realimentação de estado - fem.unicamp.brem621/aulas/aula24/observabilidade-1.pdf · esquerdo do...
TRANSCRIPT

Controle de Sistemas Mecânicos
Realimentação de estado
� Introdução
� Conceitos básicos
� Controlabilidade
� Alocação de pólos
� Observabilidade

Controle de Sistemas Mecânicos
Introdução: Observador
� A realimentação de estado envolve a medição detodo o vetor de estado, o que nem sempre épossível ou viável economicamente.
� A solução é estimar o estado a partir da saídamedida.
� Utiliza-se o vetor de ganhos calculado como se oestado fosse de fato medido.
� Substitui-se o estado pelo estado estimado,multiplicado pelo vetor de ganhos para fechar amalha.
Controle de Sistemas Mecânicos
Estimativa do estado: Observador
� O “estimador” de estados foi chamado deobservador por Luenberger, o primeiro a apresentaro conceito.
� Por esse motivo também é chamado de observadorde Luenberger.
� A idéia é estimar o vetor de estado a partir doconhecimento da entrada (u) e da saída (y) daplanta.
� Para isso utiliza-se o modelo conhecido da planta.� O conceito de observabilidade estabelece a
condição para que exista solução para o problema.

Controle de Sistemas Mecânicos
Realimentação incluindo o observador
� DB realimentação de estado
� DB RE + observadorr
-
K
kp Planta
ue y
Ox̂
C
-+
K
Planta)(ty)(tr
pk)(tx
C
( )u t

Controle de Sistemas Mecânicos
� Planta
� Observador
Realimentação incluindo o observador
B
A
L
s1 C
( )u t )(ty)(ˆ tx
++ + +−+
-+
)(ty)(tx( )u t
A
B Cs1++
Controle de Sistemas Mecânicos
Definição matemática
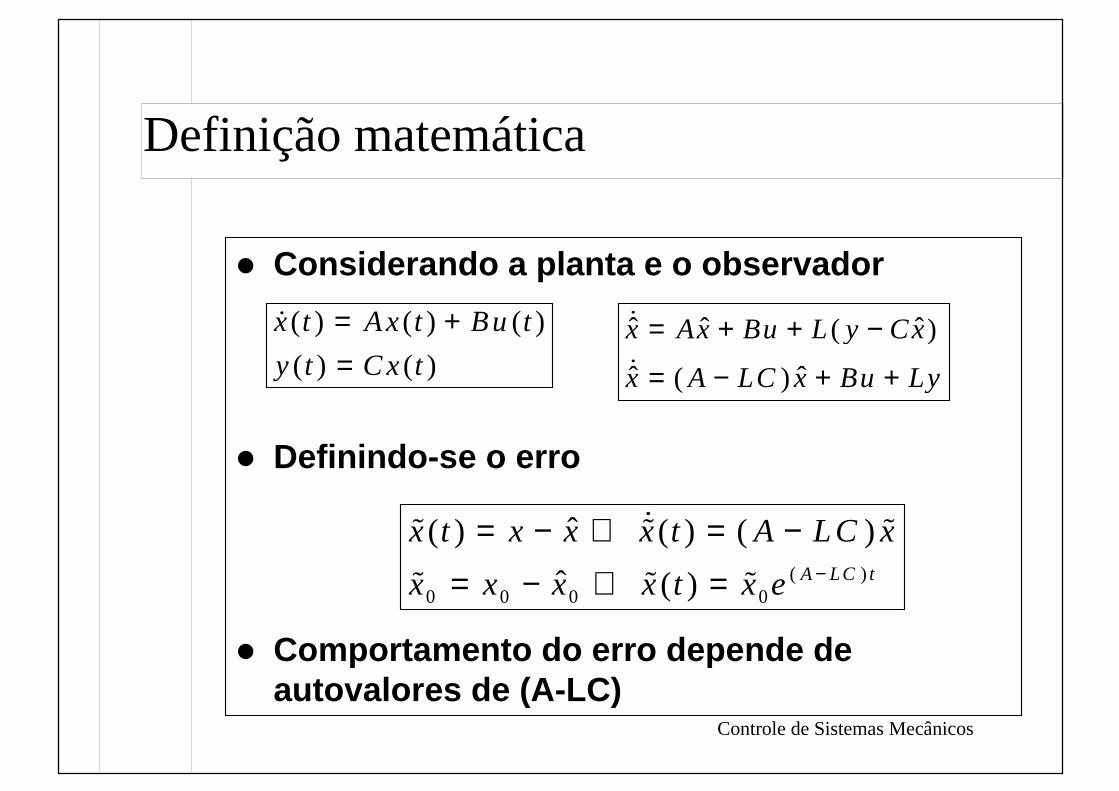
� Considerando a planta e o observador
� Definindo-se o erro
� Comportamento do erro depende deautovalores de (A-LC)
( ) ( ) ( )
( ) ( )
x t Ax t Bu t
y t C x t
= +=
� ˆ ˆ ˆ( )
ˆ ˆ( )
x Ax Bu L y Cx
x A LC x Bu Ly
= + + −
= − + +
�
�
( )0 0 0 0
ˆ( ) ( ) ( )
ˆ ( ) A LC t
x t x x x t A LC x
x x x x t x e −
= − ⇒ = −= − ⇒ =
�� � �
� � �

Controle de Sistemas Mecânicos
� Planta
� Observador
Realimentação incluindo o observador
B
A
L
s1 C
( )u t )(ty)(ˆ tx
++ + +−+
-+
)(ty)(tx( )u t
A
B Cs1++
( ) ( ) ( )
( ) ( )
x t Ax t Bu t
y t C x t
= +=
�
)ˆ(ˆˆ xCyLBuxAx −++=�

Controle de Sistemas Mecânicos
Considerações
� Apesar do erro inicial, o erro tende a zeropara um vetor L bem selecionado.
� O vetor L deve assegurar a posição dosautovalores da matriz A-LC no semi-planoesquerdo do plano complexo para que oerro tenda a zero.
� O observador deve ser mais rápido do quea planta, para permitir bom desempenho
� Regra prática: 4 vezes mais afastado doeixo real do que a planta.

Controle de Sistemas Mecânicos
Observabilidade
Uma planta linear é dita completamente observável ousimplesmente observável se o seu estado inicialx(t0) pode ser determinado para uma condição deentrada nula, unicamente a partir do conhecimentode sua saída desde o instante t0 até o instanteconsiderado, posterior a t0.
É equivalente a dizer que qualquer transição deestado afeta a saída da planta, ou, ainda, se paraalguma variável de estado ocorrer uma variaçãoque não traga conseqüências na saída, essavariável de estado é dita não observável.

Controle de Sistemas Mecânicos
Definição matemática
� Considerando o problema dual
� Este é equivalente a uma realimentação deestado com autovalores de
Pois:
( ) ( ) ( )T T
T
z t A z t C v t
n B z
= +=
�
T T TA C L−
( )x A LC x= −�� �
)()(
)()()(
tCxty
tButAxtx
=+=�
BrkxBKkAx
KxrBkAxx
pp
p
+−=
−+=
)(
)(
�
�
)( Kxrku p −=
zLv T−=

Controle de Sistemas Mecânicos
Definição matemática
� Se D não for nula, pode-se mostrar que
� Definindo-se o erro
0)0(
)()()(
xtx
tButAxtx
==+=�
0
ˆ ˆ ˆ ˆ( )
ˆ ˆ(0)
x Ax Bu L y Cx Dr DKx
x x
= + + − + −=
�
( )0 0 0 0
ˆ( ) ( ) ( )
ˆ ( ) A LC t
x t x x x t A LC LD K x LD r
x x x x t x e −
= − ⇒ = − − += − ⇒ =
�� � �
� � �
ˆu r K x= −

Controle de Sistemas Mecânicos
Matriz de observabilidade
A observabilidade vai depender da controlabilidade doproblema dual do observador
A matriz de controlabilidade é definida por:
e, para o problema dual fica:
2 1T TT T T T n TM C A C A C A C− = �
[ ]BABAABBM n 12 −= �

Controle de Sistemas Mecânicos
Matriz de observabilidade
TeoremaA planta descrita pela equação de estado
é dita observável se e só se o determinante da matriz deobservabilidade definida como
for não nulo.(MATLAB: comando obsv(A,C))
)()(
)()(
tCxty
tAxtx
==�
[ ]TnTTTTT CACACACOTT 12 −= �

Controle de Sistemas Mecânicos
Projetando um observador
Se a planta é observável existe solução para umobservador. Como o conceito é dual em relação àcontrolabilidade, utiliza-se o mesmo comando doMATLAB,
onde indicam-se os pólos desejados para oobservador.
( ’, ’, ) ’;L place A C polos=

Controle de Sistemas Mecânicos
Dinâmica final
� O modelo de estado do sistema incluindo arealimentação de estado e a definição doerro pode ser escrito como
ˆu r K x= −x A x B u= +�
ˆx Ax BKx BKx BKx Br= − + − +�
( )x A BK x BKx Br= − + +� �
ˆx x x= −�

Controle de Sistemas Mecânicos
Dinâmica final usando estado e erro
� O modelo de estado do sistema de malhafechada incluindo a realimentação de estadoe o observador pode ser escrito como
0
x A BK BK x Br
x A LC x LD
− = + −
��� �
( )x A BK x BKx Br= − + +� �
( )x A LC x= −�� �
Realimentação de estado
Observador

Controle de Sistemas Mecânicos
Equaçaõ de saída usando estado e erro
� Equação de saída
( ) ( )y t C x t D u= +ˆ( ) ( ) ( )y t C x t D r K x= + −
ˆu r K x= −
ˆ( ) ( )y t C x t D r D K x D K x D K x= + − + −( ) ( ) ( )y t C D K x t D K x D r= − + +�
[ ]( )x
y t C D K D K D rx
= − +
�

Controle de Sistemas Mecânicos
Pólos malha fechada
� Os pólos de malha fechada podem serobtidos pelo determinante de A
0
A B K B KA
A L C
− = −
00
I A BK BK
I A LC
λλ
− −=
− −
det( ) 0A =
0I A BK I A LCλ λ− − − − = princípio da separação
Controle de Sistemas Mecânicos
Princípio da separação
� O princípio da separação afirma que pode-seprojetar separadamente a realimentação como se ovetor de estado estivesse de fato disponível paramedição e em seguida projetar o observador. Ospólos resultantes de malha fechada de ambos osmódulos serão independentes uns dos outros.
� Note que a ordem do sistema agora será dobrada,porque foi incluída a dinâmica do observador, damesma ordem da planta.
� Por isso esse tipo de observador é chamado deordem completa. Pode-se projetar observadores deordem reduzida, aproveitando as medições de saídacomo parte do vetor de estado.

Controle de Sistemas Mecânicos
Malha fechada com estado e estado estimado
� Seja a equação de realimentação, o modelo de estadoda planta e do observador
r
-
K
Plantau
y
Ox̂z
x Ax Bu
y C x D u
= += +
�ˆu r Kx= −
ˆ ˆ ˆ ˆ( )
ˆ
x Ax Bu L y Cx Dr DKx
z Kx
= + + − − +=
�

Controle de Sistemas Mecânicos
Modelo de Malha fechada
� Pode-se rescrever o modelo de estado da planta emfunção de e
x Ax Bu
y C x D u
= += +
�
ˆu r Kx= −
ˆx A x B K x Br
y C x D u
= − += +
�
r x̂
Controle de Sistemas Mecânicos
Modelo de Malha fechada
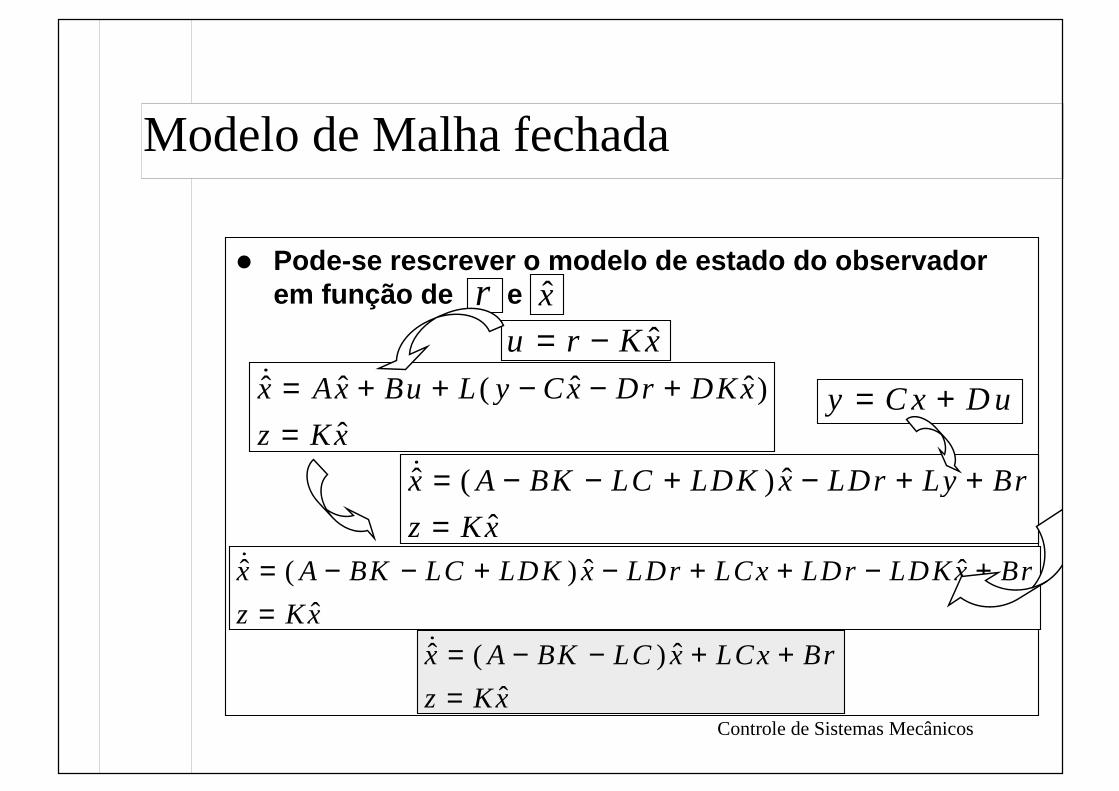
� Pode-se rescrever o modelo de estado do observadorem função de e
ˆ ˆ( )
ˆ
x A BK LC LDK x LDr Ly Br
z Kx
= − − + − + +=
�
ˆ ˆ ˆ( )
ˆ
x A BK LC LDK x LDr LCx LDr LDKx Br
z Kx
= − − + − + + − +=
�
y C x D u= +ˆ ˆ ˆ ˆ( )
ˆ
x Ax Bu L y Cx Dr DKx
z Kx
= + + − − +=
�ˆu r Kx= −
r x̂
ˆ ˆ( )
ˆ
x A BK LC x LCx Br
z Kx
= − − + +=
�
Controle de Sistemas Mecânicos
Equação de saída usando estado e estado estimado
� Equação de saída
( ) ( )y t C x t D u= +ˆ( ) ( ) ( )y t C x t D r K x= + −
ˆu r K x= −
ˆ( ) ( )y t C x t D r D K x= + −
[ ]( )ˆ
xy t C D K D r
x
= − +

Controle de Sistemas Mecânicos
Modelo de estado Malha fechada
� Portanto o modelo de estado pode ser obtido juntandoos modelos de estado da planta e do observador
r
-
K
Plantau
y
Ox̂z
[ ]
ˆˆ
ˆ
x A BK x Br
LC A BK LC x Bx
xy C DK
x
− = + − −
= −
��

Controle de Sistemas Mecânicos
Modelo de estado Malha fechada
� Modelo de estado malha fechada
r
-
K
Plantau
y
Ox̂z
[ ]0
k
k
k
k
A BKA
LC A BK LC
BB
B
C C DK
D
− = − −
=
= −=

Controle de Sistemas Mecânicos
Modelo do controlador-observador(Heq)
� Considerando o observador com r=0(regulador)
ˆ ˆ ˆ ˆ( )x Ax Bu L y Cx DKx= + + − +� ˆu Kx= −
ˆ ˆ ˆ ˆ ˆx Ax BKx Ly LCx LDKx= − + − +�
ˆ ˆ( )x A BK LC LDK x Ly= − − + +�
xKz ˆ=
r
-
K
Plantau
y
Ox̂z

Controle de Sistemas Mecânicos
Modelo de estado Heq
� Considerando o modelo de estado do controlador +observador para r=0
� Comparando-se obtém-se o modelo de estado Heq
ˆ ˆ( )x A BK LC LDK x Ly= − − + +�
xKz ˆ=
-+
)(sHeq
)(sG)(sY)(sR
pk
r
-
K
Plantau
y
Ox̂z
Ah A BK LC LDK= − − +LBh =KCh =0=Dh

Controle de Sistemas Mecânicos
Para o helicóptero cujo modelo está abaixo, projete umcontrolador de estado com pólos localizados em
-1±j e –2. Analise o desempenho do controlador.
Obs: Modelo no plano, com vetor de estado compostoda variação do “pitch”, ângulo do “pitch” dafuselagem e velocidade horizontal. Notar que é umsistema instável. O controle é feito pelo “manche”
Exercício 24.1: Controle de um helicóptero
[ ]xy
uxx
100
8.9
0
3.6
02.08.94.1
001
01.004.0
=
+
−−
−−=�
θθ,�
v
θθ
v
�

Controle de Sistemas Mecânicos
Exercício 24.2: Controle com observador
clear allclose all% Plantaa=[-0.4 0 -0.01 1 0 0 -1.4 9.8 -0.02];b=[ 6.3 0 9.8];c=[0 0 1];d=0;sg=ss(a,b,c,d);
% Projeto do observadorob=obsv(a,c);disp(’Det da observabilidade : ’)det(ob), pausepobs=[-4 -3-3*j -3+3*j];disp(’Vetor de ganhos do observador: ’)l=place(a',c',pobs)’;
% Projeto do controladorm=ctrb(a,b);disp('Det da controlabilidade : ')det(m), pausepcon=[-1-j -1+j -2];disp('Vetor de ganhos : ')k=place(a,b,pcon)
Para o mesmo helicóptero, projete um controlador deestado com observador e analise o desempenho.
Controle de Sistemas Mecânicos
Exercício 24.2: Análise do projeto
• Função de transferência da planta• Função de transferência do controlador• Função de transferência de malha aberta (HG)• Lugar das raízes da malha aberta (HG)• Margens da malha aberta (HG)• Função de transferência de malha fechada• Pólos e zeros da planta• Pólos e zeros do controlador• Pólos e zeros de malha aberta• Pólos e zeros de malha fechada• Análise de desempenho

Controle de Sistemas Mecânicos
Exercício 24.3: Proposto
Para a planta cujo modelo de estado está abaixo,determine o vetor de ganhos para que o sistema demalha fechada possua um PSS não maior que 10%e um tempo de estabilização a 2% de 4 segundos.
[ ] 0001
1
0
0
500
110
010
==
=
−−=
DC
BA

Controle de Sistemas Mecânicos
Usar o seguinte código
� Programa em MATLAB (parcial)x=[-10:0.1:-zeta*wn];y=(sqrt(1-zeta^2)/zeta)*x;
xc=[-10:0.1:-zeta*wn];yc=sqrt(wn^2-xc.^2);
plot(x,y,’:’,x,-y,’:’,xc,yc,’:’,xc,-yc,’:’)
Observar que é necessário definir os valores do fator deamortecimento e da freqüência natural.