te guia de operacoes par v1 0
DESCRIPTION
ÂTRANSCRIPT

. . . . . .. . . .
. . . . . . . . . .
Euroscope Tropa de Elite
Guia de Operações Aproximação Radar de Precisão Controlada de Solo (GCA/PAR)
Copyright @ Euroscope Tropa de Elite – USO INTERNO 2
Guia de Operações Este guia tem como objetivo padronizar as operações de controle de tráfego aéreo entre os membros da Tropa de Elite para Aproximações de Precisão Radar Controlada do Solo (GCA/PAR) Introdução
A qualidade dos serviços prestados pela Euroscope Tropa de Elite depende fortemente da adoção de padrões efetivos de Controle Radar. No nosso caso, especificamente, o piloto deve perceber que os procedimentos de controle de tráfego aéreo, fraseologia, cordialidade e educação possuem a mesma forma e qualidade, independentemente do membro da Tropa de Elite.
Assim, visando padronizar os procedimentos para Aproximação de Precisão Controlada do Solo (GCA/PAR), esse guia define normas, procedimentos e fraseologia para o controle GCA/PAR, válido para todas as localidades onde for aplicada.
As instruções constantes neste documento devem ser seguidas por todos os membros. Essas instruções abrangem os seguintes tópicos do controle de tráfego aéreo:
• Visão Geral GCA/PAR
• Posições de Controle para GCA/PAR
• Requisitos de Software
• Princípios do GCA/PAR
• Fraseologia
• Fases e Dicas do GCA/PAR
• Recomendações
Visão Geral GCA/PAR
A Aproximação Controlada do Solo, ou GCA, é um serviço especializado de controle de tráfego aéreo onde o controlador guia a aeronave até um pouso seguro utilizando as informações radar em qualquer condição meteorológica.
Para a prestação do serviço GCA, o controlador deve utilizar informações de um Radar de Aproximação de Precisão (PAR) para aproximações de precisão ou um Radar de Vigilância de Aeroporto (ASR) para aproximações sem precisão.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 3
A aproximação controlada do solo é uma das mais antigas técnicas utilizadas no tráfego aéreo implementada com o uso de radar. Foi largamente utilizada de 1948 a 1949 em Berlin, Alemanha.
Algumas das principais características desta técnica são:
• Grande quantidade de comunicação entre controlador e piloto;
• Apenas um piloto sob o controle de precisão radar, excepcionalmente 2 (dois); e
• Monitores dedicados para monitoração da aproximação utilizando PAR.
Os Radares de Aproximação de Precisão (PAR) fornecem informações precisas de proa magnética e altitude da aeronave, o que permite, aos controladores, instruir os pilotos para o pouso.
As instruções devem incluir tanto correções de altitudes quanto de proa para que o piloto siga corretamente a trajetória de aproximação. Para tanto, o monitor do PAR permite visualizar as informações de azimute (extensão da pista em uso ou da trajetória final) e a rampa de aproximação (glide path).
O controlador deve fornecer informações e/ou correções de proa e altitude entre 5 (cinco) e 10 (dez) segundos. Quando o piloto alcançar o limite para pouso (threshold), o controlador encerra as informações para pouso, neste momento o piloto deverá se encontrar na altitude de decisão (Decision Height) e, aproximadamente, ¾ de milha náutica do ponto de toque.
Apesar de não ser muito utilizado atualmente, controladores de diversos países devem estar preparados. As aproximações GCA/PAR são, em geral, utilizadas pelas organizações militares, enquanto a aviação civil utiliza o Sistema de Aproximação por Instrumentos (ILS).
A aproximação controlada do solo é muito útil em locais onde não se dispõe de instrumentação sofisticada de navegação e pode representar a sobrevivência dos tripulantes e passageiros no caso de problemas elétricos, mau funcionamento dos auxílios de navegação ou qualquer outro tipo de emergência, até quando o rádio puder funcionar.
Posições de Controles para GCA/PAR
Para uso na VATSIM Brasil o controlador deve assumir uma função de APP, utilizando o prefixo SBxx_P_APP.
NOTA: A posição _P_APP só poderá ser assumida se houver _APP disponível e pilotos homologados ou em treinamento e está limitada a um alcance de 30 NM.
Requisitos de Software
Controlador Cliente Radar Euroscope: deverá ser utilizado para conexão à VATSIM quando em uso on-line.
vPAR QuadRadar (vPAR-Q)*: Simulador de Radar de Aproximação de Precisão desenvolvido por Michael Oxner. Permite que o piloto se conecte diretamente ao controlador para que o Fight Simulator envie as informações em tempo adequado para o GCA.
*Nota: Utiliza a porta 4242 para comunicação. A mesma deverá ser liberada no Firewall e direcionada ao IP do controlador em uso, caso o mesmo utilize um roteador ou equivalente.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 4
Piloto vPAR Transponder (vPAR-X): deverá ser utilizado pelos pilotos sob controle do controlador de aproximação de precisão radar. Para conexão ao simulador de PAR o controlador deverá fornecer o endereço IP de internet para conexão via CHAT (evitar colocar no ATIS devido a problemas de segurança).
Princípios do PAR
O Radar de Aproximação de Precisão (PAR) é um tipo de sistema de direcionamento radar desenvolvido para fornecer, ao piloto das aeronaves, informações de posicionamento laterais e verticais para pouso até o ponto de aproximação perdida (MAP). Os controladores devem observar a posição da aeronave e fornecer instruções precisas para que o piloto possa manter a aeronave no curso de aproximação final.
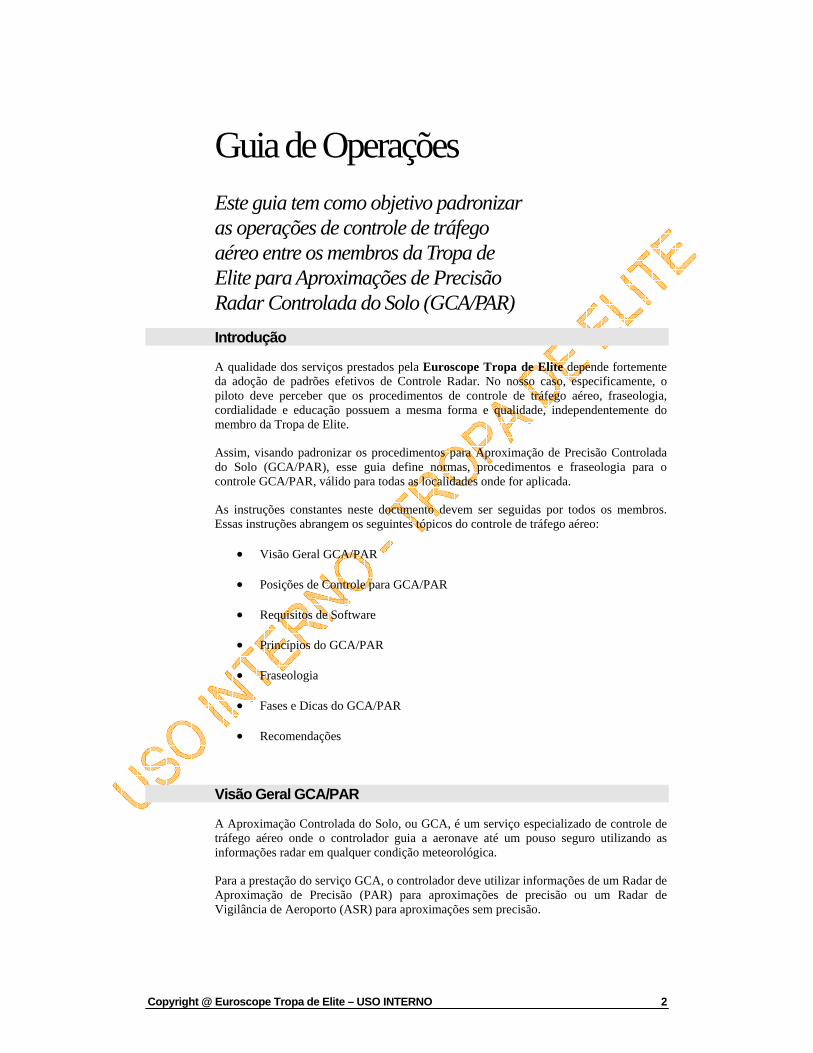
Monitores vPAR-Q O vPAR QuadRadar é composto por 3 (três) telas de monitoração (Figura 1), a saber:
• PAR – é a tela principal para execução da aproximação radar de precisão. É composta por duas telas. A metade superiora representa o monitor PAR de posicionamento vertical (altitude) e a metade inferior o posicionamento em relação ao prolongamento da pista.
• Traffic – apresenta a posição das aeronaves como em um radar convencional (Euroscope, por exemplo) para as aeronaves conectadas via vPAR-X;
• ASDE – mostra a aproximação curta final e situação em solo das aeronaves conectadas via vPAR-X;
Todos os monitores do vPAR-Q podem ser utilizados no modo de tela expandida, como mostrado na Figura 2. A vantagem deste modo é que aumenta a precisão e melhora a visibilidade do contato radar para o controlador definir suas instruções.
Os monitores apresentado nas Figura 1 e Figura 2 estão configurados para escala Linear, ou seja, separação uniforme de distância. Para aumentar a precisão ainda mais, a tela pode ser utilizada no modo de escala logarítmico (Figura 3).
Para pode utilizar o PAR deve-se selecionar um setor especificamente desenvolvido (.SCT) e a aproximação a ser executada para cada pista, devendo lembrar que existem variações devido a cenários e versões do Flight Simulator (FS2002, FS2004 ou FSX). O kit desenvolvido fornece o material necessário para as localidades em que a Euroscope Tropa de Elite atua (setores e aproximações).
Nas Figuras de 1 a 3, o monitor PAR de posicionamento vertical (metade superior) mostra a rampa de aproximação de 3.0o (linha amarela) e a linha de alerta para baixa altitude (linha vermelha tracejada), altitude de decisão de 236’ (equivale a um ILS CAT II) e um alcance de 20 NM, o qual pode ser de até 5 NM para aumentar a precisão na final de 5NM.
A metade inferior, Figuras 1 a 3, mostram o monitor PAR de posicionamento de azimute (em relação ao prolongamento de pista de pouso) para a Pista 18 de Recife (SBRF) (curso FAC = 184º).

Copyright @ Euroscope Tropa de Elite – USO INTERNO 5
Figura 1 - Tela principal do vPAR-Q
Figura 2 - Visão expandida do monitor vPAR
Copyright @ Euroscope Tropa de Elite – USO INTERNO 6
Figura 3- Escala logarítmica de distância. Maior precisão na fina para o controlador.
Exemplo de Aproximação GCA/PAR
As Figuras de 4 a 13 mostram uma seqüência de imagens de um procedimento GCA/PAR sendo realizado.
A aproximação de precisão tem início quando o controlador do APP convencional transfere a aeronave para o controlador de aproximação de precisão (Figura 4) e segue instruindo o controlador até a altitude de decisão (DH) na Figura 13. Observe que durante o processo a escala de distância foi alterada de Linear para Logarítmica para aumentar a precisão do procedimento.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 7
Figura 4 - Aeronave ingressando no setor de aproximação de precisão. (Zoom 15 NM)
Figura 5 - Aeronave próxima do alinhamento da pista.
Copyright @ Euroscope Tropa de Elite – USO INTERNO 8
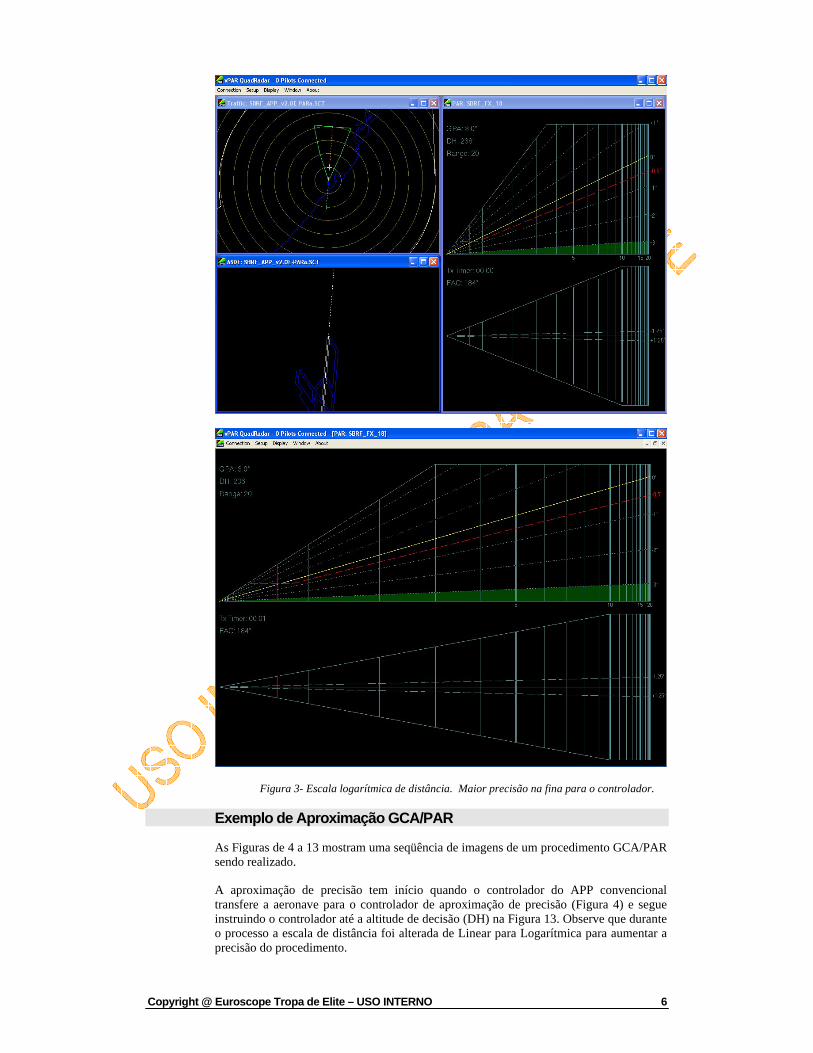
Figura 6 - Aeronave alinhada com a pista e próxima de iniciar descida pela rampa.
Figura 7 - Aeronave iniciando descida na rampa de 3.0o.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 9
Figura 8 - Detalhe da aeronave na rampa. (Zoom 10 NM)
Figura 9 - Tela expandida do PAR. (Zoom 10 NM)
Copyright @ Euroscope Tropa de Elite – USO INTERNO 10
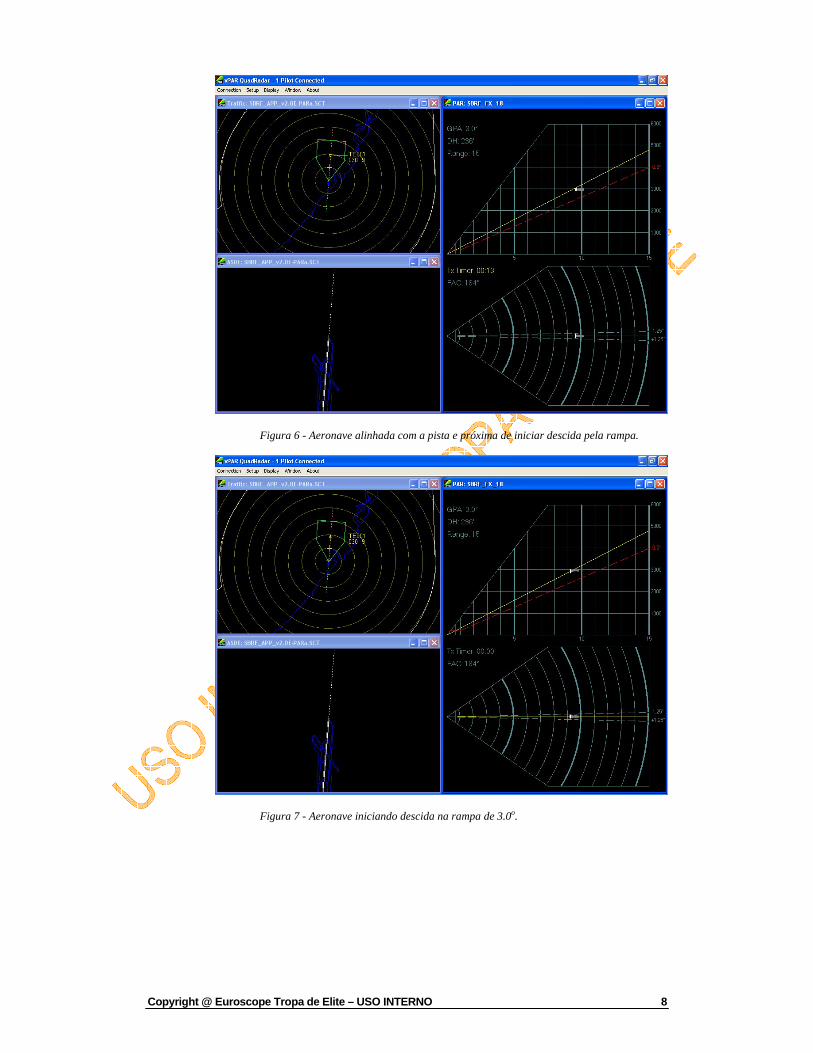
Figura 10 - Alteração para escala de distância logarítmica. (Maior precisão)
Figura 11 - Aeronave a menos de 2 NM, na rampa, pouco a esquerda do alinhamento.
Copyright @ Euroscope Tropa de Elite – USO INTERNO 11
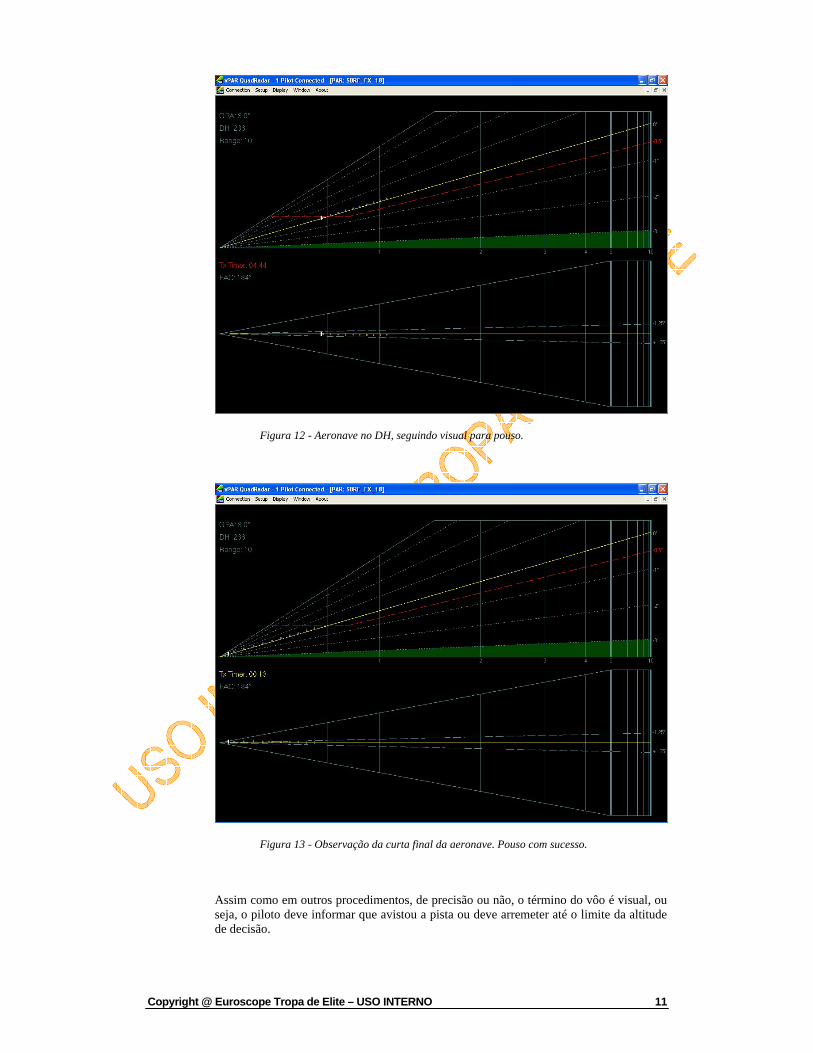
Figura 12 - Aeronave no DH, seguindo visual para pouso.
Figura 13 - Observação da curta final da aeronave. Pouso com sucesso.
Assim como em outros procedimentos, de precisão ou não, o término do vôo é visual, ou seja, o piloto deve informar que avistou a pista ou deve arremeter até o limite da altitude de decisão.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 12
Monitor PAR – Escala Linear e Logarítimica
O vPAR permite ao controlador utilizar dois tipos de escala de distância: Linear e Logarítmica. Dependendo da distância da aeronave para o ponto de toque é recomendado o uso de uma ou outras, porém fica a critério do controlador em selecionar a melhor para cada momento da aproximação.
A tabela a seguir apresenta algumas diferenças entre cada uma das escalas.
Tabela 1 - Escala Linear vs. Logarítmica
Escala Linear Escala Logarítmica
• Espaçamento linear das milhas,
o que facilita a leitura pelo
controlador de frações de
distância
• Espaçamento não-linear da
distância entre o ponto de toque
e a posição da aeronave e, para o
fornecimento de distância
fracionária, o controlador deve
estar acostumado
• Adequado para o uso para
grandes distâncias (> 10 NM)
• Adequando para final de 10 NM
ou menos
• Menor precisão para curtas
distâncias
• Maior precisão para curtas
distâncias
• Mostra o posicionamento
vertical em pés acima do solo
• Mostra o posicionamento em
relação ao ângulo de
aproximação
• Difícil para observar pequenas
variações de cursos e razão de
descida
• Facilita a observação de
tendências de pequenas
variações devido à distribuição
da escala
• Maior abertura do ângulo de
azimute (6 NM para cada lado
do curso da pista), o que implica
em menor precisão
• Menor abertura do ângulo de
azimute (3 NM para cada lado
do curso da pista) e,
conseqüentemente, maior
precisão
Copyright @ Euroscope Tropa de Elite – USO INTERNO 13
Fraseologia
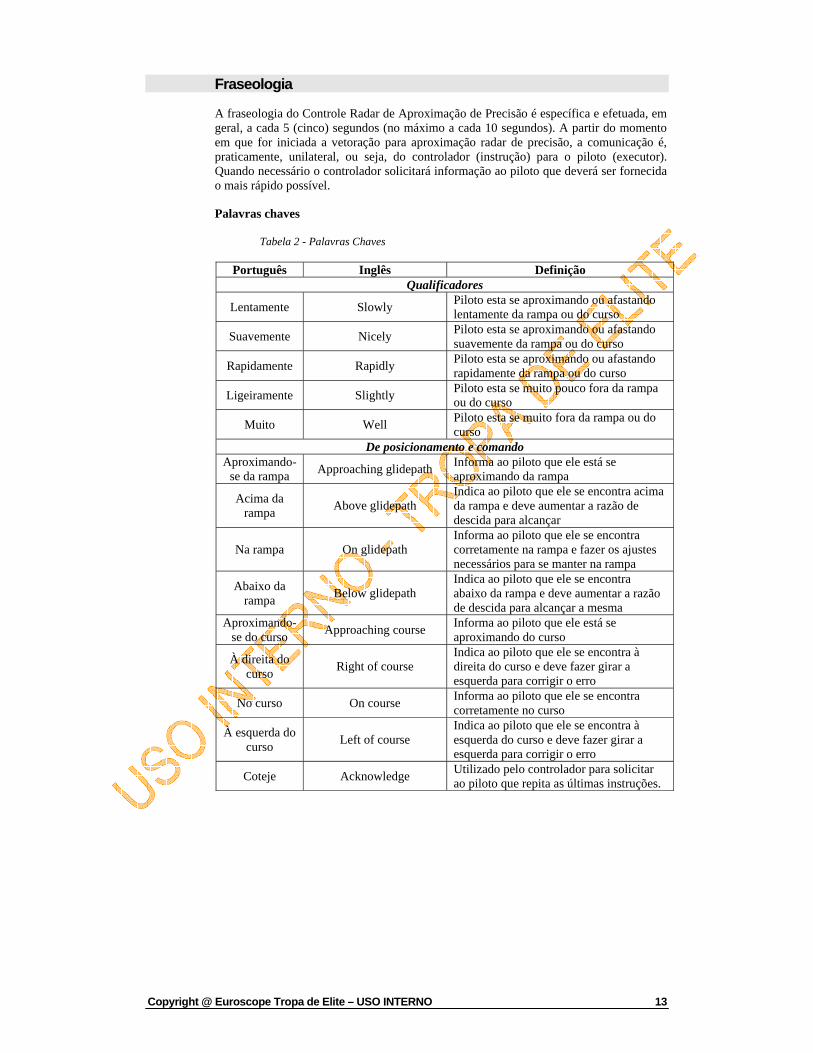
A fraseologia do Controle Radar de Aproximação de Precisão é específica e efetuada, em geral, a cada 5 (cinco) segundos (no máximo a cada 10 segundos). A partir do momento em que for iniciada a vetoração para aproximação radar de precisão, a comunicação é, praticamente, unilateral, ou seja, do controlador (instrução) para o piloto (executor). Quando necessário o controlador solicitará informação ao piloto que deverá ser fornecida o mais rápido possível.
Palavras chaves
Tabela 2 - Palavras Chaves
Português Inglês Definição Qualificadores
Lentamente Slowly Piloto esta se aproximando ou afastando lentamente da rampa ou do curso
Suavemente Nicely Piloto esta se aproximando ou afastando suavemente da rampa ou do curso
Rapidamente Rapidly Piloto esta se aproximando ou afastando rapidamente da rampa ou do curso
Ligeiramente Slightly Piloto esta se muito pouco fora da rampa ou do curso
Muito Well Piloto esta se muito fora da rampa ou do curso
De posicionamento e comando Aproximando-
se da rampa Approaching glidepath Informa ao piloto que ele está se aproximando da rampa
Acima da rampa Above glidepath
Indica ao piloto que ele se encontra acima da rampa e deve aumentar a razão de descida para alcançar
Na rampa On glidepath Informa ao piloto que ele se encontra corretamente na rampa e fazer os ajustes necessários para se manter na rampa
Abaixo da rampa Below glidepath
Indica ao piloto que ele se encontra abaixo da rampa e deve aumentar a razão de descida para alcançar a mesma
Aproximando-se do curso Approaching course Informa ao piloto que ele está se
aproximando do curso
À direita do curso Right of course
Indica ao piloto que ele se encontra à direita do curso e deve fazer girar a esquerda para corrigir o erro
No curso On course Informa ao piloto que ele se encontra corretamente no curso
À esquerda do curso Left of course
Indica ao piloto que ele se encontra à esquerda do curso e deve fazer girar a esquerda para corrigir o erro
Coteje Acknowledge Utilizado pelo controlador para solicitar ao piloto que repita as últimas instruções.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 14
Exemplo de Fonia
SBRF_P_APP: TE001, este é controle radar final. Como copia esta transmissão? TE001: 5/5, TE001 (NOTA: 5/5 = Alto e claro) SBRF_P_APP: Estes serão os vetores para uma aproximação radar de precisão pela esquerda para a pista 18 de Recife, a rampa de aproximação é de 3º e a DH de 236 pés TE001: ciente. SBRF_P_APP: Se não houver transmissão por um período de 30 segundos, execute aproximação perdida mantendo proa 184, subindo para 3000 pés e tente contato com o Controle Recife em 119.10 Quando a aeronave estiver próxima do curso de aproximação final você deve mudar para o monitor PAR. SBRF_P_APP: Proa 184. Agora na aproximação final, não coteje qualquer transmissão a não ser que seja solicitado pelo controlador. Forneça instruções e informação de posição enquanto a aeronave estiver na aproximação final, o mais freqüente possível (a cada 5 segundos), para fazer com que o piloto esteja ciente de onde ele esta e que ele ainda está em contato com você. Estas transmissões devem ser parecidas com: “muito a esquerda do curso, corrija rapidamente, direita proa 220” “13 milhas do ponto de toque, esquerda proa 210” “interceptando o curso, voe proa 184” “no curso, 12 milhas do ponto de toque” “a esquerda do curso, corrija lentamente” (ou “suavemente” ou “rapidamente”) “a esquerda do curso e paralelo” “derivando para esquerda do curso, direita proa 190” “muito a esquerda do curso, direita proa 200” “no curso, voe proa 184, 7 milhas do toque, uma milha para interceptar a rampa” “um pouco a esquerda do curso, aguarde interceptação da rampa, trem baixado e travado” “interceptando a rampa, inicie descida da rampa de 3º AGORA, DH de 236 pés” “razão inicial de descida elevada mantendo a aeronave abaixo da rampa, ajuste razão de descida” “no curso” “acima da rampa – ajuste razão de descida” “a esquerda do curso, direita proa 186, 4 milhas do ponto de toque” “de volta à rampa, reassuma razão normal de descida, no curso” “abaixo da rampa, ajuste razão de descida, 3 milhas e meia do ponto de toque, no curso” “3 milhas do toque, perigosamente abaixo da rampa, nivele sua aeronave, coteje” TE001: ciente, nivelado “de volta à rampa, reassuma razão normal de descida, duas milhas e meia do toque” “no curso e na rampa” “duas milhas para o toque, torre autoriza TE001 pouso na pista 18, vento 200 com 7 nós, cheque trem baixado e travado, coteje” TE001: ciente, trem baixado e travado “uma milha e meia para o toque” “passando os limites do controle radar” “no curso, pouco acima da rampa” “aproximando dos limites, informe condição de pouso, controle radar em espera” Como pode ser observado pelo exemplo acima, a fraseologia para a execução da Aproximação Radar de Precisão (GCA/PAR) é concisa, objetiva e difere um pouco da fraseologia padrão. É importante reforçar que é obrigação do controlador guia o piloto até a curta final de forma tranqüila e segura.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 15
Fases e Dicas do GCA/PAR
Fases da GCA/PAR Para melhor entendimento, tanto do controlador quanto do piloto, GCA/PAR pode ser divida em 6 (seis) etapas, a saber:
1. Inicial. A aproximação radar de precisão tem início quando a aeronave encontra-se no alcance do radar de precisão e o contato com o controlador GCA/PAR é estabelecido. Normalmente isso ocorre entre 8 e 15 NM do ponto de toque e abaixo da rampa. Caso o piloto tenha pouca experiência ou a aeronave encontre-se com problemas é recomendado iniciar o procedimento de aproximação o mais distante possível (15-20 NM).
2. Aproximação Final. O controlador deve garantir que, para início da aproximação final, a aeronave já esteja alinhada com o curso da pista e informar ao piloto que ele esta se aproximando da rampa (10 a 30 segundo antes). Quando a aeronave alcançar a rampa de descida, o controlador deve instruir o piloto para iniciar a descida imediatamente (AGORA), de acordo com a inclinação da rampa, e informando a altitude de decisão (DH), por exemplo, “interceptando a rampa, inicie descida da rampa de 3º AGORA, altitude de decisão 236 pés”. Para o início da descida o piloto deverá conhecer o razão de que deve ser empregada para aquela determinada inclinação de rampa, por exemplo, para uma aeronave com Vapp = 140 kt a rampa é de 700 pés por minuto (ver Tabela 3). O piloto é responsável por manter a velocidade constante, realizando os ajustes de potência e arfagem. O controlador, por sua vez, pode utilizar essas informações como referência durante todo o procedimento GCA/PAR.
Tabela 3- Velocidade de Aproximação e Razão de Descida para uma rampa de 3º
Vapp(kt)
Razão de Descida pés/min)
60 30070 35080 40090 450100 500110 550120 600130 650140 700150 750160 800170 850180 900190 950200 1000210 1050
3. Orientação do Controlador. O controlador, durante todo o procedimento GCA/PAR, deve instruir e/ou informar o piloto regulamente (a cada 5 segundo) em termos de alinhamento com o curso da pista (muito/pouco a esquerda, a direita ou no curso), posicionamento em relação a rampa (muito/pouco acima, abaixo ou na rampa). O controlador, também, pode fornecer informações de tendência de aproximação ao ângulo da rampa ou alinhamento do curso da pista, por exemplo: “está ficando acima/abaixo da rampa”, “está mantendo acima/abaixo da rampa”, “esta mantendo a esquerda/direita do curso” e etc. As informações de tendência podem ser complementadas em termos de velocidade de correção ou afastamento (lentamente, suavemente ou rapidamente).
Copyright @ Euroscope Tropa de Elite – USO INTERNO 16
4. Correções de Rampa. As correções devem ser realizadas pelo piloto imediatamente após as instruções fornecidas pelo controlador quando houver algum desvio da atitude ou desempenho desejado da aeronave. Devem ser evitadas correções excessivas de potência, arfagem e inclinação. Normalmente, mudanças de arfagem de 1º ou de 100 a 200 pés/min são suficientes para que a aeronave alcance a rampa.
5. Controle de Proa. O piloto deve manter um controle preciso da proa da aeronave, para garantir o alinhamento com a pista durante toda fase de aproximação final. Assim como nas correções de rampa, as correções de proa devem ser realizadas imediatamente depois de instruídas pelo controlador. As instruções de mudança de proa devem ser precedidas de “direita proa” ou “esquerda proa”. Visando evitar que o piloto passe do curso da pista, a inclinação da aeronave deve ser de, aproximadamente, o mesmo número de graus que a curva a ser executada, evitando ultrapassar metade da inclinação de curva padrão (30º). Assim que a nova proa for estabelecida, o controlador deve assumir que o piloto a estará mantendo. Deve-se salientar que outras correções poderão ser instruídas usando como base a última proa solicitada.
6. Altitude de Decisão (DH). Quando o piloto alcançar a altitude de decisão (DH) informada pelo controlador, ou publicada em cartas, o piloto decidirá se continuará com a aproximação caso tenha visual referências visuais da pista ou se executará uma aproximação perdida. Ressalte-se, ainda que, segundo as leis vigentes, o piloto não está autorizado para voar abaixo da DH caso não tenha referências visuais. O controlador poderá, após a aeronave ter alcançado a DH, continuar a prestar informações de posicionamento ao piloto até que a aeronave ultrapasse o ponto de toque, quando será informado “no ponto de toque”. Para que o piloto consiga realizar uma transição agradável do vôo instrumento para o visual, o piloto deverá verificar sistematicamente as condições de visibilidade para pouso na pista.
Dicas para pilotos • Tenha certeza que todos os ajustes na aeronave tenham sido realizadas antes do
início das comunicações com o controlador de aproximação radar de precisão;
• Determinar antecipadamente a razão de descida para seguir a rampa de aproximação (em pés por minuto). Para uma rampa de 3º utilize a Tabela 3 como referência;
• Utilize os intervalos entre as instruções do controlador para verificar a configuração e ajustes o que forem necessários;
• Faça pequenas correções de proa e razão de descida,. Seja gentil com a aeronave, pois como o procedimento é crítico, qualquer alteração brusca pode comprometer a aproximação;
• Se houver algum problema de posicionamento da aeronave detectado pelo controlador, este o instruirá para executar uma aproximação perdida (arremetida). Não questione! Execute as instruções!
• Se a pista não estiver no visual quando na DH, execute imediatamente uma aproximação perdida, não existe margem de erros para arriscar!
• Se a pista estiver no visual, não chame o Controlador e pouse a aeronave.

Copyright @ Euroscope Tropa de Elite – USO INTERNO 17
Recomendações Finais
A garantia da qualidade dos serviços da Euroscope – Tropa de Elite depende de que todos os membros utilizem os procedimentos, de forma, que para os pilotos e outros controladores, que observem nossos trabalhos, não percebam diferenças na qualidade do serviço de controle aéreo virtual entre os membros da equipe.
Não se esqueça que existe uma grande diversidade de grau de conhecimento de vôo dos pilotos, assim, deve-se ter muita atenção na capacidade de do piloto em receber e executar as instruções de controle.
O procedimento de Aproximação Radar de Precisão Controlada de Solo deve ser executado por controladores e pilotos treinados.
Euroscope – Tropa de Elite (Organização)
Referências Bibliográficas
Oxner, M. vPAR - GCA/PAR Phraseology, Procedures and Screen Shots, 2005. http://bathursted.ccnb.nb.ca/vatcan/fir/vPAR/PARPhraseology.html
Barrett, D. Navegational Aids – Precision Approach Radar. 2002. http://www.radarpages.co.uk/mob/navaids/par/par1.htm
vRNLAF / DutchVACC. PAR at Schiphol, a quick reference sheet. 2009. http://www.dutchvacc.nl/downloads/PAR_EN.pdf
Baseops.net. T-44 Briefing Guides – I4101 (22Mar08). 2008 http://www.baseops.net/t44/
Wikipedia. Precision Approach Radar, 25 de fevereiro de 2009. http://en.wikipedia.org/wiki/Precision_Approach_Radar
Wikipedia. Ground-Controlled Approach, 25 de fevereiro de 2009. http://en.wikipedia.org/wiki/Ground-controlled_approach
Mattison, D. Aproximação Radar de Precisão (PAR) com PA28-151 em Ronneby (ESDF), Suécia. 2008. http://video.baamboo.com/watch/4/video/KgcwUgcR6fM/phim-video-clip-Precision-Approach-Radar-approach-into-Ronneby-Sweden.htm