introdução · um objeto que se move através de uma trajetória circular experimenta ... para o...
TRANSCRIPT

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
GRAVITAÇÃO UNIVERSAL CLÁSSICA E AS FORÇAS DE MARÉ Quartuccio, J. T.
Departamento de Pesquisas Aeroespaciais (DPA) – Instituto de Pesquisas Científicas Instituto de Física Gleb Wataghin (IFGW) – Universidade Estadual de Campinas
Introdução
O estudo do movimento planetário durante a história da ciência permitiu que vários mo-
delos cosmológicos fossem criados. Com as observações astronômicas de Tycho Brahe, Kepler
pôde descrever uma relação matemática entre o período de translação dos planetas com suas
respectivas distâncias até o Sol. Além disso, Kepler mostrou que as órbitas planetárias não são
circulares, como Copérnico e outros acreditavam ser, mas sim elipses de excentricidades muito
pequenas. Com base nisso Newton, em 1666, formulou numericamente a lei da gravitação uni-
versal, publicando o resultado em 1687 em seu famoso livro Principia.
Os trabalhos de Newton permitiram que as forças de maré fossem explicadas de modo
preciso, o que resolveu um problema há muito pensado por Galileu. Embora tenha descrito com
relativa precisão os movimentos dos corpos, a mecânica formulada por Newton encontrou al-
guns problemas quando a relatividade entrou em cena no início do século XX. Para corrigir esse
problema, Einstein e outros fizeram uma descrição geométrica completamente nova do espaço
e do tempo (esse que antes era visto como algo independente). Não vamos aqui analisar essa
nova descrição dada pela relatividade geral, mas nos atentaremos somente à descrição clássica
da gravidade que consegue, e muito bem, descrever as forças de maré e o movimento dos as-
tros.
1. A determinação da lei da Gravitação Universal através das leis de Kepler
Levado pelos trabalhos de Tycho Brahe, Kepler formulou três importantes leis sobre o
movimento planetário. A terceira lei relaciona o período que um planeta leva a transladar o Sol
com a distância entre os dois objetos. Tomando 𝑇 como sendo o período e 𝑅 como sendo a
distância planeta-Sol, Kepler mostrou que a razão entre o quadrado dos períodos com a terceira
potência da distância é sempre uma constante, ou:
𝑇2
𝑅3= 𝐾
(2.1)
onde 𝐾 é uma constante denominada de constante de Kepler. Pela primeira lei, Kepler nos mos-
trou que o movimento planetário não é dado por um círculo, como os modelos anteriores de
Ptolomeu e Copérnico sugeriam. Ao invés disso o movimento é uma elipse, ou um círculo acha-
tado. Embora isso seja verdade, a excentricidade 𝑒 das órbitas planetárias não possuem valores

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
muito acima de 0. De fato, dentre os planetas do sistema solar o que possui a maior excentrici-
dade é Mercúrio (vide tabela 1).
Tabela 1 – Excentricidade dos planetas do sistema solar
Planeta Excentricidade (𝑒)
Mercúrio 0,2056
Vênus 0,0068
Terra 0,0167
Marte 0,093
Júpiter 0,048
Saturno 0,056
Urano 0,046
Netuno 0,0097
Por conta disso podemos aproximar o movimento para um círculo (excentricidade de um
círculo é igual a zero). Um objeto que se move através de uma trajetória circular experimenta
uma força resultante apontada para o centro da trajetória. Essa força resultante, que podemos
chamar de centrípeta, possui uma intensidade igual a:
�⃗�𝑐 = 𝑚�⃗�𝑐 (2.2)
de modo que 𝑎𝑐 é a aceleração centrípeta, cujo valor é igual a 𝜔2𝑅, onde 𝜔 é a velocidade
angular do corpo. Assim, para o sistema planeta-Sol, a força centrípeta é:
�⃗�𝑐 = −𝑚𝜔2𝑅�̂� (2.3)
onde �̂� é o versor que liga o planeta ao Sol. Note que o sinal é negativo por conta de a força
atuar no sentido oposto ao versor. O valor de 𝜔 é dado por 2𝜋/𝑇, onde 𝑇 é o período de trans-
lação. Usando esse valor em (2.3), obtemos:
�⃗�𝑐 = −𝑚(
2𝜋
𝑇)2
𝑅�̂� (2.4)
Aqui irei me abster em escrever a força como um vetor, de modo a olhar apenas para seu
módulo1:
𝐹𝑐 =
4𝜋2𝑚𝑅
𝑇2
(2.5)
Agora podemos fazer uma jogada matemática e multiplicar o lado direito da equação por
𝑅2/𝑅22,de modo a obter:
1 Posso fazer isso por conta de a força estar agindo em uma única direção, o que vai facilitar a notação. Dessa forma, não é mais
necessário escrever o sinal negativo na equação. 2 Note que isso é o mesmo que multiplicar por 1. Ou seja, não estamos mudando em nada a física de nossa equação.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
𝐹𝑐 =
4𝜋2𝑚𝑅3
𝑇2𝑅2
(2.6)
Esse pequeno passo algébrico permite que olhemos para o termo 𝑅3/𝑇2 como sendo
1/𝐾, que nada mais é do que o inverso de (2.1). Assim, nossa força centrípeta se torna:
𝐹𝑐 =
4𝜋2
𝐾
𝑚
𝑅2
(2.7)
O termo 4𝜋2/𝐾 é uma constante, pois temos uma constante dividida por outra constante.
Chamando esse termo de 𝐺 escrevemos:
𝐹𝑐 = 𝐺𝑚
𝑅2 (2.8)
A força centrípeta não é uma força real, mas apenas uma resultante de alguma outra
força. Newton mostrou que a força entre dois corpos ocorre sempre em pares3. Como a força
centrípeta é uma relação entre o planeta e o Sol, podemos expressar essa força levando em
conta, agora, a massa da nossa estrela 𝑀:
𝐹 = 𝐺
𝑀𝑚
𝑅2
(2.9)
ou voltando à forma vetorial:
�⃗� = −𝐺
𝑀𝑚
𝑅2�̂�
(2.10)
Essa é a equação da lei da gravitação universal. A constante 𝐺 é denominada constante
gravitacional e foi sutilmente calculada por Henry Cavendish em 1797.
2. O experimento de Cavendish: a balança de torção
Considerado o sexto entre os dez mais belos experimentos da física, a balança de torção
de Cavendish permitiu uma obtenção experimental do valor da constante 𝐺. Embora tenhamos
conhecimento sobre esse experimento como feito por Cavendish, o pioneiro da balança de tor-
ção não foi ele, mas muito provavelmente Michell e Coulomb.
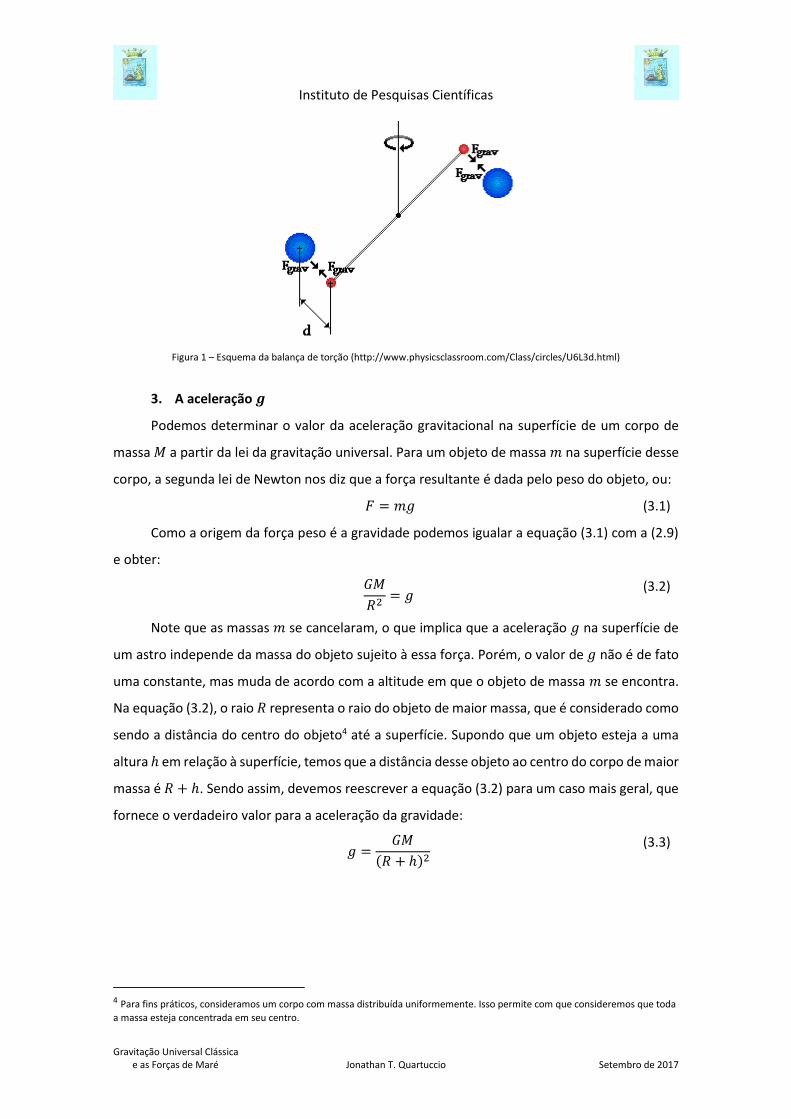
O experimento consiste em duas pequenas massas fixadas nas pontas de uma barra sus-
pensa por um fio. Duas outras massas, representadas pelas esferas maiores na figura 1, são
mantidas fixas a uma distância 𝑑 das massas menores. A força de interação gravitacional provo-
cará um deslocamento da massa menor em direção à massa maior, de modo a provocar uma
torção no fio que sustenta a barra. Com a medida do ângulo de torção, Cavendish conseguiu
determinar o valor de 𝐺. O valor por ele encontrado corresponde a 98,8% do valor atual.
3 Na lei da ação e reação, se um corpo 𝐴 aplica uma força 𝐹𝐴𝐵 sobre um corpo 𝐵, então o corpo 𝐵 aplica uma força 𝐹𝐵𝐴 em 𝐴, de
modo que 𝐹𝐴𝐵 = −𝐹𝐵𝐴.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
Figura 1 – Esquema da balança de torção (http://www.physicsclassroom.com/Class/circles/U6L3d.html)
3. A aceleração 𝒈
Podemos determinar o valor da aceleração gravitacional na superfície de um corpo de
massa 𝑀 a partir da lei da gravitação universal. Para um objeto de massa 𝑚 na superfície desse
corpo, a segunda lei de Newton nos diz que a força resultante é dada pelo peso do objeto, ou:
𝐹 = 𝑚𝑔 (3.1)
Como a origem da força peso é a gravidade podemos igualar a equação (3.1) com a (2.9)
e obter:
𝐺𝑀
𝑅2= 𝑔
(3.2)
Note que as massas 𝑚 se cancelaram, o que implica que a aceleração 𝑔 na superfície de
um astro independe da massa do objeto sujeito à essa força. Porém, o valor de 𝑔 não é de fato
uma constante, mas muda de acordo com a altitude em que o objeto de massa 𝑚 se encontra.
Na equação (3.2), o raio 𝑅 representa o raio do objeto de maior massa, que é considerado como
sendo a distância do centro do objeto4 até a superfície. Supondo que um objeto esteja a uma
altura ℎ em relação à superfície, temos que a distância desse objeto ao centro do corpo de maior
massa é 𝑅 + ℎ. Sendo assim, devemos reescrever a equação (3.2) para um caso mais geral, que
fornece o verdadeiro valor para a aceleração da gravidade:
𝑔 =
𝐺𝑀
(𝑅 + ℎ)2
(3.3)
4 Para fins práticos, consideramos um corpo com massa distribuída uniformemente. Isso permite com que consideremos que toda
a massa esteja concentrada em seu centro.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
4. O princípio da superposição
Até aqui analisamos o caso especial onde olhamos para dois corpos interagindo um com
o outro. O princípio da superposição nos diz que se tivermos 𝑛 partículas de massas 𝑚𝑖 separa-
das por uma distância 𝑟𝑖 de uma partícula de massa 𝑚, a força total sobre essa ultima partícula
(que pode ser vista como um corpo de prova) é dada pelo somatório das forças individuais de
cada par 𝑚𝑖𝑚. Escrevemos, então:
�⃗�𝑚 = ∑�⃗�𝑖
𝑛
𝑖=1
�̂�𝑖 (4.1)
O fato é que o somatório só é, de fato, utilizado para pequenas quantidades de massas
pontuais. Num caso mais geral, nosso somatório assumirá a forma de uma integral. Vejamos o
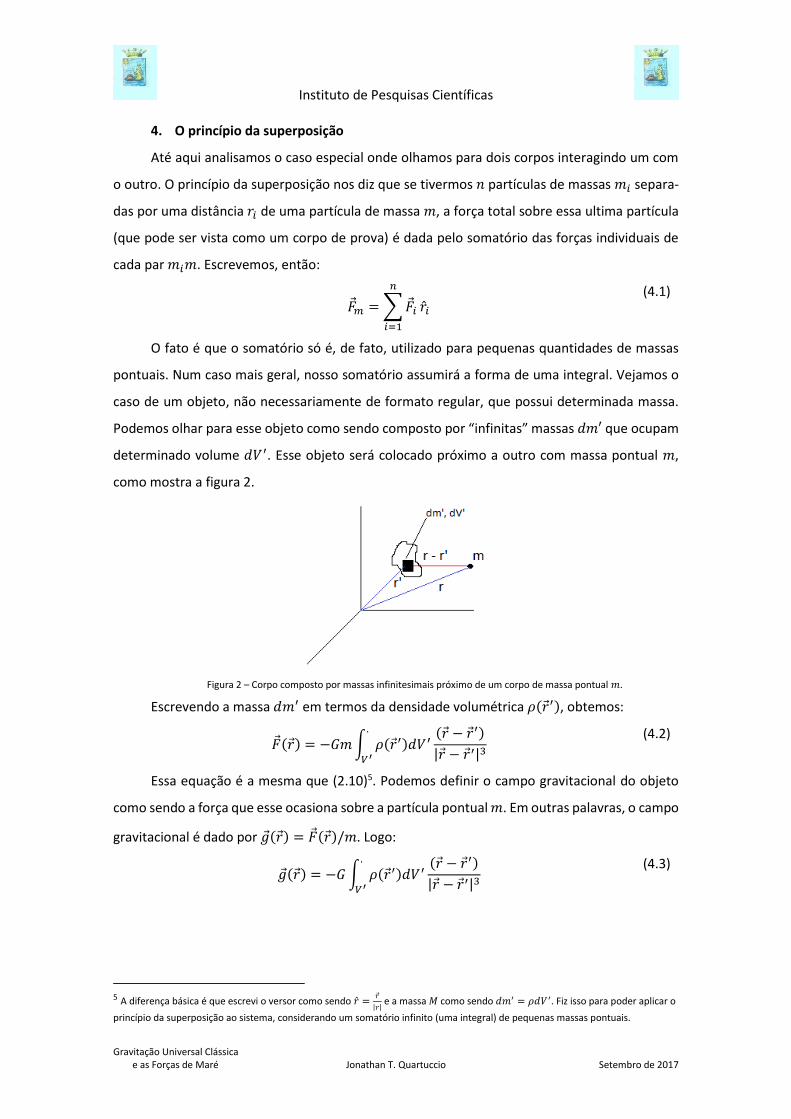
caso de um objeto, não necessariamente de formato regular, que possui determinada massa.
Podemos olhar para esse objeto como sendo composto por “infinitas” massas 𝑑𝑚′ que ocupam
determinado volume 𝑑𝑉′. Esse objeto será colocado próximo a outro com massa pontual 𝑚,
como mostra a figura 2.
Figura 2 – Corpo composto por massas infinitesimais próximo de um corpo de massa pontual 𝑚.
Escrevendo a massa 𝑑𝑚′ em termos da densidade volumétrica 𝜌(𝑟′), obtemos:
�⃗�(𝑟) = −𝐺𝑚∫ 𝜌(𝑟′)𝑑𝑉′
(𝑟 − 𝑟′)
|𝑟 − 𝑟′|3
.
𝑉′
(4.2)
Essa equação é a mesma que (2.10)5. Podemos definir o campo gravitacional do objeto
como sendo a força que esse ocasiona sobre a partícula pontual 𝑚. Em outras palavras, o campo
gravitacional é dado por �⃗�(𝑟) = �⃗�(𝑟)/𝑚. Logo:
�⃗�(𝑟) = −𝐺 ∫ 𝜌(𝑟′)𝑑𝑉′
(𝑟 − 𝑟′)
|𝑟 − 𝑟′|3
.
𝑉′
(4.3)
5 A diferença básica é que escrevi o versor como sendo �̂� =
𝑟
|𝑟| e a massa 𝑀 como sendo 𝑑𝑚′ = 𝜌𝑑𝑉′. Fiz isso para poder aplicar o
princípio da superposição ao sistema, considerando um somatório infinito (uma integral) de pequenas massas pontuais.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
O cálculo da força gravitacional e do campo gravitacional dependem do tipo de distribui-
ção existente no objeto de massa maior6. Existem três possíveis distribuições de massa, que
dependem das dimensões do corpo, sendo elas:
Volume → 𝜌 =
𝑀
𝑉→ 𝑑𝑚 = 𝜌𝑑𝑉
Superficial → 𝜎 =𝑀
𝐴→ 𝑑𝑚 = 𝜎𝑑𝐴
Linear → 𝜆 =𝑀
𝐿→ 𝑑𝑚 = 𝜆𝑑𝐿
(4.4)
onde 𝑉, 𝐴 e 𝐿 são o volume, área e comprimento, respectivamente. Vejamos o caso de uma
distribuição linear. Temos um anel de raio R e massa M (figura 3) que ocasiona um campo gra-
vitacional em um ponto P, colocado sobre o eixo z. Qual é a intensidade do campo nesse ponto?
Tomamos uma massa 𝑑𝑚 em uma parte do anel de modo a desenhar um diagrama de forças
como ao lado. Uma massa 𝑑𝑚′ diametralmente oposta a 𝑑𝑚 fará com que a resultante do
campo aponte na direção vertical e oposta a z. Assim:
𝑑�⃗�(𝑧) = −𝑑𝑔𝑧�̂� = −𝑑𝑔𝑐𝑜𝑠𝜃�̂� (4.5)
Figura 3 – Anel de raio 𝑅 e massa 𝑀 ocasionando um campo gravitacional em 𝑃.
Sendo
𝑐𝑜𝑠𝜃 =𝑧
(𝑧2 + 𝑅2)1/2 (4.6)
�⃗�(𝑧) = −𝐺 ∫
𝜆𝑑ℓ𝑐𝑜𝑠𝜃�̂�
𝑧2 + 𝑅2
(4.7)
�⃗�(𝑧) = −𝐺𝜆𝑧∫
𝑑ℓ
(𝑧2 + 𝑅2)3/2�̂�
(4.8)
6 Consideraremos, por enquanto, que o segundo corpo seja uma massa pontual.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
Sendo 𝑑ℓ = 𝑅𝑑𝜃
�⃗�(𝑧) = −
𝐺𝜆𝑧𝑅
(𝑧2 + 𝑅2)3/2∫ 𝑑𝜃
2𝜋
0
(4.9)
�⃗�(𝑧) = −
2𝜋𝐺𝜆𝑅𝑧
(𝑧2 + 𝑅2)3/2
(4.10)
Escrevendo 𝜆 = 𝑀/2𝜋𝑅7
�⃗�(𝑧) = −
𝐺𝑀𝑧
(𝑧2 + 𝑅2)3/2�̂�
(4.11)
Agora, ao invés de um anel temos um disco. A construção será quase que semelhante ao
anel, porém tomaremos uma determinada região de área 𝑑𝑎. Essa região vai delimitar um arco
na superfície do disco. Quanto maior a angular 𝑑𝜙 maior será o arco, e quanto maior 𝑑𝑟 mais
grosso ele será. Se 𝑑𝜙 = 2𝜋 então teremos um anel na superfície do disco. Assim, vemos que
para calcular o campo em P, devemos calcular o campo resultante de cada anel no disco e inte-
grar. O diferencial da área é:
Figura 4 – Disco de raio 𝑅 e massa 𝑀.
𝑑𝑎 = 𝑟𝑑𝑟𝑑𝜙 (4.12)
Então
�⃗�(𝑧) = −𝐺 ∫
𝜎𝑑𝑎𝑐𝑜𝑠𝜃�̂�
𝑧2 + 𝑟2
(4.13)
onde foi usada novamente a relação dada por (4.6). Portanto:
�⃗�(𝑧) = −𝐺𝑧 ∫
𝜎𝑑𝑎
(𝑧2 + 𝑟2)3/2�̂�
(4.14)
�⃗�(𝑧) = −𝐺𝑧𝜎 ∫
𝑟𝑑𝑟𝑑𝜙
(𝑧2 + 𝑟2)3/2�̂�
(4.15)
�⃗�(𝑧) = −𝐺𝑧𝜎 ∫ 𝑑𝜙
2𝜋
0
∫𝑟𝑑𝑟
(𝑧2 + 𝑟2)3/2�̂�
𝑅
0
(4.16)
7Pois o comprimento 𝐿 do anel é 2𝜋𝑅.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
Usando a substituição:
𝑢 = 𝑧2 + 𝑟2 → 𝑑𝑢 = 2𝑟𝑑𝑟
𝑑𝑟 =𝑑𝑢
2𝑟
�⃗�(𝑧) = −𝐺𝑧𝜎2𝜋∫𝑑𝑢
2𝑢3/2
�⃗�(𝑧) = −𝐺𝑧𝜎𝜋 ∫𝑑𝑢
𝑢3/2
�⃗�(𝑧) = −𝐺𝑧𝜎𝜋 (−2
𝑢1/2) |𝑧2
𝑧2+𝑅2
�⃗�(𝑧) = −𝐺𝑧𝜎𝜋 [−2
(𝑧2 + 𝑅2)1/2+
2
𝑧] �̂�
�⃗�(𝑧) = −𝐺𝜎𝑧2𝜋 [
1
𝑧−
1
(𝑧2 + 𝑅2)1/2] �̂�
(4.17)
Se assumirmos que 𝑅2/𝑧2 ≪ 1, podemos fazer uma expansão em série de (4.17) e obter
como resultado final:
�⃗�(𝑧) = −
𝐺𝑀
𝑧2�̂�
(4.18)
que é análogo a (4.3). Vale lembrar que Se ∇ × �⃗� = 0, então a força é conservativa. Para �⃗� =
𝑚�⃗� também vale ∇ × �⃗� = 0, logo �⃗� é conservativa:
�⃗� ≡ −∇𝜙 (4.19)
onde 𝜙 é o potencial gravitacional. Como �⃗� é radial:
∇𝜙 =
𝑑𝜙
𝑑𝑟�̂�
(4.20)
Logo, o potencial pode ser escrito como:
𝜙 = −∫ �⃗�(𝑟)𝑑𝑟 = −
𝐺𝑀
𝑟
𝑟
∞
(4.21)
Para uma distribuição de massa:
𝑑𝜙 = −𝐺𝑑𝑚
𝑟
𝜙 = −𝐺 ∫
𝜌𝑑𝑉′
|𝑟 − 𝑟′|
(4.22)
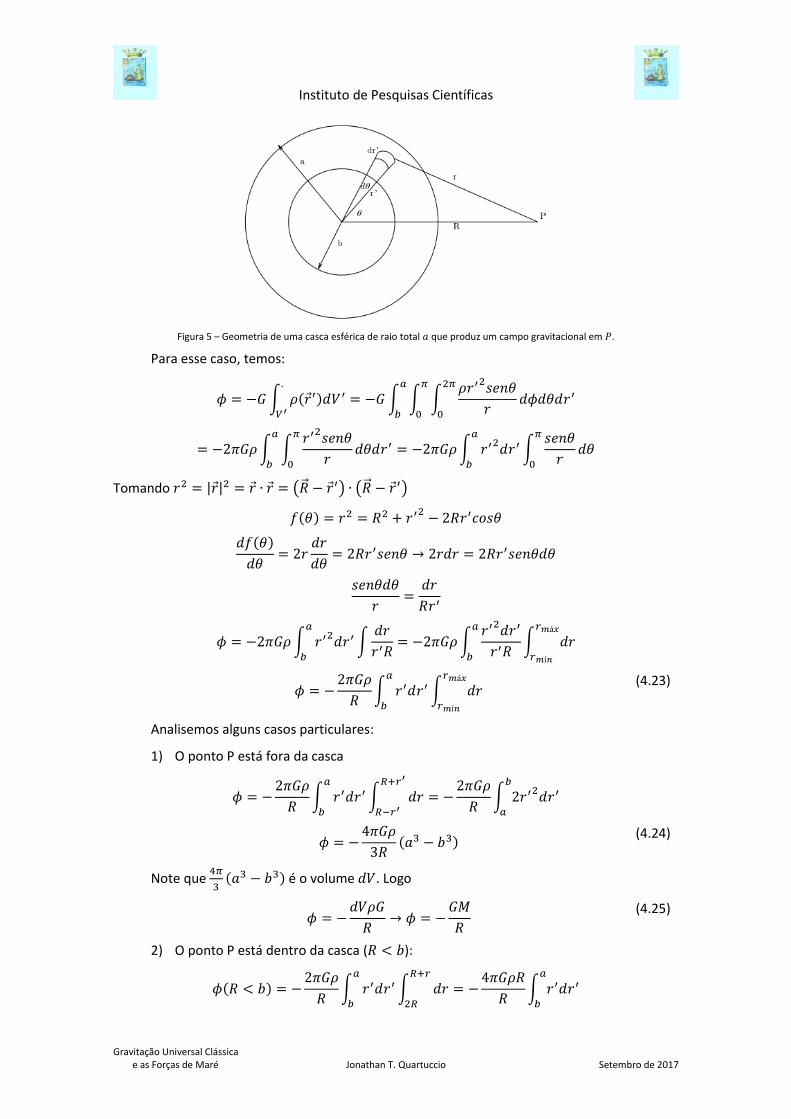
Talvez o caso mais interessante para nós seja o de um objeto esférico. Consideremos uma
camada esférica como a mostrada na figura 5. Consideraremos vários pontos no interior dessa
casca.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
Figura 5 – Geometria de uma casca esférica de raio total 𝑎 que produz um campo gravitacional em 𝑃.
Para esse caso, temos:
𝜙 = −𝐺 ∫ 𝜌(𝑟′)𝑑𝑉′ = −𝐺 ∫ ∫ ∫𝜌𝑟′2𝑠𝑒𝑛𝜃
𝑟𝑑𝜙𝑑𝜃𝑑𝑟′
2𝜋
0
𝜋
0
𝑎
𝑏
.
𝑉′
= −2𝜋𝐺𝜌∫ ∫𝑟′2𝑠𝑒𝑛𝜃
𝑟𝑑𝜃𝑑𝑟′ = −2𝜋𝐺𝜌∫ 𝑟′2𝑑𝑟′ ∫
𝑠𝑒𝑛𝜃
𝑟𝑑𝜃
𝜋
0
𝑎
𝑏
𝜋
0
𝑎
𝑏
Tomando 𝑟2 = |𝑟|2 = 𝑟 ∙ 𝑟 = (�⃗⃗� − 𝑟′) ∙ (�⃗⃗� − 𝑟′)
𝑓(𝜃) = 𝑟2 = 𝑅2 + 𝑟′2 − 2𝑅𝑟′𝑐𝑜𝑠𝜃
𝑑𝑓(𝜃)
𝑑𝜃= 2𝑟
𝑑𝑟
𝑑𝜃= 2𝑅𝑟′𝑠𝑒𝑛𝜃 → 2𝑟𝑑𝑟 = 2𝑅𝑟′𝑠𝑒𝑛𝜃𝑑𝜃
𝑠𝑒𝑛𝜃𝑑𝜃
𝑟=
𝑑𝑟
𝑅𝑟′
𝜙 = −2𝜋𝐺𝜌 ∫ 𝑟′2𝑑𝑟′ ∫𝑑𝑟
𝑟′𝑅= −2𝜋𝐺𝜌∫
𝑟′2𝑑𝑟′
𝑟′𝑅∫ 𝑑𝑟
𝑟𝑚á𝑥
𝑟𝑚í𝑛
𝑎
𝑏
𝑎
𝑏
𝜙 = −
2𝜋𝐺𝜌
𝑅∫ 𝑟′𝑑𝑟′ ∫ 𝑑𝑟
𝑟𝑚á𝑥
𝑟𝑚í𝑛
𝑎
𝑏
(4.23)
Analisemos alguns casos particulares:
1) O ponto P está fora da casca
𝜙 = −2𝜋𝐺𝜌
𝑅∫ 𝑟′𝑑𝑟′ ∫ 𝑑𝑟 = −
2𝜋𝐺𝜌
𝑅∫ 2𝑟′2𝑑𝑟′
𝑏
𝑎
𝑅+𝑟′
𝑅−𝑟′
𝑎
𝑏
𝜙 = −
4𝜋𝐺𝜌
3𝑅(𝑎3 − 𝑏3)
(4.24)
Note que 4𝜋
3(𝑎3 − 𝑏3) é o volume 𝑑𝑉. Logo
𝜙 = −
𝑑𝑉𝜌𝐺
𝑅→ 𝜙 = −
𝐺𝑀
𝑅
(4.25)
2) O ponto P está dentro da casca (𝑅 < 𝑏):
𝜙(𝑅 < 𝑏) = −2𝜋𝐺𝜌
𝑅∫ 𝑟′𝑑𝑟′ ∫ 𝑑𝑟 = −
4𝜋𝐺𝜌𝑅
𝑅∫ 𝑟′𝑑𝑟′
𝑎
𝑏
𝑅+𝑟
2𝑅
𝑎
𝑏

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
𝜙(𝑅 < 𝑏) = −2𝜋𝐺𝜌(𝑎2 − 𝑏2) (4.26)
Note que esse valor é uma constante, logo ∇𝜙 = −�⃗� = 0. Esse resultado é interessante,
e nos diz que no interior de uma casca esférica a resultante gravitacional é nula!
5. A lei de Gauss e a equação de Poisson
Outro resultado muito importante no que diz respeito ao cálculo do campo gravitacional
gerado por uma distribuição contínua de massa é dado pela lei de Gauss. Em termos gerais, a lei
de Gauss é dada por:
∮ �⃗� ∙ 𝑑�⃗� = −4𝜋𝐺𝑚𝑒𝑛𝑣
.
𝑆𝑒𝑥𝑡
(5.1)
em que a integral é feita sobre uma superfície8 que envolve uma região de massa 𝑚. Lembrando
que:
∮ �⃗� ∙ 𝑑�⃗� = ∫(∇ ∙ �⃗�)𝑑𝑉 = 0
.
𝑉
.
𝑆
(5.2)
e escrevendo a massa envolvida em termos da densidade e do volume:
∫(∇ ∙ �⃗� + 4𝜋𝐺𝜌)𝑑𝑉 = 0
.
𝑉
(5.3)
Como �⃗� = −∇𝜙
−∇ ∙ (∇𝜙) = −4𝜋𝐺𝜌
∇2𝜙 = 4𝜋𝐺𝜌 (5.4)
e essa é a equação de Poisson. Essa equação é útil quando tratamos sobre o potencial. Se o lado
direito de (5.4) foi igual a zero, então ela se torna a equação de Laplace.
6. Forças de maré
As marés são causadas pela atração gravitacional do oceano com relação à Lua e ao Sol.
Porém, existem diversos fatores que tornam a análise das forças envolvidas um pouco compli-
cada. Um desses fatores é que a Terra não é um sistema inercial, de modo que tanto ela quanto
a Lua giram em torno de seu centro de massa (e se movem ao redor do Sol). Assim podemos
considerar que a porção de água mais próxima da Lua está se afastando da Terra. Consideremos,
por simplicidade, somente o efeito da Lua sobre as marés. Para efeito, vamos considerar o caso
em que a superfície da Terra está completamente coberta por água.
8 A integral cíclica mostra que superfície que envolve a massa é fechada.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
Figura 6 – Geometria para calcular as marés oceânicas.
Consideremos uma partícula de massa 𝑚 na superfície da Terra. A força total sobre essa
partícula (analisada com respeito ao sistema de coordenadas adotado) é dada por9:
𝑚�̈�𝑚
′ = −𝑚𝑀𝐸𝐺
𝑟2�̂� −
𝑚𝑀𝑚𝐺
𝑅2�̂�
(6.1)
O primeiro termo a direita de (6.1) é a força gravitacional sobre a partícula devido à Terra,
enquanto que o segundo termo é a força devido à Lua. Além de agir sobre a partícula, a Lua age,
também, sobre a Terra. Essa interação pode ser descrita por:
𝑀𝐸 �̈�𝐸
′ = −𝐺𝑀𝑚𝑀𝐸
𝐷2�̂�
(6.2)
Note que, pela figura 6, 𝑟𝑚′ = 𝑟𝐸
′ + 𝑟, de modo que �̈� = �̈�𝑚′ − �̈�𝐸
′ . Podemos reescrever esse
resultado da seguinte maneira:
�̈� =
𝑚
𝑚�̈�𝑚
′ −𝑀𝐸
𝑀𝐸�̈�𝐸
′ (6.3)
Note que os valores de 𝑚�̈�𝑚′ e 𝑀𝐸�̈�𝐸
′ já foram obtidos com (6.1) e (6.2) respectivamente.
Usando esses valores em (6.3):
�̈� = −
𝐺𝑀𝐸
𝑟2�̂� − 𝐺𝑀𝑚 (
�̂�
𝑅2−
�̂�
𝐷2) (6.4)
O primeiro termo do lado direito nada mais é do que a aceleração da gravidade terrestre
dada por (3.2). O segundo termo é o efeito somado da Lua sobre a Terra e sobre a massa 𝑚.
Com isso, definimos a força de maré como:
�⃗�𝑚𝑎𝑟é = −𝐺𝑚𝑀𝑚 (
�̂�
𝑅2−
�̂�
𝐷2) (6.5)
9 O termo �̈� é a segunda derivada da posição 𝑟, ou aceleração.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
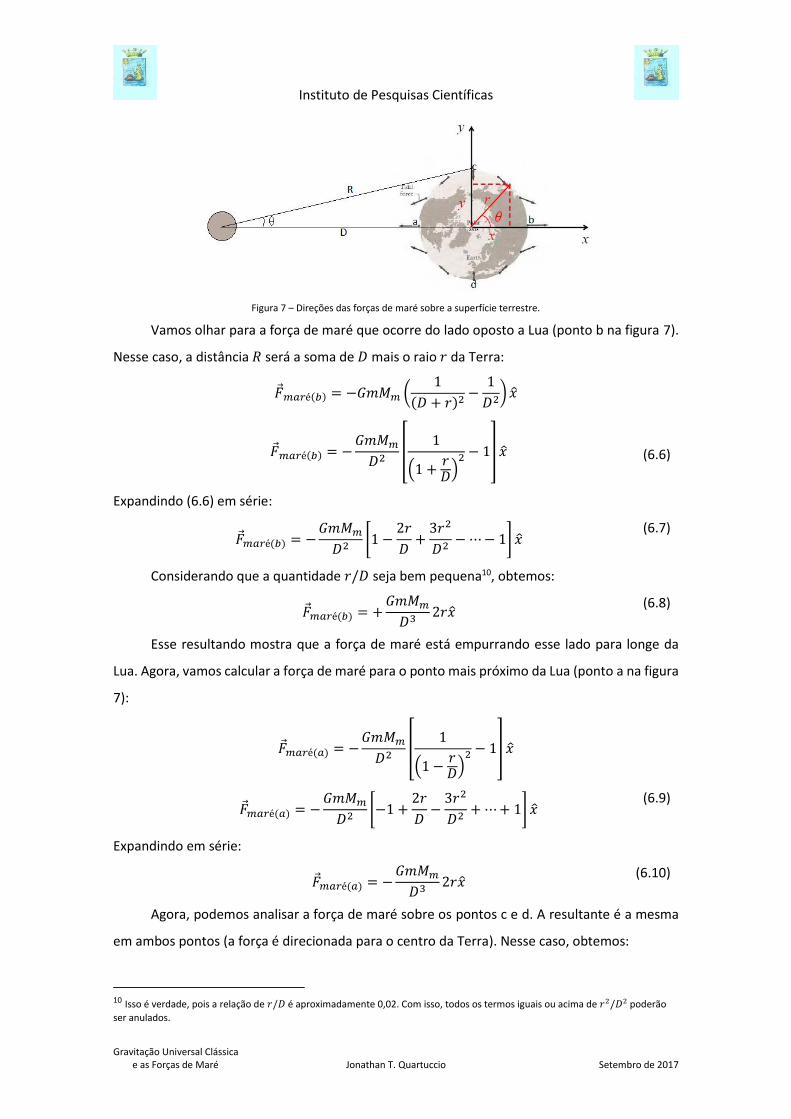
Figura 7 – Direções das forças de maré sobre a superfície terrestre.
Vamos olhar para a força de maré que ocorre do lado oposto a Lua (ponto b na figura 7).
Nesse caso, a distância 𝑅 será a soma de 𝐷 mais o raio 𝑟 da Terra:
�⃗�𝑚𝑎𝑟é(𝑏) = −𝐺𝑚𝑀𝑚 (1
(𝐷 + 𝑟)2−
1
𝐷2)𝑥
�⃗�𝑚𝑎𝑟é(𝑏) = −𝐺𝑚𝑀𝑚
𝐷2 [1
(1 +𝑟𝐷)
2 − 1]𝑥
(6.6)
Expandindo (6.6) em série:
�⃗�𝑚𝑎𝑟é(𝑏) = −
𝐺𝑚𝑀𝑚
𝐷2[1 −
2𝑟
𝐷+
3𝑟2
𝐷2− ⋯− 1] 𝑥
(6.7)
Considerando que a quantidade 𝑟/𝐷 seja bem pequena10, obtemos:
�⃗�𝑚𝑎𝑟é(𝑏) = +
𝐺𝑚𝑀𝑚
𝐷32𝑟𝑥
(6.8)
Esse resultando mostra que a força de maré está empurrando esse lado para longe da
Lua. Agora, vamos calcular a força de maré para o ponto mais próximo da Lua (ponto a na figura
7):
�⃗�𝑚𝑎𝑟é(𝑎) = −𝐺𝑚𝑀𝑚
𝐷2 [1
(1 −𝑟𝐷)
2 − 1] 𝑥
�⃗�𝑚𝑎𝑟é(𝑎) = −
𝐺𝑚𝑀𝑚
𝐷2[−1 +
2𝑟
𝐷−
3𝑟2
𝐷2+ ⋯+ 1] 𝑥
(6.9)
Expandindo em série:
�⃗�𝑚𝑎𝑟é(𝑎) = −
𝐺𝑚𝑀𝑚
𝐷32𝑟𝑥
(6.10)
Agora, podemos analisar a força de maré sobre os pontos c e d. A resultante é a mesma
em ambos pontos (a força é direcionada para o centro da Terra). Nesse caso, obtemos:
10 Isso é verdade, pois a relação de 𝑟/𝐷 é aproximadamente 0,02. Com isso, todos os termos iguais ou acima de 𝑟2/𝐷2 poderão
ser anulados.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
�⃗�𝑚𝑎𝑟é(𝑐/𝑑) = −𝐺𝑚𝑀𝑚 [
�̂�
|𝐷 + 𝑟|2−
𝑥
𝐷2]
(6.11)
Sendo �̂� = 𝑐𝑜𝑠𝜃𝑥 + 𝑠𝑒𝑛𝜃�̂�
�̂� =
𝐷
|𝐷 + 𝑟 |𝑥 +
𝑟
|𝐷 + 𝑟|�̂�
(6.12)
De modo que
|𝐷 + 𝑟| = (𝐷2 + 𝑟2)1/2 (6.13)
�⃗�𝑚𝑎𝑟é(𝑐/𝑑) = −𝐺𝑚𝑀𝑚 (
𝑟
(𝐷2 + 𝑟2)3/2�̂� +
𝐷
(𝐷2 + 𝑟2)3/2𝑥 −
1
𝐷2𝑥)
(6.14)
Adotando
(𝑟
𝐷)2
≪ 1
�⃗�𝑚𝑎𝑟é(𝑐/𝑑) = −𝐺𝑚𝑀𝑚
[
𝑟�̂�
𝐷3 (1 +𝑟2
𝐷2)3/2
+𝐷𝑥
𝐷3 (1 +𝑟2
𝐷2)3/2
−1
𝐷2𝑥
]
(6.15)
�⃗�𝑚𝑎𝑟é(𝑐/𝑑) = −
𝐺𝑚𝑀𝑚𝑟
𝐷3�̂�
(6.16)
Galileu tentou, sem sucesso, explicar as marés, mas encontrou dificuldade em teorizar
sobre a existência de duas marés altas durante o dia. Agora, vemos que a dinâmica de Newton
nos fornece respostas para a existência de duas marés, através de (6.8) e (6.9).
As marés mais altas11 ocorrem quando a Terra, a Lua e o Sol estão alinhadas12, enquanto
que as marés menores13 ocorrem nas luas crescentes e minguantes, de modo que o Sol e a Lua
estão em ângulos retos um com relação ao outro., o que cancela parcialmente seus efeitos. Um
fato interessante e que merece nossa atenção é que a fricção de marés entre a água e a Terra
ocasiona uma perda de energia significativa de nosso planeta. A Terra não é um corpo comple-
tamente rígido e sofre distorções devido às forças de maré.
Conforme a Terra gira, a Lua, ao mesmo tempo, está em órbita em torno de nós. Isso
implica que não há exatamente duas marés altas por dia por conta de elas ocorrerem a cada 12
h e 26 min. Outro fato importante, é que o plano da órbita da Lua não é perpendicular ao eixo
de rotação da Terra, o que faz com que uma maré alta por dia seja um pouco maior que a outra.
11 Também chamadas de sizígia. 12 Ocorrendo, assim, na Lua Nova e na Lua Cheia. 13 Também chamadas de quadratura.
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
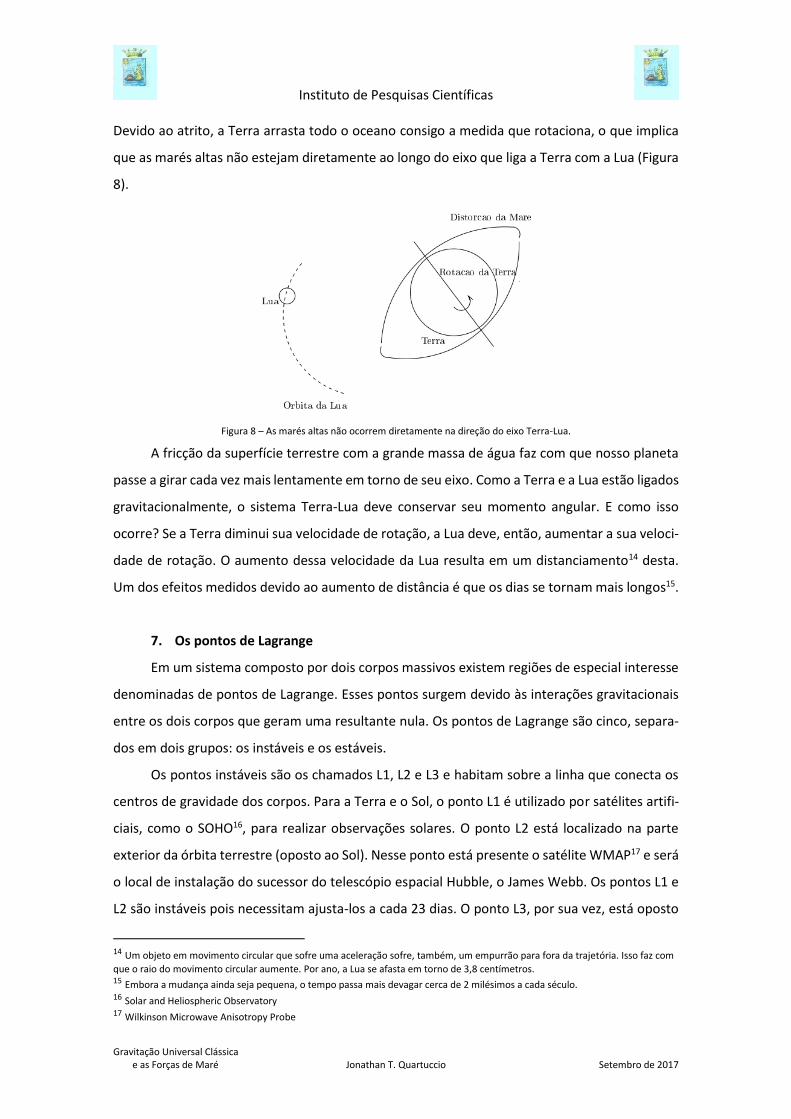
Devido ao atrito, a Terra arrasta todo o oceano consigo a medida que rotaciona, o que implica
que as marés altas não estejam diretamente ao longo do eixo que liga a Terra com a Lua (Figura
8).
Figura 8 – As marés altas não ocorrem diretamente na direção do eixo Terra-Lua.
A fricção da superfície terrestre com a grande massa de água faz com que nosso planeta
passe a girar cada vez mais lentamente em torno de seu eixo. Como a Terra e a Lua estão ligados
gravitacionalmente, o sistema Terra-Lua deve conservar seu momento angular. E como isso
ocorre? Se a Terra diminui sua velocidade de rotação, a Lua deve, então, aumentar a sua veloci-
dade de rotação. O aumento dessa velocidade da Lua resulta em um distanciamento14 desta.
Um dos efeitos medidos devido ao aumento de distância é que os dias se tornam mais longos15.
7. Os pontos de Lagrange
Em um sistema composto por dois corpos massivos existem regiões de especial interesse
denominadas de pontos de Lagrange. Esses pontos surgem devido às interações gravitacionais
entre os dois corpos que geram uma resultante nula. Os pontos de Lagrange são cinco, separa-
dos em dois grupos: os instáveis e os estáveis.
Os pontos instáveis são os chamados L1, L2 e L3 e habitam sobre a linha que conecta os
centros de gravidade dos corpos. Para a Terra e o Sol, o ponto L1 é utilizado por satélites artifi-
ciais, como o SOHO16, para realizar observações solares. O ponto L2 está localizado na parte
exterior da órbita terrestre (oposto ao Sol). Nesse ponto está presente o satélite WMAP17 e será
o local de instalação do sucessor do telescópio espacial Hubble, o James Webb. Os pontos L1 e
L2 são instáveis pois necessitam ajusta-los a cada 23 dias. O ponto L3, por sua vez, está oposto
14 Um objeto em movimento circular que sofre uma aceleração sofre, também, um empurrão para fora da trajetória. Isso faz com
que o raio do movimento circular aumente. Por ano, a Lua se afasta em torno de 3,8 centímetros. 15 Embora a mudança ainda seja pequena, o tempo passa mais devagar cerca de 2 milésimos a cada século. 16 Solar and Heliospheric Observatory
17 Wilkinson Microwave Anisotropy Probe
Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
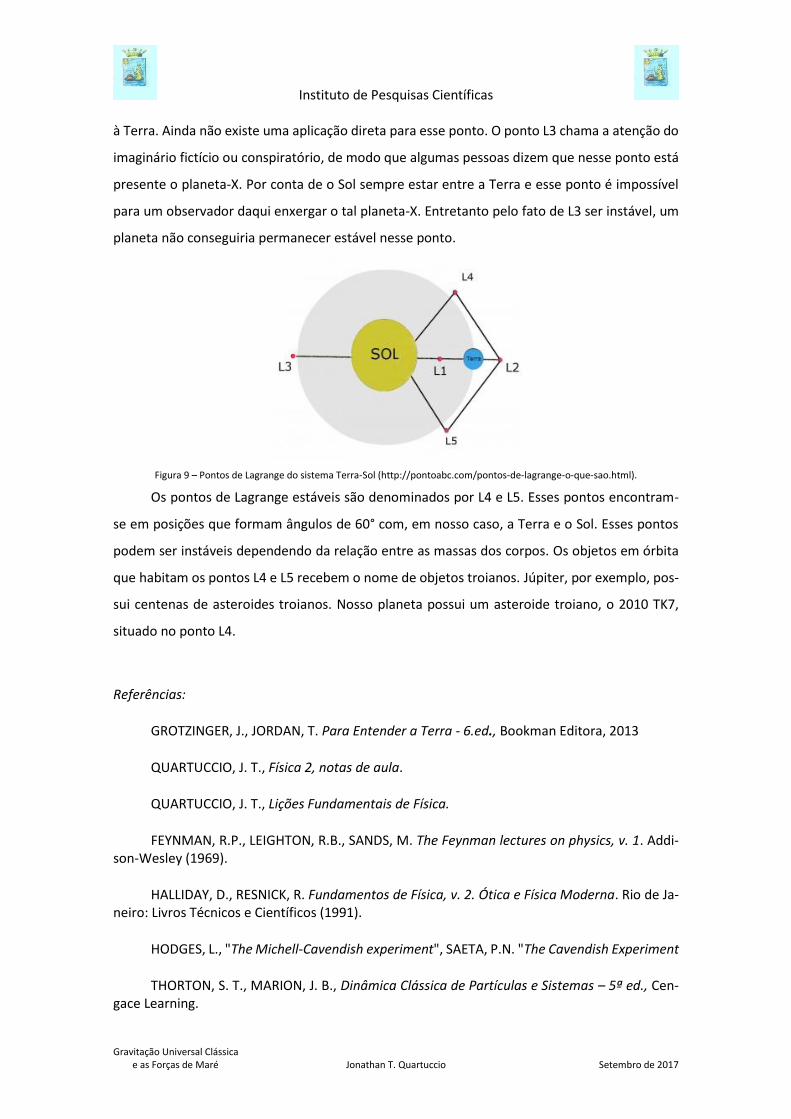
à Terra. Ainda não existe uma aplicação direta para esse ponto. O ponto L3 chama a atenção do
imaginário fictício ou conspiratório, de modo que algumas pessoas dizem que nesse ponto está
presente o planeta-X. Por conta de o Sol sempre estar entre a Terra e esse ponto é impossível
para um observador daqui enxergar o tal planeta-X. Entretanto pelo fato de L3 ser instável, um
planeta não conseguiria permanecer estável nesse ponto.
Figura 9 – Pontos de Lagrange do sistema Terra-Sol (http://pontoabc.com/pontos-de-lagrange-o-que-sao.html).
Os pontos de Lagrange estáveis são denominados por L4 e L5. Esses pontos encontram-
se em posições que formam ângulos de 60° com, em nosso caso, a Terra e o Sol. Esses pontos
podem ser instáveis dependendo da relação entre as massas dos corpos. Os objetos em órbita
que habitam os pontos L4 e L5 recebem o nome de objetos troianos. Júpiter, por exemplo, pos-
sui centenas de asteroides troianos. Nosso planeta possui um asteroide troiano, o 2010 TK7,
situado no ponto L4.
Referências:
GROTZINGER, J., JORDAN, T. Para Entender a Terra - 6.ed., Bookman Editora, 2013
QUARTUCCIO, J. T., Física 2, notas de aula.
QUARTUCCIO, J. T., Lições Fundamentais de Física.
FEYNMAN, R.P., LEIGHTON, R.B., SANDS, M. The Feynman lectures on physics, v. 1. Addi-son-Wesley (1969).
HALLIDAY, D., RESNICK, R. Fundamentos de Física, v. 2. Ótica e Física Moderna. Rio de Ja-neiro: Livros Técnicos e Científicos (1991).
HODGES, L., "The Michell-Cavendish experiment", SAETA, P.N. "The Cavendish Experiment
THORTON, S. T., MARION, J. B., Dinâmica Clássica de Partículas e Sistemas – 5ª ed., Cen-gace Learning.

Instituto de Pesquisas Científicas
Gravitação Universal Clássica e as Forças de Maré Jonathan T. Quartuccio Setembro de 2017
NUSSENZVEIG, H. M., Curso de Física Básica – Mecânica, Blucher.
CARROL, B. W., OSTLIE, D. A., An Introduction to Modern Astrophysics, 2° ed.