projeto de graduaÇÃo iiapp.uff.br/riuff/bitstream/1/2296/1/tcc allan e caio (sem... · elevador...
TRANSCRIPT

UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO II
Data: 29 de Julho de 2016
Título do Projeto:
PROJETO DE PLATAFORMA PANTOGRÁFICA PARA ELEVAÇÃO DE VEÍCULOS
Autor:
ALLAN LESSA COSTA
CAIO SOARES PONTES
Orientadora:
STELLA MARIS PIRES DOMINGUES

ALLAN LESSA COSTA
CAIO SOARES PONTES
PROJETO DE PLATAFORMA PANTOGRÁFICA PARA
ELEVAÇÃO DE VEÍCULOS
Trabalho de Conclusão de Curso apresentado
ao Curso de Engenharia Mecânica da Universidade
Federal Fluminense, como requisito parcial para
obtenção do grau de Engenheiro Mecânico.
Orientadora:
Prof. STELLA MARIS PIRES DOMINGUES
Niterói
2016

Ficha Catalográfica elaborada pela Biblioteca da Escola de Engenharia e Instituto de Computação da UFF
C837 Costa, Allan Lessa
Projeto de plataforma pantográfica para elevação de veículos /
Allan Lessa Costa, Caio Soares Pontes. – Niterói, RJ : [s.n.], 2016.
139 f.
Trabalho (Conclusão de Curso) – Departamento de Engenharia
Mecânica, Universidade Federal Fluminense, 2016.
Orientador: Stella Maris Pires Domingues.
1. Elevador pantográfico. 2. Veículo automotivo. I. Pontes, Caio
Soares. II. Título.
CDD 621.877



DEDICATÓRIA
Dedicamos este trabalho a todos que contribuíram para nossa formação. A família sempre
presente e aos amigos que a vida nos trouxe. A todos esses o nosso mais profundo
agradecimento pelo suporte nos momentos mais difíceis e contagiante alegria pelas nossas
conquistas.

AGRADECIMENTOS
Agradecemos primeiramente a Deus por nos guardar e guiar até este momento. Aos nossos
pais e irmãos que foram extremamente pacientes, amorosos e cuidadosos, pois entenderam a
árdua batalha que diariamente enfrentamos ao sermos alunos de Engenharia Mecânica.
.

RESUMO
Este trabalho de conclusão de curso visa a elaboração de uma plataforma pantográfica para
elevação de veículos automotores em oficinas mecânicas. O principal objetivo do trabalho é
apresentar o correto dimensionamento do equipamento, passando por todas as fases desde sua
concepção, desenho, escolha do material, análise estática e escolha dos componentes para o
acionamento hidráulico. São demonstrados os principais resultados obtidos para esse fim,
bem como os cálculos relacionados. Todo o estudo desenvolvido seguiu as normas técnicas
reguladoras para a categoria, em especial a NBR 8400 – Cálculo de Equipamentos para
Levantamento e Movimentação de Cargas além de se basear em catálogos fornecidos por
empresas especializadas. As análises feitas ao longo do projeto foram auxiliadas pelo uso de
softwares como: FTOOL e MDSOLID para geração de gráficos de momento fletor, esforço
cortante e normal dos componentes; Autocad para elaboração do desenho em 2D, SolidWorks
para a modelagem em 3D e Microsoft Excel para criação de gráficos e auxílio com cálculos.
Palavras-Chave: Plataforma pantográfica; elevação de veículos; análise estática;
hidráulico.

ABSTRACT
This course conclusion work is aimed at developing a pantographic platform for lifting motor
vehicles in garages. The main objective is to present the correct sizing of the equipment,
passing through all stages from conception, design, choice of material, static analysis and
choice of components for the hydraulic drive. The main results obtained for this purpose and
related calculations are shown. All the study developed followed the regulatory technical
standards for the category, particularly NBR 8400 - Equipment Calculation for Lifting and
Material Handling in addition to rely on catalogs provided by specialized companies. The
analyzes made during the project were aided by the use of software such as: FTOOL and
MDSOLID to generate bending moment graphs, shear and standard components; Autocad for
processing 2D drawing, SolidWorks for 3D modeling and Microsoft Excel for charting and
help with calculations.
Key-Words: Pantographic platform; vehicle lift; static analysis; hydraulic.

LISTA DE ILUSTRAÇÕES
Figura 1.1: Exemplo de elevador pantográfico 22
Figura 1.2: Comparação entre Elevador Pantográfico e Elevador de Colunas 23
Figura 2.1: Plataforma Pantográfica 25
Figura 2.2: Vista explodida de uma plataforma 26
Figura 3.1: Mesa formada pela viga U 33
Figura 3.2: Esboço da solicitação devido à carga 34
Figura 3.3: Diagramas Força cortante e Momento Fletor 35
Figura 3.4: Diagramas Força cortante e Momento Fletor 37
Figura 3.5: Diagramas Força cortante e Momento Fletor 38
Figura 3.6: Carregamento sobre a mesa obtido no FTOOL 40
Figura 3.7: Esforços nos apoios 41
Figura 3.8: Deflexão da mesa obtida 42
Figura 3.9: Deflexão da mesa obtida 42
Figura 3.10: Perfil de uma haste da plataforma pantográfica 43
Figura 3.11: Perfil Retangular de uma haste 44
Figura 3.12: Plataforma Pantográfica 45 Figura 3.13: Ilustração do carregamento sobre a estrutura 46
Figura 3.14: Ilustração do carregamento sobre a estrutura 48
Figura 3.15: Ilustração das forças atuando na haste 49
Figura 3.16: Diagrama de forças resultantes, normal, cortante e momento fletor 50
Figura 3.17: Ilustração das forças atuando na haste 51
Figura 3.18: Diagrama de forças resultantes, normal, cortante e momento fletor 52 Figura 3.19: Ilustração das forças atuando na haste 53
Figura 3.20: Diagrama de forças resultantes, normal, cortante e momento fletor 54
Figura 3.21: Ilustração das forças atuando na haste 55
Figura 3.22: Diagrama de forças resultantes, normal, cortante e momento fletor 56
Figura 3.23: Casos de flambagem 62
Figura 3.24: Tensões críticas para colunas de aço 64
Figura 3.25: Base da Plataforma Pantográfica 65
Figura 3.26: Ilustração esquemática da plataforma fechada 66
Figura 3.27: Esboço do carregamento sobre a base do equipamento 66
Figura 3.28: Diagrama de esforços cortantes e momento fletor 67
Figura 4.1: Barra de sustentação 69
Figura 4.2: Força feita pelo pistão na barra circular 71
Figura 4.3: Diagrama de forças, esforços cortantes e momento fletor 72
Figura 4.4: Diagrama de forças, esforços cortantes e momento fletor 73
Figura 4.5: Diagrama de forças, esforços cortantes e momento fletor 74
Figura 4.6: Montagem do pino, bucha e tubo circular 86
Figura 5.1: Gráfico limite de ruptura x Fator de superfície 90
Figura 5.2: Valores para Kt 93
Figura 5.3: Suporte de fixação das hastes 96
Figura 5.4: Tensão limite de fadiga a cisalhamento 97
Figura 5.5: Tensão limite de fadiga a tração e compressão 98

Figura 5.6: Tensão limite de fadiga a cisalhamento 98
Figura 6.1: Gráfico para seleção de haste 102
Figura 6.2: Gráfico F x ϴ 105 Figura 6.3: Casos de Euler para Flambagem 108
Figura 6.4:Exemplo de Cilindro Hidráulico 109
Figura 7.1: Sistema de catracas da plataforma 113
Figura 12.1: Momento de inércia 122
Figura 12.2: Módulo de resistência 123
Figura 13.1: Mesa a partir de uma chapa plana. 137

LISTA DE QUADROS
Quadro 3.1: Dados do elevador 29
Quadro 3.2: Classe de utilização 30
Quadro 3.3: Estado de Carga 30 Quadro 3.4: Classificação da estrutura em grupos 31
Quadro 3.5: Caso de solicitação e determinação de FS 32
Quadro 3.6: Propriedades da dimensão escolhida 34
Quadro 3.7: Propriedades da dimensão escolhida 45
Quadro 3.8: Constantes de Extremidades 62
Quadro 3.9: Propriedades da dimensão escolhida 65
Quadro 4.1: Propriedades da dimensão escolhida 70
Quadro 4. 2: Propriedades do perfil U 81
Quadro 4.3: Propriedades do Pino, bucha e tubo circular 88
Quadro 5.1: Propriedades do Suporte 96
Quadro 6.1: Fator de curso 102
Quadro 6.2: Força de avanço teórico e volume de fluido deslocado 103
Quadro 6.3: Força de avanço teórico e volume de fluido deslocado 106
Quadro 8.1: Custo dos principais materiais 114
Quadro 8.2: Custo da mão de obra 114
Quadro 12.1: Propriedades mecânicas do aço ASTM A36 123
Quadro 12.2: Propriedades mecânicas AISI 1060 124 Quadro 13.1: Propriedades da chapa 138

LISTA DE TABELAS
Tabela 4.1: Classe de funcionamento 76
Tabela 4.2: Estado de solicitação do mecanismo 76
Tabela 4.3: Grupo dos mecanismos 77
Tabela 4.4: Valores de q 77 Tabela 4.5: Valores de FS 77
Tabela 4.6: Coeficientes de Segurança 79
Tabela 4.7: Fator de segurança 84
Tabela 4.8: Esforços transmissíveis de montagem 85
Tabela 5.1: Fatores de confiabilidade 91
Tabela 5.2: Fatores de Redução de resistência à fadiga para elementos roscados 93 Tabela 6.1: Catálogo de Motores Hidráulicos 111
Tabela 12.1: Propriedades mecânicas parafuso 125
Tabela 12.2: Dimensões da mesa 125
Tabela 12.3: Dimensões das hastes 126
Tabela 12.4: Dimensões da base 126
Tabela 12.5: Diâmetro do parafuso 127 Tabela 12.6: Comprimento do parafuso 128
Tabela 12.7: Dimensões do pino e barra que sustenta o pistão 129
Tabela 12.8: Trilhos em perfil U 130
Tabela 12.9: Dimensões da roda 131
Tabela 12.10: Tensão de cisalhamento máxima 132
Tabela 12.11: Tubo circular 133
Tabela 12.12: Dimensões da bucha de bronze 134
Tabela 12.13: Mancal de rolamento de fixação do pistão com a barra circular 135

LISTA DE SÍMBOLOS
P: Fração mínima da carga máxima
E: Módulo de elasticidade longitudinal
FS: Coeficiente de segurança em relação as tensões críticas
Mmáx: Momento fletor máximo
M: Momento fletor
WX: Módulo de resistência eixo x
WY: Módulo de resistência eixo y
IX: Momento de inércia eixo x
IY: Momento de inércia eixo y
V: Esforço cortante
Q: Carregamento distribuído
Qtotal: Carregamento distribuído total
𝑀12: Momento fletor entre os pontos 1 e 2
𝑀23: Momento fletor entre os pontos 2 e 3
𝑀̅̅̅1̅2̅: Momento fletor devido a carga unitária entre os pontos 1 e 2
𝑀̅̅̅2̅3̅: Momento fletor devido a carga unitária entre os pontos 2 e 3
b: Largura da seção transversal
e: Espessura da seção transversal
h: Altura da seção transversal
AT: Área da seção transversal
PT: Peso teórico
F: Força concentrada
FX′: Força do pistão na direção x na altura máxima de trabalho

FY′: Força do pistão na direção y na altura máxima de trabalho
Ax: Reação na direção x do ponto A
Ay: Reação na direção y do ponto A
By: Reação na direção y do ponto B
Cx: Reação na direção x do ponto C
Cy: Reação na direção y do ponto C
Ey: Reação na direção y do ponto E
Dx: Reação na direção x do ponto D
Dy: Reação na direção y do ponto D
Hx: Reação na direção x do ponto H
Hy: Reação na direção y do ponto H
Gx: Reação na direção x do ponto G
Gy: Reação na direção y do ponto G
g: Aceleração da gravidade
Qh: Carregamento distribuído sobre a haste
Mmáxpp: Momento fletor máximo devido o peso próprio
PCR: Força crítica de flambagem
n: Constante de extremidade
L: Comprimento do perfil
Lf: Comprimento efetivo de flambagem
FNDFH: Força normal a seção transversal da haste DFH
r: Raio de giração
Q’: momento estático da área A′ em relação a linha neutra
T: largura da área da seção transversal
CBC: Comprimento da barra circular que sustenta o pistão

CTB: Comprimento total das barras somada aos pinos
LH: Largura da haste
EH: Espaçamento entre as hastes
eH: Espessura da haste
FCIL: Força aplicada pelo pistão hidráulico
PSB: Peso sobre a barra circular que sustenta o pistão
Mbarra: Massa da barra que sustenta o pistão
Mmesa: Massa da mesa
Mhastes: Massa das hastes
qSB: Carregamento distribuído sobre a barra circular
FSr: Fator de segurança em relação à ruptura
q: Coeficiente dependente do grupo em que o mecanismo está classificado
C: Carga por roda ou rodizio
PE: Peso do equipamento, carrinho ou estrutura
PMC: Peso máximo da carga a ser transportada
S: Coeficiente de segurança das rodas
N′: Número de rodas ou rodízios
FMI: Fator de majoração para rodas inferiores
FMS: Fator de majoração para rodas superiores
TP: Esforço de tração que se exerce no parafuso após aperto
Fpa: Força paralela por parafuso
Fsp: Coeficiente de segurança da força paralela
m: Plano de atrito
SP: Resistência de prova do parafuso
ATP: Área da seção transversal resistente do parafuso
d: Diâmetro dos parafusos

Sn: Limite de resistência à fadiga da peça
S′n: Limite de resistência à fadiga do corpo de prova do teste de flexão rotativa
Ka: fator de superfície;
Kb: fator de tamanho
Kc: fator de confiabilidade
Kd: fator de temperatura
Ke: fator de concentração de tensões
Kf: fator de efeitos diversos
Srt: limite de ruptura a tração
Kt: fator de concentração de tensão teórico
q′: sensibilidade ao entalhe
N: Número de ciclos permitidos para a estrutura
DP: Diâmetro calculado do pistão hidráulico
AP: Área do pistão hidráulico
Ptb: Força de trabalho do pistão hidráulico
K: Carga de flambagem
Fa: Força máxima de trabalho do pistão
DH: Diâmetro da haste do pistão hidráulico
Va: Velocidade de avanço
Vr: Velocidade retorno
𝑄𝑎: Vazão de avanço
Y’: Altura máxima de trabalho
𝑣: Rotação de saída do motor
σadm: Tensão normal admissível

σe: Tensão de escoamento do material
τadm: Tensão de cisalhamento admissível
τtotal: Tensão de cisalhamento total
σtotal: Tensão normal total
σcarga: Tensão normal devido à carga
σpeso próprio: Tensão normal devido ao peso próprio
𝛿𝑡𝑜𝑡𝑎𝑙 : Deflexão total
𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜: Deflexão devido o peso próprio
𝛿𝑐𝑎𝑟𝑔𝑎: Deflexão devido a carga
𝛿3: Deflexão no ponto 3
Ө: Ângulo entre hastes e o solo
σNM: Tensão normal máxima
σN: Tensão normal devido a força normal à área transversal
σF: Tensão normal devido a flexão
σFpp: Tensão normal devido ao peso próprio sobre as hastes
ξ: Coeficiente para cálculo da tensão de cisalhamento
λ: Coeficiente de esbeltez
σC: Tensão crítica de flambagem
β: Ângulo entre o braço do pistão hidráulico e o solo
σFB: Tensão normal devido a flexão na barra que sustenta o pistão
σFPPB: Tensão normal de flexão devido ao peso próprio da barra que sustenta o pistão
τPPB: Tensão de cisalhamento devido ao peso próprio da barra que sustenta o pistão
σFResult: Tensão normal resultante devido a flexão
τresul: Tensão de cisalhamento resultante
σa: Tensão admissível relacionada a tensão de ruptura
σr: Tensão última de ruptura do aço

σT: Tensão de tração
Φ: Diâmetro das rodas
ϕ’: Diâmetro do furo da roda
σFtrilho: Tensão normal nos trilhos devido a flexão
μ: Coeficiente de atrito

8
SUMÁRIO
1 INTRODUÇÃO 21
2 METODOLOGIA 24
2.1 ESCOLHA DO TIPO DE EQUIPAMENTO DE ELEVAÇÃO DE CARGA 24
2.2 ESTRUTURA DA PLATAFORMA 25
2.3 CARACTERÍSTICAS DA PLATAFORMA 27
3 DIMENSIONAMENTO DA ESTRUTURA DO EQUIPAMENTO 28
3.1 CLASSIFICAÇÃO QUANTO A NORMA NBR 8400 28
3.1.2 CLASSE DE UTILIZAÇÃO 29
3.1.3 CLASSIFICAÇÃO DA ESTRUTURA EM GRUPOS 31
3.2 ESCOLHA DO MATERIAL 31
3.3 MESA 32
3.3.1 CALCULO DA TENSÃO MÁXIMA DEVIDO À CARGA 34
3.3.2 CALCULO DA TENSÃO MÁXIMA DEVIDO AO PESO PRÓPRIO DA MESA 36 3.4 ANÁLISE DE CONTRAFLECHA 38
3.4.1 ANÁLISE DA MESA NA ALTURA MÁXIMA DE TRABALHO 40
3.5 ANÁLISE DAS HASTES 42
3.5.1 ANÁLISE DA HASTE ACE 49
3.5.2 - ANÁLISE DA HASTE BCD 51
3.5.3 – ANÁLISE DA HASTE DFH 53
3.5.4 – ANÁLISE DA HASTE GFE 55
3.5.5 – CÁLCULO DAS TENSÕES NORMAIS E CISALHANTES MÁXIMAS DEVIDO À CARGA 57 3.6 – ANÁLISE DE FLAMBAGEM NAS HASTES 61
3.7 BASE DO EQUIPAMENTO 64
4 DIMENSIONAMENTO E SELEÇÃO DE MECANISMOS 69
4.1 – COMPONENTES DE MOVIMENTAÇÃO 69
4.2 – COMPONENTES DE MOVIMENTAÇÃO 78
4.2.1 – RODAS 78
4.2.2 – TRILHOS PARA MOVIMENTAÇÃO DAS RODAS 81
4.2.2.1 Trilhos Superiores 81
4.2.2.2 Trilhos inferiores 82
4.3 – ELEMENTOS DE FIXAÇÃO 82
4.3.1 – PARAFUSOS 82
4.3.2 – PARAFUSO FIXAÇÃO DAS RODAS 85
4.3.3 – PARAFUSO DE FIXAÇÃO DO TRILHO 86 4.3.4 – PINOS DE ARTICULAÇÃO 86
5 ANÁLISE DE FADIGA 89
5.1 DETERMINAÇÃO DOS FATORES DE FADIGA 89
5.1.1 – CÁLCULO DO NÚMERO DE CICLOS 93
5.1.2 – FADIGA NA JUNTA DOS SUPORTES 95 5.1.3 – SOLDA BARRA DE SUSTENTAÇÃO NA CABEÇA DO PINO 97
6 ACIONAMENTO HIDRAULICO 100

9
6.1 SELEÇÃO E CONCEPÇÃO 100
6.2 CILINDROS HIDRÁULICOS 100
6.2.1 METODOLOGIA 101
6.2.2 DIMENSIONAMENTO 103
6.3 MOTORES HIDRÁULICOS 109
6.3.1 VELOCIDADE DOS ATUADORES 110
6.3.2 VAZÃO DE AVANÇO (QA) 110
6.3.3 ESCOLHA DO MOTOR 110
7 SISTEMAS DE SEGURANÇA 112
8 ESTIMATIVA DE CUSTOS 114
9 CONCLUSÕES 116
10 TRABALHOS FUTUROS 118
11 REFERÊNCIAS BIBLIOGRÁFICAS 119
ANEXO 121
12 ANEXO I 122
12.1 MOMENTOS DE INÉRCIA COMUMENTE UTILIZADOS 122
12.2 MÓDULOS DE RESISTÊNCIA COMUMENTE UTILIZADOS 122
12.3 PROPRIEDADES MECÂNICAS ASTM A36 123
12.4 PROPRIEDADES MECÂNICAS DOS PINOS 124
12.5 PROPRIEDADES MECÂNICAS DO AÇO A325 124
12.6 PERFIL U 125
12.7 PERFIL HASTES 126
12.8 PERFIL DA BASE 126
12.9 PARAFUSOS 127
12.10 BARRA DE SUSTENTAÇÃO 128
12.11 TRILHOS PERFIL U 129
12.12 RODAS 131
12.13 TENSÃO CISALHAMENTO MÁXIM 131
12.14 MONTAGEM DOS PINOS 132
12.15 MANCAL DE ROLAMENTO 135
APÊNDICES 136
13 APENDICE 137
13.1 – CÁLCULOS DA MESA A PARTIR DE UMA CHAPA 137

21
1 INTRODUÇÃO
Engenharia pode ser descrita como o ato de utilizar conhecimentos teóricos para a
simplificação de tarefas complexas e resolução de problemas. Após a Revolução Industrial e o
advento da indústria automobilística, um dos grandes problemas a ser resolvido foi como
realizar uma segura elevação do veículo que permitisse sua manutenção.
Antes de serem criadas alternativas que permitissem erguer o automóvel, os mecânicos
tinham que se espremer sob o veículo. As condições eram insalubres: não havia luminosidade,
o espaço para se movimentar era muito restrito e não era possível o trabalho de pessoas acima
de uma certa altura e peso.
Uma das primeiras soluções propostas foi a escavação. O carro seguia até uma
pequena rampa com um buraco por baixo, permitindo que o profissional se posicionasse sob
ele e pudesse fazer os reparos necessários com um espaço adequado. Era uma solução boa e
duradoura, mas muito cara para ser instalada, portanto poucas oficinas e garagens poderiam
custeá-la.
Já o primeiro elevador hidráulico para carros foi patenteado em 1939 por John
Mcdonald, Stanley Mcdonald, Thomas McDonald e Joseph P Schwartz. Era um dispositivo
simples, que consistia em uma câmara circular para o reservatório do fluido e uma longa
coluna reta como elevador.
Desde então muitos outros tipos de equipamentos para erguer veículos foram
patenteados, incluindo o elevador pantográfico em 1989.

22
O elevador pantográfico é um tipo de plataforma que geralmente só pode se mover na
direção vertical. O mecanismo utilizado consiste em suportes dobráveis e interligados em um
padrão cruzado "X", conhecido como pantógrafo (ou mecanismo de tesoura). O movimento
para cima é conseguido através da aplicação de pressão ao exterior do menor conjunto de
suportes, alongando o padrão de cruzamento, e impulsionando a plataforma de trabalho
verticalmente.
Figura 1.1: Exemplo de elevador pantográfico
Fonte: http://www.rokim.com.br/
A contração do mecanismo de tesoura pode ser hidráulica, pneumática ou mecânica.
Dependendo do sistema escolhido pode não ser necessário nenhum gasto energético para
descer a plataforma, bastando apenas uma liberação da pressão hidráulica ou pneumática. Por
isso esses sãos os tipos mais utilizados, já que permitem um método á prova de falhas de
retornar o elevador á sua posição original pelo acionamento de uma válvula manual.
Apesar disso, talvez a maior vantagem do elevador pantográfico em relação a outros
tipos de elevadores está no pouco espaço exigido para sua utilização, permitindo um maior
número de postos de serviço em uma oficina, o que maximiza os lucros do proprietário. Ainda
na comparação com o tradicional elevador hidráulico de colunas, as manobras com o veículo
são mais fáceis (já que não há o obstáculo das colunas), agiliza o acesso ao automóvel já que
as rodas e portas ficam totalmente livres e cria um ambiente visualmente mais amplo, limpo e
agradável para o trabalho. Conforme visto na Figura 1.2, no espaço ocupado por 2 elevadores
de colunas é possível posicionar 3 elevadores pantográficos.

23
Figura 1.2: Comparação entre Elevador Pantográfico e Elevador de Colunas
Fonte: http://www.ravenelevadores.com.br/
Para execução do projeto da plataforma pantográfica para elevação de veículos, são
realizadas em cada capítulo diversas etapas do dimensionamento de toda estrutura. O capítulo
3 aborda o dimensionamento das principais estruturas do equipamento (mesa, hastes e base),
no capítulo 4 é feito o dimensionamento e a seleção dos mecanismos (pinos, parafusos e
rodas), no capítulo 5 é a realizada a análise de fadiga das diferentes partes que compõem a
estrutura.
O capítulo 6 se refere ao dimensionamento do acionador hidráulico responsável por
elevar e abaixar a estrutura. No capítulo 7 e 8 são propostos os sistemas de segurança
possíveis para a plataforma pantográfica e a estimava de custo para a construção do
equipamento, respectivamente.

24
2 METODOLOGIA
2.1 ESCOLHA DO TIPO DE EQUIPAMENTO DE ELEVAÇÃO DE CARGA
Com a ideia de projetar um equipamento de elevação de carga em um ambiente
confinado como uma oficina mecânica, para dar base ao presente trabalho optou-se pela
tecnologia de plataforma pantográfica, conforme a figura (2.1).
A utilização desse tipo de equipamento na indústria, construção civil, aeronáutica,
entre outros, favoreceu a sua escolha devido a sua grande gama de aplicação. Podemos
encontrar esse tipo de equipamento em versões pequenas, médias e grandes (dependendo da
aplicação de carga desejada e ambiente de trabalho). O equipamento pode ser movimentado
por um motor (elétrico, combustão ou diesel), e pode se deslocar através do ambiente de
trabalho, ou apenas ser usado preso ao solo utilizando o movimento vertical para elevação de
carga.
A plataforma pantográfica em questão será do tipo tesoura dupla. Sua estrutura
consiste de hastes articuladas e duas mesas rígidas, que são elevadas por atuadores
pneumáticos ou hidráulicos (escolha dependente da quantidade de carga aplicada). O
equipamento em questão será de médio porte, com possibilidade de elevação da carga ao nível
máximo de 1,8 metros, para proporcionar ao técnico em manutenção trabalho mais flexível e
com melhor ergonomia.
O equipamento em questão quando comparado aos tradicionais elevadores de coluna
possuem vantagens como: menos espaço ocupado na oficina de trabalho o que permite um
número maior de postos de serviço (mais carros atendidos), maior agilidade para trabalhar no
veículo pois suas portas e rodas ficam livres.

25
2.2 ESTRUTURA DA PLATAFORMA
A estrutura se divide em duas plataformas possuindo cada uma delas: uma mesa rígida
(parte superior do equipamento) e oito hastes, conforme ilustrado na figura 2.1. Serão
dimensionados também os trilhos, rodas (parte superior e inferior da plataforma), barra
circular que suportará o esforço aplicado pelo pistão hidráulico para elevação da estrutura,
elementos de fixação como os pinos e parafusos, assim como os atuadores hidráulicos que
serão responsáveis pela elevação da carga.
Figura 2.1: Plataforma Pantográfica
Fonte: Dos autores (2016) software SolidWorks®

26
Figura 2.2: Vista explodida de uma plataforma
Fonte: Dos autores (2016) software SolidWorks®
1: Mesa da plataforma (viga U)
2: Hastes da plataforma (seção retangular vazada)
3: Base da estrutura (chapa grossa)
4: Barra de sustentação do pistão
5: Rodas
6: Trilhos
7: Pino de articulação
8: Parafuso
9: Acionador hidráulico

27
2.3 CARACTERÍSTICAS DA PLATAFORMA
Antes de começarmos o dimensionamento da estrutura e análise de resultados, é
preciso estabelecer as condições em que a plataforma pantográfica deve operar. Foram
escolhidos os seguintes dados para uso:
Local de trabalho: oficina mecânica (ambiente fechado)
Tempo de elevação: 50 segundos
Carga Máxima Suportada: 3000kg
Altura Máxima alcançada: 1,80m
Regime de trabalho: 8h/dia
Tempo médio de funcionamento: 3h/dia
Acionamento: hidráulico

28
3 DIMENSIONAMENTO DA ESTRUTURA DO EQUIPAMENTO
O primeiro passo para o projeto de um novo equipamento passa pelo correto
dimensionamento e análise de seus elementos constituintes, a fim de provar matematicamente
que a estrutura desejada suporta os esforços previstos e é capaz de executar o trabalho
demandado de maneira eficaz e segura.
O presente capítulo trata das classificações feitas com base na norma NBR8400, do
dimensionamento da estrutura da plataforma pantográfica e sua consequente análise estática
para as condições escolhidas.
3.1 CLASSIFICAÇÃO QUANTO A NORMA NBR 8400
Por se tratar de um mecanismo de elevação de carga, recorre-se principalmente a
norma técnica NBR 8400 que categoriza o equipamento para a determinação dos fatores de
segurança referentes para a utilização do mesmo de forma adequada e segura.
Essa Norma é responsável por fixar as diretrizes básicas para o cálculo das partes
estruturais e componentes mecânicos dos equipamentos de levantamento e movimentação de
cargas, independendo do grau de complexidade ou do tipo de serviço do equipamento,
determinando:
a) solicitações e combinações de solicitações a serem consideradas;
b) condições de resistência dos diversos componentes do equipamento em relação às
solicitações consideradas;
c) condições de estabilidade a serem observadas.

29
3.1.2 Classe de Utilização
Segundo a definição apresentada pela norma NBR8400, a classe de utilização
caracteriza a frequência de utilização dos equipamentos. Não se podendo classificar a
estrutura dos equipamentos em função de seus diversos ciclos de manobras, convencionou-se
classificá-la em função da utilização do movimento de levantamento, definindo-se quatro
classes de utilização, conforme o Quadro 3.2, que servem de base para o cálculo das
estruturas.
Para cada uma destas classes estipula-se um número total teórico de ciclos de
levantamento que o equipamento deverá efetuar durante sua vida. Estes números de ciclos de
levantamento constantes no Quadro 3.2 servem de base para a determinação do número de
ciclos de variações de tensões, em um elemento da estrutura, ou um elemento não giratório
dos mecanismos, na verificação à fadiga.
Considera-se que um ciclo de levantamento é iniciado no instante em que a carga é
içada e termina no momento em que o equipamento está em condições de iniciar o
levantamento seguinte.
Para determinar o número de ciclos de levantamento, será usada a Fórmula (3.1):
(3.1)
Assumindo que o equipamento trabalhe nas condições do Quadro 3.1, conclui-se que a
quantidade de ciclos de levantamento é 5,76 x 104.
Ciclos por hora 2
Horas/dia 8
Dias úteis/ano 240
Vida útil (anos) 15
Quadro 3.1: Dados do elevador
Ciclos de levantamento = 8x2x240x15 = 5,76 x 104 ciclos
Ciclos de levantamento = 𝐶𝑖𝑐𝑙𝑜𝑠
× ℎ𝑜𝑟𝑎𝑠
× 𝑑𝑖𝑎𝑠
× 𝑡𝑒𝑚𝑝𝑜 𝑑𝑒 𝑣𝑖𝑑𝑎 ú𝑡𝑖𝑙 𝐻𝑜𝑟𝑎 𝑑𝑖𝑎 ú𝑡𝑖𝑙 𝑎𝑛𝑜

30
Com esse resultado em mãos, podemos encontrar a classe de utilização do
equipamento, que segundo a norma, terá classe A, de acordo com o Quadro 3.2.
Classe de
utilização
Frequência de utilização do
movimento de levantamento
Número convencional de
ciclos de levantamento
A Utilização ocasional não regular, seguida de
longos períodos de repouso 6,3 𝑥 104
B Utilização regular em serviço intermitente 2,0 𝑥 105
C Utilização regular em serviço intensivo 6,3 𝑥 105
D Utilização em serviço intensivo severo, efetuado,
por exemplo, em mais de um turno 2,0 𝑥 106
Quadro 3.2: Classe de utilização
Fonte: NBR 8400 (1984), p.06
3.1.2 Estado de Carga
O estado de carga caracteriza em que proporção o equipamento levanta a carga
máxima, ou somente uma carga reduzida, ao longo de sua vida útil. Consideram-se, na
prática, quatro estados convencionais de cargas, caracterizados pelo valor de p. Estes quatro
estados de carga estão definidos no Quadro 3.3. O estado de carga escolhido foi o 2 (médio).
Estado de
carga
Definição Fração mínima da
carga máxima
0 (muito leve) Equipamentos levantando excepcionalmente a
carga nominal e comumente cargas muito
reduzidas
P = 0
1 (leve) Equipamentos que raramente levantam a carga
nominal e comumente cargas de ordem de 1/3 da
carga nominal
P = 1/3
2 (médio) Equipamentos que freqüentemente levantam a carga nominal e comumente cargas
compreendidas entre 1/3 e 2/3 da carga nominal
P = 2/3
3 (pesado) Equipamentos regularmente carregados com a carga nominal
P = 1
Quadro 3.3: Estado de Carga
Fonte: NBR 8400 (1984), p.06

31
3.1.3 Classificação da estrutura em grupos
O Quadro 3.4 classifica o grupo do equipamento a partir das informações sobre sua
classe e o estado de carga. Feito essa análise, concluímos que a plataforma projetada pertence
ao grupo 3.
Estado de cargas
Classe de utilização
A
B
C
D
0 (muito leve) 1 2 3 4
1 (leve) 2 3 4 5
2 (médio) 3 4 5 6
3 (pesado) 4 5 6 6
Quadro 3.4: Classificação da estrutura em grupos
Fonte: NBR 8400 (1984), p.08
3.2 ESCOLHA DO MATERIAL
Para as principais estruturas do equipamento (mesas e hastes) o material escolhido foi
o aço ASTM A36 por atender bem as propriedades mecânicas necessárias a construção da
plataforma e por se tratar de um dos aços mais comuns no que se refere a aço carbono
estrutural, tornando dessa forma um aço de baixo custo e de fácil acesso.
Suas propriedades mecânicas de interesse são: Tensão de escoamento (250 MPa),
Módulo de Elasticidade Longitudinal (200 GPa) e Limite de Ruptura a Tração (450 MPa).
A plataforma se adequa a caso I da norma NBR 8400 – Equipamento em serviço normal sem
vento. Pelo Quadro 3.5 é encontrado o valor do coeficiente de segurança (FS=1,5).

32
𝑎𝑑𝑚
τ =
Quadro 3.5: Caso de solicitação e determinação de FS
Fonte: NBR 8400 (1984), p.16
Como a tensão de escoamento para esse tipo de aço é 𝜎𝑒 = 250 𝑀𝑃𝑎, conclui-se que:
σ = 250
(3.2) 1,5
σ𝑎𝑑𝑚 = 166,67 𝑀𝑃𝑎
Para a tensão cisalhante admissível tem-se:
𝜎𝑎𝑑𝑚
𝑎𝑑𝑚 √3 (3.3)
τ𝑎𝑑𝑚 = 96,23 𝑀𝑃𝑎
Dessa forma para que o equipamento em questão suporte os esforços oriundos da
carga aplicada e não entre em colapso é necessário que a tensão normal total (σ𝑡𝑜𝑡𝑎𝑙) da
estrutura seja menor que a tensão normal admissível (σ𝑎𝑑𝑚) e que a tensão cisalhante total (τ𝑡𝑜𝑡𝑎𝑙) seja
menor que a tensão cisalhante admissível (τ𝑎𝑑𝑚).
3.3 MESA
Dentre as possíveis dimensões e formatos que poderiam ser aplicadas para a mesa da
plataforma pantográfica, foi inicialmente escolhida uma placa maciça de aço ASTM A36.
Porém as dimensões da placa, para que os critérios de deflexão sugeridos pela Norma NBR
8400 fossem respeitados para o carregamento proposto no presente trabalho, acarretariam no
elevado peso. As dimensões da chapa que não foi aprovada para o projeto são vistas no
apêndice.

33
A solução encontrada foi a utilização de uma viga U de aço ASTM A36, que gerou um
excelente custo benefício. Devido às dimensões escolhidas, o perfil U possui menor peso,
melhor momento de inércia e consequentemente melhor módulo de resistência do que a chapa
maciça incialmente proposta.
É preciso que o perfil e material selecionado atendam aos critérios de resistência e
deflexão. A ideia que norteia a escolha da viga U para ser a mesa da plataforma pantográfica é
vista a seguir.
𝜎𝑡𝑜𝑡𝑎𝑙 = (𝜎𝑐𝑎𝑟𝑔𝑎 + 𝜎𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜) ˂𝜎𝑎𝑑𝑚𝑖𝑠𝑠í𝑣𝑒𝑙 (3.4)
Onde 𝜎𝑡𝑜𝑡𝑎𝑙 representa a soma da tensão devido à aplicação do carregamento sobre a
plataforma (𝜎𝑐𝑎𝑟𝑔𝑎) com a tensão oriunda do próprio peso do equipamento (𝜎𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜). Para que a
mesa não colapse é preciso que a tensão (𝜎𝑡𝑜𝑡𝑎𝑙) total seja menor que a tensão admissível (𝜎𝑎𝑑𝑚𝑖𝑠𝑠í𝑣𝑒𝑙) da mesma.
Dentre as diversas dimensões e fabricantes disponíveis no mercado, foi escolhido o
perfil U de tamanho 381x86,4x10,2 mm, com comprimento de 1500 mm. As propriedades do
perfil escolhido são vistas adiante, no quadro 3.6.
Figura 3.1: Mesa formada pela viga U
Fonte: Dos autores (2016), software SolidWorks®

34
Estrutura Massa
[kg]
Área transversal
[𝑚2]
Momento de Inércia
[𝑚4]
Módulo de resistência
[𝑚3]
Mesa 76 5,3372 x 10−3 3,38 x 10−6
5,1 x 10−5
Quadro 3.6: Propriedades da dimensão escolhida
Fonte: http://www.skylightestruturas.com.br/
3.3.1 Calculo da tensão máxima devido à carga
Nessa situação é considerada a carga atuando sobre a estrutura, como um
carregamento concentrado no centro da mesa. É preciso dizer que a carga atuando sobre cada
mesa da plataforma é igualmente dividida para as duas mesas que compõem a estrutura.
Como a plataforma está sendo dimensionada para uma carga total de 3000 kg, a carga que
atuará sobre cada mesa é de 1500 kg.
Carga = 1500 𝑘𝑔 𝑥 9,81 𝑚⁄𝑠2 (3.5)
Figura 3.2: Esboço da solicitação devido à carga
Fonte: Dos autores (2016), software FTOOL®
Conhecida a força aplicada devido à carga sobre a mesa e o módulo de resistência
(𝑊𝑥), pode-se calcular a tensão normal que atua na seção da viga onde atua o momento fletor
(𝑀𝑚á𝑥).
𝜎𝑐𝑎𝑟𝑔𝑎 =
𝑀𝑚á𝑥 (3.6)
𝑊𝑥

35
Nesse instante foi utilizado o programa FTOOL para obter os diagramas de momento
fletor e esforços cortantes que atuam na mesa da plataforma pantográfica (viga U) bi apoiada.
↑ +V
M + (sentido anti-horário)
Figura 3.3: Diagramas Força cortante e Momento Fletor
Fonte: Dos autores (2016), software FTOOL®
A partir do gráfico encontra-se o momento fletor máximo e consequentemente a
tensão devido a essa flexão, de (3.6), tem-se:
𝜎𝑐𝑎𝑟𝑔𝑎 = 5512 𝑁.𝑚
5,1 𝑥 10−5
𝑚3
= 108,1𝑀𝑃𝑎

36
3.3.2 Calculo da tensão máxima devido ao peso próprio da mesa
Neste instante é levado em consideração apenas o peso próprio da viga u, que é
classificado como um carregamento distribuído. Sabendo-se que:
𝑃𝑒𝑠𝑜 [𝑁] = 𝑀𝑎𝑠𝑠𝑎 [𝑘𝑔]𝑥 𝑔 [𝑚⁄𝑠2] (3.7)
𝑃𝑒𝑠𝑜𝑣𝑖𝑔𝑎 𝑢 = 76 𝑘𝑔 𝑥 9,81 𝑚⁄𝑠2 = 745,56 𝑁
Carregamento distribuído: 𝑄 = 𝑃𝑒𝑠𝑜𝑣𝑖𝑔𝑎 𝑢⁄𝐿 (3.8)
𝑄 = 745,56⁄1,5 = 497 𝑁⁄𝑚
Esboço da solicitação devido ao peso próprio
↑ +V

37
M + (sentido anti-horário)
Figura 3.4: Diagramas Força cortante e Momento Fletor
Fonte: Dos autores (2016), software FTOOL®
Do gráfico de momento fletor é tirado o momento fletor máximo e consequentemente
encontra-se a tensão máxima devido ao peso próprio, utilizando-se a equação (3.6)
𝑀𝑚á𝑥 140 𝑁.𝑚 𝜎𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜 = = = 2,75 MPa
𝑊𝑥 5,1 𝑥 10−5 𝑚3
Conhecendo-se as tensões devido a aplicação da carga e as tensões devido ao peso
próprio, chega-se a tensão total que atua na mesa da plataforma. Para que a estrutura não
colapse é preciso que a equação (3.4) seja respeitada.
𝜎𝑡𝑜𝑡𝑎𝑙 = (𝜎𝑐𝑎𝑟𝑔𝑎 + 𝜎𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜) ˂𝜎𝑎𝑑𝑚𝑖𝑠𝑠í𝑣𝑒𝑙.
𝜎𝑡𝑜𝑡𝑎𝑙= 108,1 𝑀𝑃𝑎 + 2,75 𝑀𝑃𝑎 ˂ 166,67 𝑀𝑃𝑎
Desta maneira é visto que o aço ASTM A36 e as dimensões escolhidas para a mesa
são aceitáveis, pois os critérios para que a estrutura não colapse foram atendidos. Assim
conclui-se que o perfil escolhido está apto para suportar as solicitações que o equipamento
será submetido.
Abaixo estão os diagramas momento fletor e esforços cortantes tirados do programa
FTOOL devido ao peso próprio e devido a carga atuando juntos sobre a mesa da plataforma.

38
↑ +V
M (sentido anti-horário)
Figura 3.5: Diagramas Força cortante e Momento Fletor
Fonte: Dos autores (2016), software FTOOL®
3.4 ANÁLISE DE CONTRAFLECHA
É de suma importância a realização do estudo da deflexão que ocorre na mesa da
plataforma, de modo que esta não tenha uma flecha maior do que a tolerável pela norma
(NBR 8400, 1984).
A deflexão total será dada pela soma de duas parcelas:
𝛿𝑡𝑜𝑡𝑎𝑙 = 𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜+ 𝛿𝑐𝑎𝑟𝑔𝑎 (3.9)

39
4
3
Deflexão devido ao peso próprio (𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜)
A deflexão que ocorre devido ao peso próprio é calculada da seguinte maneira:
δ = 5𝑞𝐿 384𝐸𝐼
(3.10)
Substituindo os valores na equação 3.10, tem-se:
5 𝑥 497 𝑥 1,54 δ =
384 𝑥 200 𝑥 10 9𝑥 3,38 𝑥 10−6
= 0,048 mm
Deflexão devido a carga (𝛿𝑐𝑎𝑟𝑔𝑎)
A deflexão que ocorre devido a carga é calculada da seguinte maneira, recordando que
P é a carga máxima suportada (aplicada na estrutura).
δ = 𝑃𝐿 48𝐸𝐼
(3.11)
Resolvendo, tem-se:
14700 𝑥 3 δ =
48 𝑥 200 𝑥 10 9𝑥 3,38 𝑥 10−6
= 1,53 mm
Deflexão total (𝛿𝑡𝑜𝑡𝑎𝑙 )
A deflexão total será dada pela soma da deflexão devido ao peso próprio da mesa
(viga u) e deflexão devido a carga aplicada, da equação (3.9), obtém-se.
𝛿𝑡𝑜𝑡𝑎𝑙 = 𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜+ 𝛿𝑐𝑎𝑟𝑔𝑎 = 0,048 + 1,53 = 1,578 mm

40
Dessa maneira é visto que o valor calculado está de acordo com a norma (NBR 8400,
1984), sendo este menor que os 5 mm toleráveis. Visto isto, a geometria e o material usado na
mesa estão de acordo para suportar o carregamento.
3.4.1 Análise da Mesa na altura máxima de trabalho
Quando o equipamento está em sua elevação máxima de trabalho, uma parte da mesa
fica em balanço. Dessa forma é realizado um estudo para verificar essa deflexão, para saber se
a mesma é tolerável, de modo que a estrutura não entre em colapso. Foi utilizado o método da
carga unitária para calcular tal deflexão analiticamente, e posteriormente uma análise
numérica nos programas FTOOL e MDSOLID.
A situação que ocorre na altura máxima de trabalho (Y′ = 1,8 m) pode ser
simplificada e ilustrada como segue na figura abaixo. O carregamento considerado sobre a
estrutura é a soma do carregamento provocado pela carga sobre a plataforma e o
carregamento devido ao peso próprio da mesa dividido por dois, pois estão sobre quatro
apoios, e no plano vemos apenas dois deles.
Figura 3.6: Carregamento sobre a mesa obtido no FTOOL
Fonte: Dos autores (2016), software FTOOL®
Foi considerado nesse instante um caso a parte, pois se considerou apenas o
carregamento distribuído sobre a mesa, não sendo computada a força que o pistão hidráulico
aplica na estrutura na elevação máxima de trabalho. O que se deseja aqui é verificar o quanto
a parte em balanço da mesa pode defletir, para saber se essa deflexão é tolerável. A seguir é
mostrado o carregamento com as reações calculadas pelo programa FTOOL.

41
3 ∫ 2
𝑥
∫ 2
𝑥
3 9 −6
Figura 3.7: Esforços nos apoios
Fonte: Dos autores (2016), software FTOOL®
Tomando a origem de x no ponto 1, as equações de esforços nos trechos 12 e 23 são:
𝑀12 = 2625𝑋 − 5150 𝑋2
= 2625𝑋 − 2575𝑋2 2
𝑀23 = 2625𝑋 − 2575𝑋2 + 5100(𝑋 − 1,136) = −5793,6 + 7725𝑋 − 2575𝑋2
Da mesma forma, é realizado para a carga unitária:
𝑀̅̅̅1̅2̅ = 0,364
1,136 = −0,32𝑋
𝑀̅̅̅2̅3̅ = (𝑋 − 1.5)
1,136 𝐸𝐼𝛿 = (2625𝑋 − 2575𝑋 )( − 0,32𝑋)𝑑
0
1,5 + (−5793,6 + 7725𝑋 − 2575𝑋 )(𝑋 − 1,5)𝑑
1,136
𝐸𝐼𝛿3 = −139,35 + 11,29
𝛿 = −128,06
= 0,189 𝑚𝑚 ↑ 200𝑥10 𝑥3,38𝑥10
A análise numérica segue em sequência:

42
Figura 3.8: Deflexão da mesa obtida
Fonte Dos autores (2016), software FTOOL®
Figura 3.9: Deflexão da mesa obtida
Fonte: Dos autores (2016), software MDSOLID®
É observado que o resultado da resolução analítica é próximo dos valores encontrados
pelos dois programas. Dessa forma, conclui-se que a mesa possui deformação tolerável, ou
seja, sua geometria e material escolhido suportam o carregamento aplicado. O erro obtido
entre a solução analítica e a solução numérica é de:
𝐸𝑟𝑟𝑜 = |0,189−0,1934|
= 2,32 % (comparação com o FTOOL) 0,189
𝐸𝑟𝑟𝑜 = |0,189−0,1662|
= 12,06 % (comparação com MDSOLID) 0,189
3.5 ANÁLISE DAS HASTES
Para o dimensionamento das hastes foi utilizado uma barra de perfil retangular vazado
que atendem as solicitações do projeto. Inicialmente foi proposto adotar um perfil retangular
maciço, embora suportasse os esforços aplicados ao equipamento, há um maior custo ao

43
utilizá-lo. Além disso, é obtida uma significativa diminuição do peso, esforços aplicados e
consequentemente o custo final.
Das dimensões encontradas no mercado, foi escolhida a haste (tudo retangular vazado)
fabricada pela empresa (TUBOS ESTRUTURAIS TUPER-2012). O tubo escolhido é de aço
ASTM A36 com seção transversal de dimensões de 100x60x6,3mm e comprimento de 1450
mm, atendendo assim as necessidades para suportar as solicitações aplicadas.
Para o dimensionamento das hastes, foram realizados os cálculos de:
→ Reações nos apoios da estrutura que estão no solo (um apoio fixo para se mover nas
direções X e Y, e livre para girar no eixo Z) e (um apoio fixo para se mover na direção Y,
livre para se mover na direção X, e livre para girar no eixo Z). Para esse equacionamento é
considerado a força que o pistão hidráulico realiza para sustentar a estrutura, considerando-se
o peso da carga aplicada, peso da mesa (viga u) e um fator de carga é acrescido referindo-se
ao peso das hastes.
→ Após encontrar as forças de reação nos pontos de apoio, são utilizados os
conhecimentos absorvidos no estudo de estruturas e máquinas, que são tipos de estruturas
compostas de membros multiforças conectados por pinos, ou seja, membros que estão sujeitos
a mais de duas forças (“Mecanica para engenharia Hibbeler, página 220, 12 edição“)
→ Elaboração de gráficos de força normal, cortante e momento fletor para cada haste;
→ Realização dos cálculos das máximas tensões devido aos esforços e tensões devido
ao peso próprio para cada haste;
→ E por fim é realizada a análise de flambagem.
Figura 3.10: Perfil de uma haste da plataforma pantográfica
Fonte: Dos autores (2016), software SolidWorks®

44
Figura 3.11: Perfil Retangular de uma haste
Fonte: Dos autores (2016), software SolidWorks®
A seguir estão listadas as propriedades da dimensão escolhida:
Módulo de resistência eixo x: 𝑊𝑥 = 𝑒ℎ2
+ 𝑏𝑒ℎ = 58800𝑚𝑚3 3 (3.12)
Módulo de resistência eixo y: 𝑊𝑦 = 𝑒ℎ2
+ 𝑏𝑒ℎ = 45360 𝑚𝑚3 3 (3.13)
Área seção: 𝐴𝑇 = 100𝑥6,3𝑥2 + [(60 − (2𝑥6,3)]𝑥6,3)𝑥2 = 1857,24 𝑚𝑚2 (3.14)
Momento de inércia eixo x: 𝐼𝑥 = 𝑒ℎ3
+
6
𝑒𝑏ℎ2
= 2940000 𝑚𝑚4 2 (3.15)
Momento de inércia eixo y: 𝐼𝑦 = 𝑒ℎ3
+
6
𝑒𝑏ℎ2
= 1360800 𝑚𝑚4 2 (3.16)
Peso teórico dado pelo fabricante: 𝑃𝑇 = 14,58 𝑘𝑔
𝑥1,45𝑚 = 21,14 𝑘𝑔 (3.17) 𝑚
45
𝑃𝑇
[kg]
𝐴𝑇
[𝑚𝑚2]
𝐼𝑥
[𝑚𝑚4]
𝐼𝑦
[𝑚𝑚4]
𝑊𝑥
[𝑚𝑚4]
𝑊𝑦
[𝑚𝑚4]
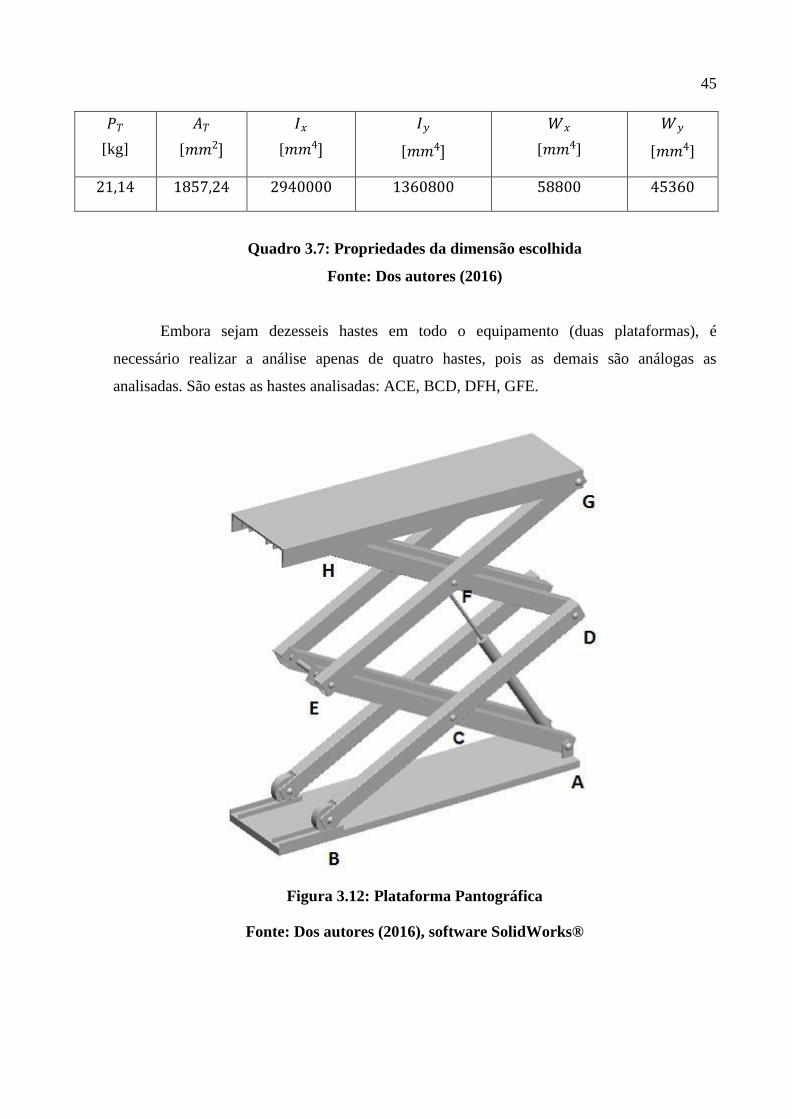
21,14 1857,24 2940000 1360800 58800 45360
Quadro 3.7: Propriedades da dimensão escolhida
Fonte: Dos autores (2016)
Embora sejam dezesseis hastes em todo o equipamento (duas plataformas), é
necessário realizar a análise apenas de quatro hastes, pois as demais são análogas as
analisadas. São estas as hastes analisadas: ACE, BCD, DFH, GFE.
Figura 3.12: Plataforma Pantográfica
Fonte: Dos autores (2016), software SolidWorks®
46
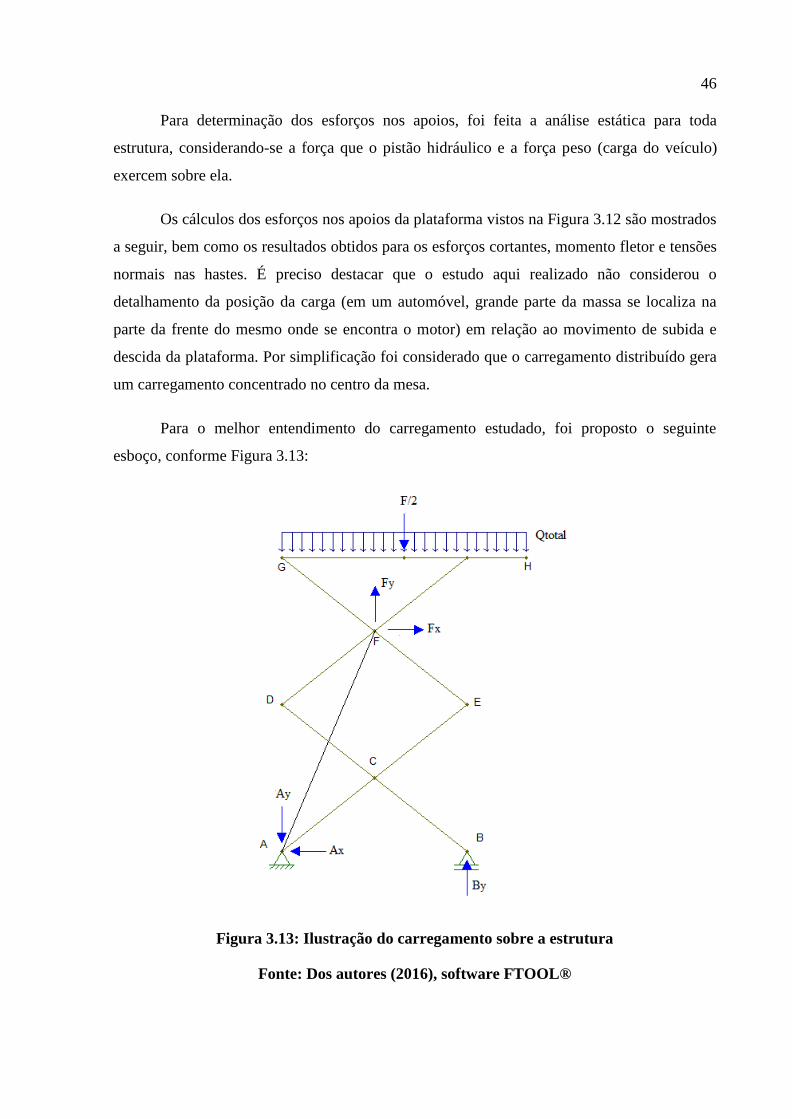
Para determinação dos esforços nos apoios, foi feita a análise estática para toda
estrutura, considerando-se a força que o pistão hidráulico e a força peso (carga do veículo)
exercem sobre ela.
Os cálculos dos esforços nos apoios da plataforma vistos na Figura 3.12 são mostrados
a seguir, bem como os resultados obtidos para os esforços cortantes, momento fletor e tensões
normais nas hastes. É preciso destacar que o estudo aqui realizado não considerou o
detalhamento da posição da carga (em um automóvel, grande parte da massa se localiza na
parte da frente do mesmo onde se encontra o motor) em relação ao movimento de subida e
descida da plataforma. Por simplificação foi considerado que o carregamento distribuído gera
um carregamento concentrado no centro da mesa.
Para o melhor entendimento do carregamento estudado, foi proposto o seguinte
esboço, conforme Figura 3.13:
Figura 3.13: Ilustração do carregamento sobre a estrutura
Fonte: Dos autores (2016), software FTOOL®

47
Para o carregamento da Figura 3.13, são conhecidas as forças 𝐹𝑥 e 𝐹𝑦 (oriundas da
equação que rege o funcionamento do pistão hidráulico, vistas no item do dimensionamento do
pistão hidráulico). A carga distribuída 𝑄𝑡𝑜𝑡𝑎𝑙 é dada pela soma do carregamento distribuído devido
ao peso próprio da mesa e o carregamento distribuído devido à carga aplicada (veículo)
sobre a estrutura.
Esse carregamento total sobre a estrutura (𝑄𝑡𝑜𝑡𝑎𝑙) é computado em toda a superfície da
mesa superior (viga U). Esse carregamento distribuído gera uma força concentrada no meio da
mesa superior. Uma simplificação para analisar o problema é a divisão de maneira igual dessa
força concentrada. Pois a Figura 3.13 ilustra no plano dois pares de tesouras, ACE, BCD,
DFH e GFE, sendo que do lado oposto da estrutura tem-se os pares análogos : ACE’, BCD’,
DFH’ e GFE’.
Com isso é realizado a análise estática global da estrutura para determinar às reações
nos apoios A e B. A estrutura está em sua elevação máxima (Y’= 1,8 metros), o ângulo que as
hastes fazem com direção horizontal é conhecido (ө= 38,4𝑜), e a distância entre os pontos A e
B é de (x=1,136 metros).
Da tabela do pistão, visto no capítulo do pistão, ( 𝐹𝑥’ = 4995 N e 𝐹𝑦’ = 11882 N)
𝑄𝑡𝑜𝑡𝑎𝑙= 10300 𝑁⁄𝑚
Utilizando a Equação (3.8), tem-se que:
𝐹 = 10300 𝑁⁄𝑚 𝑥 1,5 𝑚 = 15450 𝑁 → 𝐹⁄2 = 7725 𝑁
Segundo as equações de equilíbrio:
Σ 𝐹𝑥= −𝐴𝑥 + 𝐹𝑥′ = 0 → 𝐴𝑥 = 𝐹𝑥 ′ → 𝐴𝑥 = 4995 𝑁
Σ 𝐹𝑦= −𝐴𝑦 + 𝐹𝑦′ + 𝐵𝑦 = 𝐹⁄2 → −𝐴𝑦 + 𝐵𝑦 = 𝐹⁄2 − 𝐹𝑦′
Σ𝑀𝐴 = 0 → -0,75𝐹⁄2 + 1,136𝐵𝑦 + 1,136⁄2 𝐹𝑦′ – 1,35𝐹𝑥 ′ = 0
𝐵𝑦 = 5095 𝑁
𝐴𝑦 = 9252 𝑁

48
Com isso são conhecidos os esforços nos apoios da estrutura. A Figura 3.14 ilustra tais
esforços para melhor entendimento e visualização.
Figura 3.14: Ilustração do carregamento sobre a estrutura
Fonte: Dos autores (2016), software FTOOL®
Para determinar as forças atuantes nas hastes, primeiramente foram analisadas as
condições de contornos impostas ao problema. É preciso se atentar que os apoios A e G são
do tipo fixo, ou seja, possuem reações nas direções X e Y. Ao passo que os apoios B e H são
do tipo livre para se mover na direção X, portanto, possui reações na direção Y.
O sentido da força aplicada pelo pistão no ponto F é conhecido. Na haste DFH, para
que a reação em H na direção X seja zero, é preciso que a força que atua em D seja da mesma

49
magnitude e sentido contrário a força aplicada no ponto F. Na haste BCD, a força em C na
direção X deve ter a mesma magnitude e sentido contrário a D, para a força em B na direção
X seja igual a zero.
Prosseguindo com esse raciocínio a força em E na direção X é igual a zero, pois a
força em C na direção X é oposta a força em A nesta direção, possuindo ambas a mesma
magnitude. Esse pensamento é visto e validado quando as hastes são estudadas de forma
isolada, onde as forças aplicadas em cada haste estão em equilíbrio como é visto a seguir.
3.5.1 Análise da haste ACE
A haste ACE é fixa na base da estrutura no apoio A e é rotulada no ponto E, onde é
conectada por um pino a haste GFE. Seu dimensionamento foi feito da seguinte maneira:
Figura 3.15: Ilustração das forças atuando na haste
Fonte: Dos autores (2016) software Autocad®
Σ 𝐹𝑥= −4995 + 𝐶𝑥 = 0 → 𝐶𝑥 = 4995 𝑁
Σ 𝐹𝑦= −9252 + 𝐶𝑦 - 𝐸𝑦 = 0 → 𝐶𝑦 + 𝐸𝑦 = 9252 𝑁
Σ𝑀𝐷 = 0 → (1,136⁄2) 𝐸𝑦 + (1,136⁄2)9252 – (0,45).4995 = 0
→ 𝐸𝑦 = 5295 𝑁
→ 𝐶𝑦 = 14547 N

50
Após encontrar os esforços que atuam na haste, as forças são decompostas em
relação ao ângulo que a haste faz com solo (ө = 38,4 𝑜). Com isso são calculados os esforços
normais, cortantes e momento fletor que atuam na haste estudada.
Figura 3.16: Diagrama de forças resultantes, normal, cortante e momento fletor
Fonte: Dos autores (2016) software Autocad®

51
3.5.2 - Análise da haste BCD
A haste BCD foi estudada como uma haste móvel no ponto B em relação a base da
estrutura. O ponto D é rotulado e liga as hastes BCD e DFH. Como explicado
anteriormente foi proposto que D tem reações nas direções X e Y. Seu dimensionamento
foi realizado da seguinte forma:
Σ 𝐹𝑥= −4995 + 𝐷𝑥 = 0 → 𝐷𝑥 = 4995 𝑁
Σ 𝐹𝑦= −14547 + 𝐷𝑦 + 5095 = 0 → 𝐷𝑦 = 9452 𝑁
Figura 3.17: Ilustração das forças atuando na haste
Fonte: Dos autores (2016) software Autocad®

52
Após encontrar os esforços que atuam na haste, as forças são decompostas em relação
ao ângulo que a haste faz com solo (ө = 38,4 𝑜). Com isso são calculados os esforços
normais, cortantes e momento fletor que atuam na haste estudada.
Figura 3.18: Diagrama de forças resultantes, normal, cortante e momento fletor
Fonte: Dos autores (2016) software Autocad®

53
3.5.3 – Análise da haste DFH
A haste DFH é móvel na mesa no ponto H e é rotulada no ponto D, onde é
conectada por um pino a haste BCD. Seu dimensionamento foi feito da seguinte maneira:
Σ 𝐹𝑥= −4995 + 4995 + 𝐻𝑥 = 0
→ 𝐻𝑥 = 0
Σ 𝐹𝑦= −9452 − 𝐻𝑦 + 11882 = 0
→ 𝐻𝑦 = 2430 𝑁
Figura 3.19: Ilustração das forças atuando na haste
Fonte: Dos autores (2016) software Autocad®

54
Após encontrar os esforços que atuam na haste, as forças são decompostas em relação
ao ângulo que a haste faz com solo (ө = 38,4 𝑜). Com isso são calculados os esforços
normais, cortantes e momento fletor que atuam na haste estudada.
Figura 3.20: Diagrama de forças resultantes, normal, cortante e momento fletor
Fonte: Dos autores (2016) software Autocad®

55
3.5.4 – Análise da haste GFE
A haste GFE é fixa na mesa no ponto G, e articulado por um pino no ponto E, ligando
essa haste a haste ACE. Seu dimensionamento foi realizado a seguinte forma:
Σ 𝐹𝑥= −4995 + 𝐺𝑥 = 0
→ 𝐺𝑥 = 4995 𝑁
Σ 𝐹𝑦= 5295 + 𝐺𝑦 − 11882 = 0
→ 𝐺𝑦 = 6587 𝑁
Figura 3.21: Ilustração das forças atuando na haste
Fonte: Dos autores (2016) software Autocad®

56
Após encontrar os esforços que atuam na haste, as forças são decompostas em relação
ao ângulo que a haste faz com solo (ө = 38,4 𝑜). Com isso são calculados os esforços
normais, cortantes e momento fletor que atuam na haste estudada.
Figura 3.22: Diagrama de forças resultantes, normal, cortante e momento fletor
Fonte: Dos autores (2016) software Autocad®

57
9662 𝑁
𝑝𝑟ó𝑝𝑟𝑖𝑜 2
3.5.5 – Cálculo das tensões normais e cisalhantes máximas devido à carga
Com os valores obtidos nos gráficos de esforços normais, cortantes e momentos
fletores ilustrados nas seções 3.5.1 até a seção 3.5.4, é possível obter as tensões normais
máximas que agem sobre cada haste. A tensão normal máxima é dada pela soma da tensão
normal devido aos esforços axiais à seção de área transversal da haste e as tensões normais
oriundas da tensão devido à flexão que age sobre as mesmas. Além da tensão normal máxima
de cada haste, é possível a partir dos gráficos de esforços cortantes determinar as tensões de
cisalhamento máximas que cada está sujeita.
3.5.5.1 - Haste ACE
Tensão normal máxima ( 𝜎𝑁𝑀)
Tensão normal devido a força normal a haste (𝜎𝑁)
𝜎𝑁 = 𝐹𝑜𝑟ç𝑎 𝑁𝑜𝑟𝑚𝑎𝑙 =
𝐴 1857,24 𝑚𝑚2 = 5,20 𝑀𝑃𝑎 (3.18)
Tensão normal devido a flexão (𝜎𝐹), Equação (3.6).
𝜎𝐹 = 𝑀𝑚á𝑥 = 𝑊𝑥
3008𝑁 . 1000𝑚 = 51,16 𝑀𝑃𝑎
58800
Tensão normal de flexão devido ao peso próprio das hastes (𝜎𝐹𝑝𝑝)
Nesse caso foi considerado o peso da haste e o peso acima da haste (hastes acima e
mesa) para realizar o cálculo da tensão normal devido à flexão provada pelo peso próprio (foi
feita uma majoração para esse cálculo).
𝑃𝑒𝑠𝑜𝑝𝑟ó𝑝𝑟𝑖𝑜 = (𝑀𝑎𝑠𝑠𝑎ℎ𝑎𝑠𝑡𝑒𝑥 𝑀𝑎𝑠𝑠𝑎𝑎𝑐𝑖𝑚𝑎)𝑥 𝑔 (3.19)
𝑃𝑒𝑠𝑜 = ( 21,14 𝑘𝑔 + 2𝑥21,14𝑘𝑔 + 76𝑘𝑔)𝑥9,81
𝑚 = 1367,71 𝑁
𝑠
Da equação (3.8), acha-se o carregamento distribuído:
1367,71 𝑁 𝑁
Carregamento distribuído (𝑄ℎ) = = 943,25 1,45 𝑚 𝑚
𝑀𝑚á𝑥𝑝𝑝 = 𝑄 .𝐿 (𝐿−𝑋) (3.20)
2

58
𝑀𝑚á𝑥𝑝𝑝 = 943,25 𝑋 1,45𝑋(1,45 − 0,725)
= 495,80 𝑁𝑚 2
Para calcular a tensão normal devido a flexão, recorre-se a Equação (3.6)
𝜎𝐹𝑝𝑝 = 𝑀𝑚á𝑥𝑝𝑝 =
𝑊𝑥
495,80 𝑥 1000𝑚 = 8,43𝑀𝑃𝑎
58800
Dessa maneira pode-se calcular a tensão normal máxima (𝜎𝑁𝑀)
𝜎𝑁𝑀 = 𝜎𝑁 + 𝜎𝐹+ 𝜎𝐹𝑝𝑝 (3.21)
𝜎𝑁𝑀 = 5,20 + 51,16 + 8,43 = 64,79 MPa
Tensão de cisalhamento máxima
Para determinar a tensão de cisalhamento máxima que ocorre na haste em estudo, foi
utilizada a Equação (3.22) e Tabela (12.10) retirada da apostila de Resistência de Materiais
(CARLOS FERNANDO M. PAMPLONA). Como a relação para as hastes da estrutura é de
(𝑏
= 0,60), foi realizada uma interpolação. ℎ
𝜏 = 𝜉 𝑄
𝐴
𝜏 = 1,89 𝑥 4150
= 4,22 𝑀𝑃𝑎 < 𝜏 1857,24
𝑎𝑑𝑚
(3.22)
3.5.5.2 - Haste BCD
Tensão normal máxima ( 𝜎𝑁𝑀)
Tensão normal devido a flexão (𝜎𝑁), obtido da Equação (3.18)
𝜎𝑁 = 𝐹𝑜𝑟ç𝑎 𝑁𝑜𝑟𝑚𝑎𝑙 =
𝐴
3165 𝑁
1857,24 𝑚𝑚2 = 1,70 𝑀𝑃𝑎
Tensão normal devido à flexão (𝜎𝐹), da Equação (3.6):
𝜎𝐹 = 𝑀𝑚á𝑥 = 𝑊𝑥
5257𝑁 . 1000𝑚
58800 𝑚𝑚3 = 89,40 𝑀𝑃𝑎
Tensão normal de flexão devido ao peso próprio das hastes (𝜎𝐹𝑝𝑝)

59
Para esta haste, por estar no mesmo plano que a haste anterior, obtém-se o mesmo
valor.
𝜎𝐹𝑝𝑝 = 𝑀𝑚á𝑥𝑝𝑝 =
𝑊𝑥
495,80 𝑥 1000𝑚 = 8,43𝑀𝑃𝑎
58800
(3.21).
Dessa maneira pode-se calcular a tensão normal máxima (𝜎𝑁𝑀), a partir da Equação
𝜎𝑁𝑀 = 𝜎𝑁 + 𝜎𝐹+ 𝜎𝐹𝑝𝑝 = 1,70 + 89,40 + 8,43 = 99,53 MPa
Tensão de cisalhamento máxima
Para determinar a tensão de cisalhamento máxima que ocorre na haste em estudo, foi
utilizada a Equação (3.22) e Tabela (12.10) retirada da apostila de Resistência de Materiais
(PAMPLONA, 2008). Como a relação para as hastes da estrutura é de (𝑏
= 0,60), foi ℎ
realizada uma interpolação:
𝜏 = 𝜉 𝑄
= 1,89 𝑥 7251
= 7,38 𝑀𝑃𝑎 < 𝜏
𝐴 1857,24 𝑎𝑑𝑚
3.5.5.3 - Haste DFH
Tensão normal máxima ( 𝜎𝑁𝑀)
Tensão normal devido a força normal a haste (𝜎𝑁), da equação (3.18) tem-se:
𝜎𝑁 = 𝐹𝑜𝑟ç𝑎 𝑁𝑜𝑟𝑚𝑎𝑙 =
𝐴
9786 𝑁
1857,24 𝑚𝑚2 = 5,27 𝑀𝑃𝑎
Tensão normal devido à flexão (𝜎𝐹), da equação (3.6):
𝜎𝐹 = 𝑀𝑚á𝑥 = 𝑊𝑥
2250𝑁 . 1000𝑚
58800 𝑚𝑚3 = 38,27 𝑀𝑃𝑎
Tensão normal de flexão devido ao peso próprio das hastes (𝜎𝐹𝑝𝑝)

60
𝑝𝑟ó𝑝𝑟𝑖𝑜 2
Nesse caso foi considerado o peso da haste e o peso acima da haste (peso da mesa)
para realizar o cálculo da tensão normal devido à flexão provada pelo peso próprio, ou seja,
foi feita uma majoração para esse cálculo. Da equação (3.19), encontra-se a força devido ao
peso próprio:
𝑃𝑒𝑠𝑜𝑝𝑟ó𝑝𝑟𝑖𝑜 = (𝑀𝑎𝑠𝑠𝑎ℎ𝑎𝑠𝑡𝑒𝑥 𝑀𝑎𝑠𝑠𝑎𝑎𝑐𝑖𝑚𝑎)𝑥 𝑔
𝑃𝑒𝑠𝑜 = (21,14𝑘𝑔 + 76𝑘𝑔)𝑥9,81
𝑚 = 952,94 𝑁
𝑠
O carregamento distribuído é tirado da Equação (3.8):
952,94 𝑁 𝑁
(𝑄ℎ) = = 657,20 1,45 𝑚 𝑚
O momento fletor máximo devido ao peso próprio é dado pela Equação (3.20):
𝑀𝑚á𝑥𝑝𝑝 = 657,20𝑋 1,45𝑋(1,45−0,725) = 345,44 𝑁𝑚
2
𝜎𝐹𝑝𝑝 = 𝑀𝑚á𝑥𝑝𝑝 =
𝑊𝑥
345,44 𝑁𝑥1000𝑚
58800𝑚𝑚3 = 5,87 𝑀𝑃𝑎
Pode-se calcular a tensão normal máxima (𝜎𝑁𝑀), a partir da Equação (3.21)
𝜎𝑁𝑀 = 𝜎𝑁 + 𝜎𝐹+ 𝜎𝐹𝑝𝑝 = 5,27 + 38,27 + 5,87 = 49,41 MPa
Tensão de cisalhamento máxima
Para determinar a tensão de cisalhamento máxima que ocorre na haste em estudo, foi
utilizada a Equação (3.22) e Tabela (12.10) retirada da apostila de Resistência de Materiais
(PAMPLONA, 2008). Como a relação para as hastes da estrutura é de (𝑏
= 0,60), foi ℎ
realizada uma interpolação.
𝜏 = 𝜉 𝑄
= 1,89 𝑥 4304
= 3,16 𝑀𝑃𝑎 < 𝜏
𝐴 1857,24 𝑎𝑑𝑚
3.5.5.4 - Haste GFE
Tensão normal máxima ( 𝜎𝑁𝑀)

61
Tensão normal devido a força normal à haste (𝜎𝑁) é obtida a partir da Equação
(3.18).
𝜎𝑁 = 𝐹𝑜𝑟ç𝑎 𝑁𝑜𝑟𝑚𝑎𝑙 =
𝐴
3289 𝑁
1857,24 𝑚𝑚2 = 1,77 𝑀𝑃𝑎
Tensão normal devido à flexão (𝜎𝐹) é obtida a partir da Equação (3.6).
𝜎𝐹 = 𝑀𝑚á𝑥 = 𝑊𝑥
4500𝑁 . 1000𝑚
58800𝑚𝑚3 = 76,53 𝑀𝑃𝑎
Tensão normal de flexão devido ao peso próprio das hastes (𝜎𝐹𝑝𝑝)
Para esta haste, por estar no mesmo plano que a haste anterior, obtém-se o mesmo
valor.
𝜎𝐹𝑝𝑝 = 𝑀𝑚á𝑥𝑝𝑝 =
𝑊𝑥
345,44 𝑁𝑥1000𝑚
58800𝑚𝑚3 = 5,87 𝑀𝑃𝑎
Dessa maneira pode-se calcular a tensão normal máxima (𝜎𝑁𝑀), a partir da
Equação (3.21)
𝜎𝑁𝑀 = 𝜎𝑁 + 𝜎𝐹+ 𝜎𝐹𝑝𝑝 = 1,77 + 76,53 + 5,87 = 84,17 MPa
Tensão de cisalhamento máxima
Para determinar a tensão de cisalhamento máxima que ocorre na haste em estudo, foi
utilizada a Equação (3.22) e Tabela (12.10) retirada da apostila de Resistência de Materiais
(PAMPLONA, 2008). Como a relação para as hastes da estrutura é de (𝑏
= 0,60), foi ℎ
realizada uma interpolação.
𝜏 = 𝜉 𝑄
= 1,89 𝑥 6207𝑁
= 6,32 𝑀𝑃𝑎 < 𝜏
𝐴
1857,24𝑚𝑚2
𝑎𝑑𝑚
3.6 – ANÁLISE DE FLAMBAGEM NAS HASTES
Para uma haste longa que sofre esforços axiais de compressão de uma força P, é
preciso realizar o estudo da possibilidade de ocorrência de flambagem. Existe uma força

62
𝐿
𝑓
crítica (𝑃𝐶𝑅) que se for alcançada durante o carregamento, pode gerar uma instabilidade no
material, provocando um envergamento do mesmo.
𝑛𝛱2𝐸𝐼
A força crítica é dada pela equação 𝑃𝐶𝑅 = 2 (Equação de Euler) 𝑓
Quadro 3.8: Constantes de Extremidades
Fonte: Shigley, p378 (2005)
Para o caso em questão é utilizado 𝑛 = 1, pois as hastes são rotuladas em ambas as
extremidades. O comprimento efetivo de flambagem 𝐿𝑓 é dado segundo a figura a seguir,
sendo encolhido (𝐿 = 𝐿
= 0,725 𝑚𝑚), pois existe um pino no ponto médio da haste, que 2
conecta a mesma a outra haste.
Figura 3.23: Casos de flambagem
Fonte: PAMPLONA, p.3 (2008)
É utilizado no cálculo o menor momento de inércia da seção transversal da haste, pois
é neste que existe o maior risco de ocorrer a flambagem (envergamento). Do Quadro 3.7 é
visto que o menor momento de inércia é o 𝐼𝑦 com isso calcula-se o 𝑃𝐶𝑅.

63
𝐿𝐹 725 𝑚𝑚
𝐼𝑦 = 1360800 𝑚𝑚4
𝐸 = 200 𝑥 109𝑃𝑎 = 200000 𝑁
𝑚𝑚2
𝐿𝑓 = 0,725 𝑚 = 725 𝑚𝑚
𝑁 = 1
𝑃𝐶𝑅 = 1𝑥 𝛱2𝑥200000𝑥1360800
7252 = 5 110,3 𝑘𝑁 (3.23)
A maior tensão axial que ocorre no presente trabalho ocorre na haste DFH, onde a
força normal é 𝐹𝑁𝐷𝐹𝐻 = 9786 𝑁, ou seja, é muito menor que a força crítica que pode provocar
a flambagem nas hastes. Abaixo é visto o motivo pelo qual a força crítica de
flambagem é tão superior à força normal máxima que ocorre na haste DFH.
Aplicando o conceito de raio de giração (𝐼 = 𝐴𝑟2) e coeficiente de esbeltez (𝜆 = 𝐿𝐹
), 𝑟
tem-se:
2 𝐼𝑦 1360800 𝑟 = √ =
𝐴
1857,24 = 27,1 𝑚𝑚 (3.24)
𝜆 = = = 26,75 𝑚𝑚 (3.25) 𝑟 27,1 𝑚𝑚
Para colunas que são curtas e robustas a tensão crítica é dada pela própria tensão de
escoamento do material que está sendo solicitado, de maneira que é preciso levar em
consideração o esmagamento do material.

64
Figura 3.24: Tensões críticas para colunas de aço
Fonte: PAMPLONA, p.5 (2008)
Como o índice de esbeltez das hastes da plataforma pantográfica é de 𝜆 = 26,75, a
tensão crítica que as hastes estão submetidas é própria tensão de escoamento do material em
questão (𝜎𝐶 = 250 𝑀𝑃𝑎). Logo a equação de Euler não deve ser utilizada para colunas com índice
de esbeltez baixos. Por isso a força crítica 𝑃𝐶𝑅 é muito maior que a força normal
𝐹𝑁𝐷𝐹𝐻.
As tensões axiais aplicadas nas hastes não superam a tensão de escoamento do
material, pois estão abaixo da tensão admissível. Assim conclui-se que o perfil selecionado
está apto a suportar o carregamento, não sendo possível a ocorrência de flambagem.
3.7 BASE DO EQUIPAMENTO
O conjunto de tesouras formadas pelas hastes e a mesa onde é alocado o veículo é
montada sobre uma chapa plana de aço ASTM A36 com as dimensões de 1500x381x31,75
mm da (EMPRESA AÇO GLOBO). A seguir são mostradas as propriedades do material
escolhido (Quadro 3.9) e a imagem da peça (Figura 3.25)

65
𝑇 2
Figura 3.25: Base da Plataforma Pantográfica
Fonte: Dos autores (2016), software SolidWorks®
Peso da mesa: 𝑃 = 248,984 𝑘𝑔
𝑥(1,5𝑥0,381)𝑚2
𝑚 = 142,30 𝑘𝑔 (3.26)
Área seção transversal: 𝐴𝑇 = 381𝑥31,75 = 12096,75 𝑚𝑚2 ≅ 1,21 𝑥 10−2𝑚2 (3.27)
Momento de inercia em x: 𝐼𝑥 = 𝑏.ℎ3
=
12
381.31,753
= 1016190 𝑚𝑚4
12 (3.28)
Modulo de resistência em x: 𝑊𝑥 = 𝑏.ℎ2
=
6 381.31,752
= 60012 𝑚𝑚3 6
(3.29)
𝑃𝑇 [𝑘𝑔] 𝐴𝑇 𝐼𝑥 𝑊𝑥
142,30 12096,75 1016190 60012
Quadro 3.9: Propriedades da dimensão escolhida
Fonte: Dos autores (2016)
A plataforma pantográfica é montada em um vão feito no solo do ambiente onde o
equipamento é instalado. Isso é mostrado abaixo, como visto no catálogo do fabricante. No
manual da empresa é recomendado que o piso deve estar totalmente plano, nivelado, sem
ondulações e com espessura de 8 𝑐𝑚 na área do elevador e veículo (MANUAL
HIDROMAR). A altura do equipamento ainda fechado é de 346 mm, portanto essa é a altura
do vão feito no solo. É utilizado uma folga de 2 𝑐𝑚 entre a parede do vão e a extremidade da
mesa.

66
→
Figura 3.26: Ilustração esquemática da plataforma fechada
Fonte: Manual de instruções da empresa HIDROMAR
Na sequencia foi efeito um estudo na chapa para saber se a dimensão e o material
escolhido suportam o carregamento em questão. Para esse cálculo foi utilizada a ideia de uma
força concentrada no centro da base que representa toda força que está acima da mesma,
sendo computado o peso da carga, peso da mesa e peso das hastes.
Figura 3.27: Esboço do carregamento sobre a base do equipamento
Fonte: Dos autores (2016) software Autocad®
𝑁
Σ 𝐹𝑦 = 1,5𝑚 𝑥 𝑄 − 17129,50 = 0 𝑄 = 11419,67 𝑚

67
𝜏 = =
Com isso o carregamento sobre a base do equipamento é conhecido. Na sequencia são
mostrados os diagramas de esforços cortantes e de momento fletor.
Figura 3.28: Diagrama de esforços cortantes e momento fletor
Fonte: Dos autores (2016) software Autocad®
Com o valor do esforço cortante conhecido, pode-se então calcular a tensão de
cisalhamento máxima que ocorre na base.
𝑄′ = �̅�̅′. 𝐴′ = 31,75
𝑥 381𝑥31,75 = 192036 𝑚𝑚3 (3.30) 2
𝑉.𝑄
𝑚á𝑥 𝐼.𝑇 8564,75 𝑥 192036
= 4,25 𝑀𝑃𝑎 (3.31)
1016190 𝑥 381
Onde:
V: esforço cortante
Q’: momento estático da área 𝐴′ em relação a linha neutra
I: momento de inércia da área da seção transversal
T: largura da área da seção transversal

68
A tensão máxima de flexão devido ao momento fletor é dada pela equação (3.6):
𝜎𝐹 = 𝑀𝑚á𝑥 = 𝑊𝑥
3211,78𝑥1000 = 53,52 𝑀𝑃𝑎
60012
Com isso é visto que a tensão cisalhante máxima que ocorre na chapa que compõe a
base da plataforma pantográfica é menor que a tensão cisalhante admissível (𝜏𝑚á𝑥 < 𝜏𝑎𝑑𝑚) e a
tensão máxima devido a flexão é menor que a tensão admissível (𝜎𝐹 < 𝜎𝑎𝑑𝑚). Portanto o material
e as dimensões escolhidas estão aptos para suportar os esforços gerados, não sendo necessária
a sua mudança.

69
4 DIMENSIONAMENTO E SELEÇÃO DE MECANISMOS
É necessário dimensionar os mecanismos (pinos) que possibilitam a articulação das
hastes, os parafusos de fixação, bem como as rodas que possibilitam o movimento de abertura
do pantógrafo para elevar a carga.
4.1 – COMPONENTES DE MOVIMENTAÇÃO
O pistão hidráulico responsável pela elevação da plataforma pantográfica é ligado a
uma barra circular de aço AISI 1060 da (empresa AÇOSRENOX) de 57,15x130mm que liga
os pontos F e F’ da plataforma. Essa barra é dimensionada para trabalhar como um pino que
vai permitir a articulação das hastes e precisa ser capaz de suportar o esforço aplicado pelo
pistão hidráulico.
A força que o pistão hidráulico aplica na estrutura é maior para o menor ângulo (𝛳 =
3,75 em sua altura inicial) de elevação e diminui conforme a estrutura sobe (vide capítulo 6).
Portanto, a barra de sustentação foi dimensionada com relação a essa força, de modo que para
a máxima altura de trabalho a força aplicada na barra é menor.
Figura 4.1: Barra de sustentação
Fonte: Dos autores (2016) software Solidworks®

70
τ =
A seguir são mostradas as dimensões e propriedades do perfil selecionado.
Peso da barra: PT = 20,14 kg
x(0,130)m = 2,62 kg (4.1) m
Área da seção transversal: AT = ΠR2 = 2565,21 mm2 (4.2)
Π.D4 Π.57,154
4
Momento de inercia em x: Ix = 64
= = 522543,80 mm
64 (4.3)
Π.D3 Π.57,1583 3
Modulo de resistência em x: Wx = 32
= = 18325,20 mm
32 (4.4)
Da equação (3.2) e (3.3), obtém-se as tensões admissíveis:
σadm = σe =
1,5
485MPa = 323,33 MPa
1,5
σadm
adm √3 = 323 ,33
√3 = 224,18 MPa
𝑃𝑇 [𝑘𝑔] 𝐴𝑇[mm2] 𝐼𝑥[mm4] 𝑊𝑥[mm3] 𝜎𝑎𝑑𝑚 [𝑀𝑃𝑎] 𝜏𝑎𝑑𝑚 [𝑀𝑃𝑎]
2,62 2565,21 522543,80 18325,20 323,33 224,18
Quadro 4.1: Propriedades da dimensão escolhida
Fonte: Dos autores (2016)
Como em cada uma de suas extremidades a barra recebe duas hastes que formam uma
espécie de tesoura, e entre as hastes foi proposto um espaçamento de 2,0 𝑚𝑚, são calculados
então os esforços para um comprimento que é dado pela seguinte equação:
𝐶𝐵𝐶 = 𝐶𝑇𝐵 − 2(2𝐿𝐻 − 𝑒𝐻 + 𝐸𝐻) (4.5)
𝐶𝐵𝐶 : Comprimento da barra
𝐶𝑇𝐵: Comprimento total das barras somada aos pinos
𝐿𝐻: Largura da haste

71
𝑥
𝑦
𝐸𝐻: Espaçamento entre as hastes
𝑒𝐻: Espessura da haste
Portanto, o comprimento da barra para o cálculo de esforços é:
𝐶𝐵𝐶 = 361,4 − 2(2.60 − 6,3 + 2) = 130 𝑚𝑚
A força exercida no centro da barra, é decomposta nas direções X e Y, e é feita um
estudo para determinar os esforços cortantes que provocam o cisalhamento da barra e o
momento fletor que gera tensões normais de flexão. É preciso que as tensões provocadas por
estes não sejam superiores a tensão normal admissível e a tensão de cisalhamento admissível
do material escolhido (aço AISI 1060) vistos no quadro 4.1.
As figuras a seguir ilustram a força que o pistão aplica na barra e tal força decomposta
nas direções X e Y.
Figura 4.2: Força feita pelo pistão na barra circular
Fonte: Fonte: Dos autores (2016), software FTOOL®
O menor ângulo que as hastes fazem com o solo é de 𝛳 = 3,75𝑜, a força que o pistão
aplica na estrutura nesse instante é de 𝐹𝐶𝐼𝐿 ≅ 123149,67 𝑁. O ângulo que o braço do pistão
realiza com o solo é de 𝛽 ≅ 10,86𝑜. Decompondo-se a força nas direções X e Y tem-se:
𝐹′ = 𝐹. cos(10,86) ≅ 120944 𝑁 (4.6)
𝐹′ = 𝐹. sen(10,86) ≅ 23203 𝑁 (4.7)
A partir disso são calculados os esforços de cortante e momento fletor que atuam na
barra de seção circular. A partir dos valores obtidos pode-se calcular as tensões normais
máximas devido ao momento fletor, e as tensões máximas de cisalhamento devido aos
esforços cortantes.

72
𝐵
Direção X
Figura 4.3: Diagrama de forças, esforços cortantes e momento fletor
Fonte: Fonte: Dos autores (2016), software FTOOL®
Com os resultados obtidos, pode-se calcular a tensão normal máxima devido à flexão e
a tensão de cisalhamento devido aos esforços cortantes na direção X utilizando as equações
(3.6) e (3.22) e tabela (12.10). Comparam-se os valores obtidos aos valores do Quadro (4.1).
𝜎𝐹𝐵 = 𝑀𝑚á𝑥 = 𝑊
3931𝑁 𝑥 1000 𝑚
18325,20 𝑚3 = 214,51 𝑀𝑃𝑎 < 𝜎𝑎𝑑𝑚
𝜏 = 𝜉 𝑄
= 𝐴
1,333 𝑥 60472𝑁
2565,21 𝑚𝑚2 = 31,42 𝑀𝑃𝑎 < 𝜏𝑎𝑑𝑚

73
𝐵
Direção Y
Figura 4.4: Diagrama de forças, esforços cortantes e momento fletor
Fonte: Fonte: Dos autores (2016), software FTOOL®
Das equações (3.6) e (3.22), e a tabela (12.10) pode-se calcular a tensão normal
máxima devido à flexão e a tensão de cisalhamento devido aos esforços cortantes na direção
Y. Comparam-se os valores obtidos com as tensões do Quadro (4.1).
𝜎𝐹𝐵 = 𝑀𝑚á𝑥 = 𝑊
754𝑁 𝑥 1000 𝑚
18325,20 𝑚3 = 41,15 𝑀𝑃𝑎 < 𝜎𝑎𝑑𝑚
𝜏 = 𝜉 𝑄
= 𝐴
1,333 𝑥 11602 𝑁
2565,21 𝑚𝑚2 = 6,03 𝑀𝑃𝑎 < 𝜏𝑎𝑑𝑚

74
É preciso levar em consideração a força que o peso próprio da estrutura, que está
acima da barra circular de sustentação aplica na barra em questão. Para essa análise é feito um
estudo como um carregamento distribuído sobre a barra circular. Essa força aqui descrita só
atua na direção do eixo Y (vertical).
𝑃𝑆𝐵 = (𝑀𝑏𝑎𝑟𝑟𝑎 + 𝑀𝑚𝑒𝑠𝑎 + 𝑀ℎ𝑎𝑠𝑡𝑒𝑠). 𝑎𝑐𝑒𝑙𝑒𝑟𝑎ç𝑎𝑜 𝑑𝑎 𝑔𝑟𝑎𝑣𝑖𝑑𝑎𝑑𝑒 (4.8)
𝑃𝑆𝐵 = (7,55 + 76 + 2𝑥21,14) = 1234,4 𝑁
Da Equação (3.8), obtém-se a força distribuída sobre a barra circular:
1234,4 𝑁
𝑞𝑆𝐵 = ≅ 9496 0,13 𝑚
Aplicando esses valores no programa FTOOL, obtemos os digramas de esforços
cortantes e momento fletor.
Figura 4.5: Diagrama de forças, esforços cortantes e momento fletor
Fonte: Fonte: Dos autores (2016), software FTOOL®

75
𝜏 = 𝜉 =
𝐹𝑅𝑒𝑠𝑢𝑙𝑡 𝑎𝑑𝑚
𝑟𝑒𝑠𝑢𝑙 𝑎𝑑𝑚
Com os resultados obtidos apatir dos diagramas de esforços cortantes e momento
fletor devido ao peso próprio é possivel determinar a tensão normal devido a flexão e a
tensão de cisalhamento devido ao peso próprio, utilizando as Equaçoes (3.6) e (3.8),
respectivamente, e a Tabela (12.10).
𝜎𝐹𝑃𝑃𝐵 = 𝑀𝑚á𝑥 =
𝑊
20 𝑁 𝑥 1000 𝑚
18325,20 𝑚3 = 1,10 𝑀𝑃𝑎
𝑄
𝑃𝑃𝐵 𝐴
1,333 𝑥 617 𝑁
2565,21 𝑚𝑚2 = 0,32 𝑀𝑃𝑎
Com os resultados obtidos, pode-se calcular a tensão normal máxima devido à flexão e
a tensão de cisalhamento devido aos esforços cortantes na direção Y.
𝜎𝐹𝑇 = 𝜎𝐹𝐵 + 𝜎𝐹𝑃𝑃𝐵 = 41,15 + 1,10 = 42,25 𝑀𝑃𝑎 < 𝜎𝑎𝑑𝑚 (4.9)
𝜏 = 𝜏𝐵 + 𝜏𝑃𝑃𝐵 = 6,03 + 0,32 = 6,35 𝑀𝑃𝑎 < 𝜏𝑎𝑑𝑚 (4.10)
Com os resultados obtidos, calcula-se a tensão de flexão resultante e a tensão de
cisalhamento resultante que é aplicada a barra circular.
𝜎 = 2√(214,51)2 + (42,25)2 = 218,63 𝑀𝑃𝑎 < 𝜎 (4.11)
𝜏 = 2√(31,42)2 + (6,35 )2 = 32,05 𝑀𝑃𝑎 < 𝜏 (4.12)
Com isso é visto que o material e as dimensões escolhidas para a barra de sustentação
do pistão hidráulico estão aptos para suportar os esforços aplicados pelo pistão, pois as
tensões admissíveis foram respeitadas (Quadro 4.1). Como a barra circular também exerce o
papel de pino, ou seja, é também um mecanismo, é preciso realizar a verificação em relação à
ruptura.
A verificação dos elementos dos mecanismos em relação à ruptura efetua-se
considerando que a tensão calculada não ultrapasse uma tensão admissível relacionada com a
tensão de ruptura do material utilizado (“NORMA NBR 8400, 1984, página 30”). A tensão
admissível relacionada à tensão de ruptura é dada pela equação obtida no item 6.6.1 da
NORMA NBR 8400.

76
𝑎
𝜎 = 𝜎𝑟
𝑞.𝐹𝑆𝑟 (4.13)
𝜎𝑎: Tensão admissível em relação a ruptura
𝜎𝑟: Tensão última de ruptura do aço = 815 𝑀𝑃𝑎 (Quadro 12.2)
A plataforma pantográfica foi dimensionada (Item 3.1.2) para ter um tempo médio de
funcionamento de 3 horas por dia, com isso da Tabela 4.1 (classe de funcionamento) da
Norma NBR 8400, o equipamento é da classe de funcionamento V2, com duração teórica de
6300 horas.
Tabela 4.1: Classe de funcionamento
Fonte: NBR 8400 (1984), pág 26
O estado de solicitação dos mecanismos é definido como 2, com fração da solicitação
máxima de (𝑃 = 1
), é visto na Tabela 4.2. 3
Tabela 4.2: Estado de solicitação do mecanismo
Fonte: NBR 8400 (1984), pág 27

77
Com a classe de funcionamento e o estado de solicitação definidos, recorre-se a tabela
4.3 da NORMA NBR 8400 e encontra-se o grupo de mecanismo 2m.
Tabela 4.3: Grupo dos mecanismos
Fonte: NBR 8400 (1984), pág 28
Com isso retira-se da tabela 4.4 o valor de (q = 1,12) do grupo de mecanismos 2m.
Tabela 4.4: Valores de q
Fonte: NBR 8400 (1984), pág 31
Como visto no Item 3.2 o equipamento se adequa ao caso de solicitação 1, com isso
encontra-se o valor de 𝐹𝑆𝑟 = 2,8. Assim pode-se calcular o valor da tensão admissível em
relação a ruptura.
Tabela 4.5: Valores de FS
Fonte: NBR 8400 (1984), pág 31

78
𝑎
A partir da Equação (4.13), pode-se calcular o valor da tensão admissível em relação à
ruptura.
𝜎 = 𝜎𝑟
𝑞.𝐹𝑆𝑟 =
815 = 259,88 𝑀𝑃𝑎
1,12𝑥2,8
Pela norma NBR 8400, para um mecanismo que trabalha em flexão pura é preciso que
a tensão normal devido a flexão seja menor que a tensão admissível.
𝜎𝐹 ≤ 𝜎𝑎 → 218,63𝑀𝑃𝑎 < 259,88 𝑀𝑃𝑎
A barra que também trabalha como pino não sofre esforço de tração. É feita uma
análise utilizando a equação (4.14), que utiliza a equação combinando os esforços de flexão,
tração e cisalhamento.
√(1,25𝜎𝑇 + 𝜎𝐹)2 + 3. 𝜏2 ≤ 𝜎𝑎 (4.14)
Como é uma tentativa simplificada para avaliar se a combinação das tensões de flexão
e de cisalhamento são menores que a tensão admissível para não ocorrer a ruptura, faz-se
𝜎𝑇 ≅ 0, então, de (4.14), é visto que:
√(0 + 214,51)2 + 3. 31,422 ≤ 259,88 𝑀𝑃𝑎
221,31 𝑀𝑃𝑎 < 259,88 𝑀𝑃𝑎
Com isso entende-se que a barra pode atuar como um mecanismo de articulação
(pino), pois na verificação em relação a sua ruptura, as tensões não excederam a tensão
admissível (𝜎𝑎).
4.2 – COMPONENTES DE MOVIMENTAÇÃO
4.2.1 – Rodas
Quando o pistão hidráulico é acionado, as rodas se movimentam na direção horizontal
dentro dos trilhos, permitindo assim a abertura e o fechamento dos pantógrafos (hastes em
formato de tesoura). Na estrutura são ao todo 8 (oito) rodas, contabilizando as duas
plataformas pantográficas.

79
(
Para as hastes estudadas no Item 3.5, as rodas estão alocadas nas extremidades das
hastes BCD e DFH. Nessas extremidades dessas hastes (pontos B e H) as rodas serão fixadas
as hastes por parafusos com roscas na extremidade. Como possuem mancais de rolamento de
esferas, podem girar livremente sobre a superfície lisa do parafuso de diâmetro igual ao do
furo da roda (montagem por interferência)
Dentre os diversos tipos de rodas no mercado, foi escolhida a empresa (SCHIOPPA
RODAS E RODIZIOS Do Brasil – CATALOGO 2010). O material que compõe a roda, bem
como as dimensões, são escolhidos a partir de cálculos realizados por uma equação fornecida
pelo próprio fabricante que determina a capacidade de carga por roda.
C = PE.PMC
𝑁′ ) . S (4.15)
𝐶: carga por roda ou rodizio [kg]
𝑃𝐸 : Peso do equipamento, carrinho ou estrutura [kg]
𝑃𝑀𝐶 : Peso máximo da carga a ser transportada [kg]
𝑆: Coeficiente de segurança
𝑁′: número de rodas ou rodízios
O valor do coeficiente de segurança é dado pelo fabricante, é visto na tabela a seguir.
O coeficiente de segurança escolhido é S=1.
Tabela 4.6: Coeficientes de Segurança
Fonte: Catálogo da empresa SCHIOPPA

80
(
Rodas inferiores
São as rodas que estão nas hastes inferiores da plataforma pantográfica, por exemplo,
hastes BCD e BCD’. Para realizar esse cálculo foi computado todo peso possível sobre os
apoios. Como as rodas não apoiam todo o equipamento sozinhas, esse peso foi dividido pelos
2 (dois) apoios fixos, haste do pistão e as 2 (duas) rodas inferiores, totalizando 5 (cinco)
apoios.
Portanto, o cálculo da carga feito a seguir é dado por roda. Para a outra plataforma o
cálculo é análogo. Será usado um fator de majoração equivalente a 10% da massa estrutura (𝐹𝑀𝐼
≅ 50 𝑘𝑔)
𝑃𝐸 = 𝑀ℎ𝑎𝑠𝑡𝑒𝑠+𝑀𝑚𝑒𝑠𝑎+ 𝐹𝑀𝐼 = 8𝑥21,14 + 76 + 50 = 50,02 𝑘𝑔 (4.16)
5
𝑃𝑀𝐶 = 𝑐𝑎𝑟𝑔𝑎 𝑠𝑜𝑏𝑟𝑒 𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎 =
5 𝑎𝑝𝑜𝑖𝑜𝑠
1500 𝑘𝑔 = 300 𝑘𝑔 (4.17)
5
C = 50,02+300
1 ) . 1 = 350
𝑘𝑔
𝑟𝑜𝑑𝑎 (4.18)
Rodas superiores
São as rodas que estão nas hastes superiores da plataforma pantográfica, por exemplo,
hastes DFH e DFH’. Para realizar esse cálculo foi computado todo peso possível sobre os
apoios superiores. Como as rodas não apoiam todo o equipamento sozinhas, nesse caso o peso
foi dividido pelos 2 (dois) apoios fixos às 2 (duas) rodas superiores, totalizando 4(quatro)
apoios.
Portanto, o cálculo da carga feito a seguir é dado por roda. Para a outra plataforma o
cálculo é análogo. Será usado um fator de majoração equivalente a 10% da massa acima das
rodas superiores (𝐹𝑀𝑆 ≅ 10 𝑘𝑔)
𝑃𝐸 = 𝑀𝑚𝑒𝑠𝑎+ 𝐹𝑀𝑆 = 76 + 10 = 21,5 𝑘𝑔 (4.19)
4
𝑃𝑀𝐶 = 𝑐𝑎𝑟𝑔𝑎 𝑠𝑜𝑏𝑟𝑒 𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎 =
4 𝑎𝑝𝑜𝑖𝑜𝑠
1500 𝑘𝑔 = 375 𝑘𝑔 (4.20)
4

81
(
C = 21,5+375
1 ) . 1 = 396,5
𝑘𝑔
𝑟𝑜𝑑𝑎 (4.21)
Com os valores da carga por roda calculada, recorre-se ao catálogo do fabricante para
realizar a escolha das rodas que serão utilizadas para realizar o movimento. Foi escolhido o
modelo com rolamento de esferas R 514 FE de ferro fundido nas dimensões de ϕ 125 x 38
mm com capacidade de carga de 400 kg e furo de ϕ’ 25,4mm.
As rodas de ferro fundido cinzento possuem dureza de 160 na escala Brinell, rodam
com muita facilidade e proporcionam redução do esforço de movimentação. São muito
resistentes e suportam cargas e temperaturas elevadas (CATÁLOGO SCHIOPPA-2010).
4.2.2 – Trilhos para movimentação das rodas
Os trilhos são necessários para delimitar a região onde as rodas se movimentam.
Dentre os possíveis perfis e fabricantes, optou-se pelo perfil U de aço ASTM A36
101,6x41,80x6,27 mm da empresa GERDAU, pois as dimensões e propriedades mecânicas se
adequam aos esforços aplicados no projeto. As tensões admissíveis foram vistas nas Equações
(3.2) e (3.3).
Para o dimensionamento desse componente é preciso conhecer principalmente os
esforços de flexão oriundos dos momentos fletores na mesa (viga u – parte superior da
estrutura) e base (chapa retangular – parte inferior da estrutura), que foram calculados nos
itens 3.3 e 3.7 respectivamente.
Peso
[kg]
Altura(h)
[mm]
Base (b)
[mm]
Espessura (e)
[mm]
Área (𝐴𝑡)
[𝑚𝑚2]
Módulo de resistência (𝑊𝑥)
[𝑚𝑚3]
4,65 101,60 41,80 6,27 1190 34300
Quadro 4. 2: Propriedades do perfil U
Fonte: Dos autores (2016)
4.2.2.1 Trilhos Superiores
A tensão normal devido a flexão no trilho superior é dada pela Equação (3.6), e o
momento fletor da mesa é tirado do diagrama da Figura (3.3).

82
𝑎𝑑𝑚
𝑎𝑑𝑚
𝜎𝐹𝑡𝑟𝑖𝑙ℎ𝑜 = 𝑀𝑚á𝑥 =
𝑊
5652 𝑥 1000 = 164,78 𝑀𝑃𝑎 < 𝜎
34300
A tensão normal devido a flexão é menor que a tensão admissível calculada na
Equação (3.2), dessa maneira o material e perfil selecionado para compor o trilho superior
estão aptos a suportar o carregamento.
4.2.2.2 Trilhos inferiores
A tensão normal devido a flexão no trilho inferior é dada pela Equação (3.6), e o
momento fletor da base é tirado do diagrama na Figura 3.26
𝜎𝐹𝑡𝑟𝑖𝑙ℎ𝑜 = 𝑀𝑚á𝑥 =
𝑊 3211,78 𝑥 1000
= 93,64 𝑀𝑃𝑎 < 𝜎
34300
A tensão normal devido ao momento fletor é menor que a tensão admissível calculada
pela equação (3.2), dessa maneira o material e perfil selecionado para compor o trilho inferior
estão aptos a suportar o carregamento.
4.3 – ELEMENTOS DE FIXAÇÃO
4.3.1 – Parafusos
Os parafusos utilizados no projeto da plataforma pantográfica estão localizados nas
extremidades das hastes que possuem roda e na fixação dos trilhos. É dimensionado dois
parafusos dessa forma. É selecionado o parafuso sextavado estrutural A325 com tensão última
de ruptura de 827 𝑀𝑃𝑎 e tensão de escoamento de 635 𝑀𝑃𝑎, do fabricante INDUFIX.
Possuem comprimentos diferentes para as distintas aplicações no projeto. O diâmetro
do parafuso que fixa as rodas nas extremidades das hastes BCD e DFH (funciona como um
eixo) está diretamente ligado ao diâmetro do furo da roda selecionada no 3.9.1, e seu material
é escolhido de modo que resista aos esforços aplicados durante a utilização do equipamento.

83
𝐴 =
Os parafusos para fixação dos trilhos para movimentação das rodas na mesa e base
possuem dimensões diferentes dos parafusos usados para fixação das rodas nas extremidades,
porém possuem o mesmo material.
Para determinar a tensão admissível nos parafusos utiliza-se a norma NBR 8400.
Para verificação dos mecanismos no que se refere à ruptura, é preciso que a tensão calculada
no mecanismo não ultrapasse a tensão admissível relacionada com a tensão de ruptura do
material usado.
Utilizando a equação e os valores de q e 𝐹𝑆𝑅 calculados no item 3.8, encontra-se a
tensões admissíveis para os parafusos.
𝜎𝑎 = 𝜎𝑅
𝑞.𝐹𝑆𝑅 =
827 = 263,71 𝑀𝑃𝑎
1,12 𝑥 2,8
Do Item 5.8.2.1 da Norma NBR 8400, é encontrada a equação para a tensão de
cisalhamento admissível, dada por:
𝜏𝑎𝑑𝑚 = 0,8 𝜎𝑎 = 210,96 𝑀𝑃𝑎 (4.22)
Nas extremidades das hastes, onde se encontram os parafusos, a força aplicada é
paralela ao plano de junção. Segundo a NORMA NBR 8400, utilizam-se as equações (4.23) e
(4.24) para se determinar a área da seção transversal resistente do parafuso, bem como as
tabelas a seguir.
𝑇𝑃 = 𝐹𝑝𝑎.𝐹𝑠𝑝
(4.23) 𝜇.𝑚
𝑇𝑃
𝑇𝑃 𝑆𝑃
(4.24)
𝑇𝑃: Esforço de tração que se exerce no parafuso após aperto
𝐹𝑝𝑎: Força paralela por parafuso
𝐹𝑠𝑝: coeficiente de segurança da força paralela

84
𝐴 =
𝜇: coeficiente de atrito (0,3 para aços)
𝑚: Plano de atrito ( 2 planos )
𝑆𝑃: resistência de prova do parafuso (70 % da tensão de escoamento do parafuso)
𝐴𝑇𝑃: Área da seção transversal resistente do parafuso
Tabela 4.7: Fator de segurança
Fonte: Norma NBR 8400, página 18 (1984)
Como visto no item 3.5, o parafuso que está submetido ao maior esforço é o que está
no ponto B da haste BCD. Portanto, dimensionam-se todos os parafusos através do
dimensionamento desse parafuso, pois é o que está sujeito ao maior esforço.
A força no ponto B, e consequentemente no parafuso é de 5095 N. Então
manipulando-se as equações (4.23) e (4.24), encontra-se o valor de 𝐴𝑇𝑃.
𝑇𝑃 = 𝐹𝑝𝑎 .𝐹𝑠𝑝 = 𝜇.𝑚
5095 𝑥 1,5 = 12737,5 𝑁
0,3 𝑥 2
𝑇𝑃
𝑇𝑃 𝑆𝑃
= 12737,5 𝑁
= 28,66 𝑚𝑚2
0,7 𝑥 635
Com esse valor, recorre-se a NORMA NBR 8400 e encontra-se o valor do diâmetro do
parafuso 𝑑 = 10 𝑚𝑚, com seção resistente de 58 𝑚𝑚2. Pelo catálogo do fabricante chega-se ao
diâmetro possível de 𝑑 = 12,7 𝑚𝑚.

85
Tabela 4.8: Esforços transmissíveis de montagem
Fonte: Norma NBR 8400, pagina 55 (1984)
4.3.2 – Parafuso fixação das rodas
Para o dimensionamento deste parafuso, foram escolhidas as seguintes especificações:
Diâmetro nominal ou diâmetro maior: 12,7 mm
Comprimento: 152,4 mm
𝐴𝑇𝑃 = 58 𝑚𝑚2
Do item 3.5, a força aplicada no ponto B da haste BCD é conhecida, portanto a tensão
de cisalhamento no parafuso é dada pela equação (4.25)
𝜏 = 𝐹𝑜𝑟ç𝑎 𝑛𝑜 𝑝𝑎𝑟𝑎𝑓𝑢𝑠𝑜
𝐴 𝑝𝑎𝑟𝑎𝑓𝑢𝑠𝑜
(4.25)
𝜏 = 5095 𝑁
= 87,84 𝑀𝑃𝑎 < 𝜏 58𝑚𝑚2
𝑎𝑑𝑚
Portanto o parafuso escolhido está apto a suportar o carregamento proposto, assim
como o parafuso que se localiza na haste superior DFH, pois este recebe esforço menor que o
parafuso dimensionado para haste BCD.

86
4.3.3 – Parafuso de fixação do trilho
Na altura máxima de trabalho a maior força aplicada se dá nos trilhos inferiores e é
justamente onde se localiza o ponto B. Dessa forma a área da seção transversal resistente
desse parafuso pode ser a mesma que a do item anterior, assim a tensão de cisalhamento
também é menor que a tensão de cisalhamento admissível. Porém, para esse parafuso foi
escolhido um comprimento de 31,75 mm, pois é o suficiente para atravessar a espessura do
trilho e da mesa. Utilizando-se a Equação (4.25), encontra-se a tensão de cisalhamento:
𝜏 = 𝐹𝑜𝑟ç𝑎 𝑛𝑜 𝑝𝑎𝑟𝑎𝑓𝑢𝑠𝑜
= 5095 𝑁
= 87,84 𝑀𝑃𝑎 < 𝜏
𝐴 𝑝𝑎𝑟𝑎𝑓𝑢𝑠𝑜 58𝑚𝑚2 𝑎𝑑𝑚
4.3.4 – Pinos de articulação
Figura 4.6: Montagem do pino, bucha e tubo circular
Fonte: Dos autores (2016) software Solidworks®
São utilizados para realizar a união mecânica entre as diferentes peças. No caso da
plataforma pantográfica, os pinos são responsáveis por unir as tesouras em formato de X. Os
pinos se localizam no ponto médio das hastes, atravessando-as, permitindo que as hastes
tenham movimento de rotação ao redor do pino.
Assim como a barra circular que sustenta o pistão, os pinos de articulação são do aço
AISI 1060. A tensão admissível (𝜎𝑎) com a relação à tensão de ruptura para esse componente

87
já está calculada na Equação (4.13). Porém, por ser um pino que está submetido apenas ao
cisalhamento, foi dimensionado da seguinte maneira.
Do item 5.8.3.2 da NORMA NBR 8400 para parafusos (no presente estudo é um
pino), a tensão de cisalhamento na parte não rosqueada do parafuso não pode ser maior que os
valores determinados pela seguinte Equação (4.22):
𝜏 = 0,8 𝜎𝑎 = 0,8 𝑥 259,88 = 207,90 𝑀𝑃𝑎
O pino que está sujeito a maior tensão de cisalhamento, é justamente aquele que está
na haste submetida ao maior esforço cortante. A haste BCD, como é visto no Item 3.5.2, a
área de seção transversal resistente escolhida para o pino é mesma do parafuso 58 mm2.
Então, utilizando-se a Equação (4.26):
𝜏 = 𝑄
= 7251
𝑁
(4.26)
𝐴 58 𝑚𝑚2
𝜏 = 125,02 𝑀𝑃𝑎 < 207,90 𝑀𝑃𝑎
Com o valor do diâmetro definido, seleciona-se uma barra circular de aço AISI 1060
do fabricante (empresa AÇOSRENOX) com as dimensões de 122 x 12,7 mm.), com peso
linear de 0,99 𝑘𝑔
. 𝑚
O pino é montado sendo envolvido por uma bucha de bronze que atua como um
mancal de deslizamento, possibilitando o movimento de giro das hastes. Em torno da bucha
de bronze é montado por interferência um tubo retangular vazado.
A bucha de bronze selecionada, pertence à empresa GALVAÇO, tem as dimensões de
122 mm de comprimento, 12,7 mm de diâmetro interno, e 25,4 mm de diâmetro externo e
peso de 2,10 𝑘𝑔
. 500 𝑚𝑚
As hastes devem ser furadas em seus pontos centrais com furos que possuem o
tamanho do diâmetro externo do tubo que envolve a bucha. Assim esse conjunto é montado e
posteriormente soldado, trabalhando como uma articulação.

88
ϕ𝑖𝑛𝑡
[mm]
ϕ𝑒𝑥𝑡
[mm]
Comprimento
[mm]
Peso
[kg]
Pino - 12,7 122 0,121
Bucha 12,7 25,4 122 0,512
Tubo circular 25,4 26,9 122 0,050
Quadro 4.3: Propriedades do Pino, bucha e tubo circular
Fonte: Dos autores (2016)

89
5 ANÁLISE DE FADIGA
É necessária a realização do estudo de falhas por fadiga para validar o material e as
geometrias escolhidas para os diferentes componentes da plataforma pantográfica. A estrutura
é submetida a diferentes tipos de esforços que provocam tensões repetidas, sendo, portanto
possível à ocorrência de falhas por fadiga (repetição).
A característica mais marcante dessas falhas é que as tensões foram repetidas um
número muito grande de vezes. Diz-se então que a falha ocorre por fadiga (Shigley, 2005)
5.1 DETERMINAÇÃO DOS FATORES DE FADIGA
As equações de limite de resistência à fadiga (𝑆𝑛) e limite de fadiga (𝑆′𝑛) são:
𝑆𝑛 = 𝐾𝑎𝐾𝑏𝐾𝑐𝐾𝑑𝐾𝑒𝐾𝑓𝑆′𝑛 (5.1)
𝑆′𝑛 = 0,5 𝑆𝑟𝑡 (5.2)
Onde:
𝑆𝑛: limite de resistência à fadiga da peça
𝑆′𝑛: limite de resistência à fadiga do corpo de prova do teste de flexão rotativa
𝐾𝑎: fator de superfície;
𝐾𝑏: fator de tamanho

90
𝐾𝑐: fator de confiabilidade
𝐾𝑑: fator de temperatura
𝐾𝑒: fator de concentração de tensões
𝐾𝑓: fator de efeitos diversos
𝑆𝑟𝑡: limite de ruptura a tração
Fator de superfície 𝐾𝑎
As hastes, mesa e base são fabricadas por laminação a quente. Para o aço ASTM A36
(mesa, hastes e base) o limite de ruptura a tração é de 450 𝑀𝑃𝑎. Para o aço AISI 1060
(parafusos e pinos) é de 827 𝑀𝑃𝑎, fabricados por usinagem Tem-se respectivamente para
cada aço, 𝐾𝑎 = 0,62 e 𝐾𝑎 = 0,72.
Figura 5.1: Gráfico limite de ruptura x Fator de superfície
Fonte:Shigley, E. Joseph, Elementos de Máquinas, p. 176
𝐾𝑏: fator de tamanho
O fator de tamanho é definido pelo tamanho da peça. Para seções que não circulares,
considera-se o valor de d como a menor dimensão da seção reta.

91
Haste: 𝐾𝑏 = 1
Mesa: 𝐾𝑏 = 0,85
Base: 𝐾𝑏 = 0,85
Parafusos e pinos: 𝐾𝑏 = 0,85
𝐾𝑐: fator de confiabilidade
A escolha deste coeficiente se dá com relação à confiabilidade na estrutura. Supondo
uma confiabilidade de 50%, da tabela abaixo se encontra 𝐾𝑐 = 1.
Tabela 5.1: Fatores de confiabilidade
Fonte: Shigley, E. Joseph, Elementos de Máquinas, p. 179
𝐾𝑑: fator de temperatura
Para equipamentos que trabalham em temperatura ambiente, o fator de temperatura é
𝐾𝑑 = 1.
𝐾𝑒: fator de concentração de tensões

92
𝑒
𝐾
Hastes
Para entalhes muito grandes, usam-se os valores de sensibilidade aos entalhes (q)
correspondentes a 𝑟 = 4 𝑚𝑚, ou seja, o valor se se aproxima de 1 (um). Portanto, pode-se
considerar 𝐾𝑓 = 𝐾𝑒, onde:
𝐾 = 1
𝐾𝑓
(5.3)
𝑞′ = 𝐾𝑓−1
𝐾𝑡−1 (5.4)
𝐾𝑒: fator modificador para concentração de tensão
𝐾𝑓: fator de redução da resistência a fadiga
𝐾𝑡: fator de concentração de tensão teórico
𝑞′: sensibilidade ao entalhe
Como todos os entalhes na estrutura (hastes, mesa e base) são superiores a 4 mm,
faz-se q=1, ou seja, 𝐾𝑓 = 𝐾𝑡. Com isso faz-se uma análise do gráfico na figura 5.2 para
encontrar o valor de 𝐾𝑡 e posteriormente 𝐾𝑒.
Como o maior furo é ( 𝑑 = 45,95 𝑚𝑚) e encontra-se nas Hastes GFE e DFH, tem-se:
𝑑
= 45,95
= 0,4595 (5.5) 𝑤 100
𝑑
= 45,95
= 7,29 (5.6) ℎ 6.3
Do gráfico tem-se que 𝐾𝑡 ≅ 1,3, portanto, 𝐾𝑓 = 1,3. Da equação (5.3), tem-se:
1
𝐾𝑒 = 𝑓
1
= = 0,77 1,3

93
Figura 5.2: Valores para Kt
Fonte: Shigley, pagina 325 (2005)
Parafusos e pinos
Da tabela a seguir, para roscas usinadas escolhe-se o fator 𝐾𝑓 = 2,2, portanto 𝐾𝑒 =
0,455. Para os pinos utiliza-se 𝐾𝑓 = 1, portanto, 𝐾𝑒 = 1.
Tabela 5.2: Fatores de Redução de resistência à fadiga para elementos roscados
Fonte: Shigley, pagina 234 (2005)
𝐾𝑓: fator de efeitos diversos
Como a plataforma pantográfica é dimensionada para trabalhar num ambiente que não
é corrosivo e não há na estrutura revestimentos metálicos, faz-se 𝐾𝑓 = 1.
5.1.1 – Cálculo do número de ciclos
Hastes
Substituindo-se os valores dos fatores nas Equações (5.1) e (5.2)

94
1
1
𝑆𝑛 = 0,62𝑥1𝑥1𝑥1𝑥0,77𝑥1𝑥0,5𝑥450 𝑀𝑃𝑎 = 103,95 𝑀𝑃𝑎
A tensão na haste mais solicitada ocorre na haste BCD, o valor dessa tensão é de
99,53 𝑀𝑃𝑎. Portanto, é visto que a tensão solicitante é próximo ao limite de resistência a
fadiga. Dessa maneira optou-se por calcular seu número de ciclos, que é dado pela Equação
(5.7), (5.8) e (5.9).
𝑚 = 1
log(0,9 𝑆𝑟𝑡) = 0,196 (5.7)
3 𝑆𝑛
𝑏 = log [ (0,9𝑆𝑟𝑡)2
𝑆𝑛 ] = 3,198 (5.8)
𝑏
𝑁 = 10𝑚
= 1326428 𝑐𝑖𝑐𝑙𝑜𝑠 (5.9) 𝜎𝑚
Dessa maneira é visto que com a tensão existente na haste mais solicitada o número de
ciclos é superior ao proposto no projeto, visto no Item 3.2.1. Portanto, as hastes estão aptas
para ser usada no projeto, pois possuem um número de ciclos superior ao número de ciclos no
qual a estrutura pertence.
Mesa
Substituindo os fatores nas equações (5.1) , (5.2), (5.7), (5.8) e (5.9), obtém-se:
𝑆𝑛 = 0,62𝑥1𝑥0,85𝑥1𝑥1𝑥1𝑥0,5𝑥450 𝑀𝑃𝑎 = 118,57 𝑀𝑃𝑎
𝑚 =
1 log(0,9
𝑆𝑟𝑡) = 0,178 3 𝑆𝑛
𝑏 = log [ (0,9𝑆𝑟𝑡)2
𝑆𝑛 ] = 3,186
𝑏
𝑁 = 10𝑚
= 2603088 𝑐𝑖𝑐𝑙𝑜𝑠 𝜎𝑚
Dessa maneira é visto que com a tensão aplicada na mesa o número de ciclos é
superior ao proposto no projeto, visto em 3.2.1. Portanto, a mesa está apta para ser usada no
projeto, pois possui um número de ciclos superior ao número de ciclos no qual a estrutura
pertence.

95
1
Base
Substituindo os fatores nas Equações (5.1), (5.2), (5.7), (5.8) e (5.9), obtém-se
𝑆𝑛 = 0,62𝑥1𝑥0,85𝑥1𝑥1𝑥1𝑥0,5𝑥450 𝑀𝑃𝑎 = 118,57 𝑀𝑃𝑎
𝑚 =
1 log(0,9
𝑆𝑟𝑡) = 0,178 3 𝑆𝑛
𝑏 = log [ (0,9𝑆𝑟𝑡)2
𝑆𝑛 ] = 3,186
𝑏
𝑁 = 10𝑚
= 154210 𝑐𝑖𝑐𝑙𝑜𝑠 𝜎𝑚
Dessa maneira é visto que com a tensão aplicada na base, o número de ciclos é
superior ao proposto no projeto, visto em 3.2.1. Portanto, a base está apta para ser usada no
projeto, pois possui um número de ciclos superior ao número de ciclos no qual a estrutura
pertence.
Parafusos e pinos
Substituindo os fatores nas equações (5.1), (5.2), (5.7), (5.8) e (5.9), obtém-se:
𝑆𝑛 = 0,72𝑥0,85𝑥0,455𝑥0,5𝑥827 𝑀𝑃𝑎 = 115,14 𝑀𝑃𝑎
Esse valor é superior ao visto na equação (4.25), portanto os pinos e parafusos não
falham por fadiga.
5.1.2 – Fadiga na junta dos suportes
Esse suporte é utilizado para fixação das hastes que não possuem rodas nas
extremidades, ponto A da haste ACE, ponto G da haste GFE, e a base do pistão hidráulico.

96
Figura 5.3: Suporte de fixação das hastes
Fonte: Dos autores (2016) software SolidWorks®
Altura (h)
[mm]
Largura (L)
[mm]
Base (b)
[mm]
Momento de Inércia ( 𝐼𝑋)
[𝑚𝑚4]
100 50 65 1429167
Quadro 5.1: Propriedades do Suporte
Fonte: Dos autores (2016)
O momento nos pontos A da haste ACE e o ponto G da haste GFH é nulo. Portanto,
para dimensionar esse suporte considera-se somente a tensão cisalhante atuante. É utilizado
para o cálculo o maior esforço cortante dentre esses dois pontos. Este ocorre no ponto G,
como visto no diagrama de esforço cortante no Item 3.5
𝜏 = 𝑉.𝑄 𝐼.𝑡
(5.10)
𝜏 = 6207𝑥30625
= 2,66 𝑀𝑃𝑎 < 𝜏 1429167𝑥50
𝑎𝑑𝑚
2,66 𝑀𝑃𝑎 < 96,23 𝑀𝑃𝑎

97
𝜎𝑚𝑖𝑛
𝑅 = = 0,32
Como o pino que fixa o pistão hidráulico no suporte localizado na base possui o
mesmo diâmetro da barra que sustenta o pistão na parte superior da estrutura, assume-se que a
tensão cisalhante atuante seja menor ou igual a vista na equação (4.12).Assim conclui-se que
o perfil selecionado para servir de suporte para fixação das hastes está apto a suportar os
esforços.
Para estudo de fadiga da solda do suporte, pela norma NBR 8400, é feita uma análise
do gráfico na figura 5.4, para estruturas de grupo 3. Utiliza-se a 𝑅 = −1, por ser o caso mais
crítico. É visto que a tensão limite de resistência a fadiga é aproximadamente 𝜏 = 80 𝑀𝑃𝑎.
Figura 5.4: Tensão limite de fadiga a cisalhamento
Fonte: NBR 8400 (1984), p. 82
É visto que a tensão limite de resistência à fadiga é aproximadamente 𝜏 = 80 𝑀𝑃𝑎,
portanto, superior a tensão de cisalhamento atuante.
5.1.3 – Solda barra de sustentação na cabeça do pino
Para estudo de fadiga da solda da barra circular de sustentação do pistão, pela
NORMA NBR 8400, é feita uma análise do gráfico da Figura 5.5, para estruturas de grupo 3.
Do (item da barra circular), são retiradas as tensões máximas. A solda escolhida para fixação
da barra circular que suporta o pistão aos pinos é a solda 𝐾2 de referência 2,3.
𝑅 = = 1,10 𝑀𝑃𝑎
≅ 0
𝜎𝑚á𝑥 218,64 𝑀𝑃𝑎
𝜏𝑚𝑖𝑛 ≅ 0 𝜏𝑚á𝑥 32,05

98
Figura 5.5: Tensão limite de fadiga a tração e compressão
Fonte: NBR 8400, 1984, p. 81
Assim é visto que a tensão limite de resistência à fadiga é aproximadamente 𝜎
= 240 𝑀𝑃𝑎, superior à máxima tensão que solicita a barra circular que sustenta o pistão.
Figura 5.6: Tensão limite de fadiga a cisalhamento
Fonte: NBR 8400, 1984, p. 82

99
A tensão cisalhante atuante é menor que a tensão limite de resistência à fadiga. Assim,
a solda na barra circular está apta para resistir aos esforços e não falha por fadiga, pois
194 𝑀𝑃𝑎 > 32,05 𝑀𝑃𝑎.

100
6 ACIONAMENTO HIDRAULICO
6.1 SELEÇÃO E CONCEPÇÃO
Entre os diversos tipos de acionamentos existentes que poderiam ser empregados no
projeto, foi escolhido o acionamento hidráulico. Esse modelo é o que melhor atende às
características do projeto.
Por questões de segurança e precisão do sincronismo de elevação do sistema composto
por 2 plataformas independentes, além dos esforços envolvidos no deslocamento de grandes
cargas a alturas consideráveis, um sistema composto por atuadores hidráulicos seria o único
capaz de suprir os requisitos expostos.
A seguir será demonstrado o raciocínio responsável pela escolha dos componentes do
sistema e seu devido dimensionamento, visando a elevação e rebaixamento da plataforma
pantográfica de forma simples, eficiente e segura.
6.2 CILINDROS HIDRÁULICOS
Cilindros hidráulicos são atuadores lineares, pois convertem energia hidráulica em
energia mecânica de forma linear. Com o óleo hidráulico impulsionado por uma bomba geram
uma força, que é o produto da pressão do óleo pela área em contato com o êmbolo do cilindro.
A pressão não é gerada pela bomba, ou seja, ela apenas impulsiona o fluido.
O êmbolo é normalmente fixado à haste por rosca. A pressão do óleo (P) agindo sobre
o êmbolo (A), gera uma força que pode ser calculada pela seguinte

101
equação. Esta equação é fundamental para sabermos a força que cada cilindro levantará a
plataforma.
F = PxA (6.1)
Onde:
F = Força em N;
P = pressão em N/cm2;
A = área em cm2.
6.2.1 Metodologia
O correto dimensionamento de um cilindro hidráulico passa pela execução dos passos
listados a seguir.
Dados necessários:
• Carga (força necessária) do cilindro;
• Tipo de montagem e fixação do cilindro;
• Curso do cilindro;
• Pressão de trabalho.
Procedimentos utilizando tabelas e gráficos:
1) Consultar fator de curso conforme tipo de montagem e fixação do cilindro no Quadro 6.1
(tipos de fixação / fator de curso). No anexo, Tabela (10,8.1) é visto o mancal que articula a
extremidade do pistão;
2) Selecionar o diâmetro da haste do cilindro no gráfico 6.1 de seleção de haste e tubo de
parada;
3) Encontrar o diâmetro do cilindro no Quadro 6.2

102
Quadro 6.1: Fator de curso
Fonte: Catálogo da empresa PARKER
Figura 6.1: Gráfico para seleção de haste
Fonte: Catálogo da empresa PARKER

103
Quadro 6.2: Força de avanço teórico e volume de fluido deslocado
Fonte: Catálogo da empresa PARKER
6.2.2 Dimensionamento
Força de Avanço
É a força efetiva que o cilindro hidráulico deve desenvolver a fim de realizar o trabalho
para o qual foi projetado. Pode ser obtida por uma variada gama de equações. Entre elas,
física estática, Resistência dos Materiais, Usinagem, entre outras.
Para o caso estudado, a força exercida pelo cilindro pode ser obtida pela seguinte
análise da geometria:
F
ϴ
A 1
× 𝐿 cos 𝜃 2
L = 1,45m
𝐿 cos 𝜃
𝑌̅𝐻 = 2𝐿 sin 𝜃
𝛿𝑌̅𝐻 = 2𝐿 cos 𝜃 𝛿𝜃
E 1
× 𝐿 sin 𝜃
2
𝐿 sin 𝜃

104
A distância entre os pontos A e F (𝑑𝐴𝐹 ), correspondente ao pistão, é obtida através do
teorema de Pitágoras, encontrando assim:
𝑑𝐴𝐹 = 1
𝐿√1 + 8 sin 𝜃2 2
(6.2)
𝛿𝑑𝐴𝐹 = 4𝐿 sin 𝜃 cos 𝜃
√1+8 sin 𝜃2 𝛿𝜃
O próximo passo é encontrar a Força total (W) que o pistão deve suportar. Esse valor é
obtido pela soma dos pesos relativos à:
Carga = 1500 kg x 9,81m⁄s2 = 14700 N
Mesa = 76 kg x 9,81m⁄s2 = 746 N
Hastes =10 kg x 9,81m⁄s2 x 4 hastes = 392,4 N
Logo, W = 15839 N
Utilizando o princípio dos trabalhos virtuais para encontrar a Força do cilindro (𝐹𝑐𝑖𝑙)
chegamos à:
𝐹𝑐𝑖𝑙. 𝛿𝑑𝐴𝐹 − 𝑊. 𝛿𝑌̅𝐻 = 0 (6.4)
Substituindo os valores na equação (4.4) obtemos:
𝐹𝑐𝑖𝑙 = 7920 √1+8 sin 𝜃2
(6.5)
sin 𝜃
A fim de descobrir em que posição a estrutura estará sujeita aos maiores esforços,
construiu-se o gráfico 𝐹𝑐𝑖𝑙 × 𝜃, onde é possível identificar a cada ângulo 𝜃 a força efetuada pelo
pistão hidráulico.
Observando o desenho do projeto feito no software SolidWorks, encontramos que o
ângulo 𝜃 formado entre a haste e a base varia entre 3,75° (quando a plataforma está
inteiramente recolhida) até 38,38° quando em seu ponto mais elevado (1,80m).
A Equação 6.5 foi plotada no software Excel gerando o gráfico 6.2, que revela que o
valor de maior exigência do equipamento é na posição mais baixa, ou seja, na iminência do
movimento. Portanto para obtermos o valor do maior esforço é preciso considerar 𝜃 = 3,75°
na Equação 6.5, encontrando assim:
𝐹𝑐𝑖𝑙 = 123,15 𝑘𝑁
(6.3)

105
√
Figura 6.2: Gráfico F x ϴ
Fonte: Dos autores (2016)
Diâmetro Comercial Necessário ao Pistão
Conhecidas a força de avanço 𝐹𝑐𝑖𝑙 e a pressão de trabalho estimada 𝑃𝑡𝑏 = 21 𝑀𝑃𝑎
(informação do catálogo da empresa Parker), é possível determinar o diâmetro necessário ao
pistão que será dado por:
Dp = 4.𝐹𝑐𝑖𝑙 𝑃𝑡𝑏𝜋
= √4.123,15.103
21𝜋 = 86,41 mm (6.6)
Entretanto, esse diâmetro calculado não é o definitivo do pistão. É apenas uma
referência a qual utilizaremos para consultar o catálogo do fabricante e definir qual cilindro
hidráulico possui diâmetro de pistão no mínimo igual ou ligeiramente maior que o calculado.
Nesse caso o cilindro que será utilizado no projeto deve observar a seguinte relação:
Dp comercial ≥ Dp calculada
Consultando o Quadro 6.2 é possível identificar que o pistão necessário para suportar
os esforços deve ser o destacado a seguir:
Gráfico F x ϴ
1000
900
800
700
600
500
400
300
200
100
0
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42
Ângulo (graus)
Forç
a (K
N)

106
Quadro 6.3: Força de avanço teórico e volume de fluido deslocado
Fonte: Catálogo da empresa PARKER
O pistão escolhido apresenta as seguintes características:
Diâmetro do pistão - Dp = 101,6 mm
Força Máxima - F = 170 KN (F ≥ Fcil)
Área do Pistão – Ap = 81,1 cm2
Pressão de Trabalho
Definido o diâmetro Dp comercial, devemos recalcular a pressão de trabalho que será
a regulada no sistema. Assim:
𝑃𝑡𝑏 = 𝐹𝑐𝑖𝑙
= 15,18 MPa (6.7) 𝐴𝑝
Dimensionamento da Haste pelo Critério de Ëuler para deformação por flambagem
A configuração do cilindro hidráulico no projeto é de extrema importância no se
dimensionamento, pois é a partir dela que será dimensionado o diâmetro mínimo de haste,
uma vez que os cilindros hidráulicos são projetados para suportar unicamente cargas de tração
e compressão.
A análise de deformação por flambagem baseia-se normalmente na fórmula de
Ëuler, uma vez que as hastes dos êmbolos têm um diâmetro pequeno em relação ao
comprimento.

107
2
A carga de flambagem de acordo com Euler é obtida por:
𝐾 = 𝜋 .𝐸.𝐽
𝛌𝟐 (6.8)
Isso significa que com essa carga ocorre flambagem da haste. A carga máxima de
trabalho, ou máxima força Fa de avanço permitida, será dada por:
𝐹𝑎 = 𝐾
𝑆
(6.9)
Sendo:
λ = Comprimento livre de flambagem (cm);
E = Módulo de Elasticidade do aço (módulo de Young); 2,1 × 107 N⁄cm2;
S = Coeficiente de Segurança: 3,5
Fa = 123,15 kN
L = 1465 mm
Teremos definido o diâmetro da haste em cm como segue:
64.𝑆.λ2.𝐹𝑎 Dh = (
𝜋3.𝐸
1⁄4
)
(6.10)
Utilizando o critério de Euler para a plataforma, escolhemos o caso 2 da figura 4.3.
Assim, fazendo as devidas substituições na fórmula 6.10, econtraremos:
Dh = 3,88 cm = 38,8 mm

108
Figura 6.3: Casos de Euler para Flambagem
Fonte: Fialho, 2004
O valor encontrado representa o mínimo necessário para não ocorrer a flambagem.
Para encontrar o valor real da haste a ser utilizada é preciso consultar o gráfico 6.1.
Fazendo as seguintes considerações:
Comprimento básico = curso real x fator de curso = 1465 x 2 = 2930 mm
Força = 123,15 KN
Assim a interseção desses valores no gráfico corresponde a um ponto na curva
referente ao diâmetro de 88,9 mm.

109
Figura 6.4:Exemplo de Cilindro Hidráulico
Fonte: Catálogo Parker
6.3 MOTORES HIDRÁULICOS
Fialho (2011), afirma que o motor hidráulico é um atuador rotativo, o qual tem por
função básica converter a energia hidráulica em energia mecânica rotativa. A energia
hidráulica fornecida para um motor hidráulico é convertida em mecânica sob a forma de
torque e rotação.
De acordo com Carrara (2012), existem diversos tipos diferentes de motores
hidráulicos, como motor de palheta, de engrenagem, de lóbulos, etc., e todos eles apresentam
características de alto torque específico, ou seja, torque elevado com massa e volume
reduzidos.
Em contrapartida, Carrara (2012), explica que a exigência de elementos de controle e
pressurização do fluido hidráulico faz com que o custo destes sistemas seja elevado.
Apresentam, adicionalmente, problemas de manutenção, já que podem ocorrer
vazamentos do fluído e desgaste na bomba e motores hidráulicos.
110
6.3.1 Velocidade dos Atuadores
A função velocidade pode ser relacionada com a variável vazão (Q), área (A),
deslocamento (∆s) e tempo (∆t). Ao iniciarmos um projeto hidráulico, normalmente já
definimos o processo e conhecemos então os deslocamentos e os tempos em que eles devem
ocorrer , podemos determinar a velocidade dos atuadores.
O deslocamento (∆s) será igual ao comprimento da haste do cilindro (Lh = 1465mm).
O tempo de avanço (∆ta) será considerado como 50 segundos, enquanto o tempo de retorno
(∆tr) será de 35 segundos. Assim, temos que as velocidades de avanço e retomo dos
atuadores, respectivamente, serão dadas por:
Velocidade de Avanço: 𝑉𝑎 = 𝐿ℎ
∆𝑡𝑎 = 1465
50 = 29,3 𝑚𝑚/𝑠 (6.11)
Velocidade de Retorno: 𝑉𝑟 = 𝐿ℎ
∆𝑡𝑟 = 1465
35 = 41,8 𝑚𝑚/𝑠 (6.12)
Uma vez conhecida a velocidade de avanço (va) e a de retomo (vr), podemos
determinar a vazão necessária de fluido hidráulico que possibilita essas velocidades.
6.3.2 Vazão de Avanço (Qa)
Vazão necessária para que o cilindro, ao distender-se, atinja a velocidade (Va)
𝐴𝑝 = 81,1 𝑐𝑚2 = 8110 𝑚𝑚2
Qa = Ap.Va = 8110. 29,3 = 237623 𝑚𝑚3/s = 14,26 l/min
6.3.3 Escolha do Motor
Obtendo – se a vazão geral do sistema hidráulico da plataforma, pode – se dimensionar o
motor que acionará o pistão. Utilizou – se a equação da Bosch (2012) para encontrar a rotação de
saída do motor.
𝑣 = 𝑄𝑥1000𝑥𝜂𝑣𝑜𝑙
𝜂 =
14,26𝑥1000𝑥0,95 = 112,89𝑐𝑚3/rev (6.14)
120

111
Tabela 6.1: Catálogo de Motores Hidráulicos
Fonte: Catálogo da empresa EATON
Analisando o catálogo de produtos da empresa EATON, escolhemos o motor
selecionado na tabela 6.1 por ser aquele que melhor se adequa às necessidades de
funcionamento do projeto.

112
7 SISTEMAS DE SEGURANÇA
Equipamentos responsáveis pela elevação de cargas são utilizados nos mais diversos
tipos de ambientes. No entanto, apesar de já fazerem parte de nosso cotidiano a bastante
tempo, seu uso não está isento de riscos e certas precauções devem ser observadas.
Dentre os perigos contidos no trabalho com plataformas pantográficas destacam-se:
Riscos mecânicos (esmagamento, corte, impacto, alta pressão de fluido, peças
arremessadas, perda de estabilidade, descarrilhamento da máquina, perda de força de
carga e perda de resistência mecânica);
Ruído (perda de audição e tonturas, interferência na comunicação do ambiente);
Vibração dos componentes (casa de distúrbios neurológicos);
Materiais, fluidos expelidos pelo sistema (inalação de substâncias nocivas);
Princípios ergonômicos (postura de trabalho prejudiciais a saúde, esforço excessivo);
Falha na energia de acionamento (perda de estabilidade, desordem nas velocidades de
acionamento)
Sistemas de segurança são então desenvolvidos com o objetivo de mitigar os riscos
listados. Ao longo do projeto foram propostos os seguintes pontos:
1. O local de instalação deve ser coberto, livre de umidade e poeira;
2. O piso deve estar totalmente nivelado, plano, sem ondulações e com espessura de 8cm
na área do elevador e do veículo. O elevador não pode ser instalado em terra ou sobre
britas;
3. O peso do veículo deve ser distribuído simetricamente entre as duas plataformas;
4. O sistema de segurança funciona através de catracas, figura 5.1, que vão deslizando
até chegar à altura desejada. Alcançando a altura desejada, aperta-se o botão de
descida que a tesoura descansará no sistema de segurança;
5. Serão utilizados sensores, um na posição inicial do cilindro e outro na posição final,
que ao serem acionados provocam o corte da alimentação do óleo para o pistão
hidráulico, impossibilitando a plataforma de subir ou descer.

113
Figura 7.1: Sistema de catracas da plataforma
Fonte: Dos autores (2016) software Solidworks®

114
8 ESTIMATIVA DE CUSTOS
A estimativa do custo previsto para o equipamento projetado é importante para
mostrar a viabilidade econômica de tudo aquilo que foi desenvolvido ao longo desse projeto.
Para isso será levado em consideração os custos com os principais materiais e acessórios
utilizados (Quadro 8.1) bem como uma estimativa das horas gastas com mão de obra (Quadro
8.2)
Material
Quantidade Preço Unitário
(R$)
Preço Total
(R$)
Viga Perfil U Aço ASTM A36 (Mesa) 152 kg 3.9 592,8
Viga Perfil Retangular Aço ASTM A36
(Hastes)
676.48 kg
3.9
2638,27
Chapa Aço ASTM A36 (Base) 284.6 kg 3.9 1109,94
Pistão Hidráulico 2 1250 2500
Motor Hidráulico 1 1200 1200
Rodas 8 20 160
Pinos 16 80 1280
TOTAL 9481,01
Quadro 8.1: Custo dos principais materiais
Mão de obra Quantidade H/h Horas Trabalhadas Custo Total (R$)
Pintor 1 10 8 80
Mecânico 2 15 8 240
Soldador 1 15 8 120
Torneiro 2 18 8 288
TOTAL 728,00
Quadro 8.2: Custo da mão de obra

115
Para se obter o custo total estimado para o projeto, basta somar as 2 parcelas referentes
aos totais encontrados nos quadros 8.1 e 8.2. Dessa maneira encontramos o valor total para o
projeto sendo de R$10209,00.
Esse valor é somente um número aproximado, já que nem todos os componentes e
acessórios da plataforma foram levados em conta. Além disso, podem haver distorções em
relação ao custo real para a fabricação do sistema, seja no valor da matéria prima ou da mão
de obra.
Ainda assim vale ressaltar que modelos semelhantes de plataformas pantográficas
foram encontradas disponíveis por valores na faixa de R$12000,00 a R$17000,00. Portanto o
trabalho apresenta viabilidade econômica e competitividade no mercado, levando em
consideração as ressalvas já feitas.

116
9 CONCLUSÕES
O projeto desenvolvido se propôs a apresentar todas as etapas necessárias para a
concepção de um elevador pantográfico para elevação de veículos até 3000Kg em oficinas
mecânicas.
Esse tipo de equipamento representa uma grande evolução em relação a seus
concorrentes diretos, permitindo um trabalho mais rápido e ocupando menos espaço físico,
criando a oportunidade do empreendedor maximizar seus lucros através da otimização do
local de trabalho. Além disso sua estrutura simples demanda pouco tempo para instalação,
inspeção e manutenção e também é de fácil utilização por parte dos funcionários.
Para o dimensionamento do elevador foi adotada a estratégia de primeiramente
escolher as características que gostaríamos de obter para seu uso e a partir disso realizar os
cálculos que englobassem tanto a estrutura quanto os mecanismos e acessórios. Neles foram
verificados os critérios de resistência, contra fadiga e flambagem para mostrar que a
plataforma resiste a todas as solicitações impostas.
O trabalho permitiu que fossem utilizados muitos dos conceitos vistos ao longo do
curso de graduação em engenharia mecânica e também possibilitou o contato com normas
técnicas, principalmente a NBR8400, além do uso de catálogos de fornecedoras para a escolha
dos melhores componentes capazes de atender as exigências de operação.
Os resultados obtidos pelas análises se revelam compatíveis com a realidade
encontrada no mercado, sendo prova da qualidade do trabalho feito.

117
O projeto também possibilitou um grande aprendizado em softwares como Solidworks
e FTOOL, ferramentas que foram fundamentais no dimensionamento da plataforma e
simulação dos esforços. Aprendizado esse que é valioso na carreira de um engenheiro
mecânico e complementa a formação acadêmica.
Por fim, chegou-se à conclusão que o projeto apresenta viabilidade técnica e
econômica, tendo sido apresentado o necessário para a fabricação dos seus principais
mecanismos por um valor factível.
Vale destacar que o pouco tempo disponível deixa margens para um maior
detalhamento da estrutura e permite a criação de novas soluções para os problemas
encontrados.

118
10 TRABALHOS FUTUROS
Durante o desenvolvimento do trabalho notou-se algumas possibilidades de melhoria
que podem ser utilizadas por outros grupos em trabalhos futuros para se obter um maior
aprofundamento nas questões aqui levantadas:
Realizar estudo das tensões para alturas intermediárias da plataforma, além da
altura máxima. O objetivo inicial do estudo incluía uma análise para altura de
1,2 m mas foi descartada por falta de tempo para sua conclusão;
Estudo mais detalhado da posição da carga pelo movimento do equipamento
(centro de massa do automóvel varia, estando mais próximo da extremidade
do mesmo, pois o motor possui elevado peso);
Detalhar o sistema de acionamento hidráulico, fazendo a seleção de todos os
acessórios necessários além daqueles aqui vistos e elaboração do circuito
hidráulico adequado;
Descrição detalhada dos dispositivos de segurança e seu dimensionamento;
Considerar os elementos de fixação e suporte da estrutura para evitar
retrabalho no dimensionamento das hastes;
Otimização da estrutura, buscando selecionar os melhores tamanhos e perfis
para executar o trabalho desejado;
Uso de um software capaz de realizar análise por elementos finitos visando
obter os melhores valores para o equipamento;
119
11 REFERÊNCIAS BIBLIOGRÁFICAS
BEER, Ferdinand P.; JOHNSTON Jr, E Russell.; EINSENBERG, Elliot R. “Mecanica
Vetorial para Engenheiros”. 7º edição.
CARVALHO, Alessandra; SILVA, Diego; Projeto de Equipamento para elevação de carga:
Mesa Pantográfica, UFF - Niterói, 2012.
CISER disponível em: http://www.ciser.com.br/htcms/media/pdf/tabela-de-
precos/br/informacoes_tecnicas.pdf
GALVAÇO disponível em: http://www.galvaco.com.br/aco-laminado-produtos-siderurgicos-
ferro-aco-saopaulo-guarulhos.html
GERDAU disponível em: https://www.comercialgerdau.com.br/pt/produtos/catalogos
GLOBO disponível em: http://www.acosglobo.com.br/pdf/chapas_grossas.pdf
HARD disponível em: http://www.hard.com.br/wp-content/uploads/2016/02/BT_Linha-
ASTM-A325.pdf
HIBBELER. “Estática Mecânica para engenharia”. Editora Pearson, 12 º Edição. São Paulo,
2010.

120
INDUFIX disponível em: http://www.indufix.com.br/produtos-parafusos-porcas-arruelas
NORMA NBR 8400. “Cálculo de equipamento para levantamento e movimentação de
cargas”, 1984.
PAMPLONA, Prof. Carlos Fernando M. Resistências dos Materiais, 2008.
RAVEN disponível em: < http://www.ravenelevadores.com.br/>
RENOX disponível em: <http://www.acosrenox.com.br/catalogo-de-produtos.html>
ROKIN disponível em: < http://rokim.com.br/ >
SCHIOPPA disponível em: https://www.schioppa.com.br/pt/rodas-rodizios/index/7
SHIGLEY, JOSEPH EDWARD. “Elementos de máquinas 1”. Livros Técnicos e Científicos
Editora S.A, 1º Edição, Rio de Janeiro, 1984.
SKYLIGHT disponível em: < http://www.skylightestruturas.com.br/uamericano.asp]>
TUPER disponível em: http://www.tuper.com.br/media-center/central-de-downloads/
VIEIRA, Ronaldo, Anotações de aula da disciplina Projetos de Máquinas, 1º semestre de
2016
WILLIAN disponível em: <http://www.profwillian.com/estruturas/lista01-hiperestatica-
metodo_carga_unitaria_gab.pdf>
YOUNG, Warren C.; BUDYNAS, Richard G. “Roark’s Formulas for Stress and Strain”. 7º
edição. Ed. McGraw-Hill.
SANTAROL disponível em: http://www.santarol.com.br/catalogo/FRM%20-
%20Mancais%20e%20Rolamentos.pdf>

121
ANEXO
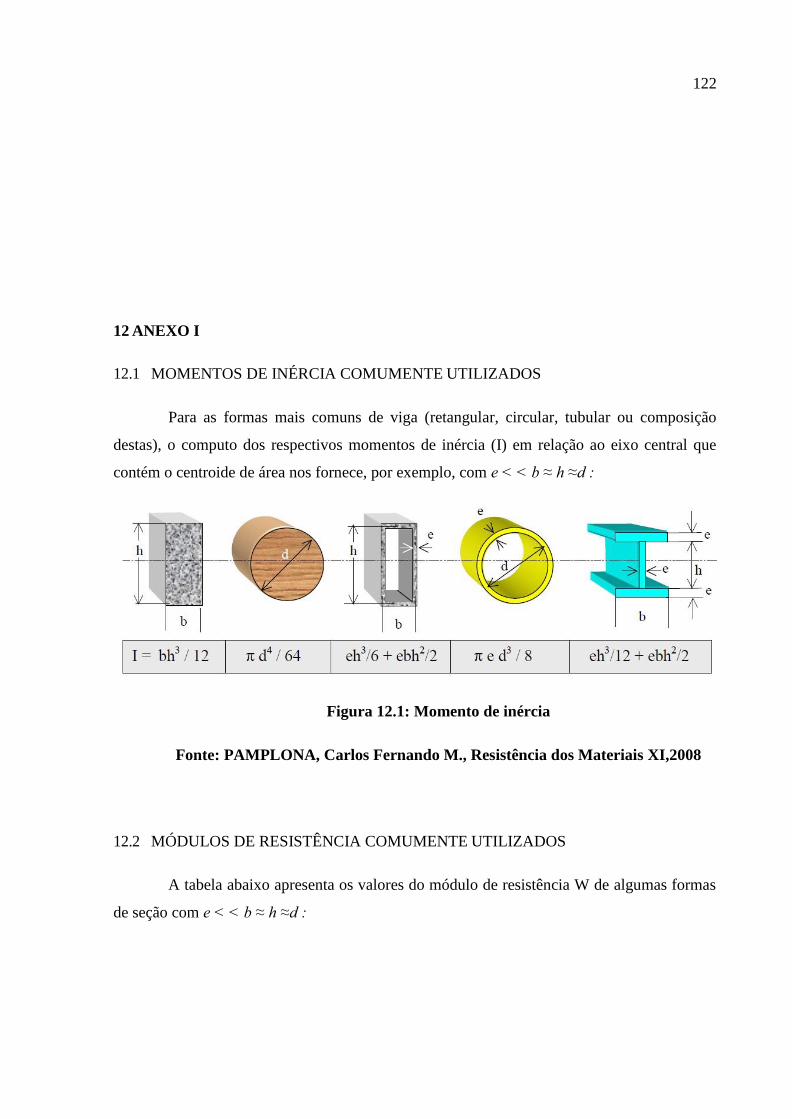
122
12 ANEXO I
12.1 MOMENTOS DE INÉRCIA COMUMENTE UTILIZADOS
Para as formas mais comuns de viga (retangular, circular, tubular ou composição
destas), o computo dos respectivos momentos de inércia (I) em relação ao eixo central que
contém o centroide de área nos fornece, por exemplo, com e ˂ ˂ b ≈ h ≈d :
Figura 12.1: Momento de inércia
Fonte: PAMPLONA, Carlos Fernando M., Resistência dos Materiais XI,2008
12.2 MÓDULOS DE RESISTÊNCIA COMUMENTE UTILIZADOS
A tabela abaixo apresenta os valores do módulo de resistência W de algumas formas
de seção com e ˂ ˂ b ≈ h ≈d :

123
Figura 12.2: Módulo de resistência
Fonte: PAMPLONA, Carlos Fernando M., Resistência dos Materiais XI,2008
12.3 PROPRIEDADES MECÂNICAS ASTM A36
As mesas, hastes e bases da plataforma pantográfica são fabricadas do aço estrutural
ASTM A36.
Quadro 12.1: Propriedades mecânicas do aço ASTM A36
Fonte: PAMPLONA, Carlos Fernando M., Tabelas, Apêndice C, 2008

124
12.4 PROPRIEDADES MECÂNICAS DOS PINOS
Os pinos são fabricados em aço AISI 1060 laminado.
Quadro 12.2: Propriedades mecânicas AISI 1060
Fonte: http://lgsteel.com.br/propriedades-mecanicas-do-carbono.htm
12.5 PROPRIEDADES MECÂNICAS DO AÇO A325
Os parafusos de fixação das rodas nas hastes são fabricados de aço ASTM A 325.

125
Tabela 12.1: Propriedades mecânicas parafuso
Fonte:http:www.ciser.com.br/htcms/media/pdf/tabeladeprecos/br/informacoes_tecnicas.
12.6 PERFIL U
As mesas da plataforma pantográfica possuem perfil U.
Tabela 12.2: Dimensões da mesa
Fonte: http://www.skylightestruturas.com.br/uamericano.asp
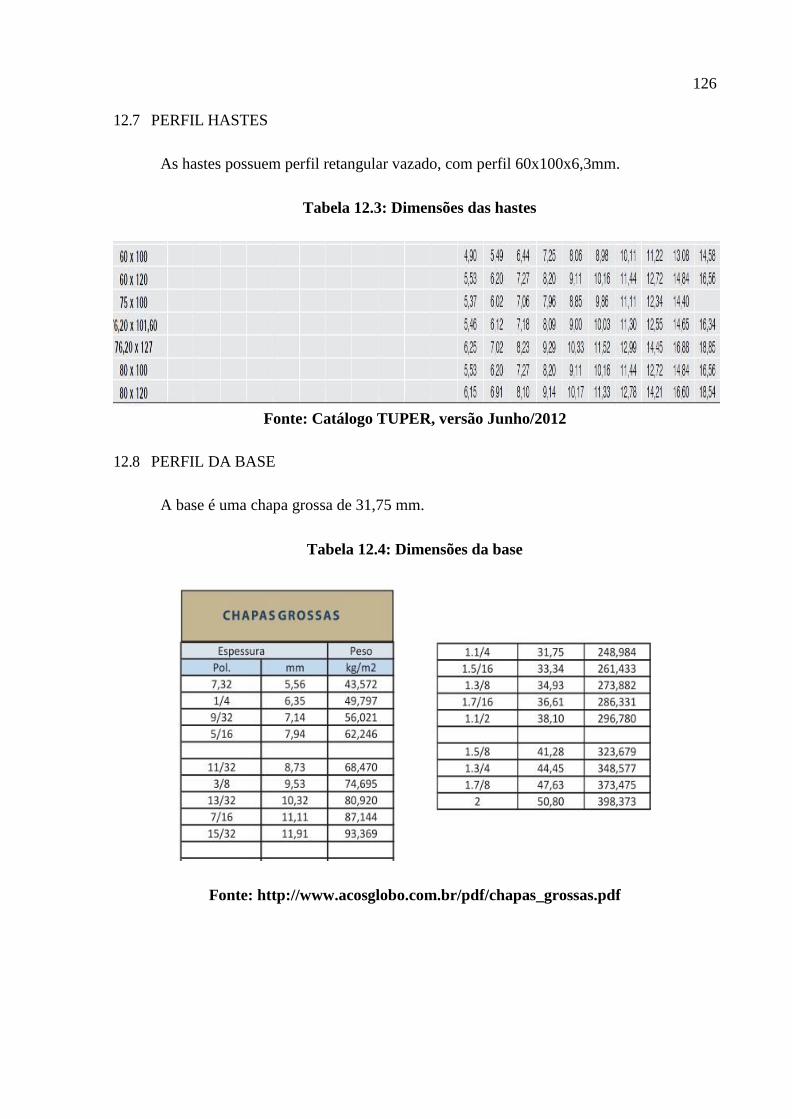
126
12.7 PERFIL HASTES
As hastes possuem perfil retangular vazado, com perfil 60x100x6,3mm.
Tabela 12.3: Dimensões das hastes
Fonte: Catálogo TUPER, versão Junho/2012
12.8 PERFIL DA BASE
A base é uma chapa grossa de 31,75 mm.
Tabela 12.4: Dimensões da base
Fonte: http://www.acosglobo.com.br/pdf/chapas_grossas.pdf

127
12.9 PARAFUSOS
Os parafusos para fixação das rodas nas hastes e os parafusos de fixação dos trilhos na
base e na mesa, possuem diâmetro de 12,7 mm, e comprimentos de 152,4 mm e 31,75 mm,
respectivamente.
Tabela 12.5: Diâmetro do parafuso
Fonte: Catálogo INDUFIX
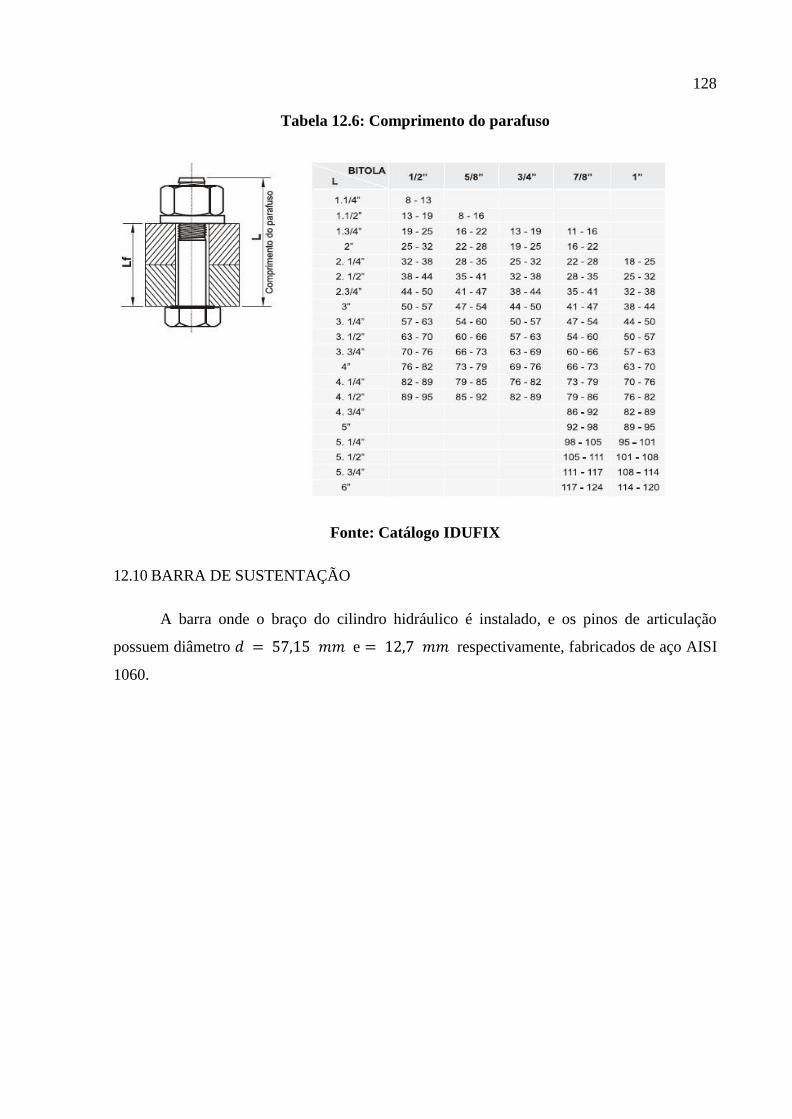
128
Tabela 12.6: Comprimento do parafuso
Fonte: Catálogo IDUFIX
12.10 BARRA DE SUSTENTAÇÃO
A barra onde o braço do cilindro hidráulico é instalado, e os pinos de articulação
possuem diâmetro 𝑑 = 57,15 𝑚𝑚 e = 12,7 𝑚𝑚 respectivamente, fabricados de aço AISI
1060.

129
Tabela 12.7: Dimensões do pino e barra que sustenta o pistão
Fonte: http://www.acosrenox.com.br/catalogo-de-produtos.html
12.11 TRILHOS PERFIL U
Os trilhos superiores e inferiores que delimitam a região onde as rodam caminham,
possuem dimensões iguais a 101,6x41,8x6,27 mm.

130
Tabela 12.8: Trilhos em perfil U
Fonte: http://www.skylightestruturas.com.br/uamericano.asp

131
12.12 RODAS
Tabela 12.9: Dimensões da roda
Fonte: Catálogo Schioppa 19/2010
12.13 TENSÃO CISALHAMENTO MÁXIM
Da Apostila de Resistência dos Materiais XI do Professor Carlos Fernando M.
Pamplona, são tiradas as relações para calculo da tensão de cisalhamento. Os perfis utilizados
no presente trabalho são os perfis retangulares vazados e circulares de seção cheia. Para as
hastes retangulares vazadas foi realizada interpolação.
0,6 − 1 =
0,5 − 1
𝜉 − 2,25
1,80 − 2,25

132
𝜉 = 1,89
Tabela 12.10: Tensão de cisalhamento máxima
Fonte: PAMPLONA, Carlos Fernando M., Capítulo 6, pág. 8
12.14 MONTAGEM DOS PINOS
Os pinos de articulação são montados a partir de um conjunto composto por uma barra
cilíndrica, uma bucha de bronze (que atua como um mancal sendo utilizada para reduzir o
atrito e facilita o giro das hastes), e um tubo circular vazado.

133
Tabela 12.11: Tubo circular
Fonte: http://www.galvaco.com.br/tubos-industriais-redondos.html

134
Tabela 12.12: Dimensões da bucha de bronze
Fonte: http://www.galvaco.com.br/buchas-de-bronze.html

135
12.15 MANCAL DE ROLAMENTO
Tabela 12.13: Mancal de rolamento de fixação do pistão com a barra circular
Fonte: http://www.timken.com/pt-br/products/pages/catalogs.aspx

136
Apêndices

137
13 APENDICE
13.1 – CÁLCULOS DA MESA A PARTIR DE UMA CHAPA
Inicialmente foi proposto a utilização de uma chapa grossa de chapa de aço ASTM
A36, para servir como a mesa de apoio para o veículo na plataforma pantográfica. Essa ideia
foi vencida, pois a deflexão da mesa não seria tolerável pela Norma NBR 8400. A seguir são
fornecidas as propriedades do material inicialmente escolhido.
Figura 13.1: Mesa a partir de uma chapa plana.
Fonte: Dos autores (2016) software Autocad®.

138
4
3
Massa
[kg]
Comprimento
[mm]
Largura
[mm]
Espessura
[mm]
Momento inércia
𝑚𝑚4
129,5 1500 550 20 366000
Quadro 13.1: Propriedades da chapa
Fonte: Catálogo GERDAU
A deflexão total da mesa é dada pela soma da deflexão causada pelo próprio peso da
mesa e pela deflexão causada pela carga aplicada.
𝛿𝑡𝑜𝑡𝑎𝑙 = 𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜+ 𝛿𝑐𝑎𝑟𝑔𝑎
→ Deflexão devido ao peso próprio (𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜)
A deflexão que ocorre devido ao peso próprio é calculada da seguinte maneira:
δ = 5𝑞𝐿 384𝐸𝐼
Fazendo, tem-se:
δ =
5 𝑥 497 𝑥 1,54
384 𝑥 200 𝑥 10 9𝑥 3,66𝑥 10−7
= 0,44 mm
→ Deflexão devido à carga (𝛿𝑐𝑎𝑟𝑔𝑎)
A deflexão que ocorre devido a carga é calculada da seguinte maneira, recordando
que P é a carga máxima suportada (aplicada na estrutura).
Fazendo, tem-se:
δ = 𝑃𝐿 48𝐸𝐼

139
14700 𝑥 1,53 δ =
48 𝑥 200 𝑥 10 9𝑥 3,66 𝑥 10−7
= 14,12 mm
→ Deflexão total (𝛿𝑡𝑜𝑡𝑎𝑙 )
A deflexão total será dada pela soma da deflexão devido ao peso próprio da mesa
(viga u) e deflexão devido a carga aplicada, da equação (3.9), obtém-se.
𝛿𝑡𝑜𝑡𝑎𝑙 = 𝛿𝑝𝑒𝑠𝑜 𝑝𝑟ó𝑝𝑟𝑖𝑜+ 𝛿𝑐𝑎𝑟𝑔𝑎 = 0,44 + 14,12 = 14, 64 mm
Por isso foi descarta a possibilidade de sua utilização, pois não atendia os requisitos
para suportar o carregamento.