análise e processamento de biosinais - fis.uc.pt · a resposta de um sistema contínuo, linear e...
TRANSCRIPT

Slide 1 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Mestrado Integrado em Engenharia Biomédica
Faculdade de Ciências e Tecnologia
Universidade de Coimbra
Análise e Processamento de BioSinais
Slide 2 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Tópicos:
Convolução
O Integral de Convolução
Interligações de SLIT - Sistemas Lineares Invariantes no Tempo
Resposta a Degrau
Equações Diferenciais e de Diferenças para SLIT
Soluções para Equações Diferenciais e de Diferenças
Características dos Sistemas
Representação por Diagramas de Blocos

Slide 3 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
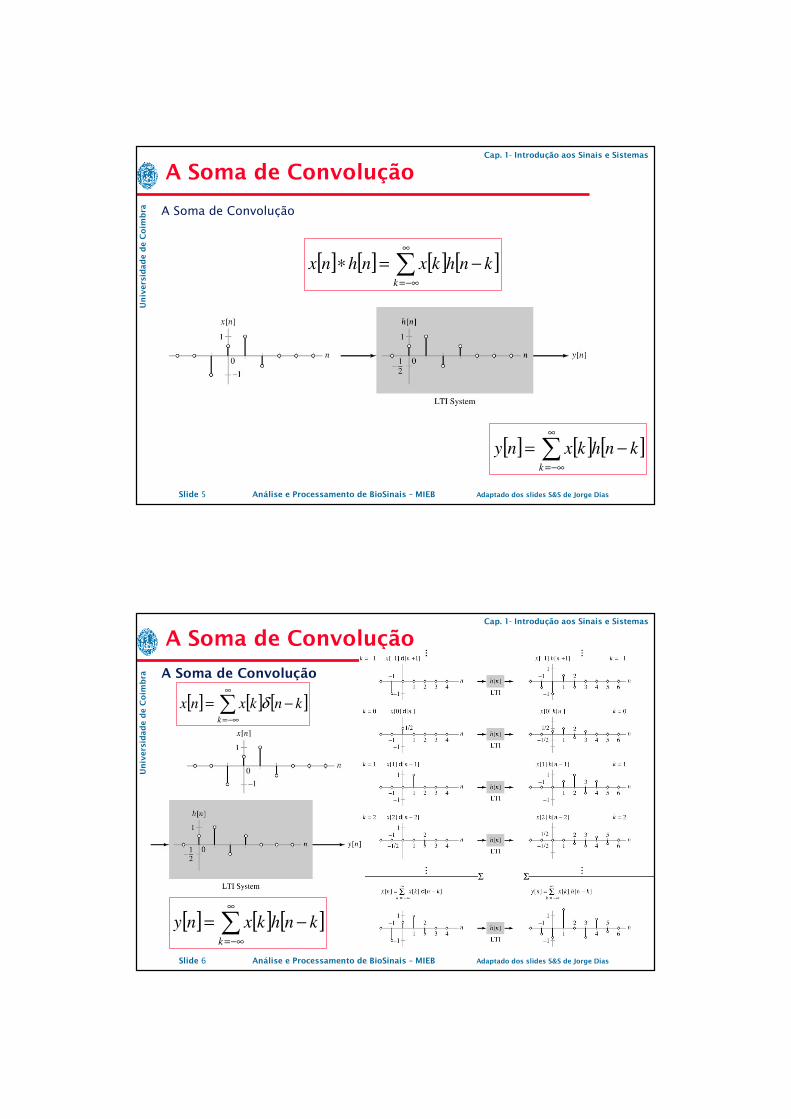
A Soma de Convolução
A Soma de Convolução para sinais discretos
Um sinal pode ser expresso por uma sobreposição de impulsos deslocados no tempo.
Considerando
Pode ser expresso como uma soma pesada de impulsos deslocados no tempo
Pode ser expresso por
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]knkxknnx
nxnnx
−=−
→=
δδ
δδ 0
[ ] [ ] [ ] [ ] [ ][ ] [ ][ ] [ ] [ ] [ ] L
L
+−+−+
+
+−++−+=
2211
0
1122
nxnx
nx
nxnxnx
δδ
δ
δδ
[ ] [ ] [ ]∑∞
−∞=
−=k
knkxnx δ
δ
δ
δ
δ
δ
Slide 4 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
A Soma de Convolução
Se H representar o operador do sistema
Sendo o sistema invariante no tempo qualquer deslocamento temporal da entrada provoca um deslocamento temporal da saída
onde h[n] é a resposta impulsional do SLIT com operador H. A resposta do sistema
Designado somatório de convolução
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] ∑∑
∑∞
−∞=
∞
−∞=
∞
−∞=
−=−=
=
−==
kk
k
knHkxknkxH
knkxHnxHny
δδ
δ
[ ] [ ]knhknH −=−δ
[ ] [ ] [ ]∑∞
−∞=
−=k
knhkxny
[ ] [ ] [ ] [ ]∑∞
−∞=
−=∗k
knhkxnhnx
Slide 5 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
A Soma de Convolução
A Soma de Convolução
[ ] [ ] [ ]∑∞
−∞=
−=k
knhkxny
[ ] [ ] [ ] [ ]∑∞
−∞=
−=∗k
knhkxnhnx
Slide 6 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
A Soma de Convolução
A Soma de Convolução
[ ] [ ] [ ]∑∞
−∞=
−=k
knhkxny
[ ] [ ] [ ]∑∞
−∞=
−=k
knkxnx δ
Slide 7 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
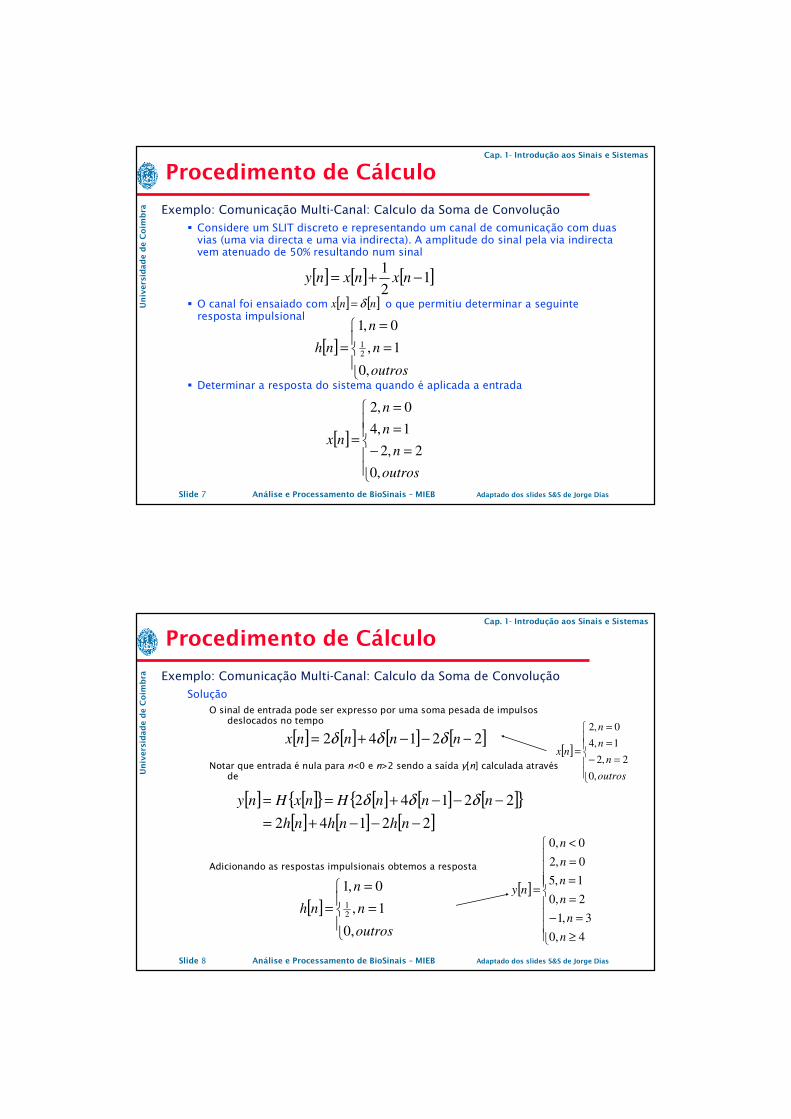
Procedimento de Cálculo
Exemplo: Comunicação Multi-Canal: Calculo da Soma de Convolução
Considere um SLIT discreto e representando um canal de comunicação com duas vias (uma via directa e uma via indirecta). A amplitude do sinal pela via indirecta vem atenuado de 50% resultando num sinal
O canal foi ensaiado com o que permitiu determinar a seguinte resposta impulsional
Determinar a resposta do sistema quando é aplicada a entrada
[ ] [ ] [ ]12
1−+= nxnxny
[ ]
=
=
=
outros
n
n
nh
,0
1,
0,1
21
[ ] [ ]nnx δ=
[ ]
=−
=
=
=
outros
n
n
n
nx
,0
2,2
1,4
0,2
Slide 8 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo
Exemplo: Comunicação Multi-Canal: Calculo da Soma de Convolução
Solução
O sinal de entrada pode ser expresso por uma soma pesada de impulsos deslocados no tempo
Notar que entrada é nula para n<0 e n>2 sendo a saída y[n] calculada através de
Adicionando as respostas impulsionais obtemos a resposta
[ ] [ ] [ ] [ ]22142 −−−+= nnnnx δδδ
[ ]
≥
=−
=
=
=
<
=
4,0
3,1
2,0
1,5
0,2
0,0
n
n
n
n
n
n
ny
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]22142
22142
−−−+=
−−−+==
nhnhnh
nnnHnxHny δδδ
[ ]
=
=
=
outros
n
n
nh
,0
1,
0,1
21
[ ]
=−
=
=
=
outros
n
n
n
nx
,0
2,2
1,4
0,2

Slide 9 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Para sistemas discretos com resposta a impulso com equações mais extensas é possível estabelecer um procedimento sistemático para o cálculo do Somatório de Convolução
Definindo o sinal intermédio
Como nesta definição consideramos k como variável e tratamos o n como uma constante e redefinimos o Somatório de Convolução como
Notar que , que corresponde a uma reflexão de , seguido de um deslocamento -n
Procedimento de Cálculo
[ ] [ ] [ ]∑∞
−∞=
−=k
knhkxny
[ ] [ ] [ ]knhkxkwn −=
[ ] [ ]∑∞
−∞=
=k
n kwny
[ ] [ ][ ]nkhknh −−=− [ ]kh
Somatório de vários valores do sinal de entrada, pesados pelos valores da resposta a impulso
Slide 10 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
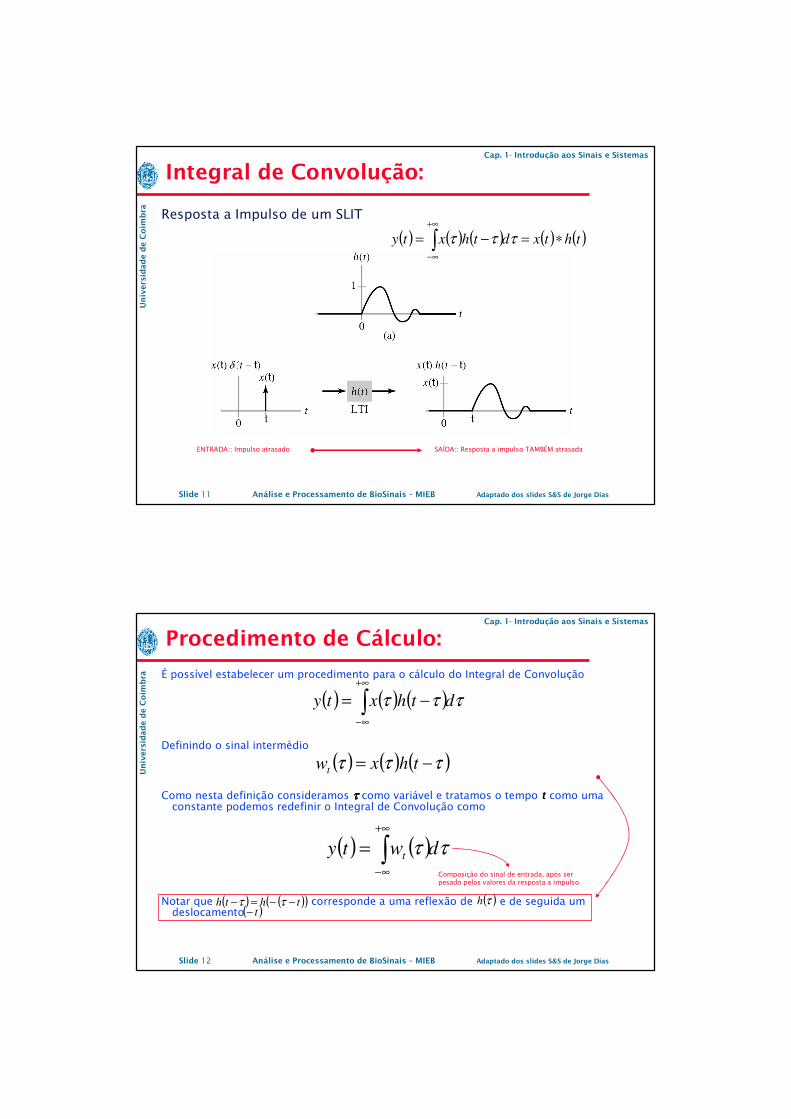
Integral de Convolução:
O Integral de ConvoluçãoA resposta de um sistema contínuo, linear e invariante no tempo também pode ser
descrita pela sua resposta impulsional composto com o sinal de entrada.
Representando o sinal de entrada por uma sobreposição (aqui um integral) de sinais de impulso deslocados no tempo
e por H o sistema ao qual a entrada x(t) foi aplicada
Sendo o sistema invariante no tempo
Correspondendo ao Integral de Convolução
( ) ( ) ( ) ττδτ dtxtx ∫+∞
∞−
−=
( ) ( ) ( ) ( ) ( ) ( ) ττδτττδτ dtHxdtxHtxHty ∫∫+∞
∞−
+∞
∞−
−=
−==
( ) ( ) ( ) ( )ττδδ −=−→= thtHthtH
( ) ( ) ( ) ( ) ( )thtxdthxty ∗=−= ∫+∞
∞−
τττ
Slide 11 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Integral de Convolução:
Resposta a Impulso de um SLIT
δ
( ) ( ) ( ) ( ) ( )thtxdthxty ∗=−= ∫+∞
∞−
τττ
ENTRADA:: Impulso atrasado SAÍDA:: Resposta a impulso TAMBÉM atrasada
Slide 12 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo:
É possível estabelecer um procedimento para o cálculo do Integral de Convolução
Definindo o sinal intermédio
Como nesta definição consideramos ττττ como variável e tratamos o tempo t como uma constante podemos redefinir o Integral de Convolução como
Notar que corresponde a uma reflexão de e de seguida um deslocamento
( ) ( ) ( ) τττ dthxty ∫+∞
∞−
−=
( ) ( ) ( )τττ −= thxwt
( ) ( ) ττ dwty t∫+∞
∞−
=
( ) ( )( )thth −−=− ττ( )t−
( )τh
Composição do sinal de entrada, após serpesado pelos valores da resposta a impulso
Slide 13 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
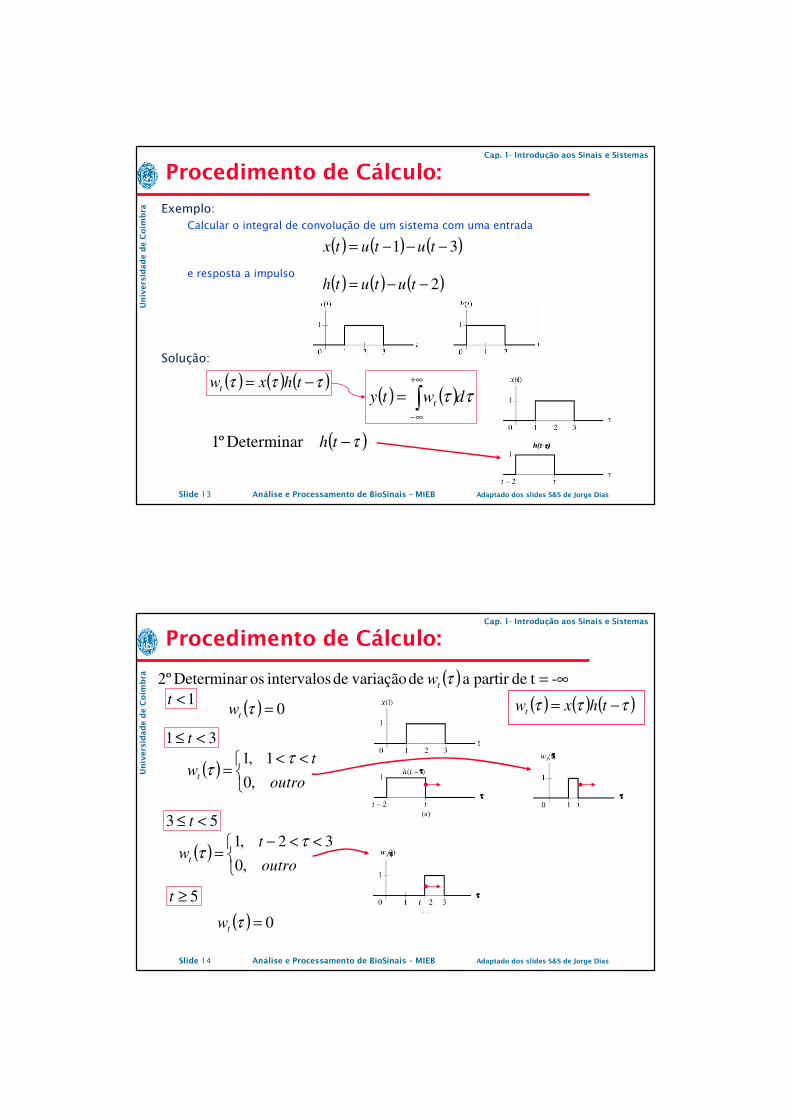
Procedimento de Cálculo:
Exemplo: Calcular o integral de convolução de um sistema com uma entrada
e resposta a impulso
Solução:
( )τ−thDeterminarº1
τ
τ
τ
( ) ( ) ( )31 −−−= tututx
( ) ( ) ( )2−−= tututh
( ) ( ) ( )τττ −= thxwt
( ) ( ) ττ dwty t∫+∞
∞−
=
h(t-ττττ) ) ) )
Slide 14 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo:
( ) ∞= - tdepartir a de variaçãode intervalos os Determinarº2 τtw
( ) 0=τtw
ττττ ττττ
ττττ
ττττ
( ) ( ) ( )τττ −= thxwt
ττττ
ττττ
t
( ) <<
=outro
twt
,0
1,1 ττ
( ) <<−
=outro
twt
,0
32,1 ττ
1<t
31 <≤ t
53 <≤ t
( ) 0=τtw
5≥t
Slide 15 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
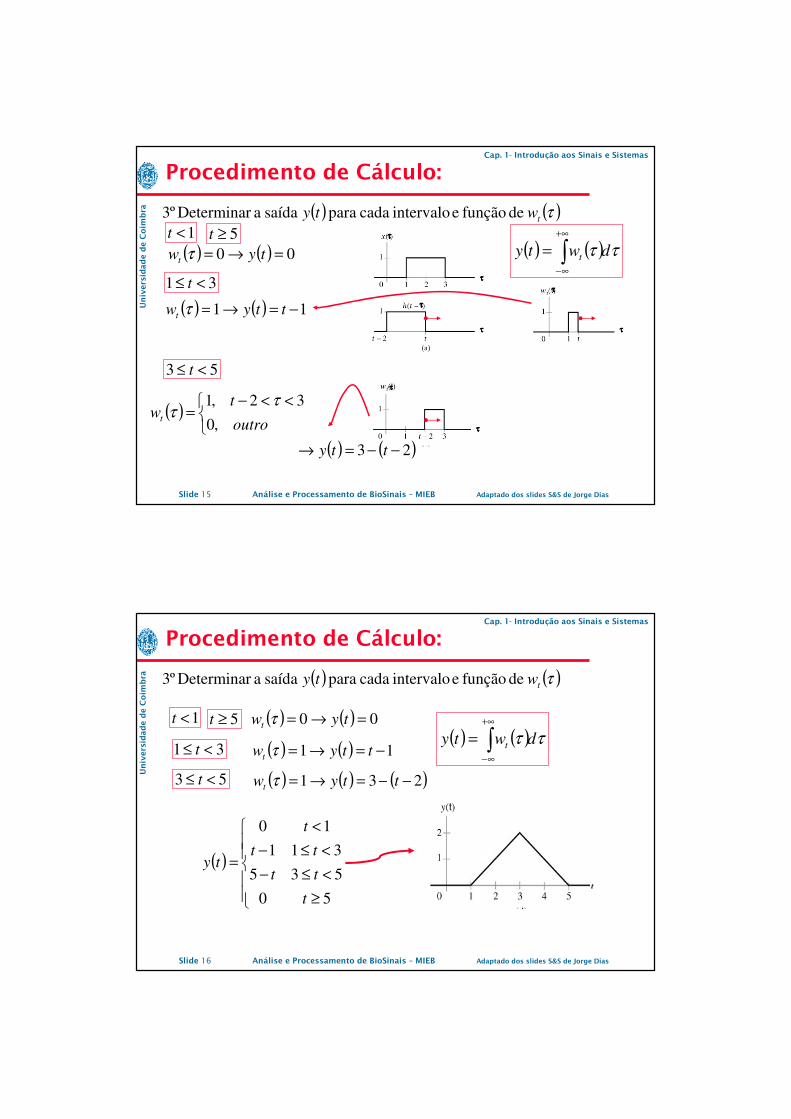
Procedimento de Cálculo:
( ) ( ) de função e intervalo cada para saída a Determinarº3 τtwty
( ) ( ) 00 =→= tywt τ
ττττ ττττ
ττττ
ττττ
ττττ
ττττ
ττττ
ττττ
t
1<t
31 <≤ t
53 <≤ t
5≥t( ) ( ) ττ dwty t∫
+∞
∞−
=
( ) ( ) 11 −=→= ttywt τ
( )
( ) ( )23
,0
32,1
−−=→
<<−
=
tty
outro
twt
ττ
Slide 16 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo:
( ) ( ) de função e intervalo cada para saída a Determinarº3 τtwty
( ) ( ) 00 =→= tywt τ
t
1<t
31 <≤ t
53 <≤ t
5≥t
( ) ( ) ττ dwty t∫+∞
∞−
=( ) ( ) 11 −=→= ttywt τ
( ) ( ) ( )231 −−=→= ttywt τ
( )
≥
<≤−
<≤−
<
=
50
535
311
10
t
tt
tt
t
ty

Slide 17 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo:
Exemplo: Suponha que a distância a um objecto é determinada por determinação do tempo
de propagação dum pulso de radiofrequência (RF) que é emitido segundo a expressão
A resposta a impulso do canal de propagação é medida através de emissão de um impulso de RF. A resposta foi um impulso atenuado e atrasado no tempo com a seguinte representação
Solução:
( )( )
≤≤
=outros
Ttttx
c
,0
0,sin 0ω
( )τ−thDeterminarº1
( ) ( )βδ −= tath
AtrasoAtenuação
( ) ( ) ( ) ( ) ( ) ( )( )βτδτβτδτβτδτ −−=−→+=−→−= tathahah
Slide 18 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Procedimento de Cálculo:
convolução de integral o Determinarº2
( ) ( ) ( ) ( ) ( ) τττ dthxthtxty ∫+∞
∞−
−=∗=
( ) ( )( )βτδτ −−=− tath
( ) ( ) ( ) ( ) ( )( )
( )β
τβτδττττ
−=
−−=−= ∫∫+∞
∞−
+∞
∞−
tax
dtaxdthxtr
Nota: Sinal é atenuado e atrasado no tempo
β β

Slide 19 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Interligações de SLIT
Se um sistema é interligado por diferentes componentes cujas respostas impulsionais são conhecidas então é possível determinar a resposta impulsional final de todo o sistema.
As interligações consideradas são:
Paralela
Série ou Cascata
Slide 20 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Interligações de SLIT
Configuração Paralela
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )thtxdthx
dththx
dthxdthx
thtxthtxtytyty
*
**
21
21
2121
=−=
−+−=
−+−=
+=+=
∫
∫
∫∫
∞
∞−
∞
∞−
∞
∞−
∞
∞−
τττ
ττττ
ττττττ
( ) ( ) ( ) ( ) ( ) ( ) ( ) ththtxthtxthtx 2121 *** +=+
[ ] [ ] [ ] [ ] ( ) [ ] [ ] nhnhnxnhnxnhnx 2121 *** +=+
Sistema contínuo
Sistema discreto
Slide 21 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
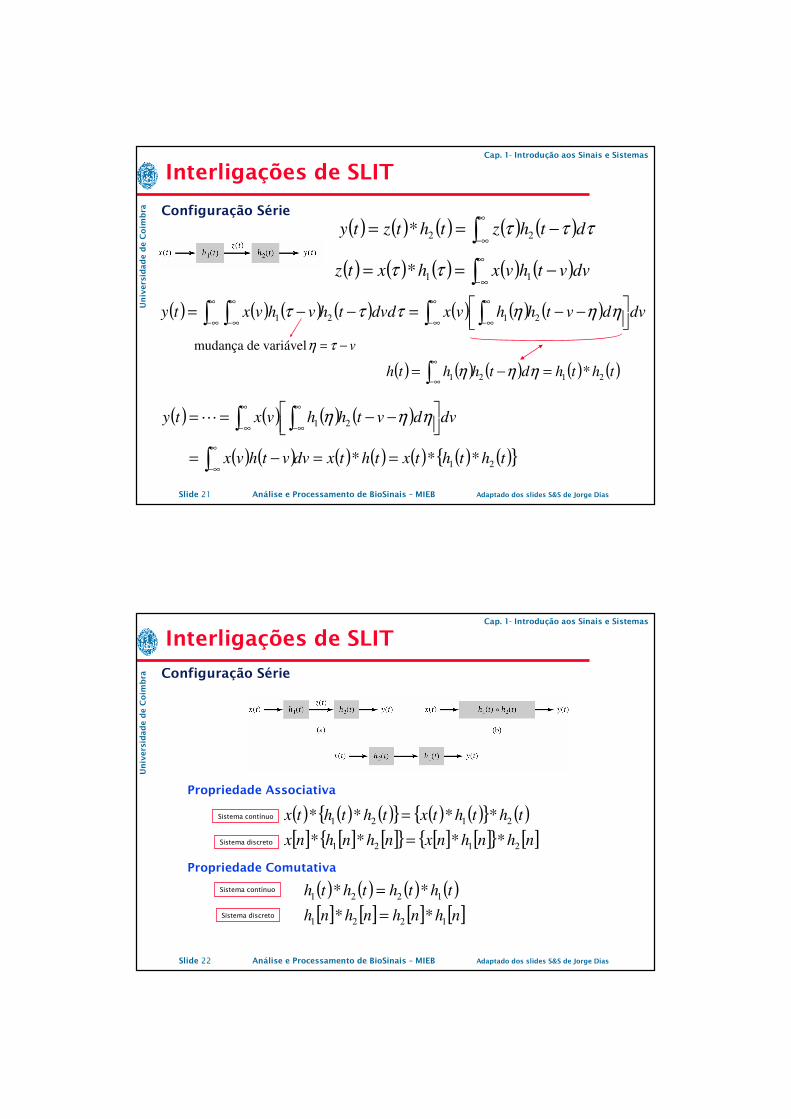
Interligações de SLIT
Configuração Série
( ) ( ) ( ) ( ) ( )∫∞
∞−−== τττ dthzthtzty 22*
( ) ( ) ( ) ( ) ( )∫∞
∞−−== dvvthvxhxtz 11* ττ
( ) ( ) ( ) ( ) ( ) ( ) ( )∫ ∫∫ ∫∞
∞−
∞
∞−
∞
∞−
∞
∞−
−−=−−= dvdvthhvxdvdthvhvxty ηηητττ 2121
v−=τη variávelde mudança
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ththtxthtxdvvthvx
dvdvthhvxty
21
21
*** ==−=
−−==
∫
∫ ∫∞
∞−
∞
∞−
∞
∞−ηηηL
( ) ( ) ( ) ( ) ( )ththdthhth 2121 *=−= ∫∞
∞−ηηη
Slide 22 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Interligações de SLIT
Configuração Série
Propriedade Associativa
Propriedade Comutativa
( ) ( ) ( ) ( ) ( ) ( )[ ] [ ] [ ] [ ] [ ] [ ]nhnhnxnhnhnx
ththtxththtx
2121
2121
****
****
=
=
( ) ( ) ( ) ( )[ ] [ ] [ ] [ ]nhnhnhnh
thththth
1221
1221
**
**
=
=
Sistema contínuo
Sistema discreto
Sistema contínuo
Sistema discreto
Slide 23 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
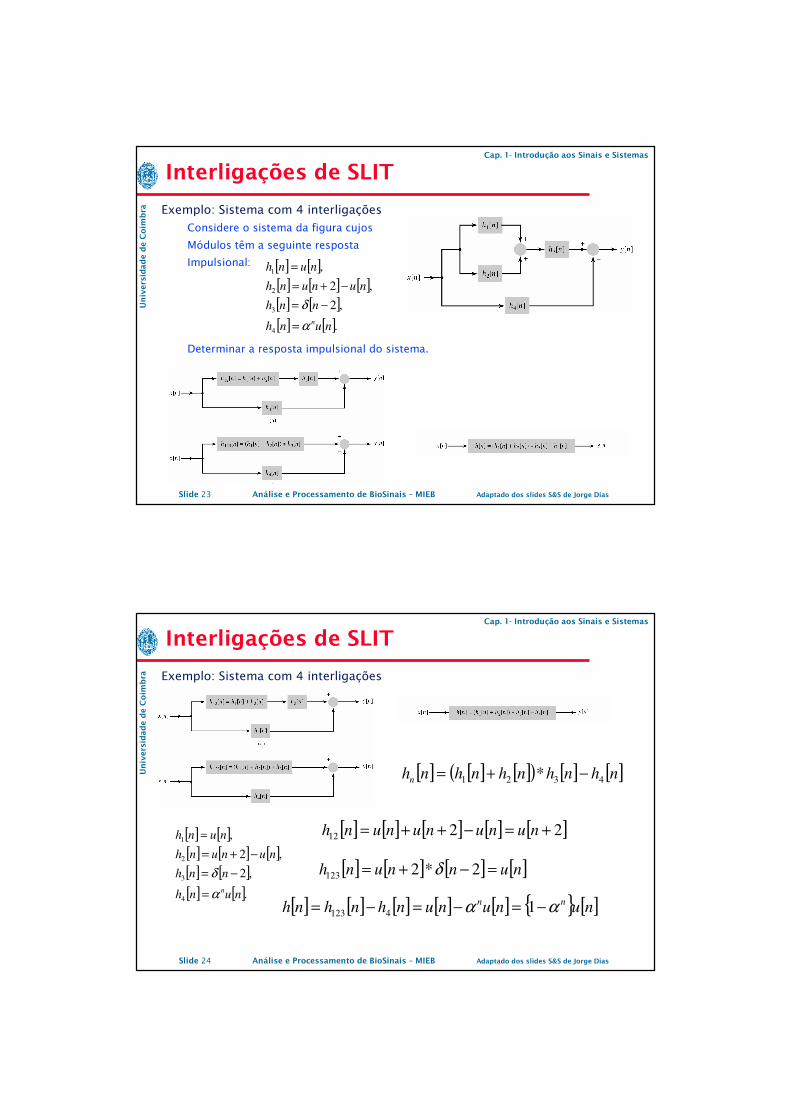
Interligações de SLIT
Exemplo: Sistema com 4 interligações
Considere o sistema da figura cujos
Módulos têm a seguinte resposta
Impulsional:
Determinar a resposta impulsional do sistema.
[ ] [ ][ ] [ ] [ ][ ] [ ]
[ ] [ ].
,2
,2
,
4
3
2
1
nunh
nnh
nununh
nunh
nα
δ
=
−=
−+=
=
Slide 24 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Interligações de SLIT
Exemplo: Sistema com 4 interligações
[ ] [ ][ ] [ ] [ ][ ] [ ]
[ ] [ ].
,2
,2
,
4
3
2
1
nunh
nnh
nununh
nunh
nα
δ
=
−=
−+=
=
[ ] [ ] [ ]( ) [ ] [ ]nhnhnhnhnhn 4321 * −+=
[ ] [ ] [ ] [ ] [ ]2212 +=−++= nununununh
[ ] [ ] [ ] [ ]nunnunh =−+= 2*2123 δ
[ ] [ ] [ ] [ ] [ ] [ ]nunununhnhnh nn αα −=−=−= 14123

Slide 25 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
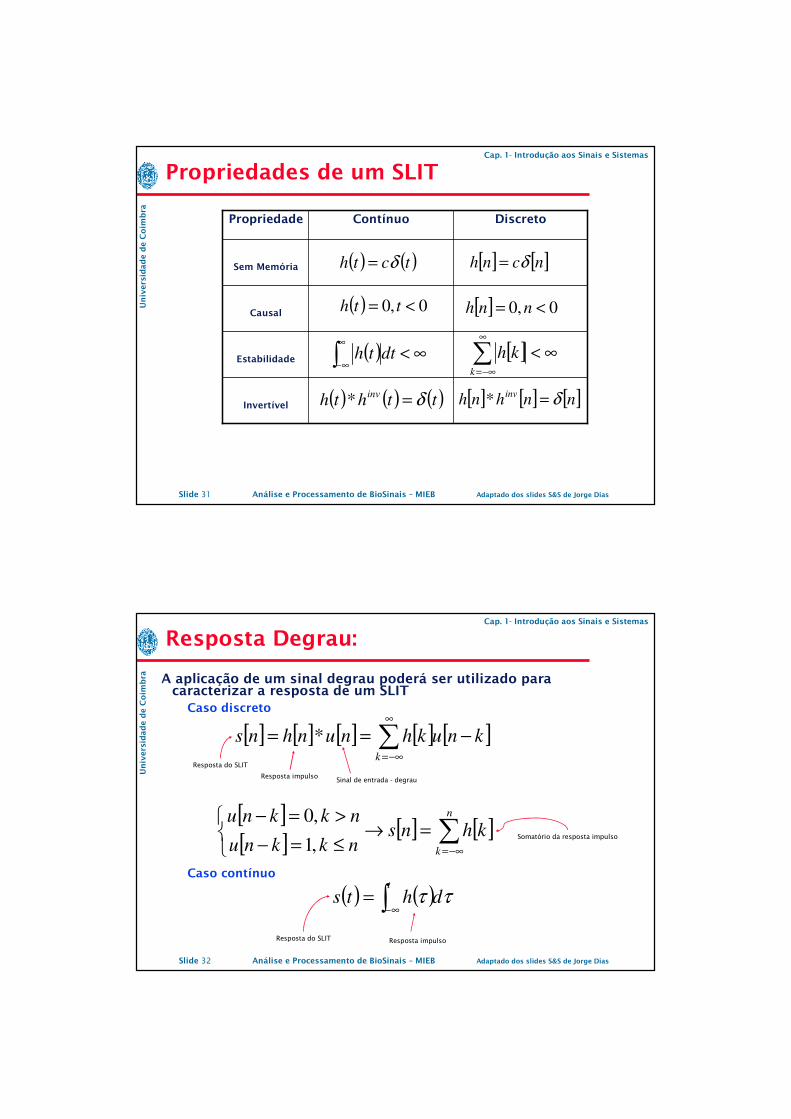
Propriedades de um SLIT
A resposta impulsional caracteriza completamente o comportamento entrada/saída de um SLIT.
As propriedades de um sistema podem ser relacionadas com a resposta a impulso.
Podemos obter relações para propriedades tais como
Memória de um Sistema
Sistema Causal
Estabilidade do Sistema
Slide 26 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
Memória de um SLIT
Um SLIT não tem memória se a sua resposta no instante t depende unicamente do valor de entrada no instante t.
Para um sistema sem memória:
Condição é:
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] LL +−+++−+=
−== ∑∞
−∞=
11011
*
nxhnxhnxh
knxkhnxnhnyk
[ ] [ ] [ ] 0 com de depende não de depende só - ≠−→ kknxnxny
[ ] [ ][ ] 0 para 0
0 de excepção à nulosser deverão termosos todos-
≠=⇒ kkh
nxh
[ ] [ ] constante uma com ckckh δ=

Slide 27 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
Condição para SLIT sem memória de um SLIT
Para o caso discreto.
Para caso contínuo:
[ ] [ ] constante uma com ckckh δ=
( ) ( ) constante uma com cch τδτ =
Slide 28 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
SLIT CausalUm SLIT é causal se depender só dos valores presentes e passados do
sinal de entrada.
Para um sistema discreto é equivalente a
Para um sistema contínuo no tempo
[ ] [ ] [ ] [ ] [ ] [ ] [ ] LL +−+++−+= 11011 nxhnxhnxhny
[ ] 0, ≥kkhPresente
Passado
[ ] [ ] [ ] [ ]∑∞
=−=→<=
0 0,0
kknxkhnykkh
( ) ( ) ( )∫∞
∞−−= τττ dtxhty
( ) ( ) ( ) ( )∫∞
−=→<=0
0,0 τττττ dtxhtyh

Slide 29 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
SLIT Estável
Sendo o SLIT estável para uma entrada
então o correspondente sinal de saída será estável e obedecerá à restrição
A resposta impulsional de um SLIT discreto e estável deverá obedecer àrestrição
No caso contínuo a
[ ] ∞≤≤ yMny
[ ] ∞≤≤ xMnx
[ ] ∞<∑∞
−∞=k
kh
( ) ∞<∫∞
∞−ττ dh
Slide 30 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
Invertível
O sistema será invertível se a entrada do sistema pode ser recuperada a partir da saída a menos de um factor de escala.
O processo de recuperar x(t) a partir de h(t)*x(t) é o inverso de uma convolução (“deconvolução”).
Para sistemas contínuos
Para sistemas discretos
( ) ( ) ( )( ) ( ) ( ) ( ) ( )tththtxththtxinvinv δ=⇒= ***
[ ] [ ] [ ]nnhnhinv δ=*
Slide 31 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Propriedades de um SLIT
Invertível
Estabilidade
Causal
Sem Memória
DiscretoContínuoPropriedade
[ ] [ ] [ ]nnhnhinv δ=*
[ ] [ ] ncnh δ=( ) ( )tcth δ=
( ) 0,0 <= tth [ ] 0,0 <= nnh
[ ] ∞<∑∞
−∞=k
kh( ) ∞<∫∞
∞−dtth
( ) ( ) ( )tththinv δ=*
Slide 32 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Resposta Degrau:
A aplicação de um sinal degrau poderá ser utilizado para caracterizar a resposta de um SLIT
Caso discreto
Caso contínuo
[ ] [ ] [ ] [ ] [ ]∑∞
−∞=
−==k
knukhnunhns *
Resposta impulso
Resposta do SLIT
Sinal de entrada - degrau
[ ][ ]
[ ] [ ]∑−∞=
=→
≤=−
>=− n
k
khnsnkknu
nkknu
,1
,0 Somatório da resposta impulso
( ) ( ) ττ dhtst
∫ ∞−=
Resposta impulsoResposta do SLIT

Slide 33 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Resposta Degrau:
Notar que as relações anteriores podem ser invertidas de forma a obter a resposta a impulso:
Desta forma a resposta a impulso fica caracterizada.
[ ] [ ] [ ]1 −−= nsnsnh
( ) ( )tsdt
dth =
[ ] [ ]∑−∞=
=n
k
khns
( ) ( ) ττ dhtst
∫ ∞−=
Slide 34 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Resposta Degrau:
Exemplo: Circuito RC: Resposta a DegrauConsiderando que a resposta impulsional do circuito
em anexo é
Determine a resposta a degrau.A partir do instante t=0 é aplicada uma tensão constante na fonte e o
condensador carrega até atingir a tensão da fonte.
( ) ( )tueRC
th RC
t−
=1
( )
≥−
<=
≥
<
= −−
∫ 0,1
0,0
0,1
0,0
0 te
t
tdeRC
t
tsRC
ttRC ττ
( ) ( )∫ ∞−
−
=t
RC dueRC
ts τττ
1

Slide 35 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Resposta Degrau:
Exemplo: Circuito RC: Resposta a Degrau
Resposta a degrau de um circuito RC para RC = 1.
( )
≥−
<= −
0,1
0,0
te
tts
RC
t
Slide 36 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Representações para SLITs :
Equações Diferenciais e de Diferenças
Equações diferenciais e equações lineares de coeficientes constantes são uma forma de representar SLITs.
As equações de diferenças são utilizadas para representações de sistemas discretos
As equações de diferencias são utilizadas para representações de sistemas contínuos
A ordem de uma equação de diferenças ou diferencial corresponde ao de dispositivos de memória/armazenamento de energia do sistema.
Muitas vezes e então a ordem é só descrita por
( )M, N
( ) ( )txdt
dbty
dt
da
M
kk
k
k
N
kk
k
k ∑∑==
=00
M ≥N N
[ ] [ ]∑∑==
−=−M
k
k
N
k
k knxbknya00

Slide 37 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Equações Diferenciais:
Exemplo: Equação Diferencial
Considerando a saída y(t) correspondente à corrente que circula no circuito RLC da figura e função da tensão de entrada x(t):
Esta expressão é de ordem N=2 (tem dois dispositivos de armazenamento de energia).
( ) ( ) ( ) ( )txdyC
tydt
dLt Ry
t
=++ ∫ ∞−ττ
1
( ) ( ) ( ) ( )txdt
dty
Cty
dt
dLty
dt
d R =++
12
2
Slide 38 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Equações Diferenças:
o Exemplo: Equação Diferenças
Um exemplo de uma equação de diferenças de ordem N=2 é
que representa a relação entre a entrada e a saída de sinais de um sistema que processa os dados em computador.
A ordem indica o número de unidades de memória necessárias.
o As equações de diferenças podem ser reorganizadas de forma a dar uma igualdade que expressa a saída expressa de forma recorrente:
Nesta expressão é possível obter y[n] em função dos valores passados da entrada e da saída.
[ ] [ ] [ ] [ ] [ ]1224
11 −+=−+−+ nxnxnynyn y
[ ] [ ] [ ]knyaa
knxba
nyN
k
k
M
k
k −−−= ∑∑== 1000
11

Slide 39 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Equações Diferenças:
o Exemplo: Equação Diferenças
Considerando a equação de diferenças
Podemos reescrever esta equação da forma
Que permite calcular y[n] em função dos valores passados da entrada e da saída.
[ ] [ ] [ ] [ ] [ ]1224
11 −+=−+−+ nxnxnynyn y
[ ] [ ] [ ] [ ] [ ]24
1112 −−−−−+= nynynxnxn y
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] L 04
111222
14
100211 2
4
111200
yyxxy
yyxxyyyxx y
−−+=
−−−+=−−−−−+=
Slide 40 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Equações Diferenças:
o Exemplo: Equação Diferenças
O calculo anterior exige valores para e .
Estas valores são as condições iniciais do sistema.
O número de valores para as condições iniciais do sistema é igual àmemória do sistema.
Para uma equação de diferenças de ordem N os valores a determinar são
Para um equação diferencial de ordem N os valores a determinar são
[ ]1−y
[ ] [ ] [ ]1,,1, −+−− yNyN y L
[ ]2−y
( ) ( ) ( )−−
−
=
−
−
==
0
1
1
00
,,,
t
N
N
tt
tydt
dty
dt
dty L

Slide 41 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Equações Diferenças:
o Exemplo: Equação Diferenças
Determine os dois primeiros valores da saída para o sistema descrito por
Assuma que a entrada é dada por
e as condições iniciais são
Os valores iniciais são:
[ ] [ ] [ ] [ ] [ ]24
1112 −−−−−+= nynynxnxn y
[ ] [ ] [ ] [ ] [ ] ( )
[ ] [ ] [ ] [ ] [ ] ( )4
72-
4
1-1-0211
4
100211
2
12-
4
1-1-0212
4
111200
=××+=−−−+=
=××+=−−−−−+=
yyxxy
yyxx y
[ ] ( ) [ ]nun xn
21=
[ ] [ ] 22,11 −=−=− y y
Slide 42 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
A saída de um sistema descrito por uma equação de diferenças ou uma equação diferencial pode ser expressa pela adição de duas componentes:
Solução homogénea (solução da equação diferencial ou de diferenças)
Solução particular (uma qualquer outra solução da equação original)
A solução completa é
Solução Homogénea
A forma homogénea de uma equação diferencial ou de diferenças éobtida igualando a zero todos os termos que envolvam a entrada.
Para um sistema contínuo
( )h y
( )p y
( ) ( )phyy y +=
( )( ) 00
=∑=
tydt
da
hN
kk
k
k Solução homogénea ( )( ) ∑=
=N
i
tr
i
h iect y1Equação homogénea

Slide 43 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Solução Homogénea
Para um sistema contínuo
Em que são as N raízes da equação característica
No caso de raízes repetidas p vezes então os termos envolvendo essas raízes tomam a forma
i r
( )( ) 00
=∑=
tydt
da
hN
kk
k
k Solução homogénea ( )( ) ∑=
=N
i
tr
i
h iect y1
∑=
=N
k
k
k ra 0
0
Equação homogénea
trptrtr jjj ette e1,,, −
L
Slide 44 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Solução Homogénea
Para um sistema discreto
Em que são as N raízes da equação característica do sistema discreto
No caso de raízes repetidas p vezes então os termos envolvendo essas raízes tomam a forma
i r
( )[ ] 00
=−∑=
knya h
N
k
k Solução homogénea ( )[ ] ∑=
=N
i
n
ii
hrcn y
1
∑=
− =N
k
kN
k ra 0
0
Equação homogénea
n
j
pn
j
n
j rnnr r1,,, −
L
Slide 45 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
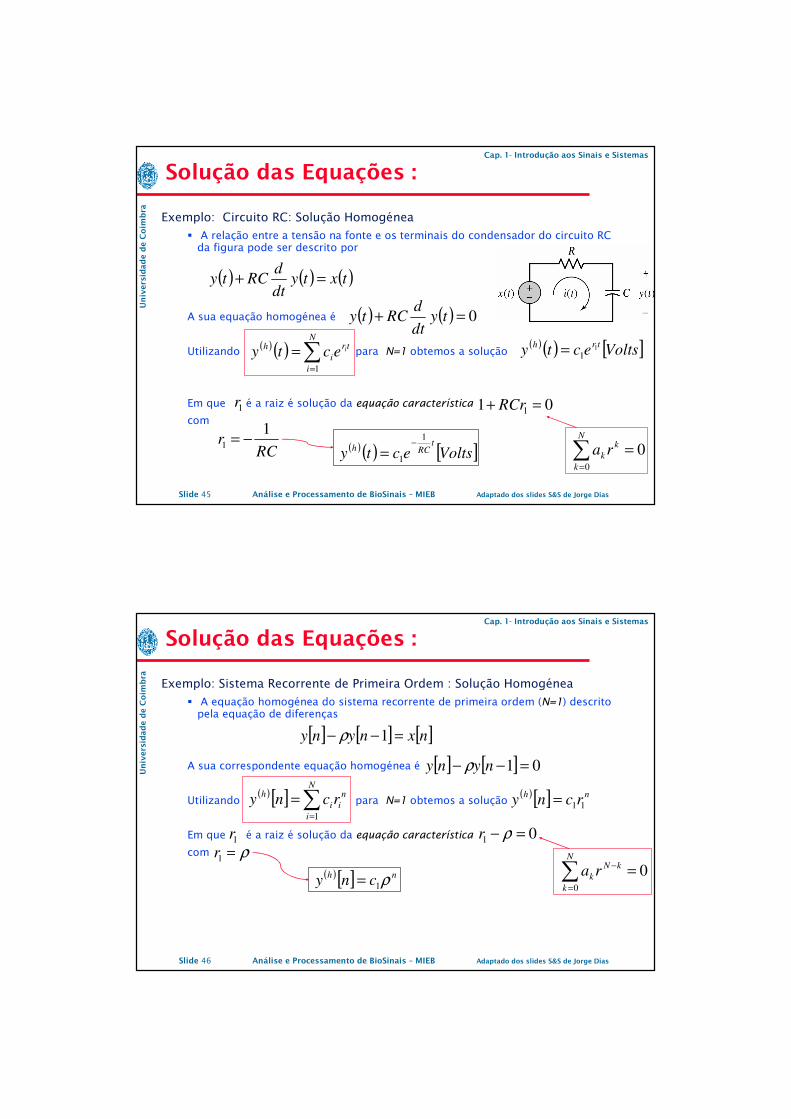
Solução das Equações :
Exemplo: Circuito RC: Solução Homogénea
A relação entre a tensão na fonte e os terminais do condensador do circuito RC da figura pode ser descrito por
A sua equação homogénea é
Utilizando para N=1 obtemos a solução
Em que é a raiz é solução da equação característica
com
( ) ( ) ( )txtydt
dRCt y =+
( ) ( ) 0=+ tydt
dRCt y
( )( ) ∑=
=N
i
tr
i
h iect y1
( )( ) [ ]Voltsect ytrh 1
1=
∑=
=N
k
k
k ra 0
0
1 r 01 1 =+ RCr
RC r
11 −=
( )( ) [ ]Voltsect yt
RCh
1
1
−
=
Slide 46 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Exemplo: Sistema Recorrente de Primeira Ordem : Solução Homogénea
A equação homogénea do sistema recorrente de primeira ordem (N=1) descrito pela equação de diferenças
A sua correspondente equação homogénea é
Utilizando para N=1 obtemos a solução
Em que é a raiz é solução da equação característica
com
[ ] [ ] [ ]nxnyn y =−− 1ρ
1 r 01 =− ρr
ρ=1 r
( )[ ] nhcn y ρ1=
[ ] [ ] 01 =−− nyn y ρ
∑=
− =N
k
kN
k ra 0
0
( )[ ] ∑=
=N
i
n
ii
hrcn y
1
( )[ ] nhrcn y 11=
Slide 47 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
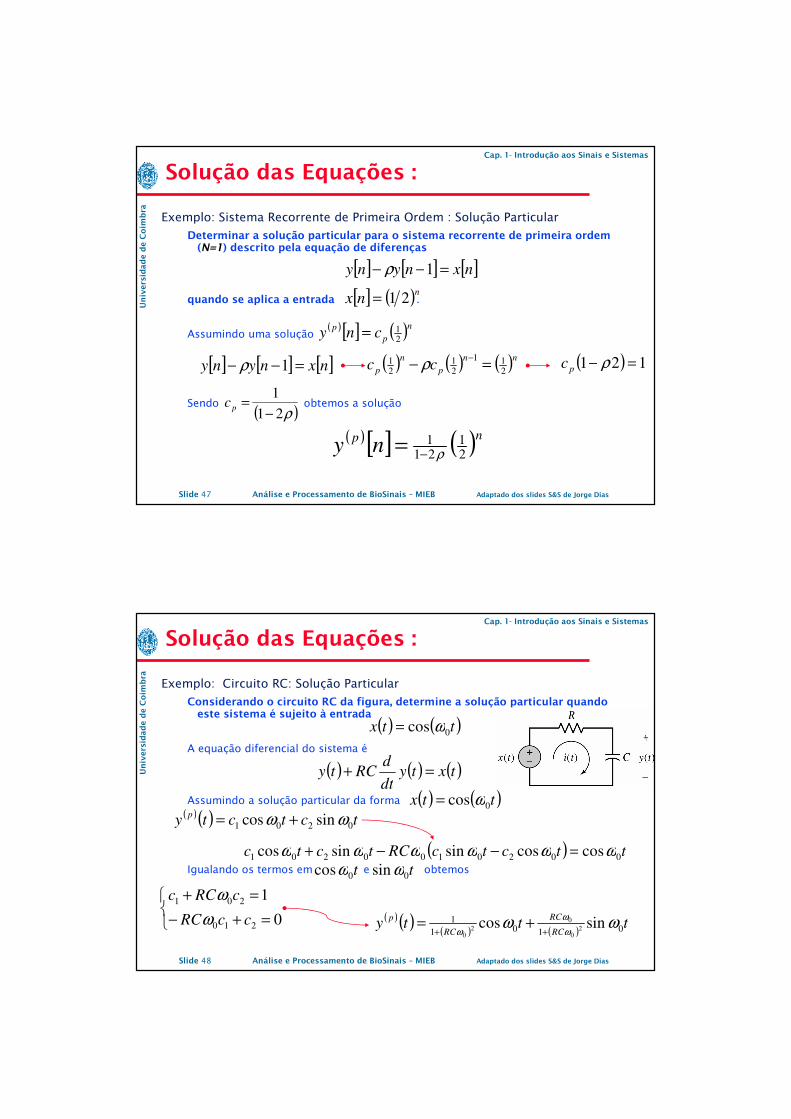
Solução das Equações :
Exemplo: Sistema Recorrente de Primeira Ordem : Solução Particular
Determinar a solução particular para o sistema recorrente de primeira ordem (N=1) descrito pela equação de diferenças
quando se aplica a entrada .
Assumindo uma solução
Sendo obtemos a solução
[ ] [ ] [ ]nxnyn y =−− 1ρ
( )[ ] ( )n
p
pcn y
21=
[ ] ( )nn x 21=
[ ] [ ] [ ]nxnyn y =−− 1ρ ( ) ( ) ( )nn
p
n
p c c211
21
21 =−
−ρ ( ) 121 =− ρp c
( )ρ21
1
−=p c
( )[ ] ( )npn y
21
211
ρ−=
Slide 48 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Exemplo: Circuito RC: Solução Particular
Considerando o circuito RC da figura, determine a solução particular quando este sistema é sujeito à entrada
A equação diferencial do sistema é
Assumindo a solução particular da forma
Igualando os termos em e obtemos
( ) ( ) ( )txtydt
dRCt y =+
( )( ) tctct yp
0201 sincos ωω +=
( ) ( )ttx 0cos ω=
( ) ( )ttx 0cos ω=
( ) ttctcRCtct c 0020100201 coscossinsincos ωωωωωω =−−+t 0cosω t 0sinω
=+−
=+
0
1
210
201
ccRC
cRCc
ω
ω
( )( )( ) ( )
ttt yRC
RC
RC
p
0101
1 sincos 20
0
20
ωωω
ω
ω +++=

Slide 49 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Solução Completa
A solução completa é obtida por adição da solução homogénea com uma
solução particular:
Para obter a expressão final determinam-se os coeficientes desconhecidos na
expressão utilizando condições iniciais.
1º - Determinar a solução a partir das raízes da equação característica.
2º - Determinar a solução assumindo que é forma idêntica que a entrada
mas com termos independentes da solução homogénea.
3º - Determinar os coeficientes da solução homogénea
de forma que satisfaça as condições iniciais do sistema.
( ) ( )phyy y +=
( )hy
( )py
( ) ( )phyy y +=
Slide 50 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Exemplo: Circuito RC: Solução Completa
Considerando o exemplo do circuito RC da figura, determine a solução completa quando e este sistema é sujeito
à entrada
A solução homogénea é
A solução particular é
Colocando obtemos a solução completa
em que pois o sinal de entrada não introduz impulsos na parte direita da equação
( ) ( ) ( )tuttx 0cos ω=
10 === RCω
( )( )( ) ( )
ttt yRC
RC
RC
p
0101
1 sincos 20
0
20
ωωω
ω
ω +++=
( )( ) [ ]Voltsect yt
RCh
1
1
−
=
( ) 0 com ,sincos21
21 >++= −
tttcet yt
( ) 20 =−y
( ) ( ) 200 == +−yy
23 0sin0cos2
21
21
210 =→+=++= ++− +
ccce
Slide 51 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Características dos Sistemas
Por vezes é bastante informativo exprimir a resposta de um sistema em função da soma de duas componentes:
• Componente associada só às condições iniciais – resposta natural
• Componente associada só ao sinal de entrada – resposta forçada
Neste caso a solução completa é
Resposta Natural
A resposta natural corresponde à saída do sistema para uma entrada de sinal nula e dessa forma permite descrever como o sistema dissipa a sua energia ou memória do passado e representada pelas condições iniciais.
Resposta Forçada
A resposta forçada corresponde à saída do sistema a um sinal na entrada mas assumindo condições iniciais nulas. Nessa situação assumimos que o sistema está em repouso e não existe energia armazenada no sistema ou a sua memória está vazia.
( )n y
( )f y
( ) ( )fnyy y +=
Slide 52 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Exemplo: Circuito RC: Resposta Natural
O circuito RC da figura pode ser descrito por
Mas pretende-se obter a sua resposta natural assumindo que
Sendo a solução homogénea
Se for a constante for calculada de forma a satisfazer a condição inicial
Então e resposta natural do sistema é
( ) ( ) ( )txtydt
dRCt y =+
( )( ) [ ] 0,2 ≥= −tvoltset y
tn
1 c
( )( ) thect y
−= 1
( ) FCRV y 1,1,20 =Ω==
( ) 20 = y
21 = c

Slide 53 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Solução das Equações :
Exemplo: Circuito RC: Resposta Forçada
Considerando o exemplo do circuito RC da figura, determine a sua resposta forçada assumindo que
e a entrada é
Sabendo que a resposta completa é
A resposta forçada é determinada escolhendo c quando o sistema está em repouso, ou seja quando:
Nesse caso e a resposta forçada é dada por
( ) ( ) ( )tuttx cos=
( ) 0 com ,sincos21
21 >++= −
tttcet yt
FCR 1,1 =Ω=
( ) ( ) 000 == +−yy
21−=c
( )( ) [ ]voltsttet y tf sincos21
21
21 ++−= −
Slide 54 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Características dos Sistemas
Resposta a Impulso
Sendo conhecida a resposta a degrau podemos determinar a resposta a impulso através da relação matemática entre as duas respostas.
Por definição a resposta a degrau assume que o sistema está em repouso ou seja, com condições iniciais nulas.
Para um sistema contínuo a resposta a impulso relaciona-se com a resposta a degrau através de
Para um sistema discreto a resposta a impulso relaciona-se com a resposta a degrau através de
( ) ( )tsdt
dt h =
Resposta a degrauResposta a impulso
[ ] [ ] [ ]1−−= nsnsn h
Resposta a degrauResposta a impulso

Slide 55 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Características dos Sistemas
Linear e Invariante
A resposta forçada de um sistema SLIT pode ser obtida por combinação linear das entradas.
De forma semelhante a resposta natural de um sistema SLIT pode ser obtida por combinação linear das condições iniciais.
( )
( )f
f
yx
y x
22
11
a
a ( ) ( ) ( )fffyyyxxx 2121 βαβα +=+=⇒ a
( )
( )n
n
yI
yI
22
11
iniciais condições
iniciais condições
a
a( ) ( ) ( )nnn
yyyII 2121 βαβα +=+ a
Slide 56 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Características dos Sistemas
Equação Característica – As suas raízes
A resposta forçada depende do sinal de entrada e das raízes da equação característica.
A resposta natural depende das raízes da equação característica.
Daqui podemos concluir que as raízes da equação característica têm um papel fundamental no comportamento do sistema.
A estabilidade de um sistema está relacionada com as raízes equação característica.
A condição de estabilidade BIBO (entrada limitada, saída limitada) implica que a resposta natural seja limitada:
Caso discreto
Caso contínuo
irr n
i ∀< ,1limitadaser deverá 1a
ire i
tri ∀< ,0Relimitadaser deverá a
Slide 57 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Diagramas de Blocos
Representações por Diagramas de Blocos
Um diagrama de blocos é uma representação para as operações elementares que são realizadas num sistema.
Um sistema com uma determinada característica entrada/saída pode ser representada por diferentes diagramas de blocos.
As três operações elementares nos sinais são:
Multiplicação Escalar
Adição
Integração
(para sistemas contínuos)
Deslocamento temporal
(para sistemas discretos)
∫ ( ) ( )∫∞−
=t
dxty ττ
Slide 58 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
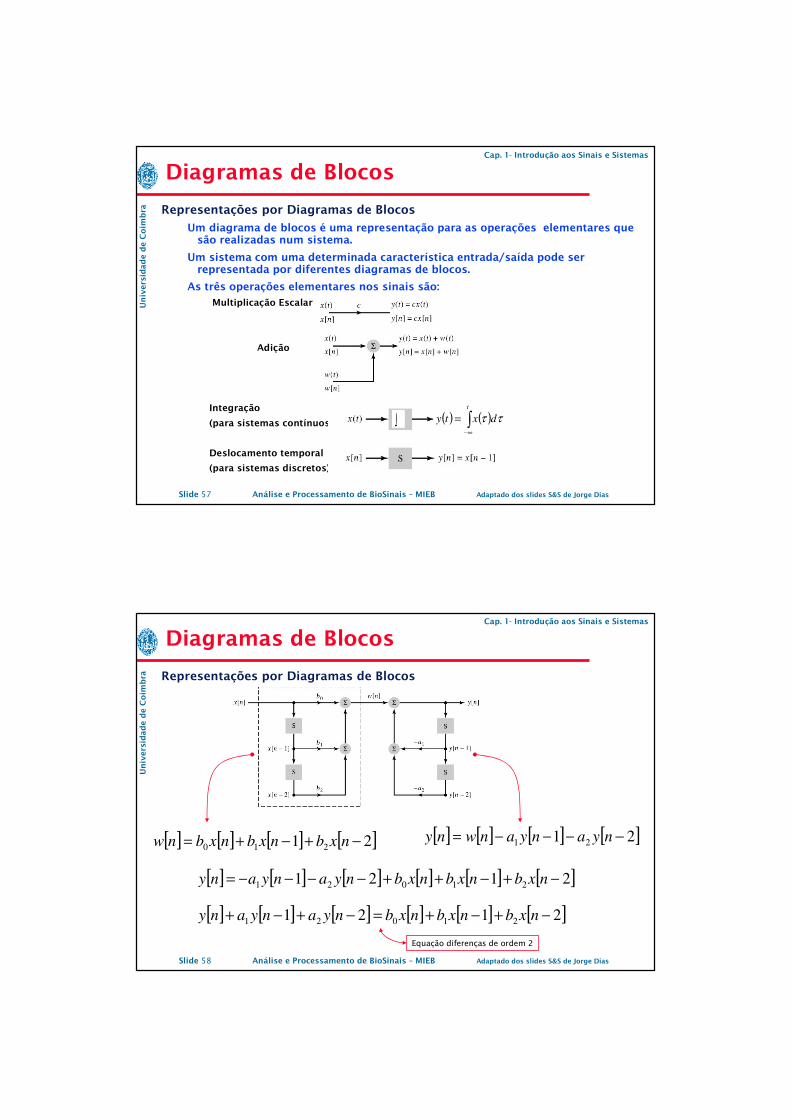
Diagramas de Blocos
Representações por Diagramas de Blocos
[ ] [ ] [ ] [ ]21 210 −+−+= nxbnxbnxbn w [ ] [ ] [ ] [ ]21 21 −−−−= nyanyanwn y
[ ] [ ] [ ] [ ] [ ] [ ]2121 21021 −+−++−−−−= nxbnxbnxbnyanyan y
[ ] [ ] [ ] [ ] [ ] [ ]2121 21021 −+−+=−+−+ nxbnxbnxbnyanyan y
Equação diferenças de ordem 2
Slide 59 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Diagramas de Blocos
Representações por Diagramas de Blocos
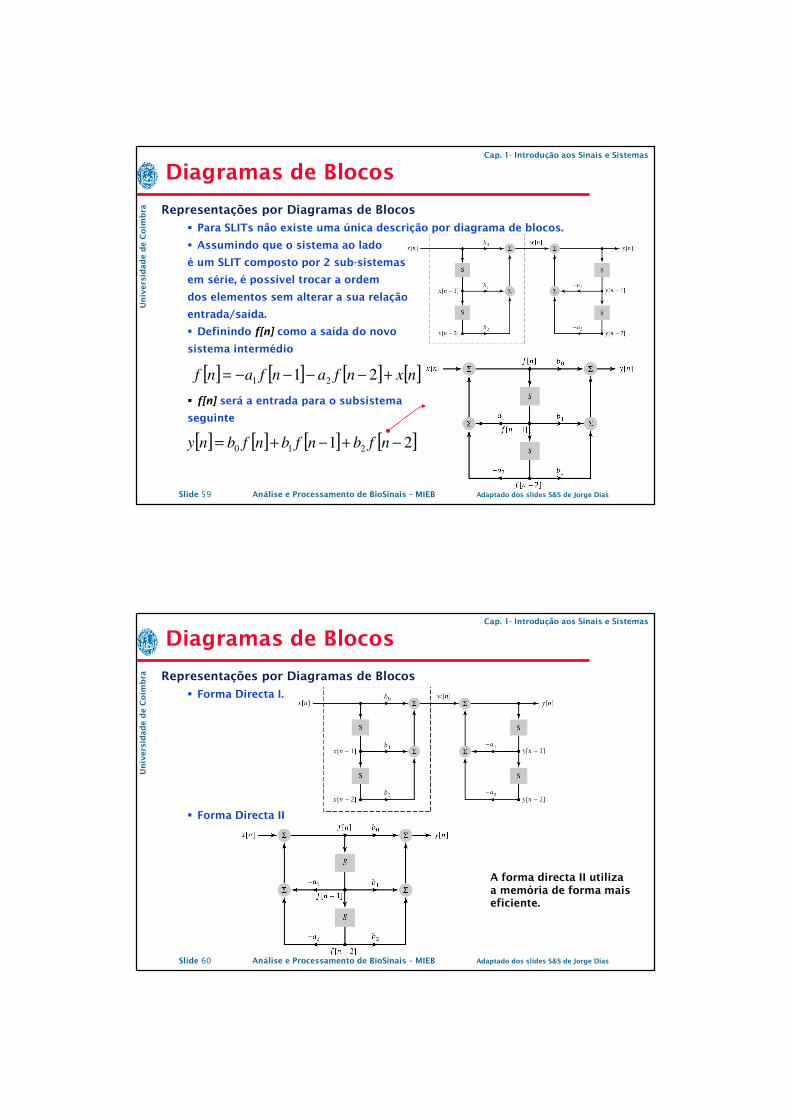
Para SLITs não existe uma única descrição por diagrama de blocos.
Assumindo que o sistema ao lado
é um SLIT composto por 2 sub-sistemas
em série, é possível trocar a ordem
dos elementos sem alterar a sua relação
entrada/saída.
Definindo f[n] como a saída do novo
sistema intermédio
f[n] será a entrada para o subsistema
seguinte
[ ] [ ] [ ] [ ]21 210 −+−+= nfbnfbnfbn y
[ ] [ ] [ ] [ ]nxnfanfan f +−−−−= 21 21
Slide 60 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Diagramas de Blocos
Representações por Diagramas de Blocos
Forma Directa I.
Forma Directa II
A forma directa II utilizaa memória de forma maiseficiente.

Slide 61 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Diagramas de Blocos
Exemplo: Diagramas de Blocos: Forma Directa I e Forma Directa II
Desenhe o diagrama de blocos correspondente ao sistema
[ ] ( ) [ ] ( ) [ ] [ ] [ ]1281141 −+=−+−+ nxnxnynyn y
Forma directa I.
Forma directa II.
[ ] [ ] [ ][ ] ( ) [ ] ( ) [ ] [ ]nxnfnfnf
nfnfn y
+−−−−=
−+=
281141
1
Slide 62 Análise e Processamento de BioSinais – MIEB Adaptado dos slides S&S de Jorge Dias
Un
ive
rsid
ad
e d
e C
oim
bra
Cap. 1- Introdução aos Sinais e Sistemas
Sumário
o Convolução
o O Integral de Convolução
o Interligações de SLIT - Sistemas Lineares Invariantes no Tempo
o Resposta a Degrau
o Equações Diferenciais e de Diferenças para SLIT
o Soluções para Equações Diferenciais e de Diferenças
o Características dos Sistemas
o Representação por Diagramas de Blocos