servocontrole nãolinear auto-sintonizado redes neurais ... · seus processadores traz vantagens em...
TRANSCRIPT

---
Servocontrole nãolinear Auto-Sintonizado. por Redes Neurais de Base Radial
Adolfo Bauchspiess'Adriana de C. Drummond IAlexandre R. S. Romariz'
IGRACO - Grupo de Automação e Controle, http://www.graco.unb.brDepartamento de Engenharia Elétrica - Universidade de Brasília - UnB
70910-900 - Brasília / DF - [email protected], [email protected], [email protected]
Abstract: This paper discusses the use of Radial Basis Function (RBF) Neural Networks for theidentification and control of positioning systems . The point in using neural networks is to give the systemgreater robustness against parameter variations, measuring noise and special1y to compensate the mostcommonly encountered non linear effects on this kind of systems: dead zone, saturation and non-lineargain. For the experimental part a DC servomotor with tacometric and position feedback is used . Thenetwork is used in a closed loop scheme adjusting the parameters of non-linear classical control1ers. Adigital PID controller implemented on a Transputer is used to establish the resulting linear dynarnics. Firstexperimental results are discussed, pointing out a significant steady-state error reduction and auniformization of the transitory response of the closed-Ioop system .. Keywords: Non-linear control, neural networks, DC motor servo-positioning.
Resumo: Este artigo discute a aplicação de Redes Neurais de Base Radial para a identificação e ocontrole de sistemas posicionadores, objetivando tornar o sistema mais robusto a variações paramétricas,a ruídos de medida e principalmente compensar os efeitos não lineares mais comuns encontrados nestetipo de sistema: zona morta, saturação e ganho não linear. Na parte experimental é empregado umservoposicionador baseado num motor de corrente contínua com realimentação tacométrica e de posição.A rede é empregada em malha fechada para o ajuste dos parâmetros do controlador não-linear clássico.Um controlador PID digital foi implementado em um Transputer para estabelecer a dinâmica do sistemalinear resultante. São discutidos primeiros resultados experimentais, que mostram uma significativaredução do erro em regime e uma uniformização da resposta transitória do sistema em malha fechada.Palavras-Chave: Controle não-linear, redes neurais, servoposicionador com motor Cc.
1. IntroduçãoSistemas de controle de posição baseados em motoresCC são utilizados com esquemas de controle clássicohá muito tempo. O esquema de controle maisutilizado consiste numa malha de realimentaçãoanalógica de corrente, de resposta rápida, e umacascata de realimentações de posição e tacométrica.Neste caso, o controle linear mais difundido é ocontrole Proporcional - Integral (PI) . Para que sejapossível projetar um controlador deste tipo énecessário um modelo linearizado da planta original,que portanto, não considera efeitos não-linearesnormalmente presentes .neste tipo de sistema, como
430
zona morta, saturação e ganho dependente do pontode operação.
Estas não-linearidades podem ser calculadasanaliticamente utilizando algumas variáveiscaracterísticas obtidas da resposta do sistema emmalha aberta, como o erro de regime e o valormáximo de saída. A obtenção destes parâmetros emtempo real, no entanto, está sujeita a vários tipos deruído e imprecisões de medida.
Neste artigo é discutida a utilização de redesneurais para tornar mais robusto este processo deextração de parâmetros [9]. Uma Rede de BaseRadial será usada para identificar as não-linearidadesatuando sobre a planta (amplitude do ganho e da zonamorta) a partir de medidas da resposta do sistema em
malha aberta (erro em relação ao sistema linearizado,amplitude máxima de saída, amplitude de referência).A idéia é empregar a rede para a adaptação deparâmetros de um controlador clássico que compensaas não-linearidades da planta.
2. O Sistema servoposicionadorO sistema servoposicionador utilizado neste
trabalho foi o pertencente ao 'kit' da marcaFeedback", modelo MS- 150. Este 'kit' consta de ummotor de corrente contínua, um servo-amplificador,um atenuador, um pré-amplificador, doispotenciômetros (um de entrada e um de saída) e uma 'fonte [5], como pode ser visto esquematicamente naFigura 1:
controle de posição. Para o controle de velocidadesimplesmente suprime-se o polo na origem.
Estes sistemas são assim, fundamentalmenteconstituídos por um motor c.c . e por um servo-amplificador que pode ser configurado por armaduraou por campo. Neste caso a configuração escolhidafoi de armadura, por apresentar um funcionamentomais estável.
AY
t
5yd->y
Perturbação
.----.w,-----, x'=Ax+8u
y=CxtDMotor&Tacômetro
Servoexcitador
P<.'lenri{lllid.rullC'Si1ilfil
r nt01d,)llletr,)de FJrt",,1Il
Figura 1 - Esquemado sistema servoposicionador.
K,,,,, = [V/rad] ,T = torque do motor km( , 'klll=constante de torque =[N.ml A],
Ra = resistência de armadura = [.a],La = indutância de armadura = [H],Tensão contra-eletromotri: = ke8 o ,ke =[V.s1rad] ,Razão de engrenagem = l :n,1L + 1m = momento de inércia total = [kg.m2
] ,
B = Coeficiente de atrito viscoso [J.LF],Sinal gerado pelo atuador: va = KA (e; - <:
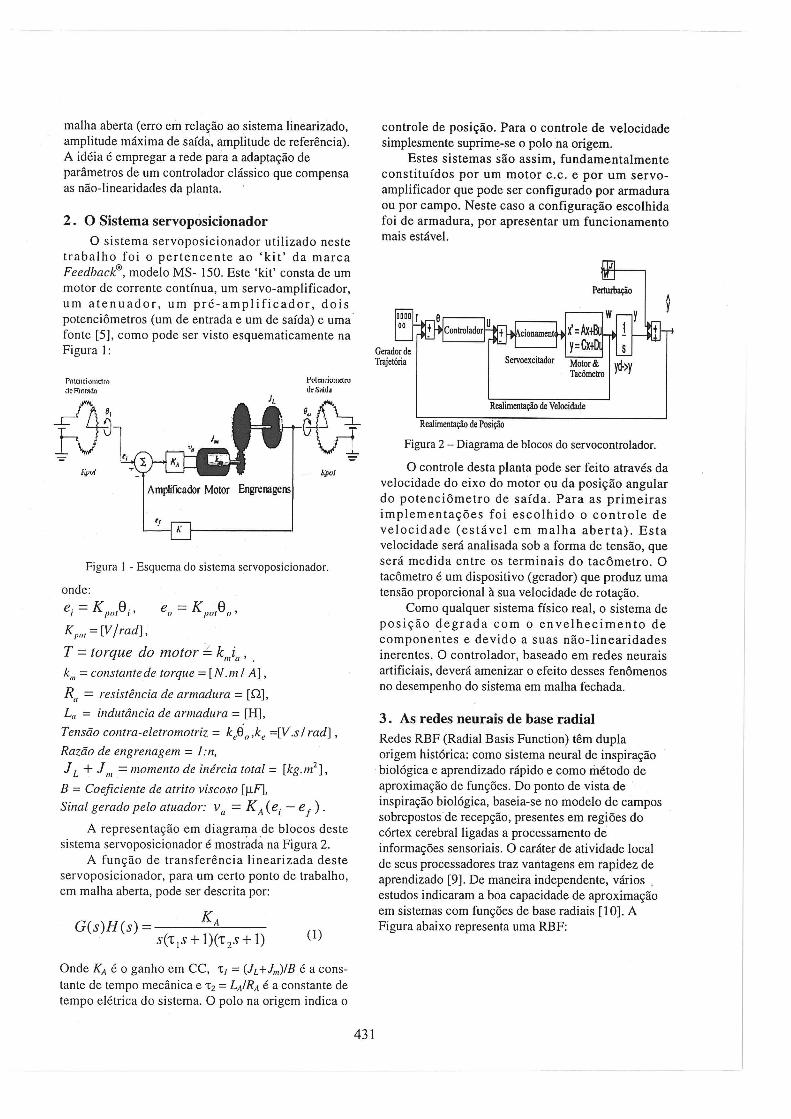
A representação em diagrama de blocos destesistema servoposicionador é mostrada na Figura 2.
A função de transferência linearizada desteservoposicionador, para um certo ponto de trabalho,em malha aberta, pode ser descrita por:
Realimentação deVelocidade
Realimentação dePosição
Figura2 - Diagramade blocosdo servocontrolador.
O controle desta planta pode ser feito através davelocidade do eixo do motor ou da posição angulardo potenciômetro de saída . Para as primeirasimplementações foi escolhido o controle develocidade (estável em malha aberta) . Estavelocidade será analisada sob a forma de tensão, queserá medida entre os terminais do tacômetro. Otacômetro é um dispositivo (gerador) que produz umatensão proporcional à sua velocidade de rotação.
Como qualquer sistema físico real, o sistema deposição degrada com o envelhecimento decomponentes e devido a suas não-linearidadesinerentes. O controlador, baseado em redes neuraisartificiais, deverá amenizar o efeito desses fenômenosno desempenho do sistema em malha fechada.
3. As redes neurais de base radialRedes RBF (Radial Basis Function) têm duplaorigem histórica: como sistema neural de inspiraçãobiológica e aprendizado rápido e como método deaproximação de funções . Do ponto de vista deinspiração biológica, baseia-se no modelo de campossobrepostos de recepção, presentes em regiões docórtex cerebral ligadas a processamento deinformações sensoriais. O caráter de atividade localde seus processadores traz vantagens em rapidez deaprendizado [9]. De maneira independente, vários .estudos indicaram a boa capacidade de aproximaçãoem sistemas com funções de base radiais [10]. AFigura abaixo representa uma RBF:
(I)
Kpol
G -........
< = Kptl,e o )
Amplifeador Motor Engrenagens
onde:e j =K'III,8 j ,
Onde KA é o ganho em CC, 'ti = (h+1111)IB é a cons-tante de tempo mecânica e 't2 = LA/RA é a constante detempo elétrica do sistema. O polo na origem indica o
431

Figura 3: Representaçãode redeRBF
A entrada é apresentada a um conjunto deneurônios com função de ativação radialmentesimétrica. Pode-se usar , por exemplo, uma gaussianado tipo
onde a norma 11.11 costuma ser uma simples distânciaeuclidiana. A saída desta camada inicial é entãousada em uma soma ponderada que representa a saídafinal da rede . Existem para esta rede resultados deaproximação universal, semelhantes aos existentespara a rede Perceptron multicamada.
O principal interesse neste tipo de rede na áreade sistemas conexionistas está no caráter local doprocessamento dos neurônios constituintes . Cadaponto de entrada excita principalmente um pequenosubconjunto dos neurônios da primeira camada.Sendo assim, durante o treinamento, pontos distantesda área de atuação de uma unidade não influenciam oajuste de seus parâmetros. Este caráter local dotreinamento faz com que novos aspectos do problema
ser aprendidos sem prejuízo do que já seconhece, característica dificilmente obtida no Per-ceptron multicamada. Sendo assim, esta rede presta-se melhor, a princípio, paraadaptaç ão on-line.
Como vantagem adicional, durante a operaçãoda rede (após treinamento), uma saída de baixo valorem todos os neurônios indica uma "novidade" emrelação aos exemplos usados para aprendizado, o queserve de alerta no caso de operação do sistema emcondições radicalmente diferentes das previstas.
Ainda outro foco de interesse é a equivalênciafuncional entre estes sistemas e um conjunto der egr as nebulosas, cujo conseqüente estariarepresentado pelos valores numéricos dos pesos w,[15].
/ --'OA "\r )\ IIx-cllI /..... .,/-
_ ["Xi -cdl]Yi -exp ?(J. -1
(2)
432
É mais comum o uso de redes neurais quandotemos um mapeamento complexo e não-linear, para oqual não se conhece um modelo preciso, mas apenasexemplos entrada x saída. Quando existem métodosanalíticos para determinação da relação entrevariáveis, o uso de rede neural pode ainda ser umaalternativa interessante considerando-se redundânciae tolerância a ruído. O método analítico geralmenteapresenta alta sensibilidade à precisão dos dados deentrada, uma Rede Neural, por outro lado, se treinadaem condições representativas da operação real docostuma exibir boa robustez a erros na aquisição deparâmetros [12].
Há várias alternativas para o treinamento darede . Em geral, não se opta pela otimização dosparâmetros W, c e c ao mesmo tempo partindo-se devalores aleatórios, já que problemas decondicionamento numérico podem ocorrer se paravários pontos do treinamento nenhum neurônio deentrada reponde adequadamente de início . Umamelhor alternativa é definir a princípio um conjuntofixo de centros e variâncias para as funções de base.
Nesta fase, durante o presente trabalho, foramidentificados problemas quando se optou por fixar ocentro dos neurônios radiais com base na distribuiçãodos pontos de entrada. Em dados do mundo real,estes pontos podem não ser uniformementedistribuídos, caso em gue este tipo de treinamentopode apresentar instabilidade ou resultar em uma redecom número excessivo de processadores.
Uma solução mais simples e que apresentoumelhores resultados foi a simples distribuiçãouniforme de processadores sobre o espaço de entrada.Outras soluções possível é um algoritmo demapeamento auto-organizável. Conhecimento préviosobre o problema pode também ser útil nesta etapa,diferentemente do que ocorre no treinamento de umPerceptron Multicamada [16] .
Fixados os parâmetros dos processadoresgaussianos, o problema de otimização é linear esobre-determinado, para o qual adota-se uma soluçãode norma mínima. Se necessário, todos os parâmetrosda rede podem passar conjuntamente por umprocesso de ajuste fino , utilizando por exemplo ogradiente do erro de saída, visando uma melhorcapacidade de generalização.
4. Controle não linearEsquemas de controle em malha fechada clássicospara o motor estão esquematizados na Figura 4 . Ocontrolador recebe a referência e o sinal de medidada variável controlada ye produz o sinal deatuação u.
Este esquema de controle é utilizado emdiversas abordagens encontradas na literatura, onde obloco "controlador" é substituído por uma redeneural [15] .

Neste trabalho, em vez de utilizar uma redeneural diretamente como controlador, a proposta éutilizar uma rede neural para fazer o ajusteparamétri co , num esquema de compensação não-line ar "feed-forward" (utilizando o funcional inverso)de estrutura conhecida, Figura 4 . Isto está ilu str ado,a título de exemplo, para o caso da compensação dazo na morta e de um ganho não-linear s igmo ida ls imé t r ic o utili z ando um compensador queimplem enta a c aracterística recíproca (atritocoul ombi ano e inversa da sigmoide simétrica),
Utiliz ando - s e a mesm a idéi a podem se rcompensados diversos tipos de não-linearidades. Aidéi a básica é: "não pedir da rede o que é conhecidoana liticamente" . A estrutura do contro la dor não-linea r é conh ecida; a rede neural deve "apenas" fazer(eventualmente div ersas vezes durante a vida útil dosistema) o aj uste fino dos seu s parâmetros.
Da seqüência de degraus com amplitudescrescentes pode ser utilizado um pré-processamentoanalítico, visando reduzir a dimensão do vetor deentrada, que extrai para cada degrau as seguintesinformações:
• e - erro em regime• r - amplitude do sinal de referência• )'meu - máx imo atingido na respostaEsta abordagem permite também que os
elementos do vetor de treinamento sejam livrementepermutados (o que é normalmente recomendado parao treinamento de redes neurais) . Isto não seriapossível se utilizássemos como vetor de entradas umsinal no tempo.
Além desse primeiro pré-processamento, paramelhorar o desempenho da rede neural é possíveltambém util izar valores de pequenos sinais para cadaum destes parâmetros, i.e ., a diferença dos parâme-tros medidos menos os da planta linear de referência.
Clock To Workspace1
sim2WS
1/(1+exp(-u[1]))-0.5
Ganho nao-linear;Ganho hao-Iinear inv.
1/(1+exp(-u[ 1]))-0.5 1--+I7+'+---.t
Ganho nao-Iínear
PIO (1/0.9rln«0.5+u[1J)/(O.5-u[1]))Plo<Çoulombi
Friction1
Figura 4 - Diagrama de Simulação (SIMULINK®-MATLAB®)a) Sistema linearizado - Modelo de Referência.b) Sistema Posi cionad or não-linearc) Sistema não-l inear com Contrrolador não-linear sitnonizado pela RBFN
A tare fa da rede neural é retirar dos sinais pré-proc essad os, co nfo rme de scrito acima, os valores :Zm - a zona morta , e K - ga nho .no ponto atua l deoperação . A red e neural deve ser treinada coms ina is de tre in am ento ricos o suficientes paraperm it i r id ent i fi c a r o m ap eam ento não -l in e arsubjacente . Ruído deve se r considerado na fase detre iname nto para dar robustez à rede . Obtendo-sees tes par âm etro s ca ra c te r í s tic os d a s não-lin earidad es bast a faze r o ajuste do compensadorn ã o-lin e ar. Est e aj us te n ão d e v e ser fei t oa rb i tr ari amen te , pois como nos con trol adoresadapta tivos , é inseri da um a din âmi ca adicional aos iste ma pel o pr ocesso de aj us te de par âmet ros, o
que eventualmente pode levar à instabilidade do processo[li ]. Em situações normais um ajuste de parâmetros auma ta xa de am os tragem muito mai s bai xa que a sco nstantes de tempo do s istema em questão não trazdificuldades . Ajustes em intervalos de tempo maiores(p.ex. ao ligar-se uma máquina, no procedimento de auto-teste) levam a sistemas auto-ajustáveis.
Uma vez que O compensador "feed -forward "linearizou o processo técn icas de controle clássico, comoo contro lad or PI , ou PID podem ser utili z ad as parae s t a b e le ce r a dinâmica de malha fechada paraacompanhamento de sinais e de rejeição de perturbações.A figu ra 5 mostra o di agrama de bl ocos d o si stemaposicionador com o controle auto-sintoniz ável.
433

'Compensador' Sistema PosicionadorNão·Linear
,I T
I JI I
Pa ra a exc i taç ão e a aquis ição da re sposta dos is tema posi c ion ad o r fora m util i z ad a s placas deint erfaceamento A/O e D/A conec tadas ao T ransputer.Este por sua vez comunicava com um PC-Pentium (Hos t)par a es tabelece r a int erface co m o usuári o . O progr am ade cont role do motor CC foi desenvolvido em linguagemC-Concorrent e [14] . Este programa é ativado de dentrodo ambie nte MATLAB, qu e foi aq ui utili zado para avisualização dos resultados.
6. ResultadosForam obtidos resultados com dois conj untos desimulações. No primeiro, foi utili zado o SIMULINK paraimp lementar a es tra tég ia de co ntro le propost a na Figura 4. Na Figur a 7 vemos que o compensado r tevedese mpenho adequado , mesmo com um pequeno erro deidenti ficação nos parâmetros fornecidos como respostada rede (arbitrado em 10%).
.... _- - --___ _-= e ::ylin· y_compensado----- -- ------ ---- --
0.6
1.2
0.8
Figura 5 - Esquema de compensação não-linearajustado por rede neural.
Este esquema de controle pode facilmente serimplementado em microcontroladores digitais , ondeuma fun ção de auto-ajuste pod e se r progr am ad apara se r executada ao co lo car-se o s is te ma emoperação e com um a ce rta per iodi c id ad e paracompe nsar va riações de componentes devido aenvelhecimento.
Para a formação da matri z de trein amento dared e foi necessário um pré-process amento do si na lde sa ída do sis tema, para que foss em retirados ospar âmetros utili zad os no trein am ento (erro emregime e amp l itude m áxima a lc a nçada) . E st eprocessam ento foi real izado a través de uma rot inaesc rita no ambiente MATLAB .
s. Aparato ExperimentalPa ra a verificação do s resultados teóricos foi
util izado um motor servoposicionado r de co rrentecontínua MS 150 da Feedback® , Figura 6.
2.5 t[s]1.50.5.().2 L---__----'- -'--_ _ ---'- -'--_ _ ---' -.J
O
Figura 7 - Simulação da resposta do sistema com e semcompensador nãolinea r (SIMLlNK).
Em seguida , a rede RBF fo i treinada, ut il izand o- separa isto um co nj unto de dados obtidos do sis tema fís icopara as"var iáve is de entrada da rede, co nforme definidasna se ção anterio r. Ne ste est ágio pretendia-se ava lia r acapacid ade de representação da rede para o mapeamen to-o bjetivo. A Fig u ras 8 a prese n tam res u ltados dodesempenho da rede (erro em re lação aos va lo resdesej ad os) pa ra po n tos do arq u ivo de test e , ou seja,po ntos diferentes dos apresentados no tre inamento . Osresultado s suge rem boas perspecti vas para a operação dosi st ema com dad o s r e ai s d e o pe ra ç ão , o qu e fo icon firmado mais tarde nos testes de laboratório.Figura 6 - Servoposicionador MS150-Feedback®
Transputer System - Parsytic.
"Um s is te ma de p rocess ame nto par al el o daParsytec® bas e ad o e m Tran spu ter s T 80S foiut il izado para a implementação digital do esquemade controle proposto.OTransputer es ta acomodadono ga b i ne te à es q u erd a, A/O e D/A sob oosci los có p io e o servo MS -I SO pode se r vi st o àdire ita nesta fig ura.
434

r.Y/M II I 'I l ,I
X, __ n __ ;
I / \..(.' - 1,I
I 1\I Refêrencla I
\1-.----- 1RD+ZMfÁ;---' /V-"1
III
c I
Figura 9 - Resposta obtida com e semcompensadorc não-linear auto-sintonizado porRede Neural para o servoposicionador MS150.
testes de laboratório mostraram excelentes resultados.Um efeito não linear importante, que está sempre
presente em sistemas físicos reais, a saturação, não foiconsiderada neste trabalho . Numa continuação destetrabalho serão utilizadas técnicas de controle avançadas(estrutura variável com transição suave [ 16 ]) , quepermitem aumentar significativamente a faixa deoperação dinâmica de sistemas posicionadores napresença de saturações.
Referendas[I] Isid ori , A.: Nonlinear Control Systems, 2nd Edition ,
Springer Verlag, 1989[2] Freund, E.: Decoupling and Pol e Assignrnent in non-
linear Systems, Electronic Letters 9, S. 373-374, 1973[3] Zel1 , A.: Simulation Neuronaler Netze, Addison-Wes ley,
Bonn, 1995[4] Bauchspiess, A.: Servocontrole preditivo de robos
guiados por sensores. Anais do XI CBA, pp. 1715-1720,Sao Paulo, 1996
[5] Feedback Inc, MS-150User Manual, 1979[6] Moody, 1., Darken , C.l.: "Fast learning in networks of
locally tuned processing units", Neural Computation, vol.I, no.2, pp. 281-294,1989.
[7] Girosi, F.: "Some extensions of radial basis functions andtheir appli cation in artificial intelligence", ComputersMath. applic.. vol. 24, no. 12, pp. 61-80,1992.
[8] Bishop , C.M. : "Novelty detection and neural newtorkva lida t ion" , Preprint (Internet). Reino Unido , AstonUniversity. Department of Cornput er Science, 1994.
[9] l ang, 1.S ., Sun, C.T .: "Functional equivalence betweenradi al basis func tion networks and fuzzy in ferencesysterns" . Preprint (Internet) . Berkeley, EUA: Universityof Californi a. Department of Electrical Engineering andCornputer Science, 1992.
[10] Romariz , A.R.S: Representação e Aquisição de Regrasem Sistemas conexio nistas . Dissertação de Mestrado.Uni ver sid ade Estadual de Campinas, Camp inas , SP ,Brasil, 1995.
[11] Widrow, B., Stearns, S.D.: Adaptive Signal Processing.Englewood Cliffs, EUA, 1984.
[12] Ramos, A.C., Yoneyama, T.: Compensador neuronal paraincertezas paramétricas em desaco plador din âmico demanipuladores mecânicos, X CBA, Vol 2, pp. 903-908,Rio de Janeiro,.19 a 23 de Setembro 1994.
[13] Bauchspiess, A.; Drummond, A.; Romariz, A.R.S.: RedesNeur ais de Base Radi al pa ra o Ser vocontrole Auto-Ajustável de Sistemas Posicionadores, mCBRN, pp. 472-477, Florianópolis, l ulho de 1997
[14] iNMOS, Ansi C- Transputer Toolset User Guide, 1992.[15] Narendra, K.S.: Neural Network forcontrol : Theory and
Practice, Proceeding s IEEE, Vol. 84, Nr. 10, pp. 1385-1406,Oct. 1996.
[16] Wurmthale r, Ch .: "Prozessmode l1e ais Grundl agenmodern er Regelungskonzepte" , Habilitation-Thes is,Universitat Erlangen-Nurnberg, 1994.
Os autores agradecem ao CNPq pelo apoio a esteprojeto na forma de uma bolsa PIBIC e ao GRACO peladisponibilização dos recursos materiais necessários.
la t/(segl 1264
/\ .:»4\f\
Figura 8 - Resultados obtidos da identificação deparâmetros com RBFN.
A fig ura 9 mostra resultados obtidos para oco ntro le do servo-posicionador MS 150 com oesquema de controle proposto . Nota-se que a com-pen sação da Zona Morta (ZM) e do Ganho Não-Linear (GNL) redu z ba stante o e rro em re gime etorn a a resposta tran si tória mai s uniforme. O atrito,uma não -l inearid ad e não-d etermin ística, mostrouser a prin cipal di ficuldade para se obter um posici o-nament o preci so do motor.
7. Conclusões e PerspectivasNest e arti go, uma pr oposta de controlador não-lin ear basead o em redes neurai s de base rad ia l foiapresentada . A red e identific a os par âm etros não-lin ear es do s istema, fo rn ecendo-os a um compen-sador não-linear cl ássico, qu e virtualmente cance laos principais efe itos não lineares. Um control adorPlf) estabelece a dinâmica do sistema result ante.
Os re sultados o b t id o s para o esquema decontro le proposto , tanto em s imulação co mo em
4
2
6
o
·4
·2
·6o
435