estudo hidrodinâmico da geometria de um flutuador para um
TRANSCRIPT

Estudo Hidrodinâmico da Geometria de um Flutuador para um
Dispositivo Conversor de Energia das Ondas
Bernardo de Melo Kahn
Projeto de Graduação apresentado ao
Curso de Engenharia Naval e Oceânica
da Escola Politécnica, Universidade
Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do
título de Engenheiro.
Orientadores:
Claudio Alexis Rodríguez Castillo,
D.Sc – COPPE/UFRJ
Eliab Ricarte Beserra,
D.Sc. – COPPE/UFRJ
Rio de Janeiro
Fevereiro de 2017
i
Estudo Hidrodinâmico da Geometria de um Flutuador para
um Dispositivo Conversor de Energia das Ondas
Bernardo de Melo Kahn
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DE GRAU DE ENGENHEIRO NAVAL.
Examinada por:
____________________________________________
Orientador: Prof. Claudio Alexis Rodríguez Castillo, D.Sc.
____________________________________________
Orientador: Eliab Ricarte Beserra, D.Sc.
____________________________________________
Prof. Paulo de Tarso Themistocles Esperança, D.Sc.
____________________________________________
Prof. Carl Horst Albrecht, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO de 2017

ii
KAHN, Bernardo de Melo
Estudo Hidrodinâmico da Geometria de um Flutuador
para um Dispositivo Conversor de Energia das Ondas.
/ Bernardo de Melo Kahn. – Rio de Janeiro: UFRJ/
Escola Politécnica, 2017.
viii, 70 p.: il.; 29,7 cm.
Orientador: Claudio Alexis Rodríguez Castillo
Orientador: Eliab Ricarte Beserra
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Naval e Oceânica, 2017.
Referências Bibliográficas: p. 71
1. Hidrodinâmica. 2. Conversão de Energia das Ondas.
3. Ansys Aqwa 4. Teoria Potencial Linear 5. Point Absorber
I. RODRÍGUEZ, Claudio Alexis R. Castillo et al. II.
Universidade Federal do Rio de Janeiro, Escola Politécnica,
Curso de Engenharia Naval e Oceânica. III. Estudo
Hidrodinâmico da Geometria de um Flutuador para um
Dispositivo Conversor de Energia das Ondas.

iii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Naval.
Estudo Hidrodinâmico da Geometria de um Flutuador para um Dispositivo Conversor
de Energia das Ondas
Bernardo de Melo Kahn
Fevereiro/2017
Orientador: Prof. D.Sc. Claudio Alexis Rodríguez Castillo
Orientador: D.Sc. Eliab Ricarte Beserra
Curso: Engenharia Naval e Oceânica
O conceito de um dispositivo para conversão de energia das ondas do tipo point
absorber para águas rasas e intermediárias é proposto, como parte de um projeto do
Programa de Planejamento Energético da UFRJ. A partir deste conceito, modelos
computacionais são criados utilizando o programa Rhinoceros e análises hidrodinâmicas
no domínio da frequência são realizadas, através do programa Ansys Aqwa, utilizando
Teoria Potencial Linear. Com base nas análises, são identificados os parâmetros
geométricos do flutuador do point absorber que mais impactam no seu desempenho na
extração de energia das ondas. Um sítio para operação do dispositivo conversor é
definido, e a geometria do flutuador é adaptada para as condições de mar do sítio,
baseado nas análises realizadas. Estimativas da potência extraída do mar em ondas
regulares e irregulares são realizadas. Ao fim, um roteiro de adaptação da geometria do
flutuador para sítios genéricos é proposto.
Palavras-chave: energia das ondas, WEC, point absorber, Rhinoceros, Ansys Aqwa,
Teoria Potencial Linear

iv
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Engineer.
Hydrodinamic Analysis of the Geometry of an Oscillator for a Wave Energy Converter
Device
Bernardo de Melo Kahn
February/2017
Advisor: D.Sc. Claudio Alexis Rodríguez Castillo
Advisor: D.Sc. Eliab Ricarte Beserra
Course: Naval Architecture and Marine Engineering
The concept of a point absorber wave energy converter device for shallow and
intermediate waters is presented, as part of a project in development at UFRJ. From this
concept, models are designed through Rhinoceros and hydrodynamic analyses are
performed in the frequency domain, using Ansys Aqwa and Linear Potential Theory.
Based on the analyses results, the geometric parameters from the point absorber’s buoy
that have the greatest influence in the wave energy extraction performance are identified.
A location is chosen for the operation of the device, and the buoy’s geometry is adapted
for the sea conditions at the site, based on the previous analyses. Estimates for the power
extracted in regular and irregular waves are performed. At the end, a script of the
procedure for future adaptions of the buoy’s geometry to generic locations is proposed.
Keywords: wave energy, WEC, point absorber, Rhinoceros, Ansys Aqwa, Linear Potential
Theory
v
Agradecimentos
Agradeço aos meus pais Nátia Cristina de Melo Kahn e Jorge Baptista da Silva,
por toda a paciência e suporte que me proporcionaram ao longo do curso. Foram
incontáveis noites mal dormidas, problemas de saúde, stress, mau humor, falta de tempo
e tantos outros que, sem o amor de vocês, eu jamais conseguiria ter superado.
A Gabriela Esteves por toda a compreensão, empatia e afeto que
compartilhamos em cada momento desta reta final, e que foram decisivos para o nosso
sucesso. Obrigado por correr até onde não se aguenta ao meu lado.
A Heloisa Fanti pela incrível habilidade de me fazer acreditar que eu sou maior
do que meus olhos podem ver.
A Priscilla Miguel por ter sido uma irmã essencial para mim ao longo do tempo
de faculdade e por me ensinar muito sobre mim mesmo.
Agradeço a Eliab Ricarte Beserra pela oportunidade concedida em trabalhar
neste projeto, a Sudá Andrade Neto pelas informações compartilhadas, a Julio Cezar
Fernandez Polo por se disponibilizar a me ajudar com o Ansys Aqwa, e também a
contribuição de Ricardo Homero Ramírez Gutiérrez com o programa.
Agradeço a orientação do Prof. Cláudio Alexis Rodríguez Castillo, um dos
melhores com os quais tive o prazer de ter aula. Aproveito e agradeço também ao Prof.
Sergio Sphaier, responsável por despertar meu interesse pela hidrodinâmica.
Aos meus colegas navais Amarildo Pereira, Joice Carrara, Jonas Haddad e
Rachel Khalil, por todos os momentos que passamos juntos em cada disciplina, cada
conversa amiga, cada apoio prestado e cada vitória.
Aos meus companheiros de lutas e amizade Caio Swan, Danielle Carneiro e
Henrique Ralsi, por estarem ao meu lado nos esforços para construir um curso de
engenharia naval melhor, doando seu tempo em prol dos outros alunos. Também
agradeço ao Prof. Luiz Vaz por se empenhar em fazer o mesmo como coordenador de
curso, e a Simone Morandini por ser uma segunda mãe para todos os navais.
Aos professores do curso que contribuíram muito para minha formação e
deixaram sua marca Prof. Moraya, Profa. Annelise, Prof. Sanglard, Profa. Marta Tapia,
Prof. Marcelo Igor e Prof. Alexandre Alho, certo de que sou um profissional melhor tendo
passado por suas aulas.
vi
Sumário 1. Introdução ................................................................................................................. 1
1.1 Cenário global ..................................................................................................... 1
1.2 Motivação para energia das ondas ...................................................................... 1
1.3 Objetivos e escopo .............................................................................................. 3
2. Revisão Bibliográfica ................................................................................................ 4
2.1 Histórico .............................................................................................................. 4
2.2 Ondas de Gravidade ........................................................................................... 4
2.3 Teoria Potencial Linear ........................................................................................ 8
2.4 Classificação de Conversores de Energia ........................................................... 9
2.4.1 Oscillating water column ............................................................................. 10
2.4.2 Oscillating body converters ......................................................................... 11
2.4.3 Overtopping converters ............................................................................... 15
2.5 Princípios de Extração de Energia das Ondas .................................................. 16
2.6 Response Amplitude Operator (RAO) ............................................................... 16
2.7 Power-Take-Off (PTO) e Sistemas de Controle ................................................. 17
3. Proposta de Trabalho ............................................................................................. 20
3.1 Origem e modelo geométrico ............................................................................ 20
3.2 Sítio para operação ........................................................................................... 22
3.3 Modelo matemático ........................................................................................... 23
3.3.1 Forças atuantes no flutuador....................................................................... 23
3.3.2 Sistema linear em ondas regulares: análise no domínio da frequência ....... 27
3.3.3 Sistema linear em ondas irregulares: análise no domínio da frequência ..... 30
4. Simulação Computacional ...................................................................................... 33
4.1 Modelos geométricos ........................................................................................ 33
4.1.1 Modelo para testes sem chanfro ................................................................. 33
4.1.2 Modelo para testes com chanfro ................................................................. 34
4.2 Limites geométricos .......................................................................................... 35
4.3 Programas Utilizados ........................................................................................ 37
5. Análise no Domínio da Frequência ......................................................................... 39
5.1 Análises RAO em Modelos Sem Chanfro .......................................................... 39
5.2 Conclusões Parciais: Modelos Sem Chanfro ..................................................... 45
5.3 Análises RAO em Modelos com chanfro ........................................................... 46
5.4 Conclusões Parciais: Modelos Com Chanfro ..................................................... 50
5.5 Análises de Massa Adicional ............................................................................. 51
vii
5.6 Conclusões Parciais: Massa Adicional .............................................................. 57
6. Definição do Modelo para o Sítio ............................................................................ 59
6.1 Síntese das Conclusões .................................................................................... 59
6.2 Modelo Selecionado .......................................................................................... 59
6.3 Potência Extraída em Ondas Regulares ............................................................ 61
6.4 Potência Extraída em Ondas Irregulares ........................................................... 64
7. Conclusão e Proposta de Roteiro ........................................................................... 66
7.1 Conclusões ....................................................................................................... 66
7.2 Proposta de Roteiro .......................................................................................... 67
7.2.1 Dados do Sítio ............................................................................................ 67
7.2.2 Limites Geométricos ................................................................................... 67
7.2.3 Ferramentas Computacionais ..................................................................... 67
7.2.4 Modelos Paramétricos ................................................................................ 68
7.2.5 Análise Hidrodinâmicas ............................................................................... 68
7.2.6 Seleção e Validação do Modelo .................................................................. 68
7.2.7 Fluxograma do Roteiro................................................................................ 68
7.3 Trabalhos Futuros ............................................................................................. 70
8. Referências Bibliográficas ....................................................................................... 71
9. Anexos .................................................................................................................... 73
9.1 Dados Meteoceanográficos do Sítio .................................................................. 73
9.2 Análise RAO dos Modelos Sem Chanfro ........................................................... 75
9.3 Análise RAO dos Modelos Com Chanfro ........................................................... 83
9.4 Análise Massa Adicional .................................................................................... 87
9.5 Estimativa dos Períodos Naturais de Oscilação ................................................ 95
9.6 Cálculo Potência Extraída em Ondas Regulares ............................................. 112
9.7 Cálculo Potência Extraída em Ondas Irregulares ............................................ 113
9.8 Guia para Rhinoceros e Ansys Aqwa .............................................................. 114
9.8.1 Rhinoceros ................................................................................................ 114
9.8.2 Ansys ........................................................................................................ 116
9.8.3 Design Modeler ......................................................................................... 117
9.8.4 Aqwa Hydrodinamic Diffraction ................................................................. 119
1
1. Introdução
1.1 Cenário global
Atualmente, existe uma predominância na matriz energética global na utilização
de combustíveis fósseis como principal fonte de energia. Esta prática leva a impactos
ambientais que causam severos danos ao planeta, bem como a uma escassez da
matéria prima, já que as taxas de extração são muito maiores do que a capacidade de
recuperação do ecossistema. Frente a esta situação, e as crises recentes do petróleo
que mudaram drasticamente os preços praticados, houve um aumento dos
investimentos voltados para exploração de novas fontes de energia limpa e renovável.
Muitos países já apresentam uma boa parte de sua matriz energética com origem
em energia renovável. A Irlanda por exemplo, segundo estatísticas da União Européia
[1] em 2014, apresentava 51,8% de sua matriz energética com fonte eólica. A grande
dificuldade de inserção de uma matriz energética mais sustentável sempre foi o custo
por energia produzida, ou seja, R$/kWh. Entretanto, com os avanços tecnológicos e o
investimento em pesquisas sobre o tema, este custo vem caindo a cada ano, a ponto
de que para alguns países, já se equipara ao custo de utilização dos combustíveis
fósseis.
Tratados internacionais, como o Protocolo de Kyoto e a Conferência do Clima
em Paris (COP21), que visam estabelecer metas para os países reduzirem suas
emissões de CO2, também são fatores que estimulam a produção de conhecimento
científico na exploração de fontes renováveis de energia.
Percebe-se portanto, que existe um cenário global favorável para pesquisas e
desenvolvimento de tecnologia para exploração de energias alternativas aos
combustíveis fósseis. O Brasil, sendo signatário de tratados internacionais, e possuindo
condições naturais favoráveis para aproveitar novas fontes de energia, deve ser capaz
de produzir conhecimento de forma autônoma sobre o tema, a exemplo do que já ocorre
com a cana-de-açúcar. O presente estudo se propõe a dar sua contribuição sobre o
tema.
1.2 Motivação para energia das ondas
Segundo Falnes [2], o potencial global de energia representado pelas ondas que
atingem todas as áreas costeiras do mundo é da ordem de 1 TW (1 terawatt = 1012 W).
Se a energia das ondas for captada em mar aberto, a energia que seria perdida por
fricção com o leito marinho ou com o quebramento das ondas ao se aproximar da costa,
2
poderia ser utilizada. Neste caso, o potencial de energia global das ondas subiria para
algo em torno de 1013 W, uma quantidade que é comparável ao consumo de energia do
mundo inteiro em 2007. Embora isto represente apenas uma pequena fração da energia
eólica global, que por sua vez representa uma pequena fração da energia solar global,
a energia das ondas se destaca como uma enorme fonte de energia inexplorada.
A energia das ondas é uma forma de energia solar, com o sol produzindo
diferenças de temperatura ao redor do planeta, o que causa a ocorrência de ventos, que
por sua vez percorrem a superfície dos oceanos gerando ondas. Quando a energia solar
é convertida em energia eólica, o fluxo médio de energia ao longo do tempo é
espacialmente concentrado, de uma intensidade típica de 0,1~0,3 kW/m² de área
horizontal da superfície da Terra, para 0,5 kW/m² de área projetada perpendicular à
direção do vento. Quando a energia do vento é convertida para energia das ondas, o
fluxo se torna ainda mais concentrado. Logo abaixo da superfície do oceano, a
concentração média é da ordem de 2~3 kW/m² de área projetada perpendicular à
direção de propagação das ondas. Este aumento na concentração de energia e o fato
da energia das ondas ser mais constante que a energia eólica, é um estimulante para
que mais pesquisas sejam voltadas para este assunto.
De acordo com Drew, Plummer e Sahinkaya [3], as principais vantagens da
exploração de energia das ondas são:
Ondas oceânicas apresentam a maior concentração espacial de fluxo
energético, conforme discutido acima;
Ondas podem se propagar por grandes distâncias com muito pouca dissipação
de energia, dessa forma o mar age como um integrador entre os continentes.
Ventos na costa da África, por exemplo, podem gerar ondas que viagem até a
costa do Brasil, que podem ser aproveitadas como energia;
Baixo impacto ambiental negativo;
Estima-se que dispositivos conversores de energia das ondas podem gerar
energia por até 90% do tempo de operação, comparado a 20~30% dos
dispositivos de energia eólica e solar, por exemplo.
Segundo a CIA [4], agência americana de inteligência, o Brasil é um dos países
com maior área costeira do mundo, ocupando a posição de 16º. Além disso, diversos
centros de atividade econômica do país são localizados em regiões litorâneas e existe
uma significativa atividade portuária. Ainda assim, a energia das ondas não é explorada,
e estes dispositivos podem ser usados não só para geração de energia elétrica, como
3
também para bombeamento de fluidos, dessalinização da água dos oceanos, sistemas
trocadores de calor, dentre outros propósitos.
1.3 Objetivos e escopo
O objetivo deste trabalho é estudar a geometria de um flutuador, que fará parte
de um dispositivo conversor de energia das ondas, modificando suas características
para maximizar o aproveitamento energético do dispositivo frente às cargas
hidrodinâmicas atuantes no sítio onde o mesmo será instalado.
O conceito do dispositivo conversor de energia das ondas é uma premissa de
projeto, apresentada no Capítulo 3. A geometria do flutuador será modelada e
modificada ao longo do projeto utilizando o software Rhinoceros [5] de modelagem
computacional. Os parâmetros hidrodinâmicos do flutuador e sua resposta frente as
cargas ambientas do sítio serão derivados utilizando Teoria Potencial Linear através do
software Ansys Aqwa [6].
O trabalho apresenta uma revisão sobre o histórico do uso deste tipo de
tecnologia no mundo, bem como apresentação sobre a teoria e os conceitos
hidrodinâmicos empregados nas análises, e uma breve apresentação sobre o conteúdo
e utilização dos programas empregados. Uma investigação sistemática será realizada
através de mudanças paramétricas na geometria do flutuador a fim de identificar a
sensibilidade dos parâmetros geométricos na resposta do dispositivo às cargas
ambientais de um sítio previamente selecionado, visando maximizar seu rendimento
energético. Os resultados para cada configuração geométrica são apresentados e
discutidos.
Espera-se adequar satisfatoriamente a geometria do flutuador para maximização
do potencial energético no sítio selecionado, bem como destacar quais parâmetros
geométricos são mais relevantes no processo de adequação ao sítio, a fim de identificar
um roteiro de trabalho a ser seguido para adequação em outros sítios futuros.
4
2. Revisão Bibliográfica
2.1 Histórico
Segundo Falnes [2] e Cargo [7], a primeira patente registrada sobre um
dispositivo conversor de energia das ondas aconteceu em Paris, em 1799, por um
pesquisador francês chamado Girard. Hoje em dia, existem milhares de patentes
registradas, com mais de 200 projetos já tendo alcançado o nível de protótipo.
Entretanto, a maior parte do conhecimento produzido sobre o assunto ocorreu nos
últimos 40 anos.
No fim da década de 40, um cientista japonês pioneiro em energia das ondas
chamado Yoshio Masuda começou a testar e desenvolver dispositivos conversores de
energia das ondas, em inglês chamados de WECs (Wave Energy Converters). Na
Europa, o movimento começou com as contribuições de Stephen Salter e Kjell Budal,
iniciadas em 1973 com grupos de pesquisa sobre energia das ondas em universidades
na Escócia e na Noruega, respectivamente. Nos EUA, os estudos começaram com
Michael E. McCormick, porém só se intensificaram em escala global a partir da crise do
petróleo em 1973, quando pesquisadores de diversas universidades do mundo
começaram a investigar o assunto. Programas de pesquisa e desenvolvimento
financiados por governos foram iniciados ao longo do final da década de 70 em alguns
países da Europa como Reino Unido, Suécia e Noruega. No início da década de 80,
quando o preço do petróleo despencou, o financiamento para pesquisas sobre energia
das ondas sofreu forte queda.
Desde os anos 90, com a ameaça do aquecimento global e as variações no
preço do petróleo, os programas de financiamento dos governos voltaram a crescer,
resultando em um aumento da produção científica sobre o assunto. O uso e
desenvolvimento de outras fontes de energia renovável também avançou nesse
período, entretanto, algumas fontes que se mostravam promissoras acabaram
levantando questionamentos, abrindo espaço para novas alternativas como a energia
das ondas. É o caso da energia nuclear por exemplo, que passou a ser muito
questionada devido a acidentes em larga escala como o de Chernobyl, na Ucrânia, e o
de Fukushima, no Japão.
2.2 Ondas de Gravidade
Beserra [8] explica que o vento atua sobre a superfície dos oceanos transferindo
energia cinética ao mar, em forma de quantidade de movimento. Essa atuação gera
5
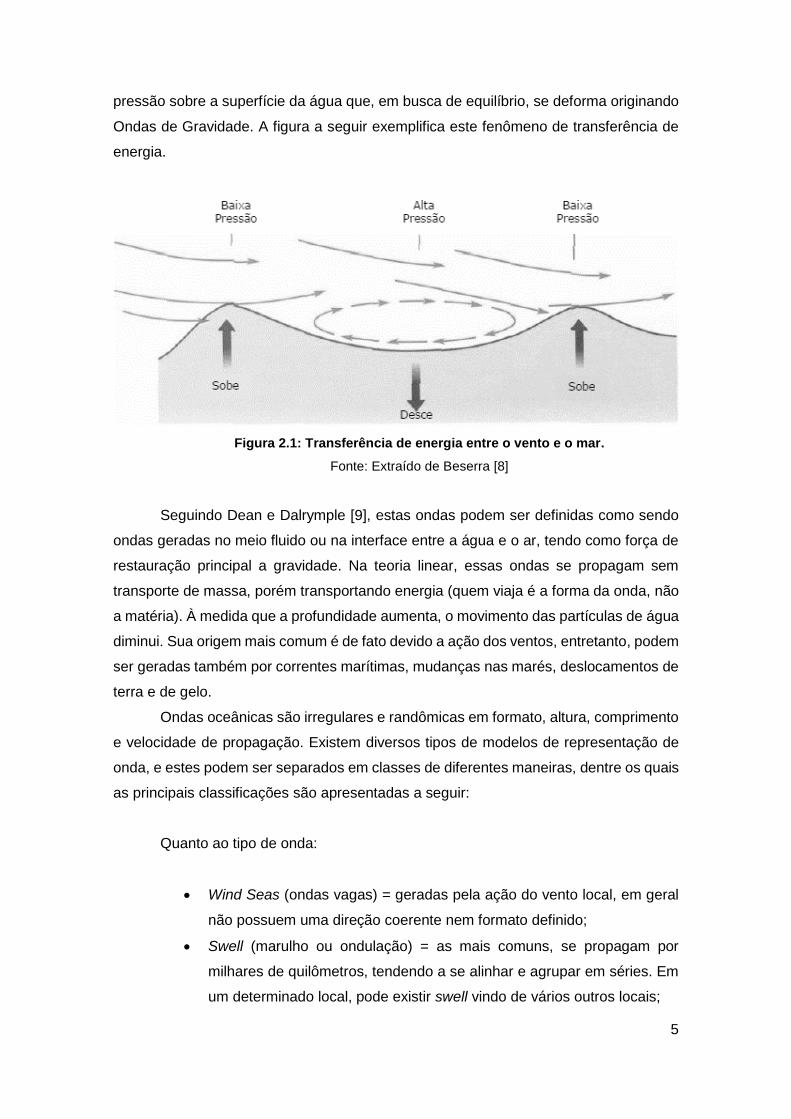
pressão sobre a superfície da água que, em busca de equilíbrio, se deforma originando
Ondas de Gravidade. A figura a seguir exemplifica este fenômeno de transferência de
energia.
Figura 2.1: Transferência de energia entre o vento e o mar.
Fonte: Extraído de Beserra [8]
Seguindo Dean e Dalrymple [9], estas ondas podem ser definidas como sendo
ondas geradas no meio fluido ou na interface entre a água e o ar, tendo como força de
restauração principal a gravidade. Na teoria linear, essas ondas se propagam sem
transporte de massa, porém transportando energia (quem viaja é a forma da onda, não
a matéria). À medida que a profundidade aumenta, o movimento das partículas de água
diminui. Sua origem mais comum é de fato devido a ação dos ventos, entretanto, podem
ser geradas também por correntes marítimas, mudanças nas marés, deslocamentos de
terra e de gelo.
Ondas oceânicas são irregulares e randômicas em formato, altura, comprimento
e velocidade de propagação. Existem diversos tipos de modelos de representação de
onda, e estes podem ser separados em classes de diferentes maneiras, dentre os quais
as principais classificações são apresentadas a seguir:
Quanto ao tipo de onda:
Wind Seas (ondas vagas) = geradas pela ação do vento local, em geral
não possuem uma direção coerente nem formato definido;
Swell (marulho ou ondulação) = as mais comuns, se propagam por
milhares de quilômetros, tendendo a se alinhar e agrupar em séries. Em
um determinado local, pode existir swell vindo de vários outros locais;

6
Tsunami = gerada por perturbações sísmicas (terremotos, erupções,
dentre outros);
Ondas de capilaridade = formadas no início das correntes de vento,
morrem quando o vento termina, sendo amortecidas pela tensão
superficial da água.
Maré = ocorrem devido a uma alteração periódica do nível das águas
oceânicas, tendo sua origem na atração exercida pela Lua e pelo Sol
sobre o mar, especialmente da lua por estar mais próxima da Terra.
Quanto à regularidade:
Ondas Regulares = são periódicas no tempo e no espaço, caracterizadas
por parâmetros determinados como o período, altura e profundidade;
Ondas Irregulares = são aleatórias no tempo e no espaço, podem ser
caracterizadas por parâmetros estatísticos e/ou espectrais.
Quanto à linearidade:
Ondas Lineares = são descritas pela Teoria Potencial Linear, cujas
premissas básicas serão apresentadas no tópico 2.3;
Ondas Não-Lineares = ondas que não satisfazem as premissas da teoria
potencial linear, por exemplo, ondas com assimetria crista-cavado, ondas
sem periodicidade, entre outras. Podem ser descritas por modelos
analíticos ou numéricos.
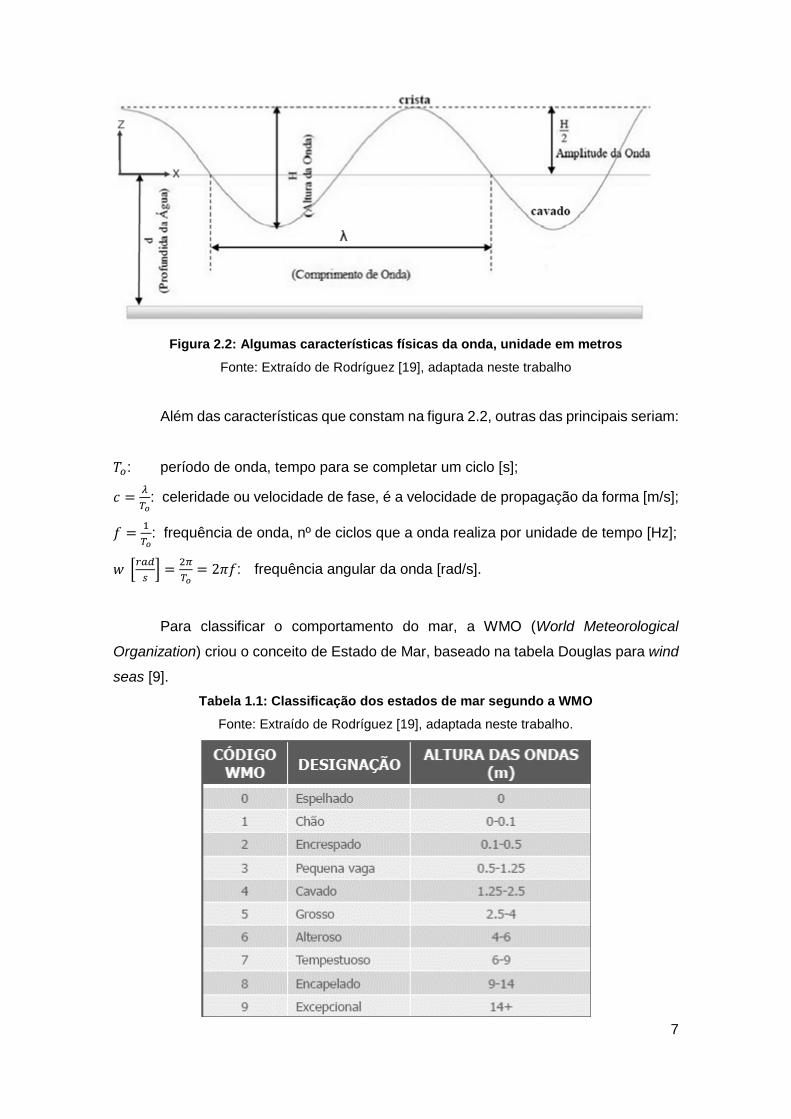
Beserra [8] afirma que, no ambiente marinho, os escoamentos possuem uma
características oscilatória, não constituindo um fluxo unidirecional. As ondas do mar
podem ser vistas como um perfil senoidal que se propaga ao longo da superfície do mar.
Dessa forma, suas principais características físicas podem ser apresentadas a seguir,
conforme figura 2.2.
7
Figura 2.2: Algumas características físicas da onda, unidade em metros
Fonte: Extraído de Rodríguez [19], adaptada neste trabalho
Além das características que constam na figura 2.2, outras das principais seriam:
𝑇𝑜: período de onda, tempo para se completar um ciclo [s];
𝑐 =𝜆
𝑇𝑜: celeridade ou velocidade de fase, é a velocidade de propagação da forma [m/s];
𝑓 =1
𝑇𝑜: frequência de onda, nº de ciclos que a onda realiza por unidade de tempo [Hz];
𝑤 [𝑟𝑎𝑑
𝑠] =
2𝜋
𝑇𝑜= 2𝜋𝑓: frequência angular da onda [rad/s].
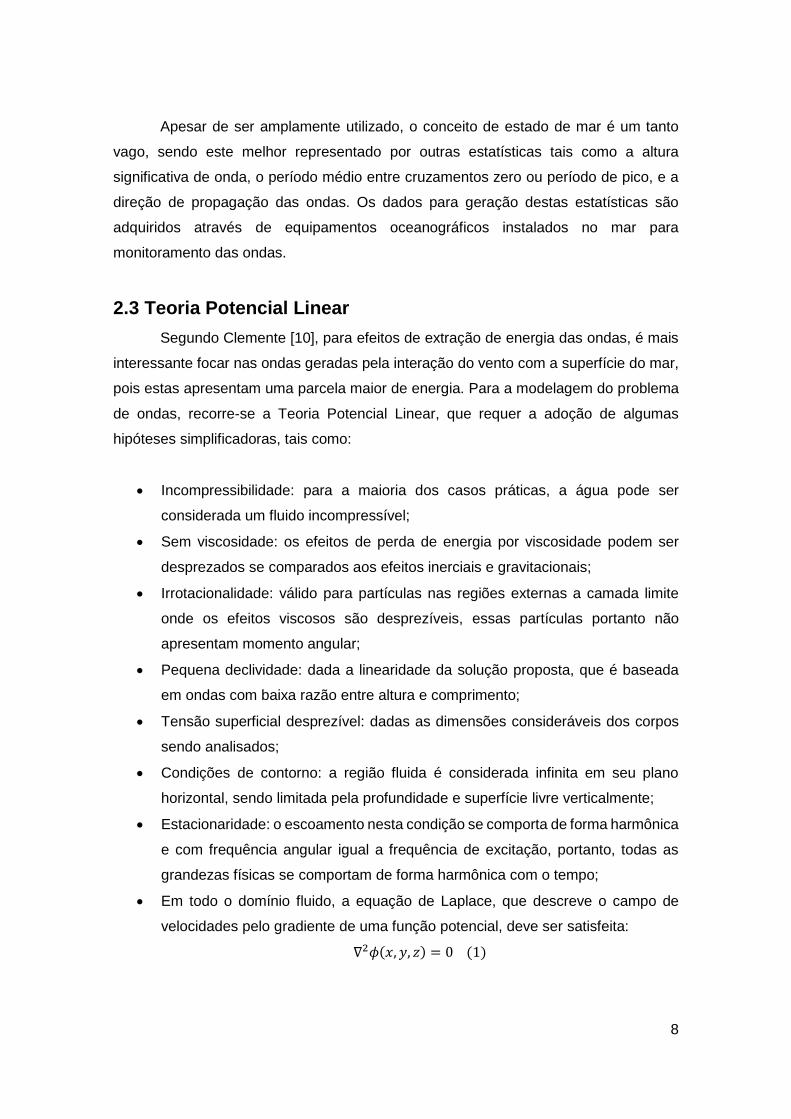
Para classificar o comportamento do mar, a WMO (World Meteorological
Organization) criou o conceito de Estado de Mar, baseado na tabela Douglas para wind
seas [9].
Tabela 1.1: Classificação dos estados de mar segundo a WMO
Fonte: Extraído de Rodríguez [19], adaptada neste trabalho.
8
Apesar de ser amplamente utilizado, o conceito de estado de mar é um tanto
vago, sendo este melhor representado por outras estatísticas tais como a altura
significativa de onda, o período médio entre cruzamentos zero ou período de pico, e a
direção de propagação das ondas. Os dados para geração destas estatísticas são
adquiridos através de equipamentos oceanográficos instalados no mar para
monitoramento das ondas.
2.3 Teoria Potencial Linear
Segundo Clemente [10], para efeitos de extração de energia das ondas, é mais
interessante focar nas ondas geradas pela interação do vento com a superfície do mar,
pois estas apresentam uma parcela maior de energia. Para a modelagem do problema
de ondas, recorre-se a Teoria Potencial Linear, que requer a adoção de algumas
hipóteses simplificadoras, tais como:
Incompressibilidade: para a maioria dos casos práticas, a água pode ser
considerada um fluido incompressível;
Sem viscosidade: os efeitos de perda de energia por viscosidade podem ser
desprezados se comparados aos efeitos inerciais e gravitacionais;
Irrotacionalidade: válido para partículas nas regiões externas a camada limite
onde os efeitos viscosos são desprezíveis, essas partículas portanto não
apresentam momento angular;
Pequena declividade: dada a linearidade da solução proposta, que é baseada
em ondas com baixa razão entre altura e comprimento;
Tensão superficial desprezível: dadas as dimensões consideráveis dos corpos
sendo analisados;
Condições de contorno: a região fluida é considerada infinita em seu plano
horizontal, sendo limitada pela profundidade e superfície livre verticalmente;
Estacionaridade: o escoamento nesta condição se comporta de forma harmônica
e com frequência angular igual a frequência de excitação, portanto, todas as
grandezas físicas se comportam de forma harmônica com o tempo;
Em todo o domínio fluido, a equação de Laplace, que descreve o campo de
velocidades pelo gradiente de uma função potencial, deve ser satisfeita:
∇2𝜙(𝑥, 𝑦, 𝑧) = 0 (1)
9
Estas hipóteses permitem o uso da Teoria Potencial Linear e a simplificação do
problema de ondas sem perda da qualidade dos resultados. Além disso, o corpo sendo
estudado é tratado como rígido, não estando sujeito a deformações devido a ação do
fluido.
Dean e Dalrymple [9] ressaltam que a Teoria Linear é usada para descrever
ondas de altura pequena em comparação com seu comprimento, ou com a profundidade
da água. Os parâmetros que definem a onda linear são a altura de onda ou amplitude,
a profundidade, o período e o comprimento de onda. Cargo [7] destaca que a Teoria
Linear tem sido a abordagem mais utilizada dentre os pesquisadores em WECs (Wave
Energy Converters).
2.4 Classificação de Conversores de Energia
Segundo a IRENA [11] (International Renewable Energy Agency), um conversor
de energia das ondas é composto por alguns elementos principais, seriam estes:
1) Estrutura e suas partes móveis, que captam a energia das ondas;
2) Fundação ou ancoragem, mantendo a estrutura no lugar correto;
3) O dispositivo power-take-off (PTO), responsável pela conversão da energia;
4) Os sistemas de controle de segurança e optimização da operação.
Existem diferentes formas com as quais os WEC podem ser categorizados,
talvez a mais geral delas seja dividir em três grandes categorias: oscillating water
columns (OWCs), oscillating body converters e os overtopping converters. A figura 2.3
traz essa divisão e cita algumas referências de dispositivos que já existem em fase
avançada de desenvolvimento, seja pelo meio acadêmico ou via iniciativa privada.
10
Figura 2.3: Exemplos de projetos reais existentes
Fonte: Extraído de IRENA [11]
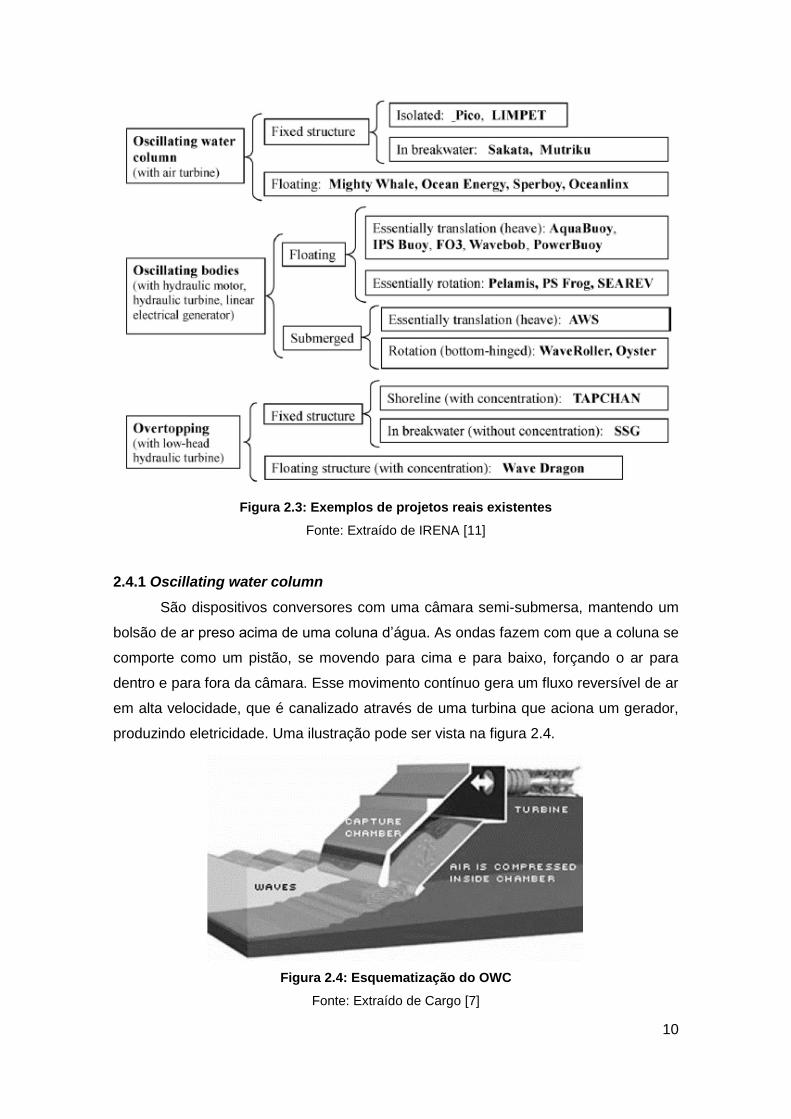
2.4.1 Oscillating water column
São dispositivos conversores com uma câmara semi-submersa, mantendo um
bolsão de ar preso acima de uma coluna d’água. As ondas fazem com que a coluna se
comporte como um pistão, se movendo para cima e para baixo, forçando o ar para
dentro e para fora da câmara. Esse movimento contínuo gera um fluxo reversível de ar
em alta velocidade, que é canalizado através de uma turbina que aciona um gerador,
produzindo eletricidade. Uma ilustração pode ser vista na figura 2.4.
Figura 2.4: Esquematização do OWC
Fonte: Extraído de Cargo [7]

11
As principais vantagens deste tipo de sistema são sua simplicidade (fora turbina,
não existem partes móveis) e a confiabilidade do sistema. Em termos de conversão de
energia, a eficiência não é grande, mas novos sistemas de controle e projetos de turbina
estão em desenvolvimento para aumentar a conversão.
2.4.2 Oscillating body converters
Podem ser flutuantes (mais usual) ou submersos, fixos ao leito marinho ou não.
Segundo a IRENA [11], eles exploram os regimes mais energéticos das ondas, que
ocorrem normalmente em águas profundas, nas quais a profundidade é maior que 40
metros. Em geral, são mais complexos que os OWCs, particularmente em relação ao
sistema PTO. As vantagens deste tipo de dispositivo incluem seu tamanho e
versatilidade, já que a maioria deles são flutuantes. Segundo Cargo [7] e Drew, Plummer
e Sahinkaya. [3], podem ser subdivididos em diversas categorias, algumas das
principais seriam:
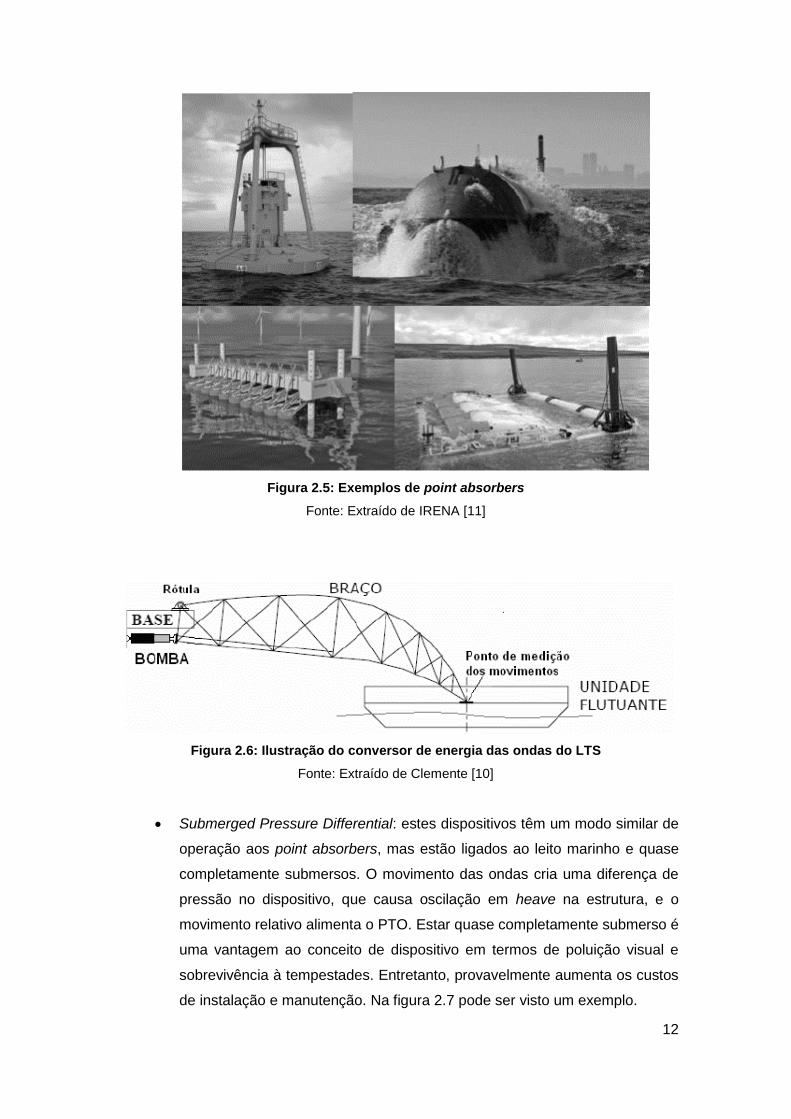
Point-Absorber: estruturas flutuantes que capturam energia das ondas em
todas as direções através de seu movimento na superfície da água. Em geral,
possuem simetria axial em relação a um eixo vertical, com uma dimensão
característica pequena em relação ao comprimento de ondas. Costumam ser
compostos por um flutuador, oscilando na vertical (em heave), conectado a
uma superfície estacionária, com o movimento relativo entre ambos
alimentando o PTO. Na figura 2.5 podem ser vistos diversos exemplos,
enquanto que na figura 2.6 é apresentada uma ilustração do modelo
desenvolvido pelo Laboratório de Tecnologia Submarina (LTS) da
COPPE/UFRJ.
12
Figura 2.5: Exemplos de point absorbers
Fonte: Extraído de IRENA [11]
Figura 2.6: Ilustração do conversor de energia das ondas do LTS
Fonte: Extraído de Clemente [10]
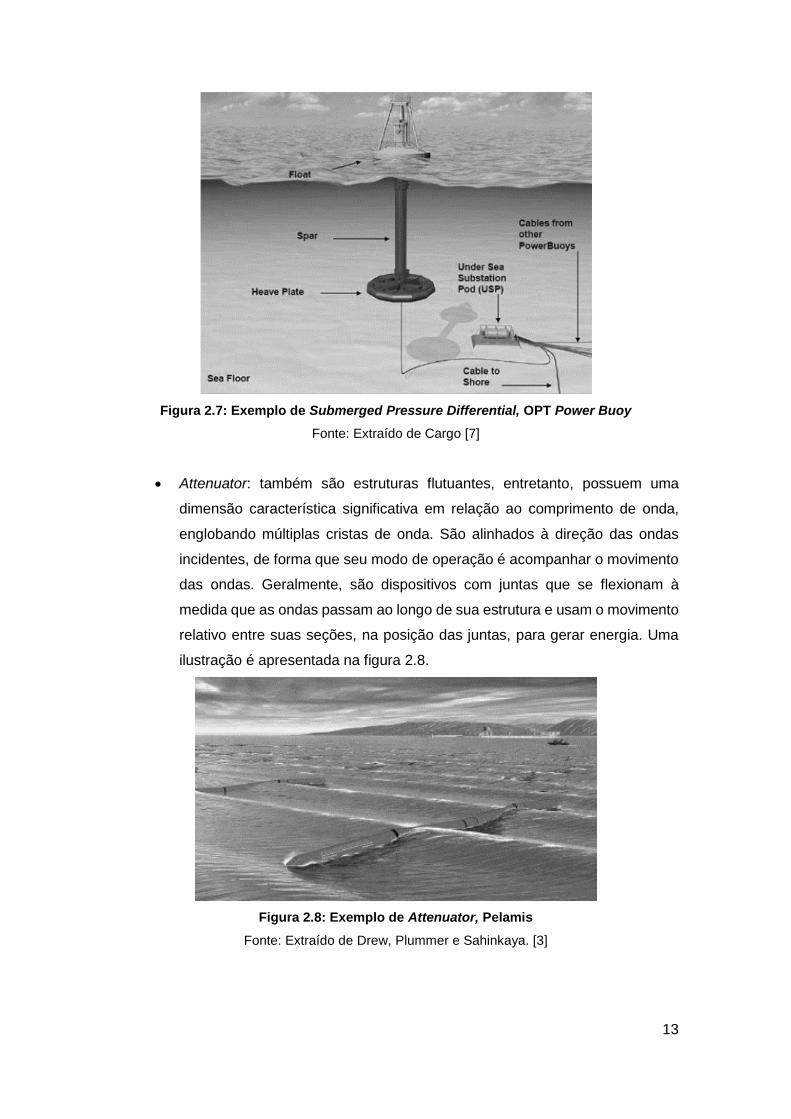
Submerged Pressure Differential: estes dispositivos têm um modo similar de
operação aos point absorbers, mas estão ligados ao leito marinho e quase
completamente submersos. O movimento das ondas cria uma diferença de
pressão no dispositivo, que causa oscilação em heave na estrutura, e o
movimento relativo alimenta o PTO. Estar quase completamente submerso é
uma vantagem ao conceito de dispositivo em termos de poluição visual e
sobrevivência à tempestades. Entretanto, provavelmente aumenta os custos
de instalação e manutenção. Na figura 2.7 pode ser visto um exemplo.
13
Figura 2.7: Exemplo de Submerged Pressure Differential, OPT Power Buoy
Fonte: Extraído de Cargo [7]
Attenuator: também são estruturas flutuantes, entretanto, possuem uma
dimensão característica significativa em relação ao comprimento de onda,
englobando múltiplas cristas de onda. São alinhados à direção das ondas
incidentes, de forma que seu modo de operação é acompanhar o movimento
das ondas. Geralmente, são dispositivos com juntas que se flexionam à
medida que as ondas passam ao longo de sua estrutura e usam o movimento
relativo entre suas seções, na posição das juntas, para gerar energia. Uma
ilustração é apresentada na figura 2.8.
Figura 2.8: Exemplo de Attenuator, Pelamis
Fonte: Extraído de Drew, Plummer e Sahinkaya. [3]
14
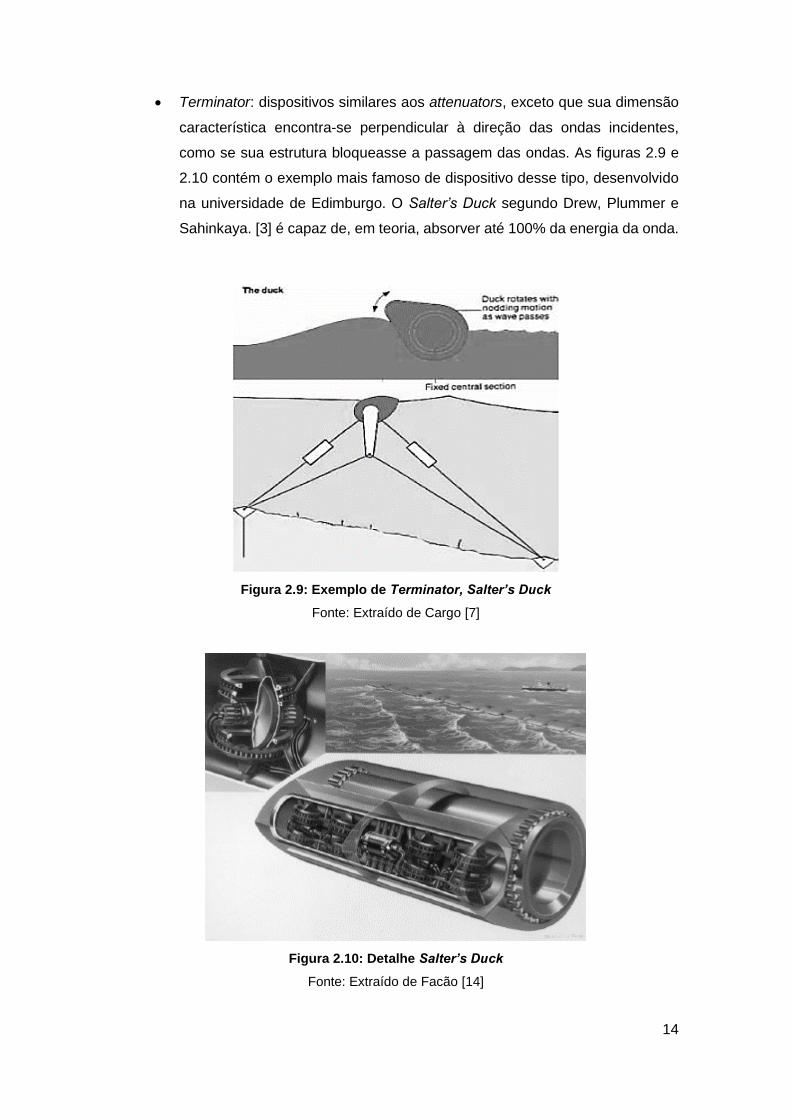
Terminator: dispositivos similares aos attenuators, exceto que sua dimensão
característica encontra-se perpendicular à direção das ondas incidentes,
como se sua estrutura bloqueasse a passagem das ondas. As figuras 2.9 e
2.10 contém o exemplo mais famoso de dispositivo desse tipo, desenvolvido
na universidade de Edimburgo. O Salter’s Duck segundo Drew, Plummer e
Sahinkaya. [3] é capaz de, em teoria, absorver até 100% da energia da onda.
Figura 2.9: Exemplo de Terminator, Salter’s Duck
Fonte: Extraído de Cargo [7]
Figura 2.10: Detalhe Salter’s Duck
Fonte: Extraído de Facão [14]
15
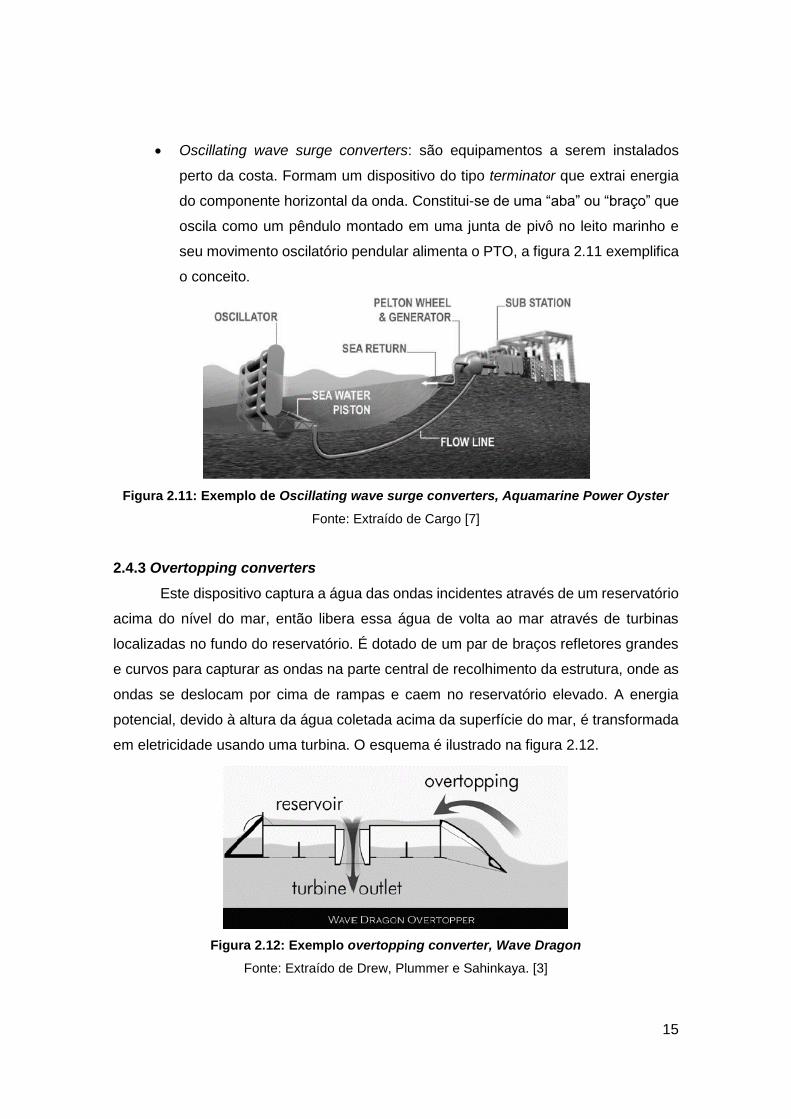
Oscillating wave surge converters: são equipamentos a serem instalados
perto da costa. Formam um dispositivo do tipo terminator que extrai energia
do componente horizontal da onda. Constitui-se de uma “aba” ou “braço” que
oscila como um pêndulo montado em uma junta de pivô no leito marinho e
seu movimento oscilatório pendular alimenta o PTO, a figura 2.11 exemplifica
o conceito.
Figura 2.11: Exemplo de Oscillating wave surge converters, Aquamarine Power Oyster
Fonte: Extraído de Cargo [7]
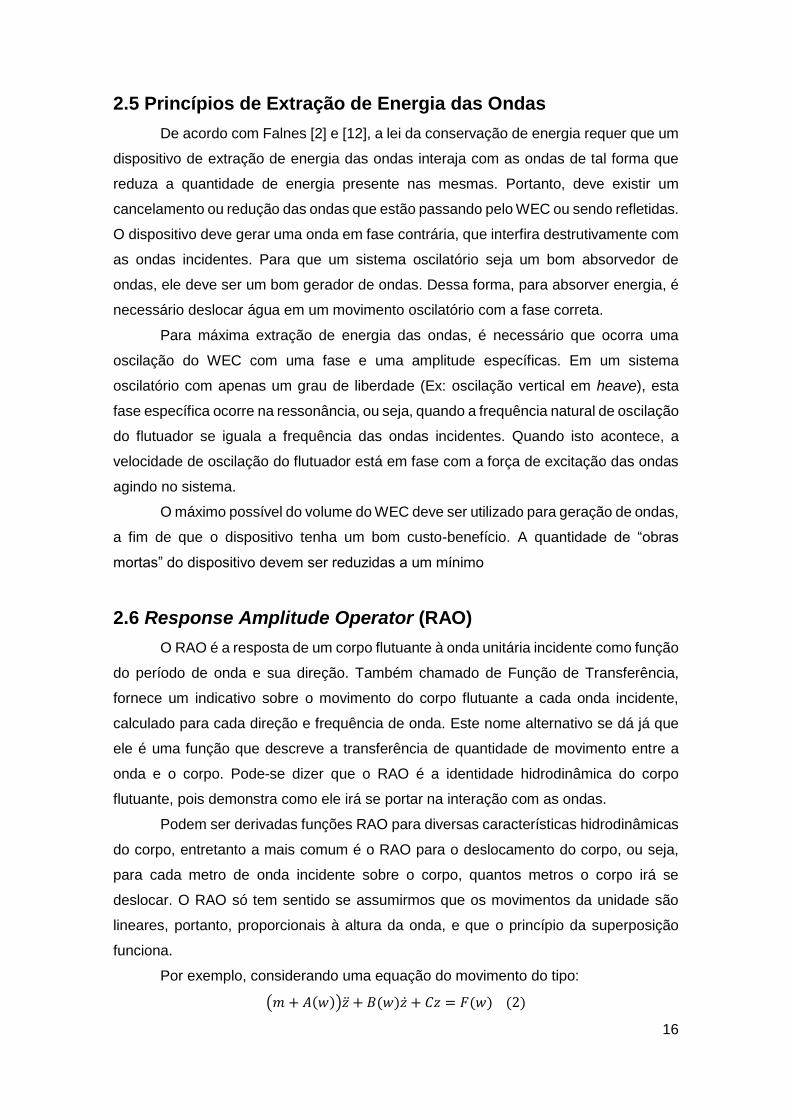
2.4.3 Overtopping converters
Este dispositivo captura a água das ondas incidentes através de um reservatório
acima do nível do mar, então libera essa água de volta ao mar através de turbinas
localizadas no fundo do reservatório. É dotado de um par de braços refletores grandes
e curvos para capturar as ondas na parte central de recolhimento da estrutura, onde as
ondas se deslocam por cima de rampas e caem no reservatório elevado. A energia
potencial, devido à altura da água coletada acima da superfície do mar, é transformada
em eletricidade usando uma turbina. O esquema é ilustrado na figura 2.12.
Figura 2.12: Exemplo overtopping converter, Wave Dragon
Fonte: Extraído de Drew, Plummer e Sahinkaya. [3]
16
2.5 Princípios de Extração de Energia das Ondas
De acordo com Falnes [2] e [12], a lei da conservação de energia requer que um
dispositivo de extração de energia das ondas interaja com as ondas de tal forma que
reduza a quantidade de energia presente nas mesmas. Portanto, deve existir um
cancelamento ou redução das ondas que estão passando pelo WEC ou sendo refletidas.
O dispositivo deve gerar uma onda em fase contrária, que interfira destrutivamente com
as ondas incidentes. Para que um sistema oscilatório seja um bom absorvedor de
ondas, ele deve ser um bom gerador de ondas. Dessa forma, para absorver energia, é
necessário deslocar água em um movimento oscilatório com a fase correta.
Para máxima extração de energia das ondas, é necessário que ocorra uma
oscilação do WEC com uma fase e uma amplitude específicas. Em um sistema
oscilatório com apenas um grau de liberdade (Ex: oscilação vertical em heave), esta
fase específica ocorre na ressonância, ou seja, quando a frequência natural de oscilação
do flutuador se iguala a frequência das ondas incidentes. Quando isto acontece, a
velocidade de oscilação do flutuador está em fase com a força de excitação das ondas
agindo no sistema.
O máximo possível do volume do WEC deve ser utilizado para geração de ondas,
a fim de que o dispositivo tenha um bom custo-benefício. A quantidade de “obras
mortas” do dispositivo devem ser reduzidas a um mínimo
2.6 Response Amplitude Operator (RAO)
O RAO é a resposta de um corpo flutuante à onda unitária incidente como função
do período de onda e sua direção. Também chamado de Função de Transferência,
fornece um indicativo sobre o movimento do corpo flutuante a cada onda incidente,
calculado para cada direção e frequência de onda. Este nome alternativo se dá já que
ele é uma função que descreve a transferência de quantidade de movimento entre a
onda e o corpo. Pode-se dizer que o RAO é a identidade hidrodinâmica do corpo
flutuante, pois demonstra como ele irá se portar na interação com as ondas.
Podem ser derivadas funções RAO para diversas características hidrodinâmicas
do corpo, entretanto a mais comum é o RAO para o deslocamento do corpo, ou seja,
para cada metro de onda incidente sobre o corpo, quantos metros o corpo irá se
deslocar. O RAO só tem sentido se assumirmos que os movimentos da unidade são
lineares, portanto, proporcionais à altura da onda, e que o princípio da superposição
funciona.
Por exemplo, considerando uma equação do movimento do tipo:
(𝑚 + 𝐴(𝑤))�� + 𝐵(𝑤)�� + 𝐶𝑧 = 𝐹(𝑤) (2)
17
onde:
𝑚: massa do corpo flutuante;
𝐴(𝑤): massa adicional do corpo flutuante;
𝐵(𝑤): coeficiente de amortecimento do corpo flutuante;
𝐶: coeficiente de restauração do corpo flutuante;
𝑧, ��, ��: deslocamento, velocidade e aceleração do corpo flutuante;
𝐹(𝑤): força de excitação das ondas no corpo flutuante;
𝑤: frequência angular das ondas;
Então a função RAO será:
𝑅𝐴𝑂(𝑤) =𝑧
𝐻𝑠=
𝐹𝑒
−𝑤2(𝑚 + 𝐴) + 𝑖𝑤𝐵(𝑤) + 𝐶 (3)
onde:
𝑅𝐴𝑂(𝑤):response amplitude operator, com unidade de [m/m];
𝐻𝑠: altura da onda incidente;
𝐹𝑒: amplitude da força de excitação;
A análise do RAO do flutuador de um WEC é portanto essencial, já que mostra
como será a resposta do flutuador frente as ondas incidentes, e também devido ao fato
da potência extraída das ondas ser proporcional ao RAO do flutuador, como será
mostrado no tópico 3.3.2. Neste trabalho, a análise do RAO é usada como insumo para
a identificação dos parâmetros geométricos mais sensíveis no desempenho
hidrodinâmico do flutuador.
2.7 Power-Take-Off (PTO) e Sistemas de Controle
Segundo Hansen, Andersen e Pedersen. [13], os PTOs são o coração de um
conversor de energia das ondas, sendo a tecnologia responsável por converter o
movimento oscilatório induzido pelas ondas de energia mecânica em energia elétrica.
Estes equipamentos extraem energia das ondas aplicando uma força de
amortecimento sobre o flutuador, de forma que o flutuador exerça trabalho sobre o PTO.
Como resultado, a potência extraída das ondas é:
𝑃𝑒𝑥𝑡 = 𝑓𝑝𝑡𝑜��(𝑡) (4)
onde:
��(𝑡): velocidade de oscilação do flutuador [m/s];
𝑓𝑝𝑡𝑜: força que o PTO impõe sobre o flutuador [kN];
𝑃𝑒𝑥𝑡: potência extraída [kW].
18
Para maximizar a potência extraída das ondas, é necessário utilizar um sistema
de controle para o amortecimento do PTO. Em geral, o que o sistema de controle faz é
deslocar a fase de oscilação do flutuador para que este esteja em fase com as ondas
incidentes. Em outras palavras, a frequência natural de oscilação do WEC deve ser a
mesma que a frequência das ondas incidentes. Para fazer isso, a força do PTO contém
um termo de amortecimento, e um termo de rigidez (força de restauração):
𝑓𝑝𝑡𝑜 = 𝐾𝑝𝑡𝑜𝑧(𝑡) + 𝐵𝑝𝑡𝑜��(𝑡) (5)
onde:
𝐵𝑝𝑡𝑜: constante de amortecimento do PTO (𝐵𝑝𝑡𝑜 < 0) [kN.s/m];
𝐾𝑝𝑡𝑜: constante elástica [kN/m];
𝑧(𝑡): deslocamento do flutuador [m].
O sistema de controle que age sobre o PTO para maximizar a energia captada
exige que, periodicamente, uma quantidade de energia seja transferida para o flutuador,
a fim de ajustar seu movimento oscilatório, a este tipo de sistema dá-se o nome de
controle reativo. Entretanto, Hansen, Andersen e Pedersen [13] ressaltam que existe
um ponto ótimo nessa operação, pois em determinadas configurações de sistema, a
energia gasta pelo sistema de controle para ajustar a frequência natural do flutuador
pode vir a ser maior do que o ganho em potência extraída das ondas. Falcão [14]
ressalta o fato que um flutuador costuma responder de forma eficiente apenas a uma
faixa estreita de frequências de onda. Em geral, provocar um grande amortecimento no
sistema costuma gerar uma curva de resposta menos acentuada, mais esparsa, o que
pode vir a ser interessante já que os estados de mar abrangem uma faixa grande de
frequências.
Cargo [7] mostra que existem dois principais tipos de modelos PTO usados no
estudo de energia das ondas da seguinte forma:
Modelo Linear: este tipo de modelo assume que a força do PTO é uma
combinação de força de amortecimento e força de restauração. Portanto, a
força do PTO é linearmente dependente da velocidade do flutuador.
Modelo Não-Linear: este tipo assume que a força do PTO é linearmente
independente da velocidade do flutuador.
Quando os dispositivos são colocados em operação, o estado de mar é
altamente irregular, mas a maioria dos sistemas de controle exige como dado de entrada
19
justamente as condições de mar para ajustar o conversor de energia das ondas para a
frequência natural necessária. Dessa forma, o sistema de controle pode ser considerado
em dois estágios: previsão do estado de mar e ajuste do PTO de acordo com a previsão.
Usando um modelo PTO linear, testes mostram que a potência extraída das ondas é
maior quando o amortecimento do PTO é ajustado por uma estimativa variável de
frequência de onda incidente, ao invés de fixar os parâmetros de um mar irregular
(estimativa média ou constante).
Na prática, os dois principais problemas para os sistemas que visam sintonizar
a frequência natural de oscilação são: (i) na maioria dos casos, exceto quando a
dimensão característica do WEC é grande, a frequência natural do flutuador é muito
maior que boa parte das frequências de onda no local de operação; (ii) ondas em um
mar real possuem uma faixa bastante variável de frequências [14].
Não faz parte do escopo deste trabalho discutir os sistemas de controle a serem
implementados ou o dispositivo PTO a ser adotado, para este último assunto,
recomenda-se o trabalho desenvolvido por Neto [15].
20
3. Proposta de Trabalho
3.1 Origem e modelo geométrico
Este trabalho faz parte de um projeto que está sendo desenvolvido por uma
equipe, liderada pelo pesquisador Eliab Ricarte Beserra no PPE (Programa de
Planejamento Energético) da COPPE/ UFRJ. A ideia é que o conversor seja do tipo
point absorber para operação em águas rasas e intermediárias, com um flutuador
oscilando em heave, fixo no leito marinho através de uma estrutura em forma de torre.
O flutuador se conecta a estrutura através de roldanas, que permitem que o mesmo
acompanhe o movimento das ondas, de forma que a estrutura serve como guia para
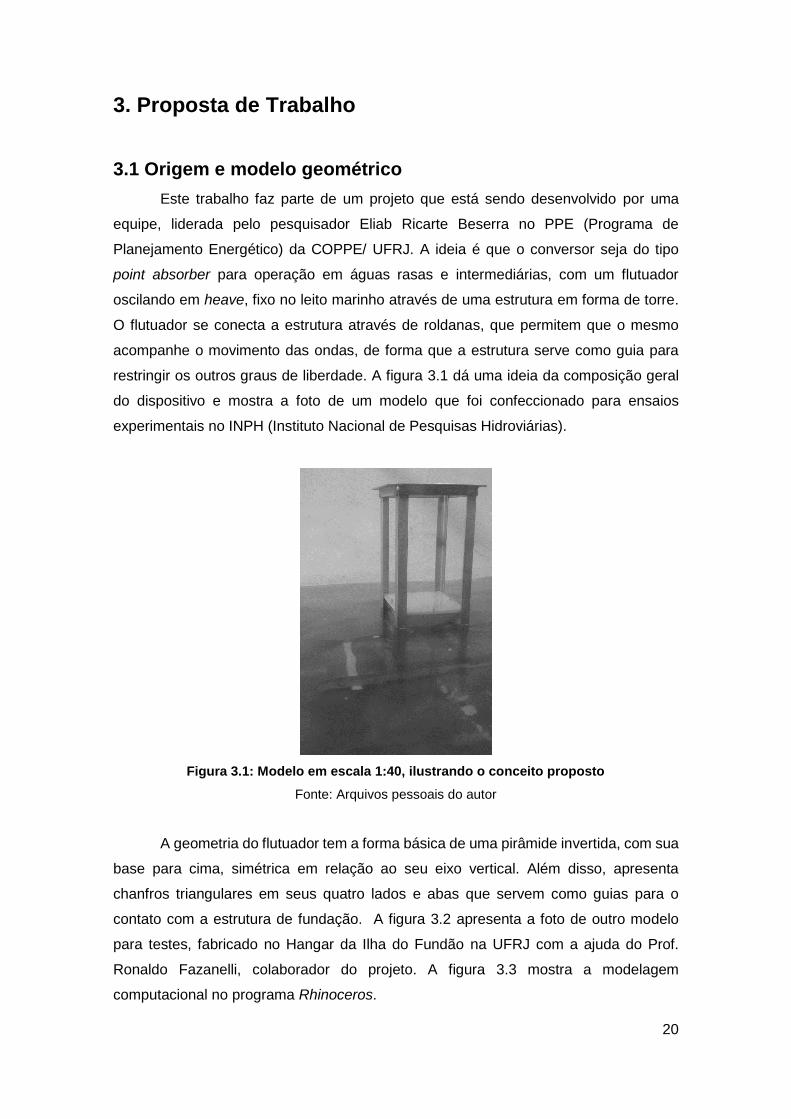
restringir os outros graus de liberdade. A figura 3.1 dá uma ideia da composição geral
do dispositivo e mostra a foto de um modelo que foi confeccionado para ensaios
experimentais no INPH (Instituto Nacional de Pesquisas Hidroviárias).
Figura 3.1: Modelo em escala 1:40, ilustrando o conceito proposto
Fonte: Arquivos pessoais do autor
A geometria do flutuador tem a forma básica de uma pirâmide invertida, com sua
base para cima, simétrica em relação ao seu eixo vertical. Além disso, apresenta
chanfros triangulares em seus quatro lados e abas que servem como guias para o
contato com a estrutura de fundação. A figura 3.2 apresenta a foto de outro modelo
para testes, fabricado no Hangar da Ilha do Fundão na UFRJ com a ajuda do Prof.
Ronaldo Fazanelli, colaborador do projeto. A figura 3.3 mostra a modelagem
computacional no programa Rhinoceros.

21
Figura 3.2: Modelo em escala 1:10, ilustrando a geometria do flutuador
Fonte: Arquivos pessoais do autor
Figura 3.3: Modelagem computacional no Rhinoceros
A ideia por trás dessa geometria é que, ao incidir das ondas, a água seja
direcionada para a base do flutuador pela superfície lateral do mesmo, de forma a
concentrar o fluxo de água na parte de baixo do flutuador, potencializando assim o
movimento vertical de subida. Os chanfros nas laterais e as abas também existem para
auxiliar na concentração do fluxo de água incidente. Estas hipóteses sobre o
comportamento do fluxo de água ao incidir sobre o flutuador ainda carecem de
comprovação técnica, fato que não é objetivo deste estudo. Como as análises aqui
realizadas são baseadas na Teoria Potencial Linear e nos parâmetros hidrodinâmicos
primários do flutuador, a influência da forma sobre o escoamento ao redor não exerce
influência significativa sobre os resultados. Para validar estas hipóteses sobre o
comportamento da forma, uma análise utilizando programas de CFD (Computational
Fluid Dynamics) seria necessária.
22
É importante ressaltar que o objetivo é que o dispositivo capte energia apenas
no movimento de subida do flutuador, e não na descida. Outra característica
interessante dessa geometria é a simetria em relação ao eixo vertical, permitindo captar
ondas incidentes de várias direções.
3.2 Sítio para operação
Como citado no tópico 1.3, um dos objetivos deste trabalho é maximizar o
potencial energético do conversor de energia das ondas através de mudanças na sua
geometria, a fim de identificar os parâmetros mais relevantes do flutuador e estabelecer
um roteiro de adequação da geometria para outros locais de operação, também
chamados de “sítios”. Para tal, é necessária a escolha de um sítio com características
favoráveis, e cujos dados meteoceanográficos estejam disponíveis para consulta.
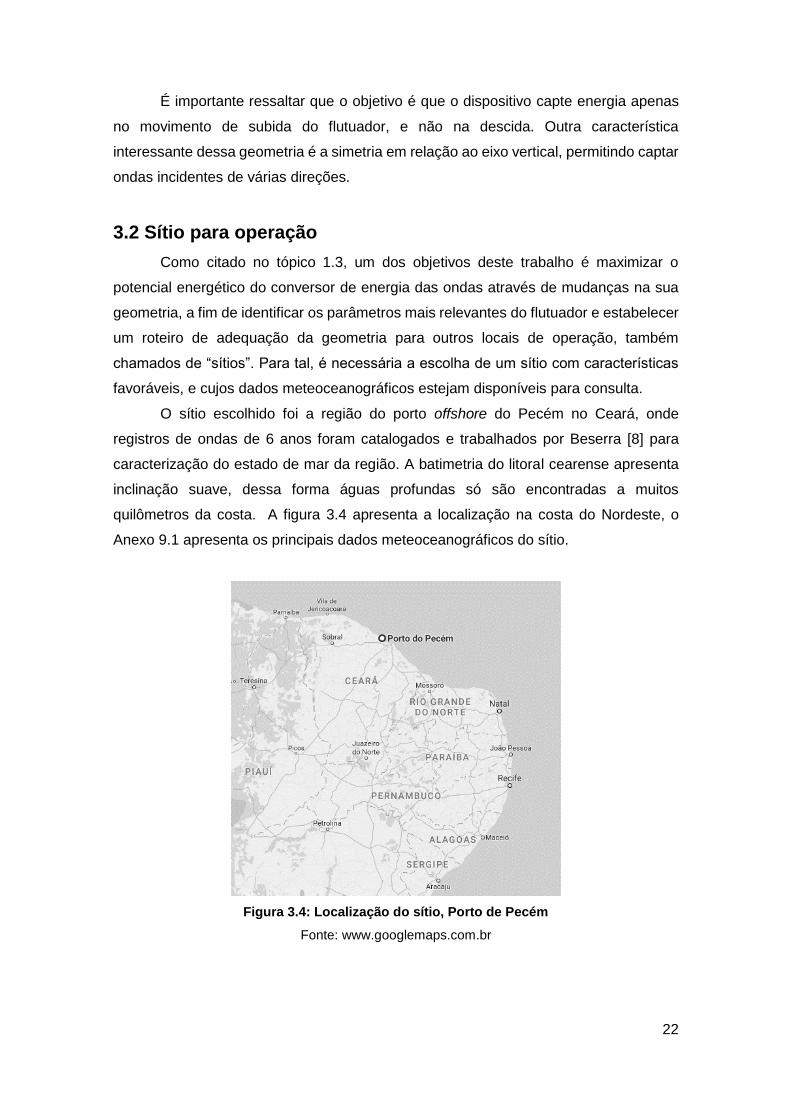
O sítio escolhido foi a região do porto offshore do Pecém no Ceará, onde
registros de ondas de 6 anos foram catalogados e trabalhados por Beserra [8] para
caracterização do estado de mar da região. A batimetria do litoral cearense apresenta
inclinação suave, dessa forma águas profundas só são encontradas a muitos
quilômetros da costa. A figura 3.4 apresenta a localização na costa do Nordeste, o
Anexo 9.1 apresenta os principais dados meteoceanográficos do sítio.
Figura 3.4: Localização do sítio, Porto de Pecém
Fonte: www.googlemaps.com.br
23
3.3 Modelo matemático
Neste tópico serão apresentadas as equações governantes do problema de
dinâmica do flutuador em ondas e extração de energia, bem como as considerações a
serem adotadas nos cálculos do estudo atual.
3.3.1 Forças atuantes no flutuador
Seguindo Falcão [14] e [16], a dinâmica do corpo flutuante pode ser determinada
pela solução da equação do movimento abaixo, que combina as forças hidrodinâmicas
pela ação das ondas, e as forças de resistência exercidas pelo sistema PTO, força esta
que é aplicada intencionalmente para tomada de potência.
𝑚��(𝑡) = 𝑓ℎ(𝑡) + 𝑓𝑝𝑡𝑜(𝑡) (6)
onde:
𝑚: massa do flutuador [ton];
��(𝑡): aceleração vertical do flutuador [m/s²];
𝑓ℎ(𝑡): componente vertical da força hidrodinâmica aplicada ao corpo [kN];
𝑓𝑝𝑡𝑜(𝑡):componente vertical da força aplicada no flutuador pelo PTO [kN].
Se a amplitude de oscilação das ondas e do flutuador for pequena (sistema linear
do ponto de vista hidrodinâmico), pode-se decompor 𝑓ℎ(𝑡) da seguinte forma [14] e [16]:
𝑓ℎ = 𝑓𝑒 + 𝑓𝑟 + 𝑓ℎ𝑠 (7)
onde:
𝑓𝑒: força produzida pelas ondas incidentes em um corpo assumido como fixo (força
de excitação) [kN];
𝑓𝑟: força hidrodinâmica devido a oscilação do corpo em águas calmas (força de
radiação) [kN];
𝑓ℎ𝑠: força hidrostática restauradora [kN];
𝑓ℎ𝑠 = −𝜌𝑔𝐴𝑤𝑝𝑧(𝑡) (8)
𝜌: massa específica da água do mar [ton/m³];
𝑔: aceleração da gravidade [m/s²];
𝐴𝑤𝑝: área de linha d’água em águas calmas [m²];
𝑧(𝑡): deslocamento vertical [m].
Existe também uma parcela de força de arrasto não linear relativa ao fluxo
turbulento. No entanto, é considerado negligenciável pela maioria dos estudos sobre o
assunto, frente às outras parcelas. Neste projeto, não será considerada.
24
Força do PTO
Assumindo um sistema PTO linear, conforme descrito no tópico 2.7, podemos
escrever [14] e [16]:
𝑓𝑝𝑡𝑜(𝑡) = −𝐵𝑝𝑡𝑜��(𝑡) − 𝐾𝑝𝑡𝑜𝑧(𝑡) (9)
onde:
−𝐾𝑝𝑡𝑜𝑧(𝑡): representa um efeito de mola elástica, força restauradora [kN];
−𝐵𝑝𝑡𝑜��(𝑡): efeito de amortecimento associado a extração de energia [kN].
Força de Excitação
Similar à força de radiação, porém composta pela superposição de duas
soluções de fluxo potenciais, conhecidas como potencial de onda incidente (excitação)
e potencial de difração de onda. Na força da onda incidente o corpo não perturba o
escoamento da onda, ela é caracterizada pela integral das pressões ao longo da
superfície (Froude-Krylov). A força de difração é a modificação no campo de pressões
da onda devido a presença do corpo. Haveria ainda uma terceira componente, a força
de Morrison, que leva em conta os efeitos viscosos, porém estes não estão sendo
considerados neste trabalho [10].
Como o flutuador é suficientemente pequeno em relação à altura e comprimento
das ondas incidentes, a força de difração será negligenciada, e apenas Froude-Krylov
será considerado. Esta hipótese pode ser comprovada utilizando o gráfico abaixo, que
explicita as forças que devem ser levadas em consideração baseado na comparação
entre o tamanho característico do corpo flutuante “D” e a altura de onda H e comprimento
de onda λ.

25
Figura 3.5: Localização do sítio, Porto de Pecém
Fonte: Rodríguez [19]
O tamanho característico do flutuador varia entre 3 e 15 metros, e o comprimento
de onda do sítio entre 36,5 e 143 metros. A explicação sobre como estes valores foram
obtidas será apresentada no tópico 4.2. Considerando a altura de onda significativa
predominante no sítio de 1,5 metros, conforme o Anexo 9.1, tem-se que:
𝐻
𝐷= 0,01~0,5
𝐷
λ≅ 0,3
De acordo com a figura 3.5 portanto, o regime de forças atuante no flutuador
estaria entre as regiões I e III, onde as forças inerciais são predominantes, as forças
viscosas(arrasto) causam pouco efeito, e as forças de difração são desprezíveis.
Vale ressaltar que a força de excitação é dependente da frequência e da fase de
oscilação, sendo ainda proporcional à amplitude da onda incidente. A análise da força
de excitação em fase com a velocidade induzida no flutuador é importante para avaliar
a potência absorvida pelo sistema.
No tratamento no domínio da frequência do sistema, existe uma relação linear
entre a amplitude da força de excitação das ondas e a amplitude de movimento
resultante no flutuador.

26
No caso de ondas regulares com frequência angular “𝑤”, a força de excitação é
uma simples função harmônica do tempo “𝑡”. Se o PTO é linear, nesse caso o sistema
é completamente linear, e se as ondas incidentes são regulares, a coordenada vertical
e as forças atuantes são simples funções harmônicas do tempo, que podem ser escritas
como [14] e [16]:
𝑧(𝑡) = 𝑅𝑒(𝑍𝑜𝑒𝑖𝑤𝑡) (10) e 𝑓𝑒(𝑡) = 𝑅𝑒(𝐹𝑒𝑒𝑖𝑤𝑡) (11)
onde:
𝑍𝑜 e 𝐹𝑒: amplitudes complexas;
𝑅𝑒( ): notação que simboliza a parte real de uma função complexa.
Como o sistema é linear, 𝐹𝑒 é proporcional a amplitude da onda incidente, e pode-
se escrever [14] e [16]:
|𝐹𝑒| = Γ(𝑤)𝐻𝑜 (12)
onde:
Γ(𝑤): coeficiente da força de excitação (real) [kN/m].
𝐻𝑜: amplitude da onda incidente (real e positiva) [m].
Força de radiação
É atuante quando o corpo harmonicamente oscilante está submerso em águas
calmas. Mesmo na ausência de ondas, um corpo em movimento cria ondas, portanto
uma força de inércia potencial deve surgir devido ao aumento da pressão na superfície
do corpo.
A força de radiação pode ser decomposta em [14] e [16]:
𝑓𝑟(𝑡) = 𝑓𝐴 + 𝑓𝐵
𝑓𝑟(𝑡) = −𝐴(𝑤)��(𝑡) − 𝐵(𝑤)��(𝑡) (13)
onde:
𝑓𝐴: força de massa adicional, inércia adicionada ao sistema devido ao volume de
fluido deslocado pelo corpo enquanto oscila [kN];
𝑓𝐵: força de amortecimento potencial, energia gasta devido às ondas geradas pelo
movimento do corpo [kN];
𝐴(𝑤): coeficiente de massa adicional [kg];
𝐵(𝑤): coeficiente de amortecimento por radiação (B > 0), representa a força em fase
com a velocidade do flutuador, corresponde à energia transferida a um fluido não
viscoso, na forma de onda radiada [kN.s/m].
27
Os coeficientes de massa adicional e amortecimento por radiação dependem da
geometria do flutuador e da frequência “𝑤”.
Força Hidrostática
Varia apenas com o deslocamento vertical do flutuador, não tendo relação com
a velocidade ou aceleração, portanto uma força conservativa.
3.3.2 Sistema linear em ondas regulares: análise no domínio da frequência
À princípio, o comportamento do flutuador deveria ser simulado no domínio do
tempo, já que o sistema PTO da maioria dos dispositivos conversores de ondas que
usam flutuadores oscilantes é altamente não linear. Contudo, conforme apresentado no
tópico anterior, assume-se um sistema PTO linear no presente estudo, portanto a
análise de um sistema não-linear no domínio do tempo não será contemplada.
Entretanto, a análise no domínio da frequência é útil, por exemplo, para
determinar a frequência natural do sistema, a fim de sintonizá-la com a frequência do
sítio onde será instalado. Além disso, fornece uma boa estimativa da potência
energética que pode ser extraída das ondas, embora essa estimativa invariavelmente
seja um tanto superestimada devido à ausência de não linearidades.
Em um primeiro momento, um modelo de ondas regulares é considerado para
os cálculos, em seguida um modelo de ondas irregulares será apresentado no tópico
3.3.3. Considerando as oscilações do conversor como suficientemente pequenas, a
Teoria Potencial Linear de ondas torna-se aplicável.
Se o sistema é linear, a expressão (6) pode ser reescrita como [14] e [16]:
(𝑚 + 𝐴)��(𝑡) + (𝐵 + 𝐵𝑝𝑡𝑜)��(𝑡) + (𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜)𝑧(𝑡) = 𝐹𝑒𝑒𝑖𝑤𝑡 (14)
Substituindo 𝑧(𝑡) = 𝑍𝑜𝑒𝑖𝑤𝑡:
𝑍𝑜 =𝐹𝑒
−𝑤2(𝑚 + 𝐴) + 𝑖𝑤(𝐵 + 𝐵𝑝𝑡𝑜) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜
(15)
Fazendo a manipulação algébrica para transformar o denominador em um
número real e deslocar o número complexo para o numerador:
𝑍𝑜 =𝐹𝑒{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜] − 𝑖𝑤(𝐵 + 𝐵𝑝𝑡𝑜)}
{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜] + 𝑖𝑤(𝐵 + 𝐵𝑝𝑡𝑜)}{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜] − 𝑖𝑤(𝐵 + 𝐵𝑝𝑡𝑜)}
𝑍𝑜 =𝐹𝑒[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜] − 𝑖𝐹𝑒𝑤(𝐵 + 𝐵𝑝𝑡𝑜)
{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜]2
− 𝑤2(𝐵 + 𝐵𝑝𝑡𝑜)2
}

28
Separando a parte real da parte imaginária, tem-se que:
𝑅𝑒(𝑍𝑜) = 𝐹𝑒[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜]
{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜]2
− 𝑤2(𝐵 + 𝐵𝑝𝑡𝑜)2
} (16)
𝐼𝑚(𝑍𝑜) = −𝐹𝑒𝑤(𝐵 + 𝐵𝑝𝑡𝑜)
{[−𝑤2(𝑚 + 𝐴) + 𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜]2
− 𝑤2(𝐵 + 𝐵𝑝𝑡𝑜)2
} (17)
Conforme apresentado na expressão (10), 𝑍𝑜 é uma amplitude complexa, dessa
forma, para transformar a parte real e imaginária em uma amplitude deve ser feita a raiz
da soma dos quadrados:
𝑍𝑜 = √𝑅𝑒(𝑍𝑜)2 + 𝐼𝑚(𝑍𝑜)2 (18)
Para Falcão [14], Fernandes e Fonseca [17], em um conversor de energia das
ondas atuando exclusivamente em heave, a potência média extraída do mar ao longo
do tempo é dada por:
𝑃𝑟𝑒𝑔 = 𝑓𝑒��(𝑡) =
1
2𝐵𝑝𝑡𝑜𝑤²|𝑍𝑜|² =
1
2𝐵𝑝𝑡𝑜 |𝑈𝑜|² (19)
onde:
𝑃𝑟𝑒𝑔 : potência média extraída do mar ao longo do tempo [kW];
𝑈𝑜: amplitude complexa da velocidade do flutuador, derivada de 𝑍𝑜.
𝑈𝑜 = 𝑖𝑤𝑍𝑜 (20)
Como dito anteriormente, a fase ideal de oscilação ocorre quando a frequência
natural de oscilação do flutuador é igual a frequência da onda incidente, portanto na
ressonância. Matematicamente, a frequência natural de ressonância é dada por [14] e
[17]:
𝑤𝑛 = (𝜌𝑔𝐴𝑤𝑝 + 𝐾𝑝𝑡𝑜
𝑚 + 𝐴)
12
(21)
O lado direito desta expressão representa a frequência de oscilação livre de um
sistema mecânico sem amortecimento de massa 𝑚 + 𝐴 sobre o qual uma rigidez de
mola 𝜌𝑔𝑆 + 𝐾𝑝𝑡𝑜 está agindo.
Sob estas condições, pode ser provado que o amortecimento ideal do PTO é
igual ao amortecimento de radiação do deslocamento vertical forçado, na frequência
predominante no sítio, para a qual o dispositivo está sendo sintonizado [14] e [17]:
𝐵𝑝𝑡𝑜 = 𝐵(𝑤𝑛) (22)
29
Obedecendo ambas as condições em (21) e (22), garante-se que a extração de
energia do flutuador é a máxima possível.
Em geral, para cada frequência, haverá um amortecimento ideal do PTO que
maximiza a potência de extração das ondas. Essa dependência da frequência para o
amortecimento ideal enfatiza a vantagem de se projetar um tipo de sistema de controle
para o dispositivo, visando maximizar a extração de energia. O sistema de controle foge
do escopo deste estudo, portanto uma abordagem diferente será adotada, assim como
fizeram Fernandes e Fonseca [17].
A constante elástica 𝐾𝑝𝑡𝑜 será assumida como sendo 5% da rigidez hidrostática
do flutuador 𝜌𝑔𝑆, e o coeficiente de amortecimento 𝐵𝑝𝑡𝑜 é calculado pela expressão (22)
de forma a maximizar a absorção de energia das ondas harmônicas com período igual
ao período de onda mais frequente do sítio.
Falcão [14] apresenta o conceito de largura de captura de onda, definida na
equação a seguir, útil para avaliar o mérito de um flutuador na absorção de energia em
ondas regulares:
𝑊 =𝑃𝑟𝑒𝑔
𝐽 (23)
onde:
𝑊: largura de captura de onda, definida como a razão entre a potência média
absorvida pelo flutuador e a potência média disponível por unidade de largura de crista
de onda [m], de acordo com Fernandes e Fonseca [17];
𝐽: fluxo de energia da frente de onda por metro de largura [kW/m]. Fornece a taxa
na qual energia é transmitida na direção de propagação da onda através de um plano
vertical perpendicular a essa direção. Segundo Dean e Dalrymple [9], o fluxo pode ser
calculado através da expressão:
𝐽 = ��𝐶𝑔 =𝜌𝑔𝐻𝑠
2
8𝐶𝑔 (24)
onde:
��: densidade de energia, em outras palavras, média da energia na onda por
unidade de área na superfície livre [J/m²];
𝐻𝑠: altura significativa de onda [m];
𝜌: massa específica do fluido [ton/m³];
𝑔: aceleração da gravidade [m/s²];
𝜆: comprimento de onda [m];
𝐶𝑔: velocidade de grupo [m/s];

30
Ainda de acordo com Dean e Dalrymple [9], a expressão para o cálculo da
velocidade de grupo em águas intermediárias seria:
𝑐𝑔(𝑤) =1
2[1 +
2𝑘𝑑
𝑠𝑖𝑛ℎ (2𝑘𝑑)] √
𝑔
𝑘𝑡𝑎𝑛ℎ (𝑘𝑑) (25)
onde:
𝑘: número de onda, corresponde ao número de ciclos de onda por unidade de
distância, segundo Dean e Dalrymple [9] pode ser encontrado por meio da
relação de dispersão através de um processo iterativo onde [rad/m]:
𝑤2 = 𝑔𝑘𝑡𝑎𝑛ℎ(𝑘𝑑) (26)
Para que a largura de captura possa ser utilizada para avaliar um flutuador, deve-
se calcular a largura de captura máxima possível que, segundo Falcão [14], Para um
corpo com eixo de simetria vertical oscilando em heave:
𝑊𝑚á𝑥 =𝜆
2𝜋 (27)
Dessa forma, pode-se comparar o valor obtido com o valor máximo possível, no
presente estudo esta razão será chamada eficiência de captura:
𝜂𝑐𝑎𝑝 =𝑊
𝑊𝑚á𝑥 (28)
Outro importante conceito que pode ser introduzido é a eficiência de absorção
de energia do flutuador, que pode ser definida como a razão entre a potência extraída
das ondas e a potência da frente de onda incidente com uma largura igual a do flutuador,
basta dividir a largura de captura pelo comprimento de linha d’água do flutuador [7].
𝜂𝑎𝑏𝑠 =𝑊
𝐿 (29)
Ambas as eficiências 𝜂𝑐𝑎𝑝 ou 𝜂𝑎𝑏𝑠 podem ser utilizadas como forma de avaliar
a qualidade do flutuador de um dispositivo conversor de energia das ondas, são
conceitos diferentes com a mesma finalidade.
3.3.3 Sistema linear em ondas irregulares: análise no domínio da frequência
Ondas irregulares reais podem ser representadas com uma boa aproximação
por uma superposição de ondas regulares, definindo assim um espectro de onda. Se
todas as ondas componentes do espectro tiverem a mesma direção de propagação,
tem-se um espectro unidimensional. O espectro bidimensional leva em conta a
31
frequência e a direção de propagação das ondas regulares das quais é composto. Como
o flutuador possui simetria axial, ele é insensível a direção de propagação da onda,
portanto será considerado neste trabalho apenas espectro unidimensional [16].
Para determinado estado de mar, as ondas são caracterizadas por uma altura
representativa, um período e o tipo de espectro. Em estudos de energia das ondas,
comumente é usado o espectro de Pierson-Moskowitz [16] e [18].
Na maioria dos casos, substitui-se um espectro contínuo por um discreto, isso é,
considerando um número finito de ondas senoidais, cada uma caracterizada por uma
amplitude, fase e frequência. Como está sendo assumida Teoria Linear das ondas, a
força de excitação resultante é obtida simplesmente por superposição linear [18].
𝑓𝑒(𝑡) = ∑ 𝑓𝑒,𝑛(𝑡)
𝑛
(30)
Segundo Fernandes e Fonseca [17], tomando as equações do sistema como
lineares, a potência média extraída das ondas irregulares ao longo do tempo pode ser
calculada pela seguinte fórmula:
𝑃𝑖𝑟𝑟 = 2 ∫ 𝑃𝑟𝑒𝑔
∞
0
(𝑤)𝐸(𝑤)𝑑𝑤 (31)
onde:
𝑃𝑟𝑒𝑔 (𝑤): potência capturada pelo flutuador em ondas regulares de frequência 𝑤 e
amplitude unitária [kW];
𝐸(𝑤): densidade de energia espectral [m²/Hz].
Segundo Cargo [7] e Rodríguez [19], a densidade de energia espectral utilizando
o espectro de Pierson-Moskowitz (PM) é dada por:
𝐸(𝑤) =5𝜋4𝐻𝑠
2
𝑇𝑝4
1
𝑤5𝑒
− 20𝜋4
𝑇𝑝4
1𝑤4
(32)
onde:
𝐻𝑠: altura significativa de onda [m];
𝑇𝑝: período de pico de onda, correspondendo ao período de onda com as ondas
mais energéticas do espectro [s];
A largura de captura também pode ser investigada para o caso de ondas
irregulares, com algumas modificações:
𝑊 =𝑃𝑖𝑟𝑟
𝐽𝑖𝑟𝑟 (33)
onde:
32
𝐽𝑖𝑟𝑟: fluxo de energia para ondas irregulares [kW/m]. Segundo Falnes [2], para o
espectro PM, tem-se que:
𝐽𝑖𝑟𝑟 = 𝜌𝑔 ∫ 𝑐𝑔(𝑤)𝐸(𝑤)𝑑𝑤∞
0
(34)
onde:
𝑐𝑔(𝑤): velocidade de grupo, conforme expressão (25);
𝑘: número de onda, conforme expressão (26).
33
4. Simulação Computacional
Este capítulo é dedicado a apresentação dos programas utilizados para realizar
os testes com a geometria do flutuador, bem como os resultados dos testes e
conclusões parciais derivadas dos mesmos.
4.1 Modelos geométricos
Serão realizadas duas rodadas de testes, uma sem considerar os chanfros na
geometria e outra considerando os chanfros. Conforme descrito no tópico 3.1, a
proposta de geometria além dos chanfros possui abas para direcionar o escoamento,
entretanto estas não serão consideradas no estudo atual. O motivo é que, como
possuem espessura muito pequena, não vão afetar nem o deslocamento nem a área de
linha d’água do flutuador, portanto sua presença é desprezível para as análises que
serão feitas a seguir.
4.1.1 Modelo para testes sem chanfro
Partindo primeiramente de um modelo geométrico que não se consideram os
chanfros no topo do flutuador, nem qualquer parte do flutuador que esteja emersa (obras
mortas) tem-se a seguinte geometria:
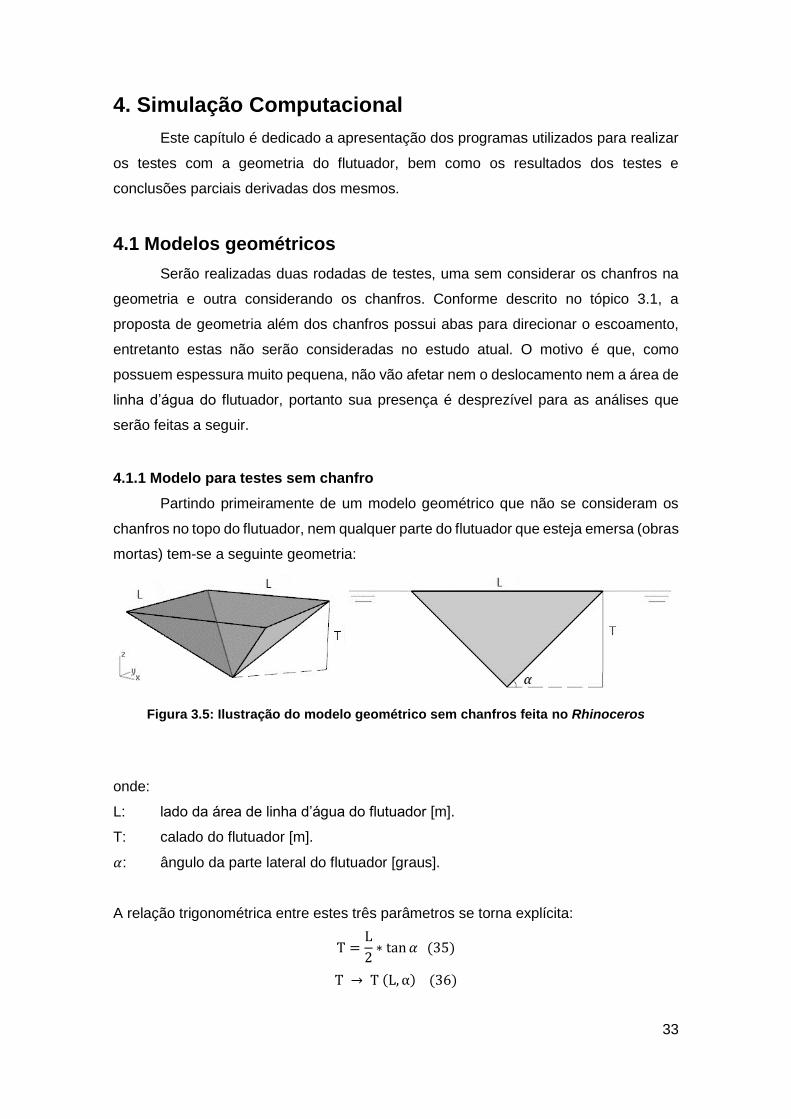
Figura 3.5: Ilustração do modelo geométrico sem chanfros feita no Rhinoceros
onde:
L: lado da área de linha d’água do flutuador [m].
T: calado do flutuador [m].
𝛼: ângulo da parte lateral do flutuador [graus].
A relação trigonométrica entre estes três parâmetros se torna explícita:
T =L
2∗ tan 𝛼 (35)
T → T (L, α) (36)

34
Conclui-se, portanto, que as variáveis geométricas que caracterizam a geometria
preliminar do flutuador são três, seriam elas L, T e α. No entanto, levando-se em
consideração a relação (36), quem governa a geometria são na verdade, L e α. Estas
duas últimas são, desta forma, as variáveis livres do problema, que devem ser
manipuladas, sendo T a variável dependente, definida em função das variáveis livres.
4.1.2 Modelo para testes com chanfro
Considerando um modelo geométrico que contenha chanfros nas laterais,
mostrando a parte de obras mortas:
Figura 3.6: Ilustração do modelo geométrico com chanfros feita no Rhinoceros.
.
Figura 3.7: Outra vista do modelo geométrico com chanfros feita no Rhinoceros.
.
35
onde:
𝐿𝑜: lado da parte quadrada superior do flutuador, comprimento de obras mortas [m].
H: altura do flutuador [m].
𝛼: ângulo da parte lateral do flutuador [graus].
𝛼𝑜: ângulo da parte lateral do flutuador no chanfro [graus].
X: comprimento do chanfro [m].
O: ponto de referência da quina do chanfro.
O comprimento do chanfro será definido como uma porcentagem do lado 𝐿𝑜, e o
ângulo da parte lateral no chanfro por sua vez é influenciado pelo comprimento do
chanfro, portanto:
x → x (L) (37)
𝛼𝑜 → 𝛼𝑜 (x) → 𝛼𝑜 (L) (38)
As outras variáveis geométricas se relacionam conforme demonstrado no
tópico 4.1.1.
4.2 Limites geométricos
A primeira coisa a se fazer é adquirir sensibilidade sobre qual será a faixa de
comprimentos característicos do flutuador a ser testada. Conforme pode ser visto pela
figura 9.1 no Anexo 9.1, a faixa de períodos de onda com maior frequência de ocorrência
no sítio é de 5 a 15 segundos, com uma concentração maior nos períodos de 6 e 7
segundos. Vale ressaltar que, para definição da faixa com maior frequência, levou-se
em conta os períodos que tinham pelo menos 5% de frequência de ocorrência.
Conforme citado por Falnes e Lillebekken [18], as unidades WEC devem ser
relativamente pequenas. Para isto, é interessante que o comprimento característico de
dispositivos point absorber seja da ordem de 5 a 10% do comprimento de onda
predominante no sítio, de forma que a energia extraída seja maximizada em relação ao
custo de construção e operação do dispositivo.
Conforme citado no tópico 3.1, o objetivo é que o dispositivo atue em águas
consideradas rasas e intermediárias. Apesar de não haver um consenso na comunidade
acadêmica sobre a definição exata dos limites entre essas águas e águas profundas,
neste estudo será considerada uma profundidade máxima de 20 metros. A expressão
(39) é a relação de dispersão, apresentada por Dean e Dalrymple [9], com a qual é
possível se calcular o comprimento de onda em águas intermediárias.
(2𝜋
𝑇𝑜)
2
=2𝜋𝑔
𝜆𝑡𝑎𝑛ℎ (
2𝜋𝑑
𝜆) (39)

36
onde:
𝑇𝑜: período de ondas [s].
Fazendo o cálculo iterativo para os períodos de 5 e 15 segundos, tem-se que:
𝜆5 = 36,5 𝑚
𝜆15 = 143,0 𝑚
Levando em conta estes comprimento de onda, o menor comprimento
característico do flutuador seria 5% do comprimento de onda para 5 segundos e o maior
seria 10% do comprimento de onda para 15 segundos, portanto:
𝐿𝑜5,5%= 1,825 𝑚
𝐿𝑜15,10%= 14,300 𝑚
onde:
𝐿𝑜: comprimento característico do flutuador, conforme modelo geométrico [m].
Entretanto, considerando que os períodos de onda com maior incidência são os
de 6 e 7 segundos, e o comprimento do flutuador para estes períodos ficaria por volta
de 3 metros, estipulou-se que seriam testados modelos computacionais de 3, 5, 8 e 15
metros, abrangendo de forma satisfatória a faixa estipulada por Falnes e Lillebekken
[18], bem como os períodos de onda do sítio.
Além disso, a outra variável livre do modelo geométrico do flutuador é o ângulo
da lateral 𝛼, e para tal, foi estipulado que a princípio seriam testados ângulos de 30º,
45º, 60º e 75º.
Decidiu-se que o calado do flutuador seria fixado, de forma a seguir a ideia
exposta por Falnes [2] e [12] de que o máximo possível do volume do flutuador de um
WEC deve estar submerso, a fim de contribuir para a geração de ondas. Com isto em
mente, decidiu-se que o calado seria equivalente a uma borda livre de 5% em relação
ao topo do flutuador, uma margem que equivale a alguns poucos centímetros da
superfície da água.
Vale ressaltar que, para todos os efeitos, o valor de 𝐿 a ser considerado será o
valor do comprimento de linha d’água em águas calmas, com o calado estipulado acima.
Apesar de, em uma situação real, devido a dinâmica do movimento do flutuador com as
ondas, tanto o calado quanto o comprimento serem grandezas variáveis, assumem-se
os valores em águas calmas considerando que estes serão valores médios.
37
4.3 Programas Utilizados
Esta seção faz uma breve apresentação sobre os programas utilizados neste
trabalho. Um guia detalhado sobre como utilizar os programas e os cuidados a serem
tomados pode ser encontrado no Anexo 9.8.
O Rhinoceros [5] é uma ferramenta poderosa de modelagem computacional.
Apresenta uma variedade grande de recursos para o usuário, fácil integração com
outros programas de CAD e de análise, além de uma interface muito simples, agilizando
a edição da modelagem computacional. A manipulação da geometria do flutuador é
sempre feita no Rhinoceros e, em seguida, exportada para o Ansys Aqwa para
realização das análises.
O pacote Ansys 15 [6], utilizado no presente trabalho, vem com dezenas de
módulos que podem ser utilizados, cada módulo possui funções de análise e síntese
diferentes. Existem módulos para análises estruturais em elementos finitos, análises
dinâmicas e estática, análises térmicas, análises CFD, campos eletromagnéticos, dentre
outros. O Ansys Aqwa é uma parte do pacote Ansys que abrange dois módulos de
análise, o Hydrodinamic Diffraction e o Hidrodynamic Time Response. O primeiro será
melhor apresentado mais adiante, o segundo não será utilizado neste trabalho. Os
módulos utilizados neste trabalho são:
Design Modeler (DM) = módulo para síntese de geometrias e edição de
geometrias importadas de outros programas CAD. É um aplicativo de
modelagem de sólidos com capacidade para desenhos 2D e modelagem de
partes 3D, faz parte do pré-processamento das geometrias para análises de
engenharia [6].
Aqwa Hydrodinamic Diffraction = faz uso do método dos painéis para permitir a
modelação numérica no domínio da frequência, considerando ondas e
movimentos no regime linear. Utiliza a teoria potencial, e proporciona um
ambiente integrado para desenvolvimento de parâmetros hidrodinâmicos
primários, requeridos para análises complexas de movimento e resposta. É
possível realizar análises tridimensionais lineares de radiação e difração com
múltiplos corpos, levando-se em consideração os efeitos de interação entre eles.
Foi criado com ênfase em estruturas flutuantes, entretanto corpos fixos como
quebra-mares e estruturas baseadas em gravidade podem ser inclusos. É capaz
de calcular efeitos de segunda ordem das ondas em uma série de profundidades
e gerar carregamentos de pressão e forças inerciais, além de possuir integração
com os módulos de análise estrutural do Ansys [6].

38
Para as análises no Hydrodinamic Diffraction, foram definidas 8 direções de onda
com variação de 45º entre elas, e períodos de 0 a 20 segundos, baseado nos período
de oscilação predominantes no sítio.
39
5. Análise no Domínio da Frequência
Neste capítulo, serão apresentadas as análises realizadas no Hydrodinamic
Diffraction, utilizando Teoria Potencial Linear, nos modelos geométricos sintetizados
para o flutuador do WEC, bem como as conclusões parciais obtidas com os resultados
destas análises. Vale ressaltar que as análises são no domínio da frequência, entretanto
foram feitas na escala dos períodos de onda, para facilitar a discussão dos resultados.
Conforme demonstrado no tópico 3.3.2, garantindo a ressonância do flutuador,
expressão (21), e o amortecimento do PTO igual ao amortecimento por radiação,
expressão (22), tem-se a extração de energia maximizada. Como o ajuste do
amortecimento é função do sistema de controle, e este já encontra-se em seu valor ideal
pela expressão (22), no presente estudo deve-se buscar a condição ressonante.
Primeiramente, análises RAO do deslocamento em heave foram realizadas em
uma faixa de períodos coerente com a faixa de períodos de onda mais frequentes no
sítio estudado, conforme figura 9.1 no Anexo 9.1. Estas análises permitem quantificar a
influência dos diferentes parâmetros geométricos no desempenho hidrodinâmico do
flutuador, ou seja, como cada parâmetro contribui ou não para a condição ressonante.
Em seguida, análises sobre a massa adicional do flutuador foram realizadas, a
fim de estimar de forma mais precisa a frequência de ressonância de cada modelo,
através de um processo iterativo proposto por Rodríguez [19].
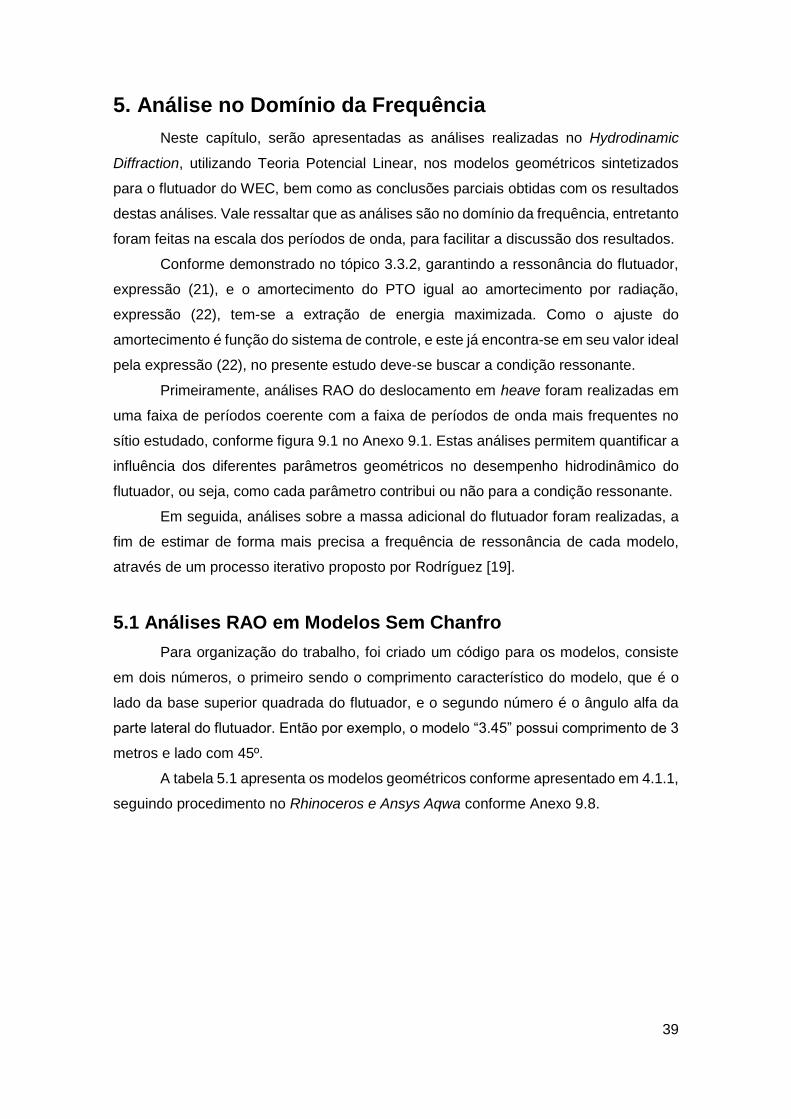
5.1 Análises RAO em Modelos Sem Chanfro
Para organização do trabalho, foi criado um código para os modelos, consiste
em dois números, o primeiro sendo o comprimento característico do modelo, que é o
lado da base superior quadrada do flutuador, e o segundo número é o ângulo alfa da
parte lateral do flutuador. Então por exemplo, o modelo “3.45” possui comprimento de 3
metros e lado com 45º.
A tabela 5.1 apresenta os modelos geométricos conforme apresentado em 4.1.1,
seguindo procedimento no Rhinoceros e Ansys Aqwa conforme Anexo 9.8.
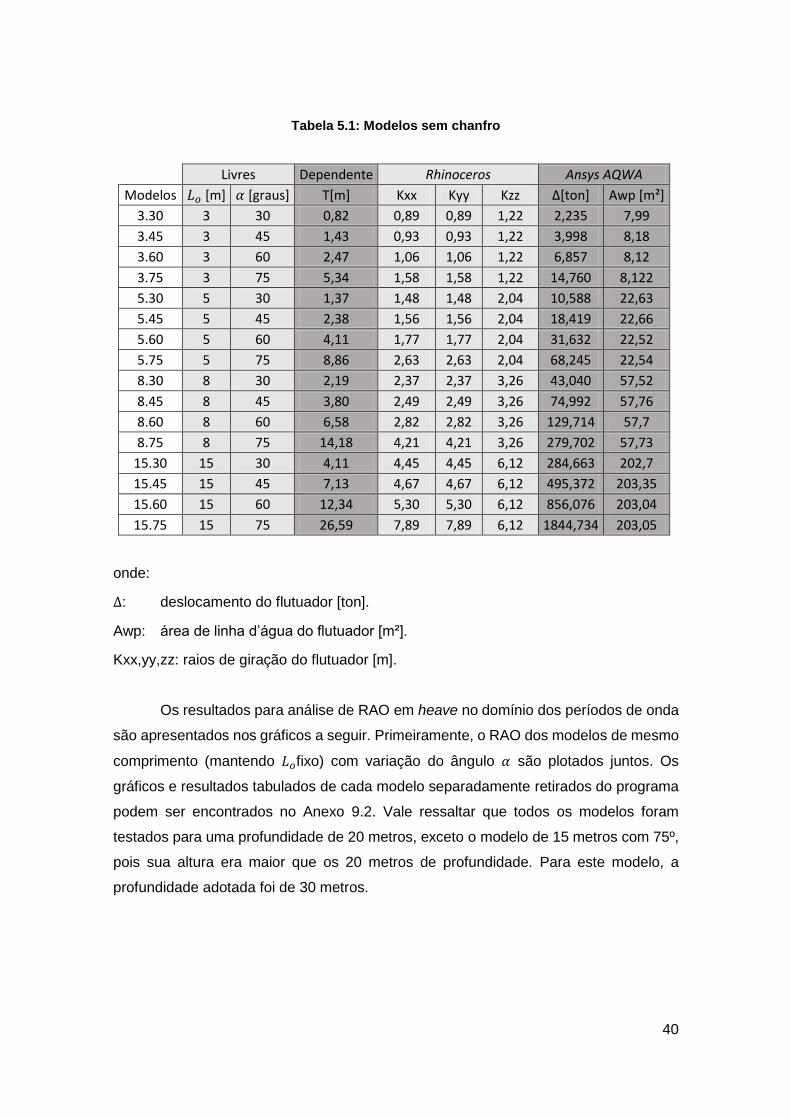
40
Tabela 5.1: Modelos sem chanfro
Livres Dependente Rhinoceros Ansys AQWA
Modelos 𝐿𝑜 [m] 𝛼 [graus] T[m] Kxx Kyy Kzz Δ[ton] Awp [m²]
3.30 3 30 0,82 0,89 0,89 1,22 2,235 7,99
3.45 3 45 1,43 0,93 0,93 1,22 3,998 8,18
3.60 3 60 2,47 1,06 1,06 1,22 6,857 8,12
3.75 3 75 5,34 1,58 1,58 1,22 14,760 8,122
5.30 5 30 1,37 1,48 1,48 2,04 10,588 22,63
5.45 5 45 2,38 1,56 1,56 2,04 18,419 22,66
5.60 5 60 4,11 1,77 1,77 2,04 31,632 22,52
5.75 5 75 8,86 2,63 2,63 2,04 68,245 22,54
8.30 8 30 2,19 2,37 2,37 3,26 43,040 57,52
8.45 8 45 3,80 2,49 2,49 3,26 74,992 57,76
8.60 8 60 6,58 2,82 2,82 3,26 129,714 57,7
8.75 8 75 14,18 4,21 4,21 3,26 279,702 57,73
15.30 15 30 4,11 4,45 4,45 6,12 284,663 202,7
15.45 15 45 7,13 4,67 4,67 6,12 495,372 203,35
15.60 15 60 12,34 5,30 5,30 6,12 856,076 203,04
15.75 15 75 26,59 7,89 7,89 6,12 1844,734 203,05
onde:
∆: deslocamento do flutuador [ton].
Awp: área de linha d’água do flutuador [m²].
Kxx,yy,zz: raios de giração do flutuador [m].
Os resultados para análise de RAO em heave no domínio dos períodos de onda
são apresentados nos gráficos a seguir. Primeiramente, o RAO dos modelos de mesmo
comprimento (mantendo 𝐿𝑜fixo) com variação do ângulo 𝛼 são plotados juntos. Os
gráficos e resultados tabulados de cada modelo separadamente retirados do programa
podem ser encontrados no Anexo 9.2. Vale ressaltar que todos os modelos foram
testados para uma profundidade de 20 metros, exceto o modelo de 15 metros com 75º,
pois sua altura era maior que os 20 metros de profundidade. Para este modelo, a
profundidade adotada foi de 30 metros.
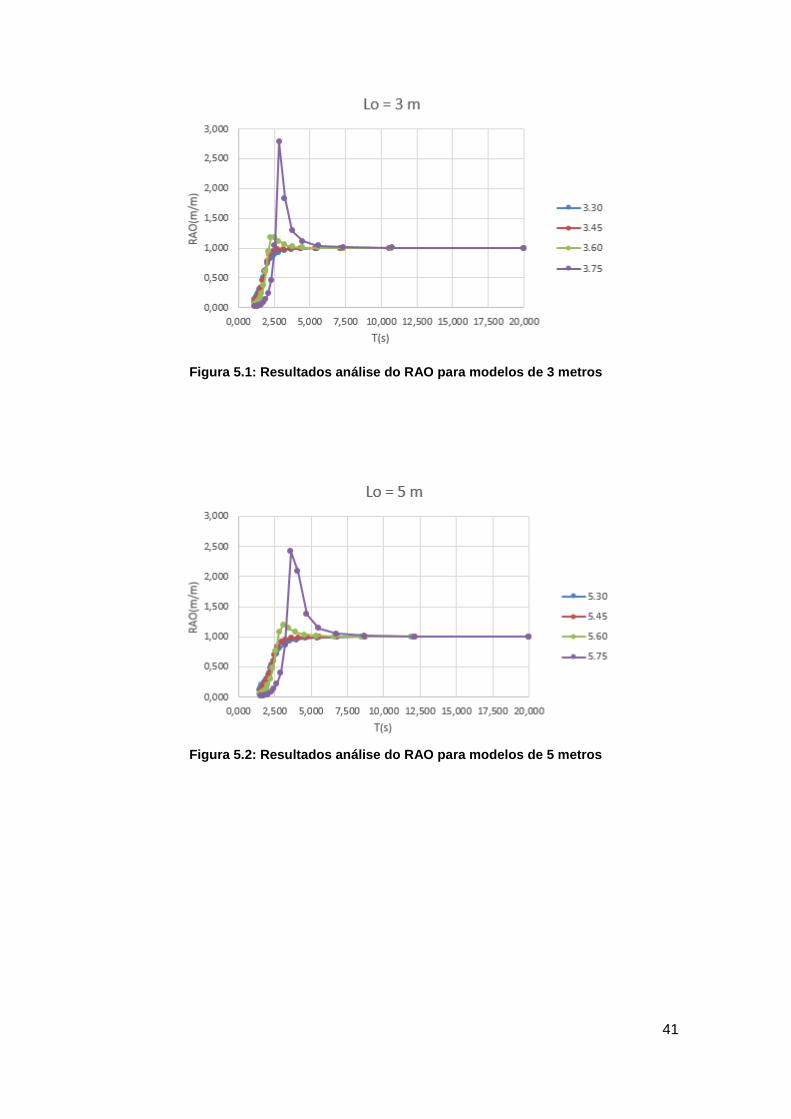
41
Figura 5.1: Resultados análise do RAO para modelos de 3 metros
Figura 5.2: Resultados análise do RAO para modelos de 5 metros

42
Figura 5.3: Resultados análise do RAO para modelos de 8 metros
Figura 5.4: Resultados análise do RAO para modelos de 15 metros

43
Agora o contrário, varia-se o comprimento e mantém-se o ângulo fixo:
Figura 5.5: Resultados análise do RAO para modelos de 30º
Figura 5.6: Resultados análise do RAO para modelos de 45º
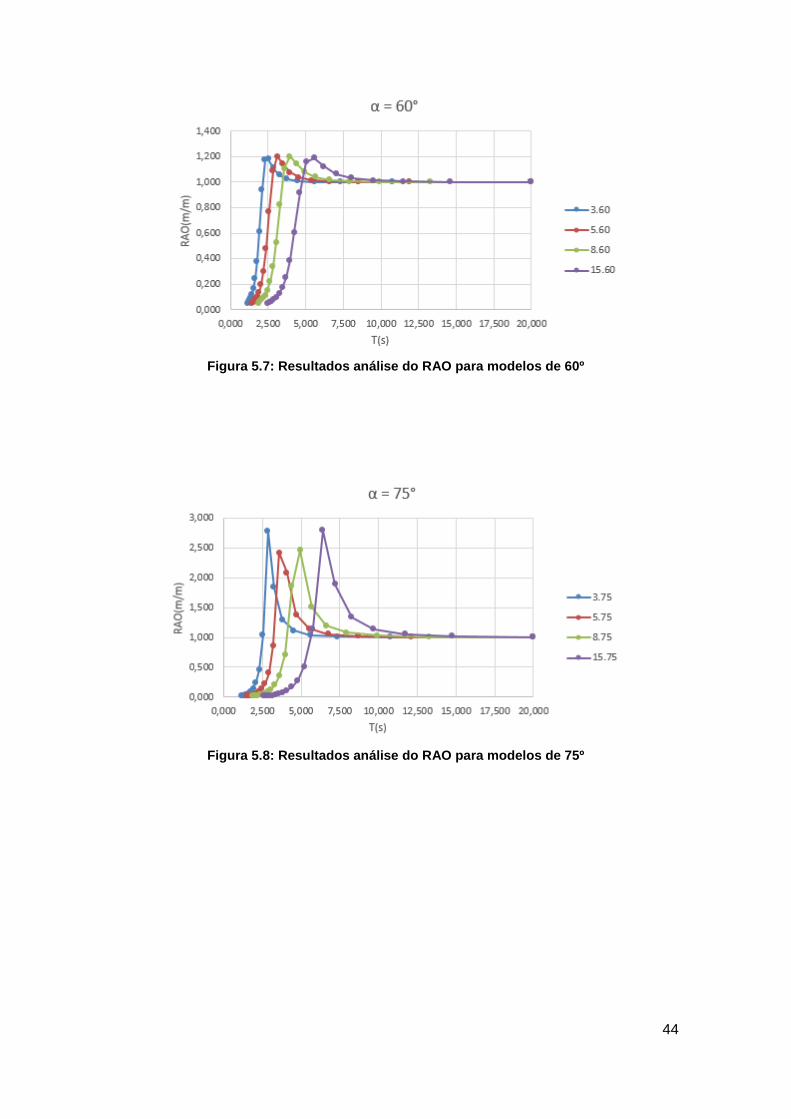
44
Figura 5.7: Resultados análise do RAO para modelos de 60º
Figura 5.8: Resultados análise do RAO para modelos de 75º

45
Agora, um gráfico final com todos os modelos unidos:
Figura 5.9: Resultados análise do RAO todos os modelos
5.2 Conclusões Parciais: Modelos Sem Chanfro
A partir da análise dos gráficos, podem ser feitas as seguintes observações:
a) Quanto maior o ângulo alfa, mais definido fica o máximo da curva de RAO,
formando uma concavidade mais acentuada, e depois decrescendo para um
valor constante de 1.00, ou seja, para cada metro de onda incidente, um metro
de deslocamento de resposta para o flutuador;
b) Quanto maior o ângulo alfa, maiores são os valores absolutos do RAO;
c) Conforme aumento do comprimento, o período no qual o valor máximo do RAO
ocorre aumenta, fazendo com que a curva se desloque para a direita;
d) Apenas os modelos com ângulo alfa de 60° e 75º ultrapassam a barreira do RAO
1,00.
e) Para os modelos com 75º, o modelo de 3 metros teve um valor máximo de RAO
equiparável ao modelo de 15 metros, estando os modelos de 5 e 8 metros em
um patamar menor.
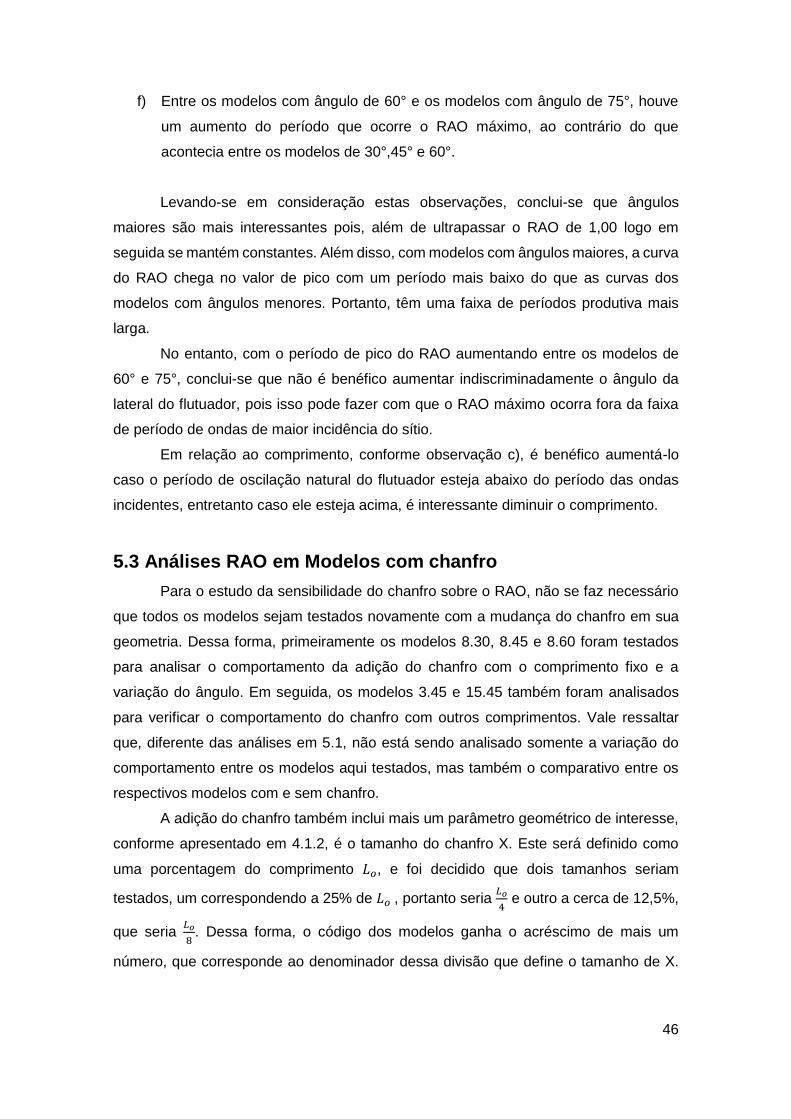
46
f) Entre os modelos com ângulo de 60° e os modelos com ângulo de 75°, houve
um aumento do período que ocorre o RAO máximo, ao contrário do que
acontecia entre os modelos de 30°,45° e 60°.
Levando-se em consideração estas observações, conclui-se que ângulos
maiores são mais interessantes pois, além de ultrapassar o RAO de 1,00 logo em
seguida se mantém constantes. Além disso, com modelos com ângulos maiores, a curva
do RAO chega no valor de pico com um período mais baixo do que as curvas dos
modelos com ângulos menores. Portanto, têm uma faixa de períodos produtiva mais
larga.
No entanto, com o período de pico do RAO aumentando entre os modelos de
60° e 75°, conclui-se que não é benéfico aumentar indiscriminadamente o ângulo da
lateral do flutuador, pois isso pode fazer com que o RAO máximo ocorra fora da faixa
de período de ondas de maior incidência do sítio.
Em relação ao comprimento, conforme observação c), é benéfico aumentá-lo
caso o período de oscilação natural do flutuador esteja abaixo do período das ondas
incidentes, entretanto caso ele esteja acima, é interessante diminuir o comprimento.
5.3 Análises RAO em Modelos com chanfro
Para o estudo da sensibilidade do chanfro sobre o RAO, não se faz necessário
que todos os modelos sejam testados novamente com a mudança do chanfro em sua
geometria. Dessa forma, primeiramente os modelos 8.30, 8.45 e 8.60 foram testados
para analisar o comportamento da adição do chanfro com o comprimento fixo e a
variação do ângulo. Em seguida, os modelos 3.45 e 15.45 também foram analisados
para verificar o comportamento do chanfro com outros comprimentos. Vale ressaltar
que, diferente das análises em 5.1, não está sendo analisado somente a variação do
comportamento entre os modelos aqui testados, mas também o comparativo entre os
respectivos modelos com e sem chanfro.
A adição do chanfro também inclui mais um parâmetro geométrico de interesse,
conforme apresentado em 4.1.2, é o tamanho do chanfro X. Este será definido como
uma porcentagem do comprimento 𝐿𝑜, e foi decidido que dois tamanhos seriam
testados, um correspondendo a 25% de 𝐿𝑜 , portanto seria 𝐿𝑜
4 e outro a cerca de 12,5%,
que seria 𝐿𝑜
8. Dessa forma, o código dos modelos ganha o acréscimo de mais um
número, que corresponde ao denominador dessa divisão que define o tamanho de X.

47
Por exemplo, o modelo 8.45.4 tem 8 metros de lado, 45º de inclinação lateral e um
tamanho de X equivalente a 8
4= 2 metros, caso fosse 8.45.8 seria um X de
8
8= 1 metros.
A tabela 5.2 apresenta os modelos geométricos conforme apresentado em 4.1.2,
seguindo parcialmente o procedimento no Rhinoceros e Ansys Aqwa conforme exposto
no Anexo 9.8. O motivo para não seguir o procedimento por completo foi que, com a
adição dos chanfros na geometria, o Hydrodinamic Diffraction não conseguiu calcular
de forma automática o peso do flutuador através do deslocamento como sempre faz.
Acredita-se que isso aconteceu pois o Ansys Aqwa não lida bem com quinas, a malha
acaba se aproximando muito, e no limite dos cantos vivos, gera superfícies com vetores
normais apontando para dentro, o que não é aceito pelo programa. Além disso, o Ansys
Aqwa gera a malha de forma automática, e o tamanho do elemento de malha está ligado
a frequência máxima que pode ser analisada, de forma que o usuário não tem controle
sobre o refino de malha em pontos que julgar críticos. Para refinar toda a malha de forma
homogênea, seria necessário um elemento de malha menor, e a faixa de períodos que
poderia ser analisada iria sair da faixa necessária devido as características do sítio (0 a
20 segundos).
Desta forma, o peso do flutuador teve que ser colocado manualmente no
programa, sendo necessária uma estimativa. Para tal, recorreu-se a geometria dos
modelos no Rhinoceros e, utilizando o comando Volume, calculou-se o volume do
flutuador abaixo da linha de calado, e portanto conseguiu-se o deslocamento
multiplicando pela densidade da água e a aceleração da gravidade. Foram feitos testes,
e o fato da massa do flutuador ser colocada manualmente, e não calculada
automaticamente pelo programa, não interfere na análise de RAO. O comando Area
também foi utilizado no Rhinoceros para obtenção da área de linha d’água Awp.
Tabela 5.2: Modelos com chanfro
Dependentes Rhinoceros
Modelos X [m] T[m] 𝛼𝑜[graus] Kxx Kyy Kzz Δ[ton] Awp [m²]
3.45.4 0,75 1,43 63,43 0,8 0,8 1,01 2,306 4,09
8.30.4 2,00 2,19 49,11 1,99 1,99 2,70 21,710 28,76
8.45.4 2,00 3,80 63,43 2,13 2,13 2,70 43,737 28,88
8.60.4 2,00 6,58 73,90 2,52 2,52 2,70 75,768 28,85
8.30.8 1,00 2,19 37,60 2,17 2,17 2,97 37,884 43,14
8.45.8 1,00 3,80 53,13 2,30 2,30 2,97 65,600 43,32
8.60.8 1,00 6,58 66,59 2,66 2,66 2,97 113,652 35,98
15.45.4 3,75 7,13 63,43 4,00 4,00 5,07 288,281 101,67

48
Os resultados para análise de RAO em heave no domínio dos períodos de onda
são apresentados nos gráficos a seguir. Primeiramente, o RAO dos modelos de mesmo
comprimento (mantendo 𝐿𝑜fixo) com variação do ângulo 𝛼 e do tamanho do chanfro X
são plotados juntos. Os gráficos e resultados tabulados de cada modelo separadamente
retirados do programa podem ser encontrados no Anexo 9.3. Vale ressaltar que o RAO
dos respectivos modelos sem chanfro também é plotado para comparação.
Figura 5.10: Resultados análise do RAO para modelos de 30º e 8 m
Figura 5.11: Resultados análise do RAO para modelos de 45º e 8 m

49
Figura 5.12: Resultados análise do RAO para modelos de 60º e 8 m
Agora o contrário, varia-se o comprimento e mantém-se o ângulo fixo em 45º
bem como o tamanho do chanfro:
Figura 5.13: Resultados análise do RAO para modelos de 45º e 3 m
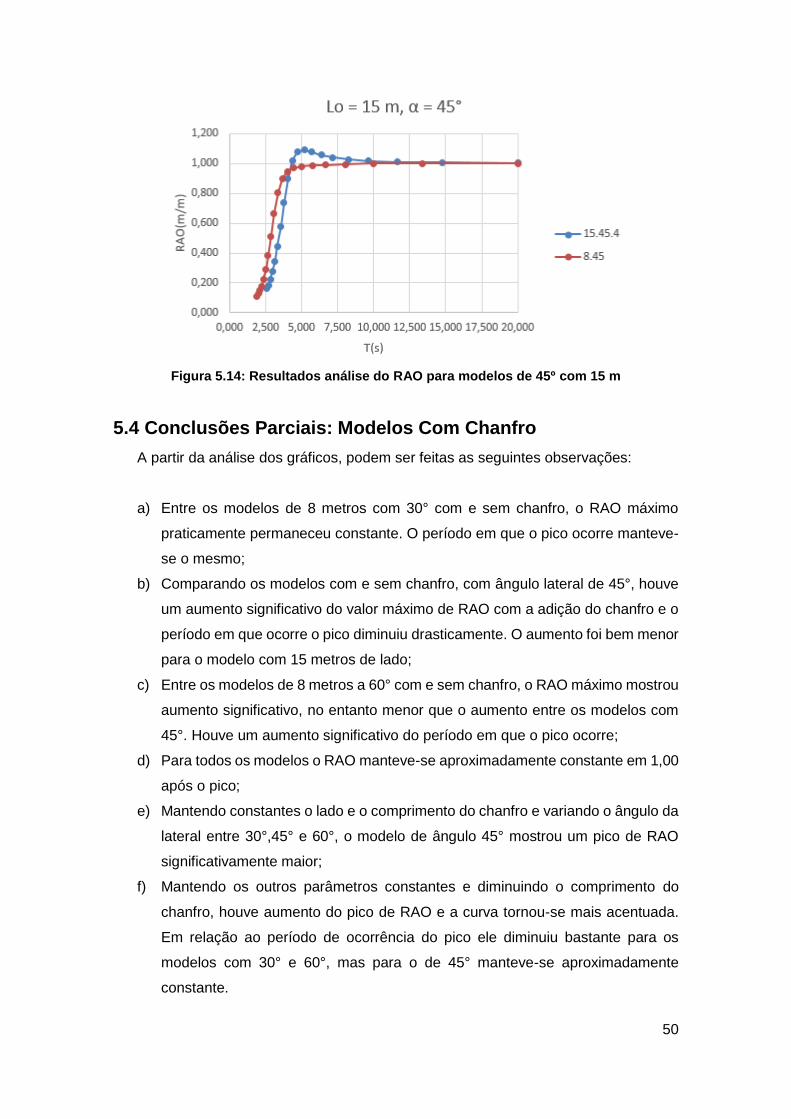
50
Figura 5.14: Resultados análise do RAO para modelos de 45º com 15 m
5.4 Conclusões Parciais: Modelos Com Chanfro
A partir da análise dos gráficos, podem ser feitas as seguintes observações:
a) Entre os modelos de 8 metros com 30° com e sem chanfro, o RAO máximo
praticamente permaneceu constante. O período em que o pico ocorre manteve-
se o mesmo;
b) Comparando os modelos com e sem chanfro, com ângulo lateral de 45°, houve
um aumento significativo do valor máximo de RAO com a adição do chanfro e o
período em que ocorre o pico diminuiu drasticamente. O aumento foi bem menor
para o modelo com 15 metros de lado;
c) Entre os modelos de 8 metros a 60° com e sem chanfro, o RAO máximo mostrou
aumento significativo, no entanto menor que o aumento entre os modelos com
45°. Houve um aumento significativo do período em que o pico ocorre;
d) Para todos os modelos o RAO manteve-se aproximadamente constante em 1,00
após o pico;
e) Mantendo constantes o lado e o comprimento do chanfro e variando o ângulo da
lateral entre 30°,45° e 60°, o modelo de ângulo 45° mostrou um pico de RAO
significativamente maior;
f) Mantendo os outros parâmetros constantes e diminuindo o comprimento do
chanfro, houve aumento do pico de RAO e a curva tornou-se mais acentuada.
Em relação ao período de ocorrência do pico ele diminuiu bastante para os
modelos com 30° e 60°, mas para o de 45° manteve-se aproximadamente
constante.

51
Levando-se em consideração estas observações, conclui-se que modelos com
ângulo de 45° e 60° levam a um aumento do pico do RAO, portanto são mais
interessantes que os de 30°, em especial o modelo de 45°. No entanto, deve-se atentar
à mudança que a adição do chanfro acarreta no período em que o pico ocorre, a fim de
sintonizar com o período mais frequente do sítio. Em relação ao tamanho do chanfro,
os testes sugerem que chanfros menores são mais interessantes, e novamente a
sintonização do período de ocorrência do pico deve ser mantida em mente.
5.5 Análises de Massa Adicional
Estas análises são realizadas de forma similar às de RAO, também seguindo os
procedimentos do Anexo 9.8. Entretanto, devido as limitações expostas no tópico 5.3,
com relação ao cálculo automático da massa do flutuador, não foi possível realizar a
análise de massa adicional para os modelos com chanfro, apenas os modelos sem
chanfro foram testados. Mesmo assim, acredita-se que os resultados dessas análises
já fornecem informações interessantes sobre o comportamento da geometria em
relação ao período natural de oscilação.
A análise da massa adicional é importante pois através dela é possível achar de
forma analítica uma estimativa para o período natural real de oscilação do modelo sendo
estudado. Os gráficos com uma curva de RAO mais acentuada deixam claro o período
natural de oscilação do flutuador, entretanto alguns deles possuem uma curva mais
esparsa, dificultando a identificação do período, por isto a estimativa se faz necessária.
Para tal, é necessário realizar um processo iterativo proposto por Rodríguez [19], que
faz uso da expressão (21), que representa a frequência natural de oscilação de um
corpo flutuante em heave.
O Hydrodinamic Diffraction fornece valores de massa adicional 𝐴33(𝑤) do
flutuador para diversos períodos de onda, estipulados pelo usuário como dado de
entrada. Portanto, pode ser montado um processo iterativo de busca para achar os
valores de 𝑤 e 𝐴(𝑤) fornecidos pelo programa que satisfaçam a igualdade em (21),
encontrando assim uma estimativa da frequência que corresponde a frequência natural
de oscilação do flutuador. Como o presente estudo está sendo desenvolvido na escala
do período, é preciso converter os períodos fornecidos pelo programa para frequências
angulares, fazendo uso da expressão:
𝑤 =2𝜋
𝑇𝑜 (40)
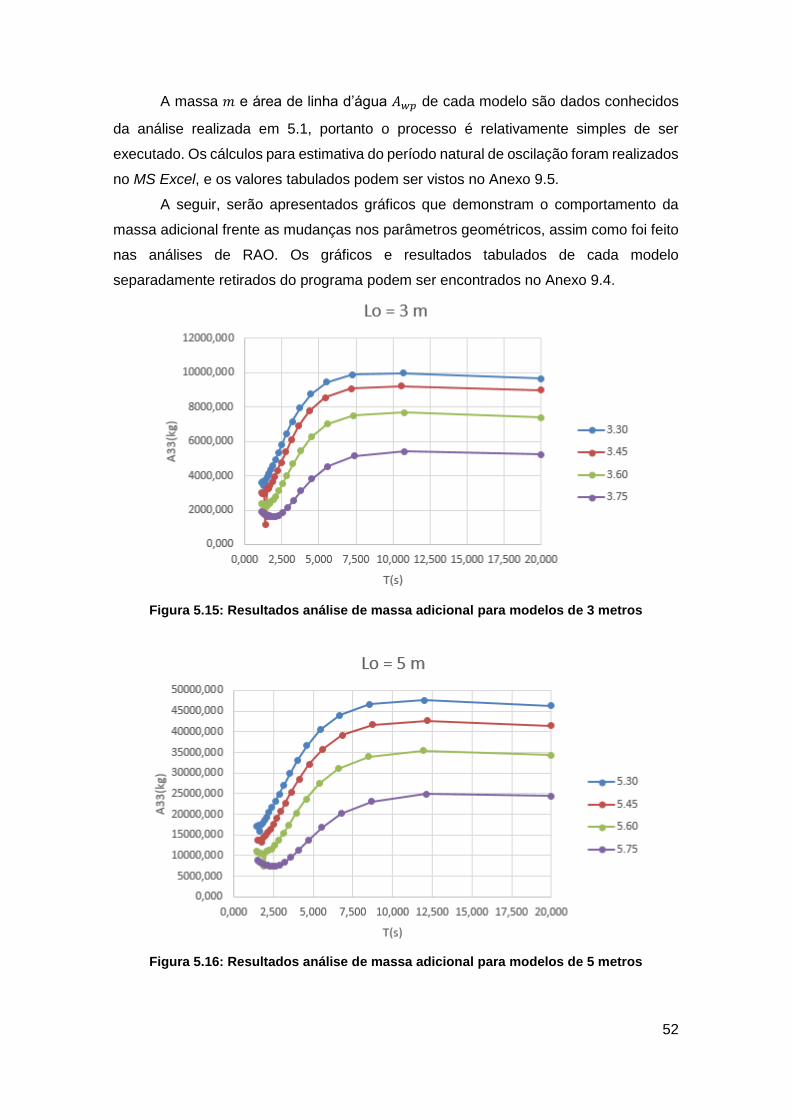
52
A massa 𝑚 e área de linha d’água 𝐴𝑤𝑝 de cada modelo são dados conhecidos
da análise realizada em 5.1, portanto o processo é relativamente simples de ser
executado. Os cálculos para estimativa do período natural de oscilação foram realizados
no MS Excel, e os valores tabulados podem ser vistos no Anexo 9.5.
A seguir, serão apresentados gráficos que demonstram o comportamento da
massa adicional frente as mudanças nos parâmetros geométricos, assim como foi feito
nas análises de RAO. Os gráficos e resultados tabulados de cada modelo
separadamente retirados do programa podem ser encontrados no Anexo 9.4.
Figura 5.15: Resultados análise de massa adicional para modelos de 3 metros
Figura 5.16: Resultados análise de massa adicional para modelos de 5 metros
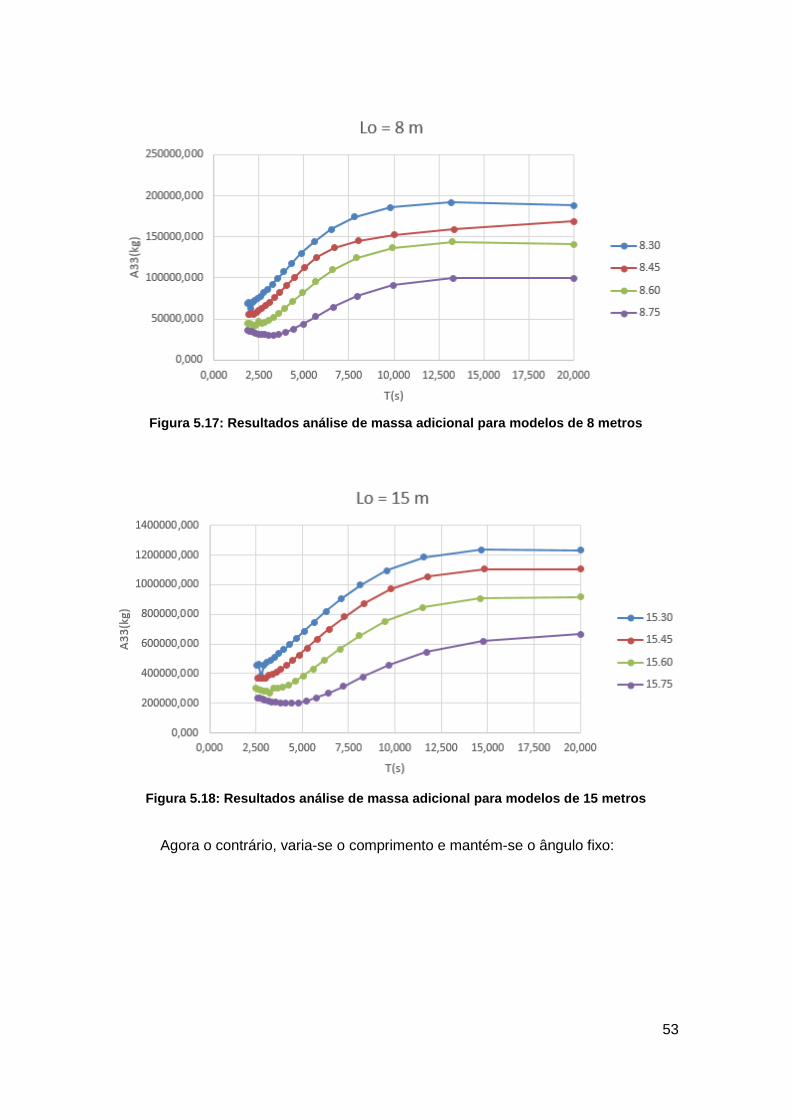
53
Figura 5.17: Resultados análise de massa adicional para modelos de 8 metros
Figura 5.18: Resultados análise de massa adicional para modelos de 15 metros
Agora o contrário, varia-se o comprimento e mantém-se o ângulo fixo:

54
Figura 5.19: Resultados análise de massa adicional para modelos de 30º
Figura 5.20: Resultados análise de massa adicional para modelos de 45º

55
Figura 5.21: Resultados análise de massa adicional para modelos de 60º
Figura 5.22: Resultados análise de massa adicional para modelos de 75º
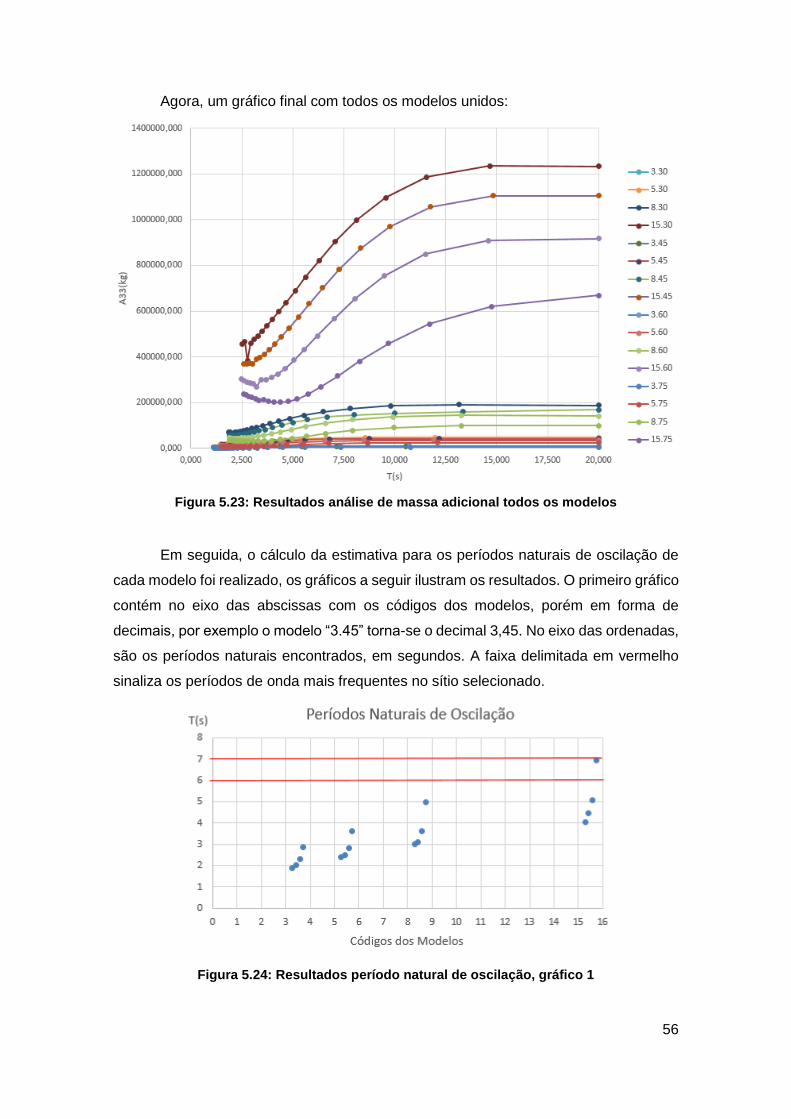
56
Agora, um gráfico final com todos os modelos unidos:
Figura 5.23: Resultados análise de massa adicional todos os modelos
Em seguida, o cálculo da estimativa para os períodos naturais de oscilação de
cada modelo foi realizado, os gráficos a seguir ilustram os resultados. O primeiro gráfico
contém no eixo das abscissas com os códigos dos modelos, porém em forma de
decimais, por exemplo o modelo “3.45” torna-se o decimal 3,45. No eixo das ordenadas,
são os períodos naturais encontrados, em segundos. A faixa delimitada em vermelho
sinaliza os períodos de onda mais frequentes no sítio selecionado.
Figura 5.24: Resultados período natural de oscilação, gráfico 1

57
Foi elaborado ainda outro gráfico com os resultados, em forma polar, para
explicitar melhor os resultados encontrados, novamente a linha em vermelho marca os
períodos de onda mais frequentes no sítio.
Figura 5.25: Resultados período natural de oscilação, gráfico 2
5.6 Conclusões Parciais: Massa Adicional
A partir da análise dos gráficos, podem ser feitas as seguintes observações:
a) Quanto maior o ângulo alfa, menor a massa adicional;
b) Quanto maior o comprimento, maior a massa adicional;
c) Quanto maior o comprimento, maior o valor do período no qual o pico da massa
adicional ocorre;
d) Com a variação do ângulo alfa, o valor do período no qual o pico da massa
adicional ocorre não apresenta um comportamento padronizado;
e) Quanto maior o ângulo alfa, maior o período natural de oscilação do modelo;
f) Quanto maior o comprimento, maior o período natural de oscilação do modelo;
g) Os valores dos períodos naturais de oscilação ficaram em geral abaixo do
período de ondas mais frequente do sítio, apenas os modelos com maior
comprimento e maior ângulo alcançaram a faixa desejada.
Levando-se em consideração estas observações, conclui-se que em casos onde
o período natural de oscilação dos modelos está abaixo do período de ondas mais
frequente do sítio, deve-se aumentar o comprimento e o ângulo lateral do flutuador.

58
Outro aspecto que merece atenção é a variação da massa adicional com as
mudanças nos parâmetros geométricos, conforme observações a) e b), o que pode vir
a exercer influência na operação do dispositivo.
59
6. Definição do Modelo para o Sítio Este capítulo dedica-se a resumir as conclusões das análises realizadas sobre
os modelos e definir a configuração geométrica mais próxima do ideal para o sítio
estudado.
6.1 Síntese das Conclusões
Como exposto em 5.2, ângulos alfa maiores são benéficos já que proporcionam
valores absolutos de RAO maiores. Entretanto, o aumento do ângulo para 75º causa
incerteza quanto aos impactos da variação de comprimento no desempenho do
flutuador. Comprimentos maiores são benéficos caso o período natural de oscilação do
modelo esteja abaixo do período predominante no sítio, da ordem de 6~7 segundos.
No item 5.4 mostrou-se que a adição do chanfro aumenta o RAO para os
modelos de 45º e 60º, no entanto há aumento do período de ocorrência do pico para os
modelos com 60º e diminuição do período para os modelos com 45º. O aumento do
RAO com o chanfro é consideravelmente menor nos modelos de 15 metros. Com a
adição de um chanfro menor, há aumento do pico do RAO, entretanto o período de
ocorrência do pico diminui drasticamente para os modelos de 30º e 60º, mantendo-se
constante para os de 45º.
A ideia de um modelo com ângulos e comprimentos maiores é reforçada no item
5.6. Vale ressaltar que, na seleção do modelo neste trabalho, aspectos operacionais
que podem ser impactados pelo tamanho da massa adicional não estão sendo levados
em conta.
6.2 Modelo Selecionado
Considerando a síntese apresentada em 6.1, buscou-se uma solução de
compromisso entre os modelos disponíveis que oferecesse a melhor configuração
geométrica, chegando-se a conclusão que, dentre os modelos estudados, o modelo
15.75 é o modelo de melhor desempenho hidrodinâmico para o sítio selecionado, ou
seja, aquele que mais se aproxima da condição ressonante.
Entretanto, é válido testar a adição de chanfros a este modelo, já que não existe
um modelo deste tipo no espaço amostral. Portanto, 2 modelos foram elaborados com
tamanhos de chanfro diferentes, seguindo o procedimento adotado nas análises do
capítulo 5, conforme tabela 6.1. Os gráficos da análise de RAO de ambos os modelos
são expostos a seguir nas figuras 6.1 e 6.2:
Tabela 6.1: Modelos selecionados

60
Rhino
Dependente Raio de Giração [m]
Modelos x[m] T[m] 𝛼𝑜 [graus] Kxx Kyy Kzz Vol. [m³] Δ[ton] Awp [m²]
15.75.8 1,875 26,59 78,64 7,68 7,68 5,57 1574,00 1613,35 152,30
15.75.4 3,75 26,59 82,37 7,51 7,51 5,08 900,00 922,50 101,53
Figura 6.1: RAO[m/m] vs período[s] modelo 15.75.8
Figura 6.2: RAO[m/m] vs período [s] modelo 15.75.4
Percebe-se que o modelo 15.75.4 entra em ressonância com o período de ondas
predominante no sítio. Portanto, o modelo 15.75.4 é o escolhido como aquele que
apresentaria o melhor desempenho hidrodinâmico no sítio estudado.
Conforme pode ser visto na tabela 6.1, o calado do modelo 15.75.4 é de 26,59
metros. Mesmo levando em conta que os modelos de 15.75.4 foram analisados
considerando uma profundidade de 30 metros, conforme item 5.1, a escolha do modelo
15.75.4 não combina com a profundidade estipulada para o sítio. Isso acontece pois, ao
61
oscilar nas ondas, o flutuador irá se deslocar a uma distância equivalente a amplitude
de onda incidente multiplicada pelo valor de RAO. A soma do deslocamento vertical com
o calado do flutuador deve ser menor que a profundidade estipulada. Levando-se em
conta a maior amplitude de onda que consta na figura 9.1 de 1,25 metros e supondo um
pico de RAO de 3,44 o deslocamento vertical do flutuador pode chegar a mais de 4
metros, que somado ao calado de 26,59 metros, é maior que a profundidade do sítio.
Conclui-se portanto que, apesar do modelo 15.75.4 ser o modelo escolhido pelo aspecto
hidrodinâmico, em termos prático outro modelo deveria ser selecionado para construção
e instalação de um protótipo.
Considerando os outros modelos disponíveis, tanto o modelo 8.75 quanto o
modelo 15.60 chegam próximos a condição ressonante, vide figuras 5.24 e 5.25,
praticamente de forma equidistante. Conforme figuras 5.8 e 5.7, o modelo 8.75
apresenta um valor absoluto do RAO maior. Entretanto, de acordo com a tabela 5.1, o
modelo 15.60 apresenta um calado menor, agregando uma distância mais segura entre
o flutuador e o leito marinho. Considerando as conclusões parciais em 5.4, a adição de
chanfros a modelos com 60° leva a uma diminuição do período em que ocorre o pico de
RAO, o que não é favorável para a condição ressonante, portanto não é interessante
adicionar chanfros. Dessa forma, o modelo 15.60 seria o modelo que alia o aspecto
hidrodinâmico ao aspecto operacional do dispositivo.
6.3 Potência Extraída em Ondas Regulares
Com o modelo selecionado, é importante ter uma estimativa sobre a quantidade
de energia extraída das ondas, ou seja, a quantidade de energia absorvida pelo
flutuador. Para tal, será utilizado o modelo matemático apresentado em 3.3. Os cálculos
foram realizados com dados de entrada oriundos da análise do modelo 15.75.4 no Ansys
Aqwa, utilizando a plataforma MS Excel. Este modelo será adotado já que este seria o
modelo com melhor desempenho hidrodinâmico, e os aspectos operacionais não estão
sendo considerados no presente estudo. Os dados do sítio no Anexo 9.1 mostram que
o período de onda mais frequente é de 6 segundos e a altura significativa de onda é de
1,5 metros. Portanto, será calculada a potência média absorvida pelo flutuador ao longo
do tempo quando uma onda regular de altura significativa de 1,5 metros incide sobre o
WEC, variando o período de onda na faixa de 0 a 20 segundos.
Espera-se que a potência máxima extraída ocorra em um período próximo de 6
segundos, validando assim a seleção do modelo para este sítio. Os valores
intermediários tabulados dos cálculos realizados podem ser encontrados no Anexo 9.6,
neste tópico apenas os gráficos gerados serão apresentados.

62
Os gráficos de massa adicional, amortecimento por radiação e Froude-Krylov no
para o modelo 15.75.4 são mostrados a seguir. Vale ressaltar que foram incluídos nas
análises uma restauração hidrostática adicional e um amortecimento adicional através
de recursos do programa, para levar em conta a atuação do PTO, conforme descrito no
item 3.3.2. Este efeito pode ser notado comparando as curvas de RAO das figuras 6.2
e 6.3, onde os valores de RAO decaíram.
Figura 6.3: Gráfico de RAO [m/m] vs período [s] para modelo 15.75.4
Figura 6.4: Gráfico de massa adicional [kg] vs período [s] para modelo 15.75.4

63
Figura 6.5: Gráfico de amortecimento por radiação [N.s/m] vs período [s] para modelo
15.75.4
Figura 6.6: Gráfico de força de Froude-Krylov [N] vs período [s] para modelo
15.75.4
Conforme apresentado em 3.3.2, o PTO é representado por seus valores de
amortecimento e restauração:
𝐵𝑝𝑡𝑜 = 𝐵(𝑤𝑛)
𝐾𝑝𝑡𝑜 = 0,05 ∗ (𝜌𝑔𝐴𝑤𝑝)
O valor da amplitude de deslocamento é obtido multiplicando os valores de RAO
da figura 6.3, já levando em conta o PTO, pela altura de onda predominante no sítio, no
caso 1,5 metros.

64
Finalmente, utilizando a expressão (19), pode-se calcular a potência média
extraída das ondas ao longo do tempo, o resultado pode ser visto na figura 6.4:
𝑃𝑟𝑒𝑔 =
1
2𝐵𝑝𝑡𝑜𝑤²|𝑍𝑜|²
Figura 6.7: Potência extraída para cada período de ondas regulares
6.4 Potência Extraída em Ondas Irregulares
O mar na realidade é composto por ondas irregulares, portanto é interessante
também estimar a potência extraída nesta situação. Para tal, o mar do sítio será
aproximado pelo espectro de Pierson-Moskowitz (PM) com período de 6 segundos e
altura de onda de 1,5 metros, seguindo o procedimento em 3.3.3. Para o cálculo da
potência extraída ao longo do tempo utiliza-se a expressão (31), que faz uso tanto da
potência extraída por cada onda regular que compõe o espectro, quanto da densidade
de energia espectral.
𝑃𝑖𝑟𝑟 = 2 ∫ 𝑃𝑟𝑒𝑔
∞
0
(𝑤)𝐸(𝑤)𝑑𝑤
Para resolver as integrais será utilizado o método numérico de Simpson
combinado com método do Trapézio [21]. A faixa de frequências a ser utilizada será a
mesma usada nas análises no Ansys Aqwa, ou seja, correspondente a períodos de 0 a
20 segundos. O cálculo da potência de cada onda regular segue o mesmo procedimento
realizado em 6.3, já o cálculo da densidade espectral faz uso da expressão (32) em
3.3.3.
𝐸(𝑤) =5𝜋4𝐻𝑠
2
𝑇𝑝4
1
𝑤5𝑒
− 20𝜋4
𝑇𝑝4
1𝑤4
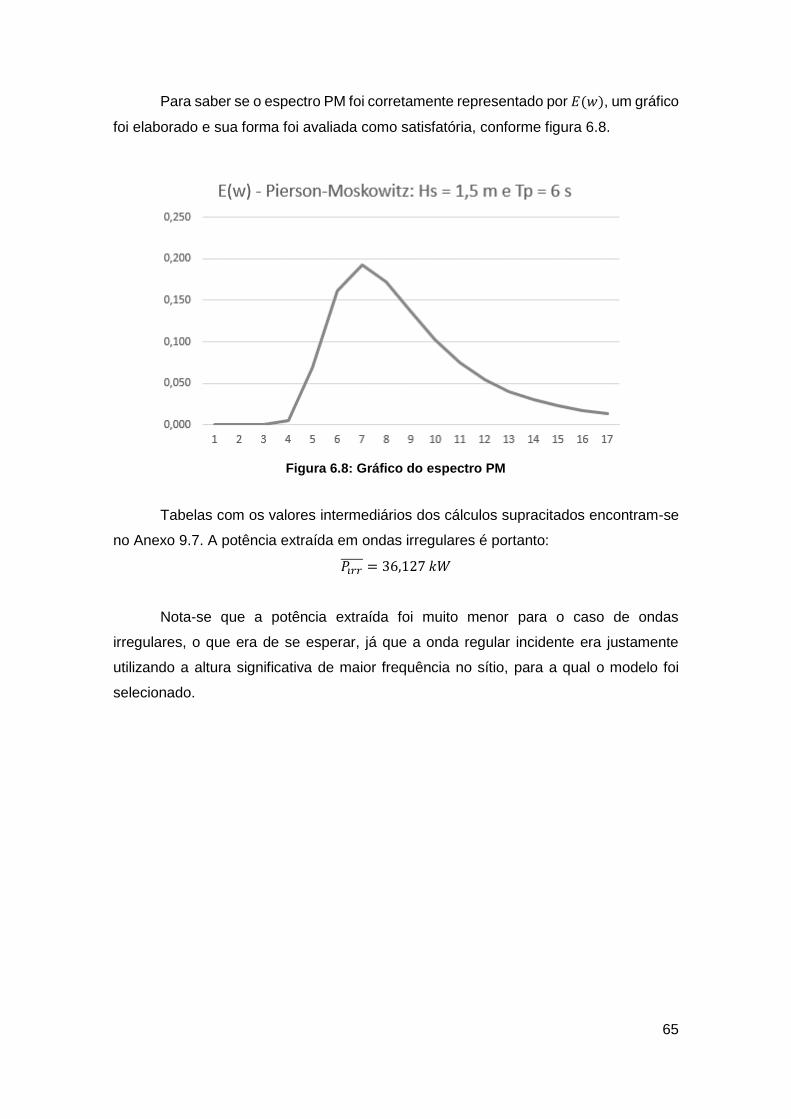
65
Para saber se o espectro PM foi corretamente representado por 𝐸(𝑤), um gráfico
foi elaborado e sua forma foi avaliada como satisfatória, conforme figura 6.8.
Figura 6.8: Gráfico do espectro PM
Tabelas com os valores intermediários dos cálculos supracitados encontram-se
no Anexo 9.7. A potência extraída em ondas irregulares é portanto:
𝑃𝑖𝑟𝑟 = 36,127 𝑘𝑊
Nota-se que a potência extraída foi muito menor para o caso de ondas
irregulares, o que era de se esperar, já que a onda regular incidente era justamente
utilizando a altura significativa de maior frequência no sítio, para a qual o modelo foi
selecionado.
66
7. Conclusão e Proposta de Roteiro
7.1 Conclusões
A proposta de modelo geométrico do flutuador, definida como premissa de
projeto, encontra embasamento nas literaturas estudadas sobre o assunto, que
reforçam seu potencial como solução para a configuração do dispositivo conversor de
energia das ondas. O sítio selecionado em 3.2 proporciona uma faixa de limites
geométricos ao flutuador que corrobora com a proposta conceitual do dispositivo,
validando assim sua aplicabilidade como balizador do presente estudo.
A utilização do Ansys Aqwa como ferramenta de análise mostrou-se o principal
desafio do trabalho, pela falta de conhecimento do autor sobre o programa, limitado
material de apoio disponível gratuito na internet, e ausência de pessoas com experiência
suficiente com o programa no curso de engenharia naval para dar suporte. Entretanto,
após adquirir expertise na operação do programa, o autor avalia que o mesmo é uma
ferramenta valiosa para análises hidrodinâmicas, em especial no que tange estudos de
energia das ondas.
As análises sobre o RAO e massa adicional comprovaram seu potencial como
insumo para tomada de decisão em relação a geometria do flutuador, bem como
identificação dos parâmetros mais relevantes para a extração de energia das ondas.
Através delas, um número considerável de modelos pôde ser testado, e conclusões
importantes puderam ser elaboradas, como por exemplo a definição do comprimento,
ângulo lateral e tamanho de chanfro como elementos principais da adequação do
flutuador ao sítio. Adicionalmente, o autor acredita que análises sobre o amortecimento
por radiação também poderiam ser utilizadas com este propósito, já que impactam tanto
nas características do flutuador, como do próprio PTO, conforme expressão (22) em
3.3.1.
As conclusões em 5.4, 5.6 e 6.1 podem ser utilizadas em trabalhos futuros,
visando antecipar o impacto que determinada mudança na geometria do flutuador
causaria no potencial de extração energética em diferentes sítios. Algo interessante de
se destacar é que, mesmo em períodos mais baixos, por exemplo 2 segundos, ainda
assim os modelos apresentam um valor de RAO razoável. Em um projeto como este, é
importante garantir o bom desempenho nestes períodos, porque nos mais altos o
comprimento de onda aumenta, e naturalmente o flutuador acompanha a onda, o que
não costuma ocorrer nos períodos mais baixos.

67
A forma de seleção do modelo no capítulo 6 mostrou-se acertada, os valores
encontrados para a potência extraída estão em uma ordem de grandeza aceitável
quando comparados com valores citados em literaturas sobre o assunto.
7.2 Proposta de Roteiro
Este tópico é dedicado a apresentação de uma proposta de roteiro para a
adequação da geometria de um flutuador a um sítio genérico, baseado na experiência
adquirida neste trabalho.
7.2.1 Dados do Sítio
A coleta dos dados meteoceanográficos do sítio é a primeira etapa para
adequação da geometria do flutuador. Em especial, é importante que os dados forneçam
as frequências de ocorrência de altura significativa de onda e períodos de onda. Além
disso, informações interessantes seriam a distribuição da potência energética das ondas
conforme altura significativa e frequências de onda. A direção de propagação das ondas
não é um dado tão crítico já que o flutuador possui simetria em relação ao seu eixo
vertical. Beserra [8] se caracteriza como uma referência bibliográfica interessante para
avaliação do potencial energético de um sítio.
7.2.2 Limites Geométricos
Os dados do sítio devem ser usados para definir a faixa de valores limite dos
parâmetros geométricos mais importantes do flutuador, que no caso deste trabalho são
o comprimento, ângulo lateral e tamanho do chanfro. A definição da faixa é importante
para que se tenha uma noção da quantidade de modelos que devem ser elaborados e
analisados, a fim de abranger as condições de mar predominantes no sítio.
Importante também manter-se em mente que aspectos operacionais podem
estabelecer limites geométricos, como por exemplo a profundidade do leito marinho
pode vir a limitar a altura do flutuador, ou o modo de instalação pode limitar o
comprimento.
7.2.3 Ferramentas Computacionais
O Rhinoceros é uma ótima opção de ferramenta de modelagem computacional,
entretanto não há nenhum impedimento que outra ferramenta seja usada. Caso seja
necessário, podem ser usados programas como AutoCAD, Inventor, CATIA, Solid
Works, Space Claim, dentre outros.

68
O mesmo vale para o Ansys Aqwa, onde existem outros exemplos de códigos
computacionais utilizados para cálculo hidrodinâmico de interação entre escoamentos
e corpos. Podem ser citados o WAMIT, Aquadyn, Sesam HydroD Wadam, Nemoh,
dentre outros.
O importante é atentar para a compatibilidade entre o programa de modelagem
e o programa de análise, bem como a variedade de análises que o segundo oferece e
a utilização da Teoria Potencial.
7.2.4 Modelos Paramétricos
Em seguida, devem ser elaborados modelos computacionais respeitando os
parâmetros limite definidos em 7.2.2. É importante que os modelos consigam abranger
de forma satisfatória a faixa de valores estipulada.
7.2.5 Análise Hidrodinâmicas
Os modelos devem então ser testados no programa de análise, nas quais se
destacam as análises de RAO, massa adicional e amortecimento por radiação como
balizadores para a tomada de decisão sobre a configuração geométrica. O modelo
matemático definido em 3.3 deve ser mantido em mente, para que se tenha uma noção
sobre como cada parâmetro afeta a potência extraída.
É crucial que a frequência natural de oscilação do modelo seja sintonizada com
a frequência de onda incidente predominante no sítio.
7.2.6 Seleção e Validação do Modelo
Devem ser derivadas conclusões sobre as análises realizadas em 7.2.5, para
que um modelo mais compatível com o sítio seja selecionado. Algum parâmetro
geométrico deste modelo pode vir a ser modificado, para contemplar uma configuração
que não constava nos modelos em 7.2.4.
Em seguida, a escolha do modelo deve ser validada com a estimativa da
potência extraída das ondas.
7.2.7 Fluxograma do Roteiro
A seguir, um fluxograma para ilustrar melhor o processo do roteiro é
apresentado. Vale ressaltar o caráter iterativo do processo já que, caso o modelo
selecionado não seja validado, deve-se retornar ao confecção de outros modelos
paramétricos que não foram previamente contemplados.
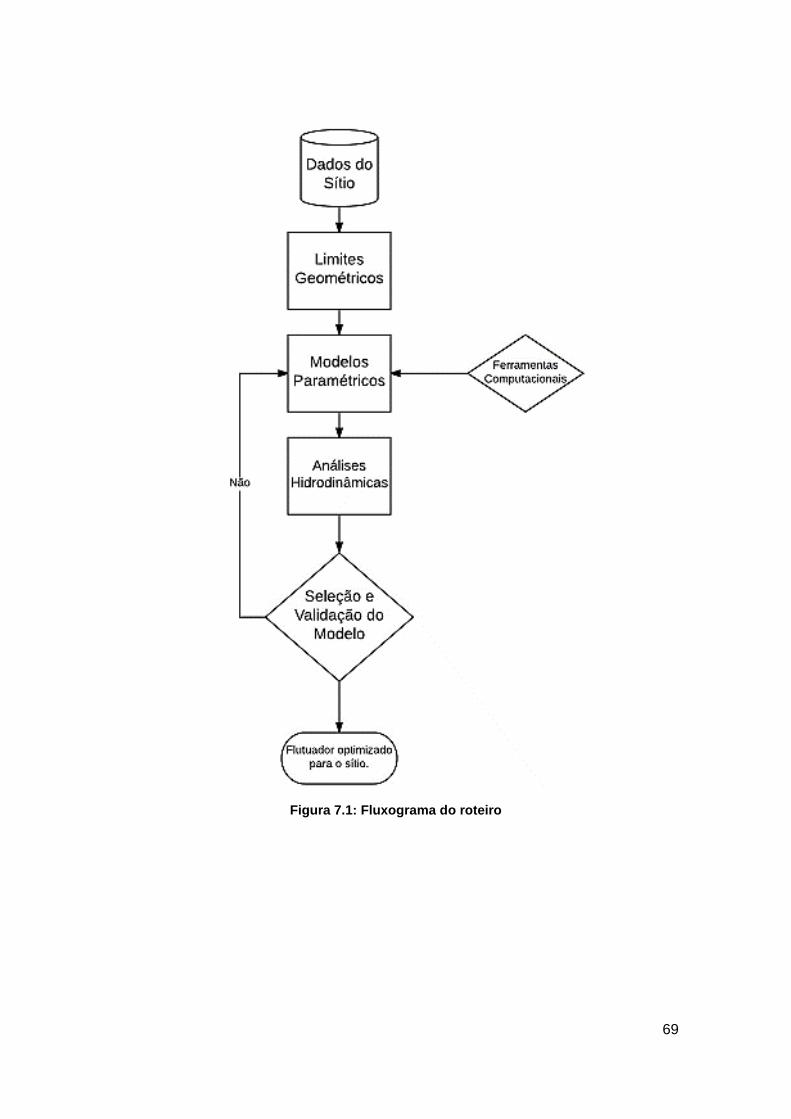
69
Figura 7.1: Fluxograma do roteiro
70
7.3 Trabalhos Futuros
As hipóteses sobre o comportamento do escoamento ao redor frente a forma
geométrica do flutuador carecem de confirmação, portanto um estudo utilizando
programas CFD seria necessário.
Este estudo considerou apenas sistemas lineares e análises no domínio da
frequência, entretanto em situações reais o PTO, em especial, é altamente não-linear,
portanto análises no domínio do tempo e uma mudança no modelo matemático
poderiam ser realizadas.
Além disso, forças viscosas e perdas de eficiência na transmissão de potência
não foram consideradas, assim como o atrito que o flutuador teria com o movimento em
contato com a torre guia. A seleção de um sistema PTO mais adequado ao projeto
também não foi contemplada, este assunto está sendo tratado por Neto [15] que faz
parte da mesma equipe de projeto do PPE/UFRJ.
Sistemas de controle que ajustem a fase de oscilação e o amortecimento imposto
sobre o flutuador também não foram considerados, e podem acrescentar muito no
desempenho de extração de energia do flutuador.
Por fim, as escolhas aqui realizadas foram feitas do ponto de vista técnico,
analisando o desempenho hidrodinâmico. Entretanto, aspectos econômicos sobre os
custos que cada escolha da geometria do flutuador acarreta poderiam ser estudados.
71
8. Referências Bibliográficas
[1] Disponível em:<http://ec.europa.eu/eurostat/statistics-
explained/index.php/File:Primary_production_of_renewable_energy,_2004_and_2014_
YB16.png>. Acesso em: 21/01/2017.
[2] FALNES, Johannes. A review of wave-energy extraction. Marine Structures, v.
20, n. 4, p. 185-201, 2007.
[3] DREW, Benjamin; PLUMMER, Andrew R.; SAHINKAYA, M. Necip. A review of
wave energy converter technology. 2009. Artigo Acadêmico. University of Bath.
[4] Disponível em: < https://www.cia.gov/library/publications/the-world-
factbook/fields/2060.html>. Acesso em: 21/01/2017.
[5] Disponível em: < https://www.rhino3d.com/>. Acesso em: 21/01/2017.
[6] Disponível em: < http://www.ansys.com/products/structures/ansys-aqwa>. Acesso
em: 21/01/2017.
[7] CARGO, Christopher. Design and Control of Hydraulic Power Take-Offs for
Wave Energy Converters. 2012. Tese de Doutorado. University of Bath.
[8] BESERRA, Eliab Ricarte. Avaliação de sítios para o aproveitamento dos
recursos energéticos das ondas do mar. 2007. Tese de Doutorado. Universidade
Federal do Rio de Janeiro.
[9] DEAN, Robert G.; DALRYMPLE, Robert A. Water wave mechanics for engineers
and scientists, v.2, part II, chapter 1. World Scientific, Advanced Series on Ocean
Eng, World Scientific Publishing Co Inc, 1991.
[10] CLEMENTE, Cristiano Henrique Pimentel. Avaliação do desempenho
hidrodinâmico de um sistema de corpos oscilantes para extração de energia das
ondas. 2011. Tese de Mestrado. Universidade Federal do Rio de Janeiro.
[11] KUMPENER, Ruud; NEUMANN, Frank. Wave Energy – Technology Brief, In:
International Renewable Energy Agency (IRENA), 2014.
[12] FALNES, Johannes, 2002, “Wave-Energy Absorption by Oscillating Bodies”, In:
Cambridge University Press, Ocean waves and oscillating systems: linear
interactions including wave-energy extraction, 1 ed, chapter 6, Cambridge, United
Kingdom, Press Syndicate of the University of Cambridge.
[13] HANSEN, Rico H.; ANDERSEN, Torben O.; PEDERSEN, Henrik C. Model based
design of efficient power take-off systems for wave energy converters. In: The
12th Scandinavian International Conference on Fluid Power, May 18-20, Tampere,
Finland. 2011.
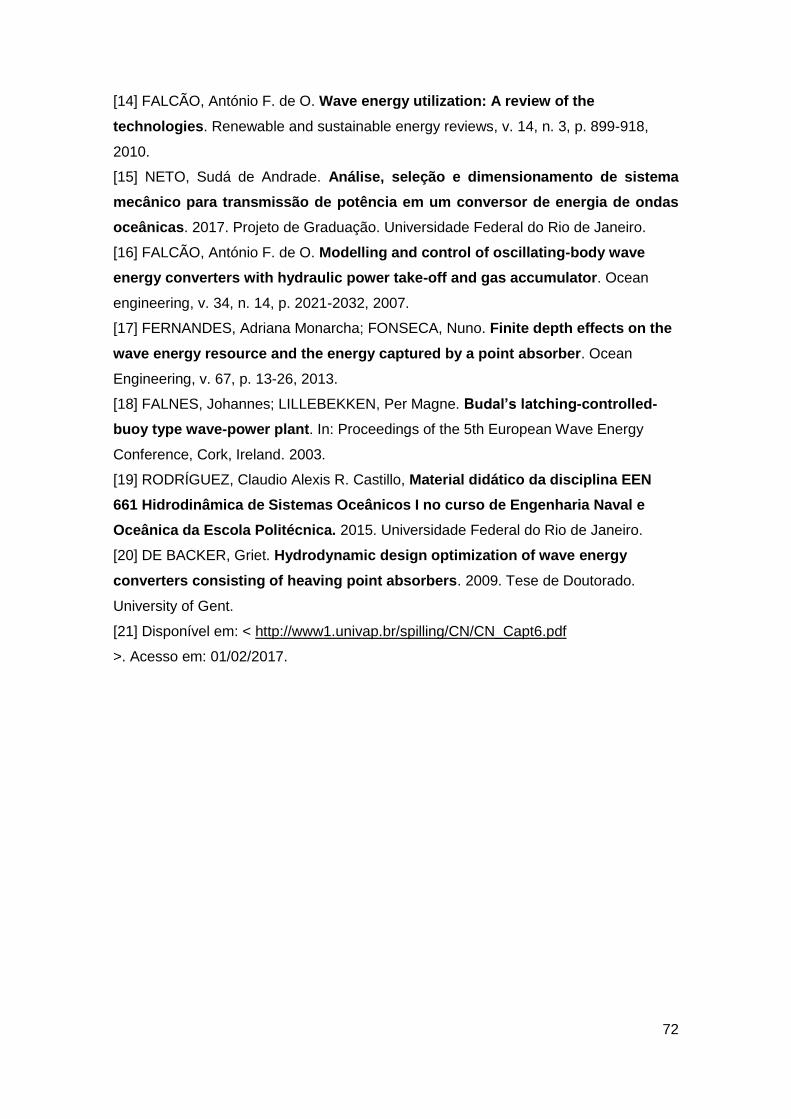
72
[14] FALCÃO, António F. de O. Wave energy utilization: A review of the
technologies. Renewable and sustainable energy reviews, v. 14, n. 3, p. 899-918,
2010.
[15] NETO, Sudá de Andrade. Análise, seleção e dimensionamento de sistema
mecânico para transmissão de potência em um conversor de energia de ondas
oceânicas. 2017. Projeto de Graduação. Universidade Federal do Rio de Janeiro.
[16] FALCÃO, António F. de O. Modelling and control of oscillating-body wave
energy converters with hydraulic power take-off and gas accumulator. Ocean
engineering, v. 34, n. 14, p. 2021-2032, 2007.
[17] FERNANDES, Adriana Monarcha; FONSECA, Nuno. Finite depth effects on the
wave energy resource and the energy captured by a point absorber. Ocean
Engineering, v. 67, p. 13-26, 2013.
[18] FALNES, Johannes; LILLEBEKKEN, Per Magne. Budal’s latching-controlled-
buoy type wave-power plant. In: Proceedings of the 5th European Wave Energy
Conference, Cork, Ireland. 2003.
[19] RODRÍGUEZ, Claudio Alexis R. Castillo, Material didático da disciplina EEN
661 Hidrodinâmica de Sistemas Oceânicos I no curso de Engenharia Naval e
Oceânica da Escola Politécnica. 2015. Universidade Federal do Rio de Janeiro.
[20] DE BACKER, Griet. Hydrodynamic design optimization of wave energy
converters consisting of heaving point absorbers. 2009. Tese de Doutorado.
University of Gent.
[21] Disponível em: < http://www1.univap.br/spilling/CN/CN_Capt6.pdf
>. Acesso em: 01/02/2017.
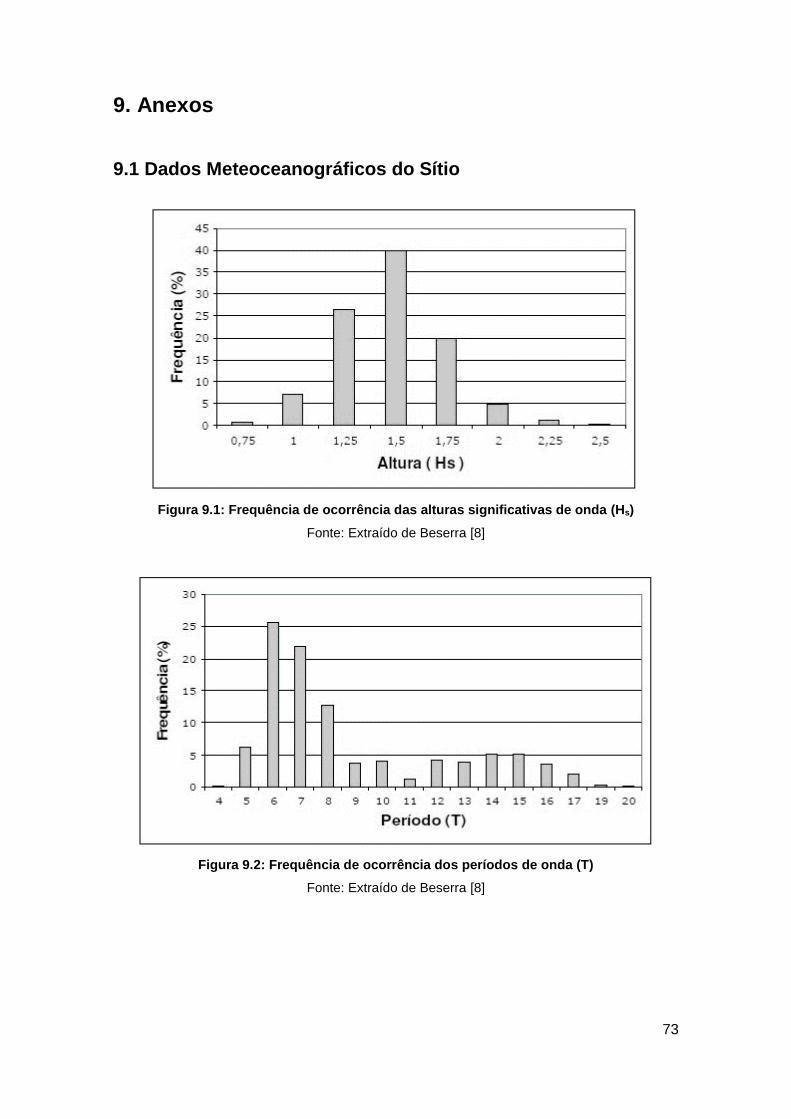
73
9. Anexos
9.1 Dados Meteoceanográficos do Sítio
Figura 9.1: Frequência de ocorrência das alturas significativas de onda (Hs)
Fonte: Extraído de Beserra [8]
Figura 9.2: Frequência de ocorrência dos períodos de onda (T)
Fonte: Extraído de Beserra [8]
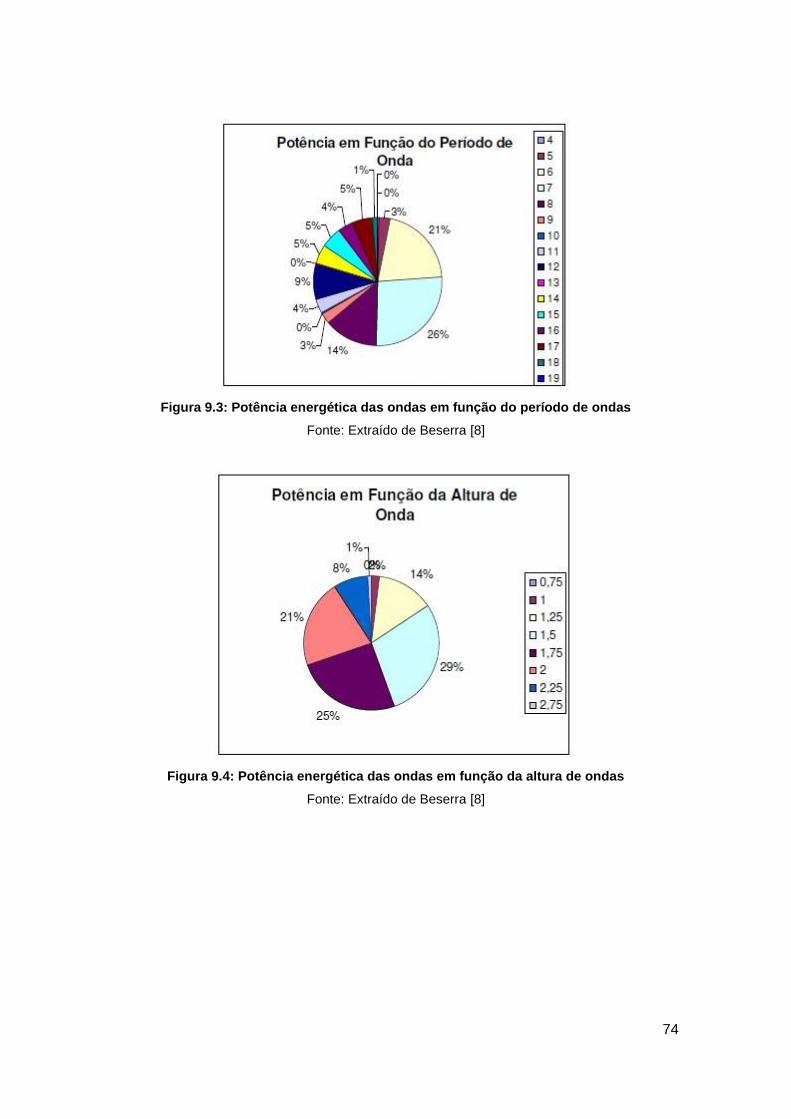
74
Figura 9.3: Potência energética das ondas em função do período de ondas
Fonte: Extraído de Beserra [8]
Figura 9.4: Potência energética das ondas em função da altura de ondas
Fonte: Extraído de Beserra [8]

75
Figura 9.5: Frequência de ocorrência da potência energética das ondas
Fonte: Extraído de Beserra [8]
9.2 Análise RAO dos Modelos Sem Chanfro
Figura 9.6: Análise RAO modelo 3.30
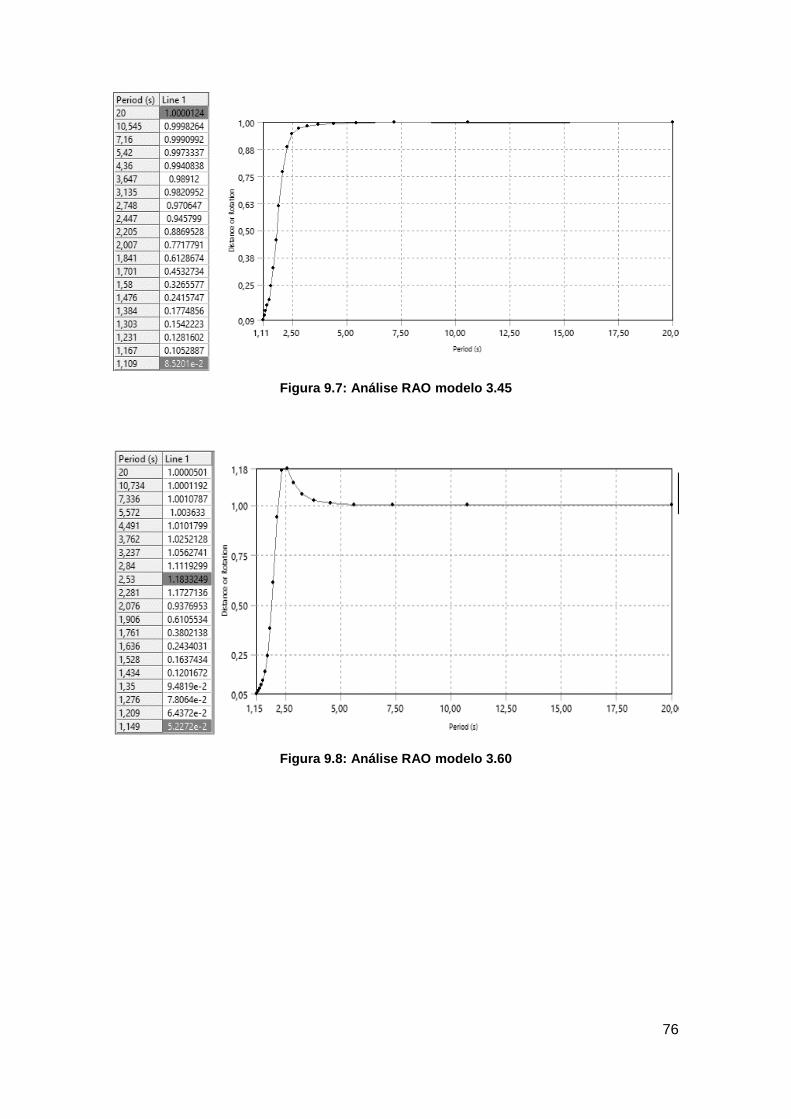
76
Figura 9.7: Análise RAO modelo 3.45
Figura 9.8: Análise RAO modelo 3.60
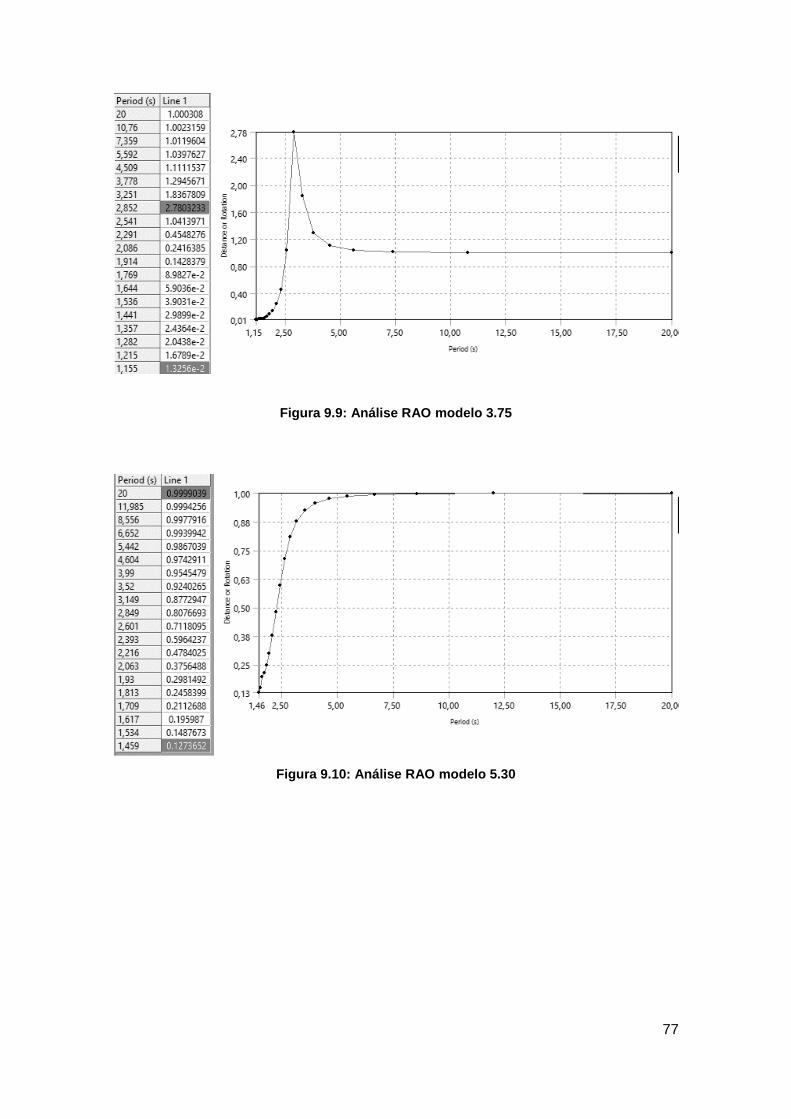
77
Figura 9.9: Análise RAO modelo 3.75
Figura 9.10: Análise RAO modelo 5.30
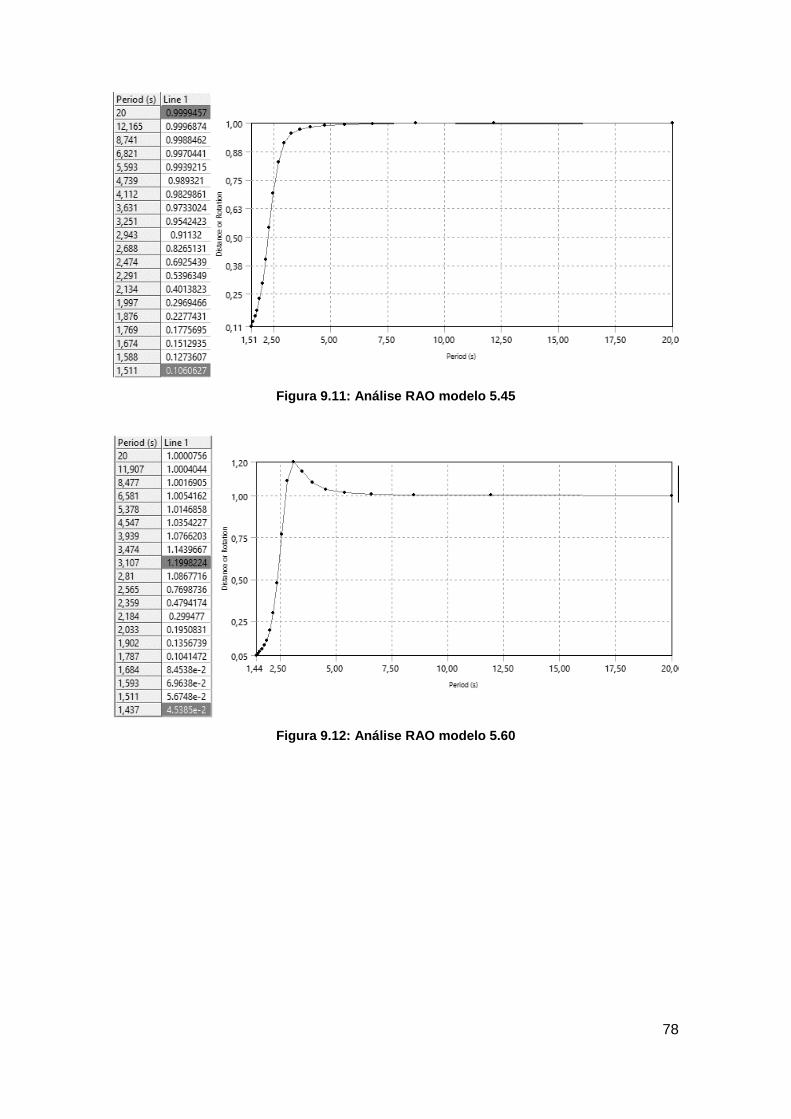
78
Figura 9.11: Análise RAO modelo 5.45
Figura 9.12: Análise RAO modelo 5.60
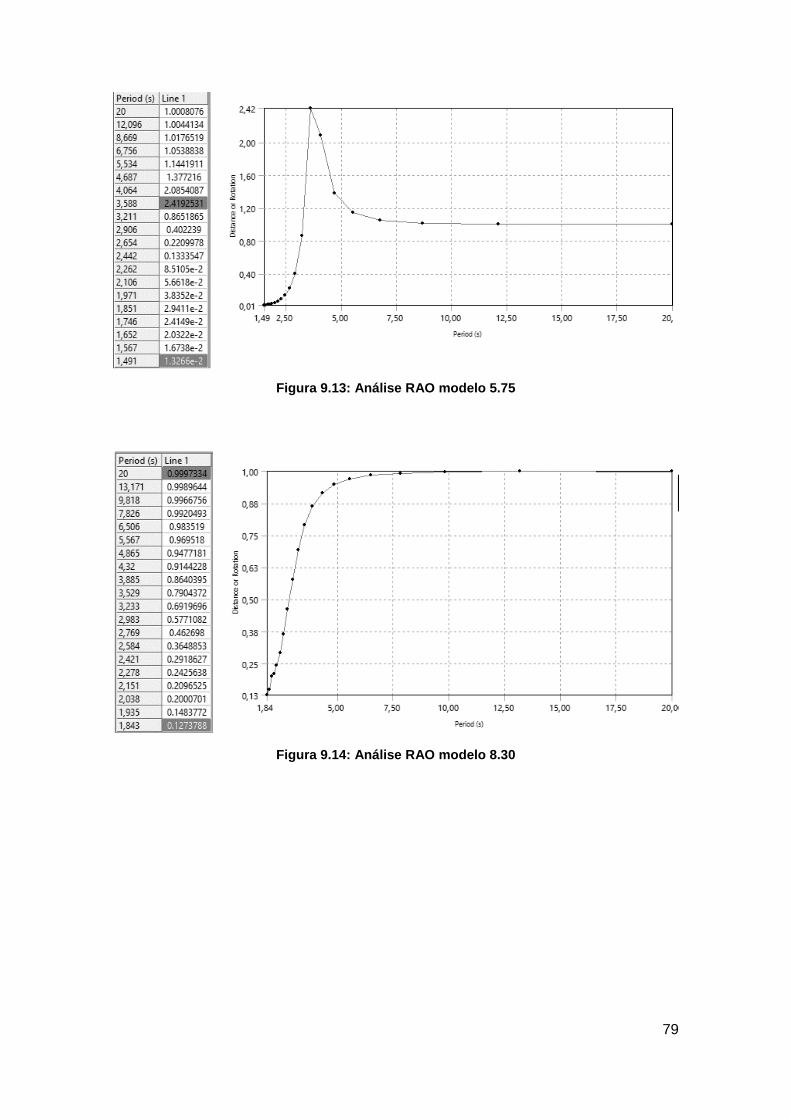
79
Figura 9.13: Análise RAO modelo 5.75
Figura 9.14: Análise RAO modelo 8.30
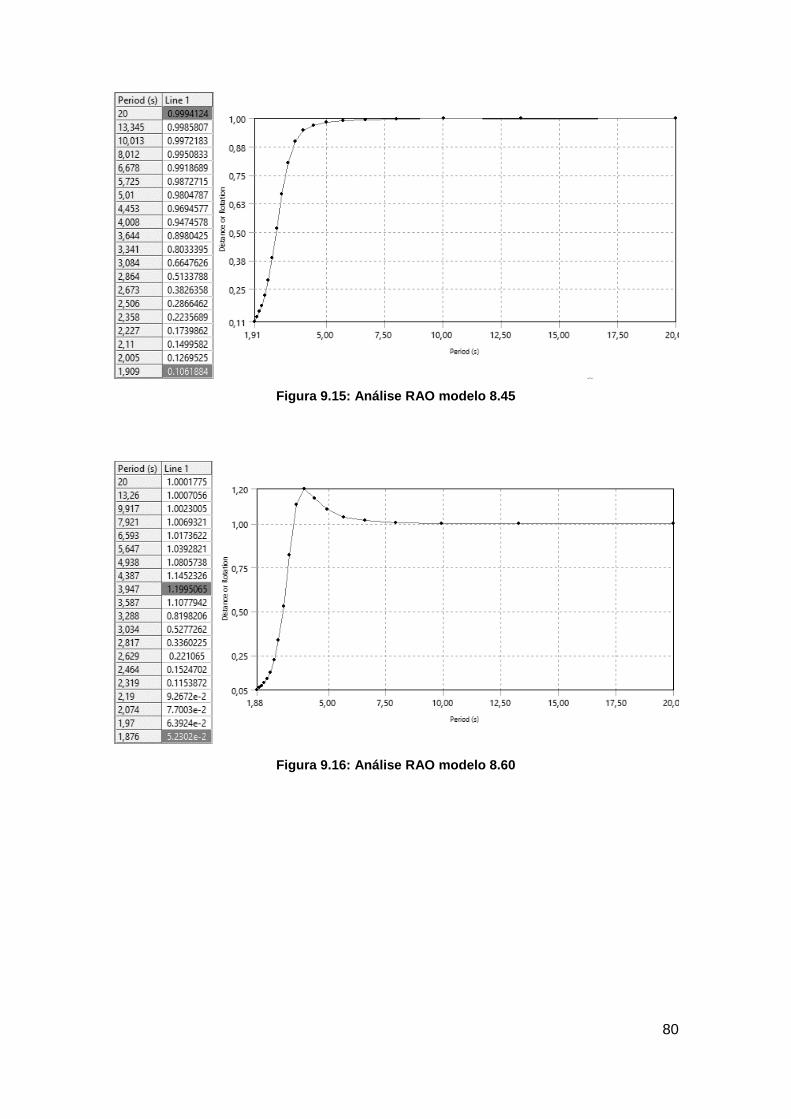
80
Figura 9.15: Análise RAO modelo 8.45
Figura 9.16: Análise RAO modelo 8.60

81
Figura 9.17: Análise RAO modelo 8.75
Figura 9.18: Análise RAO modelo 15.30
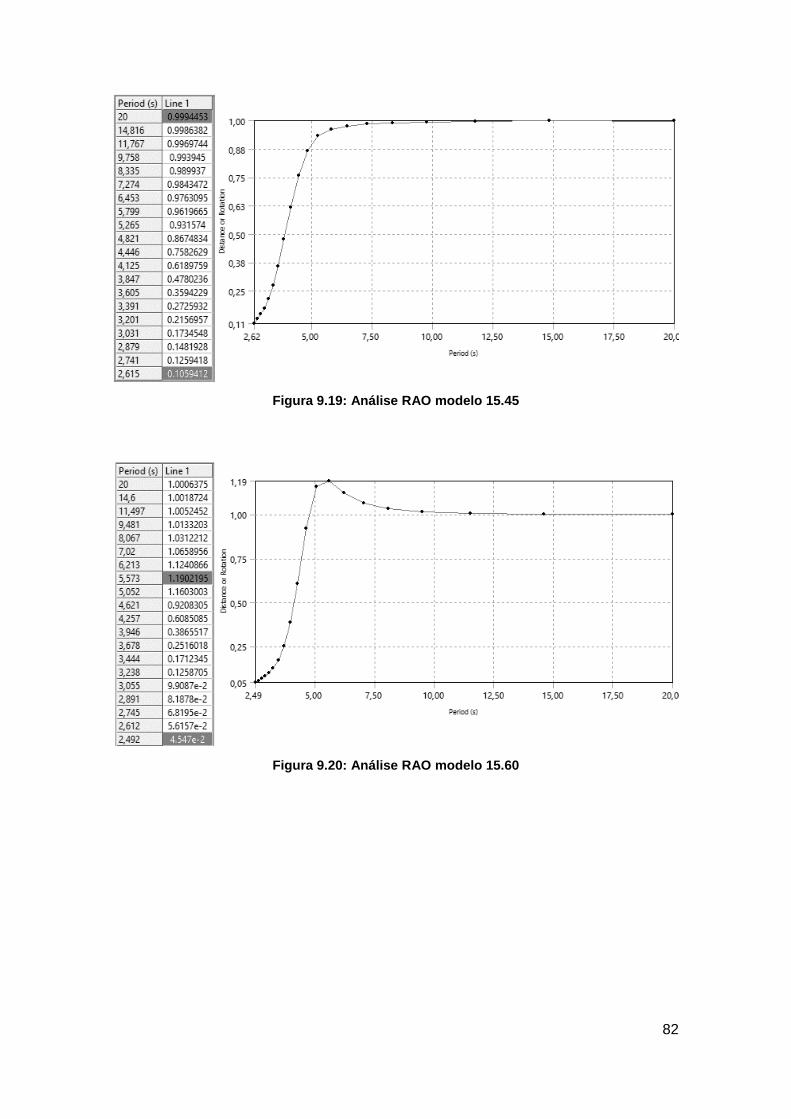
82
Figura 9.19: Análise RAO modelo 15.45
Figura 9.20: Análise RAO modelo 15.60
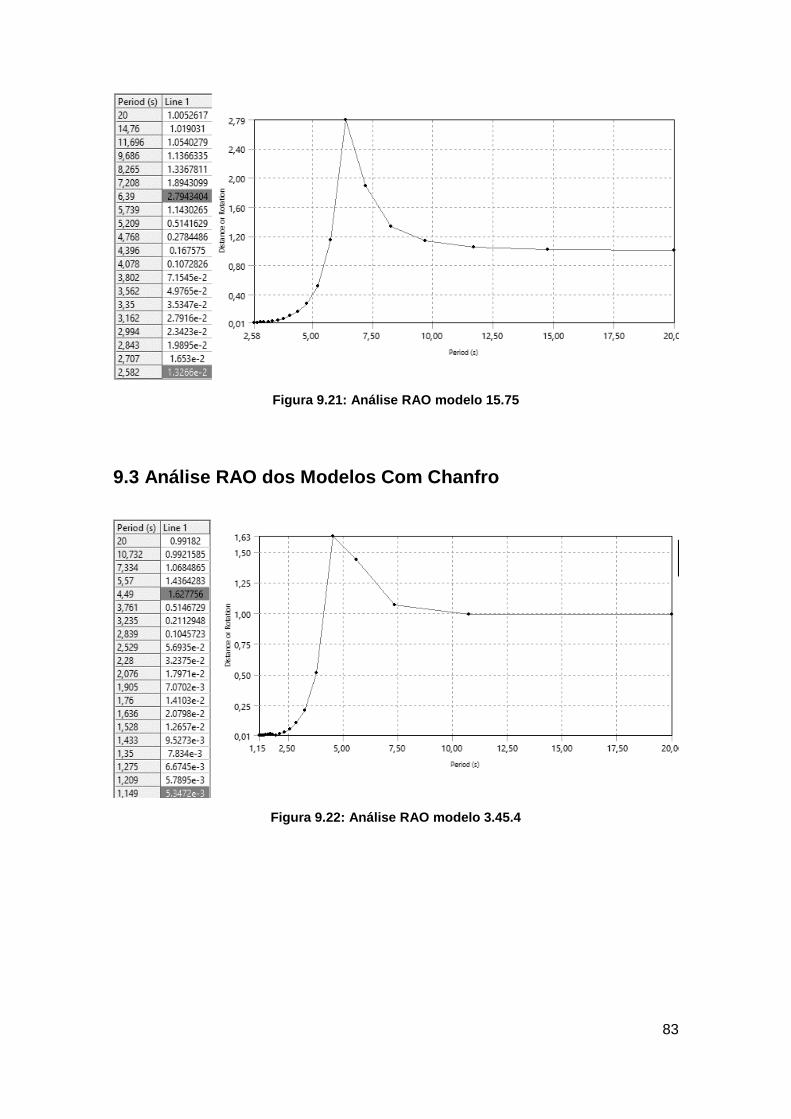
83
Figura 9.21: Análise RAO modelo 15.75
9.3 Análise RAO dos Modelos Com Chanfro
Figura 9.22: Análise RAO modelo 3.45.4

84
Figura 9.23: Análise RAO modelo 8.30.4
Figura 9.24: Análise RAO modelo 8.30.8

85
Figura 9.25: Análise RAO modelo 8.45.4
Figura 9.26: Análise RAO modelo 8.45.8
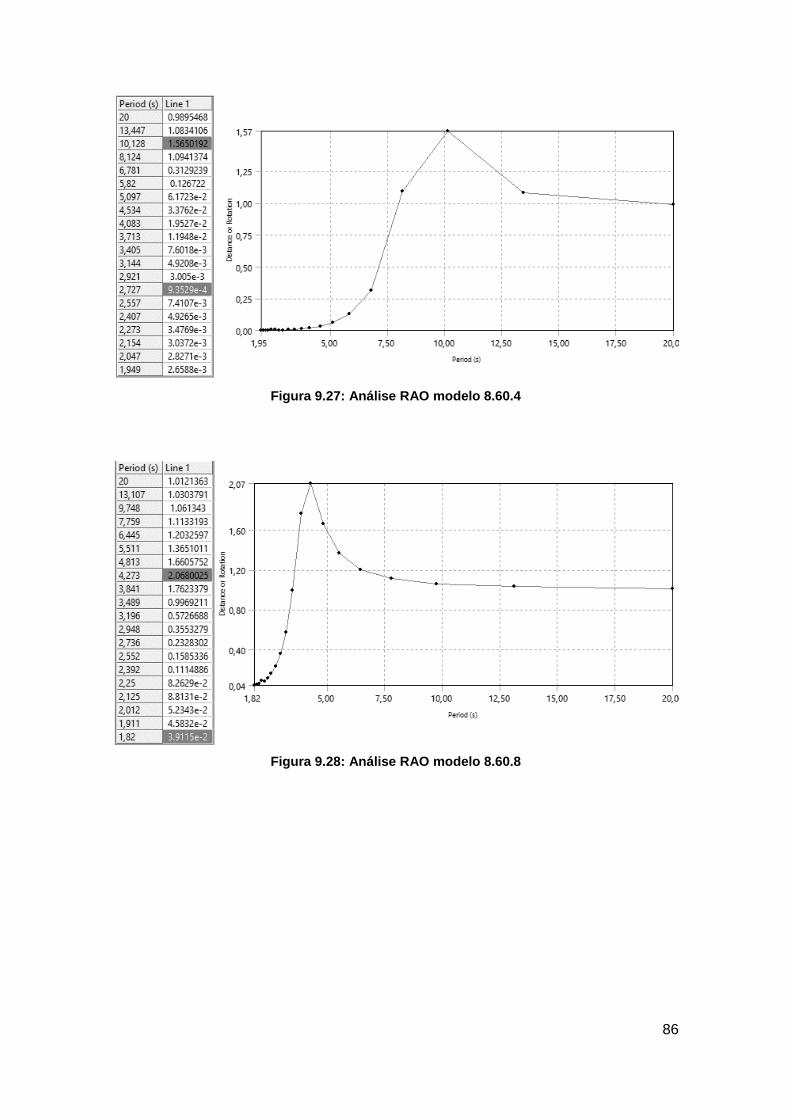
86
Figura 9.27: Análise RAO modelo 8.60.4
Figura 9.28: Análise RAO modelo 8.60.8
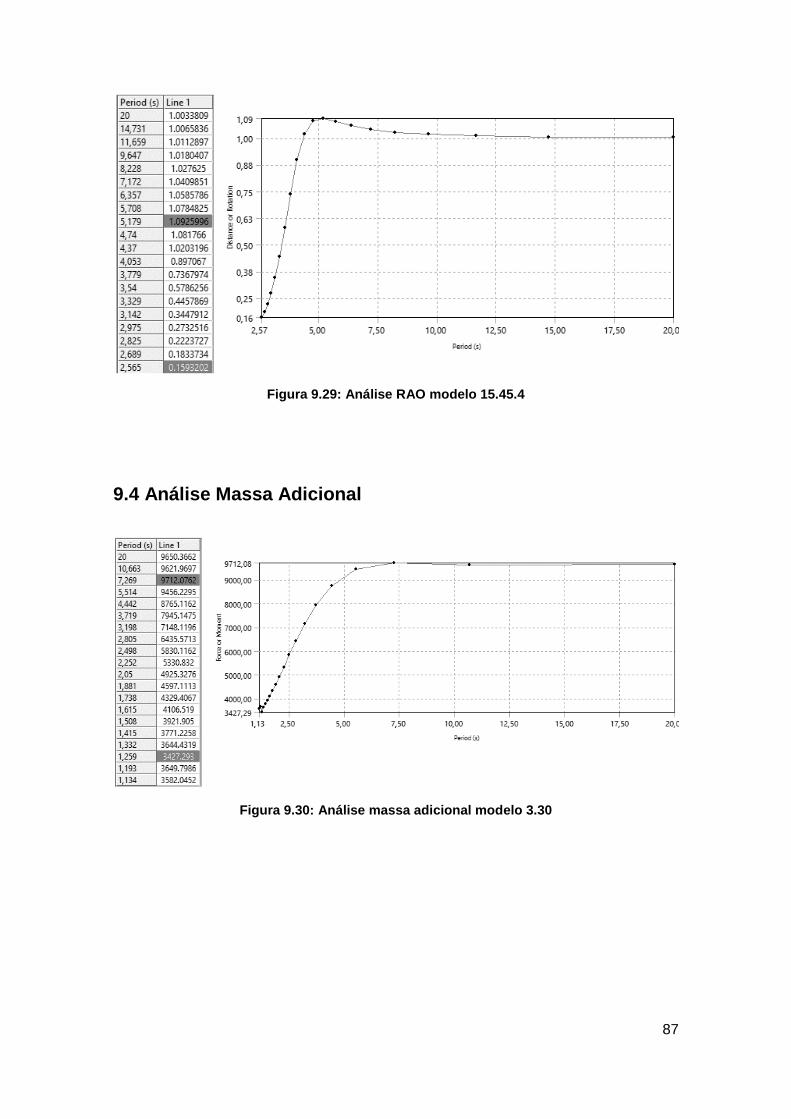
87
Figura 9.29: Análise RAO modelo 15.45.4
9.4 Análise Massa Adicional
Figura 9.30: Análise massa adicional modelo 3.30

88
Figura 9.31: Análise massa adicional modelo 3.45
Figura 9.32: Análise massa adicional modelo 3.60
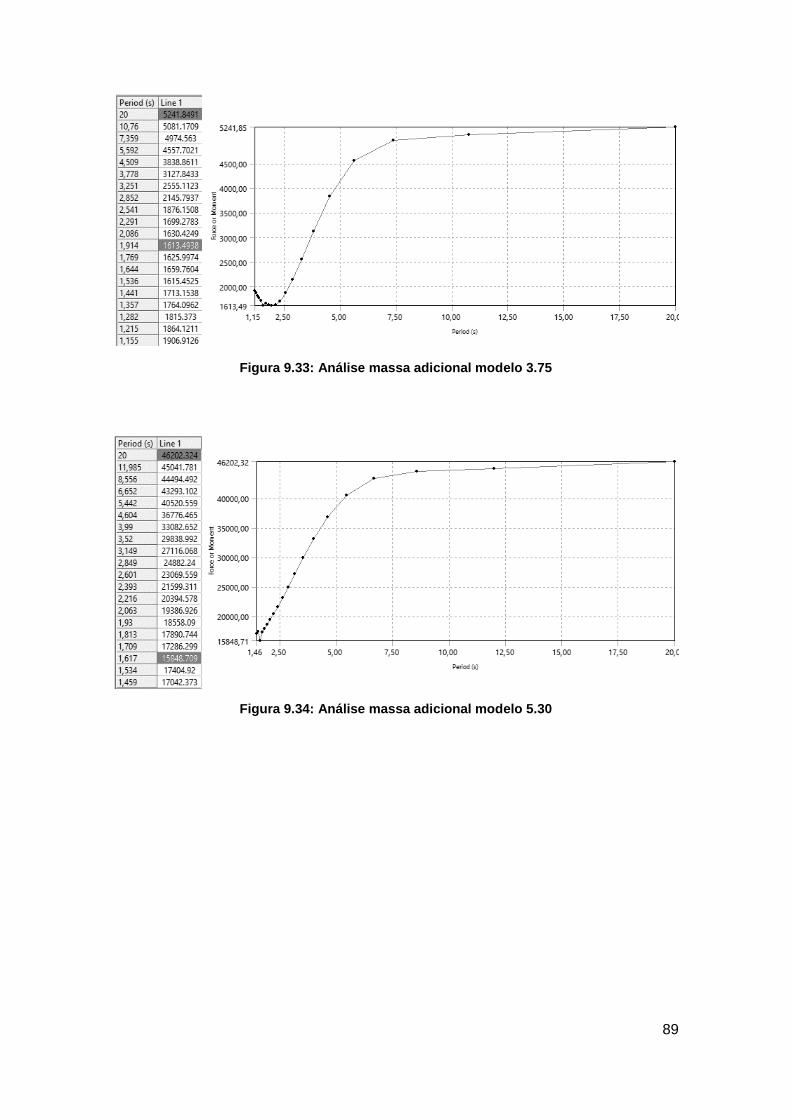
89
Figura 9.33: Análise massa adicional modelo 3.75
Figura 9.34: Análise massa adicional modelo 5.30

90
Figura 9.35: Análise massa adicional modelo 5.45
Figura 9.36: Análise massa adicional modelo 5.60
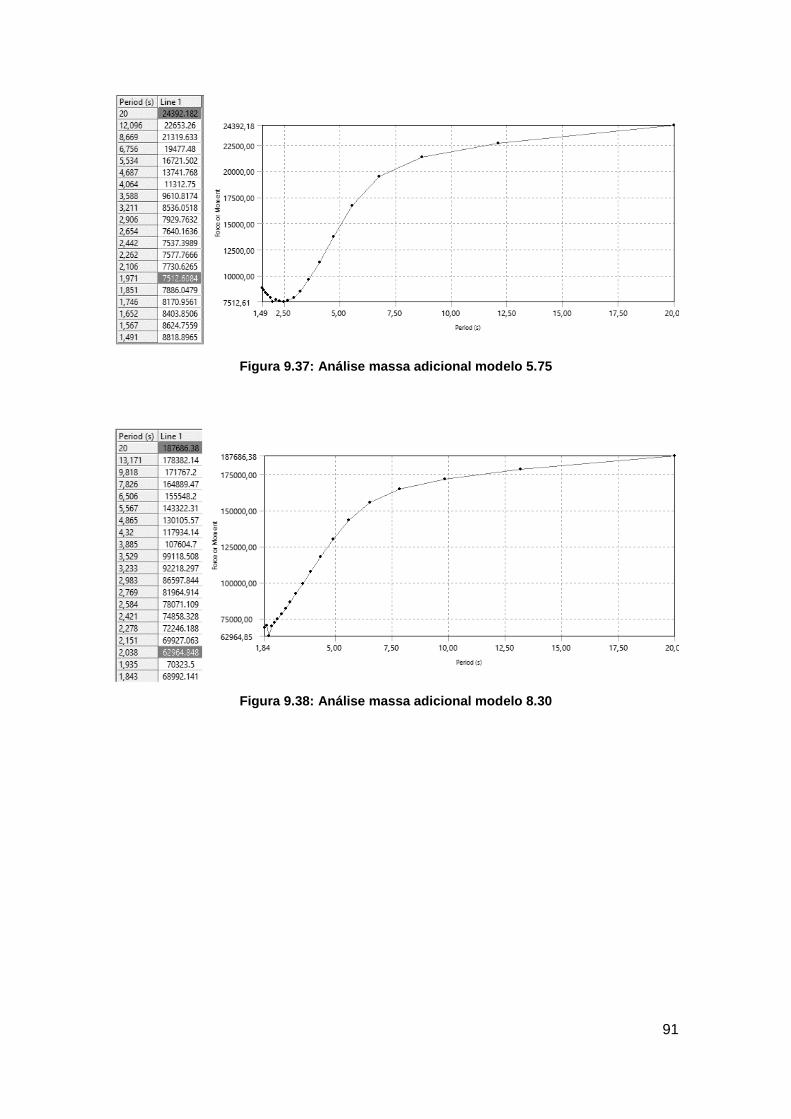
91
Figura 9.37: Análise massa adicional modelo 5.75
Figura 9.38: Análise massa adicional modelo 8.30
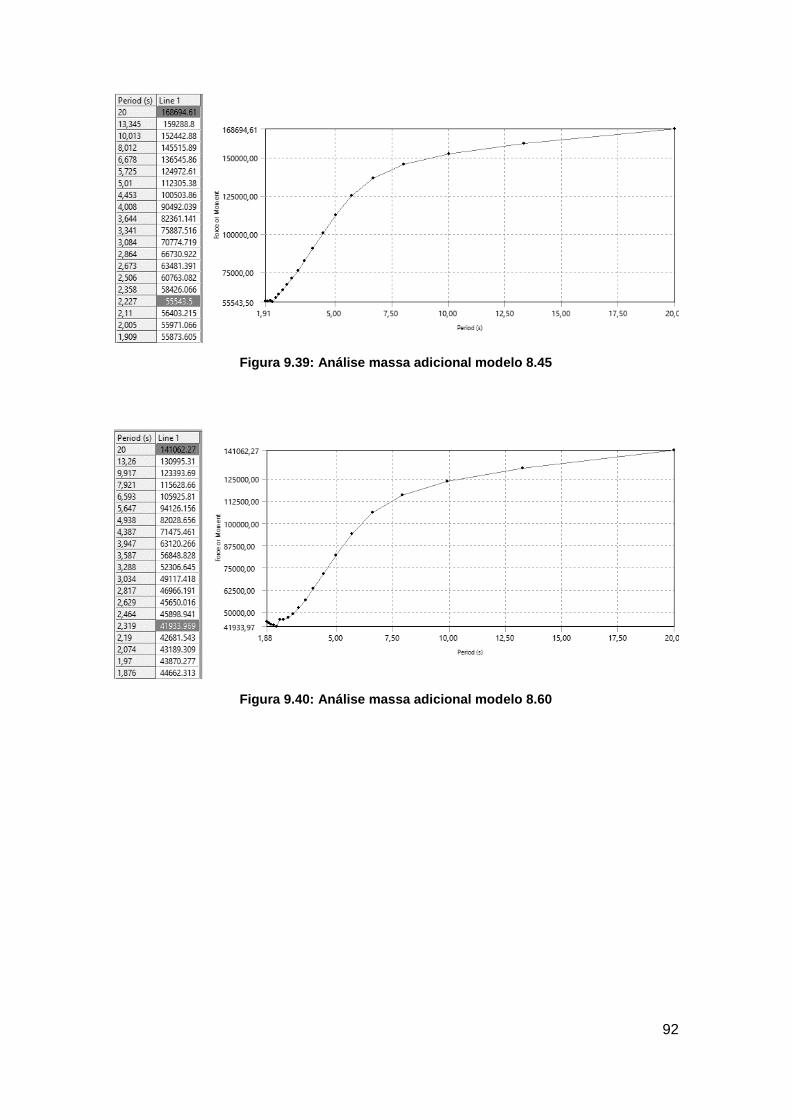
92
Figura 9.39: Análise massa adicional modelo 8.45
Figura 9.40: Análise massa adicional modelo 8.60
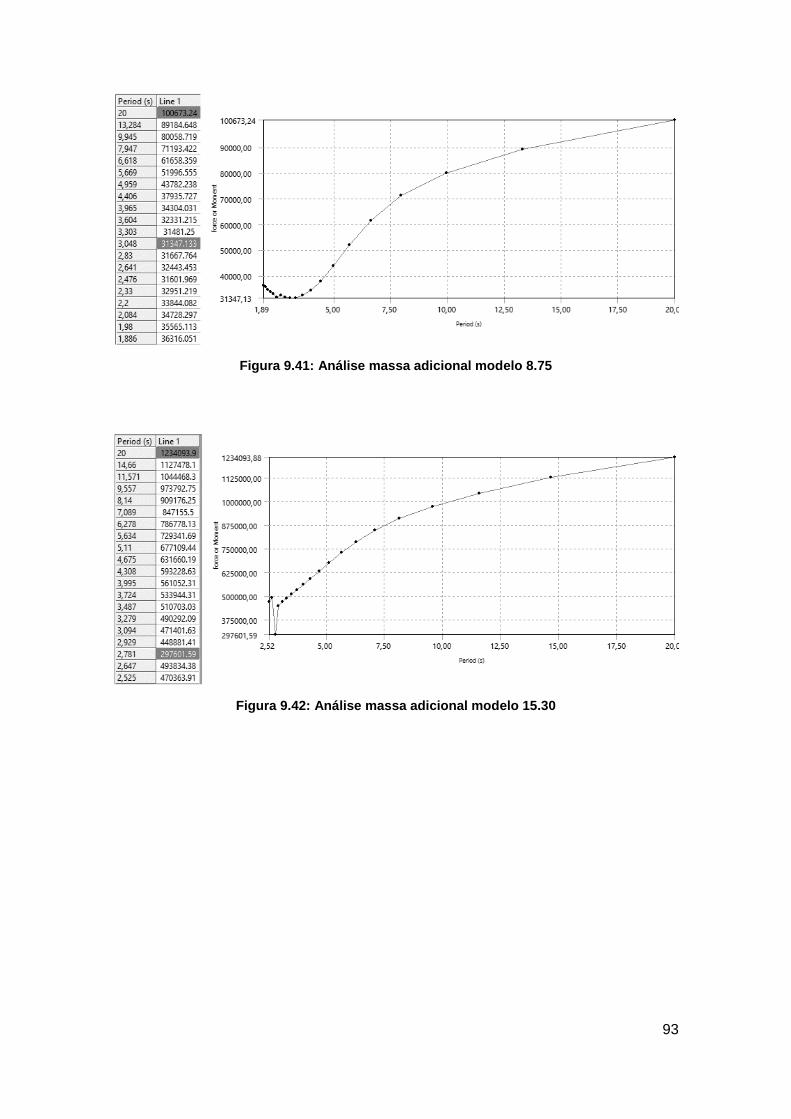
93
Figura 9.41: Análise massa adicional modelo 8.75
Figura 9.42: Análise massa adicional modelo 15.30

94
Figura 9.43: Análise massa adicional modelo 15.45
Figura 9.44: Análise massa adicional modelo 15.60
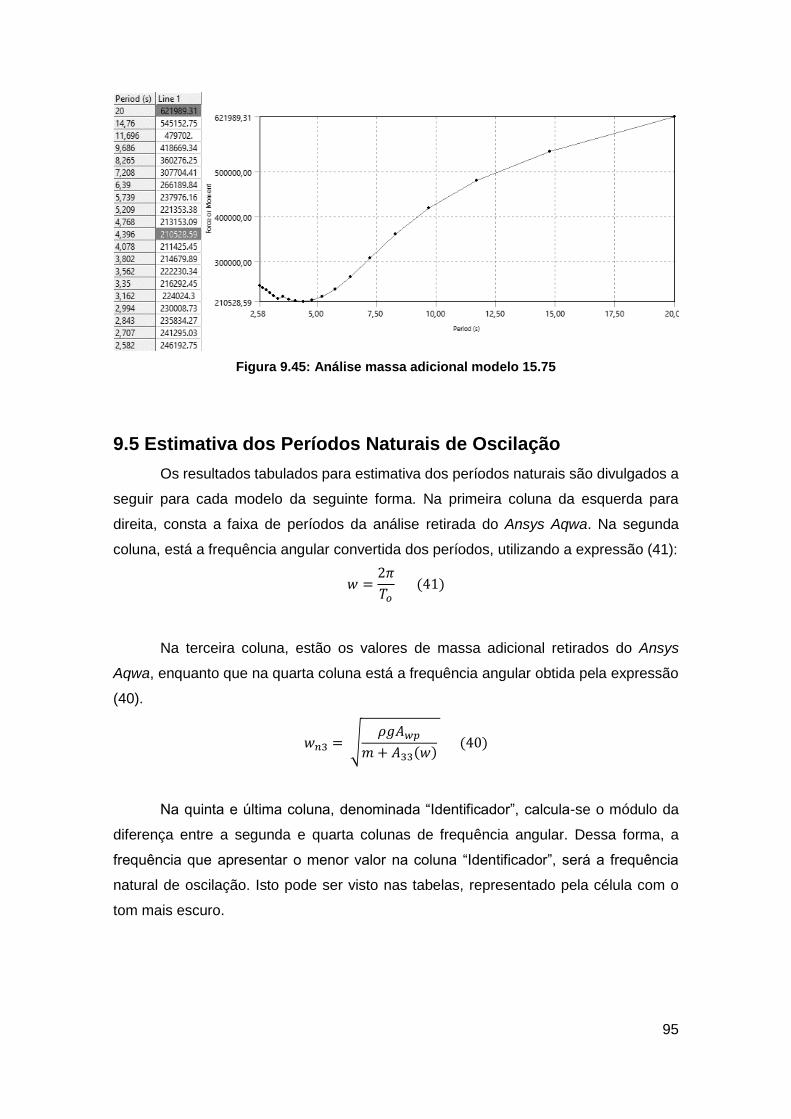
95
Figura 9.45: Análise massa adicional modelo 15.75
9.5 Estimativa dos Períodos Naturais de Oscilação
Os resultados tabulados para estimativa dos períodos naturais são divulgados a
seguir para cada modelo da seguinte forma. Na primeira coluna da esquerda para
direita, consta a faixa de períodos da análise retirada do Ansys Aqwa. Na segunda
coluna, está a frequência angular convertida dos períodos, utilizando a expressão (41):
𝑤 =2𝜋
𝑇𝑜 (41)
Na terceira coluna, estão os valores de massa adicional retirados do Ansys
Aqwa, enquanto que na quarta coluna está a frequência angular obtida pela expressão
(40).
𝑤𝑛3 = √𝜌𝑔𝐴𝑤𝑝
𝑚 + 𝐴33(𝑤) (40)
Na quinta e última coluna, denominada “Identificador”, calcula-se o módulo da
diferença entre a segunda e quarta colunas de frequência angular. Dessa forma, a
frequência que apresentar o menor valor na coluna “Identificador”, será a frequência
natural de oscilação. Isto pode ser visto nas tabelas, representado pela célula com o
tom mais escuro.

96
Tabela 9.1: Estimativa frequência natural modelo 3.30

97
Tabela 9.2: Estimativa frequência natural modelo 3.45
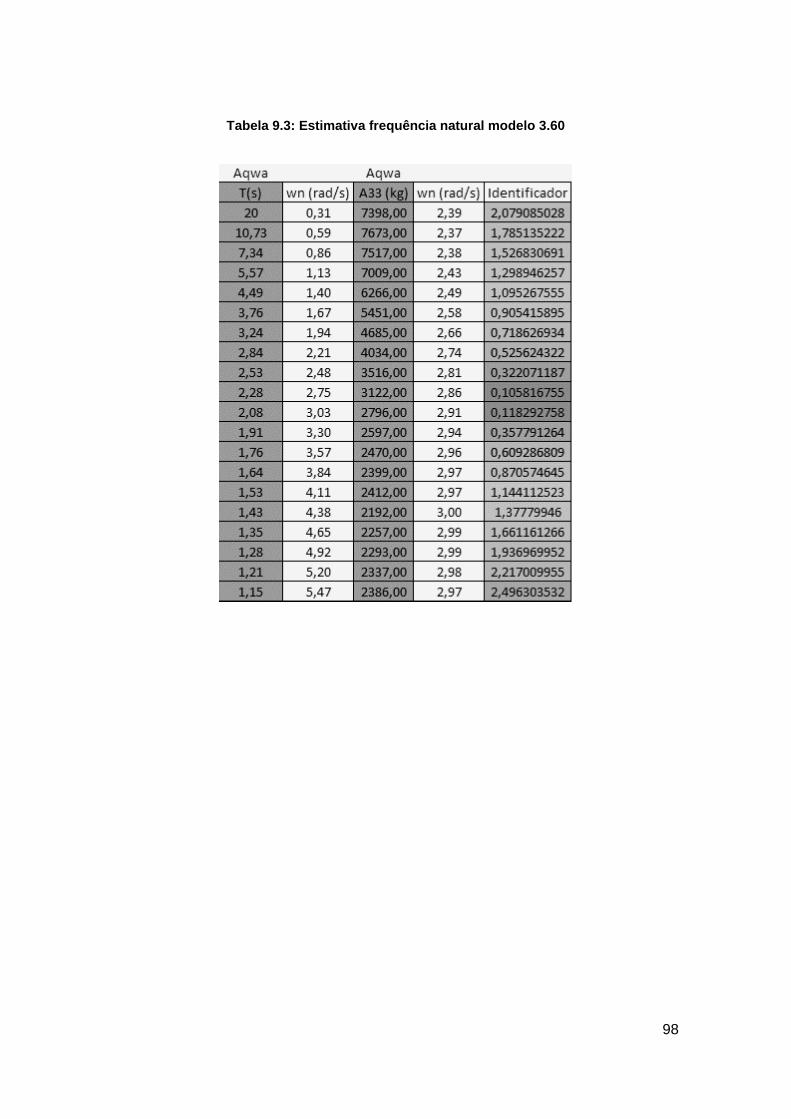
98
Tabela 9.3: Estimativa frequência natural modelo 3.60

99
Tabela 9.4: Estimativa frequência natural modelo 3.75
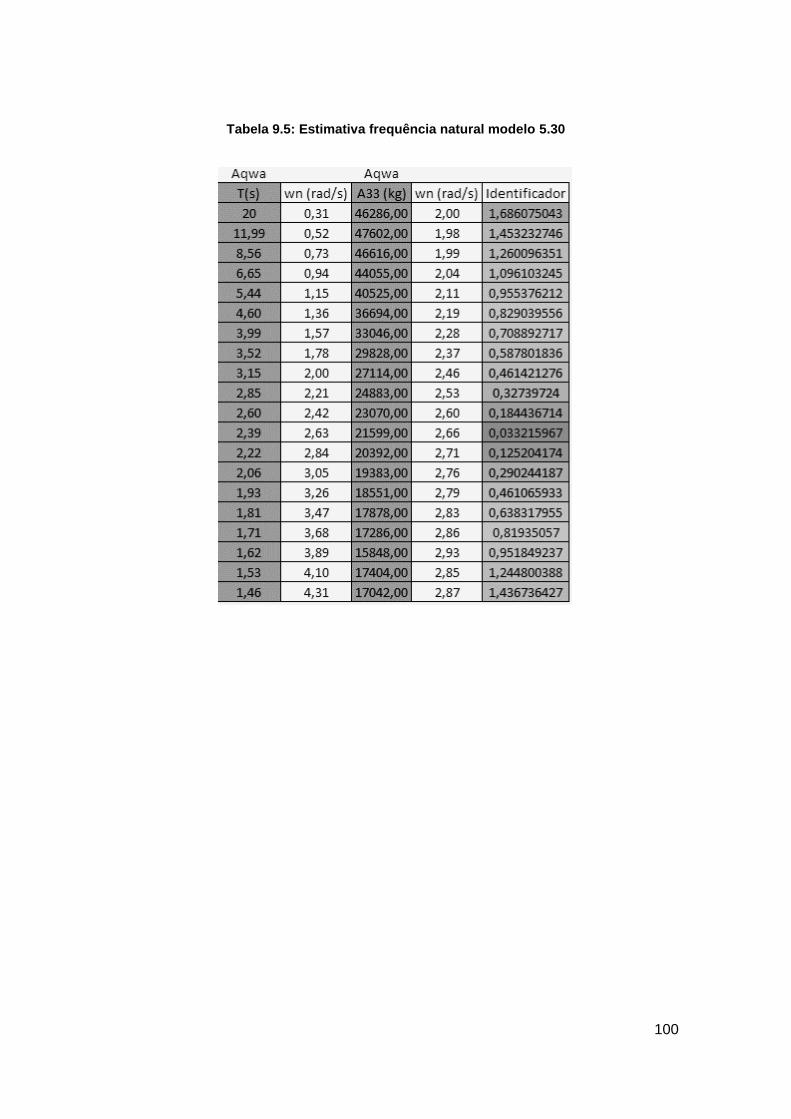
100
Tabela 9.5: Estimativa frequência natural modelo 5.30

101
Tabela 9.6: Estimativa frequência natural modelo 5.45

102
Tabela 9.7: Estimativa frequência natural modelo 5.60
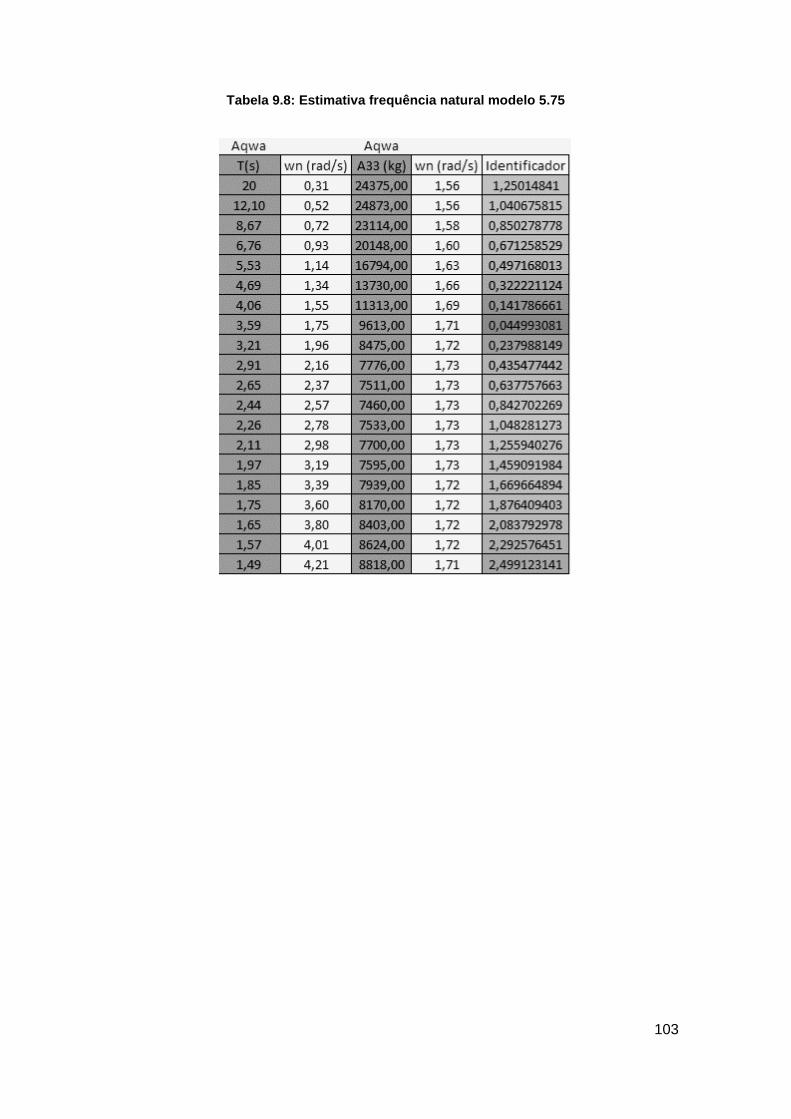
103
Tabela 9.8: Estimativa frequência natural modelo 5.75
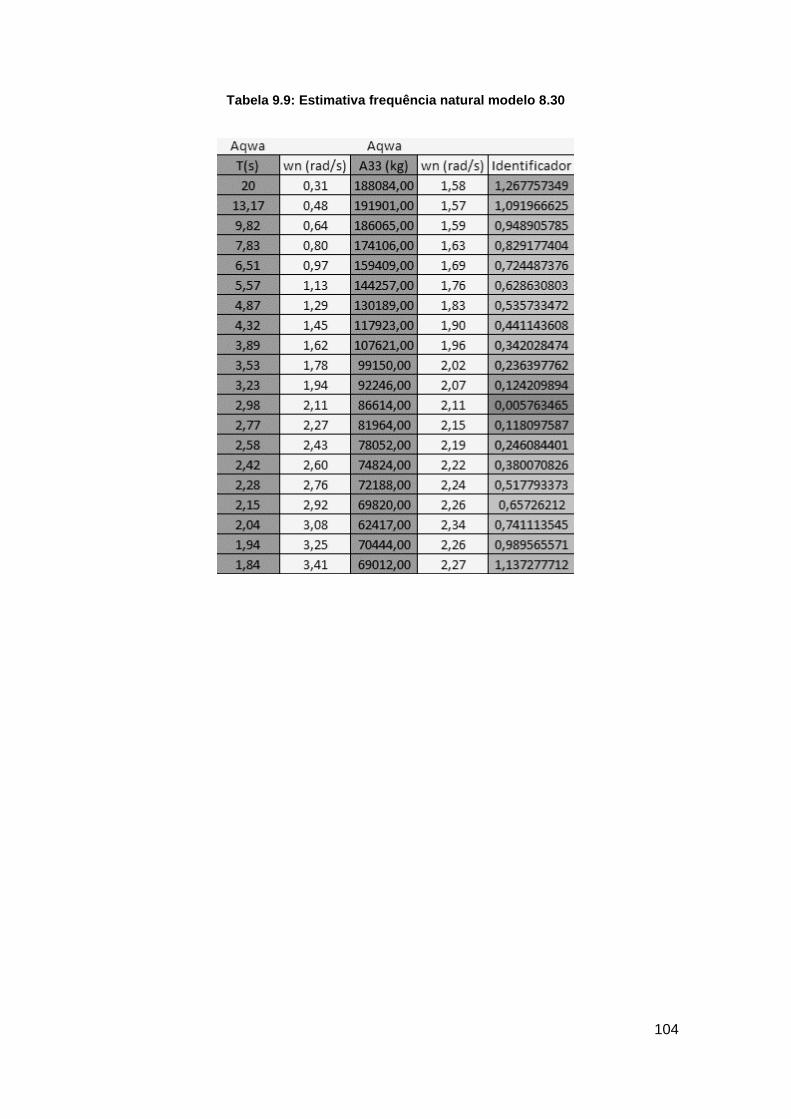
104
Tabela 9.9: Estimativa frequência natural modelo 8.30

105
Tabela 9.10: Estimativa frequência natural modelo 8.45
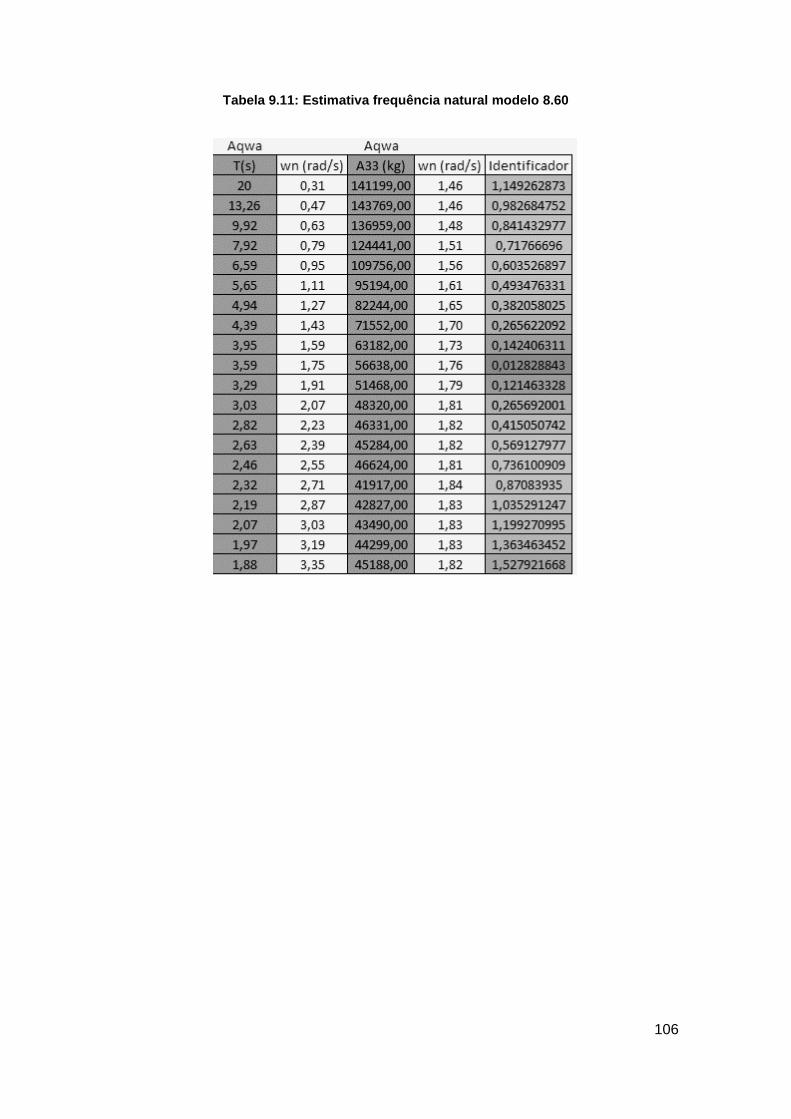
106
Tabela 9.11: Estimativa frequência natural modelo 8.60
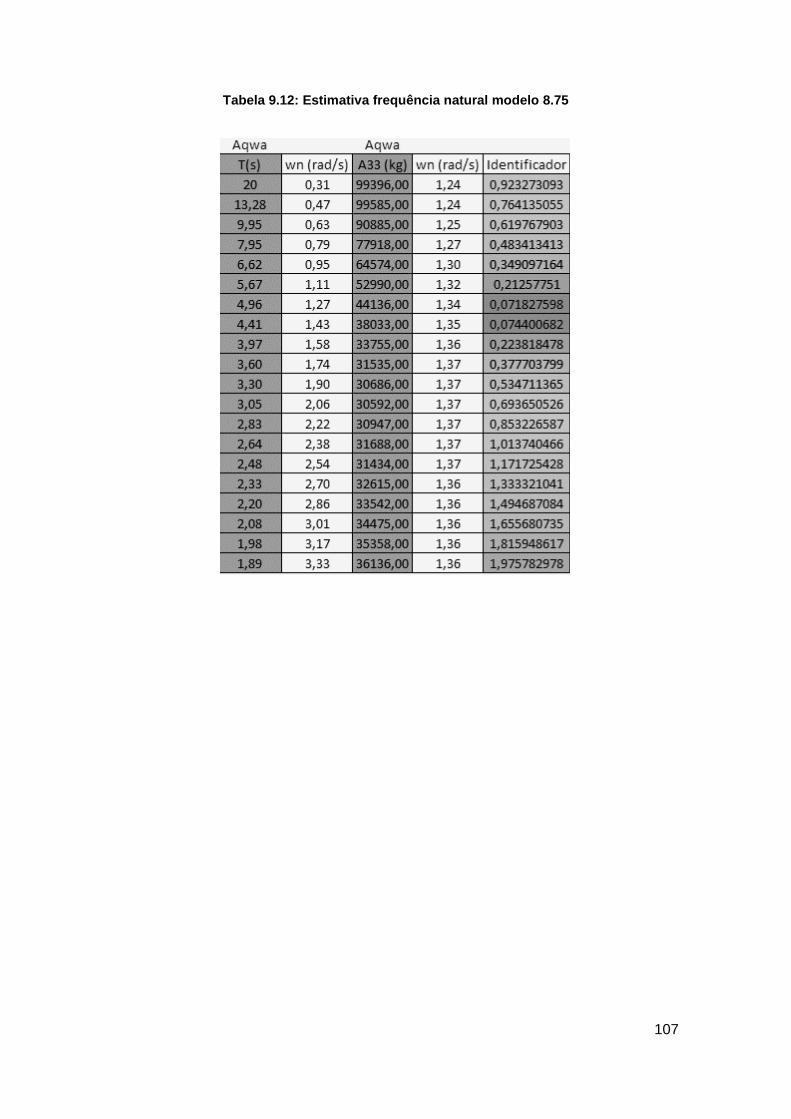
107
Tabela 9.12: Estimativa frequência natural modelo 8.75

108
Tabela 9.13: Estimativa frequência natural modelo 15.30

109
Tabela 9.14: Estimativa frequência natural modelo 15.45
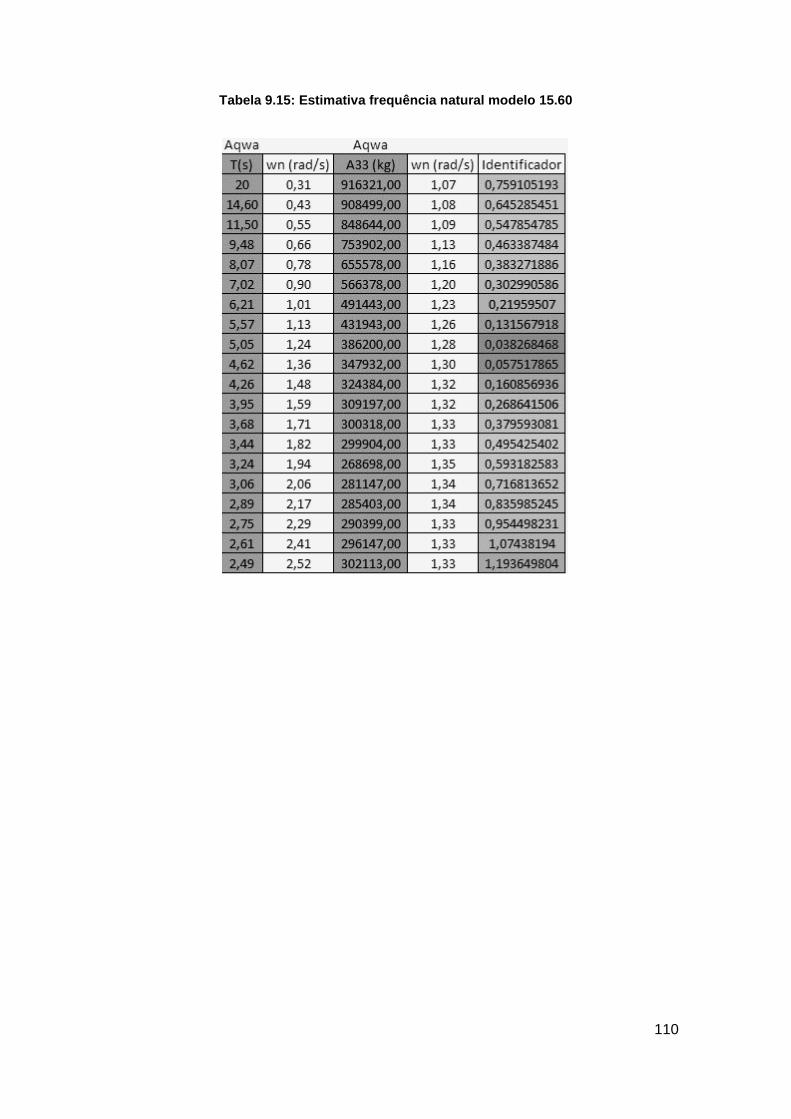
110
Tabela 9.15: Estimativa frequência natural modelo 15.60
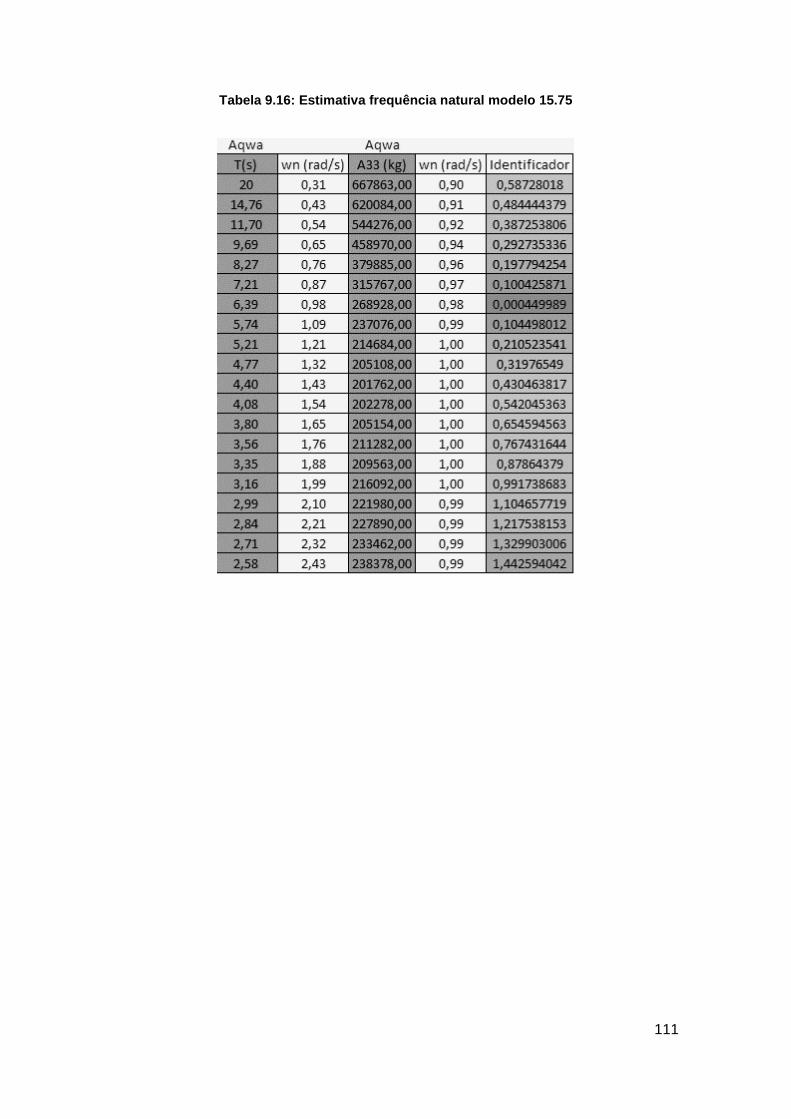
111
Tabela 9.16: Estimativa frequência natural modelo 15.75
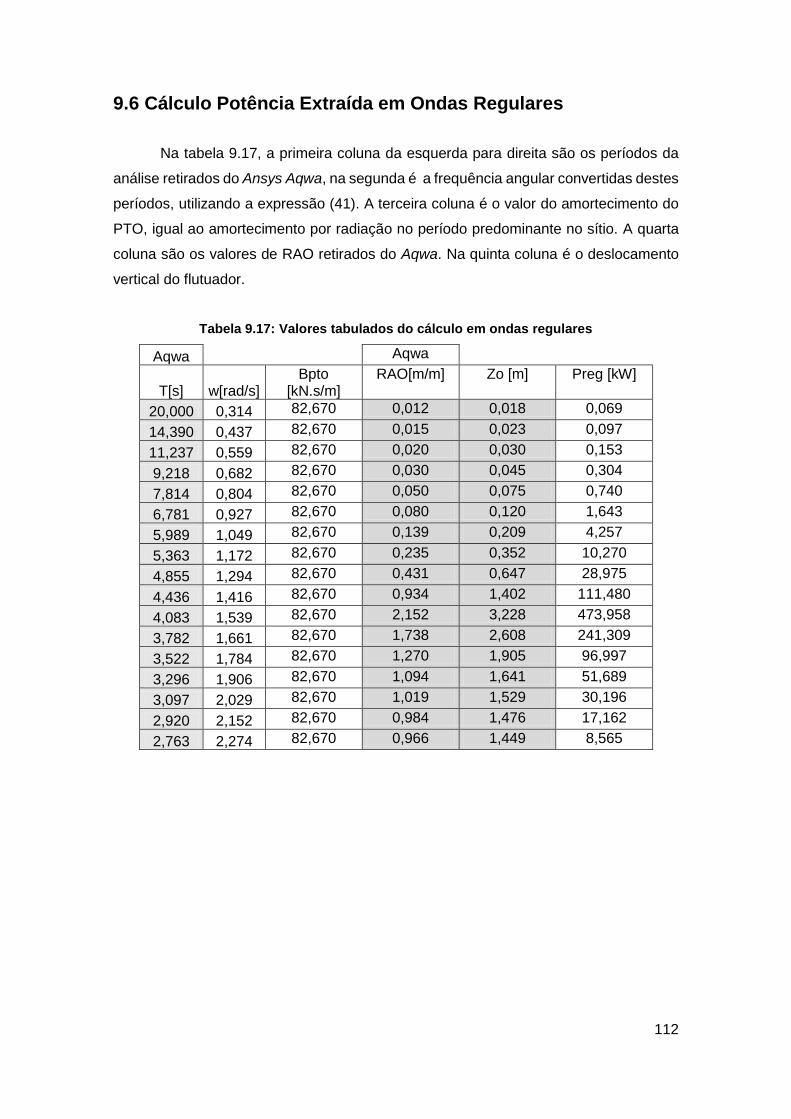
112
9.6 Cálculo Potência Extraída em Ondas Regulares
Na tabela 9.17, a primeira coluna da esquerda para direita são os períodos da
análise retirados do Ansys Aqwa, na segunda é a frequência angular convertidas destes
períodos, utilizando a expressão (41). A terceira coluna é o valor do amortecimento do
PTO, igual ao amortecimento por radiação no período predominante no sítio. A quarta
coluna são os valores de RAO retirados do Aqwa. Na quinta coluna é o deslocamento
vertical do flutuador.
Tabela 9.17: Valores tabulados do cálculo em ondas regulares
Aqwa Aqwa
T[s] w[rad/s] Bpto
[kN.s/m] RAO[m/m] Zo [m] Preg [kW]
20,000 0,314 82,670 0,012 0,018 0,069
14,390 0,437 82,670 0,015 0,023 0,097
11,237 0,559 82,670 0,020 0,030 0,153
9,218 0,682 82,670 0,030 0,045 0,304
7,814 0,804 82,670 0,050 0,075 0,740
6,781 0,927 82,670 0,080 0,120 1,643
5,989 1,049 82,670 0,139 0,209 4,257
5,363 1,172 82,670 0,235 0,352 10,270
4,855 1,294 82,670 0,431 0,647 28,975
4,436 1,416 82,670 0,934 1,402 111,480
4,083 1,539 82,670 2,152 3,228 473,958
3,782 1,661 82,670 1,738 2,608 241,309
3,522 1,784 82,670 1,270 1,905 96,997
3,296 1,906 82,670 1,094 1,641 51,689
3,097 2,029 82,670 1,019 1,529 30,196
2,920 2,152 82,670 0,984 1,476 17,162
2,763 2,274 82,670 0,966 1,449 8,565

113
9.7 Cálculo Potência Extraída em Ondas Irregulares
Na tabela 9.19, a primeira coluna da esquerda para direita são os períodos da
análise retirados do Ansys Aqwa, na segunda são as frequências angulares convertidas
destes períodos, utilizando a expressão (41). A terceira coluna é a potência calculada
em ondas regulares, conforme anexo 9.6. A quarta coluna representa a densidade
espectral calculada para o espectro PM. A quinta coluna é a multiplicação da potência
média extraída pela densidade espectral, os valores desta coluna foram integrados
numericamente para encontrar o valor da potência média em ondas irregulares.
Tabela 9.18: Valores tabulados do cálculo em ondas irregulares, primeira parte
Aqwa
T[s] w[rad/s] Preg [kW] E(w) [m²/Hz] Preg x E(w)
20,000 0,314 0,069 0,000 0,0000
14,390 0,437 0,097 0,000 0,0000
11,237 0,559 0,153 0,000 0,0001
9,218 0,682 0,304 0,005 0,2808
7,814 0,804 0,740 0,069 6,6946
6,781 0,927 1,643 0,161 38,8718
5,989 1,049 4,257 0,192 91,1720
5,363 1,172 10,270 0,172 19,2295
4,855 1,294 28,975 0,136 3,9490
4,436 1,416 111,480 0,102 1,0485
4,083 1,539 473,958 0,075 0,3191
3,782 1,661 241,309 0,055 0,0901
3,522 1,784 96,997 0,040 0,0299
3,296 1,906 51,689 0,030 0,0091
3,097 2,029 30,196 0,023 0,0034
2,920 2,152 17,162 0,017 0,0017
2,763 2,274 8,565 0,013 0,0009

114
9.8 Guia para Rhinoceros e Ansys Aqwa
9.8.1 Rhinoceros
A figura 9.46 apresenta a tela onde é realizada a modelagem no Rhinoceros.
Figura 9.46: Ambiente de modelagem do Rhinoceros
Apesar da facilidade em manipular a geometria do flutuador, o uso do Rhinoceros
combinado ao Ansys Aqwa merece uma série de cuidados, que serão discutidos neste
tópico.
O primeiro deles é checar se as unidades do Rhinoceros estão em metros,
unidade predominante no Ansys Aqwa. Caso contrário, quando a geometria for
exportada, as análises do Aqwa podem ficar comprometidas. Para tal, o usuário deve ir
em Edit > Display Options > Units. Outra preocupação a ser tomada é evitar, durante a
modelagem, o uso do comando trim. Este comando forma trimmed surfaces no Ansys
Aqwa, e o programa não trabalha bem com esse tipo de superfície. É interessante que
a geometria seja um único corpo, formando uma shell surface no Ansys Aqwa. Para isto,
recomenda-se a utilização do comando join no Rhinoceros, antes da exportar para o
Aqwa.
A malha computacional para as análises será feita no Aqwa, portanto não é
necessário gerar a malha no Rhinoceros, podendo inclusive levar a um erro na leitura
do Aqwa sobre a superfície importada. É importante também que a parte de cima do

115
corpo não seja fechada, ou seja, que a sua área de linha d’água seja aberta “ao céu”.
Finalizada a modelagem da geometria, deve-se utilizar o comando Move para “baixar”
a geometria de forma que o plano do eixo XY no Rhinoceros corte a geometria na altura
do plano de flutuação do calado desejado para as análises no Ansys Aqwa, conforme
figura 9.47. O eixo de coordenadas de referência é sempre exportado do Rhinoceros
para o Aqwa. Este último passo poderia ser feito no Ansys Aqwa, entretanto os
comandos para tal são mais fáceis de se realizar no Rhinoceros e, portanto,
aconselhável que se faça antes da exportação.
Figura 9.47: Eixo XY no plano de flutuação
Por fim, seleciona-se a geometria e utiliza-se o comando AreaMoments, que
oferece uma série de propriedades em relação a inércia de área da geometria modelada.
Em especial, a última propriedade oferecida na lista é o raio de giração da geometria
em relação ao seu próprio centróide, para os três eixos cartesianos. Estes valores
devem ser registrados, pois serão utilizados posteriormente no Ansys Aqwa. A figura
9.48 mostra a localização destes valores.

116
Figura 9.48: Obtendo raio de giração
Feito isso, deve-se exportar a geometria para o Aqwa. Para tal deve-se
selecionar a geometria e ir em File > Export Selected. No campo tipo de arquivos,
selecionar *.IGES, e pode salvar em qualquer lugar do computador. Em seguida, irá
aparecer uma tela chamada IGES Export Options, basta selecionar a opção Default da
lista suspensa e clicar em OK.
9.8.2 Ansys
O ambiente inicial do Ansys, no qual é escolhido o módulo com que se vai
trabalhar, é chamado workbench. Nos próximos tópicos, será explicado como cada um
dos módulos é utilizado nas análises. Este ambiente é mostrado na figura 9.49.
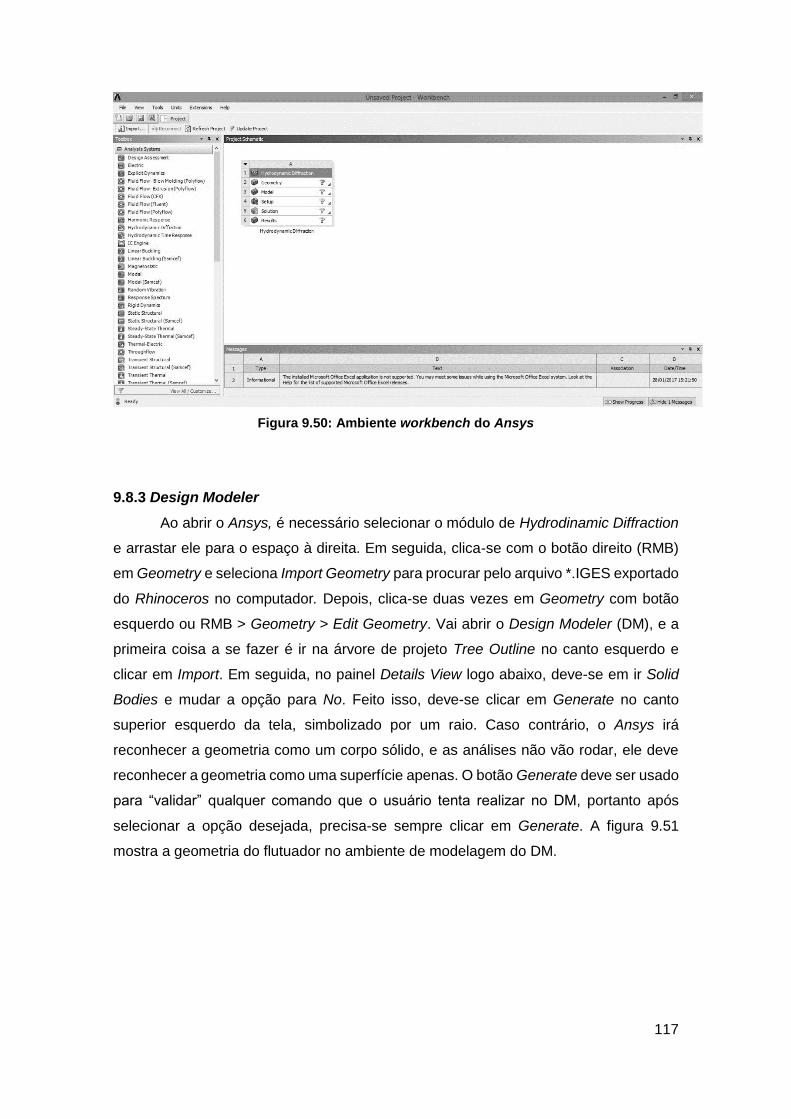
117
Figura 9.50: Ambiente workbench do Ansys
9.8.3 Design Modeler
Ao abrir o Ansys, é necessário selecionar o módulo de Hydrodinamic Diffraction
e arrastar ele para o espaço à direita. Em seguida, clica-se com o botão direito (RMB)
em Geometry e seleciona Import Geometry para procurar pelo arquivo *.IGES exportado
do Rhinoceros no computador. Depois, clica-se duas vezes em Geometry com botão
esquerdo ou RMB > Geometry > Edit Geometry. Vai abrir o Design Modeler (DM), e a
primeira coisa a se fazer é ir na árvore de projeto Tree Outline no canto esquerdo e
clicar em Import. Em seguida, no painel Details View logo abaixo, deve-se em ir Solid
Bodies e mudar a opção para No. Feito isso, deve-se clicar em Generate no canto
superior esquerdo da tela, simbolizado por um raio. Caso contrário, o Ansys irá
reconhecer a geometria como um corpo sólido, e as análises não vão rodar, ele deve
reconhecer a geometria como uma superfície apenas. O botão Generate deve ser usado
para “validar” qualquer comando que o usuário tenta realizar no DM, portanto após
selecionar a opção desejada, precisa-se sempre clicar em Generate. A figura 9.51
mostra a geometria do flutuador no ambiente de modelagem do DM.
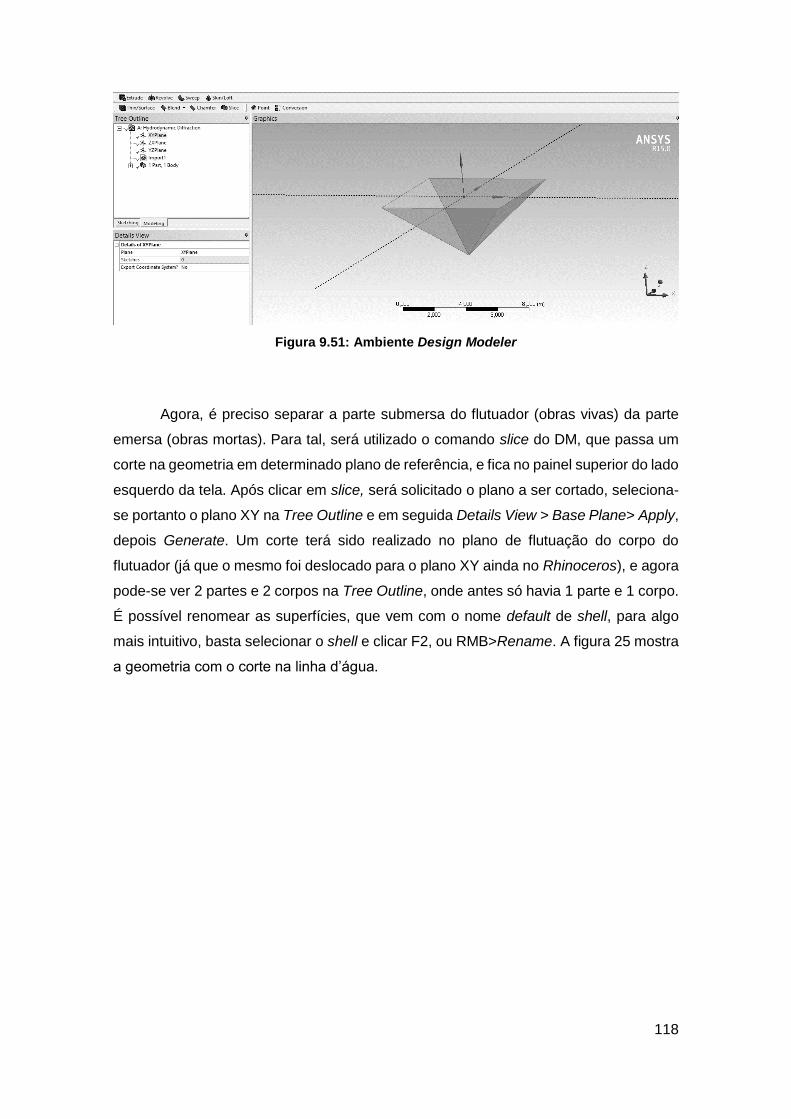
118
Figura 9.51: Ambiente Design Modeler
Agora, é preciso separar a parte submersa do flutuador (obras vivas) da parte
emersa (obras mortas). Para tal, será utilizado o comando slice do DM, que passa um
corte na geometria em determinado plano de referência, e fica no painel superior do lado
esquerdo da tela. Após clicar em slice, será solicitado o plano a ser cortado, seleciona-
se portanto o plano XY na Tree Outline e em seguida Details View > Base Plane> Apply,
depois Generate. Um corte terá sido realizado no plano de flutuação do corpo do
flutuador (já que o mesmo foi deslocado para o plano XY ainda no Rhinoceros), e agora
pode-se ver 2 partes e 2 corpos na Tree Outline, onde antes só havia 1 parte e 1 corpo.
É possível renomear as superfícies, que vem com o nome default de shell, para algo
mais intuitivo, basta selecionar o shell e clicar F2, ou RMB>Rename. A figura 25 mostra
a geometria com o corte na linha d’água.
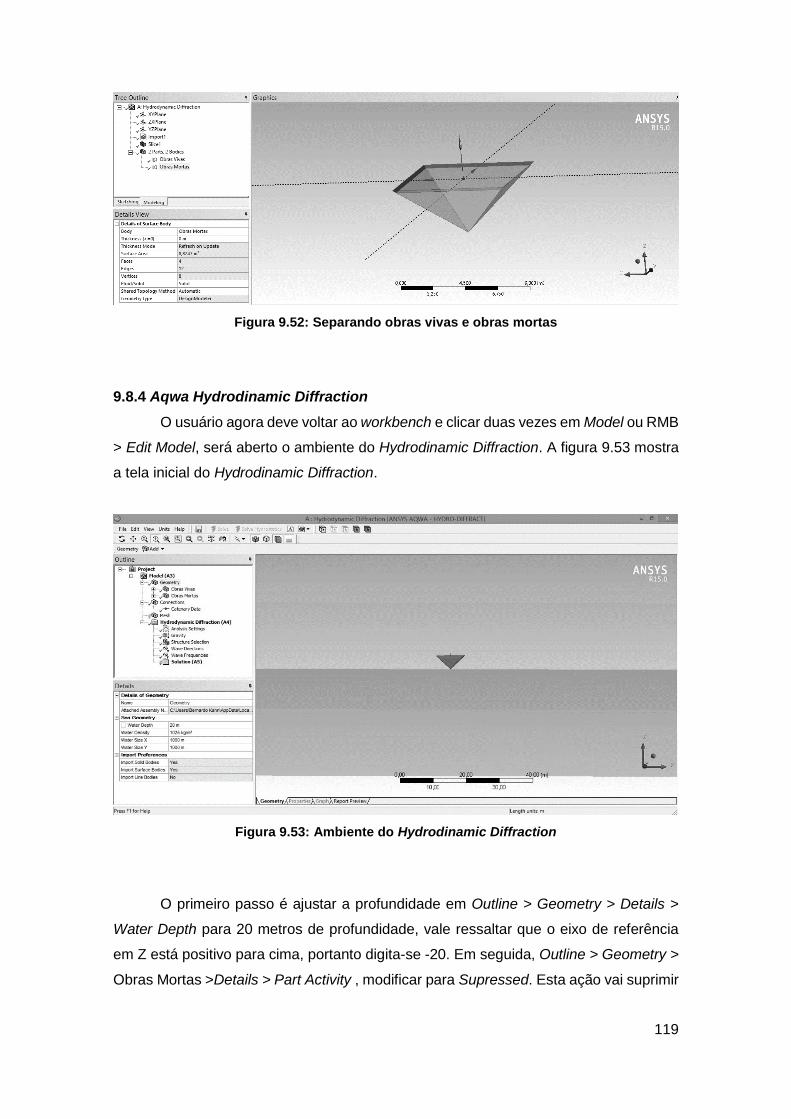
119
Figura 9.52: Separando obras vivas e obras mortas
9.8.4 Aqwa Hydrodinamic Diffraction
O usuário agora deve voltar ao workbench e clicar duas vezes em Model ou RMB
> Edit Model, será aberto o ambiente do Hydrodinamic Diffraction. A figura 9.53 mostra
a tela inicial do Hydrodinamic Diffraction.
Figura 9.53: Ambiente do Hydrodinamic Diffraction
O primeiro passo é ajustar a profundidade em Outline > Geometry > Details >
Water Depth para 20 metros de profundidade, vale ressaltar que o eixo de referência
em Z está positivo para cima, portanto digita-se -20. Em seguida, Outline > Geometry >
Obras Mortas >Details > Part Activity , modificar para Supressed. Esta ação vai suprimir

120
a parte da geometria que está emersa, de forma que sua existência será
desconsiderada nas análises.
Agora é preciso atribuir características físicas ao flutuador, para tal utiliza-se
Outline > Geometry > Obras Vivas > RMB > Add > Point Mass. Será adicionado um
novo elemento identado na árvore de projeto em Obras Vivas. Esse elemento
representa o centróide de massa do flutuador a qual serão atribuídos seu peso e inércia.
No painel Details do Point Mass o usuário tem a opção de deixar o programa calcular o
peso da geometria, ele faz isso através do cálculo de seu deslocamento, ou inserir de
forma manual o peso. Caso opte pelo manual, ele pode também definir a posição X,Y,Z
do centróide, mas apenas a posição Z caso opte pelo programa calcular a massa. A
figura 9.54 mostra em detalhe a janela de entrada de dados para o point mass.
Figura 9.54: Definição do Point Mass
Além disso, a inércia do flutuador deve ser inserida, e o usuário pode escolher
defini-la inserindo diretamente a inércia Ixx, Iyy e Izz ou inserindo o raio de giração Kxx,
Kyy, Kzz. Neste trabalho, optou-se por inserir o raio de giração retirado do Rhinoceros.
A próxima etapa é gerar a malha, para tal deve-se ir em Outline > Mesh >
Defeaturing Tolerance e definir esta grandeza, que representa o quão pequenos podem
ser os detalhes da geometria para serem tratados pela malha. Em seguida, é preciso
definir o Max Element Size que é o tamanho máximo do elemento de malha que pode

121
ser gerado. O defeaturing tolerance não pode ser maior que 60 % do valor do Max
Element Size [6]. O Max Element Size está diretamente relacionado com o Max Allowed
Frequency, a ser usada na análise, portanto apenas um deles deve ser definido e o
outro será calculado automaticamente em função do mesmo. Vale ressaltar que, quanto
maior o Max Element Size, mais imprecisa será a análise. Estes valores dependem
muito do tamanho do modelo sendo analisado e do comprimento de onda da região, no
presente trabalho, para todos os modelos, foi utilizado um defeaturing tolerance de 0,1
metros e o Max Element Size foi definido conforme tabela 9.19 encontrando-se bons
resultados:
Tabela 9.19: Definição do tamanho de malha
𝐿𝑜 [m] Max Element Size [m]
3 0,375
5 0,625
8 1,000
15 1,875
Feitos os ajustes, o usuário deve clicar em Generate Mesh no canto superior
esquerdo da tela e a malha será gerada. Com a malha definida, é hora de configurar a
análise em si. Para tal, o usuário deve ir em Outline > Hydrodinamic Diffraction >
Analysis Settings > Common Analysis Options > Ignore Modelling Rules Violations e
marcar a opção como Yes, caso contrário, imperfeições geométricas no modelo vão
causar erros na análise. Em Wave Directions são determinadas as direções de onda a
serem estudadas e em Wave Frequencies a faixa de frequências/períodos a serem
analisados. Ao clicar em Solution, aparecem opções no canto superior esquerdo da tela,
estas opções servem para o usuário definir quais análises serão feitas, existem dezenas
de análises que podem ser realizadas. A figura 9.55 mostra o detalhe da Tree Outline e
as opções para configurar análises.
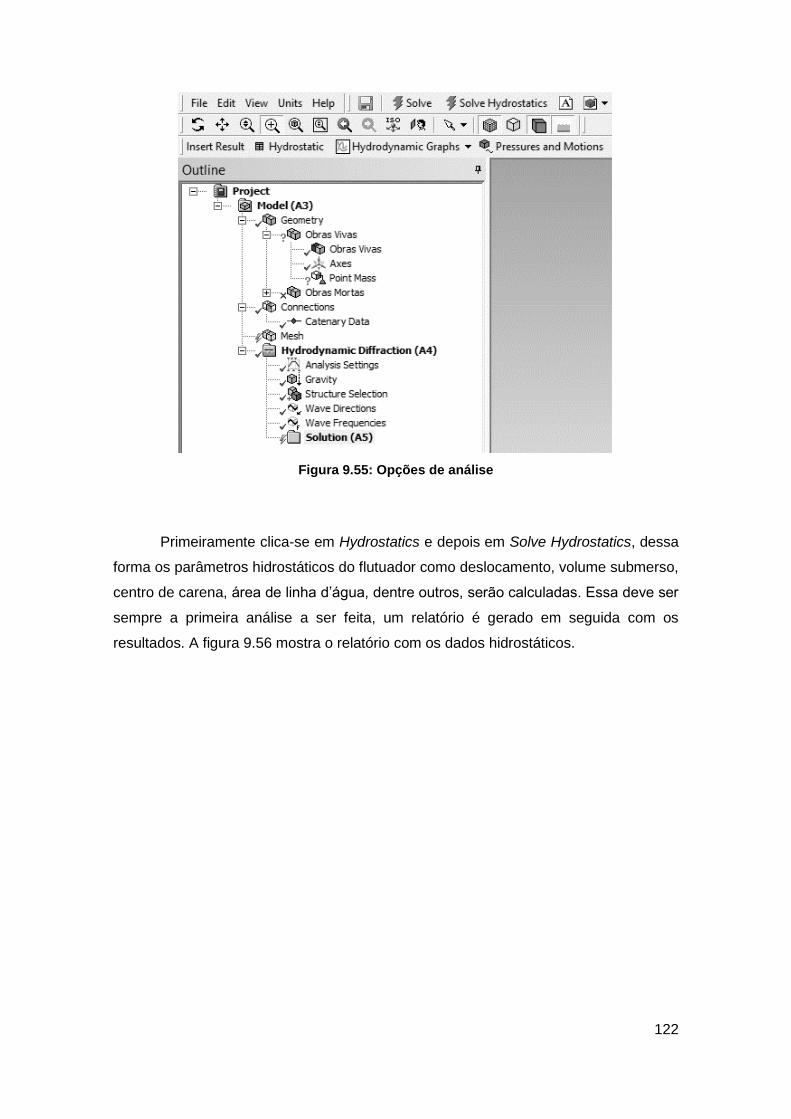
122
Figura 9.55: Opções de análise
Primeiramente clica-se em Hydrostatics e depois em Solve Hydrostatics, dessa
forma os parâmetros hidrostáticos do flutuador como deslocamento, volume submerso,
centro de carena, área de linha d’água, dentre outros, serão calculadas. Essa deve ser
sempre a primeira análise a ser feita, um relatório é gerado em seguida com os
resultados. A figura 9.56 mostra o relatório com os dados hidrostáticos.

123
Figura 9.56: Relatório de resultados hidrostáticos
Em seguida, clicando em Hydrodinamic Graphs > Response Amplitude Operator
> Distance/Rotation vs Frequency, a análise para gerar o RAO do flutuador pode ser
inserida. É necessário clicar na análise, que está identada em Solution, e no painel
Details definir se ela será na escala da frequência ou do período de ondas. Em seguida
em Structure, selecionar a geometria que será analisada, no caso, chamada Obras
Vivas. Por fim, definir o Component, que é basicamente o grau de liberdade que está
sendo estudado, que no caso atual seria Global Z (heave). Feito isso, basta clicar em
Solve e o programa irá rodar a análise, em seguida vai mostrar o resultado tanto em
forma tabular, com os valores de frequência/período e RAO, quanto em forma gráfica,
conforme figura 9.57.

124
Figura 9.57: Resultados análise do RAO
Vale notar que existe uma aba entre o gráfico e os resultados tabulados, a qual
está selecionada a opção Graph. A opção Geometry vai voltar para o ambiente
tridimensional com a geometria e a representação do mar, a opção Report Preview gera
um relatório automático com todos os resultados da análise, que pode ser salvo em
Word ou Power Point, bastando clicar em Send To no canto superior esquerdo da tela.