sistemas lineares em malha fechadatermo.furg.br/jaa/sistcont/scap12.pdf · sistema de controle para...
TRANSCRIPT
SISTEMAS LINEARES EM SISTEMAS LINEARES EM MALHA FECHADAMALHA FECHADA
O sistema de controle
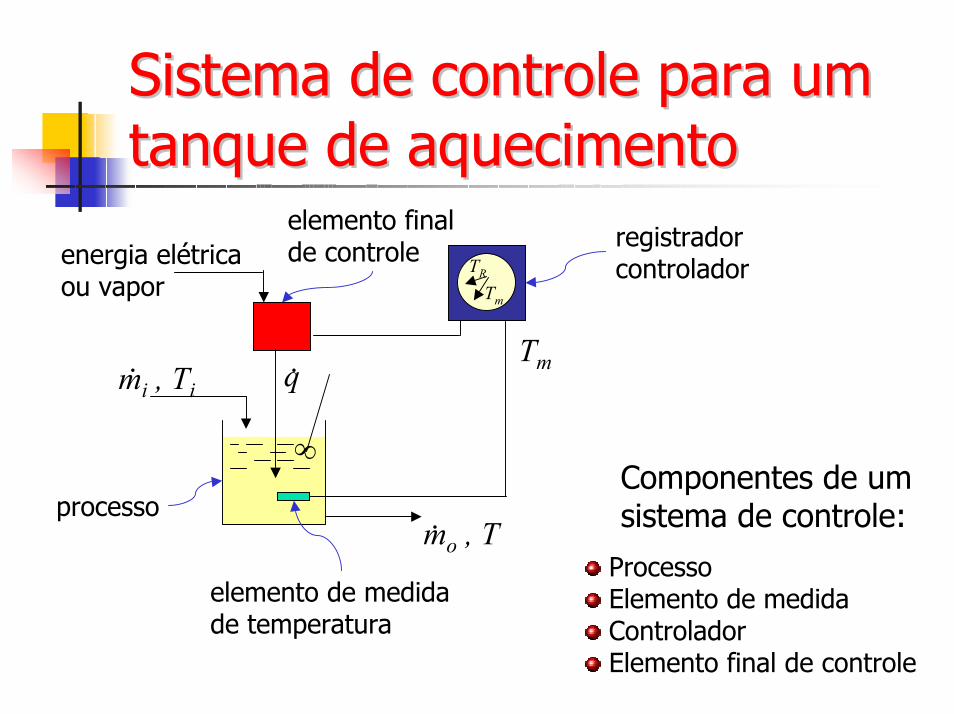
Sistema de controle para um Sistema de controle para um tanque de aquecimentotanque de aquecimento
mi , Ti
mo , T
∞
elemento de medida de temperatura
Tm
TR
elemento final de controle
q
energia elétrica ou vapor
.
..
registrador controlador
Tm
Componentes de um sistema de controle:processo
ProcessoElemento de medidaControladorElemento final de controle
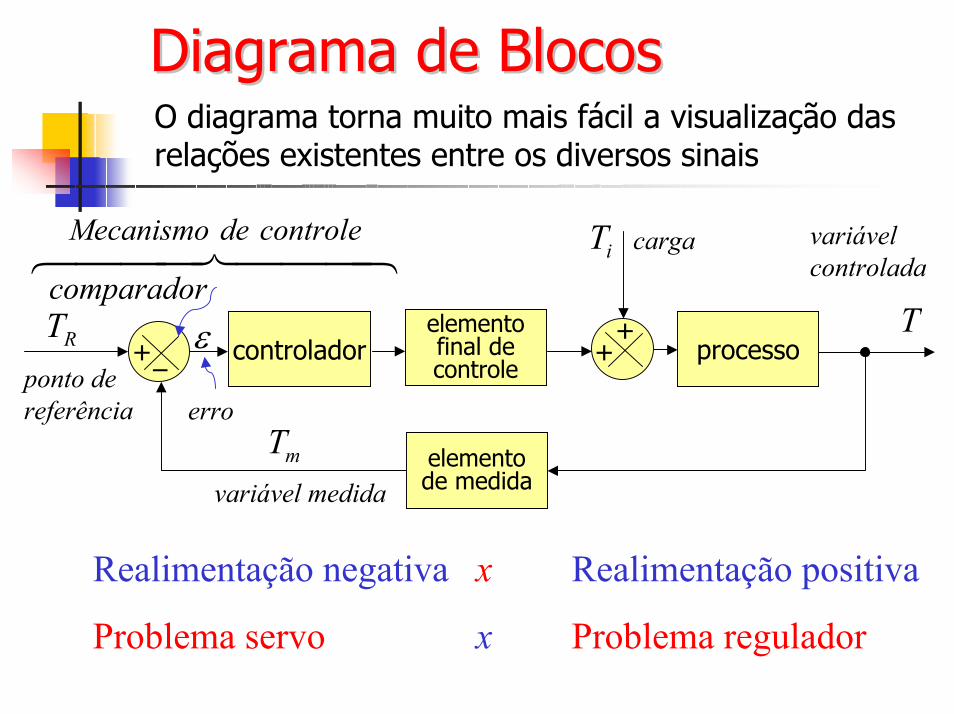
Diagrama de BlocosDiagrama de BlocosO diagrama torna muito mais fácil a visualização das relações existentes entre os diversos sinais
–+
444 8444 76controledeMecanismo
RTcomparador
ε
erroponto de referência
mT
iT variável controlada
carga
Telementofinal decontrole
controlador processo++
elementode medidavariável medida
Realimentação negativa x Realimentação positiva
Problema servo x Problema regulador
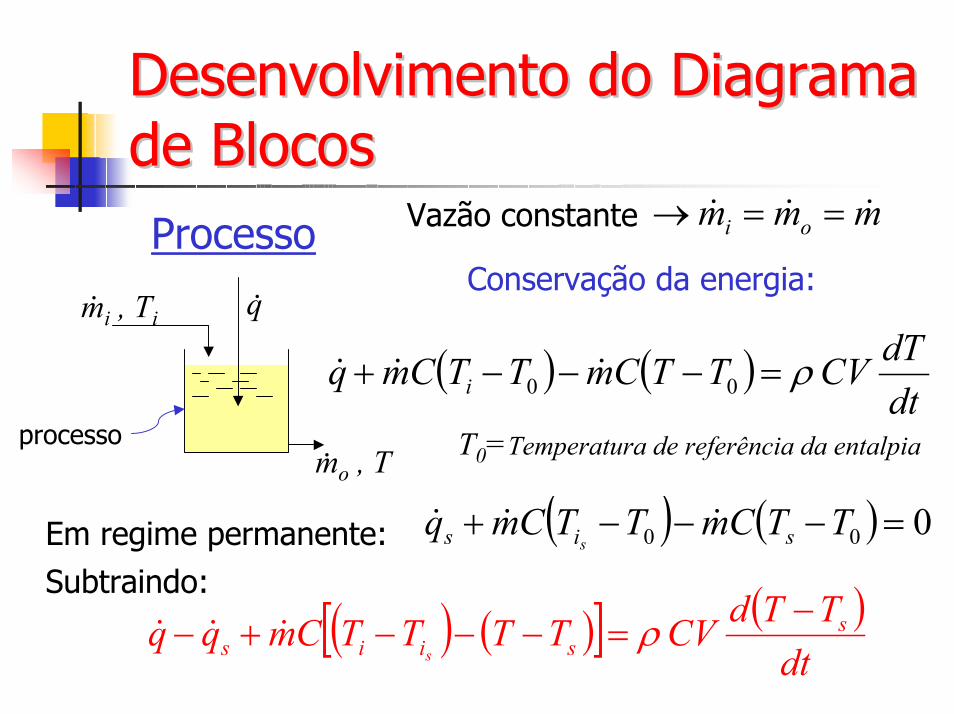
Desenvolvimento do Diagrama Desenvolvimento do Diagrama de Blocosde Blocos
mmm oi &&& ==→Vazão constanteProcessoConservação da energia:
( ) ( )dtdTCVTTCmTTCmq i ρ=−−−+ 00 &&&
mi , Ti
mo , Tprocesso
q
.
. .
T0=Temperatura de referência da entalpia
Em regime permanente: ( ) ( ) 000 =−−−+ TTCmTTCmq sis s&&&
Subtraindo:
( ) ( )[ ] ( )dt
TTdCVTTTTCmqq ssiis s
−=−−−+− ρ&&&
VARIÁVEIS DESVIO
siii TTT −=ˆsTTT −=ˆ
sqqQ &&& −=
( ) ( )[ ] ( )dt
TTdCVTTTTCmqq ssiis s
−=−−−+− ρ&&&
( )dtTdCVTTCmQ i
ˆˆˆ ρ=−+ && dtTd
mVTT
CmQ
i
ˆˆˆ&&
& ρ=−+
mV&
ρτ =
( ) ( ) ( ) ( )sTssTsTCmsQ
iˆˆˆ τ=−+
&
&
( )( ) ( ) ( )sTCmsQssT i1ˆ +=+
&
&τ
⇒
Aplicando a transformada de Laplace com
( )( ) ( ) ( )sTCmsQssT i1ˆ +=+
&
&τ
( ) ( ) ( )sTs
sQs
CmsT i11
1
1ˆ
++
+=
ττ&&
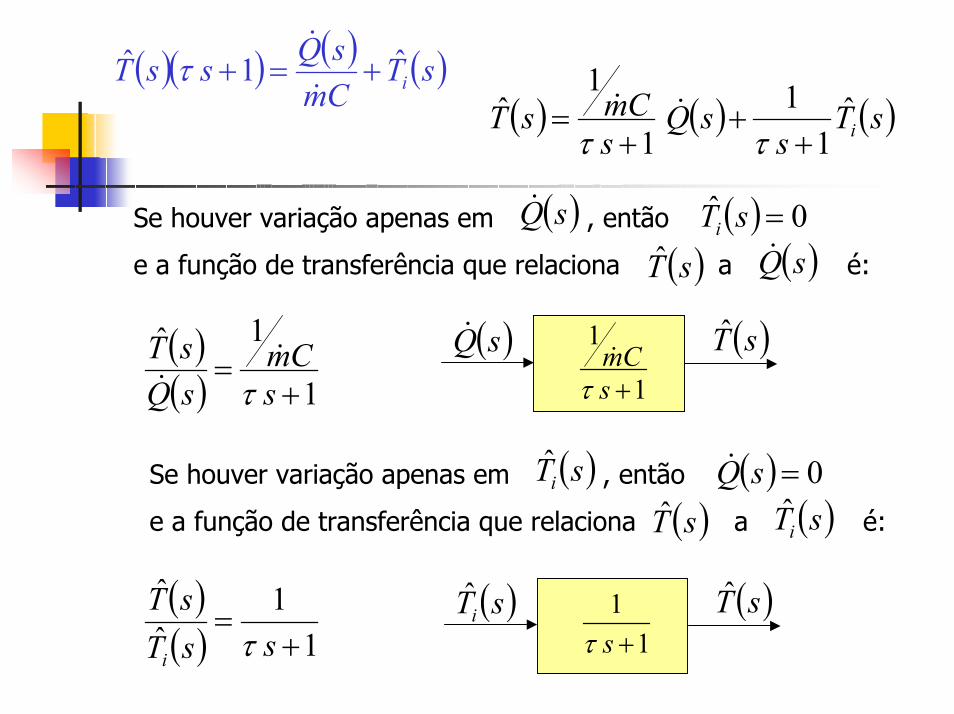
( )sQ& ( ) 0ˆ =sTi
( )sT ( )sQ&Se houver variação apenas em , então
a é:e a função de transferência que relaciona
( )sT( )sQ&( )( ) 1
1ˆ
+=
sCm
sQsT
τ&
& 1
1
+sCm
τ&
Se houver variação apenas em ( )sTi ( ) 0=sQ&
e a função de transferência que relaciona ( )sT ( )sTi
, então
a é:
( )( ) 1
1ˆˆ
+=
ssTsT
i τ( )sT
11+sτ
( )sTi
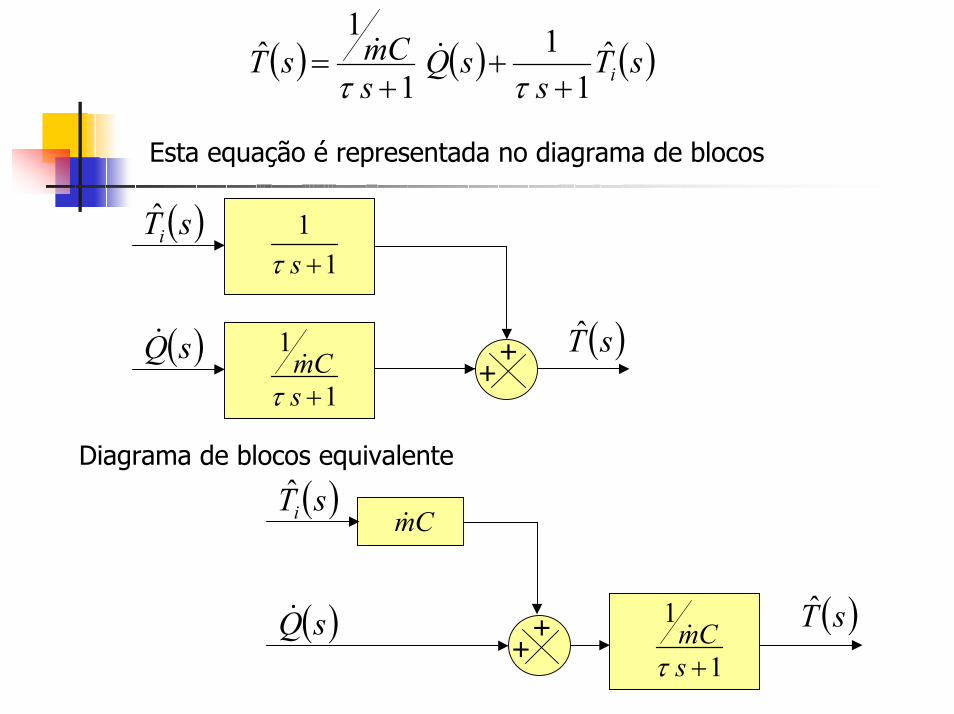
( ) ( ) ( )sTs
sQs
CmsT i11
1
1ˆ
++
+=
ττ&&
Esta equação é representada no diagrama de blocos
1
1
+sCm
τ&( )sQ&
11+sτ
( )sTi
( )sT+
+
Diagrama de blocos equivalente
1
1
+sCm
τ&( )sQ&
Cm&( )sTi
( )sT+
+

Elemento de MedidaO elemento de medida de temperatura pode apresentar algum retardo por transporte
mi , Ti
mo , Tprocesso
q
elemento de medida de temperatura
Tm
Tm
TR
registrador
..
.
( )( ) 1
1ˆˆ
+=
ssTsT
m
m
τonde:
=mτconstante de tempo do termômetro
smmm TTT −=ˆ
sTTT −=ˆ
( )sTm
11+smτ
( )sT
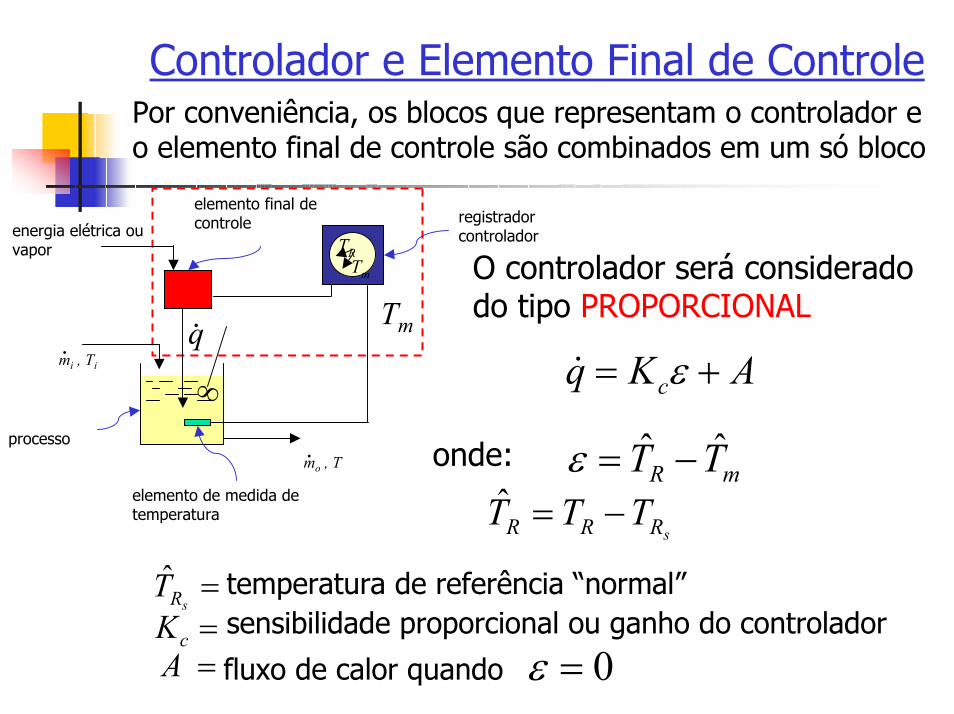
Controlador e Elemento Final de ControlePor conveniência, os blocos que representam o controlador e o elemento final de controle são combinados em um só bloco
AKq c += ε&
O controlador será considerado do tipo PROPORCIONAL
mR TT ˆˆ −=ε
sRRR TTT −=ˆonde:
mi , Ti
mo , T
∞processo
elemento de medida de temperatura
Tm
Tm
TR
registrador controlador
elemento final de controle
q
energia elétrica ou vapor
..
.
=sRT=cK=A 0=ε
temperatura de referência “normal”sensibilidade proporcional ou ganho do controlador
fluxo de calor quando

O uso da variável RT permite-nos considerar os efeitosdas variações no ponto de referência.
RsR TT =O sistema deve ser projetado para que
TTT mRˆˆˆ ==Em regime permanente ε 0= , pois:
AKq c += ε&
AKq cs += 0&
εcs Kqq =− &&⇒εcKQ =&
( ) ( )sKsQ cε=&Transformada de Laplace:
( )sQ&( )sεcK
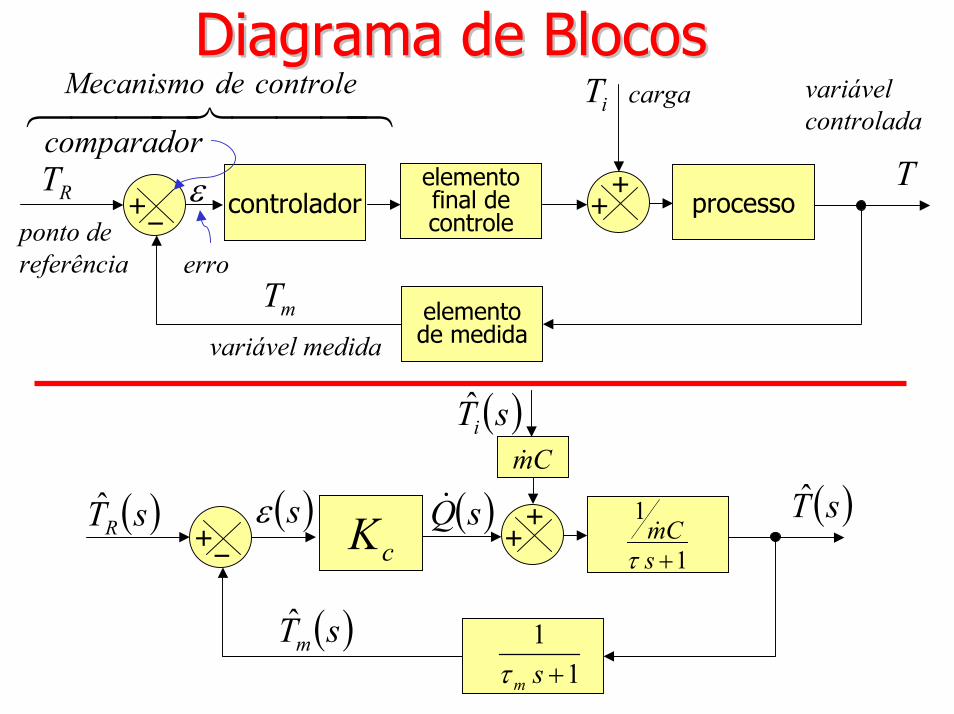
Diagrama de BlocosDiagrama de Blocos
–+
elementofinal decontrole
processo++
444 8444 76controledeMecanismo
RTcomparador
ε
erroponto de referência
mT
T
variável controlada
iT carga
controlador
elementode medidavariável medida
( )sTi
Cm&
( )sT–
+( )sε
cK1
1
+sCm
τ&+
+( )sQ&( )sTR
11+smτ
( )sTm
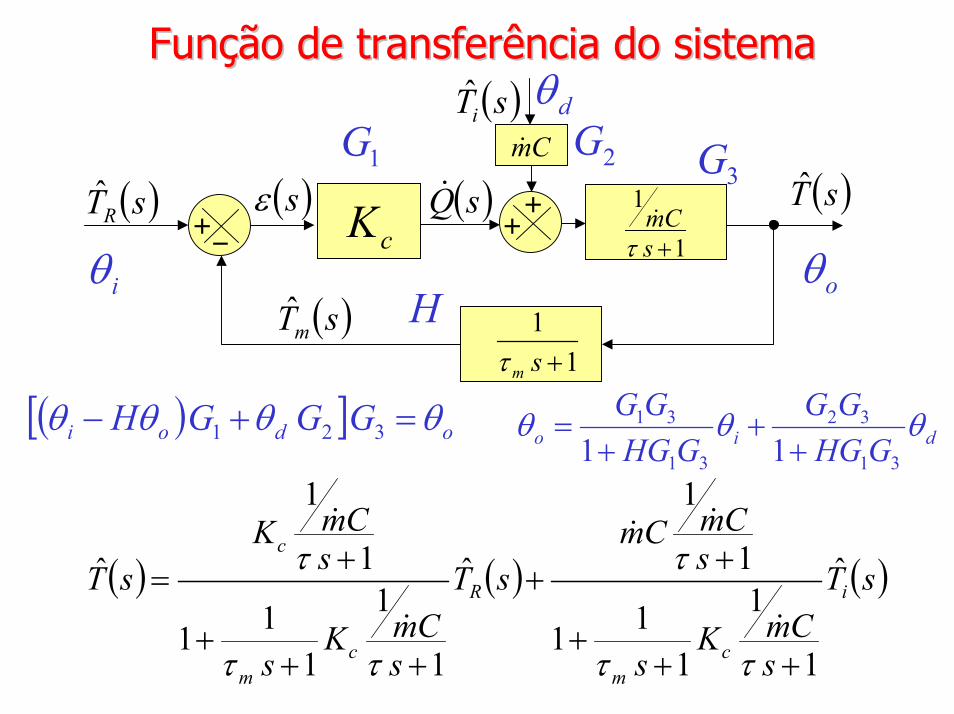
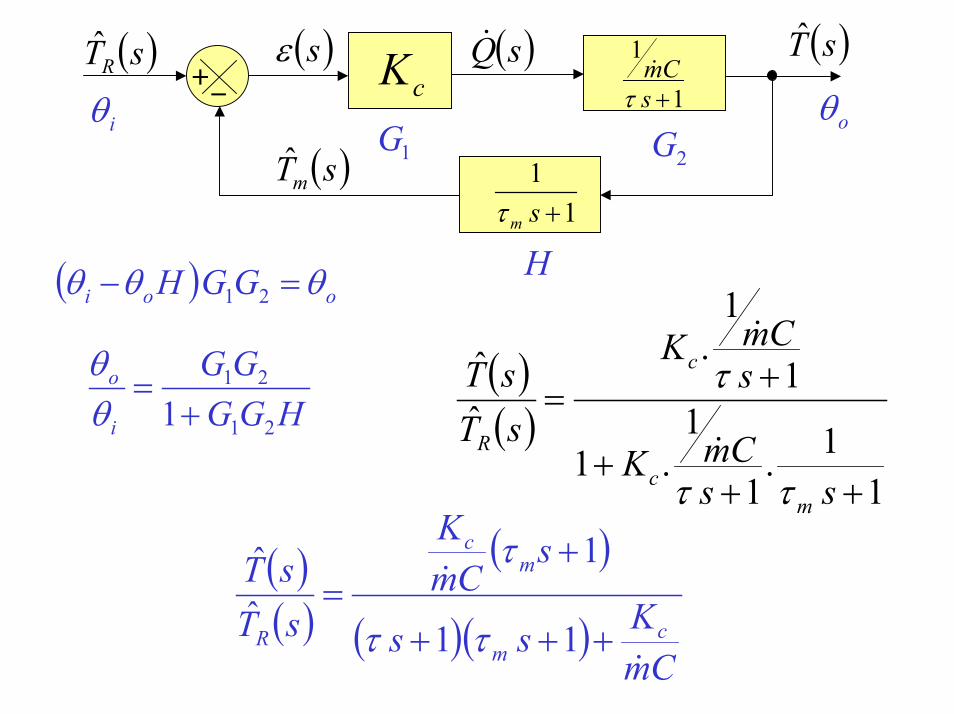
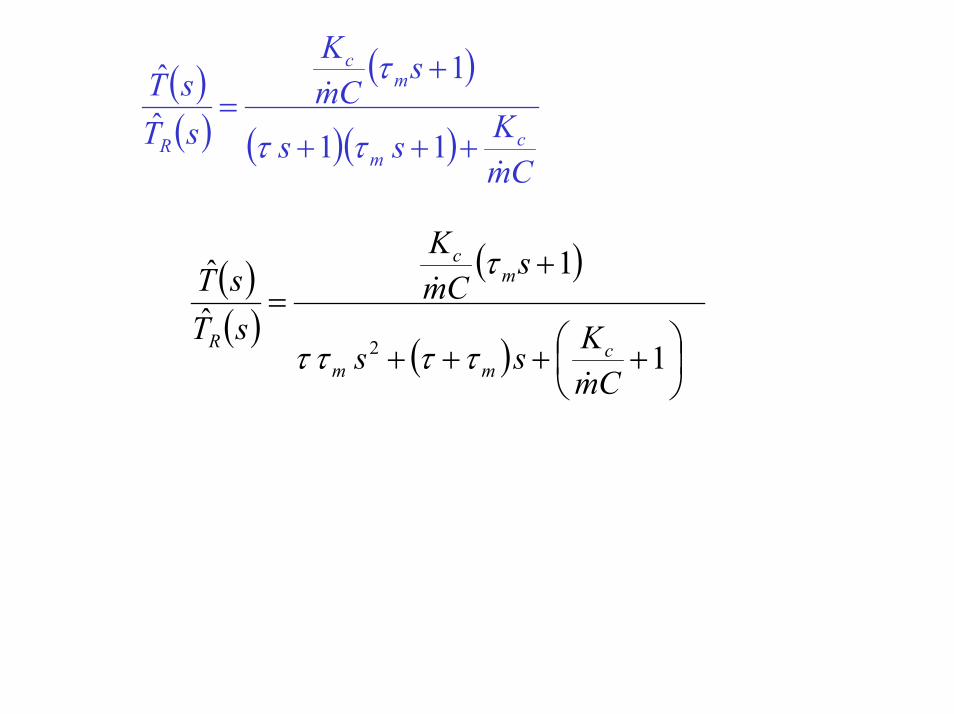
Função de transferência do sistemaFunção de transferência do sistema
–+ +
+( )sTR ( )sε
( )sTm
( )sT
( )sTi
cK
11+smτ
1
1
+sCm
τ&
Cm&
( )sQ&
iθ
1G 2G3G
Hoθ
( )[ ] odoi GGGH θθθθ =+− 321
dθ
dio GHGGG
GHGGG θθθ
31
32
31
31
11 ++
+=
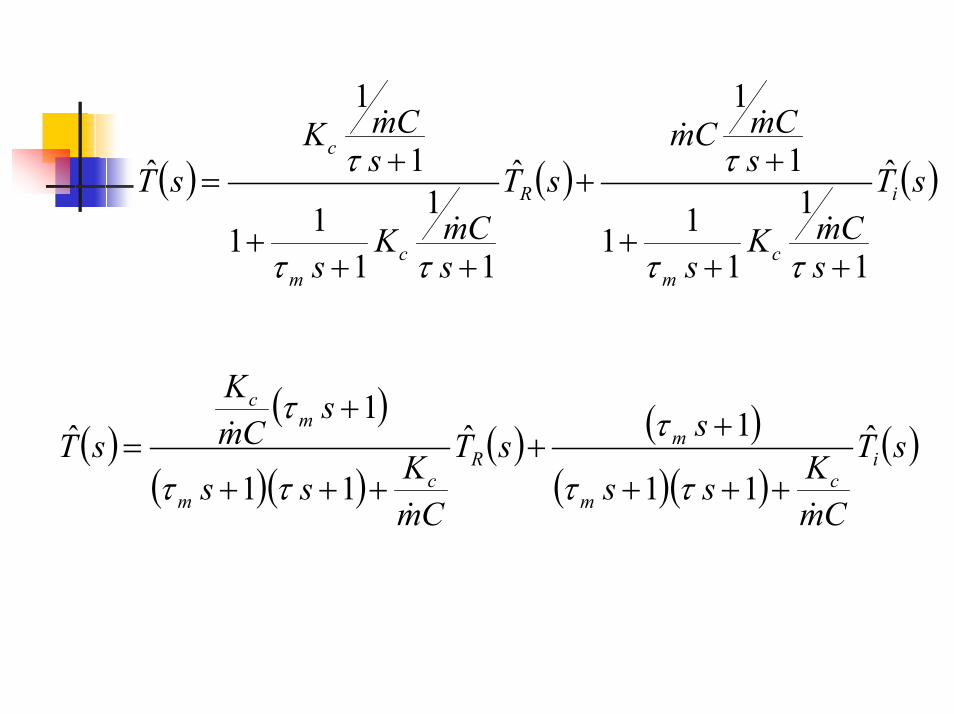
( ) ( ) ( )sT
sCmK
s
sCmCm
sT
sCmK
s
sCmK
sT i
cm
R
cm
cˆ
1
1
111
1
1
ˆ
1
1
111
1
1
ˆ
+++
++
+++
+=
ττ
τ
ττ
τ
&
&&
&
&
( ) ( ) ( )sT
sCmK
s
sCmCm
sT
sCmK
s
sCmK
sT i
cm
R
cm
cˆ
1
1
111
1
1
ˆ
1
1
111
1
1
ˆ
+++
++
+++
+=
ττ
τ
ττ
τ
&
&&
&
&
( )( )
( )( )( ) ( )
( )( )( )sT
CmKss
ssT
CmKss
sCm
K
sT ic
m
mR
cm
mc
ˆ11
1ˆ11
1ˆ
&&
&
+++
++
+++
+=
ττ
τ
ττ
τ
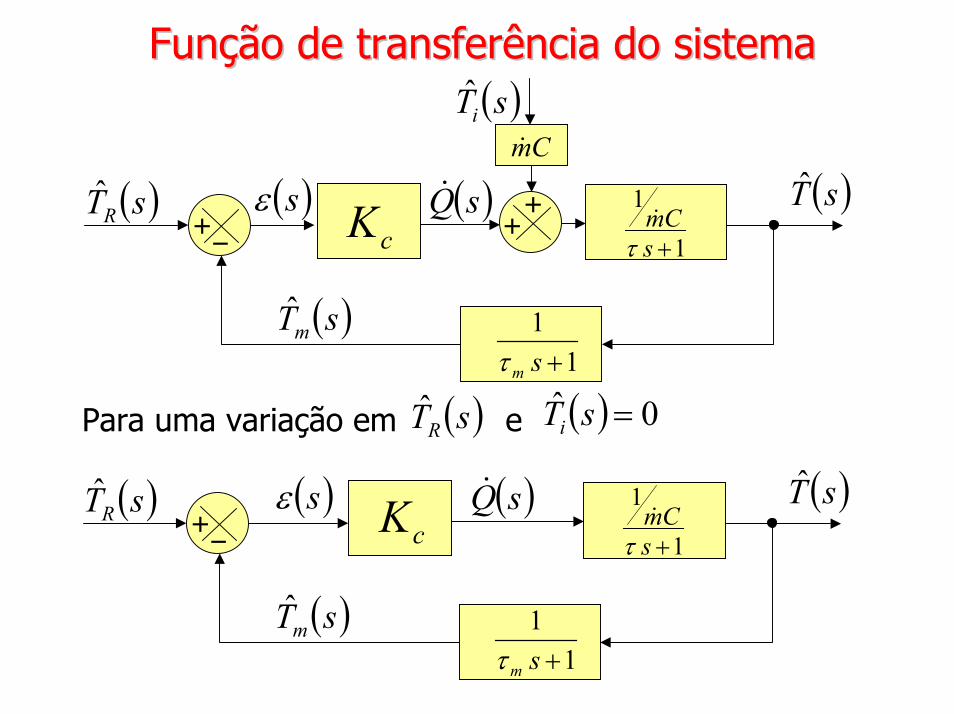
Função de transferência do sistemaFunção de transferência do sistema( )sTi
Cm&
( )sT–
+( )sε
cK1
1
+sCm
τ&+
+( )sQ&( )sTR
11+smτ
( )sTR ( ) 0ˆ =sTi
( )sTm
Para uma variação em e
( )sT( )sε–
+ cK ( )sQ&( )sTR
1
1
+sCm
τ&
11+smτ
( )sTm
( )sT( )sε–
+ cK ( )sQ&( )sTR
1
1
+sCm
τ&
2Goθiθ
11+smτ
( )sTm1G
( ) ooi GGH θθθ =− 21H
( )( )
11.
1
1.1
1
1.
ˆˆ
+++
+=
ssCmK
sCmK
sTsT
mc
c
R
ττ
τ
&
&
( )( )
( )
( )( )Cm
Kss
sCm
K
sTsT
cm
mc
R&
&
+++
+=
11
1
ˆˆ
ττ
τ
HGGGG
i
o
21
21
1+=
θθ
( )( )
( )
( )( )Cm
Kss
sCm
K
sTsT
cm
mc
R&
&
+++
+=
11
1
ˆˆ
ττ
τ
( )( )
( )
( )
++++
+=
1
1
ˆˆ
2
CmKss
sCm
K
sTsT
cmm
mc
R
&
&
ττττ
τ
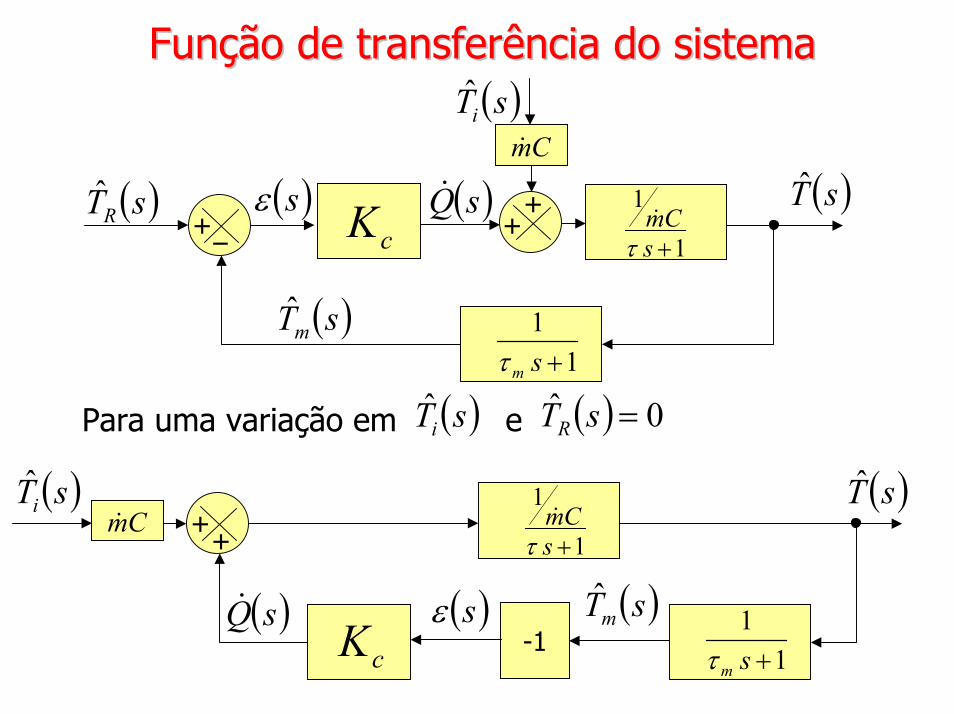
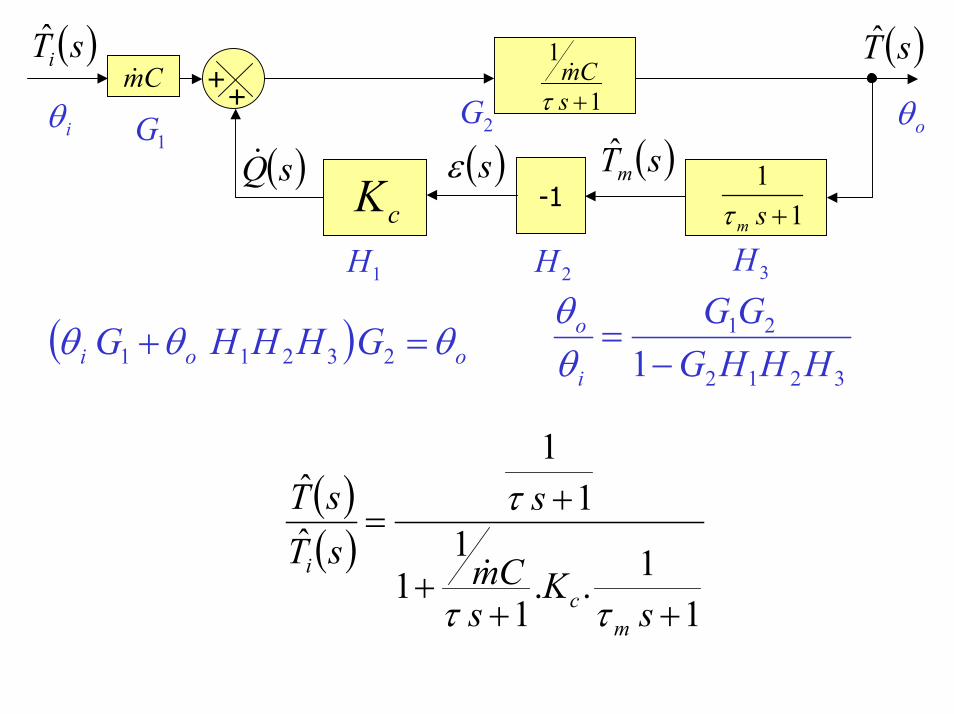
Função de transferência do sistemaFunção de transferência do sistema( )sTi
Cm&
( )sT–
+( )sε
cK1
1
+sCm
τ&+
+( )sQ&( )sTR
11+smτ
( )sTi ( ) 0ˆ =sTR
( )sTm
Para uma variação em e
( )sT( )sTi
++
cK
1
1
+sCm
τ&Cm&
( )sQ& ( )sTm( )sε1
1+smτ
-1
++
( )sTi
( )sε ( )sTm
( )sT
cK 11+smτ
1
1
+sCm
τ&
( )sQ&
Cm&
3212
21
1 HHHGGG
i
o
−=
θθ
iθ oθ1G 2G
1H 2H 3H
( ) ooi GHHHG θθθ =+ 23211
-1
( )( )
11..
1
11
11
ˆˆ
+++
+=
sK
sCm
ssTsT
mc
i
ττ
τ
&
( )( )
11..
1
11
11
ˆˆ
+++
+=
sK
sCm
ssTsT
mc
i
ττ
τ
&
( )( ) ( )( )
CmKss
ssTsT
cm
m
i&
+++
+=
11
1ˆˆ
ττ
τ
( )( )
( )
++++
+=
1
1ˆˆ
2
CmKss
ssTsT
cmm
m
i
&ττττ
τ
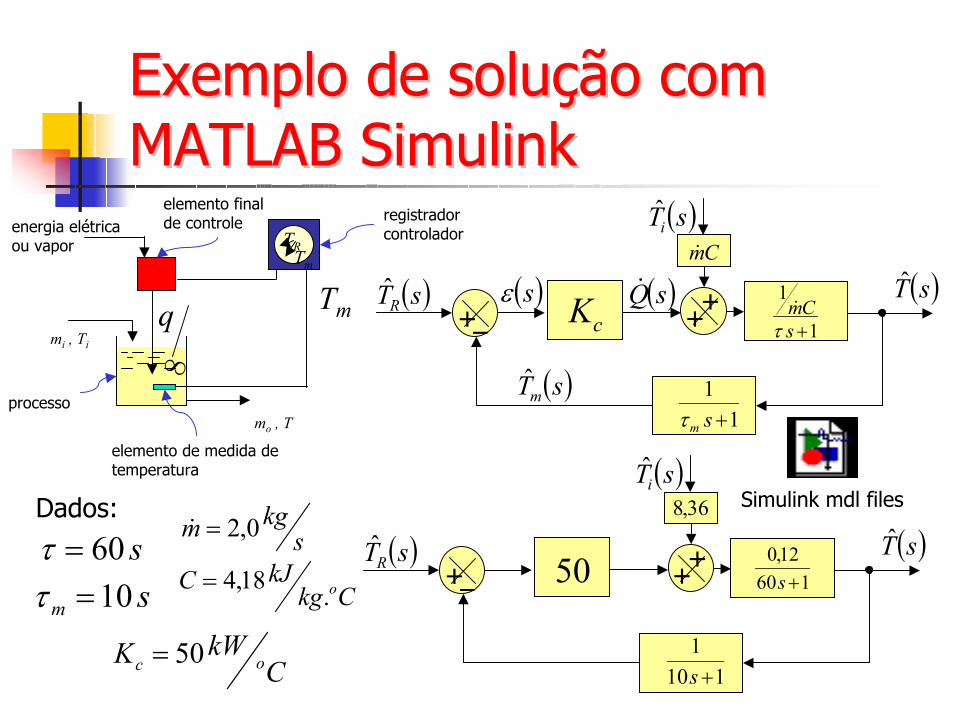
Exemplo de solução com Exemplo de solução com MATLAB SimulinkMATLAB Simulink
mi , Ti
mo , T
∞processo
elemento de medida de temperatura
Tm
Tm
TR
registrador controlador
elemento final de controle
q
energia elétrica ou vapor
–+ ++( )sTR ( )sε
( )sTm
( )sT
( )sTi
cK
11+smτ
1
1
+sCm
τ&
Cm&
( )sQ&
s60=τsm 10=τ
skgm 0,2=&
CkgkJC o.18,4= –+ +
+( )sTR( )sT
( )sTi
50 16012,0+s
36,8 Simulink mdl filesDados:
CkWK oc 50=
1101+s
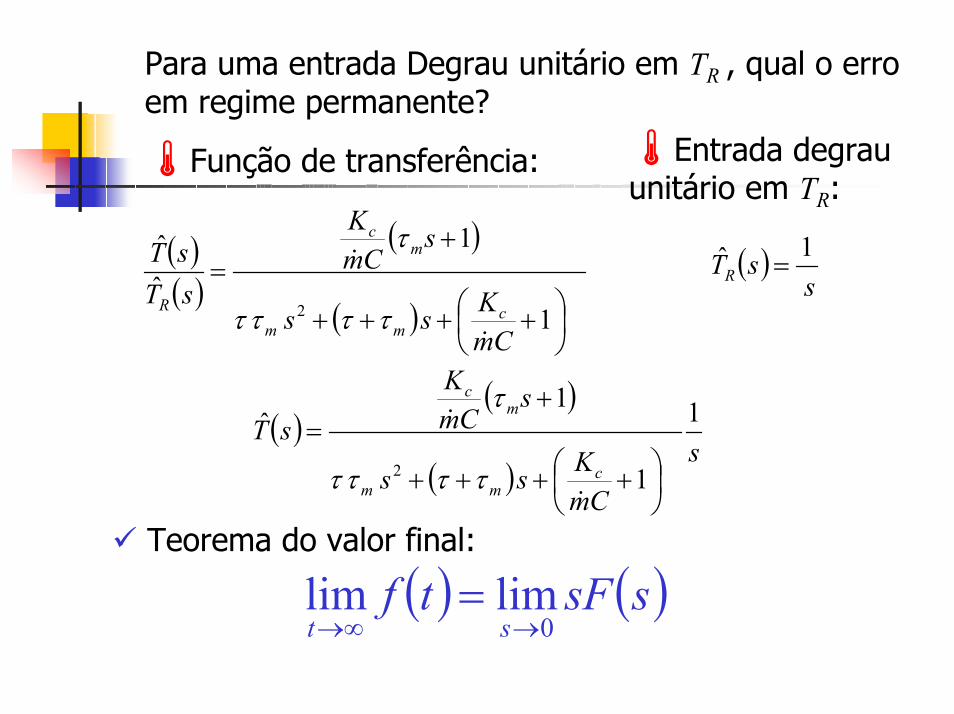
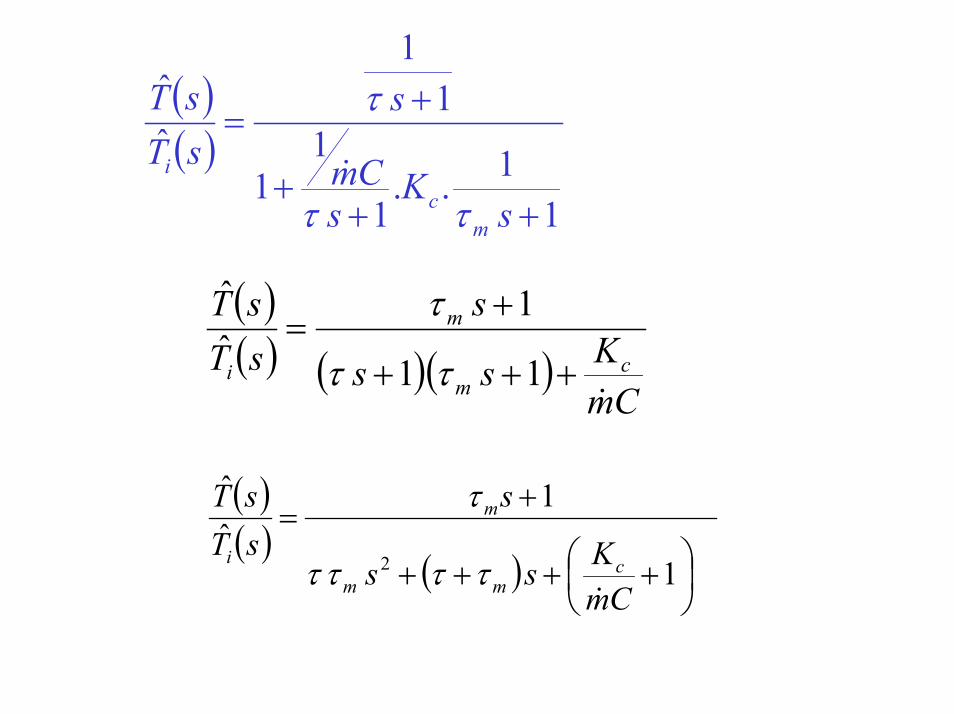
Para uma entrada Degrau unitário em TR , qual o erro em regime permanente?
( )( )
( )
( )
++++
+=
1
1
ˆˆ
2
CmKss
sCm
K
sTsT
cmm
mc
R
&
&
ττττ
τ
Entrada degrau unitário em TR:
( )s
sTR1ˆ =
( )( )
( )s
CmKss
sCm
K
sTc
mm
mc
1
1
1ˆ
2
++++
+=
&
&
ττττ
τ
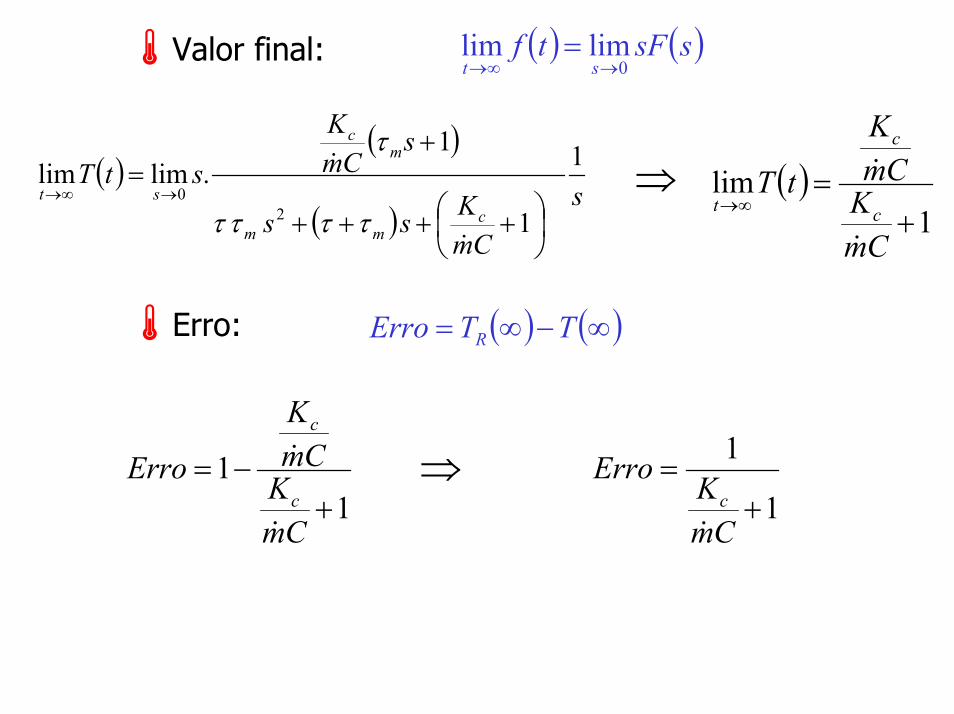
Teorema do valor final:
( ) ( )ssFtfst 0limlim→∞→
=
Função de transferência:
( ) ( )ssFtfst 0limlim→∞→
=Valor final:
( )1
lim+
=∞→
CmK
CmK
tTc
c
t
&
&( )( )
( )s
CmKss
sCm
K
stTc
mm
mc
st
1
1
1.limlim
20
++++
+=
→∞→
&
&
ττττ
τ⇒
( ) ( )∞−∞= TTErro RErro:
11
+−=
CmK
CmK
Erroc
c
&
&
1
1
+=
CmKErro
c
&
⇒
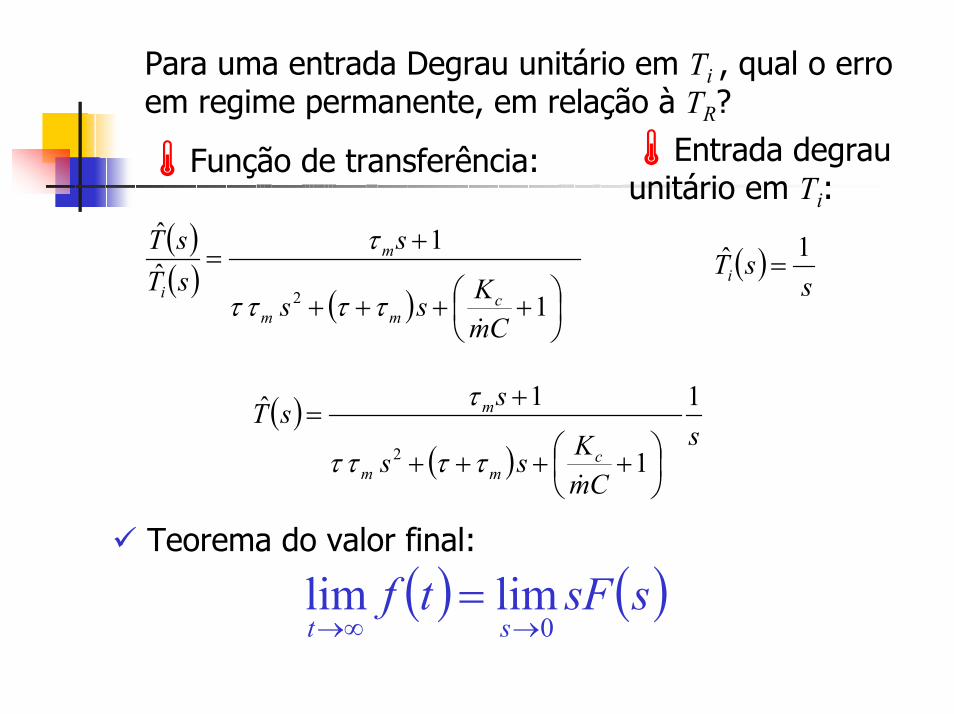
Para uma entrada Degrau unitário em Ti , qual o erro em regime permanente, em relação à TR?
Entrada degrau unitário em Ti:
Função de transferência:
( )( )
( )
++++
+=
1
1ˆˆ
2
CmKss
ssTsT
cmm
m
i
&ττττ
τ( )
ssTi
1ˆ =
( )( )
s
CmKss
ssTc
mm
m 1
1
1ˆ2
++++
+=
&ττττ
τ
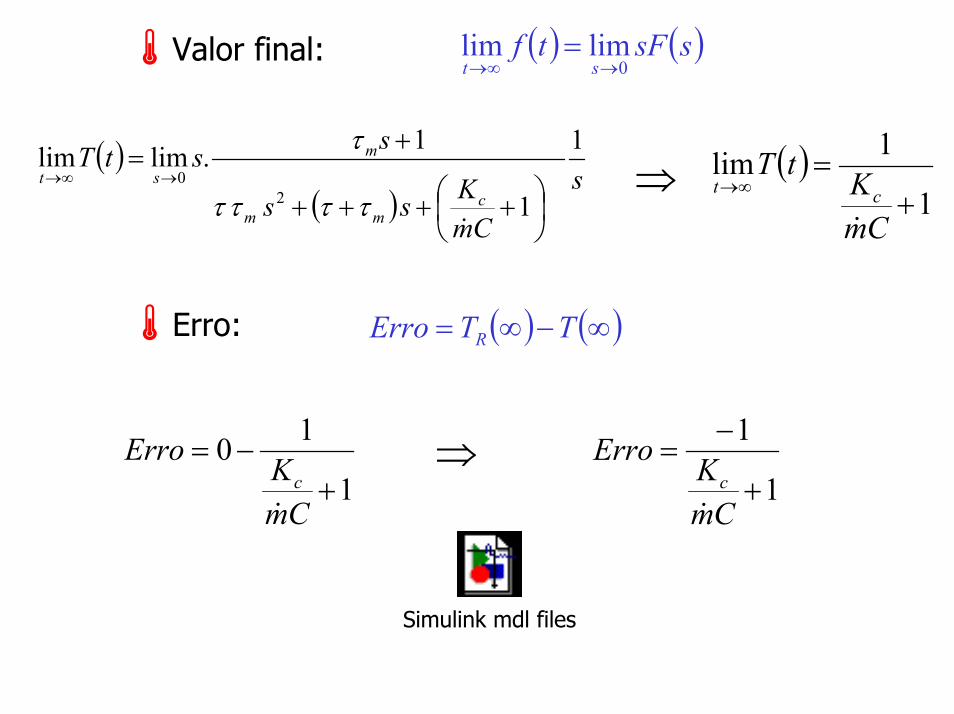
Teorema do valor final:
( ) ( )ssFtfst 0limlim→∞→
=
( ) ( )ssFtfst 0limlim→∞→
=Valor final:
( )( )
s
CmKss
sstTc
mm
m
st
1
1
1.limlim2
0
++++
+=
→∞→
&ττττ
τ ( )1
1lim+
=∞→
CmKtT
ct
&
⇒
( ) ( )∞−∞= TTErro RErro:
1
10+
−=
CmKErro
c
&
⇒1
1
+
−=
CmKErro
c
&
Simulink mdl files
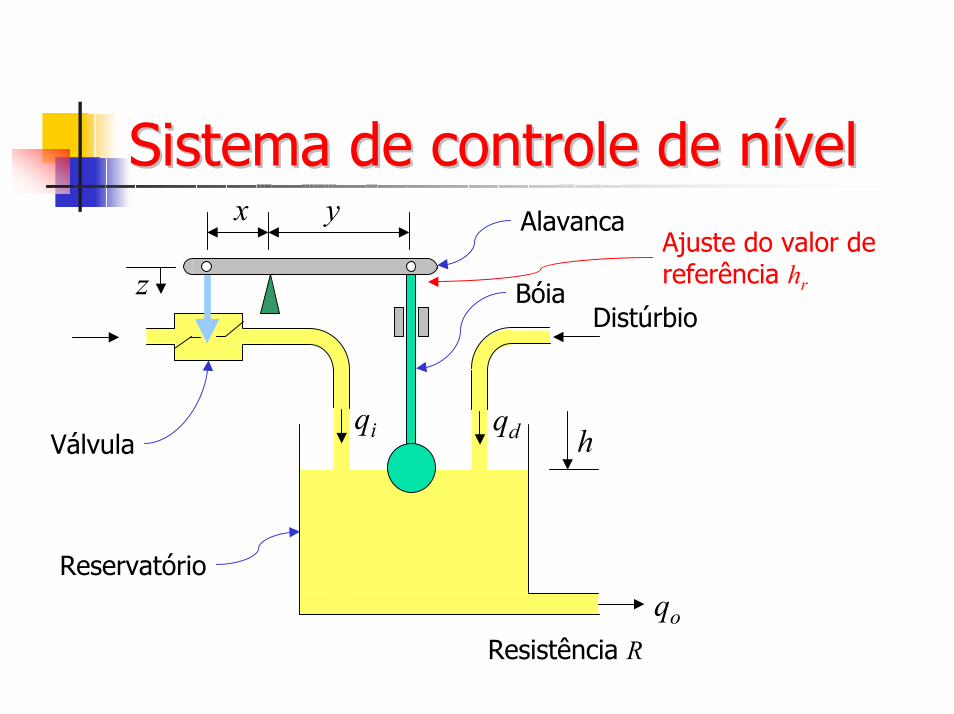
Sistema de controle de nívelSistema de controle de nível
qi qd h
BóiaDistúrbio
Ajuste do valor de referência hr
x y Alavanca
z
Válvula
Reservatórioqo
Resistência R
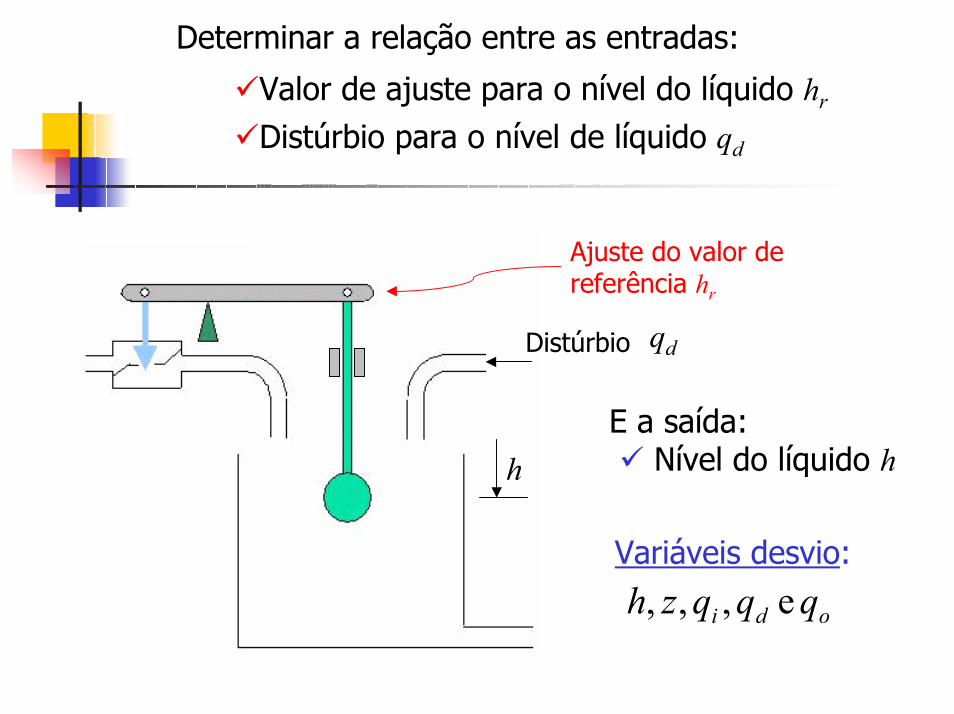
Determinar a relação entre as entradas:
Valor de ajuste para o nível do líquido hr
Distúrbio para o nível de líquido qd
Distúrbio
h
Variáveis desvio:
odi qqqzh e,,,
Ajuste do valor de referência hr
qd
E a saída:Nível do líquido h
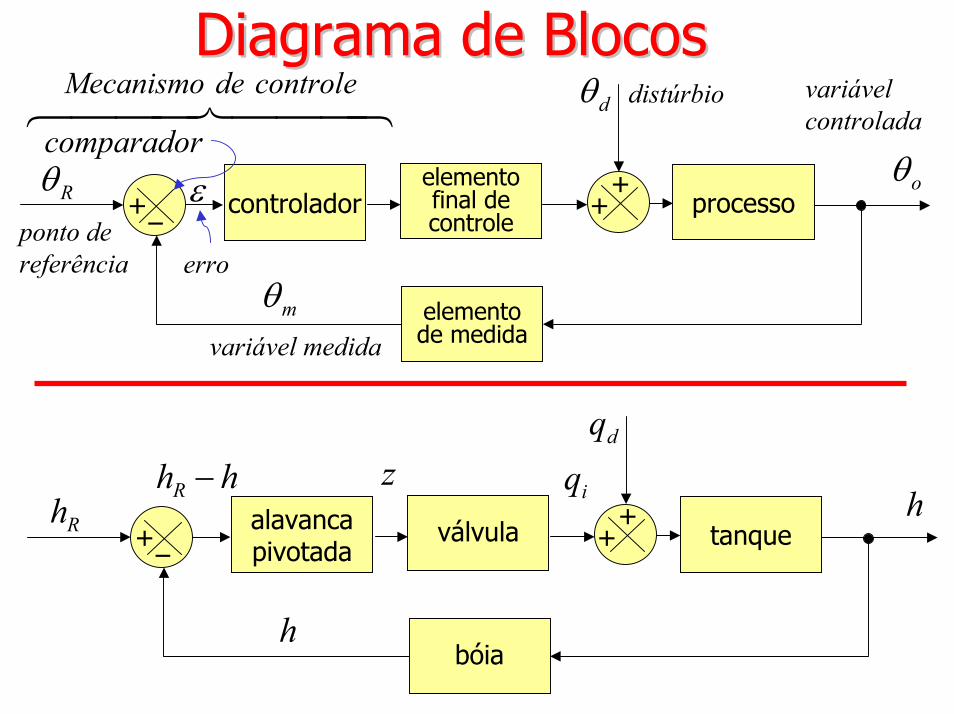
Diagrama de BlocosDiagrama de Blocos
–+
elementofinal decontrole
processo++
444 8444 76controledeMecanismo
Rθcomparador
ε
erroponto de referência
mθ
oθ
variável controlada
dθ distúrbio
controlador
elementode medidavariável medida
–+
alavancapivotada
válvula tanque++
dq
iqzhhR − hRh
hbóia
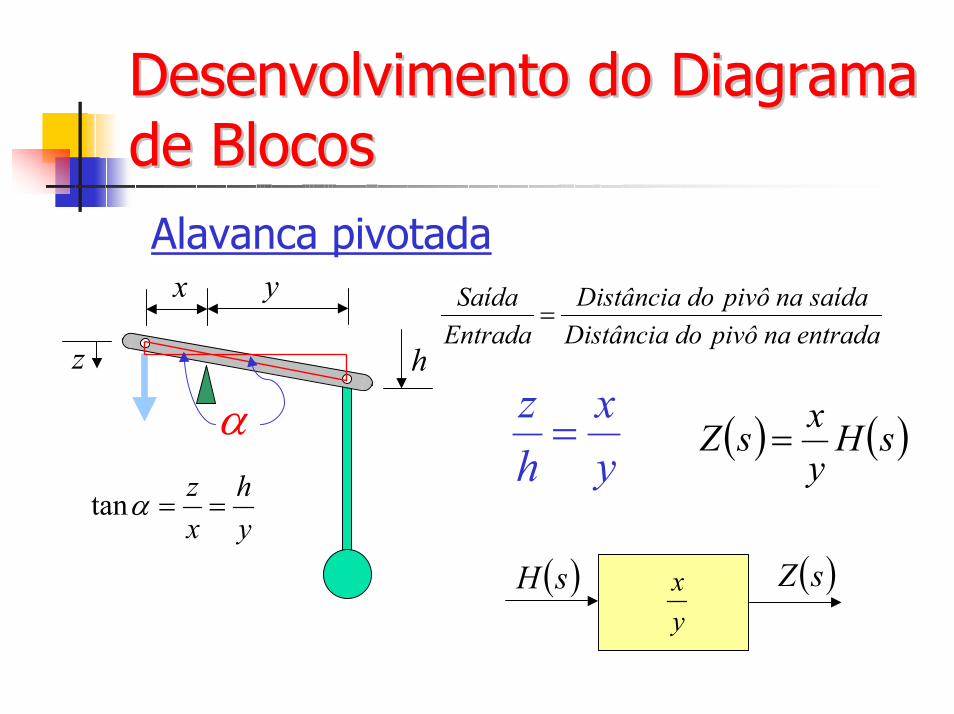
Desenvolvimento do Diagrama Desenvolvimento do Diagrama de Blocosde BlocosAlavanca pivotada
hz
x yentradanapivôdoDistânciasaídanapivôdoDistância
EntradaSaída
=
yh
xz==αtan
yx
hz= ( ) ( )sH
yxsZ =α
yx( )sH ( )sZ
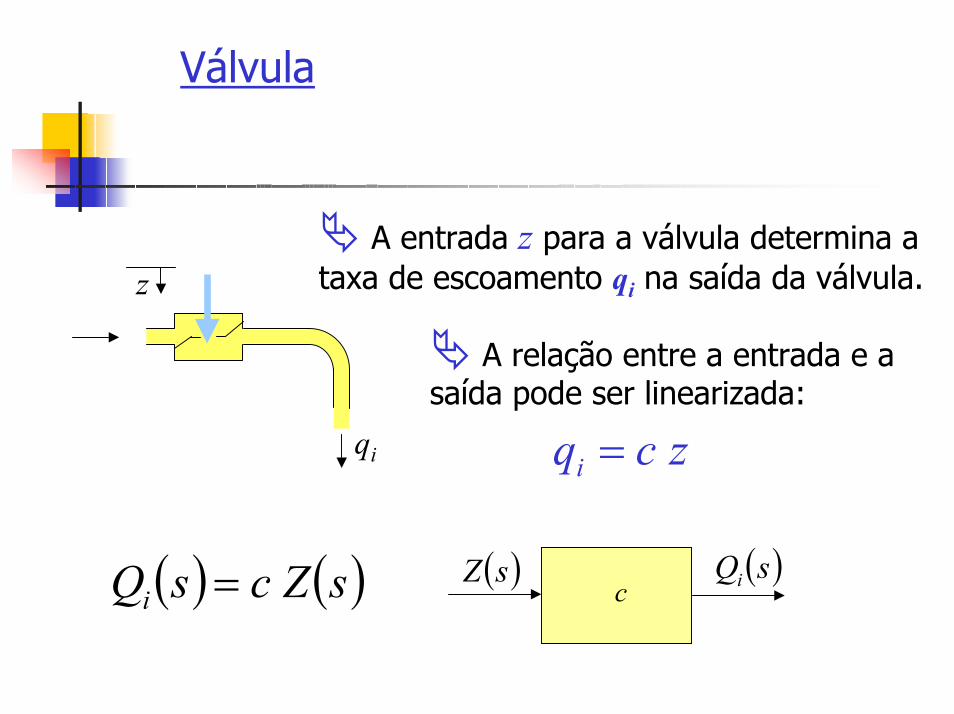
Válvula
A entrada z para a válvula determina a taxa de escoamento qi na saída da válvula.
A relação entre a entrada e a saída pode ser linearizada:
zcqi =
z
qi
( )sQi( ) ( )sZcsQi = ( )sZc
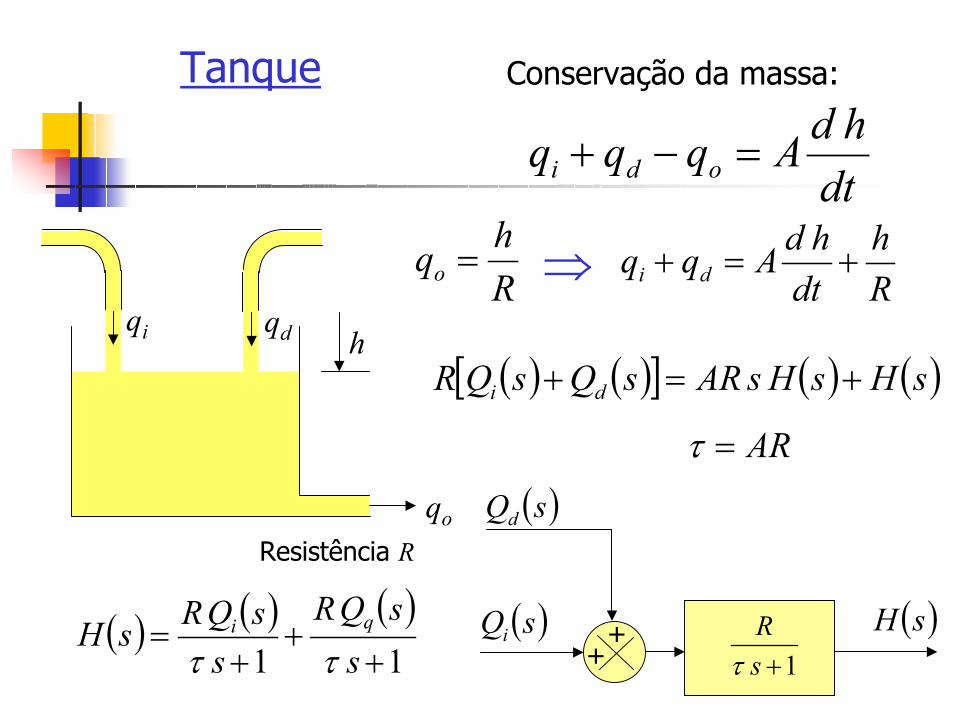
Tanque Conservação da massa:
dthdAqqq odi =−+
Rhqo = R
hdt
hdAqq di +=+⇒qi qd h
( ) ( )[ ] ( ) ( )sHsHsARsQsQR di +=+
AR=τ
( )sQdqo
Resistência R
( ) ( ) ( )11 +
++
=s
sQRs
sQRsH qi
ττ( )sH( )sQi
1+sR
τ++
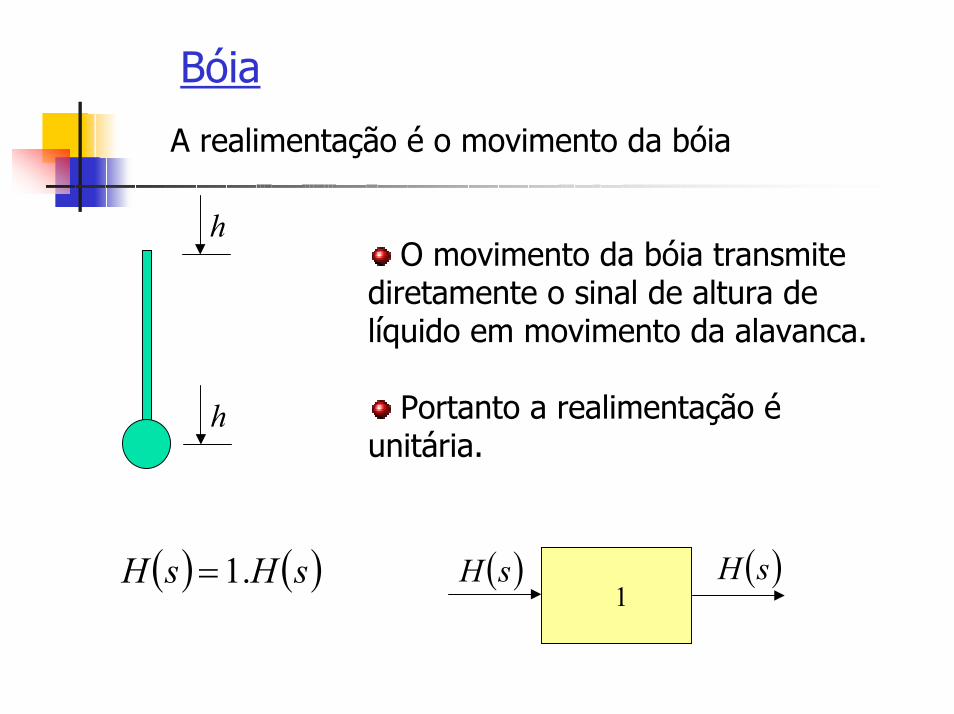
Bóia
A realimentação é o movimento da bóia
hO movimento da bóia transmite
diretamente o sinal de altura de líquido em movimento da alavanca.
Portanto a realimentação é unitária.
h
( ) ( )sHsH .1= ( )sH( )sH1
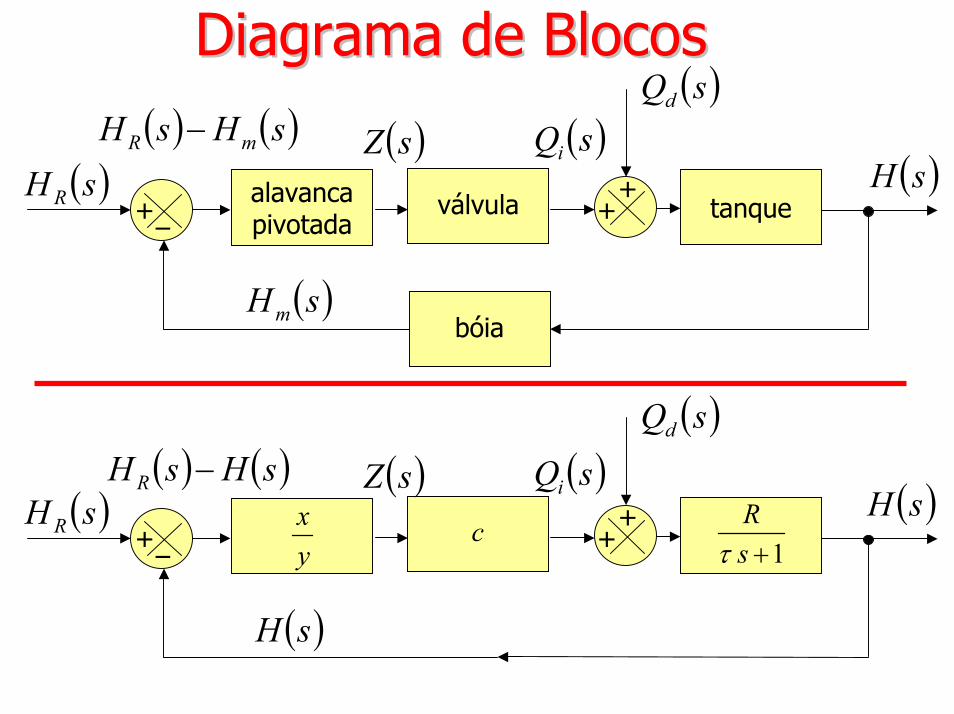
Diagrama de BlocosDiagrama de Blocos
–+ +
+( )sH R
( ) ( )sHsH mR −( )sQd
( )sZ ( )sQi ( )sHalavancapivotada
válvula tanque
( )sHmbóia
–+ +
+( )sH R
( ) ( )sHsHR −( )sQd
( )sZ ( )sQi
1+sR
τc
yx ( )sH
( )sH
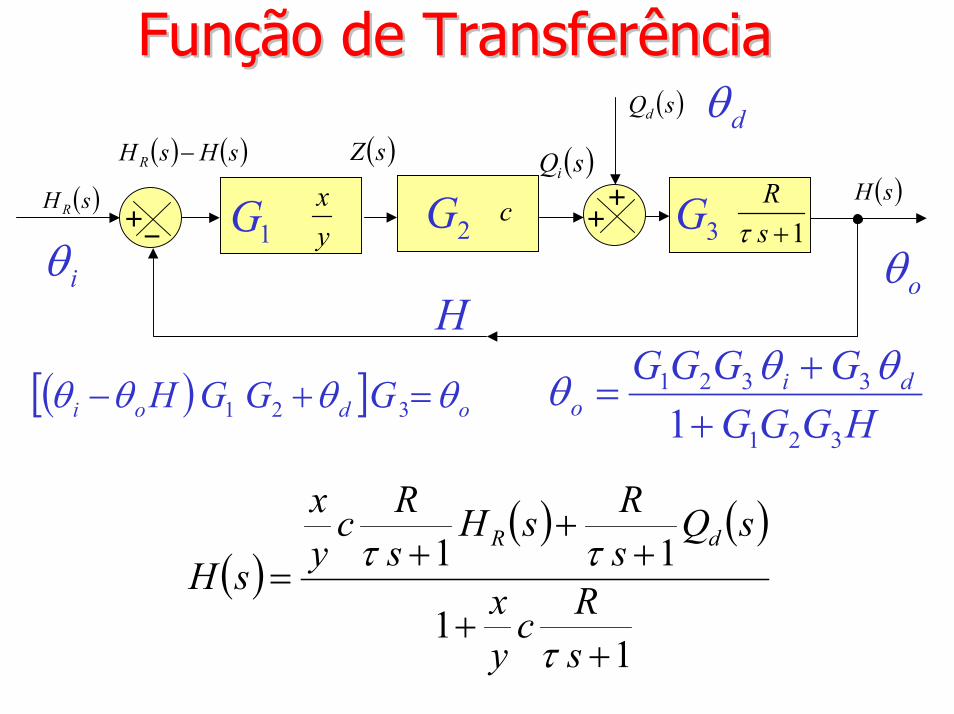
Função de TransferênciaFunção de Transferênciadθ
–+ +
+
( ) ( )sHsH R − ( )sZ ( )sQi
cyx
1G 2G
( )sQd
( )sH
1+sR
τ3G( )sH R
iθ oθH
( )[ ] odoi GGGH θθθθ =+− 321 HGGGGGGG di
o321
3321
1++
=θθθ
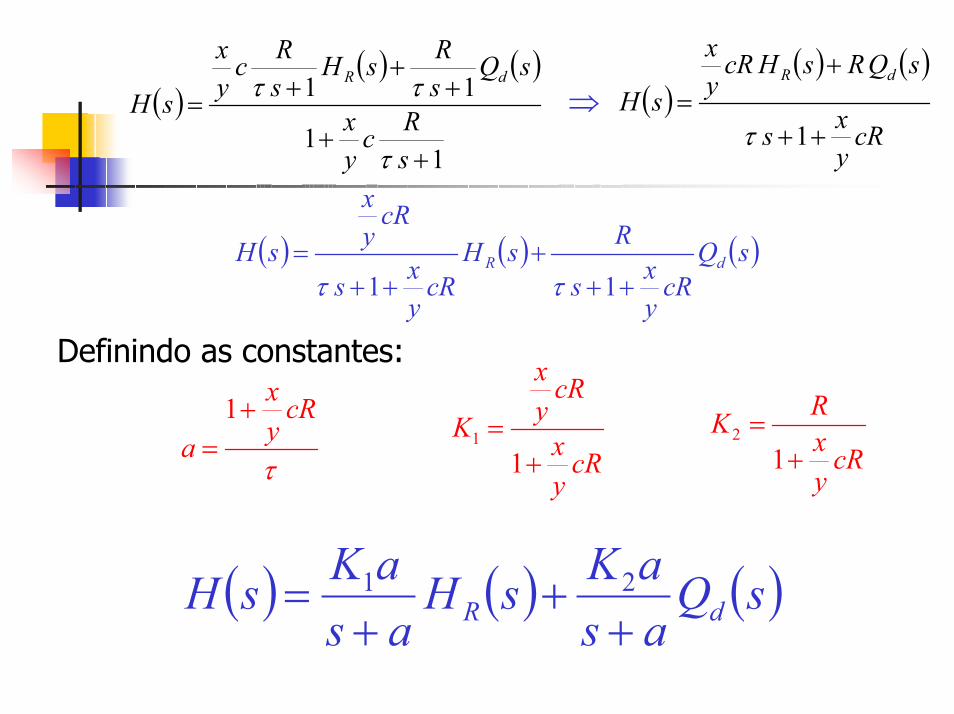
( )( ) ( )
11
11
++
++
+=
sRc
yx
sQsRsH
sRc
yx
sHdR
τ
ττ
( )( ) ( )
11
11
++
++
+=
sRc
yx
sQsRsH
sRc
yx
sHdR
τ
ττ ( )( ) ( )
cRyxs
sQRsHcRyx
sHdR
++
+=
1τ
( ) ( ) ( )sQcR
yxs
RsHcR
yxs
cRyx
sH dR
+++
++=
11 ττ
⇒
Definindo as constantes:
cRyx
cRyx
K+
=1
1
τ
cRyx
a+
=1
cRyxRK
+=
12
( ) ( ) ( )sQasaKsH
asaKsH dR +
++
= 21
( ) ( ) ( )sQas
KsHas
aKsH dR ++
+= 21
Com uma entrada degrau unitário em HR(s), sem distúrbio:
( ) ( )assaKsH+
= 1 ( ) ( )ateKth −−= 11( )s
sH R1
=
Com uma entrada degrau unitário em Qd (s), sem alterar o ponto de ajuste:
( ) ( )assaKsH+
= 2( )s
sQd1
= ( ) ( )ateKth −−= 12
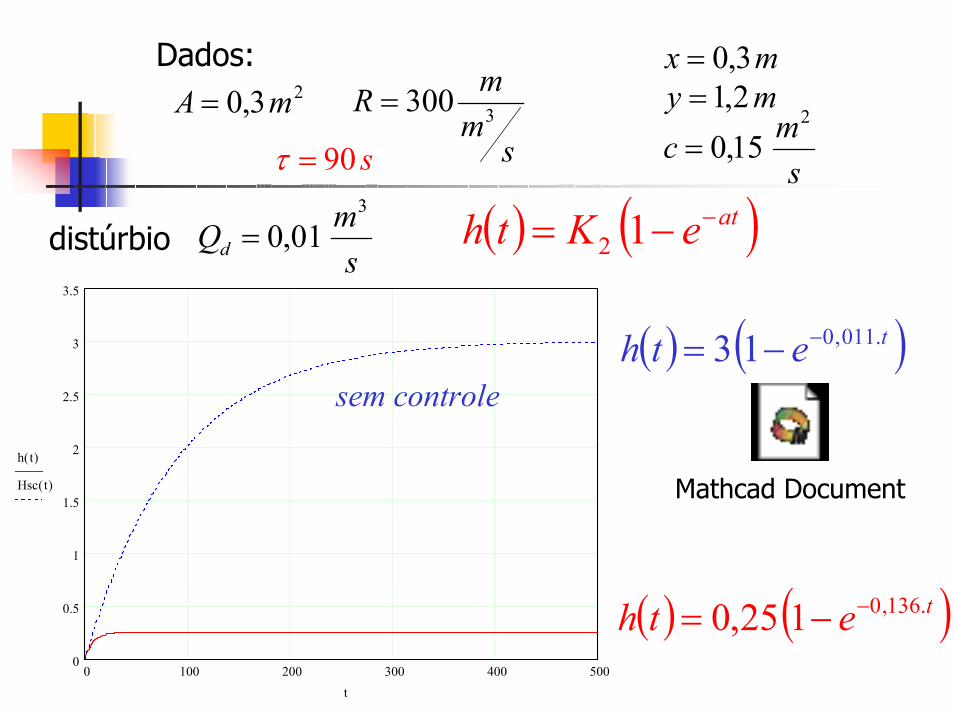
0 100 200 300 400 5000
0.5
1
1.5
2
2.5
3
3.53.5
0
h t( )
Hsc t( )
05000 t
23,0 mA =s
mmR 3300=
mx 3,0=my 2,1=
smc
2
15,0=s90=τ
( ) ( )ateKth −−= 12smQd
3
01,0=
( ) ( )teth .136,0125,0 −−=
( ) ( )teth .011,013 −−=sem controle
Mathcad Document
Dados:
distúrbio