fundamentos de robÓtica - joinville.udesc.br · prof. silas do amaral - udesc 5 localização...
TRANSCRIPT

FUNDAMENTOS DE ROBÓTICA
Localização Espacialde um Corpo Rígido

Prof. Silas do Amaral - UDESC 2
Motivação 1

Prof. Silas do Amaral - UDESC 3
Motivação 2

Prof. Silas do Amaral - UDESC 4

Prof. Silas do Amaral - UDESC 5
Localização Espacialde um Corpo Rígido
Representação da Posição
Representação da Orientação
Matrizes de Transformação Homogênea
Relação entre os Sistemas de Representação
Prof. Silas do Amaral - UDESC 6
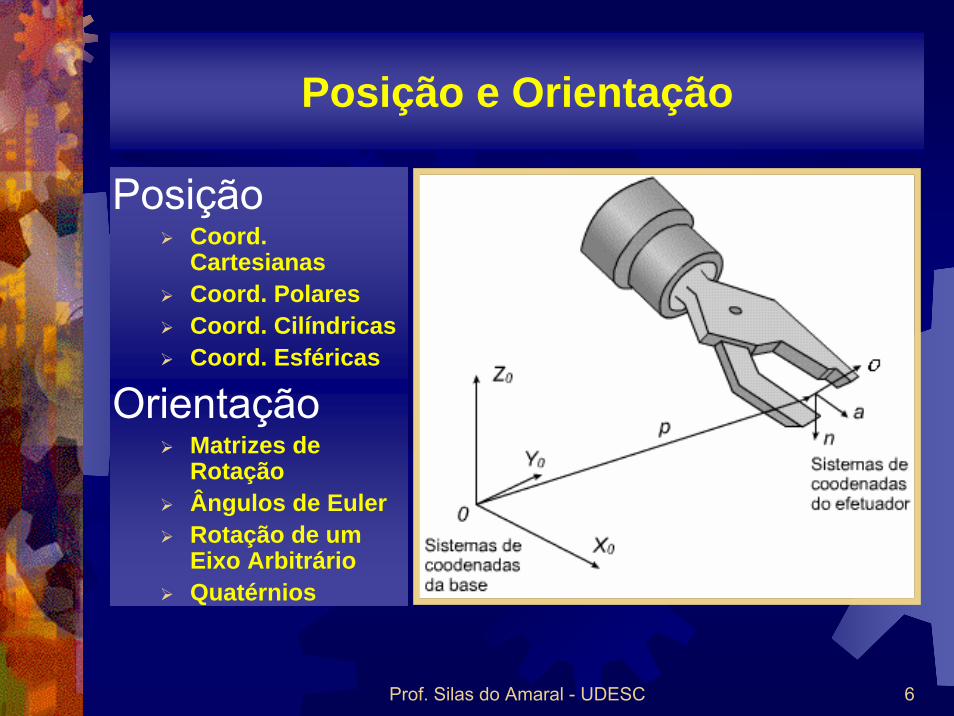
Posição e Orientação
PosiçãoCoord. CartesianasCoord. PolaresCoord. CilíndricasCoord. Esféricas
OrientaçãoMatrizes de RotaçãoÂngulos de EulerRotação de um Eixo ArbitrárioQuatérnios

Prof. Silas do Amaral - UDESC 7
Representação da PosiçãoCoordenadas Cartesianas
Duas Dimensões
Três Dimensões

Prof. Silas do Amaral - UDESC 8
Representação da PosiçãoCoordenadas Polares e Cilíndricas
Duas DimensõesCoord. Polares
Três DimensõesCoord. Cilíndricas

Prof. Silas do Amaral - UDESC 9
Representação da PosiçãoCoordenadas Esféricas

Prof. Silas do Amaral - UDESC 10
Rotação de um Sistema de Referência
[ ]yyx
yx
pp
pp
jip
x
xy
+=
= T [ ]vvuu
vuuv
pppp
jip
+=
= T
Um vetor p podeser representadonos dois sistemas.

Prof. Silas do Amaral - UDESC 11
Representação da OrientaçãoMatrizes de Rotação 2D
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
v
u
y
x
pp
pp
R
⎥⎦
⎤⎢⎣
⎡⋅⋅⋅⋅
=vyuy
vxux
jjijjiii
R
⎥⎦
⎤⎢⎣
⎡ −=
cosαsenαsenαcosα
R
A relação entre os dois sis-temas é dada pela matriz de rotação R.
A matriz de rotação Rfornece a orientação de OUV com relação a OXY.As colunas de R são osvetores unitários de OUV escritos no sistema OXY.
Matriz de Rotação Para um Giro α.

Prof. Silas do Amaral - UDESC 12
Representação da OrientaçãoMatrizes de Rotação 3D
O vetor p descrito nossistemas OUVW e OXYZ
A matriz de rotação R querelaciona OUVW a OXYZ
[ ]
[ ]zzyyxx
Tzyxxyz
wwvvuu
Twvuuvw
pppppp
pppppp
kjip
kjip
++=
=
++=
=
A relação entreos dois vetores
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
w
v
u
z
y
x
ppp
ppp
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⋅⋅⋅⋅⋅⋅⋅⋅
=
wzvzuz
wyvyuy
wxvxux
kkjkikkjjjijkijiii
R

Prof. Silas do Amaral - UDESC 13
Exemplos de Matrizes de Rotação
Rotação α emtorno do eixo OX
O sistema OXYZ é fixo.
O sistema OUVW é móvel.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=cosαsenα0senαcosα0001
)α,(xRMatriz de Rotação quedefine a orientação de OUVW com relação a OXYZ

Prof. Silas do Amaral - UDESC 14
Exemplos de Matrizes de Rotação
Matriz de Rotação para um giro φ em torno do eixo OY
Matriz de Rotação para um giro θ em torno do eixo OZ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
cosφ0senφ010
senφ0cosφ)φ,(yR
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cosθsenθ0senθcosθ
)θ,(zR

Prof. Silas do Amaral - UDESC 15
Rotações em um Objeto
R(x,90o) R(y,-90o)
R(z,90o)

Prof. Silas do Amaral - UDESC 16
Composição de RotaçõesConsidere a realização das três rotações apresentadas na ordem: α em torno de OX, seguida de φ em torno de OY e de θ em tornode OZ. A matriz de rotação é assim obtida:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−+
++−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
=
CαCφSαCφSφCαSφSθSαCθSαSφSθCαCθCφSθ
CαSφCθSαSθSαSφCθCαSθCφCθ
CαSα0SαCα0
001
Cφ0Sφ010
Sφ0Cφ
1000CθSθ0SθCθ
)α,()φ,()θ,( xRyRzRT
onde:Cθ = cosθSθ = senθ

Prof. Silas do Amaral - UDESC 17
Composição de RotaçõesInversão da ordem das rotações: θ em torno de OZ, seguida de φem torno de OY e de α em torno de OX.
Evidentemente, a matriz de rotação é diferente da anterior, pois o produto de matrizes não é comutativo:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++−−+−+
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
=
CφCαCθSαSθSφCαSθSαCθSφCαCφSαCθCαSθSφSαSθCαCθSφSα
SφSθCφCθCφ
1000CθSθ0SθCθ
Cφ0Sφ010
Sφ0Cφ
CαSα0SαCα0001
)θ,()φ,()α,( zRyRxRT
Prof. Silas do Amaral - UDESC 18
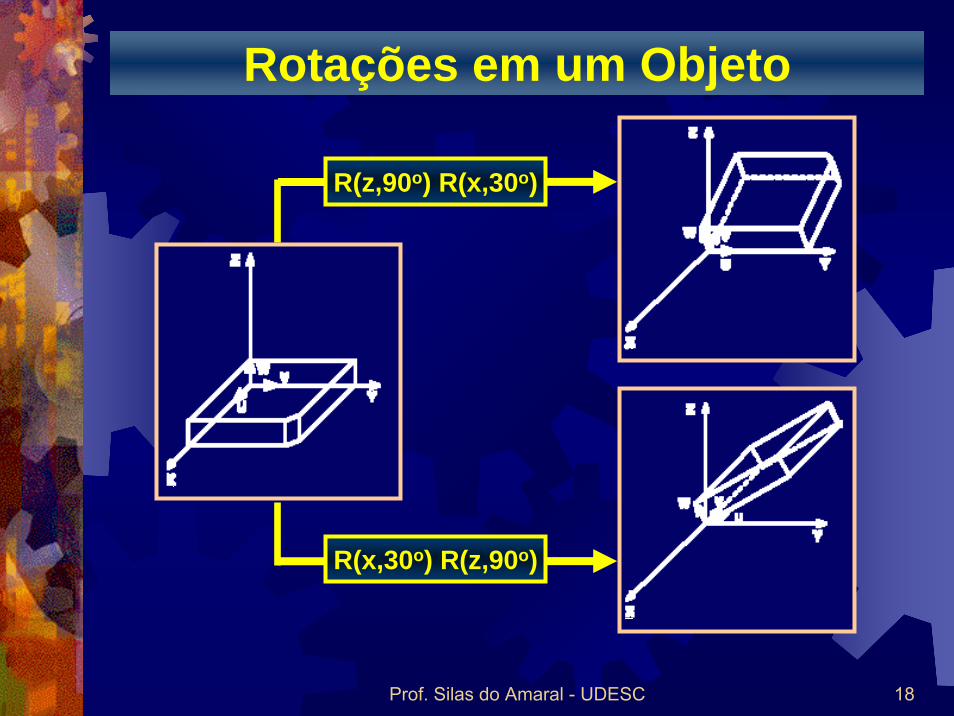
Rotações em um Objeto
R(z,90o) R(x,30o)
R(x,30o) R(z,90o)

Prof. Silas do Amaral - UDESC 19
Representação da OrientaçãoÂngulos de Euler ZXZ
Consiste de trêsângulos girandosucessivamenteem torno dos ei-xos previamentegirados.
Seqüência ZXZ:
φ em torno de OZ
θ em torno de OU’
ψ em torno de OW”

Prof. Silas do Amaral - UDESC 20
Representação da OrientaçãoÂngulos de Euler ZYZ
Consiste de trêsângulos girandosucessivamenteem torno dos ei-xos previamentegirados.
Seqüência ZYZ:
φ em torno de OZ
θ em torno de OV’
ψ em torno de OW”

Prof. Silas do Amaral - UDESC 21
Representação da OrientaçãoÂngulos de Euler ZYZ
Consiste de trêsângulos girandosucessivamenteem torno dos ei-xos previamentegirados.
Seqüência ZYZ:
φ em torno de OZ
θ em torno de OV’
ψ em torno de OW”

Prof. Silas do Amaral - UDESC 22
Representação da OrientaçãoÂngulos de Euler ZYZ

Prof. Silas do Amaral - UDESC 23
Ângulos RPY

Prof. Silas do Amaral - UDESC 24
Rotação Sobre Um Eixo ArbitrárioAo invés de três emtorno de eixos orto-normais, uma só ro-tação é feita sobreum eixo específico.
Expressão matemá-tica da aplicaçãodesta rotação a um vetor p:
θ)cos-)(1(senθ)(-cosθ θ),( pkkpkppkRot ⋅+×=

Prof. Silas do Amaral - UDESC 25
Uso de Quatérnios para Representar a Orientação
É definido por quatro compo-nentes, que representam as coordenadas do quatérnio nabase (e, i, j, k).
Quatérnio associado à rota-ção θ em torno de um eixoarbitrário k:
[ ][ ]vs
qqqq=
= 3210Q
onde s(q0) é parte escalardo quatérnio e v(q1, q2, q3) é sua parte vetorial.
⎥⎦⎤
⎢⎣⎡==
2θsen
2θcosθ),(Q kkRot
Prof. Silas do Amaral - UDESC 26
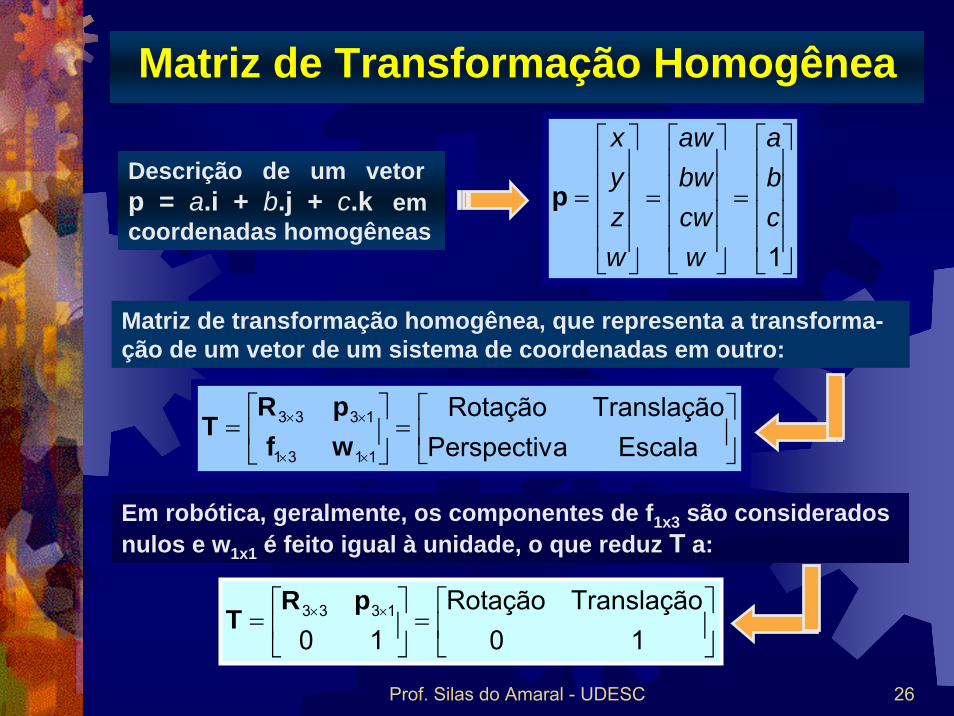
Matriz de Transformação Homogênea
Descrição de um vetorp = a.i + b.j + c.k emcoordenadas homogêneas ⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1cba
wcwbwaw
wzyx
p
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
××
××
EscalaaPerspectivTranslaçãoRotação
1131
1333
wfpR
T
Matriz de transformação homogênea, que representa a transforma-ção de um vetor de um sistema de coordenadas em outro:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡= ××
10TranslaçãoRotação
101333 pR
T
Em robótica, geralmente, os componentes de f1x3 são consideradosnulos e w1x1 é feito igual à unidade, o que reduz T a:
Prof. Silas do Amaral - UDESC 27
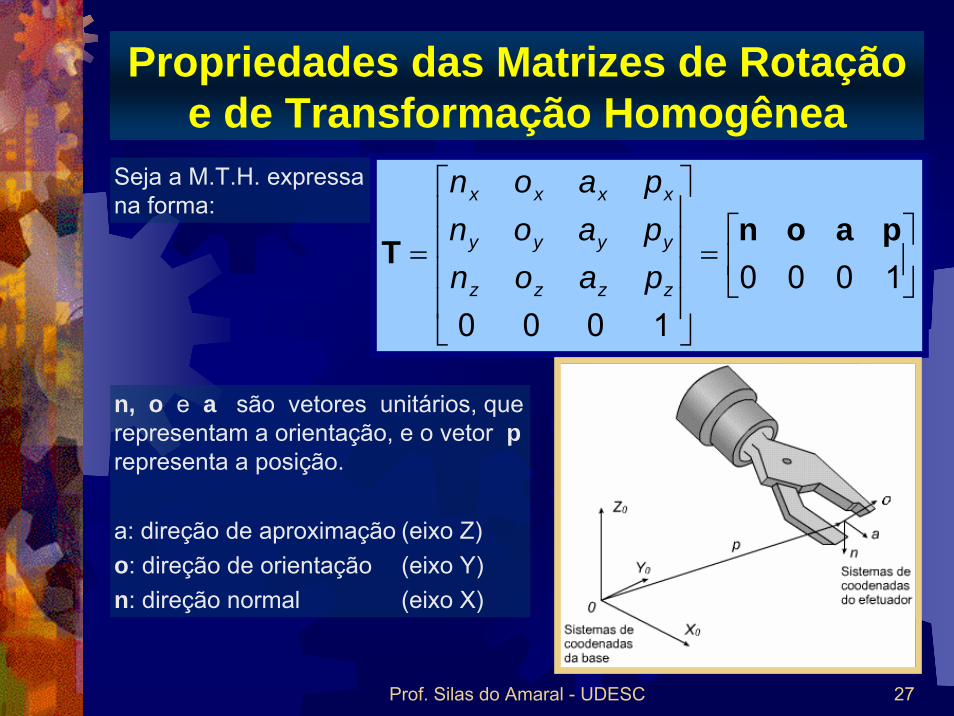
Propriedades das Matrizes de Rotaçãoe de Transformação Homogênea
Seja a M.T.H. expressana forma:
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=1000
1000
paonT
zzzz
yyyy
xxxx
paonpaonpaon
n, o e a são vetores unitários, querepresentam a orientação, e o vetor prepresenta a posição.
a: direção de aproximação (eixo Z)o: direção de orientação (eixo Y)n: direção normal (eixo X)

Prof. Silas do Amaral - UDESC 28
Propriedades das Matrizes de Rotaçãoe de Transformação Homogênea
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡=
11000
1000 z
y
x
ppp
paonrxyz
A origem do sistema O’UVW é definida pelo vetor
Isto significa que p é a posição da origem do sistema O’UVW com relação ao sistema OXYZ.
ruvw = [0,0,0,1]T
e expressa no sistema de coordenadas OXYZ como

Prof. Silas do Amaral - UDESC 29
Propriedades das Matrizes de Rotaçãoe de Transformação Homogênea
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
11001
10001z
y
x
zzzz
yyyy
xxxx
z
y
x
nnn
paonpaonpaon
rrr
ruvw = [1,0,0,1]T é o vetor unitário relativo ao eixo O’U, descrito
no sistema de coordenadas O’UVW.
Considerando p nulo, as coordenadas deste vetor no sistema OXYZsão descritas por:
Isto significa que o vetor unitário n representa o eixo O’U do sistema O’UVW com relação ao sistema OXYZ.

Prof. Silas do Amaral - UDESC 30
Translação PuraMatriz de Transf. Homogêneareferente a uma translaçãop = a.i + b.j + c.k de OUVW em relação a OXYZ: ⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1000100010001
)(z
y
x
ppp
pT
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+++
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
111000100010001
1zw
yv
xu
w
v
u
z
y
x
z
y
x
prprpr
rrr
ppp
rrr
Vetor rxyz trasladado de acordo com T(p) e ex-presso em OXYZ ⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+++
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
111000100010001
1'''
zz
yy
xx
z
y
x
z
y
x
z
y
x
prprpr
rrr
ppp
rrr
Um vetor ruvw do siste-ma O’UVW é descrito no sistema OXYZ usandoT(p) na forma:
Prof. Silas do Amaral - UDESC 31
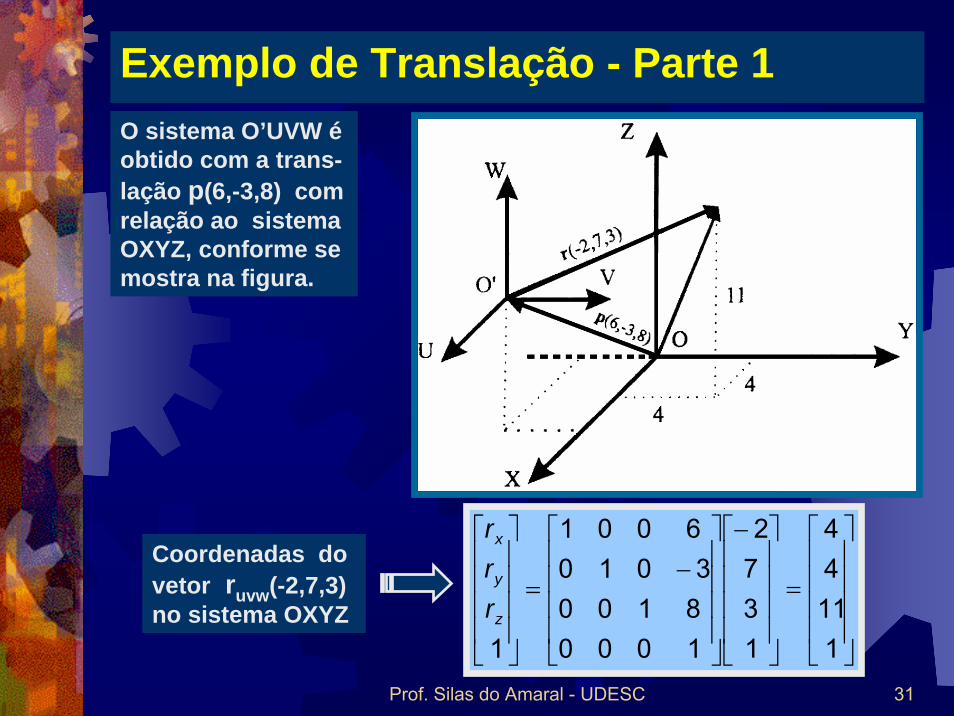
Exemplo de Translação - Parte 1O sistema O’UVW éobtido com a trans-lação p(6,-3,8) com relação ao sistema OXYZ, conforme se mostra na figura.
Coordenadas do vetor ruvw(-2,7,3) no sistema OXYZ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
11144
1372
100081003010
6001
1z
y
x
rrr
Prof. Silas do Amaral - UDESC 32
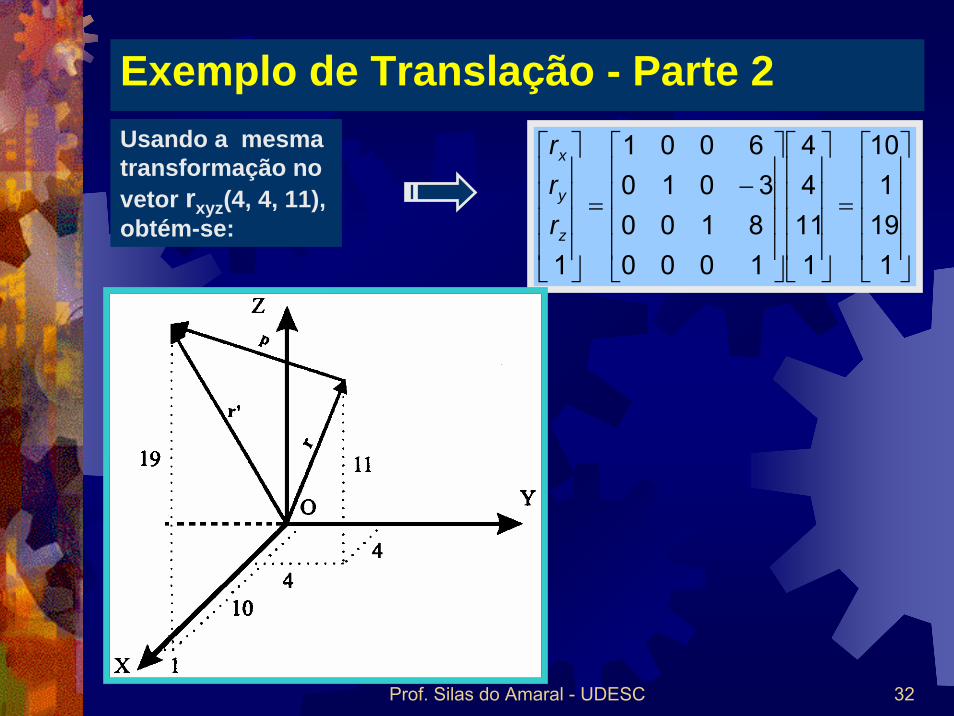
Usando a mesmatransformação no vetor rxyz(4, 4, 11), obtém-se:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
1191
10
11144
100081003010
6001
1z
y
x
rrr
Exemplo de Translação - Parte 2

Prof. Silas do Amaral - UDESC 33
Rotação Pura
Matriz de Transf. Homogêneareferente a uma rotação α emtorno do eixo OX. Neste caso, o vetor p3x1 é nulo:
Vetor ruvw do sistema rota-cionado, descrito no sistema original:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
10000cosαsenα00senα-cosα00001
α),(xT
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
11w
v
u
z
y
x
rrr
rrr
T
Aplicando a mesma transfor-mação ao vetor rxyz obtém-se:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
11'''
z
y
x
z
y
x
rrr
rrr
T

Prof. Silas do Amaral - UDESC 34
Exemplo de Rotação PuraConsidere uma rotação de –90°em torno do eixo OZ.
As coordenadas do vetor ruvw = [4 8 12]T no sistema original são:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
112
48
11284
1000010000010010
1z
y
x
rrr

Prof. Silas do Amaral - UDESC 35
Rotação Seguida de TranslaçãoA ordem das operações é importante, pois translação e rotação nãosão comutativas.
α),()()(α),( •≠• TpTpTT
Prof. Silas do Amaral - UDESC 36
Rotação Seguida de Translação
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1000cosαsenα0senα-cosα0001
),α),((z
y
x
ppp
pxT
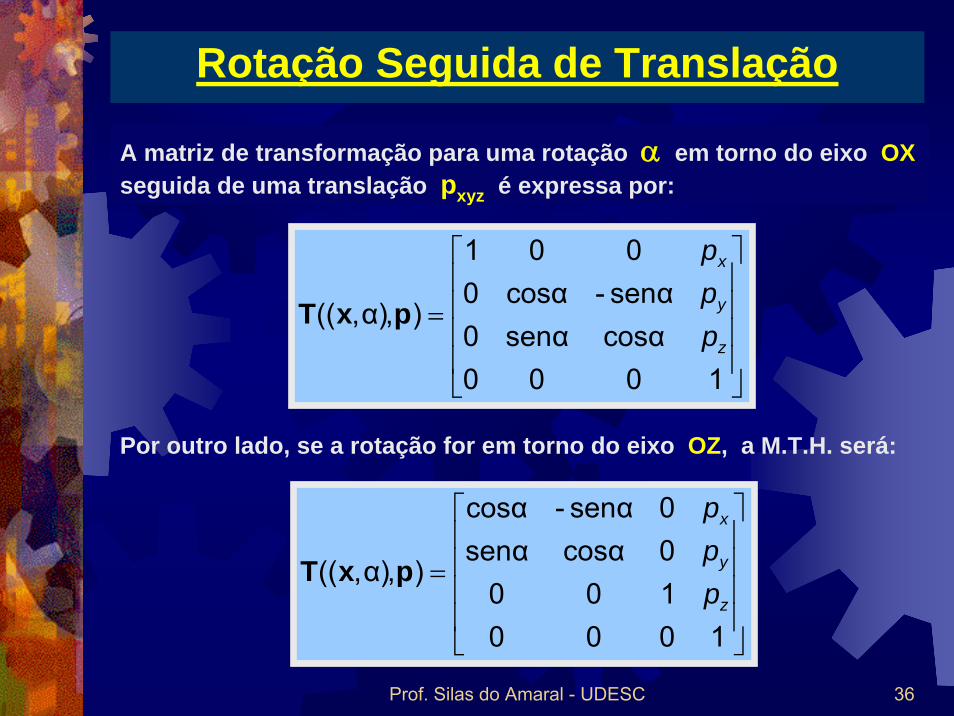
A matriz de transformação para uma rotação α em torno do eixo OXseguida de uma translação pxyz é expressa por:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
10001000cosαsenα0senα-cosα
),α),((z
y
x
ppp
pxT
Por outro lado, se a rotação for em torno do eixo OZ, a M.T.H. será:
Prof. Silas do Amaral - UDESC 37
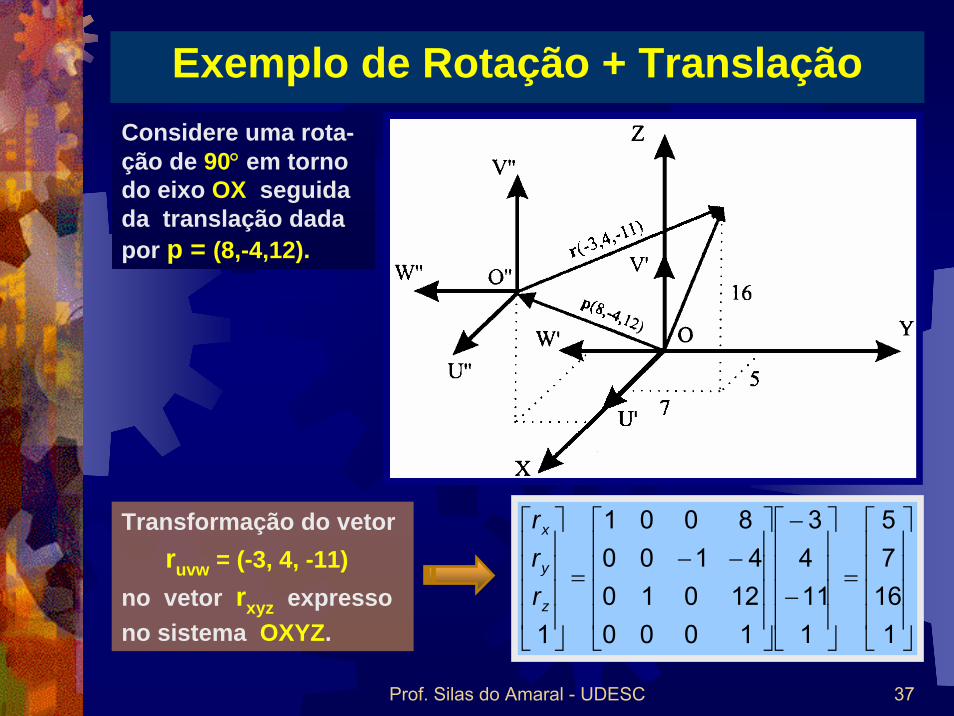
Exemplo de Rotação + TranslaçãoConsidere uma rota-ção de 90° em torno do eixo OX seguida da translação dada por p = (8,-4,12).
Transformação do vetor ruvw = (-3, 4, -11)
no vetor rxyz expressono sistema OXYZ. ⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
11675
11143
100012010
41008001
1z
y
x
rrr

Prof. Silas do Amaral - UDESC 38
Translação Seguida de Rotação
Translação pxyz seguida da rotação α em torno do eixo OX:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+=
1000cosαsenααcossenα0senα-cosααsen-cosα0
001
)α),(,(zy
zy
x
pppp
p
xpT

Prof. Silas do Amaral - UDESC 39
Translação Seguida de Rotação
Considerando pxyz = (8,-4,12)
e α = 90°, o vetor rxyz relativo
a ruvw = (-3, 4, -11) é dado por: ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
1015
11143
10004010
121008001
1z
y
x
rrr
Prof. Silas do Amaral - UDESC 40
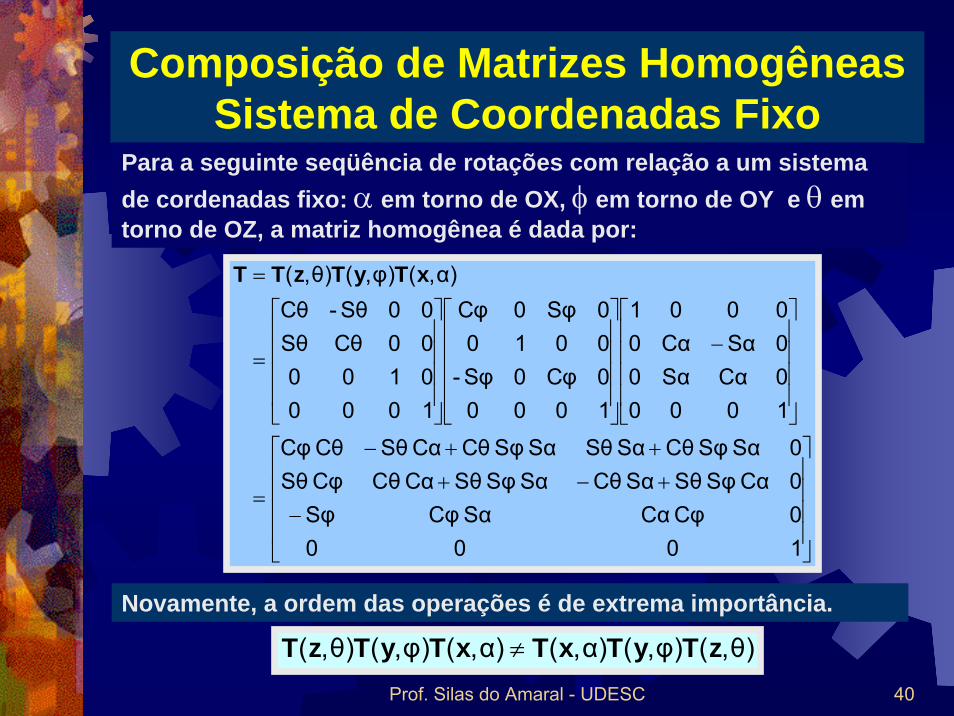
Composição de Matrizes HomogêneasSistema de Coordenadas Fixo
Para a seguinte seqüência de rotações com relação a um sistemade cordenadas fixo: α em torno de OX, φ em torno de OY e θ em torno de OZ, a matriz homogênea é dada por:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+−+
++−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
=
10000Cφ CαSα CφSφ0Cα Sφ SθSα CθSα Sφ SθCα CθCφ θS0Sα Sφ CθSα θSSα Sφ θCCα θSθC Cφ
10000CαSα00SαCα00001
10000φC0φS-00100φS0φC
1000010000θCθS00θS-θC
)α,()φ,()θ,( xTyTzTT
Novamente, a ordem das operações é de extrema importância.
)θ,()φ,()α,()α,()φ,()θ,( zTyTxTxTyTzT ≠

Prof. Silas do Amaral - UDESC 41
Composição de Matrizes HomogêneasSistema de Coordenadas Móvel
Quando uma seqüência de transformações é realizada relativas a um sistema de cordenadas que se modifique a cada operação, as matrizes devem ser multiplicadas na ordem inversa.
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
++−−+−+
−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
=
10000Cφ CαCθ SαSθ Sφ CαSθ SαSφ Cα Cθ0Cφ SαCθ CαSθ Sφ SαSθ CαCθ φS αS0SφSθ CφθC Cφ
1000010000θCθS00θSθC
10000φC0φS00100φS0φC
10000CαSα00SαCα00001
)θ,()φ,()α,( wTvTxTT
Para a seqüência de rotações: rotação α em torno de OX, seguidada rotação φ em torno de OV e da rotação θ em torno de OW, a ma-triz homogênea é dada por:

Prof. Silas do Amaral - UDESC 42
Exemplos de Composição de T. H.
A M.T.H. correspondente à seqüência de operações abaixo:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
−=
100010010
50015100
1000001001000001
100010100
50105001
1000010000010010
)90 ,( )( )90 ,( oxTpTzTT o
1. Rotação de -90° em torno do eixo OX, seguida de
2. Translação definida pelo vetor pxyz = (5,5,10) e de
3. Rotação de 90° em torno do eixo OZ.
é obtida a partir de:
Prof. Silas do Amaral - UDESC 43
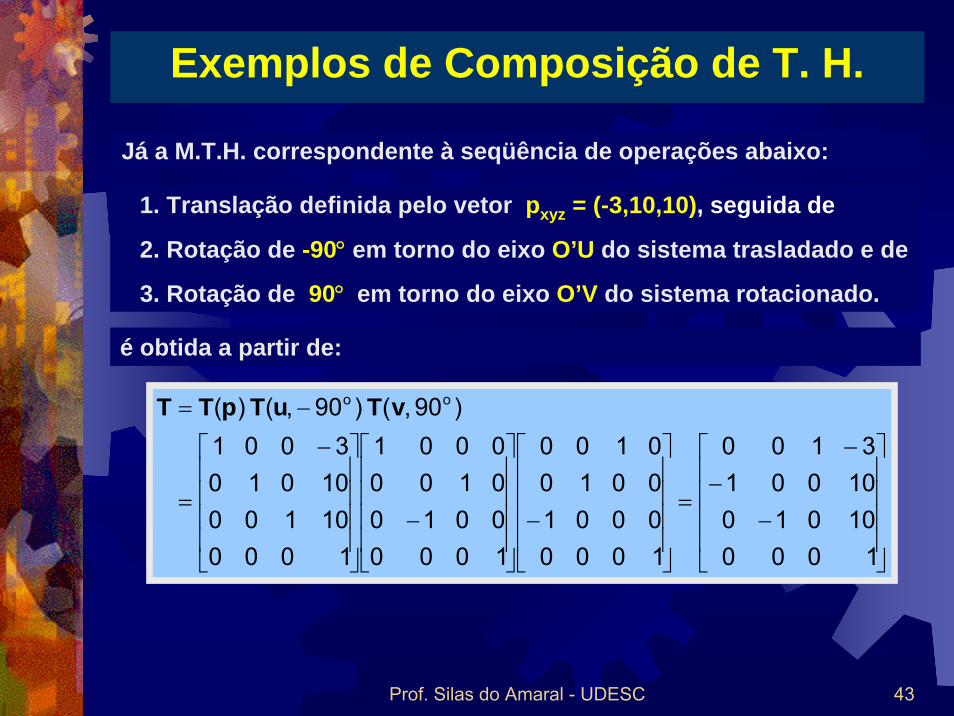
Exemplos de Composição de T. H.
Já a M.T.H. correspondente à seqüência de operações abaixo:
1. Translação definida pelo vetor pxyz = (-3,10,10), seguida de
2. Rotação de -90° em torno do eixo O’U do sistema trasladado e de
3. Rotação de 90° em torno do eixo O’V do sistema rotacionado.
é obtida a partir de:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
−=
10001001010001
3100
1000000100100100
1000001001000001
10001010010010
3001)90 ,( )90 ,( )( oo vTuTpTT

Prof. Silas do Amaral - UDESC 44
Transformações necessáriaspara localizar um objeto.
Grafos e Equações de Transformação
FO
OM
FE
ER
RM TTTTT =
FO
FE
ER
R1
O )( TTTTT =− MM
OM1
RM
1F
OF
EE
RO
R
)( )(
TTTTTT
−
−
=
=
Ferramenta referida a OXYZ
Ferramenta ref. ao objeto
Relação entre objeto e base

Prof. Silas do Amaral - UDESC 45
Relação entre os Ângulos de Euler e as Matrizes de Transf. HomogêneaRepresentação por matrizes de transformação homogênea dos ângulos de Euler na seqüência ZXZ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−++
−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
=
10000CθCψSθSψSθ0SθCφCψCθCφSψSφ-SψCθCφφCψS0SθSφCψCθSφ-SψCφSψCθSφ-CψCφ
1000010000CψSψ00SψCψ
10000θCθS00θS-Cθ00001
1000010000φCφS00φS-Cφ
)ψ,()θ,()φ,(ZXZ wTuTzTT

Prof. Silas do Amaral - UDESC 46
Relação entre os Ângulos de Euler e as Matrizes de Transf. Homogênea
Ferramenta ref. ao objeto⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡++
−
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
=
10000CθSψSθCψSθ0SθSφCψCφSψCθSφ-SψCφCψCθSφ0SθCφCψSφ-SψCθCφSψSφ-CθCψCφ
10000CψSψ00SψCψ00001
10000Cθ0Sθ-00100Sθ0Cθ
1000010000φCφS00φS-Cφ
)ψ,()θ,()φ,(ZYZ wTvTzTT
Representação por matrizes de transformação homogênea dos ângulos de Euler na seqüência ZYZ

Prof. Silas do Amaral - UDESC 47
Relação entre os Ângulos R - P - Y e as Matrizes de Transf. HomogêneaRepresentação por matrizes de transformação homogênea dos ângulos Roll-Pitch-Yaw na seqüência YPR
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡+
+
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
=
10000CψCθSψCθSθ-0SψCφ-CψSθSφCψCφSψSθSφCθSφ0SψSφCψSθCφCψSφ-ψSSθCφCθCφ
10000CψSψ00SψCψ00001
10000Cθ0Sθ-00100Sθ0Cθ
1000010000CφSφ00Sφ-Cφ
)ψ,()θ,()φ,(YPR xTyTzTT
Prof. Silas do Amaral - UDESC 48
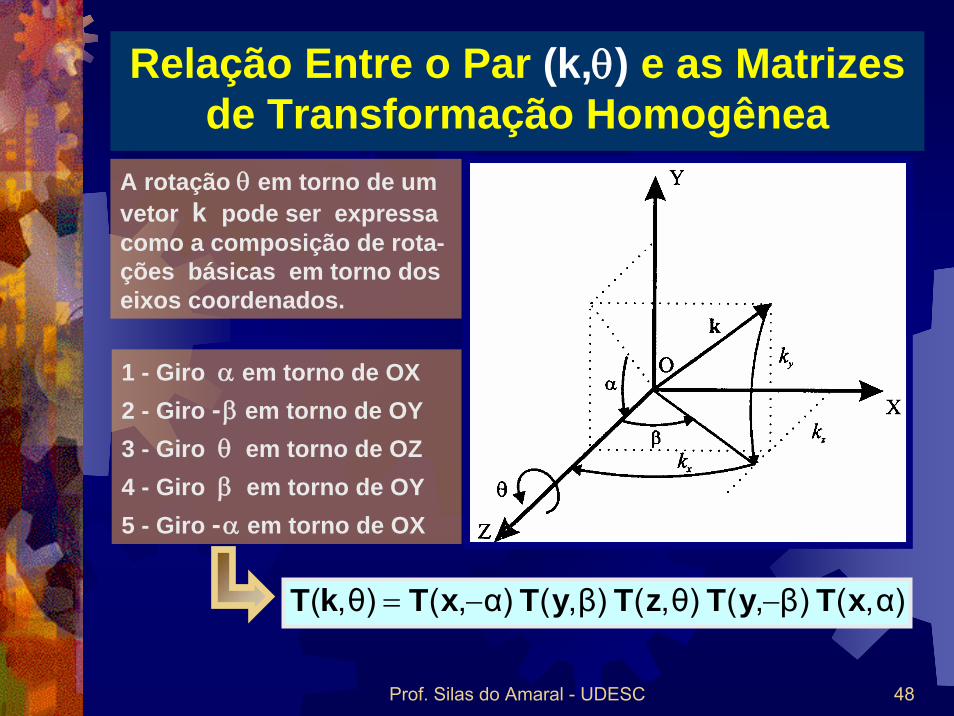
Relação Entre o Par (k,θ) e as Matrizesde Transformação Homogênea
α),()β,(θ),(β),(α),(θ),( xTyTzTyTxTkT −−=
A rotação θ em torno de um vetor k pode ser expressacomo a composição de rota-ções básicas em torno dos eixos coordenados.
1 - Giro α em torno de OX2 - Giro -β em torno de OY3 - Giro θ em torno de OZ4 - Giro β em torno de OY5 - Giro -α em torno de OX

Prof. Silas do Amaral - UDESC 49
Relação Entre R(k,θ) e a Matriz de Transformação Homogênea
22
2222
β cosβsen
αcosαsen
zyx
zy
z
zy
y
kkk
kk
k
kk
k
+==
+=
+=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
+++
++
=
10000θCθVθS-θVθS-θV0θS-θVθCθVθSθV0θSθVθS-θVθCθV
θ),(2
2
2
zxzyyzx
xzyyzyx
yzxzyxx
kkkkkkkkkkkkkkkkkkkkk
kT
Levando em conta que:
A M. T. H. equivalente à rotação em torno de um eixo arbitrário é for-necida abaixo:
onde Vθ = 1- Cθ.