos programas de CFD. ............................................................... 35
Figura 11 - Método de refino do grid. ...................................................................................... 39
Figura 12 - Erros de discretização e Erros de arredondamento. ............................................... 41
Figura 13 – Malha computacional do arquivo semente. ........................................................... 43
Figura 14 – Geometria gerada para a simulação em 3D........................................................... 45
Figura 15 – Comparação das simulações de 2D e 3D com o experimento real. ...................... 47
Figura 16 – Fenômeno ocorrido durante o run-up. ................................................................... 49
Figura 17 – Gráfico da pressão vs. tempo para o experimento H10. ....................................... 50
Figura 18 – Gráfico de pressões para os diferentes fluidos. ..................................................... 52
Figura 19 – Comparação das ondas geradas pelos fluidos. ...................................................... 53
Figura 20 – Movimentos acendente e decendente de ondas tipo table-top. ............................. 55
Figura 21 – Ondas geradas durante o experimento V21. ......................................................... 56
Figura 22 – Malhas dos tipos 1 e 2. .......................................................................................... 58
Figura 23 – Comparação entre os cenários 1 e 7. ..................................................................... 60

LISTA DE TABELAS
Tabela 1 – Características dos sinais gerados. .......................................................................... 19
Tabela 2 - Modificações a serem feitas na equação da continuidade. ...................................... 28
Tabela 3 - Propriedades dos fluidos utilizadas no experimento H10 ....................................... 44
Tabela 4 – Comparação das propriedades dos novos fluidos. .................................................. 51
Tabela 5 – Configurações dos diferentes cenários. .................................................................. 57

LISTA DE ABREVIAÇÕES
CFD Fluidodinâmica Computacional
ENE Equações de Navier-Stokes
SST Shear Stress Transport
PDE Equação Diferencial Parcial
TDMA Algoritmo da Matriz Tri-Diagonal
MGS Método de Gauss-Seidel
MCN Método de Crank-Nicolson
GCI Índice de Convergência do Grid
LISTA DE SIMBOLOS
Φ Termo de transporte
u Velocidade na direção do eixo x
v Velocidade na direção do eixo y
w Velocidade na direção do eixo z
Г Coeficiente de difusão
S Termo fonte
t Tempo
µt
Viscosidade de turbulência
K Energia cinética turbulenta
ε Taxa de dissipação de turbulência
k-ε Modelo Kappa-Epsilon
k-ω Modelo Kappa-Ômega
p Ordem de convergência

SUMÁRIO
1 Introdução .............................................................................................................................. 15
2 Fluidodinâmica Computacional ............................................................................................. 21
2.1 Introdução ao CFD .......................................................................................................... 21
2.2 Aplicações Práticas da Técnica CFD .......................................................................... 22
2.2.1 Utilização nas Diversas Industrias ........................................................................... 22
2.2.2 Utilização na Industria do Petróleo .......................................................................... 23
2.3 Equações de Conservação ............................................................................................... 24
2.3.2 Equações da Conservação de Momentum ................................................................ 25
2.3.3 Equação da Continuidade ......................................................................................... 26
3.3.4 Equação da Energia .................................................................................................. 27
2.3.5 Equações de Turbulência ......................................................................................... 27
2.4 Métodos Numéricos ........................................................................................................ 29
2.4.1 Métodos Implícito, Semi-Implícito E Explicito ....................................................... 29
2.4.1.1 Método de Adams-Bashford (Explicito) ........................................................... 29
2.4.1.2 Método de Crank-Nicolson (Semi-Implícito): .................................................. 30
2.5 Tipos de Escoamentos .................................................................................................... 30
2.5.1 Fluxos Laminares e Turbulentos .............................................................................. 31
2.5.2 Modelos de Turbulência em CFD ............................................................................ 32
2.6 O Programa ANSYS CFX .............................................................................................. 34
2.6.1 Estrutura do Programa .............................................................................................. 34
2.7 Geração da Malha Computacional .................................................................................. 35
2.7.1 Malhas Estruturadas ................................................................................................. 36
2.7.2 Malhas não Estruturadas .......................................................................................... 36
2.8 Condições de Contorno ................................................................................................... 36
2.9 Procedimentos para Soluções Computacionais .............................................................. 37

2.10 Validação e Verificação de Resultados......................................................................... 37
2.10.1 Estudo da Convergência do Grid ........................................................................... 38
2.10.2 Comparação da Simulação com Dados Experimentais .......................................... 40
2.11 Principais Fontes de Erros em CFD .............................................................................. 40
3 Modelagem Numérica ........................................................................................................... 42
3.2.1 Simulações do Experimento H10 ............................................................................. 42
3.2.1.1 Análise do Fenômeno Ocorrido Durante o Run-Up .......................................... 48
3.2.1.2 Gráficos de Pressão da Parede Lateral do Tanque ............................................ 50
3.2.1.3 Comparação Temporal das Ondas dos Diferentes Líquidos ............................. 52
3.2.2 Simulações do Experimento V21 ............................................................................. 54
4. Conclusão ............................................................................................................................. 61
Referências Bibliográficas ........................................................................................................ 62

15
1 Introdução
A fluidodinâmica computacional ou Computational Fluid Dynamics (CFD) é um braço
da mecânica dos fluidos e da transferência de calor, que estuda os fluxos de fluidos usando
análise numérica e sofisticados algoritmos. Desenvolvida inicialmente nas áreas de alta
tecnologia como aeronáutica e astronáutica, atualmente vem sendo utilizada largamente em
outros campos da engenharia. A simulação e otimização de peças, equipamentos e estruturas
complexas resulta no aumento da eficiência dos projetos modernos e redução de custos. A
técnica de CFD ainda tem sido subutilizada em aplicações na área de petróleo. As
possibilidades de aplicações na área aparentam ser vastas, podendo partir da otimização do
design de brocas de perfuração, passando pelo dimensionamento de chokes, até o projeto de
trocadores de calor. Essa técnica de computação também se faz importante na medida que em
sua aplicação em várias industrias, proporciona uma boa estimativa dos fenômenos físicos
através da simulação numérica, evitando o gasto desnecessário de tempo e recursos
financeiros.
Quando um reservatório parcialmente cheio quando submetido à forças externas, o
fenômeno conhecido como sloshing de onda pode ocorrer, causando grandes impactos de
onda nas paredes deste recipiente. As cargas produzidas pelo movimento das ondas tem o
potencial para causar danos estruturais, ou ainda afetar a estabilidade de vasos. Ondas do tipo
sloshing estão associadas à uma grande variedade de problemas de engenharia, incluindo o
movimento do combustível líquido, em aeronaves, o transporte de fluidos em contêineres e a
circulação de óleo no interior dos tanques de carga de uma FPSO.
Neste trabalho um referencial Euleriano é empregado para estudar o movimento das
ondas dentro de um reservatório parcialmente preenchido que oscila em um movimento
instável. O código de CFD comercial ANSYS-CFX é usado para simular os experimentos
H10 e V21 propostos por Bredmose et al. (2003), e estabelecer um comparação entre as ondas
de superfície livre geradas e o perfil do pico de pressões ocorrido nas paredes do reservatório,
e ainda checar a formação de ondas do tipo table-top. Para o experimento H10, ou seja, o
décimo experimento com o sinal do tipo “H”, a coluna de líquido tinha uma altura de 155 mm
em ralação ao fundo do reservatório. A relativa pequena coluna de fluido foi crucial para que

16
os resultados obtidos pelas câmeras fossem de alta visibilidade e que não houvesse
transbordamento de líquido, nem de geração gotas ou sprays, que poderiam provocar uma
perturbação na superfície livre do líquido. No experimento V21, a coluna de fluido foi de 302
mm.
O sloshing de onda é um problema clássico de fluxo com superfície livre. No passado,
cientistas como Poisson, Rayleigh e Kirchhoff investigaram este tipo de fenômeno. Mais
recentemente, diversos livros sobre este assunto foram publicados (Faltinsen e Timokha 2009,
Ibrahim 2005). Referências recentes incluem Jiang et al. (2014), que analisou
experimentalmente a hidrodinâmica e as características estruturais dos chamados sloshing
violentos em tanques elásticos; Moreira et al. (2012) e Chen et al. (2008), que avaliaram
numericamente a influência da frequência, nível de enchimento, o deslocamento e excitação
do recipiente sobre a dinâmica da onda; Godderidge et al. (2009), que estudou fluxos com
sloshing ressonantes em um tanque retangular utilizando um código comercial de
Fluidodinâmica Computacional (CFD); Nicolato e Moreira (2009), implementaram
geometrias de reservatórios otimizadas para reduzir o impacto desse tipo de onda; Bredmose
et al. (2003), que analisa experimentalmente e numericamente a geração de ondas não lineares
em um reservatório retangular. Bredmose et al. (2003) realizaram vários experimentos
considerando movimentos verticais e horizontais de um reservatório contendo diferentes
níveis de preenchimento de água. Neste estudo soluções numéricas obtidas através das
equações de Boussinesq foram comparadas com os resultados experimentais, mostrando em
geral uma boa concordância entre eles.
O reservatório empregado no presente trabalho possui a mesma forma do equipamento
utilizado por Bredmose et al. (2003). Este tanque tem a forma de um prisma com dimensões
1480 x 400 x 750 mm3 (comprimento x profundidade x altura). No experimento esse tanque
foi colocado sobre um equipamento capaz de gerar movimentos com seis graus de liberdade,
porém somente movimentos translacionais na vertical e horizontal foram realizados.
Uma das finalidades do presente estudo é fazer uma investigação das pressões e
esforços gerados dentro do tanque de estocagem de uma plataforma de petróleo, por exemplo.
Estruturas como essas são expostas a movimentos de translação - avanço (surge), deriva
(sway) e afundamento (heave) - exemplificados na figura 1; e de rotação - jogo (roll), guinada
(yaw) e arfagem (pitch) - ilustrados na figura 2.

17
Figura 1 - Movimentos translacionais de uma estrutura flutuante. Fonte: Costa, 2011.
Figura 2 - Movimentos rotacionais de uma estrutura flutuante. Fonte: Costa, 2011.
No experimento realizado por Bredmose et al. (2003) somente os movimentos de
avanço e afundamento foram estudados. Para análise dos experimentos, foram utilizadas duas
câmeras, uma normal e outra de alta velocidade, que foram capazes de capturar as ondas

18
dentro do contêiner em vários instantes distintos. Sensores de pressão também foram
instalados ao longo das paredes do tanque com a finalidade de mensurar o impacto dos
sloshings e a interação das mesmas com as paredes da estrutura. Dentre os transmissores de
pressão instalados somente um transmissor, instalado no canto inferior esquerdo do
reservatório, foi capaz de gerar resultados confiáveis. Além destes equipamentos, um
computador foi utilizado para programar os sinais reproduzidos na mesa móvel.
Neste experimento quatro tipos diferentes de sinais foram gerados, produzindo
diferentes formatos e padrões de ondas. Dentre estes, um sinal foi chamado de sinal tipo “H”,
o qual gerava somente movimentos horizontais (figura 3); os outros três sinais gerados foram
variações do tipo “V”, o qual apresenta um movimento horizontal seguido por um movimento
vertical (figura 4). No presente trabalho, no entanto, somente dois tipos de sinal foram
reproduzidos no programa ANSYS-CFX, o sinal dos experimentos H10 e V21.
Figura 3 – Deslocamento horizontal do sinal tipo “H”. Fonte: Bredmose et al., 2003.

19
Figura 4 – Deslocamentos do sinal tipo “V”. Fonte: Bredmose et al., 2003.
O sinal do tipo “H” é um movimento horizontal na direção do eixo x, do tipo senoidal.
Do instante inicial até t1, a amplitude da onda senoidal sai de zero até atingir seu valor
máximo. Do instante t1 até o instante t2 a oscilação segue o comportamento de uma senoide
comum. De t2 em diante, o tanque é movido através de um decaimento exponencial com
escala de tempo Δt para a posição Rfact, onde permanece em repouso até o final do
experimento. Esse tipo de movimento tem por finalidade gerar um impacto violento nas
paredes laterais do tanque, choque esse que é provocado principalmente pelo movimento que
ocorre a partir de t2. Os valores das variáveis citadas acima podem ser encontrados na tabela
1.
Já o sinal do tipo “V” apresenta uma combinação de deslocamento horizontal seguido
por um deslocamento vertical. Do instante inicial até t1, ocorre apenas o deslocamento
horizontal no tanque; de t1 em diante não existe mais deslocamento nesta direção.
Posteriormente a agitação vertical é iniciada indo de t2 até t3, onde ocorre um sinal também
senoidal, com frequência duas vezes superior à frequência do sinal horizontal. De t3 até tend, a
amplitude do sinal é reduzida linearmente até zero, e depois disso o tanque é mantido
estacionário até o final do experimento. A tabela 1 apresenta os valores de parâmetros
empregados nesses sinais.O movimento horizontal tem por finalidade gerar uma perturbação
inicial na superfície plana do líquido, servindo como uma semente a ser amplificada pelo
movimento vertical. Este tipo de oscilação é capaz de gerar ondas do tipo Faraday. Foram

20
estudadas no experimento as ondas do tipo table-top, ou seja, ondas que se quebram em
formato de “mesa” em sua parte superior. Este comportamento de onda era esperado para os
experimentos do tipo “V”.
Tabela 1 – Características dos sinais gerados. Fonte: Bredmose et al., 2003.
De acordo com Rajchenbach e Clamond (2015) as ondas de Faraday são uma tentativa
de descrição de fenômenos que ocorrem na superfície livre de um fluido dentro de um
recipiente que é submetido a oscilações verticais periódicas. O que chama a tenção nesta
configuração, é que ela dá origem à formação de diversos padrões de onda. De acordo com a
amplitude, frequência e viscosidade do fluido, a superfície livre pode exibir ondas solitárias
estagnadas ou padrões de simetria diferentes, tais como listras, quadrados, hexágonos, ondas
em forma de estrela, entre outros. A quebra de simetria resulta dos acoplamentos não lineares
entre ondas de superfície. Assim, o estudo de ondas de Faraday constitui uma maneira
vantajosa para explorar fenômenos não lineares complexos por meio de dispositivos
experimentais relativamente simples.

21
2 Fluidodinâmica Computacional
2.1 Introdução ao CFD
A fluidodinâmica computacional é uma ferramenta utilizada por cientistas,
profissionais da área e engenheiros na predição e simulação de fluxos de fluidos, transferência
de calor e massa, reações químicas e fenômenos correlatos. Esses problemas governados por
equações matemáticas são resolvidos por meio de métodos numéricos, geralmente utilizando-
se computadores (Tian 2015, p. 5). Como é exemplificado pela figura 5, a fluidodinâmica
computacional é formada pela junção de três disciplinas da ciência, a física (dinâmica dos
fluidos, transferência de calor, reações químicas, etc.), a matemática (resolução das equações
de governo e métodos numéricos) e a ciência da computação (programas e os códigos de
CFD). O método analítico é geralmente considerado a parte teórica, enquanto os termos
numéricos e computacionais são quase sinônimos. Em CFD, resolve-se numericamente as
equações, geralmente parciais diferenciais, que governam os fenômenos e processos (Tu,
Yeoh e Liu 2012, p. 2). A ideia do uso desse tipo de equações é bem antigo, data do início do
século passado, no entanto, só ouve uma revolução nessa área a partir da explosão
computacional dos anos 60 (Tannehill, Anderson e Pletcher 1997, pp. 3 e 4). O termo CFD foi
alcunhado no início dos anos 70. Uma das primeiras aplicações da CFD foi na simulação
aerodinâmica nas condições próximas à velocidade do som. No começo da década de 1980,
deu-se início ao emprego da técnica em problemas de duas e três dimensões. Nessa mesma
época, técnicas como multigrid abriram o leque de possibilidades de aplicação da técnica. Já
no final dos anos 1980, avanços como o esquema implícito, tornaram possíveis a resolução de
problemas de gases reais, por exemplo. Depois disso, o foco se voltou para melhora e
sofisticação da geração de grid, tendo como destaque o surgimento dos primeiros grids não
estruturados (Blazek 2001, p. 1 e 2). O objetivo final da fluidodinâmica computacional é o
entendimento dos eventos físicos do fluxo de fluidos internos ou externos à objetos,
equipamentos ou corpos. Esses eventos incluem fenômenos como dissipação, ondas de
choque, superfícies de deslizamento, difusão convecção, e turbulência (David W. Zingg 1999,
p. 1). Atualmente, devido a sua versatilidade e baixo custo, a técnica de CFD vem sendo
utilizada nas mais variadas disciplinas da engenharia, como será abordado na seção 2.2. De

22
acordo com Cebeci et al. (2005), apesar do grande desenvolvimento em CFD nos últimos
anos, a técnica ainda possui algumas imperfeições em função de ser um campo ainda muito
novo.
Figura 5 - As ciências envolvidas em CFD. Fonte: Tu, Yeoh e Liu, 2012, p. 2.
2.2 Aplicações Práticas da Técnica CFD
2.2.1 Utilização nas Diversas Industrias
A CFD pode ser empregada para o melhor entendimento processos e eventos físicos
dentro e fora de corpos. Estes fenômenos compreendem turbulência, difusão, convecção,
dissipação, camadas de contorno, fluxos incompressíveis e compressíveis, entre outros. As
aplicações dessa técnica vão da engenharia biomédica, metalurgia, automobilística,
aeroespacial, esportes, geração de energia, engenharia civil e ambiental até processos
químicos e minerais (Maliska 1995, p.8). A figura 6 é uma ilustração de uma aplicação bem

23
recente e promissora da CFD, que é na área de engenharia biomédica. Nesse caso, dentre os
benefícios da técnica estão a diminuição dos riscos em procedimentos cirúrgicos com o
desenvolvimento de equipamentos mais precisos e a melhora no design de equipamentos
artificiais que poderiam substituir órgãos em mal funcionamento. Na imagem 2 pode-se notar
que a região mais fechada da veia apresentaria as maiores tensões de cisalhamento, o que
demandaria maior atenção e cuidados dos especialistas médicos.
Figura 6 - Tensão de cisalhamento em uma artéria do corpo humano. Fonte: Tu, Yeoh
e Liu, 2012, p. 12.
2.2.2 Utilização na Industria do Petróleo
Aparentemente o potencial da técnica CFD ainda é pouco explorada na área de óleo e
gás. No entanto, já existem muitas pesquisas em áreas como fluxo multifásicos em
reservatórios e dutos, fluxo através de bombas, modelagem de trocadores de calor do tipo
casco tubo, design de aquecedor por combustão, estudo da coalescência de gotículas de água,

24
entre outros. A figura 7 demonstra um caso especifico do uso de CFD na modelagem de
permutadores de calor da indústria do petróleo. O princípio deste equipamento é bem simples,
um fluido passa pelos tubos e o outro pelo os cascos que os envolvem, e assim, devido à
diferença de temperatura entre eles, os fluidos trocam calor. A aplicação desta técnica pode
levar ao entendimento de parâmetros sofisticados, como corrosão, estresse térmico e
vibrações (comsol.com/conjugate-heat-transfer).
Figura 7 - Projeto de um trocador casco-tubo. Fonte: comsol.com/conjugate-heat-transfer.
2.3 Equações de Conservação
As equações de governo representam a face matemática da mecânica dos fluidos, sob
a qual as leis da física podem ser aplicadas. Parte significante do comportamento de fluidos
compressíveis e incompressíveis podem ser descritos por essas equações de conservação,
conhecidas como equações de Navier-Stokes. As equações de Navier-Stokes são baseadas na
conservação de massa, momentum e energia. Dependendo das condições de fluxo, se faz
necessária a simplificação dessas equações, o que não reduz a precisão dos resultados e
diminui o gasto computacional (Cebeci et al. al 2005, p. 41-42). Essas equações são

25
classificadas matematicamente como equações diferencias parciais, e na maioria dos casos os
coeficientes são constantes tanto no espaço como no tempo (David W Zingg 1999, p. 7). As
equações de Navier-Stokes podem ser aplicadas aos mais variados casos, tais como fluxo
permanente e transiente, compressível ou incompressível, laminar ou turbulento. Estas
equações também se aplicam às mais variadas condições de contorno, que podem ser do tipo
parede solida, periódicas, simétricas, abertas ou fechadas, por exemplo. A equação 1 é a
representação cartesiana generalista das equações de governo, da qual se pode obter as
equações de momentum, massa e energia, apenas fazendo-se os ajustes necessários. Na forma
diferencial temos:
(1)
Nessa equação, o termo de transporte Φ pode ser utilizado para o cálculo da
velocidade em x, y ou z, temperatura, concentração, etc., ρ indica a densidade, Г é o
coeficiente de difusão, S é o termo fonte e t é o tempo. Na forma vetorial temos:
(2)
A equação 2 é a representação da equação da conservação na forma vetorial, onde, da
esquerda para direita, temos o termo da aceleração local ou transiente, o termo convectivo,
termo difusivo e por último o termo fonte.
2.3.2 Equações da Conservação de Momentum
As equações de momentum, que são derivadas da segunda lei de Newton do
movimento, também são conhecidas como equações de Navier-Stokes. Segundo essa lei, a
soma das forças atuantes sobre uma partícula de fluido é igual ao produto da massa e da

26
aceleração desta partícula. Dentre as forças de corpo que podem alterar o momentum de um
fluido pode-se citar as forças gravitacionais, centrifugas, Coloris, e eletromagnéticas. Existem
também as chamada forças de superfície, que deformam o elemento de fluido. Estas forças
são causadas pelas tensões normais e tangenciais agindo na superfície do elemento de fluido.
As três equações gerais na forma cartesiana, para um fluido compressível em relação aos
eixos x, y e z, são representadas a seguir. A equação do momentum em relação ao eixo x é:
(3)
A formula geral do momentum em relação ao eixo y é:
(4)
Já a equação para o momentum em relação ao eixo z, pode ser representada da seguinte
forma:
(5)
2.3.3 Equação da Continuidade
A equação da conservação de massa estabelece que a variação temporal da massa por
unidade de volume, dentro do volume de controle infinitesimal, é igual a variação espacial do
fluxo de massa, por unidade de tempo, que cruza a superfície de controle. Se o fluxo for
instável, a taxa de aumento de massa dentro do elemento de fluido é igual à taxa liquida a qual
a massa entra no volume de controle, ou seja, entrada menos saída. A equação 6 representa a
forma diferencial parcial da equação da continuidade.

27
(6)
3.3.4 Equação da Energia
A equação para conservação de energia é derivada primeira lei da termodinâmica, onde
a taxa de variação energia é igual à soma da taxa liquida de calor adicionada ao sistema mais
taxa liquida de trabalho realizado pelo sistema dentro de um volume de controle. O trabalho
realizado no volume de controle é considerado como sendo o produto das forças de superfície
pelo componente de velocidade. Os fluxos de energia podem ser formulados aplicando-se a
lei de Fourier da condução de calor, que relaciona o fluxo de colar com o gradiente de
temperatura local. Os efeitos das tensões viscosas na equação da energia são representados
pela função dissipação (ψ), que representa uma fonte de energia causada pelo trabalho de
deformação no fluido. A energia de um fluido pode ser definida como a soma das energias
interna, cinética e potencial gravitacional. Seguindo a conservação de energia, obtemos a
equação 7 a partir da equação de Navier-Stokes.
(7)
2.3.5 Equações de Turbulência
Aqui temos representadas as equações do modelo de turbulência Kappa-Epsilon (k-ε), a
ser abordado em maiores detalhes na seção 2.5.2.
(8)
(9)

28
(10)
(11)
Em resumo, a tabela 2 apresenta todas as modificações e simplificações a serem feitas
na equação genérica das equações de governo afim de se obter as equações de momentum,
massa, energia e turbulência.
Tabela 2 - Modificações a serem feitas na equação da continuidade. Fonte: Tu, Yeoh e Liu,
2012, p. 107.
ϕ Гϕ Sϕ Equação
1 0 0 Massa
u
Momentum v
w
h
Energia
k
Turbulência

29
2.4 Métodos Numéricos
Nos problemas de engenharia, as equações apresentadas anteriormente são muito
difíceis de serem resolvidas analiticamente. Por tanto se faz necessário o uso de métodos
numéricos, que é linguagem utilizada nos computadores (Cebeci et al. al 2005, p. 43).
2.4.1 Métodos Implícito, Semi-Implícito E Explicito
Os modelos implícitos e explícitos são de primeira ordem em relação ao tempo. Com o
objetivo de reduzir os erros causados por problemas de segunda ordem, os esquemas de
Adams-Bashford (explicito) e Crank-Nicolson (semi-implícito), foram propostos. No método
explicito, apenas as variáveis já conhecidas são utilizadas para calcular as incógnitas do
próximo passo de tempo. Nos métodos implícito e semi-implícito variáveis desconhecidas
também são envolvidas neste cálculo, fazendo necessário o uso de um sistema de equações a
ser resolvido com a utilização de métodos numéricos. A figura 8 é uma representação das
variáveis envolvidas no cálculo de cada método.
Figura 8 – Interpolação temporal pelos diferentes metodos. Fonte: Nicolato, 2009.
2.4.1.1 Método de Adams-Bashford (Explicito)
Esse método é um mecanismo direto de resolução das equações, onde a variável
dependente (n+1) está sujeita aos valores já conhecidos previamente. Neste caso, cada
equação possui uma única incógnita, por isso pode ser resolvida de maneira simples, com um
sistema de equações.

30
(12)
2.4.1.2 Método de Crank-Nicolson (Semi-Implícito):
Diferentemente do que acontece no modelo explicito, as variáveis não podem ser
obtidas diretamente, por tanto deve haver um sistema de equações aplicado em todos os nós
do sistema para certo tempo. Dessa maneira, o método produz grandes sistemas de equações
algébricas a serem manipulados e resolvidas. Para a resolução destes problemas existem
alguns métodos iterativos clássicos que serão apresentados na seção 2.9.
(13)
2.5 Tipos de Escoamentos
Na mecânica dos fluidos existem basicamente dois tipos de escoamento, o laminar e o
turbulento. Existe também a transição entre os dois tipos de fluxo que é fonte de altas
imprecisões e erros, devido à falta de uma descrição precisa do fenômeno físico. A solução
das equações de Navier-Stokes geralmente não apresentam dificuldades fundamentais no caso
dos fluxos laminares. Contudo, a simulação de fluxos turbulentos apresenta diversos
problemas que precisam ser resolvidos através de equação mais sofisticadas como as
equações do tipo Reynolds-averaged Navier-Stokes, ou RANS (Blazek 2001), por exemplo.

31
2.5.1 Fluxos Laminares e Turbulentos
O fluxo laminar é caracterizado por ocorrer em camadas ou laminas, onde o fluido se
move de maneira ordenada, numa mesma direção e com velocidade constante. Nesse modelo
as partículas se movem de maneira suave, sem grande mistura de partículas dentro do fluido.
O fluxo laminar pode ser completamente descrito utilizando as equações da continuidade e
momentum. Em alguns casos mais simples os fluxos laminares podem até ser resolvidos
numericamente; em casos mais complexos os métodos numéricos se fazem necessários. A
figura 9 é uma representação dos dois tipos de fluido ao passar por uma asa. Antes do
obstáculo as linhas de fluxo estão alinhadas e ordenadas. Já na região influenciada pelo objeto
ocorre a formação de uma região caótica e turbulenta. O tipo de regime apresentado por um
fluido está intimamente liga à razão entre forças inerciais e viscosas, que são expressadas pelo
número de Reynolds. Em baixos números de Reynolds, as forças viscosas são proeminentes
sobre as forças inercias, ocorrendo então o fluxo laminar. Para números de Reynolds
suficientemente altos, as forças inercias ampliam as perturbação no fluido, provocando um
fluxo turbulento. Nestas condições o movimento se torna intrinsicamente instável mesmo
considerando-se condições de contorno constantes.
Figura 9 - Fluxo laminar e fluxo turbulento. Fonte: Tian, 2015, p. 385.

32
Em grande parte dos problemas relacionados à engenharia existe a predominância do
fluxo turbulento. No fluxo turbulento, as partículas de fluido seguem padrões desorganizados
e desordenados, onde as propriedades mudam constantemente ao longo do tempo. Em casos
como estes, uma perfeita descrição do fluxo requereria um tempo e custo computacional
quase proibitivos. Estes fluidos são causados por um complexa interação entre viscosidade e
inércia. Como a maioria dos fluxos em engenharia são turbulentos, com grandes variações de
temperatura, pressão e velocidades, a resolução direta das equações de Navier-Stokes se torna
muito complexa. Nesses casos, uma seria de modificações devem ser feitas, onde correlações
são adotadas e suposições são feitas.
2.5.2 Modelos de Turbulência em CFD
Como a complexidade dos fluxos com turbulência é muito alta, o uso de formulações
simples é quase sempre inviável. O modelo mais amplamente utilizado na indústria é o
Kappa-Epsilon (K- ε), que é baseado na aproximação de Boussinesq. Nessa teoria assume-se
que em fluxos isotérmicos e incompressíveis a turbulência diminui a não ser que exista um
cisalhamento. Além disso, viu-se que a taxa média de deformação segue o comportamento das
tensões turbulentas. Apesar de ser um método mais sofisticado e robusto, ele também é mais
custoso computacionalmente. Duas equações diferenciais parciais devem ser resolvidas, uma
para abranger a quantidade de energia cinética turbulenta “K”, e outras quantidades tais como
a taxa de dissipação de energia cinética turbulenta “ε” (Versteeg e Malalasekera 1995, p. 64).
A partir dessa premissa foram então desenvolvidos uma serie de modelos de turbulência (Date
2005, p. 89). Na equação 14, temos a introdução do conceito de viscosidade eddy ou
viscosidade de turbulência (µt), dado por Boussinesq. Apesar de ser simples e eficiente, o
modelo apresenta alguns pontos fracos em situações com alta curvatura, jatos assimétricos,
fortes turbilhões e fluxos parcialmente laminares.
(14)

33
Onde, a viscosidade de turbulência é: (15)
A energia cinética turbulenta é: (16)
A taxa de dissipação de turbulência é: (17)
Modelo RNG K- ε
É um método similar ao modelo padrão porém com algumas modificações para
incluir a interação entre a dissipação turbulenta e a força cisalhante e os efeitos dos
redemoinhos, podendo prever com mais precisão fluidos de transição, altas curvaturas e
transporte de massa e calor nas paredes. No entanto o modelo ainda não consegue prever o
comportamento de jatos.
Modelo k-ω
Este modelo é aplicado em situações de altos valores do número de Reynolds,
onde o K- ε não responde bem. Este modelo é aplicado na subcamada da camada limite, e
assim garantir mais estabilidade em fluxos mais turbulentos. O k-ω também se mostra
superior sob condições adversas de pressão e fluxos compressíveis.
Modelo SST
O modelo conhecido como Shear Stess Transport é a combinação dos modelos K-
ε e k-ω, com a intenção de extrair o melhor dos dois mundos. Este modelo de capaz de
simular situações com fortes gradientes de pressão, pois inclui os efeitos de transporte na
formulação (Blazek 2001, p. 245).
Modelo SSG
O modelo SSG / LRR-ω é derivado da abordagem de Menter combinando a
equação “ε” na borda externa da camada limite com a equação “ω” de Wilcox nas
proximidades da parede, misturando os coeficientes. A assim chamada equação BSL-ω

34
tem sido muito bem sucedida em conjunto com o modelo SST de Menter (Cécora et al.
2012). Este modelo de turbulência foi o único capas de gerar resultados satisfatórios para
um dos experimentos reproduzidos neste trabalho.
2.6 O Programa ANSYS CFX
O ANSYS CFX é um software de alta performance em CFD, que produz resultados
precisos e confiáveis para uma ampla gama de aplicações de dinâmica do fluidos. Existem
vários outros pacotes comerciais, tais como COMSOL, PHOENICS, FLUENT, FLOW3D,
entre outros. A escolha do programa ANSYS-CFX se deu em função deste ser um dos
melhores softwares de CFD, e por ter sido o software que tive a oportunidade de apender
durante o meu intercâmbio.
2.6.1 Estrutura do Programa
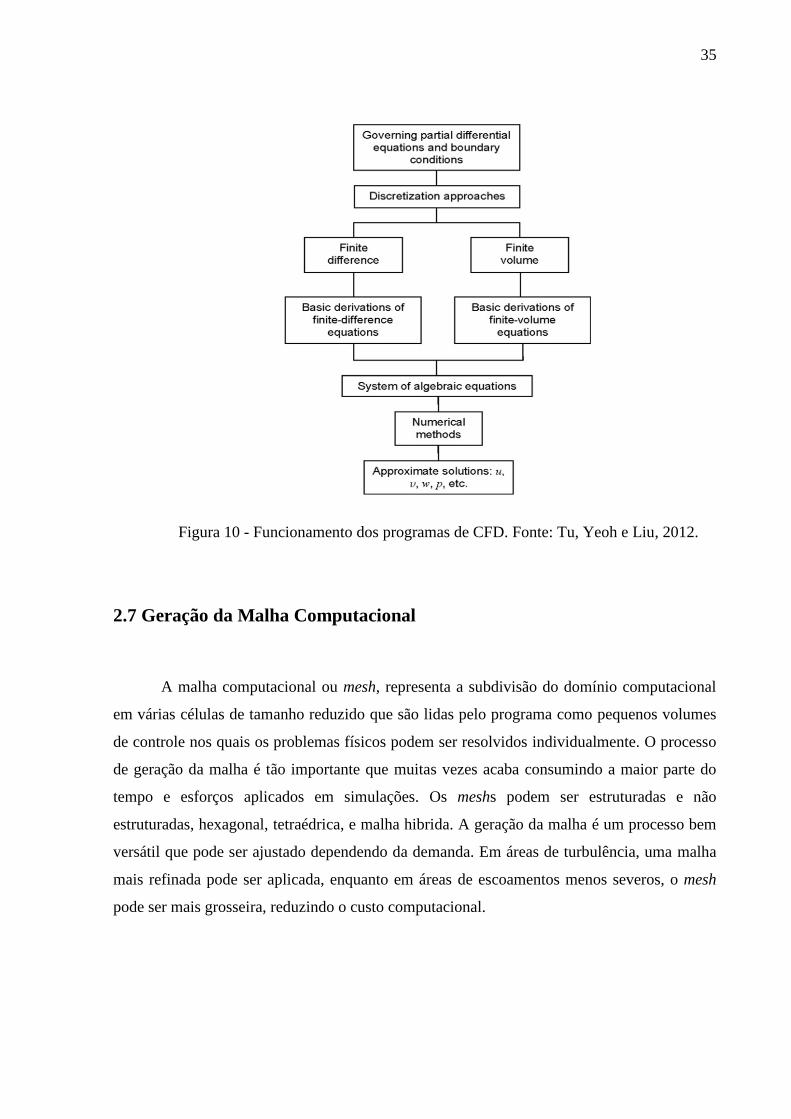
Em termos gerais, o programa tenta resolver as equações diferenciais parciais (EDP)
por discretização, tendo como ponto de partida as condições de contorno. De onde se chegará
a um sistema de equações algébricas que poderão ser resolvidas por métodos numéricos. Os
métodos utilizados para resolução dessas equações são os de diferença finita e volume finitos.
Depois disso o computador será capaz de entregar resultados como velocidade, pressão,
temperatura, entre outros. A figura 10 apresenta um panorama geral do que acontece no
processo computacional de simulação em CFD.
35
Figura 10 - Funcionamento dos programas de CFD. Fonte: Tu, Yeoh e Liu, 2012.
2.7 Geração da Malha Computacional
A malha computacional ou mesh, representa a subdivisão do domínio computacional
em várias células de tamanho reduzido que são lidas pelo programa como pequenos volumes
de controle nos quais os problemas físicos podem ser resolvidos individualmente. O processo
de geração da malha é tão importante que muitas vezes acaba consumindo a maior parte do
tempo e esforços aplicados em simulações. Os meshs podem ser estruturadas e não
estruturadas, hexagonal, tetraédrica, e malha hibrida. A geração da malha é um processo bem
versátil que pode ser ajustado dependendo da demanda. Em áreas de turbulência, uma malha
mais refinada pode ser aplicada, enquanto em áreas de escoamentos menos severos, o mesh
pode ser mais grosseira, reduzindo o custo computacional.

36
2.7.1 Malhas Estruturadas
O mesh estruturado tem as vantagens de ser a mais simples e fácil de programar. Este
foi o primeiro sistema desenvolvido e é usualmente aplicado aos casos mais simples e
básicos. No entanto o método não trabalha bem com estruturas irregulares, pois provoca um
aumentando nas assimetrias. Para o caso do presente estudo, o uso do mesh estruturado foi
suficiente para atender a demanda dos problemas em questão. Como pode ser observado na
figura 13 da seção 3.2.1, a malha aqui utilizada é composta somente por elementos
hexaédricos.
2.7.2 Malhas não Estruturadas
O mesh não estruturado foi desenvolvida para sempre preencher volumes arbitrários.
A geração deste tipo de malha é bem direta e menos complicada. Pode ser combinada com
outras técnicas para refinamento nas proximidades de paredes ou zonas mais sensíveis. Este é
o método mais utilizado e está presente em todos os pacotes comerciais do mercado. Nessa
técnica, o número de elementos aumenta consideravelmente, em relação ao método
convencional. Além disso, as células dificilmente se alinharam ao fluxo, pois a estruturação é
não isotrópica.
2.8 Condições de Contorno
As condições de contorno adequadas são elementos primordiais na resolução das
equações de Navier-Stokes e da continuidade. Essas condições é que vão delimitar e
determinar o sentido do fluxo. As condições de contorno incluem também a determinação de
uma parede sólida ou elástica, se entrada ou sai de fluidos, a velocidade do fluido no contato
com a parede, se a parede é lisa ou áspera, se existem fronteiras livres, a pressão na entrada e
saída, as velocidades nesses pontos, o fluxo mássico, as densidades, as temperaturas e

37
pressões iniciais, se existe transferência de calor, entre outros. Também é preciso determinar
se o fluxo ocorre entre paredes, se é aberto e se existe simetria (Date 2005, p. 73). O usuário
deve incluir as condições o mais próximas possível do problema real, para que os resultados
sejam consistentes.
2.9 Procedimentos para Soluções Computacionais
Existem vários métodos utilizados por programadores na geração de códigos que
resolvam os problemas de CFD. Aqui citarei alguns, que são os mais básicos e podem ser
calculados analiticamente para casos simples. No entanto, para problemas multidimensionais
estes métodos podem gerar problemas ao serem resolvidos por métodos iterativos, já que o
número de iterações é muito alto, demorando para que se atinja uma convergência.
Entre os métodos mais simples utilizados existe o método de Jacobi que é um
algoritmo que pode ser usado para se chegar a uma solução por meio de tentativas e iterações.
O modelo para de realizar iterações assim que o critério de convergência é atingido.
Uma outra possibilidade é o método de Gauss-Siedel que segue o mesmo princípio do
de Jacobi com a diferença que o valor encontrado em um iteração é substituído imediatamente
na próxima. Sendo assim, esse método atinge a convergência mais rapidamente.
Além destes também pode-se citar o método Algoritmo da Matriz Tri-Diagonal
(TDMA) que é um método direto para resolução de problemas de uma dimensão que pode ser
aplicado iterativamente, linha por linha, para resolver problemas multidimensionais. Foi
criado por Thomas em 1949 e tem sido largamente utilizado em CFD. Para casos de uma
dimensão o método é bem similar à eliminação gaussiana.
2.10 Validação e Verificação de Resultados
A fase de validação e verificação representa uma das mais importantes etapas do
processo de modelagem numérica, já que é nessa etapa que se pode determinar se a simulação

38
feita tem qualidade ou não. Como os dados são obtidos por meio de simulação, os mesmos
devem ser comparados com dados reais para mensurar o quão fiel à realidade é o resultado.
Muitas vezes, especialmente nas primeiras simulações com malhas mais grosseira, os
resultados não reproduzem fielmente a realidade. A verificação é o processo que determina se
o modelo projetado é conceitualmente condizente com a teoria, fornecendo evidencias da
consistência da solução. Já a validação procura comparar e analisar os resultados obtidos em
simulação com dados reais ou modelos padrões. A seguir temos alguns exemplos de métodos
utilizados em validação e verificação.
2.10.1 Estudo da Convergência do Grid
Esse estudo se baseia no princípio de que a solução da discretização tende à solução
exata com a diminuição do espaço do grid, ou seja, o erro por aproximação é reduzido com a
redução dos elementos da malha computacional. Para este fim, o teste de independência do
grid poderá ser aplicado. Neste teste, o grid é refinado até que a solução para certo parâmetro
pare de variar significativamente. Para isso, pelo menos três resoluções do grid devem ser
utilizadas. Se as três soluções convergirem, o método de Richardson é utilizado para encontrar
o valor ideal da variável (com espaço do grid tendendo a zero ou o número de elementos
tendendo ao infinito). Essa extrapolação também fornece um estimativa do erro de
discretização. O método possibilita a análise do quanto a malha gerada é adequada ao
problema em questão. A figura 11 é um exemplo da aplicação de refinamento de mesh para a
obtenção da pressão ideal. Com a utilização da técnica de extrapolação de Richardson, fica
evidente que a partir de certo nível de refinamento a redução do tamanho dos blocos não
influencia tanto na qualidade dos resultados obtidos. Pode-se notar na figura 11 que o
resultado para o malha gerada grosseiramente fica bem distante do que é fornecido pela
extrapolação; com a posterior melhora e refino do mesh os valores obtidos por simulação se
aproximam do valores ideais calculados.

39
Figura 11 - Método de refino do grid. Fonte: Tian, 2015, p. 250.
Com os três resultados obtidos e sabendo a taxa de refino do grid, podemos calcular a
ordem de convergência do problema. Sabendo-se os resultados, o fator de segurança e o fator
de refinamento, o índice de convergência do grid, que é a medida em porcentagem da
distância entre o valor obtido em simulação e o valor assintótico, pode ser obtido a partir da
equação 18.
(18)
(19)
Geralmente existe um fator de segurança (Fs) que segue a norma de 1,25 para três ou
mais grids e 3 para dois grids. Para dos valores GCI, devemos utilizar a equação 20. Se o
valor obtido for próximo de significa que as soluções estão dentro da variação assintótica.

40
(20)
Onde a ordem de convergência é: (21)
2.10.2 Comparação da Simulação com Dados Experimentais
Essa é uma etapa muito importante do processo que se realizada com sucesso pode
pesar muito na qualidade da simulação, determinando sua consistência ou inconsistência.
Uma simulação que conta com os dados reais de um equipamento ou peça, por exemplo, pode
ser facilmente verificada. Essa comparação também pode ser feita com modelos já bem
estabelecidos ou trabalhos feitos por especialistas da área. Se os resultados de simulação
forem próximos o suficiente dos valores reais, a simulação em questão tem grandes chances
de ter uma alta qualidade. No presente estudo, a comparação com dados experimentais foi o
principal método de validação de resultados, pois as modelagens aqui presentes foram
baseadas nos experimentos realizados por Bredmose et al. (2003) em seu artigo.
2.11 Principais Fontes de Erros em CFD
As fontes de erros em CFD são variadas, sendo principalmente causadas por
limitações computacionais e falha humana. Estes erros incluem erros por discretização,
simplificações, falhas na modelagem, erros de convergência e falta de habilidade no manuseio
do programa. O erro de discretização ocorre na solução da equação parcial diferencial, onde
um problema continuo é substituído por um discreto. Este erro é a diferença entre as soluções
analíticas e numéricas. Na solução numérica ocorrem simplificações em equações que a
distanciam os valores obtidos da solução real. O erro de discretização depende principalmente
do tamanho, densidade e qualidade do grid. Além deste existe também o erro em função da
capacidade do computador que não é capaz de considerar todos os dígitos dos números, e
acaba arredondando parte deles. Como se pode perceber na figura 12, existe um trade-off

41
entre esses dois erros, onde o erro de discretização é proporcional ao tamanho da mesh,
enquanto o erro por arredondamento é inversamente proporcional. Isso ocorre porque com o
refino da malha, o número de elementos aumenta e o número de equações a serem realizadas
pelo computador também aumenta.
Figura 12 - Erros de discretização e Erros de arredondamento. Fonte: Tian, 2015, p. 265.
Além dos mencionados anteriormente, existem os erros provocados por falhas no
modelo físico. Em muitos casos, os modelos matemáticos não conseguem retratar
perfeitamente a realidade o que acaba por afastar os resultados computacionais dos reais.
Esses erros acontecem principalmente em modelagens complexas como em problemas
envolvendo turbulência, combustão e escoamentos multifásicos. A explicação para o alto
nível de incerteza em simulações envolvendo estes tipos de fenômenos se encontra na própria
falta de conhecimento do fenômeno, na deficiência de uma descrição precisa e consistente,
incertezas nos parâmetros a serem considerados, simplificações nos modelos e dificuldades de
confirmação experimental. Os erros causados por modelagem física não satisfatória são
considerados as maiores fontes de erro em CFD.

42
3 Modelagem Numérica
Como descrito no primeiro capítulo, este trabalho de conclusão apresenta os resultados
das simulações dos experimentos H10 e V21 desenvolvidos por Bredmose et al. (2003). Estes
experimentos tinham como principais objetivos o estudos dos fenômenos de sloshing e a
formação de table-tops em contêineres parcialmente cheios com água.
3.2.1 Simulações do Experimento H10
Tomando como base os trabalhos anteriores realizados no laboratório de fluido
dinâmica computacional, novas simulações do experimento H10 foram realizadas, cada
uma contendo pequenas alterações em relação ao original. Para este caso, um arquivo
contendo todas as configurações necessárias para a simulação deste experimento já estava
pronto; este arquivo semente já continha malha computacional, as definições necessárias e as
condições de contorno já estabelecidas este caso. A figura 13 mostra a malha contida no
arquivo semente. Esse mesh foi gerado de modo que as regiões críticas tiveram um refino
maior, ou seja, apresentaram um maior número elementos de modo a evitar instabilidade na
solução numérica. As regiões críticas foram determinadas com base dos dados experimentais
obtidos por Bredmose et al. (2003). Estas regiões são localizadas no entorno dos locais de
formação das cristas e vales das ondas e também nas paredes do reservatório (locais que
sofrem os fortes impactos dos sloshings). Para esse experimento, as paredes são
particularmente importantes pois nelas ocorrem os chamados run-ups da massa de água
quando as ondas se chocam violentamente com estas barreiras. O run-up é caracterizado pela
subida do fluido pela parede do reservatório formando uma camada cada vez mais fina a
medida que a massa de fluido se eleva. Este movimento é a principal fonte de analises do
experimento H10. Fora das regiões críticas, ou seja aquelas em que o movimento de fluidos é
reduzido, a malha pode ser mais grosseira, salvando processamento e tempo computacional.
Outra característica importante dessa simulação é que a esta é uma representação
bidimensional do reservatório como um todo, na maioria dos casos um simulação 3D não é

43
necessária. Como o reservatório apresenta um comportamento simétrico, simulações
bidimensionais podem ser feitas sem que ocorra perda de qualidade nos resultados, gerando
ainda uma redução de tempo de processamento, o que torna o modelo mais simples de ser
executado. Nessa simulação 2D o comprimento e a altura originais do contêiner foram
mantidos, e a profundidade do mesmo foi reduzida de 400 mm para 8 mm, tornando-se um
problema bidimensional.
Figura 13 – Malha computacional do arquivo semente.
As equações que descrevem o movimento de fluidos contidos em contêineres fechados
podem ser simplificadas a partir da consideração de impermeabilidade e rigidez das paredes.
Para a dedução da condição de contorno para a superfície livre, o fluido é assumido como
incompressível e, a princípio, sem apresentar rotação. Os efeitos de capilaridade foram
desprezados para esta aplicação. Foram realizadas simulações considerando e
desconsiderando a tensão superficial; nestes casos os resultados foram praticamente idênticos,
sendo que com inclusão da tensão superficial os run-ups nas paredes laterais foram um pouco
maiores. A oscilação de superfícies livres pode ser produzida a partir de impulsos iniciais, ou
de um distúrbio da condição de repouso desta superfície. Para este tipo de simulação é
conveniente referenciar o movimento do fluido a um sistema de coordenadas que se desloca
juntamente com o recipiente que nele está contido. O movimento deste recipiente foi descrito
para o eixo horizontal a partir da função deslocamento da figura 3 do capítulo 1. Esta função
foi inserida no programa ANSYS-CFX por meio de uma interpolação de pontos.

44
A malha gerada no arquivo semente (figura 13) possui 40 172 nós e 19 800 elementos
hexaédricos, com um volume total de 0,00888 m3. Como esse modelo é uma representação do
reservatório como um todo, as duas paredes laterais e o fundo foram mantidas como rígidas, a
parte superior foi mantida como superfície aberta, enquanto as paredes frontal e traseira foram
substituídas por simetrias. Na simetria, presume-se que em ambos os lados das fronteiras,
existem mesmos processos físicos. As variáveis têm o mesmo valor e gradientes à mesma
distância a partir do limite. Essa condição atua como um espelho que reflete toda a
distribuição do fluxo para o outro lado. No caso do experimento H10 simulações em 3D e 2D
foram criadas, rodadas e comparadas. O reservatório em questão foi preenchido por água até
certo nível e o restante do tanque é preenchido por ar atmosférico. As propriedades físico-
químicas dos fluidos (sob temperatura de 25 °C e pressão de 1 atm) podem ser vistos na
tabela 3.
Tabela 3 - Propriedades dos fluidos utilizadas no experimento H10.
Fluido Densidade
(kg/m3)
Massa molar
(kg/kmol)
Viscosidade
dinâmica
(kg/ms)
Coeficiente de
absorção (m-1)
Água 997,0 18,02 8,899E-4 1
Ar 1,185 28,96 1,831E-05 0,01
Ambas substâncias foram consideradas puras, o ar como um gás seco e a água um
líquido puro. A temperatura nas simulações são mantidas constantes, desprezando-se as trocas
térmicas e as características relacionadas à transferência de calor; dentre essas características
podem ser citadas as constantes de condutividade e expansividade térmicas e a capacidade
calorifica dos fluidos, todas eles foram desconsideradas na modelagem. Além das
configurações explicadas anteriormente, o modelo Kappa-Epsilon foi selecionado para como
o modelo de turbulência a ser utilizado. Tal modelo foi selecionado em função de sua
versatilidade e por ser um modelo amplamente utilizado nestes tipos de problemas.
Seguindo os mesmos princípios do arquivo semente, fui capaz de criar meus próprios
modelos e realizar simulações com cenários distintos entre si. Como o arquivo semente não
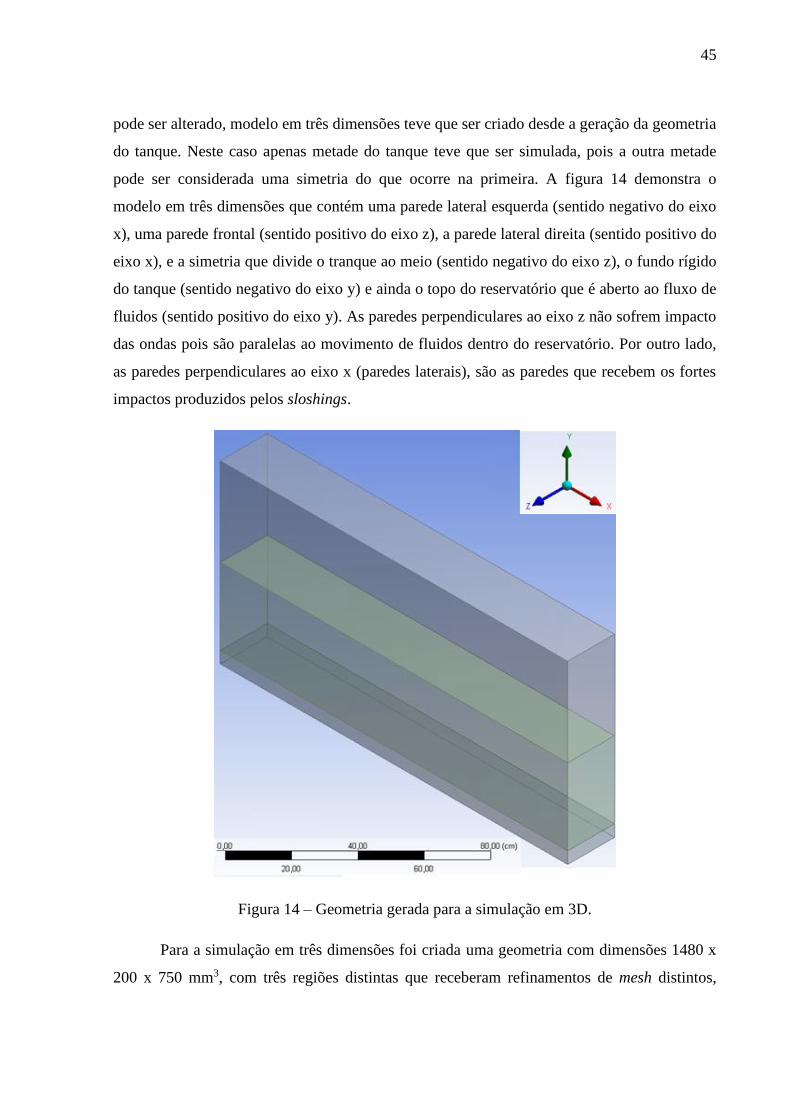
45
pode ser alterado, modelo em três dimensões teve que ser criado desde a geração da geometria
do tanque. Neste caso apenas metade do tanque teve que ser simulada, pois a outra metade
pode ser considerada uma simetria do que ocorre na primeira. A figura 14 demonstra o
modelo em três dimensões que contém uma parede lateral esquerda (sentido negativo do eixo
x), uma parede frontal (sentido positivo do eixo z), a parede lateral direita (sentido positivo do
eixo x), e a simetria que divide o tranque ao meio (sentido negativo do eixo z), o fundo rígido
do tanque (sentido negativo do eixo y) e ainda o topo do reservatório que é aberto ao fluxo de
fluidos (sentido positivo do eixo y). As paredes perpendiculares ao eixo z não sofrem impacto
das ondas pois são paralelas ao movimento de fluidos dentro do reservatório. Por outro lado,
as paredes perpendiculares ao eixo x (paredes laterais), são as paredes que recebem os fortes
impactos produzidos pelos sloshings.
Figura 14 – Geometria gerada para a simulação em 3D.
Para a simulação em três dimensões foi criada uma geometria com dimensões 1480 x
200 x 750 mm3, com três regiões distintas que receberam refinamentos de mesh distintos,

46
como observado na figura 14. Após essa etapa, a malha pôde ser gerada e então refinada, de
maneira que esta fique o mais próximo possível do mesh presente no arquivo semente (figura
13). Na geração do mesh foram utilizados os métodos de sweep e edge sizing combinado com
bias fator. Essa nova malha em 3D possui 195 321 nós e 182 000 elementos hexaédricos,
representando aumentos de 386,2% no número de nós e 809% no número de elementos. Com
esse aumento considerável no número de nós e elementos, tempo e gasto computacionais
também aumentaram consideravelmente. O tempo total de simulação saltou de 2 horas e 1
minuto no modelo 2D, para 12 horas e 15 minutos no modelo 3D.
Após a criação da geometria e da malha, foi necessário a introdução das condições de
contorno, definição do passo de tempo, seleção do melhor modelo de turbulência, introdução
do sinal que produzirá o movimento do tanque, seleção das propriedades físicas do líquido e
do ar, entre outros. Nesta etapa o regime foi estabelecido como transiente, já que as
propriedades dos fluidos no tanque variam de acordo com o tempo. O tempo inicial e final
foram determinados como 0 e 12 segundos, respectivamente, seguindo o que havia sido
estabelecido por Bredmose et al. (2003). Além disso, foi estipulado o tamanho do passo de
tempo como 0.01 segundos, tendo como base o número de Courant.
O número de Courant ou número de Courant–Friedrichs–Lewy (CFL) é, em muitos
casos, uma condição necessária para a convergência de problemas envolvendo a resolução de
alguns tipos de equações diferencias parciais. Esse fator depende, da velocidade do fluxo, do
tamanho das células e passo de tempo, e normalmente é calculado para cada situação de
acordo com a equação 22. A explicação física do número de Courant pode ser vista como uma
representação da maneira na qual o fluido se move através dos elementos computacionais. Se
o número de Courant for menor que 1, significa que as partículas de um fluido passam de uma
célula para outra dentro de, no máximo, um intervalo de tempo. Se esse valor for superior a 1,
significa que as partículas de fluido movem-se através de duas ou mais células a cada passo
de tempo e isto pode afetar negativamente a convergência do problema. Alguns sistemas mais
robustos podem lidar com altos valores dessa variável, mas em caso de divergência, este é um
bom ponto de partida para solucionar falhas e problemas relacionados à convergência que
podem afetar a precisão de uma simulação transiente. Problemas que apresentam a difusão
como característica dominante, geralmente devem ser executados com baixos valores para o
número de Courant.

47
(22)
Onde n é o número de dimensões do problema, xi é a magnitude da velocidade na dimensão n,
Δt é o passo de tempo e Δxi é o intervalo de comprimento desta dimensão.
A figura 15 é um comparativo dos resultados obtidos experimentalmente e
numericamente por Bredmose et al. (2003), e os resultados das simulações em duas e três
dimensões. Nestas imagens aparecem fotos tiradas dos experimento nos instantes 7.44, 7.52,
7.64, 7.80 e 8.04 segundos, começando de cima para baixo.
Figura 15 – Comparação das simulações de 2D e 3D com o experimento real.
De maneira geral, as formas e feições das ondas apresentadas na sequência de imagens
da figura 15 se assemelham bastante, tanto entre as simulações em 2D (coluna da esquerda) e

48
3D (coluna da direita), quanto entre as simulações e os resultados adquiridos
experimentalmente (ao centro) e por meio das Equações de Boussinesq (linha tracejada da
coluna central). Uma diferença marcante entre as simulações ocorre no segundo 7.52, no qual
a onda da simulação 3D aparenta estar um pouco atrasada em relação à simulação 2D e ao
próprio experimento. Tal ocorrido talvez seja parcialmente explicado pelo fato de o
refinamento da malha 3D ter sido inferior ao apresentado pela malha 2D. Outra diferença
ocorre no segundo 8.04, onde ocorre a descida da onda de água após o impacto na parede;
neste caso o vale formado pela descida da massa de água no modelo 2D é mais evidente tanto
se comparado à simulação 3D, quanto a imagem registrada pela câmera durante o
experimento real.
Os tempos escolhidos na figura 15 não foram escolhos ao acaso, eles demonstram o
período crítico do experimento, onde as pressões exercidas pela onda sobre a parede lateral
atingem seus valores máximos, o que será demonstrado nos gráficos de pressão da seção
3.2.1.2.
3.2.1.1 Análise do Fenômeno Ocorrido Durante o Run-Up
Na simulação em três dimensões foi possível observar um fenômeno peculiar ocorrido
durante a subida da onda de água pela parede lateral do tanque, fenômeno este que não pode
ser observado na simulação em 2D. A figura 16 mostra uma ampliação da vista frontal da
parede lateral; região sobre a qual esse fenômeno pode ser observado a partir da análise dos
resultados da simulação em 3D.
49
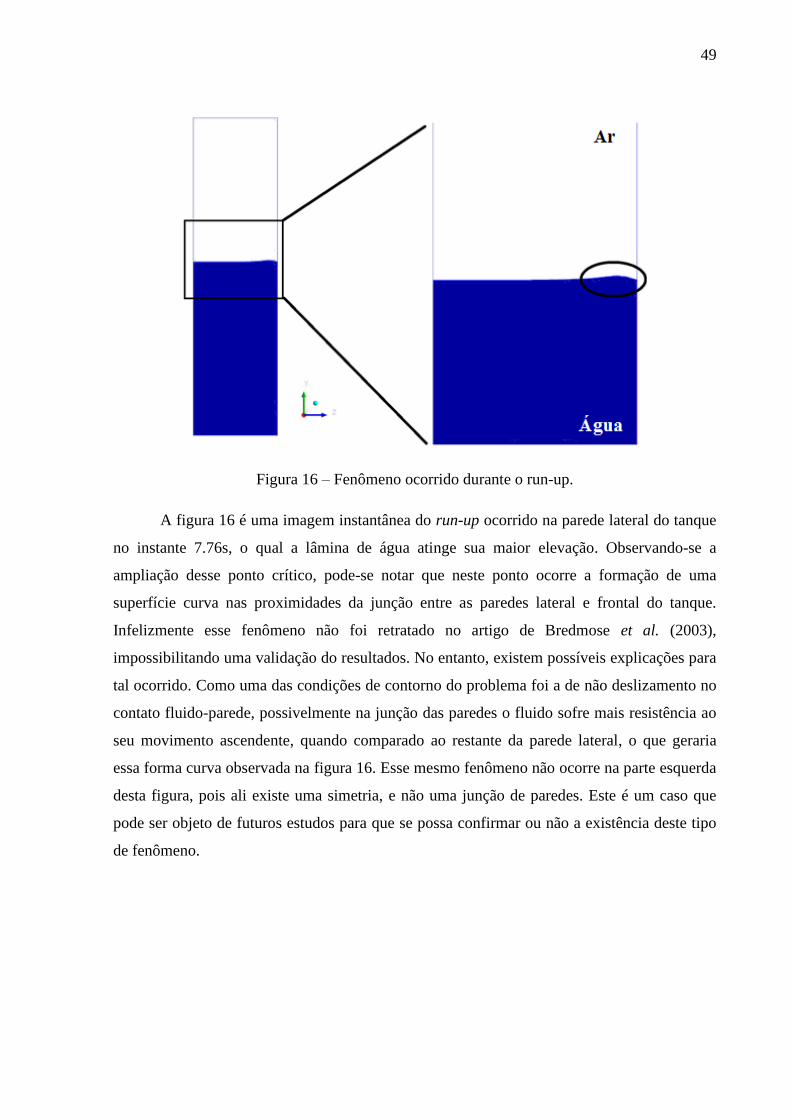
Figura 16 – Fenômeno ocorrido durante o run-up.
A figura 16 é uma imagem instantânea do run-up ocorrido na parede lateral do tanque
no instante 7.76s, o qual a lâmina de água atinge sua maior elevação. Observando-se a
ampliação desse ponto crítico, pode-se notar que neste ponto ocorre a formação de uma
superfície curva nas proximidades da junção entre as paredes lateral e frontal do tanque.
Infelizmente esse fenômeno não foi retratado no artigo de Bredmose et al. (2003),
impossibilitando uma validação do resultados. No entanto, existem possíveis explicações para
tal ocorrido. Como uma das condições de contorno do problema foi a de não deslizamento no
contato fluido-parede, possivelmente na junção das paredes o fluido sofre mais resistência ao
seu movimento ascendente, quando comparado ao restante da parede lateral, o que geraria
essa forma curva observada na figura 16. Esse mesmo fenômeno não ocorre na parte esquerda
desta figura, pois ali existe uma simetria, e não uma junção de paredes. Este é um caso que
pode ser objeto de futuros estudos para que se possa confirmar ou não a existência deste tipo
de fenômeno.

50
3.2.1.2 Gráficos de Pressão da Parede Lateral do Tanque
Como dito previamente no capítulo 1, no experimento realizado por Bredmose et al.
(2003), foram instalados transmissores de pressão ao longo do contêiner, mas somente um
deles gerou resultados satisfatórios e confiáveis. A figura 17 apresenta os dados de pressão
obtidos por este transmissor que foi instalado na posição central da parede lateral, a 26 mm do
chão do tanque.
Figura 17 – Gráfico da pressão versus tempo para o experimento H10. Fonte: Bredmose et al.,
2003.
Os tempos da imagens mostradas na figura 16 foram escolhidos com base neste gráfico,
que mostra que os momentos críticos ocorreram entre 7 e 8 segundos. É durante este intervalo
de tempo que a pressão sobre a parede atinge os seus valores mais elevados. De acordo com
Bredmose et al. (2003), o duplo pico é causado pela pressão gerada durante a ascensão da
massa de água sobre a parede lateral do recipiente e o subsequente movimento de descida
dessa mesmo massa de água.
Foi introduzido pelo presente trabalho uma análise dos os esforços que fluidos com
diferentes viscosidades e densidades produziriam na parede lateral do reservatório. Várias
simulações foram feitas com óleo de milho e também com glicerol. Estes dois fluidos são bem

51
mais viscosos que a água, e tem densidade inferior, no caso do óleo de milho, e superior no
caso do glicerol. As propriedades dos dois novos fluidos estudados podem ser vistas na tabela
4.
Tabela 4 – Comparação das propriedades dos novos fluidos.
Substância Densidade (kg/m3) Massa Molar
(kg/kmol)
Viscosidade
Dinâmica (Kg/ms)
Água 997 18.02 8.90E-04
Óleo de milho 918.8 873.4 7.20E-02
Glicerol 1262 92.09 1.50
A tabela 4 demonstra que a viscosidade dinâmica do óleo de milho é cerca de 80 vezes
superior a viscosidade da água, que por sua vez é 1680 vezes inferior à densidade da glicerina,
tomando-se como referencial a temperatura de 25 °C. Comparando estes três materiais será
possível determinar o impacto da viscosidade nas pressões e esforços exercidos pelos fluidos
sobre a parede lateral do contêiner.
Diferentemente do que ocorre no experimento de Bredmose et al. (2003), o gráfico da
pressão gerado no programa ANSYS, para os diferentes fluidos, pôde ser plotado do instante
inicial até o final. A figura 18 foi gerada a partir dos valores de pressão fornecidos pelo
programa, que foram divididos pelas pressões hidrostáticas dos respectivos fluidos; desta
maneira uma comparação entre os diferentes fluidos pode ser feita. Nesta figura, nota-se
diferenças marcantes entre os gráficos de pressões para estes diferentes fluidos. Como
esperado, o gráfico de simulação para a água gerou resultados praticamente idênticos aos
obtidos por Bredmose et al. (2003). A diferença de altura entre as curvas da figura 18 se
justifica pela diferenças de densidade entre eles. Com relação ao formato das curvas, pode-se
notar o efeito marcante da viscosidade. Entre os segundos 7 e 8, e posteriormente entre os
segundos 9 e 10, tanto a água (assim como o ocorrido no experimento de Bredmose et al.
(2003) quanto o óleo de milho apresentaram seus duplos picos de pressão.

52
Figura 18 – Gráfico de pressões para os diferentes fluidos.
Em função dos efeitos da viscosidade, o efeito de duplo pico no óleo de milho (curva
em amarelo) foi consideravelmente inferior ao demonstrado pela água (curva em azul). Este
fato provavelmente demonstra que esses tipos de esforços gerados em um contêiner seriam
maior intensidade para fluidos de menor viscosidade, pois estes apresentam uma maior
mobilidade. Já em relação ao glicerol, os duplos picos sequer aparecem. Além disso, o gráfico
de pressões do glicerol tem uma aparência muito mais suave se comparado aos outros dois
casos. Para este fluido os picos secundários, tais como o ocorrido por volta do décimo
primeiro segundo para a água e o óleo, sequer ocorrem.
3.2.1.3 Comparação Temporal das Ondas dos Diferentes Líquidos
Os mesmos resultados obtidos para água vistos na figura 16 (seção 3.2.1), também
foram obtidos para o óleo de milho e o glicerol. Tendo como base os mesmo tempos da figura
16 (7.44, 7.52, 7.64, 7.8 e 8.04 segundos), pode-se fazer um comparação entre os resultados

53
de simulação dos três fluidos em questão. Diferentemente do que ocorre com a água, as ondas
geradas no óleo de milho e com o glicerol apresentam amplitudes e run-ups bem menos
expressivos.
Figura 19 – Comparação das ondas geradas pelos fluidos.
No instante 7.44s, a onda do óleo de milho é bem reduzida se comparada à onda da
água, já a crista da onda de glicerol é praticamente imperceptível. No instante 7.64s a subida
de fluido pela parede lateral é máxima, no entanto ela é bem inferior no caso do óleo de
milho, e ainda menos aparente no caso do glicerol, o que evidencia a grande diferença de
viscosidades ente os casos. No instante final mostrado pela figura 19, diferentemente da água,
o óleo de milho e o glicerol apresentam uma descida de fluido bem mais suave e prolongada.

54
Apesar de os resultados apresentados nas seções 3.2.1.2 e 3.2.1.3 serem condizentes
com o que poderia ser esperado para essas situações, uma validação com experimentos ou
outros modelos matemáticos seria necessária para se avaliar a consistência dessas simulações.
3.2.2 Simulações do Experimento V21
Os experimentos do tipo “V” (ver figura 4 do capitulo 1), ou seja, aqueles compostos
por movimentos horizontais e verticais, foram produzidos com a intenção de criar ondas de
Faraday que apresentassem table-tops em determinados momentos. Como os modelos com
sinais do tipo “V” ainda não tinha sido simulados como sucesso pelos alunos do laboratório,
tive que trabalhar na simulação desde o seu início. Para isso tomei como base os arquivos do
experimento H10 e rodei diversos cenários variando configurações como a geração e
refinamento da malha, o modelo de turbulência e o passo de tempo. A figura 20 é uma
simulação que demonstra o que seria uma onda do tipo table-top, ou seja uma onda de crista
plana. Na parte (a) da figura 20 a onda atingiria um forma perfeitamente plana no topo,
mantendo as laterais da onda praticamente verticais. Se ocorrer uma elevação ainda maior
dessa onda, sua parte superior começa a ficar mais espessa que a parte inferior e as laterais
ficam paralelas. Na parte (b) da figura ocorre a representação do movimento descendente da
onda, onde deveria ocorrer um engrossamento ainda mais acentuado do topo, afinando as
laterais da onda.

55
Figura 20 – Movimentos acendente e decendente de ondas tipo table-top. Fonte: Bredmose et
al., 2003.
A figura 21 foi extraída do artigo de Bredmose et al. (2003) mostrando os resultados
numéricos e experimentais do experimento V21 em instantes específicos. Os resultados
numéricos para as superfícies livres estão representadas pelas linhas tracejadas e o tempo de
cada captura é mostrado na parte superior de cada imagem. Nas imagens da coluna da
esquerda, as cristas de formato pontiagudo das ondas ficam bem evidentes. Os picos de onda
ocorrem em duas regiões do tanque, um a cerca de 260 mm da parede lateral esquerda, e a
outra a cerca de 490 mm dessa mesma parede; o que pode ser observado comparando-se a
primeira e a segunda imagem da figura. Na coluna da direita da figura 21, as imagens
demonstram os table-tops gerados durante os experimentos do artigo. Neste caso tanto os

56
resultados experimentais quanto os resultados numéricos, apesar de consistentes entre si, não
conseguiram apresentar os formatos de table-top exatamente como previsto na figura 20.
Figura 21 – Ondas geradas durante o experimento V21. Fonte: Bredmose et al., 2003.
No processo de construção do modelo do experimento V21, tive que experimentar
vários modelos de malha, passos de tempos reduzidos e diferentes modelos de turbulência,
para que pudesse alcançar resultados minimamente satisfatórios. Comecei rodando
simulações com adaptações necessárias no próprio arquivo semente do experimento H10.
Esse caminho apresentava uma falha estrutural, pois apesar de bem estruturada e refinada,
essa malha era feita para uma coluna de água de 155 mm, e não 302 mm como ocorre no
experimento V21. Em função deste empecilho, a simulação produziu resultados de baixa
qualidade. Para contornar este problema decidi criar minha própria malha, assim como tinha
feito para o modelo 3D do experimente H10, de maneira que essa fosse mais adequada para os
formatos de onda previstos na figura 21. Durante os processos de simulação para o caso V21,
57
uma mensagem de erro foi recorrente nas tentativas iniciais. Na mensagem de erro lia-se:
“Floating point exception: Overflow”. A partir de uma análise detalhado do assunto, percebe-
se que este erro está relacionado a uma severa divergência no solver do programa, o que
significa que a estabilidade numérica deveria ser melhorada.
Para se resolver este problema de convergência, uma série de medidas poderiam ser
tomadas. Entre elas estão a alteração da qualidade da malha, a checagem da física do
problema, a consideração de uma melhor condição inicial, a utilização menores passos de
tempo, entre outros. Baseado nestes pontos resolvi alterar algumas destas variáveis e ver se os
resultados obtidos seriam melhores. Os fatores alterados nessas tentativas estão listados na
primeira linha da tabela 5, que também mostra os diferentes cenários gerados e seus
resultados.
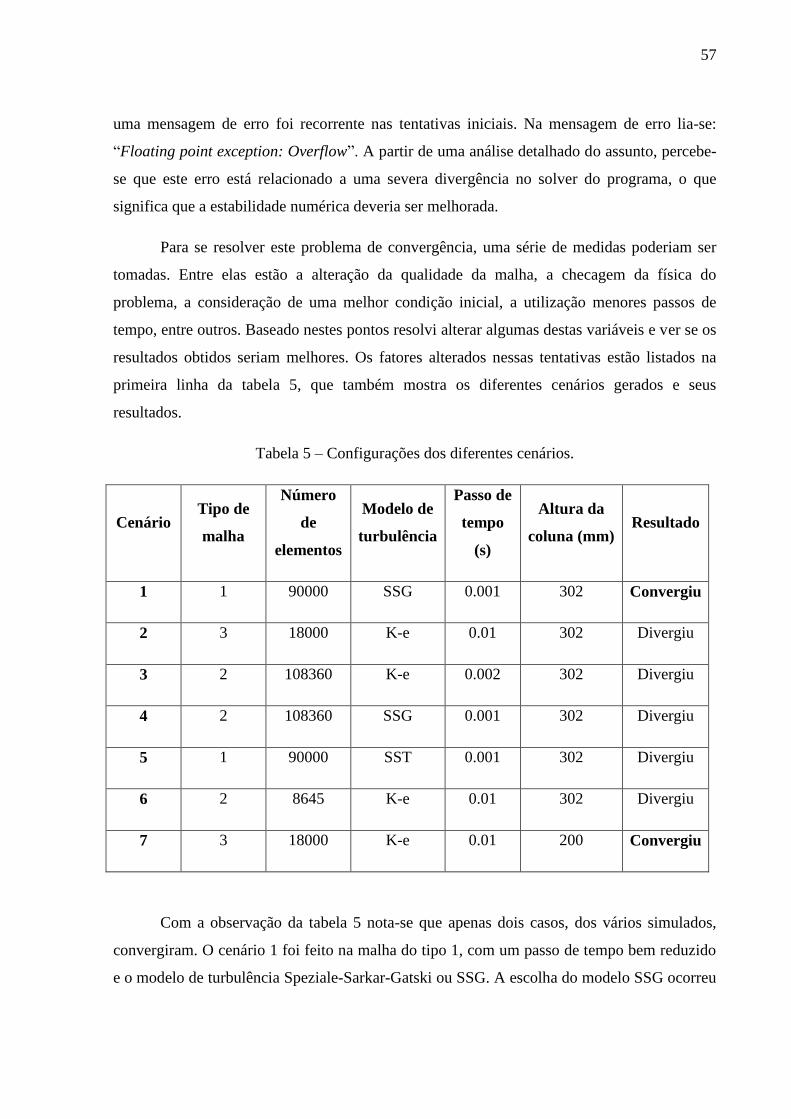
Tabela 5 – Configurações dos diferentes cenários.
Cenário Tipo de
malha
Número
de
elementos
Modelo de
turbulência
Passo de
tempo
(s)
Altura da
coluna (mm) Resultado
1 1 90000 SSG 0.001 302 Convergiu
2 3 18000 K-e 0.01 302 Divergiu
3 2 108360 K-e 0.002 302 Divergiu
4 2 108360 SSG 0.001 302 Divergiu
5 1 90000 SST 0.001 302 Divergiu
6 2 8645 K-e 0.01 302 Divergiu
7 3 18000 K-e 0.01 200 Convergiu
Com a observação da tabela 5 nota-se que apenas dois casos, dos vários simulados,
convergiram. O cenário 1 foi feito na malha do tipo 1, com um passo de tempo bem reduzido
e o modelo de turbulência Speziale-Sarkar-Gatski ou SSG. A escolha do modelo SSG ocorreu
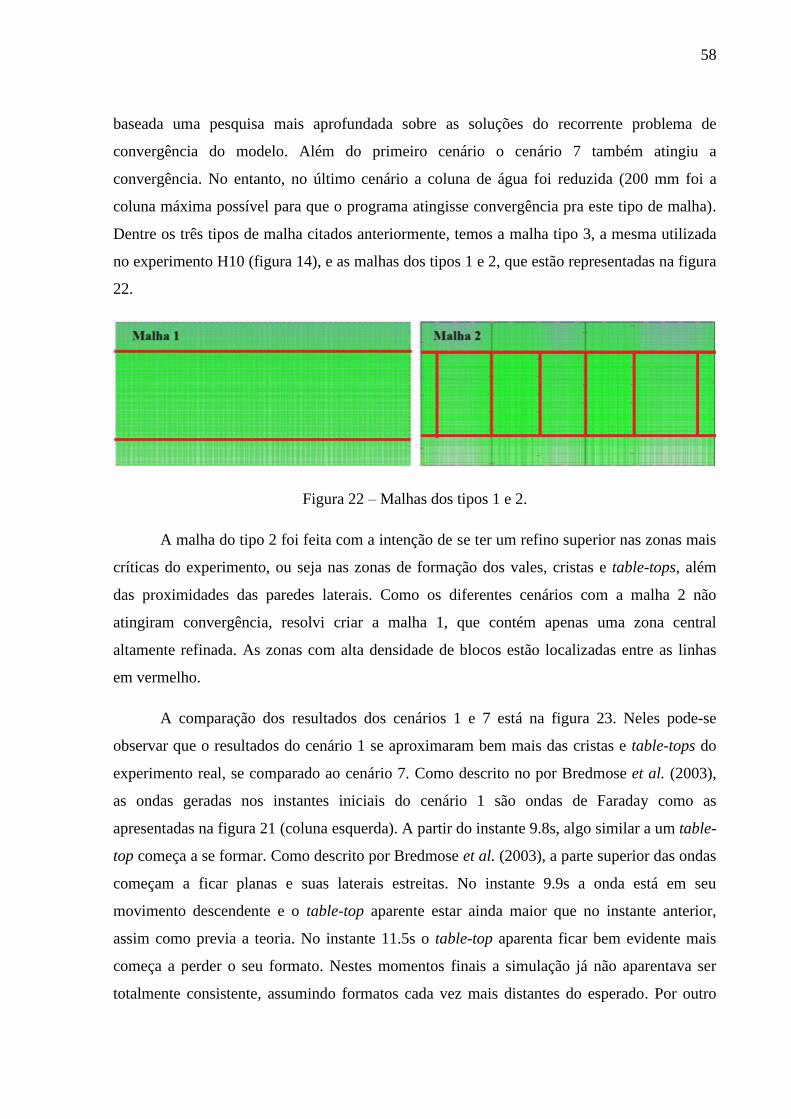
58
baseada uma pesquisa mais aprofundada sobre as soluções do recorrente problema de
convergência do modelo. Além do primeiro cenário o cenário 7 também atingiu a
convergência. No entanto, no último cenário a coluna de água foi reduzida (200 mm foi a
coluna máxima possível para que o programa atingisse convergência pra este tipo de malha).
Dentre os três tipos de malha citados anteriormente, temos a malha tipo 3, a mesma utilizada
no experimento H10 (figura 14), e as malhas dos tipos 1 e 2, que estão representadas na figura
22.
Figura 22 – Malhas dos tipos 1 e 2.
A malha do tipo 2 foi feita com a intenção de se ter um refino superior nas zonas mais
críticas do experimento, ou seja nas zonas de formação dos vales, cristas e table-tops, além
das proximidades das paredes laterais. Como os diferentes cenários com a malha 2 não
atingiram convergência, resolvi criar a malha 1, que contém apenas uma zona central
altamente refinada. As zonas com alta densidade de blocos estão localizadas entre as linhas
em vermelho.
A comparação dos resultados dos cenários 1 e 7 está na figura 23. Neles pode-se
observar que o resultados do cenário 1 se aproximaram bem mais das cristas e table-tops do
experimento real, se comparado ao cenário 7. Como descrito no por Bredmose et al. (2003),
as ondas geradas nos instantes iniciais do cenário 1 são ondas de Faraday como as
apresentadas na figura 21 (coluna esquerda). A partir do instante 9.8s, algo similar a um table-
top começa a se formar. Como descrito por Bredmose et al. (2003), a parte superior das ondas
começam a ficar planas e suas laterais estreitas. No instante 9.9s a onda está em seu
movimento descendente e o table-top aparente estar ainda maior que no instante anterior,
assim como previa a teoria. No instante 11.5s o table-top aparenta ficar bem evidente mais
começa a perder o seu formato. Nestes momentos finais a simulação já não aparentava ser
totalmente consistente, assumindo formatos cada vez mais distantes do esperado. Por outro

59
lado, o cenário 7 nestes casos sequer apresentou algo similar a um table-top, as ondas ali
apresentaram baixa amplitude. Este cenário não apresentou cristas de onda tão bem definidas
como no artigo e no cenário 1. Esse diferença entre os cenários possivelmente está
intimamente relacionada com a tamanho da coluna de fluido, que no cenário 7 teve que ser
reduzida para que a convergência pudesse ser atingida.
Fazendo uma comparação entre as simulações do experimentos H10 e V21, no cenário
1 o passo de tempo foi reduzido em 10 vezes e o número de elementos da malha foi
aumentado 5 vezes em relação ao arquivo semente do experimento H10. Em função da
alteração do passo de tempo o número total de iterações saltou de 1200 para 12000. Em
função dessas modificações o tempo total de simulação passou de 2 horas e 1 minuto, no
experimento H10, para 41h e 18 minutos, para o cenário 1 do experimento V21. Com uma
malha cada vez mais refinada e com passos de tempo tão pequenos se tornou cada vez mais
custoso e demorado rodar vários cenários diferentes afim de determinar qual seria o melhor.
Por fim, apesar de imperfeitos, os resultados obtidos para o experimento V21 aparentam ser
promissores e talvez mais conhecimento possa ser construído sobre do trabalho aqui iniciado.

60
Figura 23 – Comparação entre os cenários 1 e 7.
61
4. Conclusão
Os resultados de um experimento envolvendo a agitação de um recipiente parcialmente
cheio com água, que depois foi substituída por óleo de milho e glicerol, foram obtidos a partir
de modelagem numérica e comparados com resultados analíticos e experimentais. De forma
geral os resultados concordaram de forma consistente com a experiência real. Os dados
experimentais e analíticos foram fornecidos pelo artigo publicado por Bredmose et al. (2003),
enquanto os resultados numéricos foram gerados no programa ANSYS CFX. Para a água, os
resultados dos picos de pressão, ocorridos na parede lateral do reservatório, apresentados
estão de acordo com os resultados experimentais e com o comportamento de onda similares.
Ao se substituir a água por um fluidos com menores número Reynolds, resultados mais
suaves para os esforços foram encontrados. A implicação prática é que as mudanças na
viscosidade do líquido podem afetar as cargas de pressão sobre as paredes de um recipiente.
Outro ponto a ser destacado seria a necessidade de uma investigação mais aprofundada sobre
a ocorrência de uma borda curvilínea no topo do run-up de água, algo que pode ser
confirmado ou não a partir de dados experimentais. Com relação à simulação do experimento
envolvendo uma combinação movimentos horizontais e verticais, os resultados aparentam ser
satisfatórios. Ondas de Faraday que se assemelham ao formato do tipo table-top foram
formadas. Porém, os resultados apresentados não foram completamente estáveis, carecendo de
uma abordagem mais aprofundada.

62
Referências Bibliográficas
Batchelor, G.K., 2000, An Introduction to Fluid Dynamics, Cambridge Mathematical Library,
Cambridge University Press.
Blazek J., 2001, Computational Fluid Dynamics: Principles and Applications, Elsevier
Science, Idlington, Oxford.
Bredmose, H., Brocchini, M., Peregrine, DH. e Thais, L., 2003. “Experimental investigation
and numerical modelling of steep forced water waves”. Journal of Fluid Mechanics, Vol. 490,
pp. 217-249.
Cebeci, T., Shao, J.P., Kafyeke, F. e Laurendeau, E., 2005, Computational Fluid Dynamics
for Engineers, HORIZONS PUBLISHING.
Cécora, R.D., Radespiel, R., Eisfeld, B. e Probst., A., 2012, “Differential Reynolds Stress
Modeling for Aeronautics”, 50th AIAA Aerospace Sciences Meeting including the New
Horizons Forum and Aerospace Exposition 09 - 12 January 2012, Nashville, Tennessee.
Chen, Y.G., Djidjeli, K. e Price, W.G., 2008. “Numerical simulation of liquid sloshing
phenomena in partially filled containers”. Computers & Fluids, Vol. 38, pp. 830-842.
Chung T.J., 2002, Computational Fluid Dynamics, Cambridge University Press.
Costa, D.G., 2011, “Modelagem do Impacto de Ondas em Reservatórios”, Trabalho final de
conclusão de curso, Escola de Engenharia, Universidade Federal Fluminense, Brasil.
Date, A.W., 2005, Introduction to Computational Fluid Dynamics, Cambridge University
Press, Cambridge, UK.

63
Faltinsen, O.D. and Timokha, A.N., 2009. Sloshing, Cambridge University Press.
Godderidge, B., Turnock, S.R., Tan, M. e Earl, C., 2009. “An investigation of multiphase
CFD modelling of a lateral sloshing tank”. Computers & Fluids, Vol. 38, pp. 183-193.
Hirsch, C., 1988, Numerical Cornputation of Internal and External Flows, Volume 1:
Fundamentals of Numerical Discretization, Vrije Universiteit Brussel, Brussels, Belgium.
Ibrahim, R.A., 2005. Liquid Sloshing Dynamics: Theory and Applications. Cambridge
University Press.
Jiang, M.R., Ren, B., Wang, G.Y. and Wang, Y.X., 2014. “Laboratory study on the
hydrodynamic and structural characteristic of violent sloshing in elastic tanks”. In
Proceedings of the 7th International Conference on Thin-Walled Structures. Busan, Korea.
Paper no. ICTWS2014-0801.
Kim, Y., 2007. “Experimental and numerical analyses of sloshing flows”. Journal of
Engineering Mathematics, Vol. 58, No. 1, pp. 191-210.
Liu G.R. e Quek S. S., 2003, The Finite Element Method: A Practical Course, Butterworth-
Heinemann, Elsevier Science.
Moreira, R.M., Thorley, R.F.D., Costa, D.G., Nicolato, P.C., Bacchi, R.D.A. and Chacaltana,
J.T.A., 2012. “Modelling the dynamics of waves in reservoirs”. In Proceedings of the 7th
National Congress of Mechanical Engineering. São Luís, Brazil. Paper no. CONEM2012-
0927.
Nicolato, P.C. and Moreira, R.M., 2009. “Numerical modelling of water wave impact on
reservoirs”. In Proceedings of the 20th International Congress of Mechanical Engineering.
Gramado, Brazil. Paper no. COB09-0354.

64
Nicolato, P.C., “Modelagem Computacional da Dinâmica de Ondas Não-Lineares em um
Reservatório”, Trabalho final de conclusão de curso, Escola de engenharia, Universidade
Federal Fluminense, Brasil.
Patankar SV, 1980, Numerical heat transfer and fluid flow, CRC Press.
Rajchenbach, J. e Clamond, D., 2015, Faraday waves: their dispersion relation, nature of
bifurcation and wavenumber selection revisited, Journal of Fluid. Mech. 777, R2–1.
Tannehill J.C., Pletcher, R.H., Anderson, D., 1997, Computational Fluid mechanics and heat
transfer, CRC Press.
Tian, Z., 2015, “CFD for Engineering Applications Lecture Book”, School of Mechanical
Engineering, University of Adelaide, Australia.
Versteeg HK e W Malalasekera, 1995, An intoducion to computational Fluid Dynamics The
finite volume method, Longman Science & Technical, New York, NY.
Wu, W., 2007, Computational River Dynamics, CRC Press.
Zingg D.W., 1999, Fundamentals of Computational Fluid Dynamics, NASA Ames Research
Center, University of Toronto Institute for Aerospace Studies, Toronto, CN.