fernando martins de azevedo mÁquinas operatrizes projeto...
TRANSCRIPT
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO COM REVERSÃO PARA
MÁQUINAS OPERATRIZES
Fernando Martins de Azevedo
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2018
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Flávio de Marco Filho
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO COM REVERSÃO PARA
MÁQUINAS OPERATRIZES
Fernando Martins de Azevedo
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE FEDERAL DO
RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO
GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof. Flávio de Marco Filho
________________________________________________
Prof. Fernando Pereira Duda
________________________________________________
Prof. Fernando Augusto de Noronha Castro Pinto
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2018
iii
Azevedo, Fernando Martins
Projeto de um Variador de Velocidades Escalonado com
Reversão para Máquinas Operatrizes / Fernando Martins de
Azevedo. – Rio de janeiro: UFRJ / Escola Politécnica, 2018.
XIII, 108 p.: il.; 29,7 cm.
Orientador: Flávio de Marco Filho
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Mecânica, 2018.
Referências Bibliográficas: p. 60
1. Transmissões Mecânicas. 2. Variador de Velocidade. 3.
Bloco Deslizante. 4. Projeto Mecânico. 5. Dimensionamento dos
Componentes. 6. Conclusão. I. Filho, Flávio de Marco. II.
Universidade Federal do Rio de Janeiro, Escola Politécnica, Curso
de Engenharia Mecânica. III. Projeto de um variador de
velocidades escalonado com reversão para máquinas operatrizes.
iv
Agradecimentos
Agradeço aos meus pais que me proporcionaram, durante toda a vida, oportunidades
excelentes de estudo e incentivo para tal, possibilitando que eu pudesse ingressar em um curso
de ensino superior com o qual tinha mais afinidade.
Agradeço a todos os professores com os quais tive aula durante o curso de graduação,
que contribuiram para meu crescimento pessoal e acadêmico.
Agradeço, especialmente, ao professor e orientador Flávio de Marco Filho, com quem
tive a oportunidade de fazer duas disciplinas na área de projeto de máquinas, fazendo surgir
em mim o interesse por essa área. Agradeço a sua orientação rica de informação,
conhecimento e experiência no projeto final de graduação.
Agradeço a todos os colegas com os quais dividi momentos dentro e fora das salas de
aula durante o curso de Engenharia Mecânica, que com certeza forneceram apoio durante
momentos difíceis e alegria em momentos de comemoração. Especialmente ao colega
Frederico Dias, com quem cursei a maioria das disciplinas.
Agradeço a minha namorada Juliana Stibich, que ao longo de minha jornada de curso
me forneceu apoio e teve compreensão comigo.
Agradeço a todos os funcionários do Departamento de Mecânica e da Escola
Politécnica que trabalham para fazer a faculdade funcionar devidamente.
v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para obtenção do grau de Engenheiro Mecânico
PROJETO DE UM VARIADOR DE VELOCIDADES ESCALONADO COM REVERSÃO
PARA MÁQUINAS OPERATRIZES
Fernando Martins de Azevedo
Setembro/2018
Orientador: Flávio de Marco Filho
Curso: Engenharia Mecânica
O presente trabalho visa o projeto de um variador de velocidades escalonado com
reversão a ser utilizado em máquinas operatrizes. O variador se situa entre o motor, que é a
fonte de potência, e a máquina operatriz, que necessita receber diversas velocidades a fim de
realizar diversas operações. O projeto simula um caso de indústria, em que os dados iniciais
são fornecidos e a partir deles são realizados cálculos e são tomadas decisões que possibilitam
realizar os dimensionamentos dos componentes do variador. Após os componentes estarem
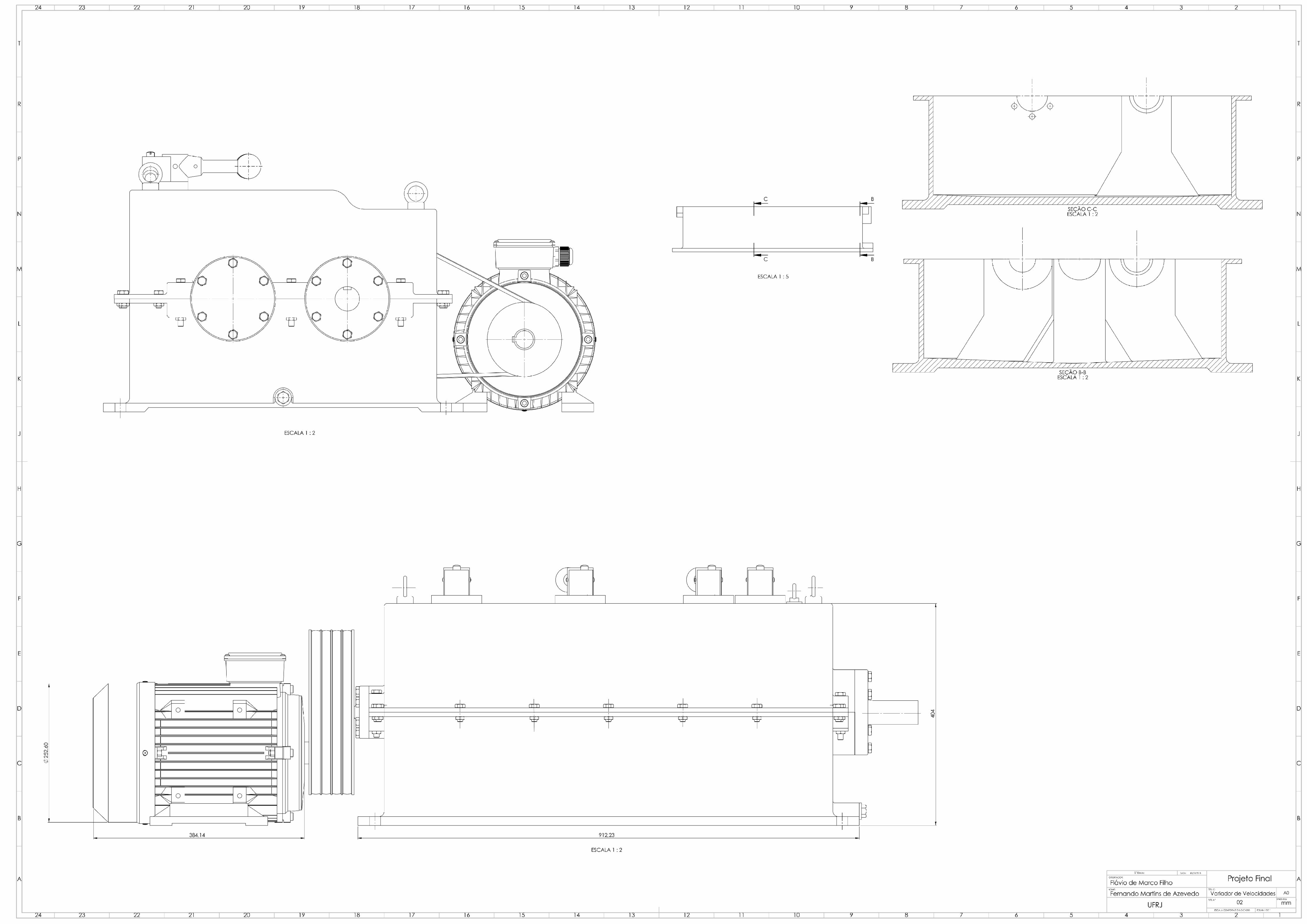
bem definidos, um desenho do conjunto é apresentado mostrando as principais peças, com
seus detalhes e posicionamento.

vi
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for degree of Mechanical Engineer
DESIGN OF A STEPPED VARIABLE SPEED DRIVE WITH REVERSION FOR
MACHINE TOOLS
Fernando Martins de Azevedo
September/2018
Advisor: Flávio de Marco Filho
Department: Mechanical Engineering
This work presents the design of a stepped variable speed drive with reversion for
machine tools. The variable speed drive is located between the engine, which is the power
source, and the machine, that needs multiple rotating speeds to perform many operations. The
project simulates an industry case, in which the initial data is provided and based on that, it is
possible to perform all calculations and make some decisions to successfully dimension it`s
components. After all calculations were made, a technical drawing of the assembly is
presented showing all the principal parts, with details and positioning.

vii
Sumário
Lista de Figuras………………………………………………………………………ix
Lista de Tabelas……………………………………………………………………....x
1. Introdução…………………………………………………………………………….1
1.1. Máquinas Operatrizes……………………………………………………………1
1.2. Variadores de Velocidade………………………………………………………..3
1.2.1. Tipos de Variadores de Velocidade............................................................3
1.3. Motivação..............................................................................................................5
2. Projeto do Variador......................................................................................................6
2.1. Organização do Projeto....................................................................................6
2.2. Seleção do Motor Elétrico................................................................................8
2.3. Determinação das Demais Velocidades de Rotação........................................8
2.4. Elaboração do Diagrama de Velocidades........................................................10
2.5. Determinação das Relações de Transmissão...................................................11
2.6. Dimensionamento das Correias e Polias.........................................................12
2.6.1. Potência de Projeto....................................................................................12
2.6.2. Determinação da Seção Mais Adequada...................................................13
2.6.3. Determinação da Capacidade de Transmissão de uma Correia Tipo B....13
2.6.4. Cálculo do Número de Correias................................................................15
2.6.5. Cálculo da Distância Real Entre Centros..................................................15
2.6.6. Determinação das Cargas..........................................................................16
2.6.7. Determinação da Carga Inicial..................................................................18
2.6.8. Cálculo da Vida das Correias....................................................................19
2.6.9. Especificação das Polias...........................................................................21
2.7. Dimensionamento das Engrenagens...............................................................22
2.7.1. Determinação do Número de Dentes........................................................22
2.7.2. Determinação das Velocidades Reais de Saída........................................24
2.7.3. Seleção dos Materiais das Engrenagens...................................................25
2.7.4. Determinação do Módulo.........................................................................26
2.7.4.1.Critério AGMA...................................................................................26
viii
2.7.4.2.Critério de Fadiga..................................................................................29
2.7.4.3.Critério de Desgaste Superficial............................................................33
2.7.5. Dimensionamento das Demais Engrenagens...............................................37
2.8. Dimensionamento dos Eixos.............................................................................38
2.8.1. Determinação das Cargas Aplicadas...........................................................38
2.8.2. Diagramas de Esforços................................................................................40
2.8.3. Determinação do Diâmetro Mínimo............................................................45
2.8.3.1. Critério das Máximas Tensões Cisalhantes..........................................45
2.8.3.2. Critério de Soderberg............................................................................45
2.9. Dimensionamento das Chavetas........................................................................49
2.10. Dimensionamento das Estrias............................................................................52
2.11. Seleção dos Rolamentos....................................................................................53
2.12. Demais Componentes........................................................................................55
2.12.1. Anéis de Retenção.......................................................................................55
2.12.2. Parafusos de Fixação...................................................................................55
2.12.3. Parafusos de Içamento.................................................................................56
2.12.4. Tampas........................................................................................................56
2.12.5. Alavancas....................................................................................................56
2.12.6. Lubrificação................................................................................................56
3. Conclusão.....................................................................................................................59
4. Referências Bibliográficas...........................................................................................60
Apêndice A – Memória de Cálculo...................................................................................61
Anexo I – Tabelas e Gráficos............................................................................................75
Anexo II – Catálogos de Componentes.............................................................................89
Anexo III – Desenho Técnico............................................................................................98
ix
Lista de Figuras
Figura 1 - Torno Mecânico Universal [13] ................................................................................. 1
Figura 2 - Máquina Ferramenta de Comando Numérico [14] .................................................... 2
Figura 3 - Exemplo de um Variador de Velocidades com Engrenagens de Dentes Retos [5] ... 3
Figura 4 - Variador CVT [15] .................................................................................................... 4
Figura 5 - Variador de Velocidades com Elementos Flexíveis - Correias [3] ............................ 4
Figura 6 - Curva Econômica de Velocidades de Corte [11].......................................................5
Figura 7 - Fluxograma de etapas do projeto e suas relações ...................................................... 7
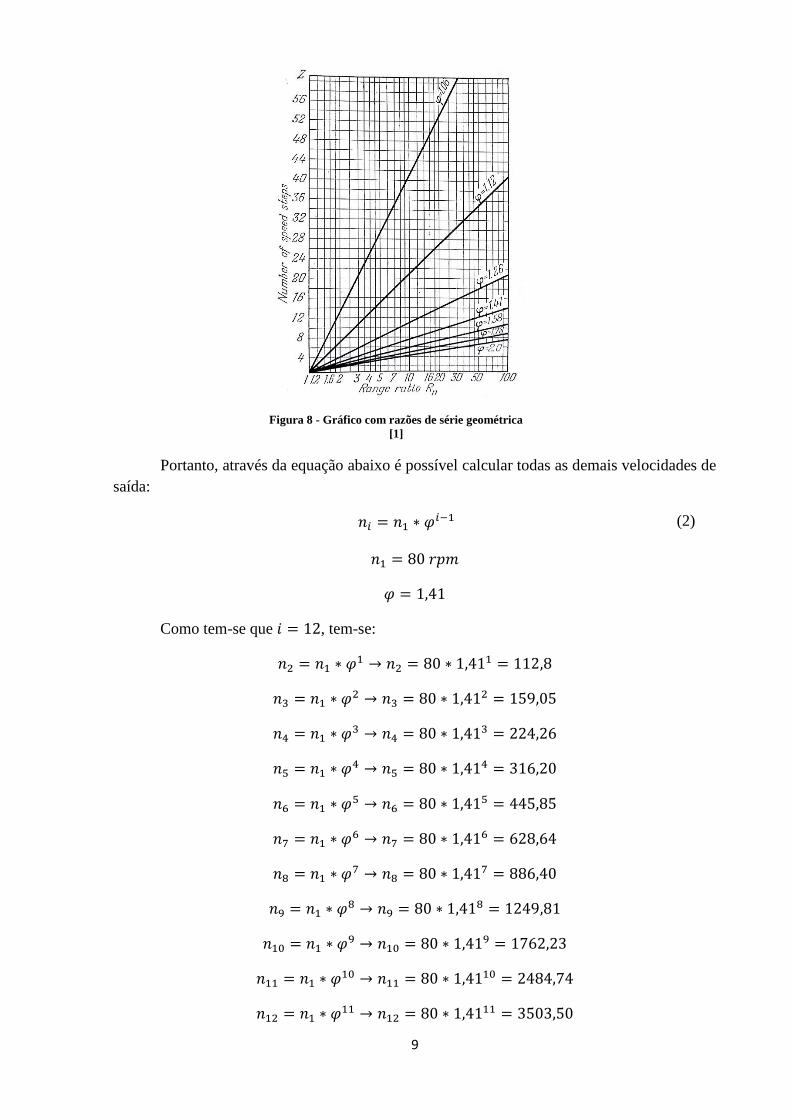
Figura 8 - Gráfico com razões de série geométrica .................................................................... 9
Figura 9 - Esquema Cinemático do Variador ........................................................................... 10
Figura 10 - Diagrama de Velocidades (Diagrama de Germar) ................................................. 11
Figura 11 - Carga Inicial (superior) e Correia em funcionamento (inferior) [3] ...................... 18
Figura 12 - Esquema dos parâmetros das polias [3] ................................................................. 22
Figura 13 - Dimensões de uma Engrenagem [2] ...................................................................... 29
Figura 14 - Esforços no dente de uma Engrenagem de Dentes Retos ...................................... 39
Figura 15 - Esquema do Eixo II................................................................................................ 40
Figura 16 - Diagrama de Esforços Eixo II plano XY [N.mm] ................................................. 41
Figura 17 - Diagrama de Esforços Eixo II plano XZ [N.mm] .................................................. 42
Figura 18 - Diagrama de Esforços Torque [N.m] ..................................................................... 42
Figura 19 - Pontos de análise com o critério de Soderberg ...................................................... 47
Figura 20 - Esquema de funcionamento das Alavancas. .......................................................... 56
Figura 21 - Modelo 3D com alavancas acopladas .................................................................... 56
x
Lista de Tabelas
Tabela 1 - Especificações do Motor Elétrico.............................................................................. 8
Tabela 2 - Especificação correia ............................................................................................... 21
Tabela 3 - Especificação dos parâmetros das polias................................................................. 21
Tabela 4 - Número de Dentes ................................................................................................... 23
Tabela 5 - Rotações reais de saída e erro.................................................................................. 24
Tabela 6 - Material para engrenagens 1 a 14.. .......................................................................... 26
Tabela 7 - Material para engrenagens 15 e 16. ......................................................................... 26
Tabela 8 - Material para engrenagens 17, 18 e 19. ................................................................... 26
Tabela 9 - Tabela de parâmtros de critério AGMA .................................................................. 27
Tabela 10 - Dimensões engrenagens 13 e 14. .......................................................................... 28
Tabela 11 - Fatores de Segurança pelo Critério de Fadiga ....................................................... 32
Tabela 12 - Fatores de Segurança pelo Critério de Desgaste Superficial ................................. 35
Tabela 13 - Resumo dos dados das Engrenagens ..................................................................... 36
Tabela 14 - Esforços de cada par engrenado ............................................................................ 38
Tabela 15 - Esforço gerado pelas correias de transmissão ....................................................... 39
Tabela 16 - Momentos fletores eixo II ..................................................................................... 42
Tabela 17 - Momento fletor máximo em cada ponto analisado ............................................... 42
Tabela 18 - Valores para as reações nos mancais ..................................................................... 43
Tabela 19 - Diâmetros obtidos através do MTC....................................................................... 44
Tabela 20 - Valores de Kt e q ................................................................................................... 46
Tabela 21 - Diâmetros mínimos, diâmetros reais e coeficientes de segurança ........................ 46
Tabela 22 - Diâmetros Padrão de Eixos ................................................................................... 47
Tabela 23 - Propriedades Mecânicas do Aço das Chavetas ..................................................... 48
Tabela 24 - Dimensões características para chavetas ............................................................... 49
Tabela 25 - Principais dimensões de chavetas e coeficiente de segurança .............................. 50
Tabela 26 - Dimensões de Estrias Padronizadas ...................................................................... 52
Tabela 27 - Parâmetros das Estrias ........................................................................................... 52
Tabela 28 - Vidas Rolamentos.................................................................................................. 54
Tabela 29 - Fator de Serviço FS [3] ......................................................................................... 74
Tabela 30 - Fator Adicional Ad [3] .......................................................................................... 74
Tabela 31 - Determinação da seção da correia [3] ................................................................... 75
Tabela 32 - Principais dimensões de Correias em V [3] .......................................................... 75
Tabela 33 - Determinação de HP para correia B [3] ................................................................ 76
Tabela 34 - Comprimentos padronizados de correias por seção [3]......................................... 77
Tabela 35 - Fator de correção para FL [3] ................................................................................ 78
Tabela 36 - Fator de correção Ca [3] ........................................................................................ 79
Tabela 37 - Parâmetros Kb e Kc [2] ......................................................................................... 79
Tabela 38 - Fator Ks [2] ........................................................................................................... 79
Tabela 39 - Dimensões dos perfis da polia [3] ......................................................................... 80
Tabela 40 - Parâmetros K e b [2] .............................................................................................. 80
Tabela 41 - Comprimento adicional Lad [2] ............................................................................ 81
xi
Tabela 42 - Fator de Forma AGMA (J) para ângulo de pressão de 20 graus [3] ..................... 81
Tabela 43 - Fator de acabamento superficial [6] ...................................................................... 82
Tabela 44 - Fator Kb [6] ........................................................................................................... 82
Tabela 45 - Fator Kc [6] ........................................................................................................... 83
Tabela 46 - Fator Kd [6] ........................................................................................................... 83
Tabela 47 - Fator Ko [6] ........................................................................................................... 83
Tabela 48 - fator Km [6] ........................................................................................................... 84
Tabela 49 - fator Cp [6] ............................................................................................................ 84
Tabela 50 - fator CL [6] ............................................................................................................ 84
Tabela 51 - Fator CR [6]........................................................................................................... 85
Tabela 52 - Gráfico do fator Kt [2]........................................................................................... 85
Tabela 53 - Gráfico do fator q [2]............................................................................................. 85
Tabela 54 - Valores de condição de funcionamento [8] ........................................................... 86
Tabela 55 - Fator Kf* [2] .......................................................................................................... 86
Tabela 56 - Valores de v [8] ..................................................................................................... 87
Tabela 57 - Fator a23 em função de viscosidade [8] ................................................................ 87

1
1. Introdução
1.1. Máquinas Operatrizes
As máquinas operatrizes, também chamadas de máquinas ferramenta, são mecanismos
capazes de realizar diversas operações de fabricação mecânica de peças. Geralmente são
constituídas por um eixo que gira e possuem algum tipo de ferramenta fixada na extremidade
que irá realizar o trabalho. De acordo com a ferramenta acoplada, o processo de fabricação
muda. Diferentes processos de fabricação utilizam diferentes velocidades de rotação, por
exemplo em um torno universal, que pode realizar diversos processos em uma só máquina.
Outros tipos de máquina ferramenta são a furadeira, a fresadora e a aplainadora, por
exemplo, e cada uma delas é capaz de realizar um processo específico de fabricação. Na
figura 1 observa-se um torno mecânico universal.
Um tipo mais recente de máquina ferramenta são as CNC’s, ou seja, de Comando
Numérico Computadorizado. Elas seguem os mesmos princípios que as máquinas mais
antigas, entretanto, a movimentação da ferramenta se dá por um código de computador,
permitindo que tais máquinas realizem operações mais complexas e fabriquem superfícies
mais complicadas de serem fabricadas manualmente. O código de computador pode por
Figura 1 - Torno Mecânico Universal [13]

2
exemplo seguir um trajeto descrito por uma equação matemática. A figura 2 ilustra uma
máquina CNC.
Como já foi dito, os processos de fabricação utilizam diferentes velocidades e até o
mesmo processo de fabricação pode utilizar diferentes velocidades. Dependendo da peça a ser
fabricada, seu material, suas dimensões e o acabamento superficial desejado, alguns
parâmetros de usinagem devem ser variados, entre eles a velocidade de corte, por isso é de
suma importância que essas máquinas consigam atingir diferentes rotações.
Figura 2 - Máquina Ferramenta de Comando Numérico [14]
3
1.2. Variadores de Velocidade
Os variadores de velocidade são mecanismos responsáveis por transmitir rotações de
uma fonte de potência, geralmente um motor, para outras máquinas ou mecanismos a fim de
se realizar trabalho. Atualmente, os motores elétricos são muito utilizados, mas a maioria
deles somente possui uma rotação de fábrica. Então, para poder aplicar um motor a mais
finalidades, os variadores são responsáveis por transformar essa única rotação de entrada em
múltiplas rotações de saída.
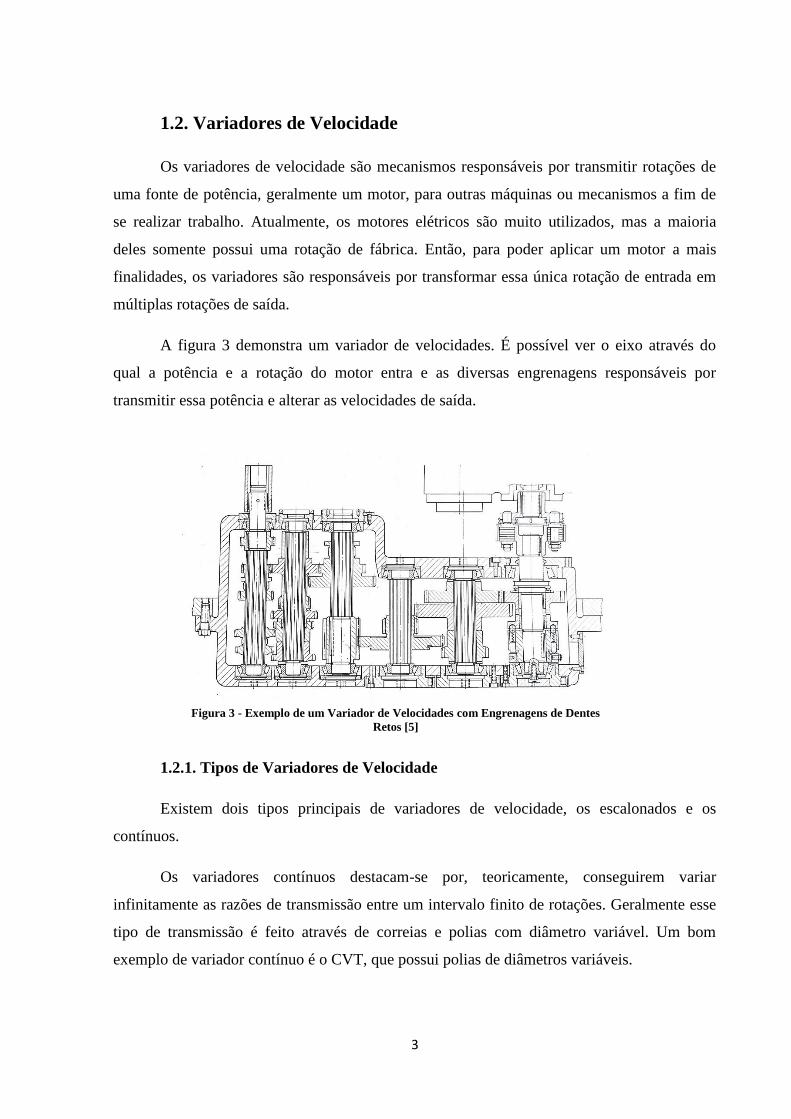
A figura 3 demonstra um variador de velocidades. É possível ver o eixo através do
qual a potência e a rotação do motor entra e as diversas engrenagens responsáveis por
transmitir essa potência e alterar as velocidades de saída.
1.2.1. Tipos de Variadores de Velocidade
Existem dois tipos principais de variadores de velocidade, os escalonados e os
contínuos.
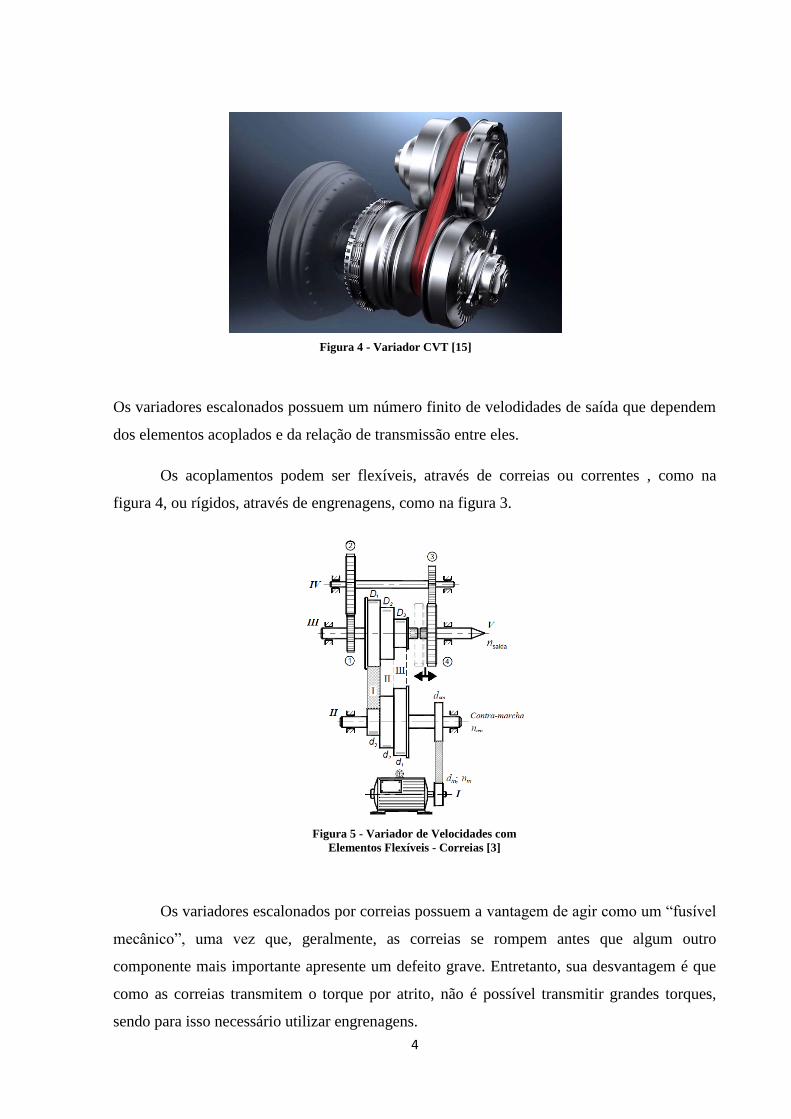
Os variadores contínuos destacam-se por, teoricamente, conseguirem variar
infinitamente as razões de transmissão entre um intervalo finito de rotações. Geralmente esse
tipo de transmissão é feito através de correias e polias com diâmetro variável. Um bom
exemplo de variador contínuo é o CVT, que possui polias de diâmetros variáveis.
Figura 3 - Exemplo de um Variador de Velocidades com Engrenagens de Dentes
Retos [5]
4
Os variadores escalonados possuem um número finito de velodidades de saída que dependem
dos elementos acoplados e da relação de transmissão entre eles.
Os acoplamentos podem ser flexíveis, através de correias ou correntes , como na
figura 4, ou rígidos, através de engrenagens, como na figura 3.
Os variadores escalonados por correias possuem a vantagem de agir como um “fusível
mecânico”, uma vez que, geralmente, as correias se rompem antes que algum outro
componente mais importante apresente um defeito grave. Entretanto, sua desvantagem é que
como as correias transmitem o torque por atrito, não é possível transmitir grandes torques,
sendo para isso necessário utilizar engrenagens.
Figura 5 - Variador de Velocidades com
Elementos Flexíveis - Correias [3]
Figura 4 - Variador CVT [15]
5
1.3. Motivação
Motivado pelas informações expostas anteriormente, o projeto contempla um variador
de velocidades escalonado com reversão.
Foi simulado um ambiente de indústria em que são fornecidos alguns parâmetros
iniciais (dados iniciais disponíveis) e o restante do projeto é baseado nas necessidades que
precisam ser atendidas.
Os dados iniciais conhecidos do projeto foram a potência do motor, que possui um
valor próximo ao utilizado para acionar tais máquinas, a velocidade mínima de saída e o
número de velocidades de saída. Também era desejado haver a possibilidade de reversão, ou
seja, que a máquina fosse capaz de girar no sentido contrário em todas as velocidades.
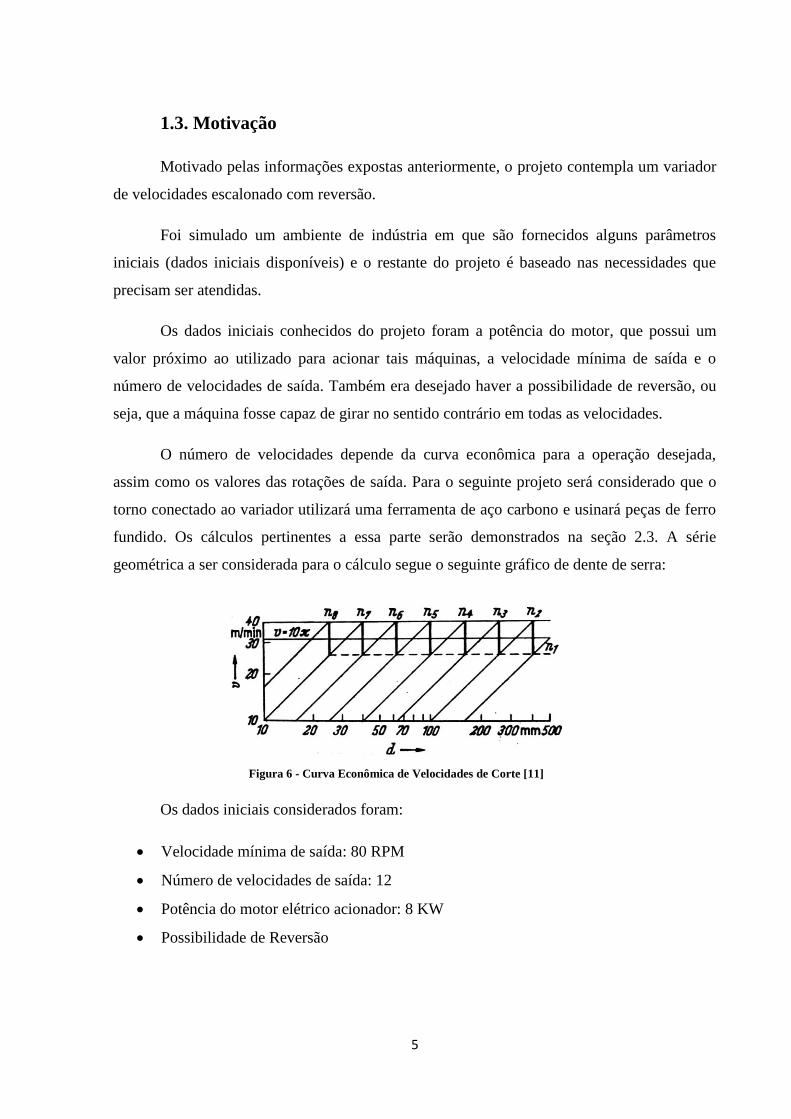
O número de velocidades depende da curva econômica para a operação desejada,
assim como os valores das rotações de saída. Para o seguinte projeto será considerado que o
torno conectado ao variador utilizará uma ferramenta de aço carbono e usinará peças de ferro
fundido. Os cálculos pertinentes a essa parte serão demonstrados na seção 2.3. A série
geométrica a ser considerada para o cálculo segue o seguinte gráfico de dente de serra:
Os dados iniciais considerados foram:
• Velocidade mínima de saída: 80 RPM
• Número de velocidades de saída: 12
• Potência do motor elétrico acionador: 8 KW
• Possibilidade de Reversão
Figura 6 - Curva Econômica de Velocidades de Corte [11]
6
2. Projeto do Variador
2.1. Organização do Projeto
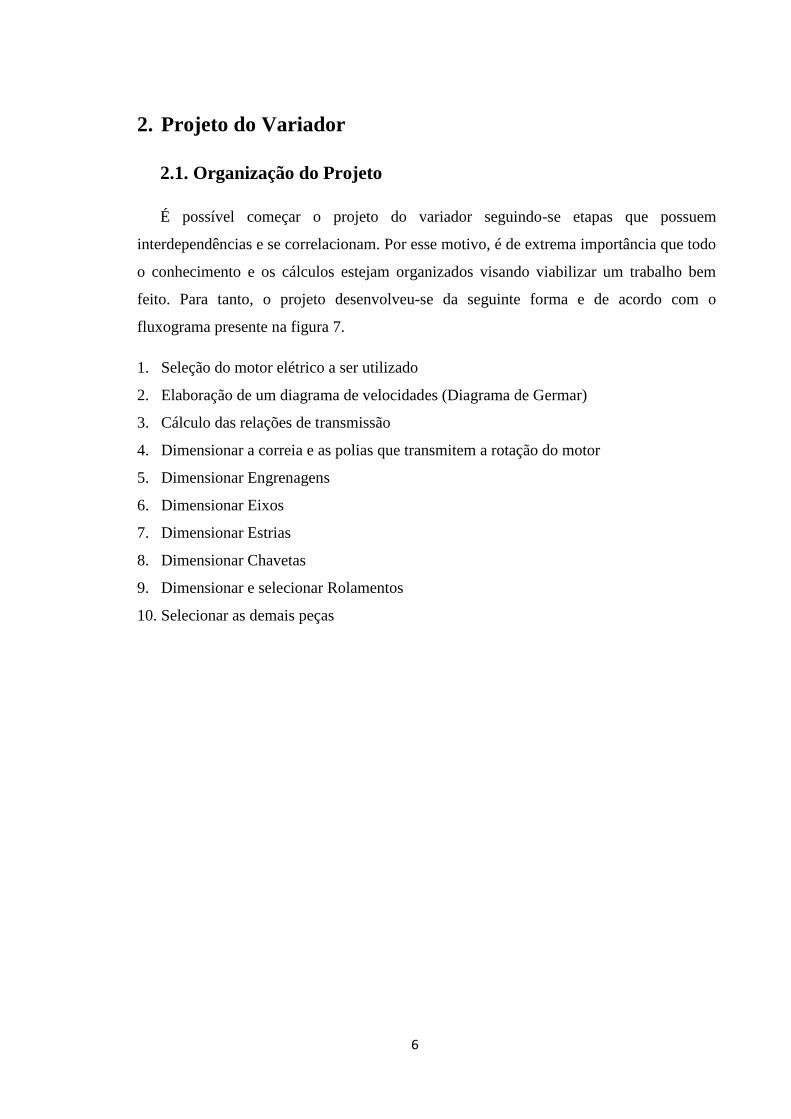
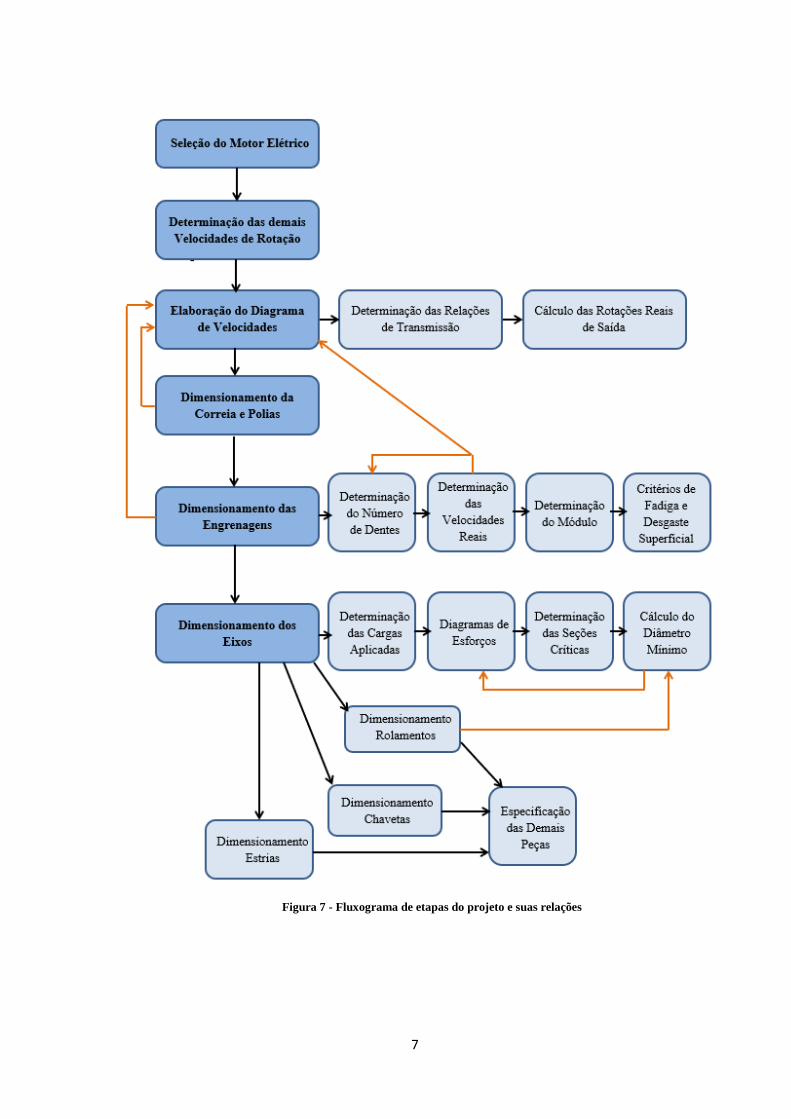
É possível começar o projeto do variador seguindo-se etapas que possuem
interdependências e se correlacionam. Por esse motivo, é de extrema importância que todo
o conhecimento e os cálculos estejam organizados visando viabilizar um trabalho bem
feito. Para tanto, o projeto desenvolveu-se da seguinte forma e de acordo com o
fluxograma presente na figura 7.
1. Seleção do motor elétrico a ser utilizado
2. Elaboração de um diagrama de velocidades (Diagrama de Germar)
3. Cálculo das relações de transmissão
4. Dimensionar a correia e as polias que transmitem a rotação do motor
5. Dimensionar Engrenagens
6. Dimensionar Eixos
7. Dimensionar Estrias
8. Dimensionar Chavetas
9. Dimensionar e selecionar Rolamentos
10. Selecionar as demais peças
7
Figura 7 - Fluxograma de etapas do projeto e suas relações
8
2.2. Seleção do Motor Elétrico
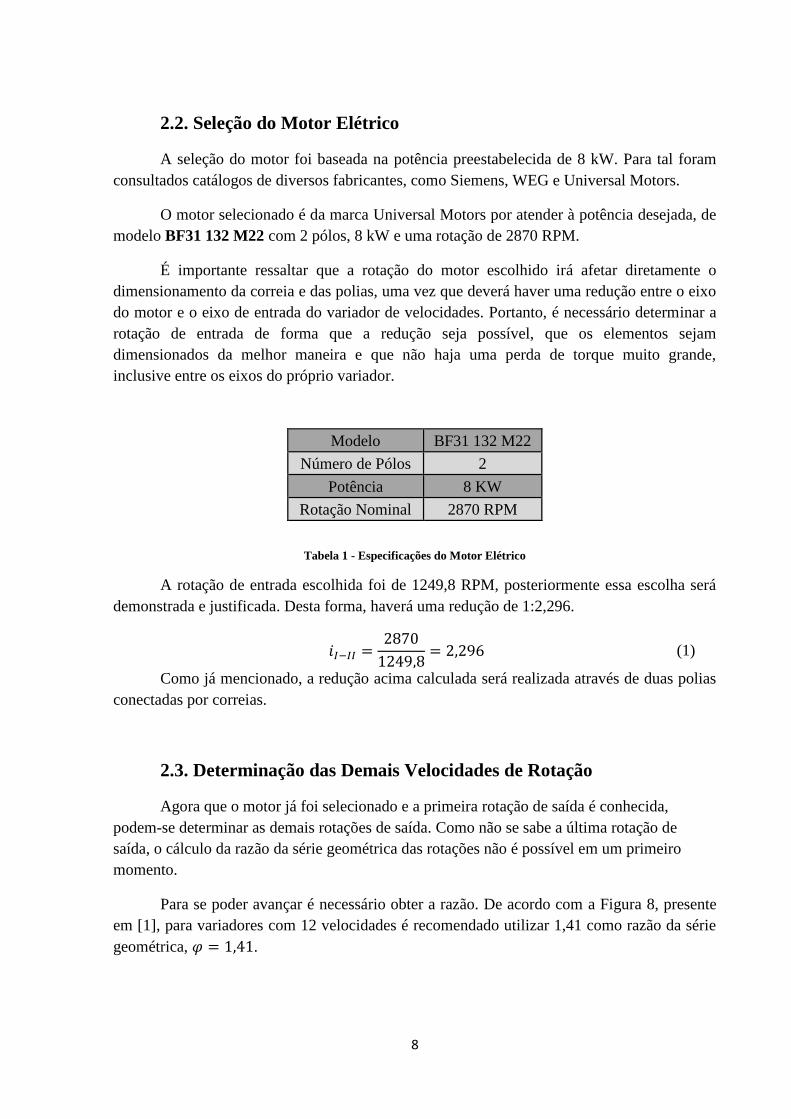
A seleção do motor foi baseada na potência preestabelecida de 8 kW. Para tal foram
consultados catálogos de diversos fabricantes, como Siemens, WEG e Universal Motors.
O motor selecionado é da marca Universal Motors por atender à potência desejada, de
modelo BF31 132 M22 com 2 pólos, 8 kW e uma rotação de 2870 RPM.
É importante ressaltar que a rotação do motor escolhido irá afetar diretamente o
dimensionamento da correia e das polias, uma vez que deverá haver uma redução entre o eixo
do motor e o eixo de entrada do variador de velocidades. Portanto, é necessário determinar a
rotação de entrada de forma que a redução seja possível, que os elementos sejam
dimensionados da melhor maneira e que não haja uma perda de torque muito grande,
inclusive entre os eixos do próprio variador.
Modelo BF31 132 M22
Número de Pólos 2
Potência 8 KW
Rotação Nominal 2870 RPM
Tabela 1 - Especificações do Motor Elétrico
A rotação de entrada escolhida foi de 1249,8 RPM, posteriormente essa escolha será
demonstrada e justificada. Desta forma, haverá uma redução de 1:2,296.
𝑖𝐼−𝐼𝐼 =
2870
1249,8= 2,296 (1)
Como já mencionado, a redução acima calculada será realizada através de duas polias
conectadas por correias.
2.3. Determinação das Demais Velocidades de Rotação
Agora que o motor já foi selecionado e a primeira rotação de saída é conhecida,
podem-se determinar as demais rotações de saída. Como não se sabe a última rotação de
saída, o cálculo da razão da série geométrica das rotações não é possível em um primeiro
momento.
Para se poder avançar é necessário obter a razão. De acordo com a Figura 8, presente
em [1], para variadores com 12 velocidades é recomendado utilizar 1,41 como razão da série
geométrica, 𝜑 = 1,41.
9
Portanto, através da equação abaixo é possível calcular todas as demais velocidades de
saída:
𝑛𝑖 = 𝑛1 ∗ 𝜑𝑖−1
(2)
𝑛1 = 80 𝑟𝑝𝑚
𝜑 = 1,41
Como tem-se que 𝑖 = 12, tem-se:
𝑛2 = 𝑛1 ∗ 𝜑1 → 𝑛2 = 80 ∗ 1,411 = 112,8
𝑛3 = 𝑛1 ∗ 𝜑2 → 𝑛3 = 80 ∗ 1,41
2 = 159,05
𝑛4 = 𝑛1 ∗ 𝜑3 → 𝑛4 = 80 ∗ 1,41
3 = 224,26
𝑛5 = 𝑛1 ∗ 𝜑4 → 𝑛5 = 80 ∗ 1,41
4 = 316,20
𝑛6 = 𝑛1 ∗ 𝜑5 → 𝑛6 = 80 ∗ 1,41
5 = 445,85
𝑛7 = 𝑛1 ∗ 𝜑6 → 𝑛7 = 80 ∗ 1,41
6 = 628,64
𝑛8 = 𝑛1 ∗ 𝜑7 → 𝑛8 = 80 ∗ 1,41
7 = 886,40
𝑛9 = 𝑛1 ∗ 𝜑8 → 𝑛9 = 80 ∗ 1,418 = 1249,81
𝑛10 = 𝑛1 ∗ 𝜑9 → 𝑛10 = 80 ∗ 1,41
9 = 1762,23
𝑛11 = 𝑛1 ∗ 𝜑10 → 𝑛11 = 80 ∗ 1,41
10 = 2484,74
𝑛12 = 𝑛1 ∗ 𝜑11 → 𝑛12 = 80 ∗ 1,41
11 = 3503,50
Figura 8 - Gráfico com razões de série geométrica
[1]

10
As velocidades acima calculadas são teóricas. Assim que o número de dentes de cada
engrenagem for determinado será possível calcular as velocidades reais de saída para que se
possa observar se existe algum erro relevante nos dados.
2.4. Elaboração do Diagrama de Velocidades
Após obter a razão da série geométrica e todas as velocidades teóricas de saída é
necessário desenvolver um Diagrama de Velocidades, também conhecido como Diagrama de
Germar. Tal diagrama torna possível obter as relações de transmissão entre cada par
engrenado entre dois eixos consecutivos.
Visando facilitar o entendimento do funcionamento do variador e definir cada par
engrenado, assim como a reversão, foi desenvolvido um esquema cinemático, mostrado na
figura 9, que representa o mecanismo como um todo.
Figura 9 - Esquema Cinemático do Variador
Como foi definido que o variador deve ter 12 velocidades, o esquema mostrado na
figura 9 evidencia que a construção se dará de forma que haja um bloco duplo de
engrenagens, seguido por um bloco triplo e terminando com outro bloco duplo, de forma que
2𝑥3𝑥2 = 12. Ou seja, serão necessárias 14 engrenagens para que se tenham 12 velocidades
de saída. As demais engrenagens, 15, 16, 17, 18 e 19, são responsáveis pela reversão e a
relação de transmissão entre elas será unitária.
O Diagrama de Germar é um gráfico em escala logarítmica, em que o espaçamento de
cada linha horizontal corresponde ao logarítmo na base 10 da razão da série geométrica (𝜑) e
cada linha vertical corresponde a um eixo. O diagrama do presente projeto foi desenvolvido
com base em [1].

11
Começa-se desenhando uma linha horizontal para cada velocidade de saída e uma
linha vertical para cada eixo a ser representado. No caso do presente projeto foram feitas 12
linhas horizontais e 5 linhas verticais, que representam o eixo do motor e os 4 primeiros eixos
do variador, uma vez que os últimos 3 possuem uma relação de transmissão unitária entre
eles. Em seguida, da direita para a esquerda são construídas as demais linhas, que representam
os pares engrenados. É interessante que se busque simetria na construção de tais linhas.
O diagrama final obtido para o projeto está demonstrado abaixo. Ele se encontra
ligeiramente deslocado para cima, o que reduz sua simetria, pois dessa forma é possível evitar
uma perda considerável de torque nos demais eixos do variador e a redução entre os eixos I e
II tem um valor melhor para o dimensionamento das correias e polias.
Como já foi mostrado anteriormente na Figura 7, as diversas etapas do projeto muitas
vezes contêm correlações e interdependências. No atual trabalho, outro diagrama de
velocidades havia sido feito, entretanto durante o dimensionamento das correias e polias
decidiu-se alterá-lo de forma a aumentar a vida útil das correias.
2.5. Determinação das Relações de Transmissão
A determinação das Relações de Transmissão é a próxima etapa do projeto. Agora que
o diagrama de velocidades final foi definido, a obtenção das relações torna-se algo simples de
ser feito. Para tal, basta observar no prórpio diagrama quantas “casas” na vertical, a linha azul,
correspondente a um par engrenado, se desloca entre o ponto à esquerda e o ponto à direita.
As relações de transmissão, portanto, serão calculadas da seguinte forma:
𝑖𝑛 − 𝑛+1 = 𝜑𝛼
(3)
Em que 𝛼 corresponde à distância na vertical que a linha azul se desloca. É importante
ressaltar que caso a linha desça o valor de 𝛼 será positivo, pois se trata de uma redução, e caso
a linha suba o valor de 𝛼 será negativo, pois se trata de uma multiplicação.
Figura 10 - Diagrama de Velocidades (Diagrama de Germar)
log (𝜑)

12
Portanto, as relações de transmissão obtidas, utilizando a equação (3), foram:
𝑖1−2 = 𝜑−1 = 0,709
𝑖3−4 = 𝜑2 = 1,988
𝑖5−6 = 𝜑0 = 1
𝑖7−8 = 𝜑1 = 1,410
𝑖9−10 = 𝜑2 = 1,988
𝑖11−12 = 𝜑−2 = 0,503
𝑖13−14 = 𝜑4 = 3,953
A definição do sinal do exponte foi determinada de forma que 𝑖 < 1 represente uma
multiplicação e 𝑖 > 1 represente uma redução.
2.6. Dimensionamento Correias e Polias
Conhecendo a rotação do motor e a rotação de entrada do variador já é possível
dimensionar as correias e polias usadas na primeira redução entre os eixos I e II.
Como já foi calculado anteriormente pela equação (1), a redução em questão é de
1:2,296. Os principais parâmetros a serem calculados seguiram as recomendações de [2] e [3].
O catálogo da marca Gates [4] foi consultado para poder selecionar a correia calculada.
2.6.1. Potência de Projeto
A potência de projeto é calculada da seguinte forma:
𝑃𝐻𝑃 = 𝑃(𝐹𝑆 + 𝐴𝑑)
(4)
𝑃 = 8 𝑘𝑊 = 10,7 𝐻𝑃
Em que 𝐹𝑆 é o fator de serviço e depende da utilização diária e da sobrecarga que a
máquina sofre, determinado através da Tabela 29, no Anexo I, e 𝐴𝑑 é o fator adicional que
depende do ambiente de operação e das polias tensoras, determinado através da Tabela 30, no
Anexo I.
Nesse caso foi definido que 𝐹𝑆 = 1,4 pois se trata de um caso com utilização de 6 a
16 horas por dia com uma sobrecarga momentânea menor que 200% da carga nominal. Já
para o fator adicional 𝐴𝑑 foi escolhido o valor 𝐴𝑑 = 0,1 + 0,1 = 0,2, pois se trata de um
ambiente úmido (0,1) e poeirento (0,1).

13
Desta forma, utilizando a equação (4):
𝑃𝐻𝑃 = 10,7 ∗ (1,4 + 0,2) = 17,12 𝐻𝑃
(5)
2.6.2. Determinação da Seção Mais Adequada
Após se obter a potência de projeto é possível determinar a seção de correia a ser
utilizada. Utilizando a Tabela 31, no Anexo I, com as informações da potência e da rotação
da polia menor determina-se a melhor seção.
No presente projeto, como trata-se de uma correia trapezoidal, decidiu-se trabalhar
com o tipo de correia Hi-Power, e a seção determinada foi do tipo B.
Como já se sabe a seção que será utilizada, através da Tabela 32, no Anexo I, é
possível obter o diâmetro mínimo da polia menor do conjunto. O diâmetro da polia menor foi
então definido como 127 mm. Dessa forma é possível obter o diâmetro da polia maior,
utilizando a equação (6), através da relação de transmissão.
𝐷 = 𝑑 ∗ 𝑖
(6)
𝐷 → Diâmetro da polia maior
𝑑 → Diâmetro da polia menor
𝑖 → Relação de Transmissão
Portanto,
𝐷 = 127 ∗ 2,296 = 292 𝑚𝑚
(7)
2.6.3. Determinação da Capacidade de Transmissão de uma Correia
do tipo B
Um passo importante para definir o número de correias a ser utilizado é calcular a
capacidade que uma correia do tipo selecionado consegue transmitir nas condições
especificadas. Para tal usa-se a equação (8) abaixo:
𝑃𝐵 = (𝐻𝑃𝑏á𝑠𝑖𝑐𝑜 + 𝐻𝑃𝑎𝑑) ∗ 𝐹𝐿
(8)
Em que,
𝐻𝑃𝑏á𝑠𝑖𝑐𝑜 → Capacidade de transmmissão da correia caso as polias possuam o mesmo
diâmetro [3]
14
𝐻𝑃𝑎𝑑 → Fator de correção aplicado devido à diferença entre os diâmetros [3]
𝐹𝐿 → Fator de correção para o comprimento de uma correia e o seu perfil [3]
A determinação de 𝐻𝑃𝑏á𝑠𝑖𝑐𝑜 se dá através da Tabela 33, no Anexo I, sabendo-se a
seção da correia, a rotação da polia menor e o diâmetro da polia menor. A determinação de
𝐻𝑃𝑎𝑑 também se dá através da Tabela 33, no Anexo I, mas é preciso saber a relação de
transmissão além dos outros parâmetros. É importante observar que é possível realizar
interpolação para obter os valores.
Os valores determinados utilizando a tabela citada acima e conhecendo-se todos os
parâmtros foram 𝐻𝑃𝑏á𝑠𝑖𝑐𝑜 = 5,4 𝐻𝑃 e 𝐻𝑃𝑎𝑑 = 1 𝐻𝑃.
A obtenção de 𝐹𝐿 já é um pouco mais complexa e depende da distância entre centros
das polias e do fator 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜, descrito pela equação (9).
𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 2 ∗ 𝑐 +
𝜋
2(𝐷 + 𝑑) +
(𝐷 − 𝑑)2
4 ∗ 𝑐
(9)
O cálculo da distância entre centros (𝑐) é feito da seguinte forma:
𝑖 < 3 → 𝑐 =
𝐷 + 𝑑
2+ 𝑑
(10)
𝑖 ≥ 3 → 𝑐 = 𝐷 (11)
Como 𝑖 < 3, utilizando a equação (10):
𝑐 =
292 + 127
2+ 127 = 336,5 𝑚𝑚 (12)
Portanto, da equação (9) tem-se que:
𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 1351,39 𝑚𝑚
O valor de 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 é um valor teórico, então precisa-se determinar um valor real,
uma vez que o comprimento de correias é predeterminado. Para tal usa-se a Tabela 34, no
Anexo I, e se escolhe o valor mais próximo de 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 possível.
Com um 𝐿𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = 1351,39 𝑚𝑚 e um seção de tipo B, o 𝐿𝑟𝑒𝑎𝑙 selecionado foi de
1340 mm, o que implica que a referência do perfil utilizado será B-51.
Sabendo-se que o perfil utilizado será o B-51 é possível, finalmente, determinar o
valor de 𝐹𝐿 através da Tabela 35, no Anexo I. Para este projeto o valor determinado foi 𝐹𝐿 =
0,88.
Então, a capacidade de transmissão de uma correia do tipo B-51 para as condições
especificadas será:
15
𝑃𝐵 = (5,4 + 1) ∗ 0,88 = 5,632 𝐻𝑃
(13)
2.6.4. Cálculo do Número de Correias
O número de correias adequado para a transmissão é determinado através da relação
entre a potência de projeto e a capacidade de transmissão de uma correia.
𝑁 =
𝑃𝐻𝑃(𝑃𝑐𝑜𝑟𝑟 ∗ 𝐶𝑎)
(14)
Sendo,
𝐶𝑎 → Fator de correção para o arco de contato [3]
O fator 𝐶𝑎 pode ser obtido através da Tabela 36, no Anexo I, e depende do parâmetro (𝐷−𝑑)
𝑐. Portanto, como:
(𝐷 − 𝑑)
𝑐= 0,49
(15)
𝐶𝑎 = 0,93
Então, o número de correias a ser utilizado será:
𝑁 =
17,12
5,632 ∗ 0,93= 3,26 → 4 𝑐𝑜𝑟𝑟𝑒𝑖𝑎𝑠
(16)
Portanto, serão utilizadas 4 correias do tipo B-51.
2.6.5. Cálculo da Distância Real entre Centros
A distância real entre centros é necessária para o cálculo dos ângulos de abraçamento
que são parâmetros importantes na determinação das forças atuantes nas correias. Seu cálculo
é realizado seguindo a equação (17).
𝑐𝑟𝑒𝑎𝑙 =
𝑘 + √𝑘2 − 32(𝐷 − 𝑑)2
16
(17)
Em que,
𝑘 = 4 ∗ 𝐿𝑟𝑒𝑎𝑙 − 2 ∗ 𝜋 ∗ (𝐷 + 𝑑)
(18)
𝑘 = 2727,34 𝑚𝑚

16
Logo, a distância real entre centros é:
𝑐𝑟𝑒𝑎𝑙 = 330,6 𝑚𝑚
(19)
2.6.6. Determinação das Cargas
O cálculo das forças atuantes nas correias é de extrema importância, pois são fatores
que influenciam diretamente na vida das mesmas. É sempre importante lembrar que o cálculo
da vida é o que determina se as correias e polias projetadas atendem ou não ao projeto
vigente. Caso a vida das correias seja muito baixa será necessário retornar e alterar algum
parâmetro de projeto para se atingir uma vida maior.
A força exercida pela correia sobre o eixo será dada pela equação (20).
𝐹 = [𝐹1
2 + 𝐹22 + 2𝐹1𝐹2 cos(𝛾)]
12⁄
(20)
Sendo,
𝛾 → Ângulo entre 𝐹1 e 𝐹2
𝐹1 → Força de tração no ramo tenso [3]
𝐹2 → Força de tração no ramo frouxo [3]
𝐹1 − 𝐹2 =
𝑃𝐻𝑃[𝑊] ∗ 𝐾𝑠 ∗ 𝑛𝑑𝑁
𝜋 ∗ 𝑛[𝑟𝑝𝑚] ∗ 𝑑[𝑚𝑚]60 ∗ 1000
(21)
𝐹1𝐹2= 𝑒𝑘1 , 𝑘1 =
𝜇 ∗ 𝜃1
𝑠𝑒𝑛(𝜑2)
(22)
𝛾 = 2𝛽 = 𝜃2 − 180°
(23)
𝜃1,2 = 𝜋 ± 2 ∗ 𝑠𝑒𝑛−1 (
𝐷 − 𝑑
2 ∗ 𝑐𝑟𝑒𝑎𝑙)
(24)
𝜃1 → Ângulo de abraçamento da polia menor
𝜃2 → Ângulo de abraçamento da polia maior
𝛽 → Ângulo entre a horizontal e a correia

17
𝜇 → Coeficiente de atrito entre a correia e a polia
𝜑 → Ângulo dos canais da correia
𝐾𝑠 → Fator de Serviço [2]
𝑛𝑑 → Fator de Projeto[2]
Da equação (24):
𝜃1,2 = 𝜋 ± 2 ∗ 𝑠𝑒𝑛
−1 (292 − 127
2 ∗ 330,6)
(25)
𝜃1 = 2,64 𝑟𝑎𝑑 = 151°
𝜃2 = 3,65 𝑟𝑎𝑑 = 209°
Substituindo na equação (23):
𝛾 = 209° − 180° = 29°
Para se obter 𝐹1 e 𝐹2 é necessário resolver o sistema composto pelas equações (21) e
(22). Portanto, ainda resta determinar os parâmetros 𝜇, 𝐾𝑠, 𝑛𝑑 e 𝜑.
O coeficiente de atrito 𝜇 foi definido com o valor de 0,7 [2]. Para tal foi suposto que a
correia é feita de Uretano. O valor de 𝑛𝑑 foi definido como 1 por ser um parâmetro de projeto.
𝐾𝑠 é extraído da Tabela 37, no Anexo I, de acordo com a máquina acionada e da fonte de
potência, e foi determinado que 𝐾𝑠 = 1,1, por ser uma máquina com choque leve e
características normais de torque. O valor de 𝜑 é retirado da Tabela 38, no Anexo I, e foi
escolhido o valor de 34º.
Dessa forma, da equação (21) tem-se que:
𝐹1 − 𝐹2 = 183,9 𝑁
Da equação (22) tem-se que:
𝑘1 = 6,31
𝐹1𝐹2= 𝑒6,31 = 552,3 𝑁
Logo,
𝐹1 = 183,62 𝑁
𝐹2 = 0,33 𝑁
18
Portanto, a carga gerada pela correia, de acordo com a equação (20) é:
𝐹 = [𝐹12 + 𝐹2
2 + 2𝐹1𝐹2 cos(𝛾)]12⁄ = 183,63 𝑁
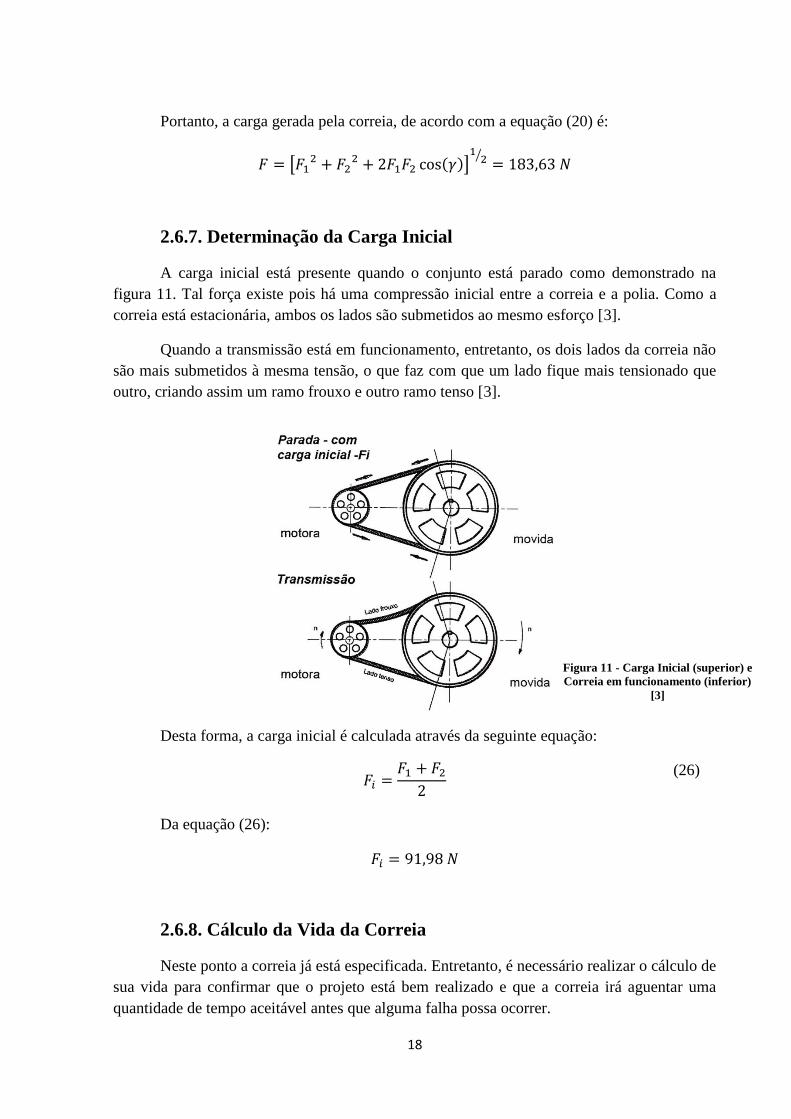
2.6.7. Determinação da Carga Inicial
A carga inicial está presente quando o conjunto está parado como demonstrado na
figura 11. Tal força existe pois há uma compressão inicial entre a correia e a polia. Como a
correia está estacionária, ambos os lados são submetidos ao mesmo esforço [3].
Quando a transmissão está em funcionamento, entretanto, os dois lados da correia não
são mais submetidos à mesma tensão, o que faz com que um lado fique mais tensionado que
outro, criando assim um ramo frouxo e outro ramo tenso [3].
Desta forma, a carga inicial é calculada através da seguinte equação:
𝐹𝑖 =
𝐹1 + 𝐹22
(26)
Da equação (26):
𝐹𝑖 = 91,98 𝑁
2.6.8. Cálculo da Vida da Correia
Neste ponto a correia já está especificada. Entretanto, é necessário realizar o cálculo de
sua vida para confirmar que o projeto está bem realizado e que a correia irá aguentar uma
quantidade de tempo aceitável antes que alguma falha possa ocorrer.
Figura 11 - Carga Inicial (superior) e
Correia em funcionamento (inferior)
[3]

19
Caso a vida calculada da correia seja muito baixa é necessário rever o projeto e alterar
alguns parâmetros para que se torne viável utilizar a correia selecionada.
Para o cálculo da vida foram utilizadas duas equações principais. A equação (27)
retorna o número de voltas, enquanto a equação (28) retorna o tempo de vida em horas.
𝑁𝑃 = [(
𝐾
𝑇1)−𝑏
+ (𝐾
𝑇2)−𝑏
]
−1
(27)
𝑡 =
𝑁𝑃 ∗ 𝐿𝑝
3600 ∗ 𝑣 (28)
Sendo,
𝑇1 = 𝐹1 +
𝐾𝑏𝑑
(29)
𝑇2 = 𝐹1 +
𝐾𝑏𝐷
(30)
O valor de 𝐾𝑏 é extraído da Tabela 39, no Anexo I, e depende somente da seção da
correia. Portanto, 𝐾𝑏 = 65.
Assim, das equações (29) e (30):
𝑇1 = 695,43
𝑇2 = 406,23
Após obter 𝑇1 e 𝑇2 já é possível calcular o número de voltas que a correia deverá
durar. Então é preciso determinar os parâmetros K e b. Ambos são retirados da Tabela 40, no
Anexo I, e dependem da seção da correia e dos picos de força. Dessa forma, foi determinado
que:
𝐾 = 5309 e 𝑏 = 10,926
Logo, da equação (27):
𝑁𝑃 = [(5309
695,43)−10,926
+ (5309
406,23)−10,926
]
−1
𝑁𝑃 = 4,4 ∗ 109 𝑣𝑜𝑙𝑡𝑎𝑠
Para o cálculo da vida em horas somente falta obter o comprimento primitivo 𝐿𝑝 e a
velocidade linear da correia.

20
De acordo com [2], tal comprimento pode ser calculado da seguinte forma:
𝐿𝑝 = 𝐿𝑟𝑒𝑎𝑙 + 𝐿𝐴𝑑
(31)
O cálculo da velocidade linear é simples e pode ser feito da seguinte forma:
𝑣 =
𝜋 ∗ 𝑑[𝑚𝑚] ∗ 𝑛[𝑟𝑝𝑚]
60 ∗ 1000 (32)
𝑣 = 19,1 𝑚/𝑠
O valor de 𝐿𝐴𝑑 pode ser obtido através da Tabela 41, no Anexo I, de acordo com a
seção da correia. Então, da equação (31):
𝐿𝑝 = 1340 + 45 = 1385 𝑚𝑚
Uma vez que a equação (27) está definida para uma vida de até 109 voltas, e o
resultado obtido supera esse valor, para o cálculo da vida em horas da correia será usado o
valor de 109 para 𝑁𝑃, ao invés de 4,4 ∗ 109. Portanto, a vida da correia em horas, de acordo
com a equação (28) será:
𝑡 >109 ∗ 1385
3600 ∗ 19,1→ 𝑡 > 20143 ℎ𝑜𝑟𝑎𝑠
O período obtido para a vida da correia possui um valor aceitável para um bom
trabalho da mesma, portanto todos os parâmetros definidos, tanto quanto a correia selecionada
atendem aos requisitos do projeto.
A tabela a seguir mostra as principais características da correia dimensionada:
Tabela 2 - Especificação correia
21
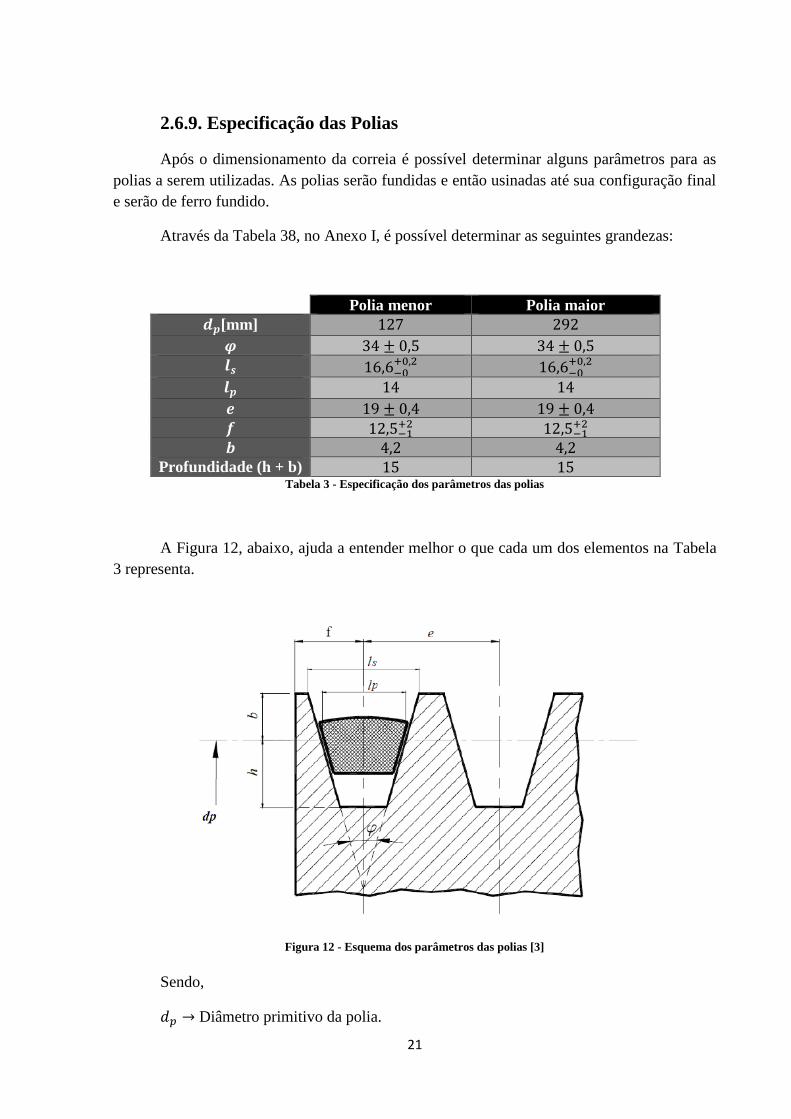
2.6.9. Especificação das Polias
Após o dimensionamento da correia é possível determinar alguns parâmetros para as
polias a serem utilizadas. As polias serão fundidas e então usinadas até sua configuração final
e serão de ferro fundido.
Através da Tabela 38, no Anexo I, é possível determinar as seguintes grandezas:
Polia menor Polia maior
𝒅𝒑[mm] 127 292
𝝋 34 ± 0,5 34 ± 0,5
𝒍𝒔 16,6−0+0,2 16,6−0
+0,2 𝒍𝒑 14 14
𝒆 19 ± 0,4 19 ± 0,4 𝒇 12,5−1
+2 12,5−1+2
𝒃 4,2 4,2 Profundidade (h + b) 15 15
Tabela 3 - Especificação dos parâmetros das polias
A Figura 12, abaixo, ajuda a entender melhor o que cada um dos elementos na Tabela
3 representa.
Sendo,
𝑑𝑝 → Diâmetro primitivo da polia.
Figura 12 - Esquema dos parâmetros das polias [3]
22
𝜑 → Ângulo dos canais da correia.
𝑙𝑠 → Largura superior do canal.
𝑙𝑝 → Largura do canal acima da linha do diâmetro primitivo.
𝑒 → Distância entre as linhas de centros de dois canais consecutivos.
𝑓 → Distância entre a linha de centro do primeiro canal e a face mais próxima da
polia.
𝑏 → Profundidade do canal acima da linha do diâmetro primitivo.
ℎ → Profundidade do canal abaixo da linha do diâmetro primitivo.
2.7. Dimensionamento das Engrenagens
2.7.1. Determinação do Número de Dentes
Algumas considerações foram feitas para se poder começar o dimensionamento das
engrenagens. Como sugerido por [6], para engrenagens com ângulo de pressão 𝜃 = 20°, o
número mínimo de dentes do pinhão é 18. Também foi determinado que todas as engrenagens
irão possuir módulos iguais, de forma que a distância entre eixos seja a mesma para todos os
eixos, facilitando a fabricação e posicionamento dos componentes.
A determinação do número de dentes partiu do par engrenado com a maior relação de
transmissão, ou seja, o par 13-14. É importante ressaltar que a distância entre todos os eixos
será igual de forma a facilitar a fabricação e montagem do conjunto, e que a soma do número
de dentes de cada par deverá ser um número par, uma vez que há relações de transmissão
unitárias, o que implica em engrenagens com o mesmo número de dentes.
Logo, sabendo-se as relações de transmissão previamente calculadas e com a definição
de 18 dentes para o pinhão do par 13-14 tem-se que o número de dentes da coroa será:
𝑧14 = 𝑧13 ∗ 𝑖13−14 (33)
Como foi dito anteriormente, a soma do número de dentes de cada par deve ser um
número par para satisfazer aos pares com relação de transmissão unitária, então o resultado
acima não poderá ser utilizado e será necessário aumentar o número de dentes do pinhão.
Após realizar algumas tentativas foi decidido definir o número de dentes do pinhão
como 21, pois dessa forma é possível reduzir a margem de erro dos valores reais das
velocidades como será mostrado no item a seguir.
Portanto,
23
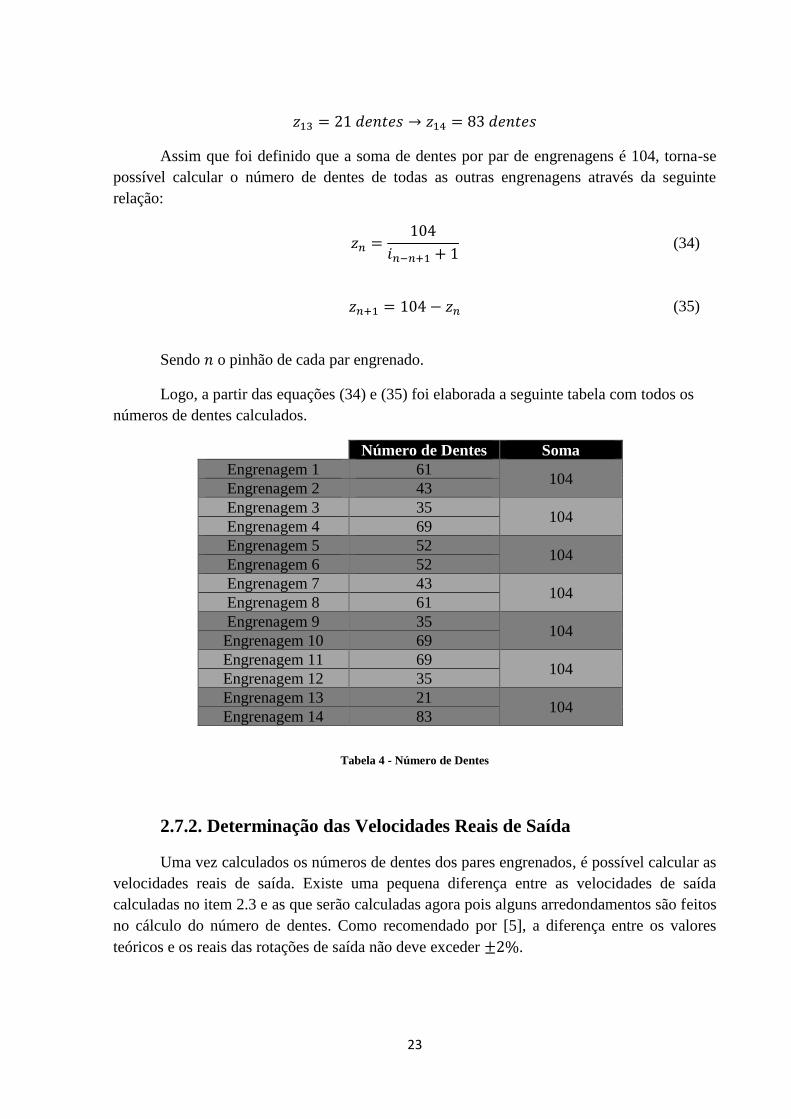
𝑧13 = 21 𝑑𝑒𝑛𝑡𝑒𝑠 → 𝑧14 = 83 𝑑𝑒𝑛𝑡𝑒𝑠
Assim que foi definido que a soma de dentes por par de engrenagens é 104, torna-se
possível calcular o número de dentes de todas as outras engrenagens através da seguinte
relação:
𝑧𝑛 =
104
𝑖𝑛−𝑛+1 + 1 (34)
𝑧𝑛+1 = 104 − 𝑧𝑛 (35)
Sendo 𝑛 o pinhão de cada par engrenado.
Logo, a partir das equações (34) e (35) foi elaborada a seguinte tabela com todos os
números de dentes calculados.
Número de Dentes Soma
Engrenagem 1 61 104
Engrenagem 2 43
Engrenagem 3 35 104
Engrenagem 4 69
Engrenagem 5 52 104
Engrenagem 6 52
Engrenagem 7 43 104
Engrenagem 8 61
Engrenagem 9 35 104
Engrenagem 10 69
Engrenagem 11 69 104
Engrenagem 12 35
Engrenagem 13 21 104
Engrenagem 14 83
Tabela 4 - Número de Dentes
2.7.2. Determinação das Velocidades Reais de Saída
Uma vez calculados os números de dentes dos pares engrenados, é possível calcular as
velocidades reais de saída. Existe uma pequena diferença entre as velocidades de saída
calculadas no item 2.3 e as que serão calculadas agora pois alguns arredondamentos são feitos
no cálculo do número de dentes. Como recomendado por [5], a diferença entre os valores
teóricos e os reais das rotações de saída não deve exceder ±2%.

24
O cálculo das rotações reais seguirá a seguinte equação:
𝑛𝑟𝑒𝑎𝑙 = 𝑛𝑚𝑜𝑡𝑜𝑟 ∗
1
𝑖𝐼−𝐼𝐼∗
1
𝑖𝐼𝐼−𝐼𝐼𝐼∗
1
𝑖𝐼𝐼𝐼−𝐼𝑉∗
1
𝑖𝐼𝑉−𝑉 (36)
Foi elaborada uma tabela no software Microsoft Excel para se calcularem todas as
velocidades reais de saída e o erro pertinente a cada uma. Tal tabela encontra-se a seguir:
O valor do erro foi calculado de acordo com a equação (37), a seguir:
𝑒 =𝑛𝑖𝑑𝑒𝑎𝑙 − 𝑛𝑟𝑒𝑎𝑙
𝑛𝑟𝑒𝑎𝑙∗ 100 (37)
Como pode ser observado na Tabela 5, o valor do erro para todas as rotações encontra-
se dentro do limite aceitável de ±2%.
2.7.3. Seleção dos Materiais das Engrenagens
A escolha dos materiais não é algo trivial. É necessário buscar na literatura quais os
tipos de aço geralmente empregados na confecção de engrenagens e então, depois de
realizados alguns cálculos, como de fadiga e desgaste superficial, observar se o material
selecionado atende aos requisitos do projeto. Caso os cálculos dos fatores de segurança não
retornem os valores esperados é necessário alterar o material de forma a atender à demanda da
situação. No presente projeto vários materiais foram testados, e os apresentados abaixo foram
selecionados pois atendiam às necessidades do projeto.
𝒏𝒊𝒅𝒆𝒂𝒍 𝒏𝒓𝒆𝒂𝒍 erro
𝑛1 80,0 81,3 -1,55%
𝑛2 112,8 112,9 -0,11%
𝑛3 159,1 160,2 -0,72%
𝑛4 224,3 227,3 -1,32%
𝑛5 316,2 315,8 0,12%
𝑛6 445,9 448,0 -0,49%
𝑛7 628,6 633,2 -0,72%
𝑛8 886,4 879,9 0,74%
𝑛9 1249,8 1248,3 0,12%
𝑛10 1762,2 1770,8 -0,48%
𝑛11 2484,7 2460,8 0,97%
𝑛12 3503,5 3491,0 0,36%
Tabela 5 - Rotações reais de saída e erro
25
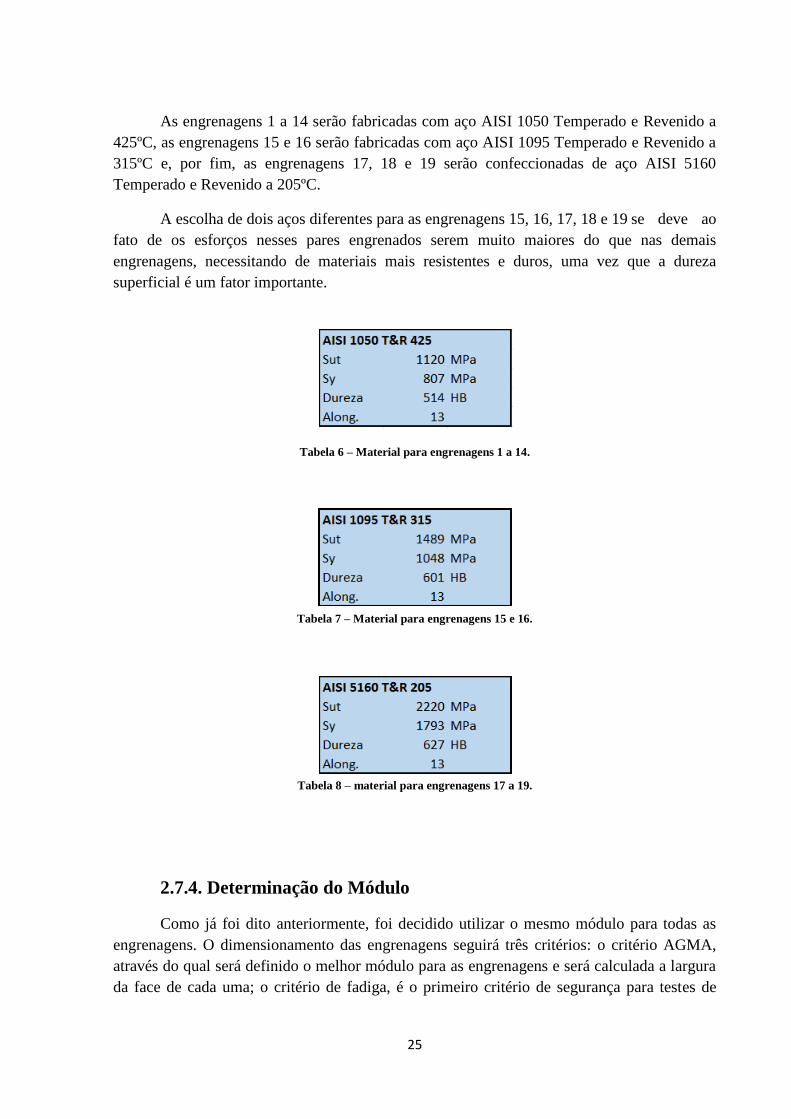
As engrenagens 1 a 14 serão fabricadas com aço AISI 1050 Temperado e Revenido a
425ºC, as engrenagens 15 e 16 serão fabricadas com aço AISI 1095 Temperado e Revenido a
315ºC e, por fim, as engrenagens 17, 18 e 19 serão confeccionadas de aço AISI 5160
Temperado e Revenido a 205ºC.
A escolha de dois aços diferentes para as engrenagens 15, 16, 17, 18 e 19 se deve ao
fato de os esforços nesses pares engrenados serem muito maiores do que nas demais
engrenagens, necessitando de materiais mais resistentes e duros, uma vez que a dureza
superficial é um fator importante.
Tabela 6 – Material para engrenagens 1 a 14.
Tabela 7 – Material para engrenagens 15 e 16.
Tabela 8 – material para engrenagens 17 a 19.
2.7.4. Determinação do Módulo
Como já foi dito anteriormente, foi decidido utilizar o mesmo módulo para todas as
engrenagens. O dimensionamento das engrenagens seguirá três critérios: o critério AGMA,
através do qual será definido o melhor módulo para as engrenagens e será calculada a largura
da face de cada uma; o critério de fadiga, é o primeiro critério de segurança para testes de

26
resistência à fadiga das engrenagens dimensionadas; e o critério de desgaste superficial, que é
o segundo critério de segurança aplicado e avalia falhas superficiais.
2.7.4.1. Critério AGMA
É recomendado por [2] e [6], e foi adotado no projeto, que a largura da face da
engrenagem deve ser um valor entre 2 vezes e 5 vezes o passo da mesma, e que o fator de
segurança deve estar entre 2 e 5.
O critério AGMA consiste em elaborar uma tabela para se testar os diversos
parâmetros a serem calculados levando em consideração diferentes módulos, a fim de,
atendendo às recomendações citadas acima, determinar um módulo satisfatório.
A tabela mencionada consiste de sete parâmetros a serem calculados e uma checagem
de resultado. Dessa forma pode-se afirmar o valor do módulo a ser utilizado. Abaixo segue
cada um dos sete parâmetros a serem avaliado:
𝑑𝑝 = 𝑚 ∗ 𝑧 [𝑚] (38)
𝑣 =
𝜋 ∗ 𝑑𝑝 ∗ 𝑛
60 [𝑚 𝑠⁄ ] (39)
Sendo,
𝑑𝑝 → Diâmetro primitivo.
𝑚 → Módulo da engrenagem.
𝑧 → Número de dentes da engrenagem.
𝑣 → Velocidade tangencial no diâmetro primitivo.
𝑛 → Rotação da engrenagem [rpm].
𝑊𝑡 =
𝑃
𝑣 [𝑘𝑁] (40)
𝐾𝑣 =
5,56
5,56 + √𝑣 (41)
27
𝜎𝑎𝑑𝑚 =
𝑆𝑦
𝐶𝑆 [𝑀𝑃𝑎] (42)
𝐹 =
𝑊𝑡
𝐾𝑣 ∗ 𝐽 ∗ 𝜎𝑎𝑑𝑚 ∗ 𝑚 [𝑚𝑚] (43)
Em que,
𝑊𝑡 → Esforço Tangencial.
𝑃 → Potência do motor acionador [kW].
𝐾𝑣 → Fator dinâmico.
𝜎𝑎𝑑𝑚 → Tensão admissível.
𝐶𝑆 → Coeficiente de Segurança. 𝐶𝑆 = 5.
𝐽 → Fator geométrico da AGMA.
Com exceção do fator geométrico, todos os outros parâmetros são calculáveis. O fator
J pode ser obtido através da Tabela 42, no Anexo I, sabendo-se o ângulo de pressão 𝜃 e o
número de dentes de ambas as engrenagens do acoplamento.
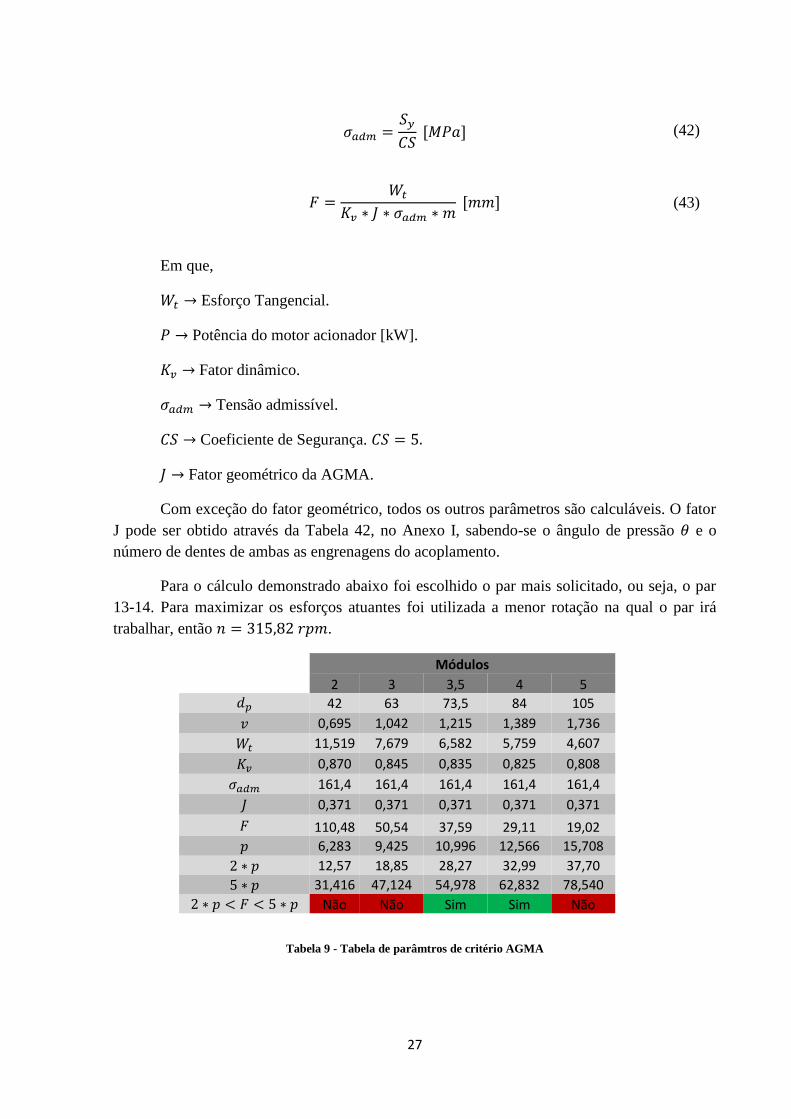
Para o cálculo demonstrado abaixo foi escolhido o par mais solicitado, ou seja, o par
13-14. Para maximizar os esforços atuantes foi utilizada a menor rotação na qual o par irá
trabalhar, então 𝑛 = 315,82 𝑟𝑝𝑚.
Módulos 2 3 3,5 4 5 𝑑𝑝 42 63 73,5 84 105
𝑣 0,695 1,042 1,215 1,389 1,736
𝑊𝑡 11,519 7,679 6,582 5,759 4,607
𝐾𝑣 0,870 0,845 0,835 0,825 0,808
𝜎𝑎𝑑𝑚 161,4 161,4 161,4 161,4 161,4
𝐽 0,371 0,371 0,371 0,371 0,371
𝐹 110,48 50,54 37,59 29,11 19,02
𝑝 6,283 9,425 10,996 12,566 15,708
2 ∗ 𝑝 12,57 18,85 28,27 32,99 37,70
5 ∗ 𝑝 31,416 47,124 54,978 62,832 78,540
2 ∗ 𝑝 < 𝐹 < 5 ∗ 𝑝 Não Não Sim Sim Não
Tabela 9 - Tabela de parâmtros de critério AGMA
28
Como pode ser observado na Tabela 9 há dois módulos possíveis. Para o projeto foi
definido que o módulo a ser utilizado será 4, este é o melhor valor a ser utilizado para que
todas tenham o mesmo módulo.
É importante ressaltar que para facilitar a fabricação das engrenagens e projeto das
demais peças, foi decidido que todas as engrenagens terão a mesma face, cujo valor foi
definido em 33 mm.
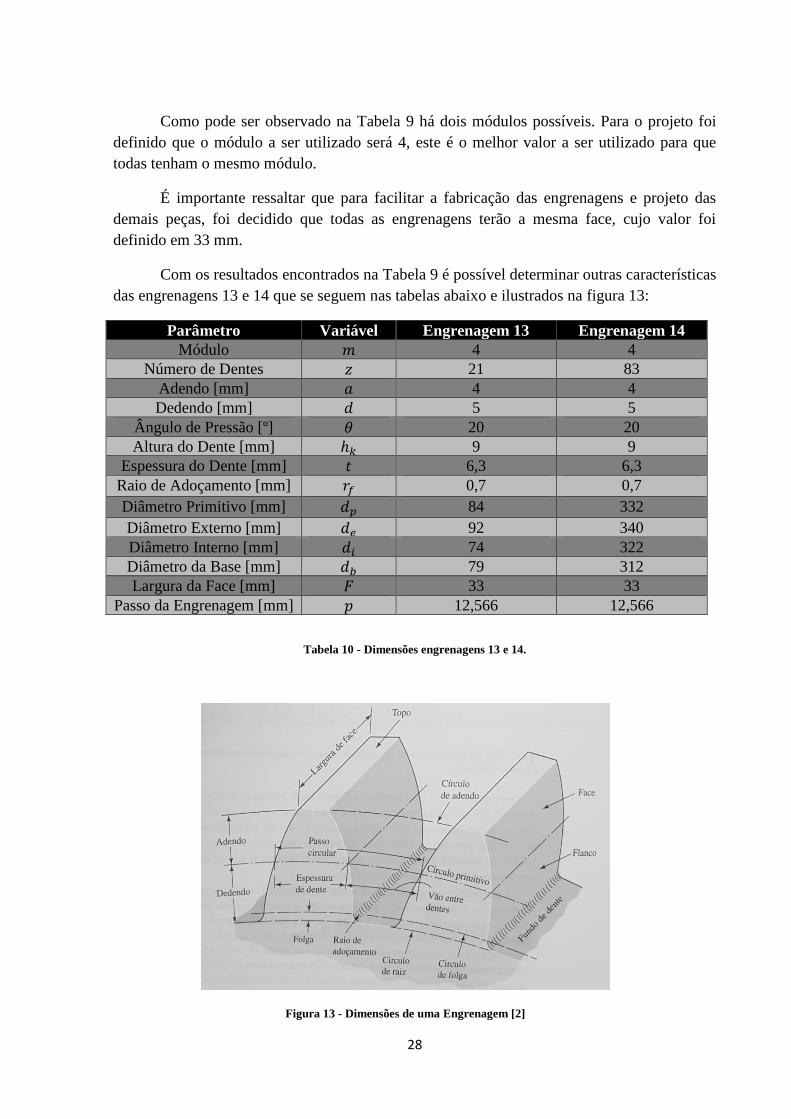
Com os resultados encontrados na Tabela 9 é possível determinar outras características
das engrenagens 13 e 14 que se seguem nas tabelas abaixo e ilustrados na figura 13:
Parâmetro Variável Engrenagem 13 Engrenagem 14
Módulo 𝑚 4 4
Número de Dentes 𝑧 21 83
Adendo [mm] 𝑎 4 4
Dedendo [mm] 𝑑 5 5
Ângulo de Pressão [º] 𝜃 20 20
Altura do Dente [mm] ℎ𝑘 9 9
Espessura do Dente [mm] 𝑡 6,3 6,3
Raio de Adoçamento [mm] 𝑟𝑓 0,7 0,7
Diâmetro Primitivo [mm] 𝑑𝑝 84 332
Diâmetro Externo [mm] 𝑑𝑒 92 340
Diâmetro Interno [mm] 𝑑𝑖 74 322
Diâmetro da Base [mm] 𝑑𝑏 79 312
Largura da Face [mm] 𝐹 33 33
Passo da Engrenagem [mm] 𝑝 12,566 12,566
Tabela 10 - Dimensões engrenagens 13 e 14.
Figura 13 - Dimensões de uma Engrenagem [2]

29
2.7.4.2. Critério de Fadiga
O critério de fadiga consiste no cálculo de um fator de segurança global, 𝜂𝐺 , e um
fator de segurança corrigido, 𝜂. Para que a engrenagem seja aceita é preciso que ambos os
fatores sejam maiores do que 1,0.
O cálculo dos fatores de segurança começa pela determinação do limite de fadiga
completamente corrigido 𝑆𝑒 [3].
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑘𝑓 ∗ 𝑆𝑒′ (44)
Sendo,
𝑘𝑎 → Fator de acabamento superficial [2]
𝑘𝑏 → Fator de tamanho e dimensão
𝑘𝑐 → Fator de confiabilidade
𝑘𝑑 → Fator de temperatura
𝑘𝑒 → Fator de concentração de tensões
𝑘𝑓 → Fator de flexão do dente
𝑆𝑒′ → Limite de Fadiga [MPa]
Para se determinar todos os fatores listados acima, algumas decisões precisam ser
tomadas. A seguir é mostrado como cada um é obtido assim como as considerações feitas
explicando os valores obtidos.
• 𝑘𝑎 : É obtido através da equação (45) e os valores de 𝑎 e 𝑏 são determinados
pela Tabela 43, no Anexo I, e foi considerado que todas as engrenagens do
projeto teriam acabamento superficial retificado. Portanto:
𝑘𝑎 = 𝑎 ∗ 𝑆𝑢𝑡𝑏 (45)
• 𝑘𝑏 : Depende da largura do dente ℎ, e da espessura do dente 𝑏. É calculado
através da equação (46) ou obtido através da Tabela 44, no Anexo I:
𝑘𝑏 = {
1 𝑑 ≤ 8 𝑚𝑚1,189 ∗ 𝑑−0,097 8 𝑚𝑚 < 𝑑 ≤ 250 𝑚𝑚
(46)
Sendo,
𝑑 = 0,808 ∗ (ℎ ∗ 𝑏)1/2 (47)

30
ℎ = 𝜋 ∗ 𝑚 (48)
𝑏 = 3 ∗ 𝑝 (49)
𝑚 → Módulo da engrenagem
𝑝 → Passo
• 𝑘𝑐 : Depende da confiabilidade do projeto. Foi determinado que o projeto teria
uma confiabilidade de 95%. O valor de 𝑘𝑐 é obtido através da Tabela 45, no
Anexo I.
• 𝑘𝑑 : Depende da temperatura de trabalho. Para esse projeto foi determinado
que a temperatura de trabalho será em torno de 60ºC. Seu valor é retirado da
Tabela 46, no Anexo I.
• 𝑘𝑒 : No modelo considerado o valor de 𝑘𝑒 será 1,0, pois o fator de
concentração de tensões já está embutido no calculo do fator de forma 𝐽
utilizado no critério AGMA.
• 𝑘𝑓 : O valor do fator de flexão do dente depende do material selecionado para
as engrenagens e pode ser determinado a partir da equação (50):
𝑘𝑓 = {
1,33 𝑆𝑢𝑡 ≤ 1400 𝑀𝑃𝑎2
1 + (700𝑆𝑢𝑡
) 𝑆𝑢𝑡 > 1400 𝑀𝑃𝑎 (50)
• 𝑆𝑒′ : O limite de fadiga é calculado de acordo com a equação (51):
𝑆𝑒′ = {
𝑆𝑢𝑡 2⁄ 𝑆𝑢𝑡 ≤ 1400 𝑀𝑃𝑎700 𝑆𝑢𝑡 > 1400 𝑀𝑃𝑎
(51)
Após o calculo de 𝑆𝑒 é possível, então, encontrar os valores para os fatores de
segurança. Primeiramente calcula-se o fator global através da seguinte equação:
𝜂𝐺 =
𝑆𝑒𝜎𝐴𝐺𝑀𝐴
(52)
Caso o valor de 𝜂𝐺 seja maior que 1,0, como o desejado, o próximo passo é calcular o
fator de segurança corrigido. Para tal é preciso definir mais dois fatores, o fator de correção de
sobrecarga 𝐾𝑜 e o fator de distribuição de carga ao longo do dente 𝐾𝑚.
• 𝐾𝑜 : O fator de sobrecarga depende do tipo de impacto da máquina motora e da
máquina movida. Para o presente projeto foi considerado impacto uniforme
para ambas. O valor pode ser obtido através da Tabela 47, no Anexo I.

31
• 𝐾𝑚 : O fator de distribuição de carga depende da largura do dente da
engrenagem e do tipo de montagem realizada. Para as engrenagens 1 a 16 foi
considerada uma montagem menos rígida, enquanto que para as engrenagens
17, 18 e 19 foi considerada uma montagem mais acurada em razão das maiores
cargas que devem ser suportadas. O valor de 𝐾𝑚 é extraído da Tabela 48, no
Anexo I.
O valor do fator de segurança global é então obtido resolvendo-se a equação (53):
𝜂 =𝜂𝐺
𝐾𝑜 ∗ 𝐾𝑚 (53)
Caso o valor dos dois fatores de segurança seja superior a 1,0, então pode-se aplicar o
segundo critério de segurança, o de desgaste superficial, caso contrário é preciso retornar no
projeto e verificar se as decisões tomadas e os parâmetros escolhidos atendem à demanda.
Da equação (45):
𝑘𝑎 = 1,58 ∗ 1120−0,085 = 0,87
Os valores definidos para 𝑘𝑏, 𝑘𝑐, 𝑘𝑑 e 𝑘𝑒, conforme explicado anteriormente, foram:
𝑘𝑏 = 0,942
𝑘𝑐 = 0,868
𝑘𝑑 = 1,0
𝑘𝑒 = 1,0
Da equação (50):
𝑘𝑓 = 1,33 → 𝑆𝑢𝑡 ≤ 1400 𝑀𝑃𝑎
Da equação (51):
𝑆𝑒′ = 𝑆𝑢𝑡 2⁄ = 560 𝑀𝑃𝑎
Portanto, da equação (44), o limite de resistência à fadiga é:
𝑆𝑒 = 0,87 ∗ 0,942 ∗ 0,868 ∗ 1 ∗ 1 ∗ 1,33 ∗ 560 = 529,77 𝑀𝑃𝑎 (54)
Então, de (54) em (52):
𝜂𝐺 =520,66
161,4= 3,28
32
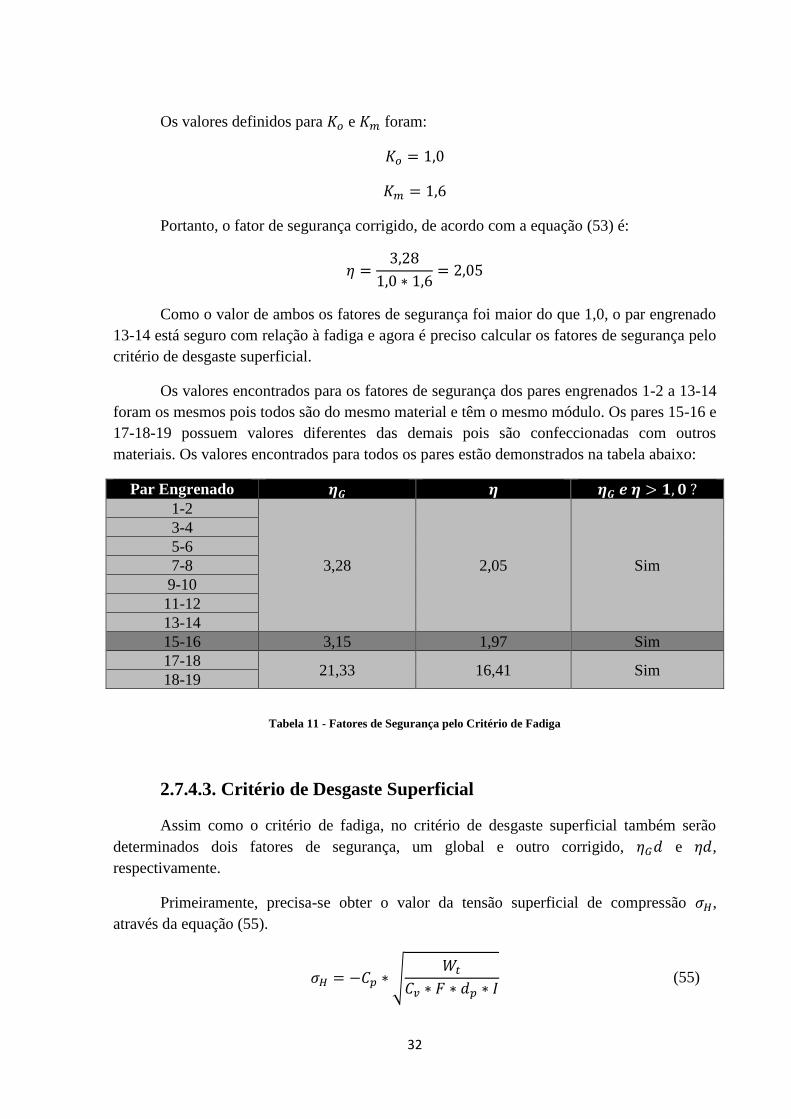
Os valores definidos para 𝐾𝑜 e 𝐾𝑚 foram:
𝐾𝑜 = 1,0
𝐾𝑚 = 1,6
Portanto, o fator de segurança corrigido, de acordo com a equação (53) é:
𝜂 =3,28
1,0 ∗ 1,6= 2,05
Como o valor de ambos os fatores de segurança foi maior do que 1,0, o par engrenado
13-14 está seguro com relação à fadiga e agora é preciso calcular os fatores de segurança pelo
critério de desgaste superficial.
Os valores encontrados para os fatores de segurança dos pares engrenados 1-2 a 13-14
foram os mesmos pois todos são do mesmo material e têm o mesmo módulo. Os pares 15-16 e
17-18-19 possuem valores diferentes das demais pois são confeccionadas com outros
materiais. Os valores encontrados para todos os pares estão demonstrados na tabela abaixo:
Par Engrenado 𝜼𝑮 𝜼 𝜼𝑮 𝒆 𝜼 > 𝟏, 𝟎 ? 1-2
3,28 2,05 Sim
3-4
5-6
7-8
9-10
11-12
13-14
15-16 3,15 1,97 Sim
17-18 21,33 16,41 Sim
18-19
Tabela 11 - Fatores de Segurança pelo Critério de Fadiga
2.7.4.3. Critério de Desgaste Superficial
Assim como o critério de fadiga, no critério de desgaste superficial também serão
determinados dois fatores de segurança, um global e outro corrigido, 𝜂𝐺𝑑 e 𝜂𝑑,
respectivamente.
Primeiramente, precisa-se obter o valor da tensão superficial de compressão 𝜎𝐻,
através da equação (55).
𝜎𝐻 = −𝐶𝑝 ∗ √𝑊𝑡
𝐶𝑣 ∗ 𝐹 ∗ 𝑑𝑝 ∗ 𝐼 (55)

33
𝐼 =
cos(𝜃) ∗ 𝑠𝑒𝑛(𝜃)
2∗
𝑖
𝑖 + 1 (56)
Sendo,
𝐶𝑝 → Coeficiente Elástico [𝑀𝑃𝑎]1
2
𝐶𝑣 → Coeficiente Dinâmico
𝐼 → Fator Geométrico
𝑖 → Relação de transmissão do par
• 𝐶𝑝 é determinado através da Tabela 49, no Anexo I, e depende somente do
material do pinhão e da coroa.
• 𝐶𝑣 é obtido da mesma forma que 𝐾𝑣, através da equação (41).
Após obtido o 𝜎𝐻, é preciso determinar a tensão de desgaste superficial 𝑆𝐻, que se dá
na equação (57):
𝑆𝐻 = 𝑆𝐶
𝐶𝐿 ∗ 𝐶𝐻𝐶𝑇 ∗ 𝐶𝑅
(57)
Em que:
𝑆𝐶 → Resistência ao desgaste superficial para vida de até 108 ciclos.
𝐶𝐿 → Fator de Vida.
𝐶𝐻 → Fator de relação de durezas.
𝐶𝑇 → Fator de Temperatura.
𝐶𝑅 → Fator de Confiabilidade.
A resistência ao desgaste superficial e os fatores acima citados são determinados da
seguinte forma:
• 𝑆𝐶 : Foi determinado que será utilizado grau 2 para todas as engrenagens.
Desta forma:
𝑆𝐶 = 2,35 ∗ 𝐻𝐵 + 162,89 𝐺𝑟𝑎𝑢 1 (58)
𝑆𝐶 = 2,51 ∗ 𝐻𝐵 + 203,86 𝐺𝑟𝑎𝑢 2 (59)

34
• 𝐶𝐿 : O fator de vida depende do número de ciclos de vida esperados. Será
utilizado um valor para 108 ou mais ciclos. Seu valor pode ser retirado da
Tabela 50, no Anexo I.
• 𝐶𝐻 : Como as engrenagens são do mesmo material e são engrenagens de dentes
retos, é sugerido por [6] usar 𝐶𝐻 = 1.
• 𝐶𝑇 : Como a temperatura de trabalho será menor que 120ºC, logo 𝐶𝑇 = 1.
• 𝐶𝑅 : Como já foi mencionado anteriormente, a confiabilidade do projeto é de
95%, portanto de acordo com a Tabela 51, no Anexo I, 𝐶𝑅 = 0,8.
Assim que 𝑆𝐻 e 𝜎𝐻 forem calculados já é possível determinar o fator de segurança
global através da seguinte equação:
𝜂𝐺𝑑 =
𝑆𝐻|𝜎𝐻|
(60)
Com o fator de segurança global, deve-se determinar mais dois fatores para se poder
efetuar o cálculo do fator de segurança corrigido. Tais fatores são 𝐶𝑜 e 𝐶𝑚 que são,
respectivamente, o fator de sobrecarga e o fator de distribuição de carga. Os métodos para a
obtenção dos valores são os mesmos utilizados para determinar 𝐾𝑜 e 𝐾𝑚 no critério anterior.
O valor para o fator de segurança corrigido é, então, dado pela equação (61):
𝜂𝑑 =
𝜂𝐺𝑑
𝐶𝑜 ∗ 𝐶𝑚 (61)
Abaixo está demonstrado o cálculo para o par engrenado 13-14.
O valor selecionado para 𝐶𝑝, como ambas as engrenagens são de aço será:
𝐶𝑝 = 191
Da equação (41):
𝐶𝑣 = 0,908
Da equação (56):
𝐼 =cos(20°) ∗ 𝑠𝑒𝑛(20°)
2∗
3,953
3,953 + 1= 0,12825
Portanto, 𝜎𝐻, da equação (55):
𝜎𝐻 = −191 ∗ √5759
0,919 ∗ 29,11 ∗ 84 ∗ 0,12825= −858,8 𝑀𝑃𝑎
35
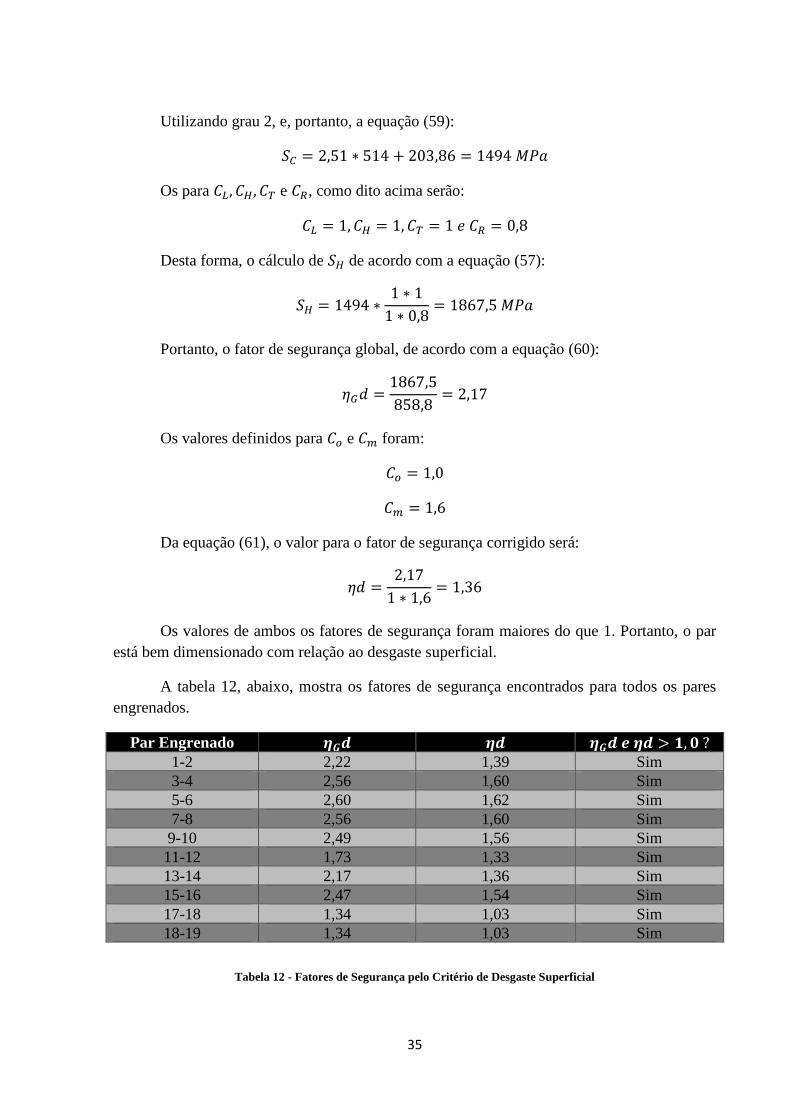
Utilizando grau 2, e, portanto, a equação (59):
𝑆𝐶 = 2,51 ∗ 514 + 203,86 = 1494 𝑀𝑃𝑎
Os para 𝐶𝐿 , 𝐶𝐻, 𝐶𝑇 e 𝐶𝑅, como dito acima serão:
𝐶𝐿 = 1, 𝐶𝐻 = 1, 𝐶𝑇 = 1 𝑒 𝐶𝑅 = 0,8
Desta forma, o cálculo de 𝑆𝐻 de acordo com a equação (57):
𝑆𝐻 = 1494 ∗1 ∗ 1
1 ∗ 0,8= 1867,5 𝑀𝑃𝑎
Portanto, o fator de segurança global, de acordo com a equação (60):
𝜂𝐺𝑑 =1867,5
858,8= 2,17
Os valores definidos para 𝐶𝑜 e 𝐶𝑚 foram:
𝐶𝑜 = 1,0
𝐶𝑚 = 1,6
Da equação (61), o valor para o fator de segurança corrigido será:
𝜂𝑑 =2,17
1 ∗ 1,6= 1,36
Os valores de ambos os fatores de segurança foram maiores do que 1. Portanto, o par
está bem dimensionado com relação ao desgaste superficial.
A tabela 12, abaixo, mostra os fatores de segurança encontrados para todos os pares
engrenados.
Par Engrenado 𝜼𝑮𝒅 𝜼𝒅 𝜼𝑮𝒅 𝒆 𝜼𝒅 > 𝟏, 𝟎 ? 1-2 2,22 1,39 Sim
3-4 2,56 1,60 Sim
5-6 2,60 1,62 Sim
7-8 2,56 1,60 Sim
9-10 2,49 1,56 Sim
11-12 1,73 1,33 Sim
13-14 2,17 1,36 Sim
15-16 2,47 1,54 Sim
17-18 1,34 1,03 Sim
18-19 1,34 1,03 Sim
Tabela 12 - Fatores de Segurança pelo Critério de Desgaste Superficial
36
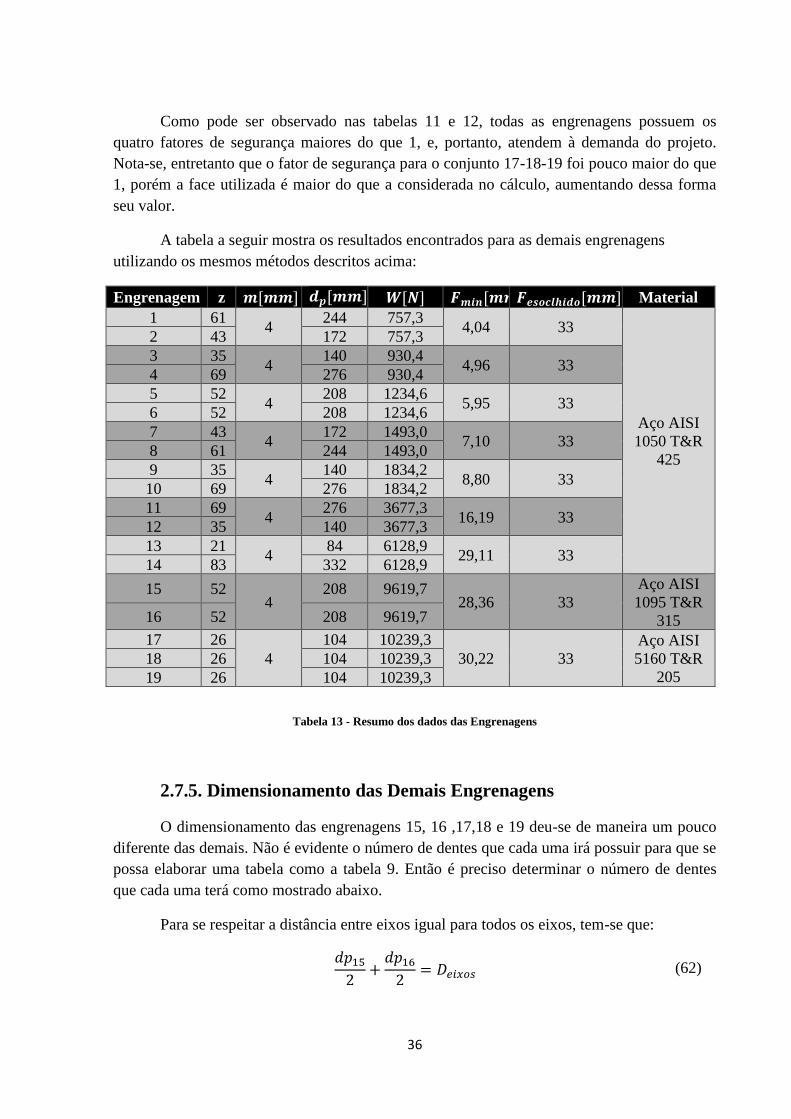
Como pode ser observado nas tabelas 11 e 12, todas as engrenagens possuem os
quatro fatores de segurança maiores do que 1, e, portanto, atendem à demanda do projeto.
Nota-se, entretanto que o fator de segurança para o conjunto 17-18-19 foi pouco maior do que
1, porém a face utilizada é maior do que a considerada no cálculo, aumentando dessa forma
seu valor.
A tabela a seguir mostra os resultados encontrados para as demais engrenagens
utilizando os mesmos métodos descritos acima:
Engrenagem z 𝒎[𝒎𝒎] 𝒅𝒑[𝒎𝒎] 𝑾[𝑵] 𝑭𝒎𝒊𝒏[𝒎𝒎] 𝑭𝒆𝒔𝒐𝒄𝒍𝒉𝒊𝒅𝒐[𝒎𝒎] Material
1 61 4
244 757,3 4,04 33
Aço AISI
1050 T&R
425
2 43 172 757,3
3 35 4
140 930,4 4,96 33
4 69 276 930,4
5 52 4
208 1234,6 5,95 33
6 52 208 1234,6
7 43 4
172 1493,0 7,10 33
8 61 244 1493,0
9 35 4
140 1834,2 8,80 33
10 69 276 1834,2
11 69 4
276 3677,3 16,19 33
12 35 140 3677,3
13 21 4
84 6128,9 29,11 33
14 83 332 6128,9
15 52 4
208 9619,7 28,36 33
Aço AISI
1095 T&R
315 16 52 208 9619,7
17 26
4
104 10239,3
30,22 33
Aço AISI
5160 T&R
205
18 26 104 10239,3
19 26 104 10239,3
Tabela 13 - Resumo dos dados das Engrenagens
2.7.5. Dimensionamento das Demais Engrenagens
O dimensionamento das engrenagens 15, 16 ,17,18 e 19 deu-se de maneira um pouco
diferente das demais. Não é evidente o número de dentes que cada uma irá possuir para que se
possa elaborar uma tabela como a tabela 9. Então é preciso determinar o número de dentes
que cada uma terá como mostrado abaixo.
Para se respeitar a distância entre eixos igual para todos os eixos, tem-se que:
𝑑𝑝152
+𝑑𝑝162
= 𝐷𝑒𝑖𝑥𝑜𝑠 (62)

37
𝑑𝑝172
+ 𝑑𝑝18 +𝑑𝑝192
= 𝐷𝑒𝑖𝑥𝑜𝑠 (63)
Como a relação de transmissão deve ser unitária entre os pares 15-16 e no conjunto
17-18-19, isso implica que:
𝑑𝑝15 = 𝑑𝑝16
𝑑𝑝17 = 𝑑𝑝19
Sabe-se que 𝐷𝑒𝑖𝑥𝑜𝑠 = 208 𝑚𝑚 já que a soma do raio de todas as engrenagens
dimensionadas até agora equivale ao mesmo valor. Portanto, basta encontrar o número de
dentes de 𝑑𝑝18 para poder-se calcular o restante.
Após alguns testes foi decidido utilizar o mesmo número de dentes para as
engrenagens 17, 18 e 19. Então, das equações (62) e (63) sabendo-se que 𝐷𝑒𝑖𝑥𝑜𝑠 = 182 𝑚𝑚,
que o módulo utilizado será 4 e que 𝑑𝑝 = 𝑚 ∗ 𝑧:
𝑧15 = 𝑧16 =208
4= 52
𝑧17 = 𝑧18 = 𝑧19 =208
8= 26
Alguns outros pontos no dimensionamento desses pares diferem dos demais e devem
ser comentados. Dentre eles estão o valor de 𝑘𝑓 e para as engrenagens 17, 18 e 19 os valores
de 𝐾𝑚 e 𝐶𝑚.
O valor de 𝑘𝑓 é diferente pois como os materiais utilizados possuem 𝑆𝑢𝑡 >
1400 𝑀𝑃𝑎, o método de cálculo é diferenciado, como mostrado na equação (50).
Os valores de 𝐾𝑚 e 𝐶𝑚 diferem dos demais pares pois os esforços suportados pelo
conjunto 17-18-19 são consideravelmente maiores do que nos demais pares e por isso é
preciso realizar uma montagem mais cuidadosa e acurada, e, portanto, o valor adotado foi de
1,3.
O próximo passo é o dimensionamento dos eixos, que agora é possível pois temos
algumas dimensões das engrenagens e as forças atuantes em cada uma.
2.8. Dimensionamento dos Eixos
Nesta etapa é possível começar a obter valores guias para a determinação do diâmetro
final de cada eixo, pois já se obteve ao longo do projeto os valores da face das engrenagens,
um esquema de funcionamento e cinemático e os esforços aplicados.

38
O material selecionado foi o aço AISI 1020 CD, que é comumente utilizado para
fabricação de eixos por ter boa usinabilidade.
2.8.1. Determinação das Cargas Aplicadas
No dimensionamento das engrenagens foi calculado o esforço tangencial, 𝑊𝑡, em cada
par engrenado. Conhecendo-se esse esforço e o ângulo de pressão 𝜃 é simples calcular os
demais componentes de acordo com o diagrama abaixo:
𝑊𝑡 = 𝑊 ∗ cos (𝜃) (64)
𝑊𝑟 = 𝑊 ∗ sen (𝜃) (65)
A tabela abaixo mostra os esforços provenientes do contato de cada par engrenado:
Par Engrenado 𝑾 [𝑵] 𝑾𝒕 [𝑵] 𝑾𝒓 [𝑵] 1-2 757,3 711,6 259,0
3-4 930,4 874,3 318,2
5-6 1234,6 1160,1 422,3
7-8 1493,0 1402,9 510,6
9-10 1834,2 1723,6 627,3
11-12 3677,3 3455,6 1257,7
13-14 6128,9 5759,3 2096,2
15-16 9619,7 9039,5 3290,1
17-18 19239,3 18079,1 6580,2
18-19 19239,3 18079,1 6580,2
Tabela 14 - Esforços de cada par engrenado
Figura 14 - Esforços no dente de uma
Engrenagem de Dentes Retos
39
F de uma correia 4 correias
Polia 183,6 734,5
Tabela 15 - Esforço gerado pelas correias de transmissão
Com os valores presentes nas tabelas 14 e 15 já se sabe a magnitude dos esforços
presentes em cada eixo. Entretanto, não é sabida exatamente a localização da aplicação de
cada uma das forças.
Visando obter valores que pudessem ajudar a tomar mais decisões, foram feitos
esboços dos eixos para que se pudesse ter ideia das distâncias entre mancais e aplicação de
cargas e pudessem ser elaborados os diagramas de esforços, já que eles são peça fundamental
na determinação do diâmetro mínimo de cada eixo.
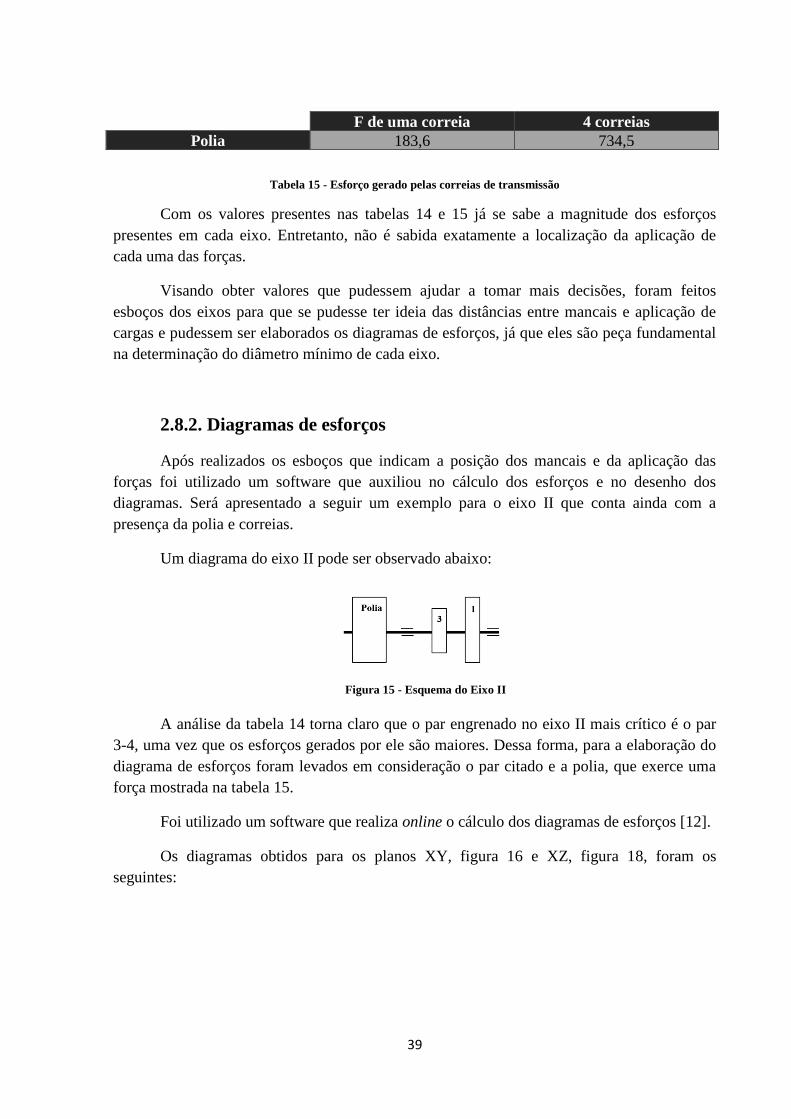
2.8.2. Diagramas de esforços
Após realizados os esboços que indicam a posição dos mancais e da aplicação das
forças foi utilizado um software que auxiliou no cálculo dos esforços e no desenho dos
diagramas. Será apresentado a seguir um exemplo para o eixo II que conta ainda com a
presença da polia e correias.
Um diagrama do eixo II pode ser observado abaixo:
A análise da tabela 14 torna claro que o par engrenado no eixo II mais crítico é o par
3-4, uma vez que os esforços gerados por ele são maiores. Dessa forma, para a elaboração do
diagrama de esforços foram levados em consideração o par citado e a polia, que exerce uma
força mostrada na tabela 15.
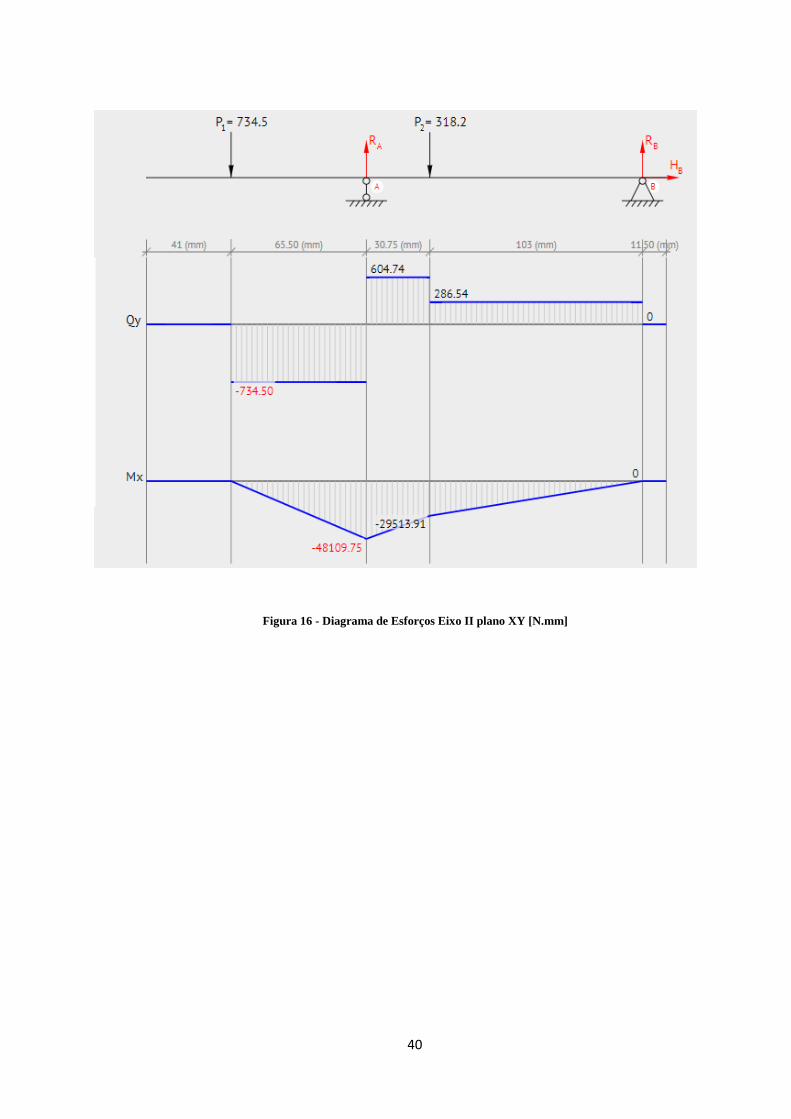
Foi utilizado um software que realiza online o cálculo dos diagramas de esforços [12].
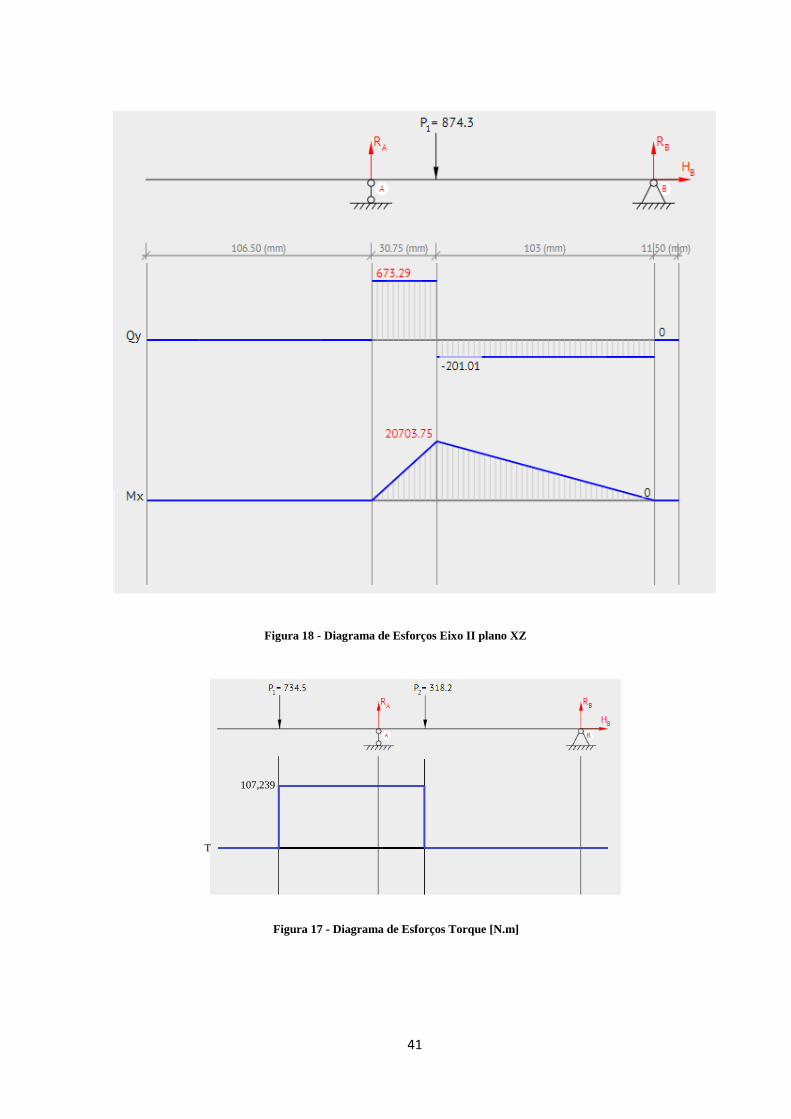
Os diagramas obtidos para os planos XY, figura 16 e XZ, figura 18, foram os
seguintes:
Figura 15 - Esquema do Eixo II
40
Figura 16 - Diagrama de Esforços Eixo II plano XY [N.mm]
41
Figura 17 - Diagrama de Esforços Torque [N.m]
Figura 18 - Diagrama de Esforços Eixo II plano XZ
107,239
107,239
107,239
107,239
107,239
107,239
T
10
7,
23
9
10
7,
23
9
10
42
No diagrama de esforços no eixo XY é possível observar como a força cortante atua
ao longo do eixo e seus valores nos mancais, já o momento que atua sobre o eixo cresce até
atingir seu valor máximo sobre o mancal A e depois diminui até atingir valor nulo no mancal
B. No eixo XZ a força cortante também é definida sobre todo o eixo e o momento fletor tem
máximo no ponto de aplicação da força proveniente da engrenagem 3.
No diagrama de torque é possível observar que o torque é recebido pela polia e
transmitido através da engrenagem 3.
Com os diagramas de esforços é possível determinar a seção do eixo em que o
momento total é máximo, assim como as reações em cada mancal e o torque. Foi elaborada
uma planilha no software Microsoft Excel que auxiliasse no cálculo de todos os valores
desejados com os novos dados obtidos. Abaixo seguem os cálculos para o eixo II.
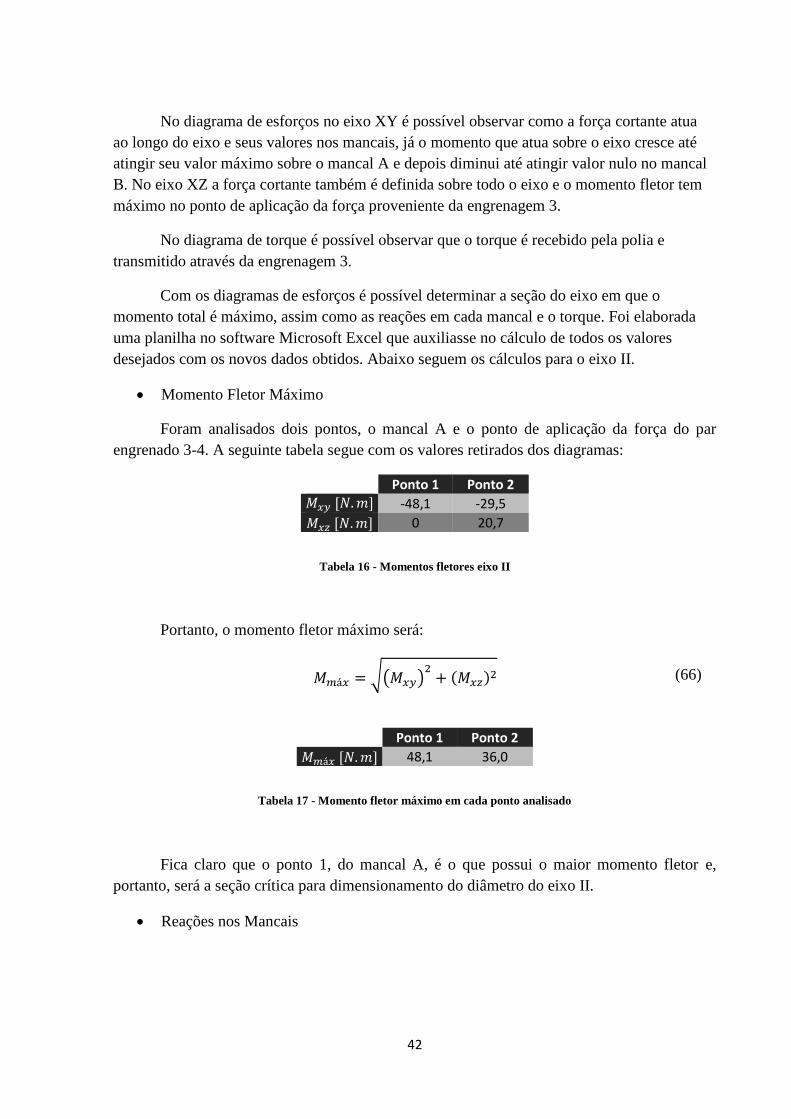
• Momento Fletor Máximo
Foram analisados dois pontos, o mancal A e o ponto de aplicação da força do par
engrenado 3-4. A seguinte tabela segue com os valores retirados dos diagramas:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] -48,1 -29,5
𝑀𝑥𝑧 [𝑁.𝑚] 0 20,7
Tabela 16 - Momentos fletores eixo II
Portanto, o momento fletor máximo será:
𝑀𝑚á𝑥 = √(𝑀𝑥𝑦)
2+ (𝑀𝑥𝑧)
2 (66)
Ponto 1 Ponto 2
𝑀𝑚á𝑥 [𝑁.𝑚] 48,1 36,0
Tabela 17 - Momento fletor máximo em cada ponto analisado
Fica claro que o ponto 1, do mancal A, é o que possui o maior momento fletor e,
portanto, será a seção crítica para dimensionamento do diâmetro do eixo II.
• Reações nos Mancais

43
A tabela abaixo mostra os valores encontrados para as reações nos mancais em cada
plano, assim como o valor efetivo das mesmas:
𝑹𝑨𝒙𝒚 [𝑵] 734,5 𝑹𝑩𝒙𝒚 [𝑵] 286,5
𝑹𝑨𝒙𝒛 [𝑵] 673,3 𝑹𝑩𝒙𝒛 [𝑵] 201,0
𝑹𝑨 [𝑵] 996,4 𝑹𝑩 [𝑵] 350,0
Tabela 18 - Valores para as reações nos mancais
Sendo,
𝑅𝐴 = √(𝑅𝐴𝑥𝑦)
2+ (𝑅𝐴𝑥𝑧)2 (67)
𝑅𝐵 = √(𝑅𝐵𝑥𝑦)
2+ (𝑅𝐵𝑥𝑧)2 (68)
• Torque
O torque será calculado seguindo a equação (69):
𝑇 = 𝑊𝑡 ∗
𝑑
2 (69)
Em que 𝑑 é o diâmetro do componente que exerce a força.
No caso do eixo II a polia será responsável por transmitir o maior torque, portanto:
𝑇 = 734,5 ∗292
2= 107,239 𝑁.𝑚

44
2.8.3. Determinação do Diâmetro Mínimo
2.8.3.1. Critério da Máxima Tensão Cisalhante
Para a análise de carregamento estático, foi utilizado o método da Máxima Tensão
Cisalhante. Tal método retorna um diâmetro mínimo para o eixo analisado, que servirá como
uma primeira estimativa da dimensão. O critério é dado pela seguinte equação, que advém de
simplificações da equação de Tensão de Von Mises [2]:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
(70)
Em que:
𝑀 → Momento Fletor no Ponto Crítico [N.mm]
𝑇 → Torque Máximo Transmitido [N.mm]
𝑆𝑦 → Tensão de Resistência ao Escoamento [MPa]
A equação (70) resolvida para todos os eixos de acordo com os valores obtidos para
o momento fletor e o torque nos diagramas de esforços, considerando-se um coeficiente de
segurança de 1,5. Abaixo segue uma tabela com os resultados encontrados.
Diâmetro (MTC) [mm]
Eixo II 16,6
Eixo III 19,4
Eixo IV 27,0
Eixo V 42,5
Eixo VI 35,3
Eixo VII 34,1
Tabela 19 - Diâmetros obtidos através do MTC
2.8.3.2. Critério de Soderberg
Para a análise de carregamento dinâmico, foi utilizado o critério de Soderberg, que
leva em consideração fadiga.
É importante ressaltar que para todos os eixos, foram analisados mais dois pontos
além do ponto com maior momento fletor. A razão para isso, é que modificações na forma do
eixo, como entalhes e variações de seção, podem acarretar novas seções críticas não intuitivas
por conta de fatores de modificação de concentração de tensões.

45
A equação que descreve o critério de Soderberg é mostrada a seguir, que é análoga à
equação do critério de Máxima Tensão Cisalhante, porém consideram-se efeitos dinâmicos,
através da fadiga:
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
(71)
Sendo,
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
Em que:
Os fatores 𝑘𝑎, 𝑘𝑏 , 𝑘 e 𝑘𝑑 são obtidos da mesma forma como demonstrado na seção
2.7.4.2.
Já o fator 𝐾𝑒 exige um pouco mais de trabalho, pois ele depende do tipo de
concentração de tensão que existe no local analisado.
𝐾𝑒 →
{
1
1 + 𝑞(𝐾𝑡 − 1) , 𝑝𝑎𝑟𝑎 𝑒𝑛𝑡𝑎𝑙ℎ𝑒 𝑜𝑢 𝑣𝑎𝑟𝑖𝑎çã𝑜 𝑑𝑒 𝑠𝑒çã𝑜
1
𝐾𝑓∗ , 𝑝𝑎𝑟𝑎 𝑟𝑎𝑠𝑔𝑜𝑠 𝑑𝑒 𝑐ℎ𝑎𝑣𝑒𝑡𝑎
(72)
Os fatores 𝐾𝑡 e 𝑞 são retirados, respectivamente, da Tabela 52, no Anexo I, e da
Tabela 53, no Anexo I. O valor de 𝐾𝑓∗ advém da Tabela 54, no Anexo I.
Com exceção do eixo II, os demais eixos apresentaram a seção crítica no rasgo de
chaveta. No caso do eixo II, a variação de seção próxima ao ponto de maior momento fletor
foi responsável por concentrar mais as tensões.
A seguir está demonstrado o cálculo realizado para o eixo II. Os demais cálculos
encontram-se no Apêndice A.
Os valores determinados para 𝑘𝑎, 𝑘𝑏 , 𝑘𝑐 e 𝑘𝑑 foram:
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
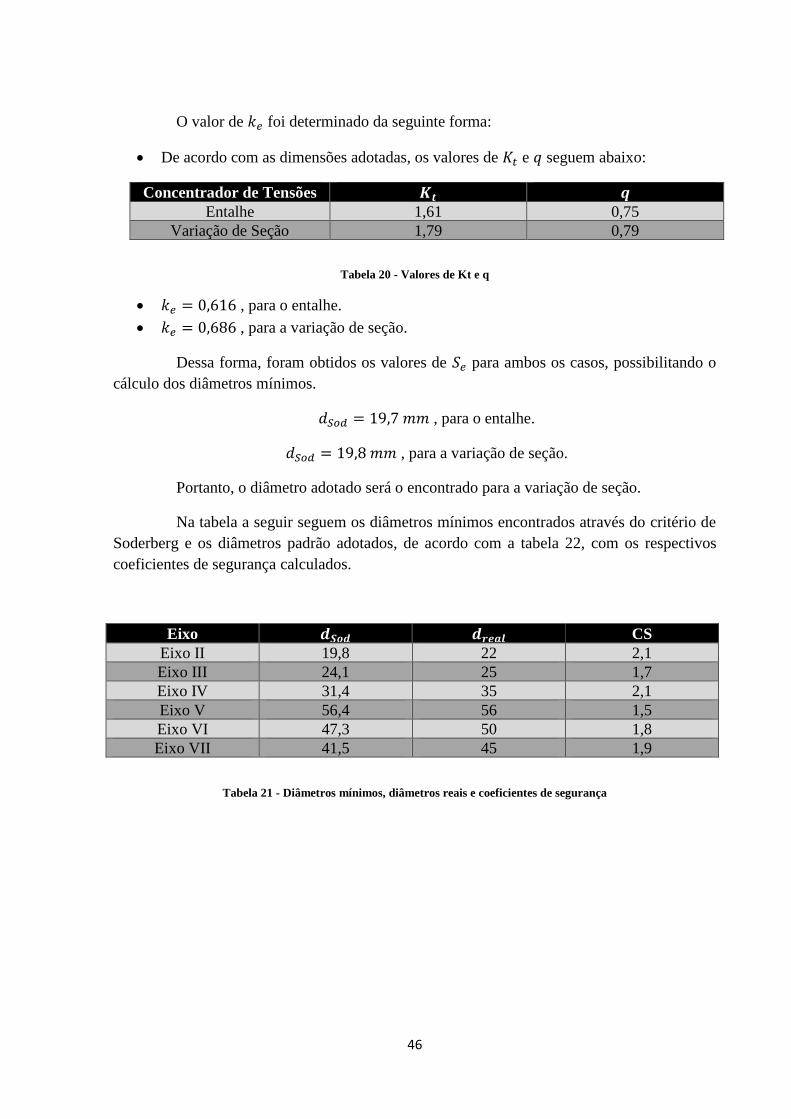
46
O valor de 𝑘𝑒 foi determinado da seguinte forma:
• De acordo com as dimensões adotadas, os valores de 𝐾𝑡 e 𝑞 seguem abaixo:
Concentrador de Tensões 𝑲𝒕 𝒒
Entalhe 1,61 0,75
Variação de Seção 1,79 0,79
Tabela 20 - Valores de Kt e q
• 𝑘𝑒 = 0,616 , para o entalhe.
• 𝑘𝑒 = 0,686 , para a variação de seção.
Dessa forma, foram obtidos os valores de 𝑆𝑒 para ambos os casos, possibilitando o
cálculo dos diâmetros mínimos.
𝑑𝑆𝑜𝑑 = 19,7 𝑚𝑚 , para o entalhe.
𝑑𝑆𝑜𝑑 = 19,8 𝑚𝑚 , para a variação de seção.
Portanto, o diâmetro adotado será o encontrado para a variação de seção.
Na tabela a seguir seguem os diâmetros mínimos encontrados através do critério de
Soderberg e os diâmetros padrão adotados, de acordo com a tabela 22, com os respectivos
coeficientes de segurança calculados.
Eixo 𝒅𝑺𝒐𝒅 𝒅𝒓𝒆𝒂𝒍 CS
Eixo II 19,8 22 2,1
Eixo III 24,1 25 1,7
Eixo IV 31,4 35 2,1
Eixo V 56,4 56 1,5
Eixo VI 47,3 50 1,8
Eixo VII 41,5 45 1,9
Tabela 21 - Diâmetros mínimos, diâmetros reais e coeficientes de segurança
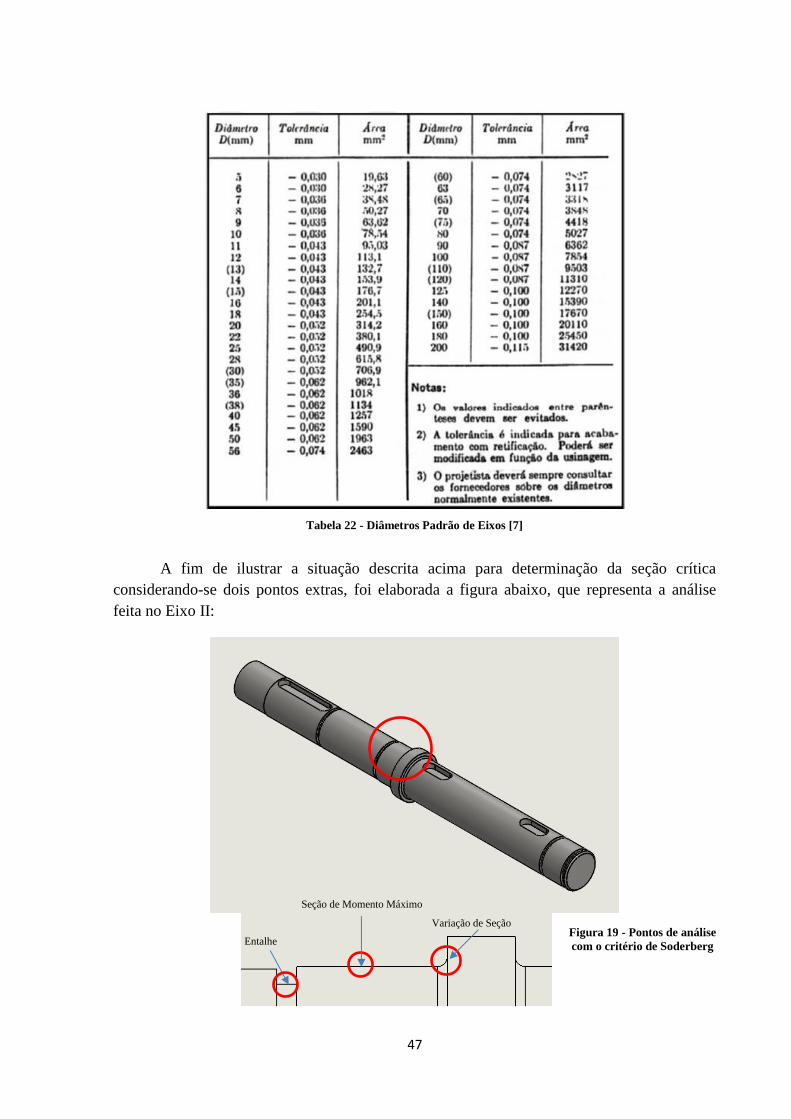
47
A fim de ilustrar a situação descrita acima para determinação da seção crítica
considerando-se dois pontos extras, foi elaborada a figura abaixo, que representa a análise
feita no Eixo II:
Seção de Momento Máximo
Variação de Seção
Entalhe Figura 19 - Pontos de análise
com o critério de Soderberg
Tabela 22 - Diâmetros Padrão de Eixos [7]
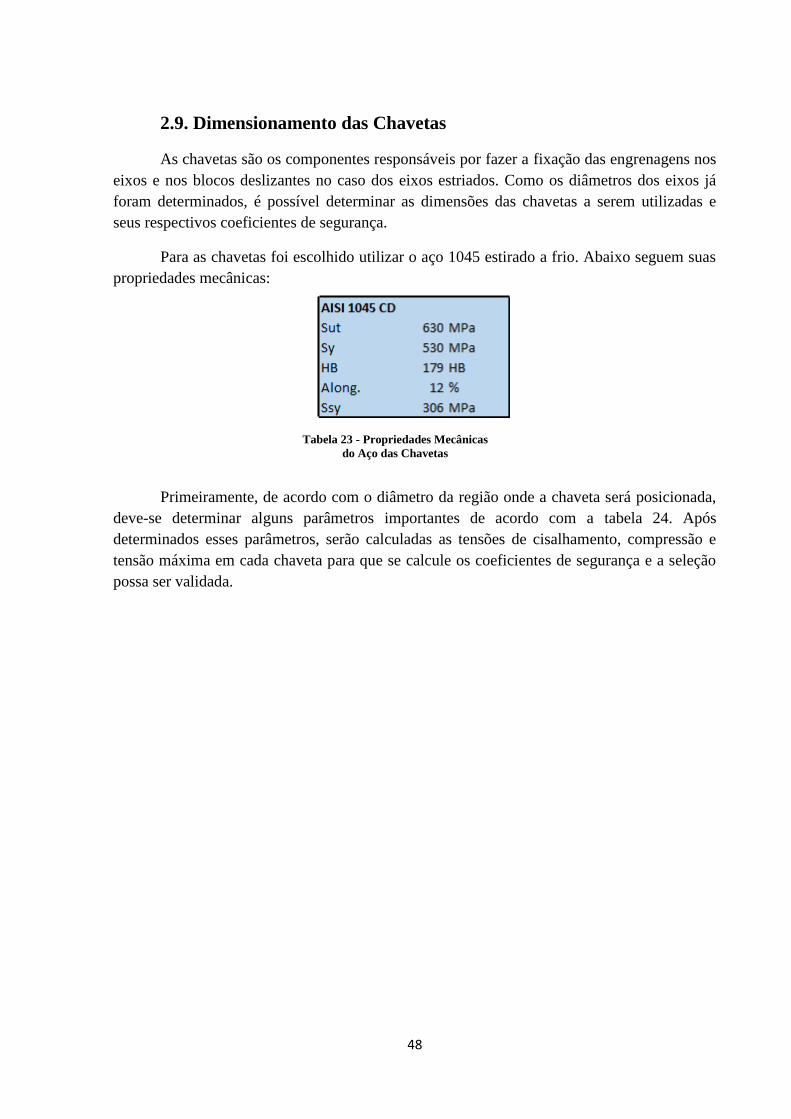
48
2.9. Dimensionamento das Chavetas
As chavetas são os componentes responsáveis por fazer a fixação das engrenagens nos
eixos e nos blocos deslizantes no caso dos eixos estriados. Como os diâmetros dos eixos já
foram determinados, é possível determinar as dimensões das chavetas a serem utilizadas e
seus respectivos coeficientes de segurança.
Para as chavetas foi escolhido utilizar o aço 1045 estirado a frio. Abaixo seguem suas
propriedades mecânicas:
Primeiramente, de acordo com o diâmetro da região onde a chaveta será posicionada,
deve-se determinar alguns parâmetros importantes de acordo com a tabela 24. Após
determinados esses parâmetros, serão calculadas as tensões de cisalhamento, compressão e
tensão máxima em cada chaveta para que se calcule os coeficientes de segurança e a seleção
possa ser validada.
Tabela 23 - Propriedades Mecânicas
do Aço das Chavetas
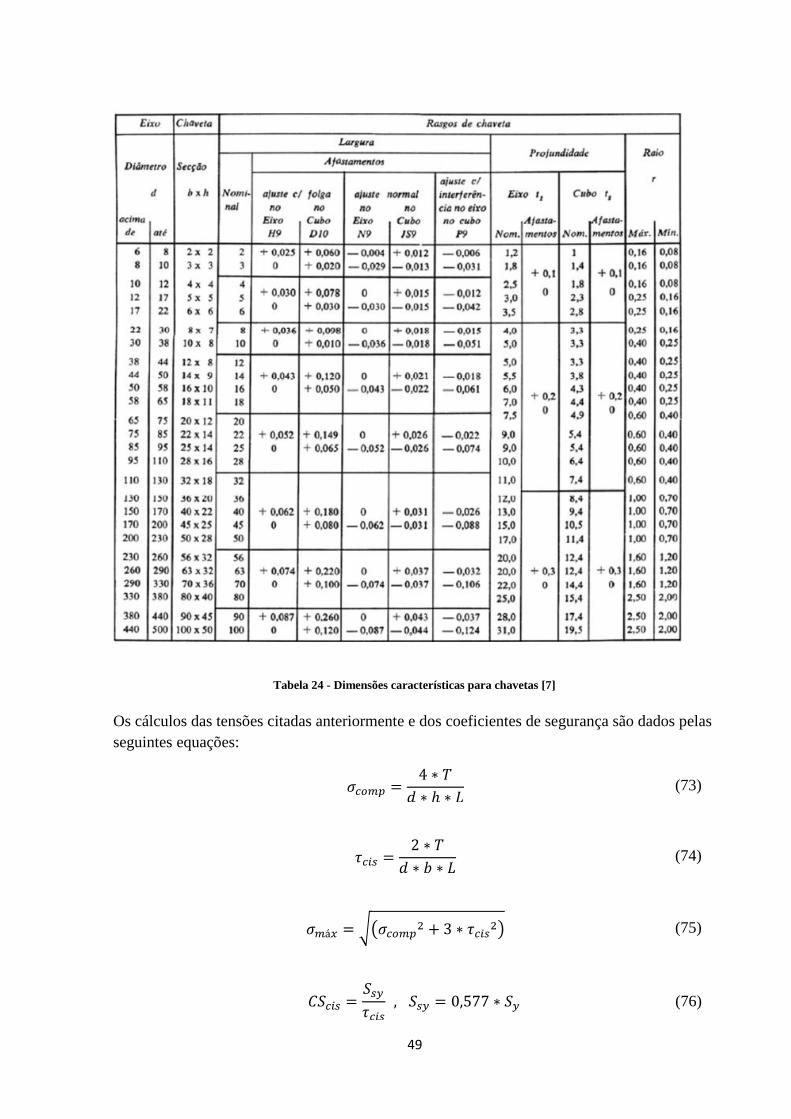
49
Os cálculos das tensões citadas anteriormente e dos coeficientes de segurança são dados pelas
seguintes equações:
𝜎𝑐𝑜𝑚𝑝 =
4 ∗ 𝑇
𝑑 ∗ ℎ ∗ 𝐿 (73)
𝜏𝑐𝑖𝑠 =
2 ∗ 𝑇
𝑑 ∗ 𝑏 ∗ 𝐿 (74)
𝜎𝑚á𝑥 = √(𝜎𝑐𝑜𝑚𝑝2 + 3 ∗ 𝜏𝑐𝑖𝑠2) (75)
𝐶𝑆𝑐𝑖𝑠 =
𝑆𝑠𝑦
𝜏𝑐𝑖𝑠 , 𝑆𝑠𝑦 = 0,577 ∗ 𝑆𝑦 (76)
Tabela 24 - Dimensões características para chavetas [7]
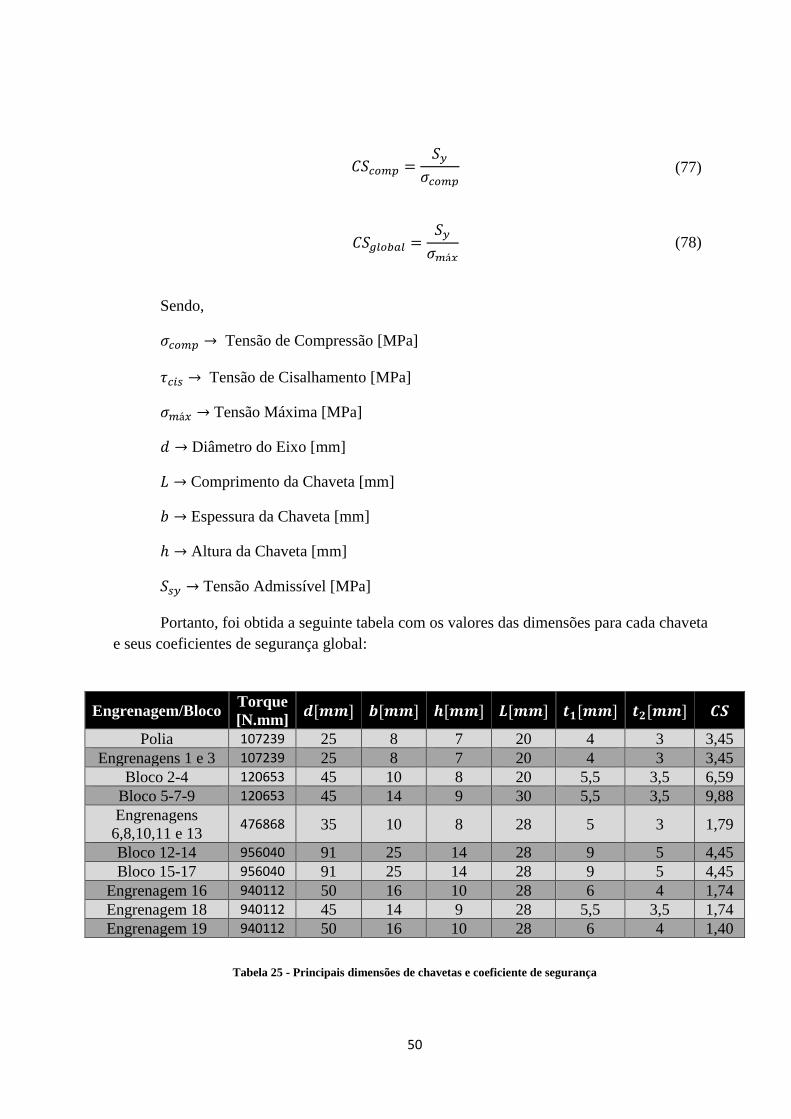
50
𝐶𝑆𝑐𝑜𝑚𝑝 =
𝑆𝑦
𝜎𝑐𝑜𝑚𝑝 (77)
𝐶𝑆𝑔𝑙𝑜𝑏𝑎𝑙 =
𝑆𝑦
𝜎𝑚á𝑥 (78)
Sendo,
𝜎𝑐𝑜𝑚𝑝 → Tensão de Compressão [MPa]
𝜏𝑐𝑖𝑠 → Tensão de Cisalhamento [MPa]
𝜎𝑚á𝑥 → Tensão Máxima [MPa]
𝑑 → Diâmetro do Eixo [mm]
𝐿 → Comprimento da Chaveta [mm]
𝑏 → Espessura da Chaveta [mm]
ℎ → Altura da Chaveta [mm]
𝑆𝑠𝑦 → Tensão Admissível [MPa]
Portanto, foi obtida a seguinte tabela com os valores das dimensões para cada chaveta
e seus coeficientes de segurança global:
Tabela 25 - Principais dimensões de chavetas e coeficiente de segurança
Engrenagem/Bloco Torque
[N.mm] 𝒅[𝒎𝒎] 𝒃[𝒎𝒎] 𝒉[𝒎𝒎] 𝑳[𝒎𝒎] 𝒕𝟏[𝒎𝒎] 𝒕𝟐[𝒎𝒎] 𝑪𝑺
Polia 107239 25 8 7 20 4 3 3,45
Engrenagens 1 e 3 107239 25 8 7 20 4 3 3,45
Bloco 2-4 120653 45 10 8 20 5,5 3,5 6,59
Bloco 5-7-9 120653 45 14 9 30 5,5 3,5 9,88
Engrenagens
6,8,10,11 e 13 476868 35 10 8 28 5 3 1,79
Bloco 12-14 956040 91 25 14 28 9 5 4,45
Bloco 15-17 956040 91 25 14 28 9 5 4,45
Engrenagem 16 940112 50 16 10 28 6 4 1,74
Engrenagem 18 940112 45 14 9 28 5,5 3,5 1,74
Engrenagem 19 940112 50 16 10 28 6 4 1,40

51
2.10. Dimensionamento das Estrias
Existem dois eixos nos quais estão acoplados blocos de engrenagens que se
movimentam permitindo que novos pares de engrenagens sejam engrenados e assim
resultando em velocidades de rotação diferentes na saída. Tais eixos são os eixos III e V.
As estrias são do mesmo material dos eixos, pois sua fabricação se dará sobre uma
barra previamente comprada para fabricar o devido eixo.
Os cálculos dos coeficientes de segurança seguiram as recomendações de [7]. Assim
como em casos anteriores, os cálculos envolvem uma série de fatores, que devem ser
determinados para se poder calcular o coeficiente de segurança final.
As equações a seguir explicitam como os cálculos são realizados:
𝐶𝑆𝑚𝑖𝑛 = 𝑛1 ∗ 𝑛2 ∗ 𝑛3 ∗ 𝑛4 (79)
𝐶𝑆𝑐𝑖𝑠 =
0,577 ∗ 𝑆𝑦 ∗ 𝑑 ∗ 𝑏 ∗ 𝐿 ∗ 𝑧
2 ∗ 𝑇 (80)
𝐶𝑆𝑐𝑜𝑚𝑝 =
𝑆𝑦 ∗ 𝑑 ∗ (𝐷 − 𝑑) ∗ 𝐿 ∗ 𝑧
4 ∗ 𝑇 (81)
Sendo,
𝑛1 → Fator de Incerteza do Material – O valor recomendado é 1,5 < 𝑛1 < 2,5. Dessa
forma, adotou-se 2 para os cálculos.
𝑛2 → Fator de Distribuição de Carga ao Longo da Estria – Adotou-se 1,33 por se
tratarem de estrias planas.
𝑛3 → Fator de Choque – Adotou-se 1,4 pois há choque.
𝑛4 → Fator de Material do Cubo – Adotou-se 1,0 pois o cubo também é de aço.
𝑑 → Menor diâmetro do eixo na região estriada [mm]
𝑏 → Espessura da Estria [mm]
𝐿 → Comprimento Estriado [mm]
𝑧 → Quantidade de Estrias
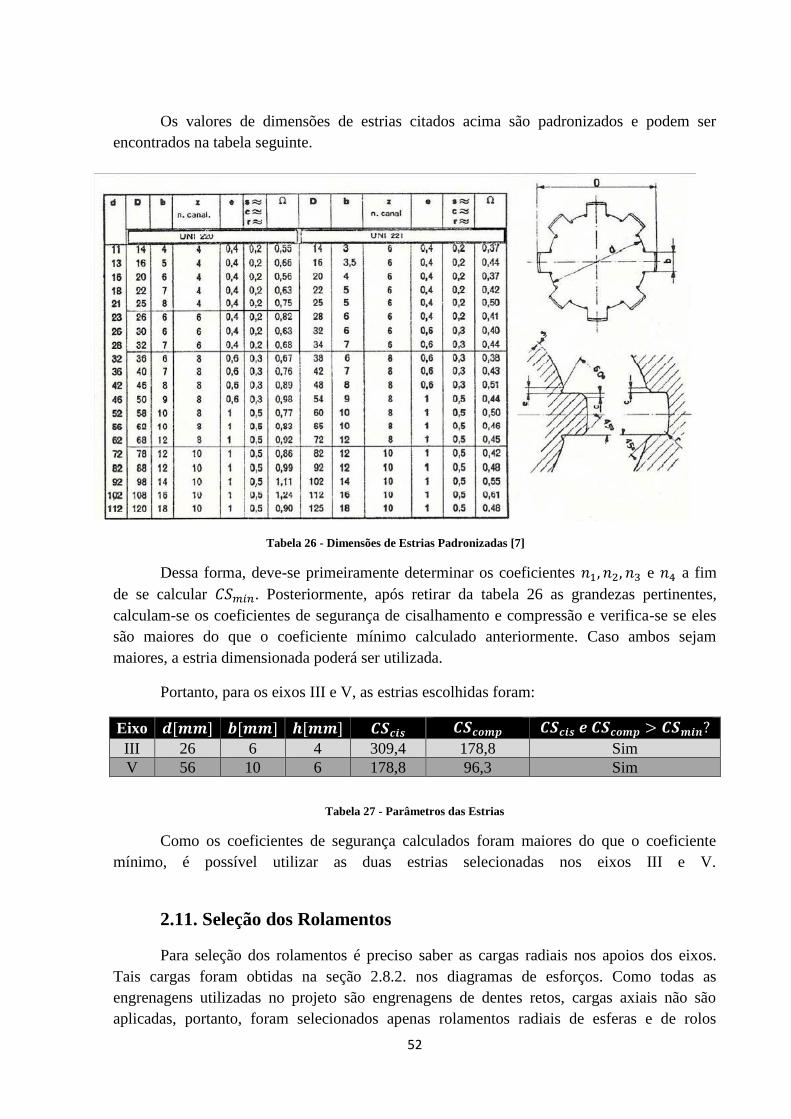
52
Os valores de dimensões de estrias citados acima são padronizados e podem ser
encontrados na tabela seguinte.
Dessa forma, deve-se primeiramente determinar os coeficientes 𝑛1, 𝑛2, 𝑛3 e 𝑛4 a fim
de se calcular 𝐶𝑆𝑚𝑖𝑛. Posteriormente, após retirar da tabela 26 as grandezas pertinentes,
calculam-se os coeficientes de segurança de cisalhamento e compressão e verifica-se se eles
são maiores do que o coeficiente mínimo calculado anteriormente. Caso ambos sejam
maiores, a estria dimensionada poderá ser utilizada.
Portanto, para os eixos III e V, as estrias escolhidas foram:
Eixo 𝒅[𝒎𝒎] 𝒃[𝒎𝒎] 𝒉[𝒎𝒎] 𝑪𝑺𝒄𝒊𝒔 𝑪𝑺𝒄𝒐𝒎𝒑 𝑪𝑺𝒄𝒊𝒔 𝒆 𝑪𝑺𝒄𝒐𝒎𝒑 > 𝑪𝑺𝒎𝒊𝒏?
III 26 6 4 309,4 178,8 Sim
V 56 10 6 178,8 96,3 Sim
Tabela 27 - Parâmetros das Estrias
Como os coeficientes de segurança calculados foram maiores do que o coeficiente
mínimo, é possível utilizar as duas estrias selecionadas nos eixos III e V.
2.11. Seleção dos Rolamentos
Para seleção dos rolamentos é preciso saber as cargas radiais nos apoios dos eixos.
Tais cargas foram obtidas na seção 2.8.2. nos diagramas de esforços. Como todas as
engrenagens utilizadas no projeto são engrenagens de dentes retos, cargas axiais não são
aplicadas, portanto, foram selecionados apenas rolamentos radiais de esferas e de rolos
Tabela 26 - Dimensões de Estrias Padronizadas [7]

53
cilíndricos. A utilização de rolamentos de rolos foi necessária pois as cargas aplicadas nos
eixos IV, V, VI e VII são maiores e os rolamentos radiais de esferas não suportavam tamanha
intensidade.
Para seleção e posterior comparação da vida dos rolamentos escolhidos, foi decidido
usar um período de 15000 horas [3] para as suas vidas. Os cálculos de suas vidas estão
mostrados abaixo:
𝐿10 = (
𝐶
𝑃)𝑎
(82)
𝐿10𝑎 = 𝑎1 ∗ 𝑎23 ∗ 𝐿10 (83)
𝐿10ℎ =
106
60 ∗ 𝑛∗ 𝐿10 (84)
𝐿10𝑎ℎ =106
60 ∗ 𝑛∗ 𝐿10𝑎
(85)
Em que,
𝐶 → Capacidade de carga Dinâmica
𝑃 → Carga Aplicada no Mancal [N]
𝑎 → Fator do tipo de Rolamento – 3 para rolamentos de esferas e 10/3 para rolamentos
de rolos cilíndricos.
𝑎1 → Fator de confiabilidade – Adotou-se 1 para 99%.
𝑎23 → fator combinado – Depende da viscosidade do lubrificante utilizado.
𝐿10 → Vida Nominal [Milhões de Revoluções]
𝐿10ℎ → Vida Nominal em horas
𝐿10𝑎 → Vida Nominal Ajustada
𝐿10𝑎ℎ → Vida Nominal Ajustada em horas
A determinação de 𝑎23 depende de alguns parâmetros, que são determinados segundo
as Tabelas 55, 56 e 57, no Anexo I.
Dessa forma, os valores encontrados para as vidas dos rolamentos devem ser
superiores ou próximos às 15000 horas estabelecidas no projeto. Vidas um pouco abaixo
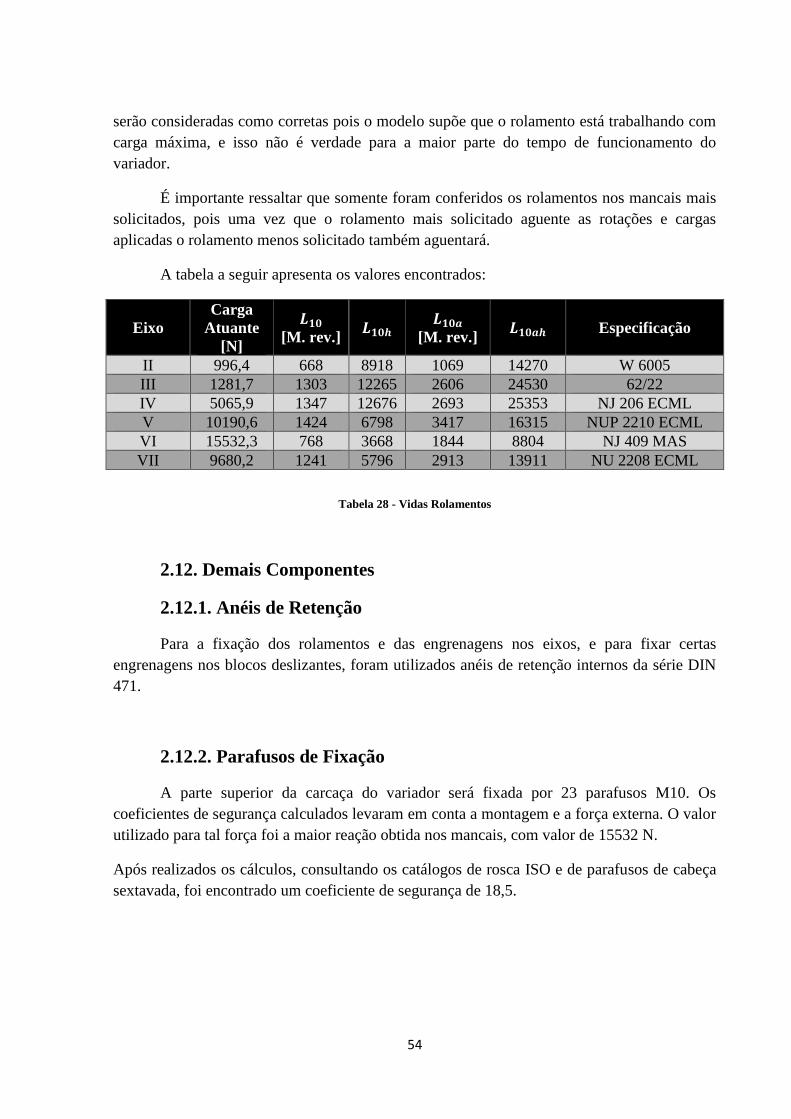
54
serão consideradas como corretas pois o modelo supõe que o rolamento está trabalhando com
carga máxima, e isso não é verdade para a maior parte do tempo de funcionamento do
variador.
É importante ressaltar que somente foram conferidos os rolamentos nos mancais mais
solicitados, pois uma vez que o rolamento mais solicitado aguente as rotações e cargas
aplicadas o rolamento menos solicitado também aguentará.
A tabela a seguir apresenta os valores encontrados:
Eixo
Carga
Atuante
[N]
𝑳𝟏𝟎
[M. rev.] 𝑳𝟏𝟎𝒉
𝑳𝟏𝟎𝒂
[M. rev.] 𝑳𝟏𝟎𝒂𝒉 Especificação
II 996,4 668 8918 1069 14270 W 6005
III 1281,7 1303 12265 2606 24530 62/22
IV 5065,9 1347 12676 2693 25353 NJ 206 ECML
V 10190,6 1424 6798 3417 16315 NUP 2210 ECML
VI 15532,3 768 3668 1844 8804 NJ 409 MAS
VII 9680,2 1241 5796 2913 13911 NU 2208 ECML
Tabela 28 - Vidas Rolamentos
2.12. Demais Componentes
2.12.1. Anéis de Retenção
Para a fixação dos rolamentos e das engrenagens nos eixos, e para fixar certas
engrenagens nos blocos deslizantes, foram utilizados anéis de retenção internos da série DIN
471.
2.12.2. Parafusos de Fixação
A parte superior da carcaça do variador será fixada por 23 parafusos M10. Os
coeficientes de segurança calculados levaram em conta a montagem e a força externa. O valor
utilizado para tal força foi a maior reação obtida nos mancais, com valor de 15532 N.
Após realizados os cálculos, consultando os catálogos de rosca ISO e de parafusos de cabeça
sextavada, foi encontrado um coeficiente de segurança de 18,5.
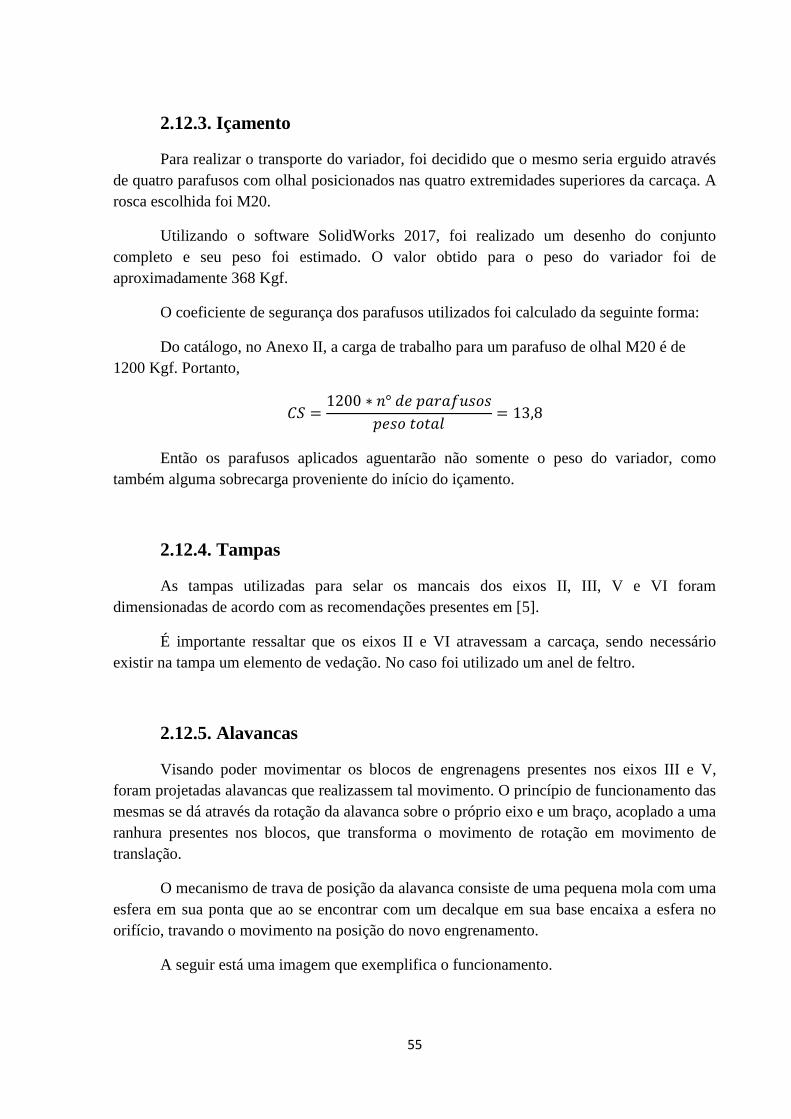
55
2.12.3. Içamento
Para realizar o transporte do variador, foi decidido que o mesmo seria erguido através
de quatro parafusos com olhal posicionados nas quatro extremidades superiores da carcaça. A
rosca escolhida foi M20.
Utilizando o software SolidWorks 2017, foi realizado um desenho do conjunto
completo e seu peso foi estimado. O valor obtido para o peso do variador foi de
aproximadamente 368 Kgf.
O coeficiente de segurança dos parafusos utilizados foi calculado da seguinte forma:
Do catálogo, no Anexo II, a carga de trabalho para um parafuso de olhal M20 é de
1200 Kgf. Portanto,
𝐶𝑆 =1200 ∗ 𝑛° 𝑑𝑒 𝑝𝑎𝑟𝑎𝑓𝑢𝑠𝑜𝑠
𝑝𝑒𝑠𝑜 𝑡𝑜𝑡𝑎𝑙= 13,8
Então os parafusos aplicados aguentarão não somente o peso do variador, como
também alguma sobrecarga proveniente do início do içamento.
2.12.4. Tampas
As tampas utilizadas para selar os mancais dos eixos II, III, V e VI foram
dimensionadas de acordo com as recomendações presentes em [5].
É importante ressaltar que os eixos II e VI atravessam a carcaça, sendo necessário
existir na tampa um elemento de vedação. No caso foi utilizado um anel de feltro.
2.12.5. Alavancas
Visando poder movimentar os blocos de engrenagens presentes nos eixos III e V,
foram projetadas alavancas que realizassem tal movimento. O princípio de funcionamento das
mesmas se dá através da rotação da alavanca sobre o próprio eixo e um braço, acoplado a uma
ranhura presentes nos blocos, que transforma o movimento de rotação em movimento de
translação.
O mecanismo de trava de posição da alavanca consiste de uma pequena mola com uma
esfera em sua ponta que ao se encontrar com um decalque em sua base encaixa a esfera no
orifício, travando o movimento na posição do novo engrenamento.
A seguir está uma imagem que exemplifica o funcionamento.
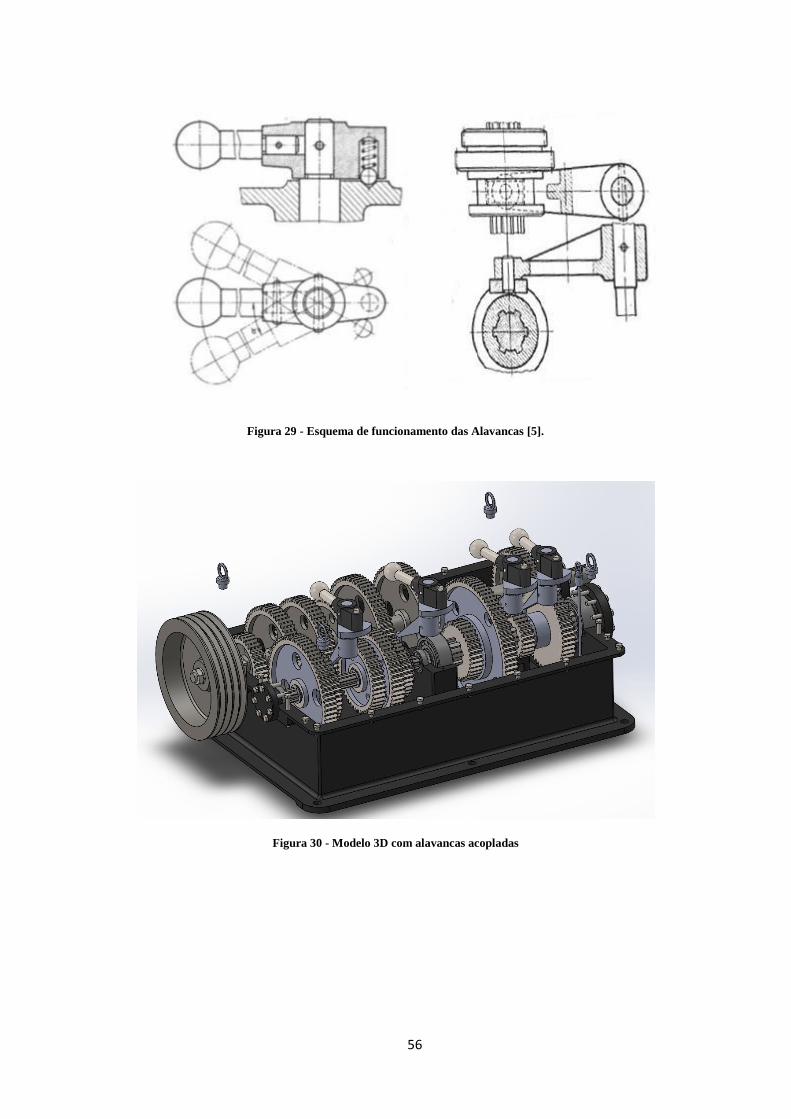
56
Figura 29 - Esquema de funcionamento das Alavancas [5].
Figura 30 - Modelo 3D com alavancas acopladas
57
2.12.6. Lubrificação
A lubrificação é um fator de extrema importância no funcionamento de equipamentos,
principalmente máquinas como o variador de velocidades projetado. O lubrificante ajuda a
reduzir o atrito entre as partes móveis, reduzindo o desgaste ao longo do tempo e aumentando
a vida útil dos componentes, assim como na refrigeração do mecanismo como um todo.
O nível do lubrificante deve ser controlado para que ele não fique muito baixo e não
tenha contato com as partes da máquina, e nem muito elevado, pois sua presença pode resultar
em uma força de resistência grande o suficiente para reduzir a eficiência da máquina. Por isso,
foi feita uma vareta que está acoplada à parte superior da carcaça que possui medições de
mínimo e máximo para controlar o nível do fluido.
O método de lubrificação adotado é o método por salpico, já que o lubrificante é
espalhado para as demais regiões da peça através da rotação dos componentes que estão em
contato com ele. Como no eixo VI não há elementos em contato com o fluido lubrificante, foi
anexado um anel que toca o óleo e o espalha pelos demais componentes ao girar juntamente
com o conjunto.
É importante ressaltar que foi feito um orifício na parte inferior da carcaça para que o
óleo possa ser retirado e que a base possui uma ligeira inclinação para facilitar a saída do
mesmo.
58
3. Conclusão
O presente trabalho teve como proposta o projeto de um variador de velocidades
escalonado para máquinas operatrizes, respeitando os dados de projeto fornecidos e os
objetivos estipulados. O variador possui doze velocidades de rotação de saída e a
possibilidade de reversão para cada uma delas.
Dois fatores foram de extrema importância para que o projeto fosse possível e bem
sucedido, uma base de dados, recomendações e informações vastas e bem estruturadas, assim
como a organização dos cálculos e alguma experiência em projeto de máquinas e seus
componentes, adquirida ao longo do curso e do próprio projeto. A elaboração de planilhas
para realizar os cálculos ajudou demais a criar e manter a organização necessária.
O dimensionamento das polias e correias seguiu o método padrão presente em diversos
catálogos e foram selecionadas 4 correias de seção para realizar a transmissão entre o motor e
o eixo de entrada do variador, apresentando uma vida com valor pertinente ao projeto.
As engrenagens foram dimensionadas seguindo o critério AGMA para determinação do
módulo 4 e posterior cálculo das demais grandezas e os coeficientes de segurança seguiram os
critérios de fadiga e desgaste superficial, retornando valores que confirmavam que as
dimensões encontradas iriam atender às demandas do projeto.
Os eixos foram calculados seguindo os métodos da Máxima Tensão Cisalhante e de
Soderberg e os valores encontrados para os diâmetros mínimos foram considerados para
poder selecionar os respectivos diâmetros padronizados.
Os demais componentes a serem selecionados como, anéis de retenção, chavetas, estrias,
rolamentos, carcaça, parafusos, dentre outros, foram selecionados e testados, através do
cálculo de vida ou de coeficientes de segurança, baseado nas grandezas previamente obtidas
para os demais elementos do variador.
O conjunto final projetado atende aos requisitos de projeto previamente propostos e sua
construção é possível. A dimensão final obtida foi satisfatória, uma vez que o variador não é
muito maior do que o motor que o aciona, economizando assim espaço e sendo mais leve.
59
4. Referências Bibliográficas
[1] ACHERKAN, N., PUSH, V., IGNATYEW, N., KUDINOV, V., Machine Tool
Design, Vol. 3, Moscow, 1982.
[2] BUDYNAS, RICHARD G., NISBETT, J. KEITH, Elementos de Máquinas de
Shigley: projeto de engenharia mecânica, 8ᵃ ed. Porto Alegre, Bookman, 2011.
[3] MARCO FILHO, FLAVIO DE, Apostila de Elementos de Transmissão Flexíveis,
UFRJ.
[4] Catálogo Gates. Correias Industriais. Catálogo 2015.
[5] RESHTOV, D.N., Atlas de Construção de Máquinas, Hemus Editora Ltda. São Paulo,
2005.
[6] MARCO FILHO, FLAVIO DE, Apostila de Engrenagens de Dentes Retos, UFRJ,
2010.
[7] MARCO FILHO, FLAVIO DE, Apostila de Elementos de Máquinas I, UFRJ, 2010.
[8] MARCO FILHO, FLAVIO DE, Apostila de Elementos de Máquinas II, UFRJ, 2010.
[9] PINA FILHO, ARMANDO CARLOS DE, Apostila de Desenho Técnico para
Engenharia Mecânica, Escola Politécnica, UFRJ, 2011.
[10] Repositório digital, http://www.skf.com/br/index.html: Acessado em: 08/09/2018.
[11] RÖGNITZ, H., Variadores Escalonados de Velocidades em Máquinas-Ferramenta,
1973.
[12] Repositório Digital, https://beamguru.com/online/beam-calculator/: Acessado em:
08/09/2018.
[13] Repositório Digital, http://www.ruapiratininga.com.br/tag/torno-mecanico-romi/:
Acessado em 08/09/2018.
[14] Repositório Digital, https://www.mecanicaindustrial.com.br/maquinas-cnc-2/:
Acessado em 08/09/2018.
[15] Repositório Digital, https://www.thoughtco.com/continuously-variable-transmission-
533857: Acessado em 08/09/2018.

60
Apêndice A – Memória de Cálculo
Dimensionamento Eixo III
Diagrama de Esforços plano xy

61
Diagrama de Esforços plano xz
Diagrama de Esforços torque
120,7
120,7
120,7
120,7
120,7
120,7
120,7

62
Os momentos e as reações nos apoios são:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] 14,49 52,73
𝑀𝑥𝑧 [𝑁.𝑚] -10,57 130,1
𝑀𝑚á𝑥 [𝑁.𝑚] 17,9 140,4
𝑹𝑨𝒙𝒚 [𝑵] 463,9 𝑹𝑩𝒙𝒚 [𝑵] -481,6
𝑹𝑨𝒙𝒛 [𝑵] -338,5 𝑹𝑩𝒙𝒛 [𝑵] -1187,8
𝑹𝑨 [𝑵] 574,3 𝑹𝑩 [𝑵] 1281,7
O Torque máximo calculado é:
𝑇 = 𝑊𝑡 ∗𝑑
2
𝑇 = 120,65 𝑁.𝑚
Estimativa de diâmetro mínimo através do critério das Máximas Tensões Cisalhantes:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
𝑑𝑀𝑇𝐶 = 19,4 𝑚𝑚
Determinação do diâmetro mínimo através do critério de Soderberg:
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
• 𝑘𝑒 = 1 , pois é estriado.
𝑑𝑆𝑜𝑑 = 24,1 𝑚𝑚
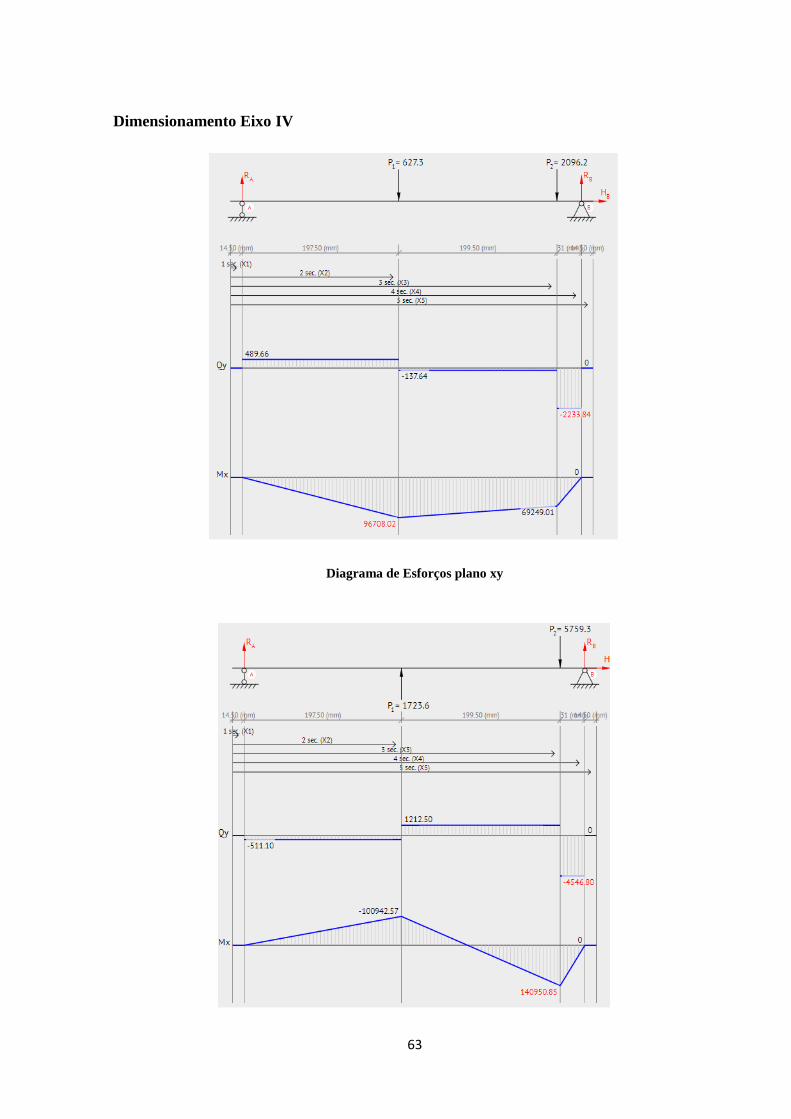
63
Dimensionamento Eixo IV
Diagrama de Esforços plano xy
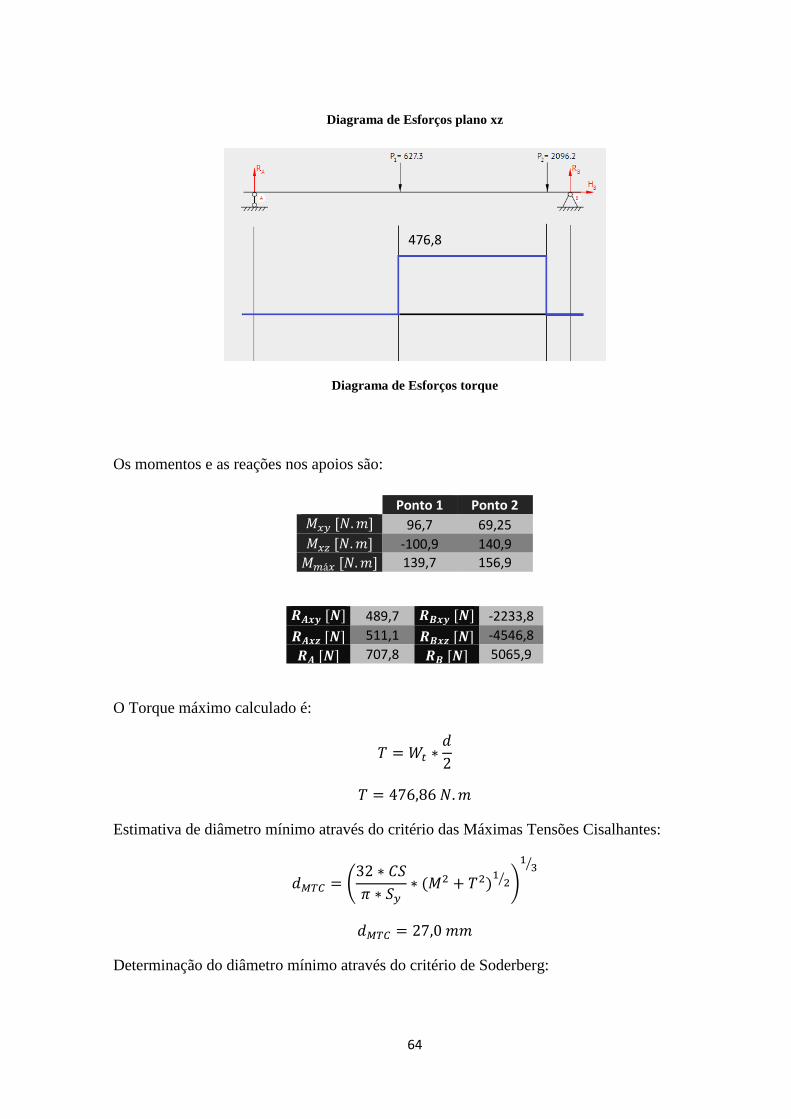
64
Diagrama de Esforços plano xz
Diagrama de Esforços torque
Os momentos e as reações nos apoios são:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] 96,7 69,25
𝑀𝑥𝑧 [𝑁.𝑚] -100,9 140,9
𝑀𝑚á𝑥 [𝑁.𝑚] 139,7 156,9
𝑹𝑨𝒙𝒚 [𝑵] 489,7 𝑹𝑩𝒙𝒚 [𝑵] -2233,8
𝑹𝑨𝒙𝒛 [𝑵] 511,1 𝑹𝑩𝒙𝒛 [𝑵] -4546,8
𝑹𝑨 [𝑵] 707,8 𝑹𝑩 [𝑵] 5065,9
O Torque máximo calculado é:
𝑇 = 𝑊𝑡 ∗𝑑
2
𝑇 = 476,86 𝑁.𝑚
Estimativa de diâmetro mínimo através do critério das Máximas Tensões Cisalhantes:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
𝑑𝑀𝑇𝐶 = 27,0 𝑚𝑚
Determinação do diâmetro mínimo através do critério de Soderberg:
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
476,8
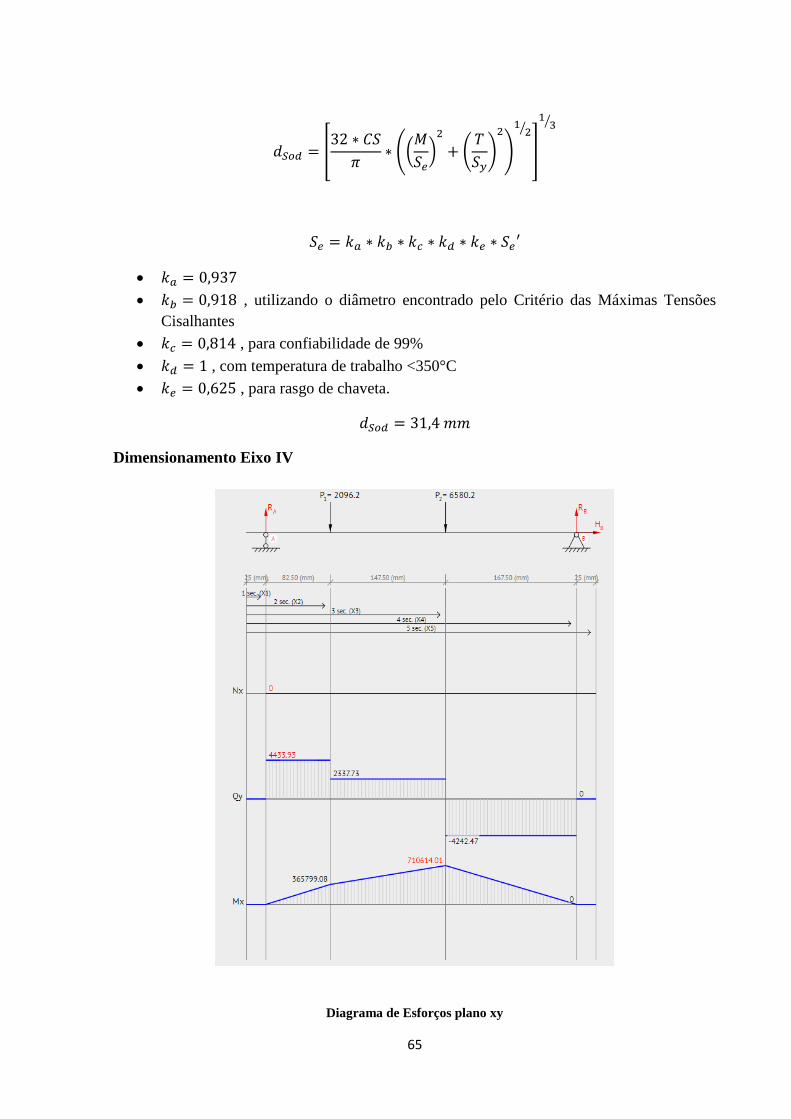
65
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
• 𝑘𝑒 = 0,625 , para rasgo de chaveta.
𝑑𝑆𝑜𝑑 = 31,4 𝑚𝑚
Dimensionamento Eixo IV
Diagrama de Esforços plano xy
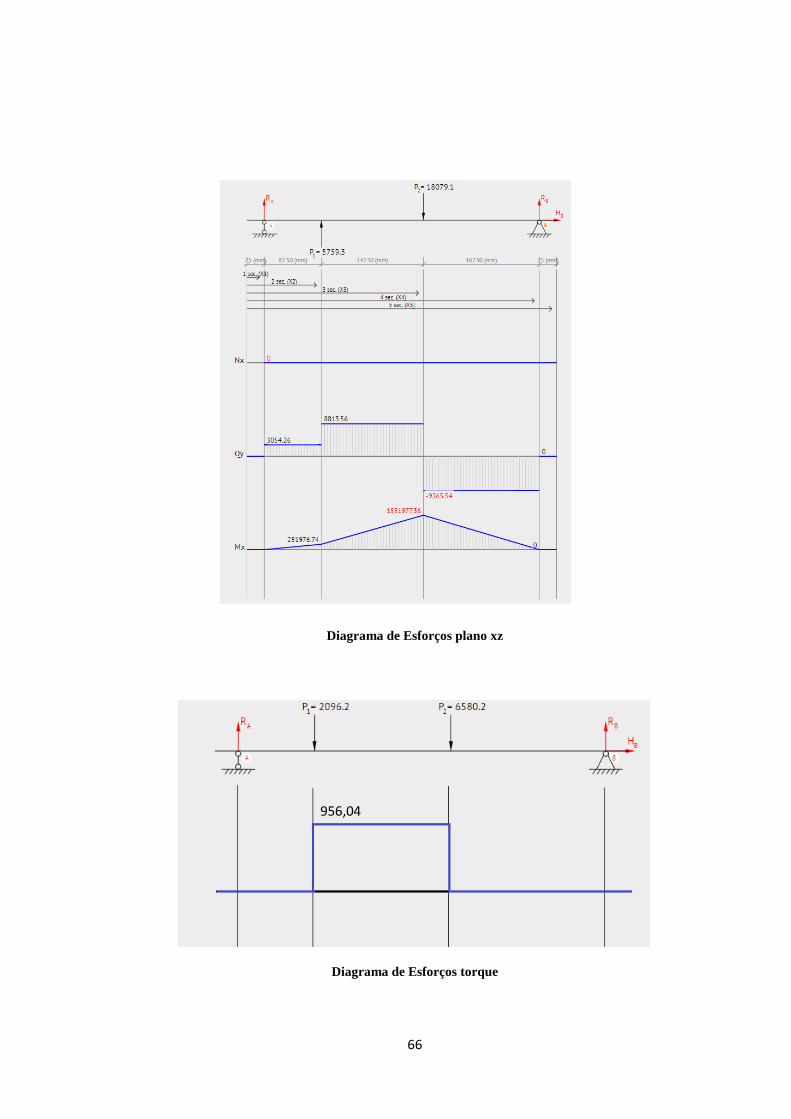
66
Diagrama de Esforços plano xz
Diagrama de Esforços torque
956,04
956,04
956,04
956,04
956,04

67
Os momentos e as reações nos apoios são:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] 365,8 710,6
𝑀𝑥𝑧 [𝑁.𝑚] 251,9 1551,9
𝑀𝑚á𝑥 [𝑁.𝑚] 444,1 1706,8
𝑹𝑨𝒙𝒚 [𝑵] 4433,9 𝑹𝑩𝒙𝒚 [𝑵] -4242,5
𝑹𝑨𝒙𝒛 [𝑵] 3054,3 𝑹𝑩𝒙𝒛 [𝑵] -9265,5
𝑹𝑨 [𝑵] 5384,1 𝑹𝑩 [𝑵] 10190,6
O Torque máximo calculado é:
𝑇 = 𝑊𝑡 ∗𝑑
2
𝑇 = 956,0 𝑁.𝑚
Estimativa de diâmetro mínimo através do critério das Máximas Tensões Cisalhantes:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
𝑑𝑀𝑇𝐶 = 42,5 𝑚𝑚
Determinação do diâmetro mínimo através do critério de Soderberg:
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
• 𝑘𝑒 = 1 , pois é estriado.
𝑑𝑆𝑜𝑑 = 56,4 𝑚𝑚

68
Dimensionamento Eixo VI
Diagrama de Esforços plano xy

69
Diagrama de Esforços plano xz
Diagrama de Esforços torque
940,11
940,11
940,11
940,11
940,11
940,11

70
Os momentos e as reações nos apoios são:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] 209,8 0
𝑀𝑥𝑧 [𝑁.𝑚] -576,5 0
𝑀𝑚á𝑥 [𝑁.𝑚] 613,5 0
𝑹𝑨𝒙𝒚 [𝑵] 209,8 𝑹𝑩𝒙𝒚 [𝑵] -1267,9
𝑹𝑨𝒙𝒛 [𝑵] -576,5 𝑹𝑩𝒙𝒛 [𝑵] 3483,5
𝑹𝑨 [𝑵] 15532,3 𝑹𝑩 [𝑵] 3707,1
O Torque máximo calculado é:
𝑇 = 𝑊𝑡 ∗𝑑
2
𝑇 = 940,11 𝑁.𝑚
Estimativa de diâmetro mínimo através do critério das Máximas Tensões Cisalhantes:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
𝑑𝑀𝑇𝐶 = 35,3 𝑚𝑚
Determinação do diâmetro mínimo através do critério de Soderberg:
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
• 𝑘𝑒 = 0,625 , pois é um rasgo de chaveta.
𝑑𝑆𝑜𝑑 = 47,3 𝑚𝑚
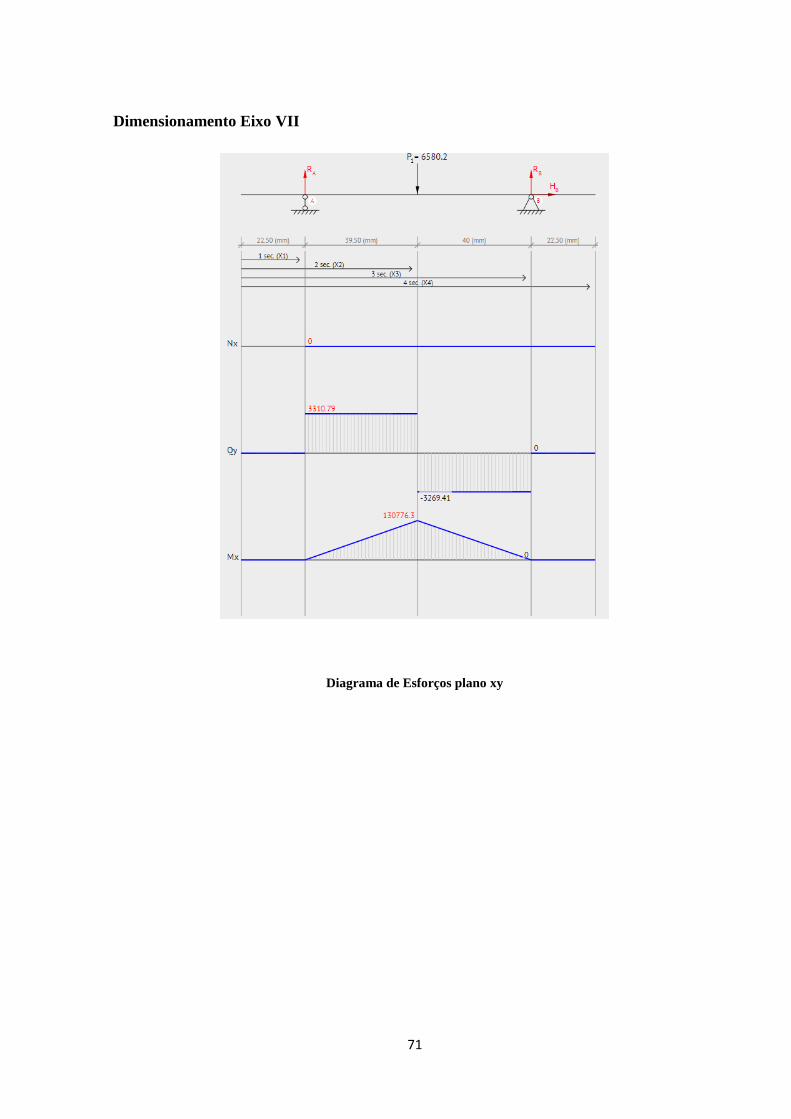
71
Dimensionamento Eixo VII
Diagrama de Esforços plano xy
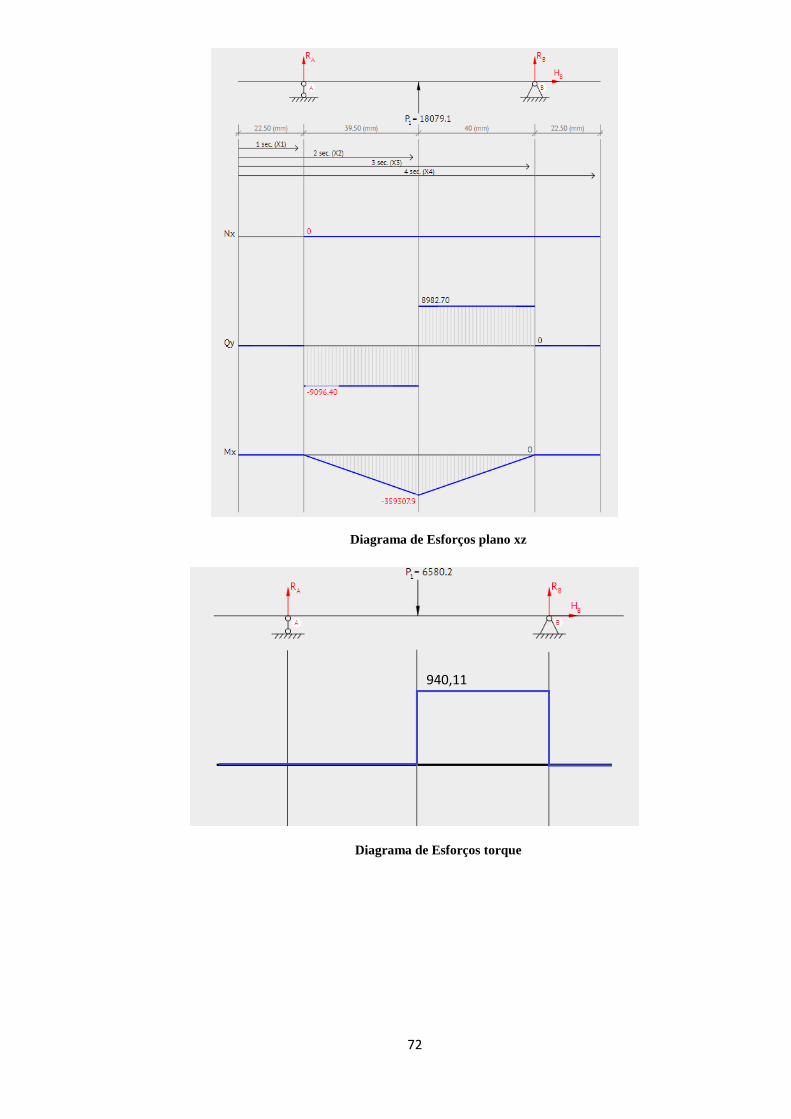
72
Diagrama de Esforços plano xz
Diagrama de Esforços torque
940,11
Tabela 6
- Fator
de
Serviço
FS
[Apostil
a
Flavio]9
40,11
Tabela 7
- Fator
de
Serviço
FS
[Apostil
a Flavio]

73
Os momentos e as reações nos apoios são:
Ponto 1 Ponto 2
𝑀𝑥𝑦 [𝑁.𝑚] 130,7 0
𝑀𝑥𝑧 [𝑁.𝑚] -359,3 0
𝑀𝑚á𝑥 [𝑁.𝑚] 382,3 0
𝑹𝑨𝒙𝒚 [𝑵] 3310,8 𝑹𝑩𝒙𝒚 [𝑵] -3269,4
𝑹𝑨𝒙𝒛 [𝑵] -9096,4 𝑹𝑩𝒙𝒛 [𝑵] 8982,7
𝑹𝑨 [𝑵] 9680,2 𝑹𝑩 [𝑵] 9559,2
O Torque máximo calculado é:
𝑇 = 𝑊𝑡 ∗𝑑
2
𝑇 = 940,11 𝑁.𝑚
Estimativa de diâmetro mínimo através do critério das Máximas Tensões Cisalhantes:
𝑑𝑀𝑇𝐶 = (32 ∗ 𝐶𝑆
𝜋 ∗ 𝑆𝑦∗ (𝑀2 + 𝑇2)
12⁄ )
13⁄
𝑑𝑀𝑇𝐶 = 34,1 𝑚𝑚
Determinação do diâmetro mínimo através do critério de Soderberg:
𝑑𝑆𝑜𝑑 = [32 ∗ 𝐶𝑆
𝜋∗ ((
𝑀
𝑆𝑒)2
+ (𝑇
𝑆𝑦)
2
)
12⁄
]
13⁄
𝑆𝑒 = 𝑘𝑎 ∗ 𝑘𝑏 ∗ 𝑘𝑐 ∗ 𝑘𝑑 ∗ 𝑘𝑒 ∗ 𝑆𝑒′
• 𝑘𝑎 = 0,937
• 𝑘𝑏 = 0,918 , utilizando o diâmetro encontrado pelo Critério das Máximas Tensões
Cisalhantes
• 𝑘𝑐 = 0,814 , para confiabilidade de 99%
• 𝑘𝑑 = 1 , com temperatura de trabalho <350°C
• 𝑘𝑒 = 0,625 , pois é um rasgo de chaveta.
𝑑𝑆𝑜𝑑 = 41,5 𝑚𝑚

74
Anexo I
Tabela 29 - Fator de Serviço FS [3]
Tabela 30 - Fator Adicional Ad [3]
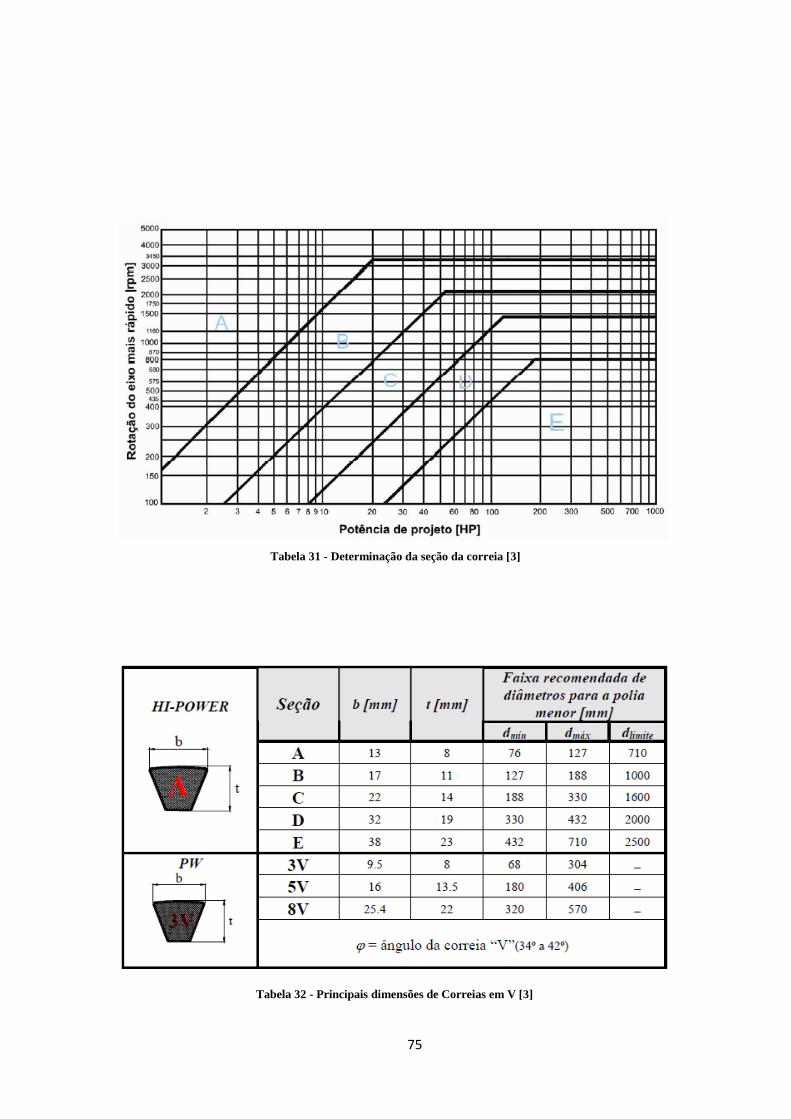
75
Tabela 31 - Determinação da seção da correia [3]
Tabela 32 - Principais dimensões de Correias em V [3]
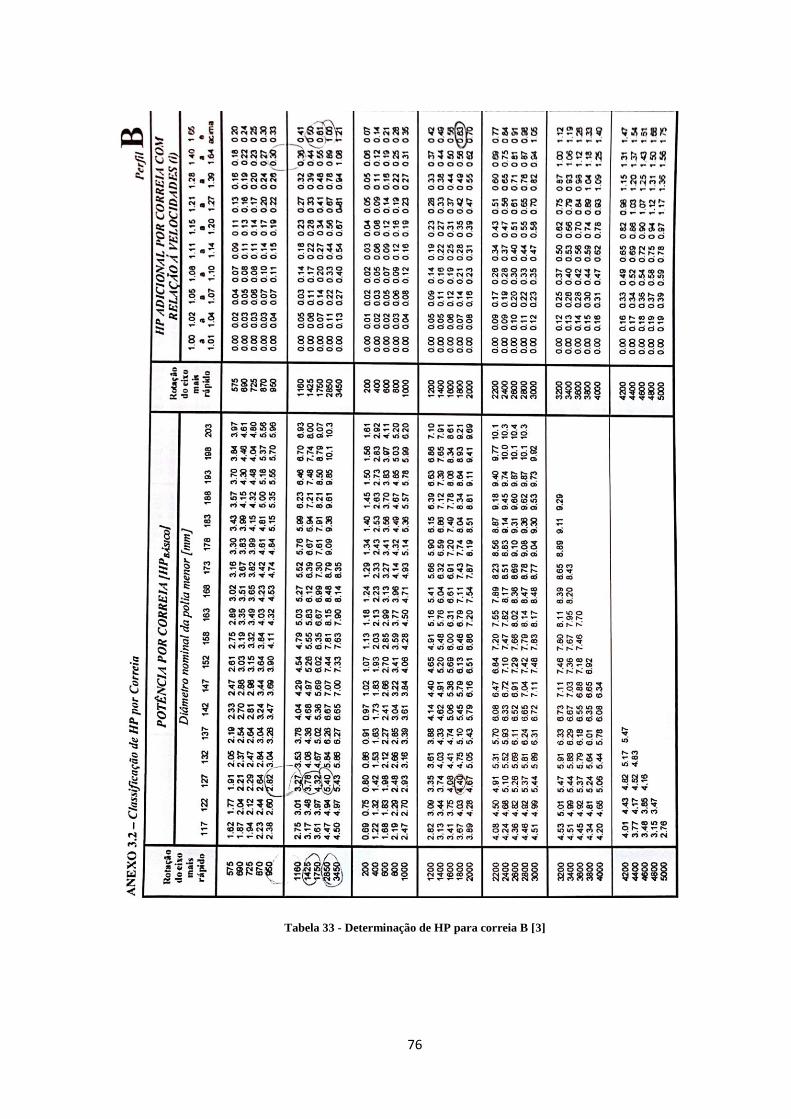
76
Tabela 33 - Determinação de HP para correia B [3]
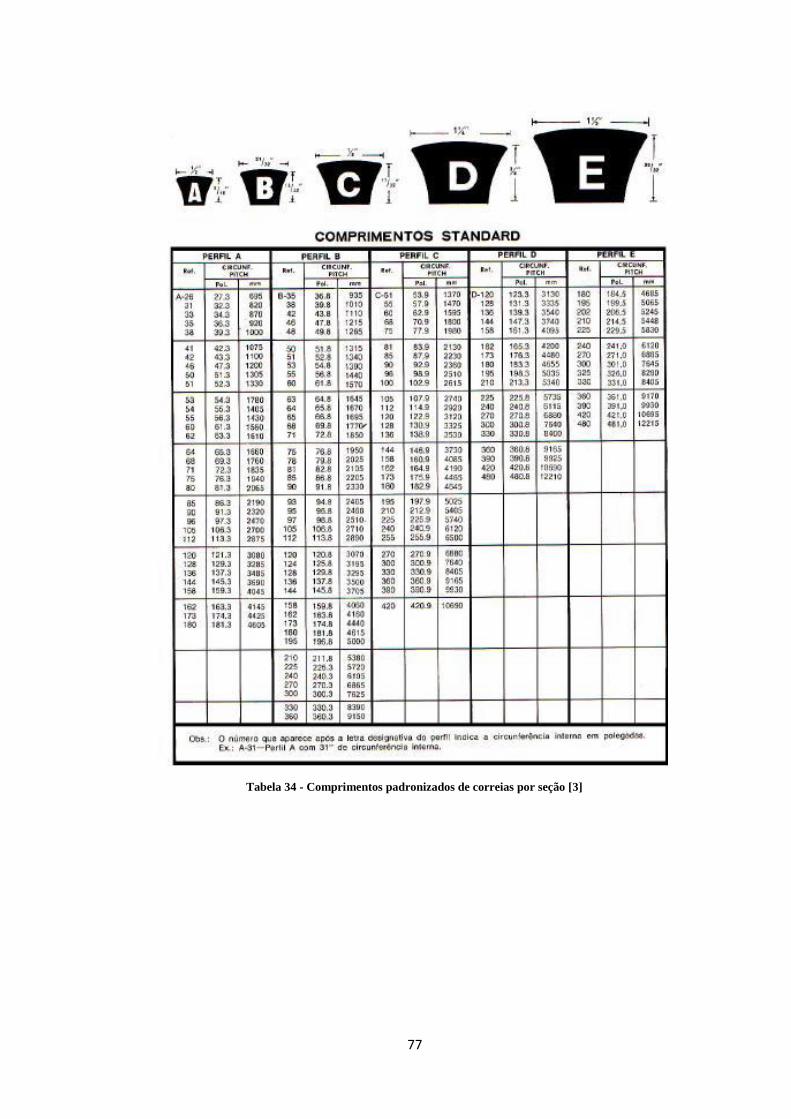
77
Tabela 34 - Comprimentos padronizados de correias por seção [3]
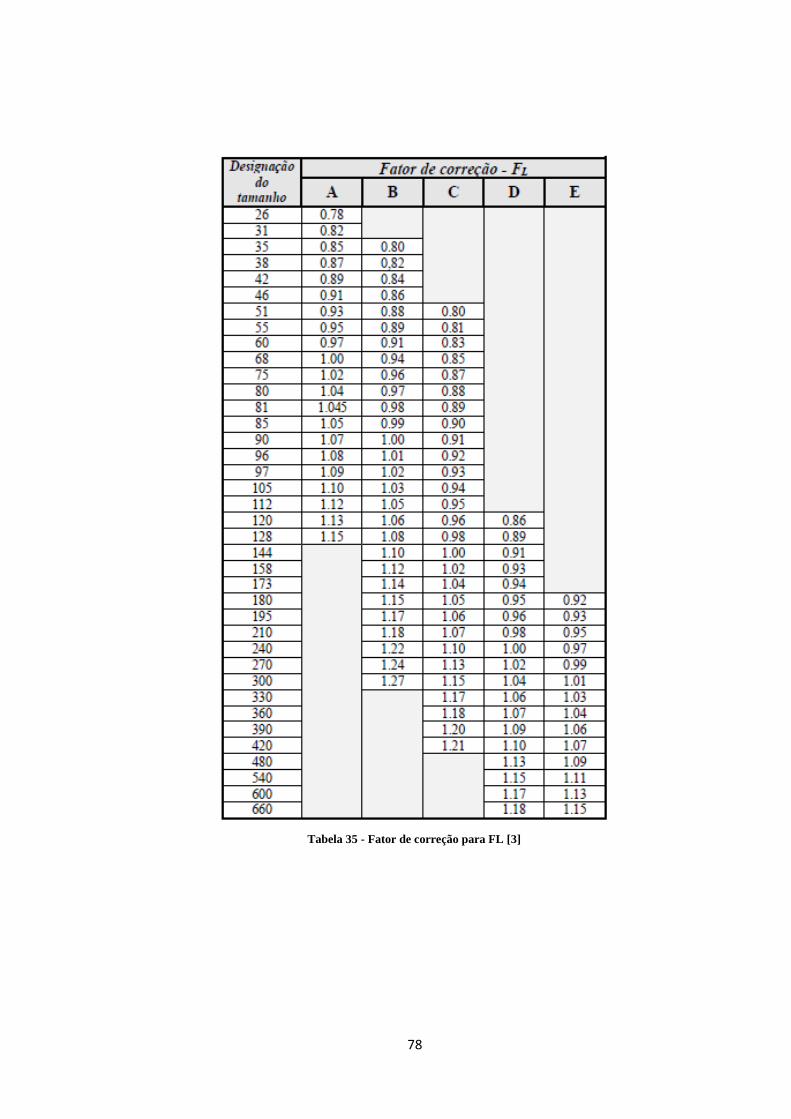
78
Tabela 35 - Fator de correção para FL [3]
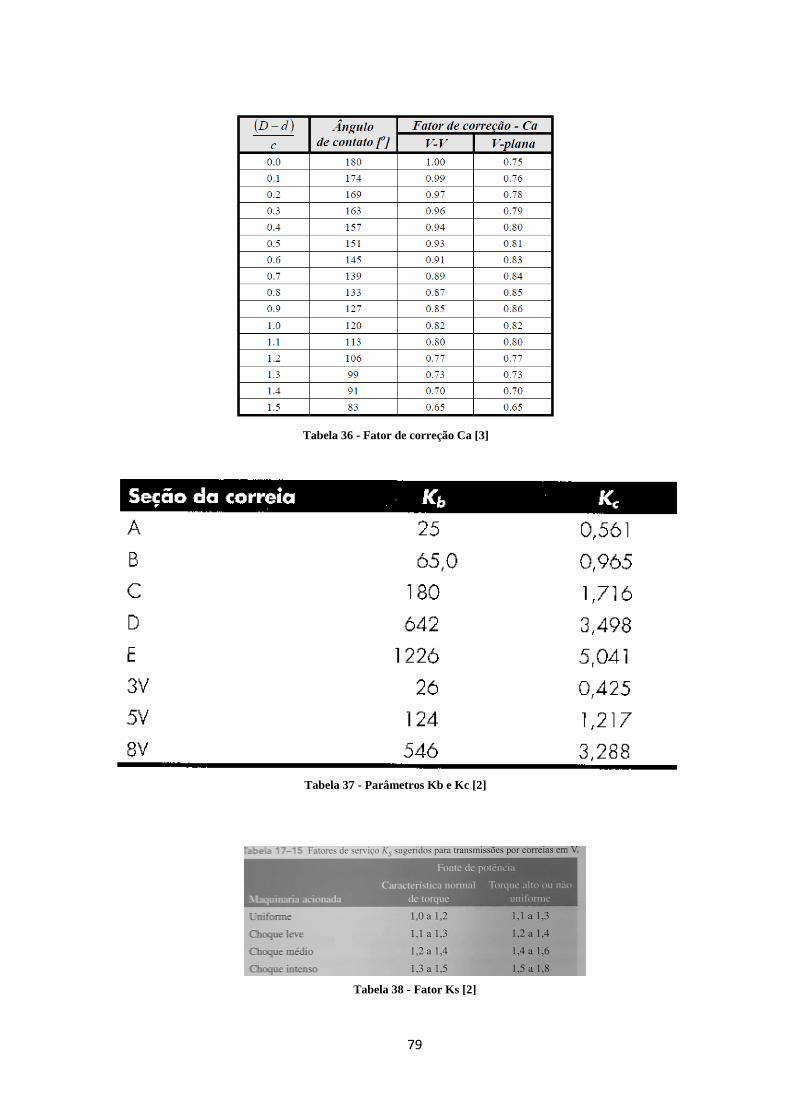
79
Tabela 36 - Fator de correção Ca [3]
Tabela 37 - Parâmetros Kb e Kc [2]
Tabela 38 - Fator Ks [2]
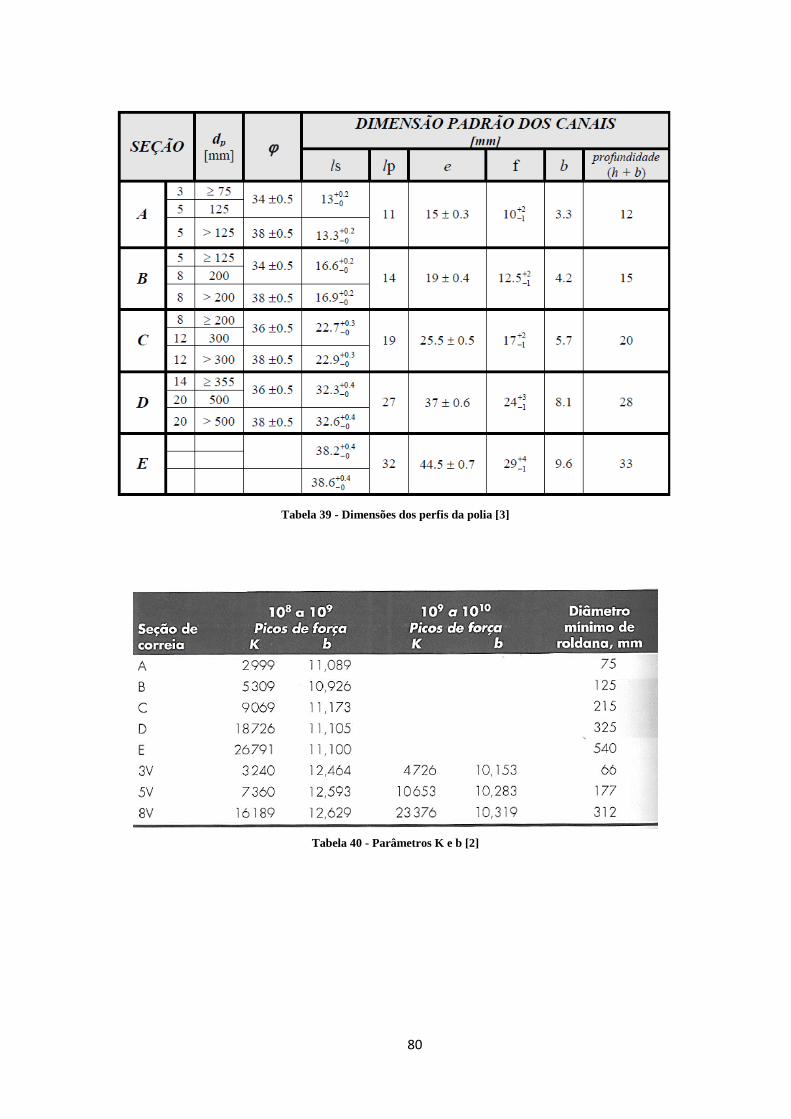
80
Tabela 39 - Dimensões dos perfis da polia [3]
Tabela 40 - Parâmetros K e b [2]
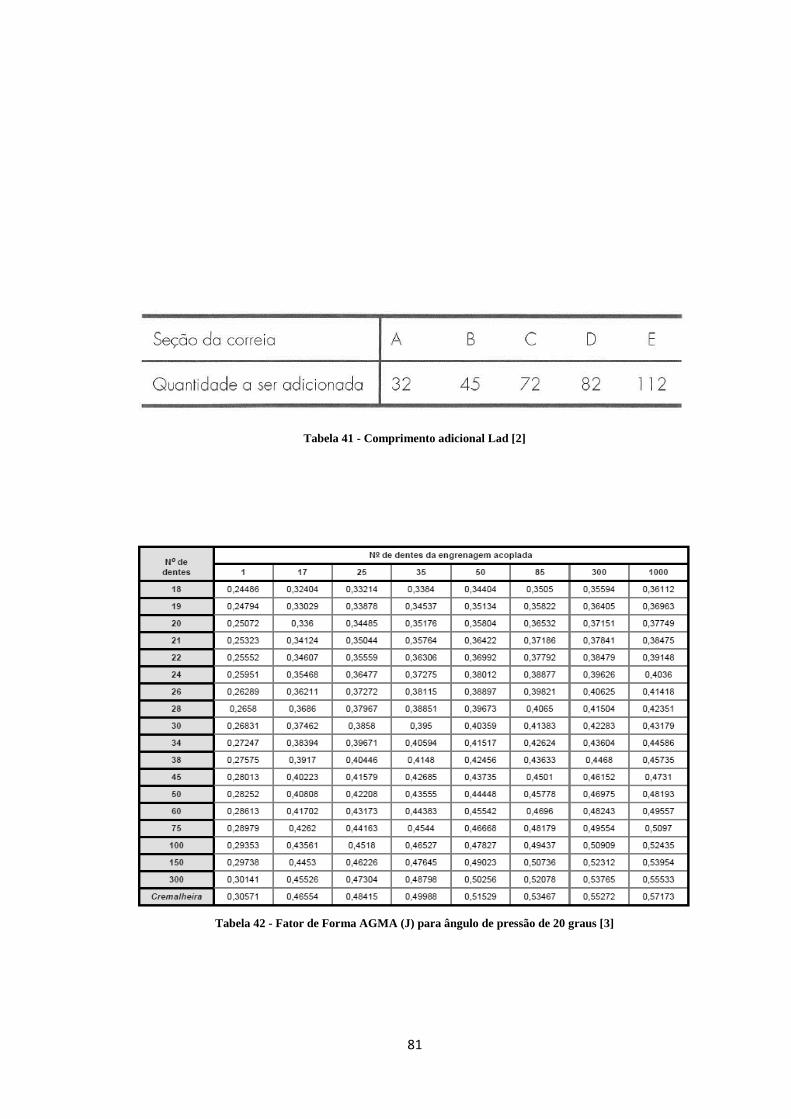
81
Tabela 41 - Comprimento adicional Lad [2]
Tabela 42 - Fator de Forma AGMA (J) para ângulo de pressão de 20 graus [3]
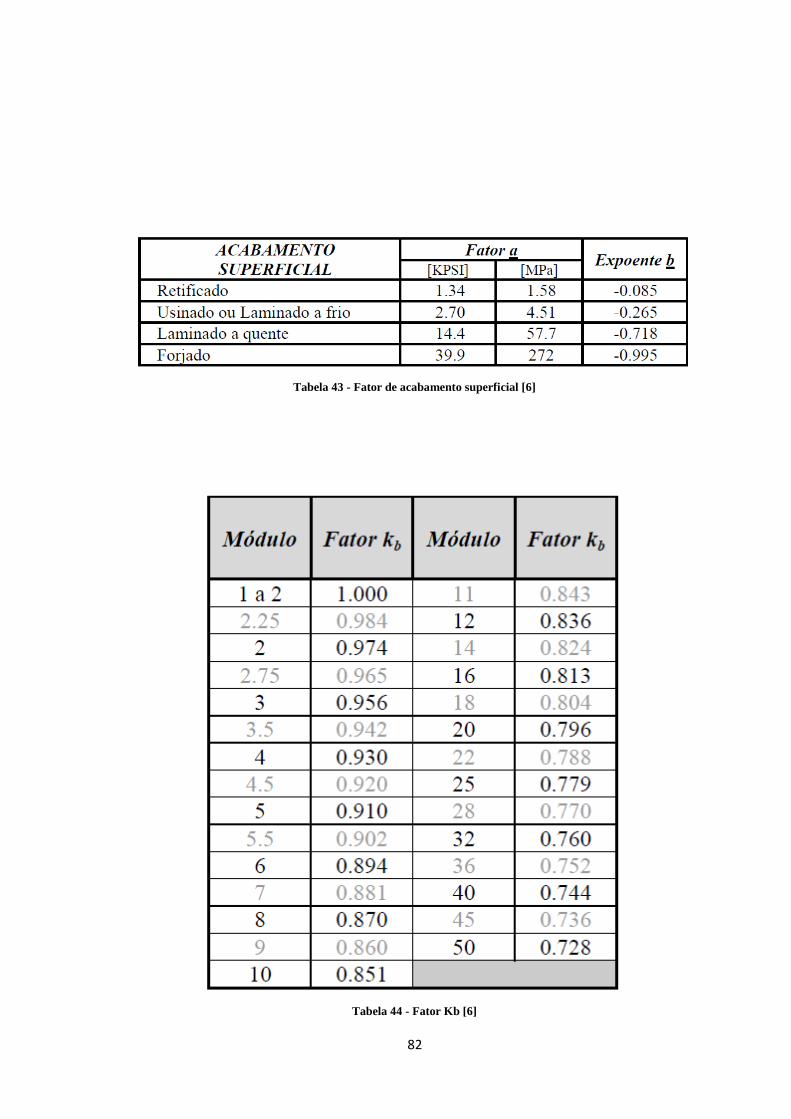
82
Tabela 43 - Fator de acabamento superficial [6]
Tabela 44 - Fator Kb [6]
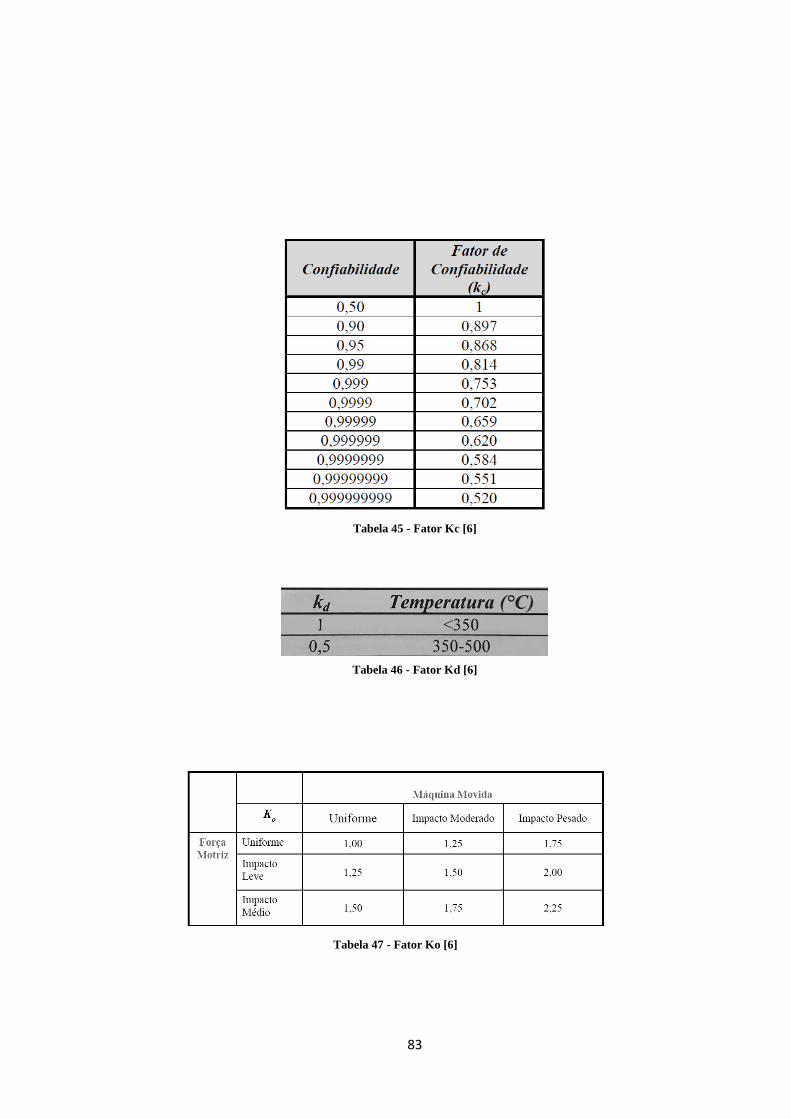
83
Tabela 45 - Fator Kc [6]
Tabela 46 - Fator Kd [6]
Tabela 47 - Fator Ko [6]
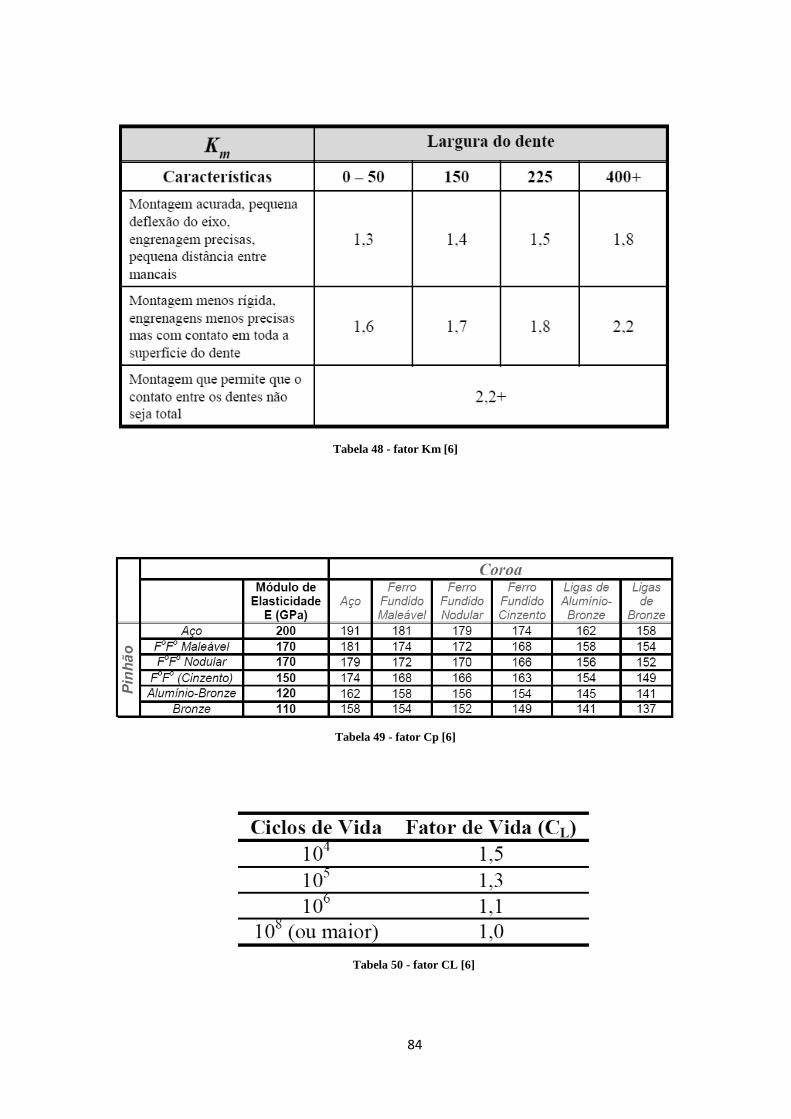
84
Tabela 48 - fator Km [6]
Tabela 49 - fator Cp [6]
Tabela 50 - fator CL [6]
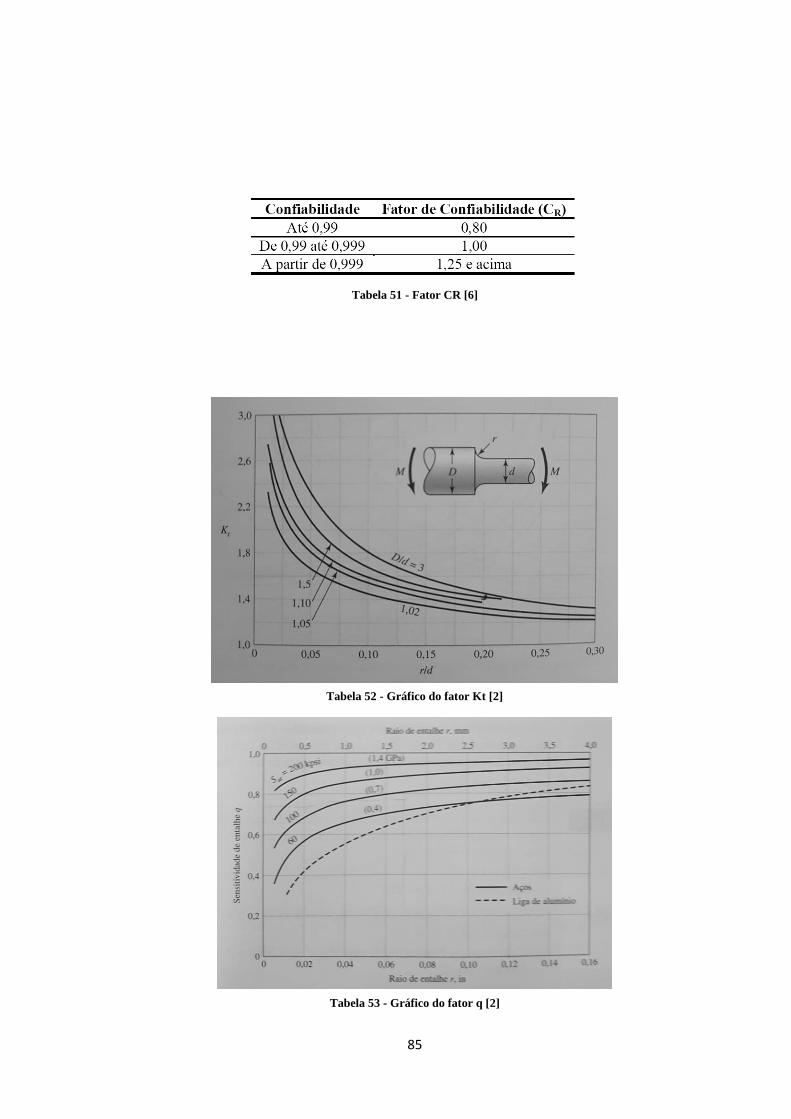
85
Tabela 51 - Fator CR [6]
Tabela 52 - Gráfico do fator Kt [2]
Tabela 53 - Gráfico do fator q [2]
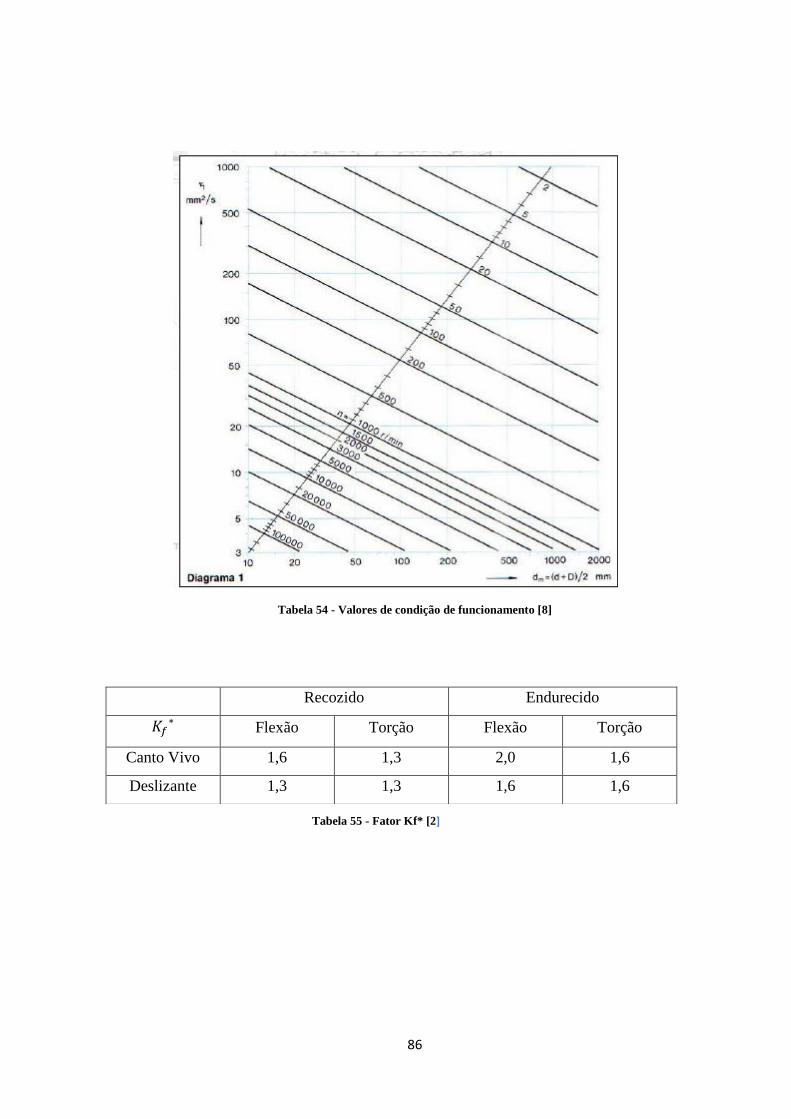
86
Recozido Endurecido
𝐾𝑓∗ Flexão Torção Flexão Torção
Canto Vivo 1,6 1,3 2,0 1,6
Deslizante 1,3 1,3 1,6 1,6
Tabela 55 - Fator Kf* [2]
Tabela 54 - Valores de condição de funcionamento [8]
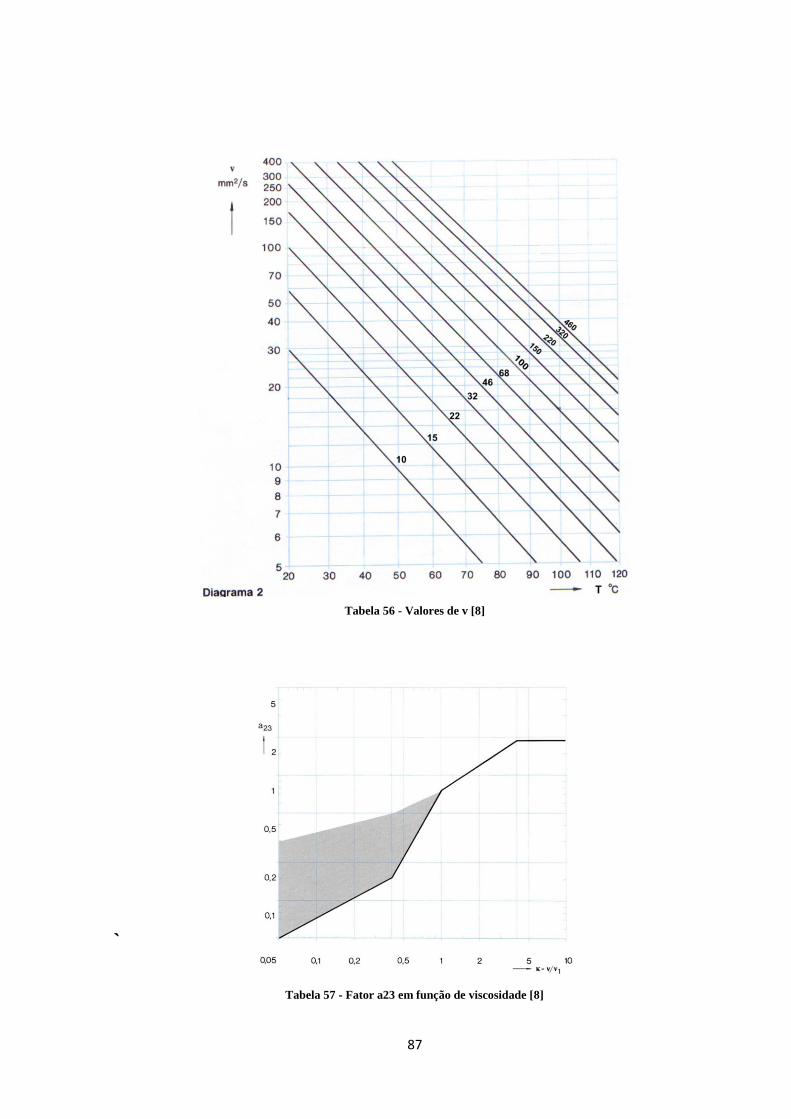
87
`
Tabela 56 - Valores de v [8]
Tabela 57 - Fator a23 em função de viscosidade [8]
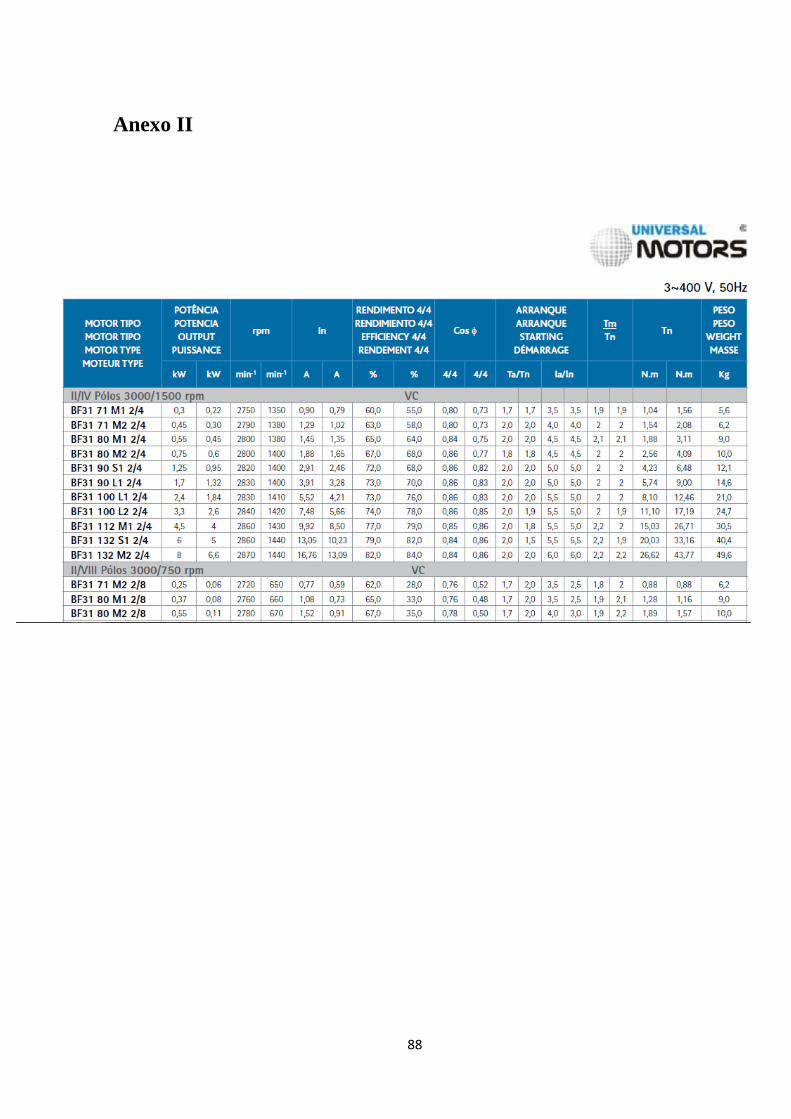
88
Anexo II
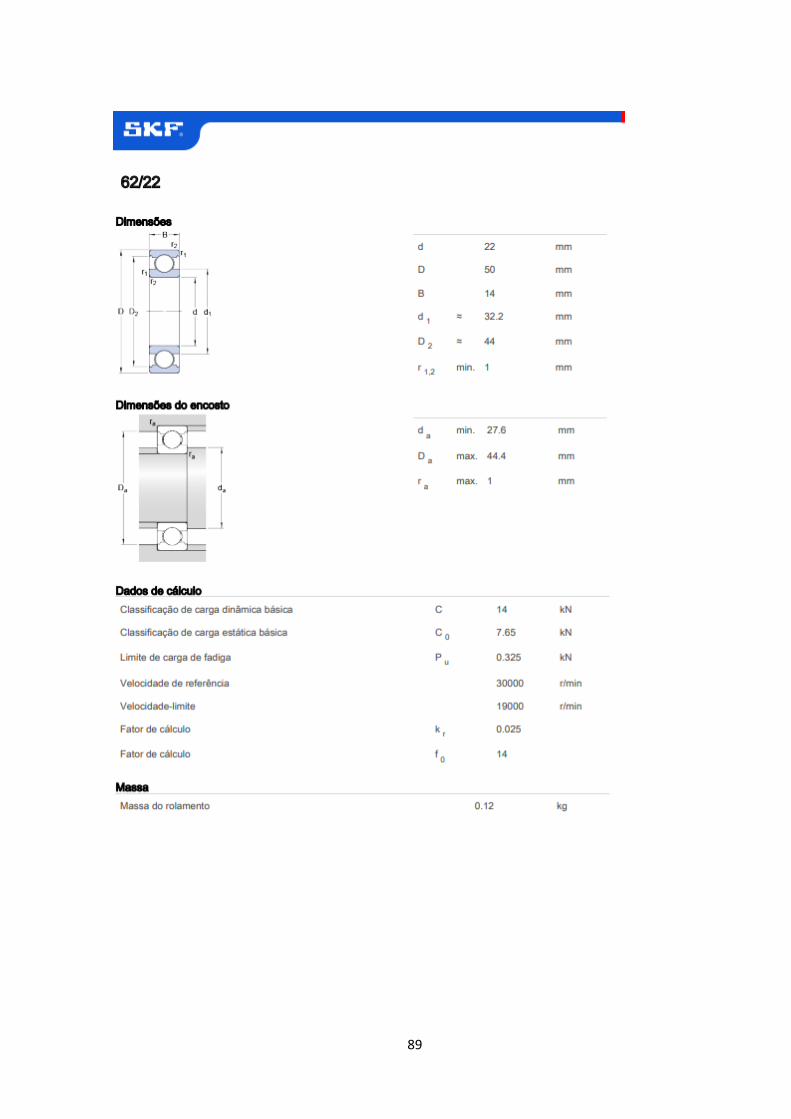
89
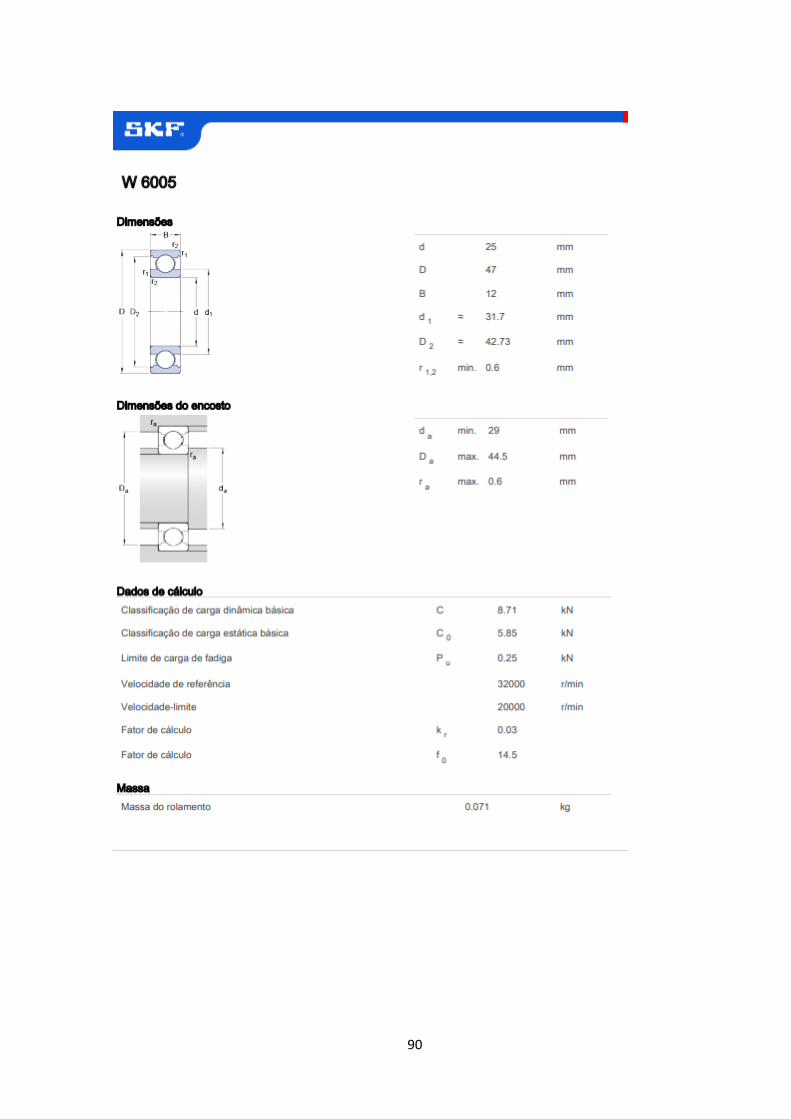
90
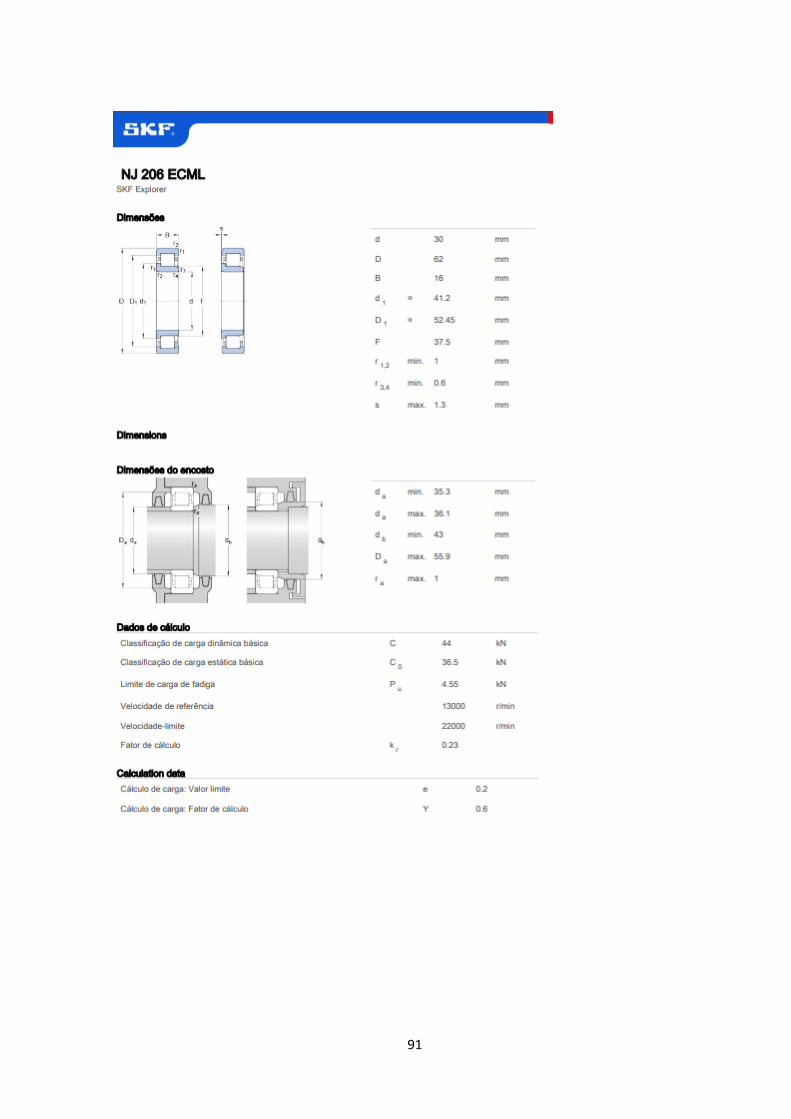
91

92
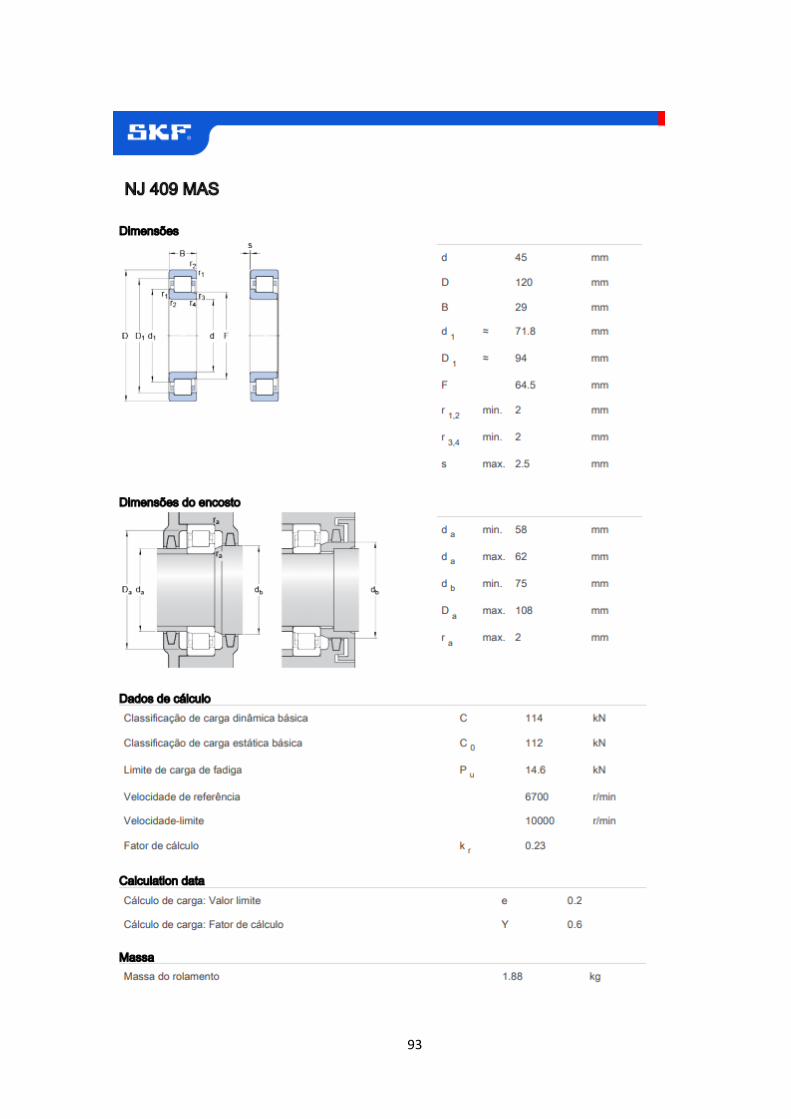
93
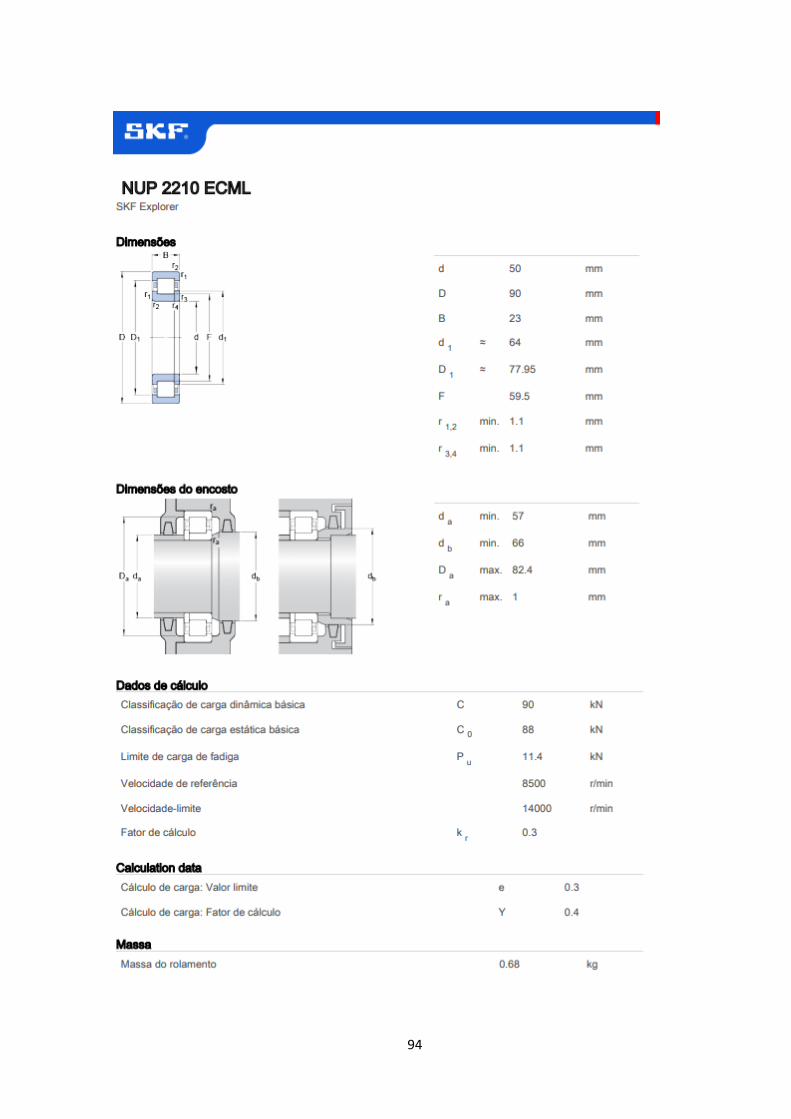
94
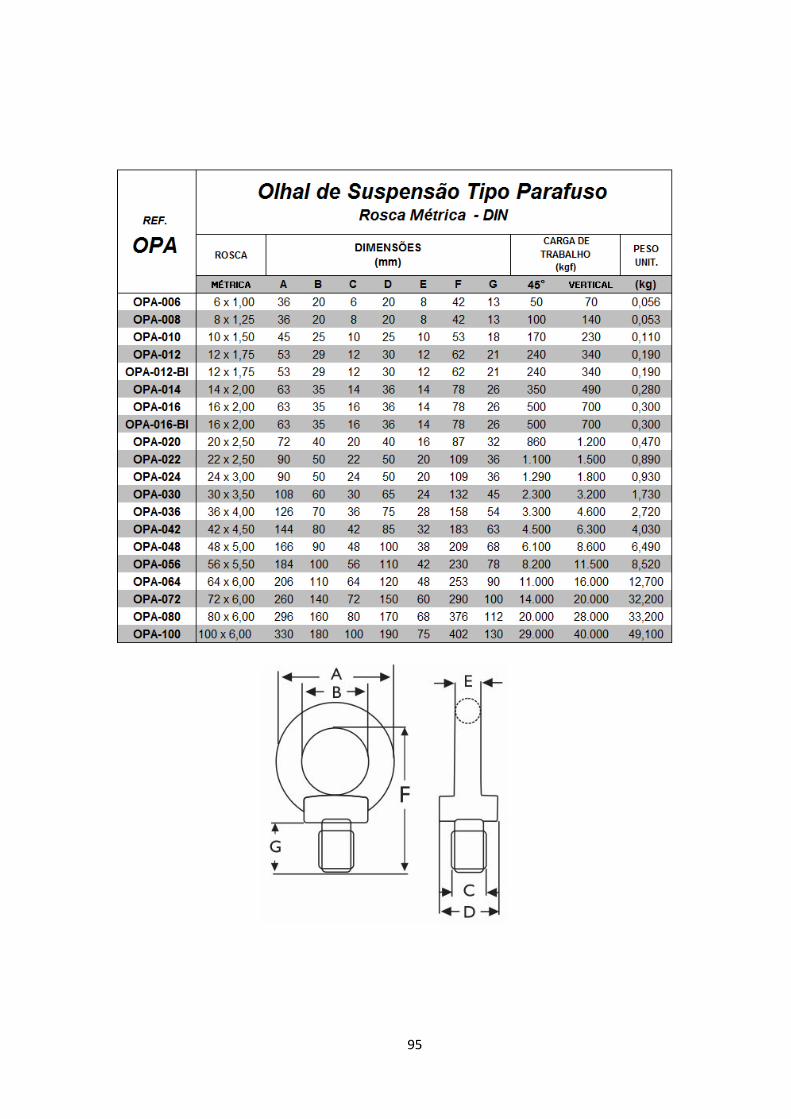
95