3 metodo proposto´ · onde n´e um vetor guassiano de m´edia zero e matriz de covariˆancia q....
TRANSCRIPT

3Metodo proposto
3.1Introduc ao
Como visto no capıtulo anterior, existem varios metodos para a
solucao de sistemas hiperbolicos de localizacao. Alem disso, todos atuam
sobre a distancia em que a estacao movel encontra-se das estacoes radio-
base contidas no cenario da localizacao. O metodo exposto neste capıtulo
prove uma nova analise para a solucao. Atraves do fato de que um conjunto
pequeno de estacoes radio-base, distribuıdas arbitrariamente numa rede
movel celular, sejam capazes de prover condicoes para a obtencao de pelo
menos 3 medidas de TDoA, o metodo exposto, a seguir, atua sobre tais
medidas, a fim de otimiza-las para que seja possıvel estimar a localizacao
de uma da estacao movel.
E de relevancia ressaltar que todos os metodos apresentados levam
em consideracao a possibilidade da existencia de linha de visada direta
entre as estacoes radio-base envolvidas na localizacao e uma dada estacao
movel. Desta forma, esta observacao foi tambem assumida no formalismo
matematico do metodo aqui apresentado.
3.2Formalismo matem atico do m etodo
Considere uma rede movel celular com estacoes radio-base distribuıdas
arbitrariamente como o ambiente do sistema. Para que se tenha pelo menos 3
medidas de TDoA, e necessario que a estacao movel a ser localizada, tenha
capacidade de enviar informacoes para 4 estacoes radio-base. Assumindo
como estacao radio-base de referencia a estacao radio base 1 e que esta
encontra-se na origem do sistema de localizacao, e bem possıvel o surgimento

Sistemas Hiperbolicos de Localizacao Movel Celular 62
de um cenario onde as posicoes das estacoes radio-base encontram-se
localizadas nos vertices de um polıgono dado por
– estacao radio-base 1 localizado no ponto O = (0 + i0);
– estacao radio-base 2 localizado no ponto P = (a+ i0);
– estacao radio-base 3 localizado no ponto W = (Wr + iWi);
– estacao radio-base 4 localizado no ponto V = (Vr + iVi);
– estacao movel localizado no ponto Z = (x+ iy).
BSs
MS
x
y
R1
R2
R3
R4
Z
O
P
W
V
Figura 3.1: Formacao do cenario de localizacao para uma estacao movel (MS) numa redemovel celular, com estacoes radio-base (BS) distribuıdas arbitrariamente
A distancia entre a estacao radio-base de referencia e a estacao movel
e dada por
R1 = OZ = |Z| = |ρ| =√
(x− 0)2 + (y − 0)2 =√x2 + y2. (3-1)
Para um sistema de localizacao hiperbolico, pode-se afirmar que o
ponto Z pertence a uma hiperbole com focos nos pontos O e P , sendo a

Sistemas Hiperbolicos de Localizacao Movel Celular 63
O P
|Z| |Z−a|
Z
a
Figura 3.2: Exemplo de uma geometria hiperbolica
diferenca da distancia do ponto Z aos pontos O e P igual a distancia entre
os vertices da mesma hiperbole (figura 3.2). Ou seja,
|Z| − |Z − P | = α. (3-2)
Para similar raciocınio envolvendo os pontos O e W , e ainda os pontos,
O e V , tem-se,
|Z| − |Z −W | = β, (3-3)
|Z| − |Z − V | = γ. (3-4)
Percebe-se que as equacoes (3-2), (3-3) e (3-4) sao equivalentes a
equacao (2-10) para i = 2, 3, 4 respectivamente. Ou seja, estas equacoes
equivalem as medidas estimadas de TDoA pelo sistema relacionadas pela
equacao (2-10). Porem, e importante notar, que α, β e γ estao vulneraveis
a serem grandezas tanto positivas quanto negativas dependendo da sua

Sistemas Hiperbolicos de Localizacao Movel Celular 64
orientacao quanto ao referencial.
Assim, e possıvel afirmar que para um modelo classico de ruıdo aditivo
nas medidas de TDoA, ou seja, a observacao dos respectivos Ri,1 para
i = 2, 3, 4 e da forma,
z =
α
β
γ
=
α0
β0
γ0
+
nα
nβ
nγ
= Z0 + n, (3-5)
onde n e um vetor Guassiano de media zero e matriz de covariancia Q.
Porem, considerando-se agora apenas as duas primeiras medidas de
TDoA estimadas pelo sistema (ou seja, apenas as variaveis α e β) e possıvel
reduzir o cenario aos pontos O, P eW e assim denominar que os 3 segmentos
de reta (OP , OW e PW ), entre as estacoes radio-base, caracterizadas
respectivamente por, a, b e c, correspondem as seguintes distancias,
OP = |P | = |a| =√
(a− 0)2 + (0− 0)2 =√a2 = a, (3-6)
OW = |W | = |b| =√
(Wr − 0)2 + (Wi − 0)2 =√W 2
r +W 2i , (3-7)
PW = |c| =√
(Wr − a)2 + (Wi − 0)2 =√
(Wr − a)2 +W 2i . (3-8)
De mesma forma, pode-se reescrever as equacoes (3-2) e (3-3) como,
|Z| − |Z − a| = α =⇒ |Z − a| = |Z| − α, (3-9)
|Z| − |Z −W | = β =⇒ |Z −W | = |Z| − β, (3-10)
Com isto, a partir das equacoes (3-9) e (3-10) e possıvel encontrar as
suas correspondentes expressoes em funcao de x e y, ou seja,

Sistemas Hiperbolicos de Localizacao Movel Celular 65
|Z − a| = ρ− α =⇒ (x− a)2 + y2 = (ρ− α)2, (3-11)
|Z −W | = ρ− β =⇒ (x−Wr)2 + (y −Wi)
2 = (ρ− β)2. (3-12)
Aplicando a equacao (3-1) na equacao (3-11), e possıvel encontrar uma
solucao para x, tal que,
x2 − 2ax+ a2 + ρ2 − x2 = ρ2 − 2αρ+ α2
−2ax+ a2 = −2αρ+ α2
x = (α2 − 2αρ− a2)
(−1
2a
)
x =
(−α
2
2a+αρ
a+a
2
)
x =(αa
)ρ+
(a2 − α2
2a
)
ou ainda,
A =(αa
)B =
(a2 − α2
2a
)∴
x = Aρ+B. (3-13)
Fazendo a subtracao da equacao (3-12) na equacao (3-1) e possıvel
obter a solucao para y, tal que,

Sistemas Hiperbolicos de Localizacao Movel Celular 66
x2 − (x−Wr)2 + y2 − (y −Wi)
2 = ρ2 − (ρ− β)2
2xWr −W 2r + 2yWi−Wi2 = 2ρβ − β2,
ou seja,
2yWi = −2xWr +W 2r +W 2
i + 2ρβ − β2
2yWi = −2xWr + b2 + 2ρβ − β2
2yWi = −2Wr(Aρ+B) + b2 + +2ρβ − β2
2yWi = −2WrAρ−−2WrB + b2 + +2ρβ − β2
2yWi = 2ρ(β −WrA) + b2 − 2WrB − β2
y =2ρ(β −WrA)
2Wi
+b2 − 2WrB − β2
2Wi
.
Assim,
y =
(β −WrA
Wi
)ρ+
(b2 − 2WrB − β2
2Wi
), (3-14)
ou ainda,
C =
(β −WrA
Wi
)D =
(b2 − 2WrB − β2
2Wi
)∴
y = Cρ+D. (3-15)

Sistemas Hiperbolicos de Localizacao Movel Celular 67
Percebe-se que com isto a posicao estimada de localizacao do movel
(x, y) e determinada em funcao das duas medidas de TDoA ou suas
equivalentes diferencas de distancia Ri,1 e de ρ, que por sua vez e funcao do
proprio par (x, y) onde a estacao movel se encontra localizado (veja equacao
(3-1)). Logo, tem-se um problema de duas equacoes e duas incognitas, pois
conhece-se A, B, C e D, e deseja-se descobrir ρ. Porem, duas equacoes
hiperbolicas nao sao suficientes para fornecer uma solucao unica, pois,
dependendo da posicao em que se encontra a estacao movel, as hiperboles
podem se interceptar em mais de um ponto. Mesmo assim, como forma de
restricao, pode ser determinada a regiao num plano αβ em que os pontos
contidos no interior da mesma fornecam solucoes nao ambıguas para a
localizacao de um determinado movel no plano xy. Para tal, ao se fazer,
x2 = (Aρ+B)2 = A2ρ2 +B2 + 2ABρ
y2 = (Cρ+D)2 = C2ρ2 +D2 + 2CDρ,
e aplicando na equacao (3-1), tem-se que,
[A2 + C2 − 1]ρ2 + 2[AB + CD]ρ+ [B2 +D2] = 0 (3-16)
cujas as raızes sao
ρ =−(AB + CD)±
√(AB + CD)2 − (A2 + C2 − 1)(B2 +D2)
(A2 + C2 − 1). (3-17)
Porem, se A2 + C2 = 1 e AB + CD 6= 0, entao pela equacao (3-16)
ρ = − (B2 +D2)
2(AB + CD), (3-18)
ou ainda, definindo

Sistemas Hiperbolicos de Localizacao Movel Celular 68
∆ = (AB + CD)2 − (A2 + C2 − 1)(B2 +D2), (3-19)
q = (AB + CD), (3-20)
r = (A2 + C2 − 1), (3-21)
tem-se
ρ = −q ±√
∆
rpara A2 + C2 6= 1 (3-22)
ρ = −B2 +D2
2qpara A2 + C2 = 1 AB + CD 6= 0(3-23)
Analisando tais equacoes, e possıvel fazer as seguintes observacoes:
– Para que se obtenha uma solucao com raızes reais, se faz necessario a
obtencao de ∆ ≥ 0;
– Porem se r < 0 entao ∆ > 0, tendo ρ valores com sinais opostos o que
implica na existencia de um unico valor viavel;
– Se r = 0 e q < 0, ρ e unico e viavel, porem se r = 0 e q > 0 ρ e unico
e nao viavel (raız negativa);
– Se r > 0 as raızes terao sinais identicos e contrarios a q. Se q > 0
regiao nao viavel (raızes negativas). Se q < 0 regiao ambıgua (raızes
positivas).
Sendo assim, os seguintes conjuntos podem ser definidos:
– Regiao Viavel nao Ambıgua =⇒ Ω1 = (∆ > 0, r ≤ 0);
– Regiao Viavel Ambıgua =⇒ Ω2 = (∆ > 0, r > 0, q < 0);
– Regiao nao Viavel =⇒ Ω3 = (∆ < 0 ou ∆ ≥ 0, r > 0, q > 0).
A regiao inicial de interesse e limitada por
α ∈ [−a, a] =⇒ A ∈ [−1, 1] e β ∈ [−b, b]

Sistemas Hiperbolicos de Localizacao Movel Celular 69
ERB 2
ERB 1
ERB 3
β
−b
b
α
−a
ac−a
a−c
Figura 3.3: Regiao de solucoes viaveis
Porem, analisando o discriminante ∆, e este sendo convenientemente
fatorado, e possıvel afirmar que ∆ > 0 se somente se c > |β − aA|, ou seja,
aA− c < β < aA+ c, o que resulta na regiao de solucoes viaveis observada
pela figura (3.3).
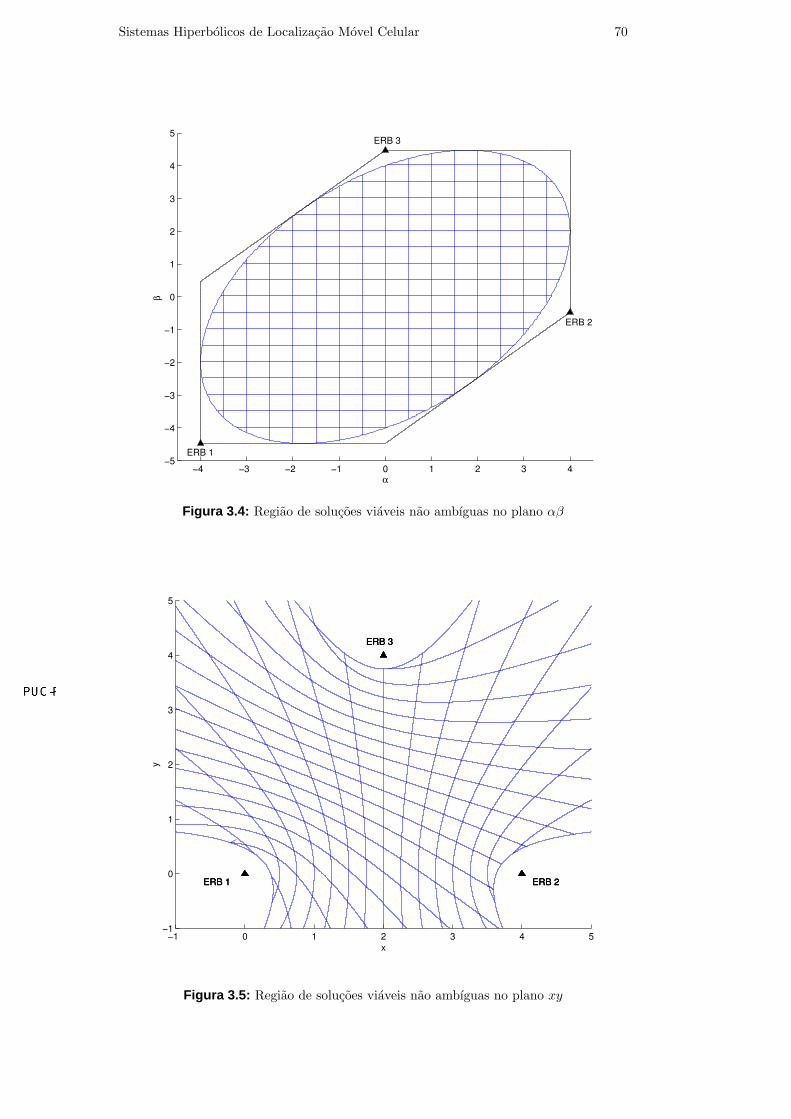
Assim, como a regiao de solucoes viaveis nao ambıguas, ou seja, a
regiao Ω1 e limitada para valores de r ≤ 0, entao, na realidade, r = 0 define
uma elipse tangente a fronteira da regiao de solucoes viaveis como descrita
na figura (3.4).
Na figura (3.4) e possıvel verificar a existencia de uma grade no
plano αβ, onde a mesma representa as incertezas nos valores de α e β.
O mapeamento da regiao de solucoes nao ambıguas, bem como da grade, no
plano xy, e mostrado pela figura (3.5). E possıvel perceber que, dependendo
da localizacao do movel na regiao de solucoes nao ambıguas, valores de
incerteza de mesma variancia no plano αβ podem causar dispersao das
estimativas de localizacao no plano xy. Isto pode ser observado atraves
do aumento nas fatias associadas aos quadrados no interior da elipse da
figura (3.4). Perceba que este aumento se intensifica nas extremidades,
acarretando num aumento da area de incerteza. Alem disso, tal fato pode
ainda demonstrar a dependencia do sistema quanto a sua geometria, o que
afeta diretamente o seu desempenho.
Sistemas Hiperbolicos de Localizacao Movel Celular 70
−4 −3 −2 −1 0 1 2 3 4−5
−4
−3
−2
−1
0
1
2
3
4
5
α
β
ERB 2
ERB 1
ERB 3
Figura 3.4: Regiao de solucoes viaveis nao ambıguas no plano αβ
−1 0 1 2 3 4 5−1
0
1
2
3
4
5
ERB 1 ERB 2
ERB 3
ERB 1 ERB 2
ERB 3
ERB 1 ERB 2
ERB 3
x
y
Figura 3.5: Regiao de solucoes viaveis nao ambıguas no plano xy

Sistemas Hiperbolicos de Localizacao Movel Celular 71
Em resumo, se apenas 3 estacoes radio-base estao envolvidas, e possıvel
afirmar que existe uma regiao de solucao unica nao ambıgua, e que a area
de incerteza da solucao cresce a medida que se afasta do centro desta regiao
no plano xy. Com isto, um sistema de equacoes hiperbolicas formado pelas
equacoes (3-13) e (3-15) oferecem uma solucao nao ambıgua, desde que o
movel esteja contido na regiao Ω1.
Partindo-se deste pre-suposto e voltando-se ao caso da possibilidade
de se obter medidas de TDoA oriundas de um sistema com 4 estacoes radio-
base, torna-se possıvel expressar a diferenca de distancia entre o movel e as
respectivas estacoes radio-base 1 (referencia) e 4, ou seja γ (R4,1) em funcao
de α e β oriundos da solucao acima citada pois,
|Z − V | = ρ− γ. (3-24)
Assim, e possıvel reescrever a expressao (3-5), como
z =
α
β
γ
=
α
β
f(α, β)
+
nα
nβ
nγ
= Z0 + n. (3-25)
Note que se α e β sao os valores exatos dos parametros, entao sao
tambem conhecidos a posicao do movel (x, y) assim como sua distancia
a origem. Por consequencia o valor de γ fica determinado por (3-4) aqui
notado por (3-24).
Desta forma a funcao densidade de probabilidade conjunta de z pode
ser expressa por
pz(Z) = Kexp
−1
2(Z − Z0)
TQ−1(Z − Z0)
, (3-26)
onde,
Q = σ2n[I + 1 1T ], (3-27)

Sistemas Hiperbolicos de Localizacao Movel Celular 72
sendo, I a matriz identidade de ordem M − 1 e 1 = [1, ..., 1]T .
A solucao para a localizacao de uma dada estacao movel no ponto
(x, y) pode ser estimada atraves de um estimador de maxima verossimi-
lhanca, que por iteracoes em Z0, tenta maximizar a funcao de maxima
verossimilhanca dada por
ZMV0 = arg min
Z0
(Z − Z0)TQ−1(Z − Z0). (3-28)
Perceba que o problema em questao apresenta uma restricao dada por
f(α, β). Alem disso, possui uma baixa dimensionalidade e que seu resultado
se generaliza para qualquer numero de estacoes radio-base envolvidas, sem
afetar a dimensao do problema.
Para a situacao de maior dimensionalidade o vetor Z0 se escreve como:
Z0 =
α
β
f1(α, β)
f2(α, β)...
fN(α, β)
, (3-29)
o que nao muda a essencia da funcao objetivo descrita em (3-28), a menos
do fato de que o numero de restricoes seja aumentado.
3.3Resumo do capıtulo
Este capıtulo teve o intuito de prover a apresentacao de um novo
metodo para a solucao de sistemas hiperbolicos de localizacao. De uma
forma diferente dos metodos presentes na literatura, o metodo aqui exposto
otimiza as proprias medidas de diferencas de tempos de chegada, no intuito
de nao sofrer a degradacao da conversao das medidas de tempos em medidas
de distancia. Porem, cabe observar que o metodo torna-se um problema de
otimizacao, o que afetara no esforco computacional do metodo.