notas de aula de geometria diferencial
TRANSCRIPT
Relatividade Especial, Geral eGeometria Lorentziana
Rodney Josue Biezuner 1
Departamento de MatematicaInstituto de Ciencias Exatas (ICEx)
Universidade Federal de Minas Gerais (UFMG)
31 de agosto de 2017
1E-mail: [email protected]; homepage: http://www.mat.ufmg.br/~rodney.

Sumario
1 Teoria da Relatividade Especial 51.1 Breve Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Deducao da existencia de ondas eletromagneticas atraves das equacoes de Maxwell . . . . . . 6
1.2.1 O Eter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Referenciais Inerciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Princıpio da Relatividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.5 Invariancia do Intervalo Espacotemporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.6 Relatividade da Simultaneidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.7 Relatividade de Intervalos Espaciais e de Intervalos Temporais . . . . . . . . . . . . . . . . . 14
1.7.1 Contracao do Espaco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.7.2 Dilatacao do Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.7.3 Invariancia das Dimensoes Transversais . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 O Espacotempo de Minkowski 182.1 Produto Interno e Formas Quadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2 Operadores Ortogonais e Isometrias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3 Metrica de Lorentz e Espacotempo de Minkowski . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.1 Propriedades do Espacotempo de Minkowski . . . . . . . . . . . . . . . . . . . . . . . 292.4 Transformacao de Lorentz do tipo Boost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4.1 Medida Quantitativa da Dilatacao do Tempo . . . . . . . . . . . . . . . . . . . . . . . 342.4.2 Matriz do Boost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4.3 Medida Quantitativa da Contracao do Espaco . . . . . . . . . . . . . . . . . . . . . . . 372.4.4 Resumo da Contracao do Espaco e Dilatacao do Tempo . . . . . . . . . . . . . . . . . 372.4.5 Lei de Adicao de Velocidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.4.6 Rotacoes Hiperbolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
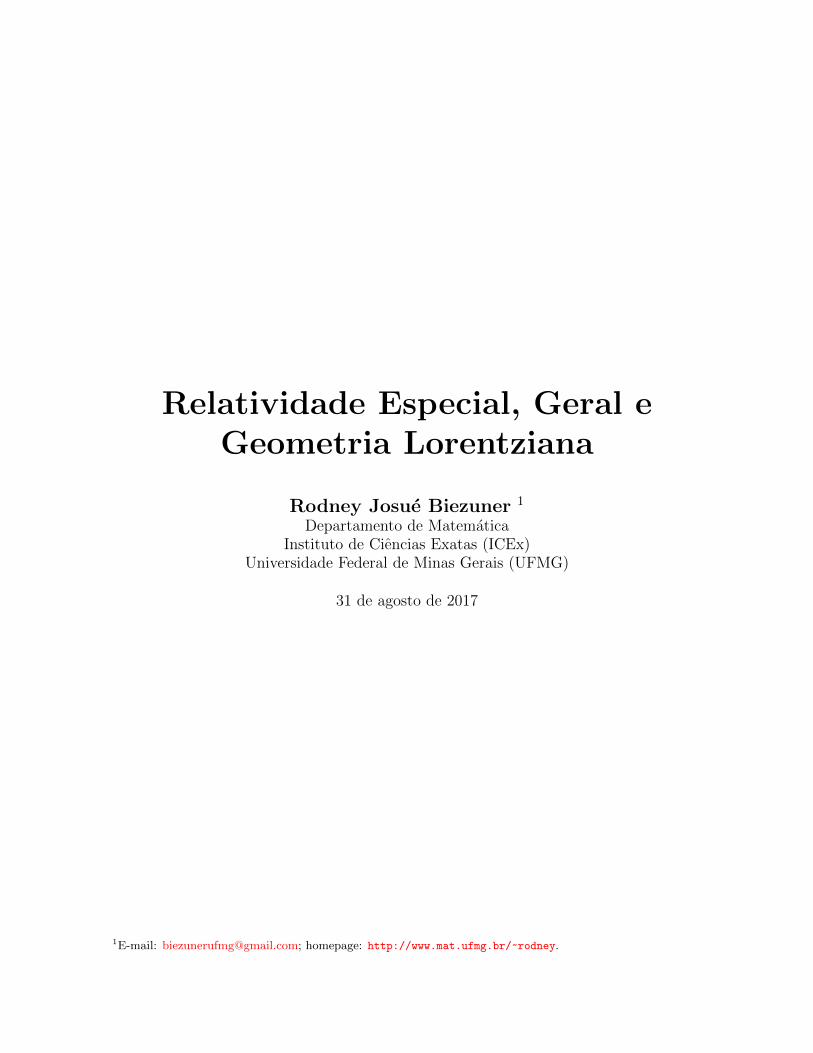
3 Paradoxos 443.1 Diagramas de Espacotempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2 Impossibilidade de se viajar acima da velocidade da luz . . . . . . . . . . . . . . . . . . . . . 463.3 Geodesicas no Espaco de Minkowski . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.4 Paradoxo dos Gemeos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 Momento-Energia 544.1 4-Vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.2 Momento-Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5 Aceleracao no Espacotempo de Minkowski 58
6 O Tensor do Campo Eletromagnetico 59
1

Rodney Josue Biezuner 2
7 O Princıpio de Equivalencia – Geodesicas no Espacotempo Curvo 607.1 O Pensamento Mais Feliz da Vida de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.1.1 Inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8 Topologia Diferencial 628.1 Variedades Diferenciaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 628.2 Aplicacoes Diferenciaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
8.2.1 Particoes da Unidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 648.3 Vetores Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8.3.1 Vetores Tangentes a Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658.3.2 Vetores Tangentes como Derivacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 688.3.3 Diferencial de uma Aplicacao Diferenciavel . . . . . . . . . . . . . . . . . . . . . . . . 69
8.4 Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 708.4.1 Diferencial em Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
8.5 Fibrado Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 728.6 Fibrados Vetoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 728.7 Campos Vetoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 738.8 Colchete de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758.9 Derivada de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 788.10 Campos Vetoriais que Comutam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 818.11 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
9 Tensores 869.1 Vetores Contravariantes e Covariantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.1.1 Significado Real do Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 889.2 Convencao da Soma de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 899.3 Vetores e Covetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.3.1 Mudanca de Coordenadas em Espacos Vetoriais . . . . . . . . . . . . . . . . . . . . . . 899.3.2 Covetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 909.3.3 O Espaco Bidual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
9.4 Vetores e Covetores Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 939.4.1 Mudanca de Coordenadas no Espaco Tangente TpM . . . . . . . . . . . . . . . . . . . 939.4.2 Covetores Tangentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
9.5 Tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959.5.1 Definicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959.5.2 Produto Tensorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 969.5.3 Mudanca de Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 989.5.4 Traco de Tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
9.6 Fibrados Tensoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1019.7 Campos Tensoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1019.8 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
10 Variedades Metricas 10310.1 Definicao e Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10310.2 Comprimentos e Volumes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
10.2.1 Comprimentos de Curvas Parametrizadas . . . . . . . . . . . . . . . . . . . . . . . . . 11110.2.2 Volumes em Variedades Riemannianas Orientaveis . . . . . . . . . . . . . . . . . . . . 112
10.3 Grupos de Lie e Algebras de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11310.4 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117

Rodney Josue Biezuner 3
11 Conexoes 11811.1 Conexoes e Derivada Covariante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11811.2 Derivada Covariante ao longo de Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12011.3 Transporte Paralelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12211.4 Conexao Compatıvel com a Metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12311.5 O Tensor Torsao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
11.5.1 Conexao Simetrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12511.6 Conexoes Metricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
11.6.1 Sımbolos de Christoffel da Conexao Metrica . . . . . . . . . . . . . . . . . . . . . . . . 12911.6.2 Interpretacao Geometrica da Derivada Covariante . . . . . . . . . . . . . . . . . . . . 131
12 Geodesicas 13312.1 Definicao – A Equacao Geodesica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13312.2 Exemplos de Geodesicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13512.3 Fluxo Geodesico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13912.4 A Aplicacao Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14112.5 Lema de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14312.6 Geodesicas em Variedades Riemannianas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
12.6.1 Geodesicas em Variedades Riemannianas minimizam distancias localmente . . . . . . 14712.6.2 Vizinhancas Convexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
12.7 Geodesicas em Variedades de Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15212.8 Funcao Distancia em Variedades Riemannianas . . . . . . . . . . . . . . . . . . . . . . . . . . 15512.9 Variedades Riemannianas Completas e Teorema de Hopf-Rinow para Variedades Riemannianas15612.10Apendice: Geodesicas atraves do Metodo Variacional . . . . . . . . . . . . . . . . . . . . . . . 15912.11Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
13 Curvatura 16313.1 Mais sobre Tensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16313.2 O Tensor Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
13.2.1 O Endomorfismo Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16413.2.2 O Significado da Curvatura Nula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16513.2.3 Operacao de Subir ou Descer um Indice . . . . . . . . . . . . . . . . . . . . . . . . . . 16913.2.4 O Tensor Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
13.3 Curvatura de Ricci e Curvatura Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18013.4 Curvatura Seccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18313.5 Variedades Riemannianas de Curvatura Seccional Constante . . . . . . . . . . . . . . . . . . . 18813.6 Apendice: Motivacao para a definicao do tensor curvatura . . . . . . . . . . . . . . . . . . . . 190
13.6.1 Efeitos de Mare em Mecanica Newtoniana . . . . . . . . . . . . . . . . . . . . . . . . . 19013.6.2 Efeitos de Mare em Relatividade Geral: Curvatura como uma medida da aceleracao
relativa de trajetorias geodesicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19113.6.3 Curvatura como uma medida do transporte paralelo em trajetorias fechadas . . . . . . 194
13.7 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
14 Derivada Covariante de Campos Tensoriais 19814.1 Conexao nos Fibrados Tensoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19814.2 Derivada Covariante Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
14.2.1 Divergencia de Campos Tensoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213

Rodney Josue Biezuner 4
15 O Tensor Momento-Energia 21515.1 4-Vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21515.2 Momento-Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21615.3 Fluxos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
15.3.1 Definicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21815.4 Tensor Momento-Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
15.4.1 Tensor Momento-Energia da Poeira . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21915.4.2 Simetria do Tensor Momento-Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . 22115.4.3 Conservacao do Momento-Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22215.4.4 Tensor Momento-Energia de um Fluido Perfeito . . . . . . . . . . . . . . . . . . . . . 222
15.5 Apendice: Divergente e Fluxo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22215.5.1 Significado Geometrico do Divergente Espacial . . . . . . . . . . . . . . . . . . . . . . 22415.5.2 Significado Fısico do Divergente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
16 Equacao de Einstein 22916.1 Equacao de Newton para o Potencial Gravitacional . . . . . . . . . . . . . . . . . . . . . . . . 22916.2 Deducao da Equacao de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
16.2.1 O Tensor de Einstein tem Divergencia Nula . . . . . . . . . . . . . . . . . . . . . . . . 23316.2.2 O Limite Newtoniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
16.3 Postulado Geodesico como Consequencia da Equacao de Einstein . . . . . . . . . . . . . . . . 23616.4 A Constante Cosmologica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
17 A Solucao de Schwarzschild 23917.1 Metrica Plana em Coordenadas Esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23917.2 Metrica de Schwarzschild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24017.3 Conservacao de Energia e Momento Angular em Geodesicas do Espacotempo de Schwarzchild 250
17.3.1 Equacao Geodesica na Metrica de Schwarzchild . . . . . . . . . . . . . . . . . . . . . . 25017.3.2 Energia e Momento Angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
17.4 Queda Livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25217.5 Calculo da Deflexao da Luz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25217.6 Precessao do Perihelio de Mercurio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25217.7 Buracos Negros de Schwarzschild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25217.8 Produtos Dobrados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
17.8.1 Espacotempos Estaticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
18 Campos de Jacobi 25418.1 A Equacao de Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25418.2 Campos de Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25618.3 Campos de Jacobi em Variedades de Curvatura Seccional Constante . . . . . . . . . . . . . . 26118.4 Velocidade de Afastamento das Geodesicas e Curvatura Seccional . . . . . . . . . . . . . . . . 26318.5 Pontos Conjugados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
19 Causalidade 26919.1 Orientacao Temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26919.2 Teoria de Causalidade para Espacotempos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
19.2.1 Cronologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27019.3 Apendice: O Recobrimento Duplo Temporalmente Orientavel . . . . . . . . . . . . . . . . . . 271

Capıtulo 1
Teoria da Relatividade Especial
Principais personagens e porque estao listados aqui:
• Aristoteles (384 BCE–322 BCE): primeira teoria sistematica do movimento.
• Galileo Galilei (1564–1642): princıpio da relatividade galileana e corpos caem com a mesma aceleracaono vacuo.
• Isaac Newton (1642–1726): primeira e segunda leis da dinamica, espaco e tempo absolutos, teoria dagravitacao universal (com o conceito de acao a distancia associado, modelado nos fenomenos eletricoe magneticos).
• Michael Faraday (1791–1867): lei da inducao de Faraday (inspiracao direta para a teoria da relatividadeespecial) e a ideia de campos (eliminando a necessidade da ideia de acao a distancia).
• James Clerk Maxwell (1831–1879): equacoes de Maxwell para o eletromagnetismo; luz e uma ondaeletromagnetica.
• Ernst Mach (1838–1916): princıpio da inercia de Mach (inspiracao indireta para a teoria da relatividadegeral; depois refutado).
• Albert Einstein (1879–1955): teoria da relatividade especial e teoria da relatividade geral.
• Hermann Minkowski (1864–1909): conceito do espacotempo.
1.1 Breve Introducao
Aristoteles dividiu o movimento em dois tipos, forcado e natural. O melhor exemplo de um movimentonatural e o de um corpo que cai. De acordo com Aristoteles, este e um movimento natural, nao sendocausado por nada. Embora esta divisao pareca bastante simplista, veremos que algumas das ideias deAristoteles em um certo sentido tiveram um renascimento na Teoria da Relatividade Geral (veja [Petkov],p. 16 e pp. 21–22).
O modelo para o Universo que Aristoteles adotou foi o geocentrico (a Terra no centro do Universo e tudo omais girando em torno dela). Galileo adotou o modelo heliocentrico de Copernico e para justifica-lo foi forcadoa abandonar a fısica de Aristoteles. Ele realizou uma serie de experimentos, reais e imaginarios (thoughtexperiments, uma expressao que ficou consagrada de Einstein em diante) para chegar a duas conclusoesfundamentais: e impossıvel determinar quando se esta em repouso ou em movimento e a aceleracao com queum corpo cai no vacuo e constante, independentemente de seu peso. Para justificar o primeiro princıpio,conhecido como relatividade galileana, ele usou a experiencia de uma pessoa dentro da cabine fechada de um
5

Rodney Josue Biezuner 6
navio: quer o navio encontre-se em movimento ou repouso, todos os objetos dentro do navio se comportaraoda mesma forma. Assim, se a agua cai de um balde, ela cai na vertical, mesmo quando o navio se move,e se houver borboletas voando, elas nao vao se acumular na traseira da cabine (veja [Topper], Cap. 1, pp.3–7 e [Petkov], Cap 2, pp. 23–28). Quanto ao segundo princıpio, e um debate historico se Galileo realmenterealizou um experimento de cima da Torre de Pisa, ja que ele nao ha nenhum documento dele afirmandoisso. O que se conhece e o seu celebre experimento imaginario, em que ele imaginou tres corpos com o mesmopeso caindo portanto com a mesma aceleracao no vacuo; se dois deles sao colados por uma cola sem peso,isso nao deve afetar a sua aceleracao, mas agora temos dois corpos, um com o dobro do peso do primeiro.(Veja [Topper], Cap. 11, pp 85–88.)
Newton aceitou os dois princıpios de Galileo. O primeiro ele imortalizou na sua primeira lei do movimento,definindo mais precisamente o movimento no princıpio de relatividade de Galileo como sendo movimentoretilıneo uniforme, enquanto que o segundo e consequencia da sua segunda lei do movimento, onde eleintroduziu o conceito de massa inercial (uma medida de resistencia ao movimento) e da Lei da GravitacaoUniversal, onde ele introduziu o conceito de massa gravitacional (uma medida da intensidade da forcagravitacional); o fato da aceleracao dos corpos que caem ser constante era consequencia da equivalencia dasduas. Na Lei da Gravitacao Universal, Newton introduziu tambem o conceito de acao a distancia ou forcaoculta, algo que foi aceito com muita dificuldade na epoca (apesar de Newton invocar os fenomenos eletricoe magnetico como exemplos de que isso ocorre na realidade). O conceito de acao a distancia so foi aceitoporque sua teoria funcionava. Eventualmente, quando Faraday introduziu os conceitos de campos eletricoe magnetico, o conceito de campo gravitacional seguiu-se naturalmente. Tambem a questao de porque oscorpos se atraem, bastante debatida na epoca depois da sua introducao por Newton, foi de forma semelhanteignorada por ele, como escreveu no final das ultimas edicoes do seu Principia Mathematica: “E e suficienteque a gravidade realmente existe e age de acordo com as leis que estabelecemos e e suficiente para explicartodos os movimentos dos corpos celestes e do nosso mar [isto e, as mares].”; ou seja, nao pergunte mais, ouindague questoes fısicas, mais profundas, pois a matematica funciona e isto e suficiente (veja [Topper], Cap.4, pp. 25–28). Foi o primeiro exemplo em Fısica da atitude “cale a boca e faca as contas” (veja [Petkov],Cap. 2, p. 2). A atitude de Newton foi aceita ate que Einstein formulou a Teoria da Relatividade Geral.
1.2 Deducao da existencia de ondas eletromagneticas atraves dasequacoes de Maxwell
Lembramos as equacoes de Maxwell no vacuo (1873):
div E =ρ
ε0,
rot E = −∂B
∂t,
div B = 0,
rot B = µ0
(J + ε0
∂E
∂t
),
que tambem podem ser escritas na notacao
∇ ·E =ρ
ε0,
∇×E = −∂B
∂t,
∇ ·B = 0,
∇×B = µ0
(J + ε0
∂E
∂t
),

Rodney Josue Biezuner 7
onde E e o campo eletrico, B o campo magnetico, ρ a densidade (volumetrica) de carga eletrica, ε0 aconstante de permissividade eletrica do vacuo, µ0 a constante de permeabilidade magnetica do vacuo e J adensidade de corrente eletrica (veja [Fleisch1], para uma introducao curta mas muito boa sobre as equacoesde Maxwell).
1.1 Lema. Seja V um campo vetorial. Entao
rot (rot V) = grad (div V)− div (grad V)
= ∇ (div V)−∆V.
Em outra notacao,
∇× (∇×V) = ∇ (∇ ·V)−∇ · (∇V)
= ∇ (∇ ·V)−∇2V.
Prova: Escrevendo V = (V1, V2, V3), temos
∇×V =
∣∣∣∣∣∣∣i j k∂
∂x
∂
∂y
∂
∂zV1 V2 V3
∣∣∣∣∣∣∣ =
(∂V3
∂y− ∂V2
∂z,∂V1
∂z− ∂V3
∂x,∂V2
∂x− ∂V1
∂y
),
donde
∇× (∇×V) =
∣∣∣∣∣∣∣∣∣i j k∂
∂x
∂
∂y
∂
∂z∂V3
∂y− ∂V2
∂z
∂V1
∂z− ∂V3
∂x
∂V2
∂x− ∂V1
∂y
∣∣∣∣∣∣∣∣∣=
(∂2V2
∂y∂x− ∂2V1
∂y2− ∂2V1
∂z2+∂2V3
∂z∂x,
− ∂2V2
∂x2+∂2V1
∂x∂y+∂2V3
∂z∂y− ∂2V2
∂z2,
∂2V1
∂x∂z− ∂2V3
∂x2− ∂2V3
∂y2+∂2V2
∂y∂z
)=
(∂2V1
∂x2+∂2V2
∂y∂x+∂2V3
∂z∂x− ∂2V1
∂x2− ∂2V1
∂y2− ∂2V1
∂z2,
∂2V1
∂x∂y+∂2V2
∂y2+∂2V3
∂z∂y− ∂2V2
∂x2− ∂2V2
∂y2− ∂2V2
∂z2,
∂2V1
∂x∂z+∂2V2
∂y∂z+∂2V3
∂z2− ∂2V3
∂x2− ∂2V3
∂y2− ∂2V3
∂z2
)=
(∂
∂x
(∂V1
∂x+∂V2
∂y+∂V3
∂z
)−∆V1,
∂
∂y
(∂V1
∂x+∂V2
∂y+∂V3
∂z
)−∆V2,
∂
∂z
(∂V1
∂x+∂V2
∂y+∂V3
∂z
)−∆V3
)= ∇ (div V)−∆V.

Rodney Josue Biezuner 8
1.2 Teorema (Existencia de Ondas Eletromagneticas). Sejam E e B os campos eletrico e magnetico,respectivamente. Entao, no vacuo, em um ambiente livre de cargas eletricas, os campos eletrico e magneticosatisfazem a equacao da onda homogenea:
∂2E
∂t2=
1
µ0ε0∆E,
∂2B
∂t2=
1
µ0ε0∆B.
Prova. Do lema anterior temos que
rot (rot E) = ∇ (div E)−∆E,
rot (rot B) = ∇ (div B)−∆B.
No vacuo, em um ambiente livre de cargas eletricas, a primeira e terceira equacoes de Maxwell (leis de Gausspara o campo eletrico e para o campo magnetico, respectivamente) se tornam
div E = 0,
div B = 0,
logo
rot (rot E) = −∆E, (1.1)
rot (rot B) = −∆B.
Por outro lado, no vacuo, em um ambiente livre de cargas eletricas, a segunda e quarta equacoes de Maxwell(lei de inducao de Faraday e lei de Ampere com a correcao de Maxwell)
rot E = −∂B
∂t,
rot B = µ0ε0∂E
∂t.
Portanto,
rot (rot E) = − ∂
∂t(rot B) = −µ0ε0
∂2E
∂t2, (1.2)
rot (rot B) = µ0ε0∂
∂t(rot E) = −µ0ε0
∂2B
∂t2.
Reunindo (1.1) e (1.2), obtemos o resultado desejado. As solucoes das equacoes da onda do Teorema 1.2 sao chamadas ondas eletromagneticas. Pode-se mostrar,usando as equacoes de Maxwell, que as ondas eletromagneticas sao ondas transversais, ou seja, as vibracoesdos campos eletrico e magnetico sao na direcao perpendicular a direcao de propagacao da onda (para umadeducao simples e curta veja, por exemplo, [Woodhouse], Secoes 3.3 e 3.4, pp. 42–44; as ondas de som saoum exemplo de ondas longitudinais, em que as vibracoes sao na mesma direcao de propagacao da onda).
1.3 Corolario. A velocidade de uma onda eletromagnetica no vacuo e
c =1
√µ0ε0
= 2, 99792458× 108m/s.

Rodney Josue Biezuner 9
Prova. Pois
∂2E
∂t2= c2∆E,
∂2B
∂t2= c2∆B.
Como este valor e igual ao da velocidade da luz, Maxwell concluiu que a luz e uma onda eletromagnetica.Varios experimentos posteriores corroboraram esta ideia. As equacoes de Maxwell foram as primeiras leisda Fısica a conterem uma velocidade como uma constante fundamental.
1.2.1 O Eter
Na teoria ondulatoria da luz de Fresnel (1821), a luz era uma onda mecanica que se propaga em um meiochamado o eter luminıfero. Ou seja, as vibracoes da luz correspondiam a vibracoes das moleculas eterias.A velocidade de propagacao c da luz era uma propriedade do eter. Para conter ondas transversais, o etertinha que ser um meio material elastico, embora fosse estranho que nao existissem ondas longitudinais nestemeio. Alem disso, para produzir ondas com esta enorme velocidade de propagacao (em um segundo, a luzda 7 voltas ao redor da Terra), o eter tinha que ser extremamente rıgido. O eter tinha que preencher todoo Universo, pois a luz se propaga em todo lugar. Era logico consider o eter como estando em repouso emrelacao ao espaco absoluto de Newton, funcionando como uma especie de materializacao deste.
No entanto, uma tal substancia onipresente deveria produzir outros efeitos mecanicos, alem dos fenomenosluminosos. Como podem os planetas se moverem atraves do eter sem perder energia? O eter penetrariaatraves dos corpos moveis sem perturba-los ou seria arrastado por eles? O eter parecia ser uma substanciaintangıvel sem qualquer outro efeito alem de ser o lugar onde os fenomenos luminososo ocorriam ([Springer],Secao 1.3.3). Todo o conceito do eter soa bastante estranho para nos, ate que lembramos que hoje em diaa teoria da materia escura, formada de misteriosas partıculas que interagem apenas gravitacionalmente, ebastante aceita.
Da mesma forma Maxwell viu suas ondas eletromagneticas como um fenomeno mecanico em um meiopropagador. Apos reconhecer que a luz era uma onda eletromagnetica, ele identificou este meio propagadorcom o eter de Fresnel. Portanto ele acreditava que suas equacoes eram validas em um referencial fixado nestemeio.
De maneira semelhante, em um experimento imaginario (thought experiment) celebre, que Einstein afir-mou em sua autobiografia ter tido na idade de 16 anos, ele imaginou o que aconteceria se viajassemos em umraio de luz. Seguindo [Topper] (uma excelente historia cientıfica sobre a descoberta de Einstein da Teoriada Relatividade) vamos descrever o experimento imaginario de Einstein de uma forma diferente: imagine-seestando na cabine do piloto de uma nave espacial, tendo atras da poltrona uma fonte de luz. A medida quea nave fosse acelerando, haveria uma hora em que ela ultrapassaria a velocidade da luz e entao a cabinerepentinamente ficaria as escuras. Desta forma seria possivel determinar se a nave estava em repouso ou nao.Mas isso significaria abandonar o princıpio de relatividade de Galileu, tambem fundamental na MecanicaNewtoniana, que afirmava que nao se podia distinguir quando se estava em repouso e quando se estava emmovimento retilıneo uniforme. Para nao violar este princıpio, a luz teria que se mover com uma velocidadeigual a soma da velocidade da nave e da velocidade da luz.
Varios experimentos no final do seculo XIX falharam em descobrir qualquer variacao na velocidade daluz devido ao movimento da fonte, notavelmente o experimento de Michelson-Morley (1881; veja [Springer],Secao 1.3, para uma descricao breve deste e de outros experimentos e [Ferraro], Capıtulo 2, para umadiscussao bem mais detalhada pelo mesmo autor).
1.3 Referenciais Inerciais
1.4 Definicao. Um referencial e um sistema de coordenadas no espaco e no tempo.

Rodney Josue Biezuner 10
Desta forma, associamos R4 ao espaco e ao tempo. Em geral, denotaremos as coordenadas de um referencialpor (t, x, y, z). Outras notacoes para as coordenadas serao introduzidas mais tarde.
Observe que com esta associacao, por enquanto o espaco e o tempo formam juntos apenas um espacovetorial de dimensao 4, mas nao ha uma unidade entre eles. O espaco e medido de uma forma diferente daforma em que o tempo e medido, as unidades de medida de espaco (metros) sao diferentes das unidades demedida de tempo (segundos). Em outras palavras este espaco vetorial ainda nao tem uma metrica associada.
No que se segue, o termo partıcula-teste se refere a uma partıcula com massa suficientemente pequenapara nao ter influencias gravitacionais perceptıveis dentro de uma precisao previamente fixada. Dizemos queela e livre se ela nao esta sujeita a nenhuma forca.
1.5 Definicao. Dizemos que um referencial para uma certa regiao de espaco e de tempo e um referencialinercial se naquela regiao de espaco e tempo, de acordo com uma precisao previamente especificada, todapartıcula-teste livre inicialmente em repouso com relacao aquele referencial permanece em repouso, e todapartıcula-teste inicialmente em movimento com relacao aquele referencial continua seu movimento ao longode uma reta (isto e, sem mudanca de velocidade em modulo ou direcao).
Referenciais inerciais sao eminentemente locais. Um elevador suficientemente pequeno em queda livre sob aacao de um campo gravitacional uniforme (por exemplo, o campo gravitacional de um planeta ou estrela, auma distancia razoavel da superfıcie) durante um intervalo de tempo suficientemente pequeno e um referencialinercial, dentro de uma precisao fixada, porque todas as partıculas-teste caem com a mesma aceleracao.A medida que o tempo passa, efeitos de mare passam a predominar e partıculas-teste inicialmente emrepouso na direcao do campo gravitacional comecam a se distanciar (partıculas-teste mais proximas da fontedo campo gravitacional sofrem aceleracao maior), enquanto que partıculas-teste inicialmente em repousosituadas em uma direcao perpendicular a direcao do campo gravitacional comecam a se aproximar (ja quecada partıcula cai seguindo a sua linha do campo gravitacional). Outro referencial inercial e uma regiaodo espaco suficientemente longe da fonte de um campo gravitacional, durante algum intervalo de temporazoavel. Para uma discussao mais detalhada sobre referenciais inerciais, veja as secoes 2.1-2.5 do livroSpacetime Physics [Taylor-Wheeler], pp. 25–36.
1.6 Definicao. Um ponto no espaco e no tempo R4 e chamado um evento.Uma observacao feita por um observador em um referencial inercial e simplesmente o ato de atribuir
a qualquer evento as suas coordenadas (t, x, y, z), ou seja, as coordenadas espaciais x, y, z da localizacaoespacial da sua ocorrencia e o instante de tempo t lido no relogio situado neste ponto em que o eventoocorre.
1.4 Princıpio da Relatividade
1.7 Axioma (Princıpio da Relatividade de Einstein). Todas as leis da Fısica sao as mesmas emqualquer referencial inercial.
O Princıpio da Relatividade diz que uma vez que as leis da Fısica foram estabelecidas em um referencialinercial, elas podem ser aplicadas sem modificacao em qualquer outro referencial inercial. A forma ma-tematica das leis da Fısica e os valores numericos das constantes fısicas basicas que estas leis contem sao asmesmas em qualquer referencial inercial. No que se refere as leis da Fısica, todos os referenciais inerciais saoequivalentes. Consequentemente,
1.8 Corolario. Nenhum teste das leis da Fısica produz uma maneira de distinguir um referencial inercialde outro referencial inercial.
1.9 Corolario. As equacoes de Maxwell no vacuo sao as mesmas em qualquer referencial inercial.
Daı o tıtulo do artigo original em que Einstein (1905) propos a Teoria da Relatividade Especial: On theElectrodynamics of Moving Bodies.

Rodney Josue Biezuner 11
1.10 Corolario. A velocidade da luz no vacuo e a mesma em qualquer referencial inercial.
Assim, quando se mede a velocidade da luz em um referencial inercial sempre se obtem o mesmo valor c, dadono Corolario 1.3. No artigo original de Einstein, este resultado e enunciado como um segundo postulado.
O nome Teoria da Relatividade a rigor nao e apropriado. Na verdade o Princıpio da Relatividade diz queas leis da Fısica sao absolutas, no sentido de que nao dependem do referencial inercial em que sao testadas(por exemplo, a velocidade da luz tem o mesmo valor absoluto, que nao e relativo ao referencial inercial emque e medido). Um melhor nome para a Teoria da Relatividade seria a Teoria da Invariancia. No entanto,uma consequencia do Princıpio de Relatividade, como veremos, e a relatividade do espaco e do tempo, isto e,medidas do deslocamento espacial (separacao entre dois pontos no espaco) e do intervalo temporal (separacaoentre dois momentos no tempo) dependem do referencial inercial em que elas sao realizadas. Dada que estaconsequencia nao intuitiva foi a maior surpresa da Teoria da Relatividade quando ela foi formulada e a maiordificuldade em aceita-la, ela recebeu o nome deste fenomeno.
No que se segue, escolhemos unidades de espaco e tempo de tal forma que c = 1.
1.5 Invariancia do Intervalo Espacotemporal
1.11 Definicao. O intervalo entre dois eventos quaisquer do espacotempo separados por incrementos∆t,∆x,∆y,∆z e definido por
∆s2 = (∆x)2
+ (∆y)2
+ (∆z)2 − (∆t)
2
Observe que podemos ter∆s2 > 0
ou∆s2 < 0
ou∆s2 = 0.
1.12 Lema. ∆s2 = 0 se e somente se os dois eventos ocorrem um apos o outro na velocidade da luz.Consequentemente, se O e O sao dois referenciais inerciais, entao
∆s2 = 0
se e somente se∆s2 = 0.
Prova. Pois, pelo Princıpio de Relatividade, a velocidade da luz e constante igual a 1 em qualquer referencialinercial. Eventos que ocorrem na velocidade da luz sao, por exemplo, os eventos emissao de um foton e absorcao domesmo.
No que se segue, usaremos a seguinte notacao:
∆t = ∆x0,
∆x = ∆x1,
∆y = ∆x2,
∆z = ∆x3.
1.13 Teorema (Invariancia do Intervalo). Sejam O e O dois referenciais inerciais. Entao
∆s2 = ∆s2.

Rodney Josue Biezuner 12
Prova. [Shutz]Observe que a relacao entre as coordenadas de O e O e linear, porque caso contrario,existiria um objeto em movimento retilıneo uniforme em um referencial (trajetoria reta) que nao estaria emmovimento retilıneo uniforme no outro referencial (sua trajetoria nao seria uma reta), contrariando o princıpiode relatividade (ate mesmo galileano). Por simplicidade, assuma tambem que suas origens coincidem, istoe, os eventos t = x = y = z = 0 e t = x = y = z = 0 sao os mesmos.
Da hipotese de linearidade, segue que ∆t,∆x,∆y,∆z sao funcoes lineares de ∆t,∆x,∆y,∆z, logo ∆s2 euma funcao quadratica de ∆t,∆x,∆y,∆z, digamos
∆s2 =
3∑i,j=0
Mij∆xi∆xj . (1.3)
Observe que em princıpio podemos ter Mij = Mij (v), onde v e a velocidade relativa entre os dois referenciais(independe dos eventos). Podemos assumir, sem perda de generalidade, que Mij = Mji (trocando, senecessario, Mij por (Mij +Mji) /2).
Para dois eventos em que∆s2 = ∆s2 = 0
temos
M00 (∆t)2
+ 2
(3∑i=1
M0i∆xi
)∆t+
3∑i,j=1
Mij
(∆xi
) (∆xj
)= 0. (1.4)
Como ∆s2 = ∆s2 = 0 continua valendo se substituirmos todos os ∆xi por −∆xi, i = 1, 2, 3, obtemos
M00 (∆t)2 − 2
(3∑i=1
M0i∆xi
)∆t+
3∑i,j=1
Mij
(∆xi
) (∆xj
)= 0.
Subtraindo uma equacao da outra, segue que(3∑i=1
M0i∆xi
)∆t = 0
Escolhendo
∆xi = ∆t = 1,
∆xj = ∆xk = 0, se j, k 6= i,
concluımos queM0i = 0 para i = 1, 2, 3 (1.5)
e, portanto,
M00 (∆t)2
+
3∑i,j=1
Mij
(∆xi
) (∆xj
)= 0.
Daı, com a mesma escolha acima, segue que
Mii = −M00 para i = 1, 2, 3.
Se i 6= j, escolhendo agora
∆xi = 1,∆xj = 1,∆t =√
2,
∆xk = 0, se k 6= i, j,

Rodney Josue Biezuner 13
e
∆xi = 1,∆xj = −1,∆t =√
2,
∆xk = 0, se k 6= i, j,
obtemos, respectivamente,
2M00 + 2M00 + 2Mij = 0,
2M00 + 2M00 − 2Mij = 0;
subtraindo estas duas equacoes, concluımos que
Mij = 0
se i 6= j.Em outras palavras,
Mij = −M00δij para i, j = 1, 2, 3, (1.6)
e∆s2 = M00
[(∆t)
2 − (∆x)2 − (∆y)
2 − (∆z)2]
= −M00 (v) ∆s2. (1.7)
Denoteφ (v) = −M00 (v) . (1.8)
Afirmamos que φ (v) ≡ 1.Em primeiro lugar, observamos que φ e radial, de modo que
φ (v) = φ (|v|) = φ (v) . (1.9)
De fato, escolhendo dois eventos que sao simultaneos no referencial O, isto e, ∆t = 0 (por exemplo, ocomprimento de uma barra) concluımos que(
distancia entre dois eventos simultaneos em O)
= φ (v) (distancia entre dois eventos simultaneos em O) .
Como esta distancia nao pode depender da direcao de v (comprimentos nao dependem da direcao da velo-cidade, ja que comprimentos perpendiculares a direcao da velocidade nao podem sofrer variacoes, conformeargumentaremos na Secao 1.7.3; veja tambem em maiores detalhes [Shutz], pp. 10–11), concluımos queφ (v) = φ (|v|).
Agora considere tres referenciais O, O e O, sendo que O move-se com velocidade v com relacao a O,
enquanto que O move-se com velocidade −v com relacao a O, ou seja, os referenciais O e O sao identicos.Segue que
∆s2 = φ (v) ∆s2,
∆s2
= φ (v) ∆s2,
donde∆s
2= [φ (v)]
2∆s2.
Mas os referenciais O e O sao identicos, logo obtemos de fato que
∆s2 = [φ (v)]2
∆s2,
dondeφ ≡ ±1.
Como o quadrado de comprimentos (isto e, ∆t = 0) deve ser positivo em qualquer referencial inercial, segueque φ ≡ 1.

Rodney Josue Biezuner 14
1.6 Relatividade da Simultaneidade
A maior parte dos paradoxos em Relatividade se originam de mal-entendidos com relacao ao conceito desimultaneidade. A simultaneidade de dois eventos depende do referencial inercial em que eles sao medidos(observados). Eventos que sao simultaneos em um referencial inercial, nao serao simultaneos em outroreferencial inercial que se desloca em relacao ao primeiro com velocidade v nao perpendicular ao vetor queconecta as duas posicoes espaciais dos eventos, como veremos.
A relatividade da simultaneidade e ilustrada pelo paradoxo do trem de Einstein. Relampagos atingemambas as extremidades de um trem que se move, deixando marcas enegrecidas no trem e no trilho. O brilhodo impacto do relampago e emitido em todas as direcoes.
Um observador que se situa no chao fora do trem, no meio entre as duas marcas, conclui que os impactosforam simultaneos, ja que os brilhos o atingem ao mesmo tempo.
Um observador que se situa no meio do trem conclui que os impactos nao foram simultaneos, ja que avelocidade da luz e a mesma em todos os referenciais e o brilho do impacto na frente do trem o atinge antesdo brilho do impacto na parte traseira do trem.
1.7 Relatividade de Intervalos Espaciais e de Intervalos Temporais
1.7.1 Contracao do Espaco
No paradoxo do trem, o observador no chao O mede o comprimento do trem como sendo o valor da medidaentre as duas marcas enegrecidas no trilho, ja que elas ocorreram simultaneamente. Ja o observador dentrodo trem O′ nao concorda com esta medicao: dado que para ele a marca frontal foi feita antes da marcatraseira, e o trem se moveu enquanto isso, para ele a medicao feita pelo observador O deu uma medidamenor para o trem.

Rodney Josue Biezuner 15
E facil entender isso usando a invariancia do intervalo. Os dois eventos sao: evento A, impacto dorelampago com a parte dianteira do trem, e evento B, impacto do relampago com a parte traseira do trem.Digamos que estes dois eventos tem coordenadas (xA, tA) e (xB , tB) no referencial inercial do observador nochao O, e coordenadas (x′A, t
′A) e (x′B , t
′B) no referencial inercial do observador dentro do trem O′. Sejam
∆x = xB − xA,∆t = tB − tA,
e
∆x′
= x′B − x′A,
∆t′
= t′B − t′A,
as separacoes espaciais e temporais destes dois eventos em cada um dos referenciais inerciais. Pela invarianciado intervalo espacotemporal,
(∆x′)2 − (∆t′)
2= (∆x)
2 − (∆t)2.
Mas∆t = 0,
ja que os eventos sao simultaneos no referencial inercial O, consequentemente
(∆x′)2 − (∆t′)
2= (∆x)
2
e∆x′ > ∆x. (1.10)
Assim, o comprimento de uma barra medido em um referencial em que ela esta em repouso e sempre maiorque o comprimento dela medido em um referencial em que ela se move. Este efeito e a chamada contracaode Lorenz. O comprimento da barra medido em um referencial em que ela esta em repouso e chamado o seucomprimento proprio. Portanto, o comprimento proprio e sempre maior que o comprimento medido emum referencial em que a barra esta se movendo. Na Secao 2.4.3 obteremos uma expressao que nos permitiracalcular exatamente o quanto o comprimento e diminuıdo no referencial que se move; o fator de contracaodependera exclusivamente da velocidade deste.
1.7.2 Dilatacao do Tempo
Imagine uma nave espacial viajando em velocidade uniforme ao sistema estelar de Canopus, situado 99anos-luz de distancia da Terra. Suponha que em relacao ao referencial inercial Terra a nave espacial viaja avelocidade de 99/101 vezes a velocidade da luz, ou seja, 99 anos-luz de distancia em 101 anos de tempo. Emoutras palavras, no referencial Terra, a nave espacial leva 101 anos para chegar ate Canopus. As coordenadasdos eventos A, saıda da nave espacial da Terra, e B, chegada da nave a Canopus (ignorando o tempo gastopara acelerar a nave ate a velocidade (99/101) c) no referencial inercial Terra sao
(xA, tA) = (0, 0) ,
(xB , tB) = (99, 101) .
As coordenadas destes eventos no referencial inercial Nave sao
(x′A, t′A) = (0, 0) ,
(x′B , t′B) = (0, T ) ,
pois no referencial inercial Nave os dois eventos, saıda da Terra e chegada em Canopus, ocorrem na mesmaposicao, isto e, na propria nave. Para calcular o tempo T decorrido entre os dois eventos de acordo com o

Rodney Josue Biezuner 16
referencial Nave, calculamos as separacoes espaciais e temporais nos dois referenciais inerciais e usamos ainvariancia do intervalo espacotemporal. Temos
∆x = xB − xA = 99,
∆t = tB − tA = 101,
e
∆x′
= x′B − x′A = 0,
∆t′
= t′B − t′A = T.
Como(∆t′)
2 − (∆x′)2
= (∆t)2 − (∆x)
2,
e∆x′ = 0
segue que
(∆t′)2 − (∆x′)
2= (∆t)
2 − (∆x)2,
isto e,
(∆t′)2
= (∆t)2 − (∆x)
2,
e consequentemente,∆t′ < ∆t. (1.11)
No caso, mais especificamente temos
T 2 = 1012 − 992
= 10.201− 9.801
= 400
e portantoT = 20.
Enquanto na Terra se passaram 101 anos, dentro da nave espacial, decorreram apenas 20 anos. Assim, ointervalo de tempo entre dois eventos medido em um referencial em que eles ocorrem na mesma posicaoe sempre menor que o intervalo de tempo entre os dois eventos medido em um referencial que se moveem relacao ao primeiro. Este efeito e a chamada dilatacao do tempo. O intervalo de tempo entre doiseventos medido em um referencial em que eles ocorrem na mesma posicao e chamado o seu tempo proprio.Portanto, o tempo proprio e sempre menor que o tempo medido em um referencial que esta se movendo emrelacao a este referencial. Na Secao 2.4.1 obteremos uma expressao que nos permitira calcular exatamenteo quanto o tempo e dilatado no referencial que se move; o fator de dilatacao dependera exclusivamente davelocidade deste.
Observe que quanto mais proxima da velocidade da luz e a velocidade da nave, menor o tempo decorridona nave. No limite, se a nave se movesse a velocidade da luz (o que e impossıvel para partıculas materiais,como veremos no final deste capıtulo), o intervalo de tempo seria zero, pois neste caso terıamos
∆x = ∆t = 99,
de modo que
(∆t′)2
= (∆t)2 − (∆x)
2= 0.

Rodney Josue Biezuner 17
1.7.3 Invariancia das Dimensoes Transversais
As dimensoes de objetos que se movem em direcoes transversais a direcao de movimento relativo de doisreferenciais inerciais tem a mesma medida nos dois referenciais.
Isso decorre de um argumento de simetria: nao ha nenhuma direcao privilegiada segundo a qual podehaver uma contracao ou dilatacao (fisicamente, dizemos que o espaco e isotropico, isto e, e o mesmo em todasas direcoes). Imagine dois cilindros ocos de mesmo raio e comprimento viajando em velocidade constante, umna direcao do outro, ao longo do seu eixo comum de simetria. Imagine que um dos cilindros esta em repouso(cilindro A) em relacao a um certo referencial inercial. Se o outro cilindro (cilindro B) for medido comotendo o seu raio contraindo [dilatando] em relacao a este referencial, entao ele passara por dentro [por fora]do cilindro A. Por outro lado, em relacao a um segundo referencial em repouso ao cilindro B exatamente ocontrario se verificara: o cilindro A passara por dentro [por fora] do cilindro B. Isto e intoleravel do pontode vista da logica. Uma objecao mais fundamental e esta escolha arbitraria do eixo de contracao [dilatacao].Se os dois cilindros estao viajando paralelamente, qual seria o eixo ao longo do qual se verificaria a contracao[dilatacao] em relacao a um referencial inercial externo aos cilindros, em relacao ao qual eles se movem? Oscilindros se contrairiam [dilatariam] cada um em relacao ao seu eixo de movimento ou em relacao a retaequidistante deles? Para o observador inercial externo, qualquer eixo paralelo ao movimento dos cilindros eequivalente. Veja [Taylor-Wheeler], Secao 3.6, pags. 65–67, para uma discussao detalhada.
Da mesma forma, dois eventos com separacoes espaciais transversais a direcao de movimento relativo dedois referenciais inerciais sao simultaneos em um dos referenciais se e somente se eles sao simultaneos nooutro referencial.
Isso decorre tambem de um argumento de simetria. Se, em um cilindro viajando com velocidade uniformeem relacao a um referencial inercial externo, dois eventos ocorrem simultaneamente na periferia do cilindrode acordo com o referencial inercial do proprio cilindro, como decidir qual evento ocorreria antes ou depoisno referencial inercial externo? Tambem no referencial externo os dois eventos devem ser simultaneos.

Capıtulo 2
O Espacotempo de Minkowski
2.1 Produto Interno e Formas Quadraticas
2.1 Definicao. Seja V um espaco vetorial real de dimensao finita.Uma forma bilinear em V e uma aplicacao f : V× V −→ R que e linear em cada variavel, isto e,
f (αv + βw, u) = αf (v, u) + βf (w, u) ,
f (u, αv + βw) = αf (u, v) + βf (u,w) ,
para todos u, v, w ∈ V e para todos α, β ∈ R. Uma forma bilinear f e simetrica se
f (v, w) = f (w, v)
para todos v, w ∈ V. Uma forma bilinear B e nao-degenerada se
f (v, u) = 0
para todo u ∈ V implicar v = 0 e sef (u,w) = 0
para todo u ∈ V implicar w = 0.Um produto interno (ou metrica) em V e uma forma bilinear simetrica nao-degenerada, que geralmente
denotaremos por g ou por 〈·, ·〉.Um produto interno 〈·, ·〉 e positivo definido se
〈v, v〉 > 0,
para todo v ∈ V e negativo definido se〈v, v〉 < 0,
para todo v ∈ V.Dizemos que dois vetores v, w sao ortogonais se 〈v, w〉 = 0.
2.2 Exemplo. Seja V um espaco vetorial real de dimensao finita e
B = e1, . . . , en
uma base para V. Para 0 6 k 6 n e α1, . . . , αn ∈ R, αi > 0 para todo i, definimos o produto interno
〈v, w〉 = −k∑i=1
αiviwi +
n∑i=k+1
αiviwi,
18

Rodney Josue Biezuner 19
onde v =(v1, . . . , vn
)e w =
(w1, . . . , wn
)sao as coordenadas de v e w em relacao a B.
De fato, esta e claramente uma forma bilinear simetrica. Se
〈v, w〉 = 0
para todo w ∈ V, isso vale em particular para os vetores da base canonica e1, . . . , en. Mas 〈v, ei〉 = ±αivi,logo vi = 0 para todo i e portanto ela e nao-degenerada. Se k = 0 este produto interno e positivo definido,se k = n este produto interno e negativo definido e se 0 < k < n este produto interno nao e nem positivodefinido nem negativo definido, pois vetores da forma
v =(v1, . . . , vk, 0, . . . , 0
)satisfazem 〈v, v〉 < 0, enquanto que vetores v da forma
v =(0, . . . , 0, vk+1, . . . , vn
)satisfazem 〈v, v〉 > 0.
Em geral, fixada uma base em um espaco vetorial V, se os seus vetores sao expressos em coordenadas emrelacao a esta base, a formula acima define um produto interno em V.
2.3 Definicao. Seja V um espaco vetorial de dimensao finita com produto interno 〈·, ·〉.A forma quadratica induzida por 〈·, ·〉 (ou associada a 〈·, ·〉) e a aplicacao q : V −→ R definida por
q (v) = 〈v, v〉 .
Dizemos que v e um vetor do tipo luz se q (v) = 0.Dizemos que v e um vetor unitario se q (v) = ±1.Dado um espaco vetorial com produto interno V, dizemos que uma base B = e1, . . . , en para V e
ortonormal se os seus vetores sao dois a dois ortogonais e unitarios.
2.4 Exemplo. Para a forma quadratica q induzida pelo produto interno g em V do Exemplo 2.2 com αi = 1para todo i, isto e,
〈v, w〉 = −k∑i=1
viwi +
n∑i=k+1
viwi,
onde v =(v1, . . . , vn
)e w =
(w1, . . . , wn
)sao as coordenadas de v e w em relacao a uma base B =
e1, . . . , en fixada, de modo que
q (v) = −k∑i=1
(vi)2
+
n∑i=k+1
(vi)2,
a propria base B e ortonormal, com
q (ei) =
−1 se i = 1, . . . , k,
1 se i = k + 1, . . . , n.
2.5 Exemplo. Se q e uma forma quadratica induzida por um produto interno positivo definido ou por umproduto interno negativo definido, entao v e um vetor do tipo luz se e somente se v = 0. Se q e induzida porum produto interno que nao e definido, entao mesmo que v 6= 0 pode acontecer que v seja um vetor do tipoluz. Por exemplo, para a forma quadratica do Exemplo 2.4, se k 6= 0 temos
q (ei + ej) = 0

Rodney Josue Biezuner 20
para todos 1 6 i 6 k e k + 1 6 j 6 n. De fato, e possıvel obter uma base para V composta inteiramente devetores do tipo luz. No caso k = 1, basta tomar
B′ = e1 + e2, e1 − e2, e1 + e3 . . . , e1 + en .
Para ver que B′ e uma base, basta verificar que os n vetores que a formam sao LI. Se
α1 (e1 + e2) + α2 (e1 − e2) + α3 (e1 + e3) + . . .+ αn (e1 + en) = 0,
entao (n∑i=1
αi
)e1 + (α1 − α2) e2 +
n∑i=3
αiei = 0.
Como B e uma base, segue quen∑i=1
αi = 0,
α1 − α2 = 0,
α3 = . . . = αn = 0,
donde αi = 0 para todo i.
Note queq (v) = q (−v) ,
para todo v ∈ V, poisq (−v) = 〈−v,−v〉 = 〈v, v〉 = q (v) .
De modo geral,q (αv) = α2q (v) .
2.6 Proposicao (Identidade Polar). Um produto interno e completamente determinado por sua formaquadratica associada. Mais especificamente, se q e a forma quadratica induzida pelo produto interno 〈·, ·〉,entao
〈v, w〉 =1
2[q (v + w)− q (v)− q (w)] .
e
〈v, w〉 =1
4[q (v + w)− q (v − w)]
Em particular, toda forma bilinear simetrica induz uma unica forma quadratica.
Prova. Pois,
q (v + w)− q (v)− q (w) = 〈v + w, v + w〉 − 〈v, v〉 − 〈w,w〉= 〈v, v〉+ 2 〈v, w〉+ 〈w,w〉 − 〈v, v〉 − 〈w,w〉= 2 〈v, w〉 ,
e
q (v + w)− q (v − w) = 〈v + w, v + w〉 − 〈v − w, v − w〉= 〈v, v〉+ 2 〈v, w〉+ 〈w,w〉 − [〈v, v〉 − 2 〈v, w〉+ 〈w,w〉]= 4 〈v, w〉 .

Rodney Josue Biezuner 21
2.7 Definicao. Seja V um espaco vetorial de dimensao finita com produto interno 〈·, ·〉 e q sua formaquadratica associada. A norma de um vetor v ∈ V e definida por
‖v‖ =√|〈v, v〉| =
√|q (v)|.
Observe que a norma de um vetor e sempre um numero positivo ou zero. Vetores do tipo luz tem normazero.
2.8 Teorema (Teorema de Sylvester). Sejam V um espaco vetorial de dimensao finita com produtointerno 〈·, ·〉 e q sua forma quadratica associada. Entao V possui uma base ortonormal.
Alem disso, o numero de vetores ei de qualquer base ortonormal B = e1, . . . , en para V tais que
q (ei) = −1
e o mesmo.
Prova. Para mostrar a existencia de uma base ortonormal faremos inducao sobre a dimensao de V. Sejan = dimV e verifiquemos primeiro o caso n = 1. Afirmamos que existe u ∈ V tal que
q (u) 6= 0.
De fato, como g e nao-degenerada, existem vetores v, w ∈ V tais que
〈v, w〉 6= 0.
Se q (v) 6= 0 ou q (w) 6= 0, a afirmacao esta provada. Caso contrario, se q (v) = q (w) = 0, escolhemosu = v + w, pois
q (v + w) = 〈v + w, v + w〉= 〈v, v〉+ 2 〈v, w〉+ 〈w,w〉= q (u) + 2 〈v, w〉+ q (w)
= 2 〈v, w〉6= 0.
Basta entao tomare1 =
u
‖u‖.
Assuma agora n > 1. Como no passo anterior, seja u ∈ V tal que
q (u) 6= 0.
Seja U = 〈u〉 o subespaco gerado por u e
U⊥ = v ∈ V : 〈u, v〉 = 0
o subespaco ortogonal a u. Afirmamos que
V = U ⊕ U⊥.
De fato, os subespacos U e U⊥ sao linearmente independentes, pois um vetor tıpico de U e da forma αupara algum escalar α ∈ R e se αu ∈ U⊥ tambem entao
〈u, αu〉 = 0

Rodney Josue Biezuner 22
por definicao, mas〈u, αu〉 = α 〈u, u〉 = αq (u)
e como q (u) 6= 0, segue que α = 0. Alem disso, V = U + U⊥: dado v ∈ V, definindo
w = v − 〈u, v〉〈u, u〉
u,
segue que w ∈ U⊥, pois
〈u,w〉 = g
(u, v − 〈u, v〉
〈u, u〉u
)= 〈u, v〉 − 〈u, v〉
〈u, u〉〈u, u〉
= 0;
portanto
v =〈u, v〉〈u, u〉
u+ w
com o primeiro vetor da soma em U e o segundo em U⊥. Agora, pela hipotese de inducao existe uma baseortonormal
B′ = e1, . . . , en−1
para U⊥. Tomando en = u, obtemos uma base ortonormal
B = e1, . . . , en−1, en
para V.Para provar a ultima parte do teorema (seguindo [Lang]), sejam
B = e1, . . . , er, er+1, . . . , en ,B′ = f1, . . . , fs, fs+1, . . . , fn
duas bases ortonormais para V ordenadas de tal forma que
q (ei) =
−1 se i = 1, . . . , r,1 se i = r + 1, . . . , n,
q (fi) =
−1 se i = 1, . . . , s,1 se i = s+ 1, . . . , n.
Afirmamos quee1, . . . , er, fs+1, . . . , fn
sao linearmente independentes. De fato, se
α1e1 + . . .+ αrer + βs+1fs+1 + . . .+ βnfn = 0,
escrevemosα1e1 + . . .+ αrer = −βs+1fs+1 − . . .− βnfn,
e tomamos o produto interno desta equacao consigo mesma, obtendo
−α21 − . . .− α2
r = β2s+1 + . . .+ β2
n,

Rodney Josue Biezuner 23
ja que g (ei, ei) = q (ei) = −1 para i = 1, . . . , r e g (fi, fi) = q (fi) = 1 para i = s + 1, . . . , n. Como o ladoesquerdo e nao positivo e o lado direito e nao negativo, segue que ambos devem ser do tipo luz e portanto
α1 = . . . = αr = βs+1 = . . . = βn = 0,
provando a afirmacao. Como dimV = n, temos que
r + (n− s) 6 n,
donder 6 s.
Por simetria do argumento, segue tambem que s 6 r e portanto r = s. Segue que dado um espaco vetorial V com produto interno g e forma quadratica associada q, V possui umabase ortonormal B = e1, . . . , en tal que em relacao a esta base o produto interno e a forma quadratica seescrevem na forma
〈v, w〉 =
k∑i=1
viwi −n∑
i=k+1
viwi,
q (v) =
k∑i=1
(vi)2 − n∑
i=k+1
(vi)2,
para todosv = viei, w = wiei ∈ V.
E obvio que a mesma conclusao do Teorema de Sylvester vale para os vetores ej tais que q (ej) = +1. A razaodo resultado ter sido enunciado em termos da contagem de vetores unitarios negativos decorre da seguinteconvencao:
2.9 Definicao. Dado um espaco vetorial V com produto interno g e sua forma quadratica associada q, oındice de g (e de q) e o numero de vetores de uma base ortonormal de V tais que q (ei) = −1.
2.10 Notacao. Definimos
ηkij =
−1 se i = j = 1, . . . , k,1 se i = j = k + 1, . . . , n,0 se i 6= j.
O sımbolo ηkij e uma generalizacao do delta de Kronecker δij , isto e,
η0ij = δij .
Ele e as vezes chamado o eta de Kronecker. Quando k = 1, omitimos o ındice superescrito e escrevemossimplesmente ηij , isto e,
ηij = η1ij
Na representacao matricial, temos
ηk =
[− idk 0
0 idn−k
],
onde idm e a matriz identidade m×m.
2.11 Exemplo. Em Rn, se e1, . . . , en sao os vetores da base canonica, definimos uma metrica com ındice kpor gkij = 〈ei, ej〉 = ηkij ,

Rodney Josue Biezuner 24
2.2 Operadores Ortogonais e Isometrias
2.12 Definicao. Seja V um espaco vetorial de dimensao finita com produto interno 〈·, ·〉. Dizemos que umoperador linear L : V −→ V e um operador ortogonal se ele preserva o produto interno, isto e, se
〈Lv,Lw〉 = 〈v, w〉
para todos v, w ∈ V.Uma matriz ortogonal e uma matriz que representa um operador ortogonal em relacao a qualquer base.
Lembramos que se A e uma matriz que representa o operador linear L em relacao a base B = e1, . . . , ende V, entao a matriz A tem a forma em colunas
A =[Le1 . . . Len
],
onde cada coluna e
Lej =
n∑i=1
Aijei =
A1j
...Anj
.Assim, A e ortogonal se
〈Av,Aw〉 = 〈v, w〉 .
Se g e uma metrica, denotaremos tambem por g a matriz
g = (gij) .
2.13 Proposicao. Seja V um espaco vetorial de dimensao finita com produto interno 〈·, ·〉 e forma quadraticaassociada q de ındice k. Entao P e uma matriz ortogonal se e somente se
PT ηkP = ηk.
Prova. SejaB = e1, . . . , en
uma base ortonormal para V satisfazendo
q (ei) =
−1 se i = 1, . . . , k,
1 se i = k + 1, . . . , n.
Se
v =
n∑i=1
viei,
denote
v#k = −k∑i=1
viei +
n∑i=k+1
viei.
Note que em notacao matricial (vetores como colunas)
v#k = ηkv
e〈v, w〉 = vTw#k

Rodney Josue Biezuner 25
Seja P uma matriz ortogonal representando o operador ortogonal L em relacao a B. Entao
〈Lei, Lej〉 = 〈ei, ej〉 = ηkij
e
PηkP =
Le1
. . .Len
[ − idk 00 idn−k
] [Le1 . . . Len
]
=
Le1
. . .Len
[ (Le1)#k
. . . (Len)#k
]= [〈Lei, Lej〉]= ηk.
Reciprocamente, suponha que PT ηkP = ηk. Entao, se v, w ∈ V sao vetores arbitrarios, multiplicandoesta equacao a esquerda por vT e a direita por w, temos
vT(PT ηkP
)w = vT ηkw. (2.1)
Observando, como visto acima, quevT ηkw = vTw#k = 〈v, w〉 ,
segue que o lado esquerdo de (2.1) e
vT(PT ηkP
)w = (Pv)
TηkPw
= 〈Pv, Pw〉 ,
enquanto que o seu lado direito e 〈v, w〉, donde
〈Pv, Pw〉 = 〈v, w〉 .
2.14 Proposicao. O conjunto G dos operadores ortogonais e um grupo sob a operacao de composicao deoperadores.
Prova. Claramente, o operador identidade esta em G. Se L,M ∈ G, entao
〈(L M) v, (L M)w〉 = 〈L (Mv) , L (Mw)〉= 〈Mv,Mw〉= 〈v, w〉 ,
logo o produto L M ∈ G. Finalmente, se L ∈ G, usaremos a nao-degeneracidade do produto interno paramostrar que L e invertıvel e que L−1 ∈ G. Se v ∈ kerL, entao para todo w ∈ V temos
〈v, w〉 = 〈Lv,Lw〉 = 〈0, Lw〉 = 0,
e a nao-degeneracidade do produto interno implica que v = 0, e portanto L e invertıvel. Daı,
〈v, w〉 =⟨L(L−1v
), L(L−1w
)⟩=⟨L−1v, L−1w
⟩,
logo L−1 ∈ G. G e chamado o grupo ortogonal.

Rodney Josue Biezuner 26
2.15 Definicao. Seja V um espaco vetorial de dimensao finita com produto interno e forma quadraticaassociada q. Uma aplicacao F : V −→ V tal que
q (F (v)− F (w)) = q (v − w)
para todos v, w ∈ V e chamada uma isometria de V.
2.16 Proposicao. O conjunto Isom(V) das isometrias de um espaco vetorial com produto interno V e umgrupo sob a operacao de composicao de operadores.
Prova. Claramente, o operador identidade e uma isometria. Se F,G ∈ Isom(V), entao
q [(F G) (v)− (F G) (w)] = q [F (G (v))− F (G (w))]
= q (G (v)−Gw)
= q (v − w) ,
logo o produto F G ∈ Isom(V).Se F ∈ Isom(V), para mostrar que F e invertıvel, seja T uma translacao que leva F (0) em 0. Entao
T F e uma isometria tal que (T F ) (0) = 0 e, pela Proposicao 2.17 a seguir, e um operador ortogonal,em particular bijetiva; logo F = T−1 (T F ) e uma composicao de bijecoes, logo e uma bijecao e portantoinvertıvel. Como
q (v − w) = q(F(F−1 (v)
)− F
(F−1 (w)
))= q
(F−1 (v)− F−1 (w)
),
segue que F−1 ∈ Isom(V). Todo operador ortogonal e uma isometria, pois
q (L (v)− L (w)) = q (L (v − w))
= 〈L (v − w) , L (v − w)〉= 〈v − w, v − w〉= q (v − w) ,
logo o grupo ortogonal e um subgrupo do grupo de isometrias.
2.17 Proposicao. Seja V um espaco vetorial de dimensao finita com produto interno. Isometrias F : V −→V tais que F (0) = 0 sao operadores ortogonais.
Prova: Passo 1. q (F (v)) = q (v) para todo v ∈ V.Pois
q (F (v)) = q (F (v)− F (0)) = q (v − 0) = q (v) .
Passo 2. F preserva o produto interno.Pela identidade polar (Proposicao 2.6), para todos v, w ∈ V vale
〈F (v) , F (w)〉 =1
2[q (F (v)− F (w))− q (F (v))− q (F (w))]
=1
2(q (v − w)− q (v)− q (w))
= 〈v, w〉 .
Passo 3. F e linear.Seja
B = e1, . . . , en

Rodney Josue Biezuner 27
uma base ortonormal para V. Suponha queF (ei) = ei (2.2)
para todo i. Para todo v ∈ V temos
〈v, ei〉 = 〈F (v) , F (ei)〉 = 〈F (v) , ei〉 .
Por linearidade do produto interno segue que
〈v, w〉 = 〈F (v) , w〉
para todo w ∈ V, de modo que pela nao-degeneracidade do produto interno temos
F (v) = v,
isto e,F = id,
que e um operador ortogonal. Se (2.2) nao se cumpre, pelo Passo 2 F leva bases ortonormais em basesortonormais, de modo que se
F (ei) = fi,
entaoB′ = f1, . . . , fn
e uma base ortonormal. Se L e o operador ortogonal que leva B′ em B, segue que G = LF e uma isometriaque satisfaz
G (ei) = ei,
logo pelo argumento anterior segue queG = id
e portantoF = L−1
e um operador ortogonal.
2.18 Proposicao. Seja V um espaco vetorial de dimensao finita com produto interno. Se F : V −→ V euma isometria, entao existe um unico operador ortogonal L e uma unica translacao T tais que
F = T L.
Prova: (Existencia) Seja T : V −→ V a translacao
T (p) = p+ F (0) .
Entao T−1 F : V −→ V e uma isometria tal que(T−1 F
)(0) = T−1 (F (0)) = F (0)− F (0) = 0,
de modo que pelo resultado anteriorL := T−1 F
e um operador ortogonal.(Unicidade) Se L1, L2 sao operadores ortogonais e T1, T2 sao translacoes tais que
F = T1 L1 = T2 L2,

Rodney Josue Biezuner 28
entaoL1 L−1
2 = T−11 T2.
Em particular, T−11 T2 e um operador linear e como operadores lineares deixam o vetor nulo fixo, segue
que T−11 T2 e a translacao nula, isto e, a identidade. Logo,
T−11 T2 = id =⇒ T1 = T2,
L1 L−12 = id =⇒ L1 = L2.
2.3 Metrica de Lorentz e Espacotempo de Minkowski
2.19 Definicao. Uma metrica de Lorentz em um espaco vetorial de dimensao 4 e um produto internode ındice 1.
Um espacotempo de Minkowski e R4 munido de uma metrica de Lorentz. Ele sera denotado por M.Os pontos de M serao chamados eventos.
Em particular, segue da observacao logo apos o Teorema de Sylvester, Teorema 2.8, que todo espacotempode Minkowski M possui uma base B = e0, e1, e2, e3 com a propriedade de que seu produto interno 〈·, ·〉 esua forma quadratica associada q em relacao a esta base sao dados por
〈v, w〉 = −v0w0 + v1w1 + v2w2 + v3w3,
q (v) = −(v0)2
+(v1)2
+(v2)2
+(v3)2
para todos v = viei, w = wiei ∈M. Usando notacao matricial, se
η =
−1 0 0 0
0 1 0 00 0 1 00 0 0 1
,a metrica de Lorentz pode ser escrita na forma
〈v, w〉 = ηijviwj .
Segue do Princıpio da Relatividade (Teorema 1.13 da Invariancia do Intervalo) que o espacotempo fısico naTeoria da Relatividade Especial e um espacotempo de Minkowski, com o intervalo entre dois eventos v, wsendo exatamente q (v − w). Mais tarde, quando estudarmos a Teoria da Relatividade Geral, veremos queisso e verdade apenas localmente.
Vale a pena ressaltar que foi Minkowski quem traduziu a Teoria da Relatividade Especial para a linguagemdo espacotempo (em 1907), isto e, foi ele quem reconheceu que a consequencia principal da teoria foi aunificacao do espaco e do tempo em uma so unidade. Em suas palavras: “De agora em diante, espacopor si so e tempo por si estao condenados a desaparecer em meras sombras, e somente uma uniao dosdois preservara uma realidade independente.” ([Taylor-Wheeler], Secao 1.5, p. 15.) Inicialmente, Einsteinnao aceitou bem a ideia de Minkowski. Em sua opiniao, estender o espaco para a quarta dimensao maismistificava do que esclarecia a teoria. Na verdade, em resposta a formulacao de Minkowski, Einstein equotado como tendo dito: “Desde que os matematicos invadiram a teoria da relatividade, eu proprio nao acompreendo mais.” Pouco tempo depois, no entanto, Einstein mudou radicalmente de opiniao e reconheceua importancia do conceito de espacotempo, que foi fundamental para a elaboracao da Teoria da RelatividadeGeral; Minkowski foi a primeira entre as duas unicas pessoas que ele reconheceu no artigo de publicacao dateoria como sendo instrumentais na sua formulacao (veja Secao 7.1).

Rodney Josue Biezuner 29
Na realidade, o espacotempo e muito mais que uma linguagem ou uma formalizacao diferente da teoria.Ele da sentido fısico a Teoria da Relatividade, como [Petkov] argumenta muito persuasivamente no Capıtulo 5(especialmente pp. 75–76). De fato, o proprio Minkowski (quotado la, p. 78) argumentou convincentementeque o Postulado da Relatividade deveria ser trocado pelo Postulado do Mundo Absoluto. Ou seja, a principalideia da Teoria da Relatividade Especial, que resume tudo e de onde todas as consequencias seguem, etrocar o espaco e o tempo absoluto de Newton pelo espacotempo absoluto com a metrica de Lorentz (oespacotempo de Minkowski). [Petkov], Capıtulo 6, argumenta que a relutancia inicial de Einstein em aceitaro espacotempo de Minkowski desempenhou um papel importante na relativa demora em desenvolver a Teoriada Relatividade Geral, mesmo apos ele ter tido o insight do princıpio da equivalencia (seu pensamento maisfeliz da vida; veja Secao 7.1).
2.20 Definicao. O grupo das isometrias do espacotempo de Minkowski Isom(M) e chamado o grupo dePoincare.
Um operador ortogonal do espacotempo de Minkowski e chamado uma transformacao de Lorentz. Ogrupo das transformacoes de Lorentz e chamado o grupo de Lorentz.
Assim, transformacoes de Lorentz sao operadores lineares no espacotempo de Minkowski que preservam ametrica de Lorentz. Consequentemente, o grupo de Lorentz e um subgrupo do grupo de Poincare.
Pode-se provar que o grupo de Poincare e um grupo a 10 parametros. Um subgrupo particularmente fisi-camente interessante e o subgrupo de Poincare ortocrono proprio, obtido quando se exclui as reflexoesespaciais e temporais (estas ultimas sao chamadas reversoes temporais; elas se referem a transformacoes decoordenadas entre dois referenciais inerciais em que o relogio de um esta andando na direcao contraria a dorelogio do outro), que ainda e um grupo a 10 parametros gerado pelas 4 translacoes (nas direcoes t, x, y, z) epor 6 transformacoes de Lorentz, 3 das quais sao as rotacoes espaciais da geometria euclideana em relacaoaos eixos x, y, z e as outras 3 sao os boosts nas direcoes x, y, z, a serem explicados na proxima secao. Paramaiores detalhes sobre o subgrupo de Poincare ortocrono proprio, veja [Rowe], Secao 1.9, pp. 31–34 e [Naber],Secao 1.3, pp. 15–42. Para maiores detalhes sobre o grupo de Poincare geral, veja [Tsamparlis], Secao 1.6,pp. 18–26, para uma deducao com insight geometrico, e Secao 1.7, pp. 26–40, para uma deducao puramentealgebrica.
2.3.1 Propriedades do Espacotempo de Minkowski
2.21 Definicao. Vetores v ∈M tais que
q (v) = 0 sao chamados do tipo luz,
q (v) > 0 sao chamados do tipo espaco,
q (v) < 0 sao chamados do tipo tempo.
Seja V um espaco vetorial de dimensao finita com produto interno. Dizemos que um subespaco W ⊂ V enao degenerado se o produto interno de V restrito a W e nao degenerado; caso contrario, dizemos que W edegenerado. Por exemplo, no espaco de Minkowski M, o subespaco gerado por e1, e2, e3 e nao degenerado,enquanto que o subespaco gerado por e0 e degenerado.
2.22 Lema. Seja V um espaco vetorial com produto interno. Um subespaco W ⊂ V e nao degenerado se esomente se
V = W ⊕W⊥.
Prova: Lembremos o seguinte resultado de Algebra Linear sobre dimensoes de subespacos:
dim(W +W⊥
)+ dim
(W ∩W⊥
)= dimW + dimW⊥. (2.3)

Rodney Josue Biezuner 30
Afirmamos que para qualquer subespaco W ⊂ V vale
dimW + dimW⊥ = n. (2.4)
De fato, seja e1, . . . , em uma base para W e complete esta base ate uma base e1, . . . , em, em+1, . . . enpara V. Um vetor v ∈ V pertence a W⊥ se e somente se 〈v, ei〉 = 0 para i = 1, . . . ,m, ou seja, se e somentese v = vjej satisfaz o sistema
gijvj = 0 para i = 1, . . . ,m.
Como a matriz (gij) e invertıvel, o subespaco solucao deste sistema tem dimensao exatamente igual a n−m.De (2.3) e (2.15) segue que V = W + W⊥ se e somente se W ∩W⊥ = 0. Assim, qualquer uma destas
condicoes e equivalente a V = W ⊕W⊥. Mas
W ∩W⊥ = w ∈W : w ⊥W ,
logo W ∩W⊥ = 0 se e somente se W e nao degenerado.
2.23 Proposicao. Se v ∈M e do tipo tempo e w 6= 0 e ortogonal a v, entao w e um vetor do tipo espaco.Em particular, 〈v〉⊥ e um subespaco vetorial formado apenas por vetores do tipo espaco, e portanto onde
o produto interno e positivo definido.
Prova: Pelo lema, podemos decomporM = 〈v〉 ⊕ 〈v〉⊥ .
Como os ındices de M e 〈v〉 sao iguais a 1, pelo Teorema de Sylvester o ındice de 〈v〉⊥ deve ser zero, casocontrario obterıamos uma base para M com mais de um vetor com valor q igual a −1. Portanto, todo vetorortogonal a v nao nulo e do tipo espaco.
2.24 Definicao. Denote por M− o conjunto dos vetores do tipo tempo. Para v ∈ M−, definimos o conetemporal de v como sendo o conjunto
C (v) =w ∈M− : 〈v, w〉 < 0
.
Seu cone temporal oposto e o conjunto
C (−v) = −C (v) =w ∈M− : 〈v, w〉 > 0
.
2.25 Proposicao. Dois vetores v, w do tipo tempo estao no mesmo cone temporal se e somente se
〈v, w〉 < 0.
Prova: Seja v ∈ C (u), para u ∈ M− que podemos tomar unitario, de modo que 〈u, u〉 = −1. Mostraremosque w ∈M− pertence tambem a C (u) se e somente se 〈v, w〉 < 0. Escreva
v = au+ x,
w = bu+ y,
para x, y ∈ 〈u〉⊥. Temos〈v, w〉 = 〈au+ x, bu+ y〉 = −ab+ 〈x, y〉 . (2.5)
Como
0 > 〈v, v〉 = 〈au+ x, au+ x〉 = −a2 + ‖x‖2 ,
0 > 〈w,w〉 = 〈bu+ y, bu+ y〉 = −b2 + ‖y‖2 ,

Rodney Josue Biezuner 31
segue que
|a| > ‖x‖ ,|b| > ‖y‖ ,
e pela desigualdade de Cauchy-Schwartz, que pela Proposicao 2.23 e valida em 〈u〉⊥, obtemos
|〈x, y〉| 6 ‖x‖ ‖y‖ < |ab| .
Segue de (2.5) quesign 〈v, w〉 = − sign (ab) .
Como v ∈ C (u),0 > 〈u, v〉 = 〈u, au+ x〉 = −a,
isto e,a > 0,
dondesign 〈v, w〉 = − sign b,
Mas w ∈ C (u) se e somente se b > 0, pois
〈u,w〉 = 〈u, bu+ y〉 = −b,
logo segue o resultado. Existem apenas dois cones temporais, pois pela Proposicao 2.23 o produto escalar de dois vetores do tipotempo nao pode ser nulo, logo ou e negativo e eles estao no mesmo cone temporal pela Proposicao 2.25, oue positivo e eles estao em cones temporais opostos. Portanto, temos a uniao disjunta
M− = C (v) ∪ C (−v)
para qualquer vetor do tipo tempo v.Da mesma forma que o conjunto dos vetores do tipo tempo M−, cones temporais nao sao subespacos
vetoriais de M. Mas cada cone temporal e um conjunto convexo: se a, b > 0 e v, w ∈ C, entao av + bw ∈ C.
2.26 Definicao. Fixada uma base ortonormal
B = e0, e1, e2, e3
para o espaco de Minkowski M com q (e0) = −1, o cone temporal futuro de M e o conjunto
C+ = C (e0) =v ∈M− : 〈v, e0〉 < 0
,
enquanto que o cone temporal passado de M e o conjunto
C− = C (−e0) =v ∈M− : 〈v, e0〉 > 0
.
Assim,M− = C+ ∪ C−.
A escolha de qual cone temporal e designado como o cone temporal futuro e qual cone temporal e designadocomo o cone temporal passado depende portanto da escolha da base. Isso determina uma orientacao noespaco de Minkowski.

Rodney Josue Biezuner 32
Como observado na demonstracao da Proposicao 2.25, existem vetores do tipo espaco que satisfazem adesigualdade de Cauchy-Schwartz. Isso nao e verdade para todos os vetores do tipo espaco. Por exemplo,
v = (−1, 1, 1, 1) ,
w = (1, 1, 1, 1) ,
sao vetores do tipo espaco, pois〈v, v〉 = 〈w,w〉 = 2,
mas〈v, w〉 = 4,
enquanto que‖v‖ ‖w‖ =
√2√
2 = 2,
portanto〈v, w〉 > ‖v‖ ‖w‖ .
Por outro lado, vetores do tipo tempo sempre satisfazem a desigualdade de Cauchy-Schwartz reversa:
2.27 Proposicao (Desigualdade de Cauchy-Schwartz Reversa). Se v, w ∈M sao do tipo tempo, entao
|〈v, w〉| > ‖v‖ ‖w‖
com a igualdade valendo se e somente se v e w sao multiplos escalares um do outro.
Prova: Escrevaw = av + z
com z ∈ 〈v〉⊥. Entao〈w,w〉 = a2 〈v, v〉+ 〈z, z〉 ,
e daı
〈v, w〉2 = a2 〈v, v〉2 =(a2 〈v, v〉
)〈v, v〉
= (〈w,w〉 − 〈z, z〉) 〈v, v〉> 〈w,w〉 〈v, v〉= ‖v‖ ‖w‖ ,
pois 〈z, z〉 > 0 pela Proposicao 2.23 e 〈w,w〉 , 〈v, v〉 < 0. A igualdade vale se e somente se z = 0.
2.28 Proposicao (Desigualdade Triangular Reversa). Se v, w ∈M sao do tipo tempo pertencentes aomesmo cone temporal, entao
‖v‖+ ‖w‖ 6 ‖v + w‖
com a igualdade valendo se e somente se v e w sao multiplos escalares um do outro.
Prova: Como v, w estao no mesmo cone temporal e cones temporais sao convexos, segue que v+w tambemesta no mesmo cone temporal e em particular tambem e um vetor do tipo tempo, ou seja,
〈v + w, v + w〉 < 0.
Pela desigualdade de Cauchy-Schwartz reversa,
‖v‖ ‖w‖ 6 −〈v, w〉 .

Rodney Josue Biezuner 33
Logo,
(‖v‖+ ‖w‖)2= ‖v‖2 + 2 ‖v‖ ‖w‖+ ‖w‖2
6 ‖v‖2 − 2 〈v, w〉+ ‖w‖2
= −〈v, v〉 − 2 〈v, w〉 − 〈w,w〉= −〈v + w, v + w〉
= ‖v + w‖2
A igualdade so valera se e somente se a igualdade valer na desigualdade de Cauchy-Schwartz reversa. Assim, a reta que liga dois pontos no espaco de Minkowski nao e o caminho mais curto entre dois pontos;na verdade, e o caminho mais longo.
2.29 Proposicao (Interpretacao Geometrica do Produto Interno). Se v, w ∈ M sao vetores do tipotempo pertencentes ao mesmo cone temporal, entao existe um unico real θ > 0 tal que
〈v, w〉 = −‖v‖ ‖w‖ cosh θ.
θ e chamado o angulo hiperbolico entre v e w.
Prova: Pela desigualdade de Cauchy-Schwartz reversa,
|〈v, w〉|‖v‖ ‖w‖
> 1,
logo existe um unico numero nao negativo θ tal que
cosh θ =|〈v, w〉|‖v‖ ‖w‖
.
Pela Proposicao 2.25, 〈v, w〉 < 0, logo|〈v, w〉| = −〈v, w〉 ,
donde
cosh θ = − 〈v, w〉‖v‖ ‖w‖
.
2.30 Definicao. Qualquer vetor do tipo tempo ou do tipo luz e chamado um vetor do tipo causal.O fecho de um cone temporal e chamado um cone causal.
Qualquer vetor que nao e do tipo espaco e um vetor do tipo causal. A fronteira de um cone temporal consisteexatamente de vetores do tipo luz. A intersecao dos dois cones causais e exatamente o vetor nulo. O motivoda terminologia “causal” sera vista no proximo capıtulo.
2.4 Transformacao de Lorentz do tipo Boost
Nesta secao vamos obter a transformacao de Lorentz entre dois sistemas de coordenadas para o espacotempode Minkowski cujas origens coincidem, e tais que, espacialmente, eles tem eixos paralelos e um se move emrelacao ao outro ao longo de um dos eixos x, y ou z. Este tipo de transformacao de Lorentz e chamada umboost (impulso) na direcao x, y ou z.
Vamos obter o boost na direcao x. Considere dois referenciais inerciais em movimento relativo. Digamosque temos um referencial inercial O, cujas coordenadas denotaremos por (t, x, y, z) , e um referencial inercialO′, cujas coordenadas denotaremos por (t′, x′, y′, z′), que se move com velocidade v, |v| < 1, na direcao

Rodney Josue Biezuner 34
positiva do eixo x do referencial inercial O, com os eixos y, z, y′, z′ transversais a direcao do movimentorelativo e a origem dos dois referenciais coincidindo no tempo t = t′ = 0. Portanto,
y = y′,
z = z′.
2.4.1 Medida Quantitativa da Dilatacao do Tempo
Para fixar ideias, comecemos com dois eventos A e B, ambos consistindo na emissao de uma faısca, oprimeiro evento ocorrendo na origem comum dos dois sistemas de coordenadas, o segundo ocorrendo algumtempo depois na origem espacial do sistema O′. As coordenadas destes eventos (ignorando as coordenadasy, z, y′, z′) nestes dois referenciais inerciais sao portanto
(xA, tA) = (0, 0) ,
(xB , tB) = (x, t) .
e
(x′A, t′A) = (0, 0) ,
(x′B , t′B) = (0, t′) .
de modo que
∆x = x,
∆t = t,
∆x′ = 0,
∆t′ = t′.
Temosx = vt
e pela invariancia do intervalo espacotemporal
(t′)2
= t2 − x2 =(1− v2
)t2,
de modo que
t =1√
1− v2t′.
2.31 Definicao. O numero
γ =1√
1− v2(2.6)
e chamado o fator de dilatacao do tempo.
Observe que t′ e o tempo proprio no referencial O′ e como
γ > 1,
isso mostra o que ja vimos antes, que o tempo proprio e sempre menor que o tempo medido em um outroreferencial que esta se movendo em relacao ao referencial onde o tempo proprio e medido. Agora temos umaexpressao que nos da exatamente o quanto o tempo e dilatado.
Concluımos que para dois eventos cujas coordenadas x′ = 0 a transformacao de Lorentz e
t = γt′, (2.7)
x = vγt′. (2.8)

Rodney Josue Biezuner 35
Observe que
v = ±√γ2 − 1
γ,
pois a velocidade relativa entre os referenciais pode ser positiva ou negativa, dependendo da direcao emque um se move em relacao ao outro, portanto opta-se por escrever v explicitamente, e nao em funcao doparametro γ. Se v > 0 (isto e, o referencial O′ se move para a direita do referencial O), entao
t = γt′,
x =√γ2 − 1t′,
enquanto que se v < 0 (isto e, o referencial O′ se move para a esquerda do referencial O), entao
t = γt′,
x = −√γ2 − 1t′,
2.4.2 Matriz do Boost
No caso geral, txyz
=
a11 a12 0 0a21 a22 0 00 0 1 00 0 0 1
t′
x′
y′
z′
,ou seja,
t = a11t′ + a12x
′,
x = a21t′ + a22x
′.
Fazendo x′ = 0, caımos no caso anterior e obtemos
a11 = γ,
a21 = vγ.
Portanto, simplificando a notacao,
t = γt′ + ax′,
x = vγt′ + bx′.
Para obter as constantes a e b usamos novamente a invariancia do intervalo espacotemporal. Escolhendoagora eventos mais gerais
(xA, tA) = (0, 0) ,
(xB , tB) = (x, t) .
e
(x′A, t′A) = (0, 0) ,
(x′B , t′B) = (x′, t′) .
de modo que
∆x = x,
∆t = t,
∆x′ = x′,
∆t′ = t′,

Rodney Josue Biezuner 36
segue que
(t′)2 − (x′)
2= t2 − x2,
Substituindo, temos
(t′)2 − (x′)
2= (γt′ + ax′)
2 − (vγt′ + bx′)2
=(γ2 − v2γ2
)(t′)
2+ (2γa− 2vγb) t′x′
+(a2 − b2
)(x′)
2
= (t′)2
+ 2γ (a− vb) t′x′ +(a2 − b2
)(x′)
2
Como t′, x′ sao arbitrarios, obtemos
a− vb = 0,
a2 − b2 = −1.
Da primeira equacao segue quea = vb,
que substituımos na segunda equacao para obter(v2 − 1
)b2 = −1
donde
b =1√
1− v2= γ.
Logo,a = vγ.
Assim,
t = γt′ + vγx′, (2.9)
x = vγt′ + γx′. (2.10)
e txyz
=
γ vγ 0 0vγ γ 0 00 0 1 00 0 0 1
t′
x′
y′
z′
. (2.11)
Observe que a matriz da transformacao de Lorentz boost e simetrica. Em termos apenas de v podemosescrever
t =t′ + vx′√
1− v2, (2.12)
x =x′ + vt′√
1− v2. (2.13)
A inversa da transformacao de Lorentz e dada port′
x′
y′
z′
=
γ −vγ 0 0−vγ γ 0 0
0 0 1 00 0 0 1
txyz
. (2.14)

Rodney Josue Biezuner 37
Ela e facilmente obtida uma vez que notamos que o referencial O se move com velocidade −v na direcaopositiva do eixo x do referencial inercial O′, logo basta substituir v por −v em (2.11).
As matrizes das transformacoes de Lorentz boosts nas direcoes y e z sao, respectivamente,γ 0 vγ 00 1 0 0vγ 0 γ 00 0 0 1
e
γ 0 0 vγ0 1 0 00 0 1 0vγ 0 0 γ
.A composta de boosts em direcoes diferentes nao e um boost e portanto o conjuntos dos boosts nao forma umsubgrupo do grupo de Poincare (e uma rotacao, chamada rotacao de Thomas ou precessao de Thomas;veja [Rowe], Secao 1.9.3, pp. 33–34 e [Rahaman], Secao 3.4, p. 31). Este fato so foi descoberto nos anos1920s e diz-se que surpreendeu Einstein. E claro que se considerarmos apenas boosts em uma unica direcaoeles formam um subgrupo a 1 parametro, isomorfo a R, como veremos na Secao 2.4.5.
2.4.3 Medida Quantitativa da Contracao do Espaco
Usando o fator de dilatacao do tempo podemos tambem encontrar o fator de contracao do espaco, isto e, acontracao medida do comprimento de um objeto ao longo de sua direcao de movimento em relacao a medidado comprimento deste objeto em relacao a um referencial em que ele se encontra em repouso.
Imagine que o referencial movel O′ e uma nave espacial viajando da Terra para um sistema estelar a umadistancia L quando medida no referencial O, que e exatamente a Terra; em relacao ao referencial Terra, ecomo se tivessemos uma barra enorme em repouso ligando a Terra ao sistema estelar de comprimento L. Oreferencial Nave deve medir uma distancia menor L′, conforme vimos. De acordo com o referencial Terra O,a viagem leva o tempo
t =L
v,
enquanto que no referencial Nave Espacial O′, o tempo proprio e
t′ =t
γ=
L
vγ=
√1− v2
vL.
A medida da distancia L′ entre a Terra e o sistema estelar de acordo com o referencial inercial Nave O′ edada por
L′ = vt′,
pois v e a velocidade da nave quando ela deixou a primeira extremidade desta longuıssima barra (que e oplaneta Terra) e t′ e o tempo que ela levou para chegar a segunda extremidade da barra (o sistema estelar).Portanto
L′ =√
1− v2L. (2.15)
2.4.4 Resumo da Contracao do Espaco e Dilatacao do Tempo
Seguindo [Ferraro], resumimos agora a contracao do espaco e dilatacao do tempo em uma unica situacao.Considere uma partıcula que se move ao longo de uma barra de comprimento L0 com velocidade v.

Rodney Josue Biezuner 38
O evento A e a partıcula passando pela extremidade esquerda da barra, enquanto que o evento B e apartıcula passando pela extremidade direita da barra. No referencial (t, x) da barra (isto e, no referencialem que a barra encontra-se em repouso), os eventos A e B tem coordenadas
(tA, xA) = (0, 0) ,
(tB , xB) = (t, L0) ,
de modo que o comprimento proprio L0 da barra e
L0 = vt,
enquanto que no referencial (t′, x′) da partıcula (isto e, no referencial em que a partıcula esta em repouso)os eventos A e B tem coordenadas
(t′A, x′A) = (0, 0) ,
(t′B , x′B) = (τ, 0) ,
de modo que o comprimento L da barra medido neste referencial e
L = vτ.
Em particular,t
τ=L0
L,
o que mostra que nao e possıvel que os comprimentos (distancias espaciais) sejam relativos, isto e, variemcom a velocidade do referencial, sem que os tempos (intervalos temporais) tambem sejam e vice-versa.
Pela invariancia do intervalo,τ2 = t2 − L2
0.
Substituindo L0 = vt, obtemos
τ =√
1− v2t,

Rodney Josue Biezuner 39
de modo que o tempo proprio, medido no referencial em que os eventos ocorrem na mesma posicao, e sempremenor que o tempo medido em um referencial em que os eventos ocorrem em diferentes posicoes. Dividindoambos os lados por τ e substituindo t/τ por L0/L, obtemos
L =√
1− v2L0,
de modo que o comprimento proprio, isto e, o comprimento de um objeto em um referencial em que ele estaem repouso, e sempre maior que o comprimento do objeto medido em um referencial em relacao ao qual elese move (mover-se em relacao a um objeto “causa” a contracao do mesmo na dimensao ao longo da direcaodo movimento).
2.4.5 Lei de Adicao de Velocidades
Considere tres referenciais inerciais em movimento relativo. Temos como antes o referencial inercialO (t, x, y, z)e o referencial inercial O′ (t′, x′, y′, z′) que se move com velocidade v′ na direcao positiva do eixo x do referen-cial inercial O. Temos agora um terceiro referencial inercial O′′ (t′′, x′′, y′′, z′′) que se move com velocidadev′′ na direcao positiva do eixo x′ do referencial inercial O′. Assumimos os eixos y, z, y′, z′, y′′, z′′ transversaisa direcao do movimento relativo e a origem dos tres referenciais coincidindo no tempo t = t′ = t′′ = 0. Quale a velocidade v do referencial inercial O′′ (t′′, x′′, y′′, z′′) em relacao ao referencial inercial O?
Para obter a resposta, basta usar a propriedade de grupo das transformacoes de Lorentz. A trans-formacao de Lorentz das coordenadas do referencial O′′ para as coordenadas do referencial O e o produtoda transformacao de Lorentz das coordenadas do referencial O′′ para as coordenadas do referencial O′ pelatransformacao de Lorentz das coordenadas do referencial O′ para as coordenadas do referencial O. Assim,temos ao mesmo tempo
txyz
=
γ vγ 0 0vγ γ 0 00 0 1 00 0 0 1
t′′
x′′
y′′
z′′
e
txyz
=
γ′ v′γ′ 0 0v′γ′ γ′ 0 0
0 0 1 00 0 0 1
γ′′ v′′γ′′ 0 0v′′γ′′ γ′′ 0 0
0 0 1 00 0 0 1
t′′
x′′
y′′
z′′
,isto e,
γ vγ 0 0vγ γ 0 00 0 1 00 0 0 1
=
γ′ v′γ′ 0 0v′γ′ γ′ 0 0
0 0 1 00 0 0 1
γ′′ v′′γ′′ 0 0v′′γ′′ γ′′ 0 0
0 0 1 00 0 0 1
=
γ′γ′′ (1 + v′v′′) γ′γ′′ (v′ + v′′) 0 0γ′γ′′ (v′ + v′′) γ′γ′′ (1 + v′v′′) 0 0
0 0 1 00 0 0 1
.Portanto,
γ = γ′γ′′ (1 + v′v′′) ,
vγ = γ′γ′′ (v′ + v′′) .
Logo, a lei de adicao de velocidades na teoria da relatividade e
v =v′ + v′′
1 + v′v′′,

Rodney Josue Biezuner 40
o que e bastante diferente da lei de adicao de velocidades na mecanica Newtoniana (la, v = v′ + v′′). Emparticular, se os referenciais viajam com velocidade menor ou igual a velocidade da luz, um em relacao aooutro, a velocidade do terceiro referencial em relacao ao primeiro tambem e menor que a velocidade da luz,como provamos a seguir.
2.32 Proposicao. Se|v′| , |v′′| 6 1
e
v =v′ + v′′
1 + v′v′′,
entao|v| 6 1.
Prova:Demonstracao 1 (mais elementar). Se |a| < 1, a funcao f : R −→ R definida por
f (x) =x+ a
1 + ax
e crescente, pois
f ′ (x) =1− a2
(1 + ax)2 > 0.
Como f (−1) = −1 e f (1) = 1, segue que f ((−1, 1)) = (−1, 1), donde o resultado.Demonstracao 2 (menos elementar, mas oferece um importante insight). A funcao tangentehiperbolica, definida da maneira esperada por
tanhx =senhx
coshx, (2.16)
e uma funcao estritamente crescente, pois sua derivada e
d
dxtanhx =
coshx coshx− senhx senhx
cosh2 x=
cosh2 x− senh2 x
cosh2 x
=1
cosh2 x> 0,
ımpar (pois e o produto de uma funcao par e uma funcao ımpar) e satisfaz
|tanhx| < 1 para todo x ∈ R (2.17)
pois|senhx| < coshx
para todo x ∈ R, ja que sempre temos
|ex − e−x|2
<ex + e−x
2
etanh (R) = (−1, 1) , (2.18)
porque, pela regra de L’Hopital,
limx→+∞
tanhx = limx→+∞
senhx
coshx= limx→+∞
ex − e−x
ex + e−x
= limx→+∞
e2x − 1
e2x + 1= limx→+∞
2e2x
2e2x= 1.

Rodney Josue Biezuner 41
Vale a identidade
tanh (a+ b) =tanh a+ tanh b
1 + tanh a tanh b. (2.19)
De fato, temos
senh (a+ b) = senh a cosh b+ cosh a senh b,
cosh (a+ b) = cosh a cosh b+ senh a senh b.
Isso e facilmente verificado:
senh a cosh b+ cosh a senh b =ea − e−a
2
eb + e−b
2+ea + e−a
2
eb − e−b
2
=ea+b + ea−b − e−a+b − e−a−b
4+ea+b − ea−b + e−a+b − e−a−b
4
=ea+b − e−a−b
2= senh (a+ b) ,
cosh a cosh b+ senh a senh b =ea + e−a
2
eb + e−b
2+ea − e−a
2
eb − e−b
2
=ea+b + ea−b + e−a+b + e−a−b
4+ea+b − ea−b − e−a+b + e−a−b
4
=ea+b + e−a−b
2= cosh (a+ b) .
Daı,
tanh (a+ b) =senh (a+ b)
cosh (a+ b)=
senh a cosh b+ cosh a senh b
cosh a cosh b+ senh a senh b
=
senh a cosh b+ cosh a senh b
cosh a cosh bcosh a cosh b+ senh a senh b
cosh a cosh b
=
senh a
cosh a+
senh b
cosh b
1 +senh a
cosh a
senh b
cosh b
=tanh a+ tanh b
1 + tanh a tanh b.
Segue de (2.18) e da injetividade da funcao tangente hiperbolica que se
|v′| , |v′′| < 1,
entao existem unicos a, b ∈ R tais que
v′ = tanh a,
v′′ = tanh b.
Portanto, segue de (2.19) que
v =tanh a+ tanh b
1 + tanh a tanh b= tanh (a+ b) ,

Rodney Josue Biezuner 42
donde|v| < 1.
Se v′ = 1, entao
v =1 + v′′
1 + v′′= 1
e se v′ = −1, entao
v =−1 + v′′
1− v′′= −1.
As mesmas conclusoes valem para v′′ = ±1.
2.4.6 Rotacoes Hiperbolicas
Considere a transformacao de Lorentz bidimensional
L =
γ vγ 0 0vγ γ 0 00 0 1 00 0 0 1
,com
γ =1√
1− v2.
Escrevendov = tanh θ,
para um unico θ ∈ R, como vimos na demonstracao da Proposicao 2.32, como
1√1− tanh2 θ
=1√
1− senh2 θ
cosh2 θ
=cosh θ√
cosh2 θ − senh2 θ=
cosh θ
1,
segue queγ = cosh θ. (2.20)
Daıvγ = tanh θ cosh θ = senh θ.
Podemos portanto escrever
L =
cosh θ senh θ 0 0senh θ cosh θ 0 0
0 0 1 00 0 0 1
,Nas duas primeiras coordenadas, isso e simplesmente[
tx
]=
[cosh θ senh θsenh θ cosh θ
] [t′
x′
].
2.33 Definicao. A transformacao
Rθ =
[cosh θ senh θsenh θ cosh θ
](2.21)
e chamada uma rotacao hiperbolica de rapidez θ.

Rodney Josue Biezuner 43
Em termos da rapidez, se denotarmos por LO−→O′ a transformacao de Lorentz das coordenadas do referencialO′ para o referencial O, a lei de adicao de velocidades da teoria da relatividade pode ser escrita na forma
θ (LO−→O′′) = θ (LO−→O′) + θ (LO′−→O′′) . (2.22)
Portanto, o subgrupo dos boosts em relacao a uma direcao fixada e isomorfo ao grupo a um parametro deadicoes R. Dado que boosts sao rotacoes hiperbolicas e que as rotacoes em R3 formam um grupo (ou seja, acomposta de duas rotacoes no espaco em relacao ao mesmo eixo ou em relacao a eixos diferentes e uma rotacaono espaco em relacao ao mesmo eixo ou em relacao a um eixo diferente dos outros dois, respectivamente)podemos entender a surpresa de Einstein ao ser informado que os boosts nao formam um grupo, ou seja,que a composta de rotacoes hiperbolicas em R4 nao e uma rotacao hiperbolica (em R2 evidentemente e).

Capıtulo 3
Paradoxos
3.1 Diagramas de Espacotempo
Uma tecnica eficiente, e com a vantagem adicional de ser visual e portanto facil de entender, para resolverproblemas de relatividade especial e a analise de diagramas espacotempo. Nesta secao examinaremosalguns exemplos.
Em primeiro lugar, vamos entender como representar as coordenadas espacotempo de dois referenciaisinerciais no mesmo diagrama espacotempo. Vamos nos restringir a uma dimensao temporal.
Escolha um dos referenciais inerciais. Escolhemos o referencial inercial Laboratorio. Os eixos t, x neste re-ferencial inercial sao representados perpendicularmente, como usual. Em seguida representamos a trajetoriano espacotempo do referencial inercial Nave nas coordenadas do referencial Laboratorio. Esta trajetoriacorresponde ao eixo t′ do referencial inercial Nave, pois, ao longo desta trajetoria, a posicao da nave nao
44
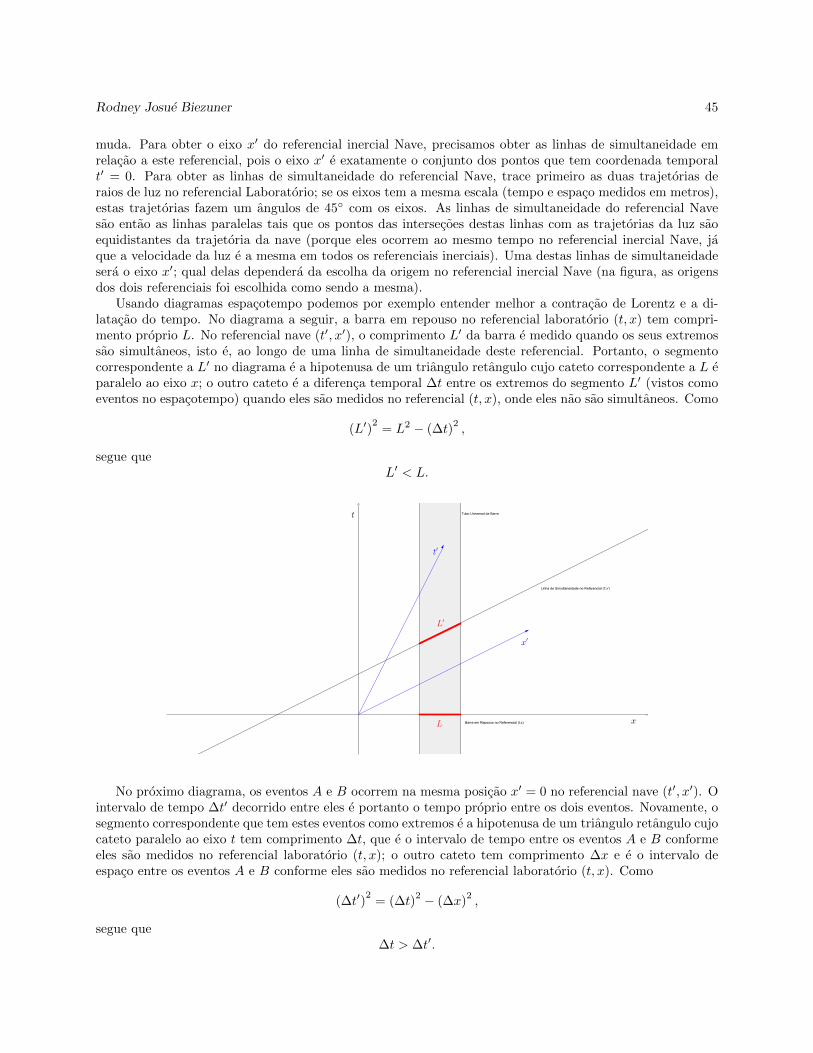
Rodney Josue Biezuner 45
muda. Para obter o eixo x′ do referencial inercial Nave, precisamos obter as linhas de simultaneidade emrelacao a este referencial, pois o eixo x′ e exatamente o conjunto dos pontos que tem coordenada temporalt′ = 0. Para obter as linhas de simultaneidade do referencial Nave, trace primeiro as duas trajetorias deraios de luz no referencial Laboratorio; se os eixos tem a mesma escala (tempo e espaco medidos em metros),estas trajetorias fazem um angulos de 45 com os eixos. As linhas de simultaneidade do referencial Navesao entao as linhas paralelas tais que os pontos das intersecoes destas linhas com as trajetorias da luz saoequidistantes da trajetoria da nave (porque eles ocorrem ao mesmo tempo no referencial inercial Nave, jaque a velocidade da luz e a mesma em todos os referenciais inerciais). Uma destas linhas de simultaneidadesera o eixo x′; qual delas dependera da escolha da origem no referencial inercial Nave (na figura, as origensdos dois referenciais foi escolhida como sendo a mesma).
Usando diagramas espacotempo podemos por exemplo entender melhor a contracao de Lorentz e a di-latacao do tempo. No diagrama a seguir, a barra em repouso no referencial laboratorio (t, x) tem compri-mento proprio L. No referencial nave (t′, x′), o comprimento L′ da barra e medido quando os seus extremossao simultaneos, isto e, ao longo de uma linha de simultaneidade deste referencial. Portanto, o segmentocorrespondente a L′ no diagrama e a hipotenusa de um triangulo retangulo cujo cateto correspondente a L eparalelo ao eixo x; o outro cateto e a diferenca temporal ∆t entre os extremos do segmento L′ (vistos comoeventos no espacotempo) quando eles sao medidos no referencial (t, x), onde eles nao sao simultaneos. Como
(L′)2
= L2 − (∆t)2,
segue queL′ < L.
No proximo diagrama, os eventos A e B ocorrem na mesma posicao x′ = 0 no referencial nave (t′, x′). Ointervalo de tempo ∆t′ decorrido entre eles e portanto o tempo proprio entre os dois eventos. Novamente, osegmento correspondente que tem estes eventos como extremos e a hipotenusa de um triangulo retangulo cujocateto paralelo ao eixo t tem comprimento ∆t, que e o intervalo de tempo entre os eventos A e B conformeeles sao medidos no referencial laboratorio (t, x); o outro cateto tem comprimento ∆x e e o intervalo deespaco entre os eventos A e B conforme eles sao medidos no referencial laboratorio (t, x). Como
(∆t′)2
= (∆t)2 − (∆x)
2,
segue que∆t > ∆t′.

Rodney Josue Biezuner 46
3.2 Impossibilidade de se viajar acima da velocidade da luz
Nesta secao quotamos diretamente de [Taylor-Wheeler], Box L-1, pp. 108–109, com pequenas modificacoes,para um exemplo dramatico de como a possibilidade de um objeto material viajando a velocidade da luzviola a ordem natural de causa e efeito.
O Tratado de Paz de Shalimar entre a Federacao Unida dos Planetas e o Imperio Klingon foi assinado 4anos antes da Grande Traicao. Sendo um evento tao crucial na historia do Quadrante Alfa de nossa galaxia,ele foi tomado como o zero nos sistemas de coordenadas do espacotempo.
Pelo Tratado de Shalimar, os Klingons concordaram em parar de atacar os postos avancados da Federacaoem retorno por acesso ao Banco de Dados Tecnico da Federacao. Os negociadores da Federacao deixaram oplaneta Shalimar imediatamente apos assinar o tratado, na nave estelar Enterprise viajando a 0, 6 da velo-cidade da luz (por algum motivo ate hoje inexplicado, o warpdrive nao estava funcionando; os historiadoresdebatem se houve ou nao sabotagem). Em 4 anos, os Klingons usaram o seu acesso garantido ao Bancode Dados Tecnico da Federacao para desenvolver um torpedo fotonico superavancado, de elevado alcance epoder de destruicao, e com a capacidade de viajar acima da velocidade da luz, que eles chamaram de Super.Naquele dia negro da Grande Traicao (evento de referencia 0), os Klingons testaram o Super, disparandoele a partir do planeta Shalimar exatamente na Enterprise contendo os negociadores, a 3 vezes a velocidadeda luz. O torpedo atingiu a nave destruindo-a completamente. Nao houve sobreviventes. Um perıodo aindamais longo de guerras e batalhas estelares do que antes da assinatura do tratado teve sequencia.
Os eventos estao descritos no diagrama de espacotempo abaixo, do ponto de vista dos Klingons, isto e,no referencial inercial do planeta Shalimar (coordenadas t, x).

Rodney Josue Biezuner 47
Com obter uma visao equilibrada da Historia, vamos investigar os acontecimentos do ponto de vista daFederacao, mais especificamente no referencial inercial da nave Enterprise (coordenadas t′, x′). Especifica-mente, quando ocorreram neste sistema de coordenadas a assinatura do Tratado de Shalimar (evento A) e oimpacto do Super com a nave, que causou a sua completa destruicao (evento B)?
Temos
(tA, xA) = (−4, 0) ,
(tB , xB) = (1, 3) .
Como a velocidade da Enterprise em relacao ao planeta Shalimar e 0, 6, segue que o fator de dilatacao dotempo e
γ =1√
1− v2=
1√1− 0, 62
= 1, 25.
de modo que a transformacao de Lorentz do referencial inercial de Shalimar para o referencial inercialEnterprise e [
γ −vγ−vγ γ
]=
[1, 25 −0, 75−0, 75 1, 25
].
Logo, [t′Ax′A
]=
[1, 25 −0, 75−0, 75 1, 25
] [tAxA
]=
[1, 25 −0, 75−0, 75 1, 25
] [−4
0
]=
[−5
3
]e [
t′Bx′B
]=
[1, 25 −0, 75−0, 75 1, 25
] [tBxB
]=
[1, 25 −0, 75−0, 75 1, 25
] [13
]=
[−1
3
]
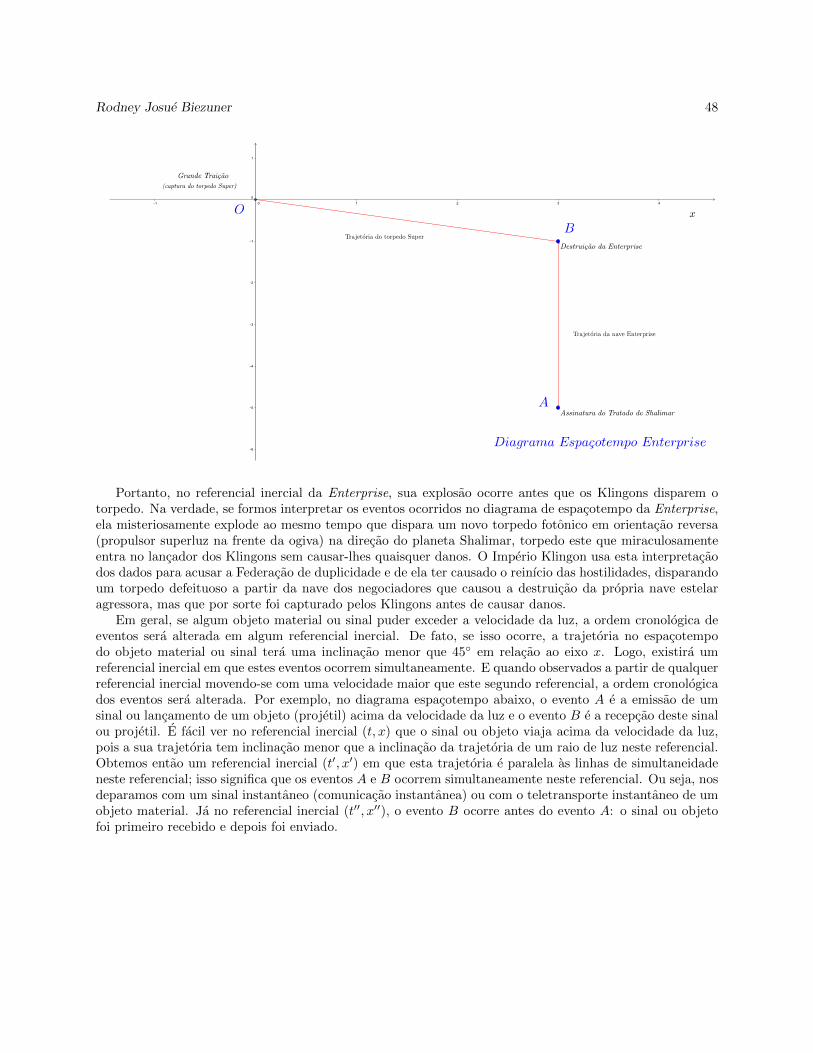
Rodney Josue Biezuner 48
Portanto, no referencial inercial da Enterprise, sua explosao ocorre antes que os Klingons disparem otorpedo. Na verdade, se formos interpretar os eventos ocorridos no diagrama de espacotempo da Enterprise,ela misteriosamente explode ao mesmo tempo que dispara um novo torpedo fotonico em orientacao reversa(propulsor superluz na frente da ogiva) na direcao do planeta Shalimar, torpedo este que miraculosamenteentra no lancador dos Klingons sem causar-lhes quaisquer danos. O Imperio Klingon usa esta interpretacaodos dados para acusar a Federacao de duplicidade e de ela ter causado o reinıcio das hostilidades, disparandoum torpedo defeituoso a partir da nave dos negociadores que causou a destruicao da propria nave estelaragressora, mas que por sorte foi capturado pelos Klingons antes de causar danos.
Em geral, se algum objeto material ou sinal puder exceder a velocidade da luz, a ordem cronologica deeventos sera alterada em algum referencial inercial. De fato, se isso ocorre, a trajetoria no espacotempodo objeto material ou sinal tera uma inclinacao menor que 45 em relacao ao eixo x. Logo, existira umreferencial inercial em que estes eventos ocorrem simultaneamente. E quando observados a partir de qualquerreferencial inercial movendo-se com uma velocidade maior que este segundo referencial, a ordem cronologicados eventos sera alterada. Por exemplo, no diagrama espacotempo abaixo, o evento A e a emissao de umsinal ou lancamento de um objeto (projetil) acima da velocidade da luz e o evento B e a recepcao deste sinalou projetil. E facil ver no referencial inercial (t, x) que o sinal ou objeto viaja acima da velocidade da luz,pois a sua trajetoria tem inclinacao menor que a inclinacao da trajetoria de um raio de luz neste referencial.Obtemos entao um referencial inercial (t′, x′) em que esta trajetoria e paralela as linhas de simultaneidadeneste referencial; isso significa que os eventos A e B ocorrem simultaneamente neste referencial. Ou seja, nosdeparamos com um sinal instantaneo (comunicacao instantanea) ou com o teletransporte instantaneo de umobjeto material. Ja no referencial inercial (t′′, x′′), o evento B ocorre antes do evento A: o sinal ou objetofoi primeiro recebido e depois foi enviado.

Rodney Josue Biezuner 49
3.3 Geodesicas no Espaco de Minkowski
Considere os eventos A e B no espacotempo e as duas trajetorias possıveis α, β de dois observadores de umevento a outro de acordo com diagrama espacotempo abaixo, em relacao ao referencial inercial do observadorque segue a trajetoria α.

Rodney Josue Biezuner 50
O observador que segue a trajetoria α permanece em repouso durante todo o tempo, isto e, os eventos Ae B ocorrem na mesma posicao em seu referencial inercial. Portanto, como ja vimos antes, o tempo propriomedido no seu referencial e exatamente
tB − tA.
O observador que segue a trajetoria curva β no espacotempo claramente nao esta em um referencial inercial,ja que o proprio fato da sua trajetoria ser curva em relacao a um referencial inercial mostra que ele sofreaceleracao ao longo de sua trajetoria. Por outro lado, faz sentido comparar o tempo proprio que ele mede(em seu referencial nao inercial), ou seja, quanto tempo se passa medido no seu relogio de pulso ou no seurelogio biologico. Dividindo a sua trajetoria em segmentos infinitesimais e usando a metrica de Lorentz,concluımos como na figura que em cada um destes segmentos da sua trajetoria vale
(∆τ)2
= (∆t)2 − (∆x)
2 6 (∆t)2,
ou seja,∆τ 6 ∆t.
Somando (integrando) as contribuicoes destes segmentos infinitesimais ao longo da trajetoria toda, con-cluımos que o tempo proprio medido seguindo-se a trajetoria β e menor que o tempo proprio medido aolongo da trajetoria α, onde o observador encontra-se em repouso. Mais precisamente, podemos escrever
(∆τ)2
= (∆t)2 − (∆x)
2=
[1−
(∆x
∆t
)2]
(∆t)2,
de modo que
∆τ =√
1− v2∆t,
donde
∆τAB =
∫ tB
tA
√1− v2dt.
Daı, como√
1− v2 < 1, segue que
∆τAB <
∫ tB
tA
dt = ∆tAB .
Assim, trajetorias curvas diminuem o tempo proprio, de modo que
retas tem tempo proprio maximo.
Embora acabamos de ver isso apenas no caso em que o observador encontra-se em repouso, isto e, eventos Ae B ocorrem no mesmo referencial, e facil obter a mesma conclusao no caso geral, fazendo-se uma mudancade coordenadas.
3.4 Paradoxo dos Gemeos
Esta secao e adaptada de [Takeuchi], Secao 6.6, pp. 148–153 e [Taylor-Wheeler], Secoes 4.6 (pp. 125–126) e4.9 (pp. 128–131) e, crucialmente, Exercıcio 5-8 (p. 169).
Uma nave espacial viaja da Terra para a estrela Canopus, percorrendo uma distancia de 99 anos-luz auma velocidade 99/101 da luz. Isso significa que ela viaja os 99 anos-luz de distancia, medidos no referencialinercial Terra em 101 anos de tempo. Como vimos na Secao 1.7.2, o tempo que os astronautas medem noreferencial Nave, isto e, o tempo proprio decorrido entre os eventos A (partida da espaconave da Terra)e B (chegada da nave em Canopus) e 20 anos. Segue que se a nave retornar para a Terra com a mesmavelocidade, o tempo decorrido entre os eventos A e C (retorno da espaconave a Terra) e medido no referencialinercial Terra como sendo de 202 anos, enquanto que o tempo medido no referencial Nave sera de apenas 40
Rodney Josue Biezuner 51
anos. Para efeitos dramaticos, se um dos astronautas tivesse um irmao gemeo na epoca que partiu da Terrae este tivesse permanecido la, quando ele retornar, o irmao gemeo terrestre tera envelhecido 202 anos (mastalvez nao tenha morrido, pois se foi desenvolvida tecnologia para viajar a velocidades proximas da luz, epossıvel que tambem foi desenvolvida tecnologia para permitir as pessoas viverem consideravelmente maistempo) enquanto que o irmao gemeo astronauta tera envelhecido apenas 40 anos.
O paradoxo dos gemeos e o seguinte: como todos os referenciais inerciais sao equivalentes, na primeiraparte da viagem, da Terra a Canopus, o astronauta mede no referencial inercial Nave que a Terra viajoupara um ponto situado a 99 anos-luz de distancia de sua posicao a uma velocidade 99/101 da luz, levandoportanto 101 anos para atingir aquela posicao, enquanto que do ponto de vista do referencial Terra, so sepassaram 20 anos; na segunda parte da viagem, a Terra retornou a posicao que o espaconave ocupa, tendogastado novamente 101 anos de acordo com o referencial Nave e 20 anos de acordo com o referencial Terra.Portanto, passaram-se 202 anos na espaconave e apenas 40 anos na Terra, exatamente o contrario do quehavıamos concluıdo no paragrafo anterior.
A resolucao trivial deste paradoxo e que enquanto o referencial Terra e de fato um referencial inercial poispermanece em repouso (relativamente) durante toda a viagem, o referencial Nave e um referencial inercial naprimeira parte da viagem, mas e um referencial inercial diferente na segunda parte da viagem. No momentoem que ele muda a direcao do seu movimento para retornar para a Terra, ele deixa de ser um referencialinercial, ele passa de um referencial inercial para outro.
Mas ainda ha duas questoes interessantes a resolver:
1. Sera que os calculos que fizemos anteriormente ainda estao corretos, isto e, decorreram-se 202 anosna Terra e apenas 40 anos na espaconave, ou a aceleracao que a espaconave sofreu quando mudou dedirecao para retornar a Terra afeta os calculos?
2. A questao anterior pode ser resolvida no ambito da Teoria da Relatividade Especial, que trata apenasde referenciais inerciais em movimento retilıneo uniforme um com relacao ao outro, ou, ja que existeuma aceleracao envolvida na mudanca da direcao da espaconave, esta questao so pode ser resolvida noambito da Teoria da Relatividade Geral que, como veremos, trata tambem de referenciais acelerados?
Em [Taylor-Wheeler], Box 4-1, p. 132, os autores afirmam categoricamente que nao ha necessidade de seusar a Teoria da Relatividade Geral. Ja em [Stephani], Secao 3.4, pp. 20–21, o autor afirma que para umaresposta confiavel, e necessario recorrer a Teoria da Relatividade Geral. Ambos estao corretos.
A Teoria da Relatividade Especial se aplica apenas a observacoes (medicoes) feitas em referenciais iner-ciais, de modo que nao podemos realmente dizer o que aconteceu com o astronauta durante o processo deaceleracao. Mas, supondo que podemos tornar o processo de aceleracao tao curto quanto quisermos, po-demos considerar um salto instantaneo de um referencial para o outro. Acompanhe a nossa discussao nodiagrama espacotempo a seguir. O referencial inercial da Terra tem coordenadas (t, x), o referencial inercialda nave na ida tem coordenadas (t′, x′) e o referencial inercial da nave na volta tem coordenadas (t′′, x′′). Osalto entre referenciais inerciais ocorre no evento B (chegada da nave a Canopus e, simultaneamente, partidade volta para a Terra). Imediatamente na chegada a Canopus, o evento B e simultaneo ao evento D naTerra. Com a mudanca instantanea de referenciais (mudanca instantanea da direcao da trajetoria da nave),o tempo medido na Terra da um salto de D para E (observe as linhas de simultaneidade; a linha inferiore a linha de simultaneidade no referencial inercial da nave na ida, isto e, os eventos C e D sao simultaneosneste referencial, e a linha de simultaneidade superior e a linha de simultaneidade do referencial inercial danave na volta, isto e, os eventos C e E sao simultaneos neste outro referencial; os eventos D e E nao estaoem escala no eixo t, pois, como veremos a seguir, eles estao relativamente muito proximos dos eventos A eC, respectivamente). Por causa deste efeito, o astronauta sera mais jovem que o seu irmao gemeo quandoretornar a Terra.
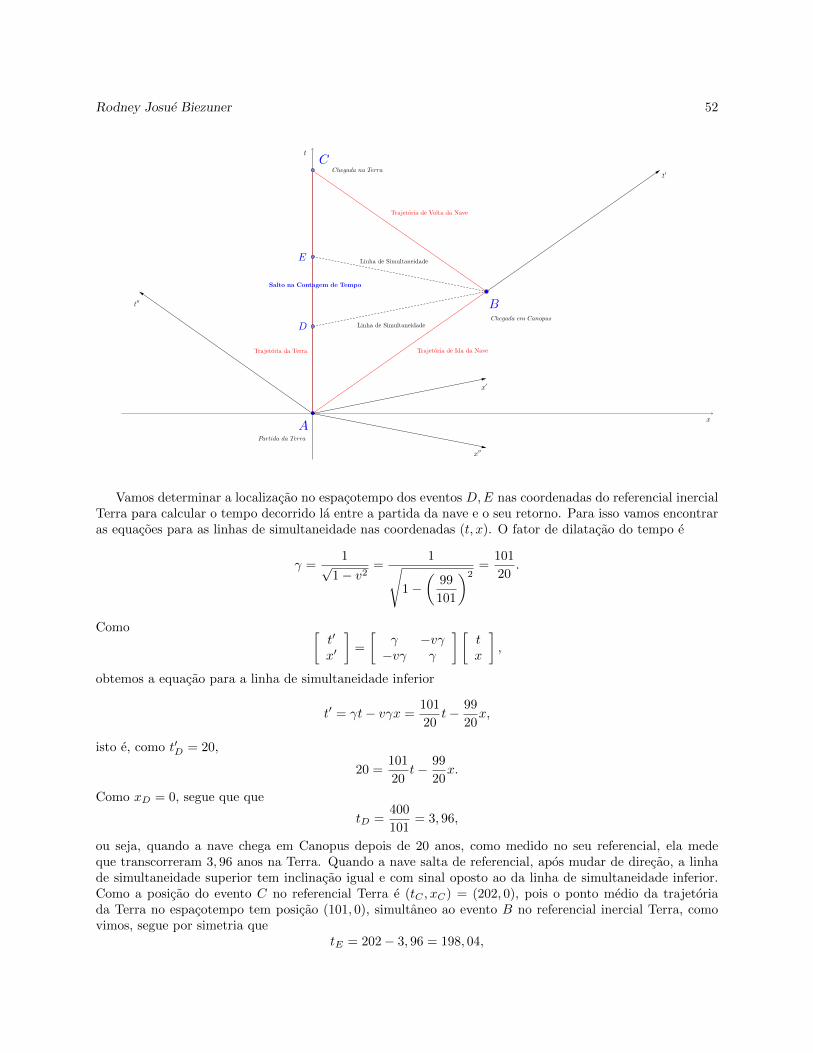
Rodney Josue Biezuner 52
Vamos determinar a localizacao no espacotempo dos eventos D,E nas coordenadas do referencial inercialTerra para calcular o tempo decorrido la entre a partida da nave e o seu retorno. Para isso vamos encontraras equacoes para as linhas de simultaneidade nas coordenadas (t, x). O fator de dilatacao do tempo e
γ =1√
1− v2=
1√1−
(99
101
)2=
101
20.
Como [t′
x′
]=
[γ −vγ−vγ γ
] [tx
],
obtemos a equacao para a linha de simultaneidade inferior
t′ = γt− vγx =101
20t− 99
20x,
isto e, como t′D = 20,
20 =101
20t− 99
20x.
Como xD = 0, segue que que
tD =400
101= 3, 96,
ou seja, quando a nave chega em Canopus depois de 20 anos, como medido no seu referencial, ela medeque transcorreram 3, 96 anos na Terra. Quando a nave salta de referencial, apos mudar de direcao, a linhade simultaneidade superior tem inclinacao igual e com sinal oposto ao da linha de simultaneidade inferior.Como a posicao do evento C no referencial Terra e (tC , xC) = (202, 0), pois o ponto medio da trajetoriada Terra no espacotempo tem posicao (101, 0), simultaneo ao evento B no referencial inercial Terra, comovimos, segue por simetria que
tE = 202− 3, 96 = 198, 04,

Rodney Josue Biezuner 53
ou seja, nesta mudanca instantanea de referenciais ha um salto na medida do tempo transcorrido na Terraconforme a nave mede: o tempo na Terra conforme medido no novo referencial inercial da nave na volta eque transcorreram na Terra 198, 04 anos. Assim, quando a nave retorna a Terra, transcorreram na Terra202 anos, enquanto que na nave transcorreram apenas 40 anos.
E claro que este salto na contagem de tempo e fisicamente impossıvel, assim como e fisicamente impossıveluma mudanca instantanea na direcao da nave. Numa situacao fısica real, a nave levaria algum tempo paramudar de direcao, de modo que a sua trajetoria no espacotempo seria uma curva diferenciavel, com as linhasde simultaneidade mudando de forma contınua a medida que a nave desacelera e acelera para mudar dedirecao. Terıamos entao uma trajetoria curva que, como vimos na Secao 3.3, tem um tempo proprio menorque o tempo medido na trajetoria reta entre os eventos A e C; uma analise detalhada do paradoxo dosgemeos ao longo deste argumento pode ser vista em [Ferraro], Secao 4.5, pp. 103–107.
A historia do paradoxo dos gemeos comeca no ano 1911 e foi um dos fenomenos mais discutidos eincompreendidos da teoria, mas a ocorrencia do fenomeno foi confirmada experimentalmente um numeroenorme de vezes, de forma direta depois da invencao dos relogios atomicos em 1949 (relogios atomicos emavioes marcaram um tempo menor do que o decorrido no chao entre decolagem e aterrisagem). Veja [Topper],pp. 77-78, 127–129 (a resolucao de Einstein usando a Teoria da Relatividade Geral; aceleracao, assim comoa gravidade, faz com que o tempo ande mais devagar), pp. 145–146 (uma comprovacao atraves dos inumerosexperimentos realizados em aceleradores de partıculas em circuito fechado).

Capıtulo 4
Momento-Energia
4.1 4-Vetores
Tanto na Teoria da Relatividade Especial quanto na Geral, e conveniente descrever o movimento de umobjeto em um referencial inercial (em Relatividade Especial) ou em um sistema de coordenadas geral (emRelatividade Geral) em coordenadas do espacotempo dependendo do seu tempo proprio τ , isto e, de acordocom o tempo medido em seu proprio referencial, e portanto independente de referencial. Assim, em umreferencial inercial a trajetoria de uma partıcula livre e uma curva parametrizada pelo tempo proprio
α (τ) = (t (τ) , x (τ) , y (τ) , z (τ)) ,
e a geodesica γ que uma partıcula livre segue no espacotempo curvo seria parametrizada pelo tempo proprioγ (τ).
Vetores no espacotempo tem 4 coordenadas e para distingui-los dos vetores espaciais (projecoes espaciais),sao frequentemente chamados de quadrivetores ou 4-vetores. Assim, temos o quadrivetor deslocamento,ou seja deslocamento no espacotempo
∆s = (∆t,∆x,∆y,∆z)
e o quadrivetor velocidade
u =ds
dτ=
(dt
dτ,dx
dτ,dy
dτ,dz
dτ
), (4.1)
ou α′ (τ) para uma trajetoria curva α (τ) no espacotempo. O quadrivetor velocidade e por definicao tangentea trajetoria da partıcula no espacotempo.
Observe que se a trajetoria do objeto no espacotempo e uma curva, o seu referencial proprio obviamentenao e um referencial inercial. Entretanto, em cada instante de tempo existe um referencial inercial que tema mesma velocidade que o objeto; este referencial inercial que comove com o objeto e temporario, pois noproximo instante de tempo ele nao esta mais se comovendo com o objeto. Ele e chamado o seu referencialcomovente temporario (em ingles: momentarily comoving reference frame (MCRF)). O quadrivetor veloci-dade em um determinado instante de tempo (tangente a trajetoria da partıcula naquele instante de tempo)e justamente o vetor base e0 do seu referencial comovente temporario naquele momento.
Como o tempo proprio τ do objeto e o tempo t de um referencial inercial arbitrario estao relacionadosatraves da equacao
τ =√
1− v2t, (4.2)
onde v e a velocidade espacial do objeto em relacao a este referencial inercial (v = ‖v‖), isto e,
v =
(dx
dt,dy
dt,dz
dt
),
54

Rodney Josue Biezuner 55
segue que
dτ =√
1− v2dt,
e portanto as coordenadas do quadrivetor velocidade no referencial inercial tambem podem ser escritas naforma
u =1√
1− v2
(1,dx
dt,dy
dt,dz
dt
)=
1√1− v2
(1,v)
ou
u =1√
1− v2(1, vx, vy, vz) =
1√1− v2
(1,v) . (4.3)
Observe que quando v << 1 temos τ ≈ t e
u ≈ (1, vx, vy, vz) = (1,v) ,
e o quadrivetor velocidade de um objeto em repouso em relacao ao referencial inercial (trajetoria vertical noespacotempo) tem neste referencial coordenadas
u = (1, 0, 0, 0) .
Em particular, segue tambem que se v 6= 1 o quadrivetor velocidade e um vetor unitario, isto e,
‖u‖2 = −1 (4.4)
pois
〈u,u〉 =
⟨1√
1− v2(1, vx, vy, vz) ,
1√1− v2
(1, vx, vy, vz)
⟩=
1
1− v2
[−1 + (vx)
2+ (vy)
2+ (vz)
2]
=1
1− v2
[−1 + v2
]= −1.
4.2 Momento-Energia
4.1 Definicao. Se m e a massa de um objeto, definimos o quadrivetor momento-energia
P = mu. (4.5)
Em um referencial inercial arbitrario, segue que o quadrivetor momento-energia tem coordenadas
P =m√
1− v2(1, vx, vy, vz) =
m√1− v2
(1,v) .
Observe que como velocidade e adimensional em relatividade (tempo e espaco sao medidos com a mesmaunidade), o quadrivetor momento-energia tem unidades de massa. De fato, se v 6= 1
〈P,P〉 = 〈mu,mu〉 = m2 〈u,u〉 = −m2,
de modo que‖P‖2 = −m2. (4.6)

Rodney Josue Biezuner 56
Note que a massa m de um objeto, sendo a norma do quadrivetor momento-energia (um vetor do espacotempode Minkowski), tem o mesmo valor em qualquer referencial inercial. Em outras palavras, ela nao dependeda velocidade do referencial: massa nao aumenta com a velocidade e na teoria da relatividade nao se define“massa relativıstica” (veja [Okun1] para uma exposicao clara, incluindo a origem historica deste termo eate seu uso inicial por Einstein para inferir a atracao da luz por uma massa gravitacional (ele raciocinouque fotons teriam massa m = E/c2), antes de formular a Teoria da Relatividade Geral, quando abandonouessa ideia inconsistente, e uma coletanea de artigos criticando os conceitos de “massa de repouso” e “massarelativıstica” em [Okun2]). Por outro lado, massa e mais facilmente medida em um referencial em que oobjeto esta em repouso.
Se m = 0, entao P e um vetor do tipo luz, e consequentemente u tambem e, donde v = 1. Portanto,fotons nao possuem massa.
4.2 Definicao. A componente temporal do quadrivetor momento-energia e chamada a energia rela-tivıstica E do objeto e sua projecao espacial o seu momento relativıstico p.
Assim,
E =m√
1− v2,
p =m√
1− v2v =
(mvx√1− v2
,mvy√1− v2
,mvz√1− v2
),
de modo quem2 = E2 − p2. (4.7)
Note que tanto a energia relativıstica quanto o momento relativıstico dependem do referencial, ja que saocomponentes (coordenadas) de um quadrivetor. Observe tambem que massa nao e a mesma coisa que energia:energia e a componente temporal do quadrivetor momento-energia, enquanto que massa e a magnitude destevetor. Apenas que, em relatividade, elas sao medidas com as mesmas unidades de medida (quilogramas), damesma forma que tempo e espaco em relatividade sao medidos com as mesmas unidades de medida (metros),apesar de nao serem a mesma coisa.
Em unidades do espacotempo (ct, x, y, z) em que a velocidade da luz e c e nao normalizada para 1, arelacao entre o tempo proprio e o tempo em um referencial inercial arbitrario e
τ =
√1−
(vc
)2
t
e o quadrivetor velocidade tem coordenadas
u =1√
1−(vc
)2(c, vx, vy, vz) =
1√1−
(vc
)2(c,v) ,
de modo que o momento-energia e
P =m√
1−(vc
)2(c, vx, vy, vz) =
m√1−
(vc
)2(c,v) ,
mas a energia relativıstica e
E =mc2√
1−(vc
)2

Rodney Josue Biezuner 57
(para que as unidades de medida de energia fiquem corretas) e o momento relativıstico e
p =mv√
1−(vc
)2,
ou seja,
P =
(E
c,v
).
Quando v = 0, temosE0 = m
ou, quando a velocidade da luz nao e normalizada, a celebre equacao
E0 = mc2
para a energia de repouso; ou seja, a energia de um objeto nao desaparece quando ele esta em repouso, comona mecanica de Newton, mas ao contrario e enorme (por causa do fator c2).
Capıtulo 5
Aceleracao no Espacotempo deMinkowski
58

Capıtulo 6
O Tensor do Campo Eletromagnetico
59

Capıtulo 7
O Princıpio de Equivalencia –Geodesicas no Espacotempo Curvo
7.1 O Pensamento Mais Feliz da Vida de Einstein
A Teoria da Gravitacao Universal de Newton, baseada na acao a distancia instantanea de uma forca gravi-tacional oculta e completamente incompatıvel com a Teoria da Relatividade, onde nada pode viajar a umavelocidade superior a da luz. Einstein precisava, portanto, inventar uma nova teoria de gravitacao (alemda necessidade obvia de estender a teoria da relatividade para referenciais acelerados). O mais importanteinsight que Einstein teve na sua busca pela Teoria da Relatividade Geral foi em 1907, conforme relatadopelo mesmo em suas proprias palavras (quotado da traducao do original alemao para o ingles em [Topper],Cap. 12, p. 89):
Quando eu estava ocupado [em 1907] escrevendo um resumo do meu trabalho na teoria da relatividaespecial ..., eu tambem tinha que tentar modificar a teoria da gravitacao de Newton para adaptar as suas leisna teoria. Por mais que tentativas nesta direcao mostraram a praticalidade do empreendimento, elas nao mesatisfaziam porque elas tinham que ser baseadas em hipoteses sem fundamento fısico. Naquele momento,eu tive o pensamento mais feliz da minha vida [der Glucklichste Gedanke meines Lebens, que podeser alternativamente traduzido tambem como o mais sortudo, ou o mais afortunado ou o mais bem sucedidopensamento da minha vida.], na seguinte forma:
Em um exemplo que vale a pena considerar, o campo gravitacional tem uma existencia relativa similar aocampo eletrico gerado por inducao eletromagnetica. Porque, para um observador em queda livre do telhadode uma casa, durante a sua queda nao existe nenhum campo gravitacional, pelo menos em sua vizinhancaimediata. Especificamente, se o observador soltar quaisquer corpos, eles permanecem em um estado derepouso ou movimento uniforme, relativamente a ele, independentemente de sua natureza quımica ou fısicaespecial [ignorando a resistencia do ar, e claro]. O observador, portanto, esta justificado em interpretar seuestado como sendo em repouso.
Em uma palestra em Kyoto, ele caracterizou este pensamento da seguinte maneira: Repentinamente, umaideia me ocorreu: ‘Se uma pessoa cair livremente, ela nao deve sentir o seu proprio peso.’ Imediatamenteeu me surpreendi. Este pensamento simples me deixou com uma impressao profunda, com efeito.
Ou seja, localmente nao existe gravidade, o espacotempo e o espacotempo de Minkowski, isto e, a metricae a metrica de Lorentz, da Relatividade Especial. Como vimos na Secao 1.3, localmente no espaco e no tempoum pequeno elevador em queda livre e um referencial inercial. Localmente quer dizer eventualmente em umponto no espacotempo, ja que em uma regiao finita do espacotempo sempre aparecem os efeitos de mare, sea resolucao e suficientemente boa.
A gravidade surge como um fenomeno global, considerando como os varios referenciais inerciais variamna vizinhanca de um ponto, isto e, a gravidade surge quando se cola os espacotempos de Lorentz em cada
60

Rodney Josue Biezuner 61
ponto para obter uma estrutura global.Assim, para se obter uma Teoria da Gravitacao, e necessario primeiro saber como colar estes varios
espacotempos de Minkowski. Por sorte, o maquinario matematico para fazer isso foi desenvolvido no inıcioda segunda metade do seculo XIX por Riemann. Por azar, quando Einstein era estudante de Fısica noInstituto Politecnico de Zurich na Suıca, ele “matava” as aulas de Matematica e preferia passar o temponos laboratorios, observando os experimentos que eram realizados. Por sorte, ele tinha um bom amigo,Marcel Grossmann, especialista em geometria nao euclideana. A partir de 1912, eles trabalharam juntos,publicando uma serie de artigos a partir de 1912 que tiveram um papel importante na jornada ate a Teoriada Relatividade Geral. Mas os esforcos nao foram realmente bem sucedidos ate que Einstein reintroduziua regra da covariancia que havia na Teoria da Relatividade Especial, isto e, que as equacoes deveriamter a mesma forma em todos os referenciais inerciais (ate entao, os dois tinham trabalhado sem assumirque as equacoes eram covariantes). A Teoria da Relatividade Geral foi anunciada por Einstein sozinho emnovembro de 1915 em uma serie de 4 palestras na Academia de Ciencias da Prussia e publicada em marcode 1916. Este artigo, “A Fundacao da Teoria da Relatividade Geral” comeca com um reconhecimento dotrabalho de Minkowski (recorde o final da Secao 2.3), “que foi o primeiro a reconhecer a equivalencia formaldas coordenadas espaciais e as coordenadas temporais, e usou isso na construcao da teoria”. Alem disso,Einstein “em reconhecimento” agradeceu “meu amigo, o matematico Grossmann, cuja ajuda nao apenasme salvou o esforco de estudar a literatura matematica pertinente, como tambem me ajudou na busca dasequacoes de campo da gravitacao.” ([Topper], Cap. 15, p. 113.)
Assim, o pensamento mais feliz da vida de Einstein, que deu origem a Teoria da Relatividade Geral, eque em cada ponto, o espacotempo e de Minkowski. A maneira como colar estes espacos de Minkowski emcada ponto para obter a geometria global do espacotempo, isto e, a curvatura do espacotempo e ditada pelaGeometria Riemanniana. Neste momento temos que fazer uma pausa na Fısica e um grande desvio paraaprender esta geometria, que requer uma serie de prerequisitos para ser bem compreendida. E o que faremosnos proximos capıtulos.
7.1.1 Inercia
Antes, porem, e necessario considerar o conceito de inercia e as trajetorias que as partıculas livres per-correm no espacotempo. Isso nos guiara na motivacao dos conceitos necessarios para o desenvolvimento doespacotempo curvo (variedade de Lorentz) fısico alem da simples colagem de espacos tangentes de Minkowski.
Newton aceitou o Princıpio da Relatividade Galileana: nao existe repouso e movimento uniforme absoluto.Mas existe a aceleracao absoluta e ela e a justificativa para a existencia do espaco absoluto. A aceleracaoabsoluta e em relacao a este espaco. Alem disso, a inercia e uma medida da resistencia de um corpo a sofreruma aceleracao, e esta e dada pela massa do corpo.
No espacotempo plano de Minkowski as geodesicas sao retas. Quaisquer trajetorias curvas implicam naexistencia de uma aceleracao e portanto de uma forca agindo. A aceleracao e absoluta, mas nao e necessariopostular um espaco absoluto para entende-la. Ela existe no espacotempo absoluto de Minkowski.
No espacotempo curvo da Relatidade Geral, partıculas que se movem apenas por inercia, sem sofrera acao de forcas, tambem se movem ao longo de geodesicas. Na geometria de Lorentz elas nao sofremqualquer alteracao de direcao, isto e, as partıculas que seguem trajetorias geodesicas no espacotempo naosofrem aceleracao (nao estao sujeitas a acao de forcas). Elas se movem por inercia, seguindo as trajetoriasgeodesicas do espacotempo. Apenas as geodesicas do espacotempo curvado da relatividade geral sao curvas,logo na projecao tridimensional existe uma aceleracao. Alem disso, devido a curvatura do espacotempo, astrajetorias geodesicas se aproximam, o que era interpretado como os corpos se atraindo sujeitos a forca dagravidade. Isso nao existe no espacotempo curvo. Portanto, nao existe uma forca de gravidade: a gravidadee apenas uma manifestacao da curvatura do espacotempo.
Forcas so existem quando as partıculas sao impedidas de percorrer sua trajetoria geodesica no espacotempo.Por exemplo, quando um corpo esta apoiado sobre o chao, impedido de cair, impedido de seguir a sua tra-jetoria geodesica natural no espacotempo curvado.
Capıtulo 8
Topologia Diferencial
8.1 Variedades Diferenciaveis
8.1 Definicao. Seja M um espaco topologico de Hausdorff com base enumeravel. Um atlas de dimensao n(ou sistema de coordenadas) para M e uma famılia
Φ = ϕαα∈A
de homeomorfismos ϕα : Uα −→ Vα de um aberto Uα ⊂ Rn sobre um aberto Vα de M para cada α ∈ A,satisfazendo as seguintes condicoes:
(i) Os abertos Vα cobrem M , isto e, ⋃α∈A
Vα = M.
(ii) Para todos ındices α, β ∈ A tais que Vαβ = Vα ∩ Vβ 6= ∅, as funcoes de transicao
ϕαβ = ϕ−1β ϕα : ϕ−1
α (Vαβ) −→ ϕ−1β (Vαβ) ,
ϕβα = ϕ−1α ϕβ : ϕ−1
β (Vαβ) −→ ϕ−1α (Vαβ) ,
sao diferenciaveis de classe C∞.Cada aplicacao ϕα e chamada uma carta (ou uma parametrizacao ou um sistema de coordena-
das locais) para uma vizinhanca de M , denotada (ϕα, Uα), e Vα = ϕα (Uα) e chamada uma vizinhancacoordenada.
Se p = ϕα (x1, . . . , xn), entao x1, . . . , xn sao chamadas as coordenadas locais de p na carta ϕα.Uma estrutura diferenciavel para M e um atlas maximal.Uma variedade diferenciavel de dimensao n e um espaco topologico de Hausdorff com base enumeravel
munido de uma estrutura diferenciavel.
Em outras palavras, uma variedade diferenciavel e uma variedade topologica em que as mudancas de coorde-nadas de um sistema de coordenadas local para outro sao diferenciaveis. Observe que o que definimos comovariedade diferenciavel e chamado variedade suave em outros lugares. Em Geometria Riemanniana, variosconceitos importantes necessitam derivadas de varias ordens, portanto costuma-se trabalhar com variedadessuaves desde o inıcio e nao com variedades diferenciaveis de classe Ck, para nao ter que especificar a todomomento o valor de k necessario para que certo conceito possa ser definido ou para que certo teorema facasentido. Requerer que o atlas seja maximal e incluir no atlas todas as cartas locais que sao compatıveiscom o atlas, isto e, um atlas Φ = ϕαα∈A e maximal se sempre que ϕ : U −→ V e um homeomorfismo deum aberto U ⊂ Rn sobre um aberto V de M tal que ϕ−1 ϕα e ϕ−1
α ϕ sao diferenciaveis para todo α ∈ A,entao ϕ ∈ Φ; por definicao, o atlas maximal e unico. Esta e uma maneira mais simples de definir o conceito
62

Rodney Josue Biezuner 63
de estrutura diferenciavel, do que definir estruturas diferenciaveis como classes de equivalencia de atlas com-patıveis, ou seja, de atlas tais que as cartas de sao todas compatıveis com as cartas do outro; uma funcaodefinida em uma variedade diferenciavel e diferenciavel (veremos a definicao logo a seguir) com relacao a doisatlas diferentes se e somente se eles sao compatıveis, portanto atlas compatıveis definem a mesma estruturadiferenciavel neste sentido. Se uma variedade topologica possui uma estrutura diferenciavel (toda variedadetopologica de dimensao n 6 3 possui, mas para toda dimensao n > 4 existem variedades topologicas compac-tas que nao possuem) ela possui uma quantidade nao enumeravel de estruturas diferenciaveis (veja [Lee 1],p. 30, Problem 1.6). Por outro lado, a estrutura diferenciavel de uma variedade diferenciavel e unica, nosentido que todo atlas diferenciavel esta contido em um unico atlas maximal (para uma demonstracao, veja[Lee 1], p. 13, Proposition 1.17).
Surpreendentemente, a condicao de ser de Hausdorff (que assegura, entre outras coisas, que conjuntosfinitos de pontos sao fechados e que limites de sequencias convergentes sao unicos) nao e implicada peladefinicao (veja Exercıcio 8.44). A condicao de possuir uma base enumeravel garante a existencia de particoesda unidade. Por outro lado, dado um conjunto X, uma estrutura diferenciavel sobre X determina umatopologia para X (veja Exercıcio 8.45). Observe que toda variedade diferenciavel e localmente conexa porcaminhos e que uma variedade diferenciavel e conexa se e somente se ela e conexa por caminhos (Exercıcio8.46). Alem disso, toda variedade diferenciavel e paracompacta, isto e, toda cobertura de uma variedadediferenciavel por abertos admite uma subcobertura localmente finita; mais que isso, esta subcobertura podeser tomada enumeravel (veja [Lee 1] para demonstracoes destas afirmacoes).
Quando nos referirmos a uma variedade diferenciavel, assumimos que ela esta munida de uma estruturadiferenciavel. Denotaremos as vezes uma variedade diferenciavel M de dimensao n por Mn quando fornecessario especificar a dimensao da variedade. Tambem denotaremos uma carta do atlas por (ϕ,U) quandoa sua imagem nao for importante nas consideracoes.
8.2 Aplicacoes Diferenciaveis
8.2 Definicao. Seja Mn uma variedade diferenciavel. Dizemos que uma funcao f : M −→ Rk e uma funcaodiferenciavel se para todo p ∈M existe uma carta (ϕ,U) de uma vizinhanca de p tal que
f ϕ : U ⊂ Rn −→ Rk
e uma funcao diferenciavel de classe C∞.
Observe que se f ϕ e diferenciavel para uma carta (ϕ,U) de uma vizinhanca de p, entao para qualquercarta (ψ, V ) de uma vizinhanca de p temos que f ψ e diferenciavel, pois
f ψ = f ϕ (ϕ−1 ψ
)e ψ−1 ϕ e um difeomorfismo. A funcao f ϕ e chamada uma representacao de f em coordena-das. Frequentemente omitimos a carta ϕ quando trabalhamos com a representacao de f em coordenadas eescrevemos
f (x1, . . . , xn)
ao inves de(f ϕ) (x1, . . . , xn) .
8.3 Definicao. Se M e uma variedade diferenciavel, definimos o espaco vetorial
C∞ (M) = f : M −→ R : f e diferenciavel .
C∞ (M) e um espaco vetorial porque a combinacao linear de funcoes diferenciaveis e uma funcao diferenciavel.

Rodney Josue Biezuner 64
8.4 Definicao. Sejam Mm e Nn variedades diferenciaveis. Dizemos que uma aplicacao F : M −→ N euma aplicacao diferenciavel se para todo p ∈ M existem cartas (ϕ,U) de uma vizinhanca de p e (ψ, V )de uma vizinhanca de F (p) com F (ϕ (U)) ⊂ ψ (V ) tais que
ψ−1 F ϕ : U ⊂ Rm −→ Rn
e uma aplicacao diferenciavel de classe C∞.
Novamente observamos que se ψ−1 F ϕ e diferenciavel para as cartas (ϕ,U) , (ψ, V ), entao para quaisquer
cartas(ϕ, U
)de uma vizinhanca de p e
(ψ, V
)de uma vizinhanca de F (p) tais que F
(ϕ(U)
)⊂ ψ
(V)
temos que ψ−1 F ϕ e diferenciavel, pois
ψ−1 F ϕ = (ψ−1 ψ) ψ−1 F ϕ (ϕ−1 ϕ
)e ϕ−1ϕ, ψ−1ψ sao difeomorfismos. A aplicacao ψ−1F ϕ e uma representacao de F em coordenadas.
Ressaltamos de novo que o que definimos como funcao diferenciavel e aplicacao diferenciavel sao chamadasfuncao suave e aplicacao suave em outros lugares.
8.5 Definicao. Dizemos que uma aplicacao diferenciavel F : M −→ N e um difeomorfismo se F e umhomeomorfismo e F−1 tambem e diferenciavel.
Se existir um difeomorfismo entre duas variedades diferenciaveis M e N , dizemos que elas sao difeomor-fas.
Se duas variedades diferenciaveis sao difeomorfas, em particular elas possuem a mesma dimensao.O conceito de difeomorfismo leva naturalmente a perguntar se, dada uma variedade diferenciavel, estru-
turas diferenciaveis diferentes sobre ela definem sempre duas variedades diferenciaveis difeomorfas ou nao.A resposta e que para variedades diferenciaveis de dimensao n 6 3 existe apenas uma estrutura diferenciavela menos de difeomorfismo, enquanto que mesmo R4 tem um numero nao enumeravel de estruturas dife-renciaveis nao difeomorfas; sabe-se que esferas de dimensao ate n = 20, n 6= 4, possuem um numero finito deestruturas diferenciaveis a menos de difeomorfismo e este numero e conhecido (veja referencias em Wikipediae [Lee 1], p. 40). Quantas estruturas diferenciaveis difeomorfas S4 possui (ou mesmo se este numero e maiorque 1 ou finito) e uma questao em aberto, a conjectura de Poincare generalizada.
Uma das aplicacoes diferenciaveis mais importantes entre variedades sao as curvas diferenciaveis:
8.6 Definicao. Uma curva diferenciavel em uma variedade diferenciavel M e uma aplicacao diferenciavelα : I −→M onde I ⊂ R e um intervalo.
8.2.1 Particoes da Unidade
8.7 Definicao. Seja V = Vαα∈A uma cobertura por abertos de uma variedade diferenciavel M . Umaparticao da unidade subordinada a V e uma colecao ραα∈A de funcoes diferenciaveis ρα : M −→ Rtais que
(i) 0 6 ρα 6 1.(ii) supp ρα ⊂ Vα.(iii) supp ραα∈A e localmente finita (todo ponto em M possui uma vizinhanca que intersecta apenas
um numero finito destes suportes).(iv)
∑α∈A
ρα = 1.
8.8 Teorema (Existencia de Particoes da Unidade). Toda cobertura por abertos de uma variedadediferenciavel possui uma particao da unidade subordinada.
Prova: Veja [Lee 2], p. 43, Theorem 2.23.

Rodney Josue Biezuner 65
8.9 Corolario (Existencia de Funcoes Bump). Dados um fechado A e um aberto V ⊃ A em umavariedade diferenciavel M , existe uma funcao diferenciavel f : M −→ R tal que
(i) 0 6 f 6 1.(ii) f ≡ 1 em A.(iii) supp f ⊂ V.
8.10 Corolario (Lema de Extensao). Dados um fechado A, um aberto V ⊃ A em uma variedade dife-
renciavel M e uma funcao diferenciavel f : A −→ Rk existe uma extensao diferenciavel f : M −→ Rk de ftal que supp f ⊂ V .
Em particular, se (ϕ,U) e uma carta local e V ⊂⊂ ϕ (U), qualquer funcao diferenciavel f : V −→ Rk
pode ser estendida a uma funcao diferenciavel f : M −→ Rk com supp f ⊂ ϕ (U).
Prova: Para a primeira parte veja [Lee 2], p. 45, Lemma 2.26. A segunda parte segue imediatamente daprimeira, ja que V ⊂ U e fechado.
8.3 Vetores Tangentes
Consideremos agora a questao de como definir a nocao de vetor tangente a um ponto em uma variedadediferenciavel. Esta nocao nao e obvia, ja que uma variedade e um espaco abstrato que nao se encontra emprincıpio imerso em um espaco ambiente, ou seja, em um espaco euclidiano, onde operacoes diferenciais evetoriais sao naturais. Portanto, precisamos procurar uma caracterıstica de vetores tangentes em espacoseuclidianos que independa do espaco ambiente. Faremos isso em duas etapas, aumentando em abstracao atechegar a uma definicao que provara ser extremamente conveniente de trabalhar.
8.3.1 Vetores Tangentes a Curvas
No que se segue, denotaremos as derivadas parciais de funcoes reais f de varias variaveis reais por
∂f
∂xiou ∂if
conforme for mais conveniente.Quando α : I −→ Rn e uma curva diferenciavel em um espaco euclidiano, com α (t0) = p e α′ (t0) = v,
escrevendo em coordenadasα (t) =
(x1 (t) , . . . , xn (t)
),
temos que
α′ (t) =
(dx1
dt(t) , . . . ,
dxn
dt(t)
),
e em particular
v = α′ (t0) =
(dx1
dt(t0) , . . . ,
dxn
dt(t0)
).
Se f : Rn −→ R e uma funcao diferenciavel em p, entao a derivada direcional de f em p na direcao de v edada pela regra da cadeia por
(f α)′(t0) = dfα(t0)α
′ (t0) =
n∑i=1
∂f
∂xi(p)
dxi
dt(t0) =
[n∑i=1
dxi
dt(t0)
∂
∂xi
]f (p) ,
o que significa que a derivada direcional na direcao de v pode ser vista como um operador linear sobre funcoesdiferenciaveis que depende apenas do vetor v.

Rodney Josue Biezuner 66
8.11 Definicao (Preliminar). Seja α : I −→ M uma curva diferenciavel com α (t0) = p. O vetortangente a curva α em p e uma funcao vp : C∞ (M) −→ R definida por
vp (f) = (f α)′(t0) .
Um vetor tangente a variedade M em p e qualquer vetor tangente a uma curva diferenciavel passandopor p.
Ou seja, cada curva diferenciavel em M passando por p da origem a um vetor tangente em p. E claro quecurvas diferenciaveis diferentes α, β : I −→ M com α (t0) = β (s0) = p podem dar origem ao mesmo vetortangente: basta que
(f α)′(t0) = (f β)
′(s0)
para todo f .
8.12 Proposicao. Um vetor tangente vp : C∞ (M) −→ R e um funcional linear e o conjunto dos vetorestangentes a uma variedade em um ponto formam um espaco vetorial real n-dimensional.
Prova: Seja (ϕ,U) uma carta de uma vizinhanca de p com ϕ (x0) = p. Sejam α : I −→ M uma curvadiferenciavel com α (t0) = p e vp o vetor tangente a α em p. Dado f ∈ C∞ (M), temos
vp (f) = (f α)′(t0)
=(f ϕ ϕ−1 α
)′(t0)
= d (f ϕ)x0
(ϕ−1 α
)′(t0)
=
n∑i=1
∂ (f ϕ)
∂xi(x0)
dxi
dt(t0) ,
onde denotamos(ϕ−1 α
)(t) =
(x1 (t) , . . . , xn (t)
)em coordenadas locais. Segue que para todos f, g ∈
C∞ (M) e para todos a, b ∈ R temos
vp (af + bg) =
n∑i=1
∂ ([af + bg] ϕ)
∂xi(x0)
dxi
dt(t0)
= a
n∑i=1
∂ (f ϕ)
∂xi(x0)
dxi
dt(t0) + b
n∑i=1
∂ (g ϕ)
∂xi(x0)
dxi
dt(t0)
= avp (f) + bvp (g) ,
de modo que vp : C∞ (M) −→ R e um funcional linear.Para mostrar que o conjunto dos vetores tangentes a M em p formam um espaco vetorial e que este tem
dimensao n, mostraremos que todo vetor tangente e a combinacao linear de n vetores tangentes linearmenteindependentes ∂1|p , . . . , ∂n|p a serem definidos e que, alem disso, qualquer combinacao linear dos vetorestangentes ∂1|p , . . . , ∂n|p e um vetor tangente (embora combinacoes lineares de funcionais lineares sejamsempre funcionais lineares, nada garante em princıpio que um tal funcional linear e um vetor tangente; defato, depois que provarmos que o espaco vetorial dos vetores tangentes tem dimensao n, segue que ele e umsubespaco vetorial proprio do espaco vetorial dos funcionais lineares de C∞ (M), pois este tem dimensaoinfinita).
De fato, reescreva a expressao obtida acima para vp (f) na forma
vp (f) =
n∑i=1
dxi
dt(t0)
∂ (f ϕ)
∂xi(x0) .

Rodney Josue Biezuner 67
Denotando por B = e1, . . . , en a base canonica de Rn, seja αi a curva diferenciavel αi : Ii −→M definidapor
αi (t) = ϕ (x0 + tei) ,
onde Ii e um intervalo aberto em torno de t0 tal que x0 + tei ∈ U para todo t ∈ Ii e denote por ∂i|p o vetortangente a curva αi em p. Como
∂ (f ϕ)
∂xi(x0) = lim
t→0
(f ϕ) (x0 + tei)− (f ϕ) (x0)
t
= (f αi)′ (t0)
= ∂i|p (f) ,
segue que
vp =
n∑i=1
dxi
dt(t0) ∂i|p .
Reciprocamente, se v e o funcional linear
vp =
n∑i=1
ci ∂i|p ,
entao v e o vetor tangente a curva α em p definida por
α (t) = ϕ
(x0 + t
(n∑i=1
ciei
)),
pois, pela regra da cadeia como vimos no inıcio da demonstracao,
(f α)′(0) =
n∑i=1
dxi
dt(0)
∂ (f ϕ)
∂xi(x0) =
n∑i=1
ci ∂i|p (f) = v (f) .
Finalmente, sen∑i=1
ci ∂i|p = 0,
entaon∑i=1
ci∂ (f ϕ)
∂xi(x0) = 0
para todo f ∈ C∞ (M). Definindo para cada j
fj(x1, . . . , xn
)= xj
em um aberto U0 ⊂⊂ U , segue que fj e diferenciavel em U0 e pelo Corolario 8.10 podemos estender fj a
uma funcao diferenciavel fj ∈ C∞ (M). Como
∂(fj ϕ
)∂xi
(x0) =∂ (fj ϕ)
∂xi(x0) = δij ,
escolhendo f = fj obtemos cj = 0 para todo j.
8.13 Proposicao (Regra do Produto). O vetor tangente vp : C∞ (M) −→ R satisfaz a propriedade
vp (fg) = vp (f) g (p) + f (p) vp (g) .

Rodney Josue Biezuner 68
Prova: Seja vp o vetor tangente a curva α em p. Entao
vp (fg) = ((fg) α)′(t0) = [(f α) (g α)]
′(t0)
= (f α)′(t0) (g α) (t0) + (f α) (t0) (g α)
′(t0)
= vp (f) g (p) + f (p) vp (g) .
8.3.2 Vetores Tangentes como Derivacoes
8.14 Definicao. Seja M uma variedade diferenciavel. Um vetor tangente a M em p e um funcional linearvp : C∞ (M) −→ R que tambem e uma derivacao em p, isto e, ele satisfaz a regra do produto
vp (fg) = vp (f) g (p) + f (p) vp (g) .
Note que nesta definicao o conjunto dos vetores tangentes a um ponto p ∈M forma naturalmente um espacovetorial real, pois e um subespaco do espaco vetorial dos funcionais lineares em C∞ (M):
(αvp + βwp) (fg) = αvp (fg) + βwp (fg)
= αvp (f) g (p) + αf (p) vp (g) + βwp (f) g (p) + βf (p)wp (g)
= [(αvp + βwp) (f)] g (p) + f (p) [(αvp + βwp) (g)] .
Mas a dimensao deste espaco nao e imediatamente obvia. Alem disso, nao e claro que todo vetor tangentesegundo esta definicao e um vetor tangente segundo a definicao anterior. Embora seja consequencia dasProposicoes 8.12 e 8.13 que vetores tangentes a curvas sao funcionais lineares em C∞ (M) que sao derivacoes,logo o espaco vetorial dos vetores tangentes segundo a definicao anterior e um subespaco vetorial do espacovetorial dos vetores tangentes segundo a nova definicao, ainda nao sabemos que todo todo funcional linearem C∞ (M) que e uma derivacao e o vetor tangente a alguma curva. Isso provara ser verdade quandoprovarmos que o espaco vetorial dos funcionais lineares em C∞ (M) que sao derivacoes tambem tem dimensaon (Proposicao 8.22). Em outras palavras, as duas definicoes nao sao apenas equivalentes, mas de fato definemo mesmo conceito de vetor tangente. De agora em diante, utilizaremos a Definicao 8.14 para vetor tangente.
8.15 Proposicao. Qualquer vetor tangente vp : C∞ (M) −→ R satisfaz as seguintes propriedades:(i) Se f e uma funcao constante, entao vp (f) = 0.(ii) Se f (p) = g (p) = 0, entao vp (fg) = 0.
Prova: Ambas as propriedades seguem imediatamente da regra do produto. (i) Como vp e linear, bastaprovar para a funcao constante f ≡ 1. Pela regra do produto,
vp (f) = vp (f) f (p) + f (p) vp (f) = 2vp (f) ,
logo vp (f) = 0. (ii) Pela regra do produto, temos
vp (fg) = vp (f) g (p) + f (p) vp (g) = vp (f) 0 + 0vp (g) = 0 + 0 = 0.
Apesar dos vetores tangentes (derivacoes) estarem definidas no espaco global C∞ (M), o proximo resul-
tado mostra que a sua atuacao e local.
8.16 Proposicao. Seja vp : C∞ (M) −→ R um vetor tangente. Se f, g ∈ C∞ (M) coincidem em umavizinhanca de p, entao vp (f) = vp (g).

Rodney Josue Biezuner 69
Prova: Seja h = f − g, de modo que h ∈ C∞ (M) e h = 0 em uma vizinhanca de p. Seja ρ ∈ C∞ (M) umafuncao cujo suporte esta contida em M\ p e que e igual a 1 no suporte de h. Em particular, como ρ = 1onde h e nao nula, segue que ρh = h. Daı, vp (h) = vp (ρh) = 0 pela propriedade (ii) da Proposicao 8.15; oresultado segue agora por linearidade.
8.17 Definicao. Seja M uma variedade diferenciavel. O espaco vetorial dos vetores tangentes a um pontop ∈M e chamado o espaco tangente a M em p e denotado TpM .
8.3.3 Diferencial de uma Aplicacao Diferenciavel
Para definir a diferencial (derivada) de uma aplicacao diferenciavel, usaremos a definicao de vetores tangentescomo derivacoes:
8.18 Definicao. Sejam M e N variedades diferenciaveis e F : M −→ N uma aplicacao diferenciavel emp ∈M . A diferencial de F em p e aplicacao linear
dFp : TpM −→ TF (p)N
definida por[dFp (vp)] (f) = vp (f F )
para todo f ∈ C∞ (N).
Note que como f ∈ C∞ (N) e F e de classe C∞, f F ∈ C∞ (M). dFp (v) e uma derivacao em F (p) porque
dFp (vp) (fg) = vp ((fg) F ) = vp ((f F ) (g F ))
= vp (f F ) g (F (p)) + f (F (p)) vp (g F )
= [dFp (vp) (f)] g (F (p)) + f (F (p)) [dFp (vp) (g)] .
Alem disso, dFp e uma aplicacao linear porque vp e um funcional linear.
8.19 Proposicao (Regra da Cadeia). Sejam M,N,P variedades diferenciaveis e F : M −→ N,G : N −→P aplicacoes diferenciaveis. Entao G F : M −→ P e uma aplicacao diferenciavel e
d (G F )p = dGF (p) dFp.
Prova: Provaremos a segunda parte; a primeira parte e deixada como exercıcio. Por definicao, para todof ∈ C∞ (P ) [
d (G F )p (vp)]
(f) = vp (f (G F )) = vp ((f G) F ) = dFp (vp) (f G)
=[dGF (p) (dFp (vp))
](f) .
8.20 Corolario. Se F : M −→ N e um difeomorfismo, entao dFp e um isomorfismo para cada p ∈ M e
d(F−1
)F (p)
= (dFp)−1
.
8.21 Lema. Seja M uma variedade diferenciavel. Se V e um aberto de M e i : V −→ M e a inclusao,entao dip e um isomorfismo para todo p ∈M .
Prova: Para provar que dip : TpV −→ TpM e injetivo, suponha que dip (vp) = 0 para vp ∈ TpV . SejaW ⊂⊂ V uma vizinhanca de p. Se f ∈ C∞ (V ) e uma funcao diferenciavel arbitraria, considere uma
extensao f ∈ C∞ (M) tal que f = f em W . Como f e f coincidem na vizinhanca W de p, segue daProposicao 8.16 que
vp (f) = vp
(f |V)
= vp
(f i
)= dip (vp)
(f)
= 0.

Rodney Josue Biezuner 70
Como f ∈ C∞ (V ) e arbitraria, isso prova que vp = 0, logo dip e injetiva.Para provar que dip e sobrejetiva, seja wp ∈ TpM um vetor tangente qualquer. Defina uma funcao
v : C∞ (V ) −→ R por
v (f) = wp
(f)
onde f e uma extensao definida como no inıcio da demonstracao. Pela Proposicao 8.16, o valor de w(f)
independe da escolha de f , logo v esta bem definida. E facil ver que v e uma derivacao. Para todo g ∈ C∞ (M)temos
dip (v) (g) = v (g i) = wp
(g i
)= wp (g)
onde a ultima igualdade segue do fato que g i e g coincidem em W . Portanto, dip (v) = wp.
8.22 Proposicao. Se M e uma variedade diferenciavel de dimensao n, entao TpM e um espaco vetorial dedimensao n para todo p ∈M .
Prova: Seja ϕ : U −→ V uma carta para uma vizinhanca V = ϕ (U) ⊂ M de p = ϕ (x). Como ϕ e umdifeomorfismo, segue que dϕx : Rn −→ TpV e um isomorfismo. Como TpV e TpM sao isomorfos pelo lema,segue o resultado. Conforme a discussao que se segue a Definicao 8.14, concluımos que para todo vetor tangente vp ∈ TpMexiste uma curva diferenciavel α : I −→M com α (t0) = p tal que
vp (f) = (f α)′(t0) .
8.23 Definicao. Seja M uma variedade diferenciavel e ϕ : U −→ M uma carta de uma vizinhanca de umponto p ∈ M . A base obtida na demonstracao da Proposicao 8.12 sera chamada a base coordenada doespaco tangente TpM associada a carta ϕ e denotada por
∂1|p , . . . , ∂n|p
ou por∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
quando for conveniente ou necessario explicitar as coordenadas da carta.
8.4 Coordenadas
8.4.1 Diferencial em Coordenadas
Seja B = e1, . . . , en a base canonica de Rn. Se ϕ : U ⊂ Rn −→ V e uma carta para uma vizinhancacoordenada V de p = ϕ (x) ∈M , a base coordenada associada a ϕ e tambem dada por
∂
∂xi
∣∣∣∣p
= dϕx (ei) .
De fato, se f ∈ C∞ (M), entao
∂
∂xi
∣∣∣∣p
(f) =∂ (f ϕ)
∂xi(x) = ei (f ϕ) = dϕx (ei) (f) .
Assim, podemos definir

Rodney Josue Biezuner 71
8.24 Definicao.∂f
∂xi(p) =
∂
∂xi
∣∣∣∣p
(f) =∂ (f ϕ)
∂xi(x) .
Vamos ver agora como e a diferencial de uma aplicacao diferenciavel em coordenadas.Primeiro recordaremos o caso em que as variedades sao espacos euclideanos. Denote por Bm = e1, . . . , em
e Bn = f1, . . . , fn as bases canonicas de Rm e Rn, respectivamente. Observe que se F : U ⊂ Rm −→ Rne uma aplicacao diferenciavel, entao dFx : Rm −→ Rn e a derivada usual para cada x ∈ U e pela regra dacadeia
dFx (ei) (f) = ei (f F ) =∂ (f F )
∂xi(x) =
m∑j=1
∂f
∂xj(F (x))
∂F j
∂xi(x) =
m∑j=1
∂F j
∂xi(x) fj (f) ,
ou seja,
dFx (ei) =
n∑j=1
∂F j
∂xi(x) fj .
Assim, a matriz da diferencial dFx em relacao as bases Bm,Bn e o jacobiano
J =
∂F 1
∂x1. . .
∂F 1
∂xm...
...∂Fn
∂x1. . .
∂Fn
∂xm
=: [dFx]Bm,Bn .
Ou seja, se v =m∑i=1
viei, entao
dFx (v) =
m∑i=1
vidFx (ei) =
n∑j=1
[m∑i=1
vi∂F j
∂xi(x)
]fj ,
isto e,
[dFx (v)]Bn =
∂F 1
∂x1. . .
∂F 1
∂xm...
...∂Fn
∂x1. . .
∂Fn
∂xm
v1
...vm
= J [v]Bm .
No caso geral, se F : Mm −→ Nn e uma aplicacao diferenciavel, sejam ϕ : U ⊂ Rm −→ ϕ (U) , ψ : V ⊂Rn −→ ψ (V ) cartas de vizinhancas de p = ϕ (x) em M e de F (p) = ψ (y) em N , respectivamente, de modoque
F = ψ−1 F ϕ : U ⊂ Rm −→ Rn.
EscrevendoF ϕ = ψ F
temos
dFp
(∂
∂xi
∣∣∣∣p
)= dFp [dϕx (ei)] = dψy
[dFx (ei)
]= dψy
n∑j=1
∂F j
∂xi(x) fj
=
n∑j=1
∂F j
∂xi(x) dψy (fj)
=
n∑j=1
∂F j
∂xi(x)
(∂
∂yj
∣∣∣∣F (p)
).

Rodney Josue Biezuner 72
Portanto, se
Bp =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xm
∣∣∣∣p
.
BF (p) =
∂
∂y1
∣∣∣∣F (p)
, . . . ,∂
∂yn
∣∣∣∣F (p)
,
sao as bases coordenadas de TpM e TF (p)N , respectivamente, entao a matriz que representa a diferencialdFp em relacao a estas bases e
[dFp]Bp,BF (p)=
∂F 1
∂x1. . .
∂F 1
∂xm...
...
∂Fn
∂x1. . .
∂Fn
∂xm
.
8.5 Fibrado Tangente
8.25 Definicao. Seja M uma variedade diferenciavel de dimensao n com um atlas Φ = ϕα : Uα −→Mα∈Ade classe Ck. O fibrado tangente de M e a variedade diferenciavel de dimensao 2n e classe Ck−1
TM = (p, v) : p ∈M e v ∈ TpM
com um atlasΨ = ψα : Uα × Rn −→ TMα∈A
definido por
ψα (x, v1, . . . , vn) =
(ϕα (x) ,
n∑i=1
vi∂i (x)
).
Na definicao acima, o proprio atlas Ψ define a topologia necessaria em TM (Exercıcio 8.45).
8.6 Fibrados Vetoriais
8.26 Definicao. Um fibrado vetorial de ordem k sobre uma variedade diferenciavel M e uma variedadediferenciavel E juntamente com uma aplicacao sobrejetiva diferenciavel π : E −→M tal que
(i) cada fibra Ep = π−1 (p) de E sobre p e um espaco vetorial de dimensao k;(ii) para cada p ∈M existe uma vizinhanca U de p e um difeomorfismo ϕ : π−1 (U) −→ U×Rk, chamado
uma trivializacao local de E, tal que o diagrama seguinte e comutativo:
π−1 (U)ϕ−→ U × Rk
π ↓ π1
U
(π1 : U × Rk −→ U e a projecao na primeira variavel) e tal que ϕ|Ep : Ep −→ p × Rk e um isomorfismode espacos vetoriais.
A variedade E e chamada o espaco total do fibrado, M a base do fibrado e π a sua projecao.

Rodney Josue Biezuner 73
Frequentemente identificamos o espaco total com o fibrado e dizemos simplesmente que E e o fibrado vetorialsobre M . Fibrados tangentes sao exemplos de fibrados vetoriais.
8.27 Definicao. Seja E um fibrado vetorial de dimensao k sobre M . Uma secao de E e uma aplicacaos : M −→ E tal que π s = Id|M .
Em outras palavras, s : M −→ E e uma secao se e somente se s (p) ∈ Ep para todo p ∈M .
8.7 Campos Vetoriais
Considere π : TM −→ M a projecao canonica do fibrado tangente de M sobre M , isto e, π (p, v) = p paratodo v ∈ TpM .
8.28 Definicao. Seja M uma variedade diferenciavel. Um campo vetorial diferenciavel em M e umaaplicacao diferenciavel X : M −→ TM tal que se π X = idM .
Podemos pensar em campos vetoriais como aplicacoes que associam a cada ponto p ∈M um vetor tangenteX (p) ∈ TpM ; frequentemente, denotaremos o vetor tangente X (p) simplesmente por Xp. Em termos de
coordenadas locais, se B =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xm
∣∣∣∣p
e a base do espaco tangente TpM associada a uma carta
ϕ : U −→M para pontos p ∈ ϕ (U), entao
Xp =
n∑i=1
Xi (p)∂
∂xi
∣∣∣∣p
e o campo vetorial X e diferenciavel em ϕ (U) se e somente se as funcoes coordenadas X1, . . . , Xn saodiferenciaveis.
Outra forma de ver um campo vetorial diferenciavel em M e como uma aplicacao que associa a cadafuncao f ∈ C∞ (M) uma funcao Xf ∈ C∞ (M) atraves da expressao
(Xf) (p) = Xpf
onde Xp : C∞ (M) −→ R e um vetor tangente.
8.29 Definicao. Seja M uma variedade diferenciavel. Um campo vetorial diferenciavel em M e umaaplicacao X : C∞ (M) −→ C∞ (M) que satisfaz as seguintes propriedades
(i) X e linear:X (αf + βg) = αXf + βXg
para todos α, β ∈ R e f, g ∈ C∞ (M).(ii) X satisfaz a regra do produto:
X (fg) = (Xf) g + f (Xg)
para todos f, g ∈ C∞ (M).
As duas definicoes sao equivalentes. Usando a ultima definicao, podemos definir combinacoes lineares decampos vetoriais de forma natural.
8.30 Notacao. Seja M uma variedade diferenciavel. O espaco vetorial dos campos vetoriais diferenciaveisem M e denotado por T (M).

Rodney Josue Biezuner 74
8.31 Proposicao. Sejam M e N variedades diferenciaveis e F : M −→ N uma aplicacao diferenciavel. SeX ∈ T (M) e Y ∈ T (N) sao campos vetoriais tais que
YF (p) = dFp (Xp)
para todo p ∈M , entaoX (f F ) = (Y f) F
para todo f ∈ C∞ (N).
Prova: Pela definicao de diferencial,
[dFp (Xp)] (f) = Xp (f F ) ,
logo,[X (f F )] (p) = Xp (f F ) = [dFp (Xp)] (f) = YF (p)f = (Y f) (F (p)) .
8.32 Definicao. Sejam M e N variedades diferenciaveis e F : M −→ N um difeomorfismo. Definimos aaplicacao pushforward
F∗ : T (M) −→ T (N)
por(F∗X)q = dFp (Xp)
onde q = F (p).
Equivalentemente,(F∗X)q = dFF−1(q)
(XF−1(q)
).
8.33 Proposicao. Sejam M e N variedades diferenciaveis e F : M −→ N um difeomorfismo. Consi-dere T (M) e T (N) como modulos sobre os aneis C∞ (M) e C∞ (N), respectivamente. Entao o operadorpushforward F∗ e linear no seguinte sentido:
F∗ (fX + gY ) =(f F−1
)F∗X +
(g F−1
)F∗Y
para todos X,Y ∈ T (M) e para todas f, g ∈ C∞ (M). Alem disso, para toda f ∈ C∞ (N) vale
[(F∗X) f ] F = X (f F )
ou, equivalentemente,(F∗X) f = X (f F ) F−1.
Prova:M
F−→ N
↓f fF−1
R
Primeiro provamos a linearidade de F∗. No que se segue, q = F (p). Temos
[F∗ (X + Y )]q = dFp (Xp + Yp)
= dFp (Xp) + dFp (Yp)
= (F∗X)q + (F∗Y )q

Rodney Josue Biezuner 75
e
[F∗ (fX)]q = dFp
((fX)p
)= dFp (f (p)Xp)
= f (p) dFp (Xp)
=(f F−1
)(q) (F∗X)q .
A ultima afirmativa segue imediatamente da Proposicao 8.31, ja que F∗X e exatamente o campo Y doenunciado daquela proposicao.
8.34 Teorema. Seja X ∈ T (M) um campo diferenciavel. Dado p ∈ M , existe uma vizinhanca V de p emM , δ > 0 e uma aplicacao diferenciavel
ϕ : (−δ, δ)× V −→M
tais que ϕq (t) = ϕ (t, q) e a unica curva diferenciavel em M que satisfazdϕ
dt(t, q) = Xϕ(t,q) para todos t ∈ (−δ, δ) , q ∈ V,
ϕ (0, q) = q.
Alem disso, para cada t fixado, ϕt = ϕ (t, ·) e um difeomorfismo e o fluxo e um grupo aditivo a um parametro,isto e,
ϕ0 = id,
ϕt+s = ϕtϕs.
Prova: Veja [Lee 1], Chapter 9, p. 209. ϕ e chamado o fluxo local do campo vetorial X. Note que por causa das propriedades de grupo temos
(ϕt)−1
= ϕ−t.
8.8 Colchete de Lie
Embora a Definicao 8.29 de campos vetoriais permite tambem em princıpio definir a composta de camposvetoriais e, ja que Xf e interpretada como a derivada de f na direcao de X, gostarıamos de interpretarnaturalmente a expressao
X (Y f)
como a derivada segunda de f primeiro na direcao de Y e em seguida na direcao de X, em geral esta compostanao e um campo vetorial porque nao satisfaz a regra do produto:
(X Y ) (fg) = X [Y (fg)] = X [(Y f) g + f (Y g)] = X [(Y f) g] +X [f (Y g)]
= [X (Y f)] g + (Y f) (Xg) + (Xf) (Y g) + f [X (Y g)]
= [(X Y ) f ] g + f [(X Y ) g] + (Xf) (Y g) + (Y f) (Xg) ;
em coordenadas locais (veja Proposicao 8.37 a seguir), a composta realmente envolve derivadas parciais desegunda ordem, as quais nao sao vetores tangentes por nao satisfazerem a regra do produto. Para definircalculo diferencial de ordem superior, e necessario o conceito de derivada covariante, que veremos no Capıtulo11.
Por outro lado, a operacaoX Y − Y X
define um campo vetorial.

Rodney Josue Biezuner 76
8.35 Definicao. Sejam X,Y ∈ T (M). O colchete de Lie de X e Y e o campo vetorial
[X,Y ] = XY − Y X.
Esta expressao deve ser entendida no sentido de
[X,Y ] = X Y − Y X,
ou seja,[X,Y ]p f = Xp (Y f)− Yp (Xf) .
O colchete de Lie e de fato um campo vetorial, pois
[X,Y ] (αf + βg) = X [Y (αf + βg)]− Y [X (αf + βg)]
= X [αY f + βY g]− Y [αXf + βXg]
= αX (Y f) + βX (Y g)− αY (Xf)− βY (Xg)
= α [X (Y f)− Y (Xf)] + β [X (Y g)− Y (Xg)]
= α [X,Y ] f + β [X,Y ] g
e
[X,Y ] (fg) = X [Y (fg)]− Y [X (fg)]
= X [fY g + gY f ]− Y [fXg + gXf ]
= X [fY g] +X [gY f ]− Y [fXg]− Y [gXf ]
= fX (Y g) + Y gXf + gX (Y f) + Y fXg − fY (Xg)−XgY f − gY (Xf)−XfY g= f [X (Y g)− Y (Xg)] + g [X (Y f)− Y (Xf)]
= f [X,Y ] (g) + g [X,Y ] (f) .
8.36 Proposicao. O colchete de Lie satisfaz as seguintes propriedades:(i) (Anticomutatividade)
[X,Y ] = − [Y,X] .
Consequentemente,[X,X] = 0.
(ii) (Bilinearidade)
[αX + βY, Z] = α [X,Z] + β [Y,Z] ,
[Z,αX + βY ] = α [Z,X] + β [Z, Y ] .
(iii) (Identidade de Jacobi)[[X,Y ] , Z] + [[Y, Z] , X] + [[Z,X] , Y ] = 0.
(iv)[fX, gY ] = fg [X,Y ] + f (Xg)Y − g (Y f)X.
(v) Se F : M −→ N e um difeomorfismo, entao
F∗ [X,Y ] = [F∗X,F∗Y ] .

Rodney Josue Biezuner 77
Prova: (i) e (ii) sao imediatas. Para provar (iii), usando (ii) obtemos
[[X,Y ] , Z] = [XY − Y X,Z] = [XY,Z]− [Y X,Z]
= XY Z − ZXY − Y XZ + ZY X.
Logo, usando (i) e novamente (ii), segue que
[[Y,Z] , X] + [[Z,X] , Y ] = − [X, [Y,Z]]− [Y, [Z,X]]
= − [X,Y Z − ZY ]− [Y,ZX −XZ]
= − [X,Y Z] + [X,ZY ]− [Y, ZX] + [Y,XZ]
= −XY Z + Y ZX +XZY − ZY X − Y ZX + ZXY + Y XZ −XZY= −XY Z + ZXY + Y XZ − ZY X= − [[X,Y ] , Z] .
A propriedade (iv) segue da regra do produto: se h ∈ C∞ (M),
[fX, gY ]h = f [X (g (Y h))]− g [Y (f (Xh))]
= f [(Xg) (Y h)] + f [gX (Y h)]− g [(Y f) (Xh)]− g [fY (Xh)]
= fgX (Y h)− gfY (Xh) + f [(Xg) (Y h)]− g [(Y f) (Xh)]
= fg (XY − Y X)h+ [f (Xg)Y ]h− [g (Y f)X]h
= [fg [X,Y ] + f (Xg)Y − g (Y f)X]h.
(v) segue da Proposicao 8.33: para todo f ∈ C∞ (N) temos
(XY ) (f F ) = X [Y (f F )] = X [(F∗Y ) f F ] = (F∗X) (F∗Y ) f F
e, analogamente,(Y X) (f F ) = (F∗Y ) (F∗X) f F.
Logo,
(F∗ [X,Y ]) f = [X,Y ] (f F ) F−1
= (XY − Y X) (f F ) F−1
= [(F∗X) (F∗Y )− (F∗Y ) (F∗X)] f F F−1
= [F∗X,F∗Y ] f.
Uma algebra de Lie e um espaco vetorial em que se define um produto (ou seja, uma aplicacao bilinear)anticomutativo que satisfaz a identidade de Jacobi (veja o Capıtulo 10). Portanto, esta proposicao mostraque T (M) com a operacao colchete e uma algebra de Lie.
8.37 Proposicao (Colchete de Lie em coordenadas locais). Se X,Y ∈ T (M) sao campos vetoriaisque se expressam em coordenadas locais por
X =
n∑i=1
Xi ∂
∂xie Y =
n∑i=1
Y i∂
∂xi,
entao
[X,Y ] =
n∑i,j=1
(Xi ∂Y
j
∂xi− Y i ∂X
j
∂xi
)∂
∂xj,

Rodney Josue Biezuner 78
ou, em notacao mais sucinta,
[X,Y ] =
n∑j=1
(X(Y j)− Y
(Xj)) ∂
∂xj.
Em particular, [∂
∂xi,∂
∂xj
]= 0
para todos i, j.
Prova: Temos
X (Y f) = X
(n∑i=1
Y i∂f
∂xi
)=
n∑i=1
X
(Y i
∂f
∂xi
)=
n∑i=1
Y iX
(∂f
∂xi
)+
n∑i=1
∂f
∂xiX(Y i)
=
n∑i=1
Y i
n∑j=1
Xj ∂2f
∂xj∂xi
+
n∑i=1
∂f
∂xi
n∑j=1
Xj ∂Yi
∂xj
=
n∑i,j=1
XjY i∂2f
∂xj∂xi+
n∑i,j=1
Xj ∂Yi
∂xj∂f
∂xi
e, por simetria,
Y (Xf) =
n∑i,j=1
Y jXi ∂2f
∂xj∂xi+
n∑i,j=1
Y j∂Xi
∂xj∂f
∂xi=
n∑i,j=1
XjY i∂2f
∂xi∂xj+
n∑i,j=1
Y j∂Xi
∂xj∂f
∂xi.
Como∂2f
∂xi∂xj=
∂2f
∂xj∂xi,
os termos envolvendo as derivadas parciais de segunda ordem se cancelam ao calcularmos [X,Y ] f = X (Y f)−Y (Xf) e a expressao do enunciado e obtida trocando os ındices i, j.
8.9 Derivada de Lie
Em princıpio, e um problema diferenciar campos vetoriais em variedades, ja que nao podemos tomar adiferenca de vetores que moram em espacos tangentes diferentes (nao ha uma maneira de identificar osespacos tangentes com Rn de uma maneira que seja invariante por mudanca de coordenadas). Uma solucaoe a seguinte. Dado um campo Y em uma variedade que queremos diferenciar na direcao de um vetor tangenteXp no ponto p, primeiro estendemos Xp a um campo vetorial X definido em toda a variedade. O campovetorial X tem um fluxo local ϕt definido. Usamos o fluxo para levar o vetor Yϕt(p) ao longo da trajetoriareversa ϕ−t do campo X para o espaco tangente TpM e fazer a diferenca la com o vetor Yp, tomando emseguida o limite quanto t→ 0. No Capıtulo 11 veremos o conceito de derivada covariante, que e uma solucaodiferente para este problema, mais semelhante ao conceito de derivada direcional, porque dependera apenasdo valor do vetor tangente Xp e nao do valor de X ao longo de uma curva; no caso desta derivada de Lie,ela depende do valor de X ao longo de uma trajetoria do campo.
8.38 Definicao. Sejam X,Y ∈ T (M) campos vetoriais, p ∈ M e ϕt o fluxo local do campo X em umavizinhanca V de p em M . A derivada de Lie do campo Y na direcao do campo X em p e definida por
(LXY )p = limt→0
[dϕ−t]ϕt(p)(Yϕt(p)
)− Yp
t=
d
dt[dϕ−t]ϕt(p) Yϕt(p)
∣∣∣∣t=0
.

Rodney Josue Biezuner 79
Na linguagem de pushforwards,
(LXY )p = limt→0
[(ϕ−t)∗ Y ]p− Yp
t.
A definicao de derivada de Lie nao e operacionalmente util, ja que em geral e muito difıcil e mesmoimpossıvel obter o fluxo explicitamente. Felizmente, como veremos agora, a derivada de Lie coincide com ocolchete de Lie e este e muito facil de calcular.
8.39 Teorema (Interpretacao Geometrica do Colchete de Lie). Se X,Y ∈ T (M) sao campos veto-riais, p ∈M e ϕt e o fluxo local do campo X em uma vizinhanca V de p em M entao
[X,Y ] = LXY.
Prova: Primeiro observe que se g : (−δ, δ)× V −→ R e uma funcao diferenciavel tal que
g (0, q) = 0 para todo q ∈ V,
entao existe uma aplicacao diferenciavel h : (−δ, δ)× V −→ R tal que
g (t, q) = th (t, q) .
De fato, basta definir
h (t, q) =
∫ 1
0
∂g
∂s(ts, q) ds
e notar que, pelo Teorema Fundamental do Calculo,
th (t, q) =
∫ 1
0
t∂g
∂s(ts, q) ds =
∫ 1
0
∂
∂s[g (ts, q)] ds
= [g (ts, q)]s=1s=0 = g (t, q)− g (0, q)
= g (t, q) .
Em particular, segue que∂g
∂t(t, q)
∣∣∣∣t=0
= h (0, q) .
Seja agora f ∈ C∞ (M). Defina g : (−δ, δ)× V −→ R por
g (t, q) = f (q)− f (ϕ−t (q)) ,
ou, em notacao funcional,g (t, ·) = f − f ϕ−t.
Entao g (0, q) = f (q) − f (ϕ0 (q)) = f (q) − f (q) = 0, de modo que a observacao que fizemos no inıcio dademonstracao se aplica e existe uma aplicacao diferenciavel h : (−δ, δ)× V −→ R tal que
f (ϕ−t (q)) = f (q)− th (t, q)
isto e,f ϕ−t = f − th (t, ·)
e, alem disso (por definicao de vetor tangente, lembrando que ϕ−t e uma curva diferenciavel, trajetoria dofluxo do campo X na direcao reversa),
h (0, q) =∂g
∂t(t, q)
∣∣∣∣t=0
= − ∂ (f ϕ−t)∂t
∣∣∣∣t=0
= − ∂ϕ−t (q)
∂t
∣∣∣∣t=0
f = Xϕ(0,q)f
= Xqf.

Rodney Josue Biezuner 80
Daı (na primeira equacao na demonstracao da Proposicao 8.31 substitua F por ϕ−t e p por ϕt (p)),[[dϕ−t]ϕt(p)
(Yϕt(p)
)]f = Yϕt(p) (f ϕ−t) = Yϕt(p)f − tYϕt(p) (h (t, ·)) .
Portanto,
(LXY )p f = limt→0
[[dϕ−t]ϕt(p)
(Yϕt(p)
)]f − Ypf
t
= limt→0
Yϕt(p)f − tYϕt(p) (h (t, ·))− Ypft
= limt→0
Yϕt(p)f − Ypft
− limt→0
Yϕt(p) (h (t, ·))
= limt→0
(Y f) (ϕt (p))− (Y f) (p)
t− Yp (h (0, ·))
=∂ϕt (p)
∂t
∣∣∣∣t=0
(Y f)− Yp (h (0, ·))
= Xp (Y f)− Yp (Xf)
= [X,Y ]p f.
Portanto, o colchete de Lie de dois campos vetoriais e a derivade de Lie. E a derivada de Lie e a “derivadadirecional” do segundo campo vetorial ao longo do fluxo do primeiro; ela nao e uma derivada direcional nosenso exato do termo, porque ela nao depende apenas da direcao do primeiro campo, ou seja, nao podemosusar qualquer curva tangente ao primeiro campo para calcula-la, mas apenas uma trajetoria do campo. Aprincipal diferenca entre a derivada de Lie e a derivada covariante (que e uma derivada direcional na corretaassumpcao da palavra) esta entao resumida nas Proposicoes 8.37 e 11.2: enquanto que a derivada covariante(∇XY )p depende apenas do valor de X em p e do valor de Y ao longo de uma curva tangente a Xp, aderivada de Lie (LXY )p depende dos valores de X ao longo de uma curva tangente a Yp e do valor de Y aolongo de uma curva tangente a Xp: de fato,
(LXY )p = [X,Y ]p =
n∑i=1
(Xp
(Y i)− Yp
(Xi)) ∂
∂xi,
e por definicao de vetor tangente, os coeficientes Xp
(Y 1), . . . , Xp (Y n) dependem dos valores de Y ao longo
de uma curva passando por p cujo vetor tangente em p e Xp e os coeficientes Yp(X1), . . . , Yp (Xn) dependem
dos valores de X ao longo de uma curva passando por p cujo vetor tangente em p e Yp).Outra diferenca importante entre a derivada de Lie e a derivada covariante e que em variedades rieman-
nianas esta e mais natural no seguinte sentido. Denotando q = ϕt (p), na derivada de Lie o vetor Yq e trazidoao longo da trajetoria do campo X para o espaco tangente TpM , onde ele e subtraıdo do vetor Xp atravesdo operador linear (ϕ−t)∗. Em uma interpretacao geometrica que veremos na Proposicao 11.27, o vetorYq tambem e trazido ao longo da trajetoria do campo X para o espaco tangente TpM , mas atraves de umoperador linear chamado transporte paralelo, que e interpretado, como o nome indica, como um operadorque nao muda a direcao do vetor original em um sentido que veremos em maiores detalhes no Capıtulo 11.Assim, o conceito de derivada covariante esta mais proximo ao conceito de derivada direcional em Rn, ondeidentificamos TpRn atraves de translacoes, que preservam as direcoes de vetores.
Mas e importante ressaltar que nenhuma das derivadas, tanto a derivada de Lie quanto a derivadacovariante, dependem apenas de Xp e Yp, ou seja, nenhum deles e um tensor, um conceito que veremosno proximo capıtulo. Apesar disso, ambos aparecerao na definicao do segundo tensor mais importante emGeometria Riemanniana, o tensor curvatura (o tensor mais importante e obviamente o tensor metrica).

Rodney Josue Biezuner 81
8.10 Campos Vetoriais que Comutam
8.40 Lema. Sejam M,N variedades diferenciaveis e F : M −→ N um difeomorfismo. Se X e um campovetorial em M com fluxo local ϕt em uma vizinhanca V , entao o campo vetorial F∗X em N tem fluxo localF ϕt F−1 em F (V ).
Prova: Em outras palavras, se ϕ : (−δ, δ)×V −→M e o fluxo local de X em V , entao ψ : (−δ, δ)×F (V ) −→N dado por
ψ (t, q) = F(ϕt(F−1 (q)
))e o fluxo local do campo F∗X. Para provar este resultado, note primeiro que se f ∈ C∞ (M), entao pordefinicao de vetor tangente
Xp (f) =d
dtf ϕt (p)
∣∣∣∣t=0
= limt→0
f (ϕt (p))− f (p)
t
porque a trajetoria ϕt (p) e uma curva diferenciavel que tem Xp como vetor tangente em t = 0. Por definicao,se q = F (p), temos
(F∗X)q (f) = [dFp (Xp)] f
= Xp (f F )
= limt→0
(f F ) (ϕt (p))− (f F ) (p)
t
= limt→0
f(F ϕt
(F−1 (q)
))− (f F )
(F−1 (q)
)t
= limt→0
f(F ϕt F−1 (q)
)− f (q)
t,
o que significa que a curva diferenciavel F ϕt F−1 tem (F∗X)q como vetor tangente em q, logo e o fluxolocal do campo F∗X.
8.41 Corolario. Se M e uma variedade diferenciavel e F : M −→M e um difeomorfismo, entao
F∗X = X
se e somente seF ϕt = ϕt F.
8.42 Teorema. Se X,Y ∈ T (M) sao campos vetoriais e ϕt, ψs sao os fluxos locais respectivos de X,Y emuma vizinhanca V de M , entao
ϕt ψs = ψs ϕtse e somente se
[X,Y ] = 0
em V .
Prova: Se ϕt ψs = ψs ϕt, como ϕt e um difeomorfismo, segue do Corolario 8.41 que (ϕt)∗ Y = Y , demodo que
[X,Y ]p = (LXY )p = limt→0
[(ϕ−t)∗ Y ]p− Yp
t= limt→0
Yp − Ypt
= 0
para todo p ∈ V .Reciprocamente, se [X,Y ] = 0 em V , considere a curva α : (−ε, ε) −→ TpM definida por
α (t) = [(ϕ−t)∗ Y ]p.

Rodney Josue Biezuner 82
Temos, observando que o pushforward satisfaz (F G)∗ = F∗ G∗
α′ (t) = limh→0
α (t+ h)− α (t)
h
= limh→0
[(ϕ−t−h)∗ Y ]p− [(ϕ−t)∗ Y ]
p
h
= limh→0
[(ϕ−t)∗ (ϕ−h)∗ Y ]p− [(ϕ−t)∗ Y ]
p
h
= limh→0
(dϕ−t)ϕt(p) [(ϕ−h)∗ Y ]ϕt(p)
− (dϕ−t)ϕt(p) Yϕt(p)
h
= (dϕ−t)ϕt(p) limh→0
[(ϕ−h)∗ Y ]ϕt(p) − Yϕt(p)h
= (dϕ−t)ϕt(p)
([X,Y ]ϕt(p)
)= (dϕ−t)ϕt(p) (0)
= 0.
Portanto, α (t) = α (0), o que implica (ϕ−t)∗ Y = Y , e o resultado segue do Corolario 8.41. Em particular,
ϕt ϕs ϕ−t ϕ−s = id .
Isso significa o seguinte, em outras palavras: quando [X,Y ] = 0 em uma vizinhanca V de p ∈M , se a partirde p percorrermos a trajetoria do campo X durante um intervalo de tempo t atingindo um certo ponto p1,e depois percorrermos a partir de p1 a trajetoria do campo Y durante um intervalo de tempo s atingindoum segundo ponto p2, voltarmos a partir de p2 ao longo da trajetorio do campo X durante um intervalo detempo t atingindo um certo ponto p3 e finalmente voltarmos tambem de p3 ao longo da trajetoria do campoY durante um intervalo de tempo s, chegaremos ao ponto original p (obviamente estamos assumindo queem nenhum momento saımos da vizinhanca V , o que sera verdade para deslocamentos s, t pequenos para osquais os fluxos locais de X e Y estao definidos em V ). Se [X,Y ] 6= 0, isso nao e verdade e terminamos emum ponto q diferente de p. O colchete de Lie portanto mede infinitesimalmente este defeito.
8.43 Teorema. Se E1, . . . , Ek ∈ T (M) sao campos vetoriais linearmente independentes suaves em umavizinhanca de p ∈M tais que
[Ei, Ej ] = 0
para todos i, j = 1, . . . , k, entao existe uma vizinhanca coordenada(x1, . . . , xn
)de p tal que
Ei =∂
∂xi
para i = 1, . . . , k.
Prova: Sem perda de generalidade, podemos assumir atraves de uma carta adequada que M = U ⊂ Rn,p = 0 e
Ei (0) = ei
para i = 1, . . . , k, onde e1, . . . , en e a base canonica de Rn. Seja ϕit o fluxo gerado pelo campo Ei. Defina
ψ(x1, . . . , xn
)= ϕ1
x1 ϕ2x2 . . . ϕkxk
(0, . . . 0, xk+1, . . . , xn
)= ϕ1
x1
(ϕ2x2
(. . .(ϕkxk
(0, . . . 0, xk+1, . . . , xn
)). . .)).
[Note que no caso especial em que k = n, a aplicacao ψ e
ψ (x) = ψ(x1, . . . , xn
)= ϕ1
x1 . . . ϕnxn (0)
= ϕ1x1
(ϕ2x2 (. . . (ϕnxn (0)) . . .)
).

Rodney Josue Biezuner 83
Em outras palavras, para calcular ψ(x1, . . . , xn
), percorremos sucessivamente as trajetorias dos campos
En, . . . , E1 a partir da origem durante os intervalos de tempo xn, . . . , x1: primeiro, saindo da origem, per-corremos a trajetoria do campo En durante o intervalo de tempo xn, chegando em um certo ponto ϕnxn (0);partindo deste ponto percorremos a trajetoria do campo En−1 durante o intervalo de tempo xn−1, che-gando em um certo ponto ϕn−1
xn−1 (ϕnxn (0)); continuamos desta forma sucessivamente ate chegar no pontoϕ1x1
(ϕ2x2 (. . . (ϕnxn (0)) . . .)
)que definimos como sendo o ponto ψ (x).]
Afirmamos que dψ0 = I. De fato, dada f ∈ C∞ (M), se i = 1, . . . , k
dψ0 (ei) (f) =∂ (f ψ)
∂xi(0)
= limh→0
(f ψ)
(0, . . . 0,
16i6kh , 0, . . . , 0
)− f (ψ (0))
h
= limh→0
f ϕ10 . . . ϕi−1
0 ϕih ϕi+10 . . . ϕk0 (0)− f (0)
h
= limh→0
f(ϕih (0)
)− f (0)
h
= Ei (0) (f)
= ei (f) ,
enquanto que se i = k + 1, . . . , n, temos
dψ0 (ei) (f) =∂ (f ψ)
∂xi(0)
= limh→0
(f ψ)
(0, . . . 0,
k+16i6nh , 0, . . . , 0
)− f (ψ (0))
h
= limh→0
f ϕ10 ϕ2
0 . . . ϕk0 . . . ϕk0(
0, . . . 0,k+16i6n
h , 0, . . . , 0
)− f (0)
h
= limh→0
f
(0, . . . 0,
k+16i6nh , 0, . . . , 0
)− f (0)
h
=∂f
∂xi(0)
= ei (f) ,
portantodψ0 (ei) = ei
para i = 1, . . . , n. Segue que ψ (x) =(x1, . . . , xn
)e um difeomorfismo local e portanto uma carta para uma
vizinhanca de p = 0.

Rodney Josue Biezuner 84
Observe que podemos calcular explicitamente dψx (e1) para todo x e nao somente na origem, obtendo
dψx (e1) (f) =∂ (f ψ)
∂x1(x)
= limh→0
(f ψ)(x1 + h, x2 . . . , xn
)− f (ψ (x))
h
= limh→0
f ϕ1x1+h ϕ2
x2 . . . ϕkxk(0, . . . 0, xk+1, . . . , xn
)− f (ψ (x))
h
= limh→0
f(ϕ1x1+h
(ϕ2x2 (. . . (ϕnxn (0)) . . .)
))− f (0)
h
= E1 (x) (f) ,
ou seja,
E1 (x) = dψx (e1) =∂
∂x1
∣∣∣∣x
para todo x onde a carta esta definida. Isso prova o resultado para i = 1.Mas, pelo teorema anterior, como [Ei, Ej ] = 0, temos que os fluxos dos campos E1, . . . , Ek comutam, isto
e,ϕit ϕ
jt = ϕit ϕ
jt
para todos i, j = 1, . . . , k. Logo, para i = 2, . . . , k podemos escrever
ψ(x1, . . . , xn
)= ϕixi ϕ
1x1 ϕ2
x2 . . . ϕixi . . . ϕkxk
(0, . . . 0, xk+1, . . . , xn
).
Pelo mesmo argumento anterior no caso i = 1, concluımos que
Ei (x) =∂
∂xi
∣∣∣∣x
para i = 2, . . . , k, para todo x onde a carta ψ esta definida, terminando a demonstracao do resultado. Assim, o colchete de Lie mede em algum sentido o quanto as trajetorias de campos linearmente independentesE1, . . . , En podem ser usadas para formar as “retas coordenadas” de um sistema de coordenadas (veja[Spivak], Vol. I, pp. 220-221, para uma afirmacao mais precisa deste resultado).
8.11 Exercıcios
8.44 Exercıcio. Considere o subconjunto X = (R× 0) ∪(R+ × 1
)de R2 com a seguinte base para a
sua topologia:(a) intervalos do tipo (a, b)× 0, a < b;(b) intervalos do tipo (a, b)× 1, 0 6 a < b;(c) unioes de intervalos do tipo [(a, 0)× 0] ∪ [(0, b)× 1], a < 0 < b.Verifique que X possui uma base enumeravel, que conjuntos finitos de pontos sao fechados em X e que
todo ponto de X possui uma vizinhanca difeomorfa a um conjunto aberto de R. Observe que X nao e, noentanto, um espaco de Hausdorff, porque os pontos (0, 0) e (0, 1) nao possuem vizinhancas abertas disjuntas.
8.45 Exercıcio. Seja X um conjunto. Suponha que exista uma famılia
Φ = ϕαα∈A
de aplicacoes injetivas ϕα : Uα −→ Vα de um aberto Uα ⊂ Rn sobre um subconjunto Vα de X para cadaα ∈ A, satisfazendo as seguintes condicoes:

Rodney Josue Biezuner 85
(1) Os abertos Vα cobrem X, isto e, ⋃α∈A
Vα = X.
(2) Para todos ındices α, β ∈ A tais que Vαβ = Vα ∩ Vβ 6= ∅, os conjuntos ϕ−1α (Vαβ) , ϕ−1
β (Vαβ) sao abertosem Rn e as aplicacoes
ϕαβ = ϕ−1β ϕα : ϕ−1
α (Vαβ) −→ ϕ−1β (Vαβ) ,
ϕβα = ϕ−1α ϕβ : ϕ−1
β (Vαβ) −→ ϕ−1α (Vαβ) ,
sao diferenciaveis de classe C∞.Entao existe uma unica topologia T em X relativa a qual Φ e um atlas diferenciavel de dimensao n para
X.T nao e necessariamente de Hausdorff nem precisa possuir base enumeravel (ela e apenas localmente de
Hausdorff, pois se p, q ∈ Vα, p 6= q, eles possuem vizinhancas disjuntas porque Vα e homeomorfo a um abertode Rn). Para isso, sao necessarias condicoes adicionais:
A topologia T e de Hausdorff se e somente se3) Para todos ındices α, β ∈ A tais que Vαβ = Vα ∩ Vβ 6= ∅, nao existe nenhuma sequencia xkk∈N ⊂
ϕ−1α (Vαβ) tal que
xk −→ x ∈ Uα\ϕ−1α (Vαβ) ,
ϕ−1β ϕα (xk) −→ y ∈ Uβ\ϕ−1
β (Vαβ) .
Ela possui uma base enumeravel se e somente se(4) A cobertura Vαα∈A possui uma cobertura enumeravel.
8.46 Exercıcio. Mostre que uma variedade diferenciavel M e conexa se e somente se ela e conexa porcaminhos.
Alem disso, verifique que as componentes conexas de M sao as suas componentes conexas por caminhos.Finalmente, prove que M possui no maximo um numero enumeravel de componentes conexas.

Capıtulo 9
Tensores
9.1 Vetores Contravariantes e Covariantes
Considere o conceito de vetor em Rn, por exemplo o vetor velocidade de uma curva descrita no sistema decoordenadas
(x1, . . . , xn
)por
x (t) =(x1 (t) , . . . , xn (t)
).
Temosdx
dt=
(dx1
dt, . . . ,
dxn
dt
).
Em um outro sistema de coordenadas(y1, . . . , yn
)a curva e descrita por:
y (t) =(y1 (t) , . . . , yn (t)
),
de modo que seu vetor velocidade neste sistema de coordenadas e dado por
dy
dt=
(dy1
dt, . . . ,
dyn
dt
).
A regra da cadeia nos da como as coordenadas do vetor velocidade mudam de um sistema de coordenadaspara o outro:
dyi
dt=
n∑j=1
∂yi
∂xjdxj
dt(9.1)
para i = 1, . . . , n.Considere agora o conceito do gradiente de uma funcao, usualmente identificado com um vetor. No
sistema de coordenadas(x1, . . . , xn
), o gradiente e definido por
∇xf (x) =
(∂f
∂x1(x) , . . . ,
∂f
∂xn(x)
)enquanto que no sistema de coordenadas
(y1, . . . , yn
)o gradiente e dado por
∇yf (x) =
(∂f
∂y1(x) , . . . ,
∂f
∂yn(x)
)Novamente, a regra da cadeia nos da como as coordenadas do gradiente mudam de um sistema de coordenadaspara o outro:
∂f
∂yi=
n∑j=1
∂xj
∂yi∂f
∂xj(9.2)
86

Rodney Josue Biezuner 87
para i = 1, . . . , n.Comparando as expressoes (9.1) e (9.2), vemos que elas sao bem diferentes. Isso fica ainda mais claro se
considerarmos o Jacobiano da mudanca de coordenadas y = y (x),
J =
[∂yi
∂xj
](9.3)
ou seja,
J =
∂y1
∂x1. . .
∂y1
∂xn...
...∂yn
∂x1. . .
∂yn
∂xn
.Temos
dy
dt= J
dx
dt(9.4)
enquanto que
∇yf =(J−1
)T ∇xf, (9.5)
pois
J−1 =
[dxi
dyj
]=
∂x1
∂y1. . .
∂x1
∂yn...
...∂xn
∂y1. . .
∂xn
∂yn
.Note que as leis de transformacao nao sao exatamente uma a inversa da outra no sentido matricial, ja que enecessario transpor a matriz de mudanca de coordenadas. Observe tambem que para as formulas concidirem,terıamos que ter
J =(J−1
)T,
isto e, J precisaria ser uma transformacao ortogonal, o que equivale a requerer que os dois sistemas decoordenadas
(x1, . . . , xn
)e(y1, . . . , yn
)sejam ortonormais, o que raramente ocorre.
O fato de que o gradiente de uma funcao sob uma mudanca de coordenadas transformar-se de uma maneiradiferente da de um vetor mostra que ele e um tipo diferente de vetor. Como veremos os motivos na proximasecao, vetores que se transformam de acordo com a expressao (9.1) sao chamados vetores contravariantes,enquanto que vetores que se transforma de acordo com a expressao (9.2) sao chamados vetores covariantes(ou simplesmente covetores).
As coordenadas de um vetor contravariante sao convencionalmente denotadas por superescritos:
v =(v1, . . . , vn
), (9.6)
porque, como nos casos dos vetores deslocamento, velocidade, aceleracao, etc., ou seja, vetores cujas di-mensoes estao diretamente relacionadas as dimensoes das coordenadas, o deslocamento aparece no numera-dor (acima da barra da fracao), enquanto que as coordenadas de um vetor covariante sao convencionalmentedenotadas por subescritos:
v = (v1, . . . , vn) , (9.7)
porque, como no caso do covetor gradiente, o deslocamento aparece no denominador (abaixo da barra dafracao), ou seja, vetores tais como o gradiente tem dimensoes que sao inversas as dimensoes das coordenadas.
Rodney Josue Biezuner 88
9.1.1 Significado Real do Gradiente
A derivada de uma funcao real f : Rn −→ R em um ponto x ∈ Rn e um funcional linear dfx : Rn −→ R.O gradiente realmente nao e um vetor, mas sim um funcional linear ou uma 1-forma (estes termos saosinonimos). Como veremos daqui a pouco, funcionais lineares sao vetores (no espaco dual) que se comportamcom relacao a mudanca de coordenadas como covetores.
Assim, embora diferenciemos entre a diferencial dfx de uma funcao real f : Rn −→ R, que e um funcionallinear, e a funcao gradiente, que associa a cada ponto x um vetor ∇f (x) ou grad f (x), com a propriedadeespecial que
dfx (v) = 〈∇f (x) , v〉para todo v ∈ Rn, onde 〈·, ·〉 denota o produto interno canonico de Rn, de qualquer forma, devido a suadefinicao o vetor gradiente e um covetor e se comporta como tal.
Este fato nao e apenas um acidente restrito a forma especial com que ele se comporta com relacao a umamudanca de coordenadas, mas tambem e uma consequencia do significado geometrico de funcionais linearese do gradiente. Atraves do produto interno, qualquer funcional linear ω : Rn −→ R e identificado com umunico vetor v de Rn: v e o unico vetor tal que
ω (w) = 〈v, w〉
para todo w ∈ Rn. Este vetor v e portanto perpendicular ao hiperplano kerω, o nucleo do funcional ω. Aacao do funcional linear ω sobre um vetor arbitrario w pode ser entao vista da seguinte forma: ω determinauma famılia de hiperplanos, os hiperplanos paralelos a kerω; ω (w) e entao o numero de hiperplanos quea “seta” do vetor w “perfura” por unidade de distancia (esta e medida exatamente pelo produto interno).Para vetores com o mesmo comprimento de v, o vetor v e o que perfura o maior numero de hiperplanos, jaque e perpendicular a todos estes hiperplanos (a mesma consideracao evidentemente vale para −v). Outrosvetores diferentes de v e −v formarao um angulo nao reto com estes hiperplanos e, se tiverem o mesmocomprimento que o vetor v, eles perfurarao consequentemente menos hiperplanos. Ou seja, se ‖w‖ = ‖v‖mas w 6= v, entao
ω (w) < ω (v) ;
de fato,ω (w) = 〈v, w〉 = ‖v‖ ‖w‖ cos θ < ‖v‖ ‖w‖ = ‖v‖2 = ω (v) .
Se w e ortogonal a v, entao w esta no nucleo de ω e nao perfura nenhum hiperplano da famılia; assim,ω (w) = 0.
O vetor gradiente ∇f (x) tambem se comporta geometricamente desta forma. Exceto que no caso dogradiente substituımos a famılia de hiperplanos paralelos ao nucleo do funcional pela famılia das hiperfıciesde nıvel da funcao f . O vetor gradiente e perpendicular as hiperfıcies de nıvel de f . Isto funciona porquesegue da definicao que o gradiente e perpendicular ao espaco tangente a hiperfıcie de nıvel: se α : I −→ Rne uma curva contida em uma hiperfıcie de nıvel, entao
f (α (t)) ≡ c
para todo t ∈ I algum valor real c; derivando esta equacao em relacao a t, obtemos
dfα(t) (α′ (t)) = 0,
ou seja,〈∇f (α (t)) , α′ (t)〉 = 0.
Como isso vale para todas tais curvas, concluımos que ∇f (x) e perpendicular a Txf−1 (c)
. Portanto, o
gradiente “perfura” as hiperfıcies de nıvel. Como no caso linear, a direcao do vetor gradiente e a direcao emque mais hiperfıcies de nıvel sao perfuradas por unidade de distancia. Isso e quase equivalente a dizer queo gradiente aponta na direcao em que a funcao cresce com maior rapidez (como se demonstra em Calculo),pois perfurar as hiperfıcies de nıvel equivale a subir ou descer a montanha de contornos do grafico de f ,dependendo do sentido escolhido.

Rodney Josue Biezuner 89
9.2 Convencao da Soma de Einstein
As escolhas que faremos para a notacao neste capıtulo e no futuro sao necessarias para que a convencao dasoma de Einstein funcione: ao inves de usar o sinal de somatorio
∑para denotar uma soma, convencionamos
que sempre que uma expressao contem um ındice como um superescrito e o mesmo ındice como subescrito,uma soma e implıcita sobre todos os valores que este ındice pode tomar. Alguns exemplos:
Convencao da Soma de Einstein Notacao de Somatorio
viein∑i=1
viei
ei = Ajifj ei =n∑j=1
Ajifj
ωiei
n∑i=1
ωiei
ek =(A−1
)klf l ek =
n∑i=1
(A−1
)klf l
∂
∂xi=∂yj
∂xi∂
∂yj∂
∂xi=
n∑i=1
∂yj
∂xi∂
∂yj
T = T j1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl T =
n∑i1,...,ik=1j1,...,jl=1
T j1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl ,
9.3 Vetores e Covetores
9.3.1 Mudanca de Coordenadas em Espacos Vetoriais
Dado um espaco vetorial real de dimensao finita V munido de uma base
B = e1, . . . , en ,
denotaremos por [v]B o vetor coluna cujos elementos sao as coordenadas do vetor v em relacao a base B, ouseja, se
v = viei,
entao
[v]B =
v1
...vn
.Tambem abusaremos esta notacao as vezes, escrevendo [v]B =
(v1, . . . , vn
).
9.1 Definicao. Sejam V um espaco vetorial real e
B1 = e1, . . . , en ,B2 = f1, . . . , fn ,
duas bases para V . A matriz de mudanca de coordenadas da base B1 para a base B2 e a matriz A talque
[v]B2= A [v]B1
. (9.8)
Quando necessario, ela sera denotada por AB1→B2.
9.2 Notacao. Denotaremos o elemento que ocupa a i-esima linha e a j-esima coluna de A por Aij .

Rodney Josue Biezuner 90
9.3 Proposicao. Sejam
B1 = e1, . . . , en ,B2 = f1, . . . , fn ,
duas bases para um espaco vetorial real V . Se A =(Aij)
e a matriz de mudanca de coordenadas da base B1
para a base B2, entao os elementos desta matriz sao definidos por
ei = Ajifj . (9.9)
Ou seja, as colunas de A sao as coordenadas dos vetores da base B1 em relacao a base B2.
Prova: De fato, se vale (9.9), entao
v = viei = vi(Ajifj
)=(Ajiv
i)fj ,
que e exatamente (9.8):
[v]B2=
A11 . . . A1
n...
...An1 . . . Ann
v1
...vn
= A [v]B1.
Observe agora que enquanto a lei de transformacao dos vetores da base B2 para a base B1 e
ei = Ajifj , (9.10)
a lei de transformacao das coordenadas de vetores na base B2 para a base B1 e contraria: como
[v]B1= A−1 [v]B2
,
segue que se
[v]B1=(v1, . . . , vn
),
[v]B2=(w1, . . . , wn
),
entaovi =
(A−1
)ijwj . (9.11)
A lei de transformacao (9.10) e considerada a lei de transformacao fundamental. Portanto, a observacaoacima motiva a seguinte definicao:
9.4 Definicao. Vetores cujas coordenadas se transformam de maneira contraria a lei (9.10) sao chamadosvetores contravariantes.
Assim, os vetores do proprio espaco vetorial V sao vetores contravariantes.
9.3.2 Covetores
9.5 Definicao. Seja V um espaco vetorial real de dimensao finita. Um covetor de V e qualquer funcionallinear ω : V −→ R.
O espaco vetorial dos covetores de V , com as definicoes naturais de soma de covetores e multiplicacao decovetores por escalares reais e chamado o espaco dual de V e denotado por V ∗.
Portanto, covetor de V nada mais e que um sinonimo para funcional linear sobre V .

Rodney Josue Biezuner 91
9.6 Definicao. Seja B = e1, . . . , en uma base para o espaco vetorial V . Definimos a base dual
B∗ =e1, . . . , en
de V ∗ por
ei (ej) = δji , i, j = 1, . . . , n. (9.12)
Um covetor arbitrario ω ∈ V ∗ expressa-se em coordenadas com relacao a base dual B∗ na forma
ω = ωiei.
Observe que sev = viei,
entaoei (v) = vi. (9.13)
9.7 Definicao. Sejam V,W espacos vetoriais. Dada uma aplicacao linear A : V −→ W , definimos aaplicacao linear dual ou transposta A∗ : W ∗ −→ V ∗ de A por
(A∗ω) v = ω (Av)
para todo ω ∈W ∗ e para todo v ∈ V .
9.8 Proposicao. Sejam
B1 = e1, . . . , en ,B2 = f1, . . . , fn
duas bases para o espaco vetorial V e
B∗1 =e1, . . . , en
,
B∗2 =f1, . . . , fn
as respectivas bases duais para V ∗. Se A e a matriz de mudanca de coordenadas da base B1 para a base B2,entao
ei =(A−1
)ijf j . (9.14)
Consequentemente,(A−1
)Te a matriz de mudanca de coordenadas da base dual B∗1 para a base dual B∗2,
isto e,
[ω]B∗2=(A−1
)T[ω]B∗1
. (9.15)
Prova. Pela Proposicao (9.3),ei = Ajifj .
Seja B =(Bkl)
a matriz de transformacao da base B∗1 para a base B∗2, isto e,
ek = Bkl fl.
Entao
δki = ek (ei) = ek(Ajifj
)= Ajie
k (fj) = AjiBkl f
l (fj)
= AjiBkl δlj = AjiB
kj = BkjA
ji ,

Rodney Josue Biezuner 92
de modo que BA = I, donde B = A−1 e portanto
ek =(A−1
)klf l.
(9.15) segue da aplicacao da Proposicao (9.3) a (9.14), substituindo V por V ∗ e B1,B2 por B∗1,B∗2.
Portanto, assim como a lei de transformacao dos vetores da base B2 para a base B1 (lei de transformacaofundamental) e
ei = Ajifj ,
a lei de transformacao das coordenadas de vetores na base B∗2 para a base B∗1 e a mesma: como
[ω]B∗1= AT [ω]B∗2
,
segue que se
[ω]B∗1= (ω1, . . . , ωn) ,
[ω]B∗2= (σ1, . . . , σn) ,
entaoωi = Ajiσj . (9.16)
Ou seja, covetores variam (se transformam) da mesma forma como variam (se transformam) os vetores dabase do espaco vetorial, que convencionamos ser a lei de transformacao fundamental. Esta observacao motivaa seguinte definicao:
9.9 Definicao. Vetores cujas coordenadas se transformam da mesma forma que a lei (9.10) sao chamadosvetores covariantes.
Assim, os covetores do espaco dual V ∗ sao vetores covariantes.
9.3.3 O Espaco Bidual
9.10 Definicao. Seja V um espaco vetorial real de dimensao finita. O espaco dual (V ∗)∗
do espaco dual deV e chamado o espaco bidual de V e denotado V ∗∗.
Uma importante identificacao natural (isto e, um isomorfismo definido independentemente de bases ebaseado apenas na estrutura linear) existe entre um espaco vetorial e seu espaco bidual:
9.11 Proposicao. A aplicacao Φ : V −→ V ∗∗ definida por
Φ (v) (ω) = ω (v)
e um isomorfismo natural entre V e V ∗∗.
Prova. Como dimV = dimV ∗∗, para verificar que Φ e um isomorfismo basta mostrar que ele e injetivo, istoe, que seu nucleo e o subespaco nulo. Seja e1 ∈ V um vetor nao nulo qualquer. Estenda este vetor a umabase B = e1, . . . , en para V . Seja B∗ =
e1, . . . , en
a correspondente base dual de V ∗. Entao Φ (e1) 6= 0
porqueΦ (e1)
(e1)
= e1 (e1) = 1.
Em vista desta identificacao, um vetor v ∈ V pode ser visto como um funcional linear sobre V ∗ cuja acaoem covetores de V ∗ e dada por
v (ω) = ω (v) . (9.17)
Em particular,ei(ej)
= δji (9.18)
e seω = ωie
i,
entaoei (ω) = ωi. (9.19)

Rodney Josue Biezuner 93
9.4 Vetores e Covetores Tangentes
9.4.1 Mudanca de Coordenadas no Espaco Tangente TpM
Se ϕ : U −→ ϕ (U) e ψ : V −→ ψ (V ) sao duas cartas para vizinhancas coordenadas de p = ϕ (x) =ϕ(x1, . . . , xn
)= ψ (y) = ψ
(y1, . . . , yn
)em M , abusando a notacao frequentemente escrevemos(
ψ−1 ϕ)
(x) =(ψ−1 ϕ
) (x1, . . . , xn
)=(y1(x1, . . . , xn
), . . . , yn
(x1, . . . , xn
)),
isto e, denotamos as funcao coordenadas(ψ−1 ϕ
)j(x) por yj (x).
9.12 Proposicao. Seja M uma variedade diferenciavel n-dimensional e
ϕ : U −→ ϕ (U) ,
ψ : V −→ ψ (V ) ,
duas cartas para vizinhancas coordenadas de p = ϕ (x) = ψ (y) em M . Sejam
Bx =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
,
By =
∂
∂y1
∣∣∣∣p
, . . . ,∂
∂yn
∣∣∣∣p
,
as bases coordenadas de TpM induzidas pelas cartas ϕ e ψ, respectivamente. Denote
∂yj
∂xi(x) :=
∂(ψ−1 ϕ
)j∂xi
(x)
Entao a matriz de mudanca de coordenadas da base Bx para a base By e definida por
∂
∂xi
∣∣∣∣p
=∂yj
∂xi∂
∂yj
∣∣∣∣p
. (9.20)
Prova: Por definicao e pela regra da cadeia,
∂
∂xi
∣∣∣∣p
= dϕx (ei) = dψy[d(ψ−1 ϕ
)x
(ei)]
= dψy
[∂(ψ−1 ϕ
)j∂xi
(x) fj
]=∂(ψ−1 ϕ
)j∂xi
dψy (fj)
=∂yj
∂xi
∂
∂yj
∣∣∣∣p
.
Portanto, se um vetor v ∈ TpM se escreve em coordenadas em relacao as bases Bx e By nas formas
v = vix∂
∂xi
∣∣∣∣p
,
v = vjy∂
∂yj
∣∣∣∣p
,
entao, pelas Proposicoes 9.3 e 9.12, a lei de transformacao de coordenadas e dada por
vix =∂xi
∂yjvjy. (9.21)

Rodney Josue Biezuner 94
9.4.2 Covetores Tangentes
Enquanto que o conceito de vetores tangentes em variedades permite uma interpretacao livre de coordenadasde derivadas de curvas, diferenciais de funcoes reais em variedades (ou seja, o analogo do gradiente em Rn) saointerpretadas de maneira mais natural como covetores tangentes (compare a Proposicao 9.8 com a discussaona introducao deste capıtulo).
9.13 Definicao. Seja M uma variedade diferenciael. Para cada p ∈ M definimos o espaco cotangenteT ∗pM a M em p por
T ∗pM = (TpM)∗.
Elementos de T ∗pM sao chamados covetores tangentes a M em p.
Assim, o espaco cotangente a M em p e o dual do espaco tangente a M em p.
9.14 Definicao. Seja M uma variedade diferenciavel e ϕ : U −→ ϕ (U) uma carta de uma vizinhancacoordenada de um ponto p ∈M . A base coordenada
Bp =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
do espaco tangente TpM associada a carta ϕ da origem a uma base dual coordenada para o espacocotangente T ∗pM associada a carta ϕ que denotaremos por
B∗p =dx1∣∣p, . . . , dxn|p
. (9.22)
Portanto, qualquer covetor ω ∈ T ∗pM pode ser escrito de maneira unica como
ω = ωi dxi∣∣p, (9.23)
onde
ωi = ω
(∂
∂xi
∣∣∣∣p
). (9.24)
Vamos investigar agora como as coordenadas de um covetor tangente se transformam quando ha uma mu-danca de bases coordenadas, de uma carta para outra.
9.15 Proposicao. Seja M uma variedade diferenciavel n-dimensional e ϕ : U −→ ϕ (U) , ψ : V −→ ψ (V )duas cartas para vizinhancas coordenadas de p = ϕ (x) = ψ (y) em M . Sejam
Bx =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
,
By =
∂
∂y1
∣∣∣∣p
, . . . ,∂
∂yn
∣∣∣∣p
as bases coordenadas de TpM induzidas pelas cartas ϕ e ψ, respectivamente. Denote por
B∗x =dx1∣∣p, . . . , dxn|p
,
B∗y =dy1∣∣p, . . . , dyn|p
as respectivas bases duais. Entao a matriz de mudanca de coordenadas da base B∗x para a base B∗y e dadapor
dxi∣∣p
=∂xi
∂yjdyj∣∣p. (9.25)

Rodney Josue Biezuner 95
Prova: Pela Proposicao 9.12, a mudanca de coordenadas da base Bx para a base By e dada por
∂
∂xi
∣∣∣∣p
=∂yj
∂xi∂
∂yj
∣∣∣∣p
.
O resultado segue entao da Proposicao 9.8. Obtemos tambem da discussao que se segue a Proposicao 9.8 que se
[ω]B∗x= (ωx1 , . . . , ω
xn) ,
[ω]B∗y= (ωy1 , . . . , ω
yn) ,
entao
ωxi =∂yj
∂xiωyj .
Podemos agora entender a terminologia antiga em que vetores tangentes eram chamados vetores contrava-riantes, enquanto que covetores tangentes eram chamados vetores covariantes. E importante ressaltar queesta terminologia nada tem a ver com functores covariantes e contravariantes da teoria de categorias.
9.5 Tensores
9.5.1 Definicao
9.16 Definicao. Seja V um espaco vetorial real de dimensao finita e V ∗ seu espaco dual.Um k-tensor covariante em V (ou tensor covariante de ordem k) e uma funcao real k-linear
T : V × . . .× V︸ ︷︷ ︸k vezes
−→ R.
Um l-tensor contravariante em V (ou tensor contravariante de ordem l) e uma funcao real l-linear
T : V ∗ × . . .× V ∗︸ ︷︷ ︸l vezes
−→ R.
Um tensor do tipo (k, l) e um tensor k-covariante e l-contravariante, isto e, uma funcao real multilinear
T : V × . . .× V︸ ︷︷ ︸k vezes
× V ∗ × . . .× V ∗︸ ︷︷ ︸l vezes
−→ R.
O espaco vetorial real dos k-tensores covariantes sobre V sera denotado por T k (V ); o espaco vetorial dosl-tensores contravariantes sobre V sera denotado por Tl (V ) e o espaco vetorial dos (k, l) tensores sobre Vsera denotado por T kl (V ). Estes espacos vetoriais sao chamados espacos tensoriais.
9.17 Exemplo. Um 1-tensor covariante e simplesmente um covetor. Formas bilineares, entre elas o produtointerno, sao 2-tensores covariantes. Determinantes sao n-tensores covariantes em Rn.
Algumas identificacoes naturais (isto e, independente de especificacao de bases):
• 0-tensores sao numeros reais:T 0 (V ) = R;
• tensores do tipo (k, 0) sao k-tensores covariantes:
T k0 (V ) = T k (V ) ;

Rodney Josue Biezuner 96
• tensores do tipo (0, l) sao l-tensores contravariantes:
T 0l (V ) = Tl (V ) ;
• 1-tensores covariantes sao covetores:T 1 (V ) = V ∗
• 1-tensores contravariantes sao vetores:
T1 (V ) = V ∗∗ = V.
9.18 Proposicao. Seja End (V ) o espaco vetorial dos operadores lineares sobre V . Entao existe um iso-morfismo natural
T 11 (V ) ∼= End (V ) .
Prova. Um isomorfismo natural Φ : End (V ) −→ T 11 (V ) pode ser definido por
Φ (A) (v, ω) = ω (Av) .
9.19 Proposicao. Considere o espaco vetorial L(V k × (V ∗)
l;V)
das aplicacoes multilineares
T : V × . . .× V︸ ︷︷ ︸k vezes
× V ∗ × . . .× V ∗︸ ︷︷ ︸l vezes
−→ V.
Entao existe um isomorfismo natural
T kl+1 (V ) ∼= L(V k × (V ∗)
l;V).
Prova. Este pode ser definido por
(ΦT )(v1, . . . , vk, ω
1, . . . , ωl, ωl+1)
= ωl+1
(T(v1, . . . , vk, ω
1, . . . , ωl)).
9.5.2 Produto Tensorial
9.20 Definicao. Sejam T e S tensores de tipos (k, l) e (p, q), respectivamente. Seu produto tensorial eo tensor T ⊗ S do tipo (k + p, l + q) definido por
(T ⊗ S)(v1, . . . , vk+p, ω
1, . . . , ωl+q)
= T(v1, . . . , vk, ω
1, . . . , ωl)S(vk+1, . . . , vk+p, ω
l+1, . . . , ωl+q).
9.21 Exemplo. Sejam ω, η dois covetores (1-tensores covariantes). Entao
ω ⊗ η (v1, v2) = ω (v1) η (v2)
e um 2-tensor covariante (uma forma bilinear).
Usando produtors tensoriais, podemos obter uma base para o espaco tensorial T kl (V ):

Rodney Josue Biezuner 97
9.22 Proposicao. SeB = e1, . . . , en
e uma base para o espaco vetorial V eB∗ =
e1, . . . , en
e a correspondente base dual para V ∗, entao
Bkl =ei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl
16i1,...,ik6n16j1,...,jl6n
(9.26)
e uma base para o espaco tensorial T kl (V ). Alem disso, qualquer tensor T ∈ T kl (V ) se escreve na forma
T = T j1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl , (9.27)
ondeT j1...jli1...ik
= T(ei1 , . . . , eik , e
j1 , . . . , ejl). (9.28)
Em particular, dimT kl (V ) = nk+l.
Prova. Primeiro mostraremos que Bkl gera o espaco tensorial T kl (V ). Seja T ∈ T kl (V ) um tensor qualquere defina
T j1...jli1...ik= T
(ei1 , . . . , eik , e
j1 , . . . , ejl).
Se v1, . . . , vk ∈ V , ω1, . . . , ωl ∈ V ∗ sao vetores e covetores arbitrarios, expressos em coordenadas por
vr = virr eir e ωs = ωsjsejs
para r = 1, . . . , k e s = 1, . . . , l, segue da multilinearidade que
T(v1, . . . , vk, ω
1, . . . , ωl)
= T(vi11 ei1 , . . . , v
ikk eik , ω
1j1e
j1 , . . . , ωljlejl)
= vi11 . . . vikk ω1j1 . . . ω
ljlT(ei1 , . . . , eik , e
j1 , . . . , ejl)
= T j1...jli1...ikvi11 . . . vikk ω
1j1 . . . ω
ljl
= T j1...jli1...ikei1 (v1) . . . eik (vk) ej1
(ω1). . . ejl
(ωl)
= T j1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl
(v1, . . . vk, ω
1, . . . , ωl).
Para mostrar que Bkl e linearmente independente, suponha que exista uma combinacao linear nula
T = Cj1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl = 0
para algumas constantes Cj1...jli1...ik∈ R. Como
ei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl (er1 , . . . , erk , es1 , . . . , esl)
= ei1 (er1) . . . eik (erk) ej1 (es1) . . . ejl (esl)
= δi1r1 . . . δikrkδs1j1 . . . δ
sljl
= δi1...iks1...slr1...rkj1...jl,
(o delta de Kronecker para multi-ındices e definido de maneira analoga ao delta de Kronecker usual) segueque
0 = T (er1 , . . . , erk , es1 , . . . , esl) = Cj1...jli1...ik
δi1...iks1...slr1...rkj1...jl= Cs1...slr1...rk
para todos os ındices r1, . . . , rk, s1, . . . , sl = 1, . . . , n.

Rodney Josue Biezuner 98
Este resultado mostra que um tensor e completamente determinado pela sua acao em todas as sequenciaspossıveis de covetores e vetores das bases de V ∗ e V .
Observe que, se F ∈ T kl (V ), G ∈ T pq (V ) e T = F ⊗G ∈ T k+pl+q (V ), entao
Tj1...jljl+1...jl+qi1...ikik+1...ik+p
= T(ei1 , . . . , eik , eik+1
, . . . , eik+p , ej1 , . . . , ejl , ejl+1 , . . . , ejl+q
)= F
(ei1 , . . . , eik , e
j1 , . . . , ejl)G(eik+1
, . . . , eik+p , ejl+1 , . . . , ejl+q
)de modo que
Tj1...jljl+1...jl+qi1...ikik+1...ik+p
= F j1...jli1...ikGjl+1...jl+qik+1...ik+p
. (9.29)
9.5.3 Mudanca de Base
9.23 Proposicao. Sejam B1 = e1, . . . , en ,B2 = f1, . . . , fn duas bases para o espaco vetorial V eB∗1 =
e1, . . . , en
,B∗2 =
f1, . . . , fn
as respectivas bases duais para V ∗. Sejam A a matriz de mudanca
de coordenadas da base B1 para a base B2, e(A−1
)Ta matriz de mudanca de coordenadas da base dual B∗1
para a base dual B∗2, isto e,
ei = Ajifj e ek =(A−1
)klf l.
Sejam
T = Ej1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl
= F j1...jli1...ikf i1 ⊗ . . .⊗ f ik ⊗ fj1 ⊗ . . .⊗ fjl
as expressoes em coordenadas para um tensor T ∈ T kl (V ) em relacao a estas bases. Entao
Ej1...jli1...ik= Ar1i1 . . . A
rkik
(A−1
)j1s1. . .(A−1
)jlslF s1...slr1...rk
. (9.30)
Prova. Segue da ultima proposicao e por multilinearidade que
Ej1...jli1...ik
= T(ei1 , . . . , eik , e
j1 , . . . , ejl)
= T(Ar1i1 fr1 , . . . , A
rkikfrk ,
(A−1
)j1s1fs1 , . . . ,
(A−1
)jlslfsl)
= Ar1i1 . . . Arkik
(A−1
)j1s1. . .(A−1
)jlslT (fr1 , . . . , frk , f
s1 , . . . , fsl)
= Ar1i1 . . . Arkik
(A−1
)j1s1. . .(A−1
)jlslF s1...slr1...rk
.
9.24 Definicao. Seja M uma variedade diferenciavel. Para cada p ∈ M definimos o espaco tensorialtangente T kl (TpM) a M em p. Seja ϕ : U −→ ϕ (U) uma carta de uma vizinhanca de um ponto p ∈M . Abase coordenada
Bp =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
do espaco tangente TpM associada a carta ϕ e sua respectiva base dual
B∗p =dx1∣∣p, . . . , dxn|p
dao origem a base coordenada associada a carta ϕ para o espaco tensorial tangente T kl (TpM)
(Bkl)p
=
dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂
∂xj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂xjl
∣∣∣∣p
16i1,...,ik6n16j1,...,jl6n
(9.31)

Rodney Josue Biezuner 99
9.25 Corolario. Seja M uma variedade diferenciavel n-dimensional e ϕ : U −→ ϕ (U) , ψ : V −→ ψ (V )duas cartas para vizinhancas de p = ϕ (x) = ψ (y) em M . Sejam
Bx =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
,
By =
∂
∂y1
∣∣∣∣p
, . . . ,∂
∂yn
∣∣∣∣p
as bases coordenadas de TpM induzidas pelas cartas ϕ e ψ, respectivamente, e
B∗x =dx1∣∣p, . . . , dxn|p
,
B∗y =dy1∣∣p, . . . , dyn|p
suas respectivas bases duais. Sejam
Tp = Ej1...jli1...ik(p) dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂
∂xj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂xjl
∣∣∣∣p
= F j1...jli1...ik(p) dyi1
∣∣p⊗ . . .⊗ dyik
∣∣p⊗ ∂
∂yj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂yjl
∣∣∣∣p
as expressoes em coordenadas para um tensor Tp ∈ T kl (TpM) em relacao a estas bases. Entao
Ej1...jli1...ik(p) =
∂yr1
∂xi1. . .
∂yrk
∂xik∂xj1
∂ys1. . .
∂xjl
∂yslF s1...slr1...rk
(p) . (9.32)
Prova: Segue das Proposicoes 9.12, 9.15 e 9.23.
9.5.4 Traco de Tensores
O traco de uma matriz A =(Aij)n×n e definido por
trA = Aii.
A partir disso pode-se definir o traco de um operador linear sobre um espaco vetorial real de dimensao finitacomo sendo o traco de qualquer uma de suas representacoes matriciais com respeito a uma base fixada poispode-se provar que o traco independe da base escolhida, ou seja, que o traco e uma nocao independente decoordenadas. Usando o isomorfismo natural entre o espaco vetorial End (V ) dos operadores lineares sobre Ve T 1
1 (V ), podemos definir logo de inıcio o traco para operadores lineares independemente de coordenadas.Alem da vantagem obvia de se ter uma definicao que nao se refere a coordenadas, a maior vantagem e queela sera naturalmente generalizada para definir o traco de tensores.
Observe que e uma consequencia da Proposicao 9.22 que os produtos tensoriais da forma ω⊗ v, ω ∈ V ∗,v ∈ V , geram T 1
1 (V ); em outras palavras, todo (1, 1)-tensor e uma combinacao linear de tais produtostensoriais.
9.26 Definicao. O traco de (1, 1)-tensores e o funcional linear tr : T 11 (V ) −→ R definido por
tr (ω ⊗ v) = ω (v)
em produtos tensoriais e estendido linearmente a todo T 11 (V ).
Se Φ : End (V ) −→ T 11 (V ) e o endomorfimo natural, entao o traco de um operador linear A ∈ End (V )
e definido portrA = tr (Φ (A)) .

Rodney Josue Biezuner 100
9.27 Proposicao. Se T ∈ T 11 (V ) se escreve em coordenadas na forma
T = T ji ei ⊗ ej ,
entaotrT = T ii . (9.33)
Se A ∈ End (V ), entaotrA = Aii. (9.34)
Prova: Por definicao,trT = T ji tr
(ei ⊗ ej
)= T ji e
i (ej) = T ji δij = T ii .
Daı, comotrA = [Φ (A)]
ii ,
e, pela Proposicao 9.18,
[Φ (A)]ji = Φ (A)
(ei, e
j)
= ej (Aei) = ej(Aki ek
)= Aki e
j (ek) = Aki δjk = Aji ,
segue a segunda expressao. O conceito de traco pode ser generalizado para tensores de qualquer tipo, produzindo uma operacao que
diminui a ordem total do tensor em 2, 1 para a parte covariante e 1 para a parte contravariante. Antesobserve que, dado um tensor T do tipo (k, l) e ındices p, q, cada (k − 1, l − 1)-upla fixada(
v1, . . . , vp−1, vp+1, . . . , vk, ω1, . . . , ωq−1, ωq+1, . . . , ωl
)∈ V k−1 × (V ∗)
l−1
define um tensor S ∈ T 11 (V ), que depende da (k − 1, l − 1)-upla escolhida, atraves da expressao
S (v, ω) = T(v1, . . . , vp−1, v, vp+1, . . . , vk, ω
1, . . . , ωq−1, ω, ωq+1, . . . , ωl).
Em outras palavras, fixados v1, . . . , vp−1, vp+1, . . . , vk, ω1, . . . , ωq−1, ωq+1, . . . , ωl,
T(v1, . . . , vp−1, ·, vp+1, . . . , vk, ω
1, . . . , ωq−1, ·, ωq+1, . . . , ωl)
e um (1, 1)-tensor.
9.28 Definicao. Dado um tensor T do tipo (k, l) e ındices p, q, o traco de T com respeito aos ındices p, q(ındice covariante p e ındice contravariante q) e o tensor trT do tipo (k − 1, l − 1) definido por
(trT )(v1, . . . , vp−1, vp, . . . , vk−1, ω
1, . . . , ωq−1, ωq, . . . , ωl−1)
= trT(v1, . . . , vp−1, ·, vp, . . . , vk−1, ω
1, . . . , ωq−1, ·, ωq, . . . , ωl−1).
Se for necessario explicitar os ındices em relacao aos quais foi tomado o traco, denotaremos trpq T .
9.29 Proposicao. Se T ∈ T kl (V ) se escreve em coordenadas na forma
T = T j1...jli1...ikei1 ⊗ . . .⊗ eik ⊗ ej1 ⊗ . . .⊗ ejl .
entao as coordenadas de
trT = (trT )j1...jl−1
i1...ik−1ei1 ⊗ . . .⊗ eik−1 ⊗ ej1 ⊗ . . .⊗ ejl−1
sao dadas por(trT )
j1...jl−1
i1...ik−1= T
j1...jq−1ijq...jk−1
i1...ip−1iip...il−1. (9.35)

Rodney Josue Biezuner 101
Prova: Por definicao, se S e o tensor T(ei1 , . . . , eip−1 , ·, eip , . . . , eik−1
, ej1 , . . . , ejq−1 , ·, ejq , . . . , ejl−1), entao
(trT )j1...jl−1
i1...ik−1= (trT )
(ei1 , . . . , eip−1
, eip , . . . , eik−1, ej1 , . . . , ejq−1 , ejq , . . . , ejl−1
)= trS
= Sii
= T(ei1 , . . . , eip−1 , ei, eip , . . . , eik−1
, ej1 , . . . , ejq−1 , ei, ejq , . . . , ejl−1)
= Tj1...jq−1ijq...jl−1
i1...ip−1iip...ik−1.
9.6 Fibrados Tensoriais
9.30 Definicao. SejaM uma variedade diferenciavel de dimensao n com um atlas Φ = ϕα : Uα −→Mα∈A.
O fibrado (k, l)-tensorial de M e a variedade diferenciavel de dimensao n+ nk+l
T kl M =
(p, T ) : p ∈M e T ∈ T kl (TpM)
com um atlasΨ =
ψα : Uα × Rn
k+l
−→ T kl TMα∈A
definido por
ψα
(x,(T j1...jli1...ik
)i1,...,ik=1,...,nj1,...,jl=1...,n
)
=
(ϕα (x) , T j1...jli1...ik
dxi1∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂
∂xj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂xjl
∣∣∣∣p
).
Fibrados tensoriais sao fibrados vetoriais (veja o Exercıcio 1.3). Note que
T 0M = C∞ (M) ,
T1M = TM,
T 1M = T ∗M,
T k0 M = T kM,
T 0l M = TlM.
O fibrado T 1M e chamado o fibrado cotangente.
9.7 Campos Tensoriais
9.31 Definicao. Um campo tensorial e uma secao do fibrado tensorial. Um campo tensorial dife-renciavel e uma secao diferenciavel do fibrado tensorial.
O espaco vetorial dos campos (k, l)-tensoriais diferenciaveis e denotado por Tkl (M).

Rodney Josue Biezuner 102
A menos que seja dito o contrario, lidaremos apenas com campos tensoriais diferenciaveis. Note que
T0 (M) = C∞ (M) ,
T1 (M) = T (M) ,
Tk0 (M) = Tk (M) ,
T0l (M) = Tl (M) .
e T1M e o espaco vetorial dos campos covetoriais.
9.32 Proposicao. Seja T : M −→ T kl M um campo tensorial. Para cada carta ϕ : U −→ V uma vizinhancaV de M , denote a base coordenada associada para o espaco tensorial T kl (TpM) por
(Bkl)p
=
dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂
∂xj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂xjl
∣∣∣∣p
16i1,...,ik6n16j1,...,jl6n
para todo p ∈ V , de modo que nesta base coordenada o campo tensorial T se escreve na forma
Tp = T j1...jli1...ik(p) dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂
∂xj1
∣∣∣∣p
⊗ . . .⊗ ∂
∂xjl
∣∣∣∣p
. (9.36)
Entao T e um campo tensorial diferenciavel se e somente se para toda carta ϕ as funcoes T j1...jli1...ik: V −→ R
sao diferenciaveis para todos os ındices i1, . . . , ik, j1, . . . , jl = 1 . . . , n.
9.8 Exercıcios
9.33 Exercıcio. Defina explicitamente o fibrado cotangente e mostre que ele e um fibrado vetorial. Definaexplicitamente o conceito de campos covetoriais.
9.34 Exercıcio. Mostre que o fibrado tensorial definido pela Definicao 9.30 e de fato uma variedade dife-renciavel.
9.35 Exercıcio. Mostre que um fibrado tensorial e um fibrado vetorial.
9.36 Exercıcio. Demonstre a Proposicao 9.32.
9.37 Exercıcio. Seja T : M −→ T kl M uma secao do fibrado tensorial. Mostre que T e diferenciavel (e,portanto, um campo tensorial diferenciavel) se e somente se para toda vizinhanca V ⊂M e para todos os cam-pos vetoriais X1, . . . , Xk e para todas os campos covetoriais ω1, . . . , ωl a funcao T
(X1, . . . , Xk, ω
1, . . . , ωl)
:V −→ R definida por
T(X1, . . . , Xk, ω
1, . . . , ωl)
(p) = Tp(X1 (p) , . . . , Xk (p) , ω1 (p) , . . . , ωl (p)
)e diferenciavel.

Capıtulo 10
Variedades Metricas
10.1 Definicao e Exemplos
10.1 Definicao. Seja M uma variedade diferenciavel de dimensao n. Uma metrica (ou tensor metrica)de ındice k em M e um campo diferenciavel tensorial 2-covariante g tal que gp e um produto interno com omesmo ındice k para todo p ∈ M . Uma variedade diferenciavel munida de uma metrica g e chamada umavariedade metrica.
Uma variedade diferenciavel M com uma metrica g dada e chamada uma variedade metrica.Se g e um produto interno positivo definido (ou seja, se o seu ındice e 0), dizemos que g e uma metrica
riemanniana e M e uma variedade riemanniana.Se o ındice de g e diferente de zero, dizemos que g e uma metrica semi-riemanniana e M e uma
variedade semi-riemanniana.Se g e um produto interno de Lorentz (ou seja, se o ındice e 1), dizemos que g e uma metrica de Lorentz
e M e uma variedade de Lorentz.
Em outras palavras, uma metrica em M e uma aplicacao que associa a cada ponto p ∈ M um produtointerno
gp = 〈·, ·〉pno espaco tangente TpM que varia diferenciavelmente com p no sentido de que se ϕ : U −→ V e uma
carta para uma vizinhanca coordenada V de M e Bp =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
e a base coordenada de TpM
associada a esta carta para cada p ∈ V , entao as funcoes gij : V −→ R
gij (p) =
⟨∂
∂xi
∣∣∣∣p
,∂
∂xj
∣∣∣∣p
⟩p
(10.1)
sao diferenciaveis. De fato, escrevendo o tensor metrica em coordenadas, temos
gp = gij (p) dxi∣∣p⊗ dxj
∣∣p, (10.2)
e as funcoes componentes gij do tensor metrica g sao diferenciaveis para toda parametrizacao ϕ se e somentese g e diferenciavel.
Omitindo o sımbolo do ponto de atuacao p, como frequentemente faremos, escrevemos simplesmente
gij =
⟨∂
∂xi,∂
∂xj
⟩(10.3)
103

Rodney Josue Biezuner 104
e notamos que a simetria do tensor metrica implica que
gij = gji. (10.4)
Em particular, quando consideramos a matriz
G = (gij) (10.5)
segue que G e uma matriz simetrica. Observe que devido a simetria existem apenas
n (n+ 1)
2
componentes potencialmente distintos do tensor metrica, ao inves dos n2 componentes distintos para umtensor 2-covariante geral.
Usando o produto simetrico de tensores (veja [Lee 1], Cap. 12, p. 315), que no caso de covetores esimplesmente
ωη :=1
2(ω ⊗ η + η ⊗ ω) (10.6)
e a simetria do tensor metrica, podemos escrever a expressao
g = gijdxi ⊗ dxj
na forma mais familiarg = gijdx
idxj , (10.7)
ja que
g = gijdxi ⊗ dxj =
1
2(gij + gji) dx
i ⊗ dxj
=1
2gijdx
i ⊗ dxj +1
2gjidx
i ⊗ dxj
=1
2gijdx
i ⊗ dxj +1
2gijdx
j ⊗ dxi (permutando os ındices i, j)
= gij1
2
(dxi ⊗ dxj + dxj ⊗ dxi
)= gijdx
idxj .
Estritamente falando, uma variedade metrica e um par (M, g), onde M e uma variedade diferenciavele g a metrica riemanniana, ja que uma mesma variedade diferenciavel pode admitir diferentes metricasriemannianas, como veremos no decorrer deste texto. Contudo, quando nao houver perigo de confusao, nosvamos nos referir a variedade riemanniana simplesmente por M .
10.2 Exemplo (Metrica Euclidiana). A variedade riemanniana mais simples e o espaco euclidiano Rncom a metrica euclidiana gij = δij , que denotaremos En.
10.3 Exemplo (Metrica Semieuclidiana). A variedade semi-riemanniana mais simples de ındice k e oespaco semi-euclidiano Rn com a metrica semieuclidiana gij = ηkij , que denotaremos Mn
k .
10.4 Exemplo (Metrica de Lorentz). A variedade de Lorentz mais simples de ındice 1 e o espaco deMinkowski n-dimensional Rn, n > 2, com a metrica de Lorentz gij = ηij . Denotaremos este espacopor Mn, enquanto que o espacotempo de Minkowski da relatividade especial M4 continuara a ser denotadogeralmente apenas por M.
10.5 Proposicao. Toda variedade diferenciavel possui uma metrica riemanniana.

Rodney Josue Biezuner 105
Prova: Seja ϕα : Uα −→ Vαα um atlas para M e fαα uma particao da unidade de M subordinada acobertura Vαα.
Em cada Vα podemos definir uma metrica riemanniana, aquela induzida pela carta: dado p ∈M e vetores
v, w ∈ TpM , eles se escrevem em coordenadas com relacao a base Bp =
∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
associada a
carta ϕα por
v = vi∂
∂xi
∣∣∣∣p
e w = wj∂
∂xj
∣∣∣∣p
e definimos o produto interno〈v, w〉αp = viwi.
Esta e uma metrica riemanniana na subvariedade Vα com gαij = δij . Para obter uma metrica riemannianaglobal em M , usamos a particao da unidade, definindo
〈v, w〉p =∑α
fα (p) 〈v, w〉αp .
De fato, esta soma e finita em uma vizinhanca de p, portanto define um tensor diferenciavel em M ; alemdisso, como uma combinacao linear finita positiva de produtos internos e um produto interno, ela define umproduto interno em TpM .
Observe que a demonstracao acima nao funciona para metricas semi-riemannianas. De fato, uma com-binacao linear finita de metricas semi-riemannianas, mesmo positiva, nao e necessariamente uma metricasemi-riemanniana. Por exemplo, a soma das metricas semi-riemannianas em R4
〈v, w〉1 = v1w1 + v2w2 − v3w3 − v4w4,
〈v, w〉2 = −v1w1 − v2w2 + v3w3 + v4w4,
e o tensor nulo. Mais ainda, a soma das metricas de Lorentz em R4
〈v, w〉1 = −v1w1 + v2w2 + v3w3 + v4w4,
〈v, w〉2 = v1w1 − v2w2 + v3w3 + v4w4,
e o tensorT (v, w) = 2 (v3w3 + v4w4) ,
que e degenerado, pois se v0 = (1, 1, 0, 0), entao
T (v0, w) = 0
para todo w ∈ R4. A realidade e que existem variedades diferenciaveis que nao admitem metricas semi-riemannianas. Por exemplo, e possıvel provar, usando tecnicas de Topologia Diferencial, que esferas dedimensao par nao admitem metricas de Lorentz (em particular S4 nao pode ser uma variedade de Lorentz; oespacotempo nao pode ser uma esfera 4-dimensional); mais geralmente, e possıvel provar que toda variedadediferenciavel compacta de dimensao ımpar possui uma metrica de Lorentz e que uma variedade diferenciavelcompacta de dimensao par admite uma metrica de Lorentz se e somente se ela tem caracterıstica de Euler nula(veja [Steenrod], Theorem 40.13, p. 207). Por outro lado, todas as variedades diferenciaveis nao compactasadmitem metricas de Lorentz (veja [BEE], p. 50).
10.6 Exemplo (Metrica Produto). Se (M1, g1) e (M2, g2) sao duas variedades metricas, entao definimosa metrica produto g = g1 ⊕ g2 na variedade produto M1 ×M2 por
〈(v1, v2) , (w1, w2)〉(p1,p2) = 〈v1, w1〉p1 + 〈v2, w2〉p2 (10.8)

Rodney Josue Biezuner 106
para todos (v1, v2) , (w1, w2) ∈ Tp1M1 ⊕ Tp2M2∼= T(p1,p2) (M1 ×M2). E facil ver que g e simetrica. Para
verificar a sua nao-degenericidade, suponha que
〈(v1, v2) , (w1, w2)〉(p1,p2) = 0
para todo (w1, w2) ∈ Tp1M1 ⊕ Tp2M2. Entao em particular
〈(v1, v2) , (0, w2)〉(p1,p2) = 0,
〈(v1, v2) , (w1, 0)〉(p1,p2) = 0.
para todos w1 ∈ Tp1M1 e para todo w2 ∈ Tp2M2. Como
〈(v1, v2) , (0, w2)〉(p1,p2) = 〈v1, 0〉p1 + 〈v2, w2〉p2 = 〈v2, w2〉p2 ,
〈(v1, v2) , (w1, 0)〉(p1,p2) = 〈v1, w1〉p1 + 〈v2, 0〉p2 = 〈v1, w1〉p1 ,
segue que〈v1, w1〉p1 = 0
para todo w1 ∈ Tp1M1 e〈v2, w2〉p2 = 0
para todo w2 ∈ Tp2M2, e a nao-degenericidade de g1, g2 implica que
v1 = v2 = 0.
Observe que a matriz associada a metrica G e a matriz diagonal em blocos
G =
[G1 00 G2
]=
[(g1)ij 0
0 (g2)ij
].
10.7 Definicao. Sejam M,N variedades metricas. Um difeomorfismo F : M −→ N e uma isometria se
〈v, w〉p = 〈dFpv, dFpw〉F (p) (10.9)
para todo p ∈M e para todos v, w ∈ TpM . Se existir uma isometria entre M e N , dizemos que M e N saoisometricas.
Dizemos que M e N sao localmente isometricas se para todo p ∈ M existe uma vizinhanca Vp de pem M e uma isometria F : Vp −→ F (Vp) ⊂ N e reciprocamente para todo q ∈ N existe uma vizinhanca Wq
de q em N e uma isometria G : Wp −→ G (Wp) ⊂M .Dizemos que uma variedade metrica (M, g) e plana, se ela e localmente isometrica ao espaco euclidiano
ou ao espaco semi-euclidiano.
Observe que o conjunto das isometrias em uma variedade metrica possui uma estrutura natural de grupoem que o produto de isometrias e definido como a composicao das aplicacoes. Este grupo e denotado por
Isom (M) .
Observe que o pullback de um difeomorfismo F : M −→ N em que N e uma variedade semi-riemanniananao define necessariamente uma metrica semi-riemanniana em M , pois poderıamos ate mesmo ter (na piorhipotese) que TpM seja um subespaco de vetores nulos para o 2-tensor g = F ∗h. Por exemplo, isso eexatamente o que acontece na imersao F : R −→ Mn definida por F (t) = (t, t, x3, . . . , xn). Alem disso, seisso fosse verdade, pelo Teorema do Mergulho de Whitney, que afirma que toda variedade diferenciavel dedimensao n pode ser mergulhada em R2n (um mergulho e uma imersao injetiva), toda variedade diferenciavelteria uma metrica semi-riemanniana. g = F ∗h sera uma metrica semi-riemanniana em M se e somente seg|TpM e nao-degenerado e tem o mesmo ındice para todo p ∈M .

Rodney Josue Biezuner 107
10.8 Exemplo. O grupo de isometrias de En consiste das composicoes de operadores ortogonais e translacoes.O grupo de isometrias de M e o grupo de Poincare.
E facil ver que isometria e uma relacao de equivalencia na classe das variedades metricas. GeometriaRiemanniana e principalmente o estudo das propriedades que sao invariantes por isometrias. Uma excelentereferencia para o estudo de grupos de isometrias de variedades riemannianas e [Kobayashi].
Dizemos que uma aplicacao diferenciavel F : M −→ N entre variedades diferenciaveis e uma imersao sedFp e injetiva para todo p ∈M .
10.9 Definicao. Sejam M uma variedade diferenciavel, (N,h) uma variedade riemanniana e F : M −→ Numa imersao. A metrica induzida por F em M (tambem chamada a metrica do pullback), denotadapor
g = F ∗h,
e definida por〈v, w〉p := 〈dFpv, dFpw〉F (p) (10.10)
para todo p ∈M e para todos v, w ∈ TpM .
Com esta metrica definida em M , a imersao F torna-se uma imersao isometrica. Na linguagem dopullback, um difeomorfismo F entre duas variedades metricas (M, g) e (N,h) e uma isometria se
g = F ∗h.
10.10 Exemplo (Superfıcies n-dimensionais em RN ). Seja M ⊂ Rn+k uma variedade diferenciavel dedimensao n, isto e, uma superfıcie n-dimensional. A aplicacao inclusao i : M −→ Rn+k e uma imersao, demodo que, se assumirmos a metrica euclidiana em Rn+k, ela induz em M uma metrica riemanniana. Nestecaso, a inclusao passa a ser uma imersao isometrica. Daı, como a diferencial dip da inclusao e a inclusaonatural de TpM em Rn+k, segue que
〈v, w〉p = 〈v, w〉Rn+k (10.11)
onde 〈·, ·〉Rn+k e o produto interno canonico de Rn+k. Uma demonstracao alternativa de que toda variedadediferenciavel possui uma metrica riemanniana segue entao do Teorema do Mergulho de Whitney: a metricainduzida pela metrica euclidiana em Rn. Diferentes cartas podem ser usadas para a mesma superfıcie n-dimensional, cada uma dando origem a componentes gij mais ou menos simples.
Um exemplo de superfıcie n-dimensional e o grafico de uma funcao real. Se U ⊂ Rn e um aberto ef : U → R e uma funcao, entao o grafico de f
graf (f) = (x, f (x)) : x ∈ U
e uma variedade diferenciavel com a topologia induzida de Rn+1 de dimensao n. Uma carta global para ografico de f e ϕ : Rn −→ graf(f) definida por
ϕ(x1, . . . , xn
)=(x1, . . . , xn, f
(x1, . . . , xn
)).
Como
∂ϕk
∂xj=
δkj se k 6= n+ 1,∂f
∂xjse k = n+ 1,
ou seja,∂ϕ
∂xj(x) =
(0, . . . , 0, 1
j, 0, . . . 0,
∂f
∂xj(x)
)segue que
gij (x) =
⟨∂ϕ
∂xi(x) ,
∂ϕ
∂xj(x)
⟩(x,f(x))
=
⟨∂ϕ
∂xi(x) ,
∂ϕ
∂xj(x)
⟩Rn+1
= δij +∂f
∂xi∂f
∂xj. (10.12)

Rodney Josue Biezuner 108
Outro exemplo de superfıcie 2-dimensional e uma superfıcie de revolucao gerada por uma curva. Espe-cificamente seja γ : I −→ R2, γ (t) = (α (t) , β (t)) uma curva parametrizada regular tal que β (t) 6= 0 paratodo t ∈ I; podemos imaginar γ contida no plano yz definindo
γ (t) = (0, α (t) , β (t)) .
Se girarmos esta curva ao redor do eixo z obteremos uma superfıcie parametrizada regular S. A imagem deS e a imagem da aplicacao ϕ : I × R −→ R3 dada por
ϕ (t, θ) = (α (t) cos θ, α (t) sen θ, β (t)) ;
a partir de ϕ podemos obter cartas locais restringindo o parametro θ a um intervalo aberto de comprimento2π. Daı,
∂ϕ
∂t(t, θ) = (α′ (t) cos θ, α′ (t) sen θ, β′ (t)) ,
∂ϕ
∂θ(t, θ) = (−α (t) sen θ, α (t) cos θ, 0) ,
donde
g11 (t, θ) =
⟨∂ϕ
∂t(t, θ) ,
∂ϕ
∂t(t, θ)
⟩ϕ(t,θ)
=
⟨∂ϕ
∂t,∂ϕ
∂t
⟩R3
= [α′ (t)]2
+ [β′ (t)]2,
g12 (t, θ) =
⟨∂ϕ
∂t(t, θ) ,
∂ϕ
∂θ(t, θ)
⟩ϕ(t,θ)
=
⟨∂ϕ
∂t,∂ϕ
∂θ
⟩R3
= 0,
g22 (t, θ) =
⟨∂ϕ
∂θ(t, θ) ,
∂ϕ
∂θ(t, θ)
⟩ϕ(t,θ)
=
⟨∂ϕ
∂θ,∂ϕ
∂θ
⟩R3
= [α (t)]2.
Portanto
G (t, θ) =
[[α′ (t)]
2+ [β′ (t)]
20
0 [α (t)]2
].
10.11 Exemplo (Esfera). A metrica euclidiana induz uma metrica na esfera de raio r
Snr =x ∈ Rn+1 : ‖x‖2 =
(x1)2
+ . . .+(xn+1
)2= r2
que chamaremos a metrica canonica de Snr . Denotaremos a esfera unitaria por Sn, simplesmente. Vamos veros coeficientes gij para diferentes cartas da esfera.
a) Como grafico de funcao:O hemisferio superior da esfera e o grafico da funcao f : Br ⊂ Rn −→ R dada por f
(x1, . . . , xn
)=√
r2 − (x1)2 − . . .− (xn)
2. Como
∂f
∂xi(x) =
−xi√r2 − ‖x‖2
,
segue que
gij (x) = δij +xixj
r2 − ‖x‖2. (10.13)
Similarmente para o hemisferio inferior. Estas cartas nao cobrem o equador da esfera.b) Como superfıcie de revolucao:A parametrizacao da esfera de raio r como superfıcie de revolucao e
(x, y, z) (φ, θ) = (r senφ cos θ, r senφ sen θ, r cosφ).

Rodney Josue Biezuner 109
Segue que
G (φ, θ) =
[r2 00 r2 sen2 φ
].
c) Atraves da projecao estereografica:Na projecao estereografica a partir do polo norte N = (0, . . . , 0, r), a reta a partir de N que intercepta o
plano xn+1 = 0 em um ponto x =(x1, . . . , xn, 0
), intercepta a esfera em um ponto ϕ (x). Portanto, a carta
projecao estereografica a partir do polo norte ϕ : Rn −→ Snr \ N e definida por
ϕ (x) = N + t (x−N) =(tx1, . . . , txn, (1− t) r
)onde t > 0 e tal que ‖ϕ (x)‖ = r. Ou seja, t e tal que
t2 ‖x‖2 + (1− t)2r2 = r2,
donde
t =2r2
r2 + ‖x‖2.
Logo,
ϕ(x1, . . . , xn
)=
(2r2x1
r2 + ‖x‖2, . . . ,
2r2xn
r2 + ‖x‖2, r‖x‖2 − r2
r2 + ‖x‖2
), (10.14)
donde
∂ϕk
∂xj(x) =
2r2δkj
r2 + ‖x‖2− 4r2xjxk(
r2 + ‖x‖2)2 se k 6= n+ 1,
4r3xj(r2 + ‖x‖2
)2 se k = n+ 1.
Segue que as componentes do tensor metrica nas coordenadas dadas pela carta ϕ sao
gij (x) =
⟨∂ϕ
∂xi(x) ,
∂ϕ
∂xj(x)
⟩ϕ(x)
=
⟨n+1∑k=1
∂ϕk
∂xi(x) ek,
n+1∑l=1
∂ϕl
∂xj(x) el
⟩Rn+1
=
n+1∑k=1
∂ϕk
∂xi∂ϕl
∂xj〈ek, el〉Rn+1 =
n+1∑l=1
∂ϕk
∂xi∂ϕl
∂xjδkl =
n+1∑k=1
∂ϕk
∂xi∂ϕk
∂xj
=
n∑k=1
2r2δki
r2 + ‖x‖2− 4r2xixk(
r2 + ‖x‖2)2
2r2δkj
r2 + ‖x‖2− 4r2xjxk(
r2 + ‖x‖2)2
+16r6xixj(r2 + ‖x‖2
)4
=
n∑k=1
4r4δkiδkj(r2 + ‖x‖2
)2 −8r4
(δkix
jxk + δkjxixk)(
r2 + ‖x‖2)3 +
16r4xixj(xk)2(
r2 + ‖x‖2)4
+16r6xixj(r2 + ‖x‖2
)4
=4r4δij(
r2 + ‖x‖2)2 −
16r4xixj(r2 + ‖x‖2
)3 +16r4xixj ‖x‖2(r2 + ‖x‖2
)4 +16r6xixj(r2 + ‖x‖2
)4
=4r4δij(
r2 + ‖x‖2)2 −
16r4xixj(r2 + ‖x‖2
)3 +16r4xixj(r2 + ‖x‖2
)3
=4r4δij(
r2 + ‖x‖2)2 .

Rodney Josue Biezuner 110
Vamos anotar este resultado para futura referencia:
gij (x) =4r4(
r2 + ‖x‖2)2 δij . (10.15)
Observe que
G (x) =
4r4(r2 + ‖x‖2
)2
. . .
4r4(r2 + ‖x‖2
)2
=
4r4(r2 + ‖x‖2
)2 I.
Usando a projecao estereografica a partir do polo sul obtemos duas cartas que cobrem toda a esfera.
10.12 Exemplo (Espaco Hiperbolico). Considere o semiespaco superior de Rn
Hn =(x1, . . . , xn
)∈ Rn : xn > 0
.
Com a topologia induzida como aberto de Rn, Hn e uma superfıcie diferenciavel de dimensao n. Se definirmosdiretamente em Hn a metrica
gij(x1, . . . , xn
)=
δij
(xn)2 , (10.16)
entao Hn e uma variedade riemanniana chamada o espaco hiperbolico n-dimensional. Observe que
G =
1
(xn)2
. . .1
(xn)2
=1
(xn)2 I.
10.13 Exemplo (Toros). O toro mergulhado em R3 e uma superfıcie de revolucao gerada pelo cırculo.Tomando o cırculo com centro em (R, 0) e raio r < R com parametrizacao γ (t) = (R+ r cos t, r sen t)obtemos a parametrizacao para o toro bidimensional como superfıcie de revolucao
ϕ (t, θ) = ((R+ r cos t) cos θ, (R+ r cos t) sen θ, r sen t)
cuja respectiva metrica e dada por
G (t, θ) =
[r2 0
0 (R+ r cos t)2
].
Outra metrica induzida de RN importante para o toro, nao localmente isometrica a metrica dada acima(como veremos depois) e a metrica plana do toro: considerando o toro como a superfıcie n-dimensionalTn = S1 × . . . × S1 ⊂ R2n, a metrica euclidiana de R2n induz uma metrica no toro da seguinte forma.Escrevendo
Tn = S1 × . . .× S1 =x ∈ R2n :
(x1)2
+(x2)2
=(x3)2
+(x4)2
= . . . =(x2n−1
)2+(x2n)2
= 1,
vemos que uma parametrizacao ϕ : Rn −→ Tn para este toro e dada por
ϕ (θ) = ϕ(θ1, . . . , θn
)=(cos θ1, sen θ1, . . . , cos θn, sen θn
).

Rodney Josue Biezuner 111
Temos, portanto,
∂ϕk
∂θj(θ) =
− sen θj se k = 2j − 1,cos θj se k = 2j,0 se k 6= 2j − 1, 2j.
ou seja,∂ϕ
∂θj=
(0, . . . , 0,− sen θj
2j−1, cos θj
2j, 0, . . . 0
)Daı
gij (θ) =
⟨∂ϕ
∂θi(θ) ,
∂ϕ
∂θj(θ)
⟩ϕ(θ)
=
⟨∂ϕ
∂θi(θ) ,
∂ϕ
∂θj(θ)
⟩R2n
= δij , (10.17)
que sao os mesmos componentes da metrica euclidiana. Portanto, o toro plano e localmente isometrico aoplano Rn. Observe que considerando T2 como uma superfıcie de R3 ou como uma superfıcie de R4 defineduas metricas completamente diferentes para a mesma superfıcie.
10.2 Comprimentos e Volumes
10.2.1 Comprimentos de Curvas Parametrizadas
Em variedades metricas podemos definir e calcular o comprimento de curvas parametrizadas, isto e, curvasdiferenciaveis por partes γ : I −→M , onde I ⊂ R e um intervalo real; curvas parametrizadas podem possuirautointersecoes e ate mesmo cuspides ou quinas. Um segmento de uma curva parametrizada γ e umarestricao de γ a um intervalo fechado [a, b] ⊂ I. Se M e uma variedade metrica, a norma ou comprimentode um vetor v ∈ TpM e a norma induzida pelo produto interno:
‖v‖p =
√∣∣∣〈v, v〉p∣∣∣. (10.18)
10.14 Definicao. Seja M uma variedade riemanniana e γ : I −→ M uma curva parametrizada. O com-primento do segmento de γ definido no intervalo [a, b] ⊂ I e definido por
` (γ) =
∫ b
a
‖γ′ (t)‖γ(t) dt. (10.19)
10.15 Exemplo. Considere a curva parametrizada γ (t) = (0, t) no semiespaco positivo R2+; temos γ′ (t) =
(0, 1) = e2. Se R2+ e considerado uma subvariedade riemanniana do plano euclidiano, entao
` (γ) =
∫ b
a
‖e2‖(0,t) dt =
∫ b
a
dt = b− a.
Se R2+ e o plano hiperbolico H2, entao (para a, b > 0)
` (γ) =
∫ b
a
‖e2‖(0,t) dt =
∫ b
a
1
tdt = log b− log a.
Em particular, fixando b = 1 temos ` (γ)→ +∞ quando a→ 0.

Rodney Josue Biezuner 112
10.2.2 Volumes em Variedades Riemannianas Orientaveis
A metrica riemanniana tambem permite definir uma nocao de volume em variedades orientadas que permiteintegrar funcoes, nao apenas formas diferenciais. Seja M uma variedade riemanniana orientada. Dadop ∈ M , seja Bp = e1, . . . , en uma base ortonormal positiva para TpM . Seja ϕ : U −→ ϕ (U) umaparametrizacao positiva (isto e, na mesma orientacao de M ; para detalhes, veja por exemplo [Carmo], p.18) de uma vizinhanca ϕ (U) de p em M e escreva os vetores da base coordenada de TpM associada a cartaϕ em coordenadas em relacao a base ortonormal positiva Bp na seguinte forma:
∂
∂xi
∣∣∣∣p
= Aki ek
para i = 1, . . . , n. Entao
gij (p) =
⟨∂
∂xi
∣∣∣∣p
,∂
∂xj
∣∣∣∣p
⟩p
=⟨Aki ek, A
ljel⟩p
= AkiAlj 〈ek, el〉p = δklA
kiA
lj = AkiA
kj .
Ou seja, definindo as matrizes G = (gij) e A =(Aij), temos
G (p) = ATA
dondedetG = (detA)
2.
Denotando por vol [v1, . . . , vn] o volume do paralelepıpedo formado pelos vetores v1, . . . , vn, sabemos que
vol
[∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
]= detA vol [e1, . . . , en] = detA =
√detG (p) ,
ja que vol [e1, . . . , en] = 1. Seja ψ : V −→ ψ (V ) outra carta positiva de uma vizinhanca ψ (V ) de p em Me escreva os vetores da base coordenada associada a carta ϕ em termos dos vetores da base coordenada deTpM associada a parametrizacao ψ
∂
∂xi
∣∣∣∣p
= Jji∂
∂yj
∣∣∣∣p
(10.20)
com Jji = ∂yj/∂xi. Denote
hij (p) =
⟨∂
∂yi
∣∣∣∣p
,∂
∂yj
∣∣∣∣p
⟩p
eH = (hij) .
Segue que
√detG (p) = vol
[∂
∂x1
∣∣∣∣p
, . . . ,∂
∂xn
∣∣∣∣p
]= det J vol
[∂
∂y1
∣∣∣∣p
, . . . ,∂
∂yn
∣∣∣∣p
](10.21)
= det J√
detH (p) .
Podemos agora definir o volume.
10.16 Definicao. Seja Mn uma variedade riemanniana e Ω ⊂M um conjunto aberto, conexo e com fechocompacto, tal que Ω esta contida em uma vizinhanca coordenada ϕ (U) de uma parametrizacao ϕ : U −→ϕ (U) e a fronteira de ϕ−1 (Ω) tem medida nula em Rn. O volume de Ω e definido por
vol Ω =
∫ϕ−1(Ω)
√detGdx1 . . . dxn. (10.22)

Rodney Josue Biezuner 113
Se Ω ⊂M e um compacto, tome qualquer cobertura finita Vii=1,...,n de Ω por vizinhancas parametrizadasde M e considere uma particao da unidade ρii=1,...,n subordinada a esta cobertura; se ϕi : Ui −→ Vi,i = 1, . . . , n, sao parametrizacoes destas vizinhancas, definimos
vol Ω =
n∑i=1
∫ϕ−1i (Ω)
ρi√
detGdx1 . . . dxn. (10.23)
Se f : M −→ R e uma funcao contınua com suporte compacto Ω, definimos∫M
f dVg =
n∑i=1
∫ϕ−1i (Ω)
f(ϕ−1i (x)
)√detGdx1 . . . dxn. (10.24)
Segue da formula de mudanca de variaveis para integrais multiplas e de (10.21) que o volume esta bemdefinido, isto e, nao depende da carta. Na linguagem de formas, o elemento de volume riemanniano
dVg =√
detGdx1 . . . dxn =√
detGdx1 ∧ . . . ∧ dxn (10.25)
e uma n-forma (para um tratamento usando formas, veja [Lee 2] e especialmente [Lee 1], Cap. 16, p. 422em diante, que traz o teorema de Stokes e suas varias versoes para variedades riemannianas).
10.3 Grupos de Lie e Algebras de Lie
O grupo de isometrias de uma variedade Riemanniana e um grupo de Lie, como pode ser visto em [Kobayashi].
10.17 Definicao. Um grupo de Lie G e uma variedade diferenciavel que possui uma estrutura algebricade grupo tal que a aplicacao
G×G −→ G
(g, h) 7→ gh−1
e diferenciavel.
10.18 Proposicao. Seja G um grupo que e uma variedade diferenciavel. Entao G e um grupo de Lie se esomente se as aplicacoes
G −→ G
g 7→ g−1
e
G×G −→ G
(g, h) 7→ gh
sao diferenciaveis.
Prova: Suponha que G e um grupo de Lie. Entao a primeira aplicacao e diferenciavel porque e a compostadas aplicacoes diferenciaveis
G −→ G×G −→ Gx 7→ (e, g) 7→ eg−1 = g−1

Rodney Josue Biezuner 114
(lembre-se que a inclusao na variedade produto sempre e uma aplicacao diferenciavel). A segunda e dife-renciavel porque e a composta das aplicacoes diferenciaveis
G×G −→ G×G −→ G
(g, h) 7→(g, h−1
)7→ g
(h−1
)−1= gh
(lembre-se que uma aplicacao de G × G em G × G e uma aplicacao diferenciavel se e somente se cadaaplicacao coordenada G ×G −→ G e, e as projecoes da variedade produto sobre suas componentes sempresao aplicacoes diferenciaveis). A recıproca e obvia.
10.19 Exemplo. As seguintes variedades diferenciaveis sao grupos de Lie sob as operacoes indicadas.a) Rn, adicao vetorial.b) C\ 0, multiplicacao.c) S1, multiplicacao induzida de C.d) G×H, variedade produto de dois grupos de Lie G,H, com estrutura de grupo do produto direto dos
grupos (g1, h1) (g2, h2) = (g1g2, h1h2).e) Tn = S1 × . . .× S1, variedade produto e produto direto n vezes do grupo de Lie S1.
f) GL(Rn) (o grupo linear geral das matrizes reais invertıveis n×n, subvariedade de Rn2
), multiplicacaomatricial.
10.20 Proposicao. Seja G um grupo de Lie. Dado g ∈ G, entao as aplicacoes translacao a esquerda por g
Lg : G −→ Gg 7→ gh
(10.26)
e translacao a direita por gRx : G −→ G
h 7→ yg(10.27)
sao difeomorfismos.
Observando que
(Lg)−1
= Lg−1 ,
(Rg)−1
= Rg−1 ,
temos pela regra da cadeia [(dLg)h
]−1=(dL−1
g
)Lgh
=(dLg−1
)gh
(10.28)
e similarmente [(dRg)h
]−1=(dRg−1
)gh. (10.29)
10.21 Definicao. Uma algebra de Lie (sobre R) e um espaco vetorial G munido de uma aplicacao bilinear,chamada o colchete de Lie,
[·, ·] : V × V −→ R
que satisfaz(i) (anticomutatividade)
[X,Y ] = − [Y,X] ; (10.30)
(ii) (identidade de Jacobi)[[X,Y ] , Z] + [[Y, Z] , X] + [[Z,X] , Y ] = 0 (10.31)
para todos X,Y, Z ∈ G.

Rodney Josue Biezuner 115
10.22 Exemplo. Seja M uma variedade diferenciavel. O espaco vetorial T (M), equipado com o colchetede Lie e uma algebra de Lie.
10.23 Exemplo. O espaco vetorial das matrizes reais n× n com a operacao colchete definida por
[A,B] = AB −BA (10.32)
e uma algebra de Lie. De fato, bilinearidade e anticomutatividade claramente valem e
[[A,B] , C] + [[B,C] , A] + [[C,A] , B]
= (AB −BA)C − C (AB −BA) + (BC − CB)A−A (BC − CB)
+ (CA−AC)B −B (CA−AC)
= ABC −BAC − CAB + CBA+BCA− CBA−ABC +ACB
+ CAB −ACB −BCA+BAC
= 0.
Esta algebra de Lie e denotada por gl (Rn).
10.24 Exemplo. R3 com o produto vetorial e uma algebra de Lie.
Veremos agora a relacao entre grupos de Lie e algebras de Lie. Primeiro algumas preliminares. PelaProposicao 10.20, toda translacao a esquerda Lx em um grupo de Lie e um difeomorfismo.
10.25 Definicao. Seja G um grupo de Lie. Dizemos que um campo vetorial X ∈ T (G) e invariante aesquerda se
dLgX = X Lg (10.33)
para todo g ∈ G.
Explicitando a definicao acima, temos que para todo g ∈ G vale
(dLg)hXh = XLgh = Xgh. (10.34)
para todo h ∈ G. Em particular, um campo invariante a esquerda fica completamente determinado pelo seuvalor em algum ponto qualquer de G. Por exemplo, se conhecemos o valor de Xe entao, tomando h = e,segue que
Xg = (dLg)eXe. (10.35)
O proximo resultado garante a existencia de um numero infinito de campos invariantes a esquerda em umgrupo de Lie.
10.26 Proposicao. Seja G um grupo de Lie. Todo vetor tangente Xe no espaco tangente TeG possui umaextensao a um campo invariante a esquerda X ∈ T (G).
Prova: Basta definirXg = (dLg)eXe.
Como Lg e um difeomorfismo C∞, claramente X ∈ T (G). Para ver que X e um campo invariante a esquerda,seja h ∈ G qualquer. Como
Lh Lg = Lhg
segue que(dLh)gXg = (dLh)g (dLg)eXg = [d (Lh Lg)]eXg = (dLhg)eXg = Xhg.

Rodney Josue Biezuner 116
10.27 Proposicao. Seja G um grupo de Lie. Entao o colchete de Lie de campos invariantes a esquerda einvariante a esquerda.
Em particular, o subespaco dos campos invariantes a esquerda e uma algebra de Lie.
Prova: Sejam X,Y ∈ T (G) campos invariantes a esquerda. Temos, para toda f ∈ C∞ (G),
(dLg)h [X,Y ]h f = [X,Y ]h (f Lg)= XYh (f Lg)− Y Xh (f Lg)= X (dLg)h Yh (f)− Y (dLg)hXh (f)
= XYgh (f)− Y Xgh (f)
= [X,Y ]gh f.
Como o subconjunto dos campos invariantes a esquerda e um subespaco vetorial de T (G), segue que elee uma (sub)algebra de Lie.
Podemos agora definir uma operacao colchete de Lie no espaco tangente (espaco vetorial) TeG que otransforma em uma algebra de Lie:
10.28 Definicao. Seja G um grupo de Lie. A algebra de Lie G de G e o espaco tangente TeG munido docolchete de Lie
[Xe, Ye] := [X,Y ]e . (10.36)
onde X,Y ∈ T (G) sao quaisquer extensoes invariantes a esquerda dos vetores tangentes Xe, Ye.
Pode-se mostrar que a algebra de Lie dos campos invariantes a esquerda e isomorfa ao espaco tangente TeG,em particular como espaco vetorial ela tem dimensao finita, igual a dimensao de G (veja [Lee 1], Teorema8.37, e [Warner], p.86, Definicao 3.1).
Podemos agora introduzir uma metrica em G com certas propriedades algebricas.
10.29 Definicao. Seja G um grupo de Lie. Dizemos que uma metrica 〈·, ·〉g em G e invariante a esquerdase
〈v, w〉h =⟨(dLg)h v, (dLg)h w
⟩Lgh
(10.37)
para todos g, h ∈ G e para todos v, w ∈ TeG. Analogamente, definimos uma metrica invariante a direita.Uma metrica que e ao mesmo tempo invariante a esquerda e a direita e chamada uma metrica bi-
invariante.
Em outras palavras, em uma metrica invariante a esquerda, toda translacao a esquerda Lg e uma isometria,enquanto que em uma metrica invariante a direita, toda translacao a direita Rg e uma isometria. Em umametrica bi-invariante todas as translacoes sao isometrias. A existencia de metricas bi-invariantes para gruposde Lie compactos e estabelecida no Exercıcio 7 de [Carmo]. A existencia de metrica invariantes a esquerdaou a direita em qualquer grupo de Lie e estabelecida atraves da seguinte definicao.
10.30 Proposicao. Seja G um grupo de Lie. Suponha que 〈, 〉 e algum produto interno em TeG. Entao ametrica em G definida por
〈v, w〉g =⟨(dLg−1
)gv,(dLg−1
)gw⟩e
(10.38)
para todo g ∈ G e para todos v, w ∈ TeG, e invariante a esquerda.Analogamente, a metrica em G definida por
〈v, w〉g =⟨(dRg−1
)gv,(dRg−1
)gw⟩e
para todo g ∈ G e para todos v, w ∈ TeG, e invariante a direita.

Rodney Josue Biezuner 117
Prova: Temos, por definicao,
⟨(dLg)h v, (dLg)h w
⟩Lgh
=
⟨(dL(Lgh)−1
)Lgh
(dLg)h v,(dL(Lgh)−1
)Lgh
(dLg)h w
⟩e
=⟨(dLh−1g−1
)gh
(dLg)h v,(dLh−1g−1
)gh
(dLg)h w⟩e
= 〈(dLh−1)h v, (dLh−1)h w〉e= 〈v, w〉h
lembrando que Lh−1g−1 Lg = Lh−1g−1g = Lh−1 . Analogamente prova-se a invariancia a direita da segundametrica.
Ha uma relacao entre o produto interno e o colchete de Lie em G = TeG que caracteriza as metricasbi-invariantes de G que enunciaremos sem prova.
10.31 Teorema. Seja G um grupo de Lie com algebra de Lie G. A metrica invariante a esquerda definidana proposicao anterior e bi-invariante se e somente se o produto escalar 〈, 〉 em G = TeG usado para definira metrica satisfaz
〈[V,X] ,W 〉 = −〈V, [W,X]〉
para todos V,W,X ∈ G.
10.4 Exercıcios
10.32 Exercıcio. Mostre que a metrica produto e de fato uma metrica. Porque
g(p1,p2) ((v1, w1) , (v2, w2)) = gp1 (v1, v2) gp2 (w1, w2)
nao define uma metrica na variedade produto M1 ×M2?
Capıtulo 11
Conexoes
E possıvel definir geodesicas e estudar suas propriedades sem falar de curvatura. Na verdade e ate possıvelfalar em geodesicas sem falar de metrica. Geodesicas sao generalizacoes das retas da geometria euclideana.Embora seja possıvel definir geodesicas como curvas que minimizam distancias em variedades riemannianase curvas que maximizam o tempo proprio em variedades de Lorentz, pelo menos localmente (e neste casoa nocao de geodesica estaria tambem fundamentalmente ligada a nocao de metrica) esta propriedade etecnicamente difıcil de trabalhar como definicao. Ao inves, escolheremos uma propriedade diferente dasretas para generalizar: retas sao caracterizadas como curvas com aceleracao nula. Esta propriedade nao faznenhuma referencia a metrica e pode ser utilizada mesmo em variedades diferenciaveis que nao tenham umaestrutura metrica. E em relatividade geral ela faz mais sentido, ja que partıculas livres seguem trajetoriasgeodesicas no espacotempo curvo, ja que nao estao sujeitas a forcas externas e portanto nao sofrem aceleracao,assim como partıculas livres na mecanica newtoniana seguem trajetorias retas com velocidade uniforme. Parausar esta propriedade, precisaremos primeiro definir o conceito de derivadas de campos tangentes a curvassegundo uma direcao. Como em geral nao existe um espaco ambiente Rn onde a variedade esta mergulhada,nao e imediatamente obvio como defini-lo. Se α : I −→ M e uma curva diferenciavel em uma variedade Mnao podemos simplesmente definir
α′′ (t0) = limt→t0
α′ (t)− α′ (t0)
t− t0porque α′ (t) ∈ Tα(t)M e α′ (t0) ∈ Tα(t0)M vivem em diferentes espacos vetoriais, logo sua diferenca naofaz sentido. Ja vimos que a derivada de Lie nao e uma boa solucao para este problema, ja que ela nao euma derivada direcional. A definicao do conceito de conexao atende esta necessidade de definir uma nocaode derivacao intrınseca para campos vetoriais e se comporta exatamente como uma derivada direcional. Onome conexao se refere exatamente a ideia de conectar localmente os espacos tangentes de uma variedade.
11.1 Conexoes e Derivada Covariante
Consideremos o conjunto T (M) dos campos vetoriais diferenciaveis em uma variedade diferenciavel M comoum modulo sobre o anel C∞ (M) das funcoes suaves definidas em M .
11.1 Definicao. Seja M uma variedade diferenciavel de dimensao n. Uma conexao ∇ em M e umaaplicacao
∇ : T (M)× T (M) −→ T (M) ,
denotada por (X,Y ) 7→ ∇XY que satisfaz as seguintes propriedades:(i) ∇fX+gY Z = f∇XZ + g∇Y Z,(ii) ∇X (Y + Z) = ∇XY +∇XZ,(iii) ∇X (fY ) = f∇XY + (Xf)Y.
118

Rodney Josue Biezuner 119
para todos os campos X,Y, Z ∈ T (M) e para todas as funcoes f, g ∈ C∞ (M).Dizemos que ∇XY e a derivada covariante do campo Y na direcao de X.
Uma explicacao para o nome derivada covariante sera dada no Capıtulo 14. O sımbolo ∇XY deve serinterpretado como a derivada direcional do campo Y na direcao X. O resultado a seguir reforca estainterpretacao:
11.2 Proposicao (Conexao em Coordenadas). Seja ∇ uma conexao em uma variedade diferenciavelM . Se X,Y ∈ T (M) sao campos vetoriais que se expressam em coordenadas locais por
X = Xi∂i e Y = Y j∂j ,
entao∇XY = X
(Y j)∂j +XiY j∇∂i∂j . (11.1)
Em particular, (∇XY )p depende apenas do valor de X em p e do valor de Y ao longo de uma curva tangentea Xp.
Prova: Usando as propriedades de uma conexao, obtemos
∇XY = ∇X(Y j∂j
)= Y j∇X∂j +X
(Y j)∂j
= Y j∇Xi∂i∂j +X(Y j)∂j
= XiY j∇∂i∂j +X(Y j)∂j .
Em particular,(∇XY )p = Xi (p)Y j (p) (∇∂i∂j)p +
[Xp
(Y j)]
(p) ∂j |p .
Os coeficientesX1 (p) , . . . , Xn (p) dependem apenas do valor deX em p; os coeficientesXp
(Y 1), . . . , Xp (Y n),
por definicao de vetor tangente, dependem apenas dos valores de Y ao longo de uma curva passando por pcujo vetor tangente em p e Xp.
Da expressao (11.1), escrevendo os campos vetoriais ∇∂i∂j em termos dos campos base ∂k na forma
∇∂i∂j = Γkij∂k, (11.2)
obtemos a seguinte expressao local para o campo ∇XY :
∇XY =(X(Y k)
+XiY jΓkij)∂k. (11.3)
11.3 Definicao. As funcoes suaves Γkij definidas pela expressao (11.3) sao chamadas os sımbolos deChristoffel associados a carta particular utilizada.
Observe que em princıpio precisamos obter n3 sımbolos de Christoffel para determinar uma conexao. Nocaso de conexoes riemannianas, como veremos, a sua simetria diminuira o numero de sımbolos diferentes.
11.4 Proposicao. Toda variedade diferenciavel possui uma conexao.
Prova: Se V e uma vizinhanca coordenada de M , dadas n3 funcoes arbitrarias Γkij ∈ C∞ (V ), a formula(11.3) define uma conexao em V , vista como subvariedade de M . Se Vα e uma cobertura de M porvizinhancas coordenadas, cada uma com uma conexao ∇α definida, entao podemos definir uma conexaoglobal em M , usando uma particao da unidade ρα subordinada a esta cobertura, por
∇XY =∑α
ρα∇αXY.

Rodney Josue Biezuner 120
As propriedades de uma conexao sao facilmente verificadas; apenas a regra do produto merece atencaoespecial, ja que combinacoes lineares de conexoes nao sao conexoes em geral, exatamente por deixarem desatisfazer a regra do produto. Mas combinacoes lineares convexas de conexoes sao conexoes e no nosso casotemos
∇X (fY ) =∑α
ρα∇αX (fY ) =∑α
ρα [(Xf)Y + f∇αXY ]
= (Xf)Y∑α
ρα + f∑α
ρα∇αXY
= (Xf)Y + f∇XY.
11.5 Exemplo (Conexao Euclidiana). Identificando espacos tangentes em Rn com o proprio Rn, vetorestangentes com vetores em Rn e campos vetoriais em Rn com aplicacoes suaves Rn −→ Rn, nos definimos aconexao euclidiana ∇ : T (Rn)× T (Rn) −→ T (Rn) por
(∇XY )p = dYp (Xp) , (11.4)
ou seja, a derivada direcional do campo Y em p na direcao de Xp. Em coordenadas, usando a definicao dediferencial em Rn,
dYp (Xp) = Xi ∂Yj
∂xiej ,
ou seja,
∇XY = Xi ∂Yj
∂xi∂
∂xj. (11.5)
Outra maneira de obter a mesma expressao em coordenadas, usando a regra da cadeia,
dYp (Xp) (f) = Xp (f Y ) = Xi ∂ (f Y )
∂xi= Xi ∂f
∂xj∂Y j
∂xi= Xi ∂Y
j
∂xi∂
∂xj(f) .
Em notacao mais sucinta, a expressao em coordenadas da conexao euclidiana que obtemos a partir de (11.5)e
∇XY = X(Y j) ∂
∂xj. (11.6)
Segue de (11.3) e da observacao no inıcio da demonstracao da Proposicao 11.4 que a conexao euclidiana ede fato uma conexao com sımbolos de Christoffel Γkij = 0.
Esta e uma conexao tanto para o espaco euclidiano, para o espaco semieuclidiano e para o espaco deMinkowski, ja que apenas a estrutura diferencial esta envolvida.
11.2 Derivada Covariante ao longo de Curvas
A existencia de uma conexao em uma variedade diferenciavel M permite derivar campos vetoriais ao longode curvas na variedade. Em particular, e possıvel falar em aceleracao de uma curva e portanto de geodesicase, eventualmente, curvatura. Na proxima secao veremos que uma metrica define uma conexao unica em umavariedade metrica. Conexoes diferentes da conexao induzida pela metrica permitem a definicao de estruturasgeometricas em variedades diferenciaveis mais gerais que a dada pela metrica; em particular, e possıvel falarde geodesicas sem uma nocao de metrica.
Veremos agora como a conexao permite definir uma nocao intrınseca de derivada de um campo vetorialao longo de uma curva na variedade.

Rodney Josue Biezuner 121
11.6 Definicao. Seja α : I −→M uma curva diferenciavel em uma variedade diferenciavel M . Um campovetorial ao longo da curva α e um campo vetorial diferenciavel V : I −→ TM tal que V (t) ∈ Tα(t)Mpara todo t ∈ I.
O espaco vetorial dos campos vetoriais ao longo de uma curva α e denotado T (α).
11.7 Proposicao. Seja M uma variedade diferenciavel com uma conexao ∇. Existe uma unica corres-pondencia que associa a cada campo vetorial diferenciavel V ao longo de uma curva diferenciavel α : I −→Mum outro campo diferenciavel
DV
dt
ao longo de α tal queD
dt(V +W ) =
DV
dt+DW
dt,
D
dt(fV ) =
df
dtV + f
DV
dt
para todos os campos diferenciaveis V,W ao longo de α e para toda funcao diferenciavel f : I −→ R, e talque, se V e induzido por um campo de vetores X ∈ T (M), ou seja, V = X α, entao
DV
dt= ∇α′(t)X.
Localmente,DV
dt=
(dV k
dt+dαi
dtΓkijV
j
)∂k, (11.7)
Prova: Observe que para a expressao ∇α′(t)X fazer sentido, devemos entender o subescrito α′ (t) nestesımbolo como qualquer extensao local do campo α′ (t) a um campo em M , ja que pela Proposicao 11.2 soimporta o valor da extensao em α (t), isto e, o vetor tangente α′ (t), e o valor de X em uma curva tangentea α′ (t) em α (t), que pode ser tomada como sendo a propria curva α.
Vamos provar primeiro a unicidade deDV
dt. Suponha que exista um tal campo
DV
dtsatisfazendo todas
as propriedades do enunciado. SejaV (t) = V j (t) ∂j |t
a expressao local do campo V . Pelas primeiras duas propriedades do enunciado, temos
DV
dt
∣∣∣∣t
=dV j
dt(t) ∂j |t + V j (t)
D∂jdt
∣∣∣∣t
.
Pela terceira propriedade,
D∂jdt
∣∣∣∣t
=(∇α′(t)∂j
)t
=(∇ dαi
dt (t)∂i∂j
)t
=dαi
dt(t) ∇∂i∂j |t .
Portanto, localmente o campoDV
dtse escreve na forma
DV
dt
∣∣∣∣t
=
[dV k
dt(t) +
dαi
dt(t) Γkij (t)V j (t)
]∂k|t ,
o que mostra que o campoDV
dte unicamente determinado.
Para determinar a existencia deDV
dt, dada uma carta (ϕ,U) para uma vizinhanca de α (t), defina o
campoDV
dtem ϕ (U) pela expressao (11.7); e imediato verificar que um campo definido desta forma satisfaz
todas as propriedades do enunciado.

Rodney Josue Biezuner 122
11.8 Definicao. O campo diferenciavelDV
dte chamado a derivada covariante de V ao longo da curva
α.
11.3 Transporte Paralelo
11.9 Definicao. Seja M uma variedade diferenciavel com uma conexao ∇. Um campo vetorial diferenciavelV ao longo de uma curva diferenciavel α : I −→M e chamado um campo paralelo ao longo de α se
DV
dt≡ 0.
Um campo vetorial X ∈ T (M) e chamado um campo paralelo se ele e paralelo ao longo de qualquer curva.
E facil ver que um campo vetorial X ∈ T (M) e paralelo se e somente se
∇YX = 0
para todo campo Y ∈ T (M).
11.10 Proposicao. Seja M uma variedade diferenciavel com uma conexao ∇. Seja α : I −→M uma curvadiferenciavel e V0 um vetor tangente em α (t0), t0 ∈ I. Entao existe um unico campo paralelo V definido aolongo de α tal que Vt0 = V0.
Prova: Usando a expressao (11.7) obtida na Proposicao 11.7, o campo derivada covarianteDV
dtem coorde-
nadas locais se escreve na forma
DV
dt
∣∣∣∣t
=
[dV k
dt(t) +
dαi
dt(t) Γkij (t)V j (t)
]∂k|t , (11.8)
Logo, a existencia local do campo V (t) satisfazendoDV
dt= 0 para todo t e V (t0) = V0 corresponde a uma
solucao do sistema linear de n equacoes diferenciais
dV 1
dt(t) +
dαi
dt(t) Γ1
ij (t)V j (t) = 0
...
dV n
dt(t) +
dαi
dt(t) Γnij (t)V j (t) = 0
com condicao inicialV 1 (t0) = V 1
0 , . . . , Vn (t0) = V n0 .
Se α (I) esta inteiramente contida em uma vizinhanca coordenada, entao o teorema de existencia e unicidadepara equacoes diferenciais lineares garante a existencia de um unico campo V definido em todo o intervaloI. Caso contrario, como α (I) e um conjunto compacto, ela pode ser coberta por um numero finito devizinhancas coordenadas, em cada uma das quais V pode ser definido de maneira unica usando o raciocınioacima e esta unicidade garante que o campo e o mesmo nas intersecoes das vizinhancas.
11.11 Definicao. O campo V obtido na Proposicao 11.10 e chamado o transporte paralelo de V0 aolongo de α.

Rodney Josue Biezuner 123
A aplicacao transporte paralelo e a aplicacao linear
τt : Tα(t0)M −→ Tα(t)M
definida em cada vetor V0 ∈ Tα(t0)M porτt (V0) = Vt,
isto e, τt (V0) e o transporte paralelo do vetor V0 ao longo da curva α.
Quando necessario, para s, t ∈ I denotaremos a aplicacao transporte paralelo de vetores em Tα(s)M paravetores em Tα(t)M por
τs→t : Tα(s)M −→ Tα(t)M.
A aplicacao transporte paralelo e linear porque o transporte paralelo e dado pela solucao de um sistema deequacoes diferenciais lineares. Por unicidade, ela e um isomorfismo com
τ−1s→t = τt→s,
e da unicidade de solucao para um sistema de EDOs segue tambem que
τ0→0 = id,
τr→t τs→r = τs→t.
Em geral, o transporte paralelo de um vetor V em TpM para um vetor em TqM dependera da curva αligando p e q usada; isto e, se α1, α2 : I −→M sao duas curvas diferenciaveis tais que
α1 (s) = α2 (s) = p,
α1 (t) = α2 (t) = q,
entao em geralτα1s→t (V ) 6= τα2
s→t (V )
para todo V ∈ TpM . Como veremos depois, o transporte paralelo sera o mesmo, independente do caminhoutilizado para ir de p ate q, se e somente se a curvatura riemanniana for nula.
11.4 Conexao Compatıvel com a Metrica
Como metricas e conexoes definem cada uma uma estrutura geometrica particular, o caso mais relevante devariedade metrica dotada de uma conexao e quando as estruturas geometricas definidas por elas coincidem.Para isso a conexao deve satisfaz duas condicoes.A primeira delas e a chamada compatibilidade da conexaocom a metrica, que pode ser definida de qualquer um dos tres modos equivalentes a seguir.
11.12 Proposicao. Seja M uma variedade metrica com uma conexao ∇. Entao as seguintes afirmacoessao equivalentes:(i) Para todos os campos paralelos V e W ao longo de qualquer curva diferenciavel α em M vale
〈V,W 〉 ≡ constante. (11.9)
(ii) Para todos os campos vetoriais V e W ao longo de qualquer curva diferenciavel α em M vale
d
dt〈V,W 〉 =
⟨DV
dt,W
⟩+
⟨V,DW
dt
⟩. (11.10)
(iii) Para todos os campos X,Y, Z ∈ T (M) vale
X 〈Y,Z〉 = 〈∇XY,Z〉+ 〈Y,∇XZ〉 . (11.11)

Rodney Josue Biezuner 124
Prova: (ii) ⇒ (i) Se V e W sao campos paralelos, entao
d
dt〈V,W 〉 = 〈0,W 〉+ 〈V, 0〉 = 0
e portanto 〈V,W 〉 e constante.(i) ⇒ (ii) Seja α : I −→ M uma curva diferenciavel qualquer e para um ponto fixado t0 ∈ I escolha umabase ortonormal
B0 =E1|t0 , . . . , En|t0
para Tα(t0)M . Usando a Proposicao 11.10, estenda cada um dos vetores E1|t0 , . . . , En|t0 paralelamente acampos E1, . . . , En ao longo de α. Segue da definicao de compatibilidade que
Bt = E1|t , . . . , En|t
e uma base ortonormal para Tα(t)M para cada t ∈ I. Dados campos diferenciaveis V e W ao longo de α,podemos entao escrever
V = V i (t) Ei|t e W = W j (t) Ej |tcom as funcoes V i,W j diferenciaveis, pois
V i (t) = 〈V,Ei〉 e W j (t) = 〈W,Ej〉 .
Como os campos E1 (t) , . . . , En (t) sao paralelos ao longo de α, temos
DE1
dt= . . . =
DEndt
= 0,
logoDV
dt
∣∣∣∣t
=dV i
dt(t) Ei|t + V i (t)
DEidt
∣∣∣∣t
=dV i
dt(t) Ei|t ,
e, similarmente,DW
dt
∣∣∣∣t
=dW j
dt(t) Ej |t .
Daı, ⟨DV
dt,W
⟩+
⟨V,DW
dt
⟩=
⟨dV i
dtEi,W
jEj
⟩+
⟨V iEi,
dW j
dtEj
⟩=dV i
dtW j 〈Ei, Ej〉+ V i
dW j
dt〈Ei, Ej〉
=
(dV i
dtW j + V i
dW j
dt
)δij
=
n∑i=1
(dV i
dtW i + V i
dW i
dt
)=
d
dt
n∑i=1
V iW i
=d
dt〈V,W 〉 .
(ii) ⇒ (iii) Seja p ∈ M e α : I −→ M uma curva diferenciavel com α (t0) = p e α′ (t0) = Xp. Entao, pordefinicao de vetor tangente,
Xp 〈Y, Z〉 =d
dt
⟨Yα(t), Zα(t)
⟩∣∣∣∣t=t0
=
⟨DY
dt
∣∣∣∣t0
, Zt0
⟩+
⟨Yt0 ,
DZ
dt
∣∣∣∣t0
⟩
=
⟨(∇α′(t0)
Y)α(t0)
, Zt0
⟩+
⟨Yt0 ,
(∇α′(t0)
Z)α(t0)
⟩=⟨
(∇XY )p , Zp
⟩+⟨Yp, (∇XZ)p
⟩.

Rodney Josue Biezuner 125
(iii) ⇒ (ii) Se V,W sao campos ao longo de uma curva diferenciavel α em M com α (t0) = p e α′ (t0) = Xp,entao
d
dt〈Vt,Wt〉
∣∣∣∣t=t0
= Xp 〈Vt,Wt〉
=⟨
(∇XV )p ,Wt
⟩+⟨Vt, (∇XW )p
⟩=
⟨(∇α′(t0)
V)α(t0)
,Wt0
⟩+
⟨Vt0 ,
(∇α′(t0)
W)α(t0)
⟩=
⟨DV
dt
∣∣∣∣t0
,Wt0
⟩+
⟨Vt0 ,
DW
dt
∣∣∣∣t0
⟩.
A condicao 〈V,W 〉 ≡ constante justifica o nome campos paralelos.
11.13 Definicao. Seja M uma variedade metrica com uma conexao ∇. Dizemos que a conexao e com-patıvel com a metrica, quando ela satisfaz qualquer uma das condicoes da proposicao anterior.
11.5 O Tensor Torsao
11.5.1 Conexao Simetrica
A segunda condicao para que a estrutura geometrica definida pela conexao seja a mesma definida pela metricae que a conexao seja simetrica:
11.14 Definicao. Seja M uma variedade diferenciavel com uma conexao ∇. O tensor torcao da conexao∇ e a aplicacao
T : T (M)× T (M) −→ T (M)
definida porT (X,Y ) = ∇XY −∇YX − [X,Y ] .
Dizemos que a conexao ∇ e simetrica se T ≡ 0, isto e, se para todos os campos X,Y ∈ T (M) vale
∇XY −∇YX = [X,Y ] . (11.12)
Apesar da conexao nao ser um tensor, sua torcao e de fato um (2, 1)-tensor, pois ela so depende do valor noponto. Em coordenadas, como
∇XY =(X(Y k)
+XiY jΓkij)∂k,
∇YX =(Y(Xk)
+ Y iXjΓkij)∂k,
[X,Y ] =(X(Y k)− Y
(Xk))∂k,
o tensor torcao e dado porT (X,Y ) =
(XiY j − Y iXj
)Γkij∂k, (11.13)
de onde vemos que T (X,Y ) e linear em relacao a X e a Y , separadamente, e depende apenas de Xp e Yp.
11.15 Proposicao. Seja M uma variedade com uma conexao simetrica ∇. Entao
∇∂i∂j = ∇∂j∂i (11.14)
eΓkij = Γkji. (11.15)

Rodney Josue Biezuner 126
Prova: Como[∂i, ∂j ] = ∇∂i∂j −∇∂j∂i =
(Γkij − Γkji
)∂k
e [∂i, ∂j ] = 0, seguem os resultados. Em particular, para conexoes simetricas o numero de sımbolos de Christoffel potencialmente diferentes caipara
n2 (n+ 1)
2.
Seja M uma variedade diferenciavel com duas conexoes ∇ e ∇. Defina o tensor diferenca
D (X,Y ) = ∇YX −∇YX.
Definindo os tensores S (simetrico) e A (alternado)
S (X,Y ) =1
2[D (X,Y ) +D (Y,X)] ,
A (X,Y ) =1
2[D (X,Y )−D (Y,X)] ,
segue que D = S +A.a) Mostre que as conexoes ∇ e ∇ tem a mesma torsao se e somente se A = 0.b) Mostre que as conexoes ∇ e ∇ tem as mesmas geodesicas (com as mesmas parametrizacoes) se e somentese D (X,X) = 0 para todo X ∈ X (M).c) Mostre que as conexoes ∇ e ∇ tem as mesmas geodesicas (com as mesmas parametrizacoes) se e somentese S = 0.d) Conclua que se as conexoes ∇ e ∇ tem as mesmas geodesicas (com as mesmas parametrizacoes) e amesma torcao, entao ∇ = ∇.e) Mostre que para toda conexao ∇, existe uma unica conexao ∇ com as mesmas geodesicas e torcao nula.
11.6 Conexoes Metricas
11.16 Lema. Seja M uma variedade metrica com uma conexao simetrica ∇, compatıvel com a metrica deM . Entao, para todos campos X,Y, Z ∈ T (M), vale
〈∇XY,Z〉 =1
2(X 〈Y, Z〉+ Y 〈X,Z〉 − Z 〈X,Y 〉 − 〈X, [Y, Z]〉 − 〈Y, [X,Z]〉+ 〈Z, [X,Y ]〉) . (11.16)
Em particular, uma conexao simetrica compatıvel com a metrica e unicamente determinada pela metrica.
Prova: Pela Proposicao 11.12,
X 〈Y, Z〉 = 〈∇XY,Z〉+ 〈Y,∇XZ〉 ,Y 〈X,Z〉 = 〈∇YX,Z〉+ 〈X,∇Y Z〉 ,Z 〈X,Y 〉 = 〈∇ZX,Y 〉+ 〈X,∇ZY 〉 .
Logo, por simetria,
X 〈Y,Z〉+ Y 〈X,Z〉 − Z 〈X,Y 〉 = 〈∇XY, Z〉+ 〈Y,∇XZ〉+ 〈∇YX,Z〉+ 〈X,∇Y Z〉− 〈∇ZX,Y 〉 − 〈X,∇ZY 〉= 〈X,∇Y Z −∇ZY 〉+ 〈Y,∇XZ −∇ZX〉+ 〈∇XY, Z〉+ 〈∇YX,Z〉= 〈X, [Y,Z]〉+ 〈Y, [X,Z]〉 − 〈∇XY −∇YX,Z〉+ 2 〈∇XY, Z〉= 〈X, [Y,Z]〉+ 〈Y, [X,Z]〉 − 〈[X,Y ] , Z〉+ 2 〈∇XY,Z〉 ,
donde segue o resultado.

Rodney Josue Biezuner 127
11.17 Teorema. Seja M uma variedade metrica. Entao existe uma unica conexao simetrica ∇ compatıvelcom a metrica de M .
Prova: O lema anterior mostra como definir uma conexao simetrica compatıvel com a metrica atraves daexpressao (11.16). Alem disso, pelo lema, qualquer conexao simetrica compatıvel com a metrica satisfara aidentidade (11.5), o que estabelece a unicidade.
11.18 Definicao. Seja M uma variedade metrica. A unica conexao simetrica ∇ compatıvel com a metricade M e chamada a conexao metrica (ou conexao de Levi-Civita) de M .
Se M e uma variedade riemanniana, esta conexao e chamada conexao riemanniana, se M e umavariedade semi-riemanniana, ela e chamada conexao semi-riemanniana e se M e uma variedade deLorentz, ela e chamada conexao de Lorentz.
Isometrias preservam conexoes riemannianas, como esperado:
11.19 Proposicao. Sejam (M, g) e (M, g) variedades metricas isometricas com conexoes metricas ∇ e ∇,
respectivamente. Se F : M −→ M e uma isometria, entao
F∗ (∇XY ) = ∇F∗X (F∗Y )
Em particular, se α : I −→M e uma curva diferenciavel e V e um campo vetorial ao longo de α, entao
F∗
(DV
dt
)=D (F∗V )
dt.
Prova: Defina uma aplicacao∇ : T (M)× T (M) −→ T (M)
por
∇XY = F−1∗
[∇F∗X (F∗Y )
].
Mostraremos que ∇ e uma conexao metrica em M . A unicidade da conexao metrica garantira entao que
∇ = ∇,
o que provara o resultado. De fato, temos
∇fX+gY Z = F−1∗
[∇F∗(fX+gY ) (F∗Z)
]= F−1
∗
[∇F∗(fX+gY ) (F∗Z)
]= F−1
∗
[∇(fF−1)F∗X+(gF−1)F∗Y (F∗Z)
]= F−1
∗
[(f F−1
)∇F∗X (F∗Z) +
(g F−1
)∇F∗Y (F∗Z)
]= F−1
∗
[(f F−1
)∇F∗X (F∗Z)
]+ F−1
∗
[(g F−1
)∇F∗Y (F∗Z)
]= fF−1
∗
[∇F∗X (F∗Z)
]+ gF−1
∗
[∇F∗Y (F∗Z)
]= f∇XZ + g∇Y Z,
∇X (Y + Z) = F−1∗
[∇F∗XF∗ (Y + Z)
]= F−1
∗
[∇F∗XF∗Y + ∇F∗XF∗Z
]= F−1
∗
[∇F∗XF∗Y
]+ F−1
∗
[∇F∗XF∗Z
]= ∇XY +∇XZ

Rodney Josue Biezuner 128
e
∇X (fY ) = F−1∗
[∇F∗XF∗ (fY )
]= F−1
∗
[∇F∗X (fF∗Y )
]= F−1
∗
[(f F−1
)∇F∗XF∗Y +
[(F∗X)
(f F−1
)]F∗Y
]= F−1
∗
[(f F−1
)∇F∗XF∗Y
]+ F−1
∗[[
(F∗X)(f F−1
)]F∗Y
]= F−1
∗
[(f F−1
)∇F∗XF∗Y
]+[(F∗X)
(f F−1
)]F−1∗ (F∗Y )
= fF−1∗
[∇F∗XF∗Y
]+[X(f F−1 F
)]F−1∗ (F∗Y )
= f∇XY + (Xf)Y,
o que prova que ∇ e uma conexao.Agora verificaremos que ∇ e simetrica:
∇XY −∇YX = F−1∗
[∇F∗X (F∗Y )
]− F−1
∗
[∇F∗Y (F∗X)
]= F−1
∗
[∇F∗X (F∗Y )− ∇F∗Y (F∗X)
]= F−1
∗ [F∗X,F∗Y ]
= F−1∗ F∗ [X,Y ]
= [X,Y ] .
Observe que para provar que ∇ e uma conexao simetrica, foi suficiente usar o fato que F e um difeomorfismo.Para estabelecer a compatibilidade de ∇ com a metrica de M e necessario usar o fato que F e uma
isometria. Com efeito, dados X,Y, Z ∈ T (M), sejam V = F∗Y e W = F∗Z. Entao temos
〈∇XY,Z〉+ 〈Y,∇XZ〉
=⟨F−1∗
[∇F∗X (F∗Y )
], F−1∗ W
⟩+⟨F−1∗ V, F−1
∗
[∇F∗X (F∗Z)
]⟩=⟨∇F∗X (F∗Y ) ,W
⟩+⟨V, ∇F∗X (F∗Z)
⟩=⟨∇F∗X (F∗Y ) , F∗Z
⟩+⟨F∗Y, ∇F∗X (F∗Z)
⟩= F∗X 〈F∗Y, F∗Z〉= X 〈Y,Z〉 .
A ultima passagem merece ser mais detalhada: definindo f : N −→ R por
f (q) =⟨
(F∗Y )q , (F∗Z)q
⟩q,
por isometria segue que se p = F−1 (q) entao
f (q) = 〈Yp, Zp〉p =⟨YF−1(q), ZF−1(q)
⟩F−1(q)
,
isto e,f = 〈Y,Z〉 F−1;
assim, usando a propriedade(F∗X) f = X (f F ) F−1,

Rodney Josue Biezuner 129
temosF∗X 〈F∗Y, F∗Z〉 = X (f F ) F−1 = X 〈Y,Z〉 F−1,
ou seja,[〈∇XY, Z〉+ 〈Y,∇XZ〉] (p) = [X 〈Y,Z〉] (p) .
11.20 Exemplo (Conexao Metrica em Rn). A conexao euclidiana definida no Exemplo 11.4 e a conexaoriemanniana de En, e a conexao semi-riemanniana de Mn
k e e a conexao de Lorentz do espaco de MinkowskiMn. De fato, a conexao e compatıvel com a metrica, pois se α : I −→ Rn e uma curva diferenciavel e V,Wsao campos ao longo de α induzidos pelos campos vetoriais X,Y , respectivamente, entao segue da regra dacadeia que
d
dt
⟨Vα(t),Wα(t)
⟩=
⟨d
dtVα(t),Wα(t)
⟩+
⟨Vα(t),
d
dtWα(t)
⟩=⟨dXα(t) (α′ (t)) ,Wα(t)
⟩+⟨Vα(t), dYα(t) (α′ (t))
⟩=⟨(∇α′(t)X
)α(t)
,Wα(t)
⟩+⟨Vα(t),
(∇α′(t)Y
)α(t)
⟩=
⟨DV
dt
∣∣∣∣α(t)
,Wα(t)
⟩+
⟨Vα(t),
DW
dt
∣∣∣∣α(t)
⟩.
e ela e simetrica porque, conforme (11.5),[(∇XY )p − (∇YX)p
](f) = Xi ∂Y
j
∂xi∂f
∂xj− Y i ∂X
j
∂xi∂f
∂xj
=
(Xi ∂Y
j
∂xi− Y i ∂X
j
∂xi
)∂f
∂xj
= [X,Y ]p (f) .
ou tambem, de forma mais sucinta, conforme (11.6),
∇XY −∇YX = X(Y j) ∂
∂xj− Y
(Xj) ∂
∂xj
=(X(Y j)− Y
(Xj)) ∂
∂xj
= [X,Y ] .
11.6.1 Sımbolos de Christoffel da Conexao Metrica
Vamos agora ver como os sımbolos de Christoffel de uma conexao metrica podem ser calculados atravesdos componentes gij da metrica. Antes introduzimos a seguinte notacao: a matriz G = (gij) e uma matrizpositiva definida, logo admite uma inversa, que denotaremos por
G−1 =(gij). (11.17)
A justificativa para isso sera vista no Exemplo 13.11.
11.21 Lema. Seja M uma variedade metrica com uma conexao ∇. Entao
〈∇∂i∂j , ∂k〉 = Γmij gmk. (11.18)

Rodney Josue Biezuner 130
Prova: Segue imediatamente da definicao dos sımbolos de Christoffel:
∇∂i∂j = Γmij∂m.
11.22 Lema. Seja M uma variedade metrica com uma conexao metrica ∇. Entao
〈∇∂i∂j , ∂k〉 =1
2(∂igjk + ∂jgik − ∂kgij) . (11.19)
Prova: Por (11.16) temos que
〈∇∂i∂j , ∂k〉 =1
2(∂i 〈∂j , ∂k〉+ ∂j 〈∂i, ∂k〉 − ∂k 〈∂i, ∂j〉 − 〈∂i, [∂j , ∂k]〉 − 〈∂j , [∂i, ∂k]〉+ 〈∂k, [∂i, ∂j ]〉)
=1
2(∂jgik + ∂igjk − ∂kgij) ,
ja que [∂m, ∂l] = 0.
11.23 Proposicao. Seja M uma variedade metrica com uma conexao metrica ∇. Entao
Γkij =1
2(∂igjm + ∂jgim − ∂mgij) gmk. (11.20)
Prova: Pelos lemas temos
glmΓlij =1
2(∂igjm + ∂jgim − ∂mgij) .
Logo
gmkglmΓlij =1
2
n∑m=1
(∂igjm + ∂jgim − ∂mgij) gmk.
O lado esquerdo desta equacao egkmgmlΓ
lij = δkl Γlij = Γkij .
11.24 Corolario. Se ∇ e a conexao metrica de En, Mnk e Mn, entao
Γkij = 0. (11.21)
Consequentemente,
∇XY =
n∑k=1
X(Y k)∂k (11.22)
e∇∂i∂j = 0. (11.23)
Prova: Pois, comogij = ηkij ≡ constante,
segue que∂kgij = 0
para todos os ındices i, j, k.

Rodney Josue Biezuner 131
11.25 Corolario. Seja M uma variedade metrica com uma conexao metrica ∇. Entao
∂kgij = gipΓpjk + gpjΓ
pik (11.24)
e∂kg
ij = −gipΓjpk − gpjΓipk. (11.25)
Prova: Para provar a primeira identidade, usando a compatibilidade da metrica temos
∂kgij =∂
∂xk〈∂i, ∂j〉 = 〈∇∂k∂i, ∂j〉+ 〈∂i,∇∂k∂j〉
= 〈Γpki∂p, ∂j〉+⟨∂i,Γ
pkj∂p
⟩= Γpki 〈∂p, ∂j〉+ Γpkj 〈∂i, ∂p〉= Γpkigpj + Γpkjgip.
Para provar a segunda identidade, primeiro diferenciamos a identidade
glpgpj = δjl ,
obtendoglp∂kg
pj = − (∂kglp) gpj .
Como
gilglp∂kgpj = gilglp∂kg
pj
= δip∂kgpj
= ∂kgij ,
segue da primeira identidade que
∂kgij = −gil (∂kglp) gpj = −gilgpj∂kglp
= −gilgpj(glmΓmpk + gmpΓ
mlk
)= −gpjgilglmΓmpk − gilgpjgmpΓmlk= −gpjδimΓmpk − gilδjmΓplk
= −gpjΓipk − gilΓjlk.
11.6.2 Interpretacao Geometrica da Derivada Covariante
Usando a conexao metrica, podemos dar uma interpretacao geometrica da derivada covariante em termosdo transporte paralelo.
11.26 Lema. Se M e uma variedade metrica com uma conexao metrica ∇, entao a aplicacao transporteparalelo e uma isometria que preserva orientacao.
Prova: Seja α : I −→ M uma curva diferenciavel passando por um ponto p ∈ M . Dados V,W ∈ TpM ,considere a funcao real f : I −→ R definida por
f (t) = 〈τt (V ) , τt (W )〉 .

Rodney Josue Biezuner 132
Pela compatibilidade da metrica, segue que
f ′ (t) =
⟨D
dtτt (V ) , τt (W )
⟩+
⟨τt (V ) ,
D
dtτt (W )
⟩= 0,
ja que os campos τt (V ) , τt (W ) sao paralelos ao longo de α por definicao. Portanto, f (t) = f (0) para todot ∈ I, ou seja
〈τt (V ) , τt (W )〉 = 〈V,W 〉
o que prova que τt e uma isometria.Para provar que τt preserva orientacao, seja
B = E1, . . . , En
uma base ortonormal positivamente orientada para TpM . Como τt e uma isometria,
Bt = τt (E1) , . . . , τt (En)
e uma base ortonormal de Tα(t)M para todo t ∈ I. A orientacao positiva de Bt segue por continuidade dafuncao determinante.
11.27 Proposicao (Interpretacao Geometrica da Derivada Covariante). Seja M uma variedademetrica com uma conexao metrica ∇. Dado um campo X ∈ T (M), seja α : I −→M uma curva integral docampo X passando por p, ou seja,
α (0) = p,
α′ (t) = X (α (t)) para todo t ∈ I.
Se Y ∈ T (M), entao
(∇XY )p = limt→0
τ−1t
(Yα(t)
)− Yp
t=
d
dtτ−1t
(Yα(t)
)∣∣∣∣t=0
.
Prova: Seja B = E1, . . . , En uma base ortonormal para TpM . Pelo lema, Bt = τt (E1) , . . . , τt (En) euma base ortonormal de Tα(t)M para todo t ∈ I. Como a aplicacao transporte paralelo e linear, se
Yα(t) = Y i (t) τt (Ei) ,
segue queτ−1t
(Yα(t)
)= Y i (t)Ei.
Logo,d
dtτ−1t
(Yα(t)
)∣∣∣∣t=0
=dY i
dt(0)Ei.
Por outro lado, pela Proposicao 11.7, temos tambem
(∇XY )p =D
dt
(Y i (t) τt (Ei)
)∣∣∣∣t=0
=dY i
dt(0) τ0 (Ei) + Y i (t)
D
dt(τt (Ei))
∣∣∣∣t=0
=dY i
dt(0)Ei,
ja que os campos τt (E1) , . . . , τt (En) sao paralelos ao longo de α por definicao. Este resultado tambem vale para conexoes gerais em variedades diferenciaveis, mas o resultado requer umpouco mais de conhecimento de fibrados (veja [Dodson-Poston], Theorem 4.05, pp. 226–227).

Capıtulo 12
Geodesicas
De agora em diante, sempre que nos referirmos a uma variedade metrica, estaremos supondo que ela estamunida da sua conexao metrica.
12.1 Definicao – A Equacao Geodesica
12.1 Definicao. Seja M uma variedade metrica. Dizemos que uma curva diferenciavel γ : I −→M e umageodesica se
Dγ′
dt(t) = 0
para todo t ∈ I.
Em outras palavras, uma geodesica e uma curva cujo campo velocidade e paralelo ao longo da curva (umacurva que transporta paralelamente o seu proprio vetor tangente). Ou seja, uma geodesica e uma curva quenao muda de direcao. As vezes, por abuso de linguagem, a imagem γ (I) de uma geodesica γ tambem echamada geodesica.
Note que o conceito de geodesica pode ser definido para qualquer variedade diferenciavel dotada de umaconexao. O resultado seguinte, no entanto, depende da compatibilidade da metrica com a conexao, ou seja,requer uma conexao metrica.
12.2 Proposicao. Se γ : I −→M e uma geodesica, entao
‖γ′ (t)‖ ≡ constante. (12.1)
Consequentemente, uma reparametrizacao γ h de uma geodesica γ e uma geodesica se e somente se
h (t) = at+ b
para algumas constantes a, b ∈ R.
Prova: Pois, como a conexao e compatıvel com a metrica e o campo velocidade γ′ e paralelo ao longo de γ
‖γ′ (t)‖2 = 〈γ′ (t) , γ′ (t)〉 ≡ constante.
Como(γ h)
′(t) = h′ (t) γ′ (h (t)) ,
‖γ′ (t)‖ ≡ constante,
133

Rodney Josue Biezuner 134
e, como acabamos de provar, uma condicao necessaria para que γ h seja uma geodesica e∥∥(γ h)′(t)∥∥ ≡ constante,
concluımos que uma condicao necessaria para que a reparametrizacao γ h seja uma geodesica e que
h′ (t) ≡ constante,
ou seja,h (t) = at+ b
para algumas constantes a, b ∈ R. Alem disso, escrevendo β (t) = γ h (t) = γ (at+ b), segue que
Dβ′
dt(t) = a2Dγ
′
dt(at+ b) = 0,
logo γ h e uma geodesica.
12.3 Definicao. Uma geodesica γ : I −→M e normalizada (ou unitaria) se
‖γ′ (t)‖ ≡ 1.
Toda geodesica que nao e um ponto (ou seja, ‖γ′ (t)‖ 6= 0) pode ser normalizada atraves de uma parame-trizacao por comprimento de arco: se γ : I −→ M e uma parametrizacao qualquer para uma geodesica,ela pode ser reparametrizada para se tornar uma geodesica normalizada escolhendo-se um ponto t0 ∈ I edefinindo o parametro comprimento de arco
s (t) =
∫ t
t0
‖γ′ (t)‖ dt. (12.2)
De fato, pela regra da cadeia
‖γ′ (s)‖ = ‖γ′ (t)‖ |t′ (s)| = ‖γ′ (t)‖ 1
|s′ (t)|= ‖γ′ (t)‖ 1
‖γ′ (t)‖= 1.
12.4 Teorema (Teorema de Existencia e Unicidade de Geodesicas). Seja M uma variedade metrica.Entao para todos p ∈ M e v ∈ TpM , e para cada t0 ∈ R, existe um intervalo aberto I ⊂ R contendo t0 euma unica geodesica γ : I −→M tal que γ (t0) = p e γ′ (t0) = v.
Prova: Seja V uma vizinhanca coordenada de p, com(x1, . . . , xn
)suas coordenadas. Pela expressao em
coordenadas locais da derivada covariante de um campo ao longo de uma curva obtida no capıtulo anterior,uma curva γ (t) = x (t) =
(x1 (t) , . . . , xn (t)
)e uma geodesica se e somente se as suas componentes satisfazem
o sistema de equacoes diferenciais ordinarias de segunda ordem nao linear (quasilinear), chamado a equacaogeodesica,
d2xk
dt2+ Γkij
dxi
dt
dxj
dt= 0, k = 1, . . . , n. (12.3)
Este sistema de segunda ordem pode ser transformado num sistema de primeira ordem introduzindo as nequacoes de primeira ordem
vk =dxk
dt, k = 1, . . . , n,
de modo que estas equacoes juntamente com
dvk
dt+ Γkijv
ivj = 0, k = 1, . . . , n,

Rodney Josue Biezuner 135
formam um sistema de primeira ordem equivalente ao primeiro. O resultado segue entao do teorema deexistencia e unicidade para solucoes de sistemas de equacoes diferenciais ordinarias de primeira ordem. Note que este teorema permanece valido para geodesicas definidas em variedades diferenciaveis dotadas deuma conexao nao necessariamente metrica.
Isometrias preservam geodesicas:
12.5 Proposicao. Sejam M,N variedades metricas isometricas e seja F : M −→ N uma isometria. Seγ : I −→M e uma geodesica de M tal que
γ (0) = p,
γ′ (0) = v,
entao β = F γ : I −→ N e uma geodesica de N tal que
β (0) = F (p) ,
β′ (0) = dFp (v) .
Prova: Segue imediatamente do fato de isometrias preservarem conexoes metricas (Proposicao 11.19) e daregra da cadeia.
12.2 Exemplos de Geodesicas
Vamos calcular as geodesicas para algumas variedades riemannianas. Lembramos que os sımbolos de Chris-toffel da conexao riemanniana sao dados por
Γkij =1
2(∂igjm + ∂jgim − ∂mgij) gkm.
12.6 Exemplo (Geodesicas de Rn). Como o tensor metrica de Rn e gij = δij , temos
Γkij ≡ 0,
donde a equacao geodesica e simplesmente
d2xk
dt2= 0, k = 1, . . . , n.
As solucoes para esta equacao diferencial sao
x (t) = tv + x0
onde v, x0 ∈ Rn sao vetores fixados. Em outras palavras, as geodesicas de Rn sao retas.
12.7 Exemplo (Geodesicas de S2r). Enxergando a esfera S2
r de centro na origem e raio r como umasuperfıcie de revolucao com carta
(x, y, z) (φ, θ) = (r senφ cos θ, r senφ sen θ, r cosφ),
segue do Exemplo 10.11 que
G (φ, θ) =
[r2 00 r2 sen2 φ
],
G−1 (φ, θ) =
1
r20
01
r2 sen2 φ
.

Rodney Josue Biezuner 136
Para variedades de dimensao 2 temos
Γkij =1
2
[(∂igj1 + ∂jgi1 − ∂1gij) g
k1 + (∂igj2 + ∂jgi2 − ∂2gij) gk2].
Nesta carta,
g11 ≡ constante,
g12 = g21 = g12 = g21 = 0,
∂2gij = 0.
Portanto,
Γ1ij =
1
2(∂igj1 + ∂jgi1 − ∂1gij) g
11,
Γ2ij =
1
2(∂igj2 + ∂jgi2 − ∂2gij) g
22 =1
2(∂igj2 + ∂jgi2) g22.
Logo,
Γ111 =
1
2(∂1g11 + ∂1g11 − ∂1g11) g11 = 0,
Γ112 = Γ1
21 =1
2(∂1g21 + ∂2g11 − ∂1g12) g11 = 0,
Γ122 =
1
2(∂2g21 + ∂2g21 − ∂1g22) g11 =
1
2(−∂1g22) g11 =
1
2
(−2r2 senφ cosφ
) 1
r2= − senφ cosφ,
e
Γ211 =
1
2(∂1g12 + ∂1g12) g22 = 0,
Γ212 = Γ2
21 =1
2(∂1g22 + ∂2g12) g22 =
1
2(∂1g22) g22 =
1
2
(2r2 senφ cosφ
) 1
r2 sen2 φ=
cosφ
senφ,
Γ222 =
1
2(∂2g22 + ∂2g22) g22 = 0.
Apenas os sımbolos Γ212 = Γ2
21 e Γ122 sao nao nulos. Portanto a equacao geodesica para a esfera e
d2x1
dt2+ Γ1
22
dx2
dt
dx2
dt= 0,
d2x2
dt2+ 2Γ2
12
dx1
dt
dx2
dt= 0,
ou seja, d2φ
dt2− senφ cosφ
(dθ
dt
)2
= 0,
d2θ
dt2+ 2
cosφ
senφ
dφ
dt
dθ
dt= 0.
Resolver este sistema de equacoes diferenciais nao lineares acopladas nao e facil. Por outro lado, e facilverificar por substituicao direta que o equador
φ = π/2,
θ = t,

Rodney Josue Biezuner 137
ou qualquer meridiano da forma
φ = t,
θ = θ0,
e uma solucao para este sistema. Observe agora que rotacoes sao isometrias da esfera: rotacoes do espacoeuclideano R3 sao transformacoes ortogonais e portanto isometrias de R3; como a restricao de uma rotacaode R3 a esfera e uma rotacao da esfera e esta tem a metrica induzida de R3, ela e uma isometria da esfera.Uma vez que geodesicas sao preservadas por isometrias, concluımos que os grandes cırculos da esfera (istoe, cırculos cujos centros sao o centro da esfera, que podem tambem ser obtidos intersectando a esfera complanos passando pela origem) sao suas geodesicas, ja que dado um ponto p da esfera e um vetor tangente va esfera neste ponto existe um grande cırculo passando por p com a direcao de v.
12.8 Exemplo (Geodesicas de Sn). Um argumento envolvendo isometrias pode ser usado para obterdiretamente que as geodesicas de Sn ⊂ Rn+1 sao os grandes cırculos, sem passar pela equacao geodesica.
Primeiramente, provamos que a geodesica γ (t) =(x1 (t) , . . . , xn (t) , xn+1 (t)
)que passa pelo polo norte
γ (0) = en+1 com velocidade γ′ (0) = e1 e o meridiano x2 = . . . = xn = 0. De fato, suponha por absurdo quexi (t0) 6= 0 para algum t0 e para algum ındice 2 6 i 6 n. Considere a isometria φ : Sn −→ Sn definida por
φ(x1, . . . , xi−1, xi, xi+1, . . . , xn+1
)=(x1, . . . , xi−1,−xi, xi+1, . . . , xn+1
)(φ e a restricao da transformacao ortogonal correspondente de Rn+1, logo e uma simetria da esfera, comoobservado no final do exemplo anterior). Como isometrias preservam geodesicas e
φ (γ (0)) = φ (en+1) = en+1,
dφγ(0)γ′ (0) = φ (e1) = e1,
segue que φ leva γ em γ. Mas φ (γ (t0)) 6= γ (t0), uma contradicao.Como rotacoes da esfera que deixam o eixo xn+1 fixado transformam este meridiano em qualquer outro
meridiano passando pelo polo norte, abrangendo todas as direcoes tangentes possıveis, obtemos que asgeodesicas passando pelo polo norte sao os meridianos. Como qualquer grande cırculo da esfera pode sertransformado em um meridiano passando pelo polo norte atraves de uma rotacao da esfera, concluımos oresultado.
12.9 Exemplo (Geodesicas de H2). Como vimos no Exemplo 10.12, temos
G (x, y) =
1
y20
01
y2
,G−1 (x, y) =
[y2 00 y2
].
Para variedades de dimensao 2 temos
Γkij =1
2
[(∂igj1 + ∂jgi1 − ∂1gij) g
k1 + (∂igj2 + ∂jgi2 − ∂2gij) gk2].
Nesta carta,
g12 = g21 = g12 = g21 = 0,
∂1gij = 0.

Rodney Josue Biezuner 138
Portanto,
Γ1ij =
1
2(∂igj1 + ∂jgi1 − ∂1gij) g
11 =1
2(∂igj1 + ∂jgi1) g11,
Γ2ij =
1
2(∂igj2 + ∂jgi2 − ∂2gij) g
22.
Logo,
Γ111 =
1
2(∂1g11 + ∂1g11) g11 = 0,
Γ112 = Γ1
21 =1
2(∂1g21 + ∂2g11) g11 =
1
2(∂2g11) g11 =
1
2
(− 2
y3
)y2 = −1
y,
Γ122 =
1
2(∂2g21 + ∂2g21) g11 = 0,
e
Γ211 =
1
2(∂1g12 + ∂1g12 − ∂2g11) g22 =
1
2(−∂2g11) g22 =
1
2
(2
y3
)y2 =
1
y,
Γ212 = Γ2
21 =1
2(∂1g22 + ∂2g12 − ∂2g12) g22 = 0,
Γ222 =
1
2(∂2g22 + ∂2g22 − ∂2g22) g22 =
1
2(∂2g22) g22 =
1
2
(− 2
y3
)y2 = −1
y.
A equacao geodesica para o plano hiperbolico ex′′ − 2
yx′y′ = 0,
y′′ +1
y(x′)
2 − 1
y(y′)
2= 0,
Para resolver este sistema, consideraremos dois casos.(i) Caso x′ = 0.Neste caso, x (t) ≡ x0, enquanto que y (t) satisfaz a equacao
y′′ − 1
y(y′)
2= 0
que escrevemos na forma
yy′′ − (y′)2
= 0
que e equivalente a (y′
y
)′= 0,
ou seja,y′ = ky
para alguma constante k ∈ R. A solucao desta equacao e
y (t) = y0ekt
para alguma constante y0 > 0. Portanto, neste caso as geodesicas sao γ (t) =(x0, y0e
kt), as semi-retas
superiores do plano hiperbolico.(ii) Caso x′ 6= 0.

Rodney Josue Biezuner 139
Neste caso podemos calcular(yy′
x′
)′=x′yy′′ + x′ (y′)
2 − x′′yy′
(x′)2
=x′yy′′ + x′ (x′)
2 − x′ (y′)2 − x′′yy′ + 2x′ (y′)2 − x′ (x′)2
(x′)2
=x′[yy′′ + (x′)
2 − (y′)2]− y′ [x′′y − 2x′y′]− (x′)
3
(x′)2
=x′0− y′0− (x′)
3
(x′)2
= −x′.
Isso implica que (yy′
x′+ x
)′= 0
ou seja,yy′
x′+ x = a
para alguma constante a ∈ R. A solucao implıcita desta equacao, equivalente a
xx′ + yy′ = ax′
pode ser obtida integrando-se em relacao a t:
x2
2+y2
2= ax+ b,
ou(x− a)
2+ y2 = R2
onde R > 0. Portanto, neste caso as geodesicas sao semicırculos superiores centrados em pontos (a, 0) doeixo x.
12.3 Fluxo Geodesico
O resultado obtido pode ser melhorado, no sentido de que em uma vizinhanca de qualquer ponto da vari-edade podemos garantir que os intervalos de definicao das geodesicas passando por pontos na vizinhanca,independentemente da velocidade inicial, possuem um comprimento comum mınimo. Isto segue do seguinteresultado para o fluxo induzido por um campo vetorial:
12.10 Teorema (Fluxo de um Campo Vetorial). Sejam M uma variedade diferenciavel, V uma vizi-nhanca de um ponto p ∈ M e X ∈ T (V ) um campo vetorial Entao existem um aberto V0 ⊂ V contendo p,δ > 0 e uma aplicacao diferenciavel
ϕ : (−δ, δ)× V0 −→ V
tais que ϕq (t) = ϕ (t, q) : (−δ, δ) −→ V e a unica trajetoria de X tal que ϕ (0, q) = q para todo q ∈ V0.
Este resultado permite definir:
12.11 Definicao. O campo geodesico no fibrado tangente TM e o unico campo cujas trajetorias sao daforma t 7→ (γ (t) , γ′ (t)) onde γ e uma geodesica em M .
Seu fluxo ϕ e chamado o fluxo geodesico de TM .

Rodney Josue Biezuner 140
12.12 Corolario. Seja M uma variedade riemanniana. Entao, para cada p ∈ M existem uma vizinhancaV de (p, 0) em TM tal que π (V) = U e uma vizinhanca coordenada de p em M , δ > 0 e uma aplicacaodiferenciavel
ϕ : (−δ, δ)× V −→ TU
tais queϕ(q,v) (t) = ϕ (t, q, v) : (−δ, δ) −→ TU
e a unica trajetoria do campo geodesico que satisfaz a condicao inicial ϕ (0, q, v) = (q, v) para todo (q, v) ∈ V.
Prova: Basta aplicar o Teorema 12.10 ao campo geodesico, elemento de T (TM), e ao ponto P = (p, 0) ∈TM . Uma reinterpretacao do resultado acima que vai ser mais util e facil de usar na sequencia:
12.13 Proposicao. Seja M uma variedade riemanniana. Entao, para cada p ∈M existem uma vizinhancaV de p em M , δ, ε > 0 e uma aplicacao diferenciavel
γ : (−δ, δ)× V −→M
ondeV = (q, v) : q ∈ V e v ∈ TqM, ‖v‖ < ε
tais queγ(q,v) (t) = γ (t, q, v) : (−δ, δ) −→M
e a unica geodesica de M que satisfaz as condicoes iniciais γ (0) = q, γ′ (0) = v para todo q ∈ V e para todov ∈ TqM tal que ‖v‖ < ε.
Este resultado afirma que se ‖v‖ < ε, a geodesica γ (t, q, v) existe no intervalo (−δ, δ). Podemos de fatoaumentar a velocidade da geodesica, mas ao preco de diminuir o seu intervalo de definicao (e vice-versa).Para isso basta reparametrizar a geodesica:
12.14 Proposicao. Seja γ : (−δ, δ) −→ M uma geodesica tal que γ (0) = p e γ′ (0) = v. Para qualquera > 0 a curva
β (t) = γ (at)
e uma geodesica tal que β (0) = p e β′ (0) = av definida no intervalo
(− δa,δ
a
). Consequentemente,
γ (t, q, av) = γ (at, q, v) . (12.4)
Prova: O resultado segue da Proposicao 12.2 e do fato que β′ (t) = aγ′ (at).
12.15 Corolario. Seja M uma variedade riemanniana. Entao, para cada p ∈ M existem uma vizinhancaV de p em M , ε > 0 e uma aplicacao diferenciavel
γ : (−2, 2)× V −→M
ondeV = (q, v) : q ∈ V e v ∈ TqM, ‖v‖ < ε
tais queγ(q,v) (t) = γ (t, q, v) : (−2, 2) −→M
e a unica geodesica de M que satisfaz as condicoes iniciais γ (0) = q, γ′ (0) = v para todo q ∈ V e para todov ∈ TqM tal que ‖v‖ < ε.

Rodney Josue Biezuner 141
12.4 A Aplicacao Exponencial
12.16 Definicao. Se v ∈ TpM e tal que existe uma geodesica γ : [0, 1] −→ M satisfazendo γ (0) = p eγ′ (0) = v, definimos a exponencial de v por
expp (v) = γ (1) .
Assim,
expp (v) = γ (1, p, v) = γ
(||v|| , p, v
||v||
)e geometricamente expp (v) e o ponto de M obtido percorrendo a partir de p a geodesica com velocidadeinicial v durante um intervalo de tempo unitario ou, equivalentemente, percorrendo a geodesica que parte de pcom velocidade unitaria igual a v/ ||v|| um comprimento igual a ‖v‖. Em particular, se γ : (−2, 2)×V −→Me a aplicacao diferenciavel dada pelo Corolario 12.15, a aplicacao exponencial exp esta definida em todo V epara todo q ∈ V a aplicacao exponencial
expq : Bε (0) ⊂ TqM −→M
esta definida em uma bola Bε (0) ⊂ TqM .
12.17 Proposicao. Para cada p ∈ M existe ε > 0 tal que expp e um difeomorfismo de Bε (0) sobre umaberto de M .
Alem disso,d(expp
)0
= id .
Prova: Temos
d(expp
)0v =
∂ expp∂v
(0) =d
dtexpp (tv)
∣∣∣∣t=0
=d
dtγ (1, p, tv)
∣∣∣∣t=0
=d
dtγ (t, p, v)
∣∣∣∣t=0
= v,
o que mostra que d(expp
)0
: TpM −→ TpM e a aplicacao identidade, onde identificamos o espaco tangentea TpM na origem com o proprio TpM , isto e, T0 (TpM) = TpM . Pelo teorema da funcao inversa, expp e umdifeomorfismo local em uma vizinhanca de 0. A aplicacao exponencial recebe este nome porque no caso de variedades riemannianas que sao grupos deLie compactos ela e a aplicacao exponencial entre grupos de Lie, a qual recebe este nome la porque ela e aexponencial de matrizes no caso de grupos de Lie de matrizes.
12.18 Definicao. Se expp e um difeomorfismo de uma vizinhanca U da origem em TpM sobre uma vizi-nhanca V de p em M , dizemos que V e uma vizinhanca normal de p.
Nestas condicoes, se Bε (0) e tal que Bε (0) ⊂ V , entao nos chamamos
Bε (p) := expp (Bε (0)) (12.5)
a bola geodesica de centro em p e raio ε.
Em uma vizinhanca normal, podemos definir um sistema de coordenadas com propriedades especiais.
12.19 Definicao. Seja V = expp (U) uma vizinhanca normal de p em M . Seja E1, . . . , En uma base
ortonormal para TpM e E : Rn −→ TpM o isomorfismo Ex = xiEi. Considere a parametrizacao ϕ :E−1 (U) −→ V definida por
ϕ (x) =(expp E
)(x) = expp
(xiEi
).
As coordenadas desta parametrizacao sao chamadas coordenadas normais em p.

Rodney Josue Biezuner 142
Devido as propriedades especiais de coordenadas normais enumeradas na proposicao a seguir, elas constituemuma ferramenta vital em geometria riemanniana, como veremos em varios resultados nestas notas.
12.20 Proposicao. Seja V uma vizinhanca normal de p e x1, . . . , xn coordenadas normais em p. Nestascoordenadas vale
gij (p) = δij ,
∂gij∂xk
(p) = 0
eΓkij (p) = 0
para todos os ındices i, j, k.Alem disso, para cada v ∈ TpM , a geodesica γv (t) = γ (t, p, v) partindo de p com velocidade inicial v e
representada em coordenadas normais por um segmento radial, isto e,
γv (t) = expp (tv)
enquanto ela estiver dentro de V .
Prova: A condicaogij (p) = δij
e consequencia imediata da definicao de coordenadas normais, pois (usando a notacao da Definicao 12.19)
∂
∂xi
∣∣∣∣q
= dϕx (ei) = d(expp E
)x
(ei) = d(expp
)Ex dEx (ei) = d
(expp
)Ex E (ei)
= d(expp
)Ex Ei,
de modo que∂
∂xi
∣∣∣∣p
= d(expp
)0Ei = Ei,
logo
gij (p) =
⟨∂
∂xi
∣∣∣∣p
,∂
∂xj
∣∣∣∣p
⟩= 〈Ei, Ej〉 = δij .
O resultado sobre a geodesica γ segue do fato de que por definicao
expp (tv) = γ (1, p, tv) = γ (t, p, v) .
Isso implica por sua vez queΓkij (p) = 0,
pois as geodesicas que passam por p sao todas dadas por equacoes lineares. Mais especificamente, a equacaogeodesica para γ e
d2xk
dt2+ Γkij
dxi
dt
dxj
dt= 0
e como a solucao exk (t) = tvk,
a equacao geodesica se reduz aΓkij (γv (t)) vivj = 0
Em t = 0, temos γv (0) = p, de modo que a equacao
Γkij (p) vivj = 0

Rodney Josue Biezuner 143
vale para todo v ∈ TpM . Isso so e possıvel se Γkij (p) = 0.Para provar a condicao sobre as derivadas das componentes da metrica lembramos do Corolario 11.25 a
formula∂gij∂xk
= gipΓpjk + gpjΓ
pik.
Logo∂gij∂xk
(p) = gip (p) Γpjk (p) + gpj (p) Γpik (p) = 0.
Por causa deste resultado, as geodesicas dentro de uma vizinhanca normal que partem de p sao chamadasraios geodesicos ou geodesicas radiais. Observe que em coordenadas normais em p a derivada covarianteem p e simplesmente
(∇XY )p = Xp
(Y i) ∂
∂xi
∣∣∣∣p
= Xj (p)∂Y i
∂xj(p)
∂
∂xi
∣∣∣∣p
,
e a derivada covariante ao longo de uma curva α : I −→M com α (t0) = p e dada em t0 por
DV
dt
∣∣∣∣t0
=dV i
dt(t0)
∂
∂xi
∣∣∣∣p
.
Como coordenadas normais em p simplificam bastante as expressoes locais de varios objetos diferenciais egeometricos no ponto p, elas sao muito usadas para obter resultados em geometria riemanniana que dependemapenas da situacao em p, facilitando os calculos necessarios.
Vamos agora mostrar que uma isometria e definida pela diferencial em um unico ponto:
12.21 Proposicao. Sejam M,N variedades riemannianas, com M conexa. Se F,G : M −→ N sao isome-trias tais que
F (p) = G (p) ,
dFp = dGp,
entao F = G.
Prova: SejaA = q ∈M : F (q) = G (q) .
Entao A 6= ∅, pois p ∈ A, e por continuidade A e fechado. Como M e conexa, para provar o resultado bastamostrar que A e aberto. Para isso, provaremos que se q0 ∈ A entao qualquer vizinhanca normal V de q0 estacontida em A. De fato, se q ∈ V , seja v ∈ Tq0M tal que
γv (1) = expq0 (v) = q.
Da Proposicao 12.5 segue que
F (q) = F (γv (1)) = γdFp(v) (1) = γdGp(v) (1) = G (γv (1)) = G (q) .
12.5 Lema de Gauss
Para estudar as propriedades minimizantes das geodesicas, precisamos considerar o conceito de variacao deuma curva, que tem sua origem no calculo de variacoes.

Rodney Josue Biezuner 144
12.22 Definicao. Uma curva diferenciavel por partes em M e uma aplicacao contınua γ : [a, b] −→Mtal que existe uma particao do intervalo [a, b]
a = t0 < t1 < . . . < tk < tk+1 = b
tal que as restricoes γ|[ti,ti+1] sao curvas diferenciaveis para i = 0, . . . , k.Cada ponto γ (ti) e chamado um vertice da curva γ e o angulo da curva no vertice γ (ti) e definido
como sendo o angulo entre os vetores
limt→t−i
γ′ (t) e limt→t+i
γ′ (t)
12.23 Definicao. Seja γ : [a, b] −→ M uma curva diferenciavel por partes. Uma variacao de γ e umaaplicacao
F : (−ε, ε)× [a, b] −→M
tal que(i) F (0, t) = γ (t) ;(ii) existe uma particao de [a, b] por pontos
a = t0 < t1 < . . . < tk < tk+1 = b
tal que F |(−ε,ε)×[ti,ti+1] e diferenciavel para i = 0, . . . , k.Para cada s fixado, a curva Fs (t) = F (s, t) : [a, b] −→M e chamada uma curva principal da variacao.
Para cada t fixado, a curva Ft (s) = F (s, t) : (−ε, ε) −→M e chamada uma curva transversal da variacao.Um campo vetorial ao longo de F e uma aplicacao V : (−ε, ε) × [a, b] −→ TM tal que V (s, t) ∈
TF (s,t)M para cada (s, t) e V |(−ε,ε)×[ti,ti+1] e diferenciavel para i = 0, . . . , k. Se F e uma variacao de γ, entaoo campo variacional de F e o campo vetorial ao longo de γ
V (t) =∂F
∂s(0, t) .
Dada uma variacao F : (−ε, ε) × [a, b] −→ M de uma curva diferenciavel por partes γ, consideraremos asderivadas covariantes de um campo vetorial qualquer, definido ao longo de F , ao longo das curvas principaise ao longo das curvas transversais da variacao, onde estas derivadas estiverem definidas:
12.24 Notacao. Denotaremos as derivadas covariantes de um campo vetorial V ao longo de uma variacaoF ao longo das curvas principais e transversais de F (onde estiverem definidas) respectivamente por
DV
dte
DV
ds.
12.25 Lema (Lema de Simetria). Seja F : (−ε, ε)× [a, b] −→M uma variacao. Entao
D
ds
∂F
∂t=D
dt
∂F
∂s.
Prova: Escrevendo F localmente em coordenadas na forma
F (s, t) =(x1 (s, t) , . . . , xn (s, t)
),

Rodney Josue Biezuner 145
segue da regra da cadeia que
∂F
∂t=∂xi
∂t∂i,
∂F
∂s=∂xj
∂s∂i.
Usando a comutatividade das derivadas parciais e a simetria da conexao, temos
D
ds
∂F
∂t=D
ds
(∂xi
∂t∂i
)=∂2xi
∂t∂s∂i +
∂xi
∂t
D
ds∂i
=∂2xi
∂t∂s∂i +
∂xi
∂t∇ ∂xj
∂s ∂j∂i
=∂2xi
∂t∂s∂i +
∂xi
∂t
∂xj
∂s∇∂i∂j
=∂2xi
∂s∂t∂i +
∂xj
∂t
∂xi
∂s∇∂j∂i
=D
dt
(∂xi
∂s∂i
)=D
dt
∂F
∂s.
No que se segue, identificaremos o espaco tangente a TpM no vetor v com o proprio TpM , isto e,
Tv (TpM) = TpM . A fronteira ∂Bε (p) de uma bola geodesica e chamada uma esfera geodesica e denotadaSε (p).
12.26 Lema (Lema de Gauss). Seja M uma variedade metrica, p ∈ M e v ∈ TpM tal que expp (v) estadefinido. Entao ⟨
d(expp
)vv, d
(expp
)vw⟩
= 〈v, w〉
para todo w ∈ TpM .Em particular, as geodesicas radiais que partem de p sao ortogonais as esferas geodesicas centradas em
p.
Prova: Decompondo TpM = 〈v〉+ 〈v〉⊥, se w ∈ 〈v〉 entao w = av para algum escalar a 6= 0. Temos
d(expp
)vv =
∂ expp∂v
(v) =d
dtexpp ((t+ 1) v)
∣∣∣∣t=0
=d
dtγ (1, p, (t+ 1) v)
∣∣∣∣t=0
=d
dtγ (t+ 1, p, v)
∣∣∣∣t=0
= γ′(p,v) (1) ,
e como a norma do vetor tangente a uma geodesica e constante, segue que⟨d(expp
)vv, d
(expp
)vw⟩
= a⟨d(expp
)vv, d
(expp
)vv⟩
= a∥∥∥γ′(p,v) (1)
∥∥∥2
= a∥∥∥γ′(p,v) (0)
∥∥∥2
= a 〈v, v〉= 〈v, w〉 .
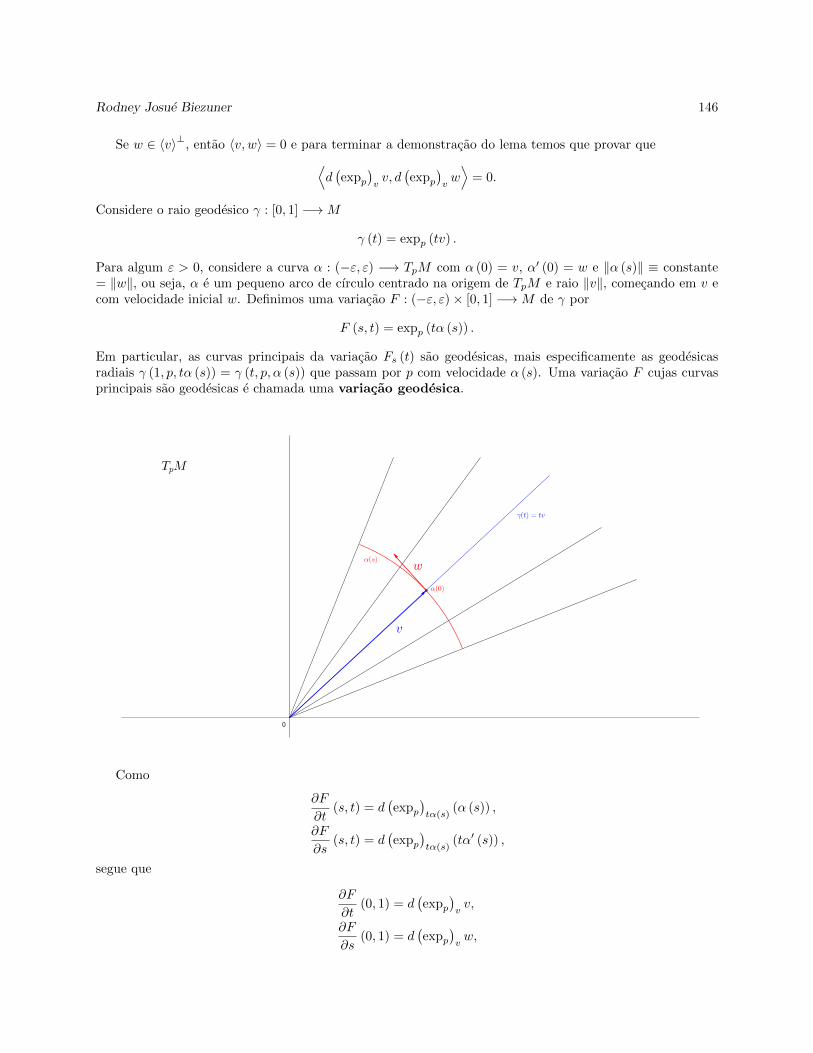
Rodney Josue Biezuner 146
Se w ∈ 〈v〉⊥, entao 〈v, w〉 = 0 e para terminar a demonstracao do lema temos que provar que⟨d(expp
)vv, d
(expp
)vw⟩
= 0.
Considere o raio geodesico γ : [0, 1] −→M
γ (t) = expp (tv) .
Para algum ε > 0, considere a curva α : (−ε, ε) −→ TpM com α (0) = v, α′ (0) = w e ‖α (s)‖ ≡ constante= ‖w‖, ou seja, α e um pequeno arco de cırculo centrado na origem de TpM e raio ‖v‖, comecando em v ecom velocidade inicial w. Definimos uma variacao F : (−ε, ε)× [0, 1] −→M de γ por
F (s, t) = expp (tα (s)) .
Em particular, as curvas principais da variacao Fs (t) sao geodesicas, mais especificamente as geodesicasradiais γ (1, p, tα (s)) = γ (t, p, α (s)) que passam por p com velocidade α (s). Uma variacao F cujas curvasprincipais sao geodesicas e chamada uma variacao geodesica.
Como
∂F
∂t(s, t) = d
(expp
)tα(s)
(α (s)) ,
∂F
∂s(s, t) = d
(expp
)tα(s)
(tα′ (s)) ,
segue que
∂F
∂t(0, 1) = d
(expp
)vv,
∂F
∂s(0, 1) = d
(expp
)vw,

Rodney Josue Biezuner 147
de modo que ⟨d(expp
)vv, d
(expp
)vw⟩p
=
⟨∂F
∂t(0, 1) ,
∂F
∂s(0, 1)
⟩p
.
Mostraremos que ⟨∂F
∂t(0, 1) ,
∂F
∂s(0, 1)
⟩p
= 0
analizando o produto interno ⟨∂F
∂t,∂F
∂s
⟩(s, t) .
Afirmamos que ele independe de t. De fato, pela compatibilidade da conexao riemanniana com a metrica,temos para todo (s, t),
∂
∂t
⟨∂F
∂t,∂F
∂s
⟩=
⟨D
dt
∂F
∂t,∂F
∂s
⟩+
⟨∂F
∂t,D
dt
∂F
∂s
⟩=
⟨∂F
∂t,D
dt
∂F
∂s
⟩,
poisD
dt
∂F
∂t= 0
ja que Fs (t) sao geodesicas e∂F
∂te seu campo velocidade. Pelo Lema de Simetria,⟨
∂F
∂t,D
dt
∂F
∂s
⟩=
⟨∂F
∂t,D
ds
∂F
∂t
⟩=
1
2
∂
∂s
⟨∂F
∂t,∂F
∂t
⟩.
Mas ∥∥∥∥∂F∂t (s, t)
∥∥∥∥ =
∥∥∥∥∂F∂t (s, 0)
∥∥∥∥ =∥∥∥d (expp
)0
(α (s))∥∥∥ = ‖α (s)‖ ≡ constante,
e assim∂
∂t
⟨∂F
∂t,∂F
∂s
⟩= 0.
Em particular, como∂F
∂s(0, 0) = 0,
concluımos que ⟨∂F
∂t,∂F
∂s
⟩(0, 1) =
⟨∂F
∂t,∂F
∂s
⟩(0, 0) = 0.
12.6 Geodesicas em Variedades Riemannianas
12.6.1 Geodesicas em Variedades Riemannianas minimizam distancias local-mente
Veremos agora que as geodesicas minimizam distancias, localmente. A distancia entre dois pontos de umavariedade riemanniana e definida como sendo o ınfimo dos comprimentos das curvas que ligam estes pontos,como veremos em detalhes na Secao 12.8.

Rodney Josue Biezuner 148
12.27 Definicao. Se γ : I −→ M e uma geodesica e [a, b] ⊂ I, a restricao γ|[a,b] e chamada o segmentode geodesica ligando γ (a) a γ (b).
Denote o comprimento de uma curva α em M ligando os pontos p e q por ` (α). Dizemos que o segmentode geodesica γ : [a, b] −→M e minimizante se ` (γ) 6 ` (α) para toda curva α ligando γ (a) a γ (b).
12.28 Proposicao (Geodesicas minimizam distancias localmente). Sejam M uma variedade rieman-niana, p ∈ M e B (p) uma bola normal centrada em p. Seja γ : [0, 1] −→ B (p) um segmento de geodesicacom γ (0) = p e denote q = γ (1).
Se α : [0, 1] −→M e qualquer curva diferenciavel por partes ligando p a q, entao
` (γ) 6 ` (α) .
Se ` (α) = ` (γ), entao necessariamente α ([0, 1]) = γ ([0, 1]).
Prova: Suponha em primeiro lugar que α ([0, 1]) ⊂ B (p). Como expp e um difeomorfismo em B (p), podemosescrever α (t) de forma unica em “coordenadas polares” na forma
α (t) = expp (r (t) c (t)) (12.6)
para t ∈ (0, 1], onde c e uma curva diferenciavel por partes em TpM com ‖c (t)‖ = 1 para todo t e r :(0, 1] −→ R e uma funcao diferenciavel por partes; de fato, basta considerar β (t) = exp−1
p (α (t)) e definir
c (t) =β (t)
‖β (t)‖e r (t) = ‖β (t)‖ .
Se α retorna ao ponto p, de modo que β (t1) = 0 para algum t1 > 0, redefinimos c eliminando todo osegmento α ([0, t1]), o que nao prejudicara o resultado, pois mostraremos que a curva resultante ainda assimpossui comprimento maior que a geodesica. Denote
F (r, t) = expp (rc (t)) , (12.7)
de modo que, exceto possivelmente para um numero finito de pontos,
α′ (t) =∂F
∂rr′ (t) +
∂F
∂t.
Como
∂F
∂r= d
(expp
)β(t)
c (t) ,
∂F
∂t= d
(expp
)β(t)
(rc′ (t)) ,
segue do lema de Gauss que ⟨∂F
∂r,∂F
∂t
⟩= 〈c (t) , rc′ (t)〉 = r 〈c (t) , c′ (t)〉 = 0, (12.8)
e ∥∥∥∥∂F∂r∥∥∥∥2
=
⟨∂F
∂r,∂F
∂r
⟩= 〈c (t) , c (t)〉 = ‖c (t)‖2 = 1. (12.9)
Logo,
‖α′ (t)‖2 =
∥∥∥∥∂F∂r∥∥∥∥2
|r′ (t)|2 +
∥∥∥∥∂F∂t∥∥∥∥2
= |r′ (t)|2 +
∥∥∥∥∂F∂t∥∥∥∥2
> |r′ (t)|2 .

Rodney Josue Biezuner 149
Daı,
` (α) >∫ 1
ε
‖α′ (t)‖ dt >∫ 1
ε
|r′ (t)| dt >∫ 1
ε
r′ (t) dt = r (1)− r (ε) = ` (γ)− r (ε) .
Fazendo ε→ 0, como r (ε) −→ 0, segue o primeiro resultado.Para que tenhamos ` (γ) = ` (α) e necessario que
∂F
∂t= 0,
ou seja,c′ (t) = 0
e portanto c ≡ constante. Como r′ (t) > 0, α e entao uma reparametrizacao monotona de γ, donde α ([0, 1]) =γ ([0, 1]).
Se α ([0, 1]) 6⊂ B (p) = Bρ (p), consideramos o primeiro instante t1 ∈ (0, 1] tal que α (t1) ∈ ∂B (p). Entao,
` (α) > `(α|[0,t1]
)> ρ > ` (γ) .
O resultado vale apenas localmente: um segmento de geodesica suficientemente grande pode nao ser mini-mizante. Por exemplo, as geodesicas de uma esfera (cırculos maximais) que partem de um ponto p deixamde ser minimizantes depois que passam pelo antıpoda de p.
Vale a recıproca da Proposicao 12.28 e ela e ate mais forte. Antes uma definicao e um resultado preliminar.
12.29 Definicao. Seja M uma variedade riemanniana.Se V e uma vizinhanca em M que e uma vizinhanca normal para todos os seus pontos, dizemos que V e
uma vizinhanca totalmente normal.Dizemos que uma vizinhanca V em M e uma vizinhanca uniformemente normal se existe δ > 0 tal
que para todo q ∈ V a bola geodesica Bδ (q) = expq (Bδ (0)) contem V .
Observe que em uma vizinhanca uniformemente normal, dois pontos quaisquer da vizinhanca sao ligados poruma geodesica radial. Toda vizinhanca uniformemente normal e em particular totalmente normal.
12.30 Lema. Seja M uma variedade riemanniana. Para cada p ∈M existe uma vizinhanca W de p que euma vizinhanca uniformemente normal.
Prova: Sejam ε > 0, V e V como na Proposicao 12.13. Defina F : V −→M ×M por
F (q, v) =(q, expq v
).
Temos F (p, 0) = (p, p) e
dF (p, 0) =
[I ∗0 I
]pois d
(expp
)0
= I. Portanto, F e um difeomorfismo local em uma vizinhanca de (p, 0), logo existe umavizinhanca V′ ⊂ V de (p, 0) em TM tal que F aplica V′ difeomorficamente sobre uma vizinhanca W ′ de (p, p)em M ×M . Para algum δ > 0, escolha V′ da forma
V′ = (q, v) : q ∈ V ′ e v ∈ Bδ (0) ⊂ TqM
onde V ′ e uma vizinhanca de p em M . Escolha a vizinhanca W de p em M de tal forma que W ×W ⊂W ′.Entao, para todo q ∈W e Bδ (0) ⊂ TqM temos
F (q ×Bδ (0)) ⊃ q ×W
o que implica, pela definicao de F ,Bδ (q) = expq (Bδ (0)) ⊃W.

Rodney Josue Biezuner 150
12.31 Corolario (Curvas que minimizam distancias sao geodesicas). Seja M uma variedade rieman-niana. Se α : [a, b] −→M e uma curva diferenciavel por partes com parametro proporcional ao comprimentode arco que tem comprimento menor ou igual a qualquer outra curva diferenciavel por partes ligando α (a)a α (b), entao α e uma geodesica.
Em particular, α e diferenciavel em todo o intervalo [a, b].
Prova: Sejam t0 ∈ [a, b] e V uma vizinhanca uniformemente normal de α (t0). Seja I = [t0 − δ, t0 + δ] ⊂ [a, b]um intervalo fechado tal que α (I) ⊂ V . Entao a restricao α|I e uma curva diferenciavel por partes ligandodois pontos de uma bola normal. Pela Proposicao 12.28, ` (α|I) e igual ao comprimento da geodesicaradial ligando α (t0 − δ) a α (t0 + δ) (caso contrario obterıamos outra curva diferenciavel por partes comcomprimento menor que α ligando α (a) a α (b), contrariando a hipotese). Segue da mesma proposicao quea imagem de α|I e a imagem desta geodesica. Como α|I esta parametrizada por um parametro proporcionalao comprimento de arco, segue que α|I e ela propria uma geodesica. Observe que este resultado e global, nao apenas local: dados dois pontos quaisquer de uma variedaderiemanniana, se existir uma curva ligando eles que minimiza distancias, entao ela e uma geodesica. Por outrolado, dados dois pontos arbitrarios em uma variedade riemanniana pode nao existir nenhuma geodesica queos ligue: considere Rn com a bola centrada em zero e raio 1 removida; para δ > 0 suficientemente pequeno,nao existe nenhuma geodesica que une os pontos
(−1− δ, 0, . . . , 0) e (1 + δ, 0, . . . , 0) ,
por exemplo, e esta afirmacao vale para quaisquer dois pontos antıpodas muito proximos ao bordo da bolaremovida.
12.32 Exemplo (Geodesicas de H2 usando isometrias). Como no Exemplo 12.8, para determinar asgeodesicas do plano hiperbolico usaremos isometrias.
Primeiramente, usando o Corolario 12.31 mostraremos que o semieixo y superior e uma geodesica. Defato, seja γ (t) = (0, t), t > 0, uma parametrizacao por comprimento de arco deste semieixo e considere umsegmento γ|[a,b]. Temos
` (γ) =
∫ b
a
‖γ′ (t)‖γ(t) dt =
∫ b
a
1
tdt = log b− log a.
Se c : [a, b] −→ H2, c (t) = (x (t) , y (t)) , e qualquer curva diferenciavel por partes com c (a) = γ (a) = (0, a)e c (b) = γ (b) = (0, b), entao
` (c) =
∫ b
a
‖c′ (t)‖c(t) dt =
∫ b
a
√[x′ (t)]
2+ [y′ (t)]
2
y (t)dt >
∫ b
a
√[y′ (t)]
2
y (t)dt =
∫ b
a
y′ (t)
y (t)dt = ` (γ) .
Observe que, diferentemente da esfera, variedade compacta, esta geodesica de H2 tem comprimento infinito,como as retas do plano R2.
As isometrias do plano hiperbolico sao dadas pelas transformacoes de Mobius
T (z) =az + b
cz + d, ad− bc = 1,
onde z = x+ iy ∈ C. Estas isometrias transformam o semieixo y em semicırculos superiores ou em semi-retassuperiores x = x0, y > 0. Estas sao as geodesicas de H2, pois por todo ponto p ∈ H2 passa um tal semicırculoou uma tal semi-reta, em todas as direcoes possıveis. A demonstracao de todos estes detalhes e deixada aoleitor (Exercıcio 12.54).
12.6.2 Vizinhancas Convexas
Em uma vizinhanca uniformemente normal, como a considerada no Lema 12.30, dados dois pontos q1, q2 ∈Wexiste uma unica geodesica minimizante de comprimento menor que 2δ ligando q1 a q2. Por outro lado, nada

Rodney Josue Biezuner 151
garante que esta geodesica esteja contida em W (as duas geodesicas radiais, uma partindo de q1 e outrapartindo de q2 podem se ligar atraves de um ponto p fora de W ⊂ Bδ (q1) ∪Bδ (q2).
12.33 Definicao. Seja M uma variedade riemanniana. Dizemos que uma vizinhanca V em M e umavizinhanca convexa se para todos os pontos p, q ∈ V existe uma unica geodesica minimizante ligando p aq cuja imagem esta inteiramente contida em V .
O raio de uma bola geodesica pode ser escolhido de tal forma que ela se torne convexa.
12.34 Lema. Seja M uma variedade riemanniana. Para todo p ∈M existe R > 0 tal que qualquer geodesicade M que e tangente a esfera geodesica Sr (p) de raio r < R em q ∈ M esta fora da bola geodesica Br (p)numa vizinhanca de q.
Prova: Seja V uma vizinhanca totalmente normal de p. Restringindo convenientemente o intervalo dedefinicao, podemos assumir que todas as geodesicas de V tem velocidade 1. Podemos portanto nos restringirao fibrado tangente unitario
T1V = (q, v) ∈ TM : q ∈ V , v ∈ TqM e ‖v‖ = 1 .
Seja γ : (−ε, ε)× T1V −→M a aplicacao diferenciavel tal que γ (t, q, v) e a geodesica que no instante t = 0passa por q com velocidade v, ‖v‖ = 1. Definimos
u (t, q, v) = exp−1p (γ (t, q, v))
e F : (−ε, ε)× T1V −→ R por
F (t, q, v) = ‖u (t, q, v)‖2 ,ou seja, F mede o quadrado da distancia (medida em TpM , nao na variedade M) a origem de um ponto quese desloca sobre a geodesica γ. Temos
∂F
∂t= 2
⟨u,∂u
∂t
⟩,
∂2F
∂t2= 2
⟨u,∂2u
∂t2
⟩+ 2
∥∥∥∥∂u∂t∥∥∥∥2
.
Seja agora r > 0 tal que Br (p) = exppBr (0) ⊂ V e γ uma geodesica tangente a esfera geodesica no pontoq = γ (0, q, v). Pelo lema de Gauss, ⟨
u (0, q, v) ,∂u
∂t(0, q, v)
⟩= 0
ja que γ (t, q, v) e uma geodesica radial que parte de q. Em particular,
∂F
∂t(0, q, v) = 0.
Se mostrarmos que para r suficientemente pequeno o ponto crıtico (0, q, v) de F e um mınimo estrito, demodo que os pontos de γ estao a uma distancia de p maior que r, a demonstracao estara concluıda.
Para provar isso, basta observar que para q = p temos u (t, p, v) = tv e portanto
∂2F
∂t2(0, p, v) = 2 ‖v‖2 = 2,
logo existe uma vizinhanca W ⊂ V de p tal que
∂2F
∂t2(0, q, v) > 0
para todo q ∈ W . Escolha R > 0 tal que Br (p) = exppBR (0) ⊂ W . Entao, se r < R, F tem um mınimoestrito em (0, q, v).

Rodney Josue Biezuner 152
12.35 Proposicao. Seja M uma variedade riemanniana. Para todo p ∈ M existe ε > 0 tal que a bolageodesica Bε (p) e convexa.
Prova: Seja R > 0 como no lema. Escolha W e δ < 0 como no Lema 12.30 com δ < R/2. Tome ε < δ talque Bε (p) ⊂W . Afirmamos que Bε (p) e convexa.
De fato, sejam q1, q2 ∈ Bε (p) e γ a unica geodesica minimizante de comprimento menor que 2ε < 2δ < Rligando q1 a q2; em particular, γ esta contida na bola BR (p). Suponha por absurdo que o interior de γ naoesta contido em Bε (p). Entao existe um ponto q no interior de γ onde a distancia maxima r < R de p aγ e atingida. Logo γ e tangente a esfera geodesica Sr (p) em q, mas os pontos de γ numa vizinhanca de qestarao no fecho de Br (p), contradizendo o lema.
12.7 Geodesicas em Variedades de Lorentz
12.36 Definicao. Seja M uma variedade de Lorentz.Uma curva diferenciavel α : I −→ M e do tipo tempo se α′ (t) e do tipo tempo em Tα(t)M para todo
t ∈ I. Ela e do tipo luz se α′ (t) e do tipo luz em Tα(t)M para todo t ∈ I. Ela e do tipo espaco se α′ (t) edo tipo espaco em Tα(t)M para todo t ∈ I.
Uma curva diferenciavel por partes α : I −→M e do tipo tempo se nos pontos t onde ela for diferenciavelα′ (t) e do tipo tempo e se nos pontos ti onde ela nao for diferenciavel valer⟨
α′(t−i), α′(t+i)⟩< 0.
Ela e do tipo luz se nos pontos t onde ela for diferenciavel α′ (t) e do tipo luz e se nos pontos ti onde elanao for diferenciavel valer ⟨
α′(t−i), α′(t+i)⟩
= 0.
Ela e do tipo espaco se nos pontos t onde ela for diferenciavel α′ (t) e do tipo espaco e se nos pontos ti ondeela nao for diferenciavel valer ⟨
α′(t−i), α′(t+i)⟩> 0.
Em geral, uma curva arbitraria em uma variedade de Lorentz nao tem nenhuma destas caracterısticascausais. Por outro lado, a trajetoria de uma partıcula material no espacotempo de Minkowski e sempre umacurva do tipo tempo, como vimos no Capıtulo 3 (em Relatividade Especial, a velocidade da luz nao podeser ultrapassada). Para uma partıcula material que segue uma trajetoria α : I −→ M do tipo tempo noespacotempo de Minkowski, com velocidade unitaria, isto e,
〈α′ (τ) , α′ (τ)〉 = −1
para todo τ ∈ I, entao o parametro τ e o precisamente o tempo proprio da partıcula. Daı segue que
` (α) =
∫ τ0
0
‖α′ (τ)‖ dτ = τ0,
ou seja, o seu comprimento e o seu tempo proprio. O mesmo vale para curvas em variedades de Lorentz,isto e, curvas no espacotempo curvo.
Da Proposicao 12.2 segue no entanto que geodesicas sempre sao ou do tipo luz, ou do tipo espaco ou dotipo tempo.
12.37 Lema. Sejam M uma variedade de Lorentz e p ∈M . Seja α : [0, T ] −→M uma curva diferenciavelpor partes do tipo tempo com α (0) = p, tal que
β = exp−1p α : I −→ TpM
esta definida. Entao β e uma curva do tipo tempo que esta contida em um unico cone temporal de TpM .Em particular, β nao tem autointersecoes.

Rodney Josue Biezuner 153
Prova: Provaremos o resultado apenas no caso em que β e diferenciavel, o caso mais geral ficando comoexercıcio (ou veja [ONeill], Lema 5.33, p. 146). Note que β (0) = 0.
O Lema de Gauss garante que β e uma curva do tipo tempo em TpM : de fato, como
α′ (t) =(expp β
)′(t) = d
(expp
)β(t)
β′ (t) ,
segue do Lema de Gauss que
〈α′ (t) , α′ (t)〉 =⟨d(expp
)β(t)
β′ (t) , d(expp
)β(t)
β′ (t)⟩
= 〈β′ (t) , β′ (t)〉 ,
e portanto β e uma curva do tipo tempo em TpM se e somente se α e uma curva do tipo tempo em M .Seja C o cone temporal de TpM tal que β′ (0) ∈ C. Como a funcao
f (t) = 〈β′ (0) , β′ (t)〉
e contınua e f (0) < 0, segue que f (t) < 0 para todo t ∈ [0, ε) se ε > 0 e suficientemente pequeno, de modoque β′ ([0, ε)) ⊂ C pela Proposicao 2.25. Alem disso, pela formula de Taylor,
β (t) = β′ (0) t+O(t2),
de modo que〈β (t) , β (t)〉 = 〈β′ (0) , β′ (0)〉 t2 +O
(t3),
donde β (t) e um vetor do tipo tempo para todo t ∈ [0, ε) (diminuindo ε, se necessario); analogamente, temos
〈β (t) , β′ (0)〉 = 〈β′ (0) , β′ (0)〉 t+O(t2),
de modo que〈β (t) , β′ (0)〉 < 0
para todo t ∈ [0, ε) (diminuindo ε, se necessario) e portanto β ([0, ε)) ⊂ C. Portanto, β (t) e β′ (t) estao nomesmo cone temporal para todo t ∈ [0, ε), isto e,
〈β (t) , β′ (t)〉 < 0 (12.10)
para todo t ∈ [0, ε), pela Proposicao 2.25. Logo, a funcao
g (t) = 〈β (t) , β (t)〉
e negativa e estritamente decrescente para t ∈ (0, ε), pois g′ (t) < 0. Mas o mesmo argumento acima permiteconcluir que enquanto a curva β permanecer no cone C, β (t) sera do tipo tempo, β (t) e β′ (t) estarao nomesmo cone temporal e portanto (12.10) valera. Segue que nunca teremos g (t) = 0, isto e, a curva β nuncacruzara a fronteira do cone temporal C. Observe que o resultado acima nao impede uma curva do tipo tempo em uma variedade de Lorentz de possuirautointersecoes, pois se a imagem de uma tal curva nao esta inteiramente contida na imagem da aplicacaoexponencial expp para algum ponto p, ela pode ter autointersecoes fora de expp (TpM). Fisicamente, umapartıcula que percorresse tal trajetoria estaria viajando no tempo para o passado. Existem variedades,mesmo riemannianas que nao sao cobertas por expp (TpM) para nenhum p ∈ M ; tais variedades sao cha-madas variedades nao completas (veja a Secao 12.9 para mais detalhes). E existem exemplos de modelosde espacotempos para o universo que admitem curvas do tipo tempo com autointersecoes (os primeiros taismodelos foram obtidos por Godel).
12.38 Proposicao (Geodesicas do tipo tempo em Variedades de Lorentz maximizam distanciaslocalmente). Sejam M uma variedade de Lorentz, p ∈ M , V uma vizinhanca normal de p e q ∈ V . Seexistir uma curva do tipo tempo em V ligando p a q, entao existe uma geodesica radial do tipo tempo em Vligando p a q e alem disso ela e a unica curva do tipo tempo com comprimento maximal ligando p a q.

Rodney Josue Biezuner 154
Prova: Seja α uma curva do tipo tempo ligando p a q. Pelo lema, β = exp−1p α esta contida em um unico
cone temporal de TpM . Portanto, o segmento radial L (t) = tx0, t ∈ [0, 1], que liga 0 a v = exp−1p q esta
neste mesmo cone temporal. Segue que a geodesica radial γ (t) = expp (L (t)) que liga p a q e do tipo tempopelo Lema de Gauss.
O argumento para provar o restante do teorema e uma modificacao da demonstracao da Proposicao 12.28,a seguir.
Como na demonstracao daquela proposicao, escrevemos α (t) de forma unica em coordenadas polares naforma
α (t) = expp (r (t) c (t))
para t ∈ (0, 1], onde c e uma curva diferenciavel por partes em TpM com 〈c (t) , c (t)〉 = −1 para todo t, jaque β e do tipo tempo, e r : (0, 1] −→ R e uma funcao diferenciavel por partes, e definimos
F (r, t) = expp (rc (t)) .
Exceto possivelmente para um numero finito de pontos vale
α′ (t) =∂F
∂rr′ (t) +
∂F
∂t.
Como
∂F
∂r= d
(expp
)β(t)
c (t) ,
∂F
∂t= d
(expp
)β(t)
(rc′ (t)) ,
segue do lema de Gauss que ⟨∂F
∂r,∂F
∂t
⟩= 〈c (t) , rc′ (t)〉 = r 〈c (t) , c′ (t)〉 = 0.
Em particular, como∂F
∂re do tipo tempo,
∂F
∂te do tipo espaco, isto e,⟨∂F
∂t,∂F
∂t
⟩> 0.
Tambem pelo lema de Gauss temos⟨∂F
∂r,∂F
∂r
⟩=⟨d(expp
)β(t)
c (t) , d(expp
)β(t)
c (t)⟩
= 〈c (t) , c (t)〉 = −1.
Logo,
〈α′ (t) , α′ (t)〉 =
⟨∂F
∂r,∂F
∂r
⟩|r′ (t)|2 +
⟨∂F
∂t,∂F
∂t
⟩= − |r′ (t)|2 +
⟨∂F
∂t,∂F
∂t
⟩> − |r′ (t)|2 .
Como− |r′ (t)|2 6 〈α′ (t) , α′ (t)〉 < 0,
segue que‖α′ (t)‖ = |〈α′ (t) , α′ (t)〉| 6 |r′ (t)| .

Rodney Josue Biezuner 155
Pelo lema, α esta contida em um unico cone temporal, logo
r′ (t) > 0;
de fato, se a curva voltasse sobre si mesma, seu vetor velocidade seria do tipo luz em algum momento. Daı,
` (α) = limε→0
∫ 1
ε
‖α′ (t)‖ dt 6 limε→0
∫ 1
ε
|r′ (t)| dt = limε→0
∫ 1
ε
r′ (t) dt = ` (γ) .
Como em variedades riemannianas, todo ponto de uma variedade de Lorentz possui uma vizinhanca
convexa (de fato, este resultado e verdadeiro para qualquer variedade metrica). A demonstracao desteresultado e exatamente igual a do Lema 12.34 e Proposicao 12.35. Note que na demonstracao daquele lema,a funcao distancia pode ser tomada como a funcao distancia euclideana nas coordenadas normais de TpM ,nao a funcao distancia da variedade riemanniana (isto e, nao consideramos a metrica de Lorentz de TpM ; sedesejar, veja a demonstracao detalhada em [ONeill], Cap. 5, Proposicao 7, p. 103). Enunciamos o resultadoexplicitamente para futura referencia:
12.39 Proposicao. Seja M uma variedade de Lorentz. Para todo p ∈M existe ε > 0 tal que a bola geodesicaBε (p) e convexa.
12.8 Funcao Distancia em Variedades Riemannianas
12.40 Definicao. Seja M uma variedade riemanniana conexa. Dados p, q ∈ M , a distancia entre p e q edefinida por
dist (p, q) = inf ` (c) : c e uma curva diferenciavel por partes ligando p e q .
12.41 Proposicao. Se existe uma geodesica minimizante ligando p e q, entao dist (p, q) = ` (γ).
Prova: Segue do Corolario 12.31.
12.42 Proposicao. Seja M uma variedade riemanniana conexa. Com a funcao distancia definida acima,M e um espaco metrico.
Alem disso, a topologia de M como espaco metrico coincide com a topologia inicial de M como variedadediferenciavel.
Prova: De fato, a funcao distancia satisfaz as tres propriedades da funcao distancia de um espaco metrico:(i) Simetria:
dist (p, q) = dist (q, p) .
(ii) Desigualdade triangular:dist (p, q) 6 dist (p, r) + dist (r, q) .
(iii) Positividade:dist (p, q) > 0
edist (p, q) = 0 se e somente se p = q.
Todas as propriedades seguem imediatamente da definicao (a desigualdade triangular segue da definicao deınfimo) exceto a afirmacao que dist (p, q) = 0 implica p = q. Suponha o contrario e considere uma bolanormal Bε (p) que nao contem q. Como dist (p, q) = 0, existe uma curva c ligando p a q com comprimentomenor que ε, contradizendo a Proposicao 12.28.

Rodney Josue Biezuner 156
Pela Proposicao 12.41, se existir uma geodesica minimizante γ ligando p e q entao dist (p, q) = ` (γ). Emparticular, dado p ∈ M , se ε > 0 e suficientemente pequeno, a bola geodesica Bε (p) de raio ε coincide coma bola metrica de centro em p e raio ε definida pela funcao distancia:
B (p; ε) = q ∈M : dist (p, q) < ε .
Logo, bolas geodesicas contem bolas metricas e vice-versa, portanto as topologias sao as mesmas. De agora em diante, consideraremos variedades riemannianas tambem como espacos metricos com a nocaode distancia definida acima.
12.9 Variedades Riemannianas Completas e Teorema de Hopf-Rinow para Variedades Riemannianas
12.43 Definicao. Seja M uma variedade riemanniana. Dizemos que M e geodesicamente completa separa todo p ∈M as geodesicas radiais γ (t) partindo de p estao definidas para todo t ∈ R.
Equivalentemente, M e geodesicamente completa se para todo p ∈M a aplicacao exponencial esta definidaem todo TpM (Exercıcio 12.55).
Lembramos que um espaco metrico e completo se toda sequencia de Cauchy e convergente.
12.44 Lema. Seja M uma variedade riemanniana conexa. Se expp esta definida em todo TpM , entaoqualquer ponto q ∈M pode ser ligado a p por um segmento geodesico γ tal que
` (γ) = dist (p, q) .
Prova: Seja r = dist (p, q). Tome uma bola geodesica fechada Bδ (p). Se q ∈ Bδ (p), entao existe umageodesica radial minimizante ligando p a q e nao ha nada a provar. Se q /∈ Bδ (p), lembrando que a funcaodistancia e contınua e esferas geodesicas sao conjuntos compactos, seja x0 ∈ Sδ (p) = ∂Bδ (p) onde a funcao
f (x) = dist (x, q)
atinge um mınimo em Sδ (p). Seja γ (s) = expp (sV ) a geodesica radial unitaria ligando p a x0. Por hipotese,γ esta definida para todo t ∈ R. Para provar o lema, basta mostrar que
γ (r) = q.
Para provar isso, considere o conjunto nao vazio (pois 0 ∈ A)
A = s ∈ [0, r] : dist (γ (s) , q) = r − s .
A e fechado em [0, r] pela continuidade da funcao distancia e de γ. Se provarmos que para todo s0 ∈ A vales0 + ε ∈ A para todo ε > 0 suficientemente pequeno, isso implicara que A tambem e aberto no conjuntoconexo [0, r] e portanto A = [0, r]; em particular, r ∈ A, o que implica dist (γ (r) , q) = r − r = 0, o que eequivalente a γ (r) = q.

Rodney Josue Biezuner 157
Seja entao s0 ∈ A e considere uma bola geodesica fechada Bε (γ (s0)). Temos
r − s0 = dist (γ (s0) , q) = ε+ miny∈Bε(γ(s0))
dist (y, q) = ε+ dist (y0, q)
onde y0 ∈ Sε (γ (s0)) = ∂Bε (γ (s0)) e o ponto onde a funcao
g (y) = dist (y, q)
atinge um mınimo em Sε (γ (s0)). Para provar a afirmacao, basta entao mostrar que y0 = γ (s0 + ε), poisneste caso
r − s0 = ε+ dist (γ (s0 + ε) , q) ,
dondedist (γ (s0 + ε) , q) = r − (s0 + ε) .
De fato, temosdist (p, y0) > dist (p, q)− dist (q, y0) = r − [r − (s0 + ε)] = s0 + ε.
Por outro lado, a curva quebrada que liga p a y0 constituida do segmento geodesico γ que vai de p a γ (s0)e do raio geodesico que vai de γ (s0) a y0 tem comprimento s0 + ε. Portanto,
dist (p, y0) = s0 + ε
e esta curva quebrada e uma geodesica (logo, nao e quebrada), donde y0 = γ (s0 + ε), o que termina ademonstracao.
12.45 Teorema (Teorema de Hopf-Rinow). Uma variedade riemanniana conexa e geodesicamente com-pleta se e somente se ela e completa como um espaco metrico.
Prova:1. M variedade riemanniana completa como espaco metrico =⇒M variedade riemanniana geodesicamentecompleta.

Rodney Josue Biezuner 158
Suponha por absurdo que exista uma geodesica unitaria γ : [0, a) −→ M que nao se estende a umintervalo [0, a+ ε) para nenhum ε > 0. Seja ti uma sequencia crescente tal que ti → a; em particular, tie uma sequencia de Cauchy. Seja qi = γ (ti). Como γ e parametrizada por comprimento de arco, segue que
dist (qi, qj) 6 |ti − tj |
e (qi) e uma sequencia de Cauchy em M . Logo qi → q ∈M . Seja V uma vizinhanca uniformemente normalde q e δ > 0 tal que V esta contido em qualquer bola geodesica de raio δ centrada em um ponto de V .Para j suficientemente grande temos qj ∈ V e tj > a− δ. O fato que Bδ (qj) e uma bola geodesica implicaque toda geodesica partindo de qj existe por um intervalo de tempo pelo menos igual a δ. Em particularisso vale para a geodesica σ satisfazendo σ (0) = qj e σ′ (0) = γ′ (tj). Por unicidade de geodesica, esta euma reparametrizacao de γ, isto e, σ (t) = γ (t+ tj), logo γ (t) = σ (t− tj) e uma extensao de γ alem de a,contradizendo a hipotese inicial.2. M variedade riemanniana geodesicamente completa =⇒M espaco metrico completo.
Para provar a recıproca, demonstraremos um resultado mais forte:Se existe p ∈M tal que expp esta definida em todo TpM , entao M e um espaco metrico completo.Seja qi ⊂M uma sequencia de Cauchy. Para cada i, seja γi (s) = expp (sVi) a geodesica radial unitaria
que liga p a qi, e sejadi = dist (p, qi) ,
de modo que pelo lemaqi = expp (diVi) .
Alem disso, di e uma sequencia de Cauchy em R, pois
|di − dj | = |dist (p, qi)− dist (p, qj)| 6 dist (qi, qj) .
Como sequencias de Cauchy sao limitadas, di e limitada; alem disso ‖Vi‖ = 1 para todo i, logo diVie limitada em TpM . Portanto, uma subsequencia dikVik converge para V ∈ TpM . Por continuidade daaplicacao exponencial,
qik = expp (dikVik)→ expp (V ) .
Como a sequencia original qi e de Cauchy, ela converge para o mesmo ponto para o qual sua subsequenciaconverge. Em particular, o conceito de variedade riemanniana geodesicamente completa e equivalente ao conceito devariedade riemanniana completa como espaco metrico para variedades conexas e para estas podemos nosreferir simplesmente a uma variedade riemanniana completa, implicando ambos os conceitos.
12.46 Corolario. Toda variedade riemanniana compacta e geodesicamente completa.
Prova: Pois todo espaco metrico compacto e completo.
12.47 Corolario. Uma subvariedade fechada de uma variedade riemanniana completa e geodesicamentecompleta na metrica induzida.
Prova: Pois todo subconjunto fechado de um espaco metrico e completo.
12.48 Corolario. Os conjuntos fechados e limitados de uma variedade riemanniana conexa sao compactosse e somente se ela e geodesicamente completa.
Prova: Seja A ⊂ M fechado e limitado. Como A e limitado, A esta contido em uma bola metrica B (p; r).Pelo Lema 12.44, existe uma bola BR (0) ⊂ TpM tal que
B (p; r) ⊂ expp
(BR (0)
)= BR (p).

Rodney Josue Biezuner 159
A bola geodesica fechada BR (p) e compacta, pois e a imagem de um compacto pela aplicacao contınua expp.Logo, A e um subconjunto fechado de um compacto, portanto e compacto.
Reciprocamente, a condicao de conjuntos fechados limitados serem compactos em um espaco metricoimplica que o espaco metrico e completo: sequencias de Cauchy sao limitadas, logo seu fecho e compacto eportanto possuem uma subsequencia convergente, o que implica para sequencias de Cauchy que a sequenciatoda e convergente.
12.49 Corolario. Se M e uma variedade riemanniana conexa e existe p ∈M tal que expp esta definida emtodo TpM entao M e geodesicamente completa.
Prova: Segue da demonstracao do teorema de Hopf-Rinow.
12.50 Corolario. Se M e uma variedade riemanniana conexa completa, entao quaisquer dois pontos p, q ∈M podem ser ligados por um segmento geodesico γ tal que
` (γ) = dist (p, q) .
Prova: Segue do teorema de Hopf-Rinow e do Lema 12.44. A recıproca nao e valida: todos os pontos de um aberto convexo U de Rn (uma variedade riemanniana nametrica euclideana) podem ser ligados por segmentos de retas, mas se U e um subconjunto proprio de Rnele nao e uma variedade completa.
12.10 Apendice: Geodesicas atraves do Metodo Variacional
Excepcionalmente denotaremos a derivada de uma curva α′ (t) nesta secao por α (t), para adotar uma notacaoconsistente com a do Calculo de Variacoes.
12.51 Definicao. Seja M uma variedade diferenciavel. Considere o espaco C das curvas diferenciaveis emM que satisfazem a condicao de fronteira α (a) = p e α (b) = q:
C = α : [a, b] −→M : α e diferenciavel, α (a) = p e α (b) = q .
O lagrangiano L de um problema variacional para C e uma funcao diferenciavel
L : TM −→ R.
Associado ao lagrangiano L e o funcional acao S : C −→ R definido por
S (α) =
∫ b
a
L (α (t) , α (t)) dt.
No Calculo de Variacoes, procura-se encontrar um metodo para determinar curvas α que minimizam ofuncional acao; isto e chamado o princıpio da acao mınima.
12.52 Proposicao (Equacoes de Euler-Lagrange). Se uma curva γ ∈ C e um valor extremo do funcionalacao, entao a equacao de Euler-Lagrange
d
dt
(∂L
∂vi
)=∂L
∂xi
i = 1, . . . , n, sao satisfeitas ao longo de γ em coordenadas locais(x1, . . . , xn, v1, . . . , vn
)para TM .

Rodney Josue Biezuner 160
Prova: Vamos considerar primeiro o caso M = Rn para compreender melhor a ideia da demonstracao. Sejaβ : [a, b] −→ Rn uma curva diferenciavel arbitraria satisfazendo β (a) = β (b) = 0 e considere a seguintevariacao de γ
F (s, t) = γ (t) + sβ (t) .
Denotandoαs (t) = F (s, t)
considere a funcao diferenciavel real f : (−ε, ε) −→ R definida por
f (s) = S (αs) =
∫ b
a
L (αs (t) , αs (t)) dt.
Como γ e um extremo para S, segue que 0 e um extremo para f , de modo que
f ′ (0) = 0.
Temos, derivando sob o sinal de integracao e pela regra da cadeia,
f ′ (s) =
∫ b
a
[∂L
∂xi(αs, αs)
dαisds
+∂L
∂vi(αs, αs)
dαisds
]dt.
Ja que
dαsds
= β (t) ,
dαsds
= β (t) ,
segue que
f ′ (s) =
∫ b
a
[∂L
∂xi(αs, αs)β
i +∂L
∂vi(αs, αs) β
i
]dt.
Por outro lado, integrando por partes, temos∫ b
a
∂L
∂vi(αs, αs) β
i dt =∂L
∂viβi∣∣∣∣ba
−∫ b
a
d
dt
(∂L
∂vi(αs, αs)
)βi dt = −
∫ b
a
d
dt
(∂L
∂vi(αs, αs)
)βi dt,
de modo que
f ′ (s) =
∫ b
a
[∂L
∂xi(αs, αs)−
d
dt
(∂L
∂vi(αs, αs)
)]βi dt.
Agora, f ′ (0) = 0 implica ∫ b
a
[∂L
∂xi(γ, γ)− d
dt
(∂L
∂vi(γ, γ)
)]βi dt = 0
Como β e arbitraria, segue que∂L
∂xi(γ, γ)− d
dt
(∂L
∂vi(γ, γ)
)= 0
para todo i. Em uma variedade riemanniana (M, g) existem dois lagrangianos associados de forma natural:
L (p, v) = ‖v‖p ,
E (p, v) = ‖v‖2p .

Rodney Josue Biezuner 161
As acoes destes lagrangianos sao respectivamente o funcional comprimento e o funcional energia:
L (α) =
∫ b
a
‖α′ (t)‖p dt,
E (α) =
∫ b
a
‖α′ (t)‖2p dt.
E mais facil trabalhar com o funcional energia, ja que o lagrangiano da energia nao apresenta problemas dediferenciabilidade na origem. Alem disso, um mınimo para o funcional energia e um mınimo para o funcionalcomprimento, pois a desigualdade de Cauchy-Schwartz implica que
L (α) =
∫ b
a
‖α′ (t)‖p dt 6
(∫ b
a
‖α′ (t)‖2p dt
)1/2(∫ b
a
1 dt
)1/2
=√b− aE (α)
1/2.
12.53 Proposicao. Geodesicas sao extremos do funcional energia.
Prova: Em coordenadas locais o lagrangiano da energia e
E(x1, . . . , xn, v1, . . . , vn
)= gij
(x1, . . . , xn
)vivj ,
e ao longo de uma curva α (t) =(x1 (t) , . . . , xn (t)
)ele e dado por
E
(x1, . . . , xn,
dx1
dt, . . . ,
dxn
dt
)= gij
(x1, . . . , xn
) dxidt
dxj
dt.
Logo,∂E
∂xk=∂gij∂xk
dxi
dt
dxj
dt,
enquanto que∂E
∂vk= 2gik
dxi
dt.
de modo que, pela regra da cadeia, segue que
d
dt
(∂E
∂vk
)= 2
(∂gik∂xj
dxj
dt
dxi
dt+ gik
d2xi
dt2
)=∂gik∂xj
dxj
dt
dxi
dt+∂gik∂xj
dxj
dt
dxi
dt+ 2gik
d2xi
dt2
=∂gik∂xj
dxj
dt
dxi
dt+∂gjk∂xi
dxi
dt
dxj
dt+ 2gik
d2xi
dt2
trocando i, j no segundo termo. Portanto, a equacao de Euler-Lagrange do funcional energia
d
dt
(∂E
∂vk
)=
∂E
∂xk
transforma-se na equacao
2gikd2xi
dt2+∂gik∂xj
dxj
dt
dxi
dt+∂gjk∂xi
dxi
dt
dxj
dt− ∂gij∂xk
dxi
dt
dxj
dt= 0,
ou seja,
gikd2xi
dt2+
(∂gik∂xj
+∂gik∂xj
− ∂gij∂xk
)dxi
dt
dxj
dt= 0.

Rodney Josue Biezuner 162
Multiplicando por gmk e somando em k, obtemos
δmid2xi
dt2+
(∂gik∂xj
+∂gik∂xj
− ∂gij∂xk
)gmk
dxi
dt
dxj
dt= 0,
que e exatamente a equacao geodesica
d2xm
dt2+ Γmij
dxi
dt
dxj
dt= 0.
12.11 Exercıcios
12.54 Exercıcio. Mostre que as transformacoes de Mobius introduzidas no Exemplo 12.32 sao isometriasdo plano hiperbolico e complete os outros detalhes.
12.55 Exercıcio. Mostre que M e geodesicamente completa se e somente se para todo p ∈ M a aplicacaoexponencial esta definida em todo TpM.

Capıtulo 13
Curvatura
13.1 Mais sobre Tensores
Observe que o espaco vetorial real T (M) = T1 (M) = T01 (M) dos campos diferenciaveis de uma variedade
diferenciavel M tambem pode ser considerado como um modulo sobre o anel C∞ (M). Pensando destaforma, estamos considerando a estrutura linear de T (M) quando tomamos as funcoes reais diferenciaveis emM como escalares. Da mesma forma, o espaco vetorial real T1 (M) = T1
0 (M) dos campos covetoriais e ummodulo sobre C∞ (M).
Um campo tensorial T ∈ Tkl (M) entao induz naturalmente uma aplicacao multilinear sobre C∞ (M)
T : T1 (M)× . . .× T1 (M)× T1 (M)× . . .× T1 (M) −→ C∞ (M) (13.1)
definindoT(X1, . . . , Xk, ω
1, . . . , ωl)
(p) = Tp
(X1|p , . . . , Xk|p , ω
1∣∣p, . . . , ωl
∣∣p
). (13.2)
De fato, a funcao T (X1, . . . , Xk, ω1, . . . , ωl) ∈ C∞ (M) e T e claramente multilinear. Alem disso, pode-se provar que toda aplicacao multilinear (13.1) sobre C∞ (M) e induzida por um campo tensorial emTkl (M) (Exercıcio 13.38). Em particular, observe que se a base coordenada associada para o espaco tensorialT kl (TpM) e (
Bkl)p
=dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂j1 |p ⊗ . . .⊗ ∂jl |p
16i1,...,ik6n16j1,...,jl6n
para todo p ∈ V , de modo que nesta base coordenada o campo tensorial T se escreve na forma
Tp = T j1,...,jli1,...,ik(p) dxi1
∣∣p⊗ . . .⊗ dxik
∣∣p⊗ ∂j1 |p ⊗ . . .⊗ ∂jl |p ,
entao se os campos vetoriais e covetoriais se escrevem localmente na forma
Xr|p = Xir (p) ∂ir |p , r = 1, . . . , k,
ωs|p = ωjs (p) dxjs∣∣p
, s = 1, . . . , l,
temosT(X1, . . . , Xk, ω
1, . . . , ωl)
(p) = Xi1 . . . Xikωj1 . . . ωjlTj1,...,jli1,...,ik
(p) . (13.3)
Ou seja, o valor de T(X1, . . . , Xk, ω
1, . . . , ωl)
em p depende apenas das componentes do campo tensorialT em p e dos valores dos campos vetoriais e de 1-formas em p. Neste sentido, dizemos que tensores saopuntuais. Contraste isso com uma conexao, que nao e um tensor porque ao inves da linearidade satisfaz aregra do produto.
163

Rodney Josue Biezuner 164
13.2 O Tensor Curvatura
Quando Riemann introduziu a nocao de metrica em variedades, ele precisava mostrar que elas nao eramlocalmente isometricas ao espaco euclidiano. Para provar isso, ele introduziu a nocao de curvatura.
13.2.1 O Endomorfismo Curvatura
Para motivar a definicao de curvatura, considere Rn com a metrica ηkij , k = 0, . . . , n, e campos vetoriaisX,Y, Z ∈ T (Rn). Observe que
∇X∇Y Z −∇Y∇XZ = X (∇Y Z)j ∂
∂xj− Y (∇XZ)
j ∂
∂xj
= X[Y(Zj)] ∂
∂xj− Y
[X(Zj)] ∂
∂xj
=(X[Y(Zj)]− Y
[X(Zj)]) ∂
∂xj
= (XY − Y X)(Zj) ∂
∂xj
= ∇[X,Y ]Z.
Esta relacao e valida para qualquer variedade metrica localmente isometrica a Rn (Exercıcio 13.39).
13.1 Definicao. Seja M uma variedade metrica. O endomorfismo curvatura de M e o campo tensorialde ordem (3, 1)
R : T (M)× T (M)× T (M) −→ T (M)
definido porR (X,Y )Z = ∇X∇Y Z −∇Y∇XZ −∇[X,Y ]Z. (13.4)
Observamos que alguns autores, tais como [Carmo], definem a curvatura com o sinal oposto, mas a maioriadefine como acima. O fato de termos identificado R com um tensor do tipo (3, 1) segue da Proposicao 9.19e pelo fato de R ser multilinear sobre C∞ (M), conforme e demonstrado na proposicao a seguir. Em outraspalavras, R e identificado com o campo tensorial
R : T1 (M)× T1 (M)× T1 (M)× T1 (M) −→ R
definido porR (X,Y, Z, ω) = ω (R (X,Y )Z) .
Uma motivacao extra para a definicao do tensor curvatura pode ser vista no apendice no final deste capıtulo.
13.2 Proposicao. R e multilinear sobre C∞ (M).
Prova: Temos, em relacao a segunda variavel,
R (X,Y1 + Y2)Z = ∇X∇Y1+Y2Z −∇Y1+Y2∇XZ −∇[X,Y1+Y2]Z
= ∇X∇Y1Z +∇X∇Y2Z −∇Y1∇XZ −∇Y2∇XZ−∇[X,Y1]Z −∇[X,Y2]Z
= R (X,Y1)Z +R (X,Y2)Z

Rodney Josue Biezuner 165
e
R (X, fY )Z = ∇X∇fY Z −∇fY∇XZ −∇[X,fY ]Z
= ∇X (f∇Y Z)− f∇Y∇XZ −∇f [X,Y ]+(Xf)Y Z
= f∇X∇Y Z + (Xf)∇Y Z − f∇Y∇XZ − f∇[X,Y ]Z − (Xf)∇Y Z= f
(∇X∇Y Z −∇Y∇XZ −∇[X,Y ]Z
)= fR (X,Y )Z.
A linearidade em relacao a primeira variavel e imediatamente estabelecida uma vez que se observa que
R (X,Y )Z = −R (Y,X)Z. (13.5)
De fato,
R (Y,X)Z = ∇Y∇XZ −∇X∇Y Z −∇[Y,X]Z
= −∇X∇Y Z +∇Y∇XZ −∇−[X,Y ]Z
= −∇X∇Y Z +∇Y∇XZ +∇[X,Y ]Z
= −R (X,Y )Z.
Para estabelecer a linearidade em relacao a terceira variavel, temos
R (X,Y ) (Z1 + Z2) = ∇X∇Y (Z1 + Z2)−∇Y∇X (Z1 + Z2)−∇[X,Y ] (Z1 + Z2)
= ∇X∇Y Z1 −∇Y∇XZ1 −∇[X,Y ]Z1
+∇X∇Y Z2 −∇Y∇XZ2 −∇[X,Y ]Z2
= R (X,Y )Z1 +R (X,Y )Z2
e
R (X,Y ) (fZ) = ∇X∇Y (fZ)−∇Y∇X (fZ)−∇[X,Y ] (fZ)
= ∇X (f∇Y Z) +∇X ((Y f)Z)−∇Y (f∇XZ)−∇Y ((Xf)Z)
− f∇[X,Y ]Z − [X,Y ] (f)Z
= f∇X∇Y Z + (Xf)∇Y Z + (Y f)∇X (Z) +X (Y f)Z
− f∇Y∇XZ − (Y f)∇XZ − (Xf)∇Y Z − Y (Xf)Z
− f∇[X,Y ]Z − [X,Y ] (f)Z
= f∇X∇Y Z − f∇Y∇XZ + [X (Y f)− Y (Xf)]Z − f∇[X,Y ]Z − [X,Y ] (f)Z
= f∇X∇Y Z − f∇Y∇XZ − f∇[X,Y ]Z + [Y,X] (f)Z − [X,Y ] (f)Z
= f(∇X∇Y Z −∇Y∇XZ −∇[X,Y ]Z
)= fR (X,Y )Z.
13.2.2 O Significado da Curvatura Nula
13.3 Proposicao. Em Rn,R = 0. (13.6)
Em particular, a derivada covariante comuta
∇∂i∇∂j = ∇∂j∇∂i . (13.7)

Rodney Josue Biezuner 166
Prova: Na introducao a esta secao vimos que R ≡ 0 para Rn (de fato, foi o que nos levou a definir R emprimeiro lugar; este resultado e trazido aqui apenas para referencia e enfase). Como [∂i, ∂j ] = 0, segue que
∇∂i∇∂jZ = ∇∂j∇∂iZ
para todo campo vetorial Z ∈ T (Rn). Assim, a curvatura mede tambem o quanto a derivada covariante deixa de comutar. De fato, o principalpapel do termo ∇[∂i,∂j ] e fazer com que a curvatura seja um tensor (veja o apendice deste capıtulo para maisdetalhes).
13.4 Teorema. Uma variedade metrica Mn e localmente isometrica a Rn se e somente se R = 0.
Prova: Vamos mostrar que se R = 0 entao M e localmente isometrica a Rn, ja que a recıproca e obvia (acurvatura e um invariante isometrico local; Exercıcio 13.39).
Dado p ∈M , escolha uma base ortonormalE1|p , . . . , En|p
para TpM . Seja
x1, . . . , xn
um sistema de coordenadas para uma vizinhanca de p tal que ∂i|p = Ei|p para
todo i (por exemplo, um sistema de coordenadas normal).Diminuindo a vizinhanca se necessario, podemos assumir que o domınio da parametrizacao e um pequeno
cuboCδ =
x ∈ Rn :
∣∣xi∣∣ < δ, i = 1, . . . , n.
Para cada i faca um transporte paralelo do vetor Ei|p ao longo de todas as imagens parametrizadasdos eixos do cubo, cobrindo todos os pontos da vizinhanca parametrizada pelo cubo: por exemplo, co-mece transportando paralelamente o vetor Ei|p ao longo da imagem parametrizada do eixo x1; entao, a
partir de cada ponto da imagem parametrizada do eixo x1, transporte paralelamente ao longo da imagemparametrizada do segmento paralelo ao eixo x2; entao, sucessivamente, transporte paralelamente ao longodas imagens parametrizadas dos segmentos paralelos aos eixos x3, . . . , xn. Deste modo, obtemos n camposvetoriais ortonormais
E1, . . . , En
definidos na vizinhanca parametrizada pelo cubo Cδ. Estes campos vetoriais sao suaves pela aplicacaosucessiva do teorema da dependencia suave das solucoes de EDOs nas condicoes iniciais, pois os campos Eisao as solucoes do sistema de EDOs
DEidt
= 0.

Rodney Josue Biezuner 167
Afirmamos que os campos E1, . . . , En sao paralelos em Cδ. Para provar isso, basta provar que
∇∂iEj = 0
para todos i, j.Fixe j. Seja
Mk =x ∈ Cδ : xk+1 = . . . = xn = 0
a fatia k-dimensional do cubo correspondente a intersecao do plano k-dimensional
(x1, . . . , xk, . . . , 0
)com o
cubo Cδ. Por construcao, ∇∂1Ej = 0 em M1, ∇∂2Ej = 0 em M2 e, em geral, ∇∂kEj = 0 em Mk.Provaremos por inducao que
∇∂1Ej = . . . = ∇∂kEj = 0 (13.8)
em Mk para todo k; em particular, para k = n, obtemos a afirmacao.Ja vimos que o caso k = 1 e valido. Assuma a validade de (13.8) para k. Em Mk+1 temos ∇∂k+1
Ej = 0por construcao e
∇∂1Ej = . . . = ∇∂kEj = 0
em Mk por hipotese de inducao. Resta apenas mostrar que ∇∂iEj = 0 para i = 1, . . . , k no resto de Mk+1.Para isso, como ja temos ∇∂iEj = 0 na fatia k-dimensional Mk (a fatia que ocupa o centro de Mk+1), bastaprovar que
∇∂k+1(∇∂iEj) = 0,
pois isso implicara que o campo ∇∂iEj continuara sendo nulo ao ser paralelamente transportado para o restode Mk+1. Mas, como R = 0, temos
∇∂i(∇∂k+1
Ej)−∇∂k+1
(∇∂iEj)−∇[∂i,∂k+1]Ej = 0
ou seja, usando o fato que [∂i, ∂k+1] = 0 e a hipotese de inducao,
∇∂k+1(∇∂iEj) = ∇∂i
(∇∂k+1
Ej)
= 0.
Isso conclui a demonstracao da afirmacao que os campos E1, . . . , En sao paralelos em Cδ.

Rodney Josue Biezuner 168
Agora, pela simetria da conexao riemanniana temos
[Ei, Ej ] = ∇EiEj −∇EjEi.
Como os campos E1, . . . , En sao paralelos em Cδ, como acabamos de provar, segue que
∇EiEj = ∇EjEi = 0,
donde[Ei, Ej ] = 0
para todos i, j em Cδ. Portanto, pelo Teorema 8.43, existem coordenadasy1, . . . , yn
para uma vizinhanca
possivelmente menor de p, tais que
Ei =∂
∂yi.
Nestas coordenadas,
gij =
⟨∂
∂yi,∂
∂yj
⟩= 〈Ei, Ej〉 = ηkij ,
logo a parametrizacao das coordenadas yi define uma isometria entre esta vizinhanca parametrizada de p eum aberto de Rn. Para a demonstracao original deste resultado para variedades riemannianas por Riemann, comentada e emnotacao moderna, veja [Spivak], Vol. II, pp. 179-204. Observe que a demonstracao acima mostra que sepudermos encontrar campos E1, . . . , En ortonormais e paralelos na variedade M , entao ela e localmenteisometrica a Rn. Consequentemente, tais campos em geral nao existem. Isso significa que o transporteparalelo de vetores ao longo de curvas com extremidades coincidentes em geral da resultados diferentes(como exemplo, considere o transporte paralelo de um vetor na esfera do polo norte ao polo sul, ao longode dois meridianos fazendo um angulo reto). Assim, o tensor curvatura mede a independencia de caminhosdo transporte paralelo (veja Teorema 13.37 no apendice a este capıtulo). Outra coisa importante que acurvatura mede e o assim chamado desvio geodesico (veja Proposicao 13.35 no apendice a este capıtulo).Este e a influencia da curvatura no transporte paralelo sao discutidos detalhadamente no apendice destecapıtulo.
13.5 Proposicao. ValeR (∂i, ∂j) ∂k =
(∇∂i∇∂j −∇∂j∇∂i
)∂k. (13.9)
Em particular, os componentes do tensor endomorfismo curvatura sao
Rlijk = ΓmjkΓlim − ΓmikΓljm +∂Γljk∂xi
− ∂Γlik∂xj
. (13.10)
Prova: A primeira afirmacao segue de [∂i, ∂j ] = 0.A segunda afirmacao segue da primeira por calculo direto, observando primeiramente que os componentes
do tensor R sao definidos da forma usual, usando a multilinearidade do tensor, por
R (X,Y )Z = RlijkXiY jZk
∂
∂xl, (13.11)
de modo que
R (∂i, ∂j) ∂k = Rlijk∂
∂xl. (13.12)
Logo, lembrando que∇∂i∂j = Γmij∂m,

Rodney Josue Biezuner 169
segue que
R (∂i, ∂j) ∂k
= ∇∂i(∇∂j∂k
)−∇∂j (∇∂i∂k)
= ∇∂i(Γmjk∂m
)−∇∂j (Γmik∂m)
= ∇∂i(Γmjk∂m
)−∇∂j (Γmik∂m)
= Γmjk∇∂i∂m +∂Γmjk∂xi
∂m − Γmik∇∂j∂m −∂Γmik∂xj
∂m
= ΓmjkΓlim∂l +∂Γljk∂xi
∂l − ΓmikΓljm∂l −∂Γlik∂xj
∂l
=
(ΓmjkΓlim − ΓmikΓljm +
∂Γljk∂xi
− ∂Γlik∂xj
)∂l.
13.6 Proposicao (Simetrias do Tensor Endomorfismo Curvatura). O tensor endomorfismo curvaturasatisfaz as seguintes propriedades:
(a) R (X,Y )Z = −R (Y,X)Z.(b) (identidade de Bianchi) R (X,Y )Z +R (Y, Z)X +R (Z,X)Y = 0.Em termos dos componentes do tensor endomorfismo curvatura, estas identidades sao respectivamente
equivalentes a(a) Rlijk = −Rljik.(b) Rlijk +Rljki +Rlkij = 0.Consequentemente,
Rliik = 0.
Prova: A primeira propriedade segue diretamente da definicao, como ja vimos. A segunda propriedadesegue da simetria da conexao, aplicada duas vezes, e da identidade de Jacobi para o colchete de Lie:
R (X,Y )Z +R (Y,Z)X +R (Z,X)Y
= ∇X∇Y Z −∇Y∇XZ −∇[X,Y ]Z
+∇Y∇ZX −∇Z∇YX −∇[Y,Z]X
+∇Z∇XY −∇X∇ZY −∇[Z,X]Y
= ∇Y (∇ZX −∇XZ) +∇Z (∇XY −∇YX) +∇X (∇Y Z −∇ZY )
−∇[X,Y ]Z −∇[Y,Z]X −∇[Z,X]Y
= ∇Y [Z,X] +∇Z [X,Y ] +∇X [Y,Z]−∇[X,Y ]Z −∇[Y,Z]X −∇[Z,X]Y
=(∇Y [Z,X]−∇[Z,X]Y
)+(∇Z [X,Y ]−∇[X,Y ]Z
)+(∇X [Y,Z]−∇[Y,Z]X
)= [Y, [Z,X]] + [Z, [X,Y ]] + [X, [Y, Z]]
= 0,
A ultima propriedade e consequencia de (a).
13.2.3 Operacao de Subir ou Descer um Indice
Uma propriedade importante do produto interno e que ele permite converter vetores em covetores e vice-versa. De fato, ela permite definir um isomorfismo entre os espacos T1 (M) de campos vetoriais de M eT1 (M) de campos covetoriais de M , chamado o isomorfismo musical. A escolha deste nome se refere aossımbolos escolhidos para denotar o isomorfismo e seu inverso, conforme veremos na definicao a seguir.

Rodney Josue Biezuner 170
13.7 Definicao. Seja M uma variedade metrica. Definimos o isomorfismo bemol
[ : T1 (M) −→ T1 (M)X 7→ X[
que leva X no covetor X[ definido por
X[ (Y ) = g (X,Y ) = 〈X,Y 〉 (13.13)
para todo Y . Seu inverso e o isomorfismo sustenido
] : T1 (M) −→ T1 (M)ω 7→ ω]
que leva o covetor ω no vetor ω] definido por
g(ω], Y
)=⟨ω], Y
⟩= ω (Y ) (13.14)
para todo Y .
Em coordenadas,X[ (Y ) =
⟨Xi∂i, Y
j∂j⟩
= gijXiY j = gijX
idxj (Y ) ,
ou seja,X[ = gijX
idxj . (13.15)
Escrevendo os componentes do covetor X[ em coordenadas na forma
X[ = Xjdxj , (13.16)
segue queXj = gijX
i. (13.17)
Diz-se que o covetor X[ e obtido a partir do vetor X descendo um ındice. Por este motivo esta operacao edenotada pelo sımbolo bemol, porque em partituras musicais o sımbolo bemol e usado para abaixar a alturada nota musical que lhe segue. Ja no caso do isomorfismo inverso, escrevendo em coordenadas o vetor ω] naforma
ω] = ωi∂i, (13.18)
segue que ⟨ωk∂k, ∂j
⟩= ω (∂j) ,
dondeωj = gkjω
k.
Multiplicando pela matriz inversa gij , como
gijgjkωk = gijgjkω
k = δikωk = ωi,
segue que
ωi =
n∑j=1
gijωj . (13.19)
Diz-se que o vetor ω] e obtido a partir do covetor ω subindo um ındice. Por este motivo esta operacaoe denotada pelo sımbolo sustenido, porque em partituras musicais o sımbolo sustenido e usado para subir aaltura da nota musical que lhe segue.
O vetor gradiente e definido a partir da operacao de subir um ındice:

Rodney Josue Biezuner 171
13.8 Definicao. Seja M uma variedade metrica. Dada uma funcao f ∈ C∞ (M), definimos o campogradiente de f por
grad f = df ].
Em outras palavras, o vetor gradiente e definido por
〈grad f, Y 〉 = df (Y )
para todo Y .
Em coordenadas, como
df =∂f
∂xidxi,
temos
grad f = gij∂f
∂xi∂j . (13.20)
A operacao de subir ou descer um ındice pode ser aplicada a qualquer tensor:
13.9 Definicao. Seja M uma variedade metrica. Se T ∈ Tkl (M), entao T [ ∈ Tk+1l−1 (M) e o tensor definido
por
T [(X1, . . . , Xk, Xk+1, ω
1, . . . , ωq−1, ωq+1, . . . , ωl)
= T(X1, . . . , Xp, . . . , Xk, ω
1, . . . , ωq−1, X[k+1, ω
q+1, . . . , ωl)
e T ] ∈ Tk−1l+1 (M) e o tensor definido por
T ](X1, . . . , Xp−1, Xp+1, . . . , Xk, ω
1, . . . , ωl, ωl+1)
= T(X1, . . . , Xp−1,
(ωl+1
)], Xp+1, . . . , Xk, ω
1, . . . , ωl).
Note que ao aplicar a operacao de subir ou descer um ındice de um tensor teremos que explicitar qual ındiceestamos subindo ou descendo. Em geral isto e feito em palavras, sem o uso de um sımbolo especial. Emcoordenadas, descendo o ultimo ındice, as componentes do tensor resultante sao dadas por
Tj1...jl−1
i1...ikik+1= T [
(∂i1 , . . . , ∂ik , ∂ik+1
, dxj1 , . . . , dxjl−1)
= T(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl−1 ,(∂ik+1
)[)= T
(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl−1 , gik+1pdxp)
= gik+1pT(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl−1 , dxp)
= gik+1pTj1...jl−1pi1...ik
,
que escrevemos para futura referencia
Tj1...jl−1
i1...ikik+1= gik+1pT
j1...jl−1pi1...ik
. (13.21)
Subindo o ultimo ındice, as componentes do tensor resultante sao dadas por
Tj1...jljl+1
i1...ik−1= T ]
(∂i1 , . . . , ∂ik−1
, dxj1 , . . . , dxjl , dxjl+1)
= T(∂i1 , . . . , ∂ik−1
,(dxjl+1
)], dxj1 , . . . , dxjl
)= T
(∂i1 , . . . , ∂ik−1
, gjl+1q∂q, dx1, . . . , dxl
)= gjl+1qT
(∂i1 , . . . , ∂ik−1
, ∂q, dx1, . . . , dxl
)= gjl+1qT j1...jli1...ik−1q
,

Rodney Josue Biezuner 172
que escrevemos para futura referencia
Tj1...jljl+1
i1...ik−1= gjl+1qT j1...jli1...ik−1q
. (13.22)
Outra aplicacao importante do isomorfismo musical e estender a operacao de tomar o traco de tensores.Enquanto que o traco de tensores elimina um ındice covariante e um ındice contravariante, o traco em relacaoa metrica definido a seguir elimina dois ındices covariantes.
13.10 Definicao. Seja M uma variedade metrica. Se T ∈ Tkl (M), entao o traco de T em relacao ametrica g e o tensor trg T ∈ Tk−2
l (M) definido por
trg T = tr(T ]).
Em coordenadas, o traco de T em relacao a metrica g em relacao aos dois ultimos ındices, subindo o ultimoındice antes de tomar o traco, e dado por
(trg T )j1...jli1...ik−2
=(T ])j1...jlii1...ik−2i
= gijT j1...jli1...ik−2ij.
Por exemplo, se T ∈ T2 (M) e um tensor simetrico, de forma que nao importa qual ındice escolhemos subir,entao trg T ∈ T0 (M) = C∞ (M) e a funcao definida por
trg T =(T ])ii
= gijTij .
13.11 Exemplo (Contracao do Tensor Metrica). Estamos agora em condicao de entender porquedenotamos a inversa da matriz metrica G = (gij) por G−1 =
(gij), ou seja, porque
gikgkj = δij .
De fato, como vimos acima,gikgkj = gij
egij = g]
(ei, e
j)
= g(ei,(ej)])
= ej (ei) = δij .
13.2.4 O Tensor Curvatura
13.12 Definicao. SejaM uma variedade metrica. O tensor curvatura deM e o campo tensorial covariantede ordem 4
R : T (M)× T (M)× T (M)× T (M) −→ C∞ (M)
definido porR (X,Y, Z,W ) = 〈R (X,Y )Z,W 〉 .
Em outras palavras, o tensor curvatura e obtido atraves de descer o ındice do tensor endomorfismo curvatura.Usaremos a mesma letra R para denotar os dois tensores; ficara claro dentro do contexto a qual tensor estamosnos referindo. Enquanto que o tensor endomorfismo curvatura e dado localmente por
R = Rlijkdxi ⊗ dxj ⊗ dxk ⊗ ∂l, (13.23)
o tensor curvatura e dado localmente por
R = Rijkldxi ⊗ dxj ⊗ dxk ⊗ dxl. (13.24)

Rodney Josue Biezuner 173
13.13 Proposicao. As componentes do tensor curvatura sao
Rijkl = gmlRmijk. (13.25)
Em particular,Rlijk = gmlRijkm. (13.26)
Prova: Pois o tensor curvatura e obtido atraves do tensor endomorfismo curvatura pela operacao de descero seu unico ındice contravariante, enquanto que o tensor endomorfismo curvatura e obtido atraves do tensorcurvatura pela operacao inversa, isto e, subir o seu ultimo ındice. Tambem podemos provar diretamente: aprimeira identidade segue de
Rijkl = R (∂i, ∂j , ∂k, ∂l) = 〈R (∂i, ∂j) ∂k, ∂l〉=⟨Rmijk∂m, ∂l
⟩= Rmijk 〈∂m, ∂l〉
= gmlRmijk,
enquanto que a segunda identidade segue de
gmlRijkm = gmlgpmRpijk = gpmg
mlRpijk = δlpRpijk = Rlijk.
Potencialmente, o tensor curvatura tem n4 componentes. A presenca de simetrias reduz bastante o
numero de componentes nao nulas e de componentes independentes:
13.14 Proposicao (Simetrias do Tensor Curvatura). O tensor curvatura satisfaz as seguintes propri-edades:
(a) R (X,Y, Z,W ) = −R (Y,X,Z,W ) .(b) R (X,Y, Z,W ) = −R (X,Y,W,Z) .(c) R (X,Y, Z,W ) = R (Z,W,X, Y ) .(d) (identidade de Bianchi) R (X,Y, Z,W ) +R (Y,Z,X,W ) +R (Z,X, Y,W ) = 0.Em termos dos componentes do tensor curvatura, estas identidades sao respectivamente equivalentes a(a) Rijkl = −Rjikl.(b) Rijkl = −Rijlk.(c) Rijkl = Rklij .(d) Rijkl +Rjkil +Rkijl = 0.
Prova: (a) Segue imediatamente de
R (X,Y )Z = −R (Y,X)Z.
(b) Como
R (X,Y, Z +W,Z +W ) = R (X,Y, Z, Z) +R (X,Y, Z,W ) +R (X,Y,W,Z) +R (X,Y,W,W ) ,
a identidade segue se provarmos queR (X,Y, Z, Z) = 0. (13.27)
A identidade (13.27) segue da compatibilidade da conexao com a metrica. De fato, temos
R (X,Y, Z, Z) = 〈R (X,Y )Z,Z〉= 〈∇X∇Y Z,Z〉 − 〈∇Y∇XZ,Z〉 −
⟨∇[X,Y ]Z,Z
⟩.

Rodney Josue Biezuner 174
Daı, pela compatibilidade da metrica,
〈∇X∇Y Z,Z〉 = X 〈∇Y Z,Z〉 − 〈∇Y Z,∇XZ〉 ,〈∇Y∇XZ,Z〉 = Y 〈∇XZ,Z〉 − 〈∇XZ,∇Y Z〉 ,⟨∇[X,Y ]Z,Z
⟩=
1
2[X,Y ] 〈Z.Z〉 .
Logo, novamente pela compatibilidade da metrica,
R (X,Y, Z, Z) = X 〈∇Y Z,Z〉 − Y 〈∇XZ,Z〉 −1
2[X,Y ] 〈Z.Z〉
=1
2X (Y 〈Z,Z〉)− 1
2Y (X 〈Z,Z〉)− 1
2[X,Y ] 〈Z.Z〉
=1
2[(XY − Y X) 〈Z,Z〉 − [X,Y ] 〈Z.Z〉]
=1
2[[X,Y ] 〈Z,Z〉 − [X,Y ] 〈Z.Z〉]
= 0.
(d) A identidade de Bianchi para o tensor curvatura segue da identidade de Bianchi para o tensor endomor-fismo curvatura.(c) Segue da identidade de Bianchi aplicadas as quatro permutacoes cıclicas dos quatro vetores:
R (X,Y, Z,W ) +R (Y,Z,X,W ) +R (Z,X, Y,W ) = 0,
R (Y,Z,W,X) +R (Z,W, Y,X) +R (W,Y,Z,X) = 0,
R (Z,W,X, Y ) +R (W,X,Z, Y ) +R (X,Z,W, Y ) = 0,
R (W,X, Y, Z) +R (X,Y,W,Z) +R (Y,W,X,Z) = 0.
Somamos estas 4 identidades. Aplicando (a) cancelamos todos os termos das primeiras duas colunas ((1, 1)cancela com (4, 2), (2, 1) cancela com (1, 2), (3, 1) cancela com (2, 2) e (4, 1) cancela com (3, 2)). Quanto aostermos da ultima coluna, segue de (a) e (b) que
R (Z,X, Y,W ) = R (X,Z,W, Y ) ,
R (W,Y,Z,X) = R (Y,W,X,Z) ,
logo a soma das 4 identidades e
2R (Z,X, Y,W ) + 2R (W,Y,Z,X) = 0.
Daı,R (Z,X, Y,W ) = −R (W,Y,Z,X) = R (Y,W,Z,X) .
13.15 Corolario. ValeR (X,X,Z,W ) = R (X,Y, Z, Z) = 0.
Em termos dos componentes do tensor curvatura,
Riikl = Rijkk = 0. (13.28)
Alem disso, qualquer soma de tres componentes do tensor curvatura obtidos atraves da permutacao cıclicade tres ındices e igual a zero.

Rodney Josue Biezuner 175
Prova: A validade das duas primeiras identidades foram vistas na demonstracao da proposicao; de qualquermodo, Riikl = 0 segue da propriedade (a) e Rijkk = 0 segue da propriedade (b). A prova da ultima afirmacaoe deixada como exercıcio (Exercıcio 13.40).
13.16 Corolario. Se M e uma variedade metrica de dimensao 2, entao das 24 = 16 componentes do tensorcurvatura, existem 12 componentes nulas e apenas uma componente independente.
Prova: Pelo corolario temos
R1111 = R1112 = R1121 = R1122 = 0,
R2211 = R2212 = R2221 = R2222 = 0,
R1211 = R2111 = 0,
R1222 = R2122 = 0.
As componentes potencialmente nao nulas sao apenas R1212, R1221, R2112, R2121. E possıvel escolher umadentre estas quatro e escrever as tres outras em funcao dela usando as relacoes de simetria. Por exemplo,escolhendo R1212, temos
R1221 = −R1212,
R2112 = −R1212,
R2121 = −R2112 = R1212.
Observe que a simetria da identidade de Bianchi nao desempenha nenhum papel, porque no caso n = 2,como tambem no caso n = 3, ela e consequencia de (a)-(c). De fato, como no maximo 3 ındices sao diferentesnestes casos, pelo menos um dos coeficientes na soma cıclica (d) sera da forma Rijkk e portanto nulo, logoela se reduzira a uma ou duas das propriedades (a)-(c). Basta ver isso no caso k = l:
Rijkk +Rjkik +Rkijk = 0
e equivalente a (Rijkk = 0)Rjkik +Rkijk = 0
ou seja,Rjkik = −Rkijk,
que corresponde a aplicar (c) e depois (a). As propriedades de simetria do endomorfismo curvatura reduzem um pouco o numero de componentes acalcular, mas nao tanto quanto o tensor curvatura, ja que nao tem tantas simetrias. Pela Proposicao 13.6temos imediatamente 8 componentes nulas
R1111 = R2
111 = R1112 = R2
112 = 0,
R1221 = R2
221 = R1222 = R2
222 = 0,
e da propriedade (a) apenas 4 componentes independentes:
Rlkii = −Rliki.
Basta entao calcular R1121, R
1212, R
2121, R
2212, ja que
R1211 = −R1
121,
R1122 = −R1
212,
R2211 = −R2
121,
R2122 = −R2
212.

Rodney Josue Biezuner 176
13.17 Exemplo (Curvatura da Esfera). Considerando a esfera como uma superfıcie de revolucao comparametrizacao
(x, y, z) (φ, θ) = (r senφ cos θ, r senφ sen θ, r cosφ),
vimos no Exemplo 12.7 que
g11 = r2,
g12 = g21 = 0,
g22 = r2 sen2 φ,
e
Γ111 = Γ2
11 = Γ112 = Γ1
21 = Γ222 = 0,
Γ212 = Γ2
21 =cosφ
senφ,
Γ122 = − senφ cosφ.
Primeiro calcularemos as componentes do tensor endomorfismo curvatura. Como observado antes, bastacalcular as 4 componentes independentes R1
121, R1212, R
2121, R
2212. Para isso usamos a formula
Rlijk = ΓmjkΓlim − ΓmikΓljm +∂Γljk∂xi
− ∂Γlik∂xj
= Γ1jkΓli1 − Γ1
ikΓlj1 + Γ2jkΓli2 − Γ2
ikΓlj2 +∂Γljk∂xi
− ∂Γlik∂xj
.
Fazendo k = i, segue que
Rliji = Γ1jiΓ
li1 − Γ1
iiΓlj1 + Γ2
jiΓli2 − Γ2
iiΓlj2 +
∂Γlji∂xi
− ∂Γlii∂xj
.
Veremos que ha apenas 2 componentes independentes nao nulas.No caso l = 1, temos que calcular R1
121 e R1212. O unico sımbolo de Christoffel Γ1
ij nao nulo e Γ122 e
Γ2ii = 0 para todo i, logo para i 6= j temos
R1iji = Γ1
jiΓ1i1 − Γ1
iiΓ1j1 + Γ2
jiΓ1i2 − Γ2
iiΓ1j2 +
∂Γ1ji
∂xi− ∂Γ1
ii
∂xj
= Γ2jiΓ
1i2 −
∂Γ1ii
∂xj.
Daı,
R1121 = Γ2
21Γ112 −
∂Γ111
∂θ= 0
e
R1212 = Γ2
12Γ122 −
∂Γ122
∂φ
=cosφ
senφ(− senφ cosφ)− ∂ (− senφ cosφ)
∂φ
= − cos2 φ+ cos2 φ− sen2 φ
= − sen2 φ.

Rodney Josue Biezuner 177
No caso l = 2, temos que calcular R2121 e R2
212. Para i 6= j temos
Rliji = Γ1jiΓ
2i1 − Γ1
iiΓ2j1 + Γ2
jiΓ2i2 − Γ2
iiΓ2j2 +
∂Γ2ji
∂xi− ∂Γ2
ii
∂xj
= Γ2jiΓ
2i2 − Γ1
iiΓ2j1 +
∂Γ2ji
∂xi.
Daı,
R2121 = Γ2
21Γ212 − Γ1
11Γ221 +
∂Γ221
∂φ
=cosφ
senφ
cosφ
senφ− 0 +
∂
∂φ
(cosφ
senφ
)=
cos2 φ
sen2 φ+− sen2 φ− cos2 φ
sen2 φ
= −1
e
R2212 = Γ2
12Γ222 − Γ1
22Γ211 +
∂Γ212
∂θ= 0.
Portanto,
R1212 = −R1
122 = − sen2 φ,
R2121 = −R2
211 = −1,
enquanto que as demais 12 componentes sao todas nulas.Para calcular as 24 = 16 componentes do tensor curvatura da esfera, pelo Corolario 13.16 basta calcular
uma componente nao nula. Como
Rijkl = gmlRmijk = g1lR
1ijk + g2lR
2ijk
segue queR1212 = g12R
1121 + g22R
2121 = −r2 sen2 φ.
Portanto, as 4 componentes nao nulas do tensor curvatura da esfera sao
R1212 = −r2 sen2 φ,
R1221 = −R1212 = r2 sen2 φ,
R2112 = −R1212 = r2 sen2 φ,
R2121 = R1212 = −r2 sen2 φ.
13.18 Exemplo (Curvatura do Plano Hiperbolico). Como vimos no Exemplo 12.9, temos
g11 = g22 =1
y2,
g12 = g21 = 0,
e
Γ111 = Γ1
22 = Γ212 = Γ2
21 = 0,
Γ211 =
1
y,
Γ112 = Γ1
21 = Γ222 = −1
y.

Rodney Josue Biezuner 178
Primeiro calcularemos as componentes do tensor endomorfismo curvatura:
Rliji = Γ1jiΓ
li1 − Γ1
iiΓlj1 + Γ2
jiΓli2 − Γ2
iiΓlj2 +
∂Γlji∂xi
− ∂Γlii∂xj
.
No caso l = 1, para i 6= j,
R1iji = Γ1
jiΓ1i1 − Γ1
iiΓ1j1 + Γ2
jiΓ1i2 − Γ2
iiΓ1j2 +
∂Γ1ji
∂xi− ∂Γ1
ii
∂xj
= Γ1jiΓ
1i1 − Γ2
iiΓ1j2 +
∂Γ1ji
∂xi.
Daı
R1121 = Γ1
21Γ111 − Γ2
11Γ122 +
∂Γ121
∂x= 0
e
R1212 = Γ1
12Γ121 − Γ2
22Γ112 +
∂Γ112
∂y
=1
y2− 1
y2+
1
y2=
1
y2.
No caso l = 2, para i 6= j,
R1iji = Γ1
jiΓ2i1 − Γ1
iiΓ2j1 + Γ2
jiΓ2i2 − Γ2
iiΓ2j2 +
∂Γ2ji
∂xi− ∂Γ2
ii
∂xj
= Γ1jiΓ
2i1 − Γ1
iiΓ2j1 + Γ2
jiΓ2i2 − Γ2
iiΓ2j2 −
∂Γ2ii
∂xj.
Daı,
R2121 = Γ1
21Γ211 − Γ1
11Γ221 + Γ2
21Γ212 − Γ2
11Γ222 −
∂Γ211
∂y
= − 1
y2+ 0− 0 +
1
y2+
1
y2
=1
y2
e
R2212 = Γ1
12Γ221 − Γ1
22Γ211 + Γ2
12Γ222 − Γ2
22Γ212 −
∂Γ222
∂x= 0.
Portanto,
R1122 = −R1
212 = −R2121 = R2
211 = − 1
y2
e as demais 12 componentes sao todas nulas.Para calcular as componentes do tensor curvatura do plano hiperbolico, basta calcular a componente nao
nula
R1212 = g12R1121 + g22R
2121 =
1
y4.

Rodney Josue Biezuner 179
Portanto, as 4 componentes nao nulas do tensor curvatura do plano hiperbolico sao
R1212 =1
y4,
R1221 = −R1212 = − 1
y4,
R2112 = −R1212 = − 1
y4,
R2121 = R1212 =1
y4.
13.19 Corolario. Se M e uma variedade metrica de dimensao n, entao das n4 componentes do tensorcurvatura, existem
n2(n2 − 1
)12
(13.29)
componentes independentes.
Prova: Pela Proposicao 13.14 (c), temosRijkl = Rklij .
Portanto, denotandop = ij, q = kl,
podemos considerar R como uma matriz simetrica
Rpq = Rqp,
cada ındice p, q compreendendo uma matriz antisimetrica, pois pela Proposicao 13.14 (a), (b), temos
Rjikl = −Rijkl,Rijlk = −Rijkl.
A dimensao do subespaco das matrizes simetricas n × n, ou seja, o numero de componentes independentesde uma matriz simetrica n× n, e
n (n+ 1)
2,
enquanto que a dimensao do subespaco das matrizes antisimetricas n× n, isto e, o numero de componentesindependentes de uma matriz antisimetrica n× n, e
n (n− 1)
2.
Portanto, Rpq vista como uma matriz simetrica tem m (m+ 1) /2 componentes independentes com m =n (n− 1) /2 componentes independentes. Logo, sem levar em conta a simetria da identidade de Bianchitemos
n (n− 1)
2
(n (n− 1)
2+ 1
)2
=n2 (n− 1)
2+ 2n (n− 1)
8=n4 − 2n3 + 3n2 − 2n
8.
componentes independentes. A identidade de Bianchi nao desempenha um papel para n = 2 e n = 3, comovimos no fim da demonstracao do Corolario 13.16, e note que
n4 − 2n3 + 3n2 − 2n
8
∣∣∣∣n=2
=n2(n2 − 1
)12
∣∣∣∣∣n=2
= 1,
n4 − 2n3 + 3n2 − 2n
8
∣∣∣∣n=3
=n2(n2 − 1
)12
∣∣∣∣∣n=3
= 6.

Rodney Josue Biezuner 180
A partir de n > 4, identidade de Bianchi reduz o numero de componentes independentes. Para ver isso deforma concreta no caso n = 4, primeiro observe que seguindo o raciocınio acima restam apenas
n2(n2 − 1
)12
∣∣∣∣∣n=3
= 21
componentes independentes, que sao exatamente as componentes da parte triangular superior ou inferior damatriz
kl→ij ↓
12 13 14 23 24 34
12 R1212 R1213 R1214 R1223 R1224 R1234
13 R1312 R1313 R1314 R1323 R1324 R1334
14 R1412 R1413 R1414 R1423 R1424 R1434
23 R2312 R2313 R2314 R2323 R2324 R2334
24 R2412 R2413 R2414 R2423 R2424 R2434
34 R3412 R3413 R3414 R3423 R3424 R3434
No caso n = 4 a identidade de Bianchi desempenha um papel, reduzindo de 21 para 20 o numero decomponentes independentes. De fato, como visto no final da demonstracao do Corolario 13.16, qualquer novacondicao deve envolver 4 ındices distintos. As componentes com 4 ındices diferentes ocupam a antidiagonalda matriz acima, logo so ha 3 componentes independentes com 4 ındices diferentes; por exemplo, na partetriangular superior da matriz acima estas componentes sao: R1234, R1423 = R2314 e R1324 = −R3124. Aidentidade de Bianchi
R1234 +R2314 +R3124 = 0
permite escreverR1234 = −R2314 −R3124,
o que elimina R1234 como componente independente.No caso geral, a identidade de Bianchi elimina
(n4
)componentes independentes, ja que este e o numero
de modos que podemos escolher 4 ındices diferentes dentre n ındices e a identidade de Bianchi elimina umdestes (no caso n = 5, a identidade de Bianchi eliminara R1234, R1345, R1245, R1235, R2345 como componentesindependentes). Portanto, o numero total final de componentes independentes e
n4 − 2n3 + 3n2 − 2n
8−(n
4
)=n4 − 2n3 + 3n2 − 2n
8− n!
(n− 4)!4!
=n4 − 2n3 + 3n2 − 2n
8− n (n− 1) (n− 2) (n− 3)
24
=3n4 − 6n3 + 9n2 − 6n−
(n4 − 6n3 + 11n2 − 6n
)24
=2n4 − 2n2
24
=n2(n2 − 1
)12
.
Assim, existem 6 componentes independentes para o tensor curvatura de variedades de dimensao 3 dentre34 = 81 componentes, e 20 componentes independentes para o tensor curvatura de variedades de dimensao4 dentre 44 = 256 componentes, como as que sao estudadas em relatividade geral.
13.3 Curvatura de Ricci e Curvatura Escalar
Porque 4-tensores sao tao complexos, como vimos na secao anterior, e frequentemente util construir tensoresmais simples que resumem alguma informacao contida no tensor curvatura. Obviamente, ao simplificar o

Rodney Josue Biezuner 181
tensor curvatura estamos perdendo informacao: os tensores mais simples contem menos informacao que otensor original. O mais importante dentre estes tensores e o tensor de Ricci.
13.20 Definicao. Seja M uma variedade metrica. O tensor curvatura de Ricci de M (ou simplesmentetensor de Ricci) denotado Ric, e o campo tensorial covariante de ordem 2 definido como o traco do tensorendomorfismo curvatura em relacao ao seu primeiro ındice covariante e seu unico ındice contravariante ou,equivalentemente, como o traco em relacao a metrica do tensor curvatura no seu primeiro e ultimo ındices.Portanto, os componentes da curvatura de Ricci sao dados por
Rij = Rkkij = gkmRkijm. (13.30)
Pelas simetrias do tensor endomorfismo curvatura, usar tracos diferentes nao faria diferenca ou apenasimplicaria em uma troca de sinal:
Rij =
n∑k=1
Rkkij = −n∑k=1
Rkikj =
n∑k=1
Rkijk.
13.21 Proposicao. A curvatura de Ricci e um campo tensorial simetrico, isto e,
Rij = Rji. (13.31)
Prova: TemosRij = gkmRkijm = gkmRjmki = gmkRmjik = Rji.
O segundo tensor e a curvatura escalar, que e uma funcao real.
13.22 Definicao. Seja M uma variedade metrica. A curvatura escalar de M , denotada S, e a funcaoreal S : M −→ R definida como o traco em relacao a metrica do tensor de Ricci:
S = trg Ric = gijRij . (13.32)
13.23 Exemplo (Curvatura de Ricci e Curvatura Escalar da Esfera). Para variedades metricas dedimensao 2 a curvatura de Ricci e
Rij = Rkkij = R11ij +R2
2ij .
Referindo aos calculos efetuados no Exemplo 13.17, segue que a curvatura de Ricci da esfera e
R11 = R1111 +R2
211 = 1,
R12 = R21 = R1112 +R2
212 = 0,
R22 = R1122 +R2
222 = sen2 φ.
Para variedades riemannianas de dimensao 2 a curvatura escalar e
S = gijRij = g11R11 + 2g12R12 + g22R22.
Logo, a curvatura escalar da esfera de raio r e
S =1
r2+
sen2 φ
r2 sen2 φ=
2
r2.
Ou seja, a curvatura escalar da esfera tende a 0 (curvatura escalar do plano euclideano) quando r →∞.

Rodney Josue Biezuner 182
13.24 Exemplo (Curvatura de Ricci e Curvatura Escalar do Plano Hiperbolico). Referindo aoscalculos efetuados no Exemplo 13.18, segue que
R11 = R1111 +R2
211 = − 1
y2,
R12 = R21 = R1112 +R2
212 = 0,
R22 = R1122 +R2
222 = − 1
y2.
Logo, a curvatura escalar do plano hiperbolico e
S = y2
(− 1
y2
)+ y2
(− 1
y2
)= −2.
Como o tensor metrica e a curvatura de Ricci sao ambos tensores 2-covariantes simetricos, e natural seperguntar se existe uma relacao mais direta entre eles.
13.25 Definicao. Uma variedade metrica M e chamada uma variedade de Einstein se existe uma funcaof : M −→ R tal que
Ric = fg. (13.33)
Neste caso, dizemos tambem que g e uma metrica de Einstein.
Pela Proposicao 13.32, variedades de curvatura seccional constante (esta nocao de curvatura sera definidana proxima secao) sao variedades de Einstein. Observe que como
S = trg Ric = f trg g = nf,
poistrg g = gjkgjk = gjkgkj = δjj = n,
segue que
f =S
n.
Logo,
13.26 Proposicao. M e uma variedade de Einstein se e somente se
Ric =S
ng. (13.34)
O nome variedades de Einstein vem da equacao de Einstein (em unidades geometrizadas G = c = 1) quecomo deduziremos mais tarde e
Ric−1
2Sg + Λg = 8πT,
onde T e um 2-tensor simetrico (o tensor de momento-energia) que descreve a densidade e fluxo do momentoe energia presentes em cada ponto do espaco-tempo e Λ e a constante cosmologica. No vacuo, T = 0 e aequacao de Einstein se torna
Ric−1
2Sg + Λg = 0
(e assim, a constante cosmologica mede a densidade de energia do vacuo). Tomando o traco desta equacaocom respeito a metrica, como trg Ric = S e trg g = n = 4 para o espaco-tempo 4-dimensional, segue que
S − 2S + 4Λ = 0

Rodney Josue Biezuner 183
ou seja,S = 4Λ
(curvatura escalar do vacuo). Segue que a equacao de Einstein para o vacuo e
Ric = Λg,
ou seja, a metrica do vacuo e uma metrica de Einstein no sentido da Definicao 13.33. Vale a pena observarque Einstein considerou como o seu maior erro a introducao da constante cosmologica na sua equacao darelatividade geral. Ele a introduziu para poder produzir um universo estatico; quando Hubble observou aexpansao do universo atraves do afastamento mutuo das galaxias, Einstein removeu a constante cosmologicada sua equacao (o que equivale efetivamente a considerar Λ = 0). Quando no final da decada de 90 foiobservada a aceleracao da expansao do universo, ela foi reintroduzida, com valor positivo a ser determinadoatraves de experimentos (correntemente, o valor e bem proximo de zero).
Matematicamente, o interesse em metricas de Einstein provem de um resultado provado por Hilbert:metricas de Einstein sao pontos crıticos para o funcional curvatura escalar
S (g) =
∫M
S dV
no espaco de todas as metricas de M com volume constante.
13.4 Curvatura Seccional
13.27 Definicao. Dado um espaco vetorial real V com produto interno 〈·, ·〉 e vetores v, w ∈ V linearmenteindependentes, a area do paralelogramo determinado por v, w e
|v ∧ w| =√‖v‖2 ‖w‖2 − 〈v, w〉2. (13.35)
13.28 Proposicao. v, w ∈ V sao linearmente independentes se e somente se
|v ∧ w| 6= 0.
Prova: Mostraremos que |v ∧ w| = 0 se e somente se v e w sao linearmente dependentes. Se w = αv, entao
|v ∧ w| =√‖v‖2 ‖αv‖2 − 〈v, αv〉2 = α
√‖v‖4 − 〈v, v〉2 = 0.
Reciprocamente, se |v ∧ w| = 0 implica que vale a igualdade na desigualdade de Cauchy-Shwarz:
〈v, w〉 = ‖v‖ ‖w‖ .
Assuma w 6= 0, caso contrario v e w sao automaticamente linearmente dependentes e nao ha nada que preciseser provado. Considere o vetor
z = v − 〈v, w〉‖w‖2
w.

Rodney Josue Biezuner 184
Temos
‖z‖2 = 〈z, z〉 =
⟨v − 〈v, w〉
‖w‖2w, v − 〈v, w〉
‖w‖2w
⟩
= 〈v, v〉 −
⟨v,〈v, w〉‖w‖2
w
⟩−
⟨〈v, w〉‖w‖2
w, v
⟩+
⟨〈v, w〉‖w‖2
w,〈v, w〉‖w‖2
w
⟩
= ‖v‖2 − 〈v, w〉2
‖w‖2− 〈v, w〉
2
‖w‖2+〈v, w〉2 ‖w‖2
‖w‖4
= ‖v‖2 − ‖v‖2 − ‖v‖2 + ‖v‖2
= 0.
logo
v =〈v, w〉‖w‖2
w.
13.29 Definicao. Seja M uma variedade metrica e σ um plano de TpM . A curvatura seccional de Massociada a σ e definida por
K (X,Y ) =R (X,Y, Y,X)
|X ∧ Y |2=
R (X,Y, Y,X)
‖X‖2 ‖Y ‖2 − 〈X,Y 〉2. (13.36)
onde X,Y ∈ TpM sao quaisquer vetores que formam uma base para σ.
A curvatura seccional esta bem definida, isto e, independe da base escolhida para o plano σ. De fato, sejamX,Y e Z,W duas bases para σ, de modo que existe uma matriz invertıvel A = (aij)2×2 tal que
X = a11Z + a21W,
Y = a12Z + a22W.
Temos, usando as simetrias do tensor curvatura (em primeiro lugar, o fato que R (Z,Z, ·, ·) = R (W,W, ·, ·) =R (·, ·, Z, Z) = R (·, ·,W,W ) = 0),
R (X,Y, Y,X) = R (a11Z + a21W,a12Z + a22W,a12Z + a22W,a11Z + a21W )
= R (a11Z, a22W,a22W,a11Z)
+R (a11Z, a22W,a12Z, a21W )
+R (a21W,a12Z, a12Z, a21W )
+R (a21W,a12Z, a22W,a11Z)
= a211a
212R (Z,W,W,Z) + a11a21a12a22R (Z,W,Z,W )
+ a221a
222R (W,Z,Z,W ) + a11a21a12a22R (W,Z,W,Z)
=(a2
11a222 − 2a11a12a21a22 + a2
12a221
)R (Z,W,W,Z)
= (detA)2R (Z,W,W,Z) ,

Rodney Josue Biezuner 185
e
|X ∧ Y |
= ‖X‖2 ‖Y ‖2 − 〈X,Y 〉2
= ‖a11Z + a21W‖2 ‖a12Z + a22W‖2 − 〈a11Z + a21W,a12Z + a22W 〉2
=(a2
11 ‖Z‖2
+ 2a11a21 〈Z,W 〉+ a221 ‖W‖
2)(
a212 ‖Z‖
2+ 2a12a22 〈Z,W 〉+ a2
22 ‖W‖2)
−[a11a12 ‖Z‖2 + (a11a22 + a21a12) 〈Z,W 〉+ a21a22 ‖W‖2
]2= a2
11a212 ‖Z‖
4+ 4 (a11a21a12a22) 〈Z,W 〉2 + a2
21a222 ‖W‖
4+(a2
11a222 + a2
21a212
)‖Z‖2 ‖W‖2
+ 2(a2
11a12a22 + a212a11a21
)‖Z‖2 〈Z,W 〉+ 2
(a2
21a12a22 + a222a11a21
)‖W‖2 〈Z,W 〉
− a211a
212 ‖Z‖
4 −(a2
11a222 + 2a11a12a21a22 + a2
12a221
)〈Z,W 〉2 − a2
21a222 ‖W‖
4 − 2 (a11a12a21a22) ‖Z‖2 ‖W‖2
− 2(a2
11a12a22 + a212a11a21
)‖Z‖2 〈Z,W 〉 − 2
(a2
21a12a22 + a222a11a21
)‖W‖2 〈Z,W 〉
=(a2
11a222 − 2a11a12a21a22 + a2
12a221
) [‖Z‖2 ‖W‖2 − 〈Z,W 〉2
]= (detA)
2 |Z ∧W | .
Logo,R (X,Y, Y,X)
|X ∧ Y |=R (Z,W,W,Z)
|Z ∧W |.
O conhecimento da curvatura seccional para todos os planos σ determina o tensor curvatura:
13.30 Proposicao. Se R1 e R2 sao dois tensores covariantes de ordem 4 em um espaco vetorial V quesatisfazem as propriedades de simetria listadas na Proposicao 13.14 tais que
K1 (X,Y ) = K2 (X,Y )
para todos vetores linearmente independentes X,Y ∈ V , entao
R1 = R2.
Prova: Por hipotese, para quaisquer vetores X,Y ∈ V ,
R1 (X,Y, Y,X) = R2 (X,Y, Y,X) (13.37)
(segue diretamente da definicao no caso em que X,Y sao linearmente independentes; se X,Y sao linearmentedependentes, um e multiplo escalar do outro e a identidade e trivial, ja que cada lado e igual a zero pelaspropriedades de simetria). Daı,
R1 (X + Z, Y, Y,X + Z) = R2 (X + Z, Y, Y,X + Z) . (13.38)
Como
R1 (X +W,Y, Y,X +W ) = R1 (X,Y, Y,X) +R1 (X,Y, Y,W )
+R1 (W,Y, Y,X) +R1 (W,Y, Y,W )
= R1 (X,Y, Y,X) + 2R1 (X,Y, Y,W ) +R1 (W,Y, Y,W )
e analogamente para R2 (X +W,Y, Y,X +W ), concluımos que
R1 (X,Y, Y,W ) = R2 (X,Y, Y,W ) . (13.39)

Rodney Josue Biezuner 186
Desta identidade segue que
R1 (X,Y + Z, Y + Z,W ) = R2 (X,Y + Z, Y + Z,W ) . (13.40)
Como
R1 (X,Y + Z, Y + Z,W ) = R1 (X,Y, Y,W ) +R1 (X,Y, Z,W )
+R1 (X,Z, Y,W ) +R1 (X,Z,Z,W )
e analogamente para R2 (X,Y + Z, Y + Z,W ), segue que
R1 (X,Y, Z,W ) +R1 (X,Z, Y,W ) = R2 (X,Y, Z,W ) +R2 (X,Z, Y,W ) . (13.41)
Defina agoraR = R1 −R2. (13.42)
Entao R e um 4-tensor covariante que satisfaz as mesmas propriedades que R1, R2 satisfazem. A identidade(13.41) implica que
R (X,Y, Z,W ) +R (X,Z, Y,W ) = 0.
Portanto, R e antisimetrico com relacao a qualquer par adjacente de ındices: a relacao acima prova aantisimetricidade de R para o par adjacente interno e das regras de simetria da Proposicao 13.14 obtemos aantisimetricidade em relacao aos pares adjacentes esquerdo e direito. Daı
R (Y,Z,X,W ) = −R (Y,X,Z,W ) = R (X,Y, Z,W ) ,
R (Z,X, Y,W ) = −R (X,Z, Y,W ) = R (X,Y, Z,W ) .
Da identidade de Bianchi
R (X,Y, Z,W ) +R (Y, Z,X,W ) +R (Z,X, Y,W ) = 0
concluımos entao que3R (X,Y, Z,W ) = 0
para todos os vetores X,Z, Y,W , o que implica que R e o tensor nulo e portanto R1 = R2. Usando a curvatura seccional, pode-se dar interpretacoes geometricas para as curvaturas de Ricci e
escalar. Seja X um vetor unitario em TpM e complete ele ate uma base ortonormal X,E2, . . . , En deTpM . Entao
Ric (X,X) = R11 = gkmRk11m = δkmR (X,Ek, Em, X) =
n∑k=1
R (X,Ek, Ek, X) =
n∑k=2
R (X,Ek, Ek, X)
=
n∑k=2
R (X,Ek, Ek, X)
|X ∧ Ek|,
ou seja,
Ric (X,X) =
n∑k=2
K (X,Ek) . (13.43)
Em outras palavras, para cada vetor unitario X ∈ TpM , Ric (X,X) e a soma das curvaturas seccionais deplanos gerados por X e os outros vetores de uma base ortonormal. Por outro lado, como Ric e bilinear e

Rodney Josue Biezuner 187
simetrico, ele e completamente determinado pelos seus valores Ric (X,X) em vetores unitarios X: se X,Ysao vetores tais que X + Y,X − Y 6= 0,
Ric (X,Y ) =1
4(Ric (X + Y,X + Y )− Ric (X − Y,X − Y ))
=1
4
[‖X + Y ‖2 Ric
(X + Y
‖X + Y ‖,X + Y
‖X + Y ‖
)− ‖X − Y ‖2 Ric
(X − Y‖X − Y ‖
,X − Y‖X − Y ‖
)]=
1
4
[‖X + Y ‖2
n∑k=2
K (X + Y,Ek)− ‖X − Y ‖2n∑k=2
K (X − Y, Fk)
],
onde X,E2, . . . , En , X,F2, . . . , Fn sao bases ortonormais de TpM ; se X + Y = 0 ou X − Y = 0, oresultado continua valendo, ja que o termo correspondente e nulo.
Ric (X,Y ) = ‖X‖ ‖Y ‖Ric
(X
‖X‖,Y
‖Y ‖
).
Similarmente, se E1, . . . , En e uma base ortonormal para TpM , entao a curvatura escalar e dada por
S = gijRij = δijRij = Rii =
n∑i=1
Ric (Ei, Ei) ,
ou seja,
S =∑i 6=j
K (Ei, Ej) . (13.44)
Em outras palavras, a curvatura escalar e a soma de todas as curvaturas seccionais de planos gerados porpares de vetores de uma base ortonormal.
13.31 Exemplo (Curvaturas de Variedades de Dimensao 2). No caso de variedades de dimensao 2existe apenas um plano em TpM : o proprio. Para estas variedades, a curvatura seccional pode ser consideradauma funcao K : M −→ R. Alem disso, se E1, E2 e uma base ortonormal para TpM , segue da discussaoanterior que
S (p) = 2K (E1, E2) = 2K (p) ,
ou seja, para variedades riemannianas de dimensao 2 a curvatura seccional e essencialmente a curvaturaescalar:
S = 2K. (13.45)
Alem disso, temosR (X,Y, Z,W ) = K (p) [〈X,W 〉 〈Y, Z〉 − 〈X,Z〉 〈Y,W 〉] (13.46)
De fato, o unico componente independente de R e
R1221 = R (E1, E2, E2, E1) = K (E1, E2) = K (p) ,
enquanto que os componentes nao nulos sao dados por
R1212 = −R1221 = −K (p) ,
R2112 = −R1212 = R1221 = K (p) ,
R2121 = −R1221 = −K (p) .
Como a equacao acima define um tensor 4-covariante de ordem 4 que tem as mesmas componentes que R,ele e R. Segue que
Ric (X,Y ) = K (p) g (X,Y ) , (13.47)

Rodney Josue Biezuner 188
pois
Ric (X,Y ) =1
4
[‖X + Y ‖2
n∑k=2
K (X + Y,Ek)− ‖X − Y ‖2n∑k=2
K (X − Y, Fk)
]
=1
4
[‖X + Y ‖2K (X + Y,E2)− ‖X − Y ‖2K (X − Y, F2)
]= K (p)
1
4
[‖X + Y ‖2 − ‖X − Y ‖2
]= K (p) g (X,Y ) .
Em particular, toda variedade de dimensao 2 e uma variedade de Einstein:
Ric =S
2g. (13.48)
13.5 Variedades Riemannianas de Curvatura Seccional Constante
Variedades riemannianas que possuem curvatura seccional constante desempenham papel fundamental emGeometria Riemanniana. Algumas das mais importantes sao os espacos modelo.
13.32 Proposicao. Seja M uma variedade riemanniana com curvatura seccional constante K0 ∈ R. Entaoas curvaturas de M sao dadas pelas formulas
R (X,Y )Z = K0 [〈Y, Z〉X − 〈X,Z〉Y ] . (13.49)
R (X,Y, Z,W ) = K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉] . (13.50)
Ric = (n− 1)K0g. (13.51)
S = n (n− 1)K0. (13.52)
Reciprocamente, se (13.49) ou (13.50) valem, entao a curvatura seccional e constante.Em particular, variedades com curvatura seccional constante sao variedades de Einstein.
Prova: Para provar (13.50) defina um 4-tensor covariante R em M por
R (X,Y, Z,W ) = K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉] . (13.53)
Entao R satisfaz todas as propriedades de simetria da Proposicao 13.14. De fato,
R (Y,X,Z,W ) = K0 [〈Y,W 〉 〈X,Z〉 − 〈Y, Z〉 〈X,W 〉]= −K0 [〈X,W 〉 〈Y, Z〉 − 〈X,Z〉 〈Y,W 〉]
= R (X,Y, Z,W ) ,
R (X,Y,W,Z) = K0 [〈X,Z〉 〈Y,W 〉 − 〈X,W 〉 〈Y,Z〉]= −K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉]
= R (X,Y, Z,W ) ,
R (Z,W,X, Y ) = K0 [〈Z, Y 〉 〈W,X〉 − 〈Z,X〉 〈W,Y 〉]= K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉]
= R (X,Y, Z,W )

Rodney Josue Biezuner 189
e
R (X,Y, Z,W ) + R (Y,Z,X,W ) + R (Z,X, Y,W )
= K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉+ 〈Y,W 〉 〈Z,X〉 − 〈Y,X〉 〈Z,W 〉+ 〈Z,W 〉 〈X,Y 〉 − 〈Z, Y 〉 〈X,W 〉]= 0.
Como
K (X,Y ) =R (X,Y, Y,X)
‖X‖2 ‖Y ‖2 − 〈X,Y 〉2=K0 [〈X,X〉 〈Y, Y 〉 − 〈X,Y 〉 〈X,Y 〉]
‖X‖2 ‖Y ‖2 − 〈X,Y 〉2= K0, (13.54)
segue da Proposicao 13.30 que R = R e a recıproca segue entao de (13.54).(13.49) e equivalente a (13.50): claramente (13.50) segue de (13.49) pela definicao da curvatura a partir
do endomorfismo curvatura; reciprocamente, se (13.50) vale, entao
〈R (X,Y )Z,W 〉 = R (X,Y, Z,W ) = K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉] ,
para todo vetor W e como tambem
〈K0 [〈Y,Z〉X − 〈X,Z〉Y ] ,W 〉 = K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉]
para todo vetor W , segue que
R (X,Y )Z = K0 [〈Y, Z〉X − 〈X,Z〉Y ] .
Se X,Y sao vetores nao nulos, como vimos na discussao no final da secao anterior, temos
Ric (X,Y ) =1
4
[‖X + Y ‖2
n∑k=2
K (X + Y,Ek)− ‖X − Y ‖2n∑k=2
K (X − Y, Fk)
]
=1
4
[‖X + Y ‖2 (n− 1)K0 − ‖X − Y ‖2 (n− 1)K0
]= (n− 1)K0
1
4
[‖X + Y ‖2 − ‖X − Y ‖2
]= (n− 1)K0 〈X,Y 〉 ;
se um dos vetores e nulo, o resultado vale trivialmente. Alem disso,
S =∑i 6=j
K (Ei, Ej) =(n2 − n
)K0 = n (n− 1)K0.
13.33 Corolario. Seja M uma variedade riemanniana. Para cada ponto p ∈M escolha uma base ortonor-mal E1, E2, . . . , En de TpM e defina
Rijkl = R (Ei, Ej , Ek, El) .
Entao M possui curvatura seccional constante K0 se e somente se
Rijji = −Rijij = K0 para todo i 6= j e
Rijkl = 0 nos outros casos,
para todo p ∈M .

Rodney Josue Biezuner 190
Prova: Pela proposicao, M possui curvatura seccional constante K0 se e somente se
R (X,Y, Z,W ) = K0 [〈X,W 〉 〈Y,Z〉 − 〈X,Z〉 〈Y,W 〉] .
Como um tensor e determinado pelos seu valores em uma base, esta equacao e valida se e somente se
R (Ei, Ej , Ek, El) = K0 [〈Ei, El〉 〈Ej , Ek〉 − 〈Ei, Ek〉 〈Ej , El〉]= K0 (δilδjk − δikδjl)
=
1 se i = l e j = k e i 6= j−1 se i = k e j = l e i 6= j0 caso contrario.
.
Vemos que em uma variedade riemanniana de curvatura seccional constante o tensor curvatura pode serexpresso diretamente em funcao da metrica.
13.6 Apendice: Motivacao para a definicao do tensor curvatura
13.6.1 Efeitos de Mare em Mecanica Newtoniana
Primeiro, analizaremos os efeitos de mare do ponto de vista Newtoniano. Considere uma famılia de trajetoriasde partıculas-teste
F (s, t) =(x1 (s, t) , . . . , xn (s, t)
).
Aqui, n = 3. Pela segunda lei de Newton, a equacao de movimento para cada trajetoria (para cada s fixado)e dada por
∂2F
∂t2(s, t) +∇U (s, t) = 0
onde U e o potencial gravitacional Newtoniano. Para calcular a aceleracao relativa entre as trajetoriasproduzidas por forcas de mare, calculamos
∂
∂s
[∂2F
∂t2(s, t) +∇U (s, t)
]= 0.
Escrevendo em coordenadas∂2F
∂t2(s, t) =
(x1 (s, t) , . . . , xn (s, t)
)e
∇φ (s, t) =
(∂U
∂x1(s, t) , . . . ,
∂U
∂xn(s, t)
).
Segue que, comutando derivadas,∂
∂s
∂2xi
∂t2=
∂2
∂t2∂xi
∂s
enquanto que, pela regra da cadeia,
∂
∂s
∂U
∂xi=
n∑j=1
∂2U
∂xi∂xj∂xj
∂s.
Assim, em coordenadas, obtemos
∂2
∂t2∂xi
∂s+
n∑j=1
∂2U
∂xi∂xj∂xj
∂s= 0

Rodney Josue Biezuner 191
O termo∂2
∂t2
(∂F
∂s
)=
∂2
∂t2
(∂x1
∂s, . . . ,
∂xn
∂s
)e a aceleracao relativa das trajetorias, enquanto que o termo
n∑i,j=1
∂2U
∂xi∂xj∂xj
∂s
corresponde as forcas de gravidade que produzem as mares.
13.6.2 Efeitos de Mare em Relatividade Geral: Curvatura como uma medidada aceleracao relativa de trajetorias geodesicas
Agora analizaremos os efeitos de mare do ponto de vista de Relatividade Geral. Considere uma variacaogeodesica
F (s, t) : (−ε, ε)× [0, 1] −→M,
ou seja, para cada s fixado, a curva Fs (t) = F (s, t) e uma geodesica de M ; um exemplo e a variacaoconsiderada na demonstracao do Lema de Gauss (Lema 12.26). O vetor
∂F
∂t
e o vetor tangente em cada geodesica Fs (t), que pode ser visto como a velocidade temporal de uma partıculahipotetica ao longo desta trajetoria geodesica. Como a trajetoria e uma geodesica, temos
D
dt
∂F
∂t= 0,
isto e, a aceleracao em cada trajetoria Fs (t) da variacao e nula. Ja o vetor
∂F
∂s
mede a velocidade de afastamento, ou taxa de variacao do espaco entre as trajetorias geodesicas (a magnitudedeste vetor sera efetivamente medida na Secao ??). Ou seja, enquanto enxergamos a variavel t como umavariavel temporal, isto e, Fs (t) e a posicao de uma partıcula hipotetica na trajetoria geodesica Fs no instantede tempo t, a variavel s e vista como uma variavel espacial, medindo a separacao entre duas trajetoriasgeodesicas. Queremos obter a aceleracao relativa das trajetorias no tempo
D2
dt2
(∂F
∂s
)=D
dt
D
dt
∂F
∂s,
ou seja, a aceleracao temporal da taxa de variacao espacial (afastamento) das trajetorias geodesicas. EmRelatividade Geral medir isso e importante, pois corresponde a medir os efeitos gravitacionais de mare. EmRn, como as derivadas parciais comutam, temos para uma variacao geral, nao necessariamente geodesica,que
∂2
∂t2
(∂F
∂s
)=
∂
∂s
(∂2F
∂t2
),
de modo que medir a taxa de variacao espacial das aceleracoes temporais das partıculas nas diferentestrajetorias e equivalente a medir a aceleracao temporal da taxa de variacao espacial das trajetorias; se, emparticular, a variacao e geodesica, ou seja, uma famılia de retas, temos
∂2
∂t2
(∂F
∂s
)=
∂
∂s
(∂2F
∂t2
)= 0,

Rodney Josue Biezuner 192
ou seja, partıculas seguindo ao longo de retas paralelas nao sofrem aceleracao uma em direcao a outra, porqueno final das contas as retas paralelas se mantem a mesma distancia uma da outra e ∂F/∂s = 0. Mas emvariedades riemannianas (nao localmente isometricas a Rn, como veremos mais tarde) isso nao e verdade
porque as derivadas covariantesD
dteD
dsnao comutam, de modo que, enquanto que
D
ds
(D
dt
∂F
∂t
)= 0,
em geral temosD2
dt2
(∂F
∂s
)6= 0
e existe uma aceleracao temporal mensuravel entre as trajetorias geodesicas na variedade. De fato, a naocomutatividade das derivadas covariantes pode ser medida pelo tensor curvatura:
13.34 Lema (Curvatura como medida da nao comutividade da Derivada Covariante). Seja F :(−ε, ε)× [a, b] −→M uma variacao e V um campo vetorial ao longo de F . Entao,
D
dt
DV
ds− D
ds
DV
dt= R
(∂F
∂t,∂F
∂s
)V.
Prova: EscrevaF (s, t) =
(x1 (s, t) , . . . , xn (s, t)
)e
V = V i (s, t) ∂i
em uma vizinhanca coordenada. Entao
DV
ds=D
ds
(V i∂i
)=∂V i
∂s∂i + V i
D
ds∂i,
dondeD
dt
DV
ds=∂2V i
∂s∂t∂i +
∂V i
∂s
D
dt∂i +
∂V i
∂t
D
ds∂i + V i
D
dt
D
ds∂i.
Trocando a letra t pela letra s, tambem obtemos
D
ds
DV
dt=∂2V i
∂s∂t∂i +
∂V i
∂t
D
ds∂i +
∂V i
∂s
D
dt∂i + V i
D
ds
D
dt∂i.
Logo,D
dt
DV
ds− D
ds
DV
dt= V i
(D
dt
D
ds− D
ds
D
dt
)∂i. (13.55)
Como
∂F
∂t=∂xj
∂t∂j ,
∂F
∂s=∂xk
∂s∂k,
temosD
ds∂i = ∇ ∂xk
∂s ∂k∂i =
∂xk
∂s∇∂k∂i.

Rodney Josue Biezuner 193
Daı,
D
dt
D
ds∂i =
D
dt
(∂xk
∂s∇∂k∂i
)=∂2xk
∂s∂t∇∂k∂i +
∂xk
∂s
D
dt(∇∂k∂i)
=∂2xk
∂s∂t∇∂k∂i +
∂xk
∂s∇ ∂xj
∂t ∂j(∇∂k∂i)
=∂2xk
∂s∂t∇∂k∂i +
∂xk
∂s
∂xj
∂t∇∂j∇∂k∂i.
Da mesma forma, trocando t por s e depois j por k,
D
ds
D
dt∂i =
∂2xk
∂t∂s∇∂k∂i +
∂xk
∂t
∂xj
∂s∇∂j∇∂k∂i
=∂2xk
∂s∂t∇∂k∂i +
∂xj
∂t
∂xk
∂s∇∂k∇∂j∂i.
Portanto,
D
dt
DV
ds− D
ds
DV
dt= V i
∂xj
∂t
∂xk
∂s
(∇∂j∇∂k∂i −∇∂k∇∂j∂i
)= V i
∂xj
∂t
∂xk
∂sR (∂j , ∂k) ∂i
pois∇[∂j ,∂k]∂i = 0
ja que [∂j , ∂k] = 0. O fato de que R e um tensor permite agora escrever
D
dt
DV
ds− D
ds
DV
dt= R
(∂xj
∂t∂j ,
∂xk
∂s∂k
)V i∂i
= R
(∂F
∂t,∂F
∂s
)V.
Observe que definir a curvatura simplesmente por
R (X,Y )Z = ∇X∇Y Z −∇Y∇XZ,
de modo que a curvatura mediria apenas e diretamente o grau de nao comutatividade da derivada covariante,nao e satisfatorio, porque esta expressao nao define um tensor. De fato, ela nao e linear na terceira variavel:
∇X∇Y (fZ)−∇Y∇X (fZ) = ∇X (f∇Y Z)−∇X ((Y f)Z)−∇Y (f∇XZ) +∇Y ((Xf)Z)
= f∇X∇Y Z + (Xf)∇Y Z + (Y f)∇X (Z) +X (Y f)Z
− f∇Y∇XZ − (Y f)∇XZ − (Xf)∇Y Z − Y (Xf)Z
= f∇X∇Y Z − f∇Y∇XZ + [X (Y f)− Y (Xf)]Z
= f (∇X∇Y Z −∇Y∇XZ) + [X,Y ] (f)Z.
Para obter um tensor, precisamos definir a curvatura como
R (X,Y )Z = ∇X∇Y Z −∇Y∇XZ −∇[X,Y ]Z.

Rodney Josue Biezuner 194
pois∇[X,Y ] (fZ) = f∇[X,Y ]Z + [X,Y ] (f)Z
e o termo [X,Y ] (f)Z que restou acima e eliminado, deixando −f∇[X,Y ]Z. A demonstracao do Lema 13.34nao funciona se R nao e um tensor.
Podemos agora calcular a aceleracao temporal entre as geodesicas da variedade.
13.35 Proposicao (Equacao do Desvio Geodesico). Seja F : (−ε, ε) × [a, b] −→ M uma variacaogeodesica. Entao,
D2
dt2∂F
∂s+R
(∂F
∂s,∂F
∂t
)∂F
∂t= 0
Prova: Como cada trajetoria de F e uma geodesica, temos
D
dt
∂F
∂t= 0,
dondeD
ds
D
dt
∂F
∂t= 0.
Invocando o Lema de Simetria 12.25 (cuja validade depende de que o tensor torcao seja nulo), obtemos
0 =D
ds
(D
dt
∂F
∂t
)=D
dt
(D
ds
∂F
∂t
)−R
(∂F
∂t,∂F
∂s
)∂F
∂t
=D
dt
(D
dt
∂F
∂s
)+R
(∂F
∂s,∂F
∂t
)∂F
∂t
=D2
dt2∂F
∂s+R
(∂F
∂s,∂F
∂t
)∂F
∂t.
A equacao do desvio geodesico da Relatividade Geral e chamada equacao de Jacobi em Geometria Rie-manniana. Em Relatividade Geral, o termo da curvatura
R
(∂F
∂t,∂F
∂s
)∂F
∂t
e interpretado como sendo o responsavel pelas forcas que produzem efeitos de mare, isto e, a curvaturado espacotempo e que causa os efeitos de mare, fazendo com que partıculas-teste que seguem trajetoriageodesicas no espacotempo acelerem uma na direcao da outra.
13.6.3 Curvatura como uma medida do transporte paralelo em trajetorias fe-chadas
Outro modo importante de entender o tensor curvatura e como uma medida (infinitesimal) de quanto otransporte paralelo em trajetorias fechadas deixa de retornar o mesmo vetor ou, equivalentemente, o quantoo transporte paralelo de um vetor de um ponto para outro proximo depende da trajetoria que liga estes doispontos. O enunciado e demonstracao dados a seguir e de [Rossmann], Theorem 2.3.5, pp. 106-107 (vejatambem [MTW], Section 11.4, [Shutz], Section 6.5, pp. 157–161, [Benn-Tucker], Section 6.4, pp. 208–212 e[Dodson-Poston], pp. 309–310).
13.36 Definicao. Uma superfıcie parametrizada e uma aplicacao diferenciavel
F : [a, b]× [c, d] −→M.
Um campo vetorial ao longo de F e um campo diferenciavel V : [a, b]× [c, d] −→ TM tal que V (s, t) ∈TF (s,t)M para cada (s, t).

Rodney Josue Biezuner 195
Uma superfıcie parametrizada difere em poucos detalhes de uma variacao. Em particular, o Lema 13.34 valepara uma superfıcie parametrizada.
13.37 Teorema (Efeito da Curvatura no Transporte Paralelo em uma Trajetoria Fechada). SejaF : [s0, S]× [t0, T ] −→M uma superfıcie parametrizada e denote
p = F (s0, t0) ,
U =∂F
∂s
∣∣∣∣(s0,t0)
,
V =∂F
∂t
∣∣∣∣(s0,t0)
.
Sejaτ : TpM −→ TpM
o transporte paralelo ao longo das curvas da fronteira desta superfıcie parametrizada, isto e,
τ = τs0t0+∆t→t0 τt0+∆ts0+∆s→s0 τ
s0+∆st0→t0+∆t τ
t0s0→s0+∆s
onde
τ t0s0→s0+∆s e o transporte paralelo ao longo da curva F (s, t0) de s0 ate s0 + ∆s,
τs0+∆st0→t0+∆t e o transporte paralelo ao longo da curva F (s0 + ∆s, t) de t0 ate t0 + ∆t,
τ t0+∆ts0+∆s→s0 e o transporte paralelo ao longo da curva F (s, t0 + ∆t) de s0 + ∆s ate s0,
τs0t0+∆t→t0 e o transporte paralelo ao longo da curva F (s0, t) de t0 + ∆t ate t0.
Se W ∈ TpM , entao
R (U, V )W = lim∆s,∆t→0
1
∆s∆t(W − τ (W )) .

Rodney Josue Biezuner 196
Prova: Como
τ t0+∆ts0+∆s→s0 τ
t0+∆ts0→s0+∆s = id,
τs0t0+∆t→t0 τs0t0→t0+∆t = id,
podemos escrever
W − τ (W ) = τs0t0+∆t→t0 τt0+∆ts0+∆s→s0
[τ t0+∆ts0→s0+∆s τ
s0t0→t0+∆t (W )− τs0+∆s
t0→t0+∆t τt0s0→s0+∆s (W )
].
Ja que
lim∆s,∆t→0
(τs0t0+∆t→t0 τ
t0+∆ts0+∆s→s0
)= id,
basta entao provar que
R (U, V )W = lim∆s,∆t→0
1
∆s∆t
[τ t0+∆ts0→s0+∆s τ
s0t0→t0+∆t (W )− τs0+∆s
t0→t0+∆t τt0s0→s0+∆s (W )
]. (13.56)
Isso e equivalente a calcular a diferenca entre os transportes paralelos do vetor W de TpM ate TqM , ondeq = F (t0 + ∆t, s0 + ∆s) e o vertice oposto do retangulo ao longo dos dois caminhos possıveis da fronteirado retangulo.
Pelo Lema 11.27 (substituindo a derivada covariante pela derivada covariante ao longo de uma curva einvertendo a aplicacao do transporte paralelo), temos para s, t quaisquer
DY
dt
∣∣∣∣(s,t0)
= lim∆t→0
Y(s,t0+∆t) − τt0→t0+∆tY(s,t0)
∆t,
DY
ds
∣∣∣∣(s0,t)
= lim∆t→0
Y(s0+∆s,t) − τs0→s0+∆sY(s0,t)
∆s
onde Y e um campo ao longo da superfıcie tal que Y(s0,t0) = W . Com esta expressao em mente, reescrevemoso lado direito de (13.56) adicionando e subtraindo termos, de modo a decompor os dois caminhos do retangulonos quatro lados do mesmo:
τ t0+∆ts0→s0+∆s τ
s0t0→t0+∆t (W )− τs0+∆s
t0→t0+∆t τt0s0→s0+∆s (W )
= τ t0+∆ts0→s0+∆s τ
s0t0→t0+∆t
(Y(s0,t0)
)− τs0+∆s
t0→t0+∆t τt0s0→s0+∆s
(Y(s0,t0)
)= τ t0+∆t
s0→s0+∆s
[τs0t0→t0+∆t
(Y(s0,t0)
)− Y(s0,t0+∆t)
]+ τ t0+∆t
s0→s0+∆s
[Y(s0,t0+∆t)
]− Y(s0+∆s,t0+∆t)
− τs0+∆st0→t0+∆t
[τ t0s0→s0+∆s
(Y(s0,t0)
)− Y(s0+∆s,t0)
]− τs0+∆s
t0→t0+∆t
[Y(s0+∆s,t0)
]+ Y(s0+∆s,t0+∆t).

Rodney Josue Biezuner 197
Portanto, segue do Lema 13.34 que
lim∆s,∆t→0
1
∆s∆t
[τ t0+∆ts0→s0+∆s τ
s0t0→t0+∆t (W )− τs0+∆s
t0→t0+∆t τt0s0→s0+∆s (W )
]= − lim
∆s→0
1
∆sτ t0+∆ts0→s0+∆s
[lim
∆t→0
Y(s0,t0+∆t) − τs0t0→t0+∆t
(Y(s0,t0)
)∆t
]
− lim∆t→0
1
∆tlim
∆s→0
Y(s0+∆s,t0+∆t) − τ t0+∆ts0→s0+∆s
(Y(s0,t0+∆t)
)∆s
+ lim∆t→0
1
∆tτs0+∆st0→t0+∆t
[lim
∆s→0
Y(s0+∆s,t0) − τ t0s0→s0+∆s
(Y(s0,t0)
)∆s
]
+ lim∆s→0
1
∆slim
∆t→0
Y(s0+∆s,t0+∆t) − τs0+∆st0→t0+∆t
(Y(s0+∆s,t0)
)∆t
= − lim∆s→0
1
∆sτ t0+∆ts0→s0+∆s
(DY
dt
∣∣∣∣(s0,t0)
)
− lim∆t→0
1
∆t
DY
ds
∣∣∣∣(s0,t0+∆t)
+ lim∆t→0
1
∆tτs0+∆st0→t0+∆t
(DY
ds
∣∣∣∣(s0,t0)
)
+ lim∆s→0
1
∆s
DY
dt
∣∣∣∣(s0+∆s,t0)
= lim∆s→0
DY
dt
∣∣∣∣(s0+∆s,t0)
− τ t0+∆ts0→s0+∆s
DY
dt
∣∣∣∣(s0,t0)
∆s
− lim∆t→0
DY
ds
∣∣∣∣(s0,t0+∆t)
− τs0+∆st0→t0+∆t
(DY
ds
∣∣∣∣(s0,t0)
)∆t
=D
ds
DY
dt
∣∣∣∣(s0,t0)
− D
dt
DY
ds
∣∣∣∣(s0,t0)
= R (U, V )W.
13.7 Exercıcios
13.38 Exercıcio. Mostre que toda aplicacao
T : T1 (M)× . . .× T1 (M)× T1 (M)× . . .× T1 (M) −→ C∞ (M)
multilinear sobre C∞ (M) e induzida por um campo tensorial em Tkl (M).
13.39 Exercıcio. Mostre que a curvatura e um invariante isometrico local. Conclua que
R (X,Y )Z = 0
para qualquer variedade metrica localmente isometrica a Rn.
13.40 Exercıcio. Usando (a)-(d) da Proposicao 13.14, prove o Corolario 13.15.
Capıtulo 14
Derivada Covariante de CamposTensoriais
Gostarıamos de definir uma nocao completa de calculo diferencial em variedades diferenciaveis, isto e, deriva-das segundas e todas as derivadas de ordem superior. A derivada de uma funcao real f (sua diferencial) e umfuncional linear df , isto e, um tensor 1-covariante. Para podermos derivar mais uma vez, precisamos definira nocao da derivada de um tensor 1-covariante. Para definirmos derivadas de ordem superior, precisamosdefinir as derivadas de tensores de todos os tipos (k, l). Assim como a derivada de uma funcao aumenta aordem covariante de 0 para 1, a derivada de (k, l)-tensores aumentara a ordem covariante de k para k + 1:ela sera um tensor do tipo (k + 1, l). Por este motivo, ela sera chamada derivada covariante. Na verdade,ela sera construıda a partir da derivada covariante de campos vetoriais (a qual recebe este nome em funcaodo seu uso na definicao da derivada covariante de tensores) e isso sera feito em duas etapas: primeiro gene-ralizaremos a definicao de derivada covariante de campos vetoriais (conexoes), que e uma nocao de derivadadirecional, para definir derivadas covariantes de campos tensoriais, ou seja, derivadas direcionais de campostensoriais (que sera chamada uma conexao em ⊕Tkl (M)); esta sera usada em seguida para definir a nocaopropriamente dita de derivada covariante de campos tensoriais, a chamada derivada covariante total.
14.1 Conexao nos Fibrados Tensoriais
Por definicao, uma conexao em uma variedade diferenciavel M e uma maneira de calcular derivadas covari-antes de campos vetoriais. Esta conexao permite tambem definir derivadas covariantes para todos os campostensoriais de M .
14.1 Lema. Seja M uma variedade diferenciavel dotada de uma conexao ∇. Entao existe uma unica conexao
∇ : T (M)× Tkl (M) −→ Tkl (M)
em cada Tkl (M) tal que(i) Em T1 (M) = T (M), ∇ coincide com a conexao dada.(ii) Em T0 (M) = C∞ (M),
∇Xf = Xf.
(iii) ∇ satisfaz a regra do produto com relacao a produtos tensoriais:
∇X (F ⊗G) = (∇XF )⊗G+ F ⊗ (∇XG) .
(iv) ∇ comuta com todos os tracos: se tr denota o traco com relacao a qualquer par de ındices, entao
∇X (trF ) = tr (∇XF ) .
198

Rodney Josue Biezuner 199
Alem disso, esta conexao satisfaz tambem as propriedades adicionais:(a) Para todos Y ∈ T (M) e ω ∈ T1 (M) vale
∇X [ω (Y )] = (∇Xω) (Y ) + ω (∇XY ) .
(b) Para todos T ∈ Tkl (M), Xi ∈ T (M) e ωj ∈ T1 (M) vale
(∇XT )(X1, . . . , Xk, ω
1, . . . , ωl)
= X(T(X1, . . . , Xk, ω
1, . . . , ωl))
−k∑i=1
T(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l∑
j=1
T(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)
Prova: Dividiremos a demonstracao deste resultado em passos.Passo 1. Se existe uma conexao que satisfaz as propriedades (i)-(iv), entao ela necessariamente satisfaz(a)-(b).
De fato, (a) segue de (iii) e (iv):
∇X [ω (Y )] = ∇X tr (ω ⊗ Y )
= tr∇X (ω ⊗ Y )
= tr (∇Xω ⊗ Y ) + tr (ω ⊗∇XY )
= ∇Xω (Y ) + ω (∇XY ) .
Para provar (b), procedemos por inducao separadamente sobre k e l. O caso (k, l) = (0, 1) segue de (a)e (ii):
(∇Xω) (Y ) = ∇X [ω (Y )]− ω (∇XY )
= X (ω (Y ))− ω (∇XY ) .
Da mesma forma, o caso (k, l) = (1, 0) segue de (a) e de (ii) (usando a definicao da aplicacao de um vetor aum covetor via a dualidade entre V e o bidual V ∗∗):
(∇XY ) (ω) = ω (∇XY )
= ∇X [ω (Y )]− (∇Xω) (Y )
= X [ω (Y )]− Y (∇Xω) .
Agora assuma que (b) vale para todos os inteiros p < k, q < l. Mostraremos que isso implica que (b) valepara k, l. Como todo T ∈ Tkl (M) se escreve na forma
T =
n∑i,j=1
Fi ⊗Gj
para alguns Fi ∈ Tpq (M) e Gj ∈ T11 (M), onde p = k− 1 e q = l− 1, pela linearidade da conexao e suficiente
provar o resultado paraT = F ⊗G
com F ∈ Tpq (M) e G ∈ T11 (M). Por (iii),
∇XT = (∇XF )⊗G+ F ⊗ (∇XG) ,
Rodney Josue Biezuner 200
donde
(∇XT )(X1, . . . , Xk, ω
1, . . . , ωl)
= [(∇XF )⊗G](X1, . . . , Xk, ω
1, . . . , ωl)
+ [F ⊗ (∇XG)](X1, . . . , Xk, ω
1, . . . , ωl)
= (∇XF )(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk, ω
l)
+ F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)
(∇XG)(Xk, ω
l).
Mas
(∇XF )(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk, ω
l)
= X(F(X1, . . . , Xk−1, ω
1, . . . , ωl−1))G(Xk, ω
l)
−k−1∑i=1
F(X1, . . . ,∇XXi, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk, ω
l)
−l−1∑j=1
F(X1, . . . , Xk−1, ω
1, . . . ,∇Xωj , . . . , ωl−1)G(Xk, ω
l)
e
F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)
(∇XG)(Xk, ω
l)
= F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)X(G(Xk, ω
l))
− F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(∇XXk, ω
l)
− F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk,∇Xωl
).
Portanto,
(∇XT )(X1, . . . , Xk, ω
1, . . . , ωl)
= X(F(X1, . . . , Xk−1, ω
1, . . . , ωl−1))G(Xk, ω
l)
+ F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)X(G(Xk, ω
l))
−k−1∑i=1
F(X1, . . . ,∇XXi, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk, ω
l)
− F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(∇XXk, ω
l)
−l−1∑j=1
F(X1, . . . , Xk−1, ω
1, . . . ,∇Xωj , . . . , ωl−1)G(Xk, ω
l)
− F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk,∇Xωl
)= X
[F(X1, . . . , Xk−1, ω
1, . . . , ωl−1)G(Xk, ω
l)]
−k−1∑i=1
(F ⊗G)(X1, . . . ,∇XXi, . . . , Xk−1, Xk, ω
1, . . . , ωl−1, ωl)
− (F ⊗G)(X1, . . . , Xk−1,∇XXk, ω
1, . . . , ωl−1, ωl)
−l−1∑j=1
(F ⊗G)(X1, . . . , Xk−1, Xk, ω
1, . . . ,∇Xωj , . . . , ωl−1, ωl)
− (F ⊗G)(X1, . . . , Xk−1, Xk, ω
1, . . . , ωl−1,∇Xωl)

Rodney Josue Biezuner 201
= X[(F ⊗G)
(X1, . . . , Xk, ω
1, . . . , ωl)]
−k∑i=1
(F ⊗G)(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l−1∑j=1
(F ⊗G)(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)
= X(T(X1, . . . , Xk, ω
1, . . . , ωl))
−k∑i=1
T(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l−1∑j=1
T(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl).
Passo 2. Existencia.Defina ∇ : T (M) × Tkl (M) −→ Tkl (M) por (b) (o que inclui (a), como visto acima). Mostraremos que
∇ e uma conexao e satisfaz todas as propriedades (i)-(iv).Inicialmente, as propriedades de uma conexao:
(1) ∇fX+gY T = f∇XT + g∇Y T.Primeiro, para campos covetoriais: para todo Z vale
(∇fX+gY ω) (Z) = (fX + gY ) (ω (Z))− ω (∇fX+gY Z)
= fX (ω (Z)) + gY (ω (Z))− ω (f∇XZ + g∇Y Z)
= fX (ω (Z)) + gY (ω (Z))− fω (∇XZ)− gω (∇Y Z)
= f [X (ω (Z))− ω (∇XZ)] + g [Y (ω (Z))− ω (∇Y Z)]
= f∇Xω (Z) + g∇Y ω (Z) ,
logo∇fX+gY ω = f∇Xω + g∇Y ω.
Para T ∈ Tkl (M) temos
(∇fX+gY T )(X1, . . . , Xk, ω
1, . . . , ωl)
= (fX + gY )(T(X1, . . . , Xk, ω
1, . . . , ωl))
−k∑i=1
T(X1, . . . ,∇fX+gYXi, . . . , Xk, ω
1, . . . , ωl)
−l∑
j=1
T(X1, . . . , Xk, ω
1, . . . ,∇fX+gY ωj , . . . , ωl
).
Como
(fX + gY )(T(X1, . . . , Xk, ω
1, . . . , ωl))
= fX(T(X1, . . . , Xk, ω
1, . . . , ωl))
+ gY(T(X1, . . . , Xk, ω
1, . . . , ωl)),
T(X1, . . . ,∇fX+gYXi, . . . , Xk, ω
1, . . . , ωl)
= T(X1, . . . , f∇XXi + g∇YXi, . . . , Xk, ω
1, . . . , ωl)
= fT(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
+ gT(X1, . . . ,∇YXi, . . . , Xk, ω
1, . . . , ωl)

Rodney Josue Biezuner 202
e
T(X1, . . . , Xk, ω
1, . . . ,∇fX+gY ωj , . . . , ωl
)= T
(X1, . . . , Xk, ω
1, . . . , f∇Xωj + g∇Y ωj , . . . , ωl)
= fT(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)
+ gT(X1, . . . , Xk, ω
1, . . . ,∇Y ωj , . . . , ωl),
segue o resultado.(2) ∇X (T + S) = ∇XT +∇XS.
E obvio da definicao.(3) ∇X (fT ) = f∇XT + (Xf)T.
Note que esta regra do produto e um caso especial de (iii). Primeiro, para campos covetoriais: para todoZ vale
[∇X (fω)] (Z) = X [(fω) (Z)]− (fω) (∇XZ)
= X [fω (Z)]− fω (∇XZ)
= (Xf)ω (Z) + fX (ω (Z))− fω (∇XZ)
= (Xf)ω (Z) + f [∇Xω] (Z) ,
logo∇X (fω) = f∇Xω + (Xf)ω.
Para T ∈ Tkl (M) temos
(∇XfT )(X1, . . . , Xk, ω
1, . . . , ωl)
= X(fT(X1, . . . , Xk, ω
1, . . . , ωl))
−k∑i=1
(fT )(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l∑
j=1
(fT )(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)
= (Xf)T(X1, . . . , Xk, ω
1, . . . , ωl)
+ fX(T(X1, . . . , Xk, ω
1, . . . , ωl))
−k∑i=1
(fT )(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l∑
j=1
(fT )(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)
donde segue o resultado.Agora provemos as propriedades (i)-(iv).
(i) Por definicao, assumindo (ii) (provada logo a seguir) e por (a)
(∇XY ) (ω) = X [ω (Y )]− Y (∇Xω)
= ∇X [ω (Y )]− (∇Xω) (Y )
= ω (∇XY )
de modo que ∇XY coincide com a conexao dada.(ii) Por definicao,
∇Xf = Xf.

Rodney Josue Biezuner 203
(iii) Por definicao, se F ∈ Tkl (M) e G ∈ Tpq (M),
[∇X (F ⊗G)](X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)
= X[(F ⊗G)
(X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)]
−k+p∑i=1
(F ⊗G)(X1, . . . ,∇XXi, . . . , Xk+p, ω
1, . . . , ωl+q)
−l+q∑j=1
(F ⊗G)(X1, . . . , Xk+p, ω
1, . . . ,∇Xωj , . . . , ωl+q).
Pela regra do produto para campos vetoriais,
X[(F ⊗G)
(X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)]
= X[F(X1, . . . , Xk, ω
1, . . . , ωl)G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)]
= X[F(X1, . . . , Xk, ω
1, . . . , ωl)]G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
+ F(X1, . . . , Xk, ω
1, . . . , ωl)X[G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)].
Temos tambem
k+p∑i=1
(F ⊗G)(X1, . . . ,∇XXi, . . . , Xk+p, ω
1, . . . , ωl+q)
=
k∑i=1
F(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
+
k+p∑i=k+1
F(X1, . . . , Xk, ω
1, . . . , ωl)G(Xk+1, . . . ,∇XXi, . . . , Xk+p, ω
l+1, . . . , ωl+q)
e
l+q∑j=1
(F ⊗G)(X1, . . . , Xk+p, ω
1, . . . ,∇Xωj , . . . , ωl+q)
=
l∑j=1
F(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
+
l+q∑j=l+1
F(X1, . . . , Xk, ω
1, . . . , ωl)G(Xk+1, . . . , Xk+p, ω
l+1, . . . ,∇Xωj , . . . , ωl+q).

Rodney Josue Biezuner 204
Portanto,
[∇X (F ⊗G)](X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)
=
X[F(X1, . . . , Xk, ω
1, . . . , ωl)]−
k∑i=1
F(X1, . . . ,∇XXi, . . . , Xk, ω
1, . . . , ωl)
−l∑
j=1
F(X1, . . . , Xk, ω
1, . . . ,∇Xωj , . . . , ωl)×G (Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
+ F(X1, . . . , Xk, ω
1, . . . , ωl)×X[G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)]
−k+p∑i=k+1
G(Xk+1, . . . ,∇XXi, . . . , Xk+p, ω
l+1, . . . , ωl+q)
−l+q∑j=l+1
G(Xk+1, . . . , Xk+p, ω
l+1, . . . ,∇Xωj , . . . , ωl+q)
= (∇XF )(X1, . . . , Xk, ω
1, . . . , ωl)G(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
+ F(X1, . . . , Xk, ω
1, . . . , ωl)∇XG
(Xk+1, . . . , Xk+p, ω
l+1, . . . , ωl+q)
= [(∇XF )⊗G](X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)
+ [F ⊗ (∇XG)](X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q)
= [(∇XF )⊗G+ F ⊗ (∇XG)](X1, . . . , Xk, Xk+1, . . . , Xk+p, ω
1, . . . , ωl, ωl+1, . . . , ωl+q).
(iv) Para provar esta propriedade, estabeleceremos primeiro uma formula para ∇XT em coordenadas. Se
T = T j1...jli1...ikdxi1 ⊗ . . .⊗ dxik ⊗ ∂j1 ⊗ . . .⊗ ∂jj
eX = Xm∂m,
entao
∇XT(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)
= ∇Xm∂mT(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)
= Xm (∇∂mT )(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)
= Xm (∇∂mT )j1...jli1...ik
e a expressao em coordenadas para a derivada covariante de um campo tensorial, como veremos na Proposicao14.9, e
(∇∂mT )j1...jli1...ik
= ∂mTj1...jli1...ik
−k∑r=1
T j1...jli1...ir−1pir+1...ikΓpmir +
l∑s=1
Tj1...js−1pjs+1...jli1...ik
Γjsmp. (14.1)
Seja F ∈ Tkl (M), de modo que trF ∈ Tk−1l−1 (M). Por linearidade e suficiente provar que
[∇∂m (trF )](∂i1 , . . . , ∂ik−1
, dxj1 , . . . , dxjl−1)
= [tr (∇∂mF )](∂i1 , . . . , ∂ik−1
, dxj1 , . . . , dxjl−1),
isto e, que[∇∂m (trF )]
j1...jl−1
i1...ik−1= [tr (∇∂mF )]
j1...jl−1
i1...ik−1.
Escrevendo
F =
n∑i1,...,ik=1j1,...,jl=1
F j1...jli1...ikdxi1 ⊗ . . .⊗ dxik ⊗ ∂j1 ⊗ . . .⊗ ∂jl ,

Rodney Josue Biezuner 205
temos, assumindo que o traco e tomado em relacao aos ındices p, q,
(trF )j1...jl−1
i1...ik−1= F
j1...jq−1ujq...jk−1
i1...ip−1uip...il−1.
Logo,
[∇∂m (trF )]j1...jl−1
i1...ik−1
=∂ (trF )
j1...jl−1
i1...ik−1
∂xm−
k∑r=1
(trF )j1...jli1...ir−1pir+1...ik
Γpmir +
l∑s=1
(trF )j1...js−1pjs+1...jli1...ik
Γjsmp
=∂F
j1...jq−1ujq...jk−1
i1...ip−1uip...il−1
∂xm−
k∑r=1
Fj1...jq−1ujq...jk−1
i1...ip−1uip...ir−1pir+1...il−1Γpmir +
l∑s=1
Fj1...jq−1ujq...js−1pjs+1...jk−1
i1...ip−1uip...il−1Γjsmp
e
[tr (∇∂mF )]j1...jl−1
i1...ik−1
= (∇∂mF )j1...jq−1ujq...jk−1
i1...ip−1uip...il−1
=∂F
j1...jq−1ujq...jk−1
i1...ip−1uip...il−1
∂xm−
k∑r=1
Fj1...jq−1ujq...jk−1
i1...ip−1uip...ir−1pir+1...il−1Γpmir +
l∑s=1
Fj1...jq−1ujq...js−1pjs+1...jk−1
i1...ip−1uip...il−1Γjsmp.
Comparando as expressoes, vemos que elas sao identicas.Passo 3. Unicidade.
Se existir uma conexao ∇ : T (M)×Tkl (M) −→ Tkl (M) que satisfaz (i)-(iv), entao ela tambem satisfazera(a)-(b), logo sera igual a conexao definida no Passo 2. De agora em diante, quando nos referirmos a uma conexao em uma variedade diferenciavel M , estaremosnos referindo a conexao do lema, definida em todas os fibrados tensoriais da variedade.
14.2 Proposicao. Seja M uma variedade diferenciavel e ω um campo covetorial em M . Entao
∇Xω =
(Xi ∂ωk
∂xi−XiωjΓ
jik
)dxk. (14.2)
Em particular,∇∂idxj = −Γjikdx
k. (14.3)
Prova: De fato,
(∇Xω) (Y ) = ∇X [ω (Y )]− ω (∇XY )
= ∇X[ω(Y k∂k
)]− ω
[(X(Y k)
+XiY jΓkij)∂k]
= X[Y kω (∂k)
]−(X(Y k)
+XiY jΓkij)ω (∂k)
= X(Y kωk
)−(X(Y k)
+XiY jΓkij)ωk
= X(Y k)ωk + Y kX (ωk)−X
(Y k)ωk +XiY jωkΓkij
= Y kXi ∂ωk∂xi−XiY jωkΓkij
=
(Xi ∂ωk
∂xi−XiωjΓ
jik
)Y k
=
(Xi ∂ωk
∂xi−XiωjΓ
jik
)dxk (Y ) .

Rodney Josue Biezuner 206
14.2 Derivada Covariante Total
14.3 Definicao. Seja M uma variedade diferenciavel dotada de uma conexao ∇. Dado um campo (k, l)-tensorial T ∈ Tkl (M), a derivada covariante total de T e o campo (k + 1, l)-tensorial
∇T : T1 (M)× . . .× T1 (M)× T1 (M)× . . .× T1 (M) −→ C∞ (M)
definido por∇T
(Y1, . . . , Yk, X, ω
1, . . . , ωl)
= ∇XT(Y1, . . . , Yk, ω
1, . . . , ωl). (14.4)
O nome derivada covariante pode ser agora compreendido: a derivada covariante total de um tensor aumentaem um a sua ordem covariante.
A derivada covariante total do tensor metrica g e o tensor identicamente nulo:
14.4 Proposicao (Derivada Covariante Total do Tensor Metrica). Se (M, g) e uma variedade metrica,entao
∇g = 0.
Prova: Pela definicao e pela compatibilidade da conexao com a metrica, temos
∇g (X,Y, Z) = ∇Zg (X,Y )
= Z [g (X,Y )]− g (∇ZX,Y )− g (X,∇ZY )
= Z 〈X,Y 〉 − 〈∇ZX,Y 〉 − 〈X,∇ZY 〉= 0.
Da demonstracao vemos que a conexao riemanniana pode ser equivalentemente caracterizada como a unicaconexao simetrica tal que ∇g = 0. O fato que ∇g = 0 foi um serio empecilho para Einstein no seu caminhoem direcao a descoberta da Teoria da Relatividade Geral, como veremos no Capıtulo 16.
14.5 Proposicao (Significado da Derivada Covariante Total Nula). Se (M, g) e uma variedademetrica e X ∈ T (M), entao
∇X = 0
se e somente se X e um campo paralelo.
Prova: Veja a observacao que se segue a Definicao 14.10 e observe que se X ∈ T (M), entao por definicao∇X (Y ) = ∇YX.
14.6 Definicao. Dizemos que um tensor T ∈ Tkl (M) e paralelo se ∇T = 0.
Assim, a compatibilidade da metrica e equivalente ao paralelismo do tensor metrica.
14.7 Exemplo (Hessiana e Laplaciano). Se f ∈ C∞ (M), entao a derivada covariante total ∇f de f esimplesmente o covetor (1-forma) df , isto e, a diferencial de f . De fato, ambos os tensores tem o mesmoefeito sobre campos vetoriais:
df (X) = Xf = ∇Xf = (∇f) (X) .
O 2-tensor∇2f = ∇ (∇f)
e chamado a hessiana (covariante) de f . Por definicao,
∇2f (X,Y ) = ∇Y (∇f) (X) = Y ((∇f) (X))−∇f (∇YX) ,

Rodney Josue Biezuner 207
ou seja,∇2f (X,Y ) = Y (Xf)− (∇YX) f. (14.5)
O laplaciano de f e definido por∆f = trg∇2f. (14.6)
14.8 Notacao. Seja
T = T j1...jli1...ikdxi1 ⊗ . . .⊗ dxik ⊗ ∂
∂xj1⊗ . . .⊗ ∂
∂xjl
um campo (k, l)-tensorial. Entao temos duas notacoes bastante difundidas para escrever a expressao emcoordenadas da derivada covariante total de T :
∇T = ∇mT j1...jli1...ikdxi1 ⊗ . . .⊗ dxik ⊗ dxm ⊗ ∂
∂xj1⊗ . . .⊗ ∂
∂xjl(14.7)
e
∇T = T j1...jli1...ik;mdxi1 ⊗ . . .⊗ dxik ⊗ dxm ⊗ ∂
∂xj1⊗ . . .⊗ ∂
∂xjl(14.8)
Isto e, cada componente do campo (k + 1, l)-tensorial derivada covariante total e denotado por
∇mT j1...jli1...ik= T j1...jli1...ik;m. (14.9)
Por exemplo, se
X = Xi ∂
∂xi,
entao
∇X = ∇jXidxj ⊗ ∂
∂xi= Xi
;jdxj ⊗ ∂
∂xi. (14.10)
14.9 Proposicao. Seja M uma variedade diferenciavel dotada de uma conexao ∇. Entao as componentesda derivada covariante total em um sistema de coordenadas sao dadas por
∇mT j1...jli1...ik= T j1...jli1...ik;m = ∂mT
j1...jli1...ik
+
l∑s=1
Tj1...js−1pjs+1...jli1...ik
Γjsmp −k∑r=1
T j1...jli1...ir−1pir+1...ikΓpmir . (14.11)
Em particular, em coordenadas normais,
∇mT j1...jli1...ik(p) = ∂mT
j1...jli1...ik
(p) .

Rodney Josue Biezuner 208
Prova: Por definicao,
T j1...jli1...ik;m
= ∇T(∂i1 , . . . , ∂ik , ∂m, dx
j1 , . . . , dxjl)
= (∇∂mT )(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)
= ∂mT(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)−
k∑r=1
T(∂i1 , . . . ,∇∂m∂ir , . . . , ∂ik , dxj1 , . . . , dxjl
)−
l∑s=1
T(∂i1 , . . . , ∂ik , dx
j1 , . . . ,∇∂mdxjs , . . . , dxjl)
= ∂mTj1...jli1...ik
−k∑r=1
T(∂i1 , . . . ,Γ
pmir
∂p, . . . , ∂ik , dxj1 , . . . , dxjl
)−
l∑s=1
T(∂i1 , . . . , ∂ik , dx
j1 , . . . ,−Γjsmpdxp, . . . , dxjl
)= ∂mT
j1...jli1...ik
−k∑r=1
T j1...jli1...ir−1pir+1...ikΓpmir +
l∑s=1
Tj1...js−1pjs+1...jli1...ik
Γjsmp.
Em coordenadas normais, os coeficientes de Christoffel em p se anulam. Por exemplo, para uma funcao real:
∇if = f;i =∂f
∂xi;
para um campo vetorial (campo 1-tensorial contravariante)
∇jXi = Xi;j = ∂jX
i +XpΓijp;
para um campo covetorial (campo 1-tensorial covariante)
∇jωi = ωi;j = ∂jωi − ωpΓpij ;
para um campo 2-tensorial covariante:
∇kTij = Tij;k = ∂kTij − TpjΓpik − TipΓpjk;
para um campo (3, 1)-tensorial:
∇mRlijk = Rlijk;m = ∂mRlijk +RpijkΓlpm −RlpjkΓpim −R
lipkΓpjm −R
lijpΓ
pkm;
e para um campo 4-tensorial covariante:
∇mRijkl = Rijkl;m = ∂mRijkl −RpjklΓpim −RipklΓpjm −RijplΓ
pkm −RijkpΓ
plm.
14.10 Proposicao (Regra do Produto). Seja M uma variedade diferenciavel dotada de uma conexao ∇.Entao
∇m(F j1...jli1...ik
Gjl+1...jl+qik+1...ik+p
)=(∇mF j1...jli1...ik
)Gjl+1...jl+qik+1...ik+p
+ F j1...jli1...ik
(∇mG
jl+1...jl+qik+1...ik+p
).
Prova: Seja T = F ⊗G, de modo que
Tj1...jljl+1...jl+qi1...ikik+1...ik+p
= F j1...jli1...ikGjl+1...jl+qik+1...ik+p
.

Rodney Josue Biezuner 209
Daı,
∇mTj1...jljl+1...jl+qi1...ikik+1...ik+p
= ∇T(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , ∂m, dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)= ∇∂mT
(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)= ∂mT
(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)−k+p∑r=1
T(∂i1 , . . . ,∇∂im∂ir , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)−
l+q∑s=1
T(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . ,∇∂imdx
js , . . . , dxjl , dxjl+1 , . . . , dxjl+q).
Como
∂mT(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)= ∂m
(F j1...jli1...ik
Gjl+1...jl+qik+1...ik+p
)=(∂mF
j1...jli1...ik
)Gjl+1...jl+qik+1...ik+p
+ F j1...jli1...ik
(∂mG
jl+1...jl+qik+1...ik+p
),
k+p∑r=1
T(∂i1 , . . . ,∇∂im∂ir , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . , dxjl , dxjl+1 , . . . , dxjl+q
)= −
k∑r=1
F(∂i1 , . . . ,∇∂im∂ir , . . . , ∂ik , dx
j1 , . . . , dxjl)G(∂ik+1
, . . . , ∂ik+p , dxjl+1 , . . . , dxjl+q
)−
k+p∑r=k+1
F(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)G(∂ik+1
, . . . ,∇∂im∂ir , . . . , ∂ik+p , dxjl+1 , . . . , dxjl+q
)= −
k∑r=1
F(∂i1 , . . . ,∇∂im∂ir , . . . , ∂ik , dx
j1 , . . . , dxjl)Gjl+1...jl+qik+1...ik+p
−k+p∑r=k+1
F j1...jli1...ikG(∂ik+1
, . . . ,∇∂im∂ir , . . . , ∂ik+p , dxjl+1 , . . . , dxjl+q
)e
l+q∑s=1
T(∂i1 , . . . , ∂ik , ∂ik+1
, . . . , ∂ik+p , dxj1 , . . . ,∇∂imdx
js , . . . , dxjl , dxjl+1 , . . . , dxjl+q)
=−l∑
s=1
F(∂i1 , . . . , ∂ik , dx
j1 , . . . ,∇∂imdxjs , . . . , dxjl
)G(∂ik+1
, . . . , ∂ik+p , dxjl+1 , . . . , dxjl+q
)−
l+q∑s=l+1
F(∂i1 , . . . , ∂ik , dx
j1 , . . . , dxjl)G(∂ik+1
, . . . , ∂ik+p , dxjl+1 , . . . ,∇∂imdx
js , . . . , dxjl+q)
=−l∑
s=1
F(∂i1 , . . . , ∂ik , dx
j1 , . . . ,∇∂imdxjs , . . . , dxjl
)Gjl+1...jl+qik+1...ik+p
−l+q∑s=l+1
F j1...jli1...ikG(∂ik+1
, . . . , ∂ik+p , dxjl+1 , . . . ,∇∂imdx
js , . . . , dxjl+q),

Rodney Josue Biezuner 210
segue que
∇mTj1...jljl+1...jl+qi1...ikik+1...ik+p
=
[∂mF
j1...jli1...ik
−k∑r=1
F(∂i1 , . . . ,∇∂im∂ir , . . . , ∂ik , dx
j1 , . . . , dxjl)
−l∑
s=1
F(∂i1 , . . . , ∂ik , dx
j1 , . . . ,∇∂imdxjs , . . . , dxjl
)]Gjl+1...jl+qik+1...ik+p
+ F j1...jli1...ik
[∂mG
jl+1...jl+qik+1...ik+p
−k+p∑r=k+1
G(∂ik+1
, . . . ,∇∂im∂ir , . . . , ∂ik+p , dxjl+1 , . . . , dxjl+q
)−
l+q∑s=l+1
G(∂ik+1
, . . . , ∂ik+p , dxjl+1 , . . . ,∇∂imdx
js , . . . , dxjl+q)]
=(∇mF j1...jli1...ik
)Gjl+1...jl+qik+1...ik+p
+ F j1...jli1...ik
(∇mG
jl+1...jl+qik+1...ik+p
).
Este resultado justifica a notacao ∇m.
14.11 Lema. Seja M uma variedade metrica. Entao
∇kgij = gij;k = 0
e∇kgij = gij;k = 0
para todos os ındices i, j, k.
Prova: Embora ja tenhamos demonstrado a primeira afirmacao na Proposicao 14.4, forneceremos outrademonstracao que a derivada covariante total do tensor metrica g e o tensor identicamente nulo usando aformula para as componentes da derivada covariante. De fato, pelo Corolario 11.25,
∂kgij = gipΓpjk + gpjΓ
pik.
Logo,∇kgij = gij;k = ∂kgij − gipΓpjk − gpjΓ
pik = 0.
Para calcular ∇kgij , primeiro observamos que
∇kδji = δji;k = ∂kδji + δpi Γjpk − δ
jpΓ
pik
= δiiΓjik − δ
jjΓ
jik
= 0.
Portanto,∇k(gipg
pj)
= ∇kδji = 0.
Mas, pela regra do produto,
∇k(gipg
pj)
= gpj∇kgip + gip∇kgpj = gip∇kgpj
pela primeira afirmacao. Concluımos quegip∇kgpj = 0.

Rodney Josue Biezuner 211
Contraindo esta expressao atraves da inversa da metrica,
gligip∇kgpj = 0,
segue que0 = δlp∇kgpj = ∇kglj .
Em vista dos resultados acima, a derivada covariante se comporta bem com a operacao de subir ou descer
um ındice:
14.12 Proposicao. Seja M uma variedade metrica. Entao
∇mTj1...jl−1
i1...ikik+1= ∇m
(gik+1pT
j1...jl−1pi1...ik
)= gik+1p∇mT
j1...jl−1pi1...ik
, (14.12)
e∇mT
j1...jljl+1
i1...ik−1= ∇m
(gjl+1pT j1...jli1...ik−1p
)= gjl+1p∇mT j1...jli1...ik−1p
. (14.13)
Prova: Segue das Proposicoes 14.10 e 14.11. No caso de um (1, 1)-tensor, as formulas sao
∇mT ji = ∇m(gikT
kj)
= gik(∇mT kj
),
∇mT ji = ∇m(gkjTik
)= gkj (∇mTik) .
Na notacao de ponto e virgula:
T ji;m = gikTkj;m,
∇mT ji;m = gkjTik;m.
14.13 Exemplo (Hessiana e Laplaciano em coordenadas). As componentes de ∇f sao
∇f = ∂if dxi.
E comum denotarfi = ∂if, (14.14)
de modo que∇2f = ∇jfidxi ⊗ dxj = fi;jdx
i ⊗ dxj .
Temos∇jfi = fi;j = ∂jfi − fpΓpij = ∂2
ijf − Γkij∂kf. (14.15)
Ou seja,∇2f =
(∂2ijf − Γkij∂kf
)dxi ⊗ dxj . (14.16)
Tambem e comum escreverfij = ∂2
ijf, (14.17)
de modo que∇2f =
(fij − fkΓkij
)dxi ⊗ dxj . (14.18)
Daı obtemos a formula do laplaciano em coordenadas:
∆f = trg∇2f = gij(∇2f
)ij
= gij∂2ijf − gijΓkij∂kf.

Rodney Josue Biezuner 212
14.14 Proposicao (Identidade de Bianchi Diferencial). Seja M uma variedade metrica. A derivada cova-riante total do tensor curvatura satisfaz a seguinte propriedade:
∇R (X,Y, Z, V,W ) +∇R (X,Y, V,W,Z) +∇R (X,Y,W,Z, V ) = 0. (14.19)
Em termos de componentes,
Rijkl;m +Rijlm;k +Rijmk;l = ∇mRijkl +∇kRijlm +∇lRijmk = 0. (14.20)
Prova: Em primeiro lugar, devido a propriedade de simetria 14.14 (c) do tensor curvatura, a identidade doenunciado e equivalente a identidade
∇R (Z, V,X, Y,W ) +∇R (V,W,X, Y, Z) +∇R (W,Z,X, Y, V ) = 0. (14.21)
A vantagem desta identidade e que o campo na quarta posicao e o mesmo (isto e, Y ) em todos os termos.Por multilinearidade, basta provar que
∇R (∂i, ∂j , ∂k, ∂l, ∂m) +∇R (∂j , ∂m, ∂k, ∂l, ∂i) +∇R (∂m, ∂i, ∂k, ∂l, ∂j) = 0
para todos os campos vetoriais ∂i, ∂j , ∂k, ∂l, ∂m. Por definicao e compatibilidade da metrica,
∇R (∂i, ∂j , ∂k, ∂l, ∂m) = ∇∂mR (∂i, ∂j , ∂k, ∂l)
= ∇∂m 〈R (∂i, ∂j) ∂k, ∂l〉= 〈∇∂mR (∂i, ∂j) ∂k, ∂l〉+ 〈R (∂i, ∂j) ∂k,∇∂m∂l〉 .
Para facilitar os calculos consideravelmente, consideramos coordenadas normais em p. Em coordenadasnormais em p,
∇∂m∂l (p) = Γqlm (p) ∂q = 0.
Logo, em p,∇R (∂i, ∂j , ∂k, ∂l, ∂m) = 〈∇∂mR (∂i, ∂j) ∂k, ∂l〉 .
Escrevendo
R (∂i, ∂j) ∂k = ∇∂i∇∂j∂k −∇∂j∇∂i∂k −∇[∂i,∂j ]∂k
= ∇∂i∇∂j∂k −∇∂j∇∂i∂k,
porque [∂i, ∂j ] = 0, segue que
∇R (∂i, ∂j , ∂k, ∂l, ∂m) =⟨∇∂m∇∂i∇∂j∂k −∇∂m∇∂j∇∂i∂k, ∂l
⟩.
Daı, em p,
∇R (∂i, ∂j , ∂k, ∂l, ∂m) +∇R (∂j , ∂m, ∂k, ∂l, ∂i) +∇R (∂m, ∂i, ∂k, ∂l, ∂j)
=⟨∇∂m∇∂i∇∂j∂k −∇∂m∇∂j∇∂i∂k +∇∂i∇∂j∇∂m∂k −∇∂i∇∂m∇∂j∂k
+∇∂j∇∂m∇∂i∂k −∇∂j∇∂i∇∂m∂k, ∂l⟩
=⟨∇∂j∇∂m∇∂i∂k −∇∂m∇∂j∇∂i∂k +∇∂m∇∂i∇∂j∂k −∇∂i∇∂m∇∂j∂k
+∇∂i∇∂j∇∂m∂k −∇∂j∇∂i∇∂m∂k, ∂l⟩
=⟨R (∂j , ∂m)∇∂i∂k +R (∂m, ∂i)∇∂j∂k +R (∂i, ∂j)∇∂m∂k, ∂l
⟩= 〈R (∂j , ∂m) 0 +R (∂m, ∂i) 0 +R (∂i, ∂j) 0, ∂l〉= 0,
ja que ∇∂i∂k = ∇∂j∂k = ∇∂m∂k = 0 em p.

Rodney Josue Biezuner 213
14.2.1 Divergencia de Campos Tensoriais
Dado um campo vetorial X em Rn, sua divergencia e a funcao
divX = ∂iXi = ∇iXi.
Isto e,divX = tr∇X.
Dado um campo vetorial X ∈ T (M), de maneira analoga definimos sua divergencia por
divX = tr∇X.
Em coordenadas,divX = ∇iXi = Xi
;i.
Para definir a divergencia de um campo covetorial ω ∈ T1 (M), observe que ao descermos ındices no ultimotermo obtemos
Xi;i = gijXj;i = gij
(X[)j;i
= trg∇(X[),
de modo que faz sentido definirdivω = trg∇ω.
Em coordenadas,divω = gij∇iωj = gijωj;i.
Usando estas ideias, definimos a divergencia de tensores contravariantes e covariantes da seguinte forma:
14.15 Definicao. Dado um campo l-tensorial contravariante, a divergencia de T e o campo (l − 1)-tensorialcontravariante
div T = tr∇T.
Dado um campo k-tensorial covariante T , a divergencia de T e o campo (k − 1)-tensorial covariante
div T = trg∇T.
Observe que∆f = trg∇2f = div∇f.
Em coordenadas, se T e um 2-tensor contravariante,
(div T )i = ∇jT ij = T ij;j .
se T e um 2-tensor covariante,(div T )i = gjk∇kTij .
14.16 Proposicao. Seja M uma variedade metrica. Entao
∇S = 2 div Ric . (14.22)
Prova: Por definicao,(div Ric)i = gjk∇kRij .
Pela identidade de Bianchi diferencial, temos
∇mRijkl +∇kRijlm +∇lRijmk = 0.

Rodney Josue Biezuner 214
Daı,gjl (∇mRijkl +∇kRijlm +∇lRijmk) = 0,
donde, pela regra do produto e pelo fato que ∇pgrs = 0,
∇m(gjlRijkl
)+∇k
(gjlRijlm
)+ gjl∇lRijmk = 0. (14.23)
Como
Rpq = grsRrpqs,
Rijkl = −Rjikl,Rijlm = Rjiml,
o primeiro termo desta soma e−∇mRik,
enquanto que o segundo termo e∇kRim.
Logo a identidade (14.23) e equivalente a
∇mRik = ∇kRim + gjl∇lRijmk.
Daı,
gik∇mRik = gik∇kRim + gikgjl∇lRijmk= (div Ric)m + gjl∇l
(gikRijmk
)= (div Ric)m + gjl∇lRjm= (div Ric)m + (div Ric)m= 2 (div Ric)m .
Portanto,∇mS = ∇m
(gikRik
)= gik∇mRik = 2 (div Ric)m .
14.17 Proposicao. Se Mn e uma variedade de Einstein conexa e n > 3, entao M tem curvatura escalarconstante.
Prova: Temos
Ric =S
ng,
donde
Rij =S
ngij
e, portanto,
∇kRij =1
ngij∇kS.
Logo,
(div Ric)i = gjk∇kRij =1
ngkjgij∇kS =
1
nδki∇kS =
1
n∇iS.
Segue da proposicao anterior que∇S2
=∇Sn.
Se n 6= 2, esta identidade implica que∇S = 0
e portanto S ≡ constante, se M e conexa. Como toda variedade riemanniana de dimensao 2 e uma variedade de Einstein e existem variedades dedimensao 2 que nao possuem curvatura escalar constante, este resultado nao vale se n = 2.

Capıtulo 15
O Tensor Momento-Energia
Na Teoria da Relatividade Geral, o tensor momento-energia (tambem chamado tensor tensao-energia) des-creve a densidade e fluxo de energia e momento no espacotempo e e responsavel por criar a curvatura noespacotempo. Nas palavras de Wheeler, o espacotempo age na materia dizendo a ela como se mover [istoe, na ausencia de forcas atuando, apenas sob o efeito de sua propria inercia, ao longo das geodesicas doespacotempo]; por sua vez, a materia age sobre o espacotempo, dizendo a ele como se curvar ([MTW], Secao1.2, p. 5). Exceto que materia na Teoria da Relatividade possui um significado mais geral, nao restritoapenas a massa.
15.1 4-Vetores
Tanto na Teoria da Relatividade Especial quanto na Geral, e conveniente descrever o movimento de umobjeto em um referencial inercial (em Relatividade Especial) ou em um sistema de coordenadas geral (emRelatividade Geral) em coordenadas do espacotempo dependendo do seu tempo proprio τ , isto e, de acordocom o tempo medido em seu proprio referencial, e portanto independente de referencial. Assim, em umreferencial inercial a trajetoria de uma partıcula livre e uma curva parametrizada pelo tempo proprio
α (τ) = (t (τ) , x (τ) , y (τ) , z (τ)) ,
e a geodesica γ que uma partıcula livre segue no espacotempo curvo seria parametrizada pelo tempo proprioγ (τ).
Vetores no espacotempo tem 4 coordenadas e para distingui-los dos vetores espaciais (projecoes espaciais),sao frequentemente chamados de quadrivetores ou 4-vetores. Assim, temos o quadrivetor deslocamento,ou seja deslocamento no espacotempo
∆s = (∆t,∆x,∆y,∆z)
e o quadrivetor velocidade
u =ds
dτ=
(dt
dτ,dx
dτ,dy
dτ,dz
dτ
), (15.1)
ou α′ (τ) para uma trajetoria curva α (τ) no espacotempo. O quadrivetor velocidade e por definicao tangentea trajetoria da partıcula no espacotempo.
Observe que se a trajetoria do objeto no espacotempo e uma curva, o seu referencial proprio obviamentenao e um referencial inercial. Entretanto, em cada instante de tempo existe um referencial inercial que tema mesma velocidade que o objeto; este referencial inercial que comove com o objeto e temporario, pois noproximo instante de tempo ele nao esta mais se comovendo com o objeto. Ele e chamado o seu referencialcomovel temporario (em ingles: momentarily comoving reference frame (MCRF)). O quadrivetor velocidade
215

Rodney Josue Biezuner 216
em um determinado instante de tempo (tangente a trajetoria da partıcula naquele instante de tempo) ejustamente o vetor base e0 do seu referencial comovel temporario naquele momento.
Como o tempo proprio τ do objeto e o tempo t de um referencial inercial arbitrario estao relacionadosatraves da equacao
τ =√
1− v2t, (15.2)
onde v e a velocidade espacial do objeto em relacao a este referencial inercial (v = ‖v‖), isto e,
v =
(dx
dt,dy
dt,dz
dt
),
segue que
dτ =√
1− v2dt,
e portanto as coordenadas do quadrivetor velocidade no referencial inercial tambem podem ser escritas naforma
u =1√
1− v2
(1,dx
dt,dy
dt,dz
dt
)=
1√1− v2
(1,v)
ou
u =1√
1− v2(1, vx, vy, vz) =
1√1− v2
(1,v) . (15.3)
Observe que quando v 1 temos τ ≈ t e
u ≈ (1, vx, vy, vz) = (1,v) ,
e o quadrivetor velocidade de um objeto em repouso em relacao ao referencial inercial (trajetoria vertical noespacotempo) tem neste referencial coordenadas
u = (1, 0, 0, 0) .
Em particular, segue tambem que se v 6= 1 o quadrivetor velocidade e um vetor unitario, isto e,
‖u‖ = 1 (15.4)
pois
〈u,u〉 =
⟨1√
1− v2(1, vx, vy, vz) ,
1√1− v2
(1, vx, vy, vz)
⟩=
1
1− v2
[−1 + (vx)
2+ (vy)
2+ (vz)
2]
=1
1− v2
[−1 + v2
]= −1.
15.2 Momento-Energia
15.1 Definicao. Se m e a massa de um objeto, definimos o quadrivetor momento-energia
P = mu. (15.5)

Rodney Josue Biezuner 217
Em um referencial inercial arbitrario, segue que o quadrivetor momento-energia tem coordenadas
P =m√
1− v2(1, vx, vy, vz) =
m√1− v2
(1,v) .
Observe que como velocidade e adimensional em relatividade (tempo e espaco sao medidos com a mesmaunidade), o quadrivetor momento-energia tem unidades de massa. De fato, se v 6= 1
〈P,P〉 = 〈mu,mu〉 = m2 〈u,u〉 = −m2, (15.6)
de modo que‖P‖ = m. (15.7)
Note que a massa m de um objeto, sendo a norma do quadrivetor momento-energia (um vetor do espacotempode Minkowski), tem o mesmo valor em qualquer referencial inercial. Em outras palavras, ela nao dependeda velocidade do referencial: massa nao aumenta com a velocidade e na teoria da relatividade nao se define“massa relativıstica” (veja [Okun1] para uma exposicao clara, incluindo a origem historica deste termo eate seu uso inicial por Einstein para inferir a atracao da luz por uma massa gravitacional (ele raciocinouque fotons teriam massa m = E/c2), antes de formular a Teoria da Relatividade Geral, quando abandonouessa ideia inconsistente, e uma coletanea de artigos criticando os conceitos de “massa de repouso” e “massarelativıstica” em [Okun2]). Por outro lado, massa e mais facilmente medida em um referencial em que oobjeto esta em repouso.
Observe que m = 0 se e somente se P e um vetor do tipo luz, e consequentemente u tambem e, dondev = 1. Portanto, fotons nao possuem massa.
15.2 Definicao. A componente temporal do quadrivetor momento-energia e chamada a energia rela-tivıstica E do objeto e sua projecao espacial o seu momento relativıstico p.
Assim,
E =m√
1− v2,
p =m√
1− v2v =
(mvx√1− v2
,mvy√1− v2
,mvz√1− v2
),
de modo quem2 = E2 − p2. (15.8)
Note que tanto a energia relativıstica quanto o momento relativıstico dependem do referencial, ja que saocomponentes (coordenadas) de um quadrivetor. Observe tambem que massa nao e a mesma coisa que energia:energia e a componente temporal do quadrivetor momento-energia, enquanto que massa e a magnitude destevetor. Apenas que, em relatividade, elas sao medidas com as mesmas unidades de medida (quilogramas), damesma forma que tempo e espaco em relatividade sao medidos com as mesmas unidades de medida (metros),apesar de nao serem a mesma coisa.
Em unidades do espacotempo (ct, x, y, z) em que a velocidade da luz e c e nao normalizada para 1, arelacao entre o tempo proprio e o tempo em um referencial inercial arbitrario e
τ =
√1−
(vc
)2
t
e o quadrivetor velocidade tem coordenadas
u =1√
1−(vc
)2(c, vx, vy, vz) =
1√1−
(vc
)2(c,v) ,

Rodney Josue Biezuner 218
de modo que o momento-energia e
P =m√
1−(vc
)2(c, vx, vy, vz) =
m√1−
(vc
)2(c,v) ,
mas a energia relativıstica e
E =mc2√
1−(vc
)2
(para que as unidades de medida de energia fiquem corretas) e o momento relativıstico e
p =mv√
1−(vc
)2,
ou seja,
P =
(E
c,v
).
Quando v = 0, temosE0 = m
ou, quando a velocidade da luz nao e normalizada, a celebre equacao
E0 = mc2
para a energia de repouso; ou seja, a energia de um objeto nao desaparece quando ele esta em repouso, comona mecanica de Newton, mas ao contrario e enorme (por causa do fator c2).
15.3 Fluxos
15.3.1 Definicao
Fluxo (flux ) e a taxa de transferencia de um material (uma grandeza concreta tal como, por exemplo, massa,carga eletrica, numero de partıculas) ou propriedade (uma grandeza abstrata tal como, por exemplo, energiaou momento) ao longo de uma direcao, por unidade de area, por unidade de tempo. Ele e portanto umagrandeza vetorial, cuja unidade e quantidade de material ou propriedade por unidade de area por unidadede tempo. Por exemplo, o material pode estar sendo transferido da esquerda para a direita no eixo x, ouna direcao normal a uma certa superfıcie de referencia. [As vezes, fluxo por unidade de tempo e chamadosimplesmente de fluxo, enquanto que fluxo por unidade de area por unidade de tempo e chamado de densidadede fluxo.]
15.3 Exemplo. No fluxo de massa o material transferido comumente se refere a um fluido (taxa detransferencia de fluido, ou seja, taxa de escoamento) ou a uma certa substancia dissolvida em um fluido. Ataxa de transferencia de massa pode ser medida, por exemplo, em kg/m2s ou, o que e equivalente no casode um fluido de densidade constante, em litros/m2s.
Um exemplo simples de fluxo de energia e a taxa de transferencia de calor, que e energia termica,medida em joules/m2s.
No fluxo de momento, a taxa de transferencia dada por unidades de momento por unidade de areapor unidade de tempo, tem as mesmas unidades de forca por area ((kg·m/s)/m2s = (kg·m/s2)/m2), ou seja,pressao. Assim, a forca aplicada a um objeto pode ser vista como a taxa de transferencia de momento parao objeto. O fluxo de momento tambem chamado estresse.
No que se segue, convencionaremos que o fluxo sera positivo quando a transferencia de material ou proprie-dade e no sentido orientado positivo do eixo xi. Se o fluxo tem sinal negativo, isso significa que a transferenciade material esta-se realizando no sentido orientado negativo do eixo xi.

Rodney Josue Biezuner 219
15.4 Tensor Momento-Energia
Em cada evento do espacotempo existe um tensor de momento-energia T , que contem um conhecimentoda densidade de energia, densidade de momento e tensao, associadas a todas as formas de materia e todos oscampos nao-gravitacionais (como, por exemplo, o campo eletromagnetico) medida por qualquer e todos osobservadores naquele evento (ja que e um tensor, logo sua definicao e significado transcende todos os sistemasde coordenadas e referencias inerciais). Mas qualquer observador, limitado pelo seu referencial inercial deLorentz, presta mais atencao as componentes de T do que ao proprio T , atribuindo a cada componente umsignificado fısico especial.
O tensor momento-energia e um 2-tensor contravariante (embora tambem possa ser visto como um 2-tensor covariante ou mesmo como um (1, 1)-tensor covariante e contravariante, atraves de contracao deındices). O componente T ij e o fluxo da i-esima componente do momento-energia passando atraves dasuperfıcie xj ≡ constante. Logo, T 00 e a densidade de energia (t = constante), enquanto que T 0j parai = 1, 2, 3 e o fluxo da energia atraves de uma superfıcie no espaco. T i0 para i = 1, 2, 3 e a densidade domomento (t = constante). T ij para i, j = 1, 2, 3 e o fluxo de momento atraves de uma superfıcie espacial,tambem chamado tensao (stress): T ii e a tensao normal (pressao normal a superfıcie) e T ij , i 6= j, e atensao de cisalhamento (pressao tangente a superfıcie). Assim, o tensor momento-energia representadoem forma matricial e
T =
T 00 T 01 T 02 T 03
T 10 T 11 T 12 T 13
T 20 T 21 T 22 T 23
T 30 T 31 T 32 T 33
,onde
T =
T 00 densidade de energia T 01 T 02 T 03 fluxo de energia
T 10
T 20
T 30
densidade de momentoT 11 T 12 T 13
T 21 T 22 T 23
T 31 T 32 T 33
fluxo de momento
.
15.4.1 Tensor Momento-Energia da Poeira
O tensor momento-energia mais simples e o tensor momento-energia da poeira (dust). Poeira e simples-mente uma colecao de partıculas em repouso em algum referencial (portanto elas se movem com a mesmavelocidade em qualquer outro referencial), o seu referencial proprio. E um exemplo de um fluido perfeito (aser definido no proximo paragrafo) com pressao nula.
A densidade do numero de partıculas (fluxo atraves das superfıcies t = constante) e definida por
n = numero de partıculas por unidade de volume no referencial proprio.
Em um referencial inercial em que as partıculas nao estao em repouso, digamos em que as partıculas temvelocidade v, o volume e alterado devido a contracao de Lorentz: por exemplo, um paralelepıpedo solidode volume ∆x∆y∆z tera um volume ∆x∆y∆z
√1− v2 medido em um referencial em que as partıculas tem
velocidade v em uma das direcoes x, y, z. A densidade do numero de partıculas sera entao
n√1− v2
.
O fluxo de partıculas e o numero de partıculas que atravessam uma superfıcie por unidade de area, porunidade de tempo. Alem da orientacao da superfıcie, em Relatividade area e tempo dependem do referencial.Obviamente, no referencial em que as partıculas estao em repouso o fluxo e zero. Em um referencial em queas partıculas movem-se com todas com a velocidade v em uma mesma direcao, digamos na direcao x′, seconsiderarmos a superfıcie normal a x′ a area sera a mesma (ja que nao ha contracao nas direcoes transversais

Rodney Josue Biezuner 220
ao movimento do referencial) ∆A = ∆y∆z = ∆y′∆z′. Mas o volume que contem as partıculas durante umintervalo ∆t′ sera
V = ∆x′∆A = v∆t′∆A,
e como a densidade de partıculas por unidade de volume neste referencial e n/√
1− v2 segue que o fluxoatraves de superfıcies x = constante por unidade de area por unidade de tempo sera
φ =nv√
1− v2.
Mesmo que as partıculas tenham componentes de velocidade nas direcoes y, z, como a componente do fluxona direcao x (atraves das superfıcies x = constante) so depende da componente da velocidade ortogonal asuperfıcie, isto e, vx, segue que a componente do fluxo na direcao x e dada por
φx =nvx√1− v2
.
15.4 Definicao. O quadrivetor fluxo de partıculas e definido por
N = nu
Logo,
N =n√
1− v2(1, vx, vy, vz) =
n√1− v2
(1,v) .
Note que a densidade do numero de partıculas no referencial proprio e a norma do quadrivetor fluxo eportanto independente do referencial inercial (o que tambem e obvio da definicao dela):
〈N,N〉 = 〈nu, nu〉 = n2 〈u,u〉 = −n2,
de modo que‖N‖ = n. (15.9)
Para obter o tensor momento-energia da poeira, vamos assumir por simplicidade que as partıculas tem amesma massa m. No referencial comovel temporario das particulas, em que elas se encontram em repouso,a energia de cada partıcula e a energia de repouso m. Portanto, a energia por unidade de volume, ou seja,a densidade de energia, e
ρ = nm.
Em fluidos mais gerais, existe um movimento aleatorio das partıculas, logo energia cinetica de movimento(mesmo em um referencial media dos referenciais) e a densidade de energia do fluido tera uma expressaobem diferente. Em um referencial em que as partıculas se movem com a mesma velocidade v, a densidadede energia ainda e o numero de partıculas por unidade de volume vezes a energia de cada partıcula, que edada por
ρ =n√
1− v2
m√1− v2
=nm
1− v2.
Para obter o tensor momento-energia da poeira, basta determinar os seus componentes em algum refe-rencial. No caso da poeira, a determinacao dos seus componentes no seu referencial comovel temporario eparticularmente simples. Nao ha movimento das partıculas, logo os momentos sao todos nulos. Assim, noreferencial comovel temporario, o tensor momento-energia tem componentes
T =
ρ 0 0 00 0 0 00 0 0 00 0 0 0
.

Rodney Josue Biezuner 221
Estas sao exatamente as componentes do tensor
P⊗N = (mu)⊗ (nu) = nm (u⊗ u) = ρ (u⊗ u) ,
pois u = (1, 0, 0, 0) no referencial comovel temporario e (F⊗G)ij
= F iGj para quaisquer quadrivetores(1-tensores contravariantes) F,G. Portanto, este e o tensor momento-energia da poeira:
T = ρ (u⊗ u) .
Podemos agora calcular seus componentes em um referencial em que as partıculas se movem com velocidadev. Como
u0 =1√
1− v2,
ui =vi√
1− v2,
eT ij = ρuiuj ,
segue que
T 00 = ρu0u0 =ρ
1− v2,
T 0j = ρu0uj =ρvi
1− v2,
T i0 = ρuiu0 =ρvi
1− v2,
T ij = ρuiuj =ρvivj
1− v2, para i, j 6= 0,
e
T =ρ
1− v2
1 vx vy vz
vx (vx)2
vxvy vxvz
vy vxvy (vy)2
vyvz
vz vxvz vyvz (vz)2
.Note que o tensor momento-energia da poeira e simetrico. Veremos que isso sempre acontece.
15.4.2 Simetria do Tensor Momento-Energia
Para provar que o tensor momento-energia e simetrico, isto e, que
T ij = T ji
para todos os ındices i, j, basta provar isso em um referencial, pois isso implica
T (ω, σ) = T (σ, ω)
para todos os covetores ω, σ, o que sera valido em todo referencial. O referencial mais simples de trabalhare o referencial comovel temporario.
Para ver queT i0 = T 0i,
ou seja, que a densidade de energia e igual ao fluxo de energia, observe que o fluxo de energia e igual adensidade de energia vezes a velocidade com que ela escoa. Mas como massa e energia sao a mesma coisa,isto e a densidade de massa vezes a velocidade com que ela se move, ou seja a densidade de momento.
A simetriaT ij = T ji,
para i, j = 1, 2, 3 e deduzida como em Mecanica Newtoniana (veja, por exemplo, [Shutz], pp. 97-98).

Rodney Josue Biezuner 222
15.4.3 Conservacao do Momento-Energia
Pela lei de conservacao do momento-energia segue que
div T = 0,
ja que o divergente mede infinitesimalmente o fluxo total por unidade de volume (veja o apendice a estecapıtulo).
15.4.4 Tensor Momento-Energia de um Fluido Perfeito
Um fluido perfeito e um fluido em que nao ha conducao de calor ou viscosidade. A primeira condicaoimplica que o fluxo da energia atraves de uma superfıcie no espaco e zero, logo T 0j no referencial comoveltemporario e segunda condicao implica que nao ha tensao de cisalhamento, ou seja, T ij = 0 para i 6= j,i, j = 1, 2, 3 neste referencial. Em outras palavras, um fluido perfeito e caracterizado apenas por densidadee pressao; o exemplo mais familiar de fluido perfeito e um gas perfeito. Usando simetria, concluımos que noreferencial comovel temporario o tensor momento-energia de um fluido perfeito tem a forma
T =
ρ 0 0 00 P 0 00 0 P 00 0 0 P
,onde P e a pressao. E facil ver que
T = (ρ+ P ) (u⊗ u) + Pη,
onde η e o tensor metrica de Lorentz do espaco de Minkowski. Portanto, em um referencial em que o fluidose move com velocidade v temos
T =ρ+ P
1− v2
1 vx vy vz
vx (vx)2
vxvy vxvz
vy vxvy (vy)2
vyvz
vz vxvz vyvz (vz)2
+ P
η00 η01 η02 η03
η10 η11 η12 η13
η20 η21 η22 η23
η30 η31 η32 η33
,onde ηij sao os componentes da metrica de Lorentz no referencial.
Para qualquer metrica de Lorentz g em um espacotempo curvo teremos
T = (ρ+ P ) (u⊗ u) + Pg.
15.5 Apendice: Divergente e Fluxo
E bastante esclarecedor estudar o escoamento de um fluido para entender a matematica do fluxo. Para umfluido movendo-se no espaco, denote por V = (V x, V y, V z) o seu campo de velocidades. Para cada ponto(x, y, z) no espaco e para cada instante de tempo t, V (t, x, y, z) denota a velocidade do fluido ao passarpor aquele ponto naquele instante de tempo. De fato, fixado um ponto no espaco, a velocidade do fluido aopassar por aquele ponto pode ser variavel no tempo. Quando isso nao ocorre, isto e, se a velocidade naodepende do tempo, V = V (x, y, z), dizemos que o campo e estacionario (ou que o fluido esta em regimepermanente). Mais geralmente
V x = V x (t, x, y, z) ,
V y = V y (t, x, y, z) ,
V z = V z (t, x, y, z) ,

Rodney Josue Biezuner 223
e V : Ω × I → R3 e uma funcao vetorial definida no produto cartesiano Ω × I, onde Ω ⊂ R3 e umaregiao aberta do espaco e I e um intervalo contendo 0 (que pode ser simplesmente o extremo esquerdo desteintervalo).
Denote por F(x, t) o campo de escoamento (flow field) de um campo de velocidades V de um fluido.Por definicao, isso significa que
dF
dt(t,x) = V(t,F (t,x)),
F(0,x) = x.
Em outras palavras, fixado x ∈ Ω, F (t,x) e a trajetoria do campo de escoamento que passa por x noinstante t = 0: se uma partıcula e posicionada dentro do fluido na posicao x, a sua posicao apos haverdecorrido um intervalo de tempo t e dada por F (t,x).
Para um campo de velocidades estacionario, as trajetorias do campo de escoamento sao fixas no espaco,nao se modificando com o tempo. Assim, se uma partıcula for posicionada na posicao x no instante de tempot1 e, logo em seguida, no instante de tempo t2 uma segunda partıcula e posicionada na mesma posicao x, asduas partıculas seguirao a mesma trajetoria, ou seja, decorrido um intervalo de tempo ∆t apos o instante detempo de posicionamento inicial de cada partıcula, elas ocuparao a mesma posicao F (t,x) no espaco. Paraum campo de velocidades nao-estacionario, as trajetorias do campo nao tem uma forma fixa, variando como tempo: em cada instante de tempo t, o campo de escoamento tem uma forma diferente. Desta vez, se umapartıcula for posicionada na posicao x no instante de tempo t1, a velocidade do fluido naquele instante eV(t1,x) e a partıcula seguira uma certa trajetoria que tem esta velocidade inicial, enquanto que, se logo emseguida no instante de tempo t2 uma segunda partıcula e posicionada na mesma posicao x, a velocidade docampo naquele momento sera V(t2,x), possivelmente diferente da velocidade inicial da primeira partıcula,e muito provavelmente as duas partıculas seguirao trajetorias completamente diferentes.
E importante nao confundir o conceito de trajetorias do campo de escoamento com o conceito de linhasde corrente do escoamento. As linhas de corrente (streamlines) de um escoamento sao as curvas tangentesao campo de velocidades do escoamento. E claro que no caso de um campo estacionario as linhas de correntesao exatamente as trajetorias do campo. No caso de um campo nao-estacionario, entretanto, como o vetorvelocidade varia com o tempo, a trajetoria que uma partıcula seguira apos ser posicionada em um pontodentro do fluido em um determinado instante de tempo em geral nao coincidira com a linha de corrente doescoamento que passa por aquele ponto naquele momento. Para um campo de velocidades nao-estacionario,as linhas de corrente variam em forma com o passar do tempo.
Outra maneira de enxergar o campo de escoamento e fixar t e considerar a funcao Ft : Ω −→ Ωt, ondeΩt = Ft(Ω). Ft(x) da a posicao da partıcula que ocupava a posicao x no instante inicial apos decorridoum intervalo de tempo t. A funcao Ft pode ser vista como a funcao que nos permite ver como regioes dofluido sao deformadas atraves do escoamento: uma regiao Ω0 ⊂ Ω do fluido e deformada pelo escoamento, demodo que apos decorrido um intervalo de tempo t ela e transformada na regiao Ft(Ω0). Sob condicoes muitogerais, esta transformacao e um difeomorfismo (a inversa e diferenciavel porque basta seguir as trajetoriasno sentido reverso para de Ft(Ω0) voltar em Ω0).
As trajetorias de um campo de escoamento sao encontradas resolvendo-se a equacao diferencial ordinariacom condicao inicial acima (e claro que, sendo F e V grandezas vetorias no espaco, esta equacao diferencialordinaria e na verdade um sistema de 3 equacoes diferenciais com 3 condicoes iniciais). Desde que V satisfacacertas condicoes razoaveis de regularidade (por exemplo, se V for continuamente diferenciavel), a equacaodiferencial ordinaria acima sempre tem uma unica solucao, pelo menos localmente. Portanto, dado V,podemos encontrar F. Em geral, nao e possıvel encontrar F explicitamente (a funcao V pode ser muitocomplicada), mas podemos obte-lo aproximadamente atraves de metodos numericos.
Reciprocamente, conhecendo-se o campo de escoamento F, e possıvel encontrar o campo de velocidadesV. Essencialmente, basta derivar F em relacao ao tempo:
V (t,x) =dF
dt(t,F−1
t (x)).
Mais especificamente, V (t,x) e a derivada temporal da trajetoria do campo que passa pelo ponto F−1t (x)

Rodney Josue Biezuner 224
no instante inicial t = 0, esta derivada sendo calculada no instante de tempo t. Se o campo de escoamento edado atraves de uma expressao fechada (e nao por uma expressao aproximada), entao podemos conhecer ocampo de velocidades com exatidao. Obviamente, e mais difıcil encontrar F, dado V, do que encontrar V,dado F.
15.5.1 Significado Geometrico do Divergente Espacial
Nossos campos vetoriais em geral serao funcoes dependendo de tres coordenadas espaciais e uma temporal:V = V (t, x, y, z). Considere o divergente espacial de um campo vetorial, isto e, o divergente em relacaoas tres coordenadas espaciais, sem envolver a coordenada temporal,
divx V =∂V x
∂x+∂V y
∂y+∂V z
∂z.
DefinaV (t,x) = det dFt(x),
isto e,
dFt(x) =
∂F 1
t (x)
∂x
∂F 1t (x)
∂y
∂F 1t (x)
∂z∂F 2
t (x)
∂x
∂F 2t (x)
∂y
∂F 2t (x)
∂z∂F 3
t (x)
∂x
∂F 3t (x)
∂y
∂F 3t (x)
∂z
,
onde escrevemos Ft(x) = (F 1t (x), F 2
t (x), F 3t (x)). Intuitivamente, V (t,x) mede o volume de um elemento
infinitesimal do fluido em diferentes pontos do escoamento (produto misto de tres vetores no espaco). Estevolume varia a medida que o elemento move-se ao longo de uma trajetoria do escoamento.
Para um campo de velocidades estacionario V = V(x), esta variacao infinitesimal por unidade de volumee dada precisamente pelo divergente espacial divx V que neste caso de um campo estacionario e simplesmenteo divergente div V: o divergente do campo de velocidades estacionario de um fluido e a taxa de variacao dovolume de um elemento do fluido que se move ao longo de uma trajetoria do campo, por unidade de volume.
15.5 Teorema. Se V = V(x) e um campo vetorial estacionario, entao
div V(x) =1
V(0)
dV(t)
dt
∣∣∣∣t=0
.
Mais geralmente,
div V(Ft(x)) =1
det d (Ft)x
d
dtdet d (Ft)x .
Prova 1: Consideraremos primeiro uma demonstracao elementar e bastante intuitiva da primeira equacao.Fixe um ponto x no espaco. Considere ε > 0 pequeno e sejam v1 = εi,v2 = εj,v3 = εk, onde i, j,k
sao os vetores da base canonica de R3. O ponto x e os tres vetores v1,v2,v3 definem um paralelepıpedoP (0) no espaco com um de seus vertices localizado no ponto x e os outros vertices localizados nos pontosx + v1,x + v2 e x + v3. Para cada t fixado, o escoamento Ft e uma funcao de R3 em R3, ou seja, umafuncao que leva pontos do espaco em outros pontos do espaco ao longo das trajetorias do escoamento; oefeito visual de Ft e que cada ponto se move ao longo de sua trajetoria enquanto decorre o intervalo detempo t, apos o que ele para. Em particular, cada ponto do paralelepıpedo move-se ao longo da trajetoriaa qual ele pertence, distorcendo o paralelepıpedo no processo, de modo que Ft(P (0)) nao e mais, em geral,um paralelepıpedo. Por outro lado, se ε e pequeno (ou seja, vendo o paralelepıpedo P (0) como um elementoinfinitesimal de volume aproximado), a imagem de P (0) sob Ft pode ser aproximada pela sua imagem soba derivada dFt de Ft: de fato, se v = (x + ∆x)− x = ∆x e um pequeno vetor baseado em x, temos
Ft(x + ∆x)− Ft(x) ≈ dFt(x) ∆x = dFt(x) v,

Rodney Josue Biezuner 225
pois, por definicao de derivada direcional,
d (Ft)x v =∂Ft∂v
= lims→0
Ft(x + s∆x)− Ft(x)
s.
Portanto, se ε e pequeno, o paralelepıpedo P (0) e levado pelo escoamento do campo depois de decorrido umintervalo de tempo t no paralelepıpedo P (t) com um vertice em Ft(x) e os outros vertices localizados nospontos Ft(x) + v1(t),Ft(x) + v2(t) e Ft(x) + v3(t), onde
v1(t) = d (Ft)x v1,
v2(t) = d (Ft)x v2,
v3(t) = d (Ft)x v3.
O volume do paralelepıpedo P (t) e dado pelo produto misto:
V(t) = v1(t) · [v2(t)× v3(t)] .
Logo, pela regra da derivada do produto e a propriedade de comutatividade do produto escalar com o produtovetorial, segue que
dV
dt=dv1
dt· (v2 × v3) + v1 ·
(dv2
dt× v3
)+ v1 ·
(v2 ×
dv3
dt
)=dv1
dt· (v2 × v3) +
dv2
dt· (v3 × v1) +
dv3
dt· (v1 × v2) .
Em t = 0, temos
v2 × v3 = ε2i,
v3 × v1 = ε2j,
v1 × v2 = ε2k.
Para calculardvi(t)
dt, lembramos a definicao do campo de escoamento F(t,x) do campo de velocidades V(x):
dFtdt
(x) = V(Ft(x)).
Derivando com relacao a x, temos
d
[dFtdt
](x) = d [V(Ft)]x .
Invertendo a ordem de derivacao na derivada parcial mista do lado esquerdo e aplicando a regra da cadeiano lado direito, temos
d
dt[d (Ft)x)] = dVFt(x)d (Ft)x . (15.10)
Aplicando ambos os lados desta equacao ao vetor vi = vi (0) obtemos no lado esquerdo (pois vi e um vetorconstante) (
d
dt[d (Ft)x]
)vi =
d
dt[d (Ft)x vi] =
dvidt
(t),
enquanto que no lado direito obtemos
dVFt(x)d (Ft)x vi = dVFt(x)vi(t).

Rodney Josue Biezuner 226
Segue quedvidt
(t) = dVFt(x)vi(t). (15.11)
Em particular, em t = 0 temos F0(x) = x, donde
dvidt
∣∣∣∣t=0
= dVxvi,
Estamos agora em condicoes de concluir a demonstracao do teorema:
dV(t)
dt
∣∣∣∣t=0
= ε2 [(dV(x) (εi)) · i + (dV(x) (εj)) · j + (dV(x) (εk)) · k]
= ε3 [(dV(x) i) · i + (dV(x) j) · j + (dV(x) k) · k]
= ε3
[∂V x
∂x+∂V y
∂y+∂V z
∂z
]= V(0) div V(x).
Prova 2: Mostraremos que
d
dtdet d (Ft)x = div V(Ft(x)) det d (Ft)x .
Pela regra da cadeia,d
dtdet d (Ft)x = d (det)d(Ft)x
d
dt[d (Ft)x] .
Lembremos a derivada da funcao determinante det : R3×R3×R3 −→ R. Escrevendo detX = det(X1, X2, X3),onde X1, X2, X3 sao as linhas da matrix X, a derivada do determinante em X e o funcional linear
d (det)X : R3 × R3 × R3 −→ R
cujo valor na matriz A = (A1, A2, A3) e
d (det)X A = det(A1, X2, X3) + det(X1, A2, X3) + det(X1, X2, A3).
Segue que
d (det)d(Ft)xA = det([d (Ft)x]
1, X2, X3) + det(X1, [d (Ft)x]
2, X3) + det(X1, X2, [d (Ft)x]
3)
onde [d (Ft)x]i
denota a i-esima linha da matriz d (Ft)x. Por outro lado, pela comutatividade dos operadores
diferenciais d ed
dte pela regra da cadeia, temos
d
dt[d (Ft)x] = d
[dFtdt
(x)
]= d [V(Ft(x))] = dVFt(x)d (Ft)x .
Logo,
d (det)d(Ft)x
d
dt[d (Ft)x]
= det([dVFt(x)d (Ft)x
]1, [d (Ft)x]
2, [d (Ft)x]
3
)+ det
([d (Ft)x]
1,[dVFt(x)d (Ft)x
]2, [d (Ft)x]
3
)+ det
([d (Ft)x]
1, [d (Ft)x]
2,[dVFt(x)d (Ft)x
]3
).

Rodney Josue Biezuner 227
onde[dVFt(x)d (Ft)x
]i
denota a i-esima linha da matriz dVFt(x)d (Ft)x. Daı, usando a linearidade da funcaodeterminante com relacao a uma linha fixada, temos
det([dVFt(x)d (Ft)x
]1, [d (Ft)x]
2, [d (Ft)x]
3
)
= det
3∑j=1
∂V x
∂xj∂F jt∂x
3∑j=1
∂V x
∂xj∂F jt∂y
3∑j=1
∂V x
∂xj∂F jt∂z
∂F 2t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
= det
∂V x
∂x
∂F 1t
∂x
∂V x
∂x
∂F 1t
∂y
∂V x
∂x
∂F 1t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
+ det
∂V x
∂y
∂F 2t
∂x
∂V x
∂y
∂F 2t
∂y
∂V x
∂y
∂F 2t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
+ det
∂V x
∂xz∂F 3
t
∂x
∂V x
∂z
∂F 3t
∂y
∂V x
∂z
∂F 3t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
=∂V x
∂xdet
∂F 1
t
∂x
∂F 1t
∂y
∂F 1t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
+∂V x
∂ydet
∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
+∂V x
∂xzdet
∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z∂F 2
t
∂x
∂F 2t
∂y
∂F 2t
∂z∂F 3
t
∂x
∂F 3t
∂y
∂F 3t
∂z
=∂V x
∂xdet d (Ft)x .
Similarmente,
det([d (Ft)x]
1,[dVFt(x)d (Ft)x
]2, [d (Ft)x]
3
)=∂V y
∂ydet d (Ft)x ,
det([d (Ft)x]
1, [d (Ft)x]
2,[dVFt(x)d (Ft)x
]3
)=∂V z
∂zdet d (Ft)x .
Portanto,
d (det)d(Ft)x
d
dt[d (Ft)x] =
(∂V x
∂xFt(x) +
∂V y
∂yFt(x) +
∂V z
∂zFt(x)
)det d (Ft)x
= div V(Ft(x)) det d (Ft)x .
15.5.2 Significado Fısico do Divergente
Pelo Teorema de Gauss, ∫Ω
div V =
∫∂Ω
V · η,
Rodney Josue Biezuner 228
onde, por definicao, o lado direito e o fluxo total do campo V atraves da superfıcie ∂Ω. Em particular,se div V = 0 em um aberto de Rn, o fluxo total e nulo atraves de qualquer superfıcie fechada contida noaberto. Pelo Teorema do Valor Medio para Integrais,
1
vol Ω
∫Ω
div V = div V (x)
para algum x ∈ Ω. Portanto,
div V (x) = limε→0
1
volBε (x)
∫Bε(x)
div V.
Consequentemente,
div V (x) = limε→0
1
volBε (x)
∫Sε(x)
V · η.
Assim, o divergente mede infinitesimalmente o fluxo total por unidade de volume.

Capıtulo 16
Equacao de Einstein
16.1 Equacao de Newton para o Potencial Gravitacional
O analogo Newtoniano da equacao de Einstein e a equacao de Poisson para o potencial gravitacional φ
∆φ = 4πGρ, (16.1)
onde ρ e a densidade de massa e G denota a constante gravitacional de Newton. Em Mecanica Newtoniana,a gravidade e gerada apenas por massa.
Vamos ver como esta equacao e deduzida. No caso de uma unica fonte puntual de massa M localizada naorigem 0, e comprovado experimentalmente que a forca gravitacional atraindo uma partıcula teste de massam e
F = mg = −GMm
r2r,
onde g e a aceleracao da gravidade, r e o vetor posicao radial partindo da fonte e r denota o seu vetor unitario.O campo gravitacional G, isto e, a forca gravitacional agindo em um certo ponto do espaco localizado em rpor unidade de massa, e portanto dado por
G = −GMr2
r.
[Note que G e G denotam conceitos completamente diferentes, nao relacionados.] Assim, pela segunda leide Newton, o campo gravitacional G por definicao nada mais e que a aceleracao da gravidade g:
G =F
m= g.
Considerando um aberto Ω contendo a fonte 0 tal que sua fronteira e uma superfıcie regular fechada ∂Ω,segue que ∫
∂Ω
G · n ds = −GM∫∂Ω
1
r2r·n ds.
16.1 Lema. Se Ω ⊂ R3 e um aberto tal que sua fronteira ∂Ω e uma superfıcie regular fechada e 0 /∈ ∂Ω,vale ∫
∂Ω
1
r2r·n ds =
4π se 0 ∈ Ω,0 se 0 /∈ Ω.
Prova: Primeiro observamos que
divr
r2= 0.
229

Rodney Josue Biezuner 230
De fato,r
r2=
x
‖x‖3=
(x1, x2, x3
)[∑3i=1 (xi)
2]3/2 ,
de modo que
∂i
[(r
r2
)i]= ∂i
xi[∑3i=1 (xi)
2]3/2
=
[∑3i=1
(xi)2]3/2 − 3
(xi)2 [∑3
i=1
(xi)2]1/2[∑3
i=1 (xi)2]5/2
=1
‖x‖2−
3(xi)2
‖x‖4,
logo
divr
r2=
3∑i=1
∂i
(r
r2
)i=
3
‖x‖2− 3
∑3i=1
(xi)2
‖x‖4= 0.
Considere primeiro o caso 0 /∈ Ω, de modo que o campo vetorial1
r2r e um campo suave em Ω. Podemos
entao aplicar o Teorema da Divergencia para obter∫∂Ω
1
r2r·n ds =
∫Ω
divr
r2dv = 0.
Se 0 ∈ Ω, o campo vetorial1
r2r tem uma singularidade em 0 e o Teorema da Divergencia nao se aplica
a regiao Ω. Considere entao uma esfera de raio R centrada em 0 e contida em Ω. Entao o aberto Ω\BR (0)cuja fronteira e ∂Ω ∪ SR (0) nao contem a singularidade 0, logo segue do resultado anterior que∫
∂Ω∪SR(0)
1
r2r·n ds = 0.
Como ∫∂Ω∪SR(0)
1
r2r·n ds =
∫∂Ω
1
r2r·n ds+
∫SR(0)
1
r2r·n ds,
temos que ∫∂Ω
1
r2r·n ds = −
∫SR(0)
1
r2r·n ds.
Nesta ultima integral, para manter a convencao de n ser o vetor normal apontando para fora da superfıcieem relacao ao aberto que ela engloba, o vetor n aponta para dentro da esfera, isto e,
n = −r,
de modo que ∫∂Ω
1
r2r·n ds =
1
R2
∫∂Ω
ds =1
R24πR2 = 4π.
Segue do Lema 16.1 que ∫
∂Ω
G · n ds = −4πGM.

Rodney Josue Biezuner 231
Tambem segue dela que se Ω e um aberto tal que Ω nao contem a fonte, teremos∫∂Ω
G · n ds = 0.
Isso significa que cada partıcula de massa M dentro da regiao Ω contribui para a integral de superfıcie ovalor −4πGM , enquanto que partıculas fora da regiao Ω nao contribuem nada. Portanto, o valor da integrale −4πG vezes a massa total dentro da regiao Ω. Para uma distribuicao contınua de massa com densidadede massa ρ (x), a massa total dentro da regiao Ω e dada por∫
Ω
ρ dv.
Consequentemente, ∫∂Ω
G · n ds = −4πG
∫Ω
ρ dv
Mas, pelo Teorema da Divergencia, tambem temos que∫∂Ω
G · n ds =
∫Ω
div G dv,
logo, ∫Ω
[div G + 4πGρ] dv = 0.
Como isso e valido para qualquer domınio Ω com fronteira regular arbitrario, segue que
div G = −4πGρ.
Mas o potencial gravitacional e definido porG = −∇φ
(como o campo gravitacional e conservativo, isto e, satisfaz rot G = 0, a existencia de φ esta assegurada),donde
div (∇φ) = 4πGρ,
e daı∆φ = 4πGρ. (16.2)
16.2 Deducao da Equacao de Einstein
A primeira tentativa de Einstein em obter uma equacao equivalente para a sua nova teoria de gravitacaofoi simplesmente substituir o potencial gravitacional φ por gij . O problema e que ∇g = 0, logo ∆g = 0tambem. Este motivo levou Einstein a abandonar a busca por uma equacao covariante, contentando-se emuma equacao invariante apenas por transformacoes de coordenadas especiais (veja mais detalhes em [Pais],p. 221; para a trajetoria completa de Einstein ate chegar na equacao correta, veja na mesma referenciacitada os Capıtulos 12-14). Ele levou alguns anos ate chegar na equacao (16.4) que veremos a seguir.
Na Teoria da Relatividade Geral de Einstein, gravidade e simplesmente a curvatura do espacotempoe esta e gerada pelo tensor de momento-energia T . Como vimos no capıtulo anterior, ele e um 2-tensorsimetrico e pela lei de convervacao da energia satisfaz
div T = 0.
Na equacao de Einstein, a fonte da curvatura T do espacotempo e colocada no lado direito da equacao,enquanto que no lado esquerdo teremos um objeto que caracteriza a curvatura do espacotempo, logo este

Rodney Josue Biezuner 232
deve ser tambem um 2-tensor simetrico com divergencia nula. Chamamos este tensor de tensor de Einsteine o denotamos por G. Desta forma, a equacao para a geracao da gravidade (isto e, para o efeito da massa-energia sobre a curvatura do espacotempo) e
G = κT,
onde κ e uma constante de proporcionalidade a ser determinada mais tarde (o fato que ira determina-la esimplesmente a exigencia que no limite para campos gravitacionais estaticos, relativamente fracos, ela deveracorresponder a lei da gravitacao universal de Newton). Portanto, o 2-tensor simetrico G deve ser construıdoapenas a partir do tensor da curvatura de Riemann e da metrica, deve satisfazer divG = 0 e deve ser emprincıpio uma funcao linear da curvatura (se vamos medir a curvatura, nao ha motivo para medi-la de umaforma complicada, nao linear). Estas exigencias naturais determinam o tensor G:
G = Ric−1
2Sg. (16.3)
Em termos de componentes, a equacao de Einstein se escreve na forma covariante
Rij −1
2Sgij = κTij , (16.4)
e na forma contravariante
Rij − 1
2Sgij = κT ij . (16.5)
A equacao de Einstein e portanto um sistema de 10 equacoes independentes, ja que os tensores envolvidos saosimetricos. Cada uma destas equacoes e uma equacao parcial diferencial nao linear de segunda ordem, istoe, envolvendo gij , ∂kgij e ∂2
klgij , as componentes da metrica e suas derivadas parciais de primeira e segundaordem. Por outro lado, gij sao as componentes da metrica em algum sistema de coordenadas particular,e como ha 4 coordenadas, temos 4 graus de liberdade, o que em princıpio deveria tornar impossıvel obteruma solucao unica a partir de dados iniciais e de fronteira, como em problemas bem determinados tıpicos deEDPs. No entanto, a condicao ∇G = 0, que corresponde a 4 equacoes, faz com que o sistema efetivamentepossua apenas 6 equacoes independentes para as 6 componentes gij que permitem caracterizar a geometriaindependentemente das coordenadas.
Podemos obter a curvatura escalar exclusivamente em termos do tensor momento-energia, o que ajudamuito em certos calculos. De fato, fazendo a contracao em relacao a metrica da equacao de Einstein, como
trg Ric = S,
trg g = 4,
obtemosS = −κ trg T. (16.6)
Em termos de componentes,S = −κgijTij = −κT ii = −κgijT ij .
Assim, a equacao de Einstein pode reescrita na forma
Ric = κ
[T − 1
2(trg T ) g
]. (16.7)
Em particular, a equacao de Einstein no vacuo (T = 0) e
Ric = 0.
Isso nao significa que a curvatura do espacotempo no vacuo e nula, pois o tensor de Ricci nao contem todaa informacao da curvatura: podemos ter Ric = 0 mas R 6= 0 (isso acontece com a metrica de Schwarzschild,como veremos mais tarde).

Rodney Josue Biezuner 233
16.2.1 O Tensor de Einstein tem Divergencia Nula
16.2 Proposicao. ValedivG = 0.
Prova: Temos
divG = div Ric−1
2div (Sg)
Pela Proposicao 14.16,
div Ric =∇S2.
Pela Definicao 14.15,[div (Sg)]i = gjk∇k (Sgij) = gjk (∇kS) gij + Sgjk∇kgij .
Como (Proposicao 14.4 ou 14.11)∇g = 0,
segue que[div (Sg)]i = gijg
jk (∇kS) = δki∇kS = ∇iS,
dondediv (Sg) = ∇S.
Daı,
divG =∇S2− ∇S
2= 0.
16.2.2 O Limite Newtoniano
Consideraremos agora um campo gravitacional estatico, fraco.O movimento de uma partıcula livre no espacotempo segue uma geodesica. Parametrizando pelo tempo
proprio τ , a equacao da geodesica e dada por
d2xk
dτ2+ Γkij
dxi
dτ
dxj
dτ= 0,
para k = 0, 1, 2, 3, x0 = ct.Primeiro vamos usar o princıpio de equivalencia para obter uma expressao para a aceleracao da gravidade.
Considere uma partıcula livre no seu referencial comovente temporario em que ela esta em repouso, de modoque
dxj
dτ= 0, i = 1, 2, 3,
dx0
dτ= c
dt
dτ.
Para k = 1, 2, 3, temos entao que
d2xk
dτ2= −c2Γk00
(dt
dτ
)2
.
Escolhendo t = τ , segue qued2xk
dτ2= −c2Γk00,
isto e, a aceleracao da partıcula ea = −c2
(Γ1
00,Γ200,Γ
300
). (16.8)

Rodney Josue Biezuner 234
Esta e, pelo princıpio de equivalencia, a aceleracao da gravidade g. Suas componentes sao os sımbolosde Christoffel Γ1
00,Γ200,Γ
300. Vamos calcular estes sımbolos em um campo gravitacional fraco.
A hipotese de um campo gravitacional fraco permite escrever a metrica do espacotempo na forma
gij = ηij + hij ,
onde ηij e a metrica de Minkowski e hij e uma pequena perturbacao, isto e,
|hij | 1.
Assumindo que o tensor metrica g e h sao diagonais (o que e razoavel, ja que o tensor momento-energiae, conforme veremos mais abaixo), temos
gij = 0, se i 6= j,
donde
gii =1
gii,
gij = 0, se i 6= j,
e o sımbolo de Christoffel Γk00, k = 1, 2, 3, e entao dado por
Γk00 =1
2(∂0g0k + ∂0g0k − ∂kg00) gmk
= −1
2
∂kg00
gkk
= −1
2
∂k (η00 + h00)
ηkk + hkk
= −1
2
∂kh00
1 + hkk.
Como |hkk| 1, podemos escrever
Γk00 = −1
2∂kh00.
Portanto,
g =c2
2(∂1h00, ∂2h00, ∂3h00) .
Masg = −∇φ,
logo
−∂kφ =c2
2∂kh00,
donde
φ = −c2
2h00. (16.9)
Isso mostra que apenas a componente h00 do tensor h contribui para a aceleracao da gravidade no limiteNewtoniano. E razoavel assumir
|hij | |h0j | |h00|
isto e, todas as componentes hij = 0 exceto h00, porque o tensor momento-energia satisfaz esta condicao,como veremos mais abaixo (veja [Shutz], p. 194, para maiores detalhes), obtendo a metrica g na forma
ds2 = − (1− h00) c2dt2 + dx2 + dy2 + dz2,

Rodney Josue Biezuner 235
ou seja
ds2 = −(
1 +2
c2φ
)c2dt2 + dx2 + dy2 + dz2. (16.10)
Queremos apenas determinar κ. Usando as equacoes de Einstein na forma (16.7), escolhemos trabalharcom a equacao
R00 = κ
(T00 −
1
2g00 trg T
).
Vamos calcular primeiro R00. ComoRij = Rkkij ,
segue queR00 = Rkk00,
ja que R0000 = 0, pelas simetrias do tensor endomorfismo curvatura. Temos
Rlijk =(ΓmjkΓlim − ΓmikΓljm
)+∂Γljk∂xi
− ∂Γlik∂xj
.
Mas, como |h00| 1, a metrica e aproximadamente de Minkowski e podemos assumir que os sımbolos deChristoffel se anulam, pois
Γkij =1
2(∂igjm + ∂jgim − ∂mgij) gmk
e as componentes da metrica gij sao aproximadamente constantes, logo suas derivadas se anulam. Portanto,
Rlijk =∂Γljk∂xi
− ∂Γlik∂xj
.
Daı,
Rkk00 =∂Γk00
∂xk− ∂Γkk0
∂x0.
Como estamos supondo um campo estatico, que nao depende da variavel temporal x0, qualquer derivada emrelacao a esta variavel e nula, logo
Rkk00 =∂Γk00
∂xk
e
Γk00 =1
2(∂igjm + ∂jgim − ∂mgij) gmk
=1
2(∂0g0m + ∂0g0m − ∂mg00) gmk
= −1
2(∂mg00) gmk
= −1
2(∂kg00) gkk.
Assim, para k = 1, 2, 3,
Rkk00 =1
2
(∂2kkg00
)gkk =
1
c2(∂2kkφ).
Consequentemente,
R00 =1
c2∆φ. (16.11)

Rodney Josue Biezuner 236
O tensor momento-energia para fluidos perfeitos velocidades baixas (v/c ≈ 0) e dominado pelo compo-nente T 00 = ρc2 e as outras componentes podem ser consideradas nulas. Portanto, usando g00 ≈ η00 = −1,obtemos
trg T = η00T00 = −ρc2
e
T00 −1
2g00 trg T = T00 −
1
2η00
(η00T
00)
=1
2T00
=1
2ρc2.
Concluımos que no limite Newtoniano a equacao
R00 = κ
(T00 +
1
2g00 trg T
)e
∆φ =1
2κc2ρ. (16.12)
Comparando com a equacao da gravitacao universal de Newton (16.2)
∆φ = 4πGρ,
concluımos que
κ =8πG
c2, (16.13)
as vezes chamada a constante gravitacional de Einstein. Usando unidades geometrizadas G = c = 1, aequacao de Einstein se escreve na forma
Ric−1
2Sg = 8πT. (16.14)
16.3 Postulado Geodesico como Consequencia da Equacao de Eins-tein
O princıpio que partıculas livres percorrem trajetoria geodesicas no espacotempo e as vezes conhecido comoo postulado geodesico. Na verdade ele e uma consequencia logica da equacao de Einstein, como veremos.
A equacao de Einstein na forma contravariante quando T = ρ (u⊗ u) e o tensor poeira e
G = κρuiuj .
Como divG = 0, segue quediv [ρ (u⊗ u)] = 0.
Em coordenadas, (ρuiuj
);i
= 0.
Pela regra do produto, (ρui)
;iuj + ρuiuj;i = 0
ou (ρui)
;iuj + ρuiuj;i = 0. (16.15)

Rodney Josue Biezuner 237
Derivando‖u‖2 = giju
iuj = uiuj = −1, (16.16)
obtemos (uju
j)
;i= 0,
donde, novamente pela regra do produto,
uj;iuj + uju
j;i = 0.
Descendo e subindo ındices no primeiro termo desta equacao
uj;iuj = ujuj;i = gkjukuj;i
= ukgkjuj;i = uku
k;i
= ujuj;i,
vemos que ela e igual ao segundo termo, donde
uj;iuj = 0. (16.17)
Voltando a (16.15), multiplicamos ela por uj , obtendo
ujuj(ρui)
;i+ ρuiuju
j;i = 0
que se reduz por (16.16) e (16.17) a−(ρui)
;i= 0.
Este e o primeiro termo em (16.15), logo concluımos que
ρuiuj;i = 0.
Como ρ 6= 0, segue queuiuj;i = 0. (16.18)
Lembrando que
uj;i =∂uj
∂xi+ ukΓjki
e
uj =∂xj
∂τ,
temos que
uj;i =∂2xj
∂xi∂τ+∂xk
∂τΓjik.
Notando que
∂2xj
∂xi∂τ=
0 se i 6= 0,∂2xj
∂τ2se i = 0,
vemos que (16.18) e a equacao geodesica:
∂2xj
∂τ2+∂xi
∂τ
∂xk
∂τΓjik = 0.

Rodney Josue Biezuner 238
16.4 A Constante Cosmologica
Quando o espacotempo e plano, isto e, R = 0, segue que Ric = 0 e S = 0. Portanto, em um espacotempoplano, o tensor de Einstein se anula:
G = 0.
Assim, G e uma medida da metrica e tambem da curvatura. Alem disso, no vacuo onde T = 0, pelasequacoes (16.2) e (16.7) temos
G = 0,
assim comoS = −8π trg T = 0
e
Ric = 8π
[T − 1
2(trg T ) g
]= 0.
Isso nao implica necessariamente que R = 0, ja que o tensor de Ricci nao contem toda a informacao dotensor curvatura de Riemann, mas e um resultado esperado.
Por outro lado, a equacao de Einstein aplicada ao universo todo prediz um universo dinamico, nao estatico(veja [MTW], Cap. 27). Quando Einstein percebeu isso em 1917, ele modificou sua equacao, introduzindouma constante cosmologica Λ para que o universo permanecesse estatico:
G+ Λg = 8πT.
Observe que o tensor G + Λg continua sendo livre de divergencia. Esta equacao modificada admite umasolucao estatica para o universo (veja [MTW], Cap. 27, Box 27.5). Por outro lado, no vacuo onde T = 0, aequacao modificada de Einstein se torna
Ric−1
2Sg + Λg = 0,
ou seja,G = −Λg
e nao mais G = 0, de modo que podemos dizer que a constante cosmologica mede a densidade de energiado vacuo (o que e consistente com a nocao de que o vacuo nao e realmente vazio de acordo com a teoriaquantica). Tomando o traco desta equacao com respeito a metrica, como trg Ric = S e trg g = 4, segue que
S − 2S + 4Λ = 0
ou seja,S = 4Λ.
Segue que a equacao de Einstein para o vacuo e
Ric = Λg.
Portanto, a curvatura do vacuo nao e a mais a curvatura nula do espacotempo de Minkowski.Imediatamente depois que os resultados de Hubble sobre a expansao do universo (desvio para o vermelho
da luz das galaxias, indicando o afastamento mutuo delas) se tornaram conhecidos em 1930, Einstein consi-derou como o seu maior erro a introducao da constante cosmologica na sua equacao da relatividade geral (senao a tivesse removido, ele poderia reinvindicar a expansao do universo como uma das predicoes da teoria) enovamente a removeu, o que equivale efetivamente a considerar Λ = 0. Quando no final da decada de 90 foiobservada a aceleracao da expansao do universo, ela foi reintroduzida, com valor positivo a ser determinadoatraves de experimentos. Mas as observacoes recentes indicam que o seu valor e bem proximo de zero (daordem de 10−122 em unidades naturais adimensionais), de modo que no vacuo o espacotempo e realmentebem proximo ao espacotempo de Minkowski.

Capıtulo 17
A Solucao de Schwarzschild
A primeira solucao para a equacao de Einstein
Ric−1
2Sg = 8πT
foi obtida em dezembro de 1915 por Schwarzschild, para a surpresa de Einstein, que achava que dificilmenteseriam obtidas solucoes exatas para a sua equacao.
O espacotempo de Schwarzschild e o modelo relativıstico mais simples de um universo contendo umaunica estrela. A estrela e assumida ser estatica, isto e, sem rotacao (ou com velocidade de rotacao fisicamentedesprezıvel), e esfericamente simetrica. O modelo resultante pode ser aplicado a regioes em torno de qualquerobjeto astronomico isolado que satisfaz estas condicoes aproximadamente, tais como planetas, estrelas eburacos negros. No caso do sistema solar, ela prove um modelo mais preciso que o Newtoniano.
17.1 Metrica Plana em Coordenadas Esfericas
O espaco tridimensional menos a origem R3\ 0 e difeomorfo ao produto cartesiano R+ × S2, onde R+ =(0,+∞). Isso permite definir coordenadas esfericas para R3\ 0. Desta forma, podemos definir um di-feomorfismo de R × R+ × S2 para o espacotempo de Minkowski M ou um atlas para M de sistemas decoordenadas esfericas por
ϕ (t, r, θ, φ) = (t, r sen θ cosφ, r sen θ senφ, r cos θ) .
Por exemplo, uma carta deste atlas seria (ϕ,R× (0,+∞)× (0, π)× (0, 2π)); variando o domınio de θ e φ,cobrimos todo M com excecao da origem. Note que aqui θ = constante denota paralelos e φ = constantedenota meridianos (o exemplo de carta dado deixa de cobrir um semiplano fechado de R3). Neste tipo decarta temos
∂0ϕ = ∂tϕ = (1, 0, 0, 0) ,
∂1ϕ = ∂rϕ = (0, senφ cos θ, senφ sen θ, cosφ) ,
∂2ϕ = ∂θϕ = (0, r cos θ cosφ, r cos θ senφ,−r sen θ) ,
∂3ϕ = ∂φϕ = (0,−r sen θ senφ, r sen θ cosφ, 0) ,
239

Rodney Josue Biezuner 240
e os coeficientes gij da metrica de Lorentz sao dados por
g00 = −〈∂0ϕ, ∂0ϕ〉 = −1,
g01 = g10 = 〈∂0ϕ, ∂1ϕ〉 = 0,
g02 = g20 = 〈∂0ϕ, ∂1ϕ〉 = 0,
g03 = g30 = 〈∂0ϕ, ∂1ϕ〉 = 0,
g11 = 〈∂1ϕ, ∂1ϕ〉 = 1,
g12 = g21 = 〈∂1ϕ, ∂2ϕ〉 = 0,
g13 = g31 = 〈∂1ϕ, ∂3ϕ〉 = 0,
g22 = 〈∂2ϕ, ∂2ϕ〉 = r2,
g23 = g32 = 〈∂2ϕ, ∂3ϕ〉 = 0,
g33 = 〈∂3ϕ, ∂3ϕ〉 = r2 sen2 θ.
Portanto, em coordenadas esfericas, a metrica de Lorentz para o espacotempo de Minkowski se escreve naforma
ds2 = −dt2 + dr2 + r2dθ2 + r2 sen2 θdφ2.
Denotando o elemento de area da esfera por
dσ2 = dθ2 + sen2 θdφ2,
podemos tambem escrever de forma mais sucinta
ds2 = −dt2 + dr2 + r2dσ2. (17.1)
17.2 Metrica de Schwarzschild
No caso de uma estrela esfericamente simetrica, o espacotempo resultante deve ser esfericamente simetrico.Como a estrela tambem e suposta estatica, a metrica nao deve depender da variavel temporal t. Assim, ametrica de Schwarzschild deve ser do tipo
ds2 = −A (r) dt2 +B (r) dr2 + C (r) dσ2.
Fazendo uma mudanca de variavel em R+, podemos considerar C (r) = r2, logo podemos escrever a metricade Schwarzschild na forma
ds2 = −T (r) dt2 +D (r) dr2 + r2dσ2.
Nesta normalizacao, em cada espaco de repouso t = constante, a superfıcie r = constante e a esfera padraoS2r de raio r, com curvatura gaussiana 1/r2 e area 4πr2.
A unica fonte de gravitacao no universo de Schwarzschild e a propria estrela, que nao modelamos. Logoo espacotempo e um vacuo e a equacao de Einstein implica que
Ric = 0,
isto e, a metrica de Schwarzschild tem curvatura de Ricci nula.Finalmente, longe da fonte de gravitacao, a influencia deve ser arbitrariamente pequena, de modo que a
metrica de Schwarzschild deve aproximar a metrica plana do espaco de Minkowski (17.1) e portanto
limr→+∞
T (r)→ −1,
limr→+∞
D (r)→ 1.
Veremos que estas condicoes determinam as funcoes T (r) e D (r).

Rodney Josue Biezuner 241
17.1 Proposicao. Uma metrica de Lorentz
ds2 = −T (r) dt2 +D (r) dr2 + r2dσ2
em R× R+ × S2 satisfaz Ric = 0 e
limr→+∞
T (r)→ −1,
limr→+∞
D (r)→ 1.
se e somente se
T (r) = −f (r) ,
D (r) =1
f (r),
com
f (r) = 1− 2M
r.
Prova: Veja [ONeill], Lemma 13.1, p. 366.
17.2 Definicao. Considere a variedade diferenciavel M = R× (2M,+∞)× S2. M torna-se uma variedadede Lorentz quando definimos nela a metrica de Schwarzschild
ds2 = −(
1− 2M
r
)dt2 +
1
1− 2M
r
dr2 + r2dθ2 + r2 sen2 θdφ2. (17.2)
Para as coordenadas de Schwarzschild (t, r, θ, φ) temos
g00 = −(
1− 2M
r
)= −r − 2M
r,
g11 =1
1− 2M
r
=r
r − 2M,
g22 = r2, (17.3)
g33 = r2 sen2 θ,
gij = 0 se i 6= j.
A metrica de Schwarzschild e ortogonal e, portanto, e facil trabalhar com ela. Em particular,
g00 = − r
r − 2M,
g11 =r − 2M
r,
g22 =1
r2, (17.4)
g33 =1
r2 sen2 θ,
gij = 0 se i 6= j.
Verificaremos agora que a metrica de Schwarzschild tem curvatura de Ricci nula, mas o seu tensor curvaturanao e nulo, logo M nao e localmente isometrica a metrica plana.

Rodney Josue Biezuner 242
17.3 Lema. Os 40 sımbolos de Christoffel para a metrica de Schwarzschild sao
Γ0ij =
0
M
r (r − 2M)0 0
M
r (r − 2M)0 0 0
0 0 0 00 0 0 0
,
Γ1ij =
M (r − 2M)
r30 0 0
0 − M
r (r − 2M)0 0
0 0 − (r − 2M) 00 0 0 − (r − 2M) sen2 θ
, (17.5)
Γ2ij =
0 0 0 0
0 01
r0
01
r0 0
0 0 0 − sen θ cos θ
, Γ3ij =
0 0 0 0
0 0 01
r0 0 0 cot θ
01
rcot θ 0
.
Prova: Os sımbolos de Christoffel sao dados por
Γkij =1
2(∂igjm + ∂jgim − ∂mgij) gmk.
Como gmk = 0 se m 6= k, segue que
Γkij =1
2(∂igjk + ∂jgik − ∂kgij) gkk. (17.6)
Temos
∂1g00 =2M
r2,
∂1g11 = − 2M
(r − 2M)2 ,
∂1g22 = 2r, (17.7)
∂1g33 = 2r sen2 θ,
∂2g33 = 2r2 sen θ cos θ,
e, caso contrario,∂kgij = 0. (17.8)
Logo, de (17.3), (17.4), (17.6) e (17.7) segue que, para k = 0,
Γ0ij =
1
2(∂igj0 + ∂jgi0 − ∂0gij) g
00 =1
2(∂igj0 + ∂jgi0) g00,

Rodney Josue Biezuner 243
Γ000 = (∂0g00) g00 = 0,
Γ001 = Γ0
10 =1
2(∂0g10 + ∂1g00) g00 =
1
2(∂1g00) g00
=M
r (r − 2M),
Γ002 = Γ0
20 =1
2(∂0g20 + ∂2g00) g00 = 0,
Γ003 = Γ0
30 =1
2(∂0g30 + ∂3g00) g00 = 0,
Γ011 = (∂1g10) g00 = 0,
Γ012 = Γ0
21 =1
2(∂1g20 + ∂2g10) g00 = 0,
Γ013 = Γ0
31 =1
2(∂1g30 + ∂3g10) g00 = 0,
Γ022 = (∂2g20) g00 = 0,
Γ023 = Γ0
32 =1
2(∂2g30 + ∂3g20) g00 = 0,
Γ033 = (∂3g30) g00 = 0;
para k = 1,
Γ1ij =
1
2(∂igj1 + ∂jgi1 − ∂1gij) g
11,
Γ100 =
1
2(2∂0g01 − ∂1g00) g11 = −1
2(∂1g00) g11
=M
r2− 2M2
r3=M (r − 2M)
r3,
Γ101 = Γ1
10 =1
2(∂0g11 + ∂1g01 − ∂1g01) g11 = 0,
Γ102 = Γ1
20 =1
2(∂0g21 + ∂2g01 − ∂1g02) g11 = 0,
Γ103 = Γ1
30 =1
2(∂0g31 + ∂3g01 − ∂1g03) g11 = 0,
Γ111 =
1
2(∂1g11) g11 = − M
r (r − 2M),
Γ112 = Γ1
21 =1
2(∂1g21 + ∂2g11 − ∂2g12) g11 = 0,
Γ113 = Γ1
31 =1
2(∂1g31 + ∂3g11 − ∂1g13) g11 = 0,
Γ122 =
1
2(2∂2g21 − ∂1g22) g11 = −1
2(∂1g22) g11 = 2M − r,
Γ123 = Γ1
32 =1
2(∂2g31 + ∂3g21 − ∂1g23) g11 = 0,
Γ133 =
1
2(2∂3g31 − ∂1g33) g11 = −1
2(∂1g33) g11 = (2M − r) sen2 θ;
para k = 2,
Γ2ij =
1
2(∂igj2 + ∂jgi2 − ∂2gij) g
22,

Rodney Josue Biezuner 244
Γ200 =
1
2(∂0g02 + ∂0g02 − ∂2g00) g22 = 0,
Γ201 = Γ2
10 =1
2(∂0g12 + ∂1g02 − ∂2g01) g22 = 0,
Γ202 = Γ2
20 =1
2(∂0g22 + ∂2g02 − ∂2g02) g22 = 0,
Γ203 = Γ2
30 =1
2(∂0g32 + ∂3g02 − ∂2g03) g22 = 0,
Γ211 =
1
2(∂1g12 + ∂1g12 − ∂2g11) g22 = 0,
Γ212 = Γ2
21 =1
2(∂1g22 + ∂2g12 − ∂2g12) g22 =
1
2(∂1g22) g22 =
1
r,
Γ213 = Γ2
31 =1
2(∂1g32 + ∂3g12 − ∂2g13) g22 = 0,
Γ222 =
1
2(∂2g22) g22 = 0,
Γ223 = Γ2
32 =1
2(∂2g32 + ∂3g22 − ∂2g23) g22 = 0,
Γ233 =
1
2(∂3g32 + ∂3g32 − ∂2g33) g22 = −1
2(∂2g33) g22 = − sen θ cos θ;
e, finalmente, para k = 3,
Γ3ij =
1
2(∂igj3 + ∂jgi3 − ∂3gij) g
33 =1
2(∂igj3 + ∂jgi3) g33,
Γ300 =
1
2(∂0g03 + ∂0g03) g33 = 0,
Γ301 = Γ3
10 =1
2(∂0g13 + ∂1g03) g33 = 0,
Γ302 = Γ3
20 =1
2(∂0g23 + ∂2g03) g33 = 0,
Γ303 = Γ3
30 =1
2(∂0g33 + ∂3g03) g33 = 0,
Γ311 = (∂1g13) g33 = 0,
Γ312 = Γ3
21 =1
2(∂1g23 + ∂2g13) g33 = 0,
Γ313 = Γ3
31 =1
2(∂1g33 + ∂3g13) g33 =
1
2(∂1g33) g33 =
1
r,
Γ322 = (∂2g23) g33 = 0,
Γ323 = Γ3
32 =1
2(∂2g33 + ∂3g23) g33 =
1
2(∂2g33) g33 =
cos θ
sen θ,
Γ333 = (∂3g33) g33 = 0.
17.4 Proposicao. A metrica de Schwarzschild satisfaz
Ric = S = 0. (17.9)
Ela nao e uma metrica plana, pois o seu tensor curvatura nao e nulo, mas e uma metrica assintoticamenteplana, isto e,
Rlijk → 0 quando r →∞.

Rodney Josue Biezuner 245
Prova: As componentes do tensor endomorfismo curvatura sao dadas por
Rlijk = ΓmjkΓlim − ΓmikΓljm + ∂iΓljk − ∂jΓlik
A curvatura de Ricci e dada porRij = Rkkij ,
portanto vamos calcular apenas
Rkkij = ΓmijΓkkm − ΓmkjΓ
kim + ∂kΓkij − ∂iΓkkj .
Lembramos que Rkkkj = 0. Usando (17.5), para ij = 00 temos
Rkk00 = Γm00Γkkm − Γmk0Γk0m + ∂kΓk00 − ∂0Γkk0
= Γ100Γkk1 − Γ0
k0Γk00 − Γ1k0Γk01 + ∂kΓk00,
donde
R0000 = 0,
R1100 = Γ1
00Γ111 − Γ0
10Γ100 − Γ1
10Γ101 + ∂1Γ1
00 = Γ100Γ1
11 − Γ010Γ1
00 + ∂1Γ100
= −M (r − 2M)
r3
M
r (r − 2M)− M
r (r − 2M)
M (r − 2M)
r3+
(−2M
r3+
6M2
r4
)= −2M2
r4− 2M
r3+
6M2
r4=
4M2
r4− 2M
r3,
R2200 = Γ1
00Γ221 − Γ0
20Γ200 − Γ1
20Γ201 + ∂2Γ2
00 = Γ100Γ2
21
=M (r − 2M)
r3
1
r=M
r3− 2M2
r4,
R3300 = Γ1
00Γ331 − Γ0
30Γ300 − Γ1
30Γ301 + ∂3Γ3
00 = Γ100Γ3
31
=M (r − 2M)
r3
1
r=M
r3− 2M2
r4,
logoR00 = 0; (17.10)
para ij = 01 temos
Rkk01 = Γm01Γkkm − Γmk1Γk0m + ∂kΓk01 − ∂0Γkk1
= Γ101Γkk1 − Γ0
k1Γk00 − Γ1k1Γk01 + ∂kΓk01,
donde
R0001 = 0,
R1101 = Γ1
01Γ111 − Γ0
11Γ100 − Γ1
11Γ101 + ∂1Γ1
01 = 0,
R2201 = Γ1
01Γ221 − Γ0
21Γ200 − Γ1
21Γ201 + ∂2Γ2
01 = 0,
R3301 = Γ1
01Γ331 − Γ0
31Γ300 − Γ1
31Γ301 + ∂3Γ3
01 = 0,
logoR01 = R10 = 0; (17.11)
para ij = 02 temos
Rkk02 = Γm02Γkkm − Γmk2Γk0m + ∂kΓk02 − ∂0Γkk2
= −Γ1k2Γk01,

Rodney Josue Biezuner 246
donde
R0002 = 0,
R1102 = −Γ1
12Γ101 = 0,
R2202 = −Γ1
22Γ201 = 0,
R3302 = −Γ1
32Γ301 = 0,
logoR02 = R20 = 0; (17.12)
para ij = 03 temos
Rkk03 = Γm03Γkkm − Γmk3Γk0m + ∂kΓk03 − ∂0Γkk3
= −Γ1k3Γk01,
donde
R0003 = 0,
R1103 = −Γ1
13Γ101 = 0,
R2203 = −Γ1
23Γ201 = 0,
R3303 = −Γ1
33Γ301 = 0,
logoR03 = R30 = 0; (17.13)
para ij = 11 temos
Rkk11 = Γm11Γkkm − Γmk1Γk1m + ∂kΓk11 − ∂1Γkk1
= Γ111Γkk1 − Γ0
k1Γk10 − Γ1k1Γk11 − Γ2
k1Γk12 − Γ3k1Γk13 + ∂kΓk11 − ∂1Γkk1,
donde
R0011 = Γ1
11Γ001 − Γ0
01Γ010 − Γ1
01Γ011 − Γ2
11Γ112 − Γ3
11Γ113 + ∂0Γ0
11 − ∂1Γ001
= Γ111Γ0
01 − Γ001Γ0
10 − ∂1Γ001
= − M2
r2 (r − 2M)2 −
M2
r2 (r − 2M)2 +
2M (r −M)
r2 (r − 2M)2
=2M
r2 (r − 2M),
R1111 = 0,
R2211 = Γ1
11Γ221 − Γ0
21Γ210 − Γ1
21Γ211 − Γ2
21Γ212 − Γ3
21Γ213 + ∂2Γ2
11 − ∂1Γ221
= Γ111Γ2
21 − Γ221Γ2
12 − ∂1Γ221
= − M
r2 (r − 2M)− 1
r2+
1
r2
= − M
r2 (r − 2M),
R3311 = Γ1
11Γ331 − Γ0
31Γ310 − Γ1
31Γ311 − Γ2
31Γ312 − Γ3
31Γ313 + ∂3Γ3
11 − ∂1Γ331
= Γ111Γ3
31 − Γ331Γ3
13 − ∂1Γ331
= − M
r2 (r − 2M)− 1
r2+
1
r2
= − M
r2 (r − 2M),

Rodney Josue Biezuner 247
logoR11 = 0; (17.14)
para ij = 12 temos
Rkk12 = Γm12Γkkm − Γmk2Γk1m + ∂kΓk12 − ∂1Γkk2
= Γ212Γkk2 − Γ1
k2Γk11 − Γ2k2Γk12 − Γ3
k2Γk13 + ∂kΓk12 − ∂1Γkk2,
donde
R0012 = Γ2
12Γ002 − Γ1
02Γ011 − Γ2
02Γ012 − Γ3
02Γ013 + ∂0Γ0
12 − ∂1Γ002 = 0,
R1112 = 0,
R2212 = Γ2
12Γ222 − Γ1
22Γ211 − Γ2
22Γ212 − Γ3
22Γ213 + ∂2Γ2
12 − ∂1Γ222 = ∂2Γ2
12
= − 1
r2,
R3312 = Γ2
12Γ332 − Γ1
32Γ311 − Γ2
32Γ312 − Γ3
32Γ313 + ∂3Γ3
12 − ∂1Γ332
= Γ212Γ3
32 − Γ332Γ3
13 − ∂1Γ332
=1
rcot θ − 1
rcot θ +
1
r2
=1
r2,
logoR12 = R21 = 0; (17.15)
para ij = 13 temos
Rkk13 = Γm13Γkkm − Γmk3Γk1m + ∂kΓk13 − ∂1Γkk3
= Γ313Γkk3 − Γ1
k3Γk11 − Γ2k3Γk12 − Γ3
k3Γk13 + ∂kΓk13 − ∂1Γkk3,
donde
R0013 = Γ3
13Γ003 − Γ1
03Γ011 − Γ2
03Γ012 − Γ3
03Γ013 + ∂0Γ0
13 − ∂1Γ003 = 0,
R1113 = 0,
R2213 = Γ3
13Γ223 − Γ1
23Γ211 − Γ2
23Γ212 − Γ3
23Γ213 + ∂2Γ2
13 − ∂1Γ223 = 0,
R3313 = Γ3
13Γ333 − Γ1
33Γ311 − Γ2
33Γ312 − Γ3
33Γ313 + ∂3Γ3
13 − ∂1Γ333 = 0,
logoR13 = R31 = 0; (17.16)
para ij = 22 temos
Rkk22 = Γm22Γkkm − Γmk2Γk2m + ∂kΓk22 − ∂2Γkk2
= Γ122Γkk1 − Γ1
k2Γk21 − Γ2k2Γk22 − Γ3
k2Γk23 + ∂kΓk22 − ∂2Γkk2,

Rodney Josue Biezuner 248
donde
R0022 = Γ1
22Γ001 − Γ1
02Γ021 − Γ2
02Γ022 − Γ3
02Γ023 + ∂0Γ0
22 − ∂2Γ002 = Γ1
22Γ001
= −Mr,
R1122 = Γ1
22Γ111 − Γ1
12Γ121 − Γ2
12Γ122 − Γ3
12Γ123 + ∂1Γ1
22 − ∂2Γ112
= Γ122Γ1
11 − Γ212Γ1
22 + ∂1Γ122
=M
r+r − 2M
r− 1
= −Mr,
R2222 = 0,
R3322 = Γ1
22Γ331 − Γ1
32Γ321 − Γ2
32Γ322 − Γ3
32Γ323 + ∂3Γ3
22 − ∂2Γ332
= Γ122Γ3
31 − Γ332Γ3
23 − ∂2Γ332
= −r − 2M
r− cot2 θ +
1
sen2 θ= −r − 2M
r− cos2 θ
sen2 θ+
1
sen2 θ
= −1 +2M
r+
1− cos2 θ
sen2 θ= −1 +
2M
r+
sen2 θ
sen2 θ
=2M
r,
logoR22 = 0; (17.17)
para ij = 23 temos
Rkk23 = Γm23Γkkm − Γmk3Γk2m + ∂kΓk23 − ∂2Γkk3
= Γ323Γkk3 − Γ1
k3Γk21 − Γ2k3Γk22 − Γ3
k3Γk23 + ∂kΓk23 − ∂2Γkk3,
donde
R0023 = Γ3
23Γ003 − Γ1
03Γ021 − Γ2
03Γ022 − Γ3
03Γ023 + ∂0Γ0
23 − ∂2Γ003 = 0,
R1123 = Γ3
23Γ113 − Γ1
13Γ121 − Γ2
13Γ122 − Γ3
13Γ123 + ∂1Γ1
23 − ∂2Γ113 = 0,
R2223 = 0,
R3323 = Γ3
23Γ223 − Γ1
23Γ221 − Γ2
23Γ222 − Γ3
23Γ223 + ∂2Γ2
23 − ∂2Γ223 = 0,
logoR23 = R32 = 0; (17.18)
e, finalmente, para ij = 33 temos
Rkk33 = Γm33Γkkm − Γmk3Γk3m + ∂kΓk33 − ∂3Γkk3
= Γ133Γkk1 + Γ2
33Γkk2 − Γ1k3Γk31 − Γ2
k3Γk32 − Γ3k3Γk33 + ∂kΓk33

Rodney Josue Biezuner 249
donde
R0033 = Γ1
33Γ001 + Γ2
33Γ002 − Γ1
03Γ031 − Γ2
03Γ032 − Γ3
03Γ033 + ∂0Γ0
33 = Γ133Γ0
01
= −Mr
sen2 θ,
R1133 = Γ1
33Γ111 + Γ2
33Γ112 − Γ1
13Γ131 − Γ2
13Γ132 − Γ3
13Γ133 + ∂1Γ1
33
= Γ133Γ1
11 − Γ313Γ1
33 + ∂1Γ133
=M
rsen2 θ +
r − 2M
rsen2 θ − sen2 θ
= −Mr
sen2 θ,
R2233 = Γ1
33Γ221 + Γ2
33Γ222 − Γ1
23Γ231 − Γ2
23Γ232 − Γ3
23Γ233 + ∂2Γ2
33
= Γ133Γ2
21 − Γ323Γ2
33 + ∂2Γ233
= −r − 2M
rsen2 θ +
cos θ
sen θsen θ cos θ − cos2 θ + sen2 θ
=2M
rsen2 θ,
R3333 = 0,
logoR33 = 0. (17.19)
Para mostrar que a metrica de Schwarzschild e uma metrica assintoticamente plana, precisamos calcularas demais componentes do tensor curvatura. Isso e deixado como exercıcio.
17.5 Proposicao. Se a massa esferica estatica tem massa M em unidades geometricas e denotamos R =2M , o espacotempo para r > R e para 0 < r < R com a metrica de Schwarzschild satisfaz a equacao deEinstein.
Prova: Pois a metrica de Schwarzschild satisfaz Ric = 0, S = 0 e o tensor momento-energia satisfaz T = 0para r > R. Massa em unidades geometricas e definida por
M =G
c2Mkg,
17.6 Definicao. O raio R = 2M e chamado o raio do horizonte de evento.O espacotempo com a metrica de Schwarzschild para r > R e chamado espacotempo exterior de
Schwarzchild.O espacotempo com a metrica de Schwarzschild para 0 < r < R e chamado o buraco negro de
Schwarzchild.
Quando o chamado raio de Schwarzschild r e suficientemente grande, a metrica e aproximadamente deMinkowski e pode-se pensar t como sendo o tempo e r a distancia radial. Para r pequeno, no entanto, estasinterpretacoes passam a nao valer. Quando r e menor que R = 2M , a funcao
f (r) = 1− 2M
r
passa a ser negativa e ∂t torna-se um vetor do tipo espaco, enquanto que ∂r passa a ser um vetor do tipotempo. Neste caso, as analogias com a teoria de gravitacao de Newton perdem o valor.
O raio do horizonte de evento e onde nada, nem a luz passa. Este e o valor predito tambem pela teoriagravitacional de Newton. De fato,
V (r) = −GMkgmkg
r

Rodney Josue Biezuner 250
e a energia potencial gravitacional de uma partıcula com massa mkg (escolhendo energia potencial zero noinfinito), de modo que sua energia mecanica total e dada por
E = K + V =1
2mkgv
2m/s −G
Mkgmkg
r.
Portanto, sua velocidade de escape (isto e, a velocidade que ela deve ter para chegar pelo menos em repousono infinito, ou seja, com energia mecanica total nula) satisfaz
1
2mkgv
2m/s = G
Mkgmkg
r,
isto e,
vm/s =
√2GMkg
r.
Em unidades naturais do espacotempo temos
v =vm/s
c=
√2GMkg
c2r=
√2M
r.
Em particular, a velocidade de escape sera a velocidade da luz, isto e, v = 1, quando
r = 2M.
Porem, como veremos mais tarde, enquanto que na teoria de Newton a partıcula lancada do horizonte deevento diretamente para cima com velocidade menor que a da luz sobe alguma distancia antes de voltara cair (pois sobe desacelerando ate que sua velocidade caia totalmente para zero para algum valor finitode r), pela teoria da relatividade geral nem a luz pode avancar qualquer distancia por menor que seja apartir do horizonte de eventos (ou ultrapassa-lo, se lancada abaixo dele). Por outro lado, mesmo na teoriada relatividade geral, e possıvel que uma partıcula atravesse o horizonte de eventos sem sentir nada, nemmesmo as forcas de mare; isso aconteceria por exemplo em um buraco negro muito massivo, com um raio dohorizonte de evento muito grande (como o hipotetizado buraco negro que reside no centro da Via Lactea).A singularidade em r = 2M na metrica de Schwarzchild e uma singularidade matematica, provenienteda escolha de coordenadas. Como veremos depois, em outros sistemas de coordenadas a singularidadedesaparece.
17.3 Conservacao de Energia e Momento Angular em Geodesicasdo Espacotempo de Schwarzchild
17.3.1 Equacao Geodesica na Metrica de Schwarzchild
17.7 Lema. Em um sistema de coordenadas ortogonais(x0, . . . , xn
), a equacao geodesica para uma geodesica
γ (τ) =(x0 (τ) , . . . , xn (τ)
)pode ser escrita na forma
d
dτ
[gkk
(dxk
dτ
)]=
1
2
n∑i=0
∂kgii
(dxi
dτ
)2
, k = 0, 1, . . . , n. (17.20)
Prova: Para k = 1, . . . , n a equacao geodesica e
d2xk
dτ2+
n∑i,j=0
Γkijdxi
dτ
dxj
dτ= 0.

Rodney Josue Biezuner 251
Como os sımbolos de Christoffel sao dados por
Γkij =1
2(∂igjm + ∂jgim − ∂mgij) gmk,
em um sistema de coordenadas ortogonal temos
Γkij =1
2gkk(∂igjk + ∂jgik − ∂kgij) , (17.21)
pois g e uma matriz diagonal. Daı,
Γkij =
0, se i 6= j e i, j 6= k,1
2gkk∂jgkk, se i 6= j e i = k,
1
2gkk∂igkk, se i 6= j e j = k,
1
gkk∂kgkk −
1
2gkk∂kgkk, se i = j = k,
− 1
2gkk∂kgii, se i = j 6= k,
donden∑
i,j=0
Γkijdxi
dτ
dxj
dτ=
1
gkk
n∑i=0
∂igkkdxi
dτ
dxk
dτ− 1
2gkk
n∑i=0
∂kgii
(dxi
dτ
)2
.
Logo, a equacao geodesica se torna
d2xk
dτ2+
1
gkk
n∑i=0
∂igkkdxi
dτ
dxk
dτ− 1
2gkk
n∑i=0
∂kgii
(dxi
dτ
)2
= 0,
donde
gkkd2xk
dτ2+
n∑i=0
∂igkkdxi
dτ
dxk
dτ=
1
2
n∑i=0
∂kgii
(dxi
dτ
)2
.
Como, pela regra do produto e pela regra da cadeia,
d
dτ
[gkk
(dxk
dτ
)]= gkk
d2xk
dτ2+dgkkdτ
dxk
dτ
= gkkd2xk
dτ2+
n∑i=0
∂gkk∂xi
dxi
dτ
dxk
dτ,
segue o resultado.
17.8 Proposicao. A equacao das geodesicas γ (τ) = (t (τ) , r (τ) , θ (τ) , φ (τ)) na metrica de Schwarzschilde
d
dτ
[(1− 2M
r
)dt
dτ
]= 0,
d
dτ
1
1− 2M
r
dr
dτ
=M
r2
(dt
dτ
)2
− M
(r − 2M)2
(dr
dτ
)2
+ r
(dθ
dτ
)2
+ r sen2 θ
(dφ
dτ
)2
,
d
dτ
[r2 dθ
dτ
]= r2 sen θ cos θ
(dφ
dτ
)2
,
d
dτ
[r2 sen2 θ
(dφ
dτ
)]= 0.

Rodney Josue Biezuner 252
Prova: Segue do lema anterior, substituindo
g00 = −(
1− 2M
r
),
g11 =1
1− 2M
r
,
g22 = r2,
g33 = r2 sen2 θ,
(note que os coeficientes da metrica nao dependem de t e φ) e
∂1g00 =2M
r2,
∂1g11 = − 2M
(r − 2M)2 ,
∂1g22 = 2r,
∂1g33 = 2r sen2 θ,
∂2g33 = 2r2 sen θ cos θ.
17.3.2 Energia e Momento Angular
Da proposicao anterior segue que existem constantes reais E,L tais que(1− 2M
r
)dt
dτ= E,
r2 sen2 θ
(dφ
dτ
)= L.
E e a energia e L o momento angular.
17.4 Queda Livre
17.5 Calculo da Deflexao da Luz
17.6 Precessao do Perihelio de Mercurio
17.7 Buracos Negros de Schwarzschild
17.8 Produtos Dobrados
O espacotempo de Scharzschild e um exemplo particular de uma variedade metrica do tipo produto dobrado.
17.8.1 Espacotempos Estaticos
17.9 Definicao. Sejam M3 uma variedade riemanniana de dimensao 3 e f ∈ C∞ (M) uma funcao positiva.Se I e um intervalo aberto, definimos o espacotempo estatico padrao como sendo a variedade de Lorentz

Rodney Josue Biezuner 253
I ×M com a metrica−f dt2 + ds2.

Capıtulo 18
Campos de Jacobi
Neste capıtulo estudaremos como a curvatura afeta as geodesicas. Em um ponto p, as geodesicas radiaispartem deste ponto e se irradiam. Veremos que em uma regiao de curvatura seccional positiva as geodesicasse separam menos, em comparacao com as geodesicas (retas) no espaco euclidiano (ou seja, os raios emTpM), enquanto que em uma regiao de curvatura seccional negativa as geodesicas se separam mais.
18.1 A Equacao de Jacobi
Dados p ∈M e v ∈ TpM tais que expp (v) esta definido, considere a variacao geodesica F : (−ε, ε)× [0, 1] −→M da geodesica radial
γ (t) = expp (tv)
vista na demonstracao do Lema de Gauss, ou seja
F (s, t) = expp (tv (s))
onde v (s) e uma curva de TpM partindo de v (0) = v com velocidade v′ (0) =: w. Para cada s fixado,Fs (t) = F (s, t) e a geodesica radial que parte de p com velocidade v (s). A velocidade de afastamento destasgeodesicas radiais no ponto γ (t) e exatamente o vetor
∂F
∂s(0, t) = d
(expp
)tvtw, (18.1)
que e o vetor velocidade da curva transversal partindo de γ (t). Neste capıtulo estudaremos este campoem detalhes. Veremos em primeiro lugar nesta secao que ele satisfaz uma equacao diferencial, chamada aequacao de Jacobi (tambem conhecida como equacao do desvio geodesico em Relatividade Geral). [Paraconveniencia do leitor, repetimos o Lema 13.34 que foi visto no apendice do Capıtulo 13, juntamente com asua demonstracao.]
18.1 Lema. Seja F : (−ε, ε)× [a, b] −→M uma variacao e V um campo vetorial ao longo de F . Entao
D
dt
DV
ds− D
ds
DV
dt= R
(∂F
∂t,∂F
∂s
)V.
Prova: Escolha um sistema de coordenadas para uma vizinhanca de p ∈M e escreva
V =
n∑i=1
V i (s, t) ∂i.
254

Rodney Josue Biezuner 255
EntaoDV
ds=D
ds
(n∑i=1
V i∂i
)=
n∑i=1
∂V i
∂s∂i +
n∑i=1
V iD
ds∂i,
dondeD
dt
DV
ds=
n∑i=1
∂2V i
∂s∂t∂i +
n∑i=1
∂V i
∂s
D
dt∂i +
n∑i=1
∂V i
∂t
D
ds∂i +
n∑i=1
V iD
dt
D
ds∂i.
Trocando t por s,
D
ds
DV
dt=
n∑i=1
∂2V i
∂s∂t∂i +
n∑i=1
∂V i
∂t
D
ds∂i +
n∑i=1
∂V i
∂s
D
dt∂i +
n∑i=1
V iD
ds
D
dt∂i.
Logo,
D
dt
DV
ds− D
ds
DV
dt=
n∑i=1
V i(D
dt
D
ds− D
ds
D
dt
)∂i. (18.2)
EscrevendoF (s, t) =
(x1 (s, t) , . . . , xn (s, t)
),
de modo que
∂F
∂t=
n∑j=1
∂xj
∂t∂j ,
∂F
∂s=
n∑k=1
∂xk
∂s∂k,
temosD
ds∂i = ∇∑
∂xk
∂s ∂k∂i =
n∑k=1
∂xk
∂s∇∂k∂i.
Daı,
D
dt
D
ds∂i =
D
dt
(n∑k=1
∂xk
∂s∇∂k∂i
)
=
n∑k=1
∂2xk
∂s∂t∇∂k∂i +
n∑k=1
∂xk
∂s
D
dt(∇∂k∂i)
=
n∑k=1
∂2xk
∂s∂t∇∂k∂i +
n∑k=1
∂xk
∂s∇∑
∂xj
∂t ∂j(∇∂k∂i)
=
n∑k=1
∂2xk
∂s∂t∇∂k∂i +
n∑k,j=1
∂xk
∂s
∂xj
∂t∇∂j∇∂k∂i.
Da mesma forma, trocando t por s e depois j por k,
D
ds
D
dt∂i =
n∑k=1
∂2xk
∂t∂s∇∂k∂i +
n∑k,j=1
∂xk
∂t
∂xj
∂s∇∂j∇∂k∂i
=
n∑k=1
∂2xk
∂s∂t∇∂k∂i +
n∑k,j=1
∂xj
∂t
∂xk
∂s∇∂k∇∂j∂i.

Rodney Josue Biezuner 256
Portanto,
D
dt
DV
ds− D
ds
DV
dt=
n∑i=1
V in∑
j,k=1
∂xj
∂t
∂xk
∂s
(∇∂j∇∂k∂i −∇∂k∇∂j∂i
)=
n∑i=1
V in∑
j,k=1
∂xj
∂t
∂xk
∂sR (∂j , ∂k) ∂i
=
n∑i=1
V iR
n∑j=1
∂xj
∂t∂j ,
n∑k=1
∂xk
∂s∂k
∂i
= R
(∂F
∂t,∂F
∂s
) n∑i=1
V i∂i
= R
(∂F
∂t,∂F
∂s
)V.
18.2 Proposicao (Equacao de Jacobi). Seja F : (−ε, ε)× [0, 1] −→M uma variacao geodesica e denote
J (t) =∂F
∂s(0, t) .
Entao J satisfaz a equacao diferencial linear
D2J
dt2+R (J, γ′) γ′ = 0. (18.3)
Prova: Como as curvas principais t 7→ F (s, t) da variacao sao geodesicas, temos
D
dt
∂F
∂t= 0.
Segue do lema anterior e do Lema de Simetria 12.25 que
0 =D
ds
(D
dt
∂F
∂t
)=D
dt
(D
ds
∂F
∂t
)−R
(∂F
∂t,∂F
∂s
)∂F
∂t
=D
dt
(D
dt
∂F
∂s
)+R
(∂F
∂s,∂F
∂t
)∂F
∂t
=D2
dt2∂F
∂s+R
(∂F
∂s,∂F
∂t
)∂F
∂t.
18.2 Campos de Jacobi
18.3 Definicao. Seja γ : I −→ M uma geodesica. Qualquer campo vetorial ao longo de γ que satisfaz aequacao de Jacobi e chamado um campo de Jacobi ao longo de γ.
Segue da Proposicao 18.2 que o campo variacional de uma variacao geodesica e um campo de Jacobi.Um campo de Jacobi e determinado por suas condicoes iniciais:

Rodney Josue Biezuner 257
18.4 Proposicao (Existencia e Unicidade de Campos de Jacobi). Seja γ : I −→ M uma geodesica. Dadot0 ∈ I e V,W ∈ Tγ(t0)M , existe um unico campo de Jacobi ao longo de γ tal que
J (t0) = V ,
DJ
dt(t0) = W.
Em particular, os campos de Jacobi ao longo de uma geodesica formam um espaco vetorial de dimensao 2n.
Prova: Seja E1 (t) , . . . , En (t) campos ortonormais paralelos ao longo de γ. Escrevendo
J =
n∑i=1
J iEi,
temosD2J
dt2(t) =
n∑i=1
d2J i
dt2Ei,
e
R (J, γ′) γ′ = R
n∑k=1
JkEk,
n∑j=1
dγj
dtEj
n∑l=1
dγl
dtEl
=
n∑j,k,l=1
dγj
dt
dγl
dtJkR (Ek, Ej)El
=
n∑j,k,l=1
Rikjldγj
dt
dγl
dtJkEi,
de modo que a equacao de Jacobi e equivalente ao sistema de equacoes diferenciais lineares de segundaordem:
d2J i
dt2+
n∑j,k,l=1
Rikjldγj
dt
dγl
dtJk = 0
para i = 1, . . . , n. Como o sistema e linear, a existencia e unicidade de solucoes esta garantida em todo ointervalo I, dadas condicoes iniciais.
Um campo vetorial ao longo de uma curva que nao seja do tipo luz sempre pode ser decomposto nas suascomponentes tangencial e normal:
V = V > ⊕ V ⊥.
No caso de campos de Jacobi, ambas as componentes sao tambem campos de Jacobi:
18.5 Proposicao. Seja γ : I −→ M uma geodesica que nao e do tipo luz e J um campo vetorial ao longode γ. Decomponha
J = J> ⊕ J⊥
nas suas componentes tangencial e normal, respectivamente. Entao J e um campo de Jacobi se e somentese J> e J⊥ sao campos de Jacobi.
Prova: Pela linearidade da equacao de Jacobi, se J>, J⊥ sao campos de Jacobi entao J e um campo deJacobi.
Reciprocamente, seja J um campo de Jacobi. Como J> e um multiplo escalar de γ′, temos
R(J>, γ′
)= 0,

Rodney Josue Biezuner 258
dondeR (J, γ′) = R
(J⊥, γ′
).
Alem disso, como〈R (J, γ′) γ′, γ′〉 = R (J, γ′γ′, γ′) = 0,
temos que R (J, γ′) γ′ e normal a γ.Porque γ e uma geodesica, temos (
DV
dt
)>=DV >
dt,(
DV
dt
)⊥=DV ⊥
dt,
para qualquer campo V . De fato, para qualquer campo W temos
D
dt〈W,γ′〉 =
⟨DW
dt, γ′⟩
+
⟨W,
Dγ′
dt
⟩=
⟨DW
dt, γ′⟩,
de modo que 〈W,γ′〉 = 0 implica
⟨DW
dt, γ′⟩
= 0, isto e, se W e normal a geodesica γ, entao sua derivada
covarianteDW
dttambem e normal a γ; da mesma forma, se W e um campo tangente a γ, entao sua derivada
covarianteDW
dttambem e tangente a γ, pois se W = fγ′, entao
DW
dt=df
dtγ′ + f
Dγ′
dt=df
dtγ′.
Logo, (D2J
dt2
)>=D2J>
dt2,(
D2J
dt2
)⊥=D2J⊥
dt2.
Portanto, a equacao de JacobiD2J
dt2+R (J, γ′) γ′ = 0
da origem as duas equacoes de Jacobi
D2J>
dt2+R
(J>, γ′
)γ′ = 0,
D2J⊥
dt2+R
(J⊥, γ′
)γ′ = 0.
18.6 Exemplo. Existem sempre dois campos de Jacobi tangenciais triviais ao longo de uma geodesica γ:
J0 (t) = γ′ (t) (18.4)
que satisfaz as condicoes iniciais
J0 (0) = γ′ (0) eDJ0
dt(0) = 0

Rodney Josue Biezuner 259
eJ1 (t) = tγ′ (t) (18.5)
que satisfaz as condicoes iniciais
J1 (0) = 0 eDJ1
dt(0) = γ′ (0) .
O primeiro e um campo de Jacobi porque
D2J0
dt2=D
dt
Dγ′
dt=D
dt0 = 0,
R (J0, γ′) γ′ = R (γ′, γ′) γ = 0.
O segundo e um campo de Jacobi porque
D2J1
dt2=D
dt
DJ1
dt=D
dt
(γ′ + t
Dγ′
dt
)=Dγ′
dt= 0,
R (J1, γ′) γ′ = R (tγ′, γ′) γ′ = tR (γ′, γ′) γ′ = 0.
De fato, J0 e o campo variacional da variacao F (s, t) = γ (t+ s), enquanto que J1 e o campo variacionalda variacao F (s, t) = γ (tes). Como estas variacoes sao apenas reparametrizacoes das geodesicas γ, elas naopodem dizer mais nada do que a propria γ.
Devido ao visto no exemplo anterior, apenas campos de Jacobi normais ao longo de γ sao interessantes,capazes de fornecer informacao geometrica nova.
18.7 Proposicao. Seja γ : I −→M uma geodesica, t0 ∈ I e J um campo de Jacobi ao longo de γ. Entao
〈J (t) , γ′ (t)〉 = At+B,
onde
A =
⟨DJ
dt(t0) , γ′ (t0)
⟩,
B = 〈J (t0) , γ′ (t0)〉 −⟨DJ
dt(t0) , γ′ (t0)
⟩t0.
Em particular, um campo de Jacobi ao longo de γ e normal a γ′ se e somente se
J (t0) ,DJ
dt(t0) ⊥ γ′ (t0) .
Alem disso, qualquer campo de Jacobi ortogonal a γ′ em dois pontos e um campo normal.
18.8 Lema. Em particular, o subespaco dos campos de Jacobi tangenciais tem dimensao 2, enquanto que osubespaco dos campos de Jacobi normais tem dimensao 2n− 2.
Prova: Pela compatibilidade da metrica,
d2
dt2〈J, γ′〉 =
d
dt
(⟨DJ
dt, γ′⟩
+
⟨J,Dγ′
dt
⟩)=
d
dt
⟨DJ
dt, γ′⟩
=
⟨D2J
dt2, γ′⟩
+
⟨DJ
dt,Dγ′
dt
⟩=
⟨D2J
dt2, γ′⟩
= −〈R (J, γ′) γ′, γ′〉= −R (J, γ′, γ′, γ′)
= 0.

Rodney Josue Biezuner 260
Logo,f (t) = 〈J (t) , γ′ (t)〉 = At+B
para alguns A,B ∈ R. Como
f (t0) = 〈J (t0) , γ′ (t0)〉 ,
f ′ (t0) =
⟨DJ
dt(t0) , γ′ (t0)
⟩,
segue a identidade enunciada. Consequentemente, f ≡ 0 se e somente se J (t0) ,DJ
dt(t0) ⊥ γ′ (t0). Da mesma
forma, se J se anula em dois pontos, entao f e a funcao linear nula.
18.9 Proposicao. Dados p ∈ M , v ∈ TpM tal que expp (v) esta definido e w ∈ TvTpM = TpM , considerea variacao geodesica
F (s, t) = expp (tv (s)) ,
onde v (s) e uma curva em TpM com v (0) = v e v′ (0) = w. Entao o campo de Jacobi
J (t) =∂F
∂s(0, t) = d
(expp
)tvtw
ao longo da geodesica radial γ : [0, 1] −→M dada por γ (t) = expp (tv) satisfaz
J (0) = 0,
DJ
dt(0) = w.
Prova: E obvio que J (0) = 0. Para mostrar que
DJ
dt(0) = w,
calculamos
DJ
dt(t) =
D
dt
[d(expp
)tvtw]
=D
dt
[td(expp
)tvw]
= d(expp
)tvw + t
D
dt
[d(expp
)tvw].
Logo,DJ
dt(0) = d
(expp
)0w = w.
Em coordenadas normais, e facil calcular campos de Jacobi:
18.10 Proposicao. Sejam p ∈ M ,(x1, . . . , xn
)coordenadas normais centradas em p e γ : I −→ M uma
geodesica radial partindo de p. Entao, para cada vetor V ∈ TpM , o campo de Jacobi ao longo de γ tal que
J (0) = 0,
DJ
dt(0) = V,
e dado por
J (t) =
n∑i=1
tV i∂
∂xi
∣∣∣∣γ(t)
.

Rodney Josue Biezuner 261
Prova: Se J (t) e um campo ao longo de γ definido pela formula acima, temos
J (0) = 0
e (usando a formula da derivada covariante em coordenadas normais)
DJ
dt(0) =
n∑k=1
dJkdt
(0) +
n∑i,j=1
dγi
dt(0) Γkij (0) Jj (0)
∂
∂xk(0)
=
n∑k=1
dJk
dt(0)
∂
∂xk(0)
=
n∑k=1
V k∂
∂xk(0)
= V.
Pelo teorema de existencia e unicidade, basta provar que J e um campo de Jacobi; mostraremos que J e ocampo variacional de uma variacao geodesica. De fato, se W = γ′ (0), como γ e uma geodesica radial, ela edada por
γ (t) = expp (tW ) ;
em coordenadas, podemos escrever simplesmente γ (t) = tW . Defina a variacao geodesica
F (s, t) = expp (t (W + sV )) ;
em coordenadas, podemos escrever simplesmente F (s, t) = t (W + sV ). Observe que v (s) = W +sV satisfazv (0) = W e v′ (0) = V . Como por definicao
∂
∂xi
∣∣∣∣γ(t)
= d(expp
)tW
ei,
segue que o campo variacional de F e
∂F
∂s(0, t) = d
(expp
)tW
(tV ) =
n∑i=1
tV i∂
∂xi
∣∣∣∣γ(t)
= J (t) .
18.3 Campos de Jacobi em Variedades de Curvatura SeccionalConstante
Para metricas com curvatura seccional constante, temos uma formula explıcita para campos de Jacobi deum tipo diferente, expressando um campo de Jacobi como o multiplo escalar de um campo vetorial paralelo.
18.11 Proposicao. Seja M uma variedade riemanniana com curvatura seccional constante K e γ : I −→Muma geodesica unitaria. Os campos de Jacobi normais ao longo de γ que se anulam em t = 0 sao dados por
J (t) = ρ (t)E (t) ,
onde E e um campo paralelo normal ao longo de γ e
ρ (t) =
t se K = 0,
R sent
Rse K =
1
R2> 0,
R senht
Rse K = − 1
R2< 0.

Rodney Josue Biezuner 262
Prova: Como M tem curvatura seccional constante K, seu endomorfismo curvatura e dado por
R (X,Y )Z = K [〈Y,Z〉X − 〈X,Z〉Y ] ,
conforme vimos no capıtulo anterior. Logo, como ‖γ′‖ = 1, se J e um campo de Jacobi normal temos que
R (J, γ′) γ′ = K [〈γ′, γ′〉 J − 〈J, γ′〉 γ′] = KJ.
Portanto, a equacao de Jacobi para um campo normal de Jacobi ao longo de uma geodesica unitaria em umavariedade com curvatura seccional constante K e
D2J
dt2+KJ = 0.
Escolhendo um campo vetorial paralelo normal E (t) ao longo de γ e substituindo J (t) = ρ (t)E (t) naequacao de Jacobi podemos obter uma solucao para esta equacao para quaisquer condicoes iniciais; peloteorema de existencia e unicidade ela e a unica solucao para a equacao. De fato, temos
D2 (ρE)
dt2=D
dt
D (ρE)
dt=D
dt
(dρ
dtE + ρ
DE
dt
)=D
dt
(dρ
dtE
)=d2ρ
dt2E +
dρ
dt
DE
dt
=d2ρ
dt2E,
logo, substituindo J (t) = ρ (t)E (t) na equacao de Jacobi produz(d2ρ
dt2+Kρ
)E = 0
e a equacao linear de segunda ordemd2ρ
dt2+Kρ = 0
tem as solucoes dadas no enunciado para as condicoes iniciais ρ (0) = 0 e ρ′ (0) = 1. Combinando as formulas destes dois lemas, obteremos nossa primeira aplicacao geometrica dos campos de
Jacobi: uma formula explıcita para metricas de curvatura constante em coordenadas normais; desta formulaseguira que variedades de curvatura seccional constante sao localmente isometricas.
18.12 Proposicao. Seja (M, g) uma variedade riemanniana com curvatura seccional constante K. Sejamp ∈ M ,
(x1, . . . , xn
)coordenadas normais centradas em p e r a funcao distancia radial. Denote por ‖·‖g
a norma de um vetor tangente na metrica g e por ‖·‖e a norma euclidiana de um vetor tangente nestascoordenadas. Para cada q nesta vizinhanca normal de p e para cada V ∈ TqM escreva
V = Vr + VS ,
onde Vr esta na direcao de ∂/∂r e VS e tangente a esfera Sr (p) que passa por q. Entao a metrica g podeser escrita
‖V ‖g =
‖Vr‖2e + ‖VS‖2e se K = 0,
‖Vr‖2e +R2
r2
(sen2 r
R
)‖VS‖2e se K =
1
R2> 0,
‖Vr‖2e +R2
r2
(senh2 r
R
)‖VS‖2e se K = − 1
R2< 0.

Rodney Josue Biezuner 263
Prova: Pelo lema de Gauss, a decomposicao V = Vr + VS e ortogonal, logo
‖V ‖2g = ‖Vr‖2g + ‖VS‖2g .
Como a distancia radial e a distancia euclideana (tambem consequencia do lema de Gauss) temos que
‖Vr‖g = ‖Vr‖e .
Falta apenas calcular ‖VS‖g.Considere a geodesica radial unitaria de p a q. Pela Proposicao 18.10, o campo
J (t) =
n∑i=1
t
rV iS
∂
∂xi
∣∣∣∣γ(t)
e um campo de Jacobi J (t) que se anula em p e tal que J (r) = VS . Em particular, J e normal a γ′ emp e q e portanto J e normal ao longo de γ pela Proposicao 18.7. Logo, J possui a representacao dada naProposicao 18.11. Segue que
‖VS‖2g = ‖J (r)‖2 = |ρ (r)|2 ‖E (r)‖2 = |ρ (r)|2 ‖E (0)‖2 = |ρ (r)|2∥∥∥∥DJdt (0)
∥∥∥∥2
,
ja que ρ′ (0) = 1. Mas
DJ
dt(0) =
n∑i=1
1
rV iS
∂
∂xi
∣∣∣∣p
.
Como g = e em p, segue o resultado.
18.13 Proposicao (Unicidade Local de Metricas de Curvatura Constante). Sejam (M, g) e(M, g
)varieda-
des riemannianas com curvatura seccional constante K. Entao (M, g) e(M, g
)sao localmente isometricas.
Prova: Sejam p ∈M e p ∈ M pontos quaisquer e Bε (p) , Bε (p) bolas geodesicas, em particular vizinhancasnormais parametrizadas por
ϕ = expp : Bε (0) −→ Bε (p) ,
ϕ = expp : Bε (0) −→ Bε (p) .
Como as metricas na bola Bε (0) ⊂ Rn, onde identificamos Rn com ambos os espacos tangentes TpM e TpMsao identicas pela Proposicao 18.12, segue que ϕ ϕ−1 e uma isometria.
18.4 Velocidade de Afastamento das Geodesicas e Curvatura Sec-cional
Se r (t) e tal que
limt→0
r (t)
tk= 0,
denotaremos este fato porr (t) = o
(tk).

Rodney Josue Biezuner 264
18.14 Lema. Sejam p ∈M e γ : I −→M a geodesica radial partindo de p com velocidade inicial γ′ (0) = V .Seja W ∈ TpM com ‖W‖ = 1 e considere o campo de Jacobi J tal que
J (0) = 0,
DJ
dt(0) = W.
Entao
‖J (t)‖2 = t2 − 1
3R (V,W,W, V ) t4 + o
(t4).
Em particular, se γ e uma geodesica unitaria,
‖J (t)‖2 = t2 − 1
3K (V,W ) t4 + o
(t4)
e
‖J (t)‖ = t− 1
6K (V,W ) t3 + o
(t3).
Prova: Para simplificar a notacao, denotaremos
J ′ (t) =DJ
dt(t) ,
J ′′ (t) =D2J
dt2(t)
e, em geral,
J (k) (t) =DkJ
dtk(t) .
Para provar o resultado, aplicaremos a formula de Taylor a funcao real f : I −→ R definida por
f (t) = ‖J (t)‖2 = 〈J (t) , J (t)〉 .
Temos
f ′ = 2 〈J, J ′〉 ,f ′′ = 2 〈J ′, J ′〉+ 2 〈J, J ′′〉
= 2 ‖J ′‖2 + 2 〈J, J ′′〉 ,
e
f (0) = ‖J (0)‖2 = 0,
f ′ (0) = 2 〈J (0) , J ′ (0)〉 = 0,
f ′′ (0) = 2 ‖J ′ (0)‖2 + 2 〈J (0) , J ′′ (0)〉 = 2 ‖J ′ (0)‖2 = 2.
Como
f ′′′ = 2 〈J ′′, J ′〉+ 2 〈J ′, J ′′〉+ 2 〈J ′, J ′′〉+ 2 〈J, J ′′′〉= 6 〈J ′, J ′′〉+ 2 〈J, J ′′′〉
eJ ′′ (0) = −R (J (0) , γ′ (0)) γ′ (0) = −R (0, V )V = 0,
segue quef ′′′ (0) = 6 〈J ′ (0) , J ′′ (0)〉+ 2 〈J (0) , J ′′′ (0)〉 = 0.

Rodney Josue Biezuner 265
Falta apenas calcular a ultima derivada. Temos
f (4) = 6 〈J ′′, J ′′〉+ 6 〈J ′, J ′′′〉+ 2 〈J ′, J ′′′〉+ 2⟨J, J (4)
⟩= 6 ‖J ′′‖2 + 8 〈J ′, J ′′′〉+ 2
⟨J, J (4)
⟩,
de modo quef (4) (0) = 8 〈J ′ (0) , J ′′′ (0)〉 = 8 〈W,J ′′′ (0)〉 .
Mas
〈J ′′′ (0) ,W 〉 =
⟨D
dtJ ′′ (t)
∣∣∣∣t=0
,W
⟩= −
⟨D
dtR (J (t) , γ′ (t)) γ′ (t)
∣∣∣∣t=0
,W
⟩.
Afirmamos que ⟨D
dtR (J (t) , γ′ (t)) γ′ (t)
∣∣∣∣t=0
,W
⟩= R (V,W,W, V ) .
De fato, como
〈R (J, γ′) γ′, J ′〉 = R (J, γ′, γ′, J ′)
= R (γ′, J ′, J, γ′)
= 〈R (J ′, γ′) γ′, J〉 ,
segue qued
dt〈R (J, γ′) γ′, J ′〉 =
d
dt〈R (J ′, γ′) γ′, J〉 ,
donde ⟨D
dtR (J, γ′) γ′, J ′
⟩+ 〈R (J, γ′) γ′, J ′′〉 =
⟨D
dtR (J ′, γ′) γ′, J
⟩+ 〈R (J ′, γ′) γ′, J ′〉 .
Calculando em t = 0, como J (0) = J ′′ (0) = 0 e J ′ (0) = W , temos que⟨D
dtR (γ′ (t) , J (t)) γ′ (t)
∣∣∣∣t=0
,W
⟩= 〈R (W,V )V,W 〉 = R (W,V, V,W ) .
Consequentemente,f (4) (0) = −8R (V,W,W, V ) .
Segue portanto da formula de Taylor que
f (t) = t2 − 1
3R (V,W,W, V ) t4 + o
(t4).
Quando, ‖V ‖ = ‖W‖ = 1, temos R (V,W,W, V ) = K (V,W ) e portanto
f (t) = t2 − 1
3K (V,W ) t4 + o
(t4).
Para provar a ultima expressao do enunciado, seja
g (t) = ‖J (t)‖ =√f (t).

Rodney Josue Biezuner 266
Entao f (t) = [g (t)]2
e
f ′ (t) = 2g (t) g′ (t) ,
f ′′ (t) = 2 [g′ (t)]2
+ 2g (t) g′′ (t) ,
f ′′′ (t) = 6g′ (t) g′′ (t) + 2g (t) g′′′ (t) ,
f (4) (t) = 6 [g′′ (t)]2
+ 8g′ (t) g′′′ (t) + 2g (t) g(4) (t) .
Daı
g (0) = 0,
f ′′ (0) = 2 [g′ (0)]2
+ 2g (0) g′′ (0) =⇒ 2 = 2 [g′ (0)]2
+ 0
=⇒ g′ (0) = 1,
f ′′′ (0) = 6g′ (0) g′′ (0) + 2g (0) g′′′ (0) =⇒ 0 = 6g′′ (0) + 0
=⇒ g′′ (0) = 0,
f (4) (0) = 6 [g′′ (0)]2
+ 8g′ (0) g′′′ (0) + 2g (0) g(4) (0) =⇒ −8K (V,W ) = 0 + 8g′′′ (0) + 0
=⇒ g′′′ (0) = −K (V,W ) .
Segue da formula de Taylor que
g (t) = t− 1
6K (V,W ) t3 + o
(t3).
Este resultado produz a relacao entre a aproximacao ou espalhamento das geodesica em um ponto de acordocom a curvatura seccional neste ponto. De fato, considere
F (s, t) = expp (tv (s)) ,
onde v (s) e uma curva de TpM com v (0) = v, v′ (0) = w e ‖v (s)‖ = ‖w‖ = 1. Considere os raios partindoda origem, eles se afastam do raio tv com velocidade absoluta∥∥∥∥ ∂
∂stv (s)
∣∣∣∣s=0
∥∥∥∥ = ‖tv′ (0)‖ = t ‖w‖ = t.
Agora considere as geodesicas radiais Fs (t) partindo de p. Como
J (t) = d(expp
)tvtw =
∂F
∂s(0, t)
e um campo de Jacobi que satisfaz
J (0) = 0,
DJ
dt(0) = w,
ele satisfaz as hipoteses do enunciado do Lema 18.14 e portanto∥∥∥∥∂F∂s (0, t)
∥∥∥∥ = t− 1
6K (V,W ) t3 + o
(t3).
Isso significa que as geodesicas radiais Fs (t) se afastam da geodesica radial F0 (t) = expp (tv) com velocidadeque difere de t por uma termo de terceira ordem cujo sinal e o oposto do sinal da curvatura seccional davariedade em p associada ao plano σ gerado por v e w. Isso significa que se Kp (σ) > 0 as geodesicas seafastam menos que os raios do espaco tangente TpM , enquanto que se Kp (σ) < 0 as geodesicas se afastammais que os raios do espaco tangente TpM .

Rodney Josue Biezuner 267
18.5 Pontos Conjugados
Agora vamos estudar as singularidades da aplicacao exponencial atraves dos campos de Jacobi. A existenciade uma tal relacao e sugerida pela Proposicao 18.9 e pode ser vista de maneira concreta na esfera SnR. Todasas geodesicas que saem de um ponto p se encontram no seu ponto antipodal −p, que esta a uma distanciaπR de p ao longo de qualquer uma destas geodesicas. A aplicacao exponencial e um difeomorfismo sobre abola geodesica BπR (0) ⊂ TpM mas deixa de ser um difeomorfismo na fronteira da bola. E pela Proposicao18.11, os campos de Jacobi normais ao longo destas geodesicas que se anulam em p tem o seu proximo zeroexatamente em −p. Por outro lado, a Proposicao 18.10 mostra que em uma vizinhanca normal (ou seja umavizinhanca que e a imagem de um conjunto onde expp e um difeomorfismo) nenhum campo de Jacobi quese anula em p pode se anular em qualquer ponto da vizinhanca. Assim deve se esperar existir uma relacaoentre as singularidades da aplicacao exponencial e os zeros de um campo de Jacobi.
18.15 Definicao. Seja γ : [a, b] −→ M uma geodesica. Dizemos que o ponto q = γ (b) e conjugado aoponto p = γ (a) ao longo de γ se existe um campo de Jacobi J ao longo de γ nao identicamente nulo que seanula em p e q, isto e, tal que
J (a) = J (b) = 0.
A multiplicidade do ponto conjugado q e a dimensao do subespaco dos campos de Jacobi que se anulamem p e q.
Pelo teorema de existencia e unicidade, a dimensao do espaco dos campos de Jacobi que se anulam em p en; como o campo de Jacobi tangencial J (t) = tγ′ (t) so se anula em p (de fato, qualquer campo de Jacobitangencial que se anula em dois pontos e necessariamente nulo pela Proposicao 18.7), a multiplicidade deum ponto conjugado e no maximo n − 1. Em particular, na definicao de pontos conjugados, o ponto q econjugado a p se e somente se existir um campo de Jacobi normal ao longo de γ nao identicamente nulo quese anula em p e q. O numero n− 1 e atingido na esfera pela Proposicao 18.11, ja que para pontos antipodaisexiste um campo de Jacobi que anula neles para cada campo paralelo normal.
18.16 Proposicao. Sejam p ∈M , v ∈ TpM e q = expp (v). Entao expp e um difeomorfismo local em umavizinhanca de v se e somente se q nao e conjugado a p ao longo da geodesica γ (t) = expp (tv).
Alem disso, a multiplicidade de q e igual a dim ker d(expp
)v.
Prova: Como vimos na Proposicao 18.9, todo campo de Jacobi ao longo de γ tal que J (0) = 0 e da forma
J (t) = d(expp
)tvtw.
para algum vetor w ∈ TpM e J ′ (0) = w. Portanto, q e conjugado a p se e somente se
J (1) = d(expp
)vw = 0,
isto e, se e somente se v e ponto crıtico de expp. Como os campos de Jacobi J1, . . . , Jk que se anulam em psao linearmente independentes se e somente se os vetores
J ′1 (0) = w1, . . . , J′k (0) = wk
sao linearmente independentes em TpM , isso conclui a demonstracao.
18.17 Proposicao. Seja γ : [a, b] −→M uma geodesica tal que γ (b) nao e conjugado a γ (a).Dados V ∈ Tγ(a)M e W ∈ Tγ(b)M , existe um unico campo de Jacobi J ao longo de γ tal que
J (a) = V,
J (b) = W.

Rodney Josue Biezuner 268
Prova: Seja J o espaco vetorial dos campos de Jacobi ao longo de γ tais que J (a) = 0. Este espaco tem
dimensao n, correspondente as n escolhas linearmente independentes deDJ
dt(a). Defina uma aplicacao linear
Φ : J −→ Tγ(b)M porΦ (J) = J (b) .
Como γ (b) nao e conjugado a γ (a), Φ e injetiva. Ja que dim J = n = dimTγ(b)M , segue que Φ e umisomorfismo. Logo existe J1 ∈ J tal que
J1 (b) = W,
ou seja, existe um unico campo de Jacobi J1 ao longo de γ tal que
J1 (a) = 0,
J1 (b) = W.
Considerando o espaco vetorial J dos campos de Jacobi ao longo de γ tais que J (b) = 0 e a aplicacao linear
Ψ : J −→ Tγ(a)M porΨ (J) = J (a) ,
concluımos de maneira analoga que existe um unico campo de Jacobi J2 ao longo de γ tal que
J2 (a) = V,
J2 (b) = 0.
O campo J = J1 + J2 e o campo de Jacobi que satisfaz as condicoes do enunciado. A unicidade segueimediatamente do fato de γ (b) nao ser conjugado a γ (a), pois a diferenca de dois campos de Jacobi diferentesque satisfazem as condicoes do enunciado seria um campo de Jacobi nao trivial se anulando em γ (a) e γ (b).

Capıtulo 19
Causalidade
19.1 Orientacao Temporal
Em uma variedade de Lorentz arbitraria, em cada espaco tangente TpM , como em todo espaco de Minkowski,existem dois cones temporais. Escolher um deste cones temporais equivale a orientar o espaco tangente TpM .A questao e se e possıvel orientar todos os espacos tangentes de M de uma maneira contınua. Lembre-seque escolher um cone temporal equivale na pratica a escolher um vetor to tipo tempo v0 em TpM ; entao,um vetor causal (isto e, um vetor que nao e do tipo espaco) v esta dirigido para o futuro se 〈v0, v〉 < 0 epara o passado se 〈v0, v〉 > 0.
19.1 Definicao. Seja M uma variedade de Lorentz. Dizemos que um campo vetorial X ∈ T (M) e do tipotempo se Xp e do tipo tempo para todo p ∈M .
Em geral, uma variedade de Lorentz nao possui campos vetoriais do tipo tempo globalmente definidos.
19.2 Definicao. Dizemos que uma variedade de Lorentz M e temporalmente orientavel se existe umafuncao τ que atribui a cada ponto p um cone temporal τp em TpM e um campo vetorial do tipo tempo taisque Xp ∈ τp para todo p ∈M .
Neste caso, dizemos que τ e uma orientacao temporal para M .Se v ∈ TpM e um vetor do tipo causal, dizemos que v e dirigido para o futuro se v ∈ τp e para o passado
se −v ∈ τp.
Em outras palavras, v e dirigido para o futuro se
〈v,Xp〉 < 0
e para o passado se〈v,Xp〉 > 0.
Veja a demonstracao do Teorema 19.12 para uma definicao alternativa usando transporte paralelo.
19.3 Definicao. Uma variedade de Lorentz conexa, temporalmente orientada, e chamada um espacotempo.
Em Relatividade Geral se trabalha com espacotempos, ja que e altamente improvavel que dois observadores,mesmo nao inerciais, se encontrem em um ponto do espacotempo e o tempo para um segue o seu ritmonatural em direcao ao futuro, enquanto que para o outro observador o tempo corre em direcao ao passado.
269

Rodney Josue Biezuner 270
19.2 Teoria de Causalidade para Espacotempos
De agora em diante, M denotara sempre um espacotempo. Em um espacotempo, uma curva diferenciavelcausal e sempre orientada para o futuro ou orientada para o passado, ja que uma curva nao pode mudarcontinuamente sua orientacao temporal do futuro para o passado ou vice-versa.
19.2.1 Cronologia
19.4 Definicao. Dados pontos p, q ∈M , dizemos que p precede q cronologicamente e escrevemos
p q
se existe uma curva diferenciavel do tipo tempo orientada para o futuro ligando p a q.Dizemos que p precede q causalmente e escrevemos
p 6 q
se p = q ou se existe uma curva diferenciavel causal orientada para o futuro ligando p a q.Dizemos que p precede q causalmente estritamente e escrevemos
p < q
se p 6 q e p 6= q.
As relacoes e 6 sao claramente transitivas.
19.5 Proposicao. Se p q e q 6 r ou se p 6 q e q r, entao p r.
Prova: D. Estendemos a nocao de orientacao temporal para curvas contınuas:
19.6 Definicao. Uma curva contınua α : (a, b) −→M e uma curva causal orientada para o futuro separa cada t0 ∈ (a, b) existe ε > 0 e uma vizinhanca normal convexa V de α (t0) contendo α (t0 − ε, t0 + ε)tal que para todos t1, t2 com t0 − ε < t1 < t2 < t0 + ε existe uma curva causal orientada para o futuro emV de α (t1) a α (t2).
A necessidade de considerar vizinhancas normais convexas na Definicao 18.6 se justifica pelo fato de existiremespacotempos em que p q para todos os pontos p, q ∈M , logo nestes espacotempos qualquer curva contınuaα satisfazera α (t1) α (t2) e α (t2) α (t1) para todos t1, t2 no domınio de α, portanto apenas a condicaoα (t1) α (t2) para todos t1 < t2 implicaria que toda curva contınua e uma curva causal orientada para ofuturo.
19.7 Definicao. Dado p ∈M , definimos:
futuro cronologico de p : I+ (p) = q ∈M : p q ,passado cronologico de p : I− (p) = q ∈M : q p ,
futuro causal de p : J+ (p) = q ∈M : p 6 q ,passado causal de p : J− (p) = q ∈M : q 6 p .

Rodney Josue Biezuner 271
19.3 Apendice: O Recobrimento Duplo Temporalmente Orientavel
Toda variedade riemanniana nao orientavel possui um recobrimento duplo orientavel (veja, por exemplo,[Carmo], ultimo exercıcio do Capıtulo 0). Um resultado analogo vale para variedades de Lorentz, comoveremos. A construcao do recobrimento duplo temporalmente orientavel de uma variedade de Lorentz dadaabaixo segue [BEE], pp. 51–52. E uma construcao bem mais abstrata que a contida, por exemplo, em[ONeill], p. 194. E ha alguns aspectos que este autor nao conseguiu compreender (especificamente, Lema19.10, que parece ser o resultado usado no Lema 19.11, que e o Lema 3.2 de [BEE]).
19.8 Definicao. Seja M uma variedade de Lorentz, fixe um ponto p0 ∈ M e escolha uma orientacaotemporal v0 ∈ Tp0M . Para qualquer p ∈ M , definimos uma relacao de equivalencia no conjunto das curvasdiferenciaveis por partes ligando p0 a p
Ωp0,p = α ∈ [0, 1] −→M : α e diferenciavel por partes, α (0) = p0 e α (1) = p
da seguinte forma: duas curvas α, β ∈ Ωp0,p sao equivalentes se os campos paralelos Vα, Vβ ao longo derespectivamente α, β definidos por Vα (0) = Vβ (0) = v0 satisfazem
〈Vα (1) , Vβ (1)〉 < 0.
Esta relacao de equivalencia divide Ωp0,p em duas classes: como os campos Vα e Vβ sao paralelos, segue queV1 (1) e Vβ (1) sao vetores do tipo tempo em TpM , pois
〈Vα (1) , Vα (1)〉 = 〈Vα (0) , Vα (0)〉 = 〈v0, v0〉 < 0,
〈Vβ (1) , Vβ (1)〉 = 〈Vβ (0) , Vβ (0)〉 = 〈v0, v0〉 < 0,
logo ou eles estao no mesmo cone temporal ou estao em cones temporais opostos. Note que duas cur-vas diferenciavelmente homotopicas pertencem a mesma classe de equivalencia (pois podemos definir umcampo paralelo ao longo da imagem da homotopia, ja que a equacao diferencial do transporte paralelo elinear e a imagem da homotopia e compacta), embora curvas equivalentes nao precisem ser necessariamentehomotopicas.
Dada uma curva diferenciavel α : [0, 1] −→M com α (0) = p0, denotaremos por [α] a classe de equivalenciade α e
M = [α] : α : [0, 1] −→M com α (0) = p0 .
19.9 Proposicao. M e uma variedade de Lorentz e π : M −→M definida por
π ([α]) = α (1)
e um recobrimento duplo.
Prova: Dotamos M da topologia quociente atraves desta relacao de equivalencia, o que torna M um espacode recobrimento topologico com π : M −→ M a aplicacao de recobrimento. Lembramos entao que oespaco de recobrimento topologico de uma variedade diferenciavel possui uma unica estrutura de variedadediferenciavel que torna a aplicacao de recobrimento diferenciavel (veja [Lee 1], Proposicao 4.40, p. 92, para
uma demonstracao). Finalmente, definimos uma metrica de Lorentz em M atraves do pullback da projecao,isto e,
g = π∗g,
ou seja,g[α] (v, w) = gα(1)
(dπ[α]v, dπ[α]w
).
Em particular, π e uma isometria local. Note que se M e temporalmente orientavel, entao M = M . Caso contrario, mostraremos que M e. Para
isso, precisaremos dos lemas a seguir.

Rodney Josue Biezuner 272
19.10 Lema. Sejam p0 ∈ π−1 (p0) e α : [0, 1] −→ M e uma curva diferenciavel por partes tal que
α (0) = p0.
Se α = π α, entaoα (1) = [α] .
Prova: Este resultado parece ser incorreto pelo seguinte argumento. Suponha que
π−1 (p0) =p+
0 , p−0
.
Como ambos M e M sao variedades de Lorentz e toda variedade diferenciavel e localmente contratil, podemos
assumir vizinhancas contrateis V ± de p±0 tais que π(V ±)
= V , V sendo uma vizinhanca contratil de p0.
Dentro das vizinhancas V ± podemos tomar lacos α± com pontos inicial e final em p±0 . Se o enunciado ecorreto, entao se α± = π α±, segue que
p±0 = α± (1) =[α±].
Em particular, [α+]6=[α−],
ja que p+0 6= p−0 . Mas α+ e α−, sendo lacos com pontos inicial e final em p0, dentro da vizinhanca contratil
V , sao (diferenciavelmente) homotopicos e portanto[α+]
=[α−],
uma contradicao.Se o resultado for correto, um possıvel argumento seria o seguinte. Para fixar ideias, assuma que p0 e a
classe de equivalencia da curva constante α0 (t) ≡ p0. Neste caso, o campo paralelo a curva constante α0
com vetor inicial v0 e simplesmente V (t) ≡ v0.
Defina αt : [0, 1] −→ M porαt (s) = α (st) ,
de modo que αt e simplesmente o segmento da curva α que liga p0 a α (t), seu domınio reparametrizado para[0, 1]. Observe que α0 e a curva constante α (s) ≡ p0 e que α1 = α. Seja αt = π αt. Mostraremos que oconjunto
A = t ∈ [0, 1] : αt (1) = [αt]
e aberto e fechado em [0, 1], provando o resultado. Por escolha, 0 ∈ A. (. . .)
19.11 Lema. Sejam p0 ∈ π−1 (p0) e v0 ∈ Tp0M o unico vetor do tipo tempo tal que dπp0 v0 = v0.
Sejam p ∈ M e α, β : [0, 1] −→ M curvas diferenciaveis por parte tais que
α (0) = β (0) = p0,
α (1) = β (1) = p.
Se Vα, Vβ sao os campos paralelos ao longo de respectivamente α, β definidos por Vα (0) = Vβ (0) = v0, entao⟨Vα (1) , Vβ (1)
⟩< 0.

Rodney Josue Biezuner 273
Prova: A unicidade de v0 segue do fato de toda aplicacao de recobrimento diferenciavel ser um difeomorfismolocal. Sejam
α = π α,
β = π β.
Como π : M −→M e uma isometria local, os campos
Vα = π∗
(Vα
),
Vβ = π∗
(Vβ
),
sao paralelos ao longo de α1, α2, respectivamente, com
Vα (0) = Vβ (0) = π∗ (v0) = v0
e〈Vα (1) , Vβ (1)〉 =
⟨π∗
(Vα (1)
), π∗
(Vβ (1)
)⟩=⟨Vα (1) , Vβ (1)
⟩.
Suponha por absurdo que ⟨Vα (1) , Vβ (1)
⟩≮ 0.
Como Vα (1) , Vβ (1) sao vetores do tipo tempo, necessariamente⟨Vα (1) , Vβ (1)
⟩> 0. Logo 〈Vα (1) , Vβ (1)〉 >
0 em p e por definicao [α1] 6= [α2]. Por outro lado, pelo Lema 19.10, temos tambem que
α (1) = [α] ,
β (1) = [β] ,
contradizendo α1 (1) = α2 (1) = p.
19.12 Teorema. Toda variedade de Lorentz nao temporalmente orientavel possui um recobrimento duplotemporalmente orientavel.
Prova: Veja Teorema 3.3 em [BEE], p. 52. Implıcita na demonstracao deste teorema e uma definicaoalternativa para a orientabilidade temporal de uma variedade de Lorentz M : M e temporalmente orientavelse, fixados um ponto base qualquer p0 ∈ M e um vetor do tipo tempo qualquer v0 ∈ Tp0M , para todop ∈ M e para todas as curvas diferenciaveis α, β ligando p0 a p, os campos paralelos Vα, Vβ ao longo derespectivamente α, β definidos por Vα (0) = Vβ (0) = v0 satisfazem
〈Vα (1) , Vβ (1)〉 < 0.
Esta condicao implica que o transporte paralelo do cone futuro determinado por v0 em p0 para qualquerponto p e independente do caminho escolhido de p0 para p. Logo, uma escolha consistente de vetores do tipotempo futuros pode ser feita por transporte paralelo a partir de p0.

Referencias Bibliograficas
[BEE] John K. BEEM, Paul E. EHRLICH e Kevin L. EASLEY, Global Lorentzian Geometry,2nd. Ed., Marcel Dekker, 1996.
[Benn-Tucker] Ian M. BENN e Robin W. TUCKER, An Introduction to Spinors and Geometry withApplications in Physics, Adam Hilger, 1987.
[Berger] Marcel BERGER, A Panoramic View of Riemannian Geometry, Springer, 2002.
[Carmo] Manfredo Perdigao do CARMO, Geometria Riemanniana, 2a. Edicao, 1988.
[Carmo2] Manfredo Perdigao do CARMO, Differential Geometry of Curves and Surfaces, Pren-tice Hall, 1976.
[Dodson-Poston] C. T. J. DODSON e T. POSTON, Tensor Geometry: the geometric viewpoint and itsuses, 2nd Edition, Graduate Texts in Mathematics 130, Springer, 1991.
[Ferraro] Rafael FERRARO, Einstein’s Space-Time: An Introduction to Special and Generalrelativity, Springer, 2007.
[Fleisch1] Daniel FLEISCH, A Student’s Guide to Maxwell’s Equations, Cambridge, 2008.
[Fleisch2] Daniel FLEISCH, A Student’s Guide to Vectors and Tensors, Cambridge UniversityPress, 2012.
[Gron-Naess] Oyvind GRON e Arne NAESS, Einstein’s Theory: A Rigorous Introduction for theMathematically Untrained, Springer, 2011.
[Hoffman-Kunze] Kenneth HOFFMAN e Ray KUNZE, Linear Algebra, 2nd. Edition, Prentice-Hall, 1971.
[Kobayashi] Shoshichi KOBAYASHI, Transformation Groups in Differential Geometry, Classics inMathematics 70 (Reprint of the 1972 Edition), Springer, 1995.
[Lang] Serge LANG, Linear Algebra, 3rd. Edition, Springer, 1987.
[Lee 1] John M. LEE, Introduction to Smooth Manifolds, 2nd Edition, Graduate Texts inMathematics 218, Springer, 2012.
[Lee 2] John M. LEE, Riemannian Manifolds: an Introduction to Curvature, Graduate Textsin Mathematics 176, Springer, 1997.
[Lima 1] Elon Lages de LIMA, Curso de Analise vol. 2, IMPA, 1981.
[Lima 2] Elon Lages de LIMA, Variedades Diferenciaveis, IMPA, 2011.
[McMahon] David McMAHON, Relativity demystified, McGraw-Hill, 2006.
274

Rodney Josue Biezuner 275
[MTW] Charles W. MISNER, Kip S. THORNE e John Archibald WHEELER, Gravitation,Freeman, 1973.
[Naber] Gregory L. NABER, The Geometry of Minkowski Spacetime: an introduction to themathematics of the Special Theory of Relativity, 2nd. Edition, Springer, 2012.
[Okun1] Lev B. OKUN, The concept of mass, Physics Today, 42 (6), 31–36, 1989.
[Okun2] Lev B. OKUN, Energy and Mass in Relativity Theory, World Scientific, 2009.
[ONeill] Barrett O’NEILL, Semi-Riemannian Geometry, with applications to Relativity, Aca-demic Press, 1983.
[Pais] Abraham PAIS, Subtle is the Lord: The Science and Life of Albert Einstein, OxfordUniversity Press, 1982.
[Penrose] Roger PENROSE, Techniques of Differential Topology in Relativity, SIAM, 1972.
[Petkov] Vesselin PETKOV, Inertia and Gravitation: From Aristotle’s Natural Motion to Geo-desics Worldlines in Curved Spacetime, Minkowski Institute Press, 2012.
[Rahaman] Farook RAHAMAN, The Special Theory of Relativity: a mathematical approach, Sprin-ger, 2014.
[Rossmann] Wulf ROSSMANN, Lectures on Differential Geometry, homepage do autor, 2003.
[Rowe] E. G. Peter ROWE, Geometrical Physics in Minkowski Spacetime, Springer, 2000.
[Shutz] Bernard SHUTZ, A First Course in General Relativity, 2nd. Edition, Cambridge Uni-versity Press, 2009.
[Spivak] Michael SPIVAK, A Comprehensive Introduction to Differential Geometry, Vol. I, 2ndEdition, Publish or Perish, 1979.
[Springer] Springer Handbook of Spacetime, Abhay Ashtekar e Vesselin Petkov, Editores, Sprin-ger, 2014.
[Steenrod] Norman STEENROD, The Topology of Fibre Bundles, Princeton University Press,1951.
[Stephani] Hans STEPHANI, Relativity, an Introduction to Special and General Relativity, 3rd.Edition, Cambridge University Press, 2004.
[Takeuchi] Tatsu TAKEUCHI, An Illustrated Guide to Relativity, Cambridge University Press,2010.
[Taylor-Wheeler] Edwin TAYLOR e John Archibald WHEELER, Spacetime Physics: Introduction toSpecial Relativity, 2nd. Edition, Freeman, 1992.
[Topper] David R. TOPPER, How Einstein Created Relativity out of Physics and Astronomy,Springer, 2013.
[Tsamparlis] Michael TSAMPARLIS, Special Relativity: An Introduction with 200 Problems andSolutions, Springer, 2010.
[Warner] Frank W. WARNER, Foundations of Differentiable Manifolds and Lie Groups, Gra-duate Texts in Mathematics 94, Springer, 1983.
[Woodhouse] Nicholas M. J. WOODHOUSE, Special Relativity, Springer, 2002.