resumo - faculdade de ciências exatas e da engenharia |...
TRANSCRIPT
Resumo• Efeito da Realimentação nos Pólos do Amplificador
• Amplificador só com um Pólo
• Amplificador com dois Pólos
• Amplificador com três ou mais Pólos
• Estabilidade usando Diagramas de Bode
• Compensação de Frequência
– p. 1/26
Função de Transferência do Amplificador re-
alimentado
Num amplificador realimentado o ganho de malha aberta A é função da
frequência e deve ser designado por função de transferênciaem malha aberta
A(s). Tambémβ varia com a frequência e deverá ser designado por função de
transferência de realimentação.
A função de transferência em malha fechada será dada por:
Af (s) = A(s)1+A(s)β(s)
A análise seguinte diz respeito apenas às frequências mais elevadas.
O ganho da malhaA(s)β(s) pode ser representado no domínio complexo
fazendo s=jw. Neste caso é possível representarAβ pela magnitude e fase.
A forma como o ganho varia determina a estabilidade do amplificador.
– p. 2/26
Função de Transferência do Amplificador re-
alimentado
Para a frequência em que a fase atinge o valor de 180◦Aβ é um valor negativo.
Se nesta frequênciaAβ for menor do que a unidade então o ganhoAf será
maior do que o ganho em malha aberta mas o amplificador continua estável.
Se para esta frequência o ganho for igual a 1Af será infinito, ou seja, o
amplificador poderá ter uma saída mesmo sem entrada (oscilador).
O amplificador também oscilará para um valor deAβ superior à unidade
quando a fase atinge 180◦.
Uma vez conhecido o mecanismo que leva à oscilação importa agora
descobrir os mecanismos que permitem evitar esta situação.
– p. 3/26

Efeito da Realimentação nos Pólos do Amplifi-
cador A resposta em frequência
do amplificador
e a estabilidade
são determinadas pelos
seus pólos. É necessário
investigar o efeito da realimentação nos pólos do amplificador. Para um
amplificador ser estável os pólos devem estar no semi-plano esquerdo do
domínios.
Se num amplificador com um par de pólos conjugadoss= σo± jwn, ao ligar
a fonte de alimentação ou excitar com um impulso à entrada obtém-se uma
resposta com termos do tipo
v(t) = eσot[
e+ jwnt +e− jwnt]
= 2eσot cos(wnt)
Se os pólos estão no semiplano esquerdo entãoσo será negativo e as
oscilações decairão exponencialmente até zero o que implica que o sistema é
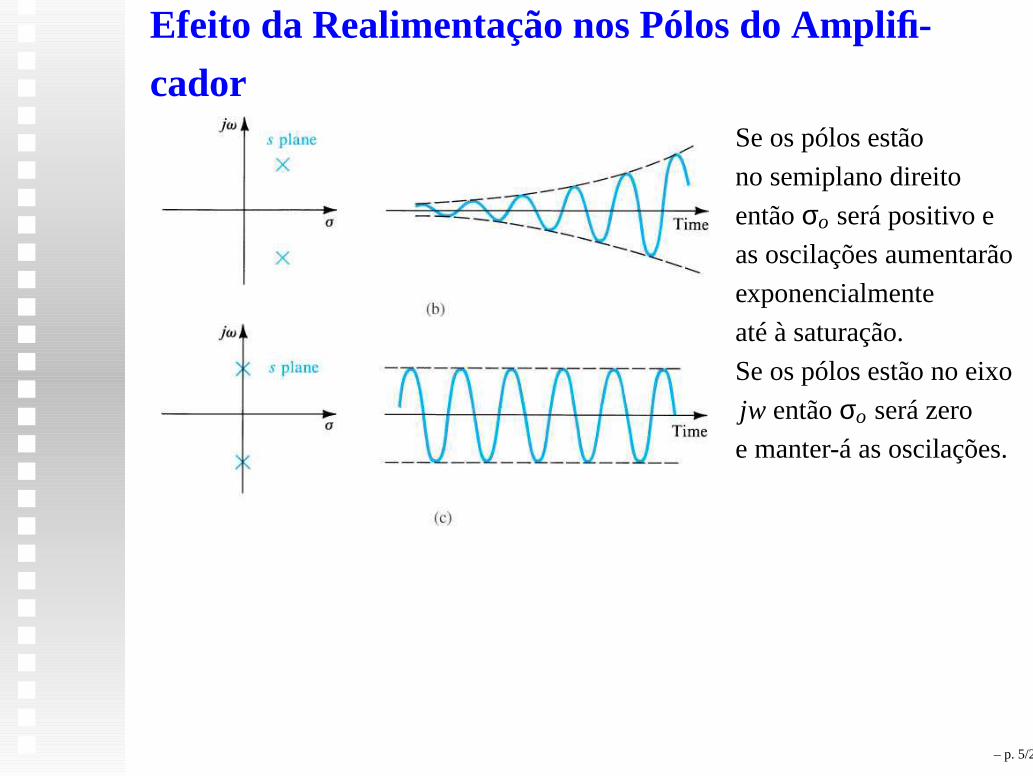
estável. Se os pólos estão no semiplano direito entãoσo será positivo e as
oscilações aumentarão exponencialmente até à saturação. Se os pólos estão no
eixo jw entãoσo será zero e manter-ão as oscilações.– p. 4/26
Efeito da Realimentação nos Pólos do Amplifi-
cadorSe os pólos estão
no semiplano direito
entãoσo será positivo e
as oscilações aumentarão
exponencialmente
até à saturação.
Se os pólos estão no eixo
jw entãoσo será zero
e manter-á as oscilações.
– p. 5/26
Amplificador só com um Pólo
Os pólos do amplificador realimentado são os zeros de 1+A(s)β(s). Os pólos
do amplificador realimentado são obtidos resolvendo a equação
1+A(s)β(s) = 0 que é chamada aequação característica. Aplicando
realimentação os pólos em malha aberta vão modificar-se. Considera-se que o
amplificador em malha aberta tem só pólos reais uma vez que só existem
condensadores e resistências. Considera-seβ independente da frequência.
– p. 6/26

Amplificador só com um Pólo
Se a função de transferência
em malha aberta tem um póloA(s) = A01+s/wP
a função em malha fechada será
Af (s) = A0/(1+A0β)1+s/(wP(1+A0β))
Para frequênciasw� wP (1+A0β)
Af (s) 'A0wP
s ' A(s)
(coincidência dos gráficos deA eAf )
Ou
seja para altas frequências o ganho da malha
é muito menor que a unidade e a realimentação
não é efectiva (a realimentação fica menos
dependente da malha de realimentação e fica
mais dependente do ganho em malha aberta).
– p. 7/26
Amplificador só com um Pólo
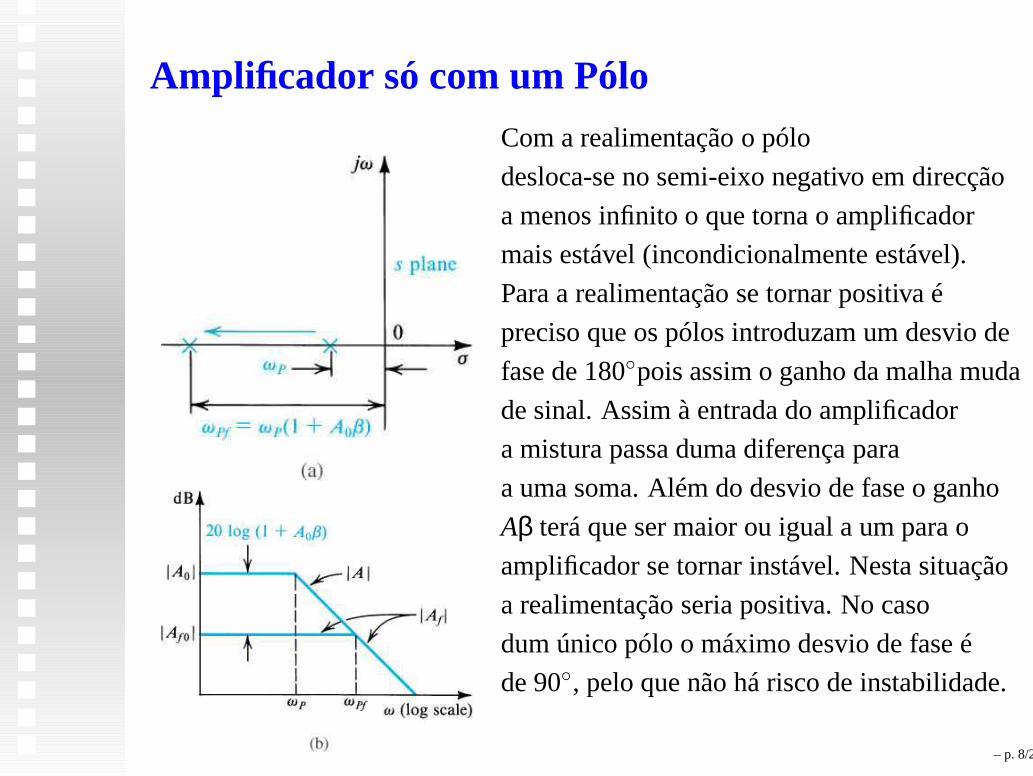
Com a realimentação o pólo
desloca-se no semi-eixo negativo em direcção
a menos infinito o que torna o amplificador
mais estável (incondicionalmente estável).
Para a realimentação se tornar positiva é
preciso que os pólos introduzam um desvio de
fase de 180◦pois assim o ganho da malha muda
de sinal. Assim à entrada do amplificador
a mistura passa duma diferença para
a uma soma. Além do desvio de fase o ganho
Aβ terá que ser maior ou igual a um para o
amplificador se tornar instável. Nesta situação
a realimentação seria positiva. No caso
dum único pólo o máximo desvio de fase é
de 90◦, pelo que não há risco de instabilidade.
– p. 8/26

Amplificador com dois Pólos
Considerando a função transferência
em malha aberta caracterizada por dois pólos
A(s) = A0(1+s/wP1)(1+s/wP2)
O pólos deAf (s) são os zeros de 1+A(s)β = 0
que se pode escrever da seguinte forma
s2 +s(wP1 +wP2)+(1+A0β)wP1wP2 = 0 (1)
Os pólos em malha fechada são
s= −12 (wP1 +wP2)±
12
√
(wP1 +wP2)2−4(1+A0β)wP1wP2
A figura é designada por diagrama do lugar das raízes. É possível verificar
que este amplificador realimentado é incondicionalmente estável (os pólos
estão no semiplano esquerdo). O máximo desvio de fase neste caso é
180◦(90◦por pólo) mas é atingido no infinito quando o ganho em malha aberto
é muito pequeno.
– p. 9/26
Amplificador com dois Pólos
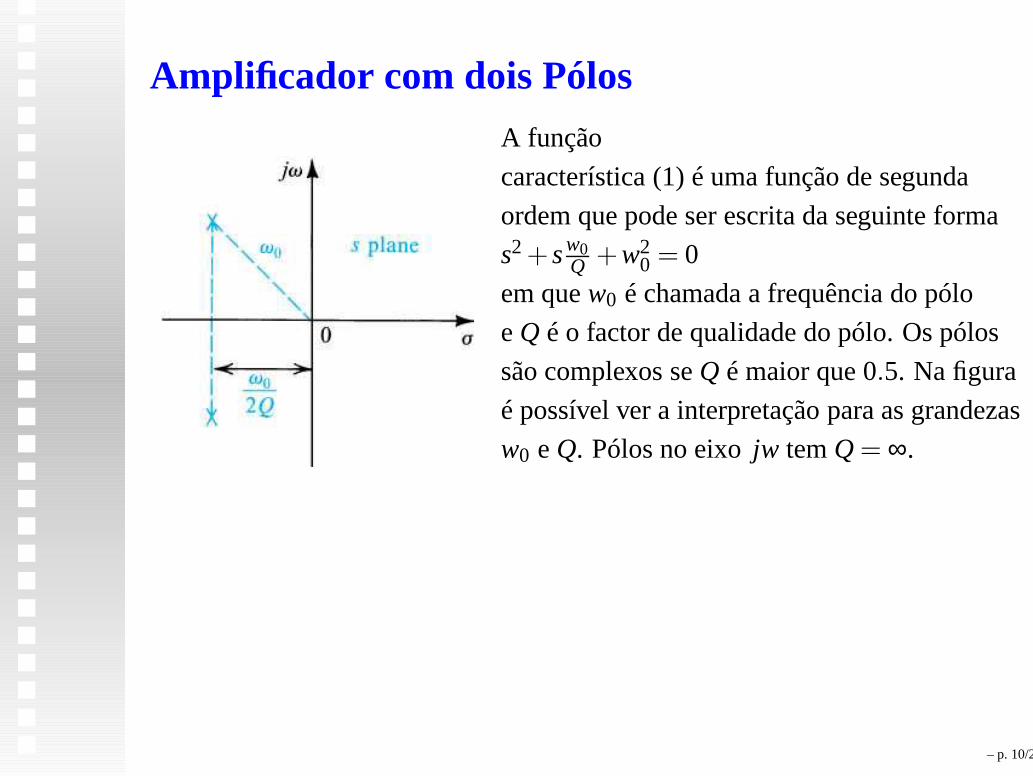
A função
característica (1) é uma função de segunda
ordem que pode ser escrita da seguinte forma
s2 +sw0Q +w2
0 = 0
em quew0 é chamada a frequência do pólo
eQ é o factor de qualidade do pólo. Os pólos
são complexos seQ é maior que 0.5. Na figura
é possível ver a interpretação para as grandezas
w0 eQ. Pólos no eixojw temQ = ∞.
– p. 10/26
Amplificador com dois Pólos
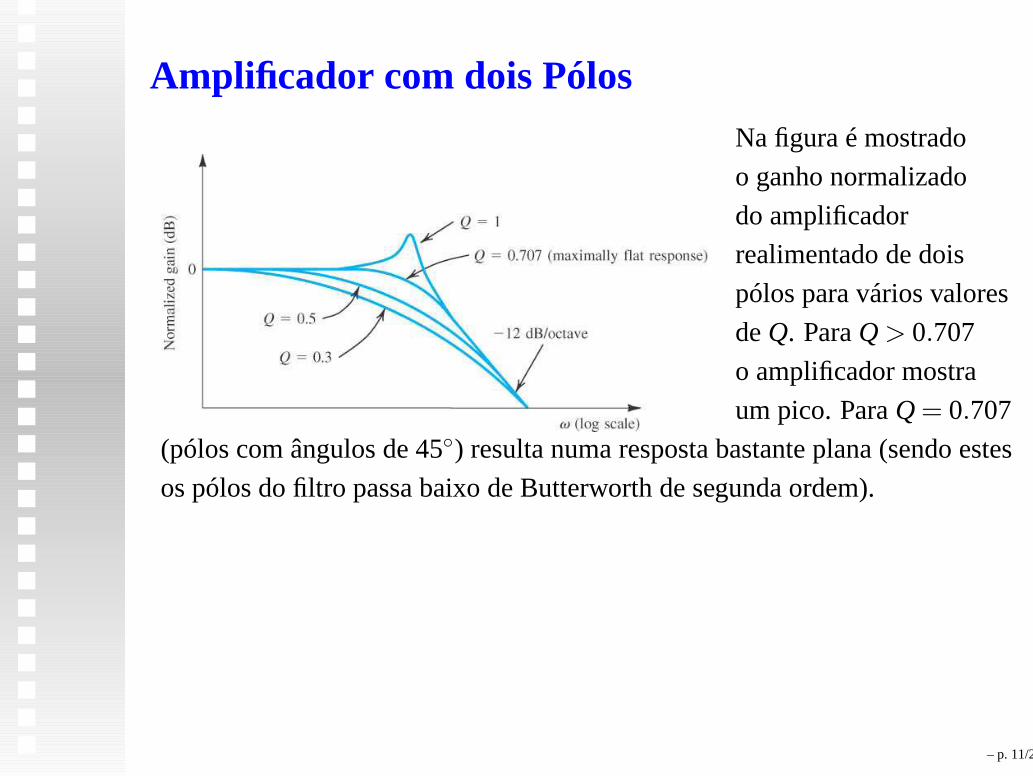
Na figura é mostrado
o ganho normalizado
do amplificador
realimentado de dois
pólos para vários valores
deQ. ParaQ > 0.707
o amplificador mostra
um pico. ParaQ = 0.707
(pólos com ângulos de 45◦) resulta numa resposta bastante plana (sendo estes
os pólos do filtro passa baixo de Butterworth de segunda ordem).
– p. 11/26
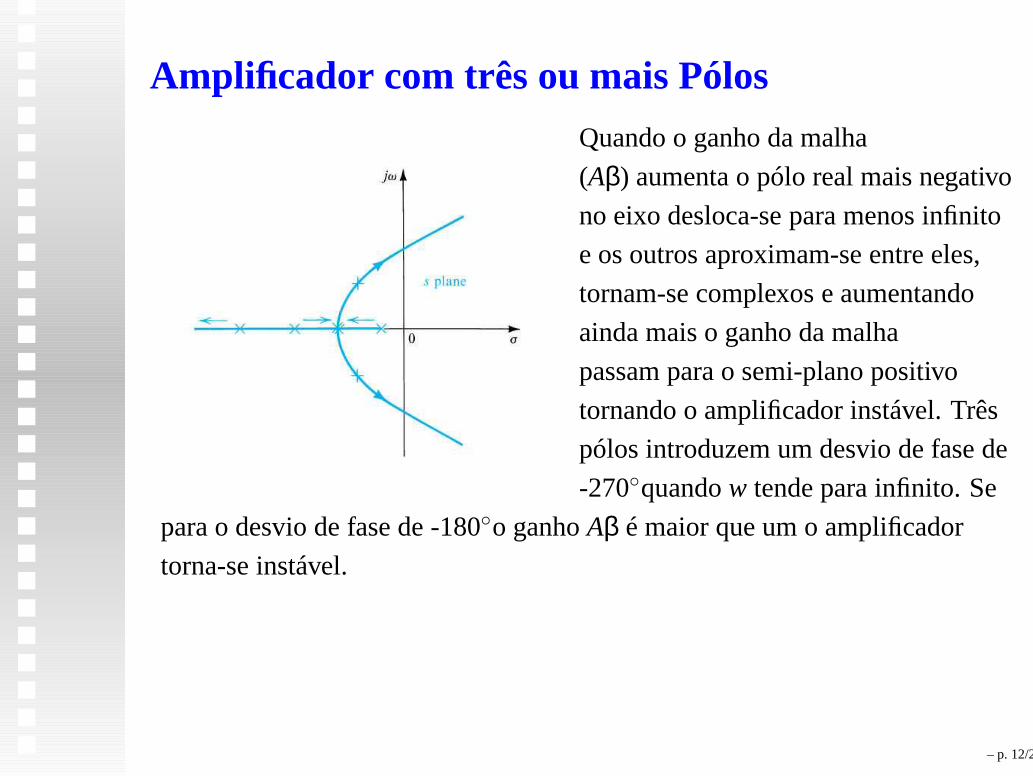
Amplificador com três ou mais Pólos
Quando o ganho da malha
(Aβ) aumenta o pólo real mais negativo
no eixo desloca-se para menos infinito
e os outros aproximam-se entre eles,
tornam-se complexos e aumentando
ainda mais o ganho da malha
passam para o semi-plano positivo
tornando o amplificador instável. Três
pólos introduzem um desvio de fase de
-270◦quandow tende para infinito. Se
para o desvio de fase de -180◦o ganhoAβ é maior que um o amplificador
torna-se instável.
– p. 12/26
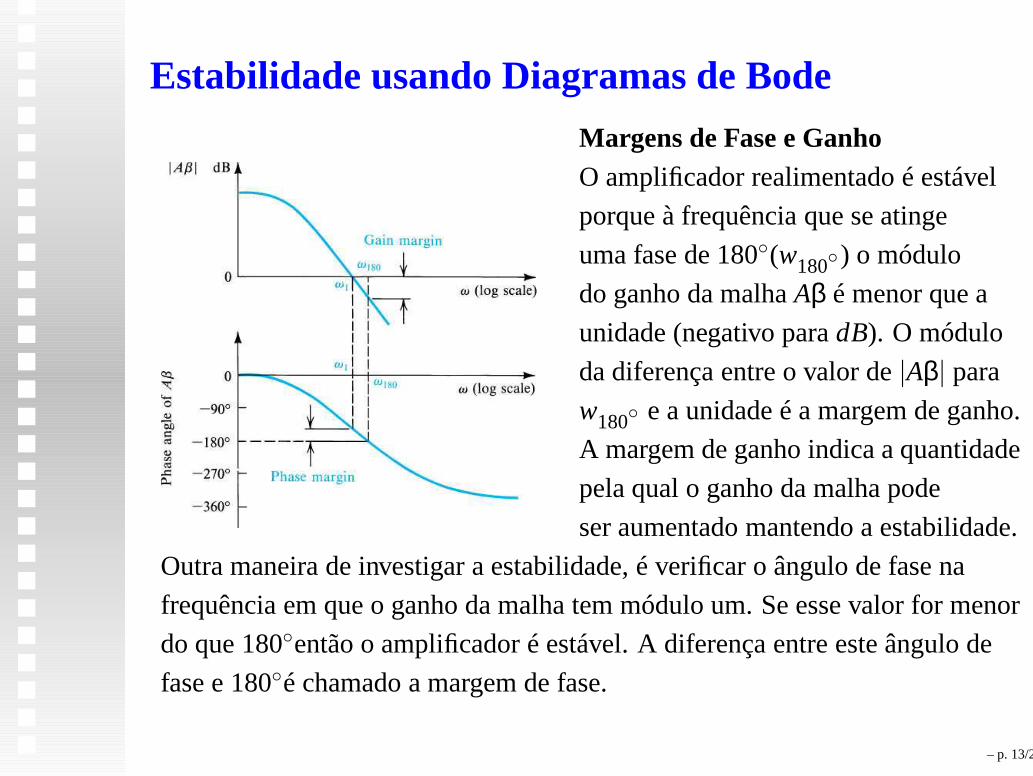
Estabilidade usando Diagramas de Bode
Margens de Fase e GanhoO amplificador realimentado é estável
porque à frequência que se atinge
uma fase de 180◦(w180◦) o módulo
do ganho da malhaAβ é menor que a
unidade (negativo paradB). O módulo
da diferença entre o valor de|Aβ| para
w180◦ e a unidade é a margem de ganho.
A margem de ganho indica a quantidade
pela qual o ganho da malha pode
ser aumentado mantendo a estabilidade.
Outra maneira de investigar a estabilidade, é verificar o ângulo de fase na
frequência em que o ganho da malha tem módulo um. Se esse valorfor menor
do que 180◦então o amplificador é estável. A diferença entre este ângulode
fase e 180◦é chamado a margem de fase.
– p. 13/26
Estabilidade usando Diagramas de Bode
Efeito da Margem de Fase na Resposta em Malha FechadaOs amplificadores com realimentação são normalmente projectados com uma
margem de fase de pelo menos 45◦. Esta margem de fase tem uma enorme
influência na resposta em malha fechada do amplificador.
Para analisar de que forma considere-se um amplificador com|A0β| � 1. O
ganho em malha fechada é aproximadamente 1/β.
Sendo a frequência em que o ganho da malha é umw1 obtém-se:
A( jw1)β = 1xe− jθ
comθ = 180◦−margem de fase
Em w1 o ganho em malha fechada é:
Af ( jw1) = A( jw1)1+A( jw1)β = (1/β)e− jθ
1+e− jθ
O módulo do ganho será:∣
∣Af ( jw1)∣
∣ = 1/β|1+e− jθ|
Para uma margem de fase de 45◦, θ = 135◦ e∣
∣Af ( jw1)∣
∣ = 1.31β
– p. 14/26

Estabilidade usando Diagramas de Bode
Efeito da Margem de Fase na Resposta em Malha FechadaExiste um pico de ganho emw1. Esse aumento de ganho é maior à medida
que a margem de ganho é reduzida.
Uma margem de fase de zero implica que o amplificador pode manter
oscilações. (pólos no eixo imaginário).
Diminuindo a margem de fase os pólos aproximam-se do eixo imaginário
resultando em picos na resposta em frequência em malha fechada.
– p. 15/26

Estabilidade usando Diagramas de Bode
Um método alternativopara investigar estabilidadeEstudar
a estabilidade por construção
de diagramas de Bode do
ganho da malhaAβ é uma tarefa
que consome muito tempo.
É conveniente encontrar um
método alternativo. O método
consiste em construir o diagrama
de Bode para o ganho em malha
abertaA( jw). Considerando que
β é independente da frequência.
– p. 16/26
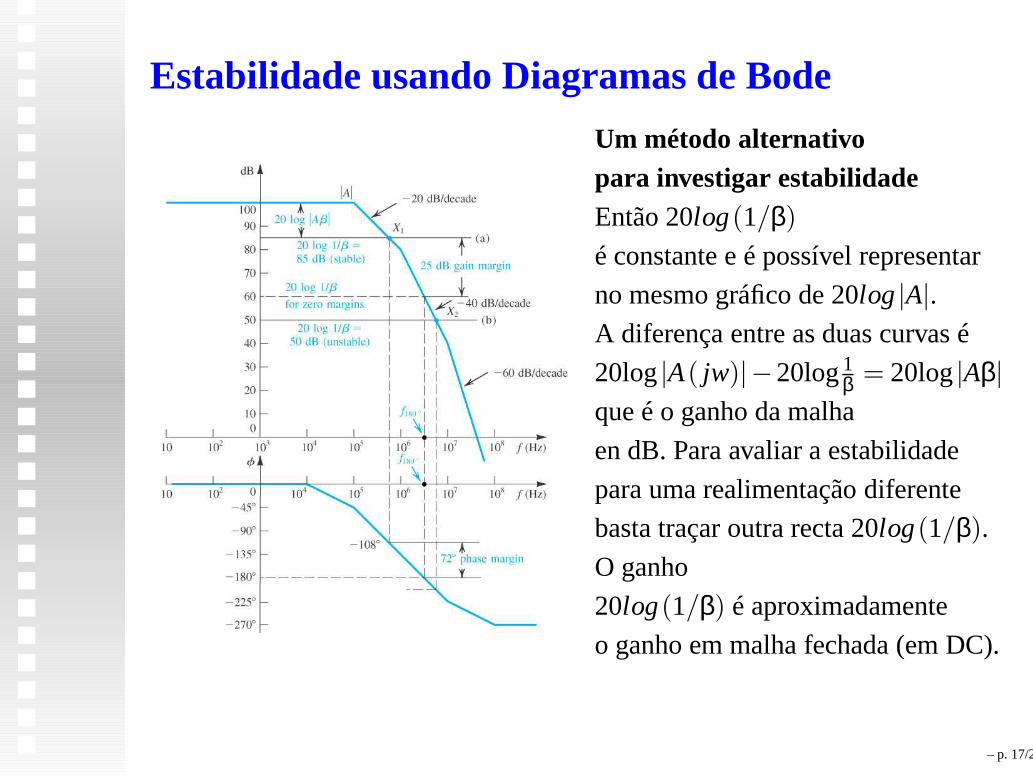
Estabilidade usando Diagramas de Bode
Um método alternativopara investigar estabilidadeEntão 20log(1/β)
é constante e é possível representar
no mesmo gráfico de 20log|A|.
A diferença entre as duas curvas é
20log|A( jw)|−20log1β = 20log|Aβ|
que é o ganho da malha
en dB. Para avaliar a estabilidade
para uma realimentação diferente
basta traçar outra recta 20log(1/β).
O ganho
20log(1/β) é aproximadamente
o ganho em malha fechada (em DC).
– p. 17/26
Estabilidade usando Diagramas de Bode
Um método alternativo para investigar estabilidadeUma vez que o ganho da malha é a diferença entre a curva 20log|A| e a curva
20log(1/β) o ponto de intersecção corresponde à frequência na qual|Aβ| = 1.
Ao aumentar a realimentaçãoβ, diminui-se o ganho em malha fechada e
aumenta-se a instabilidade do amplificador.
Na frequência correspondente ao segundo pólo (do ganho em malha aberta)
existe um desvio de fase de 135◦ (90◦do primeiro pólo e 45◦do próprio pólo).
Se a recta 20log(1/β) passar por esse ponto (corresponde nesse ponto a
20log(Aβ) = 0dB) obtém-se uma margem de fase de 45◦. Se a recta
20log(1/β) passar acima desse ponto obtém-se uma margem de fase ainda
maior. Por isso se a recta 20log(1/β) cruzar o gráfico do ganho em malha
aberta numa zona com declive igual a 20dB/Decada obtém-se uma margem de
fase superior a 45◦.
– p. 18/26
Estabilidade usando Diagramas de Bode
Um método alternativo para investigar estabilidadeAtendendo que o ponto de fase de malha aberta de 180◦é atingido quando o
ganho em malha aberta decresce a 40dB/Decada conclui-se queuma regra
prática util será:O amplificador em malha fechada será estável se a recta
20log(1/β) intersecta a curva 20log|A| num ponto em que o ganho decresce a
20dB/Decada. Seguindo esta regra garante-se uma margem de fase de 45◦.
Generalizando:Na intersecção de20log[1/ |β( jw)|] e20log|A( jw)| a
diferença de declives não poderá exceder 20dB/Decada
– p. 19/26

Compensação em Frequência
É possível
analisar a compensação
de amplificadores
em malha aberta com três ou
mais pólos de forma a serem
estáveis para qualquer valor
de ganho em malha fechada.
O que se pretende conseguir
é que a recta 20log(1/β)
intersecte o ganho
em malha aberta num ponto
de declive de 20dB/decada.
– p. 20/26

Compensação em Frequência
O método mais simples de
compensação na frequência
consiste em introduzir
um pólo novo na função
A(s) a uma frequência
suficientemente baixa,fD, tal
que a curva do novo ganho
em malha aberta intersecte
a curva 20log(1/ |β|)com uma diferença
de declive de 20dB/Decada.
Primeiro traça-se a recta
20log(1/ |β|). De seguida localiza-se o ponto Y nessa recta à frequência do
primeiro pólo, fP1. De Y traça-se uma recta com -20dB/Decada de declive e
determina-se o ponto no qual se atinge o ganho DC Y’.
– p. 21/26
Compensação em Frequência
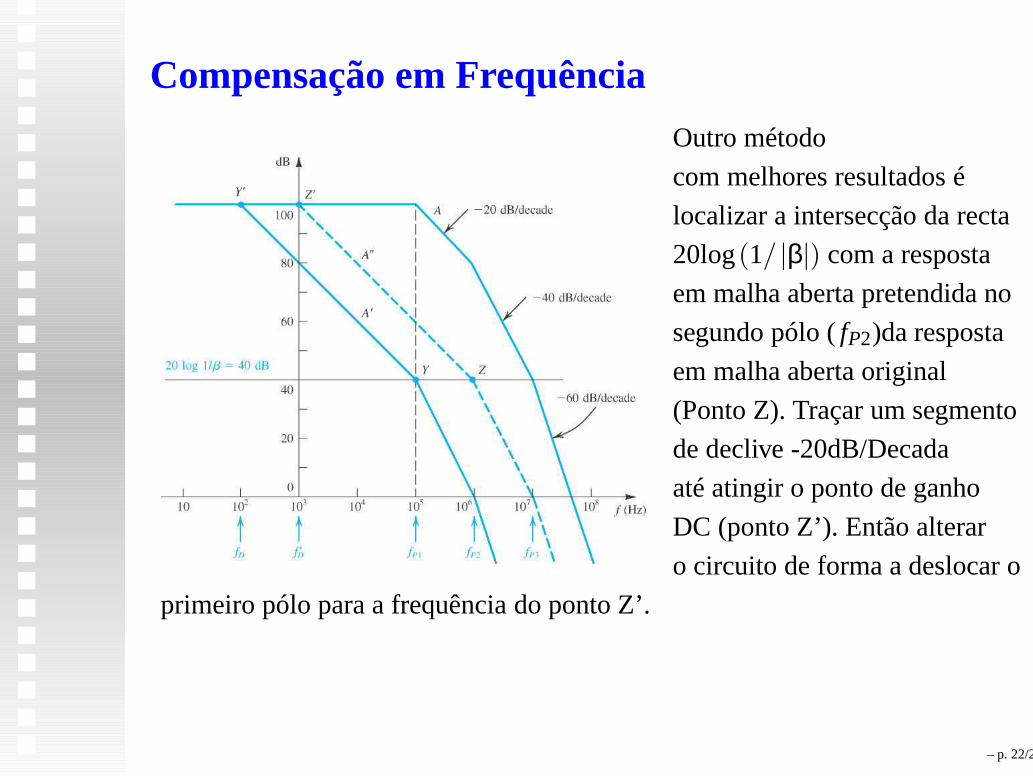
Outro método
com melhores resultados é
localizar a intersecção da recta
20log(1/ |β|) com a resposta
em malha aberta pretendida no
segundo pólo (fP2)da resposta
em malha aberta original
(Ponto Z). Traçar um segmento
de declive -20dB/Decada
até atingir o ponto de ganho
DC (ponto Z’). Então alterar
o circuito de forma a deslocar o
primeiro pólo para a frequência do ponto Z’.
– p. 22/26
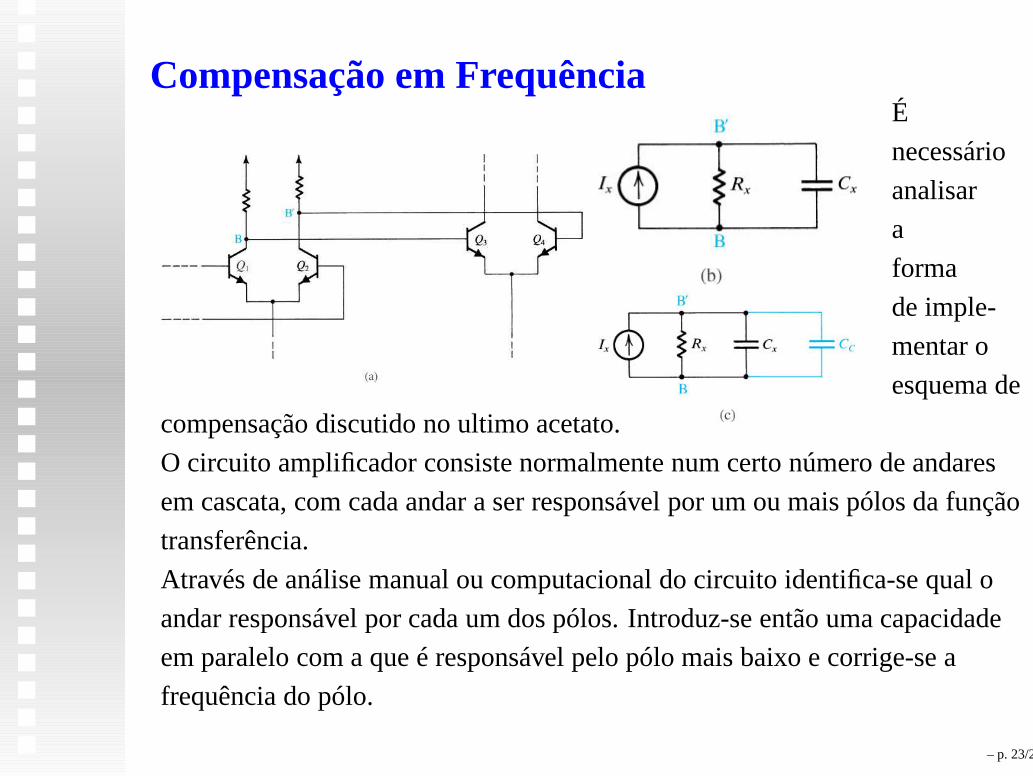
Compensação em FrequênciaÉ
necessário
analisar
a
forma
de imple-
mentar o
esquema de
compensação discutido no ultimo acetato.
O circuito amplificador consiste normalmente num certo número de andares
em cascata, com cada andar a ser responsável por um ou mais pólos da função
transferência.
Através de análise manual ou computacional do circuito identifica-se qual o
andar responsável por cada um dos pólos. Introduz-se então uma capacidade
em paralelo com a que é responsável pelo pólo mais baixo e corrige-se a
frequência do pólo.
– p. 23/26
Compensação em FrequênciaOs andares diferenciais em cascata da figura (a) têm por circuito equivalente
de saída do primeiro andar a figura (b)
O pólo é dado por
fP1 = 12πCxRx
Se for introduzida uma capacidade adicionalCC nesse andar, desloca-se o
pólo para uma frequência mais baixa
f′
D = 12π(Cx+CC)Rx
De notar que este procedimento pode afectar a localização dos outros pólos
dos andares seguintes. Poderá existir uma nova localizaçãodo segundo pólo.
Traça-se então outro segmento de recta e outro valor deCC. (repete-se este
procedimento até atingir um valor final paraCC).
A desvantagem desta implementação poderá ser um valor elevado para o
condensador que poderá não ser possível implementar num circuito integrado
(normalmente limitado a 100pF). Neste caso é possível utilizar o Efeito de
Miller e integrar um condensador entre dois pontos de ganho elevado. Assim
o condensador necessário será muito mais pequeno.
– p. 24/26
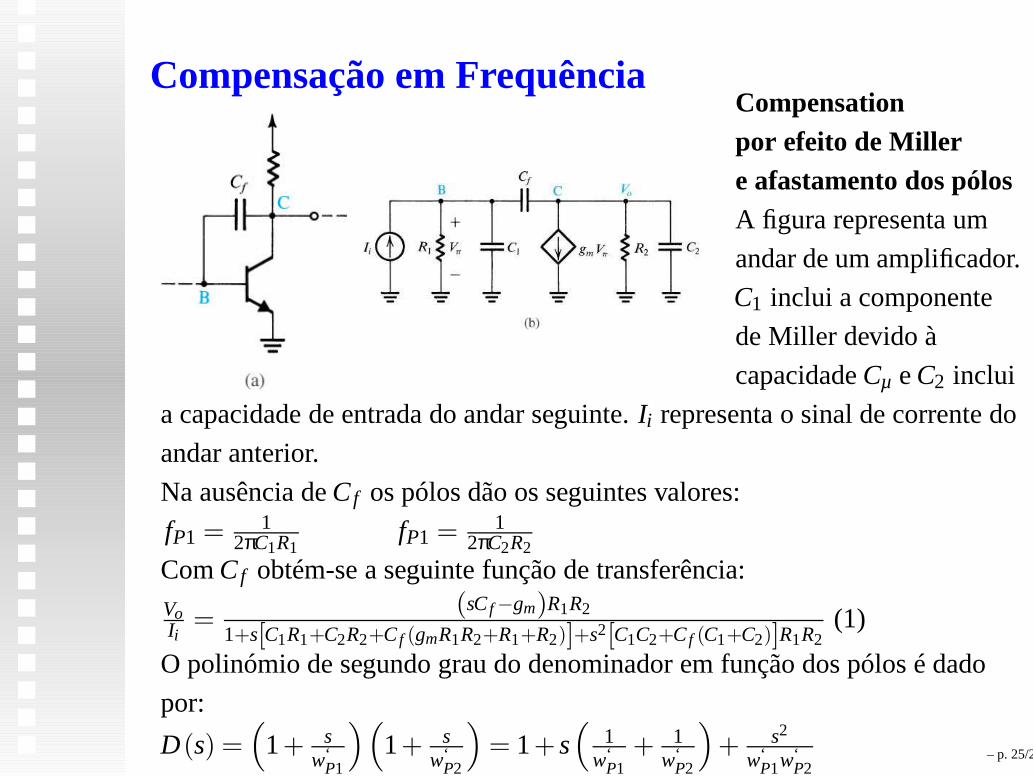
Compensação em FrequênciaCompensationpor efeito de Millere afastamento dos pólosA figura representa um
andar de um amplificador.
C1 inclui a componente
de Miller devido à
capacidadeCµ eC2 inclui
a capacidade de entrada do andar seguinte.Ii representa o sinal de corrente do
andar anterior.
Na ausência deCf os pólos dão os seguintes valores:
fP1 = 12πC1R1
fP1 = 12πC2R2
ComCf obtém-se a seguinte função de transferência:VoIi
=(sCf −gm)R1R2
1+s[C1R1+C2R2+Cf (gmR1R2+R1+R2)]+s2[C1C2+Cf (C1+C2)]R1R2(1)
O polinómio de segundo grau do denominador em função dos pólos é dado
por:
D(s) =(
1+ sw‘
P1
)(
1+ sw‘
P2
)
= 1+s(
1w‘
P1+ 1
w‘P2
)
+ s2
w‘P1w‘
P2– p. 25/26

Compensação em FrequênciaCompensationpor efeito de Millere afastamento dos pólosD(s) '
1+s 1w‘
P1+ s2
w‘P1w‘
P2(2)
De (1) e (2) do
acetato anterior tira-se:
w‘P1 '
1gmR2Cf R1
w‘P2 '
gmCfC1C2+Cf (C1+C2)
Pode-se provar que com o aumento deCf , w‘P1 diminui ew‘
P2 aumenta. O
aumento dew‘P2 é bastante benéfico pois pode deslocar o ponto Z mais para
altas frequências. A este efeito é chamado afastamento dos pólos.
No primeiro póloCf é multiplicado pelo factor do efeito de MillergmR2
resultando numa muito maior capacidade. Por issoCf será muito menor que
CC.
– p. 26/26