otimizaÇÃo em problemas de
TRANSCRIPT
OTIMIZAÇÃO EM PROBLEMAS DE
ENGENHARIA CIVIL
ELIZABETH CHRISTINE MARINS VALENTE
Dissertação submetida para satisfação parcial dos requisitos do grau de
MESTRE EM ESTRUTURAS DE ENGENHARIA CIVIL
Orientador: Professor Doutor Álvaro Ferreira Marques Azevedo
SETEMBRO DE 2020
MESTRADO EM ESTRUTURAS DE ENGENHARIA CIVIL 2019/2020
DEPARTAMENTO DE ENGENHARIA CIVIL
Tel. +351-22-508 1901
Fax +351-22-508 1440
Editado por
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Rua Dr. Roberto Frias
4200-465 PORTO
Portugal
Tel. +351-22-508 1400
Fax +351-22-508 1440
http://www.fe.up.pt
Reproduções parciais deste documento serão autorizadas na condição que seja
mencionado o Autor e feita referência a Mestrado em Estruturas de Engenharia Civil -
2019/2020 - Departamento de Engenharia Civil, Faculdade de Engenharia da
Universidade do Porto, Porto, Portugal, 2020.
As opiniões e informações incluídas neste documento representam unicamente o ponto
de vista do respetivo Autor, não podendo o Editor aceitar qualquer responsabilidade
legal ou outra em relação a erros ou omissões que possam existir.
Este documento foi produzido a partir de versão eletrónica fornecida pelo respetivo
Autor.

Otimização em Problemas de Engenharia Civil
Aos meus pais
Que a gente entenda que para tudo há um propósito.
Que não deixemos de sonhar, de acreditar, de amar, de fazer o bem.
Aline Duarte

Otimização em Problemas de Engenharia Civil
i
AGRADECIMENTOS
Expresso primeiramente a minha gratidão à Deus, por guiar todos os meus caminhos.
À minha família, sobretudo aos meus pais, por todo amor e confiança dados a mim, por sempre darem
o melhor de si em prol da minha educação. Que apesar da distância fizeram-se presentes encorajando-
me diante das minhas inseguranças.
Ao professor e orientador Álvaro Azevedo, pela atenção e orientação apresentada, por toda paciência
para solucionar as dúvidas e dificuldades que surgiram ao longo do desenvolvimento deste trabalho.
Ao meu namorado, pelo amor e paciência durante essa jornada.
Aos amigos que fiz durante o mestrado e aos amigos do Brasil, pelo apoio e carinho nos momentos
difíceis, por todo companheirismo demonstrado.
Aos professores da FEUP, por todo conhecimento transmitido, por toda atenção e dedicação para
conosco.

Otimização em Problemas de Engenharia Civil
iii
RESUMO
O principal objetivo de um projetista de estruturas é a procura da melhor solução que respeita
simultaneamente os diversos requisitos de segurança e desempenho. Porém, na prática, não se pode
afirmar que a solução encontrada pelo projetista é a solução mais económica para o projeto, visto que é
baseada apenas na sua intuição e experiência. Para ultrapassar este inconveniente é possível recorrer à
otimização de estruturas, que na generalidade dos casos procura determinar a solução que torna mínimo
o custo, sem que a estrutura perca a sua utilidade, respeitando assim as exigências relativas à sua
segurança e desempenho.
Do conjunto de parâmetros que definem a solução estrutural, seleciona-se previamente as grandezas que
se pretende modificar e que constituem o principal critério de classificação de problemas de otimização
de estruturas. Secções transversais de estruturas reticuladas, espessuras de meios laminares e
coordenadas de nós são alguns exemplos que condicionam a classificação dos problemas.
No presente trabalho é efetuada uma abordagem genérica dos problemas de otimização na engenharia
civil, através da formulação de programas matemáticos correspondentes a minimizações de custos ou
volumes que são possíveis funções objetivo do problema. As exigências relativas à segurança e
desempenho correspondem às restrições igualdade e desigualdade, e diversas grandezas figuram como
variáveis de projeto.
Para a resolução dos programas matemáticos correspondentes aos problemas de otimização abordados
neste trabalho recorre-se ao uso dos softwares EXCEL, com a utilização da ferramenta Solver, e
MATLAB, através da função Fmincon. Estes softwares utilizam diversos métodos numéricos no âmbito
do seu funcionamento. Através da comparação dos resultados obtidos com os dois softwares utilizados
é possível observar o seu bom desempenho na resolução dos problemas de otimização abordados.
PALAVRAS-CHAVE: Otimização, Engenharia civil, Minimização de custo, Solver, Fmincon.


Otimização em Problemas de Engenharia Civil
v
ABSTRACT
The main objective of a structural engineer is the search for the best solution that simultaneously takes
into account all the requirements of safety and performance. However, in practice, there is no guarantee
that the solution adopted by the engineer is the most economical, since it is only based on his intuition
and experience. This solution can be improved using a structural optimization tool that, in most cases,
finds for the solution that minimizes the cost, without compromising the safety and performance of the
structure.
In the set of parameters that define the structural solution, the quantities that can be modified constitute
the main criterion for the classification of structural optimization problems. Cross sections of frame
structures, thickness of plate elements and nodal coordinates are some examples of parameters that can
be used to provide a classification of optimization problems.
This dissertation presents a generic approach to optimization problems in civil engineering, through the
formulation of mathematical programs where the minimization of the cost or volume is the main goal,
being these the most common objective functions. The requirements related to safety and performance
correspond to a set equality and inequality constraints, and the quantities that define the solution are the
design variables.
To solve the mathematical programs that correspond to the optimization problems considered in this
dissertation, the EXCEL software is used, with the associated Solver tool, and also the Fmincon function
available in MATLAB. These tools utilize several numerical methods in their operation. By comparing
the results obtained with these software packages, it is possible to observe their good performance in the
solution of the proposed optimization problems.
KEYWORDS: Optimization, Civil engineering, Cost minimization, Solver, Fmincon

Otimização em Problemas de Engenharia Civil
vii
ÍNDICE GERAL
AGRADECIMENTOS.............................................................................................................................. i
RESUMO ............................................................................................................................................ iii
ABSTRACT ......................................................................................................................................... v
1. INTRODUÇÃO ............................................................................................................. 1
2. OTIMIZAÇÃO ............................................................................................................... 3
2.1. GENERALIDADES ....................................................................................................................... 3
2.1.1. FORMULAÇÃO DO PROGRAMA MATEMÁTICO .................................................................................. 3
2.1.2. COMPONENTES DO PROGRAMA MATEMÁTICO ................................................................................ 7
2.1.2.1. Variáveis de projeto ............................................................................................................... 7
2.1.2.2. Função objetivo ..................................................................................................................... 8
2.1.2.3. Restrições igualdade e desigualdade..................................................................................... 8
2.2. INTERESSES E LIMITAÇÕES ....................................................................................................... 9
2.3. PROBLEMAS DE OTIMIZAÇÃO APLICADOS À ENGENHARIA CIVIL .............................................10
2.4.1. OTIMIZAÇÃO DAS SECÇÕES TRANSVERSAIS ...................................................................................10
2.4.2. OTIMIZAÇÃO DE ESPESSURAS......................................................................................................10
2.4.3. OTIMIZAÇÃO DE FORMAS ............................................................................................................10
2.4.4. OTIMIZAÇÃO DE APOIO À DECISÃO ................................................................................................11
2.4.5. OTIMIZAÇÃO DE MATERIAIS .........................................................................................................11
2.4.6. OTIMIZAÇÃO DE TOPOLOGIA ........................................................................................................11
3. MÉTODOS DE OTIMIZAÇÃO........................................................................13
3.1. A FERRAMENTA SOLVER DO EXCEL .......................................................................................15
3.1.1. MÉTODOS DE OTIMIZAÇÃO UTILIZADOS PELA FERRAMENTA SOLVER .................................................15
3.1.1.1. Método LP Simplex ..............................................................................................................16
3.1.1.2. Método GRG (Gradiente Reduzido Generalizado) Não linear ...............................................17
3.1.1.3. Método Evolucionário ...........................................................................................................19
3.2. A FUNÇÃO FMINCON DO MATLAB ..........................................................................................19
3.2.1. MÉTODOS DE OTIMIZAÇÃO UTILIZADOS PELA FUNÇÃO FMINCON .......................................................21
3.2.1.1. Método Interior-Point ............................................................................................................21
Otimização em Problemas de Engenharia Civil
viii
3.2.1.2. Método Trust-Region-Reflective ........................................................................................... 23
3.2.1.3. Método SQP e SQP-Legacy ................................................................................................. 24
3.2.1.4. Método Active-Set ................................................................................................................ 24
4. APLICAÇÃO A PROBLEMAS SIMPLES DE ENGENHARIA E PROBLEMAS DE TESTE ............................................................................ 27
4.1. BARRAGEM GRAVIDADE COM TRÊS VARIÁVEIS ........................................................................ 27
4.1.1. APLICAÇÃO DO PROBLEMA DE MINIMIZAÇÃO AO MATLAB............................................................... 33
4.1.2. APLICAÇÃO DO PROBLEMA DE MINIMIZAÇÃO AO EXCEL ................................................................. 35
4.1.3. SOLUÇÕES ENCONTRADAS PELOS SOFTWARES ............................................................................. 37
4.2. POSTO DISTRIBUIDOR DE ENERGIA ELÉTRICA .......................................................................... 39
4.3. TANQUE CILÍNDRICO ................................................................................................................. 46
4.4. PROBLEMAS DE TESTE ............................................................................................................. 48
4.4.1. FUNÇÃO COM RESTRIÇÕES LINEARES DE IGUALDADE E DESIGUALDADE ............................................ 48
4.4.2. FUNÇÃO COM RESTRIÇÕES NÃO LINEARES E LINEARES DE DESIGUALDADE ........................................ 51
4.4.3. FUNÇÃO DE ROSENBROCK .......................................................................................................... 53
5. APLICAÇÃO A PROBLEMAS DE ENGENHARIA CIVIL ...... 57
5.1. COBERTURA PARA HIPERMERCADO ......................................................................................... 57
5.2. BARRAGEM GRAVIDADE COM OITO VARIÁVEIS ......................................................................... 82
5.3. TRELIÇA COM TRÊS BARRAS .................................................................................................. 114
6. CONCLUSÃO ............................................................................................................ 131
6.1. OBSERVAÇÕES FINAIS............................................................................................................ 131
6.2. SUGESTÕES PARA TRABALHOS FUTUROS.............................................................................. 132
REFERÊNCIAS BIBLIOGRÁFICAS .................................................................................................... 133
Otimização em Problemas de Engenharia Civil
ix
ÍNDICE DE FIGURAS
Fig. 2.1 – Região admissível das restrições 𝑥1 + 𝑥2 = 0 e 𝑥12 + 𝑥2
2 ≤ 1. ............................................... 4
Fig. 2.2 – Representação gráfica de problemas de maximização e minimização. ............................... 5
Fig. 2.3 – Representação gráfica dos pontos ótimos........................................................................... 6
Fig. 2.4 – Representação gráfica sujeita a restrições igualdade e desigualdade. Adaptado de Arora
(1989). ............................................................................................................................................... 9
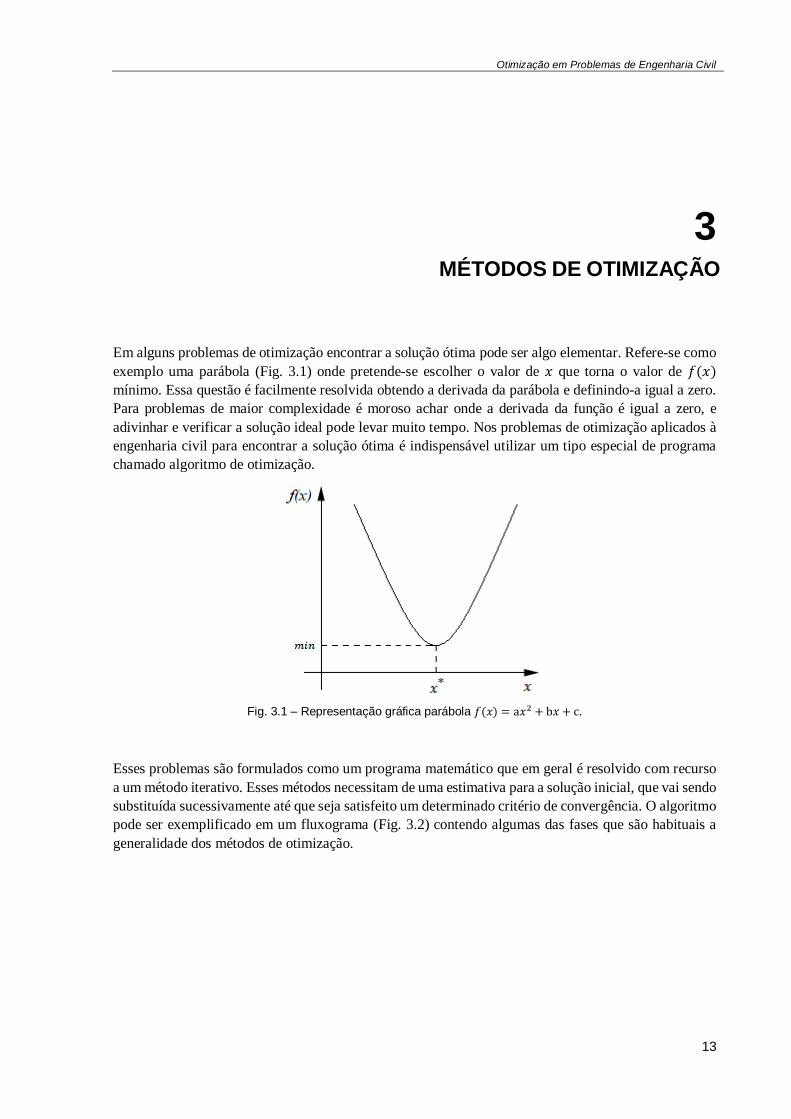
Fig. 3.1 – Representação gráfica parábola 𝑓(𝑥) = a𝑥2 + b𝑥 + c. ........................................................13
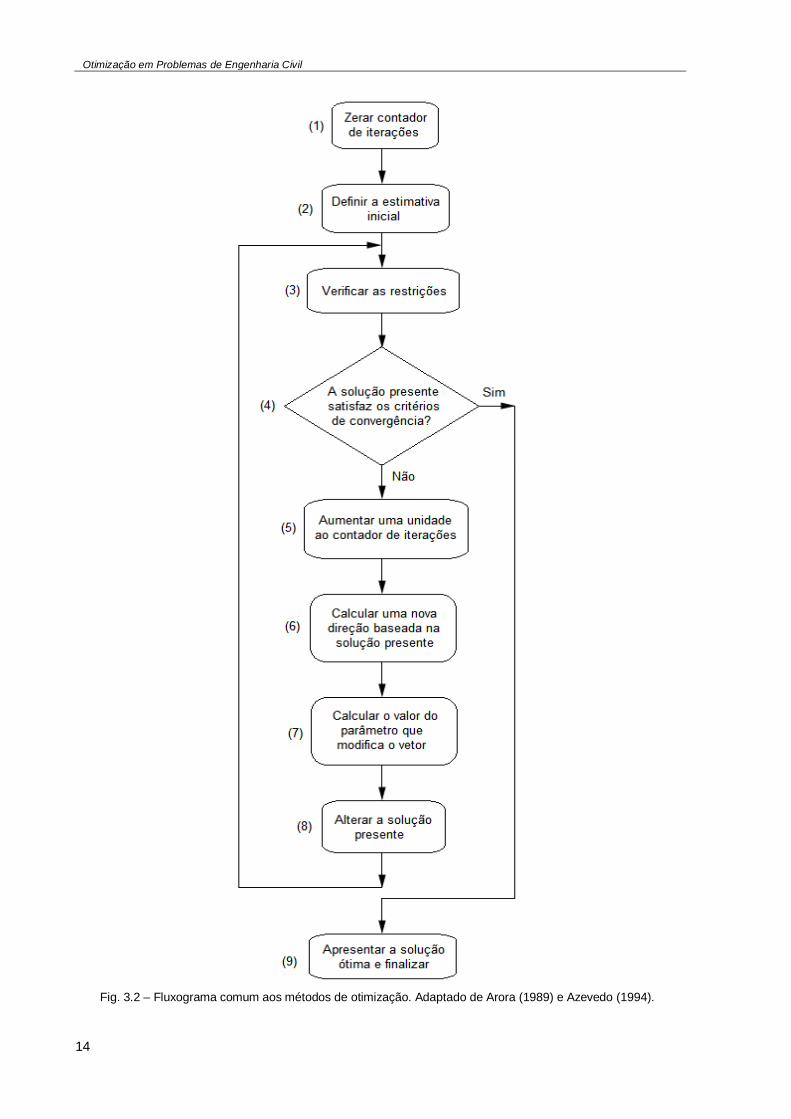
Fig. 3.2 – Fluxograma comum aos métodos de otimização. Adaptado de Arora (1989) e Azevedo (1994).
.........................................................................................................................................................14
Fig. 4.1 – Barragem gravidade com três variáveis. ............................................................................27
Fig. 4.2 – Diagrama de tensões. ........................................................................................................28
Fig. 4.3 – Folha de cálculo do EXCEL contendo o problema de otimização. ......................................36
Fig. 4.4 – Definição dos parâmetros do Solver. .................................................................................37
Fig. 4.5 – Esquema ilustrativo de ligação dos cabos ao posto distribuidor P. .....................................40
Fig. 4.6 – Folha de cálculo do EXCEL contendo o problema do posto distribuidor. ............................43
Fig. 4.7 – a) e b) Definição dos parâmetros do Solver para a minimização do comprimento do cabo. 45
Fig. 4.8 – Representação do comprimento do cabo otimizado. ..........................................................46
Fig. 4.9 – Folha de cálculo do EXCEL contendo o problema de minimização do volume do tanque. ..47
Fig. 4.10 – Definição dos parâmetros do Solver para a minimização do volume do tanque. ...............48
Fig. 4.11 – Folha de cálculo do EXCEL contendo o problema de minimização da função quadrática
sujeita às restrições lineares. ............................................................................................................50
Fig. 4.12 – Definição dos parâmetros do Solver para a minimização da função quadrática sujeita às
restrições lineares. ............................................................................................................................50
Fig. 4.13 – Folha de cálculo do EXCEL contendo o problema de minimização da função quadrática
sujeita às restrições não lineares.......................................................................................................52
Fig. 4.14 – Definição dos parâmetros do Solver para a minimização da função quadrática sujeita às
restrições não lineares. .....................................................................................................................53
Fig. 4.15 – Folha de cálculo do EXCEL contendo o problema de minimização da função de Rosenbrock.
.........................................................................................................................................................55
Fig. 4.16 – Definição dos parâmetros do Solver para a minimização da função de Rosenbrock. ........55
Fig. 4.17 – Representação das curvas de nível da função de Rosenbrock com o ponto mínimo. .......56
Fig. 5.1 – Esquema ilustrativo da cobertura. ......................................................................................58
Fig. 5.2 – Chapa trapezoidal. ............................................................................................................59
Fig. 5.3 – Linha de tendência Ac (tc) na chapa. ..................................................................................60
Fig. 5.4 – Linha de tendência Ycg (tc) na chapa. .................................................................................60
Otimização em Problemas de Engenharia Civil
x
Fig. 5.5 – Linha de tendência Ycg,sup (tc) na chapa.............................................................................. 61
Fig. 5.6 – Tabela com os valores das cargas resistentes em kN/m² [24]. ........................................... 62
Fig. 5.7 – Perfil Superomega utilizado nas madres M. ....................................................................... 63
Fig. 5.8 – Linha de tendência AM (HM) na madre. ............................................................................... 63
Fig. 5.9 – Linha de tendência IM (HM) na madre. ................................................................................ 64
Fig. 5.10 – Linha de tendência Zcg (HM) na madre. ............................................................................ 65
Fig. 5.11 – Perfil IPE utilizado nas vigas V. ....................................................................................... 67
Fig. 5.12 – Linha de tendência HV (AV) na viga. ................................................................................. 68
Fig. 5.13 – Linha de tendência HV (IV) na viga. .................................................................................. 69
Fig. 5.14 – Setor que se repete em ambas as direções (𝑥1e 𝑥2). ....................................................... 72
Fig. 5.15 – Folha de cálculo do EXCEL contendo o problema de minimização do custo da cobertura.
......................................................................................................................................................... 78
Fig. 5.16 – a), b) e c) Definição dos parâmetros do Solver para a minimização do custo da cobertura.
......................................................................................................................................................... 80
Fig. 5.17 – Valor da carga resistente em kN/m² para o vão de 1.5 m [24]. ......................................... 81
Fig. 5.18 – Barragem gravidade com oito variáveis. .......................................................................... 82
Fig. 5.19 – Folha de cálculo do EXCEL contendo o problema de minimização do volume da barragem
de oito variáveis. ............................................................................................................................. 110
Fig. 5.20 – a), b), c) e d) Definição dos parâmetros do Solver para a minimização do volume da
barragem de oito variáveis. ............................................................................................................. 113
Fig. 5.21 – Treliça com três barras e dois casos de carga. .............................................................. 114
Fig. 5.22 – Perfil tubular de secção circular. .................................................................................... 117
Fig. 5.23 – Linha de tendência 𝜒 ∙ 𝑓𝑦(A) para as barras 1 e 3. ......................................................... 118
Fig. 5.24 – Linha de tendência 𝜒 ∙ 𝑓𝑦(A) para barra 2. ..................................................................... 120
Fig. 5.25 – Folha de cálculo do EXCEL contendo o problema de minimização do custo da treliça. .. 128
Fig. 5.26 – a) e b) Definição dos parâmetros do Solver para a minimização do custo da treliça. ...... 130
Otimização em Problemas de Engenharia Civil
xi
ÍNDICE DE QUADROS
Quadro 2.1 – Particularidade das variáveis, função objetivo e restrições. ........................................... 6
Quadro 3.1 – Sintaxe da função Fmincon. .........................................................................................20
Quadro 4.1 – Comparação entre os resultados obtidos com os softwares MATLAB, EXCEL e NEWTOP.
.........................................................................................................................................................39
Quadro 4.2 – Comparação entre os resultados obtidos para a minimização do comprimento do cabo.
.........................................................................................................................................................45
Quadro 4.3 – Comparação entre os resultados obtidos para a minimização do custo do tanque. .......48
Quadro 4.4 – Comparação entre os resultados obtidos para a função com restrições lineares ..........51
Quadro 4.5 – Comparação entre os resultados obtidos para a função com restrições polinomial e linear.
.........................................................................................................................................................53
Quadro 4.6 – Comparação entre os resultados obtidos para a função de Rosenbrock. ......................56
Quadro 5.1 – Chapas utilizadas para a cobertura Ac (tc). ...................................................................59
Quadro 5.2 – Chapas utilizadas para a cobertura Ycg (tc). ..................................................................60
Quadro 5.3 – Chapas utilizadas para a cobertura Ycg,sup (tc). ..............................................................61
Quadro 5.4 – Gama de perfis utilizada na madre AM (HM). .................................................................63
Quadro 5.5 – Gama de perfis utilizada na madre IM (HM) ....................................................................64
Quadro 5.6 – Gama de perfis utilizada na madre Zcg (HM). .................................................................64
Quadro 5.7 – Gama de perfis utilizada na viga AV (HV). .....................................................................67
Quadro 5.8 – Gama de perfis utilizada na viga IV (HV)........................................................................68
Quadro 5.9 – Comparação entre os resultados obtidos para o problema da cobertura. ......................80
Quadro 5.10 – Resultados obtidos para o problema da cobertura utilizando aproximações. ..............81
Quadro 5.11 – Porcentagem de redução do custo da solução sem e com otimização. .......................82
Quadro 5.12 – Resultados obtidos na minimização do volume da barragem com oito variáveis. ......113
Quadro 5.13 – Gama de perfis utilizada na treliça e respectivos valores de 𝜒 ∙ 𝑓𝑦 para a barra 1 e 3
.......................................................................................................................................................118
Quadro 5.14 – Gama de perfis utilizada na treliça e respectivos valores de 𝜒 ∙ 𝑓𝑦 para a barra 2. ....120
Quadro 5.15 – Comparação entre os resultados obtidos para o problema da treliça. .......................130
Quadro 5.16 – Solução obtida para o problema da treliça utilizando aproximações. ........................130

Otimização em Problemas de Engenharia Civil
xii
Otimização em Problemas de Engenharia Civil
xiii
ÍNDICE DE SCRIPTS
Script 4.1 – Programa matemático da barragem de três variáveis correspondente às restrições não
lineares. ............................................................................................................................................34
Script 4.2 – Programa matemático da barragem de três variáveis correspondente ao programa principal.
.........................................................................................................................................................34
Script 4.3 – Programa matemático relativo ao software NEWTOP para o problema da barragem. .....37
Script 4.4 – Programa matemático do posto distribuidor correspondente às restrições não lineares...41
Script 4.5 – Programa matemático do posto distribuidor correspondente ao programa principal ........41
Script 4.6 – Programa matemático correspondente à minimização do custo do tanque. .....................47
Script 4.7 – Programa matemático correspondente à minimização de uma função com restrições
lineares. ............................................................................................................................................49
Script 4.8 – Programa matemático correspondente à restrição polinomial de uma função..................51
Script 4.9 – Programa matemático correspondente à minimização de uma função com restrições
polinomial e linear. ............................................................................................................................51
Script 4.10 – Programa matemático correspondente à minimização da função de Rosenbrock utilizando
FMINCON. ........................................................................................................................................54
Script 4.11 – Programa matemático correspondente à minimização da função de Rosenbrock utilizando
FMINUNC. ........................................................................................................................................54
Script 5.1 – Programa matemático correspondente às restrições não lineares da cobertura. .............75
Script 5.2 – Programa matemático correspondente ao programa principal da cobertura. ...................76
Script 5.3 – Programa matemático da barragem de oito variáveis correspondente às restrições não
lineares. ..........................................................................................................................................106
Script 5.4 – Programa matemático da barragem de oito variáveis correspondente ao programa principal.
.......................................................................................................................................................108
Script 5.5 – Programa matemático da treliça correspondente às restrições não lineares. .................126
Script 5.6 – Programa matemático da treliça correspondente ao programa principal. .......................127
Otimização em Problemas de Engenharia Civil
xiv
Otimização em Problemas de Engenharia Civil
xv
SÍMBOLOS, ACRÔNIMOS E ABREVIATURAS
𝑔𝑚 – restrições desigualdade
ℎ𝑝 – restrições igualdade
𝑓(𝑥) – função objetivo
𝑥* – solução ótima
𝛻𝑓 – gradiente da função
𝛻ℎ𝑖 – gradiente da restrição igualdade
𝐴 – matriz dos coeficientes das restrições desigualdade
𝐴𝑒𝑞 – matriz dos coeficientes das restrições igualdade
𝑏 – vetor dos termos independentes das restrições desigualdade
𝑏𝑒𝑞 – vetor dos termos independentes das restrições igualdade
𝑙𝑏 – limites inferiores
𝑢𝑏 – limites superiores
𝐽g – Jacobiano da função restrição g
𝐽h – Jacobiano da função restrição h
𝐿 – Langrageano
𝑠 – variável de desvio
H – matriz Hessiana
‖𝐷𝑠‖ – matriz diagonal na norma Euclidiana
λ𝑖 – multiplicadores de Lagrange
LP Simplex – Linear Programming Simplex
GRG – Generalized Reduced Gradient (Gradiente Reduzido Generalizado)
KKT – Karush, Kuhn e Tucker
NaN – Not a Number
Inf – Infinity
SQP – Sequential Quadratic Programming (Programação Quadrática Sequencial)
GC – Gradiente Conjugado
CAPÍTULO 4
𝛾𝑤 – peso específico da água [kN/m3]
𝛾𝑐 – peso específico do betão [kN/m3]
Otimização em Problemas de Engenharia Civil
xvi
𝐹𝑆 – fator de segurança global ao derrube
Iw – impulso da água [kN/m]
H – altura total da barragem de três variáveis [m]
B – base maior da barragem de três variáveis [m]
b – base menor da barragem de três variáveis [m]
P – posto distribuidor de energia elétrica
L – comprimento total do cabo [m]
D – diâmetro do tanque [m]
L – comprimento do tanque [m]
CAPÍTULO 5
𝑞𝐶 – sobrecarga na chapa [kN/m2]
𝑞𝑛𝑒𝑣𝑒 – sobrecarga da neve [kN/m2]
𝐵𝑖 – largura do pilar [m]
𝐿𝑃 – Comprimento do pilar [m]
𝐸𝑠 – Módulo de Young do aço [kPa]
𝜎𝑎𝑑𝑚,𝑠 – tensão admissível do aço [kPa]
𝜎𝑎𝑑𝑚,𝑐 – tensão admissível do betão [kPa]
𝜎𝑎𝑑𝑚,𝑠𝑜𝑙𝑜 – tensão admissível do solo [kPa]
𝛾𝑠 – peso específico do aço [kN/m3]
𝐶𝑠 – custo específico do aço [€/m3]
𝐶𝑐 – custo específico do betão [€/m3]
𝐿𝑖 – comprimento do elemento [m]
𝐻𝑖 – altura da secção [m]
𝑡𝐶 – espessura da chapa [m]
𝐷𝑖 – largura da sapata [m]
𝐻𝑆 – altura da sapata [m]
𝑝𝑝𝑖 – peso próprio [kN/m]
Ai – área da secção [m2]
Ii – momento de inércia [m4]
𝑌𝑐𝑔 – centro de gravidade [m]
Ycg,sup – distância do centro de gravidade até a fibra superior [m]
𝑀𝑖− – momento no apoio [kNm]
Otimização em Problemas de Engenharia Civil
xvii
𝜎𝑖 – tensão normal [kPa]
𝛿𝑚𝑎𝑥 – flecha máxima [m]
𝑅𝑖 – reação no apoio [kN]
𝑁𝑖 – esforço axial [kN]
𝑓𝑦 – tensão de cedência do aço [kN/cm2]
𝛾𝑀𝑖 – coeficiente parcial de segurança
𝜒 – coeficiente de redução para a curva de dimensionamento (de colunas à encurvadura) relevante
𝛷 – valor para determinar o coeficiente de redução
�̅� – esbelteza normalizada
𝛼 – fator de imperfeição
𝑁𝑐𝑟 – valor crítico do esforço normal para o modo de encurvadura elástica considerado, determinado
com base nas propriedades da secção transversal bruta [kN]
휀 – deformação normal
𝛥𝑖 – deslocamento do nó segundo a direção [cm]
𝐾 – matriz de rigidez
𝛥 – matriz de deslocamento
𝐹 – matriz de força

Otimização em Problemas de Engenharia Civil
xviii
Otimização em Problemas de Engenharia Civil
1
1 INTRODUÇÃO
A otimização pode ser descrita como o ato de obter o melhor resultado para determinadas circunstâncias,
assim como a otimização aplicada em problemas de engenharia civil que busca a obtenção da solução
mais vantajosa. Essa tarefa cabe ao projetista e implica uma pesquisa exaustiva que o obrigaria levar em
consideração todas as soluções possíveis. Para isso é necessário que as soluções possíveis sejam finitas
e que sua análise possa ser efetuada em um intervalo de tempo razoável. Porém, este cenário é apenas
aplicado em problemas simples com um número reduzido de parâmetros. Em casos complexos é
fundamental abordar o problema de modo relativamente simplificado para que seja possível sua solução.
Neste caso, o projetista irá avaliar se a solução do problema simplificado se aproxima adequadamente
do problema inicial.
Antes mesmo da intervenção do projetista é habitual identificar o conjunto de parâmetros gerais na
formulação de um problema. Em seguida ocorre a seleção do tipo de estrutura, visto que para cada
situação estudada existirá um reduzido número de opções passíveis de serem concretizadas, sendo tais
escolhas fundamentadas na comparação entre estudos preliminares. E finalmente é possível formular o
problema matemático que na quase totalidade das aplicações de otimização na engenharia civil busca
minimizar o custo. Esta é, assim, a fase que é abordada no presente trabalho.
Os problemas de otimização aplicados na engenharia civil em sua maioria buscam minimizar o custo,
garantindo as exigências relativas à segurança e ao desempenho da estrutura. Esta minimização é feita
através de uma função escalar intitulada de função objetivo, e as exigências aparecem na otimização
como restrições igualdade e/ou desigualdade. Em alguns casos a otimização pode não apresentar
aspectos similares aos referidos anteriormente. A função objetivo pode ser para maximizar a segurança
e o desempenho da estrutura considerando um custo fixo. Também pode ocorrer problemas em que o
objetivo não seja único, considerando assim uma única função objetivo que resulta da combinação
ponderada dos diversos objetivos iniciais.
A quantificação do custo é feita através da quantidade e na diversidade dos materiais utilizados. Quando
for utilizado apenas um único material na estrutura considera-se seu custo dependente do seu volume
ou do seu peso. Por outro lado, se na estrutura estiverem presentes diversos materiais, a função do custo
será calculada através dos custos unitários de cada material. Além do custo associado à quantidade de
material utilizado na própria estrutura, também deve ser considerado o custo associado às estruturas que
auxiliam o processo construtivo como as cofragens, por exemplo.
Para auxiliar o projetista no processo de busca da melhor solução, ou seja, da solução mais econômica
para a estrutura e que atenda às condições de segurança, são aplicados os métodos de otimização através
da utilização de softwares existentes no mercado, que vão desde os mais comuns aos mais complexos.
Otimização em Problemas de Engenharia Civil
2
Refere-se como exemplo, o editor de planilhas mais utilizado, o Microsoft EXCEL e, o software de alta
performance voltado para cálculos numéricos, o MATLAB.
A utilização dos softwares faz com que a tarefa de busca do projeto ótimo se torne atraente, de forma
que os projetistas possam economizar tempo com as sucessivas verificações de segurança para decidir
qual solução será mais econômica. Levando em conta as quantidades de variáveis relacionadas ao
processo de otimização, dificilmente a melhor solução para o projeto será encontrada sem que seja feito
um estudo detalhado e bem formulado do problema.
No projeto de estruturas, a otimização pode assumir variados aspectos, sendo caracterizada
essencialmente pela seleção das grandezas que são consideradas fixas e das que são consideradas
variáveis. As variáveis de projeto dependem da função objetivo que se pretende minimizar e a elas são
impostas restrições. Elas estão associadas ao tipo de otimização que será aplicado ao problema. No
âmbito de estruturas, é comum otimizar as secções transversais (treliça ou pórtico 3D), espessuras
(membrana, laje e cascas), forma em meios contínuos (sólido 3D), forma em meios laminares
(membrana, laje e cascas), forma em treliças ou pórticos, topologia (treliça), materiais e localização de
ações [1].
O conceito de otimização na engenharia civil torna-se imprescindível no cenário de escassez de recursos
naturais. Aplicar a otimização em projetos estruturais significa utilizar a quantidade de material
suficiente para cumprir com a segurança da estrutura, sem que haja sobredimensionamento e utilização
desnecessária de material. Desta forma, contribui para que haja menor consumo de energia para a
fabricação do material que será utilizado na construção. Concluindo, pode-se dizer que a otimização
aplicada neste contexto pode contribuir de forma positiva com a questão ambiental vivenciada no
mundo.
Otimização em Problemas de Engenharia Civil
3
2 OTIMIZAÇÃO
2.1. GENERALIDADES
2.1.1. FORMULAÇÃO DO PROGRAMA MATEMÁTICO
Os problemas de otimização de forma genérica, e de estruturas em particular, são designados programas
matemáticos e têm a seguinte formulação:
Minimizar 𝑓(𝑥1, 𝑥2, … , 𝑥𝑛)
sujeita a
(2.1)
𝑔1(𝑥1 , 𝑥2, … , 𝑥𝑛) ≤ 0
⋮ ⋮ 𝑔𝑚(𝑥1, 𝑥2, … , 𝑥𝑛) ≤ 0
(2.2)
ℎ1(𝑥1, 𝑥2, … , 𝑥𝑛) = 0
⋮ ⋮ ℎ𝑝(𝑥1, 𝑥2, … , 𝑥𝑛) = 0
(2.3)
Neste esquema, as variáveis de projeto são 𝑥𝑖(𝑖 = 1, 2, … , 𝑛), a função objetivo é 𝑓, as restrições
desigualdade são 𝑔𝑗 ≤ 0 (𝑗 = 1, 2, … ,𝑚) e por fim as restrições igualdade ℎ𝑘 = 0 (𝑘 = 1, 2, … , 𝑝).
O problema de um modo mais compacto pode ser escrito como:
Min 𝑓(𝑥)
s.a
(2.4)
𝑔(𝑥) ≤ 0 (2.5)
ℎ(𝑥) = 0 (2.6)

Otimização em Problemas de Engenharia Civil
4
As variáveis de projeto normalmente podem assumir qualquer valor real. A função objetivo, as restrições
igualdade e desigualdade são funções escalares que assumem valores contínuos e reais.
A solução do problema de minimização descrito acima (2.4) é chamada de solução ótima, pois 𝑥* é o
vetor que torna mínima a função objetivo 𝑓, satisfazendo as devidas restrições. Nos casos que existirem
mais de uma solução ótima estes serão chamados de soluções ótimas alternativas. O conjunto de
soluções (𝑥1, 𝑥2 , … , 𝑥𝑛) que estiverem definidas dentro da região admissível ou viável, ou seja, as que
respeitam as restrições igualdade e desigualdade, são ditas de soluções admissíveis, viáveis ou factíveis
e as que não respeitam a maioria das restrições são designadas soluções inadmissíveis ou inviáveis. Por
exemplo, na Fig. 2.1 observa-se um problema com duas variáveis (bidimensional) e com uma única
restrição 𝑥1 + 𝑥2 = 0, a região admissível incluiria todos os pontos definidos na linha tracejada, porém
se a restrição fosse 𝑥12 + 𝑥2
2 ≤ 1, a região admissível estaria definida no interior e no limite do círculo
unitário [2].
Fig. 2.1 – Região admissível das restrições 𝑥1 + 𝑥2 = 0 e 𝑥12 + 𝑥2
2 ≤ 1.
A solução do problema de maximização também é definida como solução ótima desde que o argumento
de maximização seja −𝑓(𝑥). Neste trabalho são comtempladas apenas os problemas de minimização.
Minimizar 𝑓(𝑥) ⇔ Maximizar −𝑓(𝑥) (2.7)
Otimização em Problemas de Engenharia Civil
5
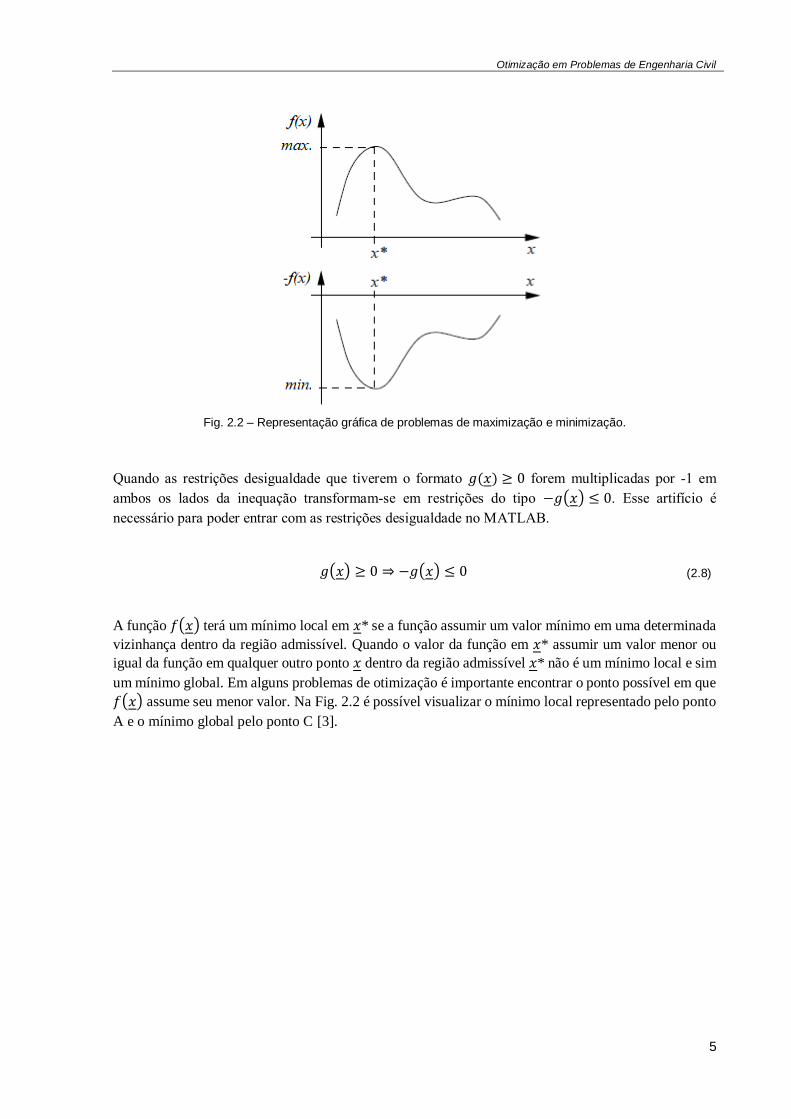
Fig. 2.2 – Representação gráfica de problemas de maximização e minimização.
Quando as restrições desigualdade que tiverem o formato 𝑔(𝑥) ≥ 0 forem multiplicadas por -1 em
ambos os lados da inequação transformam-se em restrições do tipo −𝑔(𝑥) ≤ 0. Esse artifício é
necessário para poder entrar com as restrições desigualdade no MATLAB.
𝑔(𝑥) ≥ 0 ⇒ −𝑔(𝑥) ≤ 0 (2.8)
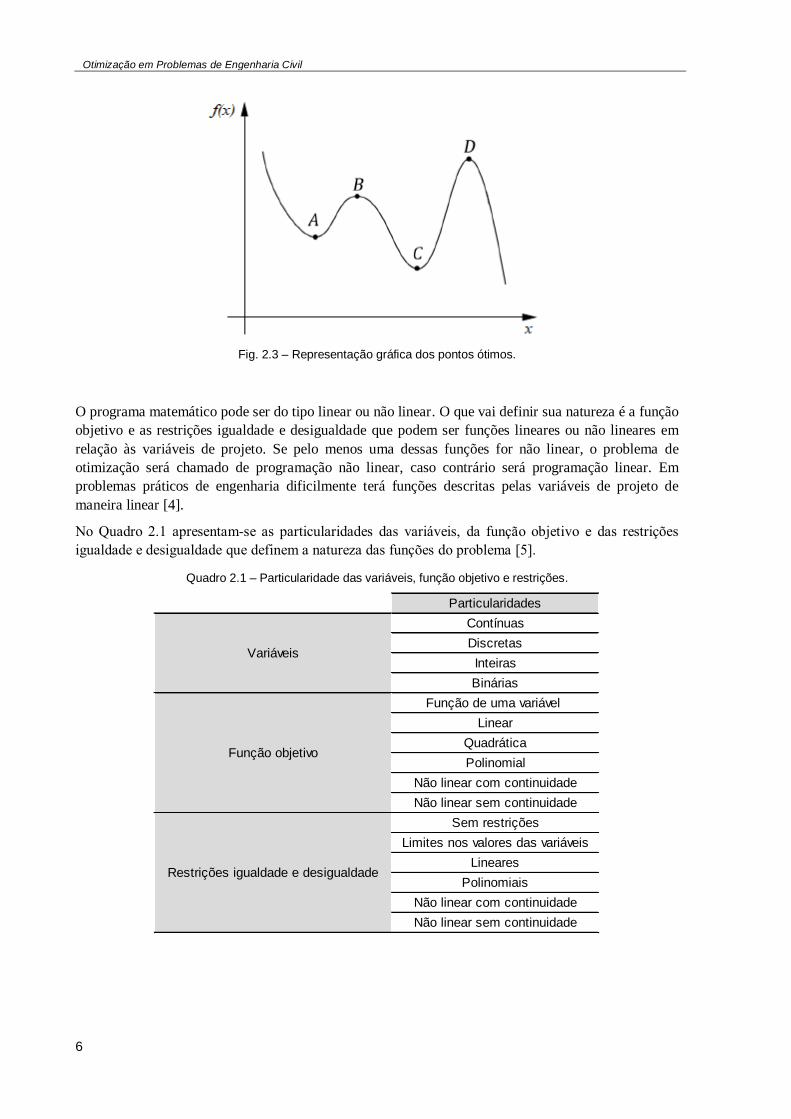
A função 𝑓(𝑥) terá um mínimo local em 𝑥* se a função assumir um valor mínimo em uma determinada
vizinhança dentro da região admissível. Quando o valor da função em 𝑥* assumir um valor menor ou
igual da função em qualquer outro ponto 𝑥 dentro da região admissível 𝑥* não é um mínimo local e sim
um mínimo global. Em alguns problemas de otimização é importante encontrar o ponto possível em que
𝑓(𝑥) assume seu menor valor. Na Fig. 2.2 é possível visualizar o mínimo local representado pelo ponto
A e o mínimo global pelo ponto C [3].
Otimização em Problemas de Engenharia Civil
6
Fig. 2.3 – Representação gráfica dos pontos ótimos.
O programa matemático pode ser do tipo linear ou não linear. O que vai definir sua natureza é a função
objetivo e as restrições igualdade e desigualdade que podem ser funções lineares ou não lineares em
relação às variáveis de projeto. Se pelo menos uma dessas funções for não linear, o problema de
otimização será chamado de programação não linear, caso contrário será programação linear. Em
problemas práticos de engenharia dificilmente terá funções descritas pelas variáveis de projeto de
maneira linear [4].
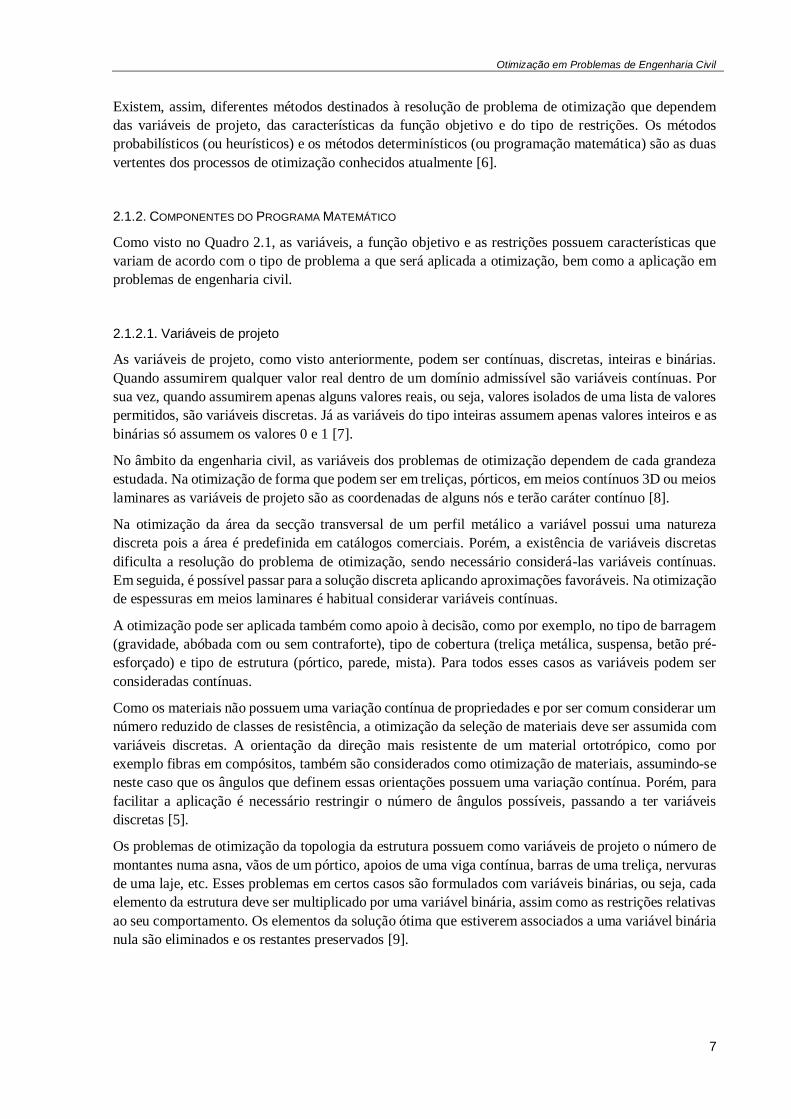
No Quadro 2.1 apresentam-se as particularidades das variáveis, da função objetivo e das restrições
igualdade e desigualdade que definem a natureza das funções do problema [5].
Quadro 2.1 – Particularidade das variáveis, função objetivo e restrições.
Sem restrições
Limites nos valores das variáveis
Lineares
Polinomiais
Não linear com continuidade
Não linear sem continuidade
Restrições igualdade e desigualdade
Função de uma variável
Binárias
Inteiras
Discretas
Linear
Quadrática
Polinomial
Não linear com continuidade
Variáveis
Função objetivo
Contínuas
Particularidades
Não linear sem continuidade
Otimização em Problemas de Engenharia Civil
7
Existem, assim, diferentes métodos destinados à resolução de problema de otimização que dependem
das variáveis de projeto, das características da função objetivo e do tipo de restrições. Os métodos
probabilísticos (ou heurísticos) e os métodos determinísticos (ou programação matemática) são as duas
vertentes dos processos de otimização conhecidos atualmente [6].
2.1.2. COMPONENTES DO PROGRAMA MATEMÁTICO
Como visto no Quadro 2.1, as variáveis, a função objetivo e as restrições possuem características que
variam de acordo com o tipo de problema a que será aplicada a otimização, bem como a aplicação em
problemas de engenharia civil.
2.1.2.1. Variáveis de projeto
As variáveis de projeto, como visto anteriormente, podem ser contínuas, discretas, inteiras e binárias.
Quando assumirem qualquer valor real dentro de um domínio admissível são variáveis contínuas. Por
sua vez, quando assumirem apenas alguns valores reais, ou seja, valores isolados de uma lista de valores
permitidos, são variáveis discretas. Já as variáveis do tipo inteiras assumem apenas valores inteiros e as
binárias só assumem os valores 0 e 1 [7].
No âmbito da engenharia civil, as variáveis dos problemas de otimização dependem de cada grandeza
estudada. Na otimização de forma que podem ser em treliças, pórticos, em meios contínuos 3D ou meios
laminares as variáveis de projeto são as coordenadas de alguns nós e terão caráter contínuo [8].
Na otimização da área da secção transversal de um perfil metálico a variável possui uma natureza
discreta pois a área é predefinida em catálogos comerciais. Porém, a existência de variáveis discretas
dificulta a resolução do problema de otimização, sendo necessário considerá-las variáveis contínuas.
Em seguida, é possível passar para a solução discreta aplicando aproximações favoráveis. Na otimização
de espessuras em meios laminares é habitual considerar variáveis contínuas.
A otimização pode ser aplicada também como apoio à decisão, como por exemplo, no tipo de barragem
(gravidade, abóbada com ou sem contraforte), tipo de cobertura (treliça metálica, suspensa, betão pré-
esforçado) e tipo de estrutura (pórtico, parede, mista). Para todos esses casos as variáveis podem ser
consideradas contínuas.
Como os materiais não possuem uma variação contínua de propriedades e por ser comum considerar um
número reduzido de classes de resistência, a otimização da seleção de materiais deve ser assumida com
variáveis discretas. A orientação da direção mais resistente de um material ortotrópico, como por
exemplo fibras em compósitos, também são considerados como otimização de materiais, assumindo-se
neste caso que os ângulos que definem essas orientações possuem uma variação contínua. Porém, para
facilitar a aplicação é necessário restringir o número de ângulos possíveis, passando a ter variáveis
discretas [5].
Os problemas de otimização da topologia da estrutura possuem como variáveis de projeto o número de
montantes numa asna, vãos de um pórtico, apoios de uma viga contínua, barras de uma treliça, nervuras
de uma laje, etc. Esses problemas em certos casos são formulados com variáveis binárias, ou seja, cada
elemento da estrutura deve ser multiplicado por uma variável binária, assim como as restrições relativas
ao seu comportamento. Os elementos da solução ótima que estiverem associados a uma variável binária
nula são eliminados e os restantes preservados [9].
Otimização em Problemas de Engenharia Civil
8
2.1.2.2. Função objetivo
A função objetivo depende do tipo de problema de otimização e da grandeza que planeia minimizar. Na
totalidade dos casos a função está escrita a partir das variáveis de projeto. Quando a estrutura é
constituída por um único material é comum minimizar o volume e consequentemente o seu custo. Se
houver mais de um material presente na estrutura a função objetivo representa o custo por unidade de
volume de cada material. E nos casos que o objetivo for minimizar o peso da estrutura considera-se
como custo por unidade de volume o peso específico de cada um dos materiais.
Em casos particulares podem haver otimização de estruturas em que a função objetivo não é um custo,
como por exemplo, maximizar a rigidez considerando custo fixo ou maximizar a frequência própria
fundamental considerando peso fixo, nestes casos a função objetivo representa a grandeza associada ao
desempenho de uma estrutura.
2.1.2.3. Restrições igualdade e desigualdade
Em problemas de otimização aplicados à engenharia civil, nem todos os valores possíveis para as
variáveis são admissíveis para o projeto, havendo a necessidade de impor restrições. Como visto
anteriormente, essas restrições podem ser de igualdade ou desigualdade.
As restrições igualdade que figuram um programa matemático podem ser eliminadas desde que em cada
uma delas seja possível explicitar uma variável de projeto distinta. Em seguida, essas variáveis podem
ser substituídas nas outras expressões do programa matemático. Para os casos em que a quantidade de
restrições igualdade excedem o número de variáveis de projeto a formulação é dada como inconsistente.
O procedimento de substituição auxilia na resolução do problema de otimização, pois reduz a quantidade
de variáveis e restrições presente na formulação. Porém, se houver um número elevado de restrições
associadas com as variáveis do problema, não é aconselhável recorrer a essas substituições, pois as
expressões passam a ter um caráter complexo, sendo necessário o uso de um programa de computador.
Na otimização aplicada à engenharia civil aparecem restrições igualdade quando há a necessidade de
impor valores fixos a deslocamentos, quando eles são variáveis de projeto ou em casos que se pretende
fixar algumas variáveis, como por exemplo, altura ou base de uma viga, espessura de um perfil metálico
ou altura de um pilar.
Quanto às restrições desigualdade, não há limitações para a sua quantidade na formulação do problema.
Na otimização em problemas de engenharia civil elas estão presentes devido à necessidade de limitar
tensões dos materiais, tensões de instabilidade, deslocamentos, frequências próprias de vibração, etc.
Podem haver também limitações para valores mínimos e máximos das variáveis, como por exemplo,
áreas mínimas e máximas de perfis metálicos que estão disponíveis em catálogos de um certo fabricante
para barras de uma treliça, impedindo que o algoritmo busque soluções nulas ou negativas. Porém, em
alguns softwares de otimização os limites são considerados à parte e não como restrições desigualdade.
Assim, é importante formular adequadamente um problema de otimização para que permita que o
software encontre boas soluções quanto sua formulação [2].
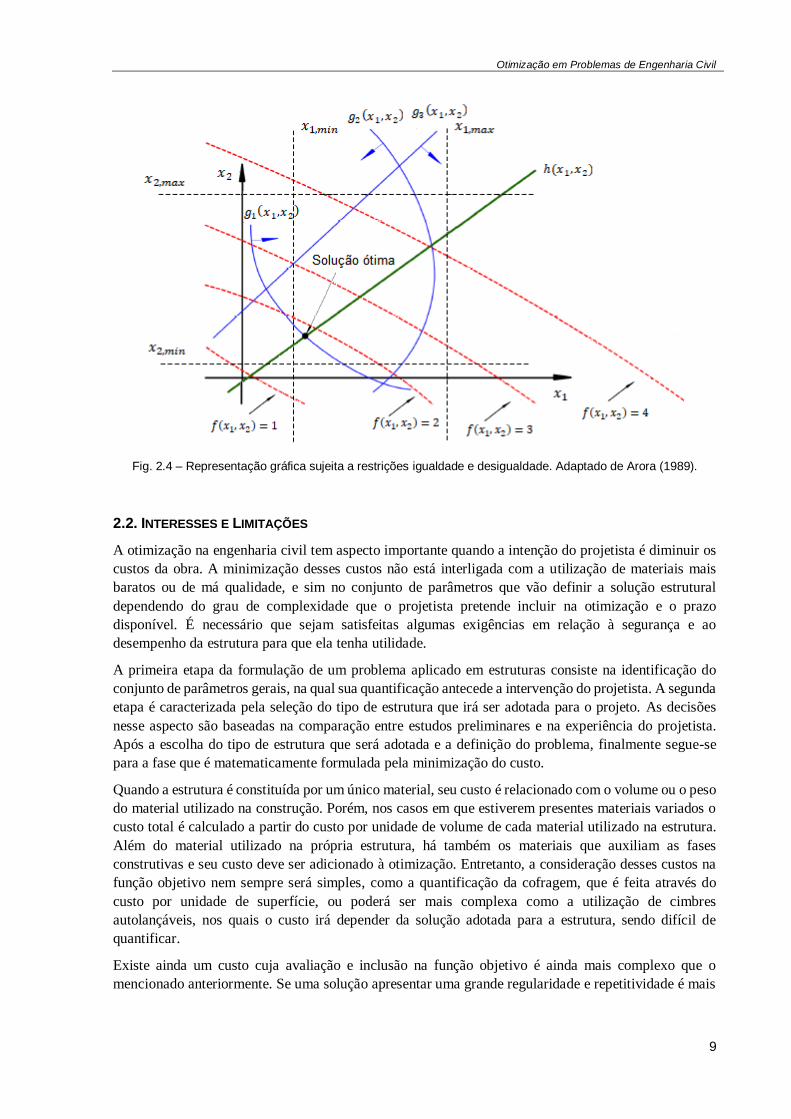
A representação gráfica de um problema de otimização contendo a função objetivo em função de duas
variáveis sujeita a três restrições desigualdade e uma restrição igualdade e a limites mínimos e máximos
impostos a variáveis, encontra-se exemplificado na Fig. 2.4. Nota-se que a região admissível é
representada pelo troço de linha definida por ℎ(𝑥1, 𝑥2) que respeita as restrições 𝑔𝑗(𝑥1 , 𝑥2); 𝑗 = 1, 2,3.
Otimização em Problemas de Engenharia Civil
9
Fig. 2.4 – Representação gráfica sujeita a restrições igualdade e desigualdade. Adaptado de Arora (1989).
2.2. INTERESSES E LIMITAÇÕES
A otimização na engenharia civil tem aspecto importante quando a intenção do projetista é diminuir os
custos da obra. A minimização desses custos não está interligada com a utilização de materiais mais
baratos ou de má qualidade, e sim no conjunto de parâmetros que vão definir a solução estrutural
dependendo do grau de complexidade que o projetista pretende incluir na otimização e o prazo
disponível. É necessário que sejam satisfeitas algumas exigências em relação à segurança e ao
desempenho da estrutura para que ela tenha utilidade.
A primeira etapa da formulação de um problema aplicado em estruturas consiste na identificação do
conjunto de parâmetros gerais, na qual sua quantificação antecede a intervenção do projetista. A segunda
etapa é caracterizada pela seleção do tipo de estrutura que irá ser adotada para o projeto. As decisões
nesse aspecto são baseadas na comparação entre estudos preliminares e na experiência do projetista.
Após a escolha do tipo de estrutura que será adotada e a definição do problema, finalmente segue-se
para a fase que é matematicamente formulada pela minimização do custo.
Quando a estrutura é constituída por um único material, seu custo é relacionado com o volume ou o peso
do material utilizado na construção. Porém, nos casos em que estiverem presentes materiais variados o
custo total é calculado a partir do custo por unidade de volume de cada material utilizado na estrutura.
Além do material utilizado na própria estrutura, há também os materiais que auxiliam as fases
construtivas e seu custo deve ser adicionado à otimização. Entretanto, a consideração desses custos na
função objetivo nem sempre será simples, como a quantificação da cofragem, que é feita através do
custo por unidade de superfície, ou poderá ser mais complexa como a utilização de cimbres
autolançáveis, nos quais o custo irá depender da solução adotada para a estrutura, sendo difícil de
quantificar.
Existe ainda um custo cuja avaliação e inclusão na função objetivo é ainda mais complexo que o
mencionado anteriormente. Se uma solução apresentar uma grande regularidade e repetitividade é mais
Otimização em Problemas de Engenharia Civil
10
simples e economicamente executada do que uma solução muito heterogénea. Se não forem impostas
restrições que limitem a heterogeneidade, a solução do problema pode ser tão complexa que a sua
execução teria custos adicionais incompatíveis. Porém, a consideração de restrições adicionais que
limitam a heterogeneidade da estrutura levará a obtenção de uma solução de custo mais elevado. Nota-
se então que a consideração da simplicidade de execução e da heterogeneidade conduziria a uma
dificuldade de quantificar e de incluir na função objetivo [5]. Assim, a decisão sobre a incorporação
dessas restrições é fundamentada na experiência do projetista.
No contexto de projetos de pequeno porte a aplicação da otimização não é tão viável, pois é necessário
um estudo elaborado que demanda tempo e atenção, e nesses tipos de projeto é mais interessante
economicamente preocupar-se com a escolha e compra de materiais, com a negociação dos prazos,
multas, etc. Apenas em obras de grande porte, que demandam estudos prévios e possuem prazos de
entrega mais longos, serão feitas otimizações.
2.3. PROBLEMAS DE OTIMIZAÇÃO APLICADOS À ENGENHARIA CIVIL
Para realizar a otimização é necessário considerar o comportamento da estrutura de modo simplificado
através do uso do método dos elementos finitos. Assim, as estruturas que possuem comportamento linear
passam a ter como variáveis os deslocamentos máximos dos nós e as tensões normais. Porém, existem
outras classes de variáveis que dependem do tipo de problema de otimização.
Como visto na secção 2.1.2.1., quem define o principal critério de classificação dos problemas de
otimização são as variáveis de projeto, pois elas são os parâmetros da solução que podem ser
modificados. A seguir, serão descritos e exemplificados de modo sucinto diversos tipos de problemas
de otimização [5].
2.4.1. OTIMIZAÇÃO DAS SECÇÕES TRANSVERSAIS
É aplicada em estruturas reticuladas como treliças e pórticos tridimensionais. Enquanto que na primeira
as variáveis de projeto são as áreas das secções transversais das barras biarticuladas, na outra é o
conjunto de parâmetros que caracterizam a secção transversal de uma barra. As coordenadas dos nós e
as propriedades dos materiais utilizados são consideradas fixas. As secções transversais podem ser
definidas através da área, momento de inércia ou dimensões transversais.
2.4.2. OTIMIZAÇÃO DE ESPESSURAS
Está associada a meios laminares (duas dimensões muito maiores que a terceira dimensão), como
membrana (paredes), lajes e cascas (lajes pré-esforçadas), onde as variáveis de projeto são a espessura
em cada ponto nodal ou as espessuras dos elementos finitos. Assim como a otimização das secções
transversais as coordenadas dos nós e os materiais utilizados são fixados.
2.4.3. OTIMIZAÇÃO DE FORMAS
Neste tipo de otimização as coordenados dos nós já passam a ser também as variáveis de projeto. Ela é
aplicada em meios contínuos tridimensionais, como sólidos e as variáveis de projeto são apenas as
coordenadas de alguns nós, pois na formulação não são consideradas secções nem dimensões
transversais de elementos finitos e evita-se que a estrutura seja modificada totalmente. Também pode
ser aplicada em meios laminares, tendo como variáveis as coordenadas dos nós e as espessuras. No caso
Otimização em Problemas de Engenharia Civil
11
das treliças ou pórticos tridimensionais as variáveis continuam a ser as coordenadas dos nós e a as
secções das barras.
2.4.4. OTIMIZAÇÃO DE APOIO À DECISÃO
Pode ser exemplificado como o tipo de barragem, tipo de cobertura e tipo de estrutura que irá ser adotada
no projeto, por exemplo, a localização e quantificação do pré-esforço. As variáveis como dimensões de
secções transversais, espessuras e coordenadas dos nós também podem estar presentes.
2.4.5. OTIMIZAÇÃO DE MATERIAIS
Sempre que na otimização as propriedades do material forem as variáveis de projeto é utilizada essa
otimização, pois os materiais apresentam propriedades distintas e podem estar relacionados à variação
de propriedades que ocorre entre as classes de resistência de um determinado material. A orientação da
direção mais resistente de um material ortotrópico (fibra de compósitos) também pode ser uma variável
de projeto.
2.4.6. OTIMIZAÇÃO DE TOPOLOGIA
Envolve a supressão ou o acréscimo de componentes da estrutura, escolhendo a melhor distribuição
possível dentro da região admissível. Em estruturas treliçadas, por exemplo, define inicialmente todos
os possíveis nós formando uma estrutura base e em seguida o processo de otimização irá alterar as
conexões existentes podendo retirar ou adicionar barras. Em meios contínuos é importante a
possibilidade de originar ou eliminar aberturas. Podem também ocorrer situações em que o número de
ligações ao exterior e sua posição são variáveis.

Otimização em Problemas de Engenharia Civil
12
Otimização em Problemas de Engenharia Civil
13
3 MÉTODOS DE OTIMIZAÇÃO
Em alguns problemas de otimização encontrar a solução ótima pode ser algo elementar. Refere-se como
exemplo uma parábola (Fig. 3.1) onde pretende-se escolher o valor de 𝑥 que torna o valor de 𝑓(𝑥)
mínimo. Essa questão é facilmente resolvida obtendo a derivada da parábola e definindo-a igual a zero.
Para problemas de maior complexidade é moroso achar onde a derivada da função é igual a zero, e
adivinhar e verificar a solução ideal pode levar muito tempo. Nos problemas de otimização aplicados à
engenharia civil para encontrar a solução ótima é indispensável utilizar um tipo especial de programa
chamado algoritmo de otimização.
Fig. 3.1 – Representação gráfica parábola 𝑓(𝑥) = a𝑥2 + b𝑥 + c.
Esses problemas são formulados como um programa matemático que em geral é resolvido com recurso
a um método iterativo. Esses métodos necessitam de uma estimativa para a solução inicial, que vai sendo
substituída sucessivamente até que seja satisfeito um determinado critério de convergência. O algoritmo
pode ser exemplificado em um fluxograma (Fig. 3.2) contendo algumas das fases que são habituais a
generalidade dos métodos de otimização.
Otimização em Problemas de Engenharia Civil
14
Fig. 3.2 – Fluxograma comum aos métodos de otimização. Adaptado de Arora (1989) e Azevedo (1994).
Otimização em Problemas de Engenharia Civil
15
No algoritmo apresentado na Fig. 3.2, é necessário dar como partida uma estimativa da solução inicial
a qual é escolhida pelo próprio usuário. Contudo, é interessante que a estimativa esteja o mais próximo
possível da solução ótima, para que a solução presente no decorrer das iterações também esteja mais
próxima da solução ótima.
Para cada método de otimização existe um critério de convergência que é baseado na finalização do
processo iterativo. Se não houver um critério que avalie a qualidade da solução presente, o processo
iterativo deve ser suspenso assim que não houver variações significativas da solução. Esta interrupção
também pode ser feita quando as iterações atingirem o limite pré-estabelecido, para que elas não
progridam de forma imprecisa quando não há convergência para a solução ótima.
A fase que essencialmente define cada método de otimização é a correspondente ao cálculo do vetor (6),
que em geral é calculado depois de serem realizadas modificações no programa matemático que
simplificam o problema inicial em um problema aproximado. Isto explica o fato de obter uma solução
presente mais próxima da solução ótima para que o erro relacionado com essa aproximação seja menor.
Os métodos capazes de encontrar a solução ótima de um determinado problema destacam-se
basicamente em duas vertentes dos processos de otimização conhecidos utilizados atualmente. Os
métodos probabilísticos (ou heurísticos) são normalmente inspirados em fenômenos que ocorrem na
natureza, pois consistem em técnicas probabilísticas de procura da solução ideal com base nos princípios
da genética de sobrevivência dos indivíduos mais adaptados à situação desejada, isto é, usam somente a
avaliação da função objetivo e introduzem no processo de otimização dados e parâmetros estocásticos.
Enquanto os métodos determinísticos (ou programação matemática) geram uma sequência
determinística de possíveis soluções requerendo, na maioria das vezes, o uso de pelo menos a primeira
derivada da função objetivo com respeito às variáveis de projeto [6], [10].
Existem vários softwares que são capazes de resolver os problemas de otimização utilizando os variados
métodos existentes na literatura, como por exemplo, OptiSLang, WOLFRAM Mathematica, Microsoft
EXCEL, MATLAB, entre outros. No presente trabalho foram utilizados para a resolução dos problemas
o EXCEL com o auxílio da ferramenta Solver e o MATLAB com a ferramenta Fmincon. O uso dessas
ferramentas e os métodos por elas utilizados será apresentado posteriormente neste capítulo.
3.1. A FERRAMENTA SOLVER DO EXCEL
O Solver é um suplemento disponível do EXCEL responsável por realizar análise de hipóteses. Ele pode
ser utilizado para encontrar o valor máximo ou mínimo de uma determinada função objetivo descrita
por uma fórmula em uma célula sujeita ou não às restrições e limites impostos descritos em outras
células da folha de cálculo. O Solver funciona com um grupo de células, designadas células variáveis
que são utilizadas no cálculo das fórmulas da função objetivo e das restrições. Conforme as iterações
vão ocorrendo o Solver vai ajustando os valores nas células variáveis para satisfazer as restrições e
entregar o resultado desejado para a célula que contém a função objetivo.
3.1.1. MÉTODOS DE OTIMIZAÇÃO UTILIZADOS PELA FERRAMENTA SOLVER
A ferramenta Solver possui disponível três métodos para a resolução de problemas de otimização. São
eles o método LP Simplex que é usado quando pretende-se realizar otimização linear, ou seja, quando a
função objetivo e as restrições são funções lineares das variáveis de projeto. O método GRG (Gradiente
Reduzido Generalizado) Não Linear nos casos que a função objetivo e as restrições resultam de funções
não lineares das variáveis de projeto, isto é, quando as células que contêm a função objetivo e as
restrições possuem potências, cálculo exponencial ou trigonométrico sobre as variáveis. E o método

Otimização em Problemas de Engenharia Civil
16
Evolucionário para os casos que a função objetivo e as restrições são determinadas a partir de funções
cujos resultados variam de forma abrupta, como por exemplo, quando a função objetivo ou as restrições
possuírem fórmulas do tipo condicional, valor absoluto, mínimo ou máximo para calcular o seu valor,
fazendo com que o declive varie radicalmente a pequenas variações das variáveis de projeto, assim
como o seu resultado [11].
3.1.1.1. Método LP Simplex
Como anteriormente mencionado, o Simplex é o método mais utilizado para solução de problemas de
programação linear. Porém, em muitos casos é possível converter um problema de otimização não linear
em um problema de otimização linear. A forma padrão de um problema de programação linear está
exposto no programa matemático (3.1). O método é descrito pela forma padrão dada pela equação linear
(3.2), onde A é uma matriz m Χ n (m < n), 𝑥 é um n-vetor, e b é um m-vetor. Para que o Simplex seja
desenvolvido de modo padrão é desejável que as restrições estejam no tipo “≤”. Se as restrições
estiverem do tipo “≥” é necessário utilizar artifícios para sua transformação em problema padrão.
Min 𝑓(𝑥) = 𝑐𝑥
s.a
(3.1)
𝐴𝑥 = 𝑏, 𝑜𝑛𝑑𝑒 𝑥 ≥ 0 𝑒 𝑏 ≥ 0 (3.2)
As variáveis de folga são utilizadas para converter as restrições do tipo “≤” em “=” e as variáveis de
excesso utilizadas para converter as restrições do tipo “≥” em “=”. O Simplex no espaço n-dimensional
é uma casca convexa de quaisquer pontos que não se encontram em um hiperplano. Refere-se como
exemplo, no espaço tridimensional que é formado por quatro pontos que não estão no mesmo plano, três
pontos podem estar no mesmo plano, mas o quarto deve ficar do lado de fora. Uma casca convexa de
n+1 pontos é o menor conjunto convexo que contém todos os pontos. Dessa forma, o Simplex representa
um conjunto convexo.
A ideia básica do método Simplex é passar de uma solução básica admissível (x) para outra solução de
maneira que diminua continuamente a função objetivo até que o mínimo seja alcançado. Uma solução
básica contém um número de variáveis idêntico ao número de restrições do problema. O Simplex é
iniciado com uma solução básica admissível, isto é, em um vértice do conjunto admissível convexo. Em
seguida ele parte para um vértice adjacente, sem perder a admissibilidade da nova solução, e reduzindo
o valor da função objetivo, através da substituição da variável básica por uma variável não básica na
solução básica admissível atual [12].
As etapas básicas do algoritmo Simplex podem ser resumidas para problemas de programação linear da
seguinte maneira:
Formular o problema padrão: formular o problema de programação linear sob a forma
padrão através da utilização das variáveis de folga e das variáveis de excesso;
Identificar uma solução básica admissível inicial: se todas as restrições forem do tipo “≤”
as variáveis de folga serão básicas e as variáveis reais não serão básicas. Quando houver
restrições de igualdade o procedimento Simplex de duas fases deve ser usado. A introdução
de variáveis artificiais para cada igualdade fornece uma solução básica inicial admissível;

Otimização em Problemas de Engenharia Civil
17
Verificar otimalidade: a função objetivo deve ser em termos apenas das variáveis não
básicas, condição que ocorre quando há apenas restrições do tipo “≤”. Para restrições de
igualdade a função objetivo artificial também pode ser facilmente transformada em termos
das variáveis não básicas. Se todos os coeficientes do objetivo reduzido para variáveis não
básicas forem não negativos (≥ 0), tem-se a solução ótima. Caso contrário, existe a
possibilidade de melhorar a função objetivo artificial. Para isso necessita-se selecionar uma
variável não básica que deve se tornar básica;
Construção do quadro Simplex: passar todos os coeficientes e constantes do problema para
um quadro Simplex. Quando o problema de otimização for de maximização, esses
coeficientes devem ser passados para o quadro com o mesmo sinal e quando forem de
minimização os coeficientes da função objetivo devem mudar de sinal quando entrarem no
quadro Simplex;
Selecionar uma variável não básica para tornar básica: verifica-se a linha do objetivo
artificial e identifica-se uma coluna com o coeficiente do objetivo reduzido negativo porque
a variável não básica associada a esta coluna deve se tornar básica para reduzir a função
objetivo artificial de seu valor atual (coluna dinâmica);
Selecionar uma variável básica para se tornar não básica: se todos os elementos da coluna
dinâmica forem negativos, o problema é ilimitado. Se houver elementos positivos na coluna
do pivô (coluna com o coeficiente mais positivo na linha da função objetivo), utiliza-se as
proporções dos parâmetros do lado direito com os elementos positivos da coluna do pivô e
identifica-se uma linha com a menor proporção positiva. Em caso de empate, qualquer linha
entre as relações de empate pode ser selecionada. A variável básica associada a esta linha
deve se tornar não básica, isto é, zero. A linha selecionada é chamada de linha dinâmica e
sua interseção com a coluna dinâmica identifica o elemento dinâmico;
Etapa pivô: aplica-se o procedimento de eliminação de Gauss-Jordan e a linha do pivô
(linha com o menor valor não-negativo do coeficiente reduzido) identificada na etapa
anterior. A eliminação também deve ser realizada na linha da função do objetivo artificial
para que seja apenas em termos de variáveis não básicas no próximo quadro. Nesta etapa
elimina-se a variável não básica de todas as linhas, exceto a linha dinâmica, tornando-se
uma variável básica;
Encontrar a solução ótima: o valor ótimo de cada variável básica corresponde ao valor da
última coluna na linha respectiva a essa variável.
3.1.1.2. Método GRG (Gradiente Reduzido Generalizado) Não linear
Por ser utilizado para resolução de problemas não lineares o método de Gradiente Reduzido
Generalizado (GRG) foi o método utilizado pela ferramenta Solver do software EXCEL para resolver
os problemas de otimização no presente trabalho.
O método GRG é baseado em uma técnica de eliminação de variável simples para problemas sujeitos
apenas a restrições igualdade. Esse método é uma extensão do método GR (Gradiente Reduzido) para
acomodar restrições de desigualdade não lineares. No GRG uma direção de busca é encontrada de modo
que para qualquer pequeno movimento, as restrições ativas atuais permanecem precisamente ativas. Se
algumas restrições ativas não forem satisfeitas com precisão devido à não linearidade das funções de
restrição, o método Newton-Raphson é usado para retornar ao limite da restrição. Um problema de
programação não linear com restrição igualdade existe quando ocorre a utilização das variáveis de folga
para a transformação das restrições de desigualdade em restrições igualdade. Cita-se também a estratégia
de restrição potencial para tratar todas as restrições no subproblema como igualdades. O subproblema
de localização de direção no método GRG pode ser definido distribuindo em dois grupos as variáveis

Otimização em Problemas de Engenharia Civil
18
do problema, o grupo das variáveis independentes (y) e o grupo das variáveis dependentes (z). Mudanças
de primeira ordem nas funções objetivo e de restrição, tratadas como igualdades, são descritas nas
Equações (3.3) e (3.4) [13].
𝛻𝑓 =
𝜕𝑓𝑇
𝜕𝑦𝛥𝑦 +
𝜕𝑓𝑇
𝜕𝑧𝛥𝑧 (3.3)
𝛻ℎ𝑖 =
𝜕ℎ𝑖𝑇
𝜕𝑦𝛥𝑦 +
𝜕ℎ𝑖𝑇
𝜕𝑧𝛥𝑧 (3.4)
Quando o processo começa com uma estimativa de solução admissível, qualquer mudança na solução
das variáveis deve manter as igualdades satisfeitas pelo menos na primeira ordem, ou seja, 𝛻ℎ𝑖 = 0.
Logo, fazendo uso da Equação 3.4, este requisito é escrito em forma de matriz, onde as colunas das
matrizes A e B contêm gradientes de restrições de igualdade com respeito a y e z, respectivamente. A
Equação 3.5 pode ser escrita em função de Δz (mudança na variável dependente) quando Δy (mudança
na variável independente) é especificada.
A𝑇𝛥𝑦 + 𝐵𝑇𝛥𝑧 = 0 𝑜𝑢 𝛥𝑧 = −(𝐵−𝑇A𝑇)𝛥𝑦 (3.5)
Realizando a substituição de 𝛥𝑧 da Equação 3.5 na Equação 3.3, é possível calcular 𝛻𝑓 (3.6) e identificar
o gradiente reduzido 𝑑𝑓
𝑑𝑦 na Equação 3.7.
𝛻𝑓 = (
𝜕𝑓𝑇
𝜕𝑦−𝜕𝑓𝑇
𝜕𝑧𝐵−𝑇A𝑇)𝛥𝑦 (3.6)
𝑑𝑓
𝑑𝑦=𝜕𝑓
𝜕𝑦− A 𝐵−1
𝜕𝑓
𝜕𝑧 (3.7)
A função objetivo é tratada como a função de descida. Para um valor de teste α, as variáveis de projeto
são atualizadas usando a Equação 3.8 e Δz da Equação 3.5.
𝛥𝑦 = −𝛼
𝑑𝑓
𝑑𝑦 (3.8)
Otimização em Problemas de Engenharia Civil
19
Se o projeto de teste não for admissível, as variáveis de projeto independentes são consideradas fixas e
as variáveis dependentes são alteradas iterativamente pela aplicação do método de Newton-Raphson até
obter um ponto com uma solução admissível. Se a solução satisfazer a condição de descida, é encerrada
a busca de linha, senão, o tamanho da etapa de teste anterior é descartado e o procedimento é repetido
com um tamanho de etapa reduzido. Nota-se que quando o gradiente reduzido é igual à zero na Equação
3.7, as condições de otimalidade de primeira ordem KKT (Karush, Kuhn e Tucker) são satisfeitas para
o problema original de programação não linear.
A notável dificuldade computacional relacionada ao algoritmo GRG vem das iterações de Newton-
Raphson durante a pesquisa de linha. De forma rigorosa, os gradientes das restrições precisam ser
recalculados e a matriz Jacobiana B precisa ser invertida em cada iteração durante a pesquisa de linha.
Para esse fim, muitos esquemas numéricos eficientes foram sugeridos. Refere-se o uso de uma fórmula
quase-Newton para atualizar B−1 sem computar novamente os gradientes, mas requerendo apenas os
valores da função de restrição. Isso poderá causar problemas se o conjunto de variáveis independentes
mudar durante as iterações. Outra dificuldade é selecionar uma estimativa inicial admissível.
Procedimentos diferentes devem ser usados para lidar com estimativas iniciais arbitrárias, como no
método de direções possíveis. Dependendo de como as restrições de desigualdade são tratadas o método
GRG apresentará muitas semelhanças com o método do gradiente projetado. Se uma estratégia de
restrição potencial é usada para tratar desigualdades o método GRG se assemelhará com o método do
gradiente projetado. Porém, se as desigualdades forem convertidas em igualdades adicionando variáveis
de folga, ele se comportará de maneira bem diferente do método do gradiente projetado [14].
3.1.1.3. Método Evolucionário
O método Evolucionário permite resolver problemas de otimização que possuem incertezas em sua
modelação. O algoritmo utiliza procedimentos metaheurísticos em que o conjunto de soluções é
analisado a cada iteração e adapta-se. É um método estocástico (envolve uso de parâmetros aleatórios
durante o processo de otimização) e iterativo que não garante a convergência para a solução ótima,
contudo, será capaz de encontrar uma boa solução para um problema bem formulado. O algoritmo
funciona com um conjunto de soluções, em que cada solução representará uma solução ideal para o
problema de otimização.
O processo é iniciado gerando de forma aleatória ou específica o primeiro conjunto de soluções,
avaliando cada solução pertencente a esse conjunto através do uso de uma função de aptidão. Esta função
é responsável por determinar a qualidade de uma solução como a solução ideal do problema e assim irá
orientando na pesquisa de novas soluções caso não encontre a ideal. Para gerar um novo conjunto de
soluções o processo necessita que primeiramente crie um conjunto provisório com algumas das soluções
do conjunto principal (que pode ou não ser o conjunto que iniciou o processo). As soluções que forem
mais aptas terão probabilidade maior de estarem presentes no conjunto provisório do que as soluções
menos aptas. Em seguida é aplicado a estas soluções o operador genético cruzamento seguido de
mutação para gerar um novo conjunto que substitui as soluções do conjunto principal ocasionando a
remoção das soluções menos aptas. O processo termina quando for atingido um número de iterações
predefinido pelo usuário, ou quando não for detectada uma melhoria significa das soluções nas últimas
iterações [15].
3.2. A FUNÇÃO FMINCON DO MATLAB
A Fmincon é um solucionador de programação não linear pertencente ao software MATLAB que tem
como objetivo encontrar o mínimo de uma função multivariável não linear sujeita às restrições igualdade
Otimização em Problemas de Engenharia Civil
20
e desigualdade e limites inferiores e superiores, conforme especificado no programa matemático (3.9),
e capaz de solucionar problemas determinísticos.
𝑚𝑖𝑛𝑥 𝑓(𝑥) 𝑑𝑒 𝑡𝑎𝑙 𝑚𝑜𝑑𝑜 𝑞𝑢𝑒
{
𝑐(𝑥) ≤ 0
𝑐𝑒𝑞(𝑥) = 0
𝐴 ⋅ 𝑥 ≤ 𝑏
𝐴𝑒𝑞 ⋅ 𝑥 = 𝑏𝑒𝑞𝑙𝑏 ≤ 𝑥 ≤ 𝑢𝑏
(3.9)
No programa matemático (3.9), c(x) e 𝑐𝑒𝑞(𝑥) são funções que retornam vetores, e f(x) é uma função que
retorna um escalar. A função objetivo f(x) e as restrições desigualdade c(x) e igualdade 𝑐𝑒𝑞(𝑥) podem
ser funções não lineares. A variável de projeto x e os limites inferiores lb e superiores ub podem ser
passados como vetores ou matrizes. b e 𝑏𝑒𝑞 são vetores que contêm os valores a serem satisfeitos da
desigualdade e igualdade, respectivamente, e 𝐴 e 𝐴𝑒𝑞 são matrizes que contêm os coeficientes das
restrições de desigualdade e igualdade, respectivamente. As restrições desigualdade devem ser do tipo
“≤” [16].
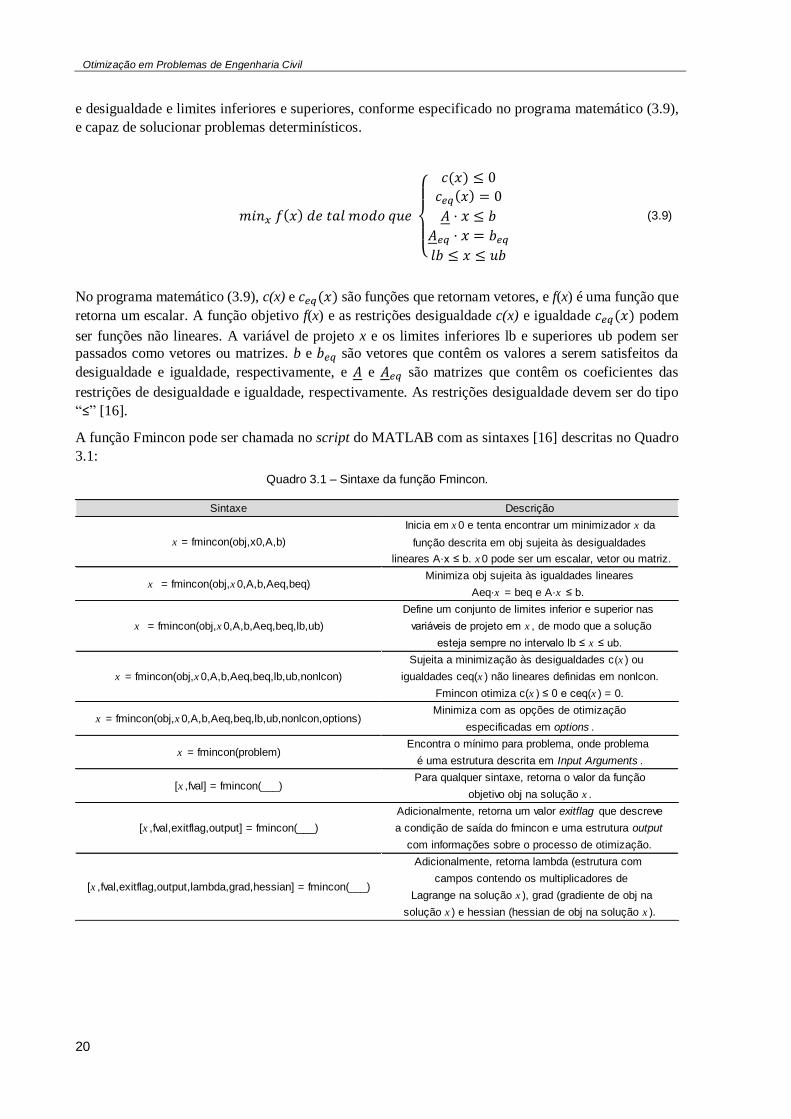
A função Fmincon pode ser chamada no script do MATLAB com as sintaxes [16] descritas no Quadro
3.1:
Quadro 3.1 – Sintaxe da função Fmincon.
Sintaxe Descrição
Inicia em x 0 e tenta encontrar um minimizador x da
x = fmincon(obj,x0,A,b) função descrita em obj sujeita às desigualdades
lineares A⋅x ≤ b. x 0 pode ser um escalar, vetor ou matriz.
Minimiza obj sujeita às igualdades lineares
Aeq⋅x = beq e A⋅x ≤ b.
Define um conjunto de limites inferior e superior nas
x = fmincon(obj,x 0,A,b,Aeq,beq,lb,ub) variáveis de projeto em x , de modo que a solução
esteja sempre no intervalo lb ≤ x ≤ ub.
Sujeita a minimização às desigualdades c(x ) ou
igualdades ceq(x ) não lineares definidas em nonlcon.
Fmincon otimiza c(x ) ≤ 0 e ceq(x ) = 0.
Minimiza com as opções de otimização
especificadas em options .
Encontra o mínimo para problema, onde problema
é uma estrutura descrita em Input Arguments .
Para qualquer sintaxe, retorna o valor da função
objetivo obj na solução x .
Adicionalmente, retorna um valor exitflag que descreve
[x ,fval,exitflag,output] = fmincon(___) a condição de saída do fmincon e uma estrutura output
com informações sobre o processo de otimização.
Adicionalmente, retorna lambda (estrutura com
campos contendo os multiplicadores de
Lagrange na solução x ), grad (gradiente de obj na
solução x ) e hessian (hessian de obj na solução x ).
[x ,fval] = fmincon(___)
[x ,fval,exitflag,output,lambda,grad,hessian] = fmincon(___)
x = fmincon(obj,x 0,A,b,Aeq,beq)
x = fmincon(obj,x 0,A,b,Aeq,beq,lb,ub,nonlcon)
x = fmincon(obj,x 0,A,b,Aeq,beq,lb,ub,nonlcon,options)
x = fmincon(problem)
Otimização em Problemas de Engenharia Civil
21
3.2.1. MÉTODOS DE OTIMIZAÇÃO UTILIZADOS PELA FUNÇÃO FMINCON
A função Fmincon do MATLAB possui disponíveis cinco opções de algoritmos para resolução de
problemas de otimização [17].
O primeiro é o método Interior-Point que é o algoritmo padrão da Fmincon. Recomenda-se seu uso
antes de testar outros métodos. A razão para isso é que Interior-Point lida com problemas grandes e
esparsos, bem como problemas pequenos e densos. O algoritmo satisfaz os limites em todas as iterações
e pode se recuperar dos resultados NaN (Not a Number) ou Inf (Infinity). É um algoritmo de grande
escala e pode usar técnicas especiais para problemas desse tipo.
O método Trust-Region-Reflective requer que o usuário forneça um gradiente e permite apenas limites
ou restrições de igualdade linear, mas não ambos. Dentro dessas limitações, o algoritmo lida com
eficiência com grandes problemas esparsos e pequenos problemas densos. É um algoritmo de grande
escala. O algoritmo pode usar técnicas especiais para economizar o uso de memória, como uma função
de multiplicação hessiana.
O terceiro método é o SQP (Sequential Quadratic Programming) que satisfaz os limites em todas as
iterações. O algoritmo pode se recuperar dos resultados NaN ou Inf. Não é um algoritmo de grande
escala. SQP-Legacy é o quarto método e é semelhante ao SQP, mas geralmente é mais lento e utiliza
mais memória.
O quinto e último método é o Active-Set que pode dar grandes passos, o que aumenta a velocidade. O
algoritmo é eficaz em alguns problemas com restrições não suaves. Não é um algoritmo de grande
escala.
3.2.1.1. Método Interior-Point
Foi o método utilizado pela função Fmincon no presente trabalho. O algoritmo Interior-Point para
minimização com restrições resolve uma sequência de problemas de minimização aproximada. O
problema original está exposto na Equação 3.10. O problema aproximado descrito na Equação 3.11 é
uma sequência de problemas com restrições igualdade para cada μ > 0, sendo mais fácil de resolver do
que o problema original com restrições desigualdade.
𝑚𝑖𝑛 𝑓(𝑥), 𝑠𝑢𝑗𝑒𝑖𝑡𝑎 à ℎ(𝑥) = 0 𝑒 𝑔(𝑥) ≤ 0 (3.10)
𝑚𝑖𝑛 𝑓𝜇(𝑥, 𝑠) = 𝑚𝑖𝑛 𝑓(𝑥) − 𝜇∑𝑙𝑛(
𝑖
𝑠𝑖), 𝑠𝑢𝑗𝑒𝑖𝑡𝑎 à ℎ(𝑥) = 0 𝑒 𝑔(𝑥) + 𝑠 = 0 (3.11)
Existem tantas variáveis de folga 𝑠𝑖 quantas restrições desigualdade g. As variáveis de folga são restritas
a serem positivos para manter ln(𝑠𝑖) limitado. À medida que μ diminui para zero, o mínimo de 𝑓𝜇 deve
se aproximar do mínimo de 𝑓. O termo logarítmico adicionado é chamado de barrier function.
Para resolver o problema aproximado, o algoritmo usa um dos dois principais tipos de etapas em cada
iteração. Uma é a etapa direta em (𝑥, 𝑠) e tenta resolver as equações KKT para o problema aproximado
por meio de uma aproximação linear. Esta etapa pode ser chamada de etapa de Newton. E a outra etapa
é a de gradiente conjugado (GC) que usa uma região de confiança.

Otimização em Problemas de Engenharia Civil
22
Em geral, o algoritmo primeiro tenta dar um passo direto, mas se não for possível, ele tenta uma etapa
GC. A etapa direta não ocorre quando o problema aproximado não é localmente convexo próximo à
iteração atual.
A cada iteração que ocorre, o algoritmo diminui uma função mérito, tal como está apresentado na
Equação 3.12.
𝑓𝜇(𝑥, 𝑠) + 𝜈‖ℎ(𝑥), 𝑔(𝑥) + 𝑠‖ (3.12)
O parâmetro ν pode aumentar conforme o número de iterações para forçar a obtenção da solução viável.
Se uma etapa realizada não diminuir a função mérito, o algoritmo rejeita essa tentativa e realiza uma
nova etapa.
Se a função objetivo ou alguma restrição não linear retornar um valor complexo, NaN, Inf ou um erro
em uma iteração 𝑥𝑗 , o algoritmo rejeitará 𝑥𝑗 . Essa rejeição tem o mesmo efeito como se a função mérito
não diminuísse o suficiente, fazendo com que o algoritmo tente uma etapa diferente e mais curta. A
função objetivo e as restrições devem produzir valores adequados (duplos) no ponto inicial.
Na definição da etapa direta são utilizadas as variáveis descritas a seguir:
H denota a Hessiana do Lagrangiano de 𝑓𝜇;
𝐻 = 𝛻2𝑓(𝑥) +∑𝜆𝑖𝛻2𝑔𝑖(𝑥) +∑𝜆𝑗𝛻
2ℎ𝑗(𝑥)
𝑗𝑖
(3.13)
𝐽g denota o Jacobiano da função de restrição g;
𝐽h denota o Jacobiano da função de restrição h;
S = diag (s)
λ denota o vetor multiplicador de Langrange associado às restrições g;
Λ= diag (λ)
y denota o vetor multiplicador de Langrange associado às restrições h;
e denota o vetor de uns do mesmo tamanho que g.
A etapa direta (Δx, Δs) pode ser definida conforme a Equação 3.14:
[ 𝐻 00 𝑆𝛬
𝐽ℎ𝑇 𝐽𝑔
𝑇
0 −𝑆 𝐽ℎ 0𝐽𝑔 −𝑆
1 00 1 ]
. [
Δ𝑥 Δ𝑠−Δy−Δλ
] = −
[ ∇𝑓 − 𝐽h
Ty − 𝐽gTλ
Sλ − μ𝑒h
g + 𝑠 ]
(3.14)
Para resolver esta equação para (Δx, Δs), o algoritmo faz uma fatoração LDL da matriz. Esta é a etapa
mais cara do ponto de vista computacional. Resultante dessa fatoração é a determinação de se o Hessiano
projetado é definido positivamente ou não. Não sendo positivo o algoritmo usará o passo do gradiente
conjugado (GC).
A abordagem do GC para resolver o problema aproximado da Equação 3.11 é semelhante a outros
cálculos de gradiente conjugado. Neste caso, o algoritmo ajusta tanto x quanto s, mantendo as folgas s
positivas. A abordagem é para minimizar uma aproximação quadrática para o problema aproximado em
uma região de confiança, sujeito a restrições linearizadas.
Otimização em Problemas de Engenharia Civil
23
O algoritmo obtém multiplicadores de Lagrange resolvendo aproximadamente as equações KKT (3.15),
no sentido dos mínimos quadrados, sujeito a λ ser positivo. Em seguida, dá um passo (Δx, Δs) para
resolver aproximadamente (3.16), sujeita às restrições linearizadas (3.17).
𝛻𝑥𝐿 = 𝛻𝑥𝑓(𝑥) +∑𝜆𝑖𝛻𝑔𝑖(𝑥) +∑𝜆𝑗𝛻ℎ𝑗(𝑥)
𝑗𝑖
= 0 (3.15)
𝑚𝑖𝑛 𝛻𝑓𝑇𝛥𝑥 +1
2𝛥𝑥𝑇𝛻𝑥𝑥
2 𝐿𝛥𝑥 + 𝜇𝑒𝑇𝑆−1𝛥𝑠 +1
2𝛥𝑠𝑇𝑆−1𝛬𝛥𝑠 (3.16)
𝑔(𝑥) + 𝐽𝑔𝛥𝑥 + 𝛥𝑠 = 0, ℎ(𝑥) + 𝐽ℎ𝛥𝑥 = 0 (3.17)
Para resolver a Equação 3.17, o algoritmo tenta minimizar uma norma das restrições linearizadas dentro
de uma região com raio escalado por R. Então a Equação 3.16 é resolvida com as restrições para
corresponder ao resíduo da solução da Equação 3.17, permanecendo dentro da região de confiança do
raio R e mantendo s estritamente positivo [18].
3.2.1.2. Método Trust-Region-Reflective
Para melhor esclarecimento sobre região de confiança para otimização, refere-se como exemplo um
problema de minimização sem restrições, a fim de minimizar 𝑓(𝑥), onde a função utiliza argumentos
vetoriais e retorna escalares. Supondo um ponto x no espaço n deseja-se mover para um ponto com um
valor de função inferior. A ideia básica é aproximar 𝑓 para uma função mais simples q, que reflete
razoavelmente o comportamento da função em uma vizinhança N em torno do ponto x. Esta vizinhança
é dita como a região de confiança. Uma etapa de teste s é calculada minimizando sobre N. Este é o
subproblema da região de confiança (3.18).
𝑚𝑖𝑛 {𝑞(𝑠), 𝑠 ∈ 𝑁} (3.18)
O ponto atual é atualizado para 𝑥 + 𝑠 se a função 𝑓(𝑥 + 𝑠) for menor que 𝑓(𝑥). Senão, o ponto atual
permanece inalterado e a região de confiança N é reduzida e o cálculo da etapa de teste é repetido.
A definição de uma abordagem de região de confiança específica para minimizar 𝑓(𝑥) possui
importantes questões como, escolher e calcular a aproximação q (definida no ponto atual x), escolher e
modificar a região de confiança N e a precisão para resolver o subproblema da região de confiança.
No método padrão da região de confiança, a aproximação quadrática q é definida pelos dois primeiros
termos da aproximação de Taylor para F em x e a vizinhança N é geralmente esférica ou elipsoidal em
forma. Matematicamente, o subproblema da região de confiança é definido tipicamente pela Equação
3.19, onde g é o gradiente de 𝑓 no ponto atual x, H é a matriz Hessiana, isto é, a matriz simétrica das
segundas derivadas, D é uma matriz de escala diagonal na norma Euclidiana (‖ ‖) e Δ é um escalar
positivo. Os algoritmos utilizados para resolver a Equação 3.19 não serão abordados neste trabalho [19].
𝑚𝑖𝑛 {1
2𝑠𝑇𝐻𝑠 + 𝑠𝑇𝑔 𝑑𝑒 𝑡𝑎𝑙 𝑚𝑜𝑑𝑜 𝑞𝑢𝑒 ‖𝐷𝑠‖ ≤ 𝛥} (3.19)
Otimização em Problemas de Engenharia Civil
24
3.2.1.3. Método SQP e SQP-Legacy
O algoritmo SQP é quase idêntico ao SQP-Legacy e semelhante ao algoritmo Active-Set. A principal
diferença entre os SQPs está na sua implementação. O SQP possui um tempo de execução mais rápido
e utiliza menos memória do que o SQP-Legacy.
SQP executa cada etapa iterativa na região restringida por limites. Além disso, as etapas de diferenças
finitas também respeitam os limites. Pelo fato de os limites não serem rígidos, uma etapa pode estar
exatamente em um limite. A viabilidade pode ser benéfica quando a função objetivo ou as restrições não
lineares são indefinidas ou são complexas fora da região restringida por limites. Durante as iterações o
algoritmo pode tentar executar uma etapa que falhou. Isto significa que uma função objetivo ou uma
restrição não-linear fornecida retorna um valor de Inf, NaN ou um valor complexo. Nesse caso, o
algoritmo tenta dar um passo menor.
Quando as restrições não são satisfeitas o SQP pode optar por combinar as funções objetivo e as
restrições em uma função mérito. O algoritmo tenta minimizar essa função sujeita a restrições relaxadas,
podendo levar a uma solução viável. No entanto, essa abordagem tem mais variáveis do que o problema
original, aumentando o tamanho do problema gerando um atraso da solução do subproblema. O
algoritmo define o parâmetro de penalidade para a função mérito. O SQP também pode optar por tentar
obter a viabilidade usando uma aproximação de segunda ordem para as restrições. A utilização da
técnica de segunda ordem pode tornar a solução mais lenta, exigindo mais avaliações das funções de
restrição não lineares, o que não impossibilita a obtenção da solução viável [18].
3.2.1.4. Método Active-Set
Em problemas de otimização com restrições, é habitual transformar o problema em um subproblema
mais fácil que pode então ser resolvido e usado como base de um processo iterativo. A maioria dos
métodos iniciais tem como objetivo a tradução do problema com restrições para um problema simples
sem restrições através de uma função de penalidade para as restrições que estão próximas ou além do
limite de restrição. Desta forma, o problema com restrições é resolvido usando uma sequência de
otimizações irrestritas parametrizadas, que no limite da sequência convergem para o problema restrito.
Porém, esses métodos não são de grande eficiência, sendo necessária sua substituição por métodos que
foquem na solução das equações de KKT. As equações KKT são condições necessárias para a
otimização de um problema de otimização com restrições. Se for um problema de programação convexa,
isto é, a função objetivo e as restrições forem funções convexas, então as equações KKT são necessárias
e suficientes para um ponto de solução global.
As três equações de Karush-Kuhn-Tucker e as restrições originais de igualdade e desigualdade podem
ser exemplificadas em (3.20).
𝛻𝑓(𝑥∗) +∑𝜆𝑖 ⋅ 𝛻𝐺𝑖(𝑥∗) = 0
𝑚
𝑖=1 𝜆𝑖 ⋅ 𝐺𝑖(𝑥
∗) = 0, 𝑖 = 1,… ,𝑚𝑒 𝜆𝑖 ≥ 0, 𝑖 = 𝑚𝑒 + 1,… ,𝑚
𝐺𝑖(𝑥) = 0
𝐺𝑖(𝑥) ≤ 0
(3.20)
Otimização em Problemas de Engenharia Civil
25
A primeira equação descreve um cancelamento dos gradientes entre a função objetivo e as restrições
ativas no ponto de solução. Para que os gradientes sejam cancelados, são necessários multiplicadores de
Lagrange (λ𝑖) para equilibrar os desvios na magnitude da função objetivo e os gradientes de restrição.
Nesta operação de cancelamento são apenas incluídas as restrições ativas. As restrições que não são
ativas recebem multiplicadores de Lagrange iguais a 0. Isso é declarado implicitamente nas duas últimas
equações de Karush-Kuhn-Tucker.
A solução das equações KKT constitui a base para muitos algoritmos de programação não linear. Esses
algoritmos tentam calcular os multiplicadores de Lagrange diretamente. Os métodos quase-Newton
restritos garantem a convergência supra linear ao acumular informações de segunda ordem com relação
às equações KKT usando um procedimento de atualização quase-Newton [18]. Esses métodos não serão
abordados no presente trabalho.

Otimização em Problemas de Engenharia Civil
26
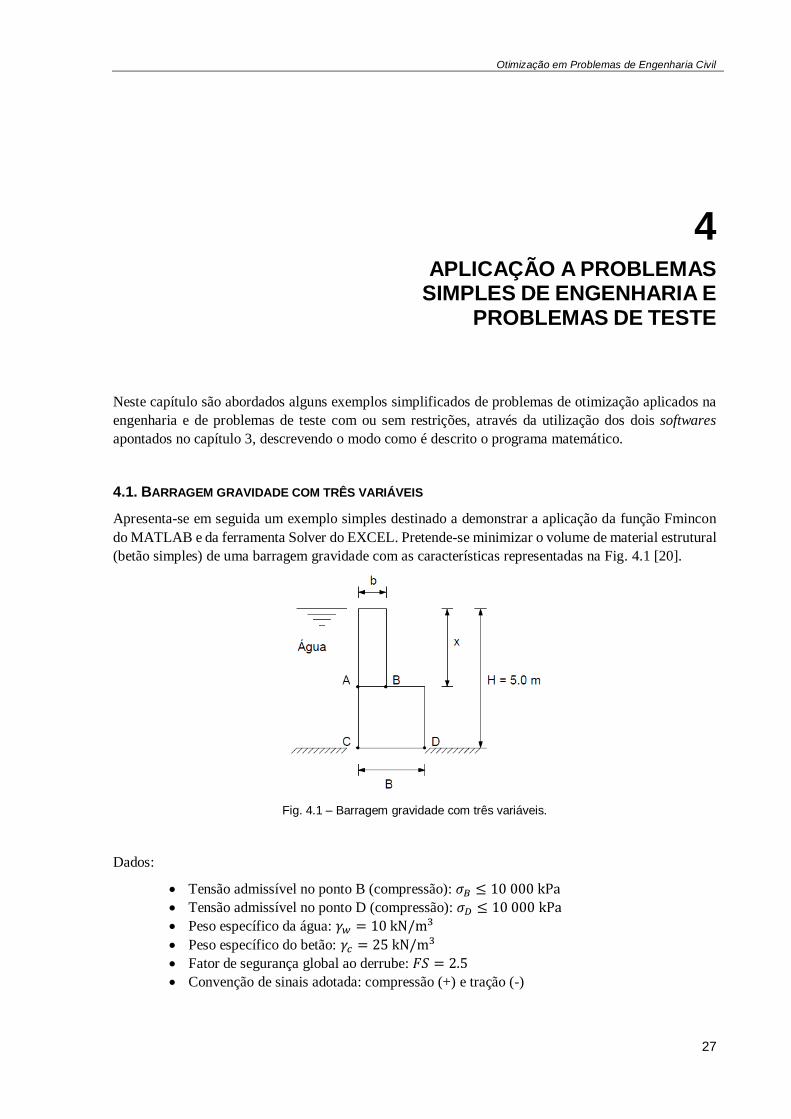
Otimização em Problemas de Engenharia Civil
27
4 APLICAÇÃO A PROBLEMAS
SIMPLES DE ENGENHARIA E
PROBLEMAS DE TESTE
Neste capítulo são abordados alguns exemplos simplificados de problemas de otimização aplicados na
engenharia e de problemas de teste com ou sem restrições, através da utilização dos dois softwares
apontados no capítulo 3, descrevendo o modo como é descrito o programa matemático.
4.1. BARRAGEM GRAVIDADE COM TRÊS VARIÁVEIS
Apresenta-se em seguida um exemplo simples destinado a demonstrar a aplicação da função Fmincon
do MATLAB e da ferramenta Solver do EXCEL. Pretende-se minimizar o volume de material estrutural
(betão simples) de uma barragem gravidade com as características representadas na Fig. 4.1 [20].
Fig. 4.1 – Barragem gravidade com três variáveis.
Dados:
Tensão admissível no ponto B (compressão): 𝜎𝐵 ≤ 10 000 kPa
Tensão admissível no ponto D (compressão): 𝜎𝐷 ≤ 10 000 kPa
Peso específico da água: 𝛾𝑤 = 10 kN/m3
Peso específico do betão: 𝛾𝑐 = 25 kN/m3
Fator de segurança global ao derrube: 𝐹𝑆 = 2.5
Convenção de sinais adotada: compressão (+) e tração (-)
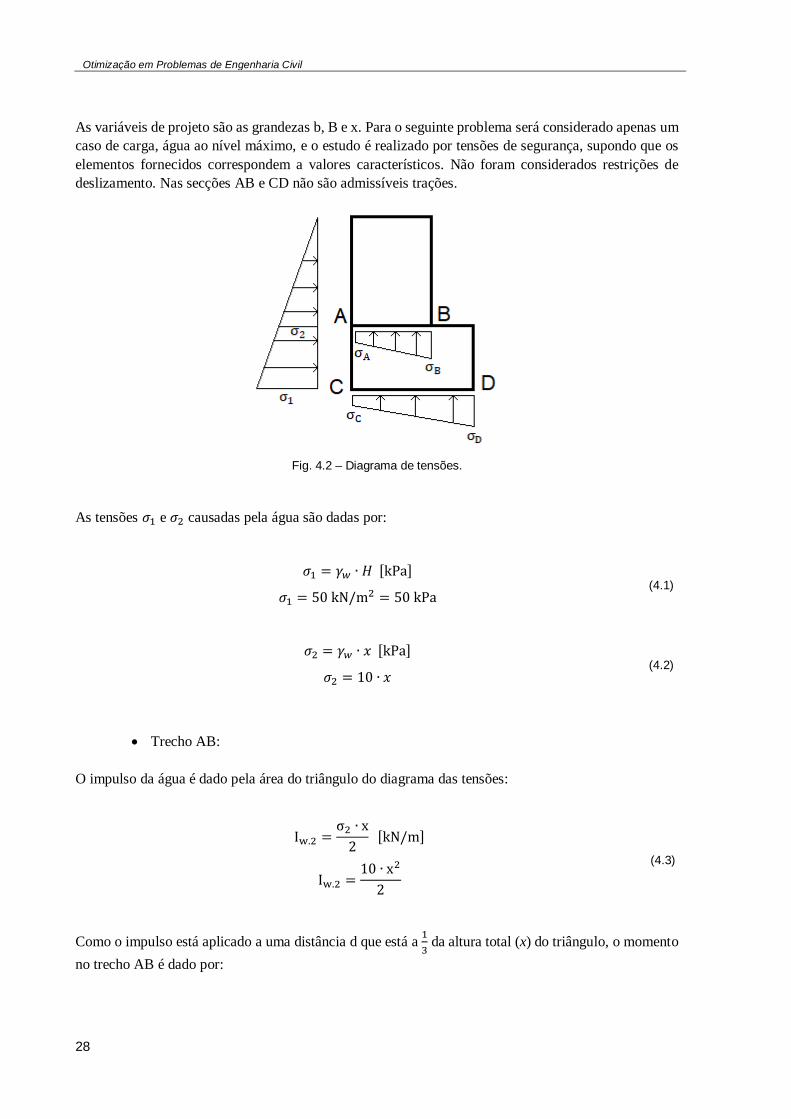
Otimização em Problemas de Engenharia Civil
28
As variáveis de projeto são as grandezas b, B e x. Para o seguinte problema será considerado apenas um
caso de carga, água ao nível máximo, e o estudo é realizado por tensões de segurança, supondo que os
elementos fornecidos correspondem a valores característicos. Não foram considerados restrições de
deslizamento. Nas secções AB e CD não são admissíveis trações.
Fig. 4.2 – Diagrama de tensões.
As tensões 𝜎1 e 𝜎2 causadas pela água são dadas por:
𝜎1 = 𝛾𝑤 ∙ 𝐻 [kPa]
𝜎1 = 50 kN/m2 = 50 kPa (4.1)
𝜎2 = 𝛾𝑤 ∙ 𝑥 [kPa]
𝜎2 = 10 ∙ 𝑥 (4.2)
Trecho AB:
O impulso da água é dado pela área do triângulo do diagrama das tensões:
Iw.2 =σ2 ∙ x
2 [kN/m]
Iw.2 =10 ∙ x2
2
(4.3)
Como o impulso está aplicado a uma distância d que está a 1
3 da altura total (x) do triângulo, o momento
no trecho AB é dado por:

Otimização em Problemas de Engenharia Civil
29
𝑀𝐴𝐵 = 𝐼𝑊,2 ∙ 𝑑 [kNm/m]
𝑀𝐴𝐵 =10 ∙ 𝑥2
2∙1 ∙ 𝑥
3
(4.4)
O esforço axial causado pelo peso próprio desse trecho da barragem é:
𝑁𝐴𝐵 = 𝛾𝑐 ∙ 𝐴𝑠𝑒𝑐çã𝑜,𝐴𝐵 [kN/m]
𝑁𝐴𝐵 = 25 ∙ (𝑏 ∙ 𝑥) (4.5)
Dessa forma é possível calcular as tensões no ponto A e no ponto B, de tal forma que não seja admitido
tensões de trações (≥ 0) e a tensão de compressão esteja limitada a 10 000 kPa (≤ 10 000 kPa),
gerando duas restrições uma em cada ponto, conforme explicitado abaixo:
𝜎𝐴 = +𝑁𝐴𝐵𝑏
−6 ∙ 𝑀𝐴𝐵
𝑏2 [kPa]
𝜎𝐴 = +25 ∙ 𝑥 −10 ∙ 𝑥3
𝑏2≥ 0
(4.6)
𝜎𝐵 = +𝑁𝐴𝐵𝑏
+6 ∙ 𝑀𝐴𝐵
𝑏2 [kPa]
𝜎𝐵 = +25 ∙ 𝑥 +10 ∙ 𝑥3
𝑏2≤ 10 000
(4.7)
Derrube em torno de B:
𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 𝑁𝐴𝐵 ∙𝑏
2 [kNm/m]
𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 =25 ∙ 𝑏2 ∙ 𝑥
2
(4.8)
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝑀𝐴𝐵 =5 ∙ 𝑥3
3 [kNm/m] (4.9)
Para que não ocorra o derrube em torno de B é necessário que exista mais uma restrição para garantir
que não gire em torno de B, majorando o 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança
global ao derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (4.10)

Otimização em Problemas de Engenharia Civil
30
𝑥2 ≤ 3 ∙ 𝑏2
Trecho CD:
O impulso da água é dado pela área do triângulo do diagrama das tensões:
𝐼𝑊,1 =𝜎1 ∙ 5
2
𝐼𝑊,1 = 125 kN/m
(4.11)
Como o impulso está aplicado a uma distância d que está a 1
3 da altura total (5.0 m) do triângulo, o
momento no trecho CD é:
𝑀𝐶𝐷 = 𝐼𝑊,1 ∙ 𝑑 − 𝑁𝐴𝐵 ∙ 𝑒 [kNm/m] (4.12)
Onde a excentricidade 𝑒 é dada por:
𝑒 =𝐵
2−𝑏
2 [𝑚] (4.13)
Então 𝑀𝐶𝐷:
𝑀𝐶𝐷 =625
3− 12.5 ∙ 𝑏 ∙ 𝐵 ∙ 𝑥 + 12.5 ∙ 𝑏2 ∙ 𝑥 (4.14)
O esforço axial causado pelo peso próprio deste trecho da barragem é:
𝑁𝐶𝐷 = 𝛾𝑐 ∙ 𝐴𝑠𝑒𝑐çã𝑜,𝐶𝐷 [kN/m] (4.15)
E a área da secção CD:
Asecção,CD = B ∙ (5 − x) [m2] (4.16)
Então 𝑁𝐶𝐷:
𝑁𝐶𝐷 = 125 ∙ 𝐵 − 25 ∙ 𝐵 ∙ 𝑥 (4.17)
O esforço axial total causado pelo peso próprio da barragem é:

Otimização em Problemas de Engenharia Civil
31
𝑁𝑡𝑜𝑡𝑎𝑙 = 𝑁𝐴𝐵 + 𝑁𝐶𝐷 [kN/m]
𝑁𝑡𝑜𝑡𝑎𝑙 = 25 ∙ 𝑏 ∙ 𝑥 + 125 ∙ 𝐵 − 25 ∙ 𝐵 ∙ 𝑥 (4.18)
Sendo assim é possível calcular as tensões no ponto C e no ponto D, de tal forma que não seja admitido
trações (≥ 0) e a tensão de compressão esteja limitada à 10 000 kPa (≤ 10 000 kPa), gerando mais
duas restrições, uma em cada ponto, conforme explicitado abaixo:
𝜎𝐶 = +𝑁𝑡𝑜𝑡𝑎𝑙𝐵
−6 ∙ 𝑀𝐶𝐷
𝐵²≥ 0 (4.19)
𝜎𝐷 = +𝑁𝑡𝑜𝑡𝑎𝑙𝐵
+6 ∙ 𝑀𝐶𝐷
𝐵²≤ 10 000 kPa (4.20)
Nota: 𝑁𝑡𝑜𝑡𝑎𝑙 e 𝑀𝐶𝐷 não foram substituídas nas equações das tensões (4.19) e (4.20) afim de deixá-las
como restrições igualdade no programa matemático.
Derrube em torno de D:
𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 𝑁𝐴𝐵 ∙ (𝐵 −𝑏
2) + 𝑁𝐶𝐷 ∙
𝐵
2 [kNm/m]
𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝑏 ∙ 𝑥 ∙ (𝐵 −𝑏
2) + (125 ∙ 𝐵 − 25 ∙ 𝐵 ∙ 𝑥) ∙
𝐵
2
(4.21)
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,1 ∙1 ∙ 5
3
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =625
3 kNm/m
(4.22)
Para que não ocorra o derrube em torno de D é necessário que exista mais uma restrição para garantir
que não gire em torno de D, majorando o 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança
global ao derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
1562.5
3≤ 25 ∙ 𝑏 ∙ 𝐵 ∙ 𝑥 − 12.5 ∙ 𝑏2 ∙ 𝑥 + 62.5 ∙ 𝐵2 − 12.5 ∙ 𝐵2 ∙ 𝑥
(4.23)
Dessa forma é possível identificar o problema de otimização correspondente ao indicado abaixo:
Função Objetivo:

Otimização em Problemas de Engenharia Civil
32
A função (4.24) é dada pelo volume de betão da barragem, para 1.0 m de desenvolvimento.
𝑓 (𝑏, 𝐵, 𝑥) = (𝑏 ∙ 𝑥 ∙ 1.0 𝑚) + (𝐵 ∙ (5 − 𝑥) ∙ 1.0 m) [m3]
𝑓 (𝑏, 𝐵, 𝑥) = 𝑏 ∙ 𝑥 + 5 ∙ 𝐵 − 𝐵 ∙ 𝑥 (4.24)
Restrições Igualdade:
Como as restrições igualdade correspondem expressões simples em que as variáveis de projeto estão
explicitadas nelas, seria possível e vantajoso efetuar a substituição delas nas equações das tensões (4.19)
e (4.20), fazendo com que as restrições igualdade sejam suprimidas do programa matemático. Porém,
opta-se por não realizar essas substituições para que ao final do processo de otimização tenha a solução
delas.
𝑅𝑖𝑔(1) ⇒ 𝑁𝑡𝑜𝑡𝑎𝑙 − 25 ∙ 𝑏 ∙ 𝑥 − 125 ∙ 𝐵 + 25 ∙ 𝐵 ∙ 𝑥 = 0
𝑅𝑖𝑔(2) ⇒ 𝑀𝐶𝐷 −625
3+ 12.5 ∙ 𝑏 ∙ 𝐵 ∙ 𝑥 − 12.5 ∙ 𝑏2 ∙ 𝑥 = 0
Restrições Desigualdade:
Conforme explicitado abaixo é possível analisar que existem três restrições que impõem um valor
mínimo positivo para 𝑥, 𝑏 e 𝐵 que destinam a impedir a convergência do processo iterativo para soluções
nulas. A quarta restrição é posta pois a variável 𝑥 não pode assumir um valor superior à 5.0 m por conta
da altura total fixada para a barragem. Os restantes das restrições são dados pela tensão (quatro
restrições) e pelo derrube (duas restrições).
Como a função Fmincon exige que as restrições desigualdade sejam do tipo " ≤ 0", as inequações que
se encontravam do tipo " ≥ 0" foram multiplicadas em ambos os lados por -1. Em contrapartida, a
ferramenta Solver aceita os dois tipos de restrições, porém, adota-se um único modelo para a resolução
do problema de otimização.
𝑅𝑑𝑒𝑠(1) ⇒ 𝑥 ≥ 0.001
−𝑥 + 0.001 ≤ 0
𝑅𝑑𝑒𝑠(2) ⇒ 𝑏 ≥ 0.1
−𝑏 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(3) ⇒ 𝐵 ≥ 0.1
−𝐵 + 0.1 ≤ 0
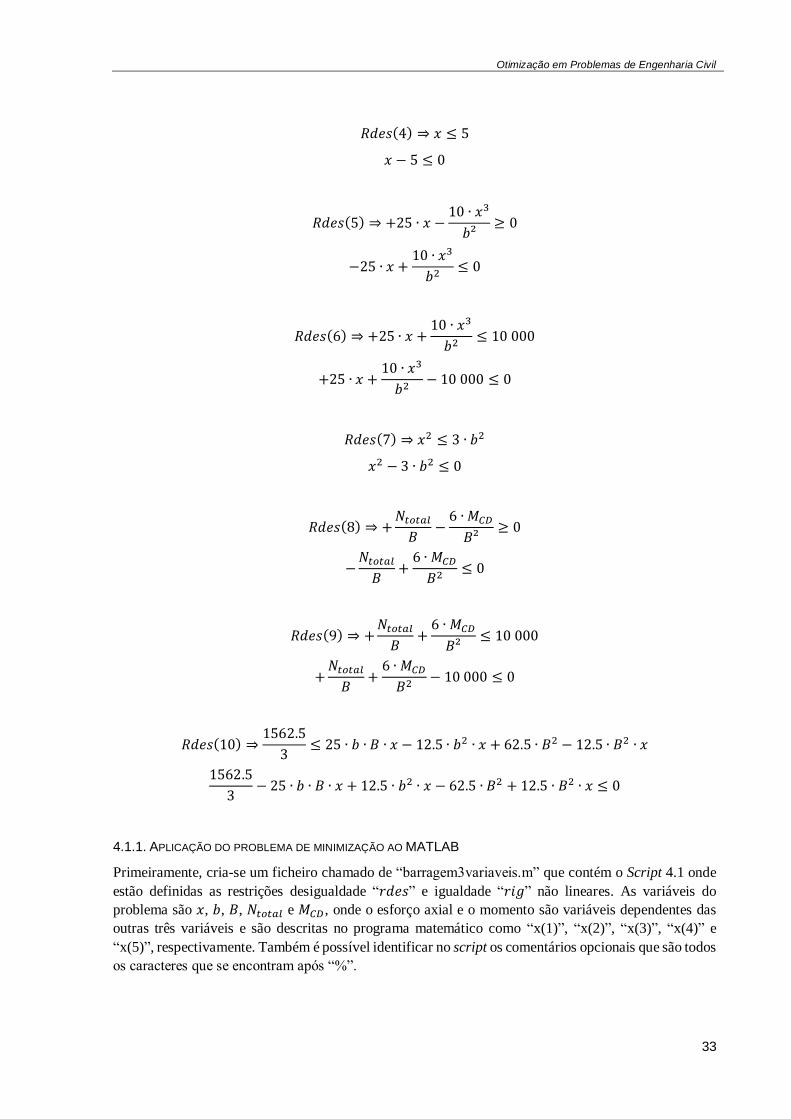
Otimização em Problemas de Engenharia Civil
33
𝑅𝑑𝑒𝑠(4) ⇒ 𝑥 ≤ 5
𝑥 − 5 ≤ 0
𝑅𝑑𝑒𝑠(5) ⇒ +25 ∙ 𝑥 −10 ∙ 𝑥3
𝑏²≥ 0
−25 ∙ 𝑥 +10 ∙ 𝑥3
𝑏2≤ 0
𝑅𝑑𝑒𝑠(6) ⇒ +25 ∙ 𝑥 +10 ∙ 𝑥3
𝑏2≤ 10 000
+25 ∙ 𝑥 +10 ∙ 𝑥3
𝑏2− 10 000 ≤ 0
𝑅𝑑𝑒𝑠(7) ⇒ 𝑥2 ≤ 3 ∙ 𝑏2
𝑥2 − 3 ∙ 𝑏2 ≤ 0
𝑅𝑑𝑒𝑠(8) ⇒ +𝑁𝑡𝑜𝑡𝑎𝑙𝐵
−6 ∙ 𝑀𝐶𝐷
𝐵²≥ 0
−𝑁𝑡𝑜𝑡𝑎𝑙𝐵
+6 ∙ 𝑀𝐶𝐷
𝐵2≤ 0
𝑅𝑑𝑒𝑠(9) ⇒ +𝑁𝑡𝑜𝑡𝑎𝑙𝐵
+6 ∙ 𝑀𝐶𝐷
𝐵²≤ 10 000
+𝑁𝑡𝑜𝑡𝑎𝑙𝐵
+6 ∙ 𝑀𝐶𝐷
𝐵2− 10 000 ≤ 0
𝑅𝑑𝑒𝑠(10) ⇒1562.5
3≤ 25 ∙ 𝑏 ∙ 𝐵 ∙ 𝑥 − 12.5 ∙ 𝑏2 ∙ 𝑥 + 62.5 ∙ 𝐵2 − 12.5 ∙ 𝐵2 ∙ 𝑥
1562.5
3− 25 ∙ 𝑏 ∙ 𝐵 ∙ 𝑥 + 12.5 ∙ 𝑏2 ∙ 𝑥 − 62.5 ∙ 𝐵2 + 12.5 ∙ 𝐵2 ∙ 𝑥 ≤ 0
4.1.1. APLICAÇÃO DO PROBLEMA DE MINIMIZAÇÃO AO MATLAB
Primeiramente, cria-se um ficheiro chamado de “barragem3variaveis.m” que contém o Script 4.1 onde
estão definidas as restrições desigualdade “𝑟𝑑𝑒𝑠” e igualdade “𝑟𝑖𝑔” não lineares. As variáveis do
problema são 𝑥, 𝑏, 𝐵, 𝑁𝑡𝑜𝑡𝑎𝑙 e 𝑀𝐶𝐷, onde o esforço axial e o momento são variáveis dependentes das
outras três variáveis e são descritas no programa matemático como “x(1)”, “x(2)”, “x(3)”, “x(4)” e
“x(5)”, respectivamente. Também é possível identificar no script os comentários opcionais que são todos
os caracteres que se encontram após “%”.
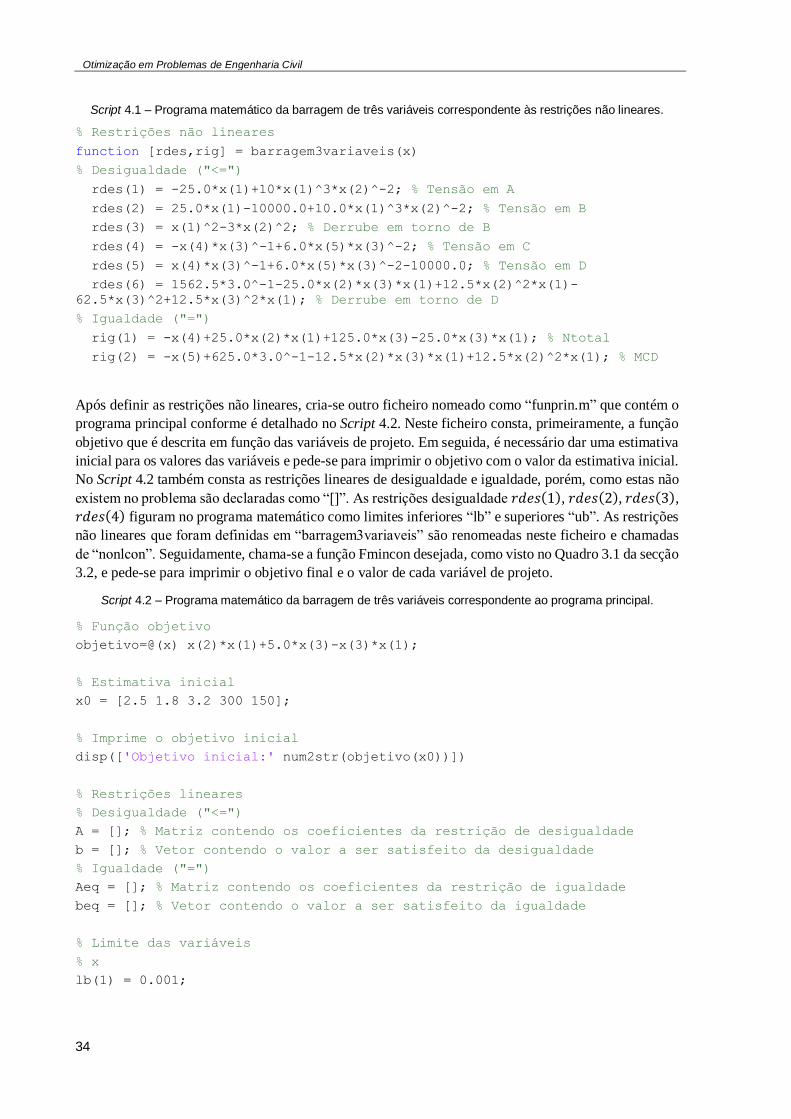
Otimização em Problemas de Engenharia Civil
34
Script 4.1 – Programa matemático da barragem de três variáveis correspondente às restrições não lineares.
% Restrições não lineares
function [rdes,rig] = barragem3variaveis(x)
% Desigualdade ("<=")
rdes(1) = -25.0*x(1)+10*x(1)^3*x(2)^-2; % Tensão em A
rdes(2) = 25.0*x(1)-10000.0+10.0*x(1)^3*x(2)^-2; % Tensão em B
rdes(3) = x(1)^2-3*x(2)^2; % Derrube em torno de B
rdes(4) = -x(4)*x(3)^-1+6.0*x(5)*x(3)^-2; % Tensão em C
rdes(5) = x(4)*x(3)^-1+6.0*x(5)*x(3)^-2-10000.0; % Tensão em D
rdes(6) = 1562.5*3.0^-1-25.0*x(2)*x(3)*x(1)+12.5*x(2)^2*x(1)-
62.5*x(3)^2+12.5*x(3)^2*x(1); % Derrube em torno de D
% Igualdade ("=")
rig(1) = -x(4)+25.0*x(2)*x(1)+125.0*x(3)-25.0*x(3)*x(1); % Ntotal
rig(2) = -x(5)+625.0*3.0^-1-12.5*x(2)*x(3)*x(1)+12.5*x(2)^2*x(1); % MCD
Após definir as restrições não lineares, cria-se outro ficheiro nomeado como “funprin.m” que contém o
programa principal conforme é detalhado no Script 4.2. Neste ficheiro consta, primeiramente, a função
objetivo que é descrita em função das variáveis de projeto. Em seguida, é necessário dar uma estimativa
inicial para os valores das variáveis e pede-se para imprimir o objetivo com o valor da estimativa inicial.
No Script 4.2 também consta as restrições lineares de desigualdade e igualdade, porém, como estas não
existem no problema são declaradas como “[]”. As restrições desigualdade 𝑟𝑑𝑒𝑠(1), 𝑟𝑑𝑒𝑠(2), 𝑟𝑑𝑒𝑠(3),
𝑟𝑑𝑒𝑠(4) figuram no programa matemático como limites inferiores “lb” e superiores “ub”. As restrições
não lineares que foram definidas em “barragem3variaveis” são renomeadas neste ficheiro e chamadas
de “nonlcon”. Seguidamente, chama-se a função Fmincon desejada, como visto no Quadro 3.1 da secção
3.2, e pede-se para imprimir o objetivo final e o valor de cada variável de projeto.
Script 4.2 – Programa matemático da barragem de três variáveis correspondente ao programa principal.
% Função objetivo
objetivo=@(x) x(2)*x(1)+5.0*x(3)-x(3)*x(1);
% Estimativa inicial
x0 = [2.5 1.8 3.2 300 150];
% Imprime o objetivo inicial
disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares
% Desigualdade ("<=")
A = []; % Matriz contendo os coeficientes da restrição de desigualdade
b = []; % Vetor contendo o valor a ser satisfeito da desigualdade
% Igualdade ("=")
Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade
beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis
% x
lb(1) = 0.001;
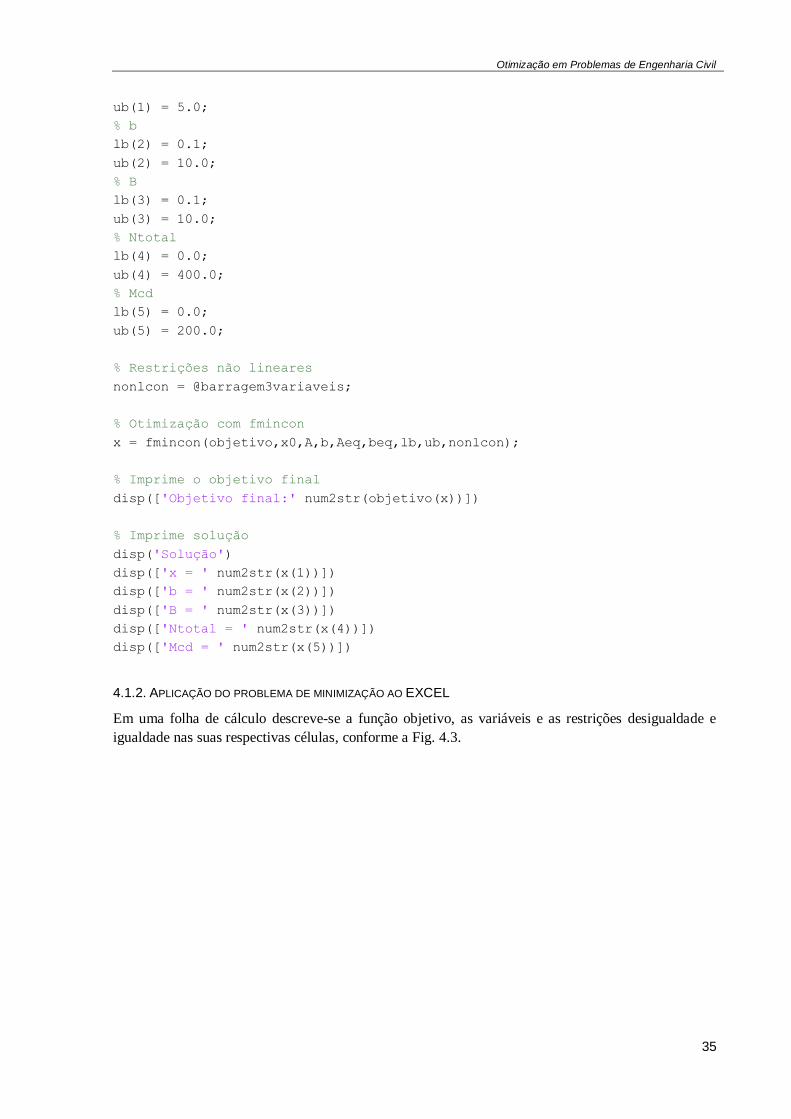
Otimização em Problemas de Engenharia Civil
35
ub(1) = 5.0;
% b
lb(2) = 0.1;
ub(2) = 10.0;
% B
lb(3) = 0.1;
ub(3) = 10.0;
% Ntotal
lb(4) = 0.0;
ub(4) = 400.0;
% Mcd
lb(5) = 0.0;
ub(5) = 200.0;
% Restrições não lineares
nonlcon = @barragem3variaveis;
% Otimização com fmincon
x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final
disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução
disp('Solução')
disp(['x = ' num2str(x(1))])
disp(['b = ' num2str(x(2))])
disp(['B = ' num2str(x(3))])
disp(['Ntotal = ' num2str(x(4))])
disp(['Mcd = ' num2str(x(5))])
4.1.2. APLICAÇÃO DO PROBLEMA DE MINIMIZAÇÃO AO EXCEL
Em uma folha de cálculo descreve-se a função objetivo, as variáveis e as restrições desigualdade e
igualdade nas suas respectivas células, conforme a Fig. 4.3.
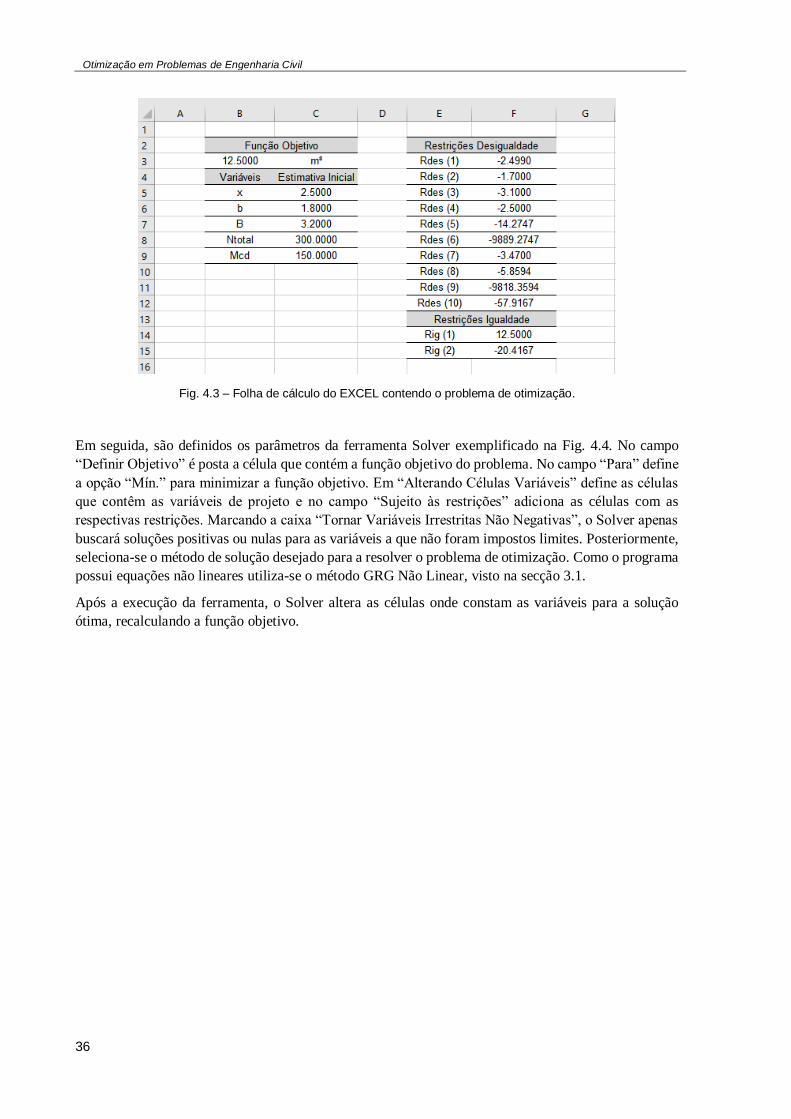
Otimização em Problemas de Engenharia Civil
36
Fig. 4.3 – Folha de cálculo do EXCEL contendo o problema de otimização.
Em seguida, são definidos os parâmetros da ferramenta Solver exemplificado na Fig. 4.4. No campo
“Definir Objetivo” é posta a célula que contém a função objetivo do problema. No campo “Para” define
a opção “Mín.” para minimizar a função objetivo. Em “Alterando Células Variáveis” define as células
que contêm as variáveis de projeto e no campo “Sujeito às restrições” adiciona as células com as
respectivas restrições. Marcando a caixa “Tornar Variáveis Irrestritas Não Negativas”, o Solver apenas
buscará soluções positivas ou nulas para as variáveis a que não foram impostos limites. Posteriormente,
seleciona-se o método de solução desejado para a resolver o problema de otimização. Como o programa
possui equações não lineares utiliza-se o método GRG Não Linear, visto na secção 3.1.
Após a execução da ferramenta, o Solver altera as células onde constam as variáveis para a solução
ótima, recalculando a função objetivo.
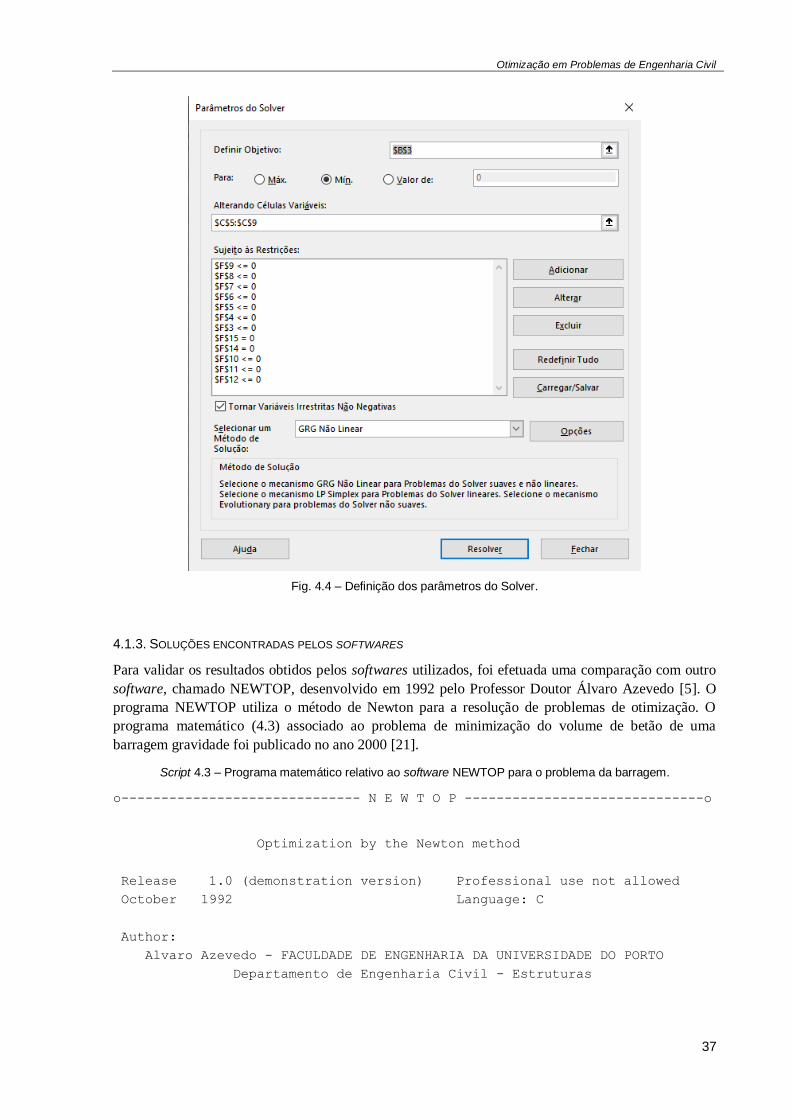
Otimização em Problemas de Engenharia Civil
37
Fig. 4.4 – Definição dos parâmetros do Solver.
4.1.3. SOLUÇÕES ENCONTRADAS PELOS SOFTWARES
Para validar os resultados obtidos pelos softwares utilizados, foi efetuada uma comparação com outro
software, chamado NEWTOP, desenvolvido em 1992 pelo Professor Doutor Álvaro Azevedo [5]. O
programa NEWTOP utiliza o método de Newton para a resolução de problemas de otimização. O
programa matemático (4.3) associado ao problema de minimização do volume de betão de uma
barragem gravidade foi publicado no ano 2000 [21].
Script 4.3 – Programa matemático relativo ao software NEWTOP para o problema da barragem.
o------------------------------ N E W T O P ------------------------------o
Optimization by the Newton method
Release 1.0 (demonstration version) Professional use not allowed
October 1992 Language: C
Author:
Alvaro Azevedo - FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Departamento de Engenharia Civil - Estruturas
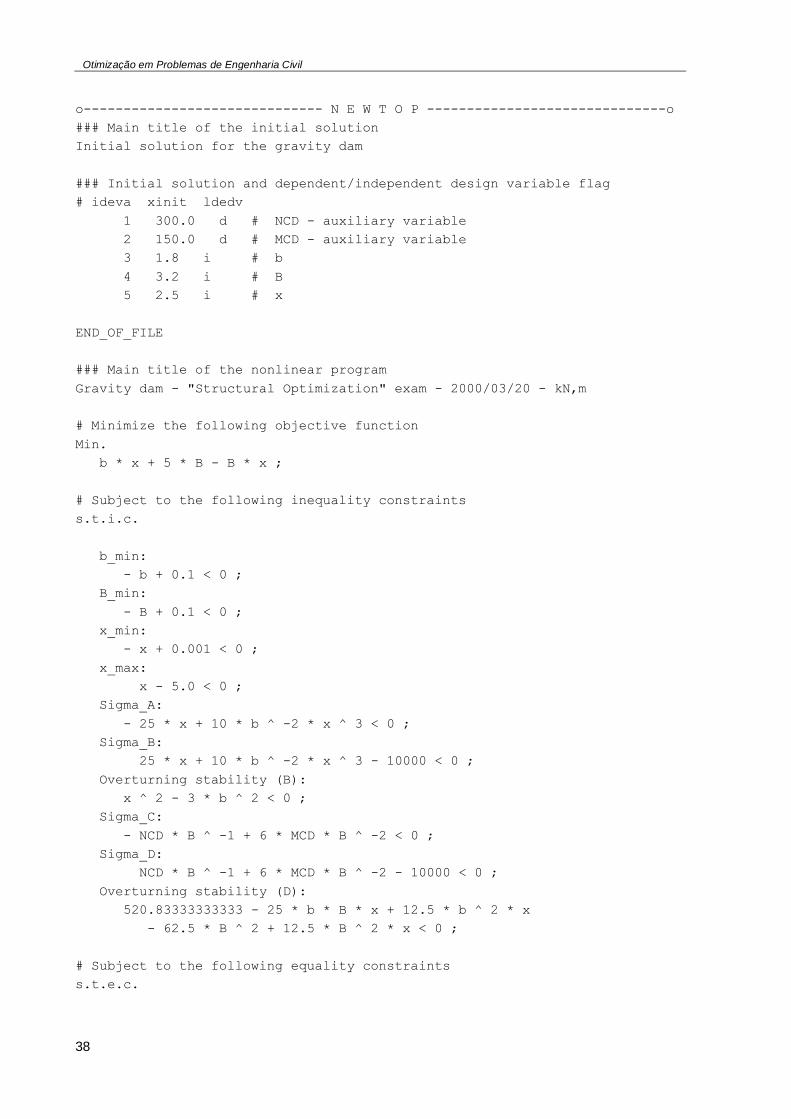
Otimização em Problemas de Engenharia Civil
38
o------------------------------ N E W T O P ------------------------------o
### Main title of the initial solution
Initial solution for the gravity dam
### Initial solution and dependent/independent design variable flag
# ideva xinit ldedv
1 300.0 d # NCD - auxiliary variable
2 150.0 d # MCD - auxiliary variable
3 1.8 i # b
4 3.2 i # B
5 2.5 i # x
END_OF_FILE
### Main title of the nonlinear program
Gravity dam - "Structural Optimization" exam - 2000/03/20 - kN,m
# Minimize the following objective function
Min.
b * x + 5 * B - B * x ;
# Subject to the following inequality constraints
s.t.i.c.
b_min:
- b + 0.1 < 0 ;
B_min:
- B + 0.1 < 0 ;
x_min:
- x + 0.001 < 0 ;
x_max:
x - 5.0 < 0 ;
Sigma_A:
- 25 * x + 10 * b ^ -2 * x ^ 3 < 0 ;
Sigma_B:
25 * x + 10 * b ^ -2 * x ^ 3 - 10000 < 0 ;
Overturning stability (B):
x ^ 2 - 3 * b ^ 2 < 0 ;
Sigma_C:
- NCD * B ^ -1 + 6 * MCD * B ^ -2 < 0 ;
Sigma_D:
NCD * B ^ -1 + 6 * MCD * B ^ -2 - 10000 < 0 ;
Overturning stability (D):
520.83333333333 - 25 * b * B * x + 12.5 * b ^ 2 * x
- 62.5 * B ^ 2 + 12.5 * B ^ 2 * x < 0 ;
# Subject to the following equality constraints
s.t.e.c.
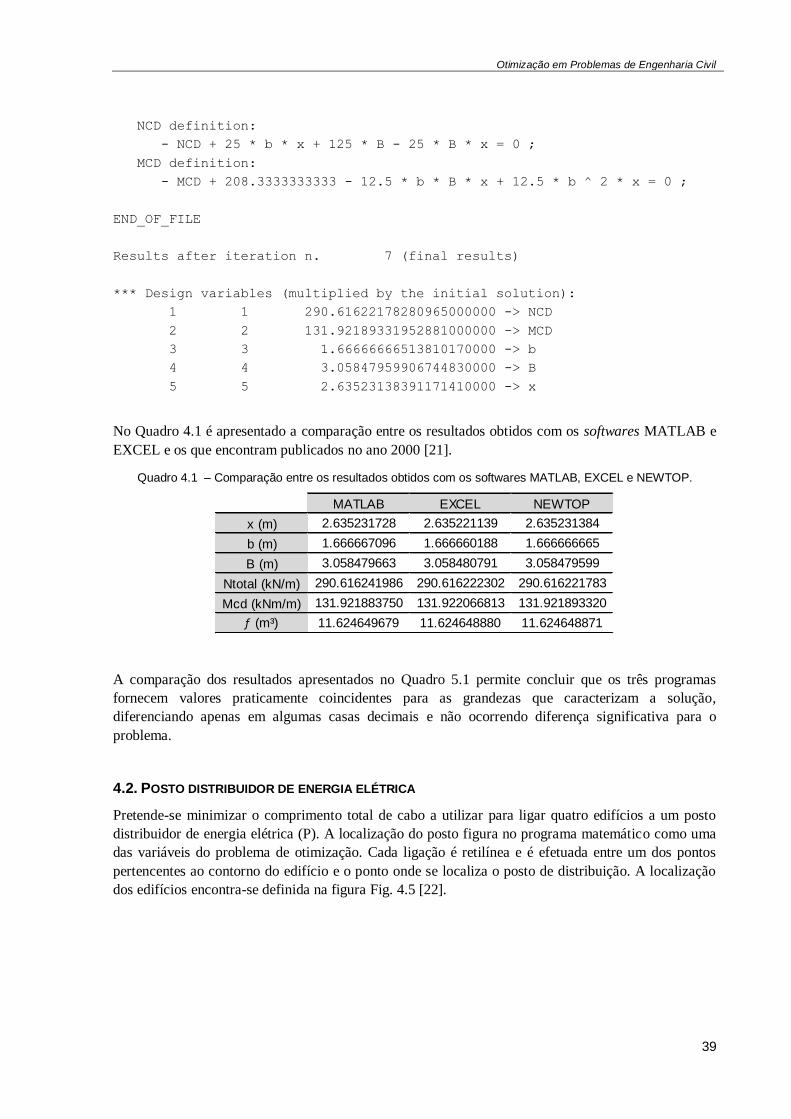
Otimização em Problemas de Engenharia Civil
39
NCD definition:
- NCD + 25 * b * x + 125 * B - 25 * B * x = 0 ;
MCD definition:
- MCD + 208.3333333333 - 12.5 * b * B * x + 12.5 * b ^ 2 * x = 0 ;
END_OF_FILE
Results after iteration n. 7 (final results)
*** Design variables (multiplied by the initial solution):
1 1 290.61622178280965000000 -> NCD
2 2 131.92189331952881000000 -> MCD
3 3 1.66666666513810170000 -> b
4 4 3.05847959906744830000 -> B
5 5 2.63523138391171410000 -> x
No Quadro 4.1 é apresentado a comparação entre os resultados obtidos com os softwares MATLAB e
EXCEL e os que encontram publicados no ano 2000 [21].
Quadro 4.1 – Comparação entre os resultados obtidos com os softwares MATLAB, EXCEL e NEWTOP.
A comparação dos resultados apresentados no Quadro 5.1 permite concluir que os três programas
fornecem valores praticamente coincidentes para as grandezas que caracterizam a solução,
diferenciando apenas em algumas casas decimais e não ocorrendo diferença significativa para o
problema.
4.2. POSTO DISTRIBUIDOR DE ENERGIA ELÉTRICA
Pretende-se minimizar o comprimento total de cabo a utilizar para ligar quatro edifícios a um posto
distribuidor de energia elétrica (P). A localização do posto figura no programa matemático como uma
das variáveis do problema de otimização. Cada ligação é retilínea e é efetuada entre um dos pontos
pertencentes ao contorno do edifício e o ponto onde se localiza o posto de distribuição. A localização
dos edifícios encontra-se definida na figura Fig. 4.5 [22].
MATLAB EXCEL NEWTOP
x (m) 2.635231728 2.635221139 2.635231384
b (m) 1.666667096 1.666660188 1.666666665
B (m) 3.058479663 3.058480791 3.058479599
Ntotal (kN/m) 290.616241986 290.616222302 290.616221783
Mcd (kNm/m) 131.921883750 131.922066813 131.921893320
f (m³) 11.624649679 11.624648880 11.624648871
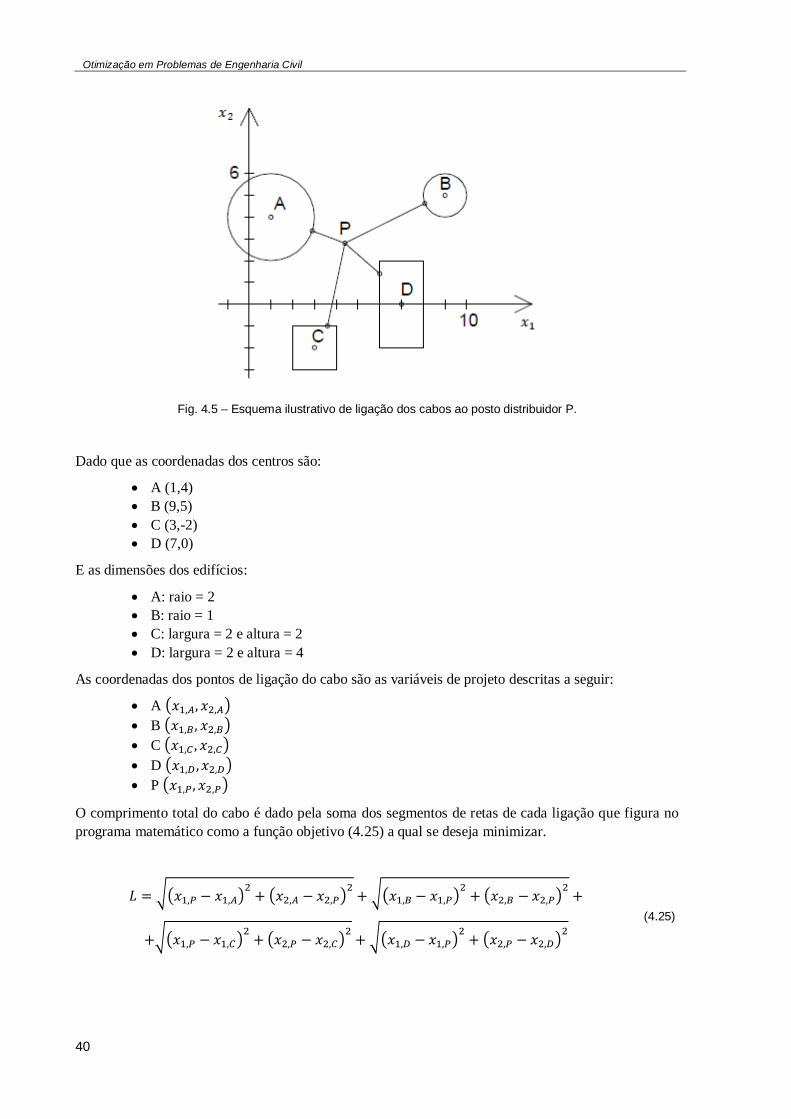
Otimização em Problemas de Engenharia Civil
40
Fig. 4.5 – Esquema ilustrativo de ligação dos cabos ao posto distribuidor P.
Dado que as coordenadas dos centros são:
A (1,4)
B (9,5)
C (3,-2)
D (7,0)
E as dimensões dos edifícios:
A: raio = 2
B: raio = 1
C: largura = 2 e altura = 2
D: largura = 2 e altura = 4
As coordenadas dos pontos de ligação do cabo são as variáveis de projeto descritas a seguir:
A (𝑥1,𝐴, 𝑥2,𝐴)
B (𝑥1,𝐵, 𝑥2,𝐵)
C (𝑥1,𝐶 , 𝑥2,𝐶)
D (𝑥1,𝐷 , 𝑥2,𝐷)
P (𝑥1,𝑃, 𝑥2,𝑃)
O comprimento total do cabo é dado pela soma dos segmentos de retas de cada ligação que figura no
programa matemático como a função objetivo (4.25) a qual se deseja minimizar.
𝐿 = √(𝑥1,𝑃 − 𝑥1,𝐴)2+ (𝑥2,𝐴 − 𝑥2,𝑃)
2+ √(𝑥1,𝐵 − 𝑥1,𝑃)
2+ (𝑥2,𝐵 − 𝑥2,𝑃)
2+
+√(𝑥1,𝑃 − 𝑥1,𝐶)2+ (𝑥2,𝑃 − 𝑥2,𝐶)
2+ √(𝑥1,𝐷 − 𝑥1,𝑃)
2+ (𝑥2,𝑃 − 𝑥2,𝐷)
2
(4.25)

Otimização em Problemas de Engenharia Civil
41
As equações das circunferências (4.26) A e B figuram no programa como as restrições não lineares de
igualdade e os pontos que se situam sobre os perímetros dos edifícios são os limites das variáveis de
projeto (4.27).
𝑥1,𝐴2 + 𝑥2,𝐴
2 − 2 ∙ 𝑥1,𝐴 − 8 ∙ 𝑥2,𝐴 + 13 = 0
𝑥1,𝐵2 + 𝑥2,𝐵
2 − 18 ∙ 𝑥1,𝐵 − 10 ∙ 𝑥2,𝐵 + 105 = 0 (4.26)
−1 ≤ 𝑥1,𝐴 ≤ 3
2 ≤ 𝑥2,𝐴 ≤ 6
8 ≤ 𝑥1,𝐵 ≤ 10
4 ≤ 𝑥2,𝐵 ≤ 6
2 ≤ 𝑥1,𝐶 ≤ 4
−3 ≤ 𝑥2,𝐶 ≤ −1
6 ≤ 𝑥1,𝐷 ≤ 8
−2 ≤ 𝑥2,𝐷 ≤ 2
−1 ≤ 𝑥1,𝑃 ≤ 10
−3 ≤ 𝑥2,𝑃 ≤ 6
(4.27)
Com o problema de otimização formulado é possível escrevê-lo no Script 4.5 do MATLAB e resolvê-
lo. Seguindo o exemplo da secção 4.1, as restrições não lineares vão à parte em um ficheiro
“comprimentocabo” no Script 4.4. Como não há restrições não lineares de desigualdade é definido “[]”.
O programa principal encontra-se em outro ficheiro “comprimentocaboobjetivo” definido no Script 4.5.
Script 4.4 – Programa matemático do posto distribuidor correspondente às restrições não lineares
% Restrições não lineares
function [rdes,rig] = comprimentocabo(x)
% Desigualdade ("<=")
rdes(1) = [];
% Igualdade ("=")
rig(1) = x(1)^2+x(2)^2-2*x(1)-8*x(2)+13;
rig(2) = x(3)^2+x(4)^2-18*x(3)-10*x(4)+105;
Script 4.5 – Programa matemático do posto distribuidor correspondente ao programa principal
% Função objetivo: Comprimento cabo objetivo=@(x) sqrt((x(9)-x(1))^2+(x(2)-x(10))^2)+sqrt((x(3)-x(9))^2+(x(4)-
x(10))^2)+sqrt((x(9)-x(5))^2+(x(10)-x(6))^2)+sqrt((x(7)-x(9))^2+(x(10)-
x(8))^2);
% Estimativa inicial x0 = [2.85 3.24 8.5 4.13 4.0 -1.0 6.0 2.0 5.7 2.0];
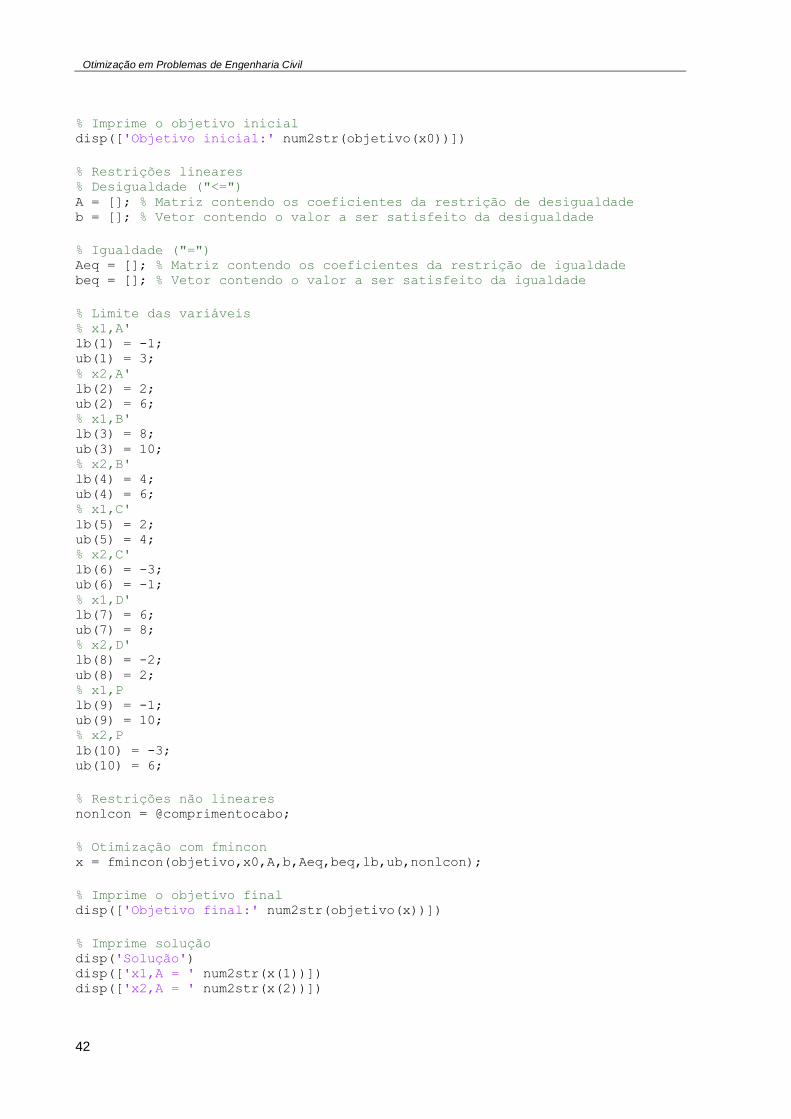
Otimização em Problemas de Engenharia Civil
42
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade
% Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis % x1,A' lb(1) = -1; ub(1) = 3; % x2,A' lb(2) = 2; ub(2) = 6; % x1,B' lb(3) = 8; ub(3) = 10; % x2,B' lb(4) = 4; ub(4) = 6; % x1,C' lb(5) = 2; ub(5) = 4; % x2,C' lb(6) = -3; ub(6) = -1; % x1,D' lb(7) = 6; ub(7) = 8; % x2,D' lb(8) = -2; ub(8) = 2; % x1,P lb(9) = -1; ub(9) = 10; % x2,P lb(10) = -3; ub(10) = 6;
% Restrições não lineares nonlcon = @comprimentocabo;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['x1,A = ' num2str(x(1))]) disp(['x2,A = ' num2str(x(2))])
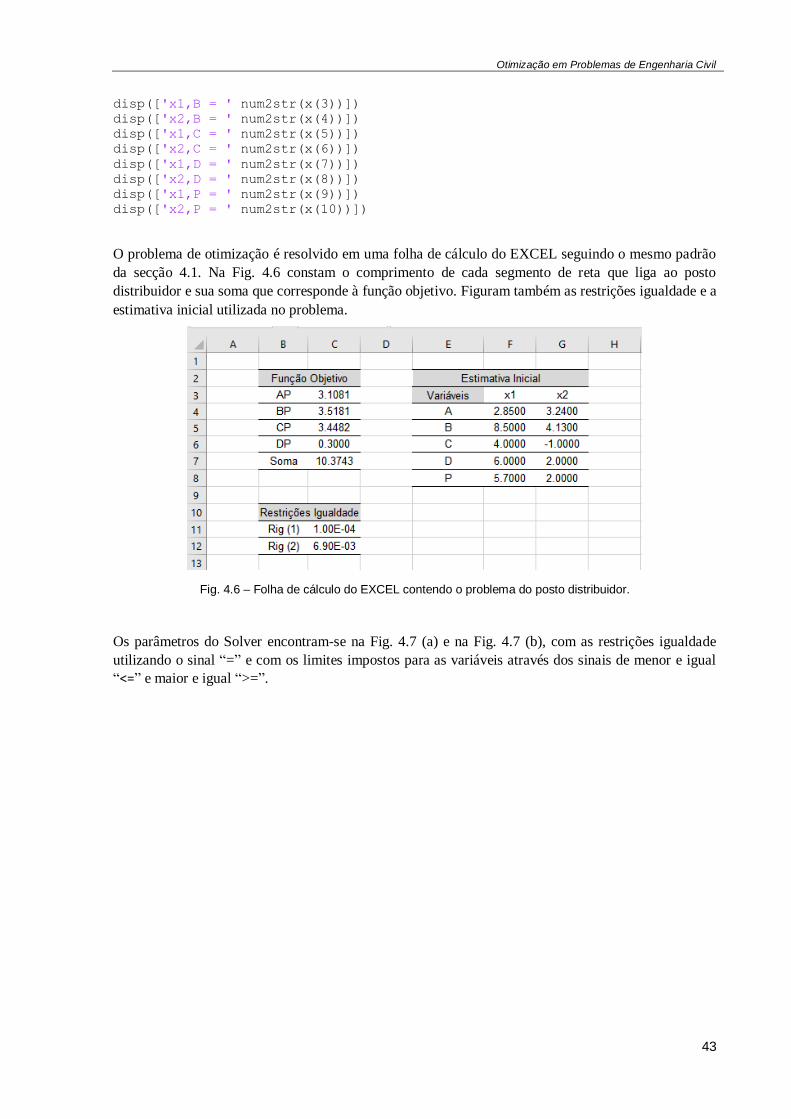
Otimização em Problemas de Engenharia Civil
43
disp(['x1,B = ' num2str(x(3))]) disp(['x2,B = ' num2str(x(4))]) disp(['x1,C = ' num2str(x(5))]) disp(['x2,C = ' num2str(x(6))]) disp(['x1,D = ' num2str(x(7))]) disp(['x2,D = ' num2str(x(8))]) disp(['x1,P = ' num2str(x(9))]) disp(['x2,P = ' num2str(x(10))])
O problema de otimização é resolvido em uma folha de cálculo do EXCEL seguindo o mesmo padrão
da secção 4.1. Na Fig. 4.6 constam o comprimento de cada segmento de reta que liga ao posto
distribuidor e sua soma que corresponde à função objetivo. Figuram também as restrições igualdade e a
estimativa inicial utilizada no problema.
Fig. 4.6 – Folha de cálculo do EXCEL contendo o problema do posto distribuidor.
Os parâmetros do Solver encontram-se na Fig. 4.7 (a) e na Fig. 4.7 (b), com as restrições igualdade
utilizando o sinal “=” e com os limites impostos para as variáveis através dos sinais de menor e igual
“<=” e maior e igual “>=”.
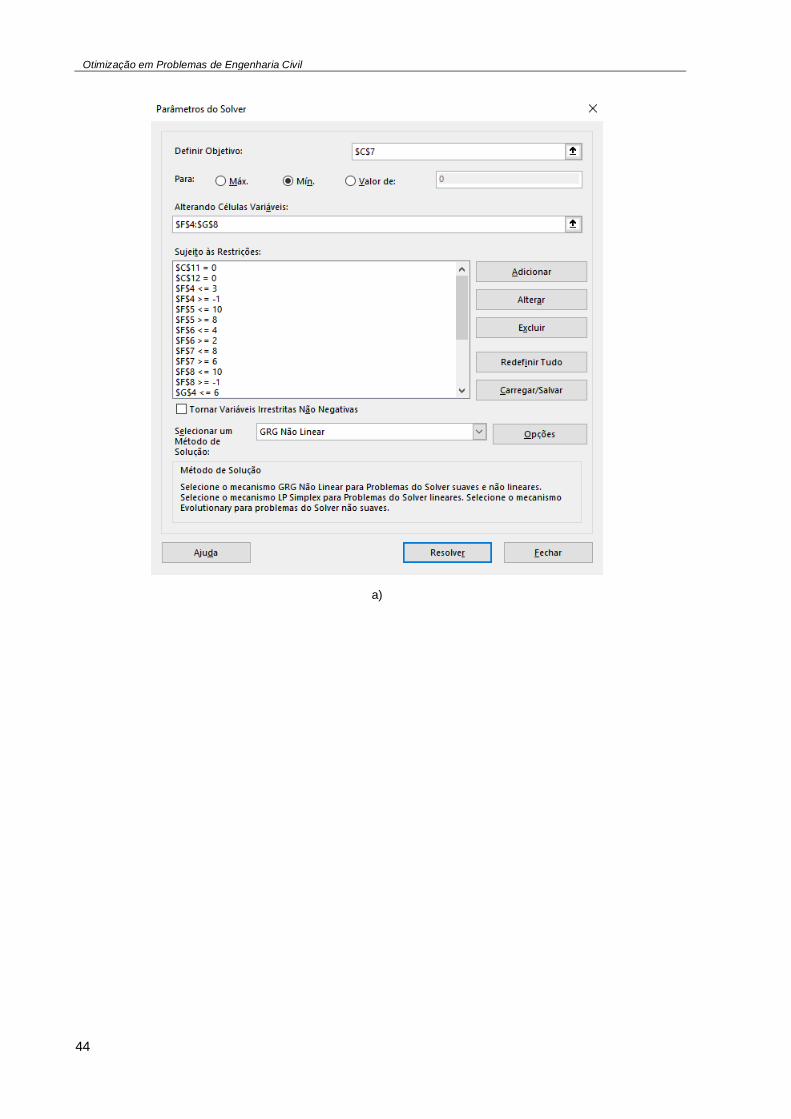
Otimização em Problemas de Engenharia Civil
44
a)
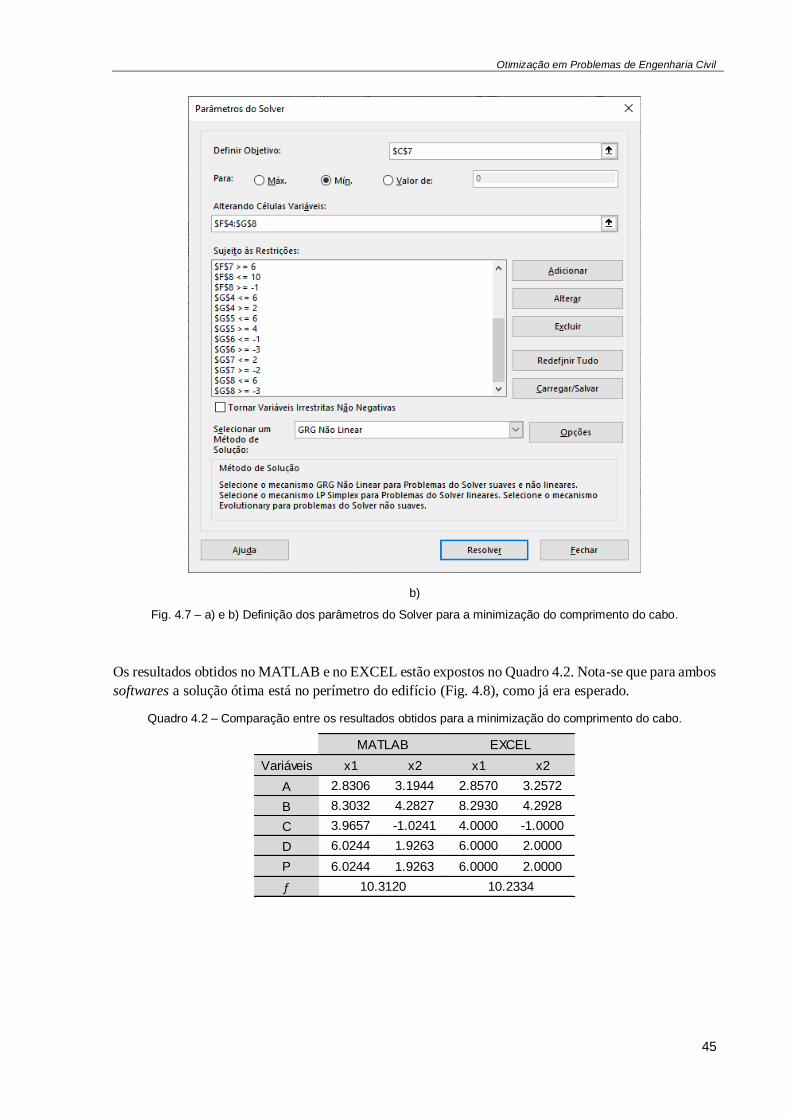
Otimização em Problemas de Engenharia Civil
45
b)
Fig. 4.7 – a) e b) Definição dos parâmetros do Solver para a minimização do comprimento do cabo.
Os resultados obtidos no MATLAB e no EXCEL estão expostos no Quadro 4.2. Nota-se que para ambos
softwares a solução ótima está no perímetro do edifício (Fig. 4.8), como já era esperado.
Quadro 4.2 – Comparação entre os resultados obtidos para a minimização do comprimento do cabo.
Variáveis x1 x2 x1 x2
A 2.8306 3.1944 2.8570 3.2572
B 8.3032 4.2827 8.2930 4.2928
C 3.9657 -1.0241 4.0000 -1.0000
D 6.0244 1.9263 6.0000 2.0000
P 6.0244 1.9263 6.0000 2.0000
f 10.3120 10.2334
MATLAB EXCEL
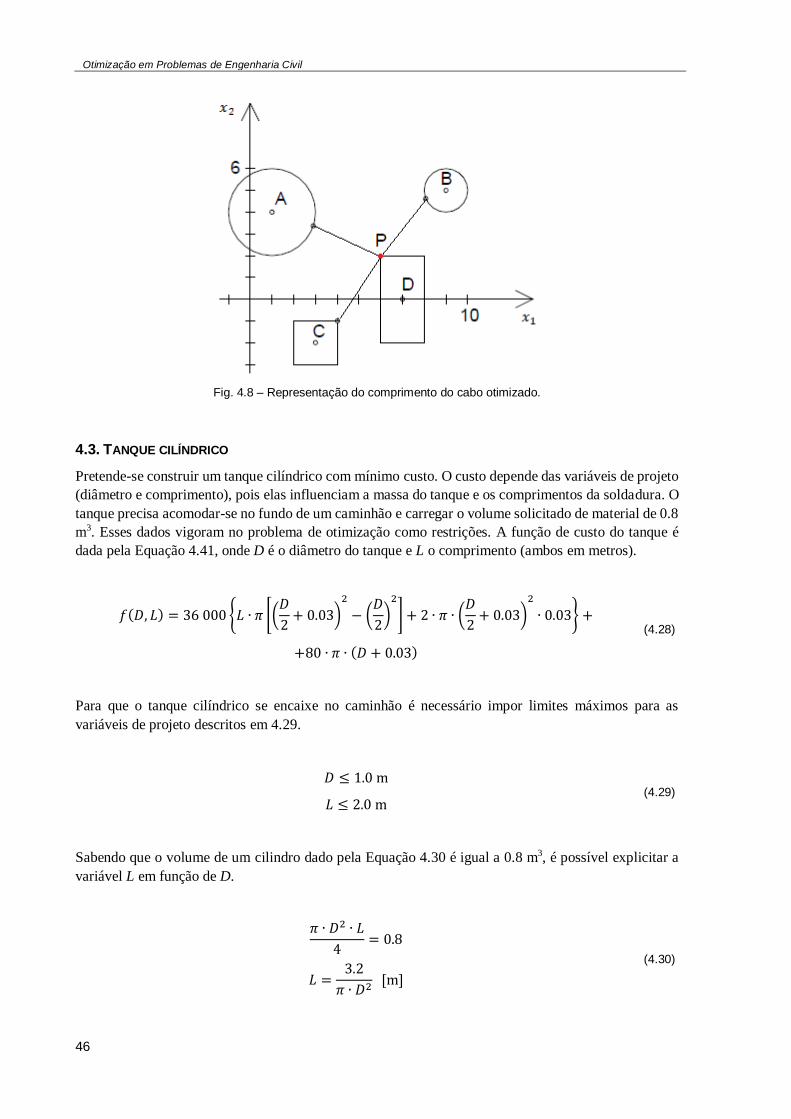
Otimização em Problemas de Engenharia Civil
46
Fig. 4.8 – Representação do comprimento do cabo otimizado.
4.3. TANQUE CILÍNDRICO
Pretende-se construir um tanque cilíndrico com mínimo custo. O custo depende das variáveis de projeto
(diâmetro e comprimento), pois elas influenciam a massa do tanque e os comprimentos da soldadura. O
tanque precisa acomodar-se no fundo de um caminhão e carregar o volume solicitado de material de 0.8
m3. Esses dados vigoram no problema de otimização como restrições. A função de custo do tanque é
dada pela Equação 4.41, onde D é o diâmetro do tanque e L o comprimento (ambos em metros).
𝑓(𝐷, 𝐿) = 36 000 {𝐿 ∙ 𝜋 [(𝐷
2+ 0.03)
2
− (𝐷
2)2
] + 2 ∙ 𝜋 ∙ (𝐷
2+ 0.03)
2
∙ 0.03} +
+80 ∙ 𝜋 ∙ (𝐷 + 0.03)
(4.28)
Para que o tanque cilíndrico se encaixe no caminhão é necessário impor limites máximos para as
variáveis de projeto descritos em 4.29.
𝐷 ≤ 1.0 m
𝐿 ≤ 2.0 m (4.29)
Sabendo que o volume de um cilindro dado pela Equação 4.30 é igual a 0.8 m3, é possível explicitar a
variável L em função de D.
𝜋 ∙ 𝐷2 ∙ 𝐿
4= 0.8
𝐿 =3.2
𝜋 ∙ 𝐷2 [m]
(4.30)
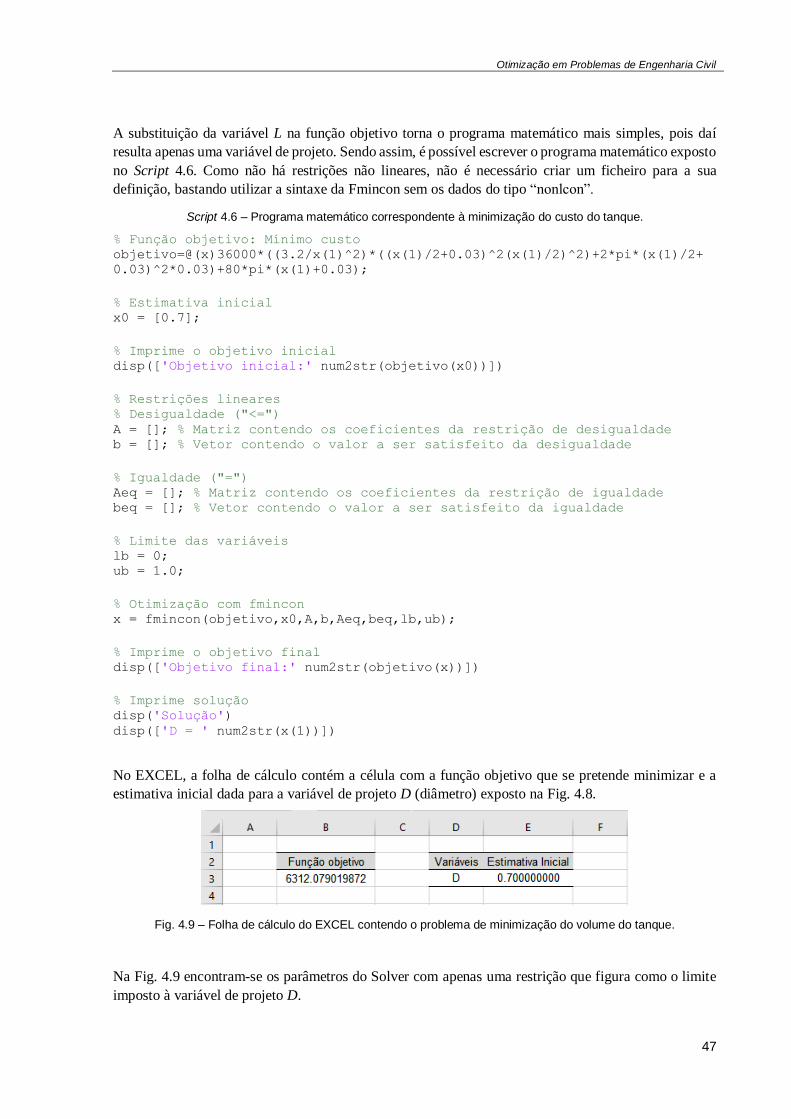
Otimização em Problemas de Engenharia Civil
47
A substituição da variável L na função objetivo torna o programa matemático mais simples, pois daí
resulta apenas uma variável de projeto. Sendo assim, é possível escrever o programa matemático exposto
no Script 4.6. Como não há restrições não lineares, não é necessário criar um ficheiro para a sua
definição, bastando utilizar a sintaxe da Fmincon sem os dados do tipo “nonlcon”.
Script 4.6 – Programa matemático correspondente à minimização do custo do tanque.
% Função objetivo: Mínimo custo objetivo=@(x)36000*((3.2/x(1)^2)*((x(1)/2+0.03)^2(x(1)/2)^2)+2*pi*(x(1)/2+
0.03)^2*0.03)+80*pi*(x(1)+0.03);
% Estimativa inicial x0 = [0.7];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade
% Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis lb = 0; ub = 1.0;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['D = ' num2str(x(1))])
No EXCEL, a folha de cálculo contém a célula com a função objetivo que se pretende minimizar e a
estimativa inicial dada para a variável de projeto D (diâmetro) exposto na Fig. 4.8.
Fig. 4.9 – Folha de cálculo do EXCEL contendo o problema de minimização do volume do tanque.
Na Fig. 4.9 encontram-se os parâmetros do Solver com apenas uma restrição que figura como o limite
imposto à variável de projeto D.
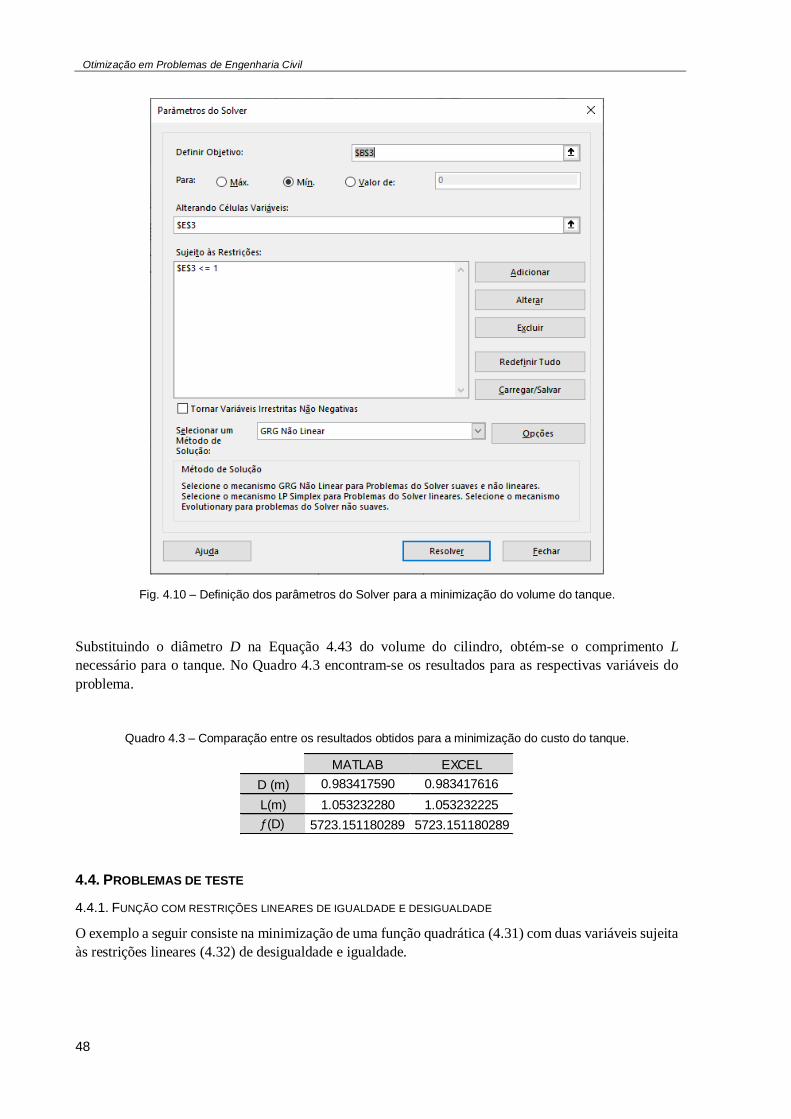
Otimização em Problemas de Engenharia Civil
48
Fig. 4.10 – Definição dos parâmetros do Solver para a minimização do volume do tanque.
Substituindo o diâmetro D na Equação 4.43 do volume do cilindro, obtém-se o comprimento L
necessário para o tanque. No Quadro 4.3 encontram-se os resultados para as respectivas variáveis do
problema.
Quadro 4.3 – Comparação entre os resultados obtidos para a minimização do custo do tanque.
4.4. PROBLEMAS DE TESTE
4.4.1. FUNÇÃO COM RESTRIÇÕES LINEARES DE IGUALDADE E DESIGUALDADE
O exemplo a seguir consiste na minimização de uma função quadrática (4.31) com duas variáveis sujeita
às restrições lineares (4.32) de desigualdade e igualdade.
MATLAB EXCEL
D (m) 0.983417590 0.983417616
L(m) 1.053232280 1.053232225
f (D) 5723.151180289 5723.151180289
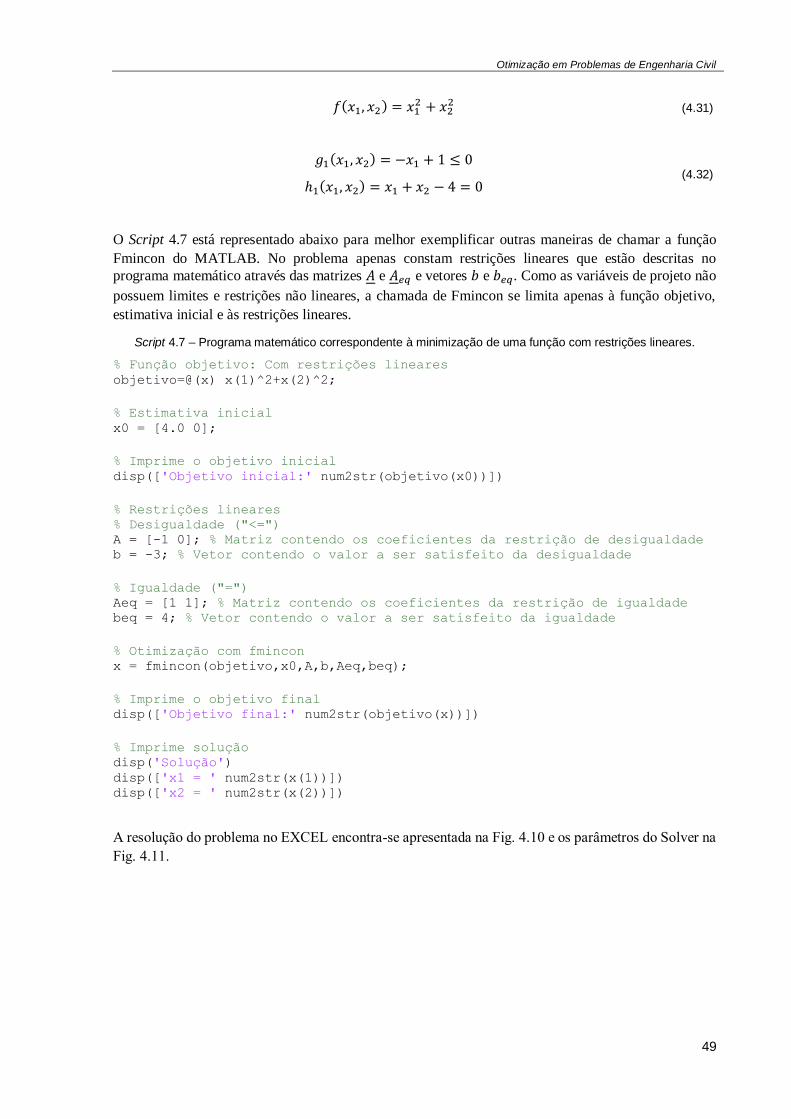
Otimização em Problemas de Engenharia Civil
49
𝑓(𝑥1, 𝑥2) = 𝑥12 + 𝑥2
2 (4.31)
𝑔1(𝑥1, 𝑥2) = −𝑥1 + 1 ≤ 0
ℎ1(𝑥1, 𝑥2) = 𝑥1 + 𝑥2 − 4 = 0 (4.32)
O Script 4.7 está representado abaixo para melhor exemplificar outras maneiras de chamar a função
Fmincon do MATLAB. No problema apenas constam restrições lineares que estão descritas no
programa matemático através das matrizes 𝐴 e 𝐴𝑒𝑞 e vetores 𝑏 e 𝑏𝑒𝑞. Como as variáveis de projeto não
possuem limites e restrições não lineares, a chamada de Fmincon se limita apenas à função objetivo,
estimativa inicial e às restrições lineares.
Script 4.7 – Programa matemático correspondente à minimização de uma função com restrições lineares.
% Função objetivo: Com restrições lineares objetivo=@(x) x(1)^2+x(2)^2;
% Estimativa inicial x0 = [4.0 0];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = [-1 0]; % Matriz contendo os coeficientes da restrição de desigualdade b = -3; % Vetor contendo o valor a ser satisfeito da desigualdade
% Igualdade ("=") Aeq = [1 1]; % Matriz contendo os coeficientes da restrição de igualdade beq = 4; % Vetor contendo o valor a ser satisfeito da igualdade
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['x1 = ' num2str(x(1))]) disp(['x2 = ' num2str(x(2))])
A resolução do problema no EXCEL encontra-se apresentada na Fig. 4.10 e os parâmetros do Solver na
Fig. 4.11.
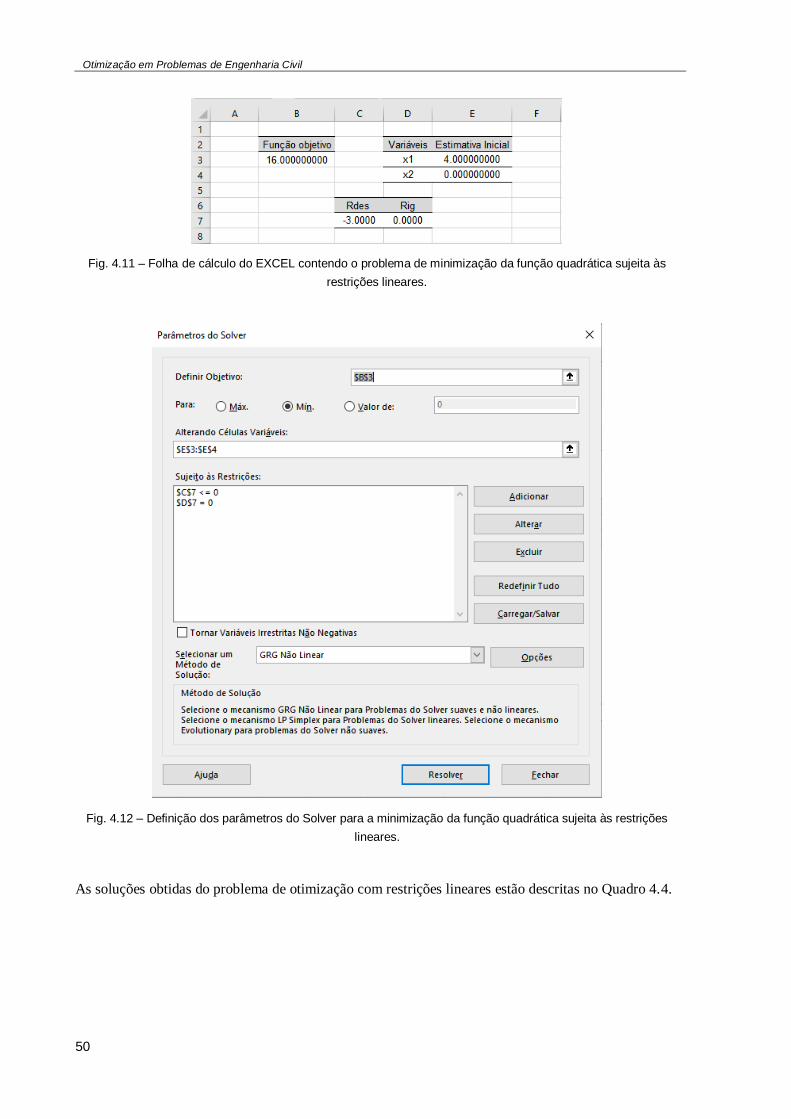
Otimização em Problemas de Engenharia Civil
50
Fig. 4.11 – Folha de cálculo do EXCEL contendo o problema de minimização da função quadrática sujeita às
restrições lineares.
Fig. 4.12 – Definição dos parâmetros do Solver para a minimização da função quadrática sujeita às restrições
lineares.
As soluções obtidas do problema de otimização com restrições lineares estão descritas no Quadro 4.4.

Otimização em Problemas de Engenharia Civil
51
Quadro 4.4 – Comparação entre os resultados obtidos para a função com restrições lineares
4.4.2. FUNÇÃO COM RESTRIÇÕES NÃO LINEARES E LINEARES DE DESIGUALDADE
No exemplo a seguir, pretende-se minimizar uma função quadrática (4.33) com duas variáveis sujeita
às restrições (4.34) polinomial e linear de desigualdade.
𝑓(𝑥1, 𝑥2) = 100(𝑥2 − 𝑥12)2 + (1 − 𝑥1)
2 (4.33)
𝑔1(𝑥1, 𝑥2) = 0.75𝑥14 − 6𝑥1
3 + 16𝑥12 − 17𝑥1 − 𝑥2 + 9 ≤ 0
𝑔2(𝑥1, 𝑥2) = 𝑥1 + 3𝑥2 − 9 ≤ 0 (4.34)
No presente problema de otimização foi necessário novamente criar dois ficheiros separados para que
um contenha a restrição não linear descrito no Script 4.8 e o outro o programa principal onde encontra-
se a restrição linear, conforme explícito no Script 4.9. As soluções obtidas encontram-se no Quadro 4.5.
Script 4.8 – Programa matemático correspondente à restrição polinomial de uma função.
% Restrições não lineares
function [rdes,rig] = funcomrest(x)
% Desigualdade ("<=")
rdes(1) = 0.75*x(1)^4-6*x(1)^3+16*x(1)^2-17*x(1)-x(2)+9;
% Igualdade ("=")
rig(1) = 0;
Script 4.9 – Programa matemático correspondente à minimização de uma função com restrições polinomial e
linear.
% Função objetivo: Com restrições polinomial e linear objetivo=@(x) 2*x(1)+x(2)^2;
% Estimativa inicial x0 = [3.0 0.75];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = [1 3]; % Matriz contendo os coeficientes da restrição de desigualdade b = 9; % Vetor contendo o valor a ser satisfeito da desigualdade
MATLAB EXCEL
x1 2.000000014 2.000000008
x2 1.999999986 1.999999992
f (x) 8.000000000 8.000000000
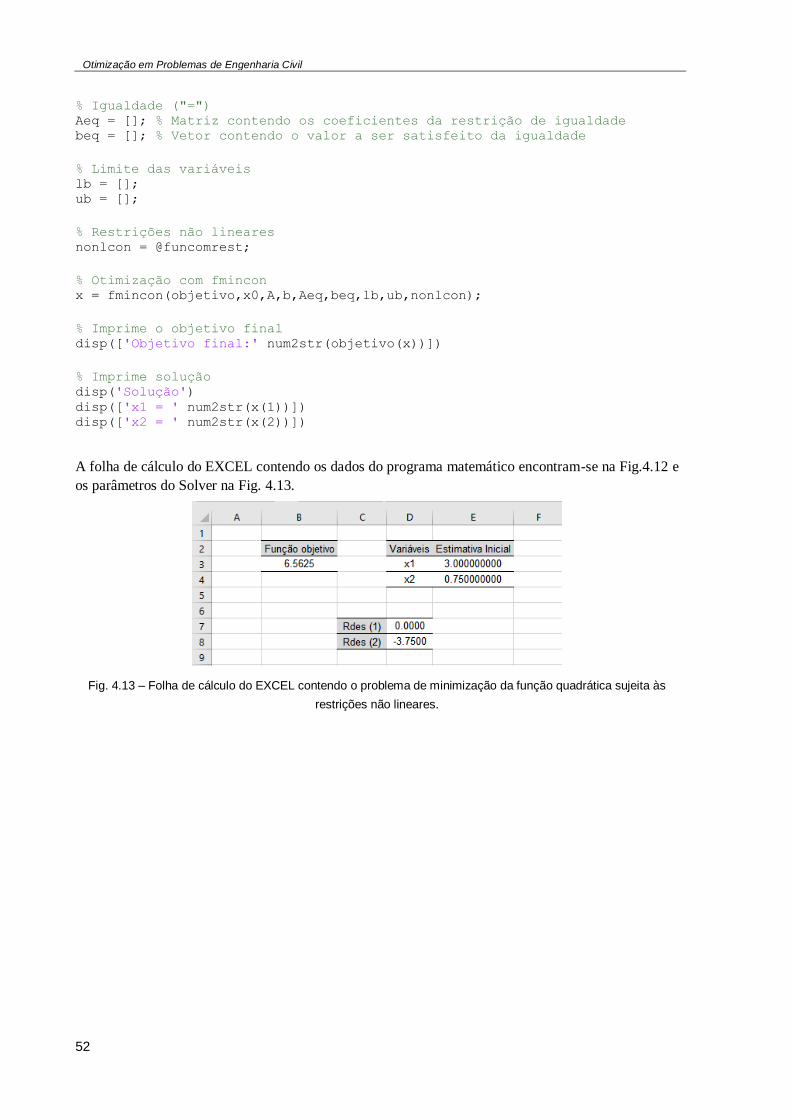
Otimização em Problemas de Engenharia Civil
52
% Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis lb = []; ub = [];
% Restrições não lineares nonlcon = @funcomrest;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['x1 = ' num2str(x(1))]) disp(['x2 = ' num2str(x(2))])
A folha de cálculo do EXCEL contendo os dados do programa matemático encontram-se na Fig.4.12 e
os parâmetros do Solver na Fig. 4.13.
Fig. 4.13 – Folha de cálculo do EXCEL contendo o problema de minimização da função quadrática sujeita às
restrições não lineares.
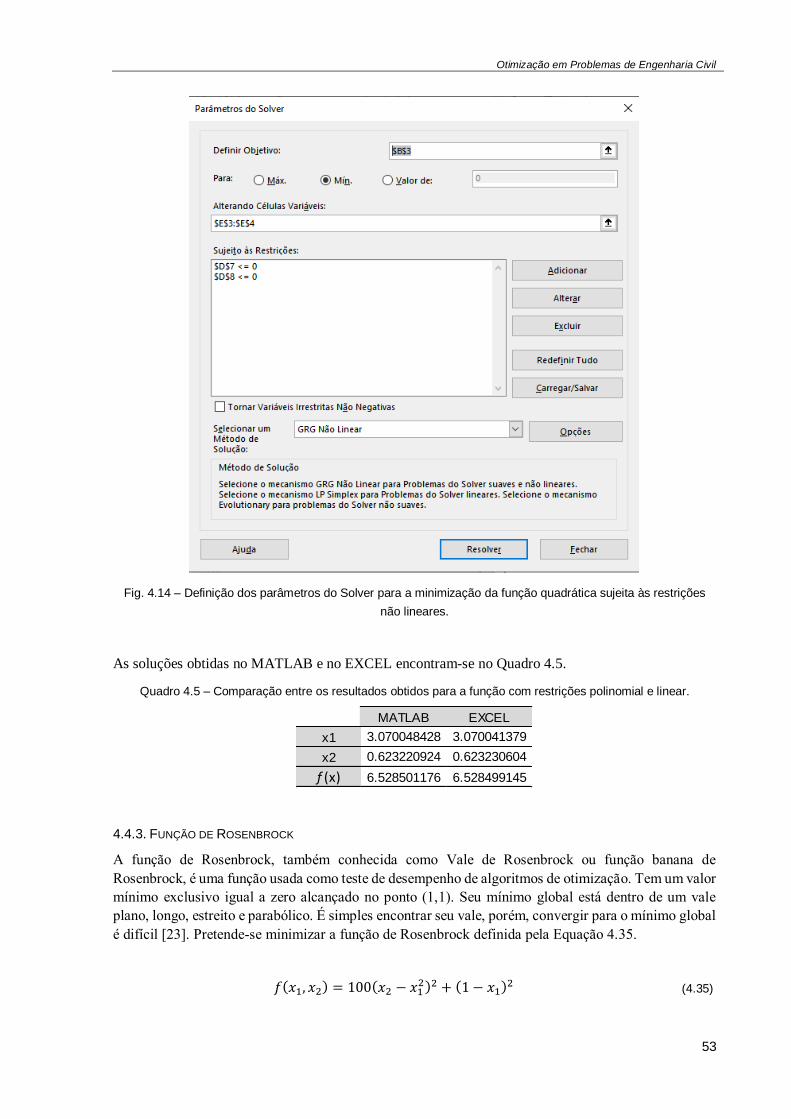
Otimização em Problemas de Engenharia Civil
53
Fig. 4.14 – Definição dos parâmetros do Solver para a minimização da função quadrática sujeita às restrições
não lineares.
As soluções obtidas no MATLAB e no EXCEL encontram-se no Quadro 4.5.
Quadro 4.5 – Comparação entre os resultados obtidos para a função com restrições polinomial e linear.
4.4.3. FUNÇÃO DE ROSENBROCK
A função de Rosenbrock, também conhecida como Vale de Rosenbrock ou função banana de
Rosenbrock, é uma função usada como teste de desempenho de algoritmos de otimização. Tem um valor
mínimo exclusivo igual a zero alcançado no ponto (1,1). Seu mínimo global está dentro de um vale
plano, longo, estreito e parabólico. É simples encontrar seu vale, porém, convergir para o mínimo global
é difícil [23]. Pretende-se minimizar a função de Rosenbrock definida pela Equação 4.35.
𝑓(𝑥1, 𝑥2) = 100(𝑥2 − 𝑥12)2 + (1 − 𝑥1)
2 (4.35)
MATLAB EXCEL
x1 3.070048428 3.070041379
x2 0.623220924 0.623230604
f (x) 6.528501176 6.528499145

Otimização em Problemas de Engenharia Civil
54
Nota-se que a função de Rosenbrock não está sujeita à restrições igualdade e desigualdade e apesar da
Fmincon ser uma ferramenta usada para minimizar funções com restrições, é possível utilizá-lo para
minimizar funções irrestritas, mediante o uso do caractere “[]” que define que a matriz e o vetor da
restrição desigualdade estão vazios. Porém, Fmincon não é a função mais indicada para esses tipos de
problemas, sendo necessário o uso de outra função, a Fminunc, que é responsável por minimizar funções
multivariáveis sem restrições. A resolução do problema utilizando a função Fmincon e Fminunc
encontra-se descrita nos Scripts 4.10 e 4.11, respectivamente.
Script 4.10 – Programa matemático correspondente à minimização da função de Rosenbrock utilizando
FMINCON.
% Função objetivo: Função de Rosenbrock objetivo=@(x) 100*(x(2)-x(1)^2)^2+(1-x(1))^2;
% Estimativa inicial x0 = [0.5 0];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade
% Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['x1 = ' num2str(x(1))]) disp(['x2 = ' num2str(x(2))])
Script 4.11 – Programa matemático correspondente à minimização da função de Rosenbrock utilizando
FMINUNC.
% Função objetivo: Função de Rosenbrock objetivo=@(x) 100*(x(2)-x(1)^2)^2+(1-x(1))^2;
% Estimativa inicial x0 = [0.5 0];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Otimização com fmincon x = fminunc(objetivo,x0);
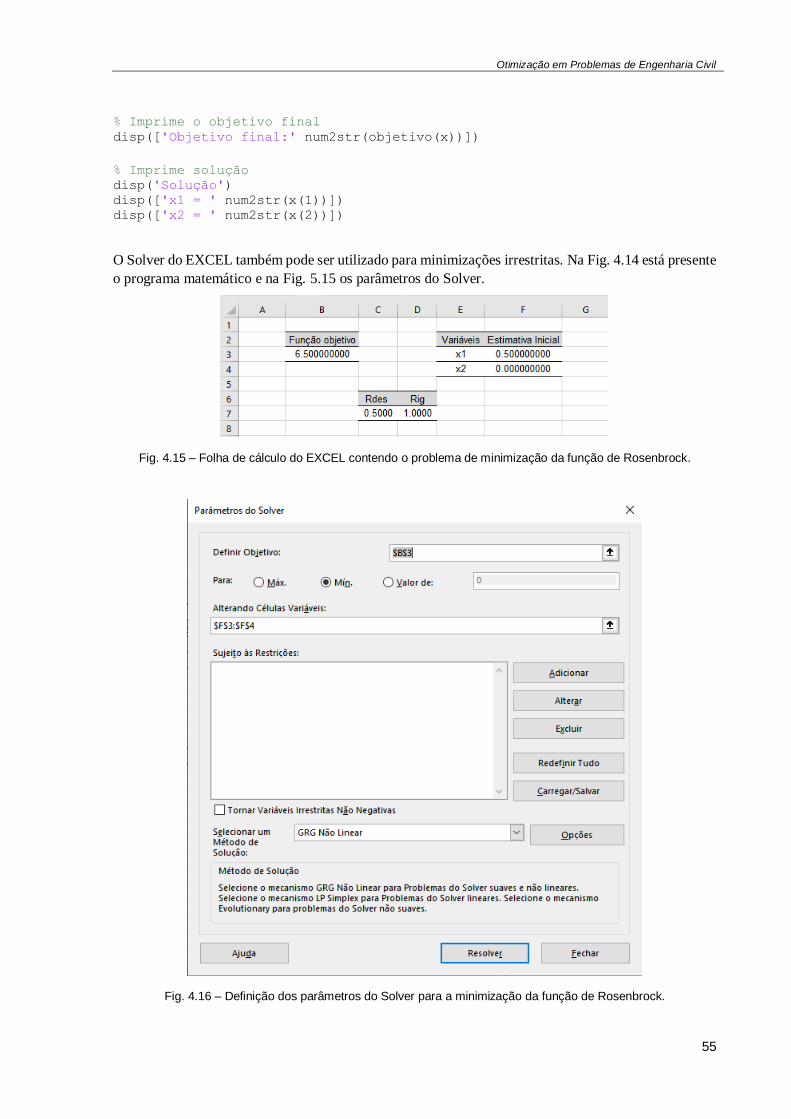
Otimização em Problemas de Engenharia Civil
55
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['x1 = ' num2str(x(1))]) disp(['x2 = ' num2str(x(2))])
O Solver do EXCEL também pode ser utilizado para minimizações irrestritas. Na Fig. 4.14 está presente
o programa matemático e na Fig. 5.15 os parâmetros do Solver.
Fig. 4.15 – Folha de cálculo do EXCEL contendo o problema de minimização da função de Rosenbrock.
Fig. 4.16 – Definição dos parâmetros do Solver para a minimização da função de Rosenbrock.
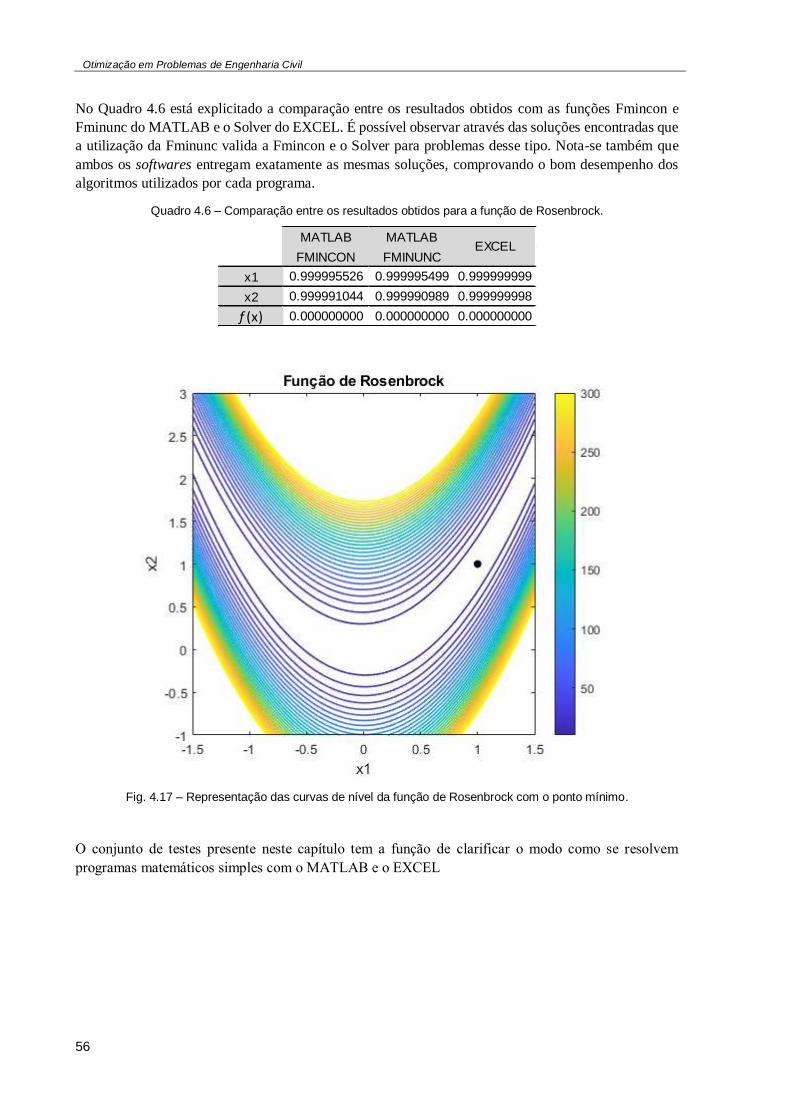
Otimização em Problemas de Engenharia Civil
56
No Quadro 4.6 está explicitado a comparação entre os resultados obtidos com as funções Fmincon e
Fminunc do MATLAB e o Solver do EXCEL. É possível observar através das soluções encontradas que
a utilização da Fminunc valida a Fmincon e o Solver para problemas desse tipo. Nota-se também que
ambos os softwares entregam exatamente as mesmas soluções, comprovando o bom desempenho dos
algoritmos utilizados por cada programa.
Quadro 4.6 – Comparação entre os resultados obtidos para a função de Rosenbrock.
Fig. 4.17 – Representação das curvas de nível da função de Rosenbrock com o ponto mínimo.
O conjunto de testes presente neste capítulo tem a função de clarificar o modo como se resolvem
programas matemáticos simples com o MATLAB e o EXCEL
MATLAB MATLAB
FMINCON FMINUNC
x1 0.999995526 0.999995499 0.999999999
x2 0.999991044 0.999990989 0.999999998
f (x) 0.000000000 0.000000000 0.000000000
EXCEL
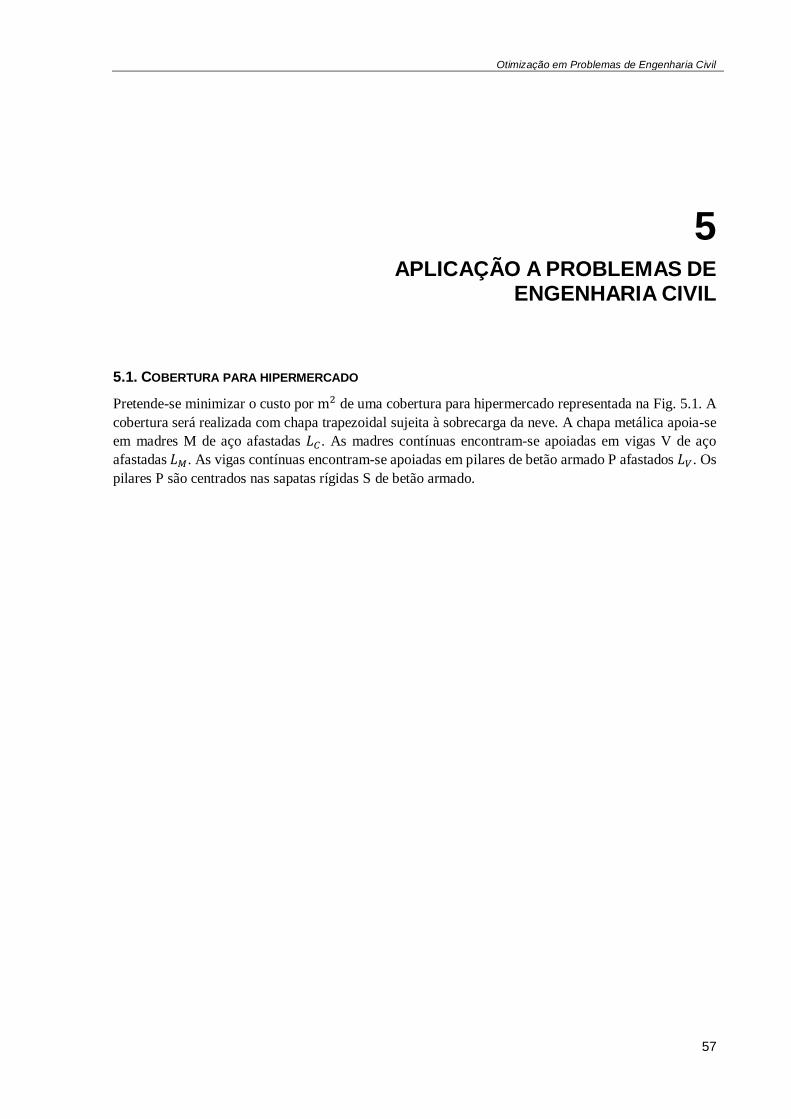
Otimização em Problemas de Engenharia Civil
57
5 APLICAÇÃO A PROBLEMAS DE
ENGENHARIA CIVIL
5.1. COBERTURA PARA HIPERMERCADO
Pretende-se minimizar o custo por m2 de uma cobertura para hipermercado representada na Fig. 5.1. A
cobertura será realizada com chapa trapezoidal sujeita à sobrecarga da neve. A chapa metálica apoia-se
em madres M de aço afastadas 𝐿𝐶 . As madres contínuas encontram-se apoiadas em vigas V de aço
afastadas 𝐿𝑀. As vigas contínuas encontram-se apoiadas em pilares de betão armado P afastados 𝐿𝑉 . Os
pilares P são centrados nas sapatas rígidas S de betão armado.
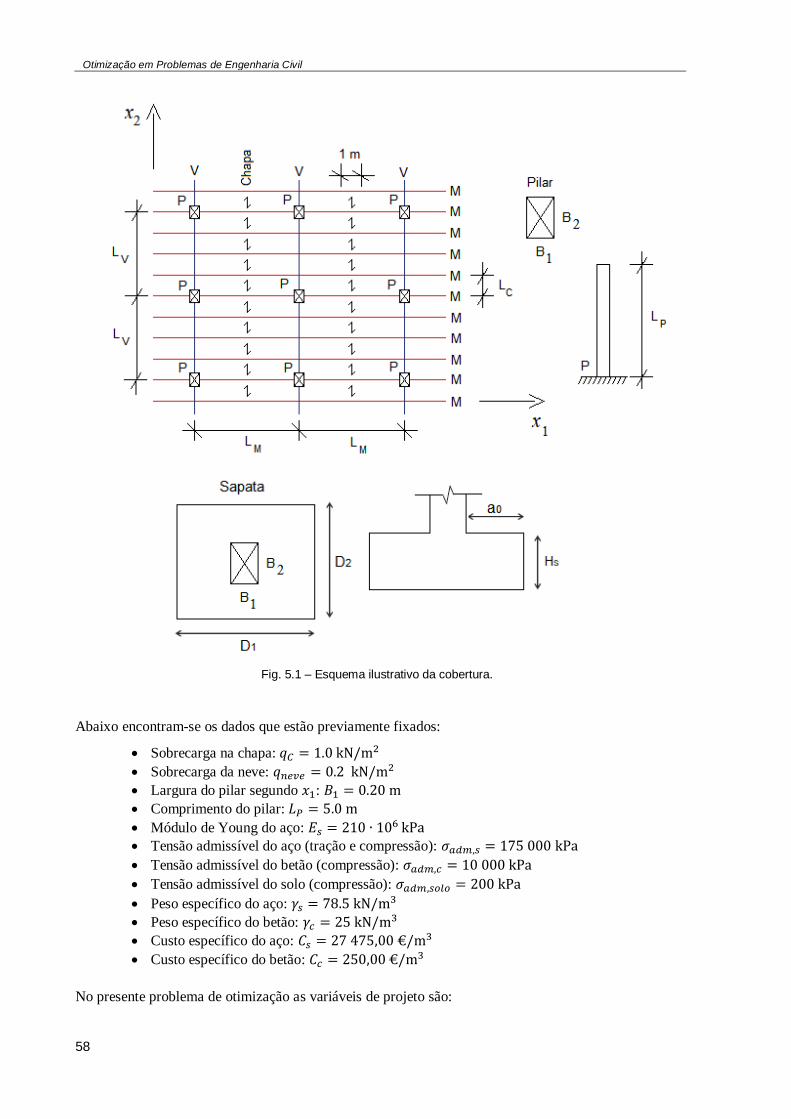
Otimização em Problemas de Engenharia Civil
58
Fig. 5.1 – Esquema ilustrativo da cobertura.
Abaixo encontram-se os dados que estão previamente fixados:
Sobrecarga na chapa: 𝑞𝐶 = 1.0 kN/m2
Sobrecarga da neve: 𝑞𝑛𝑒𝑣𝑒 = 0.2 kN/m2
Largura do pilar segundo 𝑥1: 𝐵1 = 0.20 m
Comprimento do pilar: 𝐿𝑃 = 5.0 m
Módulo de Young do aço: 𝐸𝑠 = 210 ∙ 106 kPa
Tensão admissível do aço (tração e compressão): 𝜎𝑎𝑑𝑚,𝑠 = 175 000 kPa
Tensão admissível do betão (compressão): 𝜎𝑎𝑑𝑚,𝑐 = 10 000 kPa
Tensão admissível do solo (compressão): 𝜎𝑎𝑑𝑚,𝑠𝑜𝑙𝑜 = 200 kPa
Peso específico do aço: 𝛾𝑠 = 78.5 kN/m3
Peso específico do betão: 𝛾𝑐 = 25 kN/m3
Custo específico do aço: 𝐶𝑠 = 27 475,00 €/m3
Custo específico do betão: 𝐶𝑐 = 250,00 €/m3
No presente problema de otimização as variáveis de projeto são:
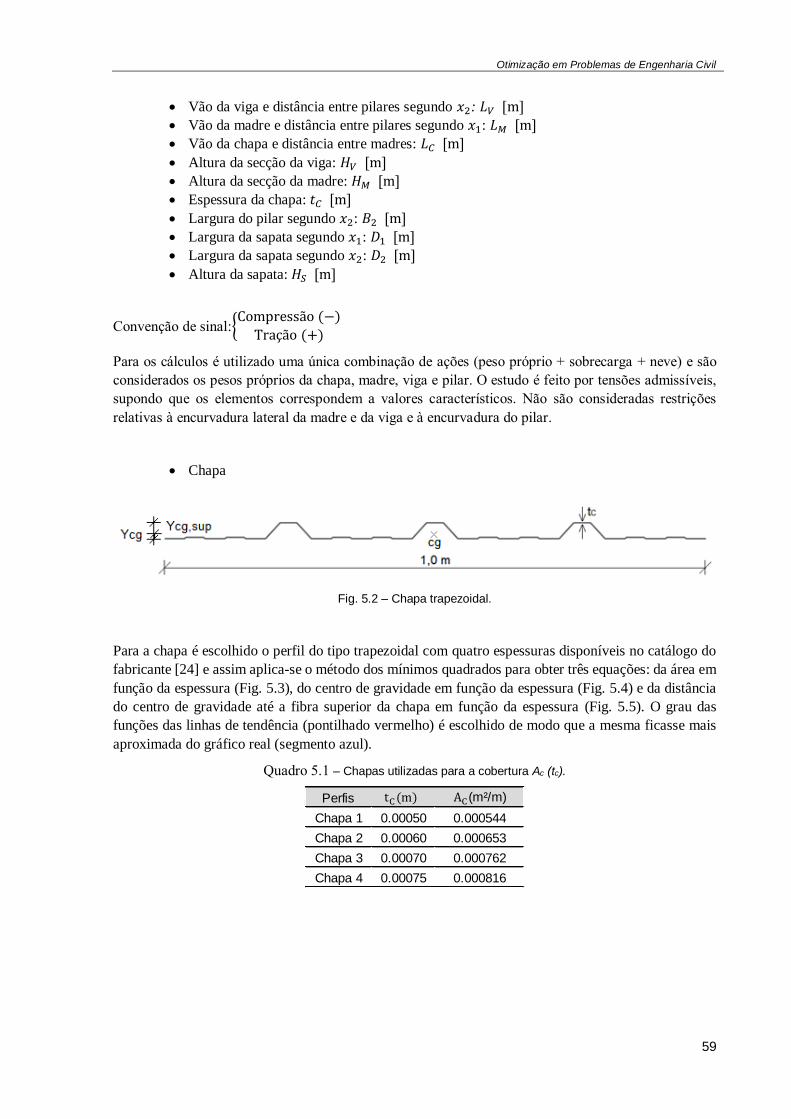
Otimização em Problemas de Engenharia Civil
59
Vão da viga e distância entre pilares segundo 𝑥2: 𝐿𝑉 [m]
Vão da madre e distância entre pilares segundo 𝑥1: 𝐿𝑀 [m]
Vão da chapa e distância entre madres: 𝐿𝐶 [m]
Altura da secção da viga: 𝐻𝑉 [m]
Altura da secção da madre: 𝐻𝑀 [m]
Espessura da chapa: 𝑡𝐶 [m]
Largura do pilar segundo 𝑥2: 𝐵2 [m]
Largura da sapata segundo 𝑥1: 𝐷1 [m]
Largura da sapata segundo 𝑥2: 𝐷2 [m]
Altura da sapata: 𝐻𝑆 [m]
Convenção de sinal:{Compressão (−)
Tração (+)
Para os cálculos é utilizado uma única combinação de ações (peso próprio + sobrecarga + neve) e são
considerados os pesos próprios da chapa, madre, viga e pilar. O estudo é feito por tensões admissíveis,
supondo que os elementos correspondem a valores característicos. Não são consideradas restrições
relativas à encurvadura lateral da madre e da viga e à encurvadura do pilar.
Chapa
Fig. 5.2 – Chapa trapezoidal.
Para a chapa é escolhido o perfil do tipo trapezoidal com quatro espessuras disponíveis no catálogo do
fabricante [24] e assim aplica-se o método dos mínimos quadrados para obter três equações: da área em
função da espessura (Fig. 5.3), do centro de gravidade em função da espessura (Fig. 5.4) e da distância
do centro de gravidade até a fibra superior da chapa em função da espessura (Fig. 5.5). O grau das
funções das linhas de tendência (pontilhado vermelho) é escolhido de modo que a mesma ficasse mais
aproximada do gráfico real (segmento azul).
Quadro 5.1 – Chapas utilizadas para a cobertura Ac (tc).
Perfis
Chapa 1 0.00050 0.000544
Chapa 2 0.00060 0.000653
Chapa 3 0.00070 0.000762
Chapa 4 0.00075 0.000816
C(m) AC(m²/m)
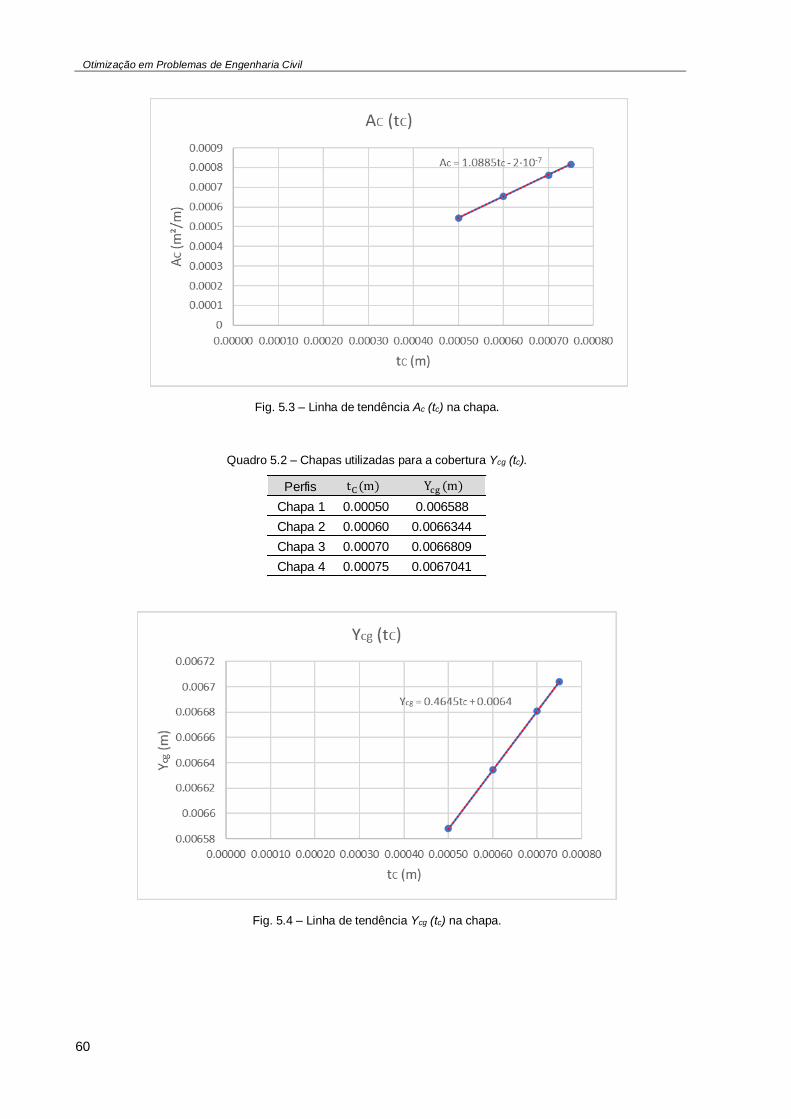
Otimização em Problemas de Engenharia Civil
60
Fig. 5.3 – Linha de tendência Ac (tc) na chapa.
Quadro 5.2 – Chapas utilizadas para a cobertura Ycg (tc).
Fig. 5.4 – Linha de tendência Ycg (tc) na chapa.
Perfis
Chapa 1 0.00050 0.006588
Chapa 2 0.00060 0.0066344
Chapa 3 0.00070 0.0066809
Chapa 4 0.00075 0.0067041
C(m) cg (m)
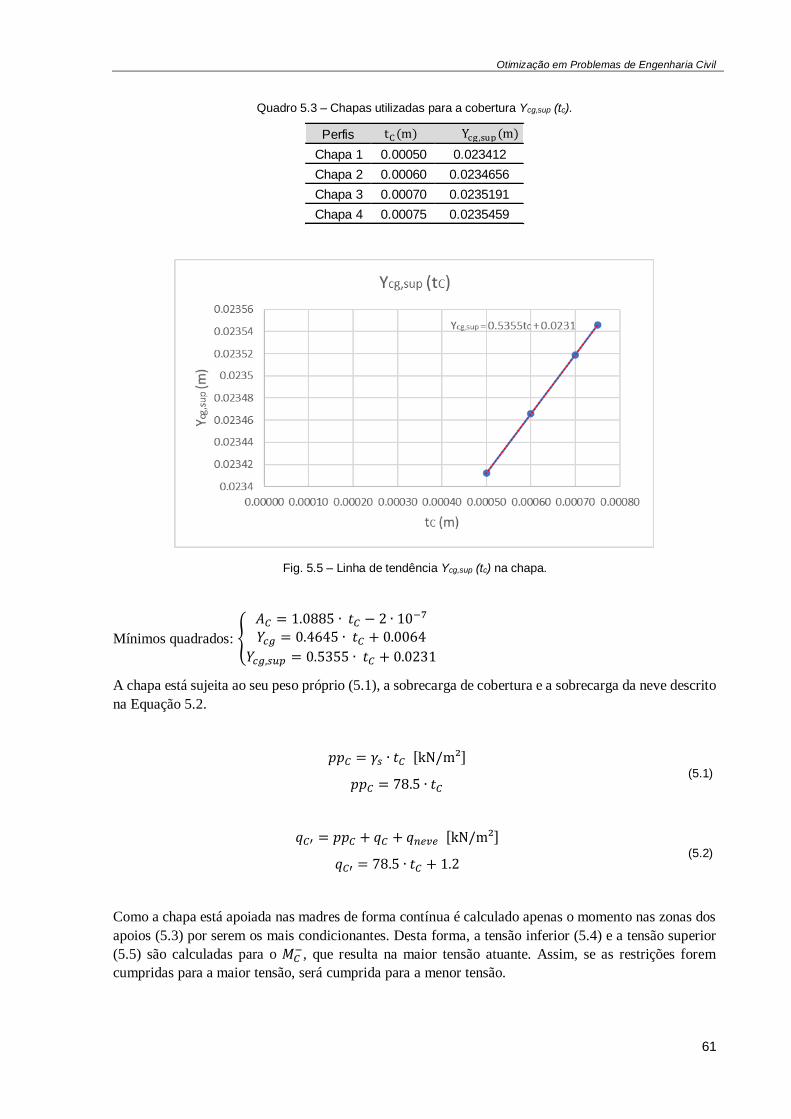
Otimização em Problemas de Engenharia Civil
61
Quadro 5.3 – Chapas utilizadas para a cobertura Ycg,sup (tc).
Fig. 5.5 – Linha de tendência Ycg,sup (tc) na chapa.
Mínimos quadrados: {
𝐴𝐶 = 1.0885 ∙ 𝑡𝐶 − 2 ∙ 10−7
𝑌𝑐𝑔 = 0.4645 ∙ 𝑡𝐶 + 0.0064
𝑌𝑐𝑔,𝑠𝑢𝑝 = 0.5355 ∙ 𝑡𝐶 + 0.0231
A chapa está sujeita ao seu peso próprio (5.1), a sobrecarga de cobertura e a sobrecarga da neve descrito
na Equação 5.2.
𝑝𝑝𝐶 = 𝛾𝑠 ∙ 𝑡𝐶 [kN/m²]
𝑝𝑝𝐶 = 78.5 ∙ 𝑡𝐶 (5.1)
𝑞𝐶′ = 𝑝𝑝𝐶 + 𝑞𝐶 + 𝑞𝑛𝑒𝑣𝑒 [kN/m²]
𝑞𝐶′ = 78.5 ∙ 𝑡𝐶 + 1.2 (5.2)
Como a chapa está apoiada nas madres de forma contínua é calculado apenas o momento nas zonas dos
apoios (5.3) por serem os mais condicionantes. Desta forma, a tensão inferior (5.4) e a tensão superior
(5.5) são calculadas para o 𝑀𝐶−, que resulta na maior tensão atuante. Assim, se as restrições forem
cumpridas para a maior tensão, será cumprida para a menor tensão.
Perfis
Chapa 1 0.00050 0.023412
Chapa 2 0.00060 0.0234656
Chapa 3 0.00070 0.0235191
Chapa 4 0.00075 0.0235459
C(m) cg,s (m)
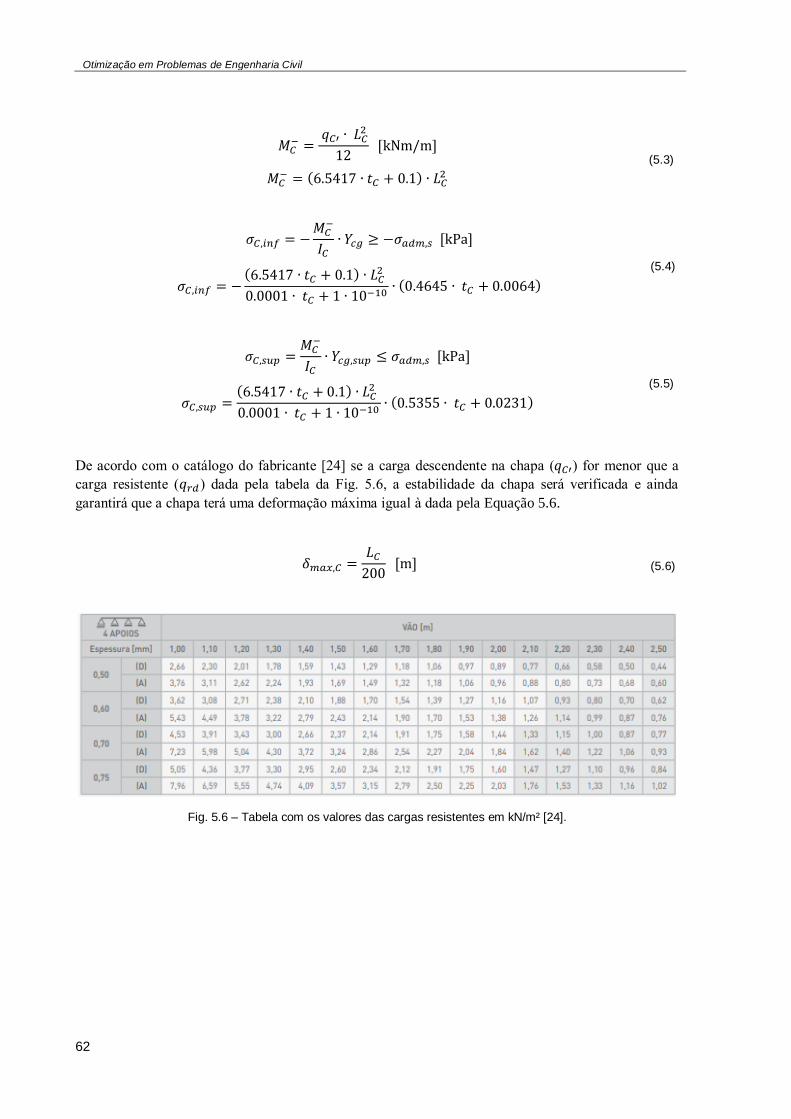
Otimização em Problemas de Engenharia Civil
62
𝑀𝐶− =
𝑞𝐶′ ∙ 𝐿𝐶2
12 [kNm/m]
𝑀𝐶− = (6.5417 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶
2
(5.3)
𝜎𝐶,𝑖𝑛𝑓 = −𝑀𝐶−
𝐼𝐶∙ 𝑌𝑐𝑔 ≥ −𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝐶,𝑖𝑛𝑓 = −(6.5417 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶
2
0.0001 ∙ 𝑡𝐶 + 1 ∙ 10−10∙ (0.4645 ∙ 𝑡𝐶 + 0.0064)
(5.4)
𝜎𝐶,𝑠𝑢𝑝 =𝑀𝐶−
𝐼𝐶∙ 𝑌𝑐𝑔,𝑠𝑢𝑝 ≤ 𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝐶,𝑠𝑢𝑝 =(6.5417 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶
2
0.0001 ∙ 𝑡𝐶 + 1 ∙ 10−10∙ (0.5355 ∙ 𝑡𝐶 + 0.0231)
(5.5)
De acordo com o catálogo do fabricante [24] se a carga descendente na chapa (𝑞𝐶′) for menor que a
carga resistente (𝑞𝑟𝑑) dada pela tabela da Fig. 5.6, a estabilidade da chapa será verificada e ainda
garantirá que a chapa terá uma deformação máxima igual à dada pela Equação 5.6.
𝛿𝑚𝑎𝑥,𝐶 =𝐿𝐶200
[m] (5.6)
Fig. 5.6 – Tabela com os valores das cargas resistentes em kN/m² [24].
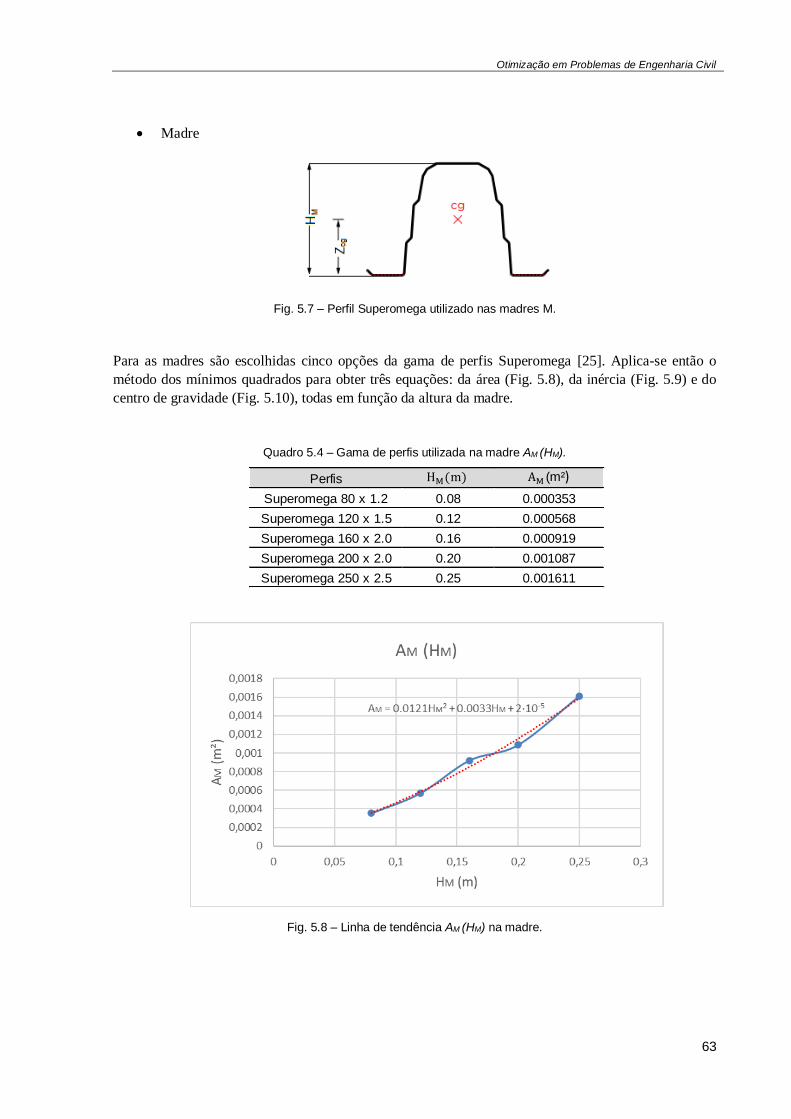
Otimização em Problemas de Engenharia Civil
63
Madre
Fig. 5.7 – Perfil Superomega utilizado nas madres M.
Para as madres são escolhidas cinco opções da gama de perfis Superomega [25]. Aplica-se então o
método dos mínimos quadrados para obter três equações: da área (Fig. 5.8), da inércia (Fig. 5.9) e do
centro de gravidade (Fig. 5.10), todas em função da altura da madre.
Quadro 5.4 – Gama de perfis utilizada na madre AM (HM).
Fig. 5.8 – Linha de tendência AM (HM) na madre.
Perfis
Superomega 80 x 1.2 0.08 0.000353
Superomega 120 x 1.5 0.12 0.000568
Superomega 160 x 2.0 0.16 0.000919
Superomega 200 x 2.0 0.20 0.001087
Superomega 250 x 2.5 0.25 0.001611
(m) A (m²)
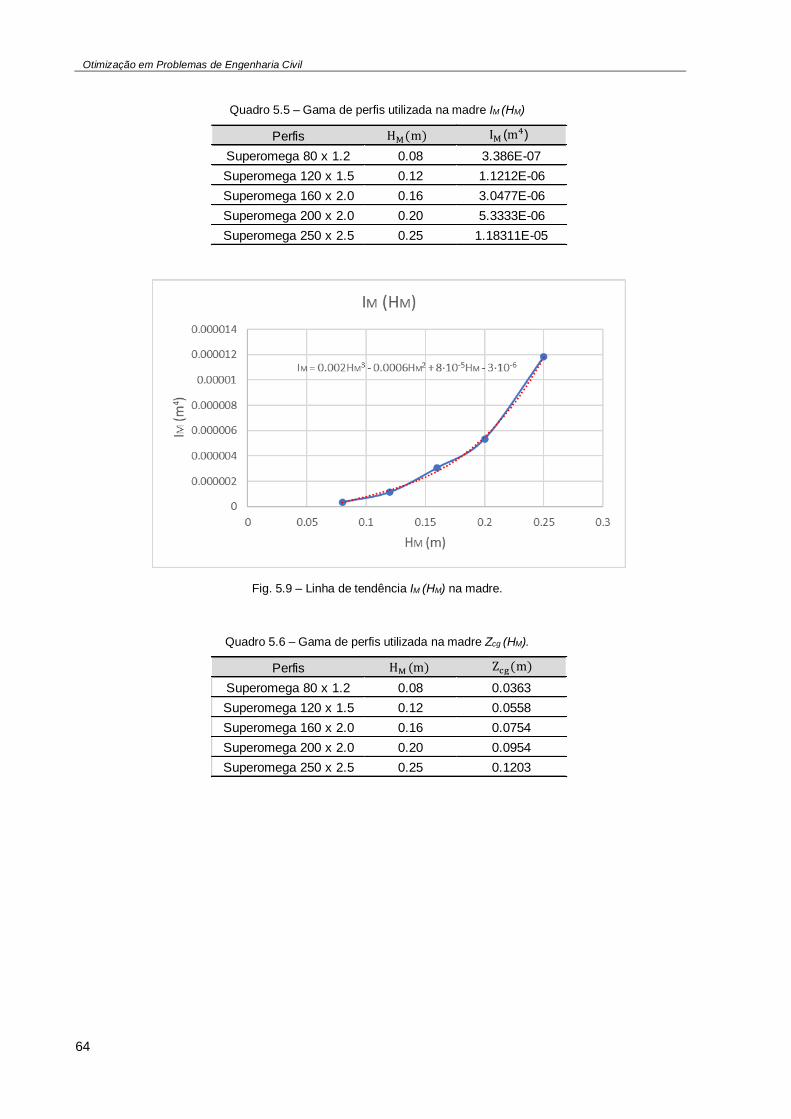
Otimização em Problemas de Engenharia Civil
64
Quadro 5.5 – Gama de perfis utilizada na madre IM (HM)
Fig. 5.9 – Linha de tendência IM (HM) na madre.
Quadro 5.6 – Gama de perfis utilizada na madre Zcg (HM).
Perfis
Superomega 80 x 1.2 0.08 3.386E-07
Superomega 120 x 1.5 0.12 1.1212E-06
Superomega 160 x 2.0 0.16 3.0477E-06
Superomega 200 x 2.0 0.20 5.3333E-06
Superomega 250 x 2.5 0.25 1.18311E-05
(m) I (m4)
Perfis
Superomega 80 x 1.2 0.08 0.0363
Superomega 120 x 1.5 0.12 0.0558
Superomega 160 x 2.0 0.16 0.0754
Superomega 200 x 2.0 0.20 0.0954
Superomega 250 x 2.5 0.25 0.1203
(m) cg(m)
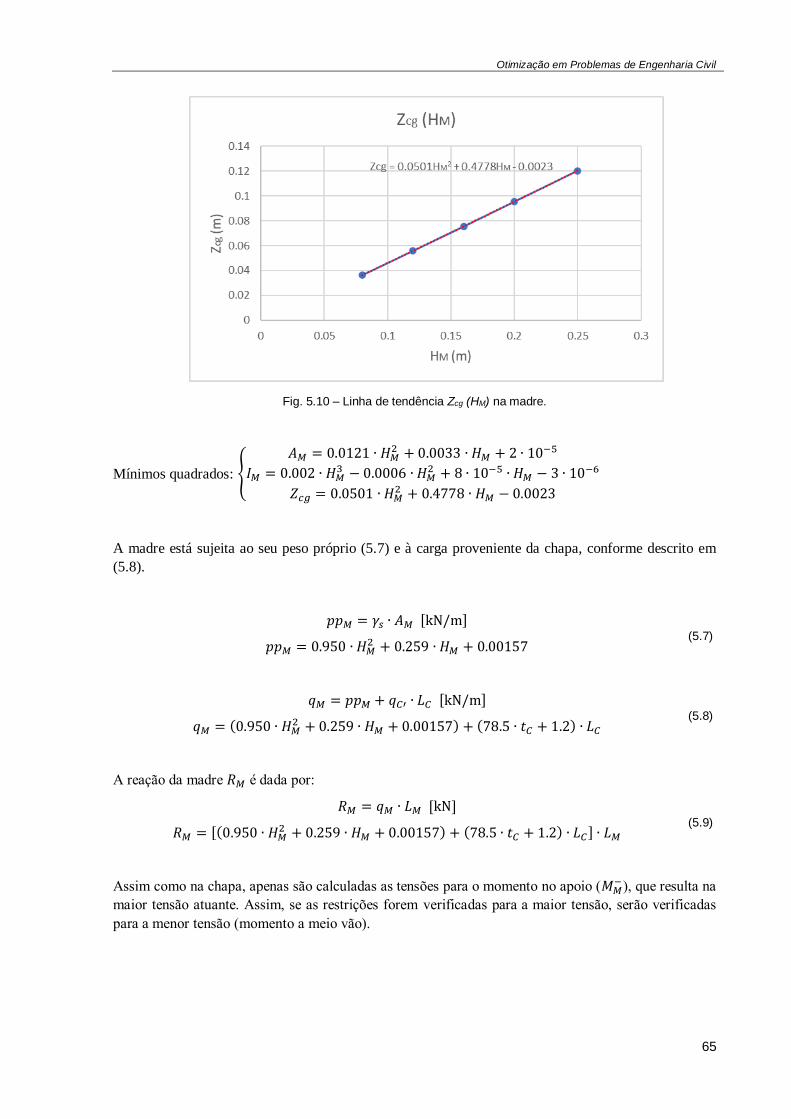
Otimização em Problemas de Engenharia Civil
65
Fig. 5.10 – Linha de tendência Zcg (HM) na madre.
Mínimos quadrados: {
𝐴𝑀 = 0.0121 ∙ 𝐻𝑀2 + 0.0033 ∙ 𝐻𝑀 + 2 ∙ 10−5
𝐼𝑀 = 0.002 ∙ 𝐻𝑀3 − 0.0006 ∙ 𝐻𝑀
2 + 8 ∙ 10−5 ∙ 𝐻𝑀 − 3 ∙ 10−6
𝑍𝑐𝑔 = 0.0501 ∙ 𝐻𝑀2 + 0.4778 ∙ 𝐻𝑀 − 0.0023
A madre está sujeita ao seu peso próprio (5.7) e à carga proveniente da chapa, conforme descrito em
(5.8).
𝑝𝑝𝑀 = 𝛾𝑠 ∙ 𝐴𝑀 [kN/m]
𝑝𝑝𝑀 = 0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157
(5.7)
𝑞𝑀 = 𝑝𝑝𝑀 + 𝑞𝐶′ ∙ 𝐿𝐶 [kN/m]
𝑞𝑀 = (0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶
(5.8)
A reação da madre 𝑅𝑀 é dada por:
𝑅𝑀 = 𝑞𝑀 ∙ 𝐿𝑀 [kN]
𝑅𝑀 = [(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀
(5.9)
Assim como na chapa, apenas são calculadas as tensões para o momento no apoio (𝑀𝑀−), que resulta na
maior tensão atuante. Assim, se as restrições forem verificadas para a maior tensão, serão verificadas
para a menor tensão (momento a meio vão).

Otimização em Problemas de Engenharia Civil
66
𝑀𝑀− =
𝑞𝑀 ∙ 𝐿𝑀2
12 [kNm]
𝑀𝑀− = [(0.0792 ∙ 𝐻𝑀
2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀2
(5.10)
Na zona no apoio a tensão inferior (5.11) e a tensão superior são (5.12):
𝜎𝑀,𝑖𝑛𝑓 = −𝑀𝑀−
𝐼𝑀∙ 𝑍𝑐𝑔 ≥ −𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝑀,𝑖𝑛𝑓 = −[(0.0792 ∙ 𝐻𝑀
2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀2
0.002 ∙ 𝐻𝑀3 − 0.0006 ∙ 𝐻𝑀
2 + 8 ∙ 10−5 ∙ 𝐻𝑀 − 3 ∙ 10−6∙
∙ (0.0501 ∙ 𝐻𝑀2 + 0.4778 ∙ 𝐻𝑀 − 0.0023)
(5.11)
𝜎𝑀,𝑠𝑢𝑝 =𝑀𝑀−
𝐼𝑀∙ (𝐻𝑀 − 𝑍𝑐𝑔) ≤ 𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝑀,𝑠𝑢𝑝 =[(0.0792 ∙ 𝐻𝑀
2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀2
0.002 ∙ 𝐻𝑀3 − 0.0006 ∙ 𝐻𝑀
2 + 8 ∙ 10−5 ∙ 𝐻𝑀 − 3 ∙ 10−6∙
∙ [𝐻𝑀 − (0.0501 ∙ 𝐻𝑀2 + 0.4778 ∙ 𝐻𝑀 − 0.0023)]
(5.12)
A flecha máxima da madre é limitada a:
𝛿𝑚𝑎𝑥,𝑀 =𝐿𝑀180
[m] (5.13)
E a flecha elástica da madre é definida em (5.14).
𝛿𝑀 =𝑞𝑀 ∙ 𝐿𝑀
4
384 ∙ 𝐸𝑠 ∙ 𝐼𝑀≤ 𝛿𝑚𝑎𝑥,𝑀 [m]
𝛿𝑀 =[(0.950 ∙ 𝐻𝑀
2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀4
(1.613 ∙ 108 ∙ 𝐻𝑀3 − 4.838 ∙ 107 ∙ 𝐻𝑀
2 + 6 451 200 ∙ 𝐻𝑀 − 241 920)
(5.14)
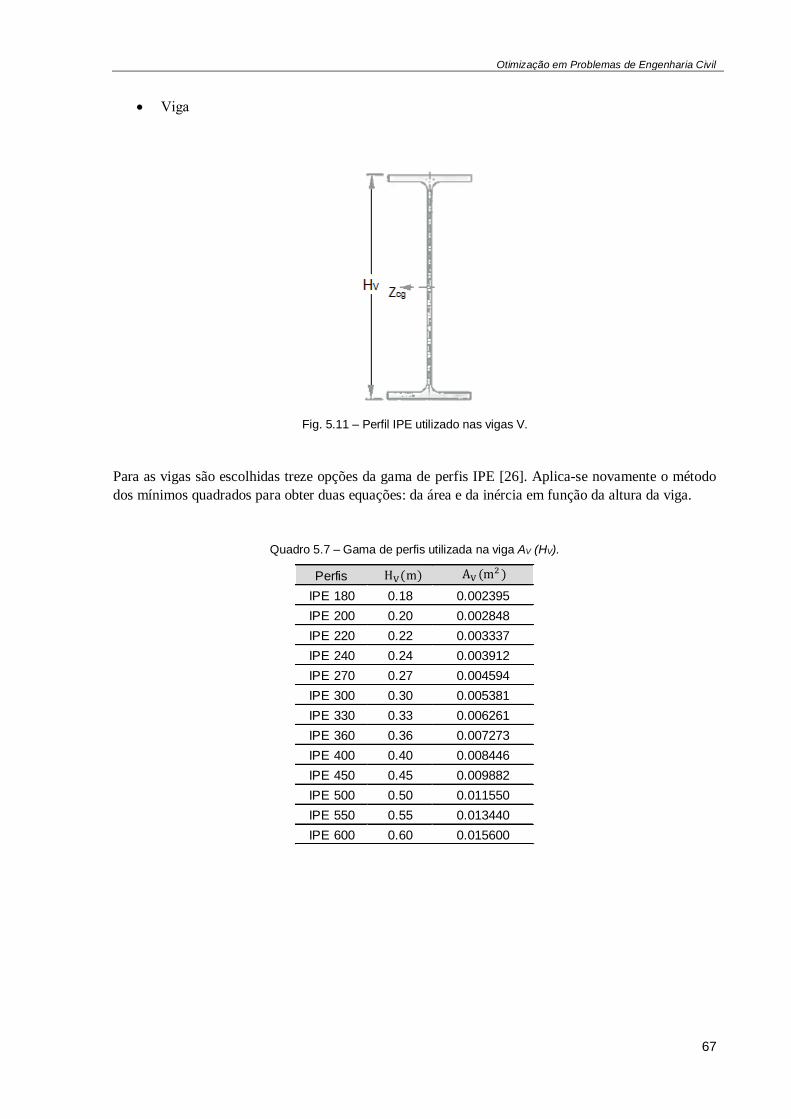
Otimização em Problemas de Engenharia Civil
67
Viga
Fig. 5.11 – Perfil IPE utilizado nas vigas V.
Para as vigas são escolhidas treze opções da gama de perfis IPE [26]. Aplica-se novamente o método
dos mínimos quadrados para obter duas equações: da área e da inércia em função da altura da viga.
Quadro 5.7 – Gama de perfis utilizada na viga AV (HV).
Perfis
IPE 180 0.18 0.002395
IPE 200 0.20 0.002848
IPE 220 0.22 0.003337
IPE 240 0.24 0.003912
IPE 270 0.27 0.004594
IPE 300 0.30 0.005381
IPE 330 0.33 0.006261
IPE 360 0.36 0.007273
IPE 400 0.40 0.008446
IPE 450 0.45 0.009882
IPE 500 0.50 0.011550
IPE 550 0.55 0.013440
IPE 600 0.60 0.015600
(m) A (m2 )
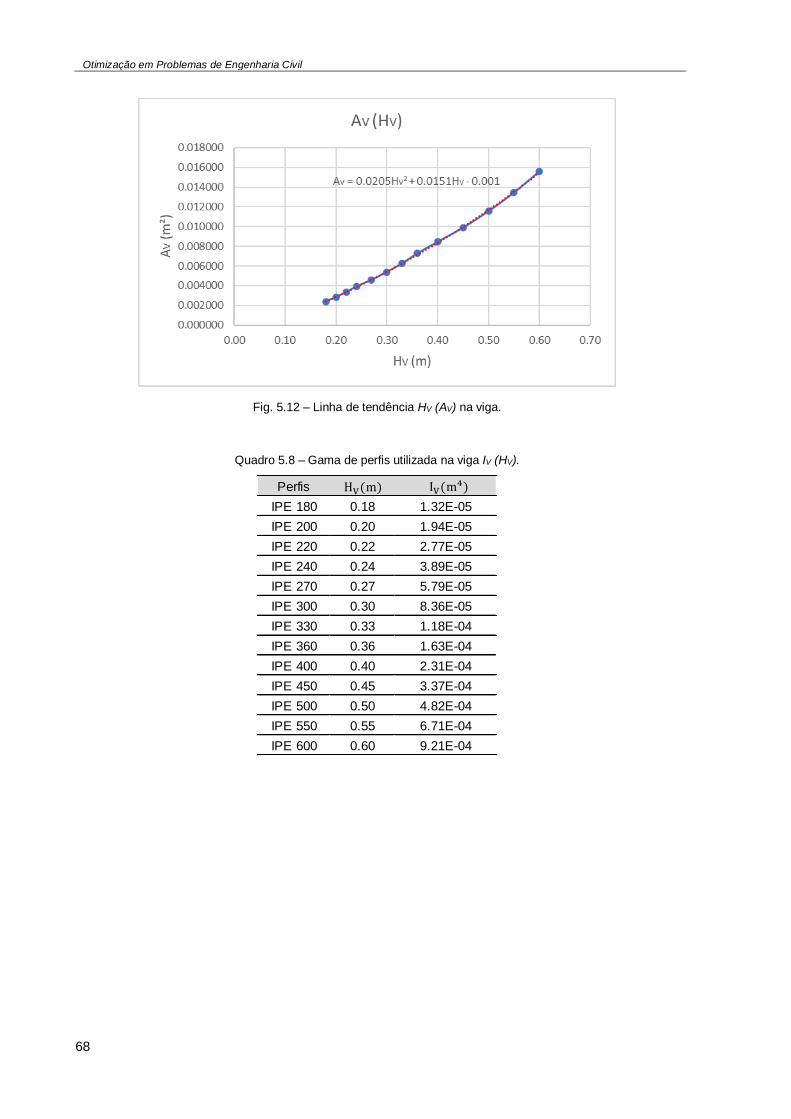
Otimização em Problemas de Engenharia Civil
68
Fig. 5.12 – Linha de tendência HV (AV) na viga.
Quadro 5.8 – Gama de perfis utilizada na viga IV (HV).
Perfis
IPE 180 0.18 1.32E-05
IPE 200 0.20 1.94E-05
IPE 220 0.22 2.77E-05
IPE 240 0.24 3.89E-05
IPE 270 0.27 5.79E-05
IPE 300 0.30 8.36E-05
IPE 330 0.33 1.18E-04
IPE 360 0.36 1.63E-04
IPE 400 0.40 2.31E-04
IPE 450 0.45 3.37E-04
IPE 500 0.50 4.82E-04
IPE 550 0.55 6.71E-04
IPE 600 0.60 9.21E-04
(m) I (m4)
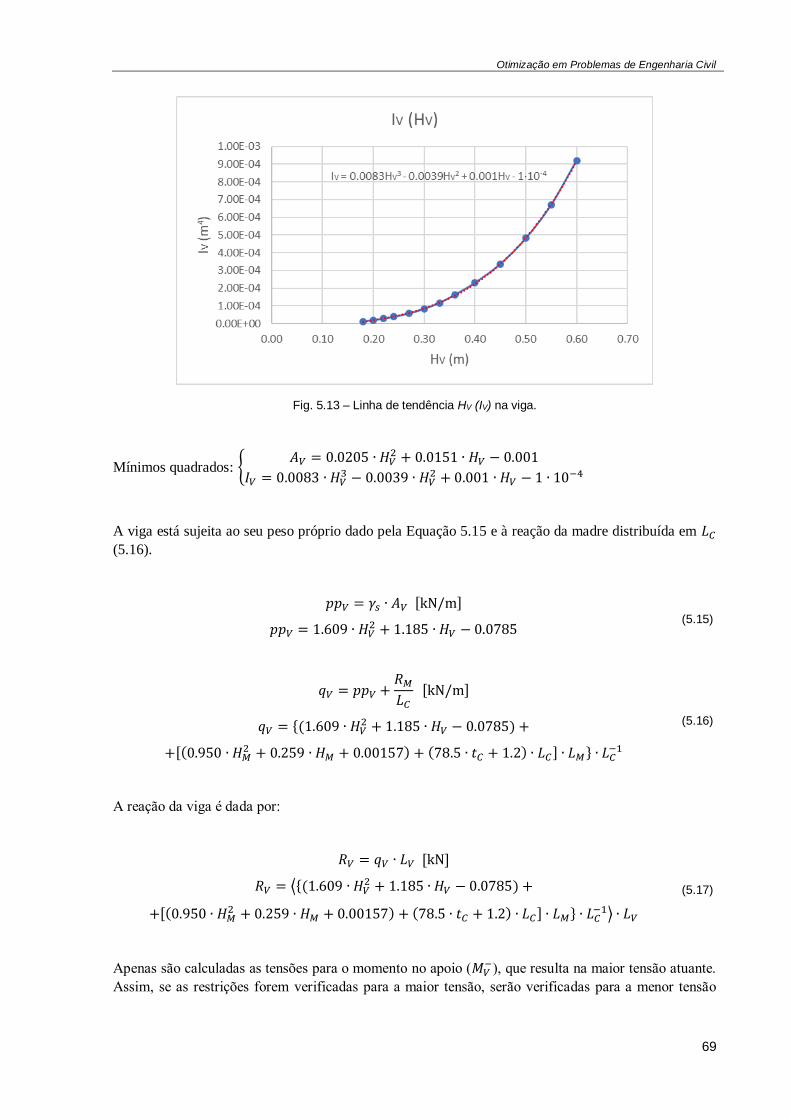
Otimização em Problemas de Engenharia Civil
69
Fig. 5.13 – Linha de tendência HV (IV) na viga.
Mínimos quadrados: {𝐴𝑉 = 0.0205 ∙ 𝐻𝑉
2 + 0.0151 ∙ 𝐻𝑉 − 0.001
𝐼𝑉 = 0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4
A viga está sujeita ao seu peso próprio dado pela Equação 5.15 e à reação da madre distribuída em 𝐿𝐶
(5.16).
𝑝𝑝𝑉 = 𝛾𝑠 ∙ 𝐴𝑉 [kN/m]
𝑝𝑝𝑉 = 1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785
(5.15)
𝑞𝑉 = 𝑝𝑝𝑉 +𝑅𝑀𝐿𝐶
[kN/m]
𝑞𝑉 = {(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1
(5.16)
A reação da viga é dada por:
𝑅𝑉 = 𝑞𝑉 ∙ 𝐿𝑉 [kN]
𝑅𝑉 = ⟨{(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉
(5.17)
Apenas são calculadas as tensões para o momento no apoio (𝑀𝑉−), que resulta na maior tensão atuante.
Assim, se as restrições forem verificadas para a maior tensão, serão verificadas para a menor tensão

Otimização em Problemas de Engenharia Civil
70
(momento a meio vão). A tensão na fibra inferior (5.20) no formato do MATLAB " ≤ 0" fica igual à
tensão da fibra superior (5.19), podendo ser suprimida no script.
𝑀𝑉− =
𝑞𝑉 ∙ 𝐿𝑉2
12 [kNm]
𝑀𝑉− = ⟨{(0.134 ∙ 𝐻𝑉
2 + 0.0988 ∙ 𝐻𝑉 − 0.00654) +
+[(0.0792 ∙ 𝐻𝑀2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉2
(5.18)
𝜎𝑉,𝑠𝑢𝑝 =𝑀𝑉−
𝐼𝑉∙𝐻𝑉2≤ 𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝑉,𝑠𝑢𝑝 =⟨{(0.134 ∙ 𝐻𝑉
2 + 0.0988 ∙ 𝐻𝑉 − 0.00654) +
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4
+[(0,0792 ∙ 𝐻𝑀2 + 0,0216 ∙ 𝐻𝑀 + 0,000131) + (6,542 ∙ 𝑡𝐶 + 0,1) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉2
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4∙𝐻𝑉2
(5.19)
𝜎𝑉,𝑖𝑛𝑓 = −𝑀𝑉−
𝐼𝑉∗𝐻𝑉2≥ −𝜎𝑎𝑑𝑚,𝑠 [kPa]
𝜎𝑉,𝑖𝑛𝑓 = −⟨{(0.134 ∙ 𝐻𝑉
2 + 0.0988 ∙ 𝐻𝑉 − 0.00654) +
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4
+[(0,0792 ∙ 𝐻𝑀2 + 0,0216 ∙ 𝐻𝑀 + 0,000131) + (6,542 ∙ 𝑡𝐶 + 0,1) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉2
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4∙𝐻𝑉2
(5.20)
A flecha máxima da viga é limitada a:
𝛿𝑚𝑎𝑥,𝑉 =𝐿𝑉250
[m] (5.21)
E a flecha elástica da viga é definida em (5.22).
𝛿𝑉 =𝑞𝑉 ∙ 𝐿𝑉
4
384 ∙ 𝐸𝑠 ∙ 𝐼𝑉≤ 𝛿𝑚𝑎𝑥,𝑉 [m]
𝛿𝑉 =⟨(1.609 ∙ 𝐻𝑉
2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
6.693 ∙ 108 ∙ 𝐻𝑉3 − 3.145 ∙ 108 ∙ 𝐻𝑉
2 + 8.064 ∙ 107 ∙ 𝐻𝑉 − 8 064 000
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉4
6.693 ∙ 108 ∙ 𝐻𝑉3 − 3.145 ∙ 108 ∙ 𝐻𝑉
2 + 8.064 ∙ 107 ∙ 𝐻𝑉 − 8 064 000
(5.22)

Otimização em Problemas de Engenharia Civil
71
Pilar
O esforço axial atuante no pilar (5.25) é oriundo da reação da viga R e do seu peso próprio (5.24), onde
AP é definido em (5.23).
𝐴𝑃 = 𝐵1 ∙ 𝐵2 [m2]
𝐴𝑃 = 0,2 ∙ 𝐵2 (5.23)
𝑝𝑝𝑃 = 𝛾𝑐 ∙ 𝐴𝑃 ∙ 𝐿𝑃 [kN]
𝑝𝑝𝑃 = 25 ∙ 𝐵2 (5.24)
𝑁𝑃 = 𝑅𝑉 + 𝑝𝑝𝑃 [kN]
𝑁𝑃 = ⟨{(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑣 + 25 ∙ 𝐵2
(5.25)
A partir do esforço axial do pilar é possível calcular sua tensão atuante em (5.26).
𝜎𝑃 = −𝑁𝑃𝐴𝑃
≥ −𝜎𝑎𝑑𝑚,𝑐 [kPa]
𝜎𝑃 = −⟨{(1.609 ∙ 𝐻𝑉
2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
0.2 ∙ 𝐵2
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑣 + 25 ∙ 𝐵20.2 ∙ 𝐵2
(5.26)
Sapata
Para sapatas rígidas normais deve ser satisfeita a seguinte condição para a altura [27]:
𝐻𝑆 ≥𝑎02, 𝑜𝑛𝑑𝑒 𝑎0 =
𝐷𝑥1,𝑥2 − 𝐵𝑥1,𝑥22
[m2]
𝐻𝑆 ≥𝐷1 − 0.2
4 𝑒 𝐻𝑆 ≥
𝐷2 −𝐵24
(5.27)
A tensão da sapata é dada pela Equação 5.28, onde os momentos segundo 𝑥1 e 𝑥2 são desprezados pelo
fato de possuírem valores muito baixo para uma estrutura de 5.0 m, não contribuindo significativamente
para a tensão da sapata.
𝜎𝑆 = −𝑁𝑃
𝐷1 ∙ 𝐷2≥ −𝜎𝑎𝑑𝑚,𝑠𝑜𝑙𝑜 [kPa] (5.28)
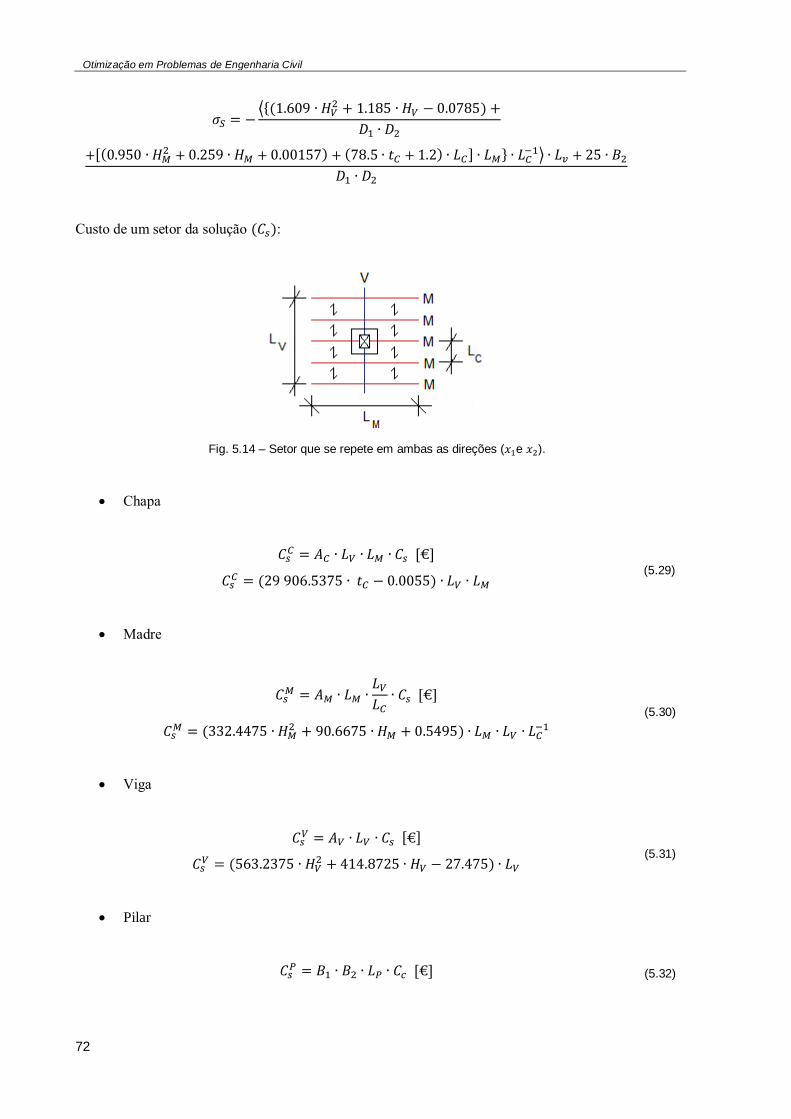
Otimização em Problemas de Engenharia Civil
72
𝜎𝑆 = −⟨{(1.609 ∙ 𝐻𝑉
2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
𝐷1 ∙ 𝐷2
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑣 + 25 ∙ 𝐵2𝐷1 ∙ 𝐷2
Custo de um setor da solução (𝐶𝑠):
Fig. 5.14 – Setor que se repete em ambas as direções (𝑥1e 𝑥2).
Chapa
𝐶𝑠𝐶 = 𝐴𝐶 ∙ 𝐿𝑉 ∙ 𝐿𝑀 ∙ 𝐶𝑠 [€]
𝐶𝑠𝐶 = (29 906.5375 ∙ 𝑡𝐶 − 0.0055) ∙ 𝐿𝑉 ∙ 𝐿𝑀
(5.29)
Madre
𝐶𝑠𝑀 = 𝐴𝑀 ∙ 𝐿𝑀 ∙
𝐿𝑉𝐿𝐶
∙ 𝐶𝑠 [€]
𝐶𝑠𝑀 = (332.4475 ∙ 𝐻𝑀
2 + 90.6675 ∙ 𝐻𝑀 + 0.5495) ∙ 𝐿𝑀 ∙ 𝐿𝑉 ∙ 𝐿𝐶−1
(5.30)
Viga
𝐶𝑠𝑉 = 𝐴𝑉 ∙ 𝐿𝑉 ∙ 𝐶𝑠 [€]
𝐶𝑠𝑉 = (563.2375 ∙ 𝐻𝑉
2 + 414.8725 ∙ 𝐻𝑉 − 27.475) ∙ 𝐿𝑉 (5.31)
Pilar
𝐶𝑠𝑃 = 𝐵1 ∙ 𝐵2 ∙ 𝐿𝑃 ∙ 𝐶𝑐 [€] (5.32)

Otimização em Problemas de Engenharia Civil
73
𝐶𝑠𝑃 = 250 ∙ 𝐵2
Sapata
𝐶𝑠𝑆 = 𝐷1 ∙ 𝐷2 ∙ 𝐻𝑆 ∙ 𝐶𝑐 [€]
𝐶𝑠𝑆 = 𝐷1 ∙ 𝐷2 ∙ 𝐻𝑆 ∙ 250
(5.33)
Custo por m2 da solução (C): Função objetivo
𝐶 =𝐶𝑠𝐶 + 𝐶𝑠
𝑀 + 𝐶𝑠𝑉 + 𝐶𝑠
𝑃 + 𝐶𝑠𝑆
𝐿𝑉 ∙ 𝐿𝑀 [€ m2]⁄
𝐶 =(29 906.5375 ∙ 𝑡𝐶 − 0.0055) ∙ 𝐿𝑉 ∙ 𝐿𝑀 +
𝐿𝑉 ∙ 𝐿𝑀
+(332.4475 ∙ 𝐻𝑀2 + 90.6675 ∙ 𝐻𝑀 + 0.5495) ∙ 𝐿𝑀 ∙ 𝐿𝑉 ∙ 𝐿𝐶
−1 +
𝐿𝑉 ∙ 𝐿𝑀
+(563.2375 ∙ 𝐻𝑉2 + 414.8725 ∙ 𝐻𝑉 − 27.475) ∙ 𝐿𝑉 + 250 ∗ 𝐵2 + 𝐷1 ∙ 𝐷2 ∙ 𝐻𝑆 ∙ 250
𝐿𝑉 ∙ 𝐿𝑀
(5.34)
São impostos limites para as variáveis, pois 𝐻𝑉 , 𝐻𝑀 e 𝑡𝐶 são tabelados e não podem assumir valores
diferentes dos existentes no catálogo. Para as restantes das variáveis os limites têm a função de impedir
que o algoritmo encontre soluções nulas ou negativas.
1 ≤ 𝐿𝑉 ≤ 100
1 ≤ 𝐿𝑀 ≤ 100
0.8 ≤ 𝐿𝐶 ≤ 50
0.20 ≤ 𝐵2 ≤ 10
0.18 ≤ 𝐻𝑉 ≤ 0.6
0.08 ≤ 𝐻𝑀 ≤ 0.25
0.00050 ≤ 𝑡𝐶 ≤ 0.00075
0.10 ≤ 𝐷1 ≤ 3
0.10 ≤ 𝐷2 ≤ 3
0.03 ≤ 𝐻𝑆 ≤ 4
As tensões na chapa, madre, viga, pilar e sapata, as flechas máximas da madre e da viga e a limitação
da altura da sapata figuram no programa matemático como restrições desigualdade, no qual foram
escritas no formato " ≤ 0".
𝑅𝑑𝑒𝑠(1) ⇒ −𝜎𝐶,𝑖𝑛𝑓 ≥ −𝜎𝑎𝑑𝑚,𝑠
(6.5417 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶2
0.0001 ∙ 𝑡𝐶 + 1 ∙ 10−10∙ (0.4645 ∙ 𝑡𝐶 + 0.0064) − 175 000 ≤ 0

Otimização em Problemas de Engenharia Civil
74
𝑅𝑑𝑒𝑠(2) ⇒ 𝜎𝐶,𝑠𝑢𝑝 ≤ 𝜎𝑎𝑑𝑚,𝑠
(6.5417 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶2
0.0001 ∙ 𝑡𝐶 + 1 ∙ 10−10∙ (0.5355 ∙ 𝑡𝐶 + 0.0231) − 175 000 ≤ 0
𝑅𝑑𝑒𝑠(3) ⇒ −𝜎𝑀,𝑖𝑛𝑓 ≥ −𝜎𝑎𝑑𝑚,𝑠
[(0.0792 ∙ 𝐻𝑀2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀
2
0.002 ∙ 𝐻𝑀3 − 0.0006 ∙ 𝐻𝑀
2 + 8 ∙ 10−5 ∙ 𝐻𝑀 − 3 ∙ 10−6∙
∙ (0.0501 ∙ 𝐻𝑀2 + 0.4778 ∙ 𝐻𝑀 − 0.0023) − 175 000 ≤ 0
𝑅𝑑𝑒𝑠(4) ⇒ 𝜎𝑀,𝑠𝑢𝑝 ≤ 𝜎𝑎𝑑𝑚,𝑠
[(0.0792 ∙ 𝐻𝑀2 + 0.0216 ∙ 𝐻𝑀 + 0.000131) + (6.542 ∙ 𝑡𝐶 + 0.1) ∙ 𝐿𝐶] ∙ 𝐿𝑀
2
0.002 ∙ 𝐻𝑀3 − 0.0006 ∙ 𝐻𝑀
2 + 8 ∙ 10−5 ∙ 𝐻𝑀 − 3 ∙ 10−6∙
∙ [𝐻𝑀 − (0.0501 ∙ 𝐻𝑀2 + 0.4778 ∙ 𝐻𝑀 − 0.0023)] − 175.000 ≤ 0
𝑅𝑑𝑒𝑠(5) ⇒ 𝛿𝑀 ≤ 𝛿𝑚𝑎𝑥,𝑀
[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀
4
(1.613 ∙ 108 ∙ 𝐻𝑀3 − 4.838 ∙ 107 ∙ 𝐻𝑀
2 + 6 451 200 ∙ 𝐻𝑀 − 241 920)−𝐿𝑀180
≤ 0
𝑅𝑑𝑒𝑠(6) ⇒ 𝜎𝑉,𝑠𝑢𝑝 ≤ 𝜎𝑎𝑑𝑚,𝑠
⟨{(0.134 ∙ 𝐻𝑉2 + 0.0988 ∙ 𝐻𝑉 − 0.00654) +
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4
+[(0,0792 ∙ 𝐻𝑀2 + 0,0216 ∙ 𝐻𝑀 + 0,000131) + (6,542 ∙ 𝑡𝐶 + 0,1) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉2
0.0083 ∙ 𝐻𝑉3 − 0.0039 ∙ 𝐻𝑉
2 + 0.001 ∙ 𝐻𝑉 − 1 ∙ 10−4∙𝐻𝑉2−
175 000 ≤ 0
𝑅𝑑𝑒𝑠(7) ⇒ 𝛿𝑉 ≤ 𝛿𝑚𝑎𝑥,𝑉
⟨(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
6.693 ∙ 108 ∙ 𝐻𝑉3 − 3.145 ∙ 108 ∙ 𝐻𝑉
2 + 8.064 ∙ 107 ∙ 𝐻𝑉 − 8 064 000
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑉4
6.693 ∙ 108 ∙ 𝐻𝑉3 − 3.145 ∙ 108 ∙ 𝐻𝑉
2 + 8.064 ∙ 107 ∙ 𝐻𝑉 − 8 064 000−
𝐿𝑉250
≤ 0
𝑅𝑑𝑒𝑠(8) ⇒ −𝜎𝑃 ≥ −𝜎𝑎𝑑𝑚,𝑐
⟨{(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
0.2 ∙ 𝐵2
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑣 + 25 ∙ 𝐵20.2 ∙ 𝐵2
−

Otimização em Problemas de Engenharia Civil
75
10 000 ≤ 0
𝑅𝑑𝑒𝑠(9) ⇒ 𝐻𝑆 ≥𝐷1 −𝐵1
4
−𝐻𝑆 +𝐷1 − 0.2
4≤ 0
𝑅𝑑𝑒𝑠(10) ⇒ 𝐻𝑆 ≥𝐷2 −𝐵2
4
−𝐻𝑆 +𝐷2 − 𝐵2
4≤ 0
𝑅𝑑𝑒𝑠(11) ⇒ −𝜎𝑆 ≥ −𝜎𝑎𝑑𝑚,𝑠𝑜𝑙𝑜
⟨{(1.609 ∙ 𝐻𝑉2 + 1.185 ∙ 𝐻𝑉 − 0.0785) +
𝐷1 ∙ 𝐷2
+[(0.950 ∙ 𝐻𝑀2 + 0.259 ∙ 𝐻𝑀 + 0.00157) + (78.5 ∙ 𝑡𝐶 + 1.2) ∙ 𝐿𝐶] ∙ 𝐿𝑀} ∙ 𝐿𝐶
−1⟩ ∙ 𝐿𝑣 + 25 ∙ 𝐵2𝐷1 ∙ 𝐷2
−
200 ≤ 0
Após a definição da função objetivo e das restrições desigualdade são calculadas no MATLAB e no
EXCEL as soluções do problema. A seguir, encontram-se expostos os scripts do MATLAB para melhor
explicá-los. No Script 5.1 encontra-se o ficheiro onde estão descritas as restrições não lineares de
desigualdade e no Script 5.2 o programa principal onde está descrito a função objetivo e os limites
impostos às variáveis.
Script 5.1 – Programa matemático correspondente às restrições não lineares da cobertura.
% Restrições não lineares
function [rdes,rig] = coberturahiper(x)
% Desigualdade ("<=")
rdes(1) =
((6.542*x(7)+0.1)*(x(3)^2)*(0.4645*x(7)+0.0064))/(0.0001*x(7)+1*10^-10)-
175000; % Tensão inf chapa M-
rdes(2) =
((6.542*x(7)+0.1)*(x(3)^2)*(0.5355*x(7)+0.0231))/(0.0001*x(7)+1*10^-10)-
175000; % Tensão sup chapa M-
rdes(3) =
(((0.0792*x(6)^2+0.0216*x(6)+0.000131)+(6.542*x(7)+0.1)*x(3))*x(2)^2*(0.050
1*x(6)^2+0.4778*x(6)-0.0023))/(0.002*x(6)^3-0.0006*x(6)^2+8*10^-5*x(6)-
3*10^-6)-175000; % Tensão inf madre M-
rdes(4) =
(((0.0792*x(6)^2+0.0216*x(6)+0.000131)+(6.542*x(7)+0.1)*x(3))*x(2)^2*(x(6)-
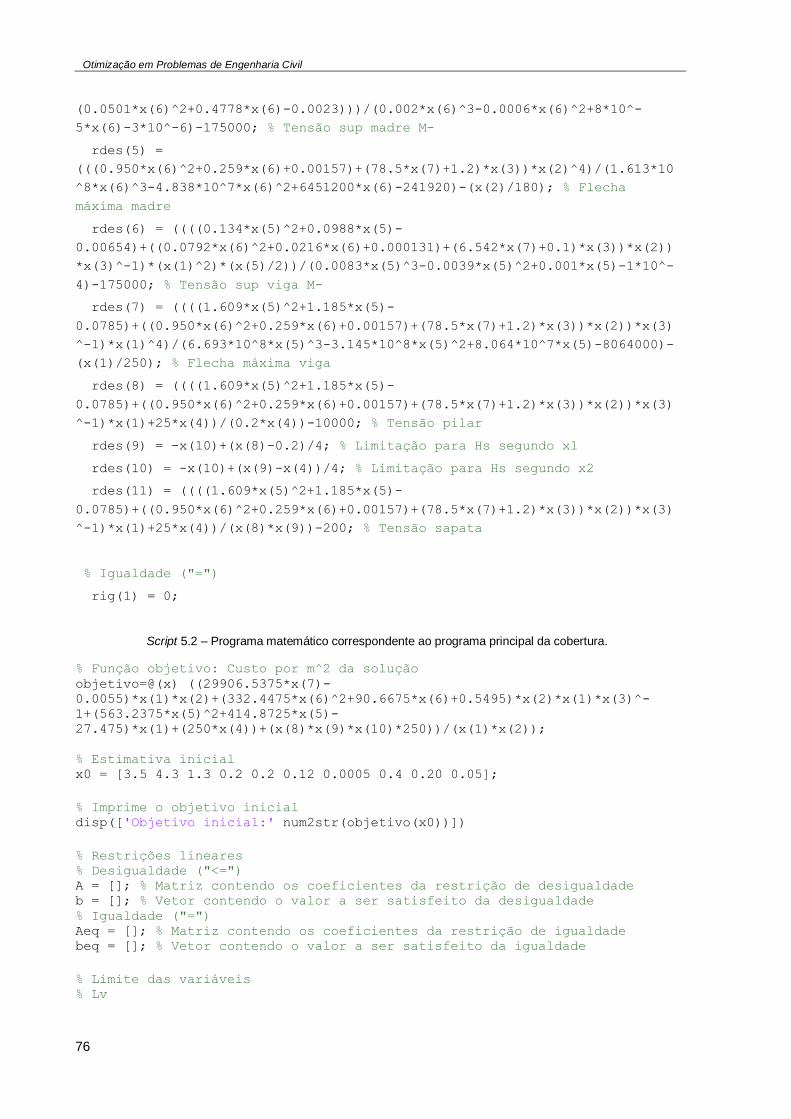
Otimização em Problemas de Engenharia Civil
76
(0.0501*x(6)^2+0.4778*x(6)-0.0023)))/(0.002*x(6)^3-0.0006*x(6)^2+8*10^-
5*x(6)-3*10^-6)-175000; % Tensão sup madre M-
rdes(5) =
(((0.950*x(6)^2+0.259*x(6)+0.00157)+(78.5*x(7)+1.2)*x(3))*x(2)^4)/(1.613*10
^8*x(6)^3-4.838*10^7*x(6)^2+6451200*x(6)-241920)-(x(2)/180); % Flecha
máxima madre
rdes(6) = ((((0.134*x(5)^2+0.0988*x(5)-
0.00654)+((0.0792*x(6)^2+0.0216*x(6)+0.000131)+(6.542*x(7)+0.1)*x(3))*x(2))
*x(3)^-1)*(x(1)^2)*(x(5)/2))/(0.0083*x(5)^3-0.0039*x(5)^2+0.001*x(5)-1*10^-
4)-175000; % Tensão sup viga M-
rdes(7) = ((((1.609*x(5)^2+1.185*x(5)-
0.0785)+((0.950*x(6)^2+0.259*x(6)+0.00157)+(78.5*x(7)+1.2)*x(3))*x(2))*x(3)
^-1)*x(1)^4)/(6.693*10^8*x(5)^3-3.145*10^8*x(5)^2+8.064*10^7*x(5)-8064000)-
(x(1)/250); % Flecha máxima viga
rdes(8) = ((((1.609*x(5)^2+1.185*x(5)-
0.0785)+((0.950*x(6)^2+0.259*x(6)+0.00157)+(78.5*x(7)+1.2)*x(3))*x(2))*x(3)
^-1)*x(1)+25*x(4))/(0.2*x(4))-10000; % Tensão pilar
rdes(9) = -x(10)+(x(8)-0.2)/4; % Limitação para Hs segundo x1
rdes(10) = -x(10)+(x(9)-x(4))/4; % Limitação para Hs segundo x2
rdes(11) = ((((1.609*x(5)^2+1.185*x(5)-
0.0785)+((0.950*x(6)^2+0.259*x(6)+0.00157)+(78.5*x(7)+1.2)*x(3))*x(2))*x(3)
^-1)*x(1)+25*x(4))/(x(8)*x(9))-200; % Tensão sapata
% Igualdade ("=")
rig(1) = 0;
Script 5.2 – Programa matemático correspondente ao programa principal da cobertura.
% Função objetivo: Custo por m^2 da solução objetivo=@(x) ((29906.5375*x(7)-
0.0055)*x(1)*x(2)+(332.4475*x(6)^2+90.6675*x(6)+0.5495)*x(2)*x(1)*x(3)^-
1+(563.2375*x(5)^2+414.8725*x(5)-
27.475)*x(1)+(250*x(4))+(x(8)*x(9)*x(10)*250))/(x(1)*x(2));
% Estimativa inicial x0 = [3.5 4.3 1.3 0.2 0.2 0.12 0.0005 0.4 0.20 0.05];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade % Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis % Lv
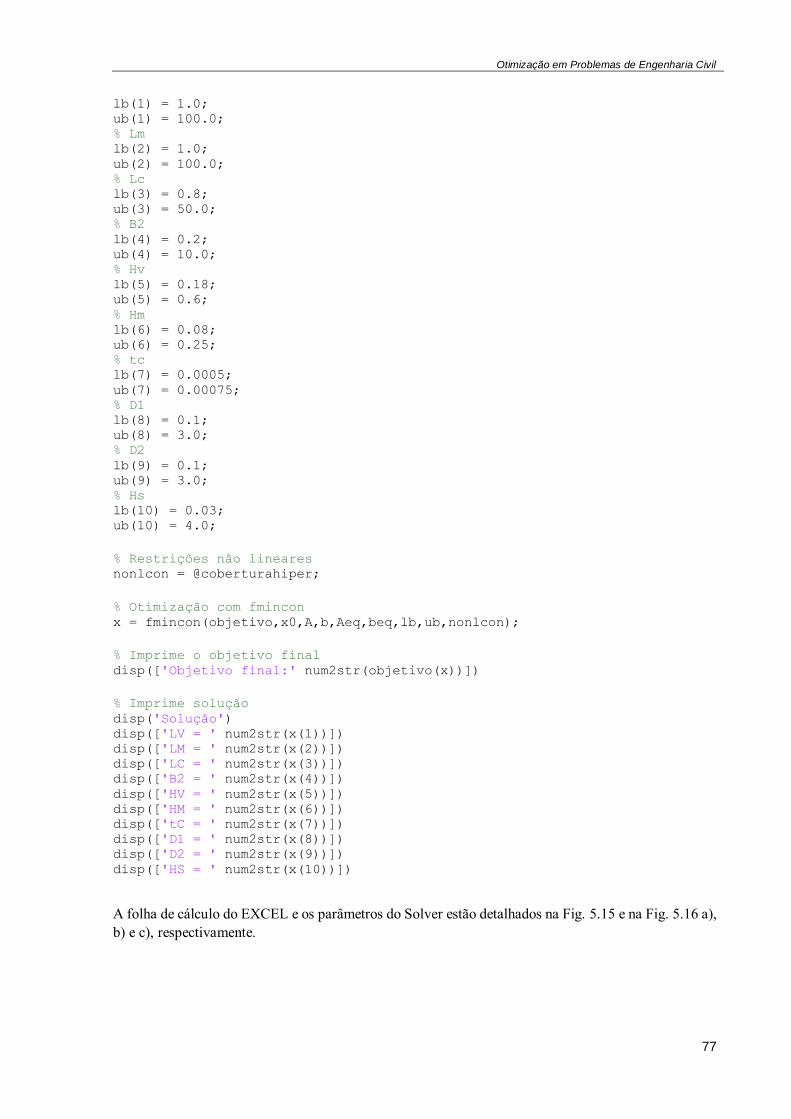
Otimização em Problemas de Engenharia Civil
77
lb(1) = 1.0; ub(1) = 100.0; % Lm lb(2) = 1.0; ub(2) = 100.0; % Lc lb(3) = 0.8; ub(3) = 50.0; % B2 lb(4) = 0.2; ub(4) = 10.0; % Hv lb(5) = 0.18; ub(5) = 0.6; % Hm lb(6) = 0.08; ub(6) = 0.25; % tc lb(7) = 0.0005; ub(7) = 0.00075; % D1 lb(8) = 0.1; ub(8) = 3.0; % D2 lb(9) = 0.1; ub(9) = 3.0; % Hs lb(10) = 0.03; ub(10) = 4.0;
% Restrições não lineares nonlcon = @coberturahiper;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['LV = ' num2str(x(1))]) disp(['LM = ' num2str(x(2))]) disp(['LC = ' num2str(x(3))]) disp(['B2 = ' num2str(x(4))]) disp(['HV = ' num2str(x(5))]) disp(['HM = ' num2str(x(6))]) disp(['tC = ' num2str(x(7))]) disp(['D1 = ' num2str(x(8))]) disp(['D2 = ' num2str(x(9))]) disp(['HS = ' num2str(x(10))])
A folha de cálculo do EXCEL e os parâmetros do Solver estão detalhados na Fig. 5.15 e na Fig. 5.16 a),
b) e c), respectivamente.
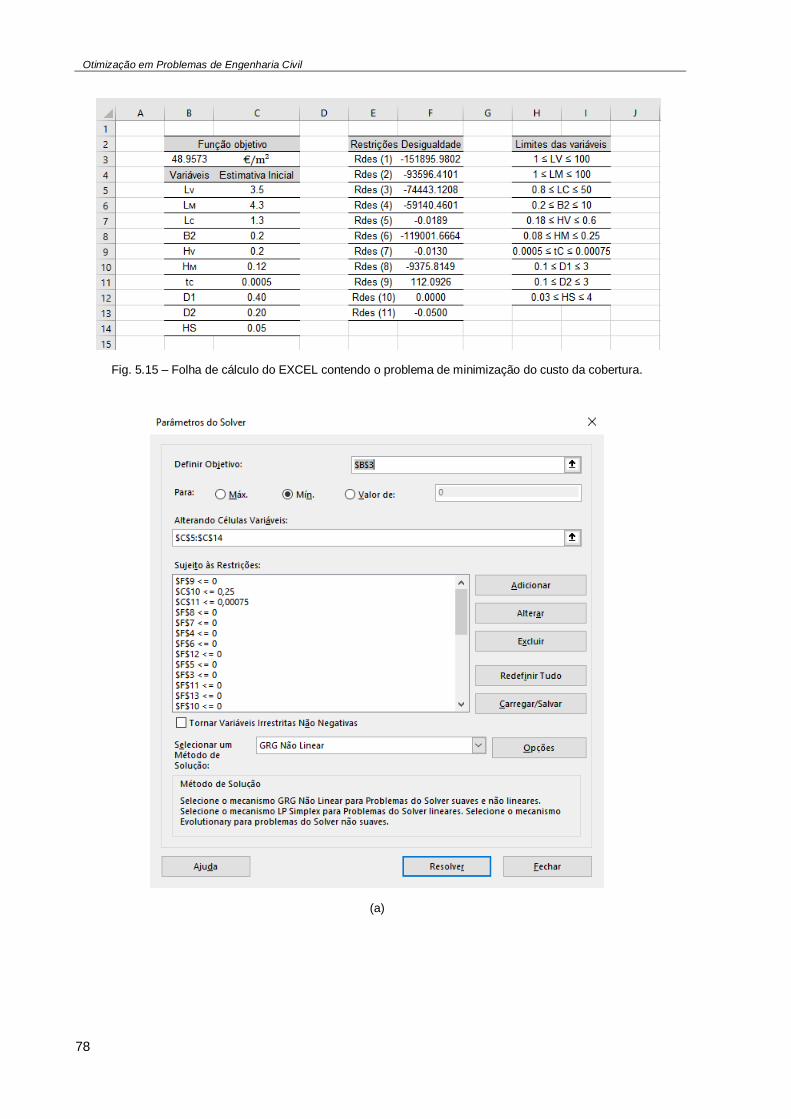
Otimização em Problemas de Engenharia Civil
78
Fig. 5.15 – Folha de cálculo do EXCEL contendo o problema de minimização do custo da cobertura.
(a)
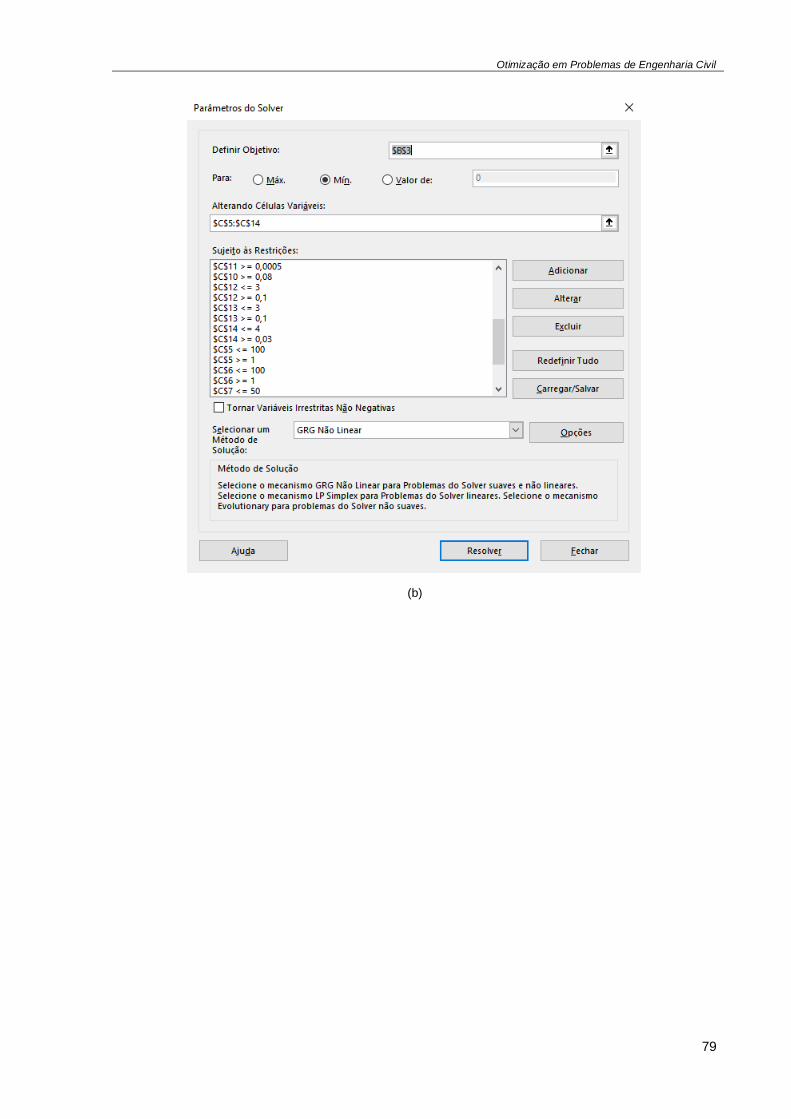
Otimização em Problemas de Engenharia Civil
79
(b)
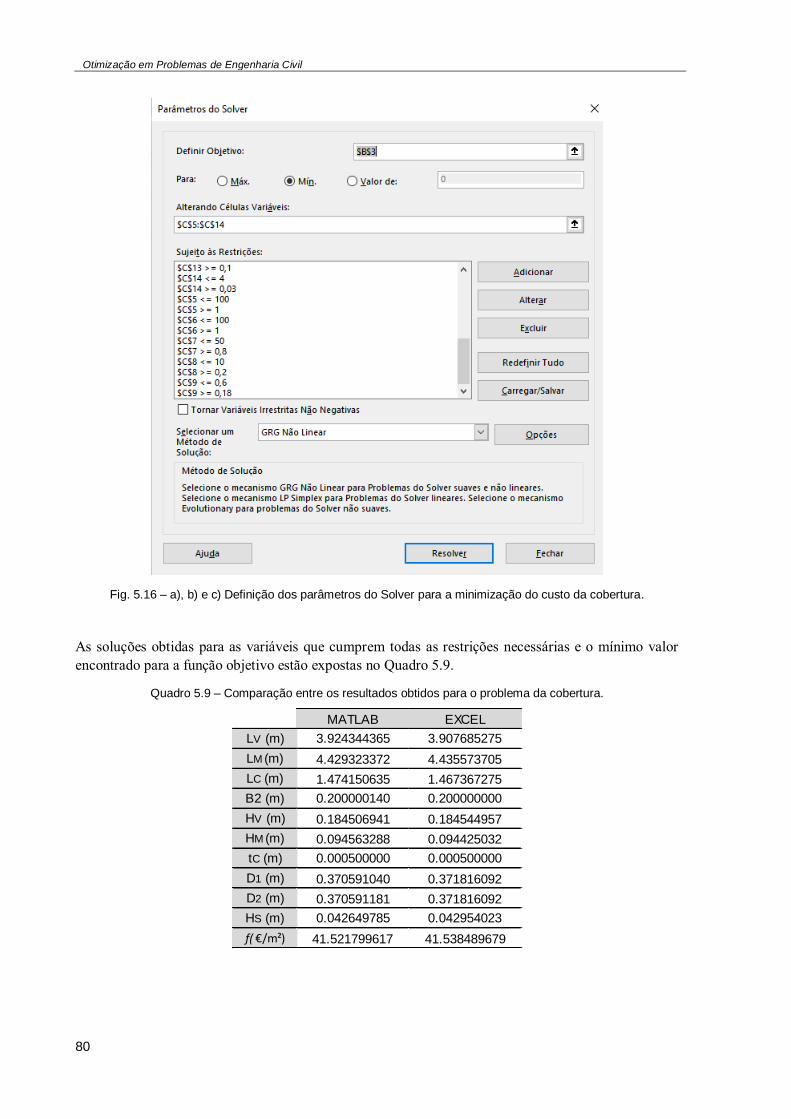
Otimização em Problemas de Engenharia Civil
80
Fig. 5.16 – a), b) e c) Definição dos parâmetros do Solver para a minimização do custo da cobertura.
As soluções obtidas para as variáveis que cumprem todas as restrições necessárias e o mínimo valor
encontrado para a função objetivo estão expostas no Quadro 5.9.
Quadro 5.9 – Comparação entre os resultados obtidos para o problema da cobertura.
MATLAB EXCEL
LV (m) 3.924344365 3.907685275
LM (m) 4.429323372 4.435573705
LC (m) 1.474150635 1.467367275
B2 (m) 0.200000140 0.200000000
HV (m) 0.184506941 0.184544957
HM (m) 0.094563288 0.094425032
tC (m) 0.000500000 0.000500000
D1 (m) 0.370591040 0.371816092
D2 (m) 0.370591181 0.371816092
HS (m) 0.042649785 0.042954023
f( €/m²) 41.521799617 41.538489679
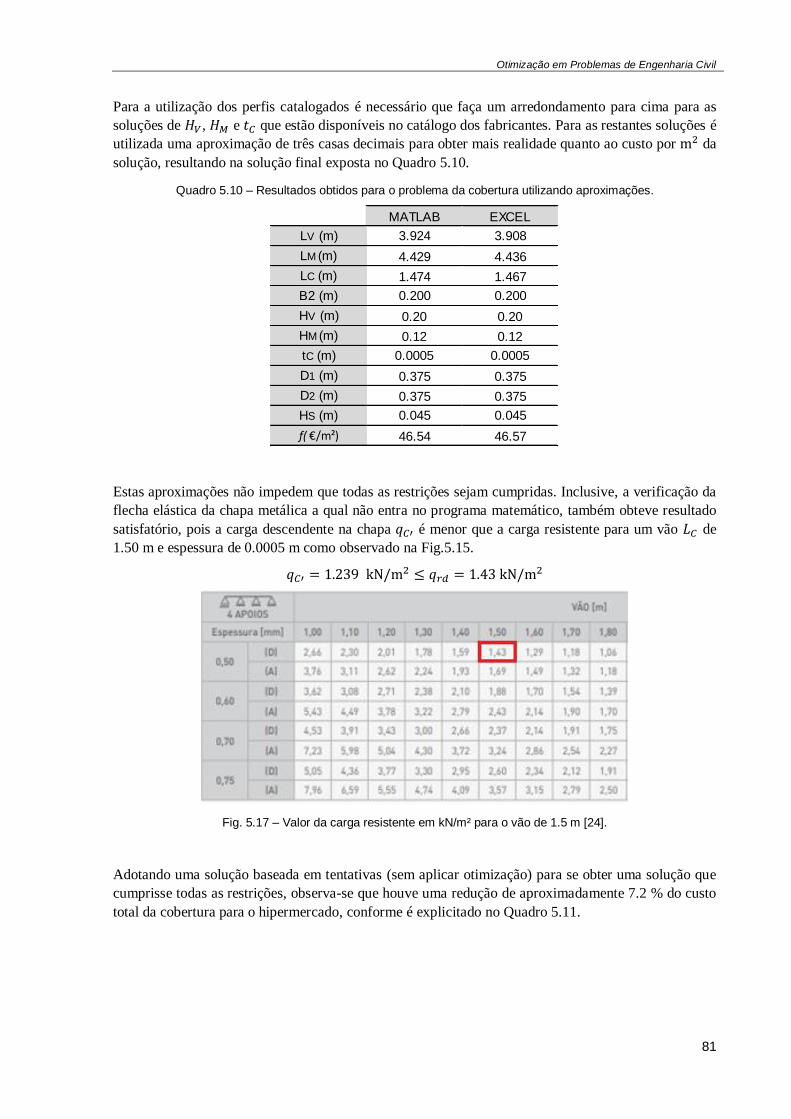
Otimização em Problemas de Engenharia Civil
81
Para a utilização dos perfis catalogados é necessário que faça um arredondamento para cima para as
soluções de 𝐻𝑉 , 𝐻𝑀 e 𝑡𝐶 que estão disponíveis no catálogo dos fabricantes. Para as restantes soluções é
utilizada uma aproximação de três casas decimais para obter mais realidade quanto ao custo por m2 da
solução, resultando na solução final exposta no Quadro 5.10.
Quadro 5.10 – Resultados obtidos para o problema da cobertura utilizando aproximações.
Estas aproximações não impedem que todas as restrições sejam cumpridas. Inclusive, a verificação da
flecha elástica da chapa metálica a qual não entra no programa matemático, também obteve resultado
satisfatório, pois a carga descendente na chapa 𝑞𝐶′ é menor que a carga resistente para um vão 𝐿𝐶 de
1.50 m e espessura de 0.0005 m como observado na Fig.5.15.
𝑞𝐶′ = 1.239 kN/m2 ≤ 𝑞𝑟𝑑 = 1.43 kN/m2
Fig. 5.17 – Valor da carga resistente em kN/m² para o vão de 1.5 m [24].
Adotando uma solução baseada em tentativas (sem aplicar otimização) para se obter uma solução que
cumprisse todas as restrições, observa-se que houve uma redução de aproximadamente 7.2 % do custo
total da cobertura para o hipermercado, conforme é explicitado no Quadro 5.11.
MATLAB EXCEL
LV (m) 3.924 3.908
LM (m) 4.429 4.436
LC (m) 1.474 1.467
B2 (m) 0.200 0.200
HV (m) 0.20 0.20
HM (m) 0.12 0.12
tC (m) 0.0005 0.0005
D1 (m) 0.375 0.375
D2 (m) 0.375 0.375
HS (m) 0.045 0.045
f( €/m²) 46.54 46.57
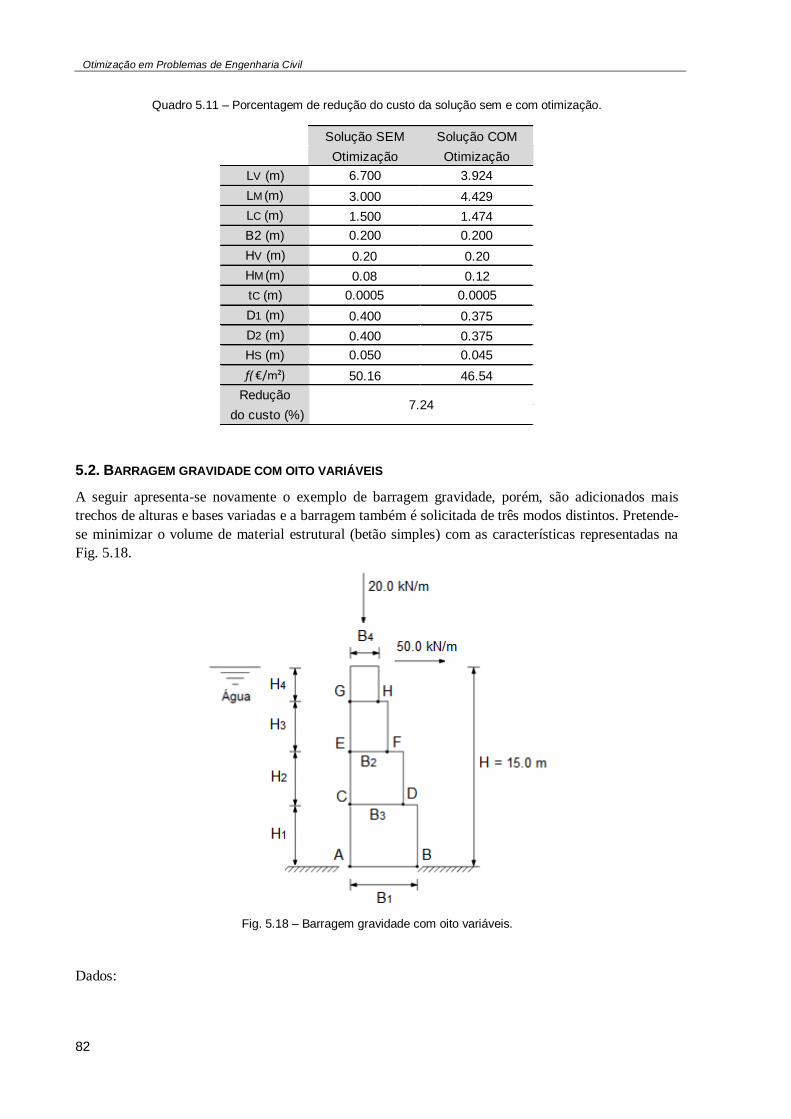
Otimização em Problemas de Engenharia Civil
82
Quadro 5.11 – Porcentagem de redução do custo da solução sem e com otimização.
5.2. BARRAGEM GRAVIDADE COM OITO VARIÁVEIS
A seguir apresenta-se novamente o exemplo de barragem gravidade, porém, são adicionados mais
trechos de alturas e bases variadas e a barragem também é solicitada de três modos distintos. Pretende-
se minimizar o volume de material estrutural (betão simples) com as características representadas na
Fig. 5.18.
Fig. 5.18 – Barragem gravidade com oito variáveis.
Dados:
Solução SEM Solução COM
Otimização Otimização
LV (m) 6.700 3.924
LM (m) 3.000 4.429
LC (m) 1.500 1.474
B2 (m) 0.200 0.200
HV (m) 0.20 0.20
HM (m) 0.08 0.12
tC (m) 0.0005 0.0005
D1 (m) 0.400 0.375
D2 (m) 0.400 0.375
HS (m) 0.050 0.045
f( €/m²) 50.16 46.54
Redução
do custo (%)7.24

Otimização em Problemas de Engenharia Civil
83
Tensão admissível no ponto B, D, F e H (compressão): 𝜎 ≤ 10 000 kPa
Peso específico da água: 𝛾𝑤 = 10 kN/m3
Peso específico do betão: 𝛾𝑐 = 25 kN/m3
Fator de segurança global ao derrube: FS = 2.5
Convenção de sinais adotada: compressão (+) e tração (-)
As variáveis de projeto são as grandezas 𝐵1, 𝐵2, 𝐵3, 𝐵4, 𝐻1, 𝐻2, 𝐻3 e 𝐻4. São considerados os seguintes
casos de carga:
a) Água ao nível máximo
b) Água ao nível máximo + força vertical de 20 kN/m
c) Água ao nível máximo + força horizontal de 50 kN/m
Novamente o estudo é realizado por tensões de segurança, supondo que os elementos fornecidos
correspondem a valores característicos. Não são considerados restrições de deslizamento. Nas secções
AB, CD, EF e GH não são admissíveis trações. A força vertical está aplicada na metade de 𝐵4 e a
horizontal a 15.0 m da base da barragem.
a) Água ao nível máximo
Trecho AB:
A tensão 𝜎1 causada pela água é dada por:
𝜎1 = 𝛾𝑤 ∙ 𝐻 [kPa]
𝜎1 = 150 kN/m2 = 150 kPa (5.35)
O impulso da água é dado pela área do triângulo do diagrama das tensões:
𝐼𝑤.1 =𝜎1 ∙ 𝐻
2 [kN/m]
𝐼𝑤.1 = 1125 kN/m
(5.36)
O momento no trecho AB é dado pelo impulso da água e pelo peso próprio do trecho CD, EF e GH:
𝑀𝐴𝐵 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) − 𝑝𝑝2 ∙ (
𝐵12−𝐵22) − 𝑝𝑝3 ∙ (
𝐵12−𝐵32) − 𝑝𝑝4 ∙ (
𝐵12−𝐵42) [kNm/m]
𝑀𝐴𝐵 = 5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32) −
(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵12−𝐵42)
(5.37)
O esforço axial causado pelo peso próprio dos trechos da barragem é:

Otimização em Problemas de Engenharia Civil
84
𝑁𝐴𝐵 = 𝛾𝑐 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐴𝐵 = 25 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) (5.38)
Como nos pontos A e B não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐴 = +𝑁𝐴𝐵𝐵1
−6 ∙ 𝑀𝐴𝐵
𝐵12 ≥ 0 [kP𝑎] (5.39)
𝜎𝐵 = +𝑁𝐴𝐵𝐵1
+6 ∙ 𝑀𝐴𝐵
𝐵12 ≤ 10 000 [kPa] (5.40)
No programa matemático 𝑀𝐴𝐵 e 𝑁𝐴𝐵 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de B:
𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) +
+25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −
𝐵42) [kNm/m]
(5.41)
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) [kNm/m]
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 5625 kNm/m
(5.42)
Para que não ocorra o derrube em torno de B é necessário impor uma restrição para garantir que não
gire em torno de B, majorando o 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
14 062.5 ≤ 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −𝐵42)
(5.43)
Trecho CD:
A tensão 𝜎2 causada pela água é dada por:

Otimização em Problemas de Engenharia Civil
85
𝜎2 = 𝛾𝑤 ∙ (𝐻 − 𝐻1) [kPa]
𝜎2 = 10 ∙ (15 − 𝐻1) (5.44)
O impulso da água é dado pela área do triângulo do diagrama das tensões:
𝐼𝑤.2 =𝜎2 ∙ (𝐻 − 𝐻1)
2 [kN/m]
𝐼𝑤.2 = 5 ∙ (15 − 𝐻1)2
(5.45)
O momento no trecho CD é dado pelo impulso da água e pelo peso próprio do trecho EF e GH:
𝑀𝐶𝐷 = 𝐼𝑊,2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] − 𝑝𝑝3 ∙ (
𝐵22−𝐵32) − 𝑝𝑝4 ∙ (
𝐵22−𝐵42) [kNm/m]
𝑀𝐶𝐷 =5
3 ∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (𝐵22−𝐵32) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵22−𝐵42)
(5.46)
O esforço axial causado pelo peso próprio dos trechos da barragem é:
𝑁𝐶𝐷 = 𝛾𝑐 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐶𝐷 = 25 ∙ (𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) (5.47)
Como nos pontos C e D não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐶 = +𝑁𝐶𝐷𝐵2
−6 ∙ 𝑀𝐶𝐷
𝐵22 ≥ 0 [kPa] (5.48)
𝜎𝐷 = +𝑁𝐶𝐷𝐵2
+6 ∙ 𝑀𝐶𝐷
𝐵22 ≤ 10 000 [kPa] (5.49)
No programa matemático 𝑀𝐶𝐷 e 𝑁𝐶𝐷 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de D:
𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) + (5.50)

Otimização em Problemas de Engenharia Civil
86
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −𝐵42) [kNm/m]
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑤.2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] [kNm/m]
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ (15 − 𝐻1)
3
(5.51)
Para que não ocorra o derrube em torno de D é necessário impor uma restrição para garantir que não
gire em torno de D, majorando o 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ (15 − 𝐻1)
3 ≤ 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −𝐵42)
(5.52)
Trecho EF:
A tensão 𝜎3 causada pela água é dada por:
𝜎3 = 𝛾𝑤 ∙ (𝐻3 +𝐻4) [kPa]
𝜎3 = 10 ∙ (𝐻3 +𝐻4) (5.53)
O impulso da água é dado pela área do triângulo do diagrama das tensões:
𝐼𝑤.3 =𝜎3 ∙ (𝐻3 +𝐻4)
2 [kN/m]
𝐼𝑤.3 = 5 ∙ (𝐻3 + 𝐻4)2
(5.54)
O momento no trecho EF é dado pelo impulso da água e pelo peso próprio do trecho GH:
𝑀𝐸𝐹 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 +𝐻4)] − 𝑝𝑝4 ∙ (
𝐵32−𝐵42) [kNm/m]
𝑀𝐸𝐹 =5
3 ∙ (𝐻3 +𝐻4)
3 − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵32−𝐵42)
(5.55)
O esforço axial causado pelo peso próprio dos trechos da barragem é:

Otimização em Problemas de Engenharia Civil
87
𝑁𝐸𝐹 = 𝛾𝑐 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐸𝐹 = 25 ∙ (𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) (5.56)
Como nos pontos E e F não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐸 = +𝑁𝐸𝐹𝐵3
−6 ∙ 𝑀𝐸𝐹
𝐵32 ≥ 0 [kPa] (5.57)
𝜎𝐹 = +𝑁𝐸𝐹𝐵3
+6 ∙ 𝑀𝐸𝐹
𝐵32 ≤ 10 000 [kPa] (5.58)
No programa matemático 𝑀𝐸𝐹 e 𝑁𝐸𝐹 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de F:
𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42) [kNm/m] (5.59)
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 +𝐻4)] [kNm/m]
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ (𝐻3 +𝐻4)
3
(5.60)
Para que não ocorra o derrube em torno de F é necessário impor uma restrição para garantir que não gire
em torno de F, majorando o 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao derrube,
tal como é dado abaixo:
2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ (𝐻3 +𝐻4)
3 ≤ 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42)
(5.61)
Trecho GH:
A tensão σ4 causada pela água é dada por:
𝜎4 = 𝛾𝑤 ∙ 𝐻4 [kPa] (5.62)

Otimização em Problemas de Engenharia Civil
88
𝜎4 = 10 ∙ 𝐻4
O impulso da água é dado pela área do triângulo do diagrama das tensões:
𝐼𝑤.4 =𝜎4 ∙ 𝐻42
[kN/m]
𝐼𝑤.4 = 5 ∙ 𝐻42
(5.63)
O momento no trecho GH é dado pelo impulso da água:
𝑀𝐺𝐻 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) [kNm/m]
𝑀𝐺𝐻 =5
3 ∙ 𝐻4
3
(5.64)
O esforço axial causado pelo peso próprio do trecho da barragem é:
𝑁𝐺𝐻 = 𝛾𝑐 ∙ (𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐺𝐻 = 25 ∙ (𝐵4 ∙ 𝐻4) (5.65)
Como nos pontos G e H não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐺 = +𝑁𝐺𝐻𝐵4
−6 ∙ 𝑀𝐺𝐻
𝐵42 ≥ 0 [kPa] (5.66)
𝜎𝐻 = +𝑁𝐺𝐻𝐵4
+6 ∙ 𝑀𝐺𝐻
𝐵42 ≤ 10 000 [kPa] (5.67)
No programa matemático 𝑀𝐺𝐻 e 𝑁𝐺𝐻 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de H:
𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42) [kNm/m] (5.68)

Otimização em Problemas de Engenharia Civil
89
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) [kNm/m]
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ 𝐻4
3
(5.69)
Para que não ocorra o derrube em torno de H é necessário impor uma restrição para garantir que não
gire em torno de H, majorando o 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ 𝐻4
3 ≤ 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42)
(5.70)
b) Água ao nível máximo + força vertical de 20 kN/m
Trecho AB:
O momento no trecho AB é dado pelo impulso da água, pelo peso próprio do trecho CD, EF e GH e pela
força vertical:
𝑀𝐴𝐵 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) − 𝑝𝑝2 ∙ (
𝐵12−𝐵22) − 𝑝𝑝3 ∙ (
𝐵12−𝐵32) −
(𝑝𝑝4 + 20) ∙ (𝐵12−𝐵42) [kNm/m]
𝑀𝐴𝐵 = 5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32) −
(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵12−𝐵42)
(5.71)
O esforço axial causado pelo peso próprio dos trechos da barragem e pela força vertical é:
𝑁𝐴𝐵 = 𝛾𝑐 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20 [kN/m]
𝑁𝐴𝐵 = 25 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20 (5.72)
Como nos pontos A e B não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐴 = +𝑁𝐴𝐵𝐵1
−6 ∙ 𝑀𝐴𝐵
𝐵12 ≥ 0 [kPa] (5.73)

Otimização em Problemas de Engenharia Civil
90
𝜎𝐵 = +𝑁𝐴𝐵𝐵1
+6 ∙ 𝑀𝐴𝐵
𝐵12 ≤ 10 000 [kPa] (5.74)
No programa matemático 𝑀𝐴𝐵 e 𝑁𝐴𝐵 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de B:
𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) +
+25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −𝐵32) + (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵1 −
𝐵42) [kNm/m]
(5.75)
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) [kNm/m]
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 5625 kNm/m
(5.76)
Para que não ocorra o derrube em torno de B é necessário impor uma restrição para garantir que não
gire em torno de B, majorando o 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
14 062.5 ≤ 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32) +
+(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵1 −𝐵42)
(5.77)
Trecho CD:
O momento no trecho CD é dado pelo impulso da água, pelo peso próprio do trecho EF e GH e pela
força vertical:
𝑀𝐶𝐷 = 𝐼𝑊,2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] − 𝑝𝑝3 ∙ (
𝐵22−𝐵32) − (𝑝𝑝4 + 20) ∙ (
𝐵22−𝐵42) [kNm/m]
𝑀𝐶𝐷 =5
3 ∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (𝐵22−𝐵32) − (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (
𝐵22−𝐵42)
(5.78)
O esforço axial causado pelo peso próprio dos trechos da barragem e pela força vertical é:

Otimização em Problemas de Engenharia Civil
91
𝑁𝐶𝐷 = 𝛾𝑐 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20 [kN/m]
𝑁𝐶𝐷 = 25 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20 (5.79)
Como nos pontos C e D não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐶 = +𝑁𝐶𝐷𝐵2
−6 ∙ 𝑀𝐶𝐷
𝐵22 ≥ 0 [kPa] (5.80)
𝜎𝐷 = +𝑁𝐶𝐷𝐵2
+6 ∙ 𝑀𝐶𝐷
𝐵22 ≤ 10 000 [kPa] (5.81)
No programa matemático 𝑀𝐶𝐷 e 𝑁𝐶𝐷 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de D:
𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵2 −𝐵42) [kNm/m]
(5.82)
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑤.2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] [kNm/m]
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ (15 − 𝐻1)
3
(5.83)
Para que não ocorra o derrube em torno de D é necessário impor uma restrição para garantir que não
gire em torno de D, majorando o 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ (15 − 𝐻1)
3 ≤ 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵2 −𝐵42)
(5.84)
Trecho EF:
O momento no trecho EF é dado pelo impulso da água, pelo peso próprio do trecho GH e pela força
vertical:

Otimização em Problemas de Engenharia Civil
92
𝑀𝐸𝐹 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 +𝐻4)] − (𝑝𝑝4 + 20) ∙ (
𝐵32−𝐵42) [kNm/m]
𝑀𝐸𝐹 =5
3 ∙ (𝐻3 + 𝐻4)
3 − (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵32−𝐵42)
(5.85)
O esforço axial causado pelo peso próprio dos trechos da barragem e pela força vertical é:
𝑁𝐸𝐹 = 𝛾𝑐 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20 [kN/m]
𝑁𝐸𝐹 = 25 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20 (5.86)
Como nos pontos E e F não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐸 = +𝑁𝐸𝐹𝐵3
−6 ∙ 𝑀𝐸𝐹
𝐵32 ≥ 0 [kPa] (5.87)
𝜎𝐹 = +𝑁𝐸𝐹𝐵3
+6 ∙ 𝑀𝐸𝐹
𝐵32 ≤ 10 000 [kPa] (5.88)
No programa matemático 𝑀𝐸𝐹 e 𝑁𝐸𝐹 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de F:
𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵3 −
𝐵42) [kNm/m] (5.89)
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 +𝐻4)] [kNm/m]
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ (𝐻3 +𝐻4)
3
(5.90)
Para que não ocorra o derrube em torno de F é necessário impor uma restrição para garantir que não gire
em torno de F, majorando o 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao derrube,
tal como é dado abaixo:
2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (5.91)

Otimização em Problemas de Engenharia Civil
93
12.5
3∙ (𝐻3 +𝐻4)
3 ≤ 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵3 −
𝐵42)
Trecho GH:
O momento no trecho GH é dado pelo impulso da água:
𝑀𝐺𝐻 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) [kNm/m]
𝑀𝐺𝐻 =5
3 ∙ 𝐻4
3
(5.92)
O esforço axial causado pelo peso próprio do trecho da barragem é:
𝑁𝐺𝐻 = 𝛾𝑐 ∙ (𝐵4 ∙ 𝐻4) + 20 [kN/m]
𝑁𝐺𝐻 = 25 ∙ (𝐵4 ∙ 𝐻4) + 20 (5.93)
Como nos pontos G e H não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐺 = +𝑁𝐺𝐻𝐵4
−6 ∙ 𝑀𝐺𝐻
𝐵42 ≥ 0 [kPa] (5.94)
𝜎𝐻 = +𝑁𝐺𝐻𝐵4
+6 ∙ 𝑀𝐺𝐻
𝐵42 ≤ 10 000 [kPa] (5.95)
No programa matemático 𝑀𝐺𝐻 e 𝑁𝐺𝐻 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de H:
𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵42) [kNm/m] (5.96)
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) [kNm/m]
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ 𝐻4
3
(5.97)

Otimização em Problemas de Engenharia Civil
94
Para que não ocorra o derrube em torno de H é necessário impor uma restrição para garantir que não
gire em torno de H, majorando o 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ 𝐻4
3 ≤ (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵42)
(5.98)
c) Água ao nível máximo + força horizontal de 50 kN/m
Trecho AB:
O momento no trecho AB é dado pelo impulso da água, pelo peso próprio do trecho CD, EF e GH e pela
força horizontal:
𝑀𝐴𝐵 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) + 50 ∙ 𝐻 − 𝑝𝑝2 ∙ (
𝐵12−𝐵22) − 𝑝𝑝3 ∙ (
𝐵12−𝐵32) −
𝑝𝑝4 ∙ (𝐵12−𝐵42) [kNm/m]
𝑀𝐴𝐵 = 6375 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32) −
(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵12−𝐵42)
(5.99)
O esforço axial causado pelo peso próprio dos trechos da barragem é:
𝑁𝐴𝐵 = 𝛾𝑐 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐴𝐵 = 25 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) (5.100)
Como nos pontos A e B não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐴 = +𝑁𝐴𝐵𝐵1
−6 ∙ 𝑀𝐴𝐵
𝐵12 ≥ 0 [kPa] (5.101)
𝜎𝐵 = +𝑁𝐴𝐵𝐵1
+6 ∙ 𝑀𝐴𝐵
𝐵12 ≤ 10 000 [kPa] (5.102)
No programa matemático 𝑀𝐴𝐵 e 𝑁𝐴𝐵 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.

Otimização em Problemas de Engenharia Civil
95
Derrube em torno de B:
𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) +
+25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −
𝐵42) [kNm/m]
(5.103)
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,1 ∙ (1
3 ∙ 𝐻) + 50 ∙ 𝐻 [kNm/m]
𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 6375 kNm/m
(5.104)
Para que não ocorra o derrube em torno de B é necessário impor uma restrição para garantir que não
gire em torno de B, majorando o 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
15 937.5 ≤ 25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −𝐵42)
(5.105)
Trecho CD:
O momento no trecho CD é dado pelo impulso da água, pelo peso próprio do trecho EF e GH e pela
força horizontal:
𝑀𝐶𝐷 = 𝐼𝑊,2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] + 50 ∙ (𝐻 − 𝐻1) − 𝐻1 − 𝑝𝑝3 ∙ (
𝐵22−𝐵32) −
−𝑝𝑝4 ∙ (𝐵22−𝐵42) [kNm/m]
𝑀𝐶𝐷 =5
3 ∙ (15 − 𝐻1)
3 + 50 ∙ (15 − 𝐻1) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (𝐵22−𝐵32) −
−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵22−𝐵42)
(5.106)
O esforço axial causado pelo peso próprio dos trechos da barragem é:
𝑁𝐶𝐷 = 𝛾𝑐 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐶𝐷 = 25 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) (5.107)

Otimização em Problemas de Engenharia Civil
96
Como nos pontos C e D não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐶 = +𝑁𝐶𝐷𝐵2
−6 ∙ 𝑀𝐶𝐷
𝐵22 ≥ 0 [kPa] (5.108)
𝜎𝐷 = +𝑁𝐶𝐷𝐵2
+6 ∙ 𝑀𝐶𝐷
𝐵22 ≤ 10 000 [kPa] (5.109)
No programa matemático 𝑀𝐶𝐷 e 𝑁𝐶𝐷 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de D:
𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −𝐵42) [kNm/m]
(5.110)
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,2 ∙ [1
3 ∙ (𝐻 − 𝐻1)] + 50 ∙ (𝐻 − 𝐻1) [kNm/m]
𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3 ∙ (15 − 𝐻1)
3 + 50 ∙ (15 − 𝐻1)
(5.111)
Para que não ocorra o derrube em torno de D é necessário impor uma restrição para garantir que não
gire em torno de D, majorando o 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3 ∙ (15 − 𝐻1)
3 + 125 ∙ (15 − 𝐻1) ≤ 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −𝐵42)
(5.112)
Trecho EF:
O momento no trecho EF é dado pelo impulso da água, pelo peso próprio do trecho GH e pela força
horizontal:
𝑀𝐸𝐹 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 +𝐻4)] + 50 ∙ (𝐻3 + 𝐻4) − 𝑝𝑝4 ∙ (
𝐵32−𝐵42) [kNm/m] (5.113)

Otimização em Problemas de Engenharia Civil
97
𝑀𝐸𝐹 =5
3 ∙ (𝐻3 +𝐻4)
3 + 50 ∙ (𝐻3 + 𝐻4) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵32−𝐵42)
O esforço axial causado pelo peso próprio dos trechos da barragem é:
𝑁𝐸𝐹 = 𝛾𝑐 ∙ (𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐸𝐹 = 25 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) (5.114)
Como nos pontos E e F não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐸 = +𝑁𝐸𝐹𝐵3
−6 ∙ 𝑀𝐸𝐹
𝐵32 ≥ 0 [kPa] (5.115)
𝜎𝐹 = +𝑁𝐸𝐹𝐵3
+6 ∙ 𝑀𝐸𝐹
𝐵32 ≤ 10 000 [kPa] (5.116)
No programa matemático 𝑀𝐸𝐹 e 𝑁𝐸𝐹 são substituídas nas equações das tensões para obter apenas como
variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de F:
𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42) [kNm/m] (5.117)
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,3 ∙ [1
3 ∙ (𝐻3 + 𝐻4)] + 50 ∙ (𝐻3 +𝐻4) [kNm/m]
𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ (𝐻3 +𝐻4)
3 + 50 ∙ (𝐻3 + 𝐻4)
(5.118)
Para que não ocorra o derrube em torno de F é necessário impor uma restrição para garantir que não gire
em torno de F, majorando o MF,derr bador através da aplicação do fator de segurança global ao derrube,
tal como é dado abaixo:
2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟
12.5
3∙ (𝐻3 +𝐻4)
3 + 125 ∙ (𝐻3 +𝐻4) ≤ 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42)
(5.119)
Trecho GH:

Otimização em Problemas de Engenharia Civil
98
O momento no trecho GH é dado pelo impulso da água e pela força horizontal:
𝑀𝐺𝐻 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) + 50 ∙ 𝐻4 [kNm/m]
𝑀𝐺𝐻 =5
3 ∙ 𝐻4
3 + 50 ∙ 𝐻4
(5.120)
O esforço axial causado pelo peso próprio do trecho da barragem é:
𝑁𝐺𝐻 = 𝛾𝑐 ∙ (𝐵4 ∙ 𝐻4) [kN/m]
𝑁𝐺𝐻 = 25 ∙ (𝐵4 ∙ 𝐻4) (5.121)
Como nos pontos G e H não são admitidas tensões de tração (≥ 0), as tensões de compressão estão
limitadas a 10 000 kPa (≤ 10 000 kPa).
𝜎𝐺 = +𝑁𝐺𝐻𝐵4
−6 ∙ 𝑀𝐺𝐻
𝐵42 ≥ 0 [kPa] (5.122)
𝜎𝐻 = +𝑁𝐺𝐻𝐵4
+6 ∙ 𝑀𝐺𝐻
𝐵42 ≤ 10 000 [kPa] (5.123)
No programa matemático 𝑀𝐺𝐻 e 𝑁𝐺𝐻 serão substituídas nas equações das tensões para obter apenas
como variáveis de projeto as dimensões de cada trecho da barragem.
Derrube em torno de H:
𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 = 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42) [kNm/m] (5.124)
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 = 𝐼𝑊,4 ∙ (1
3 ∙ 𝐻4) + 50 ∙ 𝐻4 [kNm/m]
𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 =5
3∙ 𝐻4
3 + 50 ∙ 𝐻4
(5.125)
Para que não ocorra o derrube em torno de H é necessário impor uma restrição para garantir que não
gire em torno de H, majorando o 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 através da aplicação do fator de segurança global ao
derrube, tal como é dado abaixo:
2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (5.126)

Otimização em Problemas de Engenharia Civil
99
12.5
3∙ 𝐻4
3 + 125 ∙ 𝐻4 ≤ 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42)
Com as equações formuladas para todos os casos de carga é possível identificar o problema de
otimização, indicado nos pontos abaixo:
Função Objetivo:
A função objetivo do problema é dada pelo volume de betão da barragem, para 1.0 m de profundidade.
𝑓 = (𝐵1 ∙ 𝐻1 ∙ 1.0 𝑚) + (𝐵2 ∙ 𝐻2 ∙ 1.0 𝑚) + (𝐵3 ∙ 𝐻3 ∙ 1.0 𝑚) + (𝐵4 ∙ 𝐻4 ∙ 1.0 𝑚) [m3]
𝑓 = 𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4 (5.127)
Restrições Desigualdade:
Para as variáveis de projeto 𝐻1, 𝐻2, 𝐻3, 𝐻4, 𝐵1, 𝐵2, 𝐵3 e 𝐵4 é necessário impor valores mínimos para
que o programa não obtenha soluções nulas. Para cada caso estudado existem oito restrições que limitam
as tensões de tração e compressão e quatro restrições que impedem o derrube em torno dos pontos B, D,
F e H. As restrições que eram do tipo " ≥ 0" são modificadas para " ≤ 0". A seguir encontram-se as
restrições desigualdade que figuram no programa matemático.
𝑅𝑑𝑒𝑠(1) ⇒ 𝐻1 ≥ 0.1
−𝐻1 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(2) ⇒ 𝐻2 ≥ 0.1
−𝐻2 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(3) ⇒ 𝐻3 ≥ 0.1
−𝐻3 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(4) ⇒ 𝐻4 ≥ 0.1
−𝐻4 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(5) ⇒ 𝐵1 ≥ 0.1
−𝐵1 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(6) ⇒ 𝐵2 ≥ 0.1
−𝐵2 + 0.1 ≤ 0

Otimização em Problemas de Engenharia Civil
100
𝑅𝑑𝑒𝑠(7) ⇒ 𝐵3 ≥ 0.1
−𝐵3 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(8) ⇒ 𝐵4 ≥ 0.1
−𝐵4 + 0.1 ≤ 0
𝑅𝑑𝑒𝑠(9) ⇒ 𝜎𝐴(𝑎) ≥ 0
−25 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵1+
+
6 ∙ (5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵12−𝐵42))
𝐵12
≤ 0
𝑅𝑑𝑒𝑠(10) ⇒ 𝜎𝐵(𝑎) ≤ 10 000
25 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵1+
+
6 ∙ (5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12 −
𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12 −
𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵12 −
𝐵42))
𝐵12
−10 000 ≤ 0
𝑅𝑑𝑒𝑠(11) ⇒ 2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟(𝑎) ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑎)
14 062.5 − (25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32)
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(12) ⇒ 𝜎𝐶(𝑎) ≥ 0
−25 ∙ (𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵2+
+
6 ∙ (53 ∙
(15 − 𝐻1)3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵22 −
𝐵32) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵22 −
𝐵42))
𝐵22 ≤ 0
𝑅𝑑𝑒𝑠(13) ⇒ 𝜎𝐷(𝑎) ≤ 10 000

Otimização em Problemas de Engenharia Civil
101
25 ∙ (𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵2+
+
6 ∙ (53 ∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (𝐵22−𝐵32) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵22−𝐵42))
𝐵22 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(14) ⇒ 2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟(𝑎) ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑎)
12.5
3∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32)+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −
𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(15) ⇒ 𝜎𝐸(𝑎) ≥ 0
−25 ∙ (𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4)
𝐵3+
6 ∙ (53 ∙ (𝐻3 + 𝐻4)
3 − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵32−𝐵42))
𝐵32 ≤ 0
𝑅𝑑𝑒𝑠(16) ⇒ 𝜎𝐹(𝑎) ≤ 10 000
25 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵3+
6 ∙ (53 ∙
(𝐻3 +𝐻4)3 − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵32 −
𝐵42))
𝐵32 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(17) ⇒ 2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑎) ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑎)
12.5
3∙ (𝐻3 +𝐻4)
3 − (25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(18) ⇒ 𝜎𝐺(𝑎) ≥ 0
−25 ∙ (𝐵4 ∙ 𝐻4)
𝐵4+6 ∙ (
53 ∙ 𝐻4
3)
𝐵42 ≤ 0
𝑅𝑑𝑒𝑠(19) ⇒ 𝜎𝐻(𝑎) ≤ 10 000
25 ∙ (𝐵4 ∙ 𝐻4)
𝐵4+6 ∙ (
53 ∙ 𝐻4
3)
𝐵42 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(20) ⇒ 2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑎) ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑎)
12.5
3∙ 𝐻4
3 − (25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42)) ≤ 0
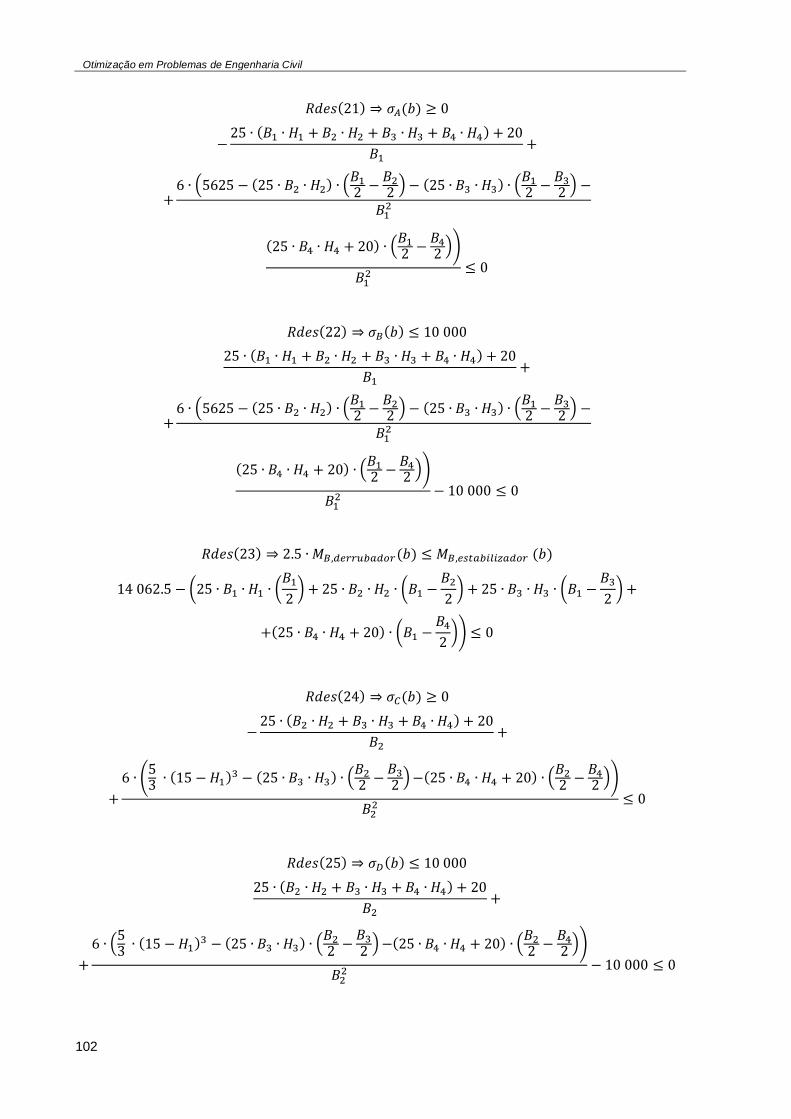
Otimização em Problemas de Engenharia Civil
102
𝑅𝑑𝑒𝑠(21) ⇒ 𝜎𝐴(𝑏) ≥ 0
−25 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20
𝐵1+
+6 ∙ (5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (
𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32) −
𝐵12
(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵12 −
𝐵42))
𝐵12 ≤ 0
𝑅𝑑𝑒𝑠(22) ⇒ 𝜎𝐵(𝑏) ≤ 10 000
25 ∙ (𝐵1 ∙ 𝐻1 +𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20
𝐵1+
+6 ∙ (5625 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (
𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32) −
𝐵12
(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵12−𝐵42))
𝐵12 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(23) ⇒ 2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟(𝑏) ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑏)
14 062.5 − (25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32) +
+(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵1 −𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(24) ⇒ 𝜎𝐶(𝑏) ≥ 0
−25 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20
𝐵2+
+
6 ∙ (53 ∙
(15 − 𝐻1)3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵22 −
𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (
𝐵22 −
𝐵42))
𝐵22 ≤ 0
𝑅𝑑𝑒𝑠(25) ⇒ 𝜎𝐷(𝑏) ≤ 10 000
25 ∙ (𝐵2 ∙ 𝐻2 + 𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20
𝐵2+
+
6 ∙ (53 ∙
(15 − 𝐻1)3 − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵22 −
𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (
𝐵22 −
𝐵42))
𝐵22 − 10 000 ≤ 0

Otimização em Problemas de Engenharia Civil
103
𝑅𝑑𝑒𝑠(26) ⇒ 2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑏) ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑏)
12.5
3∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+(25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵2 −𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(27) ⇒ 𝜎𝐸(𝑏) ≥ 0
−25 ∙ (𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4) + 20
𝐵3+
6 ∙ (53 ∙ (𝐻3 + 𝐻4)
3 − (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵32−𝐵42))
𝐵32 ≤ 0
𝑅𝑑𝑒𝑠(28) ⇒ 𝜎𝐹(𝑏) ≤ 10 000
25 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4) + 20
𝐵3+
+
6 ∙ (53 ∙
(𝐻3 + 𝐻4)3 − (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (
𝐵32 −
𝐵42))
𝐵32 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(29) ⇒ 2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑏) ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑏)
12.5
3∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵3 −
𝐵42) ≤ 0
𝑅𝑑𝑒𝑠(30) ⇒ 𝜎𝐺(𝑏) ≥ 0
−25 ∙ (𝐵4 ∙ 𝐻4) + 20
𝐵4+6 ∙ (
53 ∙ 𝐻4
3)
𝐵42 ≤ 0
𝑅𝑑𝑒𝑠(31) ⇒ 𝜎𝐻(𝑏) ≤ 10 000
25 ∙ (𝐵4 ∙ 𝐻4) + 20
𝐵4+6 ∙ (
53 ∙ 𝐻4
3)
𝐵42 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(32) ⇒ 2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑏) ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑏)
12.5
3∙ (15 − 𝐻1)
3 − (25 ∙ 𝐵4 ∙ 𝐻4 + 20) ∙ (𝐵42) ≤ 0
𝑅𝑑𝑒𝑠(33) ⇒ 𝜎𝐴(𝑐) ≥ 0

Otimização em Problemas de Engenharia Civil
104
−25 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵1+
+
6 ∙ (6375 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12 −
𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12 −
𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵12 −
𝐵42))
𝐵12
≤ 0
𝑅𝑑𝑒𝑠(34) ⇒ 𝜎𝐵(𝑐) ≤ 10 000
25 ∙ (𝐵1 ∙ 𝐻1 + 𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵1+
+
6 ∙ (6375 − (25 ∙ 𝐵2 ∙ 𝐻2) ∙ (𝐵12−𝐵22) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵12−𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵12−𝐵42))
𝐵12
−10 000 ≤ 0
𝑅𝑑𝑒𝑠(35) ⇒ 2.5 ∙ 𝑀𝐵,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑐) ≤ 𝑀𝐵,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑐)
15 937.5 − (25 ∙ 𝐵1 ∙ 𝐻1 ∙ (𝐵12) + 25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵1 −
𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵1 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵1 −𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(36) ⇒ 𝜎𝐶(𝑐) ≥ 0
−25 ∙ (𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵2+
+
6 ∙ (53 ∙
(15 − 𝐻1)3 + 50 ∙ (15 − 𝐻1) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵22 −
𝐵32) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵22 −
𝐵42))
𝐵22
≤ 0
𝑅𝑑𝑒𝑠(37) ⇒ 𝜎𝐷(𝑐) ≤ 10 000
25 ∙ (𝐵2 ∙ 𝐻2 +𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵2+
+
6 ∙ (53 ∙
(15 − 𝐻1)3 + 50 ∙ (15 − 𝐻1) − (25 ∙ 𝐵3 ∙ 𝐻3) ∙ (
𝐵22 −
𝐵32)−(25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵22 −
𝐵42))
𝐵22
−10 000 ≤ 0
𝑅𝑑𝑒𝑠(38) ⇒ 2.5 ∙ 𝑀𝐷,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑐) ≤ 𝑀𝐷,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑐)

Otimização em Problemas de Engenharia Civil
105
12.5
3 ∙ (15 − 𝐻1)
3 + 125 ∙ (15 − 𝐻1) − (25 ∙ 𝐵2 ∙ 𝐻2 ∙ (𝐵22) + 25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵2 −
𝐵32) +
+25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵2 −𝐵42) ≤ 0
𝑅𝑑𝑒𝑠(39) ⇒ 𝜎𝐸(𝑐) ≥ 0
−25 ∙ (𝐵3 ∙ 𝐻3 + 𝐵4 ∙ 𝐻4)
𝐵3+6 ∙ (
53 ∙ (𝐻3 +𝐻4)
3 + 50 ∙ (𝐻3 +𝐻4) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (𝐵32−𝐵42)
𝐵32 ≤ 0
𝑅𝑑𝑒𝑠(40) ⇒ 𝜎𝐹(𝑐) ≤ 10 000
25 ∙ (𝐵3 ∙ 𝐻3 +𝐵4 ∙ 𝐻4)
𝐵3+
+6 ∙ (
53 ∙
(𝐻3 + 𝐻4)3 + 50 ∙ (𝐻3 + 𝐻4) − (25 ∙ 𝐵4 ∙ 𝐻4) ∙ (
𝐵32 −
𝐵42)
𝐵32 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(41) ⇒ 2.5 ∙ 𝑀𝐹,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑐) ≤ 𝑀𝐹,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑐)
12.5
3∙ (𝐻3 + 𝐻4)
3 + 125 ∙ (𝐻3 + 𝐻4) − (25 ∙ 𝐵3 ∙ 𝐻3 ∙ (𝐵32) + 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵3 −
𝐵42)) ≤ 0
𝑅𝑑𝑒𝑠(42) ⇒ 𝜎𝐺(𝑐) ≥ 0
−25 ∙ (𝐵4 ∙ 𝐻4)
𝐵4+6 ∙ (
53 ∙ 𝐻4
3 + 50 ∙ 𝐻4)
𝐵42 ≤ 0
𝑅𝑑𝑒𝑠(43) ⇒ 𝜎𝐻(𝑐) ≤ 10 000
25 ∙ (𝐵4 ∙ 𝐻4)
𝐵4+6 ∙ (
53 ∙ 𝐻4
3 + 50 ∙ 𝐻4)
𝐵42 − 10 000 ≤ 0
𝑅𝑑𝑒𝑠(44) ⇒ 2.5 ∙ 𝑀𝐻,𝑑𝑒𝑟𝑟𝑢𝑏𝑎𝑑𝑜𝑟 (𝑐) ≤ 𝑀𝐻,𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 (𝑐)
12.5
3∙ 𝐻4
3 + 125 ∙ 𝐻4 − 25 ∙ 𝐵4 ∙ 𝐻4 ∙ (𝐵42) ≤ 0
Restrição Igualdade:
Devido à altura fixada de 15.0 m é considerada uma restrição linear de igualdade, onde a soma das
alturas deve ser igual a 15.0 m.
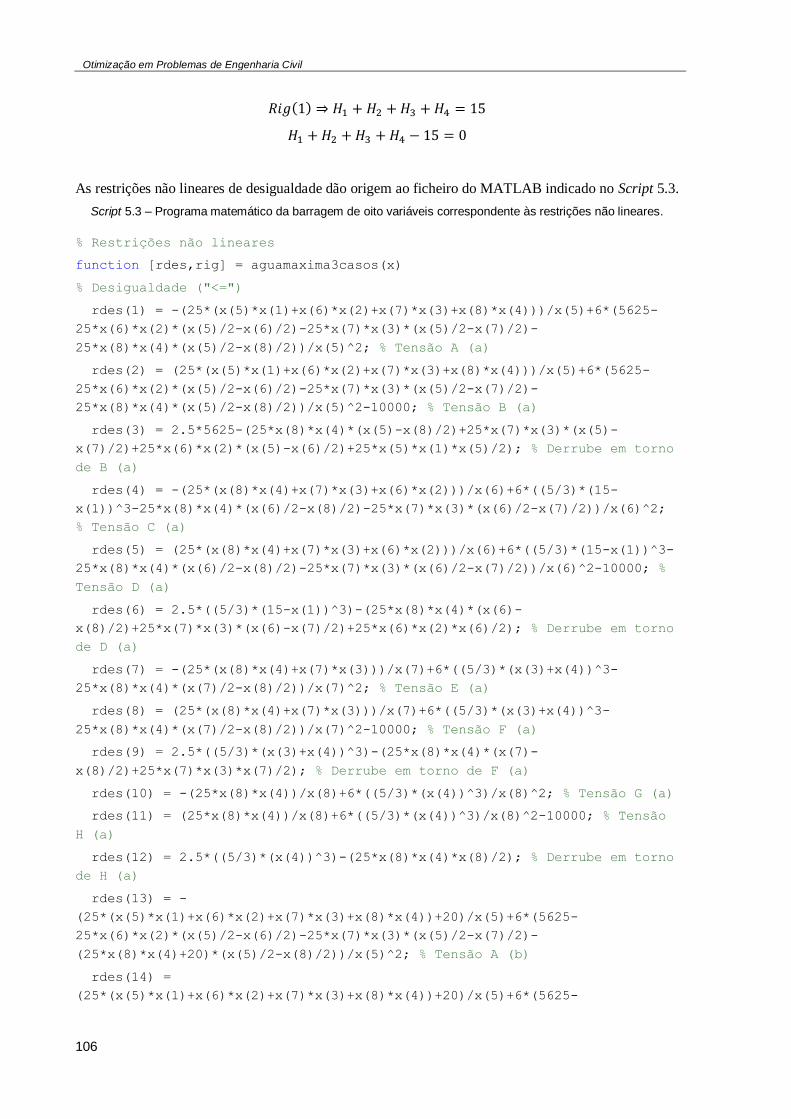
Otimização em Problemas de Engenharia Civil
106
𝑅𝑖𝑔(1) ⇒ 𝐻1 + 𝐻2 +𝐻3 +𝐻4 = 15
𝐻1 +𝐻2 +𝐻3 +𝐻4 − 15 = 0
As restrições não lineares de desigualdade dão origem ao ficheiro do MATLAB indicado no Script 5.3.
Script 5.3 – Programa matemático da barragem de oito variáveis correspondente às restrições não lineares.
% Restrições não lineares
function [rdes,rig] = aguamaxima3casos(x)
% Desigualdade ("<=")
rdes(1) = -(25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4)))/x(5)+6*(5625-
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
25*x(8)*x(4)*(x(5)/2-x(8)/2))/x(5)^2; % Tensão A (a)
rdes(2) = (25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4)))/x(5)+6*(5625-
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
25*x(8)*x(4)*(x(5)/2-x(8)/2))/x(5)^2-10000; % Tensão B (a)
rdes(3) = 2.5*5625-(25*x(8)*x(4)*(x(5)-x(8)/2)+25*x(7)*x(3)*(x(5)-
x(7)/2)+25*x(6)*x(2)*(x(5)-x(6)/2)+25*x(5)*x(1)*x(5)/2); % Derrube em torno
de B (a)
rdes(4) = -(25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2)))/x(6)+6*((5/3)*(15-
x(1))^3-25*x(8)*x(4)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-x(7)/2))/x(6)^2;
% Tensão C (a)
rdes(5) = (25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2)))/x(6)+6*((5/3)*(15-x(1))^3-
25*x(8)*x(4)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-x(7)/2))/x(6)^2-10000; %
Tensão D (a)
rdes(6) = 2.5*((5/3)*(15-x(1))^3)-(25*x(8)*x(4)*(x(6)-
x(8)/2)+25*x(7)*x(3)*(x(6)-x(7)/2)+25*x(6)*x(2)*x(6)/2); % Derrube em torno
de D (a)
rdes(7) = -(25*(x(8)*x(4)+x(7)*x(3)))/x(7)+6*((5/3)*(x(3)+x(4))^3-
25*x(8)*x(4)*(x(7)/2-x(8)/2))/x(7)^2; % Tensão E (a)
rdes(8) = (25*(x(8)*x(4)+x(7)*x(3)))/x(7)+6*((5/3)*(x(3)+x(4))^3-
25*x(8)*x(4)*(x(7)/2-x(8)/2))/x(7)^2-10000; % Tensão F (a)
rdes(9) = 2.5*((5/3)*(x(3)+x(4))^3)-(25*x(8)*x(4)*(x(7)-
x(8)/2)+25*x(7)*x(3)*x(7)/2); % Derrube em torno de F (a)
rdes(10) = -(25*x(8)*x(4))/x(8)+6*((5/3)*(x(4))^3)/x(8)^2; % Tensão G (a)
rdes(11) = (25*x(8)*x(4))/x(8)+6*((5/3)*(x(4))^3)/x(8)^2-10000; % Tensão
H (a)
rdes(12) = 2.5*((5/3)*(x(4))^3)-(25*x(8)*x(4)*x(8)/2); % Derrube em torno
de H (a)
rdes(13) = -
(25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4))+20)/x(5)+6*(5625-
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
(25*x(8)*x(4)+20)*(x(5)/2-x(8)/2))/x(5)^2; % Tensão A (b)
rdes(14) =
(25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4))+20)/x(5)+6*(5625-

Otimização em Problemas de Engenharia Civil
107
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
(25*x(8)*x(4)+20)*(x(5)/2-x(8)/2))/x(5)^2-10000; % Tensão B (b)
rdes(15) = 2.5*5625-((25*x(8)*x(4)+20)*(x(5)-x(8)/2)+25*x(7)*x(3)*(x(5)-
x(7)/2)+25*x(6)*x(2)*(x(5)-x(6)/2)+25*x(5)*x(1)*x(5)/2); % Derrube em torno
de B (b)
rdes(16) = -(25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2))+20)/x(6)+6*((5/3)*(15-
x(1))^3-(25*x(8)*x(4)+20)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-
x(7)/2))/x(6)^2; % Tensão C (b)
rdes(17) = (25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2))+20)/x(6)+6*((5/3)*(15-
x(1))^3-(25*x(8)*x(4)+20)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-
x(7)/2))/x(6)^2-10000; % Tensão D (b)
rdes(18) = 2.5*((5/3)*(15-x(1))^3)-((25*x(8)*x(4)+20)*(x(6)-
x(8)/2)+25*x(7)*x(3)*(x(6)-x(7)/2)+25*x(6)*x(2)*x(6)/2); % Derrube em torno
de D (b)
rdes(19) = -(25*(x(8)*x(4)+x(7)*x(3))+20)/x(7)+6*((5/3)*(x(3)+x(4))^3-
(25*x(8)*x(4)+20)*(x(7)/2-x(8)/2))/x(7)^2; % Tensão E (b)
rdes(20) = (25*(x(8)*x(4)+x(7)*x(3))+20)/x(7)+6*((5/3)*(x(3)+x(4))^3-
(25*x(8)*x(4)+20)*(x(7)/2-x(8)/2))/x(7)^2-10000; % Tensão F (b)
rdes(21) = 2.5*((5/3)*(x(3)+x(4))^3)-((25*x(8)*x(4)+20)*(x(7)-
x(8)/2)+25*x(7)*x(3)*x(7)/2); % Derrube em torno de F (b)
rdes(22) = -(25*x(8)*x(4)+20)/x(8)+6*((5/3)*(x(4))^3)/x(8)^2; % Tensão G
(b)
rdes(23) = (25*x(8)*x(4)+20)/x(8)+6*((5/3)*(x(4))^3)/x(8)^2-10000; %
Tensão H (b)
rdes(24) = 2.5*((5/3)*(x(4))^3)-((25*x(8)*x(4)+20)*x(8)/2); % Derrube em
torno de H (b)
rdes(25) = -
(25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4)))/x(5)+6*(5625+50*15-
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
25*x(8)*x(4)*(x(5)/2-x(8)/2))/x(5)^2; % Tensão A (c)
rdes(26) =
(25*(x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4)))/x(5)+6*(5625+50*15-
25*x(6)*x(2)*(x(5)/2-x(6)/2)-25*x(7)*x(3)*(x(5)/2-x(7)/2)-
25*x(8)*x(4)*(x(5)/2-x(8)/2))/x(5)^2-10000; % Tensão B (c)
rdes(27) = 2.5*(5625+50*15)-(25*x(8)*x(4)*(x(5)-
x(8)/2)+25*x(7)*x(3)*(x(5)-x(7)/2)+25*x(6)*x(2)*(x(5)-
x(6)/2)+25*x(5)*x(1)*x(5)/2); % Derrube em torno de B (c)
rdes(28) = -(25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2)))/x(6)+6*((5/3)*(15-
x(1))^3+50*(15-x(1))-25*x(8)*x(4)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-
x(7)/2))/x(6)^2; % Tensão C (c)
rdes(29) = (25*(x(8)*x(4)+x(7)*x(3)+x(6)*x(2)))/x(6)+6*((5/3)*(15-
x(1))^3+50*(15-x(1))-25*x(8)*x(4)*(x(6)/2-x(8)/2)-25*x(7)*x(3)*(x(6)/2-
x(7)/2))/x(6)^2-10000; % Tensão D (c)
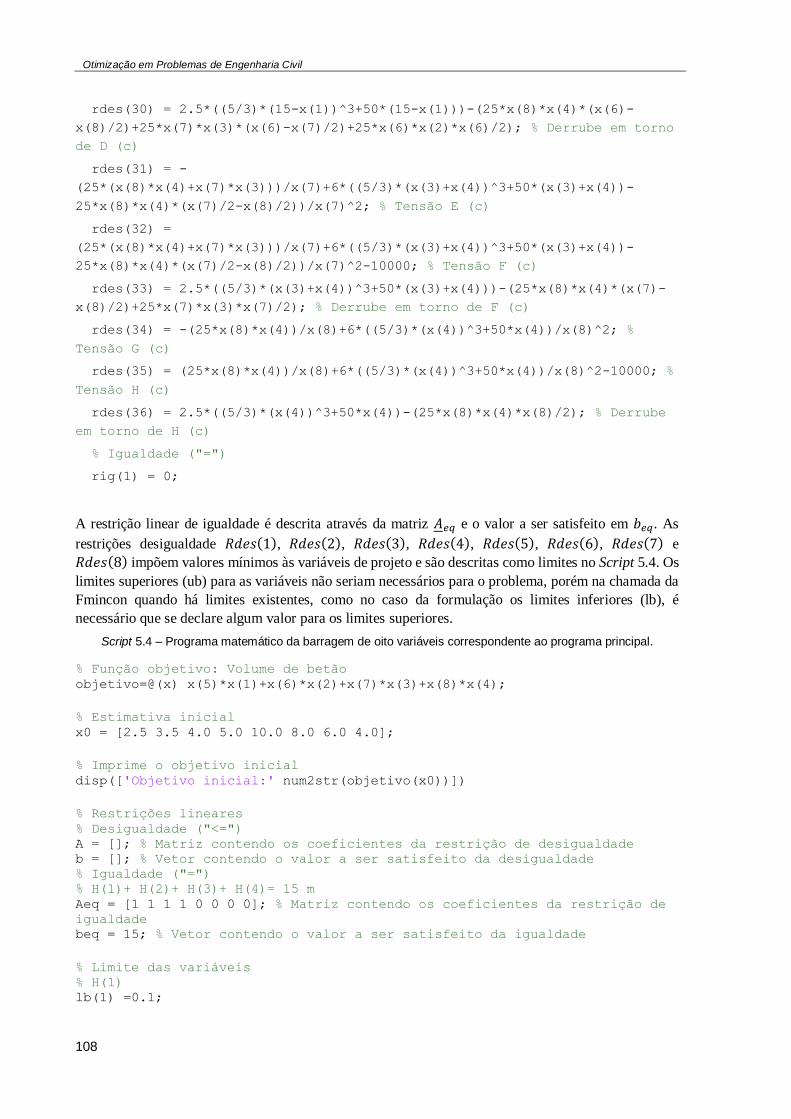
Otimização em Problemas de Engenharia Civil
108
rdes(30) = 2.5*((5/3)*(15-x(1))^3+50*(15-x(1)))-(25*x(8)*x(4)*(x(6)-
x(8)/2)+25*x(7)*x(3)*(x(6)-x(7)/2)+25*x(6)*x(2)*x(6)/2); % Derrube em torno
de D (c)
rdes(31) = -
(25*(x(8)*x(4)+x(7)*x(3)))/x(7)+6*((5/3)*(x(3)+x(4))^3+50*(x(3)+x(4))-
25*x(8)*x(4)*(x(7)/2-x(8)/2))/x(7)^2; % Tensão E (c)
rdes(32) =
(25*(x(8)*x(4)+x(7)*x(3)))/x(7)+6*((5/3)*(x(3)+x(4))^3+50*(x(3)+x(4))-
25*x(8)*x(4)*(x(7)/2-x(8)/2))/x(7)^2-10000; % Tensão F (c)
rdes(33) = 2.5*((5/3)*(x(3)+x(4))^3+50*(x(3)+x(4)))-(25*x(8)*x(4)*(x(7)-
x(8)/2)+25*x(7)*x(3)*x(7)/2); % Derrube em torno de F (c)
rdes(34) = -(25*x(8)*x(4))/x(8)+6*((5/3)*(x(4))^3+50*x(4))/x(8)^2; %
Tensão G (c)
rdes(35) = (25*x(8)*x(4))/x(8)+6*((5/3)*(x(4))^3+50*x(4))/x(8)^2-10000; %
Tensão H (c)
rdes(36) = 2.5*((5/3)*(x(4))^3+50*x(4))-(25*x(8)*x(4)*x(8)/2); % Derrube
em torno de H (c)
% Igualdade ("=")
rig(1) = 0;
A restrição linear de igualdade é descrita através da matriz 𝐴𝑒𝑞 e o valor a ser satisfeito em 𝑏𝑒𝑞. As
restrições desigualdade 𝑅𝑑𝑒𝑠(1), 𝑅𝑑𝑒𝑠(2), 𝑅𝑑𝑒𝑠(3), 𝑅𝑑𝑒𝑠(4), 𝑅𝑑𝑒𝑠(5), 𝑅𝑑𝑒𝑠(6), 𝑅𝑑𝑒𝑠(7) e
𝑅𝑑𝑒𝑠(8) impõem valores mínimos às variáveis de projeto e são descritas como limites no Script 5.4. Os
limites superiores (ub) para as variáveis não seriam necessários para o problema, porém na chamada da
Fmincon quando há limites existentes, como no caso da formulação os limites inferiores (lb), é
necessário que se declare algum valor para os limites superiores.
Script 5.4 – Programa matemático da barragem de oito variáveis correspondente ao programa principal.
% Função objetivo: Volume de betão objetivo=@(x) x(5)*x(1)+x(6)*x(2)+x(7)*x(3)+x(8)*x(4);
% Estimativa inicial x0 = [2.5 3.5 4.0 5.0 10.0 8.0 6.0 4.0];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade % Igualdade ("=") % H(1)+ H(2)+ H(3)+ H(4)= 15 m Aeq = [1 1 1 1 0 0 0 0]; % Matriz contendo os coeficientes da restrição de
igualdade beq = 15; % Vetor contendo o valor a ser satisfeito da igualdade
% Limite das variáveis % H(1) lb(1) =0.1;
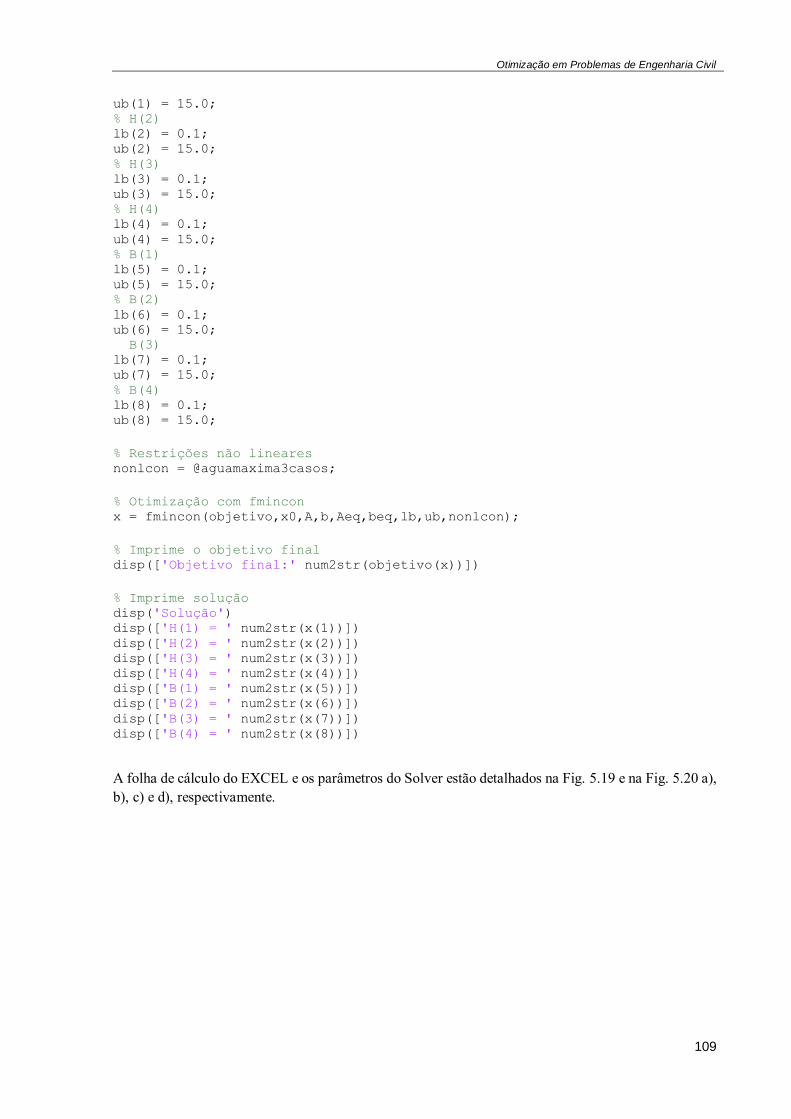
Otimização em Problemas de Engenharia Civil
109
ub(1) = 15.0; % H(2) lb(2) = 0.1; ub(2) = 15.0; % H(3) lb(3) = 0.1; ub(3) = 15.0; % H(4) lb(4) = 0.1; ub(4) = 15.0; % B(1) lb(5) = 0.1; ub(5) = 15.0; % B(2) lb(6) = 0.1; ub(6) = 15.0; B(3) lb(7) = 0.1; ub(7) = 15.0; % B(4) lb(8) = 0.1; ub(8) = 15.0;
% Restrições não lineares nonlcon = @aguamaxima3casos;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['H(1) = ' num2str(x(1))]) disp(['H(2) = ' num2str(x(2))]) disp(['H(3) = ' num2str(x(3))]) disp(['H(4) = ' num2str(x(4))]) disp(['B(1) = ' num2str(x(5))]) disp(['B(2) = ' num2str(x(6))]) disp(['B(3) = ' num2str(x(7))]) disp(['B(4) = ' num2str(x(8))])
A folha de cálculo do EXCEL e os parâmetros do Solver estão detalhados na Fig. 5.19 e na Fig. 5.20 a),
b), c) e d), respectivamente.
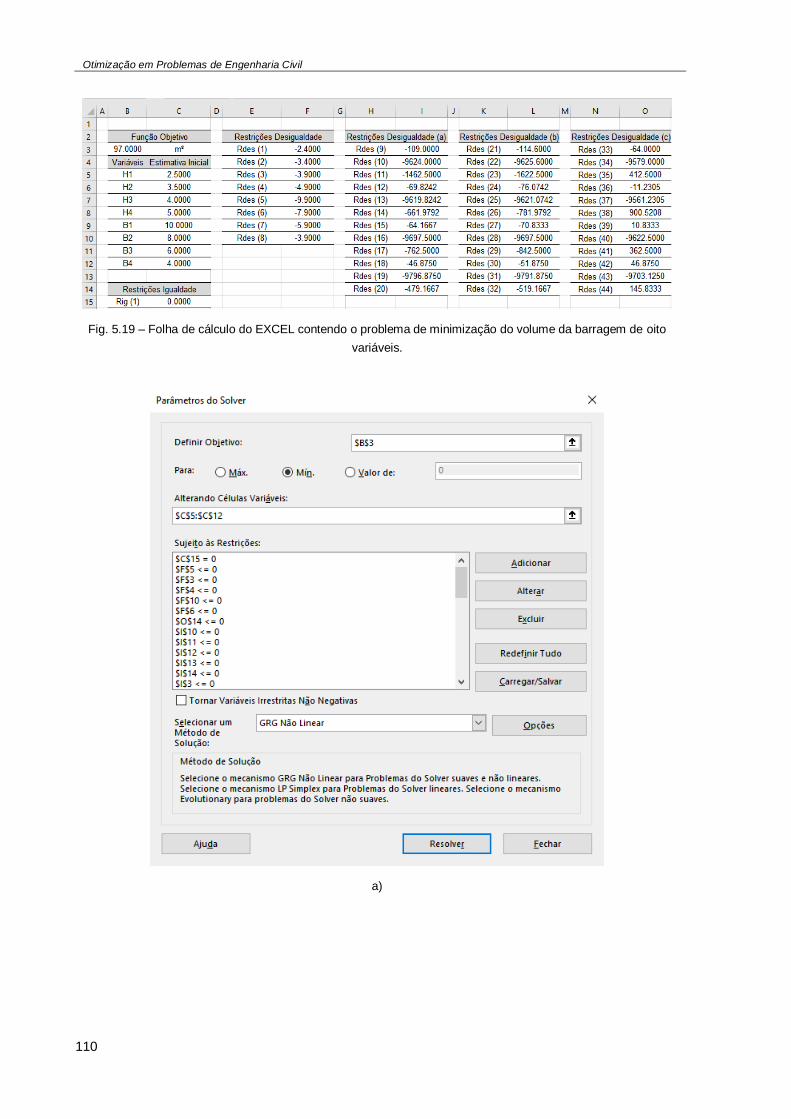
Otimização em Problemas de Engenharia Civil
110
Fig. 5.19 – Folha de cálculo do EXCEL contendo o problema de minimização do volume da barragem de oito
variáveis.
a)
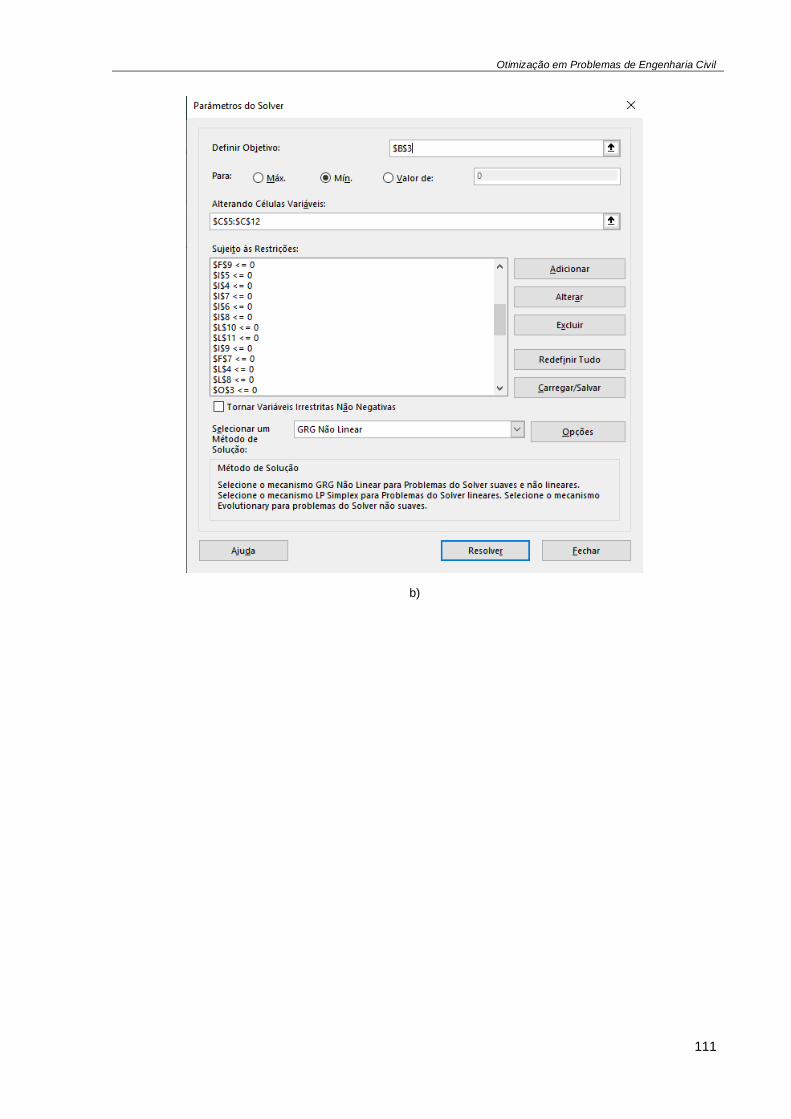
Otimização em Problemas de Engenharia Civil
111
b)
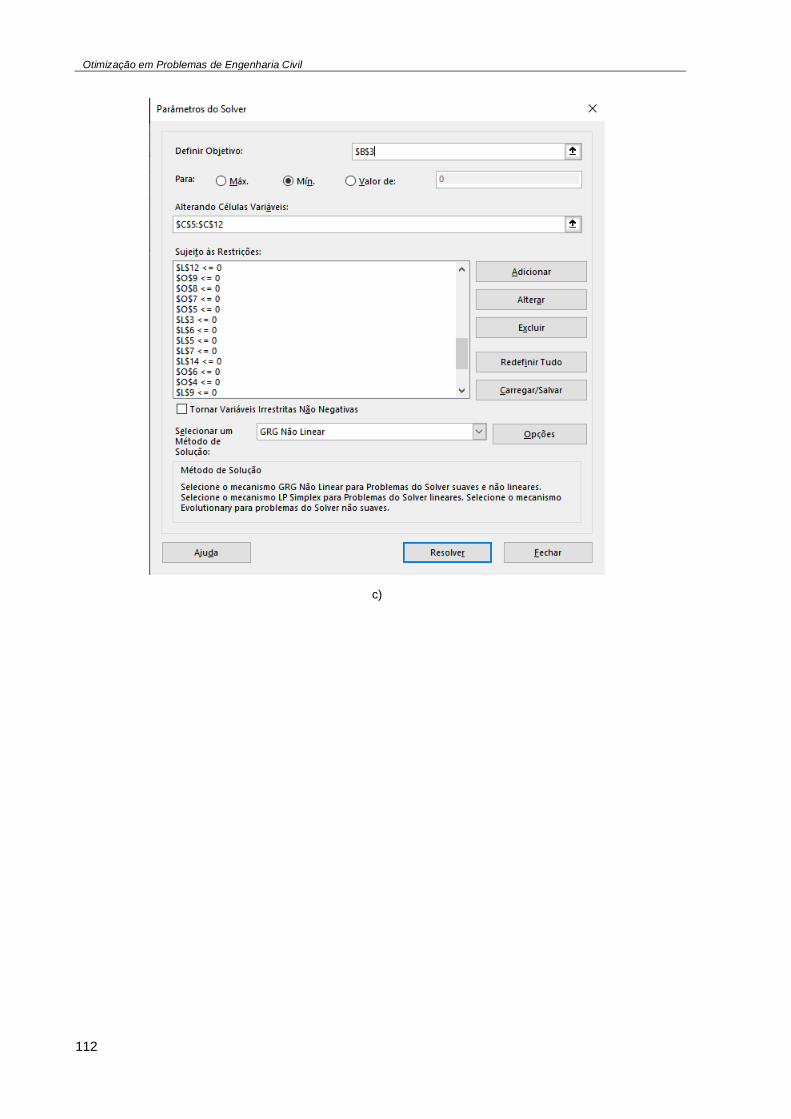
Otimização em Problemas de Engenharia Civil
112
c)
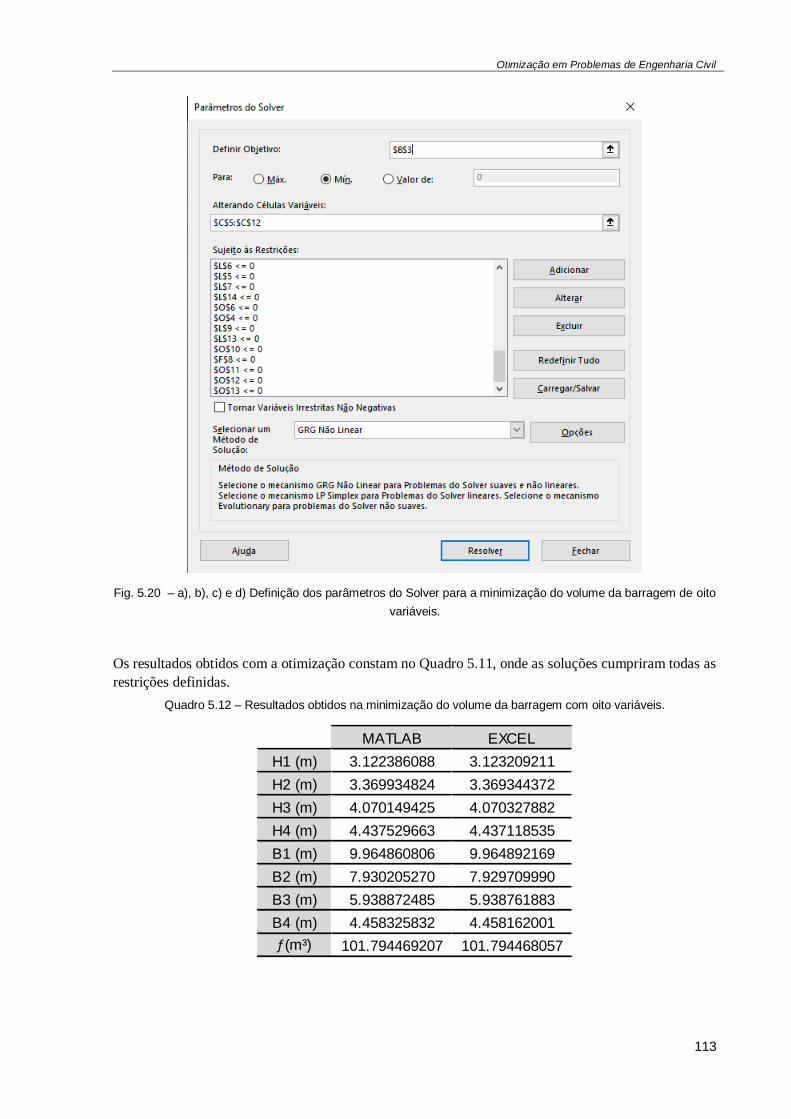
Otimização em Problemas de Engenharia Civil
113
Fig. 5.20 – a), b), c) e d) Definição dos parâmetros do Solver para a minimização do volume da barragem de oito
variáveis.
Os resultados obtidos com a otimização constam no Quadro 5.11, onde as soluções cumpriram todas as
restrições definidas.
Quadro 5.12 – Resultados obtidos na minimização do volume da barragem com oito variáveis.
MATLAB EXCEL
H1 (m) 3.122386088 3.123209211
H2 (m) 3.369934824 3.369344372
H3 (m) 4.070149425 4.070327882
H4 (m) 4.437529663 4.437118535
B1 (m) 9.964860806 9.964892169
B2 (m) 7.930205270 7.929709990
B3 (m) 5.938872485 5.938761883
B4 (m) 4.458325832 4.458162001
f (m³) 101.794469207 101.794468057
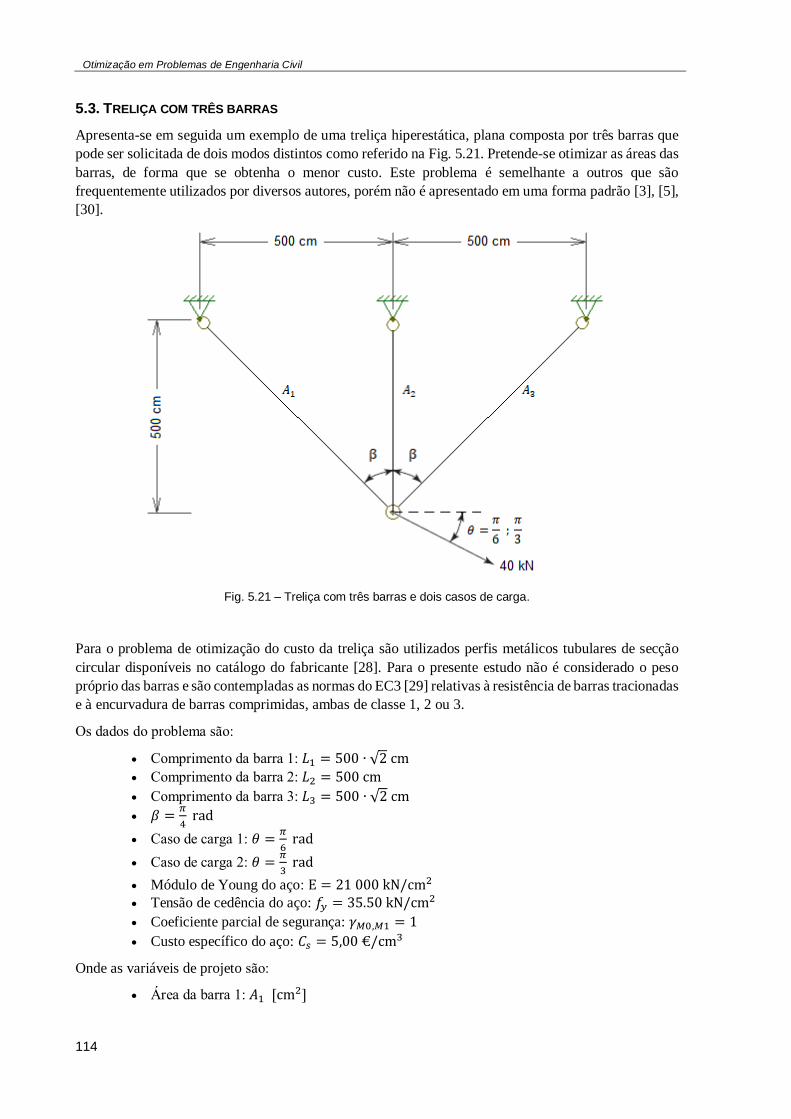
Otimização em Problemas de Engenharia Civil
114
5.3. TRELIÇA COM TRÊS BARRAS
Apresenta-se em seguida um exemplo de uma treliça hiperestática, plana composta por três barras que
pode ser solicitada de dois modos distintos como referido na Fig. 5.21. Pretende-se otimizar as áreas das
barras, de forma que se obtenha o menor custo. Este problema é semelhante a outros que são
frequentemente utilizados por diversos autores, porém não é apresentado em uma forma padrão [3], [5],
[30].
Fig. 5.21 – Treliça com três barras e dois casos de carga.
Para o problema de otimização do custo da treliça são utilizados perfis metálicos tubulares de secção
circular disponíveis no catálogo do fabricante [28]. Para o presente estudo não é considerado o peso
próprio das barras e são contempladas as normas do EC3 [29] relativas à resistência de barras tracionadas
e à encurvadura de barras comprimidas, ambas de classe 1, 2 ou 3.
Os dados do problema são:
Comprimento da barra 1: 𝐿1 = 500 ∙ √2 cm
Comprimento da barra 2: 𝐿2 = 500 cm
Comprimento da barra 3: 𝐿3 = 500 ∙ √2 cm
𝛽 =𝜋
4 rad
Caso de carga 1: 𝜃 =𝜋
6 rad
Caso de carga 2: 𝜃 =𝜋
3 rad
Módulo de Young do aço: E = 21 000 kN/cm2
Tensão de cedência do aço: 𝑓𝑦 = 35.50 kN/cm2
Coeficiente parcial de segurança: 𝛾𝑀0,𝑀1 = 1
Custo específico do aço: 𝐶𝑠 = 5,00 €/cm3
Onde as variáveis de projeto são:
Área da barra 1: 𝐴1 [cm2]

Otimização em Problemas de Engenharia Civil
115
Área da barra 2: 𝐴2 [cm2]
Área da barra 3: 𝐴3 [cm2]
Para as barras tracionadas o valor de cálculo do esforço de tração atuante 𝑁𝑒𝑑 em cada secção transversal
deve satisfazer a seguinte condição:
𝑁𝑒𝑑 ≤ 𝑁𝑡,𝑅𝑑 (5.128)
Onde o valor de cálculo do esforço normal resistente de tração 𝑁𝑡,𝑅𝑑 é dado por:
𝑁𝑡,𝑅𝑑 =𝐴 ∙ 𝑓𝑦
𝛾𝑀0 [kN] (5.129)
Para as barras comprimidas o valor de cálculo do esforço de compressão atuante 𝑁𝑒𝑑 deve satisfazer a
seguinte condição:
𝑁𝑒𝑑 ≤ 𝑁𝑏,𝑅𝑑 (5.130)
Onde o valor de cálculo da resistência à encurvadura do elemento comprimido 𝑁𝑏,𝑅𝑑 é dado por:
𝑁𝑏,𝑅𝑑 =𝜒 ∙ 𝐴 ∙ 𝑓𝑦
𝛾𝑀1 [kN] (5.131)
em que 𝜒 é o coeficiente de redução para o modo de encurvadura dado por:
𝜒 =1
𝛷√𝛷2 − �̅�2≤ 1.0 (5.132)
em que Φ é o valor de:
𝛷 = 0.5 ∙ [1 + 𝛼 ∙ (�̅� − 0.2) + �̅�2] (5.133)
e �̅� é a esbelteza normalizada dada por:
�̅� = √𝐴 ∙ 𝑓𝑦
𝑁𝑐𝑟 (5.134)

Otimização em Problemas de Engenharia Civil
116
𝛼 é o fator de imperfeição que se obtém através da curva de encurvadura em função da secção transversal
da barra dado pelos quadros 6.1 e 6.2 do EC3 [29]. O valor utilizado para o presente trabalho é de 0.49.
𝑁𝑐𝑟 é o valor crítico do esforço normal associado ao modo de encurvadura dado por:
𝑁𝑐𝑟 =𝜋2 ∙ 𝐸 ∙ 𝐼
𝐿2 [kN] (5.135)
onde 𝐼 é a inércia do perfil.
O esforço normal atuante 𝑁𝑒𝑑 pode ser dado utilizando a equação da tensão normal:
𝜎 =𝑁𝑒𝑑𝐴 [kN/cm2] (5.136)
Utilizando a lei de Hooke dada por:
𝜎 = 𝐸 ∙ 휀 [kN/cm2] (5.137)
onde a deformação normal 휀 é dada através de:
휀 =𝛥𝐿
𝐿 (5.138)
É possível substituir a Equação 5.137 e 5.138 na equação da tensão normal e obter 𝑁𝑒𝑑:
𝑁𝑒𝑑 =𝐸 ∙ 𝐴
𝐿∙ 𝛥𝐿 [kN] (5.139)
Barra 1
De forma genérica a variação do comprimento 𝛥𝐿 da barra 1 é:
𝛥𝐿1 = 𝛥𝐻 ∙ sin𝛽 [cm]
𝛥𝐿1 = −𝛥𝑉 ∙ cos 𝛽 [cm] (5.140)
Onde 𝛥𝐻 e 𝛥𝑉 é, respectivamente, o deslocamento do nó horizontalmente e verticalmente.
Como o esforço axial 𝑁𝑒𝑑 é a soma dos dois efeitos, é possível explicitá-lo em função da área e dos
deslocamentos.
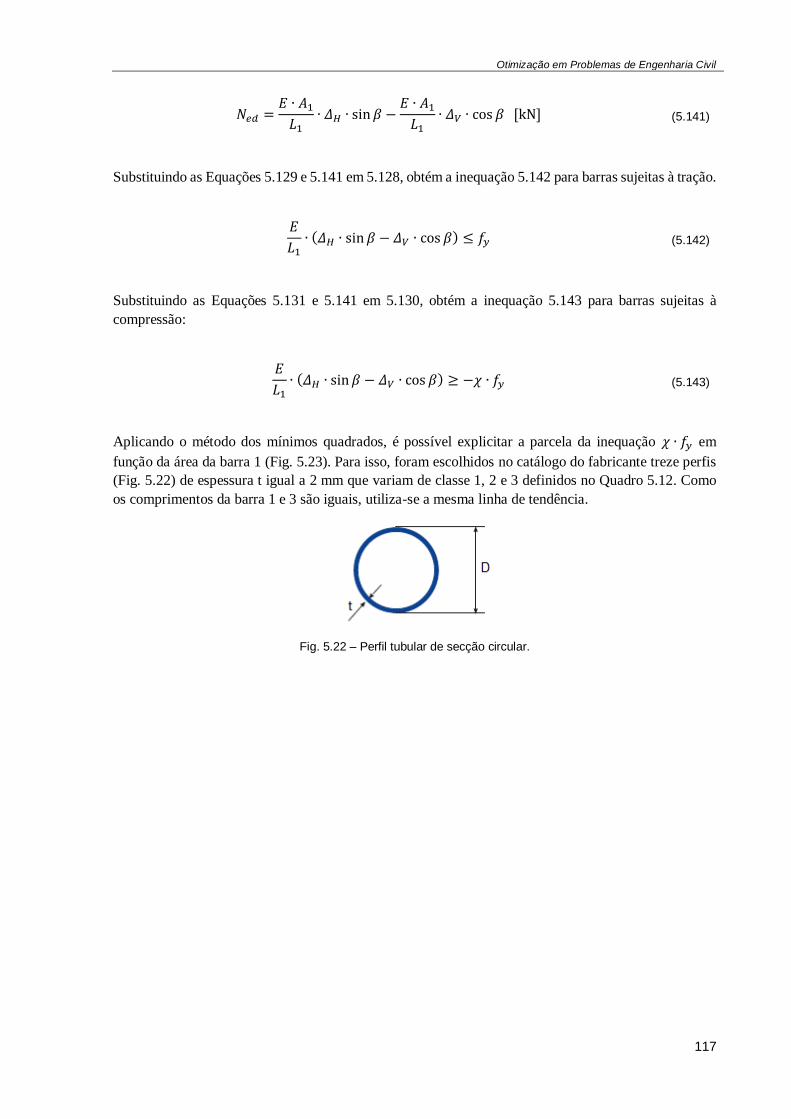
Otimização em Problemas de Engenharia Civil
117
𝑁𝑒𝑑 =𝐸 ∙ 𝐴1𝐿1
∙ 𝛥𝐻 ∙ sin 𝛽 −𝐸 ∙ 𝐴1𝐿1
∙ 𝛥𝑉 ∙ cos 𝛽 [kN] (5.141)
Substituindo as Equações 5.129 e 5.141 em 5.128, obtém a inequação 5.142 para barras sujeitas à tração.
𝐸
𝐿1∙ (𝛥𝐻 ∙ sin 𝛽 − 𝛥𝑉 ∙ cos 𝛽) ≤ 𝑓𝑦 (5.142)
Substituindo as Equações 5.131 e 5.141 em 5.130, obtém a inequação 5.143 para barras sujeitas à
compressão:
𝐸
𝐿1∙ (𝛥𝐻 ∙ sin 𝛽 − 𝛥𝑉 ∙ cos 𝛽) ≥ −𝜒 ∙ 𝑓𝑦 (5.143)
Aplicando o método dos mínimos quadrados, é possível explicitar a parcela da inequação 𝜒 ∙ 𝑓𝑦 em
função da área da barra 1 (Fig. 5.23). Para isso, foram escolhidos no catálogo do fabricante treze perfis
(Fig. 5.22) de espessura t igual a 2 mm que variam de classe 1, 2 e 3 definidos no Quadro 5.12. Como
os comprimentos da barra 1 e 3 são iguais, utiliza-se a mesma linha de tendência.
Fig. 5.22 – Perfil tubular de secção circular.
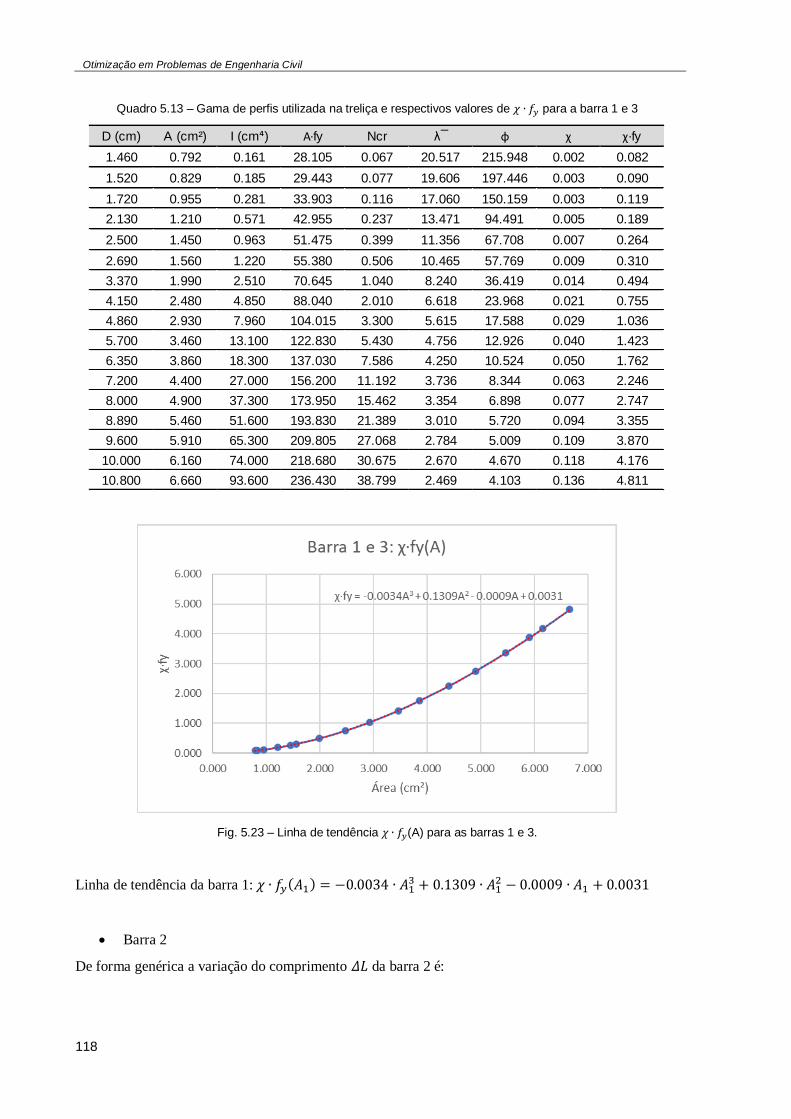
Otimização em Problemas de Engenharia Civil
118
Quadro 5.13 – Gama de perfis utilizada na treliça e respectivos valores de 𝜒 ∙ 𝑓𝑦 para a barra 1 e 3
Fig. 5.23 – Linha de tendência 𝜒 ∙ 𝑓𝑦(A) para as barras 1 e 3.
Linha de tendência da barra 1: 𝜒 ∙ 𝑓𝑦(𝐴1) = −0.0034 ∙ 𝐴13 + 0.1309 ∙ 𝐴1
2 − 0.0009 ∙ 𝐴1 + 0.0031
Barra 2
De forma genérica a variação do comprimento 𝛥𝐿 da barra 2 é:
D (cm) A (cm²) I (cm⁴) A∙fy Ncr λ¯ φ χ χ∙fy
1.460 0.792 0.161 28.105 0.067 20.517 215.948 0.002 0.082
1.520 0.829 0.185 29.443 0.077 19.606 197.446 0.003 0.090
1.720 0.955 0.281 33.903 0.116 17.060 150.159 0.003 0.119
2.130 1.210 0.571 42.955 0.237 13.471 94.491 0.005 0.189
2.500 1.450 0.963 51.475 0.399 11.356 67.708 0.007 0.264
2.690 1.560 1.220 55.380 0.506 10.465 57.769 0.009 0.310
3.370 1.990 2.510 70.645 1.040 8.240 36.419 0.014 0.494
4.150 2.480 4.850 88.040 2.010 6.618 23.968 0.021 0.755
4.860 2.930 7.960 104.015 3.300 5.615 17.588 0.029 1.036
5.700 3.460 13.100 122.830 5.430 4.756 12.926 0.040 1.423
6.350 3.860 18.300 137.030 7.586 4.250 10.524 0.050 1.762
7.200 4.400 27.000 156.200 11.192 3.736 8.344 0.063 2.246
8.000 4.900 37.300 173.950 15.462 3.354 6.898 0.077 2.747
8.890 5.460 51.600 193.830 21.389 3.010 5.720 0.094 3.355
9.600 5.910 65.300 209.805 27.068 2.784 5.009 0.109 3.870
10.000 6.160 74.000 218.680 30.675 2.670 4.670 0.118 4.176
10.800 6.660 93.600 236.430 38.799 2.469 4.103 0.136 4.811

Otimização em Problemas de Engenharia Civil
119
𝛥𝐿2 = 0
𝛥𝐿2 = −𝛥𝑉 [cm] (5.144)
Como o esforço axial 𝑁𝑒𝑑 é a soma dos dois efeitos, é possível explicitá-lo em função da área e dos
deslocamentos.
𝑁𝑒𝑑 = −𝐸 ∙ 𝐴2𝐿2
∙ 𝛥𝑉 [kN] (5.145)
Substituindo as Equações 5.129 e 5.145 em 5.128, obtém a inequação 5.146 para barras sujeitas à tração.
𝐸
𝐿2∙ (−𝛥𝑉) ≤ 𝑓𝑦 (5.146)
Substituindo as Equações 5.131 e 5.145 em 5.130, obtém a inequação 5.147 para barras sujeitas à
compressão:
𝐸
𝐿2∙ (−𝛥𝑉) ≥ −𝜒 ∙ 𝑓𝑦 (5.147)
Aplicando novamente o método dos mínimos quadrados, é possível explicitar a parcela da inequação
𝜒 ∙ 𝑓𝑦 em função da área da barra 2 (Fig. 5.24).
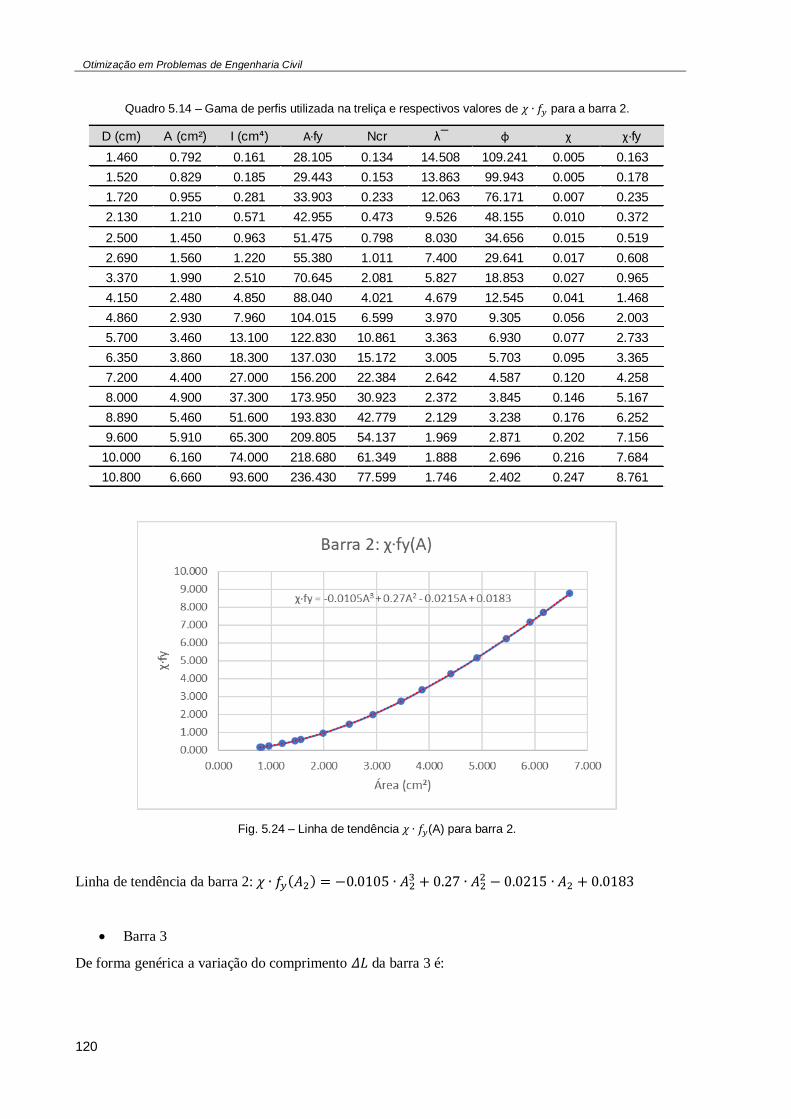
Otimização em Problemas de Engenharia Civil
120
Quadro 5.14 – Gama de perfis utilizada na treliça e respectivos valores de 𝜒 ∙ 𝑓𝑦 para a barra 2.
Fig. 5.24 – Linha de tendência 𝜒 ∙ 𝑓𝑦(A) para barra 2.
Linha de tendência da barra 2: 𝜒 ∙ 𝑓𝑦(𝐴2) = −0.0105 ∙ 𝐴23 + 0.27 ∙ 𝐴2
2 − 0.0215 ∙ 𝐴2 + 0.0183
Barra 3
De forma genérica a variação do comprimento 𝛥𝐿 da barra 3 é:
D (cm) A (cm²) I (cm⁴) A∙fy Ncr λ¯ φ χ χ∙fy
1.460 0.792 0.161 28.105 0.134 14.508 109.241 0.005 0.163
1.520 0.829 0.185 29.443 0.153 13.863 99.943 0.005 0.178
1.720 0.955 0.281 33.903 0.233 12.063 76.171 0.007 0.235
2.130 1.210 0.571 42.955 0.473 9.526 48.155 0.010 0.372
2.500 1.450 0.963 51.475 0.798 8.030 34.656 0.015 0.519
2.690 1.560 1.220 55.380 1.011 7.400 29.641 0.017 0.608
3.370 1.990 2.510 70.645 2.081 5.827 18.853 0.027 0.965
4.150 2.480 4.850 88.040 4.021 4.679 12.545 0.041 1.468
4.860 2.930 7.960 104.015 6.599 3.970 9.305 0.056 2.003
5.700 3.460 13.100 122.830 10.861 3.363 6.930 0.077 2.733
6.350 3.860 18.300 137.030 15.172 3.005 5.703 0.095 3.365
7.200 4.400 27.000 156.200 22.384 2.642 4.587 0.120 4.258
8.000 4.900 37.300 173.950 30.923 2.372 3.845 0.146 5.167
8.890 5.460 51.600 193.830 42.779 2.129 3.238 0.176 6.252
9.600 5.910 65.300 209.805 54.137 1.969 2.871 0.202 7.156
10.000 6.160 74.000 218.680 61.349 1.888 2.696 0.216 7.684
10.800 6.660 93.600 236.430 77.599 1.746 2.402 0.247 8.761

Otimização em Problemas de Engenharia Civil
121
𝛥𝐿3 = −𝛥𝐻 ∙ sin 𝛽 [cm]
𝛥𝐿3 = −𝛥𝑉 ∙ cos 𝛽 [cm]
(5.148)
Como o esforço axial 𝑁𝑒𝑑 é a soma dos dois efeitos, é possível explicitá-lo em função da área e dos
deslocamentos.
𝑁𝑒𝑑 = −𝐸 ∙ 𝐴3𝐿3
∙ 𝛥𝐻 ∙ sin 𝛽 −𝐸 ∙ 𝐴3𝐿3
∙ 𝛥𝑉 ∙ cos 𝛽 [kN] (5.149)
Substituindo as Equações 5.129 e 5.149 em 5.128, obtém a inequação 5.150 para barras sujeitas à tração.
𝐸
𝐿3∙ (−𝛥𝐻 ∙ sin𝛽 − 𝛥𝑉 ∙ cos 𝛽) ≤ 𝑓𝑦 (5.150)
Substituindo as Equações 5.131 e 5.149 em 5.130, obtém a inequação 5.151 para barras sujeitas à
compressão:
𝐸
𝐿3∙ (−𝛥𝐻 ∙ sin 𝛽 − 𝛥𝑉 ∙ cos 𝛽) ≥ −𝜒 ∙ 𝑓𝑦 (5.151)
Linha de tendência da barra 3: 𝜒 ∙ 𝑓𝑦(𝐴3) = −0.0034 ∙ 𝐴33 + 0.1309 ∙ 𝐴3
2 − 0.0009 ∙ 𝐴3 + 0.0031
Como nas inequações que constituem as restrições desigualdade do problema de otimização também há
variáveis relativas ao deslocamento, é necessário adicionar restrições de igualdade que contenham os
deslocamentos. Utilizando o Método dos Deslocamentos (Equação 5.152) é possível explicitar os
deslocamentos em função das áreas da treliça. Os deslocamentos são distintos para cada caso de carga,
pois dependem das forças aplicadas.
𝛥 = 𝐾−1 ∙ 𝐹 (5.152)
em que a matriz dos deslocamentos 𝛥 para o caso de carga 1 e 2, é respectivamente:
𝛥𝐶1 = [𝛥𝐻,𝑐1𝛥𝑉,𝑐1
]
𝛥𝐶2 = [𝛥𝐻,𝑐2𝛥𝑉,𝑐2
]
(5.153)

Otimização em Problemas de Engenharia Civil
122
a matriz rigidez 𝐾 é dada por:
𝐾 = [𝐾11 𝐾12𝐾21 𝐾22
] (5.154)
Onde:
𝐾11 significa a rigidez quando a força está segundo 𝛥1 quando apenas 𝛥1 = 1, ou seja,
quando a força está na direção horizontal e o deslocamento horizontal é unitário.
𝐾12 significa a rigidez quando a força está segundo 𝛥1 quando apenas 𝛥2 = 1, ou seja,
quando a força está na direção horizontal e o deslocamento vertical é unitário.
𝐾21 significa a rigidez quando a força está segundo 𝛥2 quando apenas 𝛥1 = 1, ou seja,
quando a força está na direção vertical e o deslocamento horizontal é unitário.
𝐾22 significa a rigidez quando a força está segundo 𝛥2 quando apenas 𝛥2 = 1, ou seja,
quando a força está na direção vertical e o deslocamento vertical é unitário.
A matriz de força 𝐹 é definida por:
𝐹 = [𝐹𝐻𝐹𝑉] (5.155)
Substituindo os valores das forças para o caso de carga 1 e 2, respectivamente:
𝐹𝐶1 = [20 ∙ √3−20
]
𝐹𝐶2 = [20
−20 ∙ √3]
Os termos da matriz 𝐾 são dados por:
𝐾11 =𝐸 ∙ 𝐴1𝐿1
∙ sin2 𝛽 +𝐸 ∙ 𝐴3𝐿3
∙ sin2(−𝛽)
𝐾12 = −𝐸 ∙ 𝐴1𝐿1
∙ sin 𝛽 ∙ cos𝛽 −𝐸 ∙ 𝐴3𝐿3
∙ sin(−𝛽) ∙ cos(−𝛽)
𝐾21 = −𝐸 ∙ 𝐴1𝐿1
∙ sin𝛽 ∙ cos 𝛽 −𝐸 ∙ 𝐴3𝐿3
∙ sin(−𝛽) ∙ cos(−𝛽)
𝐾22 =𝐸 ∙ 𝐴1𝐿1
∙ cos2 𝛽 +𝐸 ∙ 𝐴2𝐿2
+𝐸 ∙ 𝐴3𝐿3
∙ cos2(−𝛽)
(5.156)
Realizando as substituições necessárias obtém-se a matriz 𝐾 e em seguida a sua matriz inversa 𝐾−1:

Otimização em Problemas de Engenharia Civil
123
𝐾 = [10.5√2 ∙ 𝐴1 + 10.5√2 ∙ 𝐴3 −10.5√2 ∙ 𝐴1 + 10.5√2 ∙ 𝐴3
−10.5√2 ∙ 𝐴1 + 10.5√2 ∙ 𝐴3 10.5√2 ∙ 𝐴1 + 42 ∙ 𝐴2 + 10.5√2 ∙ 𝐴3]
𝐾−1 = [𝐾11 𝐾12𝐾21 𝐾22
]
𝐾11 =10.5√2 ∙ 𝐴1 + 42 ∙ 𝐴2 + 10.5√2 ∙ 𝐴3
𝐴1 ∙ (623.668181007 ∙ 𝐴2 + 882 ∙ 𝐴3) + 623.668181007 ∙ 𝐴2 ∙ 𝐴3
𝐾12 =10.5√2 ∙ 𝐴1 − 10.5√2 ∙ 𝐴3
𝐴1 ∙ (623.668181007 ∙ 𝐴2 + 882 ∙ 𝐴3) + 623.668181007 ∙ 𝐴2 ∙ 𝐴3
𝐾21 =10.5√2 ∙ 𝐴1 − 10.5√2 ∙ 𝐴3
𝐴1 ∙ (623.668181007 ∙ 𝐴2 + 882 ∙ 𝐴3) + 623.668181007 ∙ 𝐴2 ∙ 𝐴3
𝐾22 =10.5√2 ∙ 𝐴1 + 10.5√2 ∙ 𝐴3
𝐴1 ∙ (623.668181007 ∙ 𝐴2 + 882 ∙ 𝐴3) + 623.668181007 ∙ 𝐴2 ∙ 𝐴3
Desta forma é possível calcular a matriz dos deslocamentos para cada caso de carga através da Equação
5.152, resultando em:
𝛥𝐶1 =
[ 0.348595623 ∙ (𝐴1 + 6.692130430 ∙ (𝐴2 + 0.557677536 ∙ 𝐴3))
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴30.348595623 ∙ (𝐴1 − 3.732050808 ∙ 𝐴3)
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3 ]
𝛥𝐶2 =
[ −0.348595623 ∙ (𝐴1 − 3.863703305 ∙ (𝐴2 + 0.965925826 ∙ 𝐴3))
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3−0.348595623 ∙ (𝐴1 + 3.732050808 ∙ 𝐴3)
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3 ]
Em seguida é possível formular o programa matemático descrito por:
Função objetivo: Minimização do custo da treliça em €.
𝑓(𝐴1, 𝐴2, 𝐴3) = 𝐶𝑠 ∙ (𝐴1 ∙ 𝐿1 + 𝐴2 ∙ 𝐿2 + 𝐴3 ∙ 𝐿3)
𝑓(𝐴1, 𝐴2 , 𝐴3) = 2 500 ∙ (√2 ∙ 𝐴1 + 𝐴2 +√2 ∙ 𝐴3) (5.157)
Restrições desigualdade: Resistências à tração e resistências à encurvadura para o caso de carga
1 e caso de carga 2.
Apesar de se ter conhecimento prévio se algumas barras estão sujeitas a esforços de tração ou de
compressão, opta-se por adicionar as duas restrições para cada barra.

Otimização em Problemas de Engenharia Civil
124
Rdes(1) ⇒𝐸
𝐿1∙ (𝛥𝐻,𝐶1 ∙ sin𝛽 − 𝛥𝑉,𝐶1 ∙ cos 𝛽) ≤ 𝑓𝑦
21 ∙ (𝛥𝐻,𝐶1 − 𝛥𝑉,𝐶1) − 35.50 ≤ 0
𝑅𝑑𝑒𝑠(2) ⇒𝐸
𝐿1∙ (𝛥𝐻,𝐶1 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶1 ∙ 𝑐𝑜𝑠 𝛽) ≥ −𝜒 ∙ 𝑓𝑦
21 ∙ (−𝛥𝐻,𝐶1 + 𝛥𝑉,𝐶1) − (−0.0034 ∙ 𝐴13 + 0.1309 ∙ 𝐴1
2 − 0.0009 ∙ 𝐴1 + 0.0031) ≤ 0
𝑅𝑑𝑒𝑠(3) ⇒𝐸
𝐿2∙ (−𝛥𝑉,𝐶1) ≤ 𝑓𝑦
42 ∙ (−𝛥𝑉,𝐶1) − 35.50 ≤ 0
𝑅𝑑𝑒𝑠(4) ⇒𝐸
𝐿2∙ (−𝛥𝑉,𝐶1) ≥ −𝜒 ∙ 𝑓𝑦
42 ∙ (𝛥𝑉,𝐶1) − (−0.0105 ∙ 𝐴23 + 0.27 ∙ 𝐴2
2 − 0.0215 ∙ 𝐴2 + 0.0183) ≤ 0
𝑅𝑑𝑒𝑠(5) ⇒𝐸
𝐿3∙ (−𝛥𝐻,𝐶1 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶1 ∙ 𝑐𝑜𝑠 𝛽) ≤ 𝑓𝑦
21 ∙ (−𝛥𝐻,𝐶1 − 𝛥𝑉,𝐶1) − 35.50 ≤ 0
𝑅𝑑𝑒𝑠(6) ⇒𝐸
𝐿3∙ (−𝛥𝐻,𝐶1 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶1 ∙ 𝑐𝑜𝑠 𝛽) ≥ −𝜒 ∙ 𝑓𝑦
21 ∙ (𝛥𝐻,𝐶1 + 𝛥𝑉,𝐶1) − (−0.0034 ∙ 𝐴33 + 0.1309 ∙ 𝐴3
2 − 0.0009 ∙ 𝐴3 + 0.0031) ≤ 0
𝑅𝑑𝑒𝑠(7) ⇒𝐸
𝐿1∙ (𝛥𝐻,𝐶2 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶2 ∙ 𝑐𝑜𝑠 𝛽) ≤ 𝑓𝑦
21 ∙ (𝛥𝐻,𝐶2 − 𝛥𝑉,𝐶2) − 35.50 ≤ 0
𝑅𝑑𝑒𝑠(8) ⇒𝐸
𝐿1∙ (𝛥𝐻,𝐶2 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶2 ∙ 𝑐𝑜𝑠 𝛽) ≥ −𝜒 ∙ 𝑓𝑦
21 ∙ (−𝛥𝐻,𝐶2 + 𝛥𝑉,𝐶2) − (−0.0034 ∙ 𝐴13 + 0.1309 ∙ 𝐴1
2 − 0.0009 ∙ 𝐴1 + 0.0031) ≤ 0
𝑅𝑑𝑒𝑠(9) ⇒𝐸
𝐿2∙ (−𝛥𝑉,𝐶2) ≤ 𝑓𝑦
42 ∙ (−𝛥𝑉,𝐶2) − 35.50 ≤ 0

Otimização em Problemas de Engenharia Civil
125
𝑅𝑑𝑒𝑠(10) ⇒𝐸
𝐿2∙ (−𝛥𝑉,𝐶2) ≥ −𝜒 ∙ 𝑓𝑦
42 ∙ (𝛥𝑉,𝐶2) − (−0.0105 ∙ 𝐴23 + 0.27 ∙ 𝐴2
2 − 0.0215 ∙ 𝐴2 + 0.0183) ≤ 0
𝑅𝑑𝑒𝑠(11) ⇒𝐸
𝐿3∙ (−𝛥𝐻,𝐶2 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶2 ∙ 𝑐𝑜𝑠 𝛽) ≤ 𝑓𝑦
21 ∙ (−𝛥𝐻,𝐶2 − 𝛥𝑉,𝐶2) − 35.50 ≤ 0
𝑅𝑑𝑒𝑠(12) ⇒𝐸
𝐿3∙ (−𝛥𝐻,𝐶2 ∙ 𝑠𝑖𝑛 𝛽 − 𝛥𝑉,𝐶2 ∙ 𝑐𝑜𝑠 𝛽) ≥ −𝜒 ∙ 𝑓𝑦
21 ∙ (𝛥𝐻,𝐶2 + 𝛥𝑉,𝐶2) − (−0.0034 ∙ 𝐴33 + 0.1309 ∙ 𝐴3
2 − 0.0009 ∙ 𝐴3 + 0.0031) ≤ 0
Restrições igualdade: Deslocamento horizontal e vertical para o caso de carga 1 e caso de
carga 2.
𝑅𝑖𝑔(1) ⇒ 𝛥𝐶1 = 𝐾−1 ∙ 𝐹𝐶1
𝛥𝐻,𝐶1 =0.348595623 ∙ (𝐴1 + 6.692130430 ∙ (𝐴2 + 0.557677536 ∙ 𝐴3))
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3
𝑅𝑖𝑔(2) ⇒ 𝛥𝐶1 = 𝐾−1 ∙ 𝐹𝐶1
𝛥𝑉,𝐶1 −0.348595623 ∙ (𝐴1 − 3.732050808 ∙ 𝐴3)
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3= 0
𝑅𝑖𝑔(3) ⇒ 𝛥𝐶2 = 𝐾−1 ∙ 𝐹𝐶2
𝛥𝐻,𝐶2 −−0.348595623 ∙ (𝐴1 − 3.863703305 ∙ (𝐴2 + 0.965925826 ∙ 𝐴3))
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3= 0
𝑅𝑖𝑔(4) ⇒ 𝛥𝐶2 = 𝐾−1 ∙ 𝐹𝐶2
𝛥𝑉,𝐶2 −−0.348595623 ∙ (𝐴1 + 3.732050808 ∙ 𝐴3)
𝐴1 ∙ (𝐴2 + 1.414213562 ∙ 𝐴3) + 𝐴2 ∙ 𝐴3= 0
A substituição dos deslocamentos nas restrições desigualdade faz com que o programa matemático passe
a ter apenas três variáveis de projeto (𝐴1, 𝐴2 e 𝐴3) e seja sujeito a apenas restrições desigualdade.
Limites das variáveis:
Na minimização do volume de treliças hiperestáticas, as barras menos eficientes são em geral suprimidas
pelo algoritmo de otimização. Por essa questão devem ser consideradas limites de áreas mínimas em

Otimização em Problemas de Engenharia Civil
126
todas as barras. Os limites também são impostos às variáveis de projeto pelo fato de as áreas estarem
restringidas pelo catálogo do fabricante. Deste modo evita-se que o algoritmo de otimização encontre
soluções com áreas negativas ou que suprima certas barras atribuindo-lhes uma área nula.
{0.792 ≤ 𝐴1 ≤ 6.660.792 ≤ 𝐴2 ≤ 6.660.792 ≤ 𝐴3 ≤ 6.66
As restrições não lineares de desigualdade e a resolução do problema de otimização no MATLAB
encontram-se descritas no Script 5.5 e Script 5.6, respectivamente.
Script 5.5 – Programa matemático da treliça correspondente às restrições não lineares.
% Restrições não lineares
function [rdes,rig] = trelica3barras(x)
% Desigualdade ("<=")
rdes(1) =
21*(((0.348595623*(x(1)+6.69213043*(x(2)+0.557677536*x(3))))/(x(1)*(x(2)+
1.414213562*x(3))+x(2)*x(3)))-((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-35.50; %
Resistência à tração (C.1)
rdes(2) = 21*(-
((0.348595623*(x(1)+6.69213043*(x(2)+0.557677536*x(3))))/(x(1)*(x(2)+
1.414213562*x(3))+x(2)*x(3)))+((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-(-
0.0034*x(1)^3 + 0.1309*x(1)^2 - 0.0009*x(1) + 0.0031); %Resistência à
compressão (C.1)
rdes(3) = 42*(-((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-35.50; %
Resistência à tração (C.1)
rdes(4) = 42*(((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-(-
0.0105*x(2)^3 + 0.27*x(2)^2 - 0.0215*x(2) + 0.0183); % Resistência à
compressão (C.1)
rdes(5) = 21*(-
((0.348595623*(x(1)+6.69213043*(x(2)+0.557677536*x(3))))/(x(1)*(x(2)+
1.414213562*x(3))+x(2)*x(3)))-((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-35.50; %
Resistência à tração (C.1)
rdes(6) =
21*(((0.348595623*(x(1)+6.69213043*(x(2)+0.557677536*x(3))))/(x(1)*(x(2)+
1.414213562*x(3))+x(2)*x(3)))+((0.348595623*(x(1)-
3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3))))-(-
0.0034*x(3)^3 + 0.1309*x(3)^2 - 0.0009*x(3) + 0.0031); % Resistência à
compressão (C.1)
rdes(7) = 21*(((-0.348595623*(x(1)-
3.863703305*(x(2)+0.965925826*x(3))))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
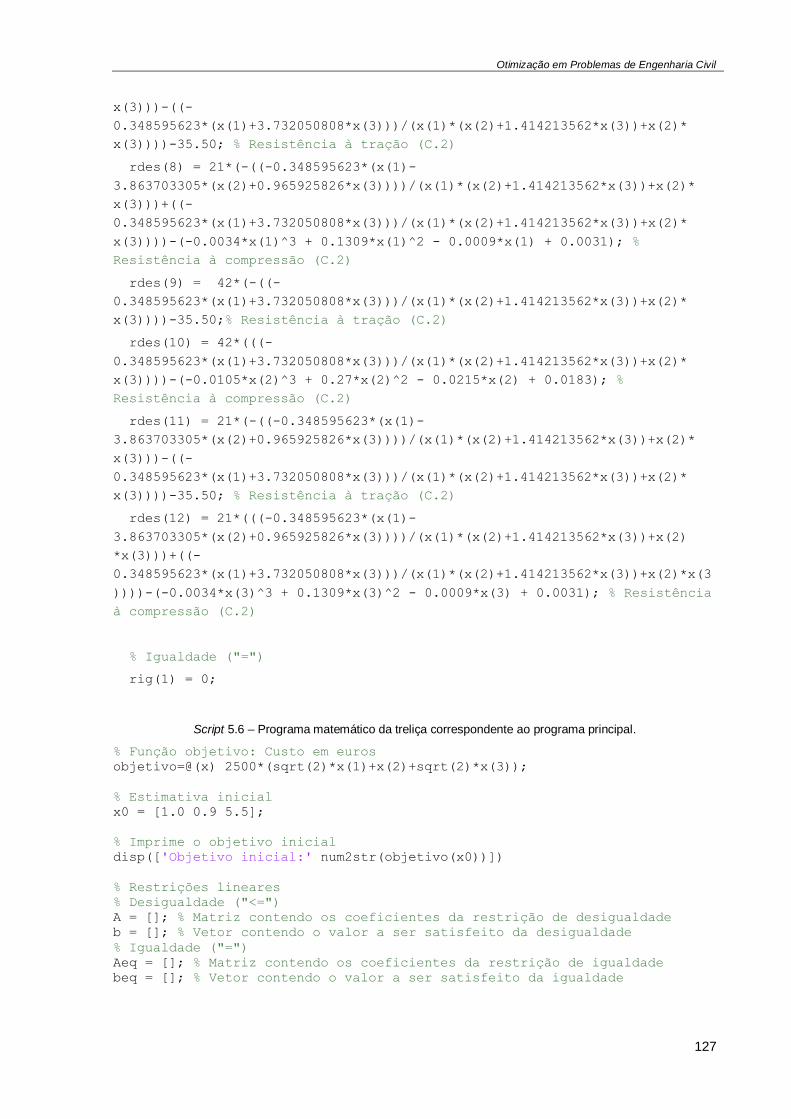
Otimização em Problemas de Engenharia Civil
127
x(3)))-((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3))))-35.50; % Resistência à tração (C.2)
rdes(8) = 21*(-((-0.348595623*(x(1)-
3.863703305*(x(2)+0.965925826*x(3))))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3)))+((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3))))-(-0.0034*x(1)^3 + 0.1309*x(1)^2 - 0.0009*x(1) + 0.0031); %
Resistência à compressão (C.2)
rdes(9) = 42*(-((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3))))-35.50;% Resistência à tração (C.2)
rdes(10) = 42*(((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3))))-(-0.0105*x(2)^3 + 0.27*x(2)^2 - 0.0215*x(2) + 0.0183); %
Resistência à compressão (C.2)
rdes(11) = 21*(-((-0.348595623*(x(1)-
3.863703305*(x(2)+0.965925826*x(3))))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3)))-((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*
x(3))))-35.50; % Resistência à tração (C.2)
rdes(12) = 21*(((-0.348595623*(x(1)-
3.863703305*(x(2)+0.965925826*x(3))))/(x(1)*(x(2)+1.414213562*x(3))+x(2)
*x(3)))+((-
0.348595623*(x(1)+3.732050808*x(3)))/(x(1)*(x(2)+1.414213562*x(3))+x(2)*x(3
))))-(-0.0034*x(3)^3 + 0.1309*x(3)^2 - 0.0009*x(3) + 0.0031); % Resistência
à compressão (C.2)
% Igualdade ("=")
rig(1) = 0;
Script 5.6 – Programa matemático da treliça correspondente ao programa principal.
% Função objetivo: Custo em euros objetivo=@(x) 2500*(sqrt(2)*x(1)+x(2)+sqrt(2)*x(3));
% Estimativa inicial x0 = [1.0 0.9 5.5];
% Imprime o objetivo inicial disp(['Objetivo inicial:' num2str(objetivo(x0))])
% Restrições lineares % Desigualdade ("<=") A = []; % Matriz contendo os coeficientes da restrição de desigualdade b = []; % Vetor contendo o valor a ser satisfeito da desigualdade % Igualdade ("=") Aeq = []; % Matriz contendo os coeficientes da restrição de igualdade beq = []; % Vetor contendo o valor a ser satisfeito da igualdade
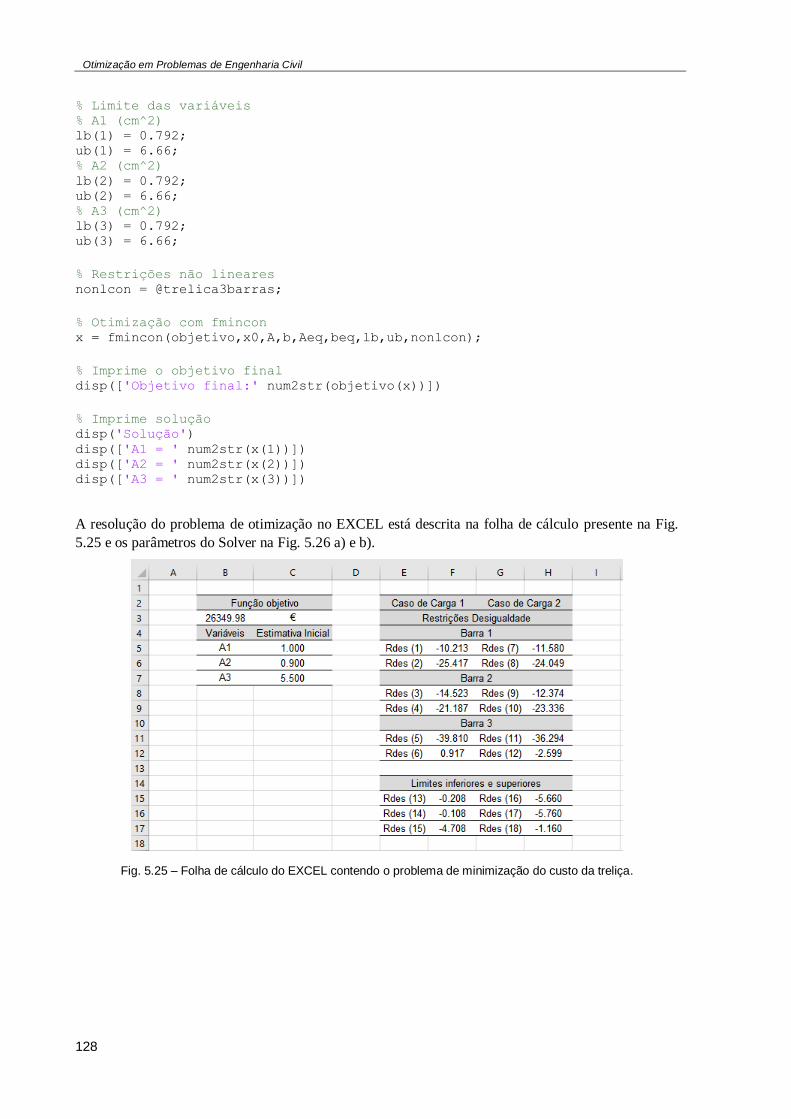
Otimização em Problemas de Engenharia Civil
128
% Limite das variáveis % A1 (cm^2) lb(1) = 0.792; ub(1) = 6.66; % A2 (cm^2) lb(2) = 0.792; ub(2) = 6.66; % A3 (cm^2) lb(3) = 0.792; ub(3) = 6.66;
% Restrições não lineares nonlcon = @trelica3barras;
% Otimização com fmincon x = fmincon(objetivo,x0,A,b,Aeq,beq,lb,ub,nonlcon);
% Imprime o objetivo final disp(['Objetivo final:' num2str(objetivo(x))])
% Imprime solução disp('Solução') disp(['A1 = ' num2str(x(1))]) disp(['A2 = ' num2str(x(2))]) disp(['A3 = ' num2str(x(3))])
A resolução do problema de otimização no EXCEL está descrita na folha de cálculo presente na Fig.
5.25 e os parâmetros do Solver na Fig. 5.26 a) e b).
Fig. 5.25 – Folha de cálculo do EXCEL contendo o problema de minimização do custo da treliça.
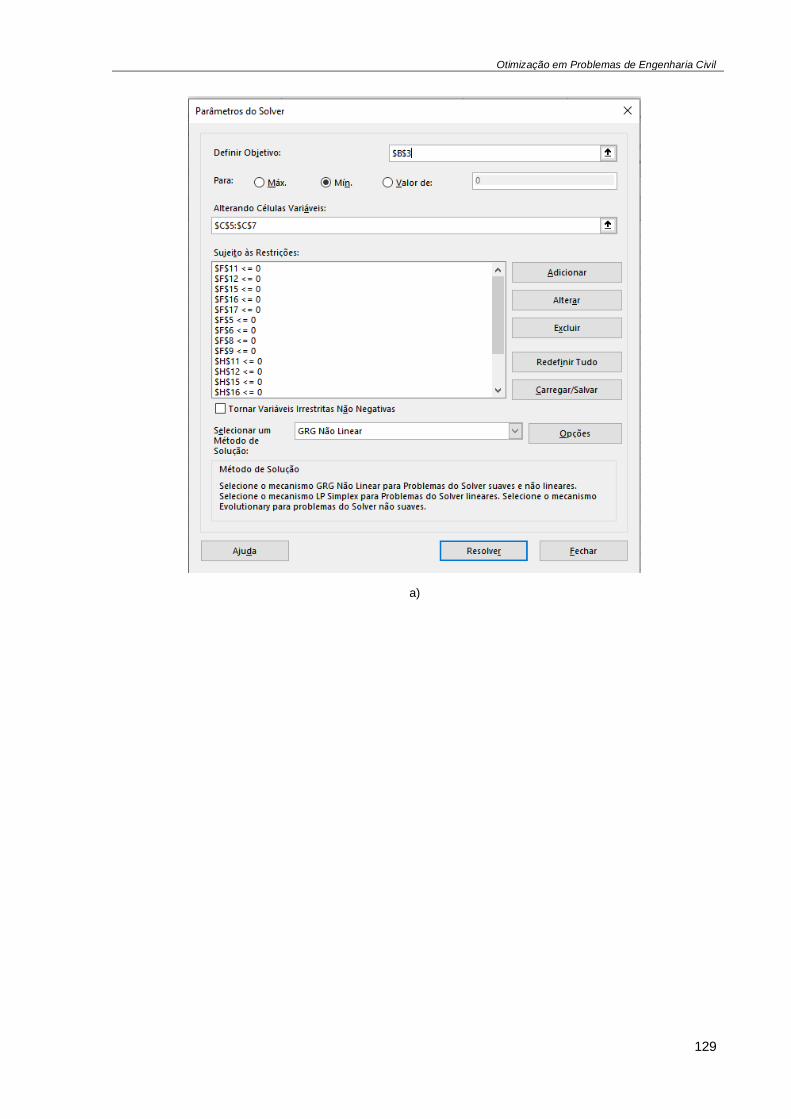
Otimização em Problemas de Engenharia Civil
129
a)
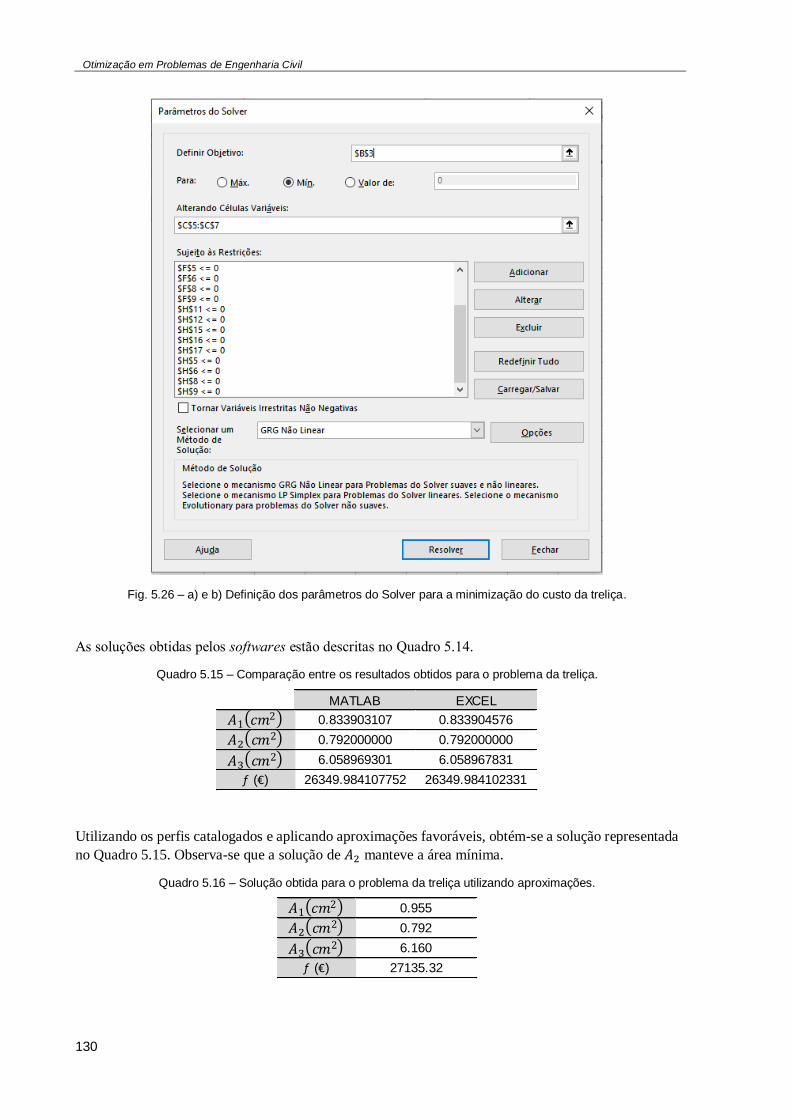
Otimização em Problemas de Engenharia Civil
130
Fig. 5.26 – a) e b) Definição dos parâmetros do Solver para a minimização do custo da treliça.
As soluções obtidas pelos softwares estão descritas no Quadro 5.14.
Quadro 5.15 – Comparação entre os resultados obtidos para o problema da treliça.
Utilizando os perfis catalogados e aplicando aproximações favoráveis, obtém-se a solução representada
no Quadro 5.15. Observa-se que a solução de 𝐴2 manteve a área mínima.
Quadro 5.16 – Solução obtida para o problema da treliça utilizando aproximações.
MATLAB EXCEL
0.833903107 0.833904576
0.792000000 0.792000000
6.058969301 6.058967831
f (€) 26349.984107752 26349.984102331
𝐴1 𝑐𝑚2
𝐴2 𝑐𝑚2
𝐴3 𝑐𝑚2
0.955
0.792
6.160
f (€) 27135.32
𝐴1 𝑐𝑚2
𝐴2 𝑐𝑚2
𝐴3 𝑐𝑚2
Otimização em Problemas de Engenharia Civil
131
6 CONCLUSÃO
6.1. OBSERVAÇÕES FINAIS
Destaca-se que o principal objetivo do presente trabalho consiste na abordagem da otimização de
problemas de engenharia civil de um modo genérico e versátil, sem perder a eficiência aceitável, que
permite a resolução dos problemas com maior complexidade em tempo útil. Para definir
satisfatoriamente os problemas de forma realista, outras particularidades necessitam ser abrangidas. Para
isso é preciso levar em consideração as restrições relativas às combinações de carregamento previstos
nos Eurocódigos, as restrições de encurvadura, imperfeições geométricas, resistências ao punçoamento,
dentre outros aspectos.
Os métodos de otimização podem auxiliar poderosamente os projetistas no objetivo de conseguir
soluções mais econômicas e igualmente seguras. Porém, é importante ressaltar a necessidade de se deter
um conhecimento prévio dos métodos de otimização para os diversos problemas. Além disso, torna-se
imprescindível que o programa matemático do problema de otimização seja corretamente formulado e
para isso é fundamental que o projetista detenha tempo suficiente para a sua preparação.
Outro ponto importante que justifica a implementação das técnicas de otimização pelos projetistas é o
fato de os softwares utilizados para verificações dos esforços, não relatarem se algum elemento da
estrutura está sobredimensionado, deixando de se obter uma solução que poderia ser mais econômica.
Em contrapartida, à implementação das técnicas de otimização em obras de pequeno porte o projetista
não tem tempo suficiente para poder se dedicar a desenvolver uma solução mais econômica para um
projeto, adotando assim uma solução baseada em sua experiência, abandonando novamente a solução
ótima.
No presento trabalho, além dos problemas de teste, foram abordados problemas de otimização aplicados
na engenharia civil que buscaram minimizar em sua maioria os custos, através da obtenção do volume
mínimo dos materiais envolvidos, onde as variáveis de projeto foram as dimensões e áreas das secções
transversais.
Da comparação entre as soluções obtidas pelo Solver do Microsoft EXCEL que fez uso do método GRG
Não Linear e da função Fmincon do MATLAB, a qual empregou o método Interior-Point, foi possível
observar o bom desempenho dos algoritmos utilizados para obter os resultados dos variados problemas
de otimização publicados neste trabalho, pois apresentam uma elevada precisão. A aplicação desses
métodos também pôde ser comprovada de forma eficiente no problema de otimização da barragem de
três variáveis, quando se comparou os resultados obtidos com os publicados anteriormente [21].

Otimização em Problemas de Engenharia Civil
132
6.2. SUGESTÕES PARA TRABALHOS FUTUROS
A otimização aplicada à engenharia civil ainda necessita de muitos estudos e com o objetivo de
aprofundar o assunto relativo ao tema, destacam-se alguns:
Otimização aplicacando Eurocódigos de forma mais rigorosa no desenvolvimento dos
problemas de otimização;
Otimização de estruturas pré-esforçadas;
Otimização considerando os efeitos de segunda ordem em estruturas metálicas;
Otimização de estruturas de suporte de terra;
Otimização de estruturas cimbradas.
Otimização em Problemas de Engenharia Civil
133
REFERÊNCIAS BIBLIOGRÁFICAS
[1] Zienkiewicz, O. C., Gallagher R. H. Optimum Structural Design: Theory and Applications, John
Wiley and Sons, London, 1973.
[2] Gill, P. E., Murray, W., Wright, M. H. Practical Optimization. Academic Press, San Diego, 1981.
[3] Arora, J. S. Introduction to Optimum Design. McGraw-Hill, Iowa City, 1989.
[4] Haftka, R. T., Gürdal, Z. Elements of Structural Optimization. Springer, Blacksburg, 1992.
[5] Azevedo, A. F. M. Optimização de Estruturas com Comportamento Linear e Não Linear.
Dissertação de Doutoramento, Faculdade de Engenharia da Universidade do Porto, 1994.
[6] Sias, F. M. Dimensionamento Ótimo de Pilares de Concreto Armado. Dissertação de Mestrado,
Universidade Federal do Espírito Santo, 2014.
[7] Hillier, F. S., Liberman, G. J. Introduction to Operations Research. McGraw-Hill, Palo Alto, 1990.
[8] Berke, L., Khot, N. Computer Aided Optimal Design: Structural and Mechanical Systems,
Springer-Verlag, Tróia, 1997.
[9] Rozvany, G. I. N., Zhou, M., Sigmund, O. Optimization of Topology, H. Adeli, London, 1994.
[10] Bastos, E. A. Otimização de Seções Retangulares de Concreto Armado Submetidas à Flexo-
Compressão Oblíqua Utilizando Algoritmos Genéticos. Dissertação de Mestrado, Universidade
Federal do Rio de Janeiro, 2004.
[11] https://support.microsoft.com/pt-pt/office/definir-e-resolver-um-problema-utilizando-o-solver-
5d1a388f-079d-43ac-a7eb-f63e45925040?ui=pt-pt&rs=pt-pt&ad=pt 07/2020.
[12] Dantzig, G. B. Linear Programming and Extensions. CA: RAND Corporation, Santa Monica, 1963.
[13] Abadie, J., Carpentier, J. Generalization of the Wolfe Reduced Gradient Method to the Case of
Nonlinear Constraints. Academic Press, New York, 1969.
[14] Belegundu, A. D. A Study of Mathematical Programming Methods for Structural Optimization.
Dissertação de Doutoramento, University of Iowa, 1982.
[15] Barrico, C. M. C. S. Optimização Evolucionária Multi-Objectivo em Ambientes Incertos: Pesquisa
de Soluções Robustas. Dissertação de Doutoramento, Faculdade de Ciências e Tecnologia da
Universidade de Coimbra, 2007.
[16] https://www.mathworks.com/help/optim/ug/fmincon.html#d120e73702 04/2020.
[17] https://www.mathworks.com/help/optim/ug/choosing-the-algorithm.html#bsbwxm7 04/2020.
[18] https://www.mathworks.com/help/optim/ug/constrained-nonlinear-optimization-algorithms.html.
05/20.
[19] Moré, J.J., Sorensen, D.C. Computing a Trust Region Step. SIAM Journal on Scientific and
Statistical Computing, Lemont, 1981.
[20] http://civil.fe.up.pt/pub/apoio/Mestr_Estr/oe/pdf/opt_1999_2000_e1.pdf 04/2020.
[21] http://civil.fe.up.pt/pub/apoio/Mestr_Estr/oe/newtop/1999_2000/gravity_dam_or.lpt.txt 04/2020.
[22] Nash, S. G., Sofer, A. Linear and Nonlinear Programming. McGraw-Hill, Fairfax, 1995.
[23] Rosenbrock, H. H. An automatic method for finding the greatest or least value of a function. The
Computer Journal, 02/02/1978, 175-184, Manchester.
Otimização em Problemas de Engenharia Civil
134
[24] http://www.ofeliz.pt/sites/default/files/o_feliz_chapa_perfilada.pdf 06/2020.
[25] https://ofelizpainel.com/wp-content/uploads/2018/03/OFMT-Superomega-pt.pdf 06/2020.
[26] ARBED GROUP - Profil Arbed, Edition 3-2001.
[27] Apontamentos da disciplina de Dimensionamento de Estruturas de Betão (Fundações em Betão),
Faculdade de Engenharia da Universidade do Porto, 2018.
[28] http://www.condesa.com/pdf/pt/tubo_estructural_castv3.pdf 07/2020.
[29] NP EN 1993-1-1. Eurocódigo 3: Projeto de Estruturas de Aço – Parte 1-1: Regras gerais e regras
para edifícios. Comité Europeu de Normalização (CEN), Bruxelas, 2010.
[30] Vanderplaats, G. N. Numerical Optimization Techniques for Engineering Design: with
Applications. McGraw-Hill, 1984.