sistemas lineares e invariantes · deslocamento na entrada um sistema é invariante no tempo se...
TRANSCRIPT

Sistemas Lineares e Invariantes
Prof. Juan Moises Mauricio Villanueva
www.cear.ufpb.br/juan
1
Universidade Federal da Paraíba Programa de Pós-Graduação em Engenharia Elétrica

Sistemas Lineares de Tempo Contínuo
• Um sistema Linear satisfaz o Princípio da Superposição, ou
seja, satisfaz as propriedades de:
Aditividade e Homogeneidade.
2
Sistema no Tempo Contínuo
1 1
2 2
1 2 1 2
( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( )
y t T x t
y t T x t
y t y t y t T x t x t
( ) ( )
( ) ( )
y t T x t
ay t T ax t

Determinar se sistema é Linear?
3
2
2( )
y ya b c u t
t t
Aditividade
2
1 1
12
2
2 2
22
( )
( )
y ya b c x t
t t
y ya b c x t
t t
2
1 2 1 2
1 22
( ) ( )2 ( ) ( )
y y y ya b c x t x t
t t
Homogeneidade
2
2
2
2
( )
( ) ( )( )
y ya b c x t
t t
y ya b c x t
t t
2
2
( ) ( )( )
y ya b c x t
t t
É um sistema Não Linear

Sistemas Invariantes de Tempo Contínuo
Deslocamento na saída
Deslocamento na entrada
• Um sistema é invariante no tempo se para um
deslocamento no tempo do sinal de entrada, este causa um
deslocamento no tempo na sinal de saída
0 0
4
( ) { ( )}y t T x t
0 0( ) { ( )}y t t T x t t

Modelagem do Motor de Corrente Continua
5

Aspectos Construtivos de um Motor CC
6

Aplicações Típicas de Motor CC
• Máquinas de Papel
• Bobinadeiras e desbobinadeiras
• Laminadores
• Máquinas de Impressão
• Extrusoras
• Prensas
• Elevadores
• Movimentação e Elevação de Cargas
• Moinhos de rolos
• Indústria de Borracha
• Mesa de testes de motores
7

Modelagem do Motor CC
• A modelagem do motor de corrente contínua envolve duas
etapas:
Modelagem elétrica;
Modelagem mecânica.
8

Modelagem Elétrica
9
Inicialmente é construída o modelo do equivalente elétrico da
armadura:
A velocidade do motor pode ser controlada pela tensão Vta ou a corrente de armadura Ia

10
Parâmetros para simulação
Ra=7.9969 La=172.4836e-3 J=11.983398e-3 B=2.77315e-3 kw=0.521149 kt=0.521149 TL = 0

11
Resposta ao Degrau e Impulso
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
1
2
3
4
5
6Impulse Response
Time (seconds)
Am
plit
ude
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
System: sys
Time (seconds): 0.33
Amplitude: 1.13
Step Response
Time (seconds)
Sistema de primeira ordem
(aproximadamente)
63%*1,8 = 1,13
Resposta ao impulso finito Sistema que depende somente das entradas atuais e passada (causal)

12
Resposta em Frequência do Sistema
-30
-20
-10
0
10
Magnitude (
dB
) System: sys
Frequency (rad/s): 0.115
Magnitude (dB): 4.97
System: sys
Frequency (rad/s): 3.07
Magnitude (dB): 1.97
10-1
100
101
102
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/s)
w
=-3 dB

Sistemas Invariante de Tempo Discreto
• Em um sistema invariante de tempo discreto a forma da
resposta y[n] depende unicamente da forma da entrada
x[n] e não do instante de tempo que é aplicada.
13
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
[ ] sin( . [ ])y n a x n
Deslocamento na saída duas unidades de tempo
Deslocamento na entrada duas unidades de tempo

Representação de Sistemas Lineares e
Invariantes • Sistemas em tempo discreto podem ser descritos com
equações em diferença que relacionam a entrada e a saída.
14
1 1[ ] [ 1] [ 2] 4 [ ]
6 6y n y n y n x n

Representação de Sistemas Lineares e
Invariantes
• Para saber se um sistema é linear ou invariante no tempo
discreto, deve-se considerar que:
Os termos que contêm produtos da entrada e/ou saída
trazem como consequência a não linearidade do sistema.
Um termo constante também torna não linear o sistema.
Os coeficientes da entrada ou da saída que são funções
explícitas de n tornam o sistema variante no tempo.
As entradas ou saídas multiplicadas no tempo por um escalar,
por exemplo y[2n], também tornam o sistema variante no
tempo.
15

• A resposta ao impulso é a resposta de um Sistema Linear a
um impulso localizado no instante k
• Sendo o sistema invariante no tempo:
Representação de Sistemas Lineares e
Invariantes
T { }[n-k] hk[n] knTnhk
16
knhknTnhk

Representação de Sistemas Lineares e
Invariantes
T { }x[n] y[n]
Se a entrada x[n] é uma sequência representada por uma somatória de impulsos
k
knkxnx
k
knkxTny
k
knTkxny
17
k
knhkxny
k k
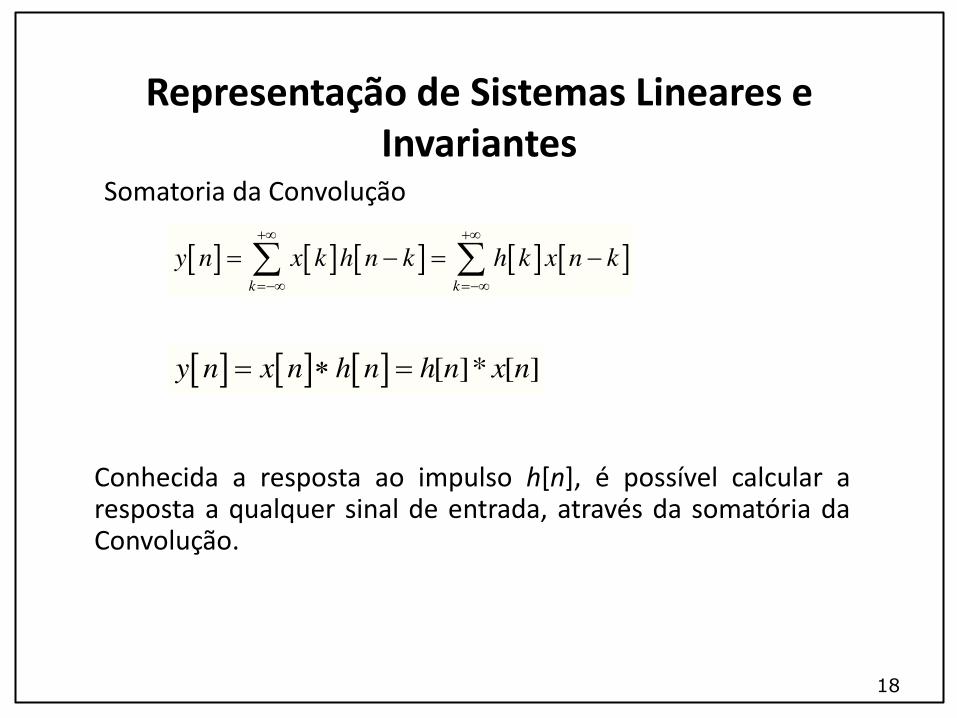
y n x k h n k h k x n k
Conhecida a resposta ao impulso h[n], é possível calcular a resposta a qualquer sinal de entrada, através da somatória da Convolução.
Somatoria da Convolução
[ ]* [ ]y n x n h n h n x n
18
Representação de Sistemas Lineares e
Invariantes

Características de Sistemas Lineares e
Invariantes
• A representação de um sinal x[n] como uma soma
ponderada de impulsos deslocados, é a base para o
método de convolução discreta.
• A representação de um sinal x[n] como uma combinação
linear de harmônicas ou exponenciais complexas, é a base
da transformada de Fourier em tempo discreto (DTFT) e a
transformada z.
19

20
Transformada de Fourier
Discreta (DFT)

Transformada de Fourier em
Tempo Discreto • Para um sinal discreta não periódico x[n], de tamanho L:
21
2, 0,..., 1
kk L
L
[ ] ( )F
x n X
1
0
( ) [ ] , 0,1,2,...., 1L
j n
n
X x n e k L
22
t
x(t)
A/D
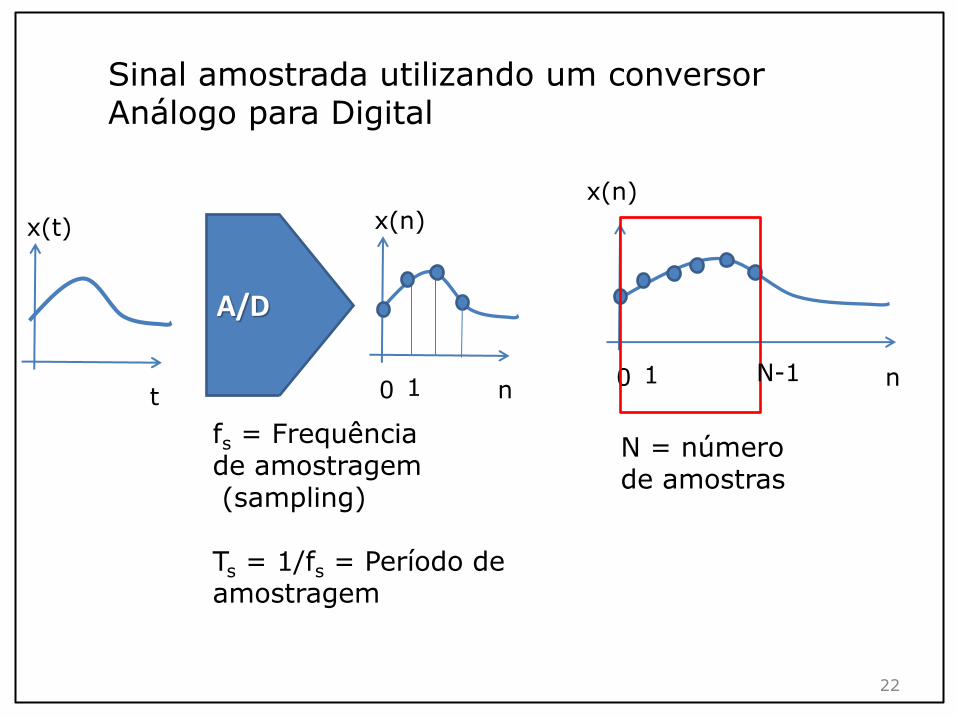
fs = Frequência de amostragem (sampling) Ts = 1/fs = Período de amostragem
n
x(n)
0 1 n
x(n)
0 1
N = número de amostras
N-1
Sinal amostrada utilizando um conversor Análogo para Digital

23
Exemplo 1: fs = 10k Amostras/s Ts = 1/fs = 0.1 ms (Período de amostragem) N = 100 amostras twindow = (N)*Ts=100*0.1ms = 10 ms
twindow
t
x(t)
A/D
fs = Frequência de amostragem (sampling) Ts = 1/fs = Período de amostragem
n
x(n)
0 1 n
x(n)
0 1
N = número de amostras
N-1

24
1
0
( ) [ ] ,
20,1,2,...., 1,
Nj n
n
X x n e
kk N
N
fs = 10k amostras/s Ts = 1/fs = 0.1 ms (Período de amostragem) N = 100 amostras twindow = N*Ts=100*0.1ms = 10 ms
twindow
t
x(t)
A/D
fs = Frequência de amostragem (sampling) Ts = 1/fs = Período de amostragem
n
x(n)
0 1 n
x(n)
0 1 N-1
DFT

Exemplo de avaliação da DFT
L = 5 k = 0,1,2,3,4
25
4
0
42 /5
0
44 /5
0
46 /5
0
48 /5
0
0 0 (0) [ ]
21 (2 / 5) [ ]
5
42 (4 / 5) [ ]
5
63 (6 / 5) [ ]
5
84 (8 / 5) [ ]
5
n
j n
n
j n
n
j n
n
j n
n
k X x n
k X x n e
k X x n e
k X x n e
k X x n e
2, 0,..., 1
kk L
L

Módulo e Fase da DFT
26
0
1
2
3
4
0
42 /5
0
44 /5
0
46 /5
0
48 /5
0
0 0 (0) [ ] (0)
21 (2 / 5) [ ] (2 / 5)
5
42 (4 / 5) [ ] (4 / 5)
5
63 (6 / 5) [ ] (6 / 5)
5
84 (8 / 5) [ ] (
5
j
n
jj n
n
jj n
n
jj n
n
j n
n
k X x n X e
k X x n e X e
k X x n e X e
k X x n e X e
k X x n e X
48 / 5)j
e

• A resolução da frequência digital é dada como:
27
0
1
2
3
4
0 0 (0)
21 (2 / 5)
5
42 (4 / 5)
5
63 (6 / 5)
5
84 (8 / 5)
5
j
j
j
j
j
k X e
k X e
k X e
k X e
k X e
0
2
L
Resolução da Frequência Digital
Resolução

Definição da Transformada de
Fourier Discreta • A DFT para o sinal x[n], de tamanho N, é definido por:
• A DFT inversa é definido por
28
2, 0,..., 1
kk N
N
1
0
( ) [ ] , 0,1, 2, ...., 1N
j n
n
X x n e k N
1
0
1[ ] ( ) , 0,1,2,..., 1
Nj n
k
x n X e n NN
[ ] ( )F
x n X Notação:

Atividade
• Realizar o estudo:
Sistemas variantes no tempo – características
Sistemas não lineares – características
A DFT para sinais estacionários e não estacionários
Potência de um sinal discreto
Energia de um sinal discreto – teoremas
Relação Sinal a Ruído (SNR)
Frequência de amostragem vs SNR
SNR vs # bits de aquisição
29