controlo meec - autenticação · – linhas de montagem em fábricas – sistemas de...
TRANSCRIPT

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-1
Cap1–IntroduçãoaoControloExemplosmoLvadores
Isabel Ribeiro António Pascoal
Transparênciasdeapoioàsaulasteóricas
TodososdireitosreservadosEstasnotasnãopodemserusadasparafinsdisLntosdaquelesparaqueforam
elaboradas(lecionaçãonoInsLtutoSuperiorTécnico)semautorizaçãodosautores
CONTROLOMEEC
1ºsemestre–2017/2018

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-2
MoLvação
OqueéumSISTEMADECONTROLO?– Umconjuntodesub-sistemas(disposiLvoseletrónicos,sistemas
decomputação,atuadores,etc)eumprocesso(instalação)queinteratuamdemodoalevarasaídadesseprocessoaexibirumcomportamentodesejado
Ø OssistemasdecontroloautomáLcoo Fazemparteintegrantedasociedademoderna(frutoda
intervençãodohomem)o Estãopresentes,desdesempre,nanaturezao Sãoimportanteseminúmerasaplicações,emáreasmuitodiversas
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efectiva

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-3
MoLvação
OqueéumSISTEMADECONTROLO?
Ø Controlodeposiçãodeumelevadoro Respostadesejada–indicaçãodopisoparaondesedesejairo RespostaefeLva–variaçãodaalturadoelevadorcomotempo
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efetiva
Ø Requisitos• Pretende-sequenãohajadesnivelamento
final• Quandooelevadorpára,nãodeveficara
oscilaremtornodaposiçãoemquevaiparar• Ocomportamentodeveserindependenteda
carga(paracertoslimitesdecarga)• Amovimentaçãodoelevadordevefazer-se
“semsolavancos”

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-4
MoLvação
OqueéumSISTEMADECONTROLO?
Ø Controlodetemperaturadeumasalao Respostadesejada–temperaturaconstante(p.e.,22ºC)o RespostaefeLva–temperaturadasala
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efetiva
Ø Porquevariaatemperaturadasala• Variaçãodetemperaturaambiente• Aberturadeportasoujanelas• Númerodepessoasnasala
Fornalha Válvula
de gás Termostato Sala
Temperaturadesejada
Temperaturadasala
Perdasdecalor
∑
Retroacção (feedback)
Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-5
ObjeLvosdoControlo
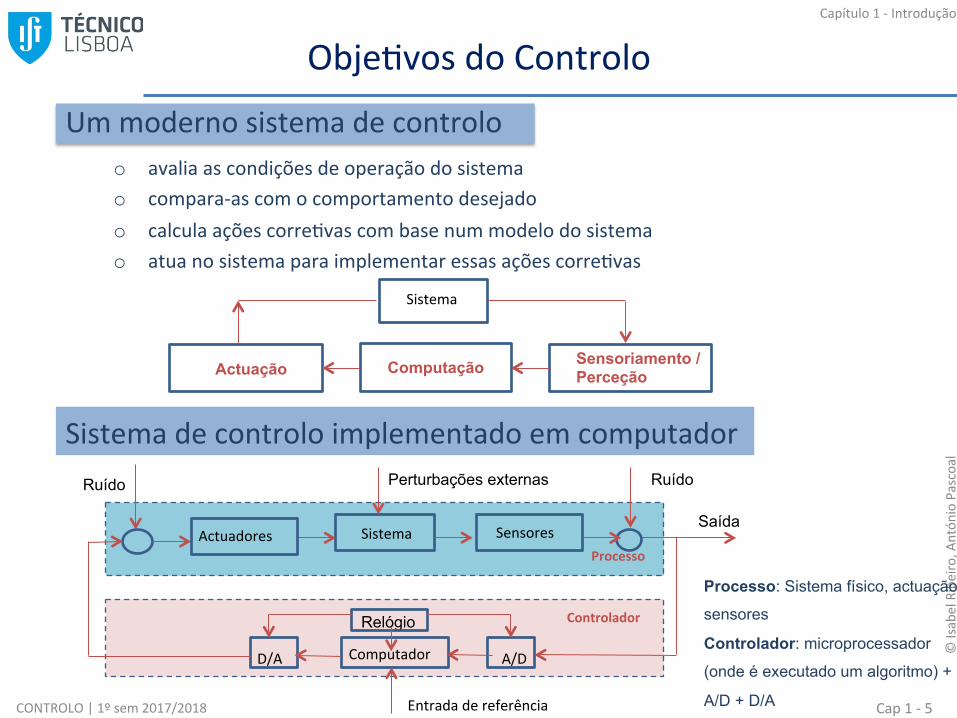
Ummodernosistemadecontroloo avaliaascondiçõesdeoperaçãodosistemao compara-ascomocomportamentodesejadoo calculaaçõescorreLvascombasenummodelodosistemao atuanosistemaparaimplementaressasaçõescorreLvas
Sistema
Sensoriamento / Perceção Computação Actuação
Ruído Perturbações externas
Sistema SensoresActuadores
Computador A/DD/A
Relógio
Saída
Entradadereferência
Ruído
Controlador
Processo
Sistemadecontroloimplementadoemcomputador
Processo: Sistema físico, actuação,
sensores
Controlador: microprocessador
(onde é executado um algoritmo) +
A/D + D/A

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-6
ObjeLvosdoControlo
• Modificarocomportamentodosistema(processo)• Fazercomqueasaídadosistema(processo)sigaumaentradadereferência
• Esimultaneamente,osistemacontrolado:– Deveserestável– Terboarejeiçãodeperturbações– Responderrapidamenteaalteraçõesnossetpoints
Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-7
Exemplos
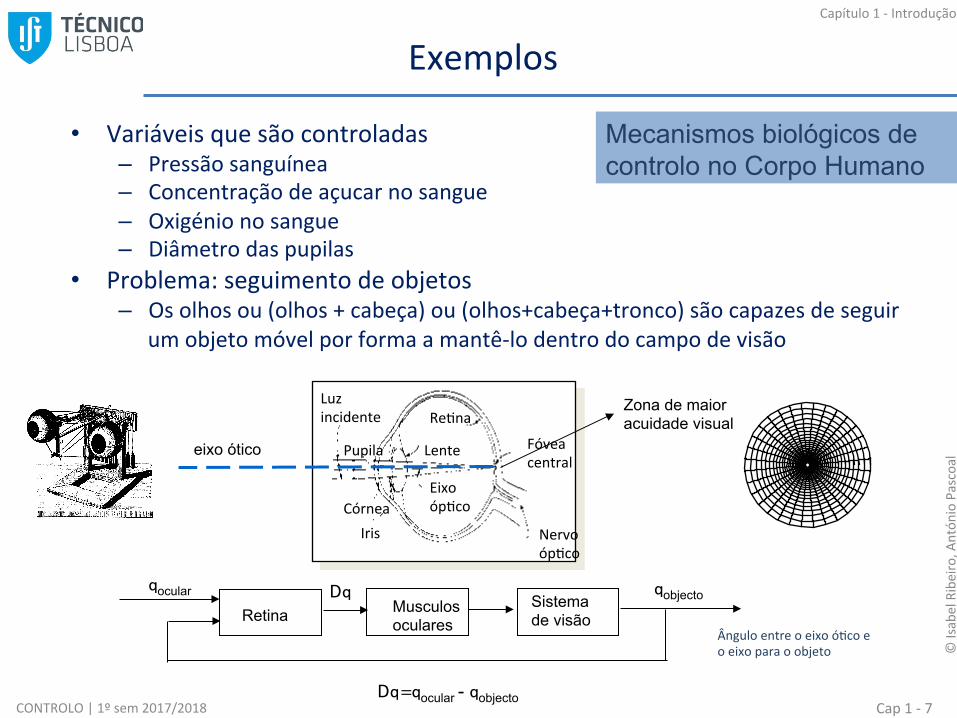
• Variáveisquesãocontroladas– Pressãosanguínea– Concentraçãodeaçucarnosangue– Oxigénionosangue– Diâmetrodaspupilas
• Problema:seguimentodeobjetos– Osolhosou(olhos+cabeça)ou(olhos+cabeça+tronco)sãocapazesdeseguir
umobjetomóvelporformaamantê-lodentrodocampodevisão
Mecanismos biológicos de controlo no Corpo Humano
Fóveacentral
NervoópLco
ReLna
Lente
EixoópLco
Luzincidente
Pupila
IrisCórnea
Zona de maior acuidade visual
eixo ótico
Retina Musculos oculares
Sistema de visão
qocular qobjecto Dq
Dq =qocular - qobjecto
ÂnguloentreoeixoóLcoeoeixoparaoobjeto

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-8
Exemplos
• CriaçãodeimplantesquepermitamaadministraçãoautomáLcademedicamentosemdoentes– p.e.,insulinaemdiabéLcos
Sistema de controlo em biomedicina
Figuras retiradas de Modern Control Systems, R.Dorf, R.Bishop
controloemcadeiaaberta
valoresparaumnãodiabéBco
controloemcadeiafechada
• modelo matemático da relação causa-efeito na administração de um fármaco
• características do paciente
(exemplo:bombasdeinfusãodeinsulina)
Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-9
Exemplos
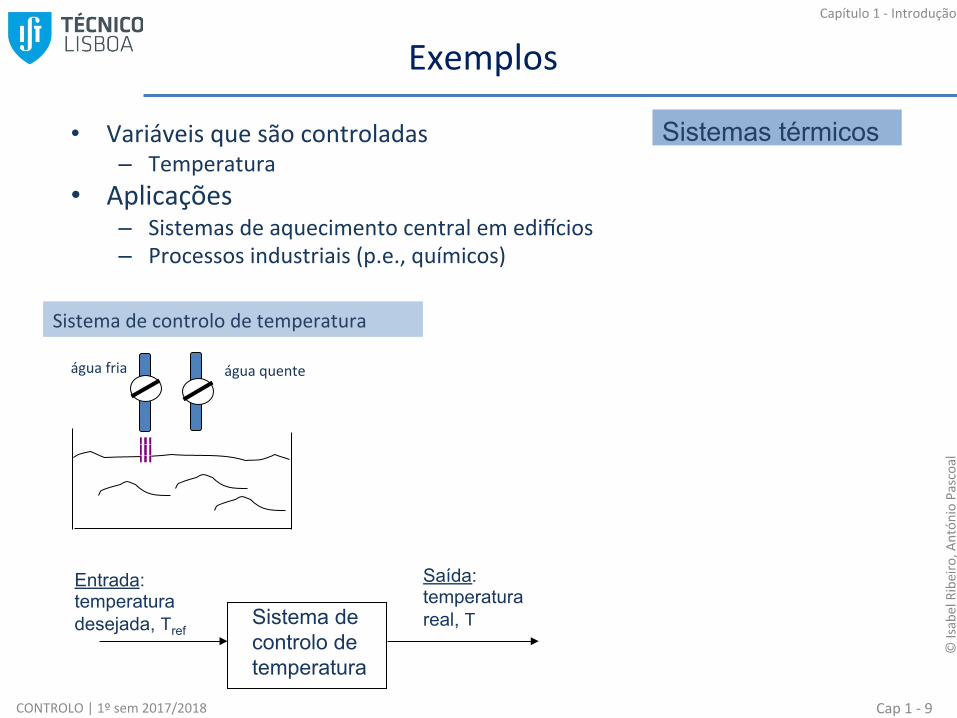
• Variáveisquesãocontroladas– Temperatura
• Aplicações– Sistemasdeaquecimentocentralemedircios– Processosindustriais(p.e.,químicos)
Sistemas térmicos
Sistemadecontrolodetemperatura
Sistema de controlo de temperatura
Entrada: temperatura desejada, Tref
Saída: temperatura real, T
águafria águaquenteOBJECTIVO:manterconstanteatemperaturadaáguanotanque
Duasestratégiasdecontrolo:
• colocarastorneirasemposiçõespré-determinadas–CADEIAABERTA
• iractuandonastorneirasemfunçãodaavaliaçãodatemperaturadaáguanotanque–CADEIAFECHADA

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-10
Exemplos
• Astorneirasdaáguafriaedaáguaquentesãocolocadasemposiçõespré-determinadas– p.e.,resultantedaexperiênciadeumoperador
• Nemasaída(temperaturadaáguanotanque)nemoutrasvariáveisdosistema(p.e.,temperaturadaáguanoscanos,temperaturaambiente)sãousadas
Sistema de controlo de temperatura
QuesucedesehouverPERTURBAÇÕESàscondiçõesnormaisdefuncionamento?Quesucedese:
q Atemperaturadaáguanascanalizaçõesfordiferentedahabitual?
q Atemperaturaambienteformaisbaixadoqueusualmente?
q Odepósitodeáguaquenteficarsemágua?
PERTURBAÇÕES o sinal de saída não tem o valor desejado
OêxitodesteLpodecontroloEMCADEIAABERTAdependede:• Calibraçãodoelementodecontrolo• Periodicidadedaocorrênciadasacçõesdecontrolo(experiênciadooperador)• Ausênciadeperturbações
CADEIAABERTA

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-11
Exemplos
Sistema de controlo de temperatura
• Existeretroação– Querasaída,queroutrasvariáveisdosistemaafetamaatuaçãodosistema
• Tipoderetroação– Manual– AutomáLca
CADEIAFECHADA
água fria água quente
engrenagens motor Ampl.
engrenagens motor Ampl.
controlador
ControloautomáLcoemcadeiafechada
termopares
Tref T
q Sensores–termopares–tensõeseléctricasproporcionaisàstemperaturaslidasq Controlador–comparaatemperaturadereferência,Tref,comumafunçãodastemperaturaslidas.
Asaídaéumatensãoeléctricaquevaiactuarosistemaampl+motor+engrenagensq AmplificadoreMotor–actuaçãonaposiçãoangulardastorneirasq Engrenagens–omotoréinerentementeumdisposiLvodealtavelocidadeeastorneirasdevemser
actuadaslentamente.
Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-12
ExemplosSistema de controlo de temperatura
• Aintroduçãodarealimentaçãoreduzosefeitosdeperturbaçõesexternasoudevariaçãodeparâmetros(incertezanomodelodosistemarsico
• Mas...podeconduzirasituaçõesdeinstabilidade
CADEIAFECHADA
água fria água quente
engrenagens motor Ampl.
controlador Tref
T
TmuitobaixoExemplo:posiçãofixanatorneiradeáguafria
Aumentarcaudaldeáguaquente
Háatrasonapropagaçãodaáguaquentenascanalizações
Tbaixaaindamais
Aumentaraindamaiscaudaldeáguaquente
QuandofinalmenteaáguaquenteaLngeatorneira,vemmuitoquente
T>Tref
Diminuirocaudaldeáguaquente
.......
T<TrefGanhoelevado+atrasoèinstabilidade

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-13
Exemplos
• Variáveisquesãocontroladas– Posição(linear,angular)– Velocidade(linear,angular)– Força– Binário
• Aplicações– Sistemasdetransporte
• Elevadores,automóvies,robotsmóvies(terrestresesubmarinos),aviões– InternaLonalSpaceStaLon(ISS)– Linhasdemontagememfábricas– Sistemasdecomunicações
• Antenas– DisposiLvoselétricoseeletrónicos
• LeitoresdeCD• Máquinasfotográficas• DiscosdePCs
– …..
Sistemas mecânicos

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-14
Exemplos
ANDROSrobotterrestreparaodesmantelamentodebombasEmpresa:REMOTEC
Robotdepintura
Robot de soldadura na indústria
automóvel

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-15
Exemplos
ManipuladorSoporcel–FigueiradaFoz
MãosrobóBcas
SistemaDaVinci

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-16
ExemplosSistemas mecânicos de posição Conduçãodeumautomóvelporum
operadorhumano(controlomanual)
condutor
Sistemadecontrolodedirecção
automóvel
Sensoresvisuaisetácteis
+
_
Erro
Direcçãodemovimentodesejada
Direcçãodemovimentoactual
Esenãohouvesseretroacção?
condutor Sistema de controlo de direcção
automóvel
Direcção de movimento desejada
Direcção de movimento actual
• Queaconteceriase:• Houvesseumobstáculoinesperado?• Umadasrodaspassasseporcimadeumobstáculo?• Umdospneusficassecommenosar?• OpisoLvesseóleo?
perturbações
Ruidosnossensores
perturbações

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-17
ExemplosConduçãoautónomadeumautomóvel
Mercedes Driverless Car
Mercedes-Benzhassuccessfullycompletedthefirstautonomouslong-distancedriveever,involvingbothtownandcross-countrytraffic,usingnear-producLon-standardsensorsystems.TheMercedes-BenzS500INTELLIGENTDRIVEresearchvehiclecovered100kilometersfromMannheimtoPforzheim,Germany,underrealtrafficcondiLonsandcomplexsituaLonsincludingtrafficlights,roundabouts,[fromh�ps://www.youtube.com/watch?v=AihC5flC-38,18Sep2013]

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-18
Exemplo• ConduçãodeumVeículoGuiadoAutomaLcamente
(AGV)quedeveseguirAUTOMATICAMENTEumatrajectóriadefinidanochão
• Aplicações– TransporteautomáLcodemateriaisoude
produtosacabadosemunidadesindustriais– EFACEC(1991-1992)–projetodoIST+EFACEC
Sistemas mecânicos de posição
Trajectória efectiva
Trajectória desejada
Sensores de posição
Controlador Motor de direcção AGV
Implementado no computador de bordo do AGV
Sinal de erro
Tem características que variam no tempo: • peso da carga • envelhecimento do material • carga das baterias
+ _
Retroacção
Incertezas no modelo matemático do AGV
Perturbações Piso irregular
ruído dos sensores

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-19
ExemploSistemas mecânicos de posição
• ControlodeconduçãodeAGVs– AGVcomcontrolodiferencial
• Vd–velocidadelineardarodadireita• Ve–velocidadelineardarodaesquerda• Vd=vetrajectóriasegundaumarecta• Vd>veAGVrodaparaaesquerda
-1
-0,5
0
0,5
1
1,5
2
2,5
3
0 10 20 30 40 50 60 70
Trajectóriadesejada–rectaEntradasdereferência,vd,vecomvd=ve
Arodaesquerdapassaporcimadeumobstáculosemi-cilíndrico
TrajectóriaefecLva
Trajectóriadesejada=recta
DesempenhodosistemaSEMRETROACÇÃOCONTOLOEMCADEIAFECHADA
Háumaperturbação
Oefeitodaperturbaçãonãoé
rejeitado

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-20
ExemploSistemas mecânicos de posição
Laser Guided Vehicle Soporcel – Fábrica de Papel
NASA Mars rover Curiosity
• TrajetóriadesejadavsTrajetóriareal
• Ocontroloéimplementadoparaqueatrajectóriarealseaproximedatrajectóriadesejada,independentementedasperturbaçõeseincertezas
NASA Mars rover Spirit
ITER–InternaLonalThermonuclear
ExperimentalReactor

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-21
Exemplos
FornodevidroFábricadaBarbosa&Almeida
Sistema de controlo de temperatura

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-22
Exemplos
FornodevidroFábricadaBarbosa&Almeida
Sistema de controlo de temperatura
sensor
FORNOQueimador
controlador
Variaçõesnacomposiçãodofuel,temperaturadoar,etc
envelhecimento
ºC
ºCnochão
controladorimplementadoemcomputador

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-23
ExemplosSistemas de controlo industrial
MáquinadepapelemfábricadepapelSoporcel,FigueiradaFoz
Matériaprimaàentrada:pastadepapelSaída:produção(aoritmode72Km/h)deumafolhadepapel,emrolo,comumalargurade8.6meumaespessurade0.1mm
Comprimento:161m
Pastadepapel Bobines
depapel
AlgumasdasvariáveisqueéprecisocontrolarTemperaturaVelocidadeEspessuraHumidade..... Detalhesdoprocessodefabricona
máquinadepapel
Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-24
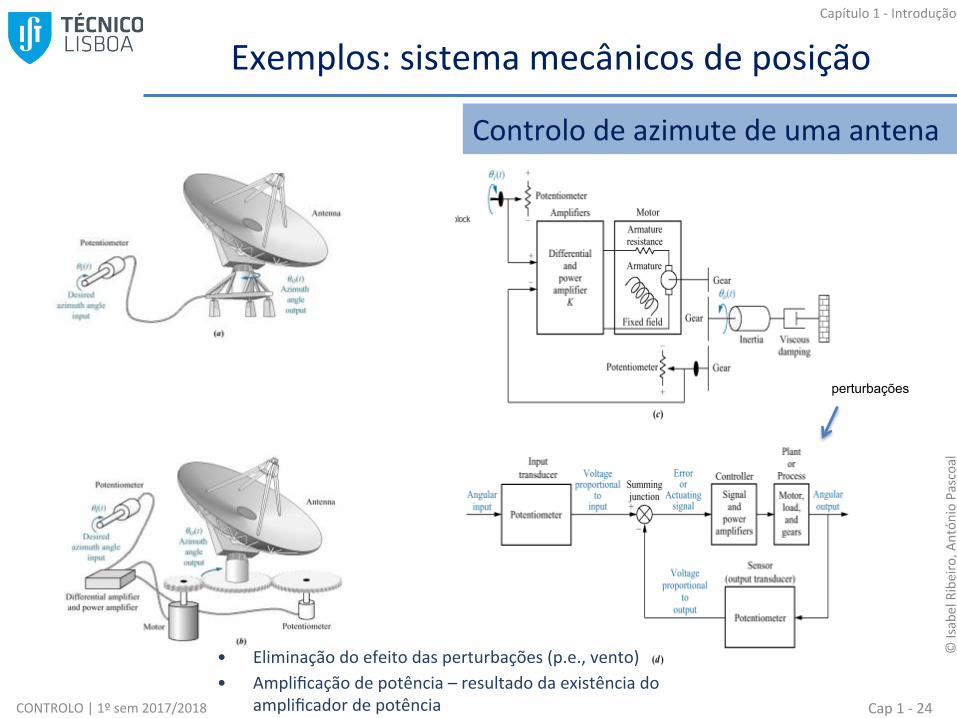
Exemplos:sistemamecânicosdeposição
Controlodeazimutedeumaantena
perturbações
• Eliminaçãodoefeitodasperturbações(p.e.,vento)• Amplificaçãodepotência–resultadodaexistênciado
amplificadordepotência

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-25
Exemplos:controlodeazimutedeumaantena
• Controlodeazimutedeumaantena.– Quandoasaídaéigualàentrada,oerroénuloeomotornãoroda.– Quantomaioroerro,maioratensãoàentradadomotor,emaiora
velocidadederotaçãodomotor.
• Consequênciadeaumentaroganhodoamplificador?– Variaovalordasaídaemregime
estacionário?• Não.Variaapenasaresposta
transitória.• Oerroemregimeestacionário
mantém-senulo.

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-26
Exemplos:estruturadocontrolador
§ Perguntas:§ Consequênciasdoaumentodoganhodocontrolador?§ Épossívellevaroerroemregimeestacionáriopara
zeroporaumentodoganhodocontrolador?
ProcessoGanho+_
Controlador
ProcessoSistemadinâmico
+_
Compensador
§ Resposta:§ Usarumcompensador(sistemadinâmico)devidamente
projectadopodelevaraanularoerroemregimeestacionárioseminduzirgrandesoscilaçõesnarespostatransitória.
Sistemacomerroemregimeestacionárionãonulo

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-27
Exemplos
RemotelyOperatedVehicle(ROV)
Controlodeposição–referidoaO–canalacúsLco
ControlodeaLtute–referidoaO’–giroscópiosecâmaras
ROVMotores
depropulsão
giroscópio
CanalacúsLco
Controlador
d(correntes)
n1
n2
Incertezasnomodelo
trajectória
posição
orientação

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-28
Exemplos
VeículoSubmarinoAutónomo
orientaçãodesejada
orientaçãoreal
ObjecLvodocontrolo:levaroerrodeorientaçãodoveículoparazero

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-29
Exemplos
VeículoSubmarinoAutónomo
• MovimentonoplanohorizontalSistemadecontrolodeorientação
COMPUTADOR+
ALGORITMODECONTROLO
Veículo+
SENSORDEORIENTAÇÃO
Valordesejado
LemeverBcal
• Omodelodoveículonãotraduzexactamenteocomportamentodoveículo.Háincertezas.
• Oveículoestásujeitoaperturbações(p.e.,correntes)
• Ossinaisdossensoressãoruidosos

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-30
Exemplos
Veículosmarinhos
Vai-vémSubmarino
DELFIM-ISR,Lisboa

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-31
Exemplos
Veículosaéreos
X-Treme-ISR,Lisboa
Helicóptero Autónomo
Quadcopters-UniversidadedeMacau,ISR,Lisboa

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-32
ExemplosControloCooperaLvodeUAVs(UnmannedAirVehicles:NPS,Monterey,CA/IST-ISR,PT/Univ.Illinois)
Veículosaéreos

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-33
Exemplos
Arquiteturadecontrolo Veículosaéreos

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-34
Exemplos
RobóLcacooperaLva

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-35
Exemplos
ControloCooperaLvode3Medusas(Julho-Set.2011)
OsveículosMEDUSA(ISR/IST)
RobóLcacooperaLva

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-36
Exemplos
DoconceitoàpráLca
RobóLcacooperaLva

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-37
OutrosExemplos–ControloCooperaLvo
• 2VeículosMedusa(Sesimbra,2011)

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-38
OutrosExemplos–ControloCooperaLvo
• 2VeículosMedusa(Sesimbra,2011)

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-39
OutrosExemplos
• ModernapplicaLonsofcontrol– Control=sensing,actuaLonandcomputaLon– Digitalcontrolsystemsareincreasinglycommon– ApplicaLonsacrossengineeringandscience

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-40
Sistemasdecontroloemcadeiafechada
Nomenclatura
Transdutordeentrada Controlador Sistema
rsico++
+ +EntradadeReferência Variável
Controlada
Perturbação Perturbação
Transdutordesaídaousensor
+_
ErroActuador
+
+
Sinaldecomando
Ruídonossensores
Cadeiaderetroacção

Capítulo1-Introdução
©IsabelRibeiro,A
ntón
ioPascoal
CONTROLO|1ºsem2017/2018
Cap1-41
Fasesnoprojetodecontrolo
• Modelação– Encontrarasleisqueregemocomportamentodo
sistema,aparLrdeconsideraçõesdeordemrsica• PodemserconsideradashipótesessimplificaLvas
• DoModeloparaaRepresentaçãoMatemáBca– ULlizaçãodasleisrsicasnatraduçãomatemáLcadas
hipótesessimplificaLvasdamodelação– EsLmaçãodosparâmetrosdomodelo(p.e.,por
experimentação)– Aomesmomodelopodemcorresponderdiversas
representaçõesmatemáLcas
• Análise– CaracterizaçãodoComportamentodoSistema
• Respostanotempo,respostaemfrequência,estabilidade,…
• Síntese– Projetodecontroladoresparaquearespostado
sistemasaLsfaçadeterminadasespecificações
Sistema Físico
Modelo
Representação Matemática
Análise
Síntese/Projecto
modelação