universidade estadual de campinas faculdade de...
TRANSCRIPT

UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Elétrica e de Computação
EDUARDO FERREIRA DA COSTA
SISTEMA AUTÔNOMO PARA MANEJO DE IRRIGAÇÃO USANDO ENERGY HARVESTING
BASEADO EM MICROSPRINKLERS E SENSORES DE UMIDADE DE SOLO COM UM ÚNI-
CO TRANSISTOR BIPOLAR ENCAPSULADO EM UM BLOCO CERÂMICO POROSO.
CAMPINAS
2018

CAMPINAS
2018
Tese de Doutorado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica da
Faculdade de Engenharia Elétrica e de Computação da
Universidade Estadual de Campinas para obtenção do título de
Doutor em Engenharia Elétrica, na área de Eletrônica,
Microeletrônica e Optoeletrônica.
Doctorate thesis presented to the
Electrical Engineering Postgraduate Program of the School of
Engineering Electrical of the University of Campinas to obtain
the Ph.D. grade in Engineering Electrical, in field of
Electronics, Microelectronics and Optoelectronics.
ESTE EXEMPLAR CORRESPONDE À VERSÃO FINAL DA DISSERTAÇÃO
DEFENDIDA PELO ALUNO EDUARDO FERREIRA DA COSTA
E ORIENTADO PELO PROF. DR JOSÉ ANTONIO SIQUEIRA DIAS
Assinatura do Orientador
_______________________________________________________________________
EDUARDO FERREIRA DA COSTA
SISTEMA AUTÔNOMO PARA MANEJO DE IRRIGAÇÃO USANDO ENERGY HARVESTING
BASEADO EM MICROSPRINKLERS E SENSORES DE UMIDADE DE SOLO COM UM ÚNICO
TRANSISTOR BIPOLAR ENCAPSULADO EM UM BLOCO CERÂMICO POROSO.
Orientador: Prof. Dr. José Antonio Siqueira Dias
Coorientador: Prof. Dr. Luís Fernando Caparroz Duarte


COMISSÃO JULGADORA - TESE DE DOUTORADO
Candidato: Eduardo Ferreira da Costa RA: 065992
Data da Defesa: 30 de julho de 2018
Título da Tese: "Sistema Autônomo para Manejo de Irrigação usando Energy Harvesting
Baseado em Microsprinklers e Sensores de Umidade de Solo com um Único Transistor Bipo-
lar Encapsulado em um Bloco Cerâmico Poroso”.
Prof. Dr. José Antonio Siqueira Dias (FEEC/UNICAMP)
Prof. Dr. Elnatan Chagas Ferreira (FEEC/UNICAMP)
Prof. Dr. Flávio José de Oliveira Morais (/UNESP - Tupã)
Prof. Dr. Nivaldo Vicençotto Serran (/UNISAL)
Profa. Dra. Maria Bernadete de Morais França (/UEL)
A ata de defesa, com as respectivas assinaturas dos membros da Comissão Julgadora, encon-
tra-se no processo de vida acadêmica do aluno.

À minha filha Ana Clara, a minha esposa Ana Cecília e aos meus pais,
José Geraldo e Helenice, que sempre apoiaram e incentivaram
o desenvolvimento deste trabalho.

AGRADECIMENTOS
À Deus pela oportunidade.
Ao meu professor e orientador José Antonio Siqueira Dias, por ter me dado a oportunidade de
realizar o doutorado, ser atencioso, me apoiar, ajudar e incentivar durante todas as fases deste
trabalho. Suas contribuições foram essenciais para superar desafios técnicos.
Ao Flávio Morais, cujo apoio técnico foi imprescindível para o desenvolvimento deste traba-
lho e dedicou-se pra me ajudar, inclusive em feriado.
Ao Luis Duarte pelo apoio e suporte durante o trajeto do doutorado.
A minha esposa e minha filha que sempre me apoiaram e me ajudaram a ter foco.
Aos meus pais que sempre me ajudaram e incentivaram a terminar o doutorado.
Ao meu irmão Alessandro e minha tia Sandra que sempre me incentivaram a realizar o douto-
rado.
À CPG pelo apoio e colaboração em todo o meu trajeto no doutorado.

RESUMO
O crescimento populacional e escassez dos recursos hídricos aumentam a demanda por
comida e mostram a necessidade de uma agricultura mais eficiente para a produção de ali-
mentos. Dessa forma, existe a necessidade do uso da irrigação associada à tecnologia, para
aumentar a produtividade da plantação, fornecer os insumos em quantidade correta (agricultu-
ra de precisão) e reduzir o impacto ambiental (desperdício de água e de energia elétrica).
A agricultura de precisão necessita de sensores de umidade de solo confiáveis e preci-
sos para que esta informação sirva de subsídio para o manejo da irrigação, cujo requisito de
precisão deve ser de, tipicamente, 1% na faixa de umidade de solo de 5% a 40%. Neste traba-
lho foi desenvolvido um sistema completo de controle de irrigação, autônomo e de baixo cus-
to, que integra: um sensor de umidade, uma válvula d'água, um módulo de energy harvesting
baseado em um microgerador instalado no topo de um microaspersor e um circuito baseado
no LTC3108 que carrega um supercapacitor.
O sensor de umidade de solo de ponteira simples (SHPP) desenvolvido neste trabalho
para medir a quantidade de água no solo é baseado na técnica de pulso de calor e usa um úni-
co transistor bipolar, encapsulado em um bloco poroso, que funciona como elemento de aque-
cimento e sensor de temperatura. O bloco cerâmico poroso utilizado para medir o potencial
matricial do solo não reduziu a eficiência energética do sensor e resolveu o problema de con-
tato térmico entre o solo e o sensor.
O protótipo laboratorial do sensor foi testado na faixa de umidade de 6% a 46,4% e
apresentou uma variação de temperatura de ΔT = 2,9 ºC para um solo saturado (θv = 46,4%),
apresentando uma sensibilidade de S = 0,025 ºC/% na região de menor sensibilidade do sen-
sor. O circuito de condicionamento de sinal de ultrabaixa potência pode ler a temperatura do
sensor com uma resolução de aproximadamente 0,026 ºC, e θv pode ser lido em incrementos
de no mínimo 1%.
A energia do pulso de calor do sensor é de aproximadamente 0,8 J e o consumo médio
de corrente do sistema completo (sensor e circuito de condicionamento de sinal) é de apenas
3,7 μA, demonstrando a sua adequação para ser alimentado por sistemas de energy harves-
ting. Quando alimentado apenas por um supercapacitor de 2 F do sistema de energy harves-
ting, o circuito de interrogação é capaz de realizar, durante 11 dias, uma medição de umidade
no solo por dia, sem a coleta de energia através do movimento rotacional do microaspersor.
Palavras-chave: 1. Sensor de umidade de solo, 2. Transistor Bipolar, 3. Sensor de Pulso de Calor, 4.
Gerador de microaspersor, 5. Circuito de baixíssimo consumo, 6. Sensores Autônomos.

ABSTRACT
Population growth and scarcity of water resources increase the demand for food and
show the need for more efficient agriculture for food production. Thus, there is a need to use
of irrigation associated with technology, to increase crop optimization, provide inputs in cor-
rect quantity (precision agriculture) and reduce environmental impact (waste of water and
electricity).
Precision agriculture requires reliable and accurate soil moisture sensors for this in-
formation to be used as a resource for irrigation management, whose accuracy requirement
should typically be 1% in the soil moisture range of 5% to 40%. In this work, we developed a
complete irrigation control system, autonomous and low cost, which includes: a soil moisture
sensor, a water valve, an energy harvesting module based on a micro generator installed on
top of a microsprinkler and a circuit based on the LTC3108 that loads a supercapacitor.
The soil moisture sensor (SHPP- Single Heat Pulse Probe) developed in this work to
measure the amount of water in the soil is based on the heat pulse technique and uses a single
bipolar transistor, encapsulated in a porous block, which functions as a heating element and
temperature sensor. The porous ceramic block used to measure the soil matrix potential did
not reduce the energy efficiency of the sensor and solved the problem of thermal contact be-
tween the soil and the sensor.
The laboratory prototype of the sensor was tested in the humidity range of 6% to
46,4% and presented a temperature variation of ΔT = 2,9 °C for a saturated soil (θv = 46,4%),
presenting a sensitivity, in the lowest sensitivity region, S = 0,025 °C/%. The ultra-low power
signal conditioning circuit can read the temperature of the sensor at a resolution of approxi-
mately 0,026 °C, and θv can be read in 1% increments.
The energy of the sensor heat pulse is approximately 0,8 J and the average current
consumption of the complete system (sensor and signal conditioning circuit) is only 3,7 μA,
demonstrating its suitability to be powered by energy harvesting systems. When powered only
by a supercapacitor of 2 F of the energy harvesting system, the interrogation circuit is able to
perform, for 11 days, a measurement of soil moisture per day, without energy harvest through
the rotational movement of the microsprinkler.
Keywords: 1. Soil water content sensors, 2. Bipolar transistors, 3. Heat dissipation sensors, 4. Micro Sprinkler
Spinner Generator, 5. Ultra-low-power Circuits, 6. Autonomous Sensors

LISTA DE FIGURAS
Figura 1 - Arquitetura de rede simplificada de monitoramente remoto [6] ............................ 18
Figura 2 - Geradores de energia para uso em energy harvesting: (a) Gerador eólico; (b)
Hidrogerador comercial; (c) Painel Solar ................................................................................. 19
Figura 3 - Diagrama de bloco da arquitetura dos sensores sem fios ....................................... 20
Figura 4 - Diagrama do Sistema de Irrigação [10] .................................................................. 22
Figura 5 - (A) Esquema básico de um sensor de ponteira dupla convencional (B) Fluxo de
calor do aquecedor no solo ....................................................................................................... 27
Figura 6 - Caracterização do sensor de umidade de solo para diferentes temperaturas em solo
seco ........................................................................................................................................... 29
Figura 7 - Sensor de ponteira múltiplas proposto por [31] ...................................................... 31
Figura 8 - Detalhes de montagem do sensor SHPP, modelo 299 da Campbell [32] ............... 32
Figura 9 - Resposta do sensor 229 da Campbell para diferentes concentrações de umidade de
solo [32] .................................................................................................................................... 33
Figura 10 - (A) Sensor TMAS da Orbital Technologies (B) Sensor 229 da Campbell
encapsulado com gesso ............................................................................................................. 33
Figura 11 - (A) Diagrama Esquemático do Sensor de Umidade de Solo baseada em
configuração de Ponte Resistiva. (B) Sensor completo montado em cima do bloco de
cerâmica porosa [33] ................................................................................................................ 34
Figura 12 - Arquitetura do dispositivo de irrigação ................................................................ 36
Figura 13 - Montagem mecânica do gerador de energia ......................................................... 37
Figura 14 - Esquema básico do princípio de operação do sensor de pulso de calor (domínio
do tempo) .................................................................................................................................. 41
Figura 15 - Curva típica de VBE e temperatura para o sensor de umidade durante a medição.42
Figura 16 - Resultado de medição de umidade em função do tempo para solo com duas
concentrações diferentes. .......................................................................................................... 43
Figura 17 - Curva de VBE em função de T [39]. ...................................................................... 44
Figura 18 - Diagrama de bloco detalhado do sistema completo ............................................. 46
Figura 19 - Diagrama de instalação do dispositivo no campo [13] ......................................... 48
Figura 20 - Microgerador adaptado ao eixo girante do microaspersor [13] ............................ 49
Figura 21 - Diagrama básico do circuito de gerenciamento de energia .................................. 50
Figura 22 - Diagrama básico do circuito do sensor e do pulso de calor .................................. 54

Figura 23 - Circuito de acionamento da válvula latch ............................................................ 57
Figura 24 - Foto do sensor montado na cerâmica porosa ....................................................... 59
Figura 25 - Curva da medida de temperatura e de ∆T para diferentes valores de θv ............. 60
Figura 26 -Curva da medida de ∆T em função de θv, para um pulso de calor de 10 segundos
.................................................................................................................................................. 61
Figura 27 - Diagrama de bloco do circuito hidráulico de teste. .............................................. 63
Figura 28 - Teste do microaspersor acoplador ao microgerador ............................................ 63
Figura 29 - Tela do osciloscópio do teste do microgerador com carga de 9Ω. ...................... 64
Figura 30 - Sequencia de acionamento do energy harvesting ................................................ 65

LISTA DE TABELAS
Tabela 3.1 – Vantagens e desvantagens das diversas técnicas dos sensores de umidade do
solo ........................................................................................................................................... 25
Tabela 4.1 – Dados do microaspersor da Agrojet.................................................................... 38
Tabela 6.1 – Medida de valores de VBE [mV] em dois sensores com diferentes condições de
solo: seco e saturado ................................................................................................................. 62
Tabela 6.2 – Resultados do teste realizado com o microgerador acoplado à bailarina do
microaspersor na pressão de 400kPa ........................................................................................ 64

LISTA DE ABREVIATURAS E SIGLAS
FAO Food and Agriculture Organization of the United Nations and Earthscan
DEMIC Departamento de Eletrônica e Microeletrônica da Faculdade de Engenharia
Elétrica da UNICAMP
SHPP Single Heat Pulse Probe - Sensor de Calor de Ponteira Simples
DHPP Dual Heat Pulse Probe - Sensor de Calor de Ponteira
MHPP Multi Heat Pulse Probe - Sensor de Calor de Ponteira Múltipla

SUMÁRIO
AGRADECIMENTOS ......................................................................................................... 6
RESUMO .............................................................................................................................. 7
ABSTRACT ........................................................................................................................... 8
LISTA DE FIGURAS .......................................................................................................... 9
LISTA DE TABELAS ........................................................................................................ 11
LISTA DE ABREVIATURAS E SIGLAS ........................................................................ 12
SUMÁRIO .......................................................................................................................... 13
1 INTRODUÇÃO ............................................................................................................... 15
2 REVISÃO BIBLIOGRÁFICA ....................................................................................... 18
3 SENSOR DE UMIDADE DO SOLO POR PULSO DE CALOR .................................. 25
3.1 PRINCÍPIO DE OPERAÇÃO DO SENSOR DE UMIDADE ........................... 26
3.1.1 SENSOR DE PULSO DE CALOR DE PONTEIRA DUPLA ..................... 27
3.1.2 SENSOR DE PULSO DE CALOR PONTEIRA MÚLTIPLAS ................. 30
3.1.3 SENSOR DE PULSO DE CALOR DE PONTEIRA SIMPLES ................. 31
4 PROPOSTA DO NOVO SISTEMA DE UMIDADE DE SOLO ................................... 36
4.1 MÓDULO DE CAPTAÇÃO E GERAÇÃO DE ENERGIA .............................. 37
4.2 MÓDULO DE GERENCIAMENTO, CONTROLE E ARMAZENAMENTO
DE ENERGIA ........................................................................................................... 39
4.2.1 NOVO SENSOR DE UMIDADE DE SOLO - SHPP .................................. 40
4.2.1.1 PRINCÍPIO DE OPERAÇÃO .............................................................. 41
4.2.1.2 CÁLCULO DA TEMPERATURA ....................................................... 43
5 PROJETO DO NOVO SISTEMA DE IRRIGAÇÃO .................................................... 46
5.1 CIRCUITO DE GERENCIAMENTO E ARMAZENAMENTO DE ENERGIA
................................................................................................................................... 48
5.2 CICRUITO DE INTERROGAÇÃO DO SENSOR DE PULSO DE CALOR
ENCAPSULADO EM CERÂMICA POROSA ........................................................ 54
5.3 CIRCUITO DE DRIVER DA VÁLVULA D'ÁGUA ......................................... 57
6 RESULTADOS EXPERIMENTAIS .............................................................................. 59
6.1 MONTAGEM DO SENSOR E TESTE DO INTERROGADOR EM
CONJUNTO COM O SENSOR ............................................................................... 59

6.1.1 TESTES DE REPETIBILIDADE DO SENSOR ........................................ 62
6.2 TESTE DO CIRCUITO DE ENERGY HARVESTING ..................................... 63
7 CONCLUSÃO ................................................................................................................. 67
REFERÊNCIAS ................................................................................................................. 69

15
1 INTRODUÇÃO
O relatório mundial das nações unidas informou que as projeções de crescimento da
população global para os próximos 40 anos, combinadas com mudanças na alimentação, re-
sultarão em um aumento de 70% na demanda por comida. Mostrando a necessidade de uma
irrigação eficiente para a produção de alimentos, visto que a agricultura é responsável por
70% da exploração global de água doce e pode chegar a 90% em algumas economias em rá-
pido crescimento [1]. Condizente, a FAO estima um aumento de consumo de água para irri-
gação de 11%, entre 2008 e 2050 [1][2], agravando mais ainda a situação dos recursos hídri-
cos.
Portanto, a irrigação desempenha um papel importante na produção de alimentos visto
que a produção irrigada é 2,7 vezes mais eficiente que a produção abastecida apenas com
água de chuva [1].
Considerando os fatores citados acima, faz-se necessário o uso da irrigação associada à
tecnologia para aumentar a eficiência da produção agrícola e reduzir o desperdício de água e
de energia elétrica, ou seja, uma tecnologia de irrigação sustentável que utiliza o princípio de
irrigação de precisão e reduz o impacto ambiental.
O uso excessivo de água é destrutivo e causa saturação do solo, impedindo a penetra-
ção de nutriente. Pesquisas mostram que a maioria dos produtores irriga, em média, 30% a
mais que o necessário [3] por falta de conhecimento e de tecnologias que subsidiam e aperfei-
çoam a irrigação.
Com o uso da tecnologia, a expectativa dos produtores é aumentar em até 4 vezes a
produtividade [4] . Essa solução pode ser aplicada em empresas de todos os portes e princi-
palmente em produções agrícolas.
A irrigação é uma técnica utilizada na agricultura para fornecimento controlado de
água. Conforme mencionado, o seu objetivo principal é aumentar a produtividade da planta-
ção e garantir a sobrevivência do cultivo através do fornecimento de água no momento cor-
reto e em quantidade suficiente. A maioria dos grandes produtores irriga suas plantações peri-
odicamente, de maneira manual ou semi-automática, e a inspeção da irrigação é visual. Desta
forma, não garantindo uma irrigação uniforme, comprometendo a produtividade e consequen-
temente o lucro do produtor. As desvantagens deste método são o tempo para verificação de
cada ponto, a periodicidade exigida para a irrigação e o fator humano, como disponibilidade
de um técnico e critérios pessoais de interpretação dos dados. A inspeção visual baseada so-

16
mente em amostragens temporais do solo nem sempre é suficiente para garantir a qualidade
do sistema de irrigação.
As soluções comerciais de monitoramento de irrigação de solo com eletrônica embar-
cada geralmente necessitam de uma fonte de alimentação local e uma rede de telecomunica-
ção para transferir os dados medidos pelos sensores ao computador centralizado que, por sua
vez, é responsável pelo processamento do algoritmo de análise e controle, assim onerando e
dificultando sua implantação e disseminação em campo [3][4][6][7][9]. Na solução proposta
deste trabalho, essa lacuna foi preenchida, resultando em um sistema inovador para irrigação,
autônomo, independente e de fácil manuseio, composto por módulo de captação e geração de
energia e o módulo de gerenciamento, controle e armazenamento de energia.
Este sistema de irrigação, de baixo consumo e baixo custo, também possibilita um ní-
vel maior de automação dos processos de irrigação. A análise dos parâmetros do solo permite
que algoritmos de irrigação atuem com segurança na plantação sem intervenção humana, pos-
sibilitando uma rápida atuação frente às situações ambientais, gerando benefícios para os pro-
dutores (redução de consumo de água, redução de consumo de energia elétrica, maior produ-
tividade e aumento da qualidade do produto) e para a sociedade que pode ser revertido em
maior disponibilidade de alimento e redução de custo final do produto.
A solução desenvolvida monitora o parâmetro do solo (temperatura do solo e umidade
do solo) e através de um módulo de processamento local, analisa os dados obtidos pelos sen-
sores e controla a válvula d'água do dispositivo de irrigação do tipo microaspersor. Os dados
obtidos e processados serão armazenadas em cartão de memória local (SDCard) para posterior
consulta e análise do agricultor. Este sistema de irrigação é completamente autônomo e não
necessita de fonte de alimentação externa, ou seja, o dispositivo de irrigação utilizará a ener-
gia mecânica gerada no microaspersor pelo movimento da água para alimentar a eletrônica e
carregar um super capacitor no caso da água estar desligada.
O microaspersor convencional, utilizado em 14% das plantações [5], pode ser sim-
plesmente substituído pelo dispositivo de irrigação desenvolvido neste trabalho, sem modifi-
car a infraestrutura existente, e desta maneira, criar um dispositivo de irrigação autônomo,
distribuído, responsável por monitorar e controlar apenas a região ao seu entorno.
O sistema desenvolvido neste trabalho monitora a umidade do solo baseado na técnica
de pulso de calor que será apresentado no capítulo 3. A umidade obtida pelo sensor é analisa-
da pelo microcontrolador, e a válvula d'água do microaspersor é acionada quando são identifi-
cadas umidades inferiores ao limiar de umidade definido. O dispositivo de irrigação entra no

17
modo de redução do consumo de energia e funciona, apenas uma vez ao dia, quando o agri-
cultar liga a bomba d'água do sistema de irrigação.
Soluções de monitoramento da irrigação local, autônomo, empregando sensores de
umidade, alimentação por energy harvesting (através do movimento do microaspersor) não
foram encontradas por meio do levantamento bibliográfico inicial e de pesquisa de mercado.
Este trabalho permitiu avaliar o dispositivo de irrigação que mede a umidade do solo, utili-
zando um único transistor bipolar NPN encapsulado em cerâmica porosa como sensor, e ava-
liar o uso do energy harvesting no ambiente agrícola.
18
2 REVISÃO BIBLIOGRÁFICA
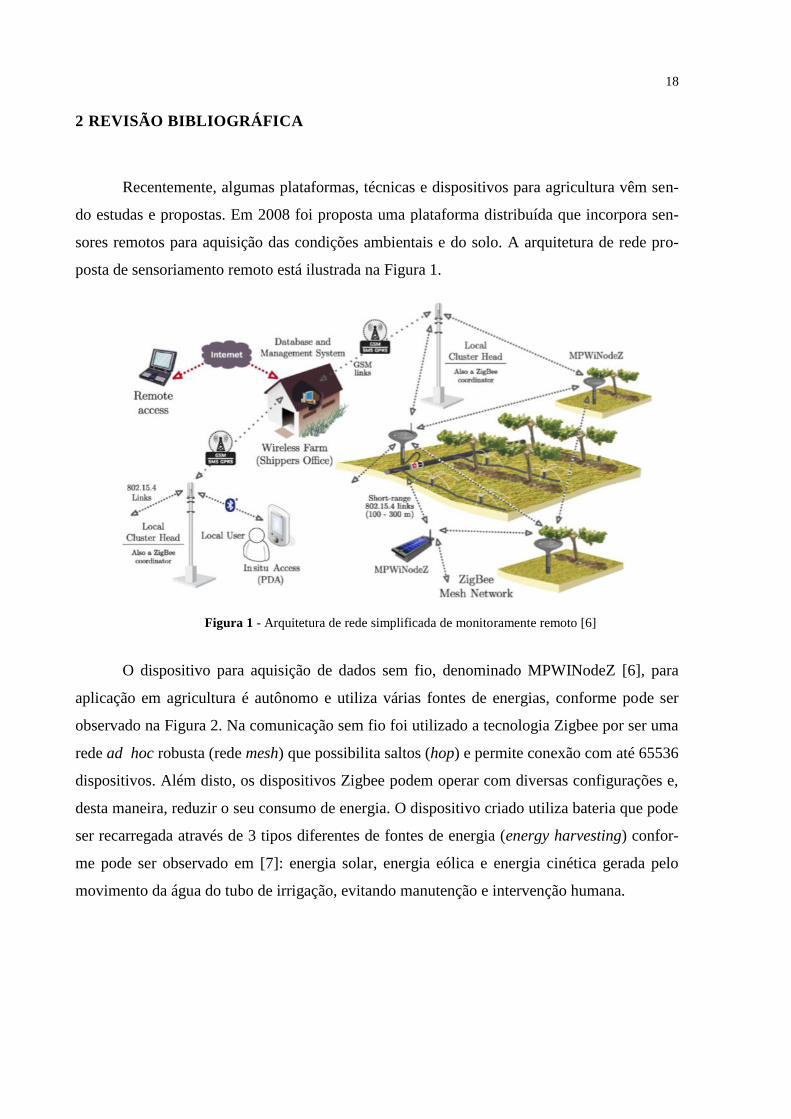
Recentemente, algumas plataformas, técnicas e dispositivos para agricultura vêm sen-
do estudas e propostas. Em 2008 foi proposta uma plataforma distribuída que incorpora sen-
sores remotos para aquisição das condições ambientais e do solo. A arquitetura de rede pro-
posta de sensoriamento remoto está ilustrada na Figura 1.
Figura 1 - Arquitetura de rede simplificada de monitoramente remoto [6]
O dispositivo para aquisição de dados sem fio, denominado MPWINodeZ [6], para
aplicação em agricultura é autônomo e utiliza várias fontes de energias, conforme pode ser
observado na Figura 2. Na comunicação sem fio foi utilizado a tecnologia Zigbee por ser uma
rede ad hoc robusta (rede mesh) que possibilita saltos (hop) e permite conexão com até 65536
dispositivos. Além disto, os dispositivos Zigbee podem operar com diversas configurações e,
desta maneira, reduzir o seu consumo de energia. O dispositivo criado utiliza bateria que pode
ser recarregada através de 3 tipos diferentes de fontes de energia (energy harvesting) confor-
me pode ser observado em [7]: energia solar, energia eólica e energia cinética gerada pelo
movimento da água do tubo de irrigação, evitando manutenção e intervenção humana.

19
Figura 2 - Geradores de energia para uso em energy harvesting: (a) Gerador eólico; (b) Hidrogerador
comercial; (c) Painel Solar
O dispositivo é flexível e pode ser montado com vários tipos de sensores na rede mesh,
como: sensores de temperatura do solo, do ar, umidade relativa, umidade do solo, precipitação
e velocidade do vento.
As informações adquiridas pelos sensores são transmitidas para o coordenador da rede
Zigbee que posteriormente envia os dados para o DMS - Data Base and Management System
através do sistema GPRS. As informações processadas podem ser acessadas remotamente
através da internet.
No entanto, a solução não atua diretamente na irrigação, ou seja, a ideia é apenas cap-
tar os dados da plantação para subsidiar a decisão do agricultor.
Mais recentemente em 2010, foi proposto uma rede de sensores sem fio (WSN) usan-
do energy harvesting para maquinário agrícola [8]. Foi proposto um energy harvesting de
vibração mecânica baseado em material piezoelétrico. Além disto, foi necessário desenvolver
dois tipos de dispositivos para a plataforma de hardware, sendo o primeiro denominado de
Base Node, que é o coordenador da rede e o segundo o Action Node, que é o responsável por
medir com os sensores ou atuar no processo. A comunicação dos dados é através de transcep-
tores RF.
A Figura 3 mostra o diagrama de bloco da arquitetura dos sensores sem fio desenvol-
vidos. Este consiste de 3 partes: (a) Unidade de Energy Harvesting (b) Unidade de Gerencia-
mento de Consumo de Energia (c) Unidade sem fio com várias unidades de sensoriamento
permutáveis.

20
Figura 3 - Diagrama de bloco da arquitetura dos sensores sem fios
No exemplo de aplicação deste artigo, os sensores tinham a função de monitorar o ní-
vel da colheita e a posição da porta traseira do vagão. Esta solução não monitora a plantação e
apresenta apenas a viabilidade da aplicação de energy harvesting para agricultura.
Já, o sistema de monitoramento de irrigação de lavouras desenvolvido pelo Instituto de
Tecnologia de Pernambuco (ITEP) [4] utiliza uma ferramenta que é instalada no pivô e moni-
tora a irrigação, indicando deficiência ou excesso de água na planta. Os dados obtidos pelos
sensores são enviados para um servidor que permite o acesso às informações de irrigação
através do celular ou computador pelo agricultor.
Não foram mencionados os parâmetros monitorados e se o sistema atua diretamente na
irrigação através de válvulas d’água. Além disto, o sistema não utiliza energy harvesting.
A solução comercial de monitoramento de irrigação de solo denominada Sencer pode
ser aplicada em empresas de todos os portes [3]. O hardware do sistema consiste em uma
haste com sensores, que permite medir simultaneamente a temperatura e a umidade do solo
em até três níveis de profundidade, um módulo de transmissão de dados wireless e um módu-
lo concentrador de dados. O software do sistema trata os dados coletados do solo e através da
previsão do tempo subsidia o agricultor com as informações das características do solo para
decidir sobre a irrigação. As informações coletadas são enviadas através de rádio para uma
central, que por sua vez, enviará os dados recebidos para a internet, podendo ser acessado
pelo usuário através de dispositivos como celular e tablet.
O Sistema da Sencer mede parâmetros do solo para auxiliar o produtor na irrigação. O
produto pode ser utilizado junto a estações meteorológicas em fazendas para o produtor ter
conhecimento do que acontece no solo e no ar. Porém esta solução não atua diretamente na
irrigação e não utiliza energy harvesting.

21
O modelo de utilidade apresentado em [9] tem como objetivo proporcionar um sistema
inteligente de controle automático de irrigação baseado no tempo do cultivo e nos parâmetros
medidos pelos sensores para determinar a quantidade de água (Threshold) necessária para a
irrigação.
O diagrama de bloco geral do sistema inteligente de controle automático de irrigação
proposto no modelo de utilidade é composto por: um módulo de processamento de sinal, o
módulo de detecção de velocidade do vento, o módulo de conversão analógico-digital do sinal
de velocidade do vento, o módulo de detecção de temperatura atmosférica, o módulo de de-
tecção de umidade atmosférica, o módulo de conversão analógico-digital do sinal de umidade
atmosférica, o módulo de detecção da umidade e temperatura do solo, o módulo de display, o
módulo de driver de aspersão, módulo aspersor, módulo de driver da unidade de irrigação de
fluxo e o módulo de irrigação de fluxo.
O módulo de processamento de sinal baseado no tipo de cultivo, nas informações do
relógio e nas medidas de temperatura e de umidade do ar, define o limite de umidade do solo
para irrigação. A partir desta informação, o sistema mede os valores de temperatura e umida-
de do solo através dos sensores de umidade e de solo para determinar se haverá irrigação. Por-
tanto, o sistema acionará a irrigação se a umidade estiver abaixo do limiar de umidade de solo
definido, caso contrário, a irrigação estará fechada. Além disto, o sistema analisa a velocidade
do vento para determinar o tipo de irrigação utilizada, aspersor ou fluxo, e mostra os valores
medidos e a hora atual no módulo do display. Porém, esta solução não utiliza alimentação
através de energy harvesting
A patente [10] do sistema de microaspersão de água permite controlar o microaspersor
separadamente, por áreas de irrigação, e de maneira independente. A Figura 4 ilustra o siste-
ma de irrigação no quintal residencial.

22
Figura 4 - Diagrama do Sistema de Irrigação [10]
O microaspersor é composto por uma válvula d'água, um driver de controle da válvu-
la, um microprocessador, memória, fonte de alimentação e um transceptor sem fio, que comu-
nica com um módulo Estação Base através de um sistema sem fio. Opcionalmente, os micro-
aspersores podem incluir um sensor de umidade, que permite uma irrigação baseada nas con-
dições atuais ao entorno da cabeça do microaspersor, ou seja, o sistema não irrigará se a umi-
dade estiver acima do limiar definido pelo usuário e armazenado na memória.
A Estação Base é constituída por microprocessador, memória, transceptores sem fio,
fonte de alimentação e interface do usuário. O transceptor sem fio do módulo Estação Base,
permite comunicação com vários microaspersores, e envia os dados programados pelo usuá-
rio, como: data/horário de irrigação e nível de umidade de solo desejado para cada microas-
persor. A interface do usuário pode ser um teclado, touchscreen, interface sem fio, conexão
ethernet, conexão celular, conexão USB e permite o usuário programar o sistema e receber
alertas de falhas via celular ou computador. Além disto, as instruções dos usuários são arma-
zenadas na memória em conjunto com os dados recebidos pelo microaspersor.
A fonte de alimentação do módulo Estação Base pode ser uma bateria, energy harves-
ting ou alimentação com fios convencionais, visto que este módulo fica em ambientes contro-
lado. Já a alimentação do microaspersor pode ser uma bateria ou de preferência uma alimen-
tação com energy harvesting para carregar uma supercapacitor, assim, não é necessária ali-
mentação através de fio. Outra aplicação é utilizar o microaspersor apenas como uma válvula
d'água que pode ser controlado pelo módulo Estação Base.
Esta solução não utiliza alimentação por energy harvesting conforme o trabalho pro-
posto, ou seja, através da energia cinética gerada pelo movimento da água.
23
Em 2011 foi apresentada [11], pelo grupo de pesquisa do DEMIC/FEEC/Unicamp, a
proposta de utilização de um microgerador acoplado a um microaspersor visando gerar ener-
gia para alimentação de sensores de umidade de solo. Na época foi demonstrado que o siste-
ma era capaz de gerar uma tensão de 1,47 V fornecendo uma corrente de 12 mA.
O trabalho publicado pelo grupo de DEMIC deu origem a patente [12] onde é proposto
um sistema de controle da água que pode ser utilizado em aspersores para monitorar e contro-
lar o padrão de distribuição de água. A quantidade de água distribuída pela aspersão pode ser
modificada através da abertura e fechamento periódico da válvula d'água e o seu monitora-
mento é realizado através de sensores de movimentos rotacionais acoplados aos aspersores. A
eletrônica de controle permite a comunicação com um sistema computacional localizado re-
motamente, que recolhe dados de aspersão, alerta o usuário de qualquer mal funcionamento, e
além disto, permite ao usuário controlar e/ou alterar a distribuição de água padrão. O circuito
de controle é alimentado pela energia gerada a partir da energia cinética do aspersor, ou seja,
é proposto o uso de gerador elétrico acoplado ao eixo girante do aspersor para gerar energia
elétrica. Esta solução tem aplicação genérica e controla apenas o padrão de distribuição de
água. Além disto, não monitora os parâmetros do solo para controlar a irrigação.
A continuidade das pesquisas com gerador acoplado em microaspersores resultou em
um trabalho [13], por nós publicado, de um sistema autônomo para monitorar a umidade do
solo e controlar a irrigação, em agricultura de precisão, utilizando sensor capacitivo. O sensor
apresentado é de baixo custo, baixo consumo, utiliza apenas componentes comerciais e forne-
ce uma estimativa confiável de umidade do solo medindo a permissividade dielétrica do solo,
que depende da quantidade de água presente. O protótipo do sensor foi fabricado em placa
FR4 e construído com trilhas de cobres interdigitadas (94 franjas, com um comprimento L =
16 mm, largura W = 200 μm e espaço entre as franjas S = 200 μm). Além disto, foi utilizada
uma cerâmica porosa para minimizar os problemas de contato entre o eletrodo e o solo.
O circuito de interrogação fornece uma tensão proporcional a capacitância do solo que,
por sua vez, é proporcional a quantidade de água no solo e é composto por um gerador trian-
gular de 10 kHz, um amplificador AC, um retificador de precisão e um microcontrolador res-
ponsável por calcular a umidade do solo e abrir/fechar a válvula de irrigação. O sistema apre-
sentou um aumento de até 5% na capacitância do sensor quando o conteúdo de água volumé-
trica da cerâmica porosa mudou de 3% para 36%, resultando em uma sensibilidade de S =
15.5 pF por mudança de unidade. O consumo médio do sistema, composto por sensor e inter-
rogador, é menor que 1.5uA e foi alimentado por um circuito de energy harvesting que utiliza
o movimento rotacional das bailarinas do microaspersor. Este circuito de energy harvesting

24
utiliza um microgerador acoplado à bailarina do microaspersor e permite que o sistema funci-
one por 23 dias sem nenhuma fonte de energia externa e sem irrigação. O circuito de energy
harvesting apresentado neste trabalho é produto desta tese de doutorado e será mais detalhado
no capítulo 4.

25
3 SENSOR DE UMIDADE DO SOLO POR PULSO DE CALOR
A agricultura de precisão necessita de sensores de umidade de solo confiáveis e preci-
sos para que esta informação possa servir de subsídio para a irrigação, cujo requisito de preci-
são deve ser de cerca de 1% na faixa de umidade de solo de 5% a 40% [29]. Atualmente, exis-
tem vários métodos e técnicas de medição disponíveis na literatura e no mercado. Os métodos
diretos que quantificam a quantidade de água podem ser destrutivos, caros, ter uma análise de
solo demorada e são utilizados esporadicamente, não apresentando o estado in situ do solo no
momento exato da irrigação [14]. Entretanto, foram desenvolvidos os métodos indiretos que
estimam a quantidade de água no solo e podem apresentar uma boa precisão instantaneamen-
te. Dentre estes sensores, pode-se citar o sensores de: Pulso de Calor [20][27][31][34], Tensi-
ométrico [15], Nuclear [16], Capacitivo [13][17], Resistivo [18] e TDR [19]. A Tabela 3.1
apresenta um quadro com tempo de resposta, vantagens e desvantagens de cada técnica do
sensor de umidade de solo [20].
Tabela 3.1 – Vantagens e desvantagens das diversas técnicas dos sensores de umidade do solo
Sensor de Umidade de Solo
Técnica Vantagens Desvantagens
Pulso de Calor
(10 segundos)
Preciso, barato, baixo consumo e fácil
de implementar
A calibração é necessária para cada tipo
de solo
Tensiométrico
(2 a 3 horas)
Barato, fácil de desenvolver, instalar
e manter
Alcance limitado, difículdade para con-
verter em conteúdo volumétrico de á-
gua, calibração especial, Perturba o solo
acima do ponto de medição e pode per-
mitir a infiltração de água de irrigação
ou chuva ao longo de sua haste
Nuclear
(1 a 2 min)
Medição remota, não destrutivo, pre-
cisão e exatidão
Caro, densidade a seco e salinidade afe-
tam a medição, perigo de radiação
Capacitivo
(instantâneo)
Exatidão, qualquer medição de pro-
fundidade, alto nível de precisão
Concentração iónica afeta a medição e
caro, dispendioso, estabilidade a longo
prazo questionável
Resistivo -
Gypsum
(2 a 3 horas)
Barato
Impreciso, necessidade de calibração
especial e o tempo de vida útil do sensor
é baixo
TDR Independente da textura, temperatura Caro

26
(28 seg) e teor de sal do solo. Possível realizar
medições in situ de longo prazo. Pode
ser automatizado
Gravimétrico
(24 horas)
Independente do tipo de solo e salini-
dade, fácil de calular e exatidão Teste destrutivo, medição demorada
Dentre as técnicas pesquisadas, foi decidido utilizar os sensores de pulso de calor, por
serem confiáveis, viáveis economicamente, compactos e de fácil manuseio. Apesar destes
sensores apresentarem características diferentes de precisão e faixa de medição de umidade,
alguns destes sensores pesquisados na literatura mostram-se viáveis para a aplicação em agri-
cultura de precisão. Foi observado que esta técnica demanda um consumo de potência elevado
durante a medição (para o caso desta aplicação), portanto, o grande desafio é fazer um sensor
de baixo consumo que atende todos os requisitos citados acima e seja completamente autô-
nomo, utilizando apenas a energia gerada pelo gerador acoplado ao microaspersor e armaze-
nada no supercapacitor.
3.1 PRINCÍPIO DE OPERAÇÃO DO SENSOR DE UMIDADE
O princípio de operação dos sensores de umidade de pulso de calor é baseado na vari-
ação da condutividade térmica do material poroso que reveste o sensor e depende da quanti-
dade de água presente nos seus poros. O material poroso que reveste o sensor está em contato
com o solo e pode ser uma cerâmica ou o próprio solo.
A medição é realizada aplicando um pulso de calor controlado próximo ao sensor e
medindo a variação de temperatura, que muda em função da quantidade de água que foi ab-
sorvida pelo material poroso em contato com o solo, desta forma permitindo correlacionar a
medida de temperatura com a quantidade de água presente no solo.
Existem três tipos de sensores de umidade do solo de pulso de calor: o de ponteira du-
pla (Dual Heat Pulse Probe - DHPP), o de ponteira múltipla, (Multi Heat Pulse Probe -
MHPP) e ponteira simples (Single Heat Pulse Probe - SHPP), cujas vantagens e desvantagens
foram apresentados em [21]. As principais características de cada tipo de sensores serão abor-
dadas nos subitens a seguir.

27
3.1.1 SENSOR DE PULSO DE CALOR DE PONTEIRA DUPLA
Os sensores de ponteira dupla, como o próprio nome diz, são compostos por duas pon-
teiras distintas, separadas fisicamente entre si, sendo uma com função de aquecedor e outra
para monitorar a temperatura. Geralmente, o elemento de aquecimento é constituído por um
resistor de fio com baixo coeficiente de variação térmica (resistor de fio de NiCR) e o elemen-
to sensor de temperatura pode ser construído com um termistor, termopar, circuito integrado
de medição de temperatura ou resistor com alto coeficiente de variação de temperatura. A
Figura 5(A) mostra a montagem convencional do sensor DHPP.
Figura 5 - (A) Esquema básico de um sensor de ponteira dupla convencional (B) Fluxo de calor do aquecedor no
solo
A técnica de medição é baseada na aplicação de um pulso de calor com período Tm,
cuja energia dissipada é calculada através da Equação 1.
Equação 1
Esta energia (Em) é propagada pelo solo até o elemento sensor de temperatura (Figura
5(B)) que mede a temperatura máxima propagada, ΔTmax. Vale ressaltar que quanto maior a
umidade do solo, menor a temperatura sentida pelo sensor de temperatura, porque a energia é
melhor dissipada pela água presente no solo, que tem um coeficiente de condutividade térmi-
ca superior ao do solo. Além disto, solo mais denso apresenta uma menor variação de tempe-
ratura, ΔT, pois não existem espaços com ar, desta forma melhorando a condutividade térmica
do solo [22]. Portanto deve-se realizar uma calibração do solo antes da medição para obter
uma melhor precisão.
A quantidade de água no solo pode ser determinada através da temperatura máxima
medida pelo sensor de temperatura. A relação que descreve o aumento da temperatura, ΔTm,

28
no elemento sensor de temperatura, localizado a uma distância r do elemento de aquecimento,
como uma função da energia de aquecimento, q, e da quantidade de água no solo, θυ, desen-
volvida por [23], é:
Equação 2
onde q é a quantidade de calor liberado pelo aquecedor em unidade de comprimento J・m−1
, e
é a base do logaritmo natural, Xm e Xo são respectivamente, frações volumétricas do material
mineral e orgânico do solo [24] e é a fração numérica da água no solo. O termo Xo é des-
prezado em solos com pouco material orgânico [25]. Os coeficientes 1,92 , 2,5 e 4,18 são da-
dos em MJ・ m−1・º C
−1.
A fração volumétrica da água no solo, , é dada pela Equação 3 e a unidade deste parâmetro
é m3・m
−3.
Equação 3
onde Va é o volume de água numa amostra de solo e Vs é o volume total da amostra. Para
apresentar este resultado em porcentagem, basta multiplicar por 100.
Em 2015, foi apresentado um sensor de ponteira dupla, de baixo custo e baixo consu-
mo, construído com sensor de temperatura (termopar) e um aquecedor (resistência de 33R)
separados a uma distância de 3 mm [26]. Este sensor apresentou um aumento máximo de
temperatura, ΔTm, entre 1º e 5ºC para solos úmidos e secos (0%≤ θ≤ 30%), respectivamente.
Foi apresentado também um estudo, experimental e computacional, mostrando que a tempera-
tura do solo influencia na medida. Portanto, é necessário compensar o efeito indesejável da
temperatura neste tipo de sensor. As medidas experimentais de umidade do solo, sem com-
pensação de temperatura, apresentaram um erro de 10%. Nesta aplicação, o sistema é alimen-
tado por bateria de litium-ion que é recarregada por um painel solar e consegue medir a umi-
dade do solo em intervalos de 30 minutos por cerca de 3,6 dias, sem necessidade de recarga.
O período da medição deste sensor é de 6 minutos, sendo que 180s deste tempo com o aque-
cedor ligado, e consumindo 59,4J (3V3, 100mA, 180s). Já, a medição da temperatura é reali-
zada pelo termopar durante todo período de medição (6 minutos). Logo, é possível observar
que para ter uma resolução de 1% em θv, deve-se ter um interrogador que meça a temperatura
com resolução de Res = (5ºC-1ºC)/(30%-0%) = 0,13 ºC/%.
Continuando o trabalho apresentado por [26], em [27] foi realizado um estudo do erro
de medição causado pela mudança de temperatura nos sensores DHPP e desenvolvido um
sistema de baixo consumo (30mW) para validar o modelo de correção de temperatura propos-

29
to. Este sistema é composto por apenas um elemento aquecedor e um termopar (espaçados em
3mm), não sendo necessário um sensor de temperatura adicional para medir a temperatura
inicial do solo, ou seja, ele utiliza o próprio termopar.
A caracterização da variação de temperatura do sensor DPHP causada pela mudança
de temperatura do solo seco, (0%), é apresentado na Figura 6.
Figura 6 - Caracterização do sensor de umidade de solo para diferentes temperaturas em solo seco
Na Figura 6 é possível observar a necessidade de compensar a variação da temperatura
do solo com 0% de umidade e a aproximação é feita utilizando ajuste linear. Logo, para anu-
lar o efeito de temperatura do solo, foi sugerido adicionar um fator de correção ΔT´ à ΔT, ou
seja, ΔT + ΔT´, chamado de compensação de temperatura. O fator ΔT´ é dado pela Equação
4:
Equação 4
Onde:
ΔT25 é o aumento de temperatura medido pelo sensor na temperatura de 25ºC.
ΔTx é o aumento de temperatura medido pelo sensor na temperatura de XºC.
As medidas realizadas pelo sistema proposto mostraram que o sensor de umidade do
solo apresentou um erro de 3% para medidas sem compensação de temperatura e 0,5% para
medidas com compensação de temperatura. No entanto, vale ressaltar que a precisão de 1% é
requisito para agricultura de precisão, mostrando a necessidade de compensação do efeito
indesejável da temperatura.

30
Outro fator importante a ser considerado e abordado é a sensibilidade do sensor de
umidade de pontas duplas. Este parâmetro é dado pela derivada da Equação 2 em função da
fração volumétrica, , resultando na Equação 5.
Equação 5
Portanto, existem duas opções para aumentar a sensibilidade do sensor: aumentar a
energia dissipada pelo aquecedor ou diminuir a distância entre as ponteiras. Nota-se que a
sensibilidade é inversamente proporcional ao quadrado da distância, tornando-se uma opção
atraente para aumentar a sensibilidade do sensor. No entanto, estudos realizados por [21] de-
monstraram que reduzir a distância r de 6 mm para 3 mm aumenta a sensibilidade do sensor
de 2 ºC para 7 ºC, mas uma deflexão de 300 um na ponteira, durante a inserção do sensor no
solo ou problema de fabricação, resulta em um erro de medição na variação de temperatura
máxima, ΔTm ,de aproximadamente 2 ºC para de 5%, que representa um erro de 28,8% do
fundo de escala do sensor que é de 6,9ºC. Logo, conclui-se que esta não é uma opção muito
boa para aumentar a sensibilidade do sensor, restando a opção de aumentar a energia dissipa-
da pelo sensor. No entanto, conforme mencionado anteriormente esta não é uma opção muito
atraente para sistema que utilizam soluções de baixo consumo alimentado por energy harves-
ting. Outra alternativa para melhorar o sistema, sem modificar o sensor, é aumentar a resolu-
ção da eletrônica de interrogação, geralmente tornando-a mais cara e complexa.
3.1.2 SENSOR DE PULSO DE CALOR PONTEIRA MÚLTIPLAS
Visando reduzir os problemas de deflexão causados durante a fabricação ou inserção
no solo dos sensores DPHP, foi proposto a fabricação de um sensor composto por um elemen-
to de aquecimento central e vários sensores de temperatura distribuídos ao redor do aquecedor
( 4 ou mais), denominado de ponteira-múltiplas - MHPP [28] [29][30]. A ideia é medir a tem-
peratura com os sensores de temperatura e realizar uma média para diminuir estes erros.
A Figura 7 mostra o sensor MHPP de umidade de solo montado com 4 sensores de
temperaturas e um aquecedor central.

31
Figura 7 - Sensor de ponteira múltiplas proposto por [31]
As desvantagens destes sensores estão no custo e no tempo do procedimento de cali-
bração pois cada sensor de temperatura deve ser calibrado individualmente e existe o custo
associado aos sensores de temperaturas adicionais. Além disto, a eletrônica de interrogação
deve ter canais adicionais para adquirir as informações destes 4 ou mais sensores.
3.1.3 SENSOR DE PULSO DE CALOR DE PONTEIRA SIMPLES
O sensor de ponteira simples é composto por dois elementos distintos, encapsulados
em um mesmo corpo, sendo que um é um elemento aquecedor e o outro um sensor de tempe-
ratura. O sensor de ponteira simples, conhecido como SHPP, opera de forma similar ao sensor
DHPP. No entanto, os elementos estão montados muito próximos, geralmente dentro de uma
agulha, preenchida com resina epóxi com baixa resistividade térmica (bom condutor térmico),
podendo este conjunto ser revestido com gesso para absorver a água do solo, ou estar em con-
tato direto com o solo, sendo que neste caso o solo serve como material poroso. A Figura 8
mostra um exemplo de montagem do sensor SHPP construído com termopar e resistor dentro
da agulha hipodérmica, sendo esta envolvida por uma cerâmica porosa.

32
Figura 8 - Detalhes de montagem do sensor SHPP, modelo 299 da Campbell [32]
Os sensores da TMAS produzidos pela Orbital Technologies [31][29] adotaram a so-
lução que o solo serve como material poroso e portanto ficaram bem compactos (Figura
10(A)).
O sensor SPHP, modelo 229 da Campbell [32], construído com termopar e um ele-
mento de aquecimento na mesma mecânica porosa de gesso, apresentou uma variação de
temperatura de 2,3 °C na escala total de 0%≤ θ ≤ 100%. No entanto, a variação deste sensor
para aplicação em agricultura é de 1,5°C ( 5%≤ θ ≤ 35%). Logo, para ter resolução de 1% em
θv, precisa medir a temperatura com resolução de 0,05 ºC. Além disto, esse sensor precisa de
uma energia de 2,55 J para aquecer a resistência (corrente do pulso de aquecimento= 50 mA;
resistência do aquecedor=34 Ω; duração do pulso = 30 s => E=34*0,05^2*30=> E=2,55 J). A
curva de resposta deste sensor pode ser vista na Figura 9.

33
Figura 9 - Resposta do sensor 229 da Campbell para diferentes concentrações de umidade de solo [32]
(A)
(B)
Figura 10 - (A) Sensor TMAS da Orbital Technologies (B) Sensor 229 da Campbell encapsulado com gesso
O sensor de umidade SHPP, com material poroso, baseado na variação de tensão de
uma ponte de Wheatstone construída com dois resistores de baixo coeficiente térmico (R1 e
R2) e dois resistores termosensíveis (R3 e R4) feitos com nanoestruturas de PbS é apresenta-
do em [33]. O elemento de aquecimento foi construído com oito resistores SMD de precisão
com baixo coeficiente térmico (R5 a R12), ao redor dos resistores termosensíveis, para aque-
cer o substrato de maneira uniforme. A Figura 11 (A) apresenta o diagrama esquemático do
sensor e a Figura 11 (B) mostra o sensor montado em cima da cerâmica porosa.

34
(A)
(B)
Figura 11 - (A) Diagrama Esquemático do Sensor de Umidade de Solo baseada em configuração de Ponte Re-
sistiva. (B) Sensor completo montado em cima do bloco de cerâmica porosa [33]
O protótipo de laboratório deste sensor apresentou uma variação de 2,4mV (que repre-
senta uma variação de 2,83 °C) na saída da ponte para uma mudança de umidade de água do
solo de 5% para 40%. A medida é realizada aplicando um pulso de calor de 290 mW durante
30s (8,7 J) e medindo a variação de temperatura causada pela troca de calor entre o elemento
aquecedor e o corpo poroso. O circuito interrogador é de baixíssimo consumo e foi desenvol-
vido um circuito de energy harvesting que capta a energia utilizando um TEG (efeito seeback)
para alimentar o circuito do sensor e do interrogador. O sistema de energy harvesting gerou
energia de 34,1 J (durante um dia ensolarado) que é suficiente para operar o sistema completo
por 5 dias sem captação de energia pelo TEG, realizando uma medição por dia. O consumo
médio do sistema completo constituído por circuito de energy harvesting, sensor e interroga-
dor, é de somente 20,1 µA, sendo que o circuito de gerenciamento baseado no LTC3109 con-
some 0,9 µA.
Em [34], foi demonstrada uma prova de conceito de um sensor SSHP de umidade
de solo baseado em um único transistor bipolar (NPN) que opera como elemento de aqueci-
mento e medição de temperatura. A medição da umidade é baseada nas variações de tempera-
tura, através da medição de VBE (T), que é calculada utilizando a expressão descrita por Wi-
dlar [35], e o aquecimento é realizado através da junção base coletor. Esta técnica permite
aplicar um pulso de calor com baixa corrente, mas este trabalho não foca no sistema de inter-
rogação de baixo consumo. Foram apresentadas duas técnicas de medição e análise de dados,
sendo que uma mede a variação de temperatura durante o pulso de calor e outra que mede a
variação de temperatura antes e depois da aplicação do pulso de calor. Na faixa de umidade de
5% a 35%, o sensor desenvolvido com um pulso térmico de 1,5 J apresentou um intervalo
ΔTmax de 6,1 °C quando a temperatura é medida antes e após o pulso de calor, e um intervalo

35
ΔTmax de 3,0 °C quando a temperatura é medida durante o pulso de calor. Testes iniciais de
caracterização em solo indicam que a sensibilidade do sensor desenvolvido é até seis vezes
maior do que o melhor resultado apresentado na literatura (o sensor BHP desenvolvido por
[36]). Desta maneira, esta técnica torna-se muito promissora para aplicação em conjunto com
circuito para energy harvesting, pois apresenta um boa sensibilidade e permite ter um baixo
consumo de corrente.
Os sensores SHPP não enfrentam problema de deflexão da ponteira durante a sua in-
serção no solo, mas podem existir variações da distância entre o elemento aquecedor e o ele-
mento sensor de temperatura durante o processo de montagem. No entanto, é esperado que o
erro causado por este motivo é reduzido pelo fato dos elementos estarem muitos próximos e
aderidos por uma resina epóxi termicamente condutivas e eletricamente isoladas. O estudo
realizado por [21] demonstrou que os sensores SHPP apresentam maior sensibilidade à varia-
ção de umidade e são menos dependentes do processo de fabricação, podendo desprezar este
erro causado durante a montagem.

36
4 PROPOSTA DO NOVO SISTEMA DE UMIDADE DE SOLO
Este capítulo apresenta a proposta do novo dispositivo de irrigação, autônomo e inde-
pendente, para uso em plantações que utilizam sistema de irrigação com microaspersor. A
alimentação deste dispositivo é realizada através de um circuito de energy harvesting que uti-
liza o movimento do microaspersor durante a irrigação para alimentar a eletrônica embarcada
e armazenar a energia excedente em um supercapacitor. A medição da umidade e da tempera-
tura do solo é realizada através de um único transistor bipolar NPN encapsulado com cerâmi-
ca porosa que utiliza a técnica de medição indireta para estimar a quantidade de água existente
no solo.
O desenvolvimento emprega basicamente dois módulos distintos: o módulo de capta-
ção e geração de energia e o módulo de gerenciamento, controle e armazenamento de energia.
A Figura 12 representa de forma genérica a arquitetura do sistema de irrigação proposto.
Figura 12 - Arquitetura do dispositivo de irrigação
O conjunto mostrado na Figura 12 é representativo, de modo que não apresenta os de-
talhes da solução, como suas características técnicas e seus aspectos construtivos. O módulo
de captação e geração de energia está representado em amarelo e o módulo de gerenciamento,
controle e armazenamento de energia está representado na cor vermelha, ou seja, o primeiro
módulo é responsável pela conversão da energia cinética em energia elétrica para alimentar o

37
circuito eletrônico e o outro é responsável pelo armazenamento de energia, medição e contro-
le. O objetivo é medir a umidade do solo da plantação durante o período da irrigação e com-
parar com um valor de referência, caso haja discrepâncias em relação a um valor limite prees-
tabelecido, a válvula d'água é mantida aberta para permitir a irrigação da plantação. Caso con-
trário, a válvula é fechada durante o período da irrigação (no qual o agricultor liga a moto
bomba) e depois aberta para a próxima irrigação/medição que será realizada apenas no dia
seguinte.
4.1 MÓDULO DE CAPTAÇÃO E GERAÇÃO DE ENERGIA
O módulo de captação e geração de energia é composto basicamente pelo microgera-
dor e mecânica de acoplamento necessária para transferir o movimento mecânico rotacional
do eixo girante do microaspersor (bailarina) ao microgerador, conforme apresentado na Figu-
ra 13. O microgerador tem a função de converter energia cinética em energia elétrica através
da rotação do imã no seu interior, acoplado ao eixo do gerador, que gera uma tensão elétrica
de saída proporcional ao movimento mecânico da bailarina do microaspersor, que, por sua
vez, é proporcional ao fluxo de água.
Figura 13 - Montagem mecânica do gerador de energia
A vazão volumétrica (Qv) na tubulação da irrigação é dada pela relação entre o volume
e tempo e representa a velocidade que um volume de água escoa no duto de irrigação. O cál-
culo da vazão é dado pela Equação 6.
Equação 6
onde V é o volume [m3] e t é o tempo [s]. Reescrevendo a Equação 6 em função da velocida-
de de escoamento, v, tem-se:

38
Equação 7
onde A é a área da seção transversal da tubulação. Considerando que a tubulação do sistema
de irrigação é circular, calcula-se a área do tubo e substitui na Equação 7 para obter a veloci-
dade de escoamento do tubo circular.
Equação 8
sendo que d é o diâmetro interno da tubulação do sistema de irrigação. Logo, esta é a veloci-
dade na qual o gerador acoplado ao eixo girante do microaspersor vai rodar.
Para avaliar a viabilidade do uso do microaspersor no sistema de energy harvesting,
foi selecionado o microaspersor da Agrojet, cujas informações são apresentadas na Tabela 4.1
[37].
Tabela 4.1 – Dados do microaspersor da Agrojet
Calculando a velocidade de escoamento do sistema de irrigação, através da Equação 8,
obtêm-se a velocidade de 14,9m/s. Calculando a energia cinética, através da Equação 9, ob-
têm-se uma energia cinética do sistema hídrico de irrigação de aproximadamente 2.6 Joule
para o microaspersor de bocal azul na pressão de 25 mca.

39
Equação 9
onde é a massa específica da água ( 1000 kg/m3).
Apesar de existir perdas de acoplamento mecânico entre microaspersor/gerador e per-
das internas do gerador, é possível observar que esta solução é viável e atende o objetivo do
trabalho, ou seja, gerar energia suficiente para alimentar o sistema completo.
4.2 MÓDULO DE GERENCIAMENTO, CONTROLE E ARMAZENAMENTO DE
ENERGIA
O módulo de gerenciamento, controle e armazenamento de energia é responsável por
armazenar a energia fornecida pelo microgerador e gerar as tensões para alimentar a eletrôni-
ca da solução, ou seja, é o circuito de energy harvesting da solução. Além disto, este módulo é
responsável por medir os diversos parâmetros da plantação através do sensor (temperatura do
solo e umidade do solo) e atuar na válvula d'água com base no algoritmo de análise do culti-
vo.
Um dos grandes desafios foi desenvolver uma solução com baixíssimo consumo de
energia. Para tal, foi necessário desenvolver um novo sensor de umidade que atendesse os
requisitos deste trabalho, como: ter boa resolução, apresentar um consumo baixíssimo, ser
fácil de instalar, ter repetibilidade, não precisar de manutenção periódica (troca da bateria),
etc.

40
4.2.1 NOVO SENSOR DE UMIDADE DE SOLO - SHPP
A ideia de utilizar um semicondutor como sensor de temperatura é bem conhecida na
literatura [40]. Entretanto, o primeiro sensor de umidade de solo, apresentado em 1971 [38],
que utiliza esta técnica, é montado com dois elementos separados, sendo um diodo para medir
a temperatura e outro elemento para operar como aquecedor. Recentemente, em [34] foi pro-
posto a utilização de um transistor NPN para realizar as duas funções, ou seja, operar como
aquecedor e medidor de temperatura. Porém, a eletrônica de interrogação da solução não foi
desenvolvida para ser utilizada com energy harvesting e não serve para este trabalho. Além
disso, o sensor (transistor) foi inserido direto no solo e neste trabalho proposto, será avaliado
o uso de uma cerâmica porosa comercial para reduzir os problemas de contato térmico entre o
solo e o sensor.
Portanto, a proposta deste trabalho foi desenvolver um novo sensor de umidade de so-
lo de ponteira simples encapsulado com cerâmica porosa baseado no princípio de pulso de
calor. Este sensor utiliza um único transistor bipolar NPN como elemento de aquecimento e
medição de temperatura. A junção emissor-coletor do transistor é utilizada para aplicar o pul-
so de calor e a junção base-emissor é utilizada para medir a temperatura. A potência dissipada
pelo transistor bipolar é dada pela Equação 10.
Equação 10
onde o segundo termo pode ser desprezado pois IB é muito menor que IC.
Através da Equação 10 é possível observar que existe a flexibilidade de aumentar a
energia do pulso de calor do sensor modificando apenas os parâmetros IC e/ou VCE. A propos-
ta de aumentar a tensão VCE do sensor é muito interessante para sistema de interrrogação de
baixo consumo porque permite aplicar pulso de corrente (Ic) de baixo nível para gerar o pulso
de calor, na ordem de 10 mA, frente aos sensores convencionais que usam correntes na faixa
de 50 mA. Por exemplo: se um aquecedor resistivo NiCr aplica uma potência de 165 mW com
uma tensão de 3,3V e corrente de 50 mA, nesta técnica é possível aplicar a mesma potência,
reduzindo a corrente para 10 mA e aumentando a tensão de VCE para 16,5V.
A vantangem do uso do transistor é pelo fato dele ser compacto, barato e ter o proces-
so de produção bem controlado, assim diminuindo os problemas causados devido à montagem
dos sensores ou de inserção do mesmo no solo (modificando a distância entre eletrodos) con-
forme apresentado no item 3.1.1.

41
4.2.1.1 PRINCÍPIO DE OPERAÇÃO
O sensor completo consiste unicamente de um transistor encapsulado por uma cerâmi-
ca porosa. Inicialmente, o transistor é polarizado com tensão (VBE) e baixa corrente (ICts) por
um período de tempo pequeno (∆tmts) para possibilitar medir a temperatura do solo sem o efei-
to térmico do aquecimento do transistor, ou seja, haverá apenas a tensão de VBE com baixa
corrente e tensão VBC nula. Como a potência dissipada pela junção base-emissor é muito pe-
quena, esta energia pode ser despreza e não afeta a medição da temperatura inicial do solo.
Após isto, é aplicado um pulso de calor com duração (tf - ti - Δtmts) no transistor, pola-
rizando o transistor com VCE e aumentando a corrente do coletor para ICm durante o período.
Depois do pulso de calor, tanto a corrente quanto a tensão retornam aos seus valores iniciais
ICi e VCEi. Os valores de VBE são adquiridos durante toda a medida (para observar o correto
funcionamento do sensor), mas apenas os valores de VBE antes e depois do pulso de calor
(ΔVBE) são utilizados para calcular a variação de temperatura no transistor e assim correlacio-
nar com a umidade do solo. O diagrama dos pontos de medição e da técnica de aplicação de
calor de pulso é apresentado na Figura 14.
Figura 14 - Esquema básico do princípio de operação do sensor de pulso de calor (domínio do tempo)
A Figura 15 mostra as curvas características de resposta de VBE e de temperatura em
função de tempo para uma determinada umidade de solo. O cálculo da temperatura em função
de VBE será apresentado no item a seguir.

42
Figura 15 - Curva típica de VBE e temperatura para o sensor de umidade durante a medição.
A Figura 16 mostra o resultado esperado de medição do sensor para solo com diferen-
tes concentrações de água. Observa-se que existe um ΔT no final das duas medidas que é cau-
sado pela diferença de dissipação do pulso de calor para solos com diferentes umidades. É
esperado que solo mais úmido apresente um valor menor de temperatura pois a água presente
no solo e nos poros do sensor, tem um coeficiente de condutividade térmica superior ao do
solo e a energia é melhor dissipada. Conforme comentado no item 3.1.1, solo mais denso
também apresenta uma menor variação de temperatura, ΔT, pois não existem espaços com ar,
desta forma melhorando a condutividade térmica do solo [29]. Portanto um procedimento de
calibração experimental do solo é necessário antes do uso do sensor e deve-se realizar com-
pensação da temperatura do solo durante a medição.
A compensação da temperatura deve ser realizada somando um termo ΔT´, obtido
através da caracterização da variação de temperatura do sensor para uma determinada umida-
de (por exemplo: solo com 10% de umidade) à variação de temperatura do sensor ΔT, fican-
do: ΔT + ΔT´, onde ΔT´ é calculada pela Equação 4 apresentada no item 3.1.1.

43
Figura 16 - Resultado de medição de umidade em função do tempo para solo com duas concentrações diferen-
tes.
No exemplo da Figura 16, observa-se que houve uma diferença de temperatura de 4,8
ºC entre as duas medidas no final do pulso de calor, apresentando uma sensibilidade de S =
4,8 ºC/(35%-5%) = 0,16 ºC/%. Portanto, neste exemplo o interrogador deve apresentar, no
mínimo, uma resolução de 0,16 ºC na medição de temperatura.
4.2.1.2 CÁLCULO DA TEMPERATURA
Este sensor mede indiretamente a umidade do solo baseado na condutividade térmica
do material do sensor, que muda proporcionalmente com a quantidade de água presente, no
seu entorno, absorvida pelo material poroso que reveste o sensor. A medição é realizada apli-
cando um pulso de calor no solo através de VCE e medindo a tensão da junção base-emissor
(VBE) do transistor que muda em função da temperatura. A Equação 11 descrita por [39] é
utilizada para calcular VBE em função da temperatura.
[ (
) ] [
(
)] Equação 11
onde Vg0 é a tensão de bandgap do silício extrapolada para 0 K (~ 1171 mV), k é a constante
de Boltzmann, q é a carga do elétron, é um parâmetro dependente do processo de fabricação

44
(tipicamente ~ 3,54), Tr é a temperatura de referência, VBE (Tr) é a tensão base-emissor do
transistor na temperatura de referência Tr e m=0 para corrente de coletor constante. O primei-
ro termos da Equação 11 é uma tensão CTAT (Complementar à Temperatura Absoluta) que
tem uma sensibilidade de temperatura dada por:
[ (
) ]
Equação 12
onde, para um VBE que tem um valor típico de 570 mV, resulta em uma sensibilidade de tem-
peratura de -2 mV/K para um Tr de 273,5K.
O segundo termo da Equação 11 tem uma resposta não linear em função da temperatu-
ra. O estudo realizado por [21] mostrou que o erro máximo causado por este termo foi de
±1,25µV para uma variação de temperatura de ±5K em torno de 296 ºC. Mostrando que este
erro é muito pequeno e pode ser desprezado pois representa 2ppm de VBE.
Outra maneira de expressar a Equação 11 é pela soma de um termo constante, um ter-
mo proporcional à temperatura (PTAT) e um termo de ordem superior, de tal forma que os
termos lineares representem a tangente da curva VBE(T) para T = Tr (Figura 17).
Figura 17 - Curva de VBE em função de T [39].
Então, da Equação 11 obtêm-se a Equação 13 [39].
[
]
[ (
)] Equação 13
onde
Equação 14
constante PTAT Ordem Superior

45
Desprezando o termo de ordem superior da Equação 13 e considerando m=0 ( para
corrente Ic constante), tem-se:
[ ]
Equação 15
esta aproximação é utilizada para calcular a temperatura do sensor neste trabalho.
Antes que o transistor seja encapsulado no bloco poroso, o valor de VBE do transistor é
medido, em uma temperatura conhecida Tr, em duas situações: com IC = 100 µA e IC = 10
mA. Estes valores medidos do VBE são usados para calcular os valores do λ dos transistores
nessas duas situações, de modo que permite facilmente calcular a temperatura do sensor antes
da aplicação do pulso de calor (com IC = 100 µA) e durante a aplicação do pulso de calor
(com IC = 10 mA), simplesmente medindo os valores de VBE durante estas fases de medição.
Se um pulso de calor de duração de tf - t0 é aplicado a um sensor SHPP, a variação da
mudança de temperatura ∆T = Tf −T0 pode ser aproximada por [41]:
ln (tf 0)
Equação 16
onde T0 e Tf são a temperatura inicial e final medidas em tempos tf e t0, q é a entrada de calor
por unidade de comprimento do aquecedor (W.m− 1
) e k é a condutividade térmica do solo (W
m−1
C −1
). Normalmente, o transiente inicial de temperatura que ocorre imediatamente após
o pulso de calor ser aplicado é descartado, e a temperatura é medida somente após t0, que é de
1 ou 2 s após o pulso de calor ser aplicado.

46
5 PROJETO DO NOVO SISTEMA DE IRRIGAÇÃO
O sistema de irrigação, autônomo e distribuído, desenvolvido neste trabalho, é respon-
sável por monitorar e controlar apenas a região ao seu entorno. Os dois módulos que com-
põem a arquitetura do sistema, conforme apresentada na Figura 12, foram subdivididos em
blocos menores para apresentar os detalhes da solução completa em diagrama de blocos. Des-
ta forma, a Figura 18 apresenta o módulo de captação e geração de energia (em amarelo) e o
módulo de gerenciamento, controle e armazenamento de energia (na cor branca) com seus
respectivos blocos.
Figura 18 - Diagrama de bloco detalhado do sistema completo
A função de conversão de energia mecânica cinética em energia elétrica, proporcional
ao fluxo de água, é realizada pelos dois blocos que integram o módulo de captação e geração
de energia representado em amarelo na Figura 18, sendo o primeiro responsável pelo acopla-
mento mecânico do movimento rotacional do microaspersor ao eixo do microgerador e o ou-

47
tro responsável pela transdução da energia mecânica em elétrica utilizando um microgerador
DC.
Conforme mencionado, o objetivo do módulo de gerenciamento, controle e armaze-
namento de energia, é armazenar a energia gerada pelo microgerador em capacitores e super-
capacitores, gerar as alimentações nos níveis corretos de operação da eletrônica, medir a umi-
dade do solo da plantação antes do período da irrigação e controlar a válvula d'água. Para tal,
a energia gerada pelo microgerador é direcionada para um conversor DC-DC, existente no
bloco do circuito de gerenciamento de energia, que por sua vez é responsável por elevar esta
tensão e armazenar esta energia em capacitores e supercapacitor e gerar as tensões reguladas.
O funcionamento do sistema de irrigação proposto é o seguinte:
O sistema é instalado com as válvulas abertas. Quando a bomba de irrigação é ligada
pela primeira vez, a água flui através do microaspersor e uma tensão DC é gerada pelo micro-
gerador acoplado ao microaspersor do sistema de irrigação.
Ao detectar a presença do nível DC gerado pelo microgerador durante a irrigação, o
microcontrolador liga SW1 e faz uma medição de umidade utilizando o sensor SHPP desen-
volvido e apresentado no item 5.2. Depois compara o valor de umidade medido com um valor
de referência, caso o valor de umidade esteja abaixo de um valor limite preestabelecido, a
válvula d'água é deixada aberta pelo tempo previamente armazenado em uma tabela de con-
sulta existente no microcontrolador, que indica a quantidade de tempo de irrigação necessária
em função da umidade presente no solo. Caso contrário, a válvula é deixada aberta por cerca
de 3 minutos, tempo que o sistema de energy harvesting necessita para carregar seus superca-
pacitores e, em seguida, o microcontrolador envia um pulso para a válvula d'água do tipo
latch, fechando-a durante o período da irrigação (no qual o agricultor liga a moto bomba), e
abrindo-a algumas horas depois (após desligada a moto bomba) para a próxima irriga-
ção/medição que será realizada apenas no dia seguinte. Vale ressaltar que o comando de fe-
chamento/abertura da válvula é feito pelo microcontrolador através de pulsos lógicos enviados
para o circuito de driver da válvula.
Após finalizada esta operação, o sistema entra em modo sleep para economizar energia
e operar apenas na próxima irrigação que será realizada no outro dia. Observa-se que o circui-
to de interrogação do sensor e do próprio sensor é alimentado, através da chave SW1, apenas
durante o período necessário para a medição da umidade. Já, o microcontrolador fica constan-
temente alimentado pelo regulador LDO ADP160.
Um diagrama da localização do sensor de umidade e da válvula d'água dentro da rede
de irrigação por microaspersor, em um campo de cultivo, é mostrado na Figura 19. Neste

48
exemplo de aplicação, a irrigação de duas parcelas de solo é controlada por dois sensores e
duas válvulas.
Figura 19 - Diagrama de instalação do dispositivo no campo [13]
5.1 CIRCUITO DE GERENCIAMENTO E ARMAZENAMENTO DE ENERGIA
O sistema de condicionamento de sinal apresentado em [34] é um equipamento portátil
que utiliza baterias e tensões relativamente altas (+ 25V e -5V) para funcionar, o que não é
adequado para ser utilizado em um sistema autônomo alimentado por energia e sistema de
energy harvesting. Portanto, neste trabalho foi desenvolvido um sistema que opera a partir de
uma única fonte de 5 V, obtida do sistema de energy harvesting.
O sistema de energy harvesting utilizou o microgerador DC (ZSFD-WH6, da BDTF-
MOTOR, Shenzhen China Merchant Energy Saving Technology Co., Ltd., Guangdong, Chi-
na) acoplado ao topo de um microaspersor de irrigação (Figura 20), para alimentar o circuito
eletrônico e carregar um supercapacitor de 2 F através de um conversor DC-DC.
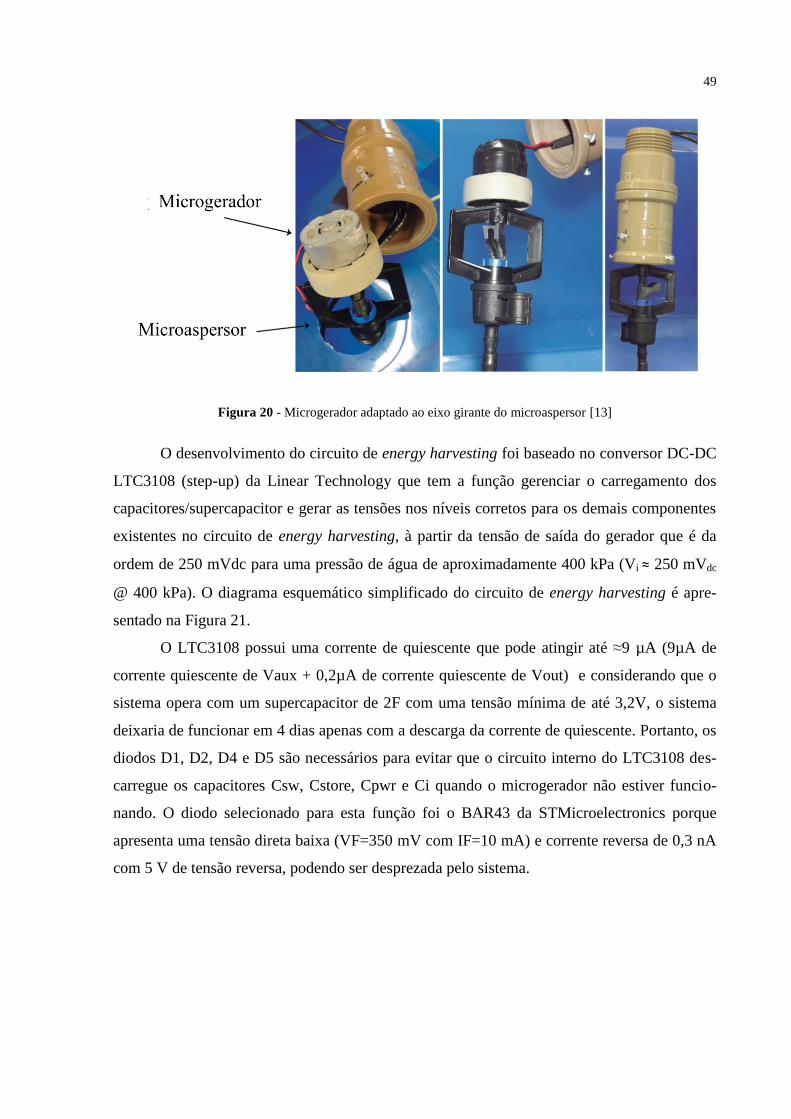
49
Figura 20 - Microgerador adaptado ao eixo girante do microaspersor [13]
O desenvolvimento do circuito de energy harvesting foi baseado no conversor DC-DC
LTC3108 (step-up) da Linear Technology que tem a função gerenciar o carregamento dos
capacitores/supercapacitor e gerar as tensões nos níveis corretos para os demais componentes
existentes no circuito de energy harvesting, à partir da tensão de saída do gerador que é da
ordem de 250 mVdc para uma pressão de água de aproximadamente 400 kPa (Vi ≈ 250 mVdc
@ 400 kPa). O diagrama esquemático simplificado do circuito de energy harvesting é apre-
sentado na Figura 21.
O LTC3108 possui uma corrente de quiescente que pode atingir até ≈9 µA (9µA de
corrente quiescente de Vaux + 0,2µA de corrente quiescente de Vout) e considerando que o
sistema opera com um supercapacitor de 2F com uma tensão mínima de até 3,2V, o sistema
deixaria de funcionar em 4 dias apenas com a descarga da corrente de quiescente. Portanto, os
diodos D1, D2, D4 e D5 são necessários para evitar que o circuito interno do LTC3108 des-
carregue os capacitores Csw, Cstore, Cpwr e Ci quando o microgerador não estiver funcio-
nando. O diodo selecionado para esta função foi o BAR43 da STMicroelectronics porque
apresenta uma tensão direta baixa (VF=350 mV com IF=10 mA) e corrente reversa de 0,3 nA
com 5 V de tensão reversa, podendo ser desprezada pelo sistema.

50
Figura 21 - Diagrama básico do circuito de gerenciamento de energia
O princípio de operação deste circuito é o seguinte: ao ligar o fluxo de água, o micro-
gerador acoplado ao microaspersor gera uma tensão contínua de aproximadamente 250 mV. O
conversor DC-DC LT3108 detecta esta tensão no terminal SW e começa a chavear o primário
do transformador de 1:100. Esta tensão é elevada por um transformador na entrada do conver-
sor DC-DC LTC3108 que por sua vez irá gerar várias tensões reguladas e gerenciar o carre-
gamento dos capacitores Csw, CLDO, Cpwr e do supercapacitor Cstore.
A sequência de recarga do LTC3108 é a seguinte: ao aparecer uma tensão Vi na sua
entrada, o capacitor Caux começa a carregar até 2,5 V. Depois, o pino Vout que está configu-
rado para atingir 5,0 V no regime estacionário, começa a carregar os capacitores Csw e Ci,
através dos diodos D1 e D5 respectivamente. Assim que o capacitor Ci atinge um pouco mais
de 1,8 V, o regulador de tensão (LDO) ADP160 da Analog Devices consegue alimentar o
microcontrolador MSP430F6736 da Texas Instruments com 1,8 V que começa a operar.

51
Quando o Vout for carregado com 92,5 % ( Vout ≈ 4,62 V) de sua tensão regulada (5
V), os capacitores Csw e Ci estarão praticamente carregados, a saída PowerGood do regulador
LTC3108 fica em alta e o microcontrolador detectará essa mudança na interrupção de borda
de subida. Vale ressaltar que o capacitor Csw carregado é utilizado para alimentar a chave
SW1 ADG819 da Analog Devices que será utilizada posteriormente para acionar a medida do
sensor de umidade .
Depois que Vout estiver com 5 V, o LTC3108 começa a carregar os capacitores Cpwr
e Cstore. Se esta operação for a primeira operação do circuito (energização a partir de zero), o
microcontrolador monitorará a cada 10 minutos as tensões em Cstore e Cprw, até que atinjam
seus valores máximos, considerando as quedas de tensão nos diodos D2 e D4. Para garantir
que o capacitor Cpwr (20.000 µF) da válvula (que é menor) carregue mais rápido que o su-
percapacitor Cstore (2 F), foi colocado um resistor em série com Cstore maior que o resistor
em série com Cpwr , sendo R2 ≈ 2*R1. Depois que o microcontrolador detecta que o Cstore
atingiu uma tensão maior do que 4,9 V (isso requer cerca de três horas de operação contínua
do microgerador com microaspersor), o microcontrolador envia um pulso ao circuito de con-
trole da válvula, fechando-a e preparando o sistema para a primeira irrigação controlada, que
será provavelmente no dia seguinte.
O capacitor eletrolítico Cpwr utilizado para comutar a válvula latch tem uma corrente
de fuga muito alta. Portanto, o sistema é deixado funcionando nas próximas operações de irri-
gação com a válvula d'água aberta por 3 minutos para carregar Cpwr de 0 a 5 V (tempo sufi-
ciente mesmos com todos os capacitores carregados). Após 3 minutos, o microcontrolador
liga a chave SW1 que, por sua vez alimenta a eletrônica do interrogador de sensor necessária
para o funcionamento do sensor de umidade.
Em seguida, o microcontrolador inicia uma interrogação do sensor de pulso de calor,
para medir a umidade do solo. Se a umidade estiver dentro do nível desejado, o microcontro-
lador envia um pulso para o circuito da válvula, fechando-a e interrompendo a irrigação em
todos os microaspersores naquela parcela de solo. Se o solo precisa ser irrigado, a válvula é
deixada aberta pelo tempo previamente armazenado em uma tabela de consulta armazenada
no microcontrolador, que indica a quantidade de tempo de irrigação necessária em função da
umidade medida. Finalmente, depois que a bomba de irrigação é desligada, o microcontrola-
dor envia um pulso para o circuito da válvula, abrindo a válvula e preparando-a para a próxi-
ma operação de irrigação.
Observa-se no diagrama esquemático da Figura 21 que a tensão de alimentação princi-
pal é obtida através de um supercapacitor que é carregado até 5,2 V ou pela tensão de saída

52
Vout do conversor LTC3108 da Linear Technology, que pode atingir 5 V quando operando
em estado estacionário e alimentado pelo microgerador. A tensão retirada do supercapacitor
Cstore possui dois diodos Schottky em série, D3 e D6, enquanto o Vout possui apenas um
diodo, D5, em série. Com esta configuração, o supercapacitor Cstore é descarregado somente
quando o LTC3108 não está captando energia.
Para o sensor de pulso de calor operar com baixa corrente de operação (10mA) foi ne-
cessário aumentar a tensão VCE do sensor, conforme explicado no item 4.2.1, tornando-a ideal
para operar com sistema de interrrogação de baixo consumo. Portanto, as tensões de operação
escolhidas foram -5 V e +8 V e devem ser geradas à partir da tensão de saída da conexão D3 e
D5, proveniente do Cstore ou de Vout. Para tal, foi necessário colocar vários reguladores em
cascata que reduzem a eficiência total desta fonte de alimentação mas que não impactam no
consumo total do circuito porque esta parte do circuito opera apenas quando existe medida de
umidade, ou seja, aproximandamente 10 segundos. Com o objetivo de reduzir o consumo de
energia do sistema, foi colocada uma chave SW1 que fornece a alimentação para o circuito de
interrogação do sensor de umidade apenas durante a medição de umidade
A tensão de saída da conexão D3 e D5, proveniente do Cstore ou de Vout, é regulado
para 5,0 ±4% V através de um conversor dc-cc charge pump de alta eficiência TPS60130 da
Texas Instruments, que pode operar a partir de tensões de entrada de 2,7 V.
As tensões de +10 V e -5 V são geradas à partir da tensão de 5 V da saída do
TPS60130. Esta tarefa foi realizada pelo componente LM2662 por ser muito versátil e permi-
tir fornecer uma saída duplicada ou invertida da sua tensão de entrada. Portanto, a tensão de 5
V é invertida pelo charge pump LM2662 (IC4), operando na configuração de inversor, e do-
brada pelo charge pump LM2662 (IC3), configurado como dobrador, gerando -5 V e +10 V
respectivamente.
No entanto, a tensão de saída do LM2662 não é regulada, apresentando alto ripple, va-
riação com a temperatura e também com a corrente de carga. Desta forma, é necessário utili-
zar um regulador estável para medir umidade do solo com alta precisão e resolução de 1% ,
gerando pulso de calor com tensão e corrente bem estáveis.
Assim, a tensão de +10 V gerada pelo LM2662 (IC3) foi regulada para +8,0 V pelo
regulador TPS71501. Este componente é um regulador LDO com tensão de saída ajustável
através da relações de dois resistores (R1 e R2). Além disto, este componente tem uma rejei-
ção de ripple de 60 dB, regulagem de linha de 61 dB, regulagem de carga de 60 dB e coefici-
ente térmico de saída TC ≈ 15 ppm/C.

53
A tensão negativa (-5 V) não é crítica para o circuito de interrogação de sensores pois
existe uma referência de tensão REF3312 (Vref2) no interrogador que é estável, inclusive
com temperatura, e responsável por manter a corrente constante no sensor.

54
5.2 CICRUITO DE INTERROGAÇÃO DO SENSOR DE PULSO DE CALOR EN-
CAPSULADO EM CERÂMICA POROSA
O esquema do circuito de polarização e pulso de calor usado para medir a umidade do
solo é apresentado na Figura 22. O sensor está indicado com linhas tracejadas na Figura 22 e é
constituído basicamente por um transistor NPN 2N2222 de encapsulamento metálico montado
dentro de bloco cerâmico poroso.
Figura 22 - Diagrama básico do circuito do sensor e do pulso de calor
Observa-se que a base do transitor sensor é mantida com uma tensão fixa de 1,25 V,
proveniente da referência de tensão REF3312 da Texas Instruments (VREF1) que é estável

55
com temperatura, apresentando um variação máxima de apenas 30 ppm/°C, e tem uma exati-
dão de 0,15% .
O emissor do transistor sensor é conectado a uma fonte de corrente, que tem seu valor
chaveado entre dois valores, 100 µA e 10 mA, pela ação de uma chave de dois pólos SW1 que
seleciona os resistores.
Conforme explicado em 4.2.1.1, o transistor sensor é polarizado com tensão e baixa
corrente por um periodo de tempo pequeno para possibilitar medir a temperatura do solo sem
o efeito térmico do transistor. Após isto, é aplicado um pulso de calor no transistor sensor,
aumentando a potência dissipada. Para isso foram utilizadas a chave SW2, que tem a função
de comutar a tensão do coletor do transistor sensor entre VREF1 e +8 V, e a chave SW1, que
tem a função de comutar a corrente de emissor do transistor sensor entre 100 µA e 10 mA,
sendo ambas as chaves ADG812 da Analog Device.
O princípio de operação é o seguinte: para começar uma medida, a tensão VREF1 é
conectada ao coletor e é aplicada uma corrente de emissor de 100 µA no transistor sensor,
desta forma a tensão VBC será nula e haverá apenas o efeito térmico causado pela potência
dissipada na junção base-emissor que é muito pequena e aproximadamente 60 µW para um
VBE de 600 mV (P ≈ ICVBE), assim não afetando a temperatura do sensor quando encapsulado
com cerâmica porosa.
Depois, durante o pulso de calor, de 10 segundos, necessário para realizar a medida de
umidade, estas chaves SW1 e SW2 são comutadas para fornecer +8 V de tensão no coletor e
10 mA de corrente no emissor do transistor sensor, gerando um pulso de calor com aproxima-
damente E = 0,8 J (80 mW durante 10 s). Vale lembrar que a lógica de acionamento e comu-
tação das chaves SW1 e SW2 são realizados pelo microcontrolador.
A fonte de corrente (100 µA / 10mA) foi construída com uma referência de tensão
VREF2 (REF3312), um amplificador operacional A1 (LTC6003), um transistor NMOS M1
(2N2222) e resistores R1e R2. Foi escolhido o amplificador operacional LTC6003 da Linear
Technology por ter uma corrente de alimentação ultrabaixa, ser rail-to-rail, ter baixo offset e
baixo bias de corrente de entrada. O princípio de funcionamento é o seguinte: o transistor M1
está dentro do circuito de realimentação negativa, e o amplificador operacional A1 força a
tensão da fonte ser igual a tensão de referência (VS = VREF2 = -3,75 V). Portanto, a corrente
de dreno no transistor M1, que é igual à corrente de emissor de transistor sensor, é dada por:
Equação 17
onde Req = R1 quando SW1 é aberto e Req = R1//R2 quando SW1 é fechado.

56
Como o ganho de corrente de base comum αF está muito próximo de um (αF ≈ 0,995)
para o transistor 2N2222 usado no sensor, foi considerado que IC = IE para estimar a potência
dissipada pelo transistor sensor. É importante notar que esta aproximação não tem influência
nos cálculos de temperatura que são realizados no sensor, porque a temperatura depende ape-
nas de VBE.
Para medir o VBE do transistor do sensor, dois amplficiadores de ganho unitário (A3 e
A4), operando como buffer, foram implementados com um LT6004. Estes buffers foram co-
nectados aos terminais emissor e base do sensor e suas saídas foram enviadas para um conver-
sor analógico-digital diferencial disponível no microprocontrolador MSP430F6736 da Texas
Instruments, que opera com uma corrente de alimentação de apenas 1,25 µA no modo de bai-
xa potência, com o relógio de tempo real (RTC) funcionando. Embora o conversor analógico-
digital do MSP430F6736 tenha 24 bits, foi usado apenas 16 bits (15 bits mais um bit de sinal),
o que é suficiente para medir VBE com resolução de ≈ 46 µV, usando a referência interna de
1,5 V. Nesta fase inicial de medição, o valor medido de VBE é usado para calcular a tempera-
tura do solo antes do pulso de calor ser aplicado, uma vez que uma curva de calibração (des-
vio do valor medido em função da temperatura do solo) deve ser obtida experimentalmente,
antes de usar o sensor no solo [32][42].
No protótipo construído, os valores medidos de VBE foram armazenados em um cartão
SDCard, para possibilitar analisar os dados e traçar as curvas do VBE em função do tempo, e
assim verificar se o sensor está funcionando corretamente . O conversor analógico-digital
está programado para fazer dez medições por segundo. Em seguida, para cada segundo, o mi-
crocontrolador calcula a média dos cinco primeiros pontos (Mi) e a média dos últimos cinco
pontos (Mf). Finalmente, a média (Mi + Mf)/2 é calculada e gravada no SDCard.
Exceto pelo período em que o pulso de calor está sendo aplicado, o consumo de cor-
rente do circuito de condicionamento é muito baixo (aproximadamente 2,5 µA) porque, exce-
to pelo regulador de tensão ADP160 (Figura 21) e o microcontrolador, o restante do circuito
está no modo "desligado". Como a corrente durante o pulso de calor é 10 mA durante 10 s, o
consumo médio de corrente do circuito completo é de apenas 3,7 µA, e mesmo se o sistema
de energy harvesting não funcionar, um supercapacitor de 2 F pode manter os circuitos fun-
cionando por mais de 11 dias. Vale ressaltar que o regulador ADP160 funciona com até 1,8 V
mas foi considerada uma tensão mínima de operação de 3,2 V, ou seja, este tempo de 11 dias
é necessario para descarregar um capacitor de 2 F de 5 V para 3,2 V com uma corrente de
consumo de 3,7 µA.

57
5.3 CIRCUITO DE DRIVER DA VÁLVULA D'ÁGUA
O acionamento da válvula d'água do tipo latch é feito através de 2 relés e utilizando a
tensão do capacitor eletrolítico Cpwr de 22000 µF que é carregado pelo LTC3108 conforme
apresentado no diagrama da Figura 21 e explicado no item 5.1.
A Figura 23 mostra o diagrama esquemático do driver de acionamento da válvula uti-
lizando os dois relés.
Figura 23 - Circuito de acionamento da válvula latch
Este circuito foi uma alternativa a ponte H convencional e possibilitou aumentar o
range de operação da tensão de acionamento, visto que a queda de tensão que ocorreria nos
transistores de acionamento da ponte H não existe nos relés.
A operação da válvula latch é bem simples e precisa de apenas de um pulso de tensão
positivo ou negativo (±5 V) com corrente de 500 mA, nos terminais 1 e 2 do conector P1, por
um período de tempo de aproximadamente 50 ms para comutá-la entre aberta e fechada, ou
vive-versa. Após este tempo, a energia pode ser removido já que existe um travamento mecâ-
nico que garante que a válvula mantêm-se no estado de operação (aberto ou fechado).
Para garantir que a válvula não está consumindo energia elétrica, o terminais 1 e 2
sempre são conectados ao terra através de dois relés quando não está sendo realizado opera-

58
ção de troca de estado (mudança de aberto para fechado, ou vice-versa), ou seja, são coloca-
dos sinais lógicos "0" nas saídas RL1 e RL2 do microcontrolador MSP430. A abertura da
válvula é realizada colocando sinal "1" no RL1 e sinal "0" no RL2 por um período de 50 ms,
ou seja, esta operação faz com que tenha 5 V no terminal 1 e Gnd no terminal 2. Após este
tempo, os dois sinais (RL1 e RL2) retornam para 0 assim garantindo que não haverá consumo
de energia. Já, o fechamento da válvula é realizada colocando “0” no RL1 e “1” no RL2 por
50 ms, ou seja, colocando Gnd no terminal 1 e 5 V no terminal 2. Depois, retorna-se esses
sinais para “0”.
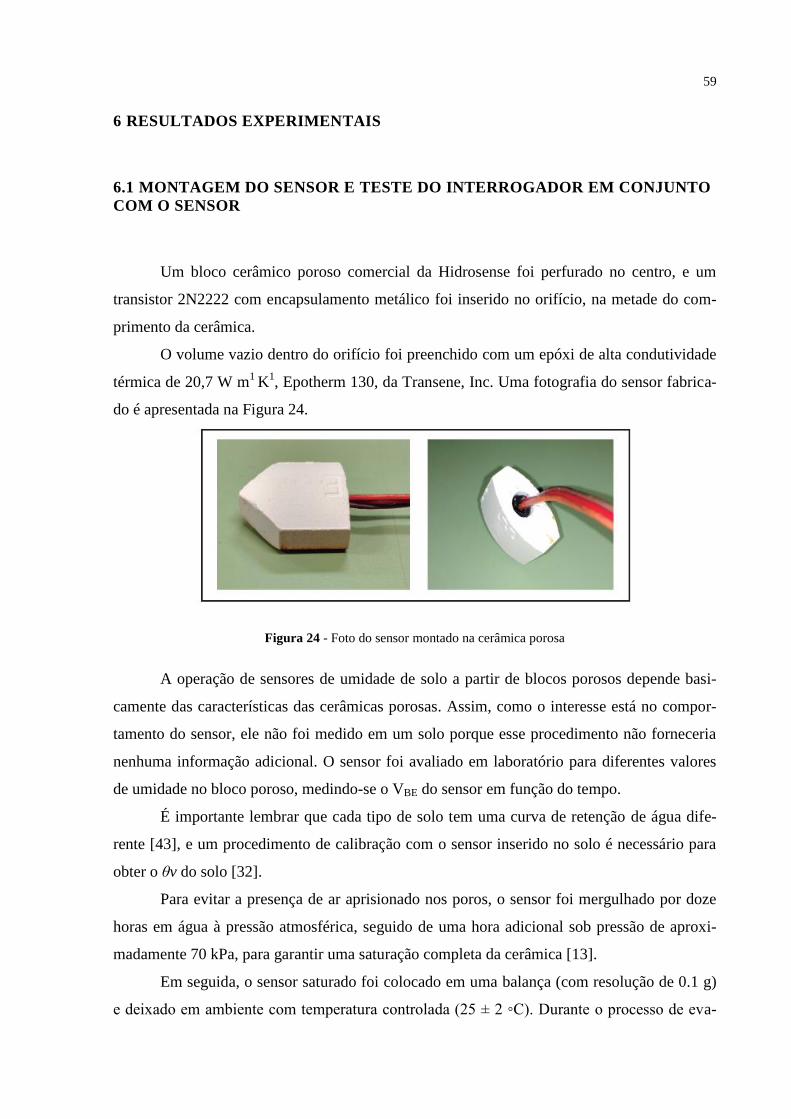
59
6 RESULTADOS EXPERIMENTAIS
6.1 MONTAGEM DO SENSOR E TESTE DO INTERROGADOR EM CONJUNTO
COM O SENSOR
Um bloco cerâmico poroso comercial da Hidrosense foi perfurado no centro, e um
transistor 2N2222 com encapsulamento metálico foi inserido no orifício, na metade do com-
primento da cerâmica.
O volume vazio dentro do orifício foi preenchido com um epóxi de alta condutividade
térmica de 20,7 W m1
K1, Epotherm 130, da Transene, Inc. Uma fotografia do sensor fabrica-
do é apresentada na Figura 24.
Figura 24 - Foto do sensor montado na cerâmica porosa
A operação de sensores de umidade de solo a partir de blocos porosos depende basi-
camente das características das cerâmicas porosas. Assim, como o interesse está no compor-
tamento do sensor, ele não foi medido em um solo porque esse procedimento não forneceria
nenhuma informação adicional. O sensor foi avaliado em laboratório para diferentes valores
de umidade no bloco poroso, medindo-se o VBE do sensor em função do tempo.
É importante lembrar que cada tipo de solo tem uma curva de retenção de água dife-
rente [43], e um procedimento de calibração com o sensor inserido no solo é necessário para
obter o θv do solo [32].
Para evitar a presença de ar aprisionado nos poros, o sensor foi mergulhado por doze
horas em água à pressão atmosférica, seguido de uma hora adicional sob pressão de aproxi-
madamente 70 kPa, para garantir uma saturação completa da cerâmica [13].
Em seguida, o sensor saturado foi colocado em uma balança (com resolução de 0.1 g)
e deixado em ambiente com temperatura controlada (25 ± 2 C). Durante o processo de eva-

60
poração, em diferentes valores de θv, os pulsos de calor foram aplicados pelos sensor e medi-
ções de VBE em função do tempo foram tomadas.
Neste protótipo, os valores medidos do VBE não foram convertidos em temperatura
dentro do microcontrolador. Os valores de VBE registrados no SDCard foram lidos em um PC,
onde foram convertidos em temperatura usando a Equação 15. Os valores das temperaturas
calculadas (bem como a diferença de temperatura entre t0 = 1 s e tf = 10 s, em função do tem-
po) são plotados simultaneamente na Figura 25, para valores de θv entre 6% e 46,4%.
Figura 25 - Curva da medida de temperatura e de ∆T para diferentes valores de θv
O gráfico da Figura 26 apresenta uma curva de ΔT para diferentes θv, para um período
de medição de 10 segundos. É importante observar que, para θv = 40%, o valor de ΔT neste
sensor (com um pulso de calor de energia E = 0,80 J) é ΔT ≈ 3,1 C, enquanto em [34], o tran-
sistor estava em contato direto com o solo e o pulso de calor de energia era 87% maior (E =
1,5 J), o valor de ΔT era 4,5 C, e isso é apenas 45% maior.

61
Figura 26 -Curva da medida de ∆T em função de θv, para um pulso de calor de 10 segundos
No entanto, isso não implica que o sensor com o bloco poroso seja mais eficiente em
termos energéticos. Essa diferença em ΔT ocorre simplesmente porque existem dois meios
diferentes servindo como dissipador de calor para o transistor: a cerâmica porosa saturada
com água e a terra saturada com água. Considerando que a razão da resistividade térmica en-
tre um solo com alto conteúdo orgânico e um solo de areia de quartzo pode chegar a 3:1 [44],
fica claro que o gesso saturado com água possui maior resistência térmica do que o solo
quando saturado com água.
Embora a resposta ΔT em função de θv seja claramente não-linear, a sensibilidade do
sensor é geralmente definida entre zero e o ponto de maior valor de θv. No sensor desenvolvi-
do a sensibilidade foi de 0,0675 C /% (dada por: 2,9 C/ 46,4%) e o conversor A/D de 15 bits
utilizado permite ler o VBE do transistor com uma resolução de 46 µV (dada por:
1,5Vref/32768), que corresponde a uma resolução de aproximadamente 0,026 C (calculado
através da Equação 15) .
Entretanto, uma análise mais realista deve ser feita, utilizando apenas a parte da curva
de resposta do sensor com menor sensibilidade. Observa-se na curva da Figura 26 que neste

62
caso (para θv variando entre 26% e 46,4%), a sensibilidade do sensor é de
S = (3,4 C – 2,9 C)/(46,4% - 26%) = 0,025 C/%. Portanto, nessa região, pode-se ler a umi-
dade do solo com aproximadamente 1% de resolução, como desejado.
6.1.1 TESTES DE REPETIBILIDADE DO SENSOR
Para avaliar a repetibilidade do sensor, dois sensores foram medidos em duas condi-
ções diferentes: saturada e seca em estufa. O sensor foi colocado dentro de uma caixa fechada,
com isolamento térmico e controle de temperatura, e a temperatura foi mantida em 21
±0.03C. Os VBEs de cada sensor foram medidos cinco vezes para cada umidade, com um in-
tervalo de 20 minutos entre as medições, para garantir que o sensor estivesse na temperatura
inicial desejada.
A Tabela 6.1 mostra os resultados do teste de repetibilidade para medições VBE, toma-
das em t = 10 s, em dois sensores (S1 e S2). O valor mais alto do desvio padrão foi encontra-
do em 0,36 mV, que é três ordens de magnitude menor que o valor médio 866,77 mV. Este
desvio padrão mais alto, em ambos os sensores, foi medido quando o sensor estava saturado.
Tabela 6.1 – Medida de valores de VBE [mV] em dois sensores com diferentes condições de solo: seco e satu-
rado
Sensor # S1 S1 S2 S2
Condição Saturado Seco Saturado Seco
Medida 1 [mV] 865,49 859,45 866,68 859,08
Medida 2 [mV] 865,40 860,18 867,14 859,17
Medida 3 [mV] 864,89 859,86 867,09 859,22
Medida 4 [mV] 865,12 860,09 866,64 858,58
Medida 5 [mV] 864,89 860,05 866,27 858,76
Média [mV] 865,16 859,93 866,76 858,96
Desvio Padrão (σ) 0,28 0,29 0,36 0,28

63
6.2 TESTE DO CIRCUITO DE ENERGY HARVESTING
Foi montado um circuito hidráulico realimentado com o uso de uma bomba d'água
com a finalidade de ter um setup de teste com um fluxo/pressão de água constante no micro-
aspersor e não ter desperdício de água. O diagrama de bloco é apresentado na Figura 27.
Figura 27 - Diagrama de bloco do circuito hidráulico de teste.
O setup montado para avaliar o uso do microaspersor acoplado ao microgerador como
circuito de energy harvesting pode ser observado na Figura 28.
Figura 28 - Teste do microaspersor acoplador ao microgerador
Nota-se que o microaspersor de irrigação está acoplado ao microgerador e gera uma
tensão elétrica de saída proporcional ao movimento mecânico da bailarina do microaspersor,
que, por sua vez, é proporcional ao fluxo de água.
Este circuito permitiu realizar testes funcionais do dispositivo, avaliar o tipo de sinal
da saída do microgerador e calcular sua impedância de saída.
Para testar o microgerador adaptado ao microaspersor, utilizou-se uma bomba d'água
Shurflo 2088-592-054 (Shurflo, Cypress, CA, EUA), regulada para fornecer primeiramente
uma pressão de água de 200 kPa e, em seguida, 400 kPa. Foi medida a saída do microgerador
sem carga e observou-se que a tensão de saída do gerador era Vgen = 0,7 V a 200 kPa e Vgen

64
= 0,8 V a 400 kPa. Em seguida, o microgerador foi carregado pelo resistor de 9Ω e a tensão
de saída medida caiu para Vgen = 328 mV (quando a pressão de água era de 400 kPa), indi-
cando que a impedância do gerador é de aproximadamente 13 Ω .
Tabela 6.2 – Resultados do teste realizado com o microgerador acoplado à bailarina
do microaspersor na pressão de 400kPa
Carga [Ω] Vsaída [V]
Sem carga 0,80
9 Ω 0,328
A Figura 29 ilustra a curva típica do microgerador operando em conjunto com o mi-
croaspersor.
Figura 29 - Tela do osciloscópio do teste do microgerador com carga de 9Ω.
Para testar o sistema de energy harvesting (Figura 21) e para poder medir a energiza-
ção do sistema com um osciloscópio, os valores de Cstore (projetado para 2 F) e Csw (proje-
tado para 0,1 F) foram reduzidos para 1000µF. O teste começou com todos os capacitores
totalmente descarregados e o microgerador com 0 V em sua saída. Em seguida, a bomba d'á-
gua foi ligada: o microgerador começou a funcionar e, com um osciloscópio de quatro canais,
mediu-se as tensões em Cstore, Csw, Cpwr e na saída do regulador ADP160 LDO (1,8 V).
A Figura 30 apresenta as tensões medidas em função do tempo. Pode-se observar que
a sequência de energização começa com o regulador LDO indo até 1,8 V (ligando o micro-
controlador), seguido pela carga de Csw até 5 V. A escala de tempo do osciloscópio foi ajus-
tada para 40 s / divisão para permitir visualizar um ciclo de carregamento completo do Cstore
e do Cpwr na tela, portanto é difícil observar que a saída de o LDO (1,8 V) ocorre antes da
carga do Csw para 5 V.

65
Figura 30 - Sequencia de acionamento do energy harvesting
Depois que o Csw é carregado, os capacitores Cstore e Cpwr começam a carregar e a-
tingem sua tensão máxima aproximadamente 120 segundos depois que o microgerador foi
ligado. É importante notar que enquanto o microgerador está ligado, o LDO é alimentado por
Vout. Entretanto, assim que o microgerador é desligado, o capacitor Ci é descarregado pelo
regulador LDO e sua carga (o microcontrolador), e assim que a tensão de Vout cai abaixo da
tensão disponível no Cstore, o regulador LDO é alimentado pelo supercapcitor Cstore.
A partir da Figura 30, é possível observar que, em aproximadamente 200 segundos, o
microcontrolador envia um pulso ao circuito da válvula, que descarrega Cpwr muito rapida-
mente de 5 V a aproximadamente 4 V (a corrente na válvula latch é de 500 mA, aplicada por
50 ms). Logo em seguida, o Cpwr carrega toralmente novamente em cerca de 50 s. Durante
este teste, o microcontrolador foi programado para enviar pulsos para a válvula a cada 50 s,
abrindo e fechando a válvula, como pode ser observado na curva Cpwr.
O consumo de corrente do circuito de condicionamento é de aproximadamente 2,5µA.
O consumo médio de corrente do circuito completo é de 3,7µA (2,5 µA da corrente média +
1,2 µA do pulso de calor distribuído durante 24 horas), considerando que existe apenas uma

66
medição de umidade por dia, ou seja, um pulso de calor de 10 mA durante 10 segundos. As-
sim, um Cstore de 2 F totalmente carregado é capaz de alimentar todo o sistema por mais de
11 dias sem a coleta de energia do microgerador.
Isso resulta em uma operação do sistema praticamente perpétua, porque a bomba de ir-
rigação deve ser ligada quase todos os dias para fazer uma medição de umidade do solo para
verificar se a irrigação é necessária em qualquer parte do campo, e isso recarregará os capaci-
tores por pelo menos 3 minutos.
Mesmo que haja mais de 24 dias consecutivos sem irrigação e, consequentemente, ne-
nhuma energia tenha sido colhida durante esse período, o microcontrolador deixará de funcio-
nar, já que drenará toda a energia armazenada no supercapacitor. No entanto, isso não repre-
senta um problema para o sistema, pois será energizado corretamente durante a próxima irri-
gação, e a reinicialização do microcontrolador irá colocá-lo no modo “primeira irrigação”,
carregando todos os capacitores necessários para o armazenamento de energia, para que o
sistema possa operar corretamente novamente por mais de 11 dias consecutivos sem coleta de
energia.

67
7 CONCLUSÃO
Foi desenvolvido um sistema inédito para controle de irrigação, autonômo, indepen-
dente e de baixíssima potência, baseado em um sensor de umidade de solo de pulso de calor
SHPP encapsulado com cerâmica porosa, e alimentado por um circuito de energy harvesting.
Além disto, este sistema é composto por um circuito de interrogação do sensores e por uma
válvula d'água que controla e atua na irrigação da implantação.
Todo o sistema de controle de irrigação foi alimentado por um módulo de energy har-
vesting baseado em um microgerador acoplado ao microaspersor, ou seja, utiliza o movimento
rotacional para gerar toda a energia necessária para o sistema através do microgerador. Este
circuito utiliza o CI LTC3108 e armazena a energia gerada pelo microgerador em um super-
capacitor de 2 F que pode manter o sistema de irrigação funcionando por mais de 11 dias sem
ser recarregado.
O sensor de umidade de solo baseado em um único transistor encapsulado em um blo-
co cerâmico poroso foi fabricado e testado em laboratório. O sensor foi testado com umidade
na faixa de 6% a 46,4% e com a cerâmica porosa saturada (v = 46%), a diferença de tempera-
tura medida foi ΔT = 2,9 C. O valor do ΔT foi 6,3 C para um solo seco (v = 6%) e a sensibi-
lidade do sensor, calculada entre os pontos de menor sensibilidade (entre 26% e 46,4%), foi
de S= 0,025 C/%. O conversor analógico-digital de 15 bits utilizado permite ler o VBE do
transistor com uma resolução de 46µV, que corresponde a uma resolução de aproximadamen-
te 0,026 C, então θv pode ser lido em incrementos de aproximadamente 1%, mesmo na regi-
ão mais crítica do sensor. O elemento sensor apresentado neste trabalho é uma grande melho-
ria em relação ao trabalho anterior, pois usa encapsulamento de cerâmica porosoa e portanto
não possui o problema de contato com o solo, sendo que a adição do bloco poroso não reduz a
eficiência energética do sensor. O sensor foi projetado para ser alimentado por sistemas de
energy harvesting, e um circuito de interrogação de ultrabaixo consumo de energia foi desen-
volvido e apresentado.
Para avaliar a repetibilidade do sensor, dois sensores foram medidos em duas condi-
ções diferentes: saturada e seca em estufa. Os VBEs de cada sensor foram medidos cinco vezes
para cada condição de umidade, utilizando um pulso de calor de 10 segundos, com um inter-
valo de 20 minutos entre as medições, para garantir que o sensor estivesse na temperatura
inicial desejada. O maior desvio padrão foi encontrado em 0,36 mV, que é três ordens de

68
magnitude menor que o valor médio 866,77 mV. Este desvio padrão mais alto, em ambos os
sensores, foi medido quando o sensor estava saturado.
O sistema completo foi submetido a um teste funcional no laboratório. A bomba do
microaspersor foi ativada manualmente simulando uma operação de irrigação convencional e
o sistema de energy harvesting mostrou-se apto para alimentar o sistema completo, ou seja,
gera energia suficiente para carrregar o supercapacitor e alimentar todas as partes que inte-
gram o sistema, inclusive o driver e a válvula d'água. A cerâmica porosa do sensor foi molha-
da manualmente, simulando um solo irrigado, e o valor de umidade foi lido através do inter-
rogador de sensor que aplica um pulso de calor de duração de 10 segundos e medindo a tem-
peratura para correlacionar com a umidade. O sensor também mostrou-se confiável e apresen-
tou um boa repetibilidade.
Portanto, foi demonstrado que o sistema completo composto por: gerador, circuito de
energy harvesting, driver, válvula d'água, novo interrogador de sensor e sensor de umidade,
funcionou conforme o esperado e pode ser aplicado em agricultura de precisão.

69
REFERÊNCIAS
[1] ICMBIO. “WWDR4: O manejo dos recursos hídricos em condições de incerteza e risco”,
Rio de Janeiro, Brasil, Jun. 2012. Disponível em:
<http://www.icmbio.gov.br/educacaoambiental/images/stories/biblioteca/rio_20/wwdr4-
fatos-e-dados.pdf>.
[2] FAO. “The State of the World’s Land and Water Resources: managing systems at risk”.
London: Earthscan, 2011a
[3] ASCOM. “Solução de monitoramento de irrigação de solo diminui consumo de energia e
aumenta a produtividade . maio de 2015. Disponível em:
<http://dinheirorural.com.br/noticia/agrotecnologia/solucao-de-monitoramento-de-
irrigacao-de-solo-diminui-consumo-de-energia-e-aumenta-produtividade>. Acesso em: 30
dez. 2015
[4] Sistema reduz custos de irrigação e aumenta produtividade nas lavouras. maio de 2014.
Disponível em: <http://www.canalrural.com.br/noticias/agricultura/sistema-reduz-custos-
irrigacao-aumenta-produtividade-nas-lavouras-10015>. Acesso em: 30 dez. 2015
[5] D. Christofidis, “Os recursos hídricos e a prática da irrigação no brasil e no mundo,” Irri-
gação e Tecnologia Moderna, vol. 49, pp. 8– 13, 2001.
[6] Raul Morais, “A Zigbee multi-powered acquisition device for remote sensing applications
in precision viticulture”. ELSEVIER, pg. 94-106, 2008.
[7] Raul Morais, “Sun, wind and water flow as energy supply for small stationary data acqui-
sition platforms”. ELSEVIER, pg. 120-132, 2008.
[8] G. Muller, Th.Rittenschober, A. Springer. “A wireless sensor network using energy har-
vesting for agricultural machinery”. Elektrotechnik & Informationstechnik, pg 39–46,
2010.
[9] LI GUOLI. “Intelligent automatic irrigation control system”. CI A01G25/16. CN
201320084075. 22 fev. 2013, 28 ago. 2013. SIPO (escritório de patentes da China), China.
[10] OVIE V. WHITSON, JR. “Water sprinkler system”. CI A01G25/16 . US
20140263719 A1. 17 mar. 2014, 18 set. 2014. Escritório de patentes do Estados Unidos,
US.
[11] ROQUE, W.; SPENGLER, A. W. ; MORAIS, F. J. O. ; Siqueira ; Elnatan . “Gerador
de corrente contínua baseado na conversão de energia mecânica de um microaspersor para

70
uso em agricultura de precisão”. In: XIX Simpósio Brasileiro de Recursos Hídricos, 2011,
Maceió - Alagoas. p. 132.
[12] Michael Patrick Defrank. “Motion control system and method with energy harvest-
ing”. CI F03G7/00 . WO 2014068594 A2. 30 out. 2013, 8 maio 2014. Escritório de paten-
tes do Estados Unidos, US. Disponível em:
<https://patents.google.com/patent/EP2914847A2/en?oq=.+Motion+control+system+and
+method+with+energy+harvesting>. Acesso em 11/06/2018
[13] Costa, E.F.; de Oliveira, N.E.; Morais, F.J.O.; Carvalhaes-Dias, P.; Duarte, L.F.C.;
Cabot, A.; Siqueira Dias, J.A. “A Self-Powered and Autonomous Fringing Field Capaci-
tive Sensor Integrated into a Micro Sprinkler Spinner to Measure Soil Water Content. ”
Sensors 2017, 17, 575.
[14] Rudnick, D, et Al, “ Soil Water Sensors for Irrigation Management, N Extension, Uni-
versity of Nebraska, 2016
[15] J. M. Hubbell and J. Sisson, “Advanced tensiometer for shallow or deep soil water
potential measurements,” Soil Science, vol. 163, no. 4, pp. 271–277, April 1998.
[16] E. Greacen, “Soil water assessment by the neutron method,” CSIRO Melbourne, 1981.
[17] D. Robinson, T. Kelleners, J. Cooper, C. Gardner, P. Wilson, I. Lebron, and S.
Logsdon, “Evaluation of a capacitance probe frequency response model accounting for
bulk electrical conductivity: Comparison with tdr and network analyzer measurements,”
Vadose Zone Journal, pp. 992–1003, November 2005.
[18] M. Seyfried, “Field calibration and monitoring of soil-water content with fiberglass
electrical resistance sensors,” Soil Sci. Soc. Am. J., vol. 57, pp. 1432–1436, 1993.
[19] G. C. Topp and J. L. Davis, “Measurement of soil water content using time-domin
reflectometry (tdr: a field evaluation,” Soil Sci. Soc. Am. J., vol. 49, pp. 19–24, 1985.
[20] Nikhil Jorapura, Vinay S. Palaparthy Shahbaz Sarik, Jobish John, Maryam Shojaei
Baghini, G.K. Ananthasuresh. “A low-power, low-cost soil-moisture sensor using dual-
probe heat-pulse technique” Sensors and Actuators A:Physical, 2015, 108–117.
[21] P. Dias, “A novel high sensitivity single probe heat pulse soil moisture sensor based
on a single npn bipolar junction transistor,” Msc. dissertation, UNICAMP, 2012.
[22] H. Nidal Abu-Hamdeh, C. Randall Reeder, Soil thermal conductivity. Effects of densi-
ty, moisture, salt concentration, and organic matter, Soil Sci. Soc. Am. J. 6 (4) (2000)
1285–1290
[23] J. W. G.S. Campbell, C. Calissendorff, “Probe for measuring soil specific heat using a
heat-pulse method,” Soil Sci. Soc. Am. J., vol. 55, pp. 291–293, 1991

71
[24] D. D. Vries, Thermal properties of soil, ser. W.R. van Wijk. New York: John Wiley
and Sons, 1963, pp. 210–234.
[25] Y. Song and G. K. J.M. Ham, M.B. Kirkham, “Measuring soil water content under
turfgrass using the dual-probe heat-pulse technique,” J.Amer.Soc.Hort.Sci., vol. 123, pp.
937–941, 1998.
[26] Jorapur N, Palaparthy V, Sarik S, John J, Baghini M, Ananthasuresh G; “A low-
power, low-cost soil-moisture sensor using dual-probe heat-pulse technique,” Sensors and
Actuators, A: Physical (2015) 233 108-117
[27] Palaparthy et Al. Compensation of temperature effects for in-situ soil moisture meas-
urement by DPHP sensors, Computers and Electronics in Agriculture, Volume 141, Sep-
tember 2017, Pages 73-80.
[28] Y. Mori, J. W. Hopmans, A. P. Mortensen, and G. J. Kluitenberg, “Multi-functional
heat pulse probe for the simultaneous measurement of soil water content, solute
concentration, and heat transport parameters,” Vadose Zone Journal, vol. 2, pp. 561–
571, 2003.
[29] A. Valente, R. Morais, C. Couto, and J. H. Correia, “Modeling, simulation and testing
of a silicon soil moisture sensor based on the dual-probe heat-pulse method,” Sensors and
Actuators A, vol. 115, pp. 434–439, 2004.
[30] J. A. S. Dias, W. Roque, F. W. D. Pfrimer, and E. C. Ferreira, “A combined wenner-
array/heat dissipation sensor for measuring electric conductivity and moisture of soils.” in
Proceedings of the CIGR, vol. 125, 2009.
[31] A. Valente, R. Morais, A. Tuli, and J. Hopmans, G. Kluitenberg, “Multi-functional
heat pulse probe for the simultaneous measurement of soil thermal properties, water con-
tent and eletrictal conductivity", Sensors and Actuators, 132 (1), pp. 70–77, 2006.
[32] C. Scientific, 229 Heat Dissipation Matric Water Potential Sensor Instruction Manual,
2006.
[33] DIAS, P. C.; CADAVID, Doris; ORTEGA, Silvia; RUIZ, A.; DE MORAIS FRAN-
ÇA, Maria Bernadete; DE OLIVEIRA MORAIS, Flávio José; CHAGAS FERREIRA,
Elnatan; CABOT, Andreu; Autonomous soil moisture sensor based on nanostructured
thermosensitive resistors powered by an integrated thermoelectric generator, 03/2016,
Sensors and Actuators. A, Physical,Vol. 239, pp.1-7, Lausanne, Suiça, 2016.
[34] P. C. Dias, W. Roque, E. C. Ferreira, and J. A. S. Dias, “A high sensitivity single
probe heat pulse soil moisture sensor based on a single npn junction transistor.” Comput-
ers and Electronics in Agriculture, vol. 96, pp. 139–147, 2013.

72
[35] Widlar R.J., An exact expression for the thermal variation of the emitter base voltage
of bi-polar transistors. In: Proceedings of the IEEE, January, pp. 96-97, 1967.
[36] Kamai, T., Kluitenberg, G. J., Jopmans, J. W. “Design and numerical analysis of a
button type heat probe for soil water content measurement. ” Vadose Journal 8, 167-173,
2009.
[37] Empresa Agrojet. Disponível em: <
http://www.agrojet.com.br/produtos_detalhes.php?cat=50&l=br&pro=579 >. Acesso em:
11 jun. 2018
[38] Phene, C.J., Hoffman, G.J., Rawlins, S.L., 1971. “Measuring soil matric potential in
situ by sensing heat dissipation within a porous body. ” Soil Science Society of America
Proceedings 35, 2733.
[39] Gerard C.M.Meijer. “Thermal sensors based on transistors” Sensors and Actuators,
Volume 10, Issues 1–2, 10 September 1986, Pages 103-125
[40] Mohtashim Mansoor, Ibraheem Haneef, Suhail Akhtar, Andrea De Luca, Florin
Udrea. "Silicon diode temperature sensors—A review of applications” Sensors and Actua-
tors, A Physical (2015) 232 63-74
[41] S. Shiozawa, G. Campbell, “Soil thermal conductivity”, Remote Sensing Review 5
(1990) 301–310. doi:10.1080/02757259009532137.
[42] A. Flint, G. Campbell, K. Ellett, C. Calissendorff, “Calibration and temperature cor-
rection of heat dissipation matric potential sensors”, Soil Science Society of America
Journal 66 (5) (2002) 1439–1445. doi:10.2136/sssaj2002.1439.
[43] S. Assouline, D. Tessier, A. Bruand, “A conceptual model of the soil water retention
curve”, Water Resource Research. vol.34, 223-231. 1998.
[44] G. Campbell, “Thermal resistivity of porous materials (soils) change with changes in
density, water content, temperature and composition”, in: Pittcon Conference & Expo
2018 - Orlando, Florida, 2018.