análise de carregamento hidrodinâmico em estruturas flutuantes - parte ii a resposta
DESCRIPTION
A Resposta (RAOs, análise nos domínios da frequência e do tempo)TRANSCRIPT
Setembro 2012
João Henrique VOLPINI MattosEngenheiro NavalRegional Sales Manager - Maritime & Offshore Solutions (South America), DNV Software
Análise de Carregamento Hidrodinâmico em Estruturas Flutuantes
Parte II – A Resposta
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 2
Hidromecânica do Navio
© Det Norske Veritas Ltda. Todos os direitos reservados.
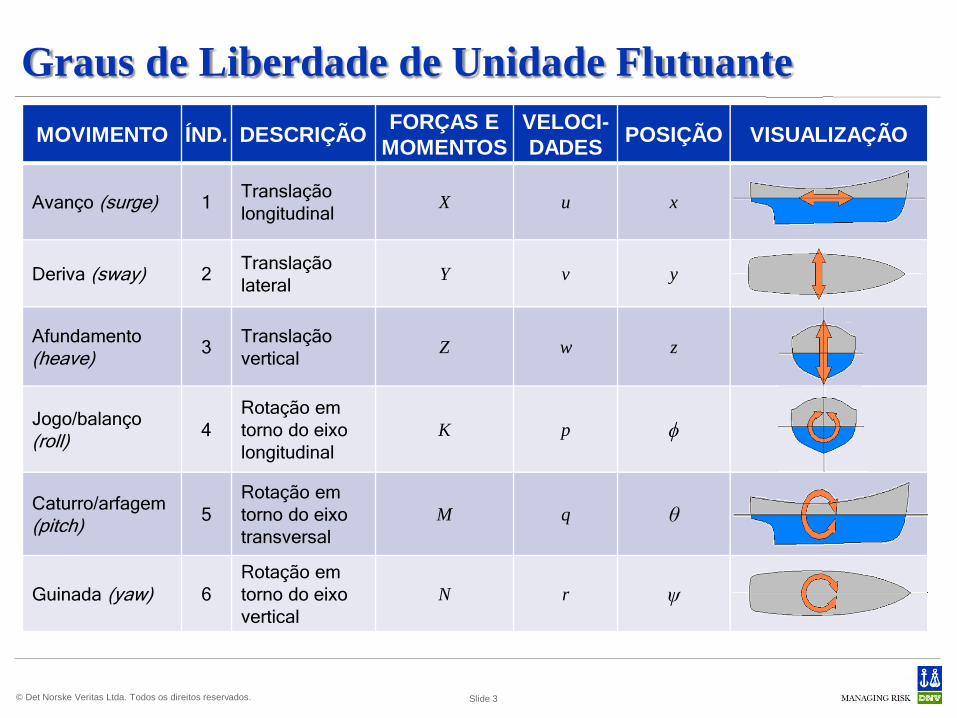
Graus de Liberdade de Unidade FlutuanteMOVIMENTO ÍND. DESCRIÇÃO FORÇAS E
MOMENTOSVELOCI-DADES POSIÇÃO VISUALIZAÇÃO
Avanço (surge) 1 Translação longitudinal
X u x
Deriva (sway) 2 Translação lateral
Y v y
Afundamento (heave) 3 Translação
vertical Z w z
Jogo/balanço (roll) 4
Rotação em torno do eixo longitudinal
K p ϕ
Caturro/arfagem (pitch) 5
Rotação em torno do eixo transversal
M q θ
Guinada (yaw) 6 Rotação em torno do eixo vertical
N r ψ
Slide 3
© Det Norske Veritas Ltda. Todos os direitos reservados.
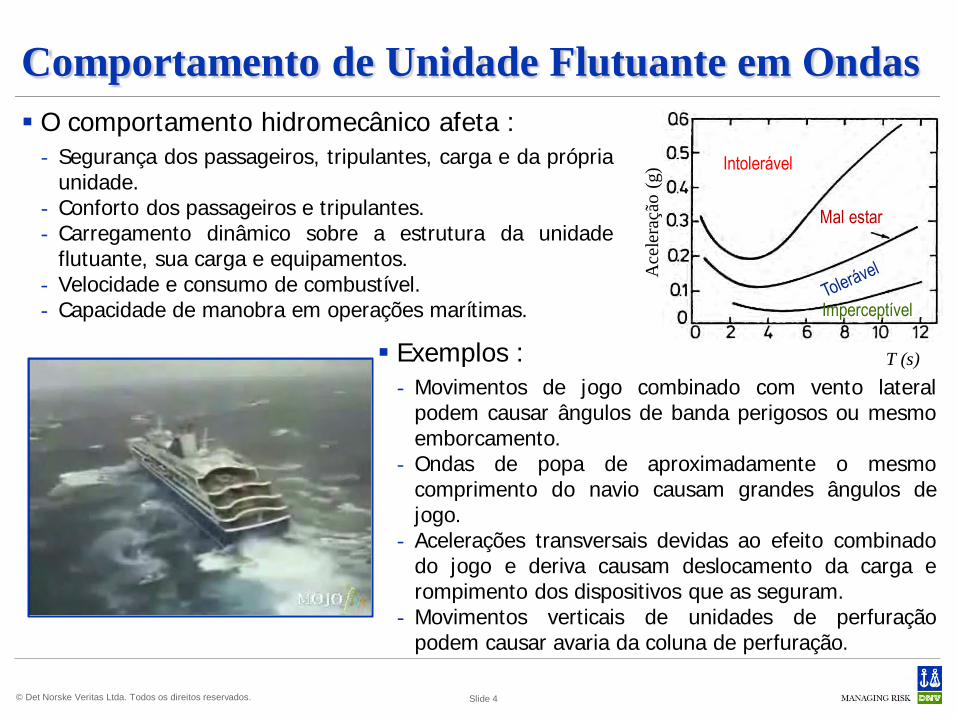
Comportamento de Unidade Flutuante em Ondas O comportamento hidromecânico afeta :
- Segurança dos passageiros, tripulantes, carga e da própriaunidade.
- Conforto dos passageiros e tripulantes.- Carregamento dinâmico sobre a estrutura da unidade
flutuante, sua carga e equipamentos.- Velocidade e consumo de combustível.- Capacidade de manobra em operações marítimas.
Slide 4
T (s)
Ace
lera
ção
(g) Intolerável
Mal estar
Imperceptível
Exemplos :- Movimentos de jogo combinado com vento lateral
podem causar ângulos de banda perigosos ou mesmoemborcamento.
- Ondas de popa de aproximadamente o mesmocomprimento do navio causam grandes ângulos dejogo.
- Acelerações transversais devidas ao efeito combinadodo jogo e deriva causam deslocamento da carga erompimento dos dispositivos que as seguram.
- Movimentos verticais de unidades de perfuraçãopodem causar avaria da coluna de perfuração.
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 5
Núm
eros
Com
plex
os
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 6
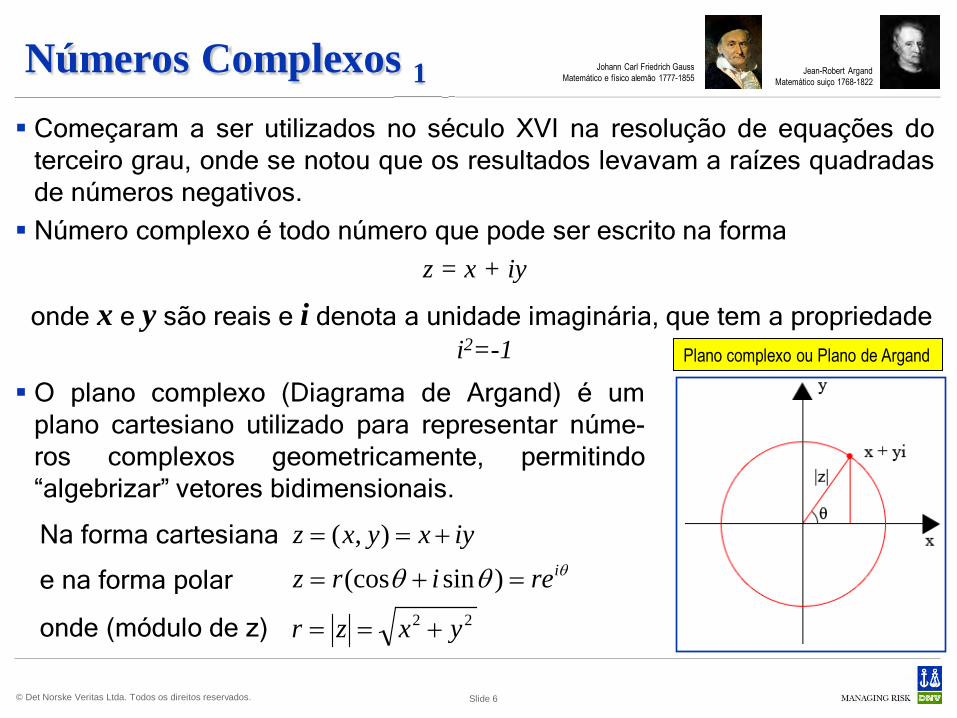
Números Complexos 1 Começaram a ser utilizados no século XVI na resolução de equações do
terceiro grau, onde se notou que os resultados levavam a raízes quadradas de números negativos. Número complexo é todo número que pode ser escrito na forma
z = x + iy
onde x e y são reais e i denota a unidade imaginária, que tem a propriedade i2=-1
O plano complexo (Diagrama de Argand) é um plano cartesiano utilizado para representar núme-ros complexos geometricamente, permitindo “algebrizar” vetores bidimensionais.
Jean-Robert ArgandMatemático suiço 1768-1822
Na forma cartesiana
e na forma polar
onde (módulo de z) 22
)sin(cos),(
yxzr
reirziyxyxz
i
+==
=+=
+==θθθ
Plano complexo ou Plano de Argand
Johann Carl Friedrich GaussMatemático e físico alemão 1777-1855
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 7
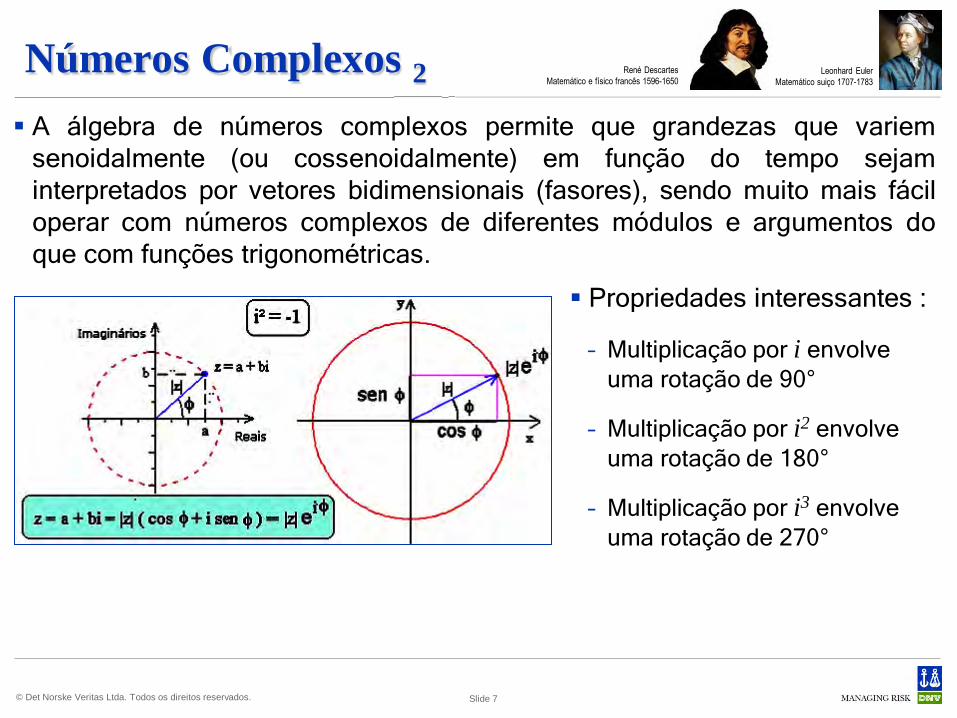
Números Complexos 2 A álgebra de números complexos permite que grandezas que variem
senoidalmente (ou cossenoidalmente) em função do tempo sejam interpretados por vetores bidimensionais (fasores), sendo muito mais fácil operar com números complexos de diferentes módulos e argumentos do que com funções trigonométricas.
Leonhard EulerMatemático suiço 1707-1783
Propriedades interessantes :
– Multiplicação por i envolve uma rotação de 90°
– Multiplicação por i2 envolve uma rotação de 180°
– Multiplicação por i3 envolve uma rotação de 270°
René DescartesMatemático e físico francês 1596-1650
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 8
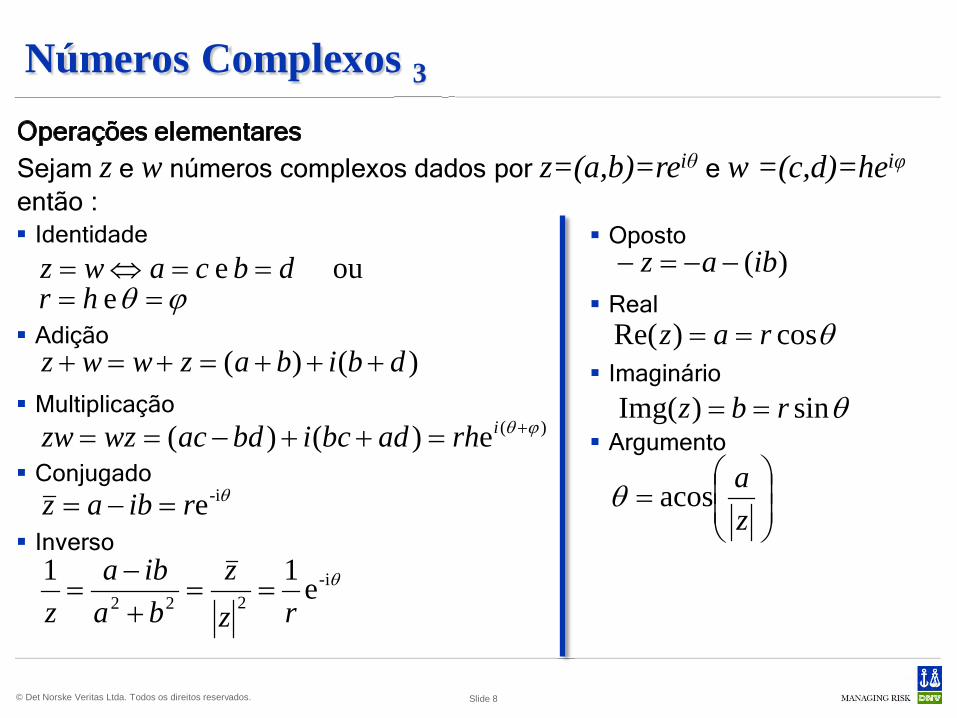
Números Complexos 3Operações elementares Sejam z e w números complexos dados por z=(a,b)=reiθ e w =(c,d)=heiφ
então :
ϕθ ====⇔=
eoue
hrdbcawz
)()( dbibazwwz +++=+=+
)(e)()( ϕθ +=++−== irhadbcibdacwzzw
θ-ieribaz =−=
θi-222 e11
rzz
baiba
z==
+−
=
Identidade
Adição Multiplicação
Conjugado
Inverso
Oposto Real
Imaginário
Argumento
)(ibaz −−=−
θcos)Re( raz ==
θsin)Img( rbz ==
=
zaacosθ
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 9
Análise de Sinais
Fourrier&
Cia
© Det Norske Veritas Ltda. Todos os direitos reservados.
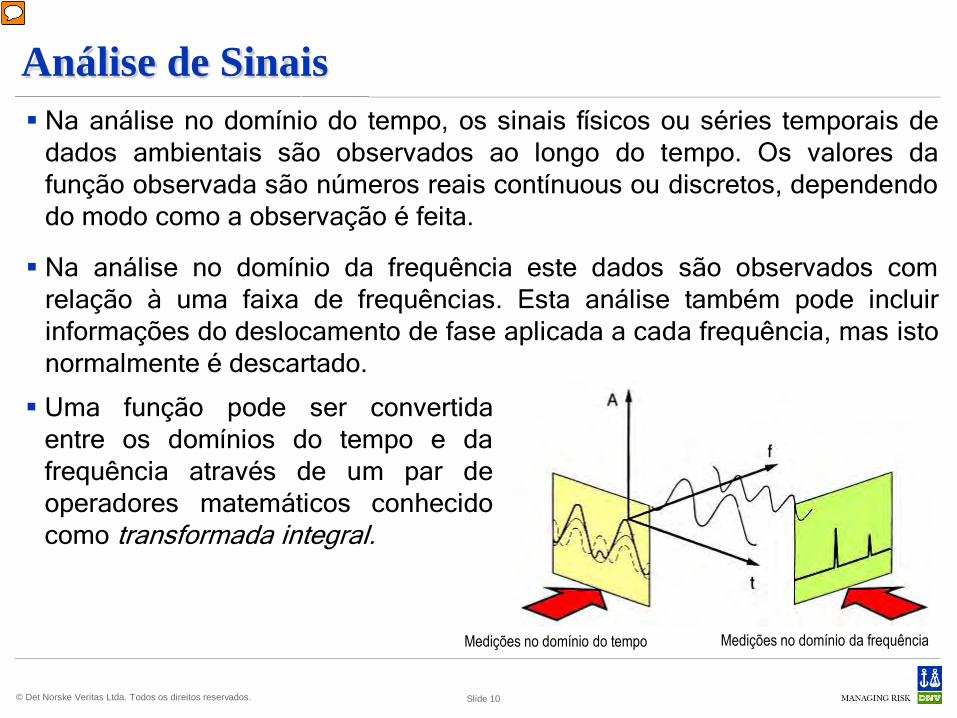
Análise de Sinais Na análise no domínio do tempo, os sinais físicos ou séries temporais de
dados ambientais são observados ao longo do tempo. Os valores da função observada são números reais contínuous ou discretos, dependendo do modo como a observação é feita.
Na análise no domínio da frequência este dados são observados com relação à uma faixa de frequências. Esta análise também pode incluir informações do deslocamento de fase aplicada a cada frequência, mas isto normalmente é descartado.
Slide 10
Uma função pode ser convertida entre os domínios do tempo e da frequência através de um par de operadores matemáticos conhecido como transformada integral.
Medições no domínio do tempo Medições no domínio da frequência
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 11
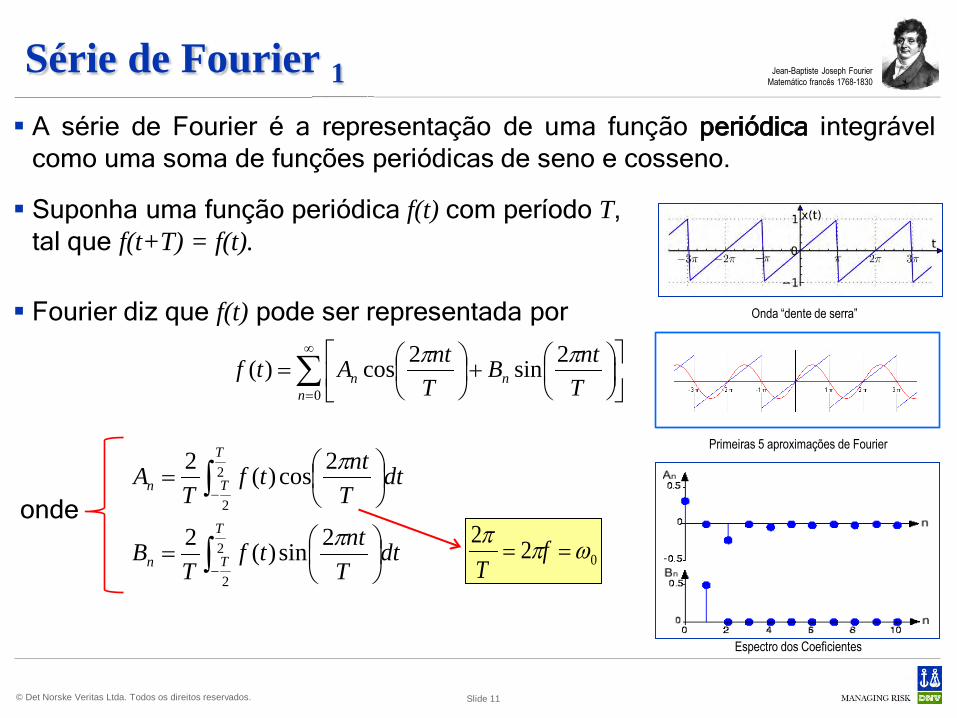
Série de Fourier 1 Jean-Baptiste Joseph FourierMatemático francês 1768-1830
A série de Fourier é a representação de uma função periódica integrável como uma soma de funções periódicas de seno e cosseno.
Suponha uma função periódica f(t) com período T, tal que f(t+T) = f(t).
Fourier diz que f(t) pode ser representada por
onde
∑∞
=
+
=
0
2sin2cos)(n
nn TntB
TntAtf ππ
∫
∫
−
−
=
=
2
2
2
2
2sin)(2
2cos)(2
T
Tn
T
Tn
dtTnttf
TB
dtTnttf
TA
π
πPrimeiras 5 aproximações de Fourier
Onda “dente de serra”
022 ωππ== f
T
Espectro dos Coeficientes
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 12
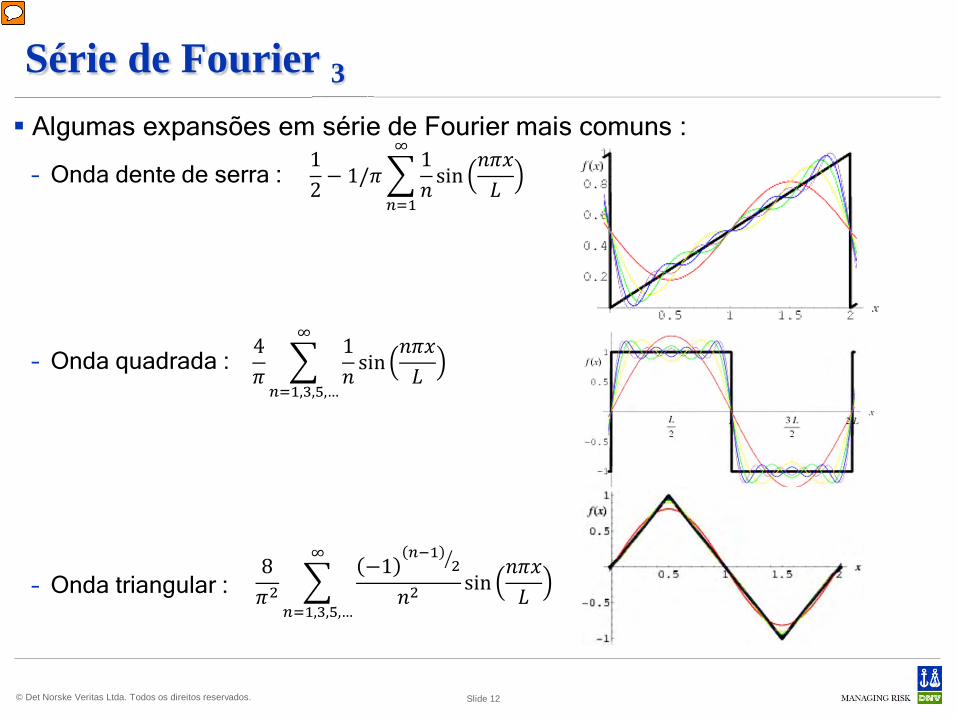
Série de Fourier 3 Algumas expansões em série de Fourier mais comuns :
– Onda dente de serra :
– Onda quadrada :
– Onda triangular :
12− 1/𝜋�
1𝑛
sin𝑛𝜋𝑛𝐿
∞
𝑛=1
4𝜋
�1𝑛
sin𝑛𝜋𝑛𝐿
∞
𝑛=1,3,5,…
8𝜋2
�−1
𝑛−12�
𝑛2sin
𝑛𝜋𝑛𝐿
∞
𝑛=1,3,5,…
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 13
Série de Fourier 4 Johann Peter Gustav Lejeune DirichletMatemático alemão 1805-1859
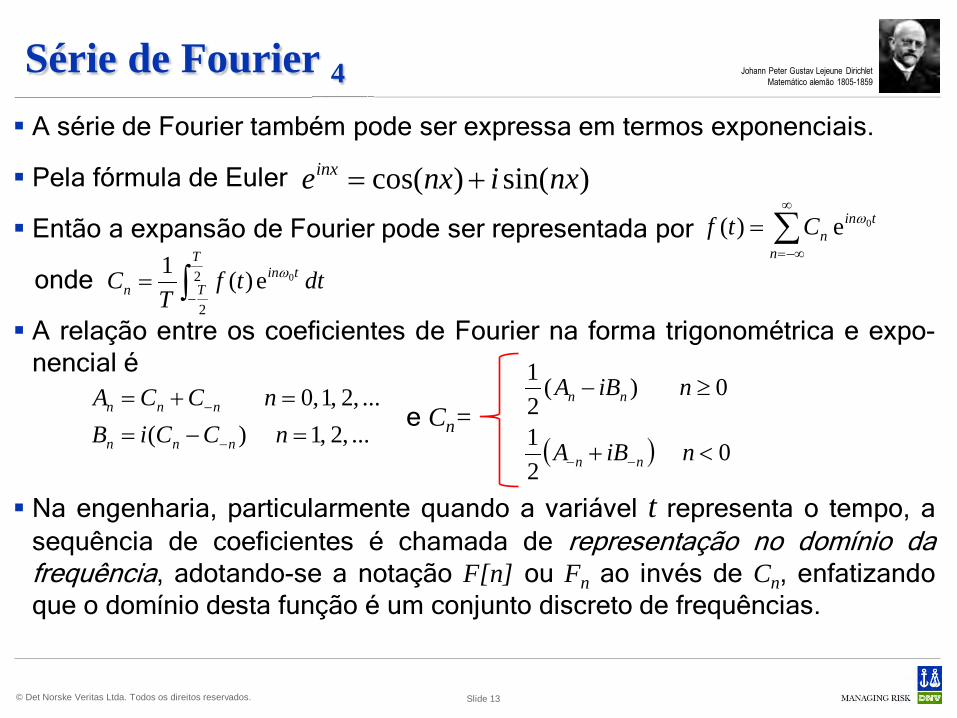
A série de Fourier também pode ser expressa em termos exponenciais.
Pela fórmula de Euler
Então a expansão de Fourier pode ser representada por
onde
A relação entre os coeficientes de Fourier na forma trigonométrica e expo-nencial é
e Cn=
Na engenharia, particularmente quando a variável t representa o tempo, a sequência de coeficientes é chamada de representação no domínio da frequência, adotando-se a notação F[n] ou Fn ao invés de Cn, enfatizando que o domínio desta função é um conjunto discreto de frequências.
∑∞
−∞=
=n
tinnCtf 0e)( ω
( ) 021
0)(21
<+
≥−
−− niBA
niBA
nn
nn
)sin()cos( nxinxeinx +=
∫−= 2
2
0e)(1 T
Ttin
n dttfT
C ω
...,2,1)(...,2,1,0
=−==+=
−
−
nCCiBnCCA
nnn
nnn
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 14
Transformada de Fourier Paul Adrien Maurice DiracFísico britânico 1902-1984
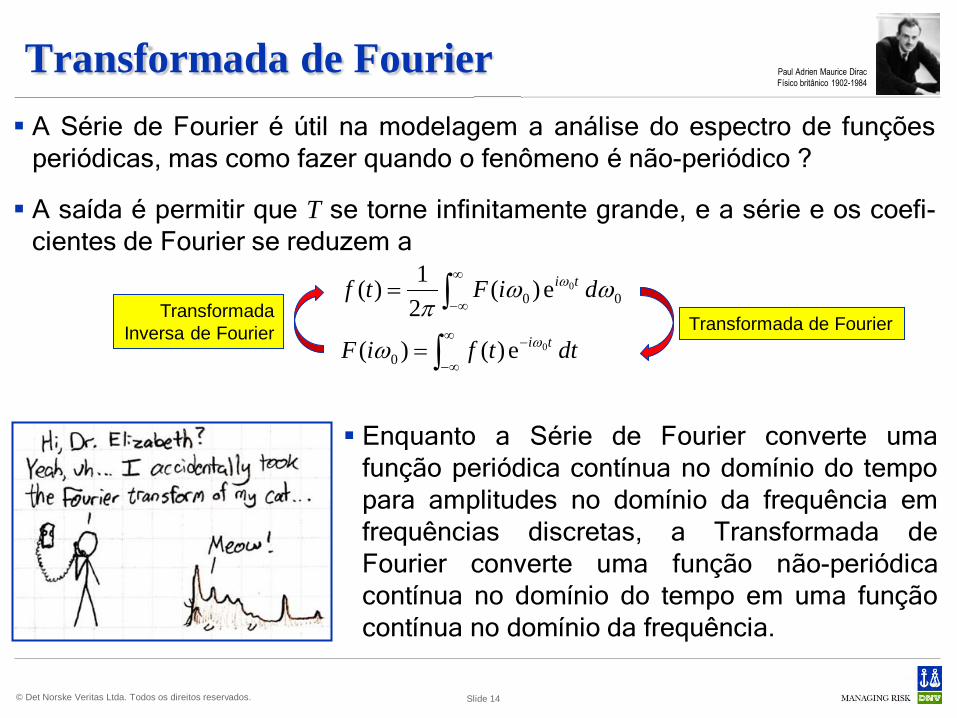
A Série de Fourier é útil na modelagem a análise do espectro de funções periódicas, mas como fazer quando o fenômeno é não-periódico ?
A saída é permitir que T se torne infinitamente grande, e a série e os coefi-cientes de Fourier se reduzem a
∫
∫∞
∞−
−
∞
∞−
=
=
dttfiF
diFtf
ti
ti
0
0
e)()(
e)(21)(
0
00
ω
ω
ω
ωωπ
Transformada de FourierTransformada
Inversa de Fourier
Enquanto a Série de Fourier converte uma função periódica contínua no domínio do tempo para amplitudes no domínio da frequência em frequências discretas, a Transformada de Fourier converte uma função não-periódica contínua no domínio do tempo em uma função contínua no domínio da frequência.
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 15
Transformada Discreta de Fourier
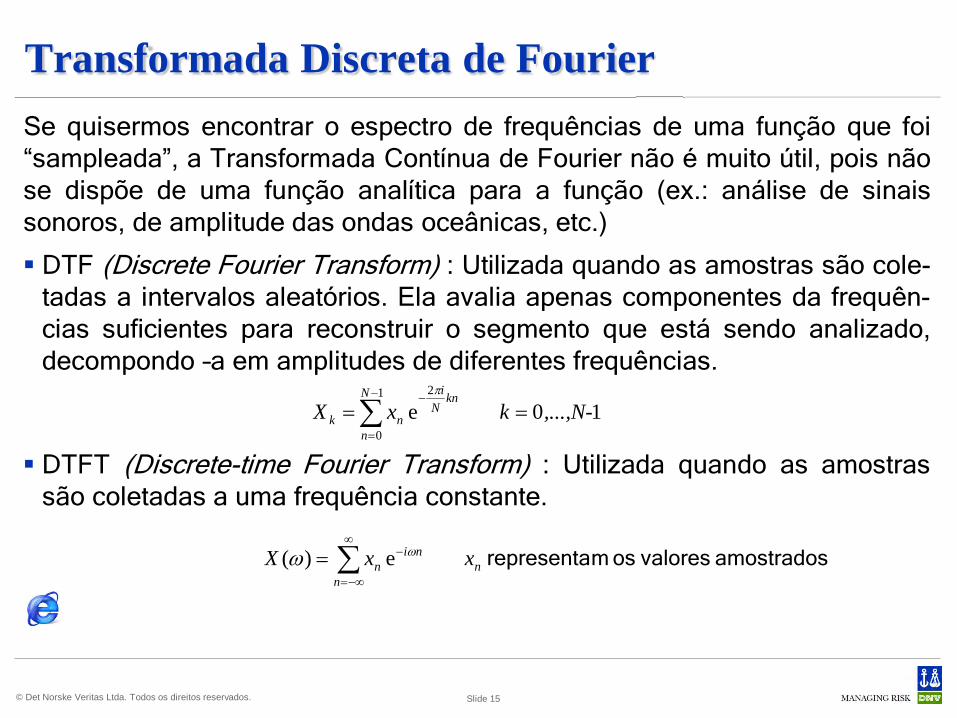
DTF (Discrete Fourier Transform) : Utilizada quando as amostras são cole-tadas a intervalos aleatórios. Ela avalia apenas componentes da frequên-cias suficientes para reconstruir o segmento que está sendo analizado, decompondo –a em amplitudes de diferentes frequências. DTFT (Discrete-time Fourier Transform) : Utilizada quando as amostras
são coletadas a uma frequência constante.
Se quisermos encontrar o espectro de frequências de uma função que foi “sampleada”, a Transformada Contínua de Fourier não é muito útil, pois não se dispõe de uma função analítica para a função (ex.: análise de sinais sonoros, de amplitude das ondas oceânicas, etc.)
10e1
0
2
,...,N-kxXN
n
knN
i
nk ==∑−
=
−
π
amostrados valores os mrepresenta nn
nin xxX ∑
∞
−∞=
−= ωω e)(
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 16
Transformada Rápida de Fourier
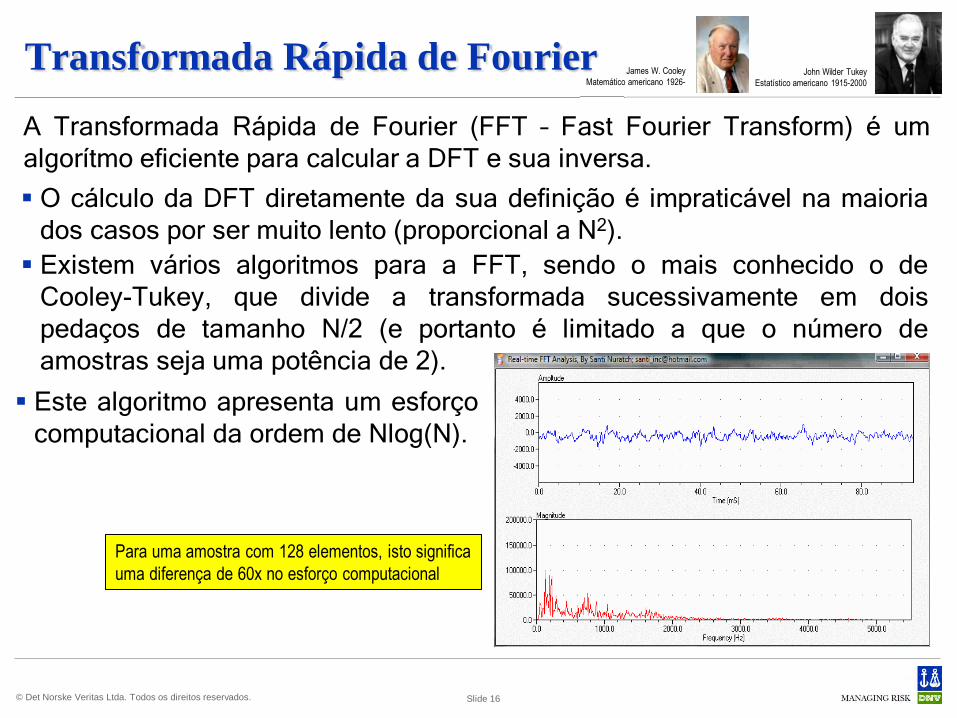
O cálculo da DFT diretamente da sua definição é impraticável na maioria
dos casos por ser muito lento (proporcional a N2). Existem vários algoritmos para a FFT, sendo o mais conhecido o de
Cooley-Tukey, que divide a transformada sucessivamente em dois pedaços de tamanho N/2 (e portanto é limitado a que o número de amostras seja uma potência de 2).
A Transformada Rápida de Fourier (FFT – Fast Fourier Transform) é um algorítmo eficiente para calcular a DFT e sua inversa.
John Wilder TukeyEstatístico americano 1915-2000
James W. CooleyMatemático americano 1926-
Este algoritmo apresenta um esforço computacional da ordem de Nlog(N).
Para uma amostra com 128 elementos, isto significa uma diferença de 60x no esforço computacional

© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 17
Vibração
© Det Norske Veritas Ltda. Todos os direitos reservados.
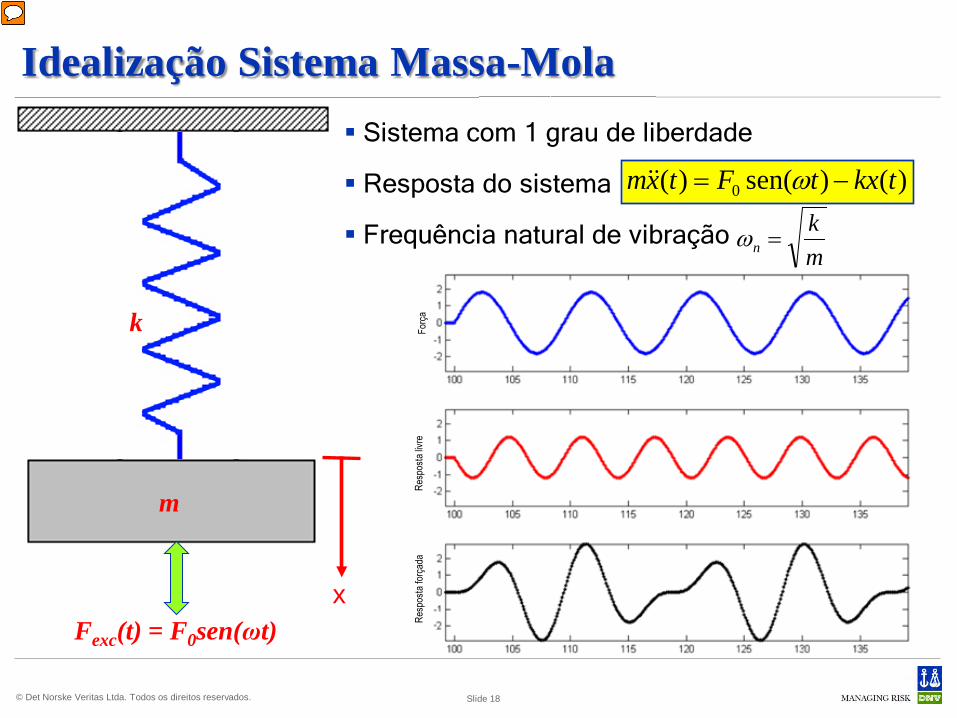
Idealização Sistema Massa-Mola
)()sen()( 0 tkxtFtxm −= ω
Sistema com 1 grau de liberdade
Resposta do sistema
Frequência natural de vibração mk
n =ω
Resp
osta
livre
Resp
osta
forç
ada
Forç
ak
m
Fexc(t) = F0sen(ωt)x
Slide 18
© Det Norske Veritas Ltda. Todos os direitos reservados.
Força excitação
Resp
osta
livre
Resp
osta
forç
ada
Força amortecimento
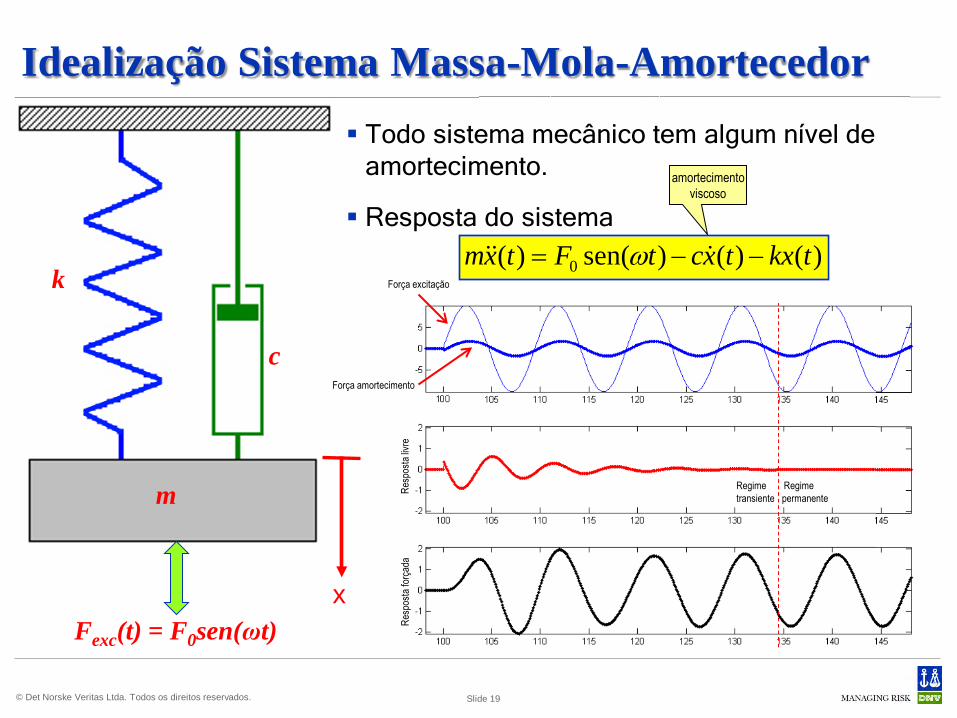
Regime Regimetransiente permanente
Idealização Sistema Massa-Mola-Amortecedor Todo sistema mecânico tem algum nível de
amortecimento.
Resposta do sistema
k
c
m
xFexc(t) = F0sen(ωt)
)()()sen()( 0 tkxtxctFtxm −−= ω
amortecimentoviscoso
Slide 19
© Det Norske Veritas Ltda. Todos os direitos reservados.
Amortecimento
Slide 20
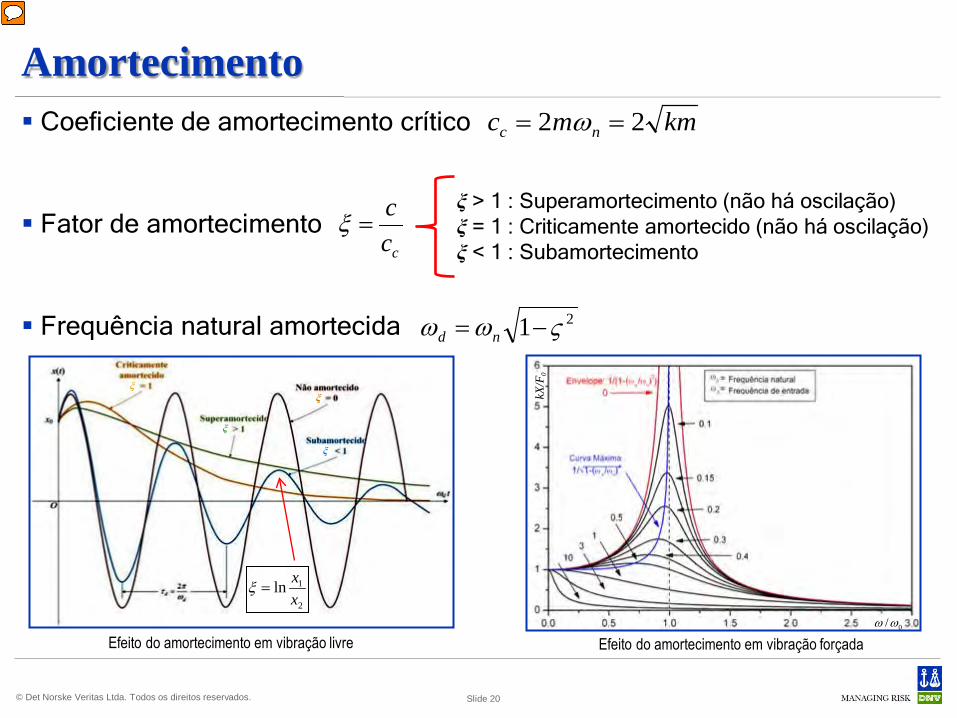
Coeficiente de amortecimento crítico
Fator de amortecimento
Frequência natural amortecida
kmmc nc 22 == ω
ccc
=ξξ > 1 : Superamortecimento (não há oscilação) ξ = 1 : Criticamente amortecido (não há oscilação) ξ < 1 : Subamortecimento
21 ςωω −= nd
Efeito do amortecimento em vibração forçada0/ωω
kX/F
0
Efeito do amortecimento em vibração livre
ξ
ξ
ξ
ξ
2
1lnxx
=ξ
© Det Norske Veritas Ltda. Todos os direitos reservados.
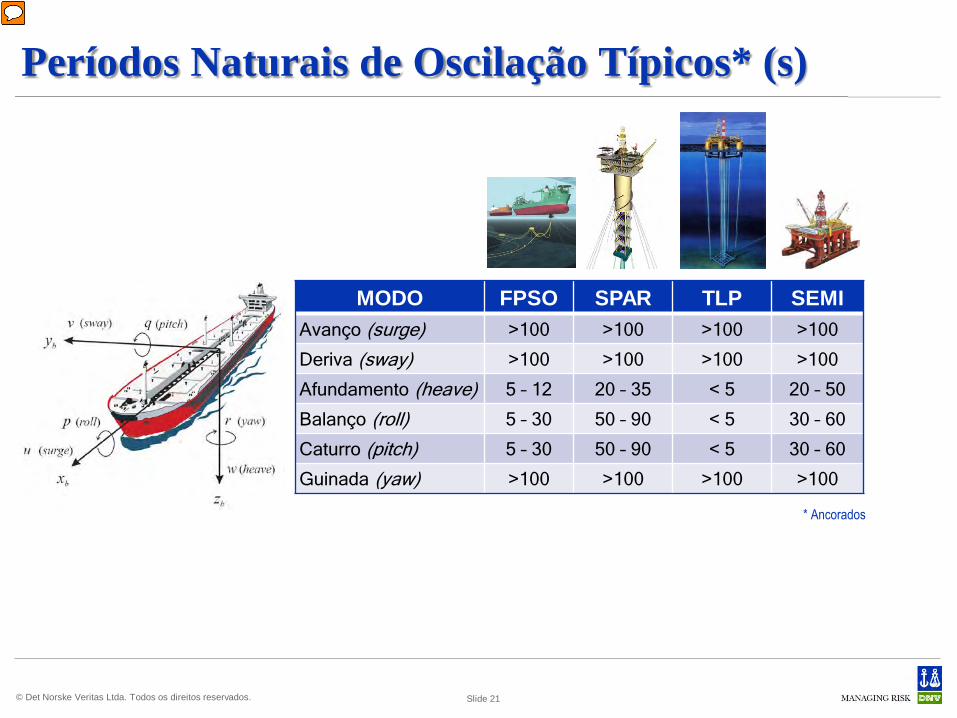
Períodos Naturais de Oscilação Típicos* (s)
MODO FPSO SPAR TLP SEMIAvanço (surge) >100 >100 >100 >100
Deriva (sway) >100 >100 >100 >100
Afundamento (heave) 5 – 12 20 – 35 < 5 20 – 50
Balanço (roll) 5 – 30 50 – 90 < 5 30 – 60
Caturro (pitch) 5 – 30 50 – 90 < 5 30 – 60
Guinada (yaw) >100 >100 >100 >100
Slide 21
* Ancorados
© Det Norske Veritas Ltda. Todos os direitos reservados.
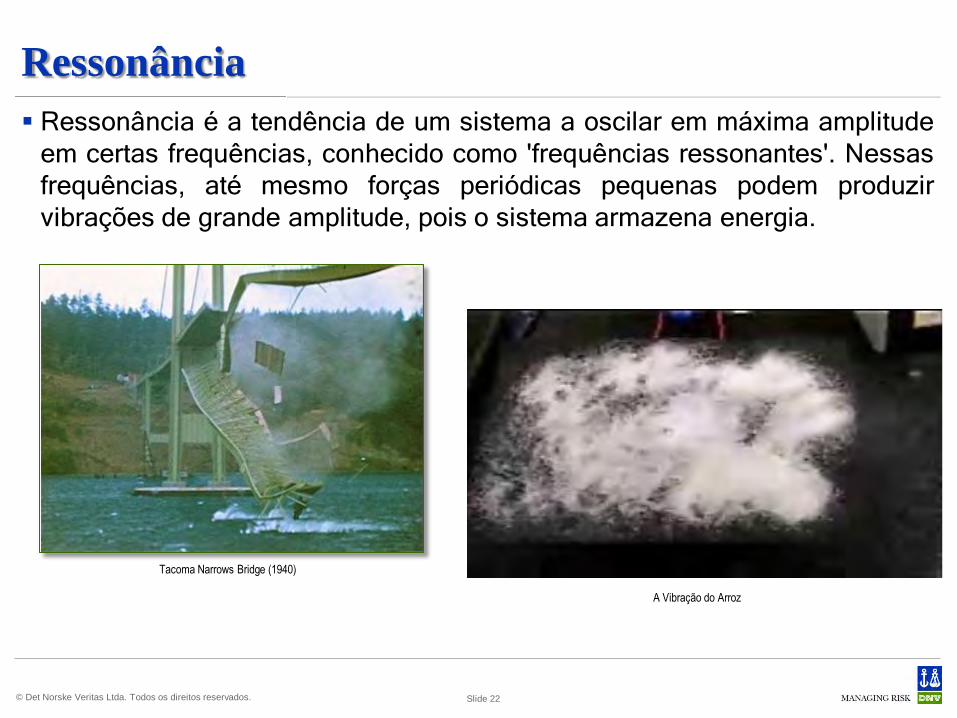
Ressonância Ressonância é a tendência de um sistema a oscilar em máxima amplitude
em certas frequências, conhecido como 'frequências ressonantes'. Nessas frequências, até mesmo forças periódicas pequenas podem produzir vibrações de grande amplitude, pois o sistema armazena energia.
Slide 22
Tacoma Narrows Bridge (1940)
A Vibração do Arroz
© Det Norske Veritas Ltda. Todos os direitos reservados.
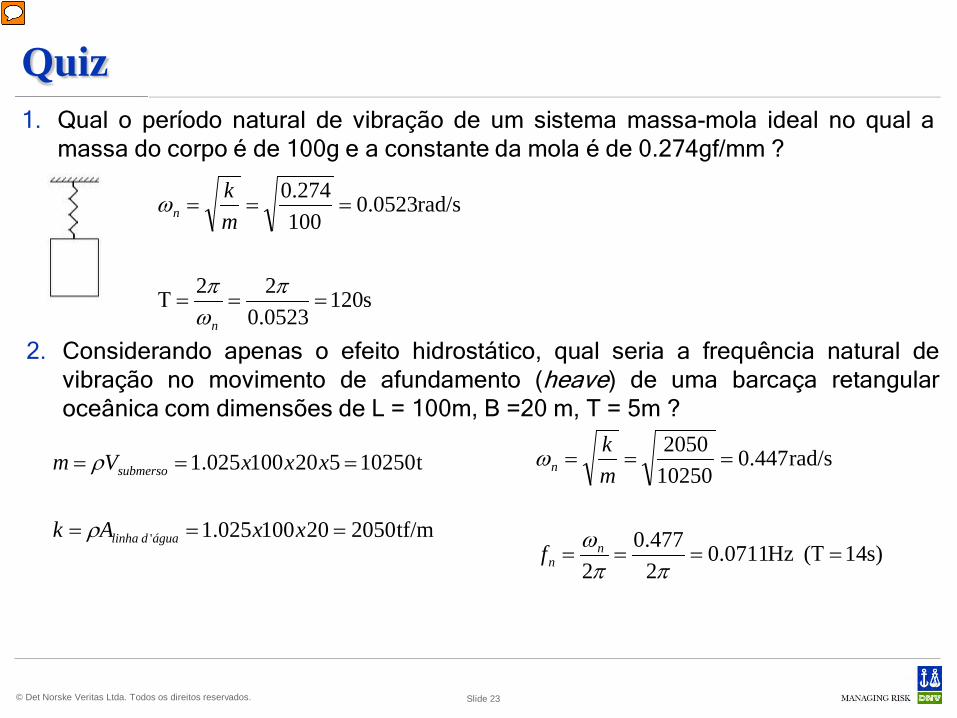
Quiz1. Qual o período natural de vibração de um sistema massa-mola ideal no qual a
massa do corpo é de 100g e a constante da mola é de 0.274gf/mm ?
Slide 23
s1200523.022
rad/s0523.0100274.0
===Τ
===
πωπ
ω
n
n mk
2. Considerando apenas o efeito hidrostático, qual seria a frequência natural de vibração no movimento de afundamento (heave) de uma barcaça retangular oceânica com dimensões de L = 100m, B =20 m, T = 5m ?
tf/m205020100025.1
t10250520100025.1
' ===
===
xxAk
xxxVm
águadlinha
submerso
ρ
ρ
s)14(Hz0711.02477.0
2
rad/s447.0102502050
=Τ===
===
ππω
ω
nn
n
f
mk

© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 24
Os Movimentos
© Det Norske Veritas Ltda. Todos os direitos reservados.
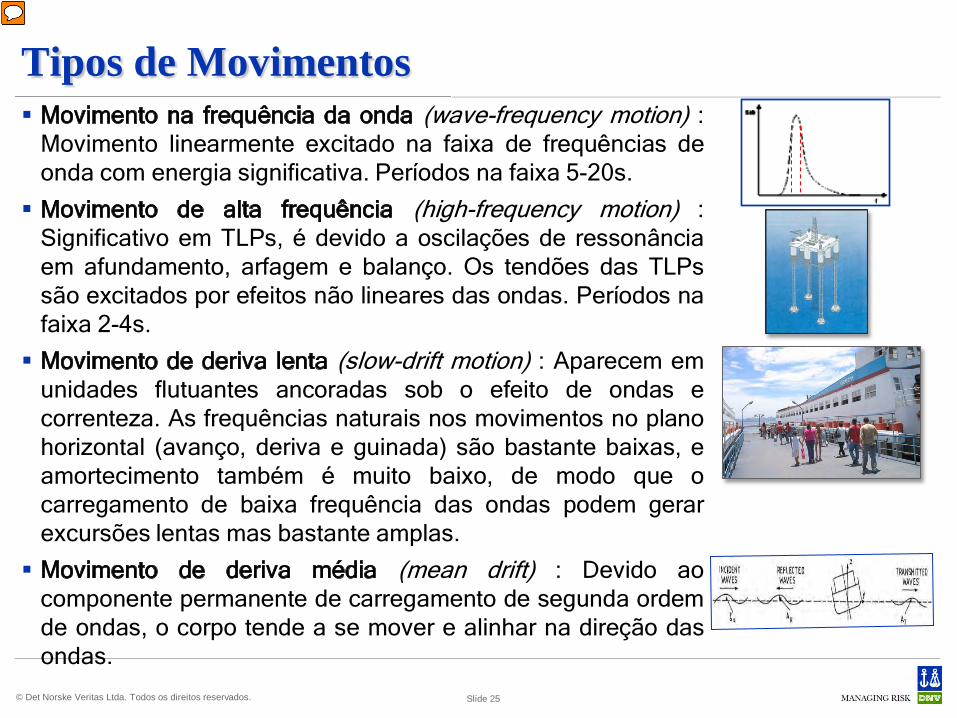
Tipos de Movimentos Movimento na frequência da onda (wave-frequency motion) :
Movimento linearmente excitado na faixa de frequências de onda com energia significativa. Períodos na faixa 5-20s.
Movimento de alta frequência (high-frequency motion) : Significativo em TLPs, é devido a oscilações de ressonância em afundamento, arfagem e balanço. Os tendões das TLPs são excitados por efeitos não lineares das ondas. Períodos na faixa 2-4s.
Movimento de deriva lenta (slow-drift motion) : Aparecem em unidades flutuantes ancoradas sob o efeito de ondas e correnteza. As frequências naturais nos movimentos no plano horizontal (avanço, deriva e guinada) são bastante baixas, e amortecimento também é muito baixo, de modo que o carregamento de baixa frequência das ondas podem gerar excursões lentas mas bastante amplas.
Movimento de deriva média (mean drift) : Devido ao componente permanente de carregamento de segunda ordem de ondas, o corpo tende a se mover e alinhar na direção das ondas.
Slide 25
© Det Norske Veritas Ltda. Todos os direitos reservados.
Equação do Movimento (Corpo Rígido Flutuante)
Slide 26
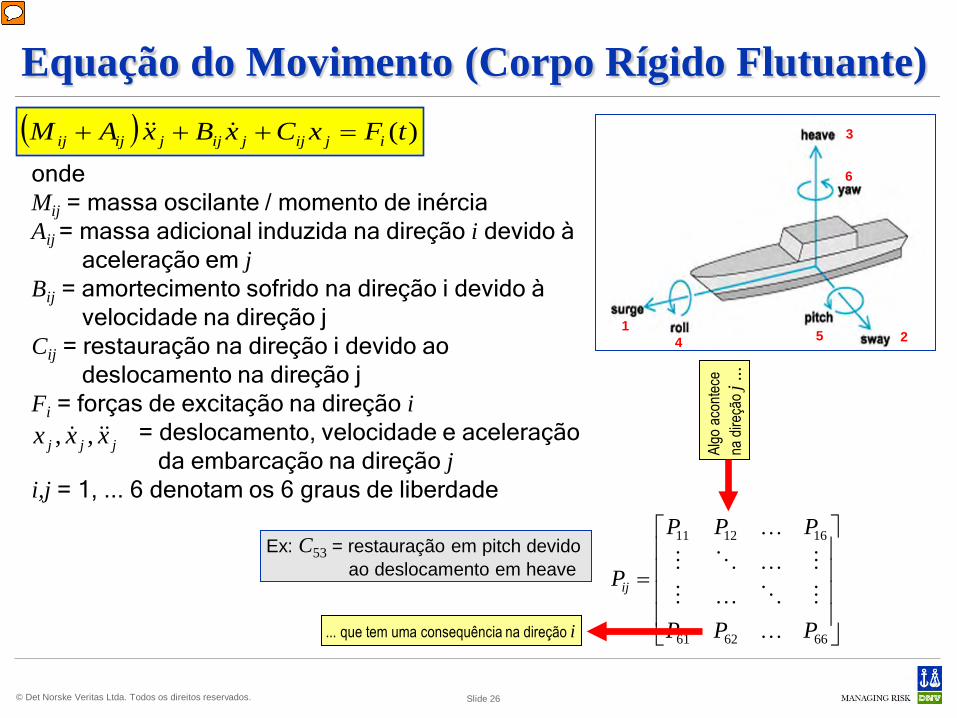
( ) )(tFxCxBxAM ijijjijjijij =+++
onde Mij = massa oscilante / momento de inércia Aij = massa adicional induzida na direção i devido à aceleração em jBij = amortecimento sofrido na direção i devido à velocidade na direção j Cij = restauração na direção i devido ao deslocamento na direção j Fi = forças de excitação na direção i = deslocamento, velocidade e aceleração da embarcação na direção ji,j = 1, ... 6 denotam os 6 graus de liberdade
12
3
4 5
6
jjj xxx ,,
=
666261
161211
PPP
PPP
Pij
... que tem uma consequência na direção i
Algo
aco
ntece
na di
reçã
o j ..
.
Ex: C53 = restauração em pitch devido ao deslocamento em heave
© Det Norske Veritas Ltda. Todos os direitos reservados.
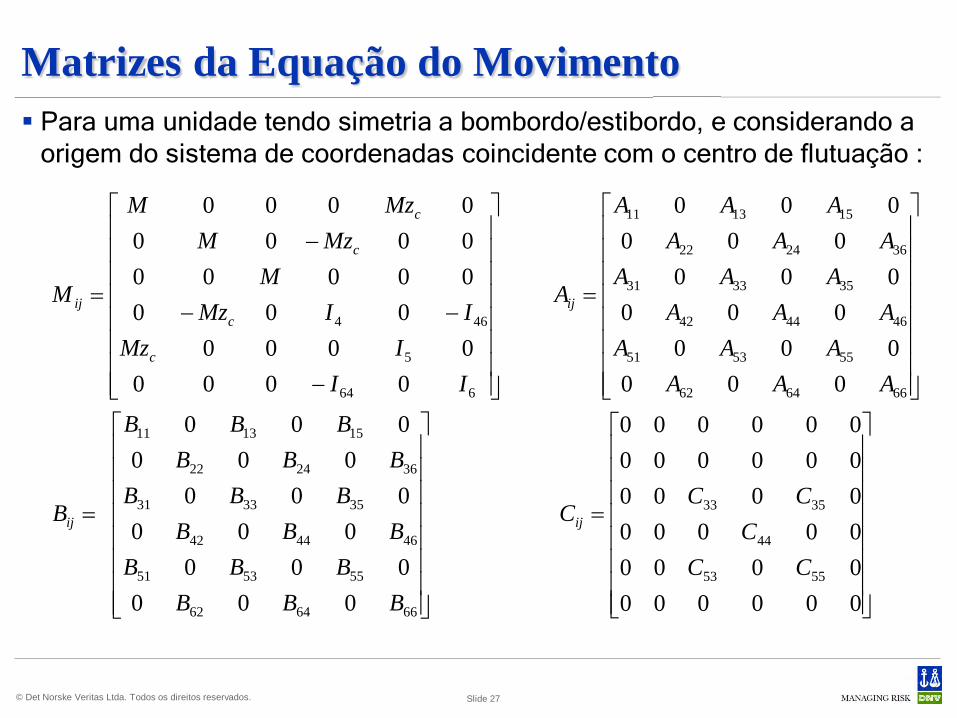
Matrizes da Equação do Movimento Para uma unidade tendo simetria a bombordo/estibordo, e considerando a
origem do sistema de coordenadas coincidente com o centro de flutuação :
Slide 27
=
=
=
−
−−
−
=
0000000000000000000000000000000
000000
000000
000000
000000
000000
000000
00000000
0000000000000000
5553
44
3533
666462
555351
464442
353331
362422
151311
666462
555351
464442
353331
362422
151311
664
5
464
CCC
CCC
BBBBBB
BBBBBB
BBBBBB
B
AAAAAA
AAAAAA
AAAAAA
A
IIIMz
IIMzM
MzMMzM
M
ijij
ij
c
c
c
c
ij

© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 28
Forças Hidrodinâmicas
© Det Norske Veritas Ltda. Todos os direitos reservados.
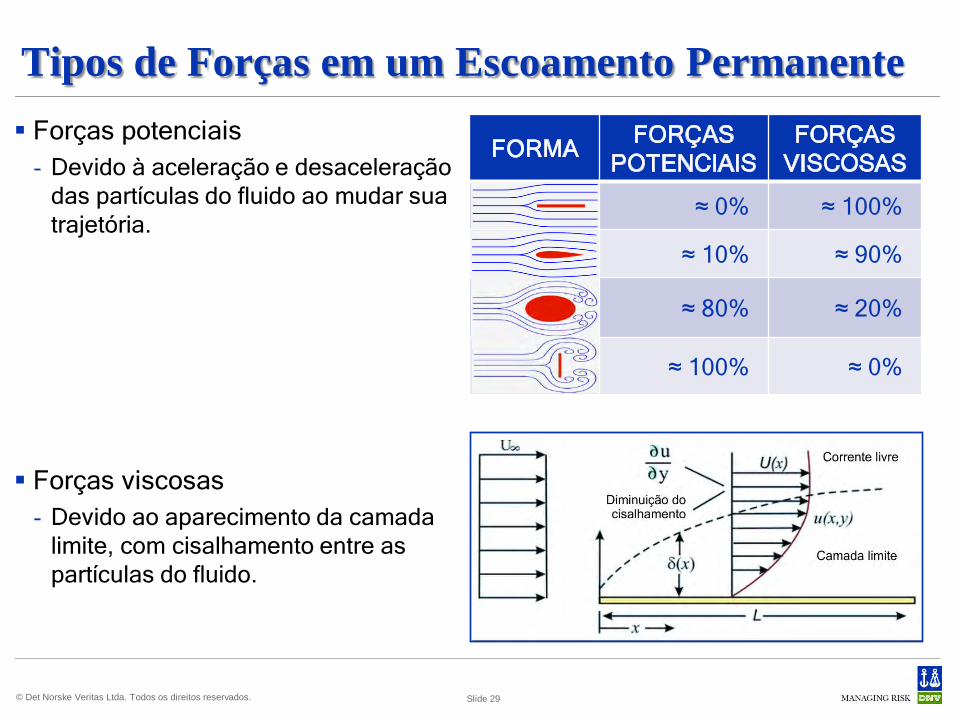
Tipos de Forças em um Escoamento Permanente Forças potenciais
- Devido à aceleração e desaceleração das partículas do fluido ao mudar sua trajetória.
Forças viscosas - Devido ao aparecimento da camada
limite, com cisalhamento entre as partículas do fluido.
Slide 29
FORMA FORÇAS POTENCIAIS
FORÇAS VISCOSAS
≈ 0% ≈ 100%
≈ 10% ≈ 90%
≈ 80% ≈ 20%
≈ 100% ≈ 0%
© Det Norske Veritas Ltda. Todos os direitos reservados.
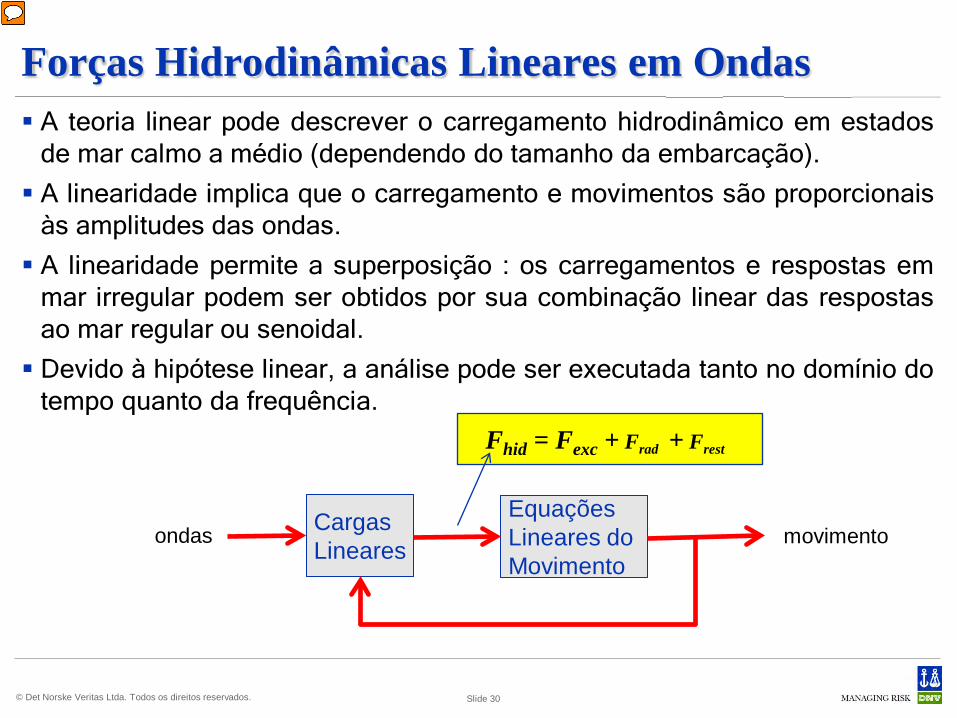
Forças Hidrodinâmicas Lineares em Ondas A teoria linear pode descrever o carregamento hidrodinâmico em estados
de mar calmo a médio (dependendo do tamanho da embarcação). A linearidade implica que o carregamento e movimentos são proporcionais
às amplitudes das ondas. A linearidade permite a superposição : os carregamentos e respostas em
mar irregular podem ser obtidos por sua combinação linear das respostas ao mar regular ou senoidal. Devido à hipótese linear, a análise pode ser executada tanto no domínio do
tempo quanto da frequência.
Slide 30
Fhid = Fexc + Frad + Frest
CargasLineares
EquaçõesLineares doMovimento
movimentoondas
© Det Norske Veritas Ltda. Todos os direitos reservados.
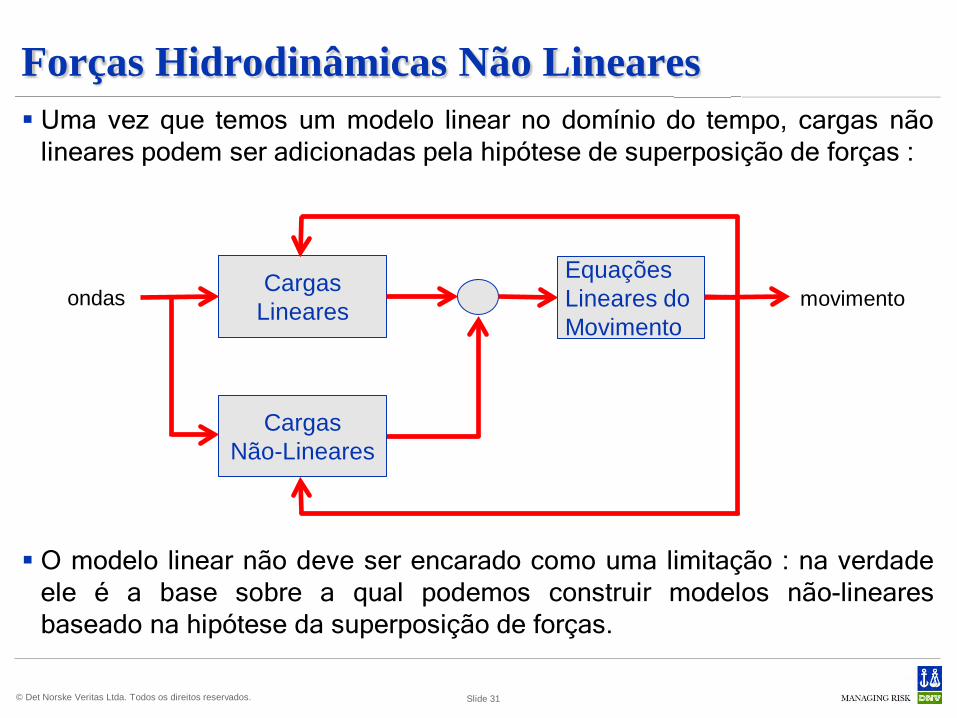
Forças Hidrodinâmicas Não Lineares Uma vez que temos um modelo linear no domínio do tempo, cargas não
lineares podem ser adicionadas pela hipótese de superposição de forças :
O modelo linear não deve ser encarado como uma limitação : na verdade ele é a base sobre a qual podemos construir modelos não-lineares baseado na hipótese da superposição de forças.
Slide 31
CargasLineares
EquaçõesLineares doMovimento
movimentoondas
CargasNão-Lineares
© Det Norske Veritas Ltda. Todos os direitos reservados.
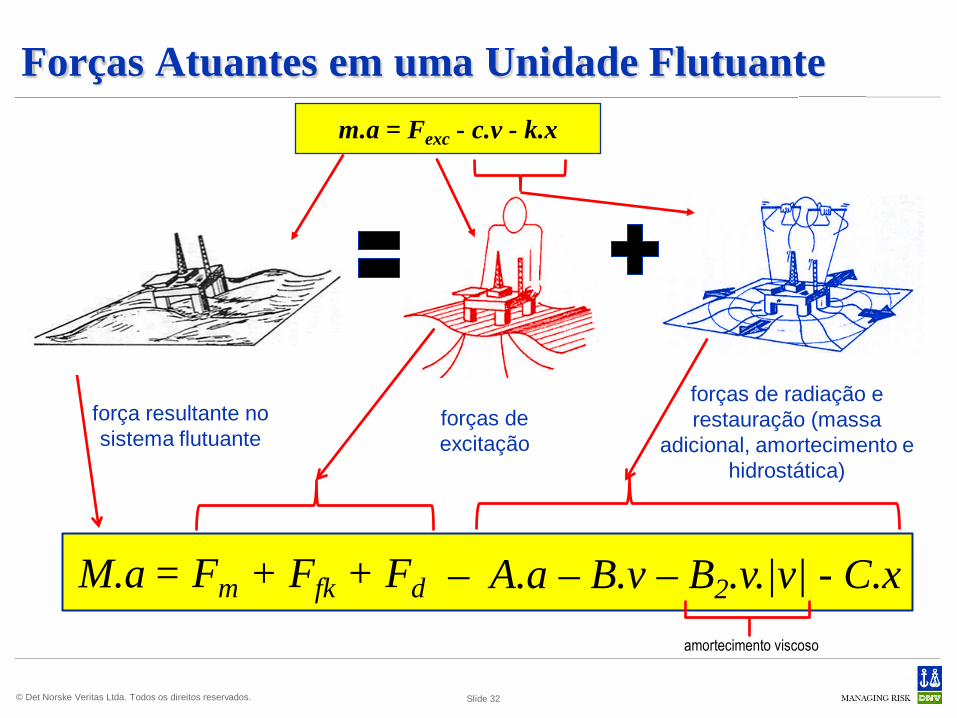
forças de excitação
Forças Atuantes em uma Unidade Flutuantem.a = Fexc - c.v - k.x
M.a
forças de radiação e restauração (massa
adicional, amortecimento e hidrostática)
força resultante no sistema flutuante
= Fm + Ffk + Fd – A.a – B.v – B2.v.|v| - C.xamortecimento viscoso
Slide 32
© Det Norske Veritas Ltda. Todos os direitos reservados.
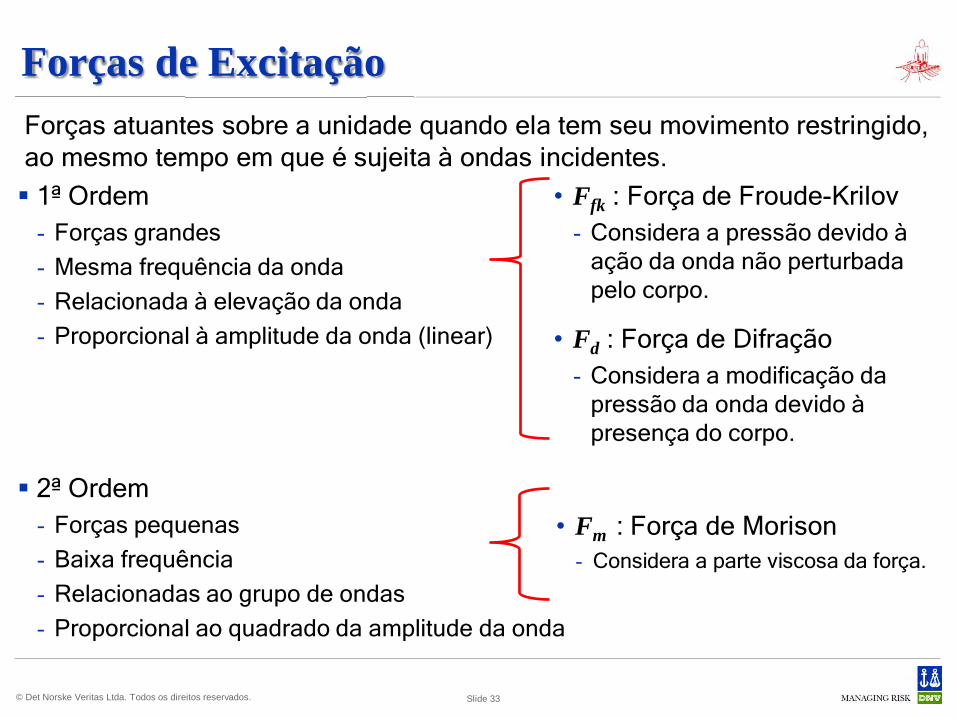
Forças de Excitação
• Ffk : Força de Froude-Krilov - Considera a pressão devido à
ação da onda não perturbada pelo corpo.
• Fd : Força de Difração - Considera a modificação da
pressão da onda devido à presença do corpo.
Forças atuantes sobre a unidade quando ela tem seu movimento restringido, ao mesmo tempo em que é sujeita à ondas incidentes. 1ª Ordem
- Forças grandes - Mesma frequência da onda - Relacionada à elevação da onda - Proporcional à amplitude da onda (linear)
2ª Ordem - Forças pequenas - Baixa frequência - Relacionadas ao grupo de ondas - Proporcional ao quadrado da amplitude da onda
• Fm : Força de Morison - Considera a parte viscosa da força.
Slide 33
© Det Norske Veritas Ltda. Todos os direitos reservados.
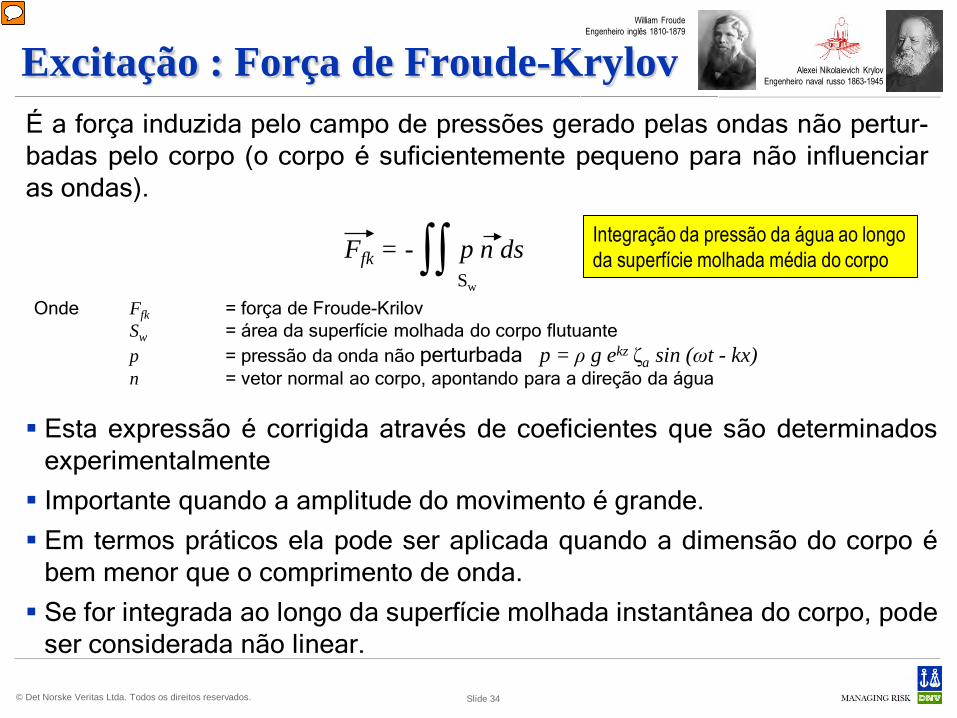
Excitação : Força de Froude-KrylovÉ a força induzida pelo campo de pressões gerado pelas ondas não pertur-badas pelo corpo (o corpo é suficientemente pequeno para não influenciar as ondas).
Onde Ffk = força de Froude-Krilov Sw = área da superfície molhada do corpo flutuante p = pressão da onda não perturbada p = ρ g ekz ζa sin (ωt - kx) n = vetor normal ao corpo, apontando para a direção da água
Ffk = - p n ds∫∫Sw
Esta expressão é corrigida através de coeficientes que são determinados experimentalmente Importante quando a amplitude do movimento é grande. Em termos práticos ela pode ser aplicada quando a dimensão do corpo é
bem menor que o comprimento de onda. Se for integrada ao longo da superfície molhada instantânea do corpo, pode
ser considerada não linear.
William FroudeEngenheiro inglês 1810-1879
Alexei Nikolaievich KrylovEngenheiro naval russo 1863-1945
Integração da pressão da água ao longo da superfície molhada média do corpo
Slide 34
© Det Norske Veritas Ltda. Todos os direitos reservados.
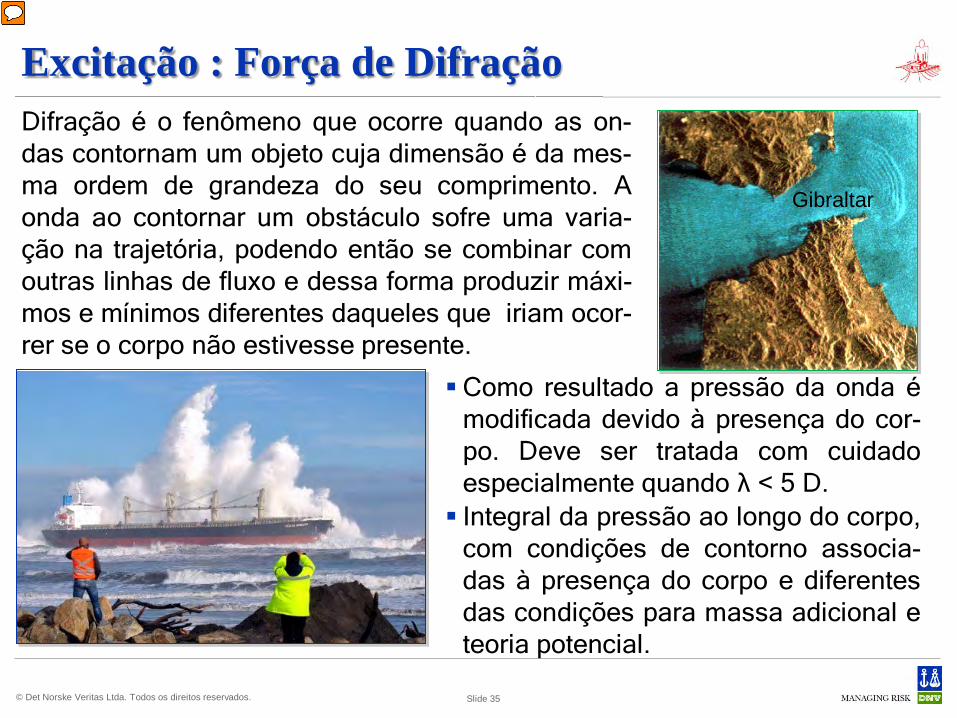
Excitação : Força de DifraçãoDifração é o fenômeno que ocorre quando as on-das contornam um objeto cuja dimensão é da mes-ma ordem de grandeza do seu comprimento. A onda ao contornar um obstáculo sofre uma varia-ção na trajetória, podendo então se combinar com outras linhas de fluxo e dessa forma produzir máxi-mos e mínimos diferentes daqueles que iriam ocor-rer se o corpo não estivesse presente.
Slide 35
Como resultado a pressão da onda é modificada devido à presença do cor-po. Deve ser tratada com cuidado especialmente quando λ < 5 D. Integral da pressão ao longo do corpo,
com condições de contorno associa-das à presença do corpo e diferentes das condições para massa adicional e teoria potencial.
Gibraltar
© Det Norske Veritas Ltda. Todos os direitos reservados.
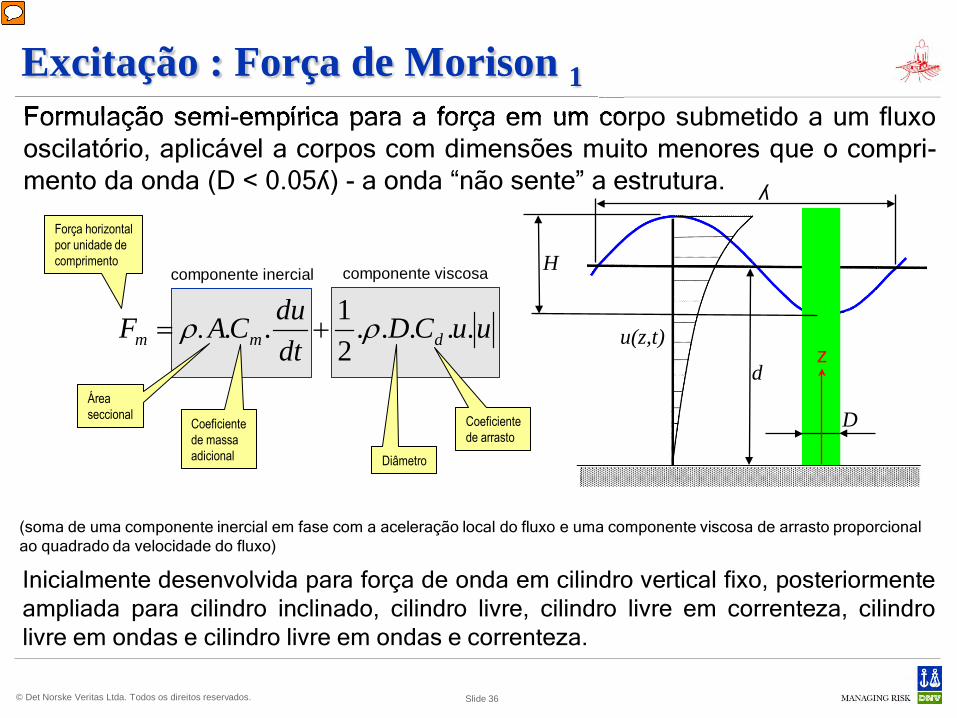
Formulação semi-empírica para a força em um corpo submetido a um fluxo oscilatório, aplicável a corpos com dimensões muito menores que o compri-mento da onda (D < 0.05ʎ) - a onda “não sente” a estrutura.
Formulação semi empírica para a força em umum corpoum corpoum
Excitação : Força de Morison 1
Slide 36
componente inercial componente viscosa
uuCDdtduCAF dmm .....
21.. ρρ +.=
(soma de uma componente inercial em fase com a aceleração local do fluxo e uma componente viscosa de arrasto proporcional ao quadrado da velocidade do fluxo)
Inicialmente desenvolvida para força de onda em cilindro vertical fixo, posteriormente ampliada para cilindro inclinado, cilindro livre, cilindro livre em correnteza, cilindro livre em ondas e cilindro livre em ondas e correnteza.
ʎ
zu(z,t)
D
d
H
Áreaseccional
Coeficientede massaadicional Diâmetro
Coeficientede arrasto
Força horizontal por unidade de comprimento
© Det Norske Veritas Ltda. Todos os direitos reservados.
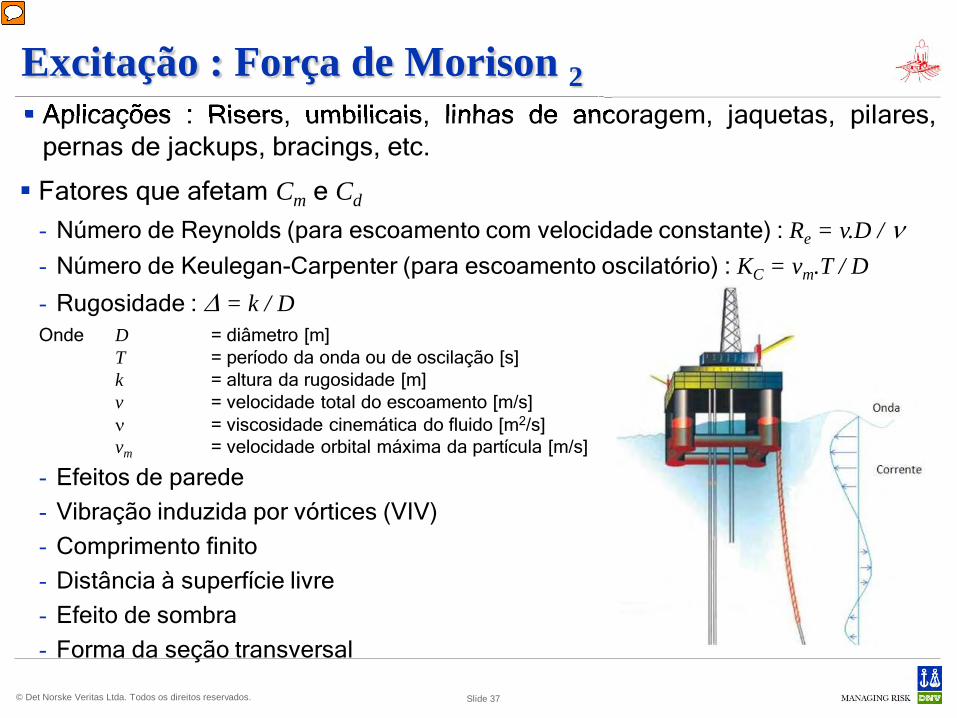
Aplicações : Risers, umbilicais, linhas de ancoragem, jaquetas, pilares, pernas de jackups, bracings, etc. Aplicações : Risers, umbilicais, linhas de ancoragem,de ancoragem,ancoragem,ancoragem,
Excitação : Força de Morison 2
Fatores que afetam Cm e Cd
- Número de Reynolds (para escoamento com velocidade constante) : Re = v.D / ν- Número de Keulegan-Carpenter (para escoamento oscilatório) : KC = vm.T / D- Rugosidade : ∆ = k / DOnde D = diâmetro [m]
T = período da onda ou de oscilação [s] k = altura da rugosidade [m] v = velocidade total do escoamento [m/s] ν = viscosidade cinemática do fluido [m2/s] vm = velocidade orbital máxima da partícula [m/s]
- Efeitos de parede - Vibração induzida por vórtices (VIV) - Comprimento finito - Distância à superfície livre - Efeito de sombra - Forma da seção transversal
Slide 37
© Det Norske Veritas Ltda. Todos os direitos reservados.
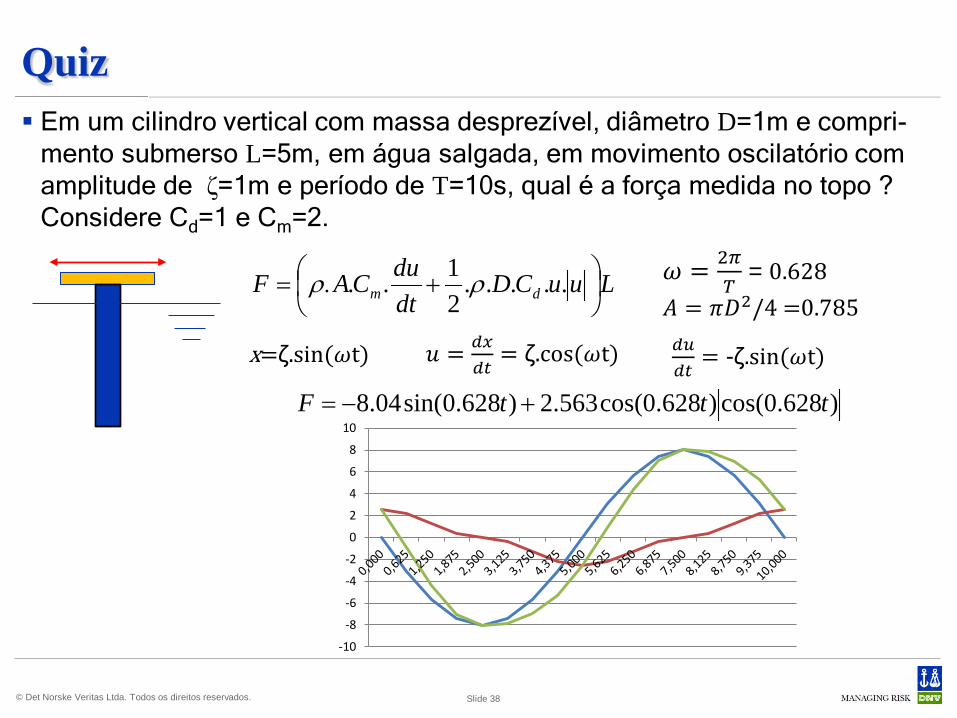
Quiz Em um cilindro vertical com massa desprezível, diâmetro D=1m e compri-
mento submerso L=5m, em água salgada, em movimento oscilatório com amplitude de ζ=1m e período de T=10s, qual é a força medida no topo ? Considere Cd=1 e Cm=2.
Slide 38
LuuCDdtduCAF dm
+.= .....
21.. ρρ 𝜔 = 2𝜋
𝑇= 0.628
𝐴 = 𝜋𝐷2/4 =0.785
𝑢 = 𝑑𝑑𝑑𝑑
= ζ.cos(𝜔t) 𝑑𝑑𝑑𝑑
= -ζ.sin(𝜔t)x=ζ.sin(𝜔t)
)628.0cos()628.0cos(563.2)628.0sin(04.8 tttF +−=
-10
-8
-6
-4
-2
0
2
4
6
8
10
© Det Norske Veritas Ltda. Todos os direitos reservados.
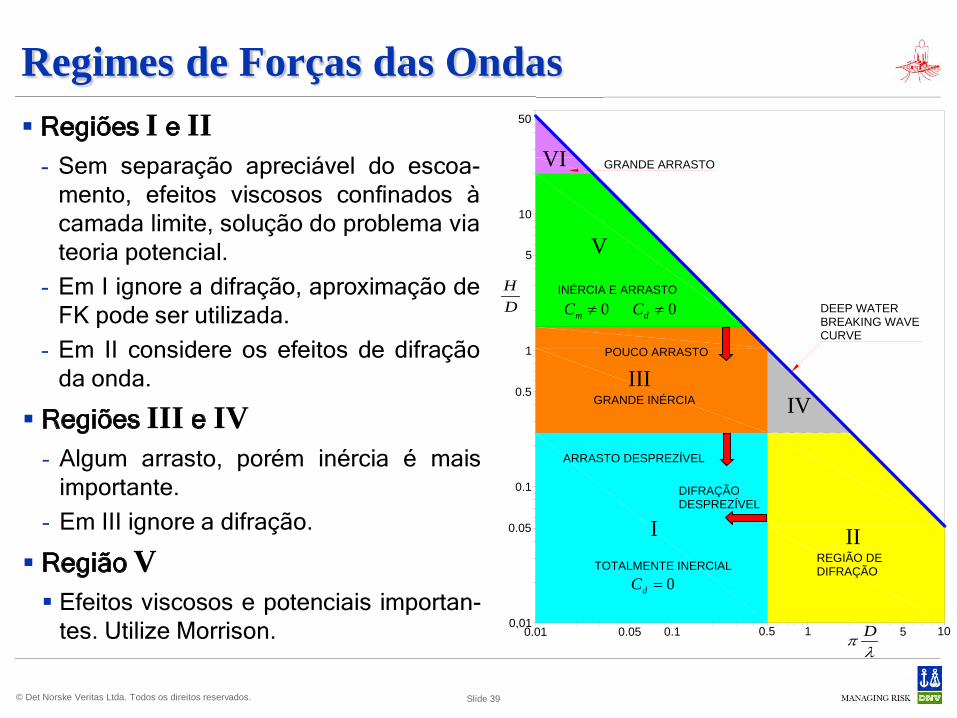
Regimes de Forças das Ondas
Slide 39
10510.50.10.050.010,01
0.05
0.1
0.5
1
5
10
50
VI
V
IIIIV
II
GRANDE ARRASTO
INÉRCIA E ARRASTO
POUCO ARRASTO
GRANDE INÉRCIA
ARRASTO DESPREZÍVEL
DIFRAÇÃODESPREZÍVEL
TOTALMENTE INERCIALREGIÃO DEDIFRAÇÃO
DEEP WATERBREAKING WAVECURVE
I
00 ≠≠ dm CC
0=dC
λπ D
DH
Regiões I e II- Sem separação apreciável do escoa-
mento, efeitos viscosos confinados à camada limite, solução do problema via teoria potencial.
- Em I ignore a difração, aproximação de FK pode ser utilizada.
- Em II considere os efeitos de difração da onda.
Regiões III e IV- Algum arrasto, porém inércia é mais
importante. - Em III ignore a difração.
Região V Efeitos viscosos e potenciais importan-
tes. Utilize Morrison.
© Det Norske Veritas Ltda. Todos os direitos reservados.
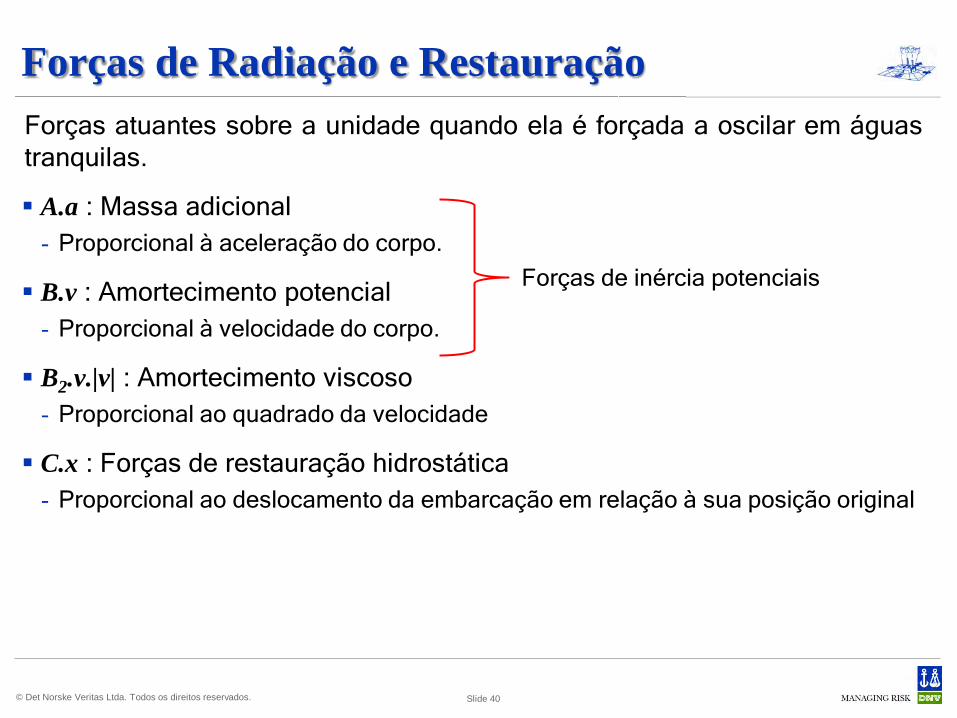
Forças de Radiação e Restauração
A.a : Massa adicional - Proporcional à aceleração do corpo.
B.v : Amortecimento potencial - Proporcional à velocidade do corpo.
B2.v.|v| : Amortecimento viscoso - Proporcional ao quadrado da velocidade
C.x : Forças de restauração hidrostática - Proporcional ao deslocamento da embarcação em relação à sua posição original
Slide 40
Forças de inércia potenciais
Forças atuantes sobre a unidade quando ela é forçada a oscilar em águas tranquilas.
© Det Norske Veritas Ltda. Todos os direitos reservados.
Forças Potenciais de RadiaçãoAs forças de radiação aparecem devido ao movimento da embarcação : a mudança no momento do fluido devido ao movimento do casco altera a distribuição de pressões ao longo do casco, induzindo as ondas.
Estas forças tem duas componentes : - Proporcional às acelerações - Proporcional às velocidades
Slide 41
© Det Norske Veritas Ltda. Todos os direitos reservados.
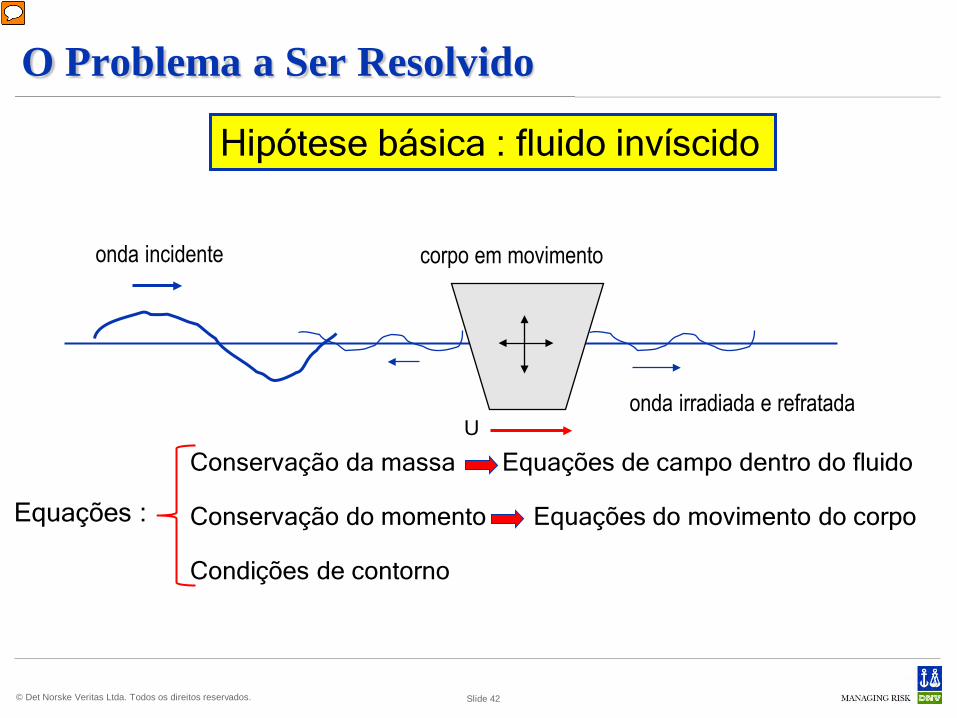
O Problema a Ser Resolvido
corpo em movimentoonda incidente
onda irradiada e refratada
Conservação da massa Equações de campo dentro do fluido
Conservação do momento Equações do movimento do corpo
Condições de contorno
Hipótese básica : fluido invíscido
Equações :
Slide 42
U
© Det Norske Veritas Ltda. Todos os direitos reservados.
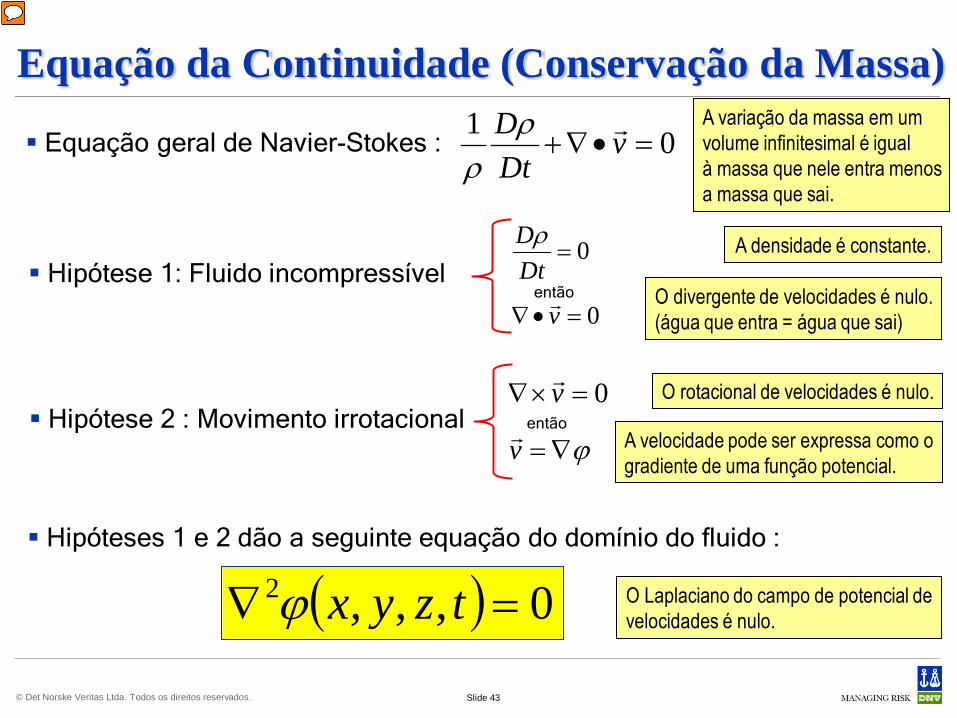
Equação da Continuidade (Conservação da Massa)
Equação geral de Navier-Stokes : 01=•∇+ v
DtD ρ
ρ
Hipótese 1: Fluido incompressível
0
0
=•∇
=
v
DtD
ρ
Hipótese 2 : Movimento irrotacional ϕ∇=
=×∇
v
v
0
Hipóteses 1 e 2 dão a seguinte equação do domínio do fluido :
( ) 0,,,2 =∇ tzyxϕ
A densidade é constante.
O divergente de velocidades é nulo.(água que entra = água que sai)
O rotacional de velocidades é nulo.
A velocidade pode ser expressa como ogradiente de uma função potencial.
O Laplaciano do campo de potencial develocidades é nulo.
então
então
A variação da massa em umvolume infinitesimal é igualà massa que nele entra menosa massa que sai.
Slide 43
© Det Norske Veritas Ltda. Todos os direitos reservados.
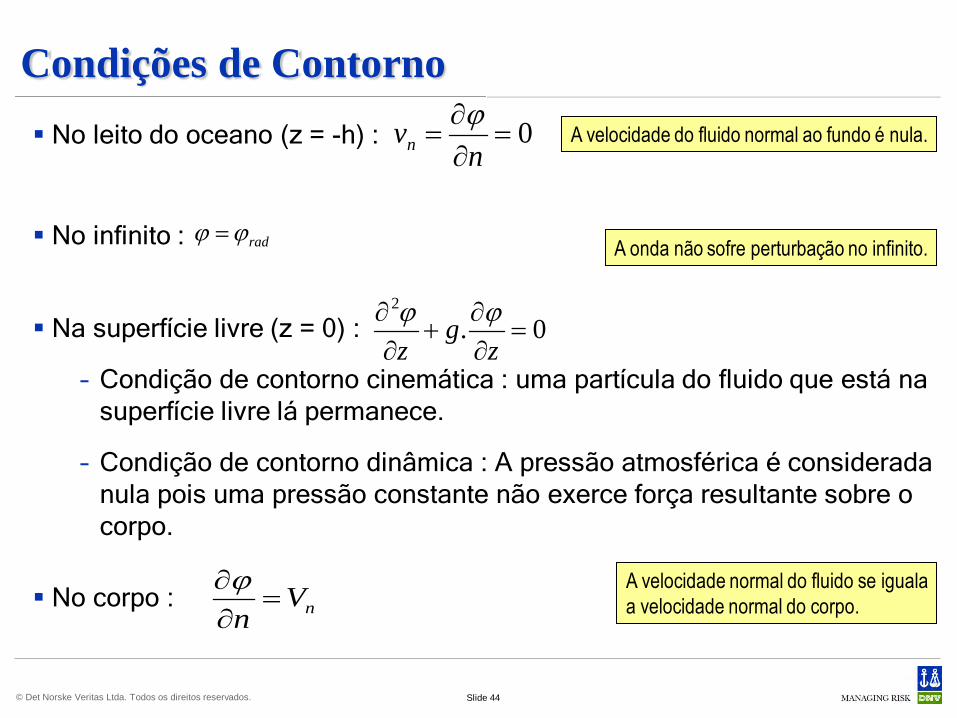
Condições de Contorno No leito do oceano (z = -h) : 0=
∂∂
=n
vnϕ
radϕϕ =
nVn=
∂∂ϕ
Slide 44
No infinito :
No corpo :
Na superfície livre (z = 0) :
– Condição de contorno cinemática : uma partícula do fluido que está na superfície livre lá permanece.
– Condição de contorno dinâmica : A pressão atmosférica é considerada nula pois uma pressão constante não exerce força resultante sobre o corpo.
A velocidade do fluido normal ao fundo é nula.
A onda não sofre perturbação no infinito.
A velocidade normal do fluido se igualaa velocidade normal do corpo.
0.2
=∂∂
+∂∂
zg
zϕϕ
© Det Norske Veritas Ltda. Todos os direitos reservados.
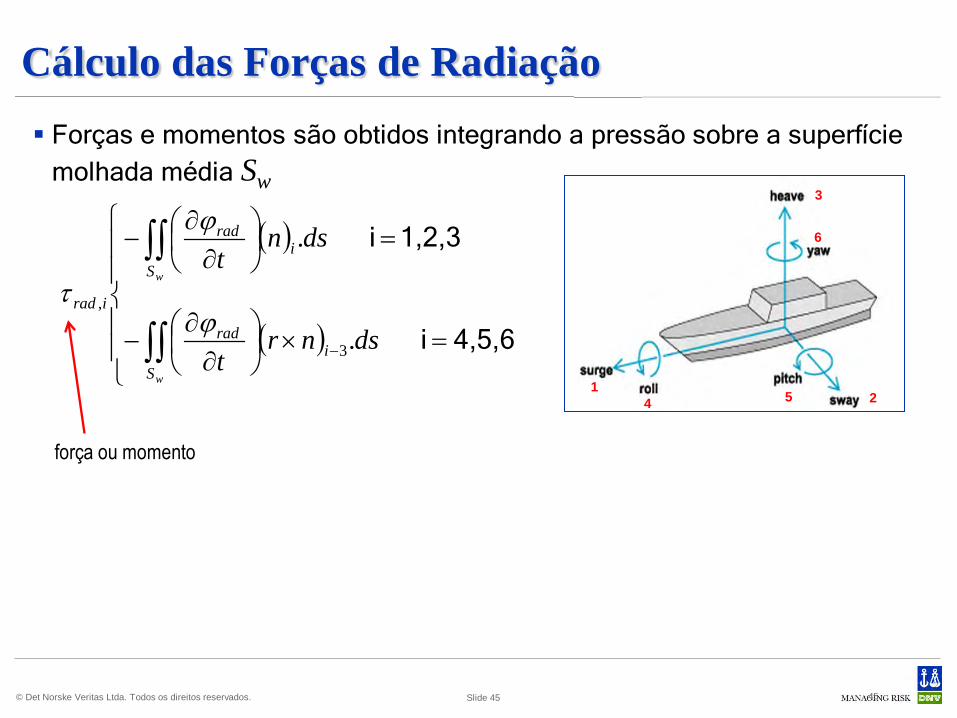
Cálculo das Forças de Radiação Forças e momentos são obtidos integrando a pressão sobre a superfície
molhada média Sw
45
( )
( )
=×
∂∂
−
=
∂∂
−
−∫∫
∫∫
4,5,6i
1,2,3i
dsnrt
dsnt
iS
rad
iS
rad
irad
w
w
.
.
3
,ϕ
ϕ
τ
12
3
4 5
6
força ou momento
Slide 45
© Det Norske Veritas Ltda. Todos os direitos reservados.
Forças de Radiação para Movimento RegularSe o movimento da embarcação na direção i for harmônico podendo ser des-crito por :
Então, após integrar a pressão sobre a superfície do casco, as forças de ra-diação na direção j devido ao movimento na direção i tomam a seguinte for-ma :
Os coeficientes que multiplicam às acelerações são chamados de coeficientes de massa adicional, embora nem todos tenham unidade de massa (alguns são inércia). Os termos de massa adicional nos dão as forças devido às acelerações do fluido a medida em que a embarcação oscila.
Os coeficientes proporcionais às velocidades são chamados de coeficientes de amortecimento potencial, e representam a energia transportada para longe com as ondas geradas pelo movimento do casco.
Slide 46
( )ti ωξξ cos=
( ) ( ) iijiijjrad BA ξωξωτ −−=,
© Det Norske Veritas Ltda. Todos os direitos reservados.
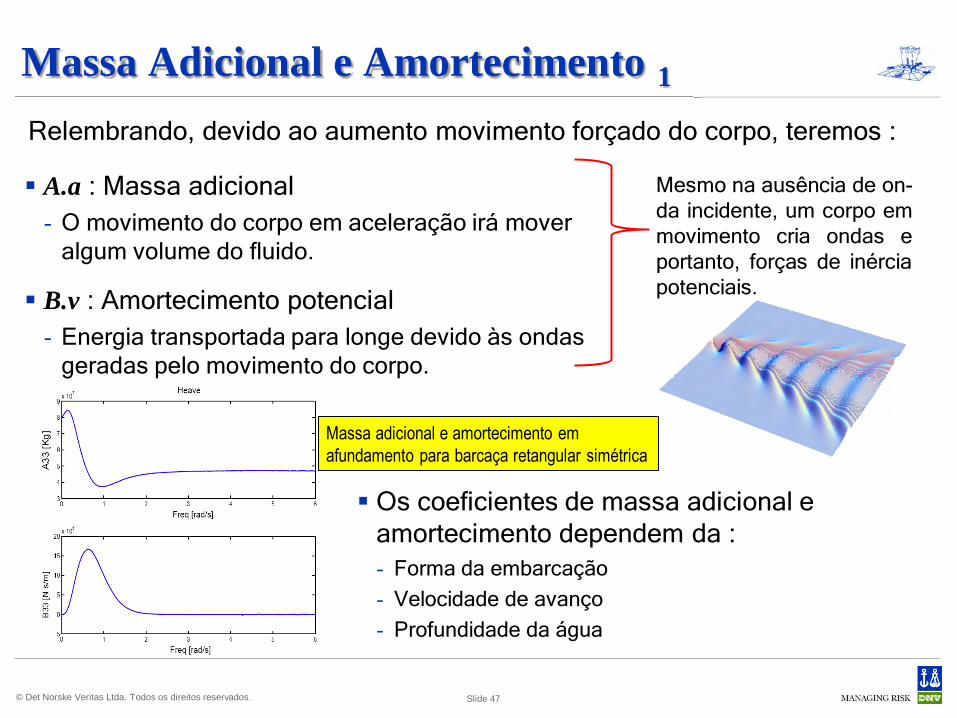
Massa Adicional e Amortecimento 1
A.a : Massa adicional - O movimento do corpo em aceleração irá mover
algum volume do fluido.
B.v : Amortecimento potencial - Energia transportada para longe devido às ondas
geradas pelo movimento do corpo.
Slide 47
Mesmo na ausência de on-da incidente, um corpo em movimento cria ondas e portanto, forças de inércia potenciais.
Relembrando, devido ao aumento movimento forçado do corpo, teremos :
Os coeficientes de massa adicional e amortecimento dependem da : - Forma da embarcação - Velocidade de avanço - Profundidade da água
Massa adicional e amortecimento em afundamento para barcaça retangular simétrica
© Det Norske Veritas Ltda. Todos os direitos reservados.
Massa Adicional e Amortecimento 2
Slide 48
As matrizes de massa adicional e amortecimento têm dimensões 6 x 6, por-tanto temos 36 coeficientes de massa adicional e 36 de amortecimento a serem calculados.
Se a estrutura não tem velocidade de avanço (ou sua velocidade é longitu-dinal), e tem um plano de simetria longitudinal, metade dos coeficientes é nulo.
Se a estrutura tem velocidade nula e não há correnteza, as matrizes de massa adicional e amortecimento são simétricas.
( ) ( )
( ) ( )ωω
ωω
jiij
jiij
BB
AA
=
=
© Det Norske Veritas Ltda. Todos os direitos reservados.
Forças de Amortecimento Viscoso Em um fluido real, a fricção também causa amortecimento, vórtices e o
fenômeno da separação da camada limite.
B2.v.|v| : Amortecimento viscoso - Importante quando a amplitude do movimento é grande. - Devido à geração de vórtices e fricção. - Proporcional ao quadrado da velocidade.
Slide 49
© Det Norske Veritas Ltda. Todos os direitos reservados.
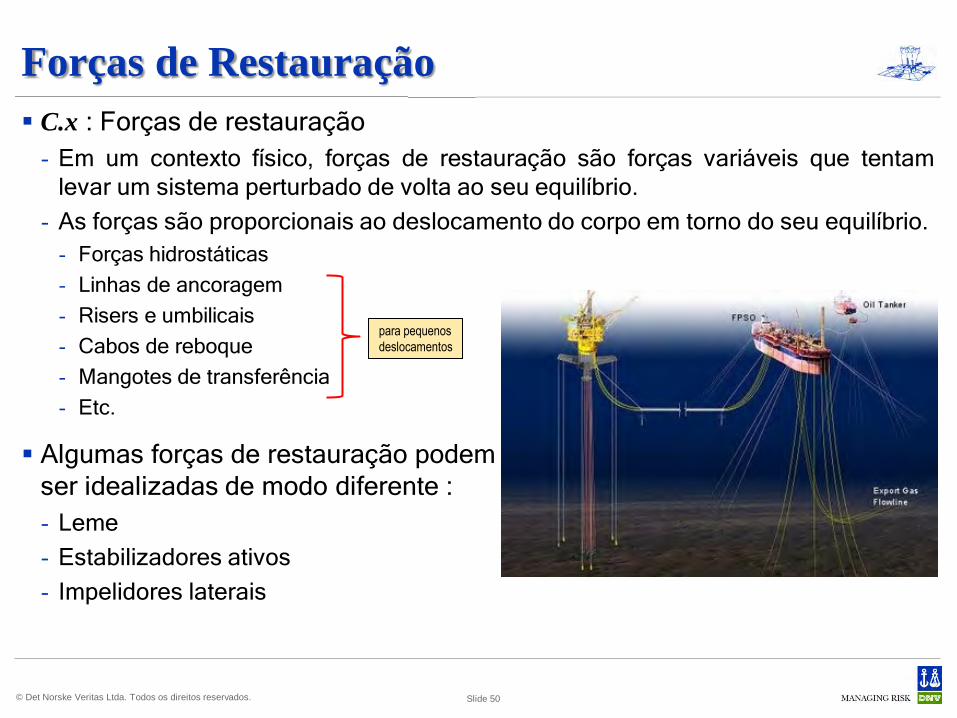
Forças de Restauração C.x : Forças de restauração
- Em um contexto físico, forças de restauração são forças variáveis que tentam levar um sistema perturbado de volta ao seu equilíbrio.
- As forças são proporcionais ao deslocamento do corpo em torno do seu equilíbrio. - Forças hidrostáticas - Linhas de ancoragem - Risers e umbilicais - Cabos de reboque - Mangotes de transferência - Etc.
Algumas forças de restauração podem ser idealizadas de modo diferente : - Leme - Estabilizadores ativos - Impelidores laterais
Slide 50
para pequenos deslocamentos
© Det Norske Veritas Ltda. Todos os direitos reservados.
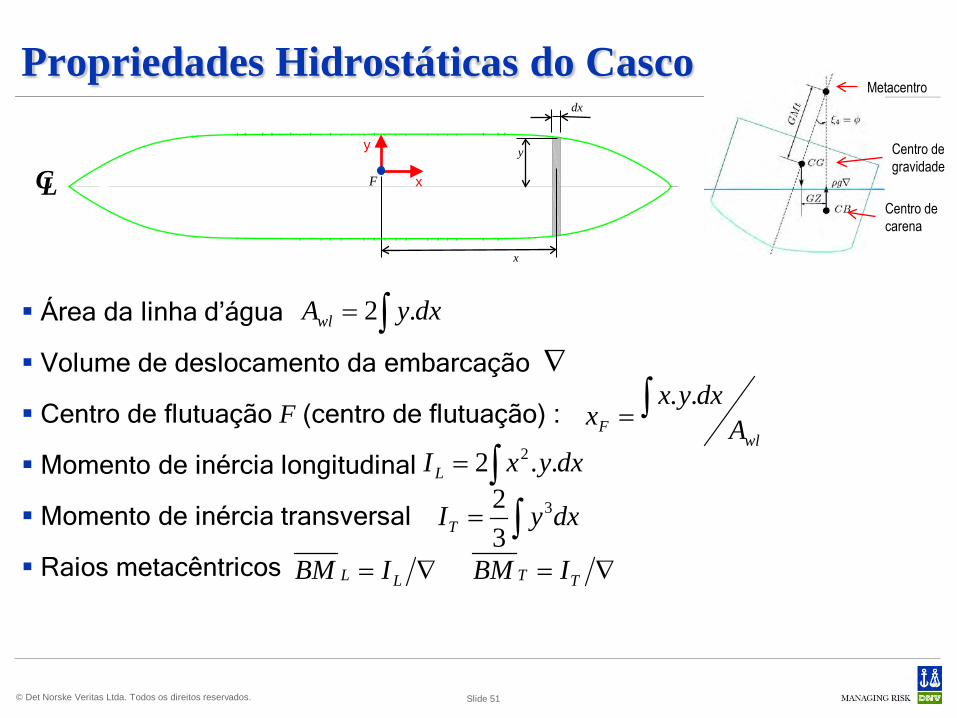
Propriedades Hidrostáticas do Casco
Slide 51
x
y
dx
F
y
x
Área da linha d’água
Volume de deslocamento da embarcação
Centro de flutuação F (centro de flutuação) :
Momento de inércia longitudinal
Momento de inércia transversal
Raios metacêntricos
∫= dxyAwl .2
wlF A
dxyxx ∫= ..
∫= dxyxIL ..2 2
∫= dxyIT3
32
∇=∇= TTLL IBMIBM
LCCentro de carena
Centro de gravidade
Metacentro
∇
© Det Norske Veritas Ltda. Todos os direitos reservados.
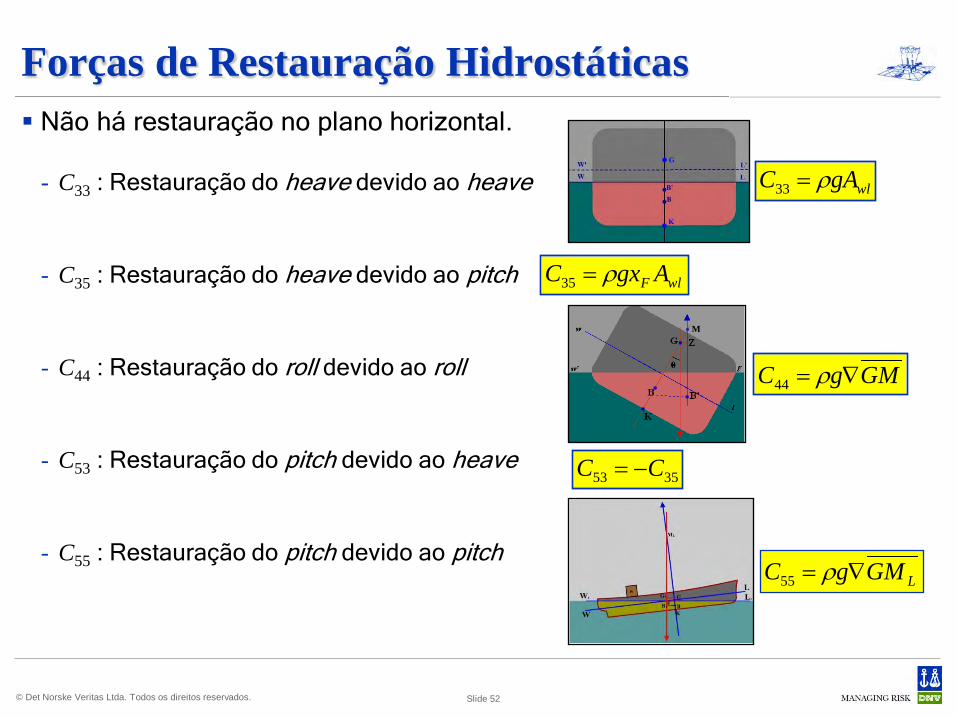
Forças de Restauração Hidrostáticas Não há restauração no plano horizontal.
- C33 : Restauração do heave devido ao heave
- C35 : Restauração do heave devido ao pitch
- C44 : Restauração do roll devido ao roll
- C53 : Restauração do pitch devido ao heave
- C55 : Restauração do pitch devido ao pitch
Slide 52
M
wlgAC ρ=33
GMgC ∇= ρ44
LGMgC ∇= ρ55
wlF AgxC ρ=35
3553 CC −=
© Det Norske Veritas Ltda. Todos os direitos reservados.
Quiz
Slide 53
Avalie os períodos naturais de uma semi-submersível com as seguintes caracterís-ticas :• 6 colunas cilíndricas (3 por bordo) com 10m de diâmetro• 2 pontões retangulares com 15m largura, 6m altura e 90m comprimento• Calado 21m• GMT=GML=1.5m• Raio de giração x = y = 15m• Cmad22=0.7. Cmad44=Cmad55=0.3• K33=ρgAwl• K44=ΔgGM
© Det Norske Veritas Ltda. Todos os direitos reservados.
T
Slide 54
Determinando a Resposta
Teste de Modelo em Peersless Pool (Londres – 1761)

© Det Norske Veritas Ltda. Todos os direitos reservados.
Teoria da Radiação-Refração As partes estruturais tem dimensões comparáveis ao comprimento da
onda (grandes volumes).
Efeitos viscosos são negligenciados.
É incluída a distorção nas ondas devido à presença da estrutura.
São criadas ondas devido ao movimento da estrutura.
Teoria linear.
Slide 55
John Nicholas NewmanEngenheiro naval americano 1935-
© Det Norske Veritas Ltda. Todos os direitos reservados.
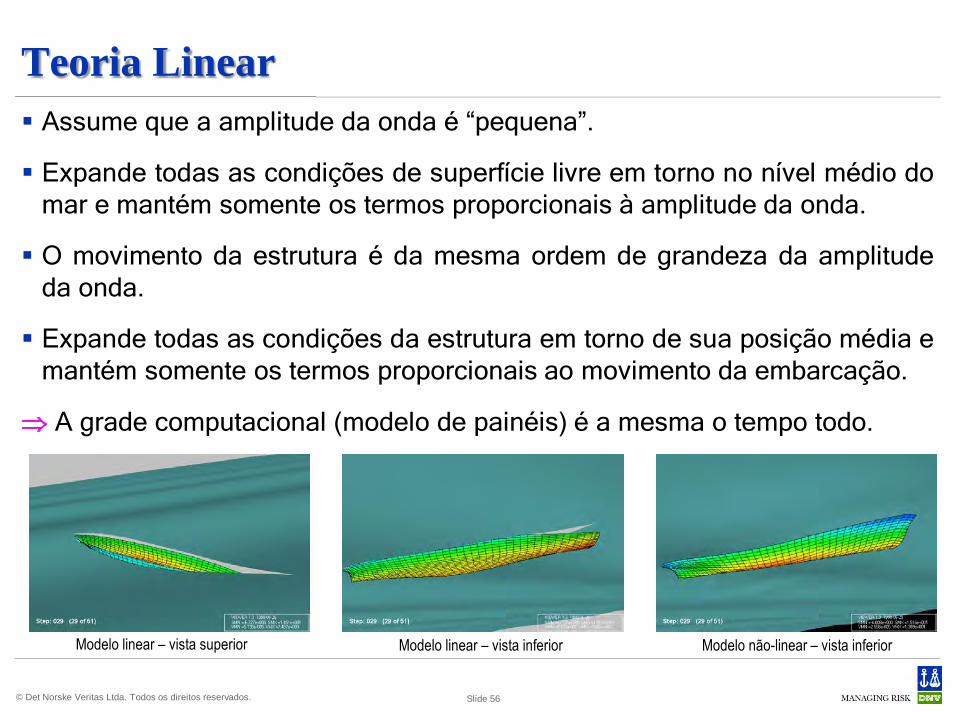
Teoria Linear Assume que a amplitude da onda é “pequena”.
Expande todas as condições de superfície livre em torno no nível médio do mar e mantém somente os termos proporcionais à amplitude da onda.
O movimento da estrutura é da mesma ordem de grandeza da amplitude da onda.
Expande todas as condições da estrutura em torno de sua posição média e mantém somente os termos proporcionais ao movimento da embarcação.
⇒ A grade computacional (modelo de painéis) é a mesma o tempo todo.
Slide 56
Modelo linear – vista superior Modelo linear – vista inferior Modelo não-linear – vista inferior

© Det Norske Veritas Ltda. Todos os direitos reservados.
Análise no Domínio da Frequência As cargas induzidas por um mar irregular podem ser obtidas por
superposição linear de componentes regulares.
Assumindo um regime permanente, com todos os efeitos transientes negligenciados, as cargas e a resposta dinâmica da estrutura está oscilando harmonicamente com a mesma frequência de encontro das ondas incidentes.
Este tipo de análise é conhecida como “análise no domínio da frequência”, e os resultados são apresentados em função da frequência de encontro.
Slide 57
S(f)
f f f
RAO
(f) 2 Z(
f)
© Det Norske Veritas Ltda. Todos os direitos reservados.
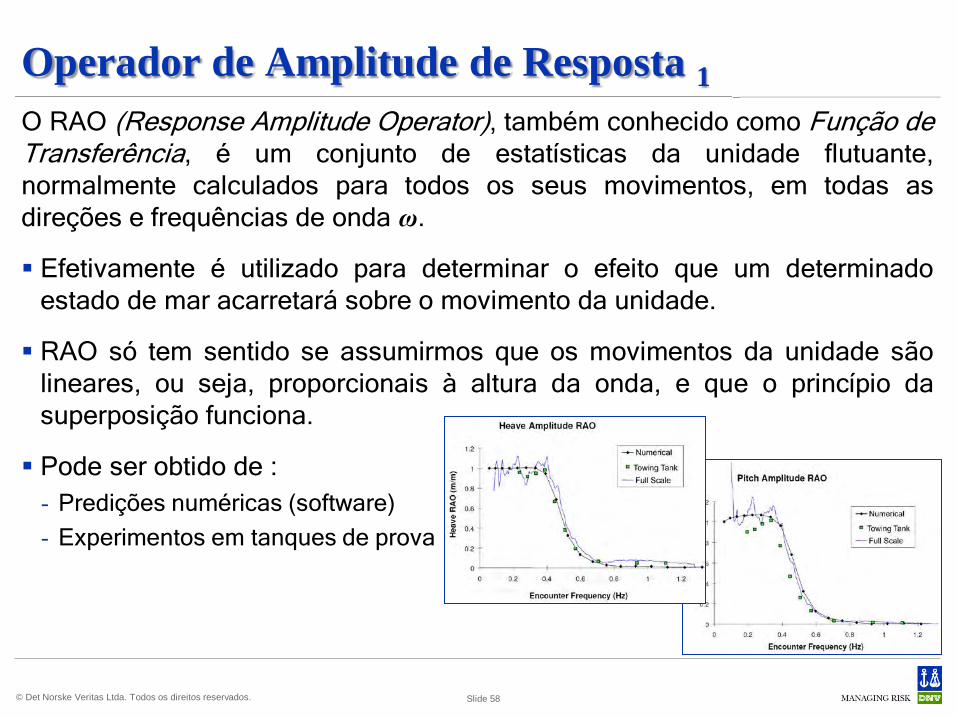
Operador de Amplitude de Resposta 1O RAO (Response Amplitude Operator), também conhecido como Função de Transferência, é um conjunto de estatísticas da unidade flutuante, normalmente calculados para todos os seus movimentos, em todas as direções e frequências de onda ω.
Efetivamente é utilizado para determinar o efeito que um determinado estado de mar acarretará sobre o movimento da unidade.
RAO só tem sentido se assumirmos que os movimentos da unidade são lineares, ou seja, proporcionais à altura da onda, e que o princípio da superposição funciona.
Pode ser obtido de : - Predições numéricas (software) - Experimentos em tanques de prova
Slide 58
© Det Norske Veritas Ltda. Todos os direitos reservados.
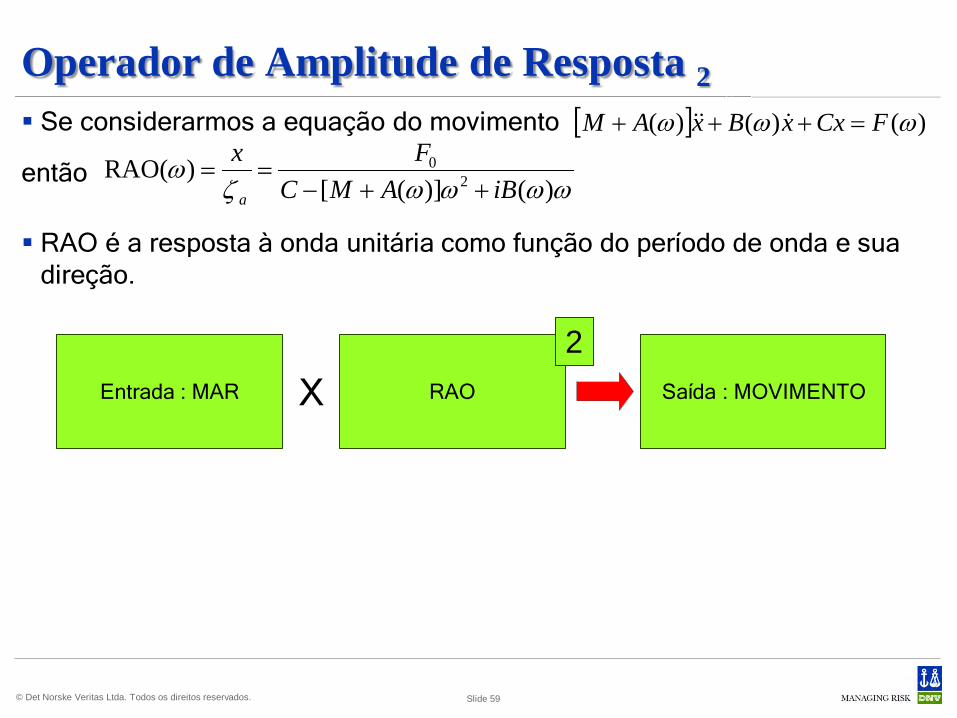
Operador de Amplitude de Resposta 2 Se considerarmos a equação do movimento
então
RAO é a resposta à onda unitária como função do período de onda e sua direção.
Slide 59
[ ] )()()( ωωω FCxxBxAM =+++
ωωωωζω
)()]([)RAO( 2
0
iBAMCFx
a ++−==
RAO Entrada : MAR Saída : MOVIMENTO X 2
© Det Norske Veritas Ltda. Todos os direitos reservados.
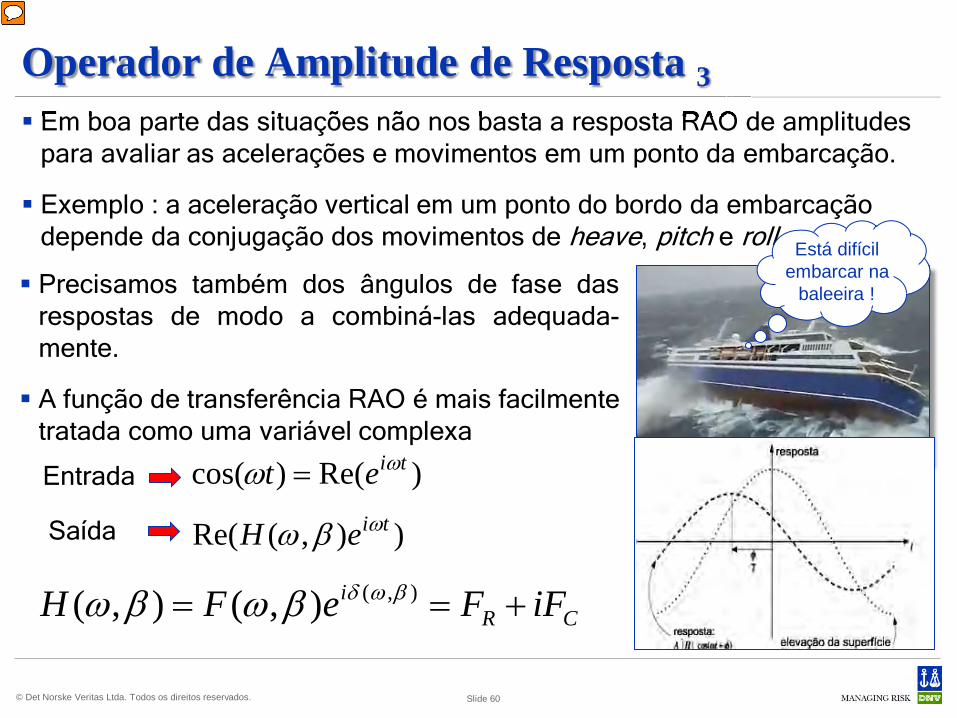
Em boa parte das situações não nos basta a resposta RAO de amplitudes para avaliar as acelerações e movimentos em um ponto da embarcação.
Exemplo : a aceleração vertical em um ponto do bordo da embarcação depende da conjugação dos movimentos de heave, pitch e roll.
Em boa parte das situações não nos basta a resposta RAO de amplitudes Em boa parte das situações não nos basta a resposta RAO de amplitudes Em boa parte das situações não nos basta a resposta RAO de amplitudes Em boa parte das situações não nos basta a resposta RAO de amplitudes Em boa parte das situações não nos basta a resposta RAO de amplitudes Em boa parte das situações não nos basta a resposta RAO de amplitudes
Operador de Amplitude de Resposta 3
Slide 60
Está difícil embarcar na
baleeira ! Precisamos também dos ângulos de fase das respostas de modo a combiná-las adequada-mente.
A função de transferência RAO é mais facilmente tratada como uma variável complexa
Entrada
Saída
CRi iFFeFH +== ),(),(),( βωδβωβω
)Re()cos( tiet ωω =
)),(Re( tieH ωβω
© Det Norske Veritas Ltda. Todos os direitos reservados.
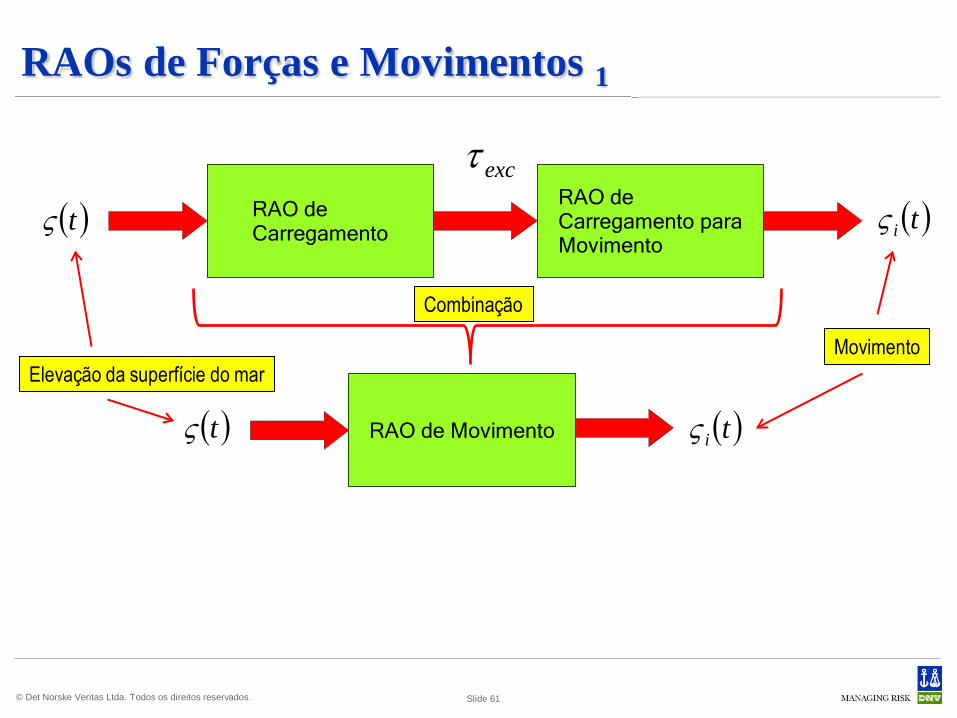
RAOs de Forças e Movimentos 1
Slide 61
RAO de Carregamento
RAO de Carregamento para Movimento
RAO de Movimento
( )tiς( )tς
( )tς ( )tiς
MovimentoElevação da superfície do mar
Combinação
excτ
© Det Norske Veritas Ltda. Todos os direitos reservados.
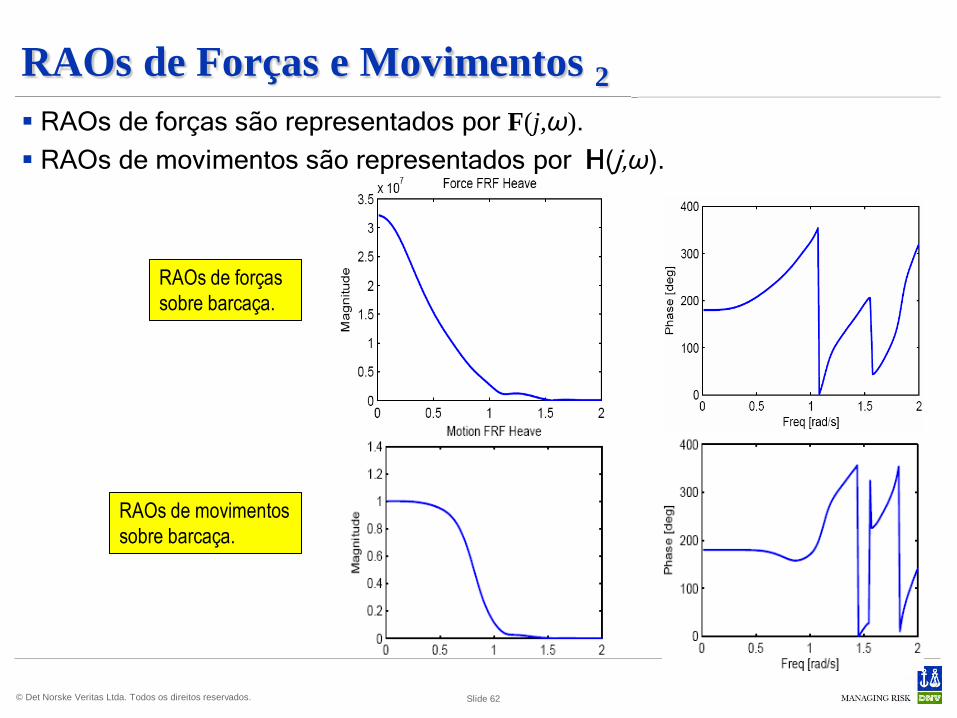
RAOs de Forças e Movimentos 2
Slide 62
RAOs de forças são representados por F(j,ω). RAOs de movimentos são representados por H(j,ω).
RAOs de forças sobre barcaça.
RAOs de movimentos sobre barcaça.
© Det Norske Veritas Ltda. Todos os direitos reservados.
RAO de Forças Para uma onda regular
as forças lineares de excitação serão :
A amplitude e fase das forças de excitação dependem de : - Ângulo de encontro (frequência das ondas, velocidade da embarcação, ângulo de
aproamento relativo às ondas) - Amplitude das ondas - Velocidade de avanço
Slide 63
( )ςϕωςς += ti cos
( ) ( )[ ]ωϕωωττ τiiiexc t += cos,
© Det Norske Veritas Ltda. Todos os direitos reservados.
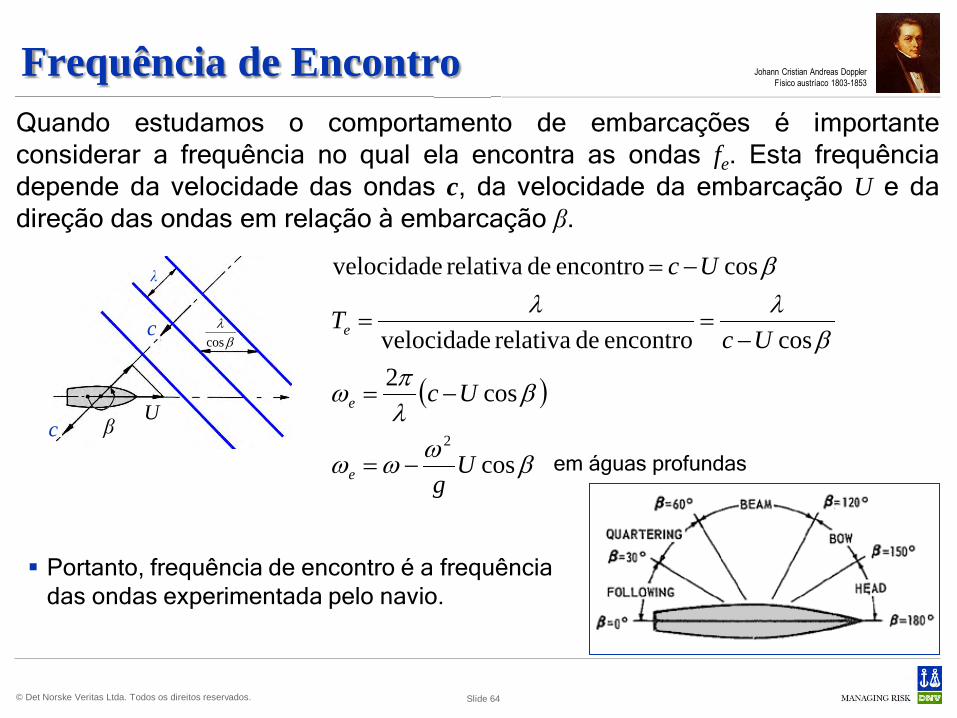
Frequência de Encontro
Slide 64
( )
βωωω
βλπω
βλλβ
cos
cos2cosencontroderelativavelocidade
cosencontroderelativavelocidade
2
Ug
Uc
UcT
Uc
e
e
e
−=
−=
−==
−=
em águas profundas
Quando estudamos o comportamento de embarcações é importante considerar a frequência no qual ela encontra as ondas fe. Esta frequência depende da velocidade das ondas c, da velocidade da embarcação U e da direção das ondas em relação à embarcação β.
β
c
Uc
λ
βλ
cos
Portanto, frequência de encontro é a frequência das ondas experimentada pelo navio.
Johann Cristian Andreas DopplerFísico austríaco 1803-1853
© Det Norske Veritas Ltda. Todos os direitos reservados.
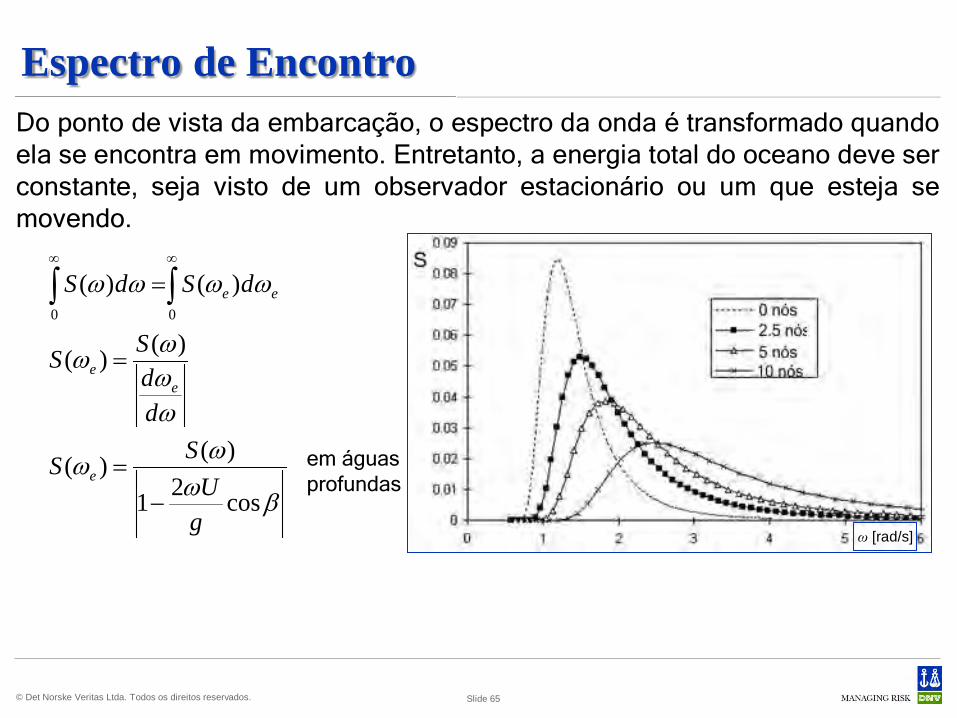
Espectro de Encontro
Slide 65
βωωω
ωωωω
ωωωω
cos21
)()(
)()(
)()(00
gU
SS
ddSS
dSdS
e
ee
ee
−=
=
=∫∫∞∞
em águas profundas
ω [rad/s]
Do ponto de vista da embarcação, o espectro da onda é transformado quando ela se encontra em movimento. Entretanto, a energia total do oceano deve ser constante, seja visto de um observador estacionário ou um que esteja se movendo.
© Det Norske Veritas Ltda. Todos os direitos reservados.
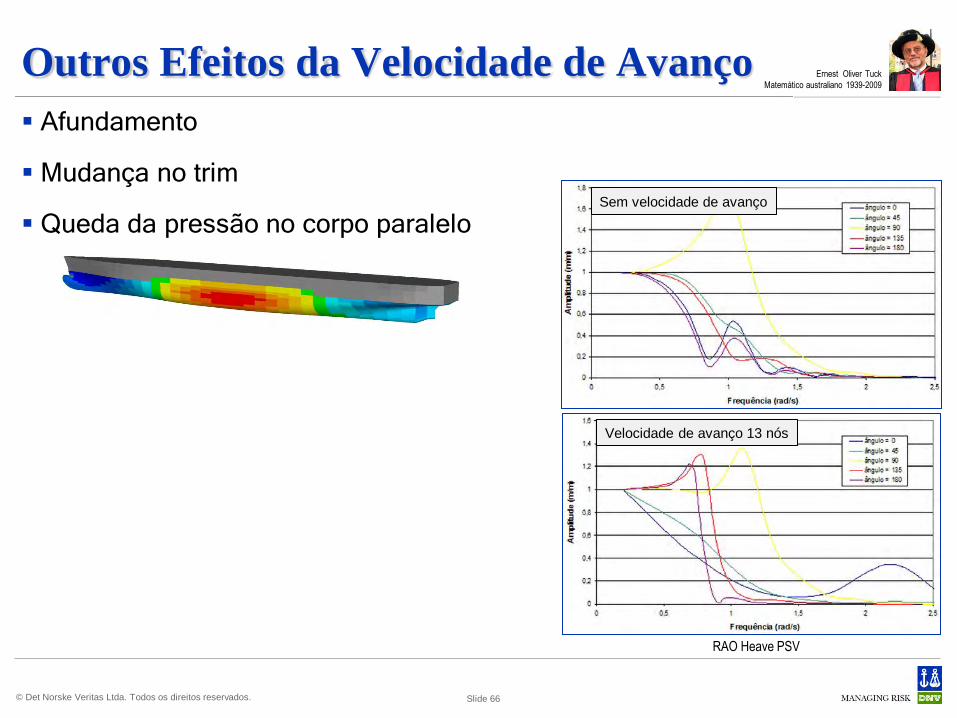
Outros Efeitos da Velocidade de Avanço Afundamento
Mudança no trim
Queda da pressão no corpo paralelo
Slide 66
Ernest Oliver TuckMatemático australiano 1939-2009
Sem velocidade de avanço
Velocidade de avanço 13 nós
RAO Heave PSV
© Det Norske Veritas Ltda. Todos os direitos reservados.
Recomendações para Análise no Domínio da Frequência Para uma análise no domínio da frequência pelo menos 30 frequências
devem ser analisadas.
Um espaçamento entre frequências não maior que ζω0 deve ser utilizada
Na região da ressonância um menor espaçamento ainda deve ser utilizado.
Slide 67
© Det Norske Veritas Ltda. Todos os direitos reservados.
Carregamento Não-Linear de Ondas Existem alguns problemas relacionados à interação ondas-estrutura que
não podem ser descritos unicamente pela teoria linear.
Os problemas não lineares tentam descrever mais precisamente as condições na superfície livre e no corpo em valores instantâneos ao invés de valores médios.
Um modo conveniente de resolver este tipo de problema é utilizando a análise de perturbação.
Na teoria de segunda ordem os problemas são resolvidos até a segunda ordem da amplitude da onda incidente, ou seja, termos potenciais e de pressão proporcionais à amplitude e ao quadrado da amplitude da onda são considerados.
Os efeitos do carregamento de segunda ordem são importantes para estruturas que são mantidas em posição através de linhas de ancoragem ou sistemas de DP, ou para embarcações que sigam trajetórias definidas.
Slide 68
© Det Norske Veritas Ltda. Todos os direitos reservados.
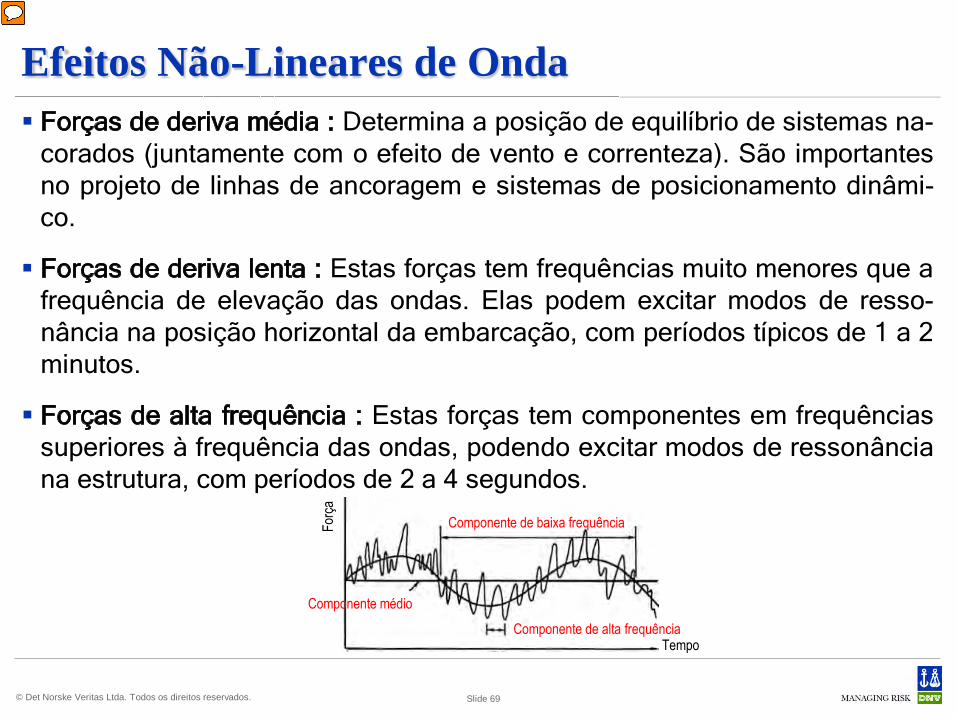
Efeitos Não-Lineares de Onda Forças de deriva média : Determina a posição de equilíbrio de sistemas na-
corados (juntamente com o efeito de vento e correnteza). São importantes no projeto de linhas de ancoragem e sistemas de posicionamento dinâmi-co.
Forças de deriva lenta : Estas forças tem frequências muito menores que a frequência de elevação das ondas. Elas podem excitar modos de resso-nância na posição horizontal da embarcação, com períodos típicos de 1 a 2 minutos.
Forças de alta frequência : Estas forças tem componentes em frequências superiores à frequência das ondas, podendo excitar modos de ressonância na estrutura, com períodos de 2 a 4 segundos.
Slide 69
Tempo
Força Componente de baixa frequência
Componente de alta frequênciaComponente médio
© Det Norske Veritas Ltda. Todos os direitos reservados.
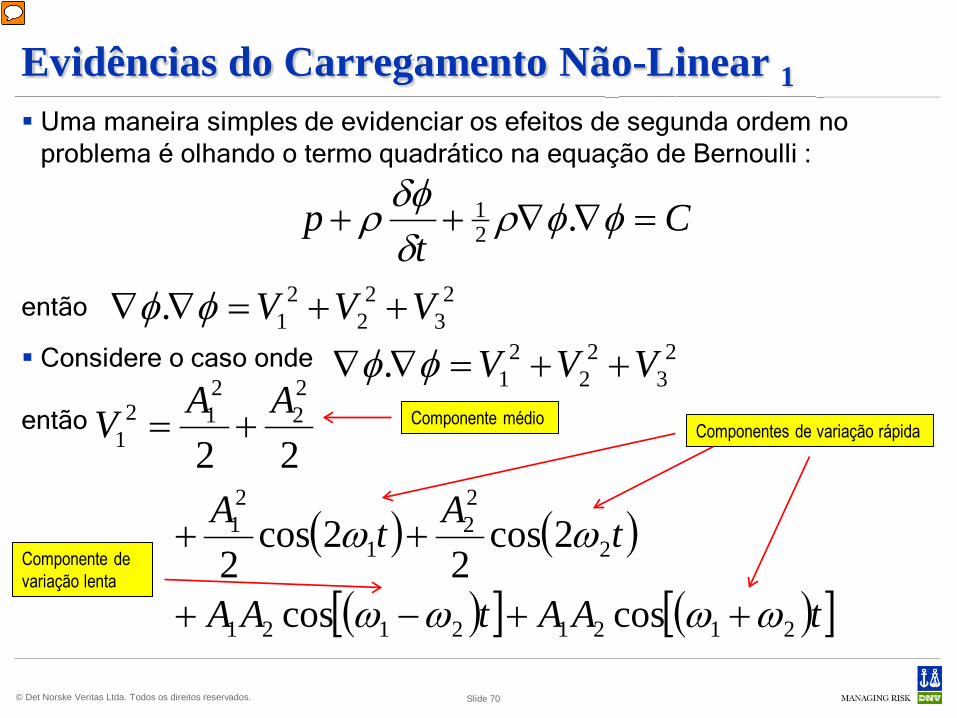
Evidências do Carregamento Não-Linear 1 Uma maneira simples de evidenciar os efeitos de segunda ordem no
problema é olhando o termo quadrático na equação de Bernoulli :
então
Considere o caso onde
então
Slide 70
Ct
p =∇∇++ φφρδδφρ .2
1
23
22
21. VVV ++=∇∇ φφ
23
22
21. VVV ++=∇∇ φφ
( ) ( )
( )[ ] ( )[ ]tAAtAA
tAtA
AAV
21212121
2
22
1
21
22
212
1
coscos
2cos2
2cos2
22
ωωωω
ωω
++−+
++
+= Componente médioComponentes de variação rápida
Componente de variação lenta
© Det Norske Veritas Ltda. Todos os direitos reservados.
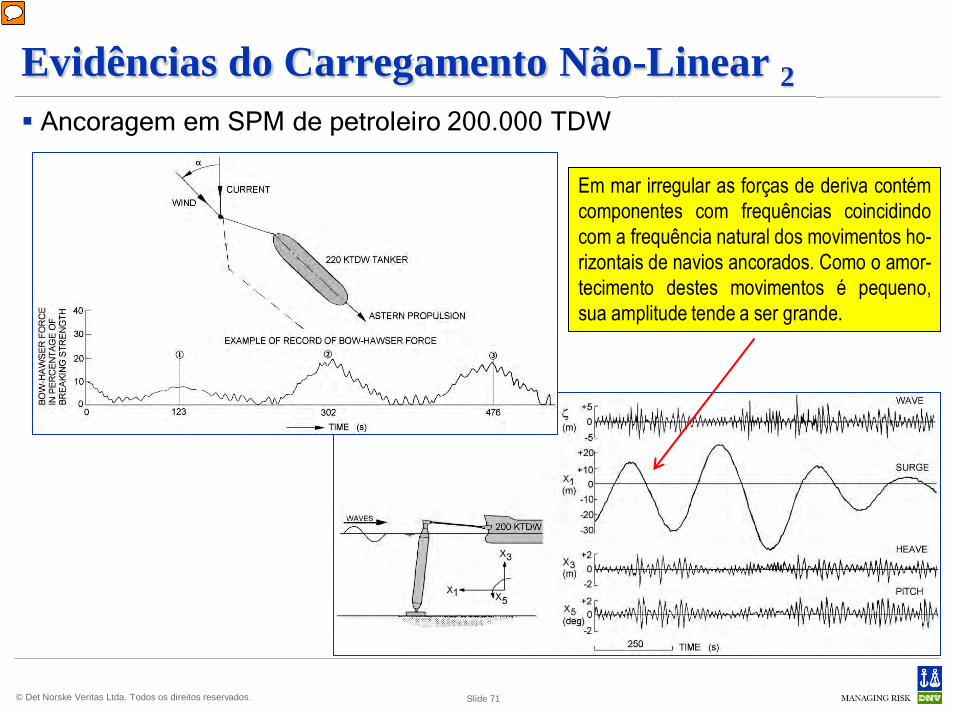
Evidências do Carregamento Não-Linear 2 Ancoragem em SPM de petroleiro 200.000 TDW
Em mar irregular as forças de deriva contémcomponentes com frequências coincidindocom a frequência natural dos movimentos ho-rizontais de navios ancorados. Como o amor-tecimento destes movimentos é pequeno,sua amplitude tende a ser grande.
Slide 71
© Det Norske Veritas Ltda. Todos os direitos reservados.
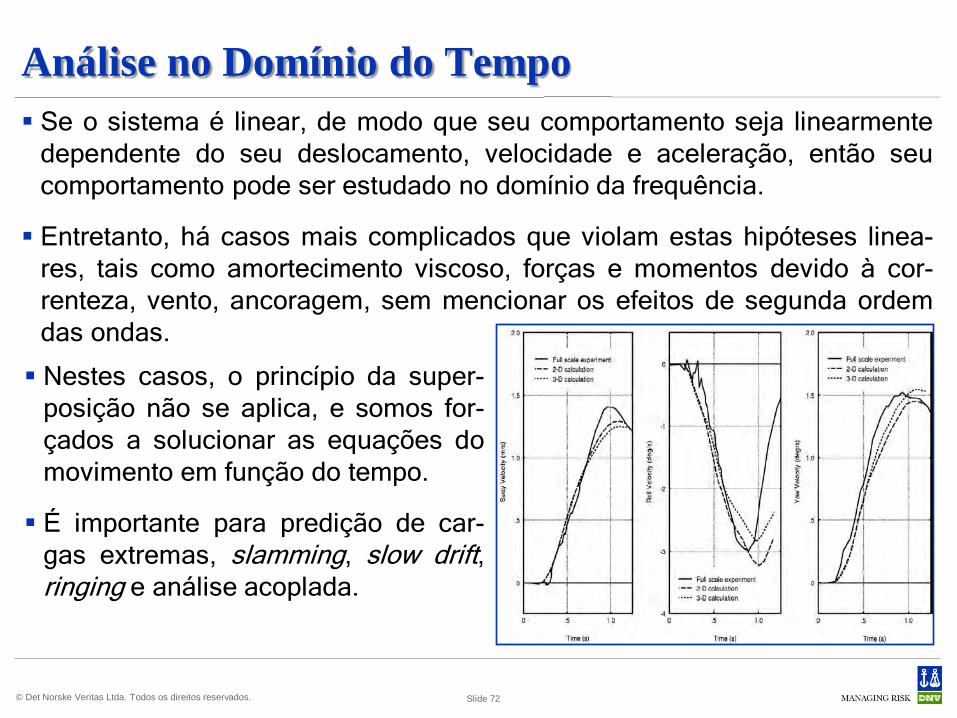
Análise no Domínio do Tempo Se o sistema é linear, de modo que seu comportamento seja linearmente
dependente do seu deslocamento, velocidade e aceleração, então seu comportamento pode ser estudado no domínio da frequência.
Entretanto, há casos mais complicados que violam estas hipóteses linea-res, tais como amortecimento viscoso, forças e momentos devido à cor-renteza, vento, ancoragem, sem mencionar os efeitos de segunda ordem das ondas.
Nestes casos, o princípio da super-posição não se aplica, e somos for-çados a solucionar as equações do movimento em função do tempo.
É importante para predição de car-gas extremas, slamming, slow drift, ringing e análise acoplada.
Slide 72
© Det Norske Veritas Ltda. Todos os direitos reservados.
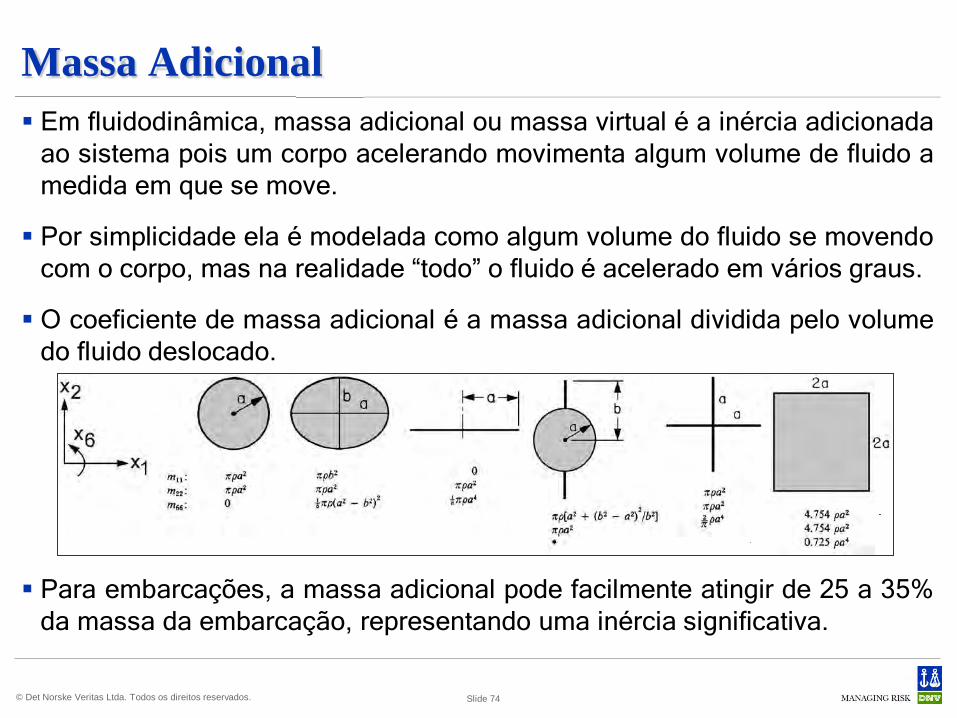
Massa Adicional Em fluidodinâmica, massa adicional ou massa virtual é a inércia adicionada
ao sistema pois um corpo acelerando movimenta algum volume de fluido a medida em que se move.
Por simplicidade ela é modelada como algum volume do fluido se movendo com o corpo, mas na realidade “todo” o fluido é acelerado em vários graus.
O coeficiente de massa adicional é a massa adicional dividida pelo volume do fluido deslocado.
Para embarcações, a massa adicional pode facilmente atingir de 25 a 35% da massa da embarcação, representando uma inércia significativa.
Slide 74
© Det Norske Veritas Ltda. Todos os direitos reservados.
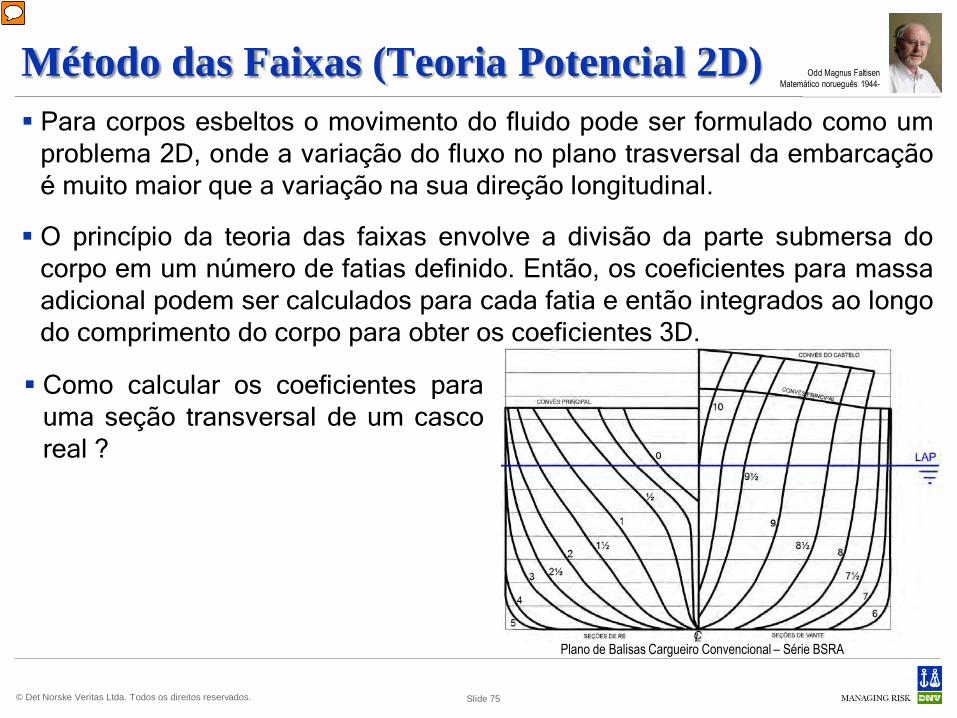
Método das Faixas (Teoria Potencial 2D) Para corpos esbeltos o movimento do fluido pode ser formulado como um
problema 2D, onde a variação do fluxo no plano trasversal da embarcação é muito maior que a variação na sua direção longitudinal.
O princípio da teoria das faixas envolve a divisão da parte submersa do corpo em um número de fatias definido. Então, os coeficientes para massa adicional podem ser calculados para cada fatia e então integrados ao longo do comprimento do corpo para obter os coeficientes 3D.
Slide 75
Como calcular os coeficientes para uma seção transversal de um casco real ?
Plano de Balisas Cargueiro Convencional – Série BSRA
Odd Magnus FaltisenMatemático norueguês 1944-
© Det Norske Veritas Ltda. Todos os direitos reservados.
Transformação Conforme 1
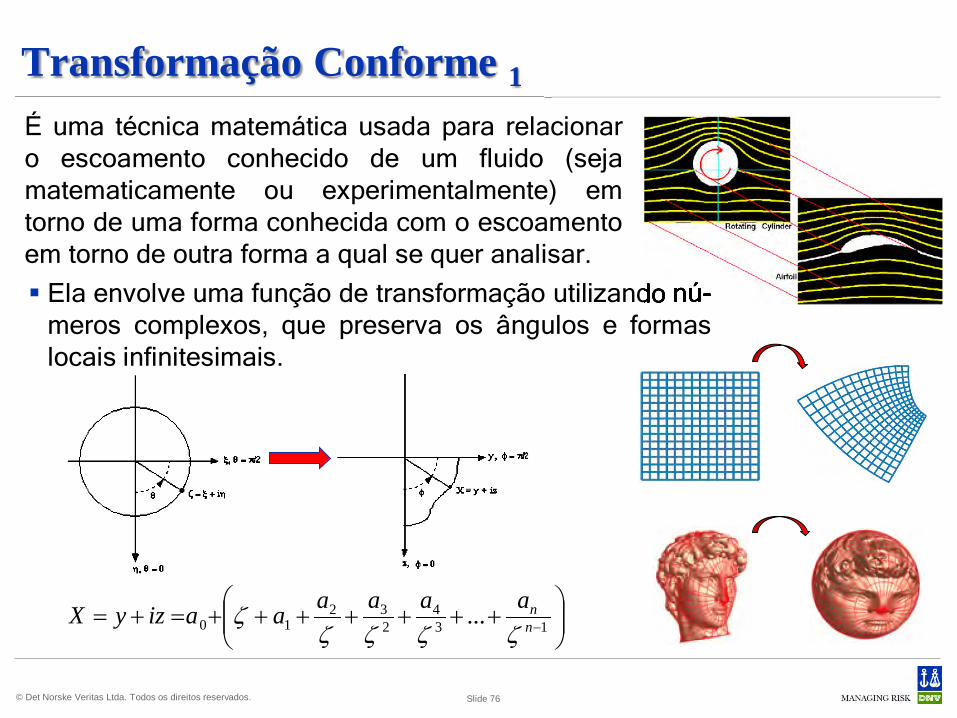
Ela envolve uma função de transformação utilizando nú-meros complexos, que preserva os ângulos e formas locais infinitesimais.
Slide 76
utilizando nú-
É uma técnica matemática usada para relacionar o escoamento conhecido de um fluido (seja matematicamente ou experimentalmente) em torno de uma forma conhecida com o escoamento em torno de outra forma a qual se quer analisar.
+++++++=+= −13
4232
10 ... nnaaaaaaizyX
ζζζζζ
© Det Norske Veritas Ltda. Todos os direitos reservados.
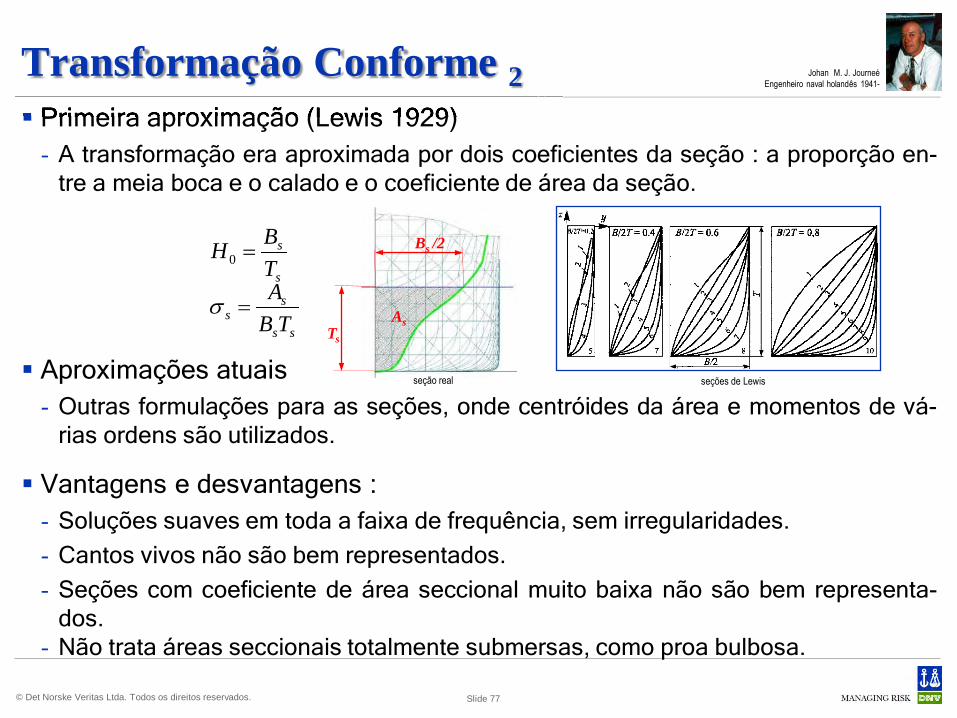
Primeira aproximação (Lewis 1929) - A transformação era aproximada por dois coeficientes da seção : a proporção en-
tre a meia boca e o calado e o coeficiente de área da seção.
Aproximações atuais - Outras formulações para as seções, onde centróides da área e momentos de vá-
rias ordens são utilizados.
Vantagens e desvantagens : - Soluções suaves em toda a faixa de frequência, sem irregularidades. - Cantos vivos não são bem representados. - Seções com coeficiente de área seccional muito baixa não são bem representa-
dos. - Não trata áreas seccionais totalmente submersas, como proa bulbosa.
Primeira aproximação (Lewis 1929)
Transformação Conforme 2
ss
ss
s
s
TBATBH
=
=
σ
0Bs /2
Ts
As
seção real seções de Lewis
Johan M. J. JourneéEngenheiro naval holandês 1941-
Slide 77
© Det Norske Veritas Ltda. Todos os direitos reservados.
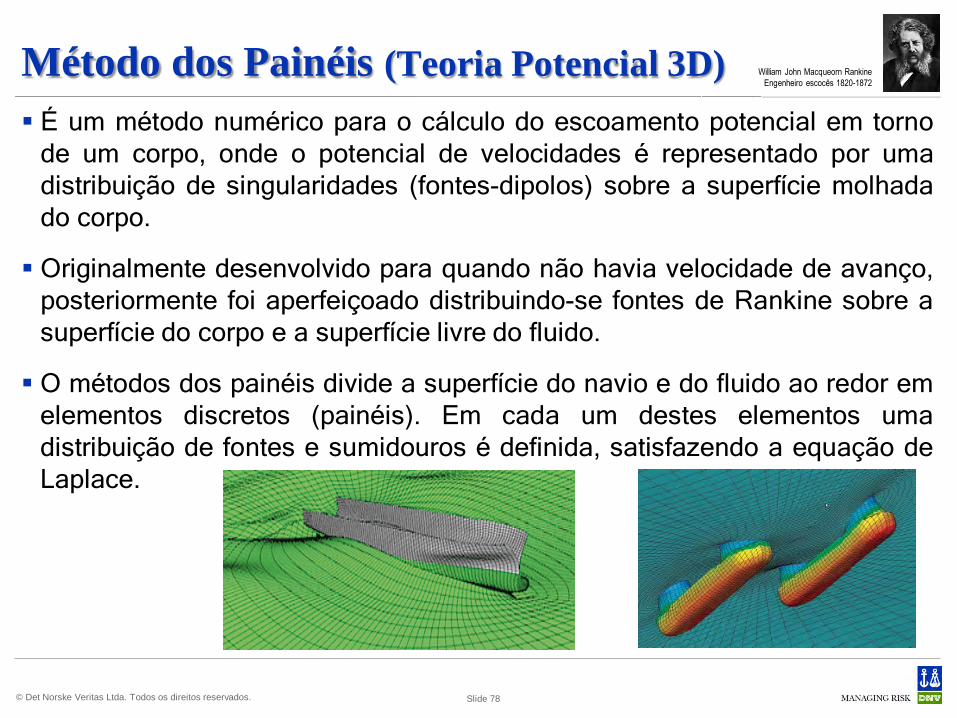
Método dos Painéis (Teoria Potencial 3D) É um método numérico para o cálculo do escoamento potencial em torno
de um corpo, onde o potencial de velocidades é representado por uma distribuição de singularidades (fontes-dipolos) sobre a superfície molhada do corpo.
Originalmente desenvolvido para quando não havia velocidade de avanço, posteriormente foi aperfeiçoado distribuindo-se fontes de Rankine sobre a superfície do corpo e a superfície livre do fluido.
O métodos dos painéis divide a superfície do navio e do fluido ao redor em elementos discretos (painéis). Em cada um destes elementos uma distribuição de fontes e sumidouros é definida, satisfazendo a equação de Laplace.
Slide 78
William John Macqueorn RankineEngenheiro escocês 1820-1872

© Det Norske Veritas Ltda. Todos os direitos reservados.
Recomendações DNV RP-C205 Sobre os Painéis O comprimento da diagonal dos painéis deve ser menor que 1/6 do menor
comprimento de onda analisado (1/8 segundo Faltisen). Uma malha mais densa deve ser aplicada em áreas com mudanças
bruscas de geometria (cantos vivos). Quando modelando estruturas finas de paredes com água em ambos os
lados o tamanho do painel não deve exceder 3 a 4 vezes a espessura da parede. Uma malha mais densa deve ser aplicada na região da linha d’água
quando calculando forças de deriva de ondas. Devem ser realizados testes de convergência através do aumento
progressivo do número de painéis. No cálculo de elevação da superfície da água e velocidades do fluido uma
malha mais densa, da ordem de 1/10 do menor comprimento de onda, deve ser utilizada.
Slide 79
© Det Norske Veritas Ltda. Todos os direitos reservados.
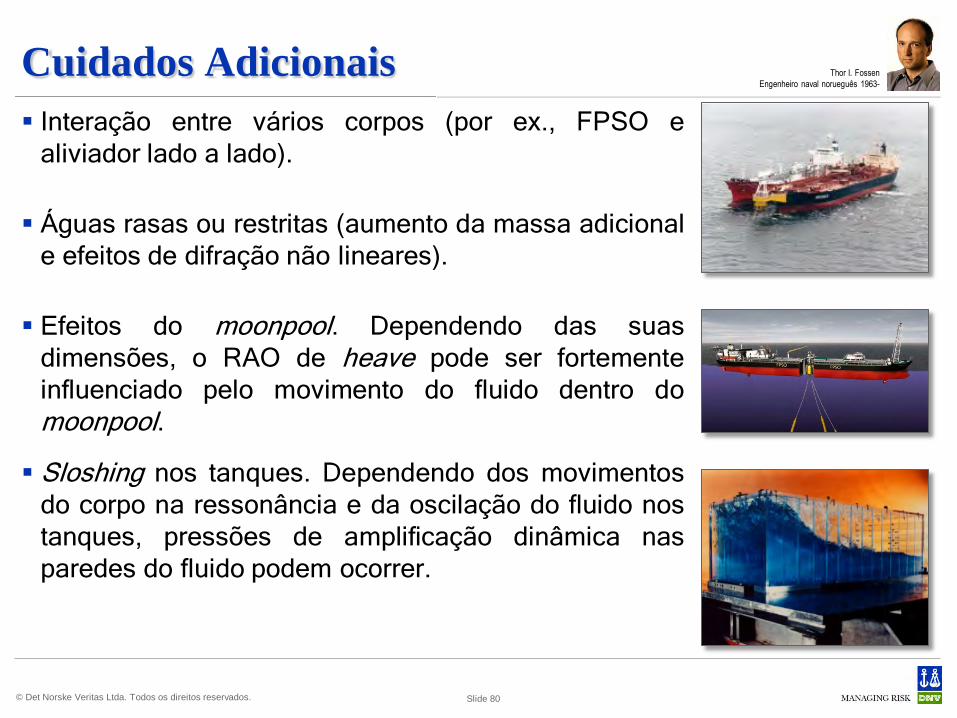
Cuidados Adicionais Interação entre vários corpos (por ex., FPSO e
aliviador lado a lado).
Águas rasas ou restritas (aumento da massa adicional e efeitos de difração não lineares).
Efeitos do moonpool. Dependendo das suas dimensões, o RAO de heave pode ser fortemente influenciado pelo movimento do fluido dentro do moonpool.
Sloshing nos tanques. Dependendo dos movimentos do corpo na ressonância e da oscilação do fluido nos tanques, pressões de amplificação dinâmica nas paredes do fluido podem ocorrer.
Slide 80
Thor I. FossenEngenheiro naval norueguês 1963-
© Det Norske Veritas Ltda. Todos os direitos reservados.
Bibliografia Recomendada F. M. Lewis. (1929) “The Inertia of Water Surrounding a Vibrating Ship”,
Transactions, SNAME.
Faltinsen, O.M. (1990) “Sea Loads on Ships and Offshore Structures”, Cambridge University Press, Cambridge, UK
Newman, J.N. (1977) “Marine Hydrodynamics”, MIT Press, Cambridge, MA, USA
Sarpkaya, T (1979) “Mechanics of Wave Forces on Offshore Structures”, Van Nostrand Reinhold Company, New York, USA
Jensen, J.J. (2001) “Load and Global Response of Ships”, Elsevier Science Ltd., Oxford, UK
Chakrabarti, S.K. (2003) “Hydrodynamics of Offshore Structures”, WIT Press, Southampton, UK
Fossen, T.I. (1994) “Guindance and Control of Ocean Vehicles”, John Wiley & Sons, Chichester, England
Slide 81
© Det Norske Veritas Ltda. Todos os direitos reservados. Slide 82• Slide 82
?João Henrique Volpini MattosEngenheiro NavalDNV Software - Maritime & Offshore SolutionsRegional Sales Manager – South America [email protected] +55 21 3722 7337 +55 21 8132 8927
Salvaguardando a vida, a propriedade e o meio ambiente
Dúvidas
www.dnv.com.br