implementação de uma rede de estações de referência gps...
TRANSCRIPT
Universidade de Lisboa Faculdade de Ciências
Departamento de Matemática
Implementação de uma Rede de Estações de Referência GPS para Posicionamento em
Tempo Real
ANTÓNIO JAIME GAGO AFONSO
Mestrado em Engenharia Geográfica e Geoinformática (Geodesia)
2006

Universidade de Lisboa Faculdade de Ciências
Departamento de Matemática
Implementação de uma Rede de Estações
de Referência GPS para Posicionamento em Tempo Real
ANTÓNIO JAIME GAGO AFONSO
Orientado por: Prof. Doutor Virgílio B. Mendes
Mestrado em Engenharia Geográfica e Geoinformática
(Geodesia)
2006

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso i
Resumo
O método de posicionamento em modo de Base – RTK (Real Time Kinematic),
constitui a forma tradicional de adquirir informação geo-referenciada, necessária aos diversos
processos de produção de Cartografia, assim como em determinados trabalhos de Topografia.
No entanto, há um conjunto de limitações que dificultam a sua aplicação.
Esta dissertação tem como tema principal a implementação de uma rede de estações de
referência GPS (Global Positioning System) para posicionamento em tempo real, de modo a
fornecer em tempo real correcções diferenciais, que permitem a qualquer utilizador a
obtenção das coordenadas precisas de um ponto no terreno, aumentando a sua produtividade e
diminuindo os custos dos trabalhos de campo.
É feita uma análise dos conceitos base-RTK e rede-RTK e das metodologias utilizadas
na geração de correcções diferenciais, quer através da Estação de Referência Virtual (VRS –
Virtual Reference Station), Parâmetros de Correcção de Área (FKP – Flächen-korrektur-
parameter) ou do conceito Principal – Auxiliar (MAX – Master Auxiliary).
Descrevem-se algumas das redes de estações de referência existentes na Europa e em
Portugal, de modo a reforçar a forma como a rede apresentada nesta dissertação foi concebida
e implementada.
Além da metodologia adoptada, são referidas as componentes principais da rede em
causa, as problemáticas associadas à implementação das estações de referência GPS, da
arquitectura da rede e do sistema de coordenadas implementado. É feito um ponto de situação
da implementação da rede já efectuada, com indicação do planeamento para os próximos
anos.
Os dados disponibilizados visam abranger as necessidades de qualquer utilizador, quer
em RTK quer em pós-processamento e simultaneamente, utilizar os seus equipamentos GNSS
independentemente das marcas existentes no mercado nacional.
Apresentam-se um conjunto de ocorrências surgidas durante o funcionamento da rede
em causa, assim como os resultados do controlo de qualidade posicional efectuado e dos
inquéritos realizados aos utilizadores mais assíduos.
Por fim, é feita uma síntese conclusiva com os trabalhos que no futuro poderão ser
desenvolvidos.
Palavras-chave: GNSS, RTK, Rede de Estações de Referência

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso ii
Abstract
The single base station RTK (Real Team Kinematic) method of positioning represents the traditional mode of acquiring geo-referenced information used in several processes of cartographic production, as well as in certain types of surveying work. However there are some limitations that restrict its use.
The main topic of this dissertation is the implementation of a network of GPS (Global Positioning System) reference stations for real time positioning, in order to provide almost real time differential corrections that will allow any user to obtain precise coordinates of a given point, increasing its productivity and decreasing the costs of field work.
In this dissertation, the concepts of single base station RTK and network RTK are discussed, the methodologies of generating differential corrections, namely the concepts of Virtual Reference Station (VRS), Area Parameters of Correction (FKP - Flächenkorrekturparameter) and Master - Auxiliary are described.
Some networks of reference stations in Europe and in Portugal are described, in order to reinforce how the design of the network presented in this dissertation was conceived and implemented. The main components of the given network, the problems associated with the implementation to the GPS reference stations, the network configuration and architecture, the choice of the reference frame and the services provided to the user are issues discussed in the dissertation.
The data made available aims to encompass the needs of any user, whether in RTK or in post-processing and, simultaneously to allow the user to make the most of their GNSS equipment, regardless of the commercial brands existing in the market.
A set of occurrences, arisen during the operation of the given network, are presented along with the results of the performed positional quality control and of a survey answered by the most frequent users.
Finally some concluding remarks and some indications of future work are made.
Keywords: GNSS, RTK, Network Reference Stations
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso iii
Agradecimentos
Os meus agradecimentos vão para todos os que trabalharam directa ou indirectamente
neste projecto da minha dissertação, cuja ideia começou há cerca de 4 anos atrás, não
deixando contudo de salientar aqueles me acompanharam desde a primeira hora.
Ao Coronel de Artilharia Engenheiro Informático José Rossa, porque foi o único
elemento do Estado Maior do IGeoE a acreditar desde o primeiro momento no projecto
SERVIR e que sempre se empenhou para que este projecto tivesse sucesso, com um
extraordinário interesse e dedicação que todos lhe reconhecem;
Ao meu orientador Sr. Professor Doutor Virgílio Mendes pela incansável colaboração,
permanente disponibilidade e orientação científica que muito me ajudaram, quer na
elaboração da dissertação, quer no apoio ao projecto SERVIR;
Ao Sr. Professor Doutor João Catalão Fernandes pelo incentivo e apoio para que
fizesse o mestrado, incentivo esse, sem o qual não estaria a apresentar este trabalho;
Ao Sr. Engenheiro Carvalho Viera pela “Qualidade” dos seus conselhos, incentivo e
ao Gabinete de Qualidade e Ambiente pelo permanente apoio nas horas mais difíceis das
certificações do IGeoE, durante as quais decorria a parte curricular;
Ao Departamento de Aquisição de Dados, nomeadamente os Chefes de Secção e seus
Adjuntos que em conjunto facilitaram o meu trabalho e me permitiram orientar os esforços
durante a realização deste mestrado;
No entanto, o maior sacrifício foi para a minha Família ... privando-os de horas e dias
de convívio e alegria, sobrecarregando-os com tarefas que deixei de fazer, mesmo nas horas
mais difíceis. Infelizmente meu pai partiu ... mas sem o Seu apoio e o da Família não teria
chegado ao fim.
Terminado este objectivo pretendo recompensar o Henrique e a Inês pela compreensão
e apoio que me deram, procurando redimir a minha ausência devido ao trabalho prolongado e
para que nunca mais me perguntem: ”Pai ... vens cedo?”.
O agradecimento especial vai para a minha mulher Lina ... que nunca regateou
esforços e se desdobrou em tarefas para que eu pudesse ter o tempo todo para me dedicar a
este projecto.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso iv
Índice Introdução...........................................................................................................................1
1.1. Sistema de Posicionamento Global ................................................................................2 1.2. Motivação .......................................................................................................................4 1.3. Contribuição da dissertação............................................................................................8 1.4. Estrutura da dissertação..................................................................................................9
Redes RTK .......................................................................................................................10 2.1. Arquitectura de uma rede-RTK ....................................................................................10 2.2. Correcções RTK ...........................................................................................................12
2 1 Estação de referência virtual (VRS) .........................................................................12 2 2 Parâmetros de correcção de área (FKP) ...................................................................15 2 3 Conceito principal-auxiliar (MAC) ..........................................................................16
2.3. Redes RTK operacionais ..............................................................................................19 3 1 Espanha.....................................................................................................................19 3 2 Dinamarca.................................................................................................................24 3 3 Suiça .........................................................................................................................24
2.4. Redes de estações permanentes em Portugal................................................................28 4 1 ReNEP / GPS............................................................................................................28 4 2 Rede Diferencial GPS (DGPS) da Marinha Portuguesa...........................................32
Projecto SERVIR..............................................................................................................37 3.1. Introdução.....................................................................................................................37 3.2. Planeamento estratégico do projecto SERVIR.............................................................40 3.3. Arquitectura da rede SERVIR ......................................................................................48 3.4. Instalação das estações de referência............................................................................51 3.5. Serviços SERVIR .........................................................................................................57 3.6. Vantagens e limitações do SERVIR.............................................................................59 3.7. Referencial do SERVIR ...............................................................................................60 3.8. Treino dos colaboradores .............................................................................................66
Controlo de Qualidade do projecto SERVIR ...................................................................71 4.1. Fiabilidade ....................................................................................................................71 4.2. Repetibilidade das coordenadas ...................................................................................75 4.3. Controlo de qualidade posicional .................................................................................77 4.4. Satisfação dos utilizadores ...........................................................................................82
Conclusão .........................................................................................................................85 Referências ...............................................................................................................................88 Anexos ......................................................................................................................................92
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso v
Lista de Tabelas Tabela 1 - Formatos de mensagens. .........................................................................................13 Tabela 2 - Fases do projecto ReNEP. .......................................................................................30 Tabela 3 - Características das estações DGPS da Marinha Portuguesa. ..................................33 Tabela 4 - Tempos de Transmissão da rede de dados do Exército...........................................44 Tabela 5 - Estações de referência no referencial ITRF2000, época 1997.0. ............................62 Tabela 6 - Estações de referência no referencial ETRF2000, época 1989.0. ..........................62 Tabela 7 - Estações de referência da ReNEP em ETRS89.......................................................63 Tabela 8 - Estações SERVIR em ETRF2000 época de observação 2006,83. ..........................64 Tabela 9 - Estações EUREF em ETRF2000 época de observação 2006,7...............................65 Tabela 10 - Comparação entre EUREF e SERVIR (EUREF - SERVIR). ...............................65 Tabela 11 - Comparação entre IGP e SERVIR (IGP - SERVIR).............................................65 Tabela 12 - Fiabilidade da rede SERVIR .................................................................................72 Tabela 13 - Vértices geodésicos e a distância à base de referência..........................................79 Tabela 14 - Coordenadas dos vértices geodésicos em ITRF 2000 época 2006,16...................79 Tabela 15 - Coordenadas obtidas através da rede SERVIR. ....................................................80 Tabela 16 - Diferença de coordenadas entre a rede SERVIR e os vértices geodésicos ...........80

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso vi
Lista de Figuras
Figura 1 - Conceito base-RTK. ..................................................................................................5 Figura 2 - Rede estações GPS para RTK....................................................................................7 Figura 3 - Componentes do sistema e fluxo de dados (adaptado de Talbot et al. [2002]). ......10 Figura 4 - Esquema da rede [Landau et al., 2002]....................................................................14 Figura 5 - Envio das correcções [Landau et al., 2002]. ............................................................14 Figura 6 - Interpolação/Extrapolação [Landau et al., 2002].....................................................15 Figura 7 - Planos lineares FKP (adaptado de Higuchi et al. [2004]).......................................16 Figura 8 - Parametrização FKP (adaptado de Wübbena et al. [2001])....................................16 Figura 9 - Geração de correcções MAC [Leica Geosystems, 2006]. .......................................17 Figura 10 - Geração de correcções i-MAC [Leica Geosystems, 2006]....................................19 Figura 11 - Rede CATNET [C.Parareda et al., 2006]. .............................................................20 Figura 12 - Estação CATNET Geodinâmica [C.Parareda et al., 2006]....................................20 Figura 13 - Estação CATNET não geodinâmica [C.Parareda et al., 2006]..............................21 Figura 14 - Modelo standard de uma estação CATNET (adaptado de Trimble [2005b])........21 Figura 15 - Canal Comunicações primário (adaptado de Trimble [2005b]). ...........................22 Figura 16 - Exemplo de um local de instalação [Wirring, 2004]. ............................................24 Figura 17 - Rede AGNES [Swisstopo, 2006a]. ........................................................................25 Figura 18 - Optimização das estações de referência da rede AGNES [Swisstopo, 2006a]......26 Figura 19 - ReNEP / GPS [IGP, s.d.]. ......................................................................................29 Figura 20 - Rede de estações de referência ReNEP [IGP, 2006]. ............................................31 Figura 21 - Planeamento das actividades da ReNEP [IGP, 2006]. ..........................................32 Figura 22 - Actividades da ReNEP [IGP, 2006]. .....................................................................32 Figura 23 - Diagrama cobertura DGPS [Monteiro, 2002]........................................................33 Figura 24 - Estação de Cabo Carvoeiro [Monteiro, 2002]. ......................................................34 Figura 25 - Estação de Sagres [Monteiro, 2002]. .....................................................................35 Figura 26 - Ponto fotogramétrico. ............................................................................................38 Figura 27 - Controlo de qualidade posicional. .........................................................................38 Figura 28 – “Smartstation”. ......................................................................................................39 Figura 29 - Sistema para Orientação e Avaliação da Exactidão Posicional [Afonso et al.,
2004b].....................................................................................................................39 Figura 30 - Ciclo de Deming. ...................................................................................................40 Figura 31 - Fluxograma para implementar o projecto SERVIR...............................................42 Figura 32 - Fase I do projecto SERVIR. ..................................................................................47 Figura 33 - Fase II e III do projecto SERVIR ..........................................................................48 Figura 34 - Arquitectura rede SERVIR. ...................................................................................49 Figura 35 - Arquitectura da estação de referência GPS SERVIR Fase I..................................51 Figura 36 - Suporte de antena geodésica GNSS para parede. ..................................................52 Figura 37 - Suporte de antena geodésica GNSS para placa. ....................................................53 Figura 38 - Suporte de antena geodésica GNSS para superfície mista. ...................................53 Figura 39 - Suporte de antena geodésica GNSS em aço inoxidável e cabos com esticadores. 54 Figura 40 - Bucha química e seus componentes.......................................................................54 Figura 41 - Relação entre direcções de referência [Alves e Cruz, 1984]. ................................55 Figura 42 - Gráfico da declinação magnética...........................................................................56 Figura 43 - Bússola de reconhecimento. ..................................................................................57 Figura 44 - Rede SERVIR – DGPS..........................................................................................58 Figura 45 - Rede SERVIR – RTK. ...........................................................................................58 Figura 46 - Rede SERVIR – Loja RINEX. ..............................................................................59 Figura 47 - Rede SERVIR permite o treino e formação das suas equipas de topografia.........69

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso vii
Figura 48 - Equipamentos de geração menos recente. .............................................................70 Figura 49 - Latência dos pacotes de observações GNSS no centro de cálculo. .......................72 Figura 50 - Estações IGP e EBRE [Fernandes, 2006]..............................................................75 Figura 51 - Estações da rede SERVIR [Fernandes, 2006]. ......................................................76 Figura 52 - Distribuição espacial dos vértices geodésicos. ......................................................79 Figura 53 - Área útil de trabalho da rede SERVIR...................................................................81 Figura 54 - Resultados dos inquéritos aos utilizadores da rede SERVIR. ...............................83 Figura 55 - Planeamento da rede SERVIR...............................................................................84
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso viii
Lista de símbolos e/ou abreviaturas ADSL Asymmetric Digital Subscriber Line AdV Arbeitsgemeinschaft der Deutchen Vermessungsverwaltungen –
(German State Survey Authorities) AGNES Automated GPS Network Switzerland ARP Antenna Reference Point BKG Bundesamt für Kartographie und Geodäsie C/A Coarse Acquisition CATNET CATalunya NETwork CMR Compact Measurement Record CMR+ Compact Measurement Record Plus CORS Continuously Operating Reference Sations 3D Três Dimensões DGPS Differential GPS DoD Department of Defense DST Direcção dos Serviços de Transmissões EGNOS European Geostationary Navigation Overlay Service ETRS89 European Terrestrial Reference Frame 1989 EUA Estados Unidos da América EUREF European Reference Frame FKP Flächenkorrekturparameter FTP File Transfer Protocol GLONASS GLObal´naya NAvigatsionnaya Sputnikovaya Sistema GGA Registo NMEA – GPS Fix Data GGK Registo NMEA – Time, Position, Position Type, and DOP GPRS General Packet Radio Service GPS Global Positioning System GSM Global System for Mobile communications http Hypertext Transfer Protocol ICC Instituto Cartográfico da Catalunha IGeoE Instituto Geográfico do Exército IGP Instituto Geográfico Português IGS International GNSS Service IH Instituto Hidrográfico i-MAC Individualized Master-Auxiliary IP Internet Protocol IPCC Instituto Português de Cartografia e Cadastro IPQ Instituto Português da Qualidade ITRF International Terrestrial Reference Frame MAC Master-Auxiliary Concept NAVSTAR NAVigation System with Timing and Ranging NMEA National Maritime Electonics Association NTRIP Networked Transport of RTCM via Internet Protocol P Precise / Protected PF Ponto Fotogramétrico POC Point Of Contact PRN Pseudo Random Noise PVC Polyvinylchloride ReNEP / GPS Rede Nacional de Estações Permanentes / GPS

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso ix
RDS Radio Data System RINEX Receiver International Exchange Format RTC Rede Telefónica Comutada RTCM-SC104 The Radio Technical Commission for Maritime Services – Special
Committee No. 104 RTK Real Time Kinematic RTms Regimento de Transmissões SAPOS SAtellite POsitioning Service SBS Single Base Station SGSis Secção de Gestão do Sistema SICOM Sistema Integrado de COmunicações Militares SPGIC Sistema de Posicionamento Geodésico Integrado de Catalunha TCP Transmission Control Protocol UPS Uninterruptible Power Supply UTC Universal Time Coordinated VG Vértice Geodésico VRS Virtual Reference Station VSAT Very Small Aperture Terminal WWW World Wide Web
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 1
1. Introdução
As técnicas de Geodesia têm como finalidade determinar matematicamente a forma e
dimensões da Terra, de modo a poder representar cartograficamente a superfície terrestre com
a maior precisão geométrica e posicional possível.
Com o aparecimento da Geodesia Espacial houve um notório desenvolvimento nas
metodologias de trabalho, das quais se identificam três vantagens essenciais:
• a obtenção de coordenadas precisas de pontos de difícil acesso, sem
intervisibilidade com pontos conhecidos, como acontecia na Topografia clássica,
independentemente das condições atmosféricas, incluindo à noite;
• a facilidade de utilização e a massificação de equipamentos GPS, quer de
posicionamento, quer de navegação, sem necessidade de conhecimentos técnicos
em Topografia e Geodesia;
• a possibilidade de posicionamento em tempo real, sem necessidade de efectuar
cálculos topográficos.
De notar, no entanto, que isto também pode ser visto como uma limitação, porque
se passa a fazer sem se saber o que se está a fazer. Desta forma, corre-se o risco de
que os conhecimentos da Topografia clássica se vão perdendo aos poucos. Apesar
disso, dada a fiabilidade dos sistemas no cômputo geral, podemos considerar que é
uma mais valia na realização dos trabalhos de campo hoje em dia.
Sensivelmente a partir dos anos 1970, tanto os Estados Unidos como a Ex-União
Soviética desenharam e implementaram os respectivos sistemas globais de navegação por
satélite, denominados GPS (Global Positioning System) e GLONASS (GLObal´naya
NAvigatsionnaya Sputnikovaya Sistema), respectivamente. Ambos os sistemas foram
inicialmente concebidos para uso militar.
A partir do ano 2000, e com a entrada prevista em funcionamento de projectos
europeus como o EGNOS (European Geostationary Navigation Overlay Service) e o
GALILEO, conjugado com a introdução de novos códigos e nova frequência no GPS, tem-se
assistido a uma evolução tão rápida que o próprio IGS – International GPS Service alterou a
sua designação e passou a ser IGS – International GNSS Service, em que GNSS significa
Global Navigation Satellite System. Quanto aos principais construtores de equipamentos e

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 2
criadores de software nesta área, têm desenvolvido novos receptores, antenas e software, de
modo a integrarem toda a nova panóplia de sinais das redes espaciais.
1.1. Sistema de Posicionamento Global
De momento, o GPS é o sistema de posicionamento mais conhecido e é utilizado pelo
Instituto Geográfico do Exército (IGeoE) na aquisição de informação geo-referenciada.
Também designado pelo acrónimo de NAVSTAR (NAVigation System with Timing And
Ranging), foi concebido e desenvolvido pelo Departamento de Defesa (DoD) dos EUA e veio
substituir o sistema TRANSIT, também conhecido pela acrónimo NNSS (Navy Navigation
Satellite System), iniciado em 1958 e que tinha sido patrocinado pela Marinha dos EUA.
O GPS tem como objectivo dar informação de precisão sobre posição, velocidade e
tempo, de forma global e contínua, em quaisquer condições atmosféricas.
O GPS é composto por 3 segmentos: segmento espacial, segmento de controlo e
segmento do utilizador.
O segmento espacial é constituído por 24 satélites, distribuídos em 6 planos orbitais,
separados entre si 60º em longitude e com inclinações próximas dos 55º em relação ao
Equador. Os satélites descrevem órbitas aproximadamente circulares, com semi-eixo maior de
cerca de 26500 km, ou seja, com uma altitude aproximada de 20200 km acima da superfície
terrestre. As órbitas têm um período de 11h 58 m UTC (Universal Time Coordinated), o que
implica que a mesma constelação de satélites observada num local, apareça no dia a seguir 4
minutos mais cedo.
Esta informação é depois introduzida nos satélites, de modo a serem radiodifundidas.
O segmento de controlo é constituído por uma estação de controlo principal e 5 estações de
monitorização, 3 das quais comunicam com os satélites. As estações monitoras fazem o
rastreio dos satélites e enviam os dados obtidos para a estação de controlo principal. A estação
de controlo principal faz o processamento dos dados, calcula parâmetros ionosféricos, os erros
dos relógios e as órbitas dos satélites, entre outros.
O segmento do utilizador é constituído pelos receptores, antenas GPS e software que
permitem receber os sinais GPS, descodificando-os e processando-os, para calcular a posição,
velocidade e tempo do utilizador.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 3
Para comunicar com os utilizadores são actualmente emitidas duas ondas portadoras
derivadas da frequência fundamental de 10,23 MHz: L1, de frequência 1575,42 MHz, e L2, de
frequência 1227,60 MHz [Mendes, 2005].
O sinal GPS é constituído por ondas portadoras, códigos PRN e mensagens de
navegação, que são modulados nessas portadoras.
A comunidade científica foi desenvolvendo metodologias, quer ao nível da
observação, quer ao nível do processamento, no âmbito das aplicações à Geodesia e à
Geodinâmica, que tornaram possível alcançar uma exactidão e precisão posicionais ao nível
milimétrico. Entre esses desenvolvimentos estão a medição da fase da onda portadora e o seu
uso como observável, o uso de órbitas pós-processadas (geralmente conhecidas como órbitas
de precisão), a combinação de observáveis, por forma a eliminar erros que estas
individualmente contêm, o uso de métodos diferenciados em pós-processamento e a correcta
modelação e estimação dos erros causados pela atmosfera.
Grande parte desses desenvolvimentos foram sendo incorporadas, quer nos receptores
e antenas GPS comerciais, quer nas aplicações comerciais. Deste modo, é hoje possível, com
estes aparelhos e aplicações, obter num referencial global, uma exactidão posicional na ordem
de alguns centímetros, se forem usados métodos de operação e processamento adequados.
Quando realizadas medições de fase, o GPS é usado como uma técnica
interferométrica, o que significa que as coordenadas de uma estação são estimadas
diferencialmente, isto é, são relativas a uma estação de referência. Isso implica que as
coordenadas de pelo menos uma estação devem ser conhecidas, com grande precisão, num
dado referencial, de modo a permitir obter coordenadas para outras estações nesse mesmo
referencial. Dado que os sistemas de referência têm sete graus de liberdade (três translações,
três rotações e um factor de escala) é preferível contudo ter, pelo menos, três estações com
coordenadas conhecidas a priori. Usualmente, estas estações são fixadas ou, pelo menos,
bastante constrangidas, no processo de ajustamento de observações.
Normalmente os métodos de posicionamento de navegação utilizam a onda portadora
L1 e, portanto, o código. Os métodos de posicionamento para Topografia e Geodesia utilizam
a onda portadora L1 e a L2, devido ao aumento da precisão requerida.
Em qualquer dos casos, o modo absoluto ou do ponto isolado, significa apenas que um
receptor recebe sinais GNSS, o qual através dos algoritmos que tem incorporados, fornece as
coordenadas do ponto desejado.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 4
O modo diferencial implica a utilização de pelo menos 2 receptores, um colocado num
ponto de coordenadas conhecido e outro móvel.
As diversas técnicas de posicionamento em tempo real1 também utilizam um receptor
a funcionar como referência num ponto de coordenadas conhecido (receptor base) e outro que
se vai deslocando de ponto para ponto (receptor móvel ou rover), mas também de uma ligação
adequada (rádio ou telemóvel) para transmitir correcções da base para o móvel. Consoante
estas correcções são aplicadas às pseudo-distâncias ou à fase, as técnicas denominam-se GPS
Diferencial (DGPS – Differential GPS) e Cinemático em Tempo Real (RTK – Real-Time
Kinematic), respectivamente. A técnica DGPS proporciona exactidões de cerca de 1 m,
enquanto que a técnica RTK conduz a um aumento substancial da exactidão posicional, para
valores da ordem de 1 cm a 2 cm.
1.2. Motivação
A metodologia associada ao RTK baseia-se no princípio de que os erros que afectam o
cálculo da posição absoluta no GPS são aproximadamente iguais numa determinada área
geográfica em que se esteja a trabalhar. Esses erros resultam dos efeitos da ionosfera,
troposfera, órbitas dos satélites GPS, osciladores dos satélites e dos receptores e multitrajecto,
entre outros. Sob estas condições, em Portugal Continental, as coordenadas obtidas pelos
receptores GPS em modo absoluto, variam entre 1 m e 10 m, consoante a geometria dos
satélites disponíveis no momento da aquisição dos dados. Para podermos trabalhar com
precisão centimétrica ou superior, existem duas hipóteses: ou se efectua o pós-processamento
das observações GPS – utilizando software próprio e, de preferência, órbitas precisas dos
satélites (disponíveis sensivelmente após 15 dias do registo das observações), o que para a
grande maioria dos utilizadores é muito tempo e implica conhecimentos acrescidos – ou se
utiliza a técnica de posicionamento RTK.
1 No decorrer da dissertação, de forma abusiva, será utilizado o termo real, em vez de
quase-real. A denominação correcta seria quase-real, devido ao facto de se registarem
fracções de segundos até ao cálculo da posição, que correspondem ao tempo de cálculo das
correcções diferenciais efectuadas pelo receptor base ou por um centro de cálculo de uma rede
de estações de referência GNSS, o envio dessas correcções diferenciais pelos meios de
comunicação envolvidos até ao receptor móvel e o tempo de cálculo da posição.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 5
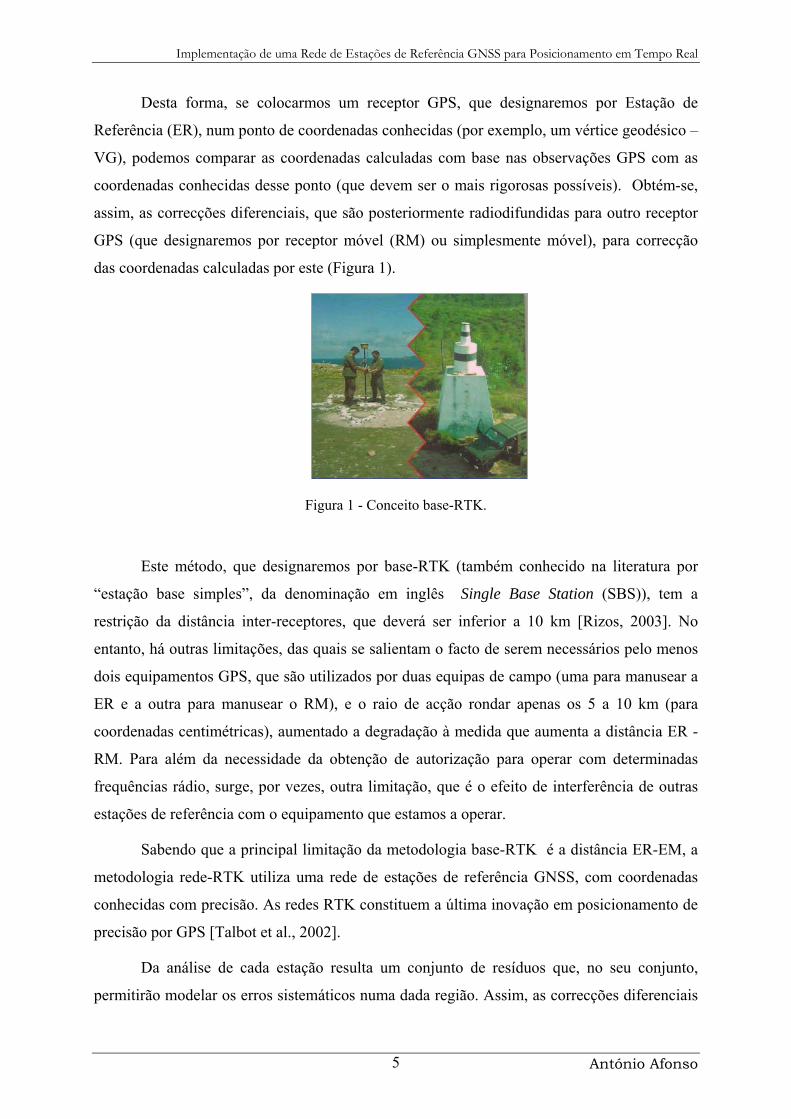
Desta forma, se colocarmos um receptor GPS, que designaremos por Estação de
Referência (ER), num ponto de coordenadas conhecidas (por exemplo, um vértice geodésico –
VG), podemos comparar as coordenadas calculadas com base nas observações GPS com as
coordenadas conhecidas desse ponto (que devem ser o mais rigorosas possíveis). Obtém-se,
assim, as correcções diferenciais, que são posteriormente radiodifundidas para outro receptor
GPS (que designaremos por receptor móvel (RM) ou simplesmente móvel), para correcção
das coordenadas calculadas por este (Figura 1).
Figura 1 - Conceito base-RTK.
Este método, que designaremos por base-RTK (também conhecido na literatura por
“estação base simples”, da denominação em inglês Single Base Station (SBS)), tem a
restrição da distância inter-receptores, que deverá ser inferior a 10 km [Rizos, 2003]. No
entanto, há outras limitações, das quais se salientam o facto de serem necessários pelo menos
dois equipamentos GPS, que são utilizados por duas equipas de campo (uma para manusear a
ER e a outra para manusear o RM), e o raio de acção rondar apenas os 5 a 10 km (para
coordenadas centimétricas), aumentado a degradação à medida que aumenta a distância ER -
RM. Para além da necessidade da obtenção de autorização para operar com determinadas
frequências rádio, surge, por vezes, outra limitação, que é o efeito de interferência de outras
estações de referência com o equipamento que estamos a operar.
Sabendo que a principal limitação da metodologia base-RTK é a distância ER-EM, a
metodologia rede-RTK utiliza uma rede de estações de referência GNSS, com coordenadas
conhecidas com precisão. As redes RTK constituem a última inovação em posicionamento de
precisão por GPS [Talbot et al., 2002].
Da análise de cada estação resulta um conjunto de resíduos que, no seu conjunto,
permitirão modelar os erros sistemáticos numa dada região. Assim, as correcções diferenciais

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 6
para os receptores a operarem nessa área terão uma influência reduzida desses mesmos erros,
ao mesmo tempo que se aumenta a área de actuação de um receptor móvel e se reduzem os
tempos de inicialização desses mesmos receptores.
O objectivo principal desta dissertação é a descrição dos antecedentes que levaram ao
desenho de uma rede de estações de referência RTK, da sua implementação e, finalmente, da
análise de testes efectuados à referida rede.
A ideia do projecto SERVIR (Sistema de Estações de Referência GPS VIRtuais),
surgiu devido ao esforço, quer em meios humanos, materiais e logísticos, quer nas
dificuldades encontradas na realização do apoio topográfico e respectivo tempo consumido,
por parte das equipas topográficas do Instituto Geográfico do Exército (IGeoE) com a
tradicional metodologia RTK [Afonso et al., 2004a].
Este projecto, liderado pelo Instituto Geográfico do Exército, visa implementar, em
três fases distintas, uma rede de estações de referência GNSS cobrindo a maior parte possível
de Portugal Continental, de forma a obter correcções diferencias para RTK nessas áreas
abrangidas. O objectivo é aumentar a produtividade de aquisição de informação geo-
referenciada visando actualizar a Cartografia Militar de forma mais rápida e precisa.
No entanto, o estudo desta dissertação abrange apenas a primeira fase do referido
projecto (Figura 2), não só por questões temporais, uma vez que o projecto no seu todo se
estende até 2011, mas principalmente porque visa realizar todos os estudos e implementar a
metodologia a ser utilizada nas fases subsequentes.
A outra motivação é a de poder estudar toda a problemática envolvida na
implementação destes sistemas, que pode constituir uma base de partida para outras entidades
que pretendam implementar sistemas deste género, dirimindo assim algumas das dificuldades
sentidas desde o início.
Uma rede RTK deste tipo irá contribuir para o aumento da produtividade não só do
IGeoE, mas também a nível Nacional, nomeadamente na celeridade da realização dos apoios
topográficos.
Por último, e não menos importante, contribuir para o desenvolvimento tecnológico do
País, ao implementar a primeira rede de estações de referência GNSS para RTK em Portugal,
tirando partido das mais valias que o Instituto Geográfico do Exército, em particular, e o
Exército, em geral, dispõem.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 7
Figura 2 - Rede estações GPS para RTK.
A implementação de uma rede RTK em Portugal constitui um percurso semelhante ao
adoptado noutros países, a nível mundial, que têm vindo a implementar redes de estações de
referência GPS para RTK [Trimble, 2006; Geo++, 2006].
De particular importância são as redes de Espanha, uma vez que podem ser integradas
com as redes RTK em Portugal e contribuir, desta forma, uma política de informação
geográfica comum. Várias regiões de Espanha, tais como a Catalunha, o País Basco, a
Comunidade de Valência, ou a de Andaluzia manifestaram interesse em instalar redes GPS
para RTK. No entanto, o pioneiro em promover e instalar redes com estas características foi a
Catalunha, com a rede CATNET (CATalunya NETwork), a qual está operacional desde
Janeiro de 2006.
A Dinamarca foi um dos primeiros países europeus a implementar uma rede deste
género. Os comprimentos entre estações desta rede RTK são da ordem dos 70 km - 75 km.
A Suíça, outro dos países europeus cuja rede de estações de referência tem uma
dimensão idêntica (em número de estações) à que se pretende instalar em Portugal, através da
rede AGNES [Swisstopo, 2006a] (Automated GPS Network Switzerland), sendo a Swisstopo a
entidade responsável [Swisstopo, 2006b].
A arquitectura e os serviços associados a estas redes serão analisados no Capítulo 2.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 8
1.3. Contribuição da dissertação
Esta dissertação visa contribuir com os conhecimentos e requisitos necessários à
implementação de uma rede de estações de referência GPS para RTK, na região da Grande
Lisboa, que corresponde à primeira fase de um projecto inovador em Portugal.
A rede de estações de referência a implementar constitui um sistema com três
componentes principais: a localização e implementação das estações de referência GPS no
terreno, as comunicações e o centro de controlo.
Quanto à contribuição da dissertação para a primeira componente, nesta dissertação
são abordados aspectos que abrangem áreas tão díspares como a escolha e características dos
locais a colocar as antenas dos receptores GPS, a escolha dos equipamentos GPS, o cálculo
das coordenadas a atribuir às estações de referência e o controlo de qualidade posicional da
rede em funcionamento, até à elaboração da documentação a disponibilizar aos utilizadores
desta rede.
Quanto às comunicações, estas dividem-se em duas grandes áreas: as comunicações
internas e as externas.
Entende-se por comunicações internas as que ocorrem no interior da rede de estações
de referência GPS. No âmbito da rede em análise, as comunicações internas englobam a rede
de dados do Exército e a rede de dados do IGeoE, por onde são transmitidas as observações
GPS registadas nas estações GPS, necessárias ao processamento pelo software do Centro de
Cálculo. A rede de dados do Exército é mantida e operada pela Direcção dos Serviços de
Transmissões (DST) e pelo Regimento de Transmissões (RTms), que são as entidades
responsáveis pelo estabelecimento das comunicações no Exército. A rede de dados do IGeoE
é da responsabilidade da Secção de Gestão do Sistema (SGSis) deste Instituto.
As comunicações externas são as comunicações a partir do Centro de Cálculo com o
exterior. Estas comunicações incluem a rede de telecomunicações das diversas operadoras
nacionais, por onde os utilizadores receberão os dados disponibilizados por esta rede. Por
estas razões, esta dissertação não poderá contribuir nesta área do conhecimento.
Quanto ao centro de controlo, apesar de basear em software já existente no mercado,
testado e implementado em diversas redes do género, esta dissertação irá contribuir para o
estudo da arquitectura da rede a implementar, tendo sempre presente os meios de
comunicações existentes e a expansão desta rede para uma cobertura a nível nacional,
potenciando as diversas áreas desta rede e na adaptação à realidade e aos meios
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 9
disponibilizados, quer pelo IGeoE quer pelo Exército, que, como se sabe, dispõem de verbas
limitadas e que não permitem implementar um sistema de raiz e tido como ideal.
Outra contribuição por parte desta dissertação é a de idealizar, planear, executar e
analisar os resultados de um conjunto de testes de campo, no interior e no exterior da área de
cobertura da rede implementada, de forma a poder efectuar um controlo de qualidade
posicional independente da rede em causa, assim como poder disponibilizar informação aos
diversos utilizadores.
1.4. Estrutura da dissertação
Esta dissertação está estruturada em 5 capítulos. Este capítulo faz uma breve
introdução ao tema, focando de forma sintetizada o Sistema de Posicionamento Global e os
conceitos que envolvem o posicionamento em tempo real. É descrita a motivação para a
realização desta dissertação e a contribuição para o conhecimento científico.
O Capítulo II (Redes RTK) aborda a arquitectura e constituição padrão de redes RTK,
as metodologias para a geração de correcções RTK e uma análise a algumas redes RTK
operacionais na Europa. É também descrita, de um modo particular, a situação das redes de
estações permanentes GPS existentes em Portugal.
O Capítulo III (Projecto SERVIR) apresenta os motivos para a implementação da rede
SERVIR, a metodologia adoptada e a arquitectura e constituição quer das estações de
referência quer o centro de vigilância e controlo da rede SERVIR. É igualmente abordada a
questão do referencial a adoptar, assim como a formação dos elementos responsáveis pela
manutenção do sistema.
O Capítulo IV (Controlo de Qualidade do projecto SERVIR) aborda o controlo de
qualidade da rede RTK implementada. Faz-se uma analogia dos requisitos identificados e
associados ao controlo de qualidade, dos testes e inquéritos efectuados, dos resultados obtidos
e da respectiva análise, focando as oportunidades de melhoria.
O Capítulo V (Conclusões) faz-se uma síntese conclusiva desta dissertação e indica
possíveis futuros trabalhos a desenvolver.
Existe ainda um conjunto de outros documentos anexos a esta dissertação, que contêm
não só os dados que suportam igualmente os estudos apresentados, mas também outros
documentos considerados relevantes e igualmente utilizados durante os trabalhos de campo
que se realizaram.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 10
2. Redes RTK
Neste capítulo é feita uma descrição da arquitectura tipo de uma rede RTK e da forma
de gerar as correcções diferenciais. São identificadas algumas redes RTK operacionais
existentes em alguns países europeus e é analisada a situação das redes de estações
permanentes GPS existentes em Portugal.
2.1. Arquitectura de uma rede-RTK
De uma forma sumária, a arquitectura de uma rede-RTK (Figura 3) compreende um
conjunto de estações de referência GNSS, um centro de controlo e um ou mais sistemas de
comunicações, que permita receber dados GNSS das estações de referência e comunicar com
os utilizadores, enviando-lhes as correcções pretendidas.
Figura 3 - Componentes do sistema e fluxo de dados (adaptado de Talbot et al. [2002]).
Cada estação de referência está equipada com um receptor, antena, fonte de energia e
um modem para comunicar com o centro de controlo [Landau et al., 2002].
O coração do sistema é o centro de controlo, que permite, entre outras, executar as
seguintes funções:
• monitorizar e receber em tempo real os dados das estações de referência;
• verificar a integridade dos dados recebidos dessas estações;
• calcular os erros atmosféricos e das efemérides ao longo da rede;
• formatar as correcções de modo a serem enviadas pelo sistema de comunicações
existente.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 11
Para que todo o sistema tenha um excelente desempenho, é essencial haver um bom
sistema de comunicações de dados entre as estações de referência GNSS e o centro de
controlo (control server), sendo uma baixa latência da rede um factor essencial para um
rápido fluxo de dados. A latência da rede é a designação utilizada para o atraso de tempo de
transmissão (tempo decorrido entre o envio de um pacote de dados de um dado emissor e o
tempo de recepção num receptor) verificado pelos vários pacotes de dados a um determinado
receptor, após a recepção do primeiro pacote. Denomina-se pacote de dados ao conjunto de
dados ou informação enviados por um emissor.
Para saber qual o tempo máximo admitido para a latência das comunicações, é preciso
ter em linha de conta a programação de transmissão das mensagens. Como exemplo, as
correcções troposféricas para satélites acima de 30º variam menos de 1 cm/minuto. Portanto,
um aspecto importante na transmissão dos dados é a flexibilidade de dividir as correcções por
categorias de taxa de velocidade lenta e rápida. Os parâmetros de correcções geométricas, por
exemplo, só precisam ser enviados cada 10 s a 15 s, enquanto que para correcções de
ionosfera devem ser enviadas cada 1 a 2 s [Talbot et al., 2002].
Por outro lado, o sistema de comunicações que envia as correcções para os diversos
móveis a operar na rede deverá:
• suportar as correcções RTK calculadas pela rede;
• ter cobertura para a região delimitada pelas estações de referência;
• ser compatível com os sistemas de comunicações dos receptores móveis;
• ter custos suportáveis pelos utilizadores.
As várias opções de suporte à transmissão de dados incluem:
• comunicações rádio (via VHF (Very High Frequency) ou UHF (Ultra High
Frequency);
• redes de telemóveis;
• internet sem fios;
• ondas de rádio e televisão.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 12
2.2. Correcções RTK
Para obter as correcções RTK a fornecer aos utilizadores há diferentes conceitos, que
são sintetizados sob o termo FKP (Flächenkorrekturparameter) ou VRS (Virtual Reference
Station) [Wübbena et al., 2005]. Mais recentemente a Leica Geosystems tem vindo a
desenvolver o MAC (Master-Auxiliary Concept).
O envio destas correcções aos utilizadores pode ser feita recorrendo a formatos de
mensagens, quer do tipo proprietário, quer do tipo padrão.
No caso das mensagens com formato padrão, estas obedecem ao formato de
mensagens idealizado pela comissão RTCM-SC104 (The Radio Technical Commission for
Maritime Services - Special Committee No. 104). Esta comissão envolve representantes do
governo americano e das indústrias e tem por missão desenvolver modelos padronizados de
transmissão de dados para técnicas de posicionamento diferencial por satélite. Estas
mensagens são, por isso, vulgarmente denominadas de mensagens RTCM (versões RTCM 2.3
e RTCM 3.0, entre outras).
No caso de serem mensagens proprietárias de um fabricante, utiliza-se essa
nomenclatura. Como exemplo, o fabricante Trimble utiliza CMR ou CMR+ (Compact
Measurement Record Plus). Estes formatos são disponibilizados a outros fabricantes, que os
utilizam nos seus equipamentos.
Consoante o tipo de posicionamento geoespacial e metodologias de cálculo de
correcções, assim teremos diferentes tipos de mensagens para envio dessas mesmas
correcções (Tabela 1) [Landau et al., 2002; Wübbena et al., 2005].
2.2.1. Estação de referência virtual (VRS)
O conceito VRS (Figura 4) é baseado numa rede de estações de referência
permanentes, que estão ligadas entre si e o centro de controlo através de uma infra-estrutura
de comunicações.
O software existente no centro de controlo, ao receber os dados de todas as estações de
referência, vai monitorizá-las, analisando permanentemente as portadoras L1 e L2 no que
respeita a erros de ionosfera e de troposfera, erros das efemérides e ambiguidades para a L1 e
L2. Terminada esta tarefa, o software efectua um cálculo para a área da rede de forma a
eliminar erros sistemáticos [M. Amor e C. Luttenberger, 2004]. Por sua vez, o receptor
móvel, através de uma ligação bidireccional (ex. telemóvel) por GSM (Global System for

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 13
Mobile communications) ou GPRS (General Packet Radio Service), envia a sua posição
aproximada para o centro de controlo, numa mensagem padrão NMEA (The National Marine
Electronics Association) com formato GGA (Registo NMEA – Global Position System Fix
Data), uma vez que é um formato que se encontra disponível na maioria dos receptores GNSS
móveis (Figura 5).
Tabela 1 - Formatos de mensagens.
Método Formato Tipo de mensagem
1 – Correcções DGPS
2 – Correcções Delta DGPS
3 – Parâmetros da Estação Referência DGPS RTCM 2.3
9 – Conjunto de correcções parciais GPS
18 – Dados brutos (pseudo-distância)
19 – Dados brutos (fase)
20 – Correcções diferenciais (pseudo-distância)
21 – Correcções diferenciais (fase)
22 – Parâmetros da estação de referência
23 – Definição do tipo de antena
24 – Parâmetros do ponto de referência da antena (ARP – Antenna Reference Point Parameter)
RTCM 2.3
59 – Correcções FKP2
RTCM 3.0 Correcções de área (ainda em discussão)
CMR Formato proprietário da Trimble
CMR+ Optimização da mensagem CMR, de forma a ser enviada compactada
RTK
CMR2 Correcções GNSS
2 RTCM-59 AdV (Arbeitsgemeinschaft der deutchen Vermessungsverwaltungen) é uma implementação especial do conceito FKP, introduzida pelas autoridades topográficas alemãs [Wübbena et al., 2005].
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
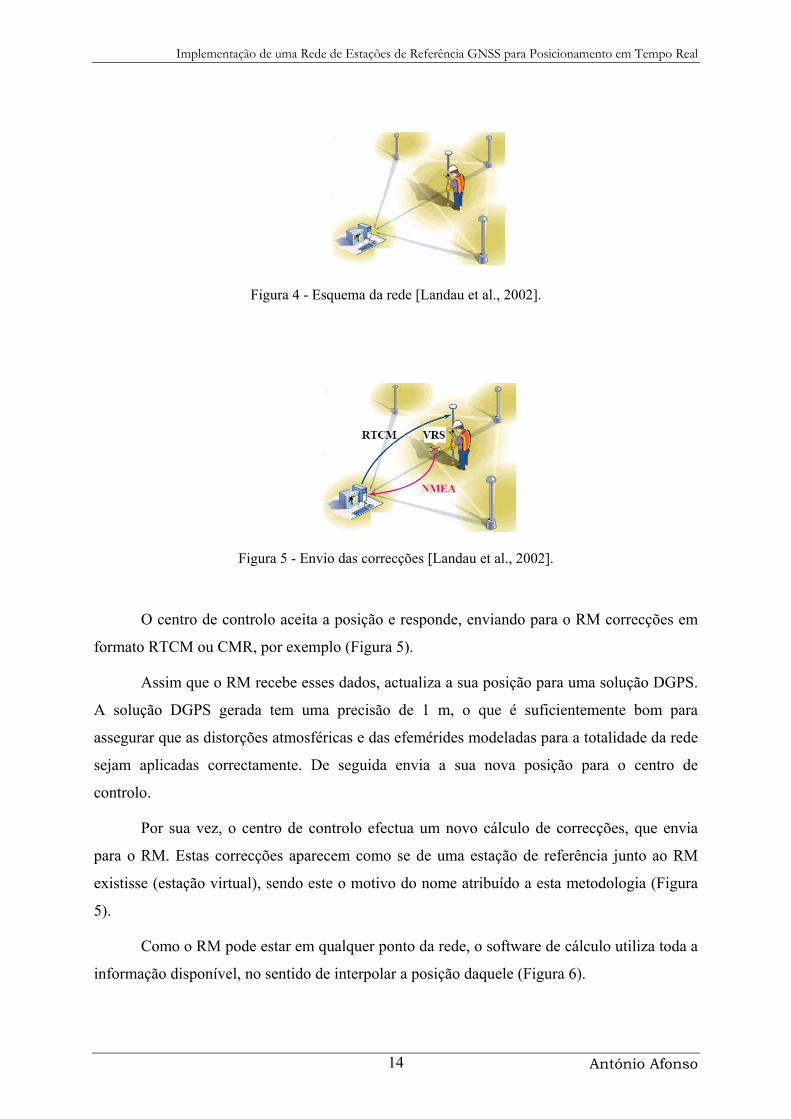
António Afonso 14
Figura 4 - Esquema da rede [Landau et al., 2002].
Figura 5 - Envio das correcções [Landau et al., 2002].
O centro de controlo aceita a posição e responde, enviando para o RM correcções em
formato RTCM ou CMR, por exemplo (Figura 5).
Assim que o RM recebe esses dados, actualiza a sua posição para uma solução DGPS.
A solução DGPS gerada tem uma precisão de 1 m, o que é suficientemente bom para
assegurar que as distorções atmosféricas e das efemérides modeladas para a totalidade da rede
sejam aplicadas correctamente. De seguida envia a sua nova posição para o centro de
controlo.
Por sua vez, o centro de controlo efectua um novo cálculo de correcções, que envia
para o RM. Estas correcções aparecem como se de uma estação de referência junto ao RM
existisse (estação virtual), sendo este o motivo do nome atribuído a esta metodologia (Figura
5).
Como o RM pode estar em qualquer ponto da rede, o software de cálculo utiliza toda a
informação disponível, no sentido de interpolar a posição daquele (Figura 6).

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 15
Figura 6 - Interpolação/Extrapolação [Landau et al., 2002].
Quando é feita a interpolação pelo software de cálculo, é utilizada uma técnica
especial, utilizando uma aproximação linear pesada e um ajustamento por mínimos quadrados,
com base na parte residual dos erros das estações de referência. Esta técnica de interpolação
tanto permite interpolar para um utilizador no interior da rede como extrapolar para outro
utilizador que esteja fora dessa mesma rede (Figura 6).
2.2.2. Parâmetros de correcção de área (FKP)
FKP é o acrónimo de Flächenkorrekturparameter, que significa, em alemão,
parâmetros de correcção de área.
Esta metodologia também se baseia numa rede de estações de referência permanentes,
ligadas entre si através de uma infra-estrutura de comunicações com o centro de controlo. A
diferença relativamente ao conceito anterior é a possibilidade de radiotransmissão de
correcções de rede.
O software de cálculo utiliza uma parametrização polinomial, para descrever a
influência dos erros para qualquer posição do móvel [Wübbena et al., 2001].
A dimensão e a cobertura da rede são suficientes para efectuar uma representação
linear FKP, que é então centrada numa estação de referência, permitindo criar planos de
parâmetros de correcção de área contendo as componentes geométrica e ionosférica (Figura
7).

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 16
Figura 7 - Planos lineares FKP (adaptado de Higuchi et al. [2004]).
Os dados dessa estação de referência e os parâmetros FKP entretanto gerados são
enviados para o RM, que tem incorporado um algoritmo que aplica essas mesmas correcções
FKP, utilizando a sua posição aproximada, o que lhe permite corrigir assim a sua posição
(Figura 8).
Figura 8 - Parametrização FKP (adaptado de Wübbena et al. [2001]).
2.2.3. Conceito principal-auxiliar (MAC)
Antes do desenvolvimento dos estudos para a nova mensagem standard RTCM 3.0, a
qual permite enviar parâmetros de correcções de rede, as metodologias já descritas foram
adoptadas pela comunidade de utilizadores, com as inerentes vantagens e desvantagens. No
entanto, novos desenvolvimentos estão a surgir, como é o caso do conceito principal-auxiliar.
Na génese da abordagem MAC está a redução do volume de dados a enviar para o
receptor GNSS Móvel.
No MAC são enviadas as correcções completas e as coordenadas de uma estação de
referência, designada por estação principal (Master Station). Das outras estações de referência
da rede ou sub-rede, conhecidas por estações auxiliares (Auxiliary Stations), apenas são
enviadas as diferenças de correcções e de coordenadas.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 17
O fluxo de dados para gerar correcções principal-auxiliar (MAC) é o seguinte (Figura
9):
• envio das observações das estações de referência para o centro de cálculo (1);
• processo de estimação da rede, incluindo resolução de ambiguidades, para redução
a um nível comum de ambiguidade;
• recepção da posição NMEA GGA do RM no centro de cálculo (opcional). São
escolhidas as estações de referência mais adequadas em função da localização do
RM (3);
• formação e transmissão das mensagens de rede RTCM 3.0, utilizando as
correcções da estação principal e diferenças de correcções das estações auxiliares
(4);
• cálculo da posição precisa para o RM, utilizando toda a informação da rede (5).
Figura 9 - Geração de correcções MAC [Leica Geosystems, 2006].
O MAC reduz ao mesmo nível de resolução as ambiguidades. Quer isto dizer que o
nível comum de ambiguidades é alcançado quando um número inteiro de ambiguidades para
cada distância calculada pela fase (par satélite-receptor) foi removida ou ajustada, pelo que,
quando se formam as diferenças duplas, o número inteiro de ambiguidades é cancelado.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 18
Assim, o objectivo do software de cálculo da rede é reduzir as ambiguidades das distâncias de
fase de todas as estações de referência a um mesmo nível, isto é, a um nível comum.
Terminada esta tarefa, o software de cálculo calcula os erros dispersivos (dependentes
da frequência), como é o caso da ionosfera, e erros não dispersivos (não dependentes da
frequência), como são o caso dos erros da troposfera e das órbitas dos satélites, para cada par
satélite-receptor e para cada frequência.
Como esta informação diferenciada, calculada entre a estação principal e cada estação
auxiliar é numericamente menor, pode então ser representada numa mensagem com menos
número de bits. Dito de outra forma, o RM vai utilizar a informação de diferença de
correcções para interpolar o erro no local onde se encontra, permitindo assim que o conceito
MAC suporte meios de comunicações unidireccionais.
Mas ainda se pode reduzir a largura de banda para transmissão de correcções de rede
para os receptores, dividindo a mensagem em duas componentes, atendendo aos erros
dispersivos e não dispersivos. Assim, uma vez que os erros não dispersivos (erros orbitais e
troposféricos) têm variações temporais mais pequenas, esta componente não precisa de ser
enviada a uma taxa tão elevada como a componente dispersiva (ionosfera).
Por outro lado, tendo em vista os receptores GNSS móveis, que não suportam
mensagens RTCM 3.0, mas possam receber correcções de rede, via RTCM 2.3, foram
desenvolvidas correcções individualizadas MAC, designadas por i-MAC (individualized
Master-Auxiliary Corrections).
Para gerar este tipo de correcções são necessárias comunicações bidireccionais. É
utilizada uma estação de referência real (a mais perto do receptor móvel), como origem das
correcções de rede, sendo o fluxo de dados para gerar correcções i-MAC o seguinte (Figura
10):
• envio das observações das estações de referência para o centro de cálculo (1);
• processo de estimação da rede, incluindo resolução de ambiguidades a um nível
comum de ambiguidade (2);
• recepção da posição NMEA - GGA do RM no centro de cálculo. São escolhidas as
estações de referência mais adequadas, em função da localização do RM;
• escolha da estação de referência mais próxima do RM como estação principal.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 19
• Cálculo das correcções de rede para o RM aplicadas às observações da estação
principal (4). Formação e transmissão das mensagens de rede RTCM 2.3 ou
formato proprietário (5);
• cálculo da posição precisa para o RM, utilizando toda a informação da rede (6).
Figura 10 - Geração de correcções i-MAC [Leica Geosystems, 2006].
2.3. Redes RTK operacionais
As redes RTK têm surgido um pouco por todo o mundo, sendo difícil quantificar o seu
número. Apresento nesta dissertação alguns casos de estudo (já mencionados de forma breve
no Capítulo 1), referindo aspectos mais específicos da sua arquitectura e serviços.
2.3.1. Espanha
Desde 1991 que o ICC [ICC, 2006] (Instituto Cartográfico da Catalunha) vem
trabalhando no projecto SPGIC (Sistema de Posicionamento Geodésico Integrado de
Catalunha), que estabelecia um conjunto de hardware, software, dados, comunicações, suporte
técnico e normas que permitem o posicionamento sobre o território da Catalunha.
O núcleo do projecto SPGIC, constituído pela rede de estações permanentes GPS que
o ICC implementou, deu origem ao CATNET (Figura 11). A rede foi concebida para oferecer
um serviço público de disponibilização de dados GPS, sendo o próprio ICC o principal
cliente, pelas necessidades de posicionamento cinemático dos seus aviões e orientação dos
sensores aerotransportados.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 20
Figura 11 - Rede CATNET [C.Parareda et al., 2006].
A rede CATNET começou por um triângulo fixado nos três extremos do território
catalão e densificou-se para o interior. Em 1999 completou-se a primeira fase, com 8 estações.
Desde 2000 que se iniciou a segunda fase de densificação da rede, com 14 estações, passando
a distância média entre as estações da rede de 100 km para 70 km, dotando a rede para novas
funcionalidades. A rede permite uma cobertura RTK para todo o território e está operacional
desde Janeiro de 2006. O sistema de coordenadas adoptado para a rede CATNET é o ETRS89
(European Terrestrial Reference Frame 1989).
Há dois tipos de estações na rede CATNET, designadas por estações geodinâmicas e
as estações não geodinâmicas.
As estações geodinâmicas (Figura 12) estão materializadas em estruturas de grande
robustez, ancoradas no subsolo, o que permite a utilização dos seus dados em estudos no
âmbito da Geodinâmica.
Figura 12 - Estação CATNET Geodinâmica [C.Parareda et al., 2006].

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 21
As estações não geodinâmicas (Figura 13) têm uma estrutura que nos garante
estabilidade da antena, mas não com precisões milimétricas a longo prazo.
Figura 13 - Estação CATNET não geodinâmica [C.Parareda et al., 2006].
Todas as estações da primeira fase pertencem ao grupo de estações geodinâmicas e,
por isso, são parte da rede EUREF (European Reference Frame) e/ou IGS e são também
utilizadas para campanhas de Geodesia. As da segunda fase combinam com estações não
geodinâmicas.
O modelo padrão de uma estação CATNET (Figura 14), inclui um receptor GPS de
dupla frequência (Trimble NetRs), com antena de redução de multitrajecto do tipo choke ring,
instalada num monumento cilíndrico em betão, de 3 m de altura e 50 cm de diâmetro,
ancorado em rocha e com centragem forçada. Para envio dos dados, estão instaladas
plataformas VSAT (Very Small Aperture Terminal) ou antenas GSM.
Figura 14 - Modelo standard de uma estação CATNET (adaptado de Trimble [2005b]).
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 22
Quanto às comunicações, a rede CATNET é suportada por 2 canais de aquisição de
dados. O canal principal utiliza a rede VSAT, isto é, os dados são transmitidos directamente
(tempo real) do receptor para o ICC via satélite. O canal secundário utiliza acesso telefónico
ao computador de cada estação, através de modem GSM ou RTC (rede telefónica comutada).
Ambos os canais usam protocolo IP (Internet Protocol) para transmissão de dados. A
redundância de acesso aos dados gerados nas estações proporciona maior fiabilidade ao
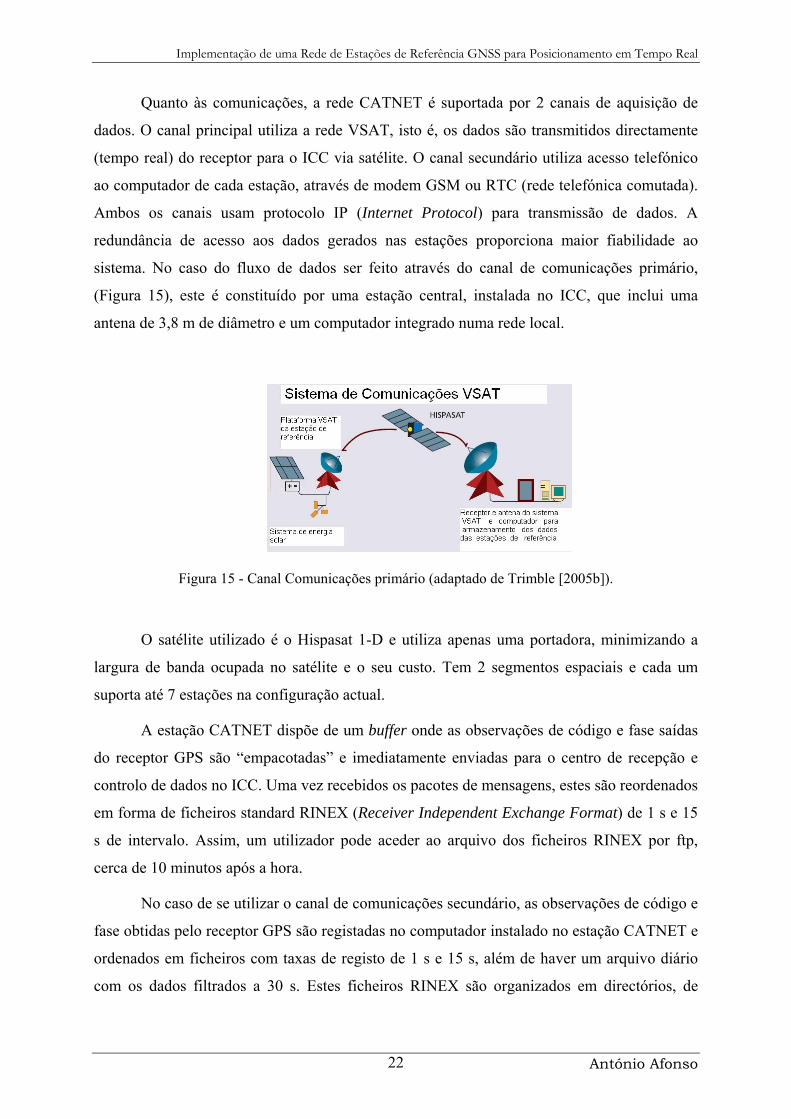
sistema. No caso do fluxo de dados ser feito através do canal de comunicações primário,
(Figura 15), este é constituído por uma estação central, instalada no ICC, que inclui uma
antena de 3,8 m de diâmetro e um computador integrado numa rede local.
Figura 15 - Canal Comunicações primário (adaptado de Trimble [2005b]).
O satélite utilizado é o Hispasat 1-D e utiliza apenas uma portadora, minimizando a
largura de banda ocupada no satélite e o seu custo. Tem 2 segmentos espaciais e cada um
suporta até 7 estações na configuração actual.
A estação CATNET dispõe de um buffer onde as observações de código e fase saídas
do receptor GPS são “empacotadas” e imediatamente enviadas para o centro de recepção e
controlo de dados no ICC. Uma vez recebidos os pacotes de mensagens, estes são reordenados
em forma de ficheiros standard RINEX (Receiver Independent Exchange Format) de 1 s e 15
s de intervalo. Assim, um utilizador pode aceder ao arquivo dos ficheiros RINEX por ftp,
cerca de 10 minutos após a hora.
No caso de se utilizar o canal de comunicações secundário, as observações de código e
fase obtidas pelo receptor GPS são registadas no computador instalado no estação CATNET e
ordenados em ficheiros com taxas de registo de 1 s e 15 s, além de haver um arquivo diário
com os dados filtrados a 30 s. Estes ficheiros RINEX são organizados em directórios, de

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 23
acordo com a taxa de registo, de forma a mais facilmente serem recuperados pelo ICC. O
acesso aos dados é feito diariamente via modem, mediante protocolo IP.
No centro de recepção e controlo dos dados reúnem-se os servidores de aquisição de
dados dos diferentes canais de comunicação, dos serviços de distribuição e monitorização da
rede CATNET. Uma vez recebidos os pacotes de mensagens das estações CATNET, estes são
armazenados em buffers circulares, com capacidade para 1 mês de dados. A partir daqui, os
diferentes serviços da rede CATNET, acedem aos buffers para construir os ficheiros em
formato RINEX com diferentes taxas de registo.
Há quatro serviços proporcionados pela rede CATNET: Geofons, DGPS, RTK e
CatPOS.
O Geofons, iniciado em 1995, disponibiliza ficheiros RINEX, geóide, transformação
de datum, coordenadas da rede geodésica da Catalunha e software de livre distribuição
desenvolvido pelo ICC. Este serviço é livre e gratuito, podendo ser acedido através de ftp
anónimo (ftp.icc.es).
Os ficheiros RINEX on-line estão disponíveis por 30 dias, embora se possam adquirir
a posteriori, formulando um pedido através de endereço electrónico ([email protected]).
O DGPS pode ser acedido por duas vias: (1) através de GPRS, via protocolo NTRIP
(Networked Transport of RTCM via Internet Protocol) para catnet-ip.icc.es, porta 8080,
obtendo-se correcções em formato RTCM 2.3; (2) através de um serviço de transmissão de
correcções de código RTCM, via RDS (Radio Data System), que o ICC disponibiliza desde
1995.
O serviço RTK disponibiliza correcções VRS através de GPRS, via protocolo NTRIP
para catnet-ip.icc.es, porta 8080, em formato RTCM 2.3 e 3.0.
O CatPOS é outro serviço público gratuito de posicionamento on-line, através do qual
os utilizadores recebem as coordenadas com precisões superiores a 10 cm, dependendo da
qualidade dos dados por eles fornecido. O objectivo é fornecer um serviço de pós-
processamento para dados GPS de dupla frequência observados em modo estático. Para obter
as coordenadas do ponto desejado um utilizador preenche um formulário com os dados
pessoais e técnicos, enviando também o seu ficheiro de observações GPS. Imediatamente se
activa um processo automático, sendo cada arquivo processado utilizando 3 estações
CATNET. O utilizador recebe via e-mail um relatório, juntamente com as coordenadas do
ponto pretendido. A principal vantagem é a de permitir um posicionamento preciso em

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 24
qualquer parte da Catalunha. O ponto crítico é a qualidade dos dados recolhidos pelo
utilizador.
2.3.2. Dinamarca
A decisão de implementar a rede dinamarquesa foi tomada na Primavera de 2000. Ao
fim de alguns meses, a rede tinha 26 estações GPS, montadas em edifícios cujo aluguer da
instalação era de 500 €. Os locais de instalação são tão díspares que incluem desde hospitais
até quintas agrícolas ou stands de automóveis (Figura 16).
Figura 16 - Exemplo de um local de instalação [Wirring, 2004].
Em 2004 tinham 120 subscritores, com um custo de 1610 € anual e o preço por minuto
0,087 € por GSM [Wirring, 2004].
Dos principais problemas encontrados ao longo dos anos, destacam-se, em 2001, uma
fonte de alimentação do receptor que se danificou e as comunicações com as estações de
referência, que obrigaram, em 2002, a uma mudança para ADSL (Asymmetric Digital
Subscriber Line). Duas estações foram deslocadas devido à demolição dos edifícios. Em 2003
registaram-se avarias em centrais telefónicas, devido às relâmpagos e trovoadas. Na região de
Sealand e sul da Suécia houve uma quebra total de energia (“apagão”). Em 2004 houve outra
estação de referência, que foi mudada devido à demolição do edifício.
Outro pequenos problemas prendem-se com quebras de linha de comunicações devido
a obras de telecomunicações ou escavações e, também, devido à manutenção do sistema
durante as horas normais de serviço.
2.3.3. Suiça
A rede suiça AGNES tem como principais objectivos:

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 25
• realização em tempo real do novo referencial suíço (CHTRS95), no âmbito
da Topografia;
• transição do antigo para o novo referencial, no âmbito do Cadastro;
• constituição da base do serviço de posicionamento suíço (swipos);
• apoio a estudos científicos no âmbito da Geodinâmica e Meteorologia.
O serviço de posicionamento da rede AGNES engloba uma rede de 38 estações de
referência permanente (Figura 17), das quais 29 são suíças, 5 são alemãs e 4 austríacas.
Figura 17 - Rede AGNES [Swisstopo, 2006a].
A optimização da rede AGNES vem sendo feita desde 2003, com a modernização e
uniformização dos equipamentos das estações de referência.
Em 2004 efectuou-se a modernização do centro de cálculo AGNES e a integração das
estações estrangeiras. O centro de cálculo ficou operacional em 11 de Novembro de 2004
[Swisstopo, 2006a]. A melhoria visou os seguintes objectivos:
• Redundância

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 26
O software de cálculo de rede foi instalado em dois computadores de elevado
desempenho, operando em simultâneo, para que, no caso de um deles ter uma
ocorrência que o impeça de funcionar, o outro possa continuar a fornecer o serviço
pretendido.
• Segurança
Os computadores estão melhores protegidos contra virus e acessos não autorizados,
através de firewalls, pelo que somente as portas TCP necessárias se encontram
abertas através das firewalls.
• Hardware
Foram instalados computadores de elevado desempenho (servidores) e capacidade
de armazenagem de dados, com vista a responder a desafios futuros.
• Software
Foi instalada a versão mais recente do GPSNet, que efectua o cálculo, entre outras
tarefas. Permite a utilização de novas tecnologias, tais como o envio de correcções
por NTRIP, por exemplo. Os algoritmos responsáveis pelo cálculo foram
melhorados e, por conseguinte, os tempos de inicialização serão diminuídos e a
precisão do posicionamento melhorada.
Em 2005 optimizou-se a rede AGNES, não só do ponto de vista de melhor localização
das estações de referência, mas também da sua aplicação em investigação em Geodinâmica e
Meteorologia [Swisstopo, 2006a].
Figura 18 - Optimização das estações de referência da rede AGNES [Swisstopo, 2006a]
( – Estações actuais; – Estações antigas; – Estações novas ou deslocadas; – Estações alemãs e austríacas; – Estações italianas)
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 27
Outro melhoramento introduzido e efectivo desde 1 de Junho de 2005 foi a conjugação
das altitudes elipsoidais das estações de referência com a última campanha da rede altimétrica
suíça (MN95), que terminou em 2004, e com o novo modelo de geóide (CHGeo2004),
permitindo precisões de 2 cm a 3 cm para toda a Suíça.
Para 2006 previa-se a consolidação da optimização da rede AGNES iniciada em 2005.
A instalação de uma nova estação na região de Valais é uma prioridade para colmatar a lacuna
nessa região. A estação de Zermatt ficou construída em Agosto de 2005 e pode assim ser
utilizada para estudos geodinâmicos. A estação de Sargans é geologicamente instável; no
entanto, é difícil encontrar um local melhor devido às obstruções no local e à instabilidade
geológica, pelo que se manterá até se encontrar um local melhor. Previa-se, ainda para 2006, a
integração das estações do Norte de Itália na rede AGNES e a construção de uma nova
estação na região de Interlaken/Grindelwald/Brienz, que permitirá eliminar as diferenças
altimétricas verificadas na estação de Jungfraujoch, a qual não será utilizada para o serviço de
posicionamento, mas apenas para estudos científicos, nomeadamente no âmbito da
Meteorologia.
As aplicações dos serviços prestados pela rede AGNES são diversas, desde a
determinação e controlo de pontos fixos, aplicações em medições oficiais, construção,
ambiente, além das medições da fronteira nacional.
Os serviços prestados pela rede AGNES, são:
• Posicionamento em pós-processamento
Os ficheiros RINEX com informações individuais das estações AGNES ou de
estações de referência virtual, estão disponíveis on-line durante 100 dias. Desde o
1 de Outubro de 2005 que se uniformizaram os preços para dados RINEX para o
valor de 0,50 CHF (Francos Suíços3) por minuto, independentemente do intervalo
pretendido (1 hora de dados RINEX custa 30,00 CHF havendo desconto de 10%
para volume de dados superior a 500,00 CHF e de 20% para mais de 1000,00
CHF). Os utilizadores de uma licença anual têm direito a descarregar os dados
RINEX gratuitamente.
3 Para efeitos de cálculo, 1€ equivale a 1,5867 CHF, segundo consulta feita ao banco
de Portugal [Banco Portugal, 2006].
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 28
• DGPS
São disponibilizados gratuitamente dados em formato RTCM 2.3 (mensagens tipo
1, 2, 23 e 24), via GSM e internet (GPRS).
• RTK
Para utilizadores do serviço em tempo real, são disponibilizados dados em formato
RTCM 2.3 (1, 2, 23 e 24), para acesso via GSM, e em formato RTCM 3.0
(mensagens tipo 1004, 1005 e 1007), para acesso via GPRS.
Para acesso via GSM e sem contrato, o preço de utilização é de 0,70 CHF /min. No
caso de acesso por internet (GPRS), terá que haver um contrato anual. Desde o dia
1 de Setembro de 2005, para além da licença individual, houve um pacote de
ofertas especialmente para grupos de receptores móveis (para a mesma empresa).
o 1 licença de base ............................ 3000 CHF
o 1 a 3 licenças suplementares........... 1000 CHF cada
o 4 a 6 licenças suplementares........... 500 CHF cada
o a partir da 7ª licença........................ 250 CHF cada
2.4. Redes de estações permanentes em Portugal
Antes de se implementar uma rede de estações GPS para posicionamento RTK, é
conveniente saber que tipo de redes de estações permanentes GPS existem em Portugal e para
que fins, de modo a evitar redundância de meios.
2.4.1. ReNEP / GPS
O Projecto ReNEP/GPS (Rede Nacional de Estações Permanentes/GPS) (Figura 19)
iniciou-se em 1997, no IPCC (Instituto Português de Cartografia e Cadastro), antecessor do
IGP (Instituto Geográfico Português) [IGP, 2006].
Este projecto teve como objectivo:
• estabelecer uma rede de pontos fiduciais em Portugal, como parte do
International Terrestrial Reference Frame (ITRF);
• criar uma infraestrutura do Serviço Nacional de Difusão de Dados GPS
para apoio à navegação terrestre e posicionamento de precisão;

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 29
• apoiar estudos na área da geodinâmica;
• contribuir para a vigilância do nível médio do mar;
Figura 19 - ReNEP / GPS [IGP, s.d.].
No estabelecimento desta rede, utilizaram-se os seguintes critérios de localização:
• estações permanentes espaçadas de 150 km (no Continente);
• cobertura homogénea de Portugal Continental;
• colocação junto a marégrafos.
Os dados da estação permanente de Cascais ficaram disponíveis via Internet em Abril
de 1998 e, em Outubro desse ano, a estação passou a integrar a rede europeia de estações
permanentes (EUREF).
A 1ª fase do projecto ReNEP ficou concluída em Dezembro de 1999 e incluiu a
modernização da estação de Cascais. A 2ª fase concluiu-se no segundo semestre de 2002
(Tabela 2).

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 30
Tabela 2 - Fases do projecto ReNEP.
Nome Ano Marégrafo IGS/EUREF Fase
Cascais 1997 Cascais IGS / EUREF 1ª Gaia 1999 Leixões (a 10 km) EUREF 1ª Lagos 1999 Lagos EUREF 1ª Ponta Delgada 1999 Ponta Delgada (a 3 km) IGS / EUREF 1ª Beja 2001 --- --- 2ª Mirandela 2001 --- --- 2ª Funchal 2002 --- candidatar EUREF 2ª Melriça 2002 --- --- 2ª
As estações ReNEP são constituídas por receptores GPS de dupla frequência, com 12
canais para a portadora L1 e 12 canais para a portadora L2, antena geodésica choke ring e
núcleo Dorne & Margolin. O ângulo de máscara utilizado no registo de observações é de 5º.
Dispõem de computador local com modem RDIS, permitindo acesso via programa de
controlo remoto e ftp. A estação meteorológica Paroscientific MET3 permite obter dados de
pressão, temperatura e humidade relativa.
Recolha dos dados
• Dados GPS: código C/A, L1 e L2
• Taxa de registo dos dados GPS: 30 s
• Taxa de registo dos dados meteorológicos: 15 min
• Recolha diária a partir do IGP: diária
Disponibilização dos dados
• Formato: RINEX
• Via Internet:
o IGP -------------- ftp://ftp.igeo.pt
o EUREF --------- ftp://igs.ifag.de/gpsdata
No caso do servidor do IGP, os dados estão disponíveis on-line durante 1 mês. Após
esse período, os dados são disponibilizados a pedido.
Recentemente o IGP remodelou a ReNEP, com o objectivo de prestar um serviço
público de geo-posicionamento, disponibilizando aos utilizadores de equipamentos GPS

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 31
dados que permitem determinar coordenadas geográficas com precisão melhor que 10 cm.
[IGP, 2006].
É constituída por estações GPS/GNSS de observação contínua, que difundem
observações no referencial ETRS89, para posicionamento em tempo real, utilizando a técnica
de posicionamento RTK, ou para análise pós-processamento, com ficheiros RINEX.
O planeamento da ReNEP (Figura 20) visa uma cobertura nacional.
Figura 20 - Rede de estações de referência ReNEP [IGP, 2006].
Neste momento, a ReNEP tem um conjunto de estações de referência (Figura 21)
activas com correcções diferenciais em RTCM 2.1 que incluem mensagens 18 e 19, outras em
instalação e outras planeadas, sendo a distribuição a nível nacional dada na Figura 22.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 32
Figura 21 - Planeamento das actividades da ReNEP [IGP, 2006].
Figura 22 - Actividades da ReNEP [IGP, 2006].
2.4.2. Rede Diferencial GPS (DGPS) da Marinha Portuguesa
Em 09 de Dezembro de 2002, é inaugurado pela Marinha Portuguesa um sistema de
radionavegação de base terrestre baseado em estações DGPS, cujo projecto foi elaborado pelo
Instituto Hidrográfico (IH) [IH, 2006].
O objectivo principal desta rede DGPS é a ajuda à navegação marítima e, por
conseguinte, a melhoria da segurança da navegação em águas nacionais; visa, também, a
substituição dos radiofaróis desactivados em 31 de Dezembro de 2000.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 33
No entanto, o sinal DGPS está disponível para todos os utilizadores, a custo zero,
bastando que, para o efeito, o utilizador disponha de um receptor capaz de receber as
correcções diferenciais.
O Instituto Hidrográfico elaborou um projecto de instalação de uma rede DGPS para
cobrir as águas costeiras nacionais e prevê a instalação de 4 estações transmissoras de
correcções de código, ficando duas no Continente e uma em cada um dos arquipélagos
(Tabela 3).
Tabela 3 - Características das estações DGPS da Marinha Portuguesa.
Nome Frequência (khz)
Taxa emissão (bps)
Alcance (km)
Estado
Cabo Carvoeiro 311.5 200 370 Em teste Sagres 305.5 200 370 Em teste Horta 545 Planeada Porto Santo 370 Planeada
O projecto engloba duas fases. Numa primeira fase foi instalada a componente
continental, constituída pelas estações DGPS de Sagres e do Carvoeiro e por uma estação de
controlo na Direcção de Faróis, localizada em Paço de Arcos. A segunda fase corresponde a
instalação das estações da Horta e do Porto Santo.
A instalação de uma estação DGPS em Sagres e Cabo Carvoeiro, em conjunto com as
estações espanholas do Cabo Finisterra e de Rota, faz com que toda a nossa faixa costeira
esteja sempre coberta simultaneamente pelo menos por duas estações DGPS (Figura 23).
Figura 23 - Diagrama cobertura DGPS [Monteiro, 2002].
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 34
A estação de controlo realiza a vigilância e controlo das várias estações DGPS, em
tempo real, através da troca de mensagens utilizando um sistema de comunicações. Recebe
relatos periódicos de cada estação (estado de funcionamento entre outros) e alarmes ocorridos.
As comunicações entre a estação de controlo e a estação de Sagres fazem-se através de
uma linha telefónica do SICOM (Sistema Integrado de Comunicações Militares), que tem as
vantagens de ser uma linha segura e não implicar quaisquer custos de utilização. As
comunicações com a estação do Cabo Carvoeiro faz-se através de uma linha telefónica RDIS,
uma vez que o SICOM não chega a Peniche.
A Estação DGPS do Cabo Carvoeiro (Figura 24) foi instalada junto a farol existente
nesse local. As antenas GPS foram montadas num mastro de 7 m de altura, fixo ao varandim
da cúpula do farol, de modo a receber sinal GPS sem obstrução. Os receptores, o monitor de
integridade e os transmissores foram instalados numa cabina construída para o efeito e
colocada junto ao edifício do farol.
Figura 24 - Estação de Cabo Carvoeiro [Monteiro, 2002].
Nesta estação, tal como na de Sagres, existem duas antenas de transmissão, as quais,
devido às intempéries, à corrosividade e salinidade associadas ao ambiente marítimo, obriga a
trabalhos de reparação e manutenção, pelo que, quando uma está indisponível, utiliza-se a
outra para radiodifundir as correcções diferenciais.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 35
Quanto à alimentação eléctrica, foi instalado um novo gerador (com capacidade para
15 kVA), que não só alimenta a estação DGPS como todos os equipamentos eléctricos do
farol.
A Estação DGPS de Sagres (Figura 25) foi instalada numa cabina semelhante à do
Cabo Carvoeiro, facilitando assim a uniformização das estações DGPS. Contém 2 sistemas de
ar condicionado independentes, extintores que podem ser activados automática ou
manualmente no local ou à distância (Direcção dos Faróis) e, ainda, alarmes de incêndio e
temperatura elevada, de humidade excessiva, de disparo do extintor, de entrada de intrusos e
de falha de corrente.
Figura 25 - Estação de Sagres [Monteiro, 2002].
No caso da estação de Sagres, como não existem obstruções para o sinal GPS, as
antenas foram instaladas em mastros montados na própria cabina da estação DGPS.
Quanto às antenas de transmissão, foi instalada uma antena primária, semelhante à do
Cabo Carvoeiro, e recuperada uma outra antiga, para servir como antena secundária. Em
termos de alimentação eléctrica de emergência, a estação dispõe de baterias com autonomia
para 5 horas, já que a alimentação primária é fornecida pela Força Aérea, que dispõe no local
de dois geradores com capacidade sobrante.
Com a concretização deste projecto, Portugal dispõe de um sistema de radionavegação
marítima com exactidões de 2 a 3 m.
Em síntese, neste capítulo, identificaram-se as principais componentes constituintes de
uma rede RTK, a forma de gerar correcções diferenciais, assim como algumas das
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 36
características de redes GPS operacionais, quer na Europa quer em Portugal. Não havendo em
funcionamento uma rede para RTK no nosso País, o capítulo seguinte refere a implementação
do projecto SERVIR.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 37
3. Projecto SERVIR
Neste capítulo são referidos os motivos e as principais etapas para a implementação de
uma rede de estações de referência GPS para RTK em Portugal.
3.1. Introdução
A forma de obtenção dos dados para a elaboração da Cartografia Militar tem de
acompanhar a evolução dos tempos. No caso do Instituto Geográfico do Exército, sobrepõe-se
ainda a necessidade da actualização da sua Cartografia Militar.
Foi considerado um feito histórico ter-se realizado a cobertura de Portugal Continental
entre 1935 e 1955, à escala 1:25000. Apesar de ser em formato analógico, temos de atender às
condições de trabalho e à tecnologia existente naquela época.
Em 2006 termina a aquisição em formato vectorial de todo o território nacional, o que
é considerado outro feito histórico, fazer em 20 anos (1986 a 2006) toda a cobertura nacional,
incluindo Açores e Madeira, em formato digital.
Presentemente outro desafio se vislumbra. Actualizar a Cartografia Militar de forma
mais rápida e precisa, de acordo com um plano já elaborado e que define 3 grandes áreas de
intervenção:
• áreas metropolitanas de Lisboa e Porto em 5 anos;
• a faixa litoral de Portugal Continental em 10 anos;
• as zonas do interior em 15 anos.
Na aquisição dos dados, várias metodologias são utilizadas. De entre elas, salienta-se o
método de posicionamento em modo base-RTK, que constitui a forma tradicional da Secção
de Topografia do IGeoE adquirir informação geo-referenciada necessária aos diversos
processos de produção da sua cartografia. Frequentemente o IGeoE é também solicitado pelo
Exército para efectuar apoio topográfico para outros fins.
Assim, as necessidades de apoio topográfico do IGeoE visam:
• obter pontos fotogramétricos (PFs);
• efectuar controlo de qualidade posicional;
• realizar levantamentos topográficos;
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 38
• adquirir informação georeferenciada.
Os pontos fotogramétricos (Figura 26) são utilizados para efectuar as
aerotriangulações dos voos, permitindo atribuir coordenadas terreno às coordenadas foto das
imagens adquiridas. Mais tarde, estes dados serão utilizados para a elaboração de ortofotos e
para a restituição da informação vectorial georeferenciada.
Figura 26 - Ponto fotogramétrico.
A escala base da Cartografia do IGeoE é a 1:25000 e a escala de voo utilizada é a
1:22000. Os filmes aéreos são digitalizados a 14 μm, pelo que a resolução do pixel ao nível do
terreno é de 30,8 cm.
Quando um operador de fotogrametria faz as leituras dos PFs, o melhor que consegue
discriminar é metade do pixel, pelo que, à partida, o valor máximo admissível para a precisão
das coordenadas dos PFs são 15,4 cm. A aquisição dos PFs faz-se com o método base-RTK.
Restituída a informação vectorial, o IGeoE faz o controlo de qualidade posicional da
mesma (Figura 27). Este controlo baseia-se, essencialmente, em verificar a correspondência
entre a informação produzida e a realidade. A metodologia consiste em comparar as
coordenadas de um conjunto de pontos homólogos e inequívocos, identificados quer num
documento digital quer no terreno.
Figura 27 - Controlo de qualidade posicional.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 39
As coordenadas desses pontos terreno devem ser obtidas com a maior exactidão
possível, de modo a sabermos a exactidão da qualidade posicional da cartografia do IGeoE. A
metodologia utilizada para efectuar o controlo de qualidade posicional é o método base-RTK.
Frequentemente o IGeoE é solicitado para realizar levantamentos topográficos (Figura
28), nomeadamente delimitações de terrenos militares, ou elaborar plantas de pormenor de
prédios militares, normalmente à 1:2000. Utiliza-se uma estação total, equipada com GPS,
mas cuja base tem de ser colocada num vértice geodésico. Em ambos os casos, utiliza-se o
método base-RTK.
Figura 28 – “Smartstation”.
Dado que o processo de elaboração de uma folha 1:25000 demora, em média, cerca de
3 anos, por vezes são construídas obras de arte (tais como estradas, pontes, aterros e
desaterros), as quais devem figurar na cartografia antes de esta ser impressa. Assim, o IGeoE
tem vindo a desenvolver aplicações informáticas, de modo a obter informação vectorial com
qualidade geométrica, de forma precisa e o mais célere possível, com o objectivo final de
actualização da sua Cartografia no mais curto intervalo de tempo.
Um exemplo dessas aplicações é o Sistema para Orientação e Avaliação da Exactidão
Posicional em Cartografia Digital (Figura 29).
Figura 29 - Sistema para Orientação e Avaliação da Exactidão Posicional [Afonso et al., 2004b].

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 40
Para obtenção de coordenadas precisas, este sistema utiliza o método base-RTK, com
recurso a um receptor Trimble 5700. Para recolha de informação para escalas 1:250000 e
1:500000 utiliza o método de posicionamento absoluto, com recurso ao receptor de navegação
Magellan GPS 320, cuja precisão de coordenadas se situa actualmente entre 1 m e 10 m.
Do exposto se infere que uma rede de estações de referência GNSS para RTK
permitiria ao IGeoE acelerar a aquisição de informação georeferenciada, com menos recursos
humanos, custos financeiros e logísticos associados, enquadrando-se desta forma dentro da
principal linha de orientação estratégica do IGeoE, a qual visa uma actualização da
Cartografia Militar de forma mais célere e precisa.
3.2. Planeamento estratégico do projecto SERVIR
Dadas as necessidades de aquisição de informação georeferenciada evidenciadas e o
facto de em Portugal ainda não existir uma rede de estações de referência GNSS para
posicionamento em tempo real que colmatasse essa necessidade, surgiu a ideia de elaborar e
implementar o projecto SERVIR.
No entanto, sem um caminho ou uma metodologia estruturada de resolução de
problemas bem delineada, dificilmente se chegará ao fim desse ciclo.
Numa primeira fase, e sem perder muito tempo a pensar qual o modelo de resolução de
problemas, pode-se simplesmente utilizar o Ciclo de Deming, o tão conhecido PDCA (Figura
30):
Figura 30 - Ciclo de Deming.
P → Plan (Planear): estabelecer os objectivos e os processos necessários para
apresentar resultados de acordo com os requisitos do cliente e as políticas da
organização.
Plan
ActDo
Check
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 41
Como resultado, antes de se começar a fazer qualquer coisa que seja, deve-se
definir o que se pretende tratar e quais são as acções a desenvolver para atingir
o objectivo. Assim se identificam as principais causas do problema, reduz-se a
discussão que muitas vezes é prolongada e sem resultados concretos, evitando-
se também a definição de soluções erradas.
D → Do (Executar): implementar os processos. Nesta fase executam-se as acções
definidas na fase anterior (P).
C → Check (Verificar): monitorizar e medir processos e produto em comparação
com políticas, objectivos e requisitos para o produto e reportar os resultados.
Após a fase da execução, dever-se-á iniciar uma fase de testes, que permita
verificar se os objectivos da fase anterior foram alcançados.
A → Act (Actuar): Empreender acções para melhorar continuamente o desempenho
dos processos.
Feita a verificação, deve-se reflectir sobre o processo, avaliando o que correu bem e o
que correu mal, não apenas quanto aos resultados a que se chegou, mas também em relação à
forma de actuação da equipa.
Retiradas as conclusões e definidos os aspectos a melhorar, deve-se garantir a
implementação das acções correctivas. Entra-se novamente no ciclo, porque se deve fazer um
planeamento das acções a executar.
Da análise da metodologia PDCA definiu-se um fluxograma de trabalho, a ser seguido
para implementação do projecto SERVIR (Figura 31).
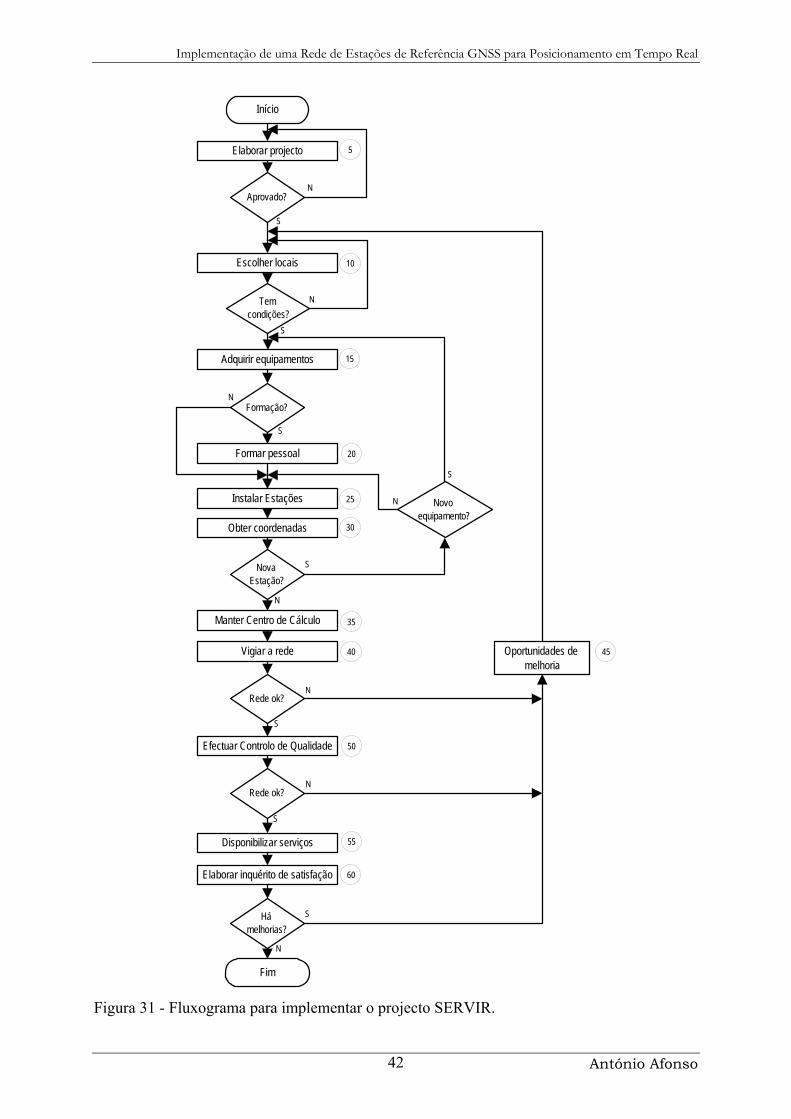
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 42
Início
Elaborar projecto
Escolher locais
Aprovado?
Tem condições?
Adquirir equipamentos
Formação?
Formar pessoal
Instalar Estações
Obter coordenadas
Manter Centro de Cálculo
Vigiar a rede
Efectuar Controlo de Qualidade
Nova Estação?
Rede ok?
Rede ok?
Disponibilizar serviços
Elaborar inquérito de satisfação
Há melhorias?
Fim
Oportunidades de melhoria
Novo equipamento?
N
S
N
S
S
N
N
N
S
S
N
S
N
S
S
N
5
10
15
20
25
30
35
40 45
50
55
60
Figura 31 - Fluxograma para implementar o projecto SERVIR.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 43
Legenda: 5 - Elaborar projecto, definir objectivos e calendarizar fase de implementação. - Submeter a aprovação e proceder de acordo com as indicações propostas, no
caso de não ser aprovado.
10 - Escolher e reconhecer locais para instalar estações de referência GNSS. - Utilizar documento para apoio de reconhecimento e lista de material a utilizar. - Registar todo o tipo de material incluindo comunicações e obras a efectuar. - Tomar nota dos elementos de contactos.
15 - Adquirir todo o material e equipamento necessário para implementar o projecto. - Elaborar caderno de encargos para concursos públicos e participar na sua
execução, se necessário. - Contratualizar a manutenção do sistema.
20 - Obter formação julgada necessária para todos os elementos e de acordo com as suas tarefas no projecto SERVIR.
25 - Proceder à instalação das estações de referência, assim que reunidas as
condições, de acordo com as especificações técnicas.
30 - Registar as observações GNSS para cada estação de referência. - Obter as coordenadas para toda a rede SERVIR através de pós-processamento
recorrendo a software específico e às estações de referência IGS ou EUREF.
35 - Instalar e manter actualizado o Centro de Cálculo do projecto SERVIR. - Incluir nova estação de referência se necessário. - Actualizar o software de acordo com novas versões assim como o hardware.
40 - Criar programa de vigilância e manutenção da rede SERVIR a vários níveis, de acordo com as especificações técnicas e com as necessidades do sistema.
- Registar ocorrências.
45 - Recolher dados de diversas fontes de informação ligados ao projecto SERVIR. - Analisar e definir oportunidades de melhoria a implementar no sistema, desde
que exequíveis. - Implementar as oportunidades de melhoria de acordo com um planeamento
acordados por todas as partes interessadas.
50 - Estabelecer um programa para efectuar um controlo de qualidade do funcionamento da rede SERVIR.
- Registar, recolher e analisar os dados obtidos. - Identificar oportunidades de melhoria se as houver e implementar.
55 - Disponibilizar os serviços da rede SERVIR. - Manter actualizada a base de dados dos utilizadores. - Criar, enviar e manter um documento de informação para os utilizadores de
modo a que estes conheçam das novidades e funcionamento da rede SERVIR.
60 - Elaborar um inquérito de satisfação aos utilizadores do sistema. - Recolher, analisar dados e definir oportunidades de melhoria e implementá-las.
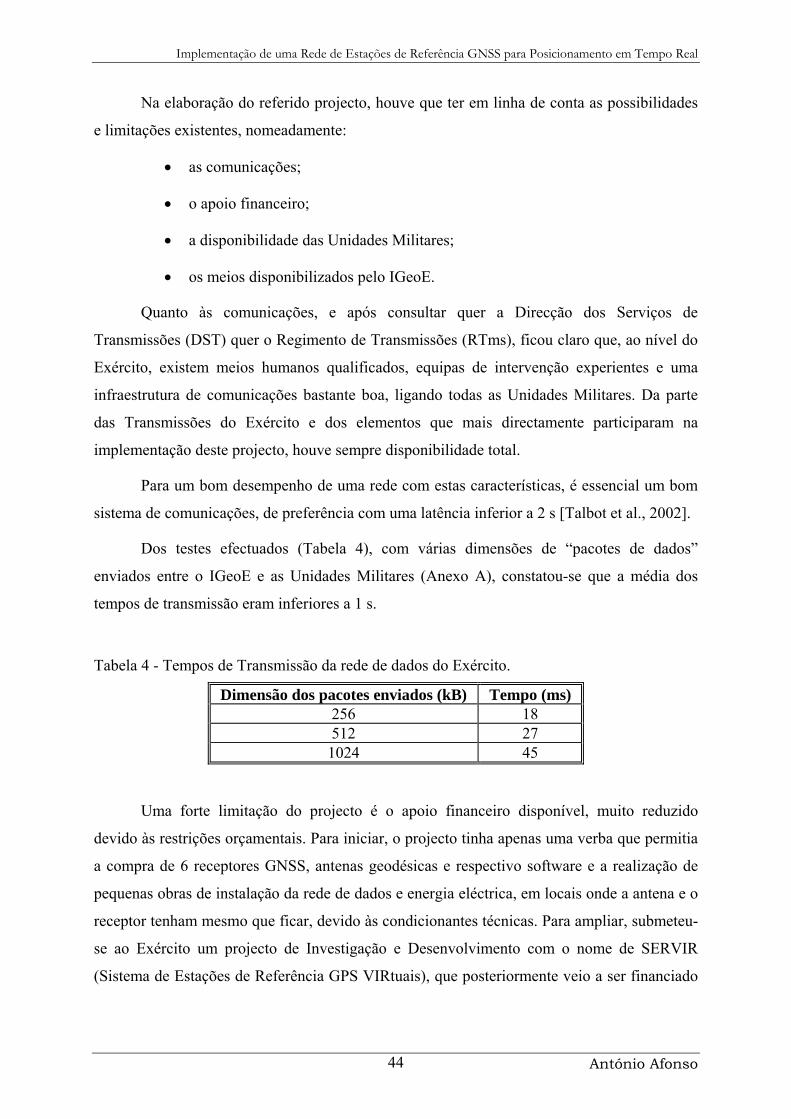
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 44
Na elaboração do referido projecto, houve que ter em linha de conta as possibilidades
e limitações existentes, nomeadamente:
• as comunicações;
• o apoio financeiro;
• a disponibilidade das Unidades Militares;
• os meios disponibilizados pelo IGeoE.
Quanto às comunicações, e após consultar quer a Direcção dos Serviços de
Transmissões (DST) quer o Regimento de Transmissões (RTms), ficou claro que, ao nível do
Exército, existem meios humanos qualificados, equipas de intervenção experientes e uma
infraestrutura de comunicações bastante boa, ligando todas as Unidades Militares. Da parte
das Transmissões do Exército e dos elementos que mais directamente participaram na
implementação deste projecto, houve sempre disponibilidade total.
Para um bom desempenho de uma rede com estas características, é essencial um bom
sistema de comunicações, de preferência com uma latência inferior a 2 s [Talbot et al., 2002].
Dos testes efectuados (Tabela 4), com várias dimensões de “pacotes de dados”
enviados entre o IGeoE e as Unidades Militares (Anexo A), constatou-se que a média dos
tempos de transmissão eram inferiores a 1 s.
Tabela 4 - Tempos de Transmissão da rede de dados do Exército.
Dimensão dos pacotes enviados (kB) Tempo (ms) 256 18 512 27 1024 45
Uma forte limitação do projecto é o apoio financeiro disponível, muito reduzido
devido às restrições orçamentais. Para iniciar, o projecto tinha apenas uma verba que permitia
a compra de 6 receptores GNSS, antenas geodésicas e respectivo software e a realização de
pequenas obras de instalação da rede de dados e energia eléctrica, em locais onde a antena e o
receptor tenham mesmo que ficar, devido às condicionantes técnicas. Para ampliar, submeteu-
se ao Exército um projecto de Investigação e Desenvolvimento com o nome de SERVIR
(Sistema de Estações de Referência GPS VIRtuais), que posteriormente veio a ser financiado

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 45
por verbas PIDDAC (Programa de Investimentos e Desenvolvimento da Administração
Central).
Junto de algumas Unidades Militares, onde possivelmente as estações de referência
GNSS seriam colocadas, fez-se uma acção de sensibilização, no sentido de se apurar qual a
sua adesão ao projecto. Foram estabelecidos contactos informais com os respectivos
Comandantes, explicando em que consistia o projecto e as mais valias para as Unidades,
nomeadamente:
• as que tinham equipamento GPS, mais facilmente percebiam o que se pretendia
e, por conseguinte, podiam beneficiar de uma infra-estrutura desta natureza;
• poderem ver melhorada ou ampliada a capacidade da sua rede de dados, dentro
das possibilidades do IGeoE e das Transmissões do Exército.
Normalmente, as questões que mais preocupavam os Comandantes diziam respeito a:
• consumo de energia;
• compromissos financeiros que teriam com o sistema;
• hipoteca de meios humanos e materiais que teriam que ter;
• questões estéticas.
Os equipamentos a serem colocados têm um baixo consumo de energia (não chega aos
4 W) e todos os custos de instalação e dos equipamentos seriam suportados pelo IGeoE. A
única hipoteca que as unidades têm é nomearem um ponto de contacto em cada Unidade, de
preferência ligado à área da Informática e Comunicações, porque os grandes problemas que
podem surgir é com o sistema de comunicações. Quanto aos aspectos estéticos, não teriam
grande impacto, uma vez que as antenas seriam instaladas nos pontos altos da unidade, livre
de obstáculos e, sempre que possível, de forma discreta e com acesso reservado, até para não
despertar curiosidades.
Quanto aos meios de que o IGeoE dispõe, constata-se que tem uma infraestrutura
informática montada e suportada por vários servidores, uma boa rede de dados interna com
fibra óptica a 1 GB, além de meios técnicos especializados nesta área. Já dispõe de acesso via
internet para o exterior com largura de banda de 4 GB, pelo que a comunicação com os
utilizadores do projecto SERVIR será feita preferencialmente por esta via. Dispõe de meios
logísticos próprios, especialmente viaturas e condutores. Tem uma Secção de Topografia
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 46
equipada com os mais modernos equipamentos GPS do mercado, além de ter experiência em
trabalhos de campo, quer com GPS em modo estático e em RTK, quer com estações totais nos
trabalhos de pormenor em prédios militares, pelo que já tem alguma capacidade técnica
adquirida.
Perante os dados disponíveis, e reunidas as condições acima referidas, procedeu-se à
elaboração do projecto SERVIR, definindo-se as linhas de orientação a seguir indicadas.
(1) Objectivo
Implementar uma rede de estações de referência GNSS para posicionamento em
tempo real.
(2) Conceito de funcionalidade do sistema
Utilizar um conceito aparentemente simples, que se baseia no princípio de que
os erros que afectam os receptores GPS dos utilizadores que estejam no interior
da rede, são determináveis pelo sistema, em função dos erros obtidos nas
estações envolventes, permitindo calcular as correcções para a posição
aproximada do ER – RM;
fazer chegar em tempo real correcções aos equipamentos dos utilizadores do
sistema, de modo a obter as coordenadas corrigidas e precisas de qualquer
ponto no terreno (localizado no interior desta rede ou fora, mas até uma
determinada distância);
permitir que um utilizador estabeleça uma ligação com o centro de cálculo (via
WEB, GSM, GPRS ou comunicação rádio), o qual, após processadas as
observações GNSS, disponibiliza as correcções diferenciais aplicáveis à área
onde pretende executar o trabalho.
(3) Pressupostos
maior cobertura possível de Portugal Continental;
dispor, sempre que possível, as estações de referência GNSS de modo a que
as distâncias entre si, sejam, em média, de 80 km [Häkli, 2004];
utilizar os sistemas comunicações militares para diminuição de custos de
operação e manutenção;
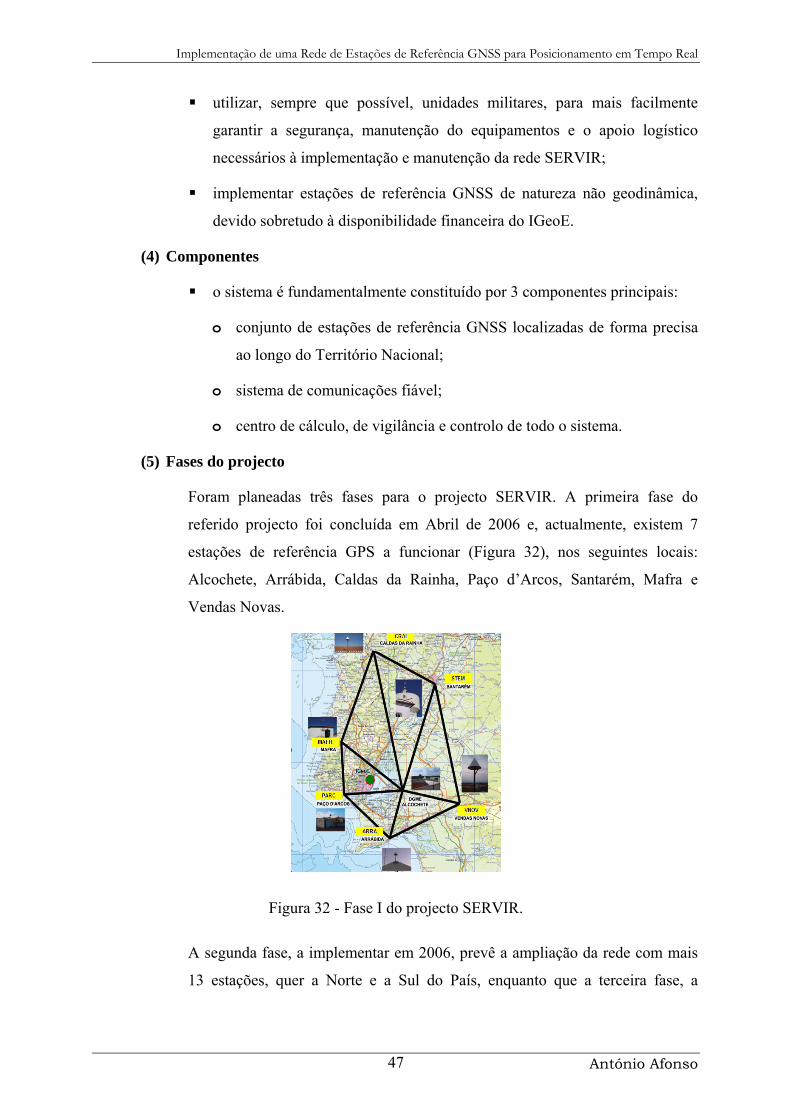
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 47
utilizar, sempre que possível, unidades militares, para mais facilmente
garantir a segurança, manutenção do equipamentos e o apoio logístico
necessários à implementação e manutenção da rede SERVIR;
implementar estações de referência GNSS de natureza não geodinâmica,
devido sobretudo à disponibilidade financeira do IGeoE.
(4) Componentes
o sistema é fundamentalmente constituído por 3 componentes principais:
o conjunto de estações de referência GNSS localizadas de forma precisa
ao longo do Território Nacional;
o sistema de comunicações fiável;
o centro de cálculo, de vigilância e controlo de todo o sistema.
(5) Fases do projecto
Foram planeadas três fases para o projecto SERVIR. A primeira fase do
referido projecto foi concluída em Abril de 2006 e, actualmente, existem 7
estações de referência GPS a funcionar (Figura 32), nos seguintes locais:
Alcochete, Arrábida, Caldas da Rainha, Paço d’Arcos, Santarém, Mafra e
Vendas Novas.
Figura 32 - Fase I do projecto SERVIR.
A segunda fase, a implementar em 2006, prevê a ampliação da rede com mais
13 estações, quer a Norte e a Sul do País, enquanto que a terceira fase, a

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 48
realizar a partir de 2007, visa adensar o existente e ampliar a rede no interior do
País (Figura 33).
Figura 33 - Fase II e III do projecto SERVIR
( A funcionar; Já instaladas, mas não ligadas à rede SERVIR; Até final de 2006; Planeado para 2007).
3.3. Arquitectura da rede SERVIR
A arquitectura da rede do projecto SERVIR (Figura 34) foi concebida de forma a
garantir a maior segurança possível, fiabilidade e rapidez de funcionamento. O sistema é
fundamentalmente constituído por 3 componentes principais:
• conjunto de estações de referência GNSS, localizadas de forma precisa ao
longo do território nacional continental;
• sistema de comunicações fiável;
• centro de cálculo, de vigilância e controlo de todo o sistema.
Existe redundância de cálculo (dois computadores em simultâneo), de forma a prever
alguma ocorrência inoportuna com um deles, pelo que o outro assegura automaticamente o
fornecimento das correcções da rede aos utilizadores, estando assegurado o acesso máximo
até 50 utilizadores em simultâneo. Este número é repartido pelos vários serviços de correcções
diferenciais gerados pelos computadores de cálculo.
Cada estação de referência está equipada com um receptor e antena geodésica GNSS,
fonte de alimentação principal e alternativa e uma linha de comunicações dedicada ao Centro
de Controlo, via TCP / IP (Transmission Control Protocol / Internet Protocol).

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 49
Figura 34 - Arquitectura rede SERVIR.
O computador SPLITTER tem a função de permitir uma comunicação sincronizada
com cada estação de referência GNSS, de forma a que as suas observações GNSS cheguem
aos dois computadores de cálculo (RTKNet1 e RTKNet2) de forma correcta. Permite também
estabelecer comunicação remota com cada estação de referência, de forma a evitar
deslocações ao local.
Os 2 computadores de cálculo (RTKNet1 e RTKNet2) executam várias tarefas, das
quais se destacam:
• verificar a qualidade dos dados GNSS observados e importados de cada
estação de referência;
• verificar e validar os ficheiros RINEX armazenados e posteriormente
disponibilizados aos utilizadores;
• corrigir o centro de fase das antenas geodésicas GNSS;
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 50
• estimar e modelar os erros ionosféricos, troposféricos e efemérides, entre
outros;
• gerar as respectivas mensagens de correcção VRS para cada utilizador no
terreno, quer em formato proprietário (CMR, CMR+), quer em formato RTCM
2.3 e RTCM 3.0.
A comunicação com os utilizadores é assegurada através de um quarto computador
(WebServer), onde se encontra uma página Web que fornece informação aos utilizadores,
assim como uma base de dados de permissão de acessos ao sistema.
Para estabelecer a comunicação com o SERVIR, os meios a utilizar podem ser via:
• Rádio – destinado às unidades militares, sendo as correcções diferenciais
enviadas através de um rádio modem com frequências próprias. O rádio
modem é ligado ao receptor da estação de referência. Neste caso, o modo de
posicionamento é do tipo base-RTK;
• GSM – para receber correcções diferenciais em modo rede-RTK, mas apenas
para situações de emergência, no caso do computador Web Server não
funcionar. Os 8 modem GSM estão ligados directamente aos computadores de
cálculo. No entanto, este meio de comunicação tem mais custos de utilização
do que o GPRS e não permite, de forma directa, saber quem está a utilizar o
SERVIR (apenas se sabe qual o número telefónico que está a ser utilizado).
Para efeitos comerciais a gestão é muito mais complexa.
• GPRS – através de protocolo NTRIP. Dado o IGeoE já dispõe de um IP para a
sua internet, é a forma mais adequada para controlar acessos ao SERVIR, além
de ser mais económico que o GSM;
• http (Hypertext Transfer Protocol) – permite que os utilizadores efectuem
transferência de dados RINEX através da página Web do SERVIR, utilizando a
internet do IGeoE. Os acessos estão controlados pelo registo efectuado pelo
utilizador e respectiva senha (password) atribuída;
• ftp – apenas para transferência de grande quantidade de dados. Como existem
problemas de segurança, nomeadamente a abertura de portas através da
firewall, optou-se por ser o SERVIR a colocar via ftp noutro computador.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 51
3.4. Instalação das estações de referência
Para a instalação das estações de referência, foi necessário efectuar um
reconhecimento às unidades militares, para escolher o melhor local possível. Para a tomada de
notas do reconhecimento, e de forma a não se perderem dados, fez-se uma pesquisa sobre as
condições necessárias para instalar uma estação de referência GNSS [Leica Geosystems,
2002; Trimble, 2005; NOAA, 2006]. Dessa pesquisa resultou um documento intitulado
“Escolha dos locais das Estações de Referência” (Anexo B), que tem vindo a ser melhorado,
de cada vez que surge uma necessidade ou outro suporte documental.
Para apoiar o reconhecimento, elaborou-se uma lista de materiais intitulada “Lista de
material para Reconhecimento das Estações de Referência” (Anexo C), de modo a facilitar a
organização do trabalho. Esta lista, tal como a anterior, tem vindo a ser melhorada.
Em resumo, para além de estar sob protecção de um pára-raios e de haver energia
alternativa provida por um gerador local, na maioria das unidades, uma estação de referência
SERVIR tem a constituição típica que é apresentada na Figura 35.
Figura 35 - Arquitectura da estação de referência GPS SERVIR Fase I
(1 - UPS (Uninterruptible Power Supply), fonte de energia alternativa para 30 min; 2 - Caixa de protecção; 3 - Receptor GPS; 4 - Linha de comunicações; 5 - Fonte de energia principal (rede eléctrica nacional – 220-240 V); 6 - Rádio modem com frequências militares; 7 - Antena geodésica choke ring com núcleo Dorne & Margolin e protecção; 8 - Tubo de protecção do cano da antena geodésica GPS; 9 - Suporte da antena geodésica).
Prevendo a evolução das constelações de satélites GNSS, nomeadamente com o
aparecimento de outras frequências de portadoras, e dado que não é prático estar sempre a
mudar de antenas geodésicas (pelo facto de se ter que reobservar a rede SERVIR e efectuar
pós-processamento para obter coordenadas precisas das posições das antenas, entre outros
inconvenientes), optou-se por adquirir, para as fases subsequentes de extensão da rede
1
23
45
6 9
8
7

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 52
SERVIR, antenas geodésicas já preparadas para receber os sinais GPS, GLONASS e
GALILEO.
Consoante os locais para colocar antenas GNSS, assim se construíram 3 diferentes
modelos de suporte de acordo com as superfícies existentes:
• verticais (parede);
• horizontais (placa)
• misto vertical e horizontal (parede e placa)
No caso das superfícies verticais, suporte para parede, utiliza-se um modelo em forma
de T, para maior estabilidade e colocação (Figura 36). Têm um conjunto de braços, que não só
permitem afastar o suporte dos beirais dos telhados, como também permitem mais facilmente
o nivelamento da antena, actuando nos braços laterais, que, por sua vez, têm um conjunto de
porcas e contra-porcas de modo a dar aperto final. Têm centragem forçada para colocar a
antena. Para melhor aderência nas paredes, utilizam-se uns apoios redondos de 4 buracos cada
com rosca. Para facilitar a montagem e transporte, o suporte monta-se através de roscas e
adaptadores.
Figura 36 - Suporte de antena geodésica GNSS para parede.
No caso das superfícies horizontais, suporte para placa, utiliza-se uma base com cerca
de 30 x 30 cm e 2 cm de espessura (Figura 37). Em cada canto da base é feito um furo para
permitir a sua fixação à placa, através dos apoios constituídos por virotões de rosca. A base
leva 4 parafusos por baixo de forma a permitir o seu nivelamento e leva 4 parafusos por cima
fixar a base aos apoios.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 53
Figura 37 - Suporte de antena geodésica GNSS para placa.
.
No caso da superfície ser um misto vertical e horizontal, suporte para parede e placa, o
suporte é também uma junção dos dois modelos anteriores (Figura 38).
Figura 38 - Suporte de antena geodésica GNSS para superfície mista.
Todos os suportes anteriormente referidos, são construídos em tubos de 2”
galvanizados (a galvanização é o processo electrolítico que consiste em revestir superfícies de
peças metálicas com outros metais, geralmente, para proteger a peça da corrosão).
Os suportes são pintados com uma tinta base anti-ferrugem e, depois, são pintados
com tinta verde escura baça, para ficar de acordo com as cores normalmente usadas nas
unidades militares. Antes da montagem é aplicada nas roscas uma massa consistente, para não
enferrujar.
Junto à orla marítima aconselha-se que todo o material do suporte seja em alumínio ou
aço inoxidável, devido à salinidade (Figura 39). Nos locais mais ventosos são colocados cabos
de aço e esticadores.
Para maior protecção do cabo da antena, é utilizado um tubo em PVC
(polyvinylchloride), com cerca 3 ou 5 cm de diâmetro (para permitir a passagem das fichas do
cabo da antena), o qual é fixado ao suporte e às paredes através de braçadeiras. Na junção do
cabo da antena com a antena do GNSS é colocada uma fita isoladora resistente às intempéries,
de modo a não deixar passar a humidade.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 54
Figura 39 - Suporte de antena geodésica GNSS em aço inoxidável e cabos com esticadores.
A fixação dos apoios dos suportes às superfícies referidas, aparentemente não constitui
problema, mas, por vezes, as tradicionais buchas não ficam bem colocadas (porque, por
exemplo, o buraco ficou largo demais para a bucha) e não permitem aparafusar
convenientemente e, por conseguinte, dar aperto. O problema agrava-se em paredes de tijolo.
Após várias pesquisas quer em casas da especialidade, que em serralharias, chegou-se à
conclusão que o melhor era usar bucha química (Figura 40) e usar virotões de rosca com
porcas. Nas paredes de tijolo é usado um adaptador denominado de camisa, o qual não deixa
espalhar o líquido da bucha química pelos buracos do tijolo. A partir de uma vareta com
rosca, cortam-se os tamanhos desejados, aos quais se chamam virotões.
Figura 40 - Bucha química e seus componentes
(1 - Pistola de colocação da bucha química; 2 - Bucha química; 3 - Camisa própria para bucha química; 4 - Virotões de rosca).
Colocados os suportes nos locais pretendidos, o passo seguinte é a colocação da
antena geodésica. Esta deve ficar orientada para o Norte Geográfico [NOAA, 2006]. Para
manter esta uniformização em todos os locais, recorreu-se ao método de orientação pela
bússola. No entanto há que atender ao:
- Cálculo da declinação magnética;
- Cuidado a ter com a utilização da bússola magnética.
1 2
3
4

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 55
Para se definir uma direcção em unidades de medida angular, é necessário uma
direcção origem, à qual também se chama direcção do zero ou de referência. A direcção de
referência normalmente utilizada é a direcção Norte; há, no entanto, três direcções Norte
[IGeoE, 2000; Alves e Cruz, 1984]:
• a direcção do Norte geográfico, que é a direcção da linha que une um local da
terra com o Pólo Norte. Todos os meridianos são linhas que passam pelo Norte
geográfico. Representa-se por um asterisco nos diagramas de declinação das
cartas (Figura 41);
• a direcção do Norte magnético, que é a direcção indicada pela bússola.
Representa-se por uma flecha ou bandeira no diagrama referido (Figura 41);
• a direcção do Norte cartográfico, que é a direcção indicada pelas linhas
verticais da quadrícula de uma carta. Representa-se pelas letras NC (Figura
41).
Figura 41 - Relação entre direcções de referência [Alves e Cruz, 1984].
Definem-se, ainda, os seguintes conceitos:
• Azimute: ângulo horizontal, medido no sentido do movimento dos ponteiros
do relógio, a partir de uma das linhas de referência anteriormente definida e a
direcção pretendida, considerando-se o seu vértice como centro do círculo
azimutal.
• Declinação magnética (Dm): ângulo formado pelas direcções do Norte
geográfico e Norte magnético.
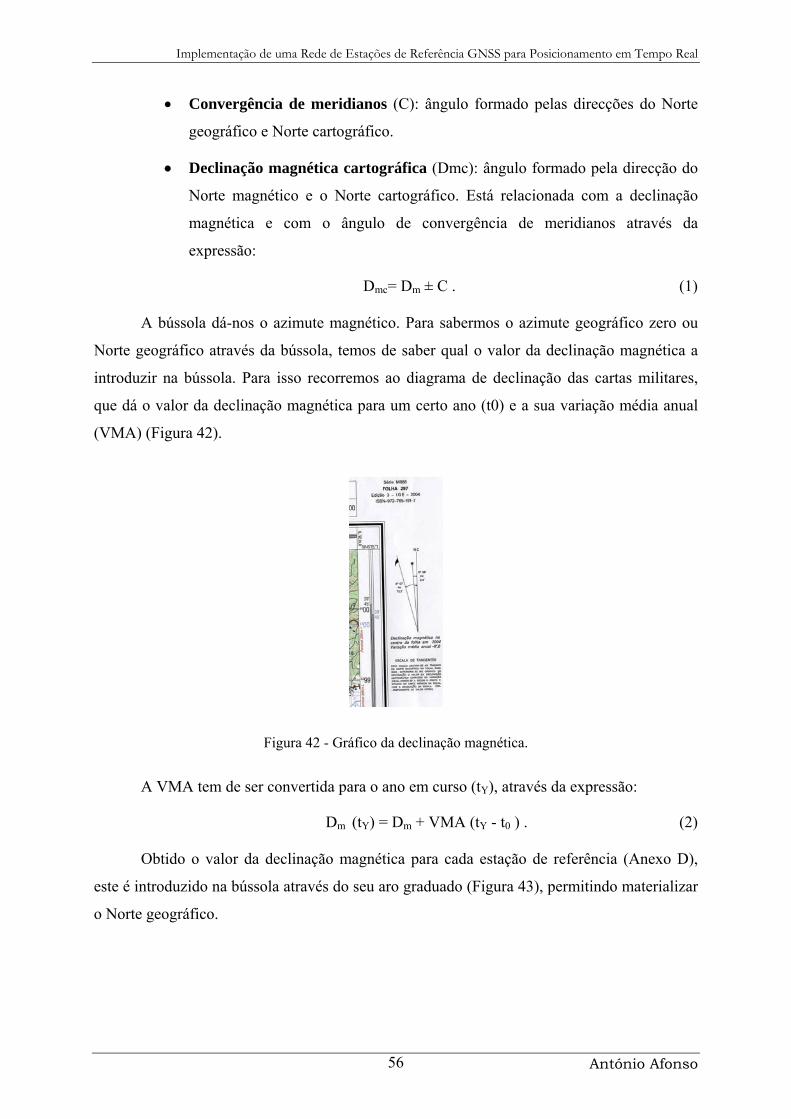
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 56
• Convergência de meridianos (C): ângulo formado pelas direcções do Norte
geográfico e Norte cartográfico.
• Declinação magnética cartográfica (Dmc): ângulo formado pela direcção do
Norte magnético e o Norte cartográfico. Está relacionada com a declinação
magnética e com o ângulo de convergência de meridianos através da
expressão:
Dmc= Dm ± C . (1)
A bússola dá-nos o azimute magnético. Para sabermos o azimute geográfico zero ou
Norte geográfico através da bússola, temos de saber qual o valor da declinação magnética a
introduzir na bússola. Para isso recorremos ao diagrama de declinação das cartas militares,
que dá o valor da declinação magnética para um certo ano (t0) e a sua variação média anual
(VMA) (Figura 42).
Figura 42 - Gráfico da declinação magnética.
A VMA tem de ser convertida para o ano em curso (tY), através da expressão:
Dm (tY) = Dm + VMA (tY - t0 ) . (2)
Obtido o valor da declinação magnética para cada estação de referência (Anexo D),
este é introduzido na bússola através do seu aro graduado (Figura 43), permitindo materializar
o Norte geográfico.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 57
Figura 43 - Bússola de reconhecimento.
Na utilização da bússola, deve-se:
• manusear a bússola com cuidado. Embora de material robusto, o mostrador da
bússola está colocado numa báscula delicada e qualquer choque a pode
danificar;
• fechar e guardar a bússola quando não estiver a ser usada;
• nunca fazer leituras com a bússola nas proximidades de objectos metálicos ou
de circuitos eléctricos. As distâncias de segurança para um bom funcionamento
da bússola são:
* Linhas de alta tensão ............................................. 60 m;
* Viatura pesada........................................................ 20 m;
* Fios telefónicos....................................................... 10 m;
* Vedações aramadas................................................. 10 m.
Os metais não magnéticos e as ligas metálicas não afectam o bom funcionamento da
bússola [IGeoE, 2000].
3.5. Serviços SERVIR
Os dados disponibilizados pelo projecto SERVIR visam abranger as necessidades não
só do IGeoE, mas também de qualquer utilizador, quer seja em DGPS ou RTK quer em pós-
processamento, permitindo-lhe utilizar os seus equipamentos GNSS, independentemente das
marcas existentes no mercado nacional.
No entanto, o utilizador precisa de ter permissão de acesso, pelo que deverá contactar
o IGeoE através de mailto:[email protected]?subject=ProjectoSERVIR ou do endereço

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 58
electrónico geral ([email protected]), disponibilizado na página Web do IGeoE
(http://www.igeoe.pt), ou fazer a sua inscrição através da página Web das Estações de
Referência (http://213.63.136.12). Os serviços disponibilizados são:
• DGPS, até um máximo de 5 utilizadores em simultâneo. As correcções diferenciais
são disponibilizadas no formato de mensagem RTCM 2.3 (Figura 44).
Figura 44 - Rede SERVIR – DGPS.
• RTK, até um máximo de 45 utilizadores em simultâneo. As correcções diferenciais
são disponibilizadas nos formatos de mensagens CMR, CMR+, cujos formatos são
proprietários, ou RTCM 2.3 cujo formato é padrão, e RTCM 3.0 (em definição final de
formato) (Figura 45).
Figura 45 - Rede SERVIR – RTK.
• Pós-processamento, através do download dos ficheiros RINEX directamente da
respectiva página Web (http://213.63.136.12) (Figura 46).
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 59
Figura 46 - Rede SERVIR – Loja RINEX.
Para mais facilmente os utilizadores identificarem as estações, foi criado um
cartograma com a sua localização e disponibilizado na página Web do SERVIR. Para dar a
conhecer as características das estações de referência GNSS SERVIR, respectivas
coordenadas e outra informação julgada pertinente, foi criada uma ficha de identificação para
cada uma delas e igualmente colocadas no sítio do SERVIR. O modelo de ficha encontra-se
no Anexo E.
3.6. Vantagens e limitações do SERVIR
Em termos práticos, o projecto SERVIR permitirá que um utilizador que pretenda
obter coordenadas centimétricas, dentro da área útil envolvida por esta rede, só necessitará de
um telemóvel que receba dados, ligado ao seu receptor GNSS móvel, o que lhe permite:
• alargar o raio de acção do seu trabalho de forma consistente e uniforme;
• efectuar os trabalhos de campo com menos recursos humanos, financeiros e logísticos;
• aumentar a produtividade.
Mas o sistema não é perfeito e as limitações identificadas são:
• existência de cobertura da rede telemóvel no local de trabalho, uma vez que necessita
de comunicações bi-direccionais;
• a localização de instalações militares, onde se possam colocar as estações de referência
com segurança, mas sobretudo usufruir da rede de dados, o que dificulta a cobertura
total de Portugal Continental;
• a fiabilidade da rede de comunicações do Exército (embora, até agora, não tenha
constituído qualquer problema).
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 60
3.7. Referencial do SERVIR
O referencial adoptado para o SERVIR é o ETRS89, uma vez que o IGP, como
Autoridade Nacional de Cartografia, assim o recomenda como sendo o referencial a adoptar
para Portugal. Quanto ao cálculo das coordenadas das estações de referência SERVIR,
aplicou-se a metodologia indicada em Boucher and Altamimi [2001].
Antes de se proceder ao cálculo das coordenadas, houve que identificar as estações de
referência SERVIR. Inicialmente atribuiu-se as iniciais de cada Unidade Militar por se
identificar mais facilmente a sua localização. Desta forma, também essas unidades sentir-se-
iam envolvidas no projecto. Identificaram-se do seguinte modo:
• ARRA (Centro de Comunicações da Arrábida, na Serra da Arrábida);
• CME (Centro Militar de Electromecânica, em Paço d’Arcos)
• DGME (Depósito Geral de Material do Exército, em Alcochete);
• EPA (Escola Prática de Artilharia, em Vendas Novas);
• EPC (Escola Prática de Cavalaria, em Santarém);
• EPI (Escola Prática de Infantaria, em Mafra);
• ESE (Escola de Sargentos do Exército, nas Caldas da Rainha).
Constatou-se que, para a grande maioria dos utilizadores, nomeadamente civis, estes
não sabem onde ficam as estações e o que representam essas iniciais, nem muito menos
conseguem associar a às localidades onde se encontram. Decidiu-se então mudar os nomes às
estações.
Após uma pesquisa, recorrendo ao sítio do ITRF (http://itrf.ensg.ign.fr), EUREF
(http://www.euref-iag.net) e IGP (http://www.igeo.pt), para uniformização de nomenclatura e
número de caracteres, bem como evitar repetição de nomes das estações de referência, optou-
se por atribuir as iniciais das localidades a cada estação de referência do SERVIR, tendo a
preocupação de verificar se já não haveria nomes iguais nas referidas listagens (encontrou-se
uma estação ITRF com o nome SANT, cujo número DOMES é o 41705M003, localizada em
Santiago do Chile).
Após este estudo atribuíram-se os seguintes nomes:

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 61
• ALCO: estação do DGME (Depósito Geral de Material do Exército, em
Alcochete);
• ARRA: (única que manteve a designação);
• CRAI: estação da ESE (Escola de Sargentos do Exército, nas Caldas da
Rainha).
• MAFR: estação da EPI (Escola Prática de Infantaria, em Mafra);
• PARC: estação da CME (Centro Militar de Electromecânica, em Paço
d’Arcos);
• STEM: estação da EPC (Escola Prática de Cavalaria, em Santarém);
• VNOV: estação da EPA (Escola Prática de Artilharia, em Vendas Novas).
No Anexo F existe uma lista com os nomes a atribuir às restantes estações de
Referência SERVIR. Como Beja já tem uma estação de referência permanente pertencente ao
IGP e com o nome BEJA, atribuiu-se o nome BEJE (E - Exército).
Para efectuar os cálculos e verificar a qualidade dos resultados obtidos utilizaram-se as
estações de referência (Tabela 5) já existentes e obedecendo aos critérios:
• pertencerem simultaneamente ao referencial ITRF2000 e ETRF2000;
• englobar estações de referência localizadas em Portugal e pertencentes à EUREF;
• baixo nível de incerteza associado às suas coordenadas;
• escolher 8 estações de referência, para fixar 4 estações. As restantes são de
controlo;
• as estações de referência que entram para o ajustamento devem ser estações que
pertencem ao IGS e fazem parte da definição do referencial.
Para uma identificação inequívoca de cada estação utilizou-se a sua numeração
DOMES, cuja descrição pode ser consultada em http://itrf.ensg.ign.fr/domes_desc.php.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 62
Tabela 5 - Estações de referência no referencial ITRF2000, época 1997.0, disponível em http://itrf.ensg.ign.fr/ITRF_solutions/2000/results/ITRF2000_GPS.SSC.txt.
Nome Bruxelas Graz Lustbuehel Potsdam Zimmerwald São
Fernando Cascais
Nº DOMES 13101M004 11001M002 14106M003 14001M004 13402M004 13909S001
Técnica GPS GPS GPS GPS GPS GPS
ID BRUS GRAZ POTS ZIMM SFER CASC X (m) 4027893.852 4194423.959 3800689.768 4331297.182 5105519.055 4917537.025
Vx(m/y) -0.0121 -0.0176 -0.0161 -0.0138 -0.0025 -0.0114
σX (m) 0.002 0.002 0.001 0.002 0.007 0.015
Y (m) 307045.689 1162702.549 882077.259 567555.730 -555146.005 -815726.366Vy (m/y) 0.0172 0.0181 0.0161 0.0185 0.0179 0.0189
σY (m) 0.001 0.001 0.001 0.001 0.002 0.004
Z (m) 4919475.037 4647245.328 5028791.246 4633133.845 3769803.246 3965857.305Vz (m/y) 0.0095 0.0082 0.0077 0.0100 0.0163 0.0033
σZ (m) 0.002 0.002 0.002 0.002 0.005 0.012
Tabela 6 - Estações de referência no referencial ETRF2000, época 1989.0, disponível em ftp://lareg.ensg.ign.fr/pub/euref/ETRF2000.SSC
Nome Bruxelas Graz Lustbuehel Potsdam Zimmerwald São
Fernando Cascais
Nº DOMES 13101M004 11001M002 14106M003 14001M004 13402M004 13909S001
Técnica ETRF2000 ETRF2000 ETRF2000 ETRF2000 ETRF2000 ETRF2000 ID BRUS GRAZ POTS ZIMM SFER CASC
X (m) 4027894.003 4194424.154 3800689.951 4331297.347 5105519.129 4917537.170Vx(m/y) 0.0008 -0.0021 -0.0008 -0.0007 0.0043 -0.0051 σX (m) 0.004 0.002 0.003 0.004 0.026 0.063 Y (m) 307045.602 1162702.455 882077.181 567555.633 -555146.098 -815726.467
Vy (m/y) -0.0002 0.0002 -0.0005 0.0001 -0.0032 -0.0015 σY (m) 0.001 0.001 0.001 0.002 0.006 0.016 Z (m) 4919474.912 4647245.214 5028791.136 4633133.717 3769803.068 3965857.231
Vz (m/y) 0.0001 -0.0013 -.0010 -0.0001 0.0040 -0.0087 σZ (m) 0.005 0.003 0.004 0.004 0.019 0.051
Da pesquisa ao sítio do IGP, em 3 de Dezembro de 2006, recolheram-se as
coordenadas oficiais listadas na Tabela 7, consideradas com precisão melhor do que 10 cm
(http://www.igeo.pt/$vg/renep/renep.asp#), não havendo, no entanto, informação sobre a
época de referência.
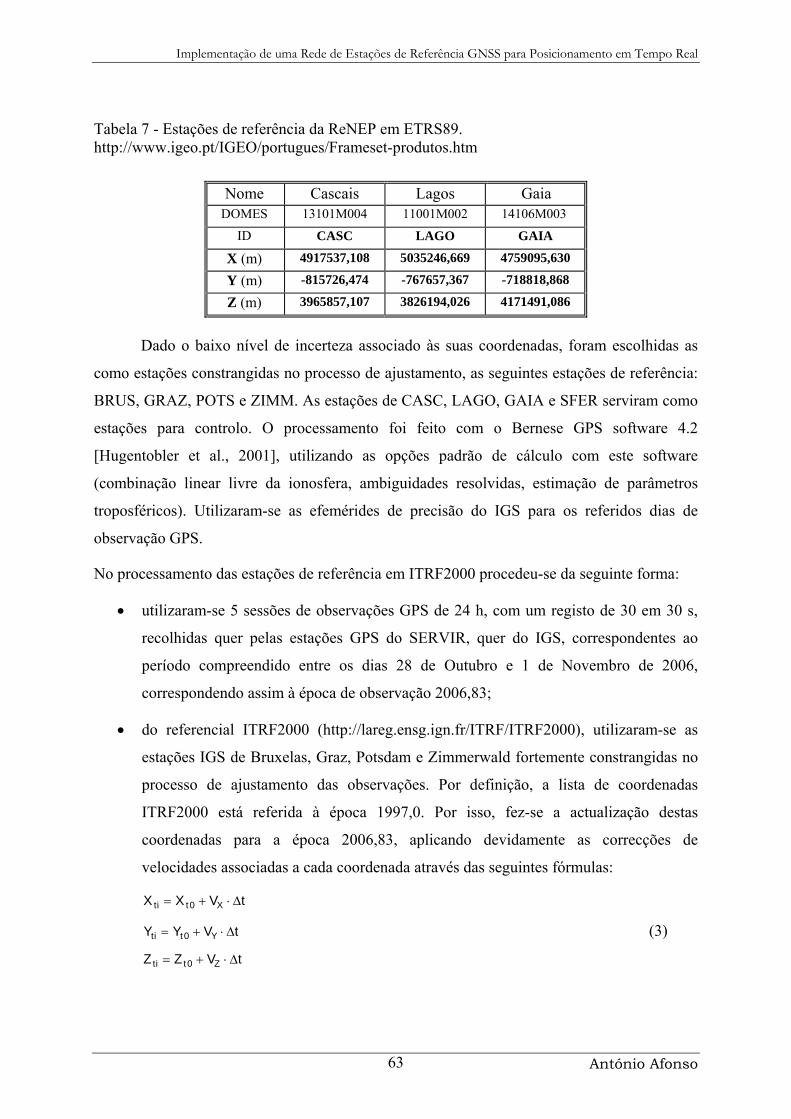
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 63
Tabela 7 - Estações de referência da ReNEP em ETRS89. http://www.igeo.pt/IGEO/portugues/Frameset-produtos.htm
Nome Cascais Lagos Gaia
DOMES 13101M004 11001M002 14106M003
ID CASC LAGO GAIA
X (m) 4917537,108 5035246,669 4759095,630
Y (m) -815726,474 -767657,367 -718818,868
Z (m) 3965857,107 3826194,026 4171491,086
Dado o baixo nível de incerteza associado às suas coordenadas, foram escolhidas as
como estações constrangidas no processo de ajustamento, as seguintes estações de referência:
BRUS, GRAZ, POTS e ZIMM. As estações de CASC, LAGO, GAIA e SFER serviram como
estações para controlo. O processamento foi feito com o Bernese GPS software 4.2
[Hugentobler et al., 2001], utilizando as opções padrão de cálculo com este software
(combinação linear livre da ionosfera, ambiguidades resolvidas, estimação de parâmetros
troposféricos). Utilizaram-se as efemérides de precisão do IGS para os referidos dias de
observação GPS.
No processamento das estações de referência em ITRF2000 procedeu-se da seguinte forma:
• utilizaram-se 5 sessões de observações GPS de 24 h, com um registo de 30 em 30 s,
recolhidas quer pelas estações GPS do SERVIR, quer do IGS, correspondentes ao
período compreendido entre os dias 28 de Outubro e 1 de Novembro de 2006,
correspondendo assim à época de observação 2006,83;
• do referencial ITRF2000 (http://lareg.ensg.ign.fr/ITRF/ITRF2000), utilizaram-se as
estações IGS de Bruxelas, Graz, Potsdam e Zimmerwald fortemente constrangidas no
processo de ajustamento das observações. Por definição, a lista de coordenadas
ITRF2000 está referida à época 1997,0. Por isso, fez-se a actualização destas
coordenadas para a época 2006,83, aplicando devidamente as correcções de
velocidades associadas a cada coordenada através das seguintes fórmulas:
ti t 0 XX X V t= + ⋅ Δ
ti t 0 YY Y V t= + ⋅ Δ (3)
ti t 0 ZZ Z V t= + ⋅ Δ

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 64
onde Xti,Yti e Zti são as coordenadas à época 2006.83, Xt0,Yt0 e Zt0 são as coordenadas na
época origem, VX, VY e VZ são as velocidades de cada componente da posição e Δt é a
diferença de tempo entre épocas.
Obtidas as coordenadas no referencial ITRF2000 à época de observação, elaborou-se
um programa em Matlab para efectuar o cálculo no sistema ETRS89 cujos resultados se
apresentam no Anexo G, das estações de referência SERVIR (Tabela 8), de acordo com a
metodologia adoptada.
Tabela 8 - Estações SERVIR em ETRF2000 época de observação 2006,83.
DOMES NOME X (m) Y (m) Z (m)
13101M004 BRUS 4027894,0221 307045,5982 4919474,9157 13909S001 CASC 4917537,0876 -815726,4814 3965857,1095 13902M001 GAIA 4759095,6319 -718818,8888 4171491,1145 11001M002 GRAZ 4194424,1328 1162702,4556 4647245,2030 13903M001 LAGO 5035246,6665 -767657,3711 3826194,0499 14106M003 POTS 3800689,9402 882077,1711 5028791,1203 13402M004 SFER 5105519,1604 -555146,1640 3769803,0969 14001M004 ZIMM 4331297,3281 567555,6380 4633133,7039
100 ALCO 4918781,2114 -767880,4411 3973821,2487 3 ARRA 4937875,4199 -778646,3652 3948655,2906
10 CRAI 4873187,0986 -783462,0104 4026308,2079 5 PARC 4919221,9103 -805104,6461 3965937,2090 9 MAFR 4902470,6741 -805104,1153 3986854,6074 8 STEM 4889882,5194 -746982,6430 4013161,1804 7 VNOV 4931659,7321 -733259,6505 3964665,2150
Para validar o cálculo efectuado, compararam estas coordenadas com as coordenadas
das estações de referência em ETRF2000 época 2006,7 (Tabela 9) disponibilizadas pela
EUREF, no dia 3 de Dezembro de 2006, e consideradas as mais recentes.
Dada a ligeira diferença de épocas de observação (2006,7 para 2006,83) em causa, e as
velocidades associadas a cada estação EUREF (tabela 6) ser melhor do que dois milímetros,
consideram-se os valores obtidos para as coordenadas SERVIR (Tabela 10) melhores que 1,1
cm nas componentes horizontais e 2,4 cm na componente vertical.
Da comparação efectuada obtiveram-se os resultados apresentados na Tabela 10.
Comparando com as coordenadas obtidas para a rede SERVIR com as coordenadas
das Estações de referência pertencentes ao IGP (Tabela 7), obtêm-se os resultados obtidos na
Tabela 11.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 65
Tabela 9 - Estações EUREF em ETRF2000 época de observação 2006,7.
(http://www.epncb.oma.be/_trackingnetwork/coordinates/stationcoordinates_stationlist.php)
DOMES NOME X (m) Y (m) Z (m)
13101M004 BRUS 4027894,0124 307045,5967 4919474,9116 13909S001 CASC 4917537,0983 -815726,4821 3965857,1322 13902M001 GAIA 4759095,6366 -718818,8870 4171491,1315 11001M002 GRAZ 4194424,1237 1162702,4610 4647245,2038 13903M001 LAGO 5035246,6762 -767657,3717 3826194,0736 14106M003 POTS 3800689,9409 882077,1747 5028791,1242 13402M004 SFER 5105519,1641 -555146,1648 3769803,1147 14001M004 ZIMM 4331297,3356 567555,6381 4633133,7199
Tabela 10 - Comparação entre EUREF e SERVIR (EUREF - SERVIR).
DOMES NOME X (m) Y (m) Z (m)
13101M004 BRUS -0,0097 -0,0015 -0,0041 13909S001 CASC 0,0107 -0,0007 0,0227 13902M001 GAIA 0,0047 0,0018 0,0170 11001M002 GRAZ -0,0091 0,0054 0,0008 13903M001 LAGO 0,0097 -0,0006 -0,0237 14106M003 POTS 0,0007 0,0036 0,0039 13402M004 SFER 0,0037 -0,0008 0,0178 14001M004 ZIMM 0,0075 0,0001 0,0160
Tabela 11 - Comparação entre IGP e SERVIR (IGP - SERVIR).
DOMES NOME X (m) Y (m) Z (m)
13909S001 CASC 0,0204 0,0074 -0,0025 13902M001 GAIA -0,0019 0,0208 -0,0285 13903M001 LAGO 0,0025 0,0041 -0,0239
Atendendo ao facto de não se saber qual a realização das coordenadas do IGP, considera-se
que as coordenadas SERVIR são melhores que 2,1 cm nas componentes horizontais e 3 cm na
componente vertical.
Atendendo ao facto de que as coordenadas oficiais a vigorar em Portugal para a
ReNEP são melhores que 10 cm [Rede RNEP, 2006], consideram-se os resultados obtidos
para a rede SERVIR dentro dos valores admitidos para a ReNEP.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 66
Assim, as coordenadas aplicadas à rede SERVIR são as obtidas em ETRF2000, época
2006,83, constantes na Tabela 5, com indicação de que os resultados obtidos são melhores
que 2 cm nas componentes horizontais e 3 cm na componente vertical.
Dado que a rede SERVIR é muito recente, ainda não se deve determinar qual a
velocidade aplicada a cada estação de referência, pelo que não é possível aplicar
completamente o modelo de Boucher and Altamimi [2001] e, dessa forma, expressar as
coordenadas da rede SERVIR à época 1989,0.
3.8. Treino dos colaboradores
Para um bom funcionamento do projecto SERVIR, o treino dos colaboradores é feito em
diversos níveis, consoante as tarefas que têm de desempenhar. Pretende-se descentralizar ao
máximo possível, de modo a facilitar a funcionalidade do sistema. Deste modo, identificaram-
se os seguintes níveis de formação:
• elemento de contacto nas Unidades Militares, conhecido por POC (point of
contact);
• atendimento no centro de cálculo, de vigilância e controlo de todo o sistema;
• manutenção do sistema.
Para o POC a formação é dada no local, enquanto acompanha a montagem da estação
de referência. Os aspectos mais importantes das suas atribuições são:
• semanalmente deve passar pelo local e verificar o estado de limpeza, humidade
ou infiltrações de água por causa da tomada eléctrica;
• ter cuidado para não desligar a alimentação do receptor e alertar as pessoas que
se dirijam ao local para não tocar quer na antena, quer no receptor;
• saber desligar, ligar o receptor e restantes ligações do receptor;
• verificar quando a rede de dados está com alguma anomalia, se a estação de
referência está a funcionar;
• preocupar-se em não ocupar o endereço IP atribuído à estação de referência;
• alertar que o equipamento pertence ao IGeoE.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 67
Os colaboradores que fazem o atendimento no Centro de cálculo, de vigilância e
controlo de todo o sistema, além de verificar o normal funcionamento do sistema, são os que
mais de perto lidam com os utilizadores e fazem a divulgação do projecto SERVIR.
Identificaram-se dez sugestões para uma boa prestação de um serviço:
a) Tratar o serviço de atendimento como uma extensão do projecto SERVIR
Providenciar orçamento para a divulgação do SERVIR e ter colaboradores disponíveis
para a área da publicidade e divulgação.
b) Ter um plano de comunicação
Este plano deve complementar e ampliar o plano global de publicidade e divulgação
do SERVIR. O visual e o discurso (oral e escrito) devem ser consistentes com a
imagem do produto.
c) Não esquecer a audiência mais importante
A audiência mais importante quando se inicia um novo serviço como o do SERVIR,
são os colaboradores que mais directamente trabalham no projecto. Todo o pessoal que
está em primeiro contacto com os utilizadores, tem de estar apto a conhecer o produto
e a responder a qualquer questão ou solicitação de apoio. Devem compreender a
importância da imagem e mensagem que passam para os utilizadores.
d) Lembrar-se de que é único
O lançamento de um novo produto é motivo de publicidade, porque é único. Devem
tirar vantagem desse facto, através dos órgãos de comunicação social, conferências da
especialidade, entre outros.
e) Focalizar no que é exclusivo
Serviços em tempo real dão a oportunidade para se perceber o que os utilizadores mais
necessitam.
f) Ter uma mensagem clara e consistente
Quanto mais simples melhor. Preparar as mensagens para serem utilizadas em vários
artigos publicitários. Os colaboradores devem compreender as mensagens que se
pretende difundir e saber responder.
g) Aproveitar as potencialidades do utilizador satisfeito

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 68
Preparar e encorajar os colaboradores a serem diligentes e solícitos a cada
oportunidade ou contacto com os utilizadores. Pedir a cada cliente satisfeito que
divulgue e encorajar os amigos e pessoas de confiança que “passem a palavra”.
h) Seguir as oportunidades de melhoria realçadas pelos utilizadores
Providenciar um meio interactivo com os utilizadores de forma que estes possam
apresentar as suas oportunidades de melhoria. Só usar os nomes dos utilizadores se
devidamente autorizados. Integrar os aspectos positivos evidenciados nas acções de
publicidade e divulgação do SERVIR.
i) Trabalhar a Web
Ver outras páginas Web que possam utilizar a ligação à página Web do SERVIR ou do
IGeoE.
Oferecer uma ligação ou e-mail para poder divulgar uma newsletter (Anexo H), de
modo a manter os utilizadores informados sobre os desenvolvimentos do projecto.
j) Avaliar
A avaliação é uma etapa crítica de qualquer esforço de publicidade ou divulgação.
Fornece uma forma interactiva do utilizador transmitir as suas opiniões positivas ou
menos positivas assim como as oportunidades de melhoria que gostaria de ver
implementadas. Recolher testemunhos de utilizadores para serem utilizados em
próximas edições de publicidade e divulgação.
Acompanhar a publicidade e divulgação feitas para verificar o que resulta e o que não
resulta. Para este efeito foi elaborado e enviado um inquérito de satisfação do
utilizador (Anexo I). Ter por objectivo melhorar da próxima vez.
Para os colaboradores que efectuam a manutenção do sistema, excepto nas
comunicações e segurança da área informática (para esse efeito já existe pessoal
especializado), têm de ter uma formação e experiência em todas as componentes do SERVIR,
desde a implementação das estações de referência até à arquitectura e configuração do
SERVIR. Em último caso, são eles que respondem às questões mais técnicas colocadas pelos
utilizadores e os únicos que recorrem ao apoio externo da parte do fabricante.
No âmbito da sua formação, engloba-se a participação em sessões de trabalho
(Workshops) relacionadas com o sistema implementado, visitas de trabalho a outras redes de
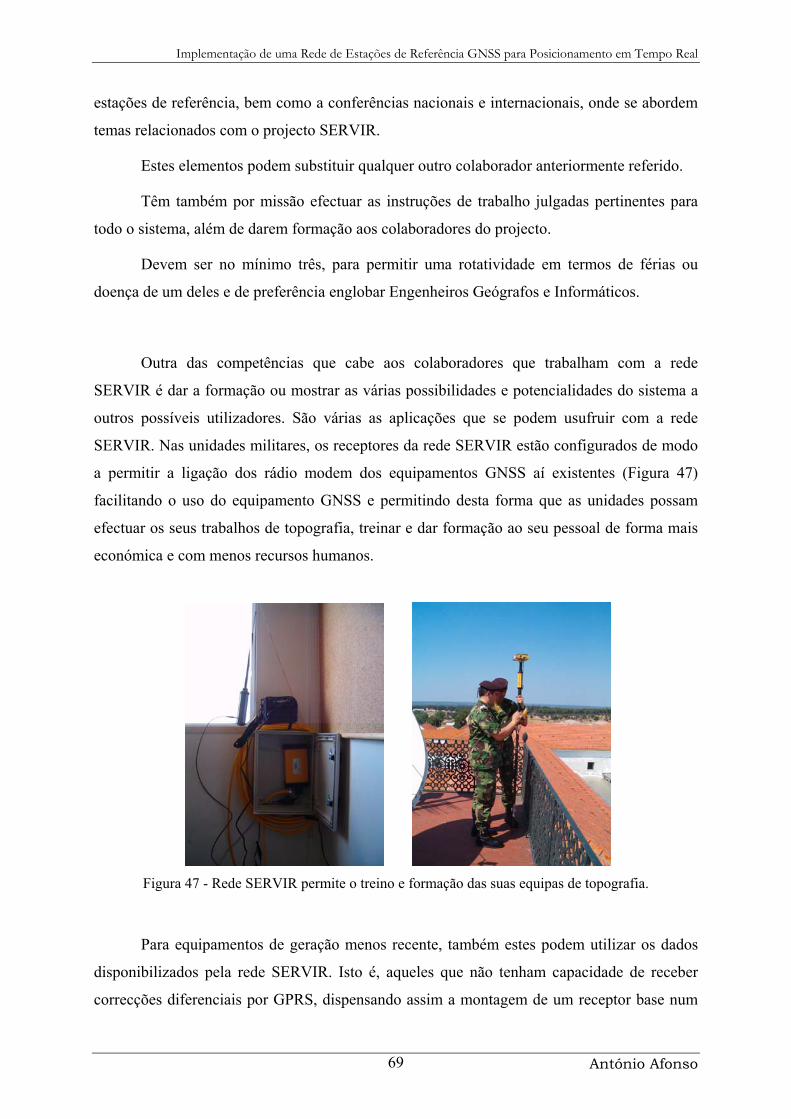
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 69
estações de referência, bem como a conferências nacionais e internacionais, onde se abordem
temas relacionados com o projecto SERVIR.
Estes elementos podem substituir qualquer outro colaborador anteriormente referido.
Têm também por missão efectuar as instruções de trabalho julgadas pertinentes para
todo o sistema, além de darem formação aos colaboradores do projecto.
Devem ser no mínimo três, para permitir uma rotatividade em termos de férias ou
doença de um deles e de preferência englobar Engenheiros Geógrafos e Informáticos.
Outra das competências que cabe aos colaboradores que trabalham com a rede
SERVIR é dar a formação ou mostrar as várias possibilidades e potencialidades do sistema a
outros possíveis utilizadores. São várias as aplicações que se podem usufruir com a rede
SERVIR. Nas unidades militares, os receptores da rede SERVIR estão configurados de modo
a permitir a ligação dos rádio modem dos equipamentos GNSS aí existentes (Figura 47)
facilitando o uso do equipamento GNSS e permitindo desta forma que as unidades possam
efectuar os seus trabalhos de topografia, treinar e dar formação ao seu pessoal de forma mais
económica e com menos recursos humanos.
Figura 47 - Rede SERVIR permite o treino e formação das suas equipas de topografia.
Para equipamentos de geração menos recente, também estes podem utilizar os dados
disponibilizados pela rede SERVIR. Isto é, aqueles que não tenham capacidade de receber
correcções diferenciais por GPRS, dispensando assim a montagem de um receptor base num

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 70
VG a emitir correcções diferenciais, eliminando não só os problemas associados à distância
Base-Móvel e comunicações rádio. Para compatibilizar esses equipamentos com o SERVIR é
necessário um computador com acesso à Internet (utilizando por exemplo uma placa de
comunicações 3G), um rádio modem ligado a uma porta COM do computador para emitir as
correcções diferenciais recebidas no computador e o programa GNSS Internet Radio
(http://igs.ifag.de/root_ftp/NTRIP/software/NtripGNSSInternetRadioWindows.exe) para se
ligar ao projecto SERVIR, receber as correcções diferenciais para a posição definida pelo
utilizador e enviar essas correcções para uma porta COM do computador que via rádio as
envia ao móvel. Também é possível ligar o receptor GPS directamente à porta COM do
computador (Figura 48).
Figura 48 - Equipamentos de geração menos recente.
Em síntese, foram abordados neste capítulo as diversas etapas que levaram à
implementação da primeira fase da rede de estações de referência GPS para RTK (SERVIR)
que abrange a área da Grande Lisboa e Vale do Tejo. Descreveu-se a metodologia adoptada, a
arquitectura e constituição quer das estações de referência quer o centro de vigilância e
controlo da rede SERVIR, assim como da formação dos colaboradores responsáveis pela
manutenção do sistema. É igualmente abordada a questão do referencial a adoptar e cujas
coordenadas se enquadramento dentro das exigências da Rede Geodésica Nacional. Para
completar o estudo, no capítulo seguinte, há que identificar os requisitos de qualidade da
referida rede, efectuar os respectivos testes comprovativos e apresentar os resultados de forma
a se retirarem as respectivas conclusões.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 71
4. Controlo de Qualidade do projecto SERVIR
A Fase I do projecto SERVIR ficou concluída em finais de Abril de 2006. Neste
capítulo descrevem-se os testes efectuados para analisar o desempenho da rede SERVIR e,
por conseguinte, a qualidade da mesma.
O termo qualidade é usado para designar grau de satisfação de requisitos dado por um
conjunto de características intrínsecas (por oposição a “atribuído”, significa existente em algo,
enquanto característica permanente). O termo qualidade pode ser usado com adjectivos como
fraca, boa, ou excelente. Por requisito entende-se a necessidade ou expectativa expressa,
geralmente implícita ou obrigatória [IPQ, 2001].
Por outras palavras, entende-se a qualidade como sendo a confirmação das
expectativas de um produto ou serviço utilizado por um cliente. Foram identificados os
seguintes requisitos para a rede SERVIR:
• fiabilidade;
• repetibilidade das coordenadas das estações;
• controlo de qualidade posicional;
• satisfação dos utilizadores.
4.1. Fiabilidade
Por fiabilidade entende-se a permanente disponibilidade de acesso aos dados da rede
SERVIR por parte do utilizador. Se a estação de referência, por qualquer motivo, estiver
inoperacional, não é possível dar o seu contributo para a rede SERVIR.
Um dos problemas poderia advir da capacidade da rede de comunicações interna da
rede SERVIR em permitir a transferência dos dados GPS entre as estações de referência e o
centro de cálculo. Quanto à latência da rede, esta pode ser confirmada através do próprio
software GPSNet, cujo módulo Synchronizer nos dá a indicação de que o atraso registado
pelos vários pacotes de mensagens de observações registados nas estações de referência é
inferior a 1 s (Figura 49), confirmando assim as expectativas da rede de comunicações interna
do projecto SERVIR.
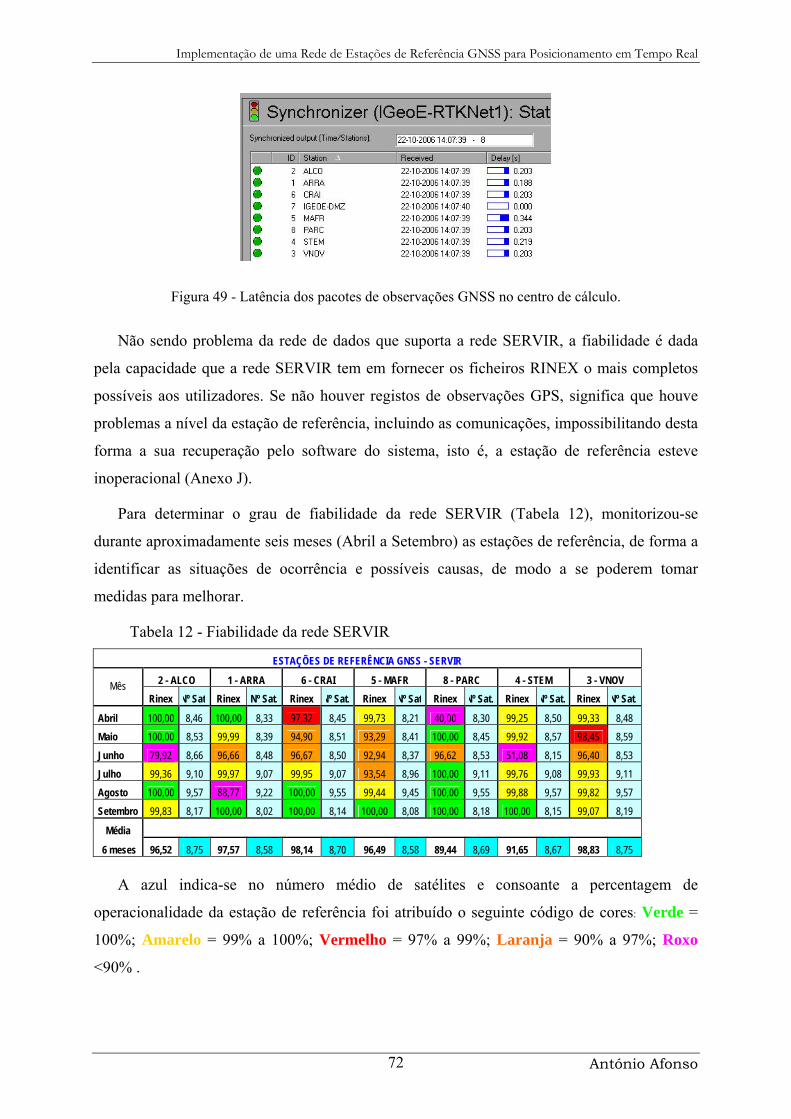
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 72
Figura 49 - Latência dos pacotes de observações GNSS no centro de cálculo.
Não sendo problema da rede de dados que suporta a rede SERVIR, a fiabilidade é dada
pela capacidade que a rede SERVIR tem em fornecer os ficheiros RINEX o mais completos
possíveis aos utilizadores. Se não houver registos de observações GPS, significa que houve
problemas a nível da estação de referência, incluindo as comunicações, impossibilitando desta
forma a sua recuperação pelo software do sistema, isto é, a estação de referência esteve
inoperacional (Anexo J).
Para determinar o grau de fiabilidade da rede SERVIR (Tabela 12), monitorizou-se
durante aproximadamente seis meses (Abril a Setembro) as estações de referência, de forma a
identificar as situações de ocorrência e possíveis causas, de modo a se poderem tomar
medidas para melhorar.
Tabela 12 - Fiabilidade da rede SERVIR
ESTAÇÕES DE REFERÊNCIA GNSS - SERVIR
2 - ALCO 1 - ARRA 6 - CRAI 5 - MAFR 8 - PARC 4 - STEM 3 - VNOV Mês Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.
Abril 100,00 8,46 100,00 8,33 97,32 8,45 99,73 8,21 40,00 8,30 99,25 8,50 99,33 8,48
Maio 100,00 8,53 99,99 8,39 94,90 8,51 93,29 8,41 100,00 8,45 99,92 8,57 98,45 8,59
Junho 79,92 8,66 96,66 8,48 96,67 8,50 92,94 8,37 96,62 8,53 51,08 8,15 96,40 8,53
Julho 99,36 9,10 99,97 9,07 99,95 9,07 93,54 8,96 100,00 9,11 99,76 9,08 99,93 9,11
Agosto 100,00 9,57 88,77 9,22 100,00 9,55 99,44 9,45 100,00 9,55 99,88 9,57 99,82 9,57
Setembro 99,83 8,17 100,00 8,02 100,00 8,14 100,00 8,08 100,00 8,18 100,00 8,15 99,07 8,19
Média
6 meses 96,52 8,75 97,57 8,58 98,14 8,70 96,49 8,58 89,44 8,69 91,65 8,67 98,83 8,75
A azul indica-se no número médio de satélites e consoante a percentagem de
operacionalidade da estação de referência foi atribuído o seguinte código de cores: Verde =
100%; Amarelo = 99% a 100%; Vermelho = 97% a 99%; Laranja = 90% a 97%; Roxo
<90% .
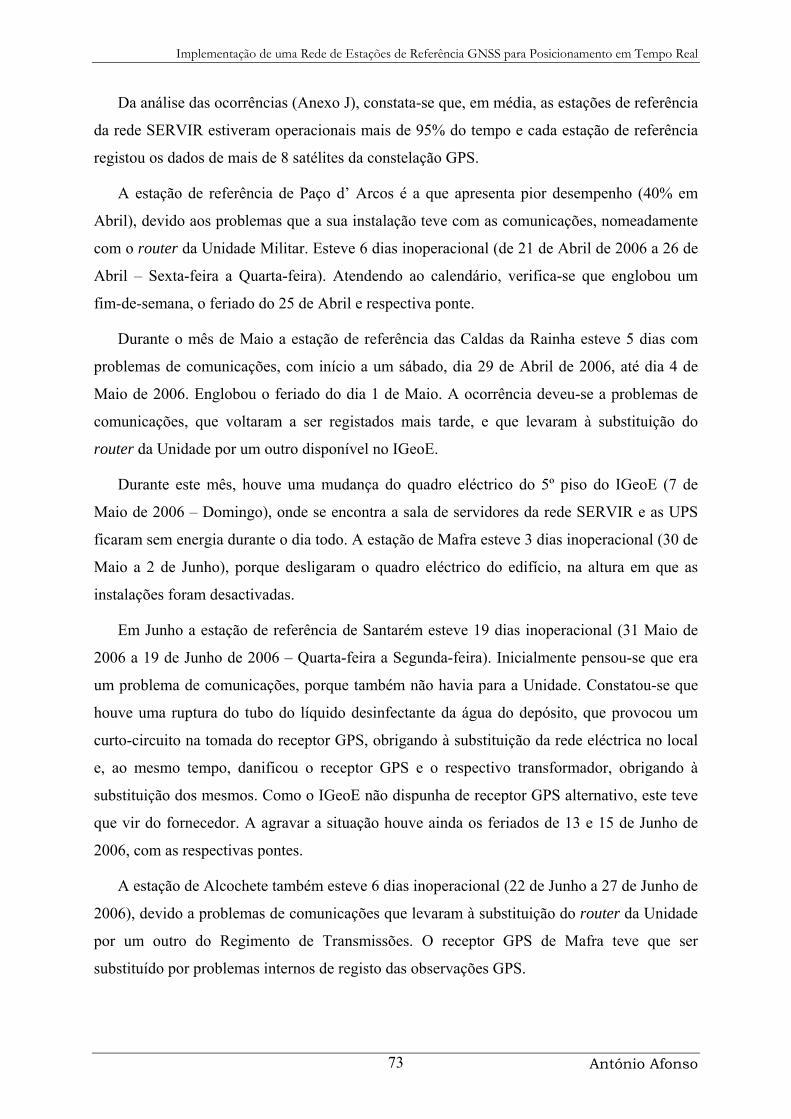
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 73
Da análise das ocorrências (Anexo J), constata-se que, em média, as estações de referência
da rede SERVIR estiveram operacionais mais de 95% do tempo e cada estação de referência
registou os dados de mais de 8 satélites da constelação GPS.
A estação de referência de Paço d’ Arcos é a que apresenta pior desempenho (40% em
Abril), devido aos problemas que a sua instalação teve com as comunicações, nomeadamente
com o router da Unidade Militar. Esteve 6 dias inoperacional (de 21 de Abril de 2006 a 26 de
Abril – Sexta-feira a Quarta-feira). Atendendo ao calendário, verifica-se que englobou um
fim-de-semana, o feriado do 25 de Abril e respectiva ponte.
Durante o mês de Maio a estação de referência das Caldas da Rainha esteve 5 dias com
problemas de comunicações, com início a um sábado, dia 29 de Abril de 2006, até dia 4 de
Maio de 2006. Englobou o feriado do dia 1 de Maio. A ocorrência deveu-se a problemas de
comunicações, que voltaram a ser registados mais tarde, e que levaram à substituição do
router da Unidade por um outro disponível no IGeoE.
Durante este mês, houve uma mudança do quadro eléctrico do 5º piso do IGeoE (7 de
Maio de 2006 – Domingo), onde se encontra a sala de servidores da rede SERVIR e as UPS
ficaram sem energia durante o dia todo. A estação de Mafra esteve 3 dias inoperacional (30 de
Maio a 2 de Junho), porque desligaram o quadro eléctrico do edifício, na altura em que as
instalações foram desactivadas.
Em Junho a estação de referência de Santarém esteve 19 dias inoperacional (31 Maio de
2006 a 19 de Junho de 2006 – Quarta-feira a Segunda-feira). Inicialmente pensou-se que era
um problema de comunicações, porque também não havia para a Unidade. Constatou-se que
houve uma ruptura do tubo do líquido desinfectante da água do depósito, que provocou um
curto-circuito na tomada do receptor GPS, obrigando à substituição da rede eléctrica no local
e, ao mesmo tempo, danificou o receptor GPS e o respectivo transformador, obrigando à
substituição dos mesmos. Como o IGeoE não dispunha de receptor GPS alternativo, este teve
que vir do fornecedor. A agravar a situação houve ainda os feriados de 13 e 15 de Junho de
2006, com as respectivas pontes.
A estação de Alcochete também esteve 6 dias inoperacional (22 de Junho a 27 de Junho de
2006), devido a problemas de comunicações que levaram à substituição do router da Unidade
por um outro do Regimento de Transmissões. O receptor GPS de Mafra teve que ser
substituído por problemas internos de registo das observações GPS.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 74
Em Agosto de 2006 foi a estação de referência da Arrábida que esteve quase oito dias
inoperacional (11 de Agosto a 18 de Agosto), porque além de problemas de comunicação,
durante a limpeza no local desligaram a ficha do receptor. A agravar a situação verificou-se o
feriado de 15 de Agosto a uma Terça-feira, com a consequente ponte. Como é um local
isolado, teve que se aguardar oportunidade até que uma equipa do Regimento de
Transmissões se deslocasse à estação de referência para repor a energia no receptor GPS.
Analisadas as ocorrências, constata-se que:
• os principais problemas que ocorrem na rede SERVIR são a nível das
comunicações;
• a demora na reposição da operacionalidade das estações deve-se ao facto de
ocorrer perto de um fim-de-semana, agravado pela existência de feriados e
respectivas pontes;
• a rede SERVIR esteve operacional mais de 95% do tempo.
No sentido de melhorar a operacionalidade da rede, foram tomadas as seguintes medidas:
• aumentar a monitorização da rede SERVIR para três vezes ao dia (início da manhã,
após almoço e antes da saída);
• identificar e registar todas as ocorrências verificadas;
• adquirir um equipamento de reserva para experiências e ensaios. Simultaneamente
servirá para uma rápida substituição de algum outro que se avarie;
• disponibilizar um telemóvel, contactos e computador portátil totalmente preparado,
incluindo placa de comunicações, de modo a poder monitorizar a rede SERVIR
durante os dias de actividade reduzida;
• implementar uma escala de serviço para monitorização do sistema.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 75
4.2. Repetibilidade das coordenadas
A repetibilidade das coordenadas das estações é entendida como um requisito essencial
para a rede SERVIR, devido ao tipo de estrutura que suporta a antena geodésica. Pretende-se
evidenciar ao longo dos vários meses de funcionamento desta rede, e nas mais diversas
condições atmosféricas, as variações das coordenadas da estações de referência.
Não havendo ainda no IGeoE um procedimento automático para análise dos dados das
estações da rede SERVIR, apresenta-se nesta dissertação alguns resultados obtidos por
Fernandes [2006]. Sendo este um estudo independente, serve como um indicador da
necessidade ou não de se tomar medidas adicionais para a adequada estabilização das estações
da rede SERVIR. O estudo engloba um conjunto de estações nacionais pertencentes ao IGP e
uma estação IGS (EBRE) situada na Catalunha, cujo desempenho (Figura 50) servirá como
termo de comparação com as estações da rede SERVIR (Figura 51). Os valores apresentados
resultam da combinação das três componentes do vector posição.
Figura 50 - Estações IGP e EBRE [Fernandes, 2006].

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 76
Figura 51 - Estações da rede SERVIR [Fernandes, 2006].
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 77
Dos resultados apresentados, constata-se que o valor de RMS mais alto registado pelas
estações IGP e EBRE foi de 15 mm, em Cascais, na semana GPS 1370, e que o valor mais
alto registado pelas estações SERVIR foi também de 15 mm, em Mafra, nas semanas GPS
1395 e 1398, e na Arrábida, na semana GPS 1397.
Quanto ao valor de RMS mínimo registado pelas estações IGP e EBRE, foi de 2 mm, em
Gaia, na semana GPS 1374, enquanto que as estações SERVIR registaram também 2 mm, em
Alcochete, na semana GPS 1384, e em Mafra, na semana GPS 1376.
Em média as estações de referência do IGP têm RMS da ordem dos 5 mm, enquanto que a
rede SERVIR regista valores da ordem de 5,5 mm.
A estação de referência EBRE é a que apresenta pior desempenho, com um RMS médio
de cerca 6,5 mm, enquanto que na rede SERVIR é a da Arrábida, com um RMS médio de 7
mm.
A estação de referência com melhor desempenho da rede IGP é a de Lagos, com um RMS
médio de cerca de 4,5 mm, enquanto que a rede SERVIR regista duas estações com
desempenho igual ou melhor. É o caso da estação de referência de Santarém, com um RMS
médio de 4 mm, e a de Mafra, com um RMS médio de 4,5 mm.
No entanto, ainda é cedo para se fazer uma análise mais cuidada, porque a rede SERVIR é
recente. De qualquer forma, são cerca de 29 semanas GPS de dados em análise, que nos dão
um indicador quanto ao desempenho da rede SERVIR, atendendo à sua finalidade
(posicionamento em RTK).
Do exposto conclui-se não ser necessário de momento adoptar medidas adicionais para a
estabilização dos suportes das antenas geodésicas da rede SERVIR.
4.3. Controlo de qualidade posicional
Quanto ao controlo de qualidade posicional a efectuar à rede SERVIR, tem por objectivo
responder às questões:
1. Qual a exactidão da rede no seu interior?
2. A exactidão obtida é a mesma quer no interior quer no exterior da rede?
3. Até que distância fora da área abrangida pela rede é expectável obter a mesma
exactidão que no seu interior?

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 78
Para analisar este requisito, apresentam-se os resultados obtidos durante a realização do
estágio curricular de Engenharia Geográfica de 2006 da aluna estagiária Manuela Santos,
realizado no Instituto Geográfico do Exército (sob a minha orientação) e em cooperação com
a Faculdade de Ciências da Universidade de Lisboa (sob a orientação do Sr. Professor Doutor
Virgílio Mendes).
Desde que a rede ficou disponível, em Abril de 2006, que as coordenadas colocadas nas
estações de referência SERVIR se encontram referidas ao referencial ITRF2000, época
2006,16. Para este cálculo, foi adoptada a metodologia expressa no Capítulo III, porque à data
ainda não tinham sido disponibilizadas pelo IGP as coordenadas dos vértices geodésicos no
referencial ETRS89.
De modo a que o processo de controlo de qualidade posicional fosse totalmente
independente, a metodologia adoptada consistiu em:
• escolher a base de maior dimensão, de entre as estações de referência da rede
SERVIR, por ser considerada a situação mais desfavorável. Essa base é formada
pelas estações de referência de Santarém e Vendas Novas, correspondendo a uma
distância de 68 km;
• a meio dessa base, identificaram-se no terreno um conjunto de vértices geodésicos,
que se encontram perpendiculares à base referida e igualmente (dentro do possível)
espaçados entre si, quer para o interior da rede quer para o exterior da mesma.
Foram identificados os vértices geodésicos constantes na Tabela 13, que
apresentam a distribuição espacial representada na Figura 52.
• foram efectuadas sessões de observação GPS de 3 h para cada VG referido,
seguido de pós-processamento em ITRF2000, época 2006,16, de modo a ser
uniforme com a mesma época de pós-processamento para a rede SERVIR. As
coordenadas obtidas estão indicadas na Tabela 14;
• a recolha das coordenadas terreno (Tabela 15) foi feita com um equipamento
GNSS Móvel Trimble R8, utilizando as correcções diferenciais difundidas pela
rede SERVIR.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 79
Tabela 13 - vértices geodésicos e a distância à base de referência.
Vértices Geodésicos Número Distância para o interior (km)
Distância para o exterior (km)
Folha 1:25000
ASNO 1 9.5 406 CHÃO BARROSO 2 0 0 392
CONCELHOS 3 14 393 CASCALHO 4 17 405
ESCUSA 5 21 393 LAGOA DA PEDRA 7 4.5 392
RAPOSEIRA 8 6 406 VALE GRANDE 9 13 405
VÁRZEA DE ÁGUA 10 9 393
Figura 52 - Distribuição espacial dos vértices geodésicos.
Tabela 14 - Coordenadas dos vértices geodésicos em ITRF 2000 época 2006,16.
Vértices Geodésicos X (m) Y (m) Z (m) ASNO 4912349.766 -748899.410 3985377.677
CHÃO BARROSO 4910930.605 -740924.947 3988601.923 CONCELHOS 4909575.591 -726829.573 3992875.665 CASCALHO 4913959.036 -756015.558 3982057.015
ESCUSA 4908815.901 -720278.898 3995043.222 LAGOA DA PEDRA 4909057.944 -736250.759 3991787.717
RAPOSEIRA 4913432.854 -744974.622 3984793.930 VALE GRANDE 4912227.024 -752813.669 3984784.661
VÁRZEA DE ÁGUA 4907595.807 -732238.349 3994322.941

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 80
Tabela 15 - Coordenadas obtidas através da rede SERVIR.
Vértices Geodésicos X (m) Y (m) Z (m) ASNO 4912349.832 -748899.461 3985377.711
CHÃO BARROSO 4910930.577 -740924.957 3988601.890 CONCELHOS 4909575.601 -726829.569 3992875.641 CASCALHO 4913959.043 -756015.555 3982057.027
ESCUSA 4908815.930 -720278.867 3995043.096 LAGOA DA PEDRA 4909057.965 -736250.766 3991787.689
RAPOSEIRA 4913432.872 -744974.612 3984793.905 VALE GRANDE 4912227.049 -752813.681 3984784.676
VÁRZEA DE ÁGUA 4907595.814 -732238.390 3994322.930
A análise dos resultados obtidos permite concluir que, apesar da necessidade da realização
de mais testes de controlo de qualidade posicional e atendendo aos valores apresentados,
conclui-se que, no interior da rede SERVIR, se obtém valores melhores que 6,6 cm e que, no
exterior e até 14 km da base, se obtêm valores melhor que 4,1 cm (Tabela 16). Não sendo
plausível que fora da rede se obtenha melhores resultados que no seu interior, há que
averiguar o que se passa no vértice geodésico ASNO, pelo que, de uma forma mais genérica e
até confirmação posterior, se pode inferir que a rede SERVIR, quer no seu interior quer até
uma distância para fora da rede de cerca 14 km, proporciona exactidões melhores do que 5
cm.
Assim, propõe-se uma área útil de trabalho delimitada pela linha azul a tracejado
apresentada na Figura 53.
Tabela 16 - Diferença de coordenadas entre a rede SERVIR e os vértices geodésicos
DIFERENÇAS Vértices Geodésicos Distância para o interior (km)
Distância para o exterior (km) dX (m) dY (m) dZ (m)
CASCALHO 17 -0.007 -0.003 -0.012VALE GRANDE 13 -0.026 0.012 -0.015
ASNO 9.5 -0.066 0.051 -0.034RAPOSEIRA 6 -0.018 -0.010 0.025
CHÃO BARROSO 0 0 0.028 0.010 0.033 LAGOA DA PEDRA 4.5 -0.021 0.007 0.028 VÁRZEA DE ÁGUA 9 -0.007 0.041 0.011
CONCELHOS 14 -0.010 -0.003 0.024 ESCUSA 21 -0.030 -0.031 0.126

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 81
Figura 53 - Área útil de trabalho da rede SERVIR.
Efectuado o controlo de qualidade posicional, elaborou-se outro teste de campo que visa
determinar em média quanto tempo um utilizador leva a obter as coordenadas de um ponto
pretendido e qual a exactidão obtida.
No IGeoE existe um ponto de centragem forçada, com coordenadas conhecidas em
ITRF2000, época 2006,16. Utilizou-se para o efeito um receptor Trimble GNSS R8 e um
cronómetro. Fizeram-se em 2 dias (manhã e tarde) 100 medições espaçadas em séries de 20,
cujos resultados se apresentam no Anexo K.
Quanto ao tempo que o receptor móvel GNSS leva em média a inicializar e a ficar pronto
para efectuar a determinação das coordenadas dos pontos pretendidos, os resultados indicam
ser melhor que 1 minuto, com uma exactidão melhor que 4 cm em planimetria e 5 cm em
altimetria.
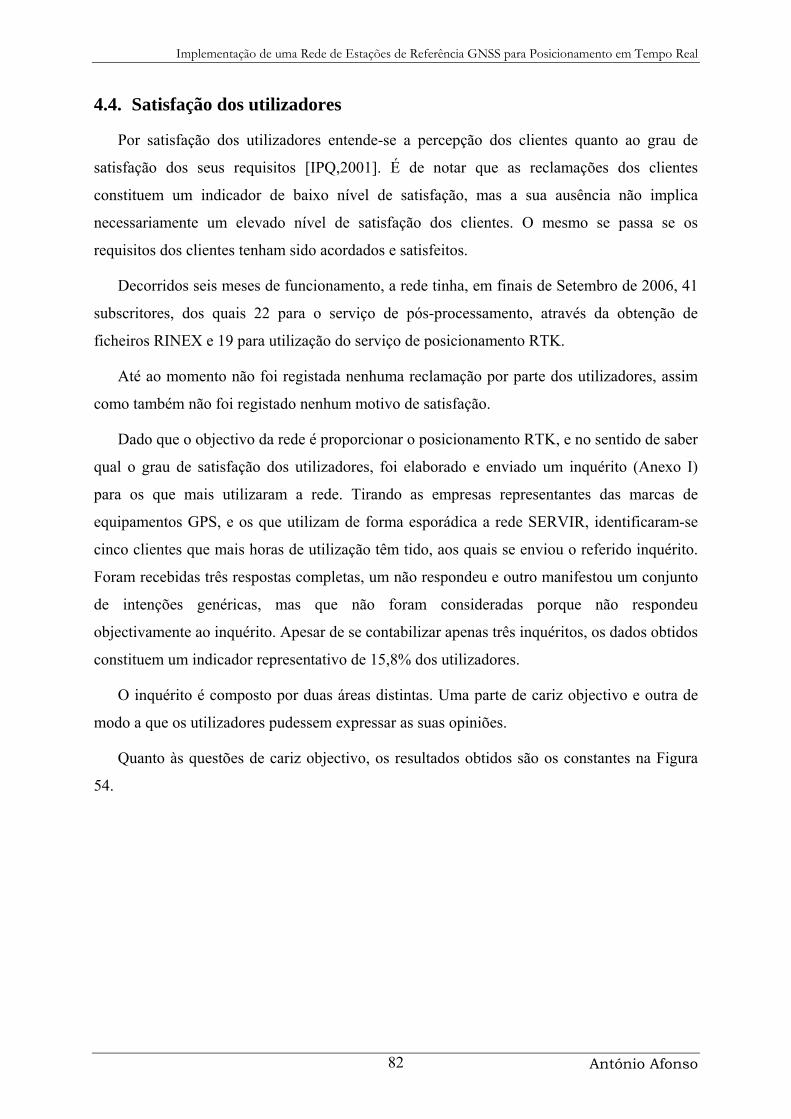
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 82
4.4. Satisfação dos utilizadores
Por satisfação dos utilizadores entende-se a percepção dos clientes quanto ao grau de
satisfação dos seus requisitos [IPQ,2001]. É de notar que as reclamações dos clientes
constituem um indicador de baixo nível de satisfação, mas a sua ausência não implica
necessariamente um elevado nível de satisfação dos clientes. O mesmo se passa se os
requisitos dos clientes tenham sido acordados e satisfeitos.
Decorridos seis meses de funcionamento, a rede tinha, em finais de Setembro de 2006, 41
subscritores, dos quais 22 para o serviço de pós-processamento, através da obtenção de
ficheiros RINEX e 19 para utilização do serviço de posicionamento RTK.
Até ao momento não foi registada nenhuma reclamação por parte dos utilizadores, assim
como também não foi registado nenhum motivo de satisfação.
Dado que o objectivo da rede é proporcionar o posicionamento RTK, e no sentido de saber
qual o grau de satisfação dos utilizadores, foi elaborado e enviado um inquérito (Anexo I)
para os que mais utilizaram a rede. Tirando as empresas representantes das marcas de
equipamentos GPS, e os que utilizam de forma esporádica a rede SERVIR, identificaram-se
cinco clientes que mais horas de utilização têm tido, aos quais se enviou o referido inquérito.
Foram recebidas três respostas completas, um não respondeu e outro manifestou um conjunto
de intenções genéricas, mas que não foram consideradas porque não respondeu
objectivamente ao inquérito. Apesar de se contabilizar apenas três inquéritos, os dados obtidos
constituem um indicador representativo de 15,8% dos utilizadores.
O inquérito é composto por duas áreas distintas. Uma parte de cariz objectivo e outra de
modo a que os utilizadores pudessem expressar as suas opiniões.
Quanto às questões de cariz objectivo, os resultados obtidos são os constantes na Figura
54.
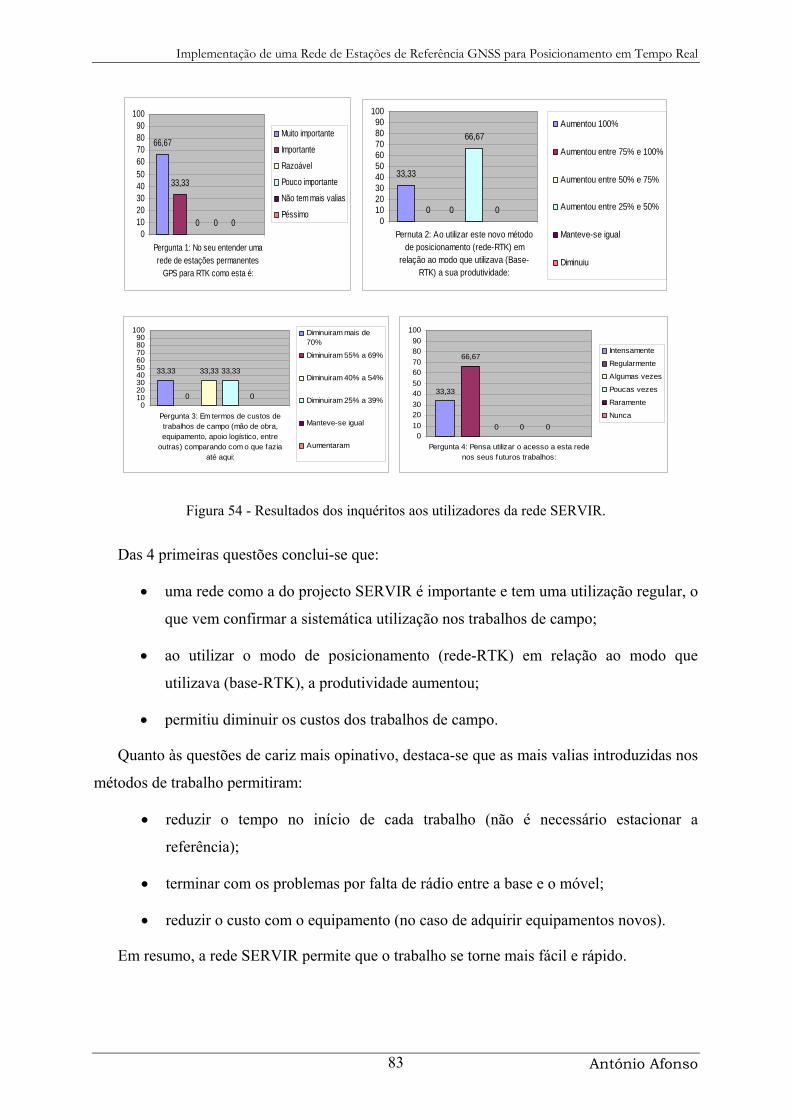
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 83
66,67
33,33
0 000
102030405060708090
100
Pergunta 1: No seu entender umarede de estações permanentes
GPS para RTK como esta é:
Muito importante
Importante
Razoável
Pouco importante
Não tem mais valias
Péssimo
33,33
0 00
66,67
0102030405060708090
100
Pernuta 2: Ao utilizar este novo métodode posicionamento (rede-RTK) em
relação ao modo que utilizava (Base-RTK) a sua produtividade:
Aumentou 100%
Aumentou entre 75% e 100%
Aumentou entre 50% e 75%
Aumentou entre 25% e 50%
Manteve-se igual
Diminuiu
33,33 33,33 33,33
000
102030405060708090
100
Pergunta 3: Em termos de custos detrabalhos de campo (mão de obra,equipamento, apoio logístico, entre
outras) comparando com o que faziaaté aqui:
Diminuiram mais de70%
Diminuiram 55% a 69%
Diminuiram 40% a 54%
Diminuiram 25% a 39%
Manteve-se igual
Aumentaram
33,33
0 0
66,67
00
102030405060708090
100
Pergunta 4: Pensa utilizar o acesso a esta redenos seus futuros trabalhos:
Intensamente
Regularmente
Algumas vezes
Poucas vezes
Raramente
Nunca
Figura 54 - Resultados dos inquéritos aos utilizadores da rede SERVIR.
Das 4 primeiras questões conclui-se que:
• uma rede como a do projecto SERVIR é importante e tem uma utilização regular, o
que vem confirmar a sistemática utilização nos trabalhos de campo;
• ao utilizar o modo de posicionamento (rede-RTK) em relação ao modo que
utilizava (base-RTK), a produtividade aumentou;
• permitiu diminuir os custos dos trabalhos de campo.
Quanto às questões de cariz mais opinativo, destaca-se que as mais valias introduzidas nos
métodos de trabalho permitiram:
• reduzir o tempo no início de cada trabalho (não é necessário estacionar a
referência);
• terminar com os problemas por falta de rádio entre a base e o móvel;
• reduzir o custo com o equipamento (no caso de adquirir equipamentos novos).
Em resumo, a rede SERVIR permite que o trabalho se torne mais fácil e rápido.
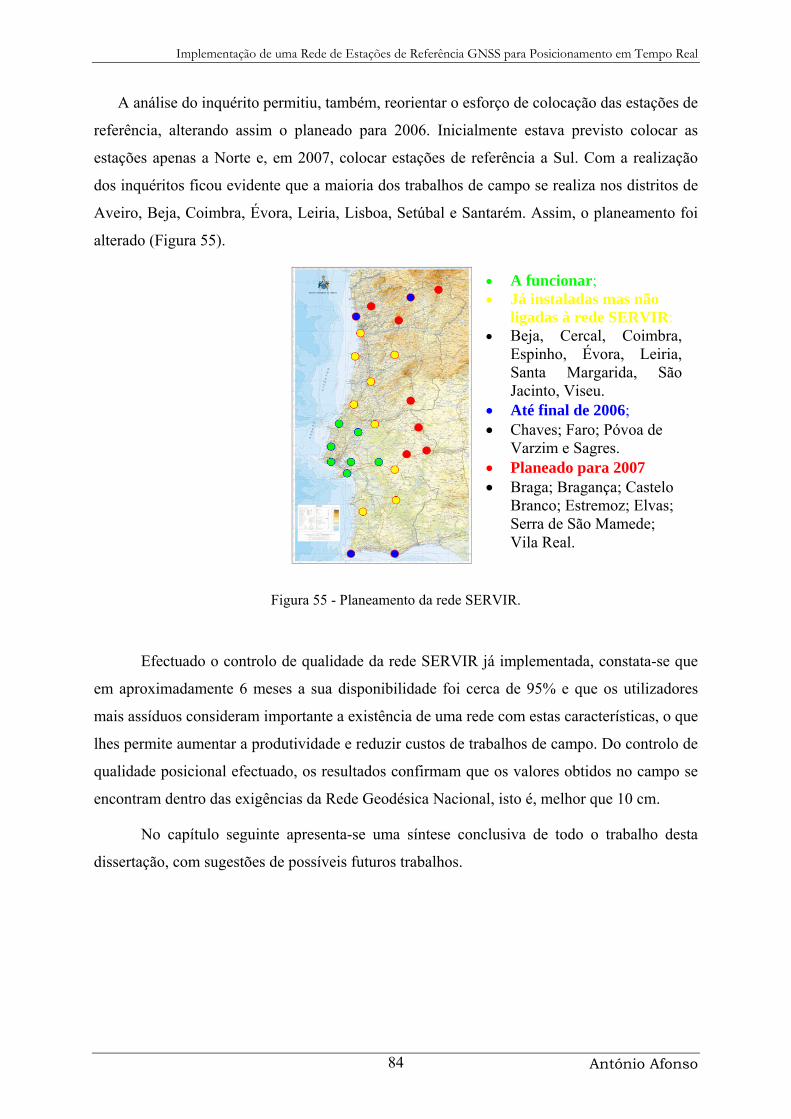
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 84
A análise do inquérito permitiu, também, reorientar o esforço de colocação das estações de
referência, alterando assim o planeado para 2006. Inicialmente estava previsto colocar as
estações apenas a Norte e, em 2007, colocar estações de referência a Sul. Com a realização
dos inquéritos ficou evidente que a maioria dos trabalhos de campo se realiza nos distritos de
Aveiro, Beja, Coimbra, Évora, Leiria, Lisboa, Setúbal e Santarém. Assim, o planeamento foi
alterado (Figura 55).
Figura 55 - Planeamento da rede SERVIR.
Efectuado o controlo de qualidade da rede SERVIR já implementada, constata-se que
em aproximadamente 6 meses a sua disponibilidade foi cerca de 95% e que os utilizadores
mais assíduos consideram importante a existência de uma rede com estas características, o que
lhes permite aumentar a produtividade e reduzir custos de trabalhos de campo. Do controlo de
qualidade posicional efectuado, os resultados confirmam que os valores obtidos no campo se
encontram dentro das exigências da Rede Geodésica Nacional, isto é, melhor que 10 cm.
No capítulo seguinte apresenta-se uma síntese conclusiva de todo o trabalho desta
dissertação, com sugestões de possíveis futuros trabalhos.
• A funcionar; • Já instaladas mas não
ligadas à rede SERVIR: • Beja, Cercal, Coimbra,
Espinho, Évora, Leiria,Santa Margarida, SãoJacinto, Viseu.
• Até final de 2006; • Chaves; Faro; Póvoa de
Varzim e Sagres. • Planeado para 2007 • Braga; Bragança; Castelo
Branco; Estremoz; Elvas; Serra de São Mamede; Vila Real.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 85
5. Conclusão
Após uma retrospectiva histórica sobre as várias metodologias de trabalho surgidas
com o aparecimento da Geodesia Espacial, elaborada de forma sucinta no capítulo I,
abordaram-se as possibilidades e limitações inerentes ao método base-RTK e, por
conseguinte, da motivação da elaboração desta dissertação, cujo objectivo visa a
implementação de uma rede de estações de referência GPS para RTK. O objectivo é aumentar
a produtividade de aquisição de informação geo-referenciada, visando a actualização da
Cartografia Militar de forma mais rápida e precisa.
São analisadas no Capítulo II, as formas de gerar correcções diferenciais e as várias
redes de estações de referência GPS operacionais quer na Europa quer em Portugal, como
forma de identificar a arquitectura da rede SERVIR e das respectivas estações de referência
GPS.
Implementada a rede SERVIR, cujas fases foram abordadas no Capítulo III e que
incluem desde o planeamento estratégico até ao treino dos colaboradores, houve que
identificar um conjunto de requisitos de controlo de qualidade apresentados no Capítulo IV.
São referidos um conjunto de testes, incluindo a elaboração de um inquérito aos utilizadores
mais assíduos da rede SERVIR, cujos resultados pretendem evidenciar as possibilidades e a
“qualidade” da rede SERVIR, cuja síntese conclusiva é apresentada nos parágrafos seguintes.
Antes da realização desta dissertação, os trabalhos de campo utilizando base-RTK, por
norma não excediam um raio de 10 km a partir do ponto de coordenadas conhecido, tal como
referido no Capítulo 1. Traduzia-se por um trabalho de campo com todas as limitações
associadas e já descritas.
Após a realização do presente trabalho e com a implementação desta rede de estações
de referência GPS para RTK, que deu origem ao projecto SERVIR em execução no IGeoE,
constata-se que a área de trabalho aumenta consideravelmente, englobando a região de Lisboa
e Vale Tejo, limitada a norte pela base Caldas da Rainha – Santarém, a Sul pela base Arrábida
-Vendas Novas, a Este pela base Vendas Novas Santarém e a Oeste por Mafra - Caldas da
Rainha.
Os resultados dos testes efectuados apontam para valores de exactidão melhores que 5
cm, quer no interior da rede SERVIR, quer no exterior da referida rede até uma distância
sensivelmente de 14 km, a contar da linha de base entre estações de referência GPS.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 86
Quanto ao tempo que o receptor móvel GPS leva em média a inicializar e a ficar
pronto para efectuar a determinação das coordenadas dos pontos pretendidos ser melhor que 1
minuto, com uma exactidão melhor que 4 cm em planimetria e 5 cm em altimetria, permite
antever a rapidez com que os trabalhos de campo poderão vir a ser efectuados, desde que
reunidas as condições de recepção do sinal da rede SERVIR.
Se atendermos que as coordenadas das estações de referência GPS em ETRS89 têm
uma exactidão melhor que 3 cm em relação às coordenadas oficias do IGP, os resultados de
campo após a inicialização do receptor GPS móvel, tal como referido no parágrafo anterior,
permitem obter coordenadas com exactidão melhor que 7 cm em planimetria e 8 cm em
altimetria.
Tendo noção de que mais testes de controlo de qualidade, nomeadamente posicional,
deverão ser efectuados, perante estes resultados a rede SERVIR permite obter coordenadas
dentro das exigências assumidas para a rede Geodésica Nacional, cujos valores são melhores
que 10 cm.
Não menos importante foi a recolha do testemunho dos utilizadores mais assíduos, que
consideram importante a existência de uma rede com estas características, o que lhes permite
aumentar a produtividade e reduzir custos de trabalhos de campo.
Para o IGeoE já está a haver uma alteração nas suas metodologias de trabalhos de
campo, com o correspondente aumento de produtividade, diminuição de recursos humanos,
materiais, logísticos e de tempo na realização das mesmas tarefas a que está submetido e, por
conseguinte, enquadra-se numa estratégia global de actualizar a sua cartografia de forma mais
rápida e com qualidade.
Com o trabalho desenvolvido até aqui, e no que à área da Geodesia diz respeito,
Portugal fica dotado com o que de mais moderno se está a utilizar entre os países mais
desenvolvidos, isto é, com uma rede de estações de referência para posicionamento em tempo
real. Por outro lado, contribui de forma inequívoca para um aumento de produtividade, não só
do IGeoE como de outras entidades que utilizem a rede SERVIR.
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 87
Sugestões para trabalhos futuros
Há vários trabalhos que de futuro se podem realizar a partir daqui, sendo de destacar:
• elaborar séries temporais, com vista a determinar o comportamento das estações de
referência SERVIR, sempre que surjam novas realizações e respectivas
velocidades de cada estação de referência SERVIR;
• estudar a influência da troposfera e da ionosfera em diferentes áreas de Portugal
Continental, nomeadamente sob a influência da actividade solar;
• implementar novas metodologias de trabalhos de campo, quer em zonas rurais,
urbanas e arborizadas, tirando partido dos sinais GPS e GLONASS;
• estudar a possibilidade da rede SERVIR apoiar voos fotogramétricos equipados
com GPS e sistemas inerciais, de modo a que os resultados obtidos sejam mais
exactos.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 88
Referências
Afonso, A.J.G., F.J.M. Simão, J.M.R. Rossa, M.S. Alhandra (2004a) “Metodologia
para apoio topográfico em WGS84.” Cartografia e Geodesia, Actas da III Conferência
Nacional de Cartografia e Geodesia.”. Lidel – Edições Técnicas, Lda, pp. 299-307.
Afonso, A.J.G., M.S. Alhandra, J.M.R. Rossa, F.J.M. Simão (2004b) “Sistema para
orientação e avaliação da exactidão posicional em Cartografia Digital.” Actas da III
Conferência de Cartografia e Geodesia, Lidel – Edições Técnicas, Lda, pp. 263-275.
Alves, J.A.D. e J.J.S. Cruz (1984) Topografia, Vol. I, Serviços Gráficos da Academia
Militar, Lisboa.
Banco de Portugal (2006) Câmbio
http://www.bportugal.pt/, acedido em 12 de Agosto de 2006.
C. Parareda, E. Bosch, A. Térmens, M. A. Ortiz, J. Talaya (2006) “CATNET:
Servicios de posicionamiento de alta precisión y su integración en las nuevas tecnologías de
la información.”
http://www.icc.es/geofons/catnet/documents/5sg_CATNET.pdf, acedido em 16 de
Fevereiro de 2006.
Boucher, C. and Z. Altamimi (2001) “Memo: Specifications for reference frame fixing
in the analysis of a EUREF GPS campaign.”
http://lareg.ensg.ign.fr/EUREF/memo.pdf, acedido em Outubro de 2006.
Fernandes, R. (2006) Comunicação pessoal, Universidade da Beira Interior, Novembro
de 2006.
Geo++ (2006) “GNSMART References.”
http://www.geopp.de/index.php?artikel=34, acedido em Julho 2006
Häkli, P. (2004) “Practical test on accuracy and usability of Virtual Reference Station
method in Finland.” Paper presented at the FIG Working Week, May 22-27, Athens, Greece.
Higuchi, H., T. Iwahashi, and J. Sawamoto (2004) “Network-based RTK-GPS and D-
GPS for survey and location-based services”,
www.unl.im.dendai.ac.jp/INSS2004/INSS2004_papers/OralPresentations/J3.pdf, acedido
em 13 de Setembro de 2006.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 89
Hugentobler, U., S. Schaer, and P. Fridez (Eds.) (2001) Bernese GPS Software Version
4.2. Astronomical Institute, University of Berne.
ICC (2006) Homepage do Institut Cartogràfic de Catalunya
http://www.icc.es, acedido em Julho 2006
IGeoE (2000) Manual de Leituras de Cartas. 4ª edição, Instituto Geográfico do
Exército, Lisboa.
IGP (s.d.) RENep. Folheto informativo.
IGP (2006) Homepage do Instituto Geográfico Português.
http://www.igeo.pt, acedido em Julho de 2006.
IH (Instituto Hidrográfico) (2006) Homepage do Instituto Hidrográfico.
http://www.hidrografico.pt, acedido em Julho de 2006.
IPQ (2001) Sistemas de Gestão da Qualidade, Fundamentos e Vocabulário. NP EN
ISO 9000:2000, Edição Março 2001. Instituto Português da Qualidade, Caparica.
Landau, H., U. Vollath, and X. Chen (2002) “Virtual Reference Station systems.”
Journal of Global Positioning Systems, Vol. 1, No. 2, pp. 137-143.
http://www.gmat.unsw.edu.au/wang/jgps/v1n2/index_v1n2.htm, acedido em 01 de
Maio de 2006
Leica Geosystems (2002) “System installation design criteria site selection -
installation issues.” Texto não publicado, 23 de Maio de 2002.
Leica Geosystems (2006) “GPS Spider nets the world.”
http://www.leica-geosystems.com/corporate/en/ndef/lgs_5336.htm, acedido em 1 de
Agosto de 2006.
M. Amor e C. Luttenberger (2004) “Introducción al concepto de redes VRS (Virtual
Reference Stations)”, VIII Congreso Nacional de Topografia y Cartografia, 19-22 Out. 2004,
Madrid.
www.isprs.org/publications/related/semana_geomatica05/front/abstracts/Dimarts8/G1
0.pdf, acedido em 05 de Abril de 2006
Mendes, V.B. (2005) “Tópicos de Geodesia Espacial”. Texto não publicado,
Faculdade de Ciências da Universidade de Lisboa.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 90
Monteiro, S. (2002) “Inauguração da rede DGPS”. Boletim do Instituto Hidrográfico –
Hidromar, nº 74, pp. 2-5.
NOAA (National Oceanic & Atmospheric Administration) (2006) “Guidelines for a
new and existing Continuously Operating Reference Stations (CORS).” National Geodetic
Survey, National Ocean Survey, NOAA, Silver Spring, MD20910.
Rizos, C. (2003) “Network RTK research and implementation – A geodetic
perspective.”
http://www.gmat.unsw.edu.au/snap/publications/rizos_2003a.pdf, acedido em 14 de
Agosto de 2006.
Swisstopo (Federal Office of Topography swisstopo) (2006a) “Automated GPS
Network for Switzerland AGNES.”
http://www.swisstopo.ch/en/basics/geo/permnetworks/agnes/index, acedido em 31
de Julho de 2006.
Swisstopo (Federal Office of Topography swisstopo) (2006b) Federal Office of
Topography swisstopo homepage.
http://www.swisstopo.ch/, acedido em 9Agosto de 2006
Talbot, N., G. Lu, and T. Allison (2002) “Broadcast Network RTK – Transmission
standards and results.” Proceedings of The Institute of Navigation GPS 2002, Portland,
September 24-27, pp. 2379- 2387.
Trimble (2005a) “Trimble reference station recommendations.” Texto não publicado,
Trimble Navigation Limited.
Trimble (2005b) “A VRS for Catalonia.” Technology & More, Fall 2005, Trimble
Navigation Limited, pp. 12-13
Trimble (2006) “Trimble VRS installations.”
http://www.trimble.com/vrsinstallations.shtml, acedido em Julho de 2006.
Wirring, E. (2004) “Running a commercial VRS network.” Paper presented at the
GPSNet Users Conference, 13-14 Jul 2004, Munich.
Wübbena, G., A. Bagge, and M. Schmitz (2001) “Network-based techniques for RTK
applications”, Presented at the GPS Symposium, GPS JIN 2001, GPS Society, Japan
Institute of Navigation, 14-16 November 2001, Tokyo.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 91
Wübbena, G., M. Schmitz, and A. Bagge (2005) “PPP-RTK: precise point positioning
using state-space representation in RTK networks.” Proceedings of The Institute of
Navigation GNSS 2005, September 13-16, Long Beach, California.

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
António Afonso 92
Anexos

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO A
Teste às comunicações da rede de Estações de Referência - SERVIR
______________________________________________________________________ António Afonso 93

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Exemplo com a estação de referência de Vendas Novas - VNOV Enviados e recebidos 4 Pacotes com 32 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
32 19 38 27 0 Enviados e recebidos 30 Pacotes com 128 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
128 12 37 22 0
______________________________________________________________________ António Afonso 94
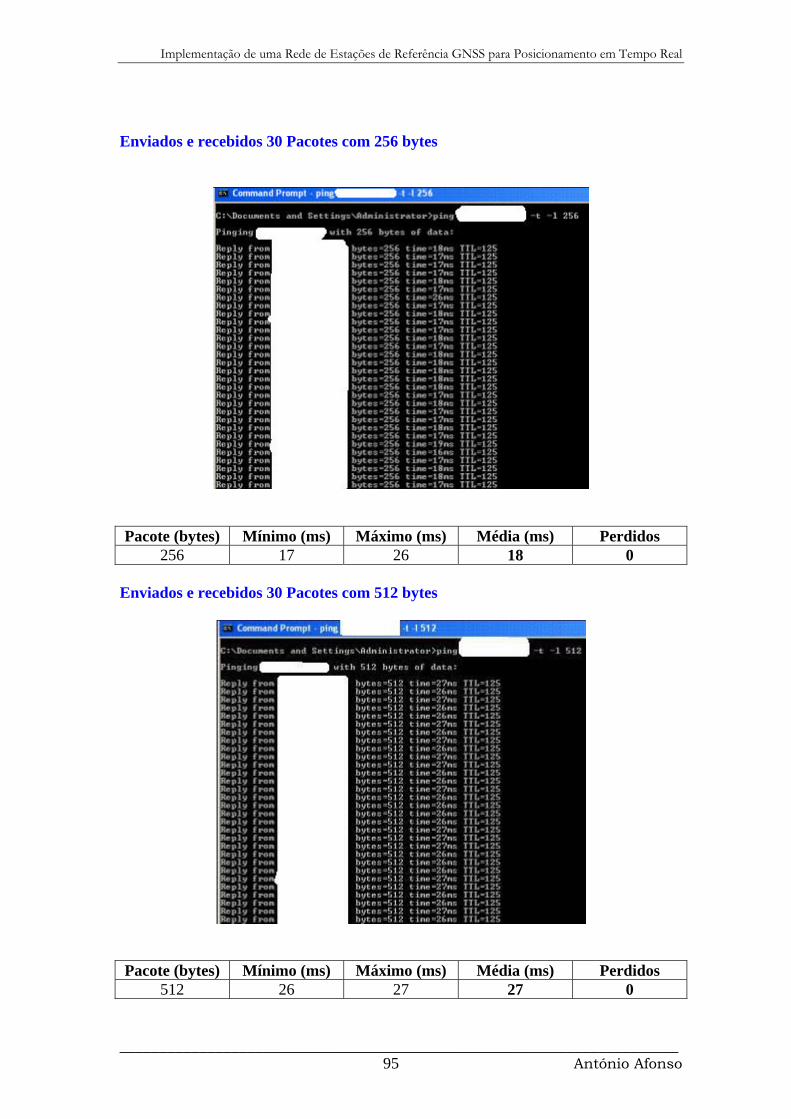
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Enviados e recebidos 30 Pacotes com 256 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
256 17 26 18 0 Enviados e recebidos 30 Pacotes com 512 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
512 26 27 27 0
______________________________________________________________________ António Afonso 95
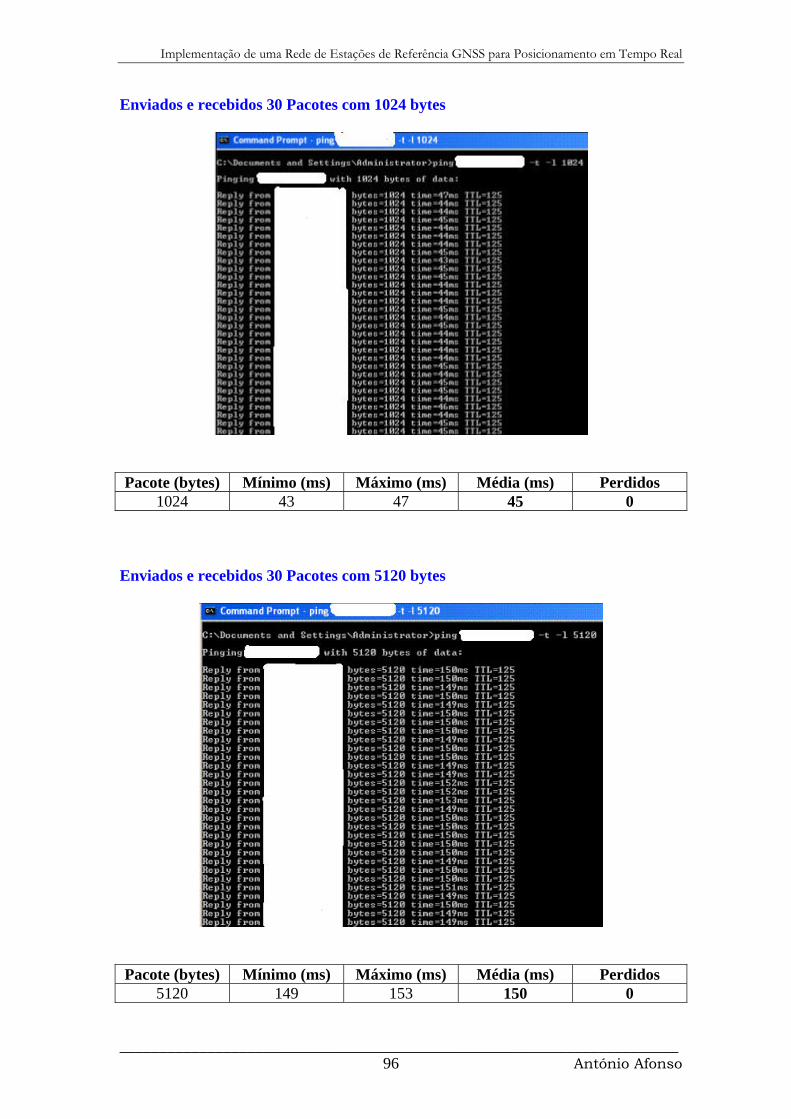
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Enviados e recebidos 30 Pacotes com 1024 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
1024 43 47 45 0 Enviados e recebidos 30 Pacotes com 5120 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
5120 149 153 150 0
______________________________________________________________________ António Afonso 96
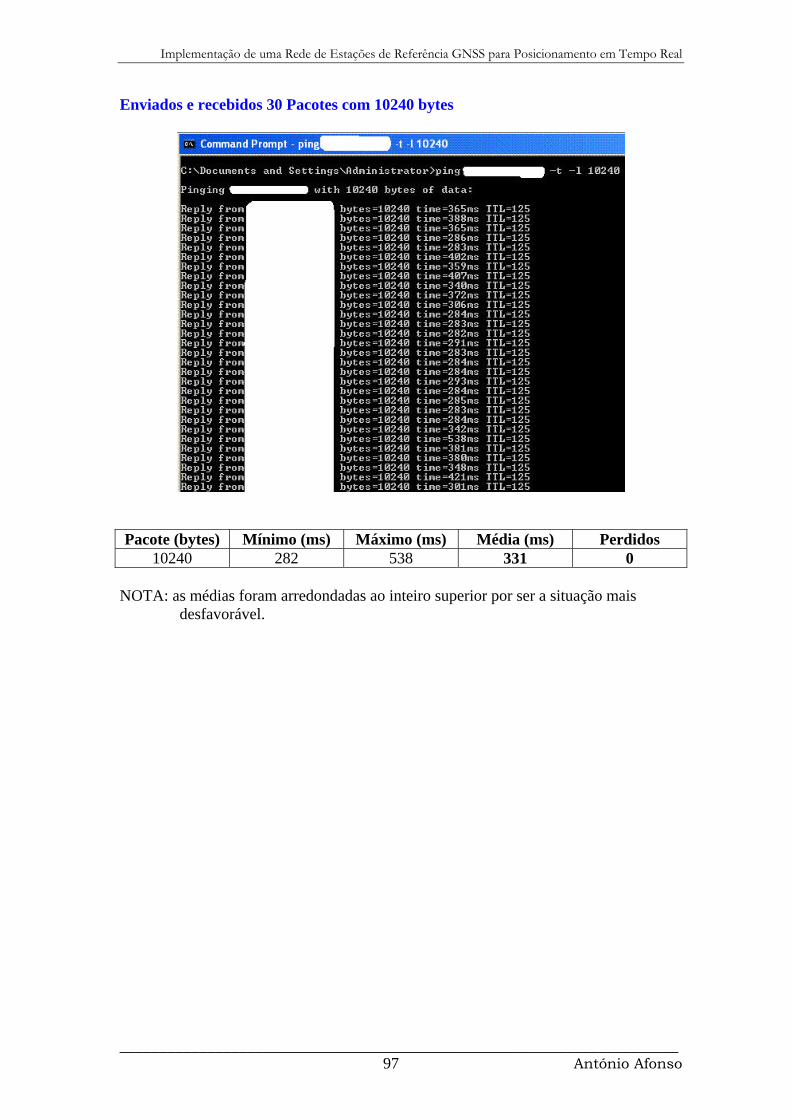
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Enviados e recebidos 30 Pacotes com 10240 bytes
Pacote (bytes) Mínimo (ms) Máximo (ms) Média (ms) Perdidos
10240 282 538 331 0 NOTA: as médias foram arredondadas ao inteiro superior por ser a situação mais
desfavorável.
______________________________________________________________________ António Afonso 97
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO B
Escolha dos locais das Estações de Referência
______________________________________________________________________ António Afonso 98

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Unidade Militar :
Identificador GNSS da Estação (4 caracteres):
Data da visita:
A. Informações acerca da Colocação e Localização da Antena GNSS:
1. Obstáculos no horizonte local que possam interferir com a recepção dos sinais:
a. Evitar presença de metais nas proximidades
b. Afastado de locais com vibrações (deslocamento meios transporte pesados)
c. 360º livre de obstáculos acima de ângulo de máscara 5º
i. Zonas arborizadas?
ii. Zonas edificadas?
d. Espelhos aquáticos?
e. Antenas de transmissão no mínimo a 300 m?
f. Linhas de transporte de energia?
g. Transformadores Eléctricos?
h. Outras estruturas:
2. Pára Raios no local?
a. Necessidade de instalar cabo e fusíveis de protecção?
3. Acesso ao local:
a. Forma de acesso (Fácil)
b. Contactos necessários para aceder ao local:
4. Altura final prevista da localização da antena GNSS (preferência 1,5 m)
______________________________________________________________________ António Afonso 99

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
5. Tipo de instalação de cabo da antena:
a. Normal?
b. Especial a construir com amplificador?
6. Suporte da antena (preferência Betão ou Rocha):
a. Local de fixação do suporte a construir?
b. Suporte a colocar num edifício existente:
i. Edifício construído há mais de 5 anos?
ii. Superfície de apoio ao suporte em tijolo ou betão?
c. Croqui/Fotos
B. Informações acerca da Colocação e Localização do Receptor GNSS:
7. Instalação do receptor (distância à antena até 30 m ; máximo 50 m):
a. Local:
b. Contactos necessários para aceder ao local
c. Forma de acesso
8. Dados relativos às comunicações:
a. Tipo de comunicação (Rede de dados do Exército/ADSL)
b. Comunicações via rede interna
c. Distância aproximada até local de instalação do receptor: 3 m
9. Dados relativos à alimentação:
a. Distância aproximada até local de instalação do receptor:
b. Tipo de alimentação:
i. Energia eléctrica(220 v):
______________________________________________________________________ António Afonso 100

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
1. Necessidade de extensão eléctrica?
ii. Gerador
iii. UPS
iv. Outro
10. Receptor a colocar em caixa de protecção e isolamento
a. entrada para cabo de rede:
b. entrada para cabo de antena GNSS:
c. entrada para alimentação:
11. Croqui/Fotografia Local Receptor
12. Croqui/Fotografia pontos de rede/routers
______________________________________________________________________ António Afonso 101

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
C. Outros Aspectos:
13. Segurança do local contra intrusos
14. Locais com muita queda de neve? (antena tem de ter altura superior p/ não soterrar)
15. Locais com grandes amplitudes térmicas? (ver características dos aparelhos)
D. Oportunidades de Melhoria:
E. Referências/Bibliografia NOAA (National Oceanic & Atmospheric Administration) (2006) “Guidelines for a new and existing Continuously Operating Reference Stations (CORS).” National Geodetic Survey, National Ocean Survey, NOAA, Silver Spring, MD20910. Leica Geosystems (2002) “System installation design criteria site selection - installation issues.” Texto não publicado, 23 de Maio de 2002. Trimble (2005a) “Trimble reference station recommendations.” Texto não publicado, Trimble Navigation Limited.
______________________________________________________________________ António Afonso 102

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Anexo A Visualização: escolha do local da Antena GPS e respectiva estrutura de montagem
(Nota: Dados e as imagens recolhidos através da Leica Geosystems Portugal)
A escolha do local deve obedecer aos seguintes critérios:
1- Livre de interferências rádio
2- Zona de acesso restrito para segurança
do equipamento;
3- Área livre de árvores
especialmente em cres-
cimento, que impeçam
a “linha de vista”;
4- Excelente visibilidade acima da linha
do Horizonte;
5- Zona livre de lagos, piscinas ou
represas, que possam reflectir o sinal
GNSS;
6 - Fácil acesso e Disponibilidade de
Linhas telefónicas dedicadas e de Energia
eléctrica
7 - Local com rocha sólida e Ligeira ondulação do terreno (superfície irregular) para
minimizar o efeito de multi-trajecto. Antena montada a 1,5 m de altura do solo
______________________________________________________________________ António Afonso 103

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
A estrutura que suporta a antena:
O suporte ideal a construir, seria numa base de betão tal como abaixo indicado:
1- A base do
suporte devia
ser de betão;
2- E o suporte
construído em
alumínio ou aço
inoxidável;
3 – De forma a se obter uma estrutura
deste género:
Este melhoramento a introduzir ficará para mais tarde, assim que as condições
financeiras o permitam. Como de momento as verbas disponíveis não permitem obter
as situações ideais, e sobretudo, devido ao sistema de comunicações que está montado
nas Unidades Militares não permitir a descentralização para locais fora dos edifícios
(sem haver grandes investimentos), a estrutura mais simples a montar deverá ser feita
de 2 formas consoante os locais, de acordo com o que se sugere nas figuras seguintes:
Para locais de aplicação vertical:
Para locais de aplicação horizontal:
______________________________________________________________________ António Afonso 104

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Apresenta-se de seguida um exemplo para uma construção simples de um suporte de
antena de aplicação vertical e alguns cuidados a observar na sua montagem:
Materiais necessários para o suporte:
- Tubo galvanizado ou em alumínio:
- Parafusos e buchas
- redução no topo (opção)
- Orientar a antena segundo a
direcção Norte:
- Montagem parcial do suporte da antena:
Montagem
Final:
Materiais necessários para suportar descargas
eléctricas:
- Fio de cobre e fusível
Ligação “terra”:
______________________________________________________________________ António Afonso 105

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO C Lista de material para Reconhecimento das Estações de Referência
______________________________________________________________________ António Afonso 106

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Equipamento Visto √ 1. Lista de pontos de contactos e números de telefones das Unidades Militares....... 2. Lista localização e características dos Routers das Unidades................................ 3. Lista de verificação das condições de escolha da Estação de Referência GNSS... 4. Lista de IP, Gateway, SubNetmask......................................................................... 5. Calendário (planeamento de actividades)............................................................... 6. Bloco de apontamentos........................................................................................... 7. Canetas (2 a 3 cores diferentes).............................................................................. 8. Prancheta para suportar o bloco de apontamentos..................................................
9. Telemóvel............................................................................................................... 10. Máquina Fotográfica Digital ..................................................................................
a. Pilhas ou Baterias e carregador.............................................................
11. Fita métrica metálica 3 ou 5 metros....................................................................... 12. Bússola....................................................................................................................
13. Equipamento GPS para recolha de Observações (estudo interferências)............... Viatura Todo o Terreno..........................................................................................
______________________________________________________________________ António Afonso 107

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO D
Cálculo da declinação magnética das Estações
______________________________________________________________________ António Afonso 108

Cálculo da declinação magnética das estações de referência SERVIR
Ano 2006
Estação Folha Dec Mag DecMagCart Total Ano Variação Anual Nº Anos Variação Total Cálculo Valor a introduzir na bússola1:25k Graus Minutos Graus Minutos Graus Minutos Minutos minutos Graus Minutos Graus Minutos
ALCO 432 7 5 0 1 7 4 1992 -7.3 14 -102.2 5 21.8 5 22ARRA 465 6 55 0 2 6 53 1994 -7.3 12 -87.6 5 25.4 5 25CRAI 326 4 2 0 6 4 8 2004 -9.0 2 -18.0 3 50.0 3 50MAFR 402 7 12 0 12 7 24 1992 -7.3 14 -102.2 5 41.8 5 42PARC 430 7 16 0 12 7 28 1992 -7.3 14 -102.2 5 45.8 5 46STEM 353 4 6 0 15 3 51 2004 -9.0 2 -18.0 3 33.0 3 33VNOV 435 8 41 0 22 8 19 1979 -7.3 27 -197.1 5 1.9 5 2

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 110 António Afonso
ANEXO E
MODELO DA FICHA DE IDENTIFICAÇÃO DA ESTAÇÃO DE REFERÊNCIA (PROJECTO SERVIR)

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 111 António Afonso
1. IDENTIFICAÇÃO DA ESTAÇÃO DE REFERÊNCIA GPS
a. Nome: Alcochete b. ID: ALCO c. Código: 2 d. Descrição do suporte: Mastro em ferro com 2”
Cravado numa parede em betão Centragem forçada
e. Data da Instalação: Nov 2005 2. INFORMAÇÃO DO LOCAL DA ESTAÇÃO
a. Local: Depósito Geral de Material do Exército b. Cidade: Alcochete c. Distrito: Setúbal d. Placa Tectónica: EURÁSIA e. Coordenadas da rede SERVIR: ETRS89 / ETRF2000 época 2006,83
Coordenadas Geodésicas Rectangulares (Cartesianas)
X (m) 4918781,2114
Y (m) -767880,4411
Z (m) 3973821,2487
ATENÇÂO: A rede SERVIR emite correcções diferenciais no sistema de referência ETRS89. As Altitudes fornecidas pela rede SERVIR são Elipsóidais. Não são Ortométricas (COTA). O IGeoE aconselha os utilizadores a efectuarem uma calibração local, no sistema de coordenadas pretendido, antes de realizarem qualquer trabalho com os dados desta rede de estações de referência GPS.
f. Outras coordenadas : WGS84 / ITRF 2000 época 2006,83
Coordenadas Geodésicas Rectangulares (Cartesianas)
X (m) 4918781,0417
Y (m) -767880,1275
Z (m) 3973821,5104
3. INFORMAÇÃO DO RECEPTOR GPS a. Tipo de receptor: Trimble NetRs b. Constelação de Satélites: GPS c. Nº de Série: 4526253187 d. Versão de Firmware: 1.15 actualizado em Abril de 2006 e. Fonte de Energia: Principal – corrente eléctrica 220 v
Secundária – UPS com capacidade de 30 min f. Ângulo de Máscara: 5º
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 112 António Afonso
4. INFORMAÇÃO DA ANTENA
a. Tipo: Chock Ring com Núcleo Dorne&Margolin b. Nº Série: 0220366838 c. Nomenclatura: TRM29659.00 d. Orientação: Encaixe do cabo de antena virado para o Norte verdadeiro e. Cobertura: Radome f. Cabo de antena: tipo – ALMR400
Comprimento: 30 m g. Data de Instalação: Nov 2005
5. OUTROS INSTRUMENTOS
a. Pára raios no local b. Estações Meteorológicas: Existe a possibilidade de integrar este tipo de
equipamento. Actualmente não há qualquer equipamento instalado para recolha deste tipo de dado.
6. MÉTODO DE POSICIONAMENTO
a. Método Topográfico: Campanha GPS b. Recolha de dados: dias 28OUT2006 a 01NOV2006 c. Processamento: Cálculo efectuado em cooperação com a Faculdade de Ciências
da Universidade de Lisboa (FCUL), utilizando o Bernese GPS software v4.2
7. POSSÍVEIS INTERFERÊNCIAS
a. Interferências electromagnécticas: Não existem no local antenas de: Rádio/Telemóveis/Radar
b. Fontes de Multitrajecto: Não existem c. Obstrução do Sinal GPS: Não há edifícios nem árvores mais altas nas
proximidades do local 8. PONTO DE CONTACTO / INFORMAÇÕES
a. Entidade: Instituto Geográfico do Exército b. Sigla: IGeoE
Endereço electrónico: mailto:[email protected]?subject=Projecto SERVIR
c. Primeiro Contacto: Departamento de Disponibilização de Informação Responsável: Tenente-Coronel António Pereira Telefone: 218505323 Central: 218505300
d. Segundo Contacto: Secção de Topografia Responsável: Major Rui Dias Telefone: 218505361 Central: 218505300

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 113 António Afonso
ANEXO F Lista dos nomes das Estações GNSS de Referência

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 114 António Afonso
Unidade Militar Nome
Estação Localidade Acrónimo Nome ALCO Alcochete DGME Depósito Geral de Material do Exército ARRA Serra da Arrábida Arrábida Arrábida BEJE Beja RI 3 Regimento de Infantaria nº 3 BGAN Bragança Bragança Bragança BRAG Braga RC 6 Regimento de Cavalaria nº6 CBRA Castelo Branco Castelo Branco Castelo Branco CERC Cercal Cercal Cercal CHAV Chaves RI 19 Regimento de Infantaria nº 19 COIM Coimbra BrigInt Brigada de Intervenção CRAI Caldas da Rainha ESE Escola de Sargentos do Exército ESPI Espinho RE 3 Regimento de Engenharia nº3
EVOR Évora CmdInstrDoutr Comando da Instrução e Doutrina FARO Faro Faro Faro LEIR Leiria RA 4 Regimento de Artilharia nº 4
IGE-DMZ Lisboa IGeoE Instituto Geográfico do Exército MAFR Mafra EPI Escola Prática de Infantaria PARC Paço D’ Arcos CME Centro Militar de Electrónica PVAR Póvoa de Varzim EPS Escola Prática dos Serviços SAGR Sagres Sagres Sagres SJAC São Jacinto RI 10 Regimento de Infantaria nº 10 SMAM São Mamede S.Mamede São Mamede SMAR Santa Margarida CMSM Campo Militar de Santa Margarida STEM Santarém EPC Escola Prática de Cavalaria VISE Viseu RI 14 Regimento de Infantaria nº 14
VNOV Vendas Novas EPA Escola Prática de Artilharia VREA Vila Real RI 13 Regimento de Infantaria nº 13

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
________________________________________________________________________ 115 António Afonso
ANEXO G Cálculo das Coordenadas das Estações de Referência SERVIR no Sistema de Referência ETRS89, de acordo com a metodologia indicada em Boucher and Altamimi [2001].

Lista Cooordenadas Oficiais Lista Coordenadas Calculadas em 21 Nov (epoca 2006.83) Dif EUREF-SERVIR21NovITRF2000 época 2006,7 (semana GPS 1397) EUREF ITRF2000 época 2006,83 SERVIR
DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z13101M004 BRUS 4027893.7307 307045.8536 4919475.1268 13101M004 BRUS 4027893.7387 307045.8574 4919475.1322 13101M004 BRUS -0.0080 -0.0038 -0.005413909S001 CASC 4917536.9330 -815726.1713 3965857.3926 13909S001 CASC 4917536.9215 -815726.1680 3965857.3715 13909S001 CASC 0.0115 -0.0033 0.021113902M001 GAIA 4759095.4561 -718818.5856 4171491.3846 13902M001 GAIA 4759095.4504 -718818.5848 4171491.3691 13902M001 GAIA 0.0057 -0.0008 0.015511001M002 GRAZ 4194423.7953 1162702.7274 4647245.4201 11001M002 GRAZ 4194423.8024 1162702.7243 4647245.4205 11001M002 GRAZ -0.0071 0.0031 -0.000413903M001 LAGO 5035246.5135 -767657.0539 3826194.3387 13903M001 LAGO 5035246.5030 -767657.0506 3826194.3166 13903M001 LAGO 0.0105 -0.0033 0.022114106M003 POTS 3800689.6155 882077.4170 5028791.3259 14106M003 POTS 3800689.6128 882077.4155 5028791.3231 14106M003 POTS 0.0027 0.0015 0.002813402M004 SFER 5105518.9893 -555145.8426 3769803.3812 13402M004 SFER 5105518.9847 -555145.8391 3769803.3650 13402M004 SFER 0.0046 -0.0035 0.016214001M004 ZIMM 4331297.0482 567555.9137 4633133.9461 14001M004 ZIMM 4331297.0390 567555.9160 4633133.9314 14001M004 ZIMM 0.0092 -0.0023 0.0147
Estações para ajustamento 100 ALCO 4918781.0417 -767880.1275 3973821.51043 ARRA 4937875.2520 -778646.0505 3948655.5532
10 CRAI 4873186.9277 -783461.6996 4026308.46785 PARC 4919221.7434 -805104.3326 3965937.47109 MAFR 4902470.5063 -805103.8028 3986854.86878 STEM 4889882.3466 -746982.3311 4013161.44077 VNOV 4931659.5604 -733259.3361 3964665.4770
Lista Cooordenadas Oficiais Lista Coordenadas Calculadas em 21 Nov (epoca 2006.83) Diferença ETRF-SERVIR21NovETRF2000 época 2006,7 (semana GPS 1397) EUREF ETRF2000 época 2006,83 SERVIR
DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z13101M004 BRUS 4027894.0124 307045.5967 4919474.9116 13101M004 BRUS 4027894.0221 307045.5982 4919474.9157 13101M004 BRUS -0.0097 -0.0015 -0.004113909S001 CASC 4917537.0983 -815726.4821 3965857.1322 13909S001 CASC 4917537.0876 -815726.4814 3965857.1095 13909S001 CASC 0.0107 -0.0007 0.022713902M001 GAIA 4759095.6366 -718818.8870 4171491.1315 13902M001 GAIA 4759095.6319 -718818.8888 4171491.1145 13902M001 GAIA 0.0047 0.0018 0.017011001M002 GRAZ 4194424.1237 1162702.4610 4647245.2038 11001M002 GRAZ 4194424.1328 1162702.4556 4647245.2030 11001M002 GRAZ -0.0091 0.0054 0.000813903M001 LAGO 5035246.6762 -767657.3717 3826194.0736 13903M001 LAGO 5035246.6665 -767657.3711 3826194.0499 13903M001 LAGO 0.0097 -0.0006 0.023714106M003 POTS 3800689.9409 882077.1747 5028791.1242 14106M003 POTS 3800689.9402 882077.1711 5028791.1203 14106M003 POTS 0.0007 0.0036 0.003913402M004 SFER 5105519.1641 -555146.1648 3769803.1147 13402M004 SFER 5105519.1604 -555146.1640 3769803.0969 13402M004 SFER 0.0037 -0.0008 0.017814001M004 ZIMM 4331297.3356 567555.6381 4633133.7199 14001M004 ZIMM 4331297.3281 567555.6380 4633133.7039 14001M004 ZIMM 0.0075 0.0001 0.0160
100 ALCO 4918781.2114 -767880.4411 3973821.2487Estações para ajustamento 3 ARRA 4937875.4199 -778646.3652 3948655.2906
10 CRAI 4873187.0986 -783462.0104 4026308.20795 PARC 4919221.9103 -805104.6461 3965937.20909 MAFR 4902470.6741 -805104.1153 3986854.60748 STEM 4889882.5194 -746982.6430 4013161.18047 VNOV 4931659.7321 -733259.6505 3964665.2150
Cálculo das Coordenadas das Estações de Referência SERVIR no Sistema de Referência ETRS89 de acordo com a metodologia Boucher e Altamimi

Lista Cooordenadas Oficiais acedido em: 16-Nov-06 Lista Coordenadas Calculadas em 21 Nov (epoca 2006.83) Diferença IGP-SERVIR21NovETRS89 IGP ETRF2000 época 2006,83 SERVIR
DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z 2D Z 3D13909S001 CASC 4917537.1080 -815726.4740 3965857.1070 13909S001 CASC 4917537.0876 -815726.4814 3965857.1095 13909S001 CASC 0.0204 0.0074 -0.0025 0.022 -0.002 0.02213902M001 GAIA 4759095.6300 -718818.8680 4171491.0860 13902M001 GAIA 4759095.6319 -718818.8888 4171491.1145 13902M001 GAIA -0.0019 0.0208 -0.0285 0.021 -0.029 0.03513903M001 LAGO 5035246.6690 -767657.3670 3826194.0260 13903M001 LAGO 5035246.6665 -767657.3711 3826194.0499 13903M001 LAGO 0.0025 0.0041 -0.0239 0.005 -0.024 0.024
IGP EUREFIGP 16-Nov-06 ETRF2000 época 2006,7 Diferença IGP-EUREF2006,7
DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z13909S001 CASC 4917537.1080 -815726.4740 3965857.1070 13909S001 CASC 4917537.0983 -815726.4821 3965857.1322 13909S001 CASC 0.0097 0.0081 -0.025213902M001 GAIA 4759095.6300 -718818.8680 4171491.0860 13902M001 GAIA 4759095.6366 -718818.8870 4171491.1315 13902M001 GAIA -0.0066 0.0190 -0.045513903M001 LAGO 5035246.6690 -767657.3670 3826194.0260 13903M001 LAGO 5035246.6762 -767657.3717 3826194.0736 13903M001 LAGO -0.0072 0.0047 -0.0476
ETRS89 IGP EUREF
Lista Cooordenadas Oficiais 16-Nov-06 ETRF2000 época 1989.0 Diferença IGP-EUREF1989.0DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z
13909S001 CASC 4917537.1080 -815726.4740 3965857.1070 13909S001 CASC 4917537.1700 -815726.4670 3965857.2310 13909S001 CASC -0.0620 -0.0070 -0.1240

Estações para ajustamento ETRS 89 / ETRF 2000 época 1989.0ETRF2000 época 1989.0
EUREF SERVIRLista Cooordenadas Oficiais Lista Coordenadas Calculadas em 21 Nov (epoca 1989.0) Diferença ETRS89.0-SERVIR21Nov
ETRF2000 época 2006,83DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z
13101M004 BRUS 4027894.0030 307045.6020 4919474.9120 13101M004 BRUS 4027894.0078 307045.6018 4919474.9140 13101M004 BRUS -0.0048 0.0002 -0.0020Vel 0.0008 -0.0002 0.0001
13909S001 CASC 4917537.1700 -815726.4670 3965857.2310 13909S001 CASC 4917537.1786 -815726.4547 3965857.2646 13909S001 CASC -0.0086 -0.0123 -0.0336Vel -0.0051 -0.0015 -0.0087
11001M002 GRAZ 4194424.1540 1162702.4550 4647245.2140 11001M002 GRAZ 4194424.1703 1162702.4520 4647245.2262 11001M002 GRAZ -0.0163 0.0030 -0.0122Vel -0.0021 0.0002 -0.0013
14106M003 POTS 3800689.9510 882077.1810 5028791.1360 14106M003 POTS 3800689.9545 882077.1800 5028791.1381 14106M003 POTS -0.0035 0.0010 -0.0021Vel -0.0008 -0.0005 -0.0010
13402M004 SFER 5105519.1290 -555146.0980 3769803.0680 13402M004 SFER 5105519.0837 -555146.1070 3769803.0255 13402M004 SFER 0.0453 0.0090 0.0425Vel 0.0043 -0.0032 0.0040
14001M004 ZIMM 4331297.3470 567555.6330 4633133.7170 14001M004 ZIMM 4331297.3406 567555.6362 4633133.7057 14001M004 ZIMM 0.0064 -0.0032 0.0113Vel -0.0007 0.0001 -0.0001
ETRS89 IGP EUREF Diferença IGP ETRS89.0 - EUREF89.0Lista Cooordenadas Oficiais 16-Nov-06 ETRF2000 época 1989.0
DOME NOME X Y Z DOME NOME X Y Z DOME NOME X Y Z13909S001 CASC 4917537.1080 -815726.4740 3965857.1070 13909S001 CASC 4917537.1700 -815726.4670 3965857.2310 13909S001 CASC -0.0620 -0.0070 -0.1240
IGP ETRS89.0 SERVIR ETRF2000 época 1989.013909S001 CASC 4917537.1080 -815726.4740 3965857.1070 13909S001 CASC 4917537.1786 -815726.4547 3965857.2646 13909S001 CASC -0.0706 -0.0193 -0.1576

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
______________________________________________________________________ 119 António Afonso
ANEXO H Newsletter: Boletim Informativo Nº 1 – Novembro de 2006

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Projecto SERVIR
Boletim Informativo Nº 1 – Novembro de 2006 Caro utilizador do Sistema de Estações de Referência GNSS Virtuais (SERVIR),
vimos por este meio informá-lo do seguinte:
1. A REDE SERVIR EM 2006 Após seis meses (desde Abril de 2006) de funcionamento da primeira fase do Projecto
SERVIR, o Instituto Geográfico do Exército não registou nenhuma ocorrência menos
positiva, por parte dos 42 utilizadores registados até ao momento.
Durante a primeira fase do Projecto SERVIR foram instaladas 7 estações de referência
GPS na zona da Grande Lisboa e Vale de Santarém.
Até final de 2006 serão instaladas mais 13 estações de referência GNSS (GPS e
GLONASS).
Fruto do inquérito efectuado aos utilizadores que mais utilizam a rede SERVIR, a
Direcção do IGeoE (contrariamente ao planeado que era expandir apenas para
Norte), decidiu que as estações de referência ficariam em:
Beja, Cercal, Coimbra, Espinho, Évora, Leiria, Santa Margarida, São Jacinto,
Viseu (Já instaladas).
Ainda por instalar: Faro, Sagres, Póvoa do Varzim e Chaves. Deste modo o dispositivo da rede SERVIR no final de 2006 será o seguinte (ver Figura1):
- A funcionar; - Já instaladas mas não ligadas à rede SERVIR; - Até final de 2006; - Planeado para 2007.
______________________________________________________________________ 120 António Afonso
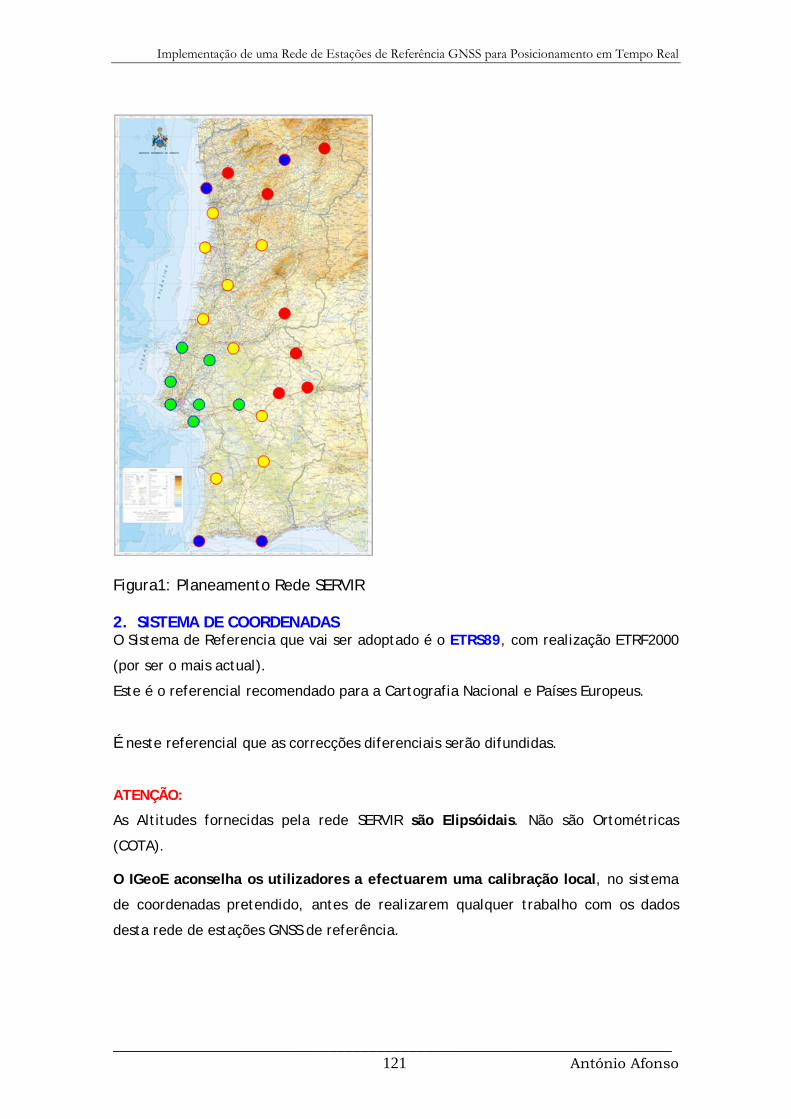
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Figura1: Planeamento Rede SERVIR 2. SISTEMA DE COORDENADAS O Sistema de Referencia que vai ser adoptado é o ETRS89, com realização ETRF2000
(por ser o mais actual).
Este é o referencial recomendado para a Cartografia Nacional e Países Europeus.
É neste referencial que as correcções diferenciais serão difundidas.
ATENÇÃO:
As Altitudes fornecidas pela rede SERVIR são Elipsóidais. Não são Ortométricas
(COTA).
O IGeoE aconselha os utilizadores a efectuarem uma calibração local, no sistema
de coordenadas pretendido, antes de realizarem qualquer trabalho com os dados
desta rede de estações GNSS de referência.
______________________________________________________________________ 121 António Afonso

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Para cada estação de referência serão calculadas e disponibilizadas na ficha de
identificação de cada estação de referência as coordenadas em:
- Datum Lisboa (DLx);
- Datum 73 (D73)
- ITRF2000
3. SERVIÇOS DISPONIBILIZADOS Os serviços disponíveis são:
- DGPS, até um máximo de 5 utilizadores em simultâneo. As correcções diferenciais
são disponibilizadas no formato de mensagem RTCM 2.3;
- RTK, até um máximo de 45 utilizadores em simultâneo. As correcções diferenciais
são disponibilizadas nos formatos de mensagens CMR, CMR+, cujos formatos são
proprietários, ou RTCM 2.3 cujo formato é padrão, e RTCM 3.0 (em definição final de
formato).
- A análise de dados em pós-processamento é possível com o download dos ficheiros
RINEX a 1s, directamente da respectiva página Web do Projecto SERVIR.
4. ACESSO AOS DADOS DA REDE SERVIR Este projecto foi lançado como sendo de interesse para o cumprimento da missão e a
actividade de produção cartográfica do IGeoE.
Fruto da sua Política, alicerçada num Sistema Integrado de Gestão de Qualidade
Ambiente e Segurança implementado no IGeoE, tem permitido uma optimização dos
recursos com a inerente redução de custos.
No caso concreto do Projecto Servir:
- Toda a concepção e desenvolvimento do Projecto, foi feita pelo IGeoE;
- A arquitectura da rede SERVIR foi idealizada neste instituto;
- A montagem das estações de referência é efectuada por elementos do IGeoE;
- Para o centro de vigilância e cálculo do Sistema, existe uma equipa de Engenheiros
Informáticos e Geógrafos responsáveis pela configuração e gestão da rede SERVIR.
______________________________________________________________________ 122 António Afonso

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Deste modo, todo o “conhecimento (Know-How)” está neste Instituto, permitindo
ainda poupar muitos recursos financeiros e sustentar a seguinte Decisão da Direcção
do IGeoE:
Tendo sido reconhecidas as mais valias que poderiam advir para a comunidade civil e
científica, caso o sistema fosse “disponibilizado” aos mais variados utilizadores,
decidiu a Direcção do IGeoE permitir que o sinal seja de livre acesso até
final de 2007, pelos seguintes motivos:
- Por Poder suportar os custos de manutenção da rede SERVIR;
- Porque considera ainda estar na Fase de ampliação e consolidação do Sistema.
ATENÇÃO: Por motivos de avaria ou de manutenção os serviços e respectivos dados
disponibilizados pela Rede SERVIR poderão ser interrompidos sem qualquer aviso
prévio aos utilizadores.
5. PLANEAMENTO PARA 2007 Para 2007 a rede SERVIR tem dois objectivos a cumprir:
- Continuar a sua ampliação;
- Adensar o dispositivo de modo a que as bases entre estações de referência se
situem na ordem dos 80 km.
Assim prevê-se a aquisição de mais 9 estações de referência GNSS. A sua localização
provável será:
Braga; Bragança; Castelo Branco; Estremoz; Elvas; Serra de São Mamede; Vila
Real.
Quanto às outras 2 estações:
Uma estação será utilizada para efectuar testes e estudar metodologias de
utilização e exploração das potencialidades da Rede SERVIR. A outra estação ficará
de reserva para substituição imediata.
______________________________________________________________________ 123 António Afonso
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
6. CONTACTOS Para qualquer esclarecimento, oportunidades de melhoria, sugestões, deve contactar: Primeiro Contacto: Departamento de Disponibilização de Informação Responsável: Tenente-Coronel António Pereira Telefone: 218505323 Central: 218505300
Segundo Contacto: Secção de Topografia Responsável: Major Rui Dias Telefone: 218505361 Central: 218505300 Ou enviar um e-mail para:
mailto:[email protected]?subject=Projecto SERVIR
______________________________________________________________________ 124 António Afonso

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO I
Inquérito de satisfação do utilizador
______________________________________________________________________ 125 António Afonso
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Questionário O presente inquérito tem por objectivo determinar o grau de satisfação do utilizador
e simultaneamente ajudar-nos a prestar-lhe um serviço melhor.
Para nós a sua opinião é muito importante. Por favor responda a este questionário, não o ignore. Obrigado pela sua colaboração.
Assinale à frente de cada pergunta com x a resposta mais adequada à sua opinião. Dentro da área de cobertura desta rede e do que já conhece, diga-nos:
1. No seu entender uma rede de estações permanentes GPS para RTK como esta é:
a. Muito importante;..........................................
b. Importante;....................................................
c. Razoável;......................................................
d. Pouco importante;........................................
e. Não tem mais valias;....................................
f. Péssimo.........................................................
2. Ao utilizar este novo modo de posicionamento (rede-RTK) em relação ao modo
que utilizava (base-RTK) a sua produtividade:
a. Aumentou 100%.............................................
b. Aumentou entre 75% e 100%.........................
c. Aumentou entre 50% e 75%...........................
d. Aumentou entre 25% e 50%...........................
e. Manteve-se igual............................................
f. Diminuiu........................................................
3. Em termos de custos de trabalhos de campo (mão de obra, equipamento, apoio
logístico, entre outras), comparando com o que fazia até aqui:
a. Diminuíram mais de 70%..............................
b. Diminuíram 55% a 69%...............................
c. Diminuíram 40% a 54%.................................
______________________________________________________________________ 126 António Afonso
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
d. Diminuíram 25% a 39%................................
e. Manteve-se igual............................................
f. Aumentaram....................................................
4. Pensa utilizar o acesso a esta rede nos seus futuros trabalhos:
a. Intensamente....................................................
b. Regularmente.................................................
c. Algumas vezes................................................
d. Poucas vezes..................................................
e. Raramente.....................................................
f. Nunca............................................................
5. Quais as mais valias que introduz no seu método de trabalho?
6. No caso de ter efectuado um controlo de qualidade posicional à rede SERVIR, pretendemos saber a ordem de grandeza das precisões obtidas:
a. Dentro da rede
b. Fora da rede e até que distância
7. Como sabe, é intenção do IGeoE ampliar a área de cobertura da actua rede já montada e em funcionamento. Para nós é importante saber onde exercer o nosso esforço de acordo com as nossas possibilidades e atendendo às suas necessidades.
______________________________________________________________________ 127 António Afonso
Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
Diga-nos quais os distritos em Portugal Continental em que poderá trabalhar com mais frequência?
8. Não podendo manter o acesso livre como até aqui e no caso do IGeoE ter que gerar receitas para suportar a ampliação e manutenção desta rede, e tendo em conta as mais valias que pode introduzir no seu processo de trabalho, no seu entender qual o valor mensal que considera adequado:
a. De 100 € a 199 €
b. De 200 € a 299 €
c. De 300 € a 399 €
d. De 400 € a 499 €
e. Tarifa de acordo com o volume de dados enviado para o utilizador
Quais as sugestões ou oportunidades de melhoria que apresentaria aos responsáveis por esta Rede?
______________________________________________________________________ 128 António Afonso

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO J Listagem de Ocorrências Detectados na Rede Servir (Estação de Referência GNSS)
______________________________________________________________________ 129 António Afonso

Listagem de Ocorrências Detectados na Rede ServirAno 2006
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Abril 100.00 8.46 100.00 8.33 97.32 8.45 99.73 8.21 40.00 8.30 99.25 8.50 99.33 8.48 90.80 8.39 A rede iniciou funções a 21 de Abril 2006Maio 100.00 8.53 99.99 8.39 94.90 8.51 93.29 8.41 100.00 8.45 99.92 8.57 98.45 8.59 98.08 8.49 Problemas de router e energia eléctricaJunho 79.92 8.66 96.66 8.48 96.67 8.50 92.94 8.37 96.62 8.53 51.08 8.15 96.40 8.53 87.18 8.46 Avarias de router e fonte alimentaçãoJulho 99.36 9.10 99.97 9.07 99.95 9.07 93.54 8.96 100.00 9.11 99.76 9.08 99.93 9.11 98.93 9.07Agosto 100.00 9.57 88.77 9.22 100.00 9.55 99.44 9.45 100.00 9.55 99.88 9.57 99.82 9.57 98.27 9.50 ARRA desligaram fichaSetembro 99.83 8.17 100.00 8.02 100.00 8.14 100.00 8.08 100.00 8.18 100.00 8.15 99.07 8.19 99.84 8.13
Média 6 meses 96.52 8.75 97.57 8.58 98.14 8.70 96.49 8.58 89.44 8.69 91.65 8.67 98.83 8.75 95.52 8.67
100%99% a 100%97% a 99%90% a 97%
<90%
Legenda
6 - CRAIMês
ESTAÇÕES DE REFERÊNCIA GNSS - SERVIR2 - ALCO 1 - ARRA Observações5 - MAFR 8 - PARC 4 - STEM 3 - VNOV
Média

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Abril
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.21/Apr/06 111 100.00 8.4 100.00 8.4 100.00 8.4 100.00 8.2 0.00 100.00 8.3 100.00 8.4 Router PARC em baixo; VNOV perdeu 349 épocas22/Apr/06 112 100.00 8.3 100.00 8.3 100.00 8.2 100.00 8.1 0.00 100.00 8.3 99.97 8.3 Router PARC em baixo; VNOV perdeu 26 épocas23/Apr/06 113 100.00 8.2 100.00 8.2 100.00 8.1 100.00 8.0 0.00 100.00 8.2 99.72 8.2 Router PARC em baixo; VNOV perdeu 238 épocas24/Apr/06 114 100.00 8.1 100.00 8.1 100.00 8.0 100.00 7.8 0.00 100.00 8.1 94.12 8.1 Router PARC em baixo; VNOV router em baixo das 3h às 13h25/Apr/06 115 100.00 8.7 100.00 8.5 100.00 8.8 100.00 8.5 0.00 100.00 8.9 99.49 8.826/Apr/06 116 100.00 8.6 100.00 8.5 100.00 8.8 100.00 8.5 0.00 100.00 8.8 100.00 8.7 Router de PARC em baixo27/Apr/06 117 100.00 8.1 100.00 8.1 100.00 8.1 100.00 7.9 100.00 8.1 96.57 8.2 100.00 8.2 Router de PARC iniciou às 17h; STEM e VNOV problema comu28/Apr/06 118 100.00 8.6 100.00 8.4 100.00 8.7 97.27 8.0 100.00 8.4 95.96 8.8 100.00 8.729/Apr/06 119 100.00 8.6 100.00 8.4 97.39 8.7 100.00 8.5 100.00 8.4 100.00 8.7 100.00 8.730/Apr/06 120 100.00 8.6 100.00 8.4 75.80 8.7 100.00 8.6 100.00 8.3 100.00 8.7 100.00 8.7
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 100 8.5 100 8.3 97.319 8.5 99.727 8.2 40 8.3 99.253 8.5 99.33 8.5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA
2 1 6 5 8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Maio
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.1/May/06 121 100.00 8.6 100.00 8.6 95.15 8.6 100.00 8.4 100.00 8.5 100.00 8.7 100.00 8.7 Problemas de comunicação em CRAI às 9h, 12h, 20h e 23h2/May/06 122 100.00 8.8 100.00 8.6 87.59 7.7 100.00 8.5 100.00 8.6 100.00 8.8 100.00 8.8 Problemas de comunicação em CRAI às 24h, 1h, 5h, 16h e 21h3/May/06 123 100.00 8.8 100.00 8.6 96.67 8.8 100.00 8.4 100.00 8.6 100.00 8.9 100.00 8.9 Problemas de comunicação em CRAI às 7h 2 8h4/May/06 124 100.00 8.7 100.00 8.6 100.00 8.9 100.00 8.4 100.00 8.5 100.00 8.9 100.00 8.85/May/06 125 100.00 8.7 100.00 8.5 100.00 8.8 100.00 8.5 100.00 8.5 100.00 8.9 100.00 8.86/May/06 126 100.00 8.6 100.00 8.5 100.00 8.8 100.00 8.5 100.00 8.4 100.00 8.8 100.00 8.77/May/06 127 Mudança Quadro eléctrico / UPS servidores ficou sem energia8/May/06 128 100.00 8.6 100.00 8.4 100.00 8.7 99.63 8.0 100.00 8.4 100.00 8.8 100.00 8.7 Falha energia UPS MAFR9/May/06 129 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.5 100.00 8.4 100.00 8.7 100.00 8.7 Falha de comunicação em VNOV10/May/06 130 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.6 100.00 8.3 100.00 8.7 100.00 8.711/May/06 131 100.00 8.6 100.00 8.5 98.59 8.7 100.00 8.6 100.00 8.5 100.00 8.7 100.00 8.6 Problemas de comunicação em CRAI às 16h e 18h12/May/06 132 100.00 8.6 100.00 8.5 100.00 8.7 100.00 8.6 100.00 8.5 100.00 8.7 100.00 8.713/May/06 133 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.5 100.00 8.4 100.00 8.7 100.00 8.714/May/06 134 100.00 8.5 100.00 8.3 100.00 8.6 100.00 8.5 100.00 8.4 100.00 8.6 100.00 8.615/May/06 135 100.00 8.5 100.00 8.3 77.23 8.6 100.00 8.4 100.00 8.4 100.00 8.6 100.00 8.5 Problemas de comunicações com CRAI16/May/06 136 100.00 8.5 100.00 8.4 69.89 8.5 100.00 8.4 100.00 8.4 100.00 8.6 100.00 8.5 Problemas de comunicações com CRAI17/May/06 137 100.00 8.6 100.00 8.4 36.74 8.4 100.00 8.6 100.00 8.6 100.00 8.6 100.00 8.6 Problemas comunicações CRAI / Mudar placa GSM RTKNet118/May/06 138 100.00 8.7 100.00 8.6 85.09 9.0 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.7 Problemas comunicações CRAI / Trocou-se router CRAI19/May/06 139 100.00 7.8 100.00 7.7 100.00 7.7 100.00 7.7 100.00 7.8 100.00 7.7 100.00 7.820/May/06 140 100.00 7.9 100.00 7.8 100.00 7.8 100.00 7.9 100.00 7.9 100.00 7.8 100.00 7.921/May/06 141 100.00 8.0 100.00 7.8 100.00 7.9 100.00 8.0 100.00 8.0 100.00 7.9 100.00 8.022/May/06 142 100.00 8.1 100.00 8.0 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.123/May/06 143 100.00 8.3 100.00 8.2 100.00 8.2 100.00 8.3 100.00 8.3 100.00 8.2 100.00 8.224/May/06 144 100.00 8.4 100.00 8.3 100.00 8.3 100.00 8.4 100.00 8.4 100.00 8.4 100.00 8.425/May/06 145 100.00 8.5 100.00 8.3 100.00 8.4 100.00 8.5 100.00 8.5 100.00 8.4 100.00 8.5 PARC perdeu 4 épocas à 1h26/May/06 146 100.00 8.6 100.00 8.3 100.00 8.5 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.627/May/06 147 100.00 8.6 100.00 8.4 100.00 8.6 100.00 8.6 100.00 8.6 100.00 8.6 100.00 8.628/May/06 148 100.00 8.6 100.00 8.6 100.00 8.6 99.04 8.6 100.00 8.7 100.00 8.6 54.14 9.0 MAFR perdeu 588 desde as 16h e VNOV perdeu 330229/May/06 149 100.00 8.7 99.84 8.7 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.7 99.36 9.2 ARRA perdeu 138 épocas e VNOV 34530/May/06 150 100.00 8.8 100.00 8.7 100.00 8.8 0.00 100.00 8.8 100.00 8.8 100.00 8.8 MAFR em baixo31/May/06 151 100.00 8.9 100.00 8.8 100.00 8.8 0.00 100.00 8.9 97.56 8.9 100.00 8.9 MAFR em baixo e STEM em baixo desde as 15h
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 100 8.5 99.995 8.4 94.898 8.5 93.289 8.4 100 8.4 99.919 8.6 98.45 8.6
8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV
2 1 6 5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Junho
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.01/06/2006 152 100.00 8.9 100.00 8.8 100.00 8.9 0.00 100.00 8.9 99.78 8.9 MAFR e STEM em baixo02/06/2006 153 100.00 8.9 100.00 8.8 100.00 9.0 88.17 7.4 100.00 9.0 0.00 100.00 8.9 MAFR tinha quadro eléctrico desligado; STEM continua em baixo03/06/2006 154 100.00 8.1 100.00 8.0 100.00 8.1 100.00 8.1 100.00 8.1 0.00 99.91 8.1 STEM continua em baixo e VNOV perdeu 76 épocas às 17h04/06/2006 155 100.00 8.2 100.00 8.1 100.00 8.2 100.00 8.2 100.00 8.1 0.00 100.00 8.1 STEM em baixo e VNOV c/ Problema comunicações 4h-5h e 21h05/06/2006 156 100.00 8.2 100.00 8.1 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 STEMrebentatubodesinfectanteágua-curto-circuito,ManutServidores15-16h
06/06/2006 157 100.00 8.3 100.00 8.2 100.00 8.3 100.00 8.2 100.00 8.3 0.00 100.00 8.3 Corte geral de comunicações entre as 2-3h; STEM em baixo07/06/2006 158 100.00 8.3 100.00 8.3 100.00 8.3 100.00 8.2 100.00 8.3 0.00 100.00 8.3 STEM continua com problemas de energia; troca circuito electrico08/06/2006 159 100.00 9.3 100.00 9.3 100.00 9.3 100.00 9.2 100.00 9.3 0.00 100.00 9.3 STEM ida ao local transformador corruído; média 9 satélites09/06/2006 160 100.00 9.3 100.00 9.3 100.00 9.3 100.00 9.2 100.00 9.3 0.00 100.00 9.3 STEM pedido troca transformador à Trimble; média 9 satélites10/06/2006 161 100.00 9.2 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.1 0.00 100.00 9.2 STEM continua em baixo; média 9 satélites11/06/2006 162 100.00 9.2 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.2 0.00 100.00 9.2 STEM continua em baixo; média 9 satélites12/06/2006 163 100.00 9.2 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.2 0.00 100.00 9.2 STEM chega transformador, cofigura-se receptor; média 9 sat.13/06/2006 164 100.00 9.2 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.2 0.00 100.00 9.2 STEM continua em baixo; média 9 satélites14/06/2006 165 100.00 9.2 99.79 9.2 100.00 9.2 100.00 9.1 100.00 9.2 97.89 9.1 100.00 9.2 STEM instalar receptor; ARRA perde 178 épocas às 14h; 9Sat15/06/2006 166 100.00 9.2 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.2 83.51 9.2 100.00 9.2 Alco perde 4 épocas;STEM em baixo; 9Sat16/06/2006 167 0.00 0.00 0.00 0.00 0.00 0.00 0.00 Falha geral comunicações possivelmente Fortes trovoadas; 9Sat 17/06/2006 168 100.00 9.2 100.00 9.2 100.00 9.1 100.00 9.0 100.00 9.2 0.00 100.00 9.2 STEM em baixo; 9Sat18/06/2006 169 100.00 9.1 100.00 9.1 100.00 9.0 100.00 8.9 100.00 9.1 0.00 99.82 9.1 STEM em baixo; VNOV perde154 épocas às 9h; 9Sat19/06/2006 170 100.00 8.4 100.00 8.4 100.00 8.4 100.00 8.3 100.00 8.4 99.98 8.7 97.48 8.4 STEM reposta comun. às 12h e VNOV várias falhas de energia20/06/2006 171 100.00 8.3 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.3 98.73 8.3 VNOV várias falhas de energia21/06/2006 172 100.00 8.2 100.00 8.1 100.00 8.1 100.00 8.2 100.00 8.2 100.00 8.1 100.00 8.222/06/2006 173 97.56 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 ALCO router em bx desde 14h; 23/06/2006 174 0.00 100.00 7.9 100.00 7.9 100.00 8.0 100.00 8.0 100.00 7.9 100.00 8.0 ALCO avaria router pedido troca RTms24/06/2006 175 0.00 100.00 7.8 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.8 100.00 7.9 ALCO avaria router pedido troca RTms25/06/2006 176 0.00 100.00 7.8 100.00 7.8 100.00 7.8 100.00 7.9 100.00 7.8 100.00 7.9 ALCO avaria router pedido troca RTms26/06/2006 177 0.00 100.00 7.8 100.00 7.8 100.00 7.7 100.00 7.9 100.00 7.8 100.00 7.9 ALCO avara router;VNOV C/ problem comuni entre 4-5h e 17h3027/06/2006 178 0.00 100.00 7.8 100.00 7.8 100.00 7.7 100.00 7.9 100.00 7.8 100.00 7.9 Reparação router ALCO28/06/2006 179 100.00 7.9 100.00 7.8 100.00 7.8 100.00 7.7 100.00 7.9 100.00 7.8 100.00 7.929/06/2006 180 100.00 7.9 100.00 7.8 100.00 7.8 100.00 7.6 98.67 7.9 100.00 7.8 99.71 7.9 PARC perde 1151 épocas das 2h-3h; VNOV perde 247 às30/06/2006 181 100.00 8.1 100.00 8.1 100.00 8.1 100.00 7.9 100.00 8.2 100.00 7.9 100.00 8.2 VNOV perde 283 épocas às 3h e 208 às 10h
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 79.919 8.7 96.66 8.5 96.667 8.5 92.939 8.4 96.622 8.5 51.082 8.2 96.402 8.5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA
2 1 6 5 8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Julho
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.1/Jul/06 182 100.00 8.8 100.00 8.7 100.00 8.7 100.00 8.6 100.00 8.8 100.00 8.7 100.00 8.72/Jul/06 183 100.00 8.7 100.00 8.7 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.6 100.00 8.73/Jul/06 184 100.00 8.6 100.00 8.6 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.6 100.00 8.64/Jul/06 185 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.4 100.00 8.6 100.00 8.5 100.00 8.55/Jul/06 186 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.3 100.00 8.6 100.00 8.5 100.00 8.66/Jul/06 187 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.4 100.00 8.6 100.00 8.5 99.91 8.5 VNOV perdeu 80 épocas7/Jul/06 188 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.3 100.00 8.6 100.00 8.5 99.48 8.6 VNOV perdeu 448 épocas8/Jul/06 189 100.00 8.7 100.00 8.6 100.00 8.6 100.00 8.4 100.00 8.7 100.00 8.6 100.00 8.79/Jul/06 190 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.5 100.00 8.7 100.00 8.7 100.00 8.710/Jul/06 191 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.6 100.00 8.7 100.00 8.7 100.00 8.711/Jul/06 192 100.00 8.7 100.00 8.7 98.59 8.7 100.00 8.6 100.00 8.8 100.00 8.7 100.00 8.712/Jul/06 193 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.6 100.00 8.8 100.00 8.7 100.00 8.713/Jul/06 194 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.8 100.00 8.7 100.00 8.7 Servidor IgeoE em baixo cerca das 15h14/Jul/06 195 100.00 8.7 99.20 8.7 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.7 99.84 8.8 Problemas de comunicações em ARRA e VNOV15/Jul/06 196 100.00 8.8 100.00 8.8 100.00 8.7 100.00 8.7 100.00 8.8 100.00 8.7 100.00 8.816/Jul/06 197 100.00 8.8 100.00 8.8 100.00 8.8 100.00 8.8 100.00 8.8 100.00 8.8 100.00 8.8 MAFR perdeu 1 época às 20h17/Jul/06 198 100.00 8.9 100.00 8.9 100.00 8.9 100.00 8.9 100.00 8.9 100.00 8.9 100.00 8.918/Jul/06 199 100.00 9.7 100.00 9.7 100.00 9.7 100.00 9.5 100.00 9.7 100.00 9.8 100.00 9.819/Jul/06 200 100.00 9.8 100.00 9.7 100.00 9.8 100.00 9.6 100.00 9.8 100.00 9.8 99.06 9.8 VNOV perdeu 815 épocas às 10h20/Jul/06 201 100.00 9.8 100.00 9.7 100.00 9.8 100.00 9.6 100.00 9.8 100.00 9.8 99.84 9.8 VNOV perdeu 137 épocas às 3h21/Jul/06 202 80.19 9.7 100.00 9.7 100.00 9.8 100.00 9.6 100.00 9.8 100.00 9.8 100.00 9.8 ALCOem baixo desde 1h perdeu 713 épocas;ARRA perdeu 122/Jul/06 203 100.00 9.7 100.00 9.8 100.00 9.6 100.00 9.8 100.00 9.8 100.00 9.8 100.00 9.823/Jul/06 204 100.00 10.0 100.00 9.7 100.00 9.8 100.00 9.6 100.00 9.8 92.69 9.8 100.00 9.8 ALCO e STEM com problemas comunicação24/Jul/06 205 100.00 9.7 100.00 9.7 100.00 9.7 100.00 9.5 100.00 9.7 100.00 9.7 100.00 9.7 Más comunicações(geral) 07h-08h; Receptor MAFR c/ Problema25/Jul/06 206 100.00 9.7 100.00 9.6 100.00 9.7 100.00 9.5 100.00 9.6 100.00 9.7 100.00 9.7 Receptor MAFR c/ problemas. Não descarregou logo RINEX26/Jul/06 207 100.00 9.6 100.00 9.5 100.00 9.6 100.00 9.4 100.00 9.6 100.00 9.6 100.00 9.6 Receptor MAFR c/ problemas. Não descarregou logo RINEX27/Jul/06 208 100.00 9.5 100.00 9.5 100.00 9.5 100.00 9.4 100.00 9.5 100.00 9.5 99.60 9.5 ReceptMAFR problem N/ descarregou RINEX;VNOV perde 348 ép28/Jul/06 209 100.00 9.5 99.84 9.4 100.00 9.5 99.67 9.4 100.00 9.5 100.00 9.5 100.00 9.5 ARRA perde 138; Troca receptor MAFR (saiu o reserva)29/Jul/06 210 100.00 8.7 100.00 8.7 100.00 8.7 0.00 100.00 8.7 100.00 8.7 100.00 9.2 MAFR tem Problem comunic ou de receptor, N/ envia RINEX30/Jul/06 211 100.00 9.4 100.00 9.3 100.00 9.3 0.00 100.00 9.4 100.00 9.4 100.00 9.4 MAFR tem Problem comunic ou de receptor, N/ envia RINEX31/Jul/06 212 100.00 9.5 100.00 9.4 100.00 9.5 100.00 9.5 100.00 9.5 100.00 9.4 100.00 9.4 MAFR perdeu 6 épocas às 15h
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 99.36 9.1 99.97 9.1 99.95 9.1 93.538 9.0 100 9.1 99.76 9.1 99.93 9.1
8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV
2 1 6 5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Agosto
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.1/Aug/06 213 100.00 9.5 100.00 9.5 100.00 9.5 99.79 9.5 100.00 8.9 100.00 9.5 STEM em baixo2/Aug/06 214 100.00 8.5 100.00 8.5 100.00 8.5 100.00 8.5 100.00 8.6 96.71 8.0 100.00 8.5 STEM fio energia fase desligado; MAFR perdeu 2 épocas3/Aug/06 215 100.00 8.6 100.00 8.5 100.00 8.5 96.96 8.5 100.00 8.6 100.00 8.5 100.00 8.6 MAFR perdeu 2630 épocas4/Aug/06 216 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.6 100.00 8.6 100.00 8.6 100.00 8.5 MAFR não regista sat 17-componente Y, perde 3 épocas5/Aug/06 217 100.00 8.6 100.00 8.6 100.00 8.6 99.99 8.7 100.00 8.7 100.00 8.6 100.00 8.6 MAFR perdeu 6 épocas6/Aug/06 218 100.00 8.7 100.00 8.7 100.00 8.7 100.00 8.8 100.00 8.7 100.00 8.7 100.00 8.7 VNOV em baixo desde as 3h7/Aug/06 219 100.00 8.8 100.00 8.8 100.00 8.8 98.96 8.9 100.00 8.8 99.74 8.8 100.00 8.8 STEM às 10h perdeu 223 épocas, Troca receptor MAFR 11-12h8/Aug/06 220 100.00 9.4 100.00 9.3 100.00 9.4 94.31 9.4 100.00 9.4 100.00 9.4 100.00 9.3 Verificação comunicação MAFR, 9 Sat9/Aug/06 221 100.00 10.0 100.00 9.9 100.00 10.0 92.65 10.0 100.00 10.0 100.00 10.0 100.00 9.9 Troca receptor em MAFR; 9 Sat
10/Aug/06 222 100.00 10.0 99.43 10.0 100.00 10.0 100.00 10.1 100.00 10.0 100.00 10.1 100.00 10.0 ARRA falha comunicação às 16h perdeu 493 épocas; 10 Sat11/Aug/06 223 100.00 10.1 96.52 10.1 100.00 10.1 100.00 10.1 100.00 10.1 100.00 10.1 100.00 10.1 ARRA falha comunicação às 14h perdeu 1881 épocas; 10 Sat12/Aug/06 224 100.00 10.2 0.00 100.00 10.2 100.00 10.2 100.00 10.2 100.00 10.2 100.00 10.2 ARRA em baixo; 10 Sat13/Aug/06 225 100.00 10.3 0.00 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 99.99 10.2 ARRA em baixo; VNOV perde 11 épocas às 3h; 10 Sat14/Aug/06 226 100.00 10.3 0.00 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 ARRA em baixo; 10 Sat15/Aug/06 227 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 ARRA em baixo; 10 Sat16/Aug/06 228 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 ARRA em baixo; 10 Sat17/Aug/06 229 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.4 100.00 10.3 ARRA em baixo; 10 Sat18/Aug/06 230 100.00 10.4 96.55 7.9 100.00 10.3 100.00 10.3 100.00 10.3 100.00 10.4 100.00 10.4 Avaria ARRA desligaram ficha energia; 10 Sat19/Aug/06 231 100.00 10.4 100.00 10.2 100.00 10.4 100.00 10.2 100.00 10.3 100.00 10.4 100.00 10.4 10 Sat20/Aug/06 232 100.00 10.4 100.00 10.2 100.00 10.4 100.00 10.1 100.00 10.3 100.00 10.4 99.85 10.4 Perdeu 131 épocas entre as 10h e as 11h; 10 Sat21/Aug/06 233 100.00 10.4 95.89 10.2 100.00 10.4 100.00 10.1 100.00 10.3 100.00 10.4 100.00 10.4 ARRA deixou de registar às 19h; 10 Sat22/Aug/06 234 100.00 10.4 97.11 10.4 100.00 10.4 100.00 10.2 100.00 10.4 100.00 10.5 98.16 10.5 ARRA perdeu 2391 épocas e VNOV perdeu 1587; 10 Sat23/Aug/06 235 100.00 9.5 100.00 9.4 100.00 9.5 100.00 9.3 100.00 9.5 100.00 9.6 100.00 9.6 9 Sat24/Aug/06 236 100.00 9.6 100.00 9.4 100.00 9.6 100.00 9.4 100.00 9.6 100.00 9.6 100.00 9.6 9 Sat25/Aug/06 237 100.00 9.6 100.00 9.5 100.00 9.6 100.00 9.4 100.00 9.6 100.00 9.6 99.55 9.6 VNOV perde 387 épocas às 8h; 9 Sat26/Aug/06 238 100.00 8.7 100.00 8.6 100.00 8.6 100.00 8.5 100.00 8.7 100.00 8.7 100.00 8.7 8 Sat27/Aug/06 239 100.00 8.8 100.00 8.7 100.00 8.8 100.00 8.5 100.00 8.9 100.00 8.9 100.00 8.9 8 Sat28/Aug/06 240 100.00 9.0 100.00 8.9 100.00 8.9 100.00 8.6 100.00 9.0 100.00 9.0 100.00 9.0 8 Sat29/Aug/06 241 100.00 9.1 100.00 8.9 100.00 8.9 100.00 8.6 100.00 9.1 100.00 9.1 96.78 9.1 VNOV perdeu 2780 épocas às 2h ; 8 Sat30/Aug/06 242 100.00 9.0 100.00 8.9 100.00 8.9 100.00 8.6 100.00 9.1 100.00 9.0 100.00 9.1 8 Sat31/Aug/06 243 100.00 9.0 100.00 8.8 100.00 8.9 100.00 8.5 100.00 9.0 100.00 8.9 99.94 9.0 VONV perdeu 51 épocas às 0h; 8 Sat
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 100 9.6 88.768 9.2 100 9.5 99.441 9.5 100 9.6 99.882 9.6 99.815 9.6
8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV
2 1 6 5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA

Listagem de Ocorrências Detectadas na Rede ServirEstação de Referência GNSS Mês: Setembro
Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.01/09/2006 244 100.00 8.9 100.00 8.6 100.00 8.8 100.00 8.5 100.00 8.9 100.00 8.8 100.00 8.902/09/2006 245 100.00 8.7 100.00 8.5 100.00 8.6 100.00 8.4 100.00 8.8 100.00 8.7 100.00 8.703/09/2006 246 100.00 8.6 100.00 8.4 100.00 8.5 100.00 8.3 100.00 8.6 100.00 8.6 100.00 8.604/09/2006 247 100.00 8.5 100.00 8.2 100.00 8.4 100.00 8.3 100.00 8.5 100.00 8.4 100.00 8.505/09/2006 248 100.00 8.3 100.00 8.1 100.00 8.2 100.00 8.1 100.00 8.4 100.00 8.3 100.00 8.306/09/2006 249 100.00 8.2 100.00 7.9 100.00 8.1 100.00 7.9 100.00 8.2 100.00 8.1 100.00 8.107/09/2006 250 100.00 7.9 100.00 7.8 100.00 7.9 100.00 7.8 100.00 8.0 100.00 7.9 100.00 8.008/09/2006 251 100.00 7.9 100.00 7.7 100.00 7.8 100.00 7.7 100.00 7.9 100.00 7.8 100.00 7.909/09/2006 252 100.00 7.7 100.00 7.5 100.00 7.7 100.00 7.6 100.00 7.8 100.00 7.7 99.85 7.8 VNOV perdeu 130 épocas entre as 12 e as 13h10/09/2006 253 100.00 8.6 100.00 8.3 100.00 8.5 100.00 8.4 100.00 8.6 100.00 8.5 100.00 8.611/09/2006 254 100.00 8.4 100.00 8.1 100.00 8.3 100.00 8.2 100.00 8.4 100.00 8.3 100.00 8.412/09/2006 255 100.00 8.2 100.00 7.9 100.00 8.2 100.00 8.1 100.00 8.2 100.00 8.1 100.00 8.213/09/2006 256 100.00 8.0 100.00 7.8 100.00 8.0 100.00 8.0 100.00 8.0 100.00 8.0 99.73 8.0 VNOV perdeu 237 épocas entre as 15 e as 17h14/09/2006 257 100.00 8.0 100.00 7.7 100.00 8.0 100.00 8.0 100.00 8.0 100.00 8.0 97.43 8.0 VNOV perdeu 2224 épocas entre as 15 e as 18h15/09/2006 258 100.00 7.9 100.00 7.7 100.00 7.9 100.00 7.9 99.99 7.9 100.00 7.9 94.72 7.9 PARCperdeu 6épocas às 0h e VNOVperdeu 4560 às 5,11 e 23h16/09/2006 259 100.00 7.9 100.00 7.7 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.917/09/2006 260 100.00 7.9 100.00 7.7 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.918/09/2006 261 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.919/09/2006 262 100.00 7.9 100.00 7.8 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.920/09/2006 263 100.00 7.9 100.00 7.8 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.9 100.00 7.921/09/2006 264 94.89 8.0 100.00 7.9 100.00 8.0 100.00 8.0 100.00 8.0 100.00 8.0 100.00 8.0 ALCO perdeu 4050 épocas entre as 7h e as 10h22/09/2006 265 100.00 8.1 100.00 8.0 100.00 8.1 100.00 8.1 100.00 8.0 100.00 8.1 100.00 8.123/09/2006 266 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.1 100.00 8.124/09/2006 267 100.00 8.2 100.00 8.1 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.225/09/2006 268 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.326/09/2006 269 100.00 8.3 99.99 8.2 100.00 8.2 100.00 8.2 99.99 8.2 99.99 8.5 84.73 8.3 Arra perde 10,Parc perde 10, STEM perde 10,VNOVperde10994falhaenergia1,2,4,8,21h
27/09/2006 270 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 95.66 8.3 VNOV perdeu 3749 épocas entre as 2h e as 3 h28/09/2006 271 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.2 100.00 8.329/09/2006 272 100.00 8.3 100.00 8.2 100.00 8.2 100.00 8.3 100.00 8.3 100.00 8.2 100.00 8.330/09/2006 273 100.00 8.3 100.00 8.3 100.00 8.3 100.00 8.3 100.00 8.3 100.00 8.3 100.00 8.3
ID
Estação Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat. Rinex Nº Sat.Média 99.83 8.2 100 8.0 100 8.1 100 8.1 99.999 8.2 100 8.2 99.071 8.2
8 4 3
ALCO ARRA CRAI MAFR PARC STEM VNOV
2 1 6 5
dia doy CausaALCO VNOVSTEMPARCMAFRCRAIARRA

Implementação de uma Rede de Estações de Referência GNSS para Posicionamento em Tempo Real
ANEXO K Tempo e exactidão na recolha de coordenadas de um ponto por um receptor Móvel.
_____________________________________________________________________137 António Afonso

4916032.319 -788617.416 3973244.078
Medição Nº T1 (s) T2 (s) X Y Z Delta X Delta Y Delta Z 2D 3D1 30 42 4916032.317 -788617.421 3973244.059 0.002 0.005 0.019 0.006 0.0202 21 25 4916032.303 -788617.429 3973244.034 0.016 0.014 0.044 0.021 0.0483 40 42 4916032.299 -788617.423 3973244.036 0.020 0.007 0.042 0.022 0.0474 26 28 4916032.317 -788617.424 3973244.052 0.002 0.008 0.026 0.009 0.0275 38 43 4916032.302 -788617.423 3973244.037 0.017 0.007 0.041 0.019 0.0456 27 31 4916032.288 -788617.42 3973244.024 0.031 0.005 0.054 0.032 0.0627 25 30 4916032.307 -788617.418 3973244.042 0.012 0.002 0.036 0.012 0.0388 34 41 4916032.315 -788617.416 3973244.044 0.004 0.000 0.034 0.004 0.0349 22 28 4916032.303 -788617.424 3973244.041 0.016 0.008 0.037 0.018 0.041
10 20 25 4916032.307 -788617.427 3973244.036 0.012 0.012 0.042 0.017 0.04511 20 23 4916032.301 -788617.425 3973244.033 0.018 0.010 0.045 0.021 0.04912 24 29 4916032.307 -788617.425 3973244.039 0.012 0.010 0.039 0.015 0.04213 32 33 4916032.299 -788617.43 3973244.043 0.020 0.015 0.035 0.025 0.04314 20 25 4916032.291 -788617.417 3973244.032 0.028 0.002 0.046 0.028 0.05415 26 28 4916032.304 -788617.422 3973244.046 0.015 0.007 0.032 0.017 0.03616 20 25 4916032.31 -788617.428 3973244.052 0.009 0.012 0.026 0.016 0.03017 24 28 4916032.318 -788617.429 3973244.055 0.001 0.014 0.023 0.014 0.02618 39 40 4916032.325 -788617.426 3973244.056 -0.006 0.010 0.022 0.012 0.02519 26 28 4916032.299 -788617.424 3973244.042 0.020 0.008 0.036 0.022 0.04220 22 27 4916032.282 -788617.421 3973244.03 0.037 0.005 0.048 0.038 0.06121 38 51 4916032.283 -788617.436 3973244.02 0.036 0.020 0.058 0.042 0.07122 24 29 4916032.321 -788617.426 3973244.05 -0.002 0.010 0.028 0.011 0.03023 22 25 4916032.316 -788617.42 3973244.055 0.003 0.005 0.023 0.006 0.02324 25 71 4916032.309 -788617.415 3973244.054 0.010 0.000 0.024 0.010 0.02625 24 82 4916032.301 -788617.423 3973244.042 0.018 0.007 0.036 0.020 0.04126 20 24 4916032.305 -788617.421 3973244.042 0.014 0.005 0.036 0.015 0.03927 22 24 4916032.298 -788617.418 3973244.039 0.021 0.002 0.039 0.021 0.04428 25 33 4916032.298 -788617.415 3973244.047 0.021 0.000 0.031 0.021 0.03729 22 35 4916032.326 -788617.421 3973244.058 -0.007 0.005 0.020 0.009 0.02130 19 27 4916032.323 -788617.416 3973244.068 -0.004 0.000 0.010 0.004 0.01031 18 23 4916032.318 -788617.417 3973244.064 0.001 0.002 0.014 0.002 0.01432 21 27 4916032.298 -788617.426 3973244.042 0.021 0.010 0.036 0.024 0.04333 20 25 4916032.295 -788617.427 3973244.028 0.024 0.012 0.050 0.027 0.05634 18 27 4916032.279 -788617.42 3973244.022 0.040 0.005 0.056 0.040 0.06935 21 36 4916032.287 -788617.423 3973244.029 0.032 0.007 0.049 0.033 0.05936 21 27 4916032.291 -788617.415 3973244.04 0.028 0.000 0.038 0.028 0.04737 103 107 4916032.297 -788617.419 3973244.043 0.022 0.003 0.035 0.022 0.04138 25 28 4916032.275 -788617.411 3973244.027 0.044 -0.005 0.051 0.044 0.06739 17 21 4916032.27 -788617.412 3973244.036 0.049 -0.003 0.042 0.049 0.06540 19 24 4916032.288 -788617.41 3973244.042 0.031 -0.005 0.036 0.032 0.04841 32 38 4916032.309 -788617.418 3973244.042 0.010 0.002 0.036 0.011 0.03743 27 32 4916030.757 -788617.168 3973242.776 1.562 -0.248 1.302 1.582 2.04844 49 52 4916032.314 -788617.418 3973244.03 0.005 0.002 0.048 0.006 0.04845 28 32 4916032.288 -788617.419 3973244.025 0.031 0.003 0.053 0.031 0.06146 21 24 4916032.305 -788617.415 3973244.022 0.014 0.000 0.056 0.014 0.05747 20 24 4916032.299 -788617.416 3973244.025 0.020 0.000 0.053 0.020 0.05648 26 29 4916032.299 -788617.418 3973244.036 0.020 0.002 0.042 0.020 0.04649 28 33 4916032.287 -788617.417 3973244.038 0.032 0.002 0.040 0.032 0.05150 28 33 4916032.285 -788617.414 3973244.045 0.034 -0.002 0.033 0.034 0.04751 30 32 4916032.283 -788617.406 3973244.055 0.036 -0.010 0.023 0.037 0.04452 22 25 4916032.282 -788617.416 3973244.036 0.037 0.000 0.042 0.037 0.05653 34 37 4916032.299 -788617.42 3973244.037 0.020 0.005 0.041 0.021 0.04654 26 30 4916032.305 -788617.424 3973244.042 0.014 0.008 0.036 0.017 0.03955 25 28 4916032.304 -788617.422 3973244.035 0.015 0.007 0.043 0.017 0.04656 20 23 4916032.297 -788617.422 3973244.05 0.022 0.007 0.028 0.023 0.03657 20 23 4916032.302 -788617.423 3973244.048 0.017 0.007 0.030 0.019 0.03558 20 24 4916032.292 -788617.429 3973244.03 0.027 0.014 0.048 0.030 0.05659 29 33 4916032.286 -788617.424 3973244.027 0.033 0.008 0.051 0.034 0.06160 20 23 4916032.285 -788617.426 3973244.045 0.034 0.010 0.033 0.036 0.04861 18 24 4916032.263 -788617.415 3973244.023 0.056 0.000 0.055 0.056 0.07862 18 24 4916032.263 -788617.41 3973244.029 0.056 -0.005 0.049 0.056 0.075
Coord. Pto
Medições (m) Diferenças (m)
PONTO TOPOGRAFICO
Trimble GNSS R8

63 25 34 4916032.277 -788617.415 3973244.038 0.042 0.000 0.040 0.042 0.05864 24 30 4916032.28 -788617.422 3973244.033 0.039 0.007 0.045 0.040 0.06065 23 41 4916032.28 -788617.414 3973244.035 0.039 -0.002 0.043 0.039 0.05866 28 47 4916032.29 -788617.416 3973244.032 0.029 0.000 0.046 0.029 0.05467 20 29 4916032.298 -788617.415 3973244.035 0.021 0.000 0.043 0.021 0.04868 20 25 4916032.298 -788617.419 3973244.032 0.021 0.003 0.046 0.021 0.05069 19 24 4916032.302 -788617.422 3973244.039 0.017 0.007 0.039 0.018 0.04370 20 24 4916032.319 -788617.419 3973244.047 0.000 0.003 0.031 0.004 0.03171 24 34 4916032.301 -788617.413 3973244.034 0.018 -0.003 0.044 0.018 0.04772 19 26 4916032.304 -788617.423 3973244.047 0.015 0.007 0.031 0.017 0.03573 27 42 4916032.291 -788617.426 3973244.035 0.028 0.010 0.043 0.030 0.05274 22 27 4916032.285 -788617.425 3973244.029 0.034 0.010 0.049 0.035 0.06075 26 48 4916032.276 -788617.418 3973244.017 0.043 0.002 0.061 0.043 0.07476 18 42 4916032.281 -788617.42 3973244.022 0.038 0.005 0.056 0.038 0.06877 23 29 4916032.295 -788617.413 3973244.02 0.024 -0.003 0.058 0.024 0.06378 22 28 4916032.301 -788617.401 3973244.034 0.018 -0.015 0.044 0.023 0.04979 24 34 4916032.277 -788617.407 3973244.032 0.042 -0.008 0.046 0.043 0.06380 21 41 4916032.287 -788617.414 3973244.026 0.032 -0.002 0.052 0.032 0.06181 39 44 4916032.307 -788617.421 3973244.046 0.012 0.005 0.032 0.013 0.03482 18 28 4916032.302 -788617.416 3973244.042 0.017 0.000 0.036 0.017 0.04083 17 23 4916032.304 -788617.417 3973244.048 0.015 0.002 0.030 0.015 0.03384 33 35 4916032.298 -788617.405 3973244.049 0.021 -0.010 0.029 0.024 0.03785 26 38 4916032.289 -788617.419 3973244.035 0.030 0.003 0.043 0.030 0.05286 27 30 4916032.298 -788617.419 3973244.042 0.021 0.003 0.036 0.021 0.04287 23 27 4916032.292 -788617.421 3973244.035 0.027 0.005 0.043 0.028 0.05188 20 23 4916032.298 -788617.414 3973244.045 0.021 -0.002 0.033 0.021 0.03989 31 42 4916032.301 -788617.417 3973244.048 0.018 0.002 0.030 0.018 0.03590 19 25 4916032.294 -788617.419 3973244.039 0.025 0.003 0.039 0.025 0.04691 25 30 4916032.291 -788617.421 3973244.042 0.028 0.005 0.036 0.029 0.04692 30 33 4916032.302 -788617.42 3973244.039 0.017 0.005 0.039 0.018 0.04293 19 23 4916032.315 -788617.418 3973244.049 0.004 0.002 0.029 0.005 0.02994 40 44 4916032.281 -788617.414 3973244.034 0.038 -0.002 0.044 0.038 0.05895 37 41 4916032.274 -788617.41 3973244.021 0.045 -0.005 0.057 0.046 0.07396 19 24 4916032.282 -788617.408 3973244.025 0.037 -0.007 0.053 0.038 0.06597 24 29 4916032.286 -788617.414 3973244.025 0.033 -0.002 0.053 0.033 0.06298 22 26 4916032.296 -788617.424 3973244.034 0.023 0.008 0.044 0.025 0.05099 26 30 4916032.297 -788617.418 3973244.036 0.022 0.002 0.042 0.022 0.047
100 20 25 4916032.288 -788617.417 3973244.033 0.031 0.002 0.045 0.031 0.054
T1 T2 Delta X Delta Y Delta Z 2D 3DMédia (s) 25.5 32.5 Média (m) 0.038 0.001 0.052 0.040 0.067
Tempo total =(T1+T2) 57.9 (s)
NOTA:T1 Tempo de ligação à rede SERVIRT2 Tempo após ligação até estar pronto a registar as coordenadas do ponto