apostila de cov251 - comportamento hidrodinâmico de plataformas ii
TRANSCRIPT

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 1/98
Programa de Engenharia Oceanica
COPPE / UFRJ
Universidade Federal do Rio de Janeiro
Hidrodinamica IVb
SH Sphaier
Marco de 2008

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 2/98
Sumario
1 Introducao a Dinamica de Corpos Flutuantes 1
1.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Sistemas de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Consideracoes Fısicas sobre o Problema Hidrodinamico . . . . . . . . . . . . . 2
2 Dinamica do Corpo Bidimensional Flutuante 7
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Movimento Vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Movimento de Jogo Puro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4 Movimento Lateral Puro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 Movimentos Simultaneos Lateral e de Jogo . . . . . . . . . . . . . . . . . . . . 20
2.6 Hipotese de Froude-Krylov para o Calculo de Forca de Onda . . . . . . . . . . 21
2.6.1 Forcas de Froude-Krylov em Estruturas Retangulares . . . . . . . . . . 22
2.6.2 Cancelamento de Forcas de Froude-Krylov em um Retangulo . . . . . . 26
2.6.3 Extensao da expressao de Froude-Krylov para o caso de um Navio com
fundo plano horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.6.4 Cancelamento de Forcas de Froude-Krylov em Estruturas Semisub-mersıveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Dinamica de um Corpo Tridimensional Esbelto em Ondas 31
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Movimentos vertical e de rotacao em torno do eixo lateral . . . . . . . . . . . . 32
3.2.1 Equacoes dos Movimentos Acoplados de Heave e Pitch . . . . . . . . . 33
3.2.2 Solucao das equacoes de movimento . . . . . . . . . . . . . . . . . . . . 35
3.3 Movimentos lateral, de rotacao em torno do eixo Oz e de jogo . . . . . . . . . 36
3.3.1 Equacoes de movimento no plano horizontal . . . . . . . . . . . . . . . 37
3.3.2 Solucao das equacoes de movimento . . . . . . . . . . . . . . . . . . . . 38
4 Generalizacao do Problema Dinamico 41
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Corpos com Geometria Qualquer . . . . . . . . . . . . . . . . . . . . . . . . . 41
i

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 3/98
ii Texto Preliminar, SH Sphaier
4.3 Um Exemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 Navio em Mar Irregular 495.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2 Transformada de Fourier da Equacao de Movimento . . . . . . . . . . . . . . . 495.3 O Espectro de Resposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.4 Espectro de Resposta de um Sistema Oceanico em um Mar Irregular . . . . . 51
5.5 Movimentos de um Corpo Flutuante no Mar . . . . . . . . . . . . . . . . . . . 52
5.5.1 Deslocamentos, velocidades e aceleracoes em um ponto do corpo . . . . 53
5.5.2 Eventos de Seakeeping . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.6 Resumo Esquematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6 Hidrodinamica de Corpos Flutuantes Estacionarios 65
6.1 Aspectos Fısicos: Leis e Princıpios . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2 Formulacao hidrodinamica: Leis e Princıpios . . . . . . . . . . . . . . . . . . . 676.3 Forcas Atuantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.3.1 Forcas hidrodinamicas . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.3.2 Forca de excitacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.3.3 Forca de radiacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.3.4 Quantidades de Movimento Linear e Angular da Massa do Corpo . . . 82
6.3.5 Restauracao: Acao das forcas hidrostaticas e das forcas de corpo . . . . 87
6.4 Equacoes de Movimento no Domınio da Frequencia . . . . . . . . . . . . . . . 92

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 4/98
Lista de Figuras
1.1 Onda Incidente e sua Difracao . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Radiacao e Empuxo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 Forca de Restauracao Vertical Resultante . . . . . . . . . . . . . . . . . . . . . 8
2.2 Decremento Logarıtmico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Fator de Amplificacao, Funcao de transferencia, Rao . . . . . . . . . . . . . . . 162.4 Angulo de Fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.5 Banda de uma secao naval . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6 Cancelamento em Formas Retangulares . . . . . . . . . . . . . . . . . . . . . . 232.7 Cancelamento em Estruturas Semisubmersıveis . . . . . . . . . . . . . . . . . . 28
4.1 Inercia Adicional e Amortecimento na Forma Adimensional I . . . . . . . . . . 45
4.2 Inercia Adicional e Amortecimento na Forma Adimensional II . . . . . . . . . 46
4.3 Inercia Adicional e Amortecimento na Forma Adimensional III . . . . . . . . . 46
4.4 Forca de Excitacao Vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.5 Momento de Excitacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.6 Rao de Heave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.7 Rao de Pitch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1 Apresentacao Esquematica I . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2 Apresentacao Esquematica II . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.3 Apresentacao Esquematica III . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.4 Apresentacao Esquematica IV . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.5 Apresentacao Esquematica V . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
iii

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 5/98
Capıtulo 1
Introducao a Dinamica de CorposFlutuantes
1.1 Introducao
O estudo do comportamento de corpos flutuantes trata do estudo da dinamica de um corpo
flutuante sujeito a forcas hidrodinamicas, hidrostaticas e forcas de corpo. Neste capıtulo ini-
ciaremos o estudo do problema de um corpo na superfıcie livre com liberdade de executar
movimento vertical. Em seguida analisaremos os aspectos hidrodinamicos, porem ainda de um
ponto mais descritivo do fenomeno que de um ponto de sua formulacao matematica. Posteri-ormente apresentaremos a formulacao matematica e a solucao para o fenomeno hidrodinamicode radiacao de ondas a partir dos movimentos de um corpo junto a superfıcie livre. Por uma
questao de simplicidade de formulacao matematica analisaremos o caso de um batedor de
ondas do tipo pistao. O problema de um corpo fixo em ondas e analisado na secao seguinte
para introduzirmos a hipotese de Froude-Krylov e o problema de difracao. Finalmente ap-
resentamos o caso de um corpo flutuante em ondas, estabelecendo o problema de valor de
contorno linearizado.
1.2 Sistemas de referencia
Ao longo do texto utilizaremos tres sistemas de referencia. Um sistema de coordenadas
OXY Z com o plano Z = 0 sobre a superfıcie livre. O eixo OZ aponta verticalmente para
cima.
Um segundo sistema utilizado e o sistema oxyz cujo centro, sempre concide com o ponto O,
1

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 6/98
2 Texto Preliminar, SH Sphaier
com eixo ox fazendo um angulo β com o eixo OX .
O terceiro sistema aqui considerado e o sistema oxyz , o qual se desloca com a velocidade
do navio, sem oscilar. Seu centro esta localizado na superfıcie livre em repouso e o eixo oz
aponta verticalmente para cima. O ponto o, centro do sistema, esta localizado a meio navio.Muitas vezes e mais pratico localiza-lo na vertical passando pelo centro de gravidade.
O navio desloca-se em linha reta com velocidade U na direcao do eixo ox.
As ondas se propagam na direcao do eixo OX e o vetor celeridade da onda faz um angulo β com o vetor velocidade do navio, e consequentemente com o eixo longitudinal do navio.
1.3 Consideracoes Fısicas sobre o Problema Hidrodi-
namico
Tentando apresentar uma visualizacao do fenomeno e identificacao das acoes hidrodinamicas
sobre um corpo flutuante deslocando-se em ondas, vamos considerar, para efeito de analise,que o corpo, inicialmente, se encontra em repouso em aguas tranquilas sujeito a acao de seu
peso e ao empuxo, resultante da acao das pressoes hidrostaticas sobre a superfıcie molhada
do corpo.
A nossa experiencia diaria nos diz que, incidindo uma onda sobre o corpo, este saira da
situacao de equilıbrio estatico executando movimentos no meio fluido.Inicialmente imaginemos o que se passa sobre uma superfıcie fictıcia cuja forma e igual a
forma do corpo colocado no meio fluido. Se nao houvesse ondas, a forca que o fluido, externo
a superfıcie imaginaria, faria sobre a massa fluida contida em seu interior seria igual ao pesodesta massa fluida. Isto nada mais e que o princıpio de Arquimedes. Esta forca pode ser
obtida como resultado da integracao da pressao hidrostatica pe,0.
Consideremos agora a acao de ondas. As partıculas fluidas atravessam a superfıcie ima-ginaria e a pressao em cada um de seus pontos varia com o tempo devido a contribuicao
da pressao hidrodinamica das ondas incidentes. Alem da forca hidrostatica temos uma forca
hidrodinamica devida ao campo de pressoes decorrente da onda incidente pinc. A esta com-ponente hidrodinamica de forca chamamos de forca de onda segundo a hipotese de Froude-
Krylov, ou de forma abreviada, forca de Froude-Krylov. Trata-se entao de determinar a forca
hidrodinamica devida a pressao hidrodinamica causada pela onda incidente sobre a superfıcie
a ser ocupada pelo contorno do corpo.
Uma segunda componente dinamica de forca aparecera devida a perturbacao que o corpo cria
no meio fluido. Na realidade as partıculas fluidas nao podem atravessar o corpo. A presenca
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 7/98
Texto Preliminar, SH Sphaier 3
do corpo impoe velocidades as partıculas fluidas de forma a terem componentes normais
junto ao corpo iguais a zero. Sao originadas ondas que se propagam para o fluido, interagem
com a onda incidente anulando as componentes de velocidades das partıculas fluidas junto asuperfıcie do corpo na direcao normal. A este fenomeno chamamos de difracao. Aparecem
ondas de difracao geradas junto ao corpo. Este fenomeno esta intimamente ligado as ondas
incidentes. A onda incidente ao encontrar o corpo se difrata. A energia que se propaga na
direcao da onda incidente espalha-se devido a presenca do corpo propagando-se em outras
direcoes. Soma-se a pressao dinamica da onda incidente uma nova parcela devida a onda
difratada pdif . De forma semelhante ao problema do escoamento uniforme acelerado em torno
de um cırculo em que a forca resultante era composta de duas componentes, uma devida ao
escoamento acelerado, e outra devida a perturbacao que o cırculo, representado pelo dipolocausava no escoamento, no problema de ondas aparecem duas componentes de for ca, uma
devida a onda incidente como se nao houvesse corpo (forca de Foude-Krylov) e outra devida
a perturbacao que o corpo cria na onda incidente, forca de difracao.Uma segunda fonte de formacao de ondas que se radiam do corpo para o meio deve-se aosmovimentos do corpo. O movimento do corpo induz movimento as partıculas fluidas junto ao
casco. Este movimento transmite-se as outras partıculas fluidas, agitando a superfıcie livre
gerando ondas que se propagam para o meio. A este fenomeno chamamos de radiacao. Estas
ondas tambem provocarao uma modificacao no campo de pressoes atuantes sobre o casco prad.
Uma ultima parcela que contribui para a variacao da pressao atuante em um ponto da su-
perfıcie do corpo com o tempo e sua constante mudanca de posicao. A pressao hidrostatica
dependera da posicao inicial do ponto e dos movimentos do corpo. Com os movimentos do
corpo cada ponto de sua superfıcie tera sua coordenada vertical variando com o tempo. Assimteremos a coluna de agua em um ponto, que rege a pressao hidrostatica, variando com o tempo
e a pressao hidrostatica total dada pela soma da pressao hidrostatica inicial correspondente a
posicao de equilıbrio estatico do corpo, e de uma componente de pressao hidrostatica variavel
com o tempo, correspondente a mudanca de posicao vertical do ponto pe,t.
Admitindo ser possıvel a superposicao dos efeitos acima descritos na forma de um somatorio
de efeitos a pressao total ptotal seria entao:
ptotal = pe + pd
= pe,0 + pe,t + pinc + pdif + prad
= pe,0 + p(t) (1.1)
onde a pressao dinamica pd e dada por
pinc + pdif + prad (1.2)
onde a pressao estatica pe e dada por
pe,0 + pe,t (1.3)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 8/98
4 Texto Preliminar, SH Sphaier
e a pressao dependente do tempo p(t) e dada por
pe,t + pinc + pdif + prad (1.4)
onde:
• pressao estatica pe
• pressao dinamica pd
• pressao dependente do tempo pt
• pressao estatica independente do tempo pe,0
• pressao estatica dependente do tempo pe,t
• pressao devida a onda incidente pinc
• pressao devida a onda difratada pdif
• pressao devida a onda radiada prad
As forcas de origem hidrodinamica seriam obtidas pela integracao destas pressoes ptotal ao
longo do casco. Alem das forcas hidrodinamicas atua sobre o corpo a forca de peso. Re-
unindo estas forcas externas e utilizando a lei de Newton, temos as equacoes que vao reger o
movimento do corpo.
Atraves das figuras 1.1 e 1.2 vemos esquematicamente as diversas contribuicoes.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 9/98
Texto Preliminar, SH Sphaier 5
Figura 1.1: Onda Incidente e sua Difracao

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 10/98
6 Texto Preliminar, SH Sphaier
Figura 1.2: Radiacao e Empuxo
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 11/98
Capıtulo 2
Dinamica do Corpo BidimensionalFlutuante
2.1 Introducao
Neste capıtulo vamos tratar da dinamica do movimento de um corpo flutuante. Vamos nosater ao problema no plano, isto e, observamos o comportamento de um cilindro, cuja secao
tem uma forma naval, flutuando na superfıcie livre. Inicialmente, daremos somente um grau
de liberdade de movimento. Este grau de liberdade sera o de movimento vertical, depois o
de movimento de jogo e por ultimo o de movimento lateral. Posteriormente analisaremos osmovimentos acoplados de jogo e lateral.
2.2 Movimento Vertical
Analisemos o movimento vertical de um cilindro infinito de secao qualquer, flutuando na
superfıcie livre com seu eixo coincidindo com o eixo Ox, e com simetria em relacao ao plano
longitudinal. Consideremos que inicialmente se encontra em equilıbrio estatico. Como trata-se
de um corpo infinito podemos desenvolver uma analise bidimensional (figura 2.1).
Utilizando a segunda lei de Newton temos:
ms = −P + E 0 = 0 (2.1)
onde:
s e o movimento vertical do corpo,
7

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 12/98

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 13/98
Texto Preliminar, SH Sphaier 9
com ωn =
ρgB/m, frequencia natural, e o corpo permaneceria em movimento harmonico
indefinidamente.
A experiencia diaria nos diz entretanto que este movimento tem um decremento com o tempo,
e podemos observar o aparecimento de ondas na superfıcie livre. Estas ondas propagam-sedo corpo para o infinito carregando consigo energia.
Lembrando as conclusoes obtidas no estudo do escoamento devido a um cırculo acelerado em
um fluido em repouso, sabemos que a pressao dinamica da origem a uma forca contraria a
aceleracao do corpo. Sem nos preocuparmos aqui com o rigor matematico, podemos dizer que
a pressao da origem a uma forca na forma
F hdin = −a33s (2.6)
A lei de Newton agora fornece
ms = −a33s − ρgBs (2.7)
ou(m + a33)s + ρgBs = 0 (2.8)
A solucao desta equacao e semelhante a solucao do caso anterior, modificando-se somente o
valor de ωn
ωn =
ρgB
m + a33
(2.9)
Isto quer dizer, que o decaimento do movimento que observamos em nossa experiencia diaria,
nao e previsto e por conseguinte a energia dissipada na formacao de ondas nao esta sendoconsiderada. A expressao acima, representativa da forca hidrodinamica nao preve termo
responsavel pela formacao de ondas e consequentemente pelo decaimento do movimento do
corpo, o que nao representa o caso real.
Ocorre que estas forcas, devidas a radiacao de ondas, nao necessariamente estao em fase com
a aceleracao do corpo. A forca de radiacao resultante esta subdividida em duas parcelas,
uma em fase com a aceleracao e outra com a velocidade do corpo. Esta segunda parcela e
responsavel pelo constante consumo de energia cinetica do corpo, transferindo energia para
a massa fluida na forma de ondas, que se transmitem para o infinito, provocando assim um
decaimento no movimento do corpo.
Ao coeficiente de proporcionalidade entre aceleracao e a forca em fase com a aceleracao
chamamos de coeficiente de massa adicional e, ao coeficiente de proporcionalidade entre ve-
locidade e forca em fase com a velocidade, damos o nome de coeficiente de amortecimento.
Com esta expressao a equacao de movimento do corpo apresenta um termo nao conservativo
linear, e esta intimamente ligado a energia da onda que, formada pela interacao fluido-corpo
junto a superfıcie livre se radia para o meio, propagando-se a longas distancias.
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 14/98
10 Texto Preliminar, SH Sphaier
F hdin = −a33s − b33s (2.10)
onde b33 e o coeficiente de amortecimento.
A equacao de movimento obtida a partir da aplicacao da lei de Newton seria agora
ms = −a33s − b33s − ρgBs (2.11)
ou
(m + a33)s + b33s + ρgBs = 0 (2.12)
Esta e uma equacao diferencial homogenea ordinaria de segunda ordem a coeficientes con-stantes. Sua solucao e da forma exponencial. Este problema corresponde ao de vibracao livre
de um sistema amortecido, sujeito a um deslocamento e uma velocidade iniciais.
Consideremos agora que incide uma onda monocromatica que, como descrito acima, introduz
uma forca de excitacao harmonica.
F exc = F 0eiωt = (F 0,R + i F 0,I )eiωt (2.13)
onde
F 0 e a amplitude da forca
ω e a frequencia de oscilacao.
A lei de Newton fornece entao a seguinte equacao de movimento
ms = −a33s − b33s − ρgBs + F exc (2.14)
ou
(m + a33)s + b33s + ρgBs = F 0eiωt (2.15)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 15/98
Texto Preliminar, SH Sphaier 11
A solucao desta equacao diferencial e a soma da solucao homogenea, que corresponderia ao
movimento apos um impulso inicial, mais a solucao particular que seria regida pela carac-
terıstica da forca de excitacao. Assim, apos algum tempo, a solucao homogenea nao maisinterferiria na solucao do problema, isto e, apos a fase transiente o corpo entraria em um
movimento harmonico com frequencia ω
s = s0ei(ωt+δ) = s0ei(ωt) (2.16)
onde:
s0 e a amplitude do movimento
s0 e a amplitude complexa
δ e a fase.
Solucao homogenea
A solucao homogenea e a solucao da equacao:
(m + a33)s + b33s + ρgBs = 0 (2.17)
e e da forma:
s = e−b33/[2(m+a33)] t a1et√ (b33/[2(m+a33)])2−ρ g B /(m+a33) + a2e−t√ (b33/[2(m+a33)])2−ρ g B /(m+a33)(2.18)
Para valores de b33 em que [b33/2(m + a33)]2 − ρ g B/(m + a33) > 0 temos o movimento
decrescendo exponencialmente segundo 2.18.
Para pequenos valores de b33 em que [b33/2(m +a33)]2−ρ g B /(m +a33) < 0 temos um sistema
pouco amortecido e o argumento das funcoes exponenciais sera imaginario. A solucao toma
a forma:
s = e−b33/[2(m+a33)] t a1 cos(t
ρ g B /(m + a33) − (b33/[2(m + a33)])2
+a2 sin(t
ρ g B /(m + a33) − (b33/[2(m + a33)])2
(2.19)
Se defirmos ω como frequencia amortecida:
ω =
ρ g B /(m + a33) − (b33/[2(m + a33)])2 (2.20)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 16/98
12 Texto Preliminar, SH Sphaier
entao teremos
s = e−b33/[2(m+a33)] t (a1 cos(ωt) + a2 sin(ωt)) (2.21)
O valor de b33
para o qual
[b33/2(m + a33)]2 − ρ g B /(m + a33) = 0 (2.22)
e chamado de amortecimento crıtico.
b33,c = 2(m + a33) ωn (2.23)
Definimos como ζ a relacao entre o amortecimento b33 e o amortecimento crıtico b33,c,
ζ = b33b33,c
(2.24)
Observemos que substituindo (2.9), (2.24) e (2.23) em (2.12) obtemos
s + 2ζωns + ω2ns = 0 (2.25)
Este e um formato compacto da uma equacao diferencial que vimos acima. Trata-se de uma
equacao ordinaria a coeficientes constantes. Embora seja totalmente equivalente ao caso visto
acima, vamos aqui desenvolver novamente sua solucao, que e da forma
s = aeλt (2.26)
Substituindo esta expressao em (2.29) obtemos, para a determinacao de λ, a seguinte equacao
do segundo grau:
λ2 + 2ζωnλ + ω2n = 0 (2.27)
Assim, temos duas solucoes na forma:
λ = −ζωn ± i
1 − ζ 2ωn (2.28)
Observemos que o crescimento ou decaimento do deslocamento, isto e, o crescimento ou
decaimento de s ao longo do tempo, depende do fator ζ , relacao entre o amortecimento do
sistema e o amortecimento crıtico. Cabe entretanto, conceituar amortecimento crıtico. Antes
porem observemos o comportamento da solucao para valores de ζ positivo, nulo e negativo.
Iniciemos abordando o caso em que ζ = 0.
s + ω2ns = 0 (2.29)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 17/98
Texto Preliminar, SH Sphaier 13
Figura 2.2: Decremento Logarıtmico
Esta equacao tem solucao na forma
s = a1eiωnt + a2e−iωnt (2.30)
Assim vemos que o corpo vai oscilar indefinidamente harmonicamente na chamada frequencia
natural.
Caso ζ < 0, o movimento aumentara indefinidamente com o tempo. Trata-se de um sistema
com amortecimento negativo causando uma amplificacao do movimento. Caso ζ > 0, o termo
exponencial atuara forcando o decaimento do movimento.
Para o caso do amortecimento positivo, isto e, ζ positivo, devemos distinguir tres casos. O
primeiro em que ζ < 1. O termo exponencial atuara como um regulador da amplitude do
movimento. Este regulador impoe um decaimento do movimento. O corpo oscila com a
frequencia
ω =
1 − ζ 2ωn (2.31)
A figura 2.2 mostra este comportamento.
Para o caso em que ζ > 1 o sistema e fortemente amortecido. Nao ha oscilacao. A solucao

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 18/98
14 Texto Preliminar, SH Sphaier
toma a forma
s = a1e
−ζ +
√ ζ 2−1
ωnt
+ a2e
−ζ −
√ ζ 2−1
ωnt
(2.32)
No caso em que ζ = 1 a expressao (2.28) torna-se
λ = −ωn (2.33)
isto e, a expressao (2.26) fornece uma unica solucao.
s = ae−ωt (2.34)
Temos que providenciar uma segunda solucao. Como sabido do calculo diferencial a solucao
homogenea torna-se entao:s = (a1 + a2t)e−ωt (2.35)
Observemos que, de forma geral, em um sistema massa-mola-amortecedor, podemos medir a
massa do corpo e o efeito de mola aplicando-se uma for ca e medindo-se a elongacao da mola.
Conhecidos estes dois termos da equacao diferencial do movimento, falta-nos determinar oamortecimento do sistema. Atraves de uma experiencia e, determinando-se o logaritmo natu-
ral da relacao entre duas amplitudes sucessivas, e possıvel extrair-se o valor do amortecimento.
No caso de um corpo oscilando na superfıcie, podemos medir os efeitos de restauracao oucalcula-los atraves das linhas do corpo. Podemos determinar a massa do corpo, compondo a
massa de cada uma de suas partes, e calcular a massa adicional e o coeficiente de amortec-
imento de ondas atraves de metodos matematicos. Na abordagem aqui encaminhada, nao
fazemos nenhuma mencao a efeitos viscosos, que por efeitos locais, podem ser importantes.Nestes casos, embora possamos determinar o amortecimento devido a formacao de ondas,
e fundamental o teste do decremento logarıtmico para a determinacao precisa dos efeitos
viscosos. Poder-se-ia perguntar entao se sempre terıamos que fazer o teste. Em termos
absolutos sempre seria necessario, entretanto devemos inicialmente verificar se os efeitos vis-
cosos sao importantes ou nao, e se os metodos de calculo das propriedades hidrodinamicas,massa adicional e amortecimento, para formas semelhantes levam a bons resultados ou nao.
Em geral para formas navais, somente o movimento de jogo apresenta efeitos viscosos im-
portantes. Costuma-se desenvolver testes experimentais, acumulando-se informacoes sobre o
amortecimento na forma de um percentual do amortecimento crıtico do sistema. Isto e, se o
amortecimento fosse igual ao crıtico este seria dado por (2.23).
Para a determinacao do decremento logarıtmico, admitamos que a solucao seja dada por:
s = Se−ζωnt
sin
1 − ζ 2ωnt + α
(2.36)
onde S e α foram obtidos a partir de (2.18) e das condi coes de deslocamento s(t = 0) e
velocicades s(t = 0) iniciais.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 19/98
Texto Preliminar, SH Sphaier 15
A curva
s = Se−ζωnt (2.37)
tangencia a curva de resposta do sistema proximo aos maximos. O decremento logarıtmico
entre duas oscilacoes sucessivas e expresso por
δ l = ln s1
s2= ln
e−ζωnt1
e−ζωn(t1+T ) = ln eζωnT = ζ ωnT (2.38)
Como o sistema oscila com frequencia
ω = ωn
1 − ζ 2 (2.39)
o intervalo de tempo entre as duas oscilacoes sera
T = 2π
ωn 1 − ζ 2(2.40)
e o decremento (ver figura 2.2):
δ l = 2πζ
1 − ζ 2(2.41)
Em sistemas pouco amortecidos teremos entao
δ l = 2πζ (2.42)
Solucao Particular
Substituindo (2.16) em (2.15) obtemos a amplitude complexa s0 dada por
s0 = 1
ρ g B − ω2 (m + a33) + i ω b33F 0
= ρ g B − ω2 (m + a33) − i ω b33
(ρ g B
− ω2 (m + a33))2
− (i ω b33)2
F 0
= ρ g B − ω2 (m + a33) − i ω b33
(ρ g B − ω2 (m + a33))2 + (ω b33)2F 0 (2.43)
que pode ser escrita em termos do modulo | s0 | e da fase δ por
s0 = (s0,R + i s0,I ) ei ω t = | s0 | e(iω t + δ) (2.44)
onde:

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 20/98
16 Texto Preliminar, SH Sphaier
freq / freq natural0 0.5 1 1.5 2 2.5 3
zeta = 0.05
zeta = 0.10zeta = 0.15
zeta = 0.20
zeta = 0.25
zeta = 0.30
zeta = 0.35
zeta = 0.50
zeta = 0.75
zeta = 1.00
Figura 2.3: Fator de Amplificacao, Funcao de transferencia, Rao
s0,R e a parte real da amplitude complexa,
s0,I e a parte imaginaria.
Multiplicando s0 pelo seu conjugado s∗0 obtemos o modulo da solucao:
| s0 |2= s0 · s∗
0
= ρ g B − ω2 (m + a33) − i ω b33[ρ g B − ω2 (m + a33)]2 + (ω b33)2
2 ρ g B − ω2 (m + a33) + i ω b33
| F 0 |2
= 1
[ρ g B − ω2 (m + a33)]2 + (ω b33)2| F 0 |2 (2.45)
onde
| F 0 |2= F 0 · F ∗0 (2.46)
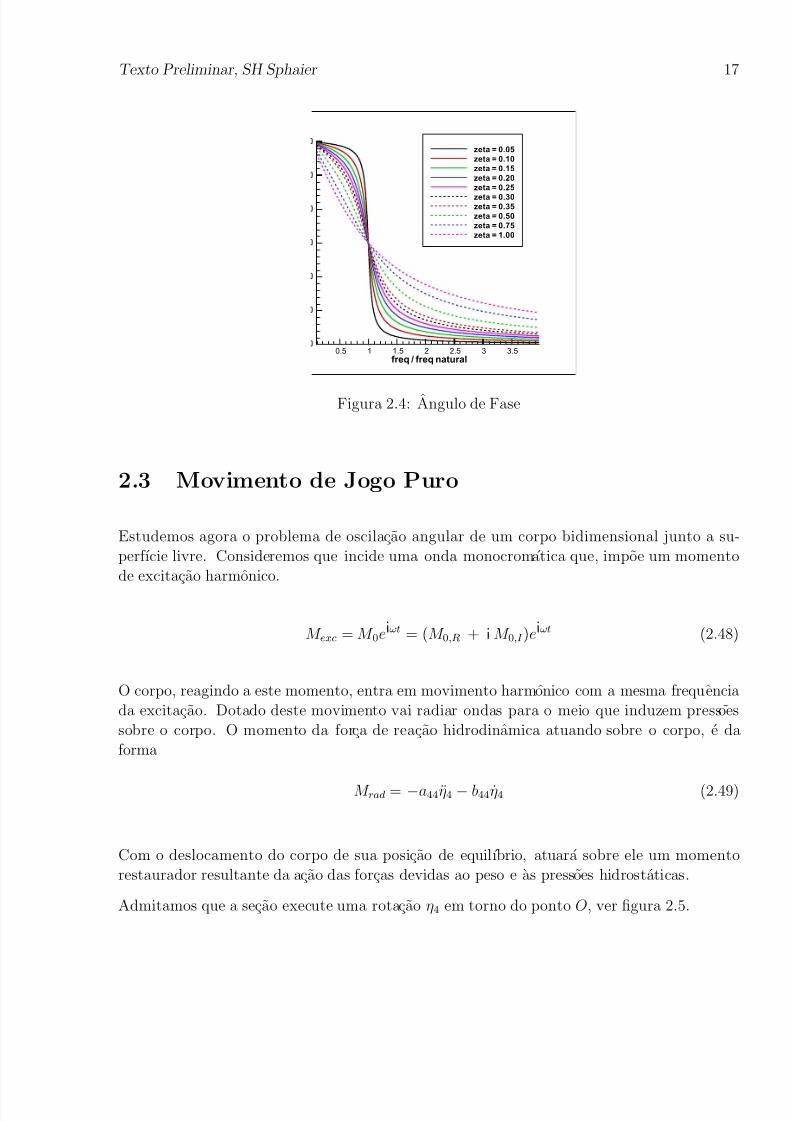
O angulo de fase δ e dado por
δ = arctan F 0,R (ρ g B − ω2 (m + a33)) + F 0,I (ω b33)
F 0,I (ρ g B − ω2 (m + a33)) − F 0,R (ω b33) (2.47)
O comportamento da solucao desta equacao diferencial e mostrado nas figuras 2.3 e 2.4. Esta
solucao e chamada de fator de amplificacao, funcao de transferencia ou RAO (Operador de
Amplitude de Resposta).
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 21/98
Texto Preliminar, SH Sphaier 17
freq / freq natural0.5 1 1.5 2 2.5 3 3.5
zeta = 0.05
zeta = 0.10
zeta = 0.15
zeta = 0.20
zeta = 0.25
zeta = 0.30zeta = 0.35
zeta = 0.50
zeta = 0.75
zeta = 1.00
Figura 2.4: Angulo de Fase
2.3 Movimento de Jogo Puro
Estudemos agora o problema de oscilacao angular de um corpo bidimensional junto a su-
perfıcie livre. Consideremos que incide uma onda monocromatica que, impoe um momento
de excitacao harmonico.
M exc = M 0eiωt = (M 0,R + i M 0,I )eiωt (2.48)
O corpo, reagindo a este momento, entra em movimento harmonico com a mesma frequencia
da excitacao. Dotado deste movimento vai radiar ondas para o meio que induzem pressoes
sobre o corpo. O momento da forca de reacao hidrodinamica atuando sobre o corpo, e da
forma
M rad = −a44η4 − b44 η4 (2.49)
Com o deslocamento do corpo de sua posicao de equilıbrio, atuara sobre ele um momento
restaurador resultante da acao das forcas devidas ao peso e as pressoes hidrostaticas.
Admitamos que a secao execute uma rotacao η4 em torno do ponto O, ver figura 2.5.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 22/98
18 Texto Preliminar, SH Sphaier
Figura 2.5: Banda de uma secao naval
O centro de carena, localizado inicialmente no ponto B, desloca-se para o ponto B
. A vertical
passando por B
encontra o eixo Oz no ponto M , o metacentro. Nesta vertical temos o ponto
B
, de forma tal que BB e um segmento horizontal. Valem as relacoes:
A1C 1 = A2C 2 = b
2
tan(η4) (2.50)
GB = BM −GM (2.51)
BB = (GM + GB)sin(η4) (2.52)
O deslocamento do centro de carena do ponto B para o ponto B
, deve-se ao ganho da area dotriangulo C 1OA1 e a perda de area do triangulo C 2OA2. A area de cada uma destas cunhas
e dada por1
2
b
2
b
2 tan(η4) =
1
8b2 tan(η4) (2.53)
Assim o peso deslocado e de ρg
1
8b
2
tan(η4) para cada cunha.As duas cunhas geram um momento
2ρg
b/2
0
yy tan(η4)dy = 2ρg tan(η4)
b/2
0
y2dy
= 2ρg tan(η4)y3
3 |b/20 = ρg tan(η4)
b3
12 (2.54)
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 23/98
Texto Preliminar, SH Sphaier 19
Dividindo o momento pelo peso temos o braco de momento igual a b/3.
Considerando o empuxo total ser composto pelo empuxo aplicado em B , somado ao empuxo
devido ao triangulo C 1OA1 e subtraıdo do empuxo devido ao triangulo C 2OA2 teremos os
seguintes momentos atuantes:M 1 = −GB sin(η4)mg (2.55)
M 2 = ρg tan(η4)b3
12 (2.56)
Por outro lado, temos que a distancia horizontal e dada por:
BB = (ρg tan(η4)b3
12)/mg (2.57)
Assim
(GM + GB) sin(η4) = (ρg tan(η4)
b3
12 )/mg (2.58)
Compondo os dois momentos teremos o momento restaurador M rest dado por:
M rest = M 1 + M 2 = ρg tan(η4)b3
12 −GBmg sin(η4)
= mg(GM + GB) sin(η4) − GBmg sin(η4) = mgGM sin(η4) (2.59)
A distancia GM e chamada de altura metacentrica e mede a capacidade que um corpo tem
para retornar a sua posicao de equilıbrio.
Admitindo pequenos deslocamentos, sin(η4) ≈ η4, e reunindo todas estas forcas, segue dasegunda lei de Newton, para a condicao de conservacao do movimento angular:
I 44η4 = M rad + M rest + M exc (2.60)
ou
(I 44 + a44)η4 + b44 η4 + mgGMη4 = M exc (2.61)
Da mesma forma que no movimento vertical, esta e uma equacao diferencial ordinaria de se-gunda ordem a coeficientes constantes, nao homogenea. Sua solucao e a soma de uma solucao
homogenea e uma solucao particular. Admitindo que a contribuicao da solucao homogenea
decai rapidamente, o corpo executara movimento harmonico na mesma frequencia das ondas
incidentes. Todo o desenvolvimento utilizado na solucao do movimento vertical e aplicado
diretamente, pois as equacoes diferenciais sao correspondentes.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 24/98
20 Texto Preliminar, SH Sphaier
2.4 Movimento Lateral Puro
As equacoes diferenciais que descrevem os movimentos de oscilacao vertical e angular sao
semelhantes. Em ambos os movimentos temos inclusive termos de restauracao. Ja no movi-mento horizontal tal comportamento nao se da. Nao ha restauracao. Se quisermos utilizar
o conceito de frequencia natural, veremos que esta sera nula. Consideremos que a ondamonocromatica incidente impoe uma forca de excitacao harmonica.
F exc = F 0eiωt = (F 0,R + i F 0,I )eiωt (2.62)
O corpo reagindo a esta forca entra em movimento harmonico com a mesma frequencia da
excitacao. Dotado deste movimento vai radiar ondas para o meio que induzem press oes sobre
o corpo. A forca de reacao hidrodinamica atuando sobre o corpo e da forma
F rad = −a22η2 − b22 η2 (2.63)
onde η2 e o deslocamento lateral do corpo.
Aplicando a segunda lei de Newton para a condicao de conservacao do movimento linear
temos:
(m + a22)η2 + b22 η2 = F exc (2.64)
Esta e uma equacao diferencial ordinaria de segunda ordem a coeficientes constantes, nao
homogenea, sendo que e nulo o coeficiente do termo de grau zero.
2.5 Movimentos Simultaneos Lateral e de Jogo
Consideremos que uma onda monocromatica incide sobre a secao impondo uma distribuicao de
pressoes sobre ela. Esta distribuicao nao ira somente induzir forca ou momento de excitacao,
porem ambos e simultaneamente. Sendo a onda harmonica, a forca e o momento de excitacaoserao harmonicos.
F exc = F 0eiωt = (F 0,R + i F 0,I )eiωt (2.65)
M exc = M 0eiωt = (M 0,R + i M 0,I )eiωt (2.66)
O corpo, reagindo a esta forca e este momento, entra em movimento harmonico com a mesma
frequencia da excitacao. Dotado deste movimento vai radiar ondas para o meio que induzem
pressoes sobre o corpo.
Ao executar um movimento lateral a secao sofre uma reacao na forma de uma forca na
direcao horizontal e um momento em torno do ponto O. Assim sendo, a secao tendera a ter
dois movimentos acoplados. De forma similar, ao executar movimentos em torno do ponto O

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 25/98
Texto Preliminar, SH Sphaier 21
a secao sofre uma reacao hidrodinamica na forma de uma forca horizontal e de um momento
em torno do ponto O. Podemos dizer que ao executar os movimentos em conjuntos, atuarao
sobre a secao forcas e momentos da forma
F rad = −a22η2 − b22 η2 − a24η4 − b24 η4 (2.67)
M rad = −a42η2 − b42 η2 − a44η4 − b44 η4 (2.68)
onde η2 e η4 sao respectivamente os movimentos lateral e de jogo.
Observando que so ha momento de restauracao, nao ha forca de restauracao, da aplicacao das
leis de conservacao de movimento linear e de movimento angular, segunda lei de Newton, as
equacoes de movimento sao escritas na forma:
mη2 − mZ gη4 = −a22η2 − b22 η2 − a24η4 − b24 η4 + f exc,2 (2.69)
I xxη4
−mZ gη2 =
−a44η4
−b44 η4
−a42η2
−b42 η2
−mgGMη4 + f exc,4 (2.70)
ou
(m + a22)η2 + b22 η2 + (a24 − mZ g)η4 + b24 η4 = f exc,2 (2.71)
(I +a44)η4+b44 η4+mgGMη4+(a42−mZ g)η2+b42 η2 = f exc,4 (2.72)
Este e um sistema de equacoes diferenciais ordinarias de segunda ordem acopladas a coefi-cientes constantes, nao homogeneas.
2.6 Hipotese de Froude-Krylov para o Calculo de Forca
de Onda
Vimos acima o problema de radiacao. Um corpo oscila junto a superfıcie livre gera ondas
que se propagam carregando energia. Determinamos a solucao para o caso de um batedor de
ondas como exemplo basico. Originalmente nao existiam ondas no meio fluido. Vamos agoraestudar o problema da acao de ondas em um corpo fixo junto a superfıcie livre.
Consideremos um retangulo flutuando na superfıcie livre e determinemos a forca de onda
atuante sobre ele segundo a hipotese de Froude-Krylov, isto e, a forca devida a onda inci-
dente. Segundo a hipotese de Froude-Krylov, as forcas hidrodinamicas atuando em um corpo
flutuante devem-se unicamente a acao da onda incidente. Despreza-se o efeito da difracao das
ondas incidentes.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 26/98
22 Texto Preliminar, SH Sphaier
A forca hidrodin amica e calculada integrando-se as press˜ oes devidas as ondas in-
cidentes atuando sobre a superfıcie imagin´ aria dada pela posic˜ ao instantˆ anea a
ser ocupada pelo corpo.
A pressao e dada pela integral da Equacao de Euler linearizada
p = −ρ∂φ
∂t − ρgz (2.73)
e a forca e entao
F = Fd + Fe = −ρ
S 0
∂φ
∂t + gz
nds (2.74)
onde Fd representa a contribuicao dinamica
Fd = −ρ S 0
∂φ∂t
nds (2.75)
e Fe representa a contribuicao estatica
Fe = −ρ
S 0
(gz ) nds (2.76)
Admitindo que o potencial de velocidades deve-se unicamente a onda incidente:
φ = φinc = iA(z ) ei(ωt−k0x) (2.77)
onde, para aguas profundas:
A(z ) = ζ 0g
ω ek0z (2.78)
Entao
pd = −ρ∂φinc
∂t = −ρiA(z )iωei(ωt−k0x)
= ωρA(z )[cos(ωt − k0x) + i sin(ωt − k0x)] (2.79)
2.6.1 Forcas de Froude-Krylov em Estruturas Retangulares
A figura (2.6) mostra o retangulo na superfıcie livre. O centro do retangulo encontra-se
localizado em x0, tem boca b, calado T e pontos extremos A, B,C e D. As normais voltadaspara fora do meio fluido estao indicadas em cada trecho do contorno. O trecho S 1 e limitado
pelos pontos A e B, S 2 e limitado pelos pontos B e C e S 3 pelos pontos C e D.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 27/98
Texto Preliminar, SH Sphaier 23
Figura 2.6: Cancelamento em Formas Retangulares

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 28/98
24 Texto Preliminar, SH Sphaier
Observando a figura 2.6 podemos escrever a expressao da forca hidrodinamica na forma
Fd = ωρ
D
A
A(z ) ei(ωt−k0x)nds (2.80)
Fd = ωρ
B
A
A(z ) ei(ωt−k0x)i(−dz )
+ωρ
C
B
A(z ) ei(ωt−k0x)k(dx)
+ωρ
D
C
A(z ) ei(ωt−k0x)(−i)(dz ) (2.81)
Escrevendo as componentes em x e em z separadamente teremos:
Forca Horizontal
F d,x = ωρ
−T
0
A(z ) ei[ωt−k0(x0−b/2)](−)dz − 0−T
A(z ) ei[ωt−k0(x0+b/2)]dz
(2.82)
F d,x = ωρ
ei[ωt−k0(x0−b/2)] − ei[ωt−k0(x0+b/2)] 0
−T
A(z )dz
= ωρ ei[(ωt−k0x0)+k0b/2] − e
i[(ωt−k0x0)−k0b/2] 0
−T A(z )dz
= ωρ
0−T
A(z )dz ei(ωt−k0x0)
ei(k0b/2) − e−i(k0b/2)
= 2iωρ
0−T
A(z )dz ei(ωt−k0x0) sin(k0b/2) (2.83)
e assim
F d,x = 2iωρ
0−T
A(z )dz ei(ωt−k0x0) sin(k0b/2) (2.84)
Como, para aguas profundas
A(z ) = ζ 0g
ω ek0z (2.85)
resolvendo a integracao obtemos:
F d,x = ρgζ 0b[1 − e−k0T ] sin(k0b/2)
(k0b/2) [i ei(ωt−k0x0)] (2.86)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 29/98
Texto Preliminar, SH Sphaier 25
Para ondas longas
[1 − e−k0T ] → 0 (2.87)
e a forca anula-se.
Observemos o caso em que x0 e nulo. A forca horizontal tem intensidade:
F d,x,0 = ρgζ 0b[1 − e−k0T ] sin(k0b/2)
(k0b/2) (2.88)
e assim pode ser escrita como:
F d,x = F d,x,0 [i ei(ωt)] = F d,x,0 ei(ωt−π/2) (2.89)
Podemos tambem observar que a forca horizontal e regida pelo seno de ωt. A forca horizontal
horizontal tem seu maximo defasado do maximo da onda. Vemos que a forca horizontal emaxima quando temos um no com zero descendente em x0.
Forca Vertical
F d,z = ωρ
C
B
A(z ) ei(ωt−k0x)dx = ωρA(−T )
x0+b/2
x0−b/2
ei(ωt−k0x)dx
= ωρA(−
T )i ei(ωt−k0x)
k0 |x0+b/2
x0−b/2
= ωρA(−T )
k0i ei[ωt−k0(x0+b/2)] − ei[ωt−k0(x0−b/2)]
= ωρA(−T )
k0i ei[(ωt−k0x0)−k0b/2] − ei[(ωt−k0x0)+k0b/2]
= ωρA(−T )
k0i ei(ωt−k0x0) e−ik0b/2 − eik0b/2 (2.90)
e finalmente
F d,z = 2ωρA(−T )
k0
ei(ωt−k0x0) sin(k0b/2) (2.91)
Podemos observar que a forca vertical e regida pelo cosseno de ωt. Isto e, a forca vertical
passara por um maximo sempre que a amplitude da onda passar por um maximo em x0.
Lembrando que em grandes profundidades A(z ) = ζ 0 g ek0z/ω entao:
F d,z = ρ g ζ 0e−k0T ei(ωt−k0x0) sin(k0b/2)
k0/2 (2.92)
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 30/98
26 Texto Preliminar, SH Sphaier
Multiplicando e dividindo por b obtemos:
F d,z = ρ g ζ 0be−k0T ei(ωt−k0x0) sin(k0b/2)
k0b/2
= ρ g b ζ (t, x0) e−k0T sin(k0b/2)
k0b/2 (2.93)
Esta expressao indica que a forca esta em fase com a elevacao da onda em x0 e tem uma forma
similar a uma forca hidrostatica como se o corpo afundasse o que a onda se eleva corrigida
de:
1. o efeito do decaimento da pressao dinamica com a profundidade
2. da variacao da forma da onda e da pressao com o cosseno de k0x
Caso a onda seja muito longa
k0b/2 = 2πb/2/L0 → 0, (2.94)
e−k0T = e−2πT/L0 → 1 (2.95)
esin(k0b/2)
k0b/2 =
sin(w)
w → 1 (2.96)
Assim,
F d,z = ρ g ζ 0b e
i(ωt−k0x0)
= ρ g b ζ (t, x0) (2.97)e a forca atuante tem uma semelhanca com uma forca hidrostatica com variacao de afunda-
mento igual a ζ (t) no ponto x0.
2.6.2 Cancelamento de Forcas de Froude-Krylov em um Retangulo
Acima obtivemos as seguintes expressoes para as forcas de Froude-Krylov sobre um retangulo:
F d,x = ρgb[1
− e−k0T ]
sin(k0b/2)
(k0b/2)
i ei(ωt−k0x0) (2.98)
F d,z = ρ g ζ 0be−k0T ei(ωt−k0x0)sin(k0b/2)
k0b/2 (2.99)
Vemos que ambas expressoes contem o termo
sin(k0b/2)
k0b/2 (2.100)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 31/98
Texto Preliminar, SH Sphaier 27
Comok0b
2 =
2πb
2L0=
πb
L0(2.101)
onde L0 e o comprimento da onda, a relacao entre a boca do retangulo e o comprimento da
onda podera, por um efeito de forma acarretar que a amplitude da forca seja nula. Assim asforcas horizontal e vertical terao amplitudes nulas se
b
L = n n = 1, 2, .... (2.102)
2.6.3 Extensao da expressao de Froude-Krylov para o caso de um
Navio com fundo plano horizontal
Digamos que temos agora um navio com fundo chato em que as ondas se propagam na direcao
do eixo longitudinal do navio. O problema e semelhante ao anterior, porem a boca torna-se
o comprimento do navio e ao longo da boca, para um x fixo a pressao e constante. O sistemade referencia agora e Oxyz com Ox na direcao longitudinal e Oy na direcao transversal. O
navio tem boca B e comprimento L. A expressao da forca vertical e dada por:
F d,z = ωρ
S
A(z ) ei(ωt−k0x)dxdy (2.103)
como a pressao nao varia com a boca
F d,z = ωρA(
−T )B L ei(ωt−k0x)dx (2.104)
A exponencial no tempo pode ser retirada da integral e entao:
F d,z = ωρA(−T ) eiωt
L
B(x) eik0xdx
= ωρA(−T ) eiωt
L
B(x)[(cos(k0x) + i sin(k0x)]dx (2.105)
No caso de um casco em forma de caixa B(x) e constante e entao:
F d,z = ωρA(
−T )B eiωt
L[(cos(k0x) + i sin(k0x)]dx (2.106)
2.6.4 Cancelamento de Forcas de Froude-Krylov em Estruturas
Semisubmersıveis
Vimos que e possıvel cancelar as forcas e ou os momentos hidrodinamicos em estruturas
flutuantes do tipo retangular. Outro tipo de cancelamento se da para estruturas em que alguns

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 32/98
28 Texto Preliminar, SH Sphaier
membros afloram da superfıcie livre e outros tem suas extremidades localizadas totalmente
no meio fluido, quando as ondas sao longas.
A figura 2.7 apresenta o esquema de uma estrutura semi-submersıvel em um plano. As colunas
estao indicadas com C1 e C2 e o pontoon com PON. O fundo da estrutura esta na cota z 2.A parte superior do pontoon esta na cota z 1. As bases das colunas tem comprimento l1 e o
comprimento do pontoon tem comprimento l2.
Figura 2.7: Cancelamento em Estruturas Semisubmersıveis

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 33/98
Texto Preliminar, SH Sphaier 29
A pressao e composta por duas parcelas, estatica e dinamica. A essas soma-se a pressao
atmosferica, que normalmente e assumida ser igual a zero.
p = patm + pest + pdin (2.107)
A pressao estatica e dada por:
p = ρgz (2.108)
e com ela obtem-se que a forca de empuxo e o peso do volume imerso. Nas colunas a forca
de empuxo e:
E =
S
pestndS =
S
ρgz 2(2l1 + l2)k −
S
ρgz 1(l2)k (2.109)
A pressao na parte superior do pontoon e menor que na parte inferior. Assim o pontoon sofre
uma forca para cima. A pressao dinamica e dada por:
pdin = −ρ∂φ(x,z,t)
∂t = −ρ
∂φ(x, 0, t)
∂t ek0z (2.110)
e como o perfil da onda e dado por:
ζ = −1
g
∂φ(x, 0, t)
∂t = ζ 0 cos(ωt − k0x) (2.111)
entao∂φ(x, 0, t)
∂t =
−gζ 0 cos(ωt
−k0x) (2.112)
e
pdin = ρgζ 0 cos(ωt − k0x)ek0z (2.113)
[Obs: o mais correto seria trabalhar com a forma exponencial, incluindo a parte imaginaria
na analise e somente no final pegar o modulo e a fase. Entretanto as conclusoes seriam as
mesmas]
Na situacao em que a crista de uma onda longa passa pelo centro geometrico da plataforma,
toda a plataforma estara sujeita a pressoes como se estivesse toda ela em situacao de crista. A
situacao em que a crista passa pelo centro da estrutura localizado na posi cao x0, corresponde
a
Θ = ωt0 − k0x0 = ωt0 − 2π
L x0 = n · 2 · π (2.114)
onde n e um inteiro. Se a onda e longa em relacao ao tamanho da estrutura, e a crista se
localiza no centro da estrutura, entao
l1 + l2 + l1L
<< 1 (2.115)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 34/98
30 Texto Preliminar, SH Sphaier
Θ = ωt − k0x = ωt − k0x0 − 2πx − x0
L ≈ 1 − 2π
x − x0
L (2.116)
em toda a regiao da estrutura, e
pdin ≈ ρgζ 0ek0z(1 − 2π x − x0L ) (2.117)
Com a pressao dinamica determina-se agora as forcas nas colunas e no pontoon
f C 1 =
l1
pdin(z 2)dx ≈ ρgζ 0ek0z2l1 (2.118)
f C 2 =
l1
pdin(z 2)dx ≈ ρgζ 0ek0z2l1 (2.119)
f P ON = l2 pdin(z 2)dx− l2 pdin(z 1)dx
≈l2ρgζ 0(ek0z2
−ek0z1) (2.120)
Como z 1 e z 2 tem valores negativos e o modulo de z 2 e maior que o de z 1 entao a forca
dinamica no pontoon aponta para baixo.
Para efeito de projeto pode-se determinar mais precisamente as cotas e as dimens oes daestrutura resolvendo-se as integrais das pressoes exatamente. Inicialmente com o volume, a
area de linha dagua e o formato da estrutura determina-se a massa adicional e a frequencia
natural. Tenta-se fazer com que este o perıodo natural nao venha a estar contido na faixa de
frequencia de excitacao do mar. A seguir determina-se o comprimento da onda cujo perıodo
coincida com o perıodo natural da estrutura. Para este comprimento ajusta-se as dimensoes
principais. Caso as premissas impostas a volume, area de linha da agua e formato nao sejamsatisfeitas, faz-se um ajuste na geometria e retorna-se ao inıcio do problema.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 35/98
Capıtulo 3
Dinamica de um Corpo TridimensionalEsbelto em Ondas
3.1 Introducao
No capıtulo anterior analisamos o problema de secoes navais oscilando na superfıcie livre.
Observamos que as ondas incidentes atuando sobre o corpo se difratam, e as ondas formadas
desta composicao, onda incidente e onda difratada, geram forcas sobre a secao. Essas forcas
obrigam o corpo a oscilar periodicamente e os movimentos oscilatorios do corpo geram ondas.Como reacao, aparecem forcas atuando sobre o corpo dadas pela soma dos produtos: massa
adicional vezes aceleracao e amortecimento vezes velocidade. Alem disto, os movimentos do
corpo provocam desiquilıbrio entre as forcas e momentos devidos a acao da gravidade sobre
a massa do corpo e as pressoes atuantes sobre a superfıcie do casco.
Neste capıtulo vamos estender nossa analise ao problema tridimensional. Vamos nos ater a
ondas monocromaticas e corpos esbeltos.
O ob jetivo do presente estudo e o desenvolvimento das equacoes de movimento de um corpo
esbelto rıgido flutuante em movimento em presenca de ondas.
Vamos equacionar o problema, de forma heurıstica, utilizando as conclusoes obtidas ate agora.
O procedimento adotado e dividir o corpo em varias secoes. Contruir uma expressao parao carregamento em cada secao, levando em consideracao a acao da gravidade na massa da
secao, a pressao hidrostatica, as pressoes dinamicas devidas as ondas incidente, difratada e
radiada, e a inercia da secao. A seguir aplicamos as leis de conservacao da quantidade de
movimento linear (segunda lei de Newton) e de forma similar a de quantidade de movimento
angular. Assim, construimos as equacoes de movimento descrevendo a dinamica do corpo em
31

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 36/98
32 Texto Preliminar, SH Sphaier
ondas.
3.2 Movimentos vertical e de rotacao em torno do eixolateral
A conservacao da quantidade de movimento linear indica: L
δma =
L
δ p +
L
δ e +
L
δ f hidrodinamica (3.1)
onde:
a e a aceleracao de cada secao, e e dada pela composicao da aceleracao linear, isto e a con-
tribuicao do movimento vertical η3, e a contribuicao do movimento angular de arfagem
η5
a = (η3 − xη5)k (3.2)
δm e a massa da secao
δ p e o peso da secao
δ p = δmgk (3.3)
δ e e o empuxo da secao
δ e = ρgB(η3 − xη5)k + δ e0 (3.4)
δ f hidrodinamica e a forca hidrodinamica na secao, composta de um termo devido ao fenomeno
de radiacao e outro devido a onda incidente e sua difracao
δ f hidrodinamica = −a33(η3 − xη5)k − b33(η3 − xη5)k + ρζ 0f exck (3.5)
ζ 0 e a amplitude da onda incidente.
a forca de excitacao e a soma da acao da onda incidente somada a acao da onda difratada
ρζ 0f exck = ρζ 0f exc + f dif k (3.6)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 37/98
Texto Preliminar, SH Sphaier 33
A conservacao da quantidade de movimento angular indica: L
r × δma =
L
r × δ p +
L
r × δ e +
L
r× δ f hidrodinamica (3.7)
onde:
r ≈ xi.
Deve-se observar que δ e0 = δ p em cada secao, porem L
δ e0 =
L
δ p (3.8)
L
r × δ e0 = L
r × δ p (3.9)
3.2.1 Equacoes dos Movimentos Acoplados de Heave e Pitch
A partir do deslocamento de uma secao a uma distancia x da origem do sistema pode-se obteras velocidades e as aceleracoes da secao:
η(x) = η3 − x sin(η5) ≈ η3 − xη5 (3.10)
˙η(x) = η3 − x η5 (3.11)¨η(x) = η3 − xη5 (3.12)
A partir das forcas acima mencionadas e com as expressoes dos deslocamentos, das velocidadese das aceleracoes, pode-se determinar a carga por secao:
q (x) = −m(x) · η − a33(x) · η − b33(x) · η + p(x) + e0(x) − ρgB(x) · η + ρζ 0(f inc + f dif )
= −m(x) · (η3 − xη5) − a33(x) · (η3 − xη5) − b33(x) · (η3 − xη5)
+ p(x) + e0(x) − ρgB(x) · (η3 − xη5) + ρζ 0(f inc + f dif ) (3.13)
A integral do carregamento e a equacao de equilıbrio de forcas e a integral da cargas mulplicadapela distancia ao centro e a equacao de momentos:
L
q (x)dx = +
L
[−m(x) · (η3 − xη5)]dx
+
L
[−a33(x) · (η3 − xη5)]dx +
L
[−b33(x) · (η3 − xη5)]dx

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 38/98
34 Texto Preliminar, SH Sphaier
+
L
[ p(x) + e0(x)]dx +
L
[−ρgB(x) · (η3 − xη5)]dx +
L
ρζ 0[f inc + f dif ]dx (3.14) L
xq (x)dx = +
L
x[−m(x) · (η3 − xη5)]dx
+
L
x[−a33(x) · (η3 − xη5)]dx +
L
x[−b33(x) · (η3 − xη5)]dx
+
L
x[ p(x) + e0(x)]dx +
L
x[−ρgB(x) · (η3 − xη5)]dx +
L
xρζ 0[f inc + f dif ]dx (3.15)
Desenvolvendo as duas equacoes, obtemos as equacoes dos movimentos acoplados no plano
vertical:
(A33 + M )η3 + B33 η3 + C 33η3 + (A35 − MX g)η5 + B35 η5 + C 35η5 = F 3 (3.16)(A53 − MX g)η3 + B53 η3 + C 53η3 + (A55 + I yy)η5 + B55 η5 + C 55η5 = F 5 (3.17)
onde os coeficientes hidrodinamicos e hidrostaticos sao dados por:
A33 =
L
a33dx B33 =
L
b33dx C 33 = ρg
L
B(x)dx
A35 = − L
x a33dx B35 = − L
x b33dx C 35 = −ρg L
x B(x)dx
A53 = A35 B53 = B35 C 53 = C 35
A55 =
L
x2 a33dx B55 =
L
x2 b33dx C 55 = ρg
L
x2 B(x)dx
As forcas de excitacao sao dadas por:
F 3 = ρζ 0
L
f excdx (3.18)
F 5 = ρζ 0 L
−xf excdx (3.19)
onde:
f exc e a soma das contribuicoes devidas a onda incidente f inc e a onda difratada f dif ,
X g e a posicao longitudinal do centro de gravidade.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 39/98
Texto Preliminar, SH Sphaier 35
3.2.2 Solucao das equacoes de movimento
Inicialmente vamos observar que ate entao consideramos o navio como uma serie de secoes,
calculamos as cargas nas secoes e integramos ao longo do comprimento. Para determinacaodas cargas detrminamos as massas adicionais, os amortecimentos e as forcas de restauracao
e de excitacao em cada secao. Podemos fazer o mesmo atraves de metodos tridimensionais.
Assim, A33, B33, C 33, A35, B35, C 35, A53, B53, C 53, A55, B55, C 55, F 3 e F 5 sao calculados por
metodos tridimensionais integrando-se as pressoes dinamicas e estaticas como anteriormente,
porem sobre uma superfıcie molhada do corpo na posicao media. As pressoes dinamicas sao
obtidas da solucao de problemas tridimensionais. Obtemos como equacoes de movimento o
sistema.
(A33 + M )η3 + B33 η3 + C 33η3 + (A35 − M X g)η5 + B35 η5 + C 35η5 = F 3 (3.20)
(A53 −MX g)η3 + B53 η3 + C 53η3 + (A55 + I yy)η5 + B55 η5 + C 55η5 = F 5 (3.21)
As equacoes acopladas que regem os movimentos vertical e de arfagem, sao equacoes diferen-
ciais ordinarias de segunda ordem a coeficientes constantes. Admitindo que a onda incidente
e harmonica, e que a fase transiente ja tenha sido superada, o processo entra em regime per-
manente; as ondas difratadas tambem o serao harmonicas. As pressoes atuantes sobre o corpotambem terao um carater harmonico e consequentemente as forcas e momentos de excitacao
terao o mesmo comportamento e neste regime permanente a solucao da equacao diferencial,
que rege o movimento e descrita pela solucao particular.
Assim, as forcas e momentos sao dados por F i,0eiω e as solucoes por:
η j = η j,0eiωt (3.22)
Substituindo (3.22) nas equacoes de movimento no plano longitudinal e definindo
P = C 33 −
ω2(A33
+ M ) + iωB33
(3.23)
Q = C 35 − ω2(A35 − MX g) + iωB35 (3.24)
R = C 53 − ω2(A53 − MX g) + iωB53 (3.25)
S = C 55 − ω2(A55 + I yy) + iωB55 (3.26)
obtemos
P η3,0eiωt + Qη5,0eiωt = F 3,0eiωt (3.27)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 40/98
36 Texto Preliminar, SH Sphaier
Rη3,0eiωt + Sη5,0eiωt = F 5,0eiωt (3.28)
Simplificando o termo eiω, temos um sistema de duas equacoes a duas incognitas, cujas
solucoes sao dadas por:
η3,0 = (F 3,0 · S − F 5,0 · Q)/DEN (3.29)
η5,0 = (P · F 5,0 − R · F 3,0)/DEN (3.30)
onde:
DEN = P · S − R · Q (3.31)
3.3 Movimentos lateral, de rotacao em torno do eixo
Oz e de jogo
Vamos equacionar o problema, de forma semelhante ao que fizemos no caso dos movimentos
vertical e de arfagem acoplados. O procedimento adotado e dividir o corpo em varias secoes,
aplicar as leis de conservacao da quantidade de movimento linear (segunda lei de Newton) e
de forma similar a de quantidade de movimento angular para os movimentos de rotacao e de
jogo.
A conservacao da quantidade de movimento linear indica: L
δma =
L
δ f hidrodinamica (3.32)
onde:
a e a aceleracao de cada secao, e e dada pela composicao da aceleracao linear, isto e a
contribuicao do movimento vertical η2, e a contribuicao do movimento de rotacao η6
a = (η2 + xη6)k (3.33)
δm e a massa da secao
δ f hidrodinamica e a forca hidrodinamica na secao, composta de um termo devido ao fenomeno
de radiacao e outro devido a onda incidente e sua difracao
δ f hidrodinamica = [−a22(η2 + xη6) − b22(η2 + xη6) − a24η4 − b24 η4 + ρζ 0f exc,2] j (3.34)
Assim, L
δm(η2−Z g η4+xη6) =
L
(−a22[η2+xη6]−b22[η2+xη6]−a24η4−b24 η4+ρζ 0f exc,2)dx (3.35)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 41/98
Texto Preliminar, SH Sphaier 37
A conservacao da quantidade de movimento angular em torno do eixo Oz indica:
k · L
r × [δm(η2 + xη6 − z m(x)η4) j] = k · L
r × δ f hidrodinamica (3.36)
De acordo com nossa aproximacao, em que estamos considerando o corpo esbelto vale r ≈ xi,
e entao
M X gη2 + I zz η6 − I xzη4 =
L
[−a22(xη2 + x2η6) − b22(xη2 + x2η6) − a24xη4 − b24xη4 + ρζ 0xf exc,2] dx (3.37)
A conservacao da quantidade de movimento angular em torno do eixo Oz indica:
L
(δI xxη4 − δmz gη2 − δmxz gη6)
= i ·
L
δ mhidrodinamica +
L
δ m peso +
L
δ mhidrostatica
(3.38)
ou L
(δI xxη4 − δmz gη2 − δmxz gη6)
= L
[−a44η4−b44 η4−a42(η2 + xη6)−b42(η2 + xη6)]dx−GM L
δmgdxη4 + L
f exc,4dx (3.39)
3.3.1 Equacoes de movimento no plano horizontal
(A22 + M )η2 + B22 η2 + (A24 − MZ g)η4 + B24 η4 + (A26 + M X g)η6 + B26 η6 = F 2 (3.40)
(A42−MZ g)η2+B42 η2 +(A44 +I xx)η4 +B44 η4+C 44η4 +(A46−I xz)η6+B46 η6 = F 4 (3.41)
(A62 + M X g)η2 + B62 η2 + (A64 − I xz)η4 + B64 η4 + (A66 + I zz )η6 + B66 η6 = F 6 (3.42)
sendo

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 42/98
38 Texto Preliminar, SH Sphaier
A22 =
La22dx B22 =
L
b22dx
A26 = A62 =
Lx a22dx B26 = B62 =
L
x b22dx
A66 = L x2 a22dx B66 = L x2 b22dx
A24 = A42 =
La24dx B24 = B42 =
L
b24dx
A44 =
La44dx B44 =
L
b44dx
A46 = A64 =
Lx a24dx B46 = B64 =
L
x b24dx
C 044 = ρ g ∆ ¯GM T
I ij - momentos e produtos de inercia
M - massa do corpo
(X g, Y g, Z g) - posicao vertical do centro de gravidade
3.3.2 Solucao das equacoes de movimento
De forma semelhante ao que foi feito para os movimentos acoplados vertical e de arfagem,
vamos supor que separamos a fase transiente, que ja estamos na fase permanente, onde asondas tem carater harmonico, as forcas e os momentos de excitacao tambem o tem, e o corpo
executa movimentos harmonicos. Definindo
P = C 22 − ω2(A22 + M ) + iωB22 (3.43)
Q = C 24 − ω2(A24 − MZ g) + iωB24 (3.44)
R = C 26 − ω2(A26 + M X g) + iωB26 (3.45)
S = C 42
−ω2(A42
−M Z g) + iωB42 (3.46)
T = C 44 − ω2(A44 + I xx) + iωB44 (3.47)
U = C 46 − ω2(A46 − I xz) + iωB46 (3.48)
V = C 62 − ω2(A62 + MX g) + iωB62 (3.49)
W = C 64 − ω2(A64 − I xz) + iωB64 (3.50)
X = C 66 − ω2(A66 + I zz ) + iωB66 (3.51)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 43/98
Texto Preliminar, SH Sphaier 39
e das equacoes de movimento no plano horizontal obtemos:
P η2,0eiω + Qη4,0eiω + Rη6,0eiω = F 2,0eiω (3.52)
Sη2,0eiω + T η4,0eiω + U η6,0eiω = F 4,0eiω (3.53)
V η2,0eiω + W η4,0eiω + Xη6,0eiω = F 6,0eiω (3.54)
Simplificando o termo eiω e resolvendo o sistema obtemos
η2 = (F 2 · T ·X + Q ·U ·F 6 + R · F 4 ·W − F 2 · T ·R−W ·U ·F 6 −X · F 4 ·Q)/DEN (3.55)
η6 = (P · T · F 6 + Q · F 4 · V + F 2 · S ·W − V · T · F 2 − W · F 4 · P − F 6 · S ·Q)/DEN (3.56)
η4 = (P · F 4 · X + F 2 · U · V + R · S · F 6 − V · F 4 · R − F 6 · U · P − X ·S · F 2)/DEN (3.57)
onde
DEN = P · T · X + Q · U · V + R · S · W − V · T · R − W · U · P − X ·S · Q (3.58)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 44/98
40 Texto Preliminar, SH Sphaier

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 45/98
Capıtulo 4
Generalizacao do Problema Dinamico
4.1 Introducao
Vamos aqui, de forma abreviada, generalizar o problema para corpos de formas quaisquer.
Escreveremos as equacoes de movimento e posteriormente vamos analisar as simplificacoes
quando aparecem simetrias.
Posteriormente mostraremos a forma das equacoes de movimento para um corpo esbelto com
simetria longitudinal e dotado de velocidade de avanco.
4.2 Corpos com Geometria Qualquer
A generalizacao do problema com seis graus de liberdade e corpos de qualquer geometria toma
a forma:
([M] + [A])η + [B]η + [C]η = [F] (4.1)
Em que introduzimos
- a matriz de inercia [M] = [M ij], onde seus termos definem a massa, os produtos e os
41

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 46/98
42 Texto Preliminar, SH Sphaier
momentos de inercia
[M] = [M ij] =
M 0 0 0 M Z g −MY g0 M 0
−MZ g 0 MX g
0 0 M MY g −MX g 00 −MZ g MY g I 44 −I 45 −I 46
MZ g 0 −MX g −I 54 I 55 −I 56−M Y g MX g 0 −I 64 −I 65 I 66
(4.2)
- a matriz de massa adicional [A] = [Aij]
[A] = [Aij] =
A11 A12 A13 A13 A15 A16
A21 A22 A23 A24 A25 A26
A31 A32 A33 A34 A35 A36
A41 A42 A43 A44 A45 A46
A51 A52 A53 A54 A55 A56
A61 A62 A63 A64 A65 A66
(4.3)
- a matriz de amortecimento [B] = [Bij]
[B] = [Bij] =
B11 B12 B13 B13 B15 B16
B21 B22 B23 B24 B25 B26
B31 B32 B33 B34 B35 B36
B41 B42 B43 B44 B45 B46
B51 B52 B53 B54 B55 B56
B61 B62 B63 B64 B65 B66
(4.4)
- a matriz de restauracao [C] = [C ij],
[C] = [C ij] =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 C 33 C 34 C 35 0
0 0 C 43 C 44 C 45 0
0 0 C 53 C 54 C 55 0
0 0 0 0 0 0
(4.5)
com:
C 33 = ρgS w (4.6)
C 34 = C 43 = ρgS y (4.7)
C 35 = C 53 = ρgS x (4.8)
C 44 = M g(z b − z g) + ρgS yy (4.9)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 47/98
Texto Preliminar, SH Sphaier 43
C 45 = C 54 = ρgS xy (4.10)
C 55 = M g(z b − z g) + ρgS xx (4.11)
observando que os coeficientes restantes C ij sao nulos, e
S x =
S w
xdxdy (4.12)
S y =
S w
ydxdy (4.13)
S xx =
S w
x2dxdy (4.14)
S yy =
S w
y2dxdy (4.15)
S xy = S w
xydxdy (4.16)
z g - posicao vertical do centro de gravidade
z b - posicao vertical do centro de carena
- o vetor forca de excitacao generalizado, composto de tres componentes de forca e tres
componentes de momentos, [F] = [F i]
Deve ser observado que para corpos sem simetria as matrizes de massa adicional e deamortec-
imento sao cheias.
Para corpos com simetria longitudinal, como navios, as matrizes de massa adicional e de
amortecimento sao dadas por:
[A] = [Aij] =
A11 0 A13 0 A15 0
0 A22 0 A24 0 A26
A31 0 A33 0 A35 0
0 A42 0 A44 0 A46
A51 0 A53 0 A55 0
0 A62
0 A64
0 A66
(4.17)
[B] = [Bij] =
B11 0 B13 0 B15 0
0 B22 0 B24 0 B26
B31 0 B33 0 B35 0
0 B42 0 B44 0 B46
B51 0 B53 0 B55 0
0 B62 0 B64 0 B66
(4.18)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 48/98
44 Texto Preliminar, SH Sphaier
em que
Aij = A ji (4.19)
Bij = B ji (4.20)
Alem disto, para corpos com simetria em relacao ao plano longitudinal:
C 34 = C 43 = 0 (4.21)
No caso de corpos alongados, como navios, podemos assumir que o acoplamento do movimento
longitudinal, na direcao 1, com os movimentos nas direcoes 3 e 5 seja pequeno e as matrizes
de massa adicional e de amortecimento tomam a forma:
[A] = [Aij] =
A11 0 0 0 0 0
0 A22 0 A24 0 A26
0 0 A33 0 A35 0
0 A42 0 A44 0 A46
0 0 A53 0 A55 0
0 A62 0 A64 0 A66
(4.22)
[B] = [Bij] =
B11 0 0 0 0 0
0 B22 0 B24 0 B26
0 0 B33 0 B35 00 B42 0 B44 0 B46
0 0 B53 0 B55 0
0 B62 0 B64 0 B66
(4.23)
e retornamos as equacoes obtidas anteriormente.
4.3 Um Exemplo
Como exemplo apresentamos nas figuras 4.1, 4.2, 4.3, 4.44.54.6 e 4.7 as inercias adicionais, osamortecimentos, as forcas de excitacao e os RAOs, em forma adimensional para os movimentos
3 (heave) e 5 (pitch) de um VLCC, calculados por um metodo tridimensional:
A33 = A33/(ρL3 pp) (4.24)
B33 = B33/(ωρL3 pp) (4.25)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 49/98
Texto Preliminar, SH Sphaier 45
Periodos em Segundos25 50 75 100
A33
B33
A33, B33
VLCC
Figura 4.1: Inercia Adicional e Amortecimento na Forma Adimensional I
A35 = A35/(ρL4 pp) (4.26)
B35 = B35/(ωρL4
pp) (4.27)
A55 = A55/(ρL5 pp) (4.28)
B55 = B55/(ωρL5 pp) (4.29)
F 3 = F 3/(ρgL2 pp) (4.30)
F 5 = F 5/(ρgL3 pp) (4.31)
A solucao deste problema para diversas frequencias de onda gera as seis funcoes de trans-
ferencia para os deslocamentos do corpo. E comum chamarmos de RAO (Operador de Am-
plitude de Resposta), como ja citamos anteriormente.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 50/98
46 Texto Preliminar, SH Sphaier
Periodos em Segundos25 50 75 100
A35
B35
A35, B35
VLCC
Figura 4.2: Inercia Adicional e Amortecimento na Forma Adimensional II
Periodos em Segundos25 50 75 100
A55
B55
A55, B55
VLCC
Figura 4.3: Inercia Adicional e Amortecimento na Forma Adimensional III

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 51/98
Texto Preliminar, SH Sphaier 47
Periodos em segundos10 20 30 40 50 60
Força de Excitaçãode Heave
Figura 4.4: Forca de Excitacao Vertical
Periodos em segundos10 20 30 40 50 60
Momento de Excitação
de Pitch
Figura 4.5: Momento de Excitacao

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 52/98
48 Texto Preliminar, SH Sphaier
Periodo em segundos10 20 30 40 50 60
RAO de Heave
Figura 4.6: Rao de Heave
Periodo em segundos10 20 30 40 50 60
RAO de Pitch
Figura 4.7: Rao de Pitch
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 53/98
Capıtulo 5
Navio em Mar Irregular
5.1 Introducao
Determinamos nos capıtulos anteriores a funcao de resposta do navio em ondas regulares, que
chamamos de RAOs. As ondas consideradas foram sempre ondas monocromaticas. Investi-
garemos agora a resposta do navio em mar irregular.
5.2 Transformada de Fourier da Equacao de Movimento
A equacao de movimento do navio e dada por:
(M + A)x + Bx + Cx = f (t) (5.1)
A esta equacao aplicamos a transformada de Fourier, definida por:
Fg(t) ≡ 1
2π
∞
−∞
eiωtg(t)dt = G(ω) (5.2)
Entretanto, vamos inicialmente considerar um intervalo T das ondas atuantes. Retiramos do
sinal original ζ (t) a funcao ζ T (t) que e igual a ζ (t) no intervalo T e fora deste intervalo e nula.
Estas ondas vao provocar forcas sobre o navio que serao nulas fora do intervalo T e iguais as
forcas do mar no intervalo T . A transformada de funcoes neste intervalo e dada por:
Ff T (t) ≡ 1
2π
∞
−∞
eiωtf T (t)dt = GT (ω) (5.3)
49

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 54/98
50 Texto Preliminar, SH Sphaier
Alem disto, para as derivadas vale:
Fg(t) = iωG(ω) (5.4)
Fg(t) = −ω2
G(ω) (5.5)entao
FgT (t) = iωGT (ω) (5.6)
FgT (t) = −ω2GT (ω) (5.7)
Aplicando a equacao do movimento, teremos:
−ω2(M + A)X T + iωBX T + CX T = F T (5.8)
−ω2(M + A) + iωB + C X T = F T (5.9)
onde X T = X R,T + iX I,T (5.10)
F T = F R,T + iF I,T (5.11)
5.3 O Espectro de Resposta
Multiplicando pelo conjugado
−ω2(M + A) + iωB + C −ω2(M + A) − iωB + C X R,T + iX I,T X R,T − iX I,T = F R,T + iF I,T F R,T − iF I,T (5.12)
X 2R,T + X 2I,T =F 2R,T + F 2I,T
(C −ω2(M + A))2 + (ωB)2 (5.13)
ou
X T X ∗T = F T F ∗T
(C −ω2(M + A))2 + (ωB)2 (5.14)
dividindo pelo tempo T e fazendo o limite quando T
→ ∞ temos:
limT →∞
2πX T X ∗T
T = lim
T →∞
2πF T F ∗T
T
1
(C −ω2(M + A))2 + (ωB)2 (5.15)
porem limT →∞
2πX T X ∗T
T e o espectro da funcao x(t) e limT →∞
2πF T F ∗T
T e o espectro das forcas.
Entao
S xx = S ff 1
(C −ω2(M + A))2 + (ωB)2 (5.16)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 55/98
Texto Preliminar, SH Sphaier 51
Por outro lado, ha uma relacao similar entre o espectro das forcas e o espectro do sinal
elevacao da onda na origem.
S f f = S ζζ |F (ω)|2 (5.17)
logoS xx = S ζζ |F (ω)|2 1
(C −ω2(M + A))2 + (ωB)2 (5.18)
5.4 Espectro de Resposta de um Sistema Oceanico em
um Mar Irregular
A previsao das respostas de um corpo flutuante en ondas, tais como movimentos e baseada
na equacao 5.18 e o trabalho pioneiro no assunto foi desenvolvido por St. Denis e Pierson em
1953. Desde entao tem sido amplamente aplicado para varios problemas de comportamento
de estruturas flutuantes no mar. Entretanto cabe ressaltar em que condicoes foi desenvolvido:
- As ondas do mar sao consideradas como um processo estocastico estacionario, normal-
mente distribuıdo com media zero.
- A funcao de densidade espectral das ondas do mar e das respostas da estrutura s ao
consideradas de banda estreita.
- As funcoes de densidade de probabilidade e o espectro de excitacao e de respostas sao
consideradas como independentes do tempo.
- O princıpio de superposicao e aplicavel para a previsao das respostas em mar irregular.
- As respostas em ondas irregulares podem ser representadas pela soma de respostass da
estrutura em ondas regulares.
Um sistema linear mantem relacoes entre respostas e excitacao de tal maneira que:
- a resposta do sistema a uma excitacao monocromatica (onda regular com uma unica
frequencia e amplitude constante) e monocromatica
- se a variavel aleatoria que representa a excitacao do sistema segue um processo gaussiano
a resposta tambem sera um processo gaussiano
- a partir das respostas do sistema para uma onda regular (monocromatica) variando
sua frequencia, construimos a funcao de resposta do sistema (funcao de transferencia,
fator de amplificacao) que e a relacao entre a amplitude da resposta e a amplitude da
excitacao para as varias frequencias

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 56/98
52 Texto Preliminar, SH Sphaier
- A funcao de densidade espectral da resposta pode ser obtida a partir da funcao de
densidade espectral da excitacao atraves de:
S Y Y (ω) = S XX (ω)|H (ω)|2
(5.19)
onde |H (ω)| e a funcao de resposta do sistema a ondas regulares
Em Engenharia Oceanica |H (ω)| e frequentemente chamado de RAO que sao as iniciais
da expressao inglesa Response Amplitude Operator.
5.5 Movimentos de um Corpo Flutuante no Mar
O estudo de um corpo flutuante tem como interesse respostas como movimentos, velocidades
e aceleracoes de pontos do corpo, alem de outras variaveis que decorrem dos movimentos.
Com os movimentos pode-se calcular as pressoes sobre o casco, cargas, etc. Inicialmente
consideremos os movimentos do centro do sistema localizado no corpo. Assim, estas respostasformam um vetor de 6 posicoes.
η =
ηl
ηa
(5.20)
onde
ηl = η1
η2
η3
e ηa = η4
η5
η6
(5.21)
- η1,2,3 movimentos lineares (surge, sway, heave)
- η4,5,6 movimentos angulares (roll, pitch yaw) e
- ηi = ηi,0 eiδi
- ηi,0 amplitude do movimento i
- δ i angulo de fase do movimento i
Uma vez que a excitacao em mar regular e harmonica e da forma F = F 0 eiωt e o modelo,
todas as respostas tambem o serao:
η = η eiωt = η0 eiδ eiωt (5.22)
Assim:

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 57/98
Texto Preliminar, SH Sphaier 53
- velocidade = (d/dt) (deslocamento)
v = d
dtη = η = iωη = v eiωt (5.23)
- aceleracao = (d/dt) (velocidade)
a = d2
dt2η = η = −ω2η = a eiωt (5.24)
Passemos agora a partir dessas respostas a determinacao de espectros de deslocamentos,
velocidades e aceleracoes e ao estudo de eventos de seakeeping. Os espectros de deslocamentos,velocidades e aceleracoes em mar irregular serao da forma
S XX
(ω) =|RAO
X (ω)
|2S
ζζ (ω) = X X ∗S
ζζ (ω) (5.25)
S X X (ω) = |RAO X (ω)|2S ζζ (ω) = ¯X ¯X ∗S ζζ (ω) = V V ∗S ζζ (ω) = ω2|RAOX (ω)|2S ζζ (ω) (5.26)
S X X (ω) = |RAOX (ω)|2S ζζ (ω) = ¯X ¯X ∗S ζζ (ω) = A A∗S ζζ (ω) = ω4|RAOX (ω)|2S ζζ (ω) (5.27)
onde: V = ¯X , A = ¯X , ¯X ∗ = V ∗ e ¯X ∗ = A∗, e X ∗, V ∗ e A∗ sao os conjugados de X , V e A
respectivamente.
5.5.1 Deslocamentos, velocidades e aceleracoes em um ponto do
corpo
Da mecanica sabemos que o deslocamento de um ponto qualquer de um corpo pode ser
obtido se conhecemos o deslocamento linear de um ponto e a rotacao em torno daquele ponto.
Admitindo pequenos deslocamentos esta expressao e da forma:
d = ηl + ηa × R (5.28)
onde
d = dx
dy
dz (5.29)
e o vetor dos deslocamentos do ponto
ηl =
η1
η2
η3
(5.30)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 58/98
54 Texto Preliminar, SH Sphaier
e o vetor dos deslocamentos lineares, isto e, ”surge”, ”sway”e ”heave”
ηa = η4
η5η6
(5.31)
e o vetor dos deslocamentos angulares, isto e, ”roll”, ”pitch”e ”yaw”
d =
x
y
z
(5.32)
sao as coordenadas do ponto em selecao ao sistema fixo no corpo,
A hipotese de pequenos deslocamentos permite-nos interpretar (η4, η
5, η
6) como um vetor.
Uma vez obtido o vetor dos deslocamentos
d =
dx
dy
dz
(5.33)
podemos obter os vetores das velocidades,
v = iωd (5.34)
v =
vx
vy
vz
=
iωdx
iωdy
iωdz
(5.35)
e
a = iωv = −ω2d (5.36)
a = ax
ay
az
e v = iωvx
iωvy
iωvz
(5.37)
Os RAOS de deslocamentos, velocidades e aceleracoes em um ponto qualquer do corpo sao
dados entao por:
|RAOdx(ω)|2 = |dx|2 = dx · d∗x (5.38)
|RAOdy(ω)|2 = |dy|2 = dy · d∗y (5.39)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 59/98
Texto Preliminar, SH Sphaier 55
|RAOdz(ω)|2 = |dz|2 = dz · d∗z (5.40)
|RAOvx(ω)|2 = |vx|2 = vx · v∗x (5.41)
|RAOvy(ω)
|2 =
|vy
|2 = vy
·v∗y (5.42)
|RAOvz(ω)|2 = |vz|2 = vz · v∗z (5.43)
|RAOax(ω)|2 = |ax|2 = ax · a∗x (5.44)
|RAOay(ω)|2 = |ay|2 = ay · a∗y (5.45)
|RAOaz(ω)|2 = |az|2 = az · a∗z (5.46)
Para obtermos os espectros resposta, basta multiplicarmos os quadrados das funcoes de trans-
ferencia (RAOs) pelo espectro do mar.
5.5.2 Eventos de Seakeeping
Para operacoes no mar torna-se importante verificar as seguintes ocorrencias:
- embarque de agua (green water)
- culapada, entrada da proa na agua (slamming)
- culapada tranversal com o movimento de jogo em transporte de estruturas ou modulos
com barcaca
- emersao do propulsor
No caso de agua no conves pesquisa-se a frequencia de ocorrencia desta situacao para uma
borda livre pre-determinada ou a borda livre necessaria para que uma certa frequencia de
ocorrencia de embarque de agua nao seja ultrapassada.
Determina-se inicialmente o quadrado do RAO de deslocamento vertical relativo corpo-ondapara um ponto no plano longitudinal da embarcacao no nıvel da linha de agua.
O deslocamento vertical de um ponto do navio localizado no eixo Ox, localizado longitudi-nalmente na posicao XL e dado por:
ηz(t) = η3(t) − XL · η5(t) (5.47)
O deslocamento relativo superfıcie do mar e o ponto acima
ηr(t) = ηz(t)− ζ (t) = η3(t)−XL · η5(t)− ζ (t) = [η3,0eiδ3 −XL · η5,0eiδ5 − ζeik0XL ]eiωt (5.48)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 60/98
56 Texto Preliminar, SH Sphaier
O quadrado do modulo da resposta da distancia relativa e dado por:
|ηr,0|2 = ηr,0 · η∗r,0
= [η3,0eiδ3 − XL · η5,0eiδ5 − ζeik0XL ] · [η3,0e−iδ3 − XL · η5,0e−iδ5 − ζe−ik0XL]
= (η23,0 + XL2 ∗ η2
5,0 + ζ 20 ) − XLη3,0η5,0[ei(δ3−δ5) + e−i(δ3−δ5)]+
−η3,0ζ 0[ei(δ3−k0·XL) + e−i(δ3−k0·XL)] + XL · η5,0ζ 0[ei(δ5−k0·XL) + e−i(δ5−k0·XL)] (5.49)
O quadrado da relacao entre a resposta do movimento e a amplitude da onda, isto e, a resposta
para onda unitaria e o modulo do RAO do deslocamento relativo ao quadrado:
RML = 1 + (XL ∗ η5,0)2 + η23,0 − 2η3,0 cos(δ 3,0 − k0XL) − 2XLη3,0η5,0 cos(δ 3,0 − δ 5,0)
+2XLη5,0 cos(δ 5,0
−k0XL) (5.50)
De forma similar ao que foi feito anteriormente, os quadrados dos RAO’s de velocidade e
aceleracoes relativas sao dados por:
RV L = ω2 · RML (5.51)
RAL = ω2 · RV L = ω4 · RM L (5.52)
Os espectros de resposta sao dados por:
S MM = S ζζ ·RM L (5.53)
S V V = S ζζ ·RV L (5.54)S AA = S ζζ ·RAL (5.55)
Como sabido, a area sob a curva da funcao de densidade espectral fornece a media dos
quadrados do processo em estudo: deslocamentos, velocidades e aceleracoes. Assumindo-se que o processo e de banda estreita o processo estocastico dos picos de deslocamentos,
velocidades e aceleracoes, segue a lei de Rayleigh cuja funcao de densidade de probabilidade
e dada por:
f X (x) = x
mxe−x2/2mx (5.56)
onde mx
e a variancia do processo da variavel X :
mx =
∞
0
S xxdω (5.57)
A probabilidade da variavel X exceder um certo valor crıtico e:
P [X > X crit] = e
−X 2crit
2mx (5.58)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 61/98
Texto Preliminar, SH Sphaier 57
ou
X 2crit = −2mx ln P [X > X crit] (5.59)
Esta expressao fornece o deslocamento relativo vertical crıtico para um certo nıvel de prob-
abilidade P [X > X crit]. Caso conheca-se a frequencia admissıvel de ocorrencia de embarquede agua no conves pode-se obter a borda livre necessaria
BL = −2mx ln P [X > X crit] (5.60)
Se, por exemplo, a probabilidade de excedencia for de 1/25 obtem-se uma borda livre
BL = 2.54√
mx (5.61)
No caso em que a borda livre e dada e se quer verificar a incidencia de ocorrencia de agua no
conves tem-se:
P [X > BL] = e−BL2
/(2mx) (5.62)
e, determinando-se o numero de oscilacoes por hora
N osc = 3600 · (ciclos por segundo) = 3600σmedio/(2π) = 3600
mv/mx/(2π) (5.63)
pode-se calcular o numero de vezes em media esperado de ocorrencia de agua no conves:
N = N osc ∗ P [X > BL] = 3600
mv/mxe−BL2/(2mx)/(2π) (5.64)
No caso de emersao do propulsor o procedimento e similar. Determina-se qual a probabilidade
da pa do propulsor deixar a agua, isto e, quer-se que a distancia entre a onda e a posicao dapa do propulsor nao se torne nula.
Para as previsoes de slamming longitudinal e transversal a situacao e relativamente similar.
Deve-se determinar a probabilidade do deslocamento, dada pela diferenca entre a cota do
fundo do corpo flutuante e a linha de aguas tranquilas, exceder uma distancia limite pre-
estabelecida. Entretanto um outro fator e tambem importante que e a velocidade de imersao.
Se a velocidade for baixa nao ha risco. Entretanto se ela exceder um certo valor a entrada na
agua e feita com risco de dano estrutural.
A probabilidade de ocorrer simultaneamente emersao do propulsor e excedencia da velocidade
crıtica e dado por:
P [ocorrencia de slamming] = P [excedencia do deslocamento] · P [excedencia da velocidade]
(5.65)
onde
P [excedencia do deslocamento] = e−DIST 2/(2mx) (5.66)
P [excedencia da velocidade] = e−V T L2/(2mx) (5.67)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 62/98
58 Texto Preliminar, SH Sphaier
DIST - e a distancia entre o nıvel de aguas tranquilas e o ponto de interesse.
VTL - e a velocidade crıtica a partir da qual pode haver danos estruturais. Recomenda-
se utilizar um valor em torno de 0.1 gL pp
Com este resultado pode-se calcular o numero de vezes em media esperado de ocorrencia de
slamming:
N = P [ocorrencia de slamming]3600
mv/mx/(2π) (5.68)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 63/98
Texto Preliminar, SH Sphaier 59
5.6 Resumo Esquematico
Figura 5.1: Apresentacao Esquematica I
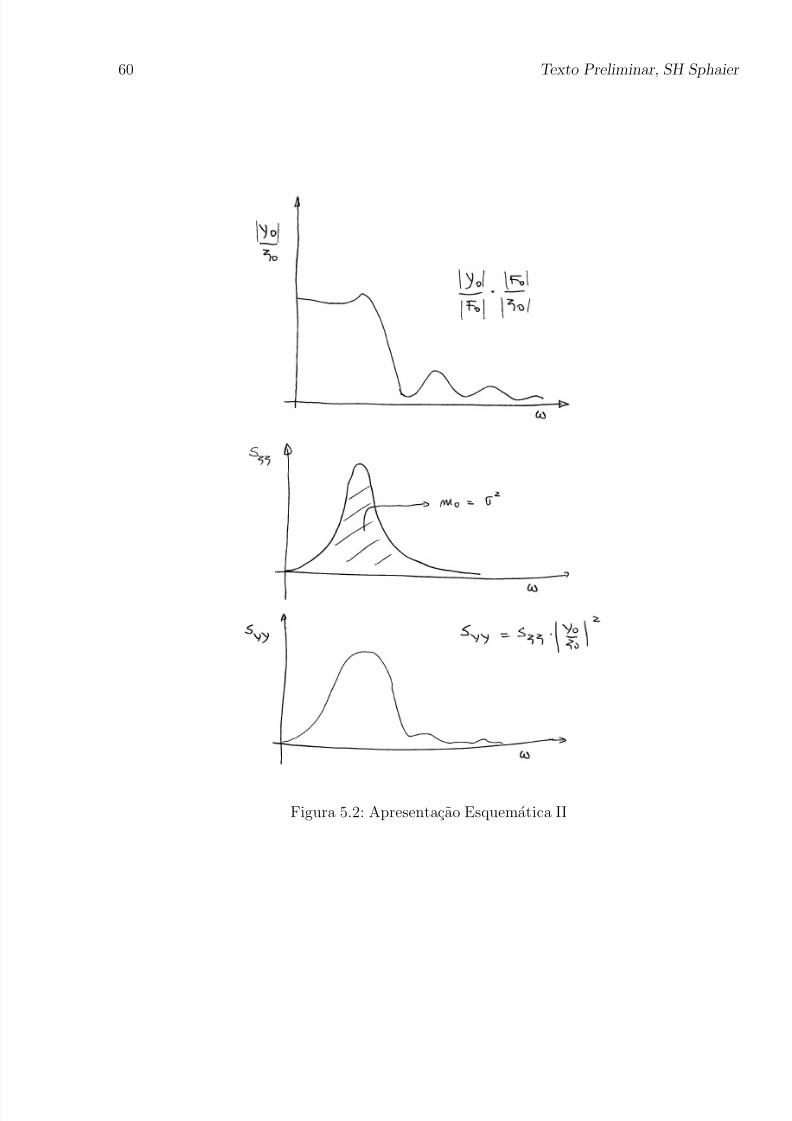
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 64/98
60 Texto Preliminar, SH Sphaier
Figura 5.2: Apresentacao Esquematica II

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 65/98
Texto Preliminar, SH Sphaier 61
Figura 5.3: Apresentacao Esquematica III

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 66/98
62 Texto Preliminar, SH Sphaier
Figura 5.4: Apresentacao Esquematica IV
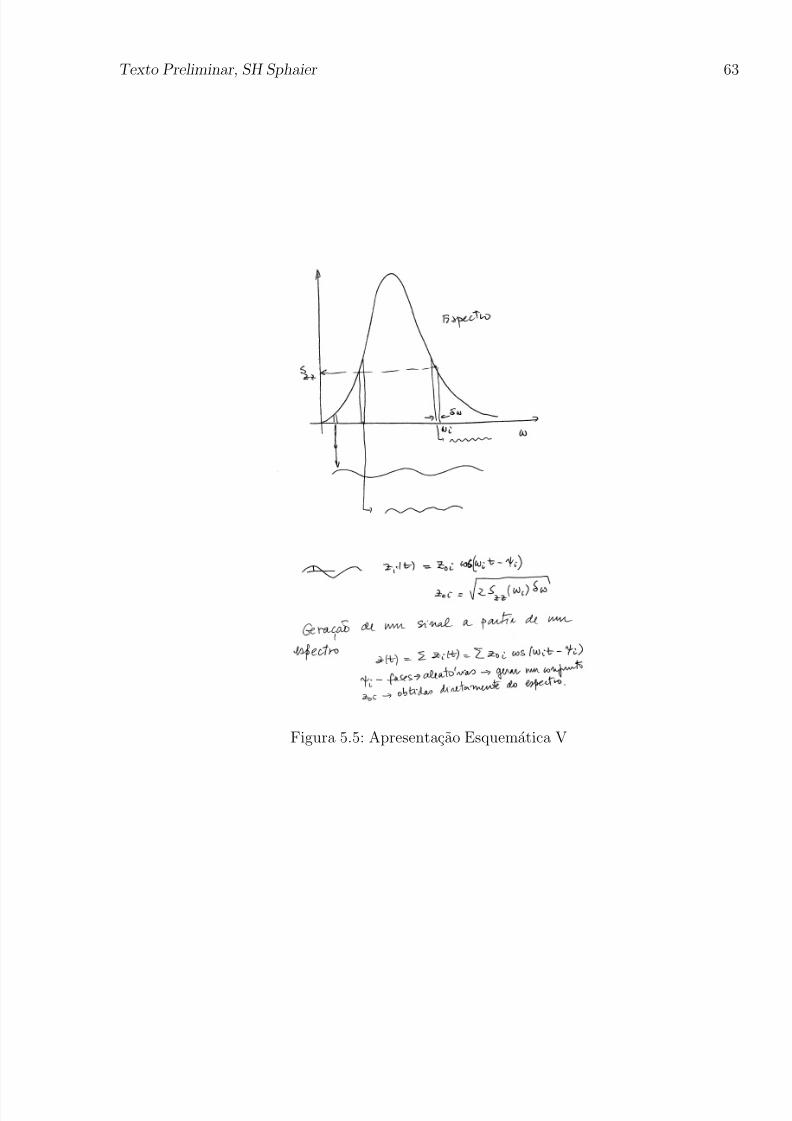
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 67/98
Texto Preliminar, SH Sphaier 63
Figura 5.5: Apresentacao Esquematica V

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 68/98
64 Texto Preliminar, SH Sphaier

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 69/98
Capıtulo 6
Hidrodinamica de Corpos FlutuantesEstacionarios
6.1 Aspectos Fısicos: Leis e Princıpios
Passaremos agora a tratar o problema discutido acima em bases mais formais do ponto de vista
hidrodinamico. Vamos assumir que as ondas sao de pequenas amplitudes, o corpo executara
movimentos de pequenas amplitudes e podemos tratar o problema linearmente.
Nosso objetivo e o estudo do comportamento de corpos flutuantes, isto e, corpos rıgidosmovendo-se, semi-imersos em um fluido em movimento. Como sabemos o movimento de um
corpo e regido pelas leis da mecanica, que sao as tres leis de Newton e a lei de gravitacao
universal. Alem disto temos que satisfazer aos princıpios de conservacao da massa e da
impenetrabilidade dos corpos.
No caso especıfico do corpo, sua massa e considerada imutavel, estando assim, automatica-
mente satisfeito o princıpio de conservacao da massa.
O princıpio da impenetrabilidade nos diz que os movimentos do corpo e das partıculas fluidas
sao tais que as partıculas nao podem penetrar no corpo, nem tampouco uma partıcula fluida
podera penetrar no corpo ou em outra partıcula fluida.
O movimento de um corpo sujeito a forca externas e descrito pela segunda lei de Newton, emque as as variacoes das quantidades de movimento sao iguais as forcas e momentosexternos:
B
d
dt(u dm) =
Fext (6.1)
65

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 70/98
66 Texto Preliminar, SH Sphaier
B
d
dt(r × u dm) =
Mext (6.2)
onde:
B e o domınio que define o corpo
dm e a massa de uma parte elementar do corpo
r e o raio vetor de cada ponto do corpo em relacao a um ponto O.
u e o vetor velocidade de cada ponto do corpo
u = U0 + Ω × r (6.3)
U0 e o vetor velocidade linear do corpo
Ω e o vetor velocidade angular do corpo no ponto O
Fext sao as forcas externas atuando sobre o corpo
Mext sao os momentos das forcas externas atuando sobre o corpo, em relacao ao ponto O .
As forcas externas atuantes sobre o corpo sao a forca da gravidade, forca de atracao da Terra,
e a forca devida a acao do fluido junto do corpo. A forca da gravidade e do tipo de forca de
corpo e as forcas devidas a acao do fluido sao do tipo de forcas de superfıcie.
B
d
dt(u dm) = Fc + Fs (6.4)
B
d
dt(r × u dm) = Mc + Ms (6.5)
onde:
Fc e a resultante das forcas de corpo
Fs e a resultante das forcas de superfıcie.
A forca devida a atracao da Terra pode ser obtida atraves da lei de gravitacao universal de
Newton. No caso especıfico do movimento junto a superfıcie da Terra podemos dizer que estaforca e constante, e dada por:
Fc = (
B
dm)g = M g (6.6)
onde:
7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 71/98
Texto Preliminar, SH Sphaier 67
M e a massa do corpo
M =
B
dm (6.7)
g e o vetor aceleracao da gravidade.
As forcas de superfıcie surgem da acao das partıculas fluidas sobre o corpo. Imaginemos
inicialmente que colocamos um corpo em um escoamento retilıneo uniforme unidirecional.
A presenca do corpo provoca uma modificacao do escoamento fluido. Ao se moverem e
encontrarem o corpo, as partıculas fluidas sao aceleradas e desaceleradas. Pela segunda lei
de Newton isto so e possivel pela acao de uma forca externa. Esta acao externa deve-se a
interacao entre as partıculas fluidas e a presenca do corpo. Pela terceira lei de Newton, a forca
que o corpo exerce sobre uma partıcula fluida, correspondera uma reacao, na forma de umaforca igual e de sentido contrario a de acao, atuando sobre o corpo. Isto dar-se-a junto a cada
parte da superfıcie do corpo. Assim, as partıculas fluidas sofrerao a acao do corpo, na formade forcas e como reacao aparecerao sobre o corpo forcas locais. Decompondo estas forcas em
componentes normal e tangencial, temos as componentes de forca devida a pressao e a tensao
cisalhante, respectivamente. Uma vez que estas forcas dependem da interacao entre o corpo
e o fluido, e necessario que determinemos o movimento do fluido para podermos calcular as
forcas de superfıcie atuando sobre o corpo. E entao necessario que estabelecamos as equacoes
de movimento das partıculas fluidas, utilizando as leis e os princıpios fısicos estabelecidos.Estes sao mais uma vez as tres leis de Newton, a lei de gravitacao universal, o princıpio de
conservacao da massa e o princıpio de impenetrabilidade.
6.2 Formulacao hidrodinamica: Leis e Princıpios
Para o estudo do movimento do corpo utilizamos a descricao Lagrangeana. Acompanhamos
o que acontece com o corpo ao longo do tempo, determinando as suas posi coes. No caso
do escoamento da massa fluida utilizamos a descricao Euleriana. Descrevemos o escoamento
atraves dos campos de velocidades e pressoes, sem nos importarmos com que partıcula ocupa
cada posicao do espaco em cada instante. Admitimos tambem que o fluido preenche con-
tinuamente todas as posicoes do espaco. Assim, nunca podera aparecer um espaco vazio no
domınio fluido; as partıculas que formam uma linha material, sempre estarao formando umalinha fluida, etc... Esta ultima afirmacao implica em que, as partıculas que formam uma
superfıcie livre, sempre a formarao.
Da mesma forma que para o corpo, o movimento de uma partıcula fluida, sujeita a forcasexternas, e descrito pela segunda lei de Newton
D
Dt(vρdV ) =
dFext. (6.8)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 72/98
68 Texto Preliminar, SH Sphaier
onde:
D/Dt e o operador derivada substantiva
ρ e a massa especıfica do fluido.
dV e o volume elementar da partıcula
v representa o campo vetorial das velocidades
dFext sao as forcas externas atuando sobre a partıcula fluida
A derivada substantiva da velocidade define o campo vetorial que representa as aceleracoes
das partıculas fluidas, a = (D/Dt)v.
As forcas externas sao tambem, a forca de atracao da Terra e as forcas de superfıcie. As forcasde superfıcie devem-se a acao das outras partıculas que estao em contato, e eventualmente ao
corpo, caso a partıcula encontre-se em contato com o corpo.
D
Dt(vρdV ) = dFc + dFs (6.9)
onde:
dFc e a forca de corpo atuando no elemento de fluido
dFs e a forca de superfıcie atuando no elemento de fluido
Aplicando-se a segunda lei de Newton ao estudo do movimento de um fluido incompressıvel,cuja relacao entre tensao cisalhante e movimento siga a equacao constitutiva de Newton,
chegamos a equacao de Navier-Stokes:
ρa dV = −ρg dV − ∇ p dV + µ∇2v dV (6.10)
ouD
Dtv + g +
∇ p
ρ − ν ∇2v = 0 (6.11)
onde:
D
Dtv =
∂
∂tv + v · ∇(v)
p e a pressao
ν e a viscosidade cinematica do fluido.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 73/98
Texto Preliminar, SH Sphaier 69
∇ e o operador gradiente
∇2 e o laplaceano, ∇2 = ∇ · ∇
O princıpio de conservacao da massa e dado pela equacao da continuidade, que para fluidos
incompressıveis e
∇ · v = 0 (6.12)
onde ∇· e o operador divergente
O princıpio da impenetrabilidade define uma relacao entre as componentes das velocidades
das partıculas fluidas e do corpo na direcao da normal ao corpo. No caso de corpos nao
porosos essas componentes devem ser iguais
v·
n = u·
n (6.13)
onde n e o vetor normal ao contorno do corpo.
Por ser uma propriedade cinematica, esta condicao e chamada de condicao de contorno
cinematica.
Alem dessa condicao, devemos introduzir a condicao de aderencia das partıculas fluidas junto
ao corpo. Se, por razoes fısicas, podemos supor que nao haja deslizamento entre as partıculas
fluidas em contato com o corpo e sua superfıcie, entao
v
·t
−u
·t = 0 (6.14)
onde t e o vetor unitario tangente ao contorno do corpo.
Como dissemos, passaremos agora a tratar o problema discutido acima em bases mais formais
do ponto de vista hidrodinamico. Assumindo que as ondas sao de pequenas amplitudes, o
corpo executara movimentos de pequenas amplitudes e podemos tratar o problema linear-
mente.
Para tal, relembremos as definicoes dos sistemas de referencias como fizemos anteriormente.
consideremos um sistema de coordenadas OX Y Z com o plano Z = 0 sobre a superfıcie livre.
O eixo OZ aponta verticalmente para cima. Consideremos um segundo sistema oxyz cujo
centro, sempre concide com o ponto O, com eixo ox fazendo um angulo β com o eixo OX .
O navio tem velocidade desloca-se em linha reta com velocidade U na direcao do eixo ox. As
ondas se propagam na direcao do eixo OX e o vetor celeridade da onda faz um angulo β com
o vetor velocidade do navio, e consequentemente com o eixo longitudinal do navio.
Consideremos um terceiro sistema oxyz que se desloca com a velocidade do navio, sem oscilar.
Seu centro esta localizado na superfıcie livre em repouso e o eixo oz aponta verticalmente para

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 74/98
70 Texto Preliminar, SH Sphaier
cima. O ponto o, centro do sistema, esta localizado a meio navio. Muitas vezes e mais comodo
localiza-lo na vertical passando pelo centro de gravidade.
Considerando que os efeitos de viscosidades sao desprezıveis podemos adotar a hipotese de
fluido ideal e escoamento irrotacional. Supomos tambem que o fluido e incompressıvel. Comestas hipoteses pode-se verificar que o escoamento e descrito por uma funcao φ, potencial de
velocidade tal que
v = ∇φ (6.15)
sendo φ solucao da equacao de Laplace
∇2φ = 0 (6.16)
Como vimos anteriormente a unicidade da solucao e conseguida impondo-se condicoes de
contorno. Isto e, nos contornos do meio fluido a funcao φ devera tambem satisfazer condicoes
da forma αφ + β ∂φ∂n
= f (6.17)
onde α, β e f sao conhecidas.
O contorno fluido neste caso e composto da superfıcie do casco, a superfıcie livre, o fundo e
uma superfıcie longe do corpo ligando a superfıcie livre e o fundo.
Na superfıcie do casco devemos ter por exemplo
u · n = ∂φ
∂n (6.18)
onde u e a velocidade de um ponto P do casco, n a normal a superfıcie do casco.
Expressando a equacao da superfıcie do casco na forma
F c(x , y, z, t) = 0 (6.19)
a condicao de contorno acima equivale a:
D
DtF c(x , y, z, t) = 0 (6.20)
Em cada ponto da superfıcie livre as componentes das velocidades do perfil da onda usl e da
velocidade da partıcula fluida na direcao da normal sao iguais.
usl · n = ∂φ
∂n (6.21)
De forma similar ao que expusemos acima, se F sl(x , y, z, t) = 0 e a equacao da superfıcie livre
entaoD
DtF sl(x , y, z, t) = 0 (6.22)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 75/98
Texto Preliminar, SH Sphaier 71
traduzira esta condicao.
Alem desta condicao cinematica a ser satisfeita na superfıcie livre, devemos impor que a
pressao p seja igual a pressao atmosferica patm.
Admitindo a regiao fluida infinita temos que impor condicoes assintoticas para pontos dis-
tantes do corpo (condicoes de radiacao). Caso o corpo encontre-se em aguas com profundidade
finita z = −d devemos ter∂φ
∂z (x,y,z = −d, t) = 0 (6.23)
Observando o problema de valor de contorno estabelecido acima e o problema de ondas de
gravidade, vemos que ambos diferem unicamente pela condicao de contorno no corpo. Assim,
apos linearizacao do problema chegamos ao seguinte problema de valor de contorno para o
potencial de velocidades φ
∇2φ = 0 (6.24)
em todo domınio fluido∂φ
∂z +
1
g
∂ 2φ
∂t2 = 0 (6.25)
em z = 0∂φ
∂z = 0 (6.26)
em z = −d∂φ
∂n = un (6.27)
na superfıcie do corpo
Resolvendo este problema obtemos a equacao da superfıcie livre
ζ = −1
g
∂φ(x,y,z = 0, t)
∂t (6.28)
e a pressao em qualquer ponto do domınio
p = −ρgz − ρ∂φ(x , y, z, t)
∂t (6.29)
De acordo com a descricao fısica do problema podemos escrever
φ = φinc + φdif + φrad (6.30)
onde φinc potencial de velocidades das ondas incidentes, φdif potencial de velocidades de
difracao das ondas incidentes e φrad potencial de velocidades das ondas de radiacao.
O potencial φinc representa as ondas existentes antes da colocacao do corpo e φdif o po-
tencial de difracao das ondas incidentes. Representa ondas que sao geradas junto ao corpo

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 76/98
72 Texto Preliminar, SH Sphaier
e se propagam para o meio, isto e, representa a presenca do corpo como obstaculo para a
propagacao da onda incidente. Traduz o efeito da presenca do corpo diante das ondas inci-
dentes gerando um campo que ”compense a penetracao das ondas atraves do corpo”. Assimsobre o corpo devemos ter
∂φdif
∂n = −∂φinc
∂n (6.31)
O potencial de radiacao representa as ondas geradas junto ao corpo devidas aos movimentosdo corpo e se propagam para o meio. Assim,
∂φrad
∂n = un (6.32)
Os tres potenciais satisfazem a equacao de Laplace e as condicoes de superfıcie livre e de
fundo. Nao entraremos neste texto em consideracoes mais aprofundadas sobre as solucoes
dos potencias, mas podemos dizer que os potenciais φdif e φrad devem satisfazer condicoesassintoticas descrevendo o comportamento a grandes distancias. Este tipo de condicao e
chamada de condicao de radiacao e foi estabelecida por Sommerfeld.
O perfil da onda que se propaga no mar e dado por
ζ (X, t) = ζ 0 cos(ωt − k0X ) (6.33)
Para um observador no navio a onda incidente, sera dada por
ζ (x,y,t) = ζ 0 cos(ωt−
k0x cos(β ) + k0y cos(β )) (6.34)
e seu potencial de velocidades e dado por:
φinc = ig
ω ek0zζ 0 ei(ωt−k0x cos(β )+k0y cos(β )) = ϕinc eiωt (6.35)
onde ϕ e dado por:
ϕinc = ig
ω ek0zζ 0 ei(−k0x cos(β )+k0y cos(β )) (6.36)
Consideracoes sobre os potenciais de difracao e de radiacao
Como dito acima, se imaginarmos um navio colocado no meio das ondas do mar, a superfıciedo casco sera invadida pelas partıculas fluidas. Isto e, as ondas vao atravessar corpo, o
que nao e fisicamente aceitavel. Assim sendo, temos que gerar um escoamento que junto
ao casco neutralize as ondas incidentes. Este e o papel do potencial de difracao; vai gerar
velocidades junto ao casco que se contraponham as velocidades das ondas incidentes. O
potencial de difracao gera velocidades cujas componentes na direcao da normal ao casco

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 77/98
Texto Preliminar, SH Sphaier 73
anulem as componentes das velocidades da onda incidente sobre o casco. Este e o sentido da
condicao de contorno sobre o corpo:
udif · n = ∂φdif ∂n
= −∂φinc∂n
= −uinc · n (6.37)
one
udif = ∇φdif (6.38)
uinc = ∇φinc (6.39)
Esses potenciais vao gerar pressoes que variam harmonicamente, uma vez que estamos assu-mindo que as ondas sao harmonicas. Essas pressoes vao gerar forcas harmonicas e o corpo
vai se mover harmonicamente.
Assim, como o corpo, alem de impedir a passagem das partıculas fluidas atraves de si, se
move periodicamente, ele impoe movimento as partıculas fluidas. Tudo se passa como se
forcassemos o corpo a se mover em aguas tranquilas. O corpo gera ondas. Para representa-
las introduzimos um potencial de velocidades. Este potencial tem que gerar movimento naspartıculas fluidas de tal forma que junto ao corpo, as partıculas fluidas acompanhem o corpo.
Pensemos agora em um ponto do corpo. Como as partıculas podem deslizar sobre o corpo,
suas componentes de velocidades na direcao normal ao corpo no ponto considerado tem quese igualar a componente de velocidade do corpo na direcao normal ao ponto da superfıcie do
corpo.
Assim, este potencial tem que satisfazer:
∂φrad
∂n = un (6.40)
Porem o corpo tem seis movimentos, tres lineares ao longo dos eixos do sistema de referencias
colocado no corpo, e tres movimentos angulares em torno desses tres eixos. Entao podemosimaginar que cada movimento seja um gerador de movimentos das partıculas fluidas. Isolamos
cada um deles e para cada um e necessario gerar um potencial de velocidades. Cada um
desses potenciais de velocidades e dado pelo produto de uma funcao, que depende da forma
do corpo e da frequencia do movimento, multiplicada pelo modulo da velocidade do corpo
naquela direcao:
φrad = ϕ1 η1 + ϕ2 η2 + ϕ3 η3 + ϕ4 η4 + ϕ5 η5 + ϕ6 η6 (6.41)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 78/98
74 Texto Preliminar, SH Sphaier
6.3 Forcas Atuantes
6.3.1 Forcas hidrodinamicas
O conhecimento da funcao φT , permite que determinemos a pressao e por conseguinte as
forcas e momentos hidrodinamicos. Utilizando a segunda lei de Newton para forcas e sua
extensao para momentos determinamos os movimentos do corpo.
Para tal vamos inicialmente determinar as pressoes atuantes sobre o corpo.
Assumimos que o corpo executa pequenas oscilacoes lineares ηl e angulares ηa, onde:
ηl = η1i + η2 j + η3k (6.42)
ηa = η4i + η5 j + η6k (6.43)
η1 movimento linear do corpo na direcao longitudinal, eixo Ox
η2 movimento linear do corpo na direcao lateral, eixo Oy
η3 movimento linear do corpo na direcao vertical, eixo Oz
η4 movimento angular do corpo em torno da direcao longitudinal, do eixo Ox
η5 movimento angular do corpo em torno do eixo lateral, em torno do eixo Oyη6 movimento angular do corpo em torno do eixo vertical, em torno do eixo Oz
Assim, o movimento de qualquer ponto do corpo e dado por:
η = ηl + ηa × r (6.44)
Alem disto vamos admitir inicialmente que as ondas sao monocromaticas, e por conseguinte,
qualquer grandeza varia no tempo harmonicamente:
F (x , y, z, t) = f (x,y,z ; ω) eiωt (6.45)
Seguindo esta linha de raciocınio, o potencial de radiacao pode ser escrito na forma:
φrad =6
i=1
φi(x , y, z, t) =6
i=1
ηi(t)ϕi(x,y,z ; ω) (6.46)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 79/98
Texto Preliminar, SH Sphaier 75
Isto e, sao seis potenciais correspondendo aos seis movimentos, em que cada um deles e o
produto de uma funcao de forma ϕi(x,y,z ; ω) multiplicada pela velocidade naquela direcao
(velocidade linear ou angular) ηi(t), onde
ηl = η1(t)i + η2(t) j + η3(t)k (6.47)
ηa = η4(t)i + η5(t) j + η6(t)k (6.48)
Deve ser lembrado que os angulos que posicionam o corpo ao longo do tempo nao formam
um vetor. Entretanto, se forem pequenos pode-se assumir que formam um vetor.
Com a integral da equacao de Euler linearizada temos a pressao em qualquer parte do domınio
dada por
p = −ρ∂φT
∂t − ρgz (6.49)
Podemos separar esta pressao em parte dinamica e parte estatica, bem como em partes
independente e dependente do tempo:
p(t) = pe + pd
= pe,0 + pe,t + pinc + pdif + prad
= pe,0 + pt
pt = pe,t + pinc + pdif + prad (6.50)
onde:
p e a pressao total,
pe e a pressao estatica,
pd e a pressao dinamica,
pe,0 e a pressao estatica independente do tempo,
pe,t e a pressao estatica dependente do tempo,
pt e a pressao dependente do tempo,
A pressao dinamica e dada por:
pd = −ρ∂φT
∂t (6.51)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 80/98
76 Texto Preliminar, SH Sphaier
A pressao estatica e dada por:
pe = −ρgz (6.52)
onde z e a posicao do ponto da superfıcie do corpo onde se esteja avaliando a pressao, isto e,
e a soma da cota da posicao em repouso e a variacao devida ao movimento do corpo:
z = z 0 + k · (ηl + ηa × r) (6.53)
Devemos lembrar que com a hipotese de pequenas perturbacoes podemos desprezar a con-
tribuicao do termo quadratico, como feito acima, na expressao das pressoes, na integral daequacao de Euler. A pressao dinamica e a soma do termo em derivada partial em relacao ao
tempo do potencial das ondas incidentes, das ondas difratadas e das ondas radiadas.
pd =
−ρ
∂φinc
∂t −ρ
∂φdif
∂t −ρ
∂φrad
∂t
(6.54)
Multiplicando-se a pressao pelo elemento de area local tem-se a intensidade da forca que a
pressao exerce sobre o corpo naquele local. Multiplicando-se pelo vetor normal, tem-se oelemento de forca local
dFs = pdndS + pendS = −ρ∂φinc
∂t ndS − ρ
∂φdif
∂t ndS − ρ
∂φrad
∂t ndS − ρgz ndS (6.55)
Multiplicando-se o elemento de forca pelo raio vetor que liga o centro do sistema ao elemento
de area, tem-se o momento que a pressao atuando neste elemento de area gera.
dMs = r × ( pdndS + pendS ) = pdr × ndS + per× ndS
= −ρ∂φinc
∂t r × ndS − ρ
∂φdif
∂t r × ndS − ρ
∂φrad
∂t r × ndS − ρgz r × ndS (6.56)
Notemos que
r × n = i(y nz − z ny) + j(z nx − x nz) + k(x ny − y nx) (6.57)
Assim, se utilizarmos a notacao
n1 = nx
n2 = ny
n3 = nz
n4 = (y nz − z ny)
n5 = (z nx − x nz)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 81/98
Texto Preliminar, SH Sphaier 77
n6 = (x ny − y nx)
podemos pensar em um elemento de forca generalizada, um vetor de seis componentes em
que as tres primeiras componentes significam forcas e as tres ultimas componentes significammomentos:
dF =
dF 1dF 2dF 3dF 4dF 5dF 6
=
p n1 dS
p n2 dS
p n3 dS
p n4 dS p n5 dS
p n6 dS
=
p nx dS
p ny dS
p nz dS
p (y nz − z ny) dS p (z nx − x nz) dS
p (x ny − y nx) dS
(6.58)
A partir dessas forcas generalizadas podemos obter as forcas e os momentos sobre o corpo inte-grando os elementos de forca. Esta integracao fornece a forca generalizada (forca e momento)
total atuando sobre o corpo:
Fs = Fd + Fe = −ρ
S 0
∂φinc
∂t ndS − ρ
S 0
∂φdif
∂t ndS
−ρ
S 0
∂φrad
∂t ndS − ρg
S 0
z ndS (6.59)
Separando em parte hidrodinamica e parte hidrostatica temos:
- forcas hidrostaticas generalizadas (forca e momento)
Fe = −ρg
S 0
z ndS (6.60)
- forcas hidrodinamicas generalizadas (forca e momento)
Fd,t =
S 0
pdndS = −ρ
S 0
∂φT
∂t ndS (6.61)
Como supomos, o potencial φT e dado por
φT = φinc + φdif + φrad (6.62)
e que o potencial de radiacao pode ser escrito na forma:
φrad =6
i=1
ηi(t)ϕi(x,y,z ; ω) (6.63)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 82/98
78 Texto Preliminar, SH Sphaier
Assim, temos:
pd = −iωρ
(ϕinc + ϕdif + ϕrad) eiωt
(6.64)
= −iωρ(ϕinc + ϕdif ) eiωt − iωρ
6i=1
ηiϕi eiωt (6.65)
A integral da pressao fornece a forca total
Fs = Fd + Fe = −ρ
S 0
(iωφ + gz ) ndS (6.66)
Para nao repetirmos sempre a expressao forca generalizada (forca e momento), vamos sim-
plesmente chamar de forca. Separando em parte hidrodinamica e parte hidrostatica temos:
Forca hidrodinamica
Fd = −ρ
S 0
iωφndS (6.67)
Forca hidrostatica
Fe = −ρ
S 0
(gz ) ndS (6.68)
As forcas hidrodinamicas sao dadas por
Fd = Finc + Fdif + Frad (6.69)
e cada uma das parcelas e dada por:
Finc =
S 0
pincndS =
S 0
−ρ∂φinc
∂t ndS = −iρω
S 0
ϕincndS eiωt (6.70)
Fdif =
S 0
pdif ndS =
S 0
−ρ∂φdif
∂t ndS = −iρω
S 0
ϕdif ndS eiωt (6.71)
Frad =
S 0
pradndS =
S 0
−ρ∂φrad
∂t ndS =
6i=1
−iρω ηi
S 0
ϕindS eiωt (6.72)
isto e:
Fd = −iρω
S 0
ϕincndS eiωt − iρω
S 0
ϕdif ndS eiωt +6
i=1
−iρω ηi
S 0
ϕindS eiωt (6.73)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 83/98
Texto Preliminar, SH Sphaier 79
6.3.2 Forca de excitacao
Como dito acima, podemos dividir a forca total em termos das contribuicoes do potencial da
onda incidente e de sua difracao e potencial das ondas de radiacao.O potencial de velocidades das ondas incidentes em aguas profundas e dado por:
φinc = ig
ω ek0zζ 0 ei(ωt−k0x cos(β )+k0y cos(β )) = ϕinc eiωt (6.74)
Assim, obtemos para as forcas de excitacao
Fexc = −iρω
S 0
ϕincndS +
S 0
ϕdif ndS
eiωt (6.75)
As forcas excitatrizes podem ser subdivididas em duas partes. Uma relativa a onda incidente
e a outra relativa ao potencial de difracao. A forca devida a onda incidente, tambem chamadade forca de Froude-Krylov, e dada por
Finc = −iρω
S 0
ϕincndS eiωt (6.76)
As forcas de difracao sao dadas por:
Fdif = −iρω S 0
ϕdif ndS eiωt (6.77)
Decompondo este vetor em suas seis componentes temos as seguintes expressoes
F dif,j = −iωρ
S 0
∂ϕ j
∂n ϕdif dS eiωt (6.78)
Utilizando agora as relacoes de reciprocidade, as componentes das forcas sao entao dadas por:
F dif,j = −iωρ
S 0
ϕ j∂ϕdif
∂n dS eiωt (6.79)
Com a condicao de contorno junto ao corpo obtemos
F dif,j = iωρ
S 0
ϕ j∂ϕinc
∂n dS eiωt (6.80)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 84/98
80 Texto Preliminar, SH Sphaier
Forca de Froude-Krylov
Acima estabelecemos a expressao do calculo da forca sobre o corpo a partir do conhecimento
das pressoes. Determinaremos agora a expressao da forca de onda segundo a hipotese deFroude-Krylov, isto e a forca devida a onda incidente. A onda incide com um angulo de
ataque β , tal que β = 0 significa ondas de traves. A pressao dinamica devida a onda incidente
e dada pela integral da Equacao de Euler linearizada
pinc = −ρ∂φinc
∂t (6.81)
e a forca e entao
Finc = −ρ
S 0
∂φinc
∂t ndS (6.82)
Admitindo que o potencial de velocidades deve-se unicamente a onda incidente, temos entao
p = pinc = ρgζ 0 ek0z eiωt e−ik0x cos β eik0y sinβ (6.83)
Com a pressao obtemos a forca
Finc = ρgζ 0
S
eik0(y sinβ −x cos β ) ek0zndS eiωt (6.84)
Forca de difracao
A partir da pressao de difracao e usando relacoes de reciprocidade entre os potenciais podemos
expressar as forcas de difracao sem que necessitemos resolver o problema de valor de contornopara φdif .
Cada componente e dada por
F dif,j = −iωρ
S 0
ϕ j∂ϕdif
∂n dS eiωt = iωρ
S 0
ϕ j∂ϕinc
∂n dS eiωt
= iωρ
S 0
ϕ j ∂ϕinc
∂x
nx + ∂ ϕinc
∂y
ny + ∂ϕinc
∂z
nzdS eiωt (6.85)
Como∂ϕinc
∂n = (−in1 cos β + in2 sin β + n3)k0ϕinc (6.86)
Chegamos finalmente a expressao
F dif,j = iρω
S 0
(−in1 cos β + in2 sin β + n3)k0ϕ j ϕincdS eiωt (6.87)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 85/98
Texto Preliminar, SH Sphaier 81
6.3.3 Forca de radiacao
Seguindo o modelo acima, as forcas hidrodinamicas sao dadas por:
Frad =6
i=1
−iρω
S 0
ϕindS ηi eiωt (6.88)
Como o potencial de radiacao pode ser escrito na forma
φrad =6
i=1
ηi(t)ϕi(x,y,z ; ω) (6.89)
entao
F rad,j =6
i=1
ρω2 S 0
ϕin j dSηi eiωt = − 6
i=1
ηi(t)ρ S 0
ϕin jdS = − 6i=1
ηi(t)λ ji(ω; forma)
(6.90)
onde o coeficiente hidrodinamico, λ ji(ω; forma), depende da forma e da frequencia, e e dado
por
λ ji = ρ
S 0
ϕin j dS (6.91)
Deve-se observar que para um movimento em uma direcao aparecem reacoes hidrodinamicas
em todas as direcoes. Isto e, se o corpo se move na direcao 1, gera o potencial
ηi(t)ϕi(x,y,z ; ω) (6.92)
este potencial gera uma pressoes. Essas pressoes multiplicadas pela normal e o elemento
de linha geram elementos de forca que integradas gera uma forca sobre o corpo com trescomponentes. Essas pressoes multiplicadas pela normal e o elemento de linha geram elementos
de forca que multiplicadas pelo braco (distancias de cada ponto na superfıcie do corpo ate o
centro do sistema) e integradas geram momentos sobre o corpo nas tres direcoes, isto e com
tres componentes .
Para o caso de um corpo profundamente imerso
λ ji(ω; forma) = A ji(forma) (6.93)
sendo A ji conhecido como massa adicional.
Atraves de uma formulacao para problemas com superfıcie livre podemos mostrar que
λ ji (ω; forma) = A ji(ω; forma) + 1
iωB ji(ω; forma) (6.94)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 86/98
82 Texto Preliminar, SH Sphaier
onde B ji e o amortecimento hidrodinamico devido a energia cedida para a formacao das ondas.
Na forma vetorial temos:
Frad =
F rad,1
F rad,2
F rad,3
F rad,4
F rad,5
F rad,6
= −[A]η − [B]η (6.95)
6.3.4 Quantidades de Movimento Linear e Angular da Massa do
Corpo
Vamos agora desenvolver os primeiros membros das equacoes de conservacao de quantidadede movimento linear e angular para o caso de um corpo em ondas regulares de pequenas
amplitudes. Sob essas condicoes, linearizando o problema, desenvolveremos um modelo para
analise da dinamica do navio no mar.
Utilizamos dois sistemas de referencia para descrever os movimentos do navio. Um sistema
Oxyz , que se desloca com velocidade de avanco igual a do corpo U = constante, sobre a
superfıcie livre do mar na condicao de aguas tranquilas. O eixo Oz esta voltado verticalmente
para cima e o eixo Ox, encontra-se sobre o plano da linha dagua apontando para vante, na
direcao do movimento do corpo. Um segundo sistema fixo ao corpo O
x
y
z
, que oscila e
avanca solidario ao corpo, sera considerado. E definido de tal forma que coincide com Oxyz
quando o corpo passa pela posicao media. O centro de gravidade tem coordenadas (X
g, Y
g , Z
g)
no sistema solidario.
Passaremos agora a desenvolver as expressoes das diversas contribuicoes citadas anterior-
mente. Inicialmente vamos desenvolver as expressoes para a determinacao das variacoes das
quantidades de movimento do corpo:
Bd
dt
(u dm) (6.96)
e B
d
dt(r × u) dm (6.97)
Nesta expressao u e a velocidade de um ponto P fixo no corpo, que no sistema Oxyz , e dada
por (6.3):
u = U0 + Ω × r = ηl + Ω × r (6.98)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 87/98
Texto Preliminar, SH Sphaier 83
Nesta expressao fizemos U0 = ηl sendo que ηl e o vetor de deslocamento linear
ηl = η1i + η2 j + η3k (6.99)
O vetor r descrito nos dois sistemas acima definidos e dado por
r = xi + y j + z k = x
i
+ y
j
+ z
k
(6.100)
Multiplicando (6.100) escalarmente por i, j e k obtemos:
x
yz
=
i
· i j · i k
· i
i · j j
· j k · j
i · k j
· k k · k
x
y
z
(6.101)
Multiplicando (6.100) escalarmente por i
, j
e k
obtemos:
x
y
z
=
i · i
j · i
k · i
i · j j · j k · ji · k
j · k
k · k
x
yz
(6.102)
As matrizes que aparecem em (6.101) e (6.102) sao inversas. A transformacao de coordenadas
de um sistema para o outro, pressupoe entretanto que conhecamos os angulos entre os vetoresunitarios, que sao desconhecidos e que descrevem o movimento angular do corpo. Admitindo
que a rotacao assumida pelo corpo em cada instante e o resultado de tres rotacoes η4, η5 e η6,
em sequencia, a partir de uma situacao onde os eixos O
x
, O
y
e O
z
inicialmente coincidem
com os eixos Ox, Oy e Oz , e que estas rotacoes se dao em torno do eixo O
x
, do eixo O
y
e
do eixo O
z
, podemos dizer que um vetor r, que na posicao final tem coordenadas (x
, y
, z
)
no sistema solidario, tera coordenadas (x,y,z ) no sistema Oxyz , relacionadas atraves de:
x
y
z
=
c(η6) s(η6) 0
−s(η6) c(η6) 0
0 0 1
c(η5) 0 −s(η5)
0 1 0
s(η5) 0 c(η5)
1 0 0
0 c(η4) s(η4)
0 −s(η4) c(η4)
xy
z
(6.103)
ou
x
y
z
= [R]x
yz = (6.104)
onde introduzimos a matriz de rotacao [R], dada por:
[R] =
c(η5)c(η6) c(η4)s(η6) + s(η4)s(η5)c(η6) s(η4)s(η6) − c(η4)s(η5)c(η6)
−c(η5)s(η6) c(η4)c(η6) − s(η4)s(η5)s(η6) s(η4)c(η6) + c(η4)s(η5)s(η6)
s(η5) −s(η4)c(η5) c(η4)c(η5)
(6.105)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 88/98
84 Texto Preliminar, SH Sphaier
onde c(ηi) e s(ηi), significam o cosseno e o seno de ηi. Assim sendo, um ponto P do corpo
que, em relacao ao sistema solidario tem coordenadas (x
, y
, z
), tera coordenadas (x,y,z )
em relacao ao sistema inercial, dadas por:
xP
yP
z P
=
η1
η2
η3
+ [R]−1
x
P
y
P
z
P
(6.106)
Sob a hipotese de pequenos deslocamentos, a expressao acima toma a forma:
xP
yP
z P
=
η1
η2
η3
+
1 −η6 η5
η6 1 −η4
−η5 η4 1
x
P
y
P
z
P
(6.107)
= η1η2
η3
+ 1 0 0
0 1 00 0 1
x
P y
P
z
P
+ 0 −
η6
η5η6 0 −η4
−η5 η4 0
x
P y
P
z
P
(6.108)
Assim, a diferenca entre os vetores rP e r
P e dada por
xP
yP
z P
−
x
P
y
P
z
P
=
η1
η2
η3
+
0 −η6 η5
η6 0 −η4
−η5 η4 0
x
P
y
P
z
P
(6.109)
ou
∆r = ηl + ηa
×r
P (6.110)
Assim, podemos assumir que o movimento de rotacao do corpo e dado pela soma vetorial de
tres rotacoes em torno de cada um dos eixos, podendo o movimento angular ser representado
por um vetor. Definimos este vetor por ηa
ηa = η4i + η5 j + η6k (6.111)
O vetor velocidade angular Ω esta relacionado com as derivadas η4, η5 e η6 atraves de:
Ωx = η4 cos(η5)cos(η6) + η5 sin(η6) (6.112)
Ωy = −η4 cos(η5) sin(η6) + η5 cos(η6) (6.113)
Ωz = η4 sin(η5) + η6 (6.114)
confirmando que, para pequenos movimentos, podemos assumir:
Ωx
Ωy
Ωz
=
η4
η5
η6
(6.115)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 89/98
Texto Preliminar, SH Sphaier 85
Isto e, a velocidade angular Ω e dada pela soma das derivadas das tres componentes do vetor
ηa:
Ω = ηa = η4i + η5 j + η6k (6.116)
Definindo as quantidades de movimento linear por
Ll =
B
udm = L1i + L2 j + L3k =
B
(ηl + ηa × r)dm (6.117)
e angular por
La =
B
r × udm = L4i + L5 j + L6k =
B
r × (ηl + ηa × r)dm (6.118)
onde o vetor velocidade do ponto P e dado por:
u = ηl + Ω× r = ηl + ηa × r = η1i + η2 j + η3k + (η4i + η5 j + η6k) × r
= i(η1 + z
η5 − y
η6) + j(η2 + x
η6 − z
η4) + k(η3 + y
η4 − x
η5) (6.119)
e o produto vetorial
r× u = iy
(η3 + y
η4 − x
η5) − z
(η2 + x
η6 − z
η4)
+ jz
(η1 + z
η5 − y
η6) − z
(η3 + y
η4 − x
η6)+kx
(η2 + x
η6 − z
η4) − y
(η1 + z
η5 − y
η6) (6.120)
teremos
L1 =
B
(η1 + z
η5 − y
η6)dm = η1
B
dm + η5
B
z
dm − η6
B
y
dm (6.121)
L2 =
B
(η2 + x
η6 − z
η4)dm = η2
B
dm + η6
B
x
dm− η4
B
z
dm (6.122)
L3 =
B
(η3 + y
η4 − x
η5)dm = η3
B
dm + η4
B
y
dm − η5
B
x
dm (6.123)
L4 = By
(η3 + y
η4
−x
η5)
−z
(η2 + x
η6
−z
η4)
dm
= − B
z
dmη2 +
B
y
dmη3 +
B
(y2 + z
2)dmη4 − B
y
x
dmη5 − B
z
x
dmη6 (6.124)
L5 =
B
z
(η1 + z
η5 − y
η6) − x
(η3 + y
η4 − x
η6)dm
= − B
z
dmη1 +
B
x
dmη3 − B
y
x
dmη4 +
B
(x2 + z
2)dmη5 − B
z
y
dmη6 (6.125)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 90/98
86 Texto Preliminar, SH Sphaier
L6 =
B
x
(η2 + x
η6 − z
η4) − y
(η1 + z
η5 − y
η6)dm
= − B
y
dmη1 +
B
x
dmη2 − B
z
x
dmη4 − B
z
y
dmη5 +
B
(x2 + y
2)dmη6 (6.126)
Introduzindo as seguintes definicoes: B
dm = M B
x
dm = M X g B
z
dm = M Z g B
y
dm = M Y g
B
(y2 + z
2)dm = I 44 B
(x2 + z
2)dm = I 55 B
(x2 + y
2)dm = I 66 B
x
y
dm = I 45 = I 54 B
x
z
dm = I 46 = I 64
B
y
z
dm = I 56 = I 65
onde M e a massa do corpo, X g, Y g e Z g sao as coordenadas do centro de gravidade do corpo
e I ij sao os produtos e momentos de inercia.
Assim sendo, vale a expressao
L =
Ll
La
= [M]η = [M]
ηl
ηa
(6.127)
onde introduzimos a matriz de inercia [M] = [M ij ], onde seus termos definem a massa, os
produtos e os momentos de inercia,
[M] = [M ij] =
M 0 0 0 MZ g −M Y g0 M 0 −M Z g 0 MX g0 0 M MY g −MX g 0
0 −M Z g MY g I 44 −I 45 −I 46M Z g 0 −MX g −I 54 I 55 −I 56−MY g MX g 0 −I 64 −I 65 I 66
(6.128)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 91/98
Texto Preliminar, SH Sphaier 87
Com isto entaod
dtL = [M]η (6.129)
6.3.5 Restauracao: Acao das forcas hidrostaticas e das forcas de
corpo
Quando um corpo flutuante abandona sua posicao de equilıbrio estatico, a acao de seu peso e
das reacoes de origem hidrostaticas tendem a restaurar sua posicao original. A estas reacoesda-se o nome de forcas e momentos de restauracao.
Assim, a obtencao das forcas e momentos de restauracao passa pela determinacao das forcas
dos momentos de origem hidrostatica, obtidos atraves da integracao das pressoes hidrostaticas
ao longo da superfıcie instantanea do corpo:
Fe =
S c
pndS (6.130)
Me =
S c
pr × ndS (6.131)
Utilizaremos aqui os mesmos dois sistemas de referencia utilizados na determinacao das quan-
tidades de movimento, ver figura (??).
Como a pressao hidrostatica e dada por p =−
ρgz , temos que:
Fe = −ρg
S c
z ndS (6.132)
Me = −ρg
S c
z r × ndS (6.133)
onde r e o vetor posicao de um ponto do casco relativo ao referencial Oxyz .
Como os movimentos oscilatorios lineares e angulares sao de pequenas amplitudes vale:
r = r
+ ηl + ηa
×r
(6.134)
onde:
ηl = (η1, η2, η3) e o vetor que fornece os deslocamentos lineares do ponto O
relativamente a
O.
ηa = (η4, η5, η6) e o vetor que dos deslocamentos angulares do referencial O
x
y
z relativa-
mente a Oxyz .

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 92/98
88 Texto Preliminar, SH Sphaier
r
e o vetor que fornece a posicao de um ponto qualquer do casco com relacao a O
, quando
o corpo se encontra em sua posicao inicial de equilıbrio.
x = x
+ η1 + η5z − η6y
(6.135)
y = y
+ η2 + η6x − η4z
(6.136)
z = z
+ η3 + η4y − η5x
(6.137)
A coordenada z , que aparece nas expressoes (6.132) e (6.133), encontra-se fixa no espaco,
enquanto a superfıcie molhada do corpo S c(x , y, z, t) oscila.
Para que se possa calcular as integrais de superfıcie por meio da aplicacao do teorema de
Gauss, deve-se utilizar o artifıcio de fechar a superfıcie S
c, acrescentando-se parte do plano
de linha dagua pertencente ao plano z = 0, observando-se, no entanto, que os integrandos em
(6.132) e (6.133) se anularao.
Aplicando as duas variantes do teorema de Gauss V
∇f dV = − S
f ndS (6.138)
V
∇× f dV = − S
n × f dS (6.139)
respectivamente as expressoes (6.132) e (6.133) vamos obter:
Fe = −ρg
S c
z ndS = ρg
V c
∇zdV (6.140)
Me = −ρg
S c
z r × ndS = ρg
V c
∇× (z r)dV (6.141)
onde V c e o volume instantaneo deslocado pelo corpo.
Desenvolvendo o termo ∇ × (z r) no sistema inercial teremos:
Me = ρg V c
(−iy + jx) dV (6.142)
As integrais volumetricas em (6.140) e (6.141) podem ser calculadas em termos das coorde-
nadas fixas ao corpo fazendo-se uma decomposicao do volume instantaneo V c num volume
constante V 0, igual ao volume sob o plano z
= 0, mais a variacao desse volume dada pela
regiao entre os planos z = 0 e z
= 0.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 93/98
Texto Preliminar, SH Sphaier 89
Usando as relacoes (6.137) a contribuicao hidrostatica de restauracao sera dada por:
Fe = ρgk
V 0 −
S w
(η3 + η4y − η5x
)dx
dy
(6.143)
e a contribuicao para o momento de restauracao sera:
Me = −ρg
V 0
−i(η2 + y
+ η6x − η4z
) + j(η1 + x
+ η5z − η6y
)
dV
− S w
(η3 + η4y − η5x
)[−i(η2 + y
) + j(η1 + x
)]dx
dy
(6.144)
onde S w e a superfıcie da linha dagua na condicao de equilıbrio do corpo e V 0 e o volumedeslocado na mesma condicao.
As equacoes (6.143) e (6.144) podem ser expressas como segue:
Fe = ρgk
V 0 − η3
S w
dx
dy − η4
S w
y
dx
dy
+ η5
S w
x
dx
dy
(6.145)
Me = ρgi
−η2
V 0
dV − V 0
y
dV − η6
V 0
x
dV + η4
V 0
z
dV
+η3
S w
y
dx
dy
+ η4
S w
y2dx
dy − η5
S w
x
dx
dy
+ρg j η1 V 0
dV + V 0
x
dV + η5 V 0
z
dV − η6 V 0
y
dV
−η3
S w
x
dx
dy − η4
S w
x
y
dx
dy
+ η5
S w
x2dx
dy
(6.146)
Como o centro de carena (xb, yb, z b) e dado por
x
b = 1
V 0
V 0
x
dV (6.147)
y
b = 1V 0
V 0
y
dV (6.148)
z
b = 1
V 0
V 0
z
dV (6.149)
como
S w =
S w
dx
dy
(6.150)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 94/98
90 Texto Preliminar, SH Sphaier
V 0 =
V 0
dV (6.151)
e definindo:
S x = S w x
dx
dy
(6.152)
S y =
S w
y
dx
dy
(6.153)
S xx =
S w
x2dx
dy
(6.154)
S yy =
S w
y2dx
dy
(6.155)
S xy =
S w
x
y
dx
dy
(6.156)
temos
Fe = ρgk
V 0 − η3S w − η4S y + η5S x
(6.157)
Me = ρgi−η2V 0 − y
bV 0 − η6x
bV 0 + η4z
bV 0 + η3S y + η4S yy − η5S xy
+ρg j
η1V 0 + x
bV 0 + η5z
bV 0 − η6y
bV 0 − η3S x − η4S xy + η5S xx
(6.158)
Podemos incorporar agora a contribuicao devida a acao das forcas gravitacionais, isto e, aacao do peso, e as forcas e aos momentos de restauracao.
F p = −Mgk (6.159)
onde M e a massa do corpo.
Para o calculo do momento do peso relativamente ao ponto O fixo no espaco devemos conhecer
o raio-vetor entre o centro de gravidade G e o ponto O origem do referencial Oxyz . Suas
coordenadas sao:
xg = x
g + η1 + η5z
g − η6y
g (6.160)
yg = y
g + η2 + η6x
g − η4z
g (6.161)
z g = z
g + η3 + η4y
g
−η5x
g (6.162)
onde:
rG = (xG, yG, z G) define a posicao instantanea do centro de gravidade G em relacao ao
referencial Oxyz
r
G = (x
G, y
G, z
G) define a posicao instantanea do centro de gravidade G em relacao ao
referencial O
x
y
z
quando o corpo se encontra em sua posicao media.

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 95/98

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 96/98
92 Texto Preliminar, SH Sphaier
C 34 = C 43 = ρgS y (6.174)
C 35 = C 53 = ρgS x (6.175)
C 44 = M g(z
b
−z
g) + ρgS yy (6.176)
C 45 = C 54 = ρgS xy (6.177)
C 55 = M g(z
b − z
g) + ρgS xx (6.178)
e os restantes C ij nulos.
Para corpos com um plano de simetria
C 34 = C 43 = 0 (6.179)
6.4 Equacoes de Movimento no Domınio da Frequencia
Nas secoes anteriores desenvolvemos expressoes para as forcas hidrostaticas, hidrodinamicas
e inerciais.
As equacoes que representam campos de velocidades e pressoes foram linearizadas e os efeitos
viscosos desprezados. O problema hidrodinamico tornou-se determinar potenciais de veloci-
dades.
Considerando-se que o problema hidrodinamico e linear, pode-se supor que a onda incidente
e monocromatica, isto e, todas suas propriedades variam com o tempo de forma harmonica.
Assim as pressoes variam harmonicamente com o tempo, assumindo a forma:
pinc(x , y, z, t) = f inc(x,y,z ) eiωt (6.180)
A onda incidente ao encontrar o corpo sofre difracao e a onda difratada e tambem harmonica,
gerando pressoes que variam harmonicamente:
pdif (x , y, z, t) = f dif (x,y,z ) eiωt (6.181)
A soma desses dois campos gera o campo de pressoes de excitacao, tambem harmonicas
pexc(x , y, z, t) = f exc(x,y,z ) eiωt = [f inc(x,y,z ) + f dif (x,y,z )] eiωt (6.182)
A integracao das pressoes hidrodinamicas gera forcas harmonicas que, atuando sobre o corpo,
vao impor um movimento harmonico ao corpo. O movimento harmonico do corpo gera forcas
de radiacao harmonicas. Assim, todas as propriedades, velocidades das partıculas fluidas,

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 97/98
Texto Preliminar, SH Sphaier 93
movimentos do corpo, forcas de excitacao, forcas de radiacao, forcas de restauracao e forcas
inerciais, sao harmonicas.
Outro aspecto que se deve considerar e que a onda incidente atua por um longo tempo de tal
forma que a resposta transiente (solucao homogenea da equacao de movimento as condicoesiniciais) evanesce e nos concentramos na resposta harmonica a excitacao harmonica (solucao
particular).
Reunindo as expressoes das forcas hidrodinamicas, hidrostaticas e do peso e aplicando as leis
de conservacao das quantidades de movimento linear e angular obtemos:
M ij η j = −(Aij η j + Bij η j ) − C ijη j + F inc,i + F dif,i (6.183)
ou
(M ij + Aij) η j + Bij η j + C ijη j = F exc,i (6.184)
Observando as forcas de excitacao e as forcas de radiacao vemos que esta equacao foi de-senvolvida para uma excitacao harmonica. Tratando-se de um sistema linear respondera
harmonicamente a excitacao. As forcas de excitacao e as respostas sao entao escritas na
forma:
F exc,i = F inc,i + F dif,i = F 0i eiωt (6.185)
η j = η0 j ei(ωt) (6.186)
com isto pode-se escrever:
η j = iωη j (6.187)
η j = −ω
2
η j (6.188)substituindo nas expressao acima da equacao de movimento:− (M ij + Aij) ω2 + iωBij + C ij
η0 j ei(ωt) = F 0i e
iωt (6.189)
Vemos que a dependencia do tempo se concentra na funcao exponencial que pode ser can-
celada na equacao, obtendo-se uma equacao algebrica para obtencao da resposta para cada
frequencia:
η0 j =− (M ij + Aij) ω2 + iωBij + C ij
−1F 0i (6.190)
Como a expressao nao depende do tempo, somente da frequencia, diz-se que se esta resolvendo
o problema no domınio do tempo. Deve-se observar que tanto a forca de excitacao bem comoa fracao sao funcoes complexas. O vetor de forcas e momentos F 0i e complexo e seu modulo
forma o vetor de intensidade e a relacao entre a parte imaginaria e a parte real fornecem a fase
da forca em relacao a onda. De maneira similar o vetor de respostas, contem a intensidadeda resposta para os seis graus de liberdade do corpo, bem como a informa cao da fase dos
movimentos em relacao a onda. Como a forca de onda pode ser escrita como:
F 0i = f (ω, forma do corpo)ζ 0 (6.191)

7/25/2019 Apostila de COV251 - Comportamento Hidrodinâmico de Plataformas II
http://slidepdf.com/reader/full/apostila-de-cov251-comportamento-hidrodinamico-de-plataformas-ii 98/98
94 Texto Preliminar, SH Sphaier
onde f (ω, forma do corpo) e a funcao de transferencia entre a onda e a forca sobre o corpo.
η0 j
ζ 0=
− (M ij + Aij) ω2 + iωBij + C ij
−1
f (ω, forma do corpo) (6.192)
Tem-se entao a relacao entre os seis movimentos do corpo e a amplitude da onda em fun cao
da frequencia. Esta funcao e chamada de funcao de transferencia, fator de amplificacao e
operador de resposta de amplitude (RAO - response amplitude operator).