sistemas de controle - mecatronica.eesc.usp.br · abertura dos portões do templo. histórico e...
TRANSCRIPT
SEM561 - SISTEMAS DE CONTROLE
Adriano Almeida Gonçalves Siqueira
Aula 1 - Introdução a Sistemas de Controle
Índice
O que é controle?
Exemplo 1: componentes de um sistema de controle
Exemplo 2: malha aberta X malha fechada
Histórico e tópicos
Exemplo 3: controle do nível de reservatório
O que é controle?
Dicionário Houaiss:
Controle: ... 3. Dispositivo ou mecanismo destinado a comandar ou regular o funcionamento de máquina, aparelho ou instrumento.
Controlar: exercer ação restritiva sobre, conter, regular, dominar, comandar.
O que é controle?
Controlar é fazer com que uma variável do sistema assuma um valor desejado (referência, comando) por meio de uma ação no sistema
O que é controle?Sistema: conjunto de elementos que atuam entre si com a finalidade de atingir um objetivo (planta ou processo)
• Ex.: automóvel, econômico, robô, químico
Variável: indica o comportamento do sistema ao longo do tempo
• Ex.: velocidade, inflação, posição/força,composição
O que é controle?
Controle manual: homem + máquina• Ex.: dirigir um automóvel
Controle automático: apenas máquina• Ex.: piloto automático
O que é controle?
Realimentação: leitura da variável controlada e utilização desta informação para alterar seu valor
• Ex.: visão ao dirigir um automóvel
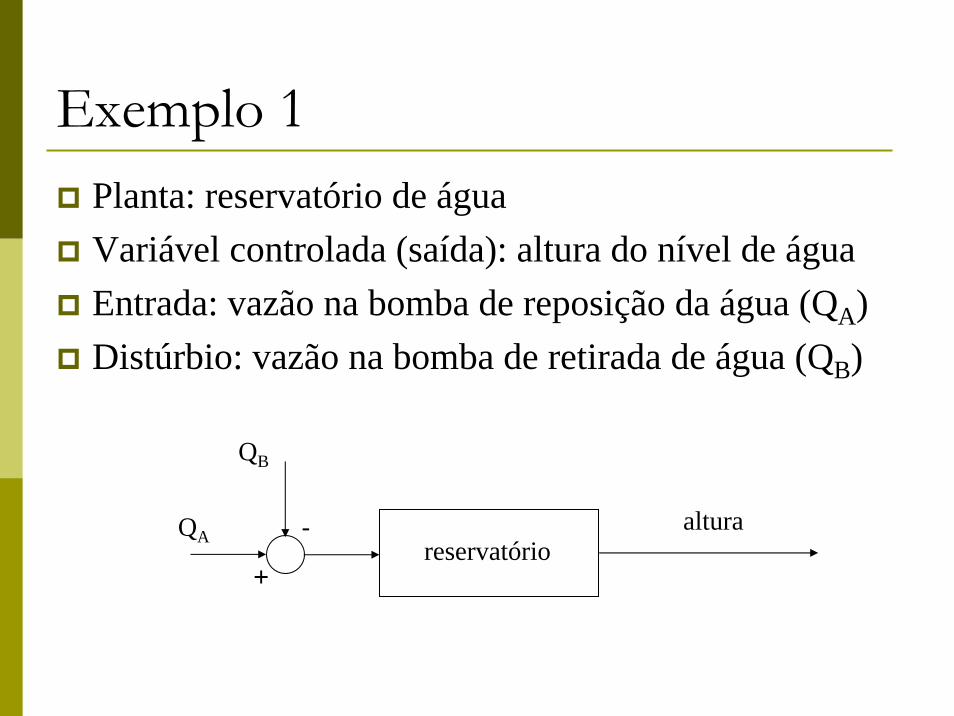
Exemplo 1Planta: reservatório de águaVariável controlada (saída): altura do nível de águaEntrada: vazão na bomba de reposição da água (QA)Distúrbio: vazão na bomba de retirada de água (QB)
QB
QAreservatório
+
- altura
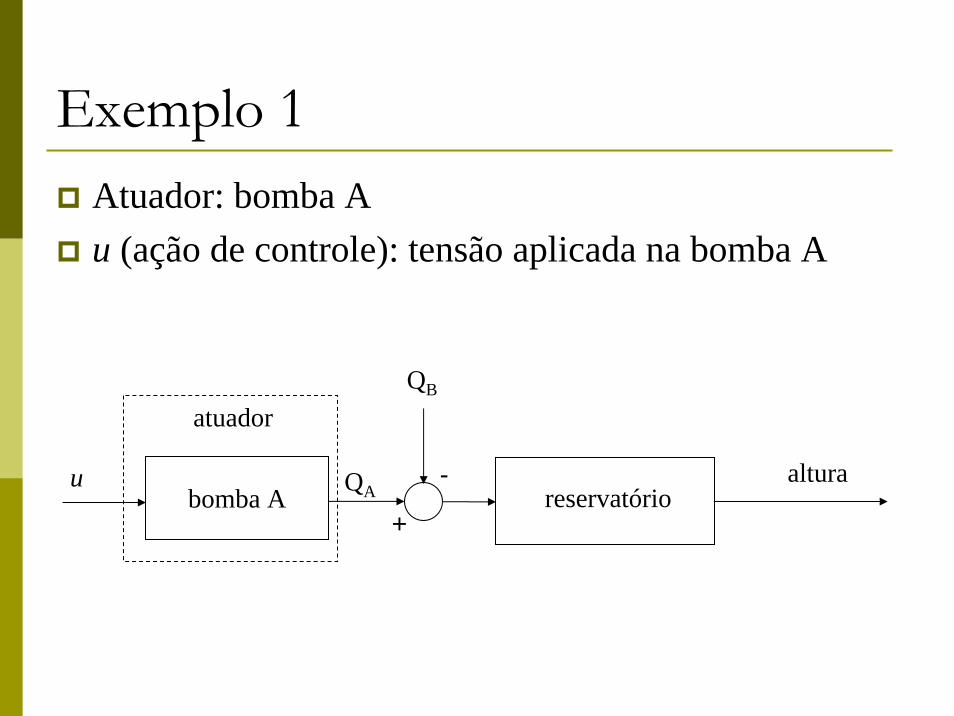
Exemplo 1Atuador: bomba Au (ação de controle): tensão aplicada na bomba A
QB
QA
+
- alturabomba A
atuador
ureservatório
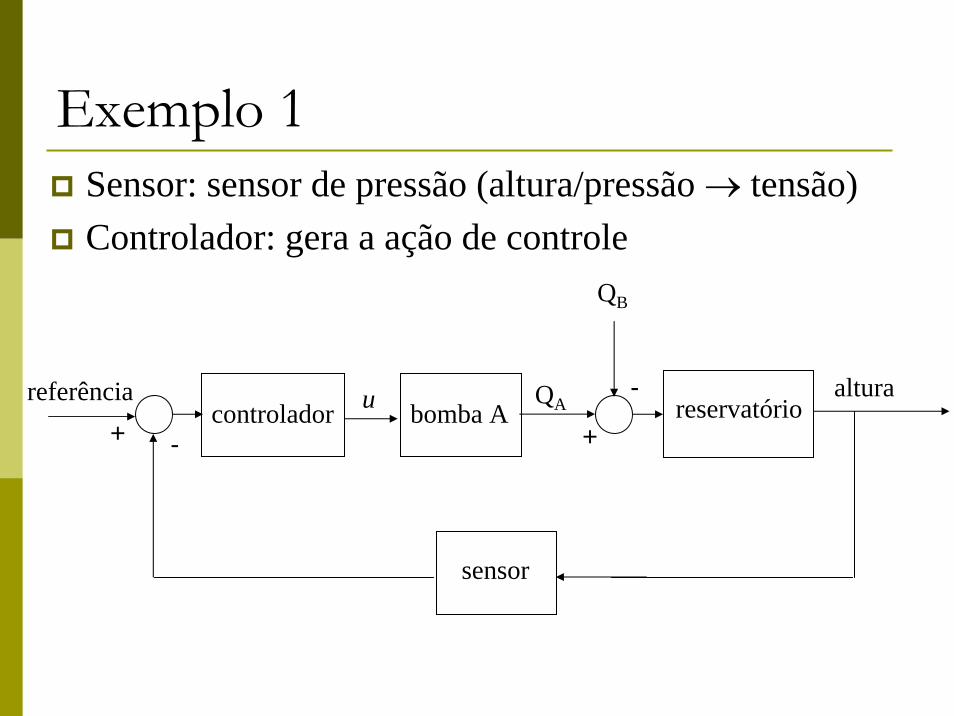
Exemplo 1Sensor: sensor de pressão (altura/pressão → tensão)Controlador: gera a ação de controle
ureferência
QB
QA
+
- alturabomba A reservatório
+ -controlador
sensor
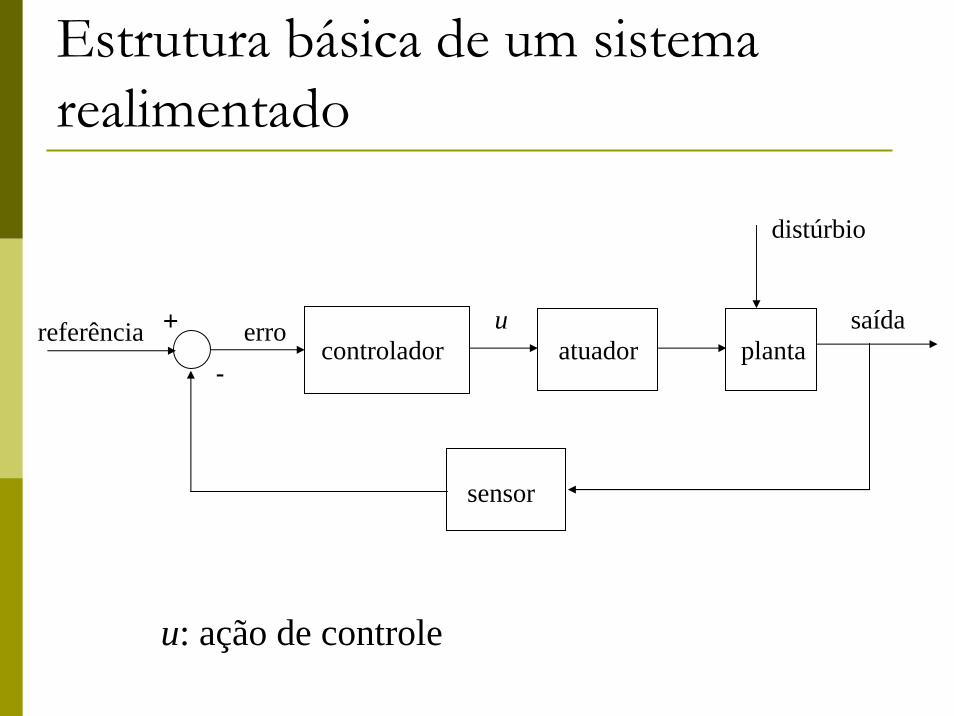
Estrutura básica de um sistema realimentado
planta+
-
saídaatuadorcontrolador
referência
sensor
erro u
distúrbio
u: ação de controle
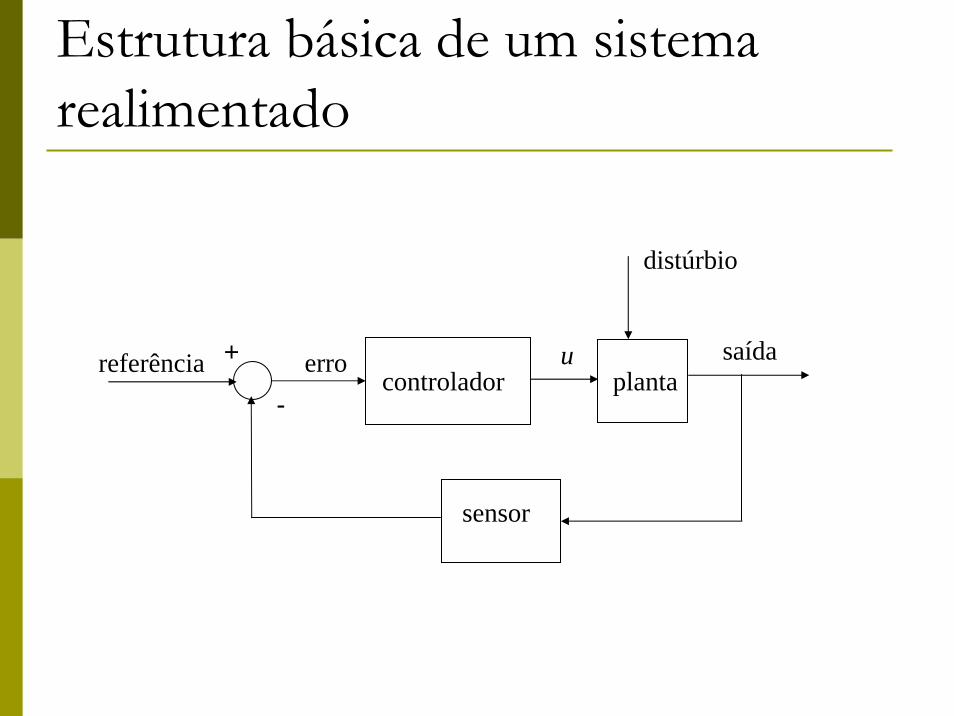
Estrutura básica de um sistema realimentado
planta+
-
saídacontrolador
referência
sensor
erro u
distúrbio
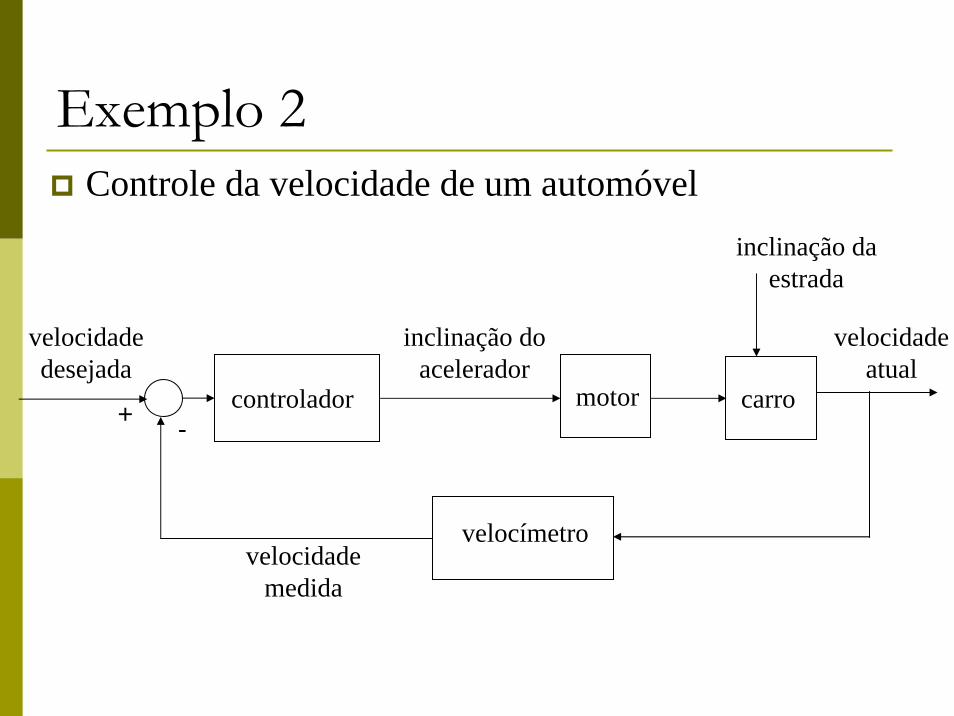
Exemplo 2Controle da velocidade de um automóvel
carro+ -
velocidadeatual
controlador
velocidadedesejada
velocímetro
inclinação daestrada
motor
inclinação doacelerador
velocidademedida
Malha Aberta X Malha FechadaModelo matemático simplificado de um sistema:
Equação relacionando:
u = ação de controle
w = distúrbio
y = saída
wuy 510 −=
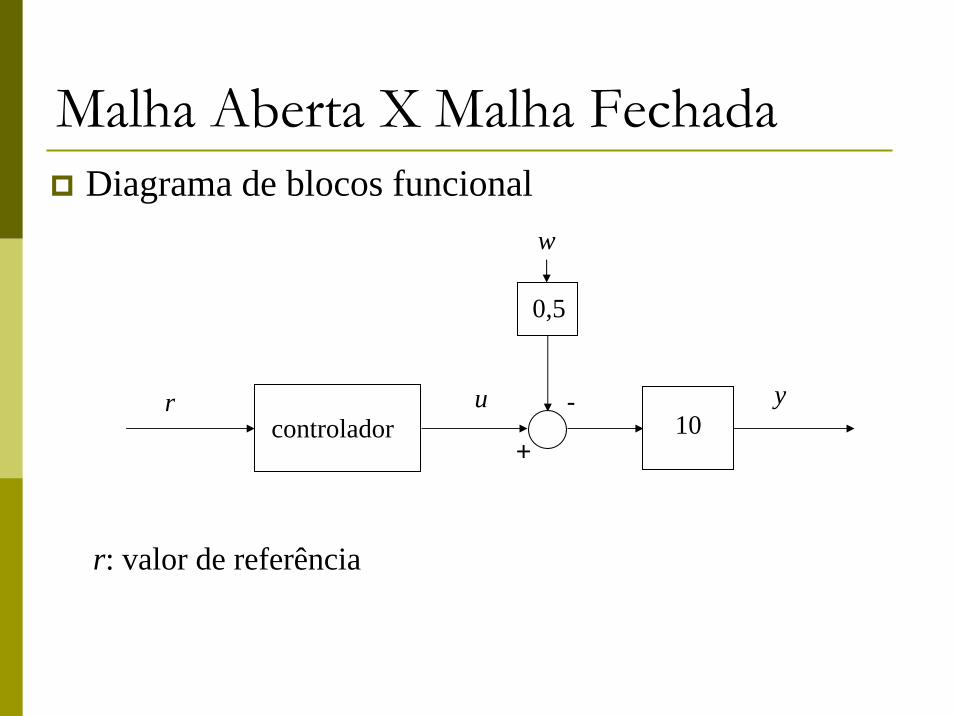
Malha Aberta X Malha FechadaDiagrama de blocos funcional
10y
controladorr u
w
+
-
0,5
r: valor de referência
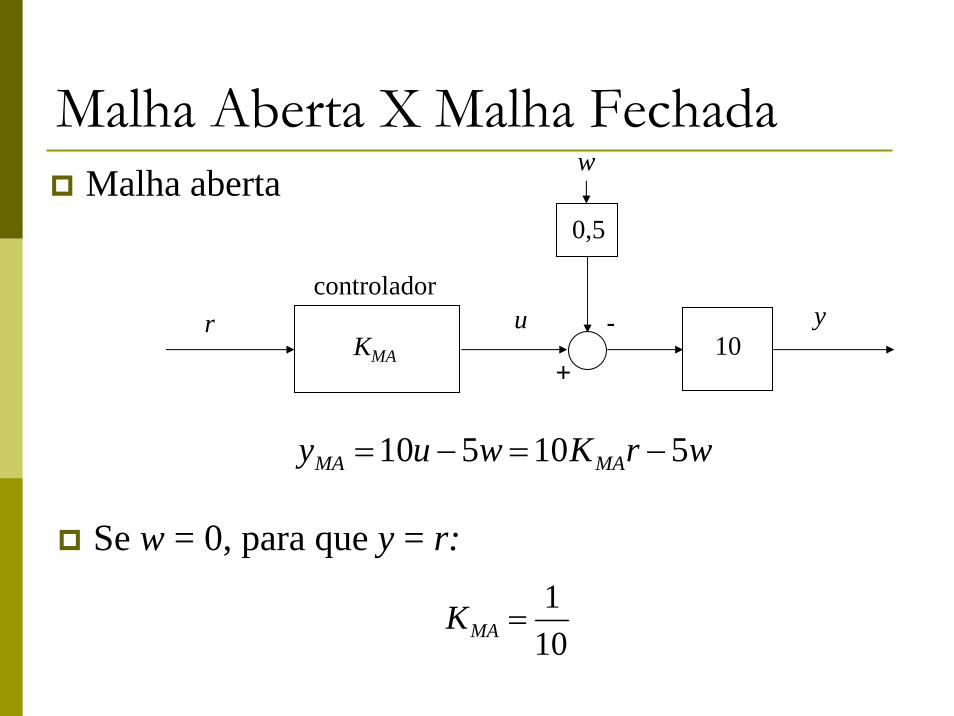
Malha Aberta X Malha FechadaMalha aberta
10y
KMA
r u
w
+
-
0,5
controlador
wrKwuy MAMA 510510 −=−=
Se w = 0, para que y = r:
101
=MAK
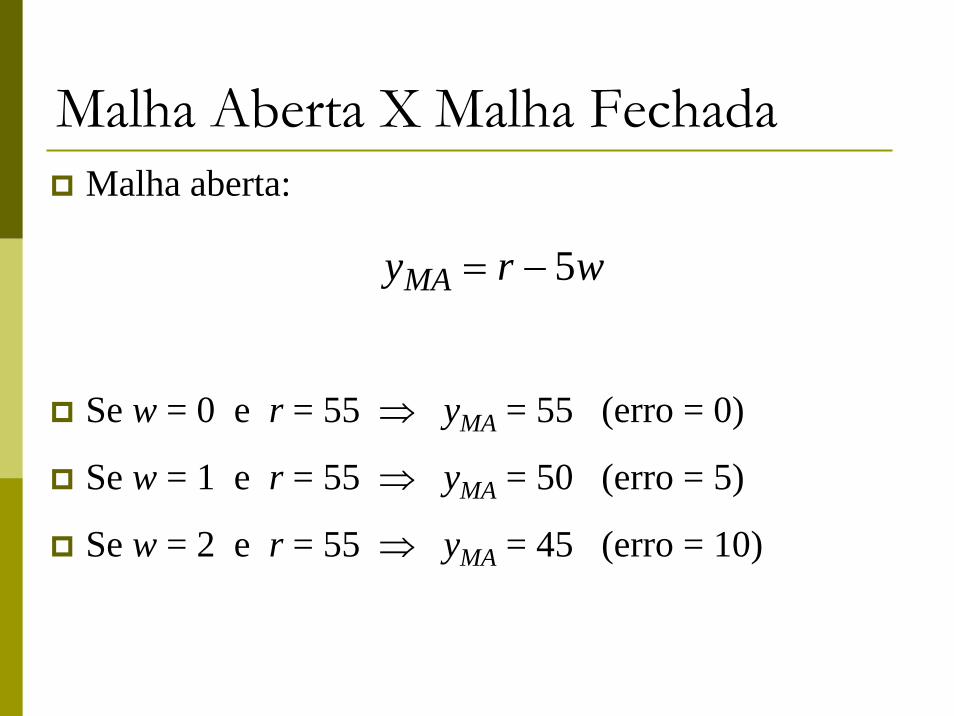
Malha Aberta X Malha FechadaMalha aberta:
Se w = 0 e r = 55 ⇒ yMA = 55 (erro = 0)
Se w = 1 e r = 55 ⇒ yMA = 50 (erro = 5)
Se w = 2 e r = 55 ⇒ yMA = 45 (erro = 10)
wryMA 5−=
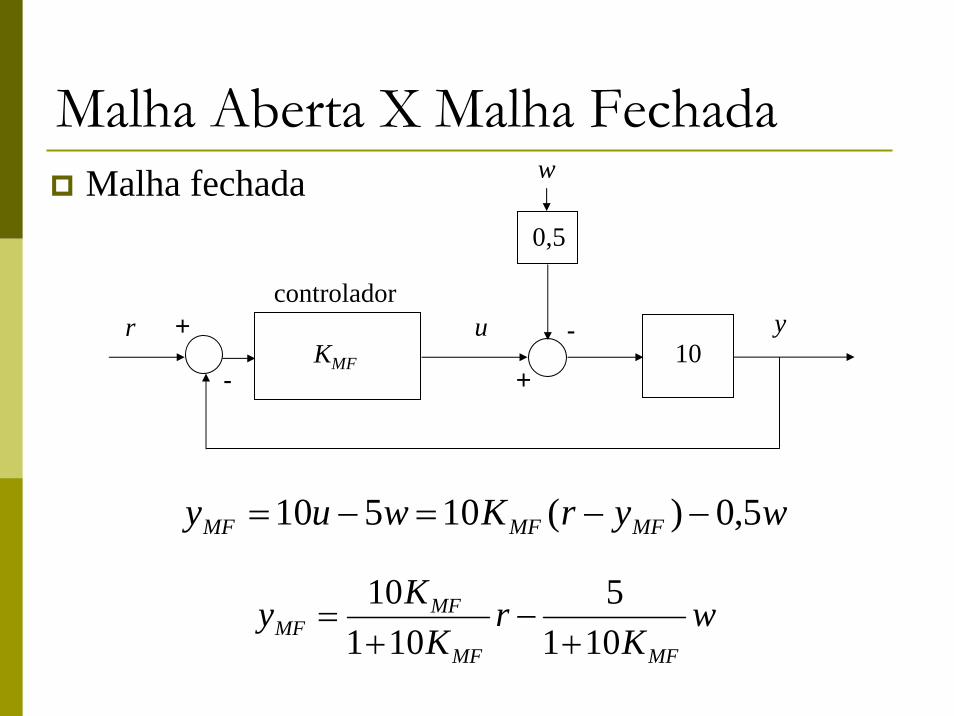
Malha Aberta X Malha FechadaMalha fechada
wyrKwuy MFMFMF 5,0)(10510 −−=−=
10y
KMF
r u
w
+
-
0,5
controlador+
-
wK
rK
KyMFMF
MFMF 101
5101
10+
−+
=
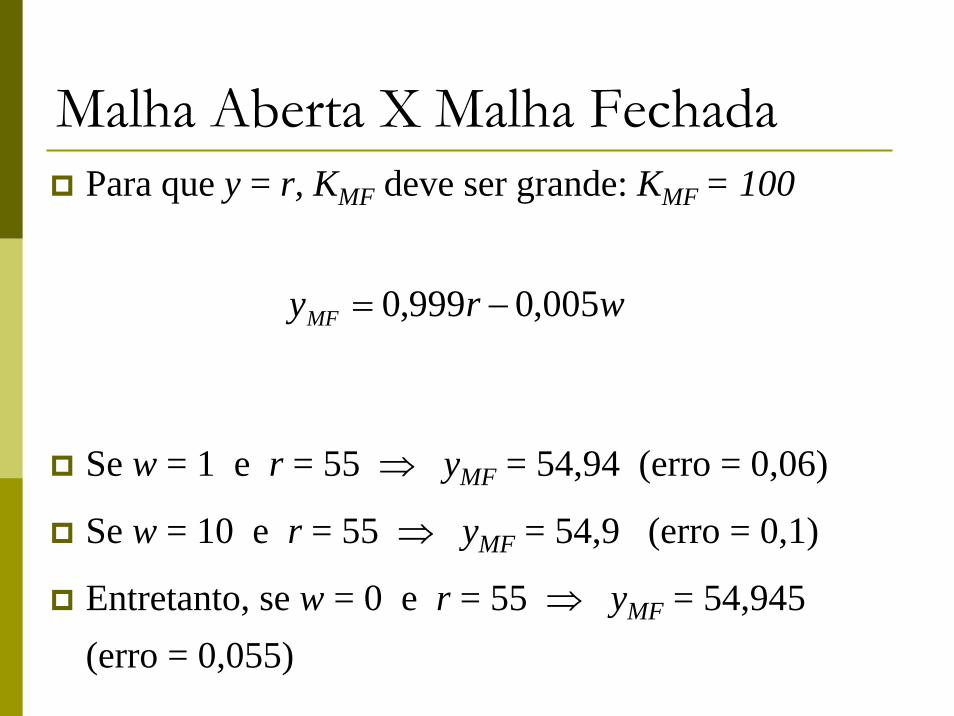
Malha Aberta X Malha FechadaPara que y = r, KMF deve ser grande: KMF = 100
Se w = 1 e r = 55 ⇒ yMF = 54,94 (erro = 0,06)
Se w = 10 e r = 55 ⇒ yMF = 54,9 (erro = 0,1)
Entretanto, se w = 0 e r = 55 ⇒ yMF = 54,945 (erro = 0,055)
wryMF 005,0999,0 −=
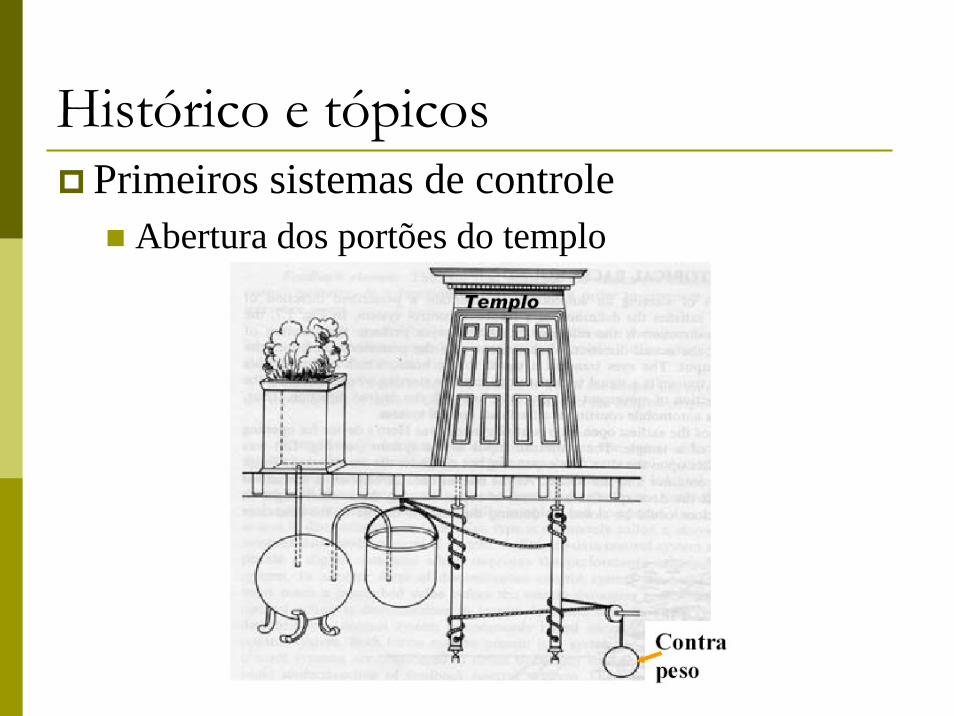
Histórico e tópicosPrimeiros sistemas de controle
Abertura dos portões do templo
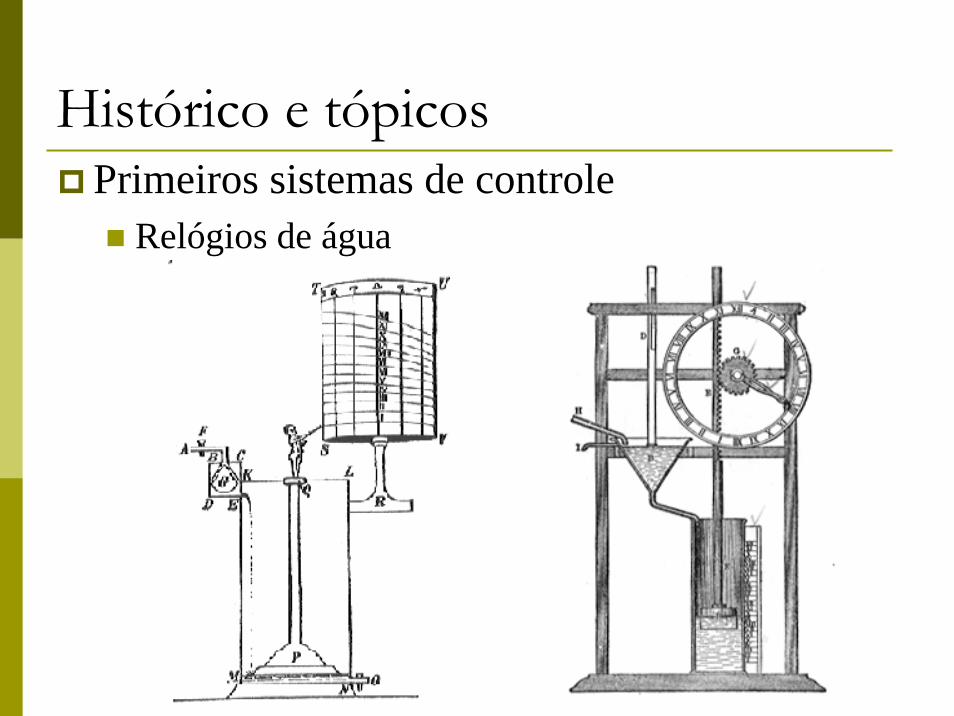
Histórico e tópicosPrimeiros sistemas de controle
Relógios de água
Histórico e tópicosCornelis Drebbel (1572-1633)
Inventor do submarino1620: Controle de temperatura de uma incubadora
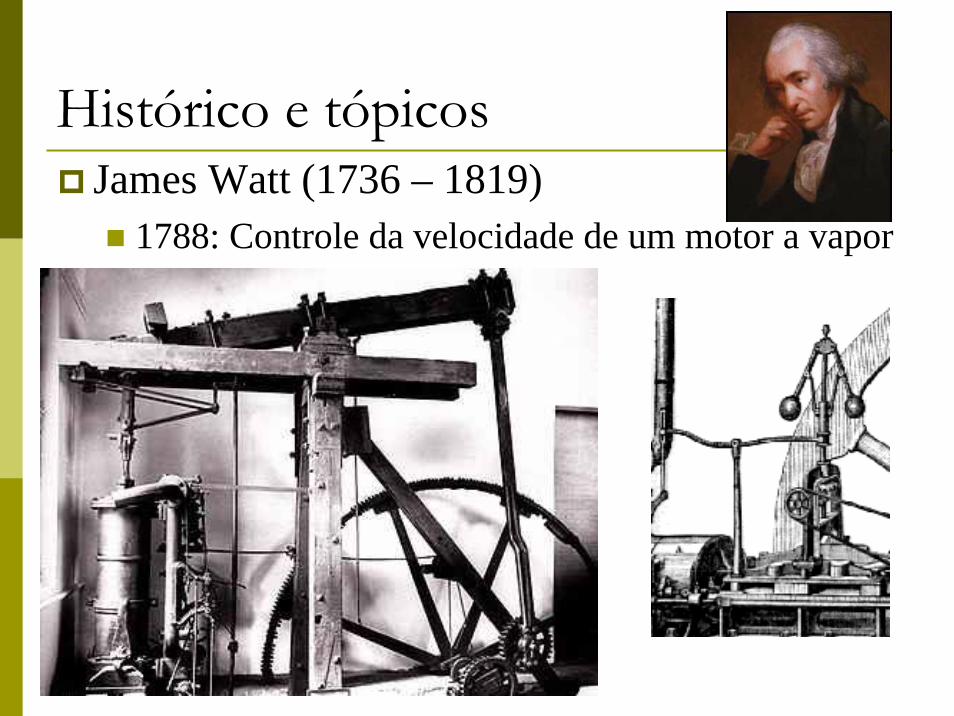
Histórico e tópicosJames Watt (1736 – 1819)
1788: Controle da velocidade de um motor a vapor
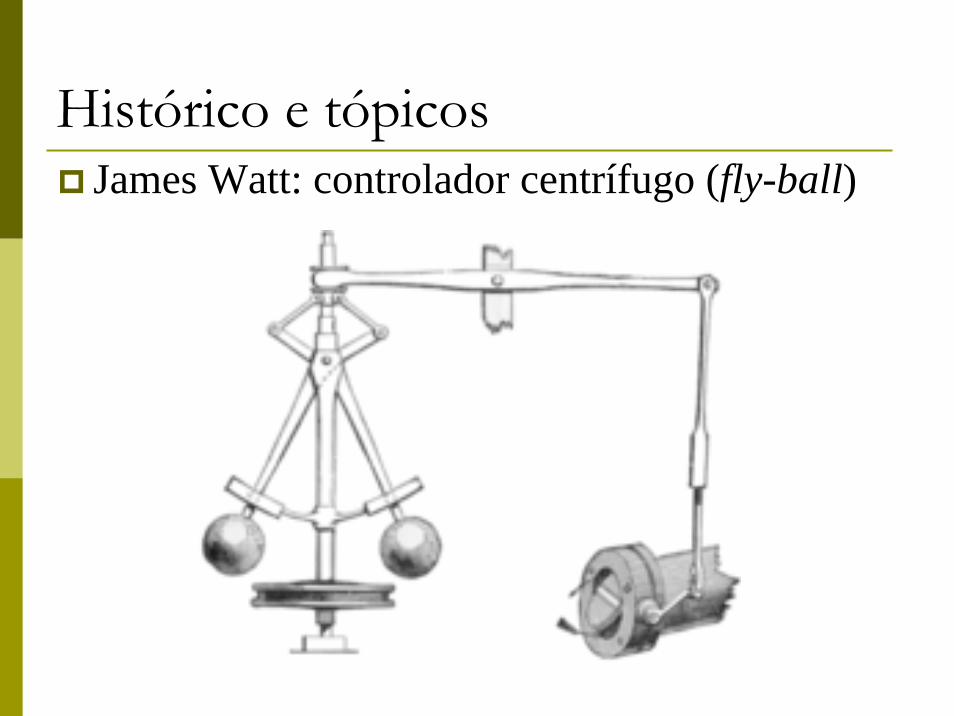
Histórico e tópicosJames Watt: controlador centrífugo (fly-ball)
Histórico e tópicosJames Clerk Maxwell (1831 -1879)
Primeiro estudo sistemático do controlador centrífugo de Watt
Artigo: “On Governors” (1868)Estabilidade depende das raízes de uma equação característica do sistemaRaízes devem ter parte real negativa
Histórico e tópicosE. J. Routh (1831 - 1907)
Adams Prize of 1877Critério de Estabilidade de Routh
A. M. Lyapunov (1857 - 1917)Estabilidade de sistemas não lineares (1890)Aplicação apenas após 1958
Histórico e tópicosH. Nyquist (1889 - 1976)
Amplificadores eletrônicosBell Telephone Laboratories1923: Critério de Estabilidade de Nyquist
Histórico e tópicosHendrik W. Bode (1905 - 1982)
1938: Resposta em frequênciaGráficos de BodeMargens de estabilidade
Histórico e tópicosChallender et. al. (1936)
Controlador Proporcional-Integral-Derivativo (PID)Trabalho experimental1942: Método de Ziegler-Nichols
Histórico e tópicosWalter R. Evans (1920 - 1999)
1948: Lugar da raízes
Histórico e tópicosL. S. Pontryagin (1908 - 1988)
1956: Princípio do MínimoR. Bellman
1958: Programação DinâmicaRudolf E. Kalman (1930)
1960: Controlador e Estimador ÓtimosUso de computadoresEspaço de estados (Controle Moderno)
Exemplo 3
Controle do nível de um reservatório
http://virtual.cvut.cz/dynlabcourse/
>> Course entry>> Introduction into Control Systems>> The basic structure of closed-loop systems