dinÂmica de estruturas - w3.ualg.ptw3.ualg.pt/~jestevao/sebdin.pdf · resolução dos problemas de...
TRANSCRIPT
UNIVERSIDADE DO ALGARVE
ESCOLA SUPERIOR DE TECNOLOGIA
Área Departamental de Engenharia Civil
COMPLEMENTOS DE ANÁLISE ESTRUTURAL
DINÂMICA DE ESTRUTURAS
VERSÃO PROVISÓRIA
JOÃO MANUEL CARVALHO ESTÊVÃO
FARO 2006/02/17


- i -
ÍNDICE
Capítulo 1 - Introdução à Dinâmica de Estruturas ...................................................... 1
1.1. Caracterização de um problema dinâmico ...................................................... 1
1.2. Acções dinâmicas............................................................................................ 3
1.3. Discretização do sistema estrutural ................................................................ 3
1.3.1. Graus de liberdade .................................................................................... 4
1.3.2. Concentração de massas .......................................................................... 4
1.3.3. Amortecedores ........................................................................................... 5
1.3.4. Molas ......................................................................................................... 7
1.3.5. Condensação estática da matriz de rigidez ............................................... 8
1.3.5. Mudança de sistema de coordenadas ....................................................... 9
1.4. Formulação das equações de movimento ..................................................... 10
1.4.1. Princípio de D’Alembert ........................................................................... 10
1.4.2. Princípio dos trabalhos virtuais ................................................................ 11
1.4.3. Princípio de Hamilton ............................................................................... 11
1.5. Problemas propostos..................................................................................... 12
1.6. Resoluções dos problemas propostos .......................................................... 14
1.6.1. Problema 1.1.a) ....................................................................................... 14
1.6.2. Problema 1.1.b) ....................................................................................... 16
1.6.3. Problema 1.1.c)........................................................................................ 19
1.6.4. Problema 1.2.a) ....................................................................................... 23
1.6.5. Problema 1.2.b) ....................................................................................... 25
1.6.6. Problema 1.2.c)........................................................................................ 27
Capítulo 2 - Oscilador linear de um grau de liberdade ............................................. 35
2.1. Resposta em regime livre .............................................................................. 35
2.1.1. Sistema não amortecido .......................................................................... 35

- ii -
2.1.2. Sistema amortecido ................................................................................. 36
2.1.2.1. Amortecimento crítico ....................................................................... 37
2.1.2.2. Amortecimento sobrecrítico .............................................................. 37
2.1.2.3. Amortecimento subcrítico .................................................................. 38
2.1.2.4. Decremento logarítmico .................................................................... 38
2.2. Resposta em regime forçado ........................................................................ 40
2.2.1. Acções periódicas .................................................................................... 40
2.2.2. Acções não periódicas ............................................................................. 44
2.3. Métodos para a determinação do amortecimento viscoso ............................ 45
2.3.1. Método baseado no decremento logarítmico ........................................... 46
2.3.2. Método da meia potência......................................................................... 46
2.3.3. Método da energia dissipada por ciclo .................................................... 48
2.4. Problemas propostos..................................................................................... 50
2.5. Resoluções dos problemas propostos .......................................................... 53
2.5.1. Problema 2.1............................................................................................ 53
2.5.2. Problema 2.2............................................................................................ 53
2.5.3. Problema 2.3............................................................................................ 56
2.5.4. Problema 2.4............................................................................................ 59
2.5.5. Problema 2.5............................................................................................ 63
2.5.6. Problema 2.6............................................................................................ 67
2.5.7. Problema 2.7............................................................................................ 67
2.5.8. Problema 2.8............................................................................................ 67
Capítulo 3 - Sistema linear de vários graus de liberdade ......................................... 68
3.1. Sistema de equações de movimento ............................................................. 68
3.2. Regime livre não amortecido ......................................................................... 69
3.2.1. Equação característica ............................................................................ 69
3.2.2. Modos de vibração .................................................................................. 70
3.3. Regime forçado amortecido .......................................................................... 73
3.3.1. Coordenadas modais ............................................................................... 73
3.3.2. Método da sobreposição modal ............................................................... 74
3.4. Método de Stodola ........................................................................................ 75

- iii -
3.5. Método de Rayleigh simplificado................................................................... 78
3.6. Problemas propostos..................................................................................... 80
3.7. Resoluções dos problemas propostos .......................................................... 82
3.7.1. Problema 3.1............................................................................................ 82
3.7.2. Problema 3.2............................................................................................ 87
3.7.3. Problema 3.3............................................................................................ 95
3.7.4. Problema 3.4.......................................................................................... 101
Bibliografia .............................................................................................................. 106


- 1 -
CAPÍTULO 1
INTRODUÇÃO À DINÂMICA DE ESTRUTURAS
1.1. Caracterização de um problema dinâmico
Os problemas de Dinâmica de Estruturas diferem dos problemas tradicionais
da Teoria das Estruturas em dois aspectos fundamentais.
• Nos problemas do domínio da Dinâmica de Estruturas, tanto as acções como
a resposta da estrutura a essas acções, variam com o tempo, o que conduz a
uma infinidade de soluções para o problema. Como tal, apresentam uma maior
dificuldade de resolução e com maior dispêndio de tempo nesse intento. Pelo
contrário, os problemas que envolvem acções estáticas só têm uma solução.
• Nos problemas tradicionais da Teoria das Estruturas, os deslocamentos
ocorridos numa estrutura dependem das acções exteriores, e são obtidos do
equilíbrio estático de forças, em que
[ ] { } { }k d F⋅ = com { } { } { }F Q Q= − 0 (1.1)
ou
{ } [ ] { }d f F= ⋅ (1.2)
sendo
[ ] [ ]k f= −1 (1.3)
em que [k] é a matriz de rigidez, [f] é a matriz de flexibilidade, {d} é o vector de
deslocamentos generalizados e {F} é o vector de forças (igual à soma vectorial
das forças nodais {Q} e das forças de fixação −{Q0}). Se as forças exteriores
F(t) forem aplicadas de forma dinâmica, de acordo com o princípio de
D’Alembert, os deslocamentos dependem das forças de restituição ( )Fr t
(proporcionais à rigidez) e das forças de inércia, que resultam da aceleração
João M. C. Estêvão - EST - UAlg
- 2 -
da massa da estrutura, em conformidade com a 2ª lei de Newton. Por outro
lado, poderão existir, também, forças dissipadoras Fa(t). Desta forma, o
equilíbrio em regime dinâmico, corresponderá a
{ } { } { } { }r r r r
F F F FI t a t r t t( ) ( ) ( ) ( )+ + = (1.4)
A análise dinâmica de uma estrutura envolve a realização das seguintes
etapas:
• quantificação das acções dinâmicas;
• concepção de um modelo estrutural;
• definição de um modelo matemático (formulação das equações de
movimento, traduzidas nas equações de equilíbrio 1.4);
• estudo do modelo matemático com base na teoria das vibrações.
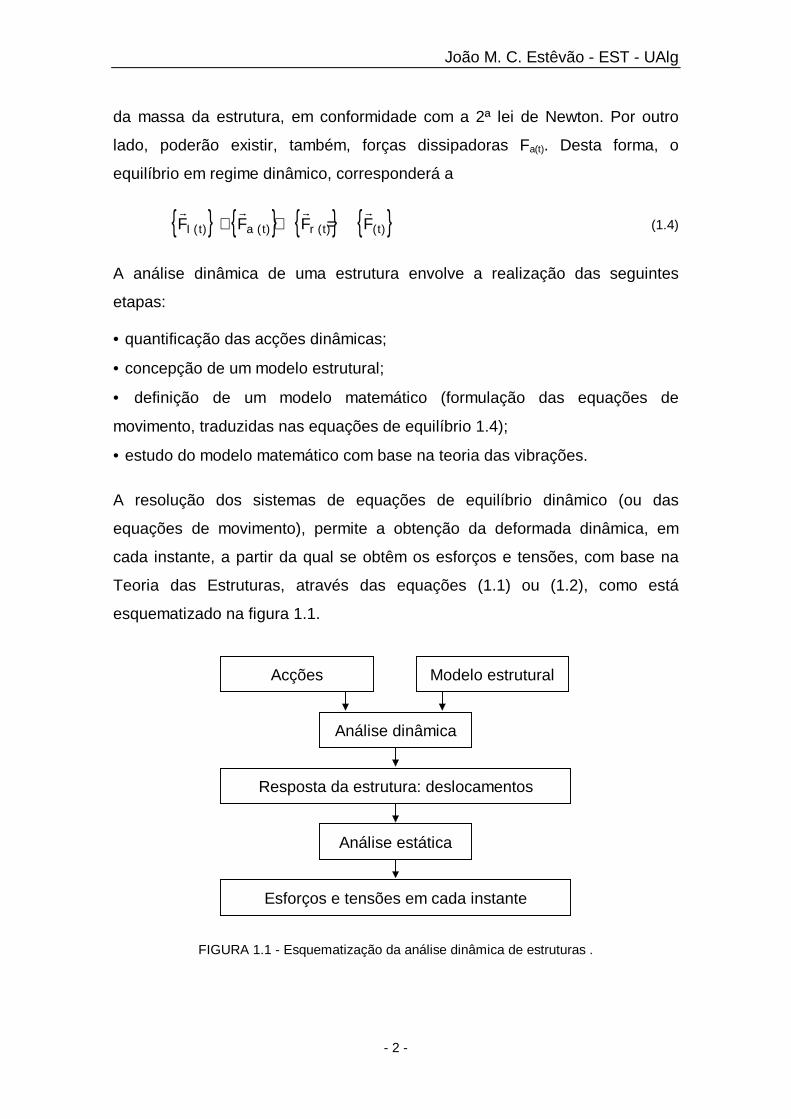
A resolução dos sistemas de equações de equilíbrio dinâmico (ou das
equações de movimento), permite a obtenção da deformada dinâmica, em
cada instante, a partir da qual se obtêm os esforços e tensões, com base na
Teoria das Estruturas, através das equações (1.1) ou (1.2), como está
esquematizado na figura 1.1.
Modelo estrutural
Análise dinâmica
Acções
Resposta da estrutura: deslocamentos
Análise estática
Esforços e tensões em cada instante
FIGURA 1.1 - Esquematização da análise dinâmica de estruturas .

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 3 -
1.2. Acções dinâmicas
As acções dinâmicas podem ser classificadas como determinísticas ou
aleatórias (estocásticas). Em relação às acções determinísticas, é conhecido o
seu valor em cada instante. Contrariamente, as acções aleatórias só podem
ser definidas em termos estatísticos, não se conhecendo o seu valor num dado
instante. A acção sísmica, a acção do vento e certo tráfego rodoviário, são
exemplos de acções aleatórias.
As acções determinísticas podem ser divididas em acções periódicas e não
periódicas, consoante os seus valores se repetem, ou não, após um dado
período de tempo fixo (T). Em relação às acções periódicas teremos
( ) ( )F Ft t n T= + ⋅ ; n = 1,2,3,K (1.5)
A acção periódica mais simples resulta de uma variação sinusoidal da acção, o
que é designada por acção harmónica simples. Este tipo de acção pode
resultar do funcionamento de máquinas rotativas de alta velocidade, tais como
turbinas, alternadores, centrifugadoras e motores eléctricos caracterizados por
regimes sensivelmente uniformes. Outras acções periódicas, mais complexas
(resultantes, por exemplo, de martelos-pilões), podem ser decompostas nas
suas componentes harmónicas, recorrendo para tal, a uma análise de Fourier.
As acções não periódicas podem ser classificadas como impulsivas
(resultantes, por exemplo, de uma explosão ou do impacto de um veículo) e
contínuas (por exemplo, a parte estacionária da acção de um sismo).
1.3. Discretização do sistema estrutural
Um modelo estrutural deve ser concebido de forma a traduzir o comportamento
do sistema real, com o maior rigor possível. No entanto, para facilitar a
resolução dos problemas de análise dinâmica, é necessário a adopção de
critérios de discretização, de forma a modelar os sistemas reais (contínuos)
como sendo constituídos por um número finito de graus de liberdade. Esta

João M. C. Estêvão - EST - UAlg
- 4 -
redução do número de graus de liberdade pode ser feita através da
concentração das massas e, também, por concentração das características
mecânicas das estruturas, como a rigidez e o amortecimento.
1.3.1. Graus de liberdade
Designam-se por graus de liberdade dinâmicos as coordenadas dos
deslocamentos (lineares ou angulares) independentes, necessárias para
descrever a solução de um sistema dinâmico em cada instante. É de salientar
a diferença entre grau de liberdade estático e dinâmico. Na análise dinâmica
de uma estrutura devemos considerar tantos graus de liberdade quanto os
necessários para descrever a posição das massas na deformada dinâmica da
estrutura, podendo não coincidir com os graus de liberdade considerados para
a análise estática da mesma estrutura.
O estudo clássico dos sistemas estruturais é dividido em sistemas de um grau
de liberdade e sistemas de vários graus de liberdade.
1.3.2. Concentração de massas
A generalidade das estruturas apresenta uma distribuição contínua da massa
nos elementos estruturais. Desse modo, o número de graus de liberdade a
considerar numa análise dinâmica tende para infinito.
É procedimento usual, a simplificação da análise através da adopção de
critérios de discretização da estrutura, sendo comum a concentração das
massas num número finito de pontos da estrutura (figura 1.2). Serão então
considerados os graus de liberdade correspondentes aos deslocamentos
lineares das massas, segundo um conjunto de eixos, e respectivos
deslocamentos angulares, caso não sejam desprezáveis os momentos de
inércia dessas massas.
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 5 -
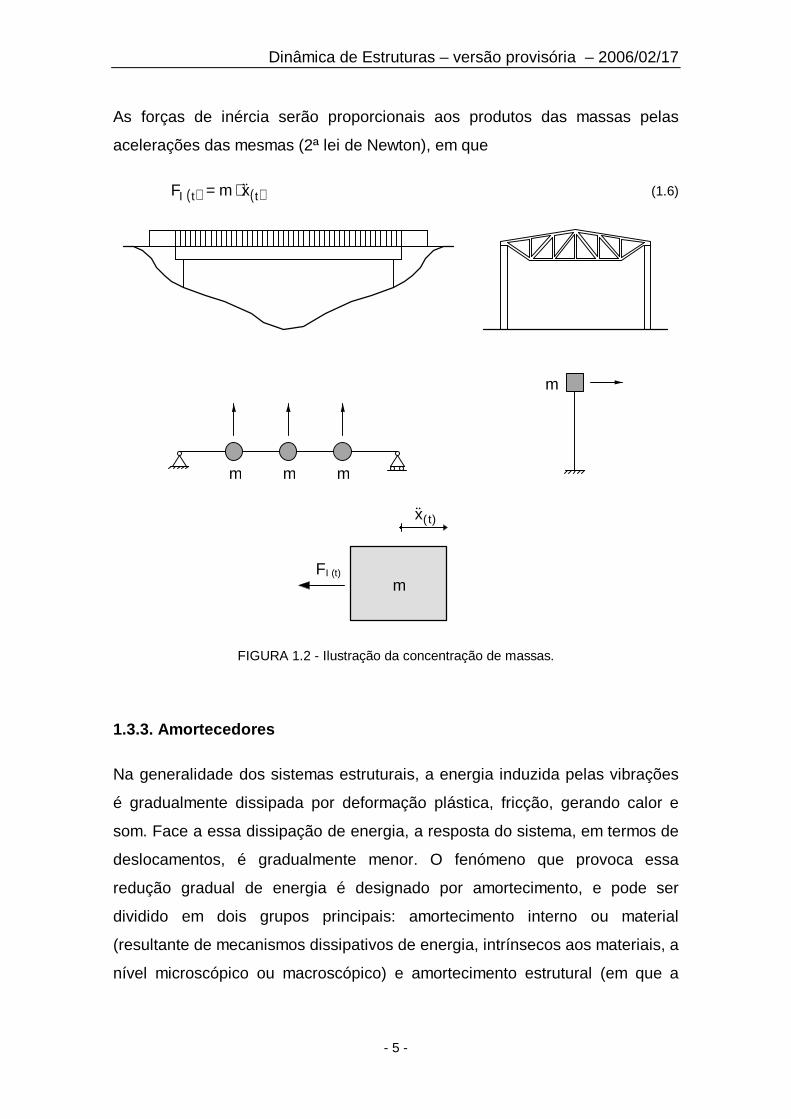
As forças de inércia serão proporcionais aos produtos das massas pelas
acelerações das mesmas (2ª lei de Newton), em que
( ) ( )F m xI t t= ⋅ && (1.6)
FI (t)
m
&&( )x t
m m m
m
FIGURA 1.2 - Ilustração da concentração de massas.
1.3.3. Amortecedores
Na generalidade dos sistemas estruturais, a energia induzida pelas vibrações
é gradualmente dissipada por deformação plástica, fricção, gerando calor e
som. Face a essa dissipação de energia, a resposta do sistema, em termos de
deslocamentos, é gradualmente menor. O fenómeno que provoca essa
redução gradual de energia é designado por amortecimento, e pode ser
dividido em dois grupos principais: amortecimento interno ou material
(resultante de mecanismos dissipativos de energia, intrínsecos aos materiais, a
nível microscópico ou macroscópico) e amortecimento estrutural (em que a

João M. C. Estêvão - EST - UAlg
- 6 -
dissipação de energia está associada a movimentos relativos de elementos de
um sistema estrutural, nomeadamente nos nós de ligação e nos apoios).
No processo de discretização das estruturas, é usual a concentração do
amortecimento em elementos designados por amortecedores. Assume-se que
um amortecedor não possui massa nem rigidez, e que só existe uma força de
amortecimento se existir velocidade relativa entre as duas extremidades do
amortecedor.
Dada a dificuldade inerente à quantificação do amortecimento de sistemas
reais, este é modelado como sendo de um, ou mais, dos seguintes tipos:
• Amortecimento viscoso - Esta é a forma mais comum de modelar o
comportamento de um amortecedor. De acordo com a lei de Newton, a tensão
tangencial gerada num escoamento de um fluido viscoso, entre duas
superfícies, é proporcional ao gradiente de velocidades entre essas
superfícies. Dessa forma, a força de amortecimento é a resultante dessas
tensões (figura 1.3), e será
( ) ( )F c xa t t= ⋅ & (1.7)
em que “c” é o amortecimento.
Fa (t)
c
Fa (t)1 2
( ) ( ) ( )& & &x x xt t t= −2 1
FIGURA 1.3 - Representação esquemática de um amortecedor viscoso.
• Amortecimento de Coulomb - De acordo com este modelo, a força de
amortecimento é constante e com sentido oposto ao do movimento, sendo
proporcional ao atrito entre duas superfícies.
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 7 -
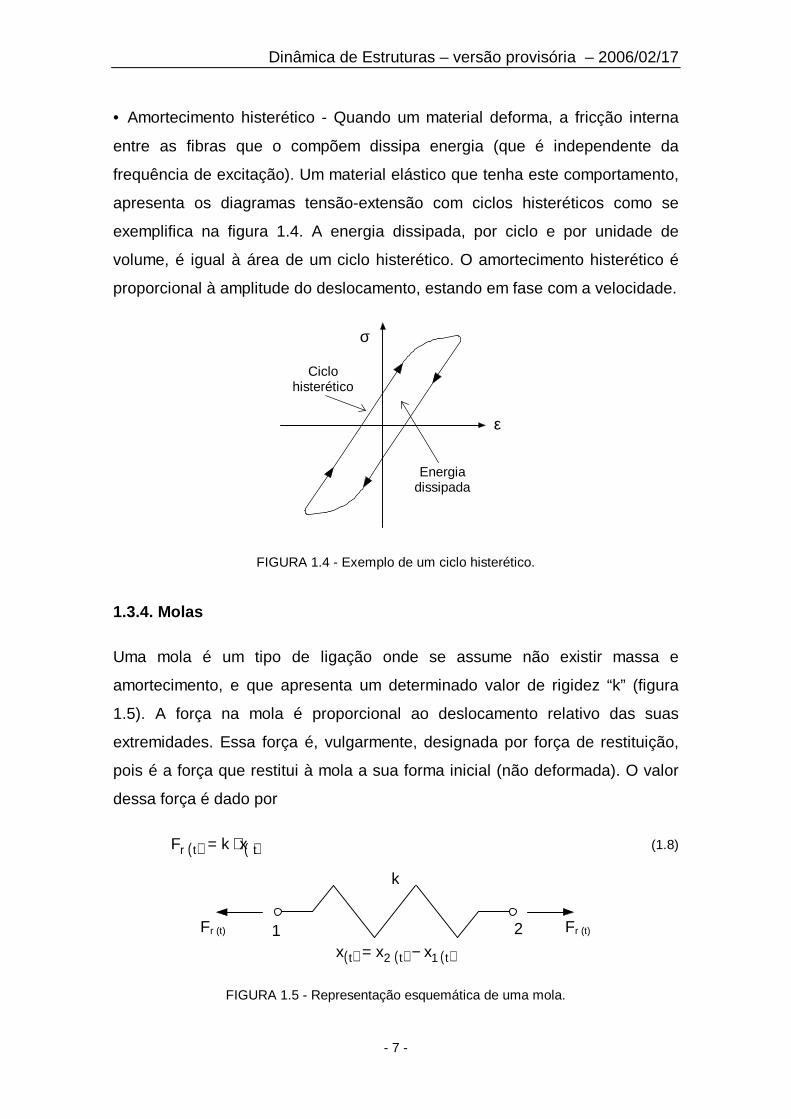
• Amortecimento histerético - Quando um material deforma, a fricção interna
entre as fibras que o compõem dissipa energia (que é independente da
frequência de excitação). Um material elástico que tenha este comportamento,
apresenta os diagramas tensão-extensão com ciclos histeréticos como se
exemplifica na figura 1.4. A energia dissipada, por ciclo e por unidade de
volume, é igual à área de um ciclo histerético. O amortecimento histerético é
proporcional à amplitude do deslocamento, estando em fase com a velocidade.
Ciclohisterético
σ
ε
Energiadissipada
FIGURA 1.4 - Exemplo de um ciclo histerético.
1.3.4. Molas
Uma mola é um tipo de ligação onde se assume não existir massa e
amortecimento, e que apresenta um determinado valor de rigidez “k” (figura
1.5). A força na mola é proporcional ao deslocamento relativo das suas
extremidades. Essa força é, vulgarmente, designada por força de restituição,
pois é a força que restitui à mola a sua forma inicial (não deformada). O valor
dessa força é dado por
( ) ( )F k xr t t= ⋅ (1.8)
Fr (t)
k
Fr (t)1 2
( ) ( ) ( )x x xt t t= −2 1
FIGURA 1.5 - Representação esquemática de uma mola.

João M. C. Estêvão - EST - UAlg
- 8 -
1.3.5. Condensação estática da matriz de rigidez
Nas análises dinâmicas, a matriz de rigidez é expressa em relação aos graus
de liberdade dinâmicos que resultam após discretização da estrutura. Desta
forma, a obtenção directa da matriz de rigidez, associada somente aos graus
de liberdade dinâmicos, torna-se, por vezes, difícil de obter.
É possível realizar-se a análise dinâmica de uma estrutura com base na matriz
de rigidez associada aos graus de liberdade estáticos e dinâmicos, em
conjunto. No entanto, tal procedimento conduz a matrizes muito maiores, o que
é bastante gravoso do ponto de vista computacional. A determinação da matriz
de rigidez, para efeitos da análise dinâmica, pode ser obtida por condensação
estática dessa matriz conjunta, tornando-se dependentes os graus de
liberdade estáticos (dd) dos graus de liberdade dinâmicos (di).
A condensação da matriz de rigidez pode ser feita recorrendo às operações
elementares sobre as matrizes, ou, de uma forma mais sistemática, fazendo as
seguintes partições
[ ] [ ] [ ][ ] [ ]kk k
k kii id
di dd=
; { } { }{ }d
d
di
d=
; { } { }
{ }FF
Fi
d=
(1.9-11)
da expressão (1.1) teremos
[ ] { } [ ] { } { }[ ] { } [ ] { } { }k d k d F
k d k d F
ii i id d i
di i dd d d
⋅ + ⋅ =
⋅ + ⋅ =
(1.12)
Resolvendo o sistema em ordem a {dd}, teremos
{ } [ ] { } [ ] { }( )d k F k dd dd d di i= ⋅ − ⋅−1 (1.13)
[ ] { } [ ] [ ] { } [ ] { }( ) { }k d k k F k d Fii i id dd d di i i⋅ + ⋅ ⋅ − ⋅ =−1 (1.14)
que pode ser escrito como
[ ] [ ] [ ] [ ]( ) { } { } [ ] [ ] { }k k k k d F k k Fii id dd di i i id dd d− ⋅ ⋅ ⋅ = − ⋅ ⋅− −1 1 (1.15)

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 9 -
Tendo em conta a equação (1.1), a rigidez associada aos graus de liberdade
dinâmicos será
[ ] [ ] [ ] [ ] [ ]k k k k kii id dd di= − ⋅ ⋅−1 (1.16)
e o novo vector de forças será
{ } { } [ ] [ ] { }F F k k Fi id dd d= − ⋅ ⋅−1
(1.17)
1.3.6. Mudança de sistema de coordenadas
Em complexos sistemas estruturais, nomeadamente com barras inclinadas
e/ou apoios inclinados, a determinação das matrizes de massa, de
amortecimento e de rigidez, associadas aos graus de liberdade, apresenta
alguma dificuldade. Este tipo de problemas torna-se mais simples de resolver
se recorrermos a mudanças do sistema de coordenadas, do tipo { } { }q d→ .
Seja
{ } [ ]{ }q T d= (1.18)
em que [ ]T é a matriz de transformação.
No sistema de coordenadas “q”, a expressão (1.4) tomará a forma
[ ]{ } [ ]{ } [ ]{ } { }m q c q k q Fq q q q&& &+ + = (1.19)
[ ] [ ]{ } [ ] [ ]{ } [ ] [ ]{ } { }m T d c T d k T d Fq q q q⋅ + ⋅ + ⋅ =&& & (1.20)
Dado que o trabalho realizado pelas forças é igual nos dois sistemas de
coordenadas, logo
{ } { } [ ]{ }( ) { } { } { }q F T d F d FTq
Tq
T= = (1.21)
pelo que
{ } [ ] { }F T FTq= (1.22)

João M. C. Estêvão - EST - UAlg
- 10 -
Se multiplicarmos a equação (1.20) por [ ]T T , teremos
[ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] { }T m T d T c T d T k T d T FTq
Tq
Tq
Tq
&& &+ + = (1.23)
que é equivalente a
[ ]{ } [ ]{ } [ ]{ } { }m d c d k d F&& &+ + = (1.24)
sendo
[ ] [ ] [ ][ ]m T m TTq= ; [ ] [ ] [ ][ ]c T c TT
q= ; [ ] [ ] [ ][ ]k T k TTq= (1.25-27)
1.4. Formulação das equações de movimento
A formulação das equações de movimento (ou das equações de equilíbrio
dinâmico), constitui um passo fundamental na resolução de um qualquer
problema de análise dinâmica, pelo que é essencial a compreensão dos
diversos métodos que possibilitam essa formulação.
1.4.1. Princípio de D’Alembert
O princípio de D’Alembert, como foi referido no ponto 1.1, é um instrumento
muito importante na formulação das equações de movimento, que são
expressas em termos das equações de equilíbrio dinâmico (1.1). Em muitos
problemas, esta é a forma mais simples e directa de se estabelecerem as
equações de movimento (figura 1.6).
Fa (t)
c
k
m F(t) F(t)
F r (t )
FI (t)
FIGURA 1.6 - Equilíbrio dinâmico de um corpo rígido.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 11 -
1.4.2. Princípio dos trabalhos virtuais
Em sistemas mais complexos, as relações de equilíbrio de forças podem não
ser evidentes. Nestes casos, o princípio dos trabalhos virtuais pode ser usado
para a formulação das equações de movimento.
O princípio dos trabalhos virtuais estipula que o trabalho realizado por todas
as forças (de inércia inclusivé) em equilíbrio, que actuam num sistema
estrutural, é nulo quando este é sujeito a um campo de deslocamentos virtuais
(e pequenos), compatíveis com as ligações existentes.
1.4.3. Princípio de Hamilton
Este princípio traduz-se por
( )δ δE E dt W dtC Pt
t
nct
t
− ⋅ + ⋅ =∫ ∫1
2
1
2
0 (1.28)
em que Wnc é o trabalho realizado pelas forças não conservativas (de atrito,
por exemplo), Ep é a energia potencial (resultante das forças de deformação
interna), Ec é a energia cinética do sistema (resultante, implicitamente, das
forças de inércia), sendo δ uma indicação de variação no tempo. A aplicação
prática do princípio de Hamilton reside nas equações de equilíbrio de
Lagrange. Escrevendo a energia potencial, cinética e dissipada, em relação ao
grau de liberdade “i”, as equações de Lagrange assumem a forma
∂∂
∂∂
∂∂
∂∂
∂∂t
E
d
E
d
E
d
E
dFC
i
C
i
P
i
D
ii& &
− + + = (1.29)
sendo ED a energia dissipada e Fi a força exterior aplicada no grau de
liberdade “i”. Em sistemas conservativos, verifica-se que a aplicação deste
princípio conduz aos mesmos resultados da aplicação do princípio da
conservação de energia:
( )ddt
E EC P+ = 0 (1.30)
João M. C. Estêvão - EST - UAlg
- 12 -
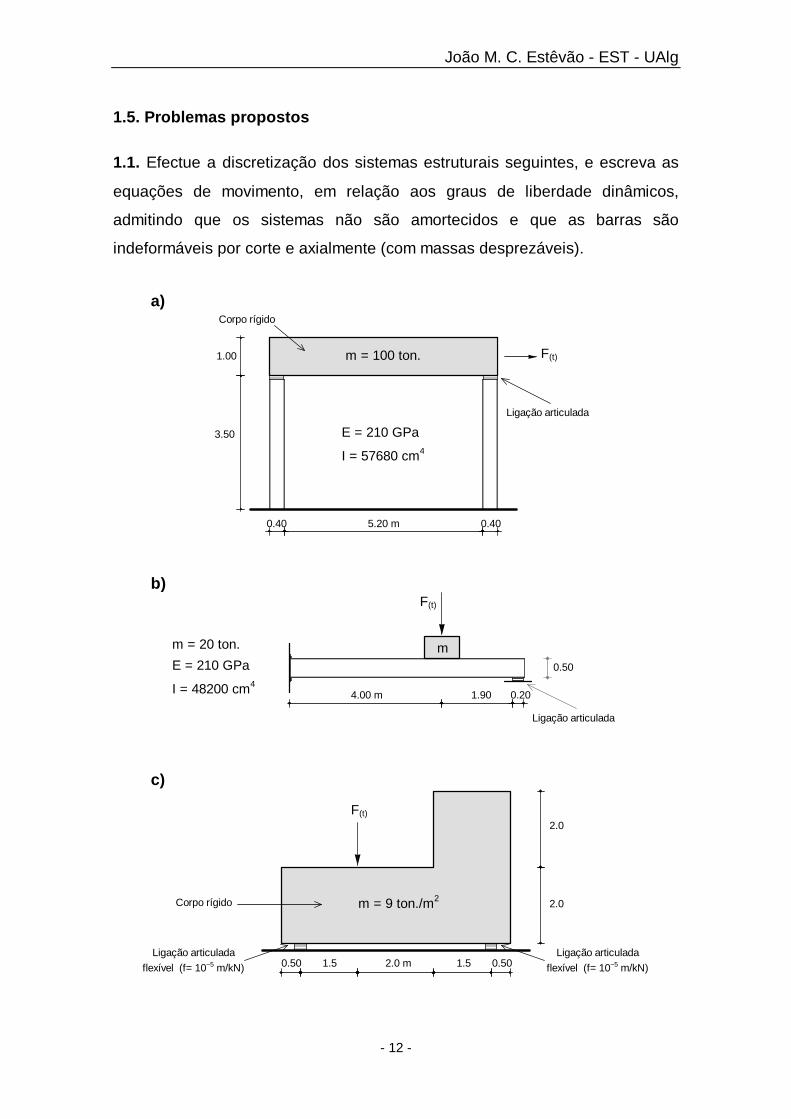
1.5. Problemas propostos
1.1. Efectue a discretização dos sistemas estruturais seguintes, e escreva as
equações de movimento, em relação aos graus de liberdade dinâmicos,
admitindo que os sistemas não são amortecidos e que as barras são
indeformáveis por corte e axialmente (com massas desprezáveis).
a)
3.50
m = 100 ton.
Ligação articulada
I = 57680 cm4
1.00
0.40 0.405.20 m
E = 210 GPa
Corpo rígido
F(t)
b)
0.50
m = 20 ton.
Ligação articulada
I = 48200 cm41.90 0.204.00 m
E = 210 GPa
F(t)
m
c)
Ligação articulada
flexível (f= 10−5 m/kN)0.50 1.5
Corpo rígido
F(t)
1.5 0.502.0 m
2.0
2.0
Ligação articulada
flexível (f= 10−5 m/kN)
m = 9 ton./m2
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 13 -
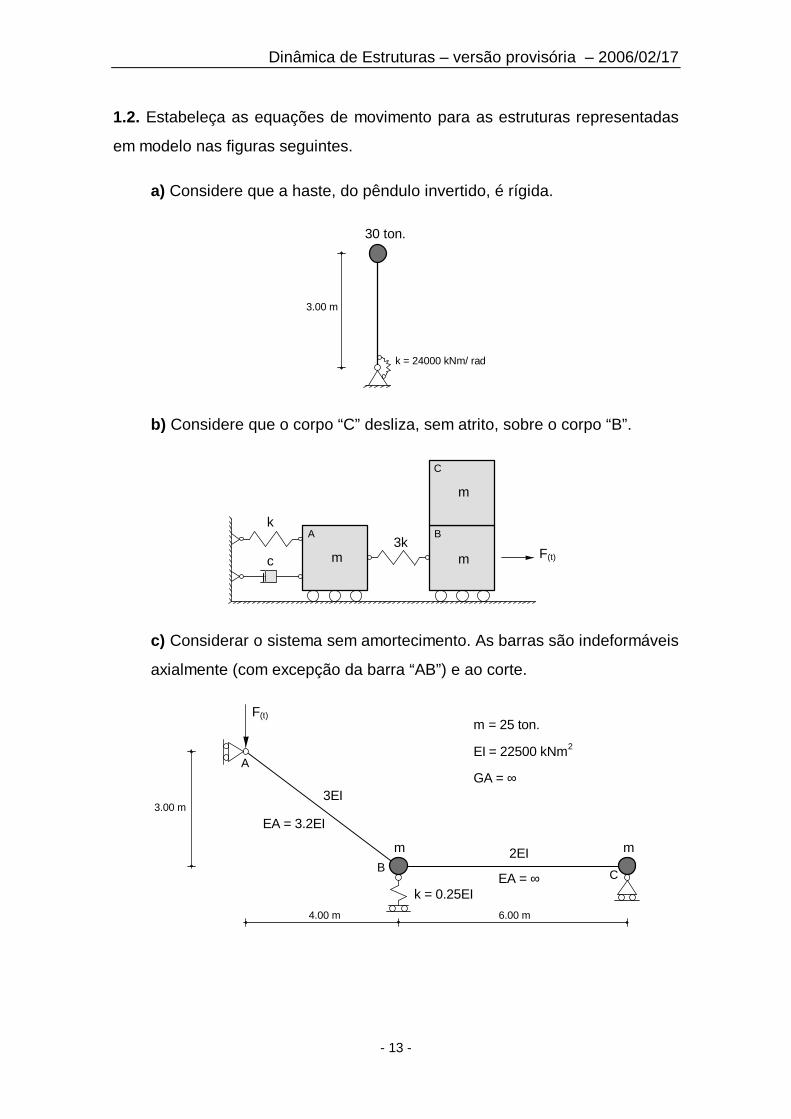
1.2. Estabeleça as equações de movimento para as estruturas representadas
em modelo nas figuras seguintes.
a) Considere que a haste, do pêndulo invertido, é rígida.
3.00 m
30 ton.
k = 24000 kNm/ rad
b) Considere que o corpo “C” desliza, sem atrito, sobre o corpo “B”.
m F(t)
k
m
mc3k
A B
C
c) Considerar o sistema sem amortecimento. As barras são indeformáveis
axialmente (com excepção da barra “AB”) e ao corte.
4.00 m
F(t)
6.00 m
3.00 m
C
m = 25 ton.
EI = 22500 kNm2
B
A
m
k = 0.25EIEA = ∞
3EI
2EI
GA = ∞
m
EA = 3.2EI

João M. C. Estêvão - EST - UAlg
- 14 -
1.6. Resoluções dos problemas propostos
1.1.
a) Em primeiro lugar, é necessário a definição do modelo estrutural e
correspondente discretização.
Vamos concentrar as massas nos nós da estrutura, como se apresenta na
figura seguinte.
4.00
5.60 m
50 ton.
F(t)
50 ton.
Neste problema, só necessitamos de considerar um grau de liberdade
dinâmico para caracterizar o movimento das massas, dado que as barras são
axialmente indeformáveis (oscilador de um grau de liberdade). Esse grau de
liberdade corresponde à translação horizontal das massas e é coincidente com
o grau de liberdade (estático) que é necessário considerar para a resolução do
problema estático.
Neste caso, só temos um deslocamento independente:
d1
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 15 -
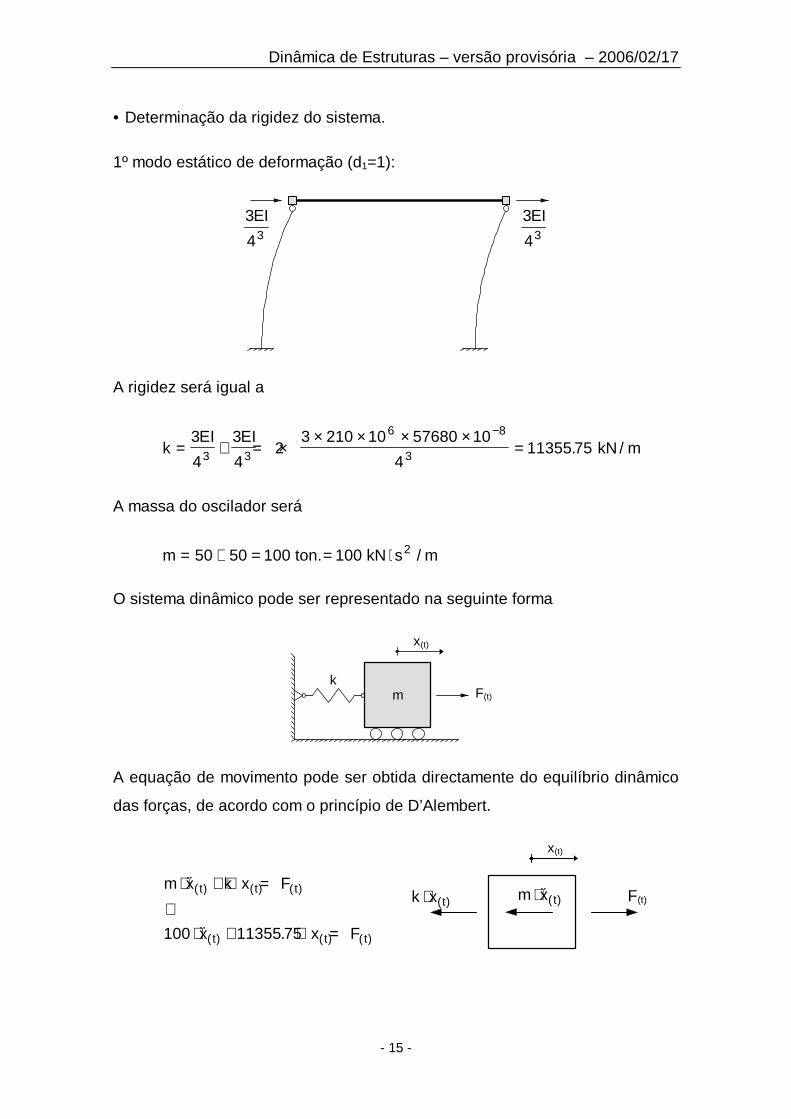
• Determinação da rigidez do sistema.
1º modo estático de deformação (d1=1):
3
43
EI3
43
EI
A rigidez será igual a
kEI EI
= + = ×× × × ×
=−3
4
3
42
3 210 10 57680 10
411355 753 3
6 8
3 . kN / m
A massa do oscilador será
m = + ⋅50 50 = 100 ton.= 100 kN s / m2
O sistema dinâmico pode ser representado na seguinte forma
m F(t)
k
x(t)
A equação de movimento pode ser obtida directamente do equilíbrio dinâmico
das forças, de acordo com o princípio de D’Alembert.
F(t)k x t⋅ ( ) m x t⋅ &&( )
x(t)
m x k x Ft t t⋅ + ⋅ =&&( ) ( ) ( )
100 11355 75⋅ + ⋅ =&& .( ) ( ) ( )x x Ft t t
⇔

João M. C. Estêvão - EST - UAlg
- 16 -
b) Em primeiro lugar, vamos estabelecer o seguinte modelo estrutural:
2.00 4.00 m
20 ton.
F(t)
G
Para caracterizar o movimento da massa, será necessário definirmos um grau
de liberdade dinâmico, traduzido pela translação vertical da massa. Por
definição, a rigidez correspondente será a força estática vertical, necessária de
aplicar para induzir uma translação vertical unitária. No entanto, verifica-se
que a imposição dessa translação unitária, gera a rotação do nó. Por esse
facto, na rigidez associada ao grau de liberdade dinâmico, estará incluída a
parcela de força que é necessária para induzir, também, uma determinada
rotação.
Se considerarmos um grau de liberdade estático, correspondente ao
deslocamento angular do nó (rotação) onde a massa foi concentrada, podemos
obter a rigidez de translação vertical por condensação da matriz de rigidez
associada aos dois graus de liberdade.
d1
d2
• Determinação da rigidez do sistema.
1º modo estático de deformação (d1=1; d2=0):
6
42
EI 3
22
EI
12
43
EI 3
23
EI

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 17 -
2º modo estático de deformação (d2=1; d1=0):
3
23
EI44EI
32EI6
42
EI
kEI EI
11 3 3
12
4
3
2= + ; k k
EI EI21 12 2 2
6
4
3
2= = − ; k
EI EI33
44
32
= +
EI = × ⋅ × =−210 10 48200 10 1012206 8 kNm2
[ ]kk k
k kEI=
=
−−
⋅ =
−−
11 12
21 22
05625 0 375
0 375 2 5
56936 25 37957 5
37957 5 253050
.
. .
. .
.
Da expressão (1.15) obtemos a rigidez associada ao grau de liberdade
dinâmico (d1), sendo igual a
k k kk
k= − ⋅ ⋅ =11 1222
211
51242 625. kN / m
A expressão anterior poderia ser obtida com base nas operações elementares
sobre as matrizes, multiplicando a segunda linha por − kk
1222
e adicionando
à primeira, o que dá origem à seguinte matriz
551242 625 0
37957 5 253050
.
.−
O comportamento dinâmico do sistema pode ser analisado através do seguinte
modelo de um grau de liberdade
m
F(t)
k
y(t)
G
João M. C. Estêvão - EST - UAlg
- 18 -
O peso da massa será igual a G m g= ⋅ = × =20 9 81 196 2. . kN.
Podemos escrever as equações de movimento por aplicação das equações de
Lagrange. Para tal, necessitamos determinar a energia potencial e a energia
cinética do sistema dinâmico.
A energia potencial corresponderá à soma da energia potencial de posição
(que é negativa para um valor positivo de y(t), pois é reduzida a altura) e da
energia potencial elástica acumulada na mola.
A massa vai ter um deslocamento total, resultante do alongamento da mola,
correspondente à parcela estática (δest) do peso da massa (G) e à parcela
dinâmica (y(t)).
Em regime dinâmico, a energia potencial de posição resulta da variação da
posição da massa em função de y(t), sendo igual a
E m g y G yP pos t t, . ( ) ( )= − ⋅ ⋅ = − ⋅
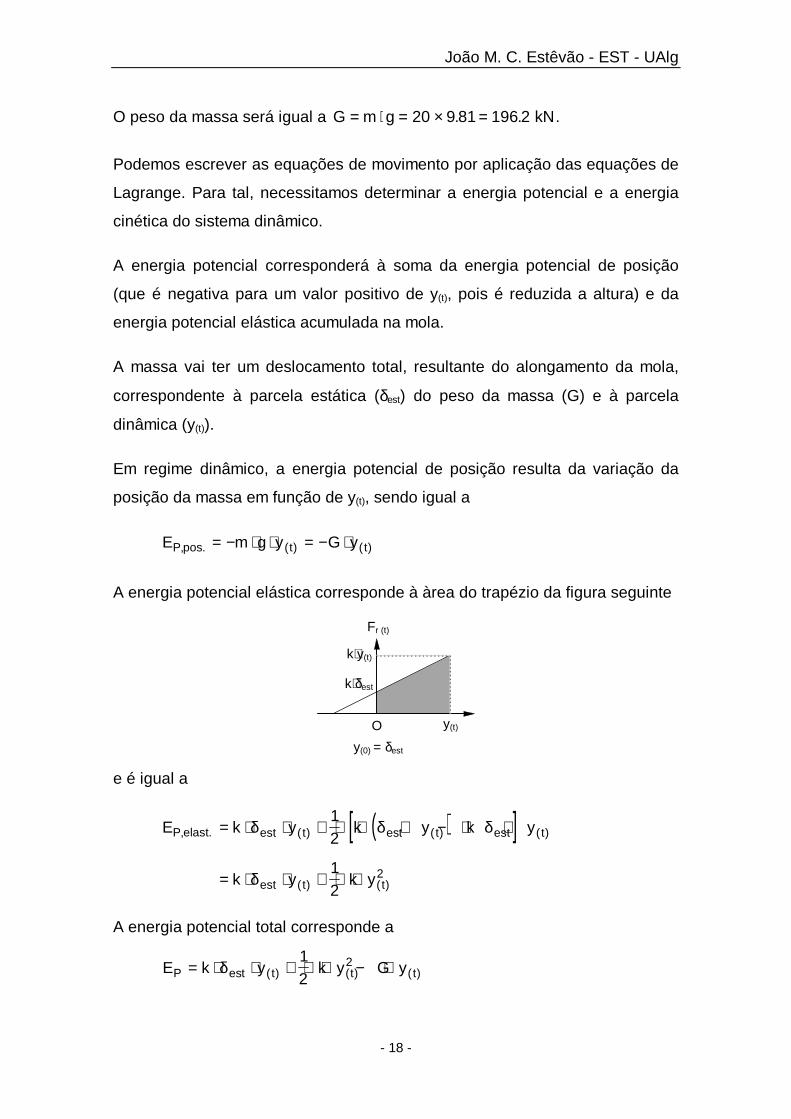
A energia potencial elástica corresponde à àrea do trapézio da figura seguinte
O y(t)
y(0) = δest
k⋅δest
k⋅y(t)
Fr (t)
e é igual a
EP elast, . ( )[ ]= ⋅ ⋅ + ⋅ ⋅ + − ⋅ ⋅k y k y k yest t est t est tδ δ δ( ) ( ) ( )12
= ⋅ ⋅ + ⋅ ⋅k y k yest t tδ ( ) ( )12
2
A energia potencial total corresponde a
E k y k y G yP est t t t= ⋅ ⋅ + ⋅ ⋅ − ⋅δ ( ) ( ) ( )12
2

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 19 -
A energia cinética do sistema é proporcional ao quadrado da velocidade da
massa ( )& ( )y t2 , sendo igual a
E m yC t= ⋅ ⋅12
2& ( )
Aplicando a expressão (1.29) iremos obter a equação de movimento.
( )∂∂
∂∂
∂∂t
E
y tm y m yC
t t&& &&( ) ( )
= ⋅ = ⋅ ;
∂∂E
yC = 0 ;
∂∂
δE
yk k y GP
est t= ⋅ + ⋅ −( )
Como k Gest⋅ =δ , dado que o peso é a única força estática que actua sobre a
estrutura, podemos concluir que o peso da massa não interfere no
comportamento dinâmico do sistema.
A equação de movimento será
m y k y F y y Ft t t t t t⋅ + ⋅ = ⇔ ⋅ + ⋅ =&& && .( ) ( ) ( ) ( ) ( ) ( ) 20 51242 625
c) Dada a forma do corpo rígido, será necessário a determinação do centro de
massa.
( ) ( )
xCM =× × + × ×
× + ×=
2 4 2 5 2 44 2 2 4
3 5. m
( ) ( )yCM =
× × + × ×× + ×
=1 4 2 2 2 4
4 2 2 415. m
CM
3.5 m 2.5 m
1.5

João M. C. Estêvão - EST - UAlg
- 20 -
As equações de movimento serão estabelecidas no modelo estrutural da figura
seguinte, em que a barra é rígida. Dadas as dimensões do corpo rígido, não
poderemos desprezar o momento polar de inércia (J), ao concentrarmos a
massa num único ponto.
1.50 m
m ; J
F(t)
1.50 m 2.00 m
f f
Em que
( ) ( )Ix = ××
+ × × +×
+ × ×
= ⋅94 2
124 2
2 412
2 4 4443
23
22 - 3.5 5 - 3.5 ton m2
( ) ( )Iy = ××
+ × × +×
+ × ×
= ⋅92 4
124 2
4 212
2 4 1563
23
21- 1.5 2 - 1.5 ton m2
J I Ix y= + = + = ⋅444 156 600 ton m2 ; ( )m = × × + × =9 4 2 2 4 144 ton.
Em virtude da discretização adoptada, o comportamento dinâmico do sistema
estrutural, só será convenientemente caracterizado se considerarmos dois
graus de liberdade dinâmicos, como é apresentado no figura seguinte.
kf
=1
kf
=1
d1
d2
3.00 m 2.00 m
A B
Recorrendo às equações de Lagrange (1.29), vamos obter as equações de
movimento. Não vamos considerar o peso da massa, pois vimos, no problema
anterior, que a caracterização do movimento não depende do peso da massa.
Para determinarmos a energia potencial, vamos aplicar o princípio da
sobreposição de efeitos, impondo em primeiro lugar o deslocamento d1 e, após
este, o deslocamento d2.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 21 -
Na figura seguinte, estão apresentados os gráficos das relações entre as
forças de restituição nas molas e os deslocamentos provocados por d1 e d2.
k⋅d1 (t)
3d2 (t)δA (t)
FrA (t)
k⋅d1 (t)
d1 (t)δA (t)
FrA (t)
+ ek⋅3d2 (t)
3d2 (t) δA (t)
FrA (t)
k⋅d1 (t)
d1 (t)δB (t)
FrB (t)
k⋅2d2 (t)
2d2 (t)δB (t)
FrB (t)
k⋅d1 (t)
2d2 (t)δB (t)
FrB (t)
E m d J dC t t= ⋅ ⋅ + ⋅ ⋅12
121
222& &
( ) ( )
( ) ( )E d d d d d d d kP t t t t t t t= × + − + − ⋅ + ⋅
⋅2
12
12
312
2 3 212
22
22
1 2 1 2 ( ) ( ) ( ) ( ) ( ) ( ) ( )
ou seja
( ) ( )E k d d k d dP t t t t= ⋅ − ⋅ + ⋅ + ⋅12
312
21 22
1 22
( ) ( ) ( ) ( )
Grau de liberdade 1
( )∂∂
∂∂
∂∂t
E
d tm d m dC
t t&& &&
( ) ( )1
1 1
= ⋅ = ⋅
;
∂∂E
dC
10=
( ) ( )∂∂E
dd d d k d d kP
t t t t t1
1 2 2 1 22 3 2 2= − + ⋅ = − ⋅ ( ) ( ) ( ) ( ) ( )
Grau de liberdade 2
( )∂∂
∂∂
∂∂t
E
d tJ d J dC
t t&& &&
( ) ( )2
2 2
= ⋅ = ⋅
;
∂∂E
dC
20=
( ) ( )∂∂E
dd d d d k d d kP
t t t t t t2
2 2 1 1 1 29 4 3 2 13= + − + ⋅ = − + ⋅ ( ) ( ) ( ) ( ) ( ) ( )

João M. C. Estêvão - EST - UAlg
- 22 -
As forças exteriores devem ser reduzidas aos graus de liberdade dinâmicos.
Desta forma, teremos
3 316×
F t( )
1116
F t( )
516
F t( )
1.50 m
F(t)
1.50 m
As equações de movimento serão
( )
( )
m d d d k F
J d d d k F
t t t t
t t t t
⋅ + − ⋅ = − −
⋅ + − + ⋅ = −
&&
&&
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 1 2
2 1 2
2 01116
13 09
16
e podem ser escritas na forma
144 0
0 6002 10 10
10 13 10
1116
916
1
2
5 5
5 51
2
⋅
+
× −− ×
⋅
=−
&&
&&
( )
( )
( )
( )
( )
( )
d
d
d
d
F
F
t
t
t
t
t
t
que, de uma maneira geral, é equivalente a
[ ] { } [ ] { } { }m d k d Ft t t⋅ + ⋅ =&&( ) ( ) ( )
O mesmo sistema de equações poderia ter sido obtido com recurso ao
princípio de D’Alembert. Em relação ao grau de liberdade 2, o cálculo das
forças de inércia seria realizado com o momento polar de inércia.
Dado que a estrutura é isostática, poderíamos determinar a matriz de rigidez,
associada aos graus de liberdade dinâmicos (que coincidem com os estáticos),
a partir da inversão da matriz de flexibilidade, com alguma facilidade. Para tal,
vamos aplicar uma força unitária, segundo o deslocamento d1, e um momento
unitário, segundo d2.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 23 -
3.00 m 2.00 m3.00 m 2.00 m
1 kN
0.4 kN 0.6 kN
1 kNm
0.2 kN 0.2 kN
A B A B
A flexibilidade desejada resulta da integração do produto das reacções nas
molas
f R R f R R fij Ai Ajmola
Bi Bjmola= ⋅ ⋅ + ⋅ ⋅
( )f f fmola mola11 0 4 0 4 0 6 0 6 0 52= × + × ⋅ = ⋅. . . . .
( )f f f fmola mola12 21 0 4 0 2 0 6 0 2 0 04= = − × + × ⋅ = ⋅. . . . .
( )f f fmola mola22 0 2 0 2 0 2 0 2 0 08= × + × ⋅ = ⋅. . . . .
A matriz de flexibilidade seria
[ ]ff f
f f=
=
⋅ −11 12
21 22
5052 0 04
0 04 0 0810
.
. .
A matriz de rigidez seria
[ ] [ ]k fk k
k k= =
=
−−
⋅−1 11 12
21 22
52 1
1 1310
equivalente à obtida, anteriormente, recorrendo às equações de Lagrange.
1.2.
a) Neste sistema estrutural, o movimento da massa pode ser caracterizado
através da rotação da haste rígida, na base do pêndulo invertido, como se
apresenta na figura seguinte.

João M. C. Estêvão - EST - UAlg
- 24 -
m
k
3.00 m
θ(t)
)t(x
Dado que o sistema é conservativo, podemos obter a equação de movimento
recorrendo à aplicação do princípio da conservação de energia. Admitindo a
hipótese dos pequenos deslocamentos e desprezando a energia potencial de
posição:
2)t(C xm
21
E &⋅⋅=
2)t(
2
)t(2)t(.elast,PP xk
181
3
xk
21
k21
EE ⋅⋅=
⋅⋅=θ⋅⋅==
Da equação (1.30), teremos
( )ddt
E EC P+ = 0
0xk181
xm21
dtd 2
)t(2
)t( =
⋅⋅+⋅⋅ &
0xx2k181
xx2m21
)t()t()t()t( =⋅⋅⋅⋅+⋅⋅⋅⋅ &&&&
0xxk91
xm )t()t()t( =⋅
⋅⋅+⋅ &&&
0x2400091
x30 )t()t( =⋅⋅+⋅ &&
0x3
8000x30 )t()t( =⋅+⋅ &&
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 25 -
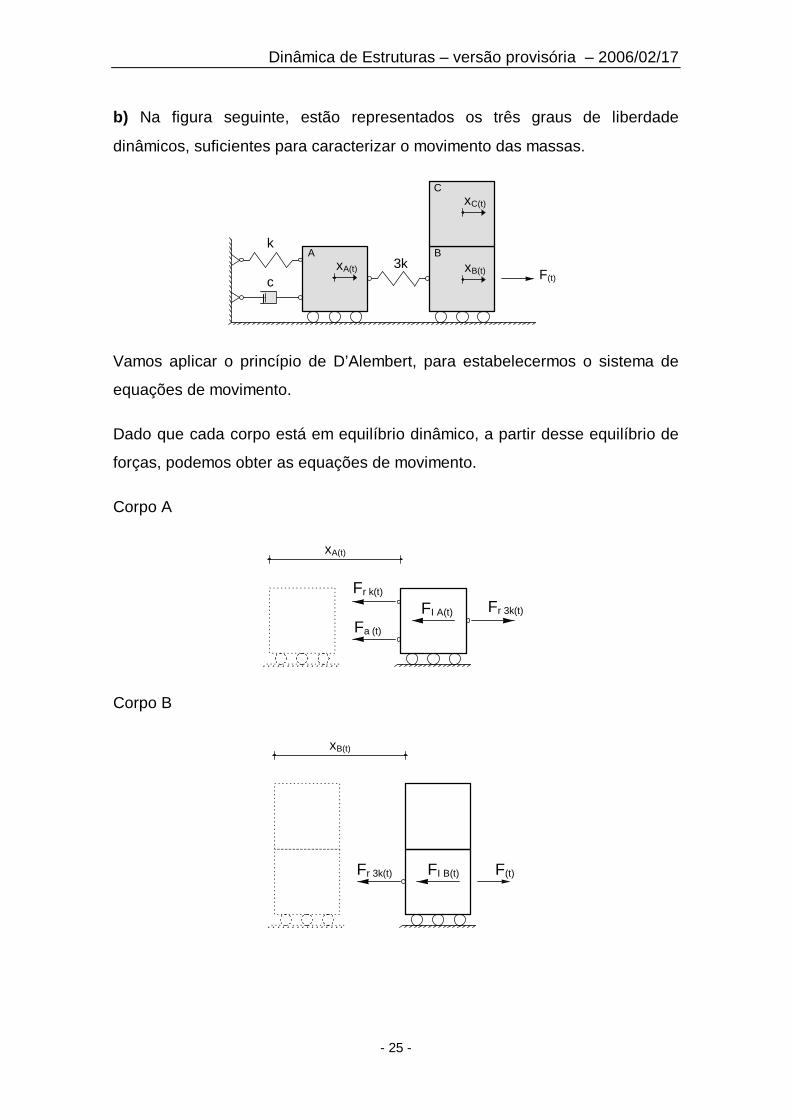
b) Na figura seguinte, estão representados os três graus de liberdade
dinâmicos, suficientes para caracterizar o movimento das massas.
F(t)
k
c3k
A B
C
xB(t)xA(t)
xC(t)
Vamos aplicar o princípio de D’Alembert, para estabelecermos o sistema de
equações de movimento.
Dado que cada corpo está em equilíbrio dinâmico, a partir desse equilíbrio de
forças, podemos obter as equações de movimento.
Corpo A
FI A(t)
xA(t)
Fr 3k(t)
Fr k(t)
Fa (t)
Corpo B
F(t)
xB(t)
Fr 3k(t) FI B(t)
João M. C. Estêvão - EST - UAlg
- 26 -
Corpo C
FI C(t)
xC(t)
Da observação das figuras anteriores, podemos escrever que
F F F F
F F F
F
rk t a t IA t r k t
r k t IB(t t
IC t
( ) ( ) ( ) ( )
( ) ) ( )
( )
+ + − =
+ − =
=
3
3
0
0
0
que corresponde a
( )( )
=⋅
=−⋅+−⋅
=−⋅−⋅+⋅+⋅
0xm
0Fxm2xxk3
0xxk3xmxcxk
)t(C
)t()t(B)t(A)t(B
)t(A)t(B)t(A)t(A)t(A
&&
&&
&&&
que pode ser escrito na seguinte forma
( )( )
=⋅
=−⋅+⋅
=⋅−⋅⋅+⋅+⋅
0xm
Fxxk3xm2
0x3x4kxcxm
)t(C
)t()t(A)t(B)t(B
)t(B)t(A)t(A)t(A
&&
&&
&&&

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 27 -
c) Além dos dois graus de liberdade dinâmicos (d1 e d2), teremos que
considerar o deslocamento angular do ponto “B” (d3) e a translação vertical do
ponto “A” (d4), dada a existência de uma força vertical (dinâmica) nesse ponto.
d1
d2d3
d4
1º modo estático de deformação (d1=1; d2=0; d3=0; d4=0):
α1.0
0.8
0.6
α = arctg
43
α
3 3
50 83
⋅⋅
EI.3 2
50 6
..
EI⋅ 3 2
62
⋅ EI
3 3
50 82
⋅⋅
EI.
3 3
50 83
⋅⋅
EI.
3 2
63
⋅ EI
αα
αα
3 25
0 6.
.EI
⋅
0 25. EI
João M. C. Estêvão - EST - UAlg
- 28 -
kEI
senEI EI
EI11 3 3
3 3
50 8
3 25
0 63 2
60 25 12470 8=
⋅⋅ ⋅ + ⋅ ⋅ +
⋅+ =.
.. cos . .α α kN / m
kEI EI
sen21 3
3 3
50 8
3 25
0 6 6134 4=⋅
⋅ ⋅ − ⋅ ⋅ = −. cos.
. .α α kN / m
kEI EI
31 2 2
3 3
50 8
3 2
62730=
⋅⋅ −
⋅=. kN / rad
kEI
senEI
41 3
3 3
50 8
3 25
0 6 6220 8=⋅
⋅ ⋅ − ⋅ ⋅ = −..
. cos .α α kN / m
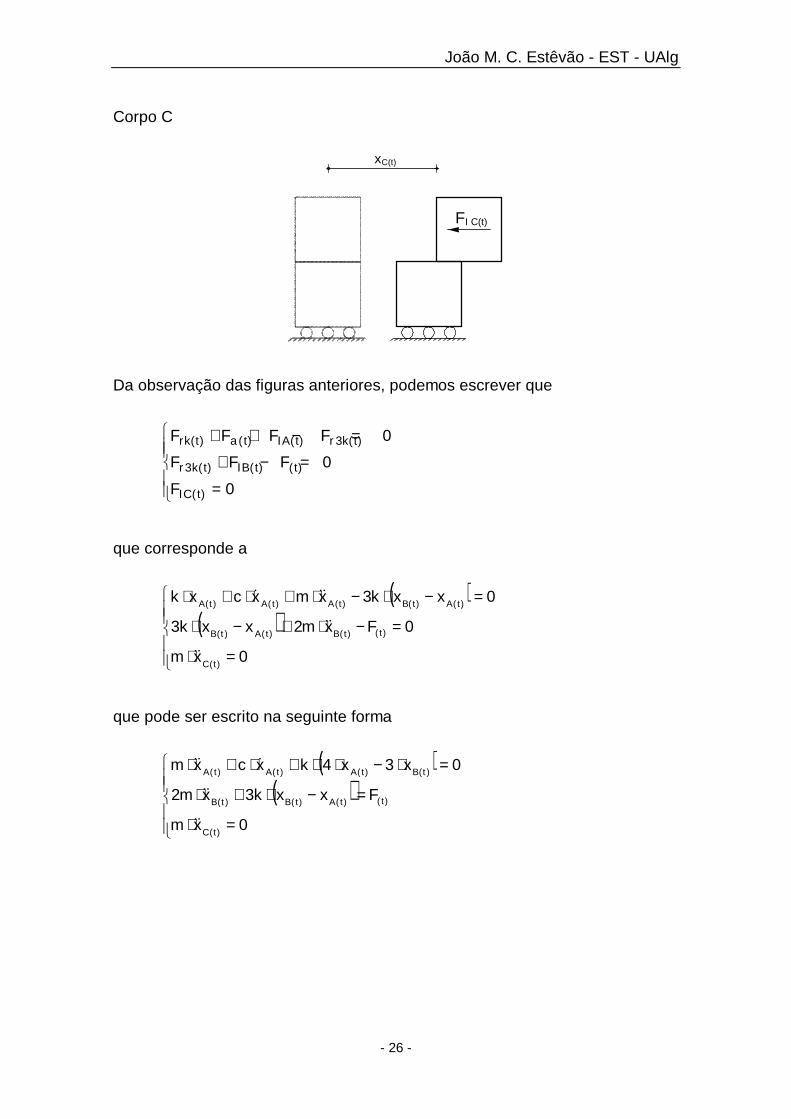
2º modo estático de deformação (d2=1; d1=0; d3=0; d4=0):
α1.0
0.80.6
3 3
50 63
⋅⋅
EI.3 2
50 8
..
EI⋅
3 3
50 62
⋅⋅
EI.
3 3
50 63
⋅⋅
EI.
α α
α α 3 25
0 8.
.EI
⋅
k k12 21 6134 4= = − . kN / m
kEI EI
sen22 3
3 3
50 6
3 25
0 8 9799 2=⋅
⋅ ⋅ + ⋅ ⋅ =. cos.
. .α α kN / m

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 29 -
kEI
32 2
3 3
50 6 4860=
⋅⋅ =. kN / rad
kEI
senEI
42 3
3 3
50 6
3 25
0 8 6134 4= −⋅
⋅ ⋅ + ⋅ ⋅ =..
. cos .α α kN / m
3º modo estático de deformação (d3=1; d1=0 d2=0; d4=0):
3 35⋅ EI
3 3
52
⋅ EI
3 26⋅ EI
3 2
62
⋅ EI
α
α
3 3
52
⋅ EI
k k13 31 2730= = kN / rad
k k23 32 4860= = kN / rad
kEI EI
333 3
53 2
663000=
⋅+
⋅= kN / rad
kEI
sen43 2
3 3
56480= −
⋅⋅ = −α kN / m

João M. C. Estêvão - EST - UAlg
- 30 -
4º modo estático de deformação (d4=1; d1=0; d2=0; d3=0):
α1.0
0.8
0.6
3 3
50 83
⋅⋅
EI.
3 25
0 6.
.EI
⋅
3 3
50 82
⋅⋅
EI.
3 3
50 83
⋅⋅
EI.
α α
α
α
3 25
0 6.
.EI
⋅
k k14 41 6220 8= = − . kN / m
k k24 42 6134 4= = . kN / m
k k34 43 6480= = − kN / m
kEI
senEI
44 3
3 3
50 8
3 25
0 6 6220 8=⋅
⋅ ⋅ + ⋅ ⋅ =..
. cos .α α kN / m
Matriz de rigidez:
[ ]k
k k k k
k k k k
k k k k
k k k k
=
=
− −−
−− −
11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
12470 8 6134 4 2730 6220 8
6134 4 9799 2 4860 6134 4
2730 4860 63000 6480
6220 8 6134 4 6480 6220 8
. . .
. . .
. . .

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 31 -
Da expressão (1.15) obtemos a matriz de rigidez associada aos graus de
liberdade dinâmicos (d1 e d2), em que
[ ]k ii =−
−
12470 8 6134 4
6134 4 9799 2
. .
. . ; [ ]kdd =
−−
63000 6480
6480 6220 8.
[ ]k id =−
2730 4860
6220 8 6134 4. . ; [ ] [ ]k kdi id
T= =
−
2730 6220 8
4860 6134 4
.
.
[ ] [ ] [ ] [ ] [ ]k k k k kii id dd di= − ⋅ ⋅ =
−1 6000 750
750 1500
O vector de forças dinâmicas, correspondente aos graus de liberdade
dinâmicos, pode ser obtido da expressão (1.16)
{ }Fi =
0
0 ; { }F
Fdt
= −
0
( )
{ } { } [ ] [ ] { }F F k k F Fi id dd d t= − ⋅ ⋅ =−
+
⋅−1
77728672
( )
Estes resultados poderiam ter sido obtidos com recurso às operações
elementares sobre as matrizes. Em primeiro lugar, efectua-se a ampliação da
matriz de rigidez inicial com o vector de forças.
12470 8 6134 4 2730 6220 8
6134 4 9799 2 4860 6134 4
2730 4860 63000 6480
6220 8 6134 4 6480 6220 8
0
0
0
. . .
. . .
. . . ( )
− −−
−− − −
F t
Vamos anular a última coluna, a partir da última linha.
João M. C. Estêvão - EST - UAlg
- 32 -
6250 0
0
- 3750 0
0 3750
3750 11250 0
11250 56250
6220 8 6134 4 6480 6220 8
0 986111
1041667
−
− −
−⋅
− ⋅−
. . .
.
.
( )
( )
( )
( )
F
F
F
F
t
t
t
t
Seguidamente vamos anular a terceira coluna, a partir da terceira linha.
6000 0
750
- 3750 0
750 0
1500 0 0
11250 56250
6220 8 6134 4 6480 6220 8
1069444
1144444
1041667
− −
− ⋅⋅
− ⋅−
. . .
.
.
.
( )
( )
( )
( )
F
F
F
F
t
t
t
t
A sub-matriz associada aos graus de liberdade dinâmicos, será a matriz de
rigidez pretendida. Da mesma forma, o vector de forças é constituído pelos
elementos das duas primeiras linhas.
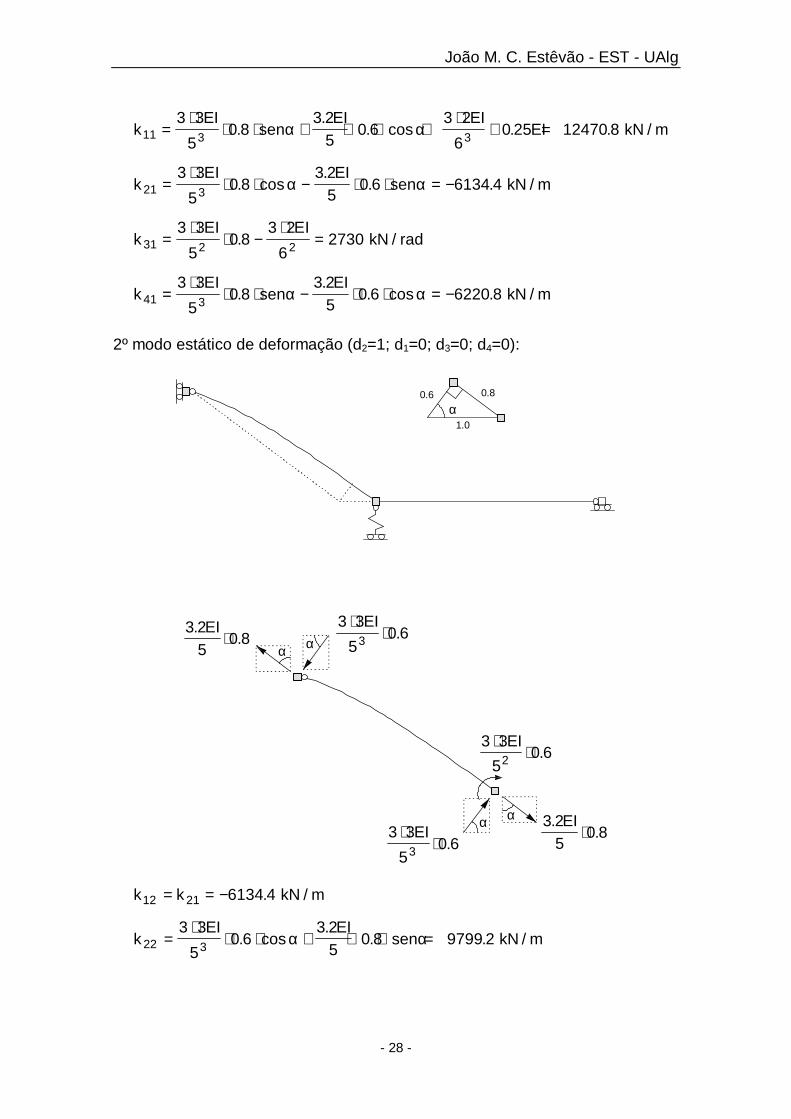
Dado que a estrutura é isostática, seria simples obter a matriz de rigidez a
partir da inversão da matriz de flexibilidade.
Vamos aplicar forças unitárias, segundo os graus de liberdade dinâmicos, e
determinam-se as reacções de apoio e os diagramas de esforços.
1 kN
1 kN
Neste caso, não surgem esforços nas barras.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 33 -
1 kN
1 kN
0.5 kN0.5 kN
0.8 kN
0.6 kN
MM2 (kNm)
−−−−
0.8+
−−−−
−3
NN2 na barra “AB” (kN)
As flexibilidades correspondem a
fM M
EIdx
N N
EAdx R R fij
i jL
i jL
Bi Bjmola=
⋅+
⋅+ ⋅ ⋅∫∑ ∫∑
0 0
fEI EI11
211
0 254
= ⋅ =.
m / kN
( )f f
EI EI12 211 0 5
0 252
= =× −
= −.
. m / kN
( ) ( )f
EI EI EI EI EI22
2 2 2 23 53 3
3 63 2
0 8 53 2
0 50 25
16=
− ⋅⋅
+− ⋅
⋅+
⋅+ =
..
..
m / kN

João M. C. Estêvão - EST - UAlg
- 34 -
Dando origem à seguinte matriz de flexibilidade
[ ]ff f
f f=
=
−−
⋅11 12
21 22
4 2
2 161
22500
Pelo que se obtém uma matriz de rigidez igual à obtida por condensação
[ ] [ ]k fk k
k k= =
=
−1 11 12
21 22
600 750
750 1500
Nos problemas anteriores, vimos que o sistema de equações de equilíbrio,
para sistemas não amortecidos, é do tipo
[ ] { } [ ] { } { }m d k d Ft t t⋅ + ⋅ =&&( ) ( ) ( )
Sendo a massa movimentada segundo d1 igual a m1= 25 ton., e segundo d2
igual a m2= 25+25= 50 ton., logo, o sistema de equações de movimento
pretendido será
25 0
0 50
6000 750
750 1500
77728672
1
2
1
2
⋅
+
⋅
=−
+
⋅&&
&&
( )
( )
( )
( )( )
d
d
d
dF
t
t
t
tt
- 35 -
CAPÍTULO 2
OSCILADOR LINEAR DE UM GRAU DE LIBERDADE
2.1. Resposta em regime livre
Um sistema estrutural, de um grau de liberdade, diz-se que vibra em regime
livre quando oscila, após uma perturbação inicial, sem que exista uma acção
dinâmica incidindo sobre o sistema. As perturbações iniciais do sistema podem
resultar, por exemplo, da libertação de massa ou da imposição de
deslocamentos iniciais.
Um sistema diz-se não amortecido caso não exista um factor que provoque
dissipação de energia durante o movimento da massa. Dessa forma, a
amplitude do movimento mantém-se constante com o tempo. Na realidade, tal
só é possível no vácuo, pois o meio que envolve a massa (o ar, por exemplo)
oferece resistência ao seu movimento, pelo que as oscilações livres vão
reduzindo-se, gradualmente (sistema amortecido).
2.1.1. Sistema não amortecido
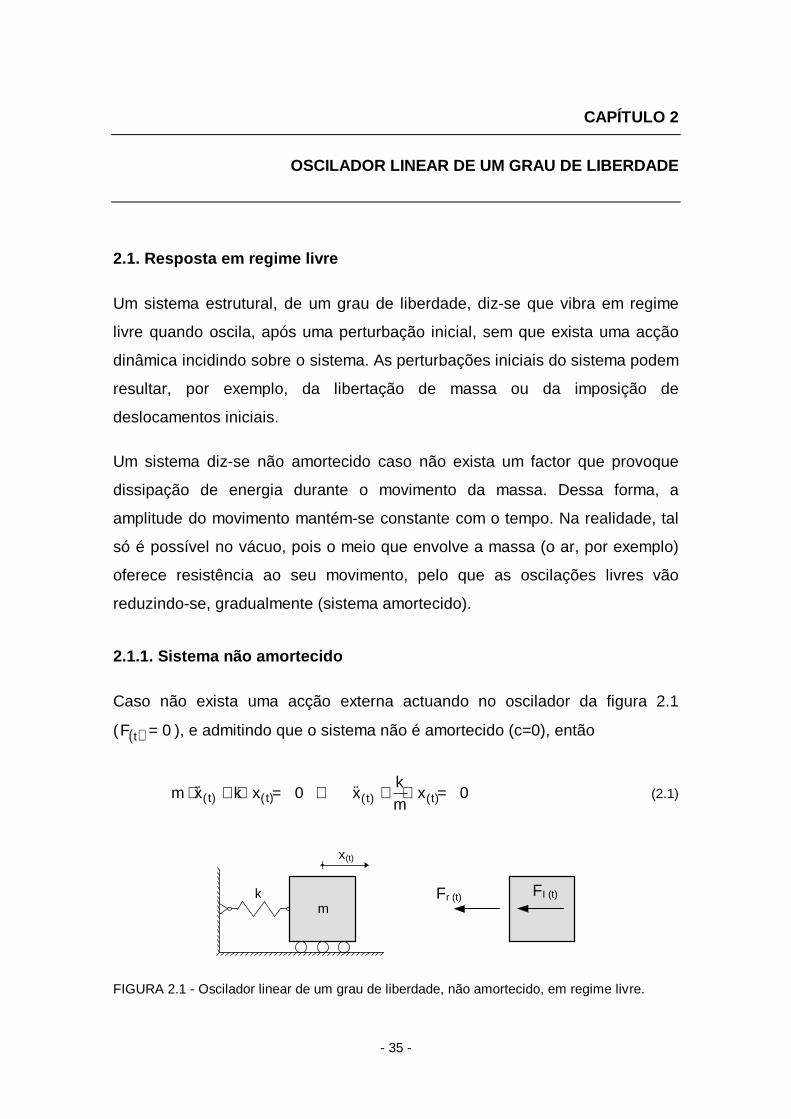
Caso não exista uma acção externa actuando no oscilador da figura 2.1
( ( )F t = 0 ), e admitindo que o sistema não é amortecido (c=0), então
m x k xt t⋅ + ⋅ =&&( ) ( ) 0 ⇔ &&( ) ( )xkm
xt t+ ⋅ = 0 (2.1)
Fr (t) FI (t)
mk
x(t)
FIGURA 2.1 - Oscilador linear de um grau de liberdade, não amortecido, em regime livre.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 36 -
A solução da equação diferencial homogénea (2.1) será do tipo
( ) ( )x A t B sen tt n n( ) cos= ⋅ ⋅ + ⋅ ⋅ ω ω (2.2)
com a frequência angular natural (ou própria) do oscilador dada por
ωnkm
= (rad/s) (2.3)
A frequência natural (cíclica) do movimento vibratório do sistema estrutural
corresponde a
f n=ω
π2 (Hz ou ciclos/s) (2.4)
O período será igual a
Tf
=1
(segundos) (2.5)
As constantes A e B obtêm-se a partir das condições iniciais do movimento.
2.1.2. Sistema amortecido
Se o sistema for amortecido (c>0), então a equação de movimento será
m x c x k xt t t⋅ + ⋅ + ⋅ =&& &( ) ( ) ( ) 0 (2.6)
Seja x A etr t
( ) = ⋅ ⋅ a solução da equação diferencial, substituindo em (2.6),
iremos obter
m r A e c r A e k A er t r t r t⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ =⋅ ⋅ ⋅2 0 (2.7)
logo
rcm
rkm
2 0+
⋅ +
= (2.8)

João M. C. Estêvão - EST - UAlg
- 37 -
com
rcm
cm
km
= − ±
−
2 2
2
(2.9)
As soluções da equação 2.9 conduzem a três situações de amortecimento:
crítico, sobrecrítico e subcrítico.
2.1.2.1. Amortecimento crítico (cc)
Esta situação corresponde à hipótese em que
cm
km
mkm
mc n20 2 2
2
− = ⇒ = = c ω (2.10)
Podemos definir um coeficiente de amortecimento, adimensionalizado ao
amortecimento crítico, dado por
ζω
= =c
cc
mc n2 (2.11)
Desta forma, o amortecimento será crítico quando ζ = 1.
A solução da equação de movimento será
( )x e A t Bttn
( ) = ⋅ ⋅ +−ω (2.12)
com as constantes A e B dependentes das condições iniciais do movimento.
2.1.2.2. Amortecimento sobrecrítico ( )ζ > 1
O amortecimento diz-se sobrecrítico quando
cm
km2
02
− > , logo existem duas raízes reais e negativas de (2.8).
A solução da equação de movimento (figura 2.2-a) será
( ) ( )[ ]x e A t B senh ttt
c cn
( ) cosh= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ω (2.13)
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 38 -
com a frequência angular amortecida dada por
ω ω ζc n= −2 1 (2.14)
e as constantes A e B ajustadas às condições iniciais do movimento.
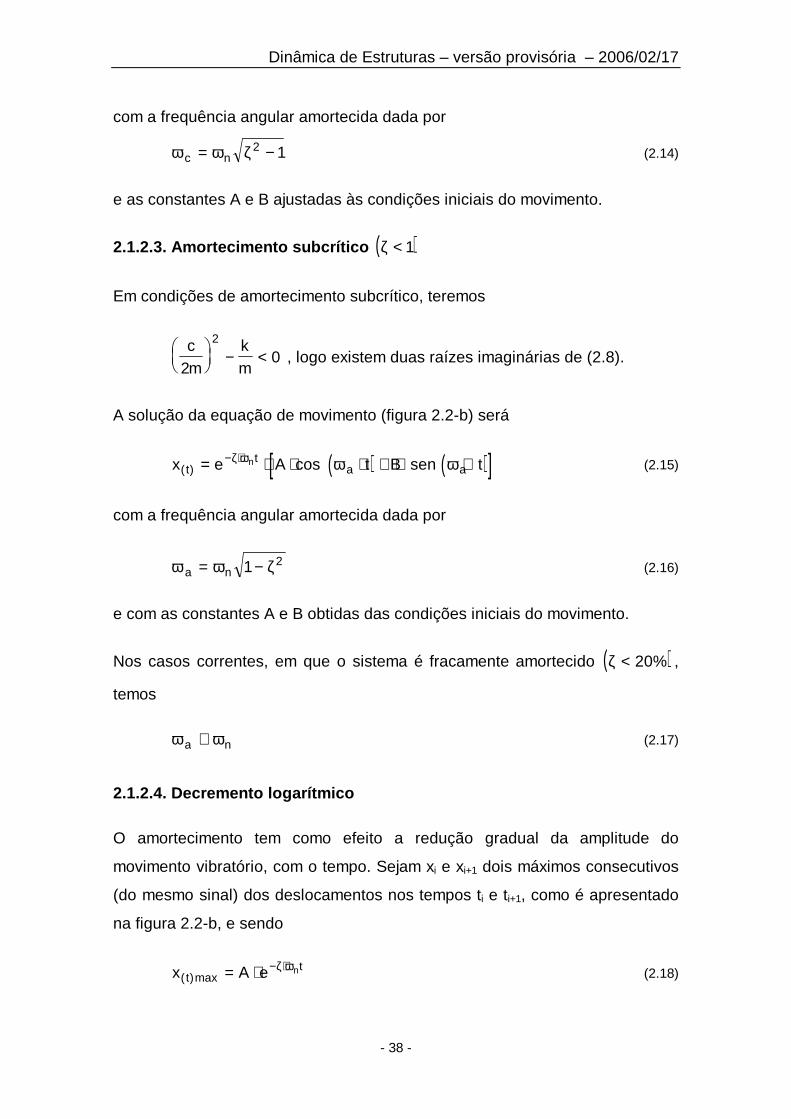
2.1.2.3. Amortecimento subcrítico ( )ζ < 1
Em condições de amortecimento subcrítico, teremos
cm
km2
02
− < , logo existem duas raízes imaginárias de (2.8).
A solução da equação de movimento (figura 2.2-b) será
( ) ( )[ ]x e A t B sen ttt
a an
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ω (2.15)
com a frequência angular amortecida dada por
ω ω ζa n= −1 2 (2.16)
e com as constantes A e B obtidas das condições iniciais do movimento.
Nos casos correntes, em que o sistema é fracamente amortecido ( )ζ < 20% ,
temos
ω ωa n≅ (2.17)
2.1.2.4. Decremento logarítmico
O amortecimento tem como efeito a redução gradual da amplitude do
movimento vibratório, com o tempo. Sejam xi e xi+1 dois máximos consecutivos
(do mesmo sinal) dos deslocamentos nos tempos ti e ti+1, como é apresentado
na figura 2.2-b, e sendo
x A ettn
( )max = ⋅ − ⋅ζ ω (2.18)

João M. C. Estêvão - EST - UAlg
- 39 -
então
x
xA e
A eei
i
t
tT
n i
n i
n a
+
− ⋅
− ⋅⋅=
⋅⋅
=+1 1
ζ ω
ζ ωζ ω (2.19)
com o período amortecido dado por
T t tfa i ia a
= − = =+11 2π
ω (2.20)
Podemos definir como decremento logarítmico do amortecimento, o logaritmo
natural do quociente entre dois máximos consecutivos (do mesmo sinal, e
separados por um período), dado pela seguinte expressão:
δ ζ ωπζ
ζπζ
ωω
=
= ⋅ =
−= ⋅
+ln
x
xTi
in a
n
a1 2
2
12 (2.21)
a)
x(t)
t
b)
x(t)
t
A e nt⋅ − ⋅ζ ω
xi+1xi
Taa
=2πω
FIGURA 2.2 - Resposta em regime livre amortecido: a) sobrecrítico b) subcrítico.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 40 -
2.2. Resposta em regime forçado
2.2.1. Acções periódicas
As acções harmónicas são um caso particular, dentro das acções periódicas.
No entanto, qualquer acção periódica pode ser desenvolvida em série de
Fourier, logo pode ser substituída pela soma das suas componentes
harmónicas (com diversas frequências e amplitudes).
Consideremos o sistema linear de um grau de liberdade, da figura 2.3, sujeito
à acção de uma força harmónica, igual a
( )F F tt( ) cos= ⋅0 ω (2.22)
em que F0 é amplitude da força e ω é a frequência angular de actuação da
referida força.
c
k
mF(t)
F0
t
x(t)
FIGURA 2.3 - Oscilador linear de um grau de liberdade sujeito a uma força harmónica.
Desta forma, a equação do movimento será
( )m x c x k x F tt t t⋅ + ⋅ + ⋅ = ⋅&& & cos( ) ( ) ( ) 0 ω (2.23)
Dividindo pela massa teremos
( )&& & cos( ) ( ) ( )x x xF
mtt n t n t+ ⋅ + ⋅ = ⋅2 2 0ζω ω ω (2.24)
João M. C. Estêvão - EST - UAlg
- 41 -
A solução desta equação diferencial resulta da soma da solução geral da
equação homogénea correspondente (regime transitório) e da solução
particular da equação não homogénea (regime permanente):
x x xt T t P t( ) ( ) ( )= + (2.25)
em que a parcela do regime transitório será
( ) ( )[ ]( )
( ) ( )[ ]x
e A t B sen t
e A t B
e A t B senh t
T t
ta a
t
tc c
n
n
n
( )
cos
cosh
=
⋅ ⋅ ⋅ + ⋅ ⋅
⋅ ⋅ +
⋅ ⋅ ⋅ + ⋅ ⋅
− ⋅
−
− ⋅
ζ ω
ω
ζ ω
ω ω ζ
ζ
ω ω ζ
1 1
1 1
1 1
; < 1
; = 1
; > 1
(2.26)
e a de regime permanente, será
( ) ( ) ( )x A t B sen t D tP(t) cos cos= ⋅ + ⋅ = ⋅ − ω ω ω θ1 (2.27)
em que as constantes (a determinar) D e θ1 são, respectivamente, a amplitude
e o ângulo de fase.
Substituindo (2.27) em (2.24), vamos obter o seguinte sistema de equações:
( )
( )ω ω ζω ω
ζω ω ω ω
n n
n n
A BF
m
A B
2 2 0
2 2
2
2 0
− ⋅ + ⋅ ⋅ =
− ⋅ ⋅ + − ⋅ =
(2.28)
cuja solução será
( ) ( )
( ) ( )
AF
m
BF
m
n
n
=−
− + ⋅
⋅⋅
=⋅
− + ⋅
⋅⋅
1
1 2
2
1 2
2
2 2 2 2
0
2 2 2 2
0
ω
ω ζ ω ω
ζ ω
ω ζ ω ω
(2.29)
com
ωω
ω=
n (2.31)

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 42 -
De acordo com a figura 2.4, teremos o ângulo de fase igual a
θζωω1 2
2
1=
=
−
arctg
BA
arctg (2.30)
e a amplitude será
est1est
10
2n
122 xH
mxk
km
HmF1
HBAD ⋅=⋅⋅⋅=⋅ω
⋅=+= (2.32)
em que
( ) ( )H1
2 2 2
1
1 2=
− +ω ζω (2.33)
é o factor de amplificação da resposta dinâmica do sistema estrutural em
relação à resposta estática xest. Atendendo ao quadrante, para ω > 1 será
necessário adicionar π ao resultado da expressão (2.30).
θ1
A
B
D
ω⋅t
ω⋅t
A
D
B
A⋅sen(ω⋅t)
B⋅cos(ω⋅t)
A⋅sen(ω⋅t)
D⋅cos(ω⋅t−θ1)
t
B⋅cos(ω⋅t) D⋅cos(ω⋅t−θ1)
( )tcosmF0 ⋅ω⋅
0 s
( )tcosm
F0 ⋅ω⋅
mF0
mF0
FIGURA 2.4 - Diagrama vectorial da resposta do oscilador.
A resposta dinâmica, em regime permanente, pode ser escrita na forma
seguinte
( )x H X tP(t) cos= ⋅ ⋅ −1 0 1 ω θ (2.34)
João M. C. Estêvão - EST - UAlg
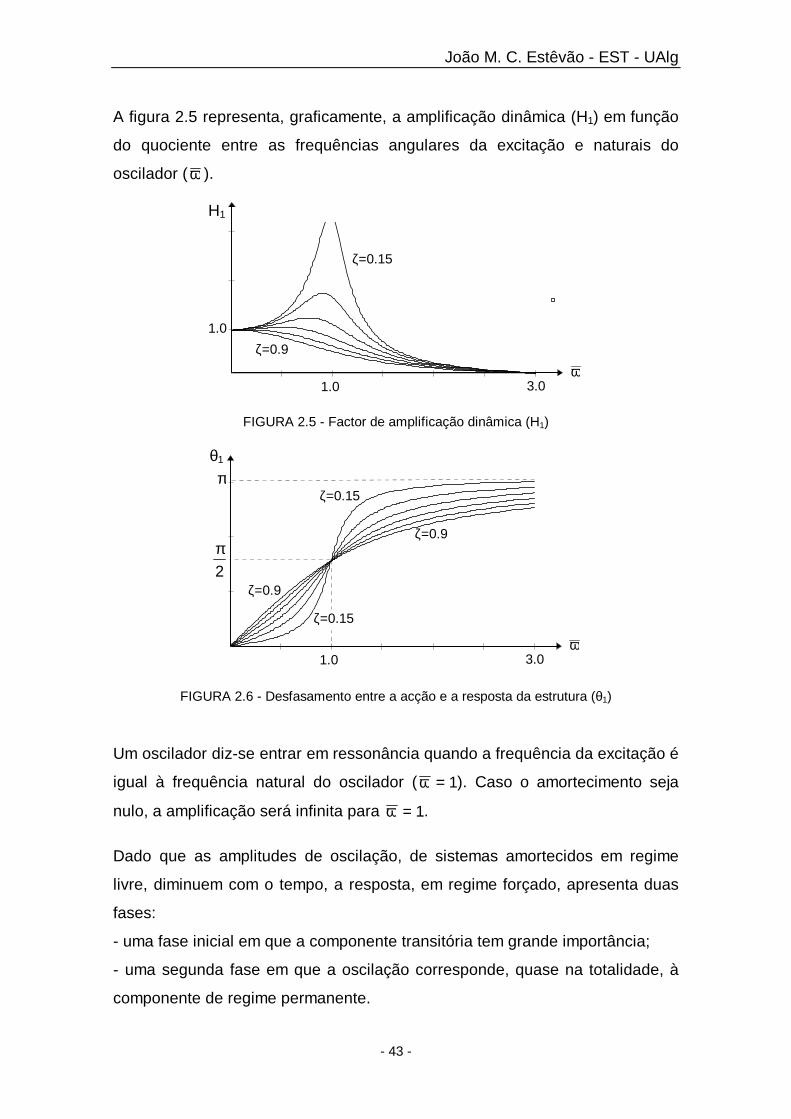
- 43 -
A figura 2.5 representa, graficamente, a amplificação dinâmica (H1) em função
do quociente entre as frequências angulares da excitação e naturais do
oscilador (ω ).
ζ=0.15
ω
1.0
H1
ζ=0.9
1.0 3.0
FIGURA 2.5 - Factor de amplificação dinâmica (H1)
ζ=0.15
ω
πθ1
ζ=0.9
1.0 3.0
ζ=0.9
π2
ζ=0.15
FIGURA 2.6 - Desfasamento entre a acção e a resposta da estrutura (θ1)
Um oscilador diz-se entrar em ressonância quando a frequência da excitação é
igual à frequência natural do oscilador (ω = 1). Caso o amortecimento seja
nulo, a amplificação será infinita para ω = 1.
Dado que as amplitudes de oscilação, de sistemas amortecidos em regime
livre, diminuem com o tempo, a resposta, em regime forçado, apresenta duas
fases:
- uma fase inicial em que a componente transitória tem grande importância;
- uma segunda fase em que a oscilação corresponde, quase na totalidade, à
componente de regime permanente.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 44 -
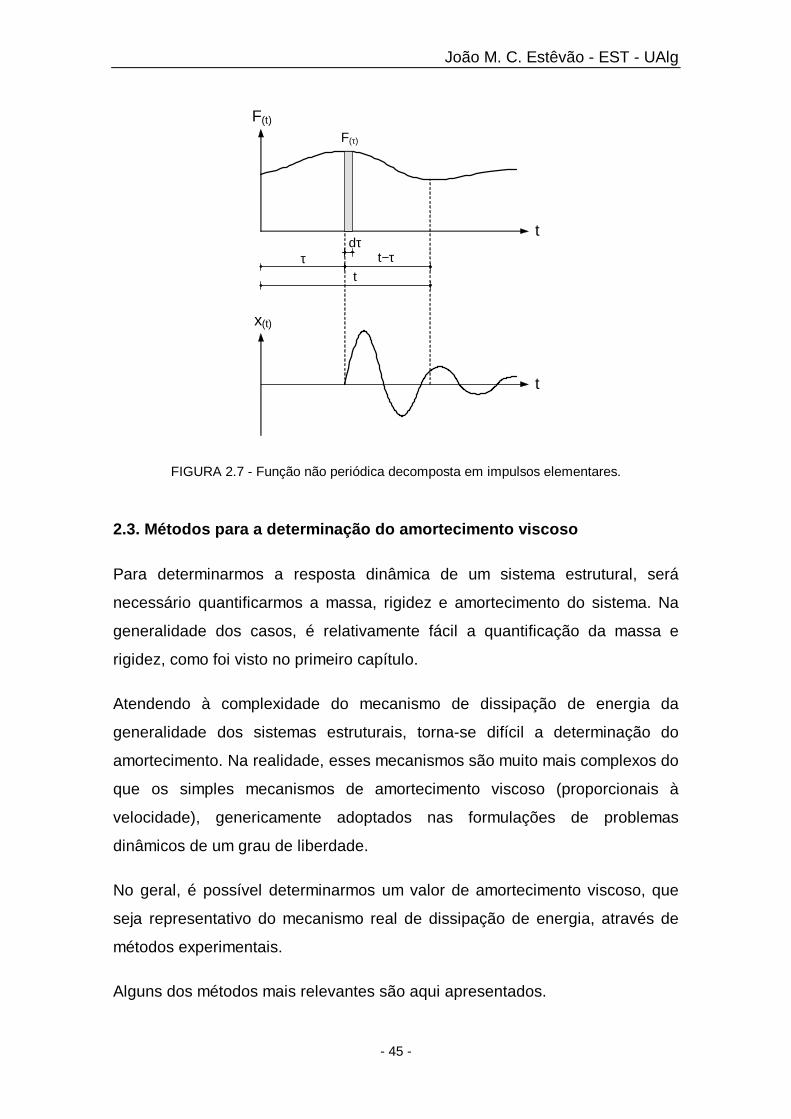
2.2.2. Acções não periódicas
A forma mais simples de tratar este tipo de acções, é considerar a excitação
como a soma de um conjunto finito de impulsos (figura 2.7), produzidos em
intervalos de tempo dτ.
Sendo válido o princípio da conservação da quantidade de movimento,
teremos
m dx F d xF
md⋅ = ⋅ ⇔ = ⋅& &( )
( )τ
ττ τ d (2.35)
Se considerarmos o impulso aplicado no tempo τ (figura 2.7), com uma
velocidade dx& , poderemos determinar a resposta do sistema (com
amortecimento subcrítico) num instante posterior (t−τ), a partir da equação
(2.15). Estabelecendo as condições iniciais
( )x t x A− = = = → =τ τ0 0 0( ) (2.36)
( )& &( ) ( )
x t dxF
md B
F
md
a− = = = ⋅ → =
⋅⋅τ τ
ωτ
τ τ0 (2.37)
logo
( ) ( ) ( )[ ]dx
F
me sen t d
a
ta
n=⋅
⋅ − ⋅− −τ ζω τω
ω τ τ (2.38)
pelo que
( ) ( )[ ]xm
F e sen t dta
ta
tn
( ) ( )=⋅
−− −∫
1
0ωω τ ττ
ζω τ (2.39)
A expressão (2.39) é designada por integral de Duhamel, para ζ < 1.
Se as condições iniciais do sistema estrutural forem ( )x t x= =0 0 e
( )& &x t x= =0 0 , será necessário adicionarmos a expressão (2.15), ajustada às
condições de fronteira, à expressão (2.39).
João M. C. Estêvão - EST - UAlg
- 45 -
t
x(t)
F(τ)
t
t
F(t)
dτ t−τ τ
FIGURA 2.7 - Função não periódica decomposta em impulsos elementares.
2.3. Métodos para a determinação do amortecimento v iscoso
Para determinarmos a resposta dinâmica de um sistema estrutural, será
necessário quantificarmos a massa, rigidez e amortecimento do sistema. Na
generalidade dos casos, é relativamente fácil a quantificação da massa e
rigidez, como foi visto no primeiro capítulo.
Atendendo à complexidade do mecanismo de dissipação de energia da
generalidade dos sistemas estruturais, torna-se difícil a determinação do
amortecimento. Na realidade, esses mecanismos são muito mais complexos do
que os simples mecanismos de amortecimento viscoso (proporcionais à
velocidade), genericamente adoptados nas formulações de problemas
dinâmicos de um grau de liberdade.
No geral, é possível determinarmos um valor de amortecimento viscoso, que
seja representativo do mecanismo real de dissipação de energia, através de
métodos experimentais.
Alguns dos métodos mais relevantes são aqui apresentados.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 46 -
2.3.1. Método baseado no decremento logarítmico
A forma mais simples de determinarmos o coeficiente de amortecimento
viscoso, baseia-se na medição experimental de duas amplitudes (xi e xi+s), no
instante “i” e após “s” ciclos consecutivos.
Sendo
δ si
i s
x
x=
+ln (2.40)
Da expressão (2.21), iremos obter
ζδπ
ωω
δπ
=⋅
⋅ ≅⋅
s a
n
s
s s2 2 (2.41)
dado que, para sistemas fracamente amortecidos (ζ<0.2),ω ωa n≅ .
2.3.2. Método da meia potência
O valor de ω correspondendo à amplificação máxima, pode ser obtido
derivando a expressão (2.33) em ordem a ω .
( ) ( )d
dωω ζω
ω ζ1
1 20 1 2
2 2 2
2
− += → = − max (2.42)
Substituindo a expressão de ωmax na expressão (2.33), iremos obter
H n
a1 2
1
2 1
12 max =
−= ⋅
ζ ζ ζωω
(2.43)
Considerando os pontos de meia potência (figura 2.8), para os quais
HH
11
2= max , e igualando as expressões (2.33) e (2.43), iremos obter
( ) ( )1 2 2 2 1 22 2 2 2− + = ⋅ −ω ζω ζ ζ (2.44)
João M. C. Estêvão - EST - UAlg
- 47 -
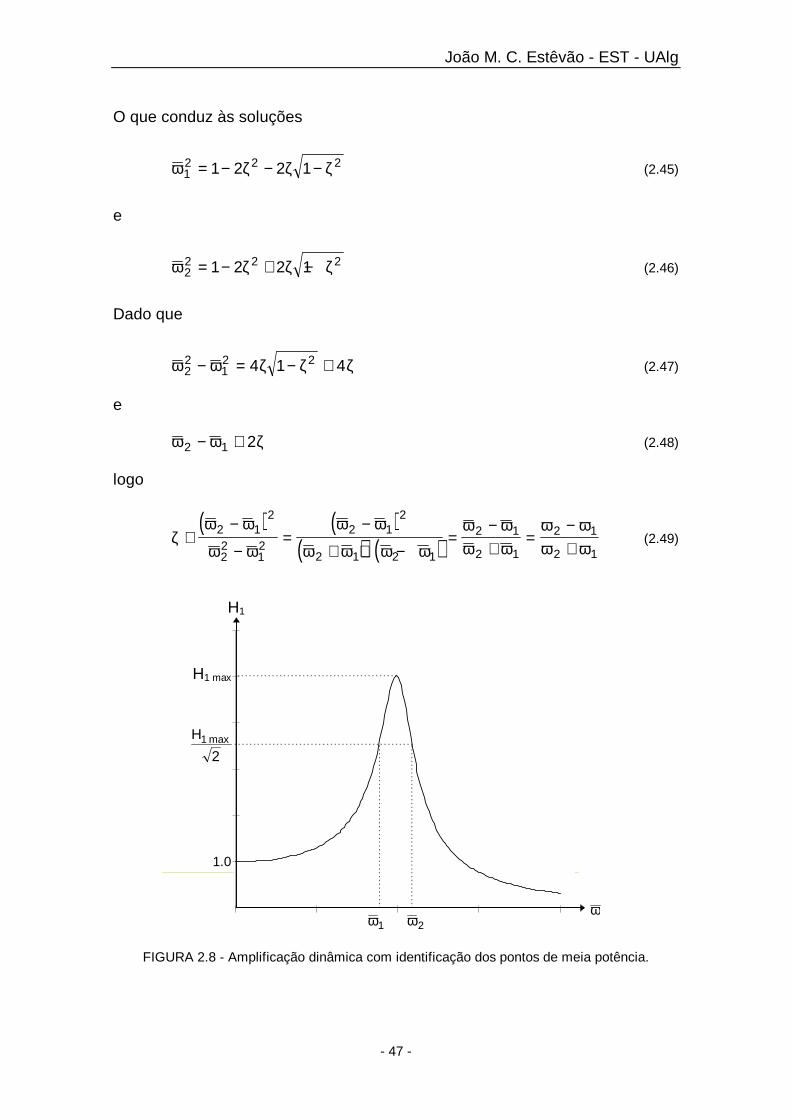
O que conduz às soluções
ω ζ ζ ζ12 2 21 2 2 1= − − − (2.45)
e
ω ζ ζ ζ22 2 21 2 2 1= − + − (2.46)
Dado que
ω ω ζ ζ ζ22
12 24 1 4− = − ≅ (2.47)
e
ω ω ζ2 1 2− ≅ (2.48)
logo
( ) ( )
( ) ( )ζω ω
ω ω
ω ω
ω ω ω ω
ω ωω ω
ω ωω ω
≅−
−=
−
+ ⋅ −=
−+
=−+
2 12
22
12
2 12
2 1 2 1
2 1
2 1
2 1
2 1 (2.49)
H1
2 max
ω
1.0
H1 max
ω2
H1
ω1
FIGURA 2.8 - Amplificação dinâmica com identificação dos pontos de meia potência.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 48 -
2.3.3. Método da energia dissipada por ciclo
Se considerarmos o sistema dinâmico da figura 2.9a, aplicando o princípio de
D’Alembert, iremos obter a seguinte equação de movimento
c x k x Ft t t⋅ + ⋅ =& ( ) ( ) ( ) (2.50)
Para uma resposta harmónica de amplitude Xmax e frequência ω, em que
( )x X sen tt( ) max= ⋅ ω (2.51)
substituindo (2.51) em (2.50), iremos obter
( ) ( )F c X t k X sen tt( ) max maxcos= ⋅ ⋅ ⋅ + ⋅ ⋅ω ω ω
( )[ ]= ⋅ ± ⋅ − ⋅k x c X X sen tt( ) max maxω ω2 2
= ⋅ ± ⋅ −k x c X xt t( ) max ( )ω 2 2 (2.52)
que corresponde a uma elipse como a representada na figura 2.9b.
c X x t⋅ −ω max ( )2 2
− c Xω max
c Xω max
k x t⋅ ( )x(t)
F(t)
−Xmax
a)
x(t)
F(t)
Xmax
c k
b)
FIGURA 2.9 - a) oscilador com amortecimento viscoso e sem massa b) resposta do oscilador.

João M. C. Estêvão - EST - UAlg
- 49 -
Se representarmos graficamente a relação força/deslocamento (figura 2.9b), a
um área limitada por um ciclo corresponde à energia dissipada no amortecedor
(∆ED). Essa energia será igual a
∆E F dxD t= ∫ ( )
( ) ( )[ ] ( )= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅∫ c X t k X sen t X t dtmax max max
/
cos cosω ω ω ω ωπ ω
0
2
= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅π ω π ω ω ζc X m Xnmax max2 22 (2.53)
Caso o amortecimento viscoso não seja linear, a relação força/deslocamento
não será elíptica, mas de uma forma distinta (figura 2.10). No entanto,
podemos obter um coeficiente de amortecimento viscoso equivalente, a partir
da energia medida num ensaio (igual à área delimitada pelo diagrama
força/deslocamento).
ζπω ωeq
D
n
E
m X.
max
=⋅ ⋅ ⋅
∆
2 2 (2.54)
x(t)
∆ED= área da figura
F c xa t t( ) ( )&= ⋅
Xmax
FIGURA 2.10 - oscilador com amortecimento viscoso não linear.
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 50 -
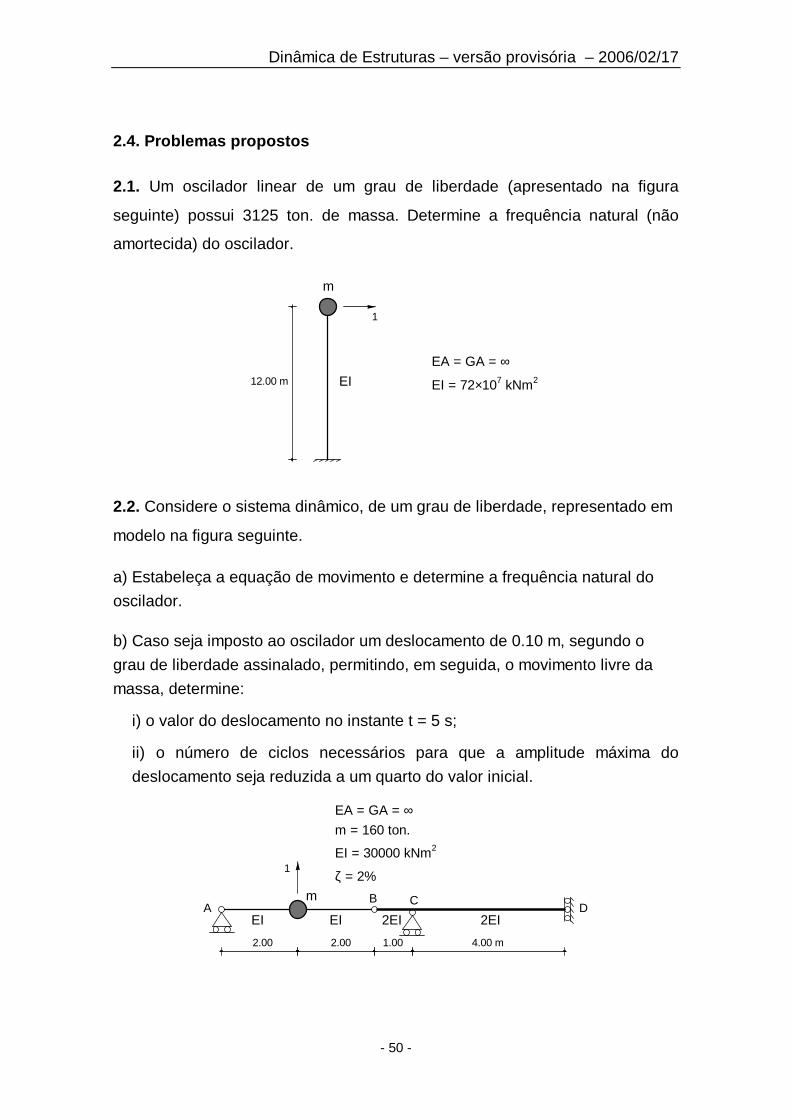
2.4. Problemas propostos
2.1. Um oscilador linear de um grau de liberdade (apresentado na figura
seguinte) possui 3125 ton. de massa. Determine a frequência natural (não
amortecida) do oscilador.
12.00 m
1
m
EA = GA = ∞
EI = 72×107 kNm2EI
2.2. Considere o sistema dinâmico, de um grau de liberdade, representado em
modelo na figura seguinte.
a) Estabeleça a equação de movimento e determine a frequência natural do
oscilador.
b) Caso seja imposto ao oscilador um deslocamento de 0.10 m, segundo o
grau de liberdade assinalado, permitindo, em seguida, o movimento livre da
massa, determine:
i) o valor do deslocamento no instante t = 5 s;
ii) o número de ciclos necessários para que a amplitude máxima do
deslocamento seja reduzida a um quarto do valor inicial.
2.00 2.00
1
CD
BA
m
2EI2EI
1.00 4.00 m
EA = GA = ∞m = 160 ton.
EI = 30000 kNm2
EIEI
ζ = 2%

João M. C. Estêvão - EST - UAlg
- 51 -
2.3. Considere o sistema dinâmico, com coeficiente de amortecimento igual a
10%, representado em modelo na figura seguinte. O sistema estrutural,
composto por barras rígidas, é sujeito a uma força harmónica F(t) = 20⋅sen(5t).
a) Estabeleça a equação de movimento e determine a frequência natural do
oscilador.
b) Calcule o deslocamento vertical do ponto “F” no instante t = 2 seg.
BC
D
A
F
k
EI = EA = GA = ∞F(t)m = 5 ton.
1.00
1.00 4.00 m2.001.00
E
k = 8000 kN/mm
2.4. Considere o oscilador de um grau de liberdade, não amortecido,
representado em modelo na figura seguinte.
a) Estabeleça a equação do movimento segundo o grau de liberdade
assinalado.
b) Calcule o momento flector no ponto “B”, no instante t = 4.82 s, quando a
estrutura é sujeita a uma força harmónica cujo valor é F(t) = 3⋅cos(4.6t) kN,
sabendo que no instante inicial d1 0 0 01
m( ) .= e & .( )d1 0 0 05
m / s= .
B
CA
EA = GA = ∞
F(t)
m = 12 ton.
1
1.80
2.40
m90º
EI = 23296 kNm2
3m
90º
3.20 m
2.5. Um oscilador linear de um grau de liberdade, cuja equação de movimento
corresponde a 150 129400⋅ + ⋅ =&&( ) ( ) ( )x x Ft t t , é sujeito à força representada,
graficamente, na figura seguinte.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 52 -
a) Determine o deslocamento da
massa do oscilador, para
i) t = 4 s;
ii) t = 8 s;
iii) t = 10 s.
b) Caso o coeficiente de amortecimento fosse igual a 10%, qual seria o
deslocamento para t = 10 s?
2.6. Foi realizado um ensaio experimental (dinâmico) de um oscilador linear de
um grau de liberdade. Foram feitos dois registos dos deslocamentos, um ao 4º
ciclo e outro ao 9º ciclo, respectivamente com 1.42011 mm e 0.29404 mm.
Determine o valor aproximado do coeficiente de amortecimento viscoso.
2.7. O quadro seguinte apresenta um conjunto de valores de amplitude da
resposta de um edifício, registados com ruído ambiental. Calcule o valor
aproximado do coeficiente de amortecimento viscoso.
Frequência
(Hz) 3.895 3.986 4.076 4.167 4.257 4.438 4.529 4.620 4.710
Amplitude
(×10-3 m) 0.044 0.053 0.067 0.096 0.117 0.076 0.052 0.040 0.031
2.8. A figura seguinte representa os resultados de um ensaio experimental,
correspondente à resposta de um oscilador linear de um grau de liberdade
com 50 ton. de massa (ωn = 10 rad/s), sujeito à acção de uma força harmónica
(ω = 5 rad/s). Calcule o valor aproximado do coeficiente de amortecimento
viscoso, sabendo que a área a que corresponde um ciclo é de 20.8 kN⋅mm.
Ciclohisterético
F(t)
−2.577 mmx(t)
2.577 mm
t8 s4 s
40 kN
20 kN
F(t)

João M. C. Estêvão - EST - UAlg
- 53 -
2.5. Resoluções dos problemas propostos
Nota: os resultados estão apresentados com cinco casas decimais, no entanto os cálculos
foram efectuados com todas as casas decimais que os meios de cálculo permitiram.
2.1.
1
kEI
L11 3
7
363 3 72 10
12125 10=
⋅=
× ×= ×. kN / m
12.00
ω n =×
=125 10
312520
6. rad / s
f = = =202
3 18 3 18π
. . ciclos / s Hz
2.2.
a) Dado que trata de uma estrutura isostática, será mais fácil determinarmos a
flexibilidade associada ao grau de liberdade dinâmico. A respectiva rigidez é
igual ao inverso da flexibilidade.
1 kN
0.5 kN 0.5 kN
0.5 kNm
Momentos flectores (kNm)
+
−−−−
−1
0.5

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 54 -
( )fM M
EIdx
EI EI EI
L
111 1
0
2 2 213
1 2 21
3 20 5 1
12
0 5 4=⋅
= − ⋅
⋅ +
⋅⋅ ⋅ + ⋅ ⋅∫∑ . .
fEI11
618756 25 10= = × −.. m / kN
kf1111
641 1
6 25 1016 10= =
×= ×−.
. kN / m
ωnk
m= =
×=11
416 10160
10.
rad / s
f = = =102
159155 159155π
. . ciclos / s Hz
c m n11 2 2 160 10 0 02 64= = ⋅ ⋅ ⋅ =ω ζ . kNs / m
Equação de movimento:
160 64 16 10 04⋅ + ⋅ + × ⋅ =&& & .( ) ( ) ( )y y yt t t
b) Como ζ<1, a resposta do oscilador será do tipo
( ) ( )[ ]y e A t B sen ttt
a an
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ω
com
ω ω ζa n= − = ⋅ − =1 10 1 0 02 9 9982 2. . rad / s
Atendendo às condições iniciais do movimento
( )y t y= =0 0 → A y= 0
( )& &y t y= =0 0 → By yn
a=
+& 0 0ζωω
pelo que
( ) ( )y e y ty y
sen ttt
an
aa
n( ) cos
&
= ⋅ ⋅ ⋅ ++
⋅ ⋅
− ⋅ζ ω ωζω
ωω0
0 0

João M. C. Estêvão - EST - UAlg
- 55 -
Como
( )y t y= = =0 0 100 . m e ( )& &y t y= = =0 00
A = 0 10. e B =+ ⋅ ⋅
=0 0 02 10 0 10
9 9980 002
. ..
.
i)
Para t = 5 seg.
( ) ( )[ ]y e t sen ttt
( ). . cos . . .= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅0 2 01 9 998 0 002 9 998
( ) ( )[ ]y e sen ( ). . cos . . . .5
0 2 5 01 9 998 5 0 002 9 998 5 0 0352= ⋅ ⋅ ⋅ + ⋅ ⋅ =− ⋅ m
ii)
y
yA e
A ee
tt
tn
n
n( )
00
14
= =⋅⋅
=− ⋅
− ⋅ ⋅− ⋅
ζ ω
ζ ωζ ω
tn
= −⋅
⋅ = −
⋅⋅ =
1 14
10 02 10
14
6 93147ζ ω
ln.
ln . seg.
Logo em
6 931471
6 93147 6 93147 159155 1103178.
. . . .
T
f= ⋅ = ⋅ = ciclos
0 5 10 15 20
y(t)
t
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 56 -
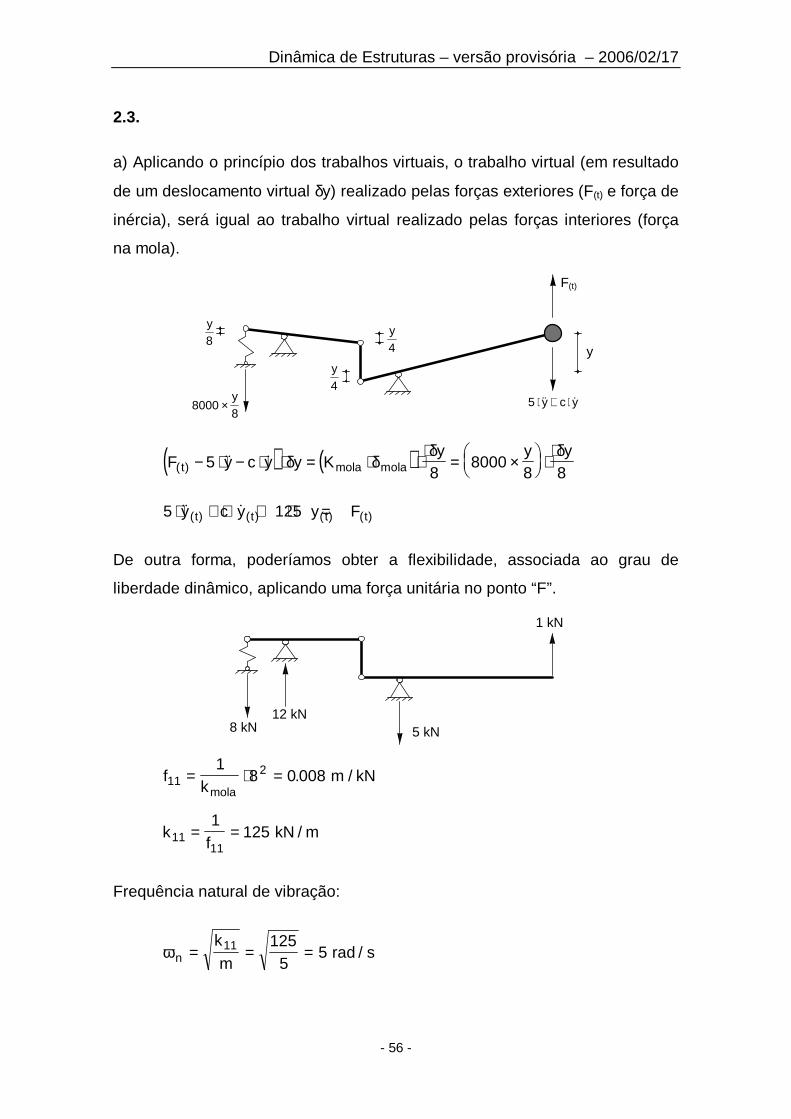
2.3.
a) Aplicando o princípio dos trabalhos virtuais, o trabalho virtual (em resultado
de um deslocamento virtual δy) realizado pelas forças exteriores (F(t) e força de
inércia), será igual ao trabalho virtual realizado pelas forças interiores (força
na mola).
5 ⋅ + ⋅&& &y c y80008
×y
y8
y4
y
F(t)
y4
( ) ( )F y c y y Ky y y
t mola mola( ) && &− ⋅ − ⋅ ⋅ = ⋅ ⋅⋅
= ×
⋅
⋅5
88000
8 8δ δ
δ δ
5 125⋅ + ⋅ + ⋅ =&& &( ) ( ) ( ) ( )y c y y Ft t t t
De outra forma, poderíamos obter a flexibilidade, associada ao grau de
liberdade dinâmico, aplicando uma força unitária no ponto “F”.
1 kN
12 kN8 kN 5 kN
fkmola
1121
8 0 008= ⋅ = . m / kN
kf1111
1125= = kN / m
Frequência natural de vibração:
ωnk
m= = =11 125
55 rad / s

João M. C. Estêvão - EST - UAlg
- 57 -
f = =5
20 79577
π. Hz
c m n= = ⋅ ⋅ ⋅ =2 2 5 0 1 5 5ζω . kNs / m
Equação de movimento:
( )5 5 125 20 5⋅ + ⋅ + ⋅ = ⋅ ⋅&& &( ) ( ) ( )y y y sen tt t t
b)
y y yt T t P(t( ) ( ) )= +
( ) ( )[ ]y e A t B sen tT tt
a an
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ω
& ( )yT t ( ) ( )[ ]= − ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ωζ ωn
ta ae A t B sen tn cos
( ) ( )[ ]+ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅− ⋅e A sen t B tnta a a a
ζ ω ω ω ω ω cos
( )y HF
ksen tP(t) = ⋅ ⋅ −1
0
111 ω θ
( )& cos)y HF
ktP(t = ⋅ ⋅ ⋅ −ω ω θ1
0
111
Atendendo às condições iniciais do movimento
( )y t y= =0 0 → ( )A y HF
ksen= − ⋅ ⋅ −0 1
0
111 θ
( )& &y t y= =0 0 → ( )
B
y A HF
kn
a=
+ ⋅ ⋅ − ⋅ ⋅ ⋅ −& cos0 10
111ζ ω ω θ
ω
ω ω ζa n= − = ⋅ − =1 5 1 01 4 974942 2. . rad / s

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 58 -
ωω
ω= = =
n
55
1 (ressonância)
( ) ( ) ( ) ( )H1
2 2 2 2 2 2
1
1 2
1
1 1 2 01 15=
− +=
− + ⋅ ⋅=
ω ζω .
θπ
1 2=
logo
y0 0= → A sen= − ⋅ ⋅ −
=5
20125 2
0 8
π.
&y0 0= → B =× × − ⋅ ⋅ ⋅ −
=01 5 0 8 5 5
20125 2
4 974940 08040
. . cos
..
π
y y yt T t P(t( ) ( ) )= +
( ) ( )[ ]y e t sen tT tt
( ). . cos . . .= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅0 5 0 8 4 97494 0 0804 4 97494
y sen t sen tP(t) .= ⋅ ⋅ ⋅ −
= ⋅ ⋅ −
5
20125
52
0 8 52
π π
Para t = 2 s, teremos y t( ) . . .= − − =0 26948 0 67126 0 40178 m (para cima)
0 1 2 3 4 5 6
0.5
0.5
1
y(t) yP(t) yT(t)
t
João M. C. Estêvão - EST - UAlg
- 59 -
2.4.
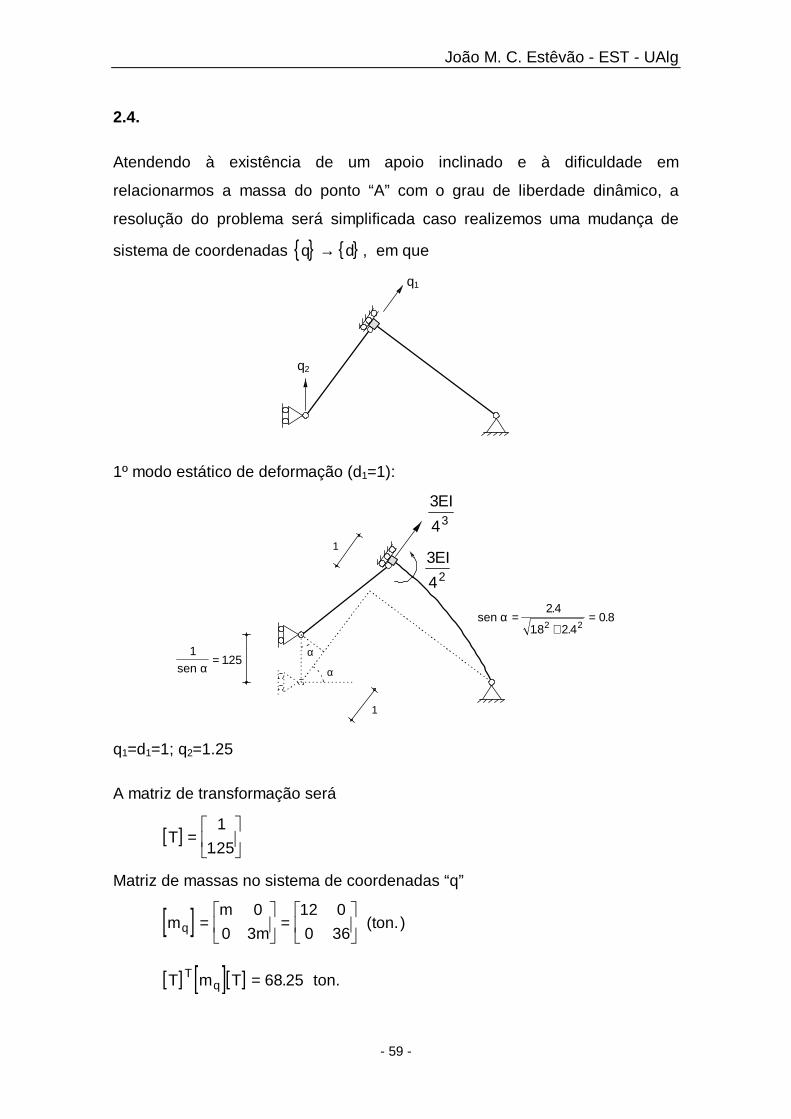
Atendendo à existência de um apoio inclinado e à dificuldade em
relacionarmos a massa do ponto “A” com o grau de liberdade dinâmico, a
resolução do problema será simplificada caso realizemos uma mudança de
sistema de coordenadas { } { }q d→ , em que
q1
q2
1º modo estático de deformação (d1=1):
1125
sen α= .
3
43
EI
3
42
EI
α
1
1
α
sen α =+
=2 4
18 2 40 8
2 2
.
. ..
q1=d1=1; q2=1.25
A matriz de transformação será
[ ]T =
1
125.
Matriz de massas no sistema de coordenadas “q”
[ ]mm
mq =
=
0
0 3
12 0
0 36 (ton.)
[ ] [ ][ ]T m TTq = 68 25. ton.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 60 -
A rigidez obtém-se directamente, sendo
kEI
112 2
3 3
3
2 4 3 2
3 23296
41092=
+
=×
=. .
kN / m
O vector de forças no sistema de coordenadas “q”
{ } ( )F tq =
⋅ ⋅ ⋅0
13 4 6cos . (kN)
[ ] { } ( ) ( )T F t tTq = ⋅ ⋅ ⋅ = ⋅ ⋅125 3 4 6 3 75 4 6. cos . . cos . kN
Equação de movimento:
( )68 25 1092 125 3 75 4 61 1. && . . cos .( ) ( ) ( )⋅ + ⋅ = ⋅ = ⋅ ⋅d d F tt t t
b)
d d dt T t P(t1 1 1 ( ) ( ) )= +
( ) ( )[ ]d e A t B sen tT tt
a an
1 ( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ω
&( )d T t1
( ) ( )[ ]= − ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅ζ ω ω ωζ ωn
ta ae A t B sen tn cos
( ) ( )[ ]+ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅− ⋅e A sen t B tnta a a a
ζ ω ω ω ω ω cos
( )d HF
ktP(t1 1
0
111
) cos= ⋅ ⋅ −ω θ
( )&)d H
F
ksen tP(t1 1
0
111
= − ⋅ ⋅ ⋅ −ω ω θ
Atendendo às condições iniciais do movimento
( )d t d1 00= = → ( )A d HF
k= − ⋅ ⋅ −0 1
0
111cos θ

João M. C. Estêvão - EST - UAlg
- 61 -
( )& &d t d1 00= = → ( )
B
d A HF
ksenn
a=
+ ⋅ ⋅ + ⋅ ⋅ ⋅ −&0 1
0
111ζ ω ω θ
ω
Como o amortecimento é nulo
( ) ( )d A t B sen tT t n n1 ( ) cos= ⋅ ⋅ + ⋅ ⋅ω ω
( ) ( )[ ]& cos( )d A sen t B tT t n n n1 = ⋅ − ⋅ ⋅ + ⋅ ⋅ω ω ω
e
( )
B
d HF
ksen
n=
+ ⋅ ⋅ ⋅ −&0 1
0
111ω θ
ω
Frequência natural de vibração:
ωnk
m= = =11 1092
68 254
. rad / s
ωω
ω= = =
n
4 64
115.
.
( ) ( ) ( )H1
2 2 2 2 2
1
1 2
1
1 115310078=
− +=
−=
ω ζω ..
Como ω > 1 será necessário reduzir o resultado ao 2º quadrante. Para tal,
teremos que adicionar π ao resultado das máquinas de calcular, pelo que
θζωω
π π π1 2
2
10=
−
+ = + =arctg rad
logo
d0 0 01= . → ( )A = − ⋅ ⋅ − =0 01 4 63 751092
0 02065. ..
cos . π
& .d0 0 05= → ( )
Bsen
=+ ⋅ ⋅ ⋅ −
=0 05 4 6 310078
3 751092
40 01250
. . ..
. π
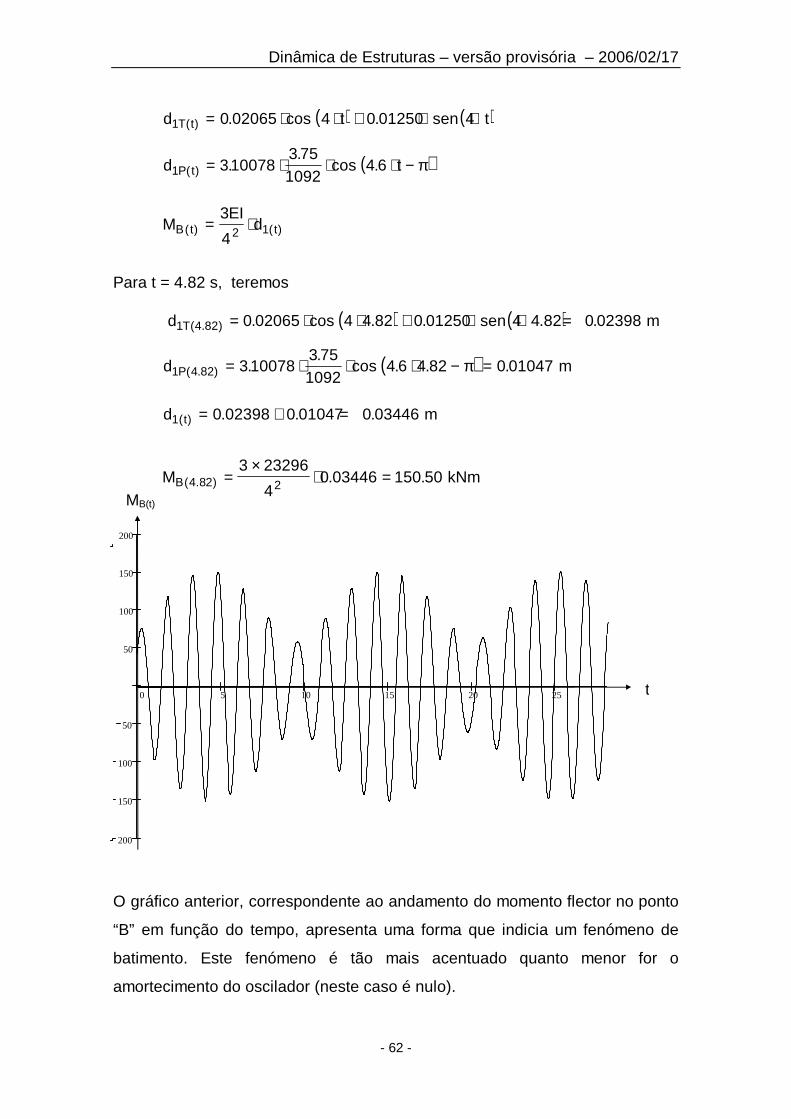
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 62 -
( ) ( )d t sen tT t1 0 02065 4 0 01250 4
( ) . cos .= ⋅ ⋅ + ⋅ ⋅
( )d tP(t1 3100783 751092
4 6
) ..
cos .= ⋅ ⋅ ⋅ − π
MEI
dB t t ( ) ( )= ⋅3
42 1
Para t = 4.82 s, teremos
( ) ( )d senT1 4 82 0 02065 4 4 82 0 01250 4 4 82 0 02398
m( . ) . cos . . . .= ⋅ ⋅ + ⋅ ⋅ =
( )d P(1 4 82 3 100783 751092
4 6 4 82 0 01047
m. ) ..
cos . . .= ⋅ ⋅ ⋅ − =π
d t1 0 02398 0 01047 0 03446
m( ) . . .= + =
MB kNm( .82) . .4 2
3 23296
40 03446 150 50=
×⋅ =
0 5 10 15 20 25
200
150
100
50
50
100
150
200
O gráfico anterior, correspondente ao andamento do momento flector no ponto
“B” em função do tempo, apresenta uma forma que indicia um fenómeno de
batimento. Este fenómeno é tão mais acentuado quanto menor for o
amortecimento do oscilador (neste caso é nulo).
t
MB(t)

João M. C. Estêvão - EST - UAlg
- 63 -
2.5.
a) Recorrendo ao integral de Duhamel, teremos
( ) ( )[ ]xm
F e sen t dta
ta
tn
( ) ( )=⋅
−− −∫
1
0ωω τ ττ
ζω τ
Dado que c = 0, logo ζ = 0 e ωa = ωn, pelo que
( )[ ]xm
F sen t dtn
n
t
( ) ( )=⋅
⋅ −∫1
0ωω τ ττ
com
ωnk
m= = =11 29400
15014 rad / s
e
F( )τ
ττ
ττ
τ= − +
≤ ≤≤ ≤>
10
5 60
0
0 4
4 8
8
;
;
;
i) Entre t = 0 e t = 4 s, teremos
( ) ( )[ ]x sen t dt
t
( ) =⋅
⋅ −∫1
150 1410 14
0
τ τ τ
Dado que
( )[ ] ( )[ ]a sen t da
t sen tn
t
nn nτ ω τ τ
ωω ω⋅ − = ⋅ −∫
02
logo
( )[ ] ( )[ ]x t sen t t sen tt( ) = ⋅ ⋅ − = ⋅ −1
210010
1414 14
141160
14 142
( )[ ]x sent( ) .=−= ⋅ ⋅ − ⋅ = ×4
3141160
14 4 14 4 137322 10 m

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 64 -
ii) Entre t = 4 s e t = 8 s, teremos
( ) ( )[ ] ( ) ( )[ ]x sen t d sen t dt
t
( ) = ⋅ − + − + ⋅ −
∫ ∫1
210010 14 5 60 14
0
4
4τ τ τ τ τ τ
Para facilitar a resolução dos integrais vamos efectuar a mudança da origem
do referencial para t = 4 s. Deste modo, teremos que adicionar a componente
de regime livre, sujeita às condições iniciais do instante t = 4 s.
( )− ⋅ + + = − +5 4 60 5 40τ τ
( ) ( ) ( ) ( )[ ]x x tx
sen t sen t dt
t
( ) cos&
= ⋅ + + − + ⋅ −∫00
0
1414
141
21005 40 14τ τ τ
sendo
x x t0 43137322 10= = ×=
−( ) . m
( )[ ]& cos( )x tt = ⋅ −1
29401 14 ; 0 ≤ t ≤ 4 s
( )[ ]& & cos .( )x x t0 451
29401 14 4 4 99251 10= = ⋅ − ⋅ = ×=
− m / s
Entre t = 4 s e t = 8 s, teremos
( ) ( )x t sen tt t( ) . cos.
= −−
−= × ⋅ ⋅ +
×⋅4
35
137322 10 144 99251 10
1414
( ) ( )[ ]+ − + ⋅ −∫1
21005 40 14
0
τ τ τsen t dt
como
( ) ( )[ ] ( )[ ] ( )[ ]a b sen t da
t sen tb
tn
t
nn n
nnτ ω τ τ
ωω ω
ωω+ ⋅ − = ⋅ − + ⋅ −∫
02 1 cos
então
( ) ( )x t sen tt t( ) . cos.
= −−
−= × ⋅ ⋅ +
×⋅4
35
137322 10 144 99251 10
1414
( )[ ] ( )[ ]+−
⋅ ⋅ − ⋅ + ⋅ − ⋅
12100
5
1414 14
4014
1 142 t sen t tcos

João M. C. Estêvão - EST - UAlg
- 65 -
Para t = 8 s, teremos
( ) ( )x sent( ) . cos.
= − =−
−= × ⋅ ⋅ +
×⋅8 4 4
35
137322 10 14 44 99251 10
1414 4
( )[ ] ( )[ ]+−
⋅ ⋅ − ⋅ + ⋅ − ⋅
12100
5
1414 4 14 4
4014
1 14 42 sen cos
= × − × = ×− − −116980 10 4 86907 10 6 82888 103 4 4. . . m
iii) Para t > 8 s, a resposta do oscilador será em regime livre, com as
condições iniciais impostas para t = 8 s.
x x t0 8 446 82888 10= = ×= −
−( ) . m
Entre t = 4 s e t = 8 s, teremos
( ) ( )& ..
cos( )x sen t tt t= −−
−= ⋅ − × ⋅ ⋅ +
×⋅
43
5
14 137322 10 144 99251 10
1414
( )[ ] ( )+−
⋅ − ⋅ + ⋅ ⋅
12100
514
1 14 40 14cos t sen t
Para t = 8 − 4 s
( ) ( )& ..
cosx sen03
5
14 137322 10 14 44 99251 10
1414 4= ⋅ − × ⋅ ⋅ +
×⋅
−−
( )[ ] ( )+−
⋅ − ⋅ + ⋅ ⋅
12100
514
1 14 4 40 14 4cos sen
= × − × = ×− − −100694 10 9 95927 10 110157 102 3 4. . . m / s
Logo para t > 8 s
( ) ( )x t sen tt t( ) . cos.
= −−
−= × ⋅ ⋅ +
×⋅8
44
6 82888 10 14110157 10
1414
Para t = 10 s
( ) ( )x sent( ) . cos.
= −−
−= × ⋅ ⋅ +
×⋅10 8
44
6 82888 10 14 2110157 10
1414 2
= − × −6 55220 10 4. m

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 66 -
0 2 4 6 8 10
x(t)
t
b) Sendo ζ = 0.1, para t > 8 s, teremos
ω ω ζa n= − = ⋅ − =1 14 1 01 13 929822 2. . rad / s
( ) ( ) ( )[ ]xm
e sen t dta
ta
n( ) =
⋅⋅ ⋅ −− ⋅ −
∫1
100
4
ωτ ω τ τς ω τ
( ) ( ) ( )[ ]+⋅
− + ⋅ ⋅ −− ⋅ −∫
15 60
4
8
me sen t d
a
ta
n
ωτ ω τ τς ω τ
( ) ( ) ( )[ ]x e sen t dtt
( ).
..=
− × ⋅ −=⋅
⋅ ⋅ −∫100 1 14
0
41150 13 92982
10 13 92982τ τ ττ
( ) ( ) ( )[ ]+⋅
− + ⋅ ⋅ −− × ⋅ −∫1
150 13 929825 60 13 929820 1 14
4
8
...τ τ ττe sen t dt
= − × − × = − ×− − −6 36411 10 3 65427 10 3 66063 108 5 5. . . m
(resolução do integral recorrendo a meios de cálculo automático)
0 2 4 6 8 10
x(t)
t
João M. C. Estêvão - EST - UAlg
- 67 -
2.6.
δsi
i s
x
x
x
x=
=
=
=
+ln ln ln
.
..4
9
1420110 29404
157477
( )ζδπ π
≅⋅
=⋅ −
=s
s2157477
2 9 40 05
..
2.7.
A amplitude máxima é igual a 0.117 mm, logo
0117
20 08273
..= mm
Interpolando, teremos
( )f14 167 4 0760 096 0 067
0 08273 0 067 4 076 4 12536=−−
⋅ − + =. .. .
. . . . Hz
( )f24 438 4 2570 076 0 117
0 08273 0117 4 257 4 40829=−−
⋅ − + =. .. .
. . . . Hz
ζω ωω ω
≅−+
=−+
=−+
=2 1
2 1
2 1
2 1
4 40829 4 125364 40829 412536
0 033f f
f f. .. .
.
2.8.
O valor do coeficiente de amortecimento viscoso será igual a
( )
ζπω ω π
eqD
n
E
m X.
max
.
..=
⋅ ⋅ ⋅=
×
⋅ ⋅ ⋅ ⋅ ×=
−
−
∆2
20 8 10
2 5 50 10 2 577 100 202
3
3 2

- 68 -
CAPÍTULO 3
SISTEMA LINEAR DE VÁRIOS GRAUS DE LIBERDADE
3.1. Sistema de equações de movimento
Considere-se o sistema estrutural da figura 3.1, correspondendo a um
oscilador linear de dois graus de liberdade, sujeito a um conjunto de forças
dinâmicas.
m2
d2(t)
k2
F2(t)
d1(t)
F1(t)
k1
c2
k3
c1 c3
m1
FIGURA 3.1 - Oscilador linear de dois graus de liberdade sujeito a forças dinâmicas.
Aplicando o princípio de d’Alembert, em cada grau de liberdade, obteremos o
seguinte sistema de equações de movimento
( ) ( )
( ) ( )m d c d c d d k d k d d F
m d c d c d d k d k d d F
t t t t t t t t
t t t t t t t t
1 1 1 1 2 2 1 1 1 2 2 1 1
2 2 3 2 2 2 1 3 2 2 2 1 2
&& & & &
&& & & &
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
+ − − + − − =
+ + − + + − =
(3.1-2)
( ) ( )
( ) ( )m d c c d c d k k d k d F
m d c d c c d k d k k d F
t t t t t t
t t t t t t
1 1 1 2 1 2 2 1 2 1 2 2 1
2 2 2 1 2 3 2 2 1 2 3 2 2
&& & &
&& & &
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
+ + − + + − =
− + + − + + =
(3.3-4)
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 69 -
Das equações (3.3-4), podemos escrever
[ ]mm
m=
1
2
0
0 (3.5)
[ ]cc c c
c c c
c c
c c=
+ −− +
=
1 2 2
2 2 3
11 12
21 22 (3.6)
[ ]kk k k
k k k
k k
k k=
+ −− +
=
1 2 2
2 2 3
11 12
21 22 (3.7)
{ } { } { } { }&&
&&
&&&
&
&( )( )
( )( )
( )
( )( )
( )
( )( )
( )
( )d
d
dd
d
dd
d
dF
F
Ftt
tt
t
tt
t
tt
t
t=
=
=
=
1
2
1
2
1
2
1
2 ; ; ; (3.8)
Generalizando, podemos escrever, na forma matricial e para “r” graus de
liberdade, que
[ ] ( ){ } [ ] ( ){ } [ ] ( ){ } ( ){ }m d c d k d Ft t t t&& &+ + = (3.9)
sendo [m] a matriz de massas (normalmente diagonal), [c] a matriz de
amortecimento e [k] a matriz de rigidez do sistema estrutural, associada aos
graus de liberdade considerados.
3.2. Regime livre não amortecido
3.2.1 Equação característica
As características dinâmicas de um sistema estrutural são estabelecidas
mediante a análise das vibrações em regime livre e sem amortecimento.
Desta forma teremos
[ ] ( ){ } [ ] ( ){ } { }m d k dt t&& + = 0 (3.10)

João M. C. Estêvão - EST - UAlg
- 70 -
Este sistema de equações diferenciais homogéneas, tem soluções do tipo
{ } { } ( )d A sen tt n( ) = ⋅ +ω θ (3.11)
em que {A} é um vector de amplitudes e ωn é a frequência angular natural do
sistema, e θ é o ângulo de fase da resposta.
Substituindo as soluções (3.11) no sistema (3.10), teremos
[ ] [ ]( ) { } { }k m An− ⋅ =ω 2 0 (3.12)
A solução do sistema de equações (3.12) constitui um problema de valores e
vectores próprios. Existindo vibração, o sistema terá amplitudes {A} diferentes
de zero, somente se o determinante da matriz dos coeficientes for zero. Desta
forma, teremos
[ ] [ ] k mn− =ω2 0 (3.13)
Esta equação é designada por equação característica e pode ser desenvolvida
na forma
ω ω ω ωnr
nr
nr
r n ra a a a21
2 22
2 41
2 0+ + + + + =− −−K (3.14)
3.2.2 Modos de vibração
Na análise de estruturas correntes sujeitas à acção de sismos, as matrizes [m]
e [k] são reais, simétricas e positivamente definidas, pelo que a equação (3.14)
tem sempre soluções ωn2 positivas e, como consequência, valores ωn reais
(os valores próprios).
A frequência natural (própria) de menor valor, designa-se por frequência
fundamental (sendo o período fundamental o de maior valor).
Os valores próprios (ωn) são ordenados por ordem crescente e constituem a
matriz espectral (uma matriz diagonal) do sistema.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 71 -
Substituindo os valores próprios na expressão (3.10), obtemos um sistema
algébrico de equações lineares homogéneas. Dadas as particularidades deste
tipo de sistemas, não é possível a obtenção dos valores das amplitudes de
cada modo, mas somente as relações entre as diversas amplitudes, ou seja, a
configuração dos modos próprios de vibração {vi}.
A totalidade dos r modos de vibração pode ser agrupada na seguinte forma
matricial
[ ] { } { } { }[ ]v v v v r= 1 2 L (3.15)
sendo a matriz [v] designada por matriz modal.
É possível escrever, para cada modo de vibração i, que
[ ] [ ]( ) { } { }k m vi i− ⋅ =ω2 0 (3.16)
As configurações dos modos de vibração {vi} têm determinadas propriedades
que são bastante úteis na análise dinâmica das estruturas, designadamente o
facto destas constituírem um conjunto ortogonal completo.
Da expressão (3.16) podemos escrever, para o modo de vibração i, que
[ ]{ } [ ]{ }k v m vi i i= ω2 (3.17)
e que
[ ]{ } { }k v Fi i= (3.18)
Desta forma, podemos considerar que, para cada modo e a cada instante, as
vibrações em regime livre podem ser consideradas como o resultado de um
conjunto de forças de inércia {Fi} aplicadas nos graus de liberdade. Como tal, o
teorema de Betti (teorema da reciprocidade dos trabalhos) pode ser aplicado,
do que resulta
{ } { } { } { }v F v FjT
i iT
j= (3.19)

João M. C. Estêvão - EST - UAlg
- 72 -
em que i e j são dois modos de vibração (com i≠j). Logo
{ } [ ]{ } { } [ ]{ }v m v v m vjT
i i iT
j jω ω2 2= (3.20)
Tendo em conta que a matriz [m] é simétrica, e atendendo a que os resultados
dos produtos matriciais são escalares, então
{ } [ ]{ } { } [ ]{ }v m v v m vjT
i iT
j= (3.21)
e como tal
( ) { } [ ]{ }ω ωj i iT
jv m v2 2 0− ⋅ = (3.22)
Logo, sempre que ωi≠ωj resulta que
{ } [ ]{ }v m viT
j = 0 (3.23)
Multiplicando a relação (3.17) por {vi}T e atendendo a (3.23), iremos obter
{ } [ ]{ }v k viT
j = 0 (3.24)
Quando i=j, teremos
{ } [ ]{ }m v m vi iT
i* = (3.25)
e
{ } [ ]{ }k m v k vi i i iT
i* *= =ω2 (3.26)
designando-se mi* por massa modal generalizada e k i
* por rigidez modal
generalizada (do modo i).
O vector dos modos de vibração é definido a menos de uma constante, pelo
que pode ser normalizado de diversas formas. A forma mais comum reside em
dividir todos os elementos do vector (de um modo i) pelo elemento de maior
valor absoluto. Desta forma, o vector, assim normalizado, terá todos os

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 73 -
elementos iguais ou inferiores à unidade. Também é comum a normalização,
tal que
{ } { }{ } [ ]{ }
{ }φ i
i
iT
i
i
i
v
v m v
v
m= =
* (3.27)
do que resulta
{ } [ ]{ }φ φiT
im = 1 (3.28)
e
{ } [ ]{ }φ φ ωiT
i ik = 2 (3.29)
As propriedades de ortogonalidade mantêm-se, quaisquer que sejam os
procedimentos de normalização, logo
{ } [ ]{ }φ φiT
jm = 0 (3.30)
e
{ } [ ]{ }φ φiT
jk = 0 (3.31)
3.3 Regime forçado amortecido
3.3.1 Coordenadas modais
A resolução do sistema de equações diferenciais de movimento (3.9) é de
difícil resolução, pelo que é usual o recurso à seguinte transformação de
coordenadas
( ){ } [ ] ( ){ }d vt t= ε * ou ( ){ } [ ] ( ){ }d t t= φ ε (3.32-33)
{ε*} e {ε} são os vectores das coordenadas modais que caracterizam as
amplitudes de cada modo de vibração. Desta maneira, a resposta do sistema
será igual à soma do produto da configuração da resposta, de cada modo, por
uma determinada amplitude modal (figura 3.2).
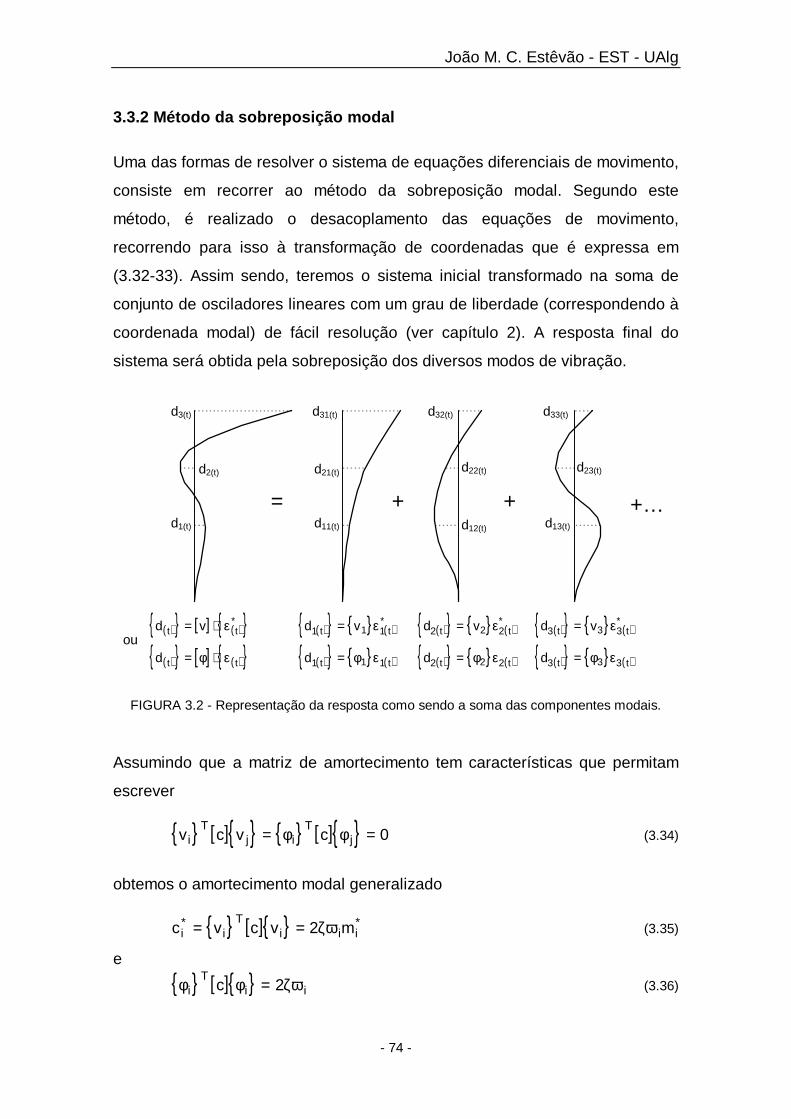
João M. C. Estêvão - EST - UAlg
- 74 -
3.3.2 Método da sobreposição modal
Uma das formas de resolver o sistema de equações diferenciais de movimento,
consiste em recorrer ao método da sobreposição modal. Segundo este
método, é realizado o desacoplamento das equações de movimento,
recorrendo para isso à transformação de coordenadas que é expressa em
(3.32-33). Assim sendo, teremos o sistema inicial transformado na soma de
conjunto de osciladores lineares com um grau de liberdade (correspondendo à
coordenada modal) de fácil resolução (ver capítulo 2). A resposta final do
sistema será obtida pela sobreposição dos diversos modos de vibração.
d3(t)
d2(t)
d1(t)
( ){ } [ ] ( ){ }d vt t= ⋅ ε *
= + + +…
( ){ } { } ( )d vt t1 1 1= ε *( ){ } { } ( )d vt t2 2 2= ε*
( ){ } { } ( )d vt t3 3 3= ε*
d11(t)
d21(t)
d31(t)
d12(t)
d22(t)
d32(t)
d13(t)
d23(t)
d33(t)
( ){ } [ ] ( ){ }d t t= ⋅φ ε ( ){ } { } ( )d t t1 1 1= φ ε ( ){ } { } ( )d t t2 2 2= φ ε ( ){ } { } ( )d t t3 3 3= φ εou
FIGURA 3.2 - Representação da resposta como sendo a soma das componentes modais.
Assumindo que a matriz de amortecimento tem características que permitam
escrever
{ } [ ]{ } { } [ ]{ }v c v ciT
j iT
j= =φ φ 0 (3.34)
obtemos o amortecimento modal generalizado
{ } [ ]{ }c v c v mi iT
i i i* *= = 2ζω (3.35)
e
{ } [ ]{ }φ φ ζωiT
i ic = 2 (3.36)

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 75 -
Escrevendo o sistema de equações (3.9) em coordenadas modais, e se
multiplicarmos por [v] T ou por [φ]T, teremos em cada instante
[ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] { }v m v v c v v k v v FT T T T&& &
* * *ε ε ε+ + = (3.37)
ou
[ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] [ ][ ]{ } [ ] { }φ φ ε φ φ ε φ φ ε φT T T Tm c k F&& &+ + = (3.38)
Atendendo às propriedades de ortogonalidade (3.23-24; 3.28-31), e às
propriedades assumidas para a matriz de amortecimento (3.34-36), teremos
( ){ } [ ] ( ){ } [ ] ( ){ } [ ][ ] { }&& &
* * **
ε ζ ω ε ω εt n t n t
Tv
mF+ + =2 2 (3.39)
ou
( ){ } [ ] ( ){ } [ ] ( ){ } [ ] { }&& &ε ζ ω ε ω ε φt n t n tT
F+ + =2 2 (3.40)
As equações de movimento (3.39-40), correspondem a um conjunto de
sistemas de um grau de liberdade (para cada modo i), em que
( ) ( ) ( ){ }
( ){ }&& &* * *
*ε ζω ε ω εi t i i t i i ti
T
it
v
mF+ + =2 2 (3.41)
ou
( ) ( ) ( ) { } ( ){ }&& &ε ζω ε ω ε φi t i i t i i t iT
tF+ + = ⋅2 2 (3.42)
Estas equações diferenciais podem ser facilmente resolvidas (ver capítulo 2).
3.4 Método de Stodola
Quando o número de graus de liberdade é superior a dois a resolução da
equação característica (3.14) torna-se progressivamente mais complicada.
O recurso a algoritmos numéricos para resolução de problemas de valores e
vectores próprios é corrente, quando o número de graus de liberdade é
elevado, e na generalidade dos programas de cálculo automático. Um dos
métodos mais usados, pela sua simplicidade, é o método de Stodola, que se
descreve em seguida.

João M. C. Estêvão - EST - UAlg
- 76 -
• Modo fundamental (1º modo)
Partindo da equação (3.17), podemos escrever para o primeiro modo
(correspondente à frequência fundamental), que
{ } [ ] [ ]{ } [ ][ ]{ } [ ]{ }v k m v f m v D v11
12
1 12
1 12
1= = =− ω ω ω (3.43)
em que [f] = [k]-1 é a matriz de flexibilidade, e [D] = [f][m] é a matriz dinâmica.
Se arbitrarmos um vector da configuração do modo fundamental {v1}<s>,
teremos
{ } [ ]{ }1
12 1
11ω
v D vs s< + > < >
= (3.44)
A amplitude do modo de vibração depende da frequência, no entanto a sua
configuração é independente desta. Logo, é possível escrever que
{ } [ ]{ }v D vs s
11
1< + > < >
= (3.45)
Normalizando este vector (dividindo, por exemplo, pelo elemento de maior
valor absoluto), teremos
{ } { }v norm vs s
1 1< > < >
= . (3.46)
Quando o algoritmo convergir, teremos
ω11
11≅
< >
< + >
v
v
js
js (3.47)
Dado que este valor não corresponde, exactamente, ao valor da frequência
fundamental, pois
v
v
v
v
js
js
js
js
1
11 1
1
11
< >
< + >
< >
< + >
< <
min. max.
ω (3.48)
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 77 -
A melhor aproximação do valor exacto pode ser obtida realizando uma média
ponderada, como
{ }( ) [ ]{ }
{ }( ) [ ]{ }ω1
1
1
1
1
1
11
≅
< + > < >
< + > < + >
v m v
v m v
T s s
T s s (3.49)
• Restantes modos de vibração
Para evitarmos a convergência para o modo fundamental, é necessário que
este seja eliminado da solução (varrimento). Se escrevermos a solução em
coordenadas modais, e multiplicarmos a expressão (3.32) por {v1}T[m],
obtemos
{ } [ ]{ } { } [ ]{ } { } [ ]{ }v m d v m v v m vT T T
1 1 1 1 1 2 2= + +ε ε* *K (3.50)
Atendendo às propriedades de ortogonalidade (3.23), teremos
{ } [ ]{ }
{ } [ ]{ }{ } [ ]{ }ε1
1
1 1 11
1**= =
v m d
v m v mv m d
T
TT
(3.51)
Como pretendemos retirar a contribuição do 1º modo, então
{ } { } [ ]{ }d v S d− =1 1 1ε* (3.52)
Sendo a matriz de varrimento
[ ] [ ] { }{ } [ ] [ ] { }{ } [ ]S Im
v v m I mT T
11
1 1 1 11
= − = −* φ φ (3.53)
As iterações seguintes, para a obtenção do 2º modo de vibração, podem ser
realizadas multiplicando a matriz de varrimento pelo vector {v2}<s>, pelo que
vamos obter
{ } [ ][ ]{ } [ ]{ }1
22 2
11 2 1 2ω
v D S v D vs s s< + > < > < >
= = (3.54)

João M. C. Estêvão - EST - UAlg
- 78 -
De forma análoga podemos obter os restantes modos de vibração, em que
[ ] [ ] { }{ } [ ] [ ] { }{ } [ ]S Sm
v v m S mi ii
i iT
i i iT
= − = −− −1 11
* φ φ (3.55)
e
{ } [ ]{ }1
12 1
11ω i
is
i is
v D v+
+< + >
+< >
= (3.56)
com
[ ] [ ][ ]D D Si i= (3.57)
Os valores da frequência angular natural de cada modo, serão determinados
com um procedimento similar ao adoptado para a obtenção da frequência do
modo fundamental.
3.5 Método de Rayleigh simplificado
A determinação do valor aproximado da frequência fundamental de uma
estrutura, pode ser realizada com recurso ao método de Rayleigh. Este método
baseia-se no princípio da conservação da energia, num oscilador linear em
regime livre, sem a consideração das forças de amortecimento. A aplicação do
método requer o conhecimento da configuração aproximada do modo
fundamental de vibração, sendo a precisão dos resultados dependente do rigor
com que a configuração é arbitrada.
Considere-se um oscilador de n graus de liberdade, cuja resposta, no modo
fundamental, possa ser aproximada por
{ } { } ( )d d tt( ) cos= ⋅ ⋅ −0 1ω θ (3.58)
{ } { } ( )&( )d d sen tt = − ⋅ ⋅ ⋅ −ω ω θ1 0 1 (3.59)
A energia potencial e cinética do sistema corresponderão a
{ } [ ]{ } { } [ ]{ } ( )[ ]E d k d d k d tP tT
tT
= = ⋅ ⋅ −12
12 0 0 1
2( ) ( ) cos ω θ (3.60)
{ } [ ]{ } { } [ ]{ } ( )[ ]E d m d d m d sen tC tT
tT= = ⋅ ⋅ ⋅ −1
212 0 0 1
21
2& &
( ) ( ) ω ω θ (3.61)

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 79 -
Das equações (3.60) e (3.61) verifica-se que quando a energia potencial é
máxima a energia cinética é nula e vice-versa. Sendo o sistema conservativo,
existe conservação de energia, logo
0 0+ = +E EC P,max ,max (3.62)
com
{ } [ ]{ }E d k dPT
,max =12 0 0 (3.63)
{ } [ ]{ }E d m dCT
,max = ⋅12 0 0 1
2ω (3.64)
Substituindo (3.63) e (3.64) em (3.62) teremos
{ } [ ]{ }{ } [ ]{ }
ω12 0 0
0 0
=d k d
d m d
T
T (3.65)
Arbitremos uma configuração do modo fundamental { }d0 correspondente à
deformada que resulta da aplicação de forças iguais aos pesos das
massas{ }G , segundo a direcção dos graus de liberdade. Dado que o sistema
é conservativo, a energia potencial é igual ao trabalho de deformação das
forças exteriores (os pesos), logo
E G dP i ii
n
,max ==∑
12 0
1 (3.66)
E m dg
G dC i ii
n
i ii
n
,max = ⋅ = ⋅ ⋅= =∑ ∑
12
12
112
02
112
02
1ω ω (3.67)
Igualando as expressões (3.66) e (3.67), teremos
ω1
01
02
1
= ⋅ =
=
∑
∑g
G d
G d
i ii
n
i ii
n (3.68)

João M. C. Estêvão - EST - UAlg
- 80 -
3.6. Problemas propostos
3.1. Determine as frequências próprias da estrutura representada na figura
seguinte e os respectivos modos de vibração. Compare os resultados obtidos
para o modo fundamental com os resultados do método de Rayleigh.
C D
EI = ∞
3.00
6.00 m
3.00 m
m = 20 ton.
EA = GA = ∞
EI = 180000 kNm2
B
A
E
EI
3.00
1
EI
m
m m
2
EI = ∞
3.2. Considere a estrutura representada em modelo na figura seguinte, com
coeficiente de amortecimento modal de 2%.
a) Estabeleça a matriz de rigidez associada aos graus de liberdade
assinalados, de forma a obter as equações de movimento.
b) Determine as frequências naturais do oscilador e respectivos modos de
vibração, a partir da equação característica.
c) Caso fosse imposto, inicialmente, um deslocamento de 5 cm (com os valores
de velocidade nulos), em “B”, qual o deslocamento no instante t = 2 s, no grau
de liberdade 2? Se após esse instante (t = 2 s) fosse aplicada uma força
F(t)=20⋅sen(6t) segundo o grau de liberdade 2, qual o deslocamento do ponto
“E” no instante t = 4 s?

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 81 -
C D
2EI
2.00
2.00 m 2.00 m
EI
m = 25 ton.
EA = GA = ∞
EI = 18000 kNm2BA
2
1
E
2EI
4.00 m
m
m m
3.3. Dado o sistema dinâmico da figura seguinte (ζ= 5%):
a) Determine as frequências naturais do oscilador e respectivos modos de
vibração, a partir da equação característica;
b) Calcule, no instante t = 0.79 segundos, os valores de d1 , d2 e o momento
flector no ponto “A”, quando o sistema estrutural é sujeito a uma força
harmónica cujo valor é F(t) = 30⋅cos(8t) kN.
2
6m
1
EA
1.20
2.40 4.00 m
EI
mB
C
A
m = 32 ton.
EA = 33750 kN
EI = EA = ∞Barra “BC”
F(t)
1.80
D GA = ∞Barra “AB”
EI = 40500 kNm2
EA = ∞
Barra “CD”
3.4. Considerando as seguintes matrizes de massa e flexibilidade:
[ ]m =
20 0 0
0 50 0
0 0 10
(ton.) [ ]f =
× −2 5 4 5
4 5 8
5 8 5
10 4.
(m/kN)
a) Determine a configuração e os períodos dos modos de vibração pelo
método de Stodola (garanta a estabilidade de cinco casas decimais).
b) Determine a frequência fundamental pelo método de Rayleigh simplificado.
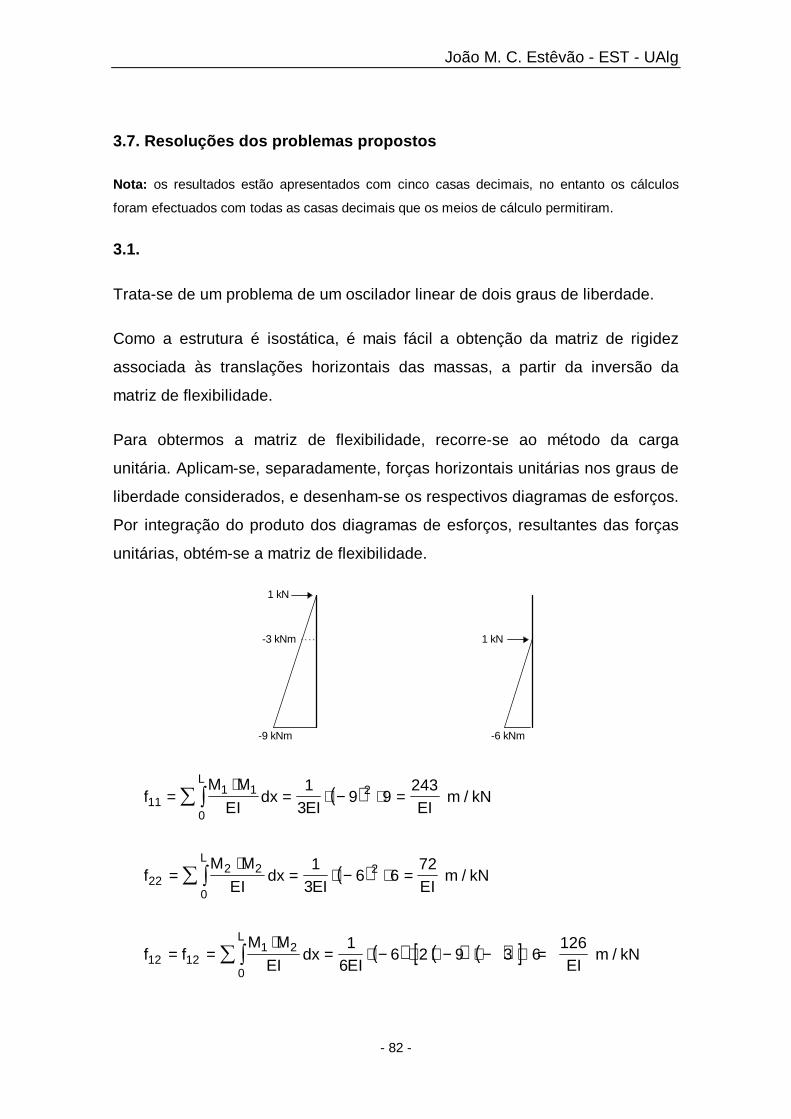
João M. C. Estêvão - EST - UAlg
- 82 -
3.7. Resoluções dos problemas propostos
Nota: os resultados estão apresentados com cinco casas decimais, no entanto os cálculos
foram efectuados com todas as casas decimais que os meios de cálculo permitiram.
3.1.
Trata-se de um problema de um oscilador linear de dois graus de liberdade.
Como a estrutura é isostática, é mais fácil a obtenção da matriz de rigidez
associada às translações horizontais das massas, a partir da inversão da
matriz de flexibilidade.
Para obtermos a matriz de flexibilidade, recorre-se ao método da carga
unitária. Aplicam-se, separadamente, forças horizontais unitárias nos graus de
liberdade considerados, e desenham-se os respectivos diagramas de esforços.
Por integração do produto dos diagramas de esforços, resultantes das forças
unitárias, obtém-se a matriz de flexibilidade.
1 kN
1 kN
-6 kNm-9 kNm
-3 kNm
( )fM M
EIdx
EI EI
L
111 1 2
0
13
9 9243
=⋅
= ⋅ − ⋅ =∫∑ m / kN
( )fM M
EIdx
EI EI
L
222 2 2
0
13
6 672
=⋅
= ⋅ − ⋅ =∫∑ m / kN
( ) ( ) ( )[ ]f fM M
EIdx
EI EI
L
12 121 2
0
16
6 2 9 3 6126
= =⋅
= ⋅ − ⋅ ⋅ − + − ⋅ =∫∑ m / kN

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 83 -
Matriz de flexibilidade
[ ]f =
⋅
×
273 126
126 721
18 105. (m / kN)
A matriz de rigidez será a matriz inversa da matriz de flexibilidade [ ] [ ]k f= −1 .
A inversão da matriz pode ser feita com o recurso às operações elementares
sobre a matriz de flexibilidade ampliada da matriz de identidade
[ ] [ ]f I I k → .
135 10 7 10
7 10 4 10
1 0
0 1
1 0
0 1
8000 14000
14000 27000
3 4
4 4. × ×
× ×
→
−−
− −
− −
Matriz de rigidez
[ ]k =−
−
8000 14000
14000 27000 (kN / m)
Matriz de massas
[ ]mm
=
=
m 20 (ton.)
0
0 2
0
0 40
A equação característica obtém-se anulando o determinante
8000 14000
14000 27000
20 0
0 4002−
−
−
=ωn
8000 20 14000
14000 27000 400
2
2− ⋅ −
− − ⋅=
ωω
n
n
logo, a equação característica será
( ) ( ) ( )8000 20 27000 40 14000 02 2 2− ⋅ ⋅ − ⋅ − − =ω ωn n
800 8 6 10 2 10 04 5 2 7⋅ − × ⋅ + × =ω ωn n.

João M. C. Estêvão - EST - UAlg
- 84 -
Fazendo a seguinte mudança de variável
λ ω= n2
teremos
800 8 6 10 2 10 02 5 7⋅ − × ⋅ + × =λ λ.
com soluções iguais a
( )
λ1
5 5 2 78 6 10 8 6 10 4 800 2 10
2 80023 78194=
× − × − × × ×
×=
. ..
( )
λ 2
5 5 2 78 6 10 8 6 10 4 800 2 10
2 800105121807=
× + × − × × ×
×=
. ..
logo as soluções da equação característica são
ω λ1 1 4 87667= = . rad/s → f11
20 78= =
ωπ
. Hz
ω λ2 2 32 42249= = . rad/s → f22
2516= =
ωπ
. Hz
Podemos obter a configuração do primeiro modo (modo fundamental), através
da expressão seguinte:
8000 20 14000
14000 27000 4001
2
12
11
21
− ⋅ −− − ⋅
⋅
=ω
ω
v
v
Arbitrando v11=1, obtemos
( )v21128000 20
140000 53745= −
− ⋅−
=ω
.
Com procedimento análogo, obtemos a configuração do segundo modo.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 85 -
Sendo
8000 20 14000
14000 27000 4002
2
22
12
22
− ⋅ −− − ⋅
⋅
=ω
ω
v
v
Arbitrando v12=1, obtemos
( )v22128000 20
140000 93031= −
− ⋅−
= −ω
.
A matriz modal será
[ ]vv v
v v=
=
−
11 12
21 22
1 1
0 53745 0 93031. .
Modo 1 Modo 2
1
0.53745 −0.93031
1
f1 = 0.78 Hz f2 = 5.16 Hz

João M. C. Estêvão - EST - UAlg
- 86 -
As configurações dos modos de vibração também podem ser apresentadas
com normalização em relação à massa. Deste modo, teremos
{ } { }{ } [ ]{ }
{ } { }φ1
1
1 1
1
12
1
2
1
3155429
017802
0 09568= = = =
=∑
v
v m v
v
m v
v
T
i ii
.
.
.
e
{ } { }{ } [ ]{ }
{ } { }φ2
2
2 2
2
22
1
2
2
54 61918
0 13531
012588= = = =
+−
=∑
v
v m v
v
m v
v
T
i ii
.
.
.
sendo a nova matriz modal igual a
[ ]φφ φφ φ
=
=
−
11 12
21 22
017802 013531
0 09568 012588
. .
. .
• Método de Rayleigh simplificado
Vector dos pesos
{ }Gm
mg=
⋅ =
⋅ =
2
20
409 8
196
392. (kN)
{ } [ ] { }d f G0 5
273 126
126 721
18 10= ⋅ =
⋅
×⋅
.
196
392=
0.57167
0.29400 (m)
ω1
01
2
02
1
2 4 76909= ⋅ ==
=
∑
∑g
G d
G d
i ii
i ii
. rad / s
Normalizando { }d0 em relação ao maior valor, termos
{ }v1 =
1
0.51429
Resultados próximos dos obtidos anteriormente para o modo fundamental.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 87 -
3.2.
a) Podemos obter a matriz de flexibilidade por integração dos diagramas
resultantes da aplicação de forças unitárias segundo os graus de liberdade
dinâmicos.
1 kN
1 kN
2 kNm
MM1 (kNm)
2
+
1 kN
3 kN
4 kNm
2 kN
MM2 (kNm)
4
+
−−−−
−4

João M. C. Estêvão - EST - UAlg
- 88 -
fM M
EIdx
EI EI
L
111 1 2
0
13
2 28
3=
⋅= ⋅ ⋅ =∫∑ m / kN
( ) ( )fM M
EIdx
EI EI EI
L
222 2 2 2 2
0
13
4 21
3 24 2 4 4
803
=⋅
= ⋅ − ⋅ +⋅
⋅ ⋅ + ⋅ =∫∑ m / kN
( )f fM M
EIdx
EI EI
L
12 121 2
0
13
2 4 2163
= =⋅
= ⋅ ⋅ − ⋅ = −∫∑ m / kN
Matriz de flexibilidade
[ ]f =−
−
⋅
×8 16
16 801
3 18000 (m / kN)
A matriz de rigidez será a inversa da matriz de flexibilidade
[ ] [ ]k f= =
−1 11250 2250
2250 1125 (kN / m)
b) Matriz de massas
[ ]mm
=
=
2m 50 (ton.)
0
0
0
0 25
Anulando o determinante
11250 2250
2250 1125
50 0
0 2502
−
=ωn
11250 50 2250
2250 1125 250
2
2− ⋅
− ⋅=
ωω
n
n
a equação característica será
1250 337500 7593750 04 2⋅ − ⋅ + =ω ωn n

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 89 -
Fazendo λ ω= n2 teremos
ω λ1 1 4 97724= = . rad/s → f11
20 79= =
ωπ
. Hz
ω λ2 2 15 65973= = . rad/s → f22
22 49= =
ωπ
. Hz
Configuração do primeiro modo (modo fundamental):
11250 50 2250
2250 1125 2501
2
12
11
21
− ⋅− ⋅
⋅
=ω
ω
v
v
Arbitrando v11=1, obtemos
v211211250 50
22504 44949= −
− ⋅= −
ω.
Configuração do segundo modo:
11250 50 2250
2250 1125 2502
2
22
12
22
− ⋅− ⋅
⋅
=ω
ω
v
v
Arbitrando v12=1, obtemos
v222211250 50
22500 44949= −
− ⋅=
ω.
A matriz modal (com os modos normalizados em relação ao elemento, de cada
modo, de maior valor absoluto) será
[ ]vv v
v v=
=
−
11 12
21 22
0 22474 1
1 0 44949
.
.

João M. C. Estêvão - EST - UAlg
- 90 -
Modo 1
Modo 2
1
0.44949
−0.22474
f1 = 0.79 Hz
f2 = 2.49 Hz
1
c) Normalizando as configurações dos modos em relação à massa, teremos
{ } { }{ } [ ]{ }
{ } { }φ1
1
1 1
1
12
1
2
1
27 52551
0 04284
019060= = = =
−+
=∑
v
v m v
v
m v
v
T
i ii
.
.
.
e
{ } { }{ } [ ]{ }
{ } { }φ2
2
2 2
2
22
1
2
2
55 05103
0 13478
0 06058= = = =
=∑
v
v m v
v
m v
v
T
i ii
.
.
.
sendo
[ ]φφ φφ φ
=
=
−
11 12
21 22
0 04284 013478
019060 0 06058
. .
. .

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 91 -
Recorrendo ao método da sobreposição modal, teremos
( ){ } [ ] ( ){ }d t t= φ ε
d
dt
t
t
t
t
t
1
2
11 12
21 22
1
2
1
2
0 04284 013478
019060 0 06058
( )
( )
( )
( )
( )
( )
. .
. .
=
⋅
=
−
⋅
φ φφ φ
ε
ε
ε
ε
No intervalo de tempo compreendido entre o instante inicial (t=0) e o instante
em que é aplicada a força dinâmica (t = 2 s), a resposta do oscilador dá-se em
regime livre, sujeito às condições iniciais d1,0 = 0.05 m e d2,0 = −0.1 m.
−0.1
0.05
Escrevendo as condições iniciais em coordenadas modais, teremos
ε
εφ φφ φ
10
2 0
11 12
21 22
110
2 0
,
,
,
,
=
⋅
− d
d ;
&
&
&
&
,
,
,
,
ε
εφ φφ φ
10
2 0
11 12
21 22
110
2 0
=
⋅
− d
d
ε
ε10
2 0
10 04284 013478
019060 0 06058
0 05
01
0 58360
018549,
,
. .
. .
.
.
.
.
=
−
⋅
−
=−+
−
(m)
&
&
. .
. .,
,
ε
ε10
2 0
10 04284 013478
019060 0 06058
0
0
0
0
=
−
⋅
=
−
(m/s)
Escrevendo as equações de movimento em coordenadas modais, ficamos com
as equações de dois osciladores lineares independentes de um grau de
liberdade.

João M. C. Estêvão - EST - UAlg
- 92 -
( ) ( ) ( )&& &ε ζω ε ω ε1 1 1 12
12 0 t t t+ + =
( ) ( ) ( )&& &ε ζω ε ω ε2 2 2 22
22 0 t t t+ + =
pelo que
( ) ( )[ ]ε ω ωζ ω1 1 1 1 1
1
( ) costt
a ae A t B sen t= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( ) ( )[ ]ε ω ωζ ω2 2 2 2 2
2
( ) costt
a ae A t B sen t= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
com
ω ω ζa1 12 21 4 97724 1 0 02 4 97625= ⋅ − = ⋅ − =. . . rad / s
ω ω ζa2 22 21 15 65973 1 0 02 15 65659= ⋅ − = ⋅ − =. . . rad / s
e
A1 10 0 58360= = −ε , . ; Ba
110 1 10
1
2116744 10=+
= − × −&
., ,ε ζω ε
ω
A 2 2 0 0 18549= =ε , . ; Ba
22 0 2 2 0
2
33 71056 10=+
= × −&
., ,ε ζω ε
ω
No instante t = 2 s teremos ( ){ } [ ] ( ){ }d t t= ==2 2φ ε
d
d1 2
2 2
0 04284 013478
0 19060 0 06058
0 41800
0 09842
0 00464
0 08564
( )
( )
. .
. .
.
.
.
.
=
−
⋅
=−+
(m)
O deslocamento do ponto “E” (grau de liberdade 2) é de 8.6 cm, para cima.
( ) ( )[ ]& cos( )ε ζω ω ωζ ω1 1 1 1 1 1
1
tt
a ae A t B sen t= − ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( ) ( )[ ]+ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅− ⋅e A sen t B tta a a a
ζ ω ω ω ω ω11 1 1 1 1 1cos
( ) ( )[ ]& cos( )ε ζω ω ωζ ω2 2 2 2 2 2
2
tt
a ae A t B sen t= − ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( ) ( )[ ]+ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅− ⋅e A sen t B tta a a a
ζ ω ω ω ω ω22 2 2 2 2 2cos

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 93 -
Entre os instantes t = 2 s e t = 4 s a resposta dá-se em regime forçado, sendo
( ) ( ) ( ) ( )&& &ε ζω ε ω ε ε1 1 1 12
1 12 6 t t t F sen t+ + = ⋅
( ) ( ) ( ) ( )&& &ε ζω ε ω ε ε2 2 2 22
2 22 6 t t t F sen t+ + = ⋅
com
{ } { } ( ) ( )F F sen t sen tt( ) = ⋅ =
⋅0 60
206
{ } { }F FT
ε φ1 1 0 3 81208= ⋅ = .
{ } { }F FT
ε φ2 2 0 121162= ⋅ = .
A resposta (em coordenadas modais) é a soma da parcela de regime
transitório e da parcela de regime permanente.
ε ε ε1 1 1 ( ) ( ) ( )t T t P t= + ; ε ε ε2 2 2 ( ) ( ) ( )t T t P t= +
( ) ( )[ ]ε ω ωζ ωT t
ta ae A t B sen t1 1 1 1 1
1
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( )εω
θεP t H
Fsen t1 11
1
12 116
( ) , ,= ⋅ −
( ) ( )[ ]ε ω ωζ ωT t
ta ae A t B sen t2 2 2 2 2
2
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( )εω
θεP t H
Fsen t2 12
2
22 126
( ) , ,= ⋅ −
ω16
4 97724120549= =
.. ; ω 2
615 65973
0 38315= =.
.
( ) ( )H11
12 2
12
1
1 2 0 05219416,
..=
− + ⋅ ⋅=
ω ω
como ω1 1> , logo será necessário reduzir ao 2º quadrante:
θω
ωπ11
1
12
2 0 05
13 03559 173 93,
.. . º=
⋅ ⋅
−
+ = =arctg rad

João M. C. Estêvão - EST - UAlg
- 94 -
( ) ( )H12
22 2
22
1
1 2 0 05117187,
..=
− + ⋅ ⋅=
ω ω
θω
ω122
22
2 0 05
10 01796 103,
.. . º=
⋅ ⋅
−
= =arctg rad
Atendendo às condições iniciais do movimento (nova origem do tempo)
ε10 0 41800, .= ; ε 2 0 0 09842, .=
e
& & ., ( )ε ε10 1 2 119891= = −=t s ; & & ., ( )ε ε2 0 2 2 015927= ==t s
logo
( )A HF
sen1 10 111
12 116 2 0 26800= − ⋅ ⋅ ⋅ − =ε
ωθε
, , , .
( )B
A HF
a1
10 1 1 111
12 11
1
6 6 2
0 01035=+ ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ −
=
& cos
., , ,ε ζ ω
ωθ
ω
ε
( )A HF
sen2 2 0 122
22 126 2 012915= − ⋅ ⋅ ⋅ − =ε
ωθε
, , , .
( )B
A HF
a2
2 0 2 2 122
22 12
2
6 6 2
0 01035=+ ⋅ ⋅ − ⋅ ⋅ ⋅ ⋅ −
=
& cos
., , ,ε ζ ω
ωθ
ω
ε
No instante t = 4 s teremos ( ){ } [ ] ( ){ }d t t= − = −=4 2 4 2φ ε
d
d1 4 2
2 4 2
0 04284 013478
019060 0 06058
0 92909
017084
0 00453
0 01166
( )
( )
. .
. .
.
.
.
.−
−
=
−
⋅
−+
=
(m)
O deslocamento do ponto “E” (grau de liberdade 2) é de 1.2 cm, para cima.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 95 -
0 0.5 1 1.5 2 2.5 3 3.5
0.05
0.05
,
0 0.5 1 1.5 2 2.5 3 3.5
0.1
0.1
3.3.
a) Para simplificarmos a resolução do problema vamos recorrer a uma
mudança de sistema de coordenadas { } { }q d→
α
d1
q3
q5
d2
←
q4
q1
q2
α
( )cos.
. .
.. α =
+= =
+= =
2 4
18 2 4
2 43
4
3 4
45
0 82 2 2 2
( )sen α =+
= =+
= =18
18 2 4
183
3
3 4
35
0 62 2 2 2
.
. .
..
d1(t)
t
d2(t)
t
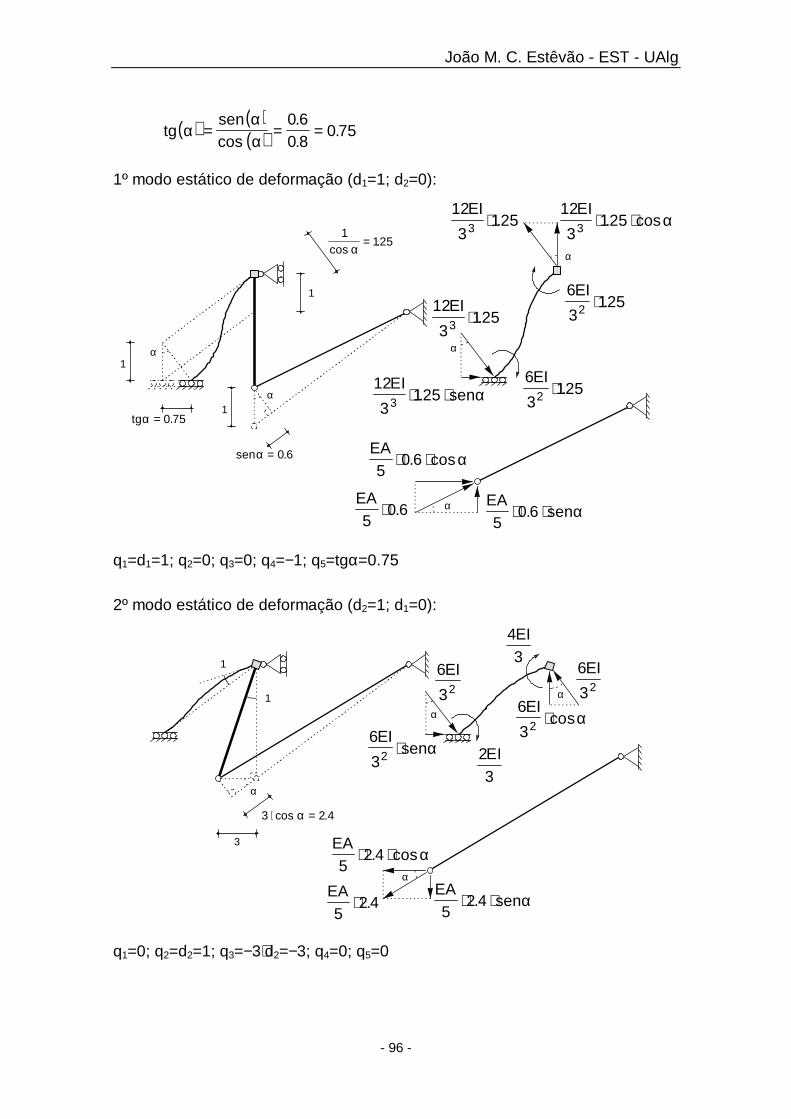
João M. C. Estêvão - EST - UAlg
- 96 -
( ) ( )( )tg
sen
ααα
= = =cos
.
..
0 60 8
0 75
1º modo estático de deformação (d1=1; d2=0):
sen α = 0 6.
12
31253
EI⋅ ⋅. cosα
1125
cos.
α=
tg α = 0 75.
EA5
0 6⋅ ⋅. cosα
EA5
0 6⋅ .
12
31253
EIsen⋅ ⋅. α
12
31253
EI⋅ .
12
31253
EI⋅ .
6
31252
EI⋅ .
1α α
α
α
α1
1 6
31252
EI⋅ .
EAsen
50 6⋅ ⋅. α
q1=d1=1; q2=0; q3=0; q4=−1; q5=tgα=0.75
2º modo estático de deformação (d2=1; d1=0):
6
32
EIsen⋅ α
6
32
EI
6
32
EI⋅cosα
3 2 4⋅ =cos . α
EA5
2 4⋅ ⋅. cosα
EA5
2 4⋅ .
6
32
EI
23EI
1
α
α
α
α
3
1
43EI
EAsen
52 4⋅ ⋅. α
q1=0; q2=d2=1; q3=−3⋅d2=−3; q4=0; q5=0
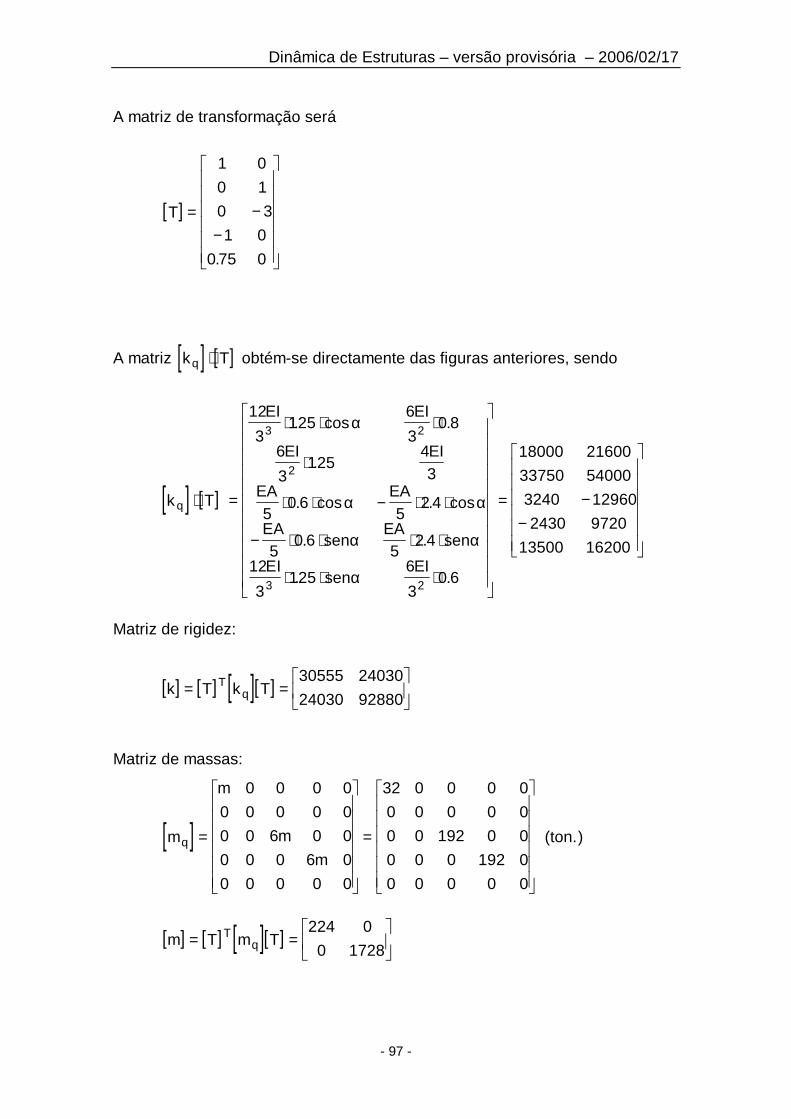
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 97 -
A matriz de transformação será
[ ]T = −−
1 0
0 1
0 3
1 0
0 75 0.
A matriz [ ] [ ]k Tq ⋅ obtém-se directamente das figuras anteriores, sendo
[ ] [ ]k Tq ⋅ =
⋅ ⋅ ⋅
⋅
⋅ ⋅ − ⋅ ⋅
− ⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅
= −−
12
3125
6
30 8
6
3125
43
50 6
52 4
50 6
52 4
12
3125
6
30 6
18000 21600
33750 54000
3240 12960
2430 9720
13500 16200
3 2
2
3 2
EI EI
EI EI
EA EA
EAsen
EAsen
EIsen
EI
. cos .
.
. cos . cos
. .
. .
α
α α
α α
α
Matriz de rigidez:
[ ] [ ] [ ][ ]k T k TTq= =
30555 24030
24030 92880
Matriz de massas:
[ ]m
m
m
mq =
=
0 0 0 0
0 0 0 0 0
0 0 6 0 0
0 0 0 6 0
0 0 0 0 0
32 0 0 0 0
0 0 0 0 0
0 0 192 0 0
0 0 0 192 0
0 0 0 0 0
(ton.)
[ ] [ ] [ ][ ]m T m TTq= =
224 0
0 1728

João M. C. Estêvão - EST - UAlg
- 98 -
Vector de forças:
{ } ( )F tq =
⋅ ⋅ ⋅
0
0
0
0
1
30 8cos (kN)
{ } [ ] { } ( ) ( )F T F t ttT
q( ).
cos.
cos= =
⋅ ⋅ ⋅ =
⋅ ⋅0 75
030 8
22 5
08 (kN)
Anulando o determinante
30555 24030
24030 92880
224 0
0 172802
−
=ωn
chegaremos à seguinte equação característica
387072 73604160 2260507500 04 2⋅ − ⋅ + =ω ωn n
Fazendo λ ω= n2 teremos
ω λ1 1 6 20573= = . rad/s → f11
20 99= =
ωπ
. Hz
ω λ2 2 12 31443= = . rad/s → f22
2196= =
ωπ
. Hz
Do sistema
{ }30555 24030
24030 92880
224 0
0 1728
0
02
−
=
ω i iv
obtém-se a seguinte matriz modal
[ ]vv v
v v=
=
−
11 12
21 22
1 1
0 91255 014205. .
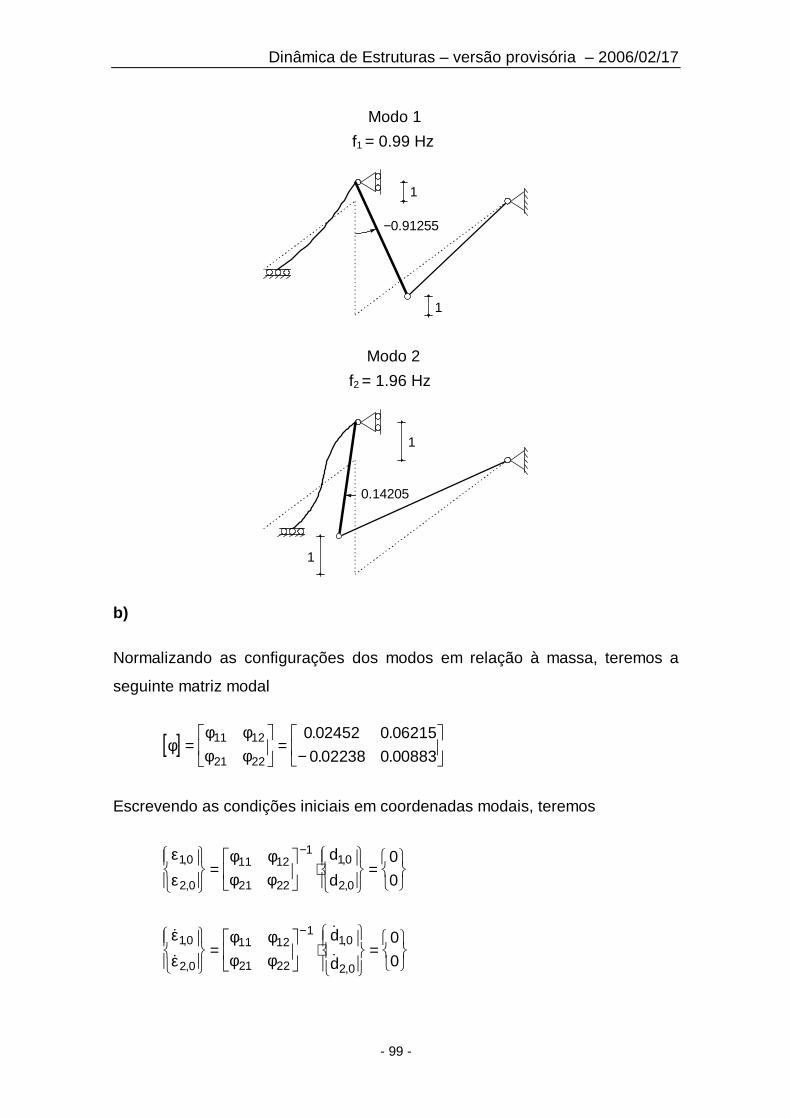
Dinâmica de Estruturas – versão provisória – 2006/02/17
- 99 -
Modo 1
Modo 2
1
0.14205
−0.91255
f1 = 0.99 Hz
f2 = 1.96 Hz
1
1
1
b)
Normalizando as configurações dos modos em relação à massa, teremos a
seguinte matriz modal
[ ]φφ φφ φ
=
=
−
11 12
21 22
0 02452 0 06215
0 02238 0 00883
. .
. .
Escrevendo as condições iniciais em coordenadas modais, teremos
εε
φ φφ φ
10
2 0
11 12
21 22
110
2 0
0
0,
,
,
,
=
⋅
=
− d
d
&
&
&
&
,
,
,
,
εε
φ φφ φ
10
2 0
11 12
21 22
110
2 0
0
0
=
⋅
=
− d
d

João M. C. Estêvão - EST - UAlg
- 100 -
Equações de movimento em coordenadas modais
( ) ( ) ( ) ( )&& &ε ζω ε ω ε ε1 1 1 12
1 12 8 t t t F sen t+ + = ⋅
( ) ( ) ( ) ( )&& &ε ζω ε ω ε ε2 2 2 22
2 22 8 t t t F sen t+ + = ⋅
com
{ } { }F FT
ε φ1 1 0 0 55175= ⋅ = .
{ } { }F FT
ε φ2 2 0 139844= ⋅ = .
{ }F022 5
0=
.
A resposta (em coordenadas modais) é a soma da parcela de regime
transitório e da parcela de regime permanente.
ε ε ε1 1 1 ( ) ( ) ( )t T t P t= + ; ε ε ε2 2 2 ( ) ( ) ( )t T t P t= +
( ) ( )[ ]ε ω ωζ ωT t
ta ae A t B sen t1 1 1 1 1
1
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( )εω
θεP t H
Ft1 11
1
12 118
( ) , ,cos= ⋅ −
( ) ( )[ ]ε ω ωζ ωT t
ta ae A t B sen t2 2 2 2 2
2
( ) cos= ⋅ ⋅ ⋅ + ⋅ ⋅− ⋅
( )εω
θεP t H
Ft2 12
2
22 128
( ) , ,cos= ⋅ −
ωa1 619797= . rad / s ; ωa2 12 29903= . rad / s
ω1 128913= . ; ω2 0 64964= .
H11 148303, .= ; H12 171939, .=
θ11 2 94923, .= rad ; θ12 011193, .= rad
( )A HF
1 10 111
12 11
22 08553 10= − ⋅ ⋅ − = × −εω
θε, , ,cos .

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 101 -
( )B
A HF
sen
a1
10 1 1 111
12 11
1
3
8
419903 10=+ ⋅ ⋅ + ⋅ ⋅ ⋅ −
= − × −
&
., , ,ε ζ ω
ωθ
ω
ε
( )A HF
2 2 0 122
22 12
2157566 10= − ⋅ ⋅ − = − × −εω
θε, , ,cos .
( )B
A HF
sen
a2
2 0 2 2 122
22 12
2
3
8
194083 10=+ ⋅ ⋅ + ⋅ ⋅ ⋅ −
= − × −
&
., , ,ε ζ ω
ωθ
ω
ε
No instante t = 0.79 s teremos
[ ]d
d1 0 79
2 0 79
1 0 79
2 0 79
( . )
( . )
( . )
( . )
= ⋅
φ
ε
ε
[ ]d
d1 0 79
2 0 79
2 30 62170 2 06917
0 96218 15811110
122578
0 5484510
( . )
( . )
. .
. .
.
.
= ⋅
−+
⋅ =
⋅− −φ
MEI
dEI
dA kNm( . ) ( . ) ( . ). .0 79 2 1 0 79 2 0 79
6
3125
23
5618= − ⋅ ⋅ − ⋅ = −
3.4.
a)
Matriz dinâmica
[ ] [ ] [ ]D f m= ⋅ =
⋅ −5 20 5
8 25 8
10 40 5
10 3
Se arbitramos a seguinte configuração
{ }v10
1
1
1
< >=

João M. C. Estêvão - EST - UAlg
- 102 -
e aplicarmos o método de Stodola, com { } [ ]{ }v D vs s
11
1< + > < >
= , teremos
{ }
{ }
v
v
s
s
1
11
< >
< + >
1
1
1
0 03
0 041
0 055
↓
.
.
.
0 54545
0 74545
1
0 02264
0 031
0 04027
.
.
.
.
.
↓
0 56208
0 76975
1
0 02321
0 03174
0 04141
.
.
.
.
.
↓
0 56037
0 76648
1
0 02313
0 03164
0 04126
.
.
.
.
.
↓
0 56059
0 76691
1
0 02314
0 03166
0 04128
.
.
.
.
.
↓
{ }
{ }
v
v
s
s
1
11
< >
< + >
0 56056
0 76685
1
0 02314
0 03166
0 04128
.
.
.
.
.
↓
0 56056
0 76686
1
0 02314
0 03166
0 04128
.
.
.
.
.
↓
0 56056
0 76686
1
0 02314
0 03166
0 04128
.
.
.
.
.
↓
O procedimento foi terminado quando estabilizaram cinco dígitos.
• Cálculo da frequência fundamental
A frequência fundamental pode ser determinada a partir de quaisquer pares de
valores v vjs
js
1 11< > < + > , .
ω11
11
0 560560 02314
0 766860 03166
10 04128
≅ ≅ ≅ ≅< >
< + >
v
v
js
js
.
... .
ω1 4 92187= . rad / s e f11
20 78= =
ωπ
. Hz
ou, com melhor aproximação, através de
{ }( ) [ ]{ }
{ }( ) [ ]{ }ω1
1
1
1
1
1
11
4 92187≅ =
< + > < >
< + > < + >
v m v
v m v
T s s
T s s. rad / s
o que conduz, neste caso particular e dado o número de dígitos estabilizados,
ao valor (até à quinta casa decimal) obtido pelo processo mais simplificado.

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 103 -
{ } { }{ } [ ]{ }
{ }φ1
1
1 1
1
12
1
3
0 08293
011345
014794
= = =
=∑
v
v m v
v
m vT
i ii
.
.
.
• Determinação da configuração do segundo modo de vibração
A matriz de varrimento será
[ ] [ ] { } { } [ ]S I mT
1 1 1
0 86245 0 47044 012269
018818 0 35643 016785
0 24539 0 83923 0 78113
= − ⋅ ⋅ =− −
− −− −
φ φ. . .
. . .
. . .
A nova matriz dinâmica será
[ ] [ ] [ ]D D S1 14
6 78219 5 80209 0 64755
2 32084 15 66663 10 71314
129511 53 56567 40 35139
10= ⋅ =− −
−− −
⋅ −. . .
. . .
. . .
Arbitrando a configuração seguinte
{ }v20
1
1
1
< >= −
, com { } [ ]{ }v D vs s
21
1 2< + > < >
=
{ }
{ }
v
v
s
s
2
21
< >
< + >
1
1
1
132318
2 87006
9 52122
10 3
−
↓
−
−
⋅ −
.
.
.
013897
0 30144
1
0 33391
157582
5 66781
10 3
.
.
.
.
.
−
↓
−−−
⋅ −
0 05891
0 27803
1
0 26603
152056
5 53205
10 3
.
.
.
.
.
−
↓
−
−
⋅ −
{ }
{ }
v
v
s
s
2
21
< >
< + >
0 04809
0 27486
1
0 25685
151309
5 51370
10 3
.
.
.
.
.
−
↓
−
−
⋅ −
0 04658
0 27442
1
0 25557
151206
5 51115
10 3
.
.
.
.
.
−
↓
−
−
⋅ −
0 04637
0 27436
1
0 25540
151191
5 51079
10 3
.
.
.
.
.
−
↓
−
−
⋅ −

João M. C. Estêvão - EST - UAlg
- 104 -
{ }
{ }
v
v
s
s
2
21
< >
< + >
0 04634
0 27435
1
0 25537
151189
5 51074
10 3
.
.
.
.
.
−
↓
−
−
⋅ −
0 04634
0 27435
1
0 25537
151189
5 51073
10 3
.
.
.
.
.
−
↓
−
−
⋅ −
O procedimento foi terminado quando estabilizaram cinco dígitos.
{ } { }{ } [ ]{ }
{ }φ2
2
2 2
2
22
1
3
0 01247
0 07384
0 26913
= = = −
=∑
v
v m v
v
m vT
i ii
.
.
.
• Cálculo da frequência do segundo modo de vibração
ω2 3
1
5 51073 1013 47086≅
×=−.
. rad / s e f22
2214= =
ωπ
. Hz
• Determinação da configuração do terceiro modo de vibração
A matriz de varrimento será
[ ] [ ] { } { } [ ]S S mT
2 1 2 2
0 85934 0 42440 015626
016976 0 08384 0 03087
0 31251 015434 0 05683
= − ⋅ ⋅ =− −
−−
φ φ. . .
. . .
. . .
A nova matriz dinâmica será
[ ] [ ] [ ]D D S2 24
6 61076 3 26484 120207
130594 0 64497 0 23745
2 40413 118735 0 43714
10= ⋅ =−
− −− −
⋅ −. . .
. . .
. . .
Arbitrando a configuração seguinte
{ }v30
1
1
1
< >=
−
, com { } [ ]{ }v D vs s
31
2 3< + > < >
=

Dinâmica de Estruturas – versão provisória – 2006/02/17
- 105 -
teremos
{ }
{ }
v
v
s
s
3
31
< >
< + >
−
↓
−−
⋅ −
1
1
1
110777
218836
4 02862
10 4
.
.
.
1
019755
0 36367
7 69288
151971
279767
10 4
−−
↓
−
⋅ −
.
.
.
.
.
1
019755
0 36367
7 69288
151971
279766
10 4
−−
↓
−
⋅ −
.
.
.
.
.
O procedimento foi terminado quando se estabilizaram cinco dígitos.
{ } { }{ } [ ]{ }
{ }φ3
3
3 3
3
32
1
3
0 20728
0 04095
0 07538
= = = −−
=∑
v
v m v
v
m vT
i ii
.
.
.
• Cálculo da frequência do terceiro modo de vibração
ω3 4
1
279766 1036 05384≅
×=−.
. rad / s e f33
2574= =
ωπ
. Hz
b) Método de Rayleigh simplificado
{ }G g=
⋅ =
20
50
10
196
490
98
(kN)
{ } [ ] { }d f G05
2 5 4 5
4 5 8
5 8 5
10= ⋅ =
⋅ × ⋅
. 196
490
98
=
0.29400
0.40180
0.53900
(m)
{ }v1
0 54545
0 74545
1
=
.
. e ω1
01
2
02
1
2 4 91807= ⋅ ==
=
∑
∑g
G d
G d
i ii
i ii
. rad / s
- 106 -
BIBLIOGRAFIA
BEER, F. P. ; JOHNSTON Jr, E. R. (1998) - Mecânica Vectorial para Engenheiros. Dinâmica.
6ª edição. Portugal: McGraw-Hill de Portugal, Lda.
BUCHHOLDT, H. (1997) - Structural dynamics for engineers. London: Thomas Telford
Publications.
CHATELIN, F. (1993) - Eigenvalues of matrices. England: John Wiley & Sons, Ltd.
CLOUGH, R. W. ; PENZIEN, J. (1993) - Dynamics of structures. 2th ed. Singapore: McGraw-
Hill International Editions.
De SILVA, C. W. (2000) - Vibration: fundamentals and practice. Florida: CRC Press LLC.
KELLY, S. G. (1993) - Fundamentals of mechanical vibrations. Singapore: McGraw-Hill
International Editions.
MEIROVITCH, L. (1986) - Elements of vibration analysis. 2th ed. Singapore: McGraw-Hill
International Editions.
PLUM, D. ; DOWNIE, M. (1997) - A foundation course in statics and dynamics. England:
Addison Wesley Longman.
SETO, W. W. (19??) - Vibrações mecânicas. Rio de Janeiro: McGraw-Hill do Brasil, Ltda.
SHABANA, A.A. (1998) - Dynamics of multibody systems. 2th ed. Cambridge: Cambridge
University Press.
RAO, S. S. (1995) - Mechanical vibrations. 3th ed. USA: Addison-Wesley Publishing Company.
RAVARA, A. (1969) - Dinâmica de estruturas. Curso 111. Lisboa: Laboratório Nacional de
Engenharia Civil.
TSE, F. S. ; MORSE, I. E. ; HINKLE, R. T. (1978) - Mechanical vibrations. Theory and
applications. 2th ed. New Jersey: Prentice-Hall, Inc.