um sistema de realidade virtual para tratamento ortodôntico · ortodôntico maria andréia f....
TRANSCRIPT

Um Sistema de Realidade Virtual para Tratamento Ortodôntico
Maria Andréia F. Rodrigues, Wendel B. Silva, Milton E. Barbosa Neto
Mestrado em Informática Aplicada - MIA Universidade de Fortaleza - UNIFOR - Fortaleza-CE Brazil
[email protected], {wendelbsilva, miltoneto}edu.unifor.br
Isabel M.M.P. Ribeiro Centro de Ciências da Saúde - Faculdade de Odontologia
Universidade de Fortaleza - UNIFOR - Fortaleza-CE Brazil [email protected]
Abstract. In this work, we have developed a virtual reality system for training and treatment planning in orthodontics. The system is composed of 3 modules: Geometric Mapping, 3D Mesh Generation and Orthodontic Treatment Simulation. To validate our simulator, we used cephalometric measurements and dental cast data taken during one-year follow-up orthodontic treatments. Initial investigations proved that the results obtained with the computer simulations are consistent with the empirical observations. We expect our prototype to be a useful environment for training orthodontists, residents and students, giving experience to explore and verify in practice the simulated temporal evolution of different planned treatments. Resumo. Neste trabalho, desenvolvemos um sistema de realidade virtual para treinamento e planejamento de tratamentos em ortodontia. O sistema é composto por 3 módulos: Mapeamento Geométrico, Geração da Malha 3D e Simulação do Tratamento Ortodôntico. Para validar nosso simulador, utilizamos medidas cefalométricas e dados de moldes dentários de tratamentos ortodônticos acompanhados durante um ano. Investigações iniciais provaram que os resultados obtidos nas simulações são consistentes com as observações empíricas. Esperamos que nosso protótipo seja um ambiente útil para treinamento de ortodontistas, residentes e estudantes, oferecendo experiência para explorar e verificar na prática a simulação da evolução temporal de diferentes planos de tratamento.
1. Introdução O desenvolvimento de ambientes gráficos para a simulação, treinamento e ensino de procedimentos médico-odontológicos tem sido alvo recente de pesquisa [9, 10, 17]. Na Ortodontia, o planejamento de um tratamento e a escolha de um modelo adequado de aparelho ortodôntico baseia-se exclusivamente na experiência clínica do ortodontista. Muitos ortodontistas estimam a condição de carga ideal e o correto posicionamento do aparelho ortodôntico com o objetivo de produzir uma movimentação aproximada de um determinado dente, direcionada pela experiência clínica do profissional. No tratamento tradicional, essa movimentação baseia-se na obtenção do posicionamento adequado dos dentes no arco dental, buscando-se a correta oclusão (posicionamento ideal dos dentes na arcada dentária), de acordo com padrões estéticos e funcionais pré-estabelecidos [1].
Para tal, o ortodontista aplica forças na coroa do dente através de componentes do aparelho ortodôntico (bracket, molas, ligas elásticas e fios metálicos, entre outros). É muito comum, por exemplo, prever-se um movimento dentário (causado pela aplicação contínua de uma determinada força durante um período de tempo) que, na prática, não ocorre. Como resultado, o dente simplesmente não se move ou o movimento gerado é insuficiente para movê-lo até uma determinada posição desejada. Geralmente isto acontece devido ao baixo carregamento de forças aplicado.
O desenvolvimento de sistemas gráficos tridimensionais interativos que possam auxiliar na geração de simulações de movimentos dentários (translação, rotação, nivelamento, alinhamento, torque, etc), suas interações (colisões com dentes vizinhos durante seus deslocamentos), e seus possíveis setups na arcada dentária ao longo do tratamento, é bastante relevante para os profissionais ligados à área ortodôntica. Principalmente, para as áreas de treinamento e ensino, onde diferentes estratégias e modelos de aparelhos ortodônticos podem ser testados em pacientes virtuais customizados, de tal forma a minimizar, ou até superar, o surgimento de possíveis problemas clínicos no arco dentário do paciente real. Muitos sistemas comerciais têm sido propostos para a prática ortodôntica, mas em nenhum caso eles investigam todas as funcionalidades mencionadas anteriormente. Basicamente, os sistemas existentes mais utilizados pelos ortodontistas no Brasil não atendem integralmente às reais necessidades destes profissionais e servem, basicamente, para gerenciamento clínico e análise cefalométrica 2D do paciente.
Este trabalho apresenta um sistema de realidade virtual que desenvolvemos para treinamento e planejamento de tratamentos em ortodontia. Implementado em Java, o sistema é composto por 3 módulos: Mapeamento Geométrico, Geração da Malha 3D e Simulação do Tratamento Ortodôntico. Para validar o nosso simulador, utilizamos medidas cefalométricas e dados de moldes dentários extraídos de tratamentos ortodônticos acompanhados durante um ano. Investigações iniciais provaram que o sistema é fácil de ser utilizado e os resultados demonstraram um grau de ajuste muito próximo entre tratamentos ortodônticos experimentais e estudos de caso simulados. Esperamos que o nosso protótipo possa ser útil para treinamento de ortodontistas, residentes e estudantes, oferecendo experiência para explorar e verificar na prática a evolução temporal de diferentes planos de tratamento. 2. Trabalhos Relacionados Existe um número considerável de sistemas comerciais, em sua maioria de produção estrangeira, propostos para a prática ortodôntica. A maior parte dos sistemas analisados não atua como sistema para a simulação de tratamento, nem integra diversas funcionalidades ortodônticas em um único ambiente gráfico 3D interativo. Os mais comuns, são os sistemas para gerenciamento clínico. Os sistemas de análise cefalométrica 2D têm sido construídos para reduzir o erro humano e o tempo gasto na extração de medidas ortodônticas do paciente. Através da superposição do Raio-X e da fotografia do crânio do paciente, estas medidas são automaticamente calculadas. Algumas pesquisas têm-se concentrado no desenvolvimento de ferramentas 2D e 3D para tratamento ortodôntico e em sistemas de simulação de movimentos mandibulares, onde os dados são obtidos através de medidas cefalométricas [9,10,11,12,13]. Os modelos 2D utilizam parâmetros muito elementares, não incluindo sequer um modelo do arco dentário e de aparelhos ortodônticos.
Meyer et al. desenvolveram um sistema 3D assistido por computador que permite prever movimentos dentários, sob a influência de um sistema de forças e momento [2]. O sistema permite somente a movimentação de 8 dentes frontais do maxilar e da mandíbula, não levando em consideração o tipo de fio ortodôntico utilizado, nem a presença de forças de resistência ao movimento. Middelton et al. aplicaram o Método de Elementos Finitos para representar a tensão e a pressão sofridas pelos ligamentos ao redor de um único dente (canino, que possui uma única raiz) [3]. É um modelo muito simplificado, que não inclui informações importantes como o tipo de fio ortodôntico usado, a geometria da mandíbula e do maxilar e as interações existentes entre os dentes durante os seus deslocamentos. Bourauel et al. propuseram dois modelos para a movimentação de um único dente (o canino), baseado também no Método de Elementos Finitos: o primeiro, para representar a deformação do tecido mole da mandíbula durante o deslocamento do dente e, o segundo, para a remodelagem óssea da mandíbula [4]. Para a modelagem geométrica do dente foram consideradas a altura total (coroa e raiz), a profundidade e a largura. No nosso trabalho, também são utilizados valores de altura total, profundidade e largura para a customização dos dentes virtuais. Adicionalmente, nosso sistema utiliza valores de medidas mandibulares (extraídos do molde plástico e da análise cefalométrica) para aproximar o modelo virtual 3D, da anatomia real do paciente. Além disso, consideramos a influência de diferentes tipos de raízes dentárias para a geração de comportamentos distintos de movimentação.
Alcañiz et al. propuseram um sistema bastante simplificado para visualização e representação de um comportamento viscoelástico de movimento dentário, utilizando variáveis unidimensionais [5]. O sistema utiliza apenas dados geométricos da coroa do dente e desconsidera a existência de colisão. Em contraste, nosso sistema trata efeitos de colisão para refletir, por exemplo, aspectos de desalinhamento dentário e oferecer um maior grau de realismo de movimento. Motohashi et al. reportaram um sistema de modelagem de moldes plásticos para diagnóstico e planejamento de tratamentos [6]. Porém, aspectos biomecânicos importantes, como correção de situações de mau posicionamento dentário, não são abordados. Soncini et al. apresentaram uma ferramenta computacional para auxiliar o ortodontista no projeto de aparelhos ortodônticos [7]. Keilig et al. propuseram uma ferramenta para análise dos deslocamentos dentários e uso de diferentes aparelhos, brackets e fios ortodônticos [8]. Entretanto, esta ferramenta não permite interação com o usuário para a customização de estudos de caso. Em nosso sistema, implementamos esta funcionalidade.
Neste trabalho, um sistema de realidade virtual para treinamento e planejamento de tratamentos em ortodontia é proposto e implementado. O sistema permite, a partir de configurações iniciais fornecidas pelo usuário, a geração de modelos customizados de pacientes e aparelhos ortodônticos e a simulação do comportamento dentário para diferentes cenários de tratamento. Além disso, inclui um modelo simplificado de resistência ao movimento dentário, bem como uma ferramenta de animação 3D para a visualização da evolução do tratamento [17]. Vários estudos de caso foram investigados para validar e avaliar as potencialidades do sistema, bem como identificar suas limitações. Dentre estes, quatro cenários típicos de situações indesejadas em Ortodontia são incluídos nesse trabalho. Em médio prazo, esperamos que nosso sistema possa ser útil para o ensino e treinamento de ortodontistas, residentes e estudantes, bem como para a simulação de diversos tipos de tratamentos ortodônticos.
3. Os Componentes do Sistema O sistema consiste de três módulos básicos: Mapeamento Geométrico, Geração da Malha 3D, e Simulação do Tratamento Ortodôntico. O módulo de Mapeamento Geométrico é responsável por mapear as medidas e as inclinações cefalométricas do Raio-X e do molde dentário do paciente, para a customização do paciente virtual. Os 1º.s dentes molares são utilizados como ponto de referência para o mapeamento geométrico, já que estão presentes na maioria da população. Basicamente, no processo de customização, calculam-se as dimensões da largura e do comprimento lingual. A largura da mandíbula corresponde à distância entre os centros das coroas dos 1º.s dentes molares da arcada dentária. O comprimento lingual corresponde à distância a partir do ponto central entre os dentes incisivos centrais até a linha horizontal definida para a medida da largura da mandíbula. Os pontos correspondentes à malha da mandíbula virtual sofrem um ajuste, aumentando ou diminuindo de tamanho) . Os dentes, já nas dimensões de escala reais, são uniformemente distribuídos na arcada dentária.
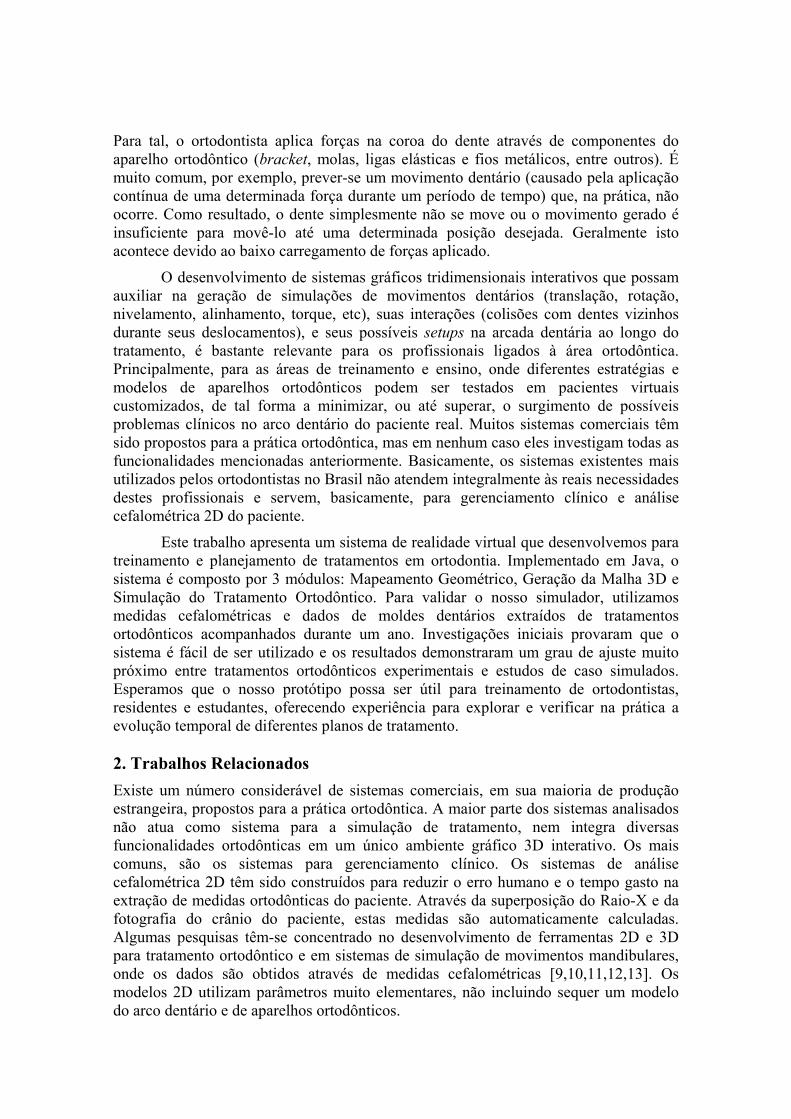
O módulo de Geração da Malha 3D é responsável pela criação de um modelo virtual customizado do crânio, do maxilar, da mandíbula, dos dentes, e do aparelho ortodôntico fixo (composto pelo bracket e arco ortodôntico). Em cada dente é anexado um bracket, representado por um cubo por onde passa o arco ortodôntico, utilizado para ativar o sistema de forças aplicado nos dentes. O arco ortodôntico é gerado pela interpolação de pontos de uma spline cúbica, que tem como pontos de controle os centros dos brackets. Os pontos intermediários da spline (Figura 1) são representados por pequenos cubos (fios retangulares) ou pequenas esferas (fios esféricos). Fios redondos são adequados para situações onde o movimento dentário é realizado em apenas duas direções (rotação em x e em z). Fios retangulares, por sua vez, são utilizados quando o controle do movimento se estende às três direções (translações em x, y e z, ou rotações realizadas em torno do centro de rotação do bracket) [1].
O módulo Simulador de Movimento Dentário permite simular, animar e visualizar a evolução temporal do tratamento [17], bem como remover e selecionar dentes, etc., conforme o plano de tratamento ortodôntico estabelecido para o paciente. O usuário pode interagir com o sistema com o objetivo de modificar configurações para simular diferentes setups, conseqüentemente, diferentes pacientes, planos de tratamento e movimentos dentários. Efeitos de colisão (detecção e resposta) entre dentes são implementados neste módulo. Estes induzem mudanças instantâneas no estado dos dentes, através da atualização de suas posições e velocidades. Adicionalmente, um efeito de colisão do tipo “dominó” é também implementado neste módulo. Cada dente possui uma matriz de transformação que representa o seu posicionamento relativo na arcada dentária. Ao se aplicar uma força no dente, esta matriz é utilizada para a movimentação e cálculo da distância percorrida.
Figura 1: Tipos de fios ortodônticos implementados: retangular (esquerda) e esférico (direita).

4. Interface e Elementos Geométricos O painel de interface com o usuário foi implementado baseado em referências geométricas e parâmetros usualmente adotados em tratamentos ortodônticos. Nessa interface, um modelo 3D inicial de um paciente virtual foi construído. O paciente virtual é composto pelos seguintes elementos geométricos: crânio, maxilar, mandíbula, arcada dentária com 32 dentes individualmente modelados (compostos por coroas e raízes), e arco ortodôntico. Para garantir um maior realismo, todos esses elementos geométricos possuem um nível de detalhamento elevado. Foram utilizados aproximadamente 125 vértices (180 polígonos) para modelar a geometria e a topologia de cada dente (como há 32 dentes, 4000 vértices foram utilizados para a modelagem da arcada dentária). O maxilar e a mandíbula são compostos por aproximadamente 1250 pontos cada (ambos totalizando 4300 polígonos). Em particular, o crânio virtual é composto por 3087 vértices (5426 polígonos) e não tem influência nos resultados da simulação, sendo utilizado somente para fornecer uma melhor visualização do ambiente. 5. Tipos de Movimentos e Forças Atuantes Os movimentos dentários são causados pela aplicação de forças nos dentes através de aparelhos ortodônticos. Os movimentos dentários podem ser de inclinação, translação, rotação, torque, extrusão (verticais para cima, acompanhados de inclinação) e intrusão (verticais para baixo, aplicados em uma pequena área do ápice do dente) [1]. De forma simplificada, o movimento dentário depende basicamente da força aplicada no bracket e da força de resistência que se opõe a essa força aplicada. Os mecanismos que definem esse movimento de oposição estão diretamente ligados a fatores biológicos complexos das estruturas de cada paciente onde o dente se encontra embutido.
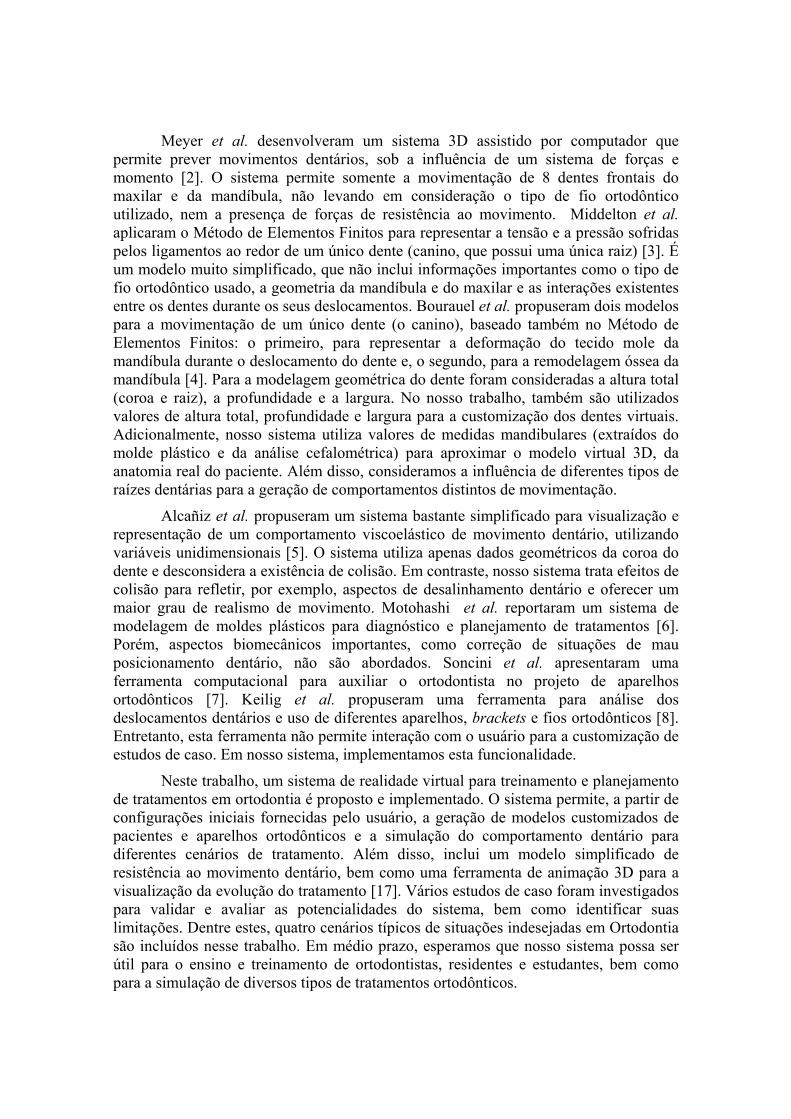
Em nosso sistema, as forças aplicadas possuem intensidade, direção e ponto de aplicação e valores de massa de dentes são utilizados [1]. Ao ser aplicada uma força sobre um dente em um ponto qualquer de sua superfície, este se desloca a uma distância proporcional à força aplicada no seu centro de resistência (1/3 a partir do ápice da raiz), podendo sofrer uma translação ou rotação. Os carregamentos aplicados são automaticamente gerados pela recuperação elástica de fios metálicos ligados às coroas dentárias através dos brackets. Movimentos ortodônticos simples, como a inclinação, ocorrem em nosso sistema no centro de resistência do dente. As translações são modeladas pela aplicação de movimento de corpo onde toda a estrutura do dente é carregada uniformemente. Torques podem ocorrer durante movimentos de inclinação. Extrusões e Intrusões são movimentos modelados através de translações verticais onde forças são utilizadas para deslocar o dente para fora ou para dentro de sua estrutura óssea, respectivamente. 6. Estudos de Caso Os estudos de caso apresentados neste trabalho representam situações típicas em ortodontia. Além disso, foram cuidadosamente selecionados e acompanhados por um especialista na área. Para gerar os diferentes cenários, medidas cefalométricas dos dentes e dos moldes plásticos das arcadas dentárias de quatro pacientes (Figura 2) foram extraídas e utilizadas como entrada de dados do sistema customizado. Para cada paciente, foi determinado um plano de tratamento específico (Figura 3).
Como parte do planejamento terapêutico, medições do posicionamento dos
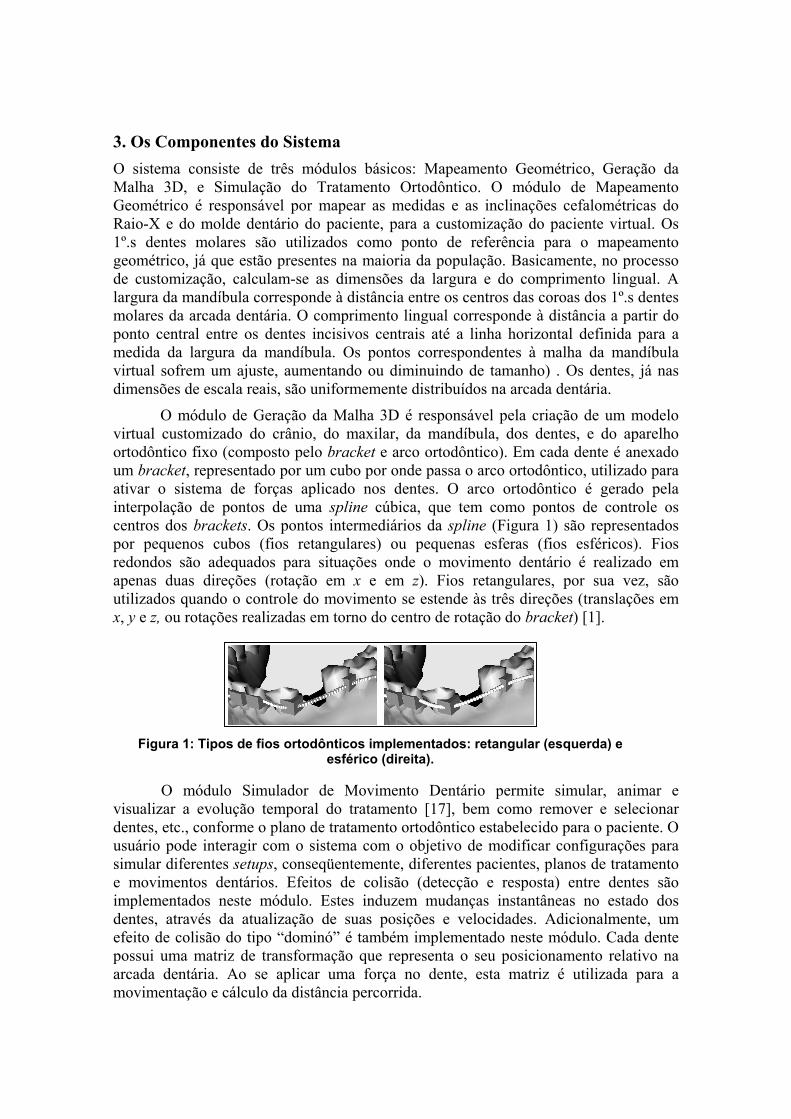
dentes e de forças aplicadas foram realizadas durante as avaliações clínicas, durante um ano. A configuração inicial dos cenários é definida na janela de propriedades da interface do sistema, especificando o posicionamento dos dentes (posição de translação e rotação), o tipo de fio ortodôntico e as forças aplicadas em cada etapa do tratamento. Dimensões linguais e palatais, e inclinação da mandíbula do paciente também são mapeadas via interface. Na Figura 3, são especificados os planos de tratamento para o maxilar. Em 3.a, os 1º.s pré-molares estão marcados para extração com um “x”. Em 3.b, tem-se o plano de movimentação dentária para a realização do fechamento dos espaços decorrentes das extrações dos 1º.s pré-molares. Em 3.c, o plano de tratamento para a movimentação dentária do maxilar, realizando uma inclinação do incisivo central. Em 3.d, o plano de tratamento para a movimentação dentária do maxilar, realizando o fechamento dos espaços dos dentes incisivos. Em 3.e, o plano de tratamento para fechamento do espaço na mandíbula, entre o 1º pré-molar inferior direito e o canino inferior direito.
O primeiro estudo de caso aborda um típico problema de retração do grupo de dentes incisivos e caninos. Os demais estudos de caso retratam problemas referentes a situações onde há risco de movimentação incorreta dos dentes durante a aplicação de forças. Em particular, o segundo estudo de caso simula um problema de projeção dos dentes incisivos centrais; o terceiro, o de afastamento lateral dos incisivos centrais; e, o quarto, trata do fechamento de espaços entre os dentes 1º. pré-molar e canino. Uma descrição detalhada dos parâmetros e métodos utilizados para a geração dos cenários pode ser obtida em [14].
Os testes de simulação consistiram na aplicação de forças leves, moderadas e pesadas. Estes valores correspondem aos utilizados experimentalmente, nos estudos de caso reais. O tempo gasto para o dente atingir a posição desejada na arcada dentária foi estimado em número de quadros necessários para movimentá-lo.
a) b) c) e) d)
Figura 3. Planos de tratamento para o maxilar.
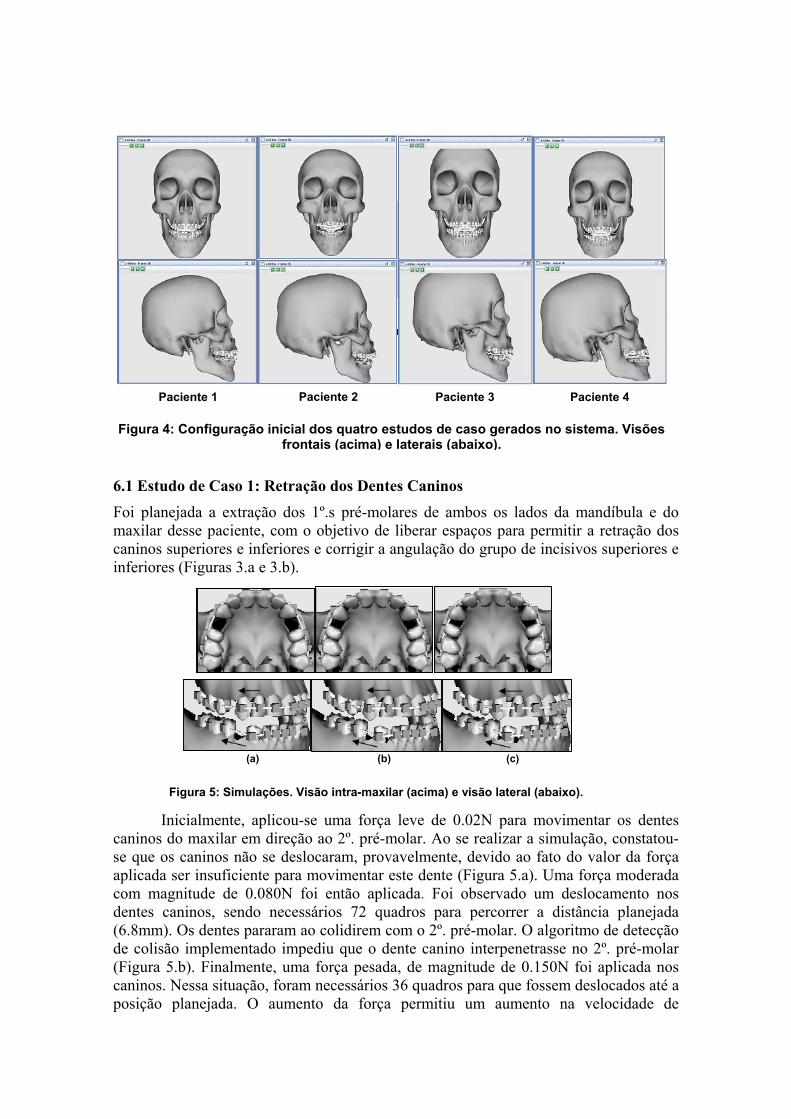
Figura 2. Moldes plásticos dentários dos 4 pacientes. Visões frontais das arcadas dentárias (acima) e visões laterais (abaixo).
Paciente 1 Paciente 2 Paciente 3 Paciente 4
6.1 Estudo de Caso 1: Retração dos Dentes Caninos Foi planejada a extração dos 1º.s pré-molares de ambos os lados da mandíbula e do maxilar desse paciente, com o objetivo de liberar espaços para permitir a retração dos caninos superiores e inferiores e corrigir a angulação do grupo de incisivos superiores e inferiores (Figuras 3.a e 3.b).
Inicialmente, aplicou-se uma força leve de 0.02N para movimentar os dentes caninos do maxilar em direção ao 2º. pré-molar. Ao se realizar a simulação, constatou-se que os caninos não se deslocaram, provavelmente, devido ao fato do valor da força aplicada ser insuficiente para movimentar este dente (Figura 5.a). Uma força moderada com magnitude de 0.080N foi então aplicada. Foi observado um deslocamento nos dentes caninos, sendo necessários 72 quadros para percorrer a distância planejada (6.8mm). Os dentes pararam ao colidirem com o 2º. pré-molar. O algoritmo de detecção de colisão implementado impediu que o dente canino interpenetrasse no 2º. pré-molar (Figura 5.b). Finalmente, uma força pesada, de magnitude de 0.150N foi aplicada nos caninos. Nessa situação, foram necessários 36 quadros para que fossem deslocados até a posição planejada. O aumento da força permitiu um aumento na velocidade de
(a) (b) (c)
Figura 5: Simulações. Visão intra-maxilar (acima) e visão lateral (abaixo).
Figura 2: Região de interesse para mapeamento geométrico da mandíbula.
Região de interesse
(x, yroi, zroi)
Região de interesse
Centro do eixo x
Paciente 1 Paciente 3Paciente 2 Paciente 4
Figura 4: Configuração inicial dos quatro estudos de caso gerados no sistema. Visões frontais (acima) e laterais (abaixo).
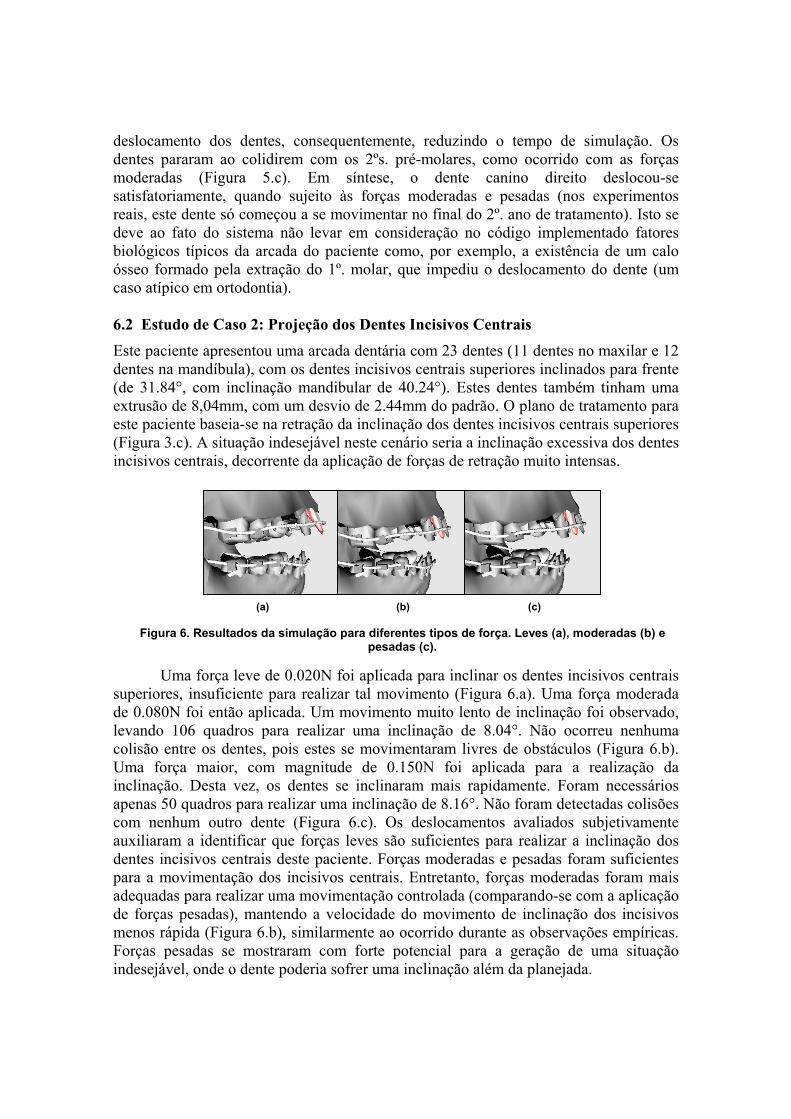
deslocamento dos dentes, consequentemente, reduzindo o tempo de simulação. Os dentes pararam ao colidirem com os 2ºs. pré-molares, como ocorrido com as forças moderadas (Figura 5.c). Em síntese, o dente canino direito deslocou-se satisfatoriamente, quando sujeito às forças moderadas e pesadas (nos experimentos reais, este dente só começou a se movimentar no final do 2º. ano de tratamento). Isto se deve ao fato do sistema não levar em consideração no código implementado fatores biológicos típicos da arcada do paciente como, por exemplo, a existência de um calo ósseo formado pela extração do 1º. molar, que impediu o deslocamento do dente (um caso atípico em ortodontia). 6.2 Estudo de Caso 2: Projeção dos Dentes Incisivos Centrais Este paciente apresentou uma arcada dentária com 23 dentes (11 dentes no maxilar e 12 dentes na mandíbula), com os dentes incisivos centrais superiores inclinados para frente (de 31.84°, com inclinação mandibular de 40.24°). Estes dentes também tinham uma extrusão de 8,04mm, com um desvio de 2.44mm do padrão. O plano de tratamento para este paciente baseia-se na retração da inclinação dos dentes incisivos centrais superiores (Figura 3.c). A situação indesejável neste cenário seria a inclinação excessiva dos dentes incisivos centrais, decorrente da aplicação de forças de retração muito intensas.
Uma força leve de 0.020N foi aplicada para inclinar os dentes incisivos centrais superiores, insuficiente para realizar tal movimento (Figura 6.a). Uma força moderada de 0.080N foi então aplicada. Um movimento muito lento de inclinação foi observado, levando 106 quadros para realizar uma inclinação de 8.04°. Não ocorreu nenhuma colisão entre os dentes, pois estes se movimentaram livres de obstáculos (Figura 6.b). Uma força maior, com magnitude de 0.150N foi aplicada para a realização da inclinação. Desta vez, os dentes se inclinaram mais rapidamente. Foram necessários apenas 50 quadros para realizar uma inclinação de 8.16°. Não foram detectadas colisões com nenhum outro dente (Figura 6.c). Os deslocamentos avaliados subjetivamente auxiliaram a identificar que forças leves são suficientes para realizar a inclinação dos dentes incisivos centrais deste paciente. Forças moderadas e pesadas foram suficientes para a movimentação dos incisivos centrais. Entretanto, forças moderadas foram mais adequadas para realizar uma movimentação controlada (comparando-se com a aplicação de forças pesadas), mantendo a velocidade do movimento de inclinação dos incisivos menos rápida (Figura 6.b), similarmente ao ocorrido durante as observações empíricas. Forças pesadas se mostraram com forte potencial para a geração de uma situação indesejável, onde o dente poderia sofrer uma inclinação além da planejada.
(a) (b) (c)
Figura 6. Resultados da simulação para diferentes tipos de força. Leves (a), moderadas (b) epesadas (c).
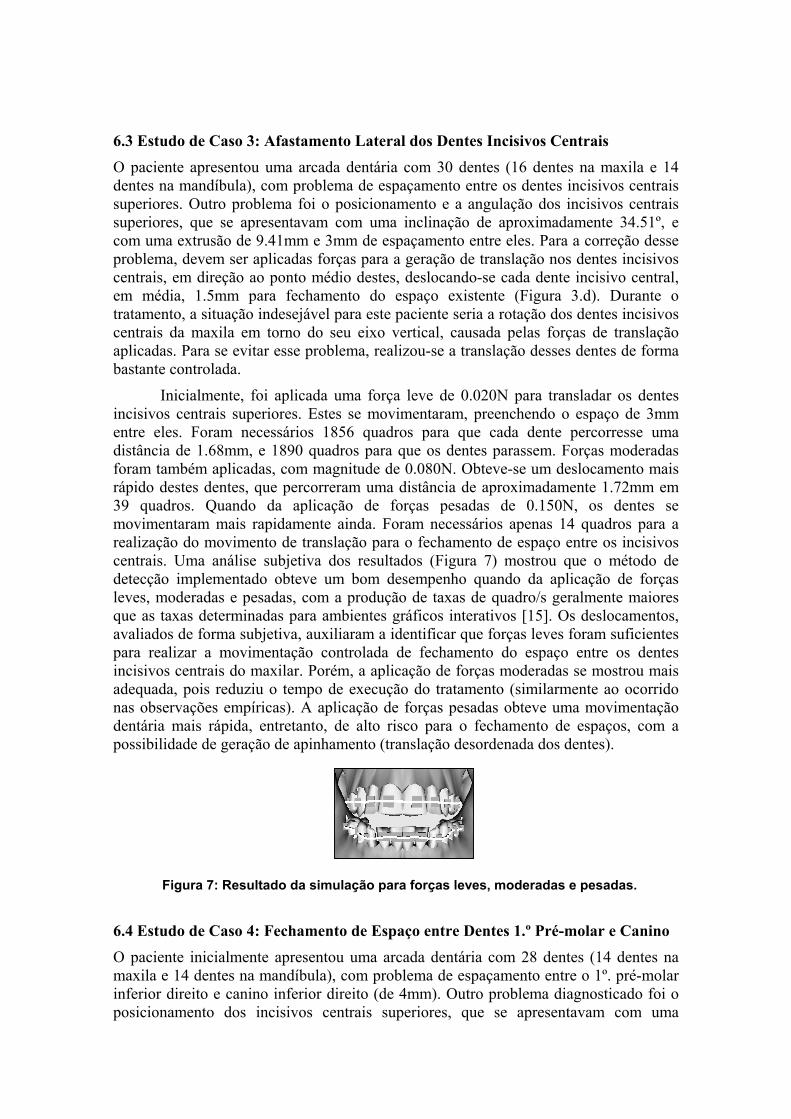
6.3 Estudo de Caso 3: Afastamento Lateral dos Dentes Incisivos Centrais O paciente apresentou uma arcada dentária com 30 dentes (16 dentes na maxila e 14 dentes na mandíbula), com problema de espaçamento entre os dentes incisivos centrais superiores. Outro problema foi o posicionamento e a angulação dos incisivos centrais superiores, que se apresentavam com uma inclinação de aproximadamente 34.51º, e com uma extrusão de 9.41mm e 3mm de espaçamento entre eles. Para a correção desse problema, devem ser aplicadas forças para a geração de translação nos dentes incisivos centrais, em direção ao ponto médio destes, deslocando-se cada dente incisivo central, em média, 1.5mm para fechamento do espaço existente (Figura 3.d). Durante o tratamento, a situação indesejável para este paciente seria a rotação dos dentes incisivos centrais da maxila em torno do seu eixo vertical, causada pelas forças de translação aplicadas. Para se evitar esse problema, realizou-se a translação desses dentes de forma bastante controlada.
Inicialmente, foi aplicada uma força leve de 0.020N para transladar os dentes incisivos centrais superiores. Estes se movimentaram, preenchendo o espaço de 3mm entre eles. Foram necessários 1856 quadros para que cada dente percorresse uma distância de 1.68mm, e 1890 quadros para que os dentes parassem. Forças moderadas foram também aplicadas, com magnitude de 0.080N. Obteve-se um deslocamento mais rápido destes dentes, que percorreram uma distância de aproximadamente 1.72mm em 39 quadros. Quando da aplicação de forças pesadas de 0.150N, os dentes se movimentaram mais rapidamente ainda. Foram necessários apenas 14 quadros para a realização do movimento de translação para o fechamento de espaço entre os incisivos centrais. Uma análise subjetiva dos resultados (Figura 7) mostrou que o método de detecção implementado obteve um bom desempenho quando da aplicação de forças leves, moderadas e pesadas, com a produção de taxas de quadro/s geralmente maiores que as taxas determinadas para ambientes gráficos interativos [15]. Os deslocamentos, avaliados de forma subjetiva, auxiliaram a identificar que forças leves foram suficientes para realizar a movimentação controlada de fechamento do espaço entre os dentes incisivos centrais do maxilar. Porém, a aplicação de forças moderadas se mostrou mais adequada, pois reduziu o tempo de execução do tratamento (similarmente ao ocorrido nas observações empíricas). A aplicação de forças pesadas obteve uma movimentação dentária mais rápida, entretanto, de alto risco para o fechamento de espaços, com a possibilidade de geração de apinhamento (translação desordenada dos dentes).
6.4 Estudo de Caso 4: Fechamento de Espaço entre Dentes 1.º Pré-molar e Canino O paciente inicialmente apresentou uma arcada dentária com 28 dentes (14 dentes na maxila e 14 dentes na mandíbula), com problema de espaçamento entre o 1º. pré-molar inferior direito e canino inferior direito (de 4mm). Outro problema diagnosticado foi o posicionamento dos incisivos centrais superiores, que se apresentavam com uma
Figura 7: Resultado da simulação para forças leves, moderadas e pesadas.

inclinação de 34.82º, com uma extrusão de 8.79mm. Para realizar o fechamento de espaço, forças de translação devem ser aplicadas no 1º. pré-molar inferior direito, em direção ao dente canino inferior direito (Figura 3.e). Durante o tratamento, a situação indesejável para este paciente também seria a ocorrência de apinhamento dos dentes incisivo lateral, canino e 1º. pré-molar, devido à ocorrência de colisão entre eles.
Inicialmente, aplicou-se uma força leve de 0.020N para translação do 1º. pré-molar inferior. Visualizou-se um movimento muito lento de translação, que levou 239 quadros para um deslocamento de 3mm (Figura 8.a). Uma força moderada de 0.080N para translação do 1º. pré-molar inferior foi então aplicada. Um movimento de translação mais rápido que o gerado pela aplicação de forças leves foi gerado, levando 108 quadros para produzir um deslocamento de 3mm. Um efeito de colisão do tipo “dominó” sobre o dente canino inferior direito foi observado, onde os dentes vizinhos foram “empurrados” ao longo de 253 quadros, deslocando-se por mais 1mm, até pararem (Figura 8.b). Finalmente, uma força pesada de 0.150N foi aplicada para translação do 1º. pré-molar. O fechamento de espaço entre estes dentes foi mais rápido, levando 27 quadros para percorrerem 3mm, até ocorrer colisão. A força aplicada causou o efeito “dominó” entre o dente movimentado e o dente canino inferior direito, até colidir com o dente incisivo lateral inferior direito, ocorrido em 163 quadros, percorrendo uma distância de 5mm (Figura 8.c). Foi observado que forças leves foram suficientes para realizar o fechamento de espaços entre os dentes 1º. pré-molar inferior direito e o canino inferior direito, mas insuficientes para causar o efeito “dominó” entre eles. Forças moderadas geraram deslocamentos mais rápidos que as forças leves, causando um efeito “dominó”, similarmente ao ocorrido durante as observações empíricas. As forças pesadas geraram movimentações mais rápidas que as forças moderadas, porém, mais arriscadas. Devido ao efeito “dominó”, o movimento se propagou até que houvesse colisão com o dente incisivo lateral inferior direito, podendo causar uma movimentação adicional e indesejada nos dentes. 7. Resultados
As principais características anatômicas dos pacientes foram mapeadas com sucesso em nosso sistema de realidade virtual, através dos módulos de Mapeamento Geométrico e Geração da Malha 3D. Avaliações subjetivas dos modelos 3D dos pacientes virtuais sintetizados exibiram um alto grau de similaridade com os moldes plásticos reais. Para todos os estudos de caso, os resultados de simulação obtidos foram confrontados com os dados experimentais obtidos ao longo de um ano de acompanhamento, obtendo um erro médio para os movimentos de translação de 2.0704mm, com um desvio padrão de ± 1.2224mm. Para os movimentos de rotação e inclinação, o sistema não gerou erros. As
(a) (b) (c)
Figura 8: Resultados da simulação para forças leves (a), moderadas (b) e pesadas (c).
simulações foram avaliadas, com base na aplicação de 3 categorias de forças (leves, moderadas e pesadas). As simulações gráficas obtiveram resultados bastante realistas, possibilitando que análises subjetivas do movimento dentário ao longo do arco ortodôntico fossem realizadas e validadas por um especialista na área ortodôntica. Vale ressaltar que avaliações clínicas extensivas são difíceis de serem realizadas, devido ao longo tempo necessário para a terapia de tratamento.
Os cenários dos estudos de caso e os resultados simulados são melhor visualizados através de animações. Sendo assim, disponibilizamos estes dados para os leitores em um site provisório http://www.geocities.com/wendelbsilva/JOrtho/. 8. Conclusões e Trabalhos Futuros Este trabalho apresentou um sistema de realidade virtual que desenvolvemos para treinamento e planejamento de tratamentos em ortodontia. Os resultados obtidos através dos estudos de caso foram bastante promissores e satisfizeram as expectativas iniciais de avaliação das potencialidades e limitações do sistema implementado. O protótipo integra e estende de forma significativa as principais idéias de alguns modelos comerciais existentes que são difíceis de testar e validar, já que são sistemas comerciais de código fechado e de custo elevado. Várias são as vantagens do sistema implementado, a principal delas é a visualização realista do deslocamento dinâmico dos dentes ao longo do arco dentário, incluindo efeitos de colisão. A modelagem de um efeito “dominó” também foi implementada com sucesso, acrescentando um maior realismo nas animações produzidas, de acordo com as restrições geométricas e funcionais estabelecidas para o ambiente. Adicionalmente, o sistema possibilita a modificação de cenários (diferentes setups) de forma interativa, através da interface do sistema. O usuário pode, por exemplo, selecionar um ou mais dentes e aplicar forças para avaliar os resultados de simulação de novas configurações. Finalmente, aspectos biomecânicos simples foram incluídos no sistema, representando diferentes tipos de forças aplicadas em diferentes tipos de dentes, bem como de resistência ao movimento dentário.
Apesar da qualidade dos resultados obtidos, o sistema não foi utilizado ainda de forma sistemática, nem completamente construído para explorar todos os aspectos mecânicos envolvidos na área de ortodontia. Por exemplo, em torno da raiz dos dentes, efeitos de deformação do tecido mole podem ser incorporados para gerar uma movimentação dentária ainda mais precisa. O Método de Elemento Finito poderia ser utilizado para representar esse problema. Porém, para que o ambiente executasse em tempo real, seria necessário que os objetos geométricos fossem compostos por um número pequeno de elementos, com comportamento elástico linear. Sob essas condições, os resultados simulados seriam altamente imprecisos, visto que já está comprovado que o comportamento de deformação de tecidos biológicos é não-linear [16]. 9. Agradecimentos Wendel B. Silva é bolsista da FUNCAP, sob matrícula No. 3265/05, e agradece o apoio financeiro concedido. Os autores também são gratos a todos os especialistas e voluntários que colaboraram para o desenvolvimento dos estudos de caso.

10. Referências [1] Marcotte. Biomecânica em Ortodontia. Editora LS, 1993. [2] Meyer, R.S., Bachmann, K., Harmsen, B. The Computer Simulation of Orthodontic
Tooth Movement. Fortschr Kieferothop, 51(4), 238-42, 1990. [3]Middleton, J., Jones, M.L., Wilson, A.N. Three-dimensional Analysis of Orthodontic
Tooth Movement, Journal of Biomedical Engineering, 12(4), 319-27, 1990. [4] Bourauel, C., Freudenreich, D., Vollmer, D., Kobe, D., Drescher, D., Jager, A.
Simulation of Orthodontic Tooth Movements: a Comparison of Numerical Models. Journal of Orofacial and Orthopedics, 60(2), 136-151, 1999.
[5] Alcañiz, M., Montserrat, C., Grau, V., Chinesta, F., Ramon, A., Albalat, S. An Advanced System for the Simulation and Planning of Orthodontic Treatment, Medical Image Analysis, 2(1), 1998, 61-79.
[6] Motohashi, N., Kuroda, T. A 3D Computer-Aided Design System Applied to Diagnosis and Treatment Planning in Orthodontics and Orthognathic Surgery. The European Journal of Orthodontics, 21(3), 263-274, 1999.
[7] Soncini, M., Pietrabissa, R., Natali, A. Simulation of the Tooth Movement during Orthodontic Treatment. In Proceedings of the 12th Conerence of the European Society of Biomechanics (Dublin, UK, 2000), 331.
[8] Keilig, L., Piesche, K., Jager, A., Bourauel, C. Applications of Surface Matching Algorithms for Determination of Orthodontic Tooth Movements. Computer Methods in Biomechanics and Biomedical Engineering, 6(5), 353-359, 2003.
[9] Bisler, A., Bockholt, U., Voss, G. The Virtual Articulator Applying VR Technologies to Dentistry. In Proceedings of the 6th IEEE International Conference on Informatics and Visualisation (USA 2002), 600-602.
[10] Enciso, R., Memon, A., Fidaleo, D. A., Neumann, U., Mah, J. The virtual Craniofacial Patient: 3D Jaw Modeling and Animation. In Proceedings of the 11th Medicine Meets Virtual Reality (USA 2003), 65-71.
[11] Ferrario, V.F., Sforza, C., Schmitz, J. H., Miani, A., Serrao, G. A 3D Computerized Mesh Diagram Analysis and its Application in Soft Tissue Facial Morphometry. American Journal of Orthodontic and Dentofacial Orthopedics, 114, 1998, 404-413.
[12] Fiorelli, G. The 3-D Occlusogram Software. In Proceedings of American Journal of Orthodontic and Dentofacial Orthop. 1999, 363-368.
[13] Spallone, L., Venanzi, L., Tantardini, M. Mandibular Movement Simulator: A Real Time 3D Analogue of the Mechanic Articulators. In Proceedings of the 5th International Symposium on Computer Methods in Biomechanics and Biomedical Engineering (Rome, Italy, 2001).
[14] Barbosa Neto, M.E. J-Ortho: Um Ambiente Gráfico Interativo para Simulação de Tratamento Ortodôntico. Dissertação de Mestrado. MIA-UNIFOR. Dezembro 2005.
[15] Watson, B., Walker, N., Ribarsky, W., Spaulding, V. Effects of Variation in System Responsiveness on User Performance in Virtual Environments, Human Factors, Special Section on Virtual Environments, 40, 3, pp. 403-414, 1998.
[16] Fung, Y.C., Biomechanics-Mechanical Properties of Living Tissues. Springer-Verlag. 1993.
[17] Rodrigues, M.A.F., Silva, W.B., Barbosa, R.G., Ribeiro, I. M.M.P, Barbosa Neto, M.E. J-Ortho: An Open-Source Orthodontic Treatment Simulator. In: 21st Annual ACM Symposium on Applied Computing (ACM SAC 2006), Special Track on Computer Applications in Health Care, 2006, Dijon, France. In Proceedings of the ACM SAC 2006. ACM Press, 2006 (aceito para publicação).