uma plataforma didÁtica para simulaÇÃo e … · abordados. a malha de controle é validada...
TRANSCRIPT
UMA PLATAFORMA DIDÁTICA PARA SIMULAÇÃO E CONTROLE EMBARCADODE VEÍCULOS QUADRIRROTORES
Raphael Ballet
⇤, Vanderlei Cunha Parro
⇤, Rodrigo Alvite Romano
⇤
⇤Instituto Mauá de TecnologiaPraça Mauá nº1 CEP:09580-900São Caetano do Sul, SP, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract— This paper presents a platform aimed at the development and study of controllers realized byembedded devices. To this end, a hybrid topology is used, so that an electronic control module is interconnectedto a simulator which reproduces the dynamics of a quadrotor in real-time. Issues concerning the implementationof the control laws in the embedded devices, as well as, its interface with the simulator are addressed. The controlloop is validated by means of experiments in the regulatory and setpoint tracking modes. The authors belivethat this platform allows that topics of great practical importance (e.g., simulation techniques, implementationof control laws in microprocessors and hardware design for control systems) are exploited in an insightful andmotivating way.
Keywords— Control education, Hardware in the loop, Embedded systems.
Resumo— Este trabalho apresenta uma plataforma voltada ao desenvolvimento e ao estudo de controladoresimplementados em dispositivos embarcados. Para tanto, uma topologia híbrida é empregada, na qual um módulode controle eletrônico é interconectado a um simulador que reproduz em tempo real a dinâmica de um quadrir-rotor. Aspectos da implementação de leis de controle e da interface entre o simulador e o módulo embarcado sãoabordados. A malha de controle é validada através de ensaios nos modos regulatório e seguidor de referência.A plataforma permite que temas de grande importância prática (como por exemplo: técnicas de simulação,implementação de leis de controle em microprocessadores e projeto de hardware de sistemas de controle) sejamexplorados de forma lógica e motivadora.
Palavras-chave— Educação em controle, Hardware in the loop, Sistemas embarcados.
1 Introdução
Os processos de miniaturização dos dispositivoseletrônicos aliados ao aumento da capacidade dememória, processamento e autonomia, possibili-tam a utilização destes em diversas soluções deengenharia. A área de controle se beneficia com apossibilidade de utilizar estes recursos e resolverproblemas críticos. Inspirado nesta realidade es-colhemos como tema deste trabalho a discussão doprojeto de uma plataforma para desenvolvimentoe validação de controladores embarcados para veí-culos quadrirrotores.
O objetivo central é descrever um problemaque nos auxilia a preparar o aluno a mergulharnesta realidade e balancear elementos de projeto,como por exemplo: simulação, modelagem, pro-jeto de controlares, escolha da arquitetura do sis-tema de controle e, principalmente, como condu-zir o projeto visando atingir as especificações dedesempenho estabelecidas.
Os quadrirrotores tornaram-se crescente-mente populares entre pesquisadores, acadêmicose praticantes de aeromodelismo. Estas aeronavesse enquadram na categoria de veículos aéreos nãotripulados (VANT’s ou UAV, do Inglês, Unman-ned Aerial Vehicle). Por um lado, a menor com-plexidade mecânica destas aeronaves em relação aoutros modelos resulta em facilidades de constru-ção e manutenção. Por outro, o acoplamento dinâ-mico e o comportamento altamente não-linear im-
põem um caráter desafiador no controle dos qua-drirrotores. Na verdade, tal característica podeser usada como um ingrediente motivacional e,consequentemente, atrair a atenção dos estudan-tes para o ensino de engenharia de controle.
Apesar disso, com exceção de iniciativas isola-das (Bayrakceken and Arisoy, 2013; Mehranpouret al., 2013), a literatura relacionada à modela-gem, simulação e controle de veículos quadrir-rotores é essencialmente voltada à pesquisadoresgraduados. Em outras palavras, na opinião dosautores há poucas referências que tratam explici-tamente quadrirrotores como uma ferramenta deensino.
A simulação é algo intrínseco das discipli-nas de controle e reconhecida como ferramenta deprojeto e ensino. No entanto, a implementaçãode controladores em sistemas físicos críticos, ci-tando os instáveis, sofre com dificuldades impostaspela identificação de parâmetros de modelagem outeste de soluções da arquitetura do sistema de con-trole. Uma técnica usual, porém ainda não muitoexplorada como ferramenta de ensino é o trata-mento em tempo real de subsistemas como HIL(do Inglês, Hardware In the Loop).
Neste trabalho o sistema de controle é vali-dado ao controlar a dinâmica de uma quadrirro-tor reproduzida em tempo real por um conjunto deequações não-lineares, como elemento de uma ma-lha HIL. Vale ressaltar o caráter didático da apre-sentação do modelo matemático do quadrirrotor
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1426

(Seção 2), de modo que a plataforma de simula-ção descrita na Seção 3 seja acessível a estudantessem conhecimentos profundos de mecânica tridi-mensional. Na visão dos autores, a plataformapossibilita que temas pouco explorados no ensinode controle seja abordados de forma lógica e moti-vadora: técnicas de simulação, implementação deleis de controle em microprocessadores, projeto dehardware de sistemas de controle. Resultados deexperimentos são expostos na Seção 4. Por fim, asconclusões e sugestões de continuidade são apon-tadas na Seção 5.
2 Modelo matemático de um veículoquadrirrotor
O veículo quadrirrotor possui uma natureza com-plexa e não-linear, o que dificulta grande parte daanálise do seu comportamento dinâmico. Por essarazão, admite-se algumas hipóteses simplificado-ras, porém sem descaracterizar significativamenteo comportamento do sistema real. São elas: (i)a estrutura do quadrirrotor é considerada rígida,(ii) todos os motores apresentam dinâmicas idên-ticas, (iii) o veículo possui simetria em relaçãoaos eixos e (iv) as forças externas como arrastoe rajadas de vento são consideradas perturbaçõesexternas não-modeladas. Além disso, admite-seque a origem do sistema de coordenadas fixo nocorpo coincide com o centro de massa.
A dinâmica do veículo é representado atravésde dois sistemas de coordenadas (Figura 1). Oprimeiro (denotado por B) é definido como o sis-tema fixo no corpo e representado pelos vetoresortonormais {X
B
, Y
B
, Z
B
} e o segundo é definidocomo sistema referencial inercial terrestre (E ) por{X,Y, Z}.
O vetor ⇠ = [x, y, z]
> representa a posição docentro de massa do veículo em relação ao sistemareferencial inercial terrestre e sua derivada é de-notada por ˙
⇠. O vetor ⌘ = [�, ✓, ]
> representa odeslocamento angular, ou atitude, do veículo em
Figura 1: Ilustração dos sistemas de coordenadase forças que atuam no quadrirrotor.
relação ao sistema de coordenadas E , através dosângulos de Euler: rolagem (�), arfagem (✓) e gui-nada ( ). Analogamente, a velocidade angularé indicada por ⌘. As velocidades lineares e an-gulares da aeronave em relação à B são repre-sentadas através dos vetores v
b
= [v
x
, v
y
, v
z
]
> e!
b
= [p, q, r]
>, respectivamente.A atitude do veículo em relação à E é obtida
através de uma matriz de rotação R, que nessecaso é calculada a partir da sequência 3-2-1, ouseja, a sequência de rotações é feita na ordem !✓ ! � (Goldstein, 2001). Assim, a matriz R édada por
R =
2
4c
c
✓
c
s
✓
s
�
� s
c
�
c
s
✓
c
�
+ s
s
�
s
c
✓
s
s
✓
s
�
+ c
c
�
s
s
✓
c
�
� c
s
�
�s
✓
c
✓
s
�
c
✓
c
�
3
5,
(1)sendo: s
x
= sin(x) e c
x
= cos(x).De modo a expressar a velocidade angular ⌘
em relação ao sistema B, utiliza-se a matriz detransformação W
n
. Nota-se que para a sequência3-2-1, ˙
� está no corpo da aeronave, ˙
✓ requer umarotação em � e ˙
deve ser rotacionado em ✓ e, emseguida, em � para ser expresso em relação à B,ou seja
!
b
=
2
4˙
�
0
0
3
5+R
�
2
40
˙
✓
0
3
5+R
�
R
✓
2
40
0
˙
3
5, (2)
em que R
�
e R
✓
as matrizes de rotação em � e ✓,respectivamente. Assim, de (2), tem-se
!
b
= W
n
⌘, (3)
com
W
n
=
2
41 0 �s
✓
0 c
�
s
�
c
✓
0 �s
�
c
�
c
✓
3
5.
Portanto, isolando-se ⌘ obtém-se2
4˙
�
˙
✓
˙
3
5=
2
41 s
�
t
✓
c
�
t
✓
0 c
�
�s
�
0 s
�
/c
✓
c
�
/c
✓
3
5
2
4p
q
r
3
5, (4)
em que t
x
denota tan(x).Note que tal representação apresenta singu-
laridades quando o ângulo de arfagem é múltiplode ⇡
2 . Embora outras representações (como a porquaternions) possam ser empregadas de modo aevitar tal limitação, por simplicidade a represen-tação por ângulos de Euler é mantida. Além disso,em simulações de manobras usuais dificilmente aatitude se aproximaria do ponto de singularidade.
Como ilustrado na Figura 1, a propulsão érealizada por 4 motores. Assim, o empuxo geradopelo i-ésimo motor pode ser modelado através dasua velocidade de rotação !
i
, conforme (Bresciani,2008)
F
i
= k · !2i
, (5)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1427

para cada i 2 {1, 2, 3, 4}. Cada motor gera aindaum torque giroscópico ⌧
gi
= c · Fi
no sentido con-trário ao de rotação do motor. As constantes deproporcionalidade k e c, dependem da geometriadas hélices acopladas aos motores. Por simpli-cidade, também não considerou-se efeitos aerodi-nâmicos que influenciam no empuxo das hélices,como a modificação do ângulo de ataque das pásda hélice por deslocamentos da ponta da pá dahélice (flapping) e turbulência do ar. A dinâ-mica de uma aeronave com estes efeitos pode serencontrada em (Hoffmann et al., 2007; Bramwellet al., 2001).
A força total de empuxo é dada por
u =
4X
i=1
F
i
. (6)
Como os eixos XB
e Y
B
estão a 45
� dos braços daaeronave, o torque generalizado ⌧ =
⇥⌧
�
, ⌧
✓
, ⌧
⇤>
em relação a cada eixo de rotação é calculado atra-vés de
⌧ =
2
64
p22 l �
p22 l �
p22 l
p22 l
�p22 l �
p22 l
p22 l
p22 l
c �c c �c
3
75
2
664
F1
F2
F3
F4
3
775 , (7)
sendo l a distância entre o centro do conjuntomotor-hélice e o centro de massa (CM) do veículo.
Baseado nas equações de Newton-Euler, a di-nâmica de atitude da aeronave é representada por(Taylor, 2005)
I!
b
+ !
b
⇥ I!
b
= ⌧, (8)
em que o símbolo “⇥” representa a operação deproduto vetorial e I = diag{I
xx
, I
yy
, I
zz
} denotaa matriz de inércia. Devido à simetria da aeronaveem relação à Y
B
resulta que I
xx
⇡ I
yy
.Substituindo-se (3) em (8) obtém-se
I
˙
W
n
⌘ + IW
n
⌘ = �W
n
⌘ ⇥ IW
n
⌘ + ⌧. (9)
Seja S
⌘
a matriz anti-simétrica criada a partir dovetor ⌘. Aplicando-se a propriedade ˙
W
n
= S
⌘
W
n
(Kreyszig et al., 2010) em (9), tem-se
⌘ = W
�1n
I
�1(�IS
⌘
W
n
⌘ �W
n
⌘ ⇥ IW
n
⌘ + ⌧) .
(10)A dinâmica de translação pode ser descrita
por (Taylor, 2005)
mv
b
+ v
b
⇥mv
b
= T, (11)
em que m denota a massa da aeronave e T a re-sultante das forças aplicadas.
Em seguida, considera-se apenas a força pesoe o empuxo u, dado por (6), pois o termo v
b
⇥mv
b
que denota a força centrífuga referente à B é nuloem relação ao sistema B (Taylor, 2005). Assim,
a equação vetorial de movimento de translaçãoresume-se a
m
¨
⇠ = �m
2
40
0
g
3
5+R
2
40
0
u
3
5, (12)
sendo g a aceleração gravitacional.Seja ⌧ = ⌘ um vetor auxiliar associado ao
torque (7) em cada eixo (Carrillo et al., 2013).Então, de (10) e (12), obtém-se um conjunto deequações diferencias não-lineares
x =
u
m
(c
�
s
✓
c
+ s
�
s
) (13)
y =
u
m
(c
�
s
✓
s
� s
�
c
) (14)
z =
u
m
c
✓
c
�
� g (15)
¨
� = ⌧
�
(16)¨
✓ = ⌧
✓
(17)¨
= ⌧
, (18)
que descrevem o comportamento dinâmico da ae-ronave, em função de (6) e (7).
A Tabela 1 apresentam os parâmetros usadosna simulação que correspondem a um protótipo(Figura 2) desenvolvido no Instituto Mauá de Tec-nologia (IMT).
Tabela 1: Parâmetros do modelo do quadrirrotor.Descrição Valor
Constante de torque (c) 0,1m
Constante de força de empuxo (k) 2,98 · 10�6 N·s2rad2
Dist. do CM ao eixo do motor (l) 0,225m
Massa da aeronave (m) 1 kg
(Ixx
)
Momento de inércia (Iyy
)
(Izz
)
2,99 · 10�2 kgm2
3,01 · 10�2 kgm2
5,92 · 10�2 kgm2
Figura 2: Protótipo do veículo quadrirrotor.
3 Plataforma de simulação híbrida
Conforme ilustrado na Figura 3, a plataforma desimulação do sistema de controle do quadrirrotor
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1428
Modelo matemáticoEquações (13) – (18)
Transformação entrada – empuxoEquações (6) e (7)
T1 – T4
Modelo simulado em Matlab/Simulink e placa NI Elvis
Conversor A/D
Conversor D/A
Controle PD (Proporcional-
Derivativo)
, z
u
Conversor D/A
Controle PD (Proporcional-Derivativo)
Conversor A/D
Controle embarcado Arduino Uno
Sistema real
Módulo MCP 4921
Controle Remoto
Setpoint – refref
Setpointref, zref
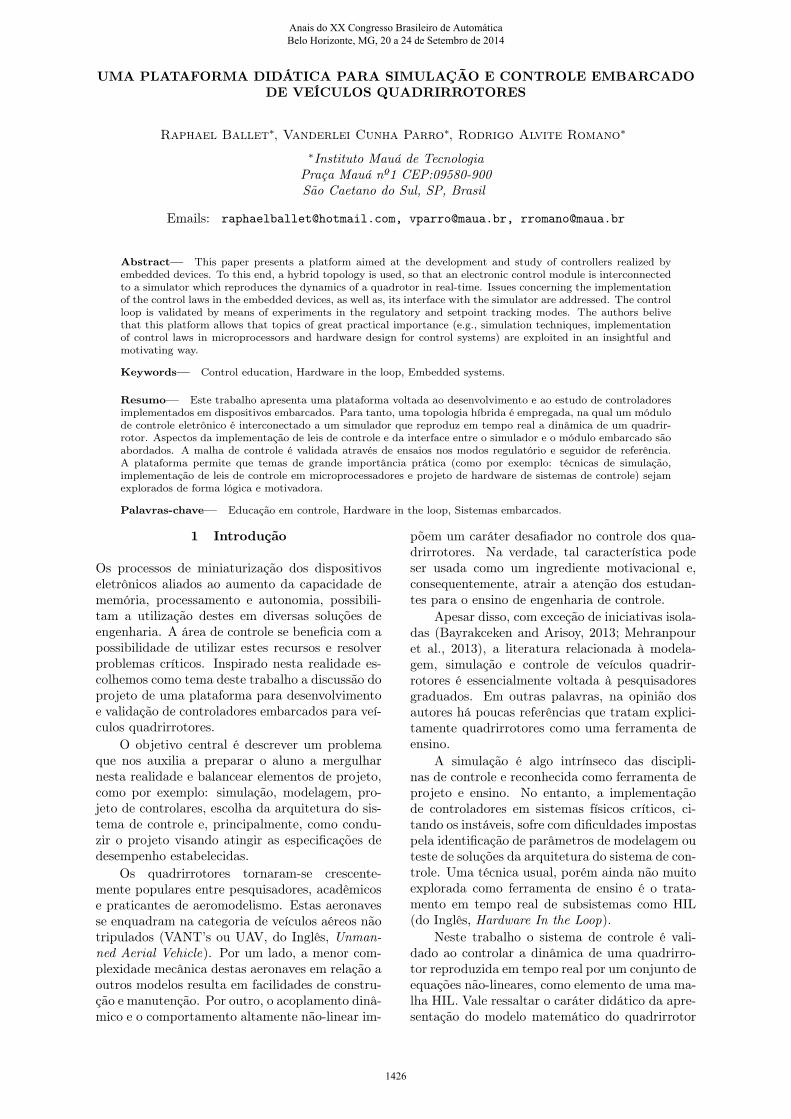
Figura 3: Diagrama da plataforma de simulação.
é composta basicamente por dois subsistemas. Oprimeiro tem como principal função simular a di-nâmica da aeronave, a partir das equações (6)-(7) e (13)-(18) que são implementadas em ambi-ente Simulink®. As equações diferenciais não-lineares são resolvidas numericamente usando ométodo Runge-Kutta com um passo de integra-ção de 10
�4s. A ferramenta Real-time WindowsTarget™(The MathWorks, Inc., 2012) é usada parasatisfazer o requisito de simulação em tempo real.
O segundo subsistema consiste em um con-trolador embarcado baseado na plataforma Ar-duino Uno (Banzi et al., 2014) que utiliza ummicrocontrolador Atmel ATmega328, dotado deum oscilador de 16MHz. Apesar de outros mó-dulos de processamento embarcado poderem serusados, adotou-se o Arduino nesse trabalho, de-vido à enorme aceitação de tal plataforma entreestudantes de engenharia e afins.
A interface entre os subsistemas real e virtualé realizada por uma placa de aquisição de dados(modelo PCI-6251). O kit didático NI ELVIS tam-bém é usado para implementar as conexões físicas.A placa PCI-6251 possui apenas 2 saídas analógi-cas. Assim, apenas duas variáveis são enviadas dosubsistema simulado para o módulo de controleembarcado. Com o intuito de estudar o projeto ea implementação de uma lei de controle para es-tabilizar as dinâmicas de rolagem e arfagem, asinformaçôes de � e ✓ são ligadas aos canais desaída analógica. Na verdade, os sinais disponíveis
nas saídas analógicas são versões normalizadas1dessas variáveis, devido a compatibilidade com osníveis de tensão dos conversores A/D do móduloembarcado.
Para estabilizar o deslocamento angular daaeronave (⌘) e a altura z, utilizou-se as seguintesleis de controle
⌧
�
= k
p�
(�ref � �)� k
d�
˙
� (19)
⌧
✓
= k
p✓
(✓ref � ✓)� k
d✓
˙
✓ (20)
⌧
= k
p
( ref � )� k
d
˙
(21)
u = (k
pz
(zref � z)� k
dz
z + g)
m
c
✓
c
�
, (22)
em que [�ref, ✓ref, ref]> e zref representam as re-
ferências do vetor ⌘ e da altura z, respectiva-mente. Portanto, são usados quatro controladoresPD (Proporcional+Derivativo), sendo k
p(·) e k
d(·)os ganhos proporcionais e derivativos das respec-tivas malhas de controle. Conforme ilustrado naFigura 3, as leis de controle de guinada (21) ede altura (22) são realizadas em ambiente virtual,enquanto (19)-(20) são implementadas no móduloembarcado. As posições lineares x e y foram man-tidas em malha aberta, já que o objetivo desta si-mulação é a estabilidade da atitude da aeronave.
Os controladores foram sintonizados de formaempírica através da observação do comportamentodo veículo em simulações. Os valores iniciais con-siderados foram baseados em outras referências
1As variações de � e ✓ na faixa [�⇡;⇡](radianos) sãomapeadas entre [0; 5](Volts).
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1429

(Luukkonen, 2011; Carrillo et al., 2013). Os pa-râmetros de sintonia usados nos ensaios são mos-trados na Tabela 2. Vale acrescentar que o es-tudo de técnicas de controle de quadrirrotoresestá fora do escopo deste trabalho e pode serencontrado em outros trabalhos (por exemplo,Bouabdallah, 2007; Rezende et al., 2012).
Tabela 2: Valores numéricos dos parâmetros desintonia dos controladores.
Variável controlada Parâmetro Valor
�kp�
1,0kd�
0,6
✓kp✓
1,0kd✓
0,6
kp
3,0kd
1,0
zkpz
10kdz
5
Controlador embarcado
Os sinais de controle calculados no módulo em-barcado devem ser enviados aos canais de entradaanalógica do subsistema de simulação2. Como omicrocontrolador ATmega328 não possui saídasanalógicas, utilizou-se dois conversores D/A, mo-delo MCP4921 de 12bits de resolução e dotadosde uma interface SPI (do Inglês, Serial PeripheralInterface).
As leis de controle (19) e (20) foram discreti-zadas usando o método retangular para trás, porser mais apropriado para aproximar a operaçãode derivada (Castrucci et al., 2011). Com baseem outros trabalhos (Nonami et al., 2010; Rezendeet al., 2012; Carrillo et al., 2013), definiu-se a taxade atualização dos sinais de controle em 500Hz.
Os principais passos realizados durante o cál-culo dos sinais de controle são mostrados na Fi-gura 4. A cada 2ms é gerada uma interrupçãodo Timer2 do ATmega328. Primeiramente, asinformações de � e ✓ são obtidas através dos con-versores A/D. Em seguida, são feitos os cálculosde ⌧
�
e ⌧✓
através das correspondentes equaçõesde diferenças. Por fim, as sinais de controle sãoajustados para a faixa [0; 4095] (compatibilidadecom o D/A) e enviados aos conversores por meioda interface SPI.
4 Simulações
A plataforma descrita anteriormente permite umaenorme gama de simulações. A seguir serão des-critos dois ensaios distintos. Ressalta-se que além
2De forma análoga a � e ✓, os sinais ⌧�
e ⌧✓
entre[�1; 1](Nm) são mapeados na faixa de valores admissíveisdo conversor D/A. Naturalmente, uma vez no ambientesimulado, estes sinais são convertidos novamente para aunidade de torque.
Interrupção Timer2
Ler e converter valores analógicos referentes aos ângulos de Euler
Calcular saídas do controlador PD
Converter saídas para faixa [0; 4095]
Enviar valores das saídas para conversor D/A
Fim Interrupção
Figura 4: Ações realizadas para implementaçãoda lei de controle no módulo embarcado.
de avaliar o desempenho da estratégia de controledescrita na Seção 3 ou a eficácia da implementaçãono módulo embarcado, o principal objetivo dos ex-perimentos é verificar até que ponto a plataformade simulação é capaz de reproduzir as principaiscaracterísticas dinâmicas do veículo quadrirrotor.
No primeiro ensaio, os sinais de referência fo-ram mantidos constantes em [�ref, ✓ref, ref]
>=
[0, 0, 0]
> e zref = 5m, ou seja, trata-se de um en-saio regulatório. Outra possibilidade é realizar umensaio servo, no qual o principal objetivo é avaliaro comportamento do sistema diante da variaçãodos sinais de referência. Com o intuito de simularruídos de medição, em ambas situações, somou-seruído branco Gaussiano de média nula e variância10
�3 ao valor simulado de cada uma das variáveiscontroladas, ou seja, z, �, ✓ e .
4.1 Ensaio regulatório
No ensaio regulatório, os estados � e ✓ tem con-dições iniciais igual a 30
� e velocidades angularesiguais a 0,5
rads . O teste inicia-se com a aeronave
em z = 5m e z = 1
ms . As demais condições iniciais
foram mantidas em zero.Na Figura 5 é mostrado o comportamento do
vetor ⌘. Pode-se observar que o tempo de estabili-zação é de aproximadamente 1s. Outro fator a sernotado é o acoplamento entre as variáveis, poisa correção de � e ✓ provoca pequenas perturba-ções em . Vale lembrar que este comportamentoé esperado, uma vez que a estratégia de controleutilizada age isoladamente em cada componentede ⌘.
Com relação à movimentação da aeronave, de-vido à condição inicial da velocidade de 0,5
ms em
relação ao eixo z, a lei de controle (22) requeraproximadamente 1s para reestabelecer a posição
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1430

desejada (Figura 6). Por outro lado, como as va-riáveis x e y não são controladas explicitamente, aaeronave apresenta livre movimentação nestes ei-xos. Logo, uma nova estratégia de controle faz-senecessária para estabilizar o quadrirrotor tambémnesses eixos.
0 0.5 1 1.5 2 2.5 3
0
10
20
30
! (
gra
us)
0 0.5 1 1.5 2 2.5 3
0
10
20
30
" (
gra
us)
0 0.5 1 1.5 2 2.5 3!2
0
2
# (
gra
us)
Tempo (segundos)
Figura 5: Dinâmica de rotação no ensaio regula-tório.
0 0.5 1 1.5 2 2.5 30
5
10
x (
m)
0 0.5 1 1.5 2 2.5 3!10
!5
0
y (
m)
0 0.5 1 1.5 2 2.5 34.95
5
5.05
z (
m)
Tempo (segundos)
Figura 6: Movimentação da aeronave no ensaioregulatório.
0 0.5 1 1.5 2 2.5 35
10
15
u (
N)
0 0.5 1 1.5 2 2.5 3!2
0
2
! " (
Nm
)
0 0.5 1 1.5 2 2.5 3!2
0
2
! # (
Nm
)
0 0.5 1 1.5 2 2.5 3!1
0
1
! $ (
Nm
)
Tempo (segundos)
Figura 7: Esforço de controle experimento de con-trole regulatório.
A Figura 7 mostra o esforço de controle ge-rado por (19)-(22). Naturalmente, o esforço decontrole é maior nos primeiros instantes do en-saio, pois nesse intervalo é feita a maior parte dacorreção nas variáveis controladas. Outro pontoimportante a ser observado é o comportamentooscilatório das variáveis que são controladas pelomódulo embarcado, ou seja, ⌧
�
e ⌧✓
. Tais oscila-ções são geradas predominantemente por ruído demedição na amostragem de � e ✓. Portanto, aocomparar os sinais de controle calculados no mó-dulo embarcado com os do subsistema simulado(⌧
e u), percebe-se a influência da implementa-ção do controlador em uma plataforma real. Estasoscilações, por serem de alta frequência, não im-pactam o sistema simulado. Este fato é evidenci-ado observando a dinâmica mais lenta em relaçãoà dinâmica do ruído.
4.2 Ensaio seguidor de referência (servo)
Diferentemente do ensaio regulatório, neste casoadmite-se condições iniciais nulas, exceto por z
que é iniciada em z = zref = 5m. Logo, inicia-seo ensaio com a aeronave na posição de referência.Os sinais de referências são geradas a partir deinterrupções temporizadas a cada 3 segundos, ga-rantindo assim sinais de mesmo período e mesmaintensidade para �ref e ✓ref.
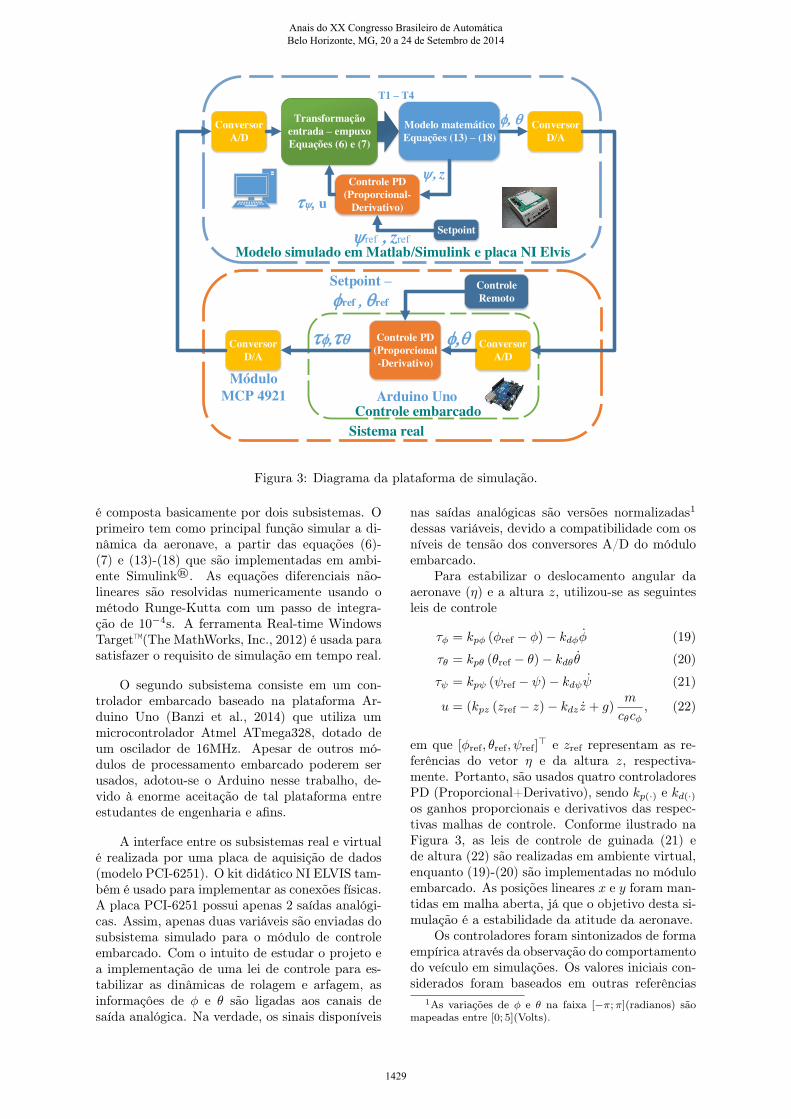
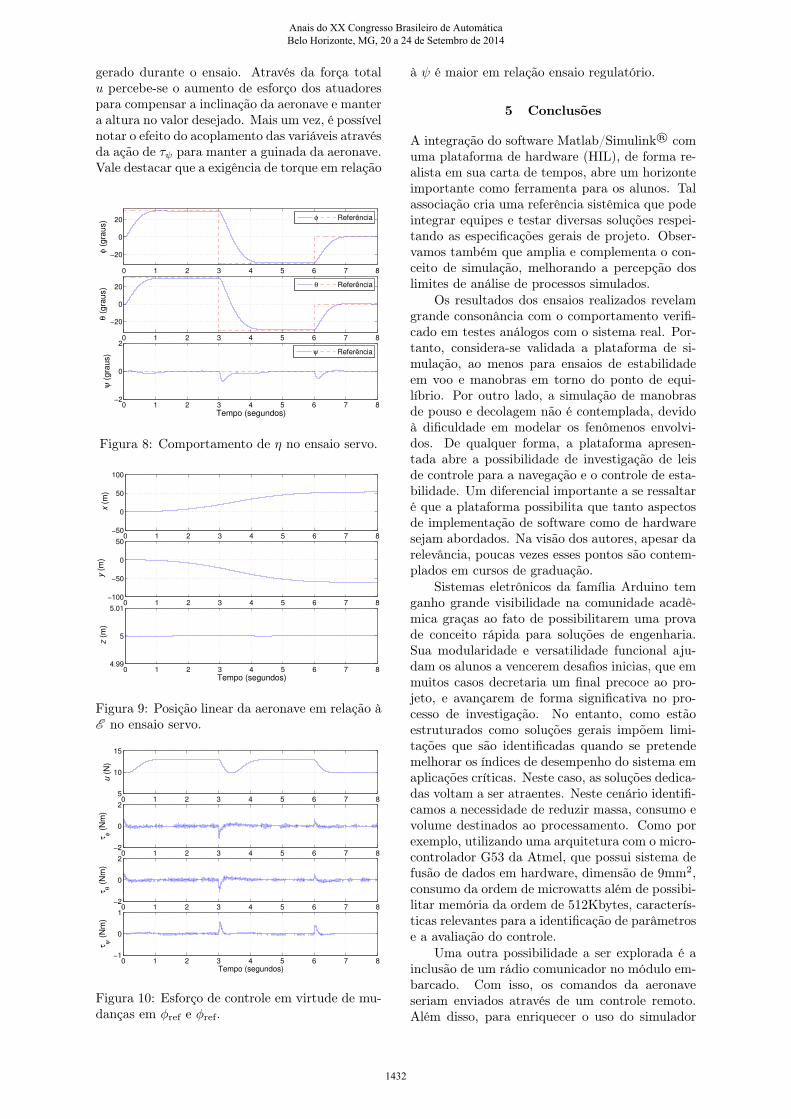
A Figura 8 apresenta o comportamento da po-sição angular quando pulsos positivos e negativossão aplicados às referências de � e ✓. Assim comono ensaio regulatório, mesmo sem ação integral,obtém-se erro estacionário nulo e tempo de aco-modação de 1s no controle dessas variáveis.
A dinâmica da posição linear da aeronave emresposta às variações nos sinais de referência émostrada na Figura 9. Como esperado, a incli-nação em � e ✓ gera aceleração em relação aoseixos y e x, respectivamente. De forma análoga,a resposta do sistema aos pulsos negativos (�30
�
em �ref e ✓ref), provoca a desaceleração do movi-mento. Assim, devido a duração do pulso a aero-nave tende a se estabilizar em outra posição. Ou-tro ponto a se mencionar é o comportamento daposição em relação à z, que manteve-se constantea despeito das variações de �, ✓, x e y, graças àação da lei de controle (22).
Outro importante fato a ser mencionado é aausência de forças de arrasto na movimentação daaeronave, o que pode ser observado no comporta-mento das variáveis x e y. Por não ter oposiçãoao seu movimento, a aeronave acelera livremente,o que não representa fielmente a dinâmica do sis-tema real. Tal comportamento não foi conside-rado por não ser escopo deste trabalho o controledestas variáveis, tendo assim na Figura 9 apenasuma representação simplificada de seu comporta-mento.
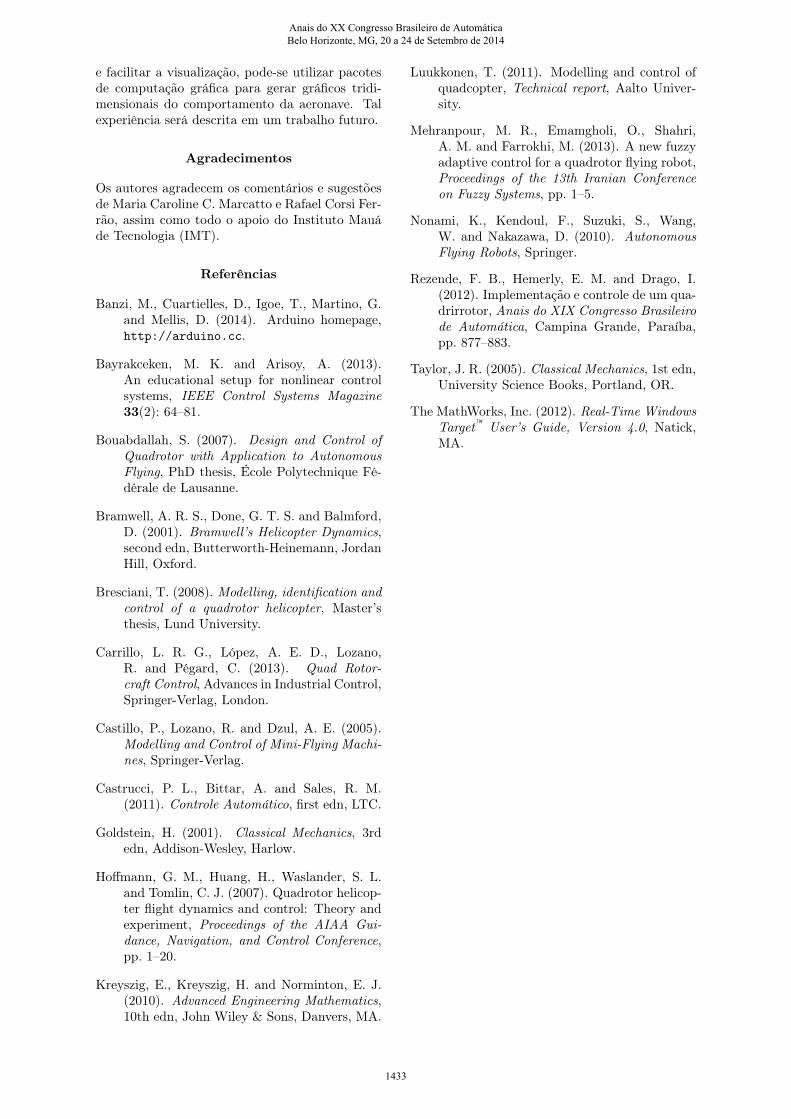
A Figura 10 apresenta o esforço de controle
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1431
gerado durante o ensaio. Através da força totalu percebe-se o aumento de esforço dos atuadorespara compensar a inclinação da aeronave e mantera altura no valor desejado. Mais um vez, é possívelnotar o efeito do acoplamento das variáveis atravésda ação de ⌧
para manter a guinada da aeronave.Vale destacar que a exigência de torque em relação
0 1 2 3 4 5 6 7 8
!20
0
20
! (
gra
us)
! Referência
0 1 2 3 4 5 6 7 8
!20
0
20
" (
gra
us)
" Referência
0 1 2 3 4 5 6 7 8!2
0
2
# (
gra
us)
Tempo (segundos)
# Referência
Figura 8: Comportamento de ⌘ no ensaio servo.
0 1 2 3 4 5 6 7 8!50
0
50
100
x (
m)
0 1 2 3 4 5 6 7 8!100
!50
0
50
y (
m)
0 1 2 3 4 5 6 7 84.99
5
5.01
z (
m)
Tempo (segundos)
Figura 9: Posição linear da aeronave em relação àE no ensaio servo.
0 1 2 3 4 5 6 7 85
10
15
u (
N)
0 1 2 3 4 5 6 7 8!2
0
2
! " (
Nm
)
0 1 2 3 4 5 6 7 8!2
0
2
! # (
Nm
)
0 1 2 3 4 5 6 7 8!1
0
1
! $ (
Nm
)
Tempo (segundos)
Figura 10: Esforço de controle em virtude de mu-danças em �ref e �ref.
à é maior em relação ensaio regulatório.
5 Conclusões
A integração do software Matlab/Simulink® comuma plataforma de hardware (HIL), de forma re-alista em sua carta de tempos, abre um horizonteimportante como ferramenta para os alunos. Talassociação cria uma referência sistêmica que podeintegrar equipes e testar diversas soluções respei-tando as especificações gerais de projeto. Obser-vamos também que amplia e complementa o con-ceito de simulação, melhorando a percepção doslimites de análise de processos simulados.
Os resultados dos ensaios realizados revelamgrande consonância com o comportamento verifi-cado em testes análogos com o sistema real. Por-tanto, considera-se validada a plataforma de si-mulação, ao menos para ensaios de estabilidadeem voo e manobras em torno do ponto de equi-líbrio. Por outro lado, a simulação de manobrasde pouso e decolagem não é contemplada, devidoà dificuldade em modelar os fenômenos envolvi-dos. De qualquer forma, a plataforma apresen-tada abre a possibilidade de investigação de leisde controle para a navegação e o controle de esta-bilidade. Um diferencial importante a se ressaltaré que a plataforma possibilita que tanto aspectosde implementação de software como de hardwaresejam abordados. Na visão dos autores, apesar darelevância, poucas vezes esses pontos são contem-plados em cursos de graduação.
Sistemas eletrônicos da família Arduino temganho grande visibilidade na comunidade acadê-mica graças ao fato de possibilitarem uma provade conceito rápida para soluções de engenharia.Sua modularidade e versatilidade funcional aju-dam os alunos a vencerem desafios inicias, que emmuitos casos decretaria um final precoce ao pro-jeto, e avançarem de forma significativa no pro-cesso de investigação. No entanto, como estãoestruturados como soluções gerais impõem limi-tações que são identificadas quando se pretendemelhorar os índices de desempenho do sistema emaplicações críticas. Neste caso, as soluções dedica-das voltam a ser atraentes. Neste cenário identifi-camos a necessidade de reduzir massa, consumo evolume destinados ao processamento. Como porexemplo, utilizando uma arquitetura com o micro-controlador G53 da Atmel, que possui sistema defusão de dados em hardware, dimensão de 9mm2,consumo da ordem de microwatts além de possibi-litar memória da ordem de 512Kbytes, caracterís-ticas relevantes para a identificação de parâmetrose a avaliação do controle.
Uma outra possibilidade a ser explorada é ainclusão de um rádio comunicador no módulo em-barcado. Com isso, os comandos da aeronaveseriam enviados através de um controle remoto.Além disso, para enriquecer o uso do simulador
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1432
e facilitar a visualização, pode-se utilizar pacotesde computação gráfica para gerar gráficos tridi-mensionais do comportamento da aeronave. Talexperiência será descrita em um trabalho futuro.
Agradecimentos
Os autores agradecem os comentários e sugestõesde Maria Caroline C. Marcatto e Rafael Corsi Fer-rão, assim como todo o apoio do Instituto Mauáde Tecnologia (IMT).
Referências
Banzi, M., Cuartielles, D., Igoe, T., Martino, G.and Mellis, D. (2014). Arduino homepage,http://arduino.cc.
Bayrakceken, M. K. and Arisoy, A. (2013).An educational setup for nonlinear controlsystems, IEEE Control Systems Magazine33(2): 64–81.
Bouabdallah, S. (2007). Design and Control ofQuadrotor with Application to AutonomousFlying, PhD thesis, École Polytechnique Fé-dérale de Lausanne.
Bramwell, A. R. S., Done, G. T. S. and Balmford,D. (2001). Bramwell’s Helicopter Dynamics,second edn, Butterworth-Heinemann, JordanHill, Oxford.
Bresciani, T. (2008). Modelling, identification andcontrol of a quadrotor helicopter, Master’sthesis, Lund University.
Carrillo, L. R. G., López, A. E. D., Lozano,R. and Pégard, C. (2013). Quad Rotor-craft Control, Advances in Industrial Control,Springer-Verlag, London.
Castillo, P., Lozano, R. and Dzul, A. E. (2005).Modelling and Control of Mini-Flying Machi-nes, Springer-Verlag.
Castrucci, P. L., Bittar, A. and Sales, R. M.(2011). Controle Automático, first edn, LTC.
Goldstein, H. (2001). Classical Mechanics, 3rdedn, Addison-Wesley, Harlow.
Hoffmann, G. M., Huang, H., Waslander, S. L.and Tomlin, C. J. (2007). Quadrotor helicop-ter flight dynamics and control: Theory andexperiment, Proceedings of the AIAA Gui-dance, Navigation, and Control Conference,pp. 1–20.
Kreyszig, E., Kreyszig, H. and Norminton, E. J.(2010). Advanced Engineering Mathematics,10th edn, John Wiley & Sons, Danvers, MA.
Luukkonen, T. (2011). Modelling and control ofquadcopter, Technical report, Aalto Univer-sity.
Mehranpour, M. R., Emamgholi, O., Shahri,A. M. and Farrokhi, M. (2013). A new fuzzyadaptive control for a quadrotor flying robot,Proceedings of the 13th Iranian Conferenceon Fuzzy Systems, pp. 1–5.
Nonami, K., Kendoul, F., Suzuki, S., Wang,W. and Nakazawa, D. (2010). AutonomousFlying Robots, Springer.
Rezende, F. B., Hemerly, E. M. and Drago, I.(2012). Implementação e controle de um qua-drirrotor, Anais do XIX Congresso Brasileirode Automática, Campina Grande, Paraíba,pp. 877–883.
Taylor, J. R. (2005). Classical Mechanics, 1st edn,University Science Books, Portland, OR.
The MathWorks, Inc. (2012). Real-Time WindowsTarget™ User’s Guide, Version 4.0, Natick,MA.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1433