fÍsica e quÍmica -...
TRANSCRIPT

Departamento de Engenharia Mecânica e Gestão Industrial
PREPARAÇÃO PARA A PROVA DE CONHECIMENTO ESPECÍFICO
FÍSICA E QUÍMICA

Departamento de Engenharia Mecânica e Gestão Industrial
RESUMO
PROGRAMA
BIBLIOGRAFIA
PROVAS MODELO
Departamento de Engenharia Mecânica e Gestão Industrial
BIBLIOGRAFIA
Tipler, Paul A.: Física - Volume 1, LTC Editora
Sitio da Secção de Física do Departamento de Engenharia Mecânica e Gestão Industrial
Beer, F.; Johnston, E.: Mecânica Vectorial para Engenheiros - Dinâmica. 7ª Edição, Editora McGraw-Hill
Beer, F.; Johnston, E.: Mecânica Vectorial para Engenheiros - Cinemática e Dinâmica. , ; , p g6ª Edição, Editora McGraw-Hill de Portugal, Lda.
Hibbeler, R.C.: Engenharia Mecânica - Dinâmica, LTC Editora

Departamento de Engenharia Mecânica e Gestão Industrial
Manuais Ensino Secundário: 9º ao 12º anos
Ciências na Nossa Vida 9 – Ciências Físico - Químicas 3º Ciclo
Autores: Fernando Morão Lopes Dias, M. Margarida R. D. Rodrigues
Eu e a Física - Física e Química A - 10.º/11.º
Autores: Maria Manuela Gradim Noémia Maciel Maria José CampanteAutores: Maria Manuela Gradim, Noémia Maciel, Maria José Campante
Eu e a Física - 12º Ano
Autores: Noémia Maciel, Maria Manuela Gradim, Maria José Campante , , p

Departamento de Engenharia Mecânica e Gestão Industrial
PROVAS MODELO – CONHECIMENTOS ESPECÍFICOS
Prova Modelo – Parte I e II (EM)
Prova Modelo – Parte I e II (EGI)
Formulário Física
Instituto Politécnico de Viseu
Escola Superior de Tecnologia
Acesso ao Ensino Superior para Maiores de 23 anos
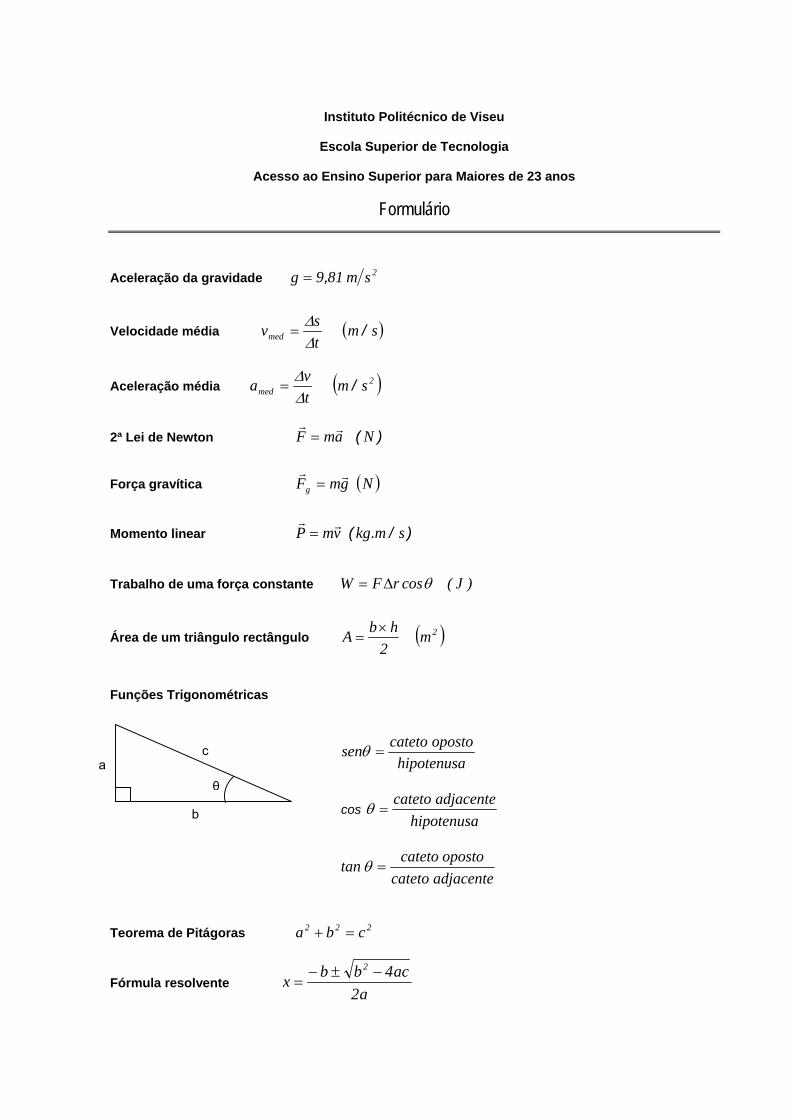
Formulário
Aceleração da gravidade 2sm819g ,=
Velocidade média ( )smtsvmed /
∆∆
=
Aceleração média ( )2med sm
tva /∆∆
=
2ª Lei de Newton )( NamF rr=
Força gravítica ( )NgmFgrr
=
Momento linear )/.( smkgvmP rr=
Trabalho de uma força constante )J(cosrFW θ∆=
Área de um triângulo rectângulo ( )2m2
hbA ×=
Funções Trigonométricas
hipotenusa
opostocatetosen =θ
hipotenusa
adjacentecateto=θcos
adjacentecateto
opostocatetotan =θ
Teorema de Pitágoras 222 cba =+
Fórmula resolvente a2
ac4bbx2 −±−
=
c
b
a θ

Física e Química
Í ÍFISÍCA E QUÍMICA
Capítulo 0 - Medidas FísicasCapítulo 0 Medidas Físicas
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
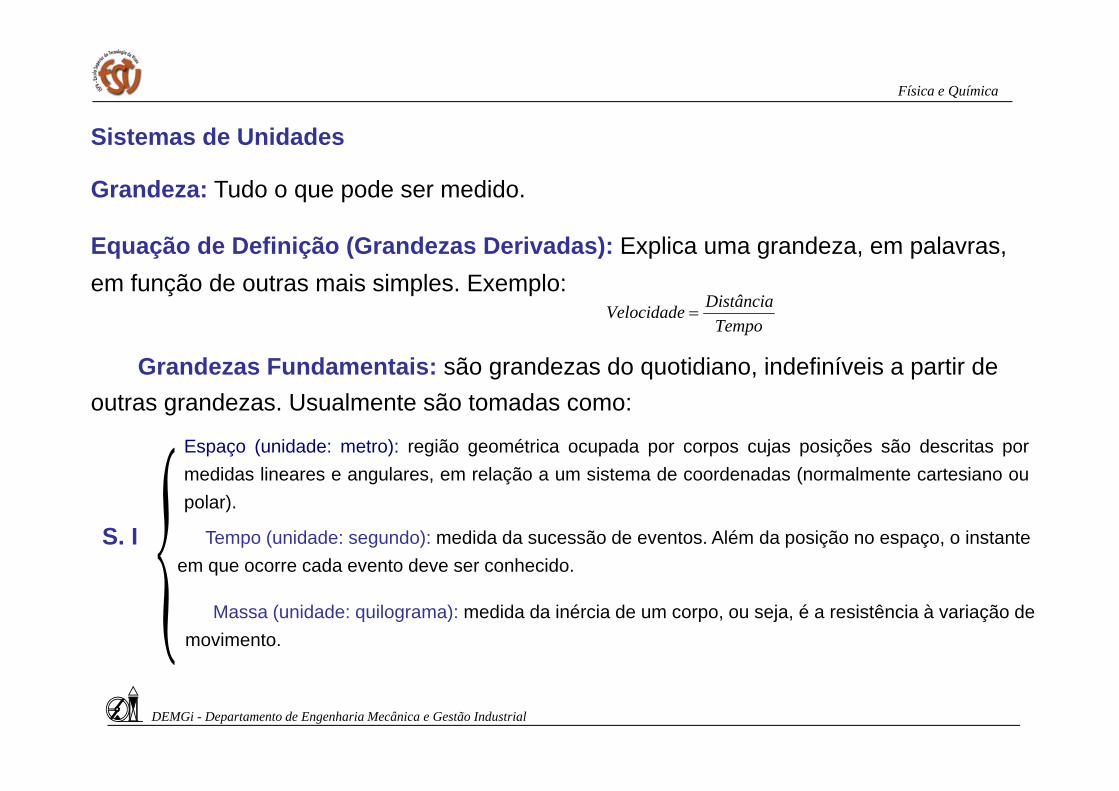
Sistemas de Unidades
Grandeza: Tudo o que pode ser medido.
Equação de Definição (Grandezas Derivadas): Explica uma grandeza, em palavras, em função de outras mais simples. Exemplo:
Distâncial d dTempo
DistânciaVelocidade =
Grandezas Fundamentais: são grandezas do quotidiano, indefiníveis a partir de t d U l t ã t doutras grandezas. Usualmente são tomadas como:
Espaço (unidade: metro): região geométrica ocupada por corpos cujas posições são descritas pormedidas lineares e angulares, em relação a um sistema de coordenadas (normalmente cartesiano oupolar).
Tempo (unidade: segundo): medida da sucessão de eventos. Além da posição no espaço, o instante em que ocorre cada evento deve ser conhecido.
S. Iq
Massa (unidade: quilograma): medida da inércia de um corpo, ou seja, é a resistência à variação de movimento.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

A escolha das grandezas fundamentais determinam qual o sistema de unidades utilizado:
Física e Quimica
A escolha das grandezas fundamentais determinam qual o sistema de unidades utilizado:
Sistema de Grandezas fundamentaisUnidades
M F L T
SI kg - m s
Sistema Técnico - kgf m S
Sistema Inglês - lb ft Sec
F S I 1 N 1 k 1 / 2Força no S.I.: 1 N = 1 kg x 1 m/s2
Massa no S.T.: 1 kgf = ? x 1 m/s2
Massa no Sistema Inglês: 1 lb = ? x 1 ft/sec2
1 slug
1 UTM (Unidade Técnica de Massa)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
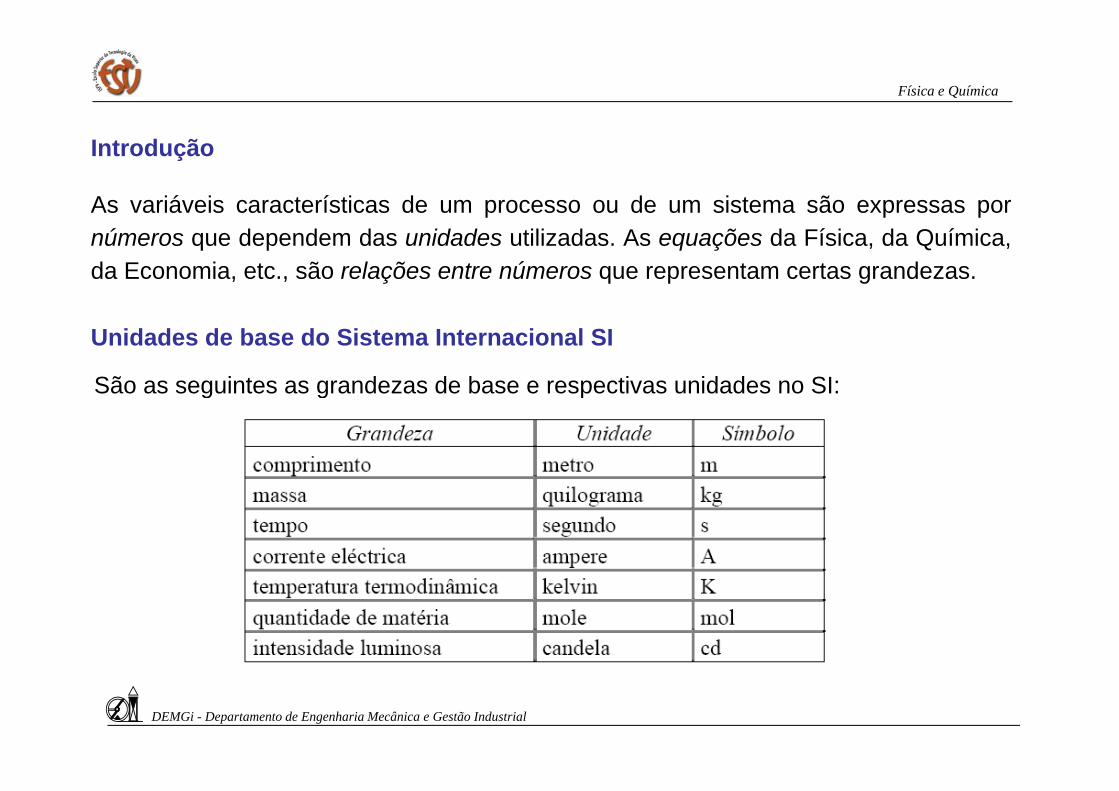
As variáveis características de um processo ou de um sistema são expressas por
Introdução
p p pnúmeros que dependem das unidades utilizadas. As equações da Física, da Química,da Economia, etc., são relações entre números que representam certas grandezas.
São as seguintes as grandezas de base e respectivas unidades no SI:
Unidades de base do Sistema Internacional SI
g g p
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
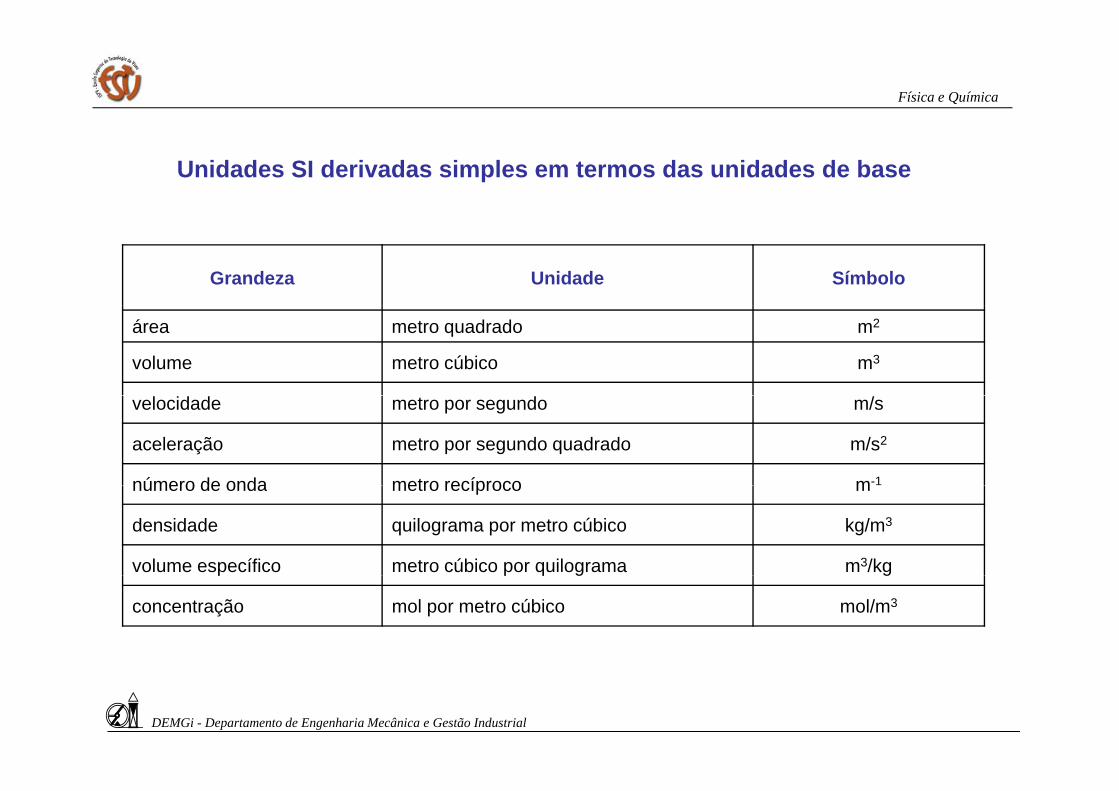
Unidades SI derivadas simples em termos das unidades de base
Grandeza Unidade Símbolo
área metro quadrado m2
volume metro cúbico m3
velocidade metro por segundo m/s
aceleração metro por segundo quadrado m/s2
número de onda metro recíproco m-1número de onda metro recíproco m
densidade quilograma por metro cúbico kg/m3
volume específico metro cúbico por quilograma m3/kgp p q g g
concentração mol por metro cúbico mol/m3
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Unidades SI derivadas com nomes especiais
Grandeza Unidade Símbolo Expressãoforça newton N kg m/s2
pressão, tensão pascal Pa N/m2
energia, trabalho joule J N menergia, trabalho joule J N m
potência, fluxo radiante watt W J/s
quantidade de electricidade coulomb C A s
potencial eléctrico volt V W/Apotencial eléctrico volt V W/A
capacitância eléctrica farad F C/V
resistência eléctrica ohm V/A
condutância eléctrica siemens S A/V
fluxo magnético weber Wb V s
densidade de fluxo magnético tesla T Wb/m2
indutância henry H Wb/A
temperatura celsius grau celcius °C K
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
O S
Física e Química
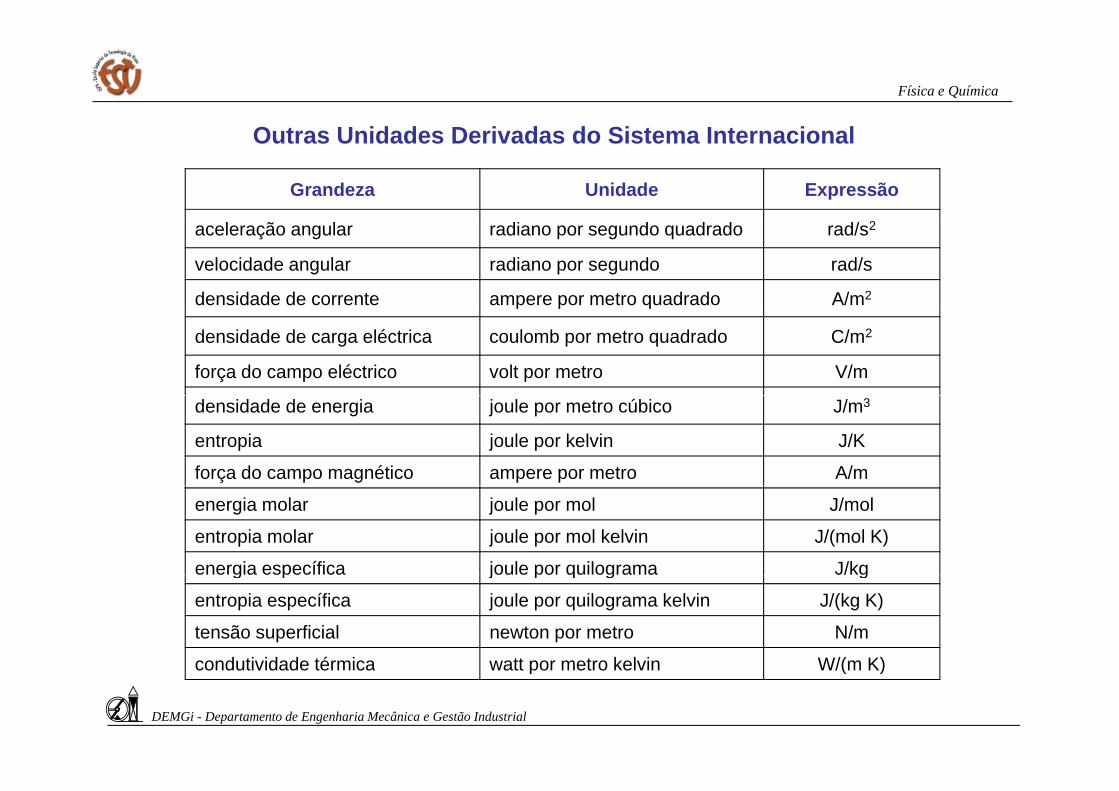
Outras Unidades Derivadas do Sistema Internacional
Grandeza Unidade Expressão
aceleração angular radiano por segundo quadrado rad/s2
velocidade angular radiano por segundo rad/s
densidade de corrente ampere por metro quadrado A/m2p p q
densidade de carga eléctrica coulomb por metro quadrado C/m2
força do campo eléctrico volt por metro V/m
densidade de energia joule por metro cúbico J/m3
entropia joule por kelvin J/K
força do campo magnético ampere por metro A/m
energia molar joule por mol J/mol
entropia molar joule por mol kelvin J/(mol K)
energia específica joule por quilograma J/kgg p j p q g g
entropia específica joule por quilograma kelvin J/(kg K)
tensão superficial newton por metro N/m
condutividade térmica watt por metro kelvin W/(m K)condutividade térmica watt por metro kelvin W/(m K)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Nome Símbolo Valor e Unidade
A l ã d G id d 9 81 / 2
Tabela de constantes
Aceleração da Gravidade g 9.81 m/s2
Constante Gravitacional G 6.67 E-11 m3/(s2*kg)
Constante de Planck h 6.626 E-32 J*s
Carga do Electrão q 1.60 E -19 C
Massa do Electrão me 9.11 E-31 kg
2Aceleração da Gravidade g 9.80 m/s2
Constante Gravitacional G 6.67 E-11 m3/(s2*kg)
C t t d Pl k h 6 626 E 32 J*Constante de Planck h 6.626 E-32 J*s
Carga do Electrão q 1.60 E -19 C
Massa do Protão mp 1.67E-27 kgp g
Faraday F 96485.309 C/gmol
Raio de Bohr a0 0.0529 nm
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Nome Símbolo Valor e UnidadeNú d A d NA 6 022 E23 l/
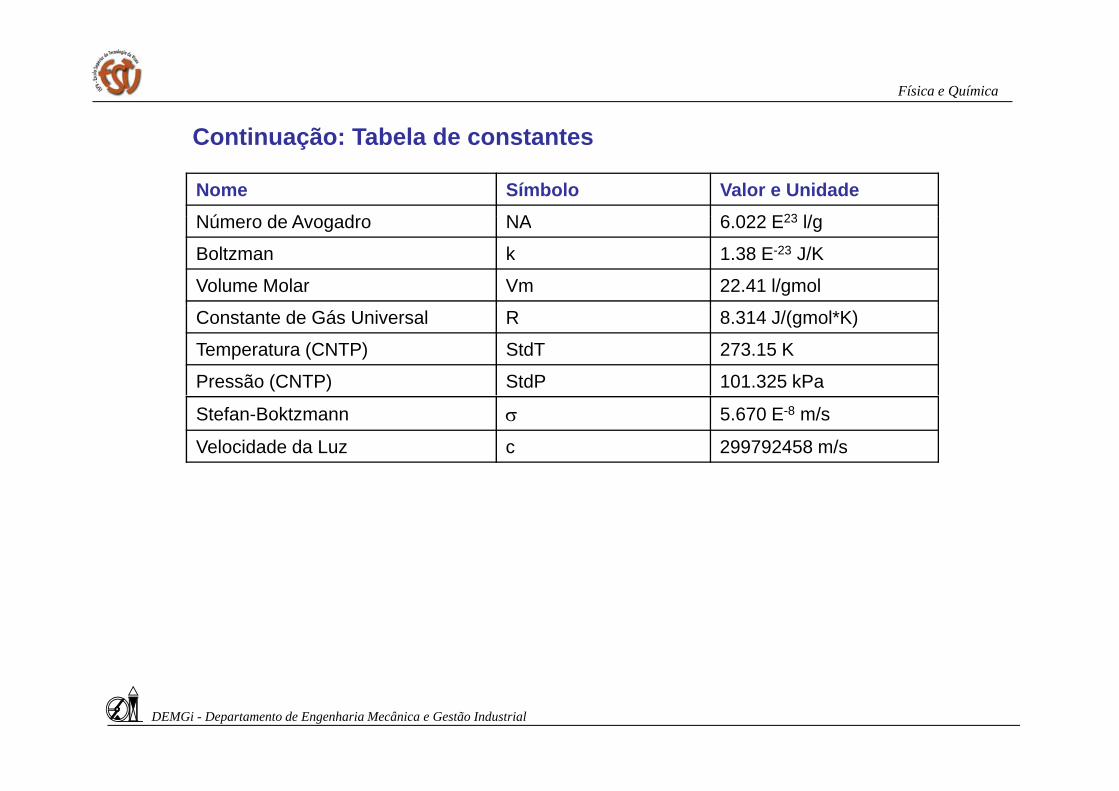
Continuação: Tabela de constantes
Número de Avogadro NA 6.022 E23 l/g
Boltzman k 1.38 E-23 J/K
Volume Molar Vm 22.41 l/gmol
Constante de Gás Universal R 8.314 J/(gmol*K)
Temperatura (CNTP) StdT 273.15 K
Pressão (CNTP) StdP 101.325 kPa
Stefan-Boktzmann σ 5.670 E-8 m/s
Velocidade da Luz c 299792458 m/s
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
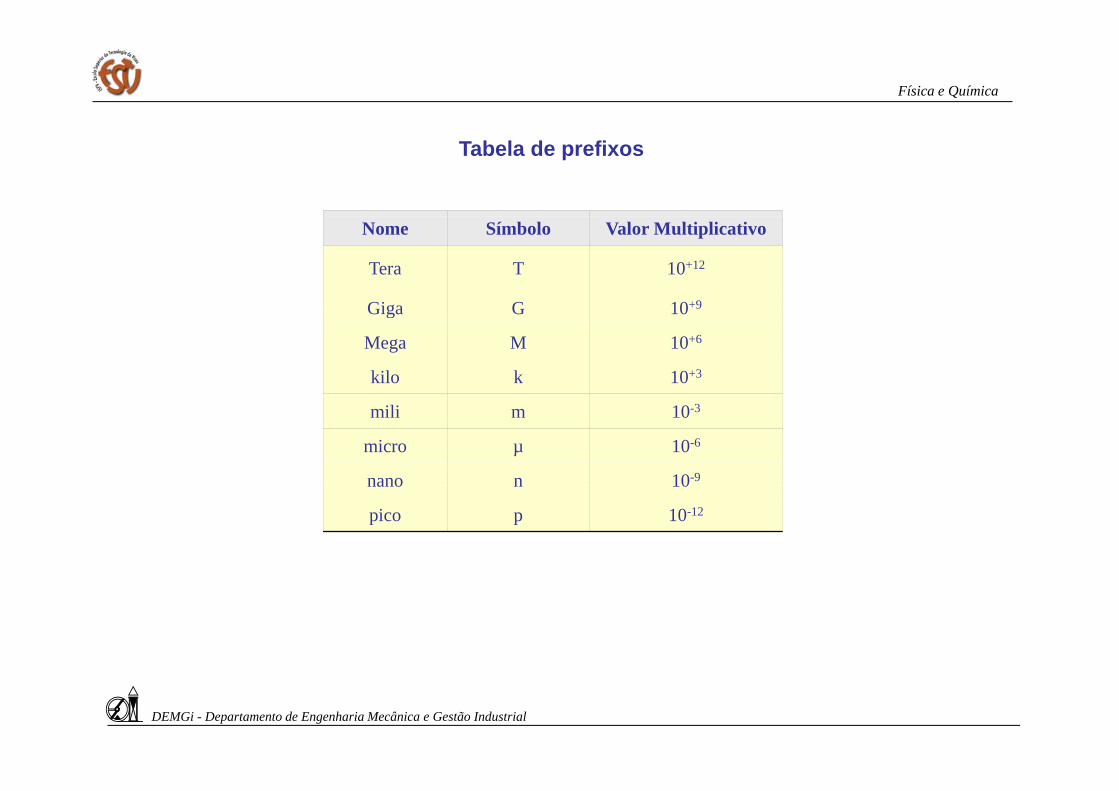
Tabela de prefixos
Nome Símbolo Valor Multiplicativo
Tera T 10+12
Giga G 10+9Giga G 10+9
Mega M 10+6
kilo k 10+3
mili m 10-3
micro µ 10-6
nano n 10-9nano n 10
pico p 10-12
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Generalidades sobre Mecânica
Conceito
Mecânica é o ramo das ciências físicas que se preocupa com as condições de repouso ou movimento de corpos sob a acção de forças.
M â i d C Rí id
Divisões
Mecânica dos Corpos Rígidos.
Mecânica dos Corpos Deformáveis.
Mecânica dos Fluidos.
Obj tiObjectivo
Estudo da acção de forças sobre corpos.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Cálculo estrutural; Projecto de máquinas; Escoamento de fluidos; Comportamento molecular e atómico dos elementos; Instrumentação eléctrica, etc.
Aplicações
e atómico dos elementos; Instrumentação eléctrica, etc.
A Mecânica dos Corpos Rígidos
Estática: Estudo dos corpos em repouso ou movendo-se em velocidade constante (corpos em equilíbrio)
Divide-se em:
constante (corpos em equilíbrio).
Dinâmica: Estudo dos corpos em movimento acelerado. Divide-se em: Divide-se em:
i) Cinemática: estuda a geometria do movimento sem se preocupar com suas causas;
ii) Dinâmica est da o mo imento relacionando o com as s asii) Dinâmica: estuda o movimento relacionando-o com as suas causas (forças aplicadas).
A táti é ti l ( i i l ) d di â i ( d l ã é l )A estática é um caso particular (mais simples) da dinâmica (onde a aceleração é nula)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Desenvolvimento Histórico
Arquimedes (287-212 a.C.): Estudo do equilíbrio de alavancas (momento).
Galileu Galilei (1564-1642): Princípios do estudo da dinâmica (pêndulos e corpos em queda livre).
Isaac Newton (1642-1727): Leis fundamentais do movimento; Mecânica Newtoniana.
Euler; D’Alembert; Lagrange: Técnicas para aplicação das leis fundamentaisEuler; D Alembert; Lagrange: Técnicas para aplicação das leis fundamentais.
Einstein (1879-1955): Teoria da relatividade: Mecânica Relativista. Contínuo espaço-temporal.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Í ÍFISÍCA E QUÍMICA
Capítulo 1 - Cinemática do Ponto Material
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Movimento uniforme
s = so + v.t
No movimento uniforme a velocidade é constante em qualquer instante
o
s = posição em um instante qualquer (m, km)so = posição inicial (m, km)v = velocidade (m/s, km/h)t = tempo (s, h)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
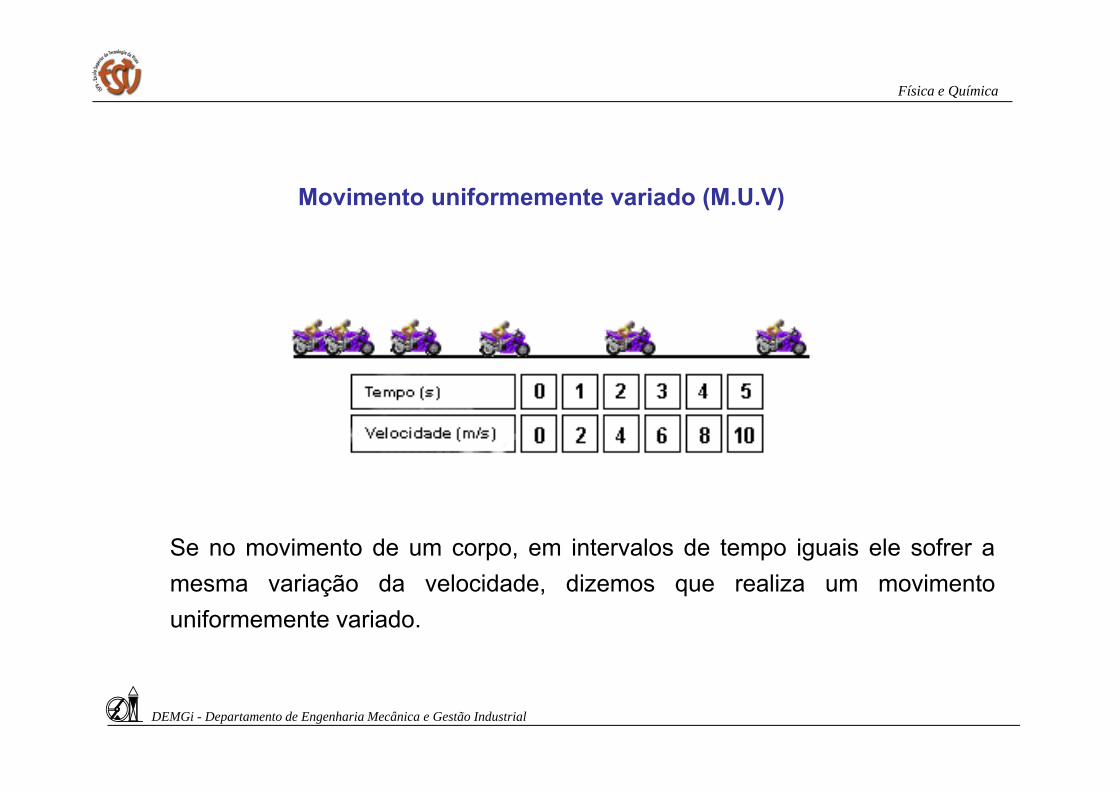
Movimento uniformemente variado (M.U.V)
Se no movimento de um corpo, em intervalos de tempo iguais ele sofrer ai ã d l id d di li i tmesma variação da velocidade, dizemos que realiza um movimento
uniformemente variado.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Movimento uniformemente variado (M.U.V)
s = s0 + v0.t + 1/2 a.t2
s = posição num instante qualquer (m, km)
s0 = posição no instante inicial (m, km)
vo = velocidade no instante inicial (m/s, km/h)
a = aceleração (m/s2, km/h2)
t t ( h)t = tempo (s, h)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Movimento uniformemente variado (M.U.V)
Posição em função do tempo: s = s0 + v0.t + 1/2 a.t2
Velocidade em função do tempo: v = v0 + a.t
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Equação de Torricelli
A equação de Torricelli relaciona a velocidade com o espaço percorrido pelo corpo.
v2 = vo2 + 2.a. ∆s
∆s = distância percorrida no intervalo considerado (m, km)∆s = s - s0
v = velocidade no final do intervalo (m/s km/h)v = velocidade no final do intervalo (m/s, km/h)vo = velocidade no início do intervalo (m/s, km/h)a = aceleração (m/s2, km/h2)ç ( , )
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
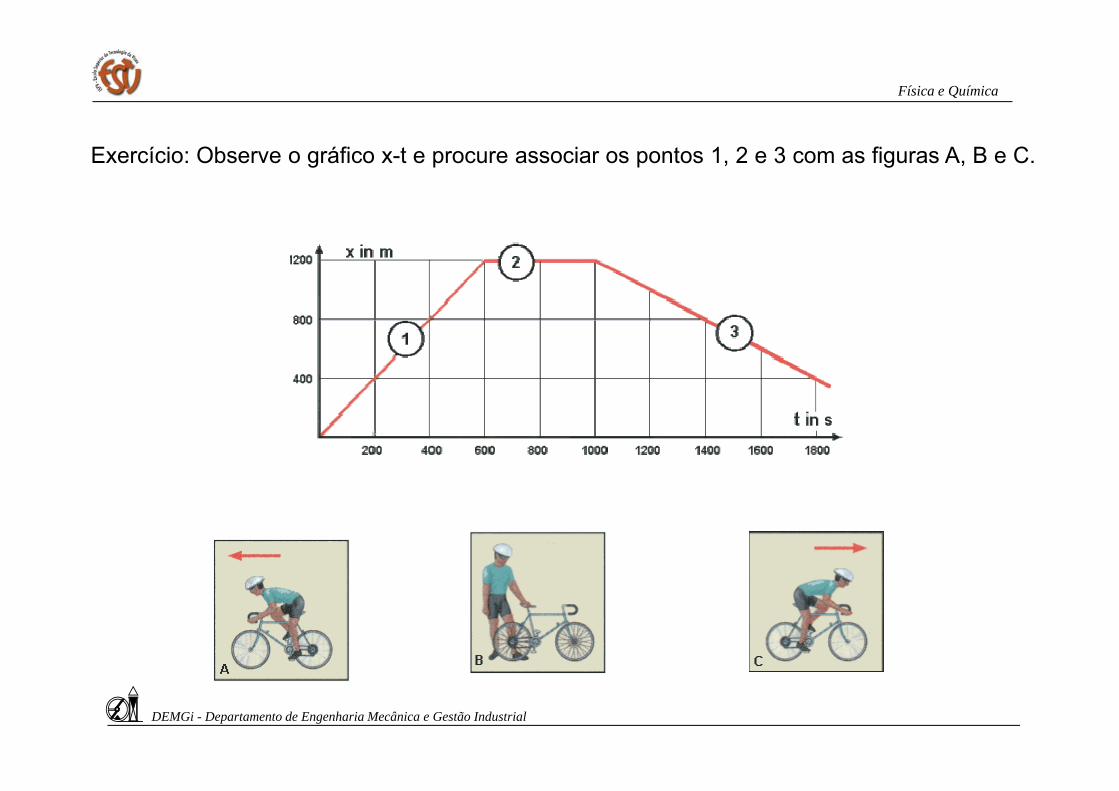
Exercício: Observe o gráfico x-t e procure associar os pontos 1, 2 e 3 com as figuras A, B e C.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
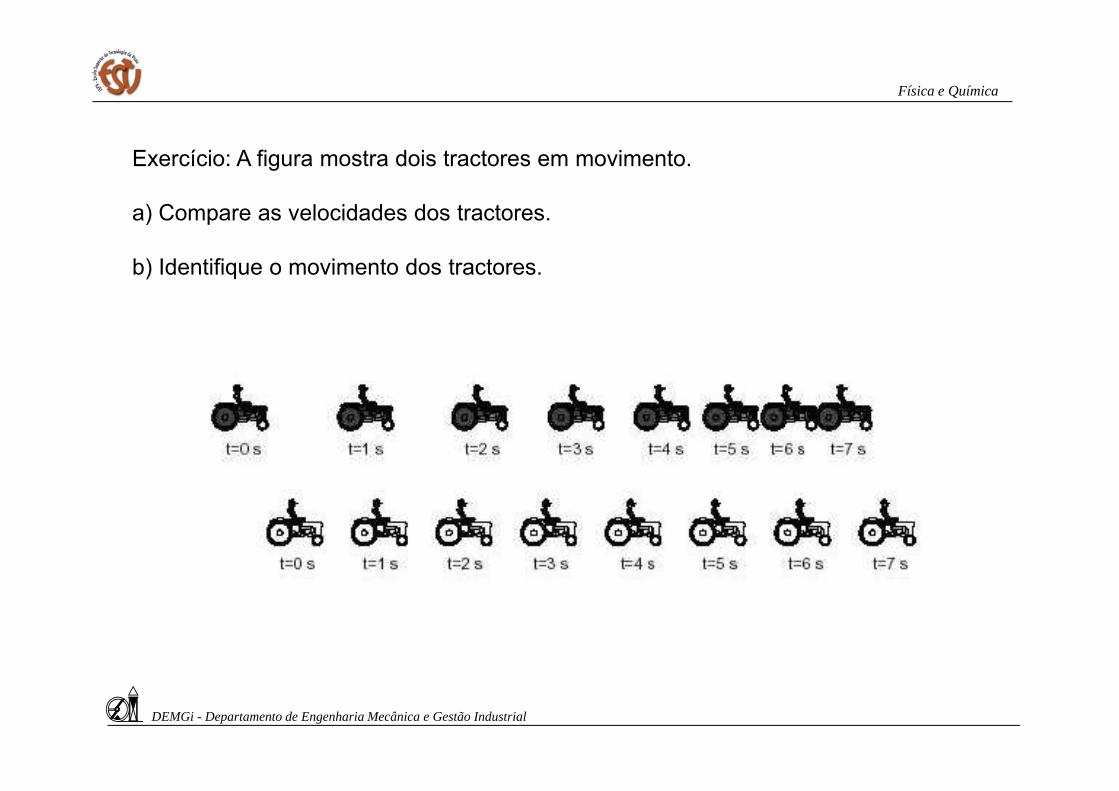
Exercício: A figura mostra dois tractores em movimento.
a) Compare as velocidades dos tractoresa) Compare as velocidades dos tractores.
b) Identifique o movimento dos tractores.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
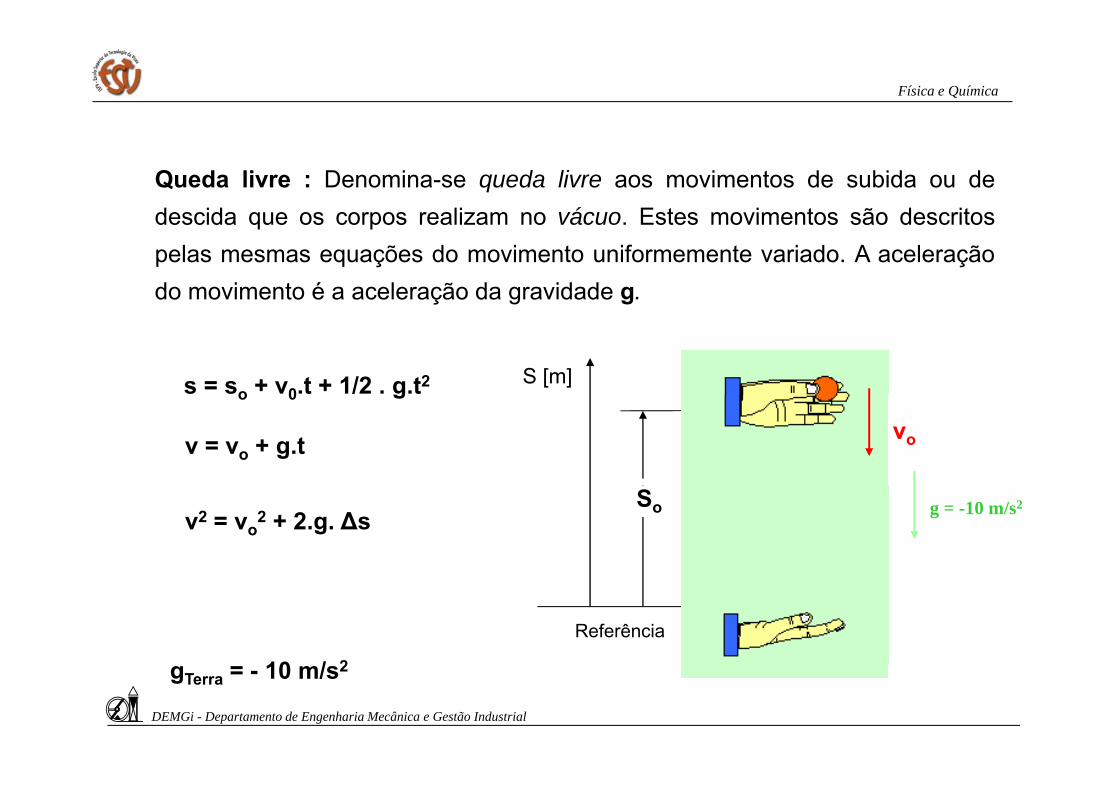
Queda livre : Denomina-se queda livre aos movimentos de subida ou dedescida que os corpos realizam no vácuo Estes movimentos são descritosdescida que os corpos realizam no vácuo. Estes movimentos são descritospelas mesmas equações do movimento uniformemente variado. A aceleraçãodo movimento é a aceleração da gravidade g.
s = so + v0.t + 1/2 . g.t2 S [m]
v = vo + g.t
o 0 g
vo
v2 = vo2 + 2.g. ∆s g = -10 m/s2So
10 / 2
Referência
gTerra = - 10 m/s2
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
O diagrama horário da velocidade pode indicar que o movimento é
composto por etapas, de tal forma que podemos, em cada trecho, identificar
as suas características e também calcular os seus respectivos deslocamentos
lescalares.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
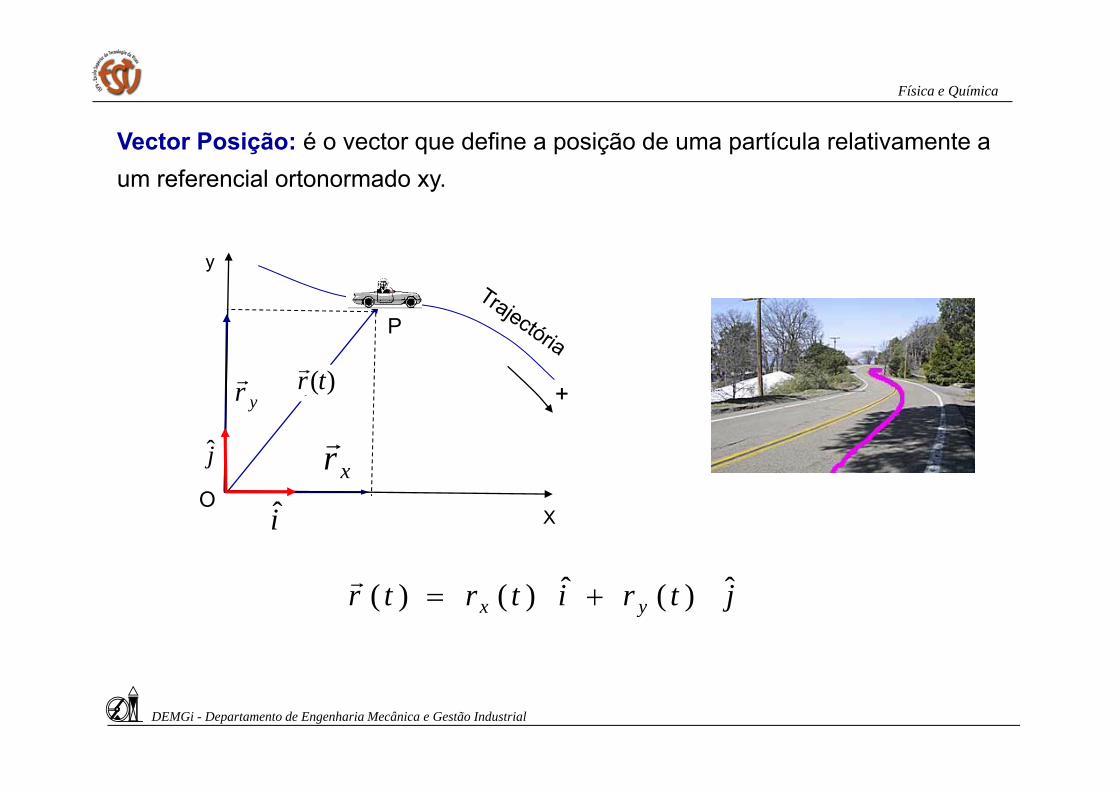
Vector Posição: é o vector que define a posição de uma partícula relativamente a um referencial ortonormado xy.
y
)(trrrr
P
+yr
xrrj
+
XO
i
jtritrtr yxˆ)(ˆ)()( +=
r
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
y
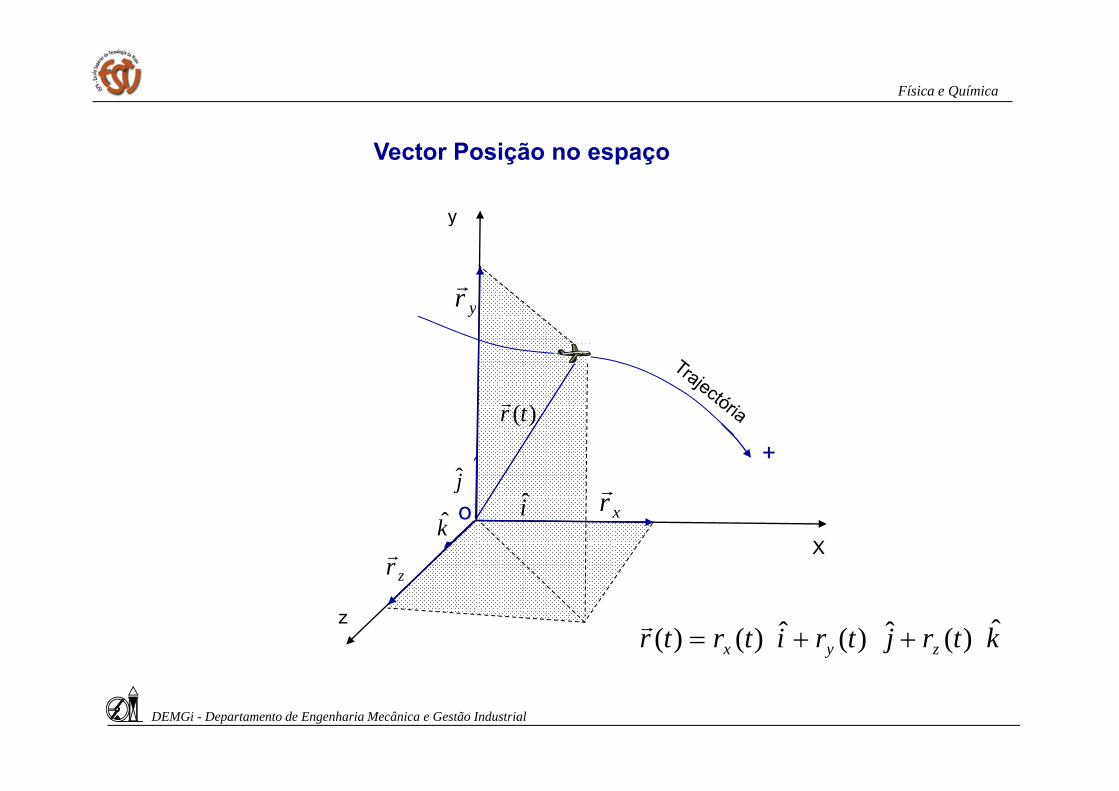
Vector Posição no espaço
yrr
y
yr
j+
)(trr
xrrk
X
j
zrr
io
z
z
ktrjtritrtr zyxˆ)(ˆ)(ˆ)()( ++=
r
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
yFísica e Química
r rr∆
y
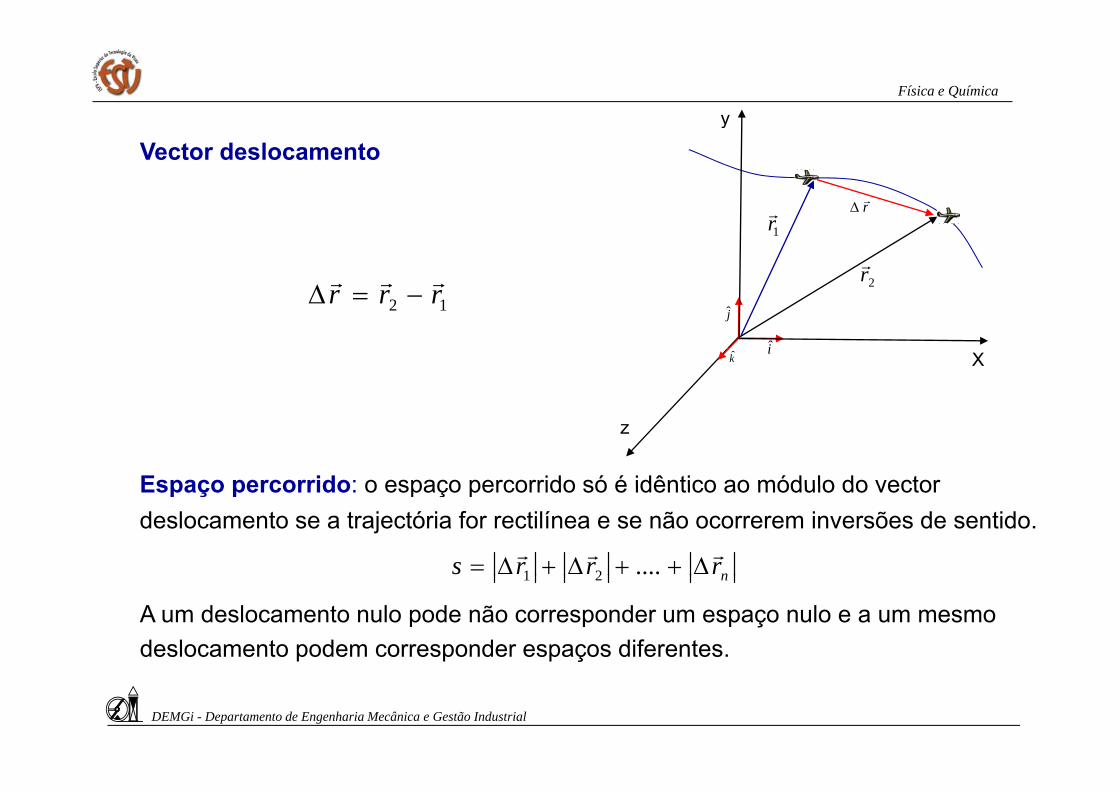
Vector deslocamento
1rr
2rr
12 rrr rrr−=∆
Xk
j
i
12
z
Espaço percorrido: o espaço percorrido só é idêntico ao módulo do vectorEspaço percorrido: o espaço percorrido só é idêntico ao módulo do vector deslocamento se a trajectória for rectilínea e se não ocorrerem inversões de sentido.
nrrrs rrr∆++∆+∆= ....21
A um deslocamento nulo pode não corresponder um espaço nulo e a um mesmo deslocamento podem corresponder espaços diferentes.
n21
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
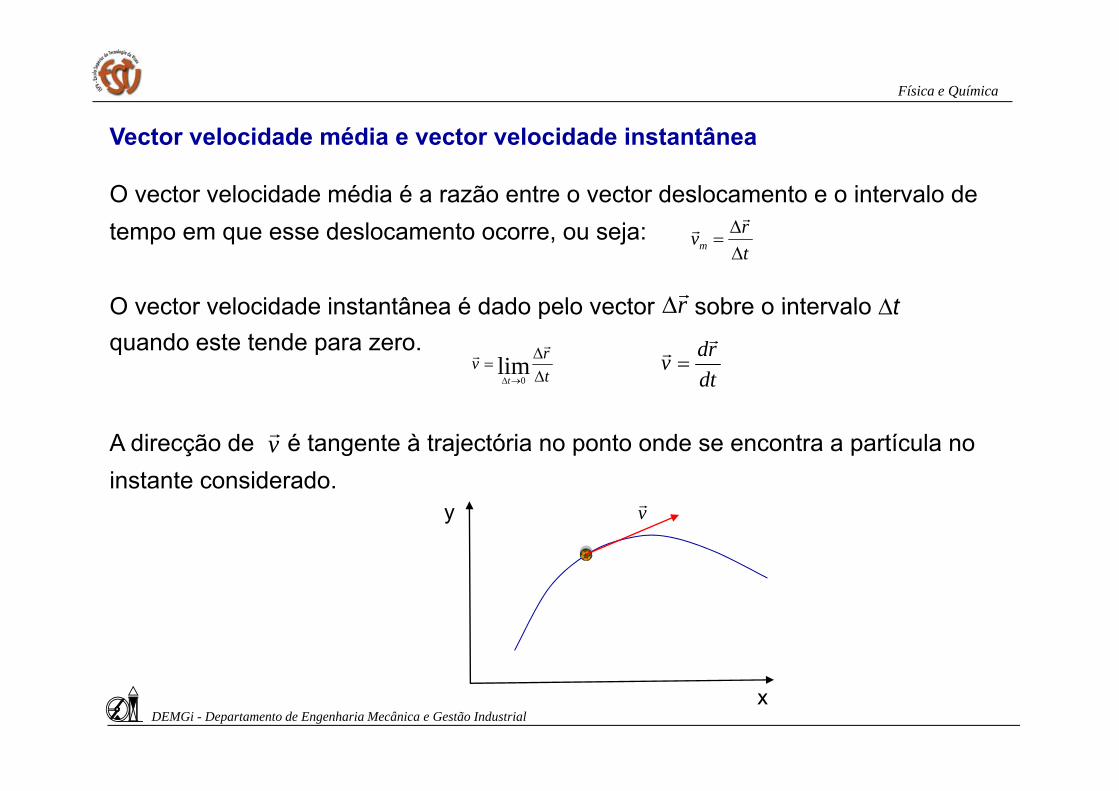
Vector velocidade média e vector velocidade instantânea
O vector velocidade média é a razão entre o vector deslocamento e o intervalo de tempo em que esse deslocamento ocorre, ou seja:
O vector velocidade instantânea é dado pelo vector sobre o intervalo ∆trr∆
trvm ∆
∆=
rr
O vector velocidade instantânea é dado pelo vector sobre o intervalo ∆t quando este tende para zero.
r∆
trv
t ∆∆
=→∆
rr lim
0 dtrdvr
r=
A direcção de é tangente à trajectória no ponto onde se encontra a partícula no instante considerado
vr
instante considerado.y vr
x DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
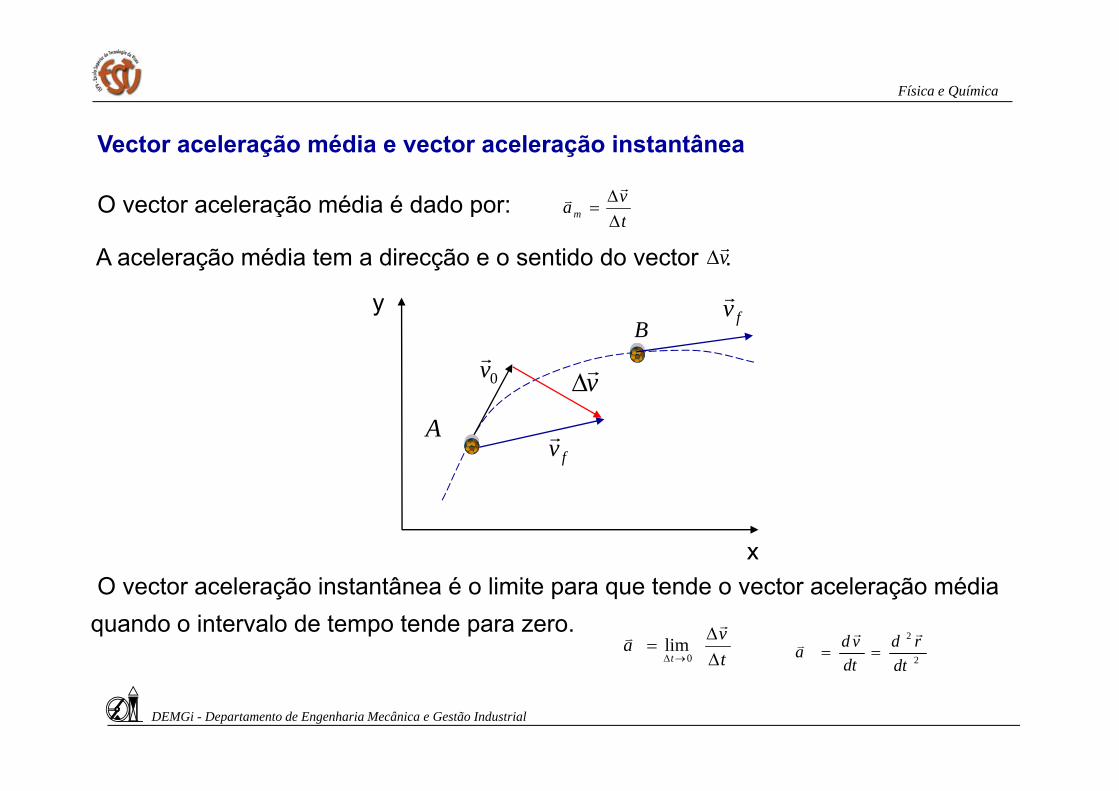
Vector aceleração média e vector aceleração instantânea
O vector aceleração média é dado por: vam ∆∆
=r
vç p
A aceleração média tem a direcção e o sentido do vector .vr∆
y vr
tm ∆
0vr
y
vr∆
B fv
Afvr
xO vector aceleração instantânea é o limite para que tende o vector aceleração média quando o intervalo de tempo tende para zero.
tva
t ∆∆
=→∆
rv
0lim
2
2
dtrd
dtvda
rrv ==t∆ dtdt
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
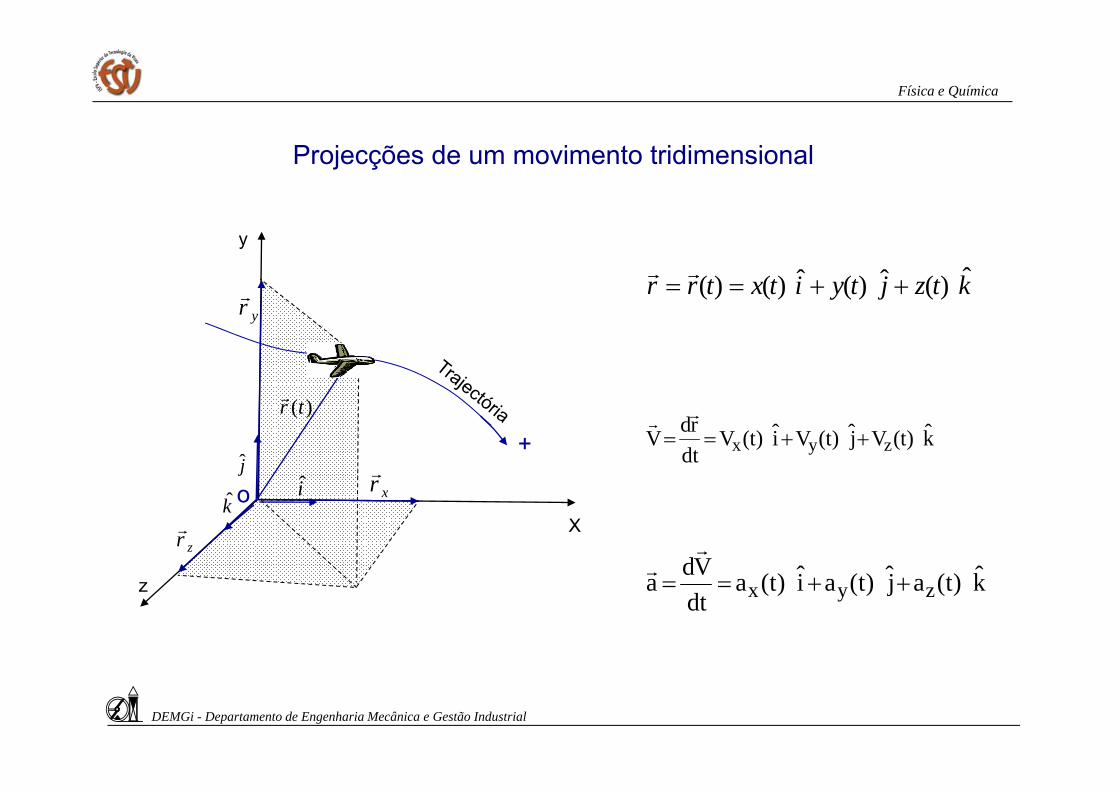
Projecções de um movimento tridimensional
ktzjtyitxtrr ˆ)(ˆ)(ˆ)()( ++==rr
rr
y
yr
k)t(Vj)t(Vi)t(VdtrdV zyx ++==rr
rrj
+
i
)(trr
k)(j)(i)(Vdr
r
xrk
Xzrr
io
k)t(aj)t(ai)t(adt
a zyx ++==r
z
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
r vr xvv rr=Y
Movimento de um projéctil numa trajectória plana
r
yvr v x
xvr
xv
gryvr vr0vr
yv0r
Ymáx.
Y
gxvr
rY0
j
yvr vrr
xv0r
j
XmáxX0 X0i
xv
Xmáx.
yvr vrDEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
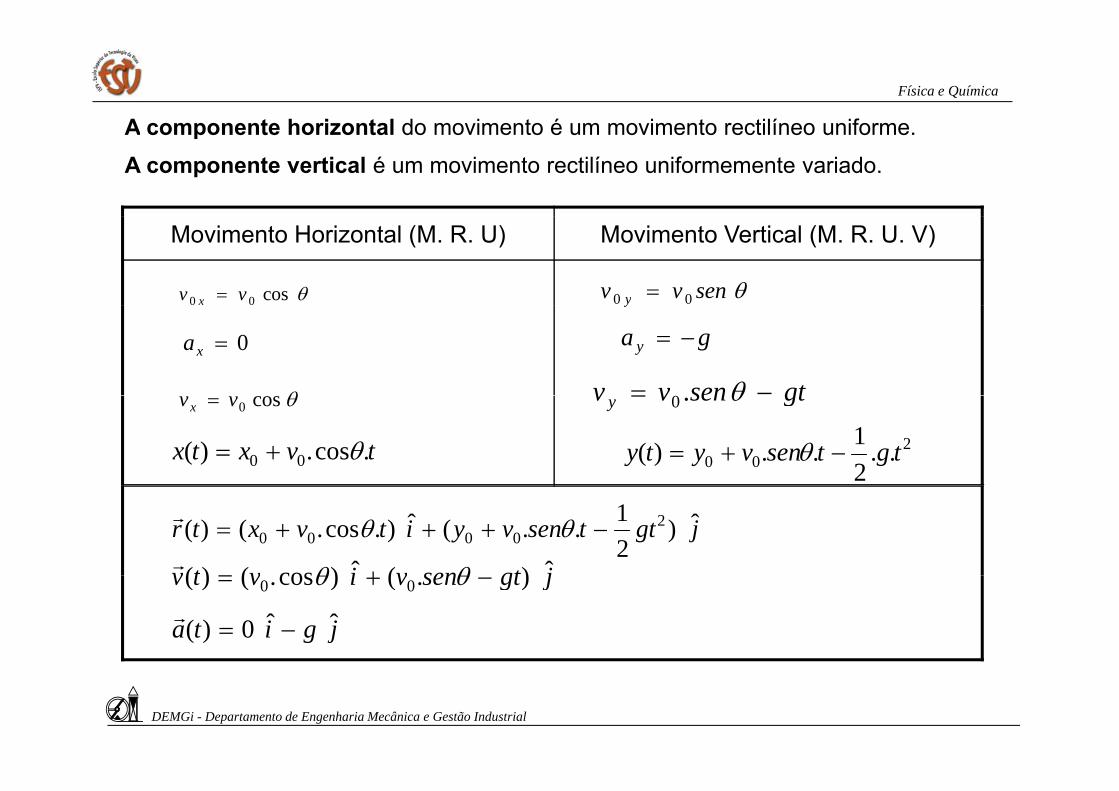
A componente horizontal do movimento é um movimento rectilíneo uniforme
Física e Química
A componente horizontal do movimento é um movimento rectilíneo uniforme.
A componente vertical é um movimento rectilíneo uniformemente variado.
Movimento Horizontal (M. R. U) Movimento Vertical (M. R. U. V)
θcos00 vv x = θsenvv y 00 =
0=xa ga y −=
y
gtsenvv −= θ0θ gtsenvv y = θ.0θcos0vvx =
tvxtx .cos.)( 00 θ+= 200 ..
21..)( tgtsenvyty −+= θ
jgttsenvyitvxtr ˆ)21..(ˆ).cos.()( 2
0000 −+++= θθr
jgtsenvivtv ˆ)(ˆ)cos()( + θθr jgtsenvivtv ).()cos.()( 00 −+= θθ
jgita ˆˆ0)( −=r
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
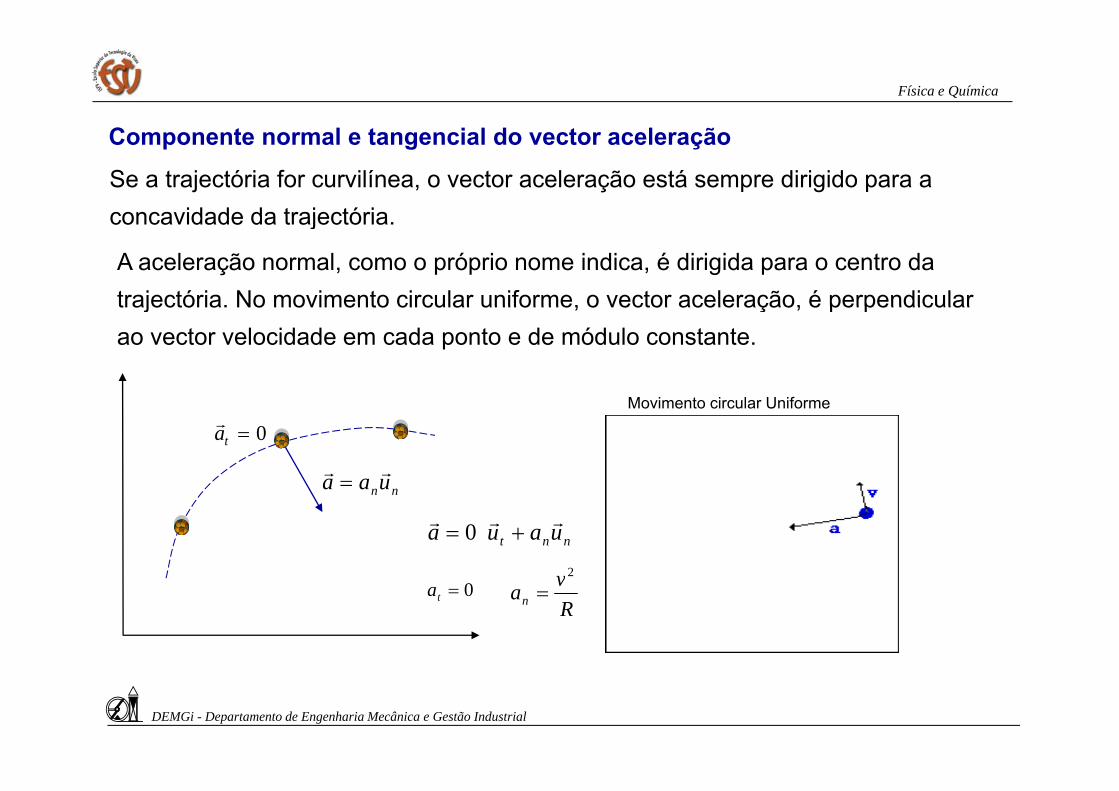
Se a trajectória for curvilínea, o vector aceleração está sempre dirigido para a concavidade da trajectória
Componente normal e tangencial do vector aceleração
concavidade da trajectória.
A aceleração normal, como o próprio nome indica, é dirigida para o centro da trajectória. No movimento circular uniforme, o vector aceleração, é perpendiculartrajectória. No movimento circular uniforme, o vector aceleração, é perpendicular ao vector velocidade em cada ponto e de módulo constante.
Movimento circular Uniforme
0=tar
uaa rr=
nnt uaua rrr+= 0
2
nnuaa =
0=taRvan
2
=
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Movimento Circular
Designam-se por movimentos circulares aqueles em que a trajectória é circular ou seja o raio R é constante
Período, T: É o tempo gasto por um corpo para efectuar uma volta completa no circulo.
seja o raio R é constante.
Frequência, f: É o número de voltas efectuadas no circulo na unidade de tempo.
fT 1=
Tf 1=
fTR
Rw ππ 22==
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
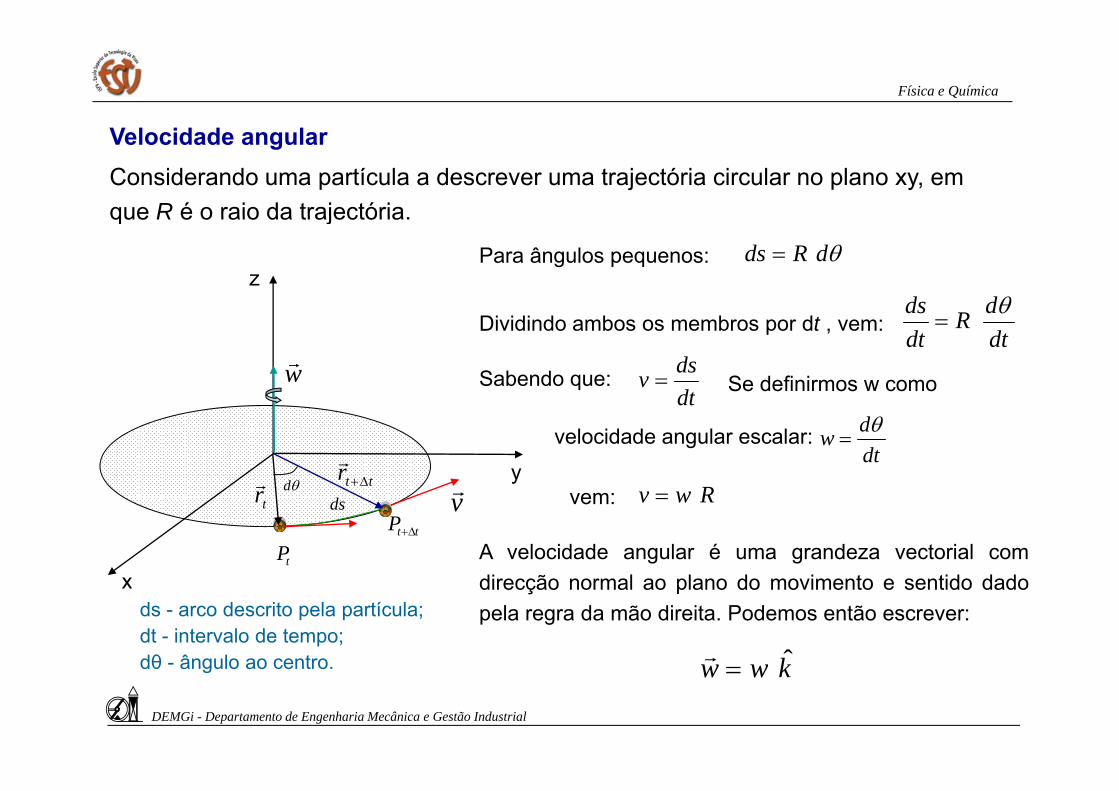
Velocidade angularConsiderando uma partícula a descrever uma trajectória circular no plano xy, em que R é o raio da trajectóriaque R é o raio da trajectória.
zPara ângulos pequenos: θdRds =
dds θ
wr Se definirmos w como
Dividindo ambos os membros por dt , vem:dtdR
dtds θ
=
Sabendo que:dtdsv =
y
dt
dtdw θ
=velocidade angular escalar:
θd ttr ∆+r
Rwv =vem:
A velocidade angular é uma grandeza vectorial comdi ã l l d i t tid d d
vrttP ∆+
θd tt ∆+
tP
trr
ds
xds - arco descrito pela partícula;dt - intervalo de tempo;dθ - ângulo ao centro
direcção normal ao plano do movimento e sentido dadopela regra da mão direita. Podemos então escrever:
kww ˆrdθ ângulo ao centro. kww =
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
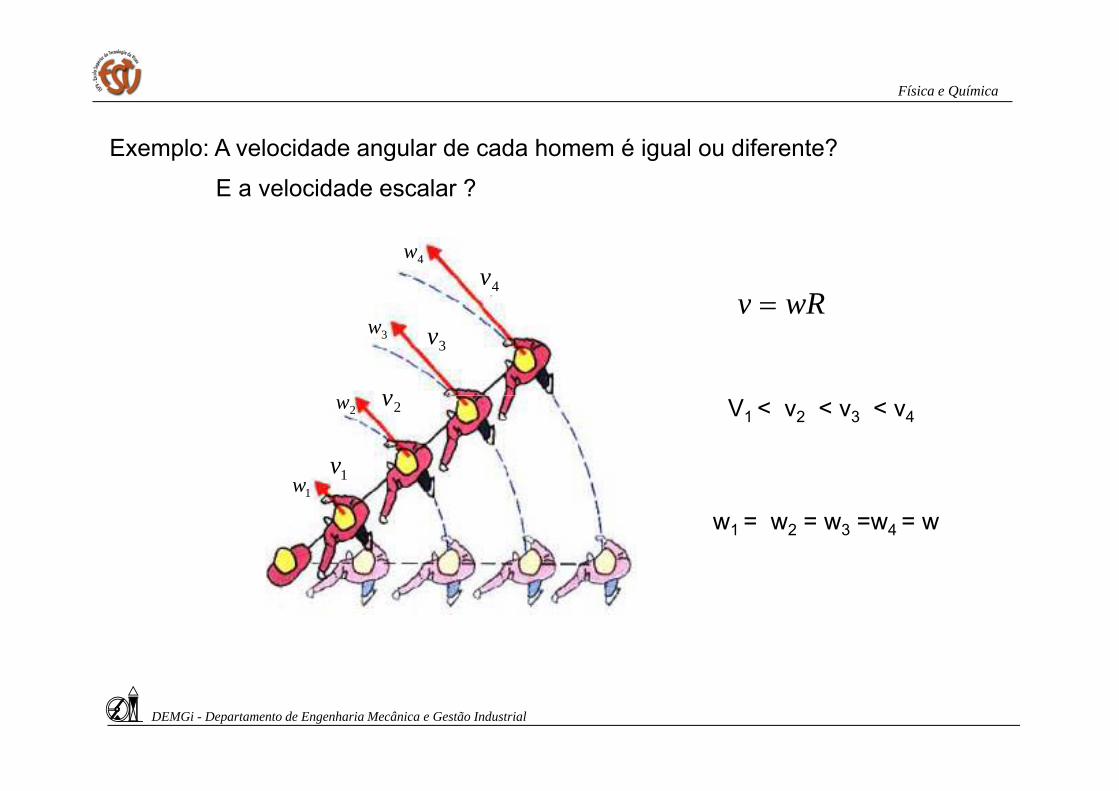
Exemplo: A velocidade angular de cada homem é igual ou diferente?
E a velocidade escalar ?
4v4w
wRv =
v
3v3wwRv =
1v
2v
w
2w V1 < v2 < v3 < v4
1w
w1 = w2 = w3 =w4 = w
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
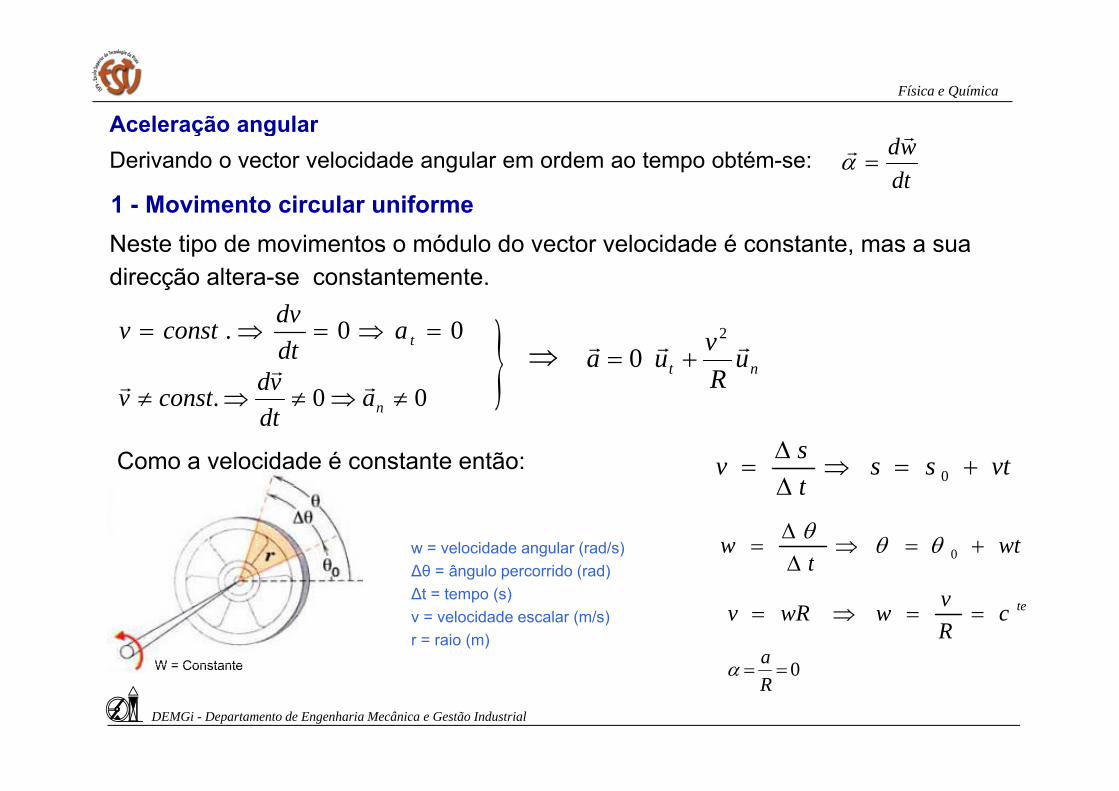
Aceleração angularFísica e Química
1 - Movimento circular uniforme
Aceleração angularDerivando o vector velocidade angular em ordem ao tempo obtém-se:
dtwd rr
=α
Neste tipo de movimentos o módulo do vector velocidade é constante, mas a sua direcção altera-se constantemente.
d
00 ≠⇒≠⇒≠ avdconstv rr
r
00. =⇒=⇒= tadtdvconstv
nt uRvua rrr 2
0 +=} ⇒
Como a velocidade é constante então:
00. ≠⇒≠⇒≠ nadt
constv}
vtsstsv +=⇒
∆∆
= 0
w = velocidade angular (rad/s)∆θ = ângulo percorrido (rad)
wtt
w +=⇒∆∆
= 0θθθ
t∆
W = Constante
∆θ ângulo percorrido (rad)∆t = tempo (s)v = velocidade escalar (m/s)r = raio (m)
tecRvwwRv ==⇒=
0aW = Constante 0==R
α
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
E í i d i t i l if
Física e Química
Um corpo realiza um movimento circular e uniforme, com velocidade de 5 m/s. Sendo a aceleração normal igual a 10 m/s2 determine o raio de sua trajectória
Exercícios de movimento circular e uniforme
Sendo a aceleração normal igual a 10 m/s , determine o raio de sua trajectória.
A Lua realiza, ao redor da Terra, um movimento aproximadamente circular e uniforme,com velocidade de 1000 m/s. Sendo o raio de sua órbita igual a 400 000 quilómetros,determine sua aceleração normal.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
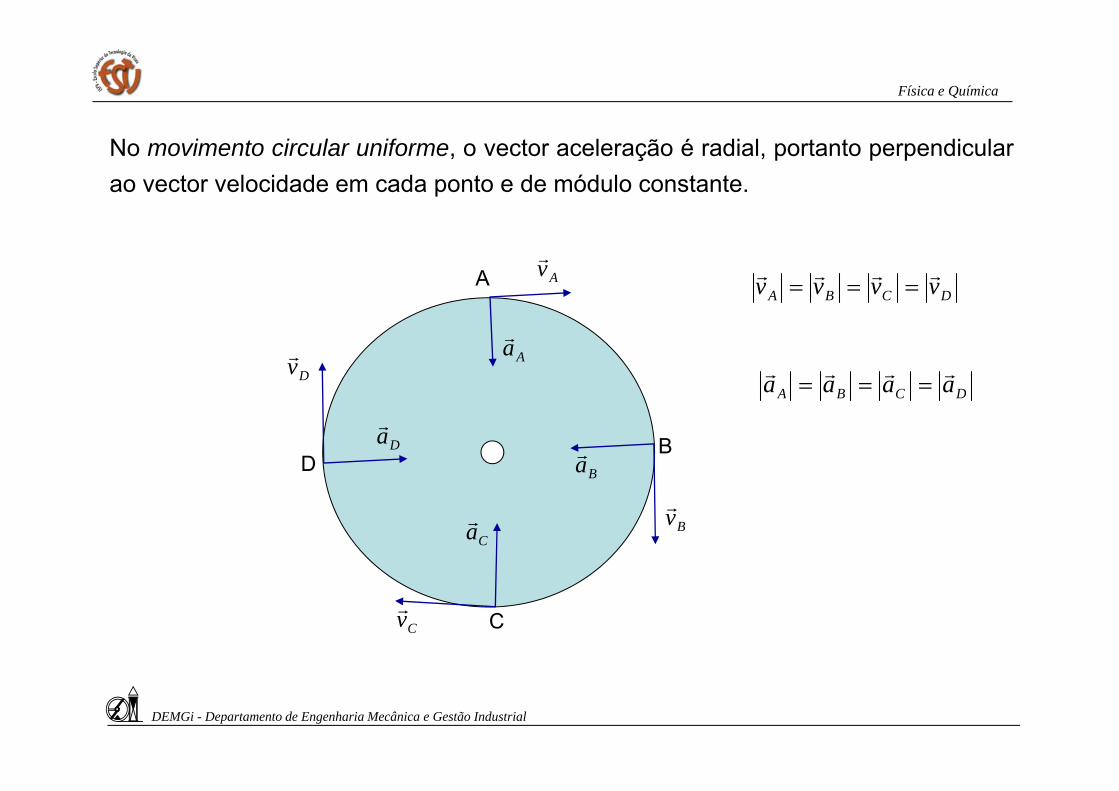
Física e Química
No movimento circular uniforme, o vector aceleração é radial, portanto perpendicularao vector velocidade em cada ponto e de módulo constante.
A Avr
DCBA vvvv rrrr===
Dvr Aar
DCBA aaaa rrrr===
BD Bar
DarDCBA
BvrCar
CCvr
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
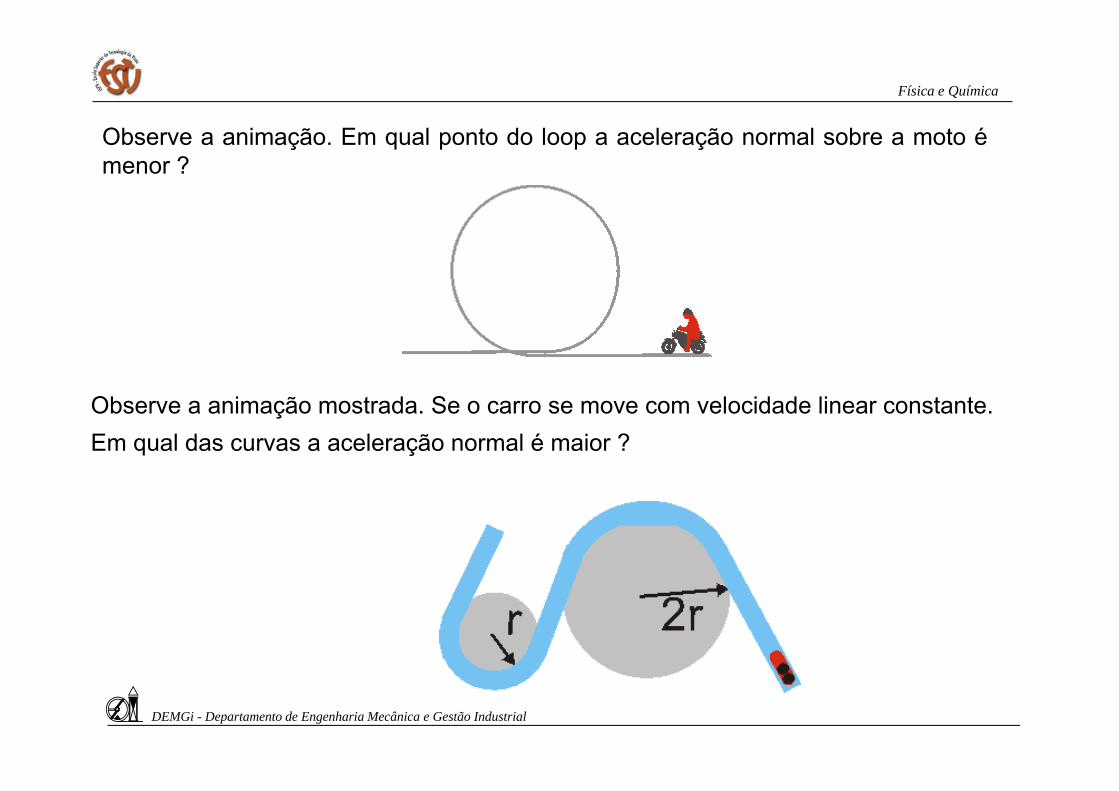
Observe a animação. Em qual ponto do loop a aceleração normal sobre a moto émenor ?
Observe a animação mostrada. Se o carro se move com velocidade linear constante. Em qual das curvas a aceleração normal é maior ?
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
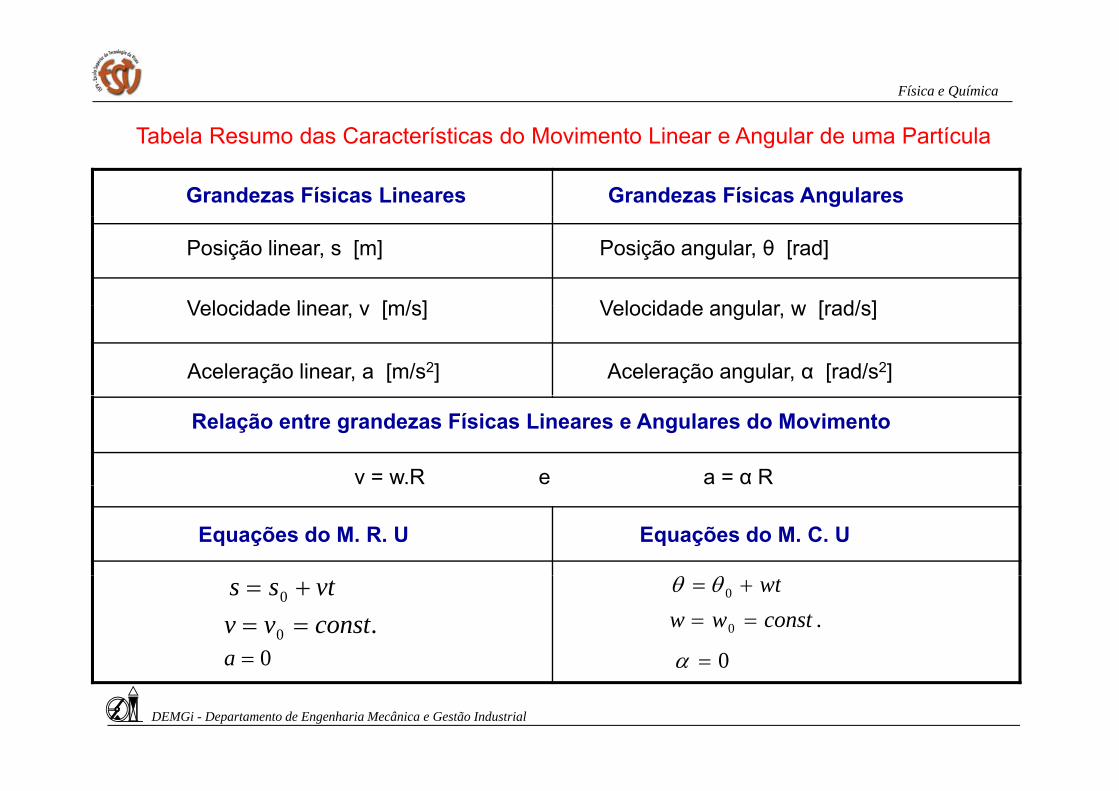
Tabela Resumo das Características do Movimento Linear e Angular de uma Partícula
Grandezas Físicas AngularesGrandezas Físicas Lineares
Posição angular, θ [rad]Posição linear, s [m]
Velocidade linear v [m/s] Velocidade angular w [rad/s]Velocidade linear, v [m/s] Velocidade angular, w [rad/s]
Aceleração linear, a [m/s2] Aceleração angular, α [rad/s2]
Relação entre grandezas Físicas Lineares e Angulares do Movimento
v = w.R e a = α R
Equações do M. R. U Equações do M. C. U
vtss += 0
.0 constvv ==0=a
wt+= 0θθ.0 constww ==
0=α0a 0α
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Í ÍFISÍCA E QUÍMICA
Capítulo 2 - Dinâmica do Ponto Material
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
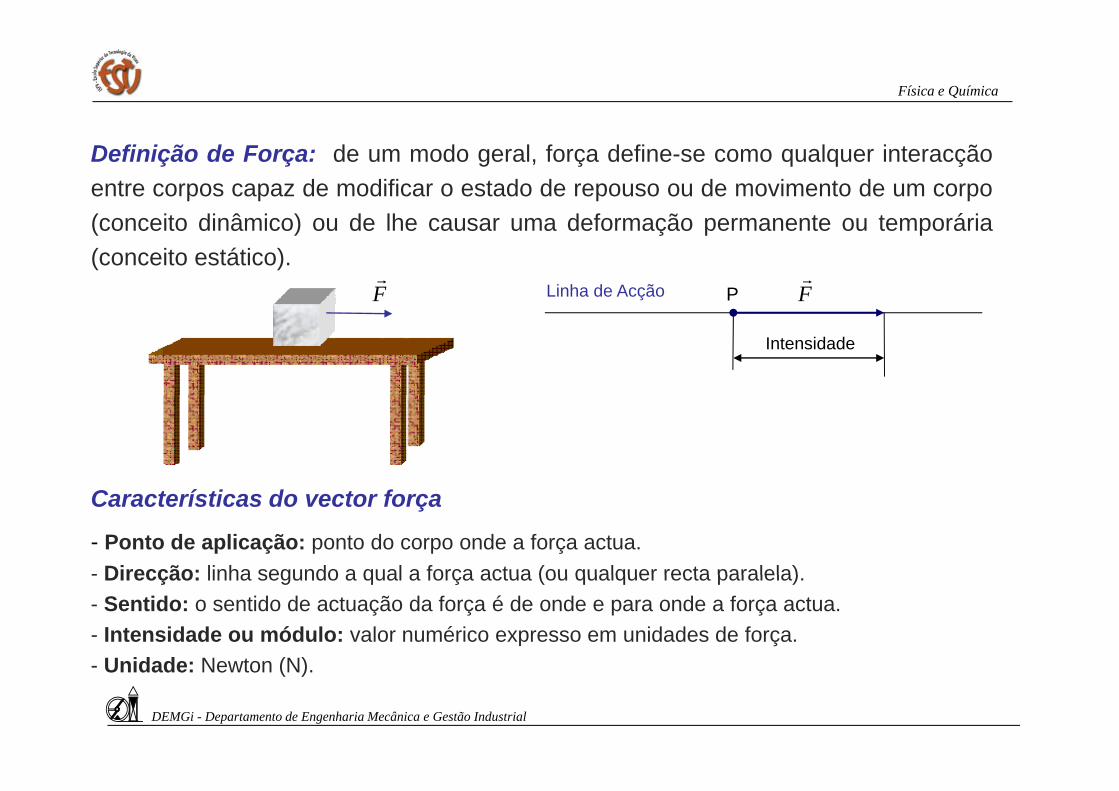
Definição de Força: de um modo geral, força define-se como qualquer interacçãoentre corpos capaz de modificar o estado de repouso ou de movimento de um corpo( it di â i ) d lh d f ã t t á i(conceito dinâmico) ou de lhe causar uma deformação permanente ou temporária(conceito estático).
Linha de AcçãoFr
P Fr
Intensidade
Características do vector força
- Ponto de aplicação: ponto do corpo onde a força actua.- Direcção: linha segundo a qual a força actua (ou qualquer recta paralela)- Direcção: linha segundo a qual a força actua (ou qualquer recta paralela).- Sentido: o sentido de actuação da força é de onde e para onde a força actua.- Intensidade ou módulo: valor numérico expresso em unidades de força.
Unidade: Newton (N)- Unidade: Newton (N).
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
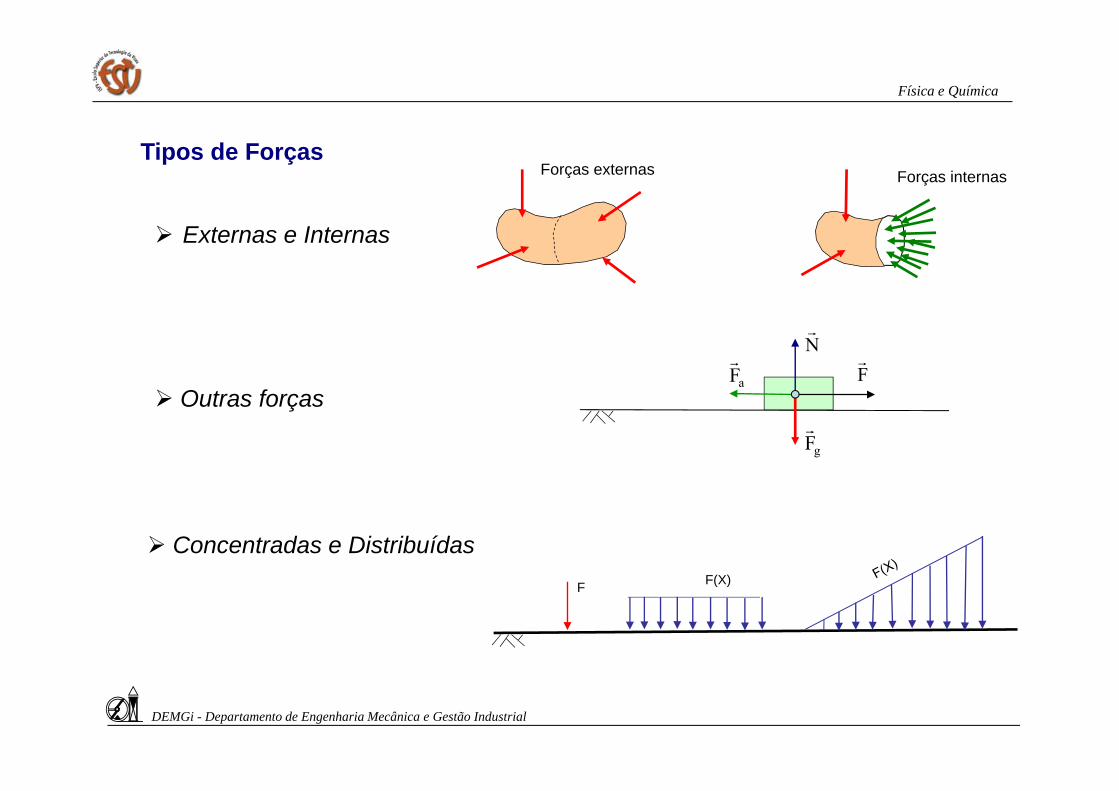
Tipos de ForçasForças internasForças externas
Externas e Internas
Outras forçasaFr
Fr
Nr
Outras forças
gFr
Concentradas e DistribuídasF(X)F F(X)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Forças de contacto - são as forças nascidas do mútuo contacto entre os corpos.
Classificação das forças quanto à sua natureza
ç ç p
Forças de "acção à distância" - são forças de campo, nascidas em função das suas
1 - Força muscular - (exercida pelo homem ou animais);
propriedades.
1 Força muscular (exercida pelo homem ou animais);2 - Força gravitacional - (força gravítica);3 - Força magnética - (exercida pelos ímãs e electroímanes);4 - Força electrostática - (exercida pelas cargas eléctricas em repouso);5 - Força electromagnética - (pelas correntes eléctricas);6 Força elástica (pelas molas e fluidos sob pressão);7 - Força de atrito - (força resultante do contacto entre corpos);8 - Forças reacção, etc.
6 - Força elástica - (pelas molas e fluidos sob pressão);
ç ç ,
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Exemplos de Forças
Fr
Fr
Fr rN S
Terra LuaFr
Fr
Forças electrostáticas
F+ -
F−
Forças magnéticas
F F−N S
Forças gravitacionais
F F−m
Forças electrostáticas Forças magnéticasForças gravitacionais
Órbita da Terra em volta do Sol.xKF ∆=
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
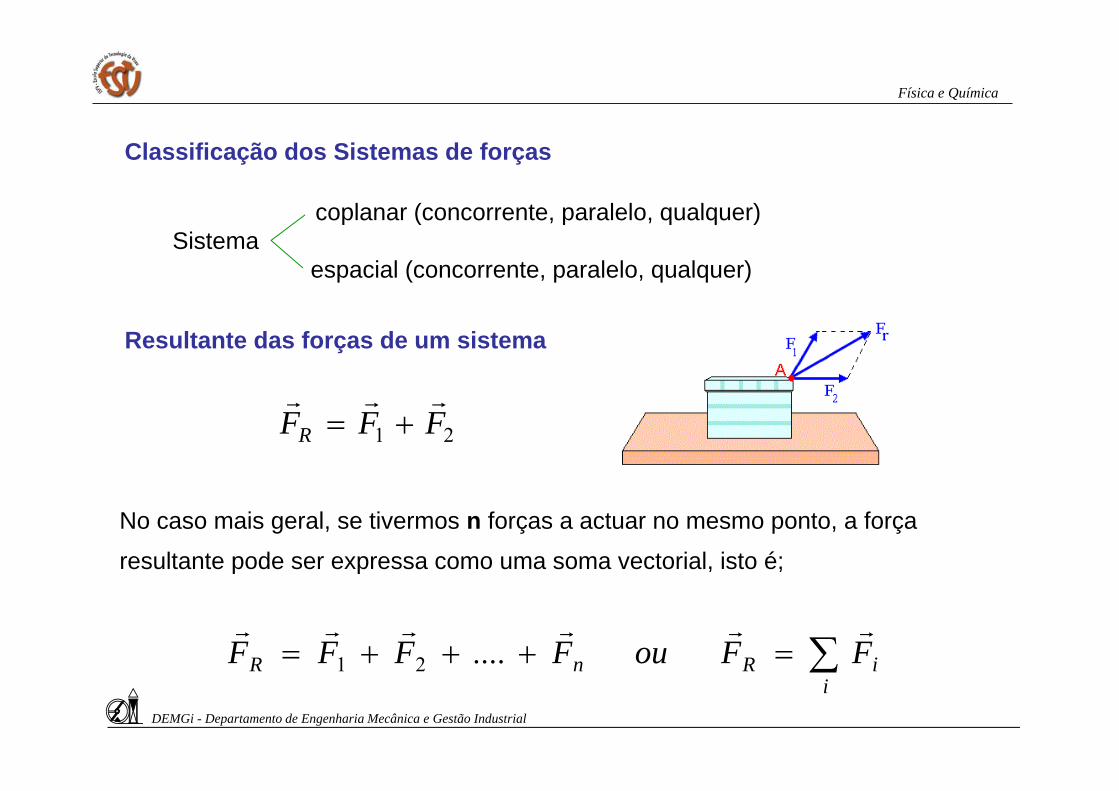
Classificação dos Sistemas de forças
coplanar (concorrente paralelo qualquer)coplanar (concorrente, paralelo, qualquer)Sistema
espacial (concorrente, paralelo, qualquer){
Resultante das forças de um sistema
21 FFFR
rrr+=
No caso mais geral, se tivermos n forças a actuar no mesmo ponto, a força
resultante pode ser expressa como uma soma vectorial, isto é;
∑=+++= iRnR FFouFFFFrrrrrr
....21 ∑i
iRnR 21
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
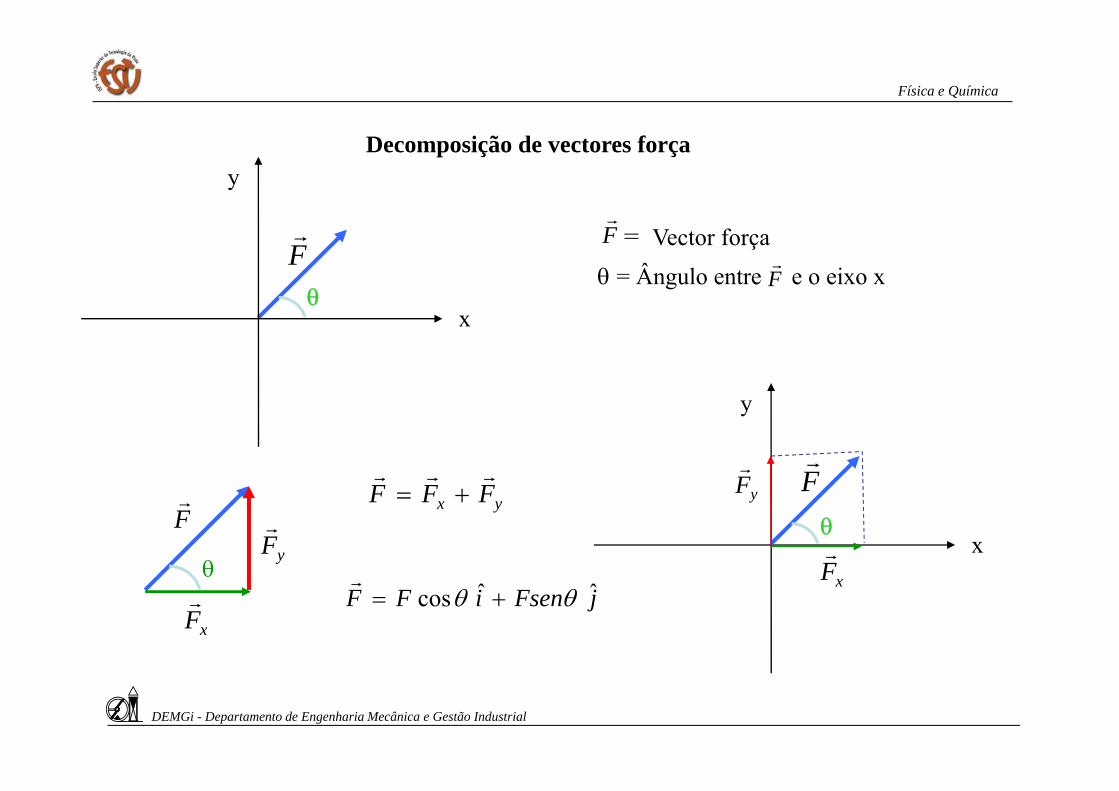
Decomposição de vectores forçay
= Vector forçaθ = Ângulo entre e o eixo xF
rFr
θ
Fr
x
y
Fr
Fr
FFFrrr
xθ
FyF
Fr
yx FFF +=
yFrF
r
θ xFjFseniFF ˆˆcos θθ +=
r
xFrθ
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Leis de Newton
1ª lei de Newton, ou lei da inércia
“Qualquer corpo permanece no estado de repouso ou de movimento rectilíneo
Isaac Newton
Qualquer corpo permanece no estado de repouso ou de movimento rectilíneouniforme se a resultante das forças que actuam sobre esse corpo for nula”.Assim, se o corpo estiver em repouso continuará em repouso; se estiver em movimento,
continuará o seu movimento em linha recta e com velocidade constante.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
“A aceleração adquirida por um corpo é directamente proporcional àintensidade da resultante das forças que actuam sobre o corpo tem
2ª lei de Newton, ou lei da força
intensidade da resultante das forças que actuam sobre o corpo, temdirecção e sentido dessa força resultante e é inversamente proporcional àsua massa”.
vmP rr= ( )
dtvdmvm
dtd
dtPdF
rr
rr
=== amF rr=
1. A força da mão imprime à caixa uma aceleração a.
2. Duas vezes a força imprime à caixa uma aceleração duas vezes maior.
3. Duas vezes a força sobre uma massa duas vezes maior, produz a mesma aceleração original, a.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

3ª lei de Newton ou lei da acção reacçãoFísica e Química
“Para cada acção existe uma reacção igual e contrária”.
3ª lei de Newton, ou lei da acção reacção
As forças manifestam-se aos pares. Se A exerce uma força sobre B, este, reagirá com outra força do mesmo módulo, mesma direcção e sentido contrário. Não existe
ã ã
E l iã j t f i d i t f á di d
acção sem reacção.Fr
−Fr
Exemplo: um avião a jacto funciona da seguinte forma: o gás expandindo-se nas câmaras de combustão, é expelido pelo avião, para trás e reage de acordo com a 3ª lei de Newton, exercendo sobre o avião uma força que o impulsiona para a frente.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Atrito é a força que resiste ou se opõe ao movimento quando uma
Leis do Atrito
Blaise Pascal (1623 - 1662)
O atrito estático impede o deslizamento; o atrito dinâmico contraria o deslizamento dos
superfície desliza sobre a outra.
corpos em contacto.
Quando se trava fazendo as rodas girarem mais lentamente o atrito é grande, pois ospneus não deslizam (atrito estático), e o carro para logo. Se você trava violentamente,impedindo as rodas de girarem, elas deslizam e o atrito é menor (atrito dinâmico) ; ocarro não parará logo e derraparácarro não parará logo e derrapará.
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Quando uma superfície sólida desliza sobre outra as pequenas reentrâncias quenelas existem prendem-se umas nas outras e produzem o atrito de deslizamento quese opõe ao movimento.
Corpo em repouso sobre a superfície da mesa Corpo a deslizar sobre a superfície da mesa
Fr
Rr
Rr
Rr
Rr
−Fr
RR
Rr
−g
Fr
Fr
gFr
Rr
−
gF−
Centro da Terra
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
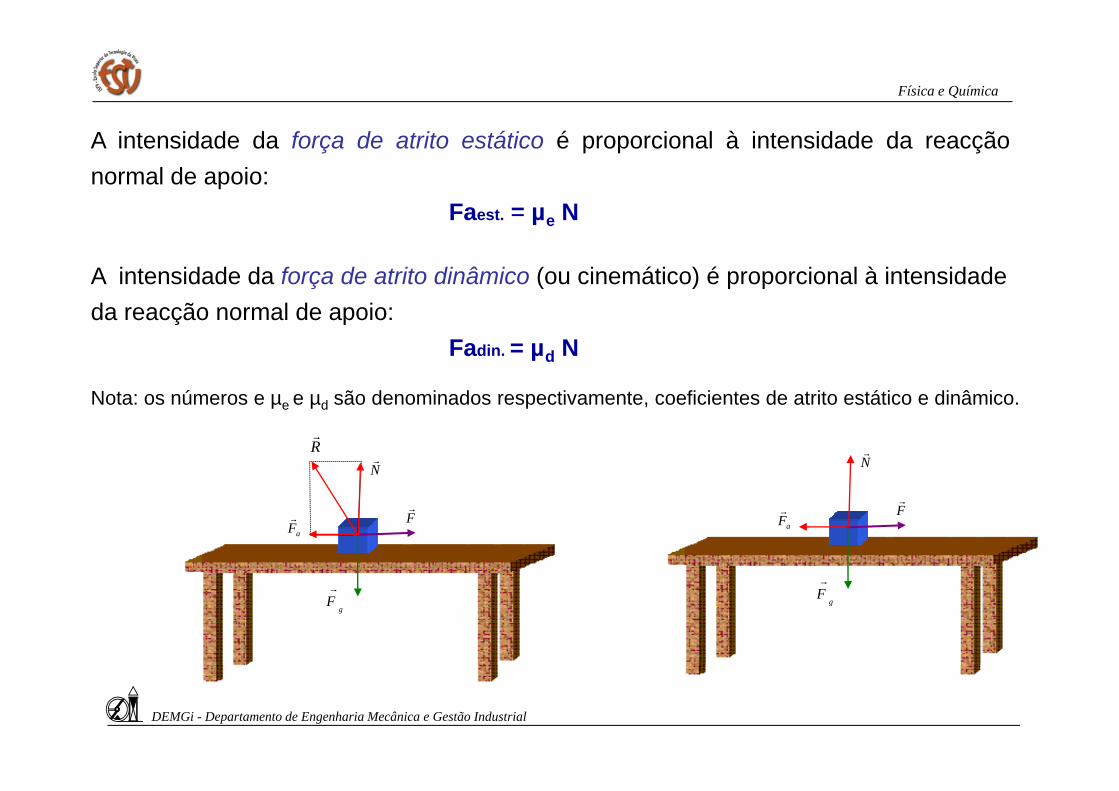
A intensidade da força de atrito estático é proporcional à intensidade da reacçãonormal de apoio:
Faest = µ N
A intensidade da força de atrito dinâmico (ou cinemático) é proporcional à intensidade d ã l d i
Faest. µe N
da reacção normal de apoio:Fadin. = µd N
Nota: os números e µ e µ são denominados respectivamente coeficientes de atrito estático e dinâmico
Nr
Rr
Nr
Nota: os números e µe e µd são denominados respectivamente, coeficientes de atrito estático e dinâmico.
aFr F
r
aFr F
r
gFr
gFr
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
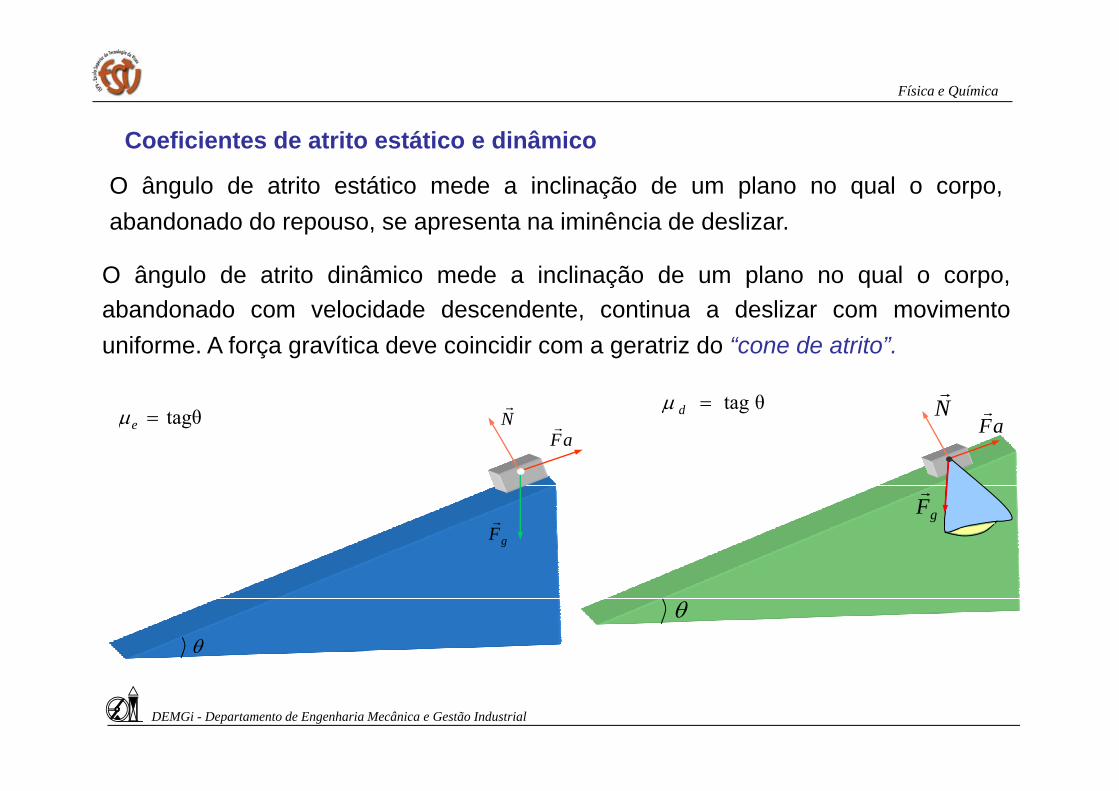
O ângulo de atrito estático mede a inclinação de um plano no qual o corpo,b d d d t i i ê i d d li
Coeficientes de atrito estático e dinâmico
O ângulo de atrito dinâmico mede a inclinação de um plano no qual o corpo,abandonado com velocidade descendente continua a deslizar com movimento
abandonado do repouso, se apresenta na iminência de deslizar.
r
abandonado com velocidade descendente, continua a deslizar com movimentouniforme. A força gravítica deve coincidir com a geratriz do “cone de atrito”.
θ Nr
aFrN
r
aFrtagθ=eµ
tag θ=dµ
gFr
gFr
θθ
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
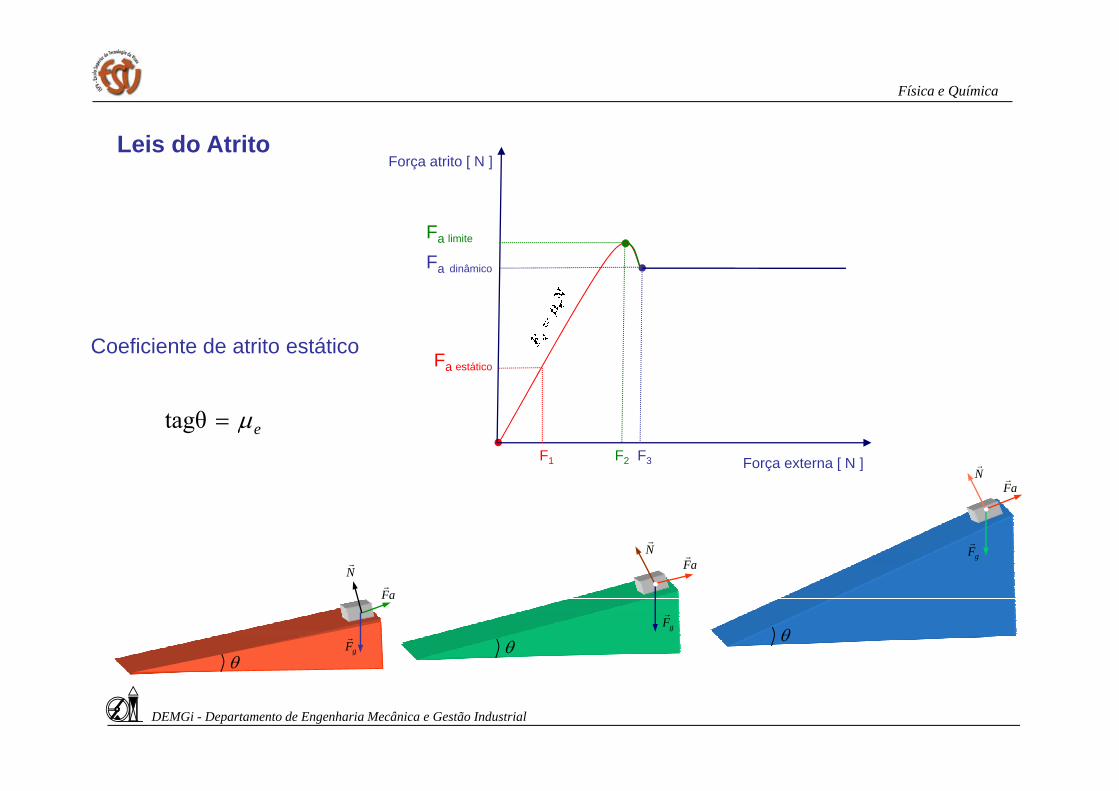
Leis do AtritoForça atrito [ N ]
Fa limite
Fa dinâmico
Fa estáticoCoeficiente de atrito estático
Nr
Fr
Força externa [ N ]F1 F3F2
eµ=tagθ
Nr
Nr
aFr
aF
gFr
θθ
θ
aFr
gFr
N
gFr
θ
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Í ÍFISÍCA E QUÍMICA
Capítulo 3 - Impulso e Momento Linear
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Momento linear de uma partícula
Define-se momento linear de uma partícula como sendo o produto de sua massa porDefine se momento linear de uma partícula como sendo o produto de sua massa porsua velocidade:
].[smkgvmP rv
=
Conta-se que Newton na realidade formulou a sua Segunda Lei em termos domomento linear da seguinte forma:A taxa de variação do momento linear de uma partícula é proporcional àresultante das forças que agem sobre essa partícula, e tem a mesma direcção e omesmo sentido que essa forçamesmo sentido que essa força.
)( vmdd
dPdFR
rr
r== amvdmFR
rrr==Para os sistemas de massa constante:)(
dtdtR amdt
mFR
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
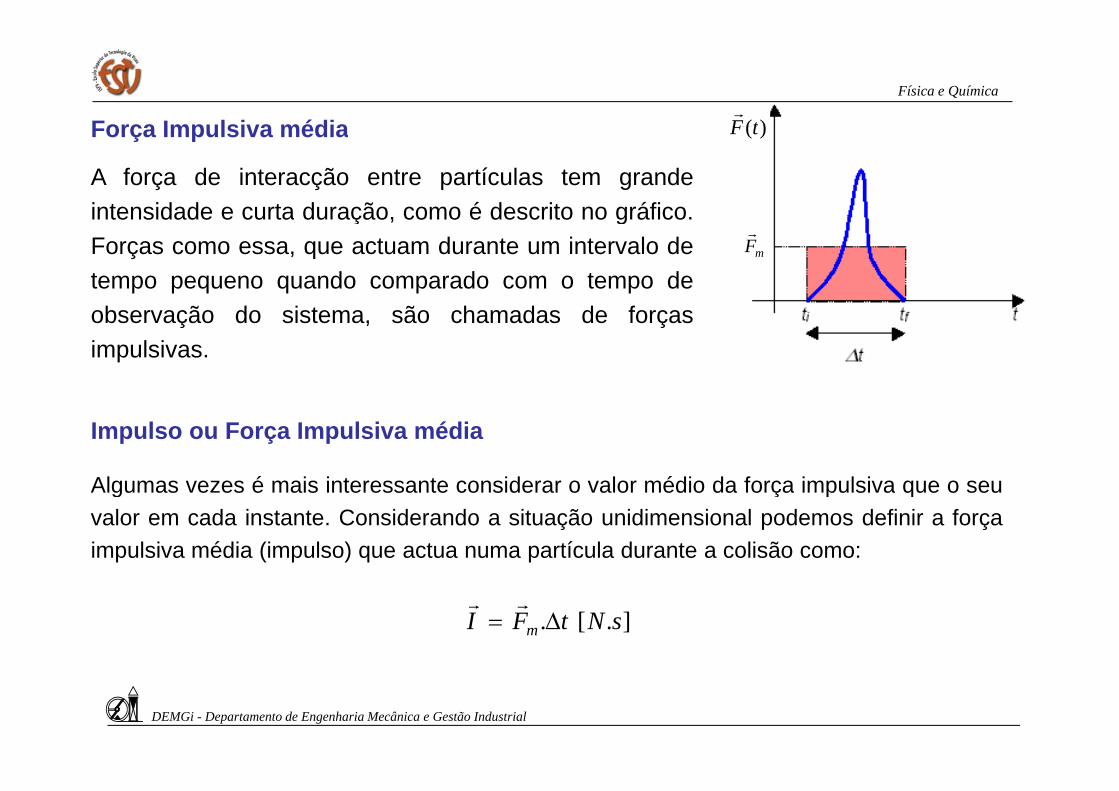
Força Impulsiva média )(tFr
Física e Química
A força de interacção entre partículas tem grandeintensidade e curta duração como é descrito no gráfico
Força Impulsiva média )(tF
intensidade e curta duração, como é descrito no gráfico.Forças como essa, que actuam durante um intervalo detempo pequeno quando comparado com o tempo de
b d i h d d f
mFr
observação do sistema, são chamadas de forçasimpulsivas.
Algumas vezes é mais interessante considerar o valor médio da força impulsiva que o seu
Impulso ou Força Impulsiva média
Algumas vezes é mais interessante considerar o valor médio da força impulsiva que o seuvalor em cada instante. Considerando a situação unidimensional podemos definir a forçaimpulsiva média (impulso) que actua numa partícula durante a colisão como:
].[. sNtFI m ∆=rr
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Considerando uma partícula isolada, que se move com momento linear . Se aPv
Teorema do Impulso
partir de um certo tempo ti até um instante posterior tf , passa a actuar sobre elauma força . O momento linear da partícula vai sofrer alteração devido àexistência da força actuante e essa variação é chamada de impulso A segunda
Pv
∆IvF
r
existência da força actuante e essa variação é chamada de impulso . A segundaLei de Newton, tem a forma:
I
∫∫ =⇒=ff p
p
t
tpddtF
dtpdF
r
r
rrrr
ii pt
)(IF rrrrrr∆∆∆ )( if vvmpIptF rrrr
−=∆=⇔∆=∆
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Momento linear (quantidade de movimento) de um sistema de partículas
Para um sistema composto de n partículas, definimos o momento linear total como:
n
n
iitotal pppPp rrrrr
+++==∑=
...211
ou ainda:n
n
iiitotal vmvmvmvmp rrrrr ..... 211
1+++==∑
=
Teorema da conservação do momento linear (quantidade de movimento)Teorema da conservação do momento linear (quantidade de movimento)
É constante o momento linear de um conjunto de partículas que constituam um sistema isolado.
Quando estivermos considerando um sistema isolado, onde a resultante das forçasexternas é nula, tem-se:
tPFext ∆
∆=
rr
.
,
fiext PPéistoPFrrrr
==∆⇒= 00.t∆
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Exemplos de Aplicação
Colisão entre partículas
Recuo das armas de fogo
Explosão de uma bomba (fragmentos)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Colisões entre partículas
Física e Química
Num choque, forças relativamente grandes, actuam em cada uma das partículasque colidem durante um intervalo de tempo relativamente curto
Colisões entre partículas
As colisões podem ser divididas em dois tipos:
que colidem, durante um intervalo de tempo relativamente curto.
Colisões elásticas: são aquelas que conservam a energia cinética
Colisões inelásticas: são aquelas que não conservam a energia cinética
Colisões elásticas: são aquelas que conservam a energia cinética
As Colisões podem ainda ser unidimensionais, bidimensionais e tridimensionais
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Colisão elástica a uma dimensão
Física e Química
Colisão elástica a uma dimensão
Antes da colisão tem-se que v1i> v2i, pois em
iv1r
iv2r
m1 m2q 1i 2i, pcaso contrário não existiria a colisão.
D i d li ã t < i
x1 2
vr fv2r
Depois da colisão tem-se que v1f< v2f, pois em caso contrário existiriam outras colisões depois da primeira a colisão.
fv1 f2
m1 m2
Da conservação do momento linear total, vem: 0)()(0 221121 =−+−⇔=∆+∆=∆ ifif PPPPPPPrrrrrrr
m1x
ç , )()( 221121 ifif
ffiifi vmvmvmvmPP 22112211rrrrrr
+=+⇒=
Da conservação energia cinética total, temos que: cfci EE =
2222 1111++ 2222
2121 2222 ffiimvmvmvmv +=+
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Í ÍFISÍCA E QUÍMICA
Capítulo 4 - Trabalho e EnergiaCapítulo 4 - Trabalho e Energia
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Trabalho e Energia
A ideia de energia está intimamente ligada à de trabalho. Intuitivamente,d i l i if t Steven Hawkingpodemos pensar em energia como alguma coisa que se manifesta
continuamente e que pode ser utilizada para realizar trabalho útil.
A energia não pode ser criada nem destruída. Ela apenas semanifesta sob outras formas de energia.
Exemplos de formas de manifestação da energia
Energia Térmica Energia EléctricaEnergia RadianteEnergia Química Energia NuclearEnergia EléctricaEnergia RadianteEnergia Química
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Trabalho de uma força
Física e Química
Define-se trabalho como o produto intensidade da força aplicada sobre um corpo pelo deslocamento que esse corpo sofre na direcção da força
Trabalho de uma força
J P J l (1818 1889)deslocamento que esse corpo sofre na direcção da força. James P. Joule (1818 - 1889)
θcosFFx =
x∆∆
Sempre que aplicamos uma força sobre um corpo, provocando o seu deslocamento, estamos a transferir energia então diz-se que estamos a realizar um trabalho
x∆x∆
transferir energia, então diz se que estamos a realizar um trabalho.
W - trabalho (J)F força (N)
xFW ∆= θcosF - força (N) θ - ângulo formado entre a força e a horizontal∆x - distância (m)
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
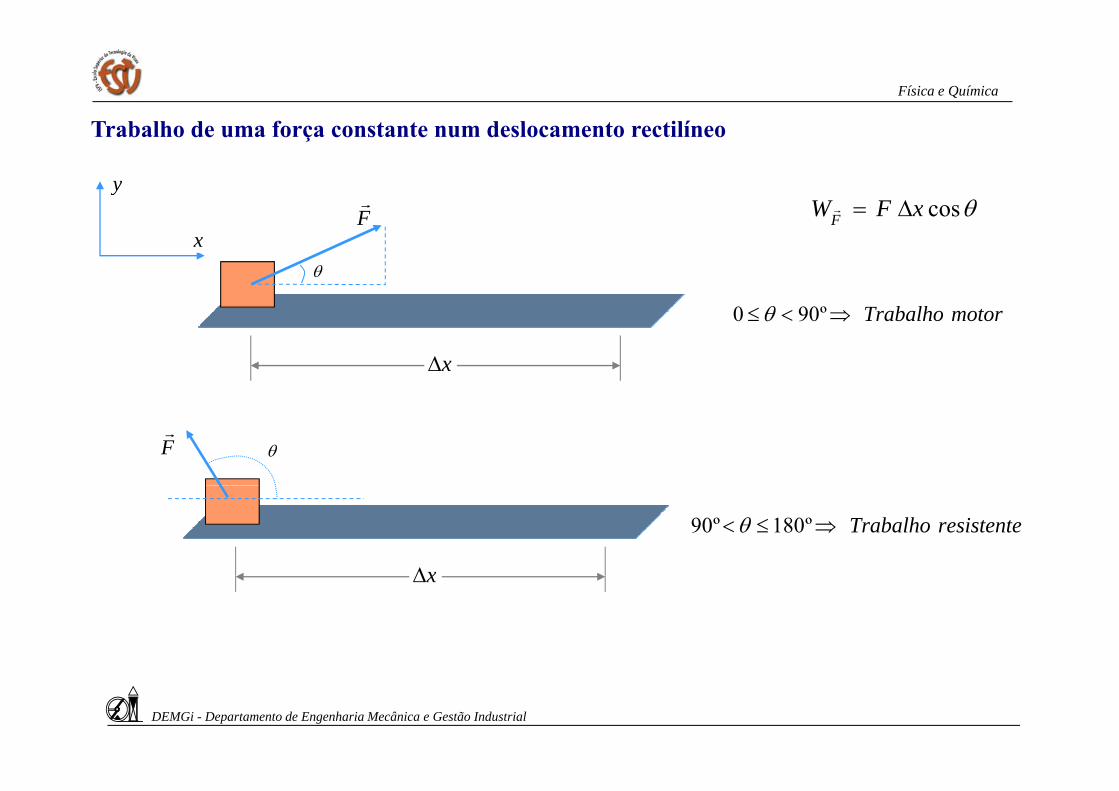
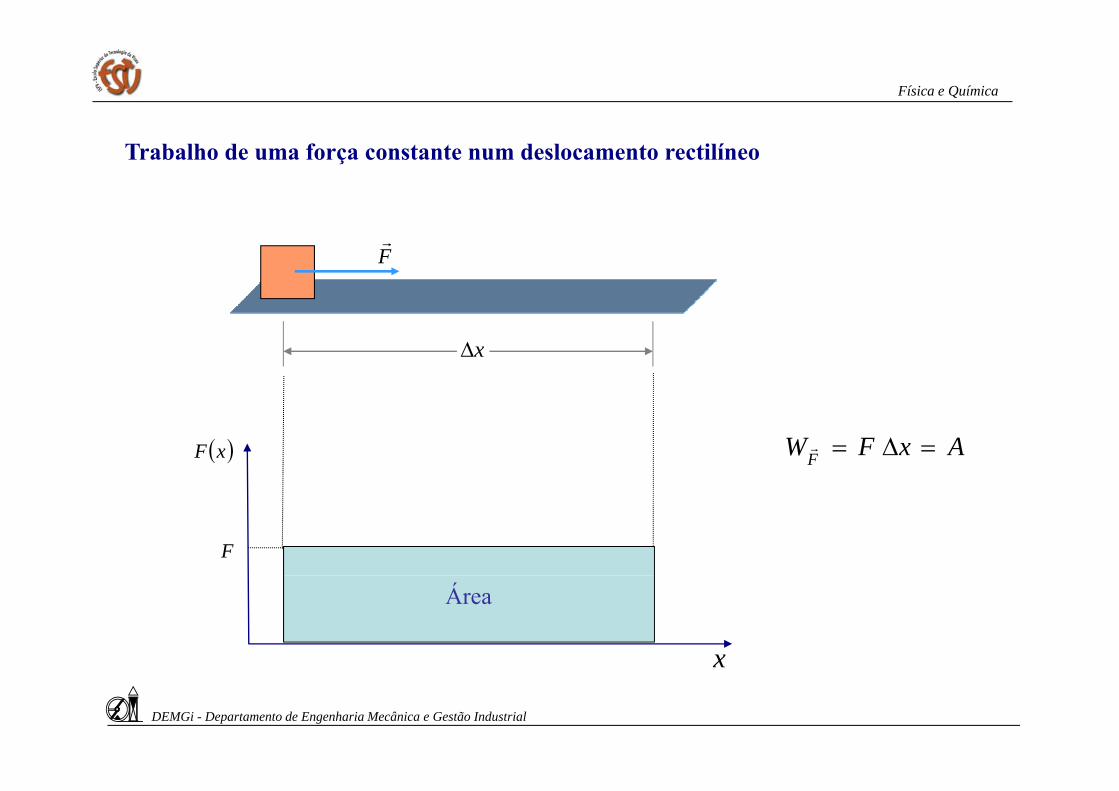
Trabalho de uma força constante num deslocamento rectilíneo
Física e Química
Trabalho de uma força constante num deslocamento rectilíneo
Fr θcosxFWF ∆=r
y
θ
F θcosxFWF ∆x
x∆
motorTrabalho⇒<≤ º900 θ
θFr
x∆
resistenteTrabalho⇒≤< º180º90 θ
x∆
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Física e Química
Trabalho de uma força constante num deslocamento rectilíneo
Fr
x∆
AxFWF =∆=r( )xF
F
Área
xx
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
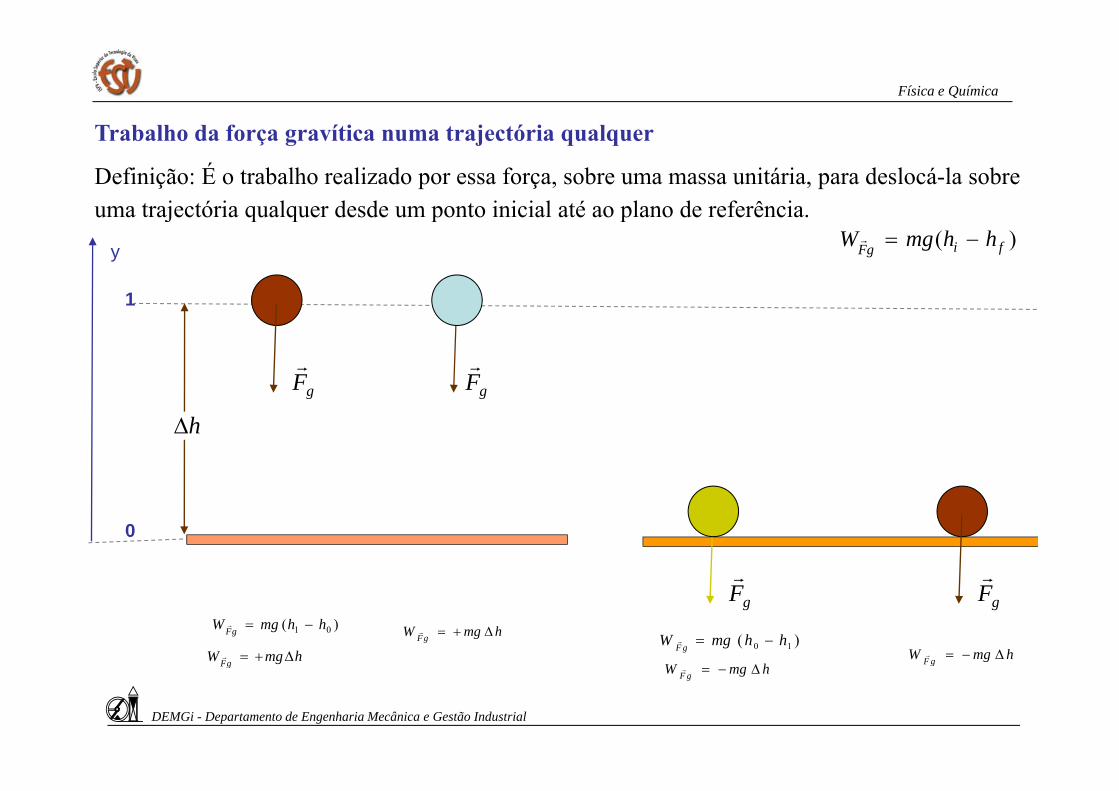
T b lh d f íti t j tó i l
Física e Química
Definição: É o trabalho realizado por essa força, sobre uma massa unitária, para deslocá-la sobre uma trajectória qualquer desde um ponto inicial até ao plano de referência.
Trabalho da força gravítica numa trajectória qualquer
1
y
uma trajectória qualquer desde um ponto inicial até ao plano de referência.)( figF hhmgW −=r
gFr
gFr
h∆gg
0
hmgW gF ∆+=r
gFr
)( 01 hhmgW gF −=r
hmgW gF ∆+=r hmgW gF ∆−=r)( 10 hhmgW gF −=r
hW ∆
gFr
gF ghmgW gF ∆−=r
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
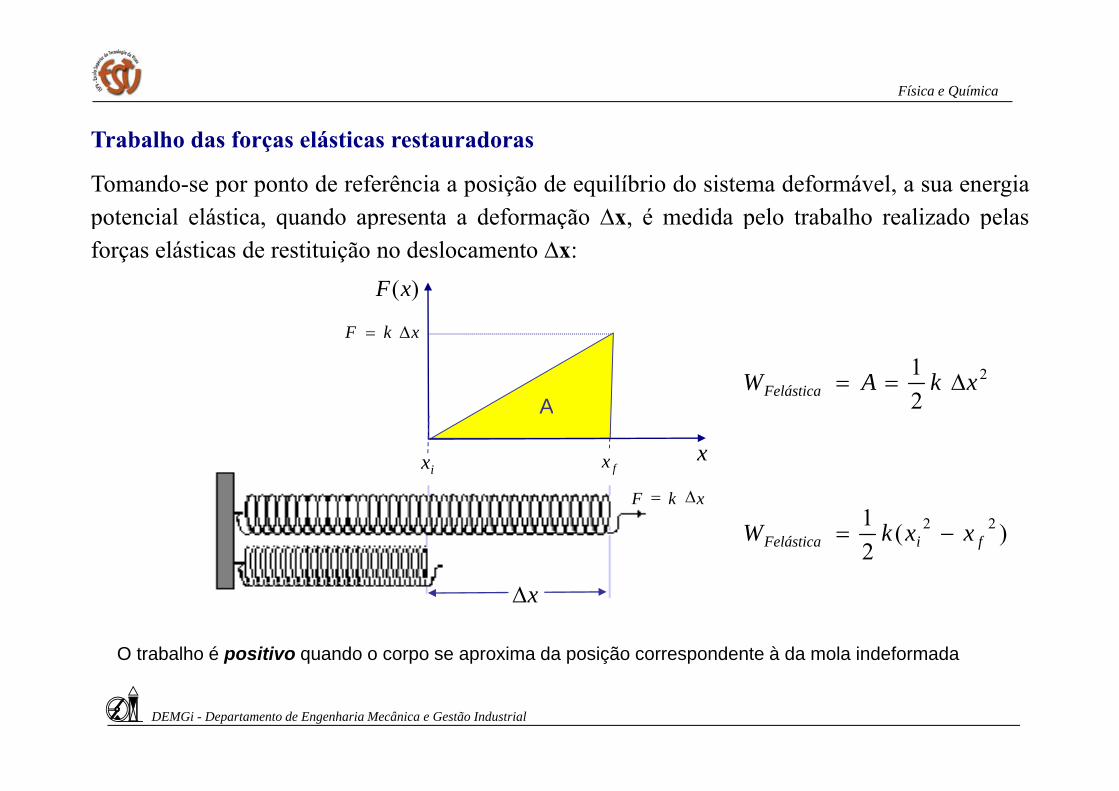
Física e Química
Tomando-se por ponto de referência a posição de equilíbrio do sistema deformável, a sua energiapotencial elástica quando apresenta a deformação ∆x é medida pelo trabalho realizado pelas
Trabalho das forças elásticas restauradoras
potencial elástica, quando apresenta a deformação ∆x, é medida pelo trabalho realizado pelasforças elásticas de restituição no deslocamento ∆x:
)(xF
xkF ∆=
2
21 xkAWFelástica ∆==
ix fx
A
x
2Felástica
)(21 22
fiFelástica xxkW −=xkF ∆=
O trabalho é positivo quando o corpo se aproxima da posição correspondente à da mola indeformada
x∆
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Energia Mecânica
James Prescott Joule (1818-1889)Energia Potencial Gravitacional James Prescott Joule (1818 1889)Energia Potencial Gravitacional
É a energia que corresponde ao trabalho que a força gravíticarealiza num deslocamento de um nível considerado até outro nívelde referência.
][JmghEPg =
Energia Cinética
Para que um corpo esteja em movimento em relação a um dadoq p j çreferencial é necessário que haja uma forma de energia denominadaenergia cinética.
Energia Potencial
][21 2 JmvEc =
Energia Potencial
Energia CinéticaCinética
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
Energia Potencial Elástica
É a energia que corresponde ao trabalho realizado pela forçalá ti d f l Joseph Fourier (1768 - 1830)elástica ao deformar uma mola.
][21 2 JxkEPelástica ∆=
Energia mecânica
A energia mecânica de um corpo ou de um sistema de corpos corresponde à soma das energias cinética e potencial.
EEEE
2xkmghE. 2vm
PePgcm EEEE ++=
2.xkE Pe =mghEPg =
2.vmEc =
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial
Forças Conservativas
Física e Química
Forças Conservativas
Uma força é conservativa se for nulo o trabalho que ela efectua sobre uma partícula que descreve uma trajectória fechada e retorna á posição inicial
Energia Potencialque descreve uma trajectória fechada e retorna á posição inicial.
Uma força diz-se conservativa quandoEnergia Cinética
trabalha no sentido de transformar energiapotencial em cinética e vice-versa.
E l d F ti f íti f lá ti t d f j t b lh t t l
F Di i ti
Exemplos de Forças conservativas: força gravítica, força elástica e todas as forças cujo trabalho total é nulo (força centrípeta, força normal num deslizamento).
Dizemos que as forças actuantes num corpo ou num sistema são dissipativas quando os seus trabalhos alteram a sua energia mecânica
Forças Dissipativas
trabalhos alteram a sua energia mecânica.
Exemplos de forças dissipativas: forças de atrito actuando durante o deslocamento de um corpo, parte da sua energia mecânica (ou até a totalidade) dissipa-se sob forma de calor. g ( ) p
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
A energia mecânica de um sistema mantém-se constante quando nele só operam forças do
Conservação da Energia Mecânica
tipo conservativas: força gravítica, força elástica e forças cujo trabalho total é nulo.
Sistema EE =Sistema
ConservativoFinalInicial mm EE =
Graficamente podemos mostrar que, à medida que o corpo desce, a sua energia potencial diminui, pois vai se transformando em energia cinética, de forma que a soma dessas energias (energia mecânica) permanece constante.( g )
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial

Física e Química
PotênciaPara exprimir a Potência de uma pessoa ou de um motor, é necessárioconhecer o tempo que cada um deles gasta para realizar um determinado
James Watt (1736 - 1819)trabalho. Generalizando, podemos dizer que a potência com que uma forçarealiza um trabalho é a razão entre esse trabalho e o tempo gasto na suarealização.
Um homem que precisa carregar uma mala do piso térreo para o quinto andar de um edifíciopode pegá-la com a mão e transportá-la lentamente pela escada ou pode colocá-la no elevador.Em ambos os casos o trabalho realizado (pelo homem ou pelo motor do elevador) é o mesmoEm ambos os casos, o trabalho realizado (pelo homem ou pelo motor do elevador) é o mesmo.Esse trabalho é dado pelo produto do peso da mala pela altura a que se encontra o quintoandar. Mesmo que o trabalho realizado pelo homem ou pelo motor do elevador seja o mesmo,há entre os dois modos de realizá-lo uma diferença. O homem executa-o lentamente, enquantohá entre os dois modos de realizá lo uma diferença. O homem executa o lentamente, enquantoo elevador realiza-o com rapidez. Por outras palavras, o motor do elevador é mais potente que ohomem.
θW θcosmmédia Fvt
WP ==
θcostan FvP tâneains =tan tâneains
DEMGi - Departamento de Engenharia Mecânica e Gestão Industrial