proposta e desenvolvimento de lentes com superfícies
TRANSCRIPT

Universidade Federal de Minas Gerais PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Rodolfo Felipe de Oliveira Costa
Proposta e desenvolvimento de lentes com superfícies polinomiais com ampliação da profundidade de foco
Belo Horizonte 2016

Universidade Federal de Minas Gerais Programa de Pós-Graduação em Engenharia Elétrica
Rodolfo Felipe de Oliveira Costa
Proposta e desenvolvimento de lentes com superfícies polinomiais com ampliação da profundidade de foco
Tese de Doutorado submetida à banca examinadora designada pelo Colegiado do Programa de Pós-Graduação em Engenharia Elétrica da Universidade Federal de Minas Gerais, como parte dos requisitos exigidos para a obtenção do título de Doutor em Engenharia Elétrica. Área de concentração: Sistemas de Computação e Telecomunicações.
Orientador: Prof. Dr. Davies William de Lima Monteiro
Belo Horizonte Fevereiro – 2016

Dedico este trabalhos aos meus pais, irmãos, minha esposa Ana Paula, minha filha е a toda minha família que, com muito carinho е apoio, não mediram esforços para que eu chegasse até esta etapa da minha vida.

AGRADECIMENTOS
Nunca estamos sós, é verdade. É bom saber que temos amigos em quem podemos
confiar. Pessoas que nos apoiam e nos acolhem, por esse motivo gostaria de agradecer a todos
que caminharam comigo durante estes 4 anos, e em especial
A meu orientador Prof. Davies;
Aos amigos que fiz na equipe de PD&I da Mediphacos;
Aos membros do OptimaLab;
Ao Pádua e toda a equipe da Sala Limpa (DFIS/UFMG);
Ao CNPq;
A FAPEMIG;
Sem os quais, a realização deste trabalho seria impossível.
Muito Obrigado!

“Treine enquanto eles dormem, estude enquanto eles se divertem, persista enquanto eles descansam, e então, viva o que eles sonham” (Provérbio Japonês)

RESUMO
Este trabalho tem como principal objetivo propor uma topologia, inicialmente para
lentes intraoculares, baseada na inclusão de aberrações de alta ordem na face posterior da lente,
que pudesse combinar a maior profundidade de foco das lentes monofocais esféricas e o melhor
contraste (MTF) das lentes monofocais asféricas.
A escolha das aberrações de alta ordem, coma e Aberração Esférica, surgiu da
observação dos mecanismos de acomodação do cristalino, sendo descritas através de
polinômios de Zernike. A proposta foi modelada como um problema de otimização
multiobjetivo, resolvido com a utilização do NSGA-II.
O protótipo foi produzido pela técnica de moldagem, sendo seu molde formado por duas
partes, ou duas superfícies. A anterior formada por uma curva asférica e a posterior composta
por um conjunto de aberrações. O molde para a superfície posterior foi o fabricado utilizando a
técnica de corrosão anisotrópica de silício com KOH para formação de calotas esféricas,
entretanto o molde da superfície anterior não pode ser construído utilizando a mesma técnica,
sendo então fabricado em PMMA por torneamento.
O protótipo construído, a partir dos modelos de otimização, apresenta desempenho
similar ao da Tecnis Symfony, uma lente comercial com profundidade de foco estendida. O
MTF obtido para o protótipo foi inferior em aproximadamente 0,1, enquanto sua profundidade
de foco 0,14 D maior. Quando seu MTF é comparado às lentes multifocais, nicho onde lentes
com profundidade de foco estendida podem atuar como possíveis substitutas, o desempenho do
modelo foi sempre superior, alcançando 0,13 de diferença no MTF quando comparado às lentes
Acrysoft Restor de +3,0D.
Palavras-chave: profundidade de foco, lentes asféricas, lentes esféricas, aberrações de
alta ordem, NSGA-II, superfícies ópticas polinomiais.

ABSTRACT
This work proposes a topology, initially with intraocular lenses, based on the inclusion
of high order aberrations in the posterior surface of the lens. This approach could associate the
larger depth of focus of the spherical monofocal lenses to the better contrast (MTF) of the
aspherical monofocal lenses.
The choice of the high order aberrations, coma and spherical aberrations, came up from
the observation of the accommodation mechanisms of the crystalline eye lens. The aberrations
were described by Zernike polynomials and the proposed solution was modeled as a
multiobjective optimization problem, solved using the NSGA- II algorithm.
The prototype was produced by the casting technique, and its mold was formed by two
parts, or two surfaces. The anterior surface was formed by an aspheric curve and the posterior
surface consists of a set of aberrations. The mold for the back surface was produced by
anisotropic etching of silicon with KOH to form spherical cavities, however the mold the front
surface (the aspherical curve) cannot be built using the same technique, then it was made of
PMMA by turning.
The prototype constructed from optimization models has similar performance to the
Tecnis Symfony, a commercial lens with extended depth of focus. The MTFs obtained for the
prototype was lower by approximately 0.1, while its depth of focus was 0.14 D larger. When
its MTF is compared to multifocal lenses, niche where lenses with extended depth of focus can
act as possible substitutes, the performance of the herein proposed lens was always higher,
reaching 0.13 difference in MTF compared to the Acrysoft Restor lens + 3.0D .
.
Keywords: depth of focus, aspherical lenses, spherical lenses, high order aberration,
NSGA-II, polynomial optical surfaces.

SUMÁRIO
RESUMO .............................................................................................................................. 5
ABSTRACT ......................................................................................................................... 6
LISTA DE FIGURAS .......................................................................................................... 9
LISTA DE TABELAS ....................................................................................................... 13
LISTA DE ABREVIATURAS E SIGLAS ...................................................................... 14
1 INTRODUÇÃO ........................................................................................................... 15
2 CONCEITOS E FUNDAMENTAÇÃO .................................................................... 18
2.1 SISTEMAS ÓPTICOS .............................................................................................. 18
2.1.1 Características fundamentais de sistemas ópticos .................................................. 20
2.1.1.1 Distância Focal e Pontos Principais .................................................................... 20
2.1.1.2 Profundidade de Foco ......................................................................................... 23
2.1.1.3 Frente de Onda. ................................................................................................... 25
2.1.1.4 Aberrações .......................................................................................................... 26
2.1.1.5 Resolução. ........................................................................................................... 31
2.1.2 Olho Humano ......................................................................................................... 33
2.1.3 Lentes Intraoculares ............................................................................................... 39
2.2 AVALIAÇÃO DE DESEMPENHO ÓPTICO .......................................................... 42
2.2.1 PSF ......................................................................................................................... 42
2.2.2 OTF ........................................................................................................................ 43
2.2.3 Razão de Strehl ...................................................................................................... 44
2.2.4 MTF........................................................................................................................ 45
2.2.5 CSF ......................................................................................................................... 48
2.2.6 SQF ........................................................................................................................ 50
3 MODELAGEM E OTIMIZAÇÃO ........................................................................... 51
3.1 MODELAGEM MATEMÁTICA ............................................................................. 51
3.1.1 Polinômios de Zernike ........................................................................................... 51
3.1.2 Polinômios de Forbes ............................................................................................. 54
3.2 MODELAGEM COMPUTACIONAL...................................................................... 55
3.2.1 Otimização ............................................................................................................. 55
3.2.1 Problema de Otimização Multiobjectivo ............................................................... 56
3.2.2 Algoritmos Genéticos (NSGA-II) .......................................................................... 57

3.2.3 Modelo Computacional .......................................................................................... 58
4 VIABILIDADE DO PROJETO ................................................................................. 63
4.1 SOLUÇÕES DO PROCESSO DE OTIMIZAÇÃO .................................................. 63
4.2 ANÁLISE DE MTF E CSF ....................................................................................... 68
4.3 ANÁLISE DO IMPACTO DA ABERTURA DA PUPILA SOBRE O MTF E
CSF ............................................................................................................................ 72
4.4 TESTE DE SIMULAÇÃO DE IMAGEM E INTENSIDADE RELATIVA ............ 75
4.5 AVALIAÇÃO DA TOLERÂNCIA À RUGOSIDADE ........................................... 80
5 FABRICAÇÃO DO PROTÓTIPO ........................................................................... 84
5.1 PROCESSO DE FABRICAÇÃO DO PROTÓTIPO ................................................ 84
5.2 PROCESSAMENTO DO MOLDE DE PMMA ....................................................... 86
5.3 PROCESSAMENTO DO MOLDE DE SILICIO ..................................................... 88
5.3.1 Etapas de limpeza das amostras ............................................................................. 89
5.3.2 Transferência de padrões por Fotolitografia .......................................................... 90
5.3.3 Etapa de remoção seletiva do nitreto de silício e do dióxido de silício ................. 91
5.3.4 A formação da estrutura do molde em silício ........................................................ 92
5.3.5 Teste da Lente fabricada ........................................................................................ 97
6 CONCLUSÕES ......................................................................................................... 102
REFERÊNCIAS .............................................................................................................. 105

9
LISTA DE FIGURAS
FIGURA 1 – (A) SUPERPOSIÇÃO DE REGIÕES DE FOCO DO OLHO DOMINANTE E NÃO
DOMINANTE, CONDIÇÃO IMPORTANTE PARA ADAPTAÇÃO DO PACIENTE A
TÉCNICA DE MONOVISÃO, (B) SISTEMA ONDE NÃO OCORREU A
SUPERPOSIÇÃO DAS REGIÕES DE FOCO DIFICULTANDO A ADAPTAÇÃO A
TÉCNICA DE MONOVISÃO. ............................................................................................. 17
FIGURA 2 - DIAGRAMA DO AXICON, EDITADO DE: (J.W. Y. LIT AND R. TREMBLAY, 1973). ...... 19
FIGURA 3 – SISTEMA ÓPTICO (WELFORD W. , 1986). . ....................................................................... 20
FIGURA 4 - (A) COMPRIMENTO FOCAL PRIMÁRIO ( F ) E PONTO FOCAL PRIMÁRIO ( F ), (B)
COMPRIMENTO FOCAL SECUNDÁRIO (F’ ) E PONTO FOCAL SECUNDÁRIO ( F' )
(HECHT, 2002). .................................................................................................................... 21
FIGURA 5 - PONTOS PRINCIPAIS EM UM SISTEMA ÓPTICO PARAXIAL (ZILIO, 2007). ................. 22
FIGURA 6 - PROFUNDIDADE DE FOCO (SMITH, 2008).. ........................................................................ 23
FIGURA 7 - MODELO DE OLHO SIMPLIFICADO (DUKER & YANOFF, 2011). ................................... 24
FIGURA 8 - FRENTES DE ONDA, (A) PLANA E (B) ESFÉRICA (OLIVEIRA, 2012).. ........................... 25
FIGURA 9 – (A) FRENTE DE ONDA ESFÉRICA FORMADA POR SISTEMA IDEAL E (B) FRENTE DE
ONDA DISTORCIDA FORMADA POR SISTEMA IMPERFEITO (RONALD R.
KRUEGER, 2001). ................................................................................................................ 26
FIGURA 10 - ABERRAÇÃO CROMÁTICA, DESTAQUE PARA A DIFERENÇA DE CONVERGÊNCIA
ENTRE OS RAIOS AZUL E VERMELHO. ........................................................................ 27
FIGURA 11 – ABERRAÇÃO ESFÉRICA EM UMA LENTE PLANO-CÔNCAVA (ESQUERDA) E
ABERRAÇÃO ESFÉRICA EM UMA LENTE CONVEXA-PLANA (HECHT, 2002). ..... 28
FIGURA 12 - (A) PONTO FOCAL FORMADO POR UMA LENTE ASFÉRICA E (B) PONTO FOCAL
FORMADO POR UMA LENTE ESFÉRICA COM DESTAQUE PARA
PROFUNDIDADE DE FOCO Δ (WELFORD W. T., 1991). ............................................... 28
FIGURA 13 – ASTIGMATISMO (HECHT, 2002). ........................................................................................ 29
FIGURA 14 – COMA (HECHT, 2002). .......................................................................................................... 30
FIGURA 15 - CURVATURA DE CAMPO (HECHT, 2002). ......................................................................... 31
FIGURA 16 – DISTORÇÃO BARRIL (HECHT, 2002). ................................................................................ 31
FIGURA 17 - CRITÉRIO DE RESOLUÇÃO DE RAYLEIGH (DANIEL MALACARA, 2004). ................. 32
FIGURA 18 - ESQUEMÁTICO DO OLHO HUMANO (LANG & AL., 2000). ............................................ 33
FIGURA 19 – CONJUNTO CAMADAS CELULARES QUE COMPÕE A RETINA (ROHKAMM,
2004)...................................................................................................................................... 34
FIGURA 20 - DISTRIBUIÇÃO DE CONES E BASTONETES NA RETINA (SACEK, TELESCOPE
OPTICS, 2006). ..................................................................................................................... 35
FIGURA 21 - RELAÇÃO ENTRE LUMINÂNCIA E RESOLUÇÃO DA RETINA (SACEK, TELESCOPE
OPTICS, 2006). ..................................................................................................................... 36
FIGURA 22 - VARIAÇÃO DA PUPILA COM AS CONDIÇÕES DE ILUMINAÇÃO. .............................. 36
FIGURA 23 - RELAÇÃO ENTRE ACOMODAÇÃO E IDADE (A- VALORES MÍNIMOS; B- VALORES
MÉDIOS C- VALORES MÁXIMOS) (WERNER, TRINDADE, PEREIRA, & WERNER.,
2000)...................................................................................................................................... 38
FIGURA 24 –GLISTENINGS FOTOGRAFADOS DE ACRYSOF™ (TRIVEDI, WERNER, APPLE,
PANDEY, & IZAK, 2002). ................................................................................................... 40
FIGURA 25 - (A) LENTE INTRAOCULAR ACOMODATIVA SYNCHRONY (B) PRICIPIO DE
FUNCIONAMENTO (SHULTZ, 2012). .............................................................................. 42
FIGURA 26: (A) PSF DE SISTEMA EM FOCO; (B) PSF DE SISTEMA FORA DE FOCO; (C) PSF DE
UM SISTEMA CONTENDO COMA. .................................................................................. 43

10
FIGURA 27 – ILUSTRAÇÃO DA MODULAÇÃO, OU CONTRASTE, NO (A) OBJETO E (B) NA
IMAGEM (MICHAEL BASS, 1995).. .................................................................................. 44
FIGURA 28 - RAZÃO DE STREHL (DANIEL MALACARA, 2004). .......................................................... 45
FIGURA 29 - CURVAS DE MTF LIMITADOS POR DIFRAÇÃO PARA SISTEMAS INCOERENTES
COM ABERTURA CIRCULAR (DANIEL MALACARA, 2004).. .................................... 47
FIGURA 30 - MUDANÇA DA RESOLUÇÃO EM CONTRASTE COM A MUDANÇA DA
FREQUÊNCIA ESPACIAL PARA UM MESMO SISTEMA ÓPTICO (ZILIO, 2007). ..... 47
FIGURA 31 - MTF THROUGH FOCUS (YI, ISKANDER, & COLLINS, 2010) .......................................... 48
FIGURA 32 - CURVA DE CSF TÍPICA OBSERVADA PARA HUMANOS (MANNOS & SAKRISON,
1974)...................................................................................................................................... 49
FIGURA 33 – 15 PRIMEIROS TERMOS DOS POLINÔMIOS DE ZERNIKE (NOLL, 1976). ................... 52
FIGURA 34 – 15 PRIMEIROS TERMOS DOS POLINÔMIOS DE FORBES .............................................. 54
FIGURA 35 - GRAU DE DOMINÂNCIA EM UM PROBLEMA DE MINIMIZAÇÃO COM DOIS
OBJETIVOS (TAKAHASHI, 2007). .................................................................................... 57
FIGURA 36 - COMPORTAMENTO DO NSGA-II (TAKAHASHI, 2007). .................................................. 58
FIGURA 37 - MODELO DE OLHO DEFINIDO PELA NORMA ISO (ISO, 1999). ..................................... 59
FIGURA 38 - DISTRIBUIÇÃO DE ABERRAÇÕES OCULARES OBSERVADAS POR PORTER E
DESCRITAS ATRAVÉS DE POLINÔMIOS DE ZERNIKE (PORTER, 2001) ................. 60
FIGURA 39 - DIAGRAMA DO PROCESSO DE OTIMIZAÇÃO ADOTADO. ........................................... 61
FIGURA 40 - FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 5 D. ................................................................................................................ 63
FIGURA 41 - FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 10 D. .............................................................................................................. 64
FIGURA 42 - FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 15 D. .............................................................................................................. 64
FIGURA 43 – FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 20 D. .............................................................................................................. 65
FIGURA 44 – FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 25 D. .............................................................................................................. 65
FIGURA 45 - FRONTEIRA PARETO-ÓTIMA OBTIDA PELO PROCESSO DE OTIMIZAÇÃO, PARA
MODELO DE 30 D. .............................................................................................................. 66
FIGURA 46 - CONJUNTO DE ABERRAÇÕES UTILIZADAS NOS MODELOS POR DIOPTRIAS. ....... 67
FIGURA 47 - COMPARATIVO ENTRE CURVAS DE MTF DE LENTES INTRAOCULARES
ESFÉRICAS E ASFÉRICAS. EDITADO DE: (ABBOTT MEDICAL OPTICS, 2014). ..... 69
FIGURA 48 - COMPARATIVOS DE MTF ENTRE SOLUÇÃO ENCONTRADA E A LENTE
COMERCIAL MINIFLEX. AS ESCALAS DE CINZA LATERAIS NAS COLUNAS DA
ESQUERDA E CENTRAL REPRESENTAM OS VALORES DE MTF, A COLUNA DA
DIREITA REPRESENTA A DIFERENÇA ENTRE OS VALORES OBTIDOS PARA A
MINIFLEX E PARA O MODELO PROPOSTO. ................................................................. 70
FIGURA 49 - COMPARATIVOS DE CSF ENTRE SOLUÇÃO ENCONTRADA E A LENTE
COMERCIAL MINIFLEX. AS ESCALAS DE CINZA LATERAIS NAS COLUNAS DA
ESQUERDA E CENTRAL REPRESENTAM OS VALORES DE CSF, A COLUNA DA
DIREITA REPRESENTA A DIFERENÇA ENTRE OS VALORES OBTIDOS PARA A
MINIFLEX E PARA O MODELO PROPOSTO. ................................................................. 71
FIGURA 50 - COMPARATIVO ENTRE MTF SOBRE O PLANO FOCAL PARA DIFERENTES
CONDIÇÕES DE ILUMINAÇÃO: (1) FOTÓPICAS, (2) MESÓPICAS E (3)
ESCOTÓPICAS. ................................................................................................................... 72
FIGURA 51 - COMPARATIVO ENTRE CSF SOBRE O PLANO FOCAL PARA DIFERENTES
CONDIÇÕES DE ILUMINAÇÃO: (1) FOTÓPICAS, (2) MESÓPICAS E (3)
ESCOTÓPICAS. ................................................................................................................... 73

11
FIGURA 52 - COMPARATIVO ENTRE MTF, AFASTADO DO PLANO FOCAL DE 0.5 DIOPTRIAS,
PARA DIFERENTES CONDIÇÕES DE ILUMINAÇÃO: (1) FOTÓPICAS, (2)
MESÓPICAS E (3) ESCOTÓPICAS .................................................................................... 74
FIGURA 53 - COMPARATIVO ENTRE CSF, AFASTADO DO PLANO FOCAL DE 0.5 DIOPTRIAS,
PARA DIFERENTES CONDIÇÕES DE ILUMINAÇÃO: (1) FOTÓPICAS, (2)
MESÓPICAS E (3) ESCOTÓPICAS. ................................................................................... 74
FIGURA 54 - (A) MINIFLEX DE 20 D SOBRE O PLANO FOCAL, (B) MODELO PROPOSTO SOBRE O
PLANO FOCAL.................................................................................................................... 75
FIGURA 55 - (A) MINIFLEX DE 20 D AFASTADA DO PLANO DE IMAGEM O EQUIVALENTE A 0,5
DIOPTRIAS E (B) MODELO PROPOSTO AFASTADO DO PLANO DE IMAGEM O
EQUIVALENTE A 0,5 DIOPTRIAS. .................................................................................. 76
FIGURA 56 - PADRÃO DE ANÁLISE DE INTENSIDADE RELATIVA PARA 100 LP/MM. .................. 77
FIGURA 57 - GRÁFICO COMPARATIVO DE INTENSIDADE RELATIVA ENTRE MODELO E LENTE
COMERCIAL PARA 50 LP/MM SOBRE O PLANO FOCAL. .......................................... 78
FIGURA 58 - GRÁFICO COMPARATIVO DE INTENSIDADE RELATIVA ENTRE MODELO E LENTE
COMERCIAL PARA 100 LP/MM SOBRE O PLANO FOCAL. ........................................ 78
FIGURA 59 - GRÁFICO COMPARATIVO DE INTENSIDADE RELATIVA ENTRE MODELO E LENTE
COMERCIAL PARA 50 LP/MM AFASTADO DO PLANO FOCAL DE 0,5D. ................ 79
FIGURA 60 - GRÁFICO COMPARATIVO DE INTENSIDADE RELATIVA ENTRE MODELO E LENTE
COMERCIAL PARA 100 LP/MM AFASTADO DO PLANO FOCAL DE 0,5D. .............. 80
FIGURA 61 - DESCRITIVO DA OBTENÇÃO DA NOVA SUPERFÍCIE A SER AVALIADA. ................ 82
FIGURA 62 - VARIAÇÃO DO MTF COM LIMITES DE TOLERÂNCIA. .................................................. 83
FIGURA 63 - ESQUEMÁTICO DO PROCESSO DE CONFECÇÃO DO PROTÓTIPO. ............................. 84
FIGURA 64 - (A) PROCESSO DE MOLDAGEM DO PROTÓTIPO, AMBOS OS MOLDE
PREENCHIDOS COM O POLÍMERO NOA63 INSTANTES ANTES DO PROCESSO DE
CURA E (B) PROCESSO CURA DA LENTE ATRAVÉS DE EXPOSIÇÃO A LUZ
ULTRAVIOLETA. ............................................................................................................... 85
FIGURA 65 - PROTÓTIPO DO MODELO DE 20 D PROPOSTO, FABRICADO POR MOLDAGEM ...... 86
FIGURA 66 - DESENHO DO MOLDE CONSTRUÍDO POR TORNEAMENTO PARA A SUPERFÍCIE
ANTERIOR, TODAS AS UNIDADES EXPRESSAS ENCONTRAM-SE EM
MILÍMETROS (A) VISTA FRONTAL, (B) CORTE A-A E (C) VISTA LATERAL. ........ 87
FIGURA 67 - MOLDE DA SUPERFÍCIE ANTERIOR PRODUZIDO EM PMMA UTILIZANDO A
TÉCNICA DE TORNEAMENTO COMPUTADORIZADO. .............................................. 87
FIGURA 68 - SÍNTESE DO PROCESSO DE FABRICAÇÃO DOS MOLDES DA SUPERFÍCIE
POSTERIOR EM SILÍCIO. .................................................................................................. 88
FIGURA 69 - PIRÂMIDE INVERTIDA FORMADA SOB MÁSCARA PROTETORA DE NITRETO DE
SILÍCIO APÓS PRIMEIRA ETAPA DE CORROSÃO COM KOH. .................................. 93
FIGURA 70 - IMAGEM DE MICROSCOPIA ÓPTICA DOS MOLDES EM SILÍCIO (A) AMOSTRA 1 (B)
AMOSTRA 2 ........................................................................................................................ 94
FIGURA 71 - AMOSTRA 2 ESTRUTURA (CÍRCULO) E DEFEITOS (QUADRADOS)
DEMARCADOS ................................................................................................................... 94
FIGURA 72 - PERFILOMETRIA ÓPTICA DOS MOLDES FABRICADOS, (A) AMOSTRA 1, (B)
AMOSTRA 2 E (C) AMOSTRA 3. ...................................................................................... 95
FIGURA 73 – MAPA DA SUPERFÍCIE DA AMOSTRA 1 REFERENTE AO MOLDE DA SUPERFÍCIE
POSTERIOR DO MODELO(ESQUERDA) E AVALIAÇÃO DA RUGOSIDADE DO
CORTE TRANSVERSAL EM DESTAQUE NO MAPA DA SUPERFÍCIE (DIREITA). .. 95
FIGURA 74 - IMAGEM DO NIMO PARA A LENTE FABRICADA DESTAQUE PARA OS DEFEITOS
DE FABRICAÇÃO APRESENTADOS. .............................................................................. 97
FIGURA 75 - MTF THROUGH FOCUS DA LENTE PRODUZIDA PARA PUPILA DE 3MM. ................. 98
FIGURA 76 - CURVA DE MTF PRODUZIDO PELO NIMO PARA LENTE FABRICADA COM PUPILA
DE 3 MM. ............................................................................................................................. 98
FIGURA 77 - CURVA DE MTF DA LENTE PRODUZIDA PARA PUPILA DE 4,5 MM. ......................... 99

12
FIGURA 78 - MTF THROUGH FOCUS PARA PUPILA DE 4,5 MM DA LENTE FABRICADA. ............. 99
FIGURA 79 - DADOS DE DIVULGAÇÃO DA TECNIS SYMFONY OBTIDO COM LUZ BRANCA E
PUPILA DE 5MM, ACRESCIDO DOS DADOS REFERENTES A LENTE FABRICADA
TAMBÉM AVALIADA COM LUZ BRANCA, MAS COM PUPILA DE 4,5 MM.
EDITADO: (ABBOTT MEDICAL OPTICS, 2016) ........................................................... 100
FIGURA 80 - COMPARATIVO ENTRE LENTES MULTIFOCAIS DO MERCADO, A TECNIS
SYMFONY E O MODELO PROPOSTO E FABRICADO. EDITADO: (BORRMANN,
2015).................................................................................................................................... 101
FIGURA 81 - COMPARATIVO DE PROFUNDIDADE DE FOCO ENTRE O PROTÓTIPO FABRICADO
E A LENTE TECNIS SYMFONY. ..................................................................................... 101

13
LISTA DE TABELAS
TABELA 1 - CARACTERÍSTICAS DOS CONES E BASTONETES E DOS SISTEMAS FORMADOS
POR ELES (LANG & AL., 2000) (ROHKAMM, 2004). ..................................................... 37
TABELA 2 - VALORES DE MTF E FWHM EM DIFERENTES DIOPTRIAS PARA LENTES
COMERCIAIS E MODELOS. .............................................................................................. 66
TABELA 3 - CONJUNTO DE COEFICIENTES PARA AS ABERRAÇÕES OBTIDAS NO PROCESSO
DE OTIMIZAÇÃO SEPARADAS POR DIOPTRIA. .......................................................... 68
TABELA 4 - TOLERÂNCIAS DE FORMA PARA FABRICAÇÃO DE LENTES (BASS, 1994) (SACEK,
FABRICATION ERRORS, 2006). ....................................................................................... 81
TABELA 5 - TABELA DE VALORES UTILIZADOS PARA O CÁLCULO DO 𝜎𝑞𝑢𝑎𝑑𝑟Á𝑡𝑖𝑐𝑜. ................ 82
TABELA 6 - COMPILAÇÃO DOS RESULTADOS DE RUGOSIDADE DAS ESTRUTURAS
PRODUZIDAS EM SILÍCIO. ............................................................................................... 96
14
LISTA DE ABREVIATURAS E SIGLAS
ASCRS – American Society of Cataract and Refractive Surgery
CMOS – Complementary Metal-Oxide-Semiconductor
CSF – Contrast Sensitivity Function
CTF – Contrast Transfer Function
DI – Deionizada
FWHM – Full Width at Half Maximum
GaN – Nitreto de Gálio
HF – Ácido Fluorídrico
HMDS – Hexametil-disilazano
ISO – International Organization for Standardization
KOH – Hidróxido de Potássio
LIO – Lente Intraocular
LW – Laser Writer
MTF – Modulation Transfer Function
𝑀𝑇𝐹𝑡𝑓 – Modulation Transfer Function through Focus
NSGA-II – Non-dominated Sorting Genetic Algorithm II
OMS – Organização Mundial de Saúde
OTF – Optical Transfer Function
PMMA – Polimetil-metacrilato
PSF – Point Spread Function
PTF – Phase Transfer Function
SQF – Fator de Qualidade Subjetivo

15
1 INTRODUÇÃO
Para qualquer sistema óptico, existe uma região ao longo do eixo óptico, próxima ao
plano focal, onde o sensor pode ser posicionado sem que ocorra uma redução significativa da
qualidade da imagem. A extensão desta região é conhecida como profundidade de foco (Smith,
2008) (Kourakos, 1999). A ampliação da profundidade de foco de sistemas ópticos tem se
mostrado um interessante campo de pesquisa, devido à imensa possibilidade de aplicações.
Diversas abordagens têm sido apresentadas no intuito resolver este tema, algumas codificam a
abertura e recorrem a etapas de pós-processamento, outras adicionam complexos elementos
ópticos ao sistema, e existem ainda aquelas que distribuem, de maneira aleatória, pinholes por
toda a abertura do sistema ou se utilizam de materiais birrefringentes. Apesar da diversidade de
estratégias disponíveis pouquíssimas podem ser aplicadas a sistemas ópticos como o olho, em
parte devido à complexidade das soluções (Zalevsky, 2010) (Goodman).
Em Oftalmologia, mais especificamente, a ampliação da profundidade de foco se
apresenta como uma alternativa viável para contornar o problema da redução da habilidade de
ver objetos situados a diferentes distâncias simultaneamente (Kourakos, 1999). Essa redução
pode ocorrer principalmente devido a dois fatores, dentre outras disfunções: o
comprometimento da capacidade de acomodação do olho com a idade (presbiopia), tornando
difícil a visualização de objetos próximos; e o desenvolvimento de catarata, que é uma
opacificação do cristalino e que pode levar à cegueira; sendo ambos tratáveis por procedimento
cirúrgico (Lang & al., 2000). No procedimento, a lente opaca, ou que tenha perdido sua
capacidade de acomodação, é removida e substituída por uma lente artificial, uma lente
intraocular (LIO).
O mercado relacionado à oftalmologia chama atenção devido ao seu tamanho, em 2014,
por exemplo, só na rede pública de saúde, foram realizadas 469.820 cirurgias de catarata, já em
2015 esse número caiu para 185.598 cirurgias (Brasil, 2016). Segundo a Organização Mundial
de Saúde (OMS) existem cerca de 19,5 Milhões de pessoas cegas no mundo devido à catarata
não tratada, sendo ela a maior causa de cegueira do mundo. Ainda segundo a OMS, no Brasil
surgem cerca de 550.000 casos novos de catarata por ano (OMS, 2016). Embora a utilização de
lentes intraoculares para correção de presbiopia não tenha chamado muita atenção desde que se
tornou disponível nos Estados Unidos em 1997, sendo que apenas 2,4% do total de lentes
intraoculares implantadas globalmente em 2014 teve esta finalidade, segundo o Market Scope.
Novas lentes para correção de presbiopia, como lentes com profundidade de foco estendida,

16
podem expandir esse mercado consideravelmente, alcançando quase 11 % de crescimento até
o final de 2016, ainda segundo o Market Scope (Smolinsky, 2015).
Buscando atender esse mercado, já se encontram disponíveis, ou ainda em fase de
desenvolvimento, uma enorme variedade de LIOs, devido à disponibilidade de novas
tecnologias e de novos materiais. Elas diferem entre si pela forma, pelo número de pontos focais
ou pela capacidade de mimetizar o comportamento do cristalino (Ronald R. Krueger, 2001).
Apesar de todo o avanço no desenvolvimento de lentes intraoculares, no Brasil, a grande
maioria dos pacientes que se submete a uma cirurgia de catarata recebe uma lente intraocular
monofocal.
As lentes monofocais apresentam uma única distância focal, geralmente favorecendo a
visão mais nítida apenas para objetos distantes. Elas são diferenciadas pelo poder dióptrico e
pela forma da superfície, que pode ser esférica ou asférica. Lentes esféricas apresentam valores
elevados de Aberração Esférica o que reduz a sensibilidade ao contraste (Mathen, 2010). A
topologia das lentes asféricas, com base em uma função cônica, minimiza as distorções
periféricas aumentando a sensibilidade ao contraste, mas reduzindo em contrapartida a
profundidade de foco. O indivíduo que implanta uma lente monofocal destinada para visão de
longe, seja ela asférica ou esférica, terá limitações para enxergar de perto, já que com a remoção
do cristalino não existe mais o fenômeno de acomodação (Marques & al., 2000) (Kezirian,
2009).
Uma das opções para permitir a habilidade de ver nitidamente objetos situados a
diferentes distâncias simultaneamente utilizando lentes intraoculares monofocais é a técnica de
monovisão (Marques & al., 2000) (Kezirian, 2009). Nesta técnica é utilizada uma lente
monofocal ajustada para ter seu ponto focal em um objeto distante no olho dominante e com
ponto focal em um objeto próximo no olho não dominante. Esta distribuição permite que o
usuário perceba de maneira nítida objetos distantes e próximos emulando a acomodação.
Entretanto, para que a técnica funcione de maneira adequada é necessário que ocorra uma
superposição das regiões de foco do olho dominante e do não dominante, como na Figura 1 (a),
caso as lentes escolhidas não possuam profundidade de foco adequada ou se a diferença de
dioptria entre os dois olhos for excessivamente grande (Figura 1 (b)) a adaptação do paciente
fica comprometida (Kezirian, 2009).

17
Figura 1 – (a) Superposição de regiões de foco do olho dominante e não dominante, condição importante para
adaptação do paciente a técnica de monovisão, (b) Sistema onde não ocorreu a superposição das
regiões de foco dificultando a adaptação a técnica de monovisão.
Para aumentar a profundidade do foco, e facilitar a adaptação a técnicas como a de
monovisão, o que se propõe neste trabalho é produzir alterações na superfície de uma lente,
originalmente asférica, incluindo Coma X, Coma Y e Aberração Esférica, descritas através
polinômios de Zernike. Busca-se com esta estratégia disponibilizar uma lente que possua
características de sensibilidade ao contraste superiores às lentes esféricas e profundidade de
foco superior àquela de lentes asféricas, sem os problemas associados à multiplicidade de focos.
Segundo Dra. Cynthia Matossian, em entrevista a American Society of Cataract and Refractive
Surgery (ASCRS), LIOs profundidade de foco estendido prometem uma profundidade de
campo expandido, sem os inconvenientes associados com um sistema visual multifocal. Os
resultados de ensaios clínicos mostrando uma alta taxa de independência dos óculos com uma
baixa incidência de fenômenos como halo (Matossian & Hovanesain, 2015), corroboram a
necessidade de novas alterativas para a ampliação da profundidade de foco.

18
2 CONCEITOS E FUNDAMENTAÇÃO
2.1 SISTEMAS ÓPTICOS
A Óptica e os Sistemas Ópticos há algum tempo fazem parte da vida cotidiana.
Atualmente inúmeras pessoas beneficiam-se de óculos, lentes de contato e lentes intraoculares
para corrigir problemas de visão e usufruem de diversos dispositivos em que a óptica
desempenha papel fundamental em seu funcionamento, como as câmeras.
Embora existam relatos da utilização de dispositivos ópticos desde 2500 a.C., somente
com os recentes avanços tecnológicos em detecção de frentes de onda e óptica adaptativa foi
possível medir, corrigir e alterar a estrutura das frentes de onda de maneira dinâmica. Este
conjunto de avanços permitiu o surgimento e o desenvolvimento de aplicações nas mais
diversas áreas, isto porque a detecção e principalmente a manipulação da frente de onda
possibilitaram a alteração de algumas características do sistema óptico sem que propriedades
básicas como o erro refrativo e o tamanho da pupila sejam modificados (Ronald R. Krueger,
2001).
Uma das características passiveis de manipulação e com um vasto leque de aplicações
é a tolerância do sistema óptico a pequenos desvios do plano focal, ou profundidade de foco. A
profundidade de foco pode ser definida como a capacidade de um sistema óptico, operar
distante do foco perfeito, sem que ocorra a redução significativa da qualidade da imagem,
resolução, contraste ou qualquer outro critério apropriado (Smith, 2008) (Kourakos, 1999).
A ampliação da profundidade de foco de sistemas ópticos nas aplicações biomédicas,
por exemplo, permitem que as técnicas de microscopia tenham nitidez adequada em um volume
da amostra e não somente em um plano. Já em aplicações de visão computacional e litografia
reduz a sensibilidade destes sistemas a perdas de foco (Kourakos, 1999).
Alterações da profundidade de foco podem ser obtidas diretamente pela mudança no
tamanho da pupila do sistema (Ronald R. Krueger, 2001). Um aumento da profundidade de
foco pode ser obtido pela simples redução da abertura da pupila, a qual pode ocorrer de maneira
gradual ou abrupta. Entretanto a redução da abertura do sistema reduz também a resolução do
sistema e a quantidade de luz que chega ao plano da imagem (Zalevsky, 2010). Diversas outras
abordagens para estender a profundidade de foco têm sido investigadas. Uma das soluções
encontradas é a adição de um elemento refrativo no plano da abertura do sistema, sendo o
elemento mais popular um tipo especializado de lente que tem uma superfície cônica, conhecido
19
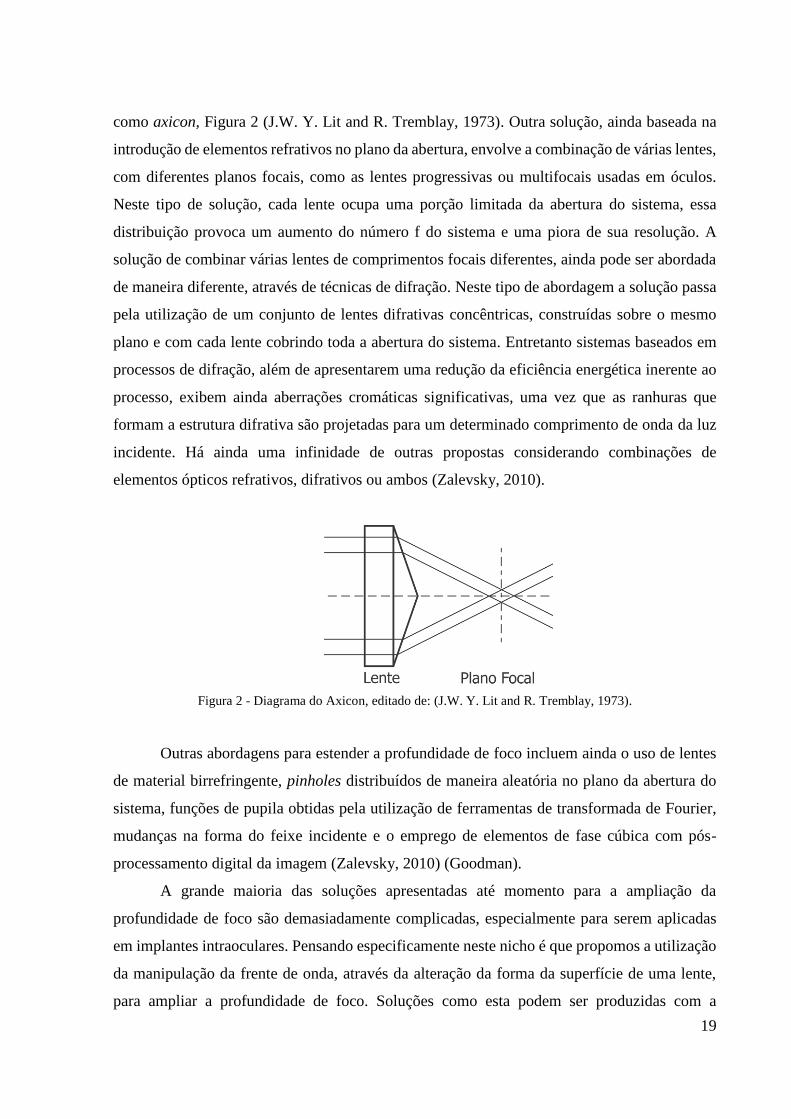
como axicon, Figura 2 (J.W. Y. Lit and R. Tremblay, 1973). Outra solução, ainda baseada na
introdução de elementos refrativos no plano da abertura, envolve a combinação de várias lentes,
com diferentes planos focais, como as lentes progressivas ou multifocais usadas em óculos.
Neste tipo de solução, cada lente ocupa uma porção limitada da abertura do sistema, essa
distribuição provoca um aumento do número f do sistema e uma piora de sua resolução. A
solução de combinar várias lentes de comprimentos focais diferentes, ainda pode ser abordada
de maneira diferente, através de técnicas de difração. Neste tipo de abordagem a solução passa
pela utilização de um conjunto de lentes difrativas concêntricas, construídas sobre o mesmo
plano e com cada lente cobrindo toda a abertura do sistema. Entretanto sistemas baseados em
processos de difração, além de apresentarem uma redução da eficiência energética inerente ao
processo, exibem ainda aberrações cromáticas significativas, uma vez que as ranhuras que
formam a estrutura difrativa são projetadas para um determinado comprimento de onda da luz
incidente. Há ainda uma infinidade de outras propostas considerando combinações de
elementos ópticos refrativos, difrativos ou ambos (Zalevsky, 2010).
Figura 2 - Diagrama do Axicon, editado de: (J.W. Y. Lit and R. Tremblay, 1973).
Outras abordagens para estender a profundidade de foco incluem ainda o uso de lentes
de material birrefringente, pinholes distribuídos de maneira aleatória no plano da abertura do
sistema, funções de pupila obtidas pela utilização de ferramentas de transformada de Fourier,
mudanças na forma do feixe incidente e o emprego de elementos de fase cúbica com pós-
processamento digital da imagem (Zalevsky, 2010) (Goodman).
A grande maioria das soluções apresentadas até momento para a ampliação da
profundidade de foco são demasiadamente complicadas, especialmente para serem aplicadas
em implantes intraoculares. Pensando especificamente neste nicho é que propomos a utilização
da manipulação da frente de onda, através da alteração da forma da superfície de uma lente,
para ampliar a profundidade de foco. Soluções como esta podem ser produzidas com a

20
utilização das tecnologias disponíveis e sem limitações como a perda de energia ou a redução
do limite de resolução.
2.1.1 Características fundamentais de sistemas ópticos
Grande parte dos fenômenos associados à óptica tratados aqui podem ser explicados
através da óptica geométrica, entretanto algumas vezes será necessário fazer referências à óptica
física na forma de teoria ondulatória, para elucidar conceitos como frente de onda e aberrações,
ou ainda para explicar de maneira mais eficiente o processo de formação da imagem.
2.1.1.1 Distância Focal e Pontos Principais
Considere um sistema óptico formado por uma lente de índice de refração 𝑛2 e raios
de curvatura 𝑟1 e 𝑟2 separando meios de diferentes índices de refração 𝑛1 a esquerda e 𝑛3 a
direita, como mostrado na Figura 3. Um raio luminoso que parta de uma fonte pontual situada
no ponto O alcança a primeira superfície da lente no ponto P onde é então desviado em direção
ao ponto Q. Caso houvesse uma extensão do meio 𝑛2 até o infinito, a imagem da fonte pontual
seria formada em um ponto I’ a uma distância q’ do vértice A. Entretanto, devido à presença da
superfície posterior da lente, o raio luminoso será novamente desviado e a imagem final será
formada a uma distância q do vértice B sobre o ponto I (Hecht, 2002) (Welford W. , 1986).
Figura 3 – Sistema óptico (Welford W. , 1986). .

21
Considerando a espessura t da lente muito pequena em relação às demais distâncias envolvidas,
e portanto desprezível, e aplicando a relação dos pontos conjugados ao sistema, temos (Hecht,
2002):
𝑛1
𝑝+
𝑛3
𝑞=
(𝑛2 − 𝑛1)
𝑟1
−(𝑛2 − 𝑛3)
𝑟2
( 1 )
Podemos aplicar a relação da equação ( 1 ) para sistemas mais comuns, como uma lente
completamente imersa em um meio de índice de refração 𝑛0. Assumindo, então, 𝑛1 = 𝑛3 = 𝑛0
e 𝑛2 = 𝑛 podemos reescrever a relação obtida na equação ( 1 ), como (Hecht, 2002):
1
𝑝+
1
𝑞=
(𝑛 − 𝑛0)
𝑛0
(1
𝑟1
−1
𝑟2
) ( 2 )
É possível obter os comprimentos focais, primário e secundário, do sistema partindo da
relação estabelecida na equação ( 2 ) fazendo 𝑞 → ∞ para obter o comprimento focal primário
( f ) e 𝑝 → ∞ para o comprimento focal secundário ( f’ ), Figura 4 (Hecht, 2002).
Figura 4 - (a) Comprimento focal primário ( f ) e ponto focal primário ( F ), (b) Comprimento focal secundário
(f’ ) e ponto focal secundário ( F' ) (Hecht, 2002).
Nota-se, neste sistema, que 𝑓 = 𝑓′ de modo que a equação ( 2 ) pode ser reescrita como
(Hecht, 2002):
22
1
𝑓=
1
𝑓′=
(𝑛 − 𝑛0)
𝑛0
(1
𝑟1
−1
𝑟2
) ( 3 )
A relação apresentada na equação ( 3 ) é chamada de equação do fabricante de lentes e mostra
que em lentes completamente imersas em um meio as distâncias focais primária e secundária
são iguais. Em Oftalmologia é comum que as lentes sejam descritas a partir de seu poder
dióptrico (D), que é definido como o recíproco do comprimento focal em metros, ou seja 𝐷 =
1/𝑓 (Hecht, 2002).
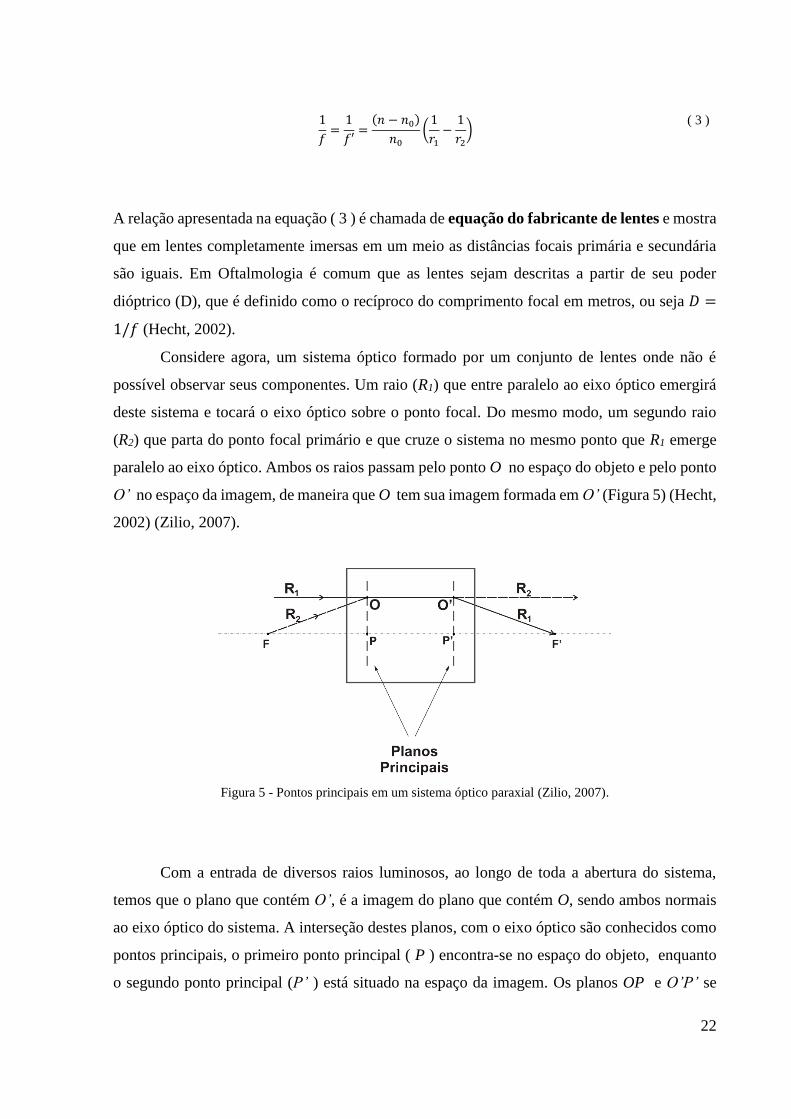
Considere agora, um sistema óptico formado por um conjunto de lentes onde não é
possível observar seus componentes. Um raio (R1) que entre paralelo ao eixo óptico emergirá
deste sistema e tocará o eixo óptico sobre o ponto focal. Do mesmo modo, um segundo raio
(R2) que parta do ponto focal primário e que cruze o sistema no mesmo ponto que R1 emerge
paralelo ao eixo óptico. Ambos os raios passam pelo ponto O no espaço do objeto e pelo ponto
O’ no espaço da imagem, de maneira que O tem sua imagem formada em O’ (Figura 5) (Hecht,
2002) (Zilio, 2007).
Figura 5 - Pontos principais em um sistema óptico paraxial (Zilio, 2007).
Com a entrada de diversos raios luminosos, ao longo de toda a abertura do sistema,
temos que o plano que contém O’, é a imagem do plano que contém O, sendo ambos normais
ao eixo óptico do sistema. A interseção destes planos, com o eixo óptico são conhecidos como
pontos principais, o primeiro ponto principal ( P ) encontra-se no espaço do objeto, enquanto
o segundo ponto principal (P’ ) está situado na espaço da imagem. Os planos OP e O’P’ se
23
comportam como superfícies de refração e são chamado de planos principais do sistema óptico
(Hecht, 2002) (Zilio, 2007).
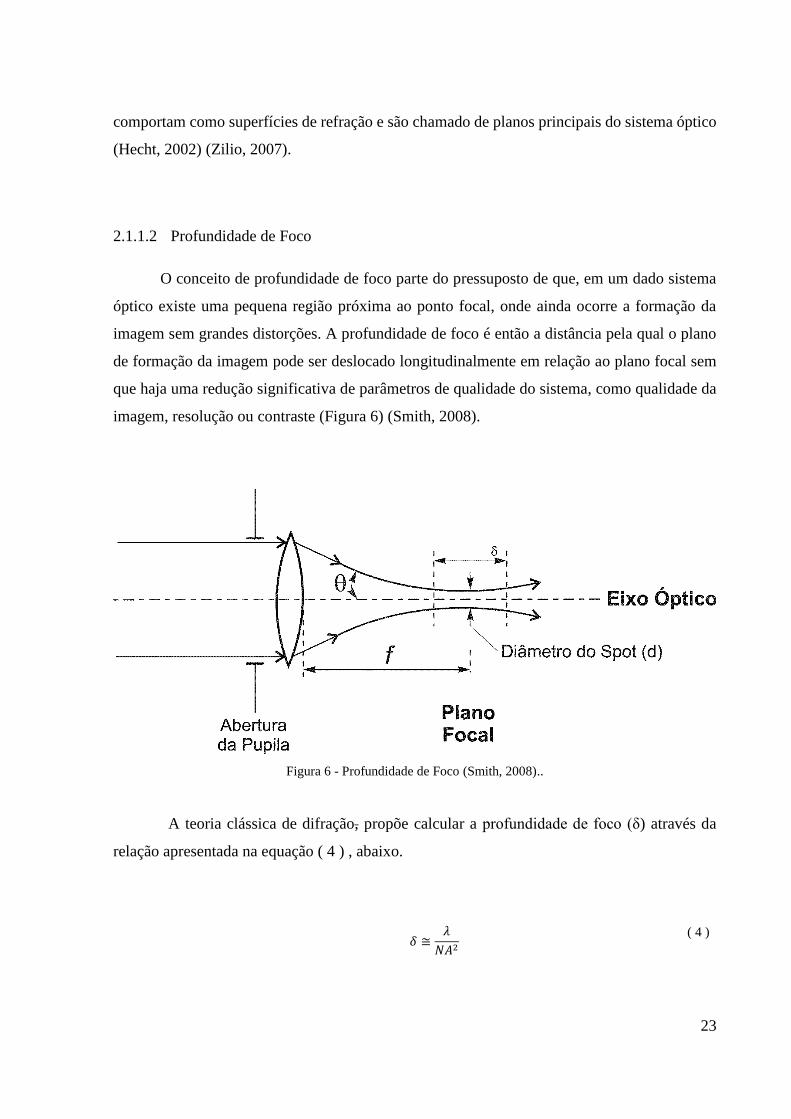
2.1.1.2 Profundidade de Foco
O conceito de profundidade de foco parte do pressuposto de que, em um dado sistema
óptico existe uma pequena região próxima ao ponto focal, onde ainda ocorre a formação da
imagem sem grandes distorções. A profundidade de foco é então a distância pela qual o plano
de formação da imagem pode ser deslocado longitudinalmente em relação ao plano focal sem
que haja uma redução significativa de parâmetros de qualidade do sistema, como qualidade da
imagem, resolução ou contraste (Figura 6) (Smith, 2008).
Figura 6 - Profundidade de Foco (Smith, 2008)..
A teoria clássica de difração, propõe calcular a profundidade de foco (δ) através da
relação apresentada na equação ( 4 ) , abaixo.
𝛿 ≅
𝜆
𝑁𝐴2
( 4 )

24
Onde λ é o comprimento de onda da luz e NA a abertura numérica do sistema dada pela relação
𝑁𝐴 = 𝑠𝑒𝑛 𝜃 (Michael Bass, 1995).
Segundo Duker e Yanoff (Duker & Yanoff, 2011), a profundidade de foco pode ser
definida considerando parâmetros do olho em um modelo simplificado (Figura 7) que utilize
apenas um elemento refrativo, como:
𝐷1 − 𝐷2 =𝑛. 𝑐
𝑓. 𝑝
( 5 )
Onde a profundidade de foco é a diferença entre D1 e D2, em dioptrias, D1 o poder dióptrico do
olho quando um objeto é visualizado no infinito, D2 o poder dióptrico quando o objeto é
visualizado no ponto próximo, n o índice de refração no modelo simplificado do olho, c1 o
tamanho dos fotorreceptores que determinam a resolução máxima do olho, f o comprimento
focal do modelo e p o diâmetro pupilar, as grandezas c, f, p devem ser expressas em metros.
Figura 7 - Modelo de olho simplificado (Duker & Yanoff, 2011).
1 Para o cálculo são considerados três cones de aproximadamente de 1,5 µm de diâmetro com espaço
entre eles de 0,5 µm, assim o valor de c é de aproximadamente 5,5 µm (três cones + dois espaços) (Duker &
Yanoff, 2011).

25
2.1.1.3 Frente de Onda.
Sistemas ópticos podem ter como um dos problemas básicos a qualidade das imagens
formadas. O modelo de raio paraxial, proposto pela óptica geométrica, supõe que os raios fazem
ângulos pequenos com o eixo principal e que todos os raios que partem de uma fonte pontual e
incidem no sistema óptico têm o mesmo ponto focal. Estas aproximações não correspondem
fielmente a maior parte dos efeitos reais, o que resulta na formação de imagens imperfeitas
(Hecht, 2002).
A deterioração da qualidade da imagem se deve a distorções introduzidas pelos
componentes ópticos ou pelo meio de propagação da frente de onda. Frente de onda, neste
contexto, torna-se um conceito imprescindível ao entendimento dos aspectos que afetam a
qualidade da imagem formada. De maneira geral, podemos definir frente de onda como o lugar
geométrico de pontos onde todas as ondas oriundas de uma mesma fonte têm a mesma fase
(Figura 8) (Welford W. , 1986) (Oliveira, 2012).
Figura 8 - Frentes de onda, (a) plana e (b) esférica (Oliveira, 2012)..
Sistemas ópticos, como as lentes por exemplo, têm a capacidade de alterar a forma da
frente de onda, entretanto pequenos defeitos na superfície ou mudanças de índice de refração
podem distorcer esta frente de onda. Os desvios entre as frentes de onda ideais e as reais são
conhecidos como aberrações (Figura 9) (Ronald R. Krueger, 2001).

26
Figura 9 – (a) Frente de Onda esférica formada por sistema ideal e (b) Frente de Onda distorcida formada por
sistema imperfeito (Ronald R. Krueger, 2001).
2.1.1.4 Aberrações
Como já mencionado anteriormente a aproximação paraxial, ou teoria de primeira
ordem nada mais é do que uma boa aproximação. Um traço exato de raios ou mesmo algumas
medições realizadas em um protótipo de sistema, irão revelar inconsistências com a descrição
paraxial correspondente. As aberrações ópticas podem ser divididas em dois grupos: as
aberrações cromáticas e aberrações monocromáticas (Welford W. , 1986) (Hecht, 2002) (Justin
Peatross, 2013).
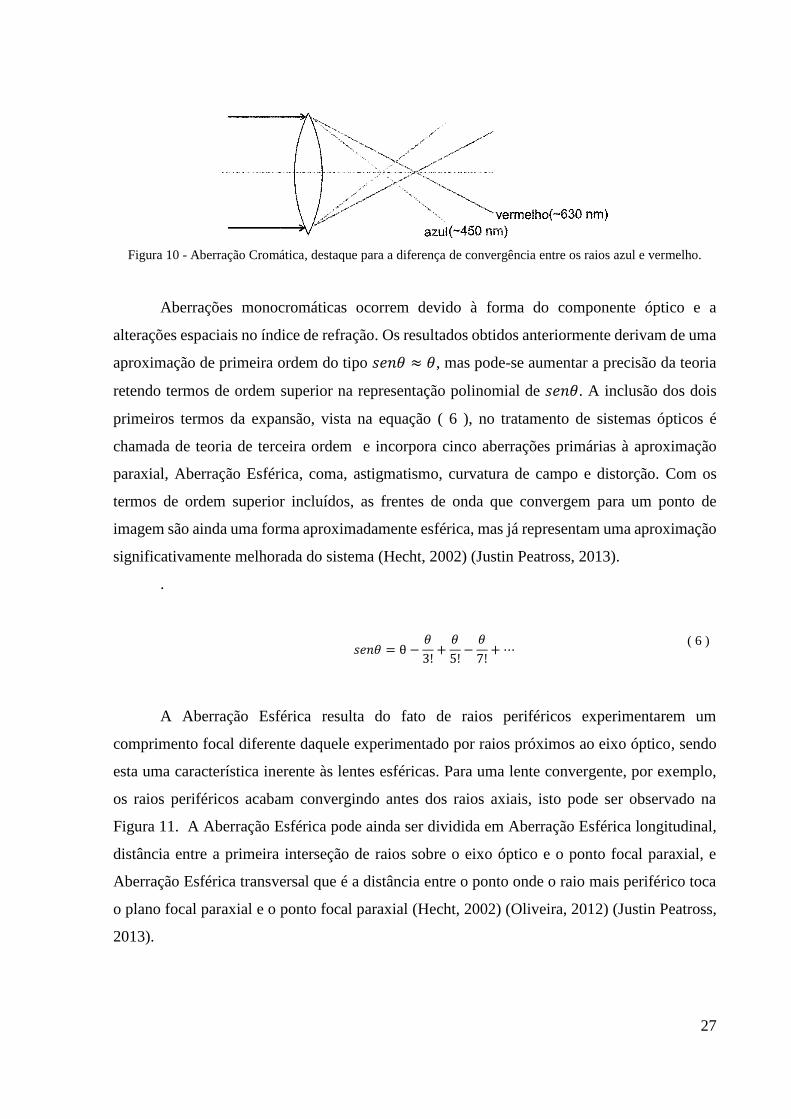
A aberração cromática ocorre devido ao fenômeno de dispersão da luz, este fenômeno
provoca a separação de uma onda luminosa branca em várias componentes com diferentes
frequências, que propagaram para diferentes pontos focais. A aberração cromática geralmente
pode ser corrigida através da associação de duas lentes, ou de uma lente e um elemento difrativo
(Hecht, 2002) (Justin Peatross, 2013).
27
Figura 10 - Aberração Cromática, destaque para a diferença de convergência entre os raios azul e vermelho.
Aberrações monocromáticas ocorrem devido à forma do componente óptico e a
alterações espaciais no índice de refração. Os resultados obtidos anteriormente derivam de uma
aproximação de primeira ordem do tipo 𝑠𝑒𝑛𝜃 ≈ 𝜃, mas pode-se aumentar a precisão da teoria
retendo termos de ordem superior na representação polinomial de 𝑠𝑒𝑛𝜃. A inclusão dos dois
primeiros termos da expansão, vista na equação ( 6 ), no tratamento de sistemas ópticos é
chamada de teoria de terceira ordem e incorpora cinco aberrações primárias à aproximação
paraxial, Aberração Esférica, coma, astigmatismo, curvatura de campo e distorção. Com os
termos de ordem superior incluídos, as frentes de onda que convergem para um ponto de
imagem são ainda uma forma aproximadamente esférica, mas já representam uma aproximação
significativamente melhorada do sistema (Hecht, 2002) (Justin Peatross, 2013).
.
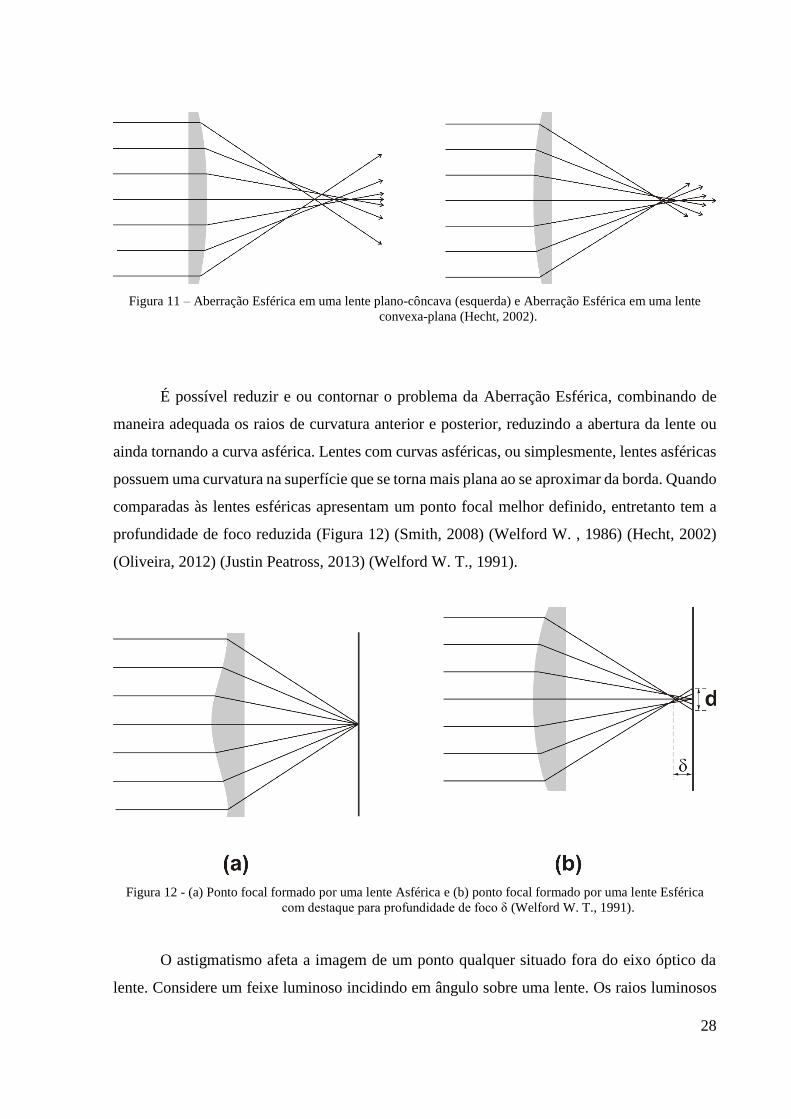
A Aberração Esférica resulta do fato de raios periféricos experimentarem um
comprimento focal diferente daquele experimentado por raios próximos ao eixo óptico, sendo
esta uma característica inerente às lentes esféricas. Para uma lente convergente, por exemplo,
os raios periféricos acabam convergindo antes dos raios axiais, isto pode ser observado na
Figura 11. A Aberração Esférica pode ainda ser dividida em Aberração Esférica longitudinal,
distância entre a primeira interseção de raios sobre o eixo óptico e o ponto focal paraxial, e
Aberração Esférica transversal que é a distância entre o ponto onde o raio mais periférico toca
o plano focal paraxial e o ponto focal paraxial (Hecht, 2002) (Oliveira, 2012) (Justin Peatross,
2013).
𝑠𝑒𝑛𝜃 = θ −
𝜃
3!+
𝜃
5!−
𝜃
7!+ ⋯
( 6 )
28
Figura 11 – Aberração Esférica em uma lente plano-côncava (esquerda) e Aberração Esférica em uma lente
convexa-plana (Hecht, 2002).
É possível reduzir e ou contornar o problema da Aberração Esférica, combinando de
maneira adequada os raios de curvatura anterior e posterior, reduzindo a abertura da lente ou
ainda tornando a curva asférica. Lentes com curvas asféricas, ou simplesmente, lentes asféricas
possuem uma curvatura na superfície que se torna mais plana ao se aproximar da borda. Quando
comparadas às lentes esféricas apresentam um ponto focal melhor definido, entretanto tem a
profundidade de foco reduzida (Figura 12) (Smith, 2008) (Welford W. , 1986) (Hecht, 2002)
(Oliveira, 2012) (Justin Peatross, 2013) (Welford W. T., 1991).
Figura 12 - (a) Ponto focal formado por uma lente Asférica e (b) ponto focal formado por uma lente Esférica
com destaque para profundidade de foco δ (Welford W. T., 1991).
O astigmatismo afeta a imagem de um ponto qualquer situado fora do eixo óptico da
lente. Considere um feixe luminoso incidindo em ângulo sobre uma lente. Os raios luminosos

29
do feixe de luz incidente apresentam simetrias diferentes no plano tangencial e no plano sagital,
ambos indicados na Figura 13. Essa diferença de simetria se reflete nas distâncias focais
fazendo com que um ponto no espaço do objeto não seja percebido como um ponto no espaço
da imagem e sim como duas linhas (Figura 13). Esta aberração deteriora a qualidade da imagem
de sistemas ópticos e desvia o poder dióptrico do sistema dos valores especificados (Justin
Peatross, 2013).
Figura 13 – Astigmatismo (Hecht, 2002).
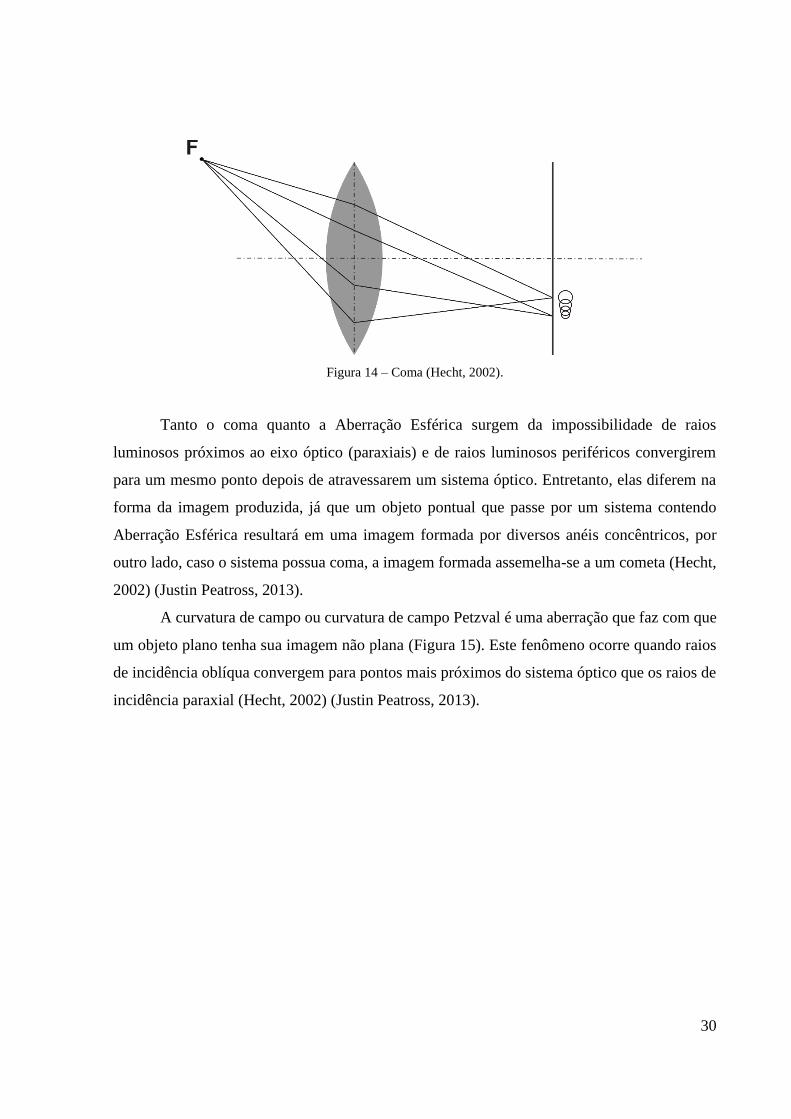
O coma é uma aberração monocromática primária que degrada a imagem e que tem sua
origem no fato de que os planos principais só podem ser considerados como planos na
aproximação paraxial. Fora desta aproximação, os planos principais são, na verdade, superfícies
curvas (Hecht, 2002). Isto torna o comprimento focal diferente para os raios que se propagam
fora do eixo óptico da lente, como mostra a Figura 14.
30
Figura 14 – Coma (Hecht, 2002).
Tanto o coma quanto a Aberração Esférica surgem da impossibilidade de raios
luminosos próximos ao eixo óptico (paraxiais) e de raios luminosos periféricos convergirem
para um mesmo ponto depois de atravessarem um sistema óptico. Entretanto, elas diferem na
forma da imagem produzida, já que um objeto pontual que passe por um sistema contendo
Aberração Esférica resultará em uma imagem formada por diversos anéis concêntricos, por
outro lado, caso o sistema possua coma, a imagem formada assemelha-se a um cometa (Hecht,
2002) (Justin Peatross, 2013).
A curvatura de campo ou curvatura de campo Petzval é uma aberração que faz com que
um objeto plano tenha sua imagem não plana (Figura 15). Este fenômeno ocorre quando raios
de incidência oblíqua convergem para pontos mais próximos do sistema óptico que os raios de
incidência paraxial (Hecht, 2002) (Justin Peatross, 2013).

31
Figura 15 - Curvatura de Campo (Hecht, 2002).
A última das aberrações primárias, a distorção barril ou simplesmente distorção, ocorre
devido a diferenças de comprimento focal e de magnificações no sistema óptico (Hecht, 2002).
Embora não afete a qualidade da imagem a distorção afeta a correspondência de posição entre
o ponto no plano do objeto e ponto no plano da imagem (Figura 16).
Figura 16 – Distorção Barril (Hecht, 2002).
2.1.1.5 Resolução.
A capacidade de um sistema óptico distinguir dois pontos muito próximos é limitada
pela natureza ondulatória da luz. A menor separação entre duas fontes pontuais de luz que um

32
dado sistema é capaz de resolver é dada pelo critério de Rayleigh. Considere uma fonte pontual
de luz sendo observada através de um dado sistema óptico de abertura circular, a imagem
resultante não é um ponto, mas sim um disco rodeado de diversos anéis mais fracos. A
ocorrência destes anéis está ligada a fenômenos de difração ocasionados pela abertura circular
(Hecht, 2002).
A região central do perfil de difração, da região do pico até o primeiro mínimo é
conhecido como disco de Airy (Figura 17). O ângulo no qual o primeiro mínimo ocorre pode
ser aproximado pela relação apresentada na equação ( 7 ), ou pela aproximação para ângulos
pequenos quando é válida a relação 𝑠𝑒𝑛𝜃 ≈ 𝜃 (Daniel Malacara, 2004).
Sempre que duas fontes pontuais tornam-se próximas, seus perfis de difração se
superpõem, só é possível resolver estas duas fontes se a superposição for menor que o raio do
disco de Airy (Figura 17) (Daniel Malacara, 2004).
Figura 17 - Critério de resolução de Rayleigh (Daniel Malacara, 2004).
𝑠𝑒𝑛𝜃 ≅ 1,22
λ
𝐷 𝑜𝑢
θ ≅ 1,22λ
𝐷
( 7 )
33
2.1.2 Olho Humano
Com os argumentos desenvolvidos até agora, já é possível apreciar os princípios
fundamentais da maioria dos sistemas ópticos práticos. Abordaremos neste estudo o olho
humano.
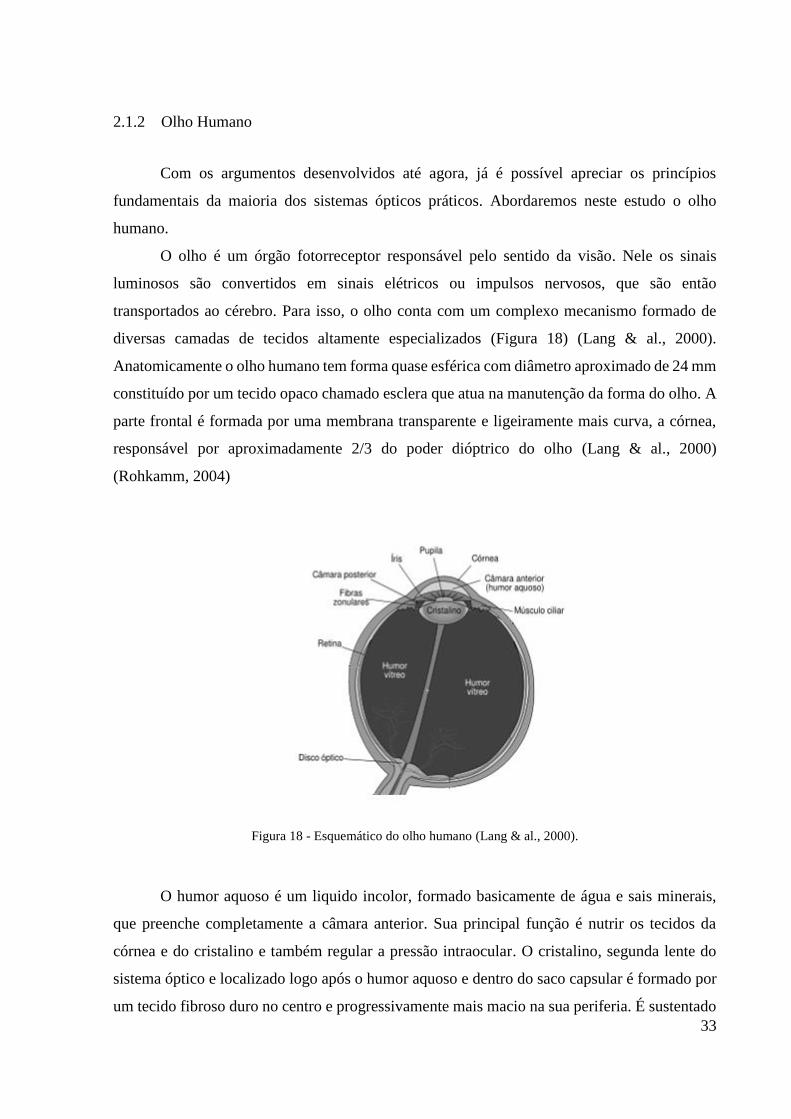
O olho é um órgão fotorreceptor responsável pelo sentido da visão. Nele os sinais
luminosos são convertidos em sinais elétricos ou impulsos nervosos, que são então
transportados ao cérebro. Para isso, o olho conta com um complexo mecanismo formado de
diversas camadas de tecidos altamente especializados (Figura 18) (Lang & al., 2000).
Anatomicamente o olho humano tem forma quase esférica com diâmetro aproximado de 24 mm
constituído por um tecido opaco chamado esclera que atua na manutenção da forma do olho. A
parte frontal é formada por uma membrana transparente e ligeiramente mais curva, a córnea,
responsável por aproximadamente 2/3 do poder dióptrico do olho (Lang & al., 2000)
(Rohkamm, 2004)
Figura 18 - Esquemático do olho humano (Lang & al., 2000).
O humor aquoso é um liquido incolor, formado basicamente de água e sais minerais,
que preenche completamente a câmara anterior. Sua principal função é nutrir os tecidos da
córnea e do cristalino e também regular a pressão intraocular. O cristalino, segunda lente do
sistema óptico e localizado logo após o humor aquoso e dentro do saco capsular é formado por
um tecido fibroso duro no centro e progressivamente mais macio na sua periferia. É sustentado

34
por ligações com o músculo ciliar que atua na mudança de forma do cristalino durante a
acomodação (Lang & al., 2000) (Rohkamm, 2004). A acomodação provoca uma mudança
significativa no conjunto de aberrações presentes no cristalino, especialmente Aberração
Esférica e Coma, sem que ocorra uma mudança na qualidade da imagem (Ninomiya, et al.,
2002).
Na câmara posterior ao cristalino está localizado o humor vítreo, líquido com textura
gelatinosa que preenche a câmara e fornece sustentação à retina. A retina é uma membrana fina,
com espessura entre 0,5 e 0,1 mm, formada por células fotorreceptoras conhecidas como cones
e bastonetes, e uma série células adicionais que auxiliam na codificação e transporte do sinal
convertido (Figura 19) (Lang & al., 2000) (Rohkamm, 2004).
Figura 19 – Conjunto camadas celulares que compõe a retina (Rohkamm, 2004).
Existem cerca de 125 milhões de cones e bastonetes distribuídos maneira não uniforme
sobre a maior parte da retina (Figura 20). Os bastonetes, que medem cerca de 0,002 mm de
diâmetro, são os responsáveis pela captação dos fótons em condições de baixa luminosidade
(visão noturna ou visão escotópica). Embora sejam extremamente sensíveis luz, podendo ser
sensibilizados por um único fóton, os bastonetes são incapazes de distinguir cor e as imagens
formadas por eles não são bem definidas (Lang & al., 2000) (Rohkamm, 2004).
Feixe luminoso

35
Figura 20 - Distribuição de cones e bastonetes na retina (Sacek, Telescope Optics, 2006).
Em contrapartida, o conjunto de seis ou sete milhões de cones, cada um medindo cerca de 0,006
mm de diâmetro, são significativamente menos sensíveis que os bastonetes e atuam em índices
de iluminação elevados (visão fotópica). São especializados na percepção de cores, tendo seu
pico de sensibilidade em torno de 546 nm, e os sistemas formados por cones na percepção de
detalhes. Essa distribuição de cones e bastonetes confere a retina alta sensibilidade e baixa
capacidade de resolução em situações de pouca luz e alta capacidade de resolução com
sensibilidade reduzida em condições com abundância de luz (Figura 21) (Sacek, Telescope
Optics, 2006).

36
Figura 21 - Relação entre luminância2 e resolução da retina (Sacek, Telescope Optics, 2006).
O diâmetro da pupila também se ajusta à condição de iluminação para favorecer o
conjunto de fotorreceptores mais adequado para a situação, que estão distribuídos de região da
retina como visto na Figura 20. Essa mudança ocorre de acordo com o esquema mostrado na
Figura 22, sendo a condição de iluminação escotópica relacionada a fenômenos com
pouquíssima luz, como uma noite sem lua por exemplo, a mesópica associada a fenômenos
onde luminosidade varia entre baixa e moderada como uma noite de lua cheia e a iluminação
produzida por um abajur, enquanto a fotópica está relacionada a eventos com iluminação entre
moderada e alta como o uso de computadores, a iluminação de um ambiente de trabalho e um
dia ensolarado, por exemplo.
Figura 22 - Variação da pupila com as condições de iluminação.
2 Luminância mede a densidade da intensidade de uma luz refletida em uma dada direção,
dada em lux ou candela por metro quadrado (cd/m2). É a luminância que produz a sensação de
claridade (Smith, 2008).

37
O conjunto de características dos cones e bastonetes e dos sistemas formados por eles
podem ser vistos na Tabela 1 (Lang & al., 2000) (Rohkamm, 2004).
Tabela 1 - Características dos cones e bastonetes e dos sistemas formados por eles (Lang & al., 2000)
(Rohkamm, 2004).
Bastonetes Cones
Alta sensibilidade a luz, especializados para visão
noturna
Sensibilidade a luz mais baixa, especializados para
visão diurna
Mais fotopigmento, captação de mais luz Menos fotopigmento
Alta amplificação, captação de um único fóton Baixa amplificação
Baixa resolução temporal: resposta lenta e tempo
até o envio da sinal é longo.
Alta resolução temporal: resposta rápida e tempo até
o envio da sinal é curto
Mais sensível a luz difusa Mais sensíveis a raios axiais diretos
Sistema de Bastonetes Sistema de Cones
Resolução baixa Resolução alta
Acromático: sem pigmentação específica para
determinados comprimentos de onda.
Cromático: três tipos de cones, cada um com um
pigmento distinto que é mais sensível a uma porção
diferente do espectro de luz visível
O comportamento óptico do olho é similar ao de uma câmera fotográfica, a córnea
permite a passagem do feixe luminoso para a interior do olho, atuando como primeira superfície
refrativa. Mas, nem toda a luz que é refratada pela córnea atinge a retina, parte dela é bloqueada
pela íris. A íris é um músculo contrátil opaco e pigmentado em sua superfície que regula a
entrada de luz. Este músculo, que dá a cor aos nossos olhos, opera como um diafragma ao
aumentar ou diminuir uma abertura em seu centro, a pupila. O recurso evita que uma quantidade
38
excessiva de luz possa danificar o tecido frágil que forma a retina (Hecht, 2002) (Lang & al.,
2000) (Rohkamm, 2004).
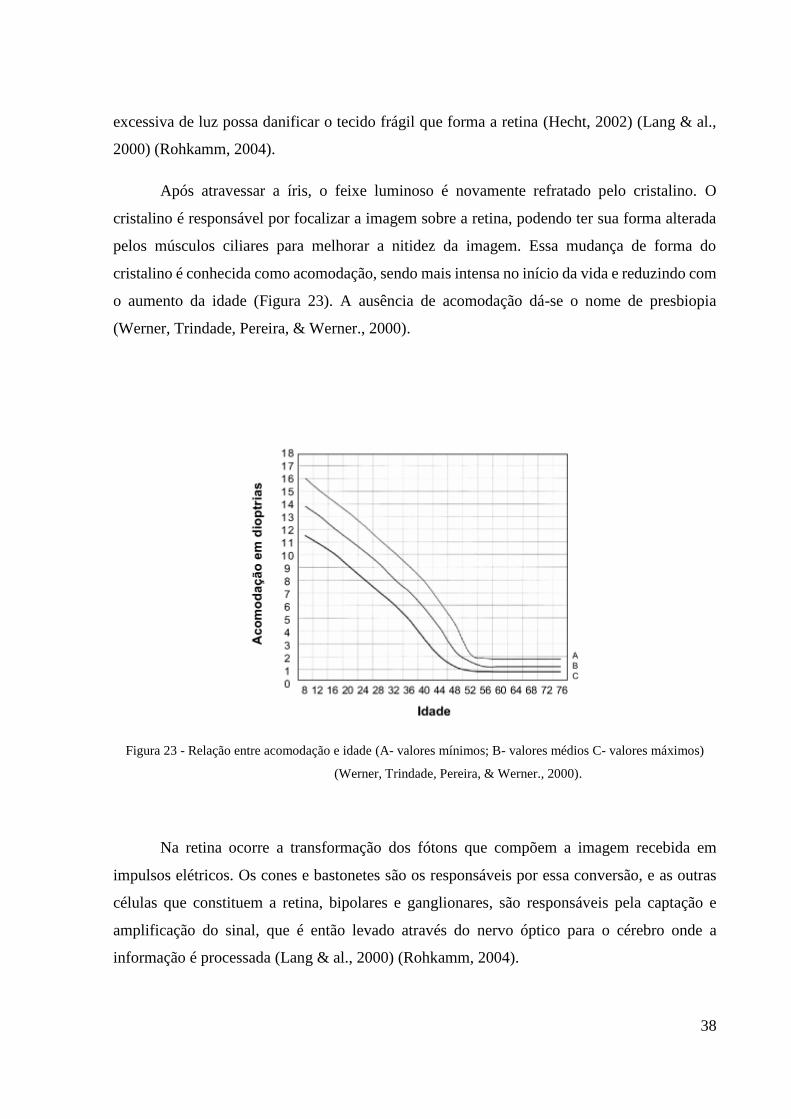
Após atravessar a íris, o feixe luminoso é novamente refratado pelo cristalino. O
cristalino é responsável por focalizar a imagem sobre a retina, podendo ter sua forma alterada
pelos músculos ciliares para melhorar a nitidez da imagem. Essa mudança de forma do
cristalino é conhecida como acomodação, sendo mais intensa no início da vida e reduzindo com
o aumento da idade (Figura 23). A ausência de acomodação dá-se o nome de presbiopia
(Werner, Trindade, Pereira, & Werner., 2000).
Figura 23 - Relação entre acomodação e idade (A- valores mínimos; B- valores médios C- valores máximos)
(Werner, Trindade, Pereira, & Werner., 2000).
Na retina ocorre a transformação dos fótons que compõem a imagem recebida em
impulsos elétricos. Os cones e bastonetes são os responsáveis por essa conversão, e as outras
células que constituem a retina, bipolares e ganglionares, são responsáveis pela captação e
amplificação do sinal, que é então levado através do nervo óptico para o cérebro onde a
informação é processada (Lang & al., 2000) (Rohkamm, 2004).
39
2.1.3 Lentes Intraoculares
Dentro o olho humano, além de corresponder a aproximadamente 1/3 do poder dióptrico
do olho o cristalino também é o responsável pelo fenômeno de acomodação. Com o passar dos
anos o cristalino perde sua capacidade de acomodação, ocasionando a presbiopia, e algumas
pessoas, podem ainda desenvolver catarata, que se caracteriza pela opacificação do cristalino.
Embora a maioria dos casos de catarata esteja relacionada ao processo de envelhecimento, ela
ainda pode se desenvolver após lesões oculares, inflamações e associadas às outras doenças
oculares. O tratamento da catarata é cirúrgico. No procedimento, a lente opaca é removida e
substituída por uma lente artificial, uma lente intraocular (LIO).
Atualmente está disponível no mercado ou em fase de desenvolvimento uma enorme
variedade de LIOs, tudo graças à disponibilidade de novas tecnologias e de novos materiais.
Podemos dividir as LIOs entre 4 grandes grupos: monofocais, tóricas, multifocais e
acomodativas (Lang & al., 2000).
As lentes monofocais direcionam os raios luminosos para um único ponto, onde a
imagem é formada de maneira clara. O indivíduo que recebe esse tipo de lente, caso nenhuma
outra estratégia seja adotada, terá limitações para enxergar objetos a diferentes distâncias, já
que com a remoção do cristalino não existe mais o fenômeno de acomodação (Lang & al.,
2000).
Uma das opções para aumentar a profundidade do foco e permitir uma visão para perto
e para longe simultaneamente é a técnica de monovisão (Marques & al., 2000) (Kezirian, 2009).
Nesta técnica é utilizada uma lente monofocal ajustada para ter seu ponto focal em um objeto
distante no olho dominante e com ponto focal em um objeto próximo no olho não dominante.
Esta distribuição permite que o usuário perceba de maneira nítida objetos distantes e próximos
emulando a acomodação. Entretanto há uma perda na percepção de profundidade que dificulta
a adaptação das pessoas à técnica (Kezirian, 2009).
As lentes intraoculares monofocais, diferem umas das outras de acordo com a forma da
superfície, que pode ser esférica ou asférica, e também pelo poder dióptrico. Lentes esféricas
apresentam uma quantidade maior de aberrações, em especial a esférica, o que reduz a
sensibilidade ao contraste. A topologia das lentes asféricas, com base em uma função cônica,
geralmente uma hipérbole, minimiza as distorções periféricas aumentando a sensibilidade ao
contraste, mas reduzindo em contrapartida a profundidade de foco (Figura 12) (Mathen, 2010).
40
Um dos mais recentes e mais significativos desenvolvimentos em implantes
intraoculares, as lentes tóricas, possuem um único foco, mas se diferenciam das monofocais por
possibilitarem a correção de astigmatismo pré-existente. O astigmatismo afeta um grande
número de pessoas e até o desenvolvimento das lentes tóricas pouca coisa poderia ser feita para
o astigmatismo presente após a cirurgia de catarata, além de óculos ou outra cirurgia
complementar a laser (PORTER, 2001) (Rayes, et al., 2007).
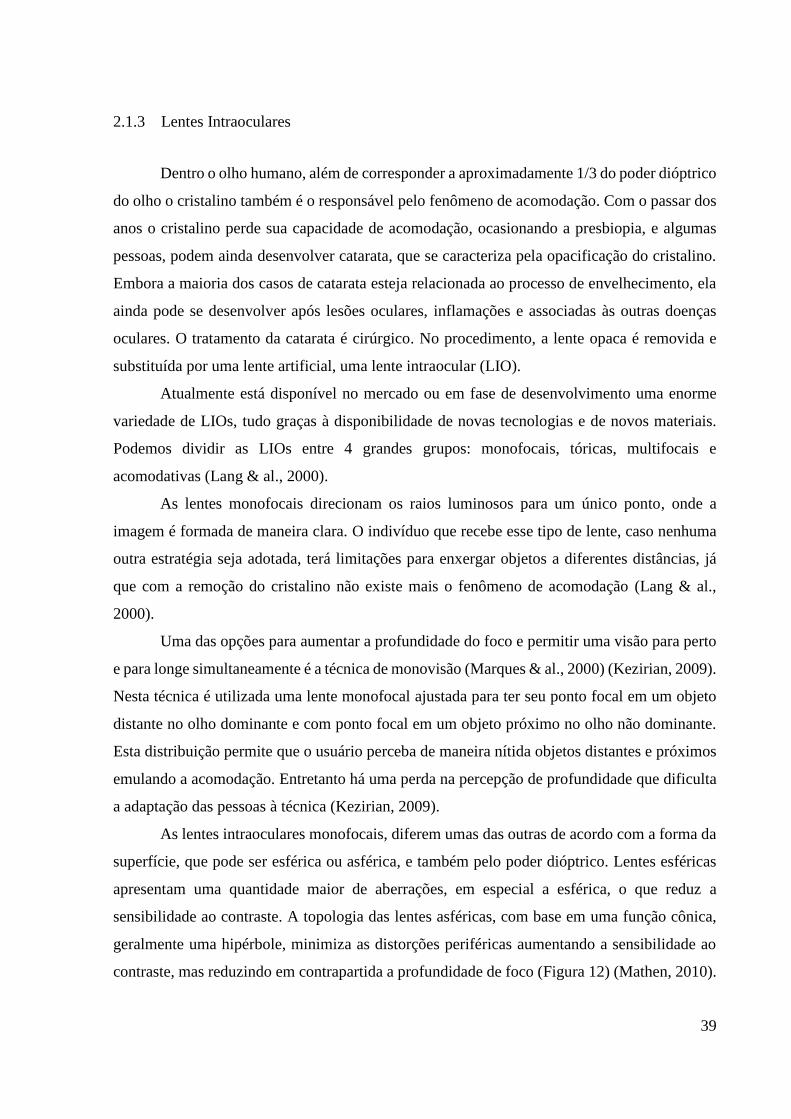
Multifocalidade ou pseudoacomodação é outra abordagem para buscar uma visão mais
próxima da realidade de uma pessoa saudável, oferecendo uma visão funcional para todas as
distâncias (Lane, Morris, Nordan, & al., 2006). LIOs multifocais são concebidas para gerar
dois ou três pontos focais separados ao longo do eixo óptico, em uma tentativa de simular a
acomodação. Diversos estudos clínicos têm demonstrado a satisfação dos usuários (Germano
& al., 2010), muito embora seja relativamente comum reclamações como o surgimento de
“glistenings”, que são pequenas imperfeições na lente que espalham a luz provocando efeito
como o apresentado na Figura 24 (Nichamin, 1993), e auras. Isso ocorre porque uma imagem
em foco é sempre acompanhada por uma ou mais imagens fora de foco tornando o espalhamento
provocado pelos “glistenings” mais significativo que em outros tipos de lentes, (Lane, Morris,
Nordan, & al., 2006).
Figura 24 –Glistenings fotografados de AcrySof™ (Trivedi, Werner, Apple, Pandey, & Izak, 2002).

41
A multiplicidade de focos pode ser obtida pela utilização de técnicas de refração e ou
difração. Sendo então divididas em três grupos: as lentes refrativas que tem como princípio a
refração da luz; as lentes difrativas que baseiam seu funcionamento no princípio de difração e;
as lentes hibridas que combinam refração e difração da luz (Lane, Morris, Nordan, & al., 2006)
(Vries, 2011).
Para garantir a pluralidade de focos necessária a uma boa acuidade visual tanto para
longe quanto para perto as LIOs multifocais refrativas, geralmente, são baseadas em zonas
anelares circuncêntricas com diferentes curvaturas. Essas diferentes curvaturas corresponderão
a diferentes dioptrias e, portanto, fornecerão diferentes pontos focais.
As lentes intraoculares acomodativas representam hoje o que há de mais moderno e
revolucionário quando o assunto é LIO. Esse grupo de lentes busca mimetizar o comportamento
do cristalino, mudando de poder dióptrico pela atuação dos músculos ciliares. Uma LIO
acomodativa é uma lente de substituição, que pode ser utilizada tanto no tratamento da
presbiopia quanto no tratamento da catarata. (Koopmans & Kooijiman, 2006) (Menapace,
Findl, Kriechbaum, & Leydolt-Koeppl., 2006). Embora já existam algumas lentes intraoculares
acomodativas no mercado, como a Synchrony (Abbott Medical Optics Inc. - Figura 25), esse
tipo de lente ainda recebe inúmeras críticas a respeito de seu mecanismo de atuação, fortemente
dependente da musculatura ciliar, de sua amplitude de correção muito limitada e por não ser
adequada à técnica cirúrgica de micro incisão (Shultz, 2012). A Figura 25 – b mostra o
mecanismo de atuação da Synchrony, onde a movimentação da musculatura ciliar promove
uma mudança na espessura da lente e consequentemente uma mudança de sua dioptria.

42
Figura 25 - (a) Lente intraocular acomodativa Synchrony (b) pricipio de funcionamento (Shultz, 2012).
2.2 AVALIAÇÃO DE DESEMPENHO ÓPTICO
2.2.1 PSF
A “point spread function” ou função de espalhamento pontual, em tradução livre,
descreve a resposta do sistema óptico a um objeto ou fonte pontual. Mesmo que um sistema
tenha todas as suas distorções corrigidas, seu PSF não será um ponto, isso se deve fenômenos
de difração que afetam o desempenho do sistema. A PSF pode ser expressa por (Daniel
Malacara, 2004):
Onde (𝑥𝐹, 𝑦𝐹) são as coordenadas no plano focal 𝑟𝑊 é o raio de curvatura da frente de onda na
saída da pupila, as funções T e T* representam a função da pupila e o complexo conjugado da
função da pupila. A função da pupila pode ser escrita como (Daniel Malacara, 2004):
𝑆(𝑥𝐹 , 𝑦𝐹) =
1
𝜋2∬ ∬ 𝑇(𝑥, 𝑦)
× 𝑇∗(𝑥′, 𝑦′)𝑒−𝑖𝑘(𝑥𝐹(𝑥−𝑥′)+𝑦𝐹(𝑦−𝑦′)) 𝑟𝑊⁄ 𝑑𝑥 𝑑𝑦 𝑑𝑥′𝑑𝑦′
( 8 )
𝑇(𝑥, 𝑦) = 𝐸(𝑥, 𝑦)𝑒
𝑖 2𝜋𝜆
𝑊(𝑥,𝑦) ( 9 )

43
Sendo E(x,y) a função que representa a distribuição de amplitudes (sem qualquer informação
de fase) da frente de onda na saída da abertura e a função W(x,y) é a deformação da frente de
onda nessa abertura (Daniel Malacara, 2004).
A PSF pode ainda ser obtida pelo quadrado da transformada de Fourier da função da
pupila como na expressão ( 10 ) (Daniel Malacara, 2004).:
Onde o termo ℑ representa a transformada de Fourier em duas dimensões. A Figura 26, abaixo
mostra o PSF para alguns sistemas Ópticos.
Figura 26: (a) PSF de sistema em foco; (b) PSF de sistema fora de foco; (c) PSF de um sistema contendo coma.
2.2.2 OTF
A função de transferência óptica ou “optical transfer function” de um sistema óptico
descreve a atenuação em contraste, ou em deslocamento de fase, que um objeto (Figura 27)
sofre quando passa por um sistema óptico, e pode ser calculado pela auto correlação entre a
função complexa da abertura do sistema (pupila) e seu conjugado (Michael Bass, 1995).
𝑆(𝑥𝐹 , 𝑦𝐹) = |ℑ [𝑇(𝑥, 𝑦)𝑒
−2𝑖𝜋𝜆
𝑊(𝑥,𝑦)]|2
( 10 )

44
Figura 27 – Ilustração da modulação, ou contraste, no (a) objeto e (b) na imagem (Michael Bass, 1995)..
Se um objeto contém todas as frequências espaciais com amplitude constante a OTF
pode ser obtida através da Transformada de Fourier da imagem. Assim se o objeto é um ponto
e a imagem é uma PSF (point spread function), então o OTF é simplesmente a transformada de
Fourier do PSF (Daniel Malacara, 2004). É possível obter a OTF pela relação:
É possível notar que o OTF é uma função complexa, contendo uma parte real e uma
imaginária. A parte real da função OTF é conhecida como Função de transferência
de modulação, “Modulation Transfer Function” ou MTF e a parte imaginária é função de
transferência de fase, “Phase Transfer Function” ou PTF (Smith, 2008).
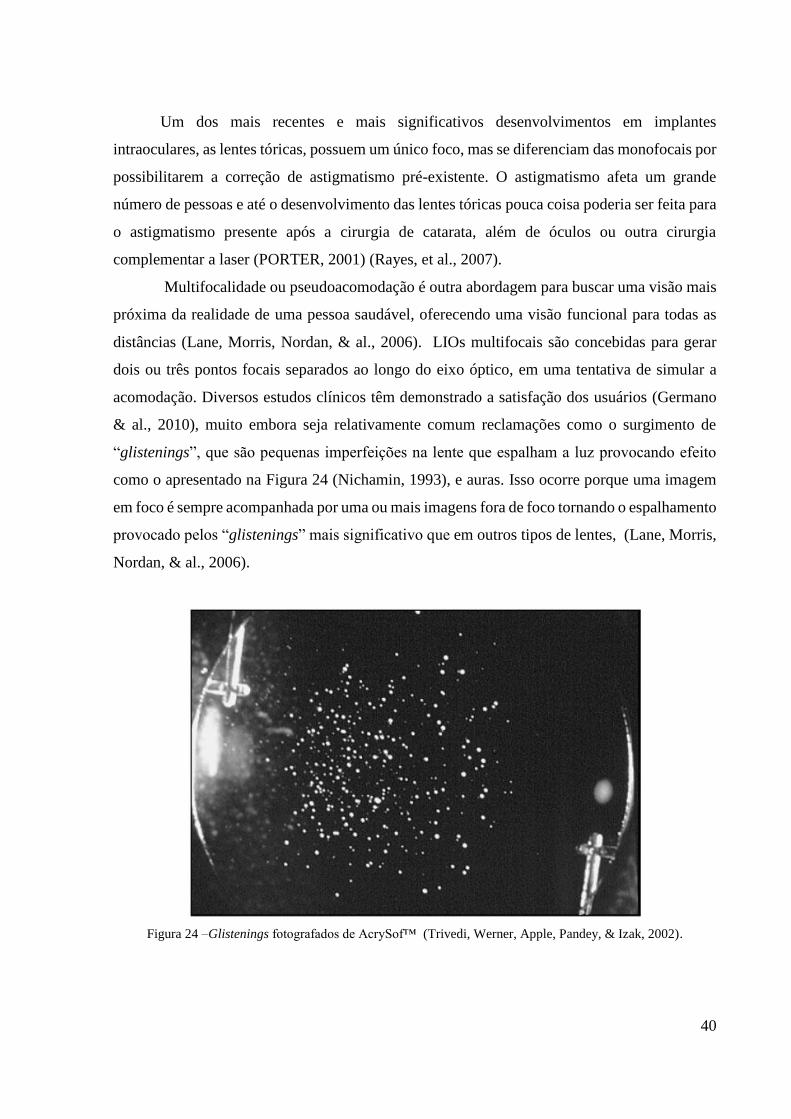
2.2.3 Razão de Strehl
Quando a amplitude das aberrações de um dado sistema óptico é grande, a imagem
formada de um objeto pontual é maior do que o disco Airy. Uma vez que a quantidade de luz
que forma a imagem é a mesma com e sem aberrações, a irradiância no centro da imagem tem
que diminuir quando o tamanho da imagem aumenta. A razão de Strehl é definida como a razão
entre a irradiância no centro da imagem de difração com aberração e a de uma imagem no
limite de difração (Smith, 2008) (Daniel Malacara, 2004).
𝐹(𝜔𝑥 , 𝜔𝑦) = ∬ 𝑆(𝑥𝐹 , 𝑦𝐹)𝑒−𝑖(𝜔𝑥𝑥𝐹,𝜔𝑦𝑦𝐹) 𝑑𝑥𝐹𝑑𝑦
( 11 )
45
Figura 28 - Razão de Strehl (Daniel Malacara, 2004).
A razão de Strehl é função da variação da frente de onda, sendo bem aproximada pela
expressão:
Onde σ é o desvio rms entre a diferença de caminho óptico da frente de onda resultante
do sistema e a frente de onda limitada por difração, dado em waves.
2.2.4 MTF
Tanto a resolução como o desempenho de um sistema óptico podem ser caracterizados
através de uma métrica conhecida como Modulation Transfer Function (MTF) (Smith, 2008),
que é uma medida da capacidade do sistema reproduzir contraste a partir do objeto para o plano
da imagem com uma resolução (frequência espacial) específica. O MTF é frequentemente
utilizado pelos fabricantes de sistemas ópticos como um dos principais parâmetros de qualidade
do sistema, sendo também amplamente utilizado por indústrias de câmeras analógicas e digitais,
intensificadores de imagem e scanners. Como mencionado anteriormente o MTF é a parte real
da função complexa OTF e pode ser analisada em uma única dimensão, observando se apenas
𝑆𝑡𝑟𝑒ℎ𝑙 = 𝑒−(2𝜋𝜎)2 ( 12 )

46
a linha (direção x) ou a coluna (direção y) central imagem bidimensional, ou em duas dimensões
(Daniel Malacara, 2004) (Smith, 2008).
Com o aumento da frequência espacial da imagem a curva do MTF cai até atingir o
valor 0 (zero), a frequência em que isso ocorre é conhecida como frequência de corte e está
relacionada à abertura do sistema (D), à distância focal (f) e ao comprimento de onda da luz (λ)
utilizada, pela equação ( 14 ) (Daniel Malacara, 2004) (Smith, 2008):
Calculada habitualmente em pares de linhas por milímetro.
Mesmo que o sistema seja livre de aberrações ópticas seu MTF ainda é limitado por
fenômenos associados à difração, sendo estes sistemas unicamente afetados por difração
considerados perfeitos. Devido a relação de dependência do MTF com a PSF, que por sua vez
está relacionada à forma da abertura da pupila deve-se esperar curvas de MTF diferentes para
pupilas diferentes, a Figura 29, mostra a curva de MTF para um sistema limitado por difração
de abertura circular e luz incoerente3.
3 Luz coerente é aquela formada por ondas que possuem mesma direção de propagação, mesma
frequência e mesma relação de fase (Daniel Malacara, 2004).
𝑀𝑇𝐹 = ‖𝑂𝑇𝐹‖
( 13 )
𝜉𝑐𝑜𝑟𝑡𝑒 =
𝐷
𝑓λ
( 14 )

47
Figura 29 - Curvas de MTF limitados por difração para sistemas incoerentes com abertura circular (Daniel
Malacara, 2004)..
Figura 30 - Mudança da resolução em contraste com a mudança da frequência espacial para um mesmo sistema
óptico (Zilio, 2007).
É possível observar, na Figura 30, uma estimativa do impacto do sistema óptico no
contraste da imagem projetada de um objeto e como esse impacto aumenta com o aumento da
frequência espacial do objeto. É importante ressaltar que embora alguns autores, entre eles
Smith (Smith, 2008), não façam a distinção entre MTF e Contrast Tranfer Function (CTF),
estas são grandezas distintas. Sendo que o MTF expressa a resposta em frequência para um
padrão de entrada senoidal com 256 tons de cinza, e o CTF é a resposta em contraste alcançada
por um padrão de entrada quadrado (binário). Sendo este último mais útil para avaliar a nitidez
em transições abruptas de intensidade para aplicações em medição. O CTF é tipicamente maior
que o MTF em todas as frequências espaciais, e pode ser expresso como uma série infinita de
48
MTFs. A relação estabelecida entre o MTF e CTF encontra-se descrita na equação ( 15 ), onde
ν é a frequência da grade periódica (Driggers, 2003):
Para que o MTF atue de maneira satisfatória como estimador de qualidade de um sistema
é necessário que o sistema esteja focalizado corretamente. Tal necessidade sugere que o MTF
também seja descrito por curvas que o relacionem ao deslocamento do plano da imagem do
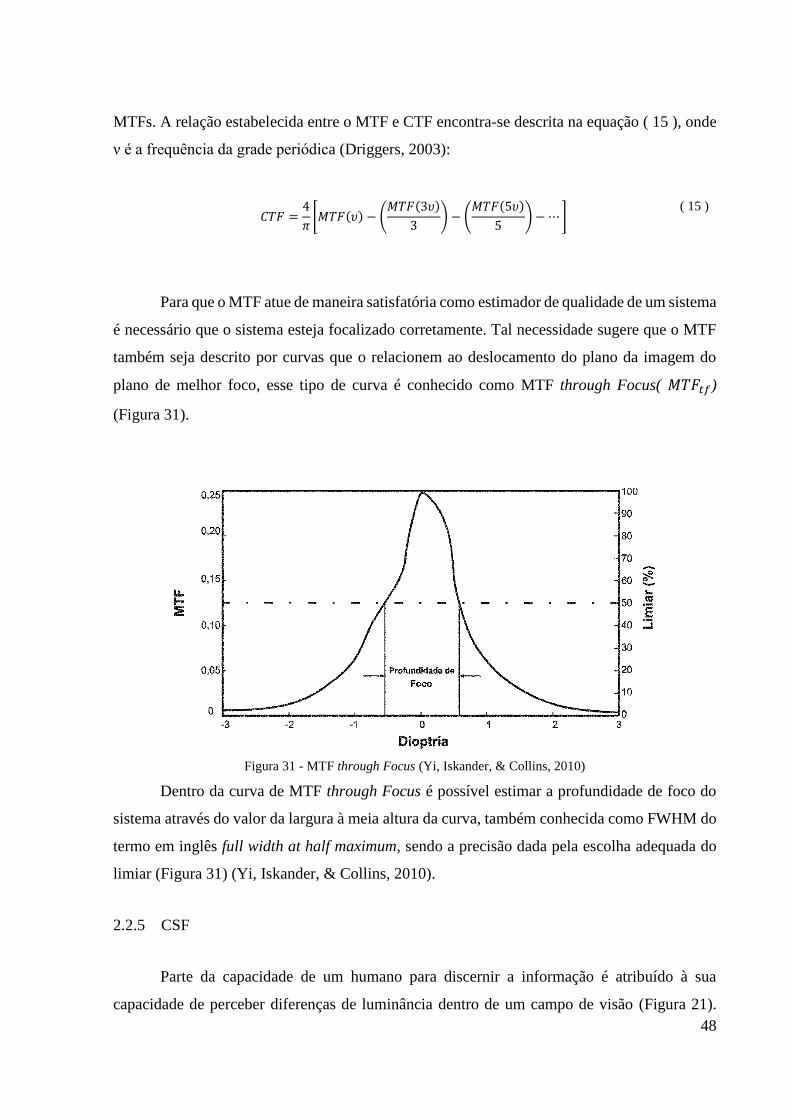
plano de melhor foco, esse tipo de curva é conhecido como MTF through Focus( 𝑀𝑇𝐹𝑡𝑓)
(Figura 31).
Figura 31 - MTF through Focus (Yi, Iskander, & Collins, 2010)
Dentro da curva de MTF through Focus é possível estimar a profundidade de foco do
sistema através do valor da largura à meia altura da curva, também conhecida como FWHM do
termo em inglês full width at half maximum, sendo a precisão dada pela escolha adequada do
limiar (Figura 31) (Yi, Iskander, & Collins, 2010).
2.2.5 CSF
Parte da capacidade de um humano para discernir a informação é atribuído à sua
capacidade de perceber diferenças de luminância dentro de um campo de visão (Figura 21).
𝐶𝑇𝐹 =
4
𝜋[𝑀𝑇𝐹(𝜐) − (
𝑀𝑇𝐹(3𝜐)
3) − (
𝑀𝑇𝐹(5𝜐)
5) − ⋯ ]
( 15 )
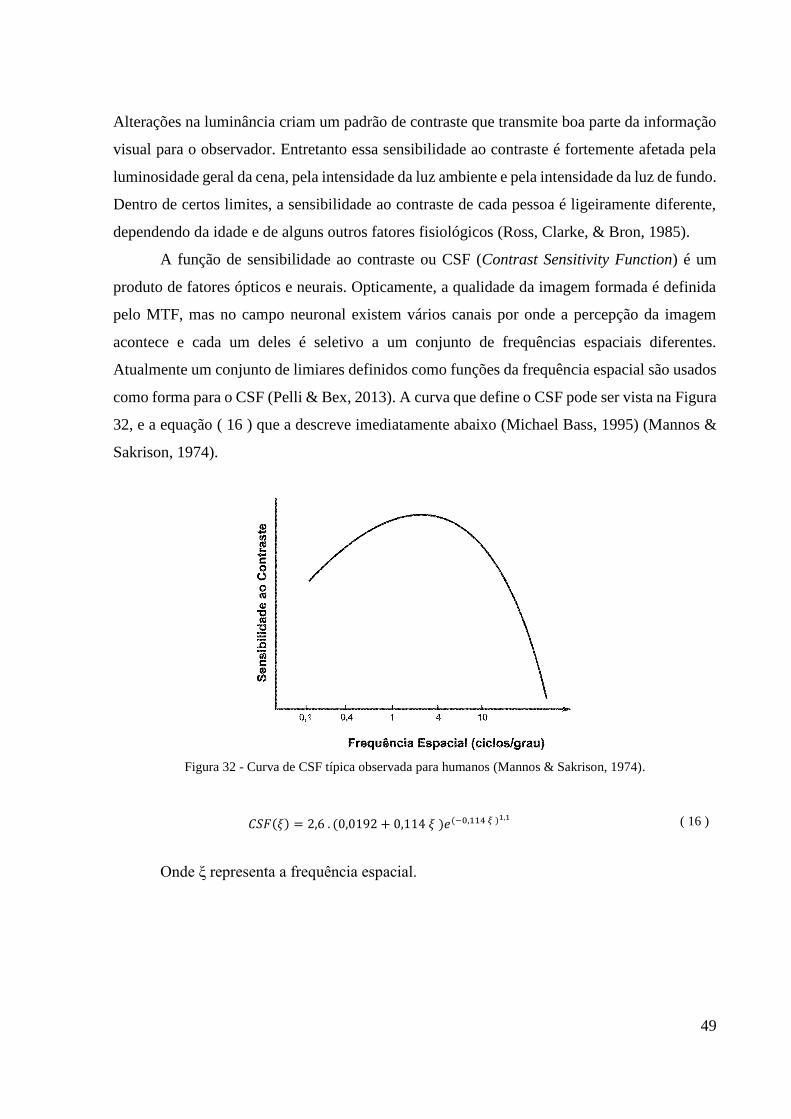
49
Alterações na luminância criam um padrão de contraste que transmite boa parte da informação
visual para o observador. Entretanto essa sensibilidade ao contraste é fortemente afetada pela
luminosidade geral da cena, pela intensidade da luz ambiente e pela intensidade da luz de fundo.
Dentro de certos limites, a sensibilidade ao contraste de cada pessoa é ligeiramente diferente,
dependendo da idade e de alguns outros fatores fisiológicos (Ross, Clarke, & Bron, 1985).
A função de sensibilidade ao contraste ou CSF (Contrast Sensitivity Function) é um
produto de fatores ópticos e neurais. Opticamente, a qualidade da imagem formada é definida
pelo MTF, mas no campo neuronal existem vários canais por onde a percepção da imagem
acontece e cada um deles é seletivo a um conjunto de frequências espaciais diferentes.
Atualmente um conjunto de limiares definidos como funções da frequência espacial são usados
como forma para o CSF (Pelli & Bex, 2013). A curva que define o CSF pode ser vista na Figura
32, e a equação ( 16 ) que a descreve imediatamente abaixo (Michael Bass, 1995) (Mannos &
Sakrison, 1974).
Figura 32 - Curva de CSF típica observada para humanos (Mannos & Sakrison, 1974).
Onde ξ representa a frequência espacial.
𝐶𝑆𝐹(𝜉) = 2,6 . (0,0192 + 0,114 𝜉 )𝑒(−0,114 𝜉 )1,1
( 16 )

50
2.2.6 SQF
O Fator de Qualidade Subjetivo, ou SQF, é grandeza mensurável referente ao mais
importante fator de qualidade de uma imagem, a nitidez. O SQF relaciona efeitos de MTF e
CSF, podendo ser calculado através da expressão ( 17 ).
Sendo K uma constante de normalização equivalente à equação ( 18 ) :
O SQF, como descrito acima, foi introduzido por Granger em 1972 (Granger & Cupery,
1972) e desde então vem sendo utilizado por fabricantes de equipamentos fotográficos e como
parâmetro para testes de lentes, no entanto este modelo apresenta algumas deficiências. Como
o modelo de SQF trabalha com a hipótese de prever as capacidades de um sistema de imagens
baseado inteiramente no MTF do próprio sistema, isso significa que o modelo só é capaz de
prever a perda de qualidade causada pelo MTF, e não por outros fatores como os associados à
cor, por exemplo. O SQF ignora qualquer informação de cor, essencialmente assumindo que
apenas a intensidade luminosa como fator de qualidade de imagem (Granger & Cupery, 1972)
(Johnson, 1998).
𝑆𝑄𝐹 = 𝐾 ∫(𝐶𝑆𝐹(𝜉). 𝑀𝑇𝐹(𝜉)/𝜉)𝑑𝜉
( 17 )
𝑆𝑄𝐹 = 100%/ ∫ 𝐶𝑆𝐹(𝜉)𝑑𝜉
( 18 )

51
3 MODELAGEM E OTIMIZAÇÃO
3.1 MODELAGEM MATEMÁTICA
Aberração monocromática, como citado anteriormente, é uma imperfeição, distorção ou
defeito em um sistema óptico, causada por raios de luz que entram no sistema e não formam a
imagem de um ponto perfeito. De maneira geral, as aberrações monocromáticas podem ser
divididas em dois grupos: as aberrações de ordem baixa (inclinações, esfera e cilindro) e as
aberrações de ordem superior (High Order Aberrations - HOAs) (Born & Wolf, 1989).
Existem inúmeras maneiras de se representar matematicamente uma superfície óptica
acometida por aberrações. Na oftalmologia, os polinômios de Zernike têm sido historicamente
utilizados como base ortogonal para a descrição das topologias tanto do olho humano quanto
das lentes. Para aplicações oftalmológicas raramente são necessários mais que os 16 primeiros
termos da base. Uma parte significativa das ametropias mais comuns pode ser facilmente
descrita com termos de baixa ordem como defoco e astigmatismo. Com o aumento do diâmetro
da pupila outros efeitos, como Aberração Esférica e coma, passam a ser significativos no
sistema, estes efeitos são descritos pelos termos de alta ordem dos polinômios de Zernike.
Apesar de representarem bem sistemas esféricos, os polinômios de Zernike apresentam
limitações ao descrever superfícies asféricas, onde é necessário um grande número de termos
para uma descrição e ou reconstrução adequada da superfície. Recentemente, Forbes propôs um
novo grupo de polinômios ortogonais, baseados nos polinômios de Jacobi e conhecidos como
Q-polynomials, que facilitaria a representação e fabricação de superfícies asféricas (Forbes.,
2012).
Devido à relevância destes polinômios na descrição e na reconstrução de frentes de onda e
superfícies ópticas, ambos serão pormenorizados em tópicos posteriores.
3.1.1 Polinômios de Zernike
Propostos em 1934 por Fritz Zernike (Born & Wolf, 1989) (Noll, 1976), os polinômios
de Zernike, Figura 33, se popularizaram nas comunidades de óptica e astronomia para medições

52
de distorções produzidas por turbulência atmosférica e mais recentemente vêm sendo
incorporado à Oftalmologia para quantificar distorções de qualidade visual no olho humano.
Essa popularização se deve, em parte, a algumas propriedades que os tornam aplicáveis onde
outros polinômios não são, como por exemplo, na descrição de turbulências atmosféricas (Born
& Wolf, 1989) (Noll, 1976).
Figura 33 – 15 primeiros termos dos Polinômios de Zernike (Noll, 1976).

53
Os polinômios de Zernike são um conjunto de polinômios definidos em um círculo
unitário e, portanto, mais facilmente descritos em coordenadas polares, como um produto de
funções polinomiais radiais e angulares. As funções angulares atuam como funções de base
para o grupo de rotação bidimensional e os polinômios radiais são desenvolvidos a partir de
polinômios de Jacobi (Noll, 1976). Os polinômios de Zernike podem ser definidos
matematicamente em coordenadas polares pela equação ( 19 ).
Onde 𝑛 é o grau radial e 𝑚 é a frequência azimutal, e R é dado pela equação ( 20 ),
descrita logo abaixo.
O grau radial e a frequência azimutal são números inteiros que devem satisfazer 𝑚 ≤ 𝑛
e 𝑛 − |𝑚| = 𝑝𝑎𝑟.
A precisão da representação de uma superfície está diretamente associada ao número de
termos de Zernike utilizados, a menos que esta faça parte de sua base. Para representar formas
e ou ametropias mais simples como miopia, hipermetropia ou astigmatismo, poucos termos são
necessários. Entretanto se a superfície apresenta forma demasiadamente irregular, asférica, ou
ainda para casos em oftalmologia onde o sistema óptico sofreu traumas intensos ou qualquer
doença grave que provoque alterações bruscas na curvatura, é necessário uma quantidade
significativamente maior de termos (Smolek & Klyce, 2003).
0m ),()1(2
0mp,ímpar ),sin()()1(2
0mp,par ),cos()()1(2
),(
0
n
m
n
m
n
p
Rn
mRn
mRn
Z
( 19 )
sn
mn
s
sm
n
smn
smn
s
snR 2
2/)(
0 )!2
()!2
(!
)!()1()(
( 20 )

54
3.1.2 Polinômios de Forbes
Com o aumento da complexidade das superfícies ópticas e das frentes de onda estudadas
e ou construídas é necessário um número cada vez maior de termos para uma descrição
adequada. Recentemente Forbes (Forbes., 2012) (Forbes, 2007) propôs a utilização de um grupo
de polinômios, baseados nos polinômios de Jacobi, para descrever e fabricar superfícies que
fossem asféricas, mas logo depois, o conceito foi ampliado para superfícies arbitrárias (Forbes.,
2012). Este conjunto de polinômios ficou conhecido como polinômios de Forbes ou Q-
polynomials.
Figura 34 – 15 primeiros termos dos Polinômios de Forbes
A definição matemática dos polinômios de Forbes é apresentada na equação ( 21 ) que
segue.
)()1(
1
1
11),( 20
0
022
2222
2
uQauucc
cf n
N
n
n
( 21 )

55
Onde 𝑐 é a curvatura da esfera de melhor ajuste à curva, 𝑢 =𝜌
𝜌𝑚𝑎𝑥⁄ com 𝜌 sendo um
raio e 𝜌𝑚𝑎𝑥 o raio da abertura circular, dentro do qual o polinômio está definido.
Para Youngworth e Betensky (Youngworth & Betensky, 2008), a utilização dos Q-
polynomials traz algumas vantagens em relação aos polinômios de Zernike, como a necessidade
de uma menor quantidade de termos para a representação de superfícies complexas, como
asfericidades extremas, por exemplo.
3.2 MODELAGEM COMPUTACIONAL
Embora exista uma infinidade de estratégias para ampliar a profundidade de foco, muitas,
por sua complexidade, não podem ser aplicadas em lentes intraoculares. O que se pretende,
neste trabalho é investigar a relação entre alterações na superfície de uma lente originalmente
asférica, através da inserção de Coma X, Coma Y e Aberração Esférica, e o aumento da
profundidade de foco. Tendo como intuito, disponibilizar uma lente com características de MTF
superiores às lentes esféricas e profundidade de foco superior às lentes asféricas. A utilização
do algoritmo de computação evolucionária NSGA-II foi a estratégia adotada na tentativa de
maximizar simultaneamente MTF e profundidade de foco.
3.2.1 Otimização
Talvez o primeiro método de otimização a ser usado no problema de projeto de sistemas
ópticos tenha sido o Método dos Mínimos Quadrados, proposto por Rosen e Eldert. Entretanto
este método foi rapidamente abandonado devido a instabilidades decorrentes da inversão de
uma matriz. Algum tempo depois, foi proposta a aplicação do Método dos Mínimos Quadrados
Amortecido ao problema, sendo esta abordagem utilizada até hoje (Daniel Malacara, 2004).
Com o avanço considerável da capacidade de processamento dos computadores atuais, desde
meados da década de 1990, os algoritmos evolucionários, considerados computacionalmente
mais caros, vêm sendo aplicados à óptica em uma tentativa de contornar as limitações dos
)()]sin()cos([ 2
1 0
uQmbmau m
n
M
m
N
n
m
n
m
n
m

56
métodos clássicos. Entretanto, para escolher ou desenvolver um algoritmo evolutivo, é
necessário conhecer seus mecanismos básicos e sua interação com a busca multiobjetivo. Em
geral, um algoritmo evolutivo é caracterizado por um conjunto de soluções candidatas que, após
serem submetidas a um processo de seleção, são manipuladas por operadores genéticos, com o
intuito de melhorar o conjunto. Em razão de seu paralelismo, os métodos baseados em
algoritmos genéticos têm o potencial de encontrar múltiplas soluções em uma única iteração
(Takahashi, 2007) (Zitzler, Deb, & Thiele, 2000). Entretanto, não há garantias de que as
soluções encontradas sejam soluções ótimas ou pareto-ótimas4, ou seja, não há garantia de
otimalidade. Neste trabalho, motivado por peculiaridades do problema de otimização, como o
número de objetivos, por exemplo, foi empregado o algoritmo genético NSGA-II
(“Nondominated Sorting Genetic Algorithm”), que será pormenorizado mais tarde.
3.2.1 Problema de Otimização Multiobjectivo
O problema geral de otimização multiobjetivo pode ser definido como sendo um
problema que visa encontrar um vetor de variáveis de decisão, restrito ou não, que otimiza uma
função vetor cujos elementos representam as funções objetivo. Estas funções formam uma
descrição matemática dos critérios de desempenho que normalmente são conflitantes entre eles.
Formalmente podemos dizer que um problema multiobjetivo de minimização pode ser escrito
pela equação ( 22 ) (Vasiljevic, 2002) (Takahashi, 2007) (Carrano & Batista, 2013):
Onde X é o vetor de variáveis de construção, f (X) é a função de mérito, as funções
ℎ𝑖(𝑿) e 𝑔𝑖(𝑿) definem as condições de contorno ou restrições do problema e m e n são o
número total de restrições de desigualdade e de igualdade, respectivamente.
4 Soluções Pareto-ótimas ou soluções multiobjetivo, são as melhores soluções entre as quais não existe
um ordenamento, ou seja, não há como definir, a partir da avaliação dos objetivos que uma solução é melhor que
a outra (Vasiljevic, 2002) (Takahashi, 2007).
max𝑿
𝑓(𝑿) ∈ ℝ, 𝑿 ∈ ℱ
ℱ = {𝑔𝑖(𝑿) ≤ 0; 𝑖 = 1, … , 𝑚 (𝑟𝑒𝑠𝑡𝑟𝑖çõ𝑒𝑠 𝑑𝑒 𝑑𝑒𝑠𝑖𝑔𝑢𝑎𝑙𝑑𝑎𝑑𝑒)
ℎ𝑖(𝑿) = 0; 𝑖 = 1, … , 𝑛 (𝑟𝑒𝑠𝑡𝑟𝑖çõ𝑒𝑠 𝑑𝑒 𝑖𝑔𝑢𝑎𝑙𝑑𝑎𝑑𝑒)𝑿 ∈ 𝒳
( 22 )

57
3.2.2 Algoritmos Genéticos (NSGA-II)
O NSGA-II, algoritmo utilizado durante o processo de otimização, foi desenvolvido
para aprimorar aspectos como da falta de elitismo e a baixa diversidade das populações de seu
antecessor (NSGA). O algoritmo inicia-se com a geração aleatória de uma população inicial,
P0, de tamanho N. Esta população é ordenada de acordo um critério de não-dominância. Em
função do seu nível de não-dominância, cada solução recebe um rank, correspondente ao índice
da fronteira à qual a solução pertence, como na Figura 35 (Deb, Pratap, Agarwal, & Meyarivan.,
2002) (Vasiljevic, 2002) (Takahashi, 2007).
Figura 35 - Grau de dominância em um problema de minimização com dois objetivos (Takahashi, 2007).
Após a classificação das soluções, é gerada uma nova população Q0, de tamanho N, através dos
mecanismos de seleção por torneio, operadores de cruzamento e mutação. Ambas as
populações, P0 e Q0 formam a população inicial do algoritmo (Rt), esse mecanismo de formação
da população Rt garante o elitismo no algoritmo. Os N melhores membros da população Rt são
selecionados. A seleção é formada pelos membros do primeiro ranking (F1), caso F1 seja menor
que N, membros de rankings inferiores podem ser selecionados até que o número de membros
da população seja igual a N (Figura 36) (Deb, Pratap, Agarwal, & Meyarivan., 2002)
(Vasiljevic, 2002) (Takahashi, 2007).
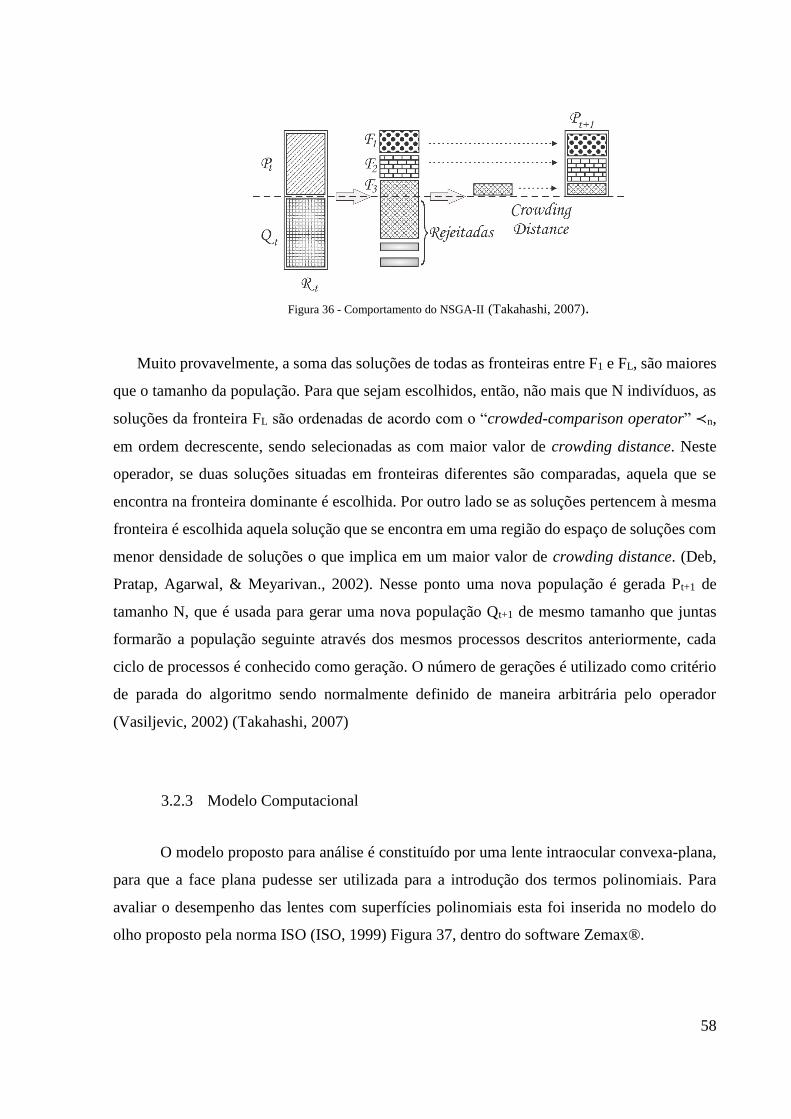
58
Figura 36 - Comportamento do NSGA-II (Takahashi, 2007).
Muito provavelmente, a soma das soluções de todas as fronteiras entre F1 e FL, são maiores
que o tamanho da população. Para que sejam escolhidos, então, não mais que N indivíduos, as
soluções da fronteira FL são ordenadas de acordo com o “crowded-comparison operator” ≺n,
em ordem decrescente, sendo selecionadas as com maior valor de crowding distance. Neste
operador, se duas soluções situadas em fronteiras diferentes são comparadas, aquela que se
encontra na fronteira dominante é escolhida. Por outro lado se as soluções pertencem à mesma
fronteira é escolhida aquela solução que se encontra em uma região do espaço de soluções com
menor densidade de soluções o que implica em um maior valor de crowding distance. (Deb,
Pratap, Agarwal, & Meyarivan., 2002). Nesse ponto uma nova população é gerada Pt+1 de
tamanho N, que é usada para gerar uma nova população Qt+1 de mesmo tamanho que juntas
formarão a população seguinte através dos mesmos processos descritos anteriormente, cada
ciclo de processos é conhecido como geração. O número de gerações é utilizado como critério
de parada do algoritmo sendo normalmente definido de maneira arbitrária pelo operador
(Vasiljevic, 2002) (Takahashi, 2007)
3.2.3 Modelo Computacional
O modelo proposto para análise é constituído por uma lente intraocular convexa-plana,
para que a face plana pudesse ser utilizada para a introdução dos termos polinomiais. Para
avaliar o desempenho das lentes com superfícies polinomiais esta foi inserida no modelo do
olho proposto pela norma ISO (ISO, 1999) Figura 37, dentro do software Zemax®.
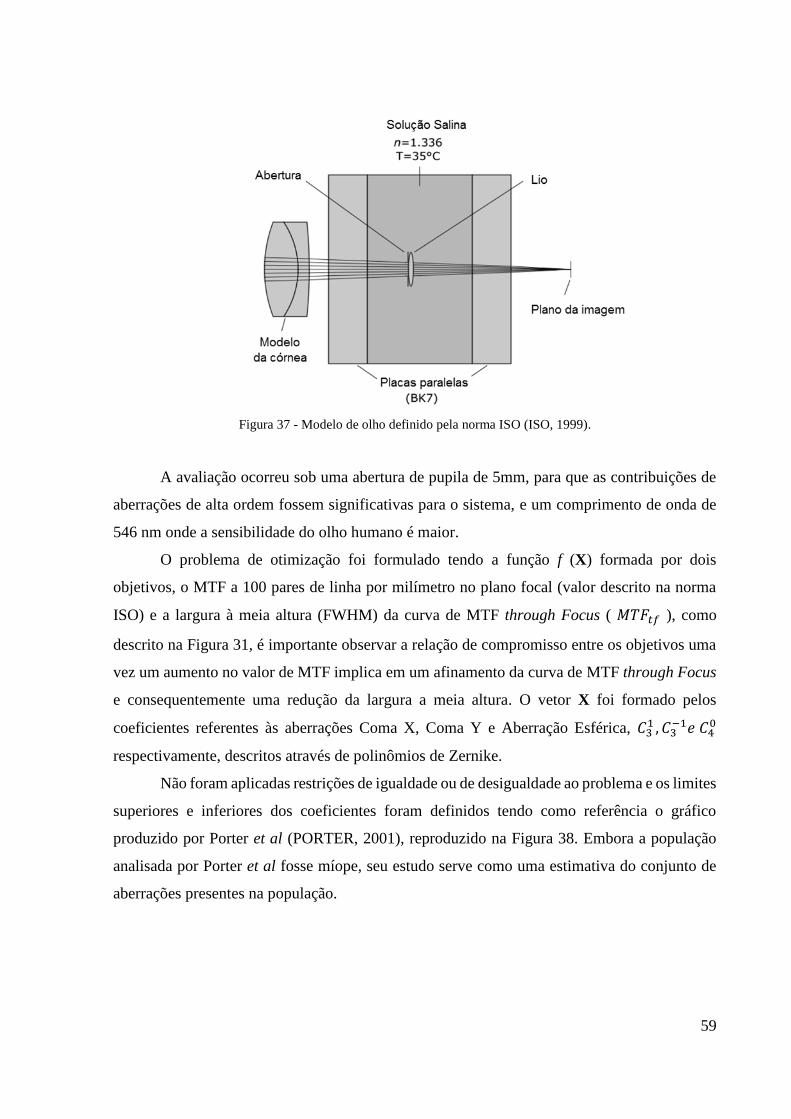
59
Figura 37 - Modelo de olho definido pela norma ISO (ISO, 1999).
A avaliação ocorreu sob uma abertura de pupila de 5mm, para que as contribuições de
aberrações de alta ordem fossem significativas para o sistema, e um comprimento de onda de
546 nm onde a sensibilidade do olho humano é maior.
O problema de otimização foi formulado tendo a função f (X) formada por dois
objetivos, o MTF a 100 pares de linha por milímetro no plano focal (valor descrito na norma
ISO) e a largura à meia altura (FWHM) da curva de MTF through Focus ( 𝑀𝑇𝐹𝑡𝑓 ), como
descrito na Figura 31, é importante observar a relação de compromisso entre os objetivos uma
vez um aumento no valor de MTF implica em um afinamento da curva de MTF through Focus
e consequentemente uma redução da largura a meia altura. O vetor X foi formado pelos
coeficientes referentes às aberrações Coma X, Coma Y e Aberração Esférica, 𝐶3 1 , 𝐶3
−1𝑒 𝐶40
respectivamente, descritos através de polinômios de Zernike.
Não foram aplicadas restrições de igualdade ou de desigualdade ao problema e os limites
superiores e inferiores dos coeficientes foram definidos tendo como referência o gráfico
produzido por Porter et al (PORTER, 2001), reproduzido na Figura 38. Embora a população
analisada por Porter et al fosse míope, seu estudo serve como uma estimativa do conjunto de
aberrações presentes na população.
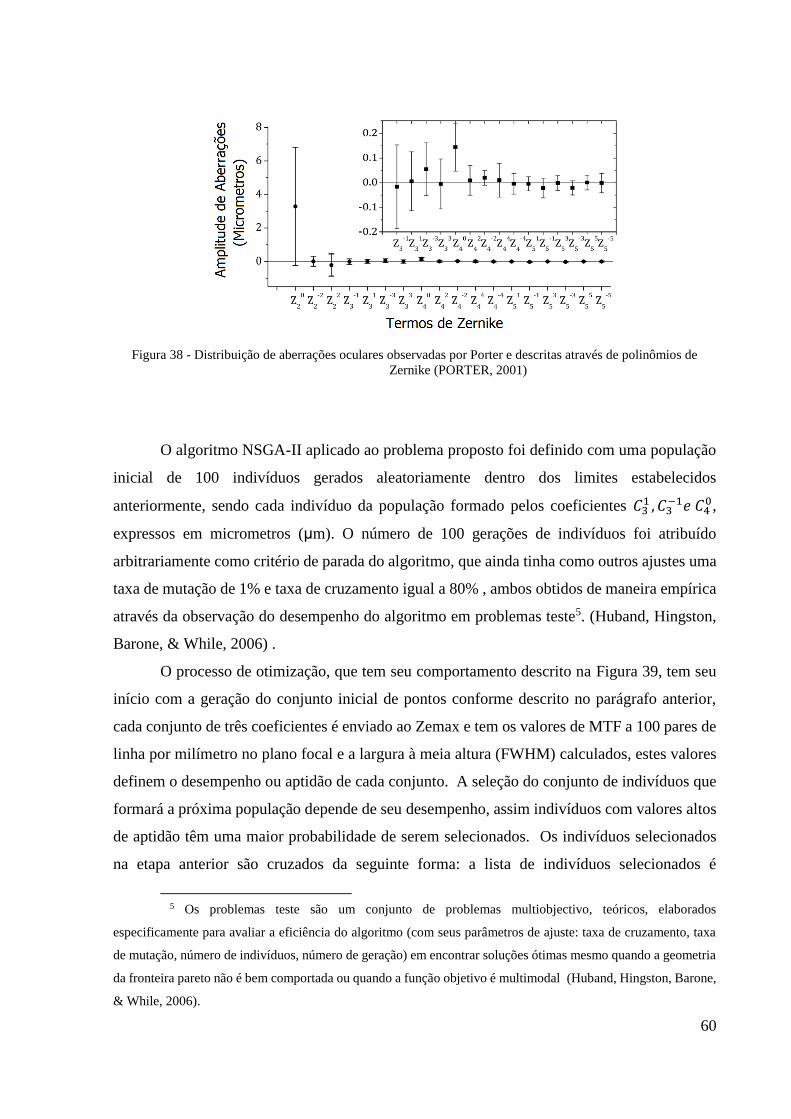
60
Figura 38 - Distribuição de aberrações oculares observadas por Porter e descritas através de polinômios de
Zernike (PORTER, 2001)
O algoritmo NSGA-II aplicado ao problema proposto foi definido com uma população
inicial de 100 indivíduos gerados aleatoriamente dentro dos limites estabelecidos
anteriormente, sendo cada indivíduo da população formado pelos coeficientes 𝐶3 1 , 𝐶3
−1𝑒 𝐶40,
expressos em micrometros (μm). O número de 100 gerações de indivíduos foi atribuído
arbitrariamente como critério de parada do algoritmo, que ainda tinha como outros ajustes uma
taxa de mutação de 1% e taxa de cruzamento igual a 80% , ambos obtidos de maneira empírica
através da observação do desempenho do algoritmo em problemas teste5. (Huband, Hingston,
Barone, & While, 2006) .
O processo de otimização, que tem seu comportamento descrito na Figura 39, tem seu
início com a geração do conjunto inicial de pontos conforme descrito no parágrafo anterior,
cada conjunto de três coeficientes é enviado ao Zemax e tem os valores de MTF a 100 pares de
linha por milímetro no plano focal e a largura à meia altura (FWHM) calculados, estes valores
definem o desempenho ou aptidão de cada conjunto. A seleção do conjunto de indivíduos que
formará a próxima população depende de seu desempenho, assim indivíduos com valores altos
de aptidão têm uma maior probabilidade de serem selecionados. Os indivíduos selecionados
na etapa anterior são cruzados da seguinte forma: a lista de indivíduos selecionados é
5 Os problemas teste são um conjunto de problemas multiobjectivo, teóricos, elaborados
especificamente para avaliar a eficiência do algoritmo (com seus parâmetros de ajuste: taxa de cruzamento, taxa
de mutação, número de indivíduos, número de geração) em encontrar soluções ótimas mesmo quando a geometria
da fronteira pareto não é bem comportada ou quando a função objetivo é multimodal (Huband, Hingston, Barone,
& While, 2006).

61
embaralhada aleatoriamente criando-se, desta forma, uma segunda lista, chamada lista de
parceiros. Cada indivíduo selecionado é então cruzado com o indivíduo que ocupa a mesma
posição na lista de parceiros.
Figura 39 - Diagrama do processo de otimização adotado.
Existem diversos mecanismos diferentes de cruzamento sendo o utilizado neste trabalho
descrito pela equação (23).
Sendo o mecanismo descrito é aplicado separadamente para cada coeficiente de Zernike
do indivíduo e o número aleatório está limitado entre 0 e 1.
A operação de mutação é utilizada para garantir uma maior varredura do espaço de
estados e evitar que o algoritmo genético tenda a soluções presentes em mínimos locais. A
mutação é efetuada alterando-se um indivíduo sorteado aleatoriamente, tendo a probabilidade
de ocorrência dada pela taxa de mutação. Assim como para o cruzamento existem diferentes
mecanismos de mutação, sendo o utilizado para o processo de otimização deste trabalho a
Mutação Gaussiana, onde um dos coeficientes que formam o indivíduo escolhido é selecionado
de maneira aleatória e submetido à relação descrita pela equação (24).
𝑓𝑖𝑙ℎ𝑜1 = 𝑝𝑎𝑖𝑠1 + 𝑛ú𝑚𝑒𝑟𝑜 𝑎𝑙𝑒𝑎𝑡ó𝑟𝑖𝑜 ∗ 𝑡𝑎𝑥𝑎 𝑑𝑒 𝑐𝑟𝑢𝑧𝑎𝑚𝑒𝑛𝑡𝑜
∗ (𝑝𝑎𝑖𝑠2 − 𝑝𝑎𝑖𝑠1 )
𝑓𝑖𝑙ℎ𝑜2 = 𝑝𝑎𝑖𝑠2 + 𝑛ú𝑚𝑒𝑟𝑜 𝑎𝑙𝑒𝑎𝑡ó𝑟𝑖𝑜 ∗ 𝑡𝑎𝑥𝑎 𝑑𝑒 𝑐𝑟𝑢𝑧𝑎𝑚𝑒𝑛𝑡𝑜 ∗ (𝑝𝑎𝑖𝑠2
− 𝑝𝑎𝑖𝑠1 )
( 23 )

62
Sendo o número aleatório gerado entre os limites estabelecidos para aquele coeficiente
e S um parâmetro associado ao desvio padrão do número aleatório produzido.
Tendo fim o processo de cruzamento e mutação um novo conjunto de pontos é estimado
como descrito na Figura 36, caso o número de gerações definido tenha sido atingido o processo
é interrompido e caso contrário o processo se reinicia com cada indivíduo sendo enviado para
o Zemax para determinação de seu desempenho.
𝑓𝑖𝑙ℎ𝑜 = 𝑝𝑎𝑖𝑠 + 𝑛ú𝑚𝑒𝑟𝑜 𝑎𝑙𝑒𝑎𝑡ó𝑟𝑖𝑜 ∗ 𝑆
∗ (𝑙𝑖𝑚𝑖𝑡𝑒 𝑠𝑢𝑝𝑒𝑟𝑖𝑜𝑟 − 𝑙𝑖𝑚𝑖𝑡𝑒 𝑖𝑛𝑓𝑒𝑟𝑖𝑜𝑟 ) ( 24 )
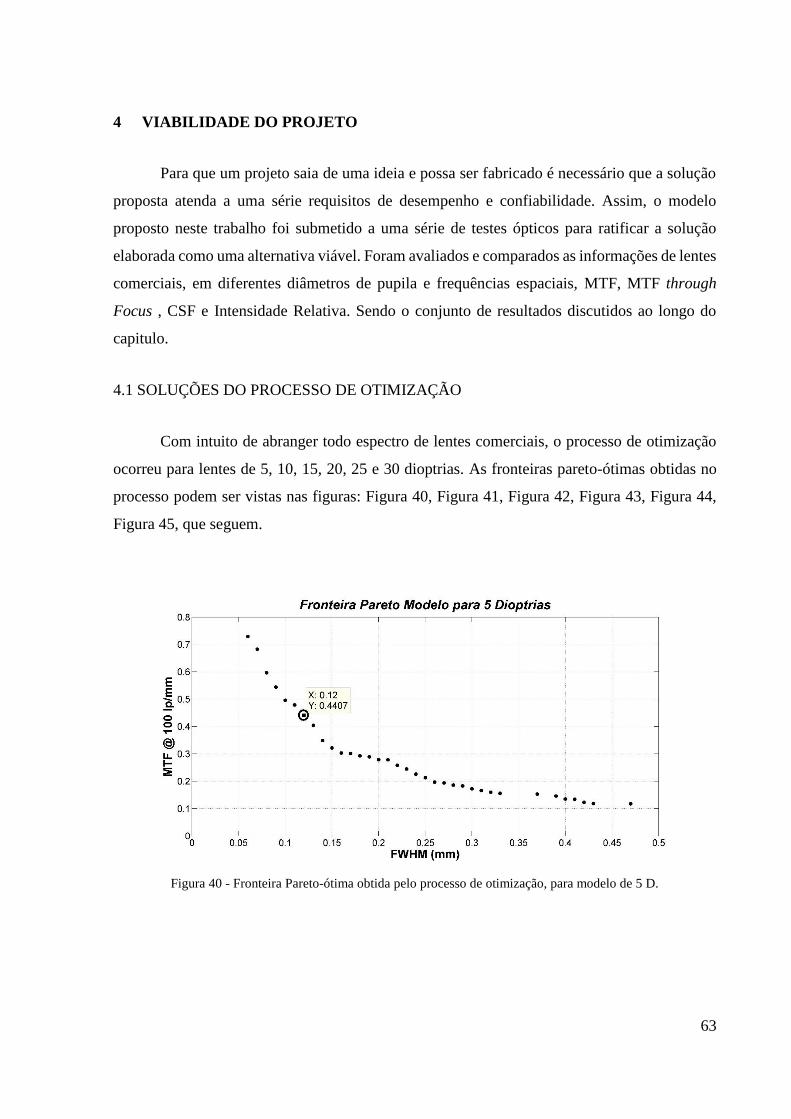
63
4 VIABILIDADE DO PROJETO
Para que um projeto saia de uma ideia e possa ser fabricado é necessário que a solução
proposta atenda a uma série requisitos de desempenho e confiabilidade. Assim, o modelo
proposto neste trabalho foi submetido a uma série de testes ópticos para ratificar a solução
elaborada como uma alternativa viável. Foram avaliados e comparados as informações de lentes
comerciais, em diferentes diâmetros de pupila e frequências espaciais, MTF, MTF through
Focus , CSF e Intensidade Relativa. Sendo o conjunto de resultados discutidos ao longo do
capitulo.
4.1 SOLUÇÕES DO PROCESSO DE OTIMIZAÇÃO
Com intuito de abranger todo espectro de lentes comerciais, o processo de otimização
ocorreu para lentes de 5, 10, 15, 20, 25 e 30 dioptrias. As fronteiras pareto-ótimas obtidas no
processo podem ser vistas nas figuras: Figura 40, Figura 41, Figura 42, Figura 43, Figura 44,
Figura 45, que seguem.
Figura 40 - Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 5 D.

64
Figura 41 - Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 10 D.
Figura 42 - Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 15 D.
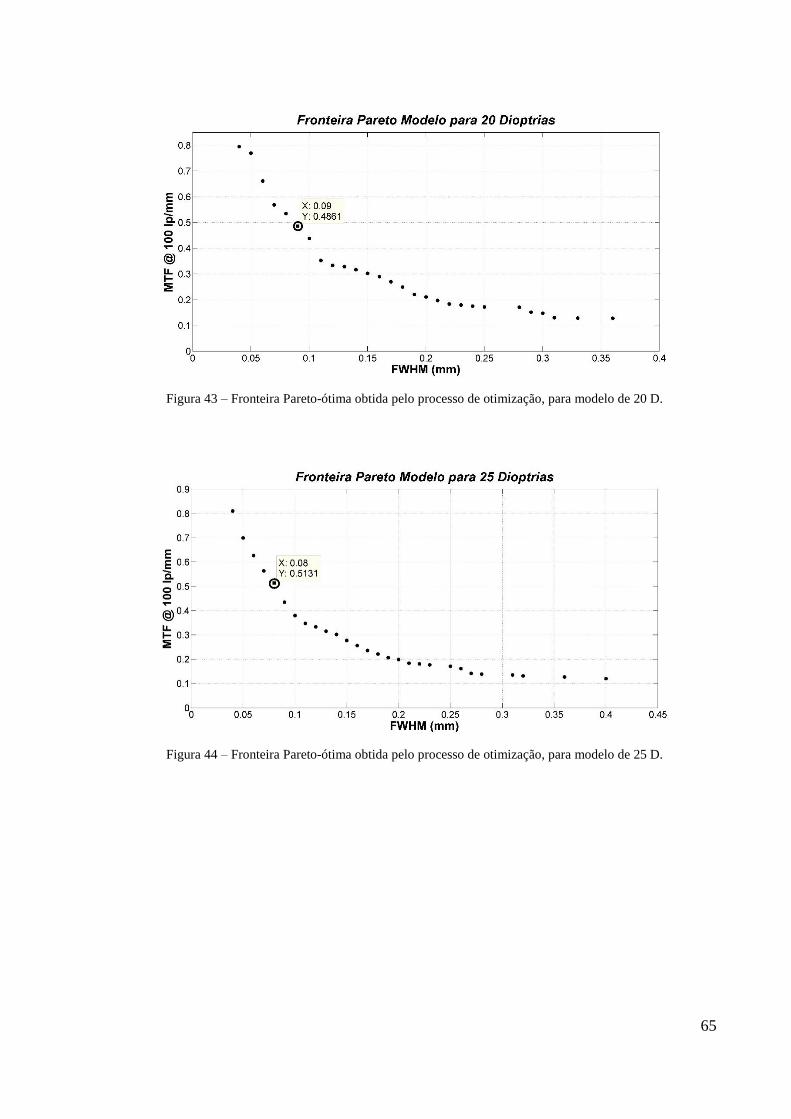
65
Figura 43 – Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 20 D.
Figura 44 – Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 25 D.

66
Figura 45 - Fronteira Pareto-ótima obtida pelo processo de otimização, para modelo de 30 D.
As soluções em destaque nas figuras acima correspondem às soluções que melhor
atendem às expectativas do modelo proposto, para que a solução fosse escolhida era necessário
apresentar um ganho igual ou maior a 50% no FWHM (largura à meia altura) em relação a lente
comercial de mesma dioptria e que o MTF avaliado a 100 pares de linha por milímetro
obedecesse à norma ISO (ISO, 1999), ou seja, apresentasse valor de MTF superior a 0,43. O
conjunto de resultados de MTF e FWHM dos modelos e das lentes comerciais que embasaram
a escolha podem ser vistos na Tabela 2. Os valores foram obtidos através de simulação para
ambos os conjuntos, uma vez que valores como o de FWHM não são reportados.
Tabela 2 - Valores de MTF e FWHM em diferentes dioptrias para Lentes Comerciais e Modelos.
Lente Mediphacos Modelo
Dioptrias (D) MTF @ 100 lp/mm
FWHM(mm) MTF @ 100 lp/mm
FWHM(mm)
5 0,6977 0,07 0,4407 0,12
10 0,7497 0,05 0,5034 0,10
15 0,7615 0,05 0,4785 0,10
20 0,7719 0,05 0,4861 0,09
25 0,7113 0,04 0,5131 0,08
30 0,4671 0,04 0,5000 0,08
As aberrações que produziram os resultados mostrados na Tabela 2, podem ser vistas
na Figura 46.

67
Figura 46 - Conjunto de aberrações utilizadas nos modelos por dioptrias.

68
E os coeficientes que constituem cada um dos conjuntos encontram-se relacionados na
Tabela 3.
Tabela 3 - Conjunto de coeficientes para as aberrações obtidas no processo de otimização separadas por dioptria.
Coeficientes de Aberração em mm
Dioptrias (D) Coma X Coma Y Aberração
Esférica
5 4,06E-04 -4,16E-04 6,84E-05
10 -4,48E-04 3,62E-04 3,99E-06
15 -4,05E-04 4,70E-04 1,19E-05
20 -4,85E-04 -4,65E-04 7,27E-05
25 -4,94E-04 5,32E-04 -6,80E-06
30 -4,90E-04 -5,51E-04 1,85E-05
4.2 ANÁLISE DE MTF E CSF
A solução destacada na Figura 43, modelo com 20 dioptrias, foi então selecionada para
a realização de uma análise pormenorizada, uma vez que, está é a faixa de dioptria média da
população. Os critérios de escolha da solução, como mencionado anteriormente, foram ganho
igual ou maior a 50% no FWHM em relação à lente comercial de mesma dioptria e que o
apresentasse valor de MTF superior a 0,43 a 100 pares de linha por milímetro. A solução
escolhida apresentou a 100 pares de linha por milímetro um MTF de 0,486 e uma profundidade
de foco de 0,09 milímetros.
A primeira análise realizada foi um comparativo entre a curva de MTF do modelo de
20D e as curvas das principais lentes asféricas do mercado. Esse conjunto de curvas pode ser
visto na figura Figura 47 (Abbott Medical Optics, 2014).
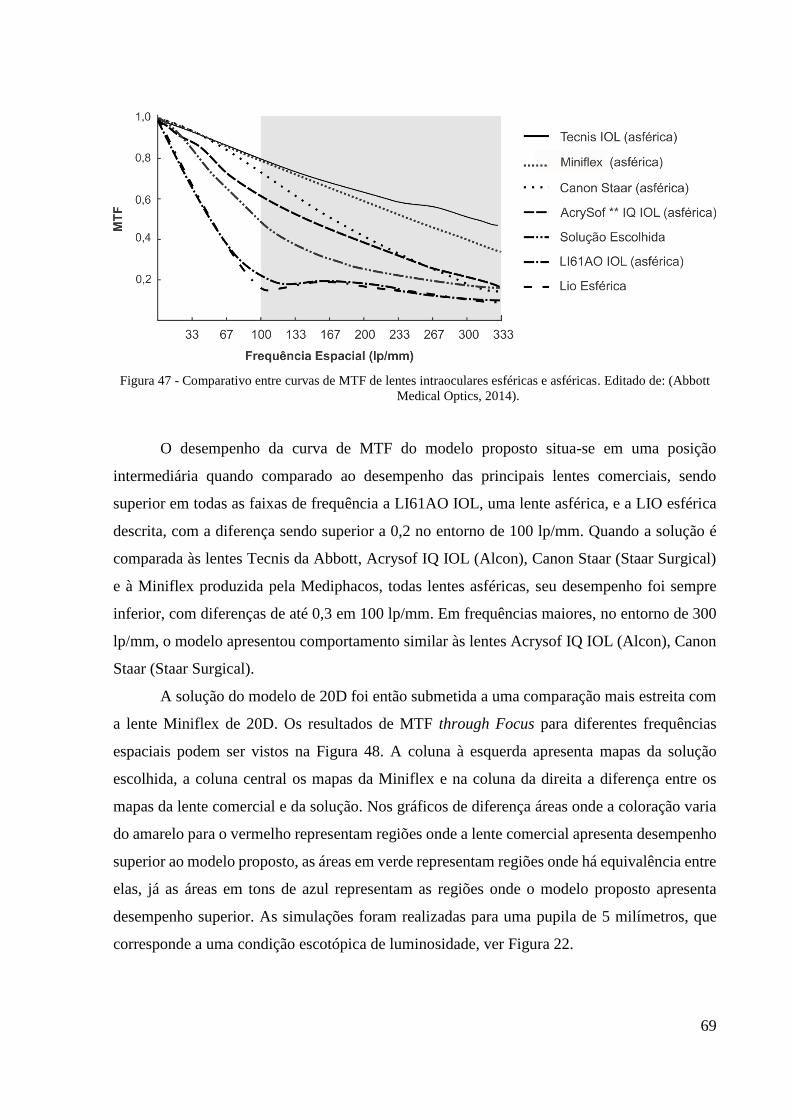
69
Figura 47 - Comparativo entre curvas de MTF de lentes intraoculares esféricas e asféricas. Editado de: (Abbott
Medical Optics, 2014).
O desempenho da curva de MTF do modelo proposto situa-se em uma posição
intermediária quando comparado ao desempenho das principais lentes comerciais, sendo
superior em todas as faixas de frequência a LI61AO IOL, uma lente asférica, e a LIO esférica
descrita, com a diferença sendo superior a 0,2 no entorno de 100 lp/mm. Quando a solução é
comparada às lentes Tecnis da Abbott, Acrysof IQ IOL (Alcon), Canon Staar (Staar Surgical)
e à Miniflex produzida pela Mediphacos, todas lentes asféricas, seu desempenho foi sempre
inferior, com diferenças de até 0,3 em 100 lp/mm. Em frequências maiores, no entorno de 300
lp/mm, o modelo apresentou comportamento similar às lentes Acrysof IQ IOL (Alcon), Canon
Staar (Staar Surgical).
A solução do modelo de 20D foi então submetida a uma comparação mais estreita com
a lente Miniflex de 20D. Os resultados de MTF through Focus para diferentes frequências
espaciais podem ser vistos na Figura 48. A coluna à esquerda apresenta mapas da solução
escolhida, a coluna central os mapas da Miniflex e na coluna da direita a diferença entre os
mapas da lente comercial e da solução. Nos gráficos de diferença áreas onde a coloração varia
do amarelo para o vermelho representam regiões onde a lente comercial apresenta desempenho
superior ao modelo proposto, as áreas em verde representam regiões onde há equivalência entre
elas, já as áreas em tons de azul representam as regiões onde o modelo proposto apresenta
desempenho superior. As simulações foram realizadas para uma pupila de 5 milímetros, que
corresponde a uma condição escotópica de luminosidade, ver Figura 22.

70
Figura 48 - Comparativos de MTF entre solução encontrada e a lente comercial Miniflex. As escalas de cinza
laterais nas colunas da esquerda e central representam os valores de MTF, a coluna da direita
representa a diferença entre os valores obtidos para a Miniflex e para o modelo proposto.
Os mapas são construídos de maneira a permitir a visualização simultânea de curvas de
MTF through Focus em diferentes frequências espaciais, sendo importantes por possibilitarem
o estabelecimento de uma relação entre a profundidade de foco e a frequências espacial. O
deslocamento apresentado nas curvas de MTF through Focus de 0,1 mm em relação ao plano
focal equivale a aproximadamente 0,5 D no plano do objeto.
Pode-se observar que sobre o plano focal, deslocamento igual a zero, o modelo proposto
é inferior à lente comercial com variações de até 0,3 no MTF, regiões onde a coloração varia
do amarelo para o vermelho da coluna da direita. Entretanto a medida que o plano da imagem
se afasta do plano focal, aumentando o módulo do deslocamento, a tendência se inverte, sendo
a solução proposta sempre equivalente ou maior que a lente comercial novamente com
variações de até 0,3 no MTF, áreas em tons de azul na coluna da direita da Figura 48. Também
foram realizados testes para avaliar o impacto do modelo na capacidade de um humano discernir
a informação para novamente compará-lo com uma lente comercial. A curva que representa
essa capacidade, como mencionado anteriormente é o CSF. Os resultados de CSF obtidos para
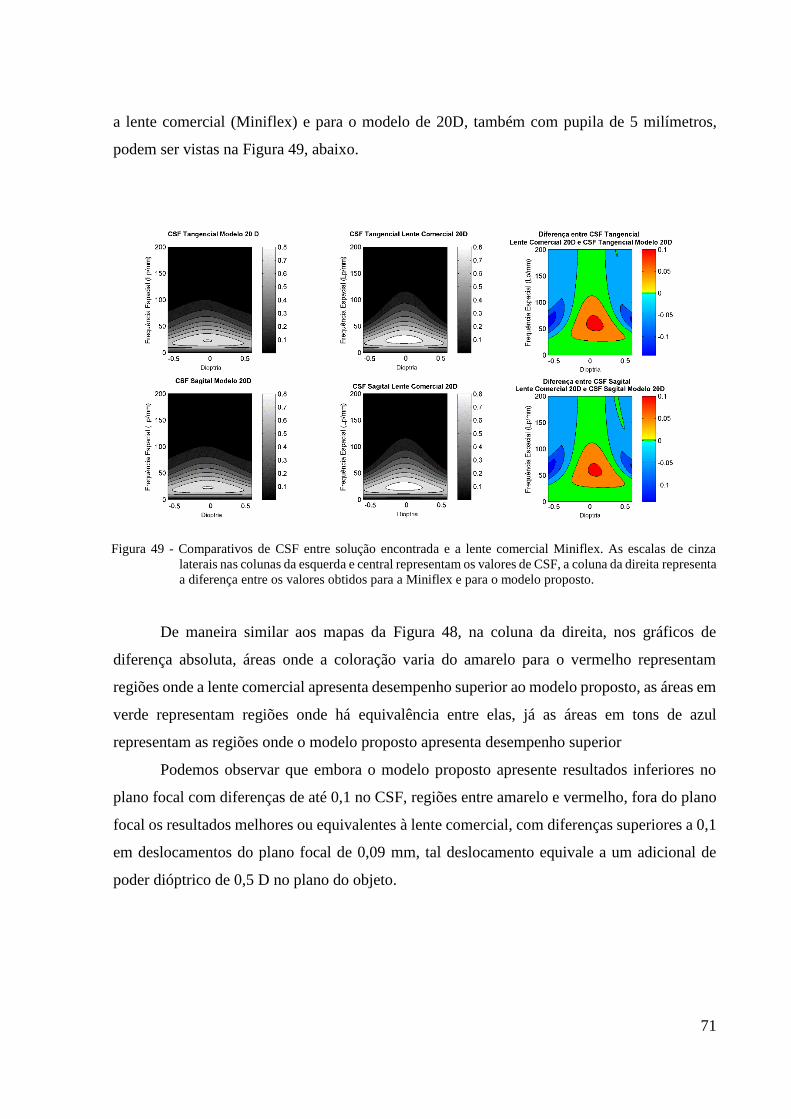
71
a lente comercial (Miniflex) e para o modelo de 20D, também com pupila de 5 milímetros,
podem ser vistas na Figura 49, abaixo.
Figura 49 - Comparativos de CSF entre solução encontrada e a lente comercial Miniflex. As escalas de cinza
laterais nas colunas da esquerda e central representam os valores de CSF, a coluna da direita representa
a diferença entre os valores obtidos para a Miniflex e para o modelo proposto.
De maneira similar aos mapas da Figura 48, na coluna da direita, nos gráficos de
diferença absoluta, áreas onde a coloração varia do amarelo para o vermelho representam
regiões onde a lente comercial apresenta desempenho superior ao modelo proposto, as áreas em
verde representam regiões onde há equivalência entre elas, já as áreas em tons de azul
representam as regiões onde o modelo proposto apresenta desempenho superior
Podemos observar que embora o modelo proposto apresente resultados inferiores no
plano focal com diferenças de até 0,1 no CSF, regiões entre amarelo e vermelho, fora do plano
focal os resultados melhores ou equivalentes à lente comercial, com diferenças superiores a 0,1
em deslocamentos do plano focal de 0,09 mm, tal deslocamento equivale a um adicional de
poder dióptrico de 0,5 D no plano do objeto.

72
4.3 ANÁLISE DO IMPACTO DA ABERTURA DA PUPILA SOBRE O MTF E CSF
Com o intuito de comparar os resultados do modelo proposto com a lente Miniflex em
diferentes condições de iluminação, foram realizadas simulações para avaliar o impacto da
abertura da pupila sobre o MTF e CSF. O diâmetro de abertura da pupila pode ser associado a
condição de iluminação como mostrado na Figura 22, assumindo valores entre 1 e 2 milímetros
em condições fotópicas, 3 e 4 milímetros em condições mesópicas e entre 5 e 6 milímetros para
condições escotópicas. Os resultados podem ser observados na Figura 50 e Figura 51, que
seguem.
Figura 50 - Comparativo entre MTF sobre o plano focal para diferentes condições de iluminação: (1) fotópicas,
(2) mesópicas e (3) escotópicas.

73
Figura 51 - Comparativo entre CSF sobre o plano focal para diferentes condições de iluminação: (1) fotópicas,
(2) mesópicas e (3) escotópicas.
Embora, sobre o plano focal, o modelo proposto não apresente resultados superiores a
lente comercial de mesma dioptria nem em MTF nem em CSF, como esperado, pode-se
observar que seus resultados são completamente equivalentes em condições fotópicas
(diâmetros pequenos), regiões mais escuras nas figuras acima. Como o modelo proposto tem
por finalidade ampliar a profundidade de foco, também foram realizados teste comparativos de
MTF e CSF para diferentes valores de abertura de pupila fora do plano focal, a uma distância
de 0,09 mm ou o equivalente a um adicional de poder dióptrico de 0,5 D dioptrias. Os resultados
podem ser observados na Figura 52 e na Figura 53.
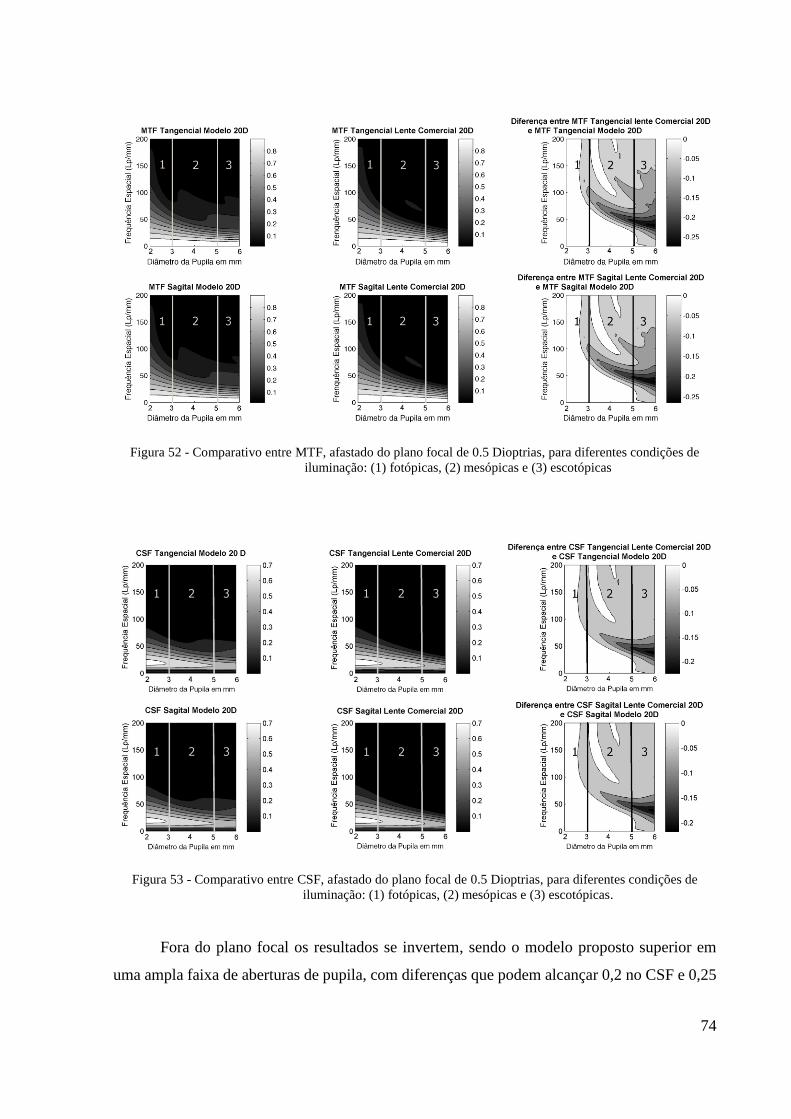
74
Figura 52 - Comparativo entre MTF, afastado do plano focal de 0.5 Dioptrias, para diferentes condições de
iluminação: (1) fotópicas, (2) mesópicas e (3) escotópicas
Figura 53 - Comparativo entre CSF, afastado do plano focal de 0.5 Dioptrias, para diferentes condições de
iluminação: (1) fotópicas, (2) mesópicas e (3) escotópicas.
Fora do plano focal os resultados se invertem, sendo o modelo proposto superior em
uma ampla faixa de aberturas de pupila, com diferenças que podem alcançar 0,2 no CSF e 0,25
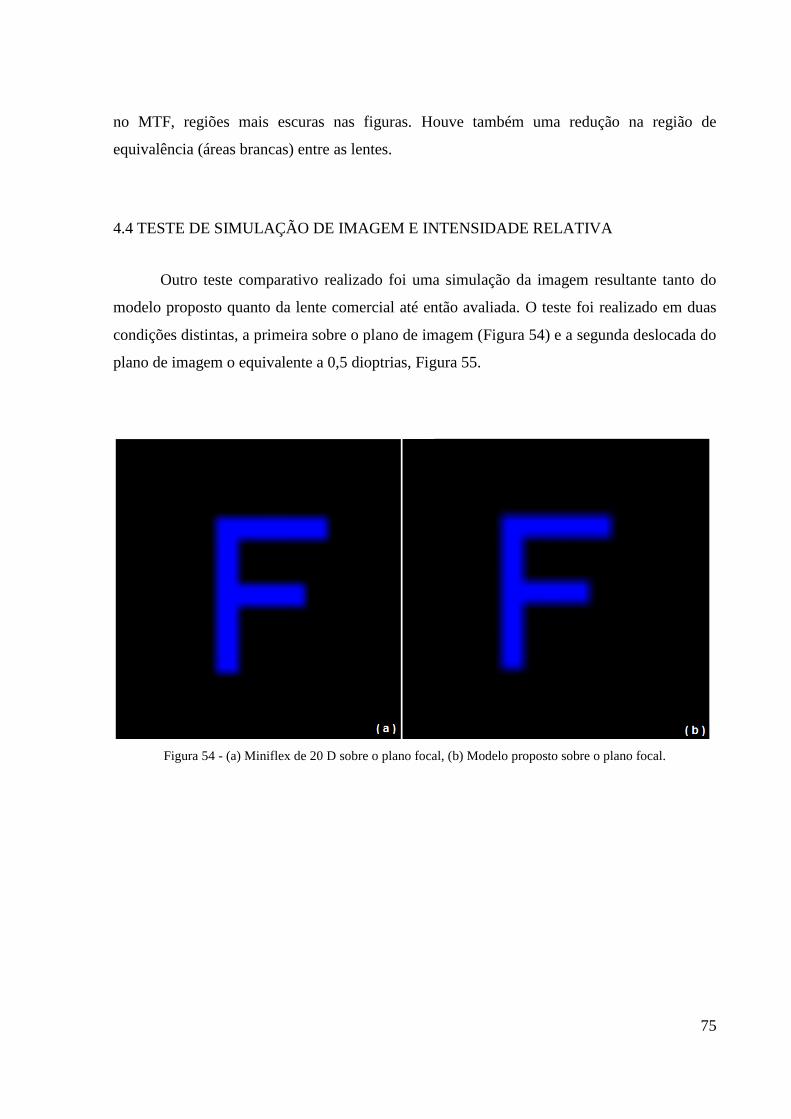
75
no MTF, regiões mais escuras nas figuras. Houve também uma redução na região de
equivalência (áreas brancas) entre as lentes.
4.4 TESTE DE SIMULAÇÃO DE IMAGEM E INTENSIDADE RELATIVA
Outro teste comparativo realizado foi uma simulação da imagem resultante tanto do
modelo proposto quanto da lente comercial até então avaliada. O teste foi realizado em duas
condições distintas, a primeira sobre o plano de imagem (Figura 54) e a segunda deslocada do
plano de imagem o equivalente a 0,5 dioptrias, Figura 55.
Figura 54 - (a) Miniflex de 20 D sobre o plano focal, (b) Modelo proposto sobre o plano focal.

76
Figura 55 - (a) Miniflex de 20 D afastada do plano de imagem o equivalente a 0,5 dioptrias e (b) Modelo proposto
afastado do plano de imagem o equivalente a 0,5 dioptrias.
A Figura 54 (a) simula a visualização da letra F através do sistema contendo a lente
comercial sobre o plano focal, enquanto a Figura 54 (b) simula a solução proposta também
sobre o plano focal, pode-se observar que embora ocorra uma diminuição do contraste não há
perdas significativas de informação, ou seja, todos os detalhes continuam perceptíveis. As
Figura 55 (a) e (b) simulam os resultados da lente comercial e da solução proposta,
respectivamente, ambas deslocadas em relação ao plano focal de 0,09 mm. Ambas apresentam
uma deterioração da qualidade da imagem quando comparadas às anteriores, mas quando
comparadas entre si pode-se observar que a deterioração foi menor na Figura 55 (b) que simula
a solução proposta.
O último teste realizado foi de intensidade relativa, este teste é realizado de maneira
similar ao anterior, entretanto a imagem submetida a análise é como a amostrada na Figura 56.
Os resultados dessa simulação representam quanto a diferença entre branco (intensidade 1,0) e
preto (intensidade 0,0) é alterada pelo sistema óptico.
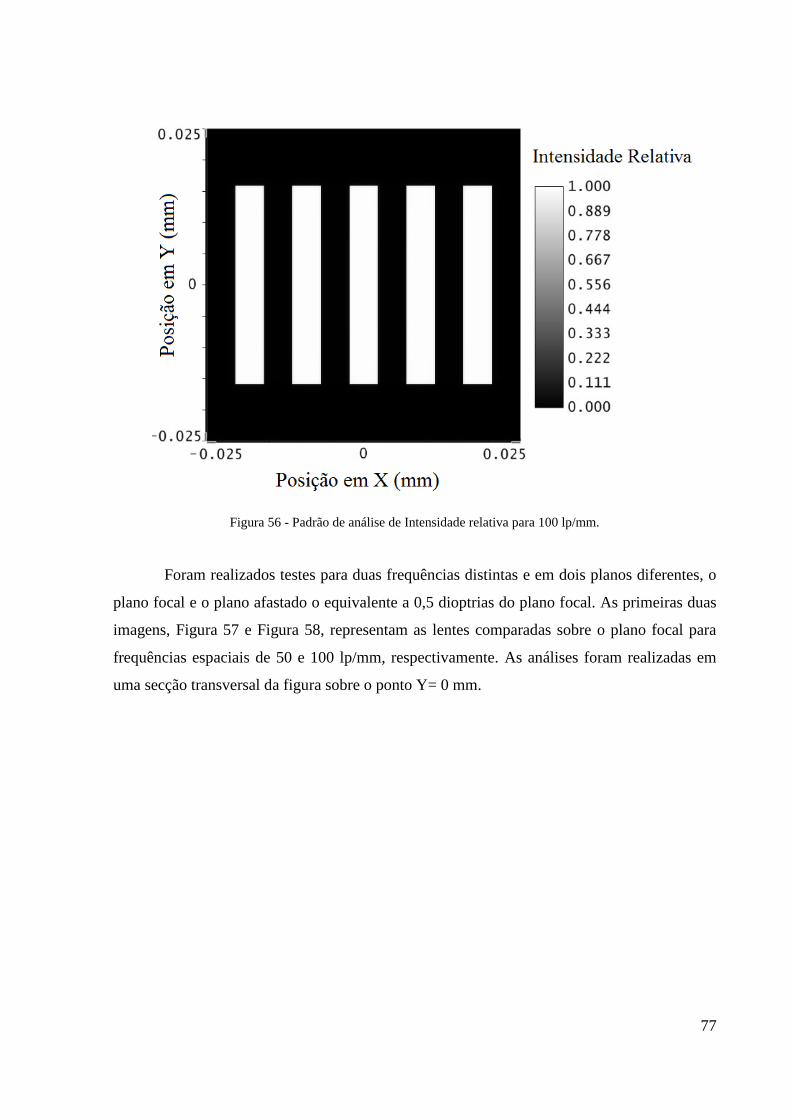
77
Figura 56 - Padrão de análise de Intensidade relativa para 100 lp/mm.
Foram realizados testes para duas frequências distintas e em dois planos diferentes, o
plano focal e o plano afastado o equivalente a 0,5 dioptrias do plano focal. As primeiras duas
imagens, Figura 57 e Figura 58, representam as lentes comparadas sobre o plano focal para
frequências espaciais de 50 e 100 lp/mm, respectivamente. As análises foram realizadas em
uma secção transversal da figura sobre o ponto Y= 0 mm.

78
Figura 57 - Gráfico Comparativo de Intensidade Relativa entre Modelo e lente comercial para 50 lp/mm sobre o
plano focal.
Figura 58 - Gráfico Comparativo de Intensidade Relativa entre Modelo e lente comercial para 100 lp/mm sobre o
plano focal.
Pode-se observar que para 50 lp/mm (Figura 57), embora ocorra deslocamento lateral de -3,0
µm (ΔX mostrado na Figura 57) nos picos de intensidade relativa do Modelo proposto,
ocasionado pela presença do coma no conjunto de aberrações, as diferenças entre as duas lentes
testadas na representação do preto (intensidade 0, 0, ΔI mostrado na Figura 57) é de apenas

79
0,03, ou seja, a cor preta visualizada através do modelo proposto é 3% mais clara a visualizada
através da lente comercial. Diferença essa dificilmente percebida em situações cotidianas. Para
a frequência de 100 lp/mm (Figura 58), a diferença na representação do preto (ΔI calculado
como indicado na Figura 57) entre as duas lentes é de 0,20 sendo a cor preta visualizada através
do modelo proposto 20% mais clara. Os picos de intensidade relativa para 100 lp/mm também
estão deslocados lateralmente em relação aos picos formados pela lente comercial de -3,0µm
calculado como o ΔX apresentado na Figura 57. É importante ressaltar que as escalas de posição
em X na Figura 57 e na Figura 58 são diferentes para representar de maneira adequada a
frequência espacial de cada uma delas, o mesmo ocorre na Figura 59 e Figura 60. As próximas
duas imagens, Figura 59 e Figura 60, representam as lentes comparadas afastadas do plano focal
o equivalente a 0,5 dioptrias para as mesmas frequências espaciais utilizadas anteriormente.
Figura 59 - Gráfico Comparativo de Intensidade Relativa entre Modelo e lente comercial para 50 lp/mm afastado
do plano focal de 0,5D.

80
Figura 60 - Gráfico Comparativo de Intensidade Relativa entre Modelo e lente comercial para 100 lp/mm
afastado do plano focal de 0,5D.
É possível averiguar que afastado do plano focal, embora ocorra uma deterioração significativa
da imagem para ambos os sistemas, tanto para 50 lp/mm, quanto para 100 lp/mm, sendo a cor
preta representada, no melhor dos casos, 64% mais clara que a cor preta dada como entrada no
sistema para 50 lp/mm e 82% mais clara para 100 lp/mm. O modelo proposto apresenta
desempenho melhor em ambos os casos com diferenças na representação do preto (ΔI) de 0,14
para 50 lp/mm e de 0,13 para 100 lp/mm. Assim como sobre o plano focal os picos de
intensidade relativa para 50 lp/mm e 100 lp/mm também estão deslocados lateralmente (ΔX)
em relação aos picos formados pela lente comercial de -5,4µm e -2,7 µm, respectivamente . É
provável que a diferença de ΔX observada entre as curvas de 50 lp/mm e 100 lp/mm tenha
ocorrido devido à deterioração da imagem.
4.5 AVALIAÇÃO DA TOLERÂNCIA À RUGOSIDADE
As dimensões de duas peças, mesmo aquelas fabricadas no mesmo ambiente e
utilizando o mesmo procedimento, têm poucas possibilidades de serem exatamente iguais,
entretanto seus valores acabam variando dentro de certos limites. O limite de inexatidão
admissível na fabricação da peça e determinado por sua tolerância, ou seja, pela diferença entre
as dimensões limites máxima e mínima (Novaski, 2014).
Tolerâncias em dispositivos ópticos são um pouco mais complicadas, uma vez que são
representadas como tolerâncias de fabricação, mas a margem de erro é determinada pelo efeito
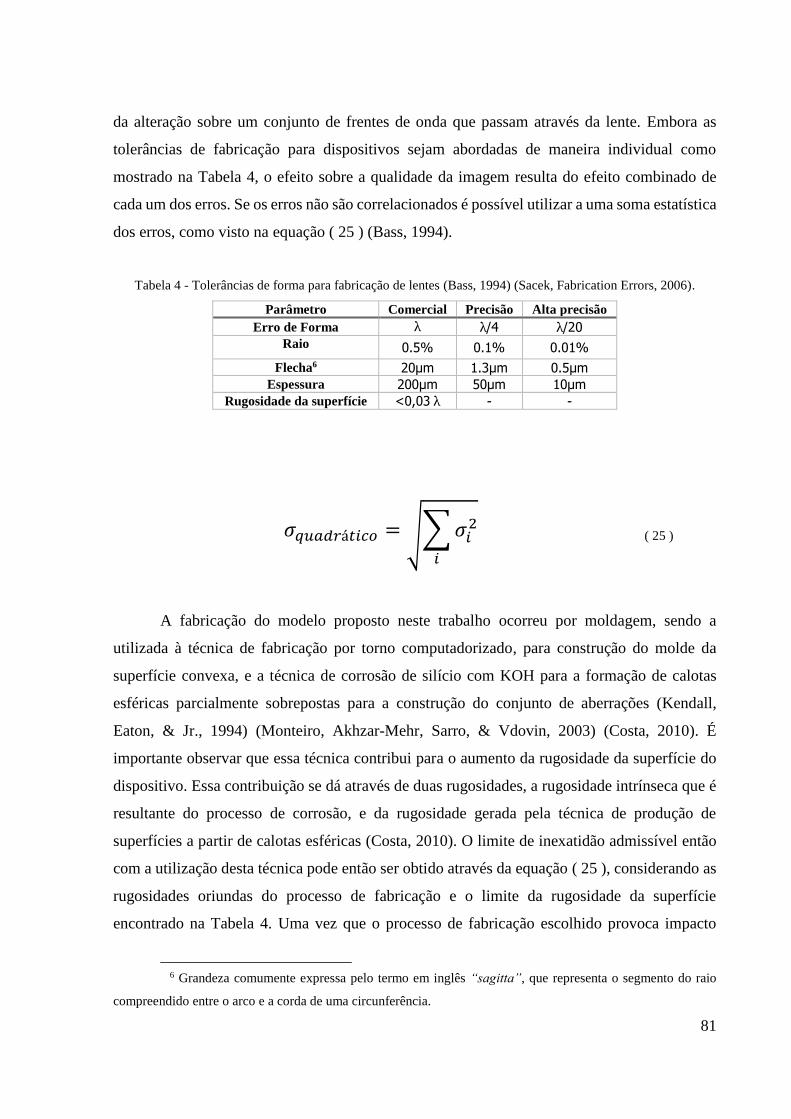
81
da alteração sobre um conjunto de frentes de onda que passam através da lente. Embora as
tolerâncias de fabricação para dispositivos sejam abordadas de maneira individual como
mostrado na Tabela 4, o efeito sobre a qualidade da imagem resulta do efeito combinado de
cada um dos erros. Se os erros não são correlacionados é possível utilizar a uma soma estatística
dos erros, como visto na equação ( 25 ) (Bass, 1994).
Tabela 4 - Tolerâncias de forma para fabricação de lentes (Bass, 1994) (Sacek, Fabrication Errors, 2006).
Parâmetro Comercial Precisão Alta precisão
Erro de Forma λ λ/4 λ/20
Raio 0.5% 0.1% 0.01%
Flecha6 20μm 1.3μm 0.5μm
Espessura 200μm 50μm 10μm
Rugosidade da superfície <0,03 λ - -
A fabricação do modelo proposto neste trabalho ocorreu por moldagem, sendo a
utilizada à técnica de fabricação por torno computadorizado, para construção do molde da
superfície convexa, e a técnica de corrosão de silício com KOH para a formação de calotas
esféricas parcialmente sobrepostas para a construção do conjunto de aberrações (Kendall,
Eaton, & Jr., 1994) (Monteiro, Akhzar-Mehr, Sarro, & Vdovin, 2003) (Costa, 2010). É
importante observar que essa técnica contribui para o aumento da rugosidade da superfície do
dispositivo. Essa contribuição se dá através de duas rugosidades, a rugosidade intrínseca que é
resultante do processo de corrosão, e da rugosidade gerada pela técnica de produção de
superfícies a partir de calotas esféricas (Costa, 2010). O limite de inexatidão admissível então
com a utilização desta técnica pode então ser obtido através da equação ( 25 ), considerando as
rugosidades oriundas do processo de fabricação e o limite da rugosidade da superfície
encontrado na Tabela 4. Uma vez que o processo de fabricação escolhido provoca impacto
6 Grandeza comumente expressa pelo termo em inglês “sagitta”, que representa o segmento do raio
compreendido entre o arco e a corda de uma circunferência.
𝜎𝑞𝑢𝑎𝑑𝑟á𝑡𝑖𝑐𝑜 = √∑ 𝜎𝑖2
𝑖
( 25 )
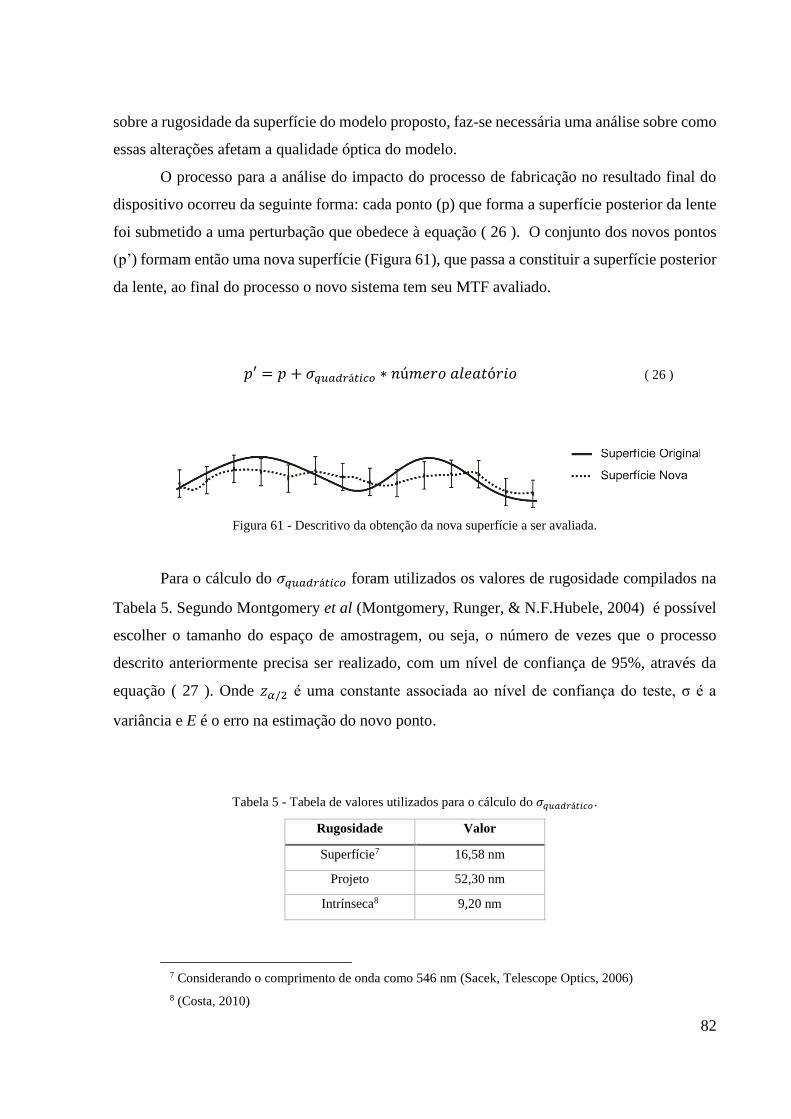
82
sobre a rugosidade da superfície do modelo proposto, faz-se necessária uma análise sobre como
essas alterações afetam a qualidade óptica do modelo.
O processo para a análise do impacto do processo de fabricação no resultado final do
dispositivo ocorreu da seguinte forma: cada ponto (p) que forma a superfície posterior da lente
foi submetido a uma perturbação que obedece à equação ( 26 ). O conjunto dos novos pontos
(p’) formam então uma nova superfície (Figura 61), que passa a constituir a superfície posterior
da lente, ao final do processo o novo sistema tem seu MTF avaliado.
Figura 61 - Descritivo da obtenção da nova superfície a ser avaliada.
Para o cálculo do 𝜎𝑞𝑢𝑎𝑑𝑟á𝑡𝑖𝑐𝑜 foram utilizados os valores de rugosidade compilados na
Tabela 5. Segundo Montgomery et al (Montgomery, Runger, & N.F.Hubele, 2004) é possível
escolher o tamanho do espaço de amostragem, ou seja, o número de vezes que o processo
descrito anteriormente precisa ser realizado, com um nível de confiança de 95%, através da
equação ( 27 ). Onde 𝑧𝛼/2 é uma constante associada ao nível de confiança do teste, σ é a
variância e E é o erro na estimação do novo ponto.
Tabela 5 - Tabela de valores utilizados para o cálculo do 𝜎𝑞𝑢𝑎𝑑𝑟á𝑡𝑖𝑐𝑜.
Rugosidade Valor
Superfície7 16,58 nm
Projeto 52,30 nm
Intrínseca8 9,20 nm
7 Considerando o comprimento de onda como 546 nm (Sacek, Telescope Optics, 2006)
8 (Costa, 2010)
𝑝′ = 𝑝 + 𝜎𝑞𝑢𝑎𝑑𝑟á𝑡𝑖𝑐𝑜 ∗ 𝑛ú𝑚𝑒𝑟𝑜 𝑎𝑙𝑒𝑎𝑡ó𝑟𝑖𝑜 ( 26 )

83
Através da equação ( 27 ), pode-se calcular o tamanho de espaço de amostragem como 1000,
considerando σ como o calculado pela equação ( 25 ), 𝑧𝛼/2 como 1,96 , valor definido pelo
nível de confiança 95% do teste (Montgomery, Runger, & N.F.Hubele, 2004) e E igual a 3,5 nm
(valor arbitrário tendo como única exigência ser menor que os valores de rugosidade dos
processos).
O resultado de cada uma das 1000 iterações foi superposto de maneira que o resultado
final pudesse ser observado na Figura 62.
Figura 62 - Variação do MTF com limites de Tolerância.
Pode-se observar que, embora possa ocorrer mudanças significativas de MTF considerando
possíveis variações de rugosidade impostas pelas técnicas de fabricação, este fato não
inviabiliza a aplicação da técnica de corrosão de silício com KOH para a formação de calotas
esféricas para a produção do modelo proposto.
𝑛 = (
𝑧𝛼/2𝜎
𝐸)
2
( 27 )

84
5 FABRICAÇÃO DO PROTÓTIPO
5.1 PROCESSO DE FABRICAÇÃO DO PROTÓTIPO
O modelo de lente proposto neste trabalho foi produzido pela técnica de moldagem
(Figura 63), sendo seu molde formado por duas partes, ou duas superfícies, a anterior formada
por uma curva asférica e posterior composta por um conjunto de aberrações. O molde para a
superfície posterior é o fabricado utilizando a técnica de corrosão anisotrópica de silício.
Entretanto o molde da superfície anterior (a curva esférica) não pode ser construído utilizando
a mesma técnica, sendo então fabricado em PMMA por torneamento. Detalhes sobre o processo
de fabricação de ambos os moldes será descrito detalhadamente mais tarde neste tópico.
Figura 63 - Esquemático do processo de confecção do protótipo.
O esquemático da Figura 63 mostra de maneira simplificada as etapas do processo de
confecção do protótipo, da esquerda para direita e de cima para baixo, é possível observar as
partes que compõem o molde, a colocação do adesivo, o alinhamento e cura do adesivo, e a
remoção do protótipo. Para a confecção do modelo foi utilizado o adesivo óptico da Norland
nº63 (ou NOA63). O NOA63 apresenta índice de refração de 1,56, valor utilizado para as
simulações, viscosidade alta que favorece a manipulação para a moldagem, e se torna
completamente rígida após a cura. Outra característica determinante para a escolha do adesivo
NOA63 foi sua adesão a outros materiais, sendo boa com metais e vidros e fraca com plásticos

85
e polímeros. A baixa adesão da cola a polímeros facilita a remoção da lente do molde da
superfície anterior, mas não do molde da superfície posterior. Para facilitar a remoção da lente
do molde da superfície posterior produzido em silício, o molde foi coberto por uma camada de
PMMA de aproximadamente 200 nm de espessura. O PMMA utilizado foi o 950K-C2 da
Microchem, sendo depositado por espalhamento em spinner a 600 rpm por 7 segundos e na
sequência a 3000 rpm por 40 segundos e curado em chapa quente a 110°C por 2 minutos. Após
a deposição do filme de PMMA, a cavidade mostrada no esquemático da Figura 63 foi
completamente preenchida com o adesivo NOA63, o molde que forma a superfície anterior foi
depositado e alinhado sobre o adesivo, não foram projetadas estruturas que permitissem um
alinhamento consistente, sendo este realizado tendo como referência única as bordas das
estruturas em ambos os moldes. A Figura 64 (a), mostra o resultado do processo.
Figura 64 - (a) Processo de moldagem do protótipo, ambos os molde preenchidos com o polímero NOA63
instantes antes do processo de cura e (b) Processo cura da lente através de exposição a luz
ultravioleta.
Para realizar a cura do adesivo que forma a lente o conjunto de moldes foi submetido à
luz ultravioleta por 60 minutos (Figura 64 (b)). A lâmpada de luz ultravioleta utilizada do
modelo BONDWand foi fornecida pela Electro-lite Corporation, com saída de 10 mW/cm2 a
um comprimento de onda de 350 nm. Após esse tempo a lente foi então removida dos moldes.
Durante o processo de cura da segunda amostra a lâmpada de luz ultravioleta utilizada se
queimou. Como não foi possível sua substituição em tempo hábil também não foi possível
confeccionar outras amostras. A única amostra fabricada pode ser vista na Figura 65, que segue.

86
Figura 65 - Protótipo do modelo de 20 D proposto, fabricado por moldagem
5.2 PROCESSAMENTO DO MOLDE DE PMMA
A confecção do molde da superfície anterior se deu pelo processo de torneamento sendo
o desenho utilizado para a confecção mostrado na Figura 66. O resultado do processo de
confecção desse molde pode ser observado na Figura 67.

87
Figura 66 - Desenho do molde construído por torneamento para a superfície anterior, todas as unidades expressas
encontram-se em milímetros (a) vista frontal, (b) Corte A-A e (c) vista lateral.
Figura 67 - Molde da superfície anterior produzido em PMMA utilizando a técnica de Torneamento
computadorizado.

88
5.3 PROCESSAMENTO DO MOLDE DE SILICIO
Para construção dos moldes em silício, três no total, foram utilizadas lâminas de silício de
grau eletrônico (100), dopadas tipo p e de espessura de 524 μm. A lâmina era coberta por uma
camada de 120 nm de dióxido de silício, seguida por uma camada de 400 nm de nitreto de
silício. As amostras processadas passaram por algumas etapas do processamento padrão para
dispositivos CMOS. As etapas de limpeza, transferência de padrões por fotolitografia, remoção
seletiva do nitreto de silício e do dióxido de silício e corrosão anisotrópica do substrato em
solução aquosa de KOH foram realizadas na produção das amostras e serão pormenorizadas a
seguir e se encontram sintetizadas na Figura 68, sendo o processo descrito acima e o resultado
deste observado na imagem que segue.
Figura 68 - Síntese do processo de fabricação dos moldes da superfície posterior em silício.

89
5.3.1 Etapas de limpeza das amostras
Todas as amostras passaram durante um período de 5 minutos por um banho de
ultrassom com acetona para remoção de gordura, impressões digitais e outros possíveis
contaminantes orgânicos. Para remover quaisquer resquícios de acetona a amostra foi
submetida então a um novo banho de 5 minutos em ultrassom, mas agora com álcool
isopropílico, ou propanol, os resíduos de álcool são então removidos no mesmo processo mas
agora imersos em água. Posteriormente estas são secas com um jato de gás nitrogênio (N2).
Após as limpezas com acetona, álcool isopropílico e água, as amostras foram então
submetidas aos processos RCA 1 e 2 de limpeza padrão de um processo MOS. A primeira
solução (RCA 1) é composta pelos seguintes reagentes nas seguintes proporções:
Essa solução foi preparada em um béquer de vidro de 300 ml e aquecida a uma
temperatura aproximada de 80 ºC. O tempo de duração dessa etapa foi de 10 minutos. Decorrido
esse tempo, as amostras foram lavadas por aproximadamente 3 minutos em água deionizada.
As amostras foram, em seguida, imersas em uma segunda solução (RCA 2) composta
pelos seguintes reagentes nas proporções:
Essa solução também foi preparada em um béquer de vidro de 300 ml, aquecida a uma
temperatura aproximada de 80 ºC e realizada por 10 minutos. As amostras foram então lavadas
por aproximadamente 3 minutos em água deionizada após essa etapa. As limpezas RCA nunca
devem ser realizadas com temperaturas inferiores a 60 °C e têm como principal objetivo
remover resíduos orgânicos e metálicos das amostras de silício.
𝑁𝐻4𝑂𝐻 + 𝐻2𝑂2 + 𝐻2𝑂 1: 1: 5 ( 28 )
𝐻𝐶𝑙 + 𝐻2𝑂2 + 𝐻2𝑂 1: 1: 5 ( 29 )

90
5.3.2 Transferência de padrões por Fotolitografia
Após as etapas de limpeza as amostras são então preparadas para o processo de
fotolitografia com a deposição do fotorresiste. As amostras passaram por uma etapa de secagem
sobre uma chapa quente a 100ºC por 3 minutos para se eliminar possíveis gotículas de água.
Em seguida ocorreu a deposição de um promotor de adesão (HMDS-hexametil disilazano) no
spinner com rotações de 1000 rpm por 5 segundos, para uniformizar o espalhamento do
promotor, e 5000 rpm por 30 segundos para uniformizar a espessura da camada formada do
promotor de adesão, e uma etapa de secagem por 2 minutos a 100 ºC ao final do spinner. A
deposição do fotorresiste positivo S-1813 ocorreu de maneira semelhante a descrita para o
promotor de adesão, como os mesmos tempos, rotações e temperaturas.
A fotolitografia foi realizada no equipamento LaserWriter (LW 405) utilizando os
projetos construídos no OptMAlab. A LaserWriter é um equipamento de escrita direta sobre o
substrato, projetada para uma operação completamente automatizada, as tarefas do operador se
resumem a inserir o substrato na unidade de escrita, iniciar o processo de focalização e
selecionar o nível de exposição. O equipamento é formado basicamente por um laser de GaN
(λ=405 nm), um sistema de micro translação do substrato e componentes eletro-ópticos para
modular o feixe laser e regular a energia da exposição. Uma câmera CCD permite a observação
de substrato para a focalização antes do processo de gravação ou para a inspeção de superfície,
com uma iluminação dada por uma fonte vermelha (λ=640nm) para evitar a exposição do
fotorresiste. A focalização pode ser realizada através de diferentes abordagens escolhidas a
partir das condições de planaridade e uniformidade da camada de fotorresiste do substrato. A
resolução do equipamento é limitada pela lente utilizada, podendo chegar a valores ligeiramente
inferiores a 1 μm limitados a efeitos de proximidade do fotorresiste. A entrada dos padrões de
exposição se dá através de arquivos de imagem .CIF ou .bmp, e o processo de gravação ocorre
de maneira não vetorizada.
O tempo de exposição dos padrões é altamente dependente da densidade de estruturas
presente na máscara. Após a exposição do padrão a amostra é revelada, inspecionada e
submetida a um cozimento mais intenso por 15 minutos a uma temperatura de 100 ºC na chapa
quente. A revelação do padrão é realizada com o revelador especifico para o fotorresiste
utilizado, durante 120 segundos, com a solução sendo renovada a cada 60 segundos; decorrido
esse tempo a amostra é lavada com água deionizada cuja resistividade é de 18 MΩ.cm. O
91
cozimento mais intenso tem por objetivo aumentar a aderência ao substrato, evaporar o solvente
e os resíduos da solução reveladora e endurecer o fotorresiste remanescente.
A inspeção tem por objetivo detectar problemas de revelação, aderência ou mesmo de
formação do padrão. Essa etapa evita que a amostra siga no processo, o que implica em perda
das amostras e de insumos. As amostras que porventura sejam reprovadas nesta etapa ainda
podem ser reutilizadas devendo passar por novas etapas de limpeza e fotolitografia.
5.3.3 Etapa de remoção seletiva do nitreto de silício e do dióxido de silício
Com o padrão já revelado no fotorresiste, este deve ser transferido para o nitreto de
silício que servirá como máscara para os processos posteriores. Para realizar esta transferência
a superfície da amostra é submetida a uma corrosão por plasma, utilizando 𝑆𝐹6/𝑂2 na proporção
de 2:3. Nestas condições a taxa de corrosão foi de aproximadamente 40 nm/min.
Com o padrão já transferido para o nitreto de silício, a próxima etapa do processo é a
abertura do acesso ao substrato de silício através do dióxido de silício. Para realizar a abertura
a amostra é imersa em uma solução conhecida como buffer de HF, descrita abaixo.
Esse processo foi realizado em um vasilhame de plástico, sendo a quantidade da solução
o suficiente para cobrir a lâmina de silício.
A taxa de corrosão desta solução para o óxido de silício é de aproximadamente
70 nm/min. Devido à espessura da camada de óxido das amostras elas permaneceram na solução
por 2 minutos e posteriormente foram lavadas por 1 minuto em água deionizada.
Antes de imergir as amostras na solução de corrosão para formação das pirâmides
invertidas, foi realizado um mergulho em HF de aproximadamente 30 segundos, onde a
concentração da solução de mergulho era de aproximadamente 1% em peso de HF em solução
aquosa, para remoção de óxido nativo inevitavelmente criado na superfície do Si dentro dos
orifícios. Essa remoção do dióxido nativo deve ocorrer sempre imediatamente antes do
processamento das amostras de silício. De maneira semelhante ao anterior esse processo foi
realizado em um vasilhame de plástico, sendo a quantidade da solução o suficiente para cobrir
a lâmina de silício. Essa solução possui a seguinte proporção:
𝐻𝐹 + 𝑁𝐻4𝐹 + 𝐻2𝑂 1: 7: 10 ( 30 )

92
As amostras foram lavadas por aproximadamente 3 minutos em água deionizada após o
mergulho em HF.
5.3.4 A formação da estrutura do molde em silício
O primeiro passo dentro do processo de corrosão de silício com KOH para a formação
de calotas esféricas parcialmente sobrepostas é a formação das pirâmides invertidas. Nele a
corrosão anisotrópica da superfície <100> do silício com KOH através de uma máscara circular
produz uma pirâmide invertida que é formada por quatro planos (111). A profundidade da
pirâmide é função da abertura inicial da máscara (d0). Para calcular o tempo necessário para a
formação destas estruturas utilizamos a equação (32),
Onde d0 é a abertura inicial do maior orifício e R100 é a taxa de corrosão do plano (100) obtida
experimentalmente, e nestas condições igual a 1,8 µm/min. Em seguida, a amostra foi imersa
na solução KOH: H2O 33% pp, 92°C 1°C9 (não é necessário agitação) pelo tempo
estabelecido para a estrutura. Sendo o maior d0 do padrão aproximadamente igual a 10 µm, o
tempo calculado para as estruturas fabricadas foi de 4 min. Para compensar possíveis variações
na taxa de corrosão a amostra foi mantida na solução por um período maior que o calculado,
assim fica garantida a formação das pirâmides.
9 Embora a incerteza fosse conhecida para todo o processo de fabricação, somente essa grandeza tem
impacto significativo sobre a rugosidade final do processo.
𝐻𝐹 + 𝐻2𝑂 1: 10 ( 31 )
𝑡 = (𝑑0/√2)/𝑅100 ( 32 )

93
Figura 69 - Pirâmide invertida formada sob máscara protetora de nitreto de silício após primeira etapa de
corrosão com KOH.
Após a formação das pirâmides invertidas e uma lavagem em água DI, por
aproximadamente 3 minutos, as amostras são novamente submetidas ao processo descrito na
seção 5.3.3 para remoção completa do nitreto de silício e do dióxido de silício. Ao término
dessa etapa as amostras passam de hidrofílica para hidrofóbica, essa mudança pode ser
visualmente verificada pela molhabilidade da superfície, em uma superfície hidrofílica há a
formação de um filme de água e na superfície hidrofóbica há a formação de gotículas.
Com a retirada do nitreto e do dióxido, as amostras estão prontas para passar pelo
processo de corrosão, na mesma solução KOH: H2O 33%pp, 92°C 1°C utilizada para abertura
de pirâmides invertidas, mas agora com agitação magnética em torno de 590 rpm. O tempo que
a amostra permanece imersa em solução pode ser calculado pela equação (33):
Onde h é a profundidade de corrosão ou o afinamento da lâmina e R100 é a taxa de corrosão do
plano (100). Todas as amostras sofreram um afinamento de 172 µm, ficando imersas na solução
por uma hora e trinta e seis minutos.
O resultado do processo de corrosão sobre duas das amostras produzidas pode ser visto
na Figura 70. Embora se possa observar algumas manchas na amostra 2 (Figura 70 – b) estas
são resíduos do processo de corrosão e não alteram a forma da estrutura.
𝑡 = ℎ/𝑅100 ( 33 )
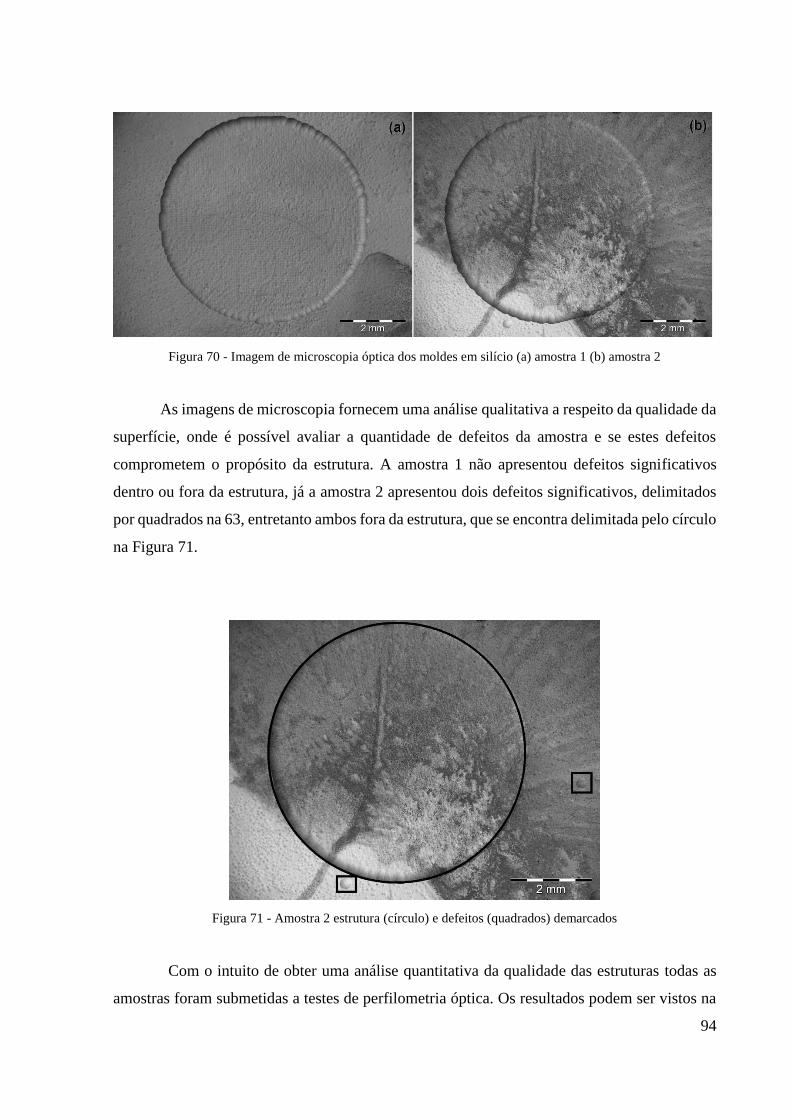
94
Figura 70 - Imagem de microscopia óptica dos moldes em silício (a) amostra 1 (b) amostra 2
As imagens de microscopia fornecem uma análise qualitativa a respeito da qualidade da
superfície, onde é possível avaliar a quantidade de defeitos da amostra e se estes defeitos
comprometem o propósito da estrutura. A amostra 1 não apresentou defeitos significativos
dentro ou fora da estrutura, já a amostra 2 apresentou dois defeitos significativos, delimitados
por quadrados na 63, entretanto ambos fora da estrutura, que se encontra delimitada pelo círculo
na Figura 71.
Figura 71 - Amostra 2 estrutura (círculo) e defeitos (quadrados) demarcados
Com o intuito de obter uma análise quantitativa da qualidade das estruturas todas as
amostras foram submetidas a testes de perfilometria óptica. Os resultados podem ser vistos na

95
Figura 72, que segue. Nesta análise é possível observar a semelhança entre o perfil das amostras
fabricadas e as imagens de aberrações calculadas na Figura 46.
Figura 72 - Perfilometria óptica dos moldes fabricados, (a) amostra 1, (b) amostra 2 e (c) amostra 3.
A Figura 73 mostra uma análise mais detalhada do perfil (em destaque a esquerda da
figura) que passa pelo pico e pelo vale da estrutura da amostra 1. A perfilometria óptica mostra
uma distância entre o pico e o vale da estrutura de aproximadamente 2,5 µm, o que é compatível
com a diferença observada no modelo para 20 D apresentado na Figura 46.
Figura 73 – Mapa da superfície da amostra 1 referente ao molde da superfície posterior do modelo(esquerda) e
avaliação da rugosidade do corte transversal em destaque no mapa da superfície (direita).

96
Como mencionado anteriormente todas as estruturas passaram pela perfilometria óptica,
os resultados de rugosidade do perfil que passa através do pico e do vale das estruturas foram
compilados dando origem a Tabela 6.
Tabela 6 - Compilação dos resultados de rugosidade das estruturas produzidas em silício.
Amostra Rugosidade em µm
PV10 Ra11 rms12
1 2,566 0,698 0,786
2 2,812 0,570 0,655
3 2,641 0,635 0,709
Embora os resultados mostrados de rugosidade obtidos para as estruturas sejam até 33
vezes maior que os mostrados como tolerados na Tabela 4, estes valores ainda sofreram uma
redução significativa devido aos processos utilizados para replicação em polímero das
estruturas e fabricação da lente. A rugosidade introduzida na frente de onda se relaciona com o
índice de refração do material utilizado para replicação, pela seguinte relação de dependência:
Onde σd é a rugosidade efetiva introduzida a frente de onda quando está passa
através do componente, σm é a rugosidade do molde construído em silício e n o índice de
refração do material utilizado.
10 Rugosidade de pico a vale ou rugosidade P-V é definida como a distância vertical entre o pico mais
alto e o vale mais profundo no comprimento de avaliação da amostra, independentemente dos valores de
rugosidade parcial (Agostinho, Rodrigues, & Lirani, 2004).
11 A rugosidade média (Ra) é calculada como a média aritmética dos valores absolutos das ordenadas
de afastamento (yi), dos pontos do perfil de rugosidade em relação à linha média, dentro do percurso de medição
(Agostinho, Rodrigues, & Lirani, 2004).
12 Rugosidade média quadrática, ou rms, é obtido pela média quadrática dos valores das ordenadas de
afastamento (yi) dentro do comprimento do percurso de mediação (Agostinho, Rodrigues, & Lirani, 2004).
)1( nmd ( 34 )

97
5.3.5 Teste da Lente fabricada
O equipamento utilizado para a caracterização da lente produzida foi o NIMO TR0815
produzido pela Lambda-X capaz de medir uma grande variedade de tipos de lentes, esféricas,
asféricas, monofocais, multifocais e tóricas, tanto no ar quanto imerso em solução. O NIMO
apresenta opções de abertura de pupila de variam de 2,0 mm a 4,5 mm e a opção de inserir a
lentes no modelo de olho da ISO conforme o descrito na Figura 37.
A lente confeccionada foi avaliada dentro do modelo de olho da ISO em pupilas de 3,0
e 4,5 mm. A Figura 74 mostra a imagem da lente fabricada produzida pelo NIMO, a região
onde as aberrações foram introduzidas aparece delimitada pelo círculo em preto, enquanto que
os defeitos de fabricação são delimitados pelos círculos em vermelho. Os três defeitos menores
são bolhas de gases formados pelo processo de cura e que ficaram aprisionados na estrutura. Já
o defeito maior que envolve quase 20% da estrutura provavelmente se deve ao processo de
desmoldagem ou à cura incompleta da estrutura, a presença desse tipo de defeito pode ser
facilmente suprimida em outras fabricações ajustando o tempo de cura do polímero e ou
reduzindo a espessura do molde da superfície anterior.
Figura 74 - Imagem do NIMO para a lente fabricada destaque para os defeitos de fabricação apresentados.
Embora a densidade de defeitos fosse grande, ainda foi possível realizar medições de
MTF through Focus e MTF para as pupilas de 3,00 e 4,5 milímetros. Para pupila de 3,0 mm os
resultados MTF through Focus e MTF podem ser vistos nas Figura 75 e Figura 76,
respectivamente.

98
Figura 75 - MTF through Focus da lente produzida para pupila de 3mm.
Figura 76 - Curva de MTF produzido pelo NIMO para lente fabricada com pupila de 3 mm.
É possível observar pela Figura 75 que, embora, a lente tenha sido projetada para possuir
20 D, o pico de MTF em 19,53 D, com um FWMW de 1,14 D no plano do objeto, o que
corresponde a uma profundidade de foco de aproximadamente 0,2 milímetros no plano da
imagem. Os resultados dos testes para pupila de 4,5 mm, valor mais próximo do valor utilizado
nas simulações, de MTF e MTF through Focus podem ser vistos nas Figura 77 e Figura 78, que
seguem.
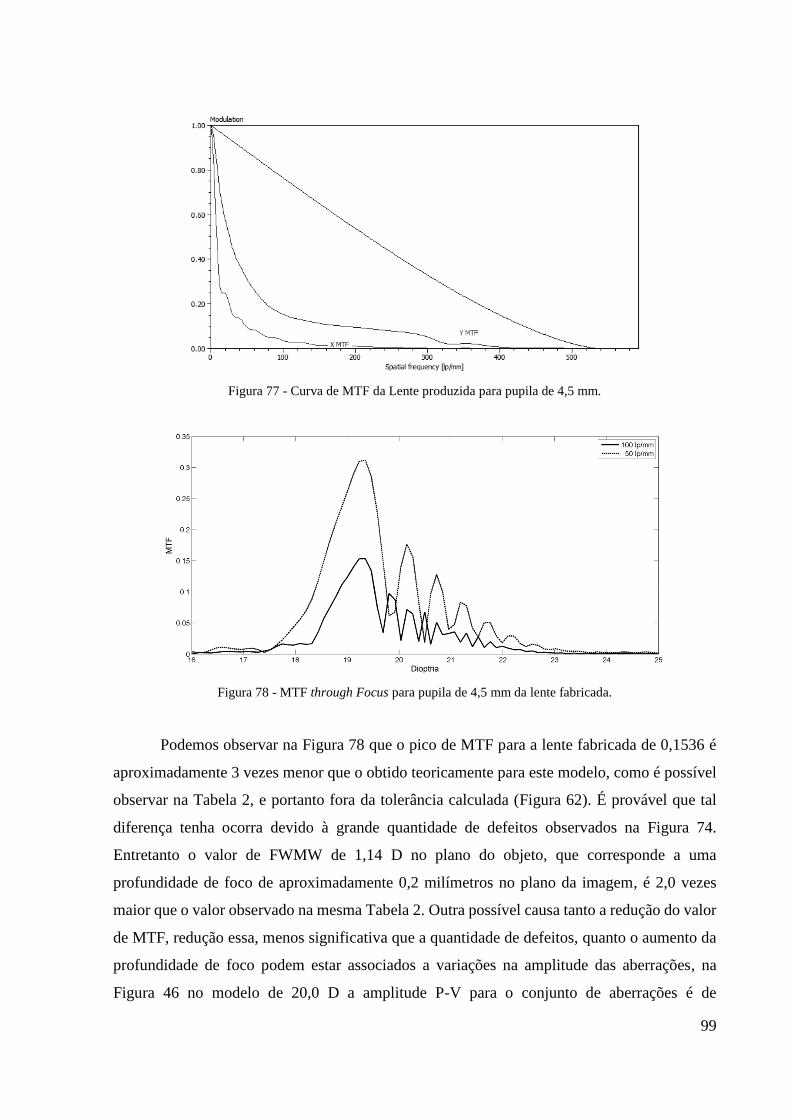
99
Figura 77 - Curva de MTF da Lente produzida para pupila de 4,5 mm.
Figura 78 - MTF through Focus para pupila de 4,5 mm da lente fabricada.
Podemos observar na Figura 78 que o pico de MTF para a lente fabricada de 0,1536 é
aproximadamente 3 vezes menor que o obtido teoricamente para este modelo, como é possível
observar na Tabela 2, e portanto fora da tolerância calculada (Figura 62). É provável que tal
diferença tenha ocorra devido à grande quantidade de defeitos observados na Figura 74.
Entretanto o valor de FWMW de 1,14 D no plano do objeto, que corresponde a uma
profundidade de foco de aproximadamente 0,2 milímetros no plano da imagem, é 2,0 vezes
maior que o valor observado na mesma Tabela 2. Outra possível causa tanto a redução do valor
de MTF, redução essa, menos significativa que a quantidade de defeitos, quanto o aumento da
profundidade de foco podem estar associados a variações na amplitude das aberrações, na
Figura 46 no modelo de 20,0 D a amplitude P-V para o conjunto de aberrações é de
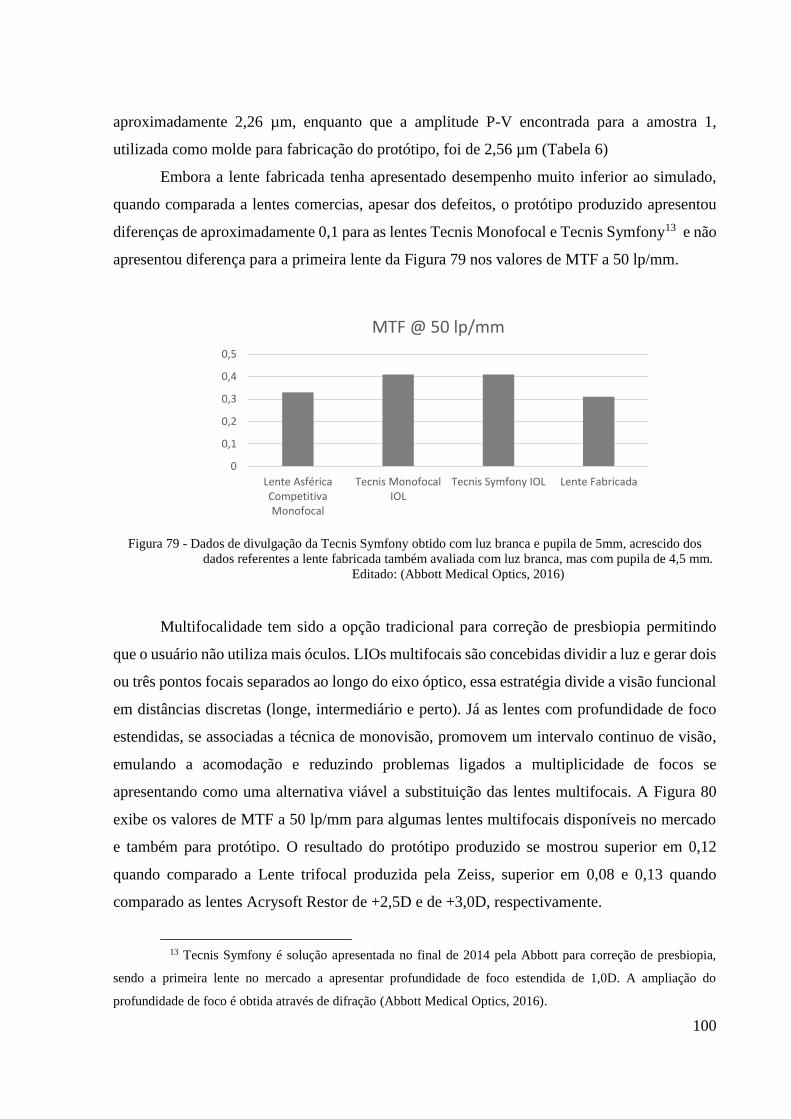
100
aproximadamente 2,26 µm, enquanto que a amplitude P-V encontrada para a amostra 1,
utilizada como molde para fabricação do protótipo, foi de 2,56 µm (Tabela 6)
Embora a lente fabricada tenha apresentado desempenho muito inferior ao simulado,
quando comparada a lentes comercias, apesar dos defeitos, o protótipo produzido apresentou
diferenças de aproximadamente 0,1 para as lentes Tecnis Monofocal e Tecnis Symfony13 e não
apresentou diferença para a primeira lente da Figura 79 nos valores de MTF a 50 lp/mm.
Figura 79 - Dados de divulgação da Tecnis Symfony obtido com luz branca e pupila de 5mm, acrescido dos
dados referentes a lente fabricada também avaliada com luz branca, mas com pupila de 4,5 mm.
Editado: (Abbott Medical Optics, 2016)
Multifocalidade tem sido a opção tradicional para correção de presbiopia permitindo
que o usuário não utiliza mais óculos. LIOs multifocais são concebidas dividir a luz e gerar dois
ou três pontos focais separados ao longo do eixo óptico, essa estratégia divide a visão funcional
em distâncias discretas (longe, intermediário e perto). Já as lentes com profundidade de foco
estendidas, se associadas a técnica de monovisão, promovem um intervalo continuo de visão,
emulando a acomodação e reduzindo problemas ligados a multiplicidade de focos se
apresentando como uma alternativa viável a substituição das lentes multifocais. A Figura 80
exibe os valores de MTF a 50 lp/mm para algumas lentes multifocais disponíveis no mercado
e também para protótipo. O resultado do protótipo produzido se mostrou superior em 0,12
quando comparado a Lente trifocal produzida pela Zeiss, superior em 0,08 e 0,13 quando
comparado as lentes Acrysoft Restor de +2,5D e de +3,0D, respectivamente.
13 Tecnis Symfony é solução apresentada no final de 2014 pela Abbott para correção de presbiopia,
sendo a primeira lente no mercado a apresentar profundidade de foco estendida de 1,0D. A ampliação do
profundidade de foco é obtida através de difração (Abbott Medical Optics, 2016).
0
0,1
0,2
0,3
0,4
0,5
Lente AsféricaCompetitivaMonofocal
Tecnis MonofocalIOL
Tecnis Symfony IOL Lente Fabricada
MTF @ 50 lp/mm

101
Figura 80 - Comparativo entre lentes multifocais do mercado, a Tecnis Symfony e o modelo proposto e fabricado.
Editado: (Borrmann, 2015).
Em relação a profundidade de foco a lente fabricada apresentou um resultado 10% maior
que a lente Tecnis Symphony, única lente de comportamento similar do mercado, Figura 81
(Abbott Medical Optics, 2016). Ou seja, enquanto para um usuário da Tecnis Sympony a
imagem de um objeto qualquer permaneceria com a mesma qualidade desde o infinito (0 D
adicionais) até 1,0 metros (1,0 D adicional), para um usuário de modelo proposto a mesma
imagem permaneceria sob as mesmas condições até 0,9 metros (1,14 D adicionais)
Figura 81 - Comparativo de profundidade de foco entre o protótipo fabricado e a lente Tecnis Symfony.
0
0,1
0,2
0,3
0,4
0,5
Tecnis SymfonyIOL
Zeiss TrifocalIOL
Acrysoft Restor+2,5 D IOL
Acrysoft Restor+3,0 D IOL
Lente Fabricada
MTF @ 50 lp/mm
0,9
1
1,1
1,2
Tecnis Symfony IOL Lente Fabricada
Profundidade de Foco em Dioptrias

102
6 CONCLUSÕES
Este trabalho teve como principal objetivo propor uma topologia, inicialmente para
lentes intraoculares, baseada na inclusão de aberrações de alta ordem em uma das faces da lente,
que pudesse combinar a profundidade de foco das lentes monofocais esféricas e o MTF das
lentes monofocais asféricas.
A ampliação da profundidade de foco encontra aplicações nas áreas de biomedicina, de
microscopia, de visão computacional, de litografia e diversas outras áreas. Em aplicações de
visão computacional, por exemplo, torna o sistema mais robusto reduzindo sua sensibilidade a
perdas de foco.
A execução deste trabalho teve como etapa inicial um levantamento acerca das
principais características de um sistema óptico. Foram abordados de maneira pormenorizada
conceitos como profundidade de foco, distância focal, frentes de onda, aberrações e resolução.
Ainda nesta etapa foram abordados estudos do olho humano, enquanto sistema óptico, e lentes
intraoculares.
A etapa seguinte foi constituída por um levantamento dos quesitos de avaliação de
qualidade de sistemas ópticos. Durante está etapa foram discutidos conceitos como MTF, OTF,
PSF e ainda alguns outros. Houve, também, uma descrição matemática detalhada de cada uma
das grandezas de avaliação de desempenho óptico visando elucidar quais aspectos os afetam
diretamente.
A representação matemática de superfícies ópticas foi o assunto abordado no tópico 3
deste trabalho. Sendo descritos os polinômios de Zernike, historicamente utilizados como base
ortogonal para a descrição das topologias tanto do olho humano quanto das lentes, e os
polinômios de Forbes, conjunto de polinômios, baseados nos polinômios de Jacobi, para
descrever e fabricar superfícies arbitrárias. Ainda neste tópico foram abordados aspectos
referentes à modelagem da proposta como um problema de otimização multiobjetivo, bem
como as estratégias de otimização utilizadas para resolvê-lo.
Na etapa posterior são apresentados os resultados obtidos com o processo de otimização
usando o NSGA-II. O processo de otimização teve como objetivos a profundidade de foco
(FWHM) e o MTF a 100 pares de linhas, sendo os critérios para a escolha do conjunto de
aberrações a serem utilizados no modelo, ganho igual ou maior a 50% no FWHM em relação à
lente comercial de mesma dioptria e valor de MTF superior a 0,43 a 100 pares de linha por
milímetro. A Tabela 2 mostra a comparação entre os modelos propostos e lentes comerciais de

103
mesma dioptria. É possível constatar através da Figura 47 que a solução escolhida, para 20 D,
apresenta comportamento intermediário, com desempenho (MTF) melhor que as lentes
esféricas e similar ou inferior as lentes asféricas. O modelo foi então exaustivamente comparado
a lente Miniflex de 20 D, com o intuído de avaliar a viabilidade do modelo. Foram comparados
os resultados de simulação de MTF, CSF, MTF through Focus, Intensidade Relativa e
Simulação da imagem produzida pelo sistema, e em todos os testes o modelo para 20 D se
mostrou inferior sobre o plano de imagem, como esperado e, portanto de acordo com a proposta,
e superior deslocado do plano de imagem de aproximadamente 0,09 mm, o que equivale a uma
variação no plano do objeto de 0,5 D, ratificando o aumento da profundidade de foco.
Antes da confecção do protótipo o limite de inexatidão no processo de fabricação
também foi avaliado. Nessa avaliação pode-se observar que embora a técnica de corrosão de
silício com KOH para formação de calotas esféricas parcialmente sobrepostas aumentasse a
rugosidade do dispositivo isso não impactaria de maneira significativa seu desempenho óptico.
Já a técnica de fabricação por torno computadoriza não altera de maneira substancialmente
nenhuma característica do molde não acarretando deterioração dos parâmetros ópticos do
protótipo.
Todo o processamento dos moldes em silício é descrito ao longo da seção 5. Os dados
de perfilometria óptica dos moldes fabricados em silício também compõem essa seção, onde é
possível averiguar a qualidade da superfície dos moldes em silício. Embora a rugosidade
encontrada, e listada na Tabela 6, para os moldes seja maior que os limites de tolerância
estabelecidos na Tabela 4, devido ao processo de replicação, estes valores ainda sofreram uma
atenuação que depende do índice de refração do material utilizado. Ainda na seção 5, a Figura
66 apresenta o projeto utilizado para confecção do molde da parte anterior e todo o processo de
moldagem do protótipo segue descrito a seguir.
O protótipo produzido passou por avaliação de MTF e MTF through Focus no NIMO,
apresentando desempenho diferente do o simulado, em parte devido à quantidade de defeitos
em sua superfície. Entretanto, em comparação com uma lente comercial de características
semelhantes (Tecnis Symfony), o protótipo exibiu resultados consistentes. O MTF obtido para
o protótipo foi inferior em aproximadamente 0,1, enquanto sua profundidade de foco 0,14 D
maior. O ganho obtido na profundidade de foco é suficiente para manter a imagem de um objeto
em foco de uma distância infinita até aproximadamente 0,90 metros do observador. Quando seu
MTF é comparado as lentes multifocais, nicho onde lentes com profundidade de foco estendida
podem atuar como possíveis substitutas, o desempenho do modelo foi sempre superior,

104
alcançando 0,13 de diferença no MTF quando comparado as lentes Acrysoft Restor de +3,0D.
Os defeitos que ocorreram durante o processo de fabricação do protótipo, que podem ser
suprimidos pelo ajuste do tempo de cura do polímero e ou reduzindo a espessura do molde da
superfície anterior, o protótipo revelou-se exequível, demonstrando desempenho muito similar
a lentes existentes no mercado.
Embora na Oftalmologia existam soluções como as lentes intraoculares multifocais, boa
parte da população que é submetida a uma cirurgia de catarata implanta uma lente monofocal.
Soluções como a proposta neste trabalho podem contribuir para uma melhoria da qualidade de
vida desta parcela da população, uma vez que, com uma maior profundidade de foco é possível
manter uma quantidade maior de objetos, a diferentes distâncias, em foco. Soluções como a
apresentada aqui, também facilitariam a aplicação da técnica de monovisão por ampliarem a
região onde a imagem é formada ainda de maneira nítida.
Com os resultados obtidos neste trabalho é possível ampliar as discussões sobre o
impacto das aberrações de alta ordem, bem como sua utilização, na qualidade de sistemas
ópticos. Possibilitando trabalhos que investiguem novos conjuntos de aberrações capazes de
provocar uma ampliação na profundidade de foco sem que ocorra uma degradação significativa
da qualidade dos parâmetros ópticos do sistema, aumentando o leque de estratégias para
confecção de lentes com profundidade de foco estendida.
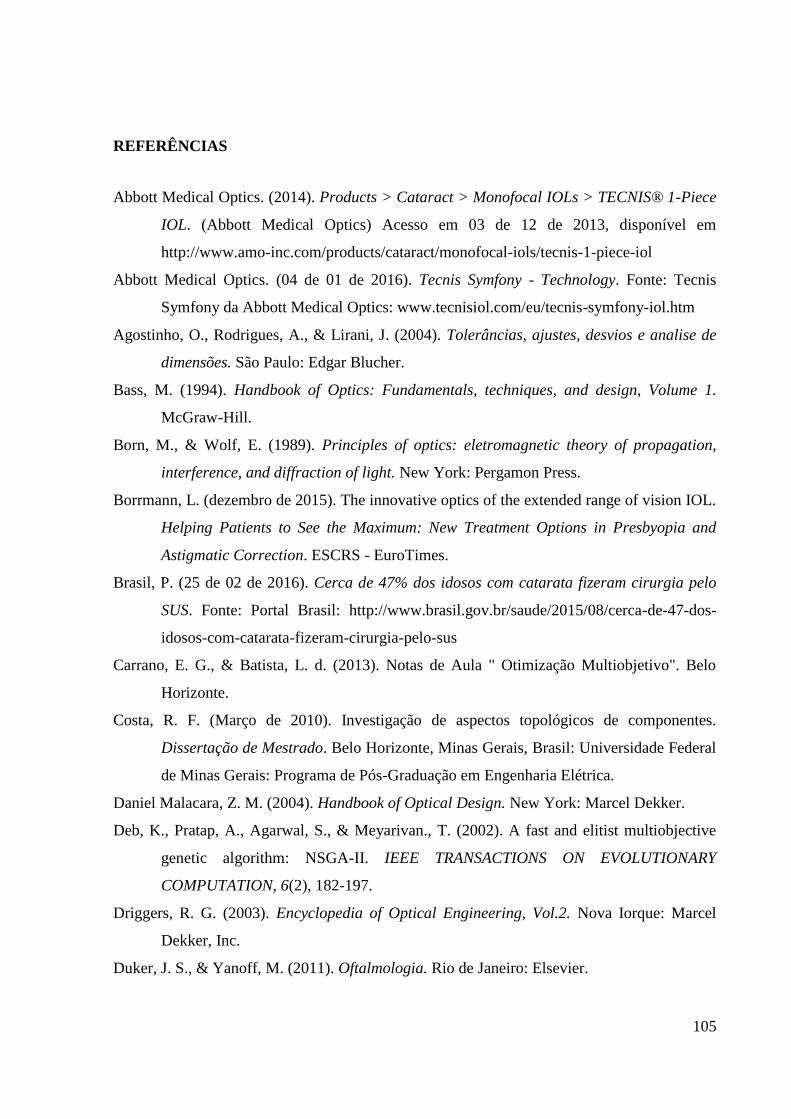
105
REFERÊNCIAS
Abbott Medical Optics. (2014). Products > Cataract > Monofocal IOLs > TECNIS® 1-Piece
IOL. (Abbott Medical Optics) Acesso em 03 de 12 de 2013, disponível em
http://www.amo-inc.com/products/cataract/monofocal-iols/tecnis-1-piece-iol
Abbott Medical Optics. (04 de 01 de 2016). Tecnis Symfony - Technology. Fonte: Tecnis
Symfony da Abbott Medical Optics: www.tecnisiol.com/eu/tecnis-symfony-iol.htm
Agostinho, O., Rodrigues, A., & Lirani, J. (2004). Tolerâncias, ajustes, desvios e analise de
dimensões. São Paulo: Edgar Blucher.
Bass, M. (1994). Handbook of Optics: Fundamentals, techniques, and design, Volume 1.
McGraw-Hill.
Born, M., & Wolf, E. (1989). Principles of optics: eletromagnetic theory of propagation,
interference, and diffraction of light. New York: Pergamon Press.
Borrmann, L. (dezembro de 2015). The innovative optics of the extended range of vision IOL.
Helping Patients to See the Maximum: New Treatment Options in Presbyopia and
Astigmatic Correction. ESCRS - EuroTimes.
Brasil, P. (25 de 02 de 2016). Cerca de 47% dos idosos com catarata fizeram cirurgia pelo
SUS. Fonte: Portal Brasil: http://www.brasil.gov.br/saude/2015/08/cerca-de-47-dos-
idosos-com-catarata-fizeram-cirurgia-pelo-sus
Carrano, E. G., & Batista, L. d. (2013). Notas de Aula " Otimização Multiobjetivo". Belo
Horizonte.
Costa, R. F. (Março de 2010). Investigação de aspectos topológicos de componentes.
Dissertação de Mestrado. Belo Horizonte, Minas Gerais, Brasil: Universidade Federal
de Minas Gerais: Programa de Pós-Graduação em Engenharia Elétrica.
Daniel Malacara, Z. M. (2004). Handbook of Optical Design. New York: Marcel Dekker.
Deb, K., Pratap, A., Agarwal, S., & Meyarivan., T. (2002). A fast and elitist multiobjective
genetic algorithm: NSGA-II. IEEE TRANSACTIONS ON EVOLUTIONARY
COMPUTATION, 6(2), 182-197.
Driggers, R. G. (2003). Encyclopedia of Optical Engineering, Vol.2. Nova Iorque: Marcel
Dekker, Inc.
Duker, J. S., & Yanoff, M. (2011). Oftalmologia. Rio de Janeiro: Elsevier.
106
Forbes., G. W. (30 de January de 2012). Characterizing the shape of freeform optics. OPTICS
EXPRESS, 20, pp. 2483-2499.
Germano, J. E., & al., e. (2010). Lente intraocular multifocal refrativa: a performance visual e
qualidade de vida em implantes bilaterais versus unilaterais. Revista Brasileira de
Oftalmologia, 69(6), 372-377.
Goodman, D. S. (s.d.). Geometric Optics. Cambridge , Massachusetts: Polaroid.
Granger, E., & Cupery, K. (1972). An optical merit function (sqf), which correlates with
subjective image judgments. . Photographic science and engineering, 16(3), 221– 230.
He, J. C., Burns, S. A., & Marcos, S. (Janeiro de 2000). Monochromatic aberrations in the
accommodated eye. Vision Research, pp. 41-48.
Hecht, E. (2002). Optics. São Francisco: Addison Wesley.
Huband, S., Hingston, P., Barone, L., & While, L. (2006). A Review of Multiobjective Test
Problems and a Scalable Test Problem Toolkit. IEEE - Transactions on Evolutionary
Computation, 477-505.
ISO, 1.-2. (1999). Ophthalmic implants - Intraocular lenses - Part 2: Optical properties and test
methods.
J.W. Y. Lit and R. Tremblay. (1973). Focal depth of a transmitting axicon. Journal of the
Optical Society of America (JOSA), 63(4), 445-449.
Johnson, G. M. (1998). Measuring Images: Differences, quality and appearance. New York:
Rochester Institute of Technology.
Justin Peatross, M. (2013). Physics of Light and Optics. Brigham Young University.
Kendall, D. L., Eaton, W. P., & Jr., R. M. (1994). Micromirror arrays using KOH:H2O
micromachining of silicon for lens templates, geodesic lenses, and other applications.
Opt. Eng., 3578-3588.
Kezirian, G. M. (2009). Techniques for Presbyopia Correction. Cataract & Refractive Surgery
Today Europe, 173-175.
Koopmans, S. A., & Kooijiman, A. C. (2006). Presbyopia correction and accommodative
intraocular lenses. Journal of the International Society for Gerontechnology, 5(4), 222-
230.
Kourakos, A. (1999). Extended Depth-of-focus in a Laser Scanning System Employing a
Synthesized Difference of Gaussians Pupil. Blacksburg: Virginia Polytechnic Institute
and State University.

107
Lane, S. S., Morris, M., Nordan, L., & al., e. (2006). Multifocal Intraocular Lenses.
Ophthalmology Clinics of North America, 19, 89-105.
Lang, G. K., & al., e. (2000). Ophthalmology. New York: Thieme.
López-Gil, N., & Fernández-Sanchéz, V. (12 de novembro de 2010). The change of spherical
aberration durring accommodation and its effect on the accommodation response.
Journal of Vision.
Mannos, J. L., & Sakrison, D. J. (july de 1974). Effects of a Visual Fidelity Criterion on the
Encoding of Images. IEEE TRANSACTIONS ON INFORMATION THEORY, pp. 525-
536.
Marques, F. F., & al., e. (2000). Evaluation of visual performance and patient satisfaction with
pseudophakic monovision technique. Arquivos Brasileiros de Oftalmologia., 72(2),
164-168.
Mathen, M. M. (2010). Multifocal IOL - An Overview. Kerala Journal of Ophthalmology,
XXII(1), 24-29.
Matossian, C., & Hovanesain, J. A. (18 de Maio de 2015). Clinical
Education/Multimedia/Extended Depth of Focus IOL. Fonte: American Academy of
Ophthalmology: http://www.aao.org/interview/extended-depth-of-focus-iol
Menapace, R., Findl, O., Kriechbaum, K., & Leydolt-Koeppl., C. (2006). Accommodating
intraocular lenses: a critical review of present and future concepts. Graefe's Archive for
Clinical and Experimental Ophthalmology, 245, 473-489.
Michael Bass, E. W. (1995). Handbook of optics. OPTICAL SOCIETY OF AMERICA.
Monteiro, D. d., Akhzar-Mehr, O., Sarro, P., & Vdovin, G. (2003). Single-mask micro
fabrication of aspherical optics using KOH anisotropic etching of Si. Optics Express,
2244-2252.
Montgomery, D., Runger, G. C., & N.F.Hubele. (2004). Estatística Aplicada à Engenharia (2ª
ed.). Rio de Janeiro: LTC.
Nichamin, L. (1993). Glare and other optical considerations with ovoid implant designs. J
Cataract Refract Surg .
Ninomiya, S., Fujikado, T., Kuroda, T., Maeda, N., Tano, Y., Oshika, T., . . . Mihashi, T.
(Dezembro de 2002). Changes of Ocular Aberration With Accommodation. American
Journal of Ophthalmology, pp. 924-926.
Noll, R. J. (março de 1976). Zernike polynomials and atmospheric turbulence. Journal of the
Optical Society of America, pp. 207-211.

108
Novaski, O. (2014). Introdução à Engenharia de Fabricação Mecânica. Blucher.
Oliveira, O. G. (2012). Optimized Microlens-array Geometry for Hartmann-Shack Wavefront
Sensor: Design, Fabrication and Test. Belo Horizonte: Universidade Federal de Minas
Gerais, Escola de Engenharia, Programa de Pós-Graduação em Engenharia Elétrica.
OMS, W. H. (25 de 02 de 2016). Prevention of Blindness and Visual Impairment. Fonte: World
Health Organization: http://www.who.int/blindness/data_maps/en/
Pelli, D. G., & Bex, P. (20 de Setembro de 2013). Measuring contrast sensitivity. Vision
Research, pp. 10-14.
PORTER, J. e. (p.1793-‐1803 de August de 2001). Monochromatic aberrations of the human
eye in a large population. Journal of the Optical Society of America, 18(8), p.1793-‐
1803.
Rayes, T. R., Rayes, G. R., Eing, F., Neto, H. P., Marquardt, F., & Rayes., A. (2007).
Prevalência do astigmatismo e distribuição de seu eixo em pacientes de um serviço
oftalmológico privado. Arquivos Brasileiros de Oftalmologia., 66(6), 369-375.
Rohkamm, R. (2004). Color Atlas of Neurology. New York: Thieme.
Ronald R. Krueger, R. A. (2001). Wavefront customized visual corrections : the quest for super
vision II. SLACK Incorporated.
Ross, J. E., Clarke, D. D., & Bron, A. J. (1985). Effect of age on contrast sensitivity function:
uniocular and binocular findings. British Journal of Ophthalmology, 69, 51-56.
Sacek, V. (14 de Julho de 2006). Fabrication Errors. Fonte: Amateur Telescope Optics:
http://www.telescope-optics.net/
Sacek, V. (14 de 07 de 2006). Telescope Optics. Acesso em 29 de 11 de 2013, disponível em
http://www.telescope-optics.net/eye.htm
Shultz, M. C. (fevereiro de 2012). Presbyopia Update 2012: New Technologies and Novel
Treatments. Journal of Cataract and Refractive Surgery Today.
Smith, W. J. (2008). Modern Optical Engineering. New York: McGrawHill.
Smolek, M., & Klyce, S. (2003). Zernike polynimial fitting fails to represent all visually
significant corneal aberrations. Invest Ophthalmol Vis Sci., pp. 4676-4681.
Smolinsky, M. (3 de 11 de 2015). OIS/News/Looking Deep at Extended Depth-of-Focus IOLs.
Fonte: OIS: http://ois.net/looking-deep-at-extended-depth-of-focus-iols/
Takahashi, R. H. (2007). Notas de aula "Otimização Escalar e Vetorial". Belo Horizonte.
Trivedi, R. H., Werner, L., Apple, D. J., Pandey, S. K., & Izak, A. M. (2002). Post cataract-
intraocular lens (IOL) surgery opacification. Eye, 217-241.

109
Vasiljevic, D. (2002). Classical and Evolutionary Algorithms in the optimization of optical
systems. Boston: Kluwer Academic Publishers.
Vries, N. E. (2011). Multifocal Intraocular Lenses in Cataract Surgery. Maastricht:
Universitaire Pers Maastricht.
Welford, W. (1986). Aberrations of Optical Systems. Bristol: Adam Hilger.
Welford, W. T. (1991). Useful Optics . Chicago: University of Chicago.
Werner, L., Trindade, F., Pereira, F., & Werner., L. (2000). Fisiologia da acomodação e
presbiopia. Arquivos Brasileiros de Oftalmologia, 63(3), 487-493.
Yi, F., Iskander, D. R., & Collins, M. J. (2010). Estimation of the depth of focus from wavefront
measurements. Journal of the Vision, 10(4), 1-9.
Youngworth, R. N., & Betensky, E. I. (27 de september de 2008). Lens design with Forbes
aspheres. Optical Design and Engineering III.
Zalevsky, Z. (2010). Extended depth of focus imaging: a review. SPIE Reviews, 1, 018001-1-
018001-11.
Zilio, S. C. (2007). Desenho e Fabricação òptica. São Paulo: Instituto de Física de São Carlos-
Universidade de São Paulo.
Zitzler, E., Deb, K., & Thiele, L. (2000). Comparison of multiobjective evolutionary
algorithms: Empirical results. Evolutionary Computation, 8(2), 173-195.