tcc- dimensionamento e analise e de sistema de direção pinhão e cremalheira para veículo baja...
DESCRIPTION
Sistema de direção Baja, Dimensionamento da direção .TRANSCRIPT

UNIVERSIDADE COMUNITÁRIA DA REGIÃO DE CHAPECÓ - UNOCHAPECÓ
DIMENSIONAMENTO E ANÁLISE DE UM SISTEMA DE DIREÇÃO DO TIPO PINHÃO E CREMALHEIRA PARA VEÍCULO BAJA
Felipe Dal Magro Rover
Chapecó – SC, Agosto de 2015

FELIPE DAL MAGRO ROVER
DIMENSIONAMENTO E ANÁLISE DE UM SISTEMA DE DIREÇÃO DO TIPO PINHÃO E CREMALHEIRA PARA VEÍCULO BAJA
Pré-projeto de Trabalho de Conclusão de Curso apresentado na Universidade da região de Chapecó - UNOCHAPECÓ de Engenharia Mecânica como requisito básico para a conclusão do Curso de Engenharia Mecânica.
Orientador (a): ANDRE LUIZ GRANDO SANTOS
Chapecó – SC, Agosto de 2015

LISTA DE ABREVIATURAS E SIGLAS
ME- Manga de eixo mm
BED – Bitola do eixo dianteiro mm
BET - Bitola do eixo Traseiro
mm
SAE Society of Automotive Engineers
DPM - Distancia do pino mestre mm
Dp – Diâmetro do pinhão mm
SPC - Sistema de pinhão e cremalheira mm
DMBA - Distância do pino mestre até ponto de fixação do braço axial mm
ρg- Raio geométrico da curva mm
ρ Ι - Raio geométrico da roda externa dianteira mm
ρ ΙΙ - Raio geométrico da roda externa traseira mm
l- Distância entre eixos mm
t Ι- Bitola do eixo dianteiro mm
β i - Giro da roda dianteira externa e interna (i = 1, 2 respectivamente Graus
β1- Giro da roda dianteira externa Graus
β2- Giro da roda dianteira interna Graus
J – Distância, medida no solo, entre os prolongamentos dos pinos mestres mm
M – Centro de rotação do veiculo ....
t Ι – Distância entre o centro das rodas mm

LISTA DE FIGURAS
Figura 1- Volante.............................................................................................................10Figura 2- Coluna de direção............................................................................................11Figura 3- Pinhão e cremalheira helicoidal.......................................................................12Figura 4- Vista explodida de um mecanismo manual.....................................................13Figura 5- Componentes do sistema de direção pinhão e cremalheira.............................14Figura 6- Cubo de roda com ponta de eixo.....................................................................15Figura 7- Manga de eixo.................................................................................................15Figura 8- Pivôs de suspensão..........................................................................................16Figura 9 - Terminais rotulares.........................................................................................16Figura 10- Bitola dianteira e traseira...............................................................................17Figura 11- Pino Mestre....................................................................................................18Figura 12- Cambagem negativa.......................................................................................19Figura 13- Cambagem Positiva.......................................................................................19Figura 14- Angulo de caster............................................................................................20Figura 15- Geometria ideal da direção............................................................................23Figura 16- Ângulos de esterçamento de um sistema de direção.....................................25

LISTA DE TABELAS
Tabela 1 - Cronograma de ação


7
SUMÁRIO
1. INTRODUÇÃO.........................................................................................................6
2. OBJETIVO.................................................................................................................7
2.1 GERAL...............................................................................................................7
2.2 ESPECÍFICOS....................................................................................................7
3. JUSTIFICATIVA.......................................................................................................7
4. INTRODUÇÃO TEÓRICA.......................................................................................8
4.1 SISTEMAS DE DIREÇÃO................................................................................8
4.2 PINHÃO E CREMALHEIRA............................................................................9
4.3 SISTEMA DE DIREÇÃO PINHÃO & CREMALHEIRA..............................10
4.4 MANGA DE EIXO..........................................................................................12
4.5 BITOLA............................................................................................................14
4.6 DISTÂNCIA ENTRE EIXOS..........................................................................15
4.7 PINO MESTRE................................................................................................15
4.8 ÂNGULO CAMBER........................................................................................16
4.9 ÂNGULO CASTER.........................................................................................17
5. SIMULAÇÃO ESTRUTURAL...............................................................................17
6. GEOMETRIA DA DIREÇÃO.................................................................................18
6.1 ESTERÇAMENTO E RAIO DE RETORNO..................................................20
7. METODOLOGIA DA PESQUISA.........................................................................22
8. CRONOGRAMA DE AÇÃO..................................................................................22
9. REFERÊNCIAS.......................................................................................................24

8
1. INTRODUÇÃO
O projeto Baja SAE Society of Automotive Engineers é uma competição entre
Instituições de Ensino Superior que desafia acadêmicos de engenharia através do
desenvolvimento de um protótipo off Road (fora de estrada), a partir do trabalho em
grupo, bem como na execução de todas as atividades que envolvem o projeto, visando a
aplicação prática dos conhecimentos adquiridos em sala de aula. As competições da
SAE visam proporcionar aos acadêmicos uma oportunidade de idealização, concepção,
dimensionamento, análises, simulações, fabricação, montagem e testes dos projetos
mecânicos, além de oferecer a oportunidade de desenvolver a capacidade de trabalho
em equipe.
O sistema de direção veicular é o componente capaz de transformar a ação mecânica
do motorista na necessidade direcional que o veículo precisa executar. Esta realidade
pode ser atingida de diferentes formas no que tange ao nível de esforço, ângulo do
volante, sensibilidade da pista pelo condutor e comportamentos distintos que são
influenciados pela velocidade do veículo.
Com a evolução dos meios de transporte os sistemas de direção passaram a evoluir
também juntamente com os componentes ligados a eles. Um sistema de direção bastante
utilizado é o sistema de pinhão e cremalheira pois se caracteriza por ser simples,
eficiente e apresentar baixo custo.
Este trabalho busca o entendimento da funcionalidade do sistema de direção bem
como o estudo detalhado sobre o esterçamento das rodas em função do giro do volante,
este apresenta influência direta na dirigibilidade do veículo, então será abordado o
dimensionamento de um sistema de direção de pinhão e cremalheira para um veículo
baja.
O intuito deste trabalho é aplicar um sistema de direção do tipo pinhão e
cremalheira, que será analisado em condições estáticas pela aplicação de teorias e
formulações matemáticas associadas ao projeto de sistemas de direção veicular.

9
2. OBJETIVO
O presente trabalho busca dimensionar e analisar um sistema de direção do tipo
pinhão e cremalheira aplicada em um veículo Baja, passando pelas etapas de
dimensionamento e análise de diferentes sistemas e configurações.
2.1 GERAL
O objetivo deste trabalho é realizar o dimensionamento e análise das diferentes
configurações adotadas para um sistema de direção veicular do tipo pinhão e
cremalheira, e desse modo definir quais seriam as melhores características do sistema
para aplicação em um veículo para as competições da SAE (Society of Automotive
Engineers) na categoria BAJA off-road (fora de estrada).
2.2 ESPECÍFICOS
Estudo de sistemas de direção veicular; Proposição de diferentes configurações de direção veicular; Analise e dimensionamento dos componentes; Seleção de processos de fabricação e materiais empregados no projeto; Modelagem e detalhamento do conjunto em software; Discussão e validação dos resultados obtidos.
3. JUSTIFICATIVA
O desenvolvimento de um sistema de direção influência muito na dirigibilidade do
veículo Baja, para que o mesmo possa realizar as manobras com facilidade e precisão,
além de garantir a segurança, e assim evitar acidentes. Logo este trabalho torna-se
relevante, pois servirá de subsídio para futuros acadêmicos que almejam participar de tais
projetos e também pela importância que exalta diante da competição, uma vez que esse
interfere diretamente no comportamento, na segurança e no custo final de um veículo.

10
4. INTRODUÇÃO TEÓRICA ( colocar história dos primeiros tipos de direçãoo)
Para o completo entendimento da rotina desenvolvida neste trabalho, será
apresentada uma breve revisão teórica abordando os principais termos e parâmetros
relacionados com o sistema de direção. A geometria da suspensão em conjunto com a
direção determina o posicionamento da roda. Este posicionamento será fundamental nas
respostas do veículo nas situações em que ele se encontrar. Esse estudo é complexo,
porque existem muitas variáveis, entre elas o próprio piloto e o terreno no qual o veículo
irá trafegar. O tipo de comportamento dinâmico desejável para o veículo é dependente
da interação entre todas essas variáveis.
Conforme GILLESPIE (1992), o sistema de direção dos veículos automotores
possui grande importância no comportamento estático e dinâmico. A função do sistema
de direção é gerar ângulos nas rodas dianteiras e/ou traseiras em resposta às
necessidades impostas pelo condutor para que haja o controle do veículo. Contudo, os
ângulos de esterçamento efetivos são modificados pela geometria do sistema de
suspensão, direção e condições de tracionamento para os veículos de tração dianteira.
4.1 SISTEMAS DE DIREÇÃO
A maioria dos sistemas de direção são compostos por alguns elementos em comum. Os
elementos mais conhecidos são o volante e a caixa de direção, sendo que o volante é o
componente do sistema que interage diretamente com o motorista (FERNANDES, 2005).
Ele geralmente possui forma circular ou semelhante, como representado na Figura (1).
11
Figura 1- Volante
Fonte: Fernandes (2005)
Comentar figuras !
Para promover o esterçamento das rodas, conforme a vontade do motorista, é
necessária a aplicação de uma força resultante ao volante, de modo que este realize
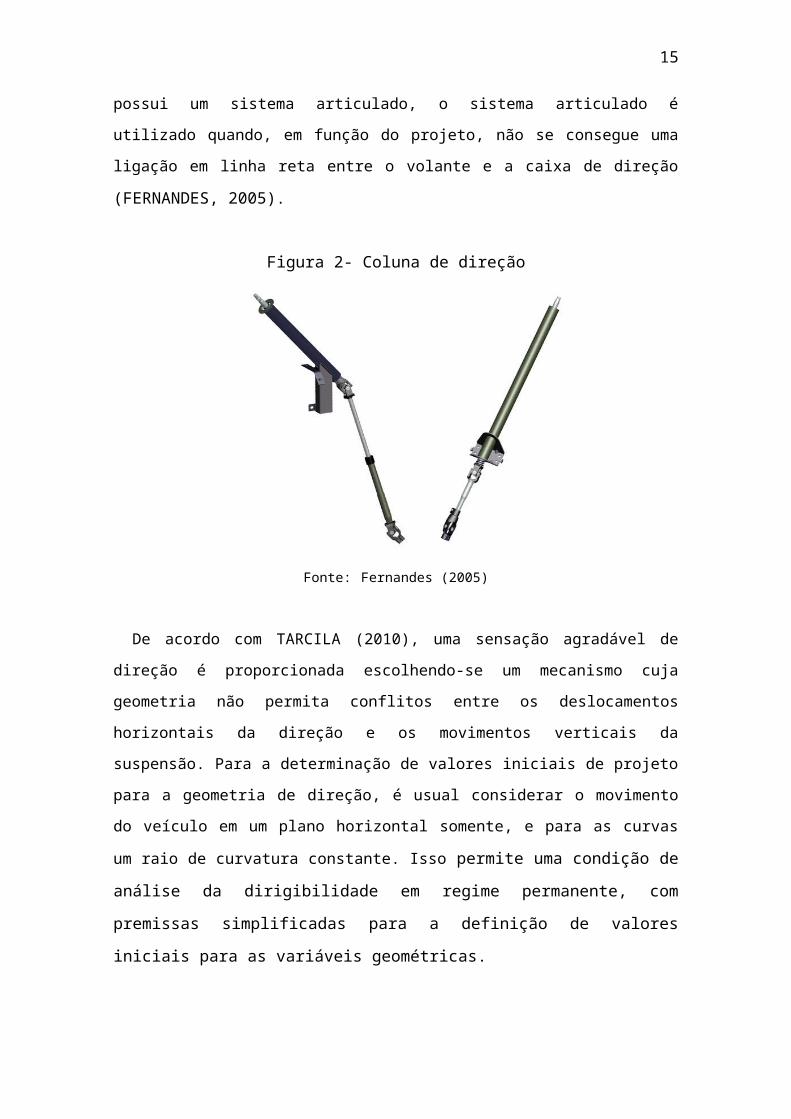
movimentos de rotação em torno do seu centro. A coluna de direção é o elemento do
mecanismo responsável por fazer a conexão entre o volante e a caixa de direção. Na maioria
das vezes, a coluna possui um sistema articulado, o sistema articulado é utilizado quando,
em função do projeto, não se consegue uma ligação em linha reta entre o volante e a caixa
de direção (FERNANDES, 2005).
Figura 2- Coluna de direção
Fonte: Fernandes (2005)
12
De acordo com TARCILA (2010), uma sensação agradável de direção é proporcionada
escolhendo-se um mecanismo cuja geometria não permita conflitos entre os deslocamentos
horizontais da direção e os movimentos verticais da suspensão. Para a determinação de
valores iniciais de projeto para a geometria de direção, é usual considerar o movimento do
veículo em um plano horizontal somente, e para as curvas um raio de curvatura constante.
Isso permite uma condição de análise da dirigibilidade em regime permanente, com
premissas simplificadas para a definição de valores iniciais para as variáveis
geométricas.
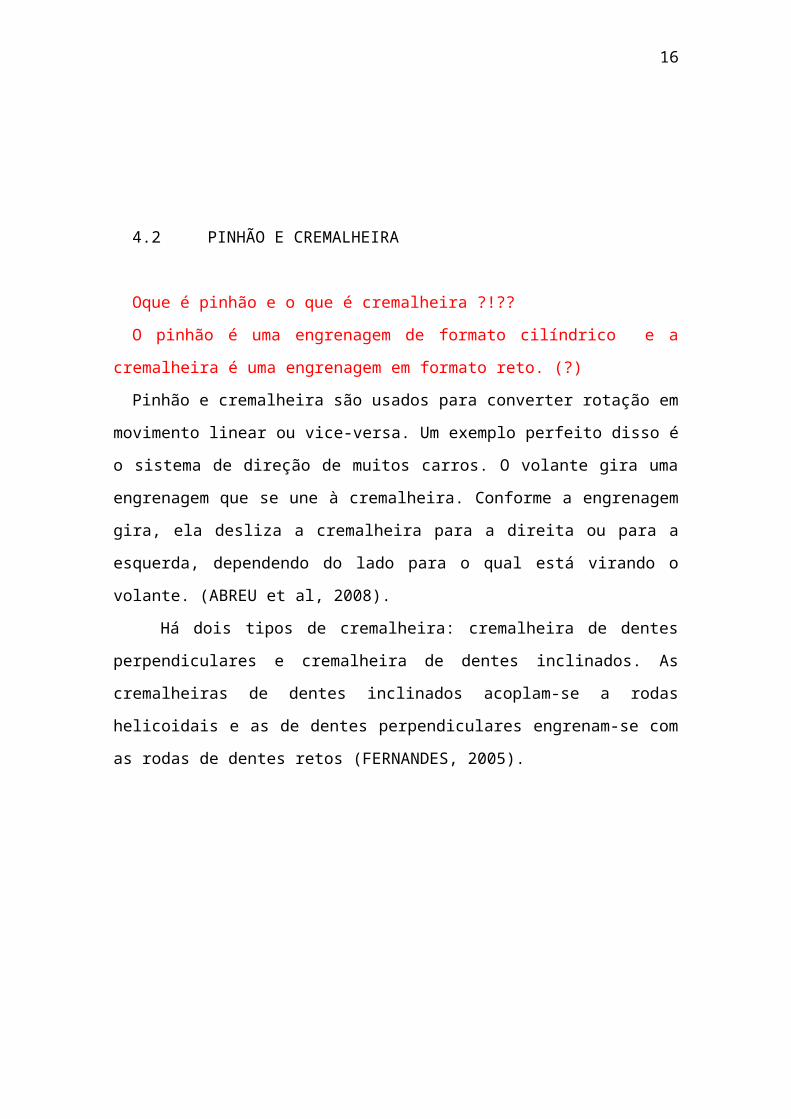
4.2 PINHÃO E CREMALHEIRA
Oque é pinhão e o que é cremalheira ?!??
O pinhão é uma engrenagem de formato cilíndrico e a cremalheira é uma
engrenagem em formato reto. (?)
Pinhão e cremalheira são usados para converter rotação em movimento linear ou
vice-versa. Um exemplo perfeito disso é o sistema de direção de muitos carros. O
volante gira uma engrenagem que se une à cremalheira. Conforme a engrenagem gira,
ela desliza a cremalheira para a direita ou para a esquerda, dependendo do lado para o
qual está virando o volante. (ABREU et al, 2008).
Há dois tipos de cremalheira: cremalheira de dentes perpendiculares e
cremalheira de dentes inclinados. As cremalheiras de dentes inclinados acoplam-se a
rodas helicoidais e as de dentes perpendiculares engrenam-se com as rodas de dentes
retos (FERNANDES, 2005).
13
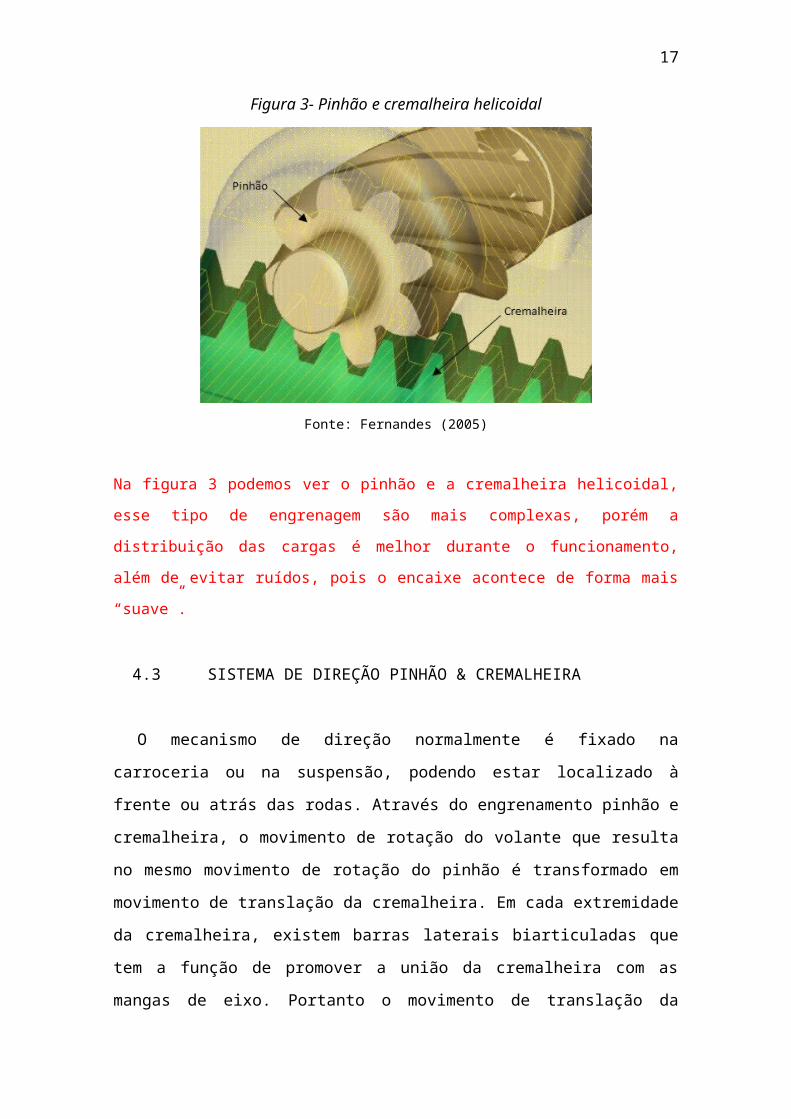
Figura 3- Pinhão e cremalheira helicoidal
Fonte: Fernandes (2005)
Na figura 3 podemos ver o pinhão e a cremalheira helicoidal, esse tipo de engrenagem são
mais complexas, porém a distribuição das cargas é melhor durante o funcionamento, além
de evitar ruídos, pois o encaixe acontece de forma mais “suave”.
4.3 SISTEMA DE DIREÇÃO PINHÃO & CREMALHEIRA
O mecanismo de direção normalmente é fixado na carroceria ou na suspensão,
podendo estar localizado à frente ou atrás das rodas. Através do engrenamento pinhão e
cremalheira, o movimento de rotação do volante que resulta no mesmo movimento de
rotação do pinhão é transformado em movimento de translação da cremalheira. Em cada
extremidade da cremalheira, existem barras laterais biarticuladas que tem a função de
promover a união da cremalheira com as mangas de eixo. Portanto o movimento de
translação da cremalheira aciona as mangas de eixo que geram os ângulos de
esterçamento das rodas esquerda e direita, onde as mangas de eixo descrevem um arco
em torno do eixo de esterçamento da roda ou pino mestre. Esta concepção é largamente
empregada em veículos de passeio e comerciais leves, e será utilizado no veículo baja.
A figura (4) e (5) demonstram o sistema em detalhes (FERNANDES, 2005).

14
Figura 4- Vista explodida de um mecanismo manual
Fonte: Manual de eixo dianteiro
Na figura (4) podemos ver um sistema simplificado de modelagem do software
ADAMS/CAR utilizado para o dimensionamento dos componentes.
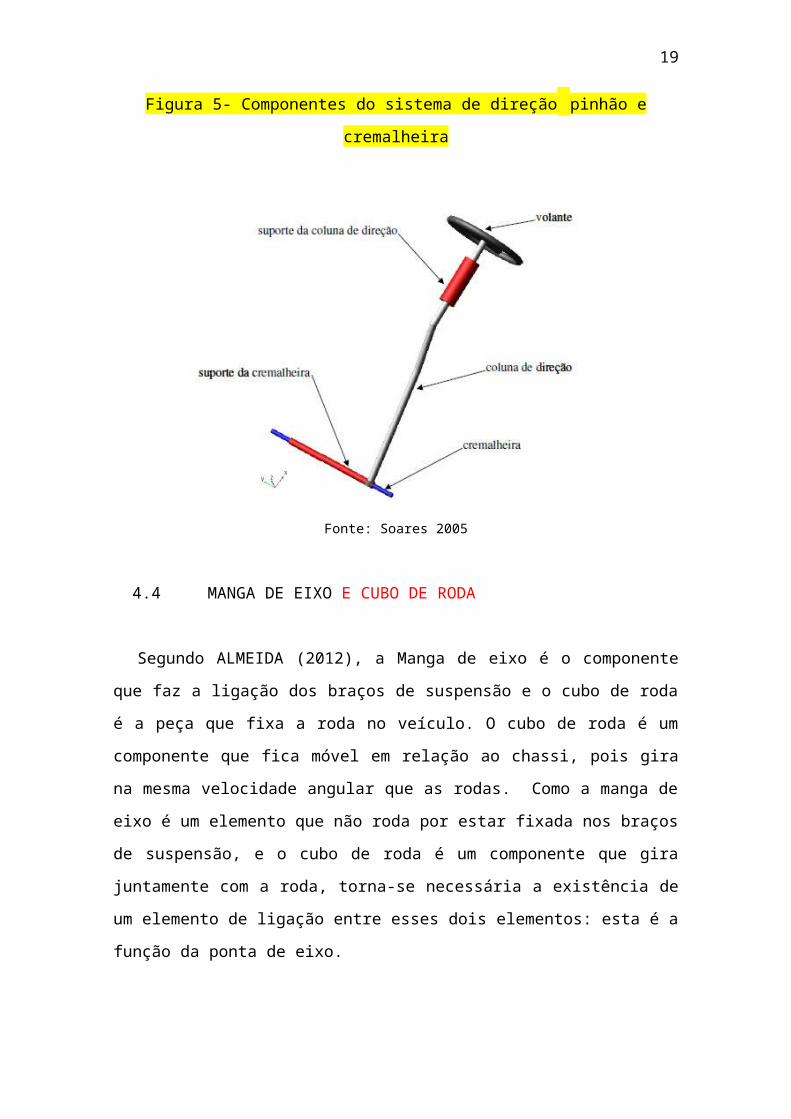
Figura 5- Componentes do sistema de direção pinhão e cremalheira
Fonte: Soares 2005
15
4.4 MANGA DE EIXO E CUBO DE RODA
Segundo ALMEIDA (2012), a Manga de eixo é o componente que faz a ligação dos
braços de suspensão e o cubo de roda é a peça que fixa a roda no veículo. O cubo de
roda é um componente que fica móvel em relação ao chassi, pois gira na mesma
velocidade angular que as rodas. Como a manga de eixo é um elemento que não roda
por estar fixada nos braços de suspensão, e o cubo de roda é um componente que gira
juntamente com a roda, torna-se necessária a existência de um elemento de ligação entre
esses dois elementos: esta é a função da ponta de eixo.
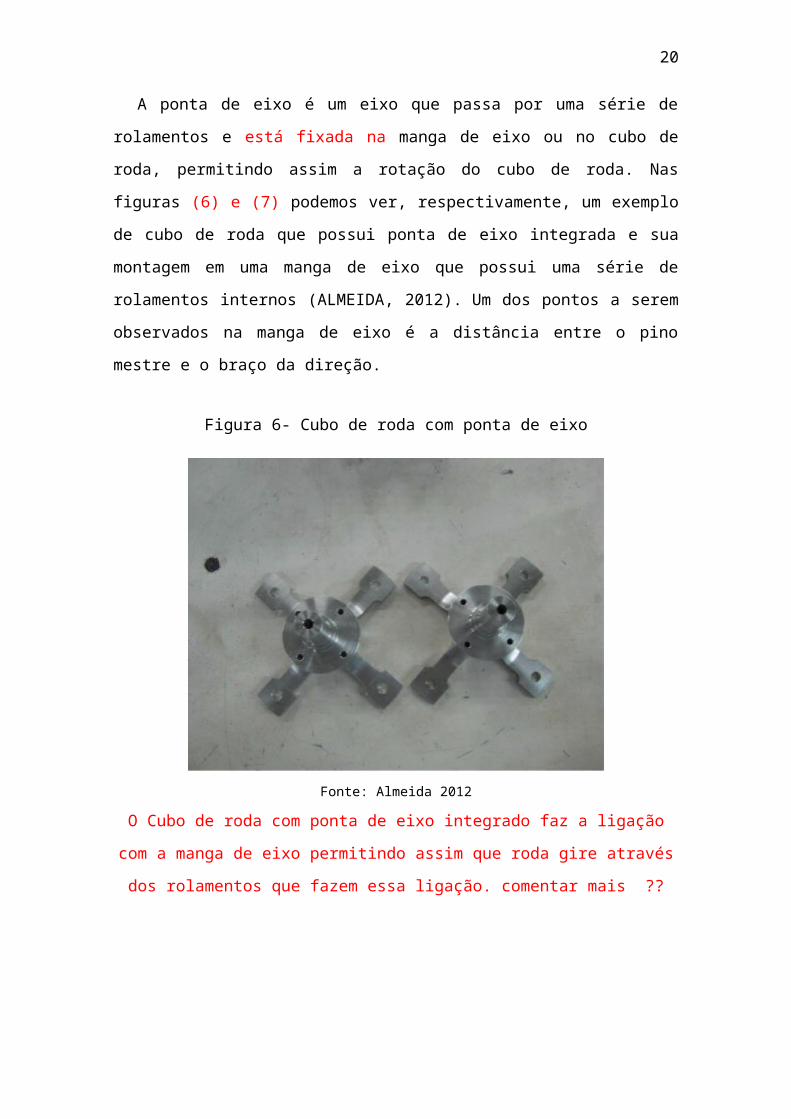
A ponta de eixo é um eixo que passa por uma série de rolamentos e está fixada na
manga de eixo ou no cubo de roda, permitindo assim a rotação do cubo de roda. Nas
figuras (6) e (7) podemos ver, respectivamente, um exemplo de cubo de roda que possui
ponta de eixo integrada e sua montagem em uma manga de eixo que possui uma série de
rolamentos internos (ALMEIDA, 2012). Um dos pontos a serem observados na manga
de eixo é a distância entre o pino mestre e o braço da direção.
Figura 6- Cubo de roda com ponta de eixo
Fonte: Almeida 2012
O Cubo de roda com ponta de eixo integrado faz a ligação com a manga de eixo
permitindo assim que roda gire através dos rolamentos que fazem essa ligação.
comentar mais ??
16
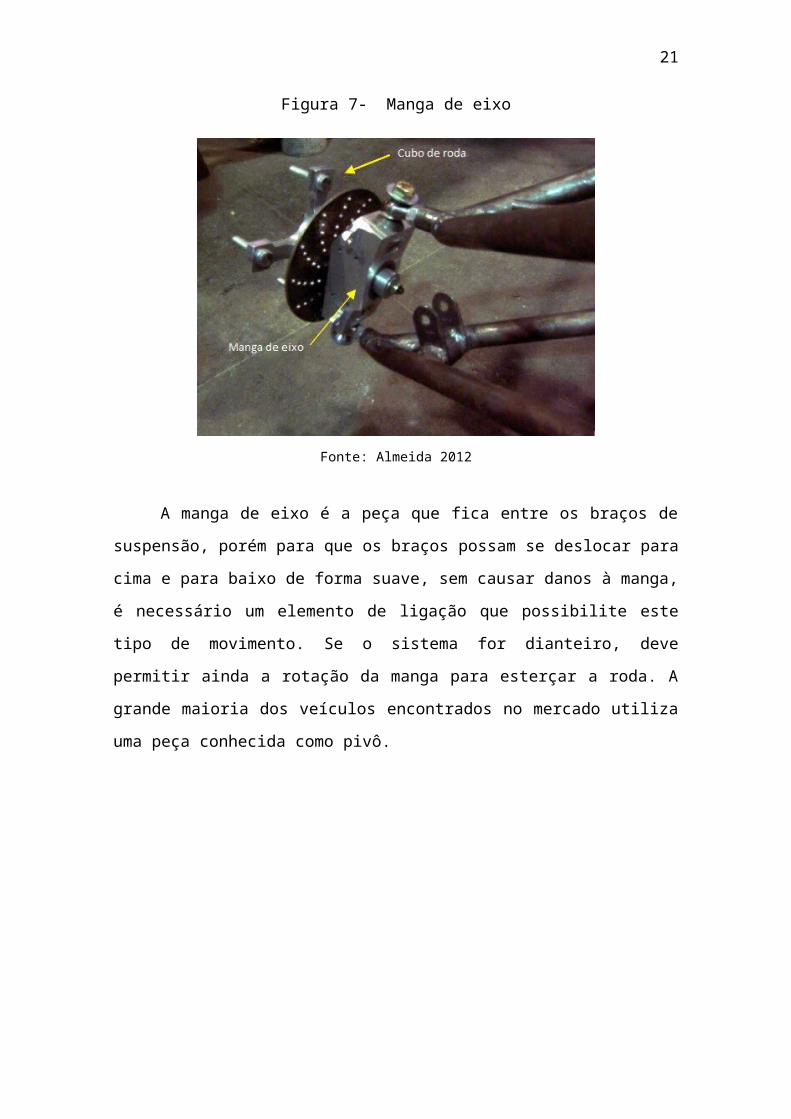
Figura 7- Manga de eixo
Fonte: Almeida 2012
A manga de eixo é a peça que fica entre os braços de suspensão, porém para que
os braços possam se deslocar para cima e para baixo de forma suave, sem causar danos
à manga, é necessário um elemento de ligação que possibilite este tipo de movimento.
Se o sistema for dianteiro, deve permitir ainda a rotação da manga para esterçar a roda.
A grande maioria dos veículos encontrados no mercado utiliza uma peça conhecida
como pivô.
17
Figura 8- Manga de eixo
A figura (8) mostra diferentes tipos de pivôs, enquanto que a figura (9) ilustra
diversos tipos de terminais rotulares esféricos (ALMEIDA, 2012).
Figura 9- Pivôs de suspensão
Fonte: Almeida 2012
Os pivôs são usados nas extremidades para fixação dos componentes, como a
direção trabalha junto com a suspensão é necessário que se tenha um componente capaz
de realizar esse deslocamento vertical (sobe e desce) para que o conjunto de direção
tenha o correto funcionamento.

18
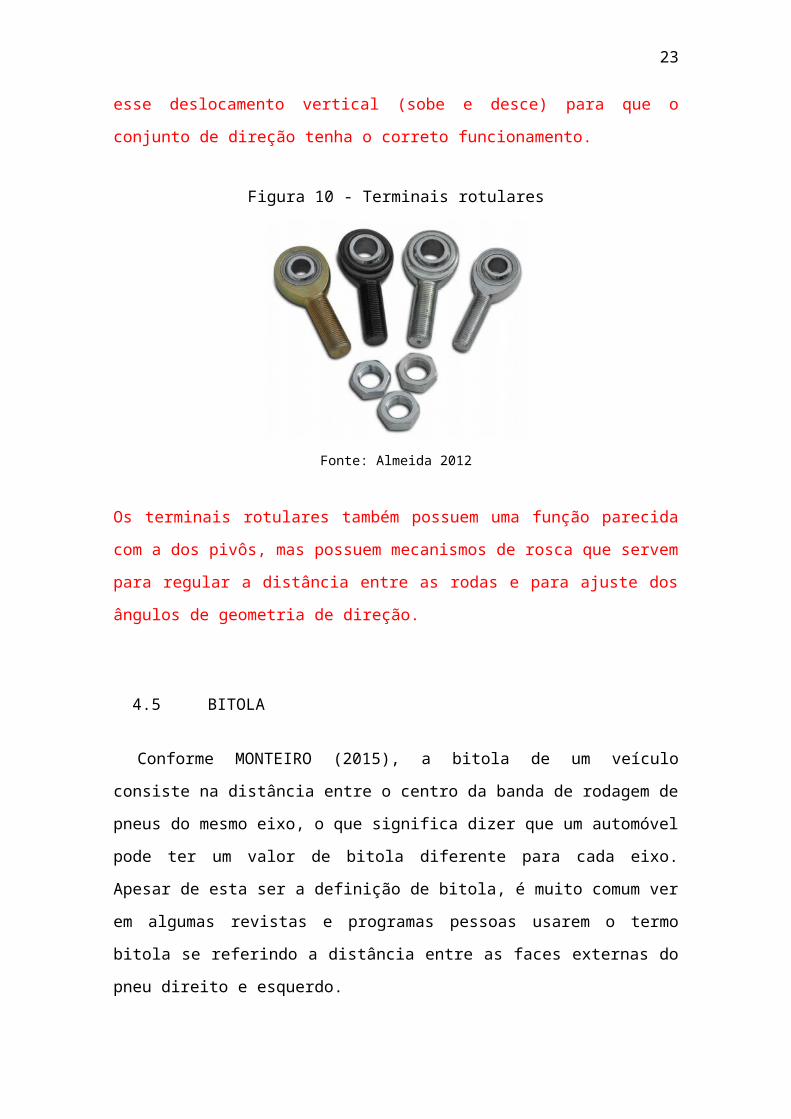
Figura 10 - Terminais rotulares
Fonte: Almeida 2012
Os terminais rotulares também possuem uma função parecida com a dos pivôs, mas
possuem mecanismos de rosca que servem para regular a distância entre as rodas e para
ajuste dos ângulos de geometria de direção.
4.5 BITOLA
Conforme MONTEIRO (2015), a bitola de um veículo consiste na distância entre o
centro da banda de rodagem de pneus do mesmo eixo, o que significa dizer que um
automóvel pode ter um valor de bitola diferente para cada eixo. Apesar de esta ser a
definição de bitola, é muito comum ver em algumas revistas e programas pessoas
usarem o termo bitola se referindo a distância entre as faces externas do pneu direito e
esquerdo.
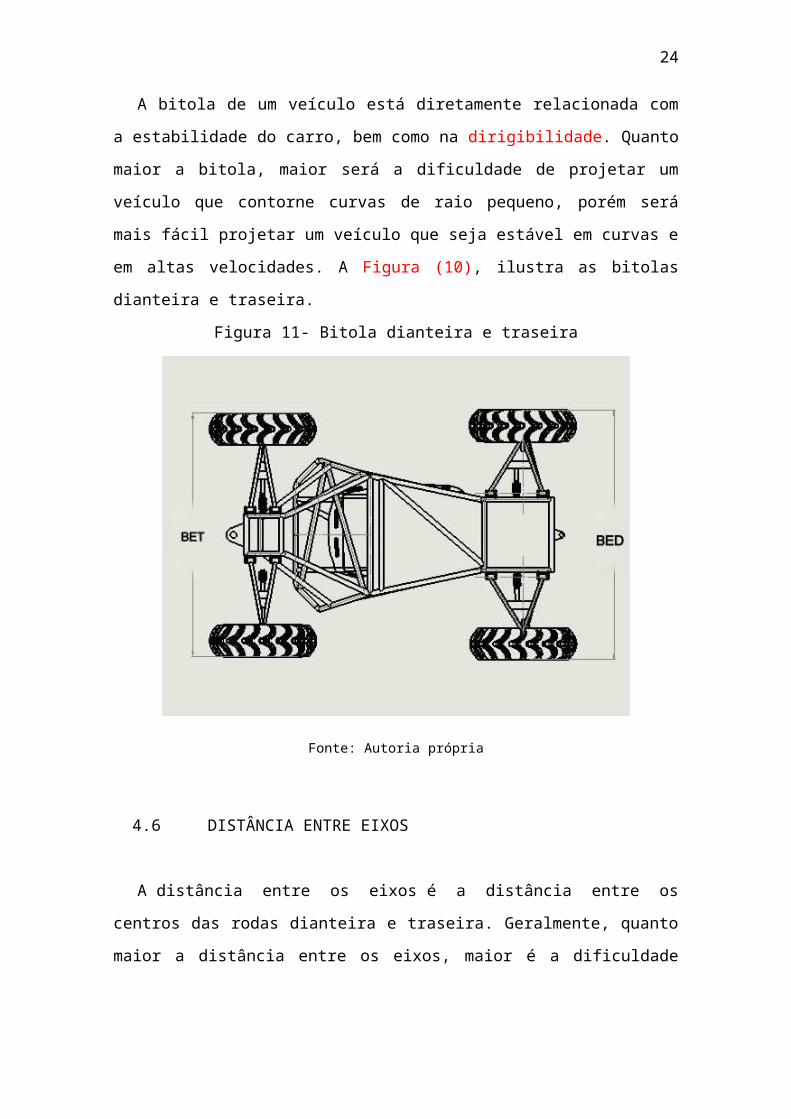
A bitola de um veículo está diretamente relacionada com a estabilidade do carro,
bem como na dirigibilidade. Quanto maior a bitola, maior será a dificuldade de projetar
um veículo que contorne curvas de raio pequeno, porém será mais fácil projetar um
veículo que seja estável em curvas e em altas velocidades. A Figura (10), ilustra as
bitolas dianteira e traseira.
19
Figura 11- Bitola dianteira e traseira
Fonte: Autoria própria
4.6 DISTÂNCIA ENTRE EIXOS
A distância entre os eixos é a distância entre os centros das rodas dianteira e traseira.
Geralmente, quanto maior a distância entre os eixos, maior é a dificuldade para fazer
curvas e a estabilidade do veículo é menor (MONTEIRO, 2015).
20
Figura 12- Entre eixos
Fonte: Autoria própria
4.7 PINO MESTRE
De acordo com MONTEIRO (2015), a roda direcional é projetada para girar em
torno do pino mestre e tanto pode ser nas rodas dianteiras como nas traseiras, mas é
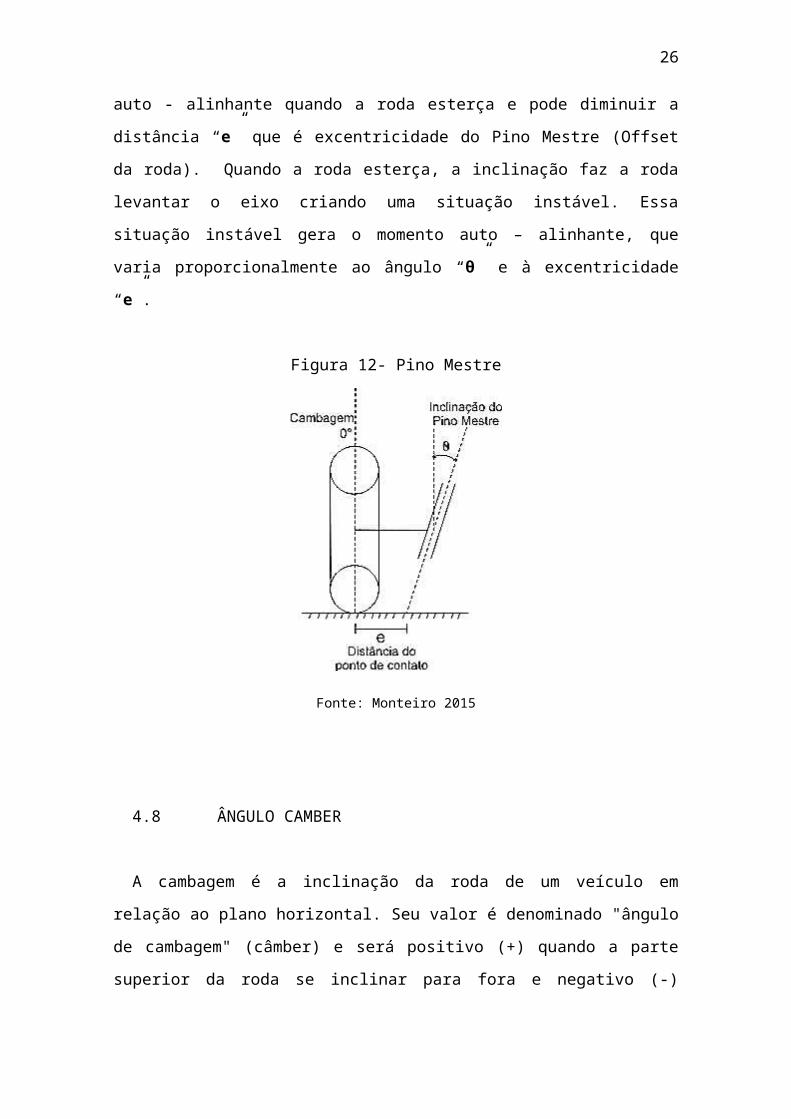
muito comum o conjunto direcional serem nas rodas dianteiras. O Pino Mestre possui
uma inclinação que é o ângulo entre o plano da roda e o seu eixo. Essa inclinação gera
um momento auto - alinhante quando a roda esterça e pode diminuir a distância “e” que
é excentricidade do Pino Mestre (Offset da roda). Quando a roda esterça, a inclinação
faz a roda levantar o eixo criando uma situação instável. Essa situação instável gera o
momento auto – alinhante, que varia proporcionalmente ao ângulo “θ” e à
excentricidade “e”.
21
Figura 12- Pino Mestre
Fonte: Monteiro 2015
4.8 ÂNGULO CAMBER
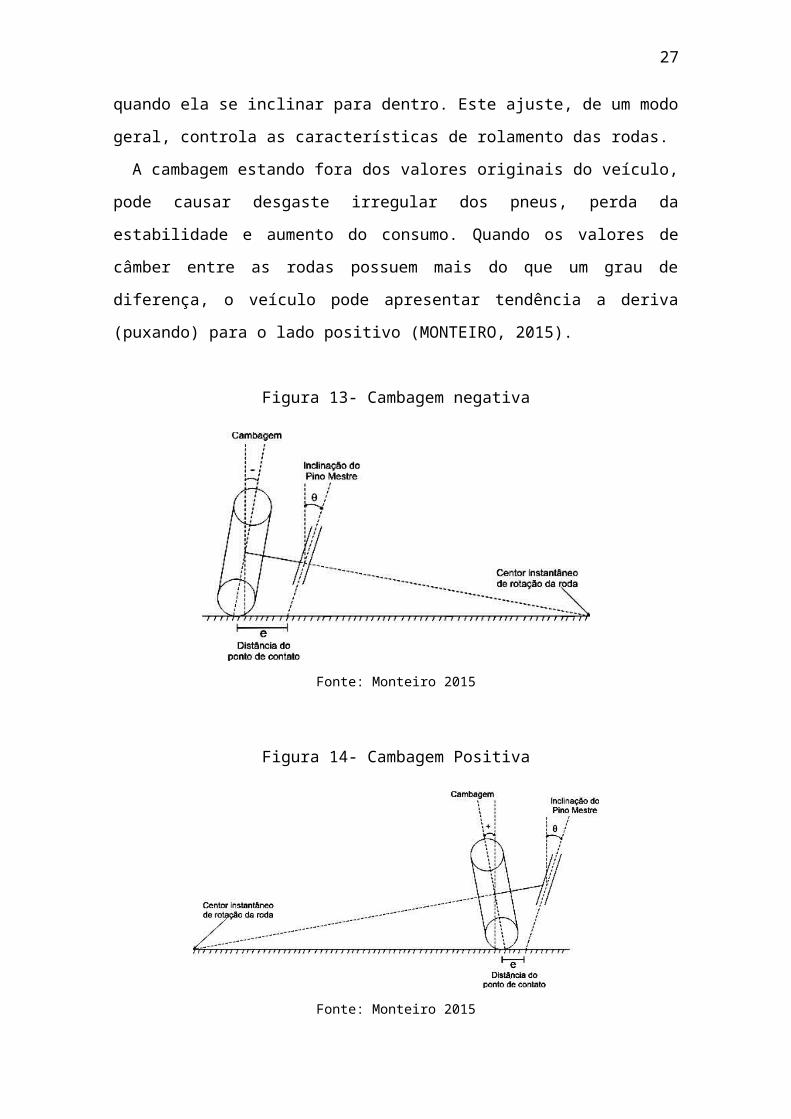
A cambagem é a inclinação da roda de um veículo em relação ao plano horizontal.
Seu valor é denominado "ângulo de cambagem" (câmber) e será positivo (+) quando a
parte superior da roda se inclinar para fora e negativo (-) quando ela se inclinar para
dentro. Este ajuste, de um modo geral, controla as características de rolamento das
rodas.
A cambagem estando fora dos valores originais do veículo, pode causar desgaste
irregular dos pneus, perda da estabilidade e aumento do consumo. Quando os valores de
câmber entre as rodas possuem mais do que um grau de diferença, o veículo pode
apresentar tendência a deriva (puxando) para o lado positivo (MONTEIRO, 2015).

22
Figura 13- Cambagem negativa
Fonte: Monteiro 2015
Figura 14- Cambagem Positiva
Fonte: Monteiro 2015
4.9 ÂNGULO CASTER
O ângulo de caster é o ângulo da linha vertical até a linha de centro do pino mestre
quando visto da lateral do veículo. O mesmo é positivo se a intersecção com o solo for
atrás do ponto de contato do pneu e se for à frente é positivo. Devido à distância “” o
ângulo de caster positivo também provoca um momento auto – alinhante. Se o conjunto
direcional for na traseira o ângulo de Caster deverá ser negativo para provocar o torque
auto - alinhante. O contrário dos dois criará uma instabilidade no conjunto direcional
(MONTEIRO, 2015).
23
Figura 15- Angulo de caster
Fonte: Monteiro 2015
O caster positivo cria um momento de auto alinhamento para estabilizar o veículo
quando andando em linha reta à frente. Se o caster é demais, aumentará o esforço de
giro da direção ou pode aumentar a vibração das rodas dianteiras.
5. SIMULAÇÃO ESTRUTURAL
A simulação estrutural possibilita o estudo do comportamento de componentes
ou montagens submetidos às condições e carregamentos de uso para análise e
otimização. Este processo fornece agilidade no desenvolvimento e modificações de
projetos, garantindo a qualidade, eficiência e segurança do produto final (ESSS, 2014).
As simulações numéricas se destacam por serem cada vez mais essenciais na
concepção de produtos. A difusão dessas ferramentas trouxe novos desafios, como uma
gama extensa de informações a serem analisadas para melhorar o desempenho do
produto, avaliação viável apenas com o auxílio do computador. Uma estratégia para
indicar a configuração ideal dos sistemas é combinar as simulações numéricas com
algoritmos de otimização, reduzindo o tempo de desenvolvimento de projetos e os
custos de fabricação (com matéria-prima, entre outros) dos produtos. A combinação das
simulações numéricas com as técnicas de otimização permite aos engenheiros e
projetistas promover a otimização estrutural de projetos ainda na fase de
desenvolvimento. A otimização estrutural de projetos realizada por simulações tem
como resultado uma redução significativa de massa em relação ao projeto original, sem
comprometer a integridade da estrutura. (ESSS, 2014)
24
6. GEOMETRIA DA DIREÇÃO
Conforme LEAL (2008) podemos afirmar que na geometria de um sistema de
direção ideal, os eixos das rodas diretoras se encontram no prolongamento do eixo das
rodas traseiras, para qualquer curva a ser realizada. Neste trabalho, serão desenvolvidas
algumas equações, com o objetivo de definir os requisitos cinemáticos que o mecanismo
de esterçamento das rodas direcionais deve satisfazer. Considerando a geometria ideal
mostrada na figura 15, o raio geométrico ρg da curva, em função do giro β1 e β2 das
rodas externa e interna, respectivamente, será dado por:
ρg=l
tan β1
−t Ι
2 (1)
ρg=l
tan β2
+t Ι
2 (2)
onde:
ρg- raio geométrico da curva;
l- distância entre eixos;
t Ι- bitola do eixo dianteiro;
β i - giro da roda dianteira externa e interna (i = 1, 2 respectivamente).
Igualando-se as duas expressões acima, tem-se
t Ι
l= 1
tan β1
− 1tag β2
(3)
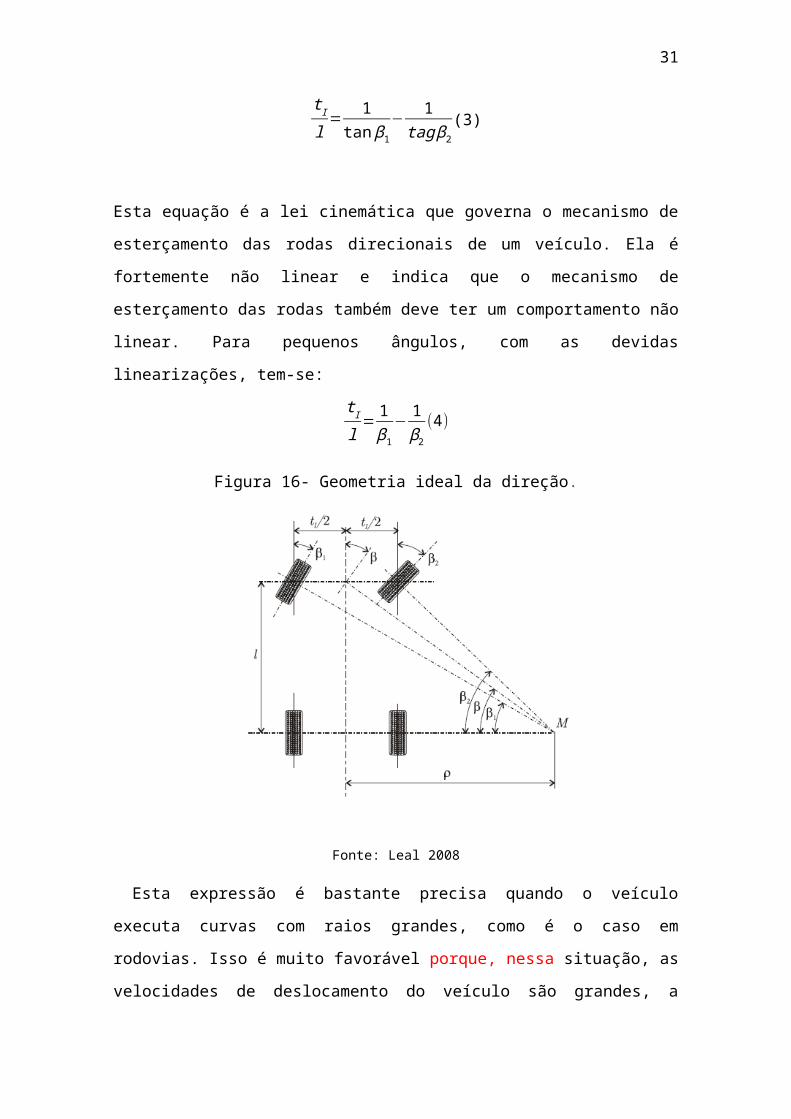
Esta equação é a lei cinemática que governa o mecanismo de esterçamento das rodas
direcionais de um veículo. Ela é fortemente não linear e indica que o mecanismo de
esterçamento das rodas também deve ter um comportamento não linear. Para pequenos
ângulos, com as devidas linearizações, tem-se:
t Ι
l= 1
β1
− 1β2
(4 )

25
Figura 16- Geometria ideal da direção.
Fonte: Leal 2008
Esta expressão é bastante precisa quando o veículo executa curvas com raios
grandes, como é o caso em rodovias. Isso é muito favorável porque, nessa situação, as
velocidades de deslocamento do veículo são grandes, a estabilidade direcional é
importante e não será influenciada por erro de esterçamento (LEAL, 2008).
Em curvas com pequenos raios, como ocorre por exemplo em cidades, um
mecanismo construído segundo a equação linearizada 4 irá causar grandes erros de
posicionamento das rodas; felizmente, porém, a estabilidade direcional será menos
afetada, pois as velocidades são baixas. Mesmo a equação linearizada que governa o
esterçamento é difícil de ser satisfeita com os mecanismos de quatro barras, pois ela é
fortemente não linear para giros médios e grandes das rodas. A recomendação básica
para o projeto do mecanismo de esterçamento é que a interseção dos prolongamentos
dos eixos de todas as rodas do veículo aconteça sempre em um ponto comum (LEAL,
2008).
6.1 ESTERÇAMENTO E RAIO DE RETORNO
Conforme salientado no item anterior por LEAL (2008), com velocidade baixa, a curva
percorrida por um veículo somente será exata se as perpendiculares às quatro rodas se
cortarem no centro da curva M. Com rodas traseiras não direcionais, portanto, as
26
perpendiculares às duas rodas dianteiras devem cortar o prolongamento da linha média
do eixo traseiro em M; com isso, as rodas dianteiras externa e interna deverão
apresentar diferentes ângulos de esterçamento β1 i e β2. Considerando as expressões
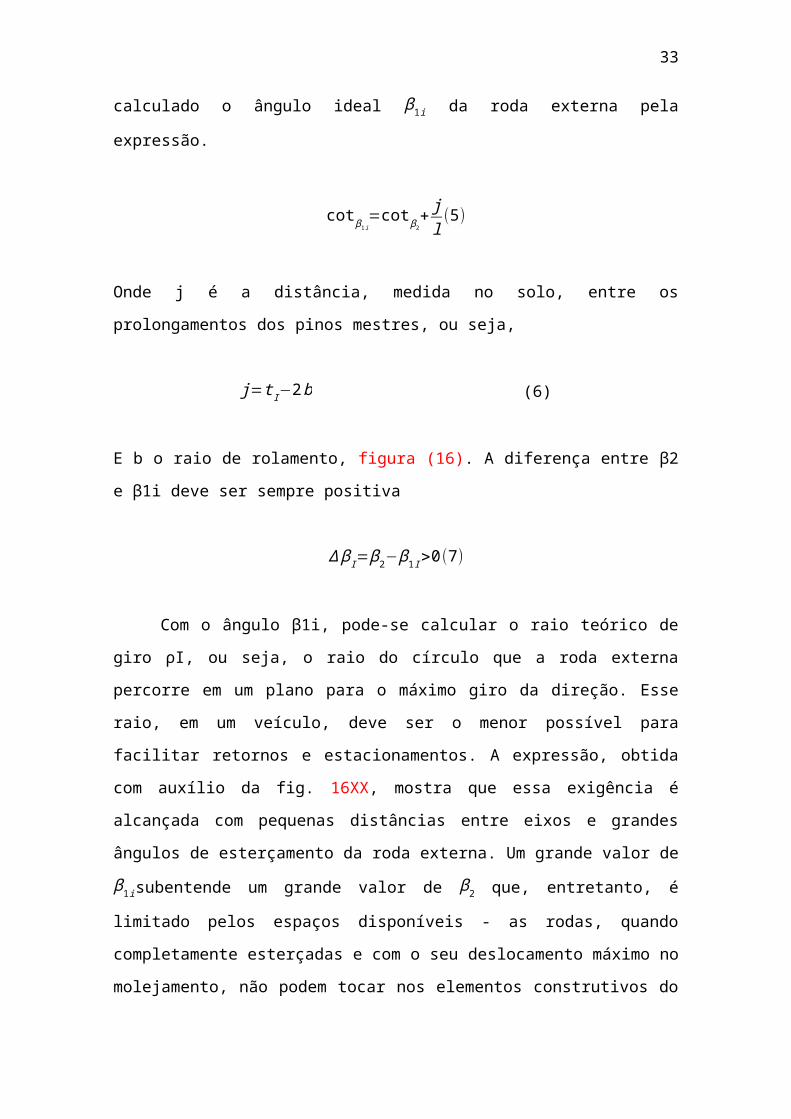
vistas no item anterior e partindo do ângulo maior β2, pode ser calculado o ângulo ideal
β1 i da roda externa pela expressão.
cotβ1 i=cotβ2
+ jl(5)
Onde j é a distância, medida no solo, entre os prolongamentos dos pinos mestres, ou
seja,
j=t Ι−2 b (6)
E b o raio de rolamento, figura (16). A diferença entre β2 e β1i deve ser sempre positiva
Δ β Ι=β2−β1 Ι>0 (7)
Com o ângulo β1i, pode-se calcular o raio teórico de giro ρI, ou seja, o raio do
círculo que a roda externa percorre em um plano para o máximo giro da direção. Esse
raio, em um veículo, deve ser o menor possível para facilitar retornos e
estacionamentos. A expressão, obtida com auxílio da fig. 16XX, mostra que essa
exigência é alcançada com pequenas distâncias entre eixos e grandes ângulos de
esterçamento da roda externa. Um grande valor de β1 isubentende um grande valor de β2
que, entretanto, é limitado pelos espaços disponíveis - as rodas, quando completamente
esterçadas e com o seu deslocamento máximo no molejamento, não podem tocar nos
elementos construtivos do eixo dianteiro nem no para-lama; com tração dianteira, além
disso, deve-se observar o máximo ângulo admitido pelas juntas do eixo de tração
(LEAL, 2008).
Enquanto o ângulo interno β2 é limitado, o externo não necessita sê-lo, podendo,
inclusive, ter o mesmo valor (β1=β2). A desvantagem seria um maior desgaste dos
pneus na curva, mas com a vantagem de obter um menor raio de giro. Este é o motivo
da maioria dos automóveis apresentar um ângulo externo real β1 r diferente do valor
ideal β1i obtido no cálculo. O erro desejado é dado por
27
βe=β1 r−β1 i(8)
Para determinar o raio de giro ρI em uma direção com erro desejado, é necessário
calcular βe e β1 i máx, ou seja, o ângulo ideal externo dado pela primeira equação
apresentada neste item (LEAL, 2008). Medidas feitas mostram que o raio de giro
diminui cerca de 0,05 m para cada 1˚ de erro desejado, de modo que seu valor pode ser
calculado por:
ρ Ι=l
sen β1 i
+b−0,05 βe ˚(9)
Figura 17- Ângulos de esterçamento de um sistema de direção.
Fonte: Leal 2008.
7. METODOLOGIA DA PESQUISA
No presente trabalho inicialmente será feita uma pesquisa bibliográfica afim de se
obter conhecimento sobre os aspectos e componentes fundamentais de um sistema de

28
direção, bem como conhecer os parâmetros dos diferentes sistemas de direção de pinhão
e cremalheira.
Em seguida, após conhecido os parâmetros envolvidos no sistemas de direção, serão
propostos algumas configurações como: bitola, distância entre eixos, ângulo de
esterçamento das rodas dianteiras, distância do pino mestre até o terminal de direção,
sendo que estas podem estar sendo modificadas para que o projeto se configure de
forma a obedecer o raio mínimo de giro.
Apoiado nos conceitos teóricos será realizado o dimensionamento onde serão usados
softwares (Adams/car; solidworks – simulation; excel) para que se determine o diâmetro
do pinhão, comprimento da cremalheira, distância entre o pino mestre e o terminal de
direção, bem como o ângulo formado pelas rodas esterçadas, também serão analisados
as forças atuantes no sistema. Podendo assim determinarmos o sistema de forma bem
dimensionada evitando excesso de material, que iria acarretar em aumento do peso do
veículo baja, porem o principal foco desse dimensionamento é que seja obtido o raio de
giro do veículo para que o veículo tenha uma melhor dirigibilidade diante das provas da
competição.
Analisados as diferentes configurações propostas, será selecionada a que apresentar
as características mais favoráveis aos requisitos impostos ao projeto, esses parâmetros
deveram ser obtidos através de pesquisas relacionadas a outras equipes e também
através das configurações das provas da competição.

29
Dimensionamento do Sistema de Direção
Determinação do Raio de Giro
A geometria inicial proposta para a análise está ilustrada na figura 18 e as dimensões
iniciais adotadas estão descritas na tabela 01.
Figura 18- Sistema de direção vista
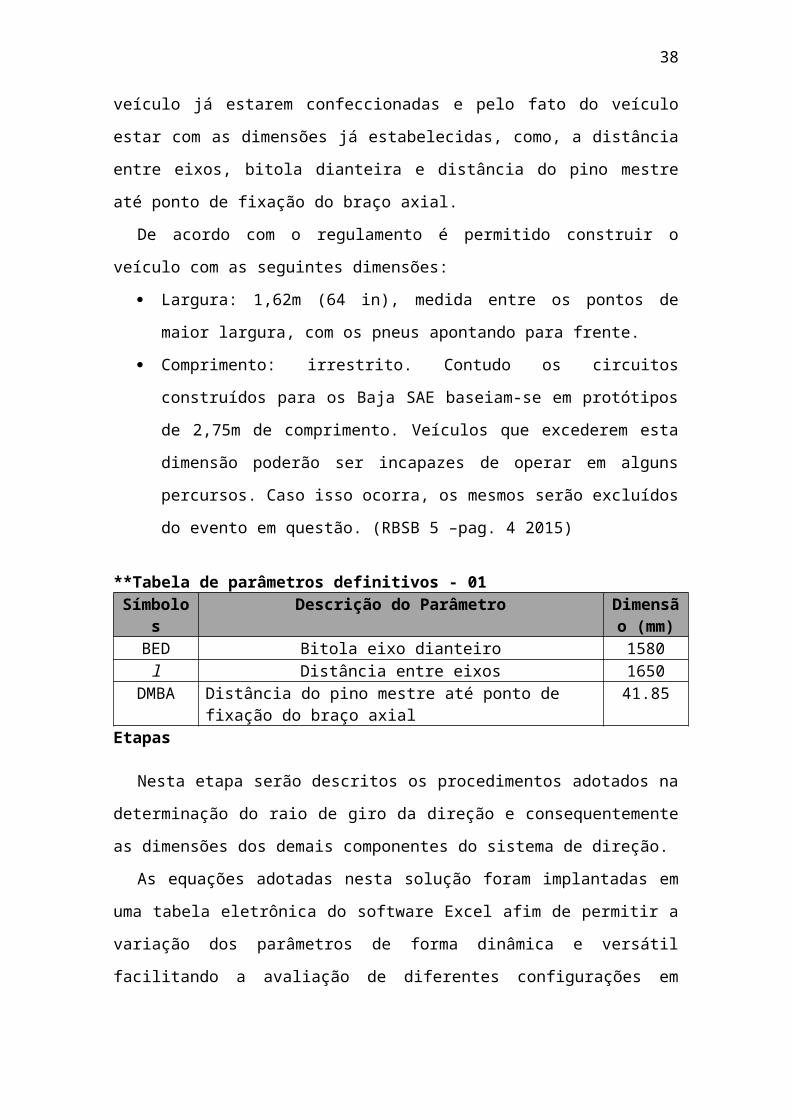
Para iniciar esse dimensionamento serão adotados alguns parâmetros que não
poderão ser mudados devidas as peças do veículo já estarem confeccionadas e pelo fato
do veículo estar com as dimensões já estabelecidas, como, a distância entre eixos, bitola
dianteira e distância do pino mestre até ponto de fixação do braço axial.
De acordo com o regulamento é permitido construir o veículo com as seguintes
dimensões:
Largura: 1,62m (64 in), medida entre os pontos de maior largura, com os pneus
apontando para frente.
Comprimento: irrestrito. Contudo os circuitos construídos para os Baja SAE
baseiam-se em protótipos de 2,75m de comprimento. Veículos que excederem
esta dimensão poderão ser incapazes de operar em alguns percursos. Caso isso

30
ocorra, os mesmos serão excluídos do evento em questão. (RBSB 5 –pag. 4
2015)
**Tabela de parâmetros definitivos - 01Símbolos Descrição do Parâmetro Dimensão
(mm)BED Bitola eixo dianteiro 1580
l Distância entre eixos 1650 DMBA Distância do pino mestre até ponto de fixação do braço axial 41.85
Etapas
Nesta etapa serão descritos os procedimentos adotados na determinação do raio de
giro da direção e consequentemente as dimensões dos demais componentes do sistema
de direção.
As equações adotadas nesta solução foram implantadas em uma tabela eletrônica do
software Excel afim de permitir a variação dos parâmetros de forma dinâmica e versátil
facilitando a avaliação de diferentes configurações em busca da mais apropriada. A
figura 19 ilustra a interface da tabela eletrônica desenvolvida.
Figura 19- Planilha do Excel
31
As formulações adotadas nas equações 05, 06, 07, 08 e 09, levam em consideração
um conjunto de variáreis, relacionadas a geometria inicial do mecanismo, as quais
devem ser pré-estabelecidas para que se obtenha um valor de ângulo de giro para o
sistema. Os valores iniciais adotados de alguns parâmetros, tidos como fundamentais
para o dimensionamento, serão discutidos a seguir.
Pesquisas sobre equipes Baja indicam que os ângulos de esterçamento do volante
mais usuais para veículos Baja podem variar de 90 a 140 graus. Com base nesses relatos
foram analisadas 3 configurações distintas buscando uma geometria que garanta um
ângulo de giro dentro da faixa de ângulos indicada, as quais são descritos na tabela 02.
Tabela 02- Giro do volante
Configuração 1 Configuração 2 Configuração 3Ângulo de 90 Ângulo de 110 Ângulo de 130
Conforme pesquisado em veículos de outras equipes de Baja constatou-se que com
uso desses ângulos o piloto não precisa retirar a mão do volante para realizar manobras,
aumentando a confiabilidade nas curvas.
Busca-se um raio de giro de no máximo 3 metros, pois as curvas mais agudas das
pistas onde ocorrem as competições não são inferiores a esse valor. Definido este
parâmetro, agora, pode-se determinar o diâmetro do pinhão adequado. Nesta etapa para
facilitar o processo utilizou-se o recurso de esboço do software SolidWorks para
elaborar um esquema do sistema e analisar se o movimento da cremalheira produzirá o
esterçamento previsto pelas equações para os seguintes parâmetros:
Parâmetro 1: Raio deve ser menor ou igual a 3 metros ( ρ Ι ≥3m ) ;
Parâmetro 2: Bitola dianteira (BED) 1580mm (figura 11);
Parâmetro 3: Distância entre eixos l = 1650mm (figura 12);
Parâmetro 4: Distância do pino mestre até o ponto de apoio da direção
(DMBA é de 41.85 mm (figura - 20);
A figura 20 ilustra o modelo da manga de eixo adotado na avaliação do ângulo de
giro através do software SolidWorks.
32
Figura 20- Manga de eixo 41,85mm em preto
Descrição do modelo proposto em Solidworks
O esquema apresentado na figura 21 elaborado em Solidworks a partir da geometria
da direção. Nesse sistema foram utilizadas linhas e algumas relações de fixação, dessa
forma quando inserimos um deslocamento na cremalheira pode-se verificar qual o
ângulo ela fornece, esse sistema foi criado para prever quanto as rodas irão esterçar com
determinado deslocamento da cremalheira. Sendo assim o diâmetro do pinhão (Dp)
deve ficar de acordo com o ângulo de esterçamento do volante para determinado giro.
Na figura XX pode-se ver o sistema desenvolvido a partir de linhas que representam
as distâncias do sistema de direção, conforme a cremalheira se desloca ocorre o
esterçamento das rodas conforme pode-se verificar nas figuras XX
Figura 21- Sistema de análise de esterçamento desenvolvido em Solidworks
33
Primeiramente precisa-se saber qual o ângulo de esterçamento obtido pelas rodas para
verificar se o raio de giro ficou menor ou igual a 3 metros. Usando os recursos
disponíveis como as tabelas do Excel e o esquema do Solidworks consegue-se verificar
que, com os parâmetros já anteriormente citados, precisa-se ter no mínimo um β1=40,12
e β2=43,16 para atingir o raio de giro de 2,97 metros a cremalheira realiza um
movimento de 26,9mm de deslocamento. Após essa conferencia, adotara-se os ângulos
do volante 90º, 110º e 130º graus de giro no volante.
1- 90º graus de esterçamento – Quando aplica- cremalheira se 90º graus de
esterçamento, no volante, para atingir um raio menor que 3 metros tem-se um
ângulo de esterçamento das rodas β1 = 40,12º e β2= 43,16º , obtendo
deslocamento da (DCR)= 27,75mm.
Figura 22- Tabela do excel
Figura 23- deslocamento da cremalheira 90 graus

34
Figura 24- Raio de giro para 90 graus
2- Ângulo de 110 graus – com um curso da caixa de direção de 28 mm, o protótipo alcança os ângulos de esterçamento b1 = 45,48 e b2= 39,97, necessários para a um raio de curvatura de 2,73 m Dado o curso da caixa de direção, escolhemos uma caixa de direção do tipo pinhão-cremalheira com uma relação de 92,1 mm por volta o que garantiu um curso angular do volante de 110 ° do ponto neutro ao batente.

35
3 – 130 graus – – com um curso da caixa de direção de 28 mm, o protótipo alcança os ângulos de esterçamento b1 = 45,48 e b2= 39,97, necessários para a um raio de curvatura de 2,73 m Dado o curso da caixa de direção, escolhemos uma caixa de direção do tipo pinhão-cremalheira com uma relação de 92,1 mm por volta o que garantiu um curso angular do volante de 110 ° do ponto neutro ao batente.

36
37
Após essa primeira análise das configurações, devemos agora verificar qual delas será melhor, para isso foi criada uma tabela com os principais requisitos que uma direção deve ter
REQUISITOS 90 110 130Manobralidade 3 2 1Conforto 1 2 3ConfiabilidadeSegurança
Esterçamento máximo das rodas- buscar literaturas para avaliar os parâmetros
38
Essas fórmulas foram testadas em dois veículos, tendo sua eficiência comprovada
mediante testes realizados em veículos do modelo Palio e HB20, estes testes foram
realizados pelo próprio autor, com a finalidade de verificar se as formulas utilizadas
apresentaria um bom resultado, nos dois testes, pode ser verificado que as formulas
estão dentro dos parâmetros. e é possível observar que devido a alguns ângulos que não
são levados em consideração como camber, caster e pino mestre houve um erro de .
(..5% exemplo) (DE ONDE ESTES DADOS). Apesar de se mostrar experimentalmente
eficiente existe um desvio em relação ao comportamento real devido ao fato de que
alguns parâmetros não são considerados por tratar-se de um modelo matemático que não
leva todos os ângulos da geometria de direção.
Colocar tabela com as variáveis e não simplesmente uma figura.

39
Terá de criar lista de siglas para esta nomenclatura não ficar redundante ao longo do texto.Sempre citar as figuras no texto com sua respectiva numeração.Só afirme quando tiver referências sólidas para sustentar a afirmação.
Justificar as decisões tomadas embasados em dados concisos, se não tem como comprovar não comente no texto
Não usar linguagem coloquial, buscar termos técnicos para suas explicações.
Colocar equações utilizadas na revisão bibliográfica e numerá-las conforme norma.
Quando for descrever os cálculos fazer menção as equações utilizadas e apresentadas na referência bibliográfica
Para um ângulo de 113 graus, ( Verificar )
Vista do veiculo baja 3D !
Ao montarmos o mecanismo de direção é preciso também analisarmos os ângulos ergonômicos que o piloto deve se sentir mais confortável, esses ângulos estão representados na figura ( XX )

40
http://www.escoladepostura.com.br/main.asp?link=noticia&id=276
Ergonomia, ângulos de conforto para o piloto Afim de facilitar a rotina de cálculos durante a proposição de diferentes dimensões para a geometria do sistema de direção na busca da melhor configuração elaborou-se uma tabela dinâmica através do software Excel conforme está ilustrado na figura XX. Tal tabela permitiu ...........
OBS: Fazer os ângulos em desenho no solidworks ( camber, caster, pino mestre, etc. )
8. CRONOGRAMA DE AÇÃO
O cronograma de atividades é necessário para a distribuição das atividade, para o
controle do tempo, ou seja, necessário para garantir o desenvolvimento adequado do
projeto e está representado na tabela (1).

41
Tabela 1 - Cronograma de ação
O cronograma irá ajudar no controle do tempo bem como para que se siga uma
metodologia durante o desenvolvimento do trabalho, com o cronograma é possível
verificar se o que foi planejado está de fato sendo cumprido

42
9. REFERÊNCIAS
ALMEIDA, D. A. DIMENSIONAMENTO CINEMÁTICO E DINÂMICO DE
SUSPENSÃO DUPLO A. Brasília 2012.
ABREU et al. Engrenagem e Parafuso sem-fim. MECANISMOS MECÂNICOS:
ENGRENAGEM E PARAFUSO SEMFIM. Camaçari BA. Faculdade Metropolitana De
Camaçari. Monografia. 2008
ESSS. Curso Online: Introdução à Simulação Estrutural. Disponível em:
<http://library.esss.com.br/curso_simulacao_estrutural_ii>. Acesso em: 02/05/2014.
FERNANDES A. M.; ESTUDO EM SISTEMAS DE DIREÇÃO VEICULAR.
Dissertação (Mestrado em Engenharia Automotiva). Politécnica da USP. São Paulo,
2005.
GILLESPIE, T. D. FUNDAMENTALS OF VEHICLE DYNAMICS. Warrendale: SAE,
1992. Capítulo 6.
LEAL Da costa M.; Da Rosa E.; Nicolazzi L. C.; UMA INTRODUÇÃO À
MODELAGEM QUASE ESTÁTICA DE VEÍCULOS AUTOMOTORES DE RODAS:
sistema de direção; cap. 9 pag. 195, Florianópolis, abril de 2008, UFSC.
MONTEIRO R. D.; ESTUDO BÁSICO DE UMA SUSPENSÃO DO TIPO DUPLO A COM ÊNFASE PARA UM VEÍCULO MINI BAJA. Escola politécnica da universidade de Ssão Paulo. 2015.
SOARES, A.L.V. ANALISE DE CONFORTO E ELASTOCINEMÁTICA DAS SUSPENSÕES DE DUBLO ESTÁGIO DE UM VEÍCULO DE COMPETIÇÃO OFF-ROAD EM AMBIENTE MULTICORPOS. Escola de engenharia de São Carlos, São Paulo, 2005 .

43
TARCILA, M. M. R. SISTEMA DE DIREÇÃO: Curso de aprendizagem Industrial –
Mecânica de automóveis. SENAI Hortotec/CA, 2010.
A habilidade de, efetivamente, manobrar um veículo foi uma necessidade bem
anterior à invenção do automóvel moderno. Assim que o homem começou a
utilizar rodas, foi necessário um sistema de direção.
Para auxiliar o direcionamento, vagões e as primeiras carruagens sem cavalos
foram projetados com um eixo central pivotado sobre um pino localizado no centro
do eixo entre rodas. Para manobrar, uma alavanca (similar àquelas, utilizadas em
barcos) foi anexada no meio do eixo.
Este método de direção era adequado enquanto os automóveis se moviam às
velocidadesde cavalos. Este sistema não era preciso e, resultava no desgaste
excessivo dos pneus.
Para superar o problema do desgaste dos pneus e melhorar a precisão da direção,
era necessário um novo sistema. Os construtores adotaram o dispositivo
patenteado por Rudolf Ackermann, em 1817. O projeto permitia que as rodas
dianteiras esterçassem, independentemente, do eixo dianteiro. Este projeto de
direção utiliza cubos de roda (Knuckles) que são pivotados no eixo dianteiro de tal
forma que permitam rotação livre.
O projeto de Ackermann permitia que as rodas movessem em diferentes ângulos.
A habilidade das rodas dianteiras esterçarem em diferentes ângulos é muito
importante, pois isto permite que a roda interna à curva possa esterçar num ângulo
mais agudo que a roda externa. O fato de a roda interna esterçar num ângulo mais
agudo faz com que ambas as rodas estercem sob um mesmo ponto pivô com um
mínimo de fricção e escorregamento.