matheus oliveira de brito simulaÇÃo e controle … · loop para motor cc: aplicações em pid e...
TRANSCRIPT

1
UNIVERSIDADE FEDERAL DA BAHIA
ESCOLA POLITÉCNICA
COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO
MATHEUS OLIVEIRA DE BRITO
SIMULAÇÃO E CONTROLE DO TIPO SOFTWARE IN THE
LOOP PARA MOTOR CC: Aplicações em PID e MPC
Salvador
2015

2
MATHEUS OLIVEIRA DE BRITO
SIMULAÇÃO E CONTROLE DO TIPO SOFTWARE IN THE LOOP
PARA MOTOR CC: Aplicações em PID e MPC
Trabalho de conclusão de curso de graduação apresentado à Universidade Federal da Bahia, como requisito parcial para obtenção do Grau de Bacharel em Engenharia de Controle e
Automação.
Orientador: Prof.º Marcus Vinicius Americano da
Costa Filho.
Salvador
2015

3
MATHEUS OLIVEIRA DE BRITO
SIMULAÇÃO E CONTROLE DO TIPO SOFTWARE IN THE LOOP PARA MOTOR
CC: Aplicações em PID e MPC
Trabalho de conclusão de curso submetido ao corpo docente do colegiado do curso de Engenharia de Controle e Automação da Universidade Federal da Bahia, como requisito para obtenção do Título de Bacharel em Engenharia de Controle e Automação.
BANCA EXAMINADORA:
_____________________________________________________
Prof. André Pires Nóbrega Tahim, Dr.
_____________________________________________________
Prof. Márcio André Fernandes Martins, Dr.
________________________________________________ Prof. Marcus Vinícius Americano da Costa Filho, Dr.
Aprovada em, Salvador, _____ de ___________________ de ________.

4
Dedicatória: À Deus, pelo cuidado
com minha vida; aos meus pais e
familiares, pelas orações, ensinamentos e
apoio; aos amigos que contribuíram em
todo período acadêmico.

5
AGRADECIMENTOS
À Deus por minha vida e por tudo quem tem me proporcionado durante a minha
trajetória.
Aos meus pais, pelo amor, incentivo e apoio incondicional.
Aos meus amigos, pelo companheirismo e comprometimento durante todo o curso.
À Universidade Federal da Bahia, pela excelente formação acadêmica a mim
proporcionada.
Ao professor Marcus Vinicius Americano da Costa Filho, pela orientação, apoio e
confiança.

6
“Que os vossos esforços desafiem
as impossibilidades, lembrai-vos de que
as grandes coisas do homem foram
conquistadas do que pareciam
impossível”.
Charles Chaplin

7
RESUMO
Este trabalho de conclusão de curso apresenta estratégias de controle para
um motor de corrente contínua (CC) em ambiente virtual, levando em consideração
o comportamento da corrente de armadura, principalmente em sua partida. Primeira
mente será comentado a importância do controle de motores elétricos CC,
representando também o seu comportamento dinâmico no domínio da
frequência e do tempo através da transformada de Laplace e da forma diferencial.
Na implementação do trabalho foi realizado um software-in-the-loop entre o
Matlab/Simulink/Simscape, onde foi simulado o equipamento estudado, e o
LabVIEW onde foi implementado o controle proporcional, integral e derivativo (PID)
além de ser utilizado como ferramenta para a construção de um pequeno
supervisório. A comunicação entre as ferramentas se deu via OPC (OLE for Process
Control), com intuito de estabelecer uma comunicação em tempo real. O trabalho
também expõe um comparativo de desempenho entre as estratégias de controle PID
e o controle preditivo, através de análises gráficas e quantitativas.
Palavras-Chaves: Motor de Corrente Contínua. Software-In-The-Loop. Controle
Preditivo. PID. Simscape. Labview. Matlab. Simulink.

8
ABSTRACT
This course conclusion work presents control strategies for a direct current motor
(DC) in a virtual environment, taking into account the armature current behavior,
especially in his departure. First mind will be discussed the importance of controlling
DC motors, also representing their dynamic behavior in the frequency domain and
time by Laplace transform and differential form. The implementation of the work was
carried out a software-in-the-loop between Matlab / Simulink / Simscape where was
simulated the study equipment and LabVIEW which was implemented proportional
control, integral and derivative (PID) as well as being used as tool for construction of
a small supervisory. Communication between the tools occurred via OPC (OLE for
Process Control), aiming to establish a real-time communication. The paper also sets
out a comparison of performance between the PID control strategies and predictive
control, through graphical and quantitative analysis.
Keywords: Motor current continues. Software-In-The-Loop. Predictive Control. PID.
Simscape. Labview. Matlab. Simulink.

9
LISTA DE ILUSTRAÇÕES
Figura 1 - Motores CC ............................................................................................... 21
Figura 2 - Circuito Equivalente de um Motor CC ....................................................... 23
Figura 3 - Resposta do processo para a entrada degrau unitário ............................. 28
Figura 4 - Resposta do processo para a entrada impulso unitário ............................ 28
Figura 5 - Interface de monitoramento do Motor CC em LabVIEW ........................... 29
Figura 6 - Blocos OPC em Simulink para comunicação com o Supervisório. ........... 31
Figura 7 - Representação em diagrama de blocos de um PID .................................. 32
Figura 8 - Representação em diagrama de blocos de uma malha fechada com um
PID ............................................................................................................................ 32
Figura 9 - Estrutura de um Controlador Preditivo. ..................................................... 43
Figura 10 - Horizontes de Previsão ........................................................................... 43

10
LISTA DE TABELAS
Tabela 1 – Parâmetros do Motor
CC...........................................................................25
Tabela 2 – Parâmetros de
Sintonia.............................................................................34
Tabela 3 – Resultados dos Testes com combinação entre
intervalos..........................44
Tabela 4 – Resultados com parâmetros MPC em Matlab/Simulink
®..........................47
Tabela 5 – Testes
1.....................................................................................................50
Tabela 6 – Testes
2.....................................................................................................52

11
LISTA DE GRÁFICOS
Gráfico 1 – Resultados PID em Matlab na plataforma
Simscape.................................35
Gráfico 2 – Corrente PID em Sintonia
Ótima...............................................................36
Gráfico 3 – Corrente Malha
Aberta..............................................................................36
Gráfico 4 – Resultados PID em Matlab na plataforma LabVIEW ...............................
37
Gráfico 5 – Corrente PID - LabVIEW
..........................................................................38
Gráfico 6 –Velocidade
LabVIEW.................................................................................39
Gráfico 7 – Corrente
LabVIEW....................................................................................40
Gráfico 8 – Velocidade e MV – Controlador MPC (Antes)
...........................................45
Gráfico 9 – Corrente Controlador MPC (Antes)
..........................................................46
Gráfico 10 – Velocidade e MV – Controlador MPC (Depois)
.......................................46
Gráfico 11 – Corrente Controlador MPC (Depois)
......................................................47

12
Gráfico 12 – Testes
1..................................................................................................49
Gráfico 13 – Testes
2..................................................................................................51
SUMÁRIO
1 INTRODUÇÃO ................................................................................................... 14
1.1 JUSTIFICATIVA ........................................................................................... 16
1.2 OBJETIVOS ................................................................................................. 17
1.2.1 OBJETIVO GERAL ................................................................................ 17
1.2.2 OBJETIVOS ESPECÍFICOS ................................................................. 17
1.3 REVISÃO DO ESTADO DA ARTE ............................................................... 18
2 MOTOR DE CORRENTE CONTÍNUA ................................................................ 19
2.1 HISTÓRIA: A Origem do Motor CC .............................................................. 19
2.2 MODELAGEM DO MOTOR CC ................................................................... 23
2.2.1 EQUAÇÕES DO SISTEMA ................................................................... 23

13
2.2.2 TRASFORMADA DE LAPLACE ............................................................ 25
2.2.3 FUNÇÃO DE TRANSFERÊNCIA .......................................................... 25
2.2.4 PARÂMETROS DO MOTOR DE CORRENTE CONTÍNUA .................. 25
3 SOFTWARES E COMUNICAÇÃO ..................................................................... 26
3.1 MATLAB ....................................................................................................... 26
3.2 SIMULINK/SIMSCAPE ................................................................................. 27
3.3 LABVIEW ..................................................................................................... 28
3.3.1 SUPERVISÓRIO ................................................................................... 29
3.4 OPC ............................................................................................................. 30
4 CONTROLE ........................................................................................................ 31
4.1 PID ............................................................................................................... 31
4.1.1 SINTONIA .............................................................................................. 33
4.2 SIMULAÇÃO ................................................................................................ 34
4.2.1 MATLAB ................................................................................................ 34
4.2.2 LABVIEW ............................................................................................... 37
4.3 MPC ............................................................................................................. 41
4.3.1 PARÂMETROS ...................................................................................... 45
4.3.2 SIMULAÇÃO.......................................................................................... 46
4.4 SIMULAÇÃO ILUSTRATIVA ........................................................................ 49
4.4.1 TESTE 1 ................................................................................................ 50
4.4.2 TESTE 2 ................................................................................................ 52
5 CONCLUSÃO E TRABALHOS FUTUROS ........................................................ 55
5.1 CONCLUSÃO .............................................................................................. 55
5.2 TRABALHOS FUTUROS ............................................................................. 56
REFERÊNCIAS ......................................................................................................... 57

14
1 INTRODUÇÃO
A alta competitividade do mercado, principalmente no segmento industrial,
tem exigido cada vez mais, o controle automático dos processos. Este por sua vez,
tornam os processos mais seguros, eficazes e eficientes, por meio de malhas de
controle automatizados. Para a obtenção de melhores desempenhos do processo
industrial e consequentemente maiores lucros, foi observado a necessidade da
minimização de custos, aumentando assim consideravelmente os ganhos e redução
dos impactos ambientais. A consciência da importância de ações com
responsabilidade ambiental vem fazendo parte das escolhas das técnicas de
controle utilizadas pelas indústrias. (Silva, 2009).
Os controles preditivos são normalmente embasados em modelos lineares,
onde os seus parâmetros atuam diretamente no processo através de algoritmos
recursivos, os controladores preditivos possuem grande popularidade devido a
aspectos essenciais para aplicações em tempo real, assim como: robustez, eficácia
e eficiência. (Mejía, 2003).

15
Na literatura, existem algumas aplicações do controle
preditivo multivariável em acionamento de máquinas elétricas rotativas, como é o
caso do controle de posição de motores brushless CC, implementado
experimentalmente e com sucesso por Low et al (1997); os resultados obtidos
mostram a robustez da estratégia de controle a ser estuda onde o desempenho
atende as especificações, ainda que o torque de carga e inercia variem. (Santana,
Bim, Amaral, 2008).
O controle model predictive control (MPC) será utilizado para estabelecer um
melhor acionamento, além de proporcionar o controle de velocidade do rotor.
Geralmente, para tornar o acionamento mais robusto e barato, empregam-se
estimadores de estado (velocidade), como por exemplo, o filtro de Kalman estendido
(Valdenebro, 2001).
Para aplicar o controle preditivo multivariável no equipamento em estudo, está
sendo utilizado ferramentas que simulem o motor além da possibilidade de se
desenvolver algoritmos de controle, para isso, os
softwares Matlab/Simulink/Simscape e Labview estão sendo estudados para a
viabilidade do projeto. Faz-se necessário obter a comunicação entre os dois
softwares para que haja a integração da simulação com o controle e monitoramento
do processo. Para a comunicação entre os diversos sistemas e equipamentos de
automação foram desenvolvidos diversos padrões de transferência de pacotes,
dentre os quais o padrão OPC é o mais utilizado atualmente, devido a sua
arquitetura e velocidade de transferência dos dados (Perazzo, 2009).
A finalidade da aplicação do controle preditivo multivariável é obter um ganho
de desempenho significativo quando comparado ao controle clássico PID.
Atualmente, novos desafios nos controladores preditivos para o tratamento de
processos multivariáveis têm ocorrido na área de controle de processos devido a
elevada demanda mundial por estratégias de controle robustas multivariáveis (Mejía,
2003).
Os volumosos investimentos, realizados pelas grandes empresas, estão
direcionados para os avanços tecnológicos, estimulados pela alta competitividade
mercadológica, contribuindo para alcançar a liderança nesse segmento. Os
resultados são às melhorias contínuas na produção industrial, especialmente nas

16
áreas de controle, automação e otimização de processos. A escolha do melhor
controle para um determinado sistema deve considerar também, fatores ambientais
e de segurança operacional por possuírem grande influência na implementação e no
resultado.
O mercado do controle preditivo está “crescendo a uma taxa anual de 18%, e
a maioria destas aplicações se concentra na indústria química e do petróleo,
segundo a Automation Research Corporation (2000), tendo em vista que esta
estratégia de controle assegura a operação da planta no seu limite mais lucrativo”.
Processos com alta complexidade exigem a utilização de estratégias de
controle avançado, principalmente em plantas industriais que têm restrições de
acoplamento das suas variáveis de entrada e saída.
1.1 JUSTIFICATIVA
O presente estudo foi conduzido pelo interesse em contribuir na formação
acadêmica de engenheiros agregando conhecimentos práticos em sistemas de
controle de uso comercial/industrial; e ainda, permite também a obtenção de
informações sobre a integração desses sistemas com ferramentas de modelagem e
simulação objetivando viabilizar a efetivação de testes que não seriam permitidos
em plantas industriais em operação.
Durante a formação de engenheiros em suas instituições de ensino, é
perceptível a falta de conhecimento prático pelos alunos, esse tipo de lacuna tenta
ser preenchido através de estágios que por sua vez não são tão práticos quando se
imagina. Essa situação causa em alguns alunos o sentimento de frustração, pois
não é possível visualizar seus conhecimentos teóricos em uma industrial.
Tentando minimizar esse problema, uma pequena solução pode ser a
utilização de ambientes virtuais que simulem processos industriais, dando total
liberdade ao aluno de interagir com uma planta e analisar o comportamento da
mesma propondo melhorias e verificando seu desempenho de forma segura e
experimental.

17
A utilização de um sistema supervisório e um planta simulada, proporcionara
ao aluno a possibilidade de realizar testes e avaliar o desempenho do controlador e
sua sintonia para o caso de um motor CC.
Considerando o lado industrial, esse tipo de exercício pode proporcionar
melhorias contínuas na produção industrial, especialmente nas áreas de controle,
automação e otimização de processos. A escolha do melhor controle para um
determinado sistema deve considerar também, fatores ambientais e de segurança
operacional por possuírem grande influência na implementação e no resultado.
Outro fator preponderante, na conclusão deste estudo será na oportunidade
de incentivar futuras implementações de controle preditivo multivariável em demais
equipamentos elétricos da interface Matlab/Simscape e sua interação no uso
comercial, permitindo também aos docentes; de disciplinas no segmento de
modelagem e simulação, automação e controle de processos; utilizarem uma
plataforma prática em sala de aula, despertando o interesse do aluno por esse ramo
da engenharia.
1.2 OBJETIVOS
1.2.1 OBJETIVO GERAL
Diante do cenário atual, este trabalho tem como objetivo geral a construção
de uma plataforma computacional do tipo software in the loop onde será possível
ilustrar resultados de estratégia de controle como PID e MPC, para o desempenho
de velocidade angular de um motor de corrente contínua, com o auxílio das
plataformas Matlab e Labview.
1.2.2 OBJETIVOS ESPECÍFICOS
Estudar a ferramenta Matlab/Simscape.

18
Estabelecer uma comunicação entre softwares distintos.
o Utilizar a ferramenta Matlab/Simscape;
o Utilizar o software Labview e a comunicação OPC;
Controle de velocidade angular, com monitoramento da corrente
de armadura, de um motor de corrente contínua.
o Realizar estudo sobre as condições de operação de um
motor CC;
o Modelagem do sistema;
Ilustrar o desempenho da estratégia clássica (PID) e do controle
preditivo (MPC).
o Implementar controle PID com sintonia ótima;
o Implementar algoritmo de controle preditivo MPC;
.
1.3 REVISÃO DO ESTADO DA ARTE
A alta competitividade do mercado, principalmente no segmento industrial,
tem exigido cada vez mais, o controle automático dos processos. Este por sua vez,
tornam os processos mais seguros, eficazes e eficientes, por meio de malhas de
controle automatizados. O resultado observado vem através da minimização de
custos, aumento considerável dos ganho e redução dos impactos ambientais. A
consciência da importância de ações com responsabilidade ambiental vem fazendo
parte das escolhas das técnicas de controle utilizadas pelas indústrias. (Silva, 2009).
O Controle Preditivo Multivariável foi desenvolvido através da necessidade de
processos com alta complexidade que dentre a sua variada aplicabilidade, se
sobrepõe a enorme eficácia no controle de plantas multivariáveis diante das diversas
variáveis de entrada e saída do sistema e da existência de restrições. (Silva, 2009).
Embasados geralmente, em modelos lineares, onde os parâmetros podem ser
considerados através de algoritmos recursivos os controladores preditivos possuem
grande popularidade devido a aspectos essenciais para aplicações em tempo real,
assim como: robustez, eficácia e eficiência. (Mejía, 2003).

19
Na literatura, existem algumas aplicações do controle preditivo multivariável
em acionamento de maquinas elétricas rotativas, como é o caso do controle de
posição de motores brushiess DC, implementado experimentalmente e com sucesso
por Low et al (1997); os resultados obtidos mostram a robustez da estratégia de
controle a ser estuda onde o sistema fica dentro das especificações, ainda que o
torque de carga e inercia variem. (Santana, Bim, Amaral, 2008).
O controle MPC será utilizado para estabelecer um melhor acionamento, além
de proporcionar o controle de velocidade do rotor. Geralmente, para tornar o
acionamento mais robusto e barato, empregam-se estimadores de estado
(velocidade), como por exemplo, o filtro de Kalman estendido (Valdenebro, 2001).
Para aplicar o controle preditivo multivariável no equipamento em estudo, está
sendo utilizado ferramentas que simulem o motor além da possibilidade de se
desenvolver algoritmos de controle, para isso, os softwares
Matlab/Simulink/Simscape e Labview estão sendo estudados para a viabilidade do
projeto. Faz-se necessário obter a comunicação entre os dois softwares para que
haja a integração da simulação com o controle e monitoramento do processo.
Na comunicação entre os diversos sistemas e equipamentos de automação
foram desenvolvidos diversos padrões de transferência de pacotes, dentre os quais
o padrão OPC é o mais utilizado atualmente, devido principalmente, sua arquitetura
e velocidade de transferência dos dados (Perazzo, 2009).
A finalidade da aplicação do controle preditivo multivariável é obter um ganho
de desempenho significativo quando comparado ao controle clássico PID.
Atualmente, novos desafios nos controladores preditivos para o tratamento de
processos multivariáveis têm ocorrido na área de controle de processos devido a
elevada demanda mundial por estratégias de controle robustas multivariáveis (Mejía,
2003).
2 MOTOR DE CORRENTE CONTÍNUA
2.1 HISTÓRIA: A Origem do Motor CC

20
Pelo período de quase três séculos de estudos, pesquisas e invenções de
importantes cientistas contribuíram para que em 1886 o cientista alemão Werner von
Siemens apresentasse a máquina elétrica, invento considerado como o primeiro
gerador de corrente contínua auto-induzido.
O cientista Siemens criou um gerador que não utiliza ímã permanente,
evidenciando que a tensão para o magnetismo poderia ser retirada através da auto
excitação da máquina. A invenção de Siemens não operava somente como um
gerador elétrico, mas inclusive podia funcionar como um motor, devendo aos seus
bornes ser aplicado uma corrente contínua.
O inovador equipamento de corrente contínua demonstrava vantagens em
relação à máquina a vapor, a roda d’água e à força animal. Paradoxalmente, eram
notórias as desvantagens tais como: o alto custo de fabricação e a sua
vulnerabilidade em serviço. Com isso, diversos cientistas direcionaram suas
pesquisas para o desenvolvimento de um motor elétrico mais robusto e de menor
custo de aquisição e de manutenção. Os esforços desenvolveram o motor de
corrente contínua, e ainda, sistemas de corrente alternada.
As partes que constituem o motor de corrente contínua são:
Rotor, trata-se da parte localizada sobre o eixo da máquina, constituído de
ferro magnético envolto a um enrolamento de armadura (responsável pelo transporte
da energia oriunda da fonte de energia).
O anel comutador, por sua vez, possui a incumbência de promover a
inversão do sentido das correntes que circulam no enrolamento de armadura de
forma mais adequada, sua composição anelar de material condutor, e segmentos de
material isolante de modo a fechar o circuito entre cada uma das bobinas do
enrolamento de armadura e as escovas no momento apropriado. O anel é acoplado
ao eixo da máquina girando concomitantemente com a mesma. A comutação, entre
os circuitos dos enrolamentos, é produzida a partir do movimento de rotação do eixo.
Há ainda o Estator, elemento estático do equipamento, posicionado ao redor
do rotor, de modo que seja possível girar internamente. Constituído de
ferromagnético, coberto por um enrolamento de baixa potência responsável em
produzir um campo magnético fixo que interaja com o campo da armadura.

21
Por fim as Escovas que são componentes de grafite que tem a função de
transportar a energia para o circuito do rotor.
A máquina corrente contínua pode produzir força mecânica rotativa, motor, ou
gerar energia elétrica CC a partir de uma forca mecânica rotativa, gerador. (Carvalho
2011).
Os Motores de corrente contínua (CC) são motores que precisam de uma
fonte de corrente contínua, como uma pilha ou bateria, ou de um dispositivo que
converta a corrente alternada comum em contínua.
Figura 1 - Motores CC
Fonte: WEG, 2007
Quanto à classificação, os motores de corrente contínua apresentam-se:
- Motor série;
- Motor shunt;
- Motor composto adicional;
- Motor composto diferencial;
- Motor CC sem escovas.
Entre as vantagens dos Motores CC encontram-se:
- Operação em 4 quadrantes com custos relativamente mais baixos;
- Ciclo contínuo mesmo em baixas rotações;
- Alto torque na partida e em baixas rotações;
- Ampla variação de velocidade;
- Facilidade de controlar a velocidade;

22
- Os conversores CA/CC requerem menos espaço;
- Confiabilidade;
- Flexibilidade (vários tipos de excitação);
- Relativa simplicidade dos modernos conversores CA/CC.
Por outro lado, as desvantagens são:
- Os motores CC são maiores e mais caros que os motores de indução
para uma mesma potência;
- Maior necessidade de manutenção (devido aos comutadores);
- Arcos e faíscas devido a comutação de corrente por elemento
mecânico (não pode ser aplicado em ambientes perigosos);
- Tensão entre lâminas não pode exceder 20V (motores CA podem ser
alimentados com milhares de volts);
- Necessidade de medidas especiais de partida, mesmo em máquinas
pequenas.
Em muitos segmentos os motores CC estão sendo substituídos por motores
CA acionados por inversores de frequência. Contudo, ainda está sendo vantajoso
sua aplicação em algumas máquinas como: máquinas de papel, bobinadoras e
desbobinadoras, laminadores, máquinas de impressão, extrusoras, prensas,
elevadores, movimentação e elevação de cargas, moinhos de rolos, indústria de
borracha, mesa de testes de motores, movimentação dos hds, cds e dvds, vant’s
(veículo aéreo não tripulado) e entre outros.
O principal objetivo na aplicação do motor CC, está ligada aos sistemas de
controle, pois suas características de velocidade e torque podem ser precisamente
controladas, sendo assim, excelentes escolhas quando necessitamos manter certos
padrões de operação influenciados pelo desempenho do motor.
A partida e aceleração de motores CC, é um dos problemas mais frequentes
e importantes em acionamentos elétricos, pois ao ser alimentado, e em um período
curto de tempo, sua corrente inicial se eleva de forma abrupta chegando a valores
muito maiores que o da corrente nominal. Esse fenômeno pode causar diversos
problemas no motor, na máquina acionada, no sistema de transmissão, na rede
elétrica e instalações, como por exemplo um forte aquecimento causando dilatações
e perda de isolamento.

23
2.2 MODELAGEM DO MOTOR CC
A identificação das equações que descrevem a dinâmica do motor de corrente
contínua, podem ser obtidas através do seu modelo eletromecânico que será de
suma importância para as futuras simulações desenvolvidas nos softwares
𝑀𝐴𝑇𝐿𝐴𝐵/𝑆𝑖𝑚𝑢𝑙𝑖𝑛𝑘®, 𝑀𝐴𝑇𝐿𝐴𝐵/𝑆𝑖𝑚𝑠𝑐𝑎𝑝𝑒® e 𝐿𝑎𝑏𝑣𝑖𝑒𝑤® mostradas no decorre deste
trabalho.
2.2.1 EQUAÇÕES DO SISTEMA
Para a realização da modelagem do motor CC, foi utilizado um circuito
equivalente, mostrado na figura 2, nela temos representado todo o circuito de
armadura, onde foi aplicado a lei de Kirchhoff, resultando no seguinte
comportamento da malha.
Figura 2 - Circuito Equivalente de um Motor CC
Fonte: Gopal, 2009.
𝑉(𝑡) = 𝑒(𝑡) + 𝐿𝑑
𝑑𝑡𝑖(𝑡) + 𝑅𝑖(𝑡) (1)
Onde:
𝑉(𝑡) Fonte de tensão;
𝑖(𝑡) Corrente;
𝑒(𝑡) Força eletromotriz;
𝑅 Resistencia da armadura;

24
𝐿 Indutância da armadura;
Conforme (Salah 2009), o torque do motor, está relacionada basicamente
com a corrente do induzido por um factor constante Kt, já a força eletromotriz está
relacionada com a velocidade de rotação através do factor Ke, como mostra as
equações seguintes:
𝑇(𝑡) = 𝐾𝑡𝑖(𝑡) (2)
𝑒(𝑡) = 𝐾𝑒𝑤(𝑡) (3)
𝑤(𝑡) =𝑑
𝑑𝑡𝜃(𝑡) (4)
Onde:
𝑇(𝑡) Torque do motor;
𝑤(𝑡) Velocidade angular;
𝜃(𝑡) Posição angular;
𝐾𝑡 Constante de torque do motor;
𝐾𝑒 Constante da força contra eletromotriz;
As constantes 𝐾𝑒 e 𝐾𝑡 são dependentes dos parâmetros construtivos do motor
de corrente contínua e se unidades consistentes forem utilizadas, elas possuem o
mesmo valor numérico (GARCIA 1997), portanto, adotando o sistema Internacional
(SI) de unidades:
𝐾𝑡 = 𝐾𝑒 = 𝐾 (5)
A dinâmica do sistema de carga do motor CC, pode ser expressa como:
𝑇(𝑡) = 𝑇𝑖(𝑡) + 𝑇𝑝(𝑡) (6)
Sendo,
𝑇𝑖(𝑡) = 𝐽𝑑
𝑑𝑡𝑤(𝑡) (7)
𝑇𝑝(𝑡) = 𝑏𝑤(𝑡) (8)
Onde:
𝑇𝑖(𝑡) Torque inercial do motor;

25
𝑇𝑝(𝑡) Torque de outras perdas;
𝑏 Atrito viscoso;
𝐽 Momento de inercia;
Com algumas manipulações algébricas, obtém-se:
𝑉(𝑡) = 𝐾𝑤(𝑡) + 𝐿𝑑
𝑑𝑡𝑖(𝑡) + 𝑅𝑖(𝑡) (9)
𝑇(𝑡) = 𝐽𝑑
𝑑𝑡𝑤(𝑡) + 𝑏𝑤(𝑡) (10)
2.2.2 TRASFORMADA DE LAPLACE
Aplicando a transformada de Laplace nas equações (2), (5), (9) e (10), as
mesmas são expressas no domínio da frequência como:
𝑇(𝑠) = 𝐾𝐼(𝑠) (11)
𝑉(𝑠) = 𝐾𝑊(𝑠) + 𝐿𝑠𝐼(𝑠) + 𝑅𝐼(𝑠) (12)
𝑇(𝑡) = 𝐽𝑠𝑊(𝑠) + 𝑏𝑊(𝑠) (13)
2.2.3 FUNÇÃO DE TRANSFERÊNCIA
O motor de corrente contínua possui como saídas a corrente de armadura
I(s), a velocidade angular W(s) ou posição angular, 𝜃(s), sendo a entrada do sistema
a tensão de alimentação V(s), conforme as equações montadas anteriormente.
Relacionando as variáveis manipuladas com as controladas foi obtida as funções de
transferências correspondentes.
𝐼(𝑠)
𝑉(𝑠)=
(𝑏+𝑠𝐽)
(𝑅+𝑠𝐿)(𝑏+𝑠𝐽)+𝐾.𝐾 (14)
𝑊(𝑠)
𝑉(𝑠)=
𝐾
(𝑅+𝑠𝐿)(𝑏+𝑠𝐽)+𝐾.𝐾 (15)
2.2.4 PARÂMETROS DO MOTOR DE CORRENTE CONTÍNUA

26
Alguns dos parâmetros do modelo aqui utilizado foram retirados do datasheet
de um motor real (GM8X24). A tabela a seguir, apresenta os valores referenciados:
Tabela 1 – Parâmetros do motor CC utilizado
Momento de inercia 𝐽 = 1,62 𝑥 10−6[𝑁 𝑚 𝑠2/𝑟𝑎𝑑]
Resistencia da armadura 𝑅 = 4,33[Ω]
Indutância da armadura 𝐿 = 2,34 𝑥 10−3[𝐻]
Atrito viscoso 𝑏 = 1,36 𝑥 10−6[𝑁 𝑚 𝑠/𝑟𝑎𝑑]
Constante da força contra
eletromotriz 𝐾𝑒 = 21,9 𝑥 10−3[𝑉 𝑠/𝑟𝑎𝑑]
Constante de torque do motor 𝐾𝑡 = 21,9 𝑥 10−3[𝑁 𝑚/𝐴]
Fonte: Próprio Autor
3 SOFTWARES E COMUNICAÇÃO
3.1 MATLAB
Desenvolvida pela MathWorks, o MATLAB possui uma linguagem de
programação de quarta geração em um ambiente de computação numérica bastante
difundido, inclusive utilizado para inúmeras aplicações, tais como: processamento de
sinal e imagem, comunicação, design de controle, teste e medição, modelagem e
análise financeira, e biologia computacional. MATLAB é uma ferramenta muito
utilizada entre os engenheiros desde a vida acadêmica. (ENOCKSSON, 2011).
O Matlab pode ser completamente integrado ao Simulink que por sua vez
poderá dirigi-lo ou até mesmo realizar o script do mesmo. Enocksson (2011)
apropriadamente conceitua: “Simulink é uma ferramenta comercial para modelagem,
simulação e análise de sistemas dinâmicos e embutidos multi-domínio, fornecendo
um ambiente gráfico interativo e um conjunto personalizável de bibliotecas de
blocos”.

27
3.2 SIMULINK/SIMSCAPE
O Simulink é uma ferramenta de simulação disponível na plataforma Matlab e
é empregado regularmente para projetar, simular e implementar testes de variedade
de sistemas de variáveis no tempo, tais como comunicação, teoria de controle,
processamento de sinal digital etc. (ENOCKSSON, 2011).
Por sua vez, o Simscape, extensão do software para MathWorks, apresenta
uma linguagem de modelagem fundamentada em MATLAB e dirigida a elemento
físico para utilização no ambiente Simulink e seu acesso se dá através de uma
biblioteca dentro do próprio ambiente Simulink. Dentre suas funcionalidades
destacam-se: um conjunto de blocos funcionais e recursos para simulação e
modelagem de sistemas físicos e ainda, fornece ferramentas para modelar sistemas
de mecânica, elétrica, hidráulica, e outros domínios físicos, a exemplo de válvulas
hidráulicas e mecanismos de roquete. A partir destes domínios físicos distintos que
será possível criar modelos personalizados de seus componentes. (ENOCKSSON,
2011).
A planta do motor de corrente contínua assim como os seus sensores, foi
realizada com a ferramenta Simscape, onde foi possível a simulação do
equipamento a ser estudado, porém a comunicação do Simulink e o Simscape não é
de forma direta, ou seja, a informação emitida pela planta não poderia ser conectada
diretamente a função do meu controlador, sendo necessário uma comunicação entre
eles através de um bloco conversor de sinal.
Utilizando-se de alguns parâmetros do motor GM8X24 foi possível a
realização de testes sobre a dinâmica do motor CC. A figura 3 e a figura 4, mostram
as respectivas respostas do equipamento para as entradas unitárias de degrau e
impulso.

28
Figura 3 - Resposta do processo para a entrada degrau unitário
Fonte: Próprio autor
Figura 4 - Resposta do processo para a entrada impulso unitário
Fonte: Próprio autor.
3.3 LABVIEW
O LabVIEW é uma plataforma de desenvolvimento que utiliza uma linguagem
de programação visual de nome “G”, muito utilizada na engenharia e desenvolvida
pela National Instruments.
O software é comumente aplicado em aquisição de dados, controle e
automação industrial, sendo compatível com os mais variados sistemas operacionais
incluindo o Microsoft Windows, Linux e Mac OS X.(Hans-Petter, 2012).

29
3.3.1 SUPERVISÓRIO
O sistema supervisório, e os sistemas SCADA (Supervisory Control and Data
Aquisition), tem como objetivo absorver e armazenar as informações provenientes
de sensores colocados no processo, em um banco de dados para posteriormente
serem manipulados, analisados e apresentados ao usuário. As informações
capturadas são de crucial importância para um bom monitoramento e avaliação do
processo estudado, pois através delas o operador pode intervir ou não no processo
de forma rápida e precisa.
No trabalho apresentado foi elaborado um pequeno supervisório para o motor
de corrente contínua estudado, no intuito de simular uma situação industrial e
também disponibilizar uma pequena planta didática. A figura 5 mostra a interface
realizada no Labview, onde ocorrerá a monitoração dos dados e a aplicação de um
controle PID para testes de comunicação entre a planta em Matlab/Simscape e o
supervisório desenvolvido.
Figura 5 - Interface de monitoramento do Motor CC em LabVIEW
Fonte: Próprio Autor

30
Os testes realizados serão apresentados no capítulo 4.2.2.
3.4 OPC
O padrão desenvolvido pela OPC Foundation é baseado na tecnologia OLE
(Object Linking and Embedding) / DCOM (Distribuited Component Object Model) , e
teve como objetivo o acesso de dados em tempo real dentro de um sistema
operacional Windows, este padrão estabelece as regras para que sejam
desenvolvidos sistemas com interfaces padrões para comunicação dos dispositivos
de campo (CLPs, sensores, balanças, etc.) com sistemas de monitoração,
supervisão e gerenciamento (SCADA, MES, ERP, etc.). (Fonseca, 2002).
Como já foi dito anteriormente, foi necessário estabelecer uma comunicação
para transferência de dados entre as plataformas LabVIEW e Matlab. A escolha do
padrão OPC (OLE for Process Control) teve vários motivos, alguns deles foram : o
sistema operacional utilizado nos computadores para a realização desde trabalho e
o forte crescimento do padrão no meio industrial.
Através do OPC toolbox disponível em Matlab, foi possível realizar a troca de
informações entre a planta e o supervisório desenvolvido e realizar testes
significativos. A figura 6 mostra dois dos três blocos utilizados para a realização da
comunicação entre plataformas, sendo eles:
- O bloco OPC configuration, onde se configura, basicamente, quem e
onde se disponibilizará as informações e o tempo de aquisição e envio de dados
configurado para tempo real.
- OPC read é o bloco responsável por ler as informações provenientes
do supervisório, ou seja, no caso da implementação do PID em LabVIEW o sinal de
controle será transportado para o Simscape através deste bloco.
- OPC write, bloco que efetua a leitura dos dados disponíveis pela
planta em Simscape e os disponibiliza para a LabVIEW, ele é responsável pela
atualização das variáveis do processo que são importantíssimas para a ação de
controle.

31
Figura 6 - Blocos OPC em Simulink para comunicação com o Supervisório.
Fonte: Próprio autor
4 CONTROLE
Neste capítulo são apresentadas as simulações em malha fechada, com o
objetivo de se controlar a velocidade angular do motor CC. Como dito anteriormente,
a corrente de armadura pode sofrer surtos que alçam até oito vezes o valor da
corrente nominal, logo o desafio de controle será levar a PV (Process Variable, ou
variável de processo em português), ao setpoint (valor de referência) sem que
ocorra um surto de corrente que prejudique os aspectos físicos do equipamento.
A análise dos controladores utilizados nas simulações e suas sintonias,
também serão discutidas nesta seção do trabalho. Primeiramente, foi implementado
um controlador linear em feedback para que fosse possível controlar a velocidade do
motor CC através da MV (Mannipulated Variable, ou variável manipulada) tensão.
Posteriormente, foi implementado o controle MPC (Model Predictive Control),
com o mesmo objetivo já citado, porém a técnica utilizada por esse tipo de controle é
muito mais robusta e moderna, logo espera-se um desempenho mais eficiente.
Por fim, os controladores terão suas performances comparadas através da
análise dos resultados obtidos nas simulações.
4.1 PID

32
O controlador linear PID é o mais utilizado na indústria devido a sua
aplicabilidade geral, segundo (Ogata, 2010). Esse tipo de controlador possui grande
aplicabilidade em processos de variadas áreas da engenharia.
A combinação de três controladores, determinam a formação de um PID:
P - Proporcional;
I - Integrador;
D - Derivativo;
Figura 7 - Representação em diagrama de blocos de um PID
Fonte: Matas, 2012
Neste trabalho, o controlador PID foi implementado com a estratégia
feedback, onde a PV será medida para o cálculo do erro, com posterior atuação do
controlador, esse tipo de estratégia relaciona uma MV com uma PV. A figura 8
mostra a malha de controle para o PID em feedback.
Figura 8 - Representação em diagrama de blocos de uma malha fechada com um PID
Fonte: Matas, 2012
O modelo matemático do controlador PID por ser expresso como:
𝑢(𝑡) = 𝐾 [𝑒(𝑡) + 1𝑇𝑖
⁄ ∫ 𝑒(𝑠)𝑑𝑠 + 𝑇𝑑𝑦
0
𝑑𝑒(𝑡)
𝑑𝑡] (18)

33
𝑒(𝑡) = 𝑟(𝑡) − 𝑦(𝑡) (19)
Onde:
𝑢(𝑡) - Variável de controle;
𝑒(𝑡) - Erro de controle;
𝑦(𝑡) - Valor medido da saída;
𝑟(𝑡) - Valor de referência;
A atuação de PID’s em motores CC, é muito comum, quando utilizados para o
controle de velocidade angular, porém o controle fica limitado a apenas uma saída
do processo, sendo assim a corrente de armadura fica sem ação de controle direto.
Como já foi visto, a corrente de armadura na partida de motores sofre mudanças de
grande amplitude em um pequeno espaço de tempo, causando danos a partes
físicas do motor, logo deve-se levar em consideração o comportamento desta
variável, para a determinação dos parâmetros do controlador.
4.1.1 SINTONIA
A utilização do PID no controle de processos, em sua maioria, é ajustada em
campo, normalmente o operador que possui uma certa sensibilidade do processo
fica responsável por esse ajuste, porém diferentes tipos de regras surgem na
literatura, já que o desempenho do controlador é diretamente afetado por essa
sintonia.
A definição dos parâmetros proporcional, integrativo e derivativo do
controlador devem satisfazer a algumas premissas como a estabilidade da malha
fechada, razão de declínio e tempo de resposta em malha fechada. Para se obter
uma boa sintonia é necessário se conhecer o processo, ou seja, ter modelos que
representem bem o comportamento do processo. (FONTES, et. al, 2014)
Neste trabalho foi utilizado o método da sintonia ótima para a determinação
dos parâmetros do controlador clássico, devido a flexibilidade do método quanto a
estrutura da função de transferência do processo e pelo objetivo da comparação de
desempenho com o MPC, já que agora as duas estratégias de controle serão
baseadas em problemas de otimização.

34
A sintonia ótima visa a minimização do erro, ou seja, o valor entre a variável
controlada e o valor desejado devem ser o menor possível. Esta função e
representada como:
𝑚𝑖𝑛(𝑃,𝐼,𝐷)(𝛼(𝑒(𝑡))) (15)
A função objetivo (𝛼) normalmente é descrita por integrais de erro, as quatro
principais são:
𝐼𝑆𝐸(𝑡) = ∫ 𝑒(𝑡)2𝑑𝑡𝑡
0 (16)
𝐼𝑇𝑆𝐸(𝑡) = ∫ 𝑡. 𝑒(𝑡)2𝑑𝑡𝑡
0 (17)
𝐼𝐴𝐸(𝑡) = ∫ 𝑒(𝑡)𝑑𝑡𝑡
0 (18)
𝐼𝑇𝐴𝐸(𝑡) = ∫ 𝑡. 𝑒(𝑡)𝑑𝑡𝑡
0 (19)
Para a sintonia do controlador foi utilizado o critério ISE que se utiliza do erro
quadrático para a avaliação de desempenho da malha de controle, pois o MPC, que
será tratado posteriormente na secção 4.3, também utiliza métodos quadráticos para
o controle do sistema, sendo assim, uma melhor comparação entre as duas
estratégias. Após a definição do critério de desempenho, foram realizados diversos
testes para alcançar os melhores parâmetros de sintonia, como mostra a tabela
abaixo:
Tabela 2: Parâmetros de Sintonia.
Variável Controlada
Ação Proporcional (K)
Ação Integral (𝑇𝑖) Ação Derivativa
(𝑇𝑑)
𝑤 0.4760 33.6700 0.0001 Fonte: Próprio Autor
4.2 SIMULAÇÃO
Para verificar a comunicação e a controlabilidade do processo, foi aplicado
um setpoint de 800 rad/s para a velocidade angular do motor CC já em sua partida,
para que possa ser analisada também a corrente de armadura. Assim, foram
analisados os gráficos de cada plataforma separadamente.
4.2.1 MATLAB

35
Primeiramente, o PID sintonizado foi testado em Matlab, já que a planta do
motor CC está sendo executada na mesma plataforma através do Simscape. Os
resultados encontrados estão ilustrados nos gráficos 1 e 2.
Gráficos 1 – Resultados PID em Matlab na plataforma Simscape
Fonte: Própria Autor
Percebe-se que o comportamento da variável manipulada foi muito parecido
com a da variável controlada. O controle foi efetuado sem qualquer tipo de
oscilação, evidenciando uma ação precisa e suave do controlador levando assim o
sistema ao seu setpoint.

36
Gráfico 2: Corrente – PID com sintonia ótima
Fonte: Própria Autor
A corrente de armadura reagiu de forma rápida, na partida do motor,
chegando a um valor muito mais alto que a corrente em regime estacionário, porém
obteve uma melhor performance quando comparada ao sistema em malha aberta,
este por sua vez obteve um pico de corrente acrescido em torno de duas o valor
obtido com a utilização do controle clássico, como mostra o gráfico 3.
Gráfico 3: Corrente- malha aberta

37
Fonte: Própria autor
4.2.2 LABVIEW
A aplicação do mesmo controle PID sintonizado, em Matlab na plataforma
labVIEW, gerou respostas um pouco diferentes das anteriormente obtidas, como
pode ser visto no gráfico 4.
Gráfico 4 – Resultados PID em Matlab na plataforma LabVIEW

38
Fonte: Própria autor
Apesar do controlador conseguir levar a PV ao seu setpoint, o comportamento
do mesmo mostrou-se muito mais agressivo, gerando oscilações tanto na PV quanto
na MV. Este comportamento oscilatório do sinal de controle também gerou
problemas na corrente de armadura, que apresentou valores negativos
representando uma força contraria ao sentido de rotação do motor, como ilustra o
gráfico 5:
Gráfico 5: Corrente – PID LabVIEW

39
Fonte: Própria autor
Percebeu-se então que as informações entre os softwares eram trocadas de
forma correta, porem essa transferência de dados não era em tempo real, similar ao
que acontece na indústria. Com a identificação do problema, foi buscado na
literatura algo que pudesse sanar este entrave. Em Pastorello (2008), também foi
verificado a existência desse problema.
Na tentativa de se conseguir um melhor controle do processo através do
supervisório, verificou-se que o LabVIEW atuava de forma mais rápida que a
disponibilidade de dados via OPC do Matlab, isto ocorre por diversos fatores entre
eles, o meio de transporte da informação (caso industrial) e a velocidade de
processamento do computador ser diferente para cada software, essa
incompatibilidade variava de acordo com a configuração das máquinas em que eram
testadas, porém o LabVIEW sempre possuía um ciclo mais rápido, assim foi
realizado um atraso no loop de processamento de controle para tentar se aproximar
do Matlab.
Gráfico 6 – Velocidade LabVIEW

40
Fonte: Própria autor
Diferentemente da simulação anterior, o atraso realizado no processamento
do LabVIEW gerou uma ação de controle mais suave e sem muitas oscilações. A
corrente também apresentou um comportamento mais aceitável, porém de valores
muito mais altos que o controle realizado no Simulink.
Gráfico 7 – Corrente LabVIEW

41
Fonte: Própria autor
O desempenho do novo controlador em LabVIEW apresentou melhor
resultado que o anterior em mesma plataforma, evidenciando assim, o problema
descrito em Pastorello (2008), porém o cálculo da diferença de tempo entre os
softwares não foi possível, devido as diversas causas que podem atrasar ou não o
processamento de uma máquina, como: configuração, sistema operacional e etc.
4.3 MPC
Os controladores preditivos (MPC, em inglês, Model Predictive Control) são
tipos de controladores que possuem larga aceitação em aplicações industriais, por
conferir alto desempenho ao sistema e operar sem intervenções dos engenheiros
por logos períodos de tempo. (Barão, 1997).
A metodologia do uso de controladores do tipo preditivo é direcionada para
sistemas multivariáveis de forte interação entre as variáveis manipuladas e
controladas. O MPC é uma técnica moderna de controle que possui a capacidade de
perceber o sistema como um todo, diferentemente do controle clássico, onde a
percepção do controlador se dá apenas entre uma PV e uma MV, porém existem

42
estratégias de controle clássico que superam essa relação forçando o controlador a
perceber outra PV a exemplo do controle em cascata, porém o MPC possui melhor
compreensão em sistemas MIMO, pois este, utiliza apenas uma malha de controle,
onde todas as variáveis controladas do sistema são analisadas e comparadas aos
seus respectivos setpoints, gerando a ação de controle das variáveis manipuladas,
podendo atuar no sistema de forma antecipatória devido ao já conhecimento dos
distúrbios causados entre as variáveis do processo e suas respectivas restrições.
Almeida (2011) determina os principais elementos para a estrutura básica do
MPC:
Trajetória de Referências - representa o comportamento do
sinal desejado para a saída no futuro. É o conhecimento prévio desta
trajetória que garante ao controlador uma característica antecipativa.
Modelo - modelo matemático do processo que deve ser capaz
de representar o seu comportamento dinâmico de forma suficientemente
precisa. Conforme a necessidade este modelo pode ser linear ou não-linear e
podendo, ainda, ser atualizado através de métodos de identificação on line
conferindo ao controlador uma característica adaptativa.
Preditor - fornece através do modelo matemático uma previsão
da saída futura com base na informação atual da planta.
Otimizador - minimiza a função custo a cada período de
amostragem de forma a obter uma ação de controle que garanta um
desempenho adequado ao sistema. A função a ser minimizada pode
contemplar, além de parcelas associadas ao erro futuro e ao incremento no
sinal de controle, outros termos que forneçam ao controlador propriedades
que melhorem o seu desempenho frente às particularidades do processo.
Quando da utilização de uma função custo quadrática, modelos lineares e na
ausência de restrições o problema de otimização apresenta uma solução
analítica, caso contrário, algum método de otimização numérica deve ser
empregado.

43
Figura 9 - Estrutura de um Controlador Preditivo.
Complementa ainda Almeida (2011), que o MPC realiza previsões do
comportamento futuro do processo para o cálculo do sinal de controle, onde estas
são feitas através de um modelo matemático do processo sobre um intervalo de
tempo denominado “horizonte de previsão” ilustrado na Figura 10:
Figura 10 - Horizontes de Previsão
OTIMIZADOR
MODELO
PROCESSO
PREDITOR
controle
erro de previsão
previsão da saída
saída
+
–
TRAJETÓRIA DE
REFERÊNCIAS
Fonte: Almeida,2011
Tempo
t
t+Nu-1 t+N2
t-1
Futuro Passado
u
y Saída prevista
Controle futuro
Referência futura
t+1 t+Nu
Fonte: Almeida,2011

44
Onde o horizonte de previsão final (N2) representa o intervalo futuro da PV
que será prevista, e o horizonte de controle (Nu) corresponde ao número de ações
de controle consideradas.
Para a implementação moderna de controladores preditivos lineares, segundo
Silva (2014), os MPC se baseiam no seguinte problema de otimização:
min𝑢
𝑉𝑘 = ∑[𝑒𝑘+𝑗𝑇 ]𝑄[𝑒𝑘+𝑗]
𝑝
𝑗=0
+ ∑ [ 𝑢𝑘+𝑗𝑇 ]𝑅[ 𝑢𝑘+𝑗]
𝑚−1
𝑗=0
(18)
Sujeito a:
𝑗 ≥ 0
𝑢𝑚𝑖𝑛 ≤ 𝑢𝑘+𝑗 ≤ 𝑢𝑚𝑖𝑛
| 𝑢𝑘+𝑗| ≤ 𝑢𝑚𝑎𝑥 …
Onde:
k é o instante atual do sistema controlado;
p é o número de instantes de tempo no futuro que o controlador deve
analisar a resposta do sistema. Ele é denominado horizonte de predição do
controlador;
m é o número de instantes de tempo no futuro que o controlador deve
realizar ações de controle sobre o sistema. Ele é denominado horizonte de
controle do controlador. Para 𝑝 ≤ 𝑘 + 𝑗 < 𝑚, 𝑢𝑘+𝑗 = 0;
𝑢𝑘+𝑗 é a diferença entre o vetor de variáveis manipuladas no instante
𝑘 + 𝑗 e no instante 𝑘 + 𝑗 − 1;
𝑒𝑘+𝑗 é a diferença entre o vetor de controladas do sistema no instante k+j e os
set-points do controlador;
Q é denominada matriz de ponderação das variáveis controladas. A
matriz determina a importância relativa das variáveis controladas para o
controlador;

45
R é denominada matriz de ponderação das variáveis manipuladas. A
matriz determina a importância relativa das variáveis manipuladas para o
controlador.
Esta técnica irá possibilitar o controle de velocidade do motor de corrente
contínua levando-se em conta a restrição em outra PV, a corrente de armadura, esta
não deve obter valores muitos altos devido aos problemas já citados no capitulo 2,
forçando o motor a partir de forma mais suave para que não ocorram os picos de
corrente prejudiciais.
4.3.1 PARÂMETROS
O controle MPC, assim como o controle clássico, também deve ter seus
parâmetros sintonizados para melhor desempenho. Para escolha destes valores foi
realizado uma análise de sensibilidade, que consistia em uma variação dos
parâmetros.
Primeiramente foi atribuído um conjunto inicial e aleatório de parâmetros
iniciais para a sintonia, após a definição desses dados iniciais e a realização de
alguns testes, as especificações do controlador foram variadas de forma isolada,
encontrando assim uma certa faixa de valores possíveis para cada parâmetro,
posteriormente foram realizados mais alguns testes, que envolveram combinações
entre esses intervalos, já adquiridos para cada item, resultando assim nos dados
representados na tabela 3, sem que todas as possibilidades de combinações
tenham sido testadas devido ao grande número de possibilidades e a pequena
melhora ou não da resposta do sistema.
Tabela 3 – Resultado dos testes com combinações entre intervalos.
Parâmetros Antes Depois
Horizonte de predição 100 560
Horizonte de controle 8 71
Matriz de Importância [ 3 1 ] [ 1 1.6]
Matriz de supressão de movimentos
[1] [5]
Fonte: Própria do Autor

46
Para uma avaliação quantitativa das sintonias a serem ilustradas na próxima
seção deste capítulo, foram utilizados os critérios ISE para a análise das PV’s,
valores máximos de corrente, velocidade e MV, o tempo para estabilização e a
variância do sinal de controle, este último utilizado por Pinto (2014), que permite
avaliar o esforço de controle sobre os atuadores, onde estes devem ter o menor
valor possível para uma maior vida útil do elemento atuador, conforme a expressão
abaixo.
𝑠 ∝𝑢2 (𝑡) =
1
𝑛 − 1∑[𝑢(𝑘) − ]2
𝑛
𝑘=1
Onde:
- Média do sinal de controle = 1
𝑁∑ 𝑢(𝑘)𝑁
𝑘=1
4.3.2 SIMULAÇÃO
Nesta seção se apresenta os gráficos obtidos na sintonia do MPC em
Matlab/simulink com uma restrição na corrente de armadura, foi realizada também
uma análise quantitativa, mantendo a mesma configuração do setpoint realizado no
caso PID.
Gráfico 8 – Velocidade e MV – Controlador MPC (Antes).

47
Fonte: Própria Autor
Gráfico 9 – Corrente: Controlador MPC (Antes)
Fonte: Própria Autor

48
Gráfico 10 – Velocidade e MV – Controlador MPC (Depois).
Fonte: Própria Autor
Gráfico 11 – Corrente: Controlador MPC (Depois)
Fonte: Própria Autor

49
Tabela 4 – Resultados parâmetros MPC em Matlab/simulink.
Critério Antes Depois
ISE 1.2377e+04 1.3385e+04
Max. Velocidade 799.9992 800.0504
Max. Corrente 1.0548 1.0472
Tempo de Est. Velocidade
0.0877 0.2365
Tempo de Est. Corrente 0.0870 0.2030
Critério Antes Depois
Max. valor de MV 20.2010 17.7362
Tempo de Est. 0.0909 0.2355
Variância 24.395969 21.693643
Fonte: Própria Autor
Os resultados exibidos, evidenciaram alguns aspectos importantes entre as
duas sintonias. A maioria dos critérios utilizados para a análise de desempenho,
demostraram-se um pouco diferentes, porém o máximo valor da MV foi bem menor
na sintonia posterior, como pode ser visto nos gráficos das MVs, o que gerou uma
maior variância na sintonia anterior. O erro quadrático foi menor na primeira sintonia,
apesar da mesma ter tempos de estabilização menores, o que mostrou uma maior
agressividade do controlador. Em relação aos valores máximos da PVs, a análise
mostrou uma similaridade muito grande entre ambas as sintonias, portanto, o
desempenho mais suave do segundo controlador foi muito satisfatório já que
estamos querendo um bom controle de velocidade sem que o atuador e a corrente
sejam sacrificados.
Com a análise dos dados mostrados, visivelmente percebe-se diferenças de
desempenho entre as duas sintonias, evidenciando assim que a análise de
sensibilidade foi satisfatória devido ao desempenho suave do segundo controlador,
quando comparado a primeira sintonia testada. Através da análise quantitativa foi
comprovado a melhor estabilidade do sistema com a segunda sintonia,
apresentando uma menor variância do sinal de controle e pico de corrente.
4.4 SIMULAÇÃO ILUSTRATIVA

50
Nesta seção é apresentada ilustrações comparativas dos dois tipos de
controladores estudados. O objetivo a ser alcançado aqui é auxiliar um projeto de
controle com características similares a desde trabalho, através de dados gráficos e
numéricos.
Com os resultados obtidos no controle clássico e no MPC, foram ilustrados,
através de dois novos testes, o desempenho dos controladores somente na
plataforma Matlab, devido ao atraso de comunicação da plataforma com o Labview,
como já foi relatado anteriormente.
4.4.1 TESTE 1
O teste consiste em uma variação do setpoint na velocidade angular do
motor CC, este teste tem como intuito analisar o comportamento do sistema caso
seja necessária uma mudança no processo sem que seja necessária uma
interrupção do mesmo.
Com a utilização da função degrau, a variação no setpoint foi realizada da
seguinte forma: o sistema iniciara com uma referência de 800 rad/s como já foi feito
anteriormente, e no tempo 0,4 segundos a referência será modificada para o valor
de 1000 rad/s. As respostas dos sistemas estão ilustrados no gráfico 14.
Gráfico 12 – Testes 1

51
Fonte: Própria do Autor
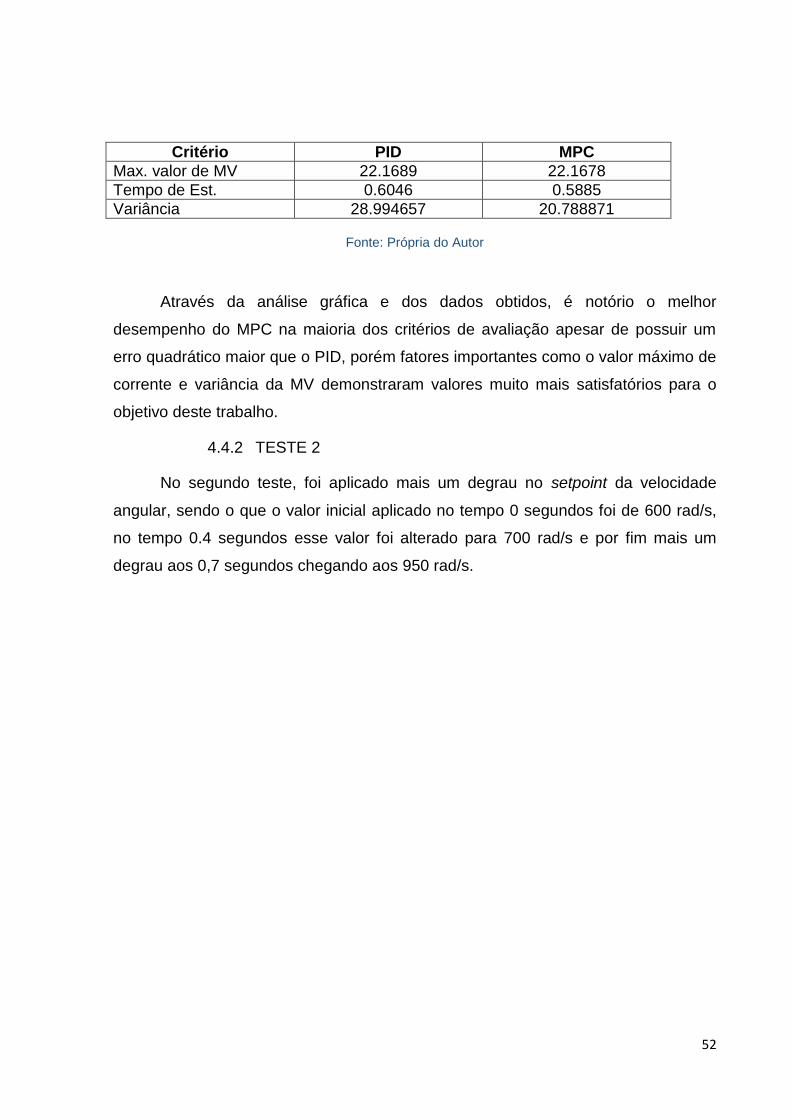
Tabela 5 – Testes 1
Critério PID MPC
ISE 1.0434e+04 1.4078e+04
Max. Velocidade 1000.0000 999.9507
Max. Corrente 1.8795 1.0472
Tempo de Est. Velocidade
0.6246 0.6195
Tempo de Est. Corrente 0.5646 0.5575
52
Critério PID MPC
Max. valor de MV 22.1689 22.1678
Tempo de Est. 0.6046 0.5885
Variância 28.994657 20.788871
Fonte: Própria do Autor
Através da análise gráfica e dos dados obtidos, é notório o melhor
desempenho do MPC na maioria dos critérios de avaliação apesar de possuir um
erro quadrático maior que o PID, porém fatores importantes como o valor máximo de
corrente e variância da MV demonstraram valores muito mais satisfatórios para o
objetivo deste trabalho.
4.4.2 TESTE 2
No segundo teste, foi aplicado mais um degrau no setpoint da velocidade
angular, sendo o que o valor inicial aplicado no tempo 0 segundos foi de 600 rad/s,
no tempo 0.4 segundos esse valor foi alterado para 700 rad/s e por fim mais um
degrau aos 0,7 segundos chegando aos 950 rad/s.

53
Gráfico 13 – Testes 2
Fonte: Própria do Autor

54
Tabela 6 – Testes 2
Criterio PID MPC
ISE 6.6454e+03 7.6560e+03
Max. Velocidade 949.9887 949.9799
Max. Corrente 1.4095 1.0473
Tempo de Est. Velocidade
0.9281 0.9125
Tempo de Est. Corrente 0.8687 0.8635
Criterio PID MPC
Max. valor de MV 21.0603 21.0600
Tempo de Est. 0.9081 0.8955
Variancia 30.552006 16.959824
Fonte: Própria do Autor
Mesmo com uma maior variação dos setpoint, o MPC continuou a apresentar
um melhor desempenho quando comparado ao controle clássico, repetindo a sua
superioridade nos mesmos critérios do teste anterior.

55
5 CONCLUSÃO E TRABALHOS FUTUROS
5.1 CONCLUSÃO
O presente trabalho de conclusão de curso, propôs uma ilustração de
desempenho entre dois tipos de controladores, o PID e o MPC, aplicados a um
motor de corrente contínua para o controle de velocidade sem que ocorressem
abruptos valores na corrente de armadura, também foi proposto neste trabalho a
utilização de ferramentas específicas como o Simscape do Matlab e um supervisório
na plataforma LabVIEW para simular uma situação real de comunicação e através
do último software citado, realizar o controle da planta montada.
No primeiro capítulo foi realizada uma introdução sobre motores de corrente
contínua e exibido algumas das problemáticas existentes neste tipo de processo.
Após entendido a problemática, no segundo capítulo foram mostradas a modelagem
do sistema para que o mesmo pudesse ser simulado.
No capitulo posterior foram exibidas as ferramentas utilizadas neste trabalho.
Nelas foram feitas algumas simulações e pequenos testes para comprovação de
funcionamento. Nesta secção, também foi mostrado a tela principal do supervisório
realizado com intuito didático, além de explanar sobre o problema de comunicação
encontrado no OPC.
A seção sobre controle, foi mostrado as estratégias que seriam utilizadas e
comparadas. Nesta parte do trabalho foram exibidas algumas simulações para teste
de sintonia tanto do controle clássico como o do controle preditivo, realizando
também o controle PID via LabVIEW.
Por fim, foi realizada a comparação entre as duas estratégias e verificado de
forma simulada o melhor desempenho do controle preditivo, como já era esperado
para esse trabalho, já que o mesmo consegue enxergar o sistema como um todo
além de possuir a habilidade de prever a resposta do sistema e se antecipar a ela,
como já foi dito.

56
5.2 TRABALHOS FUTUROS
Apesar do resultado deste trabalho ter exibido o melhor desempenho do MPC
para o controle de um motor CC, os testes foram estritamente virtuais, e
provavelmente nem todas as variáveis foram levadas em consideração, além disso
existe o fato que o controle preditivo exige um maior esforço computacional que
talvez na prática, possa gerar complicações. Com isso um trabalho a ser realizado
seria a implementação desse controle em um motor real.
A implementação de um supervisório tem como perspectiva de um trabalho
futuro, a sua implementação na prática, com utilização de controladores lógicos
programáveis e utilização de outros protocolos já disponíveis no mercado, de forma
a conseguir estabelecer uma comunicação entre operador, controle e planta em
tempo real, além de ser mais uma ferramenta de auxilio didático para o curso de
engenharia.
Um outro desafio despertado pelo o trabalho desenvolvido, e os a serem
desenvolvidos, é que os mesmos possam ajudar em um futuro projeto de mestrado
na área de controle.

57
REFERÊNCIAS
ABREU, A. C. A. F.; CARVALHO, D.O. controle de velocidade de um motor série CC. [Monografia] Graduação em Engenharia Elétrica. Instituto Militar de Engenharia. Rio de Janeiro (RJ). 2013. ABREU, B. F. Detecção dos parâmetros de um motor de corrente contínua utilizando algoritmos genéticos. [Monografia] Especialização em Sistemas Inteligentes Aplicados à Automação. Instituto Federal do Espírito Santo. Vitória (ES). 2014. ALMEIDA, G. M. Controle preditivo sintonizado via algoritmo genético aplicado em processos siderúrgicos. [Tese] Doutorado em Engenharia Elétrica. Universidade Federal do Espırito Santo. Vitória (ES). 2011. BALDURSSON, S. BLDC Motor Modelling and Control – A Matlab®/Simulink® Implementation. [Thesis] Master in Electric Power Engineering. Institutionen för Energi och Miljö. Göteborg, Sverige. 2005. BARÃO. R. C. Algoritmos de controle ótimo quadrático com restrições. [Dissertação] Mestrado em Engenharia Elétrica. Escola Politécnica da Universidade de São Paulo. São Paulo (SP). 1997. BISHOP, R. H. Modern Control Systems with LabVIEWTM. Marquette University.
National Technology and Science Press National Technology and Science Press.
2012.
CAMACHO, E.F. and C.Bordons. Model predictive control. Springer-Verlag, London. 1999. ENOCKSSON, S. Modeling in MathWorks Simscape by building a model of an automatic gearbox. UPPSALA Universitet. Mars. 2011. FARUQ, M. F. B. M. PID controller design for controlling DC motor speed using Matlab application. [Thesis] Bachelor of Electrical Engineering. Universiti Malaysia Pahang. Pahang.Malásia. Nov/2008. FILHO, M.V.A.C. Modelagem, controle e otimização de Processos da indústria do etanol: uma aplicação em energia solar. [Tese] Doutorado em Engenharia de Automação e Sistemas. Universidade Federal de Santa Catarina. Florianópolis (SC). Fev/2013. FONSECA, M. de O. Comunicação OPC - Uma abordagem prática. VI Seminário de Automação de Processos, Associação Brasileira de Metalurgia e Materiais. Vitória (ES). Out/ 2002. FONTES, R. M.; NARCISO, M.; PEREIRA, Y. G. Ferramenta educacional para simulação de um controlador PID utilizando o aplicativo Excel. ENBEQ – XV

58
Encontro Brasileiro sobre o Ensino de Engenharia Química. Florianópolis (SC). Out/2014. FRANCHI, C.M. Acionamentos elétricos. 4ª Edição. Ed. Érica. São Paulo (SP). 2008. GARCIA, C. (1997). Modelagem e Simulação. São Paulo, Editora da Universidade de São Paulo. GOMES, T. Z.; FENILI, A. Modelagem Matemática e Identificação de Parâmetros de um Motor DC. Universidade Federal do ABC. Santo André (SP). 2013. GOPAL, K. Dubey. Fundamentals Eletrical Drives. Alpha Science International, 2009. HALVORSEN, H. P. Model Predictive Control in LabVIEW. M.Sc. Tutorial. Telemark University College.Department of Electrical Engineering, Information Technology and Cybernetics. Jun. 2011. HALVORSEN, H. P. OPC and Real-Time Systems in LabVIEW. Tutorial. Telemark University College.Department of Electrical Engineering, Information Technology and Cybernetics. Jan. 2012. KOSOW, I. L. Máquinas elétricas e Transformadores. Vol 1. 4ª Edição. Ed. Globo. Rio de Janeiro (RJ). 1982. MACIEJOWSKI, J. M. Predictive Control - with Constraints. Prentice-Hall, Pearson Education Limited: England, 2002. MATAS, A. L. Sintonia de controladores PID com controle adaptativo por modelo de referência (MRAC) aplicado a um motor de corrente contínua. Trabalho de Conclusão de Curso. Escola de Engenharia de São Carlos, Universidade de São Paulo, São Carlos (SP), 2012. MEJÍA, R. I. G. Controle Preditivo Multivariável: Aspectos de Projeto e Simulação. Dissertação (Mestrado em Engenharia Elétrica) - Centro Tecnológico, Universidade Federal de Santa Catarina, Florianópolis, SC. 2003.
MOREIRA. V.D., P.A. FERREIRA, W. A. Controle preditivo robusto de sistemas híbridos incertos. XV Congresso Brasileiro de Automática, Gramado, Vol. CDROM. 2004.
OGATA, Astrom,K. J; Wittenmark B; Adaptive Control, Second Edition, 1995.
PASTORELLO, R. Integração via OPC de controlador preditivo comercial com simulador dinâmico de processos gerando ambiente virtual de testes. [Dissertação] Mestrado em Engenharia de Processos e Bioquímicos. Centro Universitário do Instituto Mauá de Tecnologia. São Caetano do Sul (SP). 2008.

59
PERAZZO, F. A. P. Implantação de um Sistema de Intertravamentos numa planta simulada no Matlab®/ Simulink® com interface de operação Delta V®. Trabalho Final de Graduação em Engenharia Elétrica. Escola Politécnica. Universidade Federal da Bahia. Salvador, BA. 2009.
PEREIRA, R. D. O. Sistemas de controle de velocidade digital embarcado de motor de corrente contínua de imã permanente. [Monografia] Bacharelado em Engenharia Elétrica. Universidade Federal do Ceará, Centro de Tecnologia, Departamento de Engenharia Elétrica. Fortaleza (CE). 2013.
PEREIRA, R. P. do A. Implantação do controlador preditivo multivariável DMC em uma planta piloto. Dissertação (Mestrado em Engenharia Elétrica) – Universidade Federal do Espírito Santo, Centro Tecnológico. Vitória (ES). 2011.
PINTO, J. E. M. G. Aplicação prática do método de sintonia de controladores PID utilizando o método do relé com histerese. [Dissertação] Mestrado em Engenharia Elétrica e de Computação. Universidade Federal do Rio Grande do Norte. Natal (RN). 2014.
PAZZINI, L. H. A. Acionamentos Elétricos. Apostila de Aula. Faculdades Integradas de São Paulo - FISP. São Paulo (SP). 2002.
SALAH, Mohammed, S. Z. Parameters Identification of a Permanente Magnet DC Motor. Tese de Graduação, The Islamic University of Gaza, 2009.
SANTANA, E.S.; BIM, E; AMARAL, W.C. Algoritmo Preditivo Baseado em Modelo Aplicado ao controle de velocidade do motor de indução. Universidade Estadual de Campinas. Rev. Controle & Automação, vol.19, nº2, p.155-164. Campinas (SP). Abril-Junho 2008.
SILVA, C. J. N. Caracterização de um conjunto didático para ensaio de motor de corrente contínua. [Monografia] Graduação em Engenharia Elétrica da Universidade São Francisco. Itatiba (SP). 2012.
SILVA, F. C. Planta didática – controle PID digital para motor DC. [Monografia] Bacharelado em Engenharia da Computação. Universidade Positivo/NCET. Curitiba (PR), 2008.
SILVA, M. R. N. Aplicação das técnicas de controle em uma planta simulada no Matlab® com interface de operação em Delta V®. Trabalho Final de Graduação em Engenharia Elétrica. Escola Politécnica. Universidade Federal da Bahia. Salvador, BA. 2009.
TORRES, A. E. Introdução ao funcionamento e ao acionamento de motores DC. Relatório Técnico de Iniciação Científica. Universidade Federal do Rio de Janeiro. Rio de Janeiro (RJ). Jan-2004.
WANG, L. Model Predictive Control System Design and Implementation Using Matlab®. © 2009 Springer-Verlag London Limited. 2009.

60
WEG. Características e especificações de motores de corrente contínua e conversores CA/CC. Jaraguá do Sul: WEG, 2007.