desenvolvimento de um dispositivo de diagnóstico para as ... · incapacidade de avaliar todos os...
TRANSCRIPT
Desenvolvimento de um dispositivo de diagnóstico para as
lesões do tornozelo
Miguel Carvalho Fernandes Barreira
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Orientadores:�
Prof. Luís Alberto Gonçalves de Sousa
Prof. Paulo Rui Alves Fernandes
Júri
Presidente: Prof. João Orlando Marques Gameiro Folgado
Orientador: Prof. Paulo Rui Alves Fernandes
Vogal: Dr. Francisco Guerra Pinto
Novembro 2016

ii
iii
Agradecimentos
Ao Prof. Luís Sousa, Prof. Paulo Fernandes e ao Dr. Francisco Guerra Pinto, por toda a ajuda e
orientação no desenvolvimento desta dissertação.
À minha família pelo apoio, compreensão e ajuda ao longo da minha vida e especialmente nos anos
como estudante universitário.
Aos colegas de curso pela constante motivação e superação que me proporcionaram.

iv
Resumo
As lesões no tornozelo são uma das patologias mais recorrentes na especialidade de Ortopedia,
nomeadamente a entorse. Esta patologia pode levar à rotura total ou parcial dos ligamentos do
complexo ligamentar lateral da articulação tíbio-peróneo-astragalina. A subjectividade e variabilidade
associada ao diagnóstico desta lesão pode muitas vezes levar a um tratamento pouco eficaz do
paciente. Com o objectivo principal de auxiliar a tarefa do Médico de proceder a um diagnostico mais
correcto, torna-se necessária a utilização de um dispositivo capaz de avaliar a integridade dos
ligamentos. Existem no mercado algumas soluções, mas devido ao seu preço elevado ou à
incapacidade de avaliar todos os graus de liberdade do tornozelo, foi proposto desenvolver um novo
dispositivo que simula uma junta esférica para avaliar os movimentos de flexão plantar ou dorsiflexão,
rotação interna ou externa, adução ou abdução e deslocamento anterior (teste de gaveta). Nesta
dissertação apresenta-se então a continuação do projecto LATeD (Lisbon Ankle Test Device), que
pretende ir de encontro aos requisitos propostos de implementar um sistema de controlo através de
motores e sensores para fazer o controlo dos movimentos de cada um dos graus de liberdade. Após
uma análise das alternativas disponíveis, chegou-se a uma primeira solução da qual resultou um
protótipo com controlo do grau de liberdade da flexão plantar e dorsiflexão e uma resolução de
movimentos de aproximadamente 1º. Para além do protótipo foi também desenvolvido um software que
permite controlar o dispositivo a partir de um computador.
Palavras Chave: Ortopedia, Dispositivo médico, Entorse, Sistema de controlo, Articulação tíbio-
peróneo-astragalina

v
Abstract
The ankle injuries are one of the most frequent pathologies in orthopedics specialty, namely the sprain.
This condition can lead to total or partial rupture of the ligaments of the lateral compartment of the
talocrural joint. The subjectivity and variability associated with the diagnosis of this injury can often lead
to a less effective treatment of the patient. With the main purpose of assisting the task of the physician
to make a more accurate diagnosis, it becomes necessary to use a device able to evaluate the integrity
of the ligaments. There are some solutions on the market, but because of its high cost or inability to
evaluate all the degrees of freedom of the ankle, a new device was proposed, which simulates a
spherical joint to measure the movements of plantar flexion, dorsiflexion, internal rotation, external
rotation, adduction, abduction and anterior displacement (drawer test). This thesis purpose is to proceed
further with the LATeD project (Lisbon Ankle Test Device), which aims to meet the proposed
requirements to implement a control system through motors and sensors to control the movements of
each of the degrees of freedom. After an analysis of the available alternatives, it came out a first solution,
which resulted in a prototype to control the degree of freedom of plantar flexion and dorsiflexion and a
movement resolution of approximately 1º. Besides the prototype, it was developed also a software that
allows the control of the device from a computer.
Keywords: Orthopedics, Medical Device, Sprain, Control System, Talocrural Joint

vi
Índice
Agradecimentos .......................................................................................................... iii
Resumo ....................................................................................................................... iv
Abstract ........................................................................................................................ v
Índice de Tabelas ...................................................................................................... viii
Índice de Figuras ......................................................................................................... ix
Abreviaturas ................................................................................................................. x
Lista de Programas ...................................................................................................... x
1 Introdução ............................................................................................................. 1 1.1 Enquadramento Geral ................................................................................................. 1 1.2 Enquadramento Médico .............................................................................................. 1 1.3 Objectivo ..................................................................................................................... 3 1.4 Estrutura da Tese ........................................................................................................ 4
2 Revisão dos dispositivos existentes e testes de diagnóstico ................................ 5 2.1 Diagnóstico clínico ...................................................................................................... 5 2.2 Telos ............................................................................................................................ 6 2.3 Hollis ............................................................................................................................ 7
3 Revisão Bibliográfica de Sistemas de Controlo .................................................... 9 3.1 Motores ....................................................................................................................... 9
3.1.1 Motor DC .............................................................................................................. 9 3.1.2 Motor passo-a-passo .......................................................................................... 10
3.2 Controladores ............................................................................................................ 11 3.2.1 Arduino ............................................................................................................... 11 3.2.2 Controlador de motor .......................................................................................... 12
3.3 Sensores ................................................................................................................... 12 3.3.1 Optoacopladores ................................................................................................ 12 3.3.2 Quadrature encoder ............................................................................................ 13
4 Desenvolvimento ................................................................................................. 14 4.1 Modelo CAD .............................................................................................................. 14
4.1.1 Motor ................................................................................................................... 16 4.1.2 Chapa de fixação ................................................................................................ 17 4.1.3 Fixação do motor para o deslocamento anterior ................................................ 18
vii
4.1.4 Tranca do motor ................................................................................................. 18 4.1.5 Suporte do pé ..................................................................................................... 19 4.1.6 Suporte do tornozelo .......................................................................................... 20 4.1.7 Suporte de rotação ............................................................................................. 23 4.1.8 Suporte de flexão ................................................................................................ 24
4.2 Implementação do código de controlo ...................................................................... 26 4.3 Software de controlo ................................................................................................. 29
5 Produção do Protótipo ......................................................................................... 31 5.1 Produção ................................................................................................................... 31
5.1.1 Componentes metálicos ..................................................................................... 31 5.1.2 Componentes em plástico .................................................................................. 32
5.1 Custos ....................................................................................................................... 32
6 Testes com o Protótipo ....................................................................................... 34
7 Conclusões e desenvolvimentos futuros ............................................................. 39
Bibliografia ................................................................................................................. 41
Anexos ...................................................................................................................... 42

viii
Índice de Tabelas
Tabela 1.1 Amplitudes para os diferentes graus de liberdade ................................................................ 3 Tabela 2.1 Raciocínio clínico do diagnóstico .......................................................................................... 5 Tabela 4.1 Conjuntos, subconjuntos e correspondência no dispositivo ................................................ 15 Tabela 4.2 Subconjuntos, componentes e correspondência no dispositivo .......................................... 15 Tabela 4.3 Esquema de ligação dos fios do motor ............................................................................... 16 Tabela 5.1 Parâmetros escolhidos para impressão 3D ........................................................................ 32 Tabela 5.2 Custo da impressão 3D e tempo de produção .................................................................... 32 Tabela 5.3 Custo dos parafusos ........................................................................................................... 33 Tabela 5.4 Custo dos componentes do sistema de controlo ................................................................ 33 Tabela 6.1 Características do motor de passo (24BYJ48 5V) .............................................................. 34 Tabela 6.2 Características do motor DC Mitusumi M28N-1 .................................................................. 35 Tabela 6.3 Resultados obtidos para motor sem carga e instrução de 1º .............................................. 36 Tabela 6.4 Resultados obtidos para motor sem carga e instrução de 0,5º ........................................... 37 Tabela 6.5 Resultados obtidos para teste com carga de 1Kg e baixas velocidades ............................ 38 Tabela 6.6 Resultados obtidos para velocidades mais elevadas com instrução de 1º (a) e 0,5º (b) .... 38
ix
Índice de Figuras
Figura 1.1 Modelo 3D do protótipo LATeD [1] ......................................................................................... 1 Figura 1.2 - Complexo ligamentar da articulação tíbio-peróneo-astragalina.. ......................................... 2 Figura 2.1 - Dispositivo Telos .................................................................................................................. 6 Figura 2.2 Funcionamento do Telos ........................................................................................................ 7 Figura 2.3 Dispositivo Hollis .................................................................................................................... 7 Figura 3.1 Esquema de um motor DC ..................................................................................................... 9 Figura 3.2 Exemplo de um motor DC com caixa de desmultiplicação 1:1000 [9] ................................. 10 Figura 3.3 Esquema de um motor passo-a-passo com imã permanente [10] ...................................... 10 Figura 3.4 Arduino Mega [13] ................................................................................................................ 11 Figura 3.5 Controlador de motor assemblado com um Arduino [9] ....................................................... 12 Figura 3.6 Encoder incremental com base num optoacoplador [14] ..................................................... 13 Figura 3.7 Funcionamento da detecção do sentido do movimento com um quadrature encoder [14] . 13 Figura 4.1 Dispositivo LATeD completo [1] ........................................................................................... 14 Figura 4.2 Vista explodida do LATeD [1] .............................................................................................. 15 Figura 4.3 Motor Pololu #2275 .............................................................................................................. 16 Figura 4.4 Desenho da chapa de fixação .............................................................................................. 17 Figura 4.5 Conjunto motor com chapa de fixação e parafusos ............................................................. 18 Figura 4.6 Fixação do motor do deslocamento anterior ........................................................................ 18 Figura 4.7 Desenho da tranca do veio .................................................................................................. 19 Figura 4.8 Comparação entre a primeira versão do suporte do pé (a) e a versão actual (b) ............... 20 Figura 4.9 Comparação das dimensões do suporto do pé original (a) para a actual (b) ...................... 20 Figura 4.10 Comparação entre a primeira versão do suporte do tornozelo (a) e a versão actual (b) ... 21 Figura 4.11 Suporte do tornozelo plataforma fixa (a) e plataforma móvel (b) ....................................... 21 Figura 4.12 Detalhe das zonas de ligação da plataforma fixa do suporte do tornozelo ........................ 22 Figura 4.13 Detalhe da plataforma móvel do suporte do tornozelo ...................................................... 22 Figura 4.14 Conjunto do deslocamento anterior em posição 0 mm (a) e posição 4 mm (b) ................. 23 Figura 4.15 Comparação entre a primeira versão do suporte de rotação (a) e a versão actual (b) ..... 23 Figura 4.16 Detalhe das zonas de ligação do suporte de rotação ........................................................ 24 Figura 4.17 Comparação entre a primeira versão do suporte de flexão (a) e a versão actual (b) ........ 25 Figura 4.18 Detalhe das zonas de ligação do suporte de flexão .......................................................... 26 Figura 4.19 Esquema de funcionamento do sistema de controlo ......................................................... 26 Figura 4.20 Esquema de ligações entre Arduino, controlador e motor ................................................. 27 Figura 4.21 Pseudocódigo implementado no Arduino .......................................................................... 28 Figura 4.22 Interface de controlo do dispositivo LATeD ....................................................................... 29 Figura 5.1 Detalhe da tranca do veio zona rectangular (a) e zona cilíndrica (b) ................................... 32 Figura 6.1 Motor de passo (24BYJ48 5V) ............................................................................................. 34 Figura 6.2 Motor DC com encoder (Mitsumi M28N-1) .......................................................................... 35

x
Figura 6.3 Esquema do circuito eléctrico utilizado para funcionamento do encoder ............................ 35 Figura 6.4 Motor com disco e ponteiro de medição .............................................................................. 36 Figura 6.5 Montagem do suporte do pé, suporte da flexão e motor (a) Massa de 1 Kg (b) .................. 37
Abreviaturas
DC – Corrente Contínua
CAD – Desenho Assistido por Computador
DEM – Departamento de Engenharia Mecânica IST
LTO – Laboratório de Tecnologias Oficinais
Lista de Programas
Solidworks Versão 2016
Lazarus IDE Versão 1.6
Arduino IDE Versão 1.6.12
1
1 Introdução
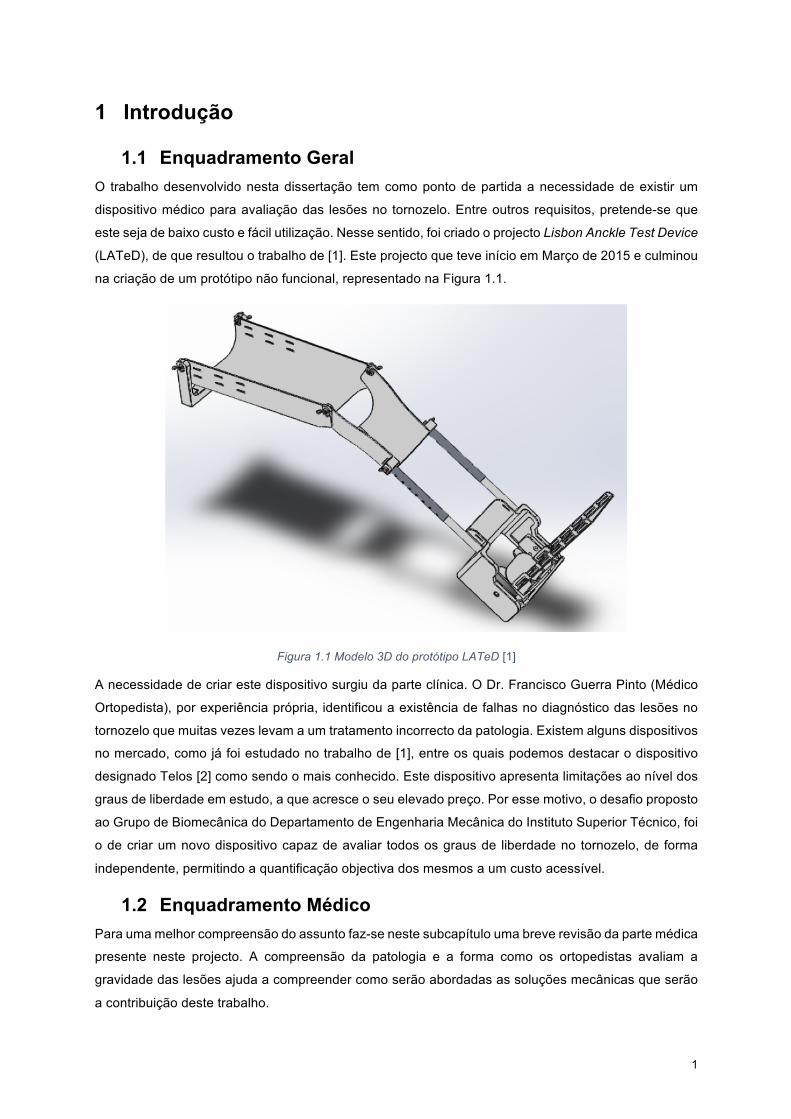
1.1 Enquadramento Geral O trabalho desenvolvido nesta dissertação tem como ponto de partida a necessidade de existir um
dispositivo médico para avaliação das lesões no tornozelo. Entre outros requisitos, pretende-se que
este seja de baixo custo e fácil utilização. Nesse sentido, foi criado o projecto Lisbon Anckle Test Device
(LATeD), de que resultou o trabalho de [1]. Este projecto que teve início em Março de 2015 e culminou
na criação de um protótipo não funcional, representado na Figura 1.1.
Figura 1.1 Modelo 3D do protótipo LATeD [1]
A necessidade de criar este dispositivo surgiu da parte clínica. O Dr. Francisco Guerra Pinto (Médico
Ortopedista), por experiência própria, identificou a existência de falhas no diagnóstico das lesões no
tornozelo que muitas vezes levam a um tratamento incorrecto da patologia. Existem alguns dispositivos
no mercado, como já foi estudado no trabalho de [1], entre os quais podemos destacar o dispositivo
designado Telos [2] como sendo o mais conhecido. Este dispositivo apresenta limitações ao nível dos
graus de liberdade em estudo, a que acresce o seu elevado preço. Por esse motivo, o desafio proposto
ao Grupo de Biomecânica do Departamento de Engenharia Mecânica do Instituto Superior Técnico, foi
o de criar um novo dispositivo capaz de avaliar todos os graus de liberdade no tornozelo, de forma
independente, permitindo a quantificação objectiva dos mesmos a um custo acessível.
1.2 Enquadramento Médico Para uma melhor compreensão do assunto faz-se neste subcapítulo uma breve revisão da parte médica
presente neste projecto. A compreensão da patologia e a forma como os ortopedistas avaliam a
gravidade das lesões ajuda a compreender como serão abordadas as soluções mecânicas que serão
a contribuição deste trabalho.

2
A especialidade de Ortopedia é uma das especialidades médicas onde o diagnóstico da patologia se
revela muito importante para um tratamento eficaz da lesão. Dentro desta especialidade, uma das
lesões mais comuns é a entorse do tornozelo [3], que pode resultar na rotura parcial ou total dos
ligamentos do complexo ligamentar lateral da articulação tíbio-peróneo-astragalina (Figura 1.2).
Figura 1.2 - Complexo ligamentar da articulação tíbio-peróneo-astragalina. 1 - Ligamento tíbio-peroneal anterior, 2 - Fascículo distal do ligamento tíbio-peroneal anterior, 3 - Tíbia, 4 - Ligamento peróneo-astragalino anterior, 5 - Astrágalo, 6 - Camada profunda do ligamento lateral interno, 7 - Camada superficial do ligamento e 8 – superfície articular [1], [4].
Embora seja possível recorrer a exames de imagiologia e radiologia para detectar lesões nesta
articulação, nenhum deles confere um diagnóstico suficientemente conclusivo, sendo assim necessário
que o Médico realize a avaliação clínica de forma manual para tentar quantificar o grau de lesão. Estes
testes são realizados pelos próprios Ortopedistas e consistem nos seguintes movimentos: flexão
plantar, dorsiflexão, adução, abdução, rotação interna e rotação externa. Existe ainda um outro
movimento de teste, o deslocamento ântero-posterior, vulgarmente designado por teste de gaveta
anterior, que permite avaliar a integridade do ligamento peróneo-astragalino.
O resultado observado pelo Médico ao executar estes testes apresenta uma elevada subjectividade [5],
tendo em conta a variabilidade entre os diferentes doentes e os diferentes modos de execução do teste.
É esta experiência, reflectida na comunidade Médica, que sugere a necessidade de uma metodologia
mais abrangente e objectiva que permita quantificar a amplitude dos movimentos descritos atrás de
forma independente.
As amplitudes máximas para cada um destes movimentos encontram-se expostas na Tabela 1.1. Estes
valores serão requisitos deste projecto.
1
3
2
8
4 5
7
6

3
Tabela 1.1 Amplitudes para os diferentes graus de liberdade
Movimento Amplitude [º] Amplitude [mm]
Dorsiflexão 0-20 -
Flexão plantar 0-90 -
Adução ou Abdução ± 20 -
Rotação interna ou externa ± 50 -
Deslocamento anterior - 4
1.3 Objectivo Esta dissertação tem como principal objectivo propor uma solução para um mecanismo que permita
assistir a avaliação clinica do tornozelo, dando continuidade ao projecto LATeD.
O trabalho e o protótipo apresentado na Figura 1.1 constituem a solução de base para o
desenvolvimento de um novo protótipo, contribuindo para um avanço que se pretende significativo para
atingir o objectivo descrito acima. É importante referir que, embora a estrutura de base se mantenha, a
introdução de sensores e actuadores constitui um novo desafio e um avanço relativamente ao projecto
inicial.
É proposto desenvolver e implementar um sistema de controlo para os graus de liberdade pretendidos.
Foram colocadas várias hipóteses para a actuação dos movimentos, tendo sido tomada a decisão de
optar por motores eléctricos. As principais razões desta escolha são:
• Facilidade de ligação a controladores de baixo custo facilmente disponíveis;
• Gama de sensores de posição ampla (e também com preços variados);
• Facilidade de interligação entre os sistemas e a interface Homem-dispositivo;
• Riscos reduzidos para os pacientes e operadores do dispositivo (baixa tensão elétrica e baixa
potência);
• Custos de aquisição e desenvolvimento moderados;
• Meios de construção disponíveis e acessíveis aos autores deste trabalho.
Para concretizar a actuação dos movimentos é necessário adaptar a articulação do dispositivo que
simula o movimento do tornozelo de modo a receber a motorização necessária. As soluções de controlo
e actuação exigiram uma pesquisa cuidada dos componentes existentes no mercado, por forma a obter
um conjunto com bom rácio de custo/desempenho. A partir destas soluções, o sistema de controlo foi
desenvolvido respeitando os requisitos do dispositivo. Também nesta fase é importante referir as várias
dificuldades que foram ultrapassadas ao longo do tempo, desde a pesquisa dos componentes, os
contactos com os respectivos fornecedores e aquisição dos mesmos.
4
1.4 Estrutura da Tese Esta dissertação está dívida em cinco capítulos, cada um deles abordando as partes mais importantes
do trabalho desenvolvido.
No primeiro capítulo é feita uma introdução ao projecto, descrevendo enquadramento geral do que já
foi desenvolvido, bem como a relação entre este projecto e a parte médica. Também é apresentado o
objectivo e a estrutura da dissertação.
O segundo capítulo aborda uma revisão sobre os dispositivos existentes bem como a prática clínica
para diagnóstico da patologia em estudo.
O terceiro capítulo refere-se à revisão bibliográfica de sistemas de controlo onde são abordados
particularmente os sensores, actuadores e microcontroladores.
O quarto capítulo mostra o desenvolvimento do projecto, onde se apresentam as soluções encontradas
e o modo como foram implementadas no protótipo.
O quinto capítulo dedica-se à descrição da produção do protótipo tanto a nível da impressão 3D como
do trabalho realizado na maquinagem e montagem.
No sexto capítulo mostram-se os testes realizados com o protótipo, bem como a validação dos mesmos.
Finalmente, no sétimo capítulo, encontram-se as conclusões e as perspectivas de desenvolvimento
futuro.
5
2 Revisão dos dispositivos existentes e testes de
diagnóstico
O diagnóstico desta patologia segue um determinado raciocínio clínico que será apresentado neste
capítulo, explicando todas as fases deste diagnóstico.
Para reforçar a ideia da necessidade da criação deste dispositivo, neste capitulo vão ser apresentados
alguns dos dispositivos existentes no mercado e será feita a ponte de ligação entre as necessidades
identificadas e o dispositivo proposto.
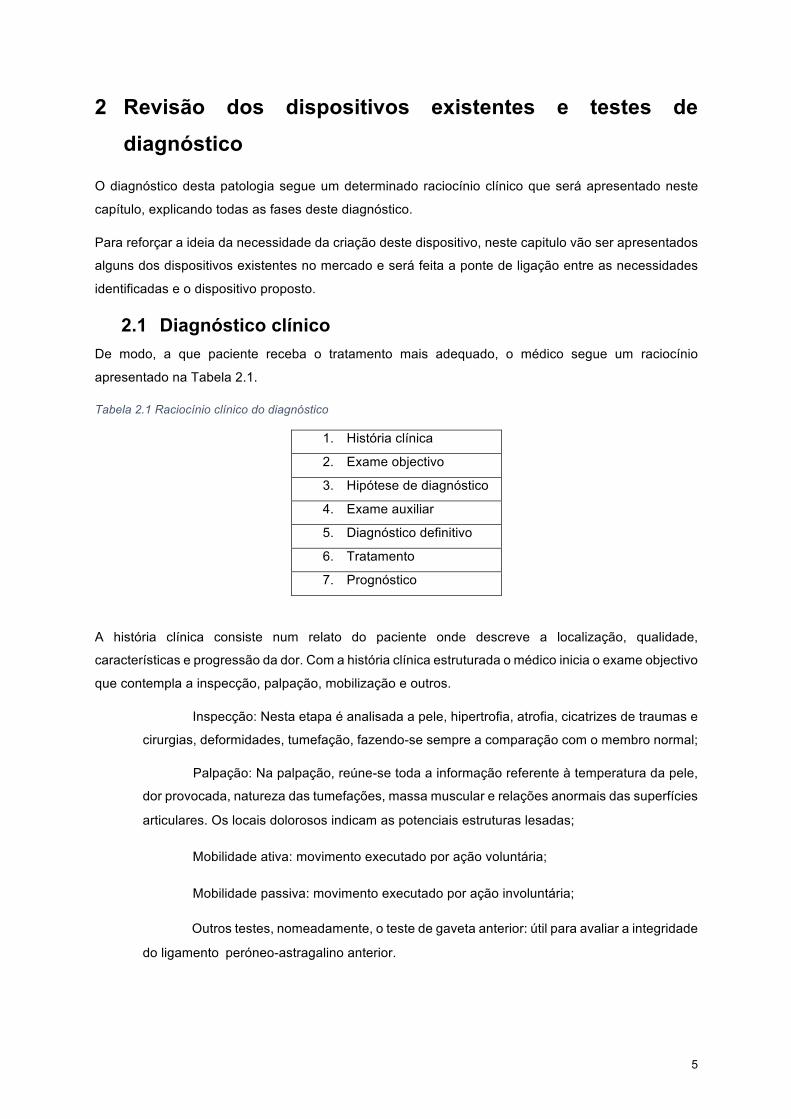
2.1 Diagnóstico clínico De modo, a que paciente receba o tratamento mais adequado, o médico segue um raciocínio
apresentado na Tabela 2.1.
Tabela 2.1 Raciocínio clínico do diagnóstico
1. História clínica
2. Exame objectivo
3. Hipótese de diagnóstico
4. Exame auxiliar
5. Diagnóstico definitivo
6. Tratamento
7. Prognóstico
A história clínica consiste num relato do paciente onde descreve a localização, qualidade,
características e progressão da dor. Com a história clínica estruturada o médico inicia o exame objectivo
que contempla a inspecção, palpação, mobilização e outros.
Inspecção: Nesta etapa é analisada a pele, hipertrofia, atrofia, cicatrizes de traumas e
cirurgias, deformidades, tumefação, fazendo-se sempre a comparação com o membro normal;
Palpação: Na palpação, reúne-se toda a informação referente à temperatura da pele,
dor provocada, natureza das tumefações, massa muscular e relações anormais das superfícies
articulares. Os locais dolorosos indicam as potenciais estruturas lesadas; �
Mobilidade ativa: movimento executado por ação voluntária; �
Mobilidade passiva: movimento executado por ação involuntária; �
Outros testes, nomeadamente, o teste de gaveta anterior: útil para avaliar a integridade
do ligamento�peróneo-astragalino anterior. �

6
A conjugação da história clínica e do exame objectivo permite formular uma primeira hipótese de
diagnóstico mas que não sendo conclusiva precisa de ser confirmada através de um exame auxiliar.
Os exames auxiliares permitem observar a lesão nas estruturas anatómicas, tipicamente são realizadas
radiografias para verificar a integridade óssea e a nível dos ligamentos podem ser feitas ressonâncias
magnéticas.
Todas as etapas anteriores permitem então chegar a um diagnóstico definitivo e que vai definir o
tratamento da patologia, finalmente existe o prognóstico a nível da evolução da patologia mas que não
passa de uma previsão do médico, sendo variável devido a factores externos.
2.2 Telos O dispositivo Telos [2] apresentado na Figura 2.1, é um dos dispositivos mais conhecidos para o
diagnóstico da patologia em análise. O Telos é considerado muito versátil pois pode ser adaptado para
diferentes diagnósticos, tornozelo, ombro, joelho ou cotovelo.
Figura 2.1 - Dispositivo Telos
Quando aplicado ao tornozelo, este dispositivo permite avaliar o ligamento peróneo-astragalino anterior
e o ligamento peróneo-calcaneano. A avaliação do ligamento peróneo-astragalino anterior é feita
colocando o joelho do paciente fletido a 45º para realizar o movimento de translação anterior. É também
colocado um suporte cerca de 5 !" acima do maléolo que permite a aplicação de uma força de 15 #
para promover o deslocamento anterior do astrágalo Figura 2.2. O paciente permanece nesta posição
durante um minuto para permitir o deslocamento anterior do astrágalo em relação à tíbia e ao perónio.
O ligamento peróneo-astragalino é analisado com o auxílio de uma radiografia.
7
Figura 2.2 Funcionamento do Telos
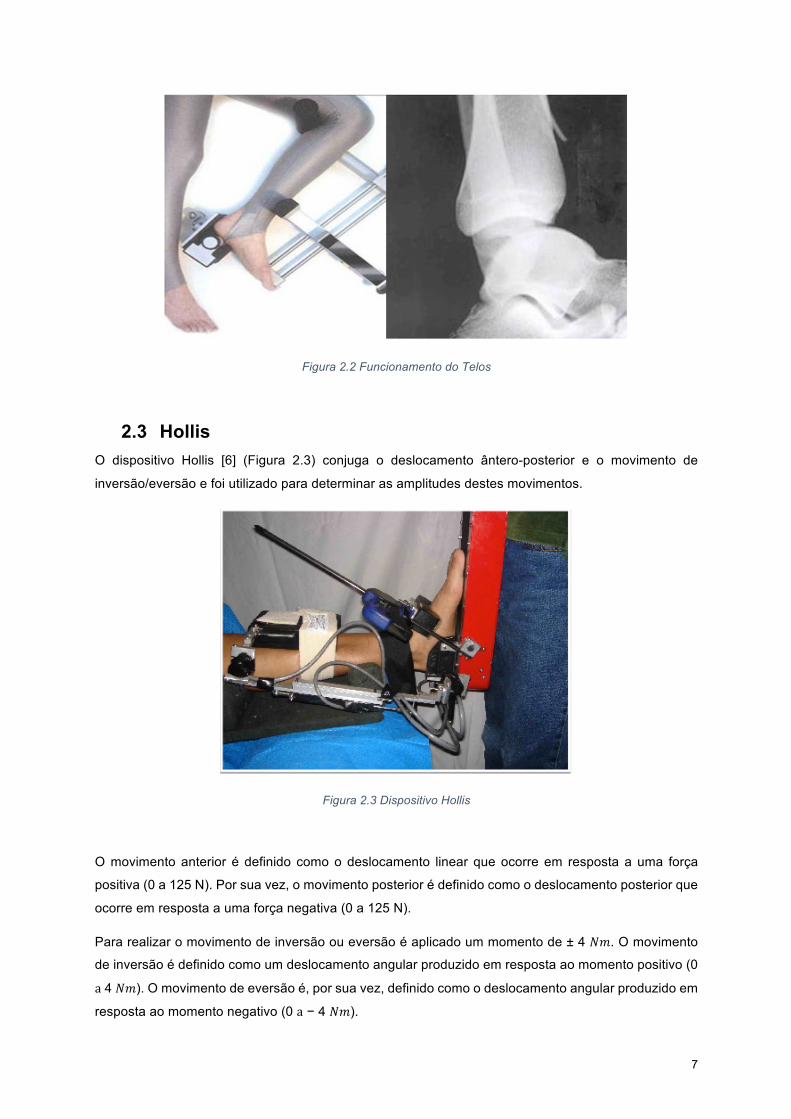
2.3 Hollis O dispositivo Hollis [6] (Figura 2.3) conjuga o deslocamento ântero-posterior e o movimento de
inversão/eversão e foi utilizado para determinar as amplitudes destes movimentos.
Figura 2.3 Dispositivo Hollis
O movimento anterior é definido como o deslocamento linear que ocorre em resposta a uma força
positiva (0 a 125 N). Por sua vez, o movimento posterior é definido como o deslocamento posterior que
ocorre em resposta a uma força negativa (0 a 125 N).
Para realizar o movimento de inversão ou eversão é aplicado um momento de ± 4 #". O movimento
de inversão é definido como um deslocamento angular produzido em resposta ao momento positivo (0
a 4 #"). O movimento de eversão é, por sua vez, definido como o deslocamento angular produzido em
resposta ao momento negativo (0 a − 4 #").
8
O Hollis recorre a uma técnica não invasiva, a eletrogoniometria, para o registo contínuo do
deslocamento ântero-posterior (em mm), o movimento de inversão e eversão do pé (em graus), bem
como a força e o momento aplicado. Assim sendo, depois de aplicar a força ou momento necessária
para a execução do movimento desejado, visualiza-se a partir do monitor do computador o valor do
deslocamento ântero-posterior (em mm) e do movimento de inversão e eversão do pé (em graus).
Para determinar as amplitudes destes movimentos, foram feitos estudos em pacientes sem lesão e
obter valores médios para o deslocamento ântero-posterior e movimento de inversão e eversão para o
sexo masculino e feminino.
Para o sexo masculino obteve-se um valor médio para o deslocamento ântero-posterior de 16,70 ± 4,8
"" e para o movimento de inversão e eversão de 34,13 ± 10,1°.
9
3 Revisão Bibliográfica de Sistemas de Controlo
Tendo em conta a variedade de soluções a nível de robótica disponíveis no mercado, é necessário
fazer uma revisão bibliográfica sobre motores, controladores e sensores. Cada subcapítulo trata de um
destes componentes e no final do capítulo será feita uma conclusão de qual a combinação adoptada
para este dispositivo.
3.1 Motores O grande desenvolvimento do mundo da robótica durante as ultimas décadas permitiu colocar à
disposição de todos um elevado número de opções quanto a tipos e soluções no que diz respeito a
motores eléctricos.
Sem pretender ser exaustivo nem profundo no tema, neste tópico vão ser apresentados dois tipos de
motores mostrando as suas vantagens e desvantagens.
3.1.1 Motor DC
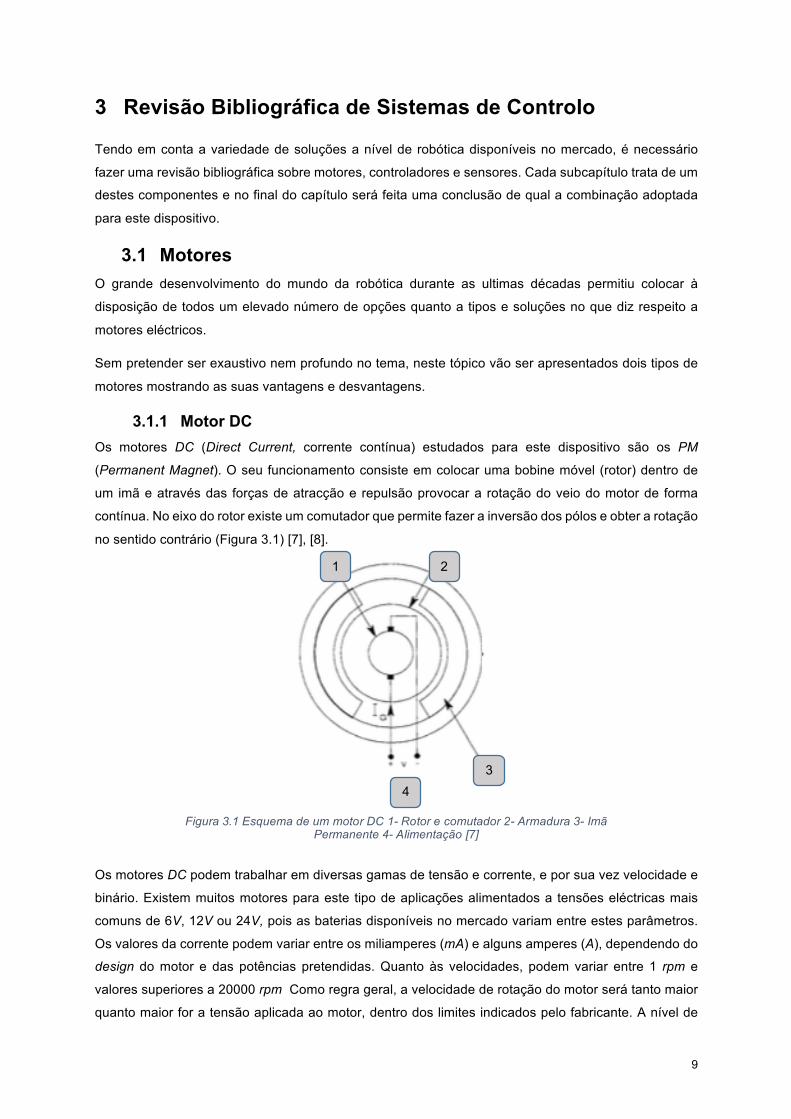
Os motores DC (Direct Current, corrente contínua) estudados para este dispositivo são os PM
(Permanent Magnet). O seu funcionamento consiste em colocar uma bobine móvel (rotor) dentro de
um imã e através das forças de atracção e repulsão provocar a rotação do veio do motor de forma
contínua. No eixo do rotor existe um comutador que permite fazer a inversão dos pólos e obter a rotação
no sentido contrário (Figura 3.1) [7], [8].
Os motores DC podem trabalhar em diversas gamas de tensão e corrente, e por sua vez velocidade e
binário. Existem muitos motores para este tipo de aplicações alimentados a tensões eléctricas mais
comuns de 6V, 12V ou 24V, pois as baterias disponíveis no mercado variam entre estes parâmetros.
Os valores da corrente podem variar entre os miliamperes (mA) e alguns amperes (A), dependendo do
design do motor e das potências pretendidas. Quanto às velocidades, podem variar entre 1 rpm e
valores superiores a 20000 rpm Como regra geral, a velocidade de rotação do motor será tanto maior
quanto maior for a tensão aplicada ao motor, dentro dos limites indicados pelo fabricante. A nível de
2 1
34
Figura 3.1 Esquema de um motor DC 1- Rotor e comutador 2- Armadura 3- Imã Permanente 4- Alimentação [7]
10
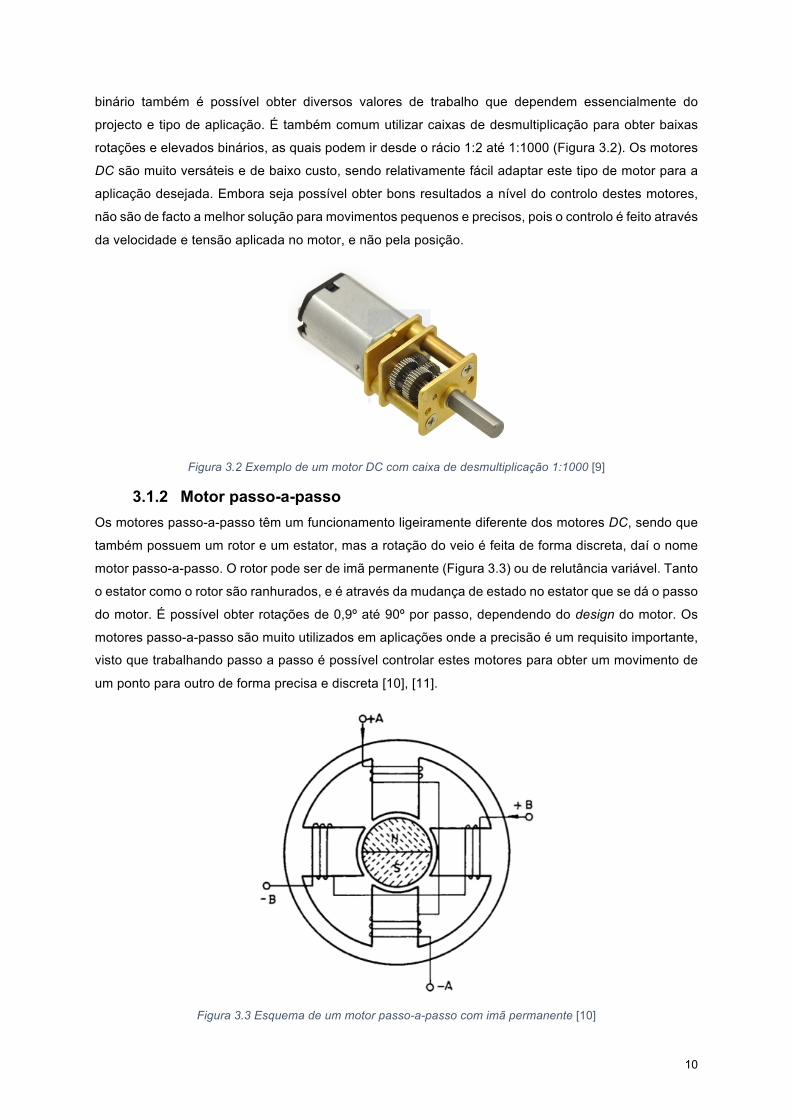
binário também é possível obter diversos valores de trabalho que dependem essencialmente do
projecto e tipo de aplicação. É também comum utilizar caixas de desmultiplicação para obter baixas
rotações e elevados binários, as quais podem ir desde o rácio 1:2 até 1:1000 (Figura 3.2). Os motores
DC são muito versáteis e de baixo custo, sendo relativamente fácil adaptar este tipo de motor para a
aplicação desejada. Embora seja possível obter bons resultados a nível do controlo destes motores,
não são de facto a melhor solução para movimentos pequenos e precisos, pois o controlo é feito através
da velocidade e tensão aplicada no motor, e não pela posição.
Figura 3.2 Exemplo de um motor DC com caixa de desmultiplicação 1:1000 [9]
3.1.2 Motor passo-a-passo
Os motores passo-a-passo têm um funcionamento ligeiramente diferente dos motores DC, sendo que
também possuem um rotor e um estator, mas a rotação do veio é feita de forma discreta, daí o nome
motor passo-a-passo. O rotor pode ser de imã permanente (Figura 3.3) ou de relutância variável. Tanto
o estator como o rotor são ranhurados, e é através da mudança de estado no estator que se dá o passo
do motor. É possível obter rotações de 0,9º até 90º por passo, dependendo do design do motor. Os
motores passo-a-passo são muito utilizados em aplicações onde a precisão é um requisito importante,
visto que trabalhando passo a passo é possível controlar estes motores para obter um movimento de
um ponto para outro de forma precisa e discreta [10], [11].
Figura 3.3 Esquema de um motor passo-a-passo com imã permanente [10]
11
A nível de binário, os valores estão dependentes das características do motor, mas podem ascender
até valores de 130 kg.cm [12]. A grande desvantagem destes motores é que para obter binários
elevados o seu tamanho e peso aumenta drasticamente. Para projectos com restrições a este nível é
difícil ou mesmo impossível aplicar motores passo-a-passo. Também o preço destes motores aumenta
fortemente quando se pretendem binários elevados.
3.2 Controladores
3.2.1 Arduino
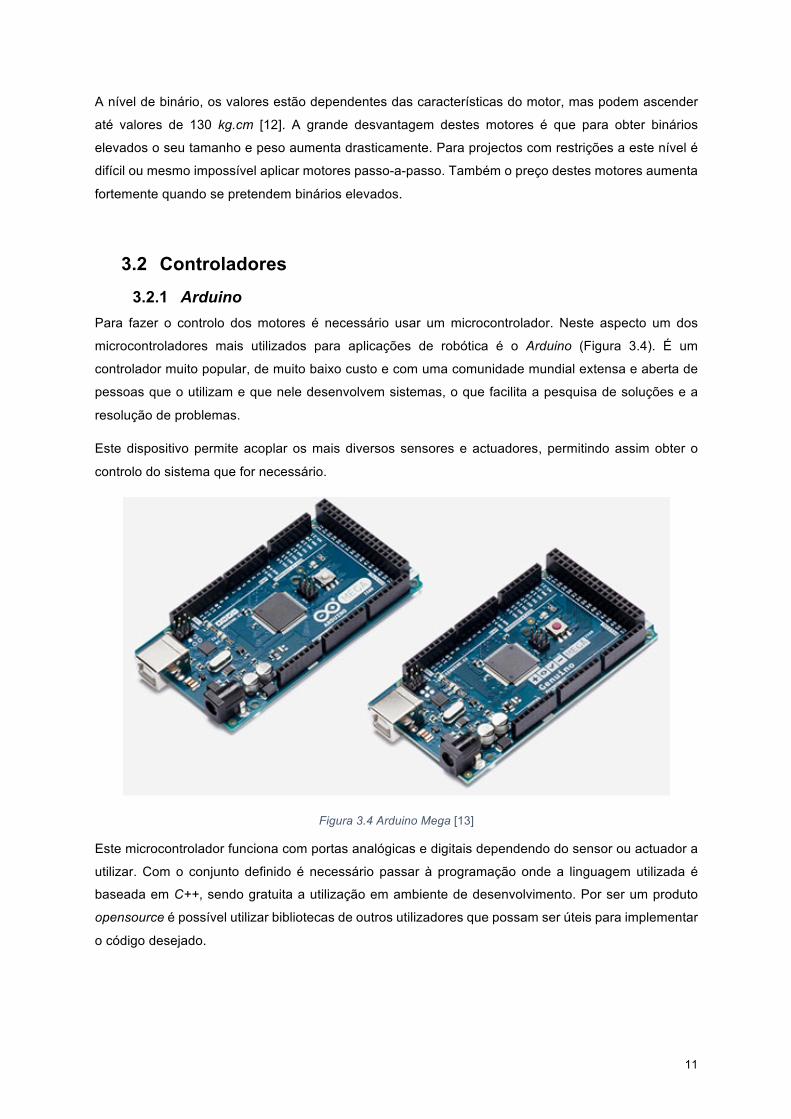
Para fazer o controlo dos motores é necessário usar um microcontrolador. Neste aspecto um dos
microcontroladores mais utilizados para aplicações de robótica é o Arduino (Figura 3.4). É um
controlador muito popular, de muito baixo custo e com uma comunidade mundial extensa e aberta de
pessoas que o utilizam e que nele desenvolvem sistemas, o que facilita a pesquisa de soluções e a
resolução de problemas.
Este dispositivo permite acoplar os mais diversos sensores e actuadores, permitindo assim obter o
controlo do sistema que for necessário.
Figura 3.4 Arduino Mega [13]
Este microcontrolador funciona com portas analógicas e digitais dependendo do sensor ou actuador a
utilizar. Com o conjunto definido é necessário passar à programação onde a linguagem utilizada é
baseada em C++, sendo gratuita a utilização em ambiente de desenvolvimento. Por ser um produto
opensource é possível utilizar bibliotecas de outros utilizadores que possam ser úteis para implementar
o código desejado.
12
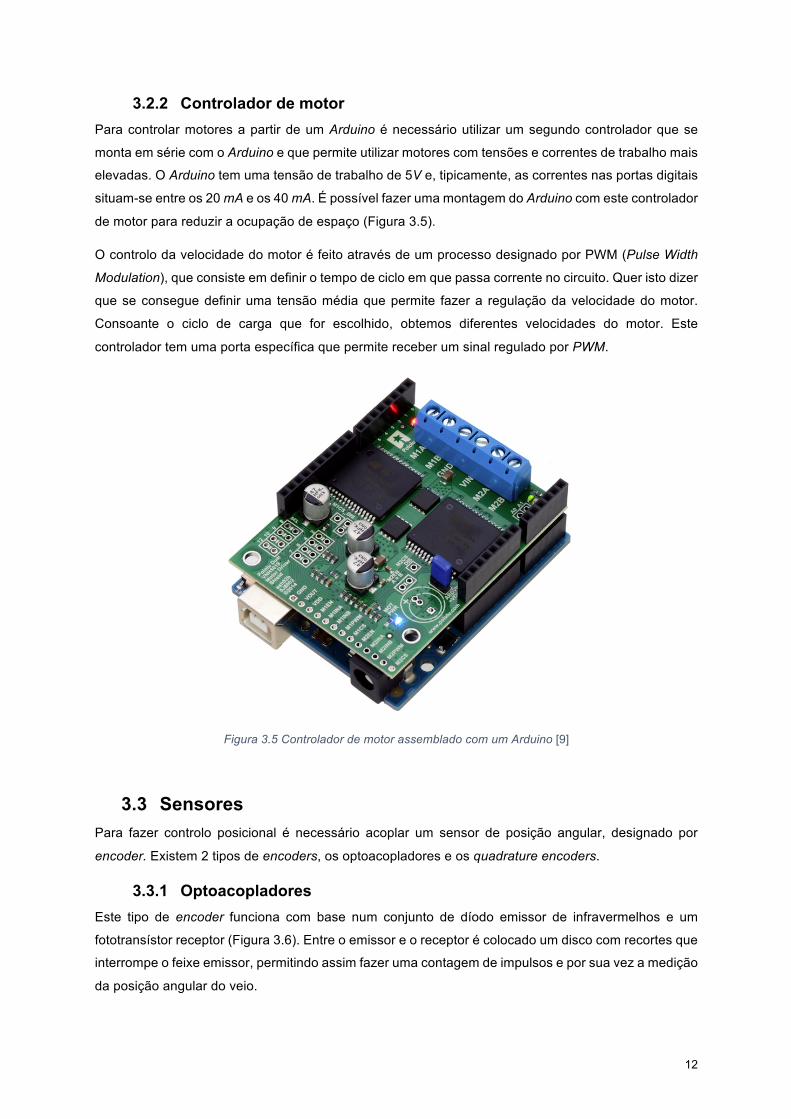
3.2.2 Controlador de motor
Para controlar motores a partir de um Arduino é necessário utilizar um segundo controlador que se
monta em série com o Arduino e que permite utilizar motores com tensões e correntes de trabalho mais
elevadas. O Arduino tem uma tensão de trabalho de 5V e, tipicamente, as correntes nas portas digitais
situam-se entre os 20 mA e os 40 mA. É possível fazer uma montagem do Arduino com este controlador
de motor para reduzir a ocupação de espaço (Figura 3.5).
O controlo da velocidade do motor é feito através de um processo designado por PWM (Pulse Width
Modulation), que consiste em definir o tempo de ciclo em que passa corrente no circuito. Quer isto dizer
que se consegue definir uma tensão média que permite fazer a regulação da velocidade do motor.
Consoante o ciclo de carga que for escolhido, obtemos diferentes velocidades do motor. Este
controlador tem uma porta específica que permite receber um sinal regulado por PWM.
Figura 3.5 Controlador de motor assemblado com um Arduino [9]
3.3 Sensores Para fazer controlo posicional é necessário acoplar um sensor de posição angular, designado por
encoder. Existem 2 tipos de encoders, os optoacopladores e os quadrature encoders.
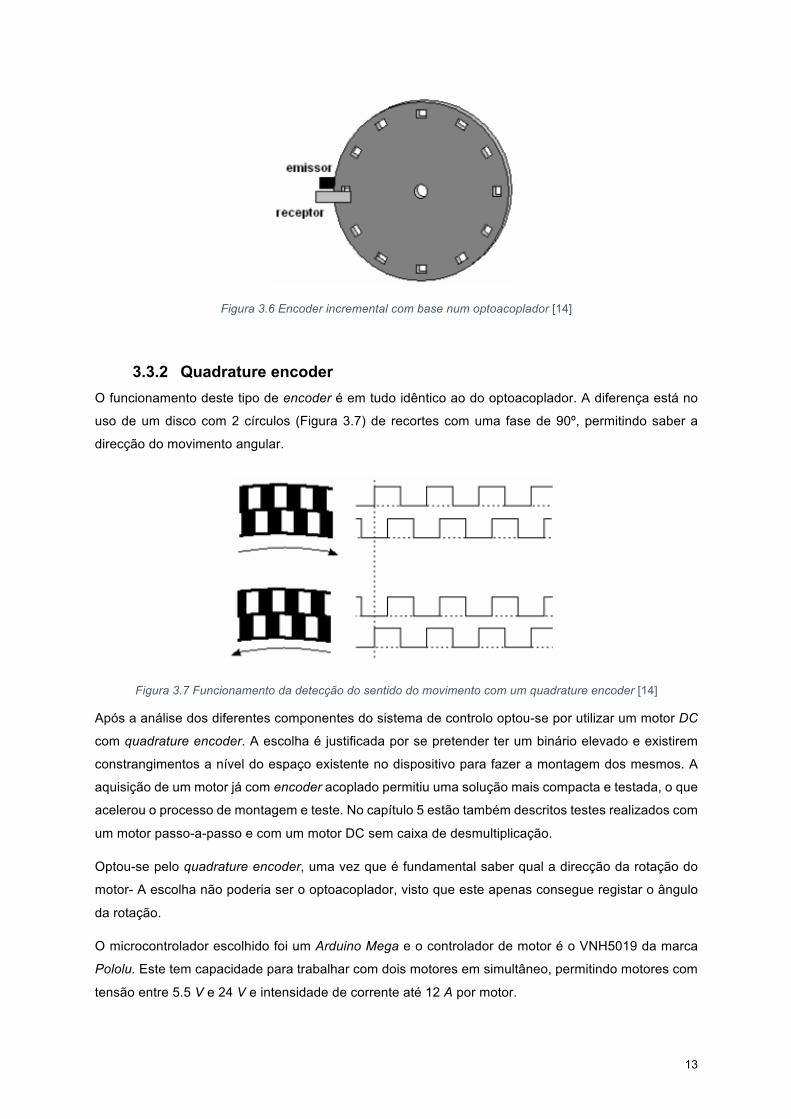
3.3.1 Optoacopladores
Este tipo de encoder funciona com base num conjunto de díodo emissor de infravermelhos e um
fototransístor receptor (Figura 3.6). Entre o emissor e o receptor é colocado um disco com recortes que
interrompe o feixe emissor, permitindo assim fazer uma contagem de impulsos e por sua vez a medição
da posição angular do veio.
13
Figura 3.6 Encoder incremental com base num optoacoplador [14]
3.3.2 Quadrature encoder
O funcionamento deste tipo de encoder é em tudo idêntico ao do optoacoplador. A diferença está no
uso de um disco com 2 círculos (Figura 3.7) de recortes com uma fase de 90º, permitindo saber a
direcção do movimento angular.
Figura 3.7 Funcionamento da detecção do sentido do movimento com um quadrature encoder [14]
Após a análise dos diferentes componentes do sistema de controlo optou-se por utilizar um motor DC
com quadrature encoder. A escolha é justificada por se pretender ter um binário elevado e existirem
constrangimentos a nível do espaço existente no dispositivo para fazer a montagem dos mesmos. A
aquisição de um motor já com encoder acoplado permitiu uma solução mais compacta e testada, o que
acelerou o processo de montagem e teste. No capítulo 5 estão também descritos testes realizados com
um motor passo-a-passo e com um motor DC sem caixa de desmultiplicação.
Optou-se pelo quadrature encoder, uma vez que é fundamental saber qual a direcção da rotação do
motor- A escolha não poderia ser o optoacoplador, visto que este apenas consegue registar o ângulo
da rotação.
O microcontrolador escolhido foi um Arduino Mega e o controlador de motor é o VNH5019 da marca
Pololu. Este tem capacidade para trabalhar com dois motores em simultâneo, permitindo motores com
tensão entre 5.5 V e 24 V e intensidade de corrente até 12 A por motor.

14
4 Desenvolvimento
Neste capítulo vai ser abordado o desenvolvimento do sistema de controlo, bem como do próprio
dispositivo. Da primeira fase do projecto resultou um protótipo e foi com base nesse dispositivo que
este sistema de controlo foi idealizado.
Ao protótipo existente, foram adicionados os dispositivos de actuação e controlo, tendo sido necessário
proceder a alterações ao projecto original, que serão abordadas no subcapítulo 3.1.
Existiu também a necessidade de criar uma interface de controlo gráfica intuitiva para facilitar o trabalho
do Médico. Nesse sentido, foi desenvolvido um software para computador que irá ser abordado no
subcapítulo 3.2.
Como já foi referido no primeiro capítulo, pretende-se implementar um sistema de controlo para os
graus de liberdade do dispositivo. Como estamos a falar de movimentos angulares de pequena
amplitude, a melhor forma de actuar no eixo de rotação é recorrer a um motor eléctrico. Para garantir
a precisão de movimentos e retroacção (feedback), é também necessário utilizar um sensor de posição
angular. Juntando um actuador e um sensor é necessário recorrer a um controlador capaz de integrar
ambos os mecanismos. Este tópico irá ser abordado no subcapítulo 3.3.
4.1 Modelo CAD Como já foi referido anteriormente, este dispositivo teve por base o primeiro protótipo desenvolvido no
ano passado (Figura 4.1). Sendo assim, a implementação do sistema de controlo foi idealizada para o
primeiro protótipo e foram posteriormente efectuadas alterações ao design por forma a ser possível
acoplar os novos componentes.
Do dispositivo completo, os componentes onde foi necessário proceder às referidas alterações de
design encontram-se dentro do contorno azul na Figura 4.1, correspondendo aos números 4 e 5. Na
Tabela 4.1 é possível ver os conjuntos e subconjuntos do dispositivo.
Figura 4.1 Dispositivo LATeD completo [1]
1
2
3 4
5
15
Tabela 4.1 Conjuntos, subconjuntos e correspondência no dispositivo
Conjunto Subconjunto Correspondência Figura 3.2
Coxa Suporte de fixação à marquesa 1
Suporte da coxa 2
Perna Suporte da perna 3
Pé Suporte do tornozelo 4
Suporte do pé 5
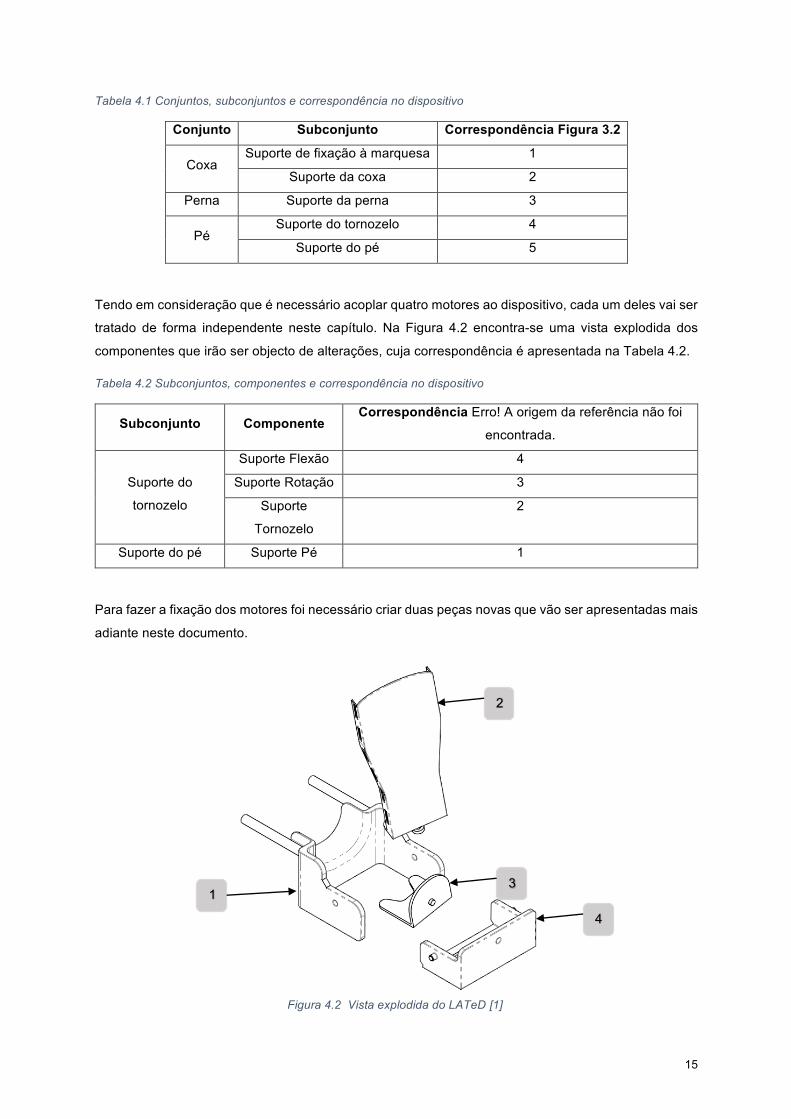
Tendo em consideração que é necessário acoplar quatro motores ao dispositivo, cada um deles vai ser
tratado de forma independente neste capítulo. Na Figura 4.2 encontra-se uma vista explodida dos
componentes que irão ser objecto de alterações, cuja correspondência é apresentada na Tabela 4.2.
Tabela 4.2 Subconjuntos, componentes e correspondência no dispositivo
Subconjunto Componente Correspondência Erro! A origem da referência não foi
encontrada.
Suporte do
tornozelo
Suporte Flexão 4
Suporte Rotação 3
Suporte
Tornozelo
2
Suporte do pé Suporte Pé 1
Para fazer a fixação dos motores foi necessário criar duas peças novas que vão ser apresentadas mais
adiante neste documento.
2
3
4
1
Figura 4.2 Vista explodida do LATeD [1]
16
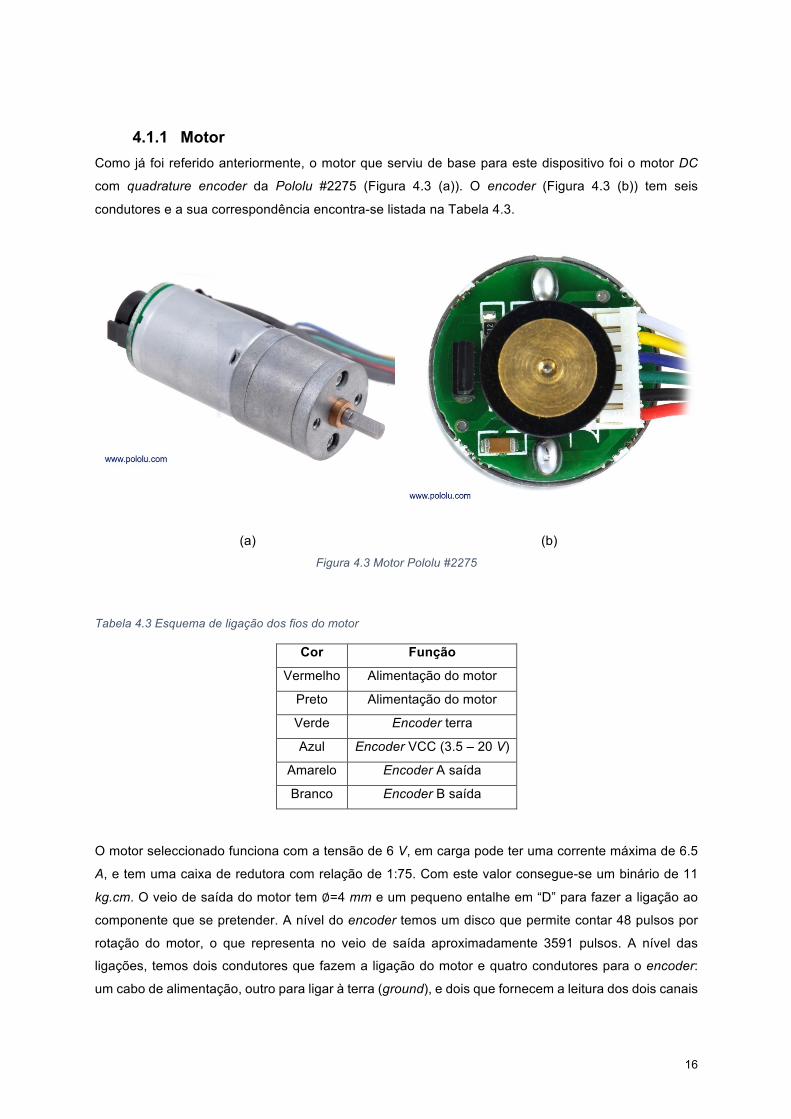
4.1.1 Motor
Como já foi referido anteriormente, o motor que serviu de base para este dispositivo foi o motor DC
com quadrature encoder da Pololu #2275 (Figura 4.3 (a)). O encoder (Figura 4.3 (b)) tem seis
condutores e a sua correspondência encontra-se listada na Tabela 4.3.
(a) (b) Figura 4.3 Motor Pololu #2275
Tabela 4.3 Esquema de ligação dos fios do motor
Cor Função
Vermelho Alimentação do motor
Preto Alimentação do motor
Verde Encoder terra
Azul Encoder VCC (3.5 – 20 V)
Amarelo Encoder A saída
Branco Encoder B saída
O motor seleccionado funciona com a tensão de 6 V, em carga pode ter uma corrente máxima de 6.5
A, e tem uma caixa de redutora com relação de 1:75. Com este valor consegue-se um binário de 11
kg.cm. O veio de saída do motor tem ∅=4 mm e um pequeno entalhe em “D” para fazer a ligação ao
componente que se pretender. A nível do encoder temos um disco que permite contar 48 pulsos por
rotação do motor, o que representa no veio de saída aproximadamente 3591 pulsos. A nível das
ligações, temos dois condutores que fazem a ligação do motor e quatro condutores para o encoder:
um cabo de alimentação, outro para ligar à terra (ground), e dois que fornecem a leitura dos dois canais
17
do sensor que permite registar o número de pulsos e o sentido de rotação do veio. Na face de saída do
veio existem dois furos roscados M3 que permitem fazer a fixação da estrutura do motor.
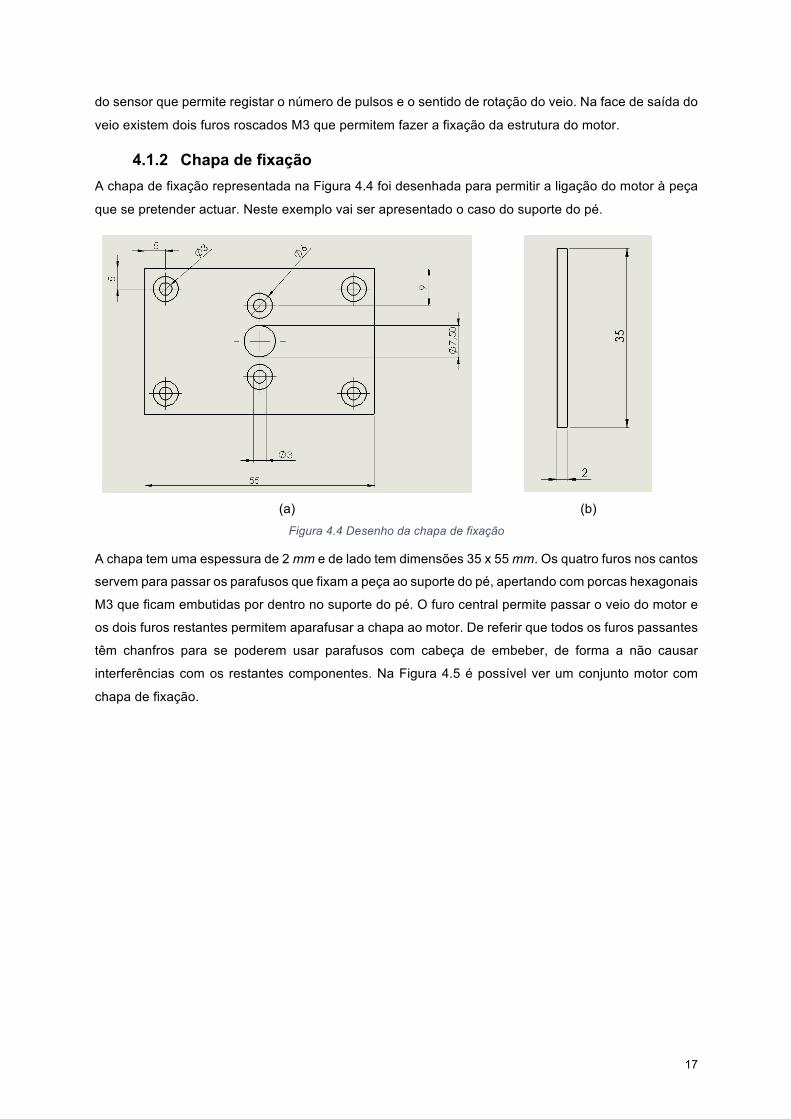
4.1.2 Chapa de fixação
A chapa de fixação representada na Figura 4.4 foi desenhada para permitir a ligação do motor à peça
que se pretender actuar. Neste exemplo vai ser apresentado o caso do suporte do pé.
(a) (b)
Figura 4.4 Desenho da chapa de fixação
A chapa tem uma espessura de 2 mm e de lado tem dimensões 35 x 55 mm. Os quatro furos nos cantos
servem para passar os parafusos que fixam a peça ao suporte do pé, apertando com porcas hexagonais
M3 que ficam embutidas por dentro no suporte do pé. O furo central permite passar o veio do motor e
os dois furos restantes permitem aparafusar a chapa ao motor. De referir que todos os furos passantes
têm chanfros para se poderem usar parafusos com cabeça de embeber, de forma a não causar
interferências com os restantes componentes. Na Figura 4.5 é possível ver um conjunto motor com
chapa de fixação.

18
Figura 4.5 Conjunto motor com chapa de fixação e parafusos
4.1.3 Fixação do motor para o deslocamento anterior
Para fazer a fixação do motor responsável pelo deslocamento anterior ou teste de gaveta, foi necessário
adaptar a chapa de fixação do motor apresentada no tópico anterior para a configuração actual (Figura
4.6). A configuração desta peça assenta nos mesmos pressupostos da chapa de fixação. Na zona 1
podemos observar os dois furos para aparafusar ao motor, e o furo central para permitir a passagem
do veio. Na zona 2 temos os quatro furos que permitem aparafusar ao componente desejado, com os
respectivos chanfros para utilizar parafusos com cabeça de embeber.
4.1.4 Tranca do motor
Por forma a transmitir o movimento do veio para o suporte da flexão foi necessário desenhar uma peça
que possa ficar solidária com o veio de saída do motor e o componente a rodar (Figura 4.7). Com os
recursos disponíveis nas oficinas do DEM, optou-se por fazer um furo com diâmetro um pouco superior
1
2
Figura 4.6 Fixação do motor do deslocamento anterior
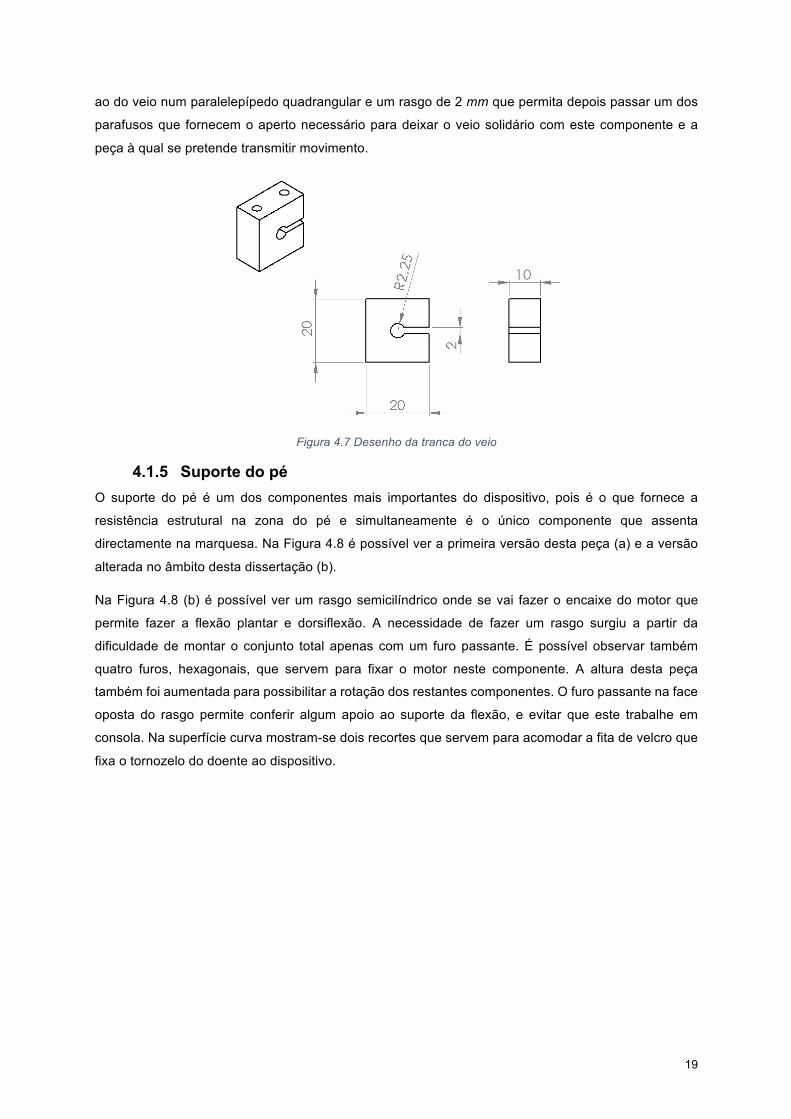
19
ao do veio num paralelepípedo quadrangular e um rasgo de 2 mm que permita depois passar um dos
parafusos que fornecem o aperto necessário para deixar o veio solidário com este componente e a
peça à qual se pretende transmitir movimento.
Figura 4.7 Desenho da tranca do veio
4.1.5 Suporte do pé
O suporte do pé é um dos componentes mais importantes do dispositivo, pois é o que fornece a
resistência estrutural na zona do pé e simultaneamente é o único componente que assenta
directamente na marquesa. Na Figura 4.8 é possível ver a primeira versão desta peça (a) e a versão
alterada no âmbito desta dissertação (b).
Na Figura 4.8 (b) é possível ver um rasgo semicilíndrico onde se vai fazer o encaixe do motor que
permite fazer a flexão plantar e dorsiflexão. A necessidade de fazer um rasgo surgiu a partir da
dificuldade de montar o conjunto total apenas com um furo passante. É possível observar também
quatro furos, hexagonais, que servem para fixar o motor neste componente. A altura desta peça
também foi aumentada para possibilitar a rotação dos restantes componentes. O furo passante na face
oposta do rasgo permite conferir algum apoio ao suporte da flexão, e evitar que este trabalhe em
consola. Na superfície curva mostram-se dois recortes que servem para acomodar a fita de velcro que
fixa o tornozelo do doente ao dispositivo.

20
(a) (b)
Figura 4.8 Comparação entre a primeira versão do suporte do pé (a) e a versão actual (b)
(a) (b) Figura 4.9 Comparação das dimensões do suporto do pé original (a) para a actual (b)
Na Figura 4.9 pode ver-se em detalhe a diferença de altura entre as duas peças, de 111,25 mm na
primeira versão (a) para 178,25 mm na versão actual (b). Também é possível observar uma abertura
de caixa na Figura 4.9 (b) que tem como finalidade acomodar a chapa com espessura de 2 mm que
serve para fazer a ligação do motor ao suporte do pé.
4.1.6 Suporte do tornozelo
O suporte do tornozelo (Figura 4.10) é o componente responsável por realizar o movimento de
deslocamento anterior, o que implicou a subdivisão deste componente.
21
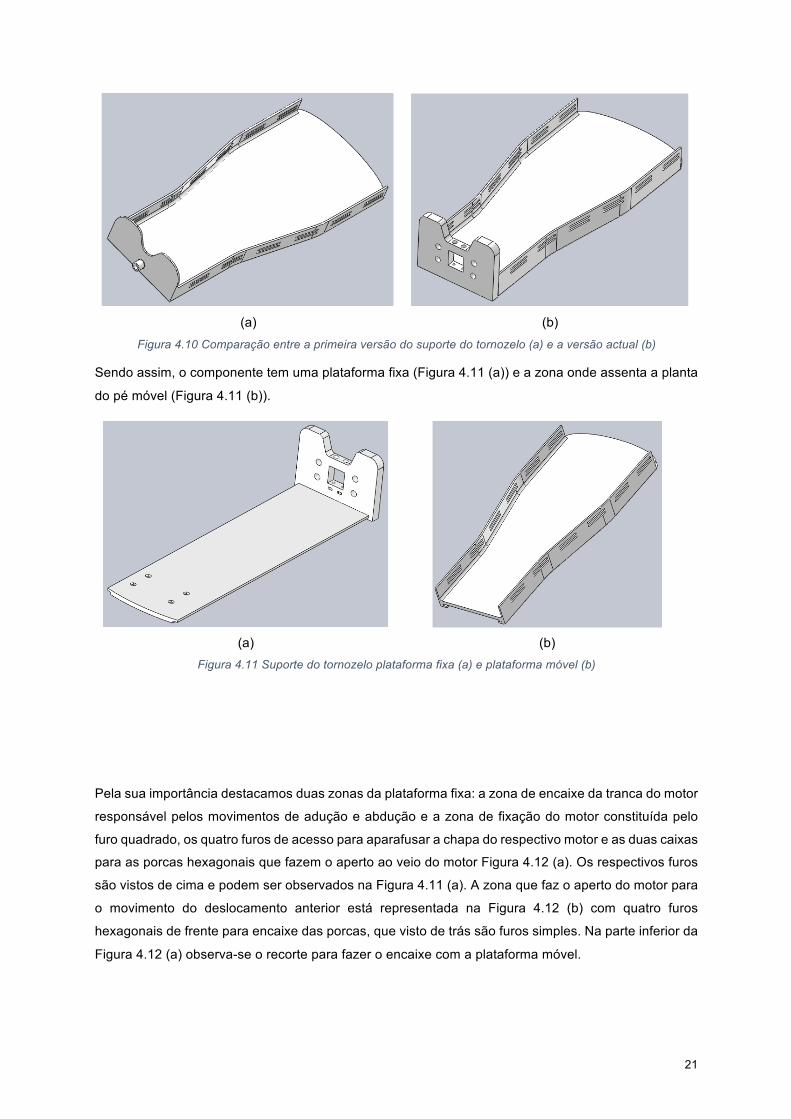
(a) (b)
Figura 4.10 Comparação entre a primeira versão do suporte do tornozelo (a) e a versão actual (b)
Sendo assim, o componente tem uma plataforma fixa (Figura 4.11 (a)) e a zona onde assenta a planta
do pé móvel (Figura 4.11 (b)).
(a) (b)
Figura 4.11 Suporte do tornozelo plataforma fixa (a) e plataforma móvel (b)
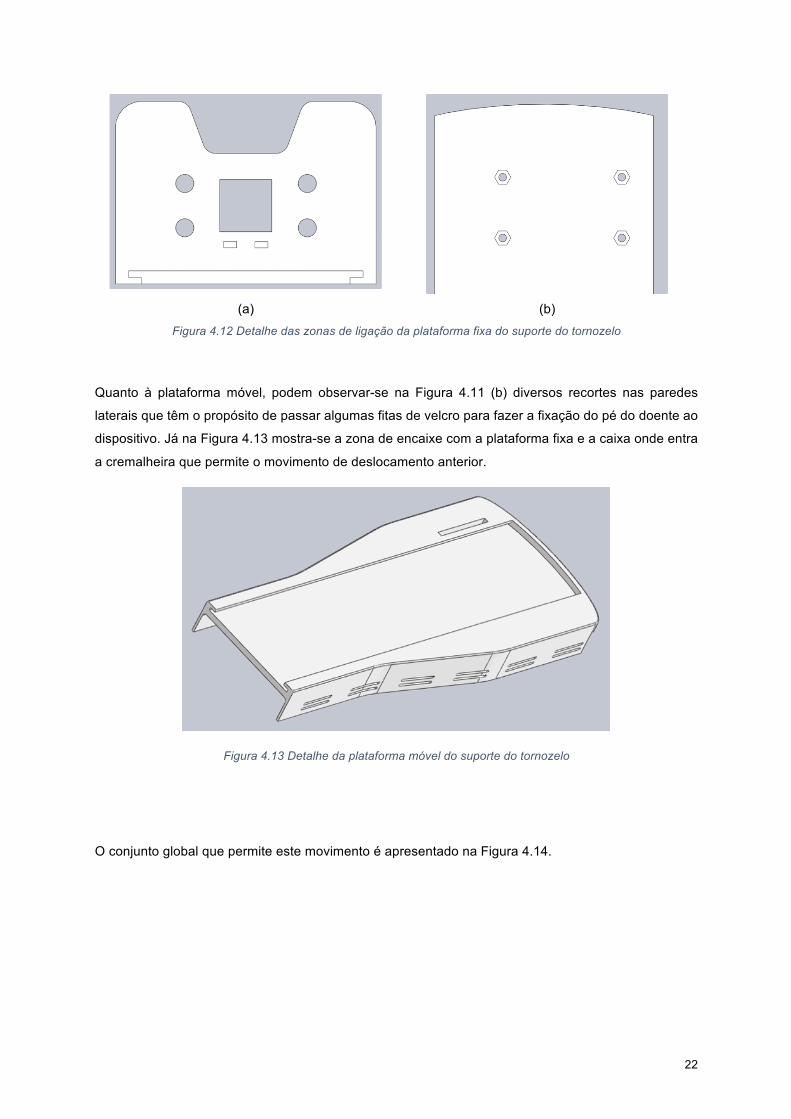
Pela sua importância destacamos duas zonas da plataforma fixa: a zona de encaixe da tranca do motor
responsável pelos movimentos de adução e abdução e a zona de fixação do motor constituída pelo
furo quadrado, os quatro furos de acesso para aparafusar a chapa do respectivo motor e as duas caixas
para as porcas hexagonais que fazem o aperto ao veio do motor Figura 4.12 (a). Os respectivos furos
são vistos de cima e podem ser observados na Figura 4.11 (a). A zona que faz o aperto do motor para
o movimento do deslocamento anterior está representada na Figura 4.12 (b) com quatro furos
hexagonais de frente para encaixe das porcas, que visto de trás são furos simples. Na parte inferior da
Figura 4.12 (a) observa-se o recorte para fazer o encaixe com a plataforma móvel.
22
(a) (b)
Figura 4.12 Detalhe das zonas de ligação da plataforma fixa do suporte do tornozelo
Quanto à plataforma móvel, podem observar-se na Figura 4.11 (b) diversos recortes nas paredes
laterais que têm o propósito de passar algumas fitas de velcro para fazer a fixação do pé do doente ao
dispositivo. Já na Figura 4.13 mostra-se a zona de encaixe com a plataforma fixa e a caixa onde entra
a cremalheira que permite o movimento de deslocamento anterior.
Figura 4.13 Detalhe da plataforma móvel do suporte do tornozelo
O conjunto global que permite este movimento é apresentado na Figura 4.14.
23
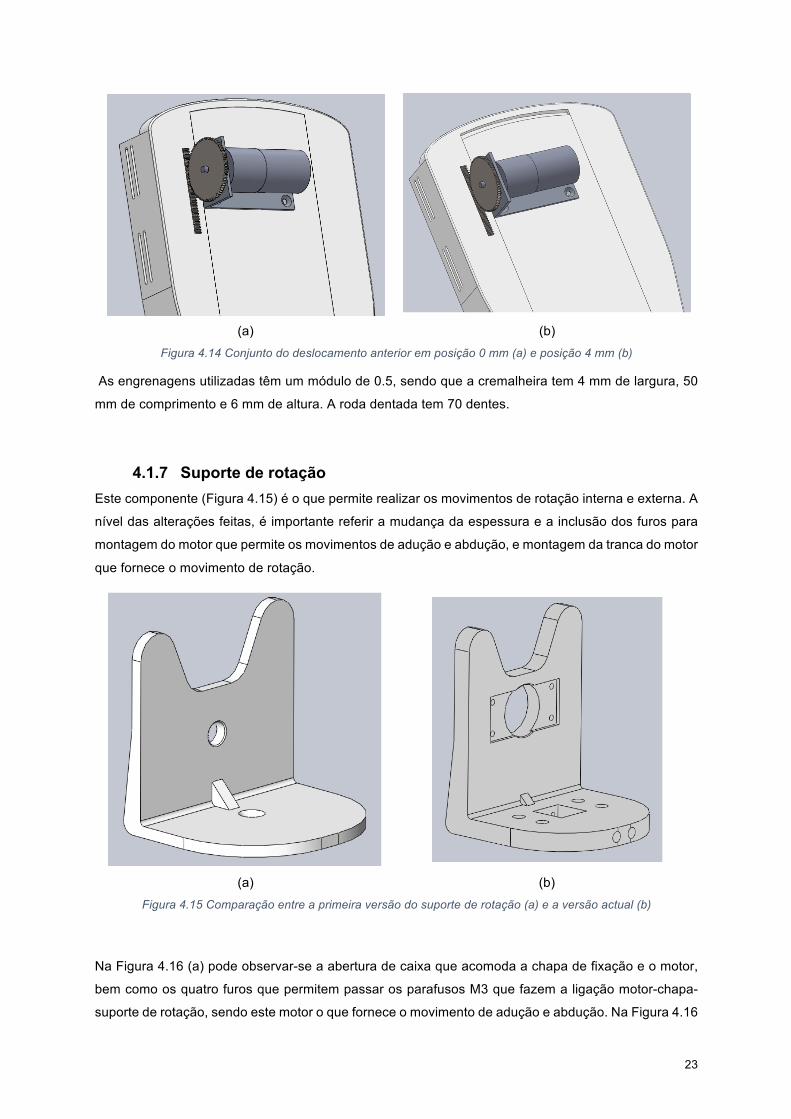
(a) (b) Figura 4.14 Conjunto do deslocamento anterior em posição 0 mm (a) e posição 4 mm (b)
As engrenagens utilizadas têm um módulo de 0.5, sendo que a cremalheira tem 4 mm de largura, 50
mm de comprimento e 6 mm de altura. A roda dentada tem 70 dentes.
4.1.7 Suporte de rotação
Este componente (Figura 4.15) é o que permite realizar os movimentos de rotação interna e externa. A
nível das alterações feitas, é importante referir a mudança da espessura e a inclusão dos furos para
montagem do motor que permite os movimentos de adução e abdução, e montagem da tranca do motor
que fornece o movimento de rotação.
(a) (b) Figura 4.15 Comparação entre a primeira versão do suporte de rotação (a) e a versão actual (b)
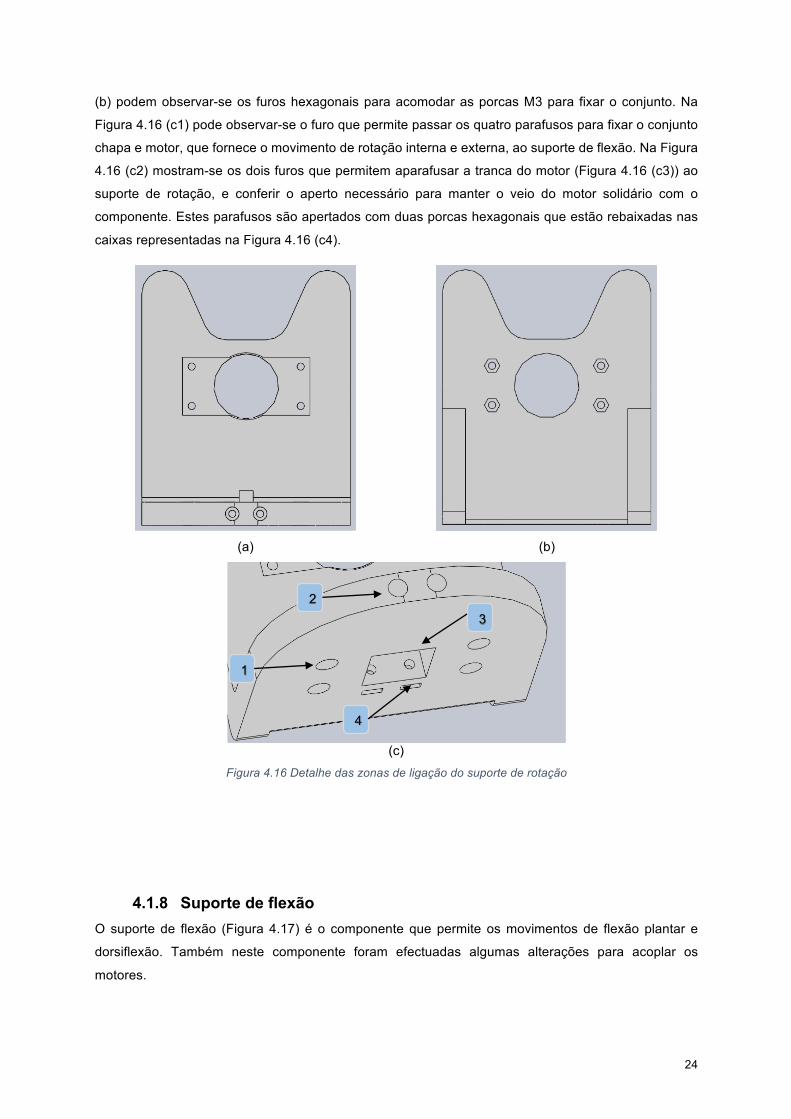
Na Figura 4.16 (a) pode observar-se a abertura de caixa que acomoda a chapa de fixação e o motor,
bem como os quatro furos que permitem passar os parafusos M3 que fazem a ligação motor-chapa-
suporte de rotação, sendo este motor o que fornece o movimento de adução e abdução. Na Figura 4.16
24
(b) podem observar-se os furos hexagonais para acomodar as porcas M3 para fixar o conjunto. Na
Figura 4.16 (c1) pode observar-se o furo que permite passar os quatro parafusos para fixar o conjunto
chapa e motor, que fornece o movimento de rotação interna e externa, ao suporte de flexão. Na Figura
4.16 (c2) mostram-se os dois furos que permitem aparafusar a tranca do motor (Figura 4.16 (c3)) ao
suporte de rotação, e conferir o aperto necessário para manter o veio do motor solidário com o
componente. Estes parafusos são apertados com duas porcas hexagonais que estão rebaixadas nas
caixas representadas na Figura 4.16 (c4).
(a) (b)
(c) Figura 4.16 Detalhe das zonas de ligação do suporte de rotação
4.1.8 Suporte de flexão
O suporte de flexão (Figura 4.17) é o componente que permite os movimentos de flexão plantar e
dorsiflexão. Também neste componente foram efectuadas algumas alterações para acoplar os
motores.
2
1
4
3
25
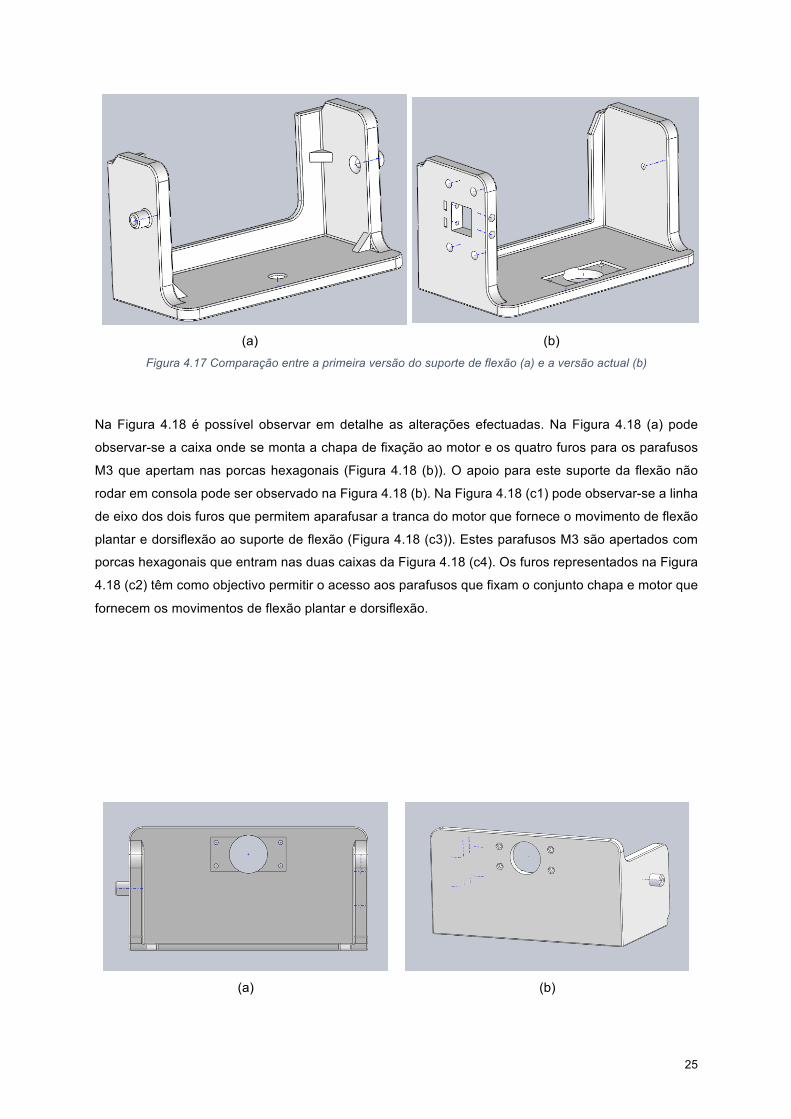
(a) (b) Figura 4.17 Comparação entre a primeira versão do suporte de flexão (a) e a versão actual (b)
Na Figura 4.18 é possível observar em detalhe as alterações efectuadas. Na Figura 4.18 (a) pode
observar-se a caixa onde se monta a chapa de fixação ao motor e os quatro furos para os parafusos
M3 que apertam nas porcas hexagonais (Figura 4.18 (b)). O apoio para este suporte da flexão não
rodar em consola pode ser observado na Figura 4.18 (b). Na Figura 4.18 (c1) pode observar-se a linha
de eixo dos dois furos que permitem aparafusar a tranca do motor que fornece o movimento de flexão
plantar e dorsiflexão ao suporte de flexão (Figura 4.18 (c3)). Estes parafusos M3 são apertados com
porcas hexagonais que entram nas duas caixas da Figura 4.18 (c4). Os furos representados na Figura
4.18 (c2) têm como objectivo permitir o acesso aos parafusos que fixam o conjunto chapa e motor que
fornecem os movimentos de flexão plantar e dorsiflexão.
(a) (b)

26
(c)
Figura 4.18 Detalhe das zonas de ligação do suporte de flexão
4.2 Implementação do código de controlo Quanto ao código que permite fazer o controlo deste dispositivo, é importante referir que foi
implementado apenas para um dos graus de liberdade, a flexão plantar e dorsiflexão. Para fazer o
controlo deste motor é necessário escolher o valor em graus que se pretende rodar na janela da
interface gráfica do software, e esse valor é enviado pela porta série (USB) de comunicação para o
Arduino. Com a chegada da instrução ao Arduino é necessário verificar a posição actual do motor e
saber qual é a direcção do movimento requerida. Consoante estas duas variáveis, o motor é accionado
e só pára quando atinge a posição que foi previamente introduzida no software.
O funcionamento deste sistema de controlo está esquematicamente mostrado na Figura 4.19.
Figura 4.19 Esquema de funcionamento do sistema de controlo
Quanto às ligações (Figura 4.201) entre os diferentes componentes deste sistema de controlo é
importante referir que é necessário conectar o motor com o respectivo controlador, que por sua vez
1 Na Figura 3.18 o controlador representado não é o mesmo controlador que será implementado no protótipo mas tem funcionalidades idênticas para o esquema de ligações.
2
1
3
4
Input SoftwareComunicação da instrução
para o ArduinoAcção do
motor
Verificação da instrução

27
está ligado ao Arduino, existindo também uma fonte de alimentação externa para o motor. O Arduino é
alimentado através da porta USB do computador.
Figura 4.20 Esquema de ligações entre Arduino, controlador e motor
A fonte de tensão alimenta o controlador do motor que por sua vez está ligado ao Arduino através de
quatro condutores: dois deles fornecem a informação sobre a direcção da rotação, um serve para fazer
o controlo PWM que permite regular a velocidade do motor, e o último serve para fazer a leitura da
corrente que está a passar pelo controlador. Do lado do motor existem seis condutores, dois dos quais
se ligam ao controlador e os restantes directamente ao Arduino. Todas as portas do Arduino utilizadas
são digitais.
O pseudocódigo do programa é apresentado na Figura 4.21 e está divido em quatro segmentos
diferentes. Em primeiro lugar está a inicialização do programa onde são definidas as variáveis a utilizar,
bem como bibliotecas necessárias para executar o programa e algumas instruções de inicialização. Em
seguida surge a zona do código em ciclo (loop), que significa que é o código que está permanentemente
a correr no Arduino. Em terceiro lugar surge a zona onde se cria a rotina para o motor rodar até chegar
à posição requerida. Em último lugar mostra-se o código para fazer o motor rodar no sentido do ponteiro
dos relógios ou no sentido inverso.

28
Figura 4.21 Pseudocódigo implementado no Arduino
Inicialização do programa
Abertura da porta Série
Inicialização da rotina de contagem de pulsos do encoder
Calculos da relação de engrenagem
Conversão de graus para pulsos
Velocidade de rotação
Código em loop
Se houver informação na porta série
Leitura da informação
Separar variavel de controlo da instrução
Se variavel de controlo for igual a X
Corre codigo do grau de liberdade X
Codigo do grau de liberdade X
Enquanto (Posição do motor-Posição incial < Posição Pretendida)
Motor roda com diversos estágios de velocidade
Motor Pára
Imprime resultados para verificação
Codigo Motor Direcção Y
Define INA ou INB como HIGH ou LOW
Fornece tensão para o motor rodar com a velocidade pretendida
29
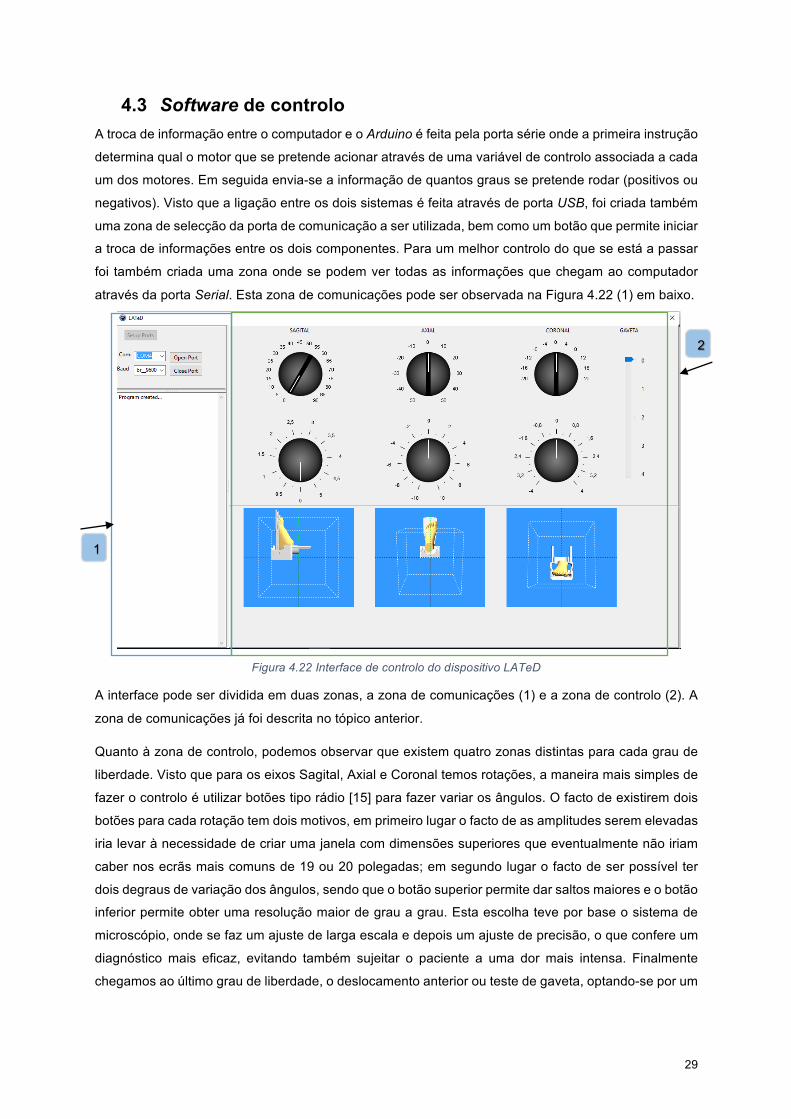
4.3 Software de controlo A troca de informação entre o computador e o Arduino é feita pela porta série onde a primeira instrução
determina qual o motor que se pretende acionar através de uma variável de controlo associada a cada
um dos motores. Em seguida envia-se a informação de quantos graus se pretende rodar (positivos ou
negativos). Visto que a ligação entre os dois sistemas é feita através de porta USB, foi criada também
uma zona de selecção da porta de comunicação a ser utilizada, bem como um botão que permite iniciar
a troca de informações entre os dois componentes. Para um melhor controlo do que se está a passar
foi também criada uma zona onde se podem ver todas as informações que chegam ao computador
através da porta Serial. Esta zona de comunicações pode ser observada na Figura 4.22 (1) em baixo.
A interface pode ser dividida em duas zonas, a zona de comunicações (1) e a zona de controlo (2). A
zona de comunicações já foi descrita no tópico anterior.
Quanto à zona de controlo, podemos observar que existem quatro zonas distintas para cada grau de
liberdade. Visto que para os eixos Sagital, Axial e Coronal temos rotações, a maneira mais simples de
fazer o controlo é utilizar botões tipo rádio [15] para fazer variar os ângulos. O facto de existirem dois
botões para cada rotação tem dois motivos, em primeiro lugar o facto de as amplitudes serem elevadas
iria levar à necessidade de criar uma janela com dimensões superiores que eventualmente não iriam
caber nos ecrãs mais comuns de 19 ou 20 polegadas; em segundo lugar o facto de ser possível ter
dois degraus de variação dos ângulos, sendo que o botão superior permite dar saltos maiores e o botão
inferior permite obter uma resolução maior de grau a grau. Esta escolha teve por base o sistema de
microscópio, onde se faz um ajuste de larga escala e depois um ajuste de precisão, o que confere um
diagnóstico mais eficaz, evitando também sujeitar o paciente a uma dor mais intensa. Finalmente
chegamos ao último grau de liberdade, o deslocamento anterior ou teste de gaveta, optando-se por um
1
2
Figura 4.22 Interface de controlo do dispositivo LATeD

30
botão deslizante com intervalo de 0 a 4 mm para o seu controlo visto ser uma translação apenas num
sentido e com um valor máximo.
Na zona inferior da janela estão as três janelas já referidas onde se pode ver em tempo real um modelo
do dispositivo e um modelo de um pé [16], que se movimentam no espaço consoante a instrução dada
nos botões superiores. Estas janelas gráficas [17] permitem criar uma experiência 3D Virtual que se
adequa perfeitamente à aplicação desejada. Os componentes do dispositivo fazem parte do primeiro
protótipo já criado neste projecto.
Relativamente às dificuldades que foram surgindo no desenvolvimento deste software, existem alguns
pontos a salientar.
A troca de informações entre interface e Arduino mostrou-se algo complicada na fase inicial enquanto
não foi possível perceber exactamente se a informação enviada pelo software chegava no mesmo
formato ao Arduino. Após alguma análise concluiu-se que o formato era erradamente lido pelo Arduino
e devia-se ao facto de não estar a ser lido como ASCII, problema que foi resolvido fazendo uma
conversão do formato.
A nível dos botões existiram também algumas dificuldades, pois nem sempre a posição era
correctamente lida pela interface. Este erro foi resolvido alterando a forma como o botão reagia à
alteração de posição.
Em anexo encontra-se um manual de utilização detalhado deste software.
31
5 Produção do Protótipo
Neste capítulo vai ser abordado o método de produção do protótipo e os custos associados ao
processo.
Nos dias que correm é cada vez mais simples e rápido passar de um modelo CAD para um protótipo,
por isso mesmo existe o conceito de Prototipagem Rápida. Passar do modelo CAD para um produto
final poderia tornar-se um processo bastante dispendioso na medida em que teriam de se fazer moldes
para injecção que podem facilmente ascender a algumas dezenas de milhares de euros. Isto tornaria
por si só o projecto inviável no caso de serem necessárias alterações ao design do produto.
As impressoras 3D são o exemplo mais concreto da Prototipagem Rápida, e cada vez mais se utilizam
estas impressoras para fazer protótipos baratos que permitem obter resultados interessantes.
O material utilizado por estas impressoras pode ser ABS ou PLA e o funcionamento consiste em
alimentar o fio até um extrusor que funde o material e o deposita em camadas na plataforma da
impressora até obter a peça completa. Existem alguns parâmetros que podem ser adaptados para
impressão, tais como:
• Espessura de camada;
• Espessura das paredes;
• Taxa de enchimento no interior das paredes.
A diminuição dos dois primeiros parâmetros resulta na obtenção de peças com melhor aspecto
superficial e melhor precisão dimensional. Quanto à taxa de enchimento, confere menor ou maior
rigidez ao conjunto dependo da aplicação final da peça. Em sentido inverso, o tempo de produção
aumenta significativamente com estas melhorias a nível dos parâmetros da operação. Dependendo de
cada peça, os parâmetros devem ser ajustados para encontrar um ponto de equilíbrio que satisfaça os
propósitos da sua utilização.
5.1 Produção
5.1.1 Componentes metálicos
Como já foi referido, os componentes metálicos foram maquinados no LTO do DEM. A peça que faz a
tranca do veio foi primeiramente cortada com uma serra eléctrica e em seguida foi maquinada na
fresadora para facejamento até às dimensões pretendidas. Em seguida foi aberto o furo central com 4
mm de diâmetro e feito o rasgo de 2 mm. Os furos que fornecem o seu aperto foram o último passo da
sequência. Com este componente fabricado foi possível testar a ligação com o veio do motor, tendo
sido verificado que a rigidez do alumínio não permitia o aperto necessário, existindo escorregamento
do veio no furo. Esta situação foi corrigida através de múltiplas passagens com lima triangular por forma
a fazer arestas interiores nas zonas cilíndricas e a peça foi cortada ao meio para facilitar no aperto. O
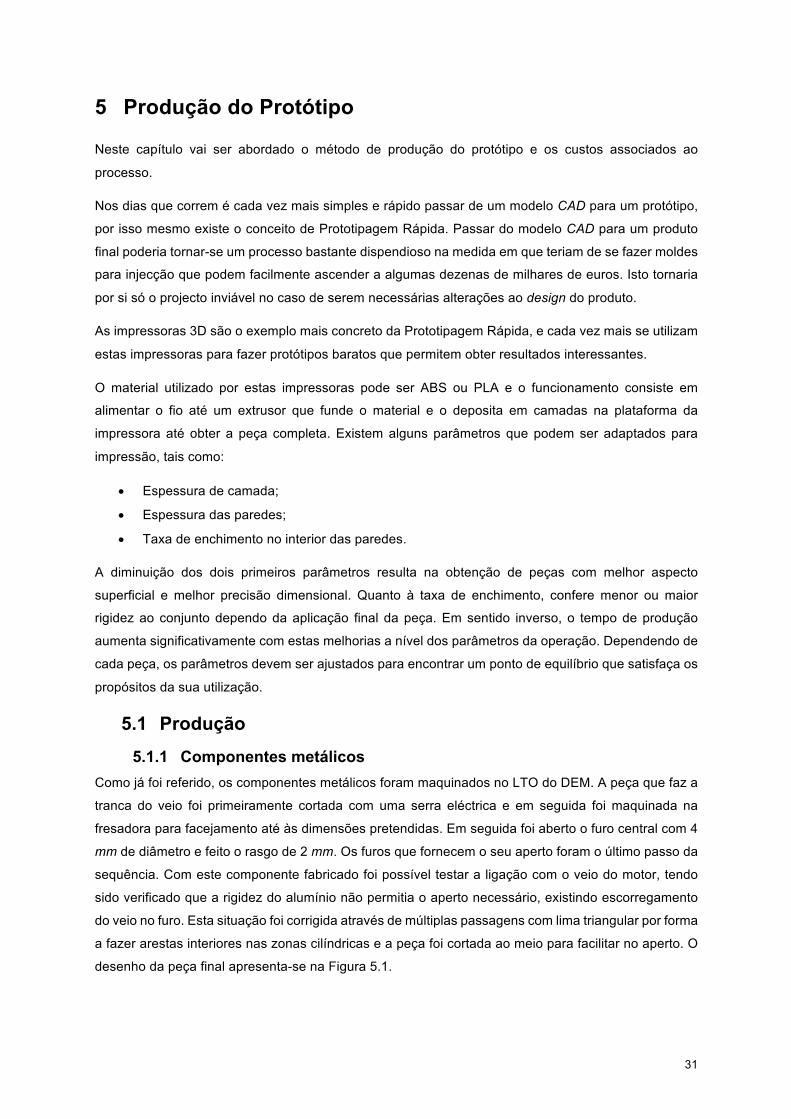
desenho da peça final apresenta-se na Figura 5.1.
32
(a) (b)
Figura 5.1 Detalhe da tranca do veio zona rectangular (a) e zona cilíndrica (b)
Para a chapa de fixação do motor, visto ser um componente onde não é requerida uma elevada
precisão dimensional, optou-se por fazer o corte com guilhotina manual e passagens à lima até chegar
à dimensão pretendida. Em seguida realizaram-se os furos e chanfros com o engenho de furar. No final
testou-se a ligação ao motor e o aperto esperado foi atingido.
5.1.2 Componentes em plástico
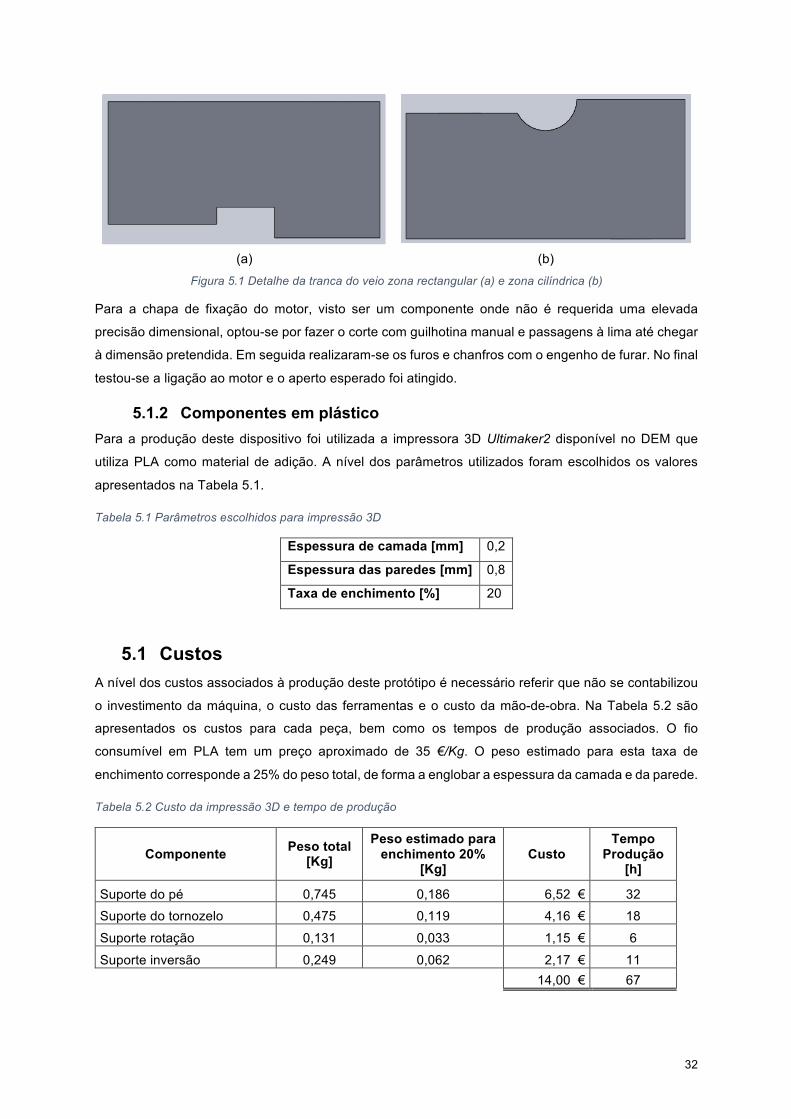
Para a produção deste dispositivo foi utilizada a impressora 3D Ultimaker2 disponível no DEM que
utiliza PLA como material de adição. A nível dos parâmetros utilizados foram escolhidos os valores
apresentados na Tabela 5.1.
Tabela 5.1 Parâmetros escolhidos para impressão 3D
Espessura de camada [mm] 0,2
Espessura das paredes [mm] 0,8
Taxa de enchimento [%] 20
5.1 Custos A nível dos custos associados à produção deste protótipo é necessário referir que não se contabilizou
o investimento da máquina, o custo das ferramentas e o custo da mão-de-obra. Na Tabela 5.2 são
apresentados os custos para cada peça, bem como os tempos de produção associados. O fio
consumível em PLA tem um preço aproximado de 35 €/Kg. O peso estimado para esta taxa de
enchimento corresponde a 25% do peso total, de forma a englobar a espessura da camada e da parede.
Tabela 5.2 Custo da impressão 3D e tempo de produção
Componente Peso total [Kg]
Peso estimado para enchimento 20%
[Kg] Custo
Tempo Produção
[h]
Suporte do pé 0,745 0,186 6,52 € 32 Suporte do tornozelo 0,475 0,119 4,16 € 18 Suporte rotação 0,131 0,033 1,15 € 6 Suporte inversão 0,249 0,062 2,17 € 11
14,00 € 67

33
A nível dos componentes metálicos para efeitos da produção deste protótipo apenas se fabricaram uma
chapa de fixação do motor e uma tranca do veio do motor. Ambas as peças foram maquinadas no LTO
do DEM com sobras de material, visto serem peças de dimensão relativamente pequena. Se não
tivesse sido possível arranjar este material, o custo estimado seria de 2,5 €/Kg, o que representaria
para os quatro conjuntos das duas peças um custo de 0,19 €, o que pode ser desprezável, mas tem de
se ter em mente que o custo da mão-de-obra para estas operações pode ascender aos 8 €/h o que já
representa um valor apreciável.
É também necessário falar do custo dos parafusos necessários para fazer a montagem do dispositivo.
Na Tabela 5.3 estão os preços e quantidades referentes aos parafusos e porcas.
Tabela 5.3 Custo dos parafusos
Componente Quantidade Preço unitário Custo
Parafuso M3x35 6 0,25 € 1,48 € Parafuso M3x16 16 0,19 € 3,03 € Parafuso M3x6 8 0,13 € 1,01 € Porca M3 30 0,01 € 0,37 €
5,89 €
Finalmente é necessário falar do custo dos motores e controladores, os quais representam a maior
contribuição para o custo global deste dispositivo. Na Tabela 5.4 são apresentados os custos
associados ao sistema de controlo.
Tabela 5.4 Custo dos componentes do sistema de controlo
Componente Quantidade Preço unitário Custo
Motor Pololu 2275 4 39,24 € 156,96 € Controlador Pololu VNH5019 2 53,01 € 106,02 € Arduino 1 41,57 € 41,57 € Fonte de alimentação 2 14,00 € 28,00 € Cabos de ligação 20 0,17 € 3,32 €
335,87 €
Em termos globais, o custo de produção do protótipo total seria de 355,76 €. Por uma questão de
orçamento e tempo disponíveis, optou-se por implementar e testar apenas um grau de liberdade, o que
permitiu baixar os custos para 164,26 €. Ambos os valores não contemplam o custo do material e mão-
de-obra dos componentes em alumínio.
A análise de custos permite assim fazer uma comparação directa com os dispositivos dos quais
dispomos informação, o Telos e o Hollis. O Telos terá um custo aproximado dos 8000$ e o Hollis custa
cerca de 12000$. Sendo assim o dispositivo desenvolvido apresenta um custo substancialmente mais
baixo e permite reforçar a ideia da necessidade deste projecto.
34
6 Testes com o Protótipo
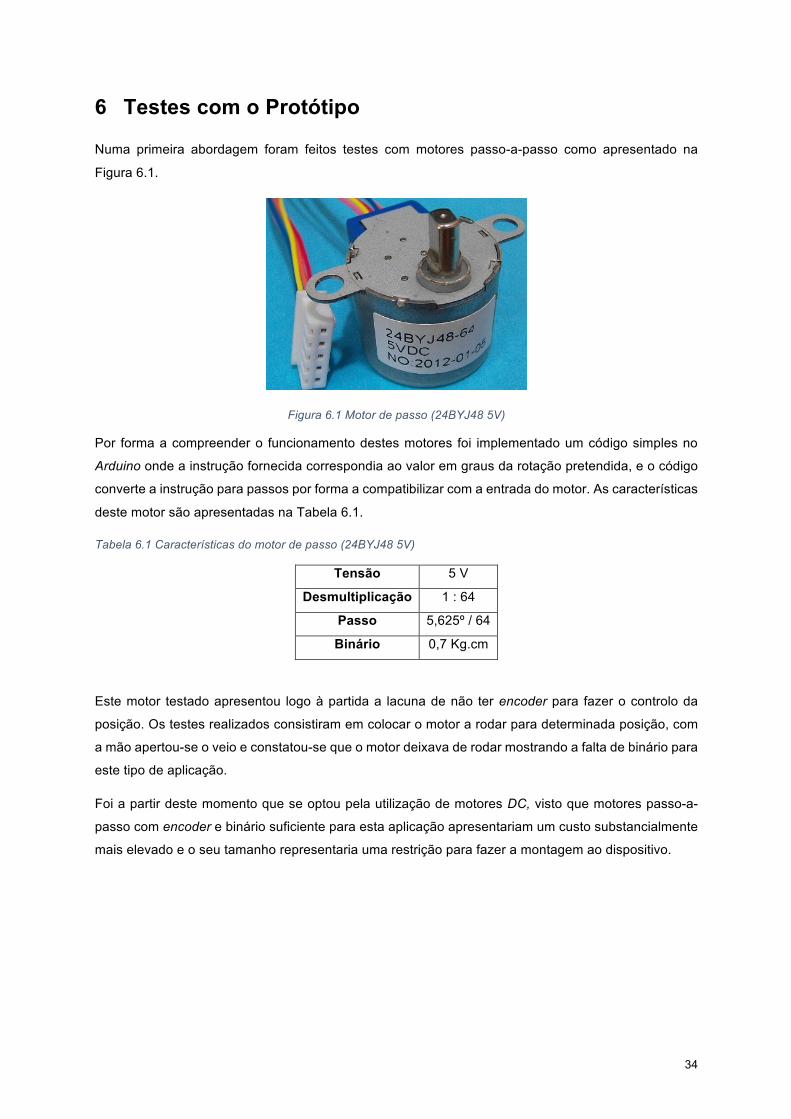
Numa primeira abordagem foram feitos testes com motores passo-a-passo como apresentado na
Figura 6.1.
Figura 6.1 Motor de passo (24BYJ48 5V)
Por forma a compreender o funcionamento destes motores foi implementado um código simples no
Arduino onde a instrução fornecida correspondia ao valor em graus da rotação pretendida, e o código
converte a instrução para passos por forma a compatibilizar com a entrada do motor. As características
deste motor são apresentadas na Tabela 6.1.
Tabela 6.1 Características do motor de passo (24BYJ48 5V)
Tensão 5 V
Desmultiplicação 1 : 64
Passo 5,625º / 64
Binário 0,7 Kg.cm
Este motor testado apresentou logo à partida a lacuna de não ter encoder para fazer o controlo da
posição. Os testes realizados consistiram em colocar o motor a rodar para determinada posição, com
a mão apertou-se o veio e constatou-se que o motor deixava de rodar mostrando a falta de binário para
este tipo de aplicação.
Foi a partir deste momento que se optou pela utilização de motores DC, visto que motores passo-a-
passo com encoder e binário suficiente para esta aplicação apresentariam um custo substancialmente
mais elevado e o seu tamanho representaria uma restrição para fazer a montagem ao dispositivo.
35
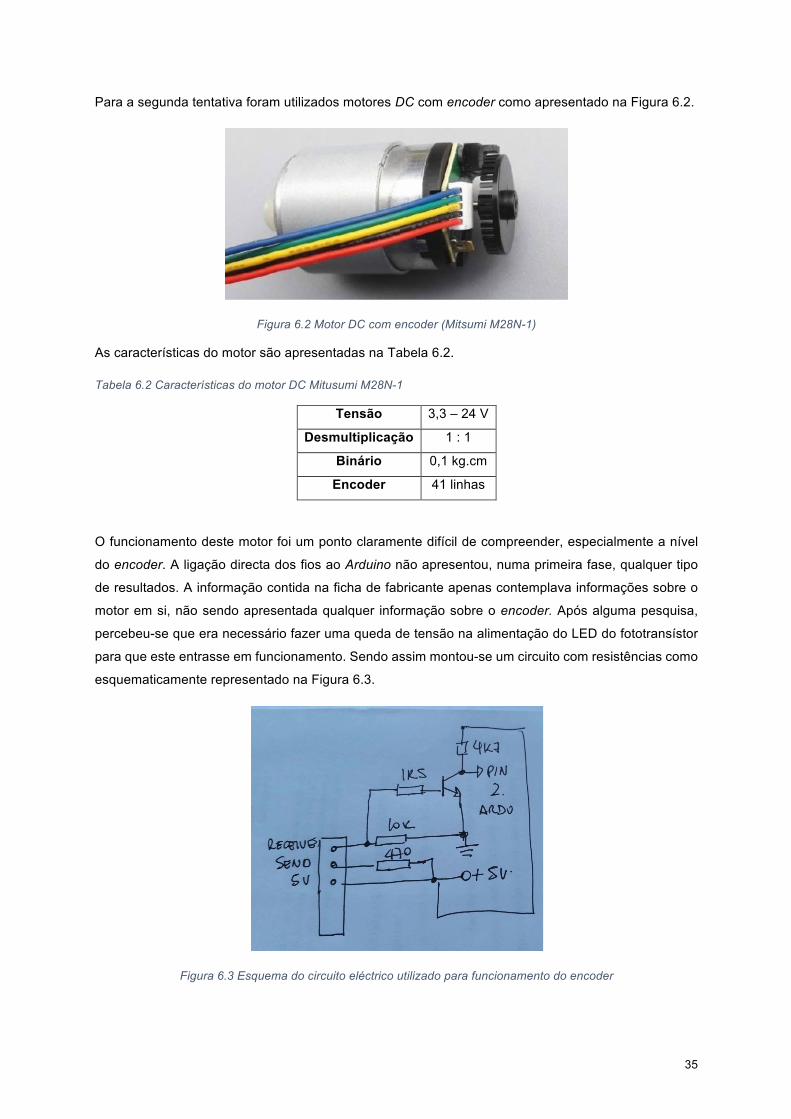
Para a segunda tentativa foram utilizados motores DC com encoder como apresentado na Figura 6.2.
Figura 6.2 Motor DC com encoder (Mitsumi M28N-1)
As características do motor são apresentadas na Tabela 6.2.
Tabela 6.2 Características do motor DC Mitusumi M28N-1
Tensão 3,3 – 24 V
Desmultiplicação 1 : 1
Binário 0,1 kg.cm
Encoder 41 linhas
O funcionamento deste motor foi um ponto claramente difícil de compreender, especialmente a nível
do encoder. A ligação directa dos fios ao Arduino não apresentou, numa primeira fase, qualquer tipo
de resultados. A informação contida na ficha de fabricante apenas contemplava informações sobre o
motor em si, não sendo apresentada qualquer informação sobre o encoder. Após alguma pesquisa,
percebeu-se que era necessário fazer uma queda de tensão na alimentação do LED do fototransístor
para que este entrasse em funcionamento. Sendo assim montou-se um circuito com resistências como
esquematicamente representado na Figura 6.3.
Figura 6.3 Esquema do circuito eléctrico utilizado para funcionamento do encoder

36
Após a compreensão do funcionamento deste motor, efectuaram-se testes idênticos aos realizados
com o motor passo-a-passo. Constatou-se que para além da velocidade do motor ser demasiado
elevada, o que não permitia movimentos na ordem de grandeza pretendida, também o encoder, por só
ter 41 linhas (o que representa na realidade 82 contagens), não consegue ter a resolução pretendida
para esta aplicação. A acrescentar aos dois pontos anteriores está o facto de o binário deste motor ser
bastante pequeno.
Com todas estas limitações procedeu-se então a uma nova pesquisa no mercado para encontrar uma
terceira solução que culminou na escolha do motor Pololu #2275.
Para validação da solução desenvolvida foram realizados alguns testes com o protótipo. Como já
referido anteriormente, para evitar custos muito elevados, apenas se montou um motor para fazer o
movimento de dorsiflexão e flexão plantar.
O primeiro teste realizado foi com o motor fora da montagem e com um disco medidor de graus e um
ponteiro para fazer uma comparação entre valores do encoder e o valor real (Figura 6.4).
Figura 6.4 Motor com disco e ponteiro de medição
Com este conjunto foi possível realizar uma bateria de testes onde para diferentes valores de
velocidade foi mantida a instrução para rodar 1º e foi feita a leitura do valor do encoder e inspeção
visual pelo ponteiro (Tabela 6.3).
Tabela 6.3 Resultados obtidos para motor sem carga e instrução de 1º
Velocidade [rpm] Instrução [º] Valor Encoder [º] 50,98 1 3,21 45,88 1 3,21 43,33 1 3,21 40,78 1 2,41 38,24 1 2,41

37
Os resultados obtidos não foram os esperados visto que os valores do encoder se mostraram sempre
mais elevados do que a instrução, sendo que com a diminuição da velocidade a diferença foi atenuada.
Esta diferença de valores pode ser explicada pela dificuldade que o motor tem em parar no exacto
momento em que é pretendido, tendo sempre um certo atraso neste processo. Este é um problema de
controlo, ao qual se deverá ter atenção em desenvolvimentos futuros. De referir que pela inspeção
visual, os resultados não conseguem ter uma precisão de duas casas decimais, mas de facto o ponteiro
indicava 3º e 2º nos respectivos casos, o que acaba por validar a leitura do encoder.
Com a primeira bateria de testes realizada, foi feita uma segunda tentativa onde a instrução dada foi
de apenas 0,5º (Tabela 6.4). A ideia de realizar os testes com a instrução de 0,5º surgiu pela observação
de que, para valores de velocidade mais baixos, existia a tendência do valor de encoder ser 2,4 vezes
superior à instrução.
Tabela 6.4 Resultados obtidos para motor sem carga e instrução de 0,5º
Velocidade [rpm] Instrução [º] Valor Encoder [º] 50,98 0,5 1,7 45,88 0,5 1,6 43,33 0,5 0,8 40,78 0,5 0,8 38,24 0,5 0,8
Para este cenário os resultados obtidos, embora não sejam o esperado, apresentam um erro
substancialmente menor e permitem obter um valor de rotação dentro daquilo que é pretendido - 1º.
De referir também que não é possível diminuir mais a velocidade de rotação pois o motor não tem
binário suficiente para iniciar o movimento a velocidades tão baixas.
Outro dos testes realizados foi, fazendo a montagem do suporte do pé e suporte da flexão do
dispositivo, como se mostra na Figura 6.5, adaptar uma massa de 1 Kg e tentar realizar os movimentos
desejados.
(a) (b)
Figura 6.5 Montagem do suporte do pé, suporte da flexão e motor (a) Massa de 1 Kg (b)
Partindo do princípio aplicado nos primeiros testes realizados, efectuou-se um teste para velocidades
baixas (Tabela 6.5).
38
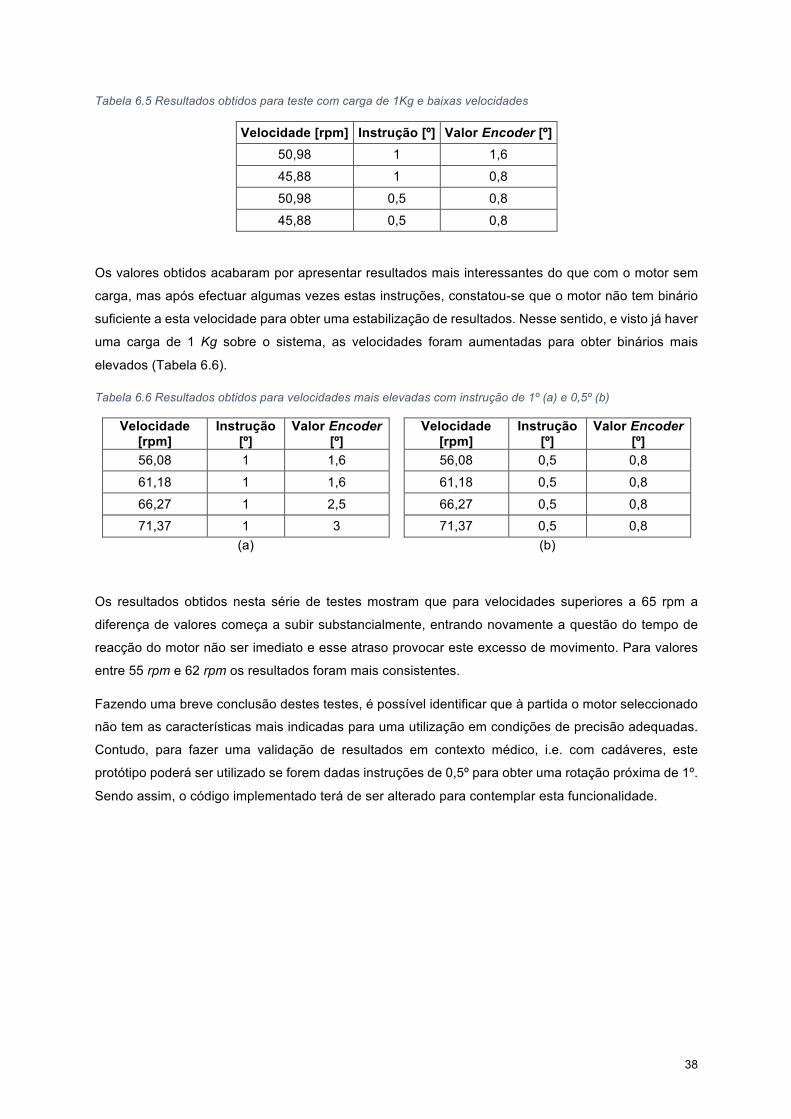
Tabela 6.5 Resultados obtidos para teste com carga de 1Kg e baixas velocidades
Velocidade [rpm] Instrução [º] Valor Encoder [º] 50,98 1 1,6 45,88 1 0,8 50,98 0,5 0,8 45,88 0,5 0,8
Os valores obtidos acabaram por apresentar resultados mais interessantes do que com o motor sem
carga, mas após efectuar algumas vezes estas instruções, constatou-se que o motor não tem binário
suficiente a esta velocidade para obter uma estabilização de resultados. Nesse sentido, e visto já haver
uma carga de 1 Kg sobre o sistema, as velocidades foram aumentadas para obter binários mais
elevados (Tabela 6.6).
Tabela 6.6 Resultados obtidos para velocidades mais elevadas com instrução de 1º (a) e 0,5º (b)
Velocidade [rpm]
Instrução [º]
Valor Encoder [º]
56,08 1 1,6 61,18 1 1,6 66,27 1 2,5 71,37 1 3
Velocidade [rpm]
Instrução [º]
Valor Encoder [º]
56,08 0,5 0,8 61,18 0,5 0,8 66,27 0,5 0,8 71,37 0,5 0,8
(a) (b)
Os resultados obtidos nesta série de testes mostram que para velocidades superiores a 65 rpm a
diferença de valores começa a subir substancialmente, entrando novamente a questão do tempo de
reacção do motor não ser imediato e esse atraso provocar este excesso de movimento. Para valores
entre 55 rpm e 62 rpm os resultados foram mais consistentes.
Fazendo uma breve conclusão destes testes, é possível identificar que à partida o motor seleccionado
não tem as características mais indicadas para uma utilização em condições de precisão adequadas.
Contudo, para fazer uma validação de resultados em contexto médico, i.e. com cadáveres, este
protótipo poderá ser utilizado se forem dadas instruções de 0,5º para obter uma rotação próxima de 1º.
Sendo assim, o código implementado terá de ser alterado para contemplar esta funcionalidade.
39
7 Conclusões e desenvolvimentos futuros
Esta dissertação teve como principal objectivo dar continuidade a um projecto inovador que visa agilizar
o trabalho do Médico na avaliação de lesões do tornozelo, mais concretamente as entorses. Nesse
sentido foi criado um dispositivo que permite colmatar as falhas identificadas na oferta actual do
mercado. Este trabalho culminou na criação de um novo protótipo capaz de integrar um sistema de
controlo para fazer um diagnóstico mais preciso e menos susceptível a factores externos à lesão em
si.
Primeiramente foi feito um enquadramento do trabalho já realizado na primeira fase deste projecto e
uma revisão músculo-esquelética para melhor compreender o problema proposto.
Em seguida foi feita uma revisão bibliográfica dos sistemas de controlo, motores e sensores, por forma
a fazer uma selecção cuidada dos componentes do dispositivo.
Após esta revisão foi necessário avaliar a implementação do sistema de controlo no dispositivo já
existente e procederam-se então às alterações necessárias ao design do conjunto, através de uma
ferramenta de CAD, para obter o dispositivo desejado e com uma sequência de montagem bem
definida.
Com esta fase concluída passou-se então à implementação do código de controlo e do
desenvolvimento da janela de controlo. Esta fase foi a mais complicada do projecto visto ser uma área
desconhecida até então para o Autor deste trabalho. Após experimentação de diferentes motores e
sensores, chegou-se à escolha final do motor Pololu. A escolha foi também condicionada pela fraca
disponibilidade destes componentes no mercado Português.
Quanto à janela de controlo, foi feita como uma aplicação autónoma para uso em qualquer computador
com sistema operativo Windows. Para esse efeito foi utilizado um software de programação baseado
em linguagem Pascal. Todo o software é gratuito e baseado em ferramentas opensourse, o que
facilitará a sua modificação e melhoramento futuro.
Chegamos então à fase de construção do protótipo, onde são apresentados os métodos utilizados para
a sua produção e onde são também abordados os custos associados ao seu fabrico.
Em último lugar temos a apresentação dos resultados obtidos com alguns testes efectuados para tentar
validar as escolhas implementadas.
Devido às limitações do motor já referenciadas é importante definir os próximos passos do projecto.
Sendo assim, as perspectivas de desenvolvimento futuro são:
• Validação do dispositivo em contexto médico com testes em cadáveres;
• Caso os binários e posicionamentos obtidos sejam satisfatórios proceder ao ajustamento do
código para as condições de trabalho;

40
• Caso o binário seja insuficiente optar por um motor mais potente ou mais desmultiplicado que
também gera mais binário e permite velocidades de operação mais baixas, logo indutoras de
menores desvios;
• Com a validação de resultados deverá fazer-se a integração dos restantes graus de liberdade
e fazer uma análise cuidada a nível da selecção de materiais para garantir a resistência
mecânica dos componentes, bem como o processo de produção em larga escala;
• Estabelecer contactos com parceiros e/ou investidores para estudar o lançamento do produto
no mercado;
41
Bibliografia
[1] S. Pestana, “Desenvolvimento de um dispositivo médico de diagnóstico para as lesões do
tornozelo,” 2015.
[2] “Telos Medical USA - Austin & Associates - Quality Orthopaedic & Podiatry Products.”
[Online]. Available: http://www.telosmedical.com/telos-stress-device.
[3] B. F. DIGiovanni, C. J. Fraga, B. E. Cohen, and M. J. Shereff, “Associated injuries found in
chronic lateral ankle instability.,” Foot ankle Int. / Am. Orthop. Foot Ankle Soc. [and] Swiss Foot
Ankle Soc., vol. 21, no. 10, pp. 809–815, 2000.
[4] P. Golanó, J. Vega, P. A. J. de Leeuw, F. Malagelada, M. C. Manzanares, V. Götzens, and C.
N. van Dijk, “Anatomy of the ankle ligaments: a pictorial essay,” Knee Surgery, Sport. Traumatol.
Arthrosc., vol. 24, no. 4, pp. 944–956, 2016.
[5] C. Dijk, “Management of the sprained ankle.,” Br J Sport. Med, vol. 36, no. 2, pp. 82–85, 2002.
[6] N. A. Schwarz, J. E. Kovaleski, R. J. Heitman, L. R. Gurchiek, and C. Gubler-Hanna,
“Arthrometric measurement of ankle-complex motion: Normative values,” J. Athl. Train., vol. 46,
no. 2, pp. 126–132, 2011.
[7] W. H. and A. W. Y. Yeadon, Handbook of Small Electric Motors, no. 1. 2003.
[8] J. F. Young, “ELEC 201 Home Page,” 2000. [Online]. Available:
https://www.clear.rice.edu/elec201/index.html. [Accessed: 03-Oct-2016].
[9] Pololu, “Pololu.” [Online]. Available: https://www.pololu.com/. [Accessed: 03-Oct-2016].
[10] M. de F. Chouzal, “Controlo digital de motores passo-a-passo,” Thesis Universidade do Porto.
1991.
[11] M. Jouaneh, Fundamentals of Mechatronics. 2013.
[12] “high torque stepper motor & CNC Stepper Motor- StepperOnline.” [Online]. Available:
http://www.omc-stepperonline.com/high-torquespeed-nema-34-cnc-stepper-motor-
13nm1841ozin-34hs595004s-p-57.html. [Accessed: 03-Oct-2016].
[13] Arduino, “Arduino - ArduinoBoardMega2560.” [Online]. Available:
https://www.arduino.cc/en/Main/ArduinoBoardMega2560. [Accessed: 03-Oct-2016].
[14] J. P. Coelho, “Sensores e Actuadores,” 2002.
[15] “uE Controls - Free Pascal wiki.” [Online]. Available: http://wiki.freepascal.org/uE_Controls.
[Accessed: 15-Mar-2016].
[16] “Human foot - STEP / IGES - 3D CAD model - GrabCAD.” [Online]. Available:
https://grabcad.com/library/human-foot-1. [Accessed: 25-Mar-2016].
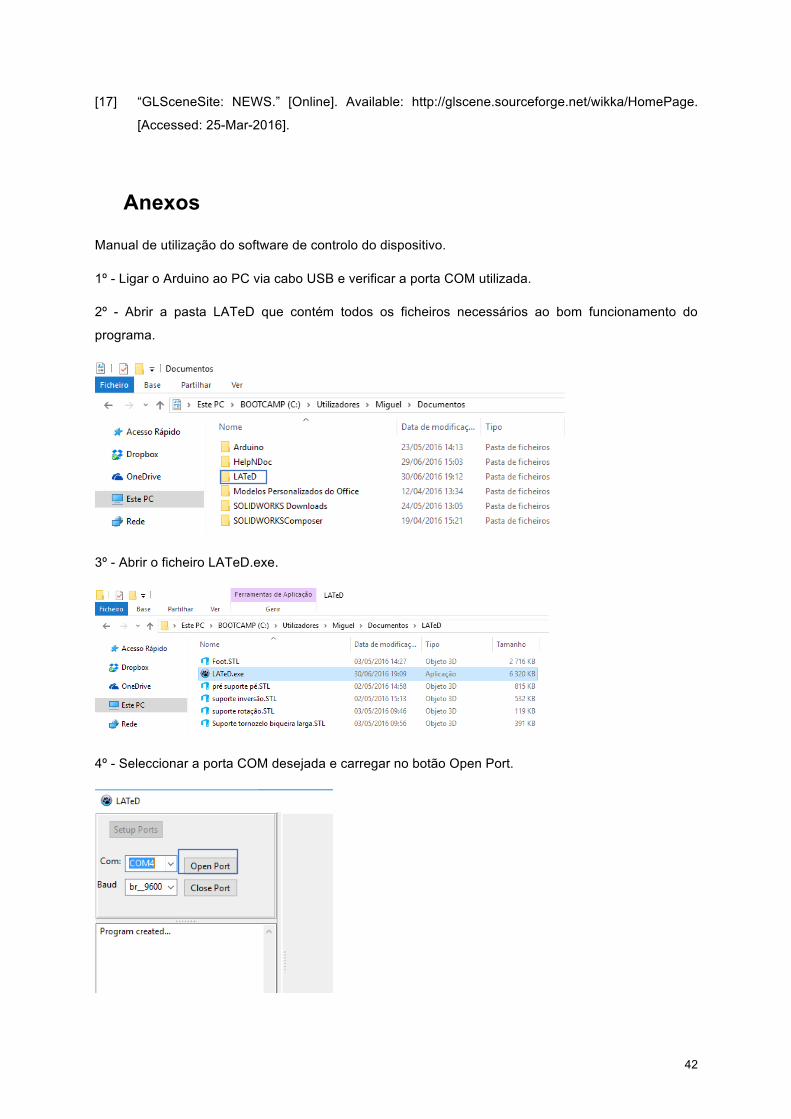
42
[17] “GLSceneSite: NEWS.” [Online]. Available: http://glscene.sourceforge.net/wikka/HomePage.
[Accessed: 25-Mar-2016].
Anexos
Manual de utilização do software de controlo do dispositivo.
1º - Ligar o Arduino ao PC via cabo USB e verificar a porta COM utilizada.
2º - Abrir a pasta LATeD que contém todos os ficheiros necessários ao bom funcionamento do
programa.
3º - Abrir o ficheiro LATeD.exe.
4º - Seleccionar a porta COM desejada e carregar no botão Open Port.
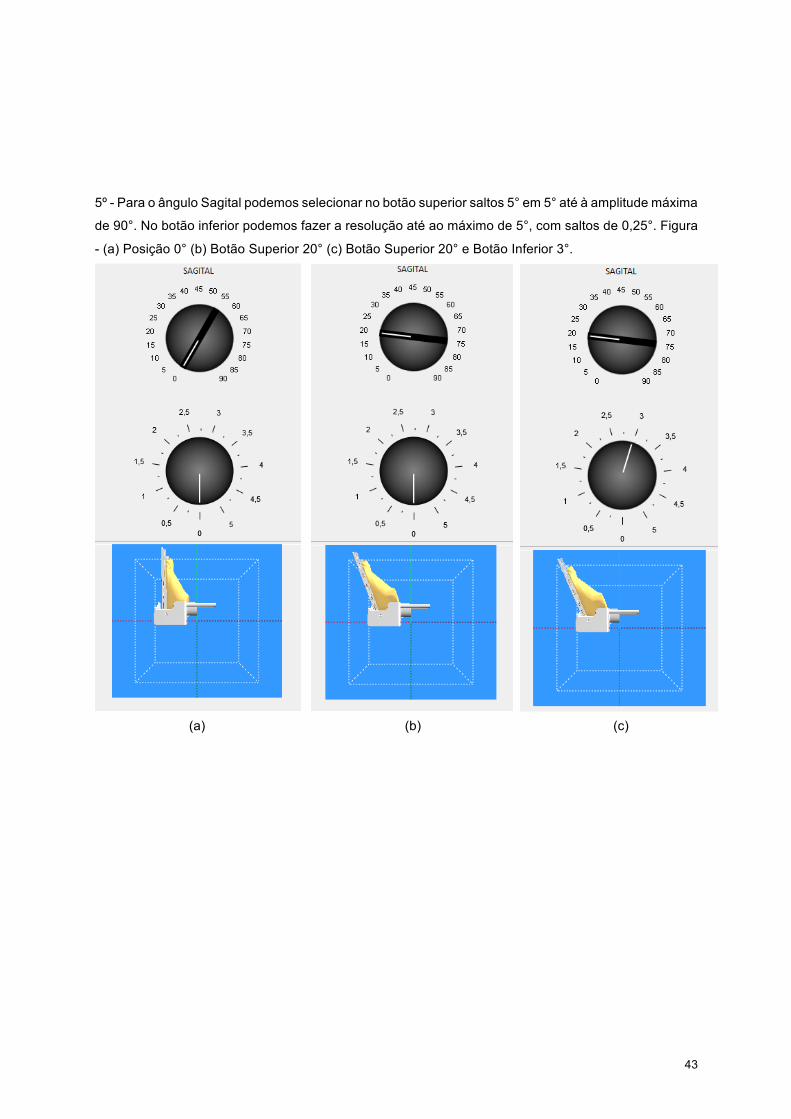
43
5º - Para o ângulo Sagital podemos selecionar no botão superior saltos 5° em 5° até à amplitude máxima
de 90°. No botão inferior podemos fazer a resolução até ao máximo de 5°, com saltos de 0,25°. Figura
- (a) Posição 0° (b) Botão Superior 20° (c) Botão Superior 20° e Botão Inferior 3°.
(a) (b) (c)

44
6º - Para o ângulo Axial podemos selecionar no botão superior saltos 10° em 10° até à amplitude
máxima de ±50°. No botão inferior podemos fazer a resolução até ao máximo de ±10°, com saltos de
1°. Figura - (a) Posição 0° (b) Botão Superior 30° (c) Botão Superior 30° e Botão Inferior 6°.
(a) (b) (c)

45
7º - Para o ângulo Coronal podemos selecionar no botão superior saltos 4° em 4° até à amplitude
máxima de ±20°. No botão inferior podemos fazer a resolução até ao máximo de 4°, com saltos de 0,4°.
Figura - (a) Posição 0° (b) Botão Superior 20° (c) Botão Superior 20° e Botão Inferior 3,2°.
(a) (b) (c)
8º - Para a translação superior podemos fazer a variação entre 0 e 4mm deslizando o botão para
posição pretendida. Figura - (a) Posição 0 (b) Posição 2 mm.
(a) (b)

46
9º - Por último podemos variar todos os ângulos ao mesmo tempo se for interessante para o
diagnóstico. (Exemplo Sagital 30°, Axial 20°, Coronal 12°)
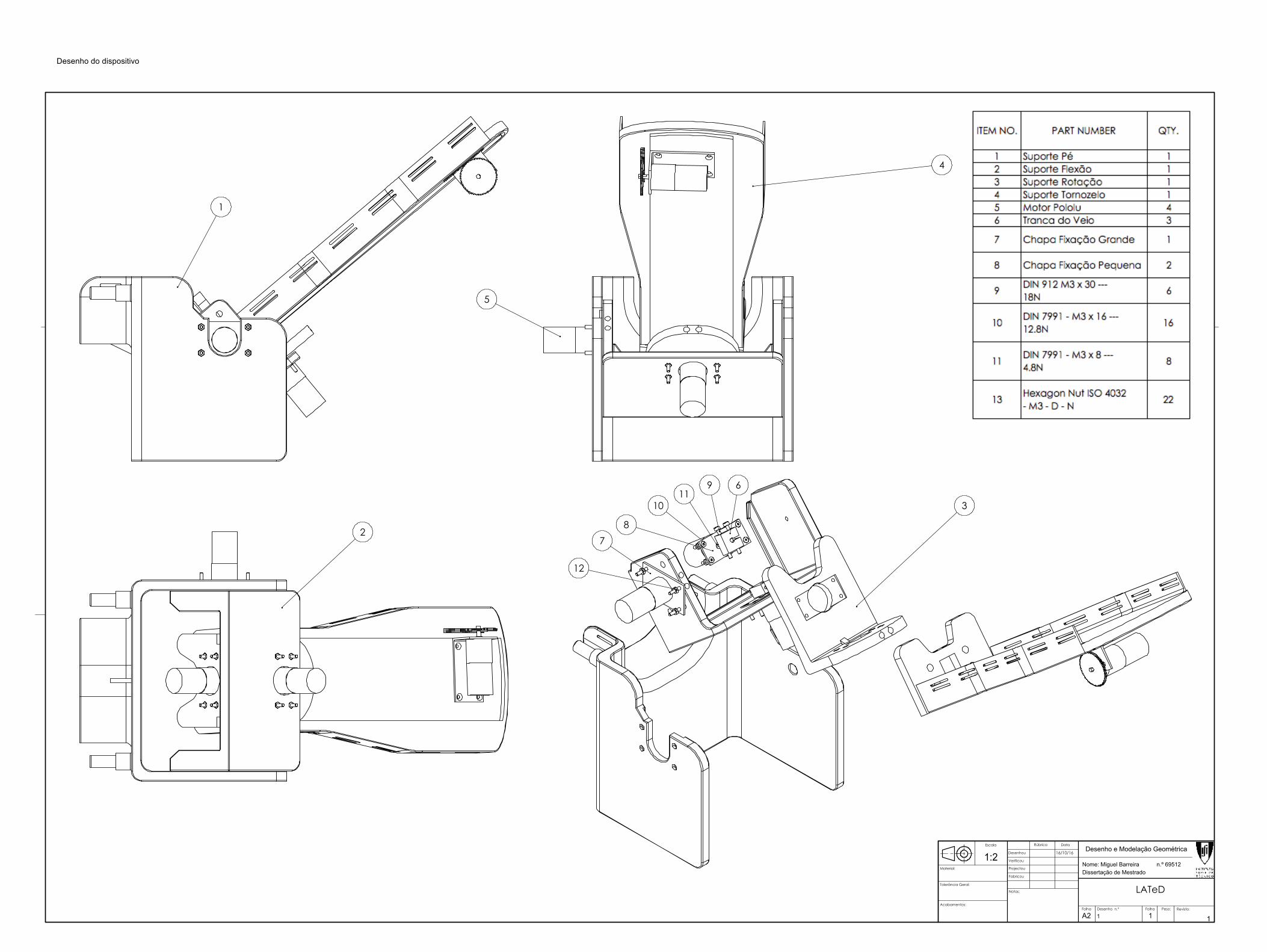
1
1
4
5
2
3
6
78
9
1011
12
ATeD
Dissertação de Mestrado
16/10/16Desenho e Modelação Geométrica
Notas:
Peso:
Fabricou
Projectou
Verificou
Desenhou
DataRúbrica
Acabamentos:
Material:
Revisto:
A2Folha Folha
1
Nome: Miguel Barreira n.º 695121:2Escala
Desenho n.º
Tolerância Geral:
1
Desenho do dispositivo