apostila rob tica10.09.2009
TRANSCRIPT
APOSTILA DE
ROBÓTICA
Professor Julio Rojas
A Mecatrônica no contexto da Automação
A mecatrônica é uma das áreas recentes da engenharia – foi criada ao longo da vida profissional de uma geração de engenheiros que ainda está ativa –, é interdisciplinar por natureza e adquiriu vida própria à medida que a automação industrial começou a ser difundida como uma solução para o aumento de produtividade. Integrando conhecimentos de diversas áreas tradicionais, como mecânica e eletricidade, e associando-se à computação, ela prima por ser rica em aspectos tecnológicos inovadores. A palavra “mecatrônica” surgiu originalmente no Japão e foi, aos poucos, encontrando seu espaço mundo afora, abrigando-se no programa curricular de muitas universidades. Ao engenheiro eletricista, especialmente ao eletrônico, com visão voltada para a placa de circuito impresso, que recebe sinais de sensores e comanda atuadores, associa-se o mecânico quando é necessário o conhecimento do movimento de corpos no espaço e da resistência estrutural do sistema, sua flexibilidade e as conseqüentes vibrações. A linguagem comum entre esses componentes é campo do engenheiro de computação e, finalmente, o resultado de toda essa soma é a vida moderna, em que todos esses novos dispositivos opto-eletro-mecânicos já estão incorporados ao dia-a-dia e não nos preocupamos se eles são produzidos com componentes oriundos dos mais diversos países e montados em uma indústria quase totalmente automatizada.
A mecatrônica pode, portanto, ser compreendida como uma filosofia relacionada à aplicação combinada de conhecimentos de áreas tradicionais, como a engenharia mecânica, a eletrônica, controle e a computação, de forma integrada e concorrente.
A economia mundial foi marcada no século XVIII pela invenção da máquina a vapor; no fim do século XX, os propulsores da nova revolução do desenvolvimento foram – e continuam a sê-lo – a tecnologia (representada pela informática e pelo aperfeiçoamento dos transportes e das comunicações) e a globalização (Rosário, 2005).
Provavelmente os dias atuais entrarão para a História como o período da “moderna Revolução Industrial”, numa analogia com o período inicial da industrialização, no século, XVIII, quando o homem passou a controlar os sistemas de potência. Na moderna Revolução Industrial, que veio após a Segunda Guerra Mundial, o homem conseguiu o controle sobre os sistemas de informação.
O termo mecatrônica foi utilizado pela primeira vez no Japão, no final da década de 70, como resultado da combinação bem-sucedida de mecânica, eletrônica e processamento digital em produtos de consumo. Essa integração de conceitos pode gerar uma gama muito ampla de aplicações, portanto o termo mecatrônica pode ser interpretado de diferentes formas dependendo da aplicação em questão.
Sistema biológico versus sistema mecatrônico
Do aspecto funcional, os sistemas de automação industrial podem ser divididos de acordo com os vários níveis de uma organização, os quais executam funções específicas no processo produtivo e, por conseguinte, estão associados a diferentes elementos. Os níveis também apresentam diferentes requisitos tecnológicos.
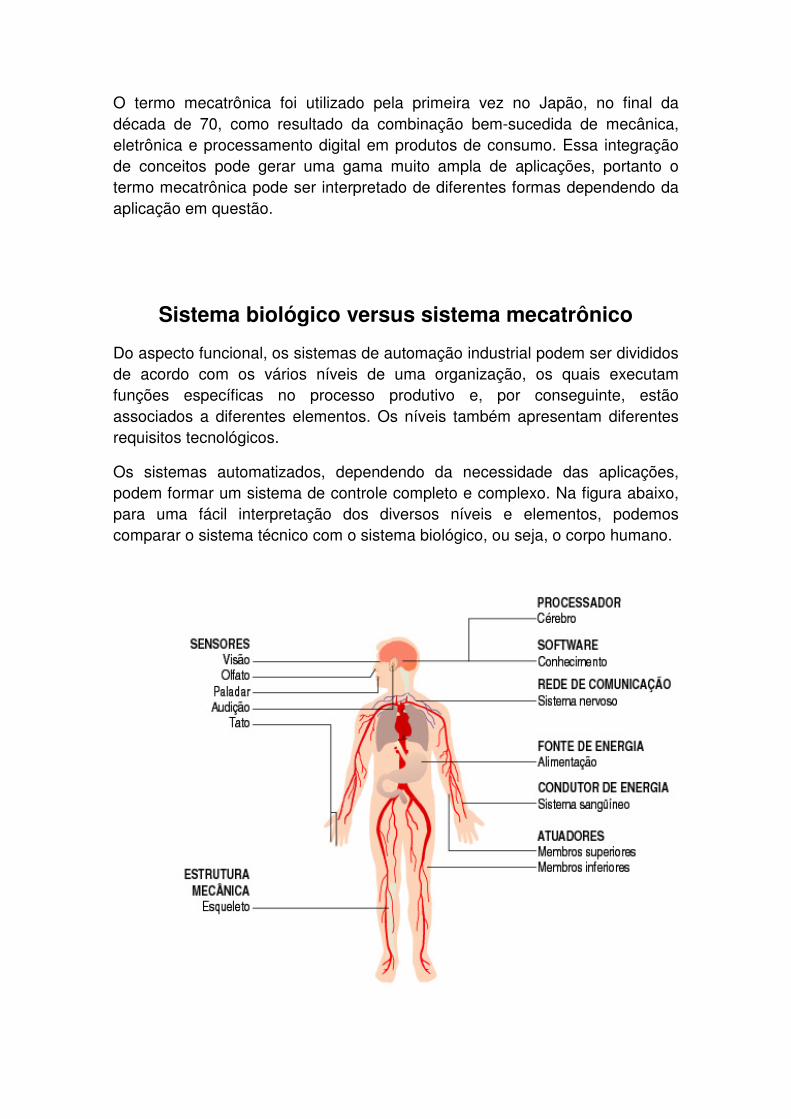
Os sistemas automatizados, dependendo da necessidade das aplicações, podem formar um sistema de controle completo e complexo. Na figura abaixo, para uma fácil interpretação dos diversos níveis e elementos, podemos comparar o sistema técnico com o sistema biológico, ou seja, o corpo humano.

A tabela seguinte sintetiza essa interpretação:
Temos então várias áreas de aplicação da mecatrônica:
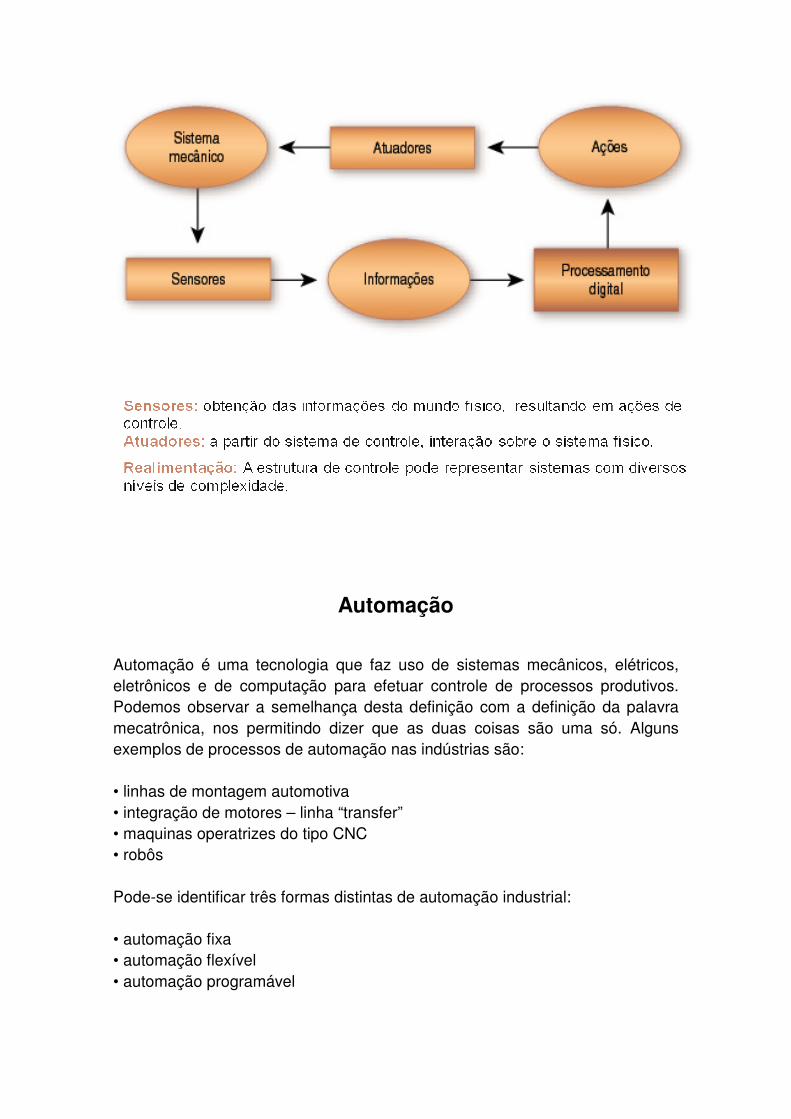
A figura a seguir representa de forma genérica um sistema mecatrônico. Os sensores permitem obter do mundo físico informações que são processadas digitalmente, resultando em ações de controle. O sistema de controle age sobre o sistema físico por meio de atuadores, o que acarreta o conceito de sistema realimentado (feedback). Essa estrutura pode representar sistemas com diversos níveis de complexidade.
Automação
Automação é uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação para efetuar controle de processos produtivos. Podemos observar a semelhança desta definição com a definição da palavra mecatrônica, nos permitindo dizer que as duas coisas são uma só. Alguns exemplos de processos de automação nas indústrias são: • linhas de montagem automotiva • integração de motores – linha “transfer” • maquinas operatrizes do tipo CNC • robôs Pode-se identificar três formas distintas de automação industrial: • automação fixa • automação flexível • automação programável
a) Automação fixa Na automação fixa as máquinas são específicas para o produto a ser produzido. Elas produzem grande quantidade um único produto, ou produtos com pequenas variações entre eles. O volume de produção é elevado, e o custo da máquina é elevado, pois é projetada para um produto especifico. Por outro lado, como o volume de produção é alto, o custo do produto em geral é baixo. Tais máquinas são encontradas em linhas transfer de motores, produção de lâmpadas, fabricação de papel e de garrafas. Neste tipo de automação, deve-se ter cuidado com o preço final do produto, pois, como o investimento de aquisição da máquina é alto, a amortização só acontece com vendas elevadas. Além disso, se o produto sair do mercado por obsolescência, perde-se o investimento. b) – Automação flexível Na automação flexível o volume de produção é médio e geralmente a máquina pode ser programada para produzir um outro produto, ainda que semelhante. Esta automação possui características da automação fixa e da programável. A máquina deve ser adaptável a um número grande de produtos similares, e, neste sentido, ela é mais flexível que a automação fixa. A automação flexível é empregada, por exemplo, numa linha de montagem automotiva. c) – Automação programável Na automação programável o volume de produção é baixo, mas a variedade de produtos diferentes é alta. Ela é adaptável por meio de programação. Os principais exemplos de automação programável são as máquinas CNC e os robôs industriais.
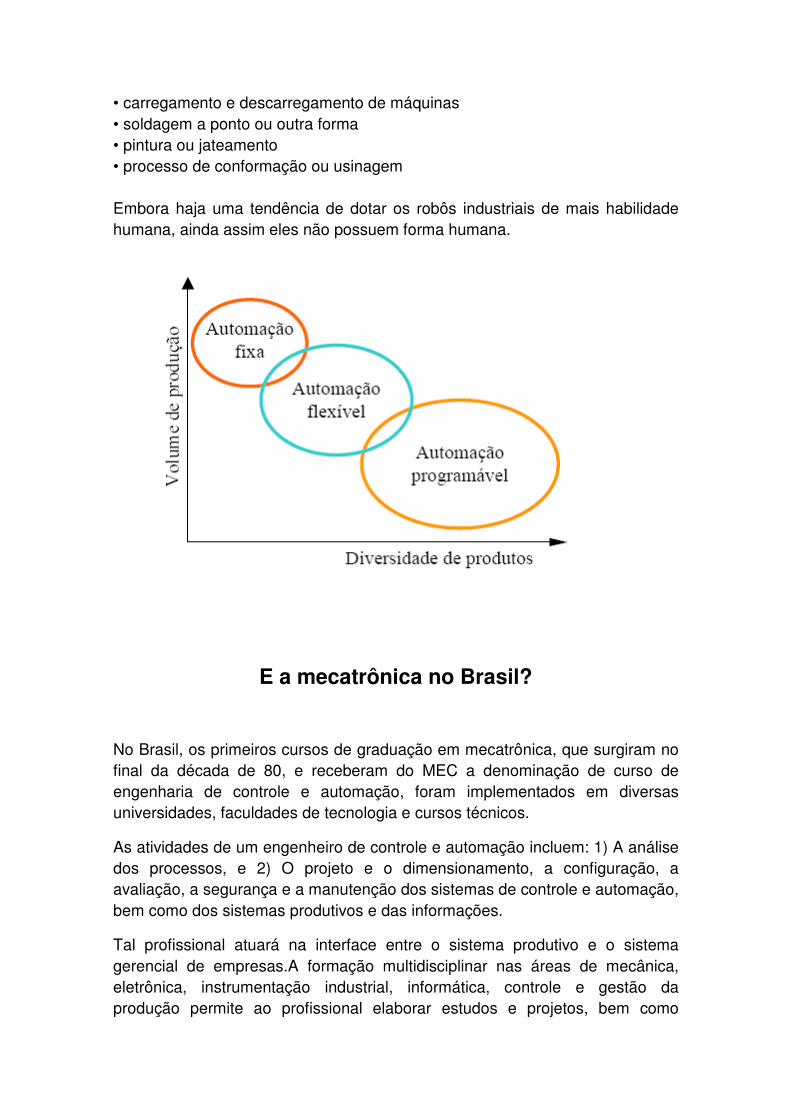
A Figura a seguir ilustra a relação entre o volume de produção e a diversidade de produtos para os processos de automação descritos. De todos os processos de automação, a robótica mais se aproxima da automação programável. Portanto, os volumes de produção de um robô industrial não são grandes, mas ele é extremamente adaptável a produtos diferentes.
Embora robôs industriais sejam produzidos em diversas configurações, algumas delas se assemelham, até certo ponto, a características humanas (antropomórficas), e, portanto, são propícias para substituir operações realizadas por humanos. Os robôs são totalmente programáveis, possuem braços moveis, e são empregados em várias atividades, entre as quais destacam-se:
• carregamento e descarregamento de máquinas • soldagem a ponto ou outra forma • pintura ou jateamento • processo de conformação ou usinagem Embora haja uma tendência de dotar os robôs industriais de mais habilidade humana, ainda assim eles não possuem forma humana.
E a mecatrônica no Brasil?
No Brasil, os primeiros cursos de graduação em mecatrônica, que surgiram no final da década de 80, e receberam do MEC a denominação de curso de engenharia de controle e automação, foram implementados em diversas universidades, faculdades de tecnologia e cursos técnicos.
As atividades de um engenheiro de controle e automação incluem: 1) A análise dos processos, e 2) O projeto e o dimensionamento, a configuração, a avaliação, a segurança e a manutenção dos sistemas de controle e automação, bem como dos sistemas produtivos e das informações.
Tal profissional atuará na interface entre o sistema produtivo e o sistema gerencial de empresas.A formação multidisciplinar nas áreas de mecânica, eletrônica, instrumentação industrial, informática, controle e gestão da produção permite ao profissional elaborar estudos e projetos, bem como
participar da direção e da fiscalização de atividades relacionadas com o controle de processos e a automação de sistemas industriais.
Como já foi dito, a característica predominante do engenheiro de controle e automação é sua formação generalista, o que requer um esforço notável tanto do corpo docente quanto do discente, mas que acabará em suprir uma lacuna que de fato existe no mercado, possibilitando uma realização profissional bastante interessante.
Pequeno Histórico da Robótica
Uma das maiores fantasias do home é a construção de uma máquina com inteligência artificial, capaz de agir e pensar como ele. No entanto, esse desejo esconde a vontade que há em seu subconsciente de possuir um “escravo metálico” que satisfaça todas as suas vontades. E esse sonho humano está perto de se tornar realidade com o espantoso avanço da tecnologia.
A palavra “robô” origina-se da palavra tcheca robotnik, que significa “servo”. O termo foi utilizado inicialmente por Karel Capek em 1923, época em que a idéia de um “homem mecânico” parecia pertencer a alguma obra de ficção. Não é só do homem moderno o desejo de construir robôs: alguns fatos históricos nos mostram que a idéia não é nova (por exemplo, são muitas as referências sobre a construção do homem mecânico por relojoeiros, que os exibiam em feiras).
Também há relatos acerca de algumas animações mecânicas realizadas por Leonardo da Vinci, tais como um leão animado, e seus esforços para fazer máquinas que reproduzissem o vôo das aves. Porém, esses dispositivos eram muito limitados, pois não podiam realizar mais do que uma tarefa, ou um conjunto reduzido delas.
A idéia de construir um robô começou a tomar força no início do século XX com a necessidade de aumentar a produtividade industrial e melhorar a qualidade dos produtos. Nessa época o robô industrial encontrou suas primeiras aplicações, e George Devol pode ser considerado o pai da robótica.
Devido aos inúmeros recursos que os sistemas de microcomputadores nos oferecem, a robótica atravessa uma época de contínuo crescimento, que permitirá, em curto espaço de tempo, o desenvolvimento de robôs inteligentes. Assim, a ficção do homem antigo se tornará a realidade do homem atual.
Robôs
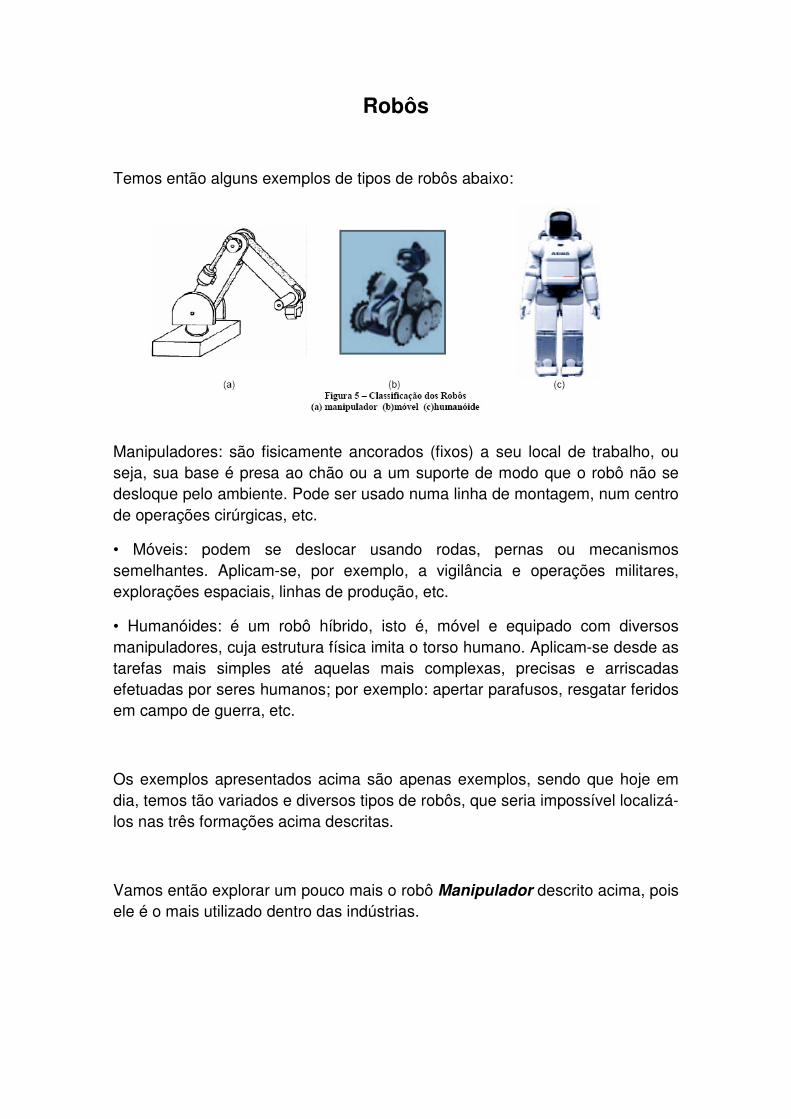
Temos então alguns exemplos de tipos de robôs abaixo:
Manipuladores: são fisicamente ancorados (fixos) a seu local de trabalho, ou seja, sua base é presa ao chão ou a um suporte de modo que o robô não se desloque pelo ambiente. Pode ser usado numa linha de montagem, num centro de operações cirúrgicas, etc.
• Móveis: podem se deslocar usando rodas, pernas ou mecanismos semelhantes. Aplicam-se, por exemplo, a vigilância e operações militares, explorações espaciais, linhas de produção, etc.
• Humanóides: é um robô híbrido, isto é, móvel e equipado com diversos manipuladores, cuja estrutura física imita o torso humano. Aplicam-se desde as tarefas mais simples até aquelas mais complexas, precisas e arriscadas efetuadas por seres humanos; por exemplo: apertar parafusos, resgatar feridos em campo de guerra, etc.
Os exemplos apresentados acima são apenas exemplos, sendo que hoje em dia, temos tão variados e diversos tipos de robôs, que seria impossível localizá-los nas três formações acima descritas.
Vamos então explorar um pouco mais o robô Manipulador descrito acima, pois ele é o mais utilizado dentro das indústrias.
Robótica Industrial
Braço Mecânico
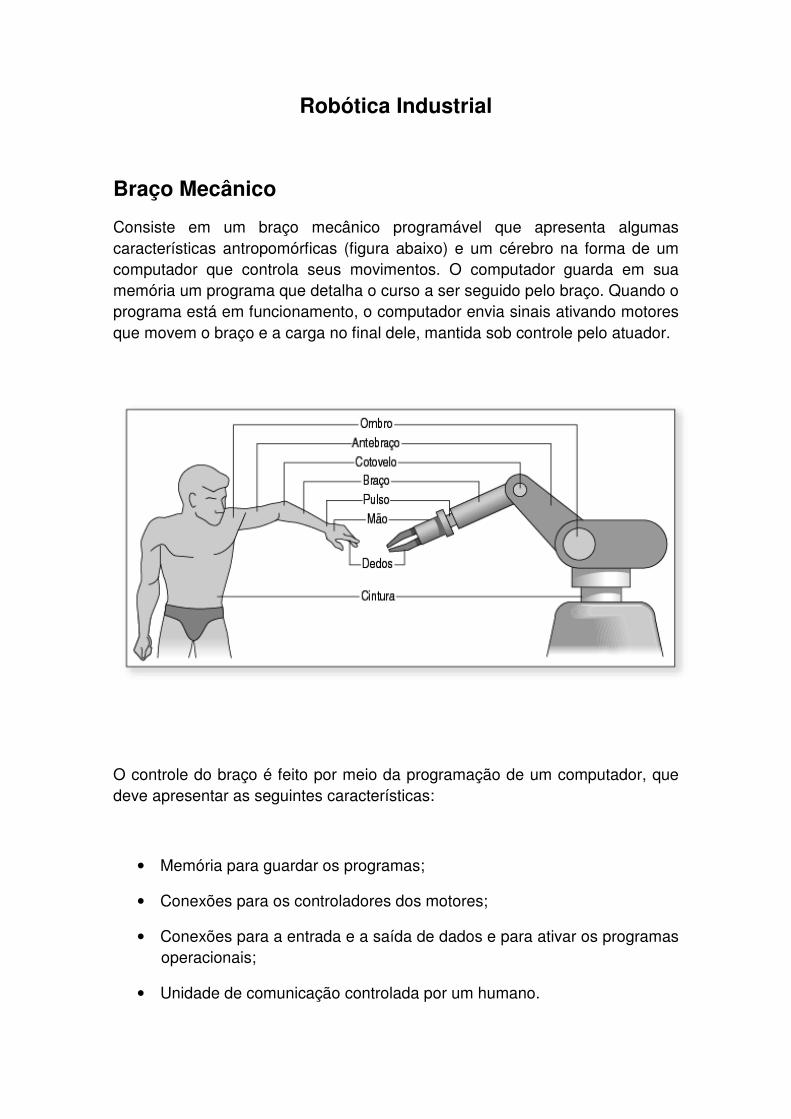
Consiste em um braço mecânico programável que apresenta algumas características antropomórficas (figura abaixo) e um cérebro na forma de um computador que controla seus movimentos. O computador guarda em sua memória um programa que detalha o curso a ser seguido pelo braço. Quando o programa está em funcionamento, o computador envia sinais ativando motores que movem o braço e a carga no final dele, mantida sob controle pelo atuador.
O controle do braço é feito por meio da programação de um computador, que deve apresentar as seguintes características:
• Memória para guardar os programas;
• Conexões para os controladores dos motores;
• Conexões para a entrada e a saída de dados e para ativar os programas operacionais;
• Unidade de comunicação controlada por um humano.
Vantagens e Desvantagens da Robótica Industrial
A automação possibilita grandes incrementos na produtividade do trabalho e conseqüentemente, o atendimento das necessidades básicas da população.
Os equipamentos automatizados aumentam a produção e possibilitam melhora na qualidade do produto. A automação possibilita o trabalho ininterrupto, o que aumenta a rentabilidade dos investimentos. Dentro desse contexto, podemos dizer que a microeletrônica proporciona flexibilidade ao processo de fabricação, pois permite que a produção siga as tendências de mercado, fazendo com que se evitem estoques de produtos invendáveis.
Principais vantagens
• Aumento da produtividade.
• Melhoria e consistência na qualidade final de um produto.
• Minimização das operações.
• Menor demanda de contratação de mão-de-obra especializada.
• Facilidade na programação e no uso de robôs.
• Operação em ambientes difíceis e perigosos ou em tarefas desagradáveis e repetitivas.
• Capacidade de trabalho por longos períodos.
Principais desvantagens
O preço de um robô é determinado por suas dimensões, grau de sofisticação e complexidade, exatidão e confiabilidade.
Na especificação de sistemas automatizados em que se utilizam dispositivos robóticos, devem-se considerar:
– número de funcionários substituídos pelo robô;
– número de turnos realizados por dia;
– a produtividade comparada a seu custo;
– custo de projeto e manutenção;
– custo de equipamentos periféricos.
Principais aplicações dos robôs industriais
Fundamentalmente os robôs industriais apresentam dois grupos de aplicações:
– manipulação de materiais diversos;
– fabricação.
Em ambos os casos, eles modificam o ambiente:
– ou mudando as peças de lugar;
– ou criando um ambiente novo mediante a fabricação.
Embora não se inclua a montagem de conjuntos mecânicos em tais grupos de aplicação, ela constitui o topo do desenvolvimento tecnológico na indústria.
Juntas Robóticas
As juntas, também denominadas eixos, são o que permite a um robô se mover para várias posições e, assim, executar várias tarefas. O movimento da junta de um robô pode ser linear ou rotacional. O número de juntas determina os graus de liberdade do robô.
A maior parte dos robôs possui de três a seis eixos, os quais podem ser divididos em duas classes: eixo do corpo e eixo da extremidade do robô. Os eixos da base do corpo, que permitem movimentar a ferramenta terminal para determinada posição no espaço, são denominados cintura, ombro e cotovelo.
Os braços robóticos podem ser constituídos por juntas:
• Deslizantes: permitem o movimento linear entre dois vínculos.
• Rotativas: sua conexão possibilita movimentos de rotação entre dois vínculos unidos por uma dobradiça comum.
• Bola-e-encaixe: conexão que se comporta como uma combinação de três juntas de rotação, permitindo movimentos de rotação em torno dos três eixos.
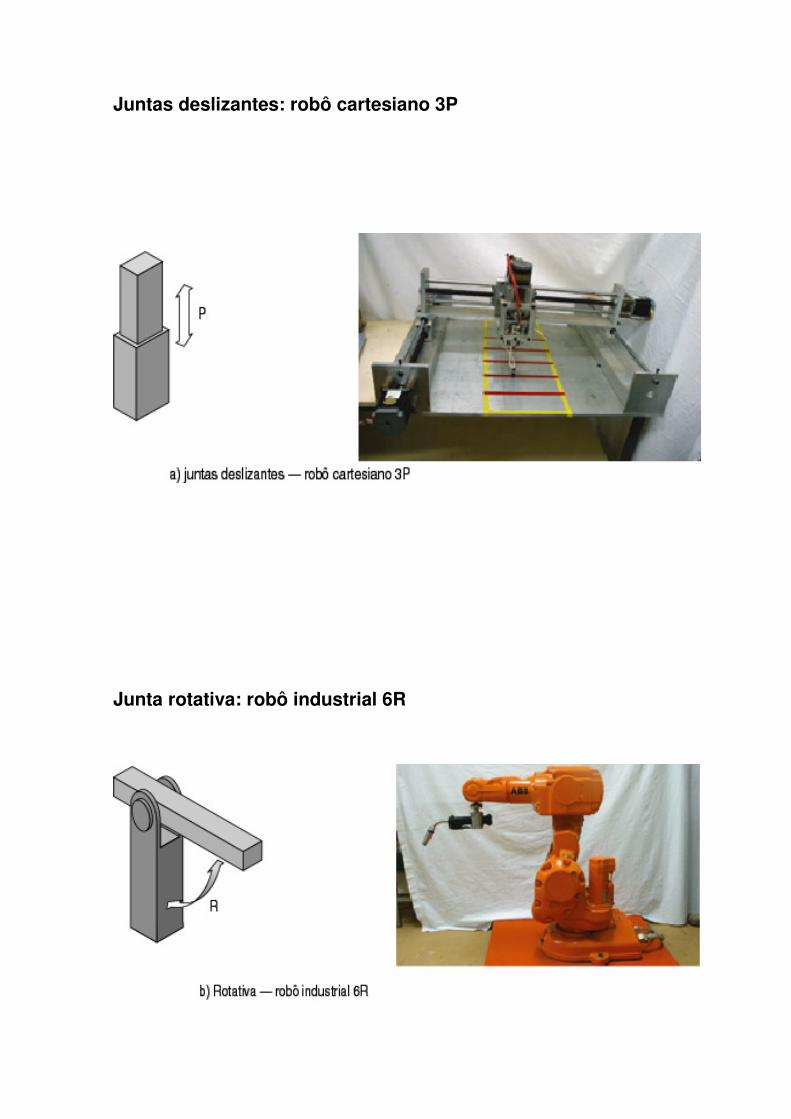
Juntas deslizantes: robô cartesiano 3P
Junta rotativa: robô industrial 6R
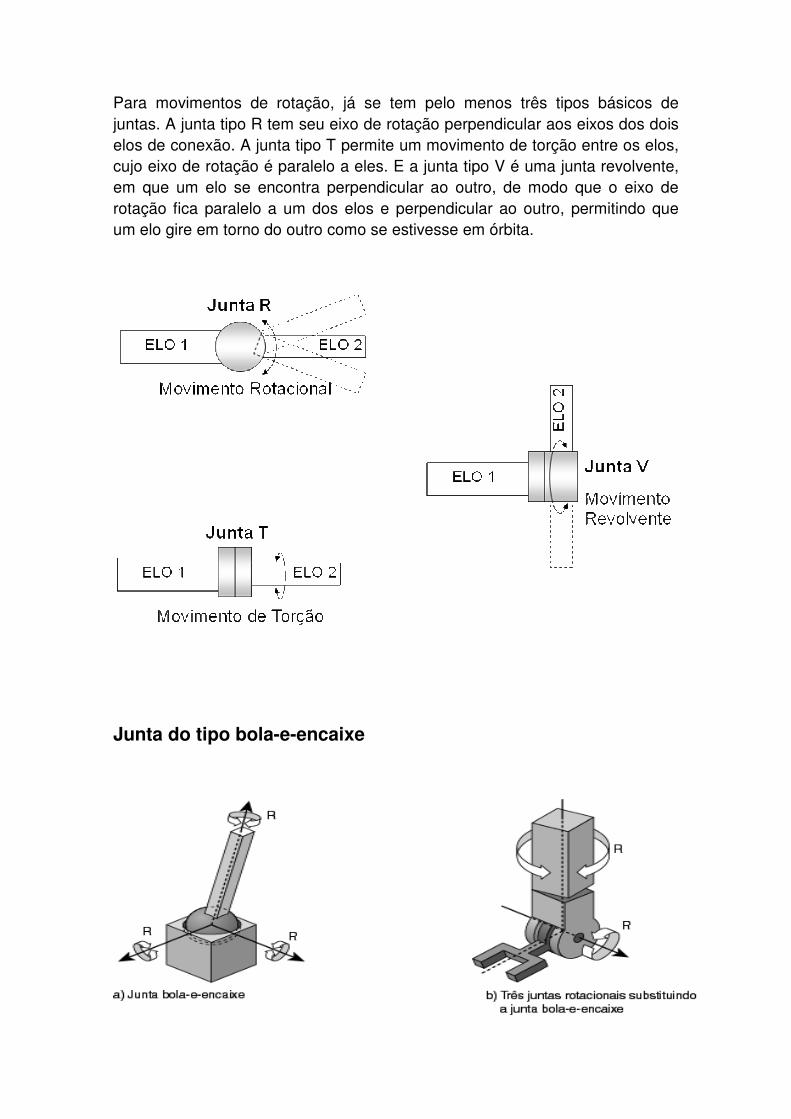
Para movimentos de rotação, já se tem pelo menos três tipos básicos de juntas. A junta tipo R tem seu eixo de rotação perpendicular aos eixos dos dois elos de conexão. A junta tipo T permite um movimento de torção entre os elos, cujo eixo de rotação é paralelo a eles. E a junta tipo V é uma junta revolvente, em que um elo se encontra perpendicular ao outro, de modo que o eixo de rotação fica paralelo a um dos elos e perpendicular ao outro, permitindo que um elo gire em torno do outro como se estivesse em órbita.
Junta do tipo bola-e-encaixe
Graus de Liberdade
O número de articulações em um braço robótico está geralmente associado ao número de graus de liberdade. Quando o movimento relativo ocorre em um único eixo, a articulação tem um grau de liberdade. Quando o movimento se dá em mais de um eixo, a articulação apresenta dois graus de liberdade. A maioria dos robôs industriais tem entre quatro e seis graus de liberdade. A título comparativo, um ser humano tem sete graus de liberdade do ombro até o pulso.
Classificação dos robôs industriais
Os robôs industriais podem ser classificados de acordo com:
– o número de juntas;
– o tipo de controle;
– o tipo de acionamento;
– a geometria.
As cinco classes ou geometrias principais de um robô (também chamadas de sistemas geométricos coordenados) são:
– cartesiana;
– cilíndrica;
– esférica (ou polar);
– de revolução (ou articulada);
– Scara (Selective Compliant Articulated Robot for Assembly).
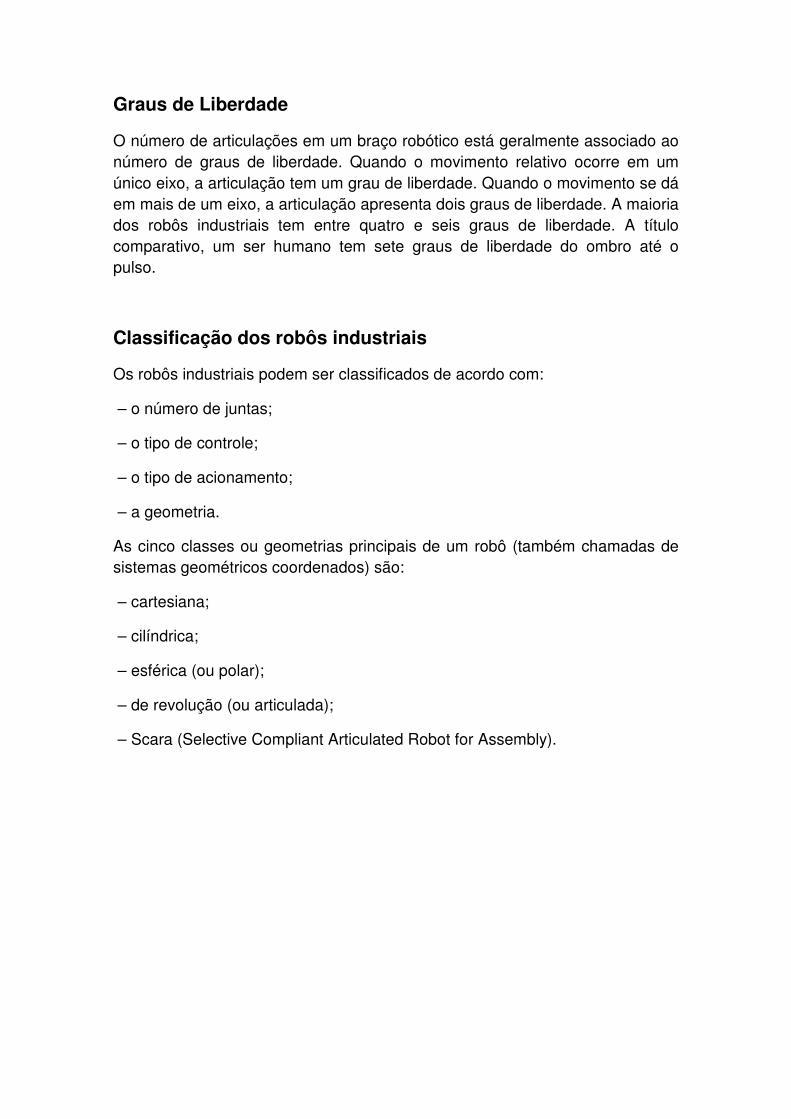
Eixos de um robô cartesiano (prismático-prismático-prismático,PPP)
Eixos de um robô de coordenadas cilíndricas (RPP)
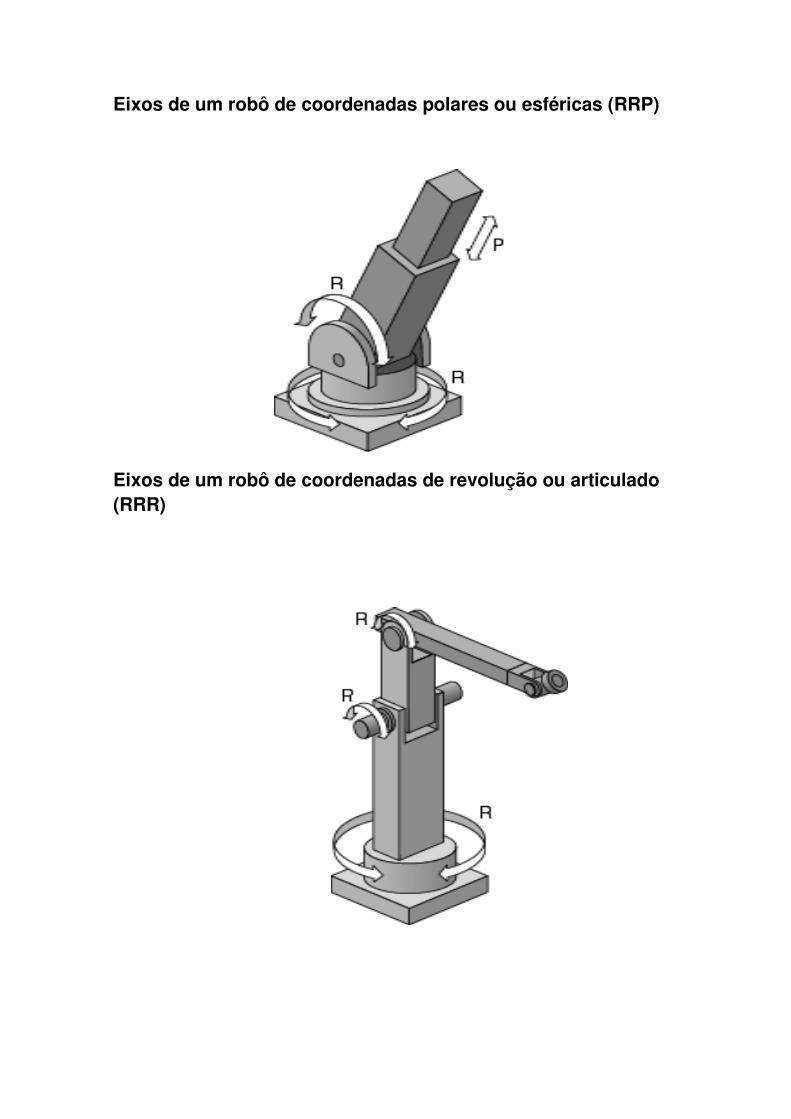
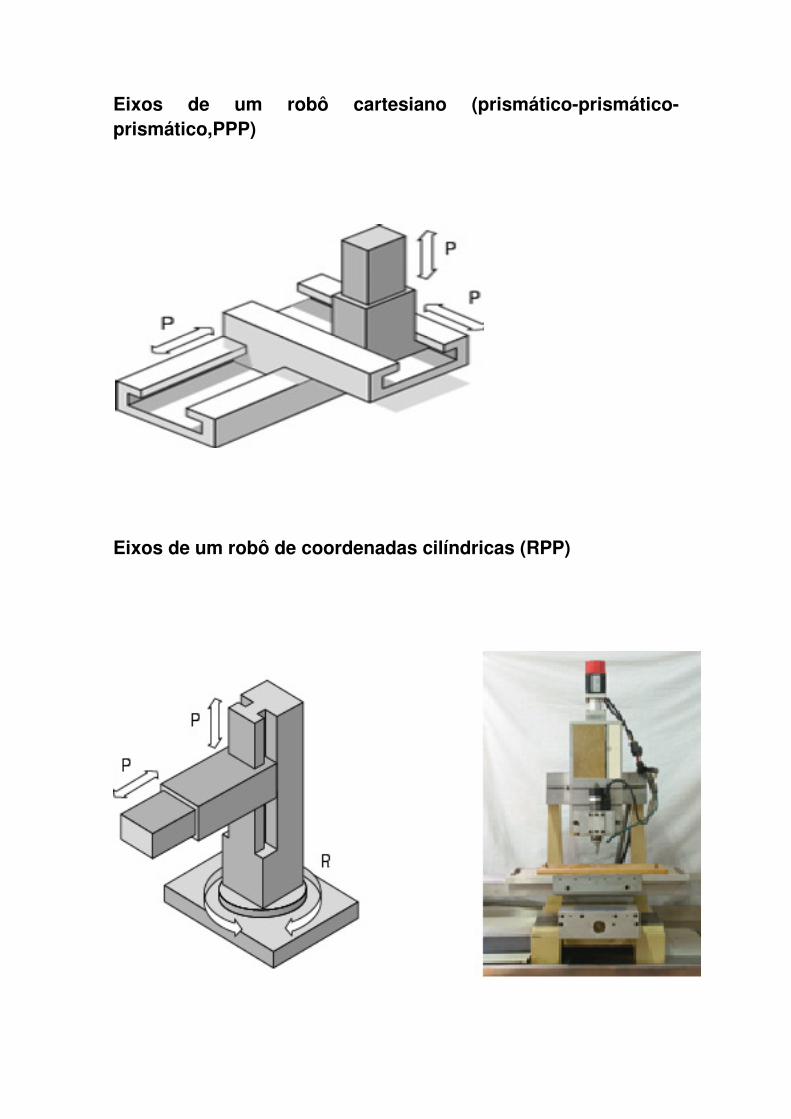
Eixos de um robô de coordenadas polares ou esféricas (RRP)
Eixos de um robô de coordenadas de revolução ou articulado (RRR)
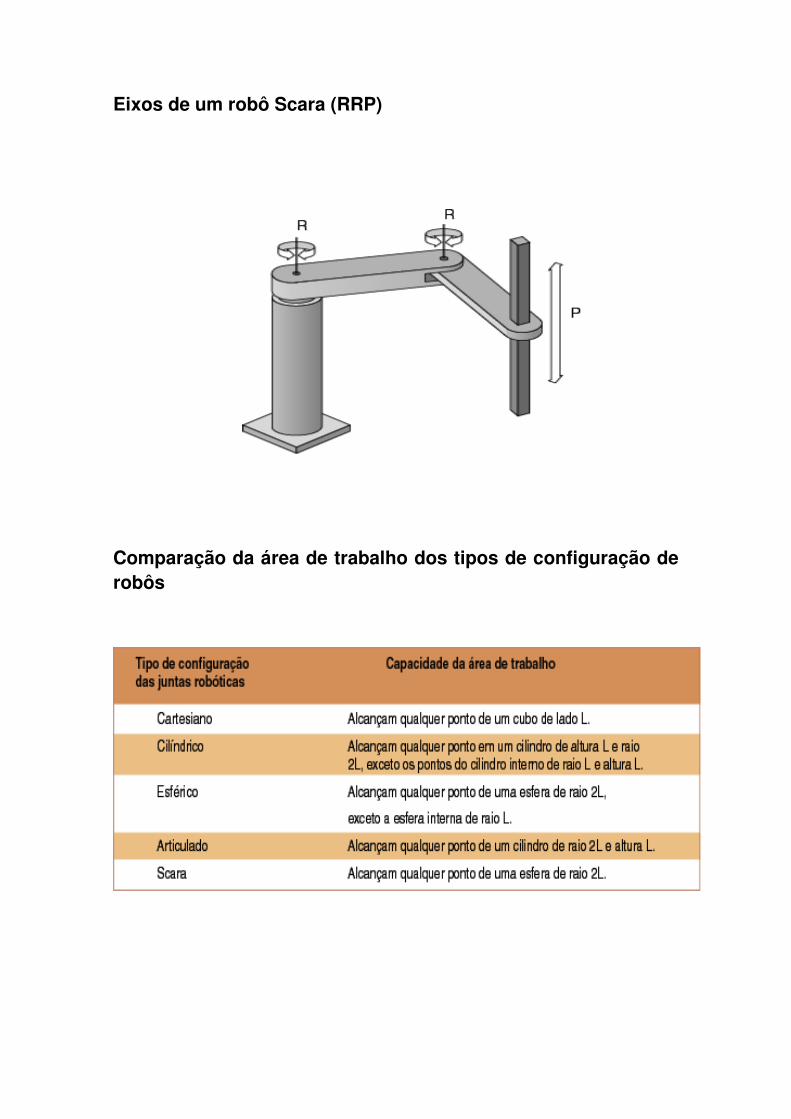
Eixos de um robô Scara (RRP)
Comparação da área de trabalho dos tipos de configuração de robôs
TIPOS DE ÓRGÃO TERMINAL
O órgão terminal é a peça do robô que realiza o ponto chave de sua atividade. Por exemplo, para transportar um objeto, o robô precisa segura-lo. Para tanto, seu órgão terminal deve apresentar características construtivas que lhe permitam manter o objeto seguro no decorrer de sua movimentação. A parte do robô que vai pegar e prender, efetivamente, o objeto é o órgão terminal.
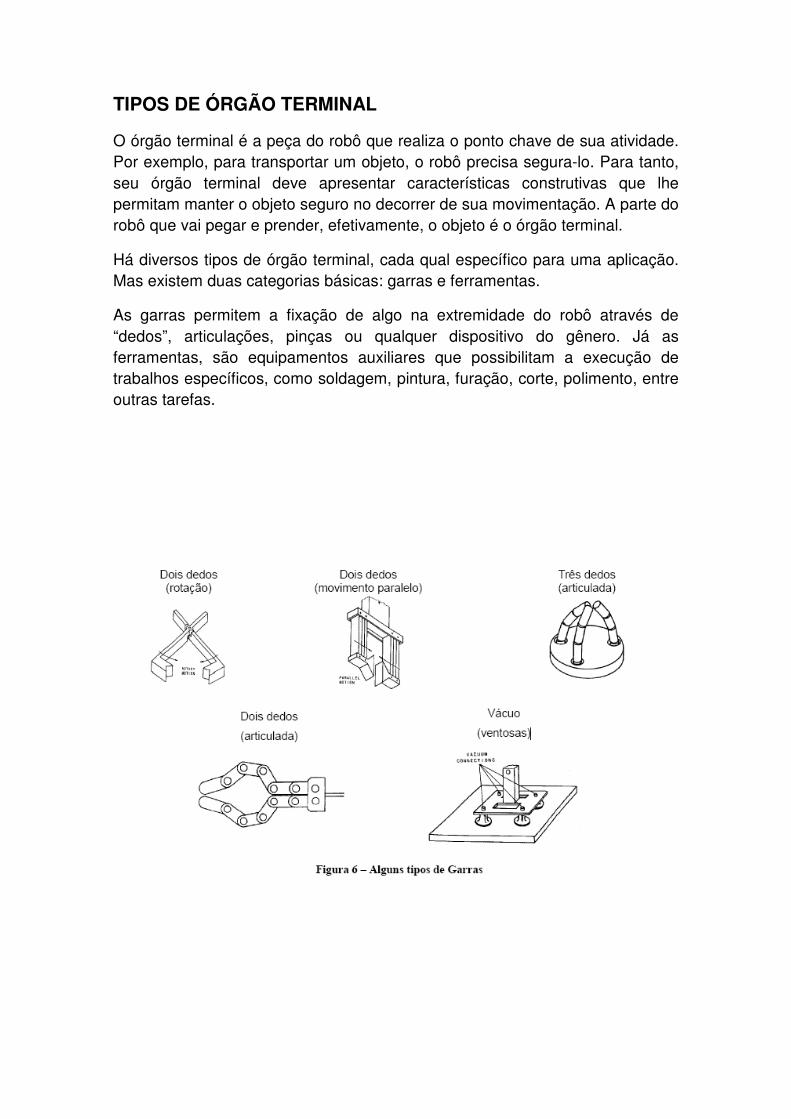
Há diversos tipos de órgão terminal, cada qual específico para uma aplicação. Mas existem duas categorias básicas: garras e ferramentas.
As garras permitem a fixação de algo na extremidade do robô através de “dedos”, articulações, pinças ou qualquer dispositivo do gênero. Já as ferramentas, são equipamentos auxiliares que possibilitam a execução de trabalhos específicos, como soldagem, pintura, furação, corte, polimento, entre outras tarefas.

Sensores
Um sensor pode ser definido como sendo um transdutor que altera a sua característica física interna devido a um fenômeno físico externo — presença ou não de luz, som, gás, campo elétrico, campo magnético etc.
Já o transdutor é todo dispositivo que fornece uma resposta de saída, da mesma espécie ou diferente, a qual reproduz certas características do sinal de entrada a partir de uma relação definida.
Todos os elementos sensores são denominados transdutores.
Os sensores são utilizados em diversas áreas como:
Automação industrial: identificação de peças, medição, verificação de posição etc. Automação bancária e de escritório: leitura de código de barras, tarja magnética, identificação de impressão digital. Automação veicular: sensores de composição de gases do escapamento, sensores de temperatura, sensores de velocidade.
Automação residencial (domótica): sistemas de alarme, sensores para controle de temperatura ambiente, sensores de controle de luminosidade, sensores de detecção de vazamento de gás, sensores de presença para acendimento automático de lâmpadas etc.
Critérios para utilização de sensores
Variáveis de medida
Sinal analógico: é aquele que assume um determinado valor compreendido dentro de uma escala. Entre alguns exemplos podemos citar: o valor da pressão indicado em um manômetro, o valor da tensão indicado em um voltímetro, o valor da temperatura indicado em um termômetro.
Sinal digital: é aquele que pode assumir um número finito de valores em uma determinada escala. Entre alguns exemplos podemos citar: um relógio digital e um contador.
Sinal binário: é um sinal digital que pode assumir somente dois valores na escala: 0 ou 1.
Controle de processos
No controle de processos discretos, os sensores podem ser utilizados para o controle de variáveis lógicas ou booleanas (sinais binários). Os mais empregados são os sensores de proximidade, utilizados geralmente para detecção de presença de objetos. Eles podem ser mecânicos, ópticos, indutivos e capacitivos.
No controle de processos contínuos, existem diferentes tipos de sensores capazes de medir as principais variáveis de controle, que podem ser classificadas como Medidas de Deslocamento, Velocidade, Pressão, Vazão e Temperatura (sinais analógicos ou binários).
As principais características de um sensor são:
Linearidade: é o grau de proporcionalidade entre o sinal gerado e a grandeza física. Quanto maior a linearidade, mais fiel é a resposta do sensor ao estímulo.
Faixa de atuação: é o intervalo de valores da grandeza em que pode ser utilizado o sensor, sem causar sua destruição ou imprecisão na leitura.
Para uma familiarização com o assunto tratado, são apresentadas a seguir algumas expressões utilizadas industrialmente para a especificação de sensores:
Acurácia: razão entre o valor real e o valor medido pelo sensor.
Resolução: grandeza relacionada ao grau de precisão de leitura do sensor.
Repetibilidade: variação dos valores lidos quando uma mesma quantidade é medida várias vezes.
Faixa de operação: Limites superiores e inferiores da variável a ser lida pelo sensor.
Sensibilidade e linearidade: índice associado à acurácia, resolução, repetibilidade e range.
A especificação de sensores industriais para utilização em processos automatizados deve basear-se no grau e na classe de proteção estabelecida em normas de proteção internacional.
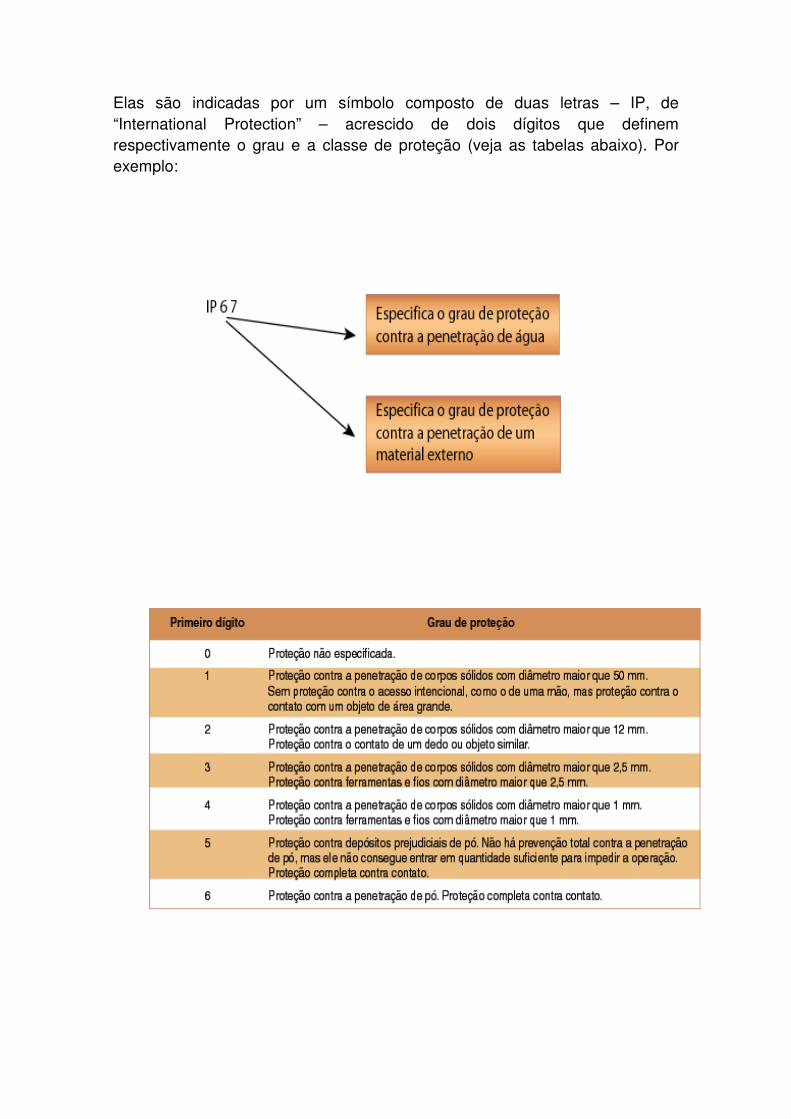
Elas são indicadas por um símbolo composto de duas letras – IP, de “International Protection” – acrescido de dois dígitos que definem respectivamente o grau e a classe de proteção (veja as tabelas abaixo). Por exemplo:
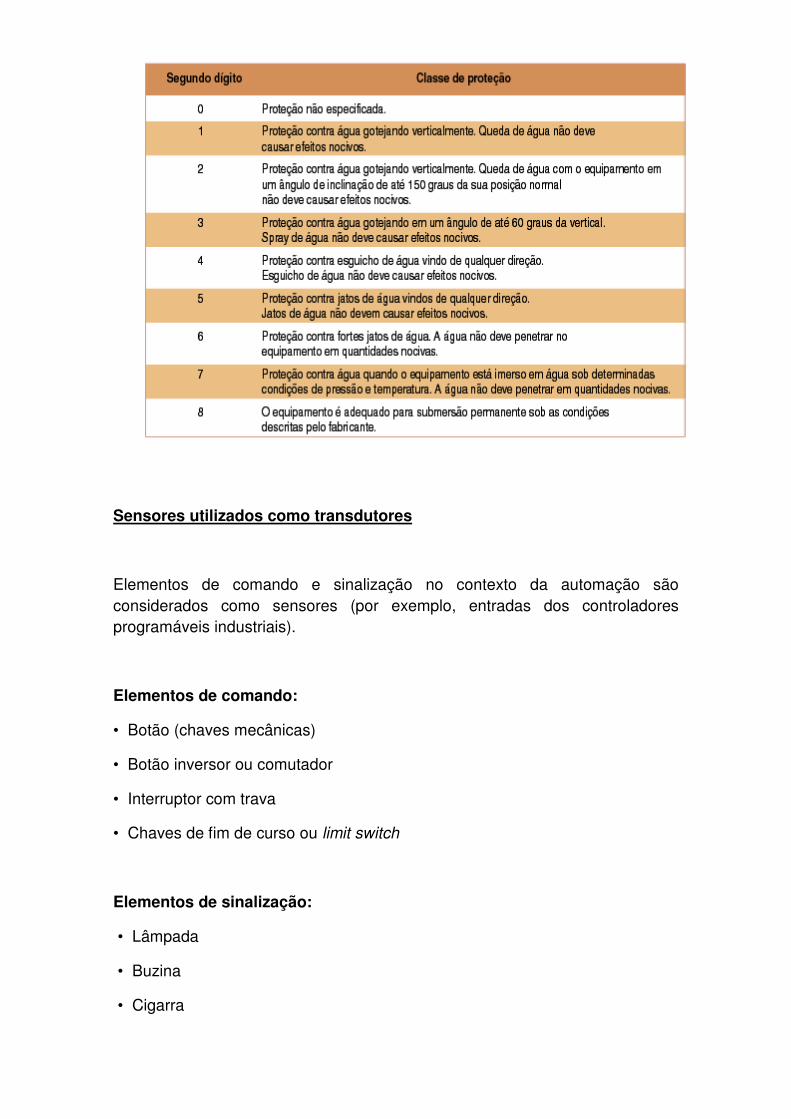
Sensores utilizados como transdutores
Elementos de comando e sinalização no contexto da automação são considerados como sensores (por exemplo, entradas dos controladores programáveis industriais).
Elementos de comando:
• Botão (chaves mecânicas)
• Botão inversor ou comutador
• Interruptor com trava
• Chaves de fim de curso ou limit switch
Elementos de sinalização:
• Lâmpada
• Buzina
• Cigarra
Os principais tipos de sensores utilizados industrialmente são:
Proximidade: mecânicos, ópticos, indutivos e capacitivos.
Posição e velocidade: potenciômetros, LVDT, encoders absolutos e relativos e tacogeradores.
Força e pressão: células extensométricas (strain gauge).
Temperatura: analógicos (termopares).
Vibração e aceleração: acelerômetros.
Sensores de proximidade
Os sensores de proximidade, normalmente digitais (on/off), são largamente utilizados em processos automatizados para detecção da presença ou ausência de um objeto.
Os mais empregados na automação de máquinas e equipamentos industriais são do tipo: chaves mecânicas de final de curso, capacitivos, indutivos, ópticos, magnéticos e ultra-sônicos, os quais estão descritos a seguir:
1. Chaves de fim de curso
As chaves de fim de curso, como o próprio nome sugere, são aplicadas para detectar o fim do movimento de um mecanismo (como, por exemplo, uma junta robótica).
2. Sensores de proximidade ópticos
Princípio de funcionamento: baseado num circuito oscilador que gera uma onda convertida em luz pelo emissor. Quando um objeto é aproximado do sensor óptico, este objeto reflete a luz do emissor para o receptor. Um circuito eletrônico identifica essa variação e emite um sinal que poderá ser utilizado para inspeção e controle.
Elementos:
Emissor - pode ser um LED (Diodo Emissor de Luz) ou uma lâmpada.
Receptor - é um componente fotossensível (sensível à luz) como fototransistor, fotodiodo, ou LDRs (resistores variáveis pela luz).
Principais características
• Não requerem contato mecânico para sensoriamento.
• Não apresentam partes móveis.
• Apresentam pequenas dimensões.
• Apresentam chaveamento seguro.
• São insensíveis a vibrações e choques.
• Apresentam muitas configurações disponíveis.
• Requerem sempre alinhamento.
• Podem ser blindados para serem usados em ambientes com alto grau de
luminosidade (setores de soldagem, por exemplo).
• Normalmente exigem limpeza e isolamento de pó e umidade.
Esses sensores são capazes de detectar diferentes tipos de objetos. Existem três formas de um sensor ótico operar:
1) Reflexão: a luz é refletida no objeto e o sensor é acionado. Neste caso os objetos devem ser transparentes ou escuros.
2) Barreira: o objeto bloqueia a passagem da luz, e a saída do sensor é comutada.
3) Emissor-receptor: nesse modo, o emissor e o receptor estão montados separadamente, e, quando o raio de luz é interrompido por um objeto colocado entre os dois, cessando a propagação da luz entre eles, o sinal de saída do sensor é comutado e enviado ao circuito elétrico de comando.
Ainda falando das características dos sensores, temos modelos algumas variações:
• Vários modelos: alimentação 12-30 VDC, 24-240 VAC.
• Sinal de saída: TTL 5 v, relé de estado sólido etc.
• Detecção de aproximação de objetos, desde que não sejam transparentes.
• Distância de detecção variável, função da luminosidade do ambiente.
• Normalmente construídos em dois corpos distintos (emissor e receptor de
luz).
3. Sensores de proximidade ultra-sônicos
O princípio de funcionamento é semelhante ao princípio de funcionamento de um sonar utilizado em navios.
Um sinal sonoro é emitido em uma determinada direção na água; as ondas sonoras caminham pela água até encontrar um obstáculo; este obstáculo reflete as ondas sonoras; quando os sensores do navio recebem o eco do sinal que foi transmitido, mede-se o tempo gasto entre a emissão e o retorno.
Funciona a partir da emissão de som em alta freqüência, inaudível ao ser humano. O tempo de propagação é diretamente proporcional à distância do obstáculo a ser identificado.
Principais características dos Sensores ultra-sônicos
• Constituídos de cristais, como o quartzo, que possuem como característica importante o efeito piezoelétrico, ou seja, quando aplicamos uma força de tração ou compressão no cristal, aparecerá uma tensão proporcional à força aplicada (conversão de força em tensão).
• Quando se aplica uma tensão no cristal, ele se comprime ou expande automaticamente. Conseqüentemente, se aplicarmos uma tensão alternada em um cristal, ele irá vibrar na mesma freqüência da tensão aplicada (conversão de tensão em movimento).
• O sensor ultra-sônico aplica uma tensão alternada em alta freqüência no cristal, fazendo-o vibrar e assim emitir um som em alta freqüência(conversão de tensão em movimento). Depois, o circuito do sensor passa a ler a tensão no cristal para receber o eco do sinal que foi emitido (conversão de força ou movimento em tensão).
• Geralmente utilizados como sensores de proximidade.
• Utilizam pulsos sonoros no sensoriamento. Medem amplitude e tempo do deslocamento do pulso sonoro de um obstáculo até o receptor em um determinado meio.
• Trabalham na faixa de freqüência entre 40 KHz e 2 MHz, podendo fornecer diretamente uma grande faixa de informações.
• Podem apresentar problemas de funcionamento em ambientes que contenham altos índices de “ruídos”. Entretanto, podem ser utilizados em ambientes que apresentam umidade e pó.
• Existem sensores ultra-sônicos digitais ou analógicos, que emitem sinal em função da distância do objeto.
• São capazes de detectar qualquer tipo de material, com exceção daqueles que absorvem o som.
4. Sensores indutivos
Os sensores indutivos apresentam o princípio de funcionamento semelhante ao de um indutor. Quando o campo magnético é:
Mais fraco (o núcleo não está totalmente dentro do indutor): a impedância (resistência) do indutor é menor, portanto, a tensão no resistor é maior.
Mais forte (o núcleo está dentro do indutor): a impedância (resistência) do indutor é maior, conseqüentemente a tensão no resistor é menor.
Num sensor indutivo, o material dielétrico é o ar/vácuo, cuja constante é igual a 1. Portanto, o valor da capacitância é considerado muito baixo.
O núcleo do sensor indutivo é aberto => denominado “entreferro”.
Princípio de funcionamento: O campo magnético tem que passar pelo ar. Ao ligarmos o indutor a um circuito RL trabalhando em corrente alternada (CA),
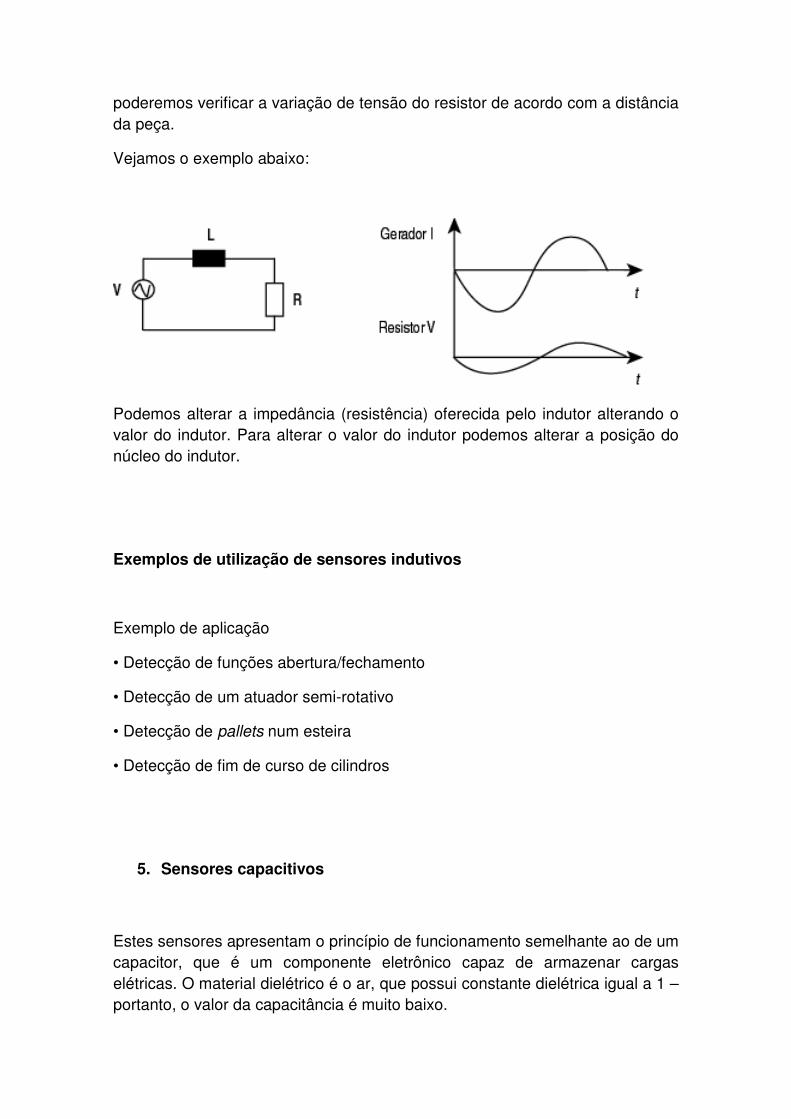
poderemos verificar a variação de tensão do resistor de acordo com a distância da peça.
Vejamos o exemplo abaixo:
Podemos alterar a impedância (resistência) oferecida pelo indutor alterando o valor do indutor. Para alterar o valor do indutor podemos alterar a posição do núcleo do indutor.
Exemplos de utilização de sensores indutivos
Exemplo de aplicação
• Detecção de funções abertura/fechamento
• Detecção de um atuador semi-rotativo
• Detecção de pallets num esteira
• Detecção de fim de curso de cilindros
5. Sensores capacitivos
Estes sensores apresentam o princípio de funcionamento semelhante ao de um capacitor, que é um componente eletrônico capaz de armazenar cargas elétricas. O material dielétrico é o ar, que possui constante dielétrica igual a 1 – portanto, o valor da capacitância é muito baixo.
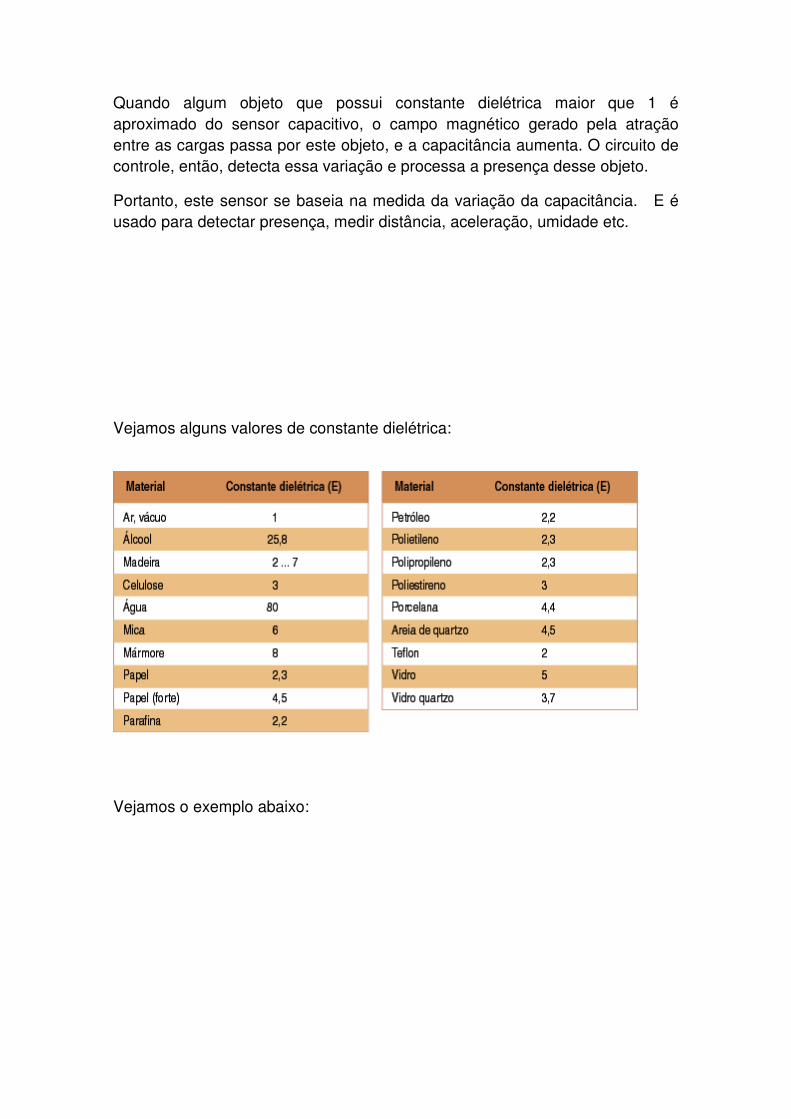
Quando algum objeto que possui constante dielétrica maior que 1 é aproximado do sensor capacitivo, o campo magnético gerado pela atração entre as cargas passa por este objeto, e a capacitância aumenta. O circuito de controle, então, detecta essa variação e processa a presença desse objeto.
Portanto, este sensor se baseia na medida da variação da capacitância. E é usado para detectar presença, medir distância, aceleração, umidade etc.
Vejamos alguns valores de constante dielétrica:
Vejamos o exemplo abaixo:

• O valor da corrente é proporcional ao sinal de tensão gerado pelo gerador CA.
• Quanto maior for a freqüência do gerador, menor será a impedância (resistência) oferecida pelo capacitor.
• Se variarmos o valor da capacitância, a tensão no resistor (R) também variará. Esse é o princípio de funcionamento do sensor capacitivo.
Sensores para medida de posição e velocidade
São requeridos em sistemas de controle realimentados de posição e velocidade. Podem ser classificados como:
Sensores para medida de posição
- potenciômetros
- LVDT
- encoders
Sensores para medida de velocidade
- tacômetros
1. Tipos de potenciômetro
Wirewound (rolo de arame): Composto por um contato que desliza ao longo de rolo de arame de nicromo. Apresenta como vantagem o baixo custo e como desvantagem possíveis falhas de leitura e sensibilidade excessiva a variações de temperatura.
Cermet (cerâmica condutiva): Composto por um contato que desliza sobre trilha de cerâmica condutiva, apresentando vantagens em relação aos wirewound.
Filme de plástico: Apresenta alta resolução, longa vida e boa estabilidade de temperatura.
Temos também um tipo de potenciômetro que é o de Precisão. Suas principais características são:
• Fornecem um sinal analógico para controle.
• Fornecem uma informação de posição absoluta.
• Apresentam baixo custo.
• Podem apresentar alterações de temperatura e variação no uso.
• Não podem ser utilizados em ambientes com umidade ou poeira.
2. LVDT (Linear Variable Diferential Transformer) – Sensor de Deslocamento Linear
Existe uma grande variedade de sensores eletromagnéticos que trabalham com relutância variável. Os mais utilizados são transformadores lineares, transformadores rotativos, potenciômetros indutivos e transdutores conhecidos como microsyn. Como principais utilizações temos: giroscópios de aviões e navios, acelerômetros e transdutores diversos, especialmente os transdutores de pressão.
O LVDT consiste de um núcleo magnético que se move no interior de um cilindro. A carcaça do cilindro contém um núcleo primário que pode se mover em função de um sinal de freqüência (tensão elétrica).
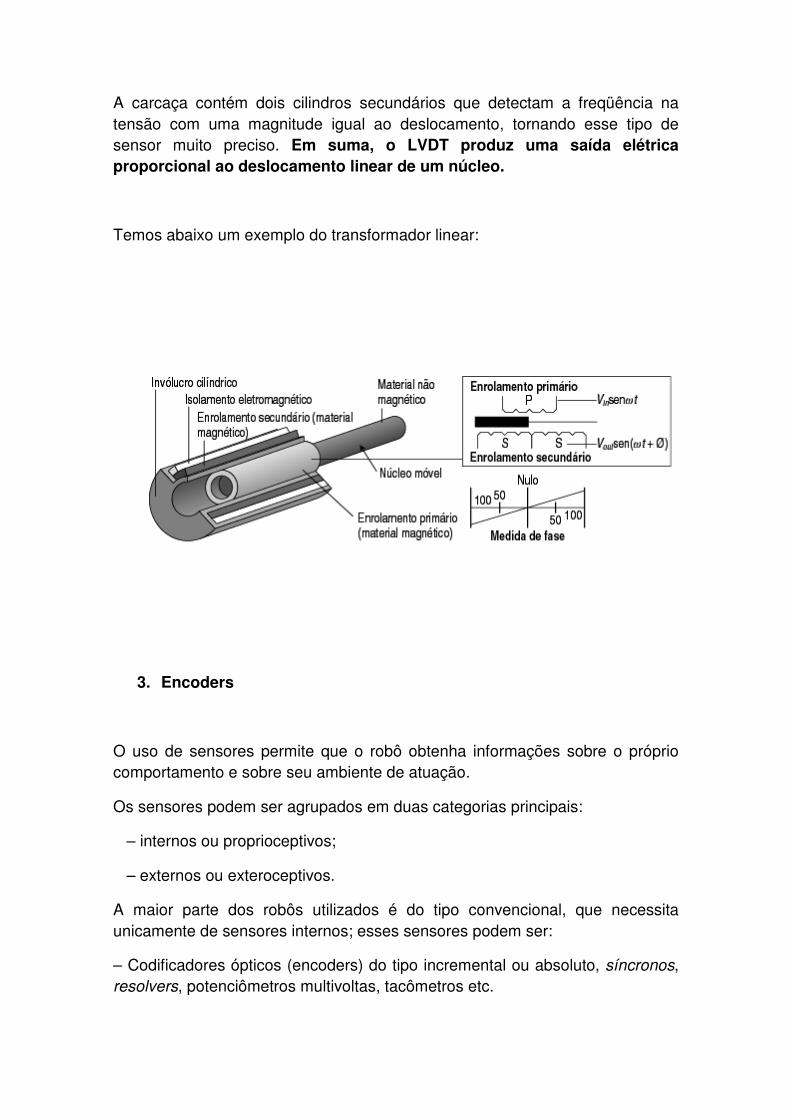
A carcaça contém dois cilindros secundários que detectam a freqüência na tensão com uma magnitude igual ao deslocamento, tornando esse tipo de sensor muito preciso. Em suma, o LVDT produz uma saída elétrica proporcional ao deslocamento linear de um núcleo.
Temos abaixo um exemplo do transformador linear:
3. Encoders
O uso de sensores permite que o robô obtenha informações sobre o próprio comportamento e sobre seu ambiente de atuação.
Os sensores podem ser agrupados em duas categorias principais:
– internos ou proprioceptivos;
– externos ou exteroceptivos.
A maior parte dos robôs utilizados é do tipo convencional, que necessita unicamente de sensores internos; esses sensores podem ser:
– Codificadores ópticos (encoders) do tipo incremental ou absoluto, síncronos, resolvers, potenciômetros multivoltas, tacômetros etc.
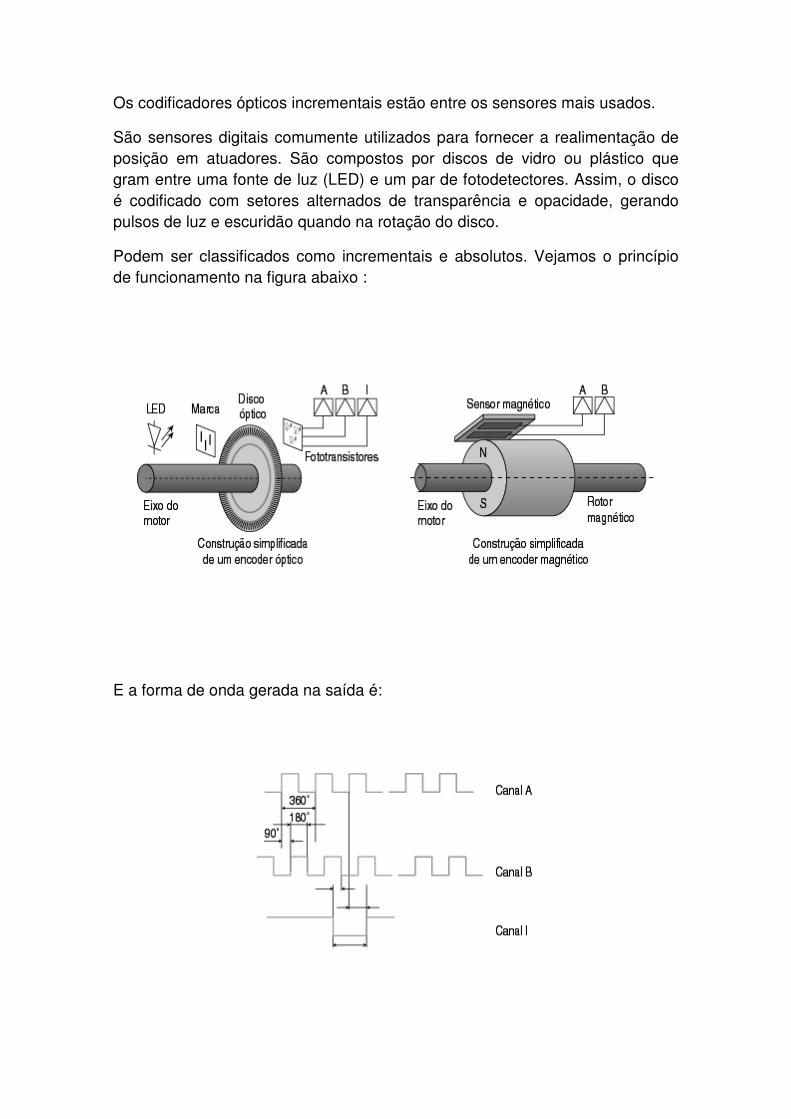
Os codificadores ópticos incrementais estão entre os sensores mais usados.
São sensores digitais comumente utilizados para fornecer a realimentação de posição em atuadores. São compostos por discos de vidro ou plástico que gram entre uma fonte de luz (LED) e um par de fotodetectores. Assim, o disco é codificado com setores alternados de transparência e opacidade, gerando pulsos de luz e escuridão quando na rotação do disco.
Podem ser classificados como incrementais e absolutos. Vejamos o princípio de funcionamento na figura abaixo :
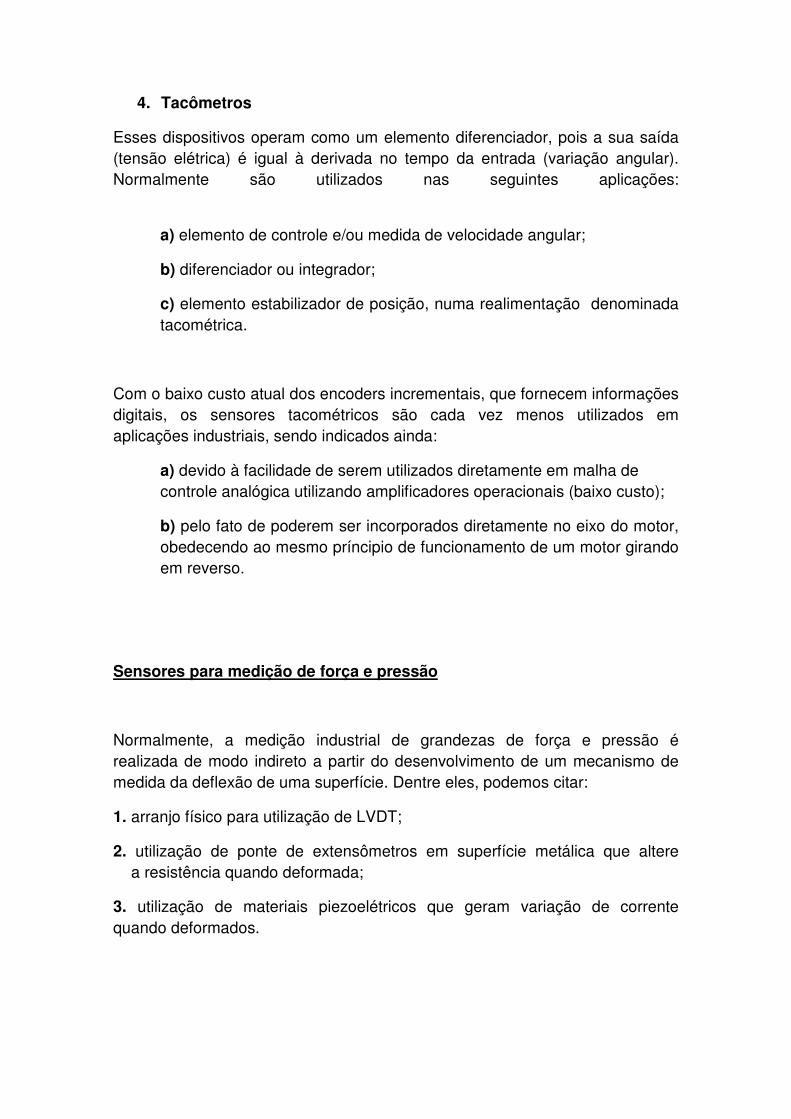
E a forma de onda gerada na saída é:
4. Tacômetros
Esses dispositivos operam como um elemento diferenciador, pois a sua saída (tensão elétrica) é igual à derivada no tempo da entrada (variação angular). Normalmente são utilizados nas seguintes aplicações:
a) elemento de controle e/ou medida de velocidade angular;
b) diferenciador ou integrador;
c) elemento estabilizador de posição, numa realimentação denominada tacométrica.
Com o baixo custo atual dos encoders incrementais, que fornecem informações digitais, os sensores tacométricos são cada vez menos utilizados em aplicações industriais, sendo indicados ainda:
a) devido à facilidade de serem utilizados diretamente em malha de controle analógica utilizando amplificadores operacionais (baixo custo);
b) pelo fato de poderem ser incorporados diretamente no eixo do motor, obedecendo ao mesmo príncipio de funcionamento de um motor girando em reverso.
Sensores para medição de força e pressão
Normalmente, a medição industrial de grandezas de força e pressão é realizada de modo indireto a partir do desenvolvimento de um mecanismo de medida da deflexão de uma superfície. Dentre eles, podemos citar:
1. arranjo físico para utilização de LVDT;
2. utilização de ponte de extensômetros em superfície metálica que altere a resistência quando deformada;
3. utilização de materiais piezoelétricos que geram variação de corrente quando deformados.
Pontes extensométricas (Strain Gauge)
O strain gauge é um transdutor de força que converte a força aplicada de tensão ou torção em valores de resistência elétrica dados em ohm.
Princípio de funcionamento: variação da resistência elétrica causada pela variação de seu comprimento, o que causa um aumento ou diminuição de sua área, de maneira que esta afeta a estrutura metálica do componente e faz com
que haja uma variação proporcional em sua resistência elétrica.
Sensor destinado a medir microdeformações em materiais sólidos em geral, tais como metais, plásticos, vidros, cerâmicas, concretos etc.
O strain gauge é um transdutor que converte força em resistência elétrica.
Sensores para medida de aceleração
A variável de aceleração normalmente é medida pela força exercida por uma massa sísmica mediante:
• distorção do cristal piezo (pressão);
• movimento de uma viga;
• deformação de uma massa;
• acelerômetros para a medida de vibração.
Acionamento e controle de robôs
Os eixos de um robô são acionados por atuadores, que podem ser: hidráulicos, pneumáticos e elétricos.
O controle dos atuadores dos robôs em geral é efetuado mediante o uso de dois métodos:
– servocontrolado;
– não servocontrolado.
Os robôs não servocontrolados utilizam chaves mecânicas no final do curso de cada junta. O posicionamento de cada eixo é controlado por paradas mecânicas ajustáveis, e não pelo controlador.
Os robôs servocontrolados utilizam sensores internos e, assim, podem conhecer a posição inicial na qual se encontra cada eixo.
Tipos de acionamento de um braço robótico
Os drivers de acionamento de braços robóticos estão classificados genericamente:
– pela forma de movimento, como drivers de rotação e de deslizamento;
– pela forma de acionamento, como drivers elétrico, hidráulico e pneumático;
– pela forma de conexão, como drivers direto e indireto.
O sistema de acionamento de um braço robótico pode ser classificado, segundo a forma de movimento, em:
– Driver de rotação: consiste em um motor que provoca no eixo uma resposta em forma de movimento de rotação.
– Driver deslizante: consiste em um cilindro hidráulico ou pneumático.
Formas de acionamento de um braço robótico
O sistema de acionamento pode ser classificado em:
– Elétrico: utiliza motores elétricos que podem ser de corrente contínua, de passo e de corrente alternada.
– Hidráulico: utiliza uma unidade hidráulica composta de um motor de movimento rotativo e de um cilindro para a realização de movimentos deslizantes. Essa unidade provoca movimentos em pistões que comprimem o óleo. O controle é feito por válvulas que regulam a pressão do óleo nas duas partes do cilindro.
– Pneumático: é composto de motores pneumáticos de movimento rotativo e cilindros pneumáticos de movimento deslizante.

Vemos a seguir o exemplo de um sistema de acionamento elétrico de uma junta robótica
Abaixo, temos um quadro comparativo das formas de acionamento elétrico, hidráulico e pneumático
Dispositivos Mecânicos
Mecânica – Conceitos Fundamentais
A Mecânica pode ser definida como o estudo das forças e os efeitos que essas forças produzem.
Força pode ser definida como toda causa capaz de mudar o estado de repouso ou movimento de um corpo(é capaz de realizar trabalho).
A grandeza força designa-se pela letra F, cuja unidade é expressa em newton (N).
Como efeitos das forças, podemos citar:
• deformação da matéria
• alteração do estado de um corpo
• deslocamento de um corpo
• redução dos efeitos de gravidade, etc
Trabalho pode ser definido como o produto da força que se exerce no corpo
pela distância que o corpo percorre na direção e sentido da força.
T = F . d
Potência pode ser definida como o trabalho produzido por unidade de tempo.
Representa-se por P e sua unidade de medida é o watt (W).
Movimento é a variação de posição espacial de um objeto ou ponto material no decorrer do tempo.

Como exemplos de tipos de movimento podemos citar:
• movimento de queda livre
resultante da força da gravidade terrestre
• movimento circular
realizado em torno de um eixo
• movimento retilíneo
trajetória em linha reta (constante ou variável)
• movimento periódico
repete identicamente em intervalos de tempo iguais
Os dispositivos mecânicos permitem a união de partes, transmitem movimentos, transforma forças, alteram velocidades, entre outras aplicações.
Os operadores mecânicos criam condições de trabalho com menor esforço. Temos então, maquinas simples criadas pelo homem como a alavanca, a roda, o plano inclinado, etc., que ainda hoje são operadores essenciais à mecânica. Veremos na seqüência alguns dispositivos mecânicos.
A Alavanca é uma barra de um material sólido e rígido que gira em torno de um ponto de apoio designado por fulcro ou eixo de rotação.
Temos como elementos de uma alavanca:
⇒ ponto de apoio (PA);
⇒ força motriz ou potência (P);
⇒⇒⇒⇒ força resistente ou resistência (R);
⇒ braço de potência (BP):
distância entre a força motriz (P) e o ponto de apoio;
⇒ braço de resistência (BR):
distância entre a força resistente (R) e o ponto de apoio.
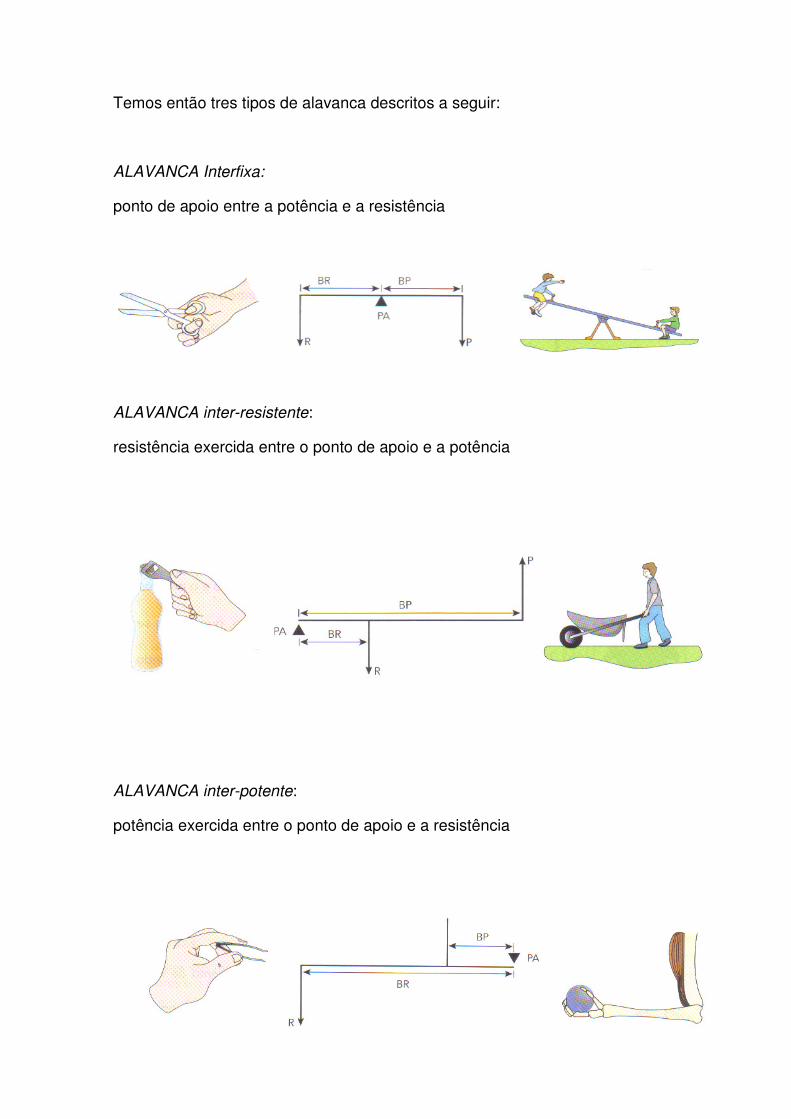
Temos então tres tipos de alavanca descritos a seguir:
ALAVANCA Interfixa:
ponto de apoio entre a potência e a resistência
ALAVANCA inter-resistente:
resistência exercida entre o ponto de apoio e a potência
ALAVANCA inter-potente:
potência exercida entre o ponto de apoio e a resistência

A Roda é um dispositivo mecânico, onde o fator importante para determinar a transmissão de força e velocidade é a relação entre o diâmetro da borda e o diâmetro do eixo.
Roldana é uma roda que na borda tem um sulco onde se encaixa uma corda ou um cabo e gira em redor do seu eixo ao centro.
Podem ser aplicadas como Fixas ou Móveis
Polia é um mecanismo de transmissão fixos a um eixo, que produz movimento transmitido por correias. Mantêm a velocidade (rpm) se tiverem diâmetros iguais, e velocidade diferente se tiverem diâmetros diferentes.
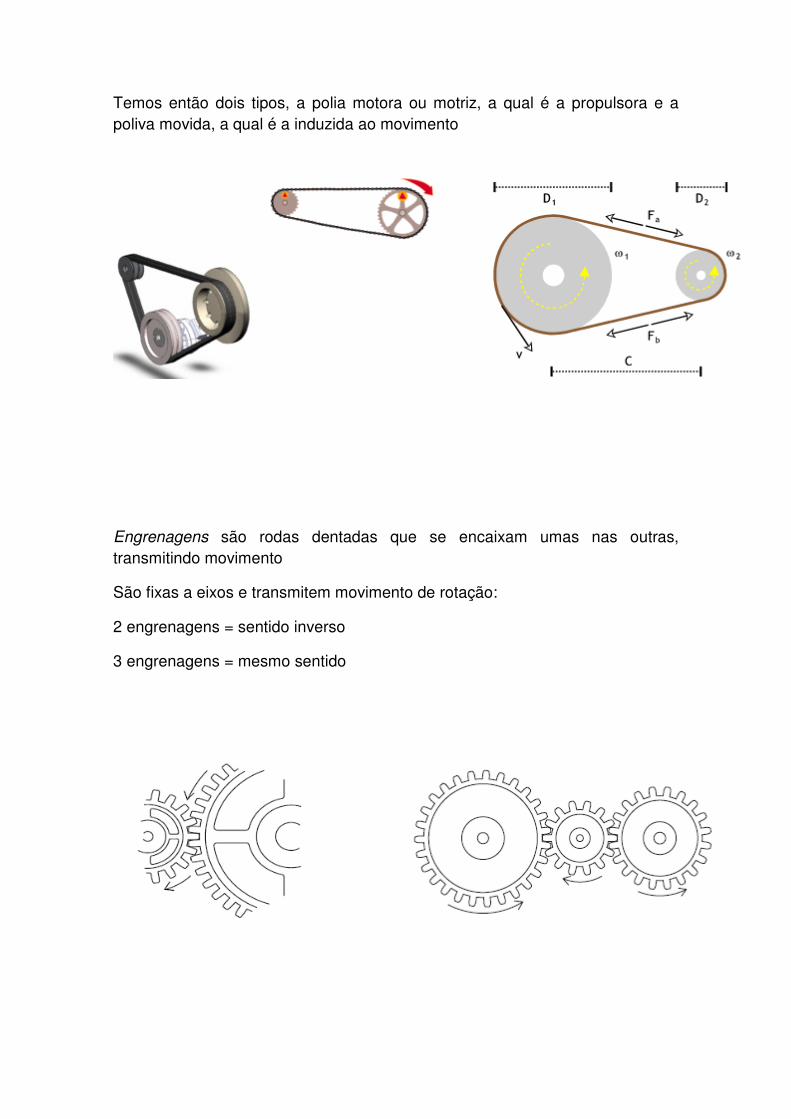
Temos então dois tipos, a polia motora ou motriz, a qual é a propulsora e a poliva movida, a qual é a induzida ao movimento
Engrenagens são rodas dentadas que se encaixam umas nas outras, transmitindo movimento
São fixas a eixos e transmitem movimento de rotação:
2 engrenagens = sentido inverso
3 engrenagens = mesmo sentido
Cálculo de Engrenagem
A razão entre o número de dentes nas rodas é diretamente proporcional à razão de torque e é inversamente proporcional à razão das velocidades de rotação. Vejamos o exemplo abaixo:
Se a coroa (a roda maior) tem o dobro de dentes do pinhão, o torque da engrenagem é duas vezes maior que o do pinhão, ao passo que a velocidade deste é duas vezes maior que a da coroa.
Em um par de engrenagens no qual:
– z1 = número de dentes da engrenagem 1
– z2 = número de dentes da engrenagem 2
– n1 = número de rotações por minuto da engrenagem 1 (rpm)
– n2 = número de rotações por minuto da engrenagem 2 (rpm)
Rolamentos podem ser definidos como Mancais com baixíssima resistência de atrito. Este atrito é diminuído por uma ou duas carreiras de esferas ou de rolos que podem ser fixos ou auto-compensadores preparados para suportar cargas radiais e axiais.
A grosso modo, a força radial é a que se estende ou se move de um ponto central para fora e a força axial é a que se estende ou dissipa através de um eixo central. Dependendo de onde os rolamentos são usados, talvez tenham cargas radiais, axiais ou uma combinação de ambas.
Os rolamentos em um motor elétrico e em polias como a da figura abaixo enfrentam apenas carga radial. Neste caso, a maior parte da carga decorre da tensão na correia conectando as duas polias.
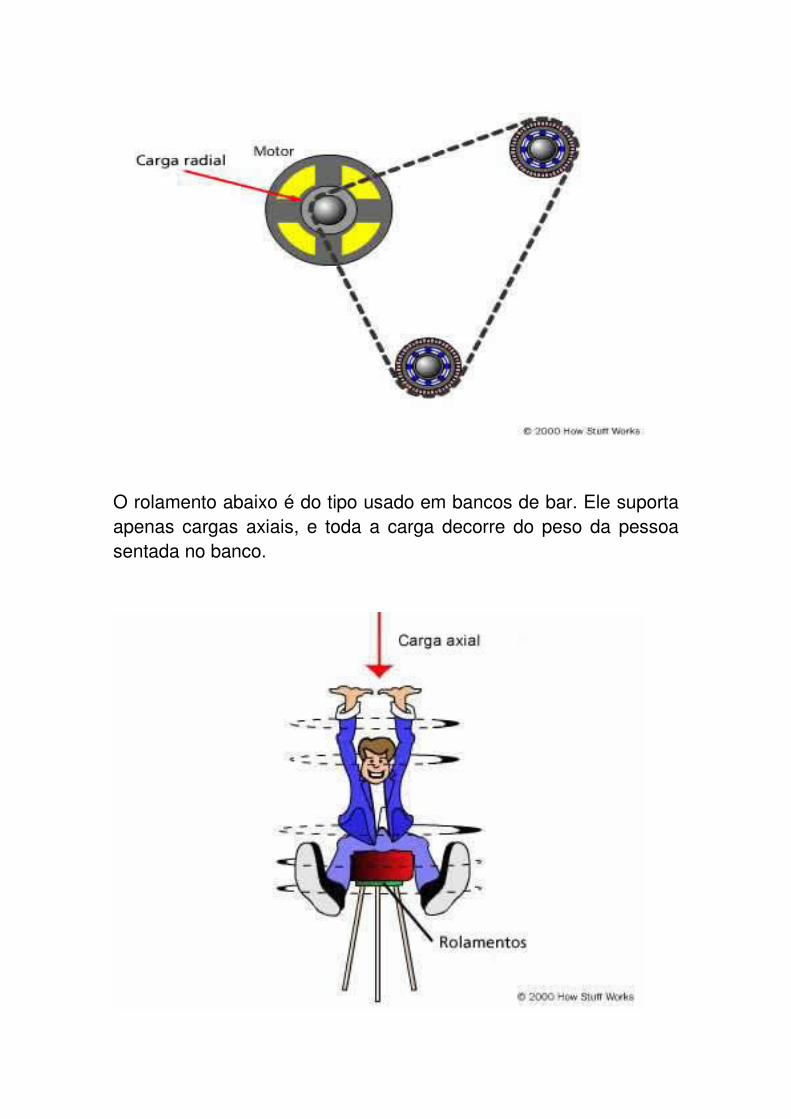
O rolamento abaixo é do tipo usado em bancos de bar. Ele suporta apenas cargas axiais, e toda a carga decorre do peso da pessoa sentada no banco.
Temos como tipos de rolamentos:
• Rolamentos rígidos de esferas
• Rolamentos auto-compensadores de esferas
• Rolamentos de esferas de contato angular
• Rolamentos axiais de esferas
• Rolamentos de agulhas
• Rolamentos axiais de agulhas
• Rolamentos de rolos cilíndricos
• Rolamentos auto-compensadores de rolos
• Rolamentos de rolos cônicos
Para a seleção de rolamentos, algumas Informações são importantes para determinar o tipo e tamanho do rolamento, tais como :
• Tipo de carga do rolamento (estático ou dinâmico)
• Medidas disponíveis do eixo e da caixa
• Conseqüências de aquecimento e dilatação
Com relação à carga, temos a carga estática, onde a força atua em baixa rotação ou pequenas oscilações, e a carga dinâmica, onde a força atua em rotação normal. Os rolamentos têm um tempo de vida útil, o qual pode ser determinado consultando-se dados do manual do fabricante do rolamento, e utilizando-se do valor do peso que irá ser exercido sobre o mesmo.
Transmissão e Transformação de movimentos
Nem sem sempre um dispositivo mecânico produz diretamente o tipo de movimento requerido. Pode nem estar diretamente acoplado ao mecanismo final que será colocado em movimento.
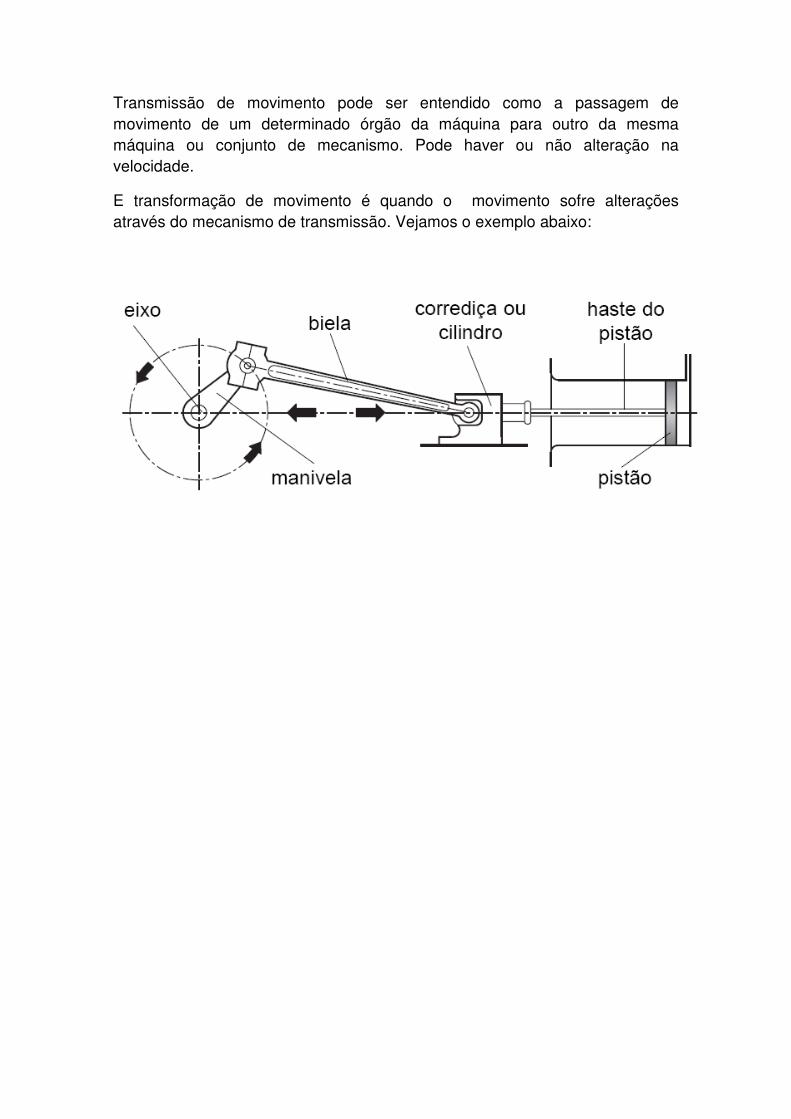
Transmissão de movimento pode ser entendido como a passagem de movimento de um determinado órgão da máquina para outro da mesma máquina ou conjunto de mecanismo. Pode haver ou não alteração na velocidade.
E transformação de movimento é quando o movimento sofre alterações através do mecanismo de transmissão. Vejamos o exemplo abaixo:
Programação de Robôs Industriais
Como fazer um robô realizar tarefas, determinar onde a máquina deve ir e como indicar uma trajetória?
A utilização de robôs no processo produtivo exige flexibilidade de uso, o que requer procedimentos sistemáticos para alterar a programação sem interromper o ciclo produtivo. Uma das principais vantagens na utilização de robôs é sua flexibilidade efetiva de programação e capacidade de realizar tarefas, na sua habilidade para se adaptar a novas linhas de produção automatizada e sua grande faixa de movimentos.
Com o intuito de melhor utilizarmos os recursos desses dispositivos num processo automatizado, torna-se quase estritamente necessário à formação de profissionais na área de robótica o conhecimento dos procedimentos metodológicos que permitem a programação das tareafas a serem executadas pelos robôs, por meio de processos de aprendizagem conhecidos como programação on-line e programação off-line.
Cada vez mais utilizada como ferramenta de concepção de sistemas automatizados e de programação de robôs, a programação off-line aumenta a flexibilidade e a habilidade de utilização destes, com uma variedade ilimitada de cenários e movimentos. Podemos definir programação off-line como os processos mediante os quais são realizadas as programações de robôs em ambientes de operação complexos, sem a necessidade dos dispositivos automatizados e do próprio robô.
Os robôs industriais são equipamentos multifuncionais reprogramáveis com grande flexibilidade de operação. Atualmente, a programação de tarefas é realizada por meio de uma “caixa de aprendizagem”, que é utilizada para conduzir o robô pelas posições críticas do ciclo de operação. Esse tipo de programação de tarefas apresenta alguns inconvenientes, por exemplo: utiliza o robô no período de programação e não permite um controle mais preciso sobre a trajetória da garra ou da ferramenta.
A programação de tarefas off-line não apresenta tais inconvenientes por ser realizada em computadores, necessitando apenas de um modelo matemático. Esse modelo contém informções sobre a cinemática e a dinâmica do robô.
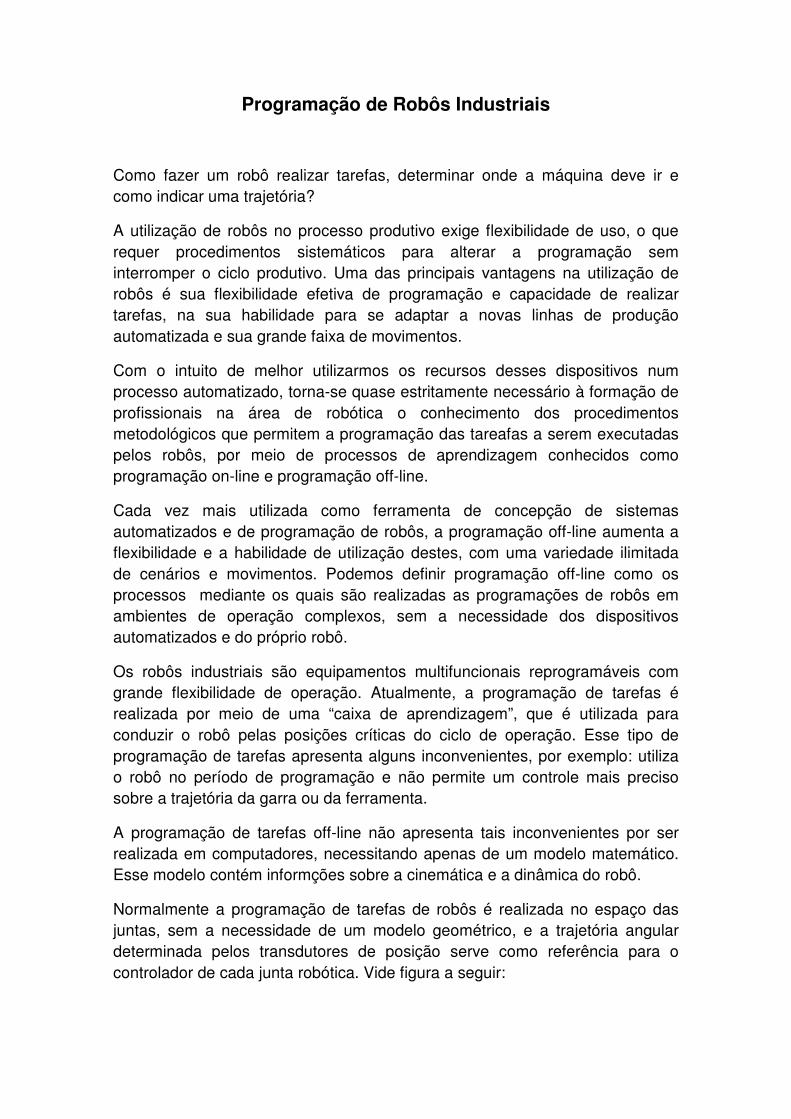
Normalmente a programação de tarefas de robôs é realizada no espaço das juntas, sem a necessidade de um modelo geométrico, e a trajetória angular determinada pelos transdutores de posição serve como referência para o controlador de cada junta robótica. Vide figura a seguir:
Entretanto, a realização de algumas tarefas relacionadas a um sistema de referência colocado na ferramenta (espaço cartesiano) exige o conhecimento completo do modelo geométrico e torna necessária a transformação de coordenadas, tendo em vista que o sinal de referência correspondente à trajetória, necessário para o controle das juntas, deve ser angular.
Num robô industrial, os diferentes graus de liberdade podem ser associados a diversos sistemas de coordenadas: cada um corresponde a um grau de liberdade e serve para descrever o movimento do grau de liberdade a ele associado.
O modelo geométrico é aquele que expressa a posição e a orientação da garra em relação a um sistema de coordenadas fixo à base do robô em função de suas coordenadas generalizadas (angulares,no caso de juntas rotacionais). Essa relação pode ser expressa matematicamente por uma matriz, denominada matriz de passagem homogênea do robô, que relaciona o sistema de coordenadas da base com o sistema de coordenadas do último elemento.

Vejamos uma figura que representa o sistema de coordenadas:
Métodos de Programação
Programar significa estabelecer uma seqüência de operações a serem executadas pelo robô. A programação das tarefas pode ser realizada por:
Programação por Aprendizagem (On-Line)
Linguagem de Programação de computadores (Off-Line)
Dentro da programação por aprendizagem, temos:
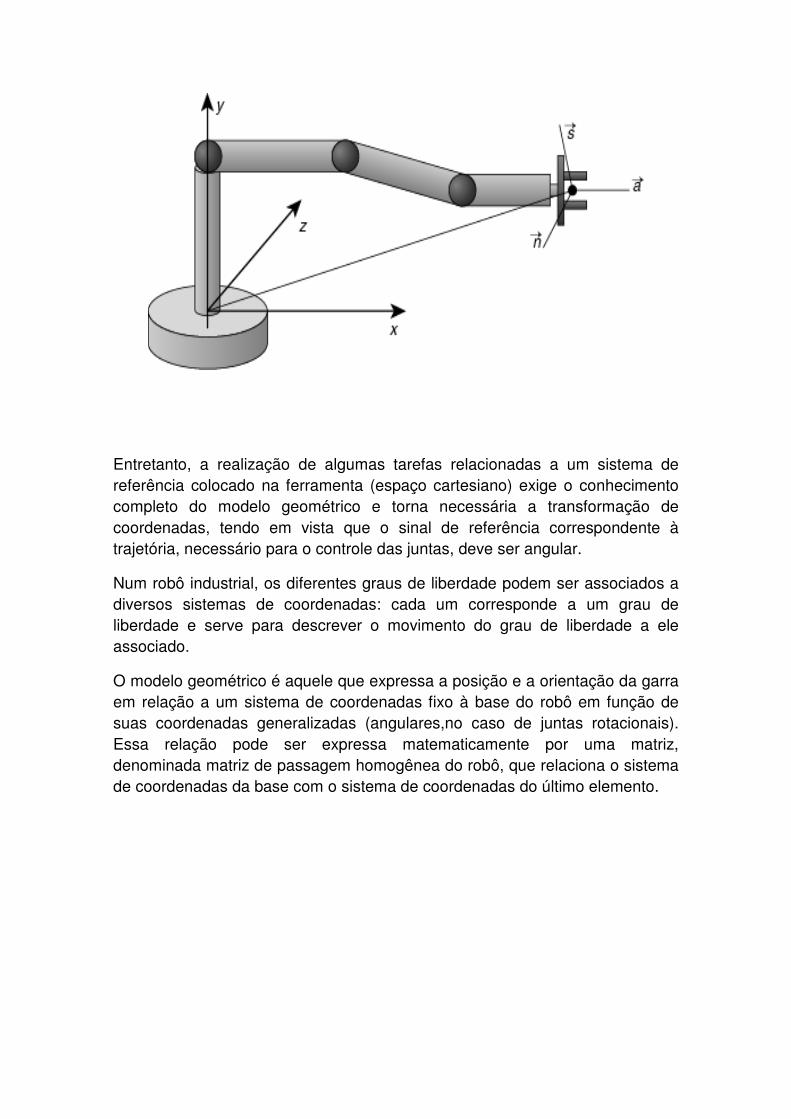
Aprendizagem Direta:
Operador guia fisicamente o robô por seu órgão terminal. Enquanto isso, os sensores de posição de cada junta são utilizados para memorizar os pontos importantes da tarefa a ser executada.
Aprendizagem Por Simulação Física:
Operador guia um simulador físico que tem geometria e sensores idênticos aos do robô original. Uma vez memorizada a tarefa, esta é transferida para o sistema de controle do robô.
Aprendizagem Por Telecomando:
Um dispositivo de telecomando (Teach-in-Pendant) é utilizado para mover cada junta do robô isoladamente ou fornecer a posição e a orientação da garra.
Podemos ver abaixo uma figura que representa o que foi dito:
A programação que utiliza linguagens pode ser considerada o processo pelo qual os programas são desenvolvidos sem a necessidade do robô propriamente dito, mas por meio da utilização de uma linguagem de programação de computador.
Vantagens da utilização de Programação por Linguagens
• Redução tempo em que o robô fica fora linha produção
• Ausência necessidade estar ambiente trabalho
• Integração Sistemas CAD-CAM
• Simplificação Programas
• Segurança na geração de trajetórias (colisão)
Níveis de Programação
As linguagens de programação de robôs podem ser classificadas de acordo com os seguintes níveis:
• Nível de Junta
• Nível de Manipulador
• Nível de Objeto
• Nível de Objetivo
Nível de junta
As linguagens classificadas nesse nível requerem a programação individual de cada junta do robô para que dada posição seja alcançada.
Nível de manipulador
Nesse nível é necessário apenas fornecer a posição e a orientação do órgão terminal e o sistema se encarrega de obter, pelo modelo geométrico inverso do robô, as posições de cada junta.
Nível de objeto
Nesse nível são necessárias apenas as especificações relativas ao posicionamento de objetos no interior do volume de trabalho do robô; desse modo, é preciso haver um modelo matemático que represente o ambiente de trabalho no qual o robô se encontra.
Nível de objetivo
Nível em que a tarefa não é realmente descrita, mas definida, como, por exemplo: “Montar as peças A, B e C”. Nesse caso é necessário, além do conhecimento do modelo do ambiente, um conjunto de dados relativos àquela determinada tarefa.
Para melhorar a performance de um programa, diminuir seu tempo de implementação e validação, o usuário deve procurar seguir alguns procedimentos básicos antes de iniciar a implementação de um programa num robô industrial. São eles:
Planejamento do programa
Conhecer o processo a ser automatizado; conhecer as variáveis de controle; saber a seqüência lógica do processo; ter como meta garantir a segurança; definir nomes, rotinas e I/O.
Verificação do sincronismo das juntas
Os contadores das informações provenientes dos encoders (ou resolvers, no caso de interrupção de energia ou de desconexão do robô) devem ser zerados, com o robô posicionado nas marcas de calibração.
Criação, definição e ativação do TCP da ferramenta
A calibração da ferramenta terminal (TCP) informa ao sistema de controle do robô as características principais da ferramenta (massa, dimensão, etc.), para que o sistema de controle possa calcular a melhor performance do robô.
Aspectos relacionados à segurança
Durante o método de aprendizagem direto, o programador se encontra dentro da região de trabalho do robô, com risco de acidente, necessitando, assim, de dispositivos de segurança. Os seguintes procedimentos deverão ser considerados para garantir aspectos relacionados à segurança:
1. Usar o bom senso e respeitar a área de trabalho.
2. Utilizar travas de segurança (com sensores nas entradas I/O, tais como porta com sensor, cortina de luz, tapete com sensor e sensor de presença.
3. Durante a aprendizagem na criação de pontos, trabalhar sempre com a velocidade reduzida (< 250nS).
4. Utilizar a chave de três posições (off/on/off), que energiza os motores no modo manual.
5. Lembrar que normalmente a chave de emergência (stop mecânico) fica em vermelho, ao lado da unidade de programação e no gabinete controlador do robô, e que a chave de parada (stop), manipulada por software, permite uma parada suave do robô.
Temos, portanto, segundo a definição de Programação Off-Line, a necessidade do modelo do robô num ambiente de trabalho para proceder à sua programação, e na Programação On-Line, a programação do sistema ocorre in loco com acesso ao robô e a equipamentos, bem como aos dispositivos de fixação e peças.
TIPOS DE LINGUAGENS DE PROGRAMAÇÃO
• Linguagens tipo Basic
• Linguagens tipo Pascal
• Linguagens tipo C
• Linguagens tipo Lisp
• Linguagens tipo Forth
• Linguagens orientadas a objetos
LINGUAGEM TIPO - BASIC
• Algoritmos simples e lineares
• Sem compilação em módulos separados
• Sem abstração de dados ou algoritmos
• Existência de apenas dados pré-definidos
onde as sub-rotinas não utilizam passagens de argumentos
• Linhas de código sintaticamente independentes
• Simples interpretação
LINGUAGEM TIPO - PASCAL
• Programação estruturada
• Funções e procedimentos podem ter argumentos
• Variáveis podem ser globais ou locais
• Programação pode ser modular
• Passagem de parâmetros deve ser feita por pilha de dados da esquerda para direita
LINGUAGEM TIPO - C
• Possibilidade de declaração de variáveis na abertura de qualquer bloco
• Capacidade de utilização de matrizes e ponteiros de forma mal definida
LINGUAGEM TIPO - LISP
• Habilidade de trabalhar com listas encadeadas
• Intercambialidade de dados e programas
• Requer um acurado gerenciamento de memória
LINGUAGEM TIPO – FORTH
• Utiliza basicamente operações de pilha
• Semelhança estrutural
• Ressalvas quanto à implementação de múltiplas pilhas
LINGUAGENS ORIENTADAS A OBJETO
• Não tem grande utilidade aplicada na robótica
Tipos de software
Software de usuário
Escrito pelo operador para realizar cada tarefa
(conjunto de pontos e operações da ferramenta)
Software de controlador
Escrito pelo fabricante e embarcado no robô
Traduz os comandos do usuário para operações adequadas ao controlador
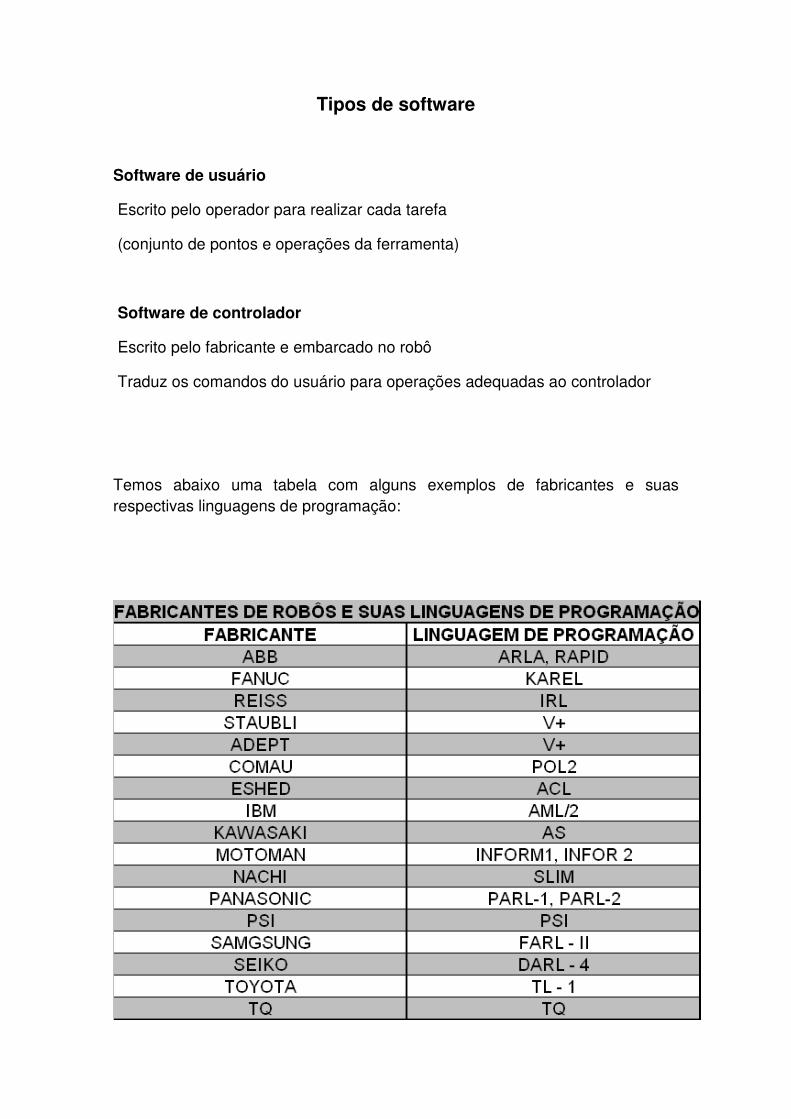
Temos abaixo uma tabela com alguns exemplos de fabricantes e suas respectivas linguagens de programação: