simulaÇÃo, medida e desenvolvimento dos sub-sistemas de ... · anteriormente, é um conjunto de...
TRANSCRIPT
Departamento de Engenharia Mecânica
SIMULAÇÃO, MEDIDA E DESENVOLVIMENTO DOS SUB-SISTEMAS DE TRANSMISSÃO E FREIO DE VEÍCULO FORA DE ESTRADA
Aluno: Richard Carlos Kohler Roehrs
Orientador: José Alberto Reis Parise
Introdução
A organização SAE (Society of Automotive Engineers) promove duas competições anuais de protótipos de mini-baja, que são veículos fora-de-estradaconstruídos por equipes de universidades por todo Brasil.Nessas competições o desempenho dos veículos é avaliado, por meio de provas que os levam ao limite. Ocorrem provas de segurança, aceleração, velocidade máxima, tração, frenagem, dirigibilidade, resistência, dinâmica, enduro (onde o carro corre continuamente por 4 horas), dentre outras.
Portanto, para obter uma boa pontuação é de extrema importância que o carro seja competitivo e esteja dentro dos conformes do regulamento da competição, e para isso, ele deve ser bem projetado e depois de construído deve ser validado por meio de testes, para constatar se o carro realmente possui o desempenho esperado.
Visto que o regulamento define que os carros podem competir apenas por dois anos, a equipe Reptiles Baja PUC-Rio, está construindo um novo carro (Mussurana), para substituir o protótipo anterior (Caiman) que já excedeu esse prazo de validade.Nesse relatório serão abordados o projeto e a validação referentes aos sistemas de transmissão e de frenagem do protótipo Mussurana, que são de extrema importância para a dinâmica do carro e segurança do piloto. O primeiro é responsável por transmitir a força do motor até as rodas, de forma que haja o melhor aproveitamento da potência possível. Já o segundo é responsável pela diminuição da velocidade do veículo, e por fazer que o mesmo pare o mais rápido e de forma mais estável possível caso seja necessário.
Projeto dos sistemas do Mussurana
A. Transmissão
Definições iniciais
Para melhor compreensão do projeto, será feita aqui uma rápida apresentação dos componentes usualmente contindos em protótipos mini-baja.
• Transmissão Continuamente Variável (TCV): ela corresponde a uma caixa de marcha automática com infinitas marchas. São duas polias que abrem e fecham ligadas por uma correia, onde uma delas sai do motor e a outra se liga, usualmente, à uma redução fixa. Ela possui internamente molas e pesos que controlam sua velocidade de abertura.
Departamento de Engenharia Mecânica
.
Figura 1 Exemplo de uma TCV
Figura 2 Principio de funcionamento de uma TCV
• Caixa de Redução Fixa: é uma caixa que contém uma ou mais reduções de engrenagens complementares, uma vez que somente a redução máxima da TCV geralmente não é suficiente. Pode ser por engrenagens por contato direto ou por corrente.
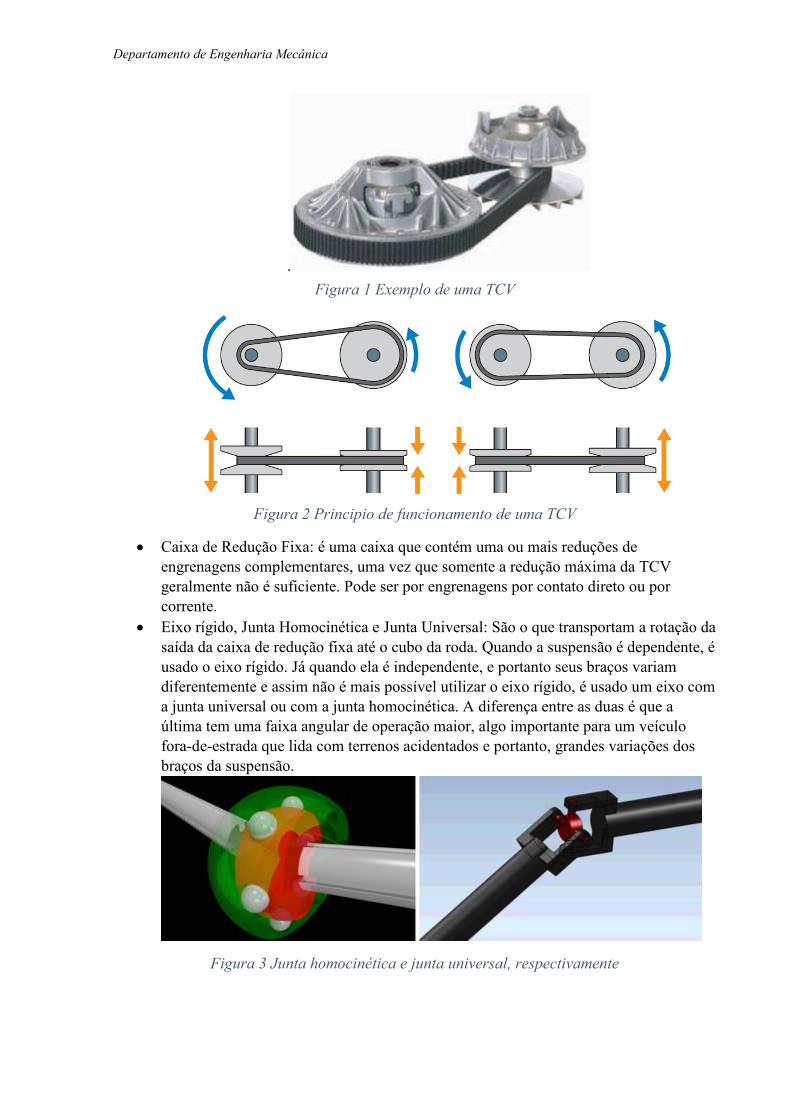
• Eixo rígido, Junta Homocinética e Junta Universal: São o que transportam a rotação da saída da caixa de redução fixa até o cubo da roda. Quando a suspensão é dependente, é usado o eixo rígido. Já quando ela é independente, e portanto seus braços variam diferentemente e assim não é mais possível utilizar o eixo rígido, é usado um eixo com a junta universal ou com a junta homocinética. A diferença entre as duas é que a última tem uma faixa angular de operação maior, algo importante para um veículo fora-de-estrada que lida com terrenos acidentados e portanto, grandes variações dos braços da suspensão.
Figura 3 Junta homocinética e junta universal, respectivamente

Departamento de Engenharia Mecânica
Figura 4- Eixo rígido do protótipo caiman
• Cubo de Roda: é onde fica fixada a roda e o disco ou tambor de freio,e é o que recebe o torque do eixo e o transmite para as rodas.
Requisitos de projeto
O primeiro passo para projetar o sistema, é definir seus requisitos de projeto. No caso da Transmissão, os requisitos de projeto foram força trativa e velocidade máxima. A força trativa é a força que chega às rodas responsáveis pela tração, e ela foi determinada a partir da força trativa máxima do protótipo antigo, considerada suficiente, uma vez que ele foi campeão nacional de tração. Para definir a tração máxima foi feito um cálculo de capacidade de rampa (gradeability) com o ângulo definido a partir da média de valores de veículos UTV (da mesma categoria do mini-baja) do mercado
Figura 5- média de capacidade de rampa de veículos UTV do mercado
O segundo requisito, a velocidade máxima, é, como o nome diz, a velocidade máxima que o veículo pode alcançar. Ele foi definido a partir das velocidades máximas das 10 melhores equipes nas provas de velocidade, esses dados são disponibilizados pela própria organização da competição. Chegamos ao valor de 50 km/h.

Departamento de Engenharia Mecânica
Figura 6-Valor da velocidade máxima das 10 melhores equipes na prova de velocidade
Cálculos
Depois de definidos Por meio de um cálculo simples de plano inclinado de 30trativa necessária para vencer as forças resistivas do veículos naquela condição.consideradas,Gradiente de inclinação e Força de resistência ao rolamento, foram calculadas a partir de formulas tiradas do AutomotiveTransmissions [1].[1], a força de resistência aerodinâmica pode ser desconsiderada quando o veículo abaixo de 60 km/h, o que é o caso do nosso protótipo.
Figura 7-Representação do cálculo feito, onde se encontram: a força de resistência
aerodinâmica (Da), o peso do protótipo(P), e as forças de resistêcia ao rolamento (Rxf
O gradiente de inclinação nada mais é que componente do peso normal ao chão.força de resistência ao rolamento é uma força gerada pela elasticidade do pneu, que se opõe ao movimento do carro, e seu valor é o produto do gradiente do peso multicoeficiente que depende do tipo de solo, que
Figura 8-fórmula da força de resistência ao rolamento quando em uma inclinação nula
Fazendo os cálculos, chegadinâmico de nosso pneu é de 0,240m, o torque necessário no eixo das rodas para subir uma inclinação de 30ᶿ tem o valor de 374,70 Nm.
artamento de Engenharia Mecânica
velocidade máxima das 10 melhores equipes na prova de velocidade
Depois de definidos os requisitos de projeto, foram feitos os cálculos para atingiPor meio de um cálculo simples de plano inclinado de 30ᶿ, foi possível determinar a força trativa necessária para vencer as forças resistivas do veículos naquela condição.
eradas,Gradiente de inclinação e Força de resistência ao rolamento, foram calculadas a partir de formulas tiradas do AutomotiveTransmissions [1]. De acordo com a mesma fonte
, a força de resistência aerodinâmica pode ser desconsiderada quando o veículo abaixo de 60 km/h, o que é o caso do nosso protótipo.
Representação do cálculo feito, onde se encontram: a força de resistência
aerodinâmica (Da), o peso do protótipo(P), e as forças de resistêcia ao rolamento (Rxf
O gradiente de inclinação nada mais é que componente do peso normal ao chão.força de resistência ao rolamento é uma força gerada pela elasticidade do pneu, que se opõe ao movimento do carro, e seu valor é o produto do gradiente do peso multi
que depende do tipo de solo, que é definido pelo Automotive
fórmula da força de resistência ao rolamento quando em uma inclinação nula
Fazendo os cálculos, chega-se ao valor de força trativa de 1561,289 N.dinâmico de nosso pneu é de 0,240m, o torque necessário no eixo das rodas para subir uma
tem o valor de 374,70 Nm.
velocidade máxima das 10 melhores equipes na prova de velocidade
os requisitos de projeto, foram feitos os cálculos para atingi-los. , foi possível determinar a força
trativa necessária para vencer as forças resistivas do veículos naquela condição. As forças eradas,Gradiente de inclinação e Força de resistência ao rolamento, foram calculadas a
De acordo com a mesma fonte , a força de resistência aerodinâmica pode ser desconsiderada quando o veículo opera
Representação do cálculo feito, onde se encontram: a força de resistência
aerodinâmica (Da), o peso do protótipo(P), e as forças de resistêcia ao rolamento (Rxf e Rxt)
O gradiente de inclinação nada mais é que componente do peso normal ao chão. Já a força de resistência ao rolamento é uma força gerada pela elasticidade do pneu, que se opõe ao movimento do carro, e seu valor é o produto do gradiente do peso multiplicado por um
definido pelo Automotive Transmissions [1]
fórmula da força de resistência ao rolamento quando em uma inclinação nula
e força trativa de 1561,289 N. Como o raio dinâmico de nosso pneu é de 0,240m, o torque necessário no eixo das rodas para subir uma

Departamento de Engenharia Mecânica
Figura 9- Valores obtidos durante os cálculos no plano inclinado
Logo, projetou-se uma redução que supre esse torque. A equipe definiu que a transmissão seria do tipo TCV, por ser mais interessante para uso em Baja-SAE. Foi definido também que ela seria do modelo CVTech series 06, pois a empresa possue um programa de patrocínio para universidades, além de possuir uma ampla gama de reduções.Esse modelo possue a redução mínima e máxima de valor 1:0,48 e 1:3 respectivamente. Porém, somente a TCV não seria o suficiente para suprir a demanda de redução, por isso, foi necessário projetar também uma caixa de redução. Utilizando a equação abaixo, Produzida a partir do AutomotiveTransmissions [1], definiu-se a redução extra necessária para subir a rampa de 30ᶿ.
����çã��� =��� ����[��].� ������[�]
������[��]. ƞ���.���� ���
Como o nosso motor possui cerca de 17,5 Nm de torque, e a TCV têm uma eficiência de cerca de 85%, nossa Redução Extra mínima para vencer a rampa chegou a um valor de 1:7,13. Depois, calculamos a reduçãoextra necessária para o requisito de velocidade máxima de 50 km/h, utilizando a equação:
����çã��� =�.�. ��� çã��á�� �������[�!�]. � ��"��â��$�[�]. ƞ���
%&. ��'�����(���[)�
*] ∗ ����í��$�
Conclui-se então que para que seja possível que o protótipo atinja a velocidade máxima de projeto, ele pode ter uma redução extra de no máximo 1:9,33. Como a redução será fixa, ela deve ter um valor entre 7,13 e 9,33. Como o baja-SAE é um veículo fora de estrada, optou-se por privilegiar a tração e escolher a maior redução possível que atenda aos dois requisitos, por isso a redução fixa foi definida como 9,33. Principalmente devido à diminuição de peso, a redução fixa do protótipo mussurana ficou 23,52% menor em relação ao protótipo anterior. Isso faz com que as perdas causadas pela inércia dos componentes girantes sejam menores e que o sistema seja mais compacto.
Componentes
O próximo passo foi definir Componentes para o sistema de transmissão, de forma que respeitassem os cálculos feitos e transmitissem a potência do motor as rodas. O principal componente da transmissão é o motor, que é fixado pelo regulamento da competição. Ele é um Briggs&Stratton, model 20. Logo após o motor, vem a TCV, que como dito anteriormente, é um conjunto de polias da marca CVTech, modelo series 06.

Departamento de Engenharia Mecânica
Figura 10-Foto do motor do padronizado pelo regulamento
Para fornecer a redução fixa de 1:9,33; foi projetada, simulada e construída uma caixa de redução de engrenagens por contato, dividida em dois estágios para diminuição de peso e inércia.
Figura 11-na direita, há a vista interna da caixa de redução, e na direita, a capa da caixa
Saindo da caixa, há dois transferência da rotação da caixa ao cubo das rodas. A escolha desse componente foi feita com base em exigências do subsistema de suspensão, uma vez que sua angulação influencia no cursos dos braços da suspensão traseira. Por isso, foramdianteiras direitas da Yamaha Rhino 450, pois permitiam uma angulação de 39necessidades do subsistema de suspensão.
Ligada à homocinética está um cubo dO conjunto pneu-roda utilizado será o mesmo do protótipo anteriordo projeto atual.
artamento de Engenharia Mecânica
Foto do motor do padronizado pelo regulamento(esquerda) e da TCV
utilizada(direita)
Para fornecer a redução fixa de 1:9,33; foi projetada, simulada e construída uma caixa de redução de engrenagens por contato, dividida em dois estágios para diminuição de peso e
há a vista interna da caixa de redução, e na direita, a capa da caixa
usinada
Saindo da caixa, há dois semieixos com duas juntas homocinéticastransferência da rotação da caixa ao cubo das rodas. A escolha desse componente foi feita com base em exigências do subsistema de suspensão, uma vez que sua angulação influencia no cursos dos braços da suspensão traseira. Por isso, foram escolhidas duas homocinéticas dianteiras direitas da Yamaha Rhino 450, pois permitiam uma angulação de 39necessidades do subsistema de suspensão.
Figura 12-Semieixo utilizado
Ligada à homocinética está um cubo de roda que tem a simples função de uniroda utilizado será o mesmo do protótipo anterior pois supre as necessidades
(esquerda) e da TCV
Para fornecer a redução fixa de 1:9,33; foi projetada, simulada e construída uma caixa de redução de engrenagens por contato, dividida em dois estágios para diminuição de peso e
há a vista interna da caixa de redução, e na direita, a capa da caixa
com duas juntas homocinéticas cada, que fazem a transferência da rotação da caixa ao cubo das rodas. A escolha desse componente foi feita com base em exigências do subsistema de suspensão, uma vez que sua angulação influencia
escolhidas duas homocinéticas dianteiras direitas da Yamaha Rhino 450, pois permitiam uma angulação de 39ᶿ, que supre as
tem a simples função de uni-lá à roda. pois supre as necessidades
Departamento de Engenharia Mecânica
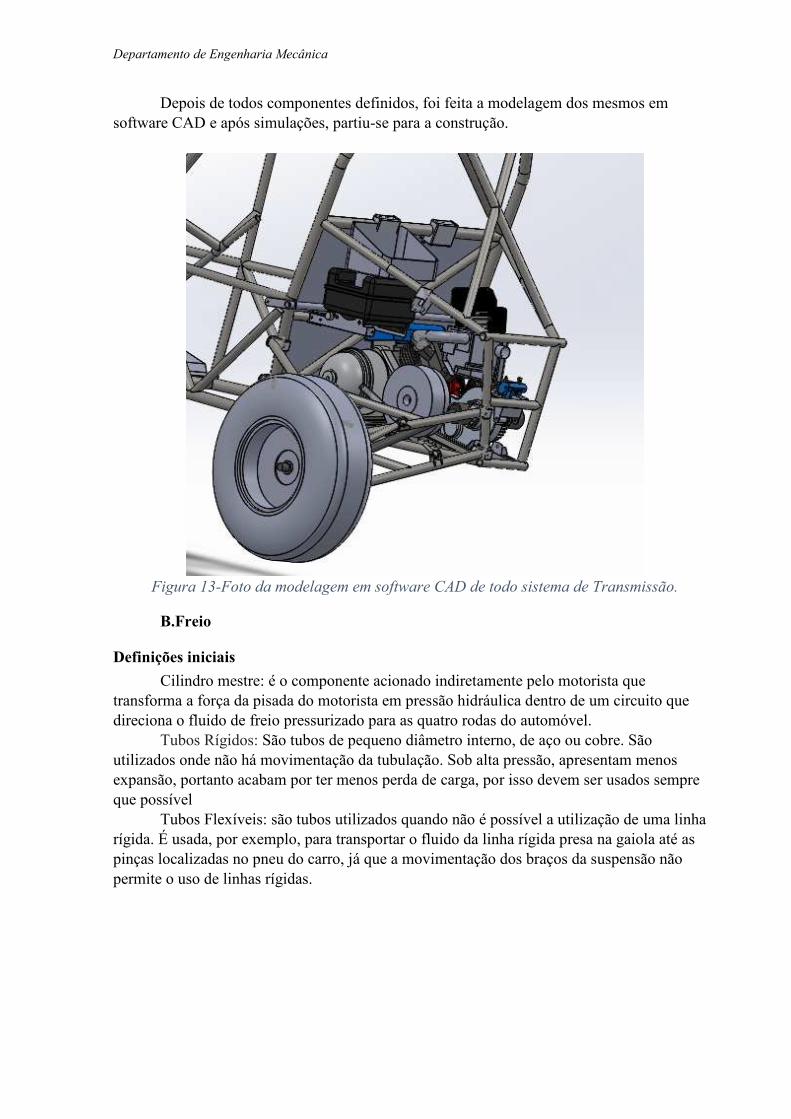
Depois de todos componentes definidos, foi feita a modelagem dos mesmos em software CAD e após simulações, partiu-se para a construção.
Figura 13-Foto da modelagem em software CAD de todo sistema de Transmissão.
B.Freio
Definições iniciais
Cilindro mestre: é o componente acionado indiretamente pelo motorista que transforma a força da pisada do motorista em pressão hidráulica dentro de um circuito que direciona o fluido de freio pressurizado para as quatro rodas do automóvel.
Tubos Rígidos: São tubos de pequeno diâmetro interno, de aço ou cobre. São utilizados onde não há movimentação da tubulação. Sob alta pressão, apresentam menos expansão, portanto acabam por ter menos perda de carga, por isso devem ser usados sempre que possível
Tubos Flexíveis: são tubos utilizados quando não é possível a utilização de uma linha rígida. É usada, por exemplo, para transportar o fluido da linha rígida presa na gaiola até as pinças localizadas no pneu do carro, já que a movimentação dos braços da suspensão não permite o uso de linhas rígidas.
Departamento de Engenharia Mecânica
Figura 14-Exemplo de Tubos Rígidos e Tubos Flexiveis
Freio a Tambor: é um sistema de freio que é composto sapatas que, ao freio ser acionado, entram em contato com uma superfície girante, que é o tambor propriamente dito. São mais baratas que um sistema de freio a disco, porém contém mais peças e é de difícil manutenção.
Freio a disco: é um sistema de dissipação de energia que é composto por uma pinça contendo uma pastilha, que ao entrar em contato com um disco de metal, gera o atrito que faz com que o veículo pare. Ele é mais recomendado para uso em veículos baja, pois, como já foi dito, tem uma maior facilidade de manutenção; acumula menos sujeira que um freio a tambor, o que é importante considerando o ambiente lamacento em que os protótipos correm; e tende a aquecer menos que o freio a tambor, o que é interessante visto que o coeficiente de atrito diminui com o aumento de temperatura.
Figura 15-Sistema de freio a disco. Pode-se perceber a presença do disco e da pinça presa
nele
Pinça de freio: é um dispositivo composto por um ou mais pistões, que move a pastilha de freio com intuito de botá-la em contato com o disco de freio.
Fluido de freio: é um tipo de fluido com características especificas, como baixíssima compressibilidade, para transmitir a pressão que aciona as pastilhas ou sapatas.
Requisitos de projeto
O freio é, possivelmente, o sistema mais importante do Protótipo, uma vez que é ele que vai garantir a segurança do piloto e a integridade do carro, por isso o mesmo deve ter atenção redobrada na hora de ser projetado. Sua função é a de dissipar a energia cinética do carro, para causar sua diminuição de velocidade.
Como norte do projeto, Foi definido um requisito de projeto: o carro ser capaz de realizar travamento das quatro rodas em ambiente pavimentado ou não pavimentado, já que o
Departamento de Engenharia Mecânica
próprio regulamento da competição Baja-SAE estabelece isso. Para os cálculos, foi usado como referência bibliográfica o livro LIMPERT[2].
Antes de iniciar os cálculos, é importante dizer que algumas hipóteses sugeridas pelo LIMPERT[2]foram seguidas. São elas: a incompressibilidade do fluido de freio; perda de carga pelo atrito com a linha de freio desprezível; e considerar o “push-out pressure” como desprezível, que é a pressão necessária para mover as pastilhas até o disco, pois essa distância é tão pequena que não foi possível nem utilizar um paquímetro para medi-la.
Ficou definido também, que seriam utilizadas três pinças de freio no carro. Duas nas rodas dianteiras, e uma acoplada no eixo que sai da caixa de redução, o que permite travar as duas rodas traseiras ao mesmo tempo.
Cálculos
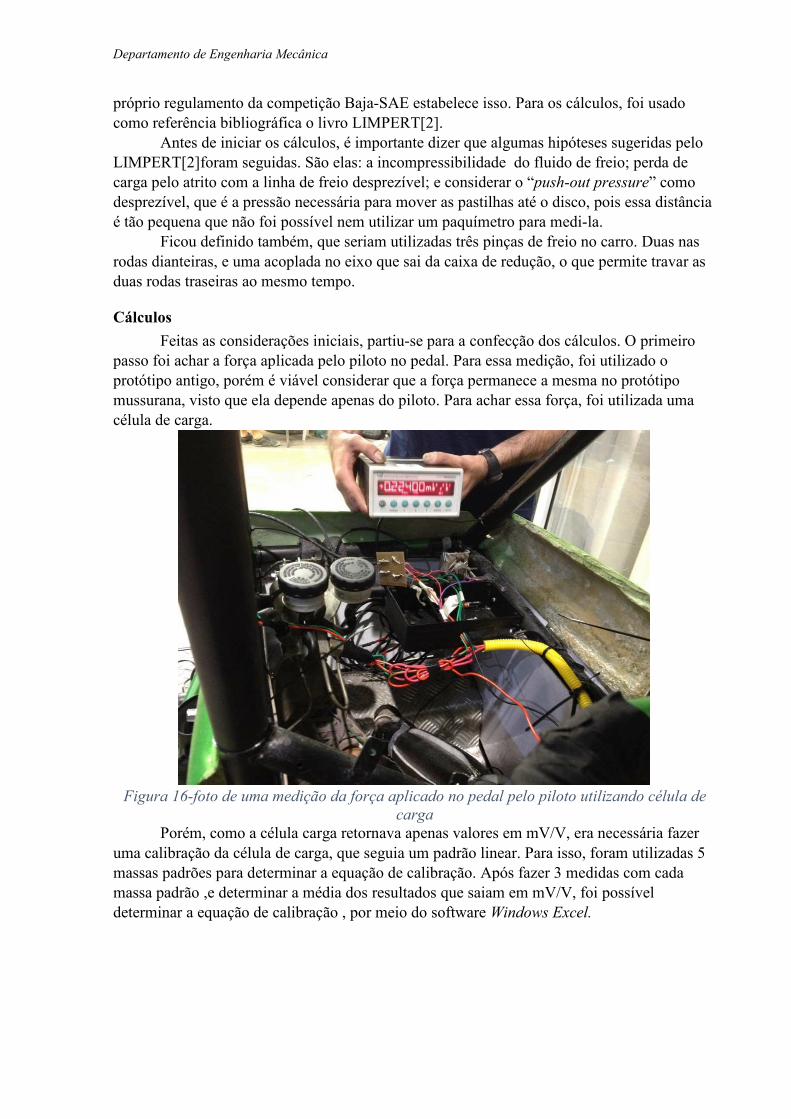
Feitas as considerações iniciais, partiu-se para a confecção dos cálculos. O primeiro passo foi achar a força aplicada pelo piloto no pedal. Para essa medição, foi utilizado o protótipo antigo, porém é viável considerar que a força permanece a mesma no protótipo mussurana, visto que ela depende apenas do piloto. Para achar essa força, foi utilizada uma célula de carga.
Figura 16-foto de uma medição da força aplicado no pedal pelo piloto utilizando célula de
carga
Porém, como a célula carga retornava apenas valores em mV/V, era necessária fazer uma calibração da célula de carga, que seguia um padrão linear. Para isso, foram utilizadas 5 massas padrões para determinar a equação de calibração. Após fazer 3 medidas com cada massa padrão ,e determinar a média dos resultados que saiam em mV/V, foi possível determinar a equação de calibração , por meio do software Windows Excel.
Departamento de Engenharia Mecânica
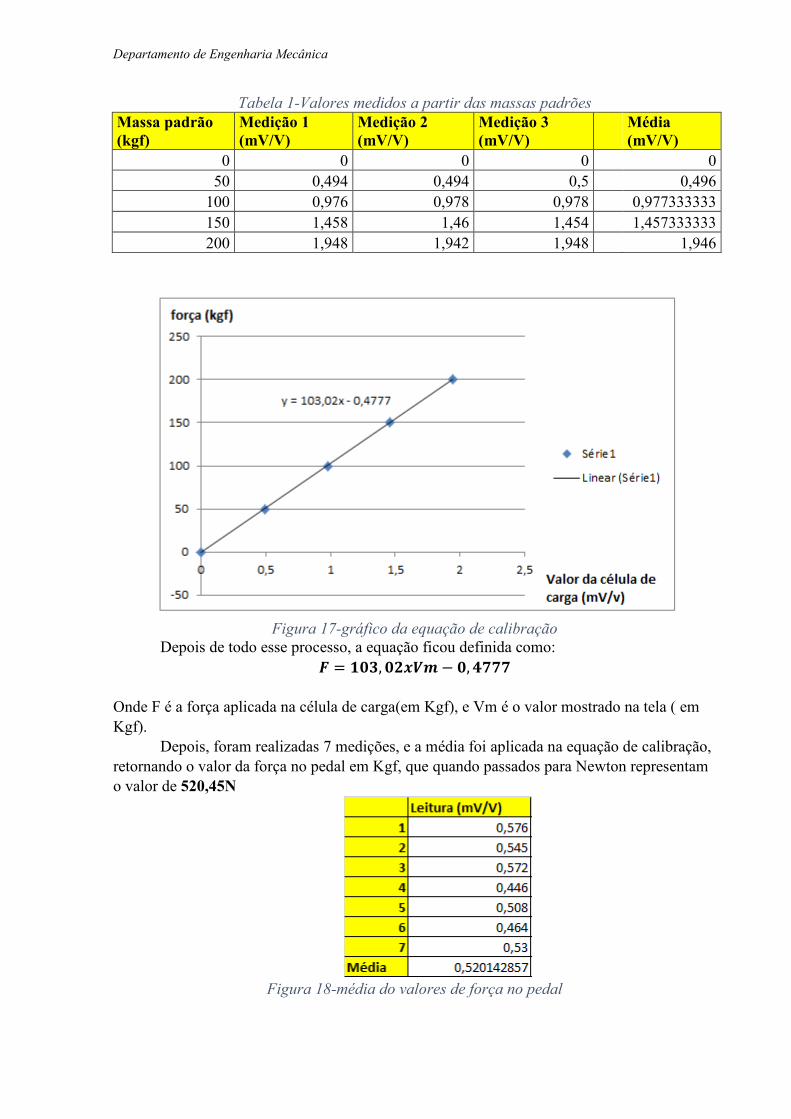
Tabela 1-Valores medidos a partir das massas padrões
Massa padrão (kgf)
Medição 1 (mV/V)
Medição 2 (mV/V)
Medição 3 (mV/V)
Média (mV/V)
0 0 0 0 0 50 0,494 0,494 0,5 0,496
100 0,976 0,978 0,978 0,977333333 150 1,458 1,46 1,454 1,457333333 200 1,948 1,942 1,948 1,946
Figura 17-gráfico da equação de calibração
Depois de todo esse processo, a equação ficou definida como: � = -&., &���− &, 1222
Onde F é a força aplicada na célula de carga(em Kgf), e Vm é o valor mostrado na tela ( em Kgf).
Depois, foram realizadas 7 medições, e a média foi aplicada na equação de calibração, retornando o valor da força no pedal em Kgf, que quando passados para Newton representam o valor de 520,45N
Figura 18-média do valores de força no pedal

Departamento de Engenharia Mecânica
� = -&., &�&, 3�&-1�432 − &1222 = ��, 45.-��4%678 = 3�&, 13�%449 Porém, mesmo obtendo esse valor, ele não será o valor usado nos cálculos, uma vez
que o limpert[2] recomenda que o valor de força no pedal não seja maior que 445N para sistemas de freio sem servo-freio. Portanto será usado um valor menor, 400 N, por motivos de segurança, mesmo sabendo que nosso piloto pode fazer maiores forças.a partir disso, foi realizado o cálculo da pressão na linha de freio, representada pela equação[2]:
:; =<=>=?=
@ABC
Onde : pE:é a pressão na linha de freio [N/cm^2]. FH: é a força aplicada no pedal [N], definida acima.
lH: é o chamado “Pedal Ratio”[mm/mm], que é uma razão entre os braços de alavanca do
pedal de freio, e é o quanto o pedal amplifica a força aplicada nele. ηH: é a eficiência do pedal [%], o[2]sugere utilizar o valor de 0,8
ALM:área transversal do cilindro mestre [cm^2], obtida por medição do próprio componente X: é a quantidade de cilindros-mestre [Adimensional]
Pelo regulamento da competição o deve-se usar um cilindro mestre duplo ou dois simples para que existam duas linhas de fluido independentes para a dianteira e para a traseira, dessa forma, evita-se pane total do sistema de frenagem caso um dos sistemas falhe. Optou-se por usar dois simples em conjunto com uma barra de balanceamento para ter controle da pressão que iria para cada cilindro. O cálculo do balance bar foi feito para que a pressão ficasse dividida igualmente, ou seja, a pressão que ia para a pinça traseira era igual à que ia para as pinças dianteiras. O valor da pressão em cada linha ficou calculado como:1011,058 N/cm^2
Figura 19-Cálculo da pressão em cada uma das linhas
Partimos então para a Força de frenagem, e para adquiri-la, é necessário descobrir o Fator K para dianteira e para traseira. Esse Fator é calculado pela seguinte equação:
N = ABO × Q< ×RSTUVW
2YSZ[
× ?BO ×\:
Onde: ABO: é a área transversal docilindro da pinça[cm^2] Q<:fator de atrito da pastilha com o disco [adimensional] – valor tabelado RSTUVW:Diâmetro do disco de freio [cm] YSZ[:Raio dinâmico da roda [cm] – valor obtido a partir do código do pneu

Departamento de Engenharia Mecânica
?BO:Eficiência do cilindro de roda [%] = 98% [2] Np:Número de pinças
Figura 20 Cálculo dos fatores Kd e Kt
Depois de encontrado o fator K, é só multiplica-lo pela pressão da linha para achar a força de frenagem do seu respectivo eixo:
�� = )��' �� = )��'
E a força de frenagem total do carro é a soma da força de frenagem dianteira com a força de frenagem traseira:
� = �� + ��
Figura 21 Cálculo da força total de frenagem
A aceleração teórica que o carro desenvolve é a divisão da força total de frenagem pela
massa de operação do veículo. Já a aceleração máxima que um veículo suporta depende da força de atrito que o pneu tem com o terreno, portanto, ela é o produto do coeficiente de atrito
do solo( que será escolhido o do pior caso, o do chão asfaltado com valor 0,75, pois o regulamento define que o carro deve travar as 4 rodas em ambiente pavimentado e não
pavimentado) ,e a aceleração da gravidade: ��ó��$ = �/�
�á = `7
Se a aceleração teórica gerada pelo sistema de frenagem for menor que a aceleração máxima, então não há travamento, e a aceleração real do carro terá o valor da aceleração teórica. Já se o oposto ocorrer, ou seja, a aceleração teórica for maior que a aceleração máxima, então há travamento e a aceleração real do carro tem o valor da aceleração máxima. Nosso objetivo, é que as rodas travem, para assim garantirmos o nosso requisito de projeto. Avaliando os dados, vemos que a aceleração teórica realmente é maior que a aceleração máxima, e, portanto, nosso requisito de projeto foi alcançado.
Departamento de Engenharia Mecânica
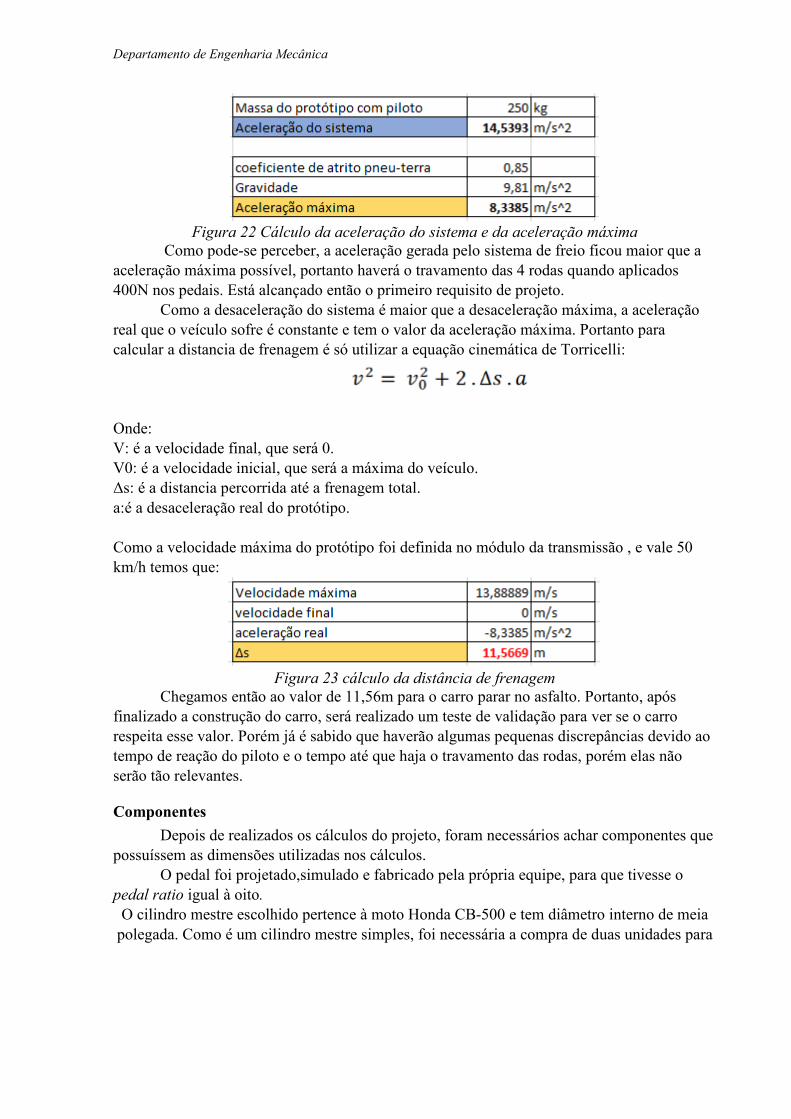
Figura 22 Cálculo da aceleração do sistema e da aceleração máxima
Como pode-se perceber, a aceleração gerada pelo sistema de freio ficou maior que a aceleração máxima possível, portanto haverá o travamento das 4 rodas quando aplicados 400N nos pedais. Está alcançado então o primeiro requisito de projeto.
Como a desaceleração do sistema é maior que a desaceleração máxima, a aceleração real que o veículo sofre é constante e tem o valor da aceleração máxima. Portanto para calcular a distancia de frenagem é só utilizar a equação cinemática de Torricelli:
Onde: V: é a velocidade final, que será 0. V0: é a velocidade inicial, que será a máxima do veículo. ∆s: é a distancia percorrida até a frenagem total. a:é a desaceleração real do protótipo. Como a velocidade máxima do protótipo foi definida no módulo da transmissão , e vale 50 km/h temos que:
Figura 23 cálculo da distância de frenagem
Chegamos então ao valor de 11,56m para o carro parar no asfalto. Portanto, após finalizado a construção do carro, será realizado um teste de validação para ver se o carro respeita esse valor. Porém já é sabido que haverão algumas pequenas discrepâncias devido ao tempo de reação do piloto e o tempo até que haja o travamento das rodas, porém elas não serão tão relevantes.
Componentes
Depois de realizados os cálculos do projeto, foram necessários achar componentes que possuíssem as dimensões utilizadas nos cálculos. O pedal foi projetado,simulado e fabricado pela própria equipe, para que tivesse o pedal ratio igual à oito.
O cilindro mestre escolhido pertence à moto Honda CB-500 e tem diâmetro interno de meia polegada. Como é um cilindro mestre simples, foi necessária a compra de duas unidades para

Departamento de Engenharia Mecânica
estar de acordo com a norma da competição de ter dois reservatórios independentes.
Figura 24-Cilindro mestre utilizado
O fluido de freio escolhido é da classe DOT 3, Satisfatório para o projeto, e foram adquiridas também Tubulações rígidas e flexíveis do tipo Aeroquip realizar seu transporte do cilindro mestre ás pinças.
As pinças escolhidas são da marca Wilwood. As dianteiras são espelhadas e do modelos SP1, já a traseira é do modelo billet GO-kart, ambas possuem 5,098 cm^2 de área transversal de seus cilindros. É importante ressaltar que a escolha das pinças dianteiras foi propositalmente feita para que as mesma pudessem ser posicionadas dentro das rodas, pois assim, o carro teria uma grande melhora na dinâmica da suspensão. As pastilhas são os modelos recomendados pela fabricante.
Figura 25-da esquerda para direita,pinçaWilwoodbillet go-kart (traseira); pinça Wilwood
SP1 ( dianteira)
Já os discos escolhidos tanto para a dianteira quanto para a traseira foram o disco da Suzuki Burgman 125 que possuem 180mm de diâmetro, porém foram usinados até 170mm para poderem ser posicionados dentro das rodas no caso dos dianteiros, e para não haver conflito com os componentes da traseira.
Departamento de Engenharia Mecânica
Figura 26-disco da suzukiburgman 125
Depois de escolhidos os componentes, foi feita uma modelagem dos mesmos em software CAD e a montagem do sistema de freio
Conclusão
O projeto dos sistemas de transmissão e freio do protótipo desenvolvido se mostrou melhor que os do protótipo anterior desenvolvido pela equipe Reptiles Baja PUC-Rio,respeitou os requisitos de projeto inicialmente propostos e se mostra dentro dos conformes do regulamento da competição promovida pela SAE Brasil.
Ambos sistemas apresesentaram uma considerável redução de peso e são mais compactas, características importantes para veículos que se propõem competitivos. Também contam com uma melhor resposta dinâmica, que contribui para uma melhor nota nas provas da competição.
Além disso, o desenvolvimento próprio dos sistemas não só gerou uma melhora interna, mas também promoveu uma melhora fora de seu sistema, estendendo seus benefícios aos sistemas de chassi, suspensão e direção. 1-NAUNHEIMER ,H., BERTSCHE B., RYBORZ, J., e NOVAK, W., Automotive Transmissions: Fundamentals, Selection Design and Application, Second edition. 2- LIMPERT R., Brake design and safety, Second edition.