–estred – estudo da estabilidade de uma rede de transporteee96118/relatorioestred.pdf ·...
TRANSCRIPT
Licenciatura em Engenharia Electrotécnica e de Computadores
Projecto, Seminário ou Trabalho de Final de Curso (PSTFC)
Ano Lectivo de 2004/2005
–ESTRED –
Estudo da Estabilidade de uma Rede
de Transporte
Trabalho Realizado por:
Nuno André Magalhães da Cunha Mesquita ([email protected])
Reinaldo Manuel da Silva Araújo ([email protected])
Orientador:
Professor Dr. Fernando Maciel Barbosa

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Índice 1 Sumário Executivo .................................................................................................... 1 2 Introdução .................................................................................................................. 2 3 Objectivos................................................................................................................... 4 4 Equação de Oscilação de uma Máquina Síncrona.............................................. 5 5 Modelo das Máquinas Síncronas para Estudos de Estabilidade...................... 9 6 Solução Numérica de Equações Diferenciais ................................................... 13
6.1 Método de Euler .............................................................................................. 13 6.2 Método de Runge-Kutta ................................................................................. 16
7 Determinação da Estabilidade Transitória num Sistema Eléctrico de Energia .......................................................................................................................... 22 8 Estudo da Estabilidade Transitória de um Sistema Eléctrico de Energia.. 27 9 Programa Desenvolvido ......................................................................................... 29
9.1 Determinação das condições iniciais ......................................................... 29 9.1.1 Matriz das Admitâncias Nodais............................................................. 29 9.1.2 Jacobiano .................................................................................................. 32 9.1.3 Newton-Rapshon...................................................................................... 34
9.2 Estabilidade ...................................................................................................... 35 9.2.1 Cálculos iniciais ....................................................................................... 35 9.2.2 Cálculo das matrizes Pré, Durante e Pós defeito............................ 36 9.2.3 Evolução temporal do δ dos geradores.............................................. 38 9.2.4 Amortecimento ........................................................................................ 38
10 Utilização da Interface Gráfica do Programa Desenvolvido....................... 40 11 Exemplos de Funcionamento............................................................................. 45 12 Conclusões.............................................................................................................. 51 13 Bibliografia ............................................................................................................. 52 Anexos........................................................................................................................... 53
Anexo1 ...................................................................................................................... 54
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte I

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
1 Sumário Executivo
O objectivo deste trabalho foi o de estudar a estabilidade de um
Sistema Eléctrico de Energia.
Foi elaborado um programa informático onde é possível analisar o
comportamento do Sistema quando ocorrem determinadas situações de
defeito.
Pretendeu-se, do ponto de vista do utilizador, um programa de simples
utilização que simule a ocorrência de perturbações permitindo, de certa
forma, prever as diferentes situações de funcionamento do sistema.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 1

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
2 Introdução
Actualmente os Sistemas Eléctricos de Energia são muito complexos de
modo a que os consumos possam ser satisfeitos com uma elevada qualidade de
serviço, alimentando as cargas de forma contínua, com tensão constante e
frequência dentro de valores muito apertados de tolerância. Define-se
estabilidade de um Sistema Eléctrico de Energia como a capacidade deste
desenvolver forças iguais ou maiores que as forças perturbadoras de forma a
manter o estado de equilíbrio, ou seja, ser capaz voltar a uma forma estável
de funcionamento depois de ter sofrido uma perturbação.
O problema de estabilidade prende-se essencialmente com o
comportamento das máquinas síncronas após perturbações. Se uma máquina
tende a afastar-se ligeiramente da velocidade de sincronismo, há forças de
sincronismo que a forçam a manter-se à velocidade de sincronismo. Procura-
se conhecer exactamente o comportamento das máquinas síncronas depois de
o sistema ter sido perturbado. Se a perturbação for pequena e de curta
duração o sistema tende a voltar ao mesmo ponto de funcionamento, o
mesmo não sucederá se for de longa duração. Ou se, por exemplo, surgir um
desequilíbrio entre a carga do sistema e a carga que estava a ser fornecida ao
sistema. Os sistemas poderão ser estáveis até determinadas amplitudes de
perturbações e instáveis para perturbações de maior amplitude.
Para uma análise conveniente, os estudos de estabilidade são divididos
em três tipos:
- Estabilidade estacionária
- Estabilidade transitória
- Estabilidade de longo termo
A estabilidade estacionária prende-se com o comportamento do
sistema ao nível da capacidade deste se manter em sincronismo após a
ocorrência de pequenas perturbações, tais como alterações graduais de carga.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 2
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
A estabilidade transitória comporta as perturbações mais graves
analisando-se o comportamento do sistema nos primeiros segundos, por
exemplo, para a ocorrência de uma curto-circuito trifásico simétrico, uma
súbita retirada de uma linha de serviço ou de uma carga.
Em estabilidade de longo termo analisa-se o comportamento dinâmico
do sistema para períodos mais longos.
Todos estes estudos são necessários para assegurar que um
determinado sistema se possa comportar da melhor forma perante
perturbações mais ou menos graves e de maior ou menor duração.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 3

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
3 Objectivos
O objectivo deste trabalho foi o de elaborar um programa informático
para estudar e analisar a estabilidade de um Sistema Eléctrico de Energia
utilizando o software MATLAB.
O programa desenvolvido tem como principal objectivo a análise de um
determinado Sistema Eléctrico de Energia após a ocorrência de determinadas
perturbações, ou seja, situações de defeito.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 4
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
4 Equação de Oscilação de uma Máquina Síncrona
Em condições normais de operação, a posição relativa do eixo do rotor
e o eixo do campo magnético resultante é fixa. O ângulo entre os dois é
conhecido como ângulo de carga. Durante uma perturbação, o rotor acelerará
ou desacelerará relativamente ao eixo de referência síncrono. A equação que
descreve este movimento relativo é a chamada equação de oscilação. Se
depois de um período oscilatório, o rotor voltar à velocidade de sincronismo a
máquina manterá a sua estabilidade.
Considere-se então que um gerador síncrono desenvolve um binário
electromagnético Te e a mover-se com velocidade de sincronismo ωs. Se Tm
for o binário mecânico e desprezando as perdas, em estado estacionário, tem-
se:
em TT = (4.1)
A mudança do estado estacionário resulta num binário Ta, de
aceleração ( ) ou desaceleração (em TT > em TT < ) no rotor.
ema TTT −= (4.2)
Se considerarmos J o momento de inércia da máquina primária,
gerador, desprezando os binários de atrito e amortecimento, a partir das leis
da dinâmica para corpos animados de movimento de rotação tem-se:
emam TTT
dtd
J −==2
2
.θ
(4.3)
Onde θm é o ângulo descrito no movimento de rotação medido em
relação a um eixo de referência estacionário no estator. Como o interesse é
relacionar a velocidade do rotor com a velocidade de sincronismo, é escolhido
um eixo de referência síncrono com velocidade angular constante ωsm:
msmm t δωθ += (4.4)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 5

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
δm é a posição do rotor antes da perturbação (para t=0) medido a
partir do eixo referência síncrono. Derivando (4.4) em ordem ao tempo, t,
obtem-se a velocidade angular do rotor:
dtmd
dtd
msm
mδω
θω +== (4.5)
Derivando novamente, obtem-se a respectiva aceleração:
2
2
2
2
dtd
dtd mm δθ
= (4.6)
Substituindo (4.6) em (4.3), tem-se:
emm TT
dtd
J −=2
2
.δ
(4.7)
Multiplicando (4.7) por ωm, resulta em:
emmmm
m TTdt
dJ .... 2
2
ωωδ
ω −= (4.8)
Como a velocidade angular multiplicada pelo momento de inércia é
igual à potência, a equação 4.8 pode escrever-se em termos de potência:
emm
m PPdt
dJ −=2
2
..δ
ω (4.9)
O produto J×ωm, M é o momento angular de um corpo animado de
movimento de rotação. Está relacionado com a energia cinética de massas em
rotação, Wk:
mmk MJW ωω ..21..
21 2 == (4.10) ou
m
kWM
ω2
= (4.11)
Se ωm não variar em grande medida antes da perda de sincronismo, M
vem em função da velocidade síncrona e considera-se constante, isto é:
sm
kWM
ω2
= (4.12)
A equação de oscilação vem:
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 6

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
emm PP
dtd
M −=2
2
.δ
(4.13)
É conveniente escrever a equação de oscilação em função do ângulo eléctrico,
de potência ou de carga da máquina síncrona, δ. Se p for o número de pares
de pólos da máquina, o ângulo δ está relacionado com o ângulo mecânico de
potência δm por:
mp δδ2
= (4.14)
da mesma forma, mpωω2
= (4.15)
A equação de oscilação em função do ângulo eléctrico, de potência
vem:
em PPdtdM
p−=2
22 δ (4.16)
Como a análise do trânsito de potências é feita no sistema p.u., a
equação de oscilação é normalmente expressa em p.u.. Dividindo (4.16) pela
potência de base, SB, e substituindo M por (4.12) resulta:
b
e
B
m
Bsm
k
SP
SP
dtd
SW
p−=2
222 δω
(4.17)
Pode agora definir-se a constante de inércia da máquina síncrona, H,
da seguinte forma:
B
k
SW
MVAAparentePotênciaMJCinéticaEnergiaH ==
)()(
(4.18)
A constante de inércia vem em segundos, s. O seu valor varia
normalmente entre 1 a 10 segundos, dependendo do tamanho e do tipo da
máquina. Substituindo em (4.17), obtém-se:
.).(.).(2
222upeupm
sm
PPdtdH
p−=
δω
(4.19)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 7

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Em que Pm(p.u.) e Pe(p.u.) são respectivamente a potência mecânica e
potência eléctrica no sistema por unidade. Analogamente a expressão (4.15)
pode escrever-se ssm pωω 2
= e substituindo em (4.19) vem:
.).(.).(2
22upeupm
s
PPdtdH
−=δ
ω (4.20)
A equação (4.20) pode exprimir-se em função da frequência fo, e para
simplificar a expressão omite-se a notação (p.u.):
em PPdtd
fH
−=2
2
0
δπ
(4.21)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 8
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
5 Modelo das Máquinas Síncronas para Estudos de
Estabilidade
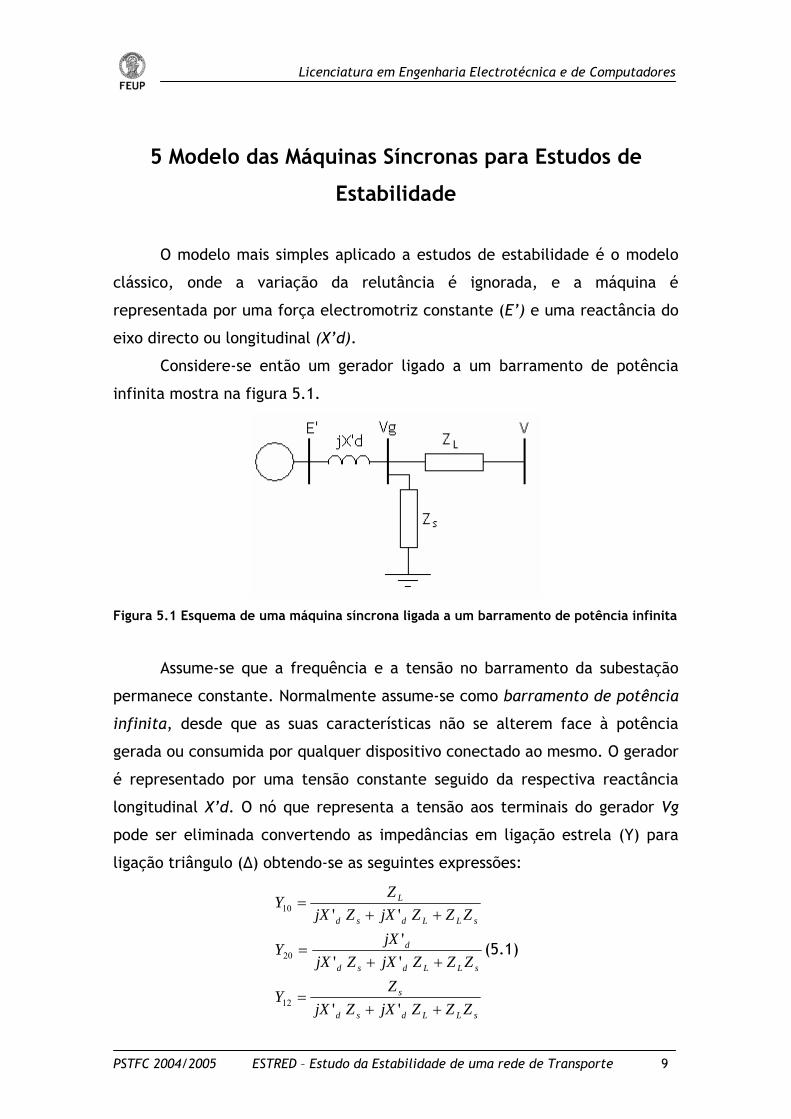
O modelo mais simples aplicado a estudos de estabilidade é o modelo
clássico, onde a variação da relutância é ignorada, e a máquina é
representada por uma força electromotriz constante (E’) e uma reactância do
eixo directo ou longitudinal (X’d).
Considere-se então um gerador ligado a um barramento de potência
infinita mostra na figura 5.1.
Figura 5.1 Esquema de uma máquina síncrona ligada a um barramento de potência infinita
Assume-se que a frequência e a tensão no barramento da subestação
permanece constante. Normalmente assume-se como barramento de potência
infinita, desde que as suas características não se alterem face à potência
gerada ou consumida por qualquer dispositivo conectado ao mesmo. O gerador
é representado por uma tensão constante seguido da respectiva reactância
longitudinal X’d. O nó que representa a tensão aos terminais do gerador Vg
pode ser eliminada convertendo as impedâncias em ligação estrela (Y) para
ligação triângulo (∆) obtendo-se as seguintes expressões:
sLLdsd
s
sLLdsd
d
sLLdsd
L
ZZZjXZjXZ
Y
ZZZjXZjXjX
Y
ZZZjXZjXZ
Y
++=
++=
++=
''
'''''
12
20
10
(5.1)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 9

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
O circuito equivalente com a tensão interna representada por um nó 1
e o barramento de potência infinita com o nó 2 como se mostra na figura 5.2.
Figura 5.2 Circuito equivalente de uma máquina síncrona ligada a um barramento de
potência infinita
Escrevendo as equações dos nós tem-se:
VyyEyIVyEyyI
).(..').(
1220122
1212101
++−=−+=
(5.2)
Estas equações podem ainda ser escritas na forma matricial, em função
da matriz das admitâncias nodais:
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡VE
YYYY
II '
.2221
1211
2
1 (5.3)
Os elementos da diagonal da matriz das admitâncias são Y11=y10+y12, e
Y22=y20+y12. Os elementos fora da diagonal são Y12=Y21=-y12. Exprimindo as
tensões e as admitâncias na sua forma polar, a parte real da potência no nó 1
é dada por:
[ ] [ ])0||.|||'|.|.(||'|' 12121111*11 ∠−∠+−∠−∠∠ℜ=ℜ= VYEYEIEPe θδθδ (5.4)
ou
)cos(|||||'|cos|||'| 121211112 θδθ −+= YVEYEPe (5.5)
Aplicando a equação do trânsito de potência, , aos dois
barramentos descritos em cima o sistema resulta na mesma expressão de
(5.5). Em muitos sistemas, Z
*1IVjQP iii =+
L e Zs são predominantemente indutivas. Se as
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 10

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
resistências forem desprezadas, θ11= θ12=90º, Y12=B12=1/X12, obtém-se uma
expressão simplificada para a potência:
)º90cos(|||||'| 12 −= δBVEPe ou δsin|||'|
12XVEPe = (5.6)
Esta é a forma mais simples da equação do trânsito de potência e é
essencial para compreender todos os problemas de estabilidade. A relação
mostra que a potência transmitida depende da reactância e do ângulo entre
as duas tensões. A curva de Pe em função do δ está representada na figura
5.3.
Figura 5.3 Curva Potência-Ângulo
O acréscimo gradual da potência de saída do gerador é possível até um
limite máximo de potência eléctrica transferida. Esse máximo chamado limite
de estabilidade estática, é atingido para um ângulo de carga igual a 90º,
então vem:
12max
|||'|X
VEP = (5.7)
Quando δ maior do que 90º, devido a uma tentativa para se obter uma
potência superior a Pmax ocorrerá na realidade uma diminuição da potência
fornecida pelo gerador. A máquina acelerará, provocando a perda do
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 11

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
sincronismo com o barramento de potência infinita. A potência eléctrica em
função da Pmax vem:
δsin.maxPPe = (5.8)
Quando um gerador for subitamente curto circuitado, a corrente
durante o período transitório é limitada pela reactância longitudinal X’d. Por
isso, para problemas de estabilidade transitória, desprezando as relutâncias, a
máquina é representada pela tensão E’ seguida da reactância X’d. Se Vg for a
tensão aos terminais do gerador e Ia a corrente pré-defeito do gerador, E’ é
descrito como:
adg IjXVE '' += (5.9)
Devido aos enrolamentos do indutor possuírem baixa resistência, os
fluxos de ligação permanecem constantes durante o início da perturbação, e a
tensão E’ assume-se constante. A curva potência-ângulo em regime transitório
terá a mesma forma geral que em regime estacionário, no entanto terá um
pico maior comparado com o valor em regime estacionário.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 12
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
6 Solução Numérica de Equações Diferenciais
Em problemas de estabilidade é necessário recorer a métodos
numéricos, nomeadamente à solução da equação de oscilação. As técnicas de
integração numérica podem ser aplicadas para obter soluções aproximadas de
equações diferenciais não lineares. Existem vários algoritmos para integração
numérica. O método de Euler é o mais simples e com menos precisão de todos
os métodos. É no entanto apresentado devido à sua simplicidade, pois torna-
se muito útil para uma boa compreensão das ideias envolvidas em soluções
numéricas levando a um melhor entendimento de outros métodos mais
complexos como o método de Runge-Kutta.
6.1 Método de Euler
Considere-se uma equação diferencial de primeira ordem do tipo:
),( xyfdxdy
= (6.1.1)
Onde x é a variável independente e y é a variável dependente. A solução
desta equação é da forma:
),( ctgy = (6.1.2)
Em que c é uma constante determinada pelas condições iniciais especificadas.
A curva correspondente a esta equação é representada na figura 6.1.1.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 13

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura 6.1.1 representação gráfica de uma função solução de uma equação diferencial
Pode considerar-se que:
xdxdyy
x
∆≈∆ .0
(6.1.3)
Em que 0xdx
dy é o declive da curva no ponto . Dado um ponto inicial xo
e yo pode-se calcular um novo valor para y para um valor especificado de ∆x.
Considerando h= ∆x, tem-se:
),( 00 yx
yyy ∆+= 01 ou hdxdyyy
x
.0
01 += (6.1.4)
Em que ∆y representa o incremento de y correspondente ao incremento de x.
Por outro lado, um segundo valor para y pode então ser calculado:
hdxdyyy
x
.1
12 ⎟⎠⎞
⎜⎝⎛+= onde ),( 11 yxf
dxdy
=
Os subsequentes valores de y, de forma a construir-se uma tabela de valores x
e y, podem-se obter de forma similar. Chegando a um algoritmo do tipo:
hdxdyyy
xiii .1 +=+ (6.1.5)
O método pode ser representado graficamente para a resolução de uma
equação diferencial de primeira ordem como se mostra na figura 6.1.2.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 14

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura 6.1.2 Representação gráfica de uma solução aproximada de uma equação pelo
método de Euler
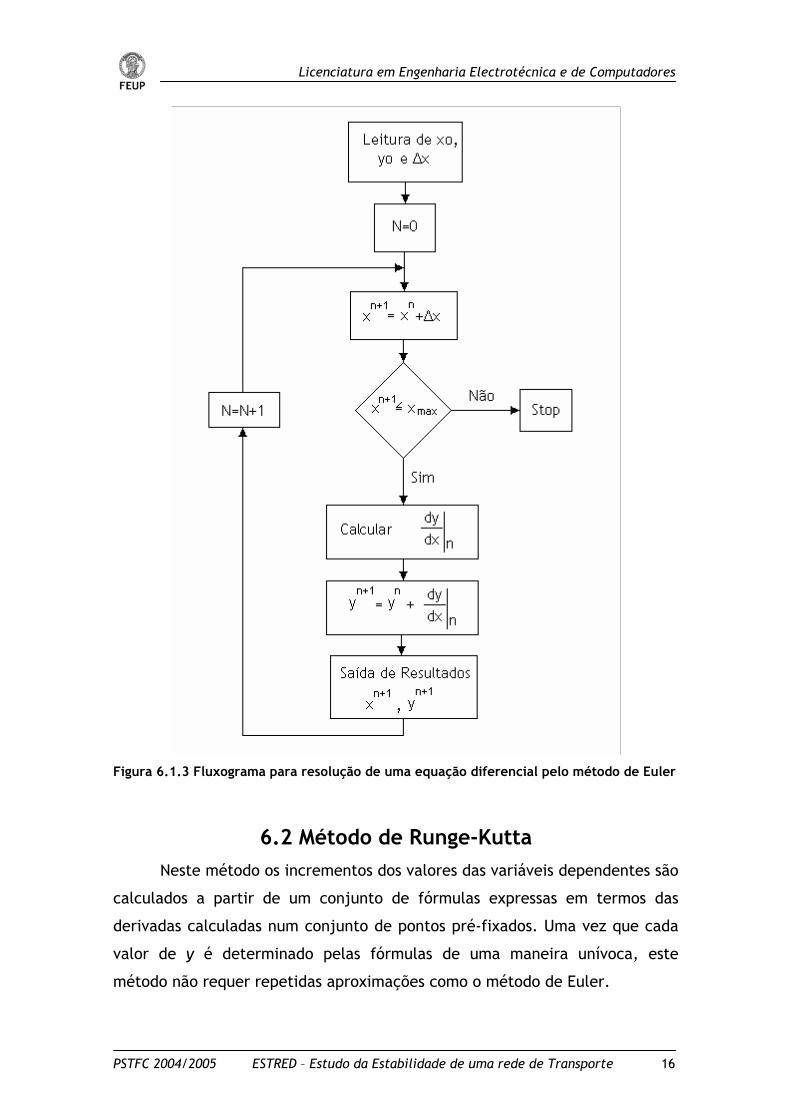
Pode finalmente construir-se um fluxograma que represente (Figura
6.1.3) o algoritmo para resolução de equações diferenciais pelo método de
Euler.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 15
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura 6.1.3 Fluxograma para resolução de uma equação diferencial pelo método de Euler
6.2 Método de Runge-Kutta Neste método os incrementos dos valores das variáveis dependentes são
calculados a partir de um conjunto de fórmulas expressas em termos das
derivadas calculadas num conjunto de pontos pré-fixados. Uma vez que cada
valor de y é determinado pelas fórmulas de uma maneira unívoca, este
método não requer repetidas aproximações como o método de Euler.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 16

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
O seu principal inconveniente é o tempo que demora a calcular várias
vezes a primeira derivada, sobretudo se a sua expressão for complexa. Outro
inconveniente é não se saber os valores dos erros. A vantagem reside em que
basta conhecer o valor da função num único ponto, o inicial, para se poder
determinar os seus valores nos pontos seguintes.
As fórmulas são derivadas usando uma dada aproximação para o
desenvolvimento em série de Taylor da função. Suponhamos dada a equação
diferencial
),( yxfdxdy
= (6.2.1)
Com valores iniciais xo e yo. Desenvolvendo em série de Taylor em torno do
ponto inicial tem-se:
...!2
..2
2
2
001 +⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+=
hxdydh
dxdyyy (6.2.2)
Supondo que não é um ponto singular, que o desenvolvimento é possível e que
h é suficientemente pequeno para a série ser convergente. Como
),( 000
yxfdxdy
=⎟⎠⎞
⎜⎝⎛ (6.2.3)
e
),(. 00000
2
2
yxfyf
xf
xdyd
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛δδ
δδ
(6.2.4)
vem
2
).,(..).,(2
002
0001hyxf
yfh
xfhyxfyy ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛++=
δδ
δδ
(6.2.5)
a forma
221101 kakayy ++= (6.2.6)
onde
hkbyhbxfkhyxfk
).,().,(
120102
001
++==
e os coeficientes a1, a2, b1 e b2 devem ser calculados. Para o cálculo dos
coeficientes faz-se o desenvolvimento em série de Taylor de
),( 12010 kbyhbxf ++
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 17

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Em torno do ponto (xo,yo). Assim tem-se
hyfbh
xfbyxfk .....),(
02
01002 ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+=
δδ
δδ
(6.2.7)
Considerando apenas dois termos do desenvolvimento para o valor de k2 e
substituindo em (6.2.6), tem-se
2
00022
2
012002101 .),(.).,().( h
yfyxfbah
xfbahyxfaayy ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+++=
δδ
δδ
(6.2.8)
O desenvolvimento em série de Taylor de y em torno de (xo,yo) é
...2
..2
02
2
001 +⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛+=
hxdydh
dxdyyy (6.2.9)
e substituindo
),( 000
yxfdxdy
=⎟⎠⎞
⎜⎝⎛ (6.2.3)
),(. 00000
2
2
yxfyf
xf
xdyd
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛δδ
δδ
(6.2.4)
fica
...2
).,(.2
).,(2
000
2
00001 +⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛++=
hyxfyfh
xfhyxfyy
δδ
δδ
Igualando os coeficientes das equações (6.2.8) e (6.2.9)
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
=+
2121
1
22
12
21
ba
ba
aa
Como temos um sistema de três equações e quatro incógnitas,
exprimimos a solução em função de uma das incógnitas. Escolhendo um valor
arbitrário para a1, a1=1/2 tem-se:
a2=1/2; b1=1; b2=1.
Substituindo estes valores na equação (6.2.6) a fórmula da aproximação
de 2ª ordem do método Runge-Kutta é
2101 21
21 kkyy ++=
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 18

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
onde
hkbyhxfkhyxfk
).,().,(
12002
001
++==
logo
( )2121 kky +=∆
A aplicação do método de Runge-Kutta, com a aproximação de 2ª ordem
requer o cálculo de k1 e k2. O erro nesta aproximação é da ordem h3 porque a
série foi truncada depois dos termos de 2ª ordem.
Sob esta forma e com valores indicados para os coeficientes o método
coincide com o de Euler modificado relativamente ao valor corrigido y1(1).
A aproximação da quarta ordem do método Runge-Kutta é
4433221101 kakakakayy ++++= (6.2.10)
onde
hkbyhbxfkhkbyhbxfkhkbyhbxfk
hyxfk
).,().,().,(
).,(
360504
240303
120102
001
++=++=++=
=
Os coeficientes da equação (6.2.10) podem ser determinados pelo
mesmo método de cálculo que foi usado para a determinação dos coeficientes
da aproximação de segunda ordem e são respectivamente
a1=1/6; a2=2/6; a3=2/6; a4=1/6
e
b1=1/2; b2=1/2; b3=1/2; b4=1/2; b5=1; b6=1.
Substituindo estes valores na equação (6.2.10) a aproximação de 4ª
ordem de Runge-Kutta será
( )432101 2261 kkkkyy ++++=
em que
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 19

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
hkyhxfk
hkyhxfk
hkyhxfk
hyxfk
)..1,.1(
.21,
21
.21,
21).,(
3004
2003
1002
001
++=
⎟⎠⎞
⎜⎝⎛ ++=
⎟⎠⎞
⎜⎝⎛ ++=
=
Assim, o cálculo de ∆y com esta fórmula requer o cálculo prévio de
k1,k2,k3, e k4 e obtém-se
∆y=1/6(k1+2k2+2k3+k4)
O erro desta aproximação é da ordem de h5.
A aproximação de quarta ordem do método Runge-Kutta para a
resolução de um sistema de duas equações diferenciais de primeira ordem da
forma
),,(
),,(
zyxgdxdz
zyxfdxdy
=
=
é
( )432101 2261 kkkkyy ++++=
( )432101 2261 llllzz ++++=
onde
hlzkyhxfk
hlzkyhxfk
hlzkyhxfk
hzyxfk
).,.1,.1(
.21,
21,
21
.21,
21,
21
).,,(
303004
202003
101002
0001
+++=
⎟⎠⎞
⎜⎝⎛ +++=
⎟⎠⎞
⎜⎝⎛ +++=
=
e
hlzkyhxfk
hlzkyhxfk
hlzkyhxfk
hzyxfk
).,.1,.1(
.21,
21,
21
.21,
21,
21
).,,(
303004
202003
101002
0001
+++=
⎟⎠⎞
⎜⎝⎛ +++=
⎟⎠⎞
⎜⎝⎛ +++=
=
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 20

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
hlzkyhxgl
hlzkyhxgl
hlzkyhxgl
hzyxgl
).,.1,.1(
.21,
21,
21
.21,
21,
21
).,,(
303004
202003
101002
0001
+++=
⎟⎠⎞
⎜⎝⎛ +++=
⎟⎠⎞
⎜⎝⎛ +++=
=
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 21

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
7 Determinação da Estabilidade Transitória num Sistema
Eléctrico de Energia
As equações para várias máquinas podem ser escritas de forma similar
às de apenas uma máquina ligada a um barramento de potência infinita. De
forma a reduzir a complexidade da análise da estabilidade transitória,
assumem-se as simplificações seguintes:
1.Cada máquina síncrona é representada por uma fonte de alimentação
constante e uma reactância longitudinal (Xd). Esta representação negligencia
o efeito da variação da relutância e assumem-se constantes os fluxos de
ligação.
2.A acção dos reguladores são negligenciadas e assume-se que as potências
injectadas são consideradas constantes durante todo o período de simulação.
3.Usando as tensões pré-defeito nos barramentos, todas as cargas são
convertidas em admitâncias equivalentes ligadas à terra e assumem-se
constantes.
4.Amortecimento ou potências assíncronas são ignoradas.
5.O ângulo mecânico do rotor de cada máquina coincide com o ângulo da
força electromotriz de cada máquina.
6.As máquinas pertencentes ao mesmo grupo oscilam juntamente e são ditas
coerentes. Um grupo de máquinas coerentes é representado por uma máquina
equivalente.
O primeiro passo na análise transitória de estabilidade é resolver o
trânsito de potências inicial e determinar os módulos e ângulos das tensões
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 22
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
em cada barramento. As correntes pré-defeito da máquina são calculadas a
partir de:
***
i
ii
i
ii V
jQPVS
I−
== i=0,1,2...,m (7.1)
onde m é o numero de geradores. Vi é a tensão aos terminais do i-ésimo
gerador, Pi e Qi são as potências activas e reactivas. Todos os valores
desconhecidos são calculados através da resolução do trânsito de potências
inicial. As resistências das armaduras dos geradores são normalmente
desprezadas e as forças electromotrizes são obtidas depois.
IiXjVE dii .'.' += (7.2)
Seguidamente, todas as cargas são convertidas em admitâncias equivalentes
usando a relação:
220 ||||*
i
ii
i
ii V
QPVS
y−
== (7.3)
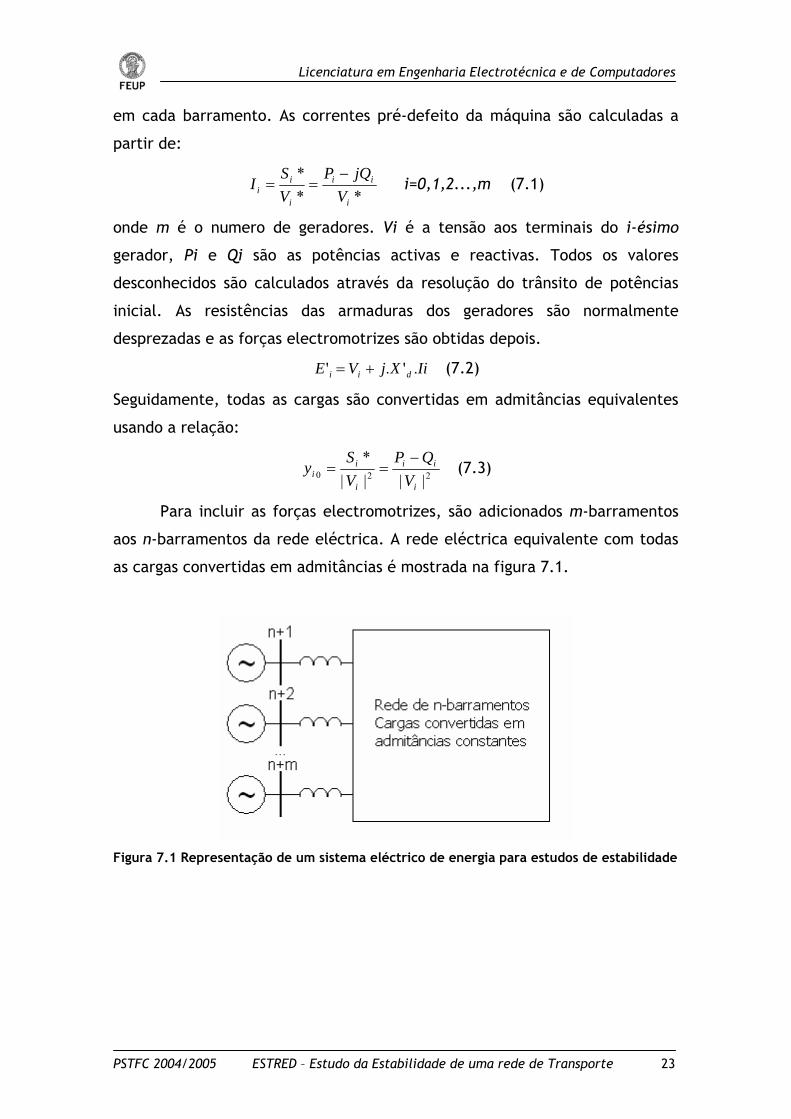
Para incluir as forças electromotrizes, são adicionados m-barramentos
aos n-barramentos da rede eléctrica. A rede eléctrica equivalente com todas
as cargas convertidas em admitâncias é mostrada na figura 7.1.
Figura 7.1 Representação de um sistema eléctrico de energia para estudos de estabilidade
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 23

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Os nós n+1, n+2,…,n+m são barramentos internos das máquinas, isto é,
barramentos atrás das reactâncias longitudinais. A equação das tensões nos
nós, com o nó 0 como referência, para esta rede é dado por:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
++++++
+++++
++
++
++
+
+
mn
n
n
mnnnmnnmnmn
nnnnnnn
nnnnnnn
nnnn
nnnn
mn
n
n
E
EV
VV
YYYY
YYYYYYYY
YYYYYYYY
I
II
II
'...'
....
........................
......
........................
......
......
...
...
1
2
1
))(1()1)(()(1)(
)1()1)(1()1(1)1(
)1()1(1
)1()1(2221
)1()1(1111
1
2
1
(7.4)
ou
busbusbus VYI .= (7.5)
Onde Ibus é o vector das correntes injectadas nos barramentos e Vbus é
o vector das tensões medidas a partir do nó de referência. Os elementos da
diagonal da matriz das admitâncias são a soma de todas as admitâncias
ligadas ao barramento, e os elementos fora da diagonal da matriz são iguais à
impedância que interliga cada barramento mas com sinal negativo. Esta
matriz é similar à usada na análise do trânsito de potências. A diferença está
nos nós adicionados para incluir as forças electromotrizes. Os elementos da
diagonal também são modificados para incluir as admitâncias das cargas.
Para simplificar a análise, todos os nós excluindo os internos dos
geradores são eliminados usando a fórmula de redução de Kron. Para eliminar
os barramentos de carga a matriz das admitâncias é partida de forma a que os
n barramentos a ser removidos são representados nas n linhas de cima. Já que
não entram ou saem correntes do barramento de carga, as correntes nas n
linhas são nulas. As correntes no gerador são denotadas pelo vector Im e o
gerador e a tensão nas cargas são representadas pelo vector E’m e Vn
respectivamente. Então a equação 7.4, em termos de submatrizes torna-se:
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
m
n
mmnmt
nmnn
m EV
YYYY
I '.
0 (7.6)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 24

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
O vector Vn de tensão pode ser eliminado substituindo da seguinte forma:
mnmnnn EYVY '..0 += (7.7)
mmmnt
nmm EYVYI '.. += (7.8)
De (7.7)
mnnnnn EYYV '..1−−= (7.9)
Substituindo em (7.8):
[ ] mred
busmnmnnt
nmmmm EYEYYYYI '.'... 1 =−= − (7.10)
A matriz de admitâncias reduzida é:
nmnnt
nmmmred
bus YYYYY .. 1−−= (7.11)
A matriz das admitâncias reduzida tem as dimensões (m×m), onde m é o
número de geradores. A potência eléctrica de saída de cada máquina pode ser
expressa em função da tensão interna da máquina.
iiei IES .'** = ou [ ]iiei IEP .'*ℜ= (7.12) onde (7.13) ij
m
jji YEI .'
1∑=
=
Exprimindo as tensões e as admitâncias na forma polar temos:
iii EE δ∠= |'|' e ijijij YY θ∠= || , e substituindo por Ii em (7.12), resulta:
∑=
+−=m
jjiijijjiei YEEP
1
)cos(..'.' δδθ (7.14)
A equação (7.14) é a mesma que é dada para o trânsito de potências dada por
∑=
+−=m
jjiijijjii YVVP
1
)cos(... δδθ .
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 25

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Antes do defeito, existe um equilíbrio entre a potência mecânica de
entrada e a potência eléctrica de saída, então temos:
∑=
+−=m
jjiijijjimi YEEP
1
)cos(..'.' δδθ (7.15)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 26
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
8 Estudo da Estabilidade Transitória de um Sistema
Eléctrico de Energia
O estudo clássico da estabilidade transitória é baseado na aplicação de
um defeito trifásico. Um defeito trifásico franco no barramento k da rede
resulta Vk=0. Esta situação é simulada retirando a k-ésima linha e coluna da
matriz de admitâncias pré-defeito. A nova matriz de admitâncias dos
barramentos é reduzida eliminando todo os nós, excepto os internos dos
geradores. As tensões de excitação do gerador durante e após o defeito
assumem-se permanecer constantes. A potência eléctrica do i-ésimo gerador
em função das novas matrizes das admitâncias reduzidas são obtidas de
(7.14). A equação de oscilação, desprezando os amortecimentos, é dada por
(7.15), para a máquina i vem:
∑=
+−−=m
jjiijijjimi
ii YEEPdtd
fH
12
2
0
)cos(..'.' δδθδπ
(8.1)
Onde Yij são os elementos da matriz das admitâncias reduzida do
defeito, e Hi é a constante de inércia da máquina i expressa em MVA e
potência base SB. Se HGi for a constante de inércia da máquina i expressa em
MVA então Hi é dada por:
GiB
Gii H
SSH .= (8.2)
Sendo a potência eléctrica do i-ésimo gerador Pef e transformando (8.1)
num modelo de variável de estado produzem
ii
dtd ωδ
∆= i=1,…m
)(0 fem
i
i PPHf
dtd
−=∆ πω
(8.3)
Temos agora duas equações de estado para cada gerador, com ângulos
de potência iniciais δoi e ∆ωoi=0. A função do Matlab, ode23, é aplicada para
resolver as 2m equações diferenciais de primeira ordem acima decritas.
Quando o defeito é eliminado, o que pode acontecer removendo a linha em
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 27
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
defeito, a matriz das admitâncias é reconfigurada para reflectir a mudança na
configuração da rede. Depois, a matriz das admitâncias reduzida pós-defeito é
avaliada e a potência eléctrica pós-defeito do i-ésmo gerador, descrita como
Pipf é imediatamente determinada a partir de (1.14). Usando a potência pós-
defeito, Pipf, a simulação continua para determinar a estabilidade do sistema,
até que o gráfico do ângulo de carga em função do tempo revele a tendência
para a estabilidade ou instabilidade. Normalmente o gerador do barramento
referência é usado também para referência dos ângulos, sendo os ângulos das
outras máquinas medidos em relação à de referência. Normalmente a solução
é apresentada com duas oscilações para mostrar se a segunda oscilação não é
maior que a primeira. Se alguma das diferenças dos ângulos se incrementar
“indefinidamente”, o sistema é instável.
O nosso programa foi baseado neste procedimento para se analisar a
estabilidade transitória de um dado Sistema Eléctrico de Energia.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 28
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
9 Programa Desenvolvido
9.1 Determinação das condições iniciais
Como foi indicado anteriormente é necessário conhecer as condições
iniciais do sistema em análise, nomeadamente, a tensão (módulo e fase). Para
tal recorre-se ao método de Newton-Rapshon.
Os dados necessários ao estudo de trânsito de potências são o esquema
unifilar da rede, a sua topologia, e as cargas. Devem conhecer-se os valores
dos parâmetros equivalentes, pré-despacho e os limites das variáveis do
sistema. De seguida é necessário definir os tipos de barramentos. Um
barramento i, onde especificamos a potência activa gerada (PiG) pode ser PQ
ou PV, onde especificamos a potência reactiva gerada (QiG) é PQ e finalmente
onde especificamos a tensão ViSP pode ser barramento PV ou de referência.
Os resultados pretendidos são o módulo da tensão Vi nos barramentos
PQ, a fase Өi nos barramentos PQ e PV. Pretende-se obter a potência activa
gerada (PiG) no barramento de referência, e a potência reactiva gerada (Qig)
nos barramentos PV e referência. Obtém-se assim o trânsito de potência e as
perdas.
Definem-se as fórmulas a aplicar para os desvios de potência:
e , e as coordenadas polares na forma Cali
SPii PPP −=∆ Cal
iSP
ii QQQ −=∆
iii VE θ∠= .
9.1.1 Matriz das Admitâncias Nodais
Pegando nos dados R, X e Ysh das linhas calcula-se:
( )( )⎪⎩
⎪⎨⎧
+=
+=⇒
⎪⎩
⎪⎨⎧
⋅+==
⋅+=
22
22
1ijijijij
ijijijij
ijijij
ij
ijijij
XRXb
XRRgBjGZY
XjRZ
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 29
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
A matriz das admitâncias ( BjGY ⋅+= ) pode então ser calculada
elemento a elemento através das relações:
⎪⎧
+=
=
≠=
∑
∑
=
=
ijsh
n
jijii
ijjiij
n
jijii
ybB
gGG
jigG
0
0,
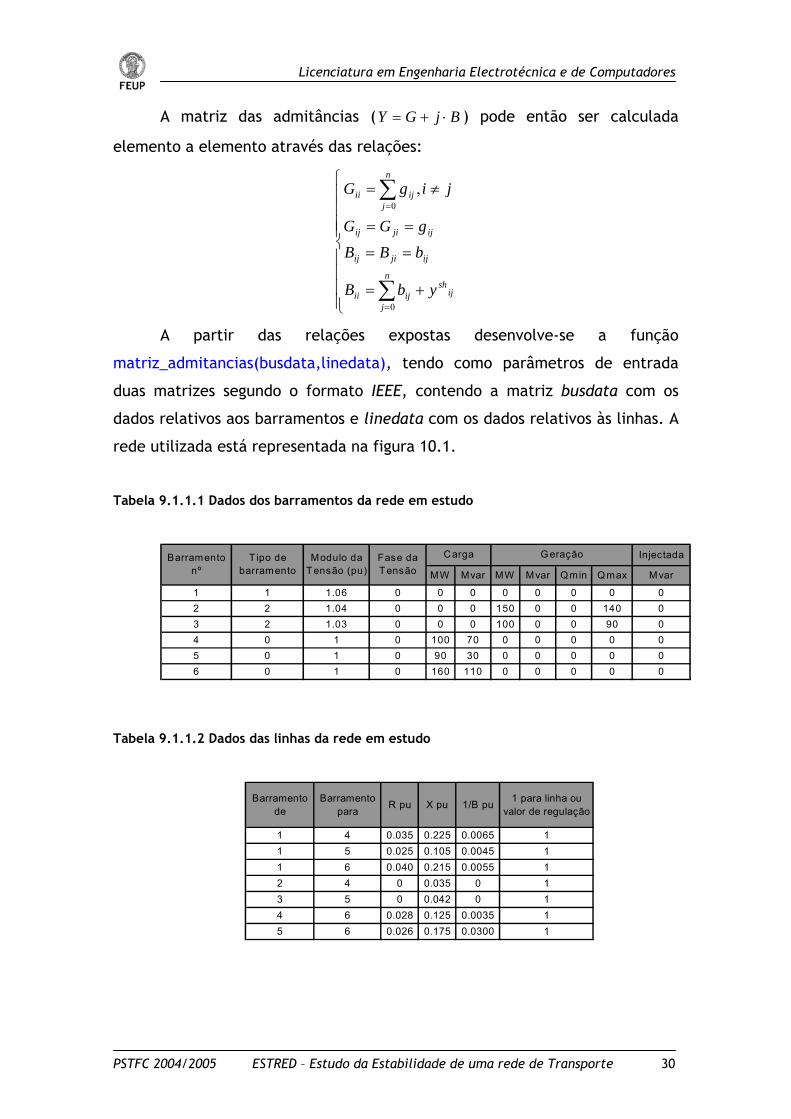
A partir das relações expostas desenvolve-se a função
matriz_admitancias(busdata,linedata), tendo como parâmetros de entrada
duas matrizes segundo o formato IEEE, contendo a matriz busdata com os
⎪⎪⎪⎪
⎩
⎪⎪⎪
⎨ ==
= ijjiij
bBB
dados relativos aos barramentos e linedata com os dados relativos às linhas. A
rede utilizada está representada na figura 10.1.
Tabela 9.1.1.1 Dados dos barramentos da rede em estudo
Injectada
MW Mvar MW Mvar Q min Q max Mvar
1 1 1.06 0 0 0 0 0 0 0 02 2 1.04 0 0 0 150 0 0 140 03 2 1.03 0 0 0 100 0 0 90 04 0 1 0 100 70 0 0 0 0 05 0 1 0 90 30 0 0 0 0 06 0 1 0 160 110 0 0 0 0 0
a G eraçãoBarramento nº
T ipo de barramento
Modulo da Tensão (pu)
Fase da Tensão
Carg
Tabela 9.1.1.2 Dados das linhas da rede em estudo
Barramento de
Barramento para
R pu X pu 1/B pu 1 para linha ou valor de regulação
1 4 0.035 0.225 0.0065 11 5 0.025 0.105 0.0045 11 6 0.040 0.215 0.0055 12 4 0 0.035 0 13 5 0 0.042 0 14 6 0.028 0.125 0.0035 15 6 0.026 0.175 0.0300 1
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 30

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
A saída da função retorna duas matrizes, G e B, cuja soma complexa
fornece a matriz das admitâncias nodais ( BjGY ⋅+= ).
Na linha de comandos do Matlab é executado da seguinte forma:
[G,B]=matriz_admitancias(busdata,linedata)
Obtiveram-se os resultados das tabelas 9.1.1.3 e 9.1.1.4.
abela 9.1.1.3 Matriz G condutância
2.3814 -1.7064
0 2 6 -0.83064
T
3.6573 0 0 -0.67502 -2.1459 -0.83638
0 0 0 0 0 0
0 0 0 0 0 0
-0.67502 0 0 0
-2.1459 0 0 .976
-0.83638 0 0 -1.7064 -0.83064 3.3734
Tabela 9.1.1.4 Matriz B susceptância
-17.831 0 0 4.3394 9.0129 4.4956
0 -28.571 0 28.571 0 0
0 0 -23.81 0 23.81 0
4.3394 28.571 0 -40.519 0 7.6178
9.0129 0 23.81 0 -38.379 5.5909
4.4956 0 0 7.6178 5.5909 -17.665
Para verificar a validade da função simulou-se no software de cálculo
owerworld a rede em estudo e obter a matriz das admitâncias nodais
bela 9.1.1.5).
Tabela 9.1.1.5 Matriz das admitâncias obtida pelo Powerworld
-0,68 + j4,34 0,00 + j28,57 2,38 - j40,52 -1,71 + j7,62
-2,15 + j9,01 0,00 + j23,81 2,98 - j38,38 -0,83 + j5,59
P
referentes a essa mesma rede (Ta
3,66 - j17,83 -0,68 + j4,34 -2,15 + j9,01 -0,84 + j4,50
0,00 - j28,57 0,00 + j28,57
0,00 - j23,81 0,00 + j23,81
-0,84 + j4,50 -1,71 + j7,62 -0,83 + j5,59 3,37 - j17,67
Como é possível de verificar o grau de aproximação para este caso é
excelente.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 31

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
9.1.2 Jacobiano
No início toma-se para o valor do módulo e fase das tensões contidos na
matriz busdata os valores de V=1p.u e θ=0.
De seguida procede-se ao cálcul das potências injectadas, sendo estas
para tal as equações seguintes:
s1
ikk
ikikikkiSP
ii QQ θ
o
subtraídas às potências especificadas, para se obter o respectivo erro,
utilizando-se
).cos..(1
1ik
n
kikikikki
SPii senBGVVPP θθ∑
+
=
+−=∆
)co...(1n
BsenGVV θ∑+
=
−=∆
, em que os parâmetros G e B são
uma optimização do tempo de
processamento. Esta função retorna dois vectores contendo a potência activa
e reactiva especificada. A função é então introduzida da seguinte forma na
linha de comandos do Matlab:
[Pi,Qi]=matriz_admitancias(busdata,linedata,G,B)
Para a construção do Jacobiano decidiu-se segmentar o mesmo da
N(n*m)
M
−
Para o cálculo das potências especificadas utiliza-se a função
potencias_injectadas(busdata,linedata,G,B)
opcionais. Caso G e B já tenham sido calculados anteriormente, podem ser
especificados como parâmetros de entrada, para evitar que sejam novamente
calculados, por esta função o que leva a
seguinte forma:
[ ] ⎥⎦
⎤⎢⎣
⎡=
)()(
)()()(
pp
ppp
LMNH
J
Definindo n como o número de barramentos PV e PQ, ou seja todos,
menos o de referência e m como o número de barramentos PQ, assim temos
as dimensões das sub matrizes:
H(n*n)
(m*n)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 32

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
L(m*m)
Para os cálculos do Jacobiano utilizam-se as seguintes expressões:
( ) ( )( ) kiBsenGVVLH ikikikikkiikik ≠⋅−⋅⋅⋅== ,cos θθ
( ) ( )( ) kisenBGVVMN ikikikikkiikik ≠⋅+⋅⋅⋅=−= ,cos θθ
iiiiii QVBH −⋅−= 2
iiiiii QVBL +⋅−= 2
ii VG ⋅ iiii PN += 2
M += 2
A função Jacobiano(busdat inedata,G,B), em que G e B são
parâmetros opcionais, para evitar que, caso a matriz das admitâncias nodais
m o
consequente desperdício de tempo, fornece o Jacobiano. Na última iteração
com um erro máximo de 0.0001 obteve-se a sub matriz da tabela 9.1.2.1.
Tabela 9.1.2.1 Matriz Jacobiano
iiiiii PVG ⋅−
a,l
já tenha sido calculada anteriormente, seja calculada internamento co
29.905 0 -29.943 0 0 0.026191 0 0
0 24.903 0 -24.923 0 0 0.017458 0
-29.943 0 41.844 0 -7.2257 1.4182 0 -1.6088
0 -24.923 0 39.938 -5.3478 0 2.1743 -0.78769
0 0 -7.2216 -5.3458 16.743 -1.6274 -0.80107 1.3873
0.026191 0 -3.4182 0 1.6088 40.444 0 -7.2257
0 0.017458 0 -3.9742 0.78769 0 39.338 -5.3478
0 0 1.6274 0.80107 -4.5873 -7.2216 -5.3458 14.543
A matriz do Jacobiano obtida pelo Powerworld é a da tabela 9.1.2.2.
obtida no Powerworld Tabela 9.1.2. 2 Matriz Jacobiano
29,9 -29,9 1,49
24,9 -24,9 0,98
-29,9 41,84 -7,32 1,41 -1,15
-24,9 39,94 -5,39 2,14 -0,44
-7,09 -5,28 16,74 -2,13 -1,16 1,47
1,5 -3,42 1,08 40,13 -7,78
1 -3,97 0,41 38,71 -5,73
2,14 1,18 -4,59 -7,03 -5,19 15,45
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 33

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Comparando a matriz calculada (Tabela 9.1.2.1) com a obtida no
u de aproximação continua a
r muito razoável.
Pode-se então inverter o Jacobiano para se obterem os desvios das
variáveis de estado:
Powerworld (Tabela 9.1.2.2) verifica-se que o gra
se
[ ]⎥⎥⎦
⎤
⎢⎢⎣
⎡
∆
∆=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∆
∆−
)(
)(1)()(
)(
.p
ppp
p
QP
J
VV
θ
Por fim actualizam-se as variáveis de estado na matriz busdata:
Reinicia-se o processo até que:
u que se atinja o numero máximo de iterações.
9.1.3 Newton-Rapshon
Com o auxílio das funções anteriores, e de outras funções secundárias
que não foram mencionadas anteriormente é possível a construção de um
Newton-raphson.
goritmo criado basta introduzir na linha
de comandos do Ma
[resultados,n_de_ite]=newton_raphson(busdata,linedata,precisao,n_max_iter,basemva)
Em que os dados de entrada são busdata que contém a informação
ferente aos barramentos, linedata às linhas, precisão ao erro máximo (
)()()1( ppp θθθ ∆+=+ )()()1( ppp VVV ∆+=+
⎩⎨⎧
≤∆≤∆εε
i
i
QP
o
algoritmo baseado no método de
Para observar o resultado do al
tlab o seguinte comando:
εre ),
n_max_iter ao numero má potencia base em
W.
ximo de iterações e basemva à
M
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 34
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
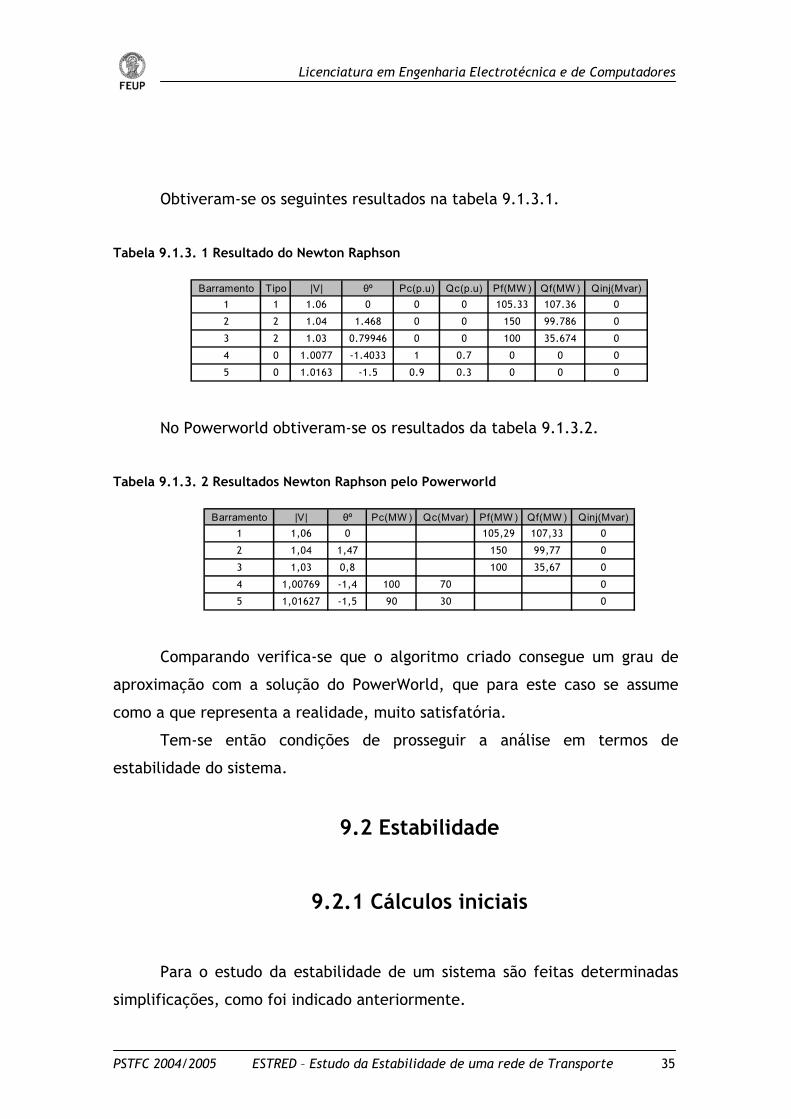
Obtiveram-se os seguintes resultados na tabela 9.1.3.1.
Tabela 9.1.3. 1 Resultado do Newton Raphson
Barramento Tipo |V| θº Pc(p.u) Qc(p.u) Pf(MW ) Qf(MW ) Qinj(Mvar)1 1 1.06 0 0 0 105.33 107.36 0
2 2 1.04 1.468 0 0 150 99.786 0
3 2 1.03 0.79946 0 0 100 35.674 0
4 0 1.0077 -1.4033 1 0.7 0 0 0
5 0 1.0163 -1.5 0.9 0.3 0 0 0
No Powerworld obtiveram-se os resultados da tabela 9.1.3.2.
Tabela 9.1.3. 2 Resultados Newton Raphson pelo Powerworld
Barramento |V| θº Pc(MW ) Qc(Mvar) Pf(MW ) Qf(MW ) Qinj(Mvar)1 1,06 0 105,29 107,33 0
2 1,04 1,47 150 99,77 0
3 1,03 0,8 100 35,67 0
4 1,00769 -1,4 100 70 0
5 1,01627 -1,5 90 30 0
Comparando verifica-se que o algoritmo criado consegue um grau de
Tem-se então condições de prosseguir a análise em termos de
stabilidade do sistema.
9.2 Estabilidade
9.2.1 Cálculos iniciais
Para o estudo da estabilidade de um sistema são feitas determinadas
simplificações, como foi indicado anteriormente.
aproximação com a solução do PowerWorld, que para este caso se assume
como a que representa a realidade, muito satisfatória.
e
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 35

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Como se pode ver na figura 7.1 é necessário adicionar m barramentos
(correspondentes ao número de geradores) à matriz busdata, e m linhas à
atriz linedata.
Foi criada a função reconfigura_rede(busdata,linedata,gendata) que
cria os respectivos barramentos e linhas. O valor da reactância das linhas, que
corresponde à reactância longitudinal dos geradores, é obtido a partir da
informação contida na mat
e seguida são calculadas as correntes dos geradores (equação 7.1)
o 7.2) utilizando para tal a
e assume constante em todo o intervalo. Introduzindo na
linha d
Obtem-se à saída os valores indicados na tabela 9.2.1.1.
nica dos geradores
m
riz gendata.
D
através da função correntes_geradores(busdata). É então possível obter as
f.e.m. (módulo e ângulo) dos geradores (equaçã
função femepmec(busdata,linedata,gendata). Esta função para além do valor
da f.e.m. também calcula a potência mecânica (equação 7.15) fornecida aos
geradores, que s
e comandos do Matlab:
Matriz=femepmec(busdata,linedata,gendata)
Tabela 9.2.1. 1 Valores da f.e.m. e potência mecâ
Gerador (i) E(i) δ(i) Pm(i)
1 1.2781 8.9451 1.0532
2 1.2035 11.824 1.4999
3 1.1427 13.063 0.99997
De seguida todas as cargas do sistema são convertidas em admitâncias
(equação 7.3), utilizando a função carga2admitancia(busdata).
9.2.2 Cálculo das matrizes Pré, Durante e Pós defeito
A partir das equações 7.4, 7.6 e 7.11 e dos dados referidos no ponto
anterior desenvolveu-se uma função que pode ser chamada directamente na
linha de comandos do Matlab da seguinte forma:
[Ypre,Ydur,Ypos]=matriz_admit_mod(busdata,linedata,gendata,barr_def,linha_def)
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 36
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
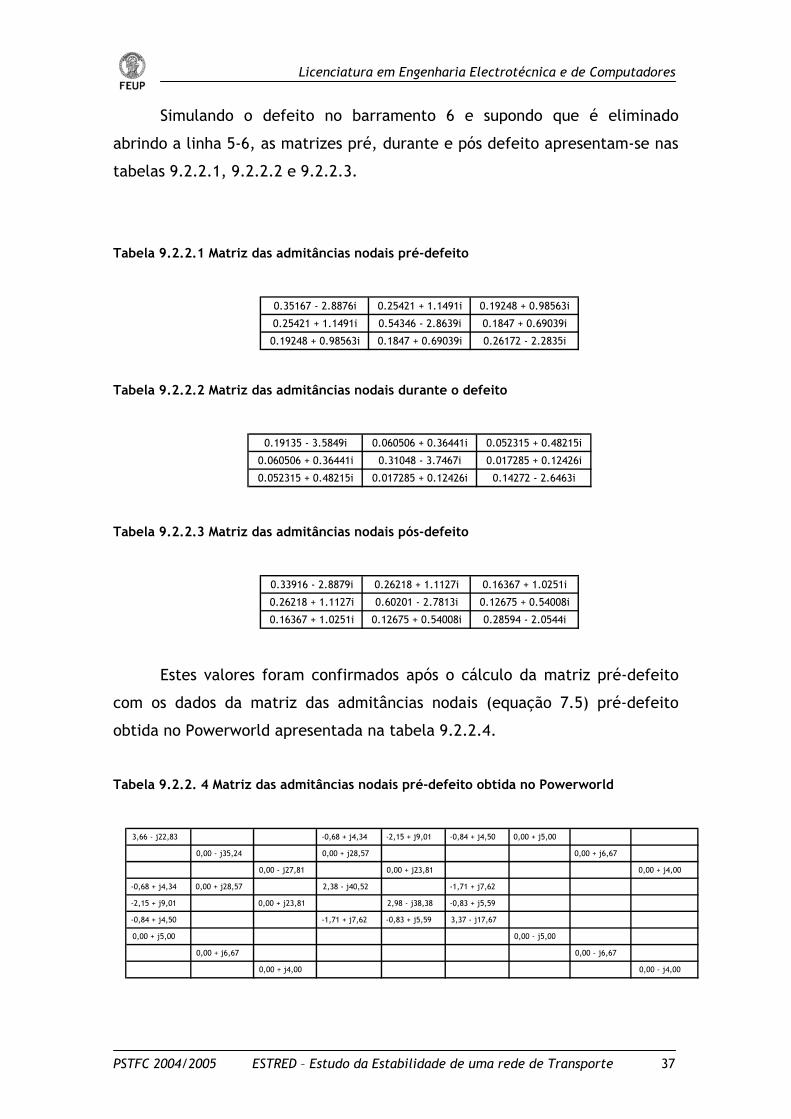
Simulando o defeito no barramento 6 e supondo que é eliminado
abrindo a linha 5-6, as matrizes pré, durante e pós defeito apresentam-se nas
belas 9.2.2.1, 9.2.2.2 e 9.2.2.3.
0.1847 + 0.69039i
ta
Tabela 9.2.2.1 Matriz das admitâncias nodais pré-defeito
0.25421 + 1.1491i 0.54346 - 2.8639i
0.35167 - 2.8876i 0.25421 + 1.1491i 0.19248 + 0.98563i
0.19248 + 0.98563i 0.1847 + 0.69039i 0.26172 - 2.2835i
Tabela 9.2.2.2 Matriz das admitâncias nodais durante o defeito
0.19135 - 3.5849i 0.060506 + 0.36441i 0.052315 + 0.48215i
0.060506 + 0.36441i 0.31048 - 3.7467i 0.017285 + 0.12426i
0.052315 + 0.48215i 0.017285 + 0.12426i 0.14272 - 2.6463i
Tabela 9.2.2.3 Matriz das admitâncias nodais pós-defeito
0.33916 - 2.8879i 0.26218 + 1.1127i 0.16367 + 1.0251i
0.26218 + 1.1127i 0.60201 - 2.7813i 0.12675 + 0.54008i
0.16367 + 1.0251i 0.12675 + 0.54008i 0.28594 - 2.0544i
Estes valores foram confirmados após o cálculo da matriz pré-defeito
com os dados da matriz das admitâncias nodais (equação 7.5) pré-defeito
obtida no Powerworld apresentada na tabela 9.2.2.4.
obtida no Powerworld
0,00 + j23,81 2,98 - j38,38 -0,83 + j5,59
-0,84 +
0,00 +
Tabela 9.2.2. 4 Matriz das admitâncias nodais pré-defeito
3,66 - j22,83 -0,68 + j4,34 -2,15 + j9,01 -0,84 + j4,50 0,00 + j5,00
0,00 - j35,24 0,00 + j28,57 0,00 + j6,67
0,00 - j27,81 0,00 + j23,81 0,00 + j4,00
-0,68 + j4,34 0,00 + j28,57 2,38 - j40,52 -1,71 + j7,62
-2,15 + j9,01
j4,50 -1,71 + j7,62 -0,83 + j5,59 3,37 - j17,67
j5,00 0,00 - j5,00
0,00 + j6,67 0,00 - j6,67
0,00 + j4,00 0,00 - j4,00
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 37
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Para confirmar os dados das matrizes durante e pós defeito procedeu-
da mesma forma chegando-se a resultados esperados.
9.2.3 Evolução temporal do δ dos geradores
Na última parte de um trabalho de estabilidade é necessário resolver o
sistema de equações diferenciais (equações 8.3) para cada gerador. Para tal
recorreu-se a função ode23 do Matlab ue é uma implementação directa do
métod
do em análise.
δδ = .)()( // (9.2.4.1)
No programa é p to através de uma
constante (Kt) que representa o valor de t para o qual a exponencial toma o
valor de ½, sendo possível calcular o valor de α:
se
q
o de Runge-Kutta. O conjunto de equações a resolver encontram-se nos
ficheiros eq_osc_1, eq_osc_2 e eq_osc_3 conforme o perío
9.2.4 Amortecimento
Para o amortecimento adoptou-se um modelo algo rudimentar
introduzindo uma exponencial do tipo e-α t. Essa exponencial multiplicada pelo
valor do ângulo de carga sem amortecimento fornece o valor do ângulo de
carga com amortecimento: tα−
amortcsamortcc ett
ossível regular o amortecimen
tK⎠⎞
⎝⎛
−= 21ln
α (9.2.4.2) ⎟⎜
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 38
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
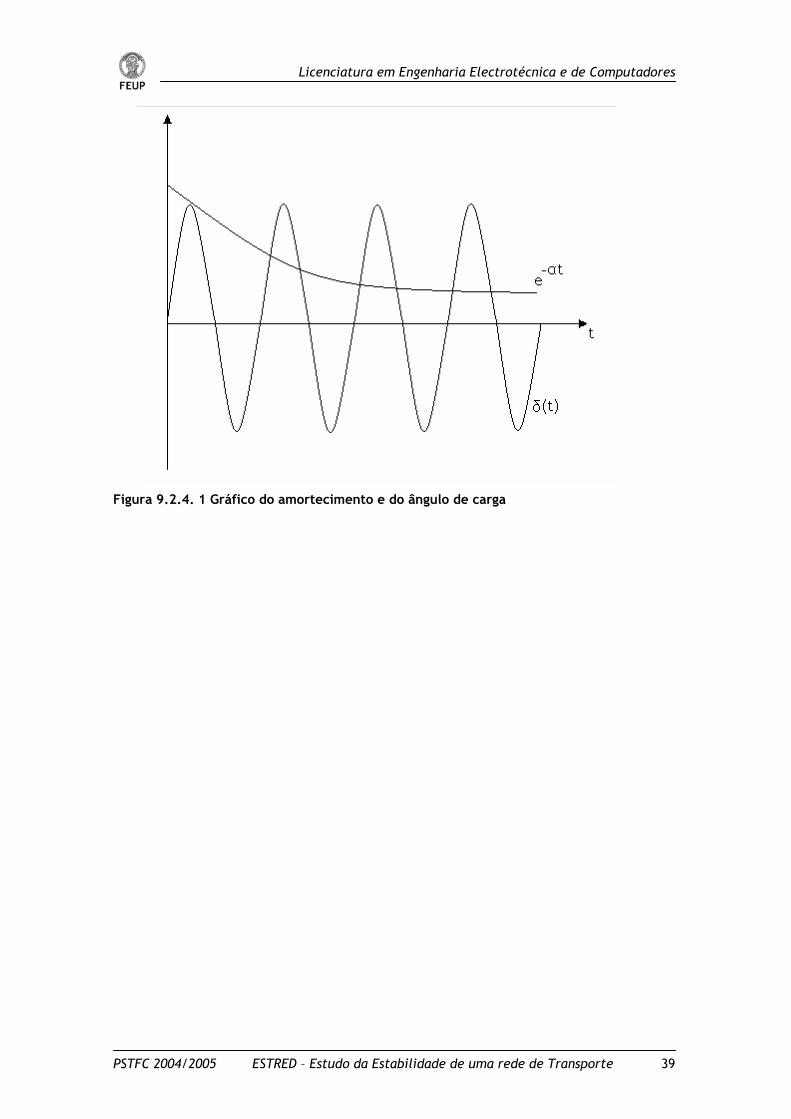
Figura 9.2.4. 1 Gráfico do amortecimento e do ângulo de carga
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 39
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
10 Utilização da Interface Gráfica do Programa
Desenvolvido
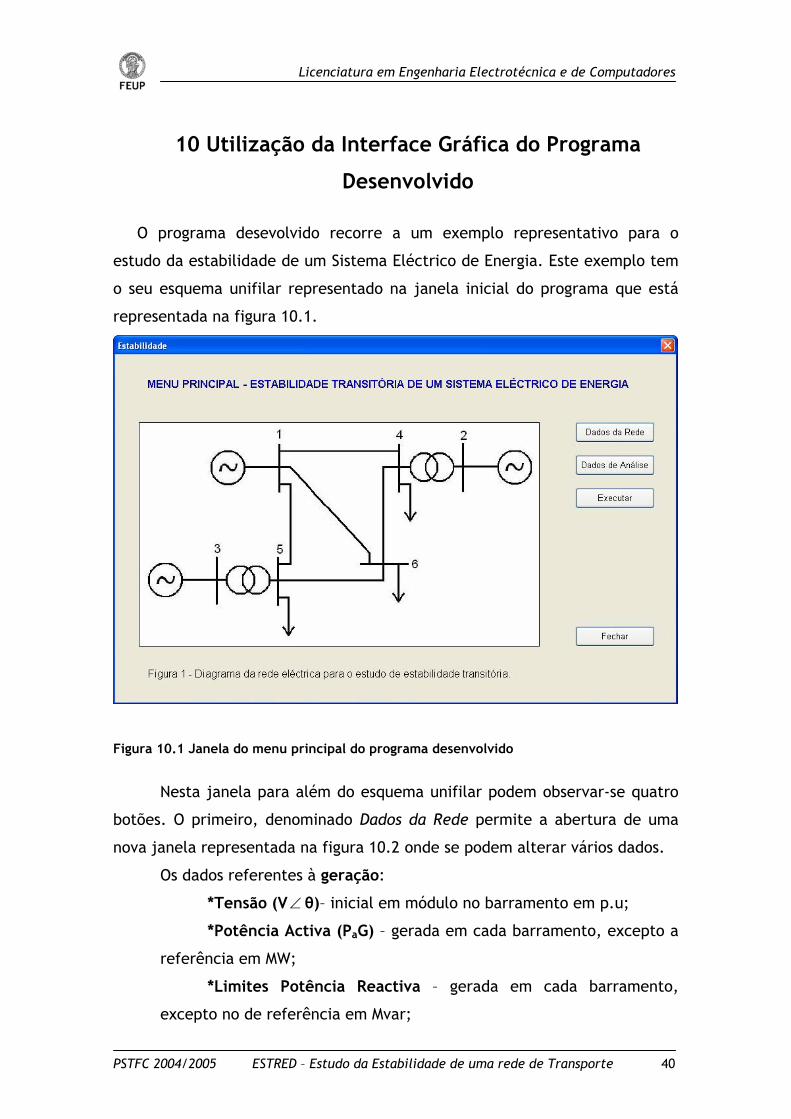
O programa desevolvido recorre a um exemplo representativo para o
estudo da estabilidade de um Sistema Eléctrico de Energia. Este exemplo tem
o seu esquema unifilar representado na janela inicial do programa que está
representada na figura 10.1.
Figura 10.1 Janela do menu principal do programa desenvolvido
Nesta janela para além do esquema unifilar podem observar-se quatro
botões. O primeiro, denominado Dados da Rede permite a abertura de uma
nova janela representada na figura 10.2 onde se podem alterar vários dados.
Os dados referentes à geração:
*Tensão (V∠θ)– inicial em módulo no barramento em p.u;
*Potência Activa (PaG) – gerada em cada barramento, excepto a
referência em MW;
*Limites Potência Reactiva – gerada em cada barramento,
excepto no de referência em Mvar;
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 40

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
*Referência – para os cálculos do trânsito de potência e
estabilidade.
Os dados referentes às cargas:
*Potência Consumida (PaC,QaC) – activa em MW e reactiva em
Mvar.
Os dados referentes às linhas:
*Resistência (R) – expressa em p.u
*Reactância (X) – expressa em p.u
*Susceptância (½B) - expressa em p.u
E finalmente os dados referentes às máquinas:
Resistência interna (Ri) – Ri expressa em p.u
Reactância interna (Xi) – Xi expressa em p.u
Constante de inércia (H) – H expressa em MJ/MVA
Figura 10.2 Janela que permite alterar os dados da rede em estudo
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 41

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
O segundo botão da janela principal, denominado Dados de Análise
permite a abertura de uma nova janela representada na figura 10.3 onde se
podem alterar dados da análise seguintes:
*Potência de Base(Sbase) – para o sistema em MVA
*Frequência (f) – de funcionamento da rede em Hz
*Localização do defeito – escolha de um dos barramentos para a
localização do defeito
*Tempo de eliminação (Tel) – do defeito em segundos
*Tempo de reengate(Trg) – do sistema em segundos
*Tempo de análise(Tan) – da equação em segundos
*Passo – de integração
*Linha a retirar – de serviço para que o sistema possa ficar a
funcionar
*Amortecimento – tempo ao fim do qual o valor do coeficiente
de amortecimento atinge 1/2.
Figura 10.3 Janela que permite alterar os dados de análise
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 42

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Após a inserção de todos os dados necessários à simulação, premindo no
botão denominado Executar obtêm-se os resultados numa janela com a forma
apresentada na figura 10.4.
Figura 10.4 Janela correspondente aos resultados obtidos na simulação
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 43

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Note-se que a janela que apresenta os resultados ainda nos oferece a
possibilidade de ver alguns resultados auxiliares referentes ao trânsito de
potências, tal como se pode verificar na figura 10.5.
Figura 10.5 Janela que permite observar |Vi| e <Viº do trânsito de potências
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 44
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
11 Exemplos de Funcionamento
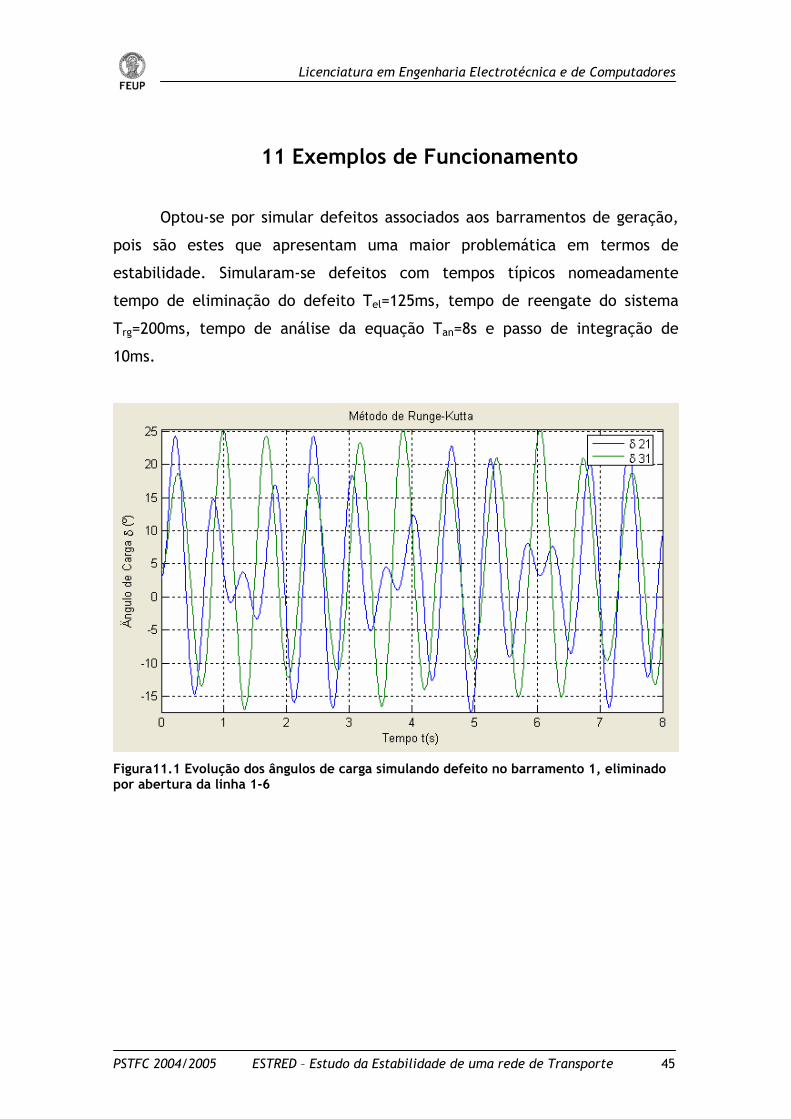
Optou-se por simular defeitos associados aos barramentos de geração,
pois são estes que apresentam uma maior problemática em termos de
estabilidade. Simularam-se defeitos com tempos típicos nomeadamente
tempo de eliminação do defeito Tel=125ms, tempo de reengate do sistema
Trg=200ms, tempo de análise da equação Tan=8s e passo de integração de
10ms.
Figura11.1 Evolução dos ângulos de carga simulando defeito no barramento 1, eliminado por abertura da linha 1-6
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 45

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura11.2 Evolução dos ângulos de carga simulando defeito no barramento 2, eliminado por abertura da linha 2-4
Figura11.3 Evolução dos ângulos de carga simulando defeito no barramento 3, eliminado
por abertura da linha 3-5
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 46
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Para os valores de simulação definidos como sendo os usuais constata-
se que a rede em causa mantém sempre a estabilidade.
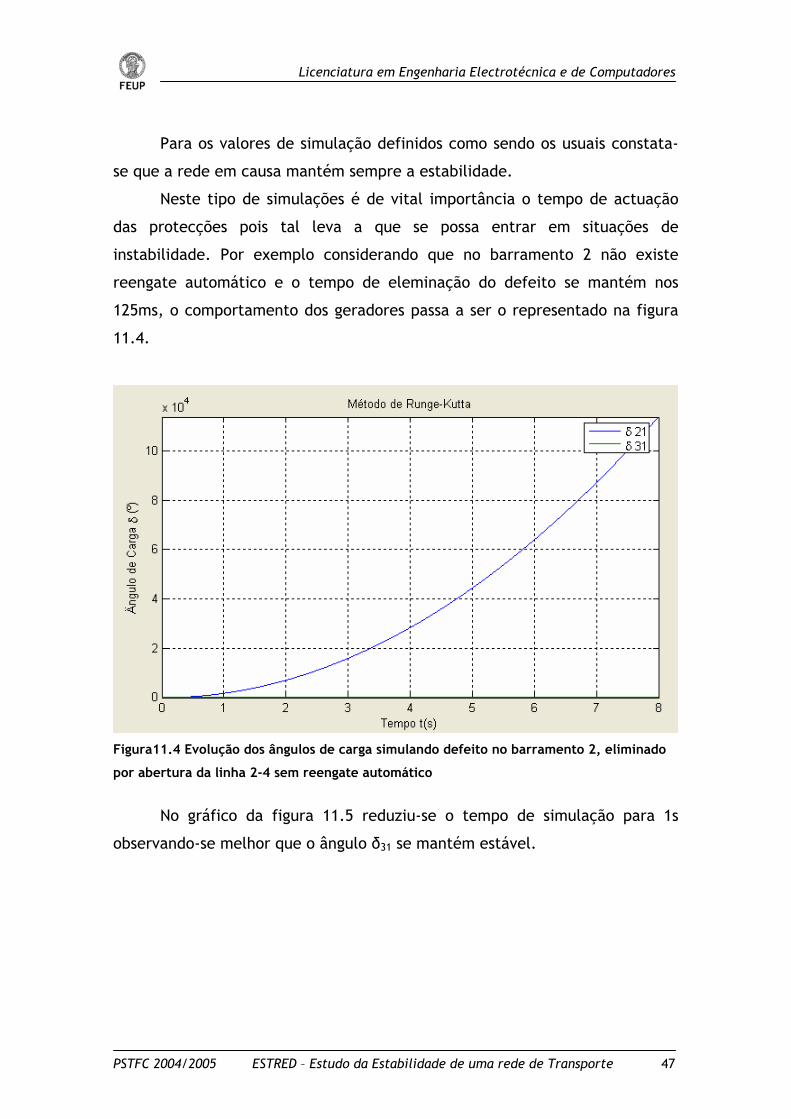
Neste tipo de simulações é de vital importância o tempo de actuação
das protecções pois tal leva a que se possa entrar em situações de
instabilidade. Por exemplo considerando que no barramento 2 não existe
reengate automático e o tempo de eleminação do defeito se mantém nos
125ms, o comportamento dos geradores passa a ser o representado na figura
11.4.
Figura11.4 Evolução dos ângulos de carga simulando defeito no barramento 2, eliminado
por abertura da linha 2-4 sem reengate automático
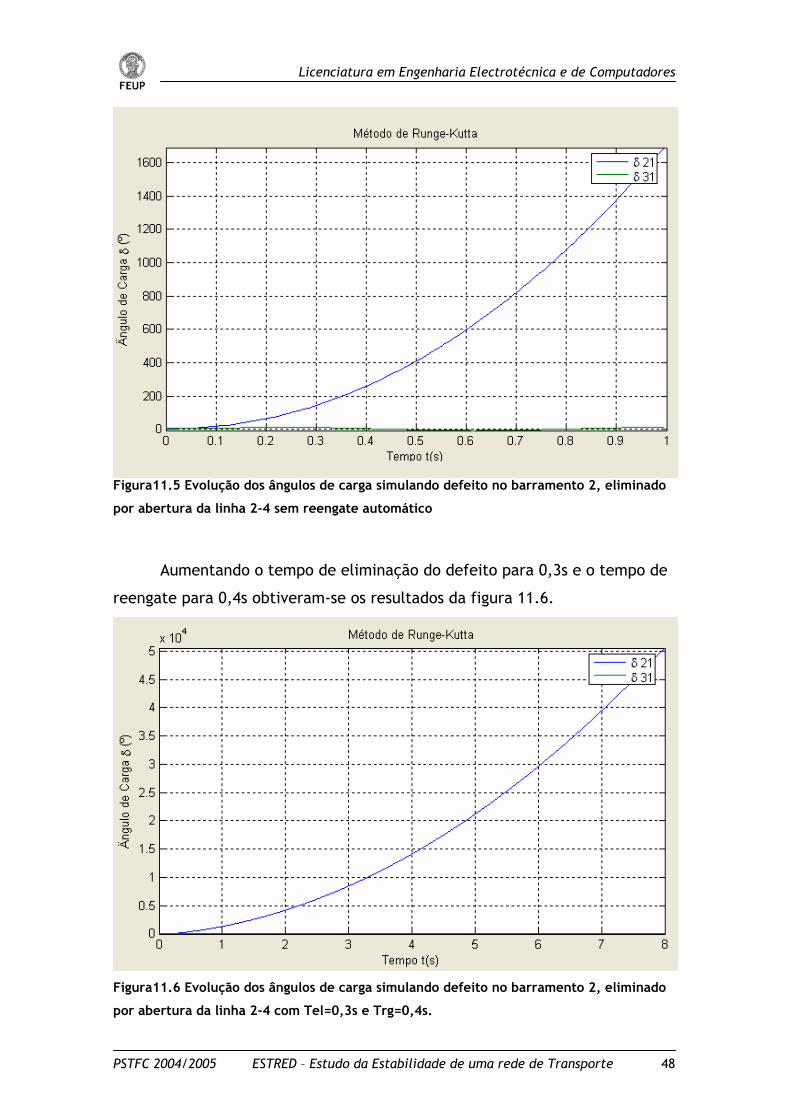
No gráfico da figura 11.5 reduziu-se o tempo de simulação para 1s
observando-se melhor que o ângulo δ31 se mantém estável.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 47
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura11.5 Evolução dos ângulos de carga simulando defeito no barramento 2, eliminado
por abertura da linha 2-4 sem reengate automático
Aumentando o tempo de eliminação do defeito para 0,3s e o tempo de
reengate para 0,4s obtiveram-se os resultados da figura 11.6.
Figura11.6 Evolução dos ângulos de carga simulando defeito no barramento 2, eliminado
por abertura da linha 2-4 com Tel=0,3s e Trg=0,4s.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 48

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
No gráfico da figura 11.7 reduziu-se o tempo de simulação para 1s
observando-se melhor que o ângulo δ31 se mantém estável.
Figura11.7 Evolução dos ângulos de carga simulando defeito no barramento 2, eliminado
por abertura da linha 2-4 com Tel=0,3s, Trg=0,4s e Tan=1s.
Pode concluir-se que o desempenho das protecções tem um papel
fulcral na estabilidade do Sistema Eléctrico de Energia.
De seguida procedeu-se à análise do comportamento da rede para
vários valores de amortecimento.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 49

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Figura 11.8 Evolução dos ângulos de carga nas condições da figura 11.1 mas com
amortecimento (Kt) igual a 10.
Figura 11.9 Evolução dos ângulos de carga nas condições da figura 11.1 mas com
amortecimento (Kt) igual a 1.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 50

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
12 Conclusões
Ao longo deste trabalho foi possivel constatar a importância que os
estudos de estabilidade desempenham na exploração de um Sistema Eléctrico
de Energia. Tal importância surge do facto que numa situação em que um
curto circuito não seja convenientemente eleminado pela actuação das
protecções os alternadores tenham de ser retirados de serviço com as
consequencias inerentes em termos de qualidade prestada aos consumidores e
demora na reposição de serviço.
Verificou-se que as condições que podem agravar ou não a severidade
de um curto-circuito são o local onde ocorre o defeito, o tempo de actuação
das protecções, a existencia de reengate automatico e a rapidez do mesmo.
Optou-se por introduzir no modelo clássico dos geradores um factor de
amortecimento para que seja visivel o decaimento progressivo da oscilação
dos ângulos de carga, algo que acontece na realidade.
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 51
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
13 Bibliografia
1 - Stagg, C.W. and A.H.El – Abiad, “Computer methods in Power System
Analysis”, McGraw-Hill, Nova Yorque, 1968
2 - Elgerd, O., “Electric Energy Systems theory: An introduction”, McGraw-
Hill, Nova Yorque, 1982 (2ª edição)
3 - Weedy B.M., “Eletric Power Systems”, John Wilwy and Sons, 1979 (3ª
edição)
4 - F. Maciel Barbosa, J. A. Peças Lopes, “Métodos directos para a análise
da estabilidade de um Sistema Eléctrico de Energia”, FEUP, 1984
5 - Anderson e Fouad, “Power System Control and Stability”, Iowa State
University Press
6 - J. Peças Lopes, “Análise da Estabilidade de Sistemas Eléctricos de
Energia”, Trabalho de síntese para as provas de Aptidão Pedagógica e
Capacidade Científica, FEUP, 1983
7 - Prabha Kundur, “Power System Stability and Control”, Electric Power
Research Institute, Power System Engineering Series, McGraw-Hill Inc.,
1994
8 - John Machowski, Jamusy W. Bialek, James R. Bumby, “Power System
Dynamics and Stability”, John Wiley&Sons, 1997
9 - K.R. Padiyar, “Power Systems Dynamics – Stability and Control”, John
Wiley&Sons, 1996
10 - A.Gomez Exposito Editor, “Análisis y Operatión de Sistemas de Energiía
Eléctrica”, McGraw-Hill, 2002
11 - Hadi Saadat, “Power System Analysis”, McGraw-Hill, 1999
12 - F. Maciel Barbosa, “Estabilidade de Sistemas Eléctricos”, FEUP, 1984
13 - http://www.mathworks.com
14 - http://www.ee.technion.ac.il/courses/MATLAB/#MATLAB%20PDF's
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 52
– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Anexos
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 53

– Lic Licenciatura em Engenharia Electrotécnica e de Computadores
Anexo1
O esquema da rede em Powerworld para a rede em estudo neste
trabalho está representado na figura A1.1.
Figura A1.1 Rede em estudo no Powerworld
PSTFC 2004/2005 ESTRED – Estudo da Estabilidade de uma rede de Transporte 54