modelagem de um sistema por cadeias de markov - inf.ufsc.brmarcelo.menezes.reis/processos03.pdf ·...
TRANSCRIPT
1
Modelagem de um sistema por cadeias de Markov
Sistemas “sem memória”: somente o estado imediatamente
anterior influencia o estado futuro.
Processo estacionário: probabilidades de transição de um estado
para outro são as mesmas em qualquer instante de tempo.
Problema:
Encontrar as probabilidades de transição a partir de dados
históricos ou experimentais;
Encontrar as probabilidades limites do sistema estar em cada
um dos seus estados.

2
Matriz de transição
Matriz de transição estocástica (2 estados):
Pij = probabilidade da transição do estado i para o estado j,
depois de 1 intervalo de tempo, dado que o sistema estava
no estado i no início do intervalo.
2221
1211
PP
PPP Soma de cada linha = 1
3
Probabilidades de Estados
As probabilidades do sistema estar nos estados 1 e 2 após n
períodos de tempo:
P10 e P2
0 são as condições iniciais do sistema: se o sistema
partir do estado 1, P10 = 1 e P2
0 = 0, e vice-versa caso partir
do estado 2.
n
nn
PP
PPPPPP
2221
12110
2
0
121

4
Probabilidades limite
Sob certas condições, as probabilidades de estado estabilizam-
se após vários períodos de tempo em determinados valores,
denominadas probabilidades limite (ou de regime permanente)
da cadeia de Markov.
As probabilidades serão denominadas P1 e P2 para o caso de
dois estados, e satisfazem à equação:
21
2221
1211
21 PPPP
PPPP
Sabendo-se que P1 + P2 =1
5
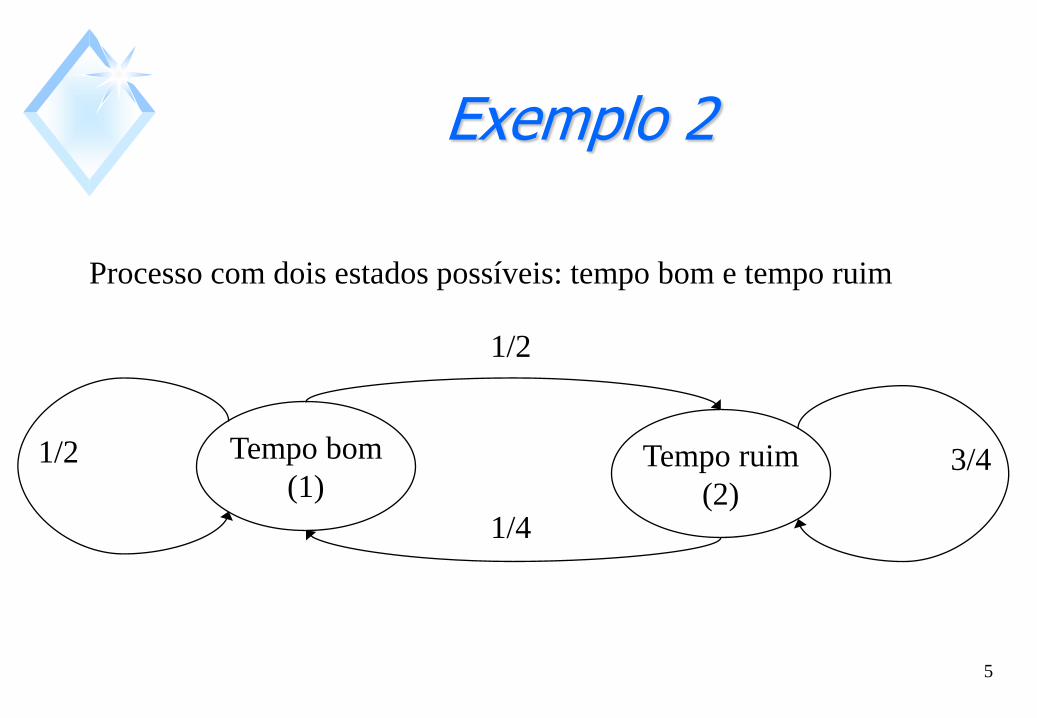
Exemplo 2
Tempo bom
(1) Tempo ruim
(2)
1/2
1/2
1/4
3/4
Processo com dois estados possíveis: tempo bom e tempo ruim
6
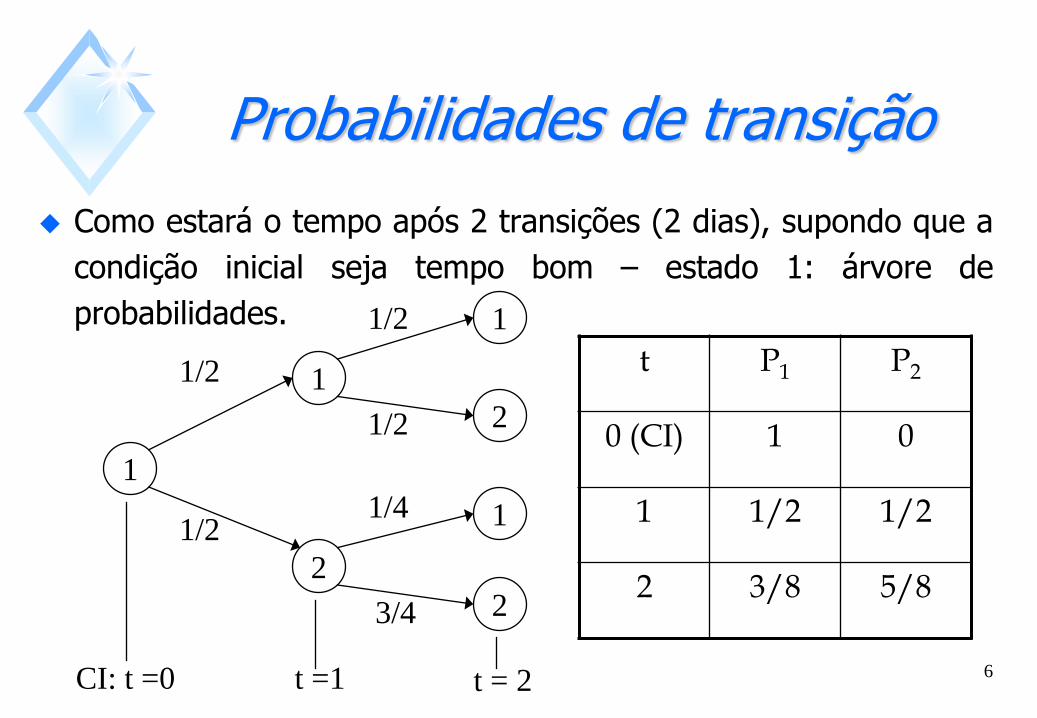
Probabilidades de transição
Como estará o tempo após 2 transições (2 dias), supondo que a
condição inicial seja tempo bom – estado 1: árvore de
probabilidades.
1
2
1
2
1
2
1
CI: t =0 t =1 t = 2
1/2
1/2
1/2
1/2
1/4
3/4
t P1 P2
0 (CI) 1 0
1 1/2 1/2
2 3/8 5/8
7
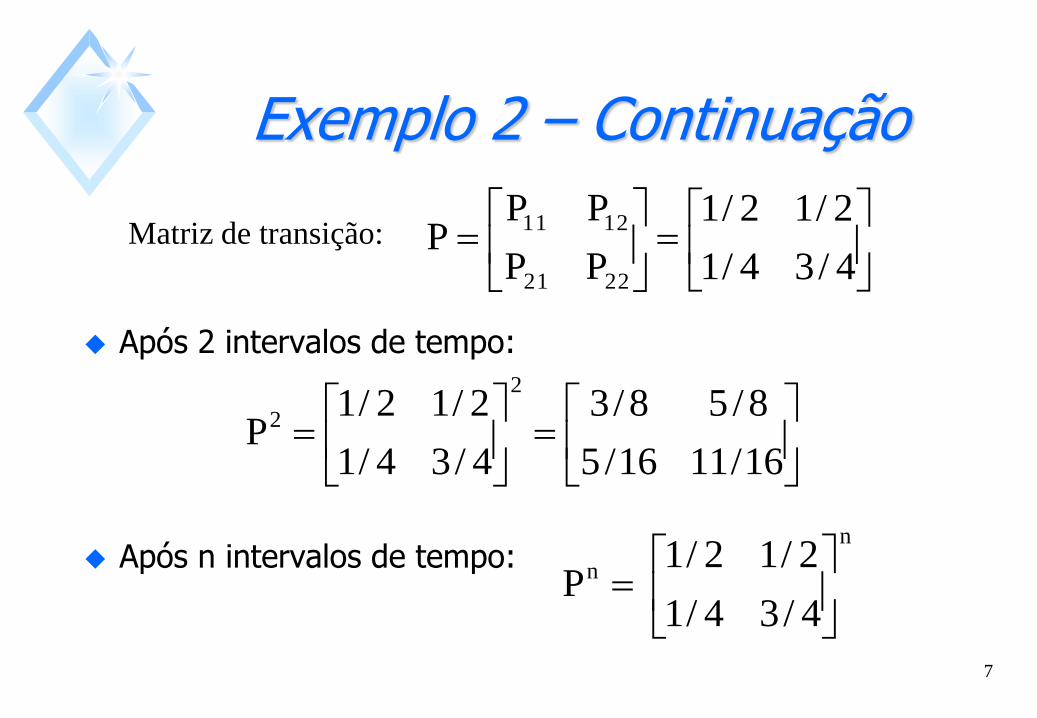
Exemplo 2 – Continuação
Após 2 intervalos de tempo:
Após n intervalos de tempo:
4/34/1
2/12/1
PP
PPP
2221
1211
16/1116/5
8/58/3
4/34/1
2/12/1P
2
2
n
n
4/34/1
2/12/1 P
Matriz de transição:

8
Exemplo 2 – Probabilidades Limite
Após 2 estados quais são as probabilidades do sistema estar
nos estados 1 e 2?
Supondo P10 = 1 e P2
0 = 0:
Supondo P10 = 0 e P2
0 = 1:
8/58/316/1116/5
8/58/3 01PP
2
2
2
1
16/1116/516/1116/5
8/58/3 10PP
2
2
2
1

9
Exemplo 2 – Probabilidades Limite
2121 PP4/34/1
2/12/1PP
sDependente eLinearment Eqs. P)4/3(P)2/1(P
P)4/1(P)2/1(P
221
121
Mas, sabe-se que P1 + P2 = 1 1PP
PP)4/1(P)2/1(
21
121
3333,0)4/3(
)4/1(P1 6667,0
)4/3(
)2/1(P2 Probabilidades limite
10
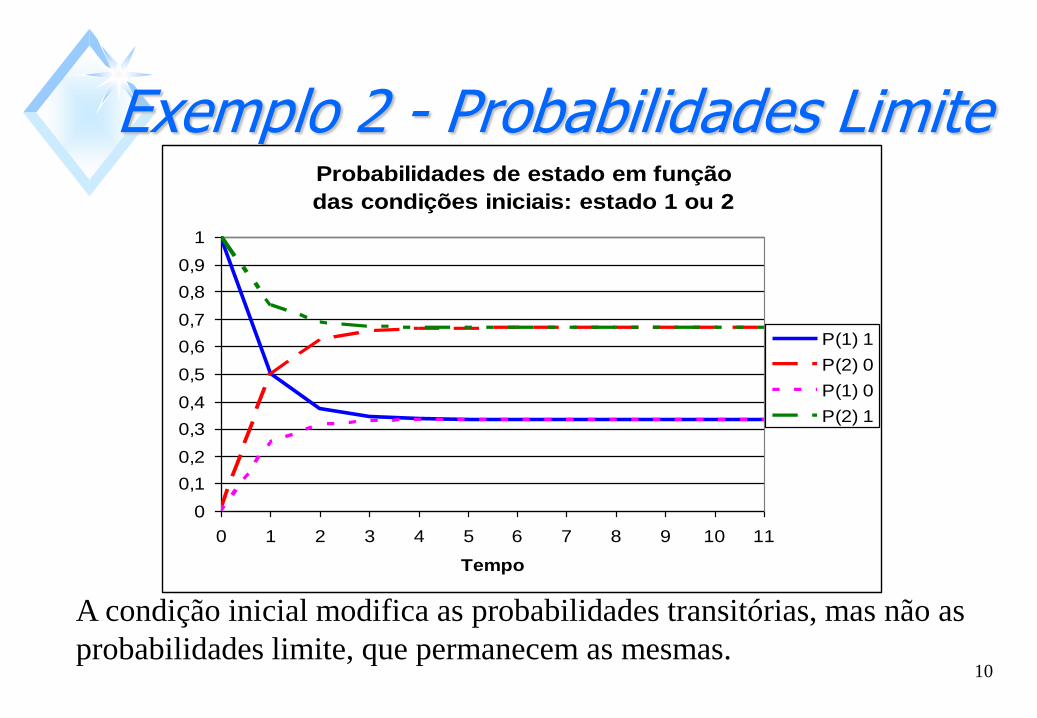
Exemplo 2 - Probabilidades Limite
A condição inicial modifica as probabilidades transitórias, mas não as
probabilidades limite, que permanecem as mesmas.
Probabilidades de estado em função
das condições iniciais: estado 1 ou 2
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 1 2 3 4 5 6 7 8 9 10 11
Tempo
P(1) 1
P(2) 0
P(1) 0
P(2) 1
11
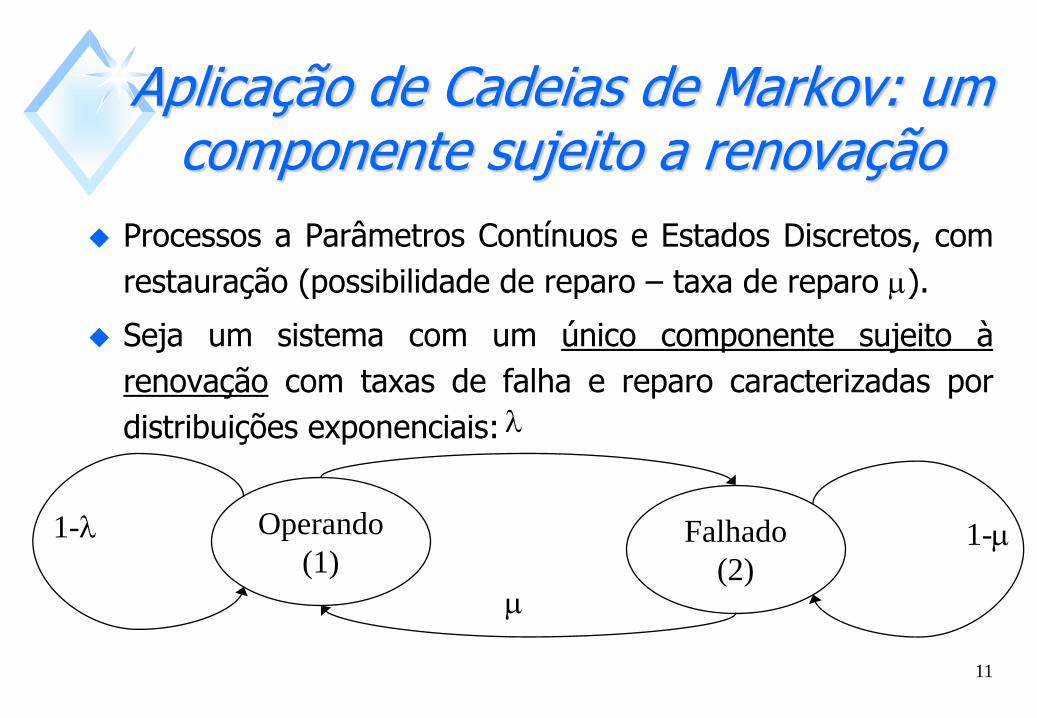
Aplicação de Cadeias de Markov: um componente sujeito a renovação
Processos a Parâmetros Contínuos e Estados Discretos, com
restauração (possibilidade de reparo – taxa de reparo ).
Seja um sistema com um único componente sujeito à
renovação com taxas de falha e reparo caracterizadas por
distribuições exponenciais:
Operando
(1) Falhado
(2)
1-
1-
12
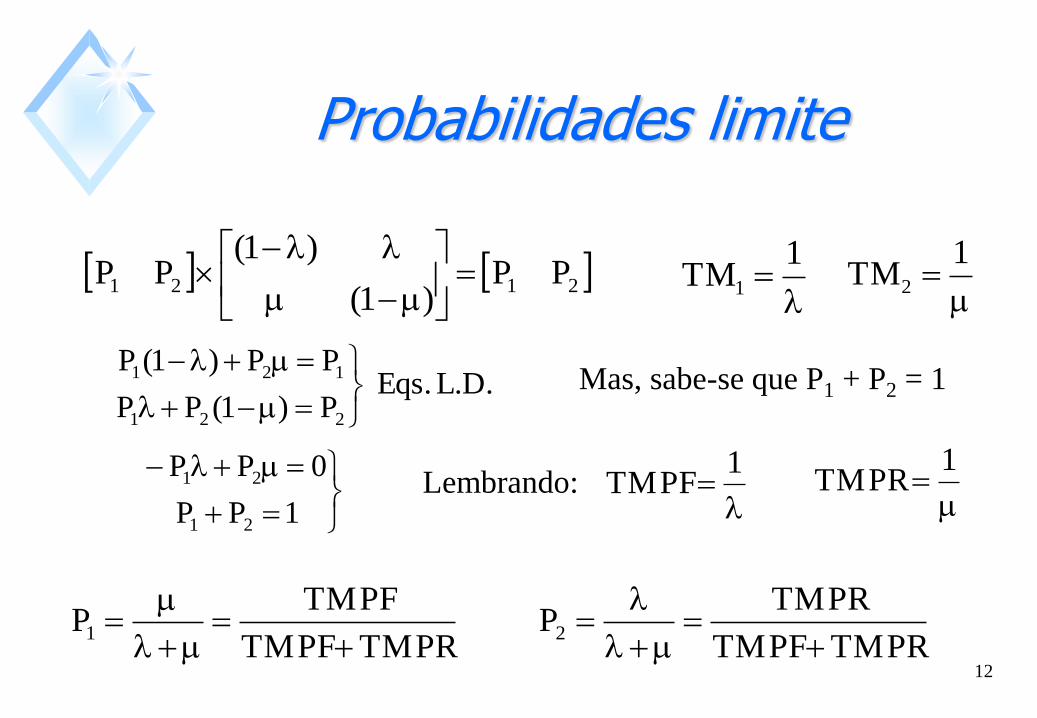
Probabilidades limite
2121 PP)1(
)1(PP
1TM1
1TM2
L.D. Eqs. P)1(PP
PP)1(P
221
121
Mas, sabe-se que P1 + P2 = 1
1PP
0PP
21
21
TMPRTMPF
TMPFP1
TMPRTMPF
TMPRP2
Lembrando:
1
TMPF
1
TMPR

13
Exemplo 2 - Continuação
Sabendo que “taxa de falha” igual a 1/2 (probabilidade de tempo
mudar de bom para ruim) e que “taxa de reparo” igual a 1/4
(probabilidade de tempo mudar de ruim para bom, as
probabilidades limites de cada estado (1- tempo bom e 2 – tempo
ruim) serão:
3/14/12/1
4/1P1
3/2
4/12/1
2/1P2

14
Disponibilidade e Indisponibilidade
Disponibilidade A(t) (Availability): probabilidade do elemento
estar disponível em qualquer tempo, em um processo sujeito
a reparo.
Indisponibilidade U(t) (Unavailability): A(t) + U(t) = 1 A(t)
1 U(t)
1
15
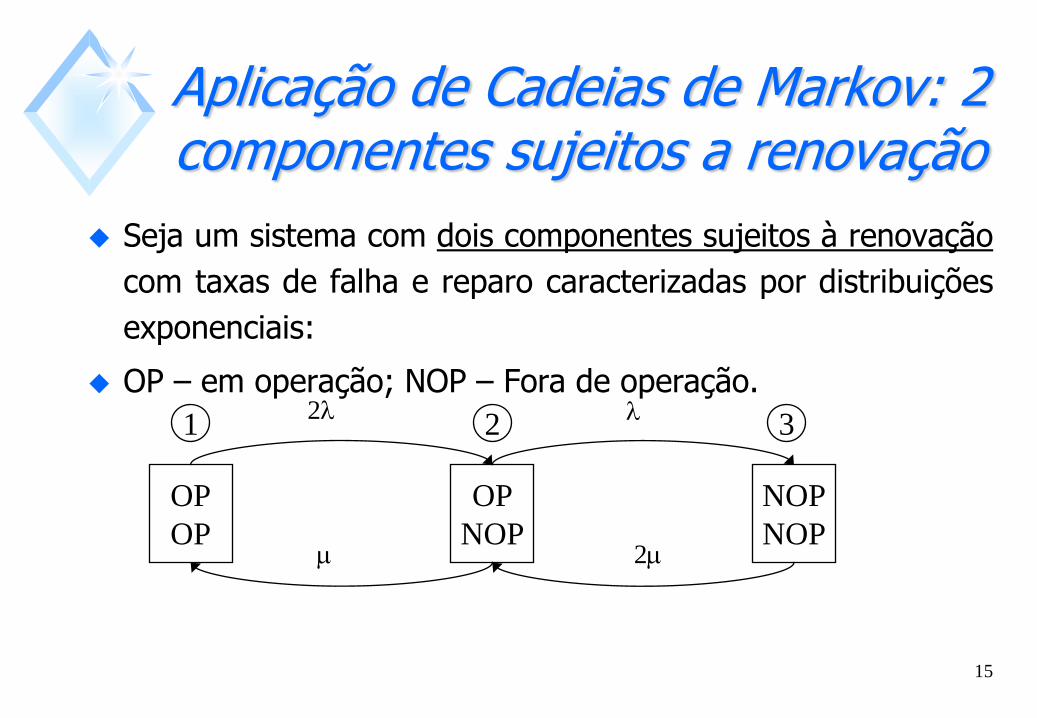
Aplicação de Cadeias de Markov: 2 componentes sujeitos a renovação
Seja um sistema com dois componentes sujeitos à renovação
com taxas de falha e reparo caracterizadas por distribuições
exponenciais:
OP – em operação; NOP – Fora de operação.
OP
OP
OP
NOP
NOP
NOP
1 3 2 2
2
16
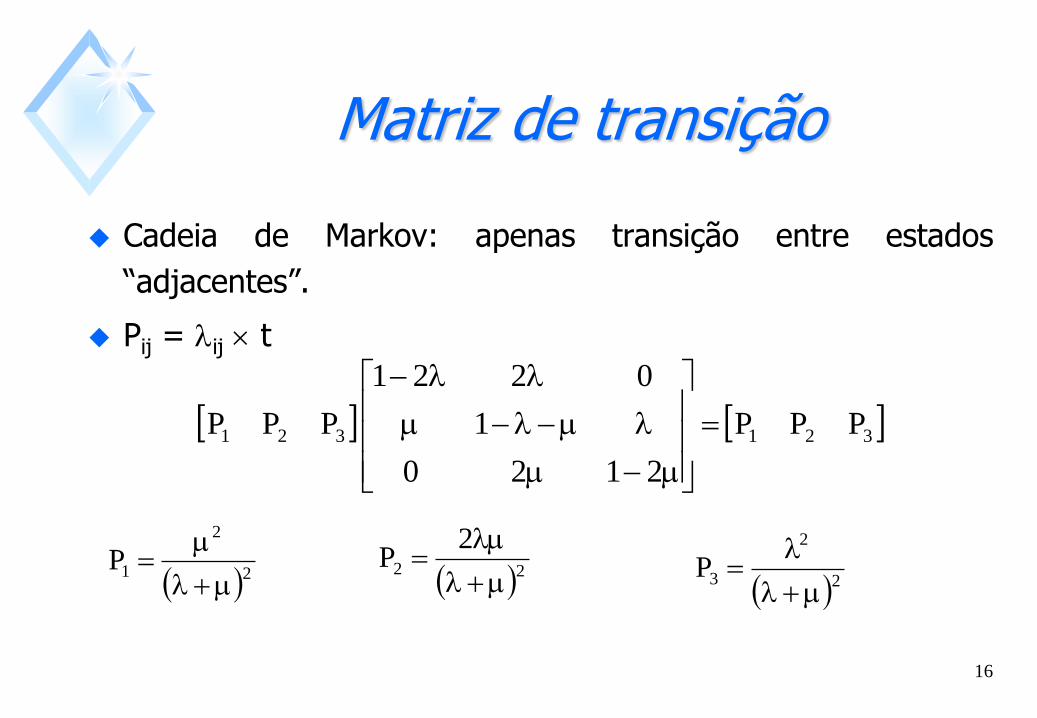
Matriz de transição
Cadeia de Markov: apenas transição entre estados
“adjacentes”.
Pij = ij t
321321 PPP
2120
1
0221
PPP
22
1P
22
2P
22
3P

17
Exemplo 3
Suponha um gerador elétrico que tenha taxas de falha e de
reparo constante:
= 0,001 falhas/hora; = 0,49 ocorrências/hora
Calcule as probabilidades limite do gerador estar nos estados
de operação e não operação.
99796,049,0001,0
49,0Poperar
00204,049,0001,0
001,0P operar não

18
Exemplo 4
Sejam agora dois geradores elétricos idênticos, que tenham
taxas de falha e de reparo constante:
= 0,001 falhas/hora; = 0,49 ocorrências/hora
Calcule as probabilidades limite do sistema formado pelos dois
geradores estar nos estados: ambos operando, apenas um
operando, nenhum operando.
9959,0
)49,0001,0(
49,0P
2
2
2
2
1
0041,0
)49,0001,0(
49,0001,022P
222
0
)49,0001,0(
001,0P
2
2
2
2
3

Processos Estocásticos Normais ou Gaussianos
Xt é normal/gaussiano se Xt(t1), ... , Xt(tn) forem normais
conjuntas para qualquer n componentes de um vetor
aleatório gaussiano X de dimensão n.
Completamente caracterizados por média e autocorrelação
(autocovariância).
Xt gaussiano na entrada de um filtro linear Yt na saída será
também gaussiano => teorema de combinações lineares.
Xt gaussiano estacionário no sentido amplo será também no
estrito.
19

Processo de Wiener (movimento Browniano)
Processo estocástico Xt será de Wiener se:
For um processo normal.
Tiver incrementos independentes estacionários.
μt = E[Xt] = 0 para todos os t 0.
Autocorrelação: R(t1,t2) = a × min(t1, t2).
20

Processo Ruído Branco Gaussiano
Modelo para o ruído térmico em condutores: “contamina”
sinal que chega a um receptor.
Ruído observado em um osciloscópio.
Ruído em uma TV sem canal sintonizado.
Para um processo ruído branco gaussiano Xt com t [-, ]
E[Xt] = 0
C(t1,t2) = E[Xt1 Xt2]
21