desenho de controladores - autenticação · desenho de controladores ... c variável controlada na...
TRANSCRIPT
1
1
Carla C. Pinheiro e F. Lemos – Dinâmica de Sistemas e Controlo de Processos – DEQB - IST
2
Desenho de ControladoresDesenho de Controladores
Critérios para o desenho de controladores:O sistema em cadeia fechada deve ser estável
Os efeitos das perturbações são minimizados
Respostas rápidas e suaves a alterações no “set-point”
O erro estacionário é eliminado
Acções excessivas do controlador são evitadas
O sistema de controlo é robusto
2
3
““RobustezRobustez”” éé uma caracteruma caracteríística chave no stica chave no controlo de controlo de realimentarealimentaççãoão
No contexto do dimensionamento de controladores “robustez” significa:
A capacidade de se conseguir um bom desempenho do controlador quando háalterações nas características dinâmicas do processo.
4
SintonizaSintonizaçção do controladorão do controlador
Envolve a selecção de valores adequadosde Kc, τI, and τD.Afecta o desempenho do controlador.Afecta a robustez do controlador.Por isso, a sintonização do controlador, resulta em muitos casos, de um compromisso entre desempenho e robustez.
3
5
Desenho de ControladoresDesenho de Controladores
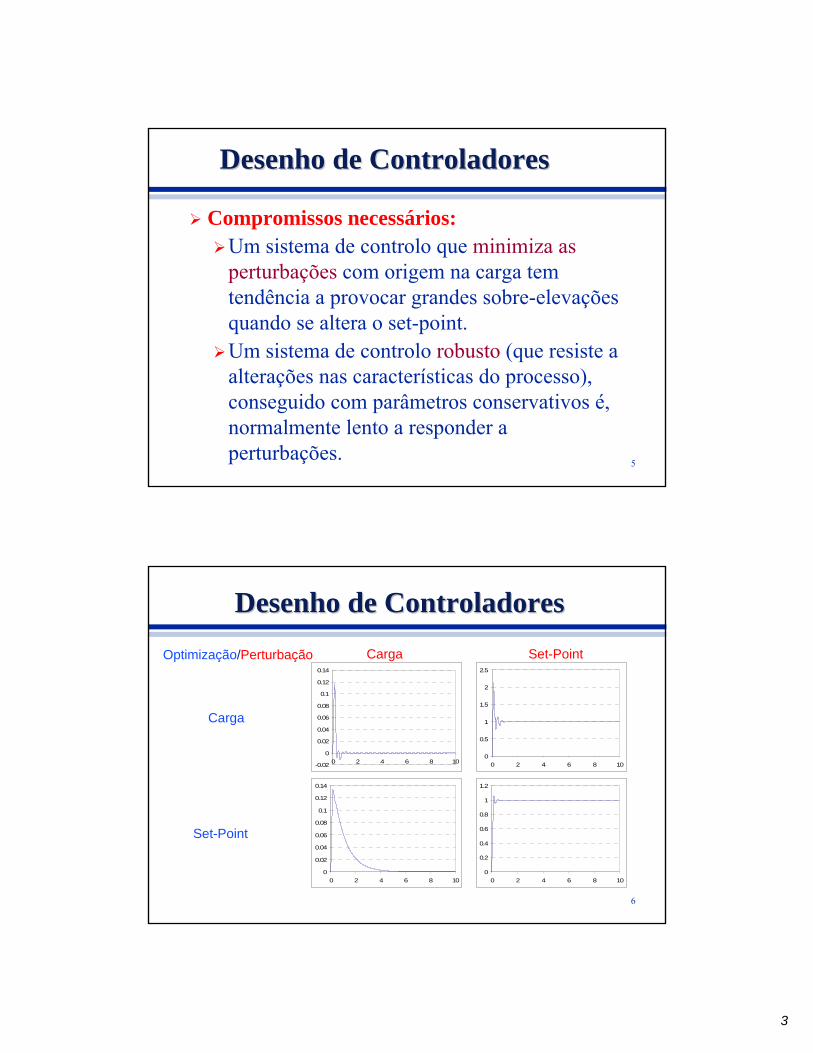
Compromissos necessários:Um sistema de controlo que minimiza as perturbações com origem na carga tem tendência a provocar grandes sobre-elevaçõesquando se altera o set-point.Um sistema de controlo robusto (que resiste a alterações nas características do processo), conseguido com parâmetros conservativos é, normalmente lento a responder a perturbações.
6
Desenho de ControladoresDesenho de Controladores
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 2 4 6 8 10
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 2 4 6 8 100
0.5
1
1.5
2
2.5
0 2 4 6 8 10
Optimização/Perturbação
Carga
Set-Point
Carga Set-Point
4
7
Desenho de ControladoresDesenho de Controladores
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 2 4 6 8 10
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 2 4 6 8 10
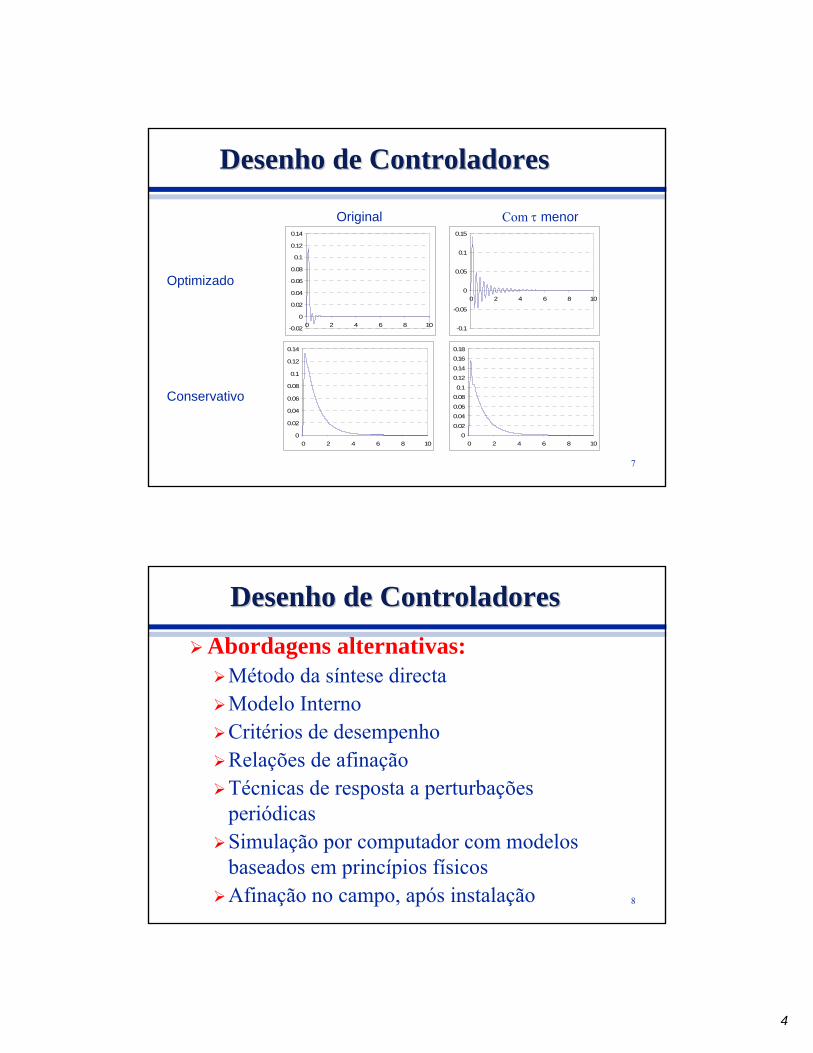
Optimizado
Conservativo
Original Com τ menor
-0.1
-0.05
0
0.05
0.1
0.15
0 2 4 6 8 10
00.02
0.040.06
0.080.1
0.120.14
0.160.18
0 2 4 6 8 10
8
Desenho de ControladoresDesenho de ControladoresAbordagens alternativas:
Método da síntese directaModelo InternoCritérios de desempenhoRelações de afinaçãoTécnicas de resposta a perturbações periódicasSimulação por computador com modelos baseados em princípios físicosAfinação no campo, após instalação
5
9
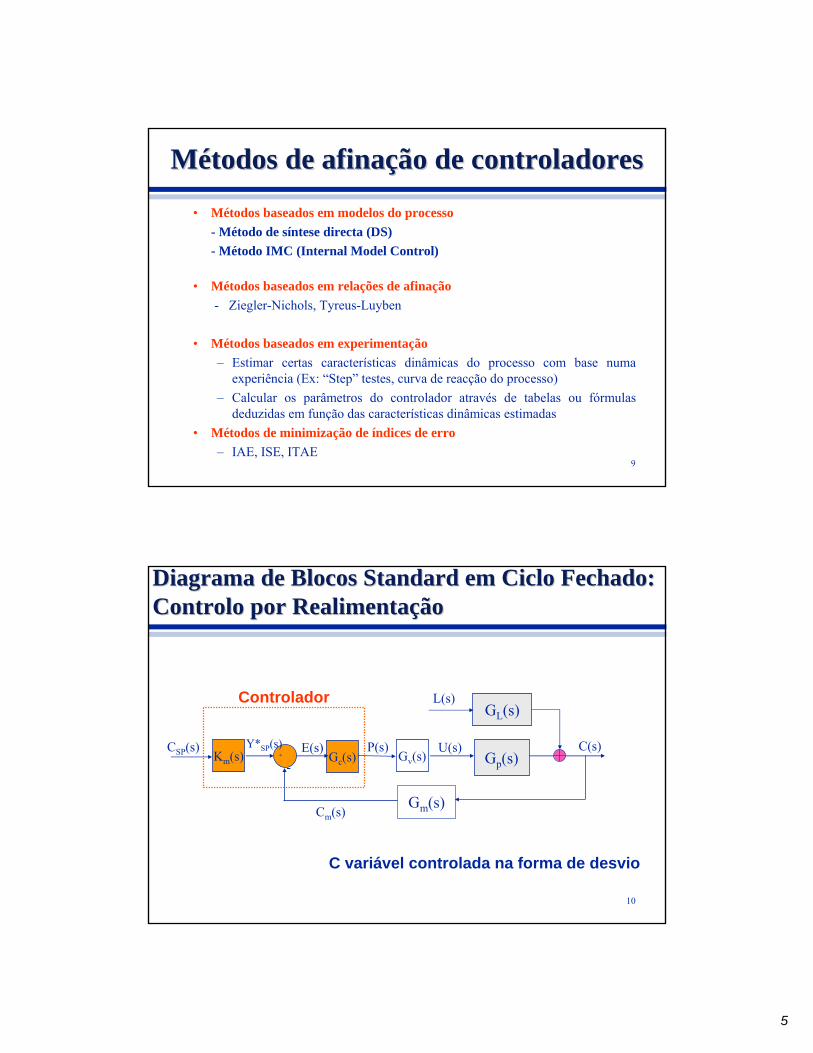
MMéétodos de todos de afinaafinaççãoão de controladoresde controladores
• Métodos baseados em modelos do processo- Método de síntese directa (DS) - Método IMC (Internal Model Control)
• Métodos baseados em relações de afinação- Ziegler-Nichols, Tyreus-Luyben
• Métodos baseados em experimentação– Estimar certas características dinâmicas do processo com base numa
experiência (Ex: “Step” testes, curva de reacção do processo)– Calcular os parâmetros do controlador através de tabelas ou fórmulas
deduzidas em função das características dinâmicas estimadas• Métodos de minimização de índices de erro
– IAE, ISE, ITAE
10
Diagrama de Diagrama de BlocosBlocos Standard Standard emem Ciclo Fechado:Ciclo Fechado:Controlo por Controlo por RealimentaRealimentaççãoão
C(s)Gp(s)Gc(s)
U(s)+
-
Y*SP(s) E(s)
GL(s)L(s)
Gm(s)
Gv(s)Km(s)
Cm(s)
CSP(s) P(s)
Controlador
C variável controlada na forma de desvio

6
11
MMéétodo da Stodo da Sííntese Directantese Directa
O controlador baseia-se num modelo do processo e numa função de transferência pretendida em cadeia fechada.
A função de transferência em cadeia fechada é normalmente especificada para alterações de set point.
12
MMéétodo da Stodo da Sííntese Directa (DS)ntese Directa (DS)
O desempenho de um controlador DS depende fortemente da especificação da função de transferência em cadeia fechada que se pretende: (C/SP )dC variável controlada na forma desvioIdealmente: (C/SP )d =1 !!Para processos sem atraso é mais razoável:
onde τc é a constante de tempo em cadeia fechada desejada
( )1
1+
=sSP
C
cd τ

7
13
MMéétodo da Stodo da Sííntese Directantese Directa
Função de transferência em cadeia fechada:
vcmp
pvcm
GGGGGGGKC
1
SP +=
=SP
CSP
C
GGc
- 11
mm KG =
pvm GGKG =
14
MMéétodo da Stodo da Sííntese Directantese Directa
Tempo de estabilização definido:
sC
cτ 11
SP +=
sGG
cc τ
11 =
A especificação de (C/SP )d é a chave para o projecto do controlador!
8
15
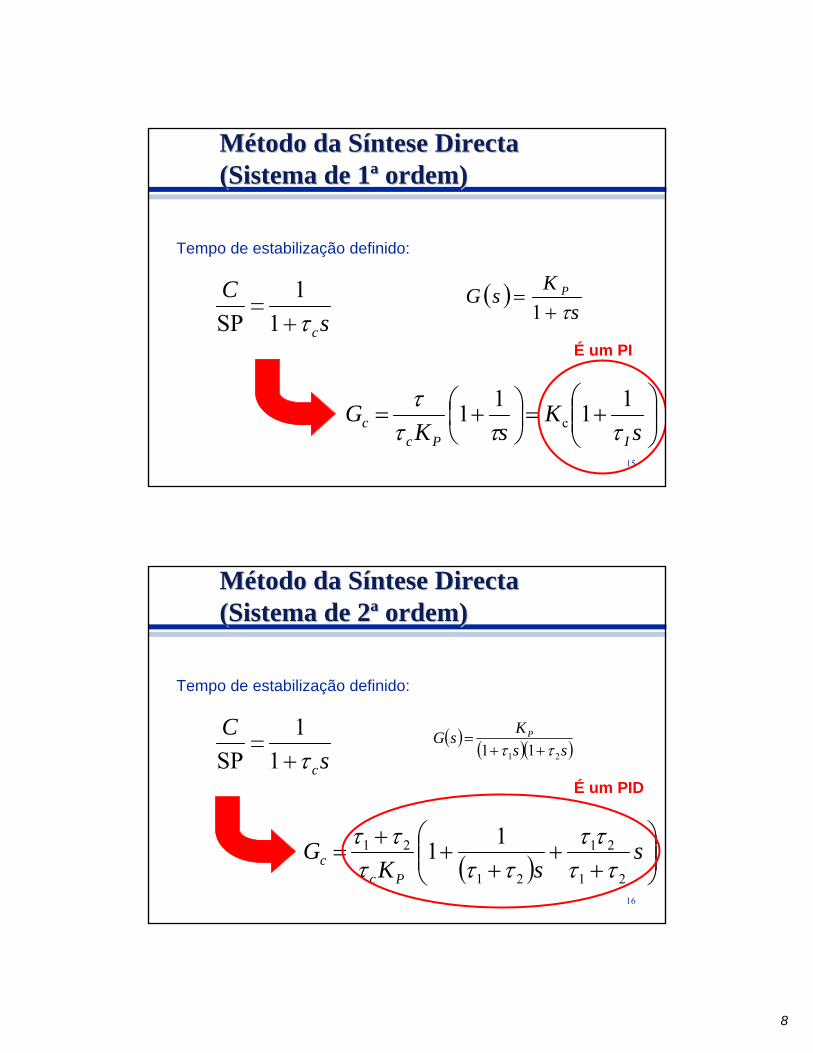
MMéétodo da Stodo da Sííntese Directantese Directa(Sistema de 1(Sistema de 1ªª ordem)ordem)
Tempo de estabilização definido:
sC
cτ 11
SP +=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟
⎠⎞
⎜⎝⎛ +=
sK
sKG
IPcc τττ
τ 11 11 c
( )s
KsG P
τ+=
1
É um PI
16
MMéétodo da Stodo da Sííntese Directantese Directa(Sistema de 2(Sistema de 2ªª ordem)ordem)
Tempo de estabilização definido:
sC
cτ 11
SP +=
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+
++
++
= ssK
GPc
c21
21
21
21 11 ττττ
τττττ
( ) ( )( )ssKsG P
21 11
ττ ++=
É um PID
9
17
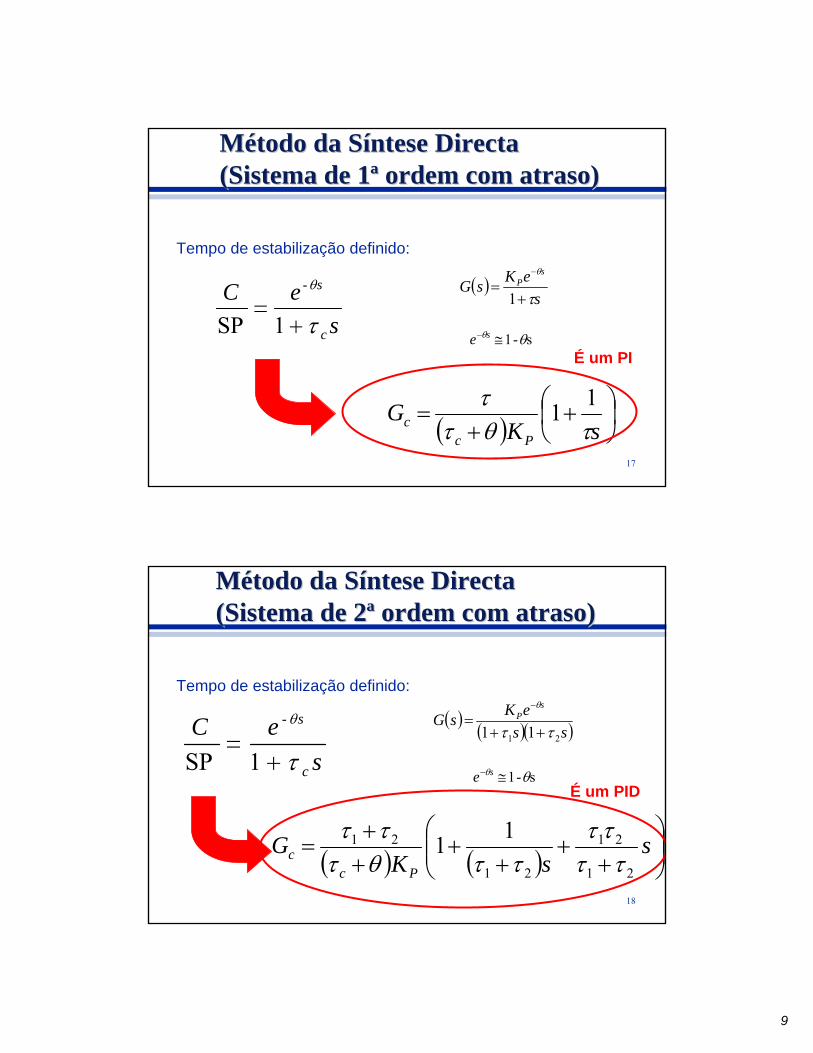
MMéétodo da Stodo da Sííntese Directantese Directa(Sistema de 1(Sistema de 1ªª ordem com atraso)ordem com atraso)
Tempo de estabilização definido:
seC
c
s
τ
θ
1
SP
-
+=
( ) ⎟⎠⎞
⎜⎝⎛ +
+=
sKG
Pcc τθτ
τ 11
( )s
eKsGs
P
τ
θ
+=
−
1
s - 1 θθ ≅− seÉ um PI
18
MMéétodo da Stodo da Sííntese Directantese Directa(Sistema de 2(Sistema de 2ªª ordem com atraso)ordem com atraso)
Tempo de estabilização definido:
seC
c
s
τ
θ
1
SP
-
+=
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+
++
+++
= ssK
GPc
c21
21
21
21 11 ττττ
ττθτττ
( ) ( )( )sseKsG
sP
21 11
ττ
θ
++=
−
s- 1 θθ ≅− seÉ um PID
10
19
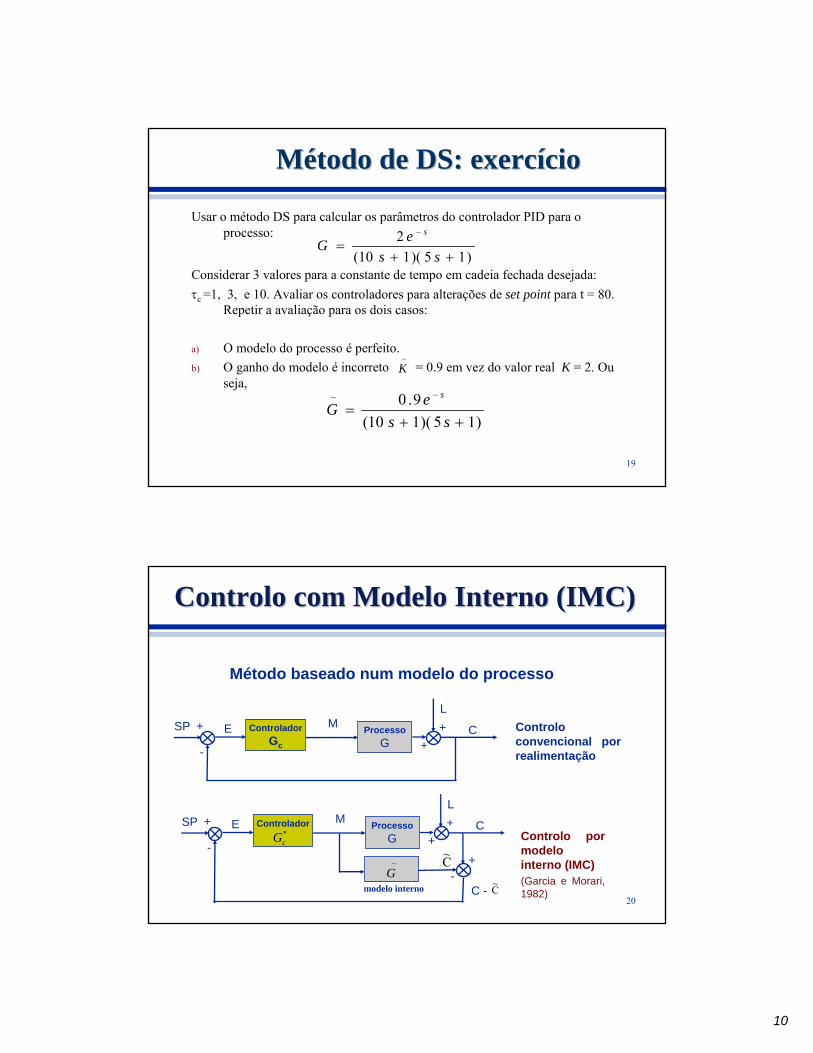
MMéétodo de DS: todo de DS: exercexercííciocio
Usar o método DS para calcular os parâmetros do controlador PID para o processo:
Considerar 3 valores para a constante de tempo em cadeia fechada desejada: τc =1, 3, e 10. Avaliar os controladores para alterações de set point para t = 80.
Repetir a avaliação para os dois casos:
a) O modelo do processo é perfeito.b) O ganho do modelo é incorreto = 0.9 em vez do valor real K = 2. Ou
seja,
)15)(110(2
++=
−
sseG
s
)15)(110(9.0~
++=
−
sseG
s
~K
20
Controlo com Modelo Interno (IMC)Controlo com Modelo Interno (IMC)
Método baseado num modelo do processo
Controlo convencional por realimentação
ProcessoG
ControladorGc
E CSPL
M
-
+ ++
Controlo por modelo interno (IMC)(Garcia e Morari, 1982)
C~
ProcessoG
ControladorE CSPL
M
~G
-
+
-
+
C -
++
*cG
modelo interno C~
11
21
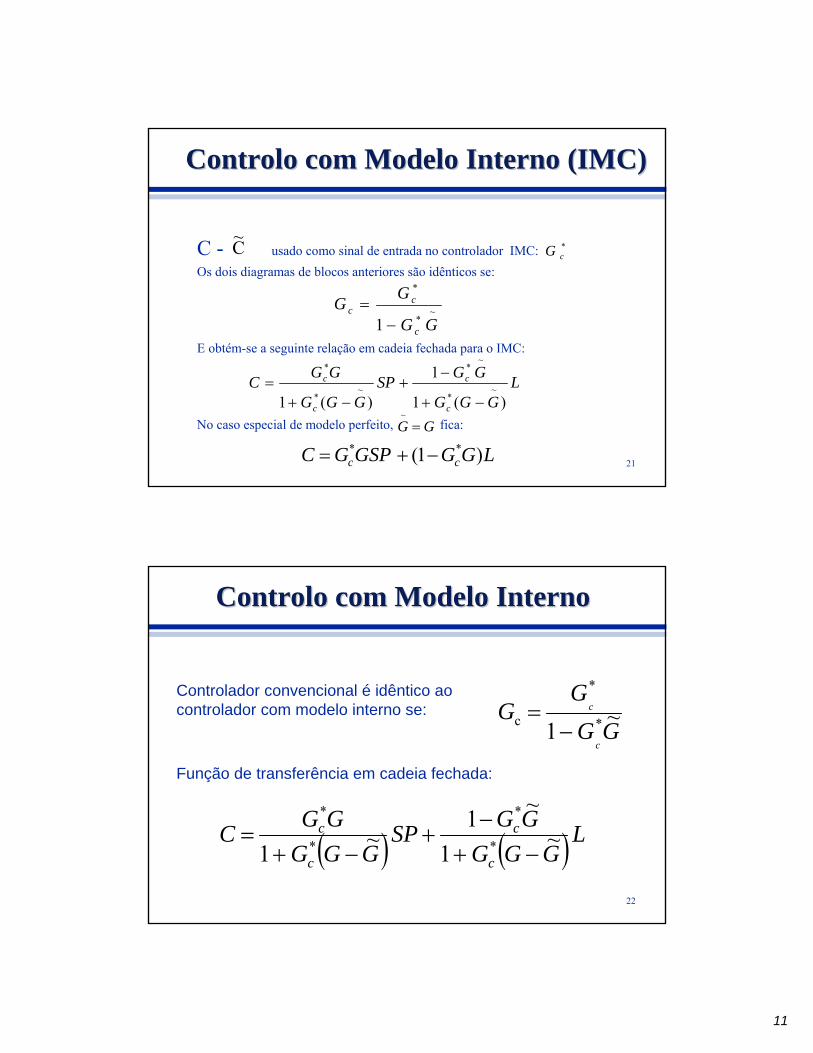
Controlo com Modelo Interno (IMC)Controlo com Modelo Interno (IMC)
C - usado como sinal de entrada no controlador IMC: Os dois diagramas de blocos anteriores são idênticos se:
E obtém-se a seguinte relação em cadeia fechada para o IMC:
No caso especial de modelo perfeito, fica:
*cG
~*
*
1 GG
GGc
cc
−=
LGGG
GGSPGGG
GGCc
c
c
c
)(1
1
)(1~
*
~*
~*
*
−+
−+
−+=
LGGGSPGC cc )1( ** −+=GG =
~
C~
22
Controlo com Modelo InternoControlo com Modelo Interno
Função de transferência em cadeia fechada:
GGG
Gc
c ~ 1 *
*
c −=
Controlador convencional é idêntico ao controlador com modelo interno se:
( ) ( )LGGGGGSP
GGGGGC
c
c
c
c ~ 1
~1~ 1
*
*
*
*
−+−
+−+
=

12
23
Controlo com Modelo InternoControlo com Modelo Interno
O controlador é desenvolvido em duas etapas:
O modelo do processo é factorizado como
O controlador é definido como−+= GGG ~~ ~
f é um filtro com ganho unitário, onde τc é a constante de tempo pretendida para cadeia fechada e r é um inteiro positivo por forma a que a função de transferência do controlador tenha ordem do numerador inferior ou igual à do denominador (excepto se for permitido controlo derivativo).
−=
GfGc ~ *
( )rsf
c 11 τ+
=
O primeiro termo contém todos os termos de atraso temporal e todos os zeros do semi-plano dos reais positivos e tem ganho estacionário unitário
24
Controlo com Modelo InternoControlo com Modelo Interno
Particularidades:O facto de se desprezar as componentes respeitantes ao atraso temporal e aos zeros no semi-plano dos reais positivos garante que o controlador é estável.
Como o controlador funciona na base do cancelamento de zeros e pólos não deve ser aplicado a sistemas instáveis em cadeia aberta.

13
25
Controlo por Modelo InternoControlo por Modelo Interno
Modelo de 1ª ordem com atraso:
( )s 12
1
21
s 1 ~
τθ
θ
τ
θ
+⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ −
≅+
=−
s
sKKe(s)G
s( )
sK
ssG
c
c
⎟⎠⎞
⎜⎝⎛ +
+⎟⎠⎞
⎜⎝⎛ +
=
2
12
1
θτ
τθ
( )
( )sK
ssG
cc τ
τθ
+
+⎟⎠⎞
⎜⎝⎛ +
=1
12
1 *
26
Controlo por Modelo InternoControlo por Modelo Interno
Modelo de 1ª ordem com atraso - parâmetros:
2
21 θτ
θτ
+
+=
cc K
K12
D
+⎟⎠⎞
⎜⎝⎛
=
θττττθτ +=
2 I
Observações:Mesmo quando o valor de τc (tempo característico desejado) tende para zero, o valor do ganho do controlador mantém-se limitado.Rivera et al. recomendam que o valor de τc seja escolhido de forma a que seja, simultaneamente, superior a 0.8θ e 0.1τ.

14
27
EscolhaEscolha de de ττcc
A escolha do parâmetro τc de afinação é uma decisão chave em ambos os métodos DS e IMC.
Foram publicadas várias indicações para a escolha de τc no método IMC para o caso do modelo de 1ª ordem com atraso (FOPTD):τc/θ > 0.8 e τc > 0.1 τ
Rivera, D.E., Morari, M., and Skogestad, S., Internal Model Control. 4. PID ControllerDesign, Ind.Eng.Process Design Dev., 25, 252 (1986).τ > τc > θChien, I-L., and Fruehauf, P.S., Consider IMC Tunning to Improve ControolerPerformance, Chem. Eng. Progress, 86 (10), 33 (1990).
τc = θSkogestad, S., Simple Analytic Rules for Model Reduction and PID Controller Tuning, J. Process Control, 13, 291 (2003).
28
CohenCohen e e CoonCoon
Particularidades:Baseado num modelo de primeira ordem com atraso.Desenhado para ter uma taxa de decaimento de ¼ (correspondente a um factor de amortecimento de 0.2 e a 50 % de sobre-elevação em reset).
τθτ
θτ
123161 +
=K
Kc
⎟⎠⎞
⎜⎝⎛+
=
τθ
θτ211
4 D
( )[ ]( )τθ
τθθ
τ813
632 I
+
+=
15
29
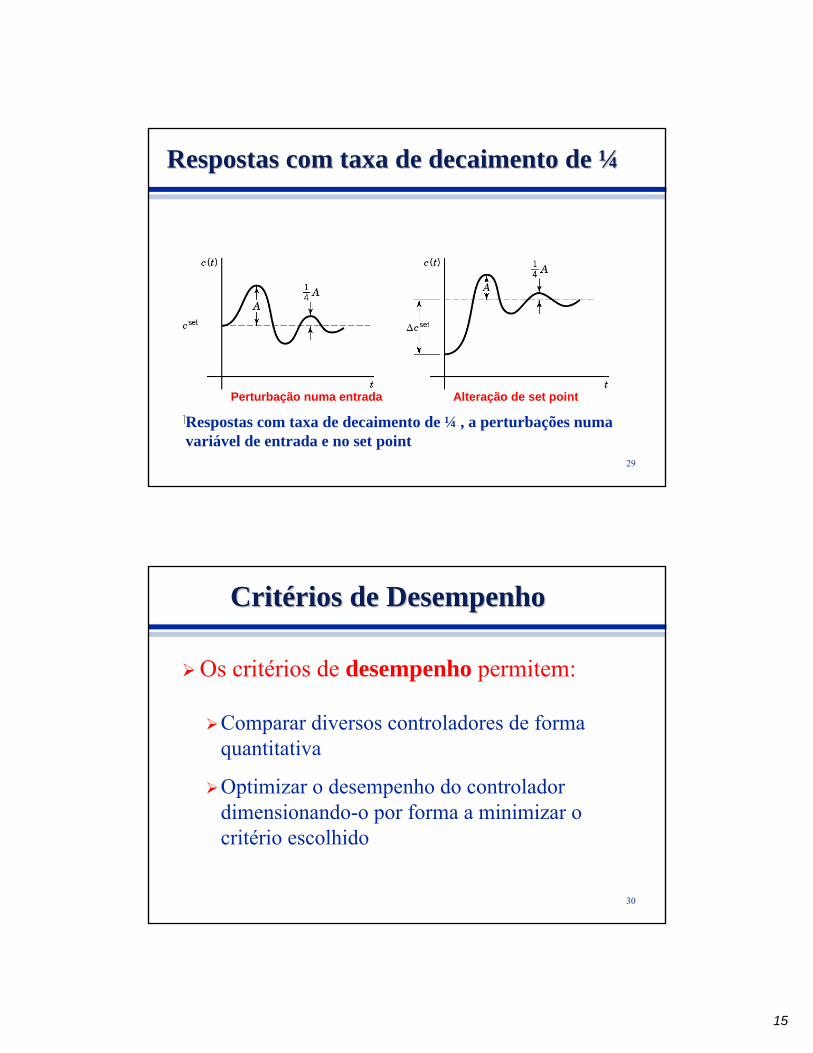
Respostas com taxa de decaimento de Respostas com taxa de decaimento de ¼¼
Respostas com taxa de decaimento de ¼ , a perturbações numa variável de entrada e no set point
Alteração de set pointPerturbação numa entrada
30
CritCritéérios de Desempenhorios de Desempenho
Os critérios de desempenho permitem:
Comparar diversos controladores de forma quantitativa
Optimizar o desempenho do controlador dimensionando-o por forma a minimizar o critério escolhido
16
31
CritCritéérios de Desempenho rios de Desempenho -- ISEISE
Integral do Quadrado do Erro(Integral of the Squared Error - ISE)
Penaliza erros elevados.
( )( )∫∞
=0
2tε dtISE
32
CritCritéérios de Desempenho rios de Desempenho -- ITAEITAE
Integral do Módulo do Erro Multiplicado pelo Tempo(Integral of the Time Absolut Error - ITAE)
Penaliza erros que se mantêm a tempos elevados.
( )∫∞
=0
t ε dttITAE
17
33
CritCritéérios de Desempenho rios de Desempenho -- IAEIAE
Integral do Módulo do Erro(Integral of the Absolut Error - IAE)
Não efectua qualquer forma de ponderação - critério intermédio.
( )∫∞
=0
t ε dtIAE
34
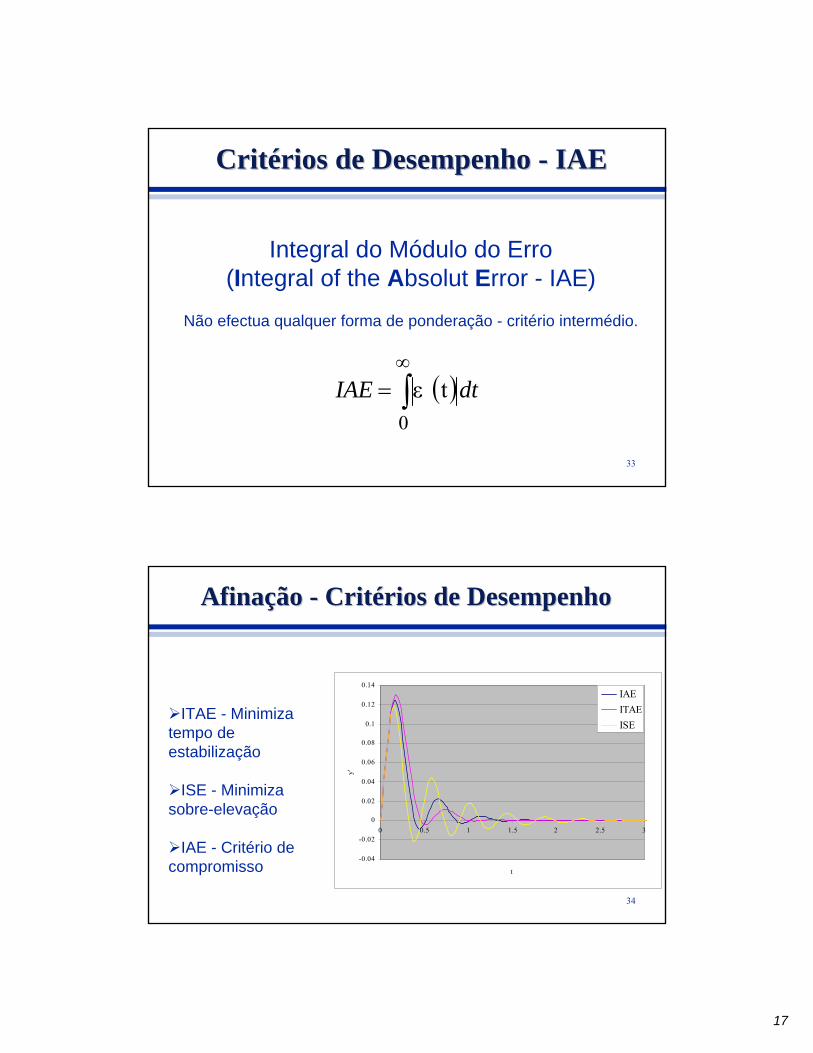
AfinaAfinaçção ão -- CritCritéérios de Desempenhorios de Desempenho
ITAE - Minimiza tempo de estabilização
ISE - Minimiza sobre-elevação
IAE - Critério de compromisso
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 0.5 1 1.5 2 2.5 3
t
y'
IAEITAEISE
18
35
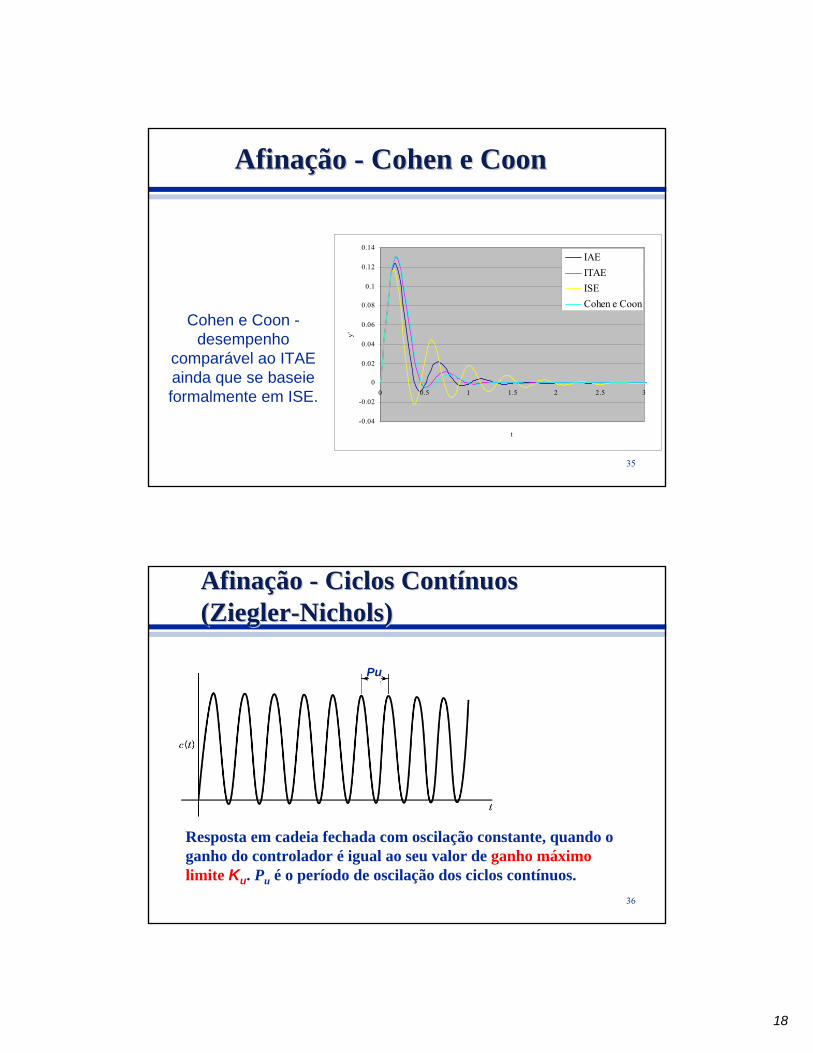
AfinaAfinaçção ão -- CohenCohen e e CoonCoon
Cohen e Coon -desempenho
comparável ao ITAE ainda que se baseie formalmente em ISE.
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 0.5 1 1.5 2 2.5 3
t
y'
IAEITAEISECohen e Coon
36
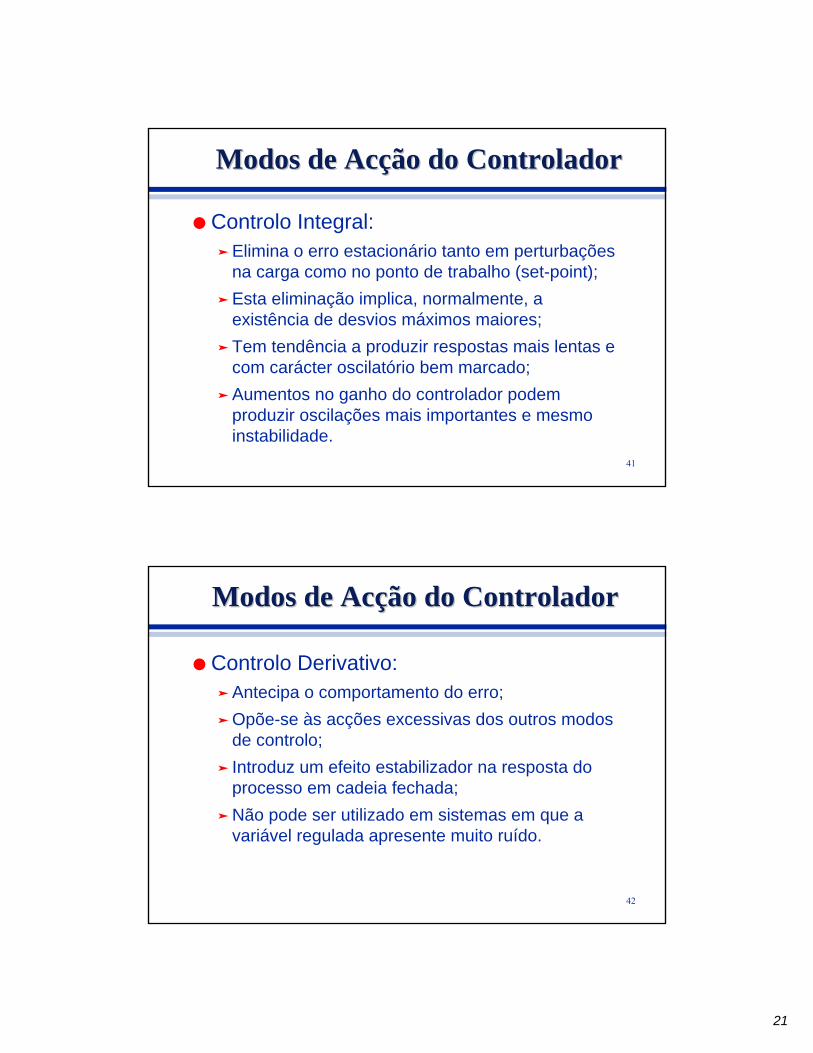
AfinaAfinaçção ão -- Ciclos ContCiclos Contíínuos nuos ((ZieglerZiegler--NicholsNichols))
Resposta em cadeia fechada com oscilação constante, quando o ganho do controlador é igual ao seu valor de ganho máximo limite Ku. Pu é o período de oscilação dos ciclos contínuos.
Pu

19
37
AfinaAfinaçção ão -- Ciclos ContCiclos Contíínuos (Z.nuos (Z.--N.)N.)
Resultados comparáveis ao
ITAE.
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 0.5 1 1.5 2 2.5 3
t
y'
IAEITAEISEZ.-N.
38
Parâmetros Parâmetros ZieglerZiegler--NicholsNichols
Kc τI τD
0.5 Ku
0.45 Ku
0.6 Ku
Pu/1.2
Pu/2 Pu/8
Ziegler-Nichols

20
39
Controlador ProporcionalControlador Proporcional
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 1 2 3 4 5 6
tPu
Ku
40
Modos de AcModos de Acçção do Controladorão do Controlador
Controlo Proporcional:Reduz o erro estacionário;
Acelera a resposta do processo;
Produz um erro estacionário tanto em perturbações na carga como no ponto de trabalho (set-point).
21
41
Modos de AcModos de Acçção do Controladorão do Controlador
Controlo Integral:Elimina o erro estacionário tanto em perturbações na carga como no ponto de trabalho (set-point);Esta eliminação implica, normalmente, a existência de desvios máximos maiores;Tem tendência a produzir respostas mais lentas e com carácter oscilatório bem marcado;Aumentos no ganho do controlador podem produzir oscilações mais importantes e mesmo instabilidade.
42
Modos de AcModos de Acçção do Controladorão do Controlador
Controlo Derivativo:Antecipa o comportamento do erro;Opõe-se às acções excessivas dos outros modos de controlo;Introduz um efeito estabilizador na resposta do processo em cadeia fechada;Não pode ser utilizado em sistemas em que a variável regulada apresente muito ruído.

22
43
SelecSelecçção do Controladorão do Controlador
Etapas:Definir claramente um objectivo de controlo e escolher um critério de desempenho (por exemplo IAE, ISE ou ITAE) adequado;
Calcular o valor desse critério de desempenho para as várias formas de controlador (P, PI ou PID), com os parâmetros óptimos em cada caso;
Seleccionar o controlador que conduzir ao “melhor” valor do critério de desempenho.
44
SelecSelecçção do Controladorão do Controlador
Desvantagens:Trabalhoso;
Baseia-se num modelo para os vários componentes do sistema (processo, sensor e actuador), o qual pode não ser conhecido rigorosamente;
Nem sempre é fácil definir claramente qual o melhor critério ou o melhor objectivo de controlo.