manipulador robÓtico horizontal scara ., robÔ 84 … · 40. sbai- sp, 08-10 1999 junta composta...
TRANSCRIPT

40. SBAI- Simpósio Brasileiro de Automação Inteligente, SãoPaulo, SP, 08-10 de Setembro de 1999
MANIPULADOR ROBÓTICO HORIZONTAL TIPO SCARA ., ROBÔ 84UMA PLATAFORMA ABERTA PARA DESENVOLVIMENTOS E
IMPLEMENTAÇÕES EM ROBÓTICA
Denilson Laudares Rodrigues, JánesLandri Júnior
Bruno Ascenção Gouvêa, Paulo Henrique Lourenço
Instituto Politécnico da Pontifícia Universidade Católica de Minas GeraisGrupo de Estudos em Automação e Robótica - GEAR - Av. Dom José Gaspar, 500
Belo Horizonte - Minas Gerais - MG - Bras il- 30.535 .610 - E-mail: [email protected]
Resumo - Este trabalho apresenta o projetomecânico e eletrônico do manipulador robóticoSCARA S4 desenvolvido na PUC Minas. O robô foiconstruído utilizando-se sensores e atuadoresindustriais, com o objetivo de se implementar umaplataforma totalmente aberta para estudos emrobótica por parte dos alunos de graduação e de pós-graduação. A concepção da arquitetura de hardwarepara interfaceamento, aquis ição de dados eacionamento, foi implementada em linguagem HDL(Hardware Description Language) utilizandocomponentes programáveis na própria interface como barramento do PC - barramento ISA.
.Palavras-chave - Robótica; projeto de robô ;cinemática de braço robótica.
Abstract - This work presents the mechanical andeletronic des ign for the rob otic manipulator SCARAS4 developed at PUC Minas. The robot was builtusing industrial sensors and actuators, making aplataform totally openedfor the development inrobotícs of undergraduate and post-graduatestudents. :The hardware architecture for interfacing,data acquisition and driving, was built in HDLlanguage (Hardware Description Language), usingprogrammable devices in the interface PC bus - ISAbus .
Key \Vords - Robotics; robot design; robot armkinematics
1 INTRODUÇÃO
A aplicação de sistemas robóticos na indústria vem sendorealizada principalmente em áreas onde a utilização de mão deobra humana não é indicada, ou pela grande repetibilidade da
177
tarefa ou pela natureza insalubre do ambiente de trabalho. Acrescente necessidade do aumento de produtividade e apadroniza ção na qualid ade dos produtos são questões que têmimpulsion ado a automação industrial, e com ela, a aplicação derobôs. Estudos em robótica tem sido alvo de constan testrabalhos nos últimos anos , sendo realizados em centros depesquisa e indústrias espalhados pelo mundo. O objetivo é umcrescente aumento de sua confiabilidade e de sua robustez,além de sua expansão para outras áreas de aplicação (a grandemaioria dos robôs encontra-se instalada na indústriaautomob ilística) . Áreas como sistemas de controle, projeto deinterface homem-máquina, arquitetura para sistemas decontrole , trabalho cooperativo entre robôs ou entre homem erobô, interação entre a máquina, o ambiente de trabalho e atarefa a' ser executada, são áreas onde constantes trabalhoscientíficos vêm sendo desenvolvidos.
Este trabalho apresenta o projeto e implementação de ummanip ulador robótico horizontal tipo SCARA (SelectiveComplianceArmfor Robotic Assembly), robô S4, desenvolvidono Instituto Politécnico da Pontifícia Universidade Católica deMinas Gerais. Todo o sistema é gerenciado por um computadorPentium 133MHz, no qual foi instalada a interface de controlee onde é executado o software controlado. O objetivo doprojeto foi a construção de uma plataforma robusta, utilizandopara isto sensores e atuadores industriais, de forma que possaser utilizada como plataforma para o desenvolvimento denovos projetos que tratem de temas aplicados à robótica.
2 PROJETO E IMPLEMENTAÇÃOMECÂNICA
O robô desenvolv ido é composto por quatro juntas, sendo trêsrevolutas e uma prismática, conforme mostrado na Figura 1. Aprimeira fase iniciada neste projeto foi o desenvolvimento doprojeto estrutural, onde foi realizada a especificação de todosos materiais necessários para a construção mecânica.' Para .o

Constituídos por uma camisa tubular de aço baixo carbono,onde é fixado o sistema de acionamento do primeiro elo.Podem ser deslocados sobre o eixo suporte, onde é ajustadamanualmente a altura de trabalho do robô . O sistema deacionamento é formado por um motor síncrono de imãpermanente acoplado a um redutor de precisão, que está fixo aoelo da base. Para transmitir o movimento da saída do redutor aopróximo elo foi utilizado um tubo de alumínio, passante emuma caixa de rolamentos (Figura 2), que é o eixo da junta eonde é fixado o próximo elo. O redutor utilizado é um redutorde precisão (folga nula), alta taxa de redução (89:1) comtamanho compacto e baixa vibração para velocidade nominalde entrada (2500RPM).
2.3 Primeiro elo
N.&i
2.4 Segunda junta
Constituído de um tubo retangular de alumínio que é fixadoatravés de parafusos aos elementos soldados à camisa do eixoda junta. O comprimento foi tal que a distância entre os eixosdas juntas 1 e 2 seja 400mm. Suas propriedades de massa, bemcomo as coordenadas do centro de gravidade foramdeterminadas a partir do software Mechanical Desktop.
Figura 2 - Detalhe de montagem da caixa de rolamentos
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
cálculo da base, bem como dos componentes estruturais, foi 2.2 Elo base e primeira juntaespecificada uma carga útil de até 5Kg no órgão terminal. Estevalor foi dimensionado de forma que o robô possa ser utilizadoem operações de soldagem e/ou corte, uma vez que uma tochapara solda MIGfTIG ou um maçarico para corte não pesammais que isto. O órgão terminal foi desenvolvido de forma queseja simples a substituição da ferramenta .
Figura I - Volume de trabalho do robô seARA S4
O projeto foi realizado com a utilização do software AutoCAD,Mechanical Desktop e os códigos de elementos finitos SAP90e ANSYS. Tais ferramentas de projeto possibilitaram a análiseda montagem (determinação de interferências mecânicas), bemcomo a determinação teórica das propriedades de massa, quesão os momentos e produtos de inércia dos diversos corpos quecompõem o robô, além das coordenadas dos centros degravidade dos elos. Tais informações são extremamenteimportantes na modelagem dinâmica do robô. Além disto,também foi realizada análise estrutural para determinação darelação tensão/deformação, bem como análise moda!. Destaforma chegou-se a uma configuração estrutural que resista aosesforços mecânicos que são solicitados quando na execuçãodas tarefas.
A seguir são apresentados os componentes estruturaisdo robô S4 (Rodrigues , 1998):
2.1 Base e eixo suporte
São as estruturas que suportam todos os esforços mecânicos,sendo fundam ental uma elevada rigidez que suporte osmomentos e forças atuantes. Foram calculadas para umadeformação mínima no eixo vertical (da ordem de 2mm), comum comprimento de 900mm. Foi utilizado aço baixo carbonodevido a seu custo reduzido e elevada resistência mecânica .Sendo estas partes fixas, seu peso não compromete odesempenho dos motores, ajudando na absorção de vibração.
Foi implementada de forma muito semelhante à primeira junta,sendo esta em alumínio, com objetivo de minimizar peso umavez que é uma parte móvel. O sistema de acionamento e osistema de transmissão de movimento desta junta é idêntico aoda primeira junta, conforme mostrado na Figura 2. Tanto aprimeira junta quanto a segunda, possuem uma velocidademáxima de 3.6 rad/s com um torque de 175Nm.
2.5 Segundo elo
Da mesma forma que o primeiro elo, o segundo elo éconstituído de um tubo retangular com o mesmo tipo defixação . O comprimento desejado entre as linhas dos eixos dasegunda e terceira junta foi de 300mm.
178

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
2.6 Terceira junta
Composta por um motor de corrente contínua de imãpermanente, acoplado à um redutor planetário com uma relaçãode redução de 5:1. Na saída do redutor foi instalada umconjunto polia-correia sincronizada com uma relação deredução de 2:1. Na polia movida, é fixada uma castanha deesferas recirculantes que proporciona o movimento linear doterceiro elo. A utilização do sistema de transmissão utilizandopolia e correia sincronizada, minimizaram o fuso do terceiroelo de vibrações oriundas do motor, além de isolar o motor eredutor de impactos mecânicos. Todo este sistemas está fixadona extremidade do segundo elo, completando assim a reduçãopara o movimento linear. Possui uma velocidade máxima dedeslocamento igual a 18mm/s, com um curso de 470mm e umaforça de 50N. A Figura 3 apresenta uma vista detalhada desteconjunto.
Figura 3 - Detalhe de montagem da terceira junta
2.7 Terceiro elo
É constituído de duas placas metálicas (superior e inferior) nasquais são lixados os eixos lineares e o fuso. Toda a estrutura doelo, que apresenta uma forma triangular, constitui um corporígido que transmite a maioria dos esforços para a seçãoretangular do segundo elo, logo após os guias dos eixoslineares .
2.8 Quarta junta e órgão terminal
Composta de um motor de corrente contínua acoplado a umredutor planetário que está fixado na placa inferior do terceiroelo. Acoplado ao redutor, um sistema polia e correiasincronizada completam a redução, isolando o conjunto damesma forma que na terceira junta. A polia movida estáencaixada a um eixo que se encontra apoiado radialmente e -axialmente em um rolamento duplo de esferas. A fixação destesistema é realizada através de anéis elásticos. A Figura 4apresenta uma vista detalhada deste conjunto.
o órgão terminal é constituído apenas da polia movida, queestá fixada ao terceiro elo. Possui um diâmetro de 79mm e édotada de oito roscas M4 igualmente espaçadas, servindo comosuporte físico para o órgão terminal. Acionada pelo motor decorrente contínua, a polia movida possui uma velocidade
179
máxima de 8.4rad/s com um torque de 1.2Nm. Foi previstopara o posicionamento do órgão terminal uma repetibilidade deposicionamento de ±0,5 mm.
3 MODELAGEMCINEMÁTICA
Robôs são projetados para execução de tarefas em umdeterminado volume de trabalho ' (a Figura 1 apresentou ovolume de trabalho para o robô 54) . Conforme Stadler (1995),existem dois grupos de variáveis para especificar ascoordenadas de um objeto no volume de trabalho do robô , quesão: variáveis externas ou coordenadas de referência e variáveisinternas ou coordenadas de junta do robô. As variáveis externassão aquelas que identificam a posição e orientação de um corporígido no espaço.
Figura 4 - Detalhe de montagem da quarta junta e órgão terminal
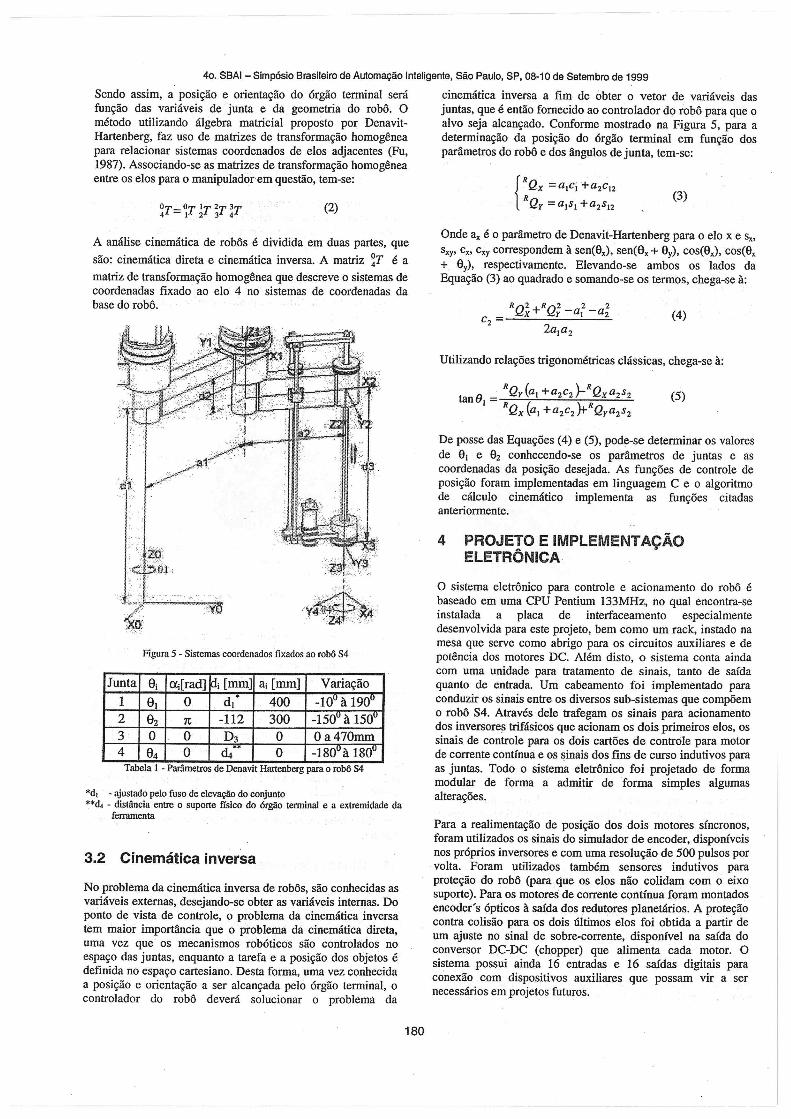
Para o robô 54, tem-se quatro graus de liberdade, sendo trêsdeles para controle de posição (predominantemente), e um paracontrole de orientação, resultando nas coordenadas (X,Y,Z,e).As variáveis internas, ou variáveis de junta, são aquelas quedevem ser especificadas para os controladores de junta paradefinição de um movimento ou ponto (qJ, q2, q3' Q4)' Utilizandoa notação de Denavit-Hartenberg (Fu, 1987), foram fixados aoselos do robô 54 sistemas coordenados, conforme mostrado naFigura 5, de forma a utilizar o método sistemático proposto porestes pesquisadores em 1955. Desta forma, foi utilizado otoolbox de robótica para o MATLAB®, apresentado por Corke(1996). A Tabela 1 apresenta os parâmetros de Denavit-Hartenberg para o robô 54. A utilização do MATLAB® nospermitiu validar os modelos cinemáticos desenvolvidos para orobô 54.
3.1 Cinemática direta
No problema da cinemática direta de robôs, são conhecidas asvariáveis de junta e o objetivo é obter as variáveis externas, ouseja as coordenadas do órgão terminal em relação ao sistema decoordenadas de referência. O vetor que define as variáveis dejunta do robô pode ser escrito como:
(1)
(3)(2)
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
Sendo assim, a posição e orientação do órgão terminal será cinemática inversa a fim de obter o vetor de variáveis dasfunção das variáveis de junta e da geometria do robô. O juntas, que é então fornecido ao controlador do robô para que ométodo utilizando álgebra matricial proposto por Denavit- alvo seja alcançado . Conforme mostrado na Figura 5, para aHartenberg, faz uso de matrizes de transformação homogênea determinação da posição do órgão terminal em função dospara relacionar sistemas coordenados de elos adjacentes (Fu, parâmetros do robô e dos ângulos de junta, tem-se:1987). Associando-se asmatrizes de transformação homogêneaentre os elos para o manípuladorem questão, tem-se:
(4)
O sistema eletrônico para controle c acionamento do robô ébaseado em uma CPU Pentium 133MHz, no qual encontra-seinstalada a placa de interfaceamento especialmentedesenvolvida para este projeto, bem como um rack, instado namesa que serve como abrigo para os circuitos auxiliares e depotência dos motores De. Além disto, o sistema conta aindacom uma unidade para tratamento de sinais, tanto de saídaquanto de entrada. Um cabeamento foi implementado paraconduzir os sinais entre os diversos sub-sistemas que compõemo robô S4. Através dele trafegam os sinais para acionamentodos inversores trifásicos que acionam os dois primeiros elos, ossinais de controle para os dois cartões de controle para motorde corrente contínua e os sinais dos fins de curso indutivos paraas juntas. Todo o sistema eletrônico foi projetado de formamodular de forma a admitir de 'forma simples algumasalterações .
Onde a, é o parâmetro de Denavit-Hartenberg para o elo x e Sx,Sxy, cx' Cxy correspondem à sen(ax) ' sen(8x+ ay) , cos(ax) , cos(ax+ 8y), respectivamente. Elevando-se ambos os lados daEquação (3) ao quadrado e somando-se os termos, chega-se à:
De posse das Equações (4) e (5), pode-se determinar os valoresde a i e a2 conhecendo-se os parâmetros de juntas e ascoordenadas da posição desejada. As funções de controle deposição foram implementadas em linguagem C e o algoritmode cálculo cinemático implementa as funções citadasanteriormente.
Utilizando relações trigonométricas clássicas, chega-se à:
4 PROJETO E IMPLEMENTAÇÃOELETRÔNICA. .
Para a realimentação de posição dos dois motores síncronos,foram utilizados os sinais do simulador de encoder, disponíveisnos próprios inversores e com uma resolução de 500 pulsos porvolta. Foram utilizados também sensores indutivos paraproteção do robô (para que os elos não colidam com o eixosuporte). Para os motores de corrente contínua foram montadosencoder's ópticos à saída dos redutores planetários. A proteçãocontra colisão para os dois últimos elos foi obtida a partir deum ajuste no sinal de sobre-corrente, disponível na saída doconversor DC-DC (chopper) que alimenta cada motor. Osistema possui ainda 16 entradas e 16 saídas digitais paraconexão com dispositivos auxiliares que possam vir a sernecessários em projetos futuros .
Tabela 1 - Parnmetros de Denavít Hartenberg para .o robô S4
Junta Si <Xj[rad] Idi [mm] ai [mm] Variação1 SI O di " 400 -ro" à 190u2 82 1t -112 300 -150u à 150u
3 O O D3 O Oa 470mm4 84 O O -180oà 180u.
Figura 5 - Sistemas fixados ao robô S4
A análise cinemática de robôs é dividida em duas partes, quesão: cinemática direta e cinemática inversa. A matriz é amatriz de transformação homogênea que descreve o sistemas decoordenadas fixado ao elo 4 no sistemas de coordenadas dabase do robô.
"dI - ajustado pelo fuso de elevação do conjunto....d, - distância entre o suporte físico do órgão terminal e a extremidade da
ferramenta
No problema da cinemática inversa de robôs, são conhecidas asvariáveis externas, desejando-se obter as variáveis internas. Doponto de vista de controle, o problema da cinemática inversatem maior importância que o problema da cinemática direta,uma vez que os mecanismos robóticos são controlados noespaço das juntas, enquanto a tarefa e a posição dos objetos édefinida no espaço cartesiano. Desta forma, uma vez conhecidaa posição e orientação a ser alcançada pelo órgão terminal, ocontrolador do robô deverá solucionar o problema da
,3.2 Cinemática inversa
180
40. SBAI-Simpósio Brasileiro de Automação Inteligente. São Paulo, SP, 08-10 de Setembro de 1999
Para o interfaceamento com o barramento ISA do computador,foi implementada uma interface que utiliza dispositivos lógicosprogramáveis (EPLD's) que são gravados através de software -HDL (hardware description language). Foram utilizadoscomponentes ALlERA para conexão com o barramento ISA(EP61O) e para interfaceamento com aquisição de dados, alémdo acionamento (EPF8452). Neste último foramimplementados blocos para o controle de acesso, controle deinterrupção e decodificação de endereços dos subsistemas daplaca. Estes subsistemas são: interface com encoder - 16 bits(para os quatro encoders); gerador PWM - 8 bits (para os doismotores de corrente contínua); acesso aos conversores DA - 12bits (para acionamento dos motores síncronos através dosinversores); entrada e saída digitais - 16 bits; controle daalimentação trifásica (Figura 8), além de circuitos lógicos paraproteção contra mal-funcionamento.
Os sub-sistemas da placa de interfaceamento são definidos egravados no próprio computador onde é executado ocontrolador do robô, tornando qualquer mudança na arquiteturade controle muito simples, graças a utilização do softwareMaxPlusIl da ALlERA.
5 ESTADO ATUAL DO ROBÔ S4
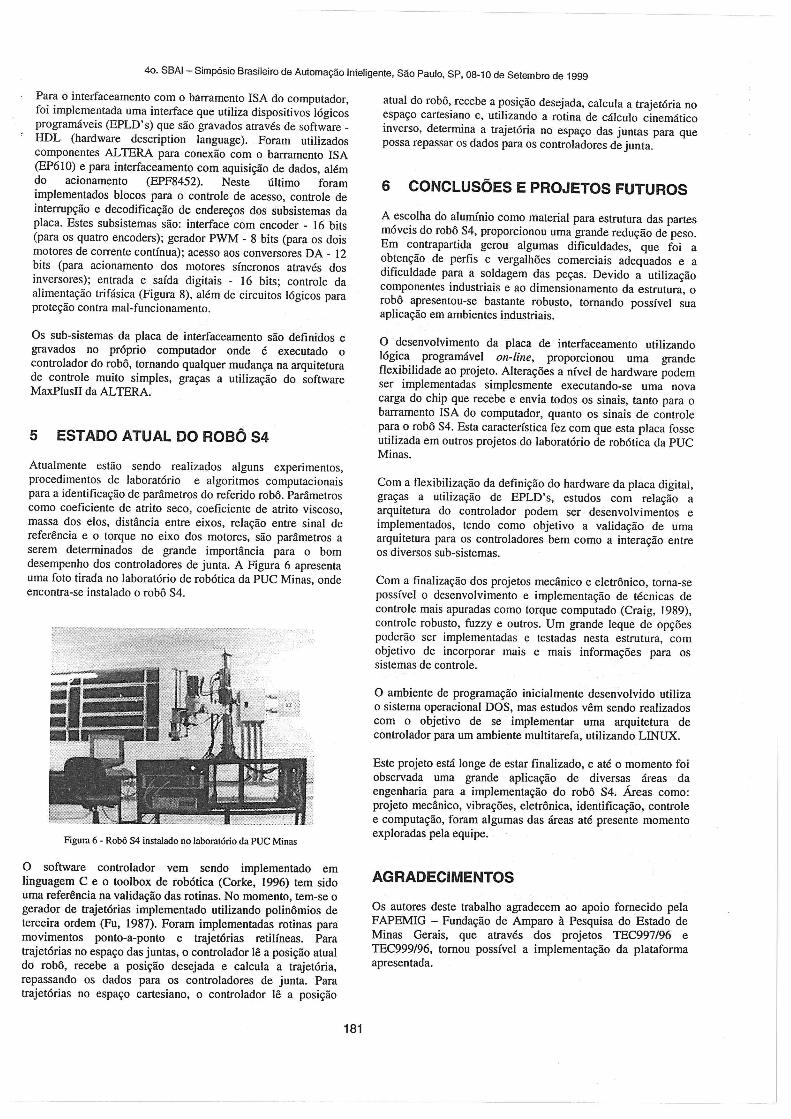
Atualmente estão sendo realizados alguns experimentos,procedimentos de laboratório e algoritmos computacionaispara a identificação de parâmetros do referido robô. Parâmetroscomo coeficiente de atrito seco, coeficiente de atrito viscoso,massa dos elos, distância entre eixos, relação entre sinal dereferência e o torque no eixo dos motores, são parâmetros aserem determinados de grande importância para o bomdesempenho dos controladores de junta. A Figura 6 apresentauma foto tirada no laboratório de robótica da PUC Minas, ondeencontra-se instalado o robô S4.
Figuro 6 - Robô S4 instalado no laborat ório da PUC Minas
O software controlador vem sendo implementado emlinguagem C e o toolbox de robótica (Corke, 1996) tem sidouma referência na validação das rotinas. No momento, tem-se ogerador de trajetórias implementado utilizando polinômios deterceira ordem (Fu, 1987). Foram implementadas rotinas paramovimentos ponto-a-ponto e trajetórias retilíneas. Paratrajetórias no espaço das juntas, o controlador lê a posição atualdo robô, recebe a posição desejada e calcula a trajetória,repassando os dados para os controladores de junta. Paratrajetórias no espaço cartesiano, o controlador lê a posição
181
atual do robô, recebe a posição desejada, calcula a trajetória noespaço cartesiano e, utilizando a rotina de cálculo cinemáticoinverso, determina a trajetória no espaço das juntas para quepossa repassar os dados para os controladores de junta.
6 CONCLUSÕES E PROJETOS FUTUROS
A escolha do alumínio como material para estrutura das partesmóveis do robô S4, proporcionou uma grande redução de peso.Em contrapartida gerou algumas dificuldades, que foi aobtenção de perfis e vergalhões comerciais adequados e adificuldade para a soldagem das peças. Devido a utilizaçãocomponentes industriais e ao dimensionamento da estrutura, orobô apresentou-se bastante robusto, tornando possível suaaplicação em ambientes industriais.
O desenvolvimento da placa de interfaceamento utilizandológica programável on-line, proporcionou uma grandeflexibilidade ao projeto. Alterações a nível de hardware podemser implementadas simplesmente executando-se uma novacarga do chip que recebe e envia todos os sinais, tanto para obarramento ISA do computador, quanto os sinais de controlepara o robô S4. Esta característica fez com que esta placa fosseutilizada em outros projetos do laboratório de robótica da PUCMinas.
Com a flexibilização da definição do hardware da placa digital,graças a utilização de EPLD's, estudos com relação aarquitetura do controlador podem ser desenvolvimentos eimplementados, tendo como objetivo a validação de umaarquitetura para os controladores bem como a interação entreos diversos sub-sistemas.
Com a finalização dos projetos mecânico e eletrônico, torna-sepossível o desenvolvimento e implementação de técnicas decontrole mais apuradas como torque computado (Craig, 1989),controle robusto, fuzzy e outros. Um grande leque de opçõespoderão ser implementadas e testadas nesta estrutura, comobjetivo de incorporar mais e mais informações para ossistemas de controle.
O ambiente de programação inicialmente desenvolvido utilizao sistema operacional DOS, mas estudos vêm sendo realizadoscom o objetivo de se implementar uma arquitetura decontrolador para um ambiente multitarefa, utilizando LINUX.
Este projeto está longe de estar finalizado, e até o momento foiobservada uma grande aplicação de diversas áreas daengenharia para a implementação do robô S4. Áreas como:projeto mecânico, vibrações, eletrônica, identificação, controlee computação, foram algumas das áreas até presente momentoexploradas pela equipe.
AGRADECIMENTOS
Os autores deste trabalho agradecem ao apoio fornecido pelaFAPEMIG - Fundação de Amparo à Pesquisa do Estado deMinas Gerais, que através dos projetos lEC997/96 elEC999/96, tornou possível a implementação da plataformaapresentada.

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1Q99
INTERFACEISA PWR CPUORO) CTRL PENnUM
133MHZ
Enc.
MÓDULO DEAlJMENTAÇÃO
Figura8 - Diagrama deblocosdossubsistemas eletrônicos
REFERÊNCIAS BIBLIOGRÁFICAS
'Corke, Pd.; A Robotics Toolbox for MATLAB. IEEERobotics & Automation Magazine, pp,24-32, march1996.
Beer, F.P.; Johnson, E.R.; Resistência dos Materiais - 2ºEdição, McGraw-HilJ, 1989.
Craig, J.1.; Introduction to Robotics: Mechanics and Control-Second Edition. Addison-Wesley Publishing Company,1989. .
Fu, K.S.; Conzalez, R.C.; Lee, C.S.O.; Robotics: ControlSensing, Vision and Intelligence. McGraw-Hill BookCompany, 1987.
Rodrigues, D.L.; Júnior, J.L.; Schirm, R.; Manipulador.Rob6tico Horizontal Tipo SCARA - Robô S4.Relatório de Projeto de Pesquisa FAPEMIGTEC99796. PUC Minas, 1998.
Rodrigues, D.L.; A Control System for Robotic Manipulator.VI Synposium on Dynamic Problems of Mechanics -DINAME, Caxambu, MO, pp. 77-80, 1995.
SIMULINK UseT'S Guide. The MathWorks Inc., 1992.
Shygley, I .E.; Mechanical Engineering Design. McGraw-Hill,1989.
Stadler, W.; Anaytical Robotics and Mechatronics. McGraw-Hill,1995.
Wolfran, S; Mathematica: a system for doing mathematics bycomputer. Addilson-Wesley, Redwood City, 1991.
182