sistemas mecatrônicos 1 - mecatronica.eesc.usp.br · • significado: integração de...
TRANSCRIPT

Sistemas Mecatrônicos 1
Módulo 2 – Introdução aos Sistemas Mecatrônicos
Prof. Leonardo Marquez Pedro

O que é um sistema mecatrônico ?
Termo “Mecatrônica”
• Criado em 1969 por Ko Kikuchi, presidente da Yaskawa Eletric Cooporation
• Significado: Integração de funcionalidades elétricas e eletrônicas a sistemas mecânicoselétricas e eletrônicas a sistemas mecânicos
• Ainda não existe uma definição totalmente abrangente

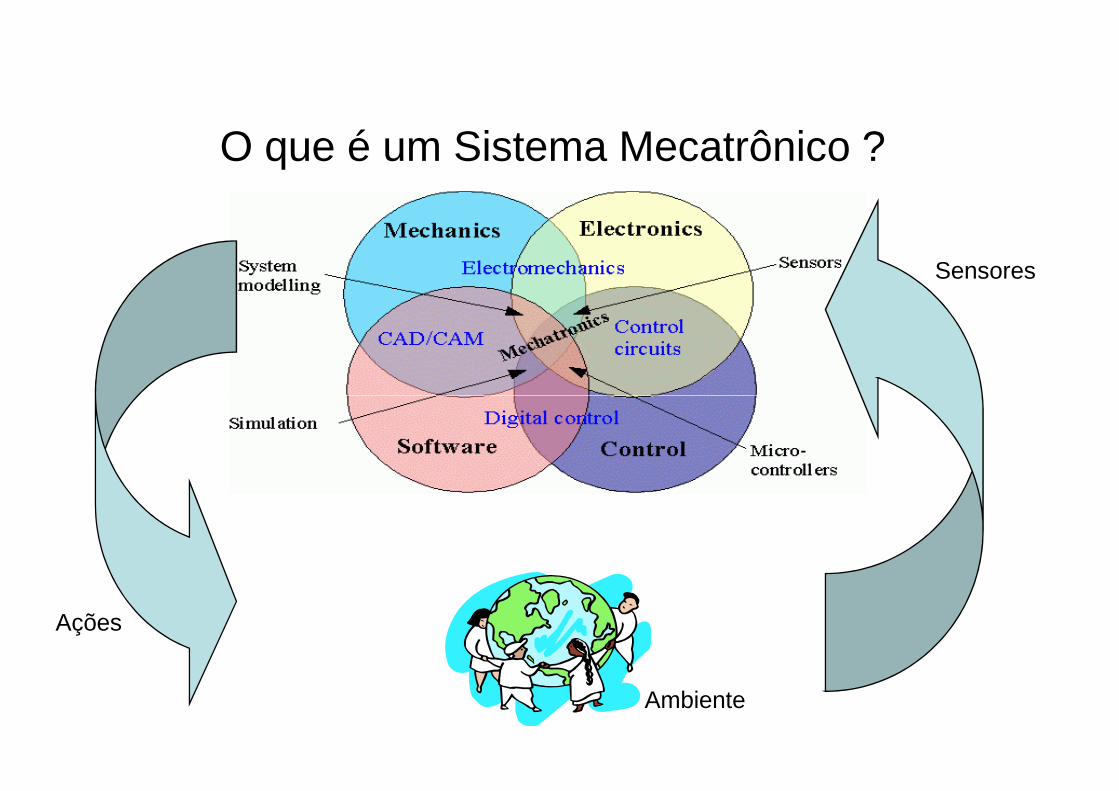
O que é um Sistema Mecatrônico ?
Mecânica Eletrônica
Sistemas mecatrônicos
Computação
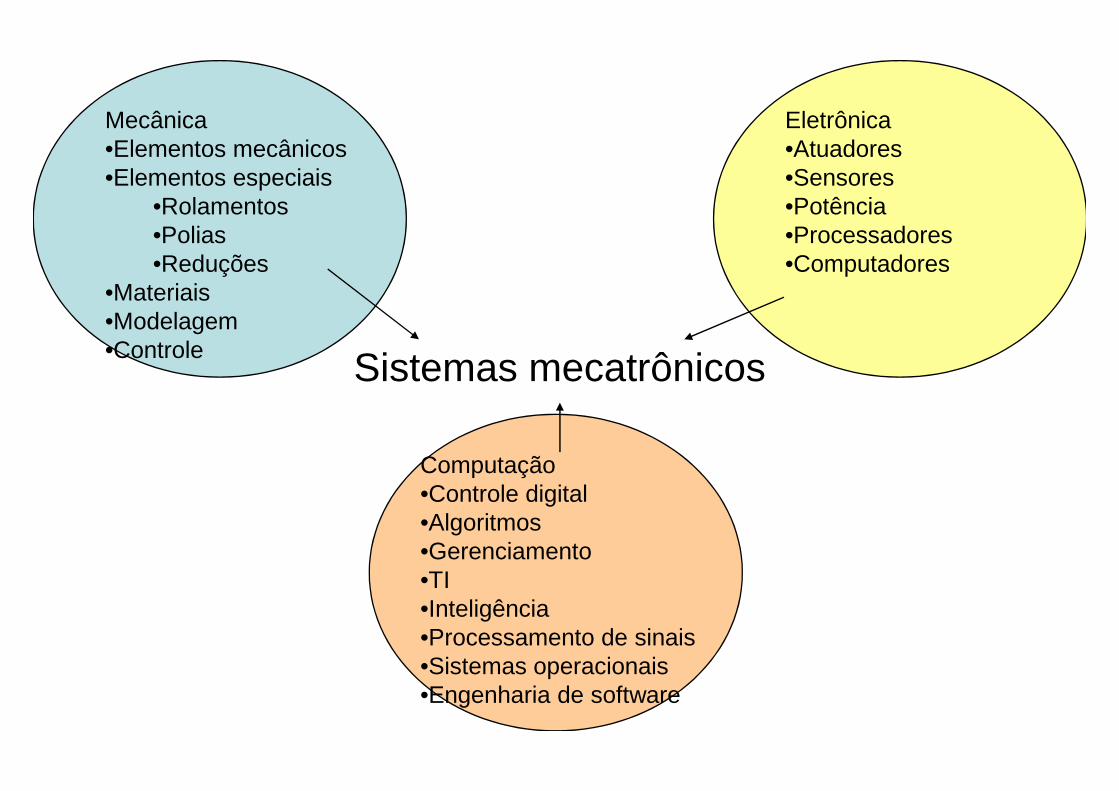
Sistemas mecatrônicos
Mecânica•Elementos mecânicos•Elementos especiais
•Rolamentos•Polias•Reduções
•Materiais•Modelagem•Controle
Eletrônica•Atuadores•Sensores•Potência•Processadores•Computadores
Computação•Controle digital•Algoritmos•Gerenciamento•TI•Inteligência•Processamento de sinais•Sistemas operacionais•Engenharia de software

Sistema mecatrônico
• Um sistema mecatrônico interage com o meio ambiente por meio de movimentos e forças. Com base em dados obtidos por meio de sensores, um sistema de tomada de decisão (sistema de controle) . sistema de tomada de decisão (sistema de controle) .
O que é um Sistema Mecatrônico ?
Sensores
Ações
Ambiente

Sistemas mecatrônicos e robôs
• Sistema mecatrônico: sistema eletro-mecânico capaz de realizar diferentes tipos de tarefas e trabalhos, independente da sua ordem ou sequência com a capacidade de se adapatar a diferentes condições de operação a partir de tomada de decisão sem a ação e controle direta do homem.
• Palavra robô - 1921 por Karel Cepek em “Rossum’s Universal Robots”
• Dicionário: “Mecânismo automático que realiza tarefas e movimentos humanos”
• Realização de tarefa: pintura, soldagem, montagem, posicionamento, etc.

Sistemas mecatrônicos e máquinas automáticas
• Uma máquina automática é também definida como um sistema elétro-mecânico capaz de realizar determinadas tarefas ou sequência de tarefas sem a ação direta do ser humano. ação direta do ser humano.
• Primeiras máquinas automáticas: máquinas CN e CNC (década de 70).
• Hidráulica e Pneumática: automação de processos de montagem, inspeção, transporte, armazenamento, etc

Aplicações de sistemas mecatrônicos
• Robótica– Industrial– Móvel– Aviônica– Aviônica– De serviço– Exploração espacial e aquática– Entretenimento– Robôs agrícolas
Aplicações de sistemas mecatrônicos
• Automação Industrial (de processos e discreta)– Sistemas hidráulicos e pneumáticos– Sisteas flexível de manufatura– Montagem– Montagem– Inspeção– Transporte
Aplicações de sistemas mecatrônicos• Produtos inteligente
– Carros inteligentes– Ar condicionado– Alarmes– Painéis solares inteligentes– Painéis solares inteligentes– Máquinas de lavar
• Desenvolvimento de novos produtos– Princípios de funcionamento
• Etapas do desenvolvimento
• 1954 – Registro da primeira patente americana sobre robôs– George Devol– Controle digital de um robô
Robótica industrial
– Controle digital de um robô

• 1956 - Primeira fábrica de robôs do mundo– Unimation criada por George Devol e Joseph
Engelberger – Baseada na patente registrada por George– Baseada na patente registrada por George– 5 milhões de dólares foram gastos no
desenvolvimento dos primeiros robôs

• 1961 – Primeiro robô Unimate da Unimation instalado
Peso 4000 pounds = 1815 kg
Introduzido na General motors para carregar peças aquecidas
A primeira instalação não foi publicada na época por tratar-se de um produto experimental, com possível resistência a aceitação.

• 1970s – PUMA (Programmable Universal Manipulation Arm)– Mais de 1500 unidades instaladas principalmente
no Japão e EUA (décadas de 80 e 70)

Robótica industrial – Aplicações
Fonte: Craig, J.J. Introduction to Robotics:Mechanics and Controls. Addison-Wesley Longman Publishing Co., Inc. Boston, MA, USA,1989.

Fabricantes de robôs industriais
• FANUC• ABB• KUKA• …

Aplicações mais recentes
• Os avanços na área permitiram a utilização de robôs na realização de novas tarefas.– Rebarbação– Troca de Ferramenta– Troca de Ferramenta– Polimento– Fluxo de Material– Célula Robótica

Rebarbação
• Sistema automático– Passo1 – Sistema CAD– Passo2 – Geração do programa de execvução– Passo3 - Usinagem
• VideoFonte: FANUC – www.fanuc.com

Troca de Ferramentas
Fonte: KUKA – www.kuka.com
Carga do robô – 165kgAlcance – 3mFerramentas – 700mm por 400mm de diâmetro -25kgSistemas mais rápido e preciso que os sistemas automáticos/manuais convencionais

Operação de polimento
• Polimento de peças de granito e mármore
Fonte: FANUC – www.fanuc.com

Célula Robótica
Robô Carregador Máquina CNC
- Combinação de dispositivos robóticos e de usinagem em um único sistema.
Robô Manipulador
Mini Robô Auxiliar
Video1 Video2 Video3 Fonte: FANUC – www.fanuc.com

Outras aplicações robôs industriais
• Montagem, paletização, etc– Vídeo1 Vídeo2 Vídeo3 Vídeo4

Robôs de serviço e domésticos
• Robôs desenvolvidos para auxiliar o trabalho humano• Autônomos• Interface homem máquina avançada
– Visão– Visão– Fala– Reconhecimento

Robôs de serviço e domésticos
• PackBotEOD iRobot www.irobot.com.br
Desenvolvido para desarmar bombas
Utilizado pela SWAT
Ano 2001

Robôs de serviço e domésticos
• Roomba Floorvac - iRobot www.irobot.com.br
Aplicações domésticas - Limpaze de pisos
Evita colisões com móveis, humanos, animais
Disponível no mercado desde 2002

Robôs de serviço e domésticos
• Husqvarna Automower
Aplicações domésticas – Cortador de grama
Evita colisões
Disponível no mercado desde 2005

Robôs sociais
• Principal objetivo é a iteração social• Wakamaru - Mitsubishi Heavy Industries
Projetado para acompanhar idosos
1 m de altura
30kg30kg
Dois braços
A venda desde setembro de 2005
U$ 14000,00
Linux como SO e é capaz de reconhecer comandos de voz

Robôs sociais
• Paro - Intelligent System Research Institute of Japan
Sensores de tato, responde a ações movendo o rabo e abrindo e fechando os olhos. É agitado durante o dia e sonolento a noite.sonolento a noite.
Produz sons similares a um filhote de foca.
A venda desde 2004
Utilizado para distrair crianças pacientes de hospitais

Robôs andróides e humanóides
• Humanóides: são aqueles que lembram a forma humana
• Andróides: robôs com aparência humana

Breve histórico
• 1495 - Leonardo da Vinci

• 1970– Teoria do ponto de momento zero “Zero Moment
Point” – modelo sobre locomoção bipede proposto por Miomir Vukobratovic por Miomir Vukobratovic
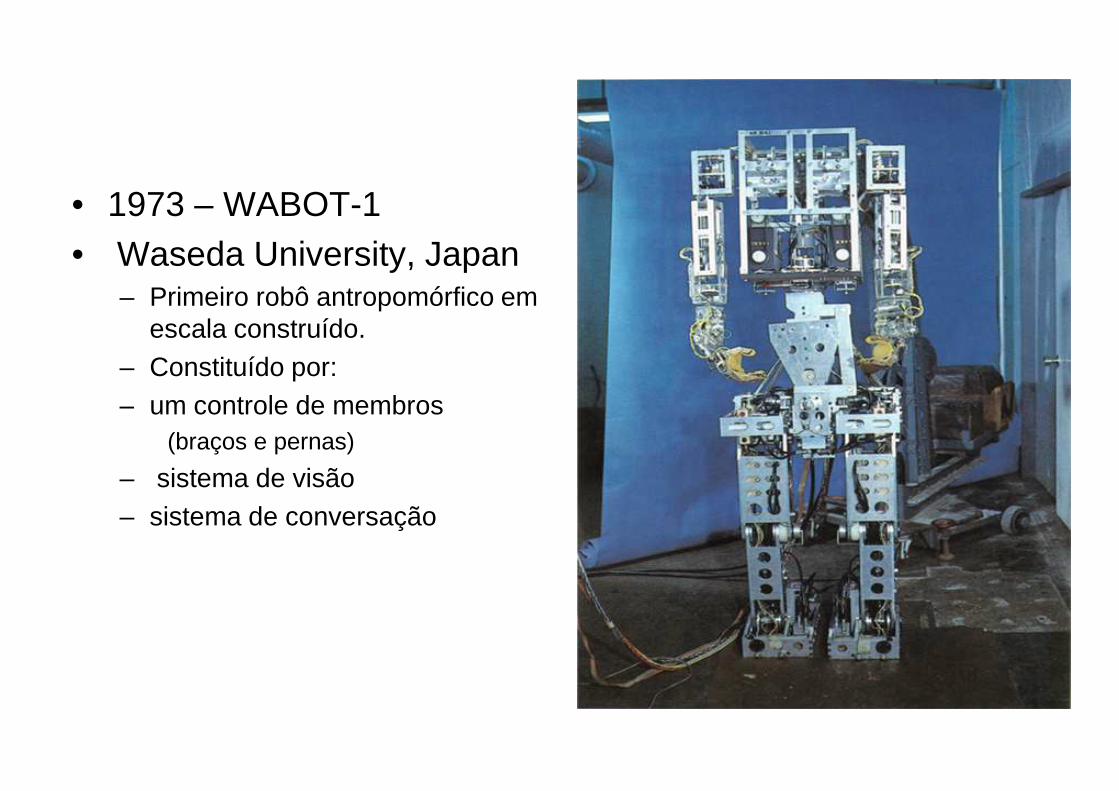
• 1973 – WABOT-1 • Waseda University, Japan
– Primeiro robô antropomórfico em escala construído.
– Constituído por: – um controle de membros– um controle de membros
(braços e pernas)
– sistema de visão– sistema de conversação

Robôs humanóides da Honda• Modelos Experimentais
E0
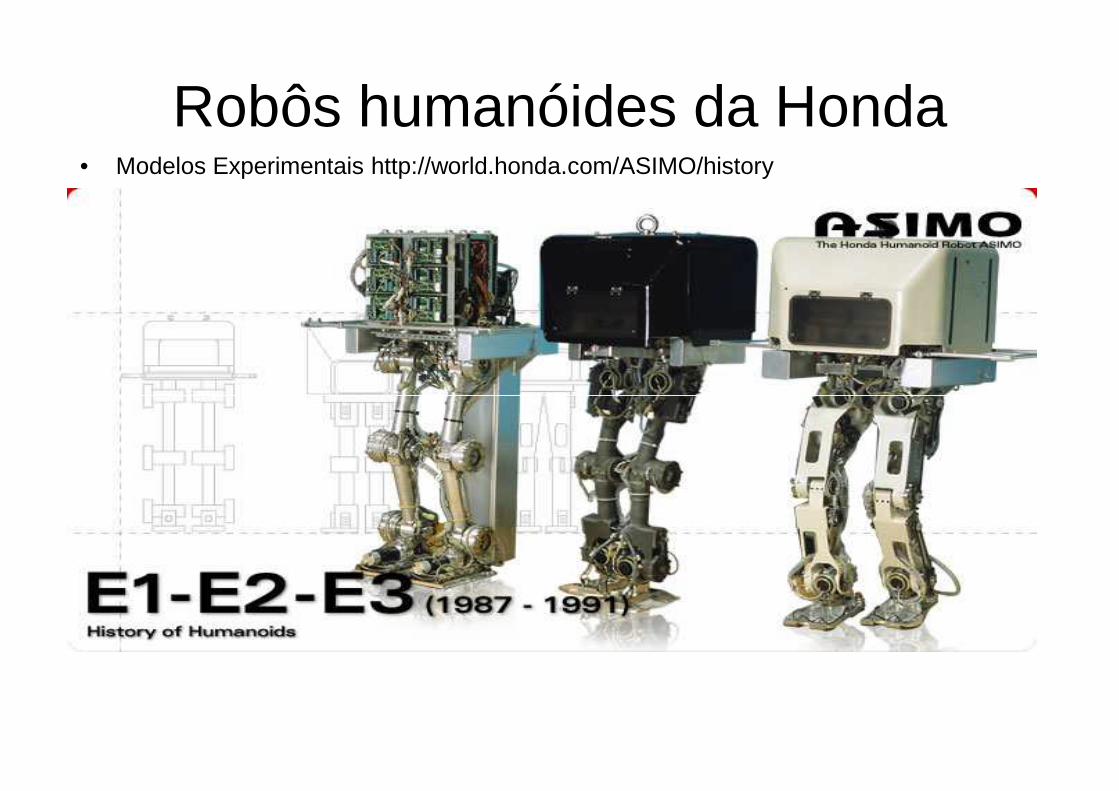
• Modelos Experimentais http://world.honda.com/ASIMO/history
Robôs humanóides da Honda

Robôs humanóides da Honda• Modelos Experimentais http://world.honda.com/ASIMO/history

Robôs humanóides da Honda• Protótipos http://world.honda.com/ASIMO/history

Robôs humanóides da Honda• ASIMO - 2000

Robôs humanóides da Honda• ASIMO - 2000
Vídeo1 Vídeo2 Vídeo3

Robôs educativos e entretenimento

Roibótica Móvel
• DARPA Grand Challenge– Defense Advanced Research Projects Agency ,
the central research organization of the United States Department of Defense.States Department of Defense.
– Competição de veículos autônomos

2004 Grand challenge
• Percurso de 150 milhas (240km) no deserto• Nenhum veículo completou o percurso
RedTeam
O time da Universidade de Carnegie Mellon University completou 7,36 milhas (11,78km) do percurso)

2005 Grand challenge
• Percurso off road de 212 km• 5 carros dentre os 23 finalistas completaram a
prova (43 times inscritos)
Stanley
O campeão – Stanford racing team
Completou a prova em 6h54min

2007 Urban Challenge
• Percurso urbano de 96km em menos de 6h• 03 de novembro de 2007• Obedecer as leis de trânsito e cumprir tarefas específicas
Vídeo
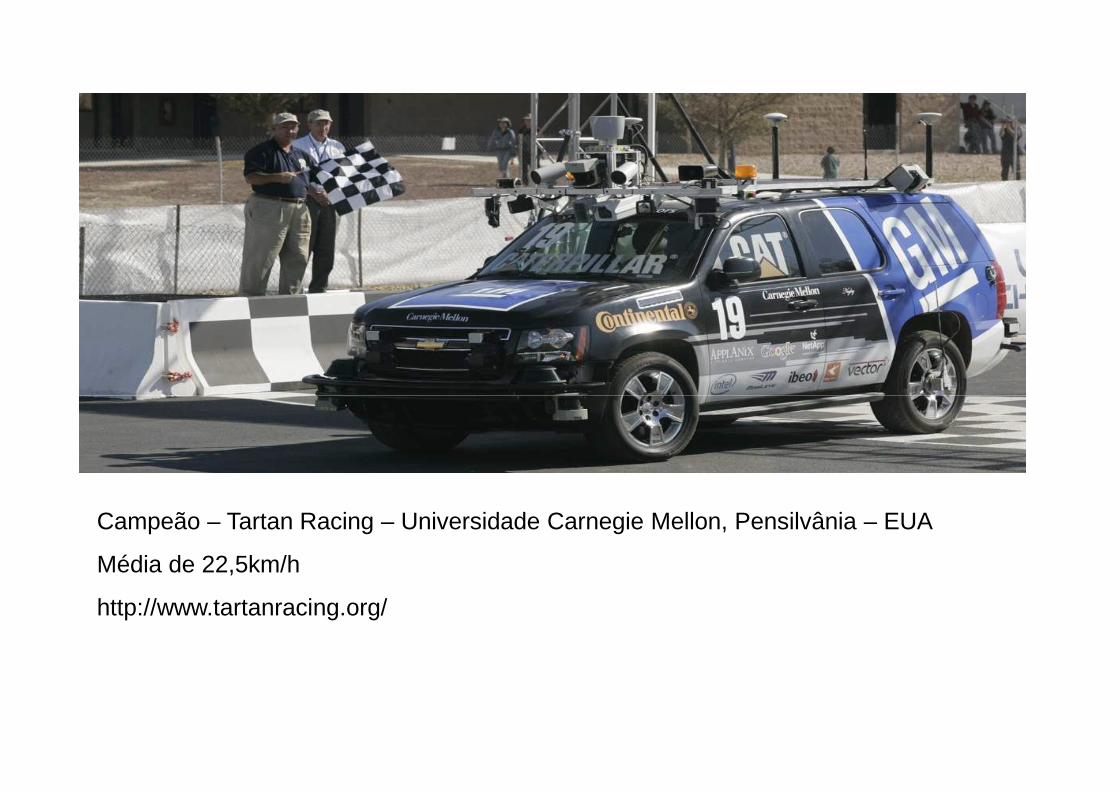
Campeão – Tartan Racing – Universidade Carnegie Mellon, Pensilvânia – EUA
Média de 22,5km/h
http://www.tartanracing.org/

Fluxo de Material por AGVs
• VideoFonte: www.logobject.ch

Importância de hardware e software na mecatrônica
Bibliografia Recomendada e Exercícios
BOLTON, W. Mechatronics: a Multidisciplinary Approach. Bookman, 2010 (Cap. 1);
GROOVER, M. P. Automação industrial e sistemas de GROOVER, M. P. Automação industrial e sistemas de manufatura. Pearson Prentice Hall, 2011 (Cap. 1 e 4)
ROSÁRIO, J.M. Princípios de Mecatrônica. Pearson Prentice Hall, 2005. (Cap. 1)
CETINKUNT, S. Mecatrônica. 2007. Editora LTC; (Cap. 1)

1966: Apollo Guidance Computer
Desenvolver um sistema que possa controlar uma nave espacial de 13.000 kg orbitando ao redor da Lua, incluindo seu pouso seguro na Lua 13.000 kg orbitando ao redor da Lua, incluindo seu pouso seguro na Lua com precisão de alguns metros e guiá-la nave de volta para a nave de
comando em órbita da lua. O sistema precisa funcionar da primeira vez, e gastar pouca energia porque só existe combustível para uma tentativa
de pouso.

2MHz | RAM: 2K |ROM: 36K

Hardware
98%

Software



Software não envelhece
Software deteriora

Desenvolvimento
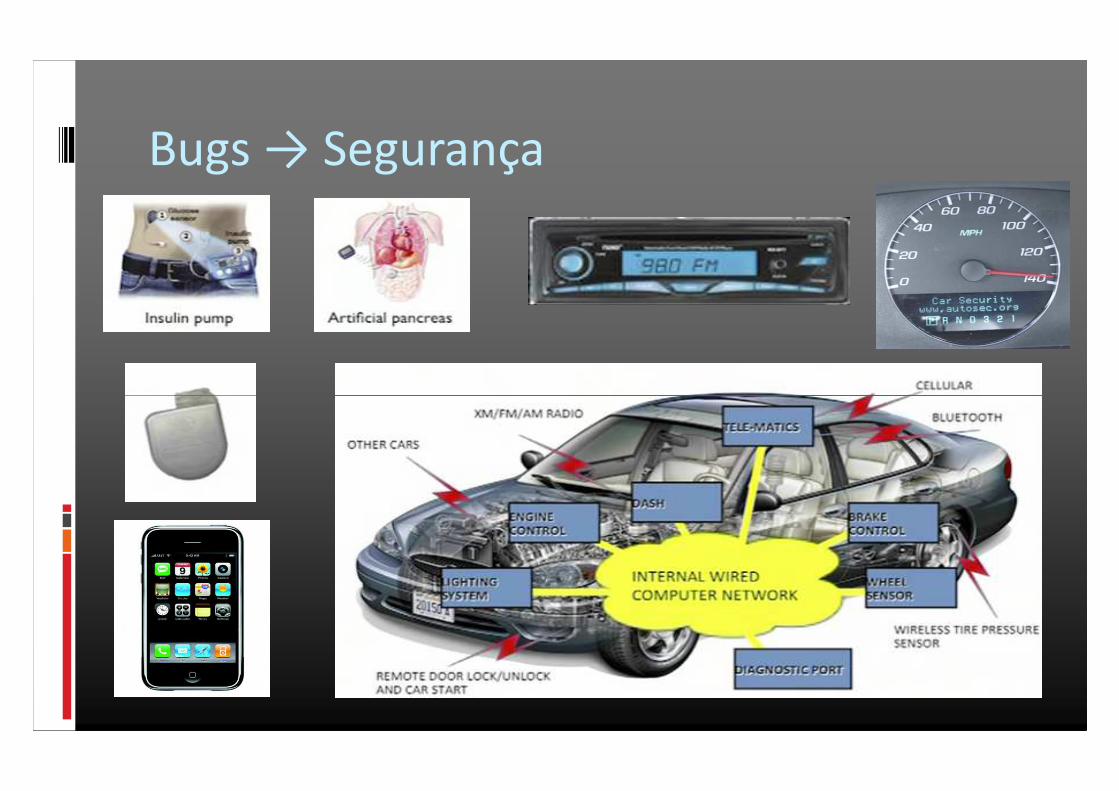
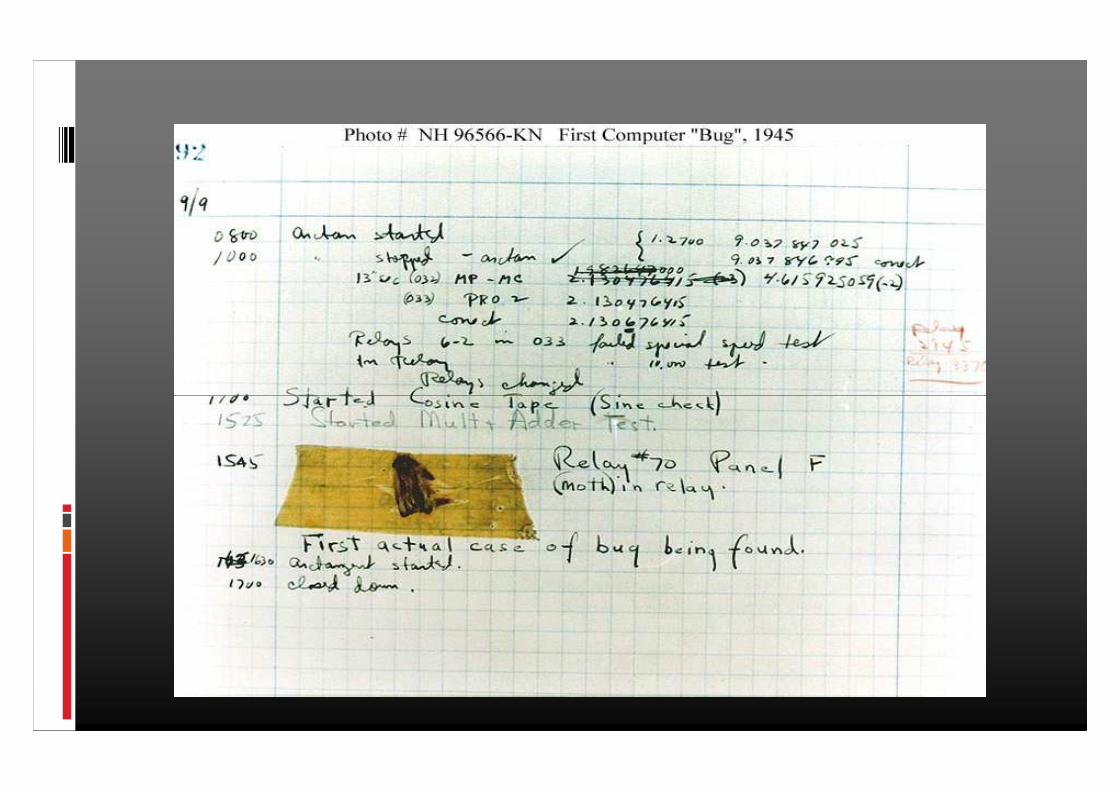
Bugs → Segurança

Marissa Mayer(9 Principles of Innovation)
� 1. INNOVATION, NOT
INSTANT
PERFECTION
4. MORPH PROJECTS � 4. MORPH PROJECTS
DON’T KILL THEM
� 8. CREATIVITY LOVES
CONSTRAINTS
