dinâmica dos corpos rígidos - departamento de engenharia ... · a dinâmica, além da análise do...
TRANSCRIPT

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Dinâmica dos Corpos Rígidos
1. Introdução A dinâmica, além da análise do movimento também analisa a origem deste movimento, ou
seja, identifica as forças que o provocam, ou determina o movimento de acordo com as
forças aplicadas. Serão explicados apenas os métodos de resolução dos problemas que
implementam as equações de movimento e a lei da conservação da energia mecânica.
Equações de movimento
As equações de movimento podem ser igualmente designadas, equações de equilíbrio
dinâmico. A sua utilização predominante é na resolução dos problemas em que se solicitam as
acelerações, as forças que originam o movimento ou as reacções dinâmicas num dado
instante. Para isso recorre-se às equações de equilíbrio estabelecidos na posição da estrutura
indicada no enunciado (indeformada), ou seja, na posição exacta que corresponde àquele
instante de tempo definido no problema. O número das equações de equilíbrio linearmente
independentes determina-se da mesma maneira como explicado na Estática. A única diferença
neste momento consiste no facto de serem adicionadas as forças de inércia. Habitualmente a
estrutura analisada será um mecanismo com 1GDL (para permitir o movimento) e assim o
número de reacções vai equivaler ao número de equações de equilíbrio linearmente
independentes -1, e por isso, além das reacções, uma incógnita corresponderá a um
parâmetro que caracteriza o movimento (por exemplo uma aceleração angular) e deste modo
a solução do problema será única. No entanto, podem existir situações em que as condições
de movimento permitem resolver todas as acelerações e velocidades, e a incógnita adicional
do problema será por exemplo uma força aplicada.
Lei da conservação da energia mecânica
A lei da conservação da energia mecânica estabelece que a energia mecânica no sistema
conservativo permanece inalterada. A utilização desta lei será predominante na resolução dos
problemas em que se solicitam as velocidades numa dada posição afastada pelo movimento
finito da posição inicial. Como a energia é uma grandeza escalar, a equação utilizada será
escalar e assim permitirá resolver apenas uma incógnita.
2. Equações de movimento
2.1 Introdução Considerando uma partícula, a segunda lei de Newton dita que a resultante de todas as forças
actuantes na partícula provoca um movimento acelerado da partícula, onde a aceleração
obedece à equação vectorial escrita abaixo
R ma
Adaptando a equação acima na forma
0R ma

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Pode-se concluir que se se designar a força de inércia iF ma , a equação acima
representava uma equação de equilíbrio, onde, além das forças aplicadas foi adicionada a
força de inércia:
0iR F
Esta equação de equilíbrio é uma equação vectorial e pode-se chamar, equação do equilíbrio
dinâmico, ou seja, a equação do movimento.
É possível estender este conceito aos corpos rígidos, mas neste caso as forças de inércia têm
que abranger todas as possibilidades de movimento. Considerando um corpo rígido em
translação, é preciso somar os efeitos de todas as partículas que o constituem, que no limite
define a integração de efeitos elementares sobre o volume do corpo. É possível concluir que as
forças de inércia são definidas da mesma maneira como para a partícula, mas o ponto de
aplicação tem que ser obrigatoriamente no centro de massa do corpo. Considerando o corpo
rígido em rotação, é novamente necessário somar os efeitos de todas as partículas. Para se
efectuar a prova da relação resultante, seria necessário introduzir a quantidade de
movimento, que não será incluído nesta sebenta. É possível concluir que o efeito de inércia
durante a rotação em torno de um ponto no plano representa-se pelo momento de inércia de
massa relativamente a esse ponto. Em resumo, durante o movimento plano geral, as forças de
inércia têm que envolver a parte correspondente à translação e a parte correspondente à
rotação. A actuação permanece ligada ao centro de massa: as componentes das forças de
inércia envolvem a aceleração do centro de massa e a componente rotacional a aceleração
angular.
i GF ma , i GM I
Assumindo que o sinal da aceleração angular será atribuído consoante à regra da mão direita.
2.2 Regras de introdução das forças de inércia Recorda-se que quando os corpos considerados tiverem a massa uniformemente distribuída, o
centro de massa coincidirá com o centróide geométrico. Durante a resolução dos problemas
será necessário separar a estrutura em corpos de movimentos diferentes e em cada um, no
seu centro de massa, introduzir as forças de inércia correspondentes. É impossível ligar dois
corpos de movimentos diferentes, determinar o centro de massa do conjunto e colocar as
forças de inércia nesse ponto. No entanto, é possível separar um corpo de movimento igual
em corpos elementares para facilitar o cálculo, como mostra-se em seguida.
Problema
Considere a barra com a massa concentrada de acordo com
a figura ao lado. Admita que o conjunto foi libertado do
repouso, cuja posição corresponde à visualização na figura.
Mostre que as forças de inércia induzem o mesmo efeito
sobre o corpo quando considerados para o conjunto, e
quando considerados em separado.
Nota: Para esta demonstração compare a componente vertical das forças de inércia e o
momento em torno de apoio.
M,m L

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Resolução
O único movimento que o mecanismo permite é a rotação em torno do apoio.
Componentes de aceleração nos centros de gravidade
Na figura à esquerda os corpos elementares (barra e massa concentrada) são considerados em
separado, por isso há dois centros de gravidade e em ambos foram determinadas as
acelerações. As componentes de aceleração normal são nulas, porque o conjunto partiu do
repouso. Nota-se que no centro de gravidade da massa concentrada não foi introduzida a
aceleração angular. Como o raio foi designado como desprezável, a massa concentrada forma
apenas uma partícula, e por isso não tem a sua inércia de rotação. Na figura à direita existe
apenas um centro de massa onde as componentes de acelerações foram introduzidas.
Naturalmente a aceleração angular pode ter a designação igual, porque está a representar-se
o mesmo movimento, no entanto, antes de proceder é necessário calcular o centro de massa
do conjunto:
/ 2G
mL MLx
m M
As forças de inércia
O efeito vertical
/ 2
/ 2mL ML
m L M L m Mm M
Imediatamente confirma-se a igualdade. Nota-se que não se trata da equação de equilíbrio
porque não foram introduzidas as reacções no apoio, apenas comparou-se o efeito vertical das
forças de inércia.
O efeito angular em torno do apoio
2 2
2 21 / 2
2 12G
L mL MLm M L mL m M I
m M
No lado esquerdo usou-se 2 2 21 1
12 12m L e mL que representa o momento de inércia da
barra esbelta (de espessura e desprezável) em relação ao eixo perpendicular ao plano da figura
que passa pelo 1G . Para o movimento plano, este eixo reduz-se a um ponto, neste caso
1G . O
lado direito pode simplificar-se, mas ainda tem que se completar por
2
221
12 2G G G
LI mL m x M L x
2G1G
/ 2m LM L
1GI
G
Gm M x
GI
2G1G
/ 2LL
separação em corpos elementares
GGx
Gx
conjunto

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Após a simplificação pode concluir-se que os dois lados da equação tomarão o valor
2 21
3M L mL
Demonstrou-se que o cálculo que usou os corpos elementares foi mais simples e por isso será
utilizado preferencialmente.
Sublinha-se mais uma vez a necessidade de utilizar as componentes de aceleração no centro
de gravidade. A figura abaixo mostra que em pontos diferentes a inércia introduzida é
diferente e por isso as forças de inércia introduzidas em outros pontos em vez dos centros de
massa, originam necessariamente erros no cálculo. Para simplificar usou-se para esta
demostração apenas uma barra de comprimento L e massa m.
O efeito vertical
Vê-se de imediato que o efeito vertical é diferente em cada caso.
O efeito angular em torno do apoio (centro de rotação)
Em primeiro lugar calculam-se 2
2 21 1
12 2 3B A
LI I mL m mL
Os efeitos angulares são: 2
2 21 1
12 2 3
LcasoG mL m mL
2 2 21 4
3 3casoB mL m L mL
21
3casoA mL
Pode concluir-se que introduzindo as forças de inércia num ponto diferente em vez de ser no
centro de massa este procedimento induz em erros graves. No entanto, num caso particular
em que será utilizado apenas o equilíbrio dos momentos em torno do centro de rotação
(fixo) e não forem utilizadas as outras equações de equilíbrio dinâmico, é possível reduzir a
inércia do corpo a este centro de rotação. Este facto será utilizado no capítulo de vibrações
rotacionais. A afirmação tem validade geral, no entanto o corpo (que pode envolver vários
corpos elementares) tem que estar sujeito a um único movimento, que é a rotação em torno
de um ponto fixo. Este facto não se altera ao longo do movimento, ou seja quando a
velocidade angular será diferente de zero, porque a componente da aceleração angular vai
estar direccionada ao centro de rotação e por isso não vai contribuir ao efeito rotacional de
inércia.
G
/ 2m L
GI AB
G
m L
BI A
BG
AI A
B

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Realça-se nesta parte a utilização correcta das unidades. Visto as forças de inércia e de peso
envolverem as acelerações, a sua combinação com a unidade de massa deve corresponder à
unidade das forças aplicadas ao sistema. Assim aconselha-se a utilização da combinação:
kg,m,N,s ou ton,m,kN,s
Há mais um assunto que é importante tratar com cuidado: as estruturas e mecanismos serão
definidos de modo que nem todas as partes terão a massa que será necessária para a
resolução do problema, ou seja algumas partes poderão ter a massa do valor muito pequeno,
ou seja desprezável. Naturalmente as forças de inércia serão introduzidas apenas nas partes
com a massa considerada. Considerando a massa, dever-se-ia considerar igualmente o peso,
mesmo quando o peso pode não ser a única origem do movimento, porque podem existir
forças externas aplicadas ao sistema. Se não for dito de uma forma diferente, os pesos
actuarão na direcção vertical, para baixo. Mas podem existir casos em que a inércia será
indispensável, mas o peso poderá ser desprezado. Isso por ter valor pequeno em relação à
força de inércia, ou por não actuar na direcção predominante ao movimento. Estes factos
serão claramente definidos nos enunciados dos problemas. Outro caso em que é necessário
considerar a inércia e não o peso, é quando o peso actua na direcção perpendicular ao plano
do movimento.
2.3 Problemas que envolvem as estruturas reticuladas com 1GDL A resolução dos problemas deste tipo vai sempre envolver uma forte parte de cinemática.
Nomeadamente é preciso determinar as acelerações nos centros de gravidade de todas as
barras com massa. A posição da estrutura definida no enunciado pode ser a posição do
repouso ou a posição em que existem as velocidades. O campo de velocidades é necessário
para a determinação das componentes normais de aceleração. No entanto deixando 1
parâmetro incógnito para as acelerações, é impossível resolver ainda outro parâmetro que
identifica as velocidades, ou seja as velocidades devem ser completamente determináveis
usando os dados do enunciado.
Problema
Considere a estrutura representada na figura ao
lado. Calcule as acelerações angulares das barras
admitindo que na posição mostrada a velocidade
angular da barra AB é 4rad/s no sentido anti-
horário e que as barras têm a massa distribuída no
valor de 1kg/m.
Nota: use 210m/sg
Resolução
Começa-se pela análise do possível movimento aplicando as regras da cinemática. A
cinemática terá assim 3 partes, determinação de velocidades, determinação de acelerações, e
determinação de acelerações nos centros de massa.
A
B
C4m
4N
2m

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
As velocidades
Para auxiliar a determinação das velocidades,
determinam-se primeiro os CIRs. O objectivo
desta parte é determinar as velocidades angulares
de todas as barras, porque são estes valores que
são necessários para as componentes normais de
aceleração. De acordo com a figura ao lado:
1 4rad/s , 2 0
Os sentidos das velocidades angulares não
afectam a resolução do problema.
As acelerações
Corpo I faz movimento de rotação; introduzindo a
aceleração angular podem-se determinar as
componentes de aceleração no ponto B.
Corpo II tem um apoio externo móvel, como tal a
aceleração neste lugar terá uma única
componente na direcção do movimento.
A propagação de acelerações dita:
/C B C Ba a a em que /C Ba corresponde a rotação de C em torno do B
ou seja
da comparação das componentes verticais: 2
2 8rad/s (anti-horário)
Poder-se-ia se usa a simplificação, visto são conhecidas componentes na direcção
perpendicular à recta que une os pontos B e C.
Não é necessário comparar as componentes horizontais. As leis da cinemática não são
suficientes para resolver a outra aceleração angular (da barra AB) que permanece no lugar da
incógnita adicional, tal como explicado na introdução.
As acelerações nos centros de gravidade
A determinação segue as mesmas regras como a
determinação anterior. Destaca-se que para uma
correcta introdução das forças de inércia
aconselha-se nos centros de gravidade marcar
também as acelerações angulares.
Determinação auxiliar
2 2 /G B G Ba a a em que 2 /G Ba corresponde a
ou seja
A
B
CII
I
1CIR
12CIR
2 ,CIR
1
1 AB Ca
1C
2
1 AB
1 ABCa
2
1 AB2 BC
2
,B fixo2 / 2BC
2G
2Ga1 AB
2
1 AB
2 / 2BC
1 AB
2
1 AB
2 / 2BC
2
1 / 2AB
2
1 / 2AB1G
2G
1
2,B fixo
2 BC
C

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
As forças (e os momentos) actuantes
Recorda-se que as forças de inércia actuam nos sentidos opostos às acelerações
1 , 1 1/ 2 2G x ABF m AB
1
2
, 1 1/ 2 16 20G y ABF m AB g
2 , 1 18G x BCF m AB
2
2
, 1 2 / 2 44G y BCF m AB BC g
1
2
1 1 1
1 2
12 3G ABI m AB
2
2
2 2
1 128
12 3G BCI m BC
Neste momento há como incógnitas 3 componentes de reacções externas, 2 componentes de
reacções internas e uma aceleração angular. Para isso há 6 equações de equilíbrio linearmente
independentes. Visto o objectivo ser o cálculo da aceleração angular, é vantajoso escolher as
equações de equilíbrio que não envolvam muitas reacções externas, nomeadamente:
Equilíbrio dos momentos da barra BC em torno B:
1284 44 2 0
3CV
Equilíbrio dos momentos da estrutura completa em torno A:
1 1 1
128 24 44 2 4 2 8 2 16 20 1 0
3 3CV
Substituindo a primeira equação, a segunda equação pode ser simplificada a
2
1 1 1 1
2 34 2 8 2 2 1 0 rad/s
3 7 (anti-horário)
Para terminar, sublinham-se 4 factos:
1) A força aplicada originou o movimento e usando as equações de equilíbrio dinâmico foi
possível determinar o campo das acelerações; a força aplicada não serviu no entanto para a
determinação das velocidades e por isso as velocidades foram definidas pelo dado adicional do
problema (1 dado foi suficiente, porque e estrutura representa um mecanismo com 1 GDL);
2) O peso da estrutura não afectou os valores das acelerações, ou seja neste caso o
movimento foi provocado e determinado somente pela força horizontal aplicada; esta
afirmação é valida apenas nesse instante;
3) Sem fazer cálculos pode-se concluir que num instante de tempo diferente, a geometria da
estrutura implicava várias alterações na determinação de acelerações (e velocidades) e na
forma das equações de equilíbrio; de maneira nenhuma o cálculo dava os mesmos valores das
acelerações angulares e por isso e movimento tem características completamente gerais.
4) Visto que as equações de movimento representam as equações de equilíbrio de um
mecanismo com 1GDL, pode-se usar o PTV para a resolução da incógnita cinemática. A
resolução torna-se ainda mais fácil porque as reacções externas não realizam trabalho e por
isso não estão a entrar na equação do trabalho virtual. O campo de deslocamentos virtuais
assemelha-se ao campo de velocidades já determinado, ou seja a relação entre as
velocidades angulares é igual à relação entre as rotações dos corpos de movimentos
2 2GI
1 ,G xF
4N
1 1GI
1 ,G yF2 ,G xF
2 ,G yF
AVAH
CV

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
diferentes. A utilização do PTV na resolução das equações de movimento tem especialmente
vantagem nos problemas, em que as reacções dinâmicas não são solicitadas.
2.4 Utilização do PTV na resolução das equações de movimento Tal como especificado acima, a resolução do problema anterior pode simplificar-se com a
implementação do PTV.
1 1 2, 1 ,1 2 4 2 0G x G G xF I F
ou seja
2
1 1 1 1
2 72 8 2 8 0 rad/s
3 3 (anti-horário)
Esta forma de resolução além de ser mais simples, permitiu deduzir directamente da
deformada virtual, que nesta posição do mecanismo os pesos não estão a contribuir ao
movimento.
Problema
Na posição representada, a barra AB tem uma
velocidade angular de 4rad/s no sentido horário.
Determine as acelerações angulares de todas as
barras, sabendo que estas têm uma massa por
unidade de comprimento de 5kg/m.
Nota: use 210m/sg
Resolução
Velocidades
Em primeiro lugar definem-se os corpos com
movimentos diferentes e os seus CIRs. Usando os CIR
define-se o campo de velocidades. Para as acelerações
normais apenas as velocidades angulares são exigidas.
Da semelhança dos triângulos
60160mm
80 30
hh
3 24 100 60 160
2
5rad/s
2 (anti-horário)
2 2GI
1 ,G xF
4N
1 1GI
1 ,G yF2 ,G xF
2 ,G yF
AB AB
I
II
III
1CIR
3CIR
2CIR
160
4
3
2

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
3
20rad/s
3 (horário)
Visto que um dado de velocidades foi fornecido, o campo de velocidades está plenamente
determinado.
Acelerações
Para as acelerações nenhum dado é fornecido, isso
significa que é possível estabelecer duas equações
que interligam as acelerações, mas um parâmetro vai
ficar como incógnita. Comparando as componentes
no ponto C: 2 2
1 3
5 20100 80 60 30
2 3
2
2
2 3
204 100 80 30 60
3
ou seja
1 3
3 55
5 3 e 2 3
3 40
8 3
Acelerações nos centros de massa (figura)
Forças actuantes
Para as forças é necessário mudar a unidade mm
para m.
As massas das barras são:
5 0,1 0,5kgABm , 5 0,08 0,4kgBCm
2 25 0,03 0,06 0,15 5kgCDm
Os momentos de inércia
1
4 24,17 10 kgmGI ,
2
4 22,13 10 kgmGI
3
4 21,26 10 kgmGI
A equação final será resolvida usando o PTV. Isso significa que as reacções externas serão
directamente removidas. A outra vantagem da aplicação do PTV é que os ângulos do campo de
deslocamentos virtuais estão relacionados à mesma proporção como as velocidades angulares,
na realidade é possível usar estes valores directamente na equação:
1 2
3
1 1 2 2 1
3 3
54 0,025 0,05 0,016 4,64 0,04 0,04 0,1 0,16
2
200,01125 0,015 5 1,5 5 0,015 20 0,06 0
3
G G
G
I I
I
Verifica-se que no caso dos CIRs fixos, a
componente normal de aceleração não está a
contribuir na equação e foi possível directamente
resumir a inércia destes corpos aos CIRs
correspondentes.
1
4 216,67 10 kgmCIRI , 3
4 25,03 10 kgmCIRI
1
2
1 AB
3
2
3 CD
2
1 AB 3CD
2
1 2AB BC
2
1 2AB BC
1
23
1 / 2AB2
3 / 2CD
2
1 / 2AB
3 / 2CD
2
1 2 / 2AB BC
2
1 2 / 2AB BC
10,025
30,011255,4
20,016 4,64 10,04 0,1
1 1GI
2 2GI 3 3GI
20
0,51,5 5
5
20,016 4,64 10,04 0,1
1 1CIRI
2 2GI
3 3CIRI
201,5 5

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Assim:
1 2
3
1 2 2 1
3
54 0,016 4,64 0,04 0,04 0,1 0,16
2
201,5 5 0,015 20 0,06 0
3
CIR G
CIR
I I
I
Resolvendo: 2
1 236,74rad/s (horário), 2
2 172,75rad/s (anti-horário),
2
3 425,12rad/s (horário).
Problema
Na posição representada o conjunto de barras
está em repouso. Determine as acelerações
angulares de todas as barras, sabendo que estas
têm uma massa por unidade de comprimento de
5kg/m.
Nota: use 210m/sg
Resolução
Neste caso as velocidades angulares são nulas, e por isso
será possível utilizar o CIR móvel também. É possível
implementar as velocidades angulares do problema
anterior no lugar de rotações virtuais como justificado
na resolução anterior. Usando os resultados anteriores
as relações entre as acelerações simplificam-se para
1 30,6 e 2 30,375
Estas relações foram possíveis encontrar usando os
CIRs e estão assim na mesma proporção como estavam
as velocidades angulares do problema anterior e como
estão os ângulos do campo de deslocamentos virtuais.
Neste caso
2
2 2 2 4 210,08 0,04 0,16 110,93 10 kgm
12CIR BC BCI m m e
1 2 31 2 3
5 204 4 0,04 1,5 5 0,015 20 0,06 0
2 3CIR CIR CIRI I I
Resolvendo: 2
1 245,51rad/s (horário), 2
2 153,44rad/s (anti-horário),
2
3 402,18rad/s (horário).
2.5 Utilização das acelerações na resolução do movimento finito Problema
Considerando que a barra na figura ao lado tem a
massa m , o comprimento L e que está em
repouso na posição apresentada, calcule a
velocidade angular para a posição vertical da
barra.
G
AB
20
1 1CIRI
2 2CIRI
3 3CIRI 5
4
1,5 5
I
II
III
1CIR
3CIR
2CIR
160
4
20
3
5
2

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Resolução
Este problema pode ser facilmente resolvido usando a conservação da energia mecânica, mas
existe também a possibilidade de o resolver usando as equações de movimento. É necessário
ter cuidado com as conclusões relacionadas ao tipo do movimento.
Forças de inércia
Como a posição inicial é a posição do repouso, as
acelerações normais são nulas e as forças de
inércia são as mostradas na figura.
Forças actuantes
Para evitar envolvimento das reacções no apoio,
pode-se escrever o equilíbrio dos momentos em
torno do apoio. 2
21 30
2 2 12 2
L L gmg m mL
L
Neste momento seria errado concluir que o
movimento é uniformemente acelerado, apesar
de o resultado da aceleração angular parecer
indicar assim. Para resolver o problema
correctamente, é necessário resolver a aceleração
numa das posições intermédias. Na posição
rodada pelo ângulo já existe alguma velocidade
angular, que será contemplada no cálculo. O
equilíbrio dos momentos em torno do apoio: 2
21 3 coscos 0
2 2 12 2
L L gmg m mL
L
O resultado acima para 0 confirma o resultado anterior, no entanto nota-se que a
aceleração angular depende da posição e não é constante. Para resolver o problema é
necessário fazer a integração seguinte:
f f f f
i i i i
d d d dd d d d
dt d dt dt
ou seja
/2
0
3 cos
2
f
i
gd d
L
2
/2
0
3 3sin
2 2
f
f
g g
L L
Para terminar sublinha-se que:
1) Usando o primeiro resultado e admitindo o movimento uniformemente acelerado, dava:
221 3
2 2 2f
gt
L
O que não é igual ao resultado calculado pelo procedimento correcto.
G
A
B
, ,
2t
La
2
2n
La
cinemática
mg
AH
AVG
A
B
GI 2
Lm
2
2
Lm
forças
G
/ 2m L
GI AB
mg
AH
AV
forças
G
/ 2m L
GI AB
inércia

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
2) A conservação da energia mecânica dava de imediato:
1 0V , 1 0T , 2
2
LV mg , 2 2
2
1 1
2 3fT mL , ou seja
3f
g
L
O procedimento será explicado mais tarde, ainda neste capítulo.
2.6 Problemas que envolvem as rodas (discos, esferas) Para resolver correctamente problemas em que a estrutura analisada envolve rodas, é
necessário explicar a introdução das forças de atrito.
2.6.1 Atrito
Neste capítulo as forças de atrito serão determinadas somente pela teoria de Coulomb.
Teoria de Coulomb
Escorregamento
Admite-se um bloco de dimensões desprezáveis colocado em cima da superfície horizontal. A
aplicação de uma força paralela com a superfície não origina necessariamente o movimento.
Primeiro é necessário ultrapassar a máxima força de atrito estático. Esta força actua na
superfície de contacto e tem a sua origem na rugosidade de ambas as superfícies.
Ultrapassando esta força, inicia-se o movimento e na superfície de contacto actua a força de
atrito dinâmico (cinético):
1) Sem movimento
Aplicando uma força relativamente pequena, esta
não consegue provocar o movimento. Não
havendo movimento, as forças actuantes são: a
força aplicada F , o peso P mg , a reacção de
superfície N e por isso a força de atrito terá a
intensidade e o sentido que assegura o equilíbrio.
Em geral diz-se que nem a intensidade, nem o sentido da força de atrito são conhecidos e têm
que ser determinados, no entanto a direcção é definida pela direcção de superfície. Do
equilíbrio neste caso segue: aF F . Aumentando a força aplicada, aumenta a força de atrito
até atingir o seu valor limite, que é dado por ,maxa eF N , em que
e é o coeficiente do
atrito estático, definido de acordo com a rugosidade das superfícies.
2) Com movimento
Continuando a aumentar a força aplicada, inicia-se o
movimento. Nesse instante ocorre uma diminuição
brusca no valor da força de atrito, ou seja durante o
movimento o valor é dado por a cF N , e não
depende mais do valor da força aplicada (mantém-se
constante). Relativamente ao bloco, a força de atrito
actua no sentido oposto ao movimento (não à
aceleração). Devido ao movimento há força de inércia, e
a força de inércia aumenta com o aumento da força
aplicada. Em geral diz-se que a intensidade e o sentido
da força de atrito são conhecidos.
Fsemmovimento
Fcommovimento
Fforças
aF
N
P
F
forças
aF N
Pma

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
O coeficiente c chama-se o coeficiente do atrito cinético e verifica
c e . Do equilíbrio
neste caso segue: aF F ma . Graficamente é possível representar os dois casos do
seguinte modo:
No gráfico acima a recta azul representa a força aplicada e a recta vermelha a força de atrito.
Até se iniciar o movimento aF F . Após o início, e com o aumento da força, aumenta a
aceleração do movimento que esta força induz e a força de atrito mantém-se constante. O
gráfico deve ser utilizado da seguinte forma: sabendo o valor da força aplicada, encontra-se
este valor na recta azul, e consoante esta posição deduz-se se esta força induz ou não o
movimento. Em caso afirmativo, pode se retirar o valor da sua aceleração.
O caso da superfície inclinada é semelhante, apenas é necessário decompor o peso.
1) Sem movimento
Do equilíbrio neste caso segue: sinaF F mg . Aumentando a força aplicada, aumenta a
força de atrito até atingir o seu valor limite, que é dado por ,max cosa e eF N mg .
2) Com movimento
Do equilíbrio neste caso segue: sin cos sina cF F ma mg mg ma mg .
Graficamente é possível representar os dois casos do seguinte modo:
forças
aumentoda forçaaplicada
F
aF
ma
semmovimento commovimento
,maxaF
a c cF N mg
Fforças
aFN
Psemmovimento
F
commovimento
F
F
forças
aFN
P
ma
forças
aumentoda forçaaplicada
F
aF
ma
semmovimento commovimento
,maxaF
cosa c cF N mg
sinmg

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
No gráfico acima a recta azul representa a força aplicada, a recta vermelha a força de atrito e a
recta verde a força aplicada mais o acréscimo do peso sinF mg , ou seja a força total que
promove o movimento. Até se iniciar o movimento sin aF mg F . Após o início, com o
aumento da força, aumenta a aceleração do movimento que a força induz e a força de atrito
mantém-se constante. O gráfico deve ser utilizado da seguinte forma: sabendo o valor da força
aplicada, encontra-se este valor na recta azul, e consoante esta posição deduz-se se esta força
induz ou não o movimento. Em caso afirmativo, pode-se retirar o valor da sua aceleração.
Nota-se neste caso, que no caso da superfície inclinada há dois factores que facilitam o início
do movimento:
1. a componente do peso sinmg actua “a favor” da força aplicada, ou seja ajuda a iniciar o
movimento, quando maior o declive da superfície, tanto maior esta contribuição.
2. a outra componente do peso cosmg equivale à reacção de superfície. Com aumento do
declive a reacção de superfície diminui-se, o que baixa o valor da força de atrito que ainda
impede o movimento, cosemg .
Imediatamente após do início do movimento, a força de atrito baixa bruscamente para
coscmg e mantém-se constante. O equilíbrio assegura a força de inércia. Com aumento
da força aplicada aumenta a força de inércia, ou seja aumenta a aceleração do movimento
induzido.
Rolamento sem o escorregamento
Considerando as rodas que rolam sem escorregamento sobre superfícies horizontais, pode-se
facilmente concluir que cada força aplicada paralela com a superfície origina o movimento.
Isso porque a roda está na superfície horizontal em equilíbrio indiferente e o contacto realiza-
se apenas via um ponto. Visto não haver deslocamentos relativos entre a superfície e a roda,
no que concerne ao cálculo da força de atrito, a situação é análoga a um bloco em repouso. Ou
seja, a força de atrito cria-se na direcção de superfície, mas o seu sentido e a sua intensidade
têm que se determinar de modo a assegurar o equilíbrio. Esta força no entanto não pode
ultrapassar o valor máximo que é analogamente igual a ,maxa eF N . Ultrapassando este
valor, o rolamento será com o escorregamento.
A força de atrito é uma força não conservativa. Isso pode comprovar-se pelo facto, de ela
seguir a forma de superfície, e por isso o trabalho que realiza é dependente do caminho que
percorre.
Considere-se por exemplo um bloco de peso P que se move sobre um
plano horizontal, ou seja o peso actua na direcção perpendicular ao
plano mostrado na figura ao lado e corresponde à reacção de
superfície. Se o caminho for de A para B directamente (seta azul) o
trabalho realizado é CPAB . Se chegar ao mesmo ponto B via C
(setas verdes) o trabalho realizado é maior, C P AC CB .
Por esta razão a força de atrito perde a energia mecânica e transforma-a numa forma
diferente (calor, som). No entanto, a perda de energia só se realiza no caso de
escorregamento. Ou seja, a força de atrito durante o rolamento sem o escorregamento não

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
realiza trabalho e por isso não perde a energia mecânica, mesmo que a roda em causa
efectue algum movimento. Na realidade, a força de atrito cria-se em cada instante de tempo,
mas visto que não há deslocamentos relativos entre a superfície e a roda, a distância
percorrida pela força de atrito é nula o que implica o trabalho nulo.
2.6.2 Problemas
Problema
Um tambor com raio r está ligado a um disco de raio R. O disco e o tambor
têm uma massa total m e um raio de giração k. Liga-se uma corda como se
mostra na figura e puxa-se com a força F. Sabendo que o disco rola sem
escorregar, determine:
a) a aceleração angular do disco ;
b) o mínimo valor do coeficiente de atrito estático compatível com o
movimento.
Resolução
a) É indiferente saber se há ou não uma velocidade angular, porque no centro de massa não há
componente normal de aceleração. A aceleração do centro de massa tem que ser paralela com
a superfície. Como não há escorregamento, a componente tangencial de aceleração do ponto
do contacto é nula.
Verifica-se que neste problema há 3 incógnitas: , aF e N para as quais existem 3 equações
de equilíbrio dinâmico.
Equilíbrio das forças na direcção vertical:
0F mg N N mg F
Pode-se assim concluir que para o problema fazer sentido, a força aplicada não pode
ultrapassar o peso do tambor, porque a força da reacção de superfície N tem que actuar no
sentido indicado, o que assegura o contacto entre o tambor e a superfície.
Equilíbrio das forças na direcção horizontal:
0a aF ma F m R
Equilíbrio dos momentos em torno do centro de massa: 2
0a G a
Fr mkFr F R I F
R
Realça-se que quando é dado o raio de giração, não é necessário calcular o momento de
inércia, mas basta utilizar a definição, que é GIkm
forças
GI
ma
mg
aF
N
acelerações
a
a
R

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Resolvendo: 2 2
Fr
m k R
Vê-se que a fórmula acima dá sempre um número positivo, por isso o sentido arbitrado como
anti-horário está correcto.
b) Para assegurar que o rolamento ocorre sem o escorregamento, é necessário manter
,maxa a eF F N
ou seja
,max ,max2 2 2 2a e e
FrR FrRF mg F
k R k R mg F
2.7 A diferença entre a cinemática e a dinâmica Os problemas de cinemática e dinâmica podem ter enunciados muito semelhantes. Por isso é
necessário saber distinguir os problemas correctamente. Os problemas da cinemática têm
imensos dados que especificam o movimento e por isso a sua resolução é possível sem ter que
envolver as forças, as massa e a inércia. No entanto, como um passo adicional, é possível
resolver as forças, que deram origem a este movimento.
Problema
Dois discos de fricção A e B estão ambos a rodar livremente a 240 rpm
em sentido anti-horário, quando são postos em contacto entre si. Após
8s de escorregamento, durante os quais cada disco tem uma
aceleração angular constante, o disco A atinge uma velocidade angular
final de 60rpm em sentido anti-horário. Para rA=80mm e rB=60mm,
determine:
a) a aceleração angular de cada disco durante a fase de escorregamento;
b) o instante para o qual a velocidade angular do disco B é zero.
Resolução:
a) O problema especificado é um problema típico da cinemática. Sabe-se que durante o
escorregamento as velocidades no ponto do contacto dos discos são diferentes e assim
permitem o deslocamento relativo não nulo. Depois de terminar o escorregamento, o
deslocamento relativo é nulo e por isso a velocidade do ponto de contacto é igual.
Usando os sentidos indicados e escrevendo as equações no sentido anti-horário:
08 8A A A
08 8B B B
0,8t
A B
8t s
8ACv 8B
8 8A A B Br r

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
0 0
2240 25,13rad/s
60A B
(anti-horário)
2
8 60 6,28rad/s60
A
(anti-horário)
8 8 8,38rad/sAB A
B
r
r (horário)
Resolvendo 22,36rad/sA (horário), 24,19rad/sB (horário),
b) 0 0 6B B Bt t t s
Problema
Dois discos de fricção A e B estão ambos a rodar livremente a 240
rpm em sentido anti-horário. O disco A tem uma massa de 6kg e
o disco B tem uma massa de 3kg. Os discos são colocados em
contacto entre si, pela aplicação de uma força horizontal de 20N
sobre o eixo do disco B. Sabendo que μc=0.15 entre os discos e
desprezando o atrito nos apoios, determine:
a) a aceleração angular de cada disco durante a fase de escorregamento;
b) a velocidade angular final de cada disco;
c) o tempo de duração da fase de escorregamento.
Considere rA=80mm e rB=60mm.
Resolução
a) Ao contrário do problema anterior, este é um problema típico de dinâmica.
Existem no total 6 incógnitas: duas componentes de reacção no disco A, uma no disco B, duas
acelerações angulares, e uma força de contacto N . Neste caso a força de atrito é conhecida,
porque ocorre o escorregamento. Para as 6 incógnitas também há 6 equações de equilíbrio, 3
em cada disco, mas como não é do interesse calcular as reacções, pode-se resolver da equação
de equilíbrio na direcção horizontal a força de contacto, ou seja: N F e usar apenas o
equilíbrio dos momentos para resolver as acelerações.
220 12,5rad/sc
A A c A A
A A
FI Fr
m r
220 33,3rad/sc
B B c B B
B B
FI Fr
m r
Deve-se ainda concluir que o cálculo efectuado não se alterava com a posição dos discos, que
permanece igual, por isso a aceleração angular é constante.
0, et t
A B
F
cinemática forças
BRBm g
F
a cF N
NB BI
A AI
Am g
AR
a cF N
N

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
b+c) terminando o problema tal como o problema anterior:
0A A At t
0B B Bt t
B B A At r t r
0 0A A A B B Bt r t r
25,13 12,5 0,08 25,13 33,3 0,06 1,17t t t s
1,17 10,47rad/sA (anti-horário)
1,17 13,96rad/sB (horário)
Voltando ao problema anterior, sabendo as acelerações poder-se-ia calcular a força que foi
necessário aplicar para criar as condições de movimento especificadas. Das relações
deduzidas vê-se por exemplo que as massas dos discos deveriam verificar a relação
A B B
B A A
m r
m r
Se esta relação fosse verificada, calculava-se a força aplicada usando 2 2
A A A B B B
c c
m r m rF
3. A lei da conservação da energia mecânica
3.1 Introdução A energia mecânica total do sistema contempla duas parcelas: a energia potencial e a energia
cinética. A energia potencial foi abordada no capítulo PTV e por isso basta definir a energia
cinética. A energia cinética de uma partícula é dada por
21
2T mv
Verifica-se assim que a energia cinética terá sempre um valor positivo e escalar. Vê-se
directamente que a unidade corresponde à unidade de energia, ou seja, Nm=J. Na fórmula
deve ser utilizada a intensidade de velocidade. Sabendo as componentes de velocidade num
referencial cartesiano, ou seja sabendo as componentes ortogonais, não é necessário calcular
a intensidade, e pode-se somar a contribuição de cada componente
2 2 21 1 1
2 2 2x yT mv mv mv
Esta relação naturalmente não é válida para componentes que não são ortogonais, nesse caso
seria necessário fazer primeiro a soma vectorial das componentes de velocidades.
É possível estender este conceito aos corpos rígidos, mas neste caso a energia cinética tem que
abranger todas as possibilidades de movimento.
Considerando um corpo rígido em translação, é preciso somar as energias cinéticas de todas as
partículas que o constituem, que no limite define a integração de efeitos elementares sobre o
volume do corpo. É possível concluir que a energia cinética é definida da mesma maneira
como para a partícula.

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Considerando o corpo rígido em rotação, é novamente
necessário somar as energias cinéticas de todas as partículas.
Neste caso o movimento é definido pela velocidade angular
, existe o CIR e a intensidade da velocidade v de cada
partícula pode exprimir-se como ,CIR pv d onde
,CIR pd
representa a distância da partícula ao CIR. Somando pelo
volume do corpo, obtém-se para o caso de densidade
constante:
2 2 2 2 2
, ,
1 1 1
2 2 2CIR p CIR p CIR
V V
T d dV d dV I
Em resumo, durante o movimento plano geral, a energia cinética pode-se exprimir de duas
formas equivalentes:
2 2 21 1 1
2 2 2CIR G GT I I mv
A igualdade é fácil de comprovar via teorema de Steiner
22 2 2 2 2 2
, ,
1 1 1 1 1 1
2 2 2 2 2 2G G G CIR G G CIR G CIRI mv I m d I md I
3.2 Semelhanças com as forças de inércia Apesar de as forças de inércia e a energia cinética representarem quantidades físicas
completamente diferentes, a sua definição usa as mesmas características do corpo rígido e
ambas contemplam duas “parcelas”: uma ligada à translação com o centro de massa, e outra à
rotação em torno do centro de massa
i GF ma , i GM I
2 21 1
2 2G GT I mv
Diferenças fundamentais
As diferenças fundamentais estão relacionadas com o tipo de cada uma das grandezas físicas:
as forças de inércia representam o vector de força e do momento e a energia cinética é um
escalar. Por esta razão há possibilidade, sempre que conveniente, usar a forma 21
2CIRT I
para cada corpo em movimento diferente e depois somar as contribuições. No entanto,
como se comprovou no início deste capítulo, a redução a um único momento de inércia
i CM I é possível apenas quando existe somente 1 corpo (possivelmente composto por
vários corpos elementares) em rotação em torno de um ponto fixo C , que representa o
centro de rotação (e assim coincide com o CIR) e somente o equilíbrio dos momentos será
utilizado em torno deste ponto C na resolução do problema (será o caso das vibrações
rotacionais). Excepcionalmente, quando se considera o instante em que as velocidades são
nulas, o mesmo verifica-se para os CIRs.

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Tal como na explicação da atribuição das forças de inércia, pode-se concluir que no caso do
corpo com o mesmo movimento, mas composto pelos corpos elementares (mais simples e/ou
de densidades diferente), é possível somar a contribuição de cada corpo elementar.
3.3 Simplificações Problema
Considere a barra com a massa concentrada de acordo com
a figura ao lado. Admita que o conjunto está a rodar em
torno do apoio com uma velocidade angular . Determine
a energia cinética considerando os corpos elementares em
conjunto e separados.
Resolução
Campo de velocidades
Na figura à esquerda os corpos elementares (barra e massa concentrada) são considerados em
separado, por isso há dois centros de gravidade e em ambos foram determinadas as
velocidades de translação. Na figura à direita existe apenas um centro de massa onde as
componentes de velocidade linear foram introduzidas. Naturalmente a velocidade angular
pode ter a designação igual porque está a representar o mesmo movimento, no entanto, antes
de proceder é necessário calcular o centro e massa do conjunto:
/ 2G
mL MLx
m M
Para a figura à esquerda
2 2
22 2 2 2 2
2 2 2 2
1 1 1 1
2 2 12 2 12 2
1 1 1
2 3 2A
L LT m mL M L mL m ML
mL ML I
Nota-se que a massa concentrada não contribuiu com a sua parcela rotacional, isso porque o
raio foi designado como desprezável e por isso a massa concertada teve comportamento de
uma partícula que não sofre rotação.
Para a figura à direita
2
2 21 / 2 1
2 2G
mL MLT m M I
m M
onde
2
221
12 2G G G
LI mL m x M L x
M,m L
2G1G
/ 2LL
GGx
Gx
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
2 22
2 2
2 2 2 22 2 2 2
2 22 2 2 2 2 2
/ 21 1
2 12 2 2
/ 21 1 3 12 12 3
2 12 4 2 12
1 3 4 1 3 1 1
2 3 2 3 2 3
m M M mT L m m M
m M m M m M
m M m mM m M mM m mM mML L
m M m M m M
m M mM m ML L mL ML
m M
2 21
2AI
Nota-se que em ambos os casos foi possível considerar directamente apenas a rotação em
torno do apoio, ou seja
21
2AT I
Demonstrou-se que o cálculo que usou os corpos elementares foi mais simples e por isso será
utilizado preferencialmente.
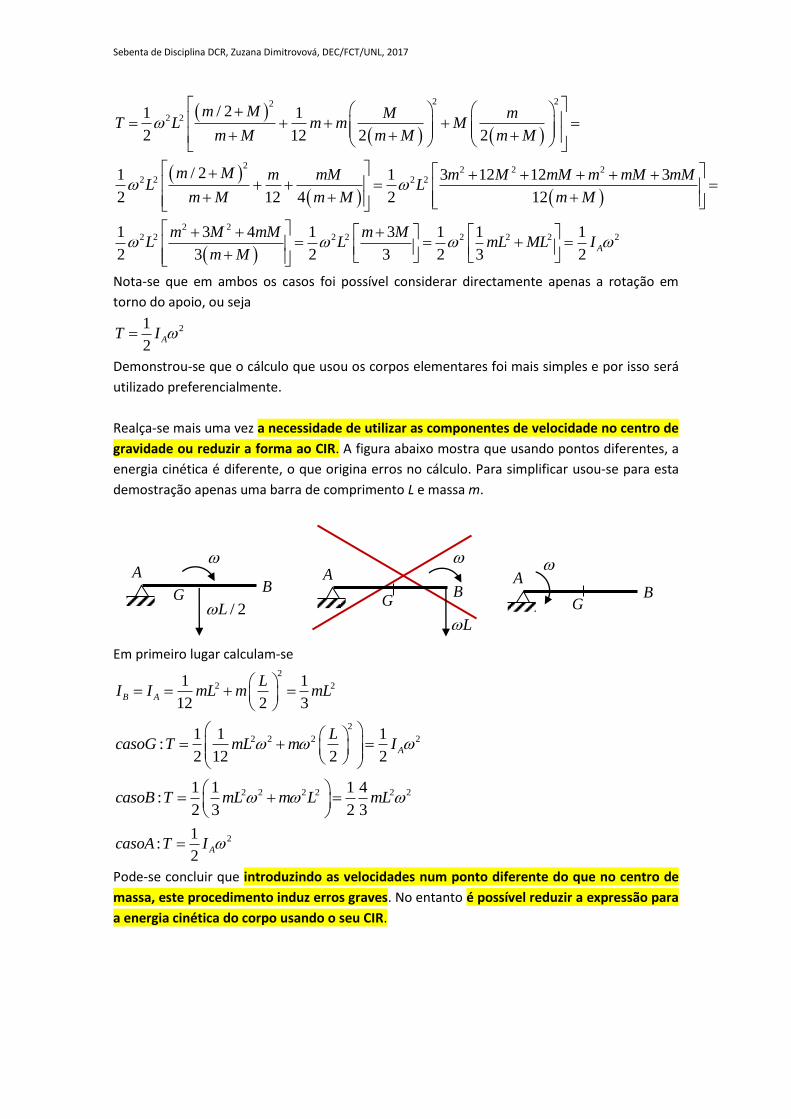
Realça-se mais uma vez a necessidade de utilizar as componentes de velocidade no centro de
gravidade ou reduzir a forma ao CIR. A figura abaixo mostra que usando pontos diferentes, a
energia cinética é diferente, o que origina erros no cálculo. Para simplificar usou-se para esta
demostração apenas uma barra de comprimento L e massa m.
Em primeiro lugar calculam-se 2
2 21 1
12 2 3B A
LI I mL m mL
2
2 2 2 21 1 1:
2 12 2 2A
LcasoG T mL m I
2 2 2 2 2 21 1 1 4:
2 3 2 3casoB T mL m L mL
21:
2AcasoA T I
Pode-se concluir que introduzindo as velocidades num ponto diferente do que no centro de
massa, este procedimento induz erros graves. No entanto é possível reduzir a expressão para
a energia cinética do corpo usando o seu CIR.
G
A
BG
L
A
BG
AB
/ 2L

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
3.4 Problemas Problema
Considerando que a barra na figura ao lado tem a
massa m , o comprimento L e que está em
repouso na posição apresentada, calcule a
velocidade angular para a posição vertical da
barra.
Resolução
Este problema já foi referido no início deste
capítulo. A conservação da energia mecânica dava
de imediato:
1 0V , 1 0T , 2
2
LV mg , 2 2
2
1 1
2 3fT mL , ou seja
3f
g
L
Explicação:
Para resolver o problema, assinalam-se duas posições: inicial (1) em que sabem-se as
condições de movimento e final (2) em que se pretende calcular alguma incógnita.
Na posição (1) a barra está em repouso e por isso a energia cinética é nula. A energia
potencial, como já explicado no capítulo PTV, pode ter contribuições de duas formas: energia
acumulada em molas e o negativo do trabalho das forças externas. No entanto, pode-se
assumir o nível zero para as forças externas, tal como já foi feito no capítulo PTV. Como não há
molas, a energia potencial na posição (1) pode ser também considerada nula.
Na posição (2) já existe alguma velocidade, por isso a energia cinética já é diferente de zero.
Visto a barra fazer uma rotação em torno do apoio, é possível reduzir a fórmula usando o CIR e
a velocidade final angular f . Relativamente à energia potencial, vê-se que a única força que
faz trabalho entre as duas posições é o peso da barra, o trabalho é positivo e equivale a
2
Lmg e por isso a energia potencial na posição (2) é negativa, definida pelo negativo do
trabalho, tal como já explicado no capítulo PTV.
Comparando os níveis de energia nas posições (1) e (2), calcula-se a incógnita do problema.
Realça-se mais uma vez que a equação é escalar e por isso permite apenas determinação de 1
incógnita.
Problema
Considere a barra com a massa concentrada de raio
desprezável de acordo com a figura ao lado. Admita que o
conjunto na posição apresentada está em repouso.
Determine a energia potencial e a cinética do conjunto na
posição rodada pelo ângulo .
Nota: considere a energia potencial na posição de repouso nula.
Resolução
Na posição (2) as velocidades têm a
distribuição como visualizado ao lado.
Outra figura mostra as forças. As
G
AB
G
A 1posição
mg
2posição
G
A
mg
M,m L
cinemática
1 2G
Lv
CIR M
2Gv L

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
únicas forças actuantes são os pesos,
foi indicado admitir a energia
potencial nula na posição (1), por isso
a energia potencial na posição (2)
corresponde ao negativo do trabalho
dos pesos:
2 sin sin2
LV mg MgL
1 2
2 2 2 2
2
1 1 1 1
2 2 12 2G GT mv mL Mv ou directamente
2 2 2 2
2
1 1 1
2 2 3CIR CIRT I I mL ML
Se o raio R da massa concentrada não for desprezável:
1 2
2 2 2 2 2 2
2
1 1 1 1 1 1
2 2 12 2 2 2G GT mv mL Mv MR ou seja, ambos os corpos elementares
contribuem com a translação e a rotação, ou directamente:
2 2 2 2 2
2
1 1 1 1
2 2 3 2CIR CIRT I I mL MR ML
Ainda poderia considerar-se que o comprimento (efectivo) da barra passava para L R .
Problema
Uma corda está enrolada à volta de um cilindro de raio R , raio de giração k e
massa m , assim como se visualiza na figura ao lado. Sabendo que o cilindro é
libertado do repouso, determine
a) a velocidade do seu centro após ter-se deslocado para baixo uma distância s ;
b) a força no cabo N .
Resolução
A pergunta da alínea a) indica
claramente como o método mais
vantajoso a conservação de
energia mecânica.
Na posição (1) as velocidades são nulas e a única força actuante é o peso do cilindro, no
entanto é possível admitir nível zero para a energia potencial, assim:
1 0V , 1 0T
Na posição (2) o cilindro já tem alguma velocidade. O campo de velocidades é possível
determinar com o auxílio dos CIRs. Visto que a corda está fixa no topo, todos os pontos do
troço vertical têm velocidade nula, o que determina o CIR na posição mostrada. O centro do
cilindro é o único ponto do cilindro que tem trajectória vertical e por isso a sua componente de
velocidade tem que ser vertical. Estes dois factores permitem determinar a velocidade angular.
1posição
s
2posição
mg
mg
cinemática
v
CIR
M
2posição
mg
Mg
sinL sin
2
L
1posição

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Ao contrário do problema anterior, a determinação mais vantajosa da energia cinética usava o
centro de massa.
2 2
2 2 2 2 2
2
1 1 1 1 11
2 2 2 2 2G
v kT mv I mv mk mv
R R
No entanto a utilização do CIR dava naturalmente o mesmo resultado.
2 2
2 2 2 2
2
1 1 11
2 2 2CIR
v kT I mk mR mv
R R
A única força que faz trabalho é o peso do cilindro e por isso
2V mgs
Resolvendo a equação 1 1 2 2V T V T obtém-se:
2
2
1
gsv
k
R
b) Para calcular a força no cabo, tem que se “cortar” o cabo para a força interna poder fazer o
trabalho.
A única alteração na resolução trazia o trabalho da força no cabo. Para determinar o trabalho
realizado por esta força, tem que se somar os trabalhos elementares. No entanto o
deslocamento infinitesimal no lugar de actuação da força N é nulo, porque
0 0ds vdt dt . Isso é um facto já conhecido porque sabe-se, que o campo de velocidades
representa igualmente o campo dos deslocamentos infinitesimais em cada instante, e
consequentemente o campo dos deslocamentos finitos, necessários para o cálculo dos
trabalhos realizados. Por isso
O que igualmente justifica que o peso do cilindro realizou o trabalho no caminho s .
Infelizmente deve-se concluir que neste caso é impossível resolver a força no cabo usando a
conservação da energia mecânica. Este valor pode ser no entanto resolvido via equações de
movimento
1posição
s
2posição
mg
mg
cinemática
v
CIR
N N
cinemática
v
CIR
2v
deslocamentos para
ocálculodotrabalho
s02s
cinemática
a
acelerações noG
2R
a
a
R
forças
mg
Nma
2
G
a aI mk
R R

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Estão disponíveis duas equações para duas incógnitas:
0N ma mg
2 0a
NR mkR
Resolvendo:
2
1
ga
k
R
, 2
1
mgN
R
k
É importante ver que a solução não se alterava considerando outro instante de tempo, porque
a aceleração normal no primeiro ponto de contacto entre a corda e o cilindro, que depende da
velocidade actual, não afecta o cálculo. Assim pode concluir-se que a força no cabo e a
aceleração do centro do cilindro são constantes ao longo do movimento. Isso na realidade
permite confirmar o resultado da alínea anterior. Considerando o movimento uniformemente
acelerado:
21
2s at , v at , ou seja
2
22
1
gsv as
k
R
Problema
O cilindro A (mA, rA) está ligado através de uma corda ao
cilindro B (mB, rB). Se o sistema for libertado do repouso,
determine a velocidade do centro do cilindro A após este
mover-se a uma distância s para baixo. Determine
igualmente os esforços axiais nas partes livres da corda.
Resolução
A resolução pode ser feita através das equações de movimento ou usando a conservação da
energia mecânica. Para ambas as resoluções é necessário efectuar primeiro a parte de
cinemática. Tal como no problema anterior o troço da corda fixo no topo tem a velocidade
nula, e por isso o primeiro ponto de contacto com o cilindro A representa o seu CIR.
Pode-se assim determinar a distribuição de velocidades sobre o diâmetro do cilindro A. Visto a
corda na parte livre entre os dois cilindros ter velocidade única, a velocidade do cilindro A
transfere-se ao cilindro B. Os 2 triângulos sobre os diâmetros dos cilindros podem representar
4 grandezas físicas: (i) deslocamentos infinitesimais; (ii) deslocamentos que podem ser usados
para exprimir o trabalho realizado pelas forças constantes actuantes nessa direcção; (iii)
velocidades; (iv) componente vertical das acelerações.
cinemática
B
CIR
AvCIR
2 Av2 Av
A

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Equações de movimento:
É possível evitar a introdução da reacção no cilindro B, porque para as 3 incógnitas 1N ,
2N ,
Aa é possível escolher 3 equações que não envolvem as reacções. Nomeadamente, somatório
dos momentos nos cilindros A e B e somatória das forças no cilindro A.
Cilindro B:
2
1
21
2
AB B B B B B B A
B
aN r I m r m r a
r , ou seja
1 B AN m a
Cilindro A:
2
2 1
1 1
2 2
AA A A A A A A A A
A
aN r N r I m r m r a
r , ou seja 2 1
1
2A AN N m a
2 1A A Am g N N m a
Resolvendo:
2
3 4
AA
A B
m ga
m m
,
1
2
3 4
A B
A B
m m gN
m m
,
2
2
3 4
A A B
A B
m g m mN
m m
Nota-se que a resolução não foi afectada pela posição actual dos cilindros, ou seja a aceleração
e os esforços determinados estão contantes ao longo do movimento, por isso
42
3 4
AA A
A B
m gsv a s
m m
Para a resolução das acelerações, foi também possível utilizar o PTV. Para isso determinava-se
ainda os deslocamentos virtuais, com auxílio das figuras anteriores
0A A A B B B A A A A AI I m a u m g u
2 2 2 21 10
2 2
A A A AA A B B A A A A A
A A B B
a u a um r m r m a u m g u
r r r r
12 0
2A A B A A A Am a m a m a m g
2
3 4
AA
A B
m ga
m m
cinemática
acelerações nosG2 A
B
B
a
r
Aa
AA
A
a
r
forças A AI
A Am a
Am gBm gR
1N2N
1N
B BI
deslocamento
virtual
AuCIR
2 Au
A
B
CIR
2 Au

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Conservação da energia mecânica:
Considerando o conjunto completo, a única força que realiza o trabalho entre as duas posições
é o peso do cilindro A, por isso, de acordo com as figuras acima:
1 0V , 1 0T
2 AV m gs
2 22 2 2 2 2 2 2 2
2 2 2
41 1 1 1 1 1 1 1 3
2 2 2 2 2 2 2 2 4
A AA A A A B B A A A A B B A A B A
A B
v vT m v I I m v m r m r m v m v
r r
Resolvendo
4
3 4
AA
A B
m gsv
m m
Sabendo a velocidade, pode-se resolver o esforço axial no cabo
Cilindro A
1 0V , 1 0T
2 12AV m gs N s
2
2
3
4A AT m v
Resolvendo
1
2
3 4
A B
A B
m m gN
m m
Cilindro B
1 0V , 1 0T
2 12V N s
2
2 B AT m v
Resolvendo
1
2
3 4
A B
A B
m m gN
m m
Nota-se que é impossível por este método resolver o esforço 2N .
Outra conclusão importante é que quando um cabo ou corda passa pela roda de raio não
desprezável, o valor da força no cabo altera-se.
3.4 Forças de atrito As forças de atrito são forças não conservativas, e por isso para elas o princípio da
conservação da energia mecânica não é valido. Mas como se consegue calcular o trabalho
realizado pelas forças de atrito, pode-se incluir o negativo deste trabalho como uma perda
de energia mecânica e assegurar assim a igualdade de dois níveis energéticos.
Problema
A barra BC está ligada através de pinos a dois discos uniformes. Sabendo que o sistema é
libertado do repouso na posição visualizada na figura abaixo, determine a velocidade do

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
centro de massa da barra depois de o disco A ter rodado 90º no sentido horário. Considere
/ 2C Ar r r .
Resolução
Novamente pode-se admitir que
1 0V , 1 0T
Cinemática na posição (2)
O conjunto de 3 corpos forma um mecanismo com 1GDL, a “estatia” pode ser calculada da
mesma maneira como na Estática, admitindo que o CIR das rodas é equivalente ao CIR das
barras, ou seja “retira” 2GDL tal como o apoio fixo. O facto de se conseguir representar o
campo de velocidades usando 1 parâmetro confirma também que o mecanismo tem 1GDL.
A barra faz movimento de translação no instante representado na figura acima. Para exprimir a
energia cinética, tal como já explicado para as rodas, a forma mais vantajosa usa o centro de
massa e não o CIR.
2 2 2 2 2
2
2 22 2 2 2 2
2 2
2
1 1 1 1 1
2 2 2 2 2
1 1 1 1 1 1 14 4
2 2 2 2 2 2 2
1 33
2 4
A A A A B B C C C C
C CA C A C B C C C C C
C C
C A B C
T m v I m v m v I
v vm v m r m v m v m r
r r
v m m m
Energia potencial na posição (2)
Cr
CCIRACIR
,BCIR
CC
C
v
r
CvB Cv v
CA C
C
v
r
Cv v
2A Cv v
2posição
Cm g
CNAN
Bm g
Am g
1posição
Cm g
CNAN
Bm g
Am g
,a AF ,a CF,a AF ,a CF
/ 2r

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Neste caso as forças de atrito não realizam trabalho. Os pesos dos discos e as reacções de
superfície também não, visto serem forças verticais sujeitas às trajectórias horizontais. Por isso
apenas o peso da barra faz trabalho (positivo), ou seja
22
B
rV m g
Resolvendo:
2
12 2 3
BB C
A B C
m g rv v
m m m
Problema
Um bloco de dimensões desprezáveis e de massa
Bm move-se sobre uma superfície com auxílio da
força F aplicada como indicado na figura ao lado.
Determine a velocidade do bloco depois de se ter
deslocado pela distância d, assumindo que esta
distância foi medida a partir da posição de
repouso.
Resolução
Princípio da conservação de energia mecânica
Pode-se admitir 1 0V , e é válido
1 0T
Na posição (2) a energia cinética vale
2
2
1
2BT m v
A energia potencial terá a contribuição da força
aplicada, e ainda tem que ser introduzida a perda
de energia devido à força de atrito. Infelizmente o
trabalho da força de atrito não é fácil de introduzir
directamente, porque a reacção de superfície e
consequentemente a força de atrito não são
constantes ao longo do movimento.
A alteração destes valores é causada pela posição do cabo que muda o seu declive (recta preta
que passa pela verde até à vermelha) e assim altera-se a contribuição da força no cabo à
reacção de superfície. Realça-se que no caso das roldanas de raio desprezáveis, que estão aqui
representadas, a força no cabo mantém-se constante ao longo do seu comprimento. Pode-se
escrever:
2
0
d
aV Fs F x dx
O comprimento s pode ser calculado como a diferença entre os comprimentos inicial e final
da corda numa dada zona. Neste caso considerou–se o troço entre o bloco e a primeira
roldana. Assim, de acordo com a figura:
222s h h h d
h
h
BmF
h
h
BmF
x
d
s
F
x
d
a cF NN
Bm g

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
Para determinar o outro termo na energia potencial,
é necessário analisar as forças actuantes no bloco
22
sina c c B c B
hF N m g F m g F
h h x
22
220 0
ln2 1
d d
a c B c c B c
h h d h ddxF x dx m gd Fh m gd Fh
hh h x
Pode-se verificar que o trabalho da força F poder-se-ia obter também pela integração
22
220 0
cos 2d d h x dxF dx F F h h h d Fs
h h x
Tal como na relação anterior.
Resolvendo
2222 22
2 ln 22 1
cc
B B
h h d h dFhFv h h h d gd
m m h
Equações de movimento:
Na posição intermédia designada x como anteriormente
sin cos 0B c Bm a m g F F
ou seja
2 22 2
cos sinc cc c
B B B B
h xF FF F ha g g
m m m mh h x h h x
A aceleração depende da posição x . Para calcular a velocidade é necessário fazer a
integração:
0 0
d vdv dv dxa adx vdx
dt dx dt
ou seja
2
2 22 20
1
2
d
cc
B B
h x FF hv g dx
m mh h x h h x
Verifica-se que os termos sujeitos à integração são iguais como foi determinado acima, por
isso:
2222 21
2 ln2 2 1
cc
B B
h h d h dFhFv h h h d gd
m m h
o que confirma o resultado anterior:
22222 2
ln 2 22 1
cc
B B
h h d h dFh Fv h h h d gd
m mh
F
a cF NN
Bm g
Bm a

Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2017
3.5 Conjuntos dos corpos rígidos com molas Problema
Uma carga P de 500N é aplicada ao mecanismo
representado no ponto C. Sabendo que a mola encontra-
se indeformada quando 15º e que o mecanismo
esteve em repouso quando 0º , determine o valor
da velocidade angular na posição do equilíbrio estável.
Considere r=150mm, L=500mm e k=8000N/m. Despreze
o peso das partes envolvidas, mas admita que a massa
da barra é Bm =3kg e da parte semi-circular é
Cm =2kg.
Resolução:
A posição do equilíbrio estável foi determinada no
capítulo PTV como 1,647 94,3ºrad .
Durante a resolução do problema também já foi
determinada a energia potencial. Realça-se que neste
caso não se pode ignorar a energia acumulada na mola
na posição inicial, tal como foi possível fazer no capítulo
PTV, ou seja: 2
2
1 1,
1 156,169J
2 180molaV V kr
2
2
2 2,
1 151 cos 96,342J
2 180P molaV V PL kr
Relativamente à energia cinética:
1 0T
2
2
1
2CIRT I
Neste caso é mais vantajoso ligar os dois corpos elementares e utilizar o CIR do conjunto.
2 2 21 10,2725kgm
3 2CIR B CI m L m r
Em resumo
216,169 0 96,342 0,2725 27,43rad/s
2
1posição P
1 cosL
2posição