3 trabalho de laborato rio - circuitos n o-lineares · sinusoidais e para limitar a amplitude de...
TRANSCRIPT

3o Trabalho de Laboratorio - Circuitos nao-lineares
Grupo 18, Turno 4afeiraAndre Patrıcio (67898)Bavieche Samgi (67901)Miguel Aleluia (67935)
MEFT, TCFE
16 de Marco de 2011
Resumo
Neste trabalho experimental, analisamos varios circuitos nao lineares, utilizando para tal tecnicas de analisepor trocos lineares e analise incremental.
Em particular, estuda-se o comportamento de um circuito rectificador de meia onda em polarizacao directa(forward bias ) e inversa( reverse bias ) e de um circuito limitador com dıodos, assumindo um modelo linear portrocos com tensao constante.
Analisamos, ainda, um circuito regulador de tensao com resistencia nao-linear construıdo com um transis-tor MOSFET VN2222L, apesar de tal circuito( porem, com menor eficiencia de regulacao ) poder tambem serconstruıdo com dıodos.
Todos os resultados experimentais obtidos foram os esperados.
1

1 Introducao e Teoria Relevante
I. a) - Circuito Rectificador de Meia Onda-Polarizacao Directa
Comecamos a analise teorica pelo estudo do seguinte circuito, denominado Circuito Rectificador de Meia Onda porrazoes que apareceram mais a frente:
Figura 1: Circuito rectificador de meia onda a analisar
Analisaremos o circuito pelo metodo dos estados assumidos, supondo que o dıodo pode ser representado peloseguinte modelo linear por trocos, com tensao constante vγ :
Figura 2: Modelo linear por trocos, com tensao constante vγ , do dıodo.
O comportamento deste modelo linearizado pode representar-se ainda em termos do modelo de dıodo ideal:
Assim, o comportamento do modelo linearizado com tensao constante par ao dıodo pode resumir-se como segue:
• Dıodo ON: vD = vγ para correntes iD positivas
• Dıodo OFF: iD = 0 para vD < vγ
Assim, o circuito a analisar e o seguinte:
Estudemos, agora, cada um dos segmentos lineares do comportamento do dıodo.2
Segmento linear de curto-circuito
O circuito que resulta neste segmento da descricao linear do dıodo e o seguinte:
E claro que este segmento se aplica quando iD ≥ 0, logo, v1 ≥ vγ . Calculos triviais mostram, entao, que
iD =(v1 − vγ)
R(1)
v0 = v1 − vγ (2)
Segmento de circuito aberto
O circuito que resulta neste segmento da caracterıstica do dıodo mostra-se na seguinte figura:
Claramente, este segmento aplica-se quando v1 < vγ . Nessa situacao, vemos de imediato que
iD = 0 (3)
v0 = 0 (4)
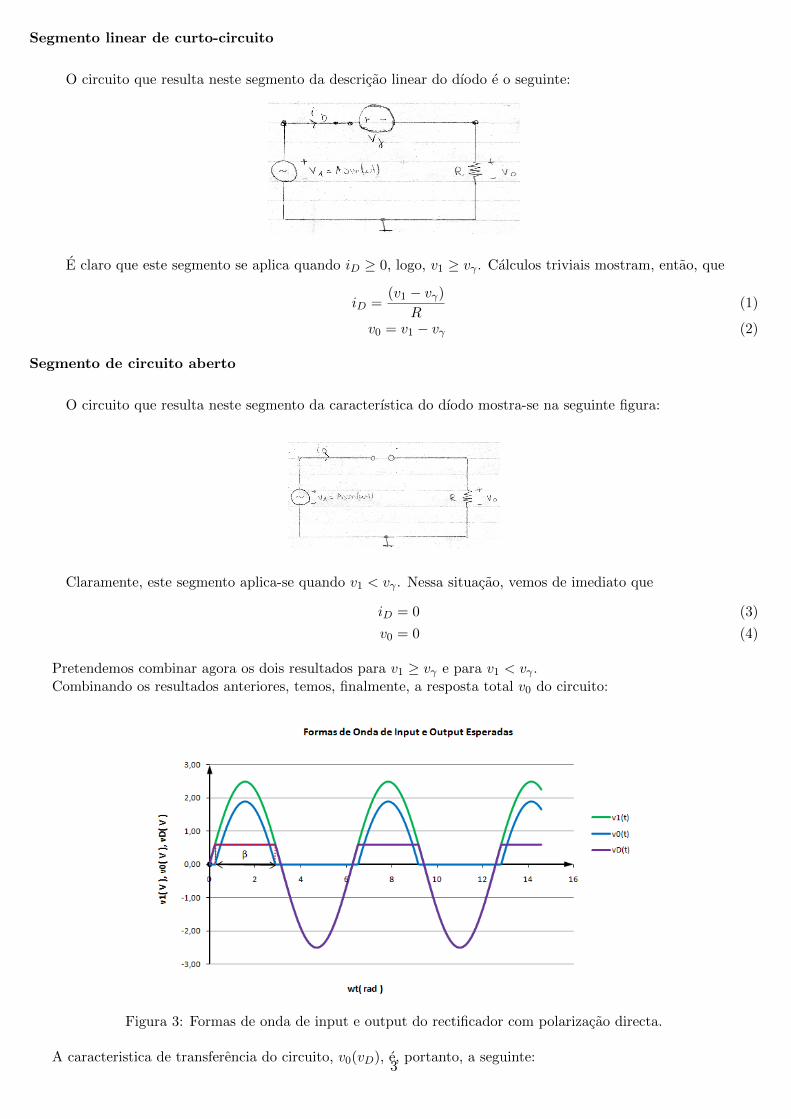
Pretendemos combinar agora os dois resultados para v1 ≥ vγ e para v1 < vγ .Combinando os resultados anteriores, temos, finalmente, a resposta total v0 do circuito:
Figura 3: Formas de onda de input e output do rectificador com polarizacao directa.
A caracteristica de transferencia do circuito, v0(vD), e, portanto, a seguinte:3

Figura 4: A caracterıstica de transferencia do circuito rectificador com polarizacao directa.
Concretizacao Numerica
O circuito a usar no laboratorio tera os seguinte valores para os parametros do circuito atras apresentado:
A = 2.5V (5)
f = 1KHz (6)
ω = 2πf (rad.s−1) (7)
vγ = 0.7V (8)
• A tensao maxima v1 ev1max = A = 2.5V (9)
e o valor da tensao maxima rectificada ev0max = A = 1.9V (10)
• A corrente no dıodo e
iD =
0 para v1 < vγv1−vγR para v1 ≥ vγ
(11)
e o seu valor maximo e
iDmax =v1max − vγ
R= 1.9mA (12)
• Ja a tensao no dıodo evD = v1 − v0 (13)
sendo a tensao maxima inversa, valor minimo de vD na situacao do dıodo estar inversamente polarizado,(vD < 0 ), igual a
vDmin = v1min − v0 = v1min = −2.5V (14)
pois na situacao de polarizacao inversa iD = 0A e vD = 0V .
• O angulo de conducao, intervalo angular em que o dıodo rectifica tensao, e( como se pode deduzir facilmenteda forma de onde de outut v0 )
β = π − 2α ≈ 2.66 rad = 152.2o (15)
, onde
α = arcsin(vγA
) ≈ 0.2424 rad (16)
4

• Note-se que o sinal de input nao possui valor medio, componente DC, enquanto que o sinal de output tem umvalor DC igual a
< v0 > =1
2π
∫ α+β
α[Asinφ− vγ ]dφ = (17)
=Acosα
π− vγ
2+vγα
π(18)
≈ 0.519V (19)
pois o circuito aproveita apenas os ciclos positivos do sinal de input.
I. b) - Circuito Rectificador de Meia Onda-Polarizacao Inversa
Suponhamos que trocamos agora os terminais do dıodo. O circuito a analisar e, agora, o seguinte:
Figura 5: Circuito rectificador de meia onda com polarizacao reversa.
Evidentemente, que se espera que v0(t) seja agora constituıdo pelas alternancias negativas de v1(t).Analisemos cada um dos segmentos do comportamento do dıodo ideal:
Segmento de curto circuito
O circuito que resulta neste segmento da caracterıstica do dıodo e o seguinte:
Este segmento e valido quando iD ≥ 0, logo, quando −v1 − vγ > 0⇔ v1 ≤ −vγ . Neste caso,
iD = −v1 + vγR
(20)
v0 = iD ·R = (v1 + vγ) (21)
Segmento de circuito aberto
O subcircuito que resulta neste segmento do comportamento do dıodo mostra-se na figura que se segue:
Nesta situacao, valida para v1 > −vγ , temos que
iD = 0 (22)
v0 = 0 (23)5
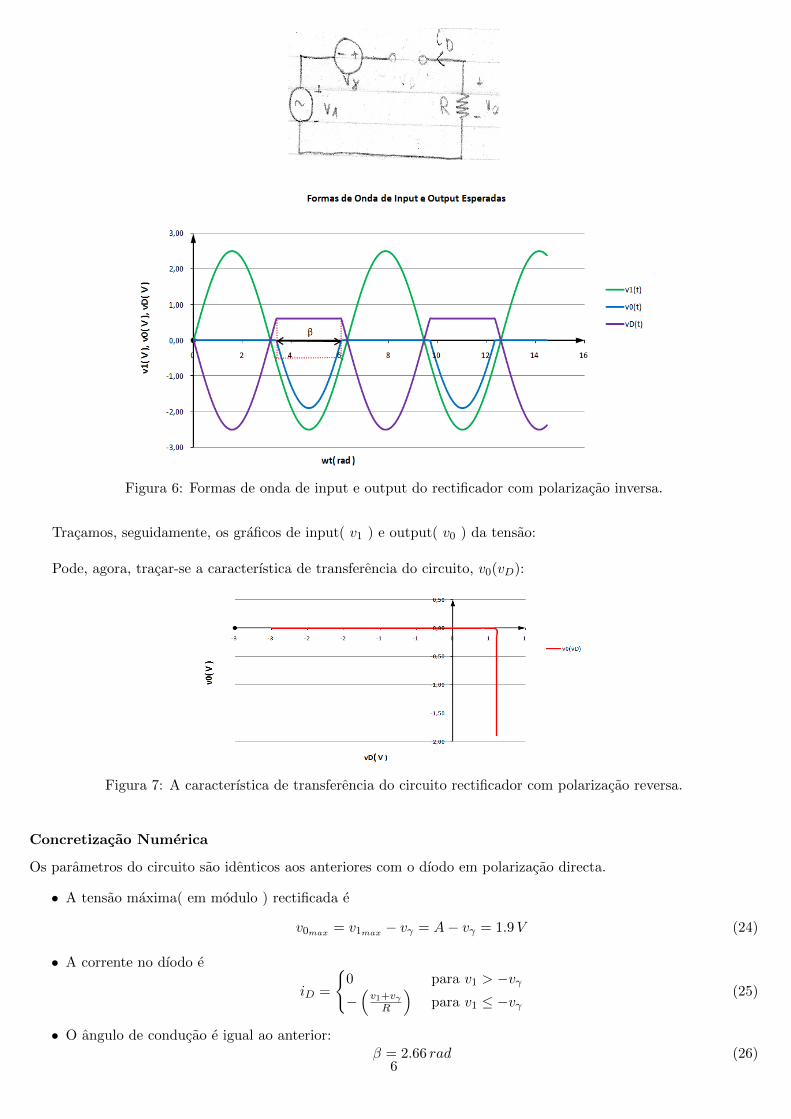
Figura 6: Formas de onda de input e output do rectificador com polarizacao inversa.
Tracamos, seguidamente, os graficos de input( v1 ) e output( v0 ) da tensao:
Pode, agora, tracar-se a caracterıstica de transferencia do circuito, v0(vD):
Figura 7: A caracterıstica de transferencia do circuito rectificador com polarizacao reversa.
Concretizacao Numerica
Os parametros do circuito sao identicos aos anteriores com o dıodo em polarizacao directa.
• A tensao maxima( em modulo ) rectificada e
v0max = v1max − vγ = A− vγ = 1.9V (24)
• A corrente no dıodo e
iD =
0 para v1 > −vγ−(v1+vγR
)para v1 ≤ −vγ
(25)
• O angulo de conducao e igual ao anterior:β = 2.66 rad (26)
6

• Ja o valor medio DC do sinal rectificado e:
< v0 > =1
2π
∫ 2π−α
π+α[Asinφ+ vγ ]dφ = (27)
= −Acosαπ
+vγ2− vγα
π(28)
≈ −0.519V (29)
,
igual ao da etapa anterior,mas com polaridade oposta.
II - Circuito Limitador
Figura 8: Circuito limitador a analisar.
Considere-se o circuito limitador anterior, util para obter ondas aproximadamente quadradas a partir de ondassinusoidais e para limitar a amplitude de uma onda de output quando a onde de input tem uma amplitude variavelnum largo intervalo.
Vamos analisar o circuito assumindo que os dıodos podem ser descritos por um modelo linear por trocos comosegue:
O comportamento do dıodo pode, assim, resumir-se como segue:
• Dıodo ON: vD = vγ para correntes iD positiva
• Dıodo OFF: iD = 0 para vD < vγ
Assim, a analise do circuito vai realizar-se pelo metodo dos estados assumidos para os dıodos. De notar que,com este modelo linearizado, o circuito a analisar e, de facto, o seguinte:
7

Estado D1 ON D2 ON (ON, ON)
Neste caso, o subcircuito a analisar e o seguinte:
Porem, vemos de imediato que este estado nao e possıvel
Estado D1 ON D2 ON (ON, OFF)
O subcircuito correspondente a este estado mostra-se na figura seguinte:
Este estado e valido quando v1 ≥ vγ1 e, segue que
iD1 =(v1 − vγ1)
R(30)
vR = v1 − vγ1 (31)
vD = vγ1 (32)
Estado OFF/ON
O subcircuito a que corresponde este estado e:
Este estado e valido para v1 ≤ −vγ2 e calculos triviais mostram que
iR =v1 + vγ2
R(33)
vR = v1 + vγ2 (34)
v0 = −vγ2 (35)
iD2 = −(v1 + vγ2R
(36)
8

Estado OFF/OFF
Pretende-se, agora, analisar o subcircuito seguinte:
Neste estado, valido apenas para −vγ2 ≤ v1 ≤ vγ1 , obtemos os valores
iR = iD1 = iD2 = 0 (37)
vR = 0 (38)
v0 = v1 (39)
Assim, o sinal de input v1(t) e a resposta total do sistema v0(t), sao representadaos nos graficos que se seguem:
Figura 9: Sinais de input e output para o circuito limitador.
9

Concretizacoes Numericas
Os parametros do circuito usado no laboratorio resumem-se de seguida:
A = 5V (40)
f = 1KHz (41)
w = 2πf (42)
vγ1 = 0.6V (43)
vγ2 = 1.8V (44)
• A tensao maxima e mınima de v0(t) sao
v0max = vγ1 = 0.6V (45)
v0min = −vγ2 = −1.8V (46)
(47)
• O intervalo angular onde v0 = vγ1 e B1 tal que
B1 = π − 2α1 = π − 2arcsin(vγ1A
)= 2.9 rad ≈ 166.2o (48)
• O intervalo angular onde v0 = −vγ2 e B2 tal que
B2 = π − 2α2 = π − 2arcsin(vγ2A
)= 2.4 rad ≈ 137.8o (49)
• Ja o valor medio do sinal de output v0 e
< v0 > =1
2π
[∫ α1
0Asinφdφ+
∫ α1+β1
α1
vγ1dφ+
∫ α1+β1+α1+α2
α1+β1
Asinφdφ+
∫ 2π−α2
2π−α2−β2−vγ2dφ
]=
1
2π[−Acosα1 + vγ1β1 − vγ2β2 +Acosα2 +Acosα1 + β1 −Acos2α1 + β1 + α2]
= −0.5072V
III. Regulador de tensao com carga nao-linear
Estudamos, agora, um circuito constituıdo por uma fonte de tensao vI , um “load resistor” R e um MOSFET decanal n em serie, que pode ser visto na Figura 10.
Figura 10: Regulador de tensao com resistencia nao-linear.
Sendo o MOSFET caracterizado pela relacao nao linear:
iDS =
0 se vGS < Vt
K[(VGS − Vt)vDS − v2
DS
2
]se vGS ≥ Vt e vDS < vGS − Vt
K2 (vGS − Vt)2 sevGS ≥ Vt e vDS ≥ vGS − Vt
(50)
e impondo VGS = VDS , evitamos a regiao de trıodo do MOSFET e podemos aplicar o modelo SCS( switchcurrent source ) do MOSFET:
Prosseguimos a analise pelo metodo de pequenos sinais:10

1 - Comecamos por encontrar o ponto de operacao DC do MOSFET, analisando para isso o circuito com as fontesde pequenos sinais a zero( vi = 0 ).
Pela analise basica do metodo dos nos, obtemos:II + IR = 0IR − IDS = 0
⇔II + VI−VDS
R = 0VI−VDS
R − IDS = 0(51)
Analisemos cada um dos dois estados possıveis do MOSFET:
• Circuito aberto:
Neste caso, o circuito a analisar e o seguinte:
e vemos de imediato que
IDS = 0 (52)
VDS = V0 = VI (53)
Este segmento do MOSFET e valido para VGS = VDS < Vt, logo para VI < Vt.
• Fonte de Corrente controlada por tensao( VCCS ):
Nesta situacao, o circuito a analisar e o que segue
e vemos que
VDS = VI −KR
2(VDS − Vt)2 ⇒
VDS = Vt − 1KR ±
√1R2+
2KR
(VI−Vt)K
IDS = K2 (VDS − Vt)2
(54)
Escolhemos apenas a solucao positiva da raiz porque este segmento do comportamento do MOSFET evalido para vDS ≥ Vt, logo VI ≥ Vt. 11

Figura 11: Variacao de vDS com vI .
Juntando os resultados para ambos os segmentos de operacao do MOSFET, tracamos a variacao de vDS comvI , variando este entre 0 e 10 V, e o grafico obtido encontra-se na Figura 11.
2 Assumimos agora a tensao VI tal que o MOSFET se encontra no segmento de fonte de corrente e substituımoso circuito de largos sinais pelo seu equivalente de pequenos sinais. Para isso, linearizamos o comportamentode cada elemento nao linear em resposta a pequenos sinais. Ora, por expansao em serie de Taylor, vamos deimediato que os modelos lineares sao os seguintes:
Figura 12: Modelos linearizados de pequenos sinais de cada elemento no circuito.
Assim, o modelo de pequenos sinais do circuito e o presente na figura 13. ou, tendo em conta que VGS = VDS
Figura 13: Modelo de pequenos sinais do circuito.
e o ponto de operacao DC do MOSFET, assumido constante, podemos reescrever o circuito de pequenos sinaiscomo
Figura 14: Modelo de pequenos sinais do circuito.
com
Rd =1
K(VDS − Vt)(55)
12

Logo, verificamos que, para VI ≥ Vt,
vds = vo = viRd
Rd +R=
viRK(VDS − Vt) + 1
(56)
ids =voRd
=vi
Rd +R(57)
Concretizacoes Numericas
Concretizamos, agora, os resultados anteriores numericamente. Os parametros caracterısticos do circuito a utilizarsao os seguintes:
R = 1 kΩ (58)
Vt = 1V (59)
K = 22mA.V −2 (60)
vI = VI + vi (V ) (61)
A = 200mV (62)
vi = Asin(ωt) (V ) (63)
ω = 2π × 103 rad.s−1 (64)
• A partir dos resultados anteriores e variando VI entre 6 e 10 V, com incrementos de 1V, calculamos os sucessivospontos de funcionamento em repouso do MOSFET, obtendo os valores de ID e VDS na tabela 1.
VI (V) VDS (V) IDS (mA)
6 1.63028 4.369727 1.69449 5.305518 1.75356 6.246449 1.80856 7.1914410 1.86022 8.13978
Tabela 1: Sucessivos pontos de funcionamento do circuito para varios valores de tensao VI .
• Sendo o circuito um regulador de tensao, o seu proposito sera diminuir a componente alterna da tensao aosterminais do transistor relativamente aquela aos terminais da fonte. Para verificar, vamos comparar o valorrelativo maximo da componente alterna na fonte max(vi)
VIe no transistor max(vds)
VDS, e por fim comparar as
componentes absolutas da corrente alterna a entrada e a saıda vdsvi
.
Para VI = 6 V, estes quocientes valem: max(vi)
Vi= 0.033
max(vds)VDS
= 0.00836vdsvi
= 0.0673
(65)
Para VI = 10 V, os valores obtidos sao: max(vi)
Vi= 0.02
max(vds)VDS
= 0.00540vdsvi
= 0.0502
(66)
Podemos entao verificar que a atenuacao da corrente alterna se verifica tanto em termos relativos como emtermos absolutos, e que esta foi ligeiramente maior para uma componente contınua relativamente maior doque a alterna. Podemos, entao, concluir que este circuito funciona como um regulador de tensao.
3) Procedimento e Resultados Experimentais
Ia). Circuito rectificador de meia onda-Polarizacao Directa
Montamos, numa breadboard, o circuito rectificador de meia onda atras descrito, visualizando o sinal vi no canal 1 doosciloscopio e o sinal vo no canal 2. Geramos o sinal vi num gerador de sinais com A = 2.5V e ω = 2π×103 rad.s−1.
13

Figura 15: Sinais vi e vo visualizados para o circuito rectificador com o dıodo polarizado directamente.
O registo visualizado no osciloscopio apresenta-se na figura 15.A partir deste resultado grafico e dos valores medidos no multımetro, obtivemos os resultados experimentais na
tabela 2.
Quantidade Valor Erro Desv. Precisao( % ) Desv. ao Esperado( % )R( Ω ) 994 5 0.5% 0.6%v1max( V ) 2.5 0.05 2.0% 0.0%v0max( V ) 1.9 0.05 2.6% 0.0%iDmax( A ) 1.9 0.01 0.5% 0.0%< v0 >DC( V ) 0.53 0.01 1.9% 2.2%ang. Cond. (rad ) 2.85 0.05 1.8% 7.3%
Tabela 2: Resultados experimentais para o rectificador de meia onda polarizado directamente.
Como se pode ver pela tabela 2 verificamos que a maioria dos valores experimentais sao coerentes com os valoresteoricos dentro do erro experimental, com excepcao do angulo de Cond. (PATRICIO EXPLICA).
Ib). Circuito rectificador de meia onda-Polarizacao Reversa
Trocamos, depois, as ligacoes aos terminais do dıodo como indicado na figura 5.Obtivemos os sinais visiveis no osciloscopio presentes na figura 16
Figura 16: Sinais vi e vo visualizados para o circuito rectificador com o dıodo em polarizacao reversa.
e, a partir deldes, os resultados experimentais na tabela 3.Comparando os valores da Tabela 3 verificamos tambem que a maioria dos valores experimentais sao coerentes
com os valores teoricos dentro do erro experimental. O unico parametro que nao se encontra coberto pelo erroe o valor de v0 maximo, cujo desvio minimo se podera dever a resistencias internas nos aparelhos que nao foramconsideradas no modelo teorico.
14

Quantidade Valor Erro Desv. Precisao( % ) Desv. ao Esperado( % )v1max( V ) 2.5 0.05 2.0% 0.0%v0max( V ) 1.8 0.05 2.8% 5.3%iDmax( A ) 0.003 0.0001 3.3% 3.2%< v0 >DC( V ) -0.51 0.01 2.0% 1.7%ang. Cond. (rad ) 2.66 0.05 1.9% 0.1%
Tabela 3: Resultados experimentais para o rectificador de meia onda polarizado inversamente.
II. Circuito limitador
Montamos, na breadboard, o circuito limitador atras descrito, visualizando o sinal vi = Asin(ωt) (V ) no canal 1 doosciloscopio e o sinal vo no canal 2. Geramos o sinal vi num gerador de sinais com A = 5V e ω = 2π × 103 rad.s−1.
O registo visualizado no osciloscopio apresenta-se na figura 17.
Figura 17: Sinais vi e vo visualizados para o circuito limitador.
A partir deste registo e dos valores medidos no multımetro, obtivemos os resultados experimentais na tabela 4.
Quantidade Valor Erro Desv. Precisao( % ) Desv. ao Esperado( % )v1max( V ) 5 0.05 1.0% 0.0%v0max( V ) 0.7 0.05 7.1% 16.7%v0min( V ) -1.8 0.05 2.8% 0.0%α1 (rad ) 0.11 0.01 11.3% 7.9%α2(rad ) 0.37 0.01 3.4% 0.7%β1 (rad ) 2.92 0.05 1.7% 0.7%β2(rad ) 2.4 0.05 2.1% 0.2%< v0 >DC( V ) -0.513 0.05 -9.7% 1.1%
Tabela 4: Resultados experimentais para o rectificador de meia onda polarizado directamente.
Comparando os valores da Tabela 4 verificamos tambem que a maioria dos valores experimentais sao aproxi-madamente coerentes com os valores teoricos dentro do erro experimental. Assim os desvios que existem podemser justificados pelo mesmo argumento utilizado anteriormente de que nao consideramos as resistencias internasdas fontes e dos aparelhos de medicao. Outra possibilidade para esta disparidade tambem podera ser o facto determos utilizado um modelo linear por trocos para o comportamento do diodo, o que tem sempre um erro associado.Quando se varia a frequencia de 1 Hz a 1 kHz a frequencia torna-se maior pelo que o declive aumenta e a ondatendera para uma onda quadrada.
III. Regulador de tensao com carga nao-linear
Montamos o circuito da figura 10 na breadboard, usando para isso o gerador de funcoes LFG-1310( para gerar vi) ea fonte de tensao GPC-2030( para gerar VI),com R = 1kΩ. Utliizamos o transistor MOSFET VN2222L com todosos restantes parametros caracterısticos do circuito como atras indicados e VI = 10V .
15

Comecamos por ligar apenas a fonte de tensao VI = 10V , registando os pontos de operacao DC, VDS , VI e VR,nos varios elementos do circuito com o multımetro. Ligamos o gerador de sinais com os parametros indicados emedimos as tensoes incrementais vds e vi por observacao no osciloscopio.
Os resultados anteriores resumem-se na tabela 5.
Quantidade Valor Erro Desv. Precisao( % ) Desv. ao Esperado( % )VDS( V ) 1.90 0.05 2.6% 2.1%VI( V ) 10.00 0.01 0.1% 0.0%VR( V ) 8.24 0.02 0.2% 1.2%vds( V ) 0.010 0.001 10.0% 0.4%vi( V ) 0.20 0.01 5.0% 0.0%
Tabela 5: Resultados experimentais para o regulador de tensao com MOSFET.
Nesta ultima fase, tambem obtivemos resultados experimentais coerentes com os resultados teoricos contudoverificamos que a medicao de VR apresenta um desvio a exactidao de 1.3% e um desvio a precisao de 0.2 % , estapequena descrepancia pode ser justificado por perdas nos fios de ligacao, problemas nos cabos BNC ou devido asresistencias internas dos dispositivos que forma considerados ideais nos calculos teoricos.
Quantidade Valor Erro Desv. Precisao( % ) Desv. ao Esperado( % )vds/vi 0.050 0.005 15% 0.4%vi/VI 0.020 0.001 5% 0.0%vds/VDS 0.005 0.001 13% 3%
Tabela 6: Resultados experimentais para os quocientes.
Como podemos verficar na tabela 6 os quocientes pedidos apresentam um desvio a precisao superior ao desvio aexactidao pelo que os erros de medicao cobrem os desvios em relacao ao valor teorico.
Sendo este circuito um regulador de tensao, o seu objectivo sera reduzir a componente alterna da tensao deentrada vI , pelo que como o esperado o quociente de ganho de tensao alterna a saida (vdsvi ) obtido foi bastantepequeno e inferior a unidade. Para alem da diminuicao em termos absolutos da componente alterna da saıda emrelacao a entrada tambem verificamos uma diminuicao relativa pois vds
VDS< vi
VI. Verificamos entao que o circuito
funciona efectivamente como um regulador de tensao.
16

4) Conclusao
Com esta experiencia pudemos verificar se os modelos teoricos do comportamento do diodo e do transistor MOSFETse adequavam ou nao aos resultados experimentais. Na analise de resultados verificamos que os valores experimentaisobtidos nas montagens que utilizavam diodos se encontravam por vezes desviadas do valor teorico. Este desvio podeser entao explicado ou por uma subestimativa do erro devido a maus contactos entre os fios ou a componentes comdeficiencias ( como por exemplo o cabo BNC). Este erro podera tambem advir do facto de os aparelhos possuiremresistencias internas nao consideradas, quer nas fontes de tensao, aparelhos de medicao, ou mesmo no proprio diodo(cujo modelo poderia ter contabilizado um diodo em serie com a sua resistencia interna). Por fim a aproximacaodo diodo por um modelo linear por trocos tambem nao e a mais exacta, pois na realidade a caracteristica do diodosegue uma exponencial variavel com a temperatura.
Na ultima parte da experiencia, respeitante ao regulador de tensao, verificamos que practicamente todos osvalores se encontravam coerentes com os valores teoricos esperados dentro dos erros experimentais. Os desviospoderao ser explicados, como referido acima, ou pelas resistencias internas dos aparelhos ou por imprecisoes nomodelo, sendo que as resistencias nao contabilizadas serao mais provaveis.
Referencias
[1] Anant Agarwal and Jeffrey H. Lang., Foundations of Analog and Digital Electronic Circuits( Elsevier, July2005 ).
[2] Manuel Medeiros da Silva, Introducao aos Circuitos Electricos e Electronicos 2a ed.( Fundacao Calouste Gul-benkian, 2001 ).
17