delauynei superficies
TRANSCRIPT
7/24/2019 delauynei superficies
http://slidepdf.com/reader/full/delauynei-superficies 1/5
Superfícies de Delaunay
Juliana Ikeda1 eAndré de Oliveira Gomes (orientador)2
1 Universidade de São Paulo (USP), Brasil [email protected] 2
Universidade de São Paulo (USP), Brasil
1. Introdução
Uma superfície é o lugar geométrico dos pontos doR
3 que estão na imagem de uma aplicação de classeC ∞ que vamos denotar por ϕ : D ⊂ R
2 −→ R3 (onde
D é um aberto do plano). Vamos supor ainda quea aplicação ϕ(u, v) tem determinante Jacobiano nãonulo em todo o ponto de D. Esta condição vai nosgarantir a existência do plano tangente à superfície no ponto p ∈ D (denotado por T pϕ) e que é, por
definição, o espaço vetorial gerado pelos vetores (l.i.){ϕu( p), ϕv( p)} ⊂ T ϕ( p)R3. As figuras a seguir são
representações de superfícies no espaço euclidiano R3
Um conceito fundamental na teoria das superfíciesdo R
3 é o de curvatura principal que descrevemos a
seguir. Tome um ponto ϕ( p) da superfície descritapor ϕ. Construa uma linha l ⊂ R
3 que passa porϕ( p) e que é perpendicular ao plano tangente T pϕ.Para cada vetor unitário v ∈ T pϕ, podemos entãoconsiderar o plano que passa pelo ponto ϕ( p) e quecontém v e l. A interseção deste plano com a dadasuperfície é a imagem de uma curva (parametrizadapelo comprimento de arco) que no ponto ϕ( p) temuma curvatura κv. Calcule estas curvaturas paracada vetor v ∈ T pϕ. O maior valor de κv, denotadopor κ1( p), e o menor valor de κv, denotado por κ2( p),são as curvaturas principais da superfície no pontoϕ( p) (veja a figura abaixo).
Podemos assim associar duas grandezas importantesa cada ponto p ∈ D de uma superfície ϕ : D −→ R
3.A primeira é a curvatura Gaussiana definida por
K p := κ1( p)κ2( p) (1)e a segunda é a curvatura Média definida por
H p := (κ1( p) + κ2( p))/2 (2)
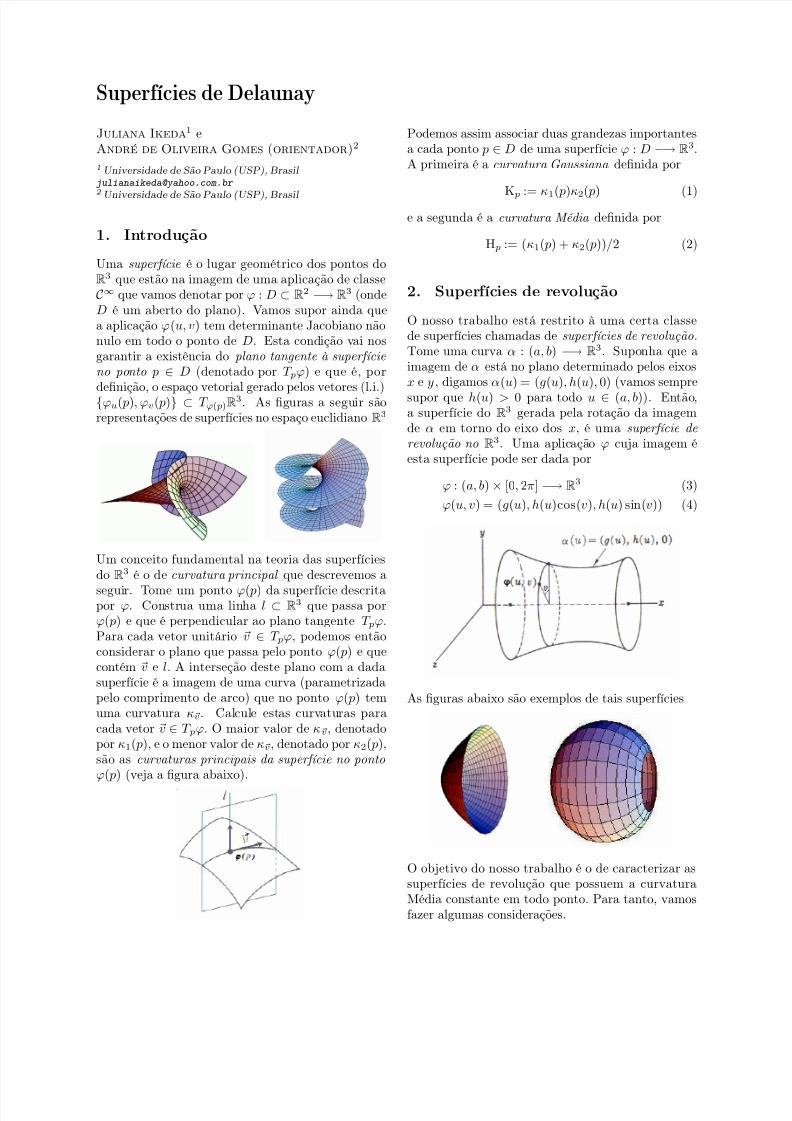
2. Superfícies de revolução
O nosso trabalho está restrito à uma certa classede superfícies chamadas de superfícies de revolução.Tome uma curva α : (a, b) −→ R
3. Suponha que aimagem de α está no plano determinado pelos eixosx e y , digamos α(u) = (g(u), h(u), 0) (vamos sempre
supor que h(u) > 0 para todo u ∈ (a, b)). Então,a superfície do R
3 gerada pela rotação da imagemde α em torno do eixo dos x, é uma superfície de revolução no R
3. Uma aplicação ϕ cuja imagem éesta superfície pode ser dada por
ϕ : (a, b) × [0, 2π] −→ R3 (3)
ϕ(u, v) = (g(u), h(u)cos(v), h(u) sin(v)) (4)
As figuras abaixo são exemplos de tais superfícies
O objetivo do nosso trabalho é o de caracterizar assuperfícies de revolução que possuem a curvaturaMédia constante em todo ponto. Para tanto, vamosfazer algumas considerações.

7/24/2019 delauynei superficies
http://slidepdf.com/reader/full/delauynei-superficies 2/5
3. Superfícies de revolução com
curvatura média constante
Dada uma superfície arbitrária no R3, podemos
expressar a curvatura Média H em termos dasderivadas parciais da função ϕ usada para descrevera superfície. No caso de uma superfície de revolução
representada pela aplicação (4), obtemos a seguinteexpressão para a curvatura média
H = 1
2
h(hg − hg) + g((g)2 + (h)2)
h((g)2 + (h)2)3/2
(5)
A equação acima nos mostra que a curvatura H éfunção apenas da variável u. Quando a curva α estáparametrizada de modo que g (u) = u, teremos aexpressão α (u) = (u, h (u) , 0). Assim g (u) = 1 eg (u) = 0. Portanto a equação (5) fica na forma
H = 1
2
−hh + (h)2 + 1
h ((h)2 + 1)3
2
(6)
Supondo H constante, digamos H = c/2, temos aseguinte equação diferencial
1 + (h)2 − hh = c
h(1 + (h)2)3/2
(7)
Temos assim, dois casos a considerar:
i) Quando a curvatura média é igual a zero.Temos c = 0 e então a equação (7) se reduz a
1 + (h)2 − hh = 0 (8)
cuja solução é h(u) = 1a cosh(au + b). Assim, a curva
geradora da correspondente superfície de revolução
é α(u) = (u, 1a cosh(au + b), 0). Tal curva é chamadade catenária
A superfície de revolução correspondente é chamadade catenóide
ii) Quando a curvatura média não é nula. Podemosescrever c = ±1/a (a > 0). Para c = −1/a temos1 + (h)2 − hh = (−1/a)h(1 + (h)2)
3
2 ou ainda
a(1 + (h)2) − ahh
(1 + (h)2)3
2
+ h = 0
2ha(1 + (h)2) − ahh
(1 + (h)2)3
2+ h
= 0
2ah(1 + (h)2) − 2ahhh
(1 + (h)2)3
2
+ 2hh = 0
d
du
2ah 1 + (h)2
+ h2
= 0
h2 + 2ah
1 + (h)2= ±b2
onde b é uma constante. Quando c = 1/a, podemoschegar de maneira análoga na expressão
h2 − 2ah
1 + (h)2= ±b2 (9)
Obtemos então uma equação diferencial geral quedescreve as superfícies de revolução com curvaturamédia constante. E ainda, uma tal superfície temcurvatura média constante não-nula se, e somentese, a função h(u) satisfaz
h2 ± 2ah
1 + (h)2
= ±b2 (10)
onde a e b são constantes reais.
4. O Teorema de Delaunay
O resultado apresentado no §3 acima caracterizaas superfícies de revolução com curvatura médiaconstante em termos de uma equação diferencial.O Teorema abaixo, provado pelo astrônomo ematemático francês C. Delaunay, nos fornece umaoutra descrição, mais geométrica, das superfícies derevolução com curvatura média constante.
(Delaunay, 1841) Toda superfície de revoluçãocom curvatura média constante é obtida como sendoa rotação da curva descrita pelo foco de uma cônica que rola (sem escorregar) ao longo do eixo de rotação.
Vamos agora verificar o Teorema de Delaunaypara cada uma das cônicas: elipse, hipérbole eparábola.

7/24/2019 delauynei superficies
http://slidepdf.com/reader/full/delauynei-superficies 3/5
4.1 Elipse
Considere a curva descrita pelo foco de uma elipseque rola sem escorregar ao longo do eixo x como nafigura a seguir.
F e F são os focos da elipse, K é o ponto de contatocom o eixo x, a é o comprimento do eixo maior e b é
o comprimento do eixo menor da elipse, P e P
sãoas projeções ortogonais de F e F no eixo x e F T éa tangente à curva descrita pelo foco F Usaremos as seguintes propriedades:
(1) F K + KF = 2a (Pela definição de elipse)
(2) θ := ∠F KP = ∠F KP (Propriedade da elipse)
(3) F P · F P = b2 (Equação pedal - O produto dasdistâncias dos focos a uma reta tangente a elipseé constante e igual ao quadrado do menor eixo)
(4) F K ⊥F T (Uma propriedade fundamental dessetipo de rolamento é o fato da direção normala curva traçada pelo foco passar no ponto decontato com a linha na qual a cônica rola)
As coordenadas x e y de F são dadas por x = OP e y = F P . Pelo ∆F KP , temos y = F K sin θ.Pela propriedade (4), no ∆F T K temos ainda que∠F T P = π/2 − θ. Temos também que ∠F T P é o ângulo entre a tangente à curva e o eixo x.Sendo a curva descrita pelo foco F parametrizadapor α(s) = (x(s), y(s), 0) (onde s é o parâmetro pelocomprimento de arco), o vetor tangente unitário de
α é dado por t = (dxds , dyds , 0). Então
sin θ = cosπ
2 − θ
=
dx
ds (11)
Sendo y = F P a altura do foco F , temos aindaque y = F K sin θ. Pela equação (11)
y = F K dx
ds e y = F K
dx
ds
Pelas propriedades (1) e (3) e notando que y = 0 ey = 0
y + y = (F K + F K )dx
ds = 2a
dx
ds (12)
yy = b2∴ y =
b2
y (13)
Substituindo o resultado (13) em (12)
y + b2
y = 2a
dx
ds ∴ y2 − 2ya
dx
ds + b2 = 0 (14)
A curva α pode ainda ser reparametrizada porα(x) = (x, y(x), 0). Deste modo, seu parâmetropelo comprimento de arco será dado pela expressãos =
||α(x)||dx =
1 + [y(x)]2dx. Logo
dx
ds =
1 1 + [y(x)]2
(15)
Substituindo (15) em (14) e notando ainda que se o
ângulo ∠F T K é suficientemente grande o sinal dedx/ds muda, temos que
y2 ± 2ay 1 + [y(x)]2
= −b2 (16)
Essa equação diferencial, pelo que foi visto no §3,nos garante que α gera uma superfície de revoluçãocom curvatura média constante. Essa curva, descritapelo foco de uma elipse, é denominada ondulária
cuja superfície de revolução é o ondulóide
No caso em que a = b a elipse degenera em umacircunferência e portanto a superfície de revolução
correspondente é um cilindro.
Na equação (16) ainda podemos considerar ocaso b = 0. Resolvendo esta equação diferencialobtemos a expressão (x + c)2 + y2 = 4a2 (c = cte.)que representa uma semi-circunferência com centrono eixo x. A superfície de revolução correspondenteé uma seqüência de esferas.

7/24/2019 delauynei superficies
http://slidepdf.com/reader/full/delauynei-superficies 4/5
4.2 Hipérbole
No caso da hipérbole, vamos considerar uma figuraanáloga ao caso da elipse. Aqui, F e F focos dahipérbole, K é o ponto de tangência e os pontos P e P são as projeções dos focos no eixo x e F T é atangente à curva descrita pelo foco F .
Usaremos as seguintes propriedades
(1) |F K − F K | = 2a (Definição de hipérbole)
(2) P F · P F = b2 (Equação pedal, válida tambémpara a hipérbole)
(3) F K ⊥F T (Propriedade fundamental deste tipode rolamento - análogo ao item (4) da elipse)
Seguindo os mesmos passos feitos para o caso daelipse, chegamos que
y2 ± 2ay 1 + y2(x)
= b2
Podemos concluir, novamente pelo §3, que a curvadescrita pelo foco de uma hipérbole que rola aolongo do eixo x gera uma superfície de revolução comcurvatura média constante. Essa curva é chamadanodária
e a superfície de revolução correspondente chama-senodóide .
4.3 Parábola
Vamos analisar o caso de uma parábola que rolasem escorregar ao longo do eixo x. Observe a figuraabaixo
F é o foco da parábola, P é a projeção do foco noeixo x, K é o ponto de contato entre a parábola eo eixo, F T é a reta tangente à curva descrita pelofoco, A é o vértice da parábola e F A é o seu eixo, e
B é a intersecção entre F A e o eixo x.Para o caso da parábola, temos também as seguintespropriedades:
(1) θ := ∠F BP = ∠F KP
(2) F A⊥AP
(3) F K ⊥F T (Propriedade fundamental desse tipode rolamento)
Sendo α a curva (parametrizada pelo comprimentode arco) descrita pelo foco da parábola, denoteα(s) = (x(s), y(s), 0) onde x(s) = OP e y (s) = F P .O vetor tangente unitário de α é dado por
t =
dx
ds, dy
ds, 0
Então, cos(∠F T P ) = dxds . Denotaremos a distância
F A entre o foco e o vértice da parábola por c. Pelo∆AF P , temos que cos(∠AF P ) = c/y.

7/24/2019 delauynei superficies
http://slidepdf.com/reader/full/delauynei-superficies 5/5
Note que pelas propriedades (1), (2) e (3) temos que∠AF P = ∠P F K = ∠F T P . Logo
dx
ds =
c
y (17)
Podemos reparametrizar a curva α da seguinteforma: α(x) = (x, y(x), 0). Como no caso da elipse,
temosdx
ds =
1 1 + [y(x)]2
Substituindo a equação acima em (17) chegamos auma equação diferencial
c
y =
1 1 + [y(x)]2
∴ y(x) =
y2 − c2
c2
cuja solução é
y = cex/c + e−x/c
2 = c cosh
x
c
Como já visto anteriormente, essa curva é a catenáriae a superfície de revolução correspondente é ocatenóide, cuja curvatura média é constante e iguala zero.
5. Considerações finais
Seja ϕ(u, v) = (g(u), h(u) cos(v), h(u) sin(v)) umasuperfície de revolução. A equação (5) nos mostraque a curvatura média da superfície ϕ só depende davariável u. Considere então uma função real H(u). É
possível determinar as curvas (parametrizadas pelocomprimento de arco) α(u) = (g(u), h(u), 0) que vãogerar superfícies de revolução com curvatura médiaem ϕ(u, v) dada por H(u). Para tanto, basta resolvero seguinte sistema de equações diferenciais
(g)2 + (h)2 = 1
2Hh − g − ghh + ghh = 0
cuja solução é dada por
g(u) =
u0
(G(t) + c2)F (t) − (F (t) − c1)G(t)
(F (t) − c1)2 + (G(t) + c2)2dt
h(u) =
(F (u) − c1)2 + (G(u) + c2)2
onde c1 e c2 são constantes reais e as funções F e Gdadas por
F (u) :=
u0
sin
2
w0
H(t)dt
dw
G(u) :=
u0
cos
2
w0
H(t)dt
dw
No caso particular em que a função H é constante,podemos determinar as parametrizações das curvasque geram superfícies de revolução com curvaturamédia constante H. Pode-se demonstrar que, nestecaso, as curvas são exatamente as que foram obtidasanteriormente: catenária, ondulária, nodária, semi-circunferências e a reta. Por exemplo, no caso em
que H é constante e não nula, podemos considerarc1 := 1/2H e c2 := b/2H (b = cte.) nas expressõesde g (u) e de h(u) dadas acima. Quando 0 < b < 1,obteremos uma parametrização da ondulária. Poroutro lado, se b > 1 teremos uma parametrização danodária. Essas idéias são apresentadas em [3].
Referências
[1] J. Eells, The surfaces of Delaunay , Math. Intelligencer,vol.9, Springer-Verlag, 1987.
[2] H. W. Guggenheimer, Differential Geometry , Dover, 1977.
[3] K. Kenmotsu, Surfaces with constant mean curvature ,
Translations of Mathematical Monographs, AMS, 2003.
[4] B. O’Neill, Elementary Differential Geometry , AcademicPress, 2006.
[5] J. Oprea, Differential Geometry and its applications,Prentice Hall, 1997.
[6] A Gallery of constant mean curvature surfaces - GANG<http://www.gang.umass.edu>.
[7] Encyclopédie des formes mathématiques remarquables<http://www.mathcurve.com >.
[8] The MacTutor History of Mathematics archive<http://www-history.mcs.st-and.ac.uk/ >.