x-008 – metodologia para estima · deve interferir com as contagens. o alumínio é um material...
TRANSCRIPT

22º Congresso Brasileiro de Engenharia Sanitária e Ambiental
14 a 19 de Setembro 2003 - Joinville - Santa Catarina
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS
Vinícius Verna M. Ferreira(1)
Engenheiro Eletricista pela UFMG. Mestre em Ciências e Técnicas Nucleares pela UFMG. Doutorando em Engenharia Sanitária, Ambiental e Recursos Hídricos na UFMG.Tecnologista Pleno do CDTN (Centro de Desenvolvimento da Tecnologia Nuclear). Inácio Loiola Pereira CamposEngenheiro Eletricista – UFMG. Mestre em Engenharia Elétrica – UFMG. Professor do Departamento de Engenharia Nuclear da Universidade Federal de Minas Gerais. Clemente José Gusmão Carneiro da SilvaEngenheiro Eletricista – UFPE. Especialista em Ciências e Técnicas Nucleares – USP. Doutor em Ciências do Solo – USASK, Canadá. Professor do Departamento de EngenhariaNuclear da Universidade Federal de Minas Gerais. Endereço(1): CDTN - Centro de Desenvolvimento da Tecnologia Nuclear. Rua Professor Mário Werneck, s/n.º. Caixa Postal 941. Campus UFMG. Belo Horizonte - MG - CEP: 30123-970 - Brasil - Tel: + 55 (31) 3499-3294 - Fax: +55 (31) 3499-3411 -e- mail: [email protected]
RESUMO
As referências existentes sobre o tema sonda de nêutrons são numerosas, devido à diversidade de aplicações nas quais este equipamento pode ser empregado. Contudo aliteratura não apresenta com clareza os meios de posicionamento correto desta sonda dentro de um tubo de acesso a uma profundidade subterrânea predefinida.
Neste trabalho, desenvolveu-se uma ferramenta computacional e uma interface, que acionam um motor, para aplicações em medições de campo feitas com sondas de nêutrons,visando com isto contribuir para atenuar o problema do posicionamento da sonda.
Configurações básicas de medições foram simuladas pelo programa desenvolvido, enquanto o posicionamento da sonda era verificado. Os resultados obtidos apresentaram umamargem de erro reduzida, habilitando o seu uso em aplicações reais.
PALAVRAS-CHAVE: Sonda de nêutrons, posicionamento, motor de corrente contínua.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 1
10.02.2004
INTRODUÇÃO
A medição do conteúdo volumétrico de água no solo usando uma sonda de nêutrons (que consiste em uma fonte radioativa e um detetor de nêutrons lentos) é um método decampo não destrutivo, baseado na termalização de nêutrons rápidos emitidos por uma fonte radioativa, e pela posterior detecção destes nêutrons. Com o auxílio de uma curva decalibração, torna-se possível a determinação da variação da taxa de umidade do solo.
As medidas são realizadas após o posicionamento da sonda na profundidade desejada, dentro de um tubo de acesso. Este tubo deve estar "encaixado firmemente" no solo aolongo de todo o seu comprimento. Erros nas taxas de contagens podem ocorrer se a água penetrar em um intervalo de ar entre o tubo e o solo, resultando assim uma umidade maiorpróxima ao tubo. As maiores variações aparecerão em solos macios como os argilosos e arenosos. Além disso, o tubo deve ser " transparente" aos nêutrons rápidos, ou seja, nãodeve interferir com as contagens. O alumínio é um material adequado para esta aplicação.
A sonda realiza uma varredura, efetuando leituras em várias profundidades. A fonte radioativa, o detetor de nêutrons (BF3, 3He,cintilação) e o pré-amplificador são encapsuladosem um cilindro de alumínio ou aço inoxidável de pequeno diâmetro. A sonda propriamente dita se constitui de um cilindro metálico selado que possui um diâmetro de 3 a 4 cm e umcomprimento de 20 a 30 cm.
O objetivo do trabalho é desenvolver um sistema de posicionamento para determinar as medidas de umidade com uma sonda de nêutrons.
METODOLOGIA
Uma sonda de nêutrons funcionando em condições de campo está representada na figura 1.
Figura 1: Diagrama operativo de uma sonda de nêutrons.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 2
10.02.2004

Para automatizar as medidas de umidade foi construído um protótipo de um sistema de posicionamento.
ARRANJO EXPERIMENTAL
As figuras 2 e 3 são fotos do arranjo experimental utilizado para desenvolver um sistema de posicionamento de uma sonda de nêutrons.
Como tubo de acesso foi usado um tubo de acrílico transparente, com cerca de dois metros de comprimento e diâmetro largo o suficiente para permitir o deslocamento do protótipousado como sonda em seu interior.
Conectou-se este tubo a um outro, de metal, através do qual um cabo preso à carga (cilindro metálico com 5,4 cm de altura) é levado a uma roldana, e esta gira juntamente com omotor. Após passar pela roldana o cabo entra em um cilindro, no qual acomoda-se "per si". Um teste preliminar mostrou que este cilindro comporta mais de quatro metros de caboenrolado.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 3
10.02.2004

A presença de uma ponta "fixa" do cabo conectado à carga, no interior do cilindro, permite a não utilização dos modelos tradicionais de acionamento usados em sistemas deelevação/abaixamento de cargas. Para esta metodologia é desnecessária a presença de um contrapeso.
Para o acionamento do cilindro que simulava a sonda, foi utilizado um motor de corrente contínua-MCC de 12 Volts com imã permanente no rotor (marca BOSCH, fabricado naAlemanha, modelo FPG 12V) que possui quatro terminais.
Paralelamente ao tubo, fixou-se um suporte no qual uma trena está presa. O suporte foi então acoplado à uma armação em forma de mesa que foi colocada sobre uma bancada.
Figura 2 – Visão frontal da montagem
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 4
10.02.2004

Figura 3: Visão da parte superior da montagem
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 5
10.02.2004
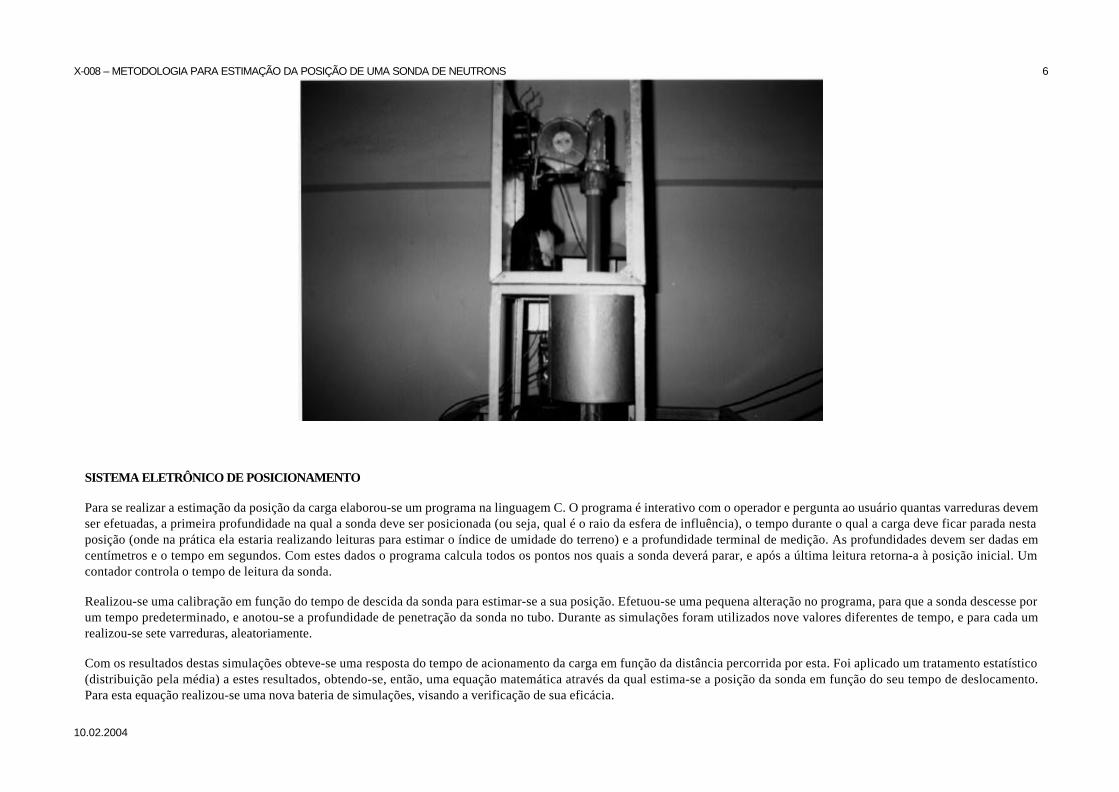
SISTEMA ELETRÔNICO DE POSICIONAMENTO
Para se realizar a estimação da posição da carga elaborou-se um programa na linguagem C. O programa é interativo com o operador e pergunta ao usuário quantas varreduras devemser efetuadas, a primeira profundidade na qual a sonda deve ser posicionada (ou seja, qual é o raio da esfera de influência), o tempo durante o qual a carga deve ficar parada nestaposição (onde na prática ela estaria realizando leituras para estimar o índice de umidade do terreno) e a profundidade terminal de medição. As profundidades devem ser dadas emcentímetros e o tempo em segundos. Com estes dados o programa calcula todos os pontos nos quais a sonda deverá parar, e após a última leitura retorna-a à posição inicial. Umcontador controla o tempo de leitura da sonda.
Realizou-se uma calibração em função do tempo de descida da sonda para estimar-se a sua posição. Efetuou-se uma pequena alteração no programa, para que a sonda descesse porum tempo predeterminado, e anotou-se a profundidade de penetração da sonda no tubo. Durante as simulações foram utilizados nove valores diferentes de tempo, e para cada umrealizou-se sete varreduras, aleatoriamente.
Com os resultados destas simulações obteve-se uma resposta do tempo de acionamento da carga em função da distância percorrida por esta. Foi aplicado um tratamento estatístico(distribuição pela média) a estes resultados, obtendo-se, então, uma equação matemática através da qual estima-se a posição da sonda em função do seu tempo de deslocamento.Para esta equação realizou-se uma nova bateria de simulações, visando a verificação de sua eficácia.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 6
10.02.2004

Para alimentar o motor e os componentes ativos da interface que necessitam de uma tensão de 12 Volts, utilizou-se durante as simulações uma fonte regulável de 0 a 15 Volts(corrente máxima de 2 Ampères). Após a confecção da placa do circuito impresso repetiram-se alguns testes, de maneira aleatória, desta vez utilizando-se uma bateria de 12 Volts, 40Ampère/hora, marca Delco Freedom.
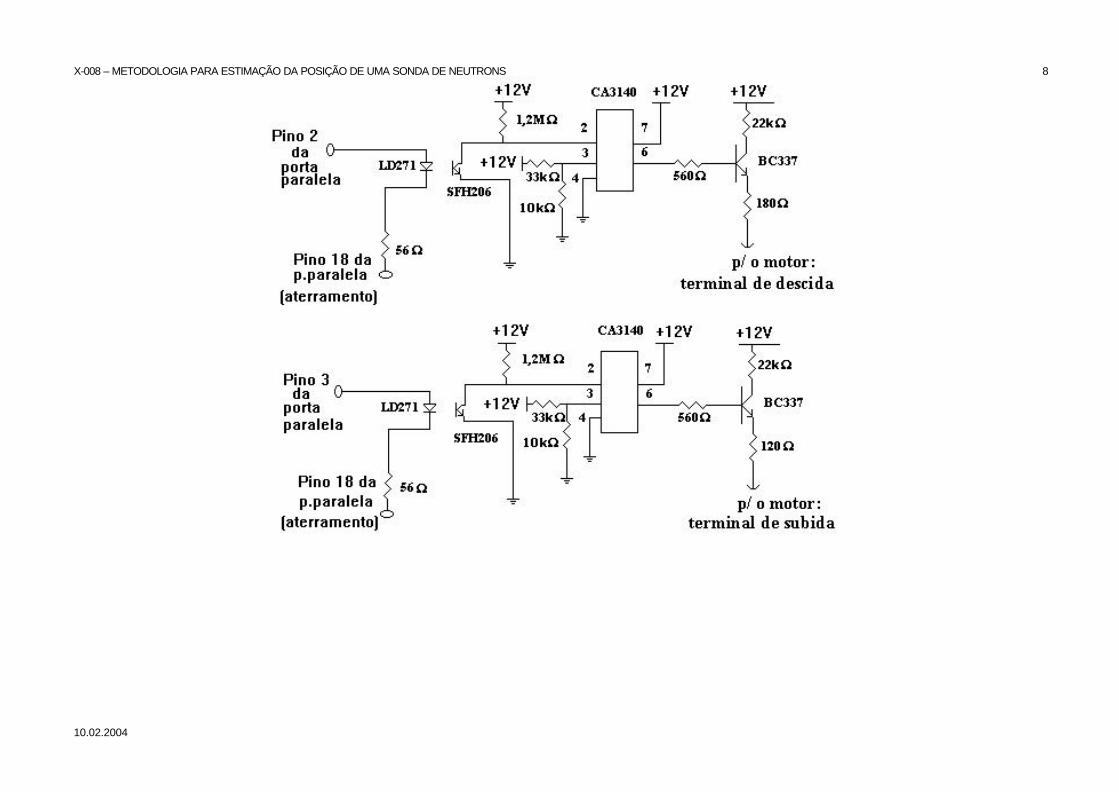
Através da função "outportb" (pertencente às bibliotecas de programação das linguagens C e C++), enviam-se "bits" à porta paralela de um computador. A porta paralela, namaioria dos computadores compatíveis com IBM , de comunicações de uso geral de 8 "bits", é utilizada para acionar uma série de dispositivos externos, tais como impressoras eplotters.
Os sinais de saída de uma porta paralela têm corrente de saída de 20 mA, e de entrada de 0,55 mA. Os dados estão presentes nos pinos 2 a 9, e representam as linhas de dados D0 aD7. A tensão de saída em nível lógico 1 é de aproximadamente 5 Volts. Para a aplicação desejada são necessários 3 "bits", e estes foram enviados aos pinos 2, 3 e 4, além do pino18, utilizado como aterramento.
A figura 4 apresenta a interface que foi utilizada para se conectar o microcomputador, através da porta paralela, ao MCC utilizado para acionar a carga.
Figura4: Interface utilizada
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 7
10.02.2004
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 8
10.02.2004

A existência de um tempo morto, quando da inversão do sentido de giro do motor, e a necessidade de se trabalhar a partir de um referencial único no início de cada varreduraindicaram pela utilização de dois sensores óticos para que estes problemas fossem sanados.
O primeiro sensor ótico (figura 5) é usado como fim de curso para a sonda quando esta retorna à posição zero, e está um pouco acima desta posição. O tempo de subida para asonda é calculado somando-se todos os tempos de descida mais um incremento de 10 segundos, para garantir a chegada da carga no sensor ótico 1.
Figura 5 – Atuação do sensor ótico 1: o par led-fototransistor superior interrompe a subida da sonda.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 9
10.02.2004

O deslocamento entre a posição de parada e a posição zero real é obtido quando a sonda desce, movendo-se entre os sensores 1 e 2. Isto é obtido habilitando-se o sensor 2 por umtempo suficiente (5 segundos) para o deslocamento desejado (figura 6):
Cabe salientar que o centro ativo da sonda fica 2,7 cm acima da posição "zero", e este valor é acrescido via "software" à profundidade a ser inicialmente percorrida pela sonda. Ossensores foram instalados externamente ao tubo de acrílico, e a luz emitida pelo led em direção ao fototransistor passa através de orifícios feitos neste tubo.
REPRODUTIBILIDADE DAS MEDIDAS DE POSICIONAMENTO
Foram efetuados testes com tempos de descida preestabelecidos. Partindo da posição zero, a sonda descia durante um tempo t até uma certa profundidade, anotando-se então ovalor desta. Na sequência realizou-se um tratamento estatístico dos valores médios das distâncias percorridas para cada um dos tempos de descida, assim como dos desviospadrões e das variâncias destes valores. Foi utilizada a técnica dos mínimos quadrados para correlacionar os tempos pré fixados e as respectivas distâncias percorridas pela sonda.
Não foram consideradas flutuações nas medidas dos tempos pré fixados, porém fatores como o aquecimento do motor fazem variar a distância percorrida pela fonte.
RESULTADOS E DISCUSSÕES
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 10
10.02.2004

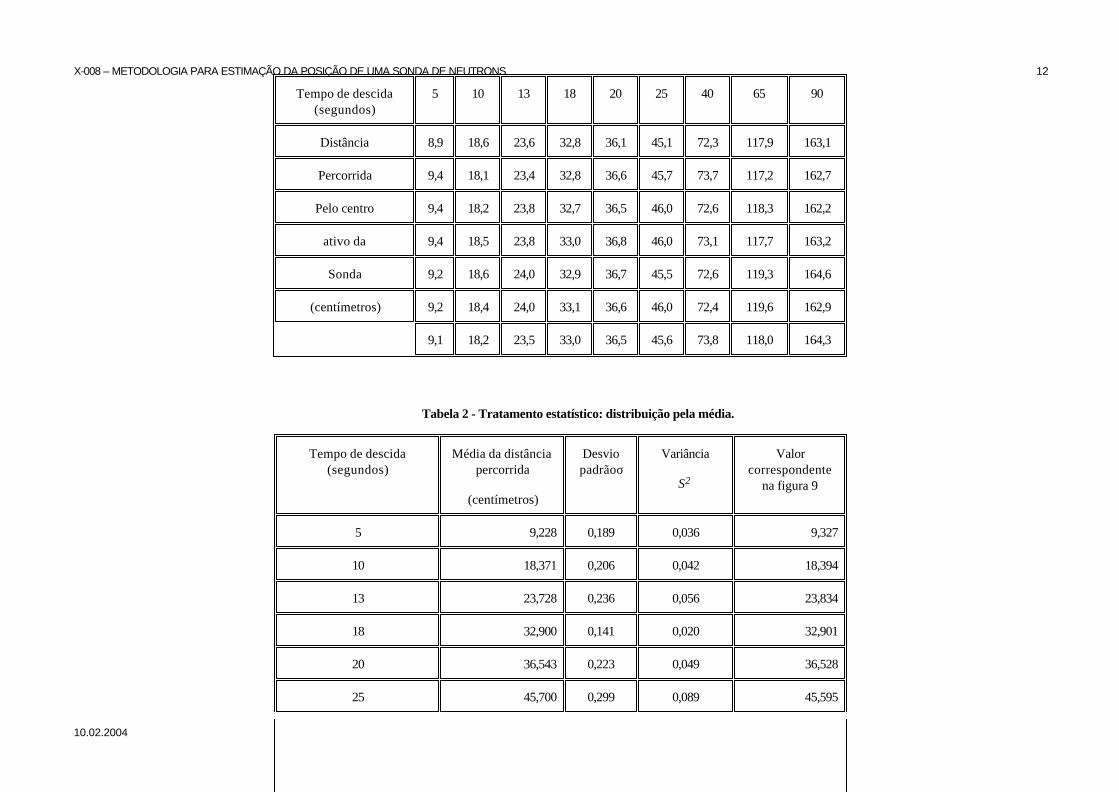
A tabela 1 mostra as distâncias percorridas pelo centro da sonda quando os tempos são previamente fixados para os valores de 5, 10, 13, 18, 20, 25, 40, 65 e 90 segundos. Essasmedidas foram efetuadas sete vezes. Os valores médios e as variâncias, mostrados na tabela 2, foram determinados para cada um dos tempos pré fixados.
Figura 6: Atuação do sensor ótico 2: o par led-fototransistor inferior interrompe a descida da sonda, posicionando-a no ponto zero (linha tracejada)
Tabela 1 - Simulações com tempos de descida preestabelecidos.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 11
10.02.2004
Tempo de descida(segundos)
5 10 13 18 20 25 40 65 90
Distância 8,9 18,6 23,6 32,8 36,1 45,1 72,3 117,9 163,1
Percorrida 9,4 18,1 23,4 32,8 36,6 45,7 73,7 117,2 162,7
Pelo centro 9,4 18,2 23,8 32,7 36,5 46,0 72,6 118,3 162,2
ativo da 9,4 18,5 23,8 33,0 36,8 46,0 73,1 117,7 163,2
Sonda 9,2 18,6 24,0 32,9 36,7 45,5 72,6 119,3 164,6
(centímetros) 9,2 18,4 24,0 33,1 36,6 46,0 72,4 119,6 162,9
9,1 18,2 23,5 33,0 36,5 45,6 73,8 118,0 164,3
Tabela 2 - Tratamento estatístico: distribuição pela média.
Tempo de descida(segundos)
Média da distânciapercorrida
(centímetros)
Desviopadrãoσ
Variância
S2
Valorcorrespondente
na figura 9
5 9,228 0,189 0,036 9,327
10 18,371 0,206 0,042 18,394
13 23,728 0,236 0,056 23,834
18 32,900 0,141 0,020 32,901
20 36,543 0,223 0,049 36,528
25 45,700 0,299 0,089 45,595
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 12
10.02.2004

40 72,929 0,615 0,379 72,796
65 118,286 0,867 0,751 118,131
90 163,286 0,863 0,745 163,466
A partir da tabela 2, somando-se os valores médios das distâncias em função do tempo pré fixado pelo sistema de posicionamento, foi obtida uma reta de calibração. Essa reta émostrada na figura 7.
Figura 7: Curva obtida com a primeira bateria de testes.
De acordo com o modelo estatístico utilizado, e após a realização dos cálculos, tem-se que:
valor da inclinação da reta: 1,813;valor do coeficiente linear: 0,259;coeficiente de correlação entre os pontos: 0,999;equação obtida para a reta: z =1,813t + 0,259.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 13
10.02.2004
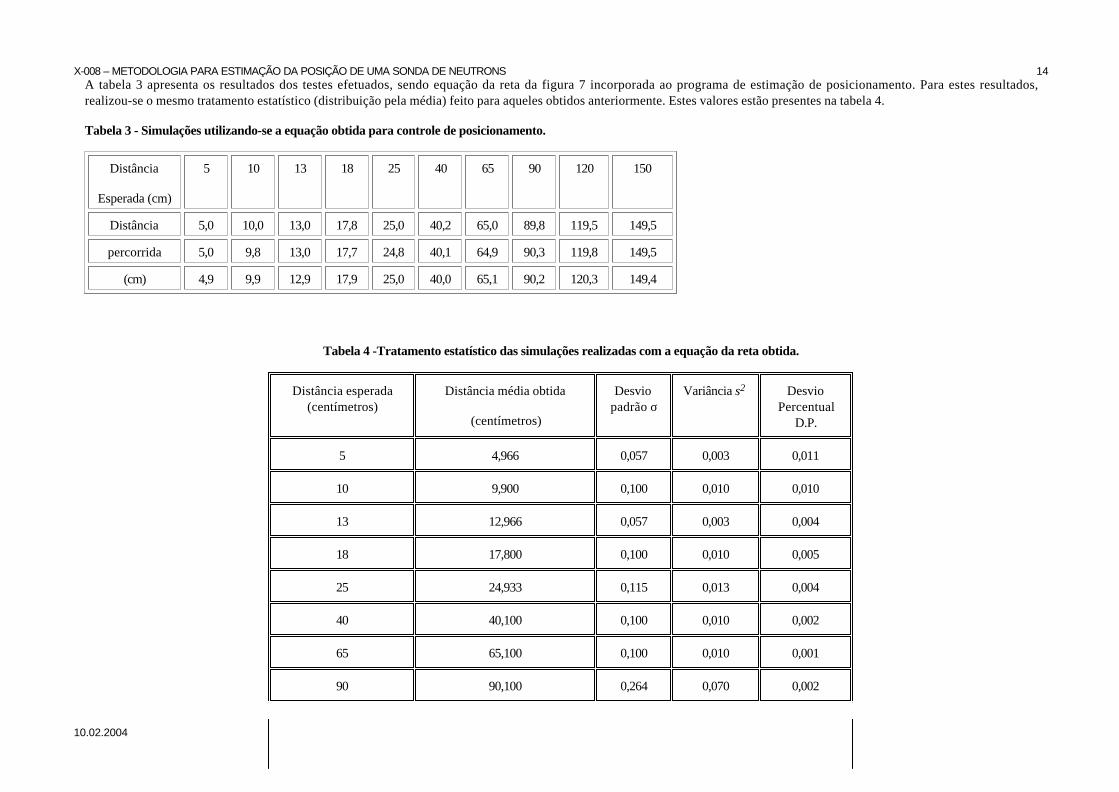
A tabela 3 apresenta os resultados dos testes efetuados, sendo equação da reta da figura 7 incorporada ao programa de estimação de posicionamento. Para estes resultados,realizou-se o mesmo tratamento estatístico (distribuição pela média) feito para aqueles obtidos anteriormente. Estes valores estão presentes na tabela 4.
Tabela 3 - Simulações utilizando-se a equação obtida para controle de posicionamento.
Distância
Esperada (cm)
5 10 13 18 25 40 65 90 120 150
Distância 5,0 10,0 13,0 17,8 25,0 40,2 65,0 89,8 119,5 149,5
percorrida 5,0 9,8 13,0 17,7 24,8 40,1 64,9 90,3 119,8 149,5
(cm) 4,9 9,9 12,9 17,9 25,0 40,0 65,1 90,2 120,3 149,4
Tabela 4 -Tratamento estatístico das simulações realizadas com a equação da reta obtida.
Distância esperada(centímetros)
Distância média obtida
(centímetros)
Desviopadrão σ
Variância s2 DesvioPercentual
D.P.
5 4,966 0,057 0,003 0,011
10 9,900 0,100 0,010 0,010
13 12,966 0,057 0,003 0,004
18 17,800 0,100 0,010 0,005
25 24,933 0,115 0,013 0,004
40 40,100 0,100 0,010 0,002
65 65,100 0,100 0,010 0,001
90 90,100 0,264 0,070 0,002
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 14
10.02.2004

120 119,867 0,404 0,163 0,003
150 149,467 0,058 0,003 0,001
Foi também considerado um solo onde se todas as posições nas quais o centro ativo da sonda deve estar posicionado quando da realização de leituras sejam conhecidas. Para estacondição particular, foram realizados mais alguns testes, sendo que alguns dos resultados estão apresentados nas tabelas abaixo. Foram efetuadas simulações para 5 casosdiferentes, sendo o tempo de leitura da sonda de um minuto, e tendo as esferas de influência raios de 10, 18, 25, 32 e 40 cm.
Tabela 5: Simulações para uma esfera de influência com raio de 18 cm.
Distância esperada(cm)
18 54 90 126 162
17,8 53,5 89,1 124,6 160,2
Distância 17,8 53,7 89,9 125,7 161,5
Percorrida 18,0 53,9 91,5 128,2 164,8
(cm) 17,8 53,3 89,6 126,0 162,2
17,5 53,1 88,9 124,5 160,7
Tabela 6: Simulações para uma esfera de influência com raio de 32 cm.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 15
10.02.2004

Distância esperada(cm)
32 96 160
31,9 95,2 158,5
Distância 32,0 96,7 161,2
Percorrida 31,8 96,0 159,9
(cm) 32,2 97,1 162,0
31,6 95,0 158,5
Tabela 7: Tratamento estatístico dos resultados apresentados para uma esfera de influência com um raio de 18 cm.
Distância esperada(centímetros)
Distância média obtida
(centímetros)
Desvio padrão σ Variância s2
18 17,780 0,178 0,032
54 53,500 0,316 0,100
90 89,800 1,029 1,060
126 125,800 1,495 2,235
162 161,196 1,828 3,343
Tabela 8:Tratamento estatístico dos resultados apresentados para uma esfera de influência com um raio de 32 cm.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 16
10.02.2004
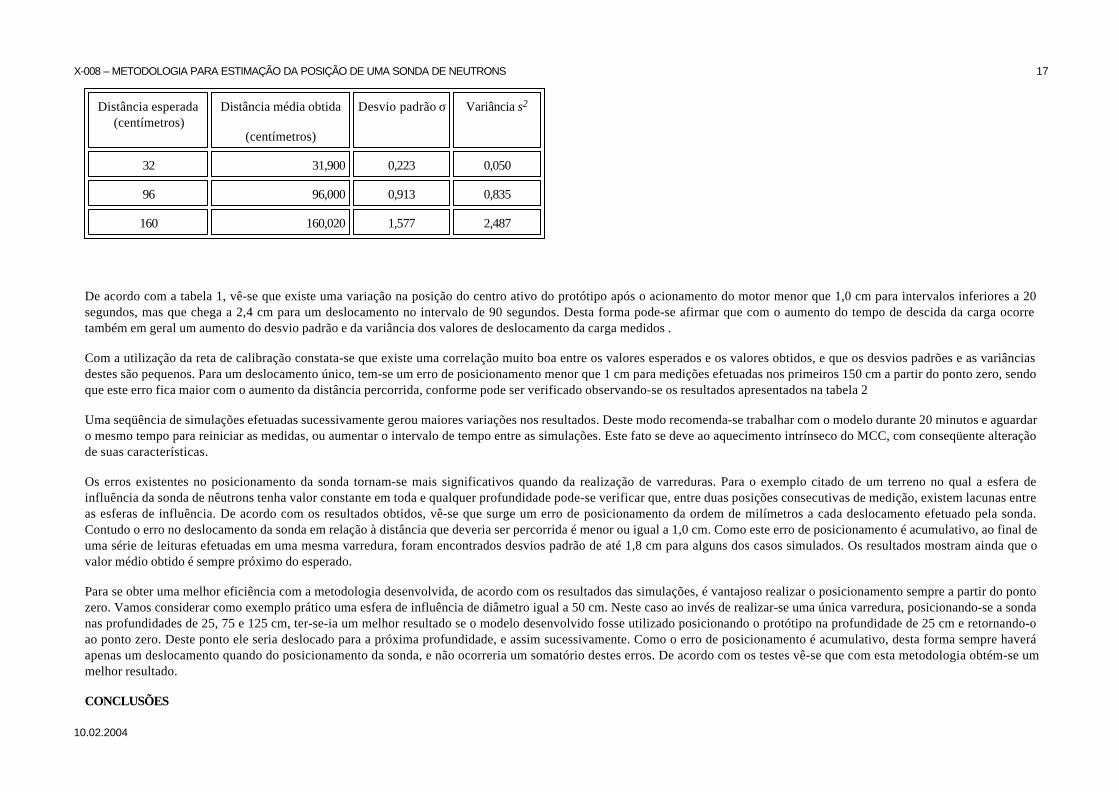
Distância esperada(centímetros)
Distância média obtida
(centímetros)
Desvio padrão σ Variância s2
32 31,900 0,223 0,050
96 96,000 0,913 0,835
160 160,020 1,577 2,487
De acordo com a tabela 1, vê-se que existe uma variação na posição do centro ativo do protótipo após o acionamento do motor menor que 1,0 cm para intervalos inferiores a 20segundos, mas que chega a 2,4 cm para um deslocamento no intervalo de 90 segundos. Desta forma pode-se afirmar que com o aumento do tempo de descida da carga ocorretambém em geral um aumento do desvio padrão e da variância dos valores de deslocamento da carga medidos .
Com a utilização da reta de calibração constata-se que existe uma correlação muito boa entre os valores esperados e os valores obtidos, e que os desvios padrões e as variânciasdestes são pequenos. Para um deslocamento único, tem-se um erro de posicionamento menor que 1 cm para medições efetuadas nos primeiros 150 cm a partir do ponto zero, sendoque este erro fica maior com o aumento da distância percorrida, conforme pode ser verificado observando-se os resultados apresentados na tabela 2
Uma seqüência de simulações efetuadas sucessivamente gerou maiores variações nos resultados. Deste modo recomenda-se trabalhar com o modelo durante 20 minutos e aguardaro mesmo tempo para reiniciar as medidas, ou aumentar o intervalo de tempo entre as simulações. Este fato se deve ao aquecimento intrínseco do MCC, com conseqüente alteraçãode suas características.
Os erros existentes no posicionamento da sonda tornam-se mais significativos quando da realização de varreduras. Para o exemplo citado de um terreno no qual a esfera deinfluência da sonda de nêutrons tenha valor constante em toda e qualquer profundidade pode-se verificar que, entre duas posições consecutivas de medição, existem lacunas entreas esferas de influência. De acordo com os resultados obtidos, vê-se que surge um erro de posicionamento da ordem de milímetros a cada deslocamento efetuado pela sonda.Contudo o erro no deslocamento da sonda em relação à distância que deveria ser percorrida é menor ou igual a 1,0 cm. Como este erro de posicionamento é acumulativo, ao final deuma série de leituras efetuadas em uma mesma varredura, foram encontrados desvios padrão de até 1,8 cm para alguns dos casos simulados. Os resultados mostram ainda que ovalor médio obtido é sempre próximo do esperado.
Para se obter uma melhor eficiência com a metodologia desenvolvida, de acordo com os resultados das simulações, é vantajoso realizar o posicionamento sempre a partir do pontozero. Vamos considerar como exemplo prático uma esfera de influência de diâmetro igual a 50 cm. Neste caso ao invés de realizar-se uma única varredura, posicionando-se a sondanas profundidades de 25, 75 e 125 cm, ter-se-ia um melhor resultado se o modelo desenvolvido fosse utilizado posicionando o protótipo na profundidade de 25 cm e retornando-oao ponto zero. Deste ponto ele seria deslocado para a próxima profundidade, e assim sucessivamente. Como o erro de posicionamento é acumulativo, desta forma sempre haveráapenas um deslocamento quando do posicionamento da sonda, e não ocorreria um somatório destes erros. De acordo com os testes vê-se que com esta metodologia obtém-se ummelhor resultado.
CONCLUSÕES
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 17
10.02.2004

A utilização de um programa computacional utilizando o "clock" (relógio) do microcomputador como contador, para realizar o posicionamento da carga, mostrou-sesatisfatória, visto que alterando-se os valores de entrada realiza-se varreduras em toda a profundidade, com desvios dentro dos limites aceitáveis;A presença de uma ponta fixa do cabo que sustenta a sonda, no interior do cilindro, reduz a inércia do sistema devido a ausência do tambor e de um contrapeso.Consequentemente pode-se trabalhar com um motor de menor potência;Em termos estatísticos, mesmo em profundidades nas quais o erro de posicionamento foi maior, este é aceitável para aplicação e metodologia utilizada, visto que erros deposicionamento de 1 a 2 cm não afetam os resultados, já que as contagens da sonda refletem uma umidade média dentro da esfera de influência (com pesos que decrescem amedida que o raio aumenta).
REFERÊNCIAS BIBLIOGRÁFICAS
Ferreira, Vinícius V. M. Controlador de Posição de uma Sonda Neutrônica Acionada por um Motor de Corrente Contínua com um Grau de Liberdade. Dissertação deMestrado. Departamento de Engenharia Nuclear – UFMG, Março de 1998.
1.
Greacen, E.L., Soil water assessment by the neutron method, CSIRO, Australia, 1981.2.Reichardt, K., Neutrons probes and their use in agronomy, IAEA – International Atomic Energy Agency, Trieste-Itália, SMR 402-9,1989.3.Kosow, Irving I., Máquinas elétricas e transformadores, terceira edição, Editora Globo, Porto Alegre, 1977.4.Hoog, R. V. e Ledolfer, J. Engineering statistics , Macmillan publishing Company, New York, USA, 1987.5.Lamarsh, J. R., Introduction to nuclear engineering, Addison Wesley Publishing Company, 1975.6.Encarnação, F. A. F., Nova técnica para calibração de uma sonda de nêutrons pelo método volumétrico. Dissertação de mestrado, Departamento de Ciências do Solo. UFRPE,setembro de 1986.
7.
X-008 – METODOLOGIA PARA ESTIMAÇÃO DA POSIÇÃO DE UMA SONDA DE NEUTRONS 18
10.02.2004