aula 1 - principios básicos.ppt
TRANSCRIPT

Comportamento em Ondas de Navios e
Estruturas Flutuantes
César SalhuaCésar Salhua
Área de Engenharia NavalÁrea de Engenharia NavalDepartamento de Engenharia MecânicaDepartamento de Engenharia MecânicaUniversidade Federal de PernambucoUniversidade Federal de Pernambuco
Princípios Fundamentais
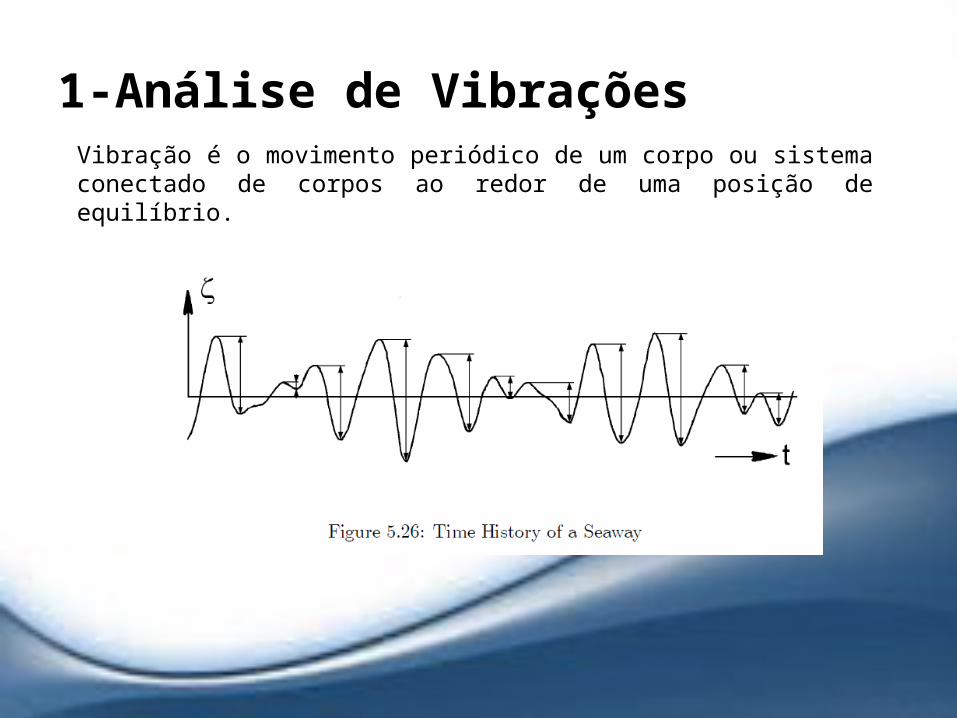
1-Análise de VibraçõesVibração é o movimento periódico de um corpo ou sistema conectado de corpos ao redor de uma posição de equilíbrio.

Existem dois classes de vibrações:-Vibrações livres.- quando o movimento é mantido por forças gravitacionais ou elásticas.-Vibrações forçadas.- quando o movimento é mantido por uma força externa periódica ou intermitente aplicada ao corpo.

Dentro de cada uma das classes de vibrações mostradas existem dois tipos vibrações possíveis:
-Vibrações sem amortecimento
-Vibrações com amortecimento

Vibrações livres sem amortecimento
As forças de atrito ou dissipação de energia não existem, portanto o movimento vibracional é permanente. Na natureza este tipo de movimento não existe.
0kxxm Equação de movimento:
Frequência natural do movimento:
Solução da equação diferencial:
Velocidade:
Aceleração:

Considerando as condições iniciais do problema:
Para t=0x = x1v = v1
n
2T
T
1f
Período:
Frequência:
C: amplitude: fase

Vibrações forçadas sem amortecimento
Equação de movimento:
Solução:
Oscilação livre:
Solução particular:

Solução total:

Vibrações livres com amortecimento
Equação de movimento:
Soluções do tipo:
Duas possíveis soluções:
Amortecimento crítico:

Vibrações livres com amortecimento
Sistema super amortecido
Sistema sem vibrações.
Raízes positivas

Vibrações livres com amortecimento
Sistema com amortecimento crítico
Sistema sem vibrações, c tem o mínimo valor para que este comportamento aconteça.
Raízes

Vibrações livres com amortecimento
Sistema com sub amortecido
Sistema com vibrações
Raízes são números complexos.
Frequência natural amortecida:
D e são constantes determinadas das condições iniciais do problema.
Período natural amortecido:
Td > Tn devido a :

Vibrações forçadas com amortecimento
Equação de movimento:
Solução:
xC : obtido do problema de vibrações livres com amortecimento
xP :
Amplitude:
Fase:


2-Ondas
Forma da onda:
Número de onda:
Frequência:
Velocidade da onda:
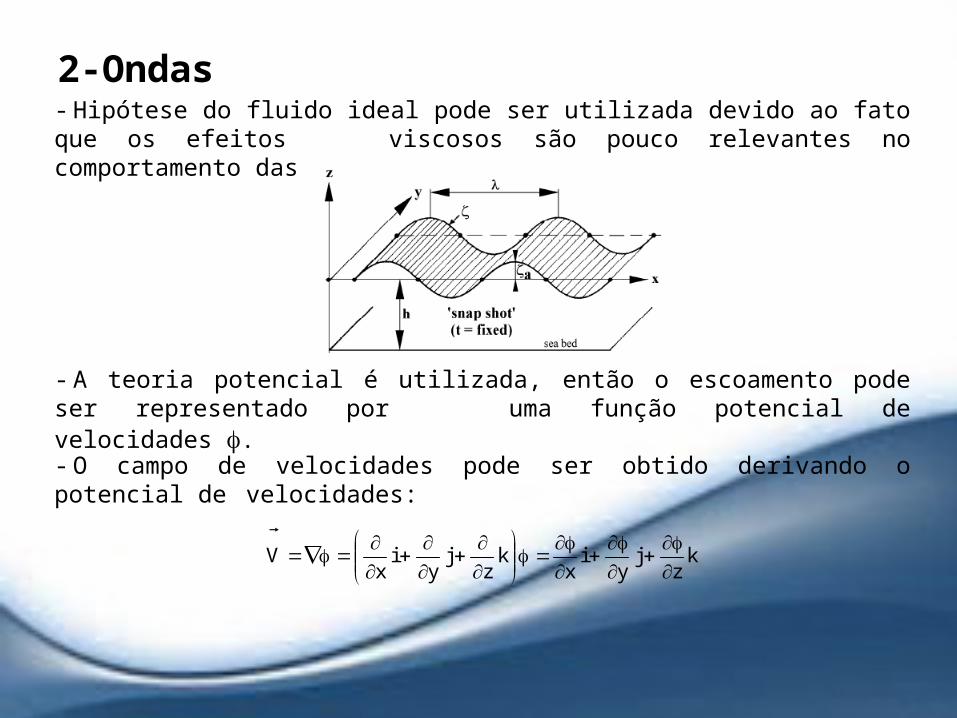
2-Ondas- Hipótese do fluido ideal pode ser utilizada devido ao fato que os efeitos
viscosos são pouco relevantes no comportamento das ondas.
- A teoria potencial é utilizada, então o escoamento pode ser representado por uma função potencial de velocidades .
kz
jy
ix
kz
jy
ix
V
- O campo de velocidades pode ser obtido derivando o potencial de velocidades:

C.C. dinâmica:
C.C. cinemática:
C.C. no fundo:
-Equação de Laplace:
2-Ondas- Formulação do Problema

Relação de dispersão:
Potencial de velocidades das ondas lineares:
Solução do Problema:
tkxsenkhcosh
zhkcoshga
Equação que governa o comportamento das ondas regulares com influência da profundidade do fundo.
Potencial que representa o escoamento produzido pela onda.

Águas profundas:
Águas intermediarias:
Águas rasas:
Comportamento da equação de dispersão:
2
gTL
2

Da equação de dispersão:
)khtanh(kg2
)khtanh(gL
2
T
22
)khtanh(L
22
gT
22
)khtanh(LL Comprimento da onda:
Celeridade da onda: )khtanh(cc

Influência da profundidade
0
0.2
0.4
0.6
0.8
1
1.2
0.000 0.100 0.200 0.300 0.400 0.500 0.600 0.700
h/L
c/c
inf
ou
L/L
inf
L/Linf

Trajetória das partículas fluidas: orbital
Comportamento do escoamento produzido pela onda

Pressão
Equação de Bernoulli: ou
Para águas profundas:

Energia das ondas:
Energia potencial:
Energia cinética:
Energia total:
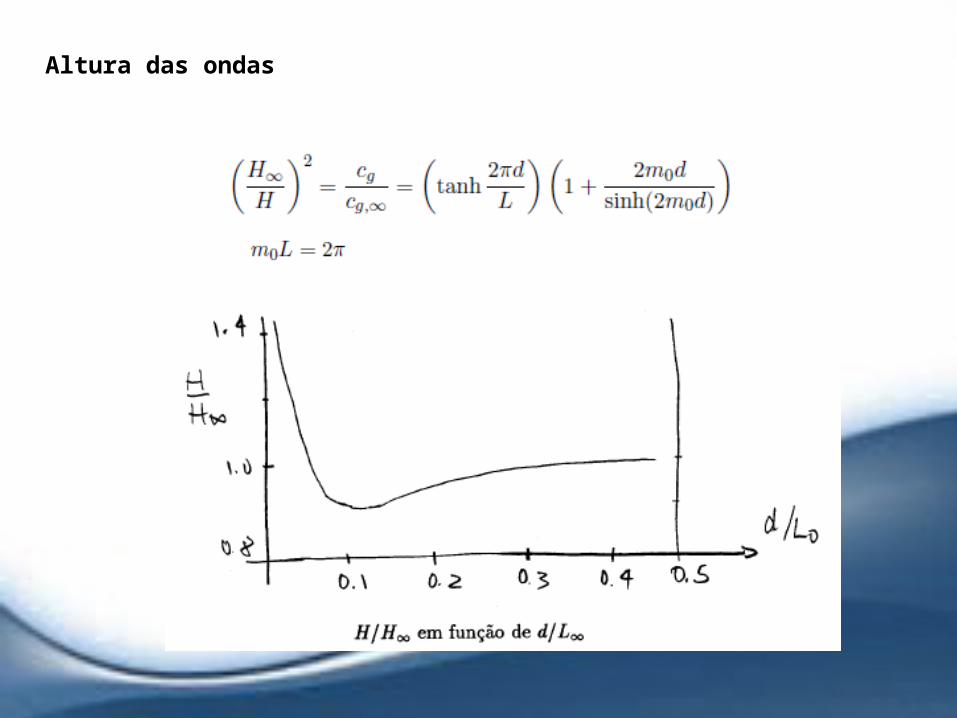
Altura das ondas

Batedor de ondas tipos pistão

Formulação do problema

Solução do problema:
Massa adicional
Amortecimento
Fsnsmm 1111
Substituindo a força hidrodinâmica
Radiação

Hipótese de Froude-Krilov para o cálculo da força da onda
A força hidrodinâmica é calculada integrando-se as pressões devidas as ondas incidentes atuando sobre a superfície imaginária dada pela posição instantânea a ser ocupada pelo corpo.
S
sdpF
S
a sd)tkxcos()khcosh(
)zh(kcoshggzF
S S
a sd)tkxcos()khcosh(
)zh(kcoshgsdgzF

sd)tkxcos(
)khcosh(
)zh(kcoshgF
S
aKF
Z
Sz
aX
Sx
a)Z(KF)X(KF sd)tkxcos()khcosh(
)zh(kcoshgsd)tkxcos(
)khcosh(
)zh(kcoshgFF
Força em X:
X
Sx
a)X(KF ds)tkxcos()khcosh(
)zh(kcoshgF
X
Sx
a)X(KF ds)tkxcos()khcosh(
)zh(kcoshgF
i)kxt(sen2
kbsen
)khcosh(k
)Th(ksenhg2F oa)X(KF
)dz)(i()tkxcos(
)khcosh(
)zh(kcosh)dz(i)tkxcos(
)khcosh(
)zh(kcoshgF
D
C
B
A
a)X(KF
idz
2
bxktcos
)khcosh(
)zh(kcoshdz
2
bxktcos
)khcosh(
)zh(kcoshgF o
0
T
o
0
T
a)X(KF
i
2
bxktcos
2
bxktcosdz
)khcosh(
)zh(kcoshgF oo
0
T
a)X(KF
i
2
kb)kxt(cos
2
kb)kxt(cos
)khcosh(k
)Th(ksenhgF ooa)X(KF

Força em Z:
Z
Sz
a)Z(KF ds)tkxcos()khcosh(
)zh(kcoshgF
)dx)(k()tkxcos(
)khcosh(
)Th(kcoshgF
D
C
a)Z(KF
)k()dx()kxtcos()khcosh(
)Th(kcoshgF
2
bx
2
bx
a)Z(KF
o
o
)k(
k
)kxt(sen
)khcosh(
)Th(kcoshgF
2
bx
2
bx
a)Z(KF
o
o
)k()
2
kb)kxt((sen)
2
kb)kxt((sen
)khcosh(k
)Th(kcoshgF ooa)Z(KF
)k()kxtcos(2
kbsen
)khcosh(k
)Th(kcoshg2F oa)Z(KF

3-Restauração Hidrostática
a) Restauração hidrostática em heave (eixo z)
Forças e momentos que agem sobre um corpo para restaurar a posição inicial dele após uma perturbação.
0FZ
0E E
maFZ
madEE
madE
Caso hidrostático Caso hidrodinâmico

dVdE Termo de restauração hidrostática:
dgdE
zAd WL
WL33 gAC Termo de restauração hidrostática de heave puro: (N/m)

b) Restauração hidrostática em pitch (rotação ao redor do eixo y)
Embarcação sofre uma perturbação ao redor do eixo y:
0MG GG IM
GIM
Caso hidrostático Caso hidrodinâmico

Conceito do metacentro longitudinal
LBMgM
L55 BMgC
G55 IC
(Nm)

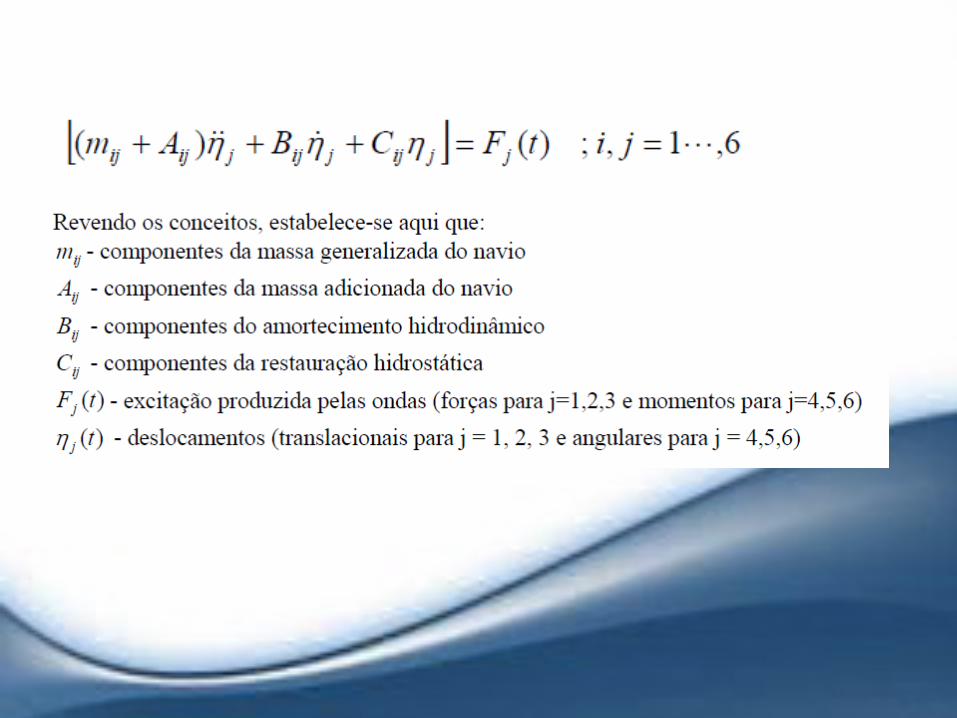
Equação de movimento de um corpo oscilando em heave considerando efeitos hidrodinâmicos:
33333333 FzCzBzAm
Efeitos hidrodinâmicos
Efeitos hidrostáticos
Forças e momentosde radiação
Forças e momentos de excitação
Forças e momentos de restauração hidrostática
-Massa adicional-Amortecimento de onda
-Froude-Krilov-Difração

4-Definição do movimentos
Sistema de referência inercial :x0, y0 , z0
Sistema de referência translacional :x, y , z
Sistema de referência solidário ao navio do centro de gravidade (G):xb, yb , zb
As ondas regulares são definidas do sistema de referência inercial as:x0, y0 , z0

4.1-Frequência de encontro

4.2-Movimentos ao redor do CGMovimentos ao redor do centro de Gravidade:
Velocidades e acelerações:
Movimento:
Velocidade:
Aceleração:

Resposta movimento e a onda:
Resposta movimento, velocidade e aceleração:

Para um navio com simetria lateral
Matriz de massas:
Matriz de restaurações:

Matriz de massas adicionais:
Matriz de amortecimentos:

Problema 1
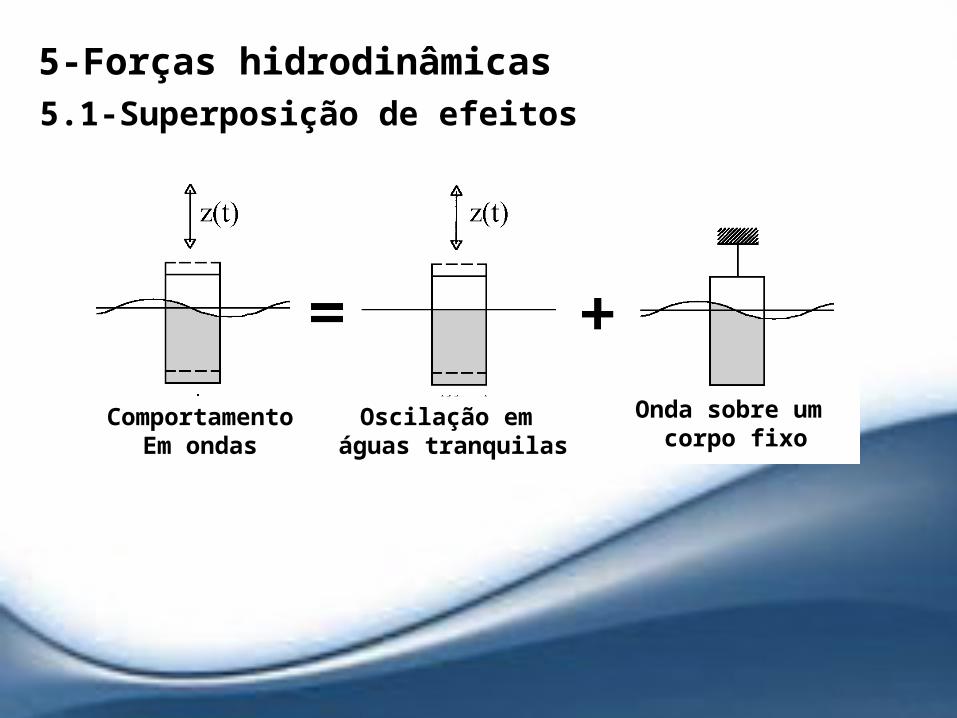
5-Forças hidrodinâmicas5.1-Superposição de efeitos
ComportamentoEm ondas
Oscilação em águas tranquilas
Onda sobre um corpo fixo

5.2-Teste de decaimentoMedir o amortecimento e massa adicional na frequência de ressonância
Equação de movimento sem força externa
Equação adimensionalisada
Parâmetros de adimensionalização:
-Frequência natural sem amortecimento:
-Coeficiente de amortecimento:
-Relação de amortecimento:
-Amortecimento crítico:


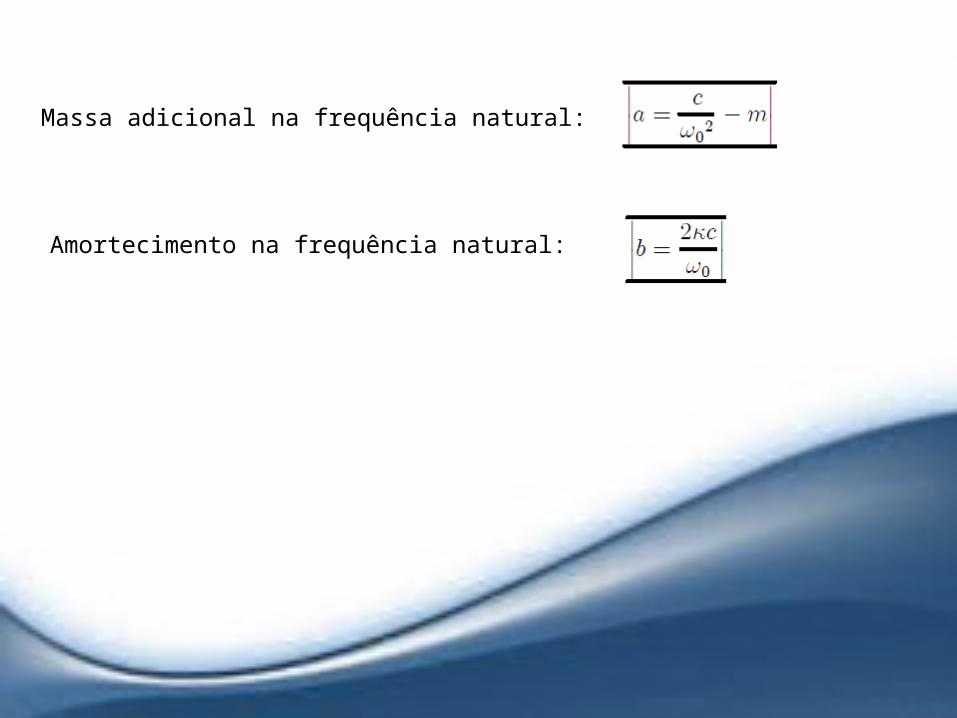
Massa adicional na frequência natural:
Amortecimento na frequência natural:


5.3-Teste de oscilação forçada ou testes de PMM tests (Planar Motion Mechanism)
Determinar as massas adicionais e amortecimentos para várias frequências
Medição de forças:
Equação de movimento:

Para poder obter a fase da força de oscilação forçada:
Para:
Para:
Da geometria:

5.4-Determinação do RAOa) Solução da equação de movimento



b) Determinação numéricas dos RAO e forças hidrodinâmicas
• Teoria das Faixas;- Método 2D
- Navios esbeltos
- Efeito da velocidade de avanço não incluído na modelagem do problema
• Teoría das Faixas de Salvensen et. al. (1974);• Existem programas comerciais que permitem resolver o
problema de multicascos mediante a Teoría das Faixas de Salvensen et. al. (1974);

Teoría das FaixasTeoría das Faixas;
• Método da Função de Green, Newman (1985), Lee et. al. (2003).
• Atualmente existem programas comerciais baseados no Método da Função de Green como o WAMIT e AQWA que permitem obter o comportamento de dois navios no arranjo side by side, porém sem velocidade de avanço.
• Método da Função de Green/Fonte Pulsante;- Método 3D- Funciona bem com navios esbeltos e não esbeltos- Sem/com velocidade de avanço (muito complicado incluir o
efeito da velocidade de avanço).
- Frequências irregulares.


• Método dos Painéis de Rankine, Sclavounos & Nakos (1988), Nakos (1990), Kring (1994) e Huang (1997).
• Programas comerciais (exemplos: SWAN e AEGIR) permitem obter o comportamento de multicorpos com e sem velocidade de avanço.
• Levi & Salhua (2007) utilizaram o método dos painéis de Rankine para determinar a dinâmica de navios e esferoides submersos com velocidade de avanço.
• Método da Função de Green/Rankine- Método 3D- Com velocidade de avanço- Funciona bem com navios esbeltos e não esbeltos- Condição de radiação.- Não apresenta frequências irregulares.


Movimentos absolutos totais no ponto P de uma embarcação
Sejam as coordenadas do ponto P em relação ao CG:
Os movimentos absolutos:
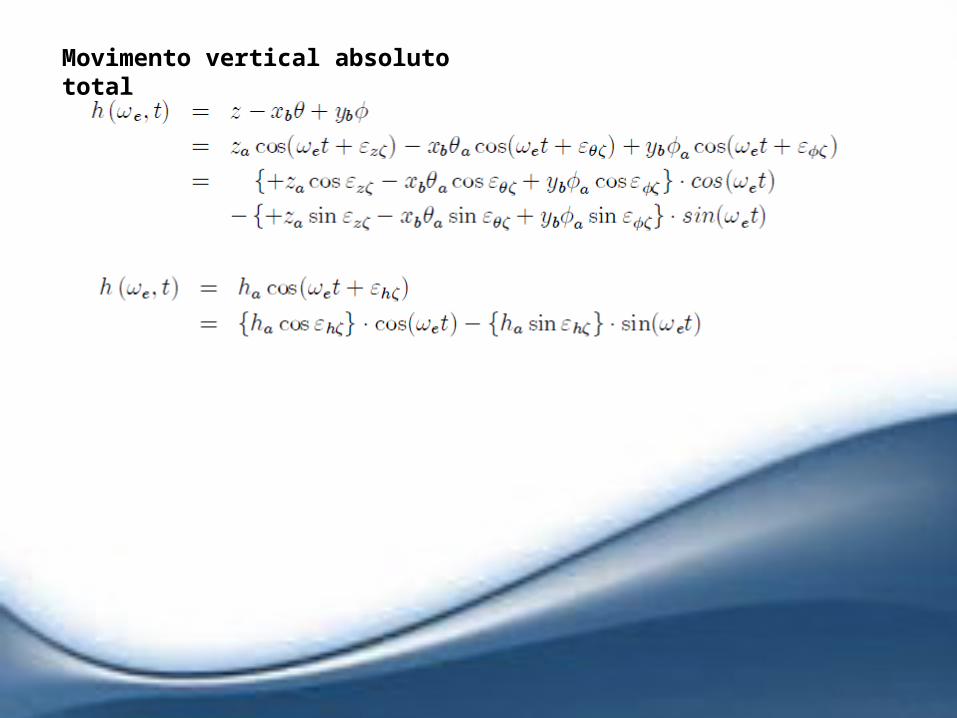
Movimento vertical absoluto total

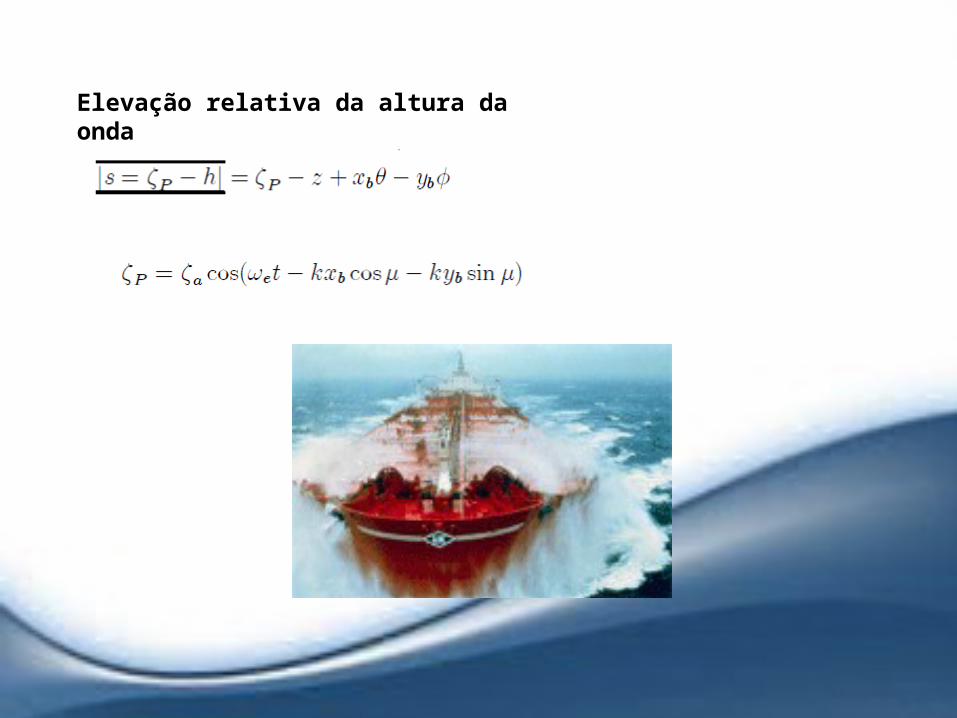
Elevação relativa da altura da onda
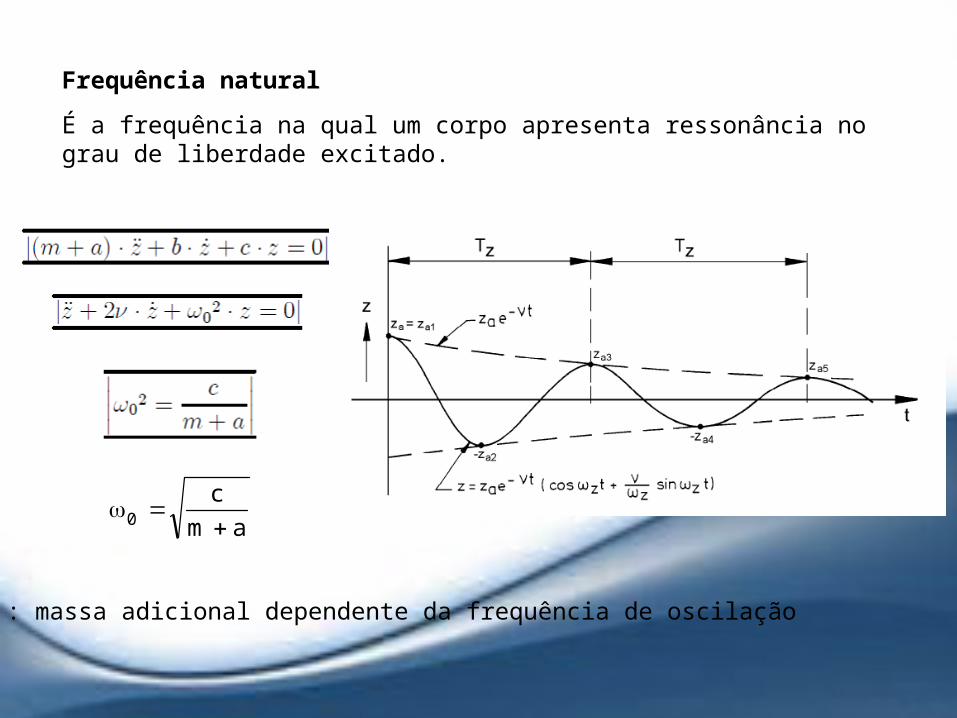
Frequência natural
É a frequência na qual um corpo apresenta ressonância no grau de liberdade excitado.
am
c0
a : massa adicional dependente da frequência de oscilação

Graus de liberdade com restauração hidrostática
)(0
0am
c
Processo de determinação da frequência natural

Período natural de heave = 6.51s
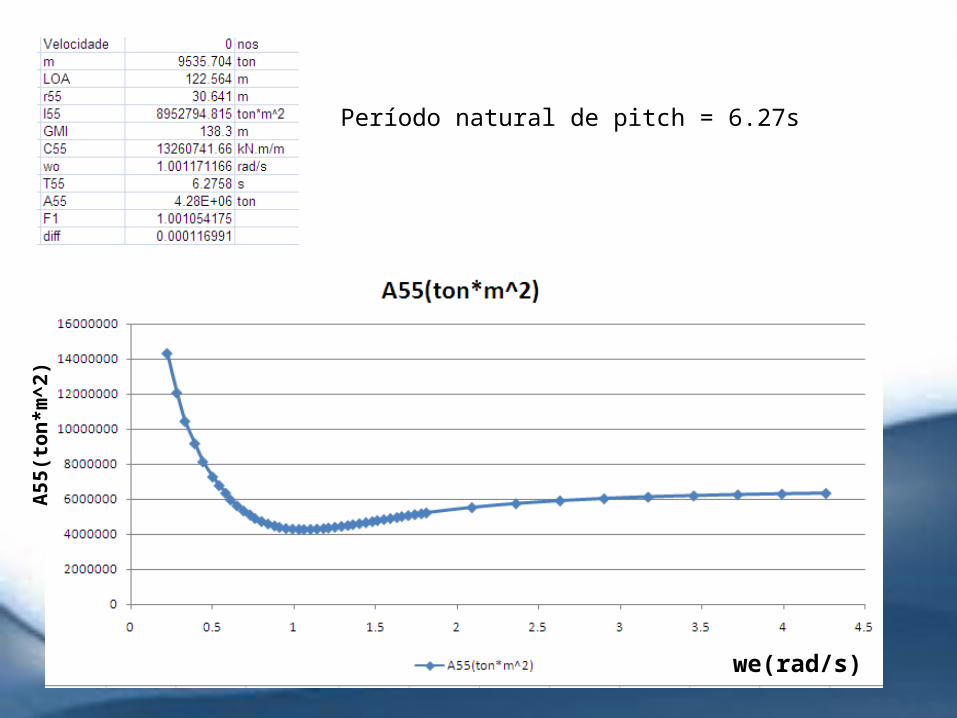
Período natural de pitch = 6.27s
A5
5(t
on
*m^
2)
we(rad/s)

Comportamento em ondas irregulares
Análise Estatístico e de Fourier:
Caracterização pela sua energia não pela sua forma.
a) Caracterização das ondas do mar
Amostra das elevações de onda num ponto de uma determinada região

- Espectro de Energia
Energia total das ondas contida no mar:
Distribuição de energia:
Comportamento em ondas irregulares
Ondas mais energética

Momentos espectrais:
Período médio:
Período de cruzamento entre zeros:

Métodos Estatístico para Medição das Ondas
Bóias:
Fonte ideal para análise estatística de ondas
Há informações significativas disponíveis desse método – No entanto, há um alto custo devido ao custo de recolha

Medição do Vento:Utilizar a medição do vento para estimar ondas produzidas usando técnicas de modelagem

Satélite:Fotografias da superfície oceânica com satélites – Custo alto

Observações Visuais
Hogben & Lumb (1967) compararam observações visuais com valores medidos de wave buoys.
Onde:
Altura significativa da onda
Período Modal
Tempo Médio de Cruzamento do Zero
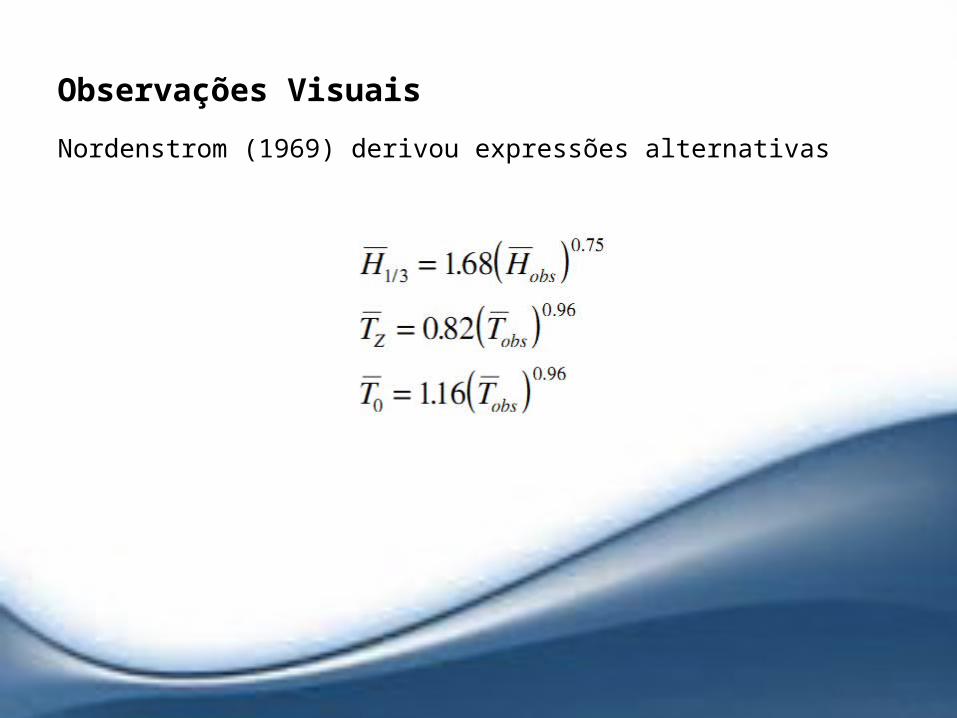
Observações Visuais
Nordenstrom (1969) derivou expressões alternativas

Observações Visuais
Por exemplo, Hogben e Lumb (1967) publicaram um atlas compreensivo baseado em 2 milhões de observações visuais de navios entre 1953 e 1966

Condições Esperadas do Mar
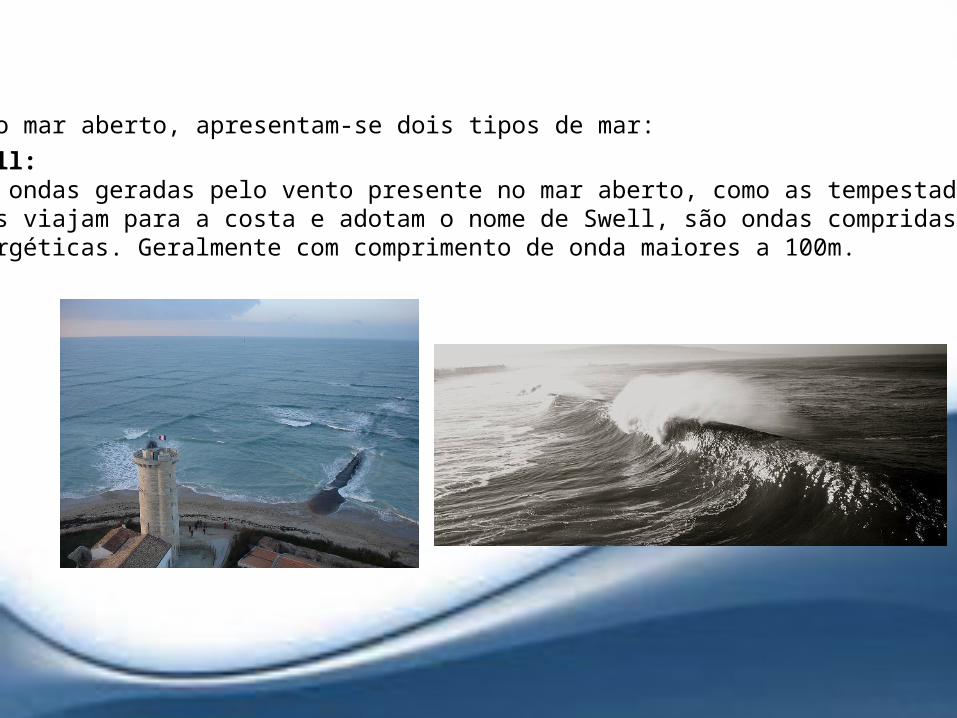
No mar aberto, apresentam-se dois tipos de mar:
Swell: Son ondas geradas pelo vento presente no mar aberto, como as tempestades.Elas viajam para a costa e adotam o nome de Swell, são ondas compridas e Energéticas. Geralmente com comprimento de onda maiores a 100m.

Mar localSão as ondas produzidas pelos ventos da região da costa originados pela variação de temperatura entre a terra e a costa.


a) narrow b) broad

Espectro Multi-Direcional

Formulações teóricas do espectro:
Espectro de Jonswap modificado

Espectro Padrão do Mar
Espectro de dois parâmetros de ITTC ou Bretschneider
Onde:

Espectro de Mar para o Mar do Norte
Em águas costais onde o esforço pode ser limitado, o espectro JONSWAP(Joint North Sea Wave Project) pode ser usado.

Espectro de Mar da ITTC
O espectro simplificado ITTC conhecido como espectro Pierson-Moskowitz é usado de vez em quando, e possui a velocidade do vento como sua única variável.

Espectro de Mar

Efeito da Frequência de encontro no espectro do mar
Então as novas ordenadas verticais são encontradas a partir da derivada da formula da frequência de encontro:
Onde:
Velocidade do navio(m/s)
Angulo de encontro com a popa
Conservação de energia


Movimentos de uma Embarcação em Mar Irregular

Movimentos de um sistema flutuante em mar irregular
Usando os RAOs, os movimentos podem ser determinados assumindo que a função resposta é linear com respeito a amplitude da onda e que o princípio da superposição é válido. (O princípio da superposição diz que a resposta de um corpo a um espectro de ondas é igual a soma dos efeitos das ondas individuais).
Então se a resposta linear da embarcação é dada por:
Então o movimento de resposta ao espectro é dado por:
Onde é o espectro de energia das ondas.

Movimentos de um sistema flutuante em mar irregular
Espectro deEnergia do mar (ω)
[RAO (ω)] Espectro deResposta (ω)
=2
*

Espectro de energia do mar
RAO de Heave Espectro de resposta
Espectro deEnergia do mar (ω)
[RAO (ω)]2 Espectro deResposta (ω)
=*

Valor Significativo
Movimento de Heave – Espectro de Resposta
Heave Motion

Movimento Absoluto

Movimento Absoluto
• Movimento absoluto vertical,Sz na posição (px,py,pz), devido aos movimentos de heave,pitch e roll:

Velocidades e Acelerações

Exemplo:

)m(
)m(HeavedeMovimentoHeaveRao
o
)m(k
)rad(PitchdeMovimentoPitchRao
o
Onde: k é o número de onda.
2
p
p5,0exp
PMmar )(SA)(S
4
p
54p
2SPM 4
5expH
16
5)(S
ln287,01A
491,0PT4,6
P
P
09,0
07,0
Espectro de energia do mar Jonswap modificado
Onde:

Movimentos absolutos


Análise de “Seakeeping”
• Determinar se a performance da embarcação é aceitável frente a uma determinada condição ambiental.

Porque usar um critério?• Para poder decidir se a performance da embarcação é aceitável, se faz necessária a comparação com algum parâmetro de controle.
Os critérios utilizado em seakeeping estão relacionados com diversos fenômenos produzidos pelas ondas.

O que é importante para o projeto de um ferry
• “sea sickness” em relação aos passageiros (enjôo no mar)• Perda de velocidade devido aos movimentos

O que é importante para o projeto de um barco patrulha
• Água no convés (“deck wetness”)
• Habilidade da tripulação em realizar as tarefas independente dos movimentos da
embarcação.
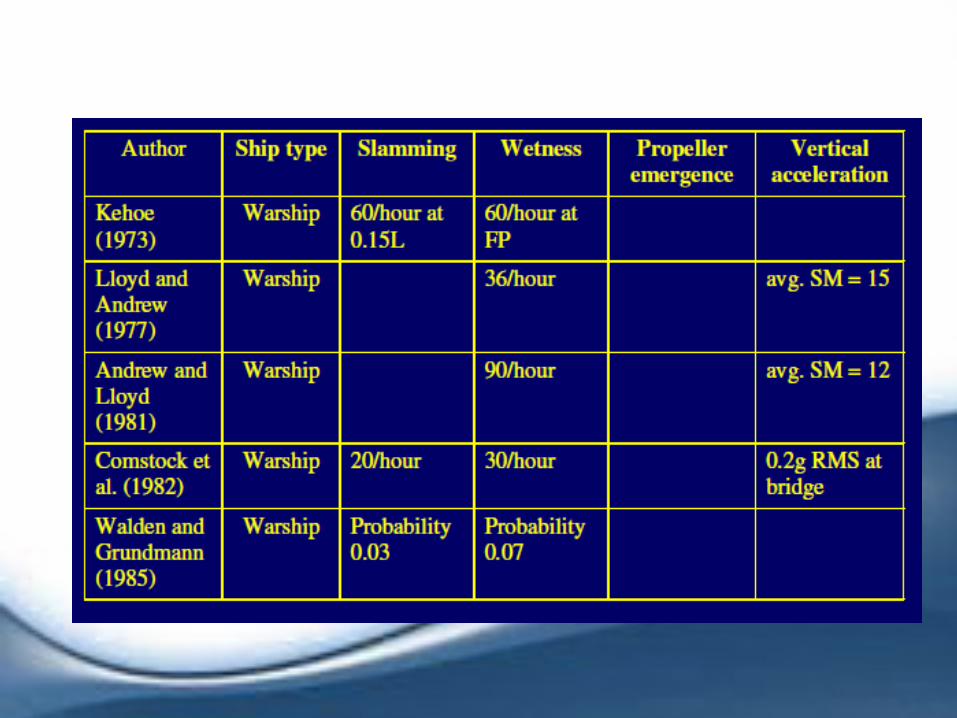
Eventos de seakeeping produzidos pelo mar e que devem ser atenuados:
-Slamming-Deck wetness – água no convés – green water-Perda de velocidade-Resistência adicional-Acelerações verticais - Performance humana-Capacidade da tripulação realizar suas tarefas

Slamming
Slamming
• Pode causar– Acelerações e avaria localizada na estrutura– Tensão causada por vibração (“whipping”)
• Ocorre quando dois eventos ocorrem simultaneamente– Movimento relativo casco – superfície do mar– Velocidade relativa entre casco e superfície do mar excedendo um valor
crítico específico

Deck Wetness / Água no Convés

Deck Wetness
• Ocorre quando
– A proa do navio impacta com a superfície do mar jogando água e “spray” no convés do navio
• Este fenômeno pode causar danos ao pessoal embarcado e avarias no convés e equipamentos
• Dificuldade de modelação do fenômeno. Informações podem ser obtidas através de testes com modelos

Perda de Velocidade
Voluntaria
• Decisão do comandante em reduzir a velocidade objetivando reduzir os movimentos e os eventos de “seakeeping”, mantendo os dentro dos limites aceitáveis
Involuntária
• Perda de velocidade por aumento da resistência ao avanço devido aos movimentos e a redução da eficiência do propulsor.

Resistência Adicional

Emersão do Propulsor
• Emersão do propulsor ocorre quando sua pás saem para fora da água em função dos movimentos do navio

Emersão do Propulsor
• O movimento relativo da embarcação com o superfície do mar onde o propulsor esta localizado pode ser utilizada para determinar a quantidade de emersões por minuto.
• O movimento relativo pode ser calculado pela subtração da elevação local da superfície do mar e o movimento vertical absoluto.

Performance Humana
• Os movimentos do navio causam efeitos indesejáveis a tripulação e passageiros
– “Motion Sickness”– Incapacidade de desenvolver atividades de forma
adequada.

Aceleração Vertical
• Performance humana
• Freqüência de oscilação – importante para a performance humana
• Ambos MSI e SM são dependentes da freqüência

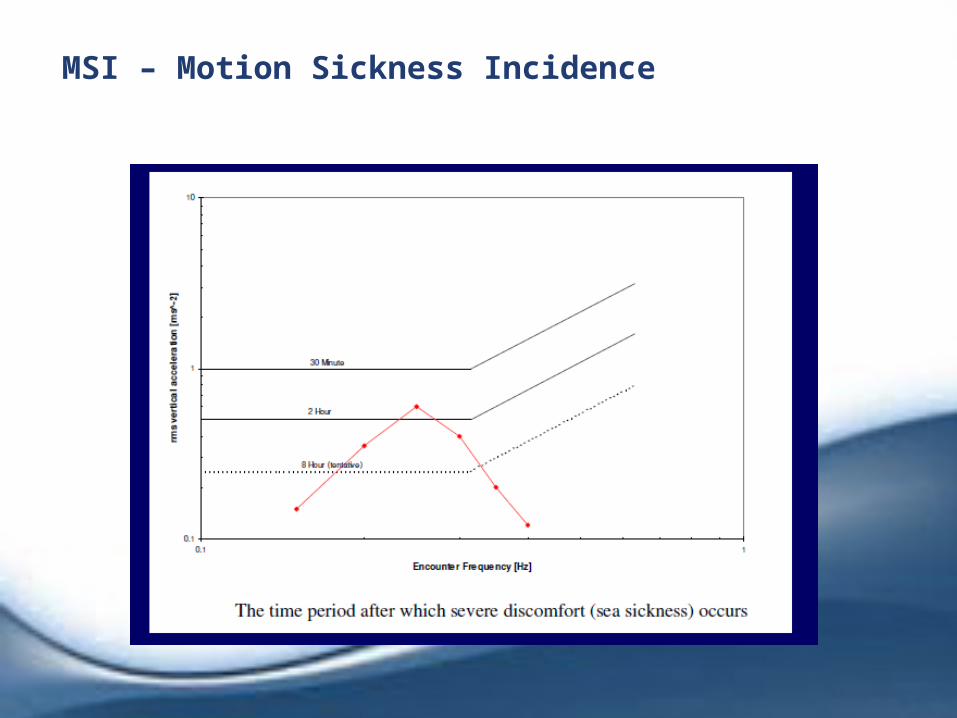
MSI – Motion Sickness Incidence
• MSI – método padrão para comparação de características de “seakeeping” para diferentes projetos, particularmente para barcos de passageiros
• Pode ser apresentado de duas formas:
– A percentagem de pessoas que são levadas ao vomito em duas horas
– O período de tempo para o qual o desconforto ocorre
2
1EEVertcentroE d)(S)(MSI
ISO 2631/3

MSI – Motion Sickness Incidence
MSI – Motion Sickness Incidence

• Limitações da Análise– Os experimentos de “sickness” são limitados, eles
devem variar com idade, sexo e raça.– Estatisticamente, a tolerância aos movimentos
aumenta com o tempo no mar. Assim os passageiros são mais suscetíveis do que a tripulação.
– Influencia adicional como visão e odor, afetam o enjôo no mar, mas seu efeito não são ainda qualificados.
– A performance pode ser degradada após a ocorrência de vomito a bordo.
MSI – Motion Sickness Incidence

Movimentos Subjetivos (SM)
• A análise irá indicar a habilidade da tripulação de realizar tarefas a bordo.

Movimentos Subjetivos (SM)
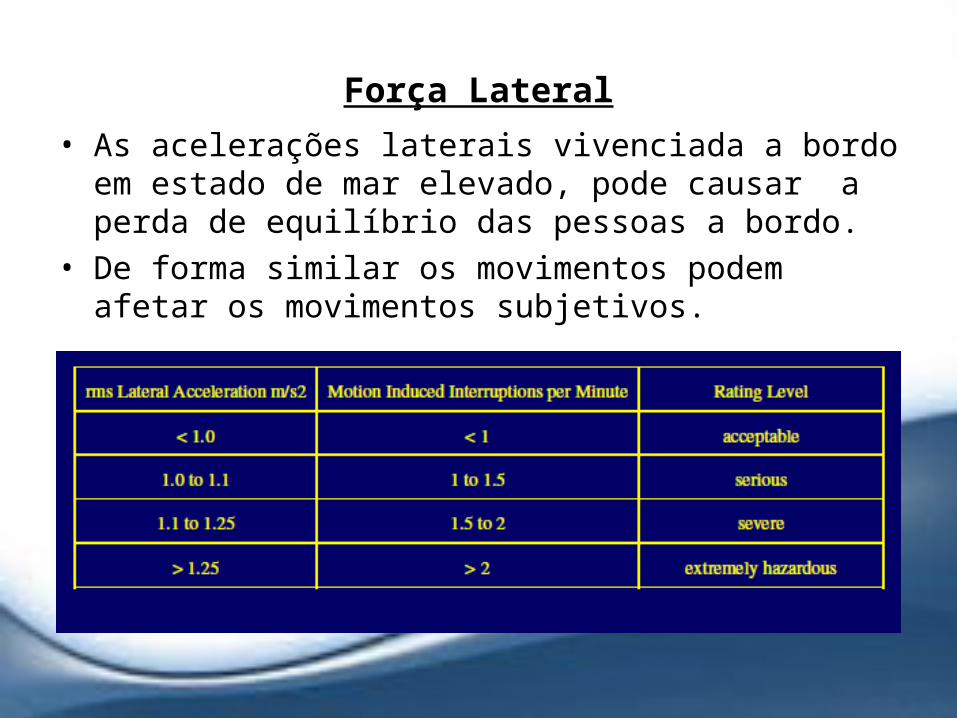
Força Lateral
• As acelerações laterais vivenciada a bordo em estado de mar elevado, pode causar a perda de equilíbrio das pessoas a bordo.
• De forma similar os movimentos podem afetar os movimentos subjetivos.
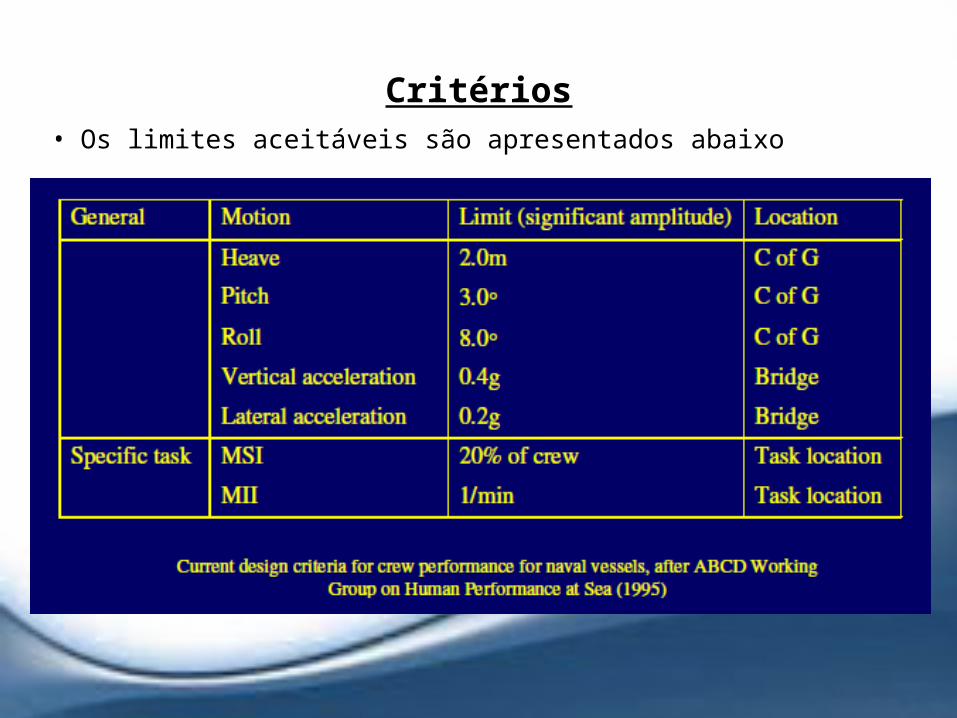
Critérios
• Os limites aceitáveis são apresentados abaixo

Critério de Probabilidade de Excedência
• Assumindo a função densidade de probabilidade dos movimentos é uma distribuição de Rayleigh
• Para avaliar a probabilidade de excedência critica Zcrit dada a variância do espectro de energia do movimento moz.