wxs-8r--Í404 reconstruÇÃo de imagem em … · 2015-03-30 · transformada de fourier para...
TRANSCRIPT

W X S - 8 R - - Í 4 0 4
RECONSTRUÇÃO DE IMAGEM EM TOMOCRAFIA COMPUTADORIZADA
USANDO O MÉTODO DE CONVOLUÇÃO
Ana Maria d* Oliveira Rebelo
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO
GRAU DE MESTRE EM CIÊNCIAS (M. Sc.) EM ENGENHARIA NUCLEAR
Aprovada por:
Pròi.JJohn/Douglas Rogers ^^(PreWr/cnte)
Prcf* Wilms, dor Santos Bfstvs
RIO DE JANtlRO, RJ - BRASIL
MARÇO OE 1984

ii
REBELO, ANA MARIA DE OLIVEIRA
Reconstrução de Imagem em Tomografia Computadorizada
Usando o Método de Convoluçao (Rio de Janeiro) 1984.
XI, 89 p. 29,7 cm (COPPE/UFRJ, M. S c , Engenharia
Nuclear, 1984)
Tese - Universidade Federal do Rio de Janeiro, COPPE
1. Reconstrução de Imagens I. COPPE/UFRJ II. Título
(série)

ill
A meus pais
Josefino e Laurinda
A minhas irmãs
Maria de Fátima, Maria Lucia e
Maria Olivia

iv
AGRADECIMENTOS
Ao professor JOHN DOUGLAS ROGERS pela orientação, su
gestões e pelo interesse com que sempre acompanhou este trabalho.
A CESAR ANTONIO CAGOIANO SANTOS, pela ajuda na solu
ção de problemas surgidos durante o trabalho e pelo interesse.
A RICARDO TADEU LOPES pela elaboração gr'fica das fi
gures apresentadas neste trabalho.
A todos cs professores e funcionário!, uo Prjgrama de
Engenharia Nuclear.
Aos Cologas do Núcleo de Computação Eletrônica pelo
apoio e ajuda durance este trabalho.
r
A todos os amigos que encontrei e que af>ra fazem par
te da minha vida, por tuoo que me ensinaram. A esi;<?s amigos, não
cito nomes para não esquecer, muito obrigada.
A Prof* VILM* DOS SANTOS BASTOS e Prof. JOSÉ CARLOS
H0R0E5 peia participação oa banca examinadora desta tese.
A COMISSÃO NACIONAL DE ENERGIA NUCLEAR pelo ftpOiO fl
V
naneelro prestado.
À TEREZA pela datilografia deste trabalho, paciência
e interesse COM que seapre ae tratou.
A Minha faallia e amigos pelo apoio e carinho dados
durante todo este trabalho.
À ainha sobrinha OLÍVIA por todo o carinho.
vi
Resumo da tese apresentada i COPPE/UFRJ, como parte dos requisi
tos necessários para a obtenção do grau de Mestre em Ciências
(M. Sc.)
RECONSTRUÇÃO DE IMAGEM EM TOMOGRAFIA COMPUTADORIZADA
USANDO 0 MÉTODO DE CONVOLUÇXO
Ana Maria de Oliveira Rebelo
Março de 1984
Orientador: John Douglas Rogers
Program de Engenharia Nuclear
Neste trabalho montou-se um algoritmo, utilizando-se
o modelo analítico de convolução ou retroprojeção filtrada para
a reconstrução de imagens bidimensionais ou tridimensionais em
tomografia computadorizada aplicada a testes não-destrutivos e à
área médica. 'Este modelo matemático parte do modelo analítico da
Transformada de Fourier para reconstrução de imagens/
Este modelo consiste rum sistema descontínuo formado
por um arranjo N x N células (pixels). A atenuação no objeto de
um feixe colimado de radiação gama foi determinada para várias
posições e ângulos de incidência (projeções) em termos da intera
çao do .feixe com os pixels interceptados. A contribuição de cada
pixel na atenuação do feixe foi determinada pela função peso W, .,
usada apenas para testes simulados.
Foram realizados testes simulados em objetos padrão
com coeficiente de atenuação v na faixa de 0,2 a 0,7 cm" , usan
do arranjos de pixel de até 25 x 25. Também foi simulada uma apli,
cação na área médica, dos ossos do ante-braço, com coeficiente de at£
nuação na região de 0,2 a 0,5 cm" e com um arranjo de pixels de
41 x 41.

vil
Os resultados simulados indica» que para objetos eon
ua núaero grande de interfaces e grandes variações dos coeficien
tes de atenuação nessas interfaces, U M boa reconstrução é obti
da coa um núaero de projeções igual à diaensão da aatris de re
construção (arranjo de células). Caso contrário, obtea-seuaaboa
reconstrução coa poucas projeções.
viil
Abstract of thesis presented to COPPE/UFRJ as partial fulfllinent
of the requirements for the degree of Master of Science (M. Sc.)
IMAGE RECONSTRUCTION IN COMPUTERIZED TOMOGRAPHY
USING THE CONVOLUTION METHOD
Ana Maria de Oliveira Rebelo
March 1984
Chairman: John Douglas Rogers
Nuclear Engineering Program
In the presente work an algorithm was derived, using
the analytical convolution method (filtered back-projection) for
two-dimensional or three-dimensional image reconstruction in com
puterized tomography applied to non-destructive testing and to
the medical use. This mathematical model is based on the analyti
cal Fourier Transform method for image reconstruction.
This model consists of a discontinuous system formed
by an N x N array of cells (pixels). The attenuation in the ob
ject under study of a colimated gamma ray beam has been determi
ned for various positions and incidence angles (projections) in
terms of the Interaction of the beam with the intercepted pixels.
The contribution of each pixel to beam attenuation was determi-
ned using the weight function V.. which was used for simulated
tests.
Simulated tests using standard objects with attenua
tion coefficients in the range of 0,2 to 0,7 cm' , were carried
out using cell arrays of up to 25 x 25.
One application was carried out in the medical area
simulating image reconstruction of an arm phantom with attenua
tion coefficients in the range of 0,2 to 0,5 cm using cell ar-

ix
rays of 41 .x 41.
•
The simulated results show that. In objects with a
great number of Interfaces and great variations of attenuation
coefficients at these interfaces, a good reconstruction is ob
tained with the nuaber of projections equal to the reconstruct
ion amtrlx dimension. A good reconstruction is otherwise obtain
ed with fewer projections.

X
ÍNDICE
CAPÍTULO I - INTRODUÇÃO j
I- 1 - OBJETIVOS 4
CAPÍTULO II - REVISÃO BIBLIOGRÁFICA .' 5
CAPÍTULO III - TEORIA 8
III. 1 - INTERAÇÃO DA RADIAÇÃO GAMA COM A MATÉRIA ... 8
III. I. 1 - Processos de Interação 8
III. 1. 2 - Atenuação do Ralo Gama 14
III. 2 - TOMOGRAFTA RECONSTRUTIVA 16
III. 2. 1 - Reconstrução Tridimensional .... 19
III. 3 - TÉCNICA DE RECONSTRUÇÃO ANALÍTICA - CONVOLU-
CÃO 20
III. 3. 1 - Modelo Matemático de Reconstru
ção 20
III. 3. 2 - Bases Matemáticas 22
III. 3. 3 - Desenvolvimento do Método 24
III. 4 - ALGORITMO DO MÉTODO 31
CAPÍTULO IV - RESULTADOS 36
IV. 1 - TESTES SIMULADOS 36
CAPÍTULO V - DISCUSSÕES E CONCLUSÕES 67

BIBLIOGRAFIA 73
APÊNDICE I - DEMONSTRAÇÃO DAS EQUAÇÕES (III. 12) • (III. 13) . 79
APÊNDICE II - DESENVOLVIMENTO DA EQUAÇÃO (III. 24) 84
APÊNDICE III - MÉTODO DE INTERPOLAÇÃO SPLINES CÚBICA'40' 87
9
•

1
CAPÍTULO I
INTRODUÇÃO
I - INTRODUÇÃO
A técnica de reconstrução de imagens foi primeiro d«s
«envolvida por Bracewell (1956) para uso na radioestronomia ,
com a finalidade de identificar regiões do sol, emissoras de ra
diação de micro-onda. Em seguida foi aplicada na mlcroscopia ele
trônica, no estudo de biomoléculas complexas, mas foi na raúiolo
gia médica que a reconstrução de imagens teve um grande desenvol^
vimento, obtido pela técnica conhecida como Tomografia Computado
rizada.
Na radiografia convencional, as imagens produzidas
são resultantes da atenuação de raios X através de camadas (pla
no longitudinal), com diferentes coeficientes de absorção, no
corpo em estudo. Assim, a resolução contida na radiografia é mui
to limitada devido à superposição de imagens de diferentes cama
das que dão origem a sombras sobre a área investigada.
Numa tentativa de melhorar a nitidez da imagem, foi
|2|
desenvolvida a tomografia convencional . Nesta técnica, a fon
te move-se em um sentido e o filme no sentido oposto, mantendo a
imagem do plano de interesse continuamente focalizada, enquanto
2
que as Imagens das outras camadas surgem nos filmes como borroes
(desfocaiizadas). A tomografla convencional mostrou assim, baixo
contraste de imagem devido à superposição de muito ruido (cama
das desfocaiizadas) com o sinal (camada focalizada).
0 ideal seria uma Imagem somente do plano de interes_
se, sem a interferência de outros planos. As bases matemáticas pa
ra a solução desse problema existiam desde 1917, no trabalho do
l3l matemático austríaco Johann Radon que foi desenvolvido por Da
|4| vid Kuhl em 1963 (Tomografia Computadorizada Axial). Em seule
todo, um feixe colimado de radiação atravessa uma estreita seção
transversal do corpo e õ filme é substituído por um sistema de de
teção .mais sofisticado. Através de um movimento síncrono, da fon
te de raios X e detetor em torno de um eixo perpendicular à seção
transversal, produzia-se uma imagem somente da seção transversal
escolhida (veja Capítulo III. 3.2).
A idéia da primeira técnica de reconstrução de imagem
agora conhecida como retro-projeção (veja Capítulo III. 3.2),foi
patenteada por Oldendorf (1961). Nessa técnica, em seguida d£
I6l l7l
senvolvida por Vainshtein' ' (1970) e Gordon' (1974), a recons
trução não era nítida, devido a certas limitações do método. Cojr
reçõeB foram então necessárias, usando-se o método analítico de
Transformada de Fourier (espaço recíproco) ou de cònvolução (es
paço real).

3
O principio de reconstrução de Imagens utilizado em
Tomografla Computadorizada é usado para a visualização de estru-
turas anatômicas* e também no campo da medicina nuclear para a vi,
suallzação de órgãos, através de radionuclideos emissores de pósl.
trons ou radiação gama (Tomografla Compi tàorizada por Emissão),
ou da transmissão de radiação pela área investigada (Tomografla
Computadorizada por Transmissão).
A importância da Tomografla Computadorizada está na
capacidade de distinguir quantitativamente pequenas diferenças na
atenuação da radiação pelo corpo humano. Essas diferenças de at£
nuação podem ser associadas às diferenças de densidade física do
corpo investigado.
Muitos dos algoritmos desenvolvidos para reconstru
ção de Imagens tiveram suas origens nas diversas áreas da Ciên
cia, como radioa8tronomla e microscopia eletrônica mas, sem dúvi
da, apresentaram um maior impulso após o desenvolvimento da Tomo
grafia para a medicina. •'•
0 primeiro tomógrafo computadorizado comercial, para
a área médica, capaz de obter imagens de alta resolução, foi pro lot
jetado por Hounsfleld no Central Research Laboratory de EMI,
na Inglaterra, em 1967. Esse tomógrafo foi projetado para tomada
de medidas apenas da cabeça,e os dados eram analizados utilizan
do-se uma técnica iteratlva de reconstrução. Em 1974 foi projeta

• 4
da, pela National Biomedical Research Foundation, nos Estados Ifrrf
dos, uma outra máquina, cujo emprego se destinava a qualquer par-
te do corpo e que se chamava ACTA (Automatic Computerized Trans
verse Axial) - Ledley . A técnica de reconstrução usada era a
de Convolução.
Uma das preocupações em tomograf ia .médica é o tempo de
aquisição de dados pelo sistema. Esta preocupação é devida a dois
importantes fatores:
- Dose recebida pelo paciente e
- Nitidez da imagem, já que movimentos do corpo (res
piração, pulsações arteriais, batimentos cardíacos) fazem com que
a imagem perca sua nitidez.
Procura-se assim o desenvolvimento de tomógrafos com
a mais alta taxa de obtenção de dados. Com essa finalidade, utili
zam-se diversas fontes de raios X, assim como um conjunto de dete_
tores.
I. 1 - OBJETIVOS
0 objetivo principal deste trabalho é o desenvolvimen
to de um algoritmo, usando o método analítico de Convolução para
a utilização em tomografia computadorizada aplicada a testes não
destrutivos de objetos industriais, assim como na area medica, no
estudo ósseo. .

CAPÍTULO II
REVISXO BIBLIOGRÁFICA
II - REVISÃO BIBLIOGRÁFICA
A Tcmografla Convencional ou plano-focal foi introdu-3
sida por Bocage em 1921, quando obteve imagens através da
transmissão de raios X.
A origem da Tomografia reconstrutiva de raios X e en-
contrada no estudo da Tomografia convencional de Takahashl
(1957) que melhorou o sistema de Bocage, colocando a fonte de
raios X e o filme num mesmo plano retirando assim a interferência
de outros planos.
Mais tarde surgiram trabalhos com fontes de raio gama,
para aplicação nos métodos de transmissão e de emissão '
através do uso de radionucl»ídeos.
Uma solução matemática, isto é, a determinação da fun
ção distribuição de densidade da região investigada, através do
raio-soma p (l; e) (veja Capitulo III. 3.2) foi primeiro encontra < "" lâl
da por Radon' (19*17). A mesma solução foi encontrada por Berry
e Gibtos'13' (1970) e Junginger e Van Haeringen'14' (1972).
6
Nenhuma reconstrução numérica foi investigada até ao
ano de 1956, quando Bracewell desenvolveu a técnica de recons
tração dê imagens para uso em radioastronomla, na identificação
de regiões do sol emissoras de microondas.
Oldendorf (1961) foi o primeiro a usar o método de
retroprojeção na reconstrução de imagens através de ralos X.
Alterações na reconstrução de imagens por retro-pro-
jeção.na tentativa de tornar nítida a reconstrução,foram discuti
das por Vainshteln • (1970) e outros, como Bates e Peters
(1971) que propuseram o uso da Transformada de Fourier, e Muehl
lehner e Witzel'16' (1971).
0 método da Transformada de Fourier foi sugerido por t>
1171
De Rosier, Klug e Hoppe (1966) para a reconstrução tridimen
sional em microscopia eletrônica * tem sido aplicado em radiogra 115 18 19l «. »
fia * * . Uma discussão matemática da aproximação foi da-/> , 1201 '
da por Crowther (1970) e uma visão geral com exemplos em mi-|21|
croscopia eletrônica foram apresentados por De Rosier (1971).
As bases matemáticas para o método analítico de re
construção, chamado "método de convolução" foram propostas, pri-r
1221 meiramente, por Bracewell e Riddle' (1967) e mais tarde redes
i* v |23 24I
cobertas por Ramachandran e Lakihminarayanan ' (1971). 0
algoritmo destes últimos pesquisadores foi colocado numa forma g£
I
%
125! fterallsada per Herman e Rowland (1973), onde as lar&uras dos
ralos nao eram wscessariamente iguais, podendo variar de proje
ção para projeçüo, e as projeções não eram Igualmente espaçadas.
1251
Herma-, e Rowland apresentaram vm estudo compara
tivo de reconstruct de Imagem por três métodos: I) ART 2; II)
CSWV""UÇÃO; III) SÍÍT, sendo ART (Algebric Reconstruotior Technl_
que? 3 SIRT (Siuulc neous Iterative Reconstruction Technique).

0
CAPÍTULO III
TEORIA
III. 1 - INTERAÇÃO DA RADIAÇÃO CAMA COM A MATÉRIA
A interação da radiação gama con a matéria ocorre prin
cipaluente com a camada eletrônica do material.
Os principais processos de interação são:
a - Absorção fotoelétrica (efeito fotoelétrico)
b - Espalhamento Compton
c - Produção de pares
III. 1. 1 - Processos de Interação
a - Absorção fotoelétrica
Neste processo/ o foton é absorvido pelo átomo do mat£
rial, causando o desligamento de um elétron da configuração eletrô
nica. A energia do foton-t (hv) é convertida em energia de ligação
(E.) e clnética (ECIN) d o elétron.
h v- EL* ECIN < m ' 2>
(8e o foton incidente possuir uma energia hv maior que

a energia de ligação do elétron da canada K, teremos una probabi
lidade nalor de interação do fóton con o elétron desta camada.
A remoção de elétrons da canada K dá origem à emissão
de raio-X, quando elétrons de níveis mais altos caiem para o i í-
vel deixado pelo fotoelétron.
A probabilidade de interação de um fóton com um átomo,
coeficiente de absorção total, é Z (número atômico) vezes o coefi
ciente definido para a interação com um elétron.
0 processo fotoelétrico é predominante para baixas ener
gias e materiais com alto número atômico Z. Pode-se verificar essa
dependência na expressão (III. 2) para a seção de choque de absor-
<W 0 0 .
çao fotoeletrica. Essa expressão e valida para uma determinada fai
l36l xa de energia do fóton-Y .
A Zn
(hv) ,
onde n está entre 4 e 5, m entre 1 e 3
A • 1,25 x IO"9
para
hv > 0,5 MeV n • 4,5, m • 1
hv < 0,5 MeV n • 4, m • 3

IV
b - Efeito Compton
«
0 efeito Compton é um espalhamento lneláetlco entre um
fóton e um elétron, onde parte da energia do fóton é transferida
para o elétron e a energia do fóton original é reduzida por uma
quantidade Igual.
ELÉTRON COMPTON
ELÉTRON ^ >
FOTON WCtOENTE
FOTON ESPALHADO
Figura III. 1 - Espalhamento Compton
Essa interação pode ser considerada como ocorrendo en
tre o fóton e um elétron livre, se admitirmos que a energia do fó
ton seja muito mais alta do que a energia de ligação do elétron.IÍ»
to significa que para fótons-y com energia acima de 0.1 MeV, os
elétrons podem ser considerados livres. Para fótons-Y com energia
menor que 0.1 MeV, o efeito fotoelétrico se torna multo mais impor
tante do que o efeito Compton para materiais com número atômico ai
to, figura III.2.
• Supondo que o fóton Incida com energia E « hv e que
o elétron esteja em repouso. Seja E. • hv a energia do fóton espa
lhado de um ângulo #, figura III. 1.

11
Levando em conta • conservação de energia e de momen
to, obtém-se a seguinte relação:
hv hv.
hv. (III. 3)
1 + (1 - cos •) i» C o
onde m C e a energia de repouso do elétron. o
A probabilidade de ocorrer o espalhamento Compton de
pende do número atômico dos átomos que constituem o material.
A seção de choque Compton (o ), probabilidade de int£
ração de um fóton com um elétron, aumenta com a diminuição de ene£
gia e se aproxima de um valor numérico de 0.6651 barn/elétron pa
ra baixas energias, tornando-se independente da energia. Estes re
l26l suitados foram obtidos por J. J. Thomson
tho 8* * a %' o^_ * *r*( *' (III. 4)
m C
A distribuição angular do fóton-y espalhado é previs
ta pela fórmula de Klein-Nishina para uma seção de choque de espa d o. hv
lhamento diferencial - ~ '26,°nde • * -775 è r- ° raío clássico. 00 mo
dc 1 4 cos •
1 + 0 ( 1 - eos f)

12
x 4 « 2 (1 - cos O 2
(1 + cos2 Oil • • (1 - cos • ) !
(III. S)
c - Produção de Pares
Esse processo resulta numa completa absorção do fóton
v. que é convertido Inteiramente em um par de elétrons (um posi
tron e um elétron) com uma certa energia cinética. Esse processo
ocorre na vizinhança do núcleo, numa interação com o campo nucle
ar.
Aplicando o princípio da conservação de energia:
hv « 2 m C • E+ + E~ (III. 6) " c o CIN CIN * '
o 2 m C - energia de repouso do positron e elétron criados.
E__„ - energia cinética do positron.
E__„ - energia cinética do elétron. CIN / hv - energia do fóton.
A energia minima necessária para que ocorra o proces
so é de 2 m c2, ou seja, 1.022 MeV. como pode *er visto na Figura
III. 2.
A seção de choque para produção de pares, de acordo
com Bethe e Heitler' , é proporcional a Z (Z+l), isto é, • Z ,
variando lentamente com a energia, aproximadamente com log ZQ.
13
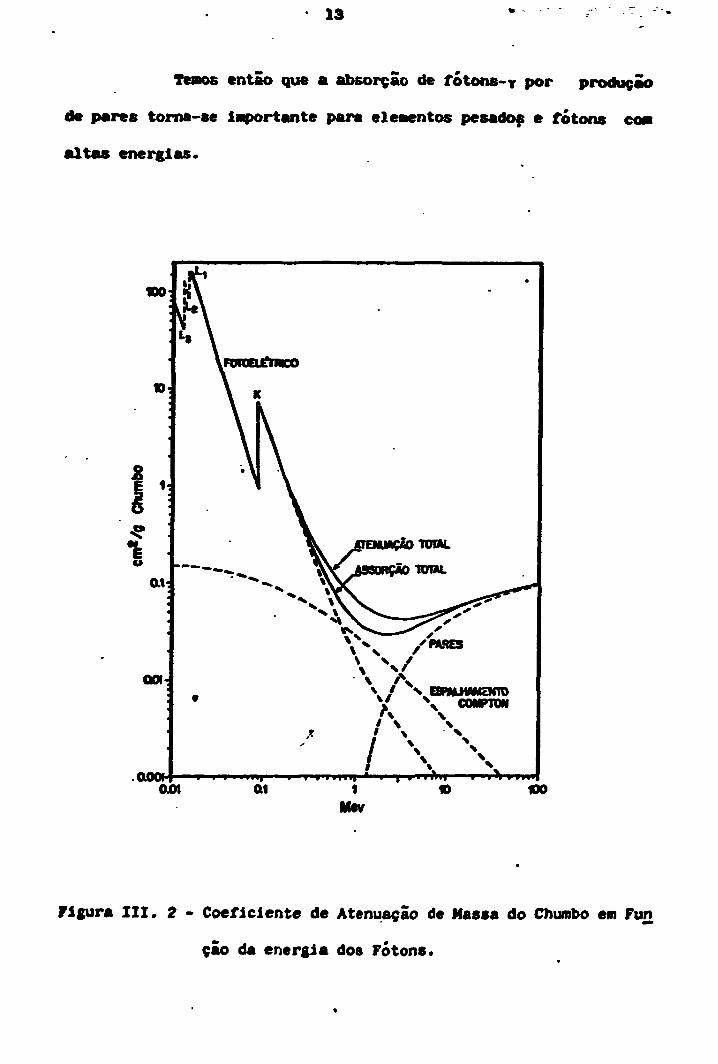
Temos entao que a absorção de fótons-v por produção
de pares torna-se importante para elementos pesados e fótons con
altas energias.
*
on
ao» 100
Figura III. 2 - Coeficiente de Atenuação de Massa do Chumbo em Fun
ção da energia dos Fótons.
£4
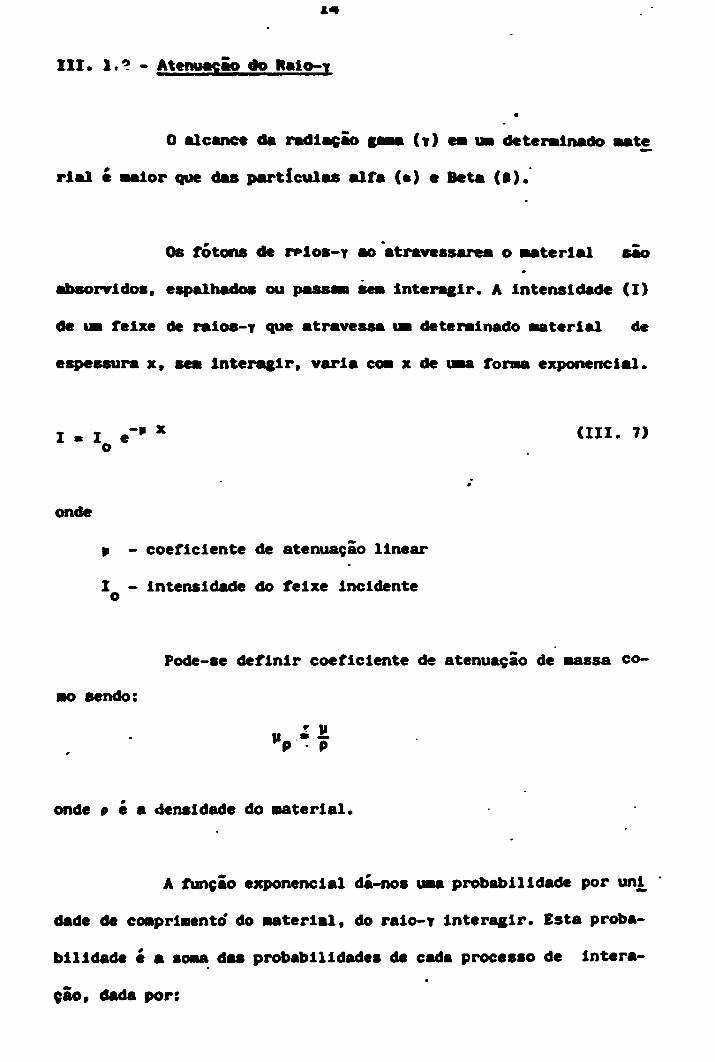
III. 1.* - Atenuação do Ralo-Y
0 alcance da radiação gaaa (T) ea ua deteminado Mate
rial a Maior que das partículas alfa (•) e Beta (•).
Os fótons de wios-t ao atravessarea o Material são
absorvidos, espalhados ou passaa sea interagir. A intensidade (I)
de ua feixe de raios-y que atravessa ua deteminado aaterial de
espessura x, sea interagir, varia coa x de uaa forma exponencial.
-I» x (III. 7) I m I O o
onde
p - coeficiente de atenuação linear
I - intensidade do feixe incidente o
Pode-se definir coeficiente de atenuação de aassa CO
MO sendo:
*• !• u « —
HP • P
onde p é a densidade do Material.
A função exponencial dá-nos uaa probabilidade por wrt
dade de comprimento* do aaterial, do raio-y interagir. Esta proba
bilidade é a soma das probabilidades de cada processo de intera
ção, dada por:
15
y « i (FOTOELÉTRICO) + o (COMPTON) + R (PARES)
que é chamada de coeficiente de atenuação linear.
(III. 8)
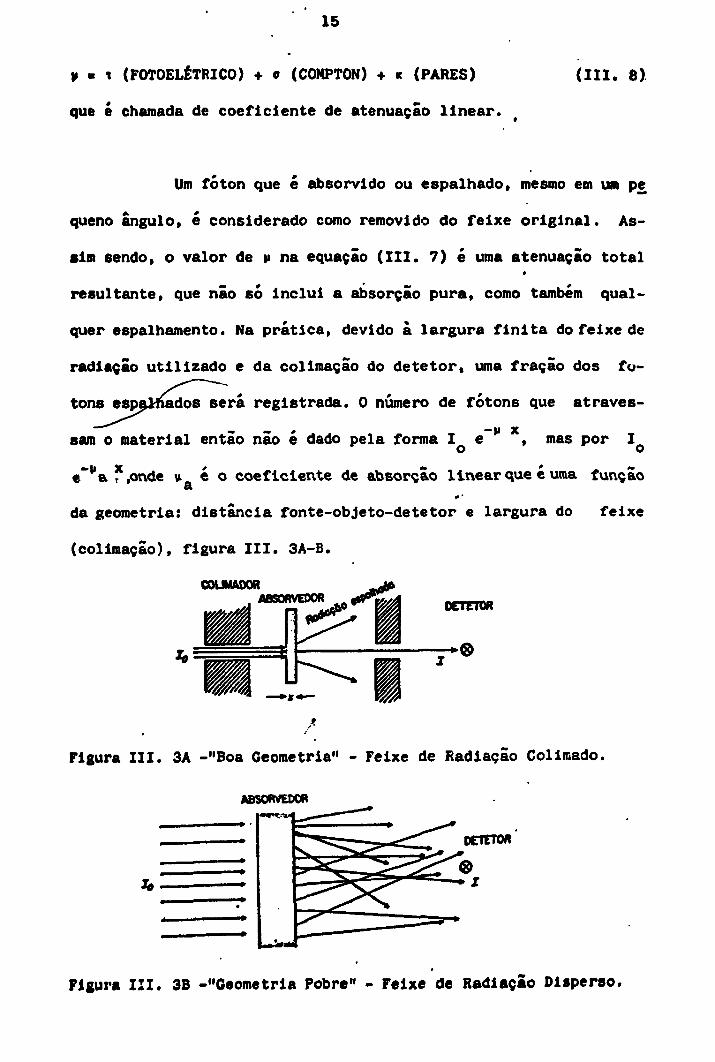
Um fóton que é absorvido ou espalhado» mesmo em um p£
queno ângulo, é considerado como removido do feixe original. As
sim sendo, o valor de P na equação (III. 7) é uma atenuação total
resultante, que não só inclui a absorção pura, como também qual
quer espalhamento. Na prática, devido à largura finlta do feixe de
radiação utilizado e da colimação do detetor* uma fração dos fu
tons espalhados será registrada. 0 número de fótons que atraves-
— — r — P X
sam o material então nao e dado pela forma I e , mas por I o o
e ^ a *,onde u é o coeficiente de absorção l inear que é uma função
da geometria: distância fonte-objeto-detetor e largura do feixe
(colimação), figura I I I . 3A-B. GOUMAOOR
Figura III. 3A -"Boa Geometria" - Feixe de Radiação Collmado.
ABSORVIDO*
DETETOR
Figura III. 3B -"Geometria Pobre" - Feixe de Radiação Disperso.
16
III. 2 - TOMOCRAFIA RECONSTRUTIVA
Tomografia, grafia por partes (do grego Tomes)» apre
senta uma "vista em corte" do corpo analisado. Esse corte, porém,
é transversal e não longitudinal como na tradicional radiografia.
A seção transversal do corpo é varrida, num movimento
translacional, por uma fonte de raios gama e um detetor, alinha
dos (para definirem uma boa geometria), figura III. 4A.
' A varredura é feita num movimento contínuo ou em in
tervalos discretos, geralmente em intervalos iguais a, colimação
da fonte. Neste caso, cada feixe é considerado como uma faixa de
largura a, chamada RAIO, figura III. 4B.
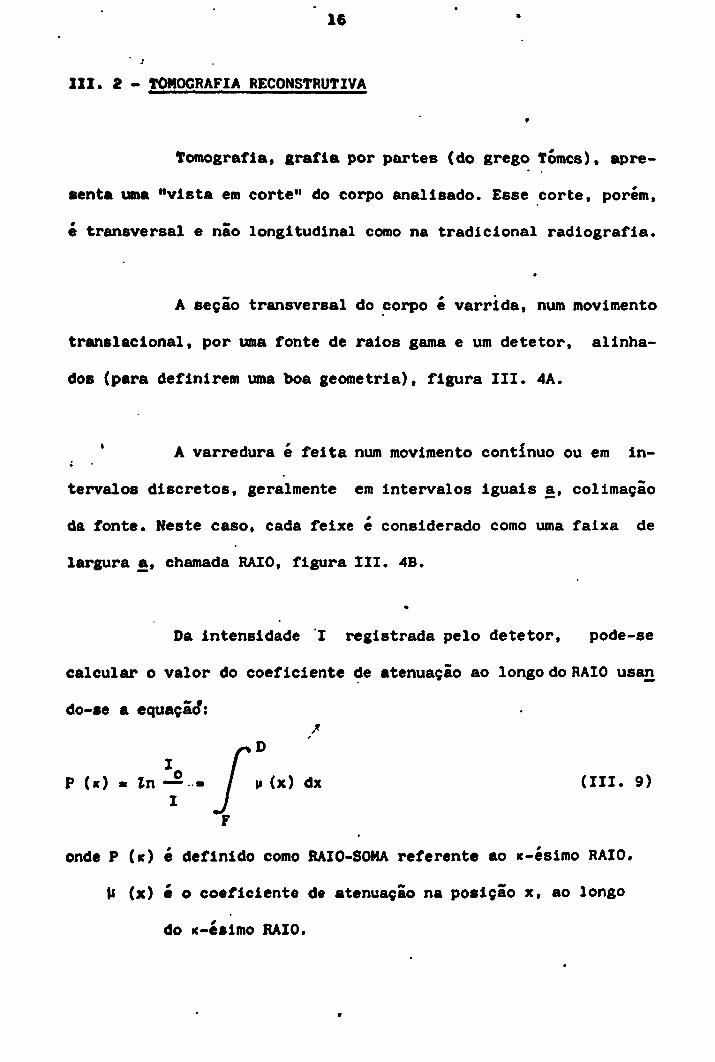
Da intensidade I registrada pelo detetor, pode-se
calcular o valor do coeficiente de atenuação ao longo do RAIO usan
do-se a equação*:
* r" P (O - In — ••« / M (x) dx (III. 9)
1 4 onde P (K) é definido como RAIO-SOMA referente ao K-ésimo RAIO.
M (x) é o coeficiente de atenuação na posição x, ao longo
do K-ésimo RAIO.

17
No sistema real, a Integral passa a ser um somatório
discreto. Logo, calcula-se v para pontos discretos *- chamados c£
lulas (Pixels). A seção transversal do corpo, é então dividida
em uma malha de células quadradas de lado a (mesma largura do
RAIO), figura III. 4B.
O sistema FONTE-DETETOR.ouoCORPO, é girado de um angu
lo *, e o movimento de transiação é repetido coletando-se um no
vo conjunto de RAIOS-SOMA.
A um conjunto de raios-soma pertencentes a um ângulo
£, chama-se PROJEÇÃO de angulo £, figura III. 4C.
Obtém-se assim um conjunto de M projeções, com incre
mento angular • . o
Após a obtenção de um número suficiente de projeções
esses dados são analizados por métodos matemáticos, resultando na
reconstrução da seção examinada. Essas reconstruções são apresen
tadas na forma de uma matriz N x N , onde cada elemento represen
ta o coeficiente de atenuação na área de cada célula (Pixel),que
pode ser interpretado em termos de densidade do material.
Das muitas aproximações matemáticas usadas para a re_
construção de imagens, citamos algumas:

18
Fig. I l l - 4 A - Tomogrofio por transmissão. B, - Esquemo do divisõo em Pixel do seçõo
plonor e o roio. C - Projeções 8 , e 6 2 do seção plonor.
1ft
a) RETRO-PROJEÇÃO - Foi usada nos experimentos inici
ais. É a mais simples em conceito, mas produz reconstruções com
pouca nitidez, (veja Capitulo III. 3.3)
b) ITERATIVO - 0 método iterativo exige longos tempos
de computação para resolver o problema, pois é feito um número
multo grande de correções na distribuição do coeficiente de ate
nuação em todos os Pixels, a partir ae uma distribuição inicial
aproximada, até chegar a convergir a uma solução.
c) ANALÍTICO - Os métodos analíticos são baseados em i
soluções matemáticas exatas para as equações de imagens (Equação
(III. 9)), portanto mais rápidos em termos computacionais. Dois
métodos analíticos de grande importância são: Reconstrução de Fou
rler, que usa o espaço de Fourier e /Retro-projeção Filtrada ou Con
volução? que usa o espaço real.
III. 2. 1 - Reconstrução Tri-Dimensional
É possível obter-se a distribuição de densidade de um
corpo tridimensional. A técnica consiste na reconstrução de vá
rias seções transversais (reconstrução bidimensional) do corpo,
como mostra a figura III. S.
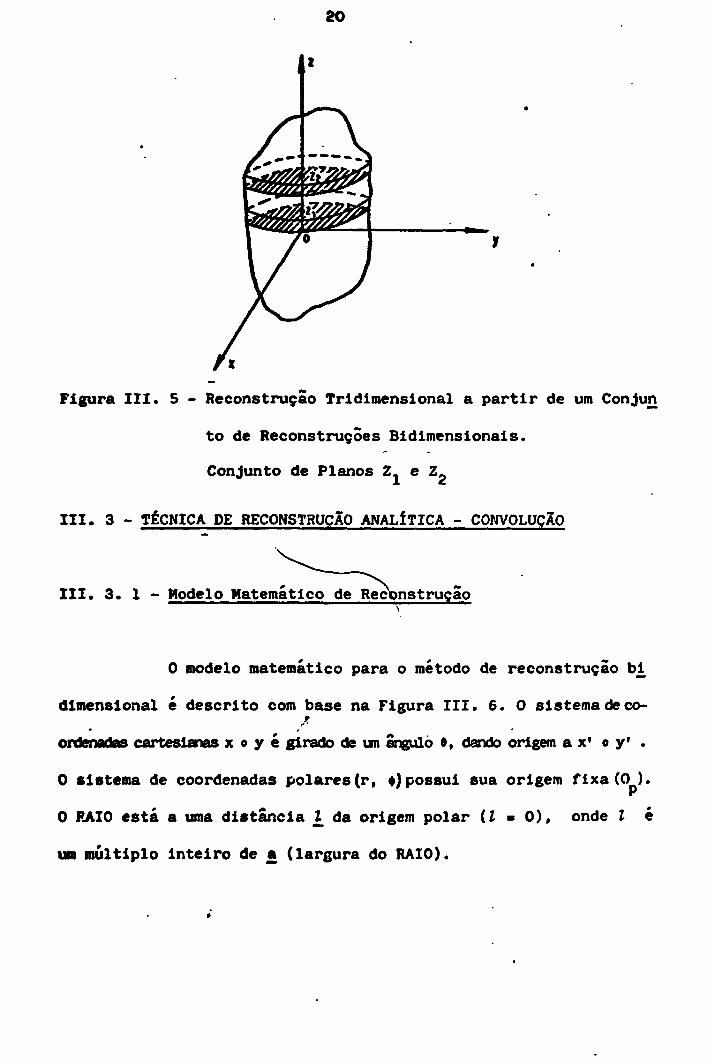
Figura III. 5 - Reconstrução Tridimensional a partir de um Conjun
to de Reconstruções Bidimensionais.
Conjunto de Planos Z. e Z.
III. 3 - TÉCNICA DE RECONSTRUÇÃO ANALÍTICA - CONVOLUÇÃO
III. 3. 1 - Modelo Matemático de Reconstrução
0 modelo matemático para o método de reconstrução bJL
dimensional é descrito com base na Figura III. 6. 0 sistema de co-
ordenadas cartesianas x o y é girado de um angulo •, dando origem a x' o y' .
0 sistema de coordenadas polares (r, •)possui sua origem fíxa (0 ) .
0 RAIO está a uma distância £ da origem polar (l « 0), onde l é
um múltiplo inteiro de a (largura do RAIO).
i
20

21
Figura III. 6 - Formação de uma Projeção de uma Seção Bidimensio
nal de um Objeto Tridimensional.
A intensidade transmitida na direção y* ao longo de x'
e dada por:
(*) I (x«; e) « v (x'f y») dyj (III. 10)
onde
V (x'f y') é a função distribuição de coeficiente de atenua
ção linear.
Calculando o logarítmo neperiano da Equação (III. 10),
o RAIO-SOMA na posição x' para um ângulo • , será dado por:
(•) 0 caracter ; indica que • é um parâmetro.

É2
r 4 < D
n - « / » ( x ' t y») dy' I(x*; •) J
>4<D
P <x»; • ) - t n - « / n (x«, y») dy» . ( i l l . 11)
Pela figura III* 6 observa-se que P ( x ' ; • ) pode ser
representado por P ( I ; • ) .
Cada valor P ( l ; • ) é'conhecido, já que 1 ( 1 ; • ) é obtl^
do' experimentalmente. 0 problema é então resolver a equação integrei
( m . 11) que tem como parâmetro desconhecido a função v (x'. y ' ) .
I I I . 3 . 2 - Bases Matemáticas
Pode-se mostrar (veja Apêndice I ) que se P ( i ; e)é uma
medida f í s i c a , então a fjunção distribuição de coef ic iente de a te
nuação |i (x*,y?)(ii ( r , • ) em coordenadas polares) pode ser re
construída pelo seguinte processo:
a) Obter a Transformada de Fourier unidimensional~j de . * •
P ( t ; •)» para cada ângulo e (Projeção).
-CD
b) Calcular a Transformada de Fourier Inversa bidimen
sional dos dados armazenados F (R; • ) para R e ( - 0 D , + < D ) e
• < Q>°, 180°).
23 CD
» (r, •)
•if F (R; •) exp (-2 i i R r cos (• - •)) R dR do
•'if"" (III. 13)
onde l m r cos (« - e).
Para uma reconstrução tridimensional considere na flgu
ra III. 6 um eixo Z, perpendicular ao plano x o y, na origem do sis
tema, figura III. 5. As equações (III. 12) e (III. 13) ficam:
.+©
P (I; e; Z) exp (2 » i I R) dl (III. 14) (R; •; Z) * /
-CD
CD 2»
M (r, #; Z)
dR de (III. 15)
ff r i / / F (R; e; Z) exp - 2 * i R r cos (• - «)
A função distribuição de coeficiente de atenuação line
ar tridimensional é então obtida em coordenadas cilíndricas.
9 r
0 método descrito acima usa portanto o espaço de Fou
rier para o cálculo da função distribuição de coeficiente de ate- .
nuação linear y (x, y ) .
|23| Para evitar as dificuldades surgidas no método de Fourier ,con
vergência da série de Fourier para a. solução errada, tentou-se encontrar un mé
todo que não utilizasse a transformada de Fourier, mas que realizasse cálculos
24
somente no espaço real e com tempo computacional reduzido.
Este método utiliza-se de uma propriedade da Transfor
nada de Fourier que a correlaciona com a Integral de Convolução
|27|
III. 3. 3 - Desenvolvimento do Método de Convolução
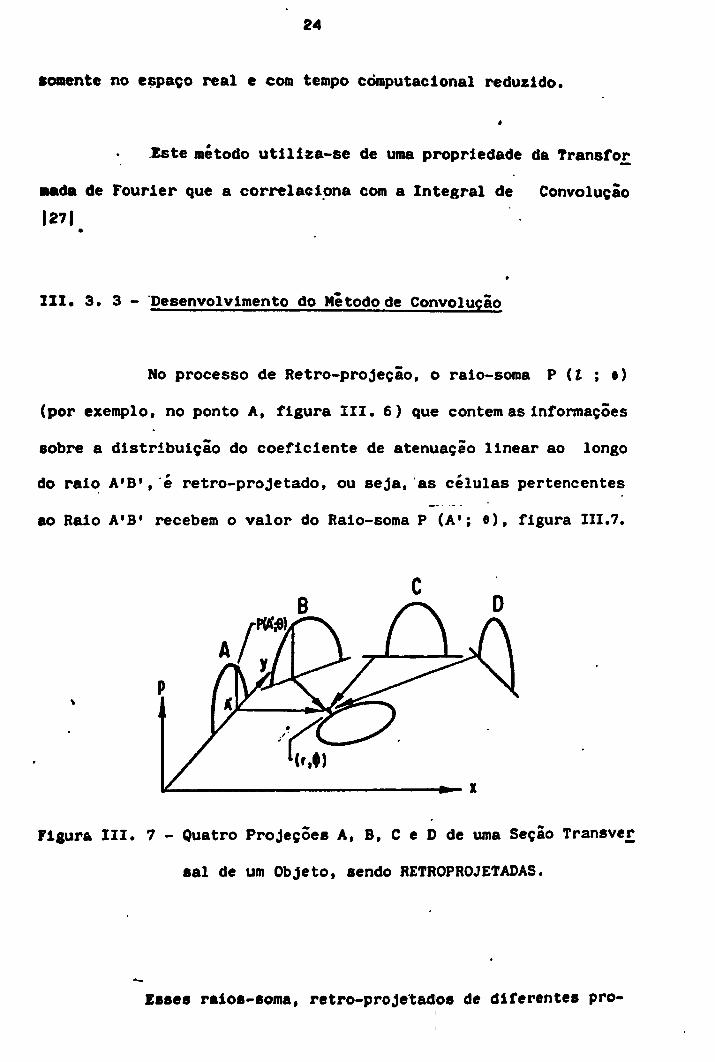
No processo de Retro-projeçao, o raio-soma P (l ; e)
(por exemplo, no ponto A, figura III. 6) que contem as informações
sobre a distribuição do coeficiente de atenuação linear ao longo
do raio A'B', é retro-projetado, ou seja, as células pertencentes
ao Raio A'B' recebem o valor do Raio-soma P (A'; e), figura III.7.
Figura III. 7 - Quatro Projeções A, B, C e D de uma Seção Transver
sal de um Objeto, sendo RETROPROJETADAS.
Esses raios-soma, retro-projetados de diferentes pro-
25
jeçoes e que passam pelo ponto (r, •) são somados dando origem à
função • (r, • ) . •
onde
• /
« (r, •) m I p (r cos (• - e), e) de (III. 16)
0
A função • (r, •) dá o valor qualitativo das variações
da função distribuição de coeficiente de atenuação linear e não o
valor real.
Uma das limitações da retro-projeção é de não definir
as fronteiras do objeto. Por exemplo: na reconstrução de um objeto
circular, surgem regiões fora da fronteira, com altos valores da
função • (r, • ), dando-lhe uma forma estrelada, já que essas regi-
oes recebem de todas as projeções apenas contribuições positivas,
figura III. 7.
0 •»
0 objetivo e então procurar uma nova função projeção ,
P' (l i • ), de forma a se obter uma reconstrução mais próxima da
real.
Na equação (III. 12) a transformada inversa é:
-0D
r i ê) m / F (R;
P (I; •) - / F (R; • ) exp (- 2 i i R l) dR
'•(D
substituindo na equação (III. 16)
' . • ) « / / F (R;
26
• (r, •) - / / F (R; •) exp (-2 • i R i) dR d» . (III. 17)
0*
Reescrevendo a equação (III. 13)
•V*QD
v (r, 4) > / / F (R, •) exp (-2 • i R r cos (• - »)llR| dR-d»
0*
(III. 18)
. 1 1 F (R, •) exp (-2 • i R r cos (• - »))|R|
Comparando as equações (III. 17) e (III. 18), verifica
se que diferem de um termo |R|, que pode ser interpretado como uma
função filtro, no espaço recíproco.
Definindo a função P* (Z; 6) como:
+0D
P» (l; •) = / |R| F (R, e) exp (-2 * 1 R l) tfR (III. 19) = / |R| F (R,
A equação (III. .18) então fica:
/
J» (r, •) - / P'(P (co« (• - •) ); e) de (III. 20)
'o
A retroprojeção da função P» (l; •) resultará na obtcn
çao da função v (r, • ) , uma reconstrução real.
É necessário encontrar uma relação entre P' (tj •) e
27
P (ti • ) . já que P (t; •) é U M nedlda experlnental e portanto tm
dado conhecido» enquanto que P* (l; •) foi apenas definida.
As equações (III. 12) e (III. 19) defines as Transfor
•adas de Fourier:
1(P d; •)) - F (R; •)
T(P» (l; e)) «= |R| F (R; •) (III. 21)
Uma função q (l) é definida, tal que:
+GD
|R| « / q (t) exp (2 * i R l) dl (III. 22)
-©
onde
!R| - T(q (D)
9.
Aplicando-se o teorema de Convoluçâo:
"A Transformada de Fourier da convoluçâo de duas
funçoee e igual ao produto da» Transformadas de
Fourier de cada função".

28
. Pel* equação (ZII. 21)
T(P» (t; •)) «T(q (!) • P (I; •)).
Tirando-se a transformada inversa de ambos os tentos:
P1 (l; #) - q (O * P Cl; §)
Colocando na forma integral
+CD
U; •) « J q (i2) P U- xx; •) dij (III. 23)
'-(D
Calculando q (l),
.•<D
q (l) - / |R| exp (-2 i i R 1) dR (III. 24) í O.cálculo de q (l) não pode ser feito diretamente, já
que |R| diverge nos Unites de integração. Substituindo os limites
de integração por A/2 e -A/2, obtém-se a função q . (l) que se apro
xima de q (l) no limite de A * (D, ou no limite de a * 0, já que
A m — t (Apêndice II).
• / .
A/2
QA í l ) " / ,R| C X P ("2 " * R l ) *"* (I11' 25>
r 2
Desenvolvendo-se a integral (III. 25), para l « na, on
de n < 1 • a é a largura do Raio (Apêndice II).

29
q (na) * o para n « par
q (na) e — — £ — - para n » impar « n a
q (na) = r para n e O 4 a
Discretizando a equação (III. 23), já que Z. = ma, on
de m c l
+0D P' (na; e) - a £_j q(ma) P ((n - m) a; e ) (III. 26)
m*-0D
Substituindo os valores de q (na)
P, (na; 6) . P (na; t) „ __ £ P « " " P> a» 9> 2 *^ 2
4 a * a . p p=impar
(III. 27)
A figura III. 8 mostra a função Projeção P (na; e)con
voluindo' com a função filtro (no espaço real), dando origem a uma
nova função projeção filtrada P' (na; e).
Discretizando a equação (III. 20) em e, r e • :
" <* V * •ô1 ? *o £ P' [J ro cos * 'o'* *o); t6o]
t-1 (III. 28)

30
o o
onde J, K» t são inteiros positivos
são Incrementos de r e 4
é o incremento na projeção
é o número de projeções
p(x)
4 ^TT-
Figura III. 8 - Convoluçao dando Origem a Função Projeção Filtra
da.
0 problema é então resolvido com as equações (III. 27)
e (III. 28). Contudo, o argumento da equação (III. 28) (j r cos
(K * - t • )), não será sempre um múltiplo inteiro de a, tornando 0 0 — —
se necessário interpolar entre os valores conhecidos de P', para
que se possa efetuar o somatório na equação (III. 28)
0 método de convoluçao eliminaria portanto as falsas
fronteiras, já que regiões fora da fronteira recebem contribuições
positivas de algumas projeções e negativas de outras.
A figura III. 9 mostra a figura III. 7 modificada com
essa filtragem, onde o Pixel fora do circulo recebe contribuições
positivas das projeções A e B e negativas de C e D.

31
Figura III. 9 - Retro-projeção da Função Projeção Filtrada A, B,
C e D.
III. 4 - ALGORÍTMO DO MÉTODO *
Um programa computacional foi escrito em Linguagem Fo£
tran e implantado no Burroughs 6700 do NCE/UFRJ.
Esse programa é dividido em seis fases.
!• Fase
Dados de entrada: dimensão da matriz (número de raios)
número de projeções e intensidade não atenuada (*)» * (largura do
RAIO).
Calcula-se a posição em coordenadas polares do ponto
central de cada Pixel, da matriz de reconstrução, figura III. 10.
32
* 9
v
1 \ 1 r
0
X . 1
t /
*
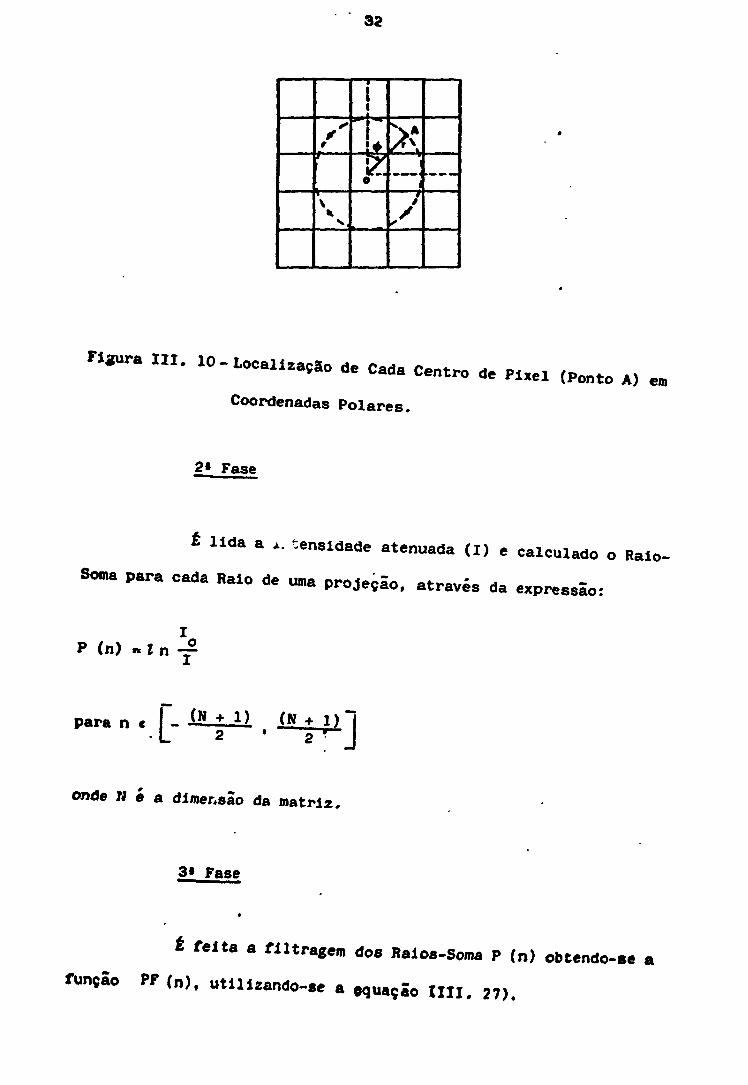
Figura Hi. io-Localização de Cada Centro de Pixel (Ponto A)
Coordenadas Polares. em
2» Fase
t lida a .. tensidade atenuada (I) e calculado o Raio-
Soma para cada Raio de uma projeção, através da expressão:
P (n) « I n -^
para n c L ÜL+JJL % (N + i)"|
onde N é a dimensão da matriz.
3* Fase
É fe i ta a filtragem dos Raios-Soma P (n) ©btendo-se a
função PF (n) , utilizano-o.se a aquação I I I I . 27).
33
„ (n) . Lin) _-J_ £ Uz-sL 4.a » .a . p
p»impar "
4» Fase
Com os dados obtidos na 3* Fase, um conjunto de pontos
(na, P F (na)) da t-ésima projeção, é calculado o pollnSmio inter-
polador SPLINE CÚBICO (Veja Apêndice III) para cada intervalo
I (n - 1) a, na I. Em seguida é calculado o argumento r cos (+-t • )
para cada valor do ângulo •_ num determinado raio £. Caso seu valor
não seja um múltiplo inteiro de a calcula-se, através do polinômio
interpolador correspondente ao intervalo, o valor de
PF r cos (• - t e ) .
51 Fase
É feita a retroprojeçao, calculando-se o coeficiente de
atenuação em cada Pixel, usando-se a expressão que define a retro-
projeçao. em coordenadas polares* equação (III. 28).
N
v (r, •) « «o J ^ PF Ir cos (• - t e o), 6 Q tJ
t«l
34
6» Fase
A mudança de coordenadas da função t» (r, 4) é realiza
da de polares para carteslanas. Essas coordenadas são em seguida
relacionadas com a posição linha-coluna do elemento da matriz,pas
sando de v (x, y) para ii (I, J).
Para um número N de projeções, são repetidas a 2», 3*
e 4* Fases, M vezes.
Torna-se assim possível a simultãniedade da tomada de
dados e análise dos mesmos.
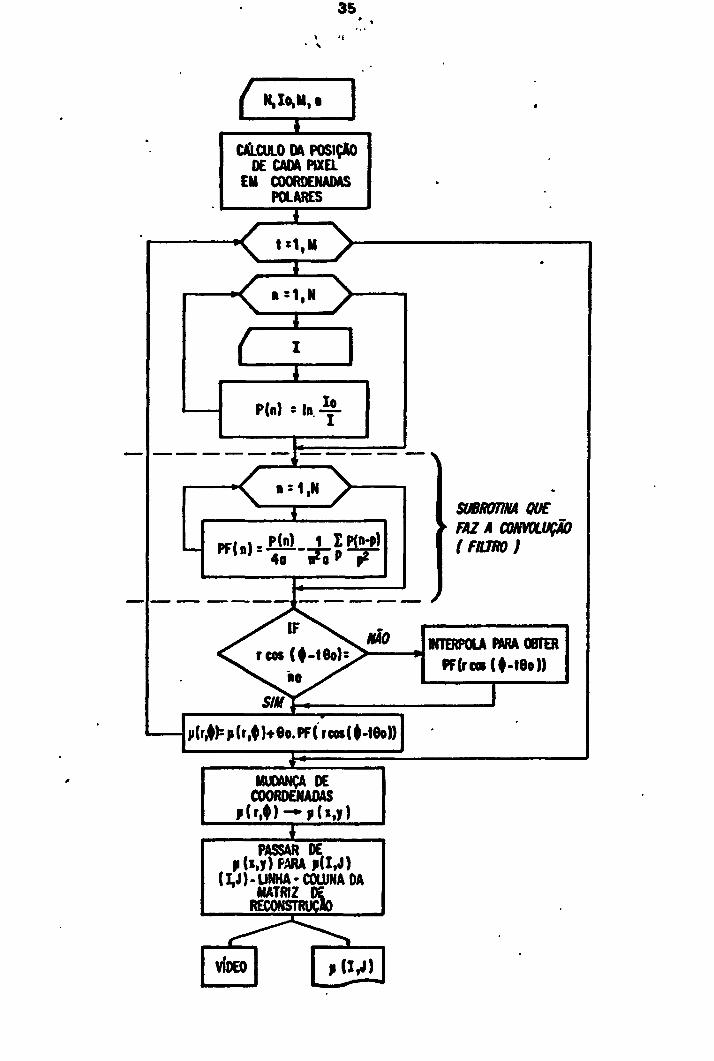
A seguir é mostrado o fluxograma do programa montado.
35
£ N, Io, U.o
—r CÁLCULO DA POSIÇÃO
DE CADA rata EM COORDENADAS
POLARES I
\ j ^ r i
PM > k i -
40 rO r p*
SUBROTINA QUE FAZ A CONVOLUÇÃO
(Fiam)
RfTERPOLA PARA OBTER
PF{rc«(*-l8o))
p(r,^Ji(r,tkeo.PFÍrcos(^teo))
MUDANÇA DE COORDENADAS
yM)-»y(»,r) I
PASSAR DE j i (M)FARA| ( I , J )
(I.J)-UNHA-COLUNADA MATRIZ DE
RECONSTRUÇÃO
36
CAPÍTULO IV
RESULTADOS
IV. 1 - TESTES SIMULADOS
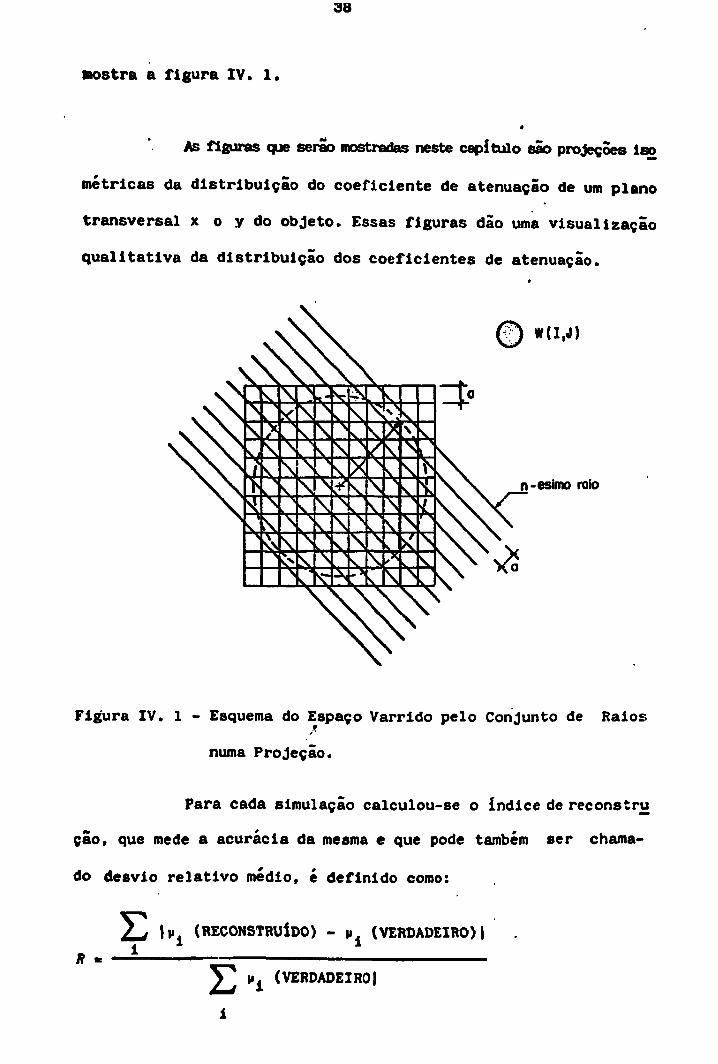
Com o objetivo de se testar o algoritmo, foram feitos
testes simulados onde eram conhecidos os valores na distribuição do
coeficiente de atenuação linear i> (I, J), que são usados no cálcu
Io do Raio-soma P (n) através da equação:
P (n)
N N
5 ^ ][] W (I, J) . » (I, J) 1=1 J=l
onde
W (I, J) é a fração de área do Pixel (I, J) interceptada pelo raio
1371 nt chamada Função Peso ; figura IV. 1.
¥ (I# J) é o coeficiente de atenuação linear para o Pixel de posi
ção (I, J).
a largura do pixel.
Os testes simulados foram feitos com o objetivo de res
ponder as seguintes questões:
1 - Qual o problema encontrado, quando houver interfaces
com uma grande variação nos valores do coeficiente de atenuação
linear?
37
2 - Dada uma matriz (N x N),com quantas projeções se re-
constrói a imagem de um objeto?
3 - A reconstrução melhora com o aumento da dimensão da
matriz?
Visando responder a essas perguntas, foram variados:
á) As dimensões da matriz (N x N) de coeficiente de
atenuação v (I, J) (valores de N de 15, 23 e 25) mantendo uma
largura de Pixel de 0,25 cm.
b) O coeficiente de atenuação linear JI (I, J) (entre
0,2 a 0,7 cm" ).
c) o número de projeções.
9,
Neste trabalho, a matriz usada para a reconstrução de
Imagem dos objetos citados no item (a) possui dimensões de 21x21,
33x33 e 35x35 que correspondem ao comprimento da diagonal do obje
to dividido pela largura do feixe (Raio ou Pixel).
0 objeto é, portanto, circunscrito por uma, circunfe
rência cujo raio é a semi-diagonal do objeto em questão, como
38
nostra a figura IV. 1.
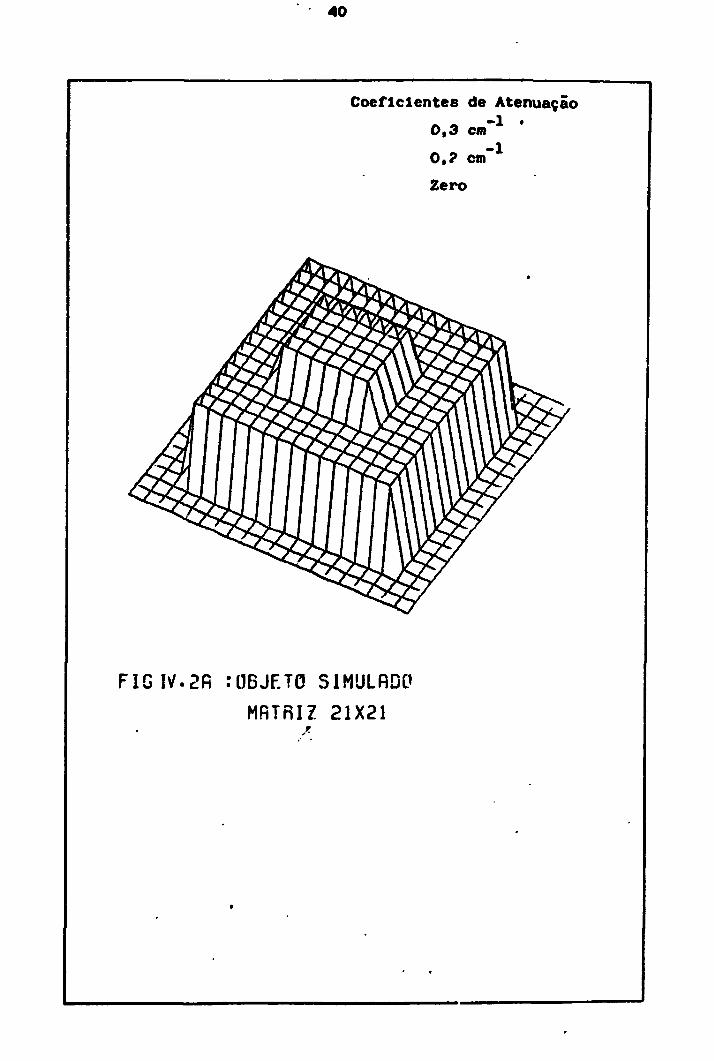
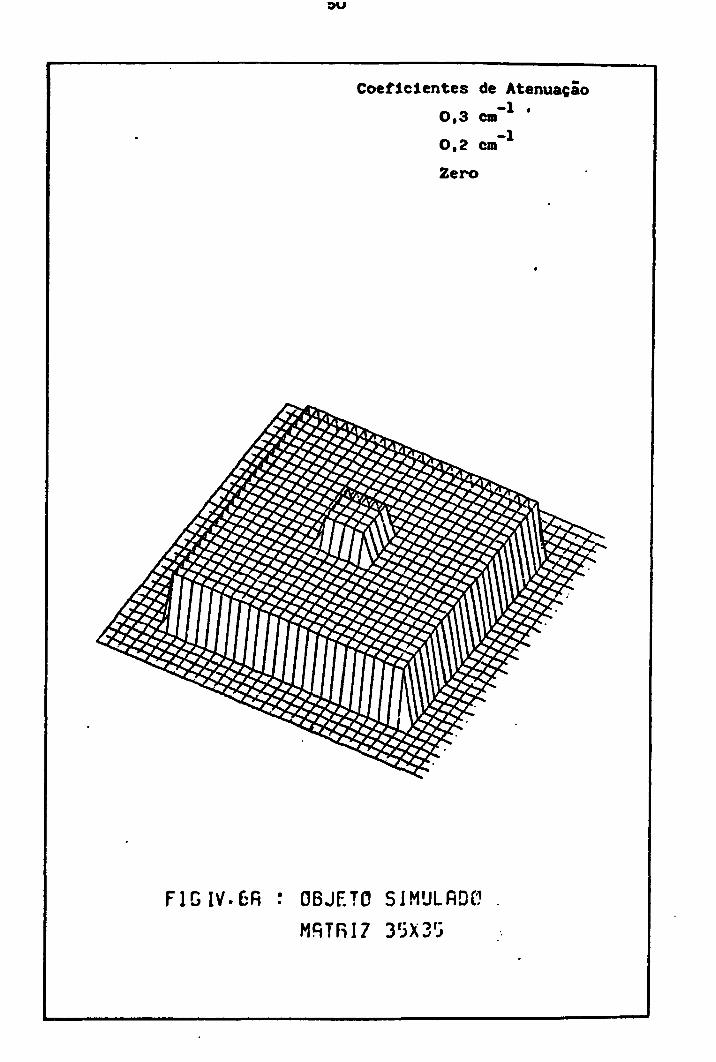
As figuras que serão mostradas neste capitulo são projeções iso
métricas da distribuição do coefic iente de atenuação de um plano
transversal x o y do objeto. Essas figuras dão uma visualização
qual i tat iva da distribuição dos coef ic ientes de atenuação.
W(I,J)
-esimo roío
Figura IV. 1 - Esquema do Espaço Varrido pelo Conjunto de Raios
numa Projeção.
Para cada simulação calculou-se o índice de reconstru
çao, que mede a acurada da mesma e que pode também ser chama
do desvio relativo médio, é definido como:
2^ \v (RECONSTRUÍDO) - n (VERDADEIRO) | 1 1 *
^ MA (VERDADEIROI

•'39
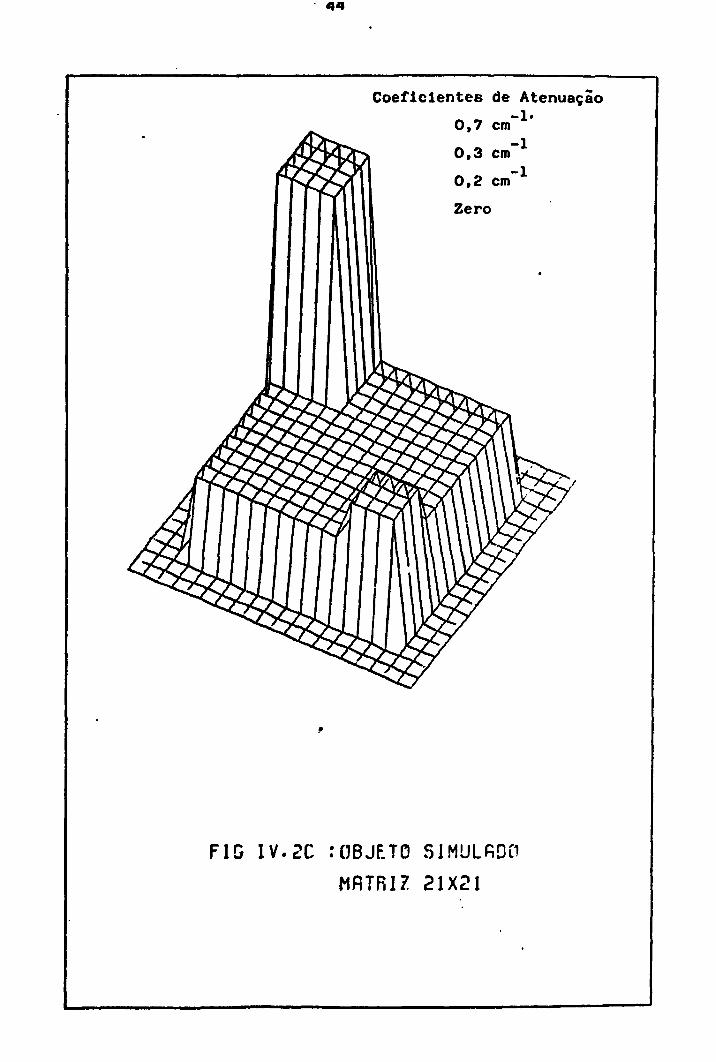
Os objetos simulados são caixas contendo água e blo
cos cúbicos com coeficientes de atenuação de 0,3, 0,4 e 0,7cm** .
As paredes da caixa são de material com coeficiente de atenuação
igual ao da água. A atenuação para a energia de 60 keV do raio
gama da fonte A é de 0,2 cm para a água.
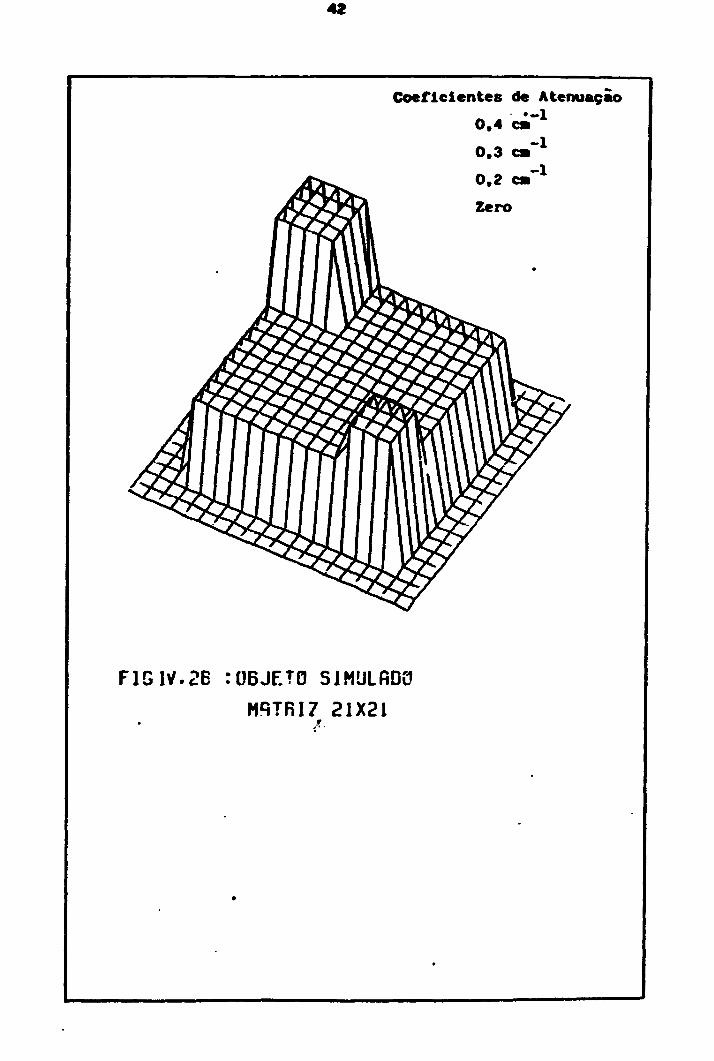
Para a matriz (21 x 21) foram feitas 3 simulações ,
representadas nas figuras IV. 2 A-C . Foram usadas 6, 12, 18,24,
30, 36 e 40 projeções para cada simulação, calculando-se o índi
ce de reconstrução (ff), Tabela IV. IA.
Para o caso da 1* simulação foi montada a tabela IV.
18 com os índices de reconstrução calculados para a matriz mais
interna (13 x 13), obtida eliminando-se a borda do objeto,inter-
face (AR-ÂGUA).
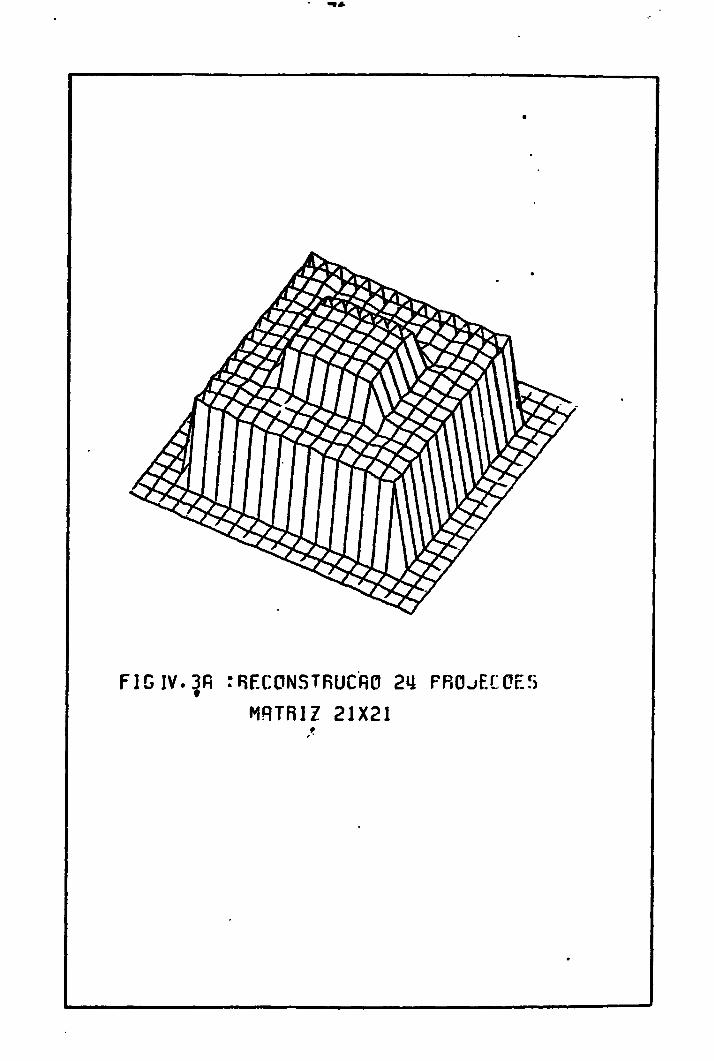
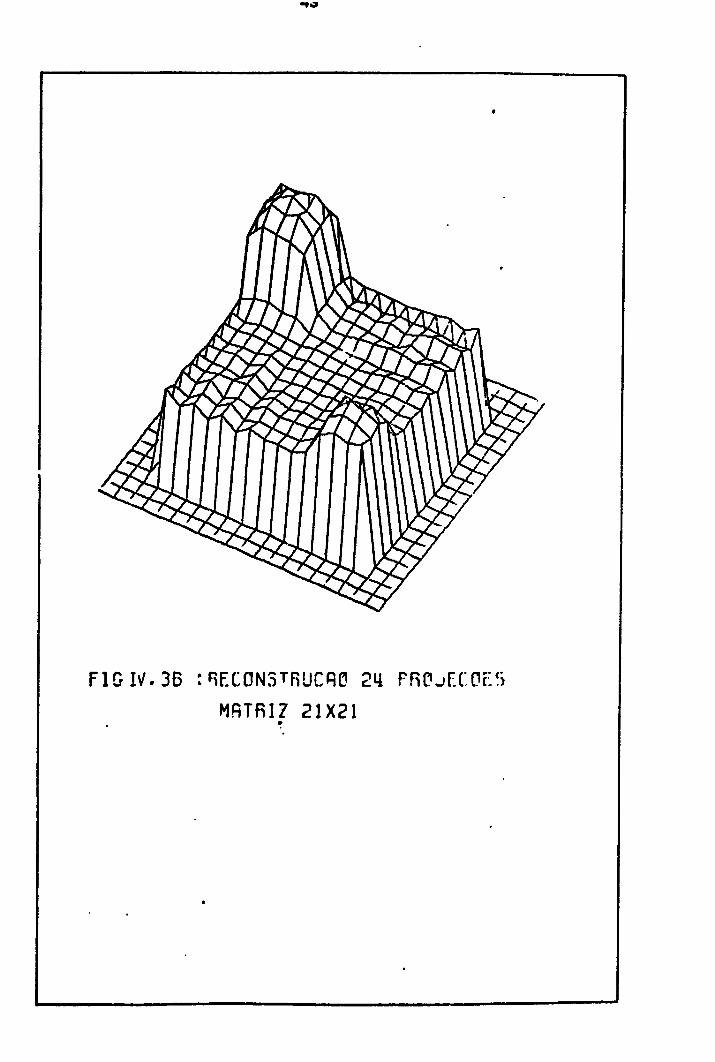
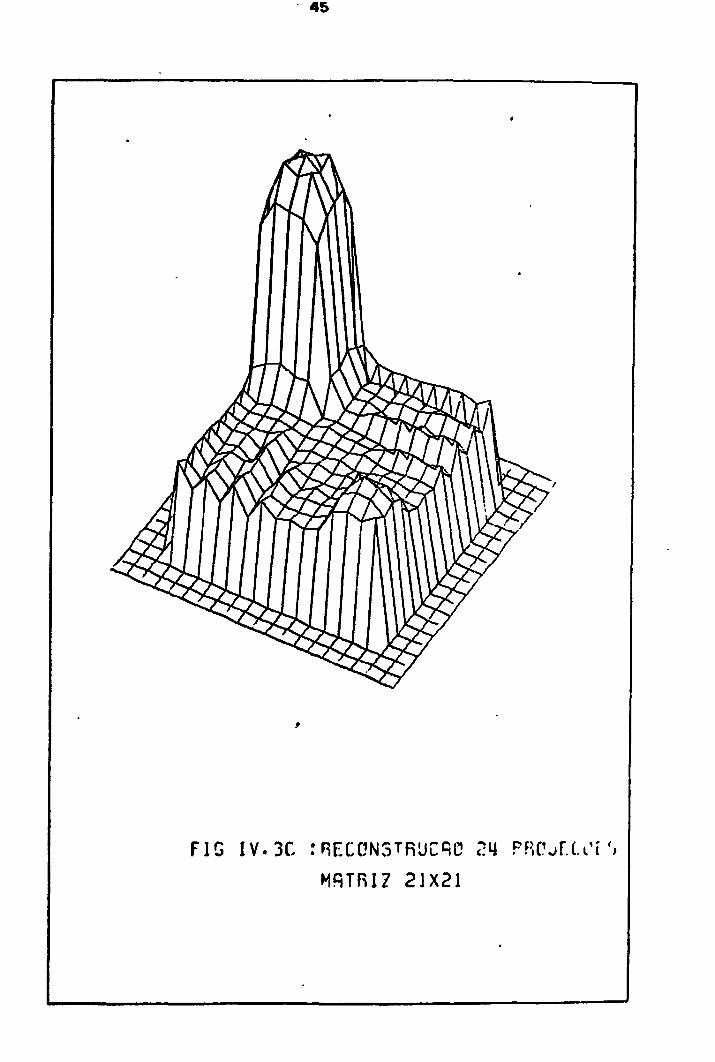
As figuras IV. 3A-C mostram a reconstrução da imagem
dos objetos das figuras IV. 2A-C para 24 projeções. 9
TABELA I V . IA - VALORES DER ( # ) PARA AS SIMULAÇÕES (21 x 2 1 )
^sNNPR0JEÇÕES
3IMULAÇÂ0^Nw
1
2
3
6
• 22,1
30
37,3
12
7 ,6
10,3
15
18
3 , 5
5 , 3
9 , 4
24
2 , 3
4 , 4
7 ,5
30
2 ,4
4 . 2
7 ,5
36
2 ,7
3 ,8
7 ,3
40
2 ,7
3 ,8
6 ,9
40
Coeficientes de Atenuação
0,3 em
0,? cm"
Zero
F1GIV.2R rOBJF.TG SiMULRDO
MfiTRIZ 21X21
42
Coeficientes de Atenuação
0,4 a»"*
0,3 cm
0,2 ca
Zero
-1 i
-1
F1G1V.26 :0BJF.T0 SIMULfiDD
MfiTRI7 21X21 9
F1GI\/.3B : RECONSTRUCT 24 PROjF.COF.f>
MfiTRl? 21X21
1 1
Coeficientes de Atenuação
0 ,7 cm"
0 ,3 cm"
0 ,2 cm
F1G IV.2C :0BJF.T0 SIMULfiDO
MfiTRIZ 21X21
45
FIG IV. 3C : RECONSTRUCT ?A PP.Pjf.U'i S MRTRI7 21X21
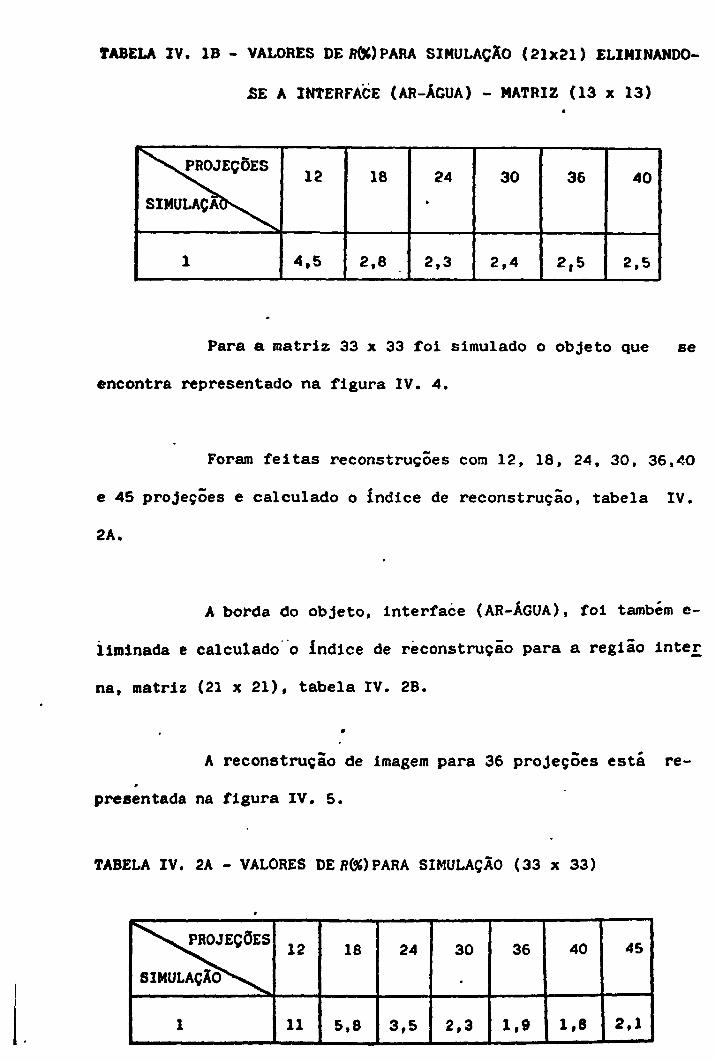
TABELA IV. IB - VALORES DE Aft) PARA SIMULAÇÃO (21x22) ELIMINANDO-
SE A INTERFACE (AR-ÁGUA) - MATRIZ (13 x 13)
^VPROJEÇÕES
SIMULAÇAÍK.
1
12
4 . 5
18
2 , 8
24 *
2 , 3
30
2 , 4
36
2 , 5
40
2 , 5
Para a matriz 33 x 33 foi simulado o objeto que se
encontra representado na figura IV. 4.
Foram feitas reconstruções com 12, 18, 24, 30, 36,40
e 45 projeções e calculado o índice de reconstrução, tabela IV.
2A.
A borda do objeto, interface (AR-ÁGUA), foi também e-
liminada e calculado o índice de reconstrução para a região inter
na, matriz (21 x 21), tabela IV. 2B.
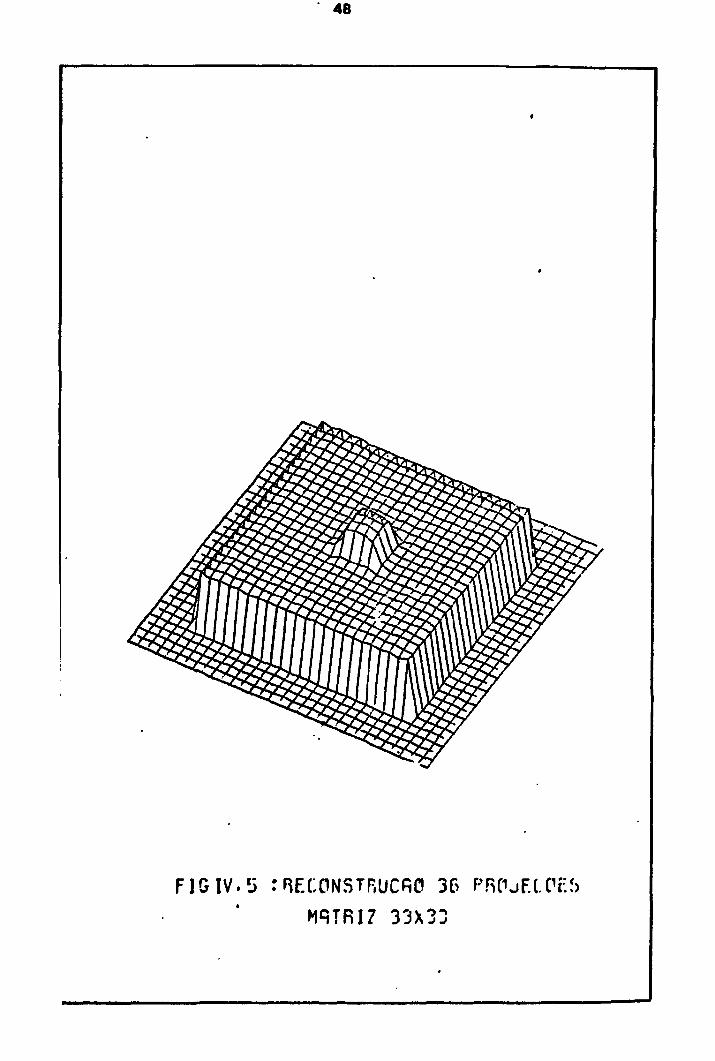
A reconstrução de imagem para 36 projeções está re-
presentada na figura IV. 5.
TABELA IV. 2A - VALORES DE/?(%)PARA SIMULAÇÃO (33 x 33)
^X.PROJEÇÕES
SIMULAÇÃO^v.
1
12
11
18
5 ,8
24
3 , 5
30
2 , 3
36
1 .»
40
1 .8
45
2 , 1

t f
Coeficientes de Atenuação -1. 0,3 cm
0,2 cm
Zero
-1
TiGlV.H : 0BJF.T0 SIMULRDO
MRTRI7 33X33
4B
FIG IV. 5 :RECONSTRUÇÃO 36 PRPjF.tPr.í>
MqiRI7 33X33

49
TABELA IV. 2B - VALORES DE R% PARA SIMULAÇÃO (33 x 33) ELIMI
NANDO A INTERFACE (AR-ÁGUA), MATRIZ 21 x 21
^^V^PROJEÇÕES
SIMULAÇXÒ^V.
1
12
5 . 0 0
18
3 , 7 0
24
2 ,60
30
2 .20
36
1 .90
40
1.80 •
45
1.98
As figuras IV. 6A-B representam as duas simulações
feitas com matriz 35 x 35.
Foi usado o mesmo número de projeções da simulação
anterior.
As tabelas IV. 3A e IV. 3B mostram os valores obti
dos no cálculo do índice de reconstrução (/?). para cada reccns
trução, considerando todo o objeto (matriz 35 x 35) e apenas a
região interna, eliminando-se as bordas, interface(AR-ÁGUA),(ma
f
triz 23 x 23). 9,
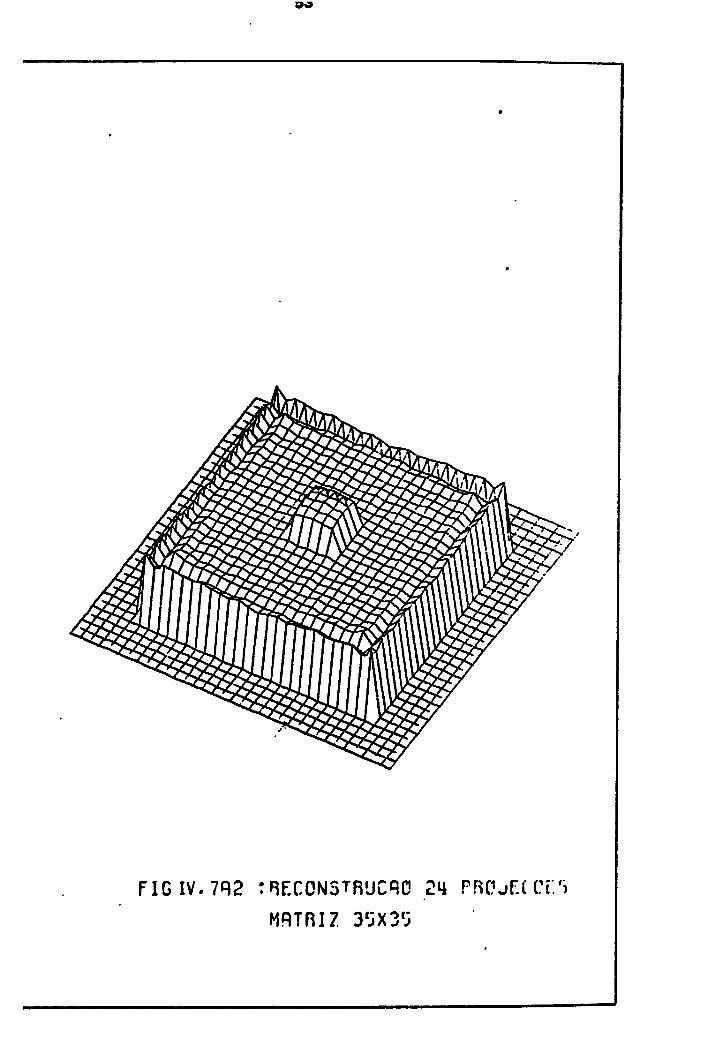
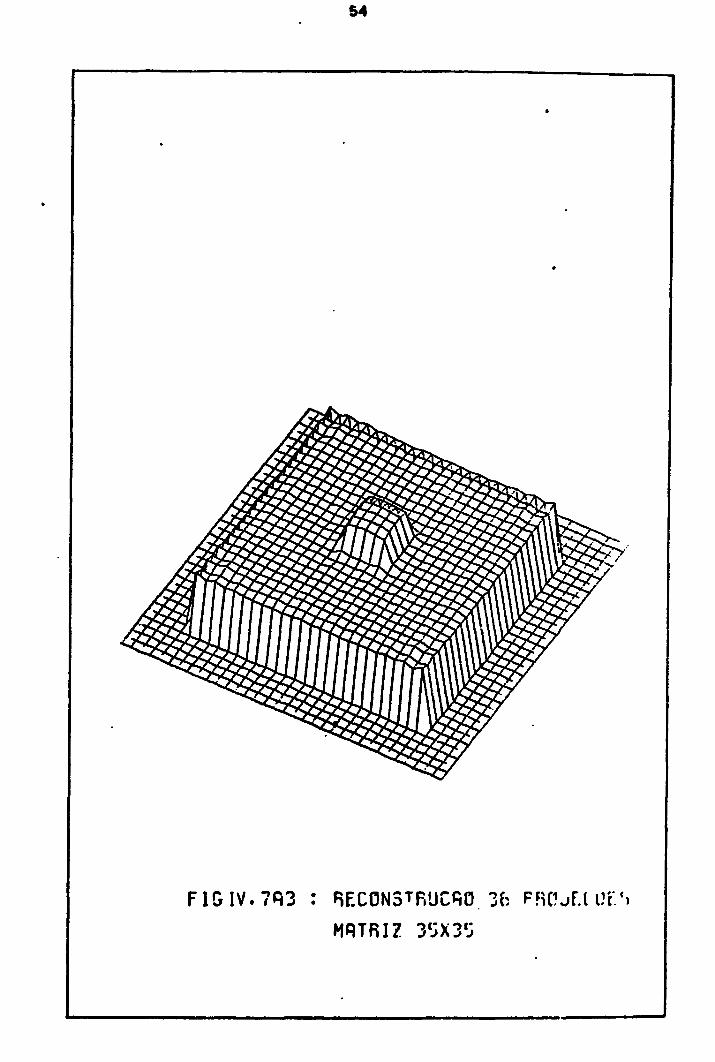
As figuras IV. 7A1 - 7A3 mostram reconstruções pa
ra 18, 24 e 36 projeções referentes à figura IV. 6A e as figu
ras IV. 7B1 - IV. 7B2 para 36 e.40 projeções referentes à figu
ra IV. 6B.
0 gráfico IV - 1 mostra o comportamento do Índice de
Reconstrução em função do número de projeções, utilizando os re_
suit ados obtidos nas Tabelas de IV. IA a IV. 3A.
D U
Coefic ientes de Atenuação
0 , 3 cm
0 ,2 cm
Zero
-1 i
-1
FIGiV.fcfi OBJF.TO SIMULADO
MRTR17 3fiX3r3
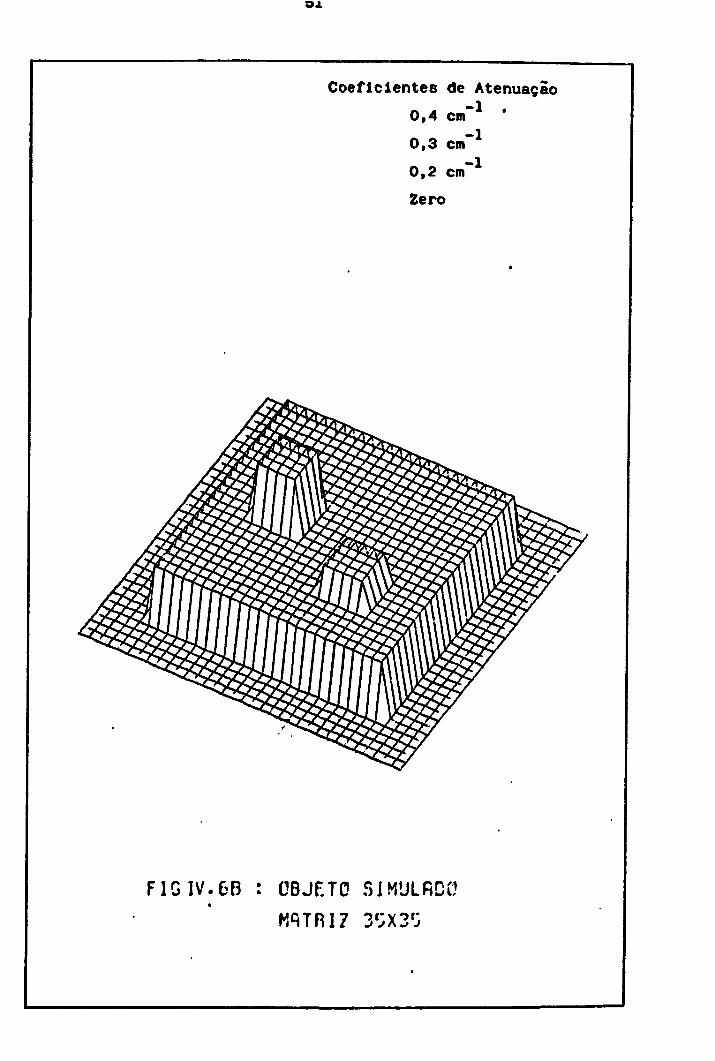
9 4
Coeficientes
0.4
0,3
0,2
Zerc
de
cm"
cm"
cm"
»
Atenuação -1 .
-1
-1
•
F1GIV.6B OBJF.TO SIMULRDC
M,qTRi7 35x35
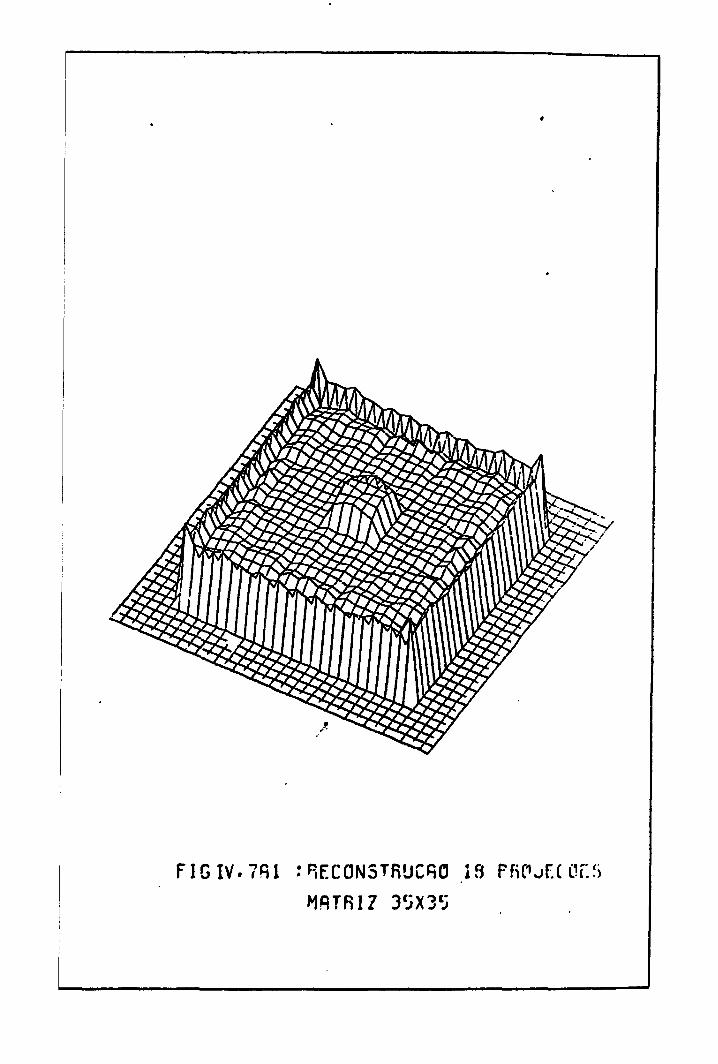
F1GIV.7R1 .-RECONSTRUCRO ifi PRPJEÍ Or.íi
MRTRI7 3t;X3t;
9<9
F1GIV.7R2 tHF.C0N3TRUCq0 24 PROJF-C CT.r>
MRTRIZ 3I3X3C3
54
F1G1V.7R3 : RECONSTRUÇÃO. 3fe FROJF.1 ÜF.S
MRTRIZ 3lJX3i;
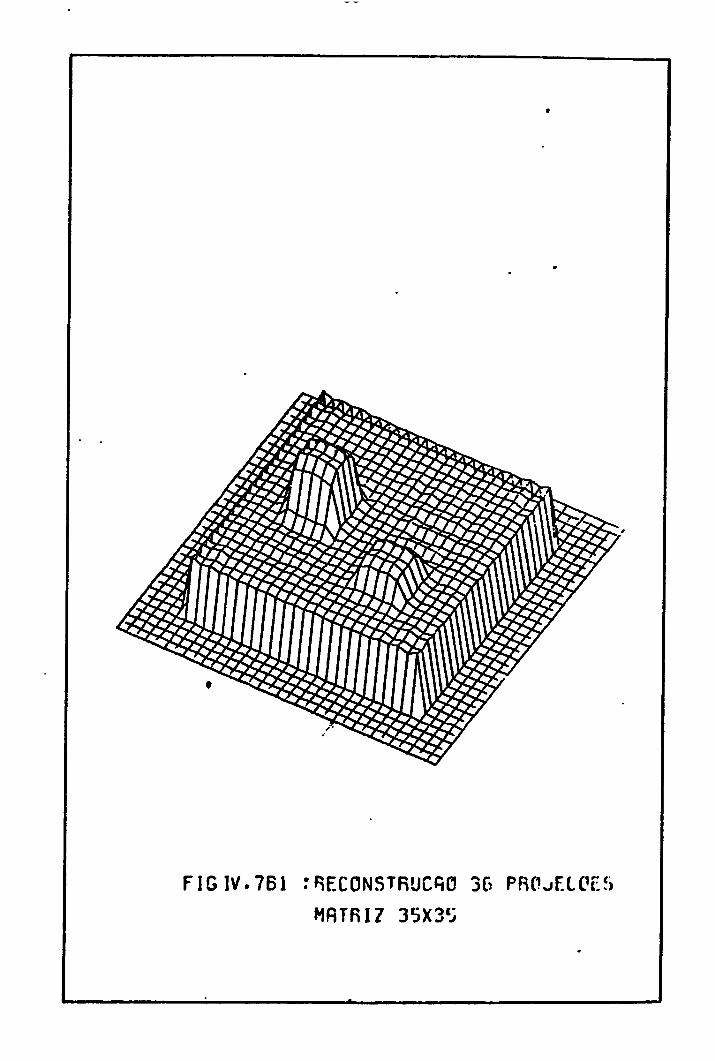
FIG IV. 761 : RECONSTRUCT 36 PROJELOES
MRTRI7 35X3'J

FIG IV.762 :RECONSTR'JCfiO 40 PR0jf.C0ff>
MRTRJ7 35X35

GRsnco
D
o A
+ X * • 9
X
z o Y
o
I V . 1 - IND. DE
HftTRI? - 21X21
RECPNST. X NUM. D
SIMULACRO - t tUMNRNDC R INTEHF« fCRR-RGMRJ
MqtR17 21X21 H1TRIZ. - 21X21 M9TRI7 - 31X33
itIMINRNDC M3TRI7 - 35X35
f.UMINANDC MRTR17 - 3'jX3'j
fLIMINRNDC
SMULRCRC - 2 SIMULACRO - 3
fl iNTiKF-rnft-RGonj SiMULRCRC - 1
n isTnr.rfiP.-nooRj OiMULRCRC - 2
R INUA/.VflR-nCURJ
P R P J F X O E * ,
12. CO 44 DO 52. i'C
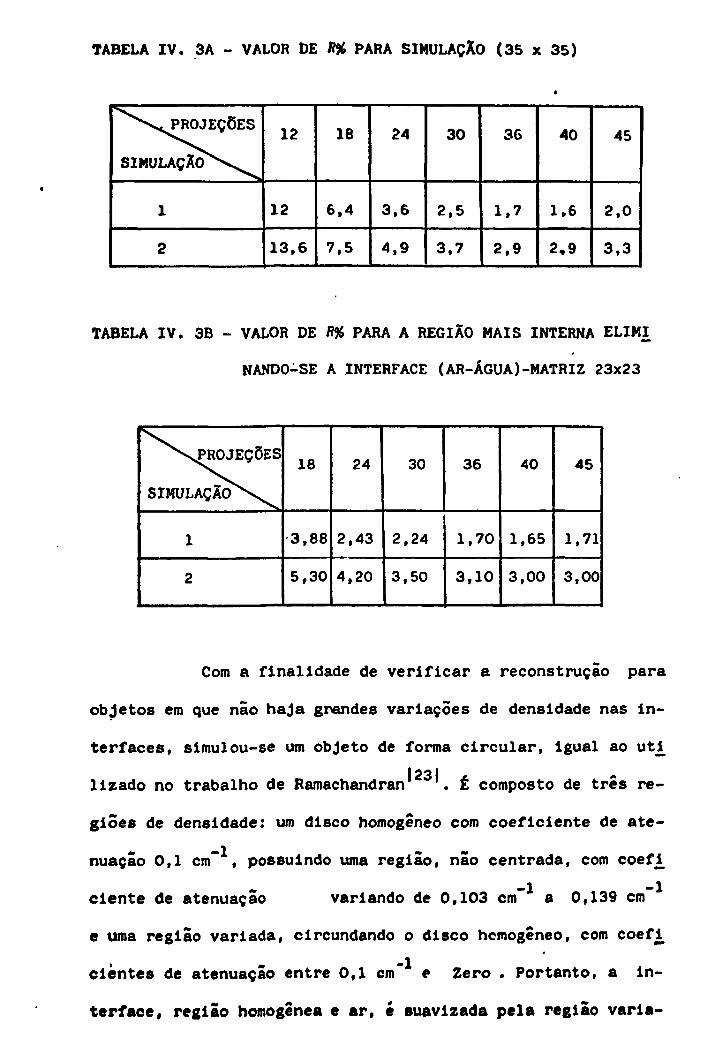
TABELA IV. 3A - VALOR DE R% PARA SIMULAÇÃO (35 x 35)
^ S \ P R O J E Ç Õ E S
SIMULAÇÃO^V.
1
2
12
12
1 3 , 6
18
6 ,4
7 ,5
24
3 , 6
4 , 9
30
2 , 5
3 ,7
36
1,7
2 , 9
40
1.6
2 , 9
45
2 , 0
3 , 3
TABELA IV. 3B - VALOR DE B% PARA A REGIÃO MAIS INTERNA ELIMI
NANDO-SE A INTERFACE (AR-ÁGUA)-MATRIZ 23x23
^XPROJEÇÕES
S I M U L A Ç Ã O ^ N .
1
2
18
3 , 8 8
5 ,30
24
2 , 4 3
4 , 2 0
30
2 ,24
3 ,50
36
1,70
3 , 1 0
40
1,65
3 ,00
45
1,71
3 ,00
Com a finalidade de verificar a reconstrução para
objetos em que não haja grandes variações de densidade nas in
terfaces, simulou-se um objeto de forma circular, igual ao uti
l23l
lizado no trabalho de Ramachandran . É composto de três re
giões de densidade: um disco homogêneo com coeficiente de ate-
-1 -
nuaçao 0,1 cm , possuindo uma região, nao centrada, com coefl
ciente de atenuação variando de 0,103 cm" a 0,139 cm
e uma região variada, circundando o disco homogêneo, com coefi^
-1
cientes de atenuação entre 0,1 cm e Zero . Portanto, a in
terface, região homogênea e ar, é suavizada pela região varia-

da, Tabela IV. 4A.
A matriz de reconstrução possui uma dimensão de 25 x
25, com 0,1 cm de largura de pixel. As reconstruções feitas com
6, 12 e 18 projeções tiveram seus índices de reconstrução calcu
lados, considerando-se apenas a região do disco homogêneo inclu-
indo a região de alto coeficiente de atenuação, na tabela IV. 5.
A tabela IV. 4B e a figura IV. 8 representam a ima
gem reconstruída, de uma forma quantitativa e qualitativa, com 6
projeções.
TABELA IV. 5 - ÍNDICE DE RECONSTRUÇÃO (R)
^"^^ROJEÇÕES
R %
6
2,00
12
1,60
18
1,66
Uma aplicação importante de Tomografia, na área médi
ca, é o desenvolvimento de medidas precisas da densidade óssea
no esqueleto humano, investigando a concentração de cálcio e ou
tros elementos.
*
Com o objetivo de testar o algoritmo desenvolvido nes_
te trabalho, na área médica, simulou-se a reconstrução de uma se_
ção transversal do braço humano. Os valores para os coeficientes
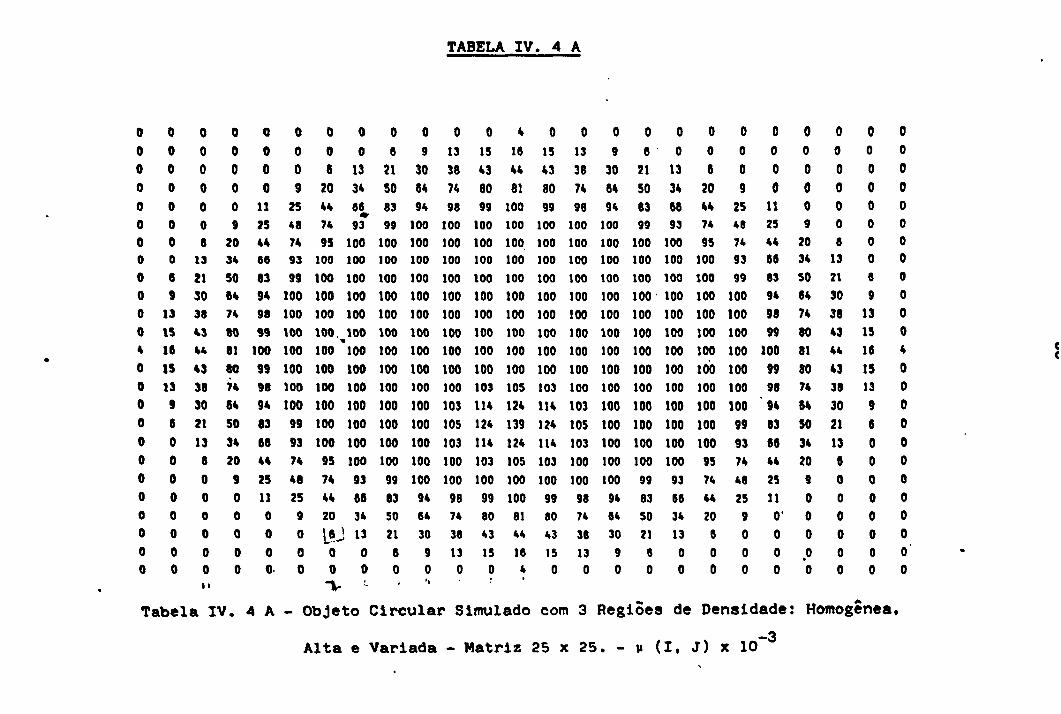
TABELA IV. 4 A
0
0
0 0
0
0
0 0
0
0
0
0 *
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0
0
0
0
0
Tabel
0
0
0
0
0
0
6 13
21
so 38
13
44
43
38
30
21
13
6
0
0
0
0
0 0
0
0
0
0
0
9
20 34
SO 04
74
80
81
80
74
64
SO
34
20
9
0
0
0
0 0
a IV.
0
0
0
0
11
25
44 66
83 94
98
99
100
99
98
94
83
68
44
25
11
0
0
0 0
4 A
0
0
0
9
25
48
74 93
99
100
100
100
100
100
100
100
99
93
74
48
25
9
0
0 0
0 0
0 0
6 13
20 34
44 66
74 93
95 100 100 100
100 100
100 100
100 100
100 M00
100 "lOO
100 100
100 100
100 100
100 100
100 100
95 100
74 93
44 66
20 34
L?J 13 0 0 0 0
0
6
21
50
83
99
100 100
100
100
100
100
100
100
100
100
100
100
100
99
83
50
21
6 0
0
9
30
64
94
100
100 100
100
100
100
100
100
100
100
100
100
100
100
100
94
64
30
9 0 'l
0
13
38
74
98
100
100 100
100
100
100
100
100
100
100
103
105
103
100
100
98 74
38
13 0
0
15
43
80
99
100
100 100
100
100
100
100
100
100
103
114
124
114
103
100
99
80
43
15 0
4
16
44
81
100
100
100 100
100
100
100
100
100
100
105
124
139
124
105
100
100
81
44
16 4
- Objeto Circular Simulado
Alta e Variada - Matriz
0
15
43
80
99
100
100 100
100
100
100
100
100
100
103
114
124
114
103
100
99
80
43
15 0
0 13
38
74
98
100
100 100
100
100
100
100
100
100
100
103
105
103
100
100
98
74
38
13 0
com 3
25 x 25
0
9
30
64
94
100
100 100
100
100
100
100
100
100
100
100
100
100
100
too 94
64
30
9 0
0
6
21
50
83
99
100 100
100
100
100
100
100
100
100
100
100
100
100
99
83
50
21
6 0
0
0
13
34
66 93
100 100
100
100
100
100
100
100
100
100
100
100
100
93
66 34
13
0 0
Regiões de
> . — V 1 II,
0
0
6
20
44 74
95 100
100
100
100
100
100
100
100
100
100
100
95
74
44
20
6
0 0
0 0
0
9
25
48
74
93
99
100
100
100
100
100
100
100
99
93
74
48
25
9
0
0 0
0
0
0
0
11
25
44
66
83
94
98
99
100
99
98
'94
83
66
44
25
11
0'
0
0
0
Densidade
J) X IO -3
0
0
0
0
0 9
20 34 1
so ; 64
74 :
80 '
81 <
80 <
74
64 .
50 .
34
20
9
0
0
0
0 • 0
0 0
0
0
0
0
0 0
0
0
0
0
0
0
0
0
0
0
: Homogênea
0
0
0
0
0 0
0 0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
t
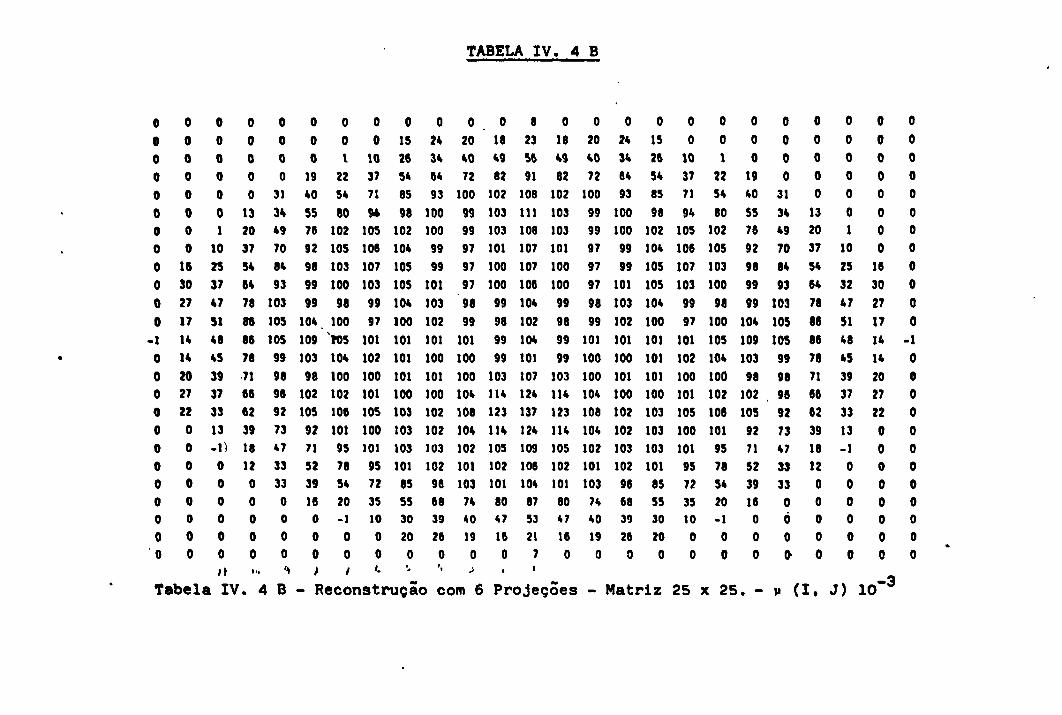
TABELA IV. 4 B
0
0
0
0
0
13 20
37
54
64
78
86
88
78
71
66
62
39
18
12
0
0 0
0
0 1..
0
0
0
0
31
34 49
70
84
93
103
10S
105
99
98
96
92
73 47
33
33
0 0
0
0 't
. 4 B
0
0
0
19 40
55 76
92
98
99
99
104
109
103
98
102
105
92 71
52
39
16 0
0
0 >
- R
0
0 l
22 54
80
102
105
103
100
98
100
>05
104
100
102
106
101
95
78
54
20 -1
0
0 /
ecoi
0
0
10
37
71
9* 105
106
107
103
99
97
101
102
100
101
105
100
101
95
72
35 10
0
0
c istr
0
15
26 54
85
98
102
104
105
105
104
100
101
101
101
100
103
103
103
101
85
55 30
20
0 '-
•uçã
0
24
34
64
93
100
100
99
99
101
103
102
101
100
101
100
102
102
103
102
96
68
39
26
0 '.
0
20
40
72
100
99
99
97
97
97
98
99
101
100
100 104
108
104
102
101
103
74 40
19
0 J
o com 6
0
18
49
82
102
103 103
101
100
100
99
98
99
99
103 114
123
114
105
102
101
80 47
16
0 c
Pr
8
23
56
91
108
111
108 107
107
106
104
102
104
101
107
124
137
124
109
106
104
87
S3
21 7 i
oJe<
0
16
49
82
102
103
103
101
100
100
99
98
99
99
103
114
123
114
105
102
101
80 47
16
0
;Ses
0
20
40
72
100
99
99
97
97
97
98
99
101
100
100
104
106
104
102
101
103 74 40
19
0
-
0
24
34
64
93
100
100
99
99
101
103
102
101
100
101
100
102
102
103
102
96
68 39
26
0
0
15
26
54
85
98 102
104
105
105
104
100
101
101
101
100
103
103
103
101
85
55 30
20
0
Matriz
0
0
10
37
71
94
105
106
107
103
99
97
101
102
100
101
105
100
101
95
72
35 10
0
0
25
0
0
1
22 54
80
102
105
103
100
98
100
105
104
100
102
106
101
95
78 54
20 -1
0
0
x 25
0 0
0 0
0 0
19 0
40 31
55 34
76 49
92 70
98 84
99 93
99 103
104 105
109 105
103 99
98 98
102 . 96
105 92
92 73
71 47
52 33
39 33
16 0
0 Ò
0 0
0 0
». - V (
0
0
0
0
0
13
20
37 J
54 J
64 2
78 t
86 !
86 <
78 <
71 :
66 :
62
39 1
18
12
0
0 0
0
0
I . J
0
0
0
0
0
0
0
) . -3

FIG IV. 8 : RECONSTRUCT 6 PROJ C I11'. S
MRTRIZ 2<JX2lJ

de atenuação em cada região do osso foram obtidos do trabalho de
1331 Hangartner . Esses valores, para ralos gama de energia de 60
KeV da fonte de Am , são: 0,2 cm para os tecidos envolventes
- —1
e a região do osso esponjoso (trabecular) e 0,5 cm para a re
gião do osso compacto (cortical).
A seção do ante-braço simulada (ossos rádio e cúbito)
está representada na figura IV. 9.
A dimensão da matriz de reconstrução é 41 x 41, con
largura de pixel igual a 0,1 cm.
A tabela IV. 6 mostra os valores do índice de recons
trução (/?). para o caso de reconstrução com 40, 45 e 60 projeções.
A reconstrução com 40 projeções está representada na figura IV.
10.
TABELA IV. 6 - VALORES DO ÍNDICE DE RECONSTRUÇÃO (ff), PARA A SI
MULAÇÃO DO OSSO.
^^f iROJEÇÕES
R %
40
6,66
45
6,65
60
6,64
Além de obter boas reconstruções, o algoritmo usando
o método analítico (convoluçâo) montado neste trabalho, possui
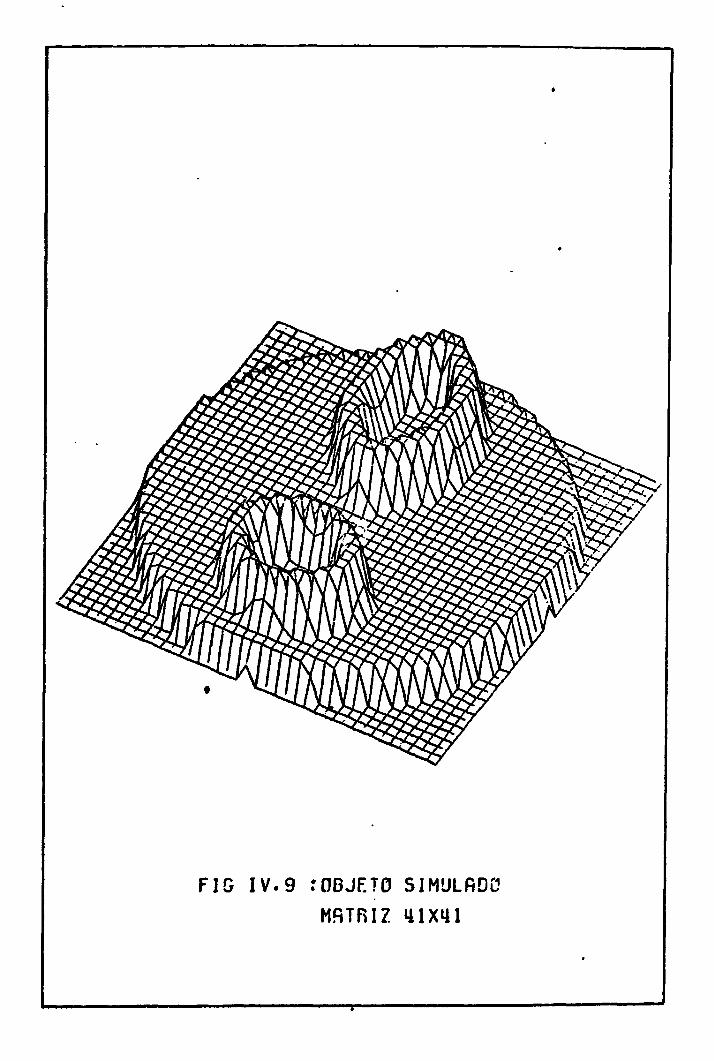
FIG IV. 9 rOBJF.TO SIMULfiDO
MRTRIZ 41X41
T

FIG IV. IO :REC:ONS-RUCRO 40 PRPjf.U'i.*)
MSTRIZ 41X41

maior rapidez na análise dos dados, em comparação com outros mé
todos. Este fator é importante para tomógrafos médicos comerciais
com alta velocidade de aquisição de dados, já que a aquisição e
análise de dados é feita simultaneamente.
Para se ter uma idéia do tempo de processamento gas-
to, montou-se uma tabela com o tempo (em segundos) para cada si
mulação - Tabela IV. 7. Pelos dados da tabela, observa-se uma
certa linearidade do número de projeções com o tempo para cada
matriz de reconstrução.
TABELA IV. 7 - TEMPO DE PROCESSAMENTO PARA MATRIZES DE RECONSTRU
ÇÃO N x N COM DETERMINADO NÚMERO DE PROJEÇÕES
^"v. N x N
PROJEÇÕES>s>».
6
12
18
24
30
36
40
45
60
21x21
5,5
11,6
13,3
17,5
21,0
28,6
37,7
25x25
7,0
12,4
18,0
9
33x33
12,0
28,6
38,4
65,0
71,0
87,0
99,0
35x35
— -
40,0
44,0
71,0
75,0
83,0
98,0
41x41
—
_ —
— -
— _
131,0
141,0
173,0
Tempo em segundos

CAPÍTULO V
DISCUSSÕES E CONCLUSÕES
Para a interpolaçao usada no algoritmo analítico (con
volução), foi necessária a utilização de um método em que o erro
nao dependesse do número de pontos que no caso seria' o número de
Raios. Foram assim, de início, eliminados os seguintes métodos:
Polinomio de Interpolaçao de Newton, de Lagrange e Mínimos Quadra
dos.
Testou-se a interpolaçao linear, que ajusta uma curva
sobre os pontos, através de retas traçadas de dois em dois pontos.
Em seguida, utilizou-se o método de interpolaçao SPLI
NES CÚBICA, que molda uma curva aos pontos dados, através da conss
trução de polinômios de 3a grau, em cada intervalo considerado.
Comparando os resultados das duas Interpolações, en
controu-se um erro menor no uso da SPLINES CÚBICA, o que era esp£
rado, já que a curva construída se aproxima mais da curva real.Ba
seado nestes resultados, o algoritmo foi montado, incorporando a
interpolaçao SPLINES CÚBICA.
Para a reconstrução de matriz (21 x 21), (Tabela IV.
IA), foi obtida uma boa reconstrução (R < 2,7%) a partir de 24pro
jeções, com o menor índice de reconstrução obtido para 24 proje
ções, para o caso da primeira simulação.

Para ai* simulação. Figura IV. 2A, comparando-se as
Tabelas IV. IA e IV. IB, pode-se verificar que para. 24 e 30 pro
jeções, os valores de R permaneceram os mesmos. Portanto, com es
se número de projeções os erros na Interpolação,devidos à descon
tinuldade na interface AR-ÁGUA foram minimizados.
Para um número maior de projeções o valor de R prato
camente não se altera, não se obtendo informações adicionais a
respeito do objeto.
Para a 2* e 3» simulações, Figuras IV. 2B e IV. 2C ,
verifica-se pela Tabela IV. IA que, devido ao aumento do número
de interfaces com descontinuidades nos valores dos coeficientes
de atenuação, não foi obtido um valor mínimo para R. No entanto,
a partir de 24 projeções o valor de R passa a sofrer pequenas va
riações (menores que 10%), mostrando que o aumento do número de
projeções não adiciona informações relevantes a respeito do obJ£
to analisado.
Os valores de R sofrem um aumento dal* para a 3* simu
lação,devido aos erros de Interpolação causados pelo aumento da
variação dos valores do coeficiente de atenuação na interface BLO
CO-ÁGUA, já que a atenuação dos blocos é variada oe 0,3 cm a
0,7 cm" .
Na reconstrução da matriz (33 x 33) (Tabela IV. 2A)
foi obtida uma boa reconstrução (R < 2,7*) a partir de 30 proje
ções con os menores índices para 36 e 40 projeções.
As informações obtidas pela análise dos valores de R
nas Tabelas IV. 2A e IV. 2B são as mesmas obtidas nas Tabelas
IV. IA e IV. IB para ai* simulação.
Na reconstrução (35 x 35), cujos resultados sao mos
trados nas Tabelas IV. 3A e IV. 3B, para a 1* simulação foi obti
da uma boa reconstrução a partir de 30 projeções. Para 36 e 40
projeções obtiveram-se os menores índices, tanto na 1» simulação
quanto na 2*. Portanto, com esse número de projeções, o erro na
interpolaçao é reduzido ao mínimo.
Numa comparação entre as Tabelas Iv. 3A e IV. 3B, ob
serva-se que foram obtidas as mesmas informações das Tabelas IV.
IA e IV. IB. No caso da 2» simulação, os valores de R para 36 e
40 projeções aumentaram na Tabela IV. 3B. Este resultado mostra
que o erro causado pelo aumento da variação da atenuação nas in
terfaces é compensado quando toda a matriz do objeto é considera
da, já que os erros causados pela descontinuidade na borda são
minimizados com 36 e 40 projeções.
Na simulação do disco, Tabela IV. 4A foi obtida uma
boa reconstrução para todas as projeções .testadas. Neste coso,
são necessárias apenas 6 projeções para a reconstrução,Tabela IV.
4 B e Figura IV. 8. Este fato é devido a não haver grandes decon
tinuidades nas interfaces, ou seja, as variações são suaves.
Foi verificado que a reconstrução da região variada,
externa ao disco, não foi boa, obtendo-se um Índice de reconstru
ção (A) aaior que 9JÉ. Neste caso tornou-se necessário o aumento
de número de projeções para obter-se boas reconstruções.
Para a simulação do osso. Figura IV. 9 não foi obti
da uma boa reconstrução quantitativa da imagem (J? > 656), já que,
para os valores de coeficiente de atenuação nas interfaces, obti
veram-se erros relativos maiores que 10%. Porém, qualitativamen
te foi possível delimitar as regiões do osso, como se pode ver
pela Figura IV. 10.
O alto valor obtido para R é devido ao grande número
de interfaces com descontinuidades nos valores do coeficiente de
atenuação, acarretando um aumento do erro de interpolação.
•r
Para esta simulação, foram feitas reconstruções, ape
nas a partir de 40 projeções, tendo em vista que nas simulações
anteriores, o menor índice de reconstrução foi obtido para o nú
mero de projeções em torno da dimensão da matriz.
Dos resultados simulados pode-se concluir:

1 - Para objetos com uma distribuição continua de
coeficiente de atenuação podem-se obter boas reconstruções (quan
tltatlva) com poucas projeções. Reconstruções sao obtidas com in
dice de reconstrução (R) menor que 2%.
2 - No caso de objetos em que o coeficiente de ate-«
nuação varie muito nas interfaces, a melhor reconstrução é encon
trada com o número de projeções em torno do valor da dimensão da
matriz de reconstrução. Para o caso de haver um grande número de
interfaces com essa variação, a reconstrução quantitativamente
não é boa, contudo pode-se distinguir regiões de altaebaixa den
sidade.
3 - Quanto maior a dimensão da matriz de reconstrução,
melhor a reconstrução para o mesmo número de projeções.
0 algoritmo montado neste trabalho é viável, tanto em
termos de tempo de processamento, quanto em termos de acurácla,
já que mesmo para imagens complexas (grande número de interfaces)
sao obtidas boas reconstruções qualitativas. Essa boa reconstru
ção qualitativa, diferenciação entre regiões de alta e baixa den
sidade em um corpo, é importante para diagnósticos, na área médi
ca, devido à necessidade de se obter um resultado visual.
Todo o algoritmo de retroprojeçaofiltrada foi monta-
do em cima de um único filtro teórico |R|, deduzido matematica
mente. Existem porém outros filtros, variações deste, utiliza
dos com dados experimentais, na tentativa de melhorar a Imagem
obtida, diminuindo a relação entre ruído e sinal. A escolha de
um filtro depende, principalmente, da estrutura do objeto em e£
tudo, assim como do grau de resolução desejada na imagem a ser
obtida.
Estes filtros podem ser incorporados ao programa mon
tado, apenas com a mudança da subrotina que realiza a filtragem
das projeções.
Torna-se interessante a continuação deste trabalho,
testando-se o programa montado com dados experimentais, compa
rando-se os diversos filtros usados na reconstrução de determi
nados objetos para melhorar a resolução da Imagem obtidr .

BIBLIOGRAFIA
|1| - BRACEWELL, R. N., "Strip Integration in the Radio Astrono
my", Aust. J. Phys., 9, 198-217 (1956).
|2| - BROOKS, R. A. e CHIRO, G. D., "Principles of Computer As
sisted Tomography (CAT) in Radiographic and Radioisotopic
Imaging", Phys. Med. Biol., USA, vol 21, n» 5, 689-732
(1976).
|3| - RADON, J. "On the Determination of Functions from their
Integrals along Certain Manifolds", Ber. Saechs. Akad.Wiss,
Leipzig Math. Phys. Kl. 69, 262-277 (1917).
|4| - KUHL, D. E. e EDWARDS, R. Q. - "Image Separation Radioiso
tope Scanning", Radiology 80, 653-661 (1963).
|5| - OLDENDORF, W. H., "Isolated Flying Spot Detection of Radio
density Discontinuities-Displaying the Internal Structural
Pattern of a Complex Object", I.R.E. Transactions on Bio
medical Electronics, 8, 68-72, (1961).
|6| - VAINSHTEIN, B. K; "Finding the Structure of Objects from
Projections", Sov. Phys. Crystallogr., 15, 781-787 (1971).
|7| - GORDON, R. e HERMAN, G. T. "Three Dimensional Reconstruct^
on from Projections: A Review of Algorithms", Int. Rev. Cy_
tol., USA, 38, 111-151 (1974).
|8| - HOUNSFIELD,G. N. - "Computerized Transverse Axial Scanning
(Tomography):Part I. Description of System", British Jour
nal of Radiology, 46, 1016-Í022 (1973).
|9| - LEDLEY, R. S., CHIRO, G. D., LUESSENHOP, A. J. e TWIGG, H.
L. "Computerized Transaxial X-Ray Tomography of the Human
Body", Science, 186 (1974).
|10| - BOCAGE, E.M., (1921) Patent n» 536464, Paris, France, cita
do no "HISTORY OF TOMOGRAPHY" por J. Massiot, Medicina Mun
di, 19 (3), 106-115 (1974).
|11| - TAKAHASHI, S. - "ROTATION RADIOGRAPHY", Japan Society for
the Promotion of Science, (1957).
|12| - CORMACK, A. M. - "Representation of a Function by its Line
Integrals with some Radiological Applications", J. Appl.
Phys. 34, 2722 - 2727 (1963).
|13| - BERRY, M. V. è GIBBS, D. F. "The Interpretation of Optical
Projections", Proc. Roy. Soe, Ler.A 314, 143-152 (1970).
1141 - JUNGINGER, H. G. e VAN HAERINGEN, W. "Calculation of Three-
dimensional Refractive-Index Field using Phase Integrals" »
Opt. Commun. 5 (1), 1-4 (1972).
1151 - BATES, R. H. T. e PETERS, T. M., "Towards Improvements in
Tomography, N. Z. J. Sci., 14, 883-896 (1971).
•
1161 - MUEHLLEHNER, G. e WETZEL, R. A. "Section Imaging by Compile
ter Calculation", Journal of Nuclear Medicine, 12(2) 76-
-84 (1971).
1171 -DE ROSIER, D. J. e KLUG, A. "Reconstruction of Three-Dimen-
sional Structures from Electron. Micrographs, Nature (Lon
don) 217, 130-134 (1968).
1181 - KAY, D. B., KEYES, J. W. e SIMON, W. "Radionuclide Tomogra
phic Image Reconstruction Using Fourier Transform Techni
ques", J,Nucl. Med. 15, 981-986 (1974).
|19| - MERSEREAU, R, M., "Recovering Multidimensional Signals from
Their Projertions, Computer Graphics and Image Processing",
1, 179-195 U973).
1201 - CROWTHER, R. A., DE ROSIER, D. J. e KLUG, A. "The Recons
traction of a Three-Dimensional Structure from Projections,
and its Application to Electron Microscopy", Proc. Roy.Soc.
/o
Ser A 317, 319-340 (1970).
|21| - DE ROSIER» D. J., "The Reconstruction of Three-Dimensional
Images from Electron Micrographs", Contemp. Phys. 12 (5),
437-452 (1971).
#
1221 - BRACEWELL, R. N. e RIDDLE, A. C , "Inversion of Fan - Beam
Scans in Radio Astronomy", Astrophys. J. 150 (2),425-434,
(1967).
1231 - RAMACHANDRAN, G. N. e LAKSHMINARAYANAN, A. V. "Three-Dimen
sional Reconstruction from Radiographs and Electron Micro
graphs: Application of Convolutions Instead of Fourier Tram»
forms", Proc. Nat. Acad. Sçi., US, 68 (9) 2236-2240 (1971).
1241 - RAMACHANDRAN, G. N. e LAKSHMINARAYANAN, A. V. "Three-Dimen
sional Reconstruction from Radiographs and Electron Micro
graphs: Part III - Description & Application of the Convo
lution Method", Indian"J. Pure Appl. Phys. 9, 997-1003,
(1971).
HERMAN, G. T. e ROWLAND, S. "Three Methods for Reconstruct
Ing Objects from X-Rays; a Comparative Study", Comput. Gra
phics Image Process 2, 151-178 (1973).
EVANS, R. D. "THE ATOMIC NUCLEUS", McGraw-Hill, New York,
1251 -
|26| -

(1955).
|27| - SPIEGEL, N. R., "FOURIER ANALYSIS", Shawn's Outline Series.
(1974).
1281 - PANTON, D. M. "Mathematical Reconstruction Techniques in
Computer Axial Tomography", Math. Scientist, Austrália, 6,
87-102 (1981).
|29| - BUCHMANN, F. "The Future of Computed Tomography", Kedicamun
di, Germany, vol. 26, n* 1, (1981).
|30| - CHO, Z. H., AHN, I., BOHM, C. e HÜTH, G. "Computerized Ima
ge Reconstruction Methods with Multiple Photon/X-Ray Trans
mission Scanning", Phys. Med. Biol., 19, n« 4, 511-522 (1974).
1311 - RAMACHANDRAN, G. N. "Reconstruction of Substance from Sha
dow" Proc. Indian Acad. Sei., 73A, 14 (1971).
1321 - HOUNSFIELD,G. N. "Computerized Transverse Axial Scanning
(Tomography): Part I - Description of System", British Jou£
nal of Radiology, 46, 1016-1022 (1973).
|33| - KRUGER, R. P. e CANNON, T. M. "The Application of Computed
Tomography, Boundary Detection, and Shaded Graphics Recons-
tructlon to Industrial Inspection, Innovative and Advanced
Radiography, 2-4, August (1977).
1341 - SWINDELL, V. e BARRETT, H. H. "Computerized Tomography: Ta
king Sectional X-Rays", Physics Today, December (1977).
1351 - MERSEREAU, R. M. e APPENHEIM. A. V. "Digital Reconstruction
of Multidimensional Signals from their Projections" Proceed^
ings of the IEEE, vol. 62, n» 10 (1974).
|36| - KAMBIC, G. X. e WAKE, R. H. "Computed Tomography with an X-
Ray Transmission Pencil Beam Scanner" IEEE Transactions on
Nuclear Science, vol. NS - 24, n« 2, April (1977).
|37| - POGOSSIAN, M. M. "Basic Principles of Computed Axial Tomo
graphy", Seminars in Nuclear Medicine, vol. VII, n« 2(1977).
1381 - SANTOS, C. A. C. "Um Algoritmo em Tomografia Computadoriza
da Aplicada em Testes Nao-Destrutivos", Tese de Mestrado ,
COPPE/UFRJ (1982).
1391 - HANGARTNER, T. N. e Overton, T. R. "Quantitative Measurement
of Bone Density using Gama-Ray Computed Tomography", Journal
of Computer Assisted Tomography, vol. 6 1156-1162 (1982).
|40| - SHAMPINE, L. F. e ALLEN JR, R. C. "NUMERICAL COMPUTING: AN
INTRODUCTION"

APÊNDICE I
DEMONSTRAÇÃO DAS EQUAÇÕES (III, 12) e (III. 13)
Seja y (x, y) a função distribuição de coeficiente de
atenuação linear de um corpo. Como o corpo possui massa e dimen
são finitas, pode-se dizer que \v (x, y)|é uma função'limitada,ou
seja v (x, y) é absolutamente integrável. Assim a sua Tranformada
^ ~ * * * I27| de Fourier existe
+QD
(A. 1)
invertendo:
t> (x , y) = / / F (X, Y) exp Li
-CD
>] exp W t i (xX + yY) dX dY (A. 2)
onde x, y são coordenadas no espaço real e X, Y são coordenadas no
espaço recíproco.
ESPAÇO REAL ESPAÇO RECIPROCO

80
onde
l>
V
<r,
<r.
x •
y «
• >
• )
: r cos •
= r sen •
X *
Y *
Em coordenadas polares i
+QD
rr • :
0 0
(R.
t
(R.
• ) exp 1-2» i
• ) exp 1-2 * i
R cos •
R sen •
\ equaçac
r R cos
r R cos
• (A. 2)
(•
(•
-] ..,]
t
fica
• |R| dl
R dR<
(A. 3)
J-(D
Aplicando a definição de Raio-soma:
+GD
P (x) * / v (x, y) dy
+0D +CD
Y) exp | - 2 « i <xX+yY)| dX dY 0 / n (x , y) dy = / / / F (X, Y) exp | -
•f© *-~®
" / / {F (x* Y) exp r2* * x^ /cxp r2" * yY dy } -a> " • ? -OD
dy
dX dY
Resolvendo
/ exp T-2 w i yyj dy
•ZflD
« (Y - 0)
í F (X. Y) ê (Y - 0) dY
F (X, o) p/ Y - 0
0 p/Y ^0

/ M ( X . y) dy « / F(X, O)
/VOD
P(x) « / F(X, 0)
ivertendo a equa<
/
+CD
P(x) exp (2
Escolhendo a solução nao t r i v i a l , ou se ja , Y«=0
4<D ^ +(D
exp ( - 2 * i xX) dX
^B —. -» ~-0D
exp (-2 « i xX) dX (A. 4)
'-CD
invertendo a equação (A. 4)
,+OD
F (X, O) = / P(x) exp (2«i xX) dX (A. 5)
*4D
Seja o sistema real x o y e o recíproco X o Y coincidentes, mes
ma origem , figura III. 7.
Verifica-se que Y=0 corresponde a • = O, no espaço re
ciproco.
Assim
t
F (X, 0) = F(R, 0) onde X c (0, CD) e R c (0, CD)
F (Xf 0) = F(R, «) onde X c (-<D, 0) e R e (-0D, 0),
Girando-se o sistema real de um ângulo e, e demonstra
do que o sistema reciproco sofrerá a mesma transformação
Obtem-se assim um novo sistema x'oy' e X' o Y*.
As equações de transformação sao:

•O (x\ X») « (x, X) cos t +: (y, Y) sen*
(y*. Y T - ' U , X) sen • 9 (y. V) cos •
No novo sistema de coordenadas:
.•<D
P (x')
+0D
= / * <*. y') dy«
(X«t O) = / P(x«) exp 2 « i x* X» I
•/-(D
F (X*t O) « / P(x«) exp I 2 « i x* X»|dx« (A. 6)
-GD
Em coordenadas polares:
F (X1, O) « F (R, e) para X' c (-0D, + OD) e Rc(-0D, + (D)
ou
F (X'f O) = F (R, •) p/ X' e fo, • ©je R e |j0, • OD)
e
F (X*, O) « F (R, • + w) p/ X' c (-QD, Gje R e jjO, + (D)
Reescrevendo a equação (A. 4) em coordenadas polares:
<R. •) « / P»;
J-ÇD
F (R, •) * / P(l; 0) exp (2 « i l R) dl (A. 7)
-OD
Obtendo-se experimentalmente P (l; • ) com valores de
1 c (-(D, 4-0)) para cada valor de ângulo 0 c (_0, * )• Tem-se, assim
um grupo completo de F (R, a) e assim v (r, •) pode ser reconstruí
da usando-se as equações
F (R; •) - / P (I; •) exp |2 « i I Rj dt
» (r. •) « / / F(R, t) exp I -2 » 1 r R cos (• - Oil
0 Modelo matemático descrito acima é conhecido como i
todo analítico de Reconstrução usando-se Transformada de Fourier.

84
APÊNDICE II
DESENVOLVIMENTO DA EQUAÇÃO (III. 24)
Expandindo-se |R| em sua série de Fourier de perío
do A, onde A * — a
+QD
IRI « /] C (na) exp (2 w i R —) a « largura do raio
-0D n e inteiro qualquer
Calculando-se C (na)
.A/2 -A/2
|R| exp (-2 w i R £) dR = / C(na) dR f í I |R| exp (-2 * i R "-) dR = /
-A/2 .A/2 ^A/2 -A/2
J-kl
C (na) R | * / |R| exp (-2 1 i R j) dR
"-A/2 -A/Z
A/2
C (na) « T / |R| exp (-2 w i R j) dR i • • / .
C (na) « a / |R| exp (-2 w i R na) dR
-A/2
C(na) » a QA (na)
assim
|R| - 53 a qA (na) Cxp (2f * R n A* (B* l)
-0D

85
que é a integral (III* 21) escrita sob a forma de somatório, ou se
Ja, considerando-se l • na (discreto).
Tomando-se o limite da equação (B. 1) quando A • (D, ou
seja a - 0, volta-se à forma integral (III. 21) e q (na) se apro-
xina de q (na).
Assim sendo, podemos calcular q (ha) ao invés de q(na)
• /
A/2
i R na) dR
q Ona) * / |R| exp (-2 * i R na) dR =
fO -A/2 . A/2
« / -R exp (-2 i I R na) dR + / R exp (-2 »
•*-A/2 *0
10 / i exp (-2 w i R na)
-A/2
r° I i exp (-2 w i
•/-A/2 2 " n a
dR +
i R exp (-2
^ A / 2
> (-2 ir i R na) _ / i exp (-2 w i
2 * na J • 2 w na
R na) dR
i A exp (w 1 A na)
4 * na
_ exp (-2 w i R na
(2w na) 2
1 A exp (-w 1 A na) _
4 t na
-A/2
nA/2
_ e x p (~2 * * R n a)
(2 • na) 2
tomando A » l/a
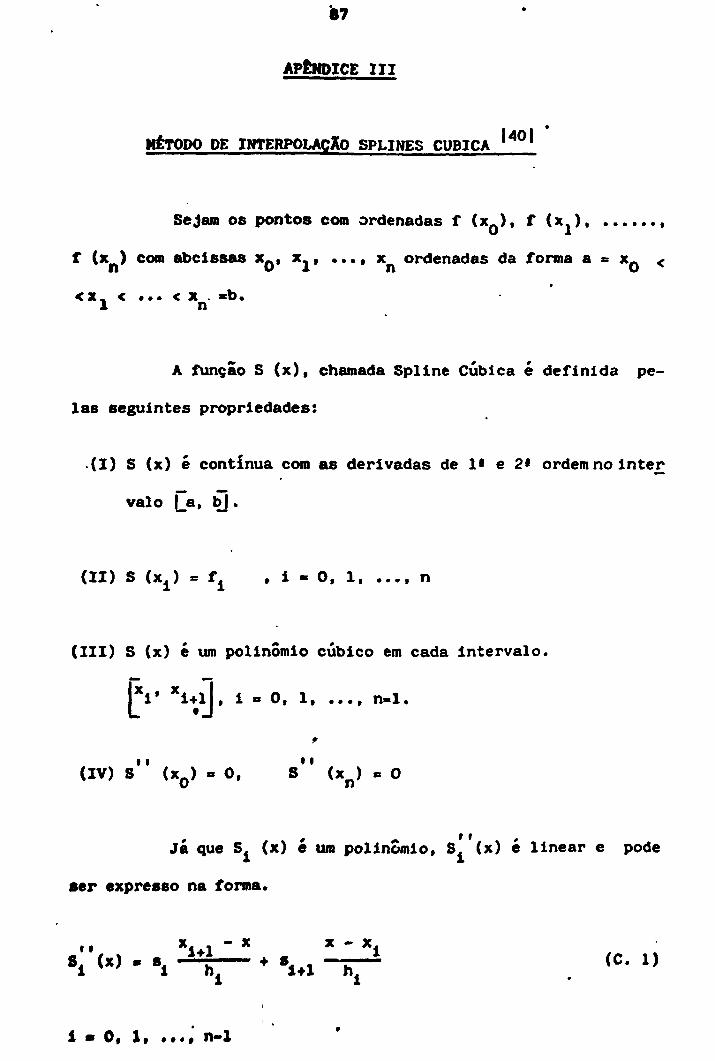
87
APÊNDICE III
MÉTODO DE INTERPOLAÇÃO SPLINES CÚBICA *4°*
Sejam os pontos com ordenadas f (x_), f (x ),
f (x ) coro abcissas xft, x,, ..., x ordenadas da forma a = xn < n v x n o
<x, < ... < x . *b. 1 n
A função S (x), chamada Spline cúbica é definida pe
las seguintes propriedades:
(I) S (x) é contínua com as derivadas de 1* e 2* ordem no inter
valo [_a, bj.
(II) S (Xi) = f4 , i « O, 1 n
(III) S (x) é um polinomio cúbico em cada intervalo.
|xif Xi+l|, i • 0, 1, ..., n-1.
(IV) s" (x0) - 0, s" (xn) e O
11 Já que S. (x) é um polinomio, S. (x) é linear e pode
ser expresso na forma.
»l <*> • 't " 4 — + »!•! -IT1 (C- »>
i » 0, lf ...» n-1

6 8
onde n « * x 4 1 ~ x i
s i *x* r s *x* p/ x c jjtj , x i + i J
Integrando duas vezes a equação (C. 1) e calculando-se as constan
tes de integração através das condições: S,(x,)ef , S!(x^ .)«f , . i i i i i+1 i+1
obtém-se: _ _ i 1 1
Si (x) ' TTl (xi*l " x) * rn7 (x * xi> +
,fi+l Sl+1 h i % , s ,fi 8i h i w + (-h^ e - ) (x - V + (h7 - - T - } (xi+i "
x) •
i « O, 1, ..., n - 1 (C. 2)
Torna-se necessário o calculo de s . e s . i 1+1
Diferenciando a equação (C. 2) e aplicando a condição
de continuidade da derivada primeira
»úl (xi ) ' Si (xi )
o . A * hl-U hi-l 6 /i+1 " fi fi " fl-l, •Í*I • 2 8 i ( — — > • T f ei-i - ÍÇ ( — ~ v T "
i - 1, . . . . n-l (C. 3)
Reescrevendo (C. 3).
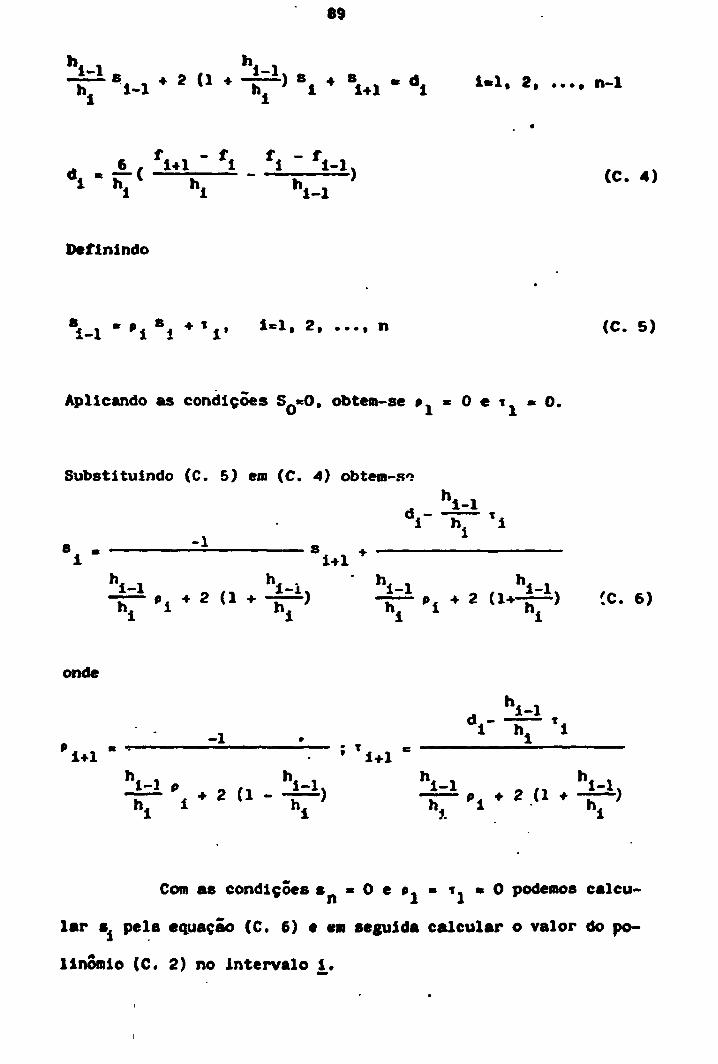
•9
"Kf Vi * * (1 * -Éf> "i * "in " ai »-»• * -1
f - f t - f «I 1 / J** i 1 1-1. ,„ - %
d. « — C r ) (C. 4)
Definindo
\ ^ x • Pj s j • *ji i«l, 2. ...i n (C. 5)
Aplicando as condições S.eO, obtem-se p « O c t . «0.
Substituindo (C. 5) em (C. 4) obtem-so
d " «
8 „ li S +
1 i+1 h . h. . h, - h. ,
onde
'±•1 " — ! Ti+1 hi-l P . f.
hi-l, hi-l , #. hi-l% — — • 2 (1 -—) - r — p. + 2 (1 • -r—)
hi * hi hJ. * hi
Com as condições s * 0 e P, • i. « O podemos calcu
lar s pela equação (C. 6) e em seguida calcular o valor do po-
llnomio (C. 2) no Intervalo 1.