as geometrias nÃo euclidianas - …matematicafafiuv.pbworks.com/w/file/fetch/65156517/as...
TRANSCRIPT

0
FACULDADE ESTADUAL DE FILOSOFIA, CIÊNCIAS E LETRAS – FAFIUV
COLEGIADO DE MATEMÁTICA
JULIANE WASZAK BUASKI
AS GEOMETRIAS NÃO EUCLIDIANAS
UNIÃO DA VITÓRIA
2011

1
JULIANE WASZAK BUASKI
AS GEOMETRIAS NÃO EUCLIDIANAS
Trabalho de Conclusão de Curso, apresentado como requisito parcial para obtenção do título de Licenciada em Matemática, pela Faculdade Estadual de Filosofia, Ciências e Letras – FAFIUV Orientadora: Profª Ms. Maria Ivete Basniak
UNIÃO DA VITÓRIA
2011

2
Dedico este trabalho aos meus pais Josefa e
Olando, que em nenhum momento mediram
esforços para a realização dos meus sonhos, que
me guiaram pelos caminhos corretos, me
ensinaram a fazer as melhores escolhas, me
mostraram que a honestidade e o respeito são
essenciais à vida. A eles devo a pessoa que me
tornei, sou extremamente feliz e tenho muito
orgulho de chamá-los de pai e mãe. Amo Vocês!

3
AGRADECIMENTOS
A Deus, que me ajudou espiritualmente nas horas difíceis.
A toda minha família, pelo carinho, compreensão e ajuda.
A Profª Ms. Maria Ivete Basniak, pela contribuição com seus conhecimentos e
sugestões na elaboração deste trabalho.
A colega e grande amiga Luciane, pela amizade, apoio e incentivo no
decorrer de todo o trabalho.
A todos que direta ou indiretamente contribuíram para a conclusão desta
pesquisa.

4
Não há ramo da Matemática, por mais abstrato que seja, que não
possa um dia vir a ser aplicado aos fenômenos do mundo real.
(Lobachevsky)

5
BUASKI, Juliane Waszak. As Geometrias Não Euclidianas. União da vitória, 2011, 56 f. Trabalho de conclusão de curso (Licenciatura Plena em Matemática). Faculdade Estadual de Filosofia, Ciências e Letras – FAFIUV, União da Vitória, 2011.
RESUMO
A Geometria teve origem entre os povos gregos e egípcios, a partir da necessidade de dividir suas terras, sendo o primeiro conceito desenvolvido o de distância. Esses conceitos foram desenvolvidos cientificamente por alguns matemáticos, entre os quais o que mais se destacou foi Euclides, que em seu famoso trabalho “Os Elementos” descreve seus cinco postulados e axiomas, que sustentaram a sua Geometria. No entanto, o seu 5° postulado, “por um ponto P exterior a uma reta m, consideradas em um mesmo plano, existe uma única reta paralela à reta m”, foi muito estudado por vários matemáticos, tendo todos tentado demonstrá-lo, sem obter êxito, chegando a conclusão de que este postulado não era consequência de nenhum outro. Por volta do ano de 1800, os matemáticos Gauss, Lobachevsky e Bolyai cogitaram a existência de uma Geometria Não Euclidiana. A partir daí, vários matemáticos dedicaram-se ao estudo dessas novas Geometrias entre eles Riemann, Poncelet e Mandelbrot. Dentre essas novas Geometrias, nesse trabalho destacamos a Geometria Hiperbólica, a qual substitui o 5° postulado pelo seguinte: “Por um ponto P fora de uma reta r passa mais de uma reta paralela à reta r”. A Geometria Elíptica que também substitui o 5° postulado pela hipótese que não existe nenhuma reta paralela a uma reta dada. Também temos a Geometria Projetiva, que é caracterizada pelos seus axiomas de incidência e separação e pelos princípios de continuidade e dualidade, e por fim, a Geometria Fractal, que tem como principais características a auto similaridade, iteração e dimensão. Palavras chaves: Geometria Euclidiana, Geometria Hiperbólica, Geometria Elíptica, Geometria Projetiva, Geometria Fractal.

6
BUASKI, Juliane Waszak. The Geometries No Euclideans. União da Vitória, 2011, 56 f. Work of
course conclusion (Full Degree in Mathematics). Faculdade Estadual de Filosofia Ciências e Letras -
FAFIUV, União da Vitória, 2011.
ABSTRACT
The Geometry had origin among the Greek and Egyptian people, starting from the need to divide their lands, being the first developed concept the one of distance. Those concepts were developed scientifically by some mathematical, among the ones which the one that more she highlighted was Euclides, that in her famous work “The Elements” it describes their five postulates and axioms, that sustained her Geometry. However, her 5° postulate, “for a point external P to a straight line m, considered in a same plan, a single parallel straight line exists to the straight line m”, it was very studied for several mathematical, because all tried to demonstrate it, and none of them obtained success. With that the conclusion was arrived that this postulate was not consequence of any other one. About the year of 1800 mathematicians Gauss, Lobachevsky and Bolyai cogitated the existence of a Geometry No Euclidean. Since then, several mathematicians were devoted to the study of those new Geometries among them Riemann, Poncelet and Mandelbrot. Among those new Geometries in that work detached the Hyperbolic Geometry, which substitutes the 5° postulated by the following: “For a point P out of a straight line r passes to the straight line more than a parallel straight line r.” The Elliptic Geometry that it also substitutes the 5° postulated by the hypothesis that any parallel straight line doesn't exist to a given straight line. We also have the Projective Geometry, that is characterized by their incidence axioms and separation and for the continuity beginnings and duality, and finally, the Fractal Geometry, that has as main characteristics to solemnity similarity, iteration and dimension. Key words: Euclidean Geometry, Hyperbolic Geometry, Elliptic Geometry, Projective Geometry, Fractal Geometry.

7
LISTA DE ILUSTRAÇÕES
Figura 1 – Retas paralelas.........................................................................................20
Figura 2 – Pseudo esfera...........................................................................................21
Figura 3 – Pseudo esfera com o Postulado de Lobachevsky....................................21
Figura 4 – Modelo de Klein........................................................................................22
Figura 5 – Quadrilátero PQSR...................................................................................23
Figura 6 – Modelo de Poincaré..................................................................................23
Figura 7 – Distância entre dois pontos no modelo de Poincaré.................................23
Figura 8 – Triângulo ômega.......................................................................................24
Figura 9 – Quadrilátero de Saccheri..........................................................................25
Figura 10 – Quadrilátero de Lambert.........................................................................25
Figura 11 – Triângulo de área máxima......................................................................26
Figura 12 – Curva limitante com o vértice no ponto ideal Ω......................................27
Figura 13 – Curva equidistante com linha base EF...................................................27
Figura 14 – Círculo máximo e círculo menor.............................................................29
Figura 15 – Distância entre dois pontos.....................................................................29
Figura 16 – Geodésicas.............................................................................................30
Figura 17 – Perpendicular no quadrilátero de Saccheri.............................................31
Figura 18 – Ângulos no quadrilátero de Saccheri......................................................31
Figura 19 – Ângulos no quadrilátero de Lambert.......................................................31
Figura 20 – Ângulos de um triângulo..........................................................................31
Figura 21 – Ângulo esférico........................................................................................32
Figura 22 – Triângulo esférico....................................................................................32
Figura 23 – Quadrângulo completo............................................................................34
Figura 24 – Axioma 5 de incidência...........................................................................35
Figura 25 – Princípio da continuidade........................................................................36
Figura 26 – Representação dos pontos.....................................................................38
Figura 27 – Perspectividade.......................................................................................39
Figura 28 – Projetividade............................................................................................40
Figura 29 – Ponto interior e exterior...........................................................................41
Figura 30 – Cônica segundo Steiner..........................................................................42
Figura 31 – Triângulo de Sierpinski............................................................................44

8
Figura 32 – Exemplo de iteração algébrica...............................................................45
Figura 33 – Construção do floco de neve de Koch....................................................45
Figura 34 – Conjunto de Cantor.................................................................................46
Figura 35 – Construção da curva de Peano...............................................................47
Figura 36 – Construção da curva de Hilbert...............................................................48
Figura 37 – Construção da curva de Koch.................................................................49
Figura 38 – Construção do tapete de Sierpinski........................................................50
Quadro 1 – Comparação entre a Geometria Euclidiana, Geometria
Hiperbólica e Geometria Elíptica................................................................................51
Quadro 2 – Comparação entre a Geometria Euclidiana e a Geometria Projetiva.....52
Quadro 3 – Comparação entre a Geometria Euclidiana e a Geometria Fractal........52

9
SUMÁRIO
1 INTRODUÇÃO ....................................................................................................... 11
2 GEOMETRIA EUCLIDIANA ................................................................................... 12
2.1 EUCLIDES ....................................................................................................... 13
2.2 ARQUIMEDES ................................................................................................. 14
2.3 APOLÔNIO ...................................................................................................... 15
3 O SURGIMENTO DAS GEOMETRIAS NÃO EUCLIDIANAS ............................... 16
3.1 MATEMÁTICOS NOTÁVEIS ............................................................................ 16
3.1.1 Johann Carl Friedrich Gauss .................................................................... 17
3.1.2 Nicolai Ivanovich Lobachevsky ................................................................. 17
3.1.3 Janos Bolyai .............................................................................................. 17
3.1.4 Georg Friedrich Bernhard Riemann ........................................................... 18
4 GEOMETRIA HIPERBÓLICA ................................................................................ 20
4.1 POSTULADO DE LOBACHEVSKY ................................................................. 20
4.2 MODELOS DA GEOMETRIA HIPERBÓLICA .................................................. 21
4.2.1 Modelo de Beltrami .................................................................................... 21
4.2.2 Modelo de Klein ......................................................................................... 22
4.2.3 Modelo de Poincaré .................................................................................. 23
4.3 TRIÂNGULO ÔMEGA ...................................................................................... 24
4.4 QUADRILÁTEROS .......................................................................................... 25
4.5 CURVAS .......................................................................................................... 26
4.5.1Curva limitante ............................................................................................ 26
4.5.2 Curva equidistante ..................................................................................... 27
5 GEOMETRIA ELÍPTICA ........................................................................................ 29
5.1 POSTULADO DE RIEMANN ............................................................................ 29
5.2 TRIÂNGULOS E QUADRILÁTEROS ............................................................... 30
5.2 ÂNGULO E TRIÂNGULO ESFÉRICO.............................................................. 31
6 GEOMETRIA PROJETIVA .................................................................................... 33
6.1 AXIOMAS DA GEOMETRIA PROJETIVA........................................................ 34
6.1.1 Axiomas de incidência ............................................................................... 35
6.1.2 Axiomas de separação .............................................................................. 36
6.2 PRINCÍPIO DA CONTINUIDADE ..................................................................... 36

10
6.3 PRINCÍPIO DA DUALIDADE ........................................................................... 36
6.4 PLANO PROJETIVO ........................................................................................ 37
6.4.1 Representação de pontos .......................................................................... 37
6.4.2 Retas ......................................................................................................... 38
6.5 PLANO PROJETIVIDADE................................................................................ 38
6.5.1 Colineações, correlações e polaridade ..................................................... 40
6.6 CÔNICAS ........................................................................................................ 41
6.6.1 Definição de Von Staudt ............................................................................ 41
6.6.2 Definição de Steiner .................................................................................. 42
7 GEOMETRIA FRACTAL ........................................................................................ 43
7.1 DEFINIÇÃO ..................................................................................................... 43
7.1.1 Auto similaridade ....................................................................................... 43
7.1.2 Iteração ...................................................................................................... 44
7.1.3 Dimensão ................................................................................................... 45
7.2 OS PRINCIPAIS FRACTAIS ........................................................................... 46
7.2.1 Conjunto de Cantor .................................................................................. 46
7.2.2 Curva de Peano........................................................................................ 47
7.2.3 Curva de Hilbert........................................................................................ 48
7.2.4 Curva de Koch .......................................................................................... 48
7.2.5Tapete de Sierpinski .................................................................................. 49
8 CONCEITOS QUE DIFEREM A GEOMETRIA EUCLIDIANA DAS GEOMETRIAS
NÃO EUCLIDIANAS ................................................................................................. 51
9 CONSIDERAÇÕES FINAIS ................................................................................... 53
REFERÊNCIAS ......................................................................................................... 54

11
1 INTRODUÇÃO
A Geometria Euclidiana fundamenta-se na famosa obra do grande
matemático Euclides, “Os Elementos”, com seus cinco axiomas e cinco postulados.
Durante muitos séculos a Geometria de Euclides foi considerada como a única
possível. Muitos matemáticos que surgiram após Euclides tentaram demonstrar seus
axiomas e postulados, porém não obtiveram êxito no seu 5° postulado, o conhecido
postulado das paralelas. Com isso matemáticos como Gauss, Lobachevsky e Bolyai
cogitaram a existência de uma outra Geometria, pois já que o 5° postulado de
Euclides não era consequência de nenhum outro, este poderia ser substituído e
assim teria-se uma nova Geometria, a então chamada Geometria Não Euclidiana. A
nova Geometria desenvolvida por esses três matemático deu-se o nome de
Geometria Hiperbólica.
Anos mais tarde, Riemann demonstrou certo interesse nas Geometrias Não
Euclidianas. Aparentemente ele não tinha conhecimento dos estudos Lobachevsky e
Bolyai, só tinha uma noção do interesse de Gauss pelo assunto. Através de seus
estudos Riemann desenvolveu uma Geometria bem diferente da Geometria
Hiperbólica, a qual deu-se o nome de Geometria Elíptica. Ao longo do tempo,
também foram desenvolvidas outras Geometrias Não Euclidianas, a Geometria
Projetiva e a Geometria Fractal desenvolvidas por Poncelet e Mandelbrot,
respectivamente.
Este trabalho é uma pesquisa bibliográfica que tem como objetivo fazer uma
breve abordagem dos principais conceitos e propriedades das Geometrias Não
Euclidianas e fazer um comparativo dessas propriedades com as da Geometria
Euclidiana, para que se perceba de fato quais são os fatores que diferem as
Geometrias Não Euclidianas da Geometria de Euclides.

12
2 GEOMETRIA EUCLIDIANA
Segundo Eves (1992, p.1), “a geometria parece ter se originado de simples
observações provenientes da capacidade humana de reconhecer configurações
físicas, comparar formas e tamanhos”.
Os princípios da geometria foram desenvolvidos pelos povos antigos,
principalmente os gregos e os egípcios. As principais fontes a respeito da geometria
egípcia antiga são os papiros de Moscou e Rhind, sendo que dos 110 problemas, 26
são de geometria. A maioria desses problemas provêm de fórmulas de mensuração
necessárias para calcular áreas de terras e volume de celeiros. Ainda segundo Eves
(1992, p.1), “a noção de distância foi, sem dúvida, um dos primeiros conceitos
geométricos a serem desenvolvidos”. De fato, a palavra geometria significa “medida
de terra”. Muitos séculos antes de Cristo, os egípcios, após cada inundação do rio
Nilo, tinham necessidade de dividir suas terras. Assim, descobriram várias
propriedades geométricas. De acordo com Heródoto citado por Eves (1992, p.3).
Eles diziam que este rei [Sesóstris] dividia a terra entre os egípcios de modo a dar a cada um deles um lote quadrado de igual tamanho e impondo-lhes o pagamento de um tributo anual. Mas qualquer homem despojado de uma parte de sua terra teria de ir a Sesóstris e notificar-lhe o ocorrido. Ele então mandava homens seus observarem e medirem quanto a terra se tornara menor, para que o proprietário pudesse pagar sobre o que restara, proporcionalmente ao tributo total. Dessa maneira, parece-me que a geometria teve origem, sendo mais tarde levada até a Hélade.
Foram os gregos, porém, que por volta de sete séculos antes de Cristo
motivados pela curiosidade científica deram origem a geometria como ciência
dedutiva. Deve-se isso aos esforços de muitos notáveis predecessores de Euclides,
como Tales de Mileto (640 - 546 a.C.) que foi um digno fundador da geometria
demonstrativa, considerado um dos “sete sábios” da antiguidade. Pitágoras (580 -
500 a.C.), foi o continuador da sistematização da geometria iniciada por Tales, e
Eudoxo (408 - 355 a.C.). Estes desenvolveram não só o material que acabou sendo
organizado por Euclides, mas também noções relativas a infinitésimos, limites e
processos somatórios. Também desenvolveram a geometria superior ou geometria
de curvas. Contudo, os três geômetras mais importantes da antiguidade foram

13
Euclides (325 - 265 a.C.), Arquimedes (287 - 212 a.C.) e Apolônio (225 a.C.). A
seguir farei uma breve explanação sobre esses geômetras.
2.1 EUCLIDES
Euclides de Alexandria nasceu em 325 a.C. e morreu em 265 a.C.. Foi um
matemático grego, que ficou conhecido pelo seu mais famoso trabalho “Os
Elementos”, este foi dividido em treze livros ou capítulos. O pouco que se sabe de
sua vida é que ensinou em Alexandria, no Egito, durante o reinado do Rei Ptolomeu
(306-283 a.C.). Alcançou grande prestígio pela forma brilhante como ensinava
Geometria e Álgebra, conseguindo assim, atrair para suas lições públicas um grande
número de discípulos. É um dos mais influentes matemáticos gregos da Antiguidade.
Segundo Boyer (1996, p.69) “da natureza de seu trabalho pode-se presumir que
tivesse estudado com discípulos de Platão, se não na própria Academia”. Euclides
tornou-se professor e estudioso da escola em Alexandria conhecida como Museum,
fundou a primeira escola de matemática de Alexandria, onde ficava a biblioteca mais
impressionante da Antiguidade, onde havia cerca de 700 000 volumes, sendo aí que
suas obras tomaram forma. Como Euclides escreveu “Os Elementos”, que é usado
há mais de 2 000 anos, esse lhe rendeu o título de “Pai da Geometria”, estes livros e
a bíblia são provavelmente os livros mais reproduzidos e estudados na história do
mundo ocidental.
Euclides, cerca de 300 anos a. C. apresentou, em sua famosa obra, “Os
Elementos”, um conjunto de cinco axiomas e cinco postulados. Através destes,
Euclides construiu toda a geometria que aprendemos na escola. A seguir os
postulados e axiomas de Euclides.
Postulados. Seja postulado o seguinte: 1. Traçar uma reta de qualquer ponto a qualquer ponto. 2. Prolongar uma reta finita continuamente em uma linha reta. 3. Descrever um círculo com qualquer centro e qualquer raio. 4. Que todos os ângulos retos são iguais. 5. Que, se uma reta cortando duas retas faz os ângulos interiores de um mesmo lado menores que dois ângulos retos, as retas, se prolongam indefinidamente, se encontram desse lado em que os ângulos são menores que dois ângulos retos. Axiomas (ou noções comuns): 1. Coisas que são iguais a uma mesma coisa são também iguais entre si. 2. Se iguais são somados a iguais, os totais são iguais. 3. Se iguais são subtraídos de iguais, os restos são iguais. 4. Coisas que coincidem uma com a outra são iguais uma a outra. 5. O todo é maior que a parte. (BOYER, 1996, p.73).

14
Este 5° postulado é o famoso postulado das paralelas. Modernamente, é
descrito da seguinte forma: “Por um ponto P exterior a uma reta m, consideradas em
um mesmo plano, existe uma única reta paralela à reta m”.
2.2 ARQUIMEDES
Arquimedes era natural da cidade de Siracusa, situada na ilha da Sicília,
nasceu em 287 a.C., foi educado em Alexandria tendo-se dedicado à matemática,
mais especialmente à geometria. Arquimedes foi um grande matemático e inventor
grego, escreveu importantes trabalhos sobre a geometria plana e sólida, aritmética,
hidráulica e mecânica. Ele antecipou muitas das descobertas da ciência moderna,
assim como o cálculo integral, através dos seus estudos acerca de áreas, volumes
de sólidos e de áreas de figuras planas. Arquimedes provou ainda que o volume de
uma esfera é dois terços do volume de um cilindro que circunscreve a esfera. Na
mecânica, ele definiu o princípio da alavanca sendo também creditado com a
invenção da roldana.
Arquimedes passou grande parte da sua vida na Sicília, e dedicou-se
inteiramente à descoberta e à experimentação. Durante as tentativas de conquista
da Sicília pelos romanos, ele colocou à disposição todas as suas descobertas na
mecânica para que fossem empregadas na defesa de Siracusa. Ele inventou
inúmeras máquinas de guerra, dentre elas estão a catapulta e o, talvez legendário
sistema do espelho para focar os raios de sol sobre os barcos dos invasores e
incendiá-los.
Após a conquista de Siracusa (212 a.C.), Arquimedes foi morto por um
soldado romano que o descobriu enquanto desenhava um diagrama traçado na
areia, pois ele sempre encontrava-se mergulhado em seus raciocínios matemáticos.
Assim que Arquimedes pediu para que o soldado romano se afastasse de seu
diagrama, o saqueador teria atravessado uma lança no corpo do ancião. Devido as
maquinas de defesa construídas por Arquimedes, Siracusa resistiu por três anos aos
cerco de Roma.

15
2.3 APOLÔNIO
Apolônio nasceu em Perga, (atual Turquia) na Ásia Menor por volta de 262
a.C. quando jovem foi para Alexandria estudar com os sucessores de Euclides. Foi
unanimemente considerado como um dos mais originais e profundos matemáticos.
Desafortunadamente, boa parte de seus escritos desapareceram. O que sabemos
dessas obras perdidas devemos a Pappus de Alexandria (século IV d.C.), que fez
uma breve descrição de sua grande produção matemática. Infere-se que os tratados
de Apolônio continham uma matemática bastante avançada e inclusive muito do que
conhecemos hoje como Geometria Analítica.
Embora Arquimedes fosse um astrônomo notável, sua principal obra foi sobre
as secções cônicas, que era um estudo profundo sobre essas curvas. Foi Apolônio
quem introduziu os nomes parábola, elipse e hipérbole, ele mostrou que de um único
cone podem ser obtidas essas três curvas, simplesmente variando a inclinação do
plano de seção.

16
3 O SURGIMENTO DAS GEOMETRIAS NÃO EUCLIDIANAS
Por aproximadamente dois mil anos a geometria de Euclides era incontestável
e única. Durante esse tempo vários matemáticos dedicaram-se a prova de seus
postulados.
Segundo o filósofo Kant por Coutinho (2001, p. 35) “se há a possibilidade de
uma única geometria, certos postulados ou noções comuns seriam teoremas, isto é,
seria uma consequência lógica de proposições primeiras”.
Estimulados por essas afirmações, os matemáticos tentaram provar o 5°
postulado de Euclides. Muitas provas foram dadas, mas todas se apoiavam numa
suposição equivalente ao próprio postulado. Deduzindo então que este não é uma
consequência lógica de nenhum dos outros postulados. Isso gerou um grande
acontecimento na história da matemática, que foi a descoberta das geometrias não
euclidianas, o que aconteceu por volta da primeira metade do século XIX.
A dificuldade de Euclides em escrever o 5° postulado mereceu das palavras
do matemático francês D’ Alembert por Coutinho (2001, p.36): “A definição de reta e
de retas paralelas, na obra de Euclides, constituem o escândalo da geometria”.
3.1 MATEMÁTICOS NOTÁVEIS
Os primeiros matemáticos que suspeitaram e proclamaram a impossibilidade
de demonstrar o 5° postulado foram o alemão Gauss, o húngaro Janos Bolyai e o
russo Nikolai Ivanovich Lobachevsky. Esses três homens enfocaram o assunto
considerando três possibilidades. Por um ponto dado pode-se traçar mais que uma,
exatamente uma e nenhuma paralela à reta dada. Eles tentaram instituir uma
redução ao absurdo, produzindo uma contradição sob a hipótese. Apesar de longas
investigações, nenhum deles conseguiu chegar a uma contradição, cada um deles
começou a suspeitar de que nenhuma contradição poderia ocorrer e de que a
geometria resultante, ainda que muito diferente da geometria euclidiana, era tão
consistente quanto ela.

17
3.1.1 Johann Carl Friedrich Gauss
Johann Carl Friedrich Gauss nasceu no ano de 1777 em Brunswich, na
Alemanha, filho de uma família pobre, vivia em condições precárias. Logo que
Gauss entrou para a escola primária recebeu o apoio do Duque Brunswich, pois foi
considerada uma criança prodígia após mostrar que a soma dos números inteiros de
1 a 100 representava a soma de 50 pares de números e também que a soma de
cada um desses pares daria sempre 101.
Gauss deu contribuições notáveis à astronomia, geodésia, eletricidade,
geometria diferencial e análise. Por volta do ano de 1800, Gauss começou a
suspeitar da existência das Geometrias Não Euclidianas. Sabe-se que desenvolveu
um notável trabalho sobre essas novas geometrias até o ano de 1820, mas Gauss
sabia que a existência de uma nova geometria causaria uma perturbação imensa à
matemática. Por esse motivo ele não publicou nada sobre o assunto, pois temia que
fosse rejeitado pelos outros matemáticos da época.
3.1.2 Nicolai Ivanovich Lobachevsky
Lobachevsky foi um matemático russo que viveu entre os anos de 1792 e
1856. Ele passou a maior parte de sua vida na Universidade de Kazan, a partir de
1802 ele já destacava-se pelo seu pendor em matemática. Passou 40 anos de sua
vida nessa universidade, primeiro como aluno e depois como professor. Em 1827
Lobachevsky foi nomeado Reitor da Universidade.
No ano de 1829 ele publicou o seu mais importante artigo “On the Principles
of Geometry”, o qual marcou oficialmente o nascimento da Geometria Não
Euclidiana. Isto fez com que Lobachevsky fosse visto na Rússia como uma “pessoa
excêntrica”, foi extremamente punido pelos matemáticos da época que faziam
zombarias e rudes comentários sobre ele. Lobachevsky passou o restante de sua
vida trabalhando na Universidade, no entanto, amargurado pela pouca apreciação
do seu trabalho que só foi reconhecido após a sua morte.
3.1.3 Janos Bolyai
Janos era húngaro e foi oficial do exército austríaco, nasceu em 1802, filho de
Farkas Bolyai, um professor de matemática que foi um grande amigo de Gauss.
Passou boa parte de sua vida tentando provar o postulado das paralelas, com isso o
filho Janos viu-se estimulado pelo mesmo fato. Em 1823 escreveu uma carta a seu

18
pai, onde demonstrava entusiasmo em seus estudos sobre as paralelas. Em um
trecho da carta ele exclamou: “Do nada eu criei um universo novo e estranho”
(EVES, 2004, p. 542). Vendo que o filho estava absorvido pelo problema das
paralelas, o pai escreveu uma carta em resposta ao filho: “Pelo amor de Deus, eu
lhe peço, desista! Tema tanto isso quanto as paixões sensuais porque isso também
pode tomar todo o seu tempo, e privá-lo de sua saúde, paz de espírito, e felicidade
na vida”! (BOYER, 1996, p. 361).
Mas ele não desistiu e, em 1829, em vez de tentar provar o impossível ele
desenvolveu o que chamou de “Ciência Absoluta do Espaço”, considerando como
hipótese que por um ponto fora da reta podem ser traçadas infinitas retas no plano,
cada uma paralela a reta dada. Janos enviou seus manuscritos ao pai, que três anos
depois os publicou como apêndices de um trabalho seu. Anos depois de sua
publicação, Janos ficou sabendo que suas descobertas sobre a geometria não
euclidiana seriam as mesmas conclusões que Lobachevsky teria chegado.
3.1.4 Georg Friedrich Bernhard Riemann
Riemann nasceu em 1826, era filho de um pastor de aldeia vivia em
condições modestas, mas seu pai conseguiu dar-lhe uma boa educação em Berlim e
depois em Gottingen, onde fez seu doutorado com uma tese sobre a teoria das
funções de variável complexa.
No ano de 1854 Riemann tornou-se Privatdocent (professor oficial, mas não
remunerado) de Gottingen, onde apresentou uma famosa conferência probatória
sobre as hipóteses em que se baseavam os fundamentos da geometria. Em 1857
tornou-se professor assistente de Gottingen e em 1859 ocupou o lugar de Dirichlet
como professor titular, uma posição em que anos atrás fora ocupada por Gauss.
Gauss ficou impressionado pela abordagem feita por Riemann para a
Geometria Não-Euclidiana pelo fato de que ela era bem diferente daquelas
apresentadas por seus antecessores. Aparentemente Riemann não sabia nada
sobre os trabalhos de Lobachevsky e Bolyai e tinha somente uma vaga ideia do
interesse de Gauss pelo assunto. O sucesso de Riemann se deve ao fato dele ter
incorporado em seu estudo duas ideias extremamente férteis: o aparato matemático
de Gauss para descrever a geometria de superfícies curvas bi-dimensionais e seu
próprio novo conceito de variedade multidimensional, ou seja, objetos geométricos
com múltiplas dimensões.

19
Em 1866 Riemann morreu com apenas quarenta anos de idade, vítima da
tuberculose, em uma cidade do norte da Itália onde estaria procurando melhoras
para sua saúde.
20
4 GEOMETRIA HIPERBÓLICA
A geometria desenvolvida quase que simultaneamente ao mesmo tempo por
Gauss, Lobachevsky e Bolyai deu-se o nome de Geometria Hiperbólica. Mas, como
Lobachevsky foi o primeiro a publicar suas descobertas esta geometria é bastante
conhecida como Geometria de Lobachevsky.
4.1 O POSTULADO DE LOBACHEVSKY
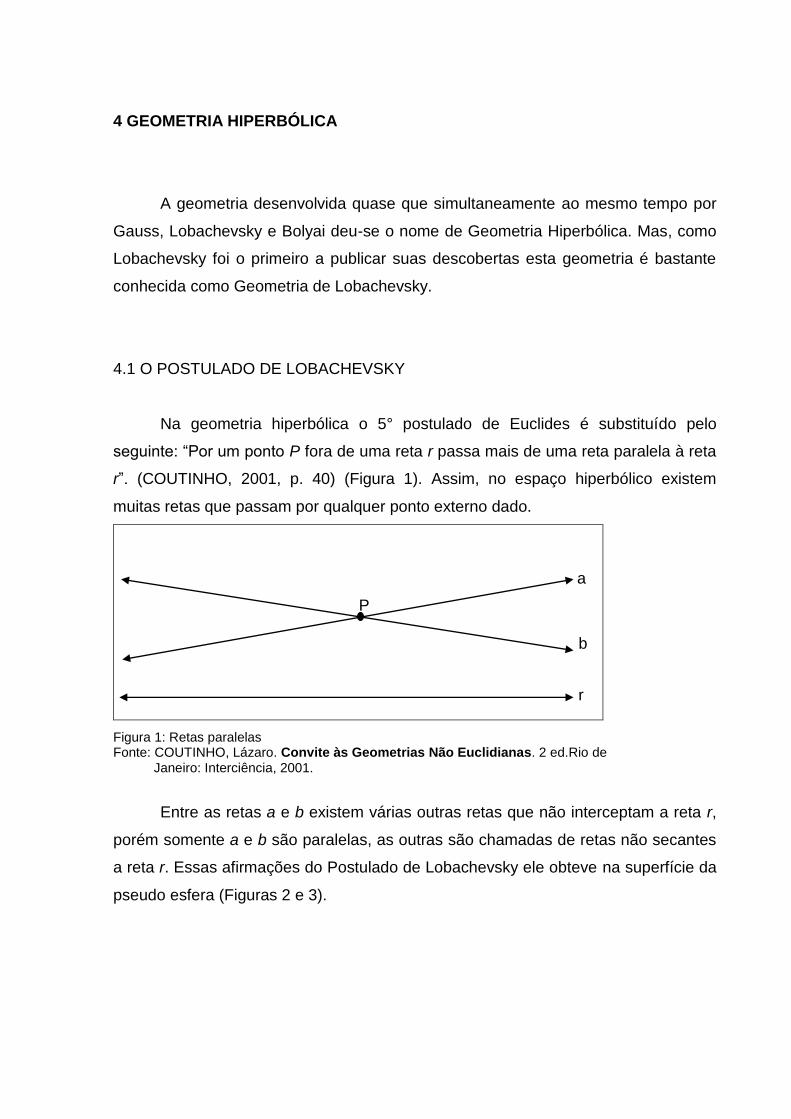
Na geometria hiperbólica o 5° postulado de Euclides é substituído pelo
seguinte: “Por um ponto P fora de uma reta r passa mais de uma reta paralela à reta
r”. (COUTINHO, 2001, p. 40) (Figura 1). Assim, no espaço hiperbólico existem
muitas retas que passam por qualquer ponto externo dado.
Figura 1: Retas paralelas Fonte: COUTINHO, Lázaro. Convite às Geometrias Não Euclidianas. 2 ed.Rio de Janeiro: Interciência, 2001.
Entre as retas a e b existem várias outras retas que não interceptam a reta r,
porém somente a e b são paralelas, as outras são chamadas de retas não secantes
a reta r. Essas afirmações do Postulado de Lobachevsky ele obteve na superfície da
pseudo esfera (Figuras 2 e 3).
r
b
a
P

21
Figura 2: Pseudo esfera Figura 3: Pseudo esfera com o postulado de Lobachevsky Fonte: ZIEGLER, Janaina de Ramos. Geometria Euclidiana Plana e Geometria Hiperbólica:
Comparação de Conceitos e Propriedades. 2008, 42f. Monografia ( Graduação em Licenciatura em Matemática). Centro Universitário Franciscano, Santa Maria, RS, 2008. Disponível em <http://www.unifra.br/cursos/matematica/downloads/Janaina%20de% 20Ramos%20Ziegler.pdf.pdf> Acesso em 04 de junho de 2011.
Na figura 3 temos o postulado de Lobachevsky, onde a e b são as “retas” que
passam pelo ponto P e são paralelas a “reta” r.
4.2 MODELOS DA GEOMETRIA HIPERBÓLICA
Foram criados três modelos para a Geometria Hiperbólica, o primeiro foi o de
Eugênio Beltrami, seguido dos modelos de Felix Klein e Henry Poincaré. A seguir
farei uma descrição desses modelos.
4.2.1 Modelo de Beltrami
Eugênio Beltrami apresentou um modelo contido em R³, ou seja, na pseudo
esfera (Figura 2). Neste ele mostrava que em uma superfície de curvatura negativa
constante, tomando as geodésicas (curvas que cobrem a menor distância entre dois
pontos) como retas. Assim, todos os resultados obtidos por Lobachevsky foram
verificados.
Porém, esse modelo possuía um defeito, as superfícies de curvatura negativa
constantes conhecidas na época possuíam arestas, o que impedia o prolongamento
de algumas geodésicas.

22
4.2.2 Modelo de Klein
O modelo de Klein toma um círculo no plano euclidiano, em que se considera
apenas o interior desse círculo, que passa a ser chamado plano de Lobachevsky. As
retas desse plano são chamadas cordas do círculo.
Figura 4: Modelo de Klein Fonte: A autora (2011)
Dado uma reta AB e um ponto P fora dela, as retas AC e BD são as retas
paralelas à AB e as infinitas retas que passam pelo ponto P que estão entre AD e
BC são as retas não secantes (Figura 4).
Neste modelo é preciso que as retas tenham uma extensão infinita dentro de
uma área finita. Introduzindo uma unidade de medida variável, ou seja, que diminui
proporcionalmente quando se aproxima da circunferência do círculo, com isso, a
extensão de uma reta (corda) torna-se infinita. Se formos medí-la não atingiremos a
extremidade, pois cada vez que formos chegando mais próximos da extremidade a
unidade de medida vai encolhendo proporcionalmente cada vez mais.
Esse modelo causa alguns fatos para a Geometria Hiperbólica:
- O ângulo de paralelismo é agudo;
- O ângulo de paralelismo varia de acordo com a distância do ponto à reta;
- Duas retas distintas e perpendiculares à reta AB formam um quadrilátero PQSR
(Figura 5) e este é o retângulo da Geometria Hiperbólica. E em consequência disto
temos que a soma dos ângulos internos de um triângulo é menor que 180°.
P
C
B A
D

23
Figura 5: Quadrilátero PQSR Fonte:A autora (2011)
4.2.3 Modelo de Poincaré
Este modelo é parecido com o de Klein, o que o difere é que as retas são
substituídas por arcos de círculo perpendiculares ao círculo considerado (Figura 6).
Para este modelo a distância entre PQ (Figura 7) é dada pela fórmula:
PQ = k 𝑙𝑜𝑔𝑒 [(AP/PB)/(AQ/QB)]
Onde k é um parâmetro e AP, PB, AQ e QB são segmentos de retas.
Figura 6: Modelo de Poincaré Figura 7: distância entre dois pontos no Modelo de Poincaré Fonte: COUTINHO, Lázaro. Convite às Geometrias Não Euclidianas. 2 ed. Rio de Janeiro:
Interciência, 2001.
P
Q
B A R S

24
4.3 TRIÂNGULO ÔMEGA
Antes de falar sobre o triângulo ômega vejamos uma definição: ”Na Geometria
Hiperbólica duas retas paralelas não têm um ponto em comum, porém se diz que se
encontram num ponto ideal. Portanto, chama-se de ponto ideal o ponto de encontro
de duas retas paralelas”. (COUTINHO, 2001, p. 47).
O triângulo ômega é aquele com um dos vértices em um ponto ideal (Figura
8). Também são chamados de triângulos hiperbólicos.
Figura 8: Triângulo Ômega Fonte: A autora (2011)
Esses triângulos possuem duas propriedades e dois critérios de congruência,
descritos respectivamente a seguir:
- Se uma reta passa por um vértice, ou por qualquer outro ponto de um triângulo
ômega, então essa reta intercepta o lado oposto.
- Seja qualquer triângulo ômega OAΩ, os ângulos exteriores do prolongamento OP
serão sempre maiores que os ângulos interiores do lado oposto.
- Sendo dois triângulos ômegas OAΩ e O’A’Ω’, estes são congruentes se os lados de
extensões finitas forem congruentes e também se o par de correspondentes ângulos
Ô e Ô ou  e  são congruentes.
- Dois triângulos ômegas OAΩ e O’A’Ω’ são congruentes somente se os dois pares
de ângulos Ô e Ô,  e  forem congruentes.
Ω O
A

25
4.4 QUADRILÁTEROS
Na tentativa de demonstrar o 5° postulado de Euclides, Girolomo Saccheri e
Johann Heinrich Lambert acabaram construindo os dois quadriláteros que temos na
Geometria Hiperbólica. O quadrilátero de Saccheri tem dois ângulos retos e dois
lados congruentes (Figura 9) e o quadrilátero de Lambert possui três ângulos retos
(Figura 10).
Figura 9: Quadrilátero de Saccheri Figura 10: Quadrilátero de Lambert Fonte: DELAI, Sidinei; FRANCO, Valdeni Soliani. Geometrias Não Euclidianas. Disponível em
<http://www.diaadiaeducacao.pr.gov.br/portals/pde/arquivos/236-2.pdf> Acesso em 25 de maio de 2011.
Com tudo que vimos pode-se chegar a alguns resultados da Geometria
Hiperbólica:
- Os triângulos semelhantes são obrigatoriamente congruentes, ou seja, tem que
possuir as mesmas medidas;
- A área de um triângulo euclidiano é dada por LH/2, onde L é o comprimento de um
lado do triângulo e H a altura do lado, o que não é valido para os triângulos
hiperbólicos;
- Na geometria hiperbólica não existem retângulos, os quadriláteros terão no máximo
três ângulos retos;
- Na geometria euclidiana se duas retas são paralelas a uma terceira, então elas são
paralelas entre si, o mesmo não se pode dizer para a Geometria Hiperbólica.
Pelo fato de não existir o retângulo ou quadrado na Geometria Hiperbólica
não se pode usar um quadrado unitário como medida de área, usa-se assim o
triângulo, e disto provém a seguinte definição: “Dois polígonos são equivalentes se
podem ser divididos no mesmo número finito de pares de triângulos
congruentes”(COUTINHO, 2001, p. 64).

26
A medida da área de um triângulo é dado por k.d, onde k é uma constante
positiva e d é o valor da diferença angular, que é a diferença entre 180° (ou π) e a
soma das medidas dos ângulos internos de um triângulo que é expresso por δ = π -
(Â+B̂+Ĉ).
Um triângulo de área máxima é constituído por três pontos ideais (Figura 11).
Figura 11: Triângulo de área máxima Fonte: COUTINHO, Lázaro. Convite às
Geometrias Não Euclidianas. 2 ed. Rio de Janeiro: Interciência, 2001.
4.5 CURVAS
Por fim, com relação às curvas, sabe-se que toda a teoria dos círculos que
depende do quinto postulado de Euclides não é mais válida. Assim, surgem dois
tipos de lugares geométricos na geometria de Lobachevsky: curva limitante e curva
equidistante.
4.5.1 Curva limitante
Um feixe de retas com trajetória ortogonal em que os seus vértices se
encontram em um ponto ideal é chamado de curva limitante, ou seja, a direção é
sempre perpendicular a cada uma das infinitas retas do feixe (Figura 12).

27
Figura 12: Curva limitante com vértice no ponto ideal Ω Fonte: COUTINHO, Lázaro. Convite às Geometrias
Não Euclidianas. 2 ed. Rio de Janeiro : Interciência, 2001.
Esta curva possui algumas propriedades:
- A reta perpendicular no ponto médio de uma corda passa pelo centro do círculo;
- Uma curva limitante é determinada de maneira única por três pontos distintos;
- Quaisquer duas curvas limitantes são congruentes;
4.5.2 Curva equidistante
Um feixe de retas na trajetória ortogonal com uma perpendicular em comum é
chamada curva equidistante. Esta curva possui dois ramos, um de cada lado da
perpendicular comum, esta é chamada linha base. (Figura 13).
Figura 13: Curva equidistante com linha base EF Fonte: COUTINHO, Lázaro. Convite às Geometrias
Não Euclidianas. 2 ed. Rio de Janeiro : Interciência, 2001.
A curva equidistante possui as seguintes propriedades:
- Apenas as curvas equidistantes que estão à mesma distância da linha base são
congruentes;
- Uma curva equidistante é determinada de maneira única por três pontos;

28
- Nas curvas equidistantes congruentes, as cordas congruentes interceptam arcos
congruentes e o mesmo acontece inversamente;
- Somente a curva equidistante está a mesma distância da linha base, as retas
paralelas e não secantes variam a sua distância desta linha.

29
5 GEOMETRIA ELÍPTICA
Esta Geometria foi desenvolvida por Riemann, também é conhecida como
Geometria Esférica ou ainda por Geometria Riemanniana. Nesta Geometria
Riemann contraria o 5° postulado de Euclides, ou seja, não existe nenhuma reta
paralela a uma reta dada e também se abandona a noção de que a reta é infinita,
mas sim ilimitada. Na Geometria Hiperbólica o espaço que se trabalha é o da
pseudo esfera. Já nesta Geometria o espaço trabalhado é o esférico, onde a reta
passa a ser uma porção limitada desse espaço sendo assim chamados de círculos
máximos ou geodésicas.
Os círculos máximos ou geodésicas são quando os planos que interceptam a
esfera passam pelo centro dela. Também existem os círculos menores, que são
quando os planos não interceptam a esfera ao centro (Figura 14). A distância entre
dois pontos na superfície esférica é a menor porção do círculo máximo que contém
esses pontos (Figura 15).
Figura 14: Círculo máximo e círculo menor Figura 15: Distância entre dois pontos Fonte: COUTINHO, Lázaro. Convite às Geometrias Não Euclidianas. 2 ed. Rio de Janeiro: Interciência, 2001.
5.1 POSTULADO DE RIEMANN
Para qualquer duas retas em um plano, existe um ponto de encontro. Este
postulado pode ser melhor observado na Figura 16, onde as “retas” seriam os
círculos máximos ou geodésicas. Nessa superfície os círculos máximos se
encontram em mais de um ponto.

30
Figura 16: Geodésicas Fonte: CRUZ, Donizete Gonçalves. Algumas diferenças entre a Geometria Euclidiana e as Geometrias Não Euclidianas – Hiperbólica e Elíptica a serem abordados no ensino médio. Disponível em < http ://www.diaadia Educação .pr. gov. br / portals / pde/ arquivos/1734-8.pdf> Acesso em 04 de junho de 2011.
Nesta Geometria não existem retas paralelas e nem retas não secantes, pois
para quaisquer duas “retas” dessa Geometria elas sempre se encontram.
5.2 TRIÂNGULOS E QUADRILÁTEROS
Nesta geometria os triângulos e quadriláteros possuem algumas propriedades:
- O segmento que liga os pontos médios da base e do topo de um quadrilátero de
Saccheri é perpendicular a ambos (Figura 17);
- Os ângulos do topo do Quadrilátero de Saccheri são congruentes e obtusos (Figura
18);
- O Quadrilátero de Lambert tem o seu quarto ângulo obtuso e os lados do
quadrilátero adjacentes a esse ângulo são maiores do que os correspondentes lados
opostos (Figura 19);
- A soma das medidas dos ângulos de qualquer triângulo é maior do que 180°
(Figura 20);
- A soma das medidas dos ângulos de qualquer quadrilátero é maior do que 360°.

31
Figura 17: Perpendicular no quadrilátero de Figura 18: Ângulos no quadrilátero de Saccheri Saccheri
Figura 19: Ângulos no quadrilátero de Figura 20: Ângulos de um triângulo Lambert Fonte: CRUZ, Donizete Gonçalves. Algumas diferenças entre a Geometria Euclidiana e as
Geometrias Não Euclidianas – Hiperbólica e Elíptica a serem abordados no ensino médio. Disponível em< http://www.diaadiaeducacao.pr.gov.br/portals/pde/arquivos/1734-8.pdf> Acesso em 04 de junho de 2011.
5.3 ÂNGULO E TRIÂNGULO ESFÉRICO
O que define o ângulo esférico são os círculos máximos, sendo que este
ângulo é formado pela intersecção de dois círculos máximos (Figura 21).
O triângulo esférico é formado por três pontos distintos A, B e C não
pertencentes ao mesmo círculo máximo, os arcos que unem esses pontos dois a
dois formam o triângulo esférico. Os lados do triângulo esférico são denotados por a,
b e c e medidos pelos ângulos subentendido por eles no centro da esfera, e podem
ser medidos em graus ou radianos (Figura 22). Os ângulos do triângulo ABC, são os
ângulos esféricos.

32
Figura 21: Ângulo esférico Figura 22: Triângulo esférico Fonte:COUTINHO, Lázaro.Convite às Geometrias Não Euclidianas. 2 ed. Rio de Janeiro : Interciência, 2001.
A soma dos ângulos de um triângulo esférico varia entre 180° e 540° e pode
ter um valor fixo dependendo do triângulo considerado. Em relação à soma dos
lados a, b e c estes podem variar de 180° a 360°, sendo que nenhum dos lados
pode ser maior que 180°. Os triângulos esféricos são classificados em:
Relação aos ângulos:
- Retângulo: um ângulo reto;
- Birretângulo: dois ângulos retos;
- Trirretângulo: os três ângulos retos;
Relação aos lados:
- Retilátero: um lado medindo 90°;
- Birretilátero: dois lados medindo 90° cada um;
- Trirretilátero: cada um dos lados medindo 90°.
Vale aqui notar que, se um triângulo esférico é trirretângulo e trirretilátero,
este triângulo cobre exatamente a oitava parte da superfície esférica.

33
6 GEOMETRIA PROJETIVA
Esta geometria surgiu pelos esforços de artistas e arquitetos da época do
Renascimento que necessitavam de técnicas e conceitos novos para que suas obras
se tornassem uma boa representação da realidade ou então de suas fantasias.
Sendo que a Geometria Euclidiana, com suas noções de semelhança, congruência e
equivalência não era capaz de suprir essas novas necessidades.
Assim, por volta do século XV, surgiu a noção de perspectiva nas obras dos
pintores iniciando-se essa nova teoria geométrica. Esta teoria foi consideravelmente
ampliada no início do século XVII, por um grupo de matemáticos franceses cujo
motivador foi Gérard Desargues que era engenheiro e arquiteto. Este publicou em
Paris, em 1639, um notável tratado sobre secções cônicas que explorava a ideia de
projeção.
No entanto, os matemáticos da época não só não aceitavam os métodos da
nova geometria como também se opuseram a ela, pois a consideravam mal
fundamentada. Desargues escrevia de modo difícil e pouco convencional e também
seu ponto de vista não estava de acordo com o tempo, que celebrava os triunfos da
álgebra e análise. Com isso, a obra ficou completamente perdida. O pouco que se
sabe deve-se a Philippe de Lahire que em 1847 fez uma cópia a mão de sua obra, e
a Blaise Pascal que continuou a desenvolver os seus métodos. Depois da morte de
Pascal a Geometria Projetiva foi esquecida e quase que totalmente substituída pela
geometria analítica cartesiana, ressurgindo apenas no início do século XIX graças
aos estudos de Gaspard Monge, Lazare Carnot, Chasles J. Brianchon e
principalmente por Victor Poncelet.
Poncelet foi prisioneiro de guerra e enquanto esteve preso, sem a ajuda de
livro algum, ele planejou uma grande obra sobre a Geometria Projetiva. Em 1822,
depois de sua libertação publicou-a em Paris. Este trabalho impulsionou os estudos
na área e dessa forma pode-se dissipar as dúvidas sobre a sua consistência.

34
6.1 AXIOMAS DA GEOMETRIA PROJETIVA
A Geometria Projetiva Plana baseia-se em dois conceitos primitivos ponto e
reta. Através destas são definidas outras primitivas geométricas como o triângulo e o
quadrângulo completo.
Triângulos: Formado por três pontos A, B e C não colineares, sendo estes pontos
os vértices do triângulo. Então, por cada par desses pontos passa-se uma reta,
formando assim os lados AB, BC e AC do respectivo triângulo.
Quadrângulo completo: Formado por quatro pontos A, B, C e D, sendo três
quaisquer desses pontos não colineares, com vértices nos pontos dados, então por
cada par de pontos passa-se uma reta, formando assim os lados AB, BC, CD, AD,
AC e BD. Sendo que dois lados são ditos opostos quando não tem nenhum vértice
em comum, assim os pontos P, Q e R, que são as intersecções de dois lados
opostos são chamados de pontos diagonais (Figura 23).
Figura 23: Quadrângulo Completo Fonte: A autora
Na Geometria Projetiva temos dois importantes teoremas, o de Desargues e o
de Pascal.
Teorema de Desargues: “Se dois triângulos estão colocados de tal maneira que as
retas que unem os pares de vértices correspondentes são concorrentes, então os
pontos de intersecção de pares de lados correspondentes são colineares, e
reciprocamente” (BOYER, 1996, p. 249).
Teorema de Pascal: “Os seis vértices de um hexágono pertencem a uma cônica se,
e somente se os pontos de intersecção dos três pares de lados opostos pertencem a
uma reta” (EVES, 2004, p. 592).
Esta Geometria é formada pelos grupos axiomáticos de incidência e
separação e pelos princípios de continuidade e dualidade.
A
B C
D
R P
Q

35
Antes de descrever estes axiomas farei a abordagem de algumas definições
que servirão de apoio para a melhor compreensão destes:
Definição 1: Pontos incidentes com a mesma linha dizem-se colineares;
Definição 2: Duas linhas que têm um ponto em comum dizem-se concorrentes;
Definição 3: Sejam A, B e C três pontos colineares: O segmento ]AB[ \ C é o
conjunto dos pontos X tais que AB ∥ CX (notemos que C ∉ ]AB[ \ C ∪ {A, B};
Definição 4: O intervalo [XY] \ C diz-se interior ao intervalo [AB] \ C e um ponto D
esta entre os pontos X e Y de [AB] \ C se D ∈ ]XY[ \ C.
6.1.1 Axiomas de incidência
I1) Existem uma reta e um ponto não incidentes;
I2) Toda reta incide com pelo menos três pontos distintos;
I3) Dados dois pontos distintos, estes incidem com uma única reta;
I4) Duas linhas quaisquer são incidentes com pelo menos um ponto, assim não
existem retas paralelas;
I5) Se três linhas distintas PP’, QQ’ e RR’ incidem com um ponto 0, existe uma única
reta incidente com os três pontos de intersecção A= QR ∩ Q’R’, B= RP ∩ R’P’ e C=
PQ ∩ P’Q’, ou seja, estes pontos são colineares (Figura 24).
Figura 24: Axioma 5 de incidência Fonte: ROSA, Antônio Pereira. Geometrias Não Euclidianas. 2008, 242f. Dissertação (Mestrado em Matemática para o Ensino). Universidade de Lisboa, 2008. Disponível em<http://repositorio.ul.pt/bitstream/10451/1265/1/19096_ULFC091290_TM_Tese.pdf> Acesso em 25 de maio de 2011.
O axioma 5 de incidência é uma versão do Teorema de Desargues.

36
6.1.2 Axiomas de separação
S1 – Há uma linha que incide com pelo menos quatro ponto distintos;
S2 – Se AB é paralelo a CD, os pontos A, B, C e D são colineares e distintos;
S3 – Se AB é paralelo a CD, então AB é paralelo a DC;
S4 – Se os pontos A, B, C e D são colineares e distintos, verifica-se sempre
exatamente uma das três hipóteses BC é paralela a AD, CA é paralela a BD ou AB é
paralela a CD;
S5 – Se AB é paralela a CD e AC é paralela a BE, então AB é paralela a DE;
S6 – Se AB é paralela a CD e termos ABCD e A'B'C'D', então A'B' é paralela a C'D'.
6.2 PRINCÍPIO DA CONTINUIDADE
Dada qualquer partição de um segmento S em dois subconjuntos não vazios
S1 e S2, sendo que nenhum ponto de nenhum deles está entre dois pontos do outro,
existe um ponto num dos subconjuntos que está entre qualquer ponto de S1 e
qualquer ponto de S2.
Figura 25: Princípio da continuidade Fonte: A autora
6.3 PRINCÍPIO DA DUALIDADE
Os pontos e retas do plano projetivo têm exatamente o mesmo
comportamento em relação à incidência. Assim, quaisquer propriedades envolvendo
pontos, retas e incidência permanecem válidas ao trocarmos pontos por retas e
retas por pontos. A nova propriedade assim obtida é denominada "dual" da primeira.
Como exemplo podemos dualizar o teorema de Pascal, assim obtendo:” Os seis
lados de um hexágono são tangentes a uma cônica se, e somente se, as retas que
unem os três pares de vértices opostos concorrem num ponto” (EVES, 2004, p.592).
S2 S1
A

37
6.4 PLANO PROJETIVO
O astrônomo Johannes Kepler introduziu um termo chamado ponto no infinito,
que designava o ponto de concorrência de um feixe de retas paralelas. Dados dois
pontos distintos, estes incidem com uma única reta, pelo axioma 3 de incidência.
Então se tivermos dois pontos no infinito, estes estarão sobre uma reta denominada
reta no infinito. Assim, todos os pontos no infinito estão sobre esta reta. Com isso foi
definido um plano para a Geometria Projetiva chamado de plano projetivo, que é a
união do plano afim que contém os pontos de intersecção de todas as retas
concorrentes e a reta no infinito, que contém pontos de intersecção de todos os
feixes de retas paralelas.
6.4.1 Representação de pontos
A primeira tentativa de introduzir coordenadas na Geometria Projetiva foi feita
através das coordenadas baricêntricas. Fixados três pontos, formando um triângulo,
as coordenadas baricêntricas de um ponto P no plano do triângulo, são números que
correspondem a pesos que devem ser colocados em cada vértice do triângulo para
que o centro da gravidade caia em P. Isto fornece um conjunto de coordenadas
homogêneas em cada ponto P, no seguinte sentido; (t1, t2, t3) é um conjunto de
coordenadas baricêntricas de P, e P1, P2, P3 forem as referências de um triângulo,
então temos: (t1+ t2+ t3).P = (t1 P1+ t2 P2+ t3 P3), com t1+ t2+ t3 ≠ 0.
Devemos observar que: As coordenadas cartesianas (x, y, z) de um ponto
sobre um plano afim x + y + z = 1 são iguais as coordenadas baricêntricas desse
ponto em termos de um triângulo definido pelos vértices P1 = (1, 0, 0), P2 = (0, 1, 0) e
P3 = (0, 0, 1).
Sendo assim, no espaço 3D as coordenadas cartesianas de um ponto sobre
um plano afim x + y + z = 1 coincidem com as coordenadas baricêntricas (t1, t2, t3),
do triângulo dado com os vértices A1 = (1, 0, 0), A2 = (0, 1, 0) e A3 = (0, 0, 1). Os
pontos (x, y, z) sobre a reta que passa pela origem (0, 0, 0) e por qualquer outro
ponto (x, y, z) que esteja sobre o plano x + y + z = 1 satisfaz:
x
t1 =
y
t2 =
z
t3 = μ ≠ 0, ou seja, x = μ t1, y = μ t2 e z = μ t3.
Assim temos que, as coordenadas (x, y, z) dos pontos sobre a reta são
homogêneas as coordenadas baricêntricas (t1, t2, t3). Somente os pontos que estão

38
sobre o plano x + y + z = 0 não tem correspondências projetivas sobre o plano
(Figura 26).
Figura 26: Representação dos pontos Fonte: Geometria Projetiva. Disponível em <http://www.dca.fee. unicamp.br/courses/IA841/2s2006/notas/cap4.pdf> Acesso em 06 de agosto de 2011.
Assim para definir um plano projetivo além dos três pontos não colineares A1,
A2 e A3, cujas coordenadas baricêntricas são (1, 0, 0), (0, 1, 0) e (0, 0, 1), também
necessitamos de um quarto ponto não colinear aos três pontos, este para indicar a
posição do plano em relação ao centro da projeção. Podemos observar também que
os quatro pontos A1, A2, A3 e (t1, t2, t3) formam um quadrângulo, assim, podemos
dizer que as coordenadas (x, y, z) da Geometria Projetiva Plana são sempre
referentes a um quadrângulo.
6.4.2 Retas
Nesta Geometria a reta (x, y, z) que passa por dois pontos (p1x ,p1y, p1z) e
(p2x ,p2y, p2z) deve estar no mesmo plano dos pontos (p1x ,p1y, p1z) e (p2x ,p2y, p2z)
e com isso temos:
x y zp1x p1y p1zp2x p2y p2z
=(p1y. p2z - p1z. p2y)x+(p1x. p2z - p1z .p2x)y+(p1x .p2z - p1y. p2x)z= 0
6.5 PROJETIVIDADE
Antes de abordar o conceito de projetividade vejamos algumas definições
importantes.
A1
A3
A2
T1
T2
T3
(t1, t2, t3)

39
Definição 5: Fileira de pontos. Se tivermos um ponto P e uma reta r, podemos
chamar de fileira de pontos o conjunto de todos os pontos sobre a reta r e de feixe
de retas o conjunto de todas as retas que passam pelo ponto P. E se as retas de um
feixe que passam pelo ponto P ligam os pontos de uma fileira com um outro ponto,
dizemos que a fileira é uma seção do feixe.
Definição 6: Perspectividade. Dizemos que perspectividade é a correspondência
entre duas fileiras que são seções de um mesmo feixe. O feixe passa por um ponto
fixo O denominado centro de perspectividade (Figura 27).
Figura 27: Perspectividade Fonte: A autora
Podemos dizer que os pontos A e B são correspondências dos pontos A’ e B’
respectivamente (em símbolos A ∧ A’ e B ∧ B’). Dizemos também que duas figuras
são perspectivas se os seus vértices correspondentes definem retas concorrentes
num ponto que é chamado centro de perspectividade ou, quando as suas retas
correspondentes se cruzam sobre uma mesma reta, esta chamada de eixo de
perspectividade.
Enfim, com essas definições que acabamos de ver podemos definir
projetividade.
Definição 7: Projetividade é o produto de duas ou mais perspectividades (Figura 28).
O
B’
A’
A B
R1
R2

40
Figura 28: Projetividade Fonte: A autora
A reta AB contém as intersecções das retas dos dois feixes que passam por
O e O’. Temos que O = O’, então o produto de A’B’ com A’’B’’ é equivalente à A’B’
correspondências de A’’B’’( em símbolos A’B’ ∧ A’’B’’ ≡ A’B’ ∧ A’’B’’).
Teorema Fundamental da Geometria Projetiva: Uma projetividade é determinada
quando três pontos colineares e também os seus três pontos colineares
correspondentes são conhecidos.
As projetividades podem ser classificadas em:
- Elíptica, se não tiver pontos fixos;
- Parabólica, se tiver apenas um ponto fixo;
- Hiperbólica, se tiver dois pontos fixos.
6.5.1 Colineações, correlações e polaridade
As colineações e correlações são análogos bidimensionais das projetividades
que preservam a relação de incidência.
Definição 8: Uma colineação projetiva é uma transformação ponto em ponto e reta
em reta, preservando a relação de incidência de maneira projetiva, isto é, se ela
transforma um ponto X da fileira x e um ponto Y da fileira y, a relação entre X e Y é a
projetividade, ou seja, X ∧ Y.
Definição 9: Uma correlação projetiva é uma transformação ponto em reta e reta em
ponto, preservando a relação de incidência de maneira projetiva, isto é se ela
transforma um ponto X sobre uma reta x em uma reta y através de um ponto Y, a
relação entre X e y é a projetividade, ou seja, X ∧ y.
O
B’
A’
A B
R1
R2
B’’
A’’ O’

41
Definição 10: Polaridade é um tipo de correlação projetiva, isto é, enquanto uma
correlação qualquer transforma um ponto A numa reta a e a num ponto A’, uma
polaridade garante que a imagem de a’ sempre coincidirá com A, assim temos uma
polaridade A → a → A. Neste caso dizemos que a é o polar do ponto A enquanto A é
o pólo da reta a.
A polaridade preserva e também dualiza a relação de incidência, se o polar de
A passa pelo ponto B, então o polar de B passa pelo ponto A. Além disso, se um
ponto C está sobre seu polar c, diremos que C é um ponto auto conjugado e a reta c
é uma reta auto conjugada.
6.6 CÔNICAS
6.6.1 Definição de Von Staudt
Segundo a definição de Von Staudt, uma seção cônica é o lugar geométrico
formado pelos pontos ou pelas retas auto conjugadas de uma polaridade.
Diremos que as retas auto conjugadas, por interceptarem a cônica em um
único ponto são retas tangentes à cônica, também temos as retas secantes que são
aquelas que interceptam a cônica em dois pontos e as não secantes que não
interceptam a cônica em nenhum ponto. Um ponto E incidente a duas retas
tangentes a e b é um ponto exterior a cônica e já um ponto I que é centro de um
feixe formado apenas por retas secantes é dito ponto interior (Figura 29).
Assim podemos perceber que o polar de ponto exterior será uma reta secante
e o pólo de uma reta não secante será um ponto interior.
Figura 29: Ponto interior e exterior Fonte: A autora
i
B
A
a
b
i
e I E

42
6.6.2 Definição de Steiner
Segundo Steiner, cônica é um lugar geométrico dos pontos comuns a retas
correspondentes de dois feixes projetivos, mas não perspectivos. Observe a figura
30, os pontos P, Q, R, S, T e U pertencem a cônica.
Figura 30: Definição de cônica segundo Steiner Fonte: A autora
1
2
3
4
5 6
0
7 6 5
4 3
2 1
7
P
Q R
S
T
U

43
7 GEOMETRIA FRACTAL
O criador da Geometria Fractal foi Benoit Mandelbrot que nasceu em Varsóvia
no ano de 1936. Este tinha uma aptidão geométrica aguçada e não viu com bons
olhos o predomínio da abstração imposta por Bourbaki no seu movimento que
buscava a reconstrução da matemática francesa. Com isso, Mandelbrot deixou a
França e foi para os Estados Unidos no ano de 1948 e passou a trabalhar no Centro
de Pesquisas Thomas Watson, onde desenvolveu projetos de pesquisa com
problemas de economia e questões de ruídos nas linhas telefônicas utilizadas em
redes entre os computadores.
7.1 DEFINIÇÃO
A definição de fractal ainda é um problema na matemática, pois várias
tentativas foram feitas, mas todas deixavam alguma lacuna. Mas isto não significa
uma falha que impossibilite o seu uso e estudo. Citarei uma das suas definições,
segundo J. Feder (apud BARBOSA, 2005, p. 18) diz que: “Um fractal é uma forma
cujas partes se assemelham ao seu todo sob alguns aspectos”.
Através desta definição poderemos abordar três características fundamentais
para designar um fractal, que são: a auto similaridade, iteração e a dimensão.
7.1.1 Auto similaridade
A auto similaridade é quando uma porção de uma figura pode ser vista como
uma réplica da figura toda, numa escala menor, ou seja, na figura fractal cada
ampliação sempre se parece com a figura toda. Um exemplo de auto similaridade é
o triângulo de Sierpinski (Figura 31). Observe que o triângulo central de cada
triângulo é retirado, mesmo assim a última figura não perde a similaridade com as
construções anteriores. Cada um dos triângulos que compõem a figura são cópias
exatas da figura maior. Essa invariância que independe da escala de ampliação é
chamada de auto similaridade.

44
Figura 31: Triângulo de Sierpinski Fonte: NUNES, Raquel Sofia. Geometria Fractal e Aplicações. 2006, 78f. Dissertação (Mestrado em
ensino da Matemática). Faculdade de Ciências da Universidade de Porto, 2006. Disponível em <http://www.fc.up.pt/pessoas/jfalves/Teses/Raquel.pdf> Acesso em 03 de setembro de 2011.
A auto similaridade pode ser classificada em exata e estatística. A exata são
cópias idênticas da figura original, apenas varia a sua amplitude, já na estatística os
padrões não se repetem com tanta exatidão. Um exemplo de auto similaridade
estatística são as formas naturais encontradas na natureza (Figura 32).
7.1.2 Iteração
É através desta propriedade que se representa a complexidade de um fractal,
sendo que este consiste em repetir um determinado princípio um número infinito de
vezes. As iterações dentro desta geometria classificam-se em algébrica e
geométrica.
A iteração algébrica se dá como uma equação algébrica. Dado um valor inicial
xn, encontra-se um xn+1, e a partir do xn+1 encontra-se o xn+2 e assim sucessivamente
(Figura 32). Já a iteração geométrica é uma regra que pode ser aplicada a uma
figura ou em partes de uma figura. Geralmente essa regra causa uma certa
fragmentação na figura, pois esta regra é aplicada infinitas vezes. Um exemplo de
iteração geométrica é o floco de neve de Koch (Figura 33).

45
Figura 32: Exemplo de iteração algébrica Figura 33: Construção do Floco de neve de Koch Fonte: CARVALHO, Hamilton Cunha. Geometria Fractal: Perspectivas e possibilidades no ensino de
Matemática. 2005, 108f. Dissertação (Mestrado em Educação em Ciências e Matemática). Universidade Federal do Pará, Belém, 2005. Disponível em <http://www.ufpa.br/ppgecm/media/dissertacao_hamilton_cunha_de_carvalho.pdf> Acesso em 03 de setembro de 2011.
7.1.3 Dimensão
Sabemos que um ponto não tem dimensão, uma linha tem dimensão um, uma
superfície tem duas dimensões e um sólido três dimensões. Os factais possuem
dimensão topológica que relaciona a dimensão com o espaço que ocupa, portanto
admite dimensão fracionária. Para determinar esta dimensão Mandelbrot usou a
definição de Hausdorff que trata da situação da seguinte maneira:
Divide-se uma linha em n partes iguais onde n = n1, assim, é sabido que o
tamanho dos fragmentos de reta são 1/n. Ao se dividir os lados de um quadrado em
n partes iguais, dividimos o quadrado em n2 partes iguais. Analogamente, ao se
dividir as arestas de um cubo em n partes iguais, dividimos o cubo em n3 partes
iguais. Generalizando, se tivermos um hipercubo de d dimensões, este poderá ser
dividido em nd partes iguais ao se dividir a aresta em n partes iguais. Assim, fica
claro percebermos que na geometria convencional a dimensão é igual ao valor do
expoente de n. Assim temos, N=(L/n)-d onde o segmento L pode ser afirmado
comprimento da linha, e n é definido como o número das partes em que a linha pode
ser dividida numa iteração p da construção do fractal. N será o comprimento do

46
segmento na iteração p, onde p é um número natural e d é a dimensão do fractal.
Aplicando o logaritmo a ambos os lados da fórmula temos: d = 𝑙𝑜𝑔 𝐿 𝑛
𝑙𝑜𝑔 𝑁 .
7.2 OS PRINCIPAIS FRACTAIS
7.2.1 Conjunto de Cantor
Cantor se destacou por apresentar inúmeras ideias inovadoras no conceito de
infinito. Propôs daí uma nova construção que chamou de Conjunto de Cantor, que
também é conhecida como Poeira de Cantor.
Definição: Segundo Barbosa (2005, p.26): “É o conjunto de pontos (números) que
permanecem após as infinitas fases”.
A ideia da construção deste conjunto é a de que se considerando um
segmento de reta, divide-se este segmento em três partes iguais, na qual se elimina
a parte do meio, as porções restantes são dividas novamente eliminando-se a parte
do meio e assim sucessivamente infinitas vezes (Figura 34).
Figura 34: Conjunto de Cantor Fonte: CARVALHO, Hamilton Cunha. Geometria Fractal: Perspectivas e possibilidades no ensino de
Matemática. 2005, 108f. Dissertação (Mestrado em Educação em Ciências e Matemática). Universidade Federal do Pará, Belém, 2005. Disponível em <http://www.ufpa.br/ppgecm/media/dissertacao_hamilton_cunha_de_carvalho.pdf> Acesso em 03 de setembro de 2011.
A representação numérica desse conjunto se dá ao considerar o primeiro
segmento como sendo um intervalo fechado [0, 1]. Então na próxima porção
teríamos os intervalos [0, 1/3] e [2/3, 1], na próxima [0, 1/9], [2/9, 3/9], [6/9, 7/9] e
[8/9, 9/9] que é igual a [0, 1/9], [2/9, 1/3], [2/3, 7/9] e [8/9, 1], na porção seguinte
teríamos [0, 1/27], [2/27, 1/9], [2/9, 7/27], [8/27, 1/3], [2/3, 19/27], [20/27, 7/9], [8/9,

47
25/27] e [26/27, 1] e assim por diante. O conjunto de Cantor é, portanto, um conjunto
não enumerável e também possui uma outra propriedade curiosa que é a de ser
infinitamente poroso.
7.2.2 Curva de Peano
A curva de Peano foi desenvolvida pelo matemático italiano Giusepe Peano,
no ano de 1890, quando ele tratava de um aprofundamento das noções de
continuidade e dimensão, publicou a sua famosa curva, que também ficou conhecida
como Monstro de Peano, que tinha como proposta cobrir totalmente uma superfície
plana quadrangular. A Curva de Peano recebeu vários comentários, como o do
russo Vilenkin (apud BARBOSA, 2005, p. 33): “Ele faz aparentar que tudo estaria em
ruína, que todo conceito matemático tenha perdido seu significado” ou então do
francês Dieudonée (apud BARBOSA, 2005, p. 33): “Alguns objetos matemáticos
como a Curva de Peano são totalmente não intuitivas [...], extravagantes”.
A construção dessa curva se inicia com um segmento de reta, que após é
substituído por uma nova curva de nove segmentos, e posteriormente se substitui
cada segmento anterior pela curva de nove segmentos e assim por diante (Figura
35).
Figura 35:Construção da Curva de Peano Fonte: A autora
No passo 1 podemos perceber que existem dois quadrados e no passo 2, 32
quadrados, se continuarmos a iteração substituindo cada segmento do passo 2 pela
curva de nove segmentos teremos o passo 3, com 338 quadrados. O comprimento
dessa curva é calculado da seguinte maneira: no passo 0 temos o próprio segmento,
no passo 1 o comprimento será dado pela soma das medidas dos nove segmentos,
Passo 1 Passo 0
Passo 3 Passo 2

48
isto é, 9×1/3 = 3, no passo 2 cada um dos nove segmentos se transforma em mais
nove, assim temos 81×1/9 = 32, no passo 3, teremos 81×9 = 729 segmentos de
1/27, então o comprimento será de 729×1/27 = 27 = 33, e assim por diante.
O comprimento da Curva de Peano é dado por potências de 3, onde os
expoentes são iguais a ordem de iteração. Assim aumentando a ordem da iteração o
comprimento da curva aumenta indefinidamente, o qual tende para o infinito.
7.2.3 Curva de Hilbert
Em 1891 David Hilbert publicou sua curva de cobertura da superfície de um
quadrado. Para a construção desta curva, inicialmente considera-se um quadrado, e
este divide-se em quatro quadrados, assim dá-se inicio à curva com três segmentos
consecutivos sendo que seus extremos estão nos pontos centrais. É feita a
substituição de cada quadrado por outros novos quatro quadrados da mesma
maneira que é feita na curva inicial, sendo conectada cada curva parcial com um
segmento da mesma ordem anterior, e assim por diante (Figura 36).
Figura 36: Construção da Curva de Hilbert Fonte: BARBOSA, Ruy Madsen. Descobrindo a Geometria Fractal: para a sala de aula. 3 ed. Belo
Horizonte: Autêntica editora, 2005.
7.2.4 Curva de Koch
Helge Von Koch foi um matemático polonês que por volta de 1906 introduziu
uma curva, que atualmente leva seu nome. Esta curva não possui reta tangente e
pode ser modificada com outras construções análogas. A construção inicia-se com
um segmento de reta, este segmento será divido em três segmentos iguais,
substitui-se por quatro congruentes, tendo como intermediário um triângulo
equilátero sem a sua base (Figura 37).

49
Figura 37: Construção da curva de Koch Fonte: CARVALHO, Hamilton Cunha. Geometria Fractal: Perspectivas e possibilidades no ensino de
Matemática. 2005, 108f. Dissertação (Mestrado em Educação em Ciências e Matemática). Universidade Federal do Pará, Belém, 2005. Disponível em <http://www.ufpa.br/ppgecm/media/dissertacao_hamilton_cunha_de_carvalho.pdf> Acesso em 03 de setembro de 2011.
Foi esta curva que deu origem ao fractal conhecido como Floco de Neve ou
Ilha de Koch, já citado e representado na Figura 32.
7.2.5 Tapete de Sierpinski
Criado pelo matemático Waclaw Sierpinski, aplica-se a mesma técnica do
triângulo de Sierpinski, ou seja, com um triângulo equilátero inicial marca-se os
segmentos dos pontos médios formando quatro triângulos eqüiláteros. Desses
elimina-se o triângulo central, e assim sucessivamente. Isto pode ser observado na
figura 31 citada anteriormente.
No caso do Tapete de Sierpinski, parte-se de um quadrado que é dividido em
outros nove quadrados congruentes, no qual será sempre eliminado o quadrado
central, esse procedimento é aplicado aos oito quadrados restantes e assim
sucessivamente (Figura 38).

50
Figura 38: Construção do Tapete de Sierpinski Fonte: BARBOSA, Ruy Madsen. Descobrindo a Geometria Fractal: para a sala de aula. 3 ed. Belo Horizonte: Autêntica, 2005.

51
8 CONCEITOS QUE DIFEREM A GEOMETRIA EUCLIDIANA DAS NÃO EUCLIDIANAS
O surgimento das Geometrias Não Euclidianas foram uma consequência da
Geometria Euclidiana. Uma não desvalida a outra, apenas temos a mudança de
alguns conceitos.
Aqui faremos uma comparação entre os principais conceitos e propriedades
que caracterizam a Geometria Euclidiana e as Geometrias não Euclidianas, vistas
nos capítulos anteriores. Com isso podemos perceber em que propriedades as
Geometrias Não Euclidianas diferem da Geometria Euclidiana.
Conceito ou
propriedade
Geometria
Euclidiana
Geometria
Hiperbólica
Geometria
Elíptica
Espaço Plano Hiperbólico
(pseudo esfera) Esférico
Retas
Determinada por
dois pontos e é
infinita
Determinada
por dois pontos
e é infinita
Determinada por
dois pontos e é
limitada
Retas paralelas que
passam por um ponto
dado fora da reta
Apenas uma Mais de uma Não existem
Ângulos internos de
um triângulo Somam 180°
Somam menos
que 180°
Somam mais
que 180°
Ângulos internos de
um quadrilátero Somam 360°
Somam menos
que 360°
Somam mais
que 360°
Quadro 1: Comparação entre a Geometria Euclidiana, Geometria Hiperbólica e Geometria Elíptica Fonte: A autora (2011)

52
Conceito ou propriedade Geometria Euclidiana Geometria Projetiva
Espaço Plano Espaço projetivo
Retas paralelas que
passam por um ponto
dado fora da reta
Apenas uma Nenhuma (não existem
retas paralelas)
Quadro 2: Comparação entre a Geometria Euclidiana e a Geometria Projetiva Fonte: A autora (2011)
Conceito ou propriedade Geometria Euclidiana Geometria Fractal
Dimensão Zero, um, dois e três Admite dimensão
fracionária
Quadro 3: Comparação entre a Geometria Euclidiana e a Geometria Fractal Fonte: A autora (2011)
Como podemos observar, as Geometrias Hiperbólica, Elíptica e Projetiva tem
como principais características o espaço em que são trabalhados, o espaço
hiperbólico, esférico e projetivo, respectivamente. Isso ocasiona mudanças nos
conceitos de retas paralelas e no caso das Geometrias Hiperbólica e Elíptica
mudanças nos conceitos de ângulos internos dos triângulos e quadriláteros. Já a
Geometria Fractal tem como principal característica a sua dimensão, que ao
contrário da Geometria Euclidiana, admite dimensão fracionária.

53
9 CONSIDERAÇÕES FINAIS
Podemos perceber que as Geometrias não Euclidianas não surgiram de
formas isoladas, mas sim como uma consequência da tentativa de demonstrar o 5°
postulado de Euclides. Assim, as primeiras Geometrias Não Euclidianas que
surgiram foram as Geometrias Hiperbólica e Elíptica que substituíam o 5° postulado
e mantinham válidos todos os outros postulados da Geometria Euclidiana. Mais
tarde surgiram outras Geometrias Não Euclidianas, a Geometria Projetiva e Fractal,
sendo que, a geometria Projetiva é dita uma Geometria Não Euclidiana por ser
trabalhada num espaço diferenciado, que seria o espaço projetivo e a Geometria
Fractal por admitir dimensão fracionária.
Os matemáticos Gauss, Lobachevsky e Bolyai contribuíram para a mudança
de paradigmas na Geometria, onde o espaço Euclidiano plano deixou de ser único
possível na representação do mundo. A criação das Geometrias Não Euclidianas
romperam uma crença tradicional, carregada por séculos como única e
incontestável. Foi um golpe duro para aqueles que tinham um pensamento secular
aceitar este ponto de vista. Nas palavras de Georg Cantor (apud EVES, 2004, p.
545):” A essência da matemática está em sua liberdade”.
Este trabalho de pesquisa bibliográfica contribuiu muito para minha formação,
pois, através dele adquiri novos conhecimentos, que com certeza serão úteis e
necessários para a minha futura vida profissional.

54
REFERÊNCIAS
ASSIS, Thiago Albuquerque. Geometria Fractal: Propriedades e características de fractais ideais. Disponível em <http://www.scielo.br/pdf/rbef/v30n2/a05v30n2.pdf> Acesso em 03 de setembro de 2011.
AUNFFINGER, Antônio Carlos; VALENTIM, Fábio Júlio. Introdução à Geometria Projetiva. 2003, 62f. Monografia (Graduação em Matemática). Universidade Federal do Espírito Santo, Vitória, 2003. Disponível em <http://www.ime.unicamp.br/~jardim/ ma620/geoproj.pdf> Acesso em 22 de agosto de 2011.
BARBOSA, Ruy Madsen. Descobrindo a Geometria Fractal: para a sala de aula. 3 ed. Belo Horizonte: Autêntica, 2005.
BOYER, Carl B. História da Matemática. Tradução de Elza E. Gomide. 2 ed. São Paulo: ABDR, 1996.
BRAZ, Fernanda Martins. História da Geometria Hiperbólica. 2009, 34f. Monografia (Especialização em Matemática). Universidade Estadual de Minas Gerais, Belo Horizonte, 2009. Disponível em < http://www.mat.ufmg.br/~espec/ monografiasPdf/Monografia_FernandaMartins.pdf> Acesso em 28 de maio de 2011.
CARVALHO, Hamilton Cunha. Geometria Fractal: Perspectivas e possibilidades no ensino de Matemática. 2005, 108f. Dissertação (Mestrado em Educação em Ciências e Matemática). Universidade Federal do Pará, Belém, 2005. Disponível em <http://www.ufpa.br/ppgecm/media/dissertacao_hamilton_cunha_de_carvalho.pdf> Acesso em 03 de setembro de 2011.
COUTINHO, Lázaro. Convite às Geometrias Não Euclidianas. 2 ed. Rio de Janeiro: Interciência, 2001.
CRUZ, Donizete Gonçalves. Algumas diferenças entre a Geometria Euclidiana e as Geometrias Não Euclidianas – Hiperbólica e Elíptica a serem abordados no ensino médio. Disponível em< http://www.diaadiaeducacao.pr.gov.br/portals/pde/ arquivos/1734-8.pdf> Acesso em 04 de junho de 2011. DELAI, sidinei; FRANCO, Valdeni Soliani. Geometrias Não Euclidianas. Disponível em <http://www.diaadiaeducacao.pr.gov.br/portals/pde/arquivos/236-2.pdf> Acesso em 25 de maio de 2011.

55
DEVITO, André; FREITAS, Araone Koaerece; PEREIRA, Kênia Cristina. Geometrias Não Euclidianas. Disponível em<http://www.sies2012.com.br/cursos /filosofia/LIVROS/Geometria%20n%C3%A3o%20euclidiana.pdf> Acesso em 28 de maio de 20011.
EVES, Howard. Introdução à História da Matemática. Tradução de Higyno H. Domingues. Campinas, SP: Editora da Unicamp, 2004.
EVES, Howard. História da Geometria. Tradução de Higyno H. Domingues. São Paulo: Atual, 1992.
Geometria Projetiva. Disponível em <http://www.dca.fee.unicamp.br/courses/IA841/ 2s2006/notas/cap4.pdf> Acesso em 06 de agosto de 2011.
HEFEZ, Abramo. Uma Introdução à Historia da Geometria Projetiva. Disponível em <http://pt.scribd.com/doc/47075149/03-03-Uma-Introducao-a-Historia-da-Geometria-Projetiva-Abramo-Hefez> Acesso em 06 de agosto de 2011.
NUNES, Raquel Sofia. Geometria Fractal e Aplicações. 2006, 78f. Dissertação
(Mestrado em ensino da Matemática). Faculdade de Ciências da Universidade de
Porto, 2006. Disponível em <http://www.fc.up.pt/pessoas/jfalves/Teses/Raquel.pdf>
Acesso em 03 de setembro de 2011.
ROSA, Antônio Pereira. Geometrias Não Euclidianas. 2008, 242f. Dissertação (Mestrado em Matemática para o Ensino). Universidade de Lisboa, 2008. Disponível em<http://repositorio.ul.pt/bitstream/10451/1265/1/19096_ULFC091290_TM_Tese.pdf> Acesso em 25 de maio de 2011.
ZIEGLER, Janaina de Ramos. Geometria Euclidiana Plana e Geometria Hiperbólica: Comparação de Conceitos e Propriedades. 2008, 42f. Monografia ( Graduação em Licenciatura em Matemática). Centro Universitário Franciscano, Santa Maria, RS, 2008. Disponível em <http://www.unifra.br/cursos/matematica/ downloads/Janaina%20de%20Ramos%20Ziegler.pdf.pdf> Acesso em 04 de junho de 2011.

56