avaliaÇÃo de receptores gps em levantamento...
TRANSCRIPT
L
UNIVERSIDADE FEDERAL DO PARÁ
CAMPUS UNIVERSITÁRIO DE ALTAMIRA
FACULDADE DE ENGENHARIA AGRONÔMICA
AVALIAÇÃO DE RECEPTORES GPS EM LEVANTAMENTO
TOPOGRAFICO PLANIMÉTRICO
JAIR OTÁVIO FARIAS BRAGA
ALTAMIRA - PA
Agosto de 2010
UNIVERSIDADE FEDERAL DO PARÁ
CAMPUS UNIVERSITÁRIO DE ALTAMIRA
FACULDADE DE ENGENHARIA AGRONÔMICA
AVALIAÇÃO DE RECPTORES GPS DE NAVEGAÇAO E
GEODÉSICO EM LEVANTAMETOS TOPOGRAFICO
PLANIMÉTRICO
Trabalho de Conclusão de Curso
apresentado à Faculdade de Engenharia
Agronômica da Universidade Federal do
Pará, Campus Universitário de Altamira,
como requisito obrigatório para a
conclusão do curso de Engenharia
Agronômica.
Orientador:
Prof. M. Sc. RONILSON DE SOUZA SANTOS
CO - orientador:
Prof. M. Sc. NÉRIO APARECIDO CARDOSO
ALTAMIRA - PA
Agosto de 2010

Dados Internacionais de Catalogação-na-Publicação (CIP) UFPA – Campus de Altamira - Biblioteca
Braga, Jair Otávio Farias
Avaliação de receptores GPS em levantamento planimétrico, Altamira,
Pará/Jair Otávio Farias Braga; Orientador, Profº Msc. Ronilson de Souza Santos -
Altamira: [s.n.], 2010.
Trabalho de Conclusão de Curso (Graduação) - Universidade Federal do Pará,
Campus Universitário de Altamira, 2010.
1. GPS. 2. Planimetria. 3. Agricultura. I. Santos, Ronilson de Souza. II.Título.
CDD: 651.8

BANCA EXAMINADORA
Engenheiro Agrônomo Professor M.Sc. RONILSON DE SOUZA SANTOS Orientador
Universidade Federal do Pará - UFPA
Estatístico Professor M.Sc. NÉRIO APARECIDO CARDOSO Co-Orientador
Universidade Federal do Pará - UFPA
Geógrafo Professor Me. EDER MILENO SILVA DE PAULA
Universidade Federal do Pará - UFPA
ALTAMIRA - PA
Agosto de 2010

DEDICATÓRIA
Aos meus pais, José Otávio Oliveira Braga e Maria Graciete Farias Braga, ao meu
irmão Cleber Oberdan Farias Braga e aos meus familiares altamirenses que me apoiaram em
momentos difíceis durante a concretização deste sonho.

AGRADECIMENTOS
A Deus por me dar força nos momentos difíceis, ajudando a vencer os obstáculos e
pela oportunidade de aprendizado. Aos meus pais, José Otavio Oliveira Braga e Maria
Graciete Farias Braga pelo apoio financeiro e não somente, por toda educação e bons
exemplos ensinados, ao meu irmão Cleber Oberdan Farias Braga e aos meus familiares
altamirenses pela dedicação através de incentivo e apoio durante minha vida acadêmica.
Agradeço a minha companheira Rhoberta Santana de Araújo, que me apoiou em
momentos delicados de problemas de saúde, e graças a sua dedicação pude completar essa
jornada, seu apoio foi imprescindível para êxito na vida acadêmica e profissional.
Agradeço ao meu orientador Prof. M.Sc. Ronilson de Souza Santos pela paciência,
orientação, ensinamentos e sugestões durante a elaboração do trabalho.
Agradeço ao meu Co- orientador Prof. M.Sc. Nério Aparecido Cardoso pela paciência,
orientação, ensinamentos e sugestões durante a elaboração do trabalho.
Ao Prof. Dr. Sebastião Geraldo Augusto pela oportunidade de bolsa e nas orientações
de laboratório de solos da Universidade Federal do Pará.
Ao Prof. Dr. Rainério Meireles da Silva, pelos ensinamentos e apoio na graduação.
Ao Prof. Dr. Djair Alves Moreira, pelos ensinamentos e apoio na graduação.
Ao amigo e Técnico de Informática Marcos Rogério Ferreira, pelos momentos de
aprendizagem e descontração no Laboratório de Informática da UFPA.
Ao Sr. José Barbosa França e Hugo Borges França pela grande ajuda e apoio técnico,
fundamentais na elaboração do trabalho.
Não poderia deixar de agradecer aos meus colegas de graduação, refiro-me aqui a
todos os formandos da Agronomia 2005, em especial ao Mário Vitorino Marques, Diorcélio
Ribeiro, Mércia Torres, Éder Felizardo, Milton Gomes, Karina Calado e Gilsilene Gama, que
em meio a muitas descontrações, palhaçadas e seriedade, mostraram-se ótimos companheiros
em todos os momentos, enfatizando estes pelo companheirismo e ajuda em muitos trabalhos
efetuados na graduação.

SUMÁRIO
1 - INTRODUÇÃO....................................................................................................... 1
2 - REVISÃO DE LITERATURA................................................................................ 2
2.1 - Histórico do Posicionamento................................................................................ 2
2.2 - Aplicação do GPS na Agricultura......................................................................... 3
2.3 - O Sistema de Posicionamento Global (GPS)........................................................ 4
2.4 - Segmento Espacial................................................................................................ 5
2.5 - Segmento de Controle........................................................................................... 6
2.6 - Segmento de Usuários.......................................................................................... 7
2.7 - O Funcionamento do Sistema GPS....................................................................... 9
2.8 - Os Métodos de Posicionamento............................................................................ 9
2.9 - Posicionamento Absoluto..................................................................................... 10
2.10 - Posicionamento Diferencial (Relativo) .............................................................. 11
2.11 - Posicionamento por DGPS (Differential GPS) E RTK (Real Time Kinematic) 12
2.12 - Erros que atuam no sistema................................................................................ 12
2.13 - Erros dos Satélites............................................................................................... 13
2.14 - Erro de Órbita..................................................................................................... 13
2.15 - Relógio dos Satélites........................................................................................... 14
2.16 - Relatividade........................................................................................................ 15
2.17 - Multicaminhamento........................................................................................... 15
2.18 - Propagação de Sinais.......................................................................................... 16
2.19 - Perdas dos Ciclos................................................................................................ 16
2.20 - Rotação da Terra................................................................................................. 17
2.21 - Ionosfera............................................................................................................. 18
2.22 - Troposfera........................................................................................................... 19
2.23 - Erros de Receptor .............................................................................................. 19
2.24 - Receptor de Navegação...................................................................................... 21
2.25 - Receptor Geodésico............................................................................................ 21
3.0 - MATERIAL E MÉTODOS.................................................................................. 23
4.0 - RESULTADOS E DISCUSSÃO.......................................................................... 27
4.1 - Acurácia de coordenadas entre os receptores de GPS geodésico e de navegação 27
4.2 - Tamanho da área obtida com receptores geodésico e de navegação.................... 29
4.3 - Determinação de coordenada utilizando receptores geodésico e de navegação... 34
CONCLUSÃO...................................................................................................... 33
REFERÊNCIAS BIBLIOGRÁFICAS................................................................. 34
APÊNDICE........................................................................................................... 37

LISTA DE TABELAS
Tabela 1 - Coordenadas planas rastreadas com receptores de GPS geodésico e de
navegação....................................................................................................................
26
Tabela 2 - Dados estatísticos de média, quadrado médio, intervalos de confiança das
Coordenadas planas rastreadas com receptores de GPS geodésico e de
navegação....................................................................................................................
28
Tabela 3 - Medidas dos tamanhos de área de quatro propriedades obtidas com
receptores geodésico e de navegação..........................................................................
28
Tabela 4 - Valores de coordenadas UTM do marco geodésico da RBMC- SAT
93827 ..........................................................................................................................
29
Tabela 5 - Resultados da análise estatística descritiva dos erros de posicionamento... 30
LISTA DE FIGURAS
Figura 1 - Segmento Espacial do Sistema GPS ........................................................... 5
Figura 2 - Segmento de Controle do Sistema GPS ...................................................... 7
Figura 3 - Segmento de Usuário do Sistema GPS........................................................ 8
Figura 4 - Método da Triangulação.............................................................................. 8
Figura 5 - O posicionamento absoluto.......................................................................... 10
Figura 6 - Posicionamento Diferencial (Relativo)........................................................ 11
Figura 7: Posicionamento por DGPS (Differential GPS) .......................................... 12
Figura 8 - Efeito do Multicaminhamento.................................................................... 12
Figura 9 - Efeito do Multicaminhamento.................................................................... 15
Figura 10 - Efeito da Correção do sinal....................................................................... 17
Figura 11 - Receptor de Navegação ........................................................................... 20
Figura 12 - Receptor Geodésico ................................................................................. 21
Figura 13 - Localização da Área de Estudo ............................................................... 21
Figura 14 - Marco IBGE SAT 93827 em Altamira-PA .............................................. 24
Figura 15 - Vista de ocupação dos receptores geodésico e de navegação................... 27
Figura 16 - Vista de ocupação dos receptores geodésicos e de navegação no para
determinação da área da propriedade............................................................................ 29
Figura 17 - Vista de ocupação dos receptores geodésicos, de navegação no marco
da RBMC SAT 93827
30

LISTA DE EQUAÇÕES
Equação 1 - Média Aritmética...................................................................................... 19
Equação 2 - Intervalo de Confiança............................................................................. 19
Equação 3 - Quadrado Médio....................................................................................... 20

LISTA DE SIGLAS
GPS - SISTEMA DE POSICIONAMENTO GLOBAL............................................... 1
C/A - CORSE AQUISITION……………………………………………………….. 1
LORAN - LANG-RANGE NAVIGATION SYSTEM……………………………… 2
DECCA - LOW FREQUENCY CONTÍNUOUS WAVE PHASE COMPARÍSON
NAVÍGATÍON……………………………………………………………………….. 2
NNSS - NAVY NAVIGATION SATELLITE SYSTEM…………………………… 2
NAVSTAR-GPS - NAVIGATION SATTELLITE WITH TIME AND RANGING.. 2
AP - AGRICULTURA DE PRECISÃO....................................................................... 3
DoD - DEPARTAMENT OF DEFENSE..................................................................... 4
PRN - RUIDOS PSEUDO ALEATORIOS………………………………………….. 9
DPGS - DIFEREENTIAL GPS / DIFERENCIAL GPS.............................................. 9
RTK - REAL TIME KINEMATIC.............................................................................. 9
IGS - INTERNATIONAL GEODINAMIC SERVICE................................................ 12
CÓDIGO P - PRECISE OU PRECISO........................................................................ 8
TEC - TAXA DE TRANSFERÊNCIA DE ELÉTRONS............................................. 18
L1 e L2 - LINK 1 E LINK 2......................................................................................... 19
RESUMO
AVALIAÇÃO DE RECPTORES GPS DE NAVEGAÇAO E GEODÉSICO EM
LEVANTAMETOS TOPOGRAFICO PLANIMÉTRICO
Atualmente o Sistema de Posicionamento Global - GPS é utilizado em diversos setores
tais como na engenharia civil, agronômica, bélica entre outras. Por isso, este trabalho tem
como objetivo avaliar a precisão de aparelhos GPS de navegação em levantamentos
topográfico planimétrico, utilizando como testemunha um receptor GPS geodésico. A
metodologia utilizada para elaboração do trabalho foi o método estático e absoluto, com
levantamento planimétrico de vértices e área de uma propriedade. Primeiramente com
receptor Geodésico, com 30 minutos de rastreio pelo método estático e posteriormente com
receptores de navegação pelo método absoluto. As coletas das informações foram efetuadas
com base no Datum Global WGS-84. Posteriormente os dados do GPS Geodésico foram
processados com o software Trimble Office Geomatics (versão 1.6). Já os dados dos
receptores de navegação foram descarregados no software GPS TrackMaker PRO (versão
4.3), sem correção. Em ambos os métodos, os dados foram tabulados no software
MICROSOFT EXCEL 2007, e analisados utilizando Estatística Descritiva, considerando
Média, Intervalos de Confiança, Quadrado Médio. Os resultados demonstraram que os
receptores de GPS denominados de navegação, não se mostraram adequados para
levantamentos planimétricos ocasionando erros na ordem de 1,395 m a -2,395 m e 1,618 a
2,385 m para longitude e latitude respectivamente.
PALAVRAS-CHAVE: Sistema de posicionamento global - GPS; precisão; levantamento
planimétrico.

1
1 - INTRODUÇÃO
Posicionar um objeto atualmente, nada mais é do que atribuir-lhe coordenadas em
determinada parte do globo terrestre. O homem sempre esteve interessado em saber onde
estava; inicialmente restrita à vizinhança imediata, mais tarde a curiosidade se ampliou
para os locais de comércio e, por fim, com o desenvolvimento da navegação marítima,
alcançou todo o globo terrestre (MONICO, 2000).
Por muito tempo, o sol, os planetas e as estrelas foram excelentes fontes de
orientação. Mas, além da necessária habilidade do navegador, as condições climáticas
podiam significar a diferença entre o sucesso e o fracasso de uma expedição (DOTORI &
NEGRAES 1997).
Surgiram muitos aparelhos buscando solucionar os problemas de localização
geográfica. A exemplo disto, a bússola, inventada pelos chineses, que proporcionou uma
verdadeira revolução na navegação. Mas ainda perdurava um problema, como determinar a
posição de uma embarcação em alto-mar. Então foi criado o astrolábio, que possibilitava
apenas a obtenção da latitude, sujeita a grande margem de erro. Apresentando ainda o
inconveniente de que a medição só podia ser realizada no período noturno (MONICO,
2000).
Visando suprir as necessidades de orientação sobre o globo terrestre, no fim da
década de 1950 foi idelaizado o sistema de posicionamento global (GPS). Segundo
Morgan (2004), foi criado pelo governo dos Estados Unidos com o objetivo principal de
localizar suas tropas em qualquer lugar da terra. Sua constituição se dá por 24 satélites, dos
quais 21 são de uso corrente e três em “stand-by”. Eles orbitam a uma altura de 20.200 km
em seis órbitas distintas, igualmente espaçadas de 55 graus, com quatro satélites por órbita.
Os sinais são emitidos em duas bandas (L1 e L2) com dois códigos diferentes: o Y
(Precision Code) e o C/A (Coarse Acquisition Code); assim sendo, o sistema teoricamente
permite uma visão de cinco a oito satélites constantemente, em qualquer lugar do globo
terrestre (STABILE, 2006).
A partir da década de 1960 com a liberação do GPS ao uso civil e seu pleno
funcionamento em 1993, a popularização dos receptores GPS gerou e ampliou sua
utilização nas diversas áreas como: agricultura de precisão, na proteção civil, bases
militares e o uso recreativo (BARRETO, 2004).

2
O objetivo deste trabalho foi avaliar a precisão de um receptor GPS geodésico e de
alguns modelos navegação na atividade de planimetria.
2 - REVISÃO DE LITERATURA
2.1 - Histórico do Posicionamento
Atualmente é uma fácil tarefa atribuir localização exata a um corpo ou local no
globo terrestre devido à tecnologia desenvolvida, através de um receptor de GPS, mas isso
nem sempre foi assim, esse foi um dos grandes problemas que o ser humano encontrou e
procurou solucionar durante séculos. Este homem se interessava em saber onde estava, e
para onde ia se deslocar (MONICO, 2008).
Com o desenvolvimento do comércio e da navegação marítima, o posicionamento se
tornou um grande desafio, já que o homem precisava de instrumentos para navegação,
objetivando sucesso em suas expedições. Por muito tempo o ser humano desenvolveu formas
matemáticas de se guiar, através dos astros, o sol, os planetas e as estrelas. Entretanto,
existiam fatores que influenciavam na exatidão das informações geradas por estes métodos,
entre eles a experiência do navegador e as condições climáticas do local poderiam
representar o sucesso e o fracasso de uma expedição marítima (DOTORI & NEGRAES
1997).
Criou-se, depois de algum tempo, a bússola, inventada pelos chineses, que ajudou
muito o homem a se orientar, mas não resolvia alguns problemas como o posicionamento
em longas distâncias, e em alto mar. Visando suprir esta deficiência foi criado o astrolábio,
o qual possibilitava a localização com certo nível de precisão. Entretanto tinha a
desvantagem de seu peso e tamanho, e de ser operado em período noturno (MONICO,
2000).
Com o passar dos anos surgiram novos aparelhos, como o quadrante de Davis e o
Sextante. Mesmo assim não tinham precisão suficiente para serem utilizados a noite.
Mesmo com os avanços da eletrônica, alguns sistemas foram desenvolvidos, e
apresentavam algum tipo de problema. A exemplo o LORAN (Long-Range Navígatíon
System), o DECCA (Low frequency contínuous wave phase comparíson navígatíon) e o
Ômega Globallow frequency navígatíon system) (SEGANTINE, 2005). Ambos funcionam

3
através das ondas de rádio, operam bem na faixa costeira. No entanto, não fornecem o
posicionamento global, além de limitações quanto à acurácia em razão da interferência
eletrônica e das variações do relevo (MONICO, 2000).
O Ômega, apesar de sua cobertura global, apresenta baixa precisão e os
equipamentos são de custo elevado. Um outro sistema desenvolvido, agora baseado em
satélites artificiais, foi o NNSS (Navy Navigation Satellite System), também conhecido
como Transit, cujas medidas se baseavam no efeito Doppler, que é uma característica
observada nas ondas quando emitidas ou refletidas por um objeto que está em movimento
com relação ao observador (SEEBER, 1993).
Nesse sistema, as órbitas dos satélites eram muito baixas e não havia uma
quantidade muito grande de satélites. Conseqüentemente, não se tinha como obter posições
com muita freqüência. Faltava, portanto, uma solução que oferecesse boa precisão,
facilidade de uso e custos acessíveis para os usuários. A solução definitiva para o problema
surgiu na década de 1970 com a proposta do GPS (Global Positioning System) (MONICO,
2000).
2.2 - Aplicação do GPS na Agricultura
O Sistema de Posicionamento Global, otimizou os trabalhos de engenharia,
garantindo rapidez e precisão em diversos setores produtivos. O primeiro usuário de
tecnologia GPS na agricultura brasileira foi à aviação agrícola, a partir de 1995, na
fertilização das lavouras (MOLIN, 1998). Existem muitos outros casos de aplicação uso do
GPS no setor agrícola, a exemplo os serviços de agrimensura, na realização de
levantamentos topográficos. Com o uso correto de aparelhos para fins específicos, que
permitem coleta de dados para cadastramentos diversos e posteriormente sua utilização em
banco de dados (FIGUEIRÊDO, 2005).
Devido à popularização do sistema GPS, um novo conceito emergiu na agricultura:
a agricultura de precisão que segundo Molin, (1998) é compreendida como um conjunto de
ações gerenciais que assumem que as lavouras não são uniformes em seus aspectos de solo
e desenvolvimento das culturas, implicando na necessidade de investigações

4
georreferrenciadas e intervenções localizadas ao máximo aproveitamento dos recursos e
minimização dos efeitos indesejáveis ao ambiente.
Esse novo conceito surge baseado em técnicas advindas da criação do sistema GPS.
Segundo Watzlawick (2001) relata que a agricultura de precisão engloba o uso de
tecnologias atuais para o manejo do solo, insumos e culturas de modo adequado para as
variações espaciais e temporais nos fatores que afetam a produtividade das mesmas.
O que tem levado a esta nova filosofia de prática agrícola é o uso de três novas
tecnologias, que são o sensoriamento remoto, que consiste na técnica para obter
informações sobre objetos através de dados coletados por instrumentos que não estejam em
contato físico como os objetos investigados, o uso de sistemas de informações geográficas
(SIG), que pode ser definido como sendo coleções de subsistemas integrados, em que
dados espaciais passam por uma sequência de processos de conversão, coleta,
armazenamento e posterior gerenciamento dos dados.
Na agricultura de precisão (AP), que resumidamente consiste em melhorar a
produtividade das culturas por meio do gerenciamento diferenciado das parcelas da
lavoura, o GPS é utilizado em todas as etapas: no georreferenciamento das parcelas, por
exemplo, no posicionamento das amostras de solo; no registro da produtividade de grãos
no momento da colheita; na determinação do local correto de aplicação de corretivos e
fertilizantes (FIGUEIRÊDO, 2005).
2.3 - O Sistema de Posicionamento Global
Popularmente denominado pela sigla GPS (Global Positioning System), ou
NAVSTAR-GPS (Navigation Sattellite With Time And Ranging) é um sistema de
radionavegação desenvolvido pelo Departamento de Defesa dos Estados Unidos da
América DOD (Department of Defense), com o intuito de ser o principal sistema de
navegação das forças armadas norte americanas. Oriundo da fusão de dois programas, o
Timation e System 621B, financiados pelo governo daquele país, com vista a desenvolver
um sistema de navegação de abrangência global.
Em razão da alta acurácia e precisão proporcionada pelo sistema GPS, e do
desenvolvimento da tecnologia envolvida nos receptores GPS, uma grande comunidade
usuária emergiu dos mais variados segmentos da comunidade civil. Entre este o da

5
navegação, posicionamento geodésico, agricultura e controle de frotas de veículos
(DOCKHORN, 2006).
A concepção do sistema GPS permite que um usuário em qualquer local da
superfície terrestre, ou próximo a ela, tenha à sua disposição, necessitando que haja no
mínimo quatro satélites para serem rastreados. Os quais informarão latitude, longitude e
altitude, em tempo real (MONICO, 2000).
Figura 1: Segmento Espacial do Sistema GPS DANA, 1995.
O sistema GPS se divide em três partes. São eles: segmentos espacial, controle e
usuário. O primeiro está diretamente relacionado com a constelação de satélites e seus
sinais, o de controle faz a manutenção e monitora o sistema em tempo integral. O sistema
de usuários e abrangente e continua a se expandir, com o grande número de receptores
lançados no mercado todos os anos (BERNARDI & LANDIN, 2002).
2.4 - Segmento Espacial
O segmento espacial é composto por uma constelação de 24 satélites, específicos
do sistema, e distribuídos em 6 planos orbitais, 4 satélites por órbita, inclinação entre si de
55°, altitude aproximada de 20.200 Km em um período de revolução de 12 horas siderais,
o que faz com que a configuração dos satélites repita-se a cada dia em um mesmo local 4
minutos mais cedo. Esta configuração assegura uma cobertura mínima de pelo menos 4

6
satélites, que em qualquer parte do planeta excetuando-se algumas regiões polares a
qualquer hora das 24 horas do dia (MONICO, 2000).
Cada satélite transmite continuadamente sinais em duas ondas portadoras L, sendo
a primeira L1, com freqüência de 1575,42 MHz e comprimento de onda de 19 cm e a
segunda, com freqüência de L2 1227,60 MHz e comprimento de onda de 24 cm. Sobre
estas ondas são modulados dois códigos, denominados códigos pseudo-aleatórios. Na
banda L1, modula-se o código “Clear Acess” ou “Coarse Aquisition” – C/A e o código
“Precise” – P. A banda L2 é somente modulada pelo código P e sobre as portadoras L1 e
L2 é somente modula-se o código P, este é exclusivo ao uso militar (MACHADO, 2008).
Na concepção original, quatro tipos de satélites fazem parte do projeto NAVSTAR-
GPS. Eles são denominados satélites do Bloco, I, II, IIA . Onde “A” refere-se à
ADVANCE, avançado e IIR REPLENISBMENT, reabastecimento..
Os do bloco II e IIA são compostos de 28 satélites, denominado de primeira e
segunda geração. Satélites operacionais com o suporte mínimo de 24 satélites, recíprocos e
de pouca capacidade de armazenamento de dados (MONICO, 2000).
Os satélites do bloco II e IIA serão substituídos por 20 do bloco III, denominado de
terceira geração, à medida que for necessário. Duas novas características são a capacidade
de medir distâncias entre eles (cross link ragers) e calcular efemérides (erros) no próprio
satélite, além de transmitir essas informações para o sistema de controle em terra
(SEEBER, 1993).
A quarta geração de satélites, a qual substituirá os do Bloco IIR, denomina-se
Bloco IIF “F” refere-se à FOLLOW- ON, continuação, e será composta por 33 satélites.
Trata-se dos satélites que deverão incorporar a modernização do GPS, cada satélite carrega
padrões de freqüência altamente estáveis formando uma referência de tempo muito precisa.
(MONICO, 2000). Após a atualização de infra-estrutura do sistema GPS em 2007, estão
ativos somente satélites do bloco IIR e IIIF, (MONICO, 2008).
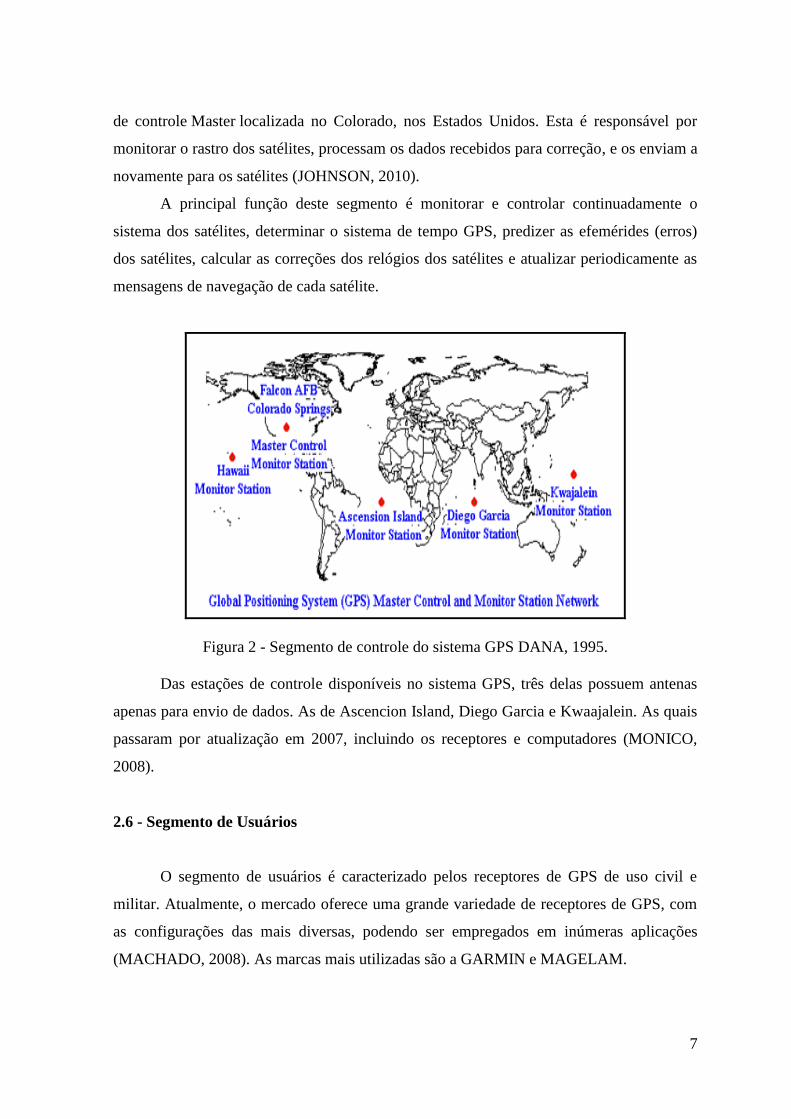
2.5 - Segmento de Controle
Este segmento é composto por cinco estações espalhadas pela Terra, localizadas no
Hawaii, Ascencion Island, Diego Garcia, Kwaajalein e Master Control Stayion. As quais
são controlados pelo segmento de controle em terra. Este controle é feito em uma estação
7
de controle Master localizada no Colorado, nos Estados Unidos. Esta é responsável por
monitorar o rastro dos satélites, processam os dados recebidos para correção, e os enviam a
novamente para os satélites (JOHNSON, 2010).
A principal função deste segmento é monitorar e controlar continuadamente o
sistema dos satélites, determinar o sistema de tempo GPS, predizer as efemérides (erros)
dos satélites, calcular as correções dos relógios dos satélites e atualizar periodicamente as
mensagens de navegação de cada satélite.
Figura 2 - Segmento de controle do sistema GPS DANA, 1995.
Das estações de controle disponíveis no sistema GPS, três delas possuem antenas
apenas para envio de dados. As de Ascencion Island, Diego Garcia e Kwaajalein. As quais
passaram por atualização em 2007, incluindo os receptores e computadores (MONICO,
2008).
2.6 - Segmento de Usuários
O segmento de usuários é caracterizado pelos receptores de GPS de uso civil e
militar. Atualmente, o mercado oferece uma grande variedade de receptores de GPS, com
as configurações das mais diversas, podendo ser empregados em inúmeras aplicações
(MACHADO, 2008). As marcas mais utilizadas são a GARMIN e MAGELAM.
8
De acordo com Camara e Silva (2005) conforme a finalidade almejada se escolhe o
tipo do receptor GPS, que pode ser de navegação ou geodésico. A diferença entre os tipos
de receptores se deve principalmente a seguinte condição: O de navegação não armazena
as informações codificadas entre este e os satélites, ao contrario do denominado geodésico
o qual armazena e pode se corrigir as fontes de erro no momento do rastreio, para corrigi-
lôs com a técnica denominada de pós processamento.
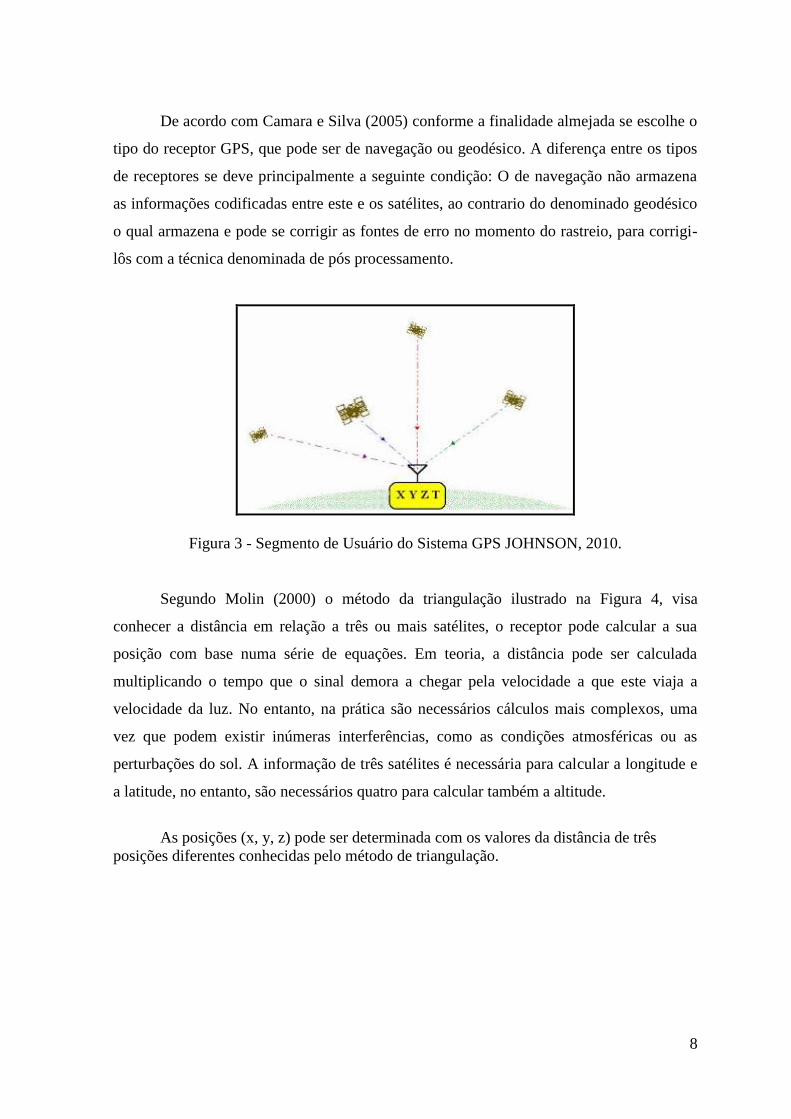
Figura 3 - Segmento de Usuário do Sistema GPS JOHNSON, 2010.
Segundo Molin (2000) o método da triangulação ilustrado na Figura 4, visa
conhecer a distância em relação a três ou mais satélites, o receptor pode calcular a sua
posição com base numa série de equações. Em teoria, a distância pode ser calculada
multiplicando o tempo que o sinal demora a chegar pela velocidade a que este viaja a
velocidade da luz. No entanto, na prática são necessários cálculos mais complexos, uma
vez que podem existir inúmeras interferências, como as condições atmosféricas ou as
perturbações do sol. A informação de três satélites é necessária para calcular a longitude e
a latitude, no entanto, são necessários quatro para calcular também a altitude.
As posições (x, y, z) pode ser determinada com os valores da distância de três
posições diferentes conhecidas pelo método de triangulação.

9
Figura 4: Método da Triangulação MOLIN, 2009.
2.7 - O Funcionamento do Sistema GPS
O sistema fundamenta-se em informações enviadas pelos satélites do sistema GPS,
que emitem sinais modulando as portadoras (L1 e L2), a qual contém duas variedades de
informações. Em um dos tipos a mensagem de navegação consiste em bits de dados que
possui os parâmetros orbitais, esses dados são para correção da propagação na atmosfera,
parâmetros para correção do erro dos relógios dos satélites e saúde dos satélites. Essas
informações espaciais e temporais contidas nas mensagens de navegação são determinadas
pelo segmento de controle do GPS em terra (SILVA e CAMARA, 2005).
O segundo tipo de informação é um conjunto de códigos de ruídos pseudo-
aleatórios (PRN), uma seqüência de pulsos digitais em um padrão inconfundível. Essas
transmissões não transportam dados no sentido tradicional. Os códigos são concebidos para
possibilitar a unidade receptora medir o instante exato de chegada do sinal de cada satélite
à antena do receptor. A mesma portadora (L1 e L2) é modulada por todos os satélites, no
entanto, os códigos são perfeitamente distinguíveis, face sua característica de baixa
correlação, ou seja, sua assinatura digital é individualizada (SILVA e CAMARA, 2005).
2.8 - Os Métodos de Posicionamento
Os métodos de posicionamento dependerão exclusivamente da utilidade acurácia e
precisão desejada. Posicionar um objeto consiste no ato ou efeito de localizá-lo sobre a
10
superfície terrestre, determinando as coordenadas latitude, longitude e altitude sobre esta
superfície em conformidade com um sistema de referência (MACHADO, 2005).
Existem vários métodos de posicionamento estes podem ser classificados como
absoluto, quando as coordenadas de um objeto estão associadas diretamente ao geocentro,
e relativo, quando as coordenadas são determinadas em relação a um referencial
materializado por um ou mais vértices com coordenadas conhecidas (SILVA e CAMARA,
2005).
Segundo Araújo (2006) as principais técnicas de observações por GPS são,
basicamente o posicionamento por ponto (absoluto), diferencial (relativo) e
posicionamento com DGPS (Differential GPS) e RTK (Real Time Kinematic).
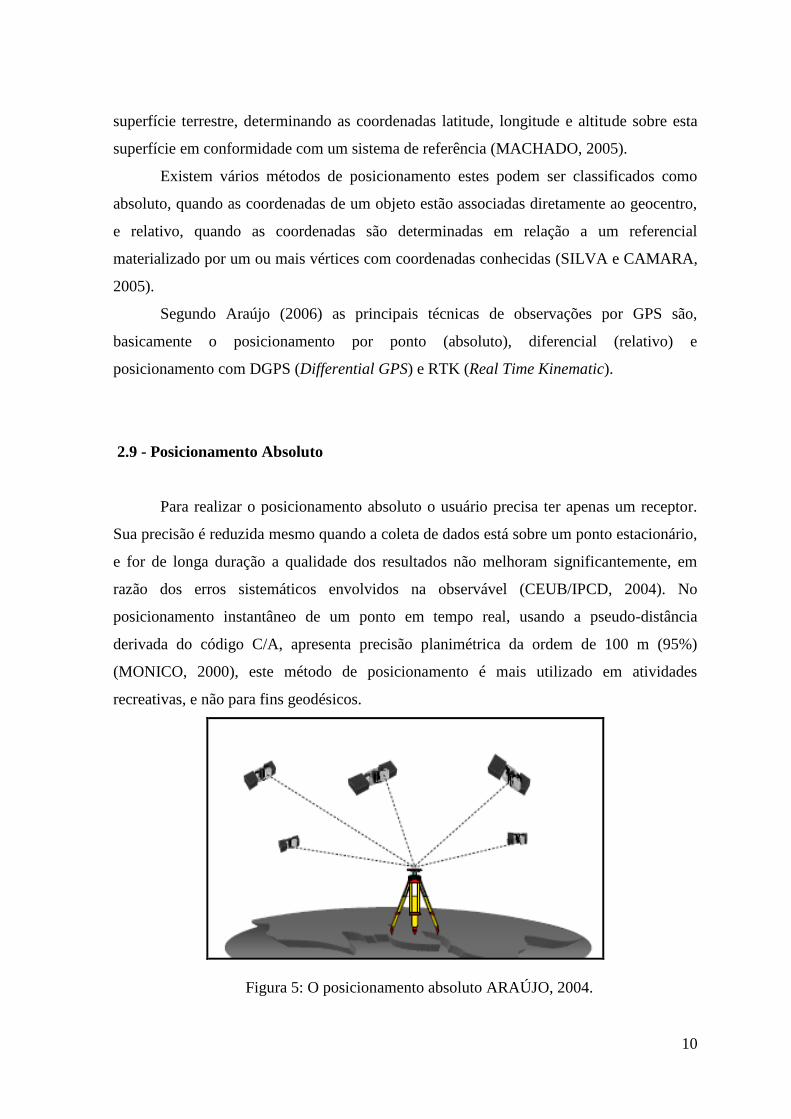
2.9 - Posicionamento Absoluto
Para realizar o posicionamento absoluto o usuário precisa ter apenas um receptor.
Sua precisão é reduzida mesmo quando a coleta de dados está sobre um ponto estacionário,
e for de longa duração a qualidade dos resultados não melhoram significantemente, em
razão dos erros sistemáticos envolvidos na observável (CEUB/IPCD, 2004). No
posicionamento instantâneo de um ponto em tempo real, usando a pseudo-distância
derivada do código C/A, apresenta precisão planimétrica da ordem de 100 m (95%)
(MONICO, 2000), este método de posicionamento é mais utilizado em atividades
recreativas, e não para fins geodésicos.
Figura 5: O posicionamento absoluto ARAÚJO, 2004.

11
2.10 - Posicionamento Diferencial (Relativo)
No posicionamento diferencial se devem utilizar dois ou mais aparelhos receptores.
Esse posicionamento pode ser realizado pelo método cinemático, quando o receptor remoto
se movimenta durante a observação, e quando o receptor remoto permanece em repouso
durante a observação, se diz que o posicionamento é feito pelo método estático (ARAÚJO,
2006).
O método cinemático estático é a técnica de posicionamento mais utilizada nos
serviços de campo, pode alcançar precisões da ordem de 0,1 cm ou melhores, com o uso de
receptores de dupla freqüência. Aplica-se na implantação de pontos de apoio e controle,
tais como: estabelecimento de redes geodésicas regionais, nacionais ou internacionais,
No método estático um receptor tem a posição conhecida, é chamado receptor base
ou de referência, o receptor ou receptores que estão em posições desconhecidas são
chamados “rover”. O receptor de referência calcula as medições para cada satélite,
baseando-se na sua posição que é conhecida e na localização instantânea de cada satélite.
Depois compara os valores calculados com as medições reais. Com a diferença entre esses
valores temos a correção para cada satélite, a qual vai ser transmitida ao outro receptor. O
rover pode então calcular a sua posição com melhor precisão (MARQUES, 1999). Nesse
método as correções dos erros também podem ser feitas através do pós-processamento dos
dados com a utilização de software específico (PESTANA, 2002).
Figura 6: Posicionamento Diferencial Relativo, ARAÚJO 2006.

12
2.11 - Posicionamento por DGPS (Differential GPS) e RTK (Real Time Kinematic)
No posicionamento DGPS são utilizados dois ou mais receptores, o conceito de
DGPS envolve o uso de um receptor estacionário em local com coordenadas conhecidas,
rastreando todos os satélites visíveis (SILVA e CAMARA, 2005). Ainda conforme os
autores, o processamento dos dados nesta estação permite calcular correções posicionais,
das pseudo-distâncias e da fase da portadora. Estas correções são aplicadas ao
posicionamento calculado nos equipamentos itinerantes em tempo real ou pós-processado.
É necessário que os dados na estação base e nos receptores móveis, sejam coletados
simultaneamente.
Os cálculos realizados no DGPS são possíveis se os dados dos satélites coletados
em todos os receptores, forem os mesmos, tem que existir sincronia para o cálculo preciso
(FIGUEIREDO, 2005). A principal diferença existente entre o DGPS e o RTK reside nas
informações utilizadas, enquanto o DGPS utiliza a pseudo-distância, já no RTK se
emprega a fase da onda portadora, fato que melhora consideravelmente a qualidade dos
resultados obtidos.
Figura 7: Posicionamento por DGPS (Differential Gps) ARAÚJO, 2006.
2.12 - Erros que atuam no sistema
Na criação do sistema GPS o DoD introduzia um erro proposital, denominado de
S/A que visava eliminar a possibilidade das tropas inimigas localizarem o posicionamento
exato das bases militares norte americanas. Este erro gerava um ruído no relógio do satélite
para limitar o uso do GPS por forças inimigas durante o período das guerras. Entretanto em

13
01/05/2000, esse que era a principal fonte de erro do posicionamento do GPS, foi retirado
do sistema (MACHADO, 2008).
Mesmo o sistema sendo bem elaborado, está sujeito a erros. Estes relacionados com
a qualidade das observáveis utilizadas. Além dos erros já mencionados, o trabalho irá
ressaltar os mais freqüentes. Alguns outros, o próprio sistema se encarrega de corrigir
através de cálculos matemáticos criados com seu melhoramento e a partir da utilização de
satélites mais sofisticados (MONICO, 2008).
2.13 - Erros dos Satélites
Para usuários que não precisam de posições instantâneas existe uma ferramenta
importante, que permite uma maior acurácia, há a opção de acessar, via Internet às
efemérides pós-processadas, denominadas efemérides precisas, produzidas por diversos
centros de análises que compõem o IGS (International Geodinamic Service) (SILVA e
CAMARA, 2005).
As efemérides precisas são: IGS resultante da combinação das órbitas de vários
centros de análises, disponíveis dentro de um período de 7 a 10 dias após a coleta de dados;
IGR órbitas, IGS rápidas, disponíveis dentro de até 48 horas; IGP órbitas, IGS preditas,
disponíveis a partir de algumas horas do dia a que se refere, nos levantamentos geodésicos
são fundamentais no sucesso do trabalho (MONICO, 2000).
A acurácia das efemérides transmitidas deve variar entre 0 (zero) e 20 (vinte)
metros. Elas são disponíveis em tempo real, haja vista serem transmitidas com as
observáveis. As efemérides precisas (IGS e IGR), com acurácia estimada de 5 a 10 cm, são
resultantes de pós-processamento. A efeméride predita pelo IGS fica disponível poucas
horas antes do dia a que se refere e apresenta precisão da ordem de 50 cm (SILVA e
CAMARA, 2005).
2.14 - Erro de Órbita
A órbita de um satélite quando sujeita a um campo esférico e homogêneo sem
influências externas é chamada órbita normal. A Terra, porém, tem a forma de um
elipsóide de revolução com protuberância equatorial, é constituída internamente de

14
materiais muito heterogêneos, tem uma superfície externa repleta de saliências e
reentrâncias geográficas e está inserida em um sistema dinâmico (Sistema Solar) sujeito a
influências diversas (atração do Sol, da Lua e dos Planetas), por isso os satélites na Terra
descrevem órbitas perturbadas (BARRETO, 2004).
As informações orbitais podem ser obtidas a partir das efemérides transmitidas
pelos satélites ou por informações pós-processadas, denominadas efemérides precisas. As
coordenadas são calculadas a partir das efemérides, são normalmente, injuncionadas como
fixas durante o processo de ajustamento de dados GPS. Assim sendo, qualquer erro nas
coordenadas do satélite se propagará para posição do usuário. O qual e ajustado a cada 12h
pelo controle em terra, pode chegar a 0,6 m de precisão (MONICO, 2000).
As orbitas dos satélites são calculadas em um sistema inercial (SI) onde as
coordenadas independem da posição do observador. Por se tratar de um sistema
tridimensional fixado no espaço absolutamente independe da rotação da terra e tendo como
plano fundamental o plano do equador (TIMBÓ, 2000).
2.15 - Relógio dos Satélites
De acordo com Silveira (2006) os sinais transmitidos pelos satélites GPS são
controlados por relógios atômicos, que influenciam diretamente na precisão do
posicionamento, sendo assim os sinais transmitidos usam como referência o tempo GPS.
Este é gerado por todas as estações de controle GPS e pelos próprios satélites. Conforme o
mesmo autor, nas equações de observações indiferenciadas da portadora, o erro do relógio
do satélite é expresso por um termo resultante de compensação e alteração, enquanto que
nas equações de observações da simples diferença de fase, o termo relativo ao erro do
relógio é eliminado.
Conforme Silveira (2006) a compensação do erro do relógio do satélite pode ser
corrigida, usando-se coeficientes polinomiais transmitidos, os termos de menor
significância são negligenciados. Segundo Molin (2009) um atraso de 1 segundo a cada
160 anos equivale a um erro de aproximadamente 20 metros. Os satélites são
constantemente monitorados pela estação de controle que ajusta os relógios e reduz o erro
para cerca de 0,6 m.

15
2.16 - Relatividade
Os efeitos da relatividade no GPS não estão restritos apenas aos satélites, mas
também a propagação do sinal e aos relógios dos receptores. O relógio do satélite além dos
erros já citados variam em razão da relatividade geral e espacial. Os relógios dos
receptores nas estações terrestres e a bordo dos satélites ficam em campos gravitacionais
diferentes, além de se deslocarem em velocidades diferentes, o que gera uma aparente
alteração na freqüência dos relógios a bordo dos relógios terrestres (CEUB/IPCD, 2004).
Esses efeitos são compensados antes do lançamento do satélite por uma redução
nominal nos relógios dos satélites, o que não elimina todos os erros, porém utilizando
algumas técnicas de posicionamento, esses erros são reduzidos consideravelmente
(LOPES, 2007).
2.17 - Multicaminhamento
Ocorre um efeito no posicionamento por GPS, em que os sinais enviados pelos
satélites chegam na antena do receptor após um ou vários desvios causados por reflexões
em objetos. Os sinais GPS podem ser refletidos por superfícies inclinadas, verticais ou
horizontais: ruas, árvores, lagos, veículos. Dependendo da localização dos receptores
durante a coleta de dados, especialmente em estações de referência, devido às reflexões
tais sinais percorrem caminhos mais longos e chegam atrasados comparados aos sinais
diretos o que ocasionam erros nas leituras e se caracteriza o efeito do multicaminhamento
(NOGUEIRA, 2009).
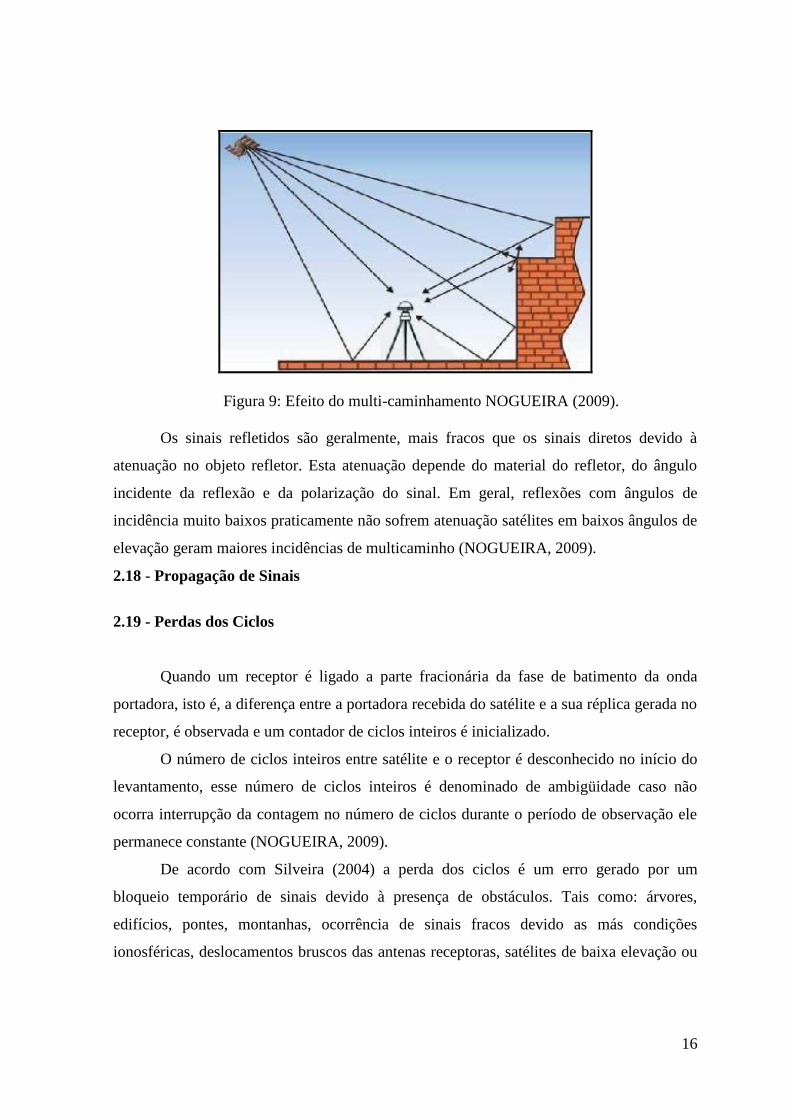
Figura 8: Efeito do Multicaminhamento NOGUEIRA (2009).
16
Figura 9: Efeito do multi-caminhamento NOGUEIRA (2009).
Os sinais refletidos são geralmente, mais fracos que os sinais diretos devido à
atenuação no objeto refletor. Esta atenuação depende do material do refletor, do ângulo
incidente da reflexão e da polarização do sinal. Em geral, reflexões com ângulos de
incidência muito baixos praticamente não sofrem atenuação satélites em baixos ângulos de
elevação geram maiores incidências de multicaminho (NOGUEIRA, 2009).
2.18 - Propagação de Sinais
2.19 - Perdas dos Ciclos
Quando um receptor é ligado a parte fracionária da fase de batimento da onda
portadora, isto é, a diferença entre a portadora recebida do satélite e a sua réplica gerada no
receptor, é observada e um contador de ciclos inteiros é inicializado.
O número de ciclos inteiros entre satélite e o receptor é desconhecido no início do
levantamento, esse número de ciclos inteiros é denominado de ambigüidade caso não
ocorra interrupção da contagem no número de ciclos durante o período de observação ele
permanece constante (NOGUEIRA, 2009).
De acordo com Silveira (2004) a perda dos ciclos é um erro gerado por um
bloqueio temporário de sinais devido à presença de obstáculos. Tais como: árvores,
edifícios, pontes, montanhas, ocorrência de sinais fracos devido as más condições
ionosféricas, deslocamentos bruscos das antenas receptoras, satélites de baixa elevação ou

17
falha no programa do receptor, informações enviadas pelo satélite incompletas ou
incorretas devido ao mau funcionamento dos osciladores dos satélites.
Deste modo, se faz necessários alguns minutos para o que se denomina de resolver
a ambigüidade. Ou seja, determinar a diferença de número de ciclos entre o satélite e o
receptor para se obter o posicionamento mais preciso (NOGUEIRA, 2009).
2.20 - Rotação da Terra
Para o cálculo das coordenadas do satélite no instante de transmissão se torna
necessário efetuar a correção do movimento de rotação da Terra, já que durante a
propagação do sinal o sistema de coordenadas terrestre rotaciona em relação ao satélite. As
coordenadas originais do satélite devem ser rotacionadas sobre o eixo z em um ângulo alfa,
definido como o produto do tempo de propagação do sinal pela velocidade de rotação da
Terra. Os satélites e o segmento de controle se encarregam de corrigir esse erro
(CEUB/IPCD, 2004).

18
Figura 10: Efeito da Correção do sinal GPS, em
decorrência da Rotação Terrestre NOGUEIRA, 2009.
2.21 - Ionosfera
A ionosfera é uma região situada entre 100 e 1000 km acima da superfície terrestre,
caracterizada pela presença de elétrons livres que afetam diretamente a modulação do
código P e a fase portadora, quando atravessam está camada (SILVEIRA, 2004).
O que vai determinar o atraso do sinal é o número de elétrons que o sinal vai
encontrar no seu caminho do satélite até ao receptor. O conteúdo total de elétrons (TEC) é
uma função de diversas variáveis tais como as mudanças no fluxo solar ionizante, atividade
magnética, estações do ano, hora, localização do utilizador e ângulo de elevação (LOPES,
2007).
Segundo Nogueira (2009) vários modelos matemáticos têm sido criados para
estimar a densidade de elétrons, no entanto é difícil encontrar um método adequado que
estime o TEC com precisão. De acordo com Silveira (2004) para linhas com distâncias
superiores a 100 km, se torna necessário o uso de receptores de dupla freqüência de modo

19
a considerar os efeitos ionosféricos, pois a freqüência da portadora L2 é menor, o que
proporciona uma menos interferência desses efeitos.
2.22 - Troposfera
A troposfera é a primeira camada da atmosfera, que se estende desde a superfície
terrestre até uma altitude de cerca de 40 km, basicamente é composta de uma mistura de
dois gases ideais, vapores de água seca e úmida. (SILVEIRA, 2004).
Esta camada provoca também atrasos importantes no sinal de satélite. Ao contrário
do que acontece com a ionosfera, a troposfera é um meio não dispersivo para as
frequências de funcionamento do sistema GPS, pelo que não é possível estimar os atrasos
troposféricos a partir das medições efetuadas com duas bandas distintas. Enquanto que a
ionosfera atrasa o código e avança a fase da portadora, a troposfera afeta da mesma forma
o código e a fase da portadora. O atraso troposférico depende essencialmente da pressão
atmosférica, temperatura e umidade relativa, e pode ser dividido em duas componentes
uma componente seca e outra úmida (LOPES, 2007).
2.23 - Erros de Receptor
2.23.1 - Erros de Receptor/Antena
Segundo Nogueira (2009) são os erros relacionados com o hardware do receptor e
da antena que são ocasionados devido à diferença dos sinais emitidos pelas bandas L1 e L2
que são responsáveis pela maior precisão na obtenção dos cálculos de posicionamento.
2.23.2 - Erro do Relógio
Os relógios a bordo dos satélites são altamente precisos, mas não acompanham um
sistema de tempo capaz de sincronizar os relógios dos receptores associados aos dos
satélites, por esse motivo devemos sempre ficar atentos a esses detalhes que podem trazer
erros no momento dos registros (CEUB/IPCD, 2004).
Os relógios dos receptores GPS normalmente são equipados com osciladores de
quartzo, os quais possuem boa estabilidade interna bem melhor do que os dos relógios de

20
pulso e de custo relativamente baixo. Segundo Nogueira (2009) os erros relacionados com
os relógios dos receptores são praticamente eliminados pelo método de posicionamento
escolhido, e pelo melhoramento do sistema.
É importante saber que os relógios dos satélites são monitorados pelo segmento de
controle. E que uma forma efetiva de eliminar os erros dos relógios dos satélites é através
do uso do posicionamento relativo, o qual sincroniza automaticamente os relógios entre os
GPS e os satélites, e caso ocorra erro este pode chegar até 24 m.
2.23.3 - Erros entre os Canais
Em receptores que possuem mais de um canal, pode ocorrer um erro sistemático
entre os mesmo, já que o sinal de cada satélite percorrerá um caminho eletrônico diferente.
É o que ocorre atualmente, pois a maioria dos receptores possui canais múltiplos, e cada
um deles registra os dados de um satélite particular, o que resulta portanto nesse tipo de
erro. Para fazer a correção o receptor dispõe de dispositivo que realiza uma calibração no
início de cada levantamento (NOGUEIRA, 2009).
2.23.4 - Erros de Estação
Segundo Monico (2000) no que se refere a estação, as marés terrestres, cargas dos
oceanos e da atmosfera não se tratam de erros, mas de variações que devem ser
consideradas para os casos de posicionamento de alta precisão que são normalmente
acuradas no pós processamento.
2.23.5 - Erros nas Coordenadas
O erro nas coordenadas está em função de posicionamento GPS, este deve ter pelo
menos um ponto fixo para que o sistema possa calcular de forma precisa as diferenças de
orbita. Conforme CEUB/IPCD (2004) o posicionamento proporciona diferenças de
coordenadas tridimensionais de alta precisão, essas diferenças de coordenadas não contém
informações sobre o sistema de referência (datum, que em cartografia refere-se ao modelo
21
matemático teórico da representação da superfície da Terra ao nível do mar utilizado pelos
cartógrafos), as quais são indispensáveis em qualquer tipo de levantamento.
2.24 - Receptor de Navegação
Atualmente no mercado existem diversas marcas e modelos de aparelhos receptores
de sinal GPS. Os equipamentos de navegação são aqueles que fornecem o posicionamento
em tempo real, baseado no código C/A ou P. A precisão (SPS – código C/A) destes
equipamentos é da ordem de 5 a 15 metros, com o S/A desligado e precisão PPS (código P)
da ordem de 3 a 10 metros. O código P é restrito ao uso das forças militares norte
americano (SEGANTINE, 1995).
Figura 11 -* www.garmin.com
2.25 - Receptor Geodésico
São aparelhos de dupla freqüência (sofrem menos interferência da ionosfera),
recebendo a freqüência L1 (e código C/A) e a freqüência L2 (código C/A ou P). São
indicados para trabalhos geodésicos como transportes de coordenadas e controle de redes.
Se utilizados para trabalhos topográficos conseguem produtos de escala 1:1000, ou melhor.
O pós-processamento é realizado em gabinete se utilizando um software específico e sua
precisão chega a ser milimétrica, isso é claro condicionado ao método de posicionamento
(SEGANTINE, 1995).

22
Figura 12 - * www.spectraprecision.com/
3.0 - MATERIAL E MÉTODOS
O experimento foi desenvolvido em uma propriedade rural município de Altamira-
PA, utilizando receptores de sinal de GPS geodésico e de navegação utilizando os métodos
para levantamento planimétrico estático e absoluto.
Figura 13 - Localização da Área de Estudo.

23
No método estático, foi lançado mão de um par de receptores marca/modelo
Spectra Precision/ Epoch 25 com freqüência L1 no hover e L1/L2 na base ambos de 12
canais e erro RMS de 3 m.m a cada km . A taxa de aquisição da cada 5''. O receptor
denominado base foi estacionado a 5 Km de distancia da propriedade objeto do trabalho e,
permaneceu ligado durante 8 horas ininterruptas de forma que a posteriori se efetuasse a
correção das latitude e longitude dos vértices hover's em pós processamento. O receptor
denominado hover, percorreu os quatro vértices que compõem o limite da propriedade com
estacionamento e rastreio durante 30 minutos em cada marco e dados descarregados em
micro computador utilizando Softwear Trimble Office Geomatics/TGO versão 1.6. Seguido
de pós processamento com correção, utilizando as informações dos marcos geodésicos do
IBGE, componentes da Rede Brasileira de Monitoramento Contínuo - RBMC.
Denominados de SAT 93827 e SAT 93620, Altamira e Belém respectivamente.
No método absoluto, foram utilizados receptores GPS de navegação marca
GARMIN modelos GPS 72, MAP 76, ETREX Euro e ETREX CAR. Todos com 12 canais
e erro RMS de 5m. O rastreio foi realizado com os receptores no modo 3D com os dados
descarregados em micro computador utilizando Software GPS Track Maker-PRO, versão
4.3 sem correção.
Em ambos métodos de rastreio, os receptores operaram com base no Datum
geocêntrico Word Geografic Sistem/ WGS-84 em coordenadas geográfica. Nos receptores de
navegação, antes de descarregar os dados, as coordenadas foram convertidas para planas
(UTM), reconfigurando-as no próprio receptor.
Os tratamentos foram constituídos com os receptores da seguinte forma: EPOCH-
25 L1(testemunha)= Rcp.GT, GPS 72= Rcp.N1; Rcp.N2=MAP 76; Rcp.N3=ETREX
EURO e Rcp.N4=ETREX CAR.
Cada receptor se configurou como um tratamento. As informações do receptor
geodésico L1 denominado de hover, ao serem pós processados, assumiram a função de
testemunha frente as adquiridas pelos receptores de navegação.
Para avaliar a precisão dos receptores de navegação com base no geodésico. Foram
considerados os pares de coordenadas obtidas no marco da propriedade denominado m-1.
O qual não possuía obstrução aérea que provocasse erro por multi-caminhamento e a área
mensurada.
24
Em uma segunda avaliação, as informações tanto do receptores geodésico quanto
dos de navegação foram comparados com as coordenadas do marco geodésico do IBGE,
componente da Rede Brasileira de Monitoramento Contínuo - RBMC (IBGE, 2010)
denominado de SAT 93827, localizado no aeroporto de Altamira-PA que agora assumiu a
condição de Marco geodésico testemunha = M.GT. visando avaliar a precisão de todos os
receptores relacionados neste trabalho ponto a ponto. Nomeados conforme a seguir:
receptor geodésico L1 EPOCH-25= Rcp.G; receptores de navegação GPS 72= Rcp.N1,
Rcp.N2= MAP 76, Rcp.N3= ETREX EURO e Rcp.N4= ETREX CAR.
Figura 14 - Marco IBGE SAT 93827 em Altamira-PA.
Os dados obtidos com o marco geodésico, receptores geodésico e de navegação,
foram tabulados no software Microsoft Excel 2007, em seguida analisados com a estatística
descritiva. Considerando a Média, Intervalos de Confiança (I.C) e Erro quadrado médio
(EQM) das variáveis.
Estatística Descritiva
A Estatística Descritiva é uma ferramenta rápida e básica para se criar quadros e
tabelas. Essa é parte da Estatística que utiliza números para descrever os fatos.
Compreende a coleta, a organização, o resumo. E em geral a simplificação de informações
que podem ser muito complexas. Dentro da estatística descritiva foram utilizados para
elaboração do trabalho a Média Aritmética, o Intervalo de Confiança e o Quadrado Médio
(SILVA, 2010).

25
Média Aritmética
A média segundo Braule (2001) é a mais usual das medidas de tendência central,
sendo igual à soma das observações dividida pelo número de observações, a formula
utilizada foi a seguinte:
Aonde é a média aritimetica, e x1,..., xn são os n valores (distintos ou não) da
variável x. A média foi utilizada devido ser um bom parametro para obter medidas de
maior estabilidade (CRESPO, 2002).
Intervalo de Confiança
O Intervalo de confiança foi utilizado para avaliação da acurácia e precisão e
contêm a seguinte fórmula:
Os números dos limites de confiança ± 1,96 são de 95% a 99%. Esses são
denominados os limites de confiança, ou ainda coeficientes de confiança ou valores
críticos (MURRAY, 1993).
2.32 - Quadrado Médio
O quadrado médio considera que seus argumentos são uma amostra e seus dados
representarem toda a amostra, e foi utilizado devido apresentar um bom indicador de
medidas do grau de dispersão dos valores em relação ao valor médio (a média). E tem a
seguinte fórmula:
Aonde s é média de amostra (n...), e n é o tamanho da amostra.

26
4.0 - RESULTADOS E DISCUSSÃO
4.1 - Acurácia de coordenadas entre os receptores de GPS geodésico e de navegação
A Tabela 1 contém os valores dos pares de coordenadas planas UTM,
correspondentes a um vértice de uma propriedade obtidas com uso dos receptores
geodésico considerada como a coordenada denominada de testemunha. Bem como as
obtidas com o uso de receptores de navegação. Nesta tabela é possível constatar que o
tratamento Rcp.N4 foi o que apresentou o par de coordenadas (x,y) que mais se
aproximou da verdadeira, com variação de 1,395 m e -2,385 m para longitude e latitude
respectivamente. Portanto, com a mesma tendência de comportamento dados no trabalho
de Fransson et al. (2005) os quais perceberam que os valores de latitude foram sempre
maior que os de longitude. Considerando os resultados dos demais receptores, o tratamento
Rcp.N3 apresentou os valores mais distantes da testemunha com 5,069 m e -8,019 m
longitude e latitude respectivamente. Valores estes, acima dos encontrados por Matsuoka
et al. (2008) em condições semelhantes, os quais eram de ordem sub métrica em
planimetria.
Tabela 1 - Coordenadas planas rastreadas com receptores de GPS geodésico e de navegação.
Tratamentos EASTING (m) NORTING (m)
RcpGT
365.273, 455 9.644.772, 083
RcpN1 365.278, 506 * 9.644.773, 701
RcpN2 365.275, 623 9.644.777,545
RcpN3 365.268, 386 * 9.644.780, 102 *
RcpN4 365.272, 060 9.644.774, 468
* Dado fora do intervalo de confiança com nível de 5% de significância.
Na Tabela 2, encontram-se os dados de análise estatística descritiva. A qual
considera as variáveis Erro Médio Quadrático (E.Q.M) e Intervalo de Confiança (I.C),
utilizados para avaliação da precisão dos equipamentos.
Os resultados do E.M.Q forma na ordem de 4,38 m e 2,94 m longitude (E) e
latitude (N) respectivamente. Analisando os resultados obtidos nos tratamentos Rcp.N1 e
Rcp.N3, constata-se que os valores estão fora do IC. Portanto, dependendo do nível de

27
precisão exigido na atividade de planimetria, não se aconselha utilizar estes receptores.
Argumentação esta que se ratifica com as observações de Tragueta e Cardoso (2009) os
quais em trabalho semelhante encontraram variações de até 37% acima da coordenada
exata. Esta variação pode ser atribuída aos fatores discutidos anteriormente na revisão de
literatura. Entre estas as características intrínsecas de cada receptor ou até mesmo as
condições atmosféricas.
Relacionado aos demais tratamentos (Rcp.N2 e Rcp.N4), com base no IC
estabelecido pelo tratamento Rcp.GT
(Tabela 2), tiveram variações tanto de longitude
quanto de latitude dentro dos níveis aceitáveis, com valores na ordem de 1,395 m a -2,395
m e 1,618 a 2,385 m para longitude e latitude respectivamente, mostrando assim, não ser
confiável o uso das informações destes em levantamentos planimétricos para
determinação das coordenadas dos marcos de uma propriedade caso esta seja para fins
cadastrais. Haja vista ocorrer “flutuação” das coordenadas em torno do marco ocupado
conforme a Figura 15.
Tabela 2 - Dados estatísticos de média, quadrado médio, intervalos de confianças das Coordenadas planas
rastreadas com receptores de GPS geodésico e de navegação.
EASTING (m) NORTING (m)
MÉDIA 365.273, 61 9.644.776, 454
QME 4, 38600444 2, 94513101
IC 4, 29820537 2, 88617535
IC Superior 365277, 942* 9644779, 340*
IC Inferior 365269, 346* 9644773, 568* * Dado fora do intervalo de confiança com nível de 5% de significância.
QME = Quadrado Médio
IC = Intervalo de Confiança
IC SUPERIOR = Intervalo de Confiança Superior
ICINFERIOR = Intervalo de Confiança Inferior
28
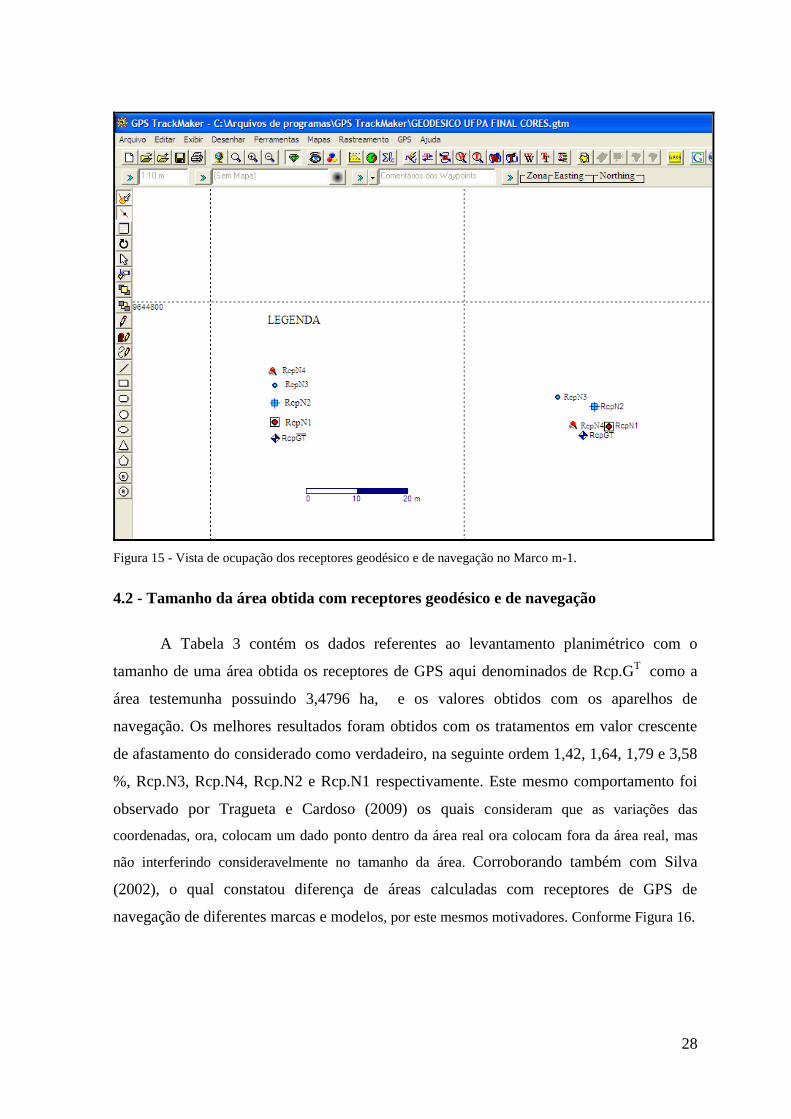
Figura 15 - Vista de ocupação dos receptores geodésico e de navegação no Marco m-1.
4.2 - Tamanho da área obtida com receptores geodésico e de navegação
A Tabela 3 contém os dados referentes ao levantamento planimétrico com o
tamanho de uma área obtida os receptores de GPS aqui denominados de Rcp.GT
como a
área testemunha possuindo 3,4796 ha, e os valores obtidos com os aparelhos de
navegação. Os melhores resultados foram obtidos com os tratamentos em valor crescente
de afastamento do considerado como verdadeiro, na seguinte ordem 1,42, 1,64, 1,79 e 3,58
%, Rcp.N3, Rcp.N4, Rcp.N2 e Rcp.N1 respectivamente. Este mesmo comportamento foi
observado por Tragueta e Cardoso (2009) os quais consideram que as variações das
coordenadas, ora, colocam um dado ponto dentro da área real ora colocam fora da área real, mas
não interferindo consideravelmente no tamanho da área. Corroborando também com Silva
(2002), o qual constatou diferença de áreas calculadas com receptores de GPS de
navegação de diferentes marcas e modelos, por este mesmos motivadores. Conforme Figura 16.

29
Tabela 3 - Medidas dos tamanhos de área de quatro propriedades obtidas com receptores GPS geodésico e de
navegação.
TRATAMENTO ÁREA (ha)
Rcp.GT
3, 47960
Rcp.N1 3, 60400*
Rcp.N2 3, 54190
Rcp.N3 3, 52900
Rcp.N4 3, 53650
* Dado fora do intervalo de confiança com nível de 5% de significância.
Rcp.GT = Receptor Geodésico
Apesar do resultado do tratamento Rcp.N1 está fora do I.C em 3,78 % do
tratamento testemunha, foi consideravelmente inferior aos resultados encontrados por
Tragueta e Cardoso (2009) que em condições semelhantes a este experimento chegaram até
29 % do resultado obtido com o receptor geodésico. Segundo Coelho (2003) os dados
obtidos com este tipo de receptor poderiam ser melhorados aumentando o tempo de
rastreio antes da coleta. No entanto o mesmo argumenta que esta melhora é pouco
significativo.
Figura 16 - Vista de ocupação dos receptores geodésicos e de navegação no para determinação da área da
propriedade.

30
4.3 – Determinação de coordenada em ponto geodésico utilizando receptores
geodésico e de navegação
Em uma outra condição de avaliação de desempenho da precisão dos receptores
GPS de todos os receptores utilizados no experimento, foram considerados o pares de
coordenadas planas UTM do marco geodésico aqui denominado de testemunha= M.GT,
pertencente a Rede Brasileira de Monitoramento Contínuo - RBMC (IBGE, 2010)
denominado de SAT 93827 assim como os obtidos com receptores GPS geodésico (Rcp.G)
e de navegação (Rcp.N) sobre este marco geodésico (Tabela 4).
É possível constatar que todos tratamentos apresentaram dados fora do intervalo de
confiança estabelecido para esta análise (Tabela 4), inclusive o Rcp.G, que apesar de ter os
dados corrigidos por pós processamento, utilizando o método da triangulação com duas
estações da RBMC, ficaram com valores bem acima da média do I.C do marco geodésico,
que nesta condição foi de 0,68 m e 1,083 m para longitude e latitude respectivamente
(Tabela 5). Contrapondo assim, a afirmativa de Fransson et al. (2005) os quais
recomendam o uso dos receptores de navegação para gerenciamento de unidades de
produção denominada também de agricultura de precisão.
Tabela 4 - Valores de um par de coordenadas UTM do marco geodésico da RBMC- SAT 93827 e com
valores de coordenadas comparados com receptores geodésico e de navegação.
Tratamento
EASTING
(m)
NORTING
(m)
ΔE
(m)
ΔN
(m)
M.GT 361.117, 249 9.640.132, 788 - -
Rcp.G 361.166, 887* 9.640.172, 516* 49, 638 39, 728
Rcp.N1 361.166, 103* 9.640.172, 887* 48, 854 40, 099
Rcp.N2 361.166, 054* 9.640.174, 814* 48, 805 42, 026
Rcp.N3 361.165, 619* 9.640.172, 923* 48, 370 40, 135
Rcp.N4 361.167, 312* 9.640.174, 732* 50, 063 41, 944
* Dado fora do intervalo de confiança com nível de 5% de significância.
Δ EASTING (m) = Variação de Latitude
Δ NORTING (m) = Variaçao de Longitude

31
Figura 17 - Vista de ocupação dos receptores geodésicos, de navegação no marco da RBMC SAT 93827.
Tabela 5 - Resultados da análise estatística descritiva dos erros de posicionamento em relação
à média das observações.
MÉDIA 361166, 395 9640173, 574
QME 0, 68678126 1, 10608512
IC 0, 67303327 1, 08394350
IC superior 361167, 068* 9640174, 658*
IC inferior 361165, 722* 9640172, 490* * Dado fora do intervalo de confiança com nível de 5% de significância.
Nesta mesma linha de pesquisa, Rodrigues (2003), utilizando três receptores GPS,
geodésico, topográfico e de navegação, verificou a grande potencialidade de uso do
receptor GPS geodésico tanto em levantamentos planimetrico quanto nos altimetricos para
fisn de projetos de irrigação e drenagem. Bem como na engenharia civil. Entretanto este
alerta que o mesmo não se consegue com os receptores GPS de navegação. Restringindo-
os apenas a elaboração de croqui das áreas.
32
CONCLUSÕES
Mesmo que o levantamento planimétrico realizado com receptores GPS de
navegação, não exija precisão, é aconselhável realizar testes preliminares afim de aferir a
qualidade das informações por estes fornecida;
A qualidade das informações de calculo de área informada pelos receptores de
navegação é muito próxima das fornecidas pelo receptor geodésico. Podendo estas servir
com informação preciosa nas atividades cotidianas da propriedade;
Face aos resultados obtidos com os receptores GPS de navegação, não se aconselha
o uso do mesmo em atividades de planimetria que exijam a determinação exata dos pares
de coordenadas dos marcos da propriedade uma vez que há flutuação desta coordenada
sobre o plano de levantamento, propiciando sobre posição das áreas;
Mesmo que a precisão do receptor geodésico seja de ordem submeteria e
aconselhável realizar aferições periódicas destes aparelhos para avaliar a qualidade de seus
dados.
33
REFERÊNCIAS BIBLIOGRÁFICAS
ARAÚJO, J. N. O. Análise da precisão e acurácia de pontos georreferenciados com a
técnica do código suavizado pela fase da portadora utilizando GPS de simples
freqüência. Tese de mestrado. Universidade de São Paulo. São Carlos. 2006.
BARRETO, E. R. Curso de Extensão em Georreferenciamento. Faculdade de
Engenharia de Minas Gerais. [S.l.: s.n.], 2004.
BERNARDI, J. V. E.; LANDIM, P. M. B. Aplicação do Sistema de Posicionamento
Global (GPS) na coleta de dados. DGA,IGCE,UNESP/Rio Claro, Lab.
Geomatemática,Texto Didático 10, 2002. 31 pag.
BUICK, R. GPS guidance-making an informed decision. in: CONFERENCE ON
PRECISION AGRICULTURE, 3., 2002 MADISON. Abstracts.[s.n], 2002.
BRAULE, R. Estatística aplicada com Excel: para cursos de administração e
economia. Rio de janeiro: Elsevier, 2001.
CEUB/IPCD. Curso de GPS e cartografia básica. Instituto de pesquisa CEUB. [S.l.: s.n.],
2004.
COELHO. A. C. S. Avaliação do desempenho de receptores GPS em levantamentos
altimétricos, para fim sistematização de terras. Dissertação de Mestrado. Escola
Superio de Agricultura Luiz de Queiroz - ESALQ, 2003.
CRESPO, A. A. Estatística Fácil. 17. ed. São Paulo: Saraiva, 2002.
DANA, P. H. Global Positioning System Overview. Relatório Técnico. Department of
Geography, University of Texas at Austin, Janeiro, 1995.
DOROTI, M. e NEGRAES, R.GPS POSITIONING SYSTEM. São Paulo: Editora
Fitipaldi, 1997.
DOCKHORN, E. S. Comparação de dois tipos de solução no posicionamento com
receptores GPS. Dissertação (mestrado) Universidade Federal de Santa Maria, Centro de
Ciências Rurais, Programa de Pós-graduaçao em Geomática, RS, 2006. 63 p.
FRASSON, F. R.; SENATORE, G. M.; MOTOMIYA, A. V. A.; MOLIN, J. P.
Avaliação do desempenho estático de receptores de GPS, In: V Congresso Brasileiro
de Agroinformática, Londrina-PR, 2005.
FIGUEIRÊDO, D. C. Curso Básico de GPS. [S.l.: s.n.], Setembro de 2005.
JOHNSON, T. M. Introdução ao GPS. [S.l.: s.n.], 2010.

34
LOPES. T. M de S. S. Análise de Erros em Receptores de GNSS. Dissertação de
mestrado. Universidade de Lisboa. Instituto superior técnico. [S.l.], Outubro de 2007.
MARQUES. G. B. Introdução ao Sistema de Posicionamento Global GPS. [S.l.: s.n.],
1999.
MATSUOKA, M. T.; SOARES, D. M.; SOUZA, S. F. de; VERONEZ,M.R. Análise da
aplicação de receptor GPS de navegação no posicionamento relativo estático de linha-base
curta, Jornal of Geoscience 4(2):88-93, 2008.
MOLIN, J. P. Utilização de GPS em Agricultura de Precisão. Eng. Agrícola, Jaboticabal,
v.17, n.3, 1998. p.121-132.
MOLIN, J. P. Oficina de aplicações de GPS de navegação em agricultura.
ESALQ/USP, 2009.
MORRETIN, A. P. & BUSSAD, W. O. Estatística Básica. 5. ed. Sao Paulo: Saraiva,
2002.
MONICO, J.F.G. Posicionamento pelo NAVSTAR-GPS, descrição, fundamentos e
aplicações. 1.ed.Presidente Prudente: Editora ENESP, 2000.
MONICO, J.F.G. Posicionamento pelo GNSS: descrição, fundamentos e aplicações.
2.ed.. São Paulo: editora UNESP, 2008. 473 p.
MURRAY, R. S. Estatística. Coleção. São Paulo: Schaum. Makron Books, 1993.
NOGUEIRA, E. D. Observáveis Gps: Características e Erros. Universidade do Estado
de Mato Grosso. Departamento de Engenharia civil. Topografia II - Aula 10, 2009.
PESTANA, A. Sistema de posicionamento global Navstar/GPS. Instituto superior de
Engenharia do Porto. [S.l.: s.n.], junho de 2002.
SILVA, H.S e CÂMARA, M. J. C. Avaliação da acurácia das coordenadas pós
processadas com dados rinex obtidos por meio de um receptor GPS de navegação.
Universisade Federeal de Dom Bosco, especializada em georreferenciamento rurais de
limites rurais. Monografia. .Campo Grande, 2005.
SILVEIRA, A. C. da. Avaliação de desempenho de aparelhos receptores GPS.
Dissertação de Mestrado. Universidade Estadual de Campinas, Faculdade de Engenharia
Agrícola. SP: [s.n.], 2004.
STABILE, M. C. C. & BALASTREIRE, L. A., Comparação de três receptores GPS
para uso em agricultura de precisão. Eng. Agríc. Jaboticabal, v.26, n.1, jan./abr. 2006.
p.215-223.
35
MORGAN, M. The precision-farming guide for agriculturists. Moline: Deere &
Company, 1997. 116 p.
SEEBER, G. SATELLITE GEODESY: foundations, methods, and applications. New
York, Walter de Gruyter, 1993.
SEGANTINE, P. C. L. GPS: Sistema de Posicionamento Global. São Carlos: Editora
Edusp, 2005.
TIMBÓ, M. A. Levantamentos através do Sistema GPS. Departamento de Cartografia
da Universidade Federal de Minas Gerais. Minas Gerais 2000.

36
APÊNDICE
37
o
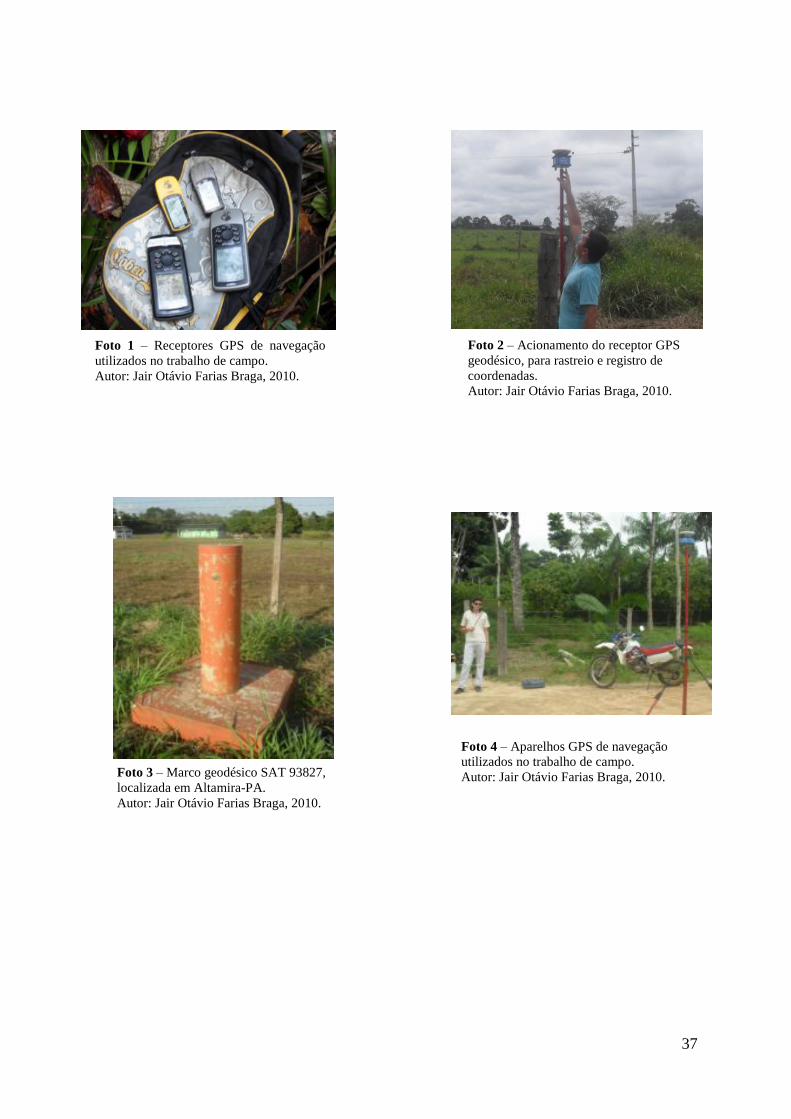
Foto 4 – Aparelhos GPS de navegação
utilizados no trabalho de campo.
Autor: Jair Otávio Farias Braga, 2010.
Foto 1 – Receptores GPS de navegação
utilizados no trabalho de campo.
Autor: Jair Otávio Farias Braga, 2010.
Foto 2 – Acionamento do receptor GPS
geodésico, para rastreio e registro de
coordenadas.
Autor: Jair Otávio Farias Braga, 2010.
Foto 3 – Marco geodésico SAT 93827,
localizada em Altamira-PA.
Autor: Jair Otávio Farias Braga, 2010.